

Page 1

SIRIUS Motor Starter
M200D AS-Interface Basic
Manual
•
03/2009
SIRIUS
Answers for industry.
Page 2

Page 3
SIRIUS
Motor starter
M200D AS-Interface Basic
Manual
Introduction / product
description
Product family
Functions
Installation / connection
Configuration /
parameterization
Commissioning
Diagnostics
Technical specifications
Appendix
1
2
3
4
5
6
7
8
A
03/2009
A5E01668085-01
Page 4

Legal information
Warning notice system
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
with a safety alert symbol, indicates that minor personal injury can result if proper precautions are not taken.
CAUTION
without a safety alert symbol, indicates that property damage can result if proper precautions are not taken.
NOTICE
indicates that an unintended result or situation can occur if the corresponding information is not taken into
account.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
Qualified Personnel
The device/system may only be set up and used in conjunction with this documentation. Commissioning and
operation of a device/system may only be performed by qualified personnel. Within the context of the safety notes
in this documentation qualified persons are defined as persons who are authorized to commission, ground and
label devices, systems and circuits in accordance with established safety practices and standards.
Proper use of Siemens products
Note the following:
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
documentation. If products and components from other manufacturers are used, these must be recommended
or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be adhered to. The information in the relevant documentation must be observed.
Trademarks
All names identified by ® are registered trademarks of the Siemens AG. The remaining trademarks in this
publication may be trademarks whose use by third parties for their own purposes could violate the rights of the
owner.
Disclaimer of Liability
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANY
Ordernumber: 3RK1702-2BB11-1AA1
Ⓟ 03/2009
Copyright © Siemens AG 2009.
Technical data subject to change
Page 5

Table of contents
1 Introduction / product description............................................................................................
1.1 What are M200D distributed motor s
1.2 Fieldbus interfaces.......................................................................................................................11
1.2.1 AS-Interface .................................................................................................................................11
2 Product family
2.1 Motor starter M200D AS-Interface
2.2 Overview of the device functions .................................................................................................14
2.3 Design concept ............................................................................................................................15
2.3.1 Operator cont
2.3.2 Connections .................................................................................................................................17
2.3.3 Status indicators
3 Functions................................................................................................................................................. 19
3.1 Overview of the device functions .................................................................................................19
3.2 Introduction ..................................................................................................................................20
3.3 Basic functions / parameters........................................................................................................21
3.3.1 Rated operating c
3.3.2 Protection against voltage failure............................................................................................
3.4 Fieldbus interface.........................................................................................................................22
3.5 Motor control ................................................................................................................................23
3.5.1 Control function: reversing starter................................................................................................23
3.5.2 Brake output
................................................................................................................
.........................................................................................................................16
rols
.............................................................................................................
rrent ...............................................................................................................21
u
..................................................................................................................
tarters?.................................................................................9
...............................................................................................13
................... 9
.......................... 13
.............18
.....21
...............23
3.6 Motor protection ...........................................................................................................................25
3.6.1 Thermal motor model
3.6.2 Temperature sensor.....................................................................................................................27
3.7 System monitoring .......................................................................................................................29
3.7.1 Current limit values ......................................................................................................................29
3.7.2 Asymmetry monitoring .................................................................................................................31
3.7.3 Inputs ...........................................................................................................................................32
3.7.4 Outputs.........................................................................................................................................35
3.7.5 Connector monitoring...................................................................................................................36
3.7.5.1 Power connector ..........................................................................................................................36
3.7.5.2 Motor connector ...........................................................................................................................37
3.8 Short-circuit protection (circuit breaker / disconnecting means)
3.9 Communic
3.9.1 Mode monitoring ..........................................................................................................................39
3.9.2 Plausibility check for settings
3.9.3 Message output ...........................................................................................................................40
3.10 Trip reset ......................................................................................................................................41
3.11 Self-test ........................................................................................................................................41
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
ation ............................................................................................................................38
...........................................................................................................
..................................................38
...............................................................................................
........25
........39
5
Page 6

Table of contents
3.12 Solid-state/mechanical switching technology.............................................................................. 42
3.13 Local device interface ................................................................................................................. 43
c
3.14 Integrated manual local
ontrol................................................................................................... 44
4 Installation / conne
ction ........................................................................................................................... 47
4.1 Installation ................................................................................................................................... 47
4.1.1 Installation rules .......................................................................................................................... 47
4.1.2 Derating....................................................................................................................................... 48
4.1.3 Installing the protec
tion guards
................................................................................................... 51
4.1.4 Installing the motor starter..................................................................................................
4.1.5 Functional ground .............................................................................................................
4.1.6 Setting the AS-i address ......................................................................................................
4.2 Connection .................................................................................................................................. 55
4.2.1 Required components/cables
4.2.2 Prefabric
ating power cables...................................................................................................
4.2.3 Installing and wiring power connec
..................................................................................................... 55
tors....................................................................................... 57
4.2.4 Power terminal ............................................................................................................................ 58
4.2.5 Brake output
4.2.6 Digital inputs/outputs
4.2.6.1 Digital inputs
..................................................................................................................
................................................................................................................... 62
................................................................................................................................ 62
4.2.6.2 Digital output ............................................................................................................................... 63
4.2.7 AS-Interface ................................................................................................................................ 64
4.2.8 Connection options for AS-Interface ........................................................................................... 64
rization.............................................................................................................. 67
5 Configuration / paramet
e
5.1 Configuration............................................................................................................................... 67
t
5.2 Configuration on the AS-i mas
er CP 343-2................................................................................ 68
5.3 Parameterization ......................................................................................................................... 71
5.3.1 Parameterization ......................................................................................................................... 71
5.3.2 Parameterization via local setting ............................................................................................... 72
......... 52
.......... 52
....... 53
..... 56
.............. 60
5.4 Process images........................................................................................................................... 74
ng
6 Commissioni
........................................................................................................................................ 75
6.1 Prerequisites ............................................................................................................................... 75
6.2 M200D AS-i components ............................................................................................................ 76
6.3 Procedure.................................................................................................................................... 77
7 Diagnostic
s ...................................................................................................................
........................... 79
7.1 Diagnostics.................................................................................................................................. 79
7.2 Diagnostics with LED .................................................................................................................. 80
7.2.1 Statuses of the indivi
dual LEDs
7.2.2 LED display combinations......................................................................................................
.................................................................................................. 80
..... 82
7.3 Diagnostics via parameter channel (parameter echo) ................................................................ 84
7.4 Diagnostics with the addressing and diagnostics unit
................................................................ 87
7.5 Troubleshooting .......................................................................................................................... 87
7.5.1 Response to faults ...................................................................................................................... 87
7.5.2 Acknowledging faults
M200D AS-Interface Basic
..........................................................................................................
........ 88
6 Manual, 03/2009, A5E01668085-01
Page 7

Table of contents
8 Technical specifications........................................................................................................................... 89
8.1 General technical specifications ..................................................................................................89
8.2 Motor starter.................................................................................................................................90
8.3 Brake control................................................................................................................................91
8.4 Inputs ...........................................................................................................................................92
8.5 Output ..........................................................................................................................................92
tion
8.6 Thermistor motor protec
.........................................................................................................93
8.7 Switching frequency.....................................................................................................................93
8.8 Electrical service life of contactor.................................................................................................96
8.9 Dimension drawing ......................................................................................................................98
A Appendix.................................................................................................................................................. 99
A.1 Order numbers.............................................................................................................................99
A.1.1 Order numbers.............................................................................................................................99
A.1.2 Spare parts/accessories ............................................................................................................100
A.2 Bibliography ...............................................................................................................................102
Glossary ................................................................................................................................................ 105
Index...................................................................................................................................................... 109
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
7
Page 8

Table of contents
M200D AS-Interface Basic
8 Manual, 03/2009, A5E01668085-01
Page 9

Introduction / product description
1.1 What are M200D distributed motor starters?
M200D motor starters are standalone devices with a high degree of protection (IP65) for
distributed use near the motor.
Depending on the order variant, they are available as:
● Direct starters, electromechanical or electronic (DSte, sDSte)
● Reversing starters, electromechanical or electronic (RSte, sRSte)
They are suitable for the following tasks:
● Switching and protecting three-phase loads at 400 V AC up to 5.5 kW
● Control via AS-Interface
Depending on the order variant, they are equipped with:
● Brake output for 400 / 230 V AC or 180 V DC
● Integrated manual local control with a key-operated switch and keypad
1
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
9
Page 10
Introduction / product description
1.1 What are M200D distributed motor starters?
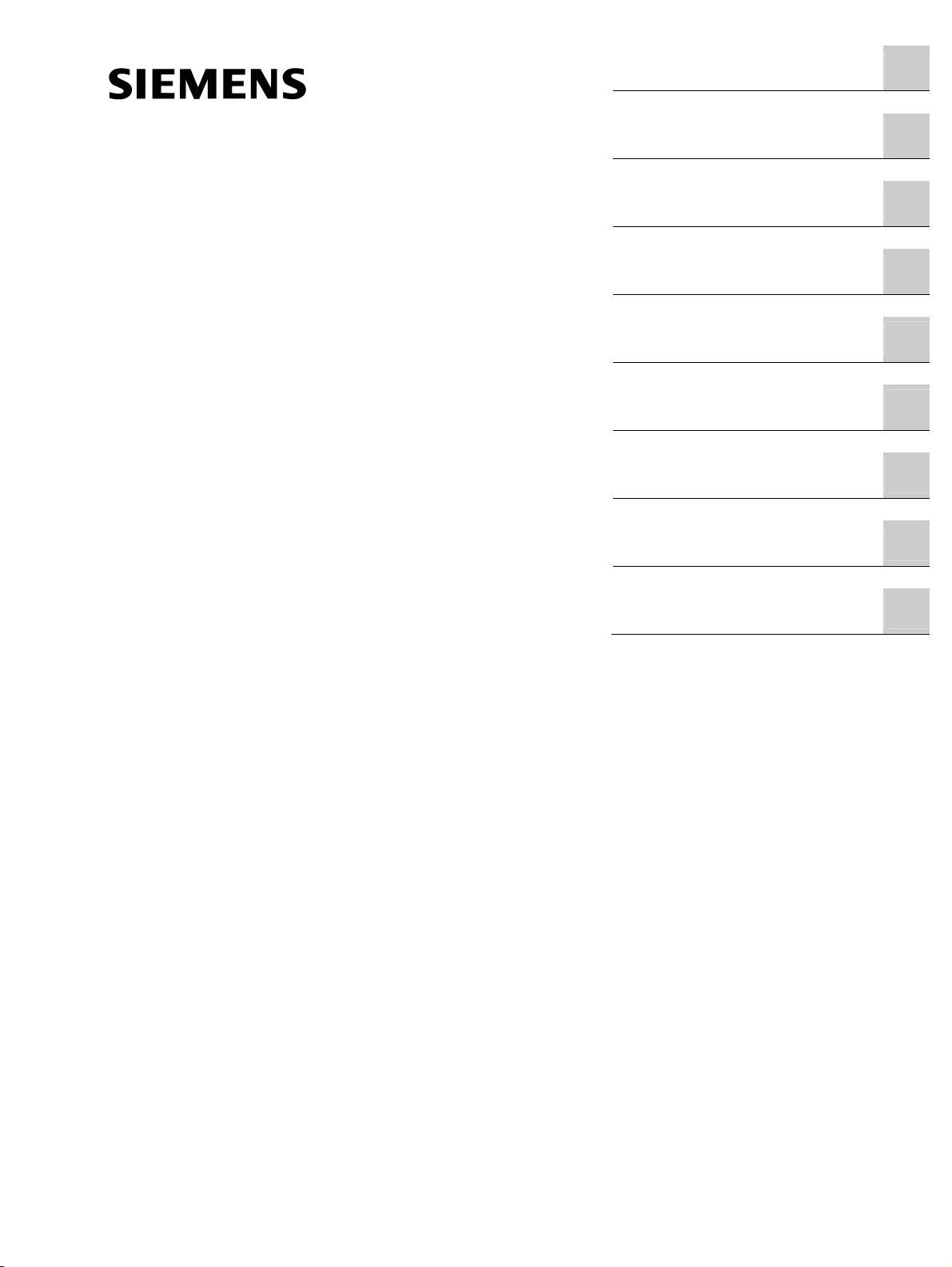
Connecting the M200D motor starter to AS-Interface
352),1(7
3RZHU
VXSSO\XQLW
3&ZLWK
62)71(731,2
,($6L
/,1.
31,2
$6,17(5)$&(
(7SUR
*'
(76
6
HJZLWK
&3
$GYDQFHG
*'
3*HJ
ZLWK&3
$6,17(5)$&(
6
HJZLWK&3
6
HJZLWK&3
,(3%
/,1.
31,2
(7SUR
352),%86
'3$6L
/,1.
$GYDQFHG
6ODYH
Figure 1-1 M200D: overview
6ODYH
0'0'
U
VXSSO
\XQLW
6ODYH
6ODYH3RZH
6ODYHZLWK
(0(5*(1
&<6723
M200D AS-Interface Basic
10 Manual, 03/2009, A5E01668085-01
Page 11
Introduction / product description
1.2 Fieldbus interfaces
1.2 Fieldbus interfaces
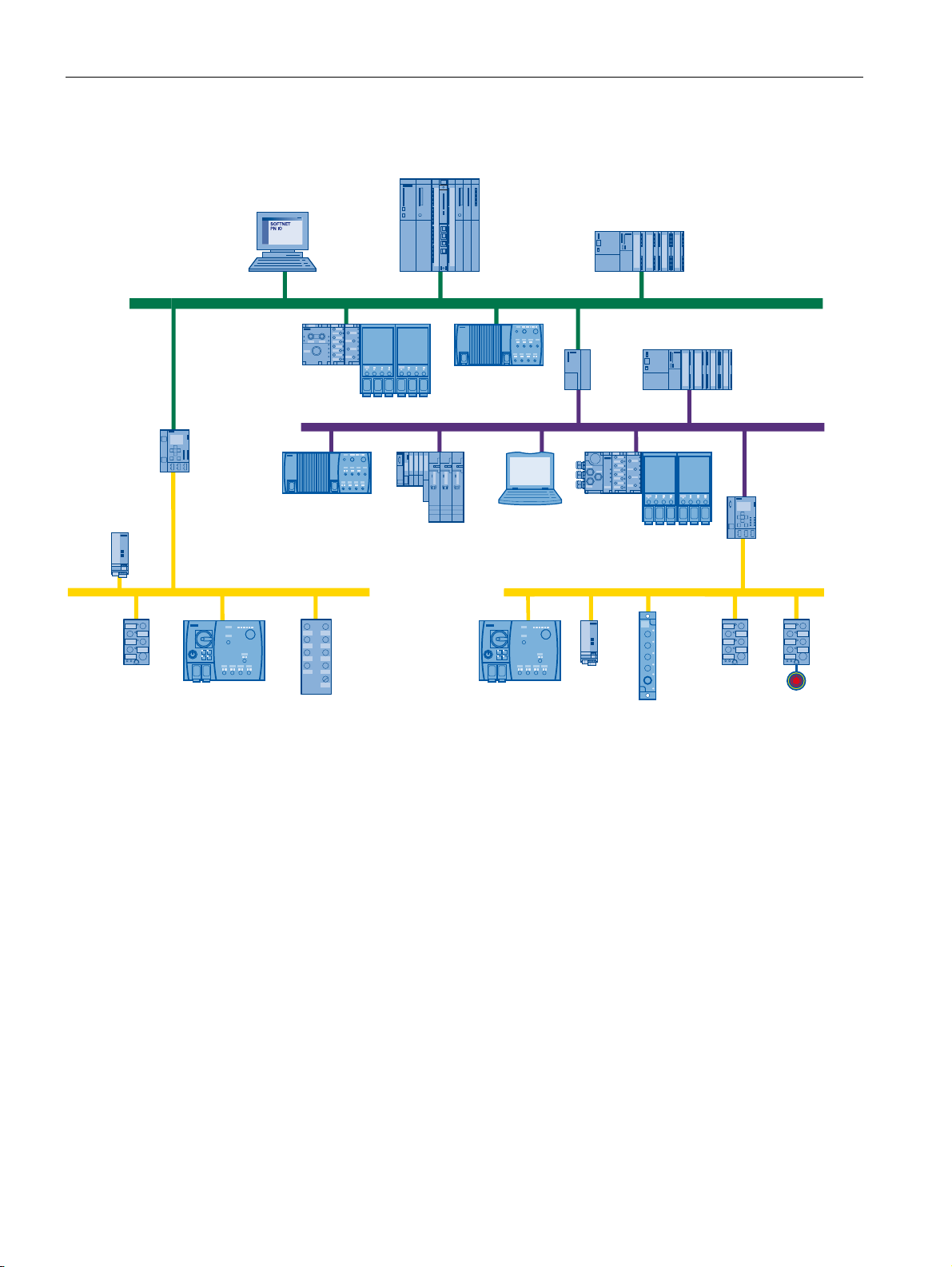
1.2.1 AS-Interface
Overview
The AS-Interface (actuator sensor interface, AS-i) is an open international standard for
fieldbus communication between distributed actuators and sensors at the lowest control
level.
AS-i complies with the IEC 61158 / EN 50295 standards and was specifically designed for
connecting binary sensors and actuators that comply with these standards. AS-i makes it
possible to replace point-to-point cabling of the sensors and actuators by a bus line.
3RZHUVXSSO\XQLWV
3/& $6LPDVWHU
$6L/LQN
8
$6L
8
$8;
9'&
(QHUJ\
LQIHHG
0RWRUVWDUWHU
0'
Figure 1-2 Example: M200D AS-i
The AS-Interface has the following advantages:
● Flexibility
● Cost effectiveness
● Simple and rapid installation with a minimum of errors
● A common line for transferring data and power
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
11
Page 12
Introduction / product description
1.2 Fieldbus interfaces
Further information
● Catalogs, customer magazines, and brochures are available on the Internet
(http://www.automation.siemens.com/net/html_00/support/presales.htm
● Brochure "Industrial communication for automation"
(http://www.automation.siemens.com/download/internet/cache/3/1462730/pub/e
schrift_en_0408.pdf)
(Introductory information about industrial communication):
● Catalog IK PI 2009 "Industrial Communication for Automation and Drives"
(
http://www.automation.siemens.com/net/html_76/support/printkatalog.htm
(Device overview and ordering data for industrial communication)
)
n/bs_k-
)
● "AS-Interface - The Solution for Automation" (
interface.net/EN/System/Publications?)
(Compendium of technology, function and applications):
● AS-Interface homepage (http://www.as-interface.net/EN/Homepage?
http://www.as-
)
M200D AS-Interface Basic
12 Manual, 03/2009, A5E01668085-01
Page 13

Product family
2.1 Motor starter M200D AS-Interface
The following motor starters with AS-Interface (AS-i) are available:
● M200D AS-i Basic
motor starter with thermistor motor protection + electronic motor model:
– Direct starter (electromechanical) (DSte) up to 5.5 kW,
Current ranges: 0.15 – 2 A and 1.5 – 12 A
– Reversing starter (electromechanical) (RSte) up to 5.5 kW,
Current ranges: 0.15 – 2 A and 1.5 – 12 A
– Direct starter (electronic) (sDSte) up to 4 kW,
Current ranges: 0.15 – 2 A and 1.5 – 9 A
– Reversing starter (electronic) (sRSte) up to 4 kW,
Current ranges: 0.15 – 2 A and 1.5 – 9 A
Order variants:
● Brake output for:
2
Accessories:
– 400/230 V AC
– 180 V DC
● Integrated manual operation (key-operated switch and keypad)
● Connection components (e.g. cables, connectors, etc.)
● Hand-held device
● Protection guard for the plug connections
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
13
Page 14
Product family
2.2 Overview of the device functions
2.2 Overview of the device functions
Device functions Electromechanical (DSte, RSte)/
electronic (sDSte, sRSte)
Fieldbus interface ●
Control function: reversing starter ○
Control function: soft starter —
Brake output 400 V / 230 V AC ○
Brake output 180 V DC ○
Thermal motor model ●
Temperature sensor (thermistor motor protection) ●
Asymmetry monitoring ●
Blocking current monitoring ●
Zero-current monitoring ●
M12 inputs (routed via AS-i) 4 (2)
M12 outputs (routed via AS-i) 1 (0)
Connector monitoring ●
Short-circuit protection ●
Communication
Slave type A/B slave (4I / 3O)
Communication profile 7.A.E
Diagnostics via parameter channel (parameter echo) ●
Support for AS-i S1 status bit ●
Transfer of data sets via AS-i —
Extended cyclic process image —
Access via "Motor Starter ES" —
Additional functions
Self-test ●
Local device interface ●
Disconnecting means ●
Integrated manual local control
(key-operated switch, keypad with LEDs)
Setting elements parameterized on device ●
● Integrated
○ Order variant
○
M200D AS-Interface Basic
14 Manual, 03/2009, A5E01668085-01
Page 15
Product family
2.3 Design concept
2.3 Design concept
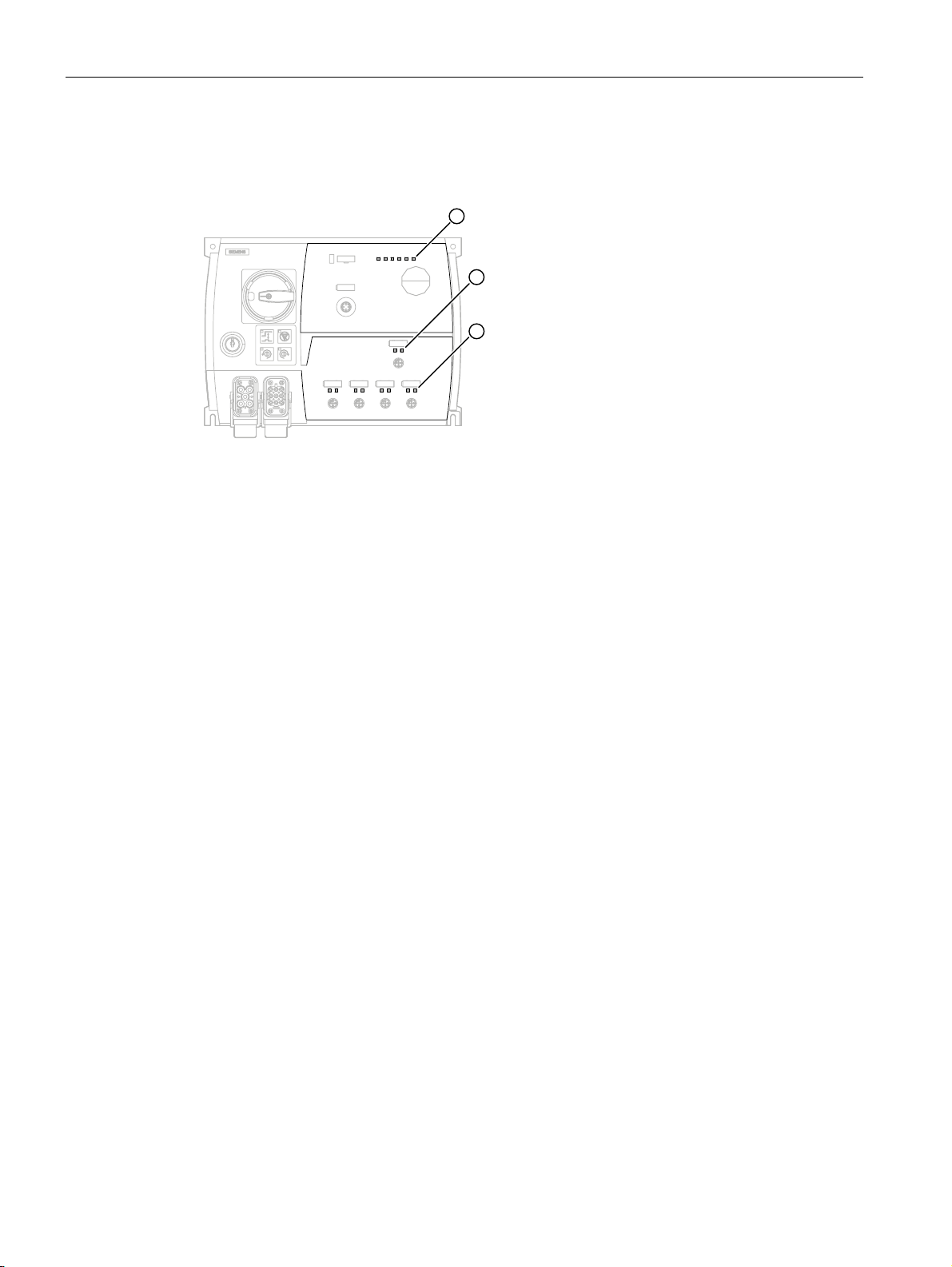
Connections and controls on the motor starter
$6L
$8;
)$8/7
3:567$76)'(9
3:5
0,6
0,4
0,8
1
0,3
1,2
0,2
1,5
1,8
CLASS
2A
OFF
0,15
l
;
e
RQ
RQ 7&
RII
RQ
RII
RII
37&
;
287
;;
,1,1,1,1
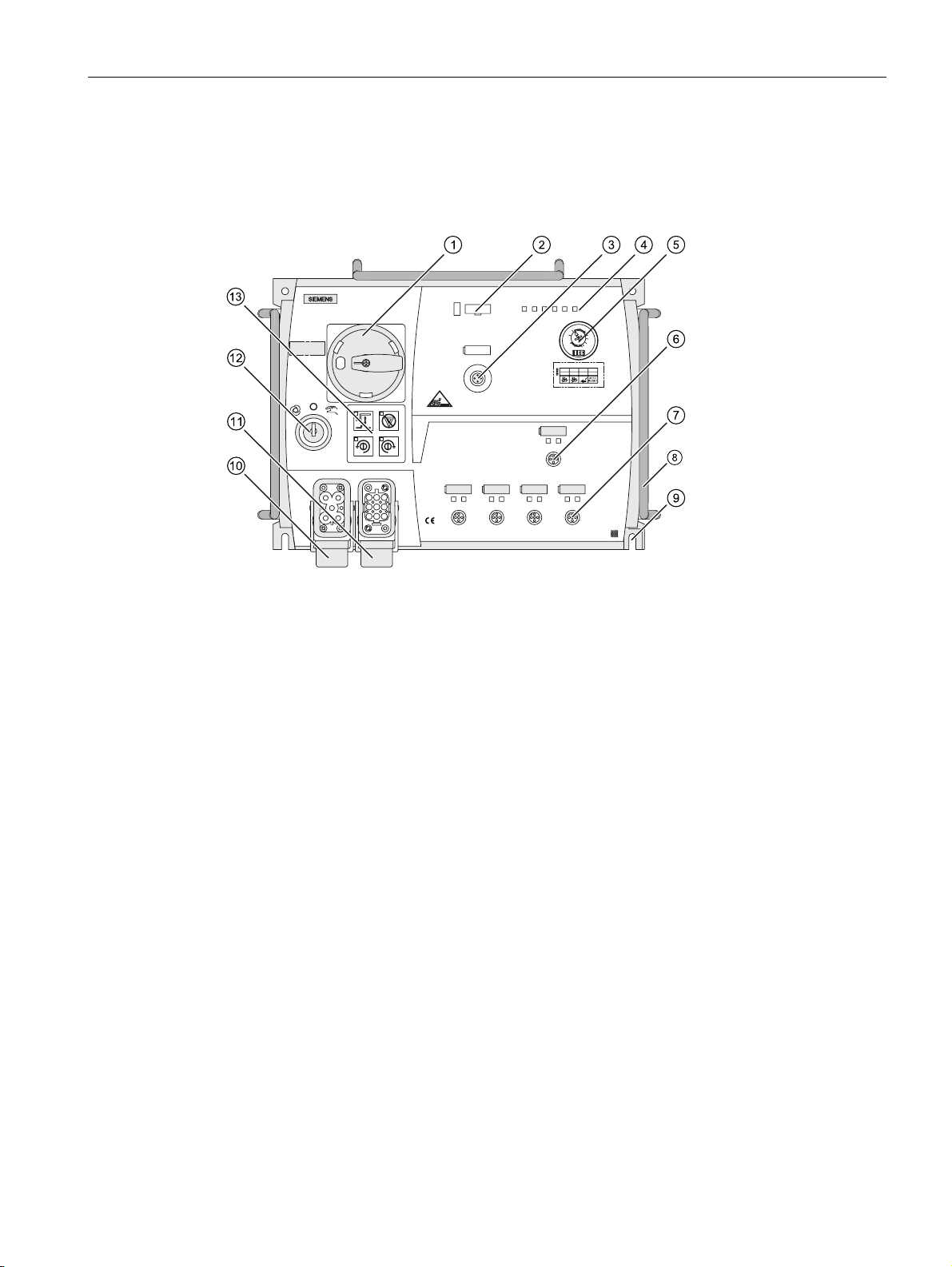
① Disconnecting means (circuit breaker), can be locked
② Optical device interface
③ M12 AS-i connection
④ Diagnostic LEDs
⑤ Cover (setting elements)
⑥ M12 output
⑦ M12 inputs
⑧ Protection guard for cables and connections (accessories)
⑨ Fixing holes for installation
⑩ 400 V infeed
⑪ Motor connection
⑫ Key-operated switch (order variant)
⑬ Keypad for manual operation (order variant)
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
15
Page 16
Product family
2.3 Design concept
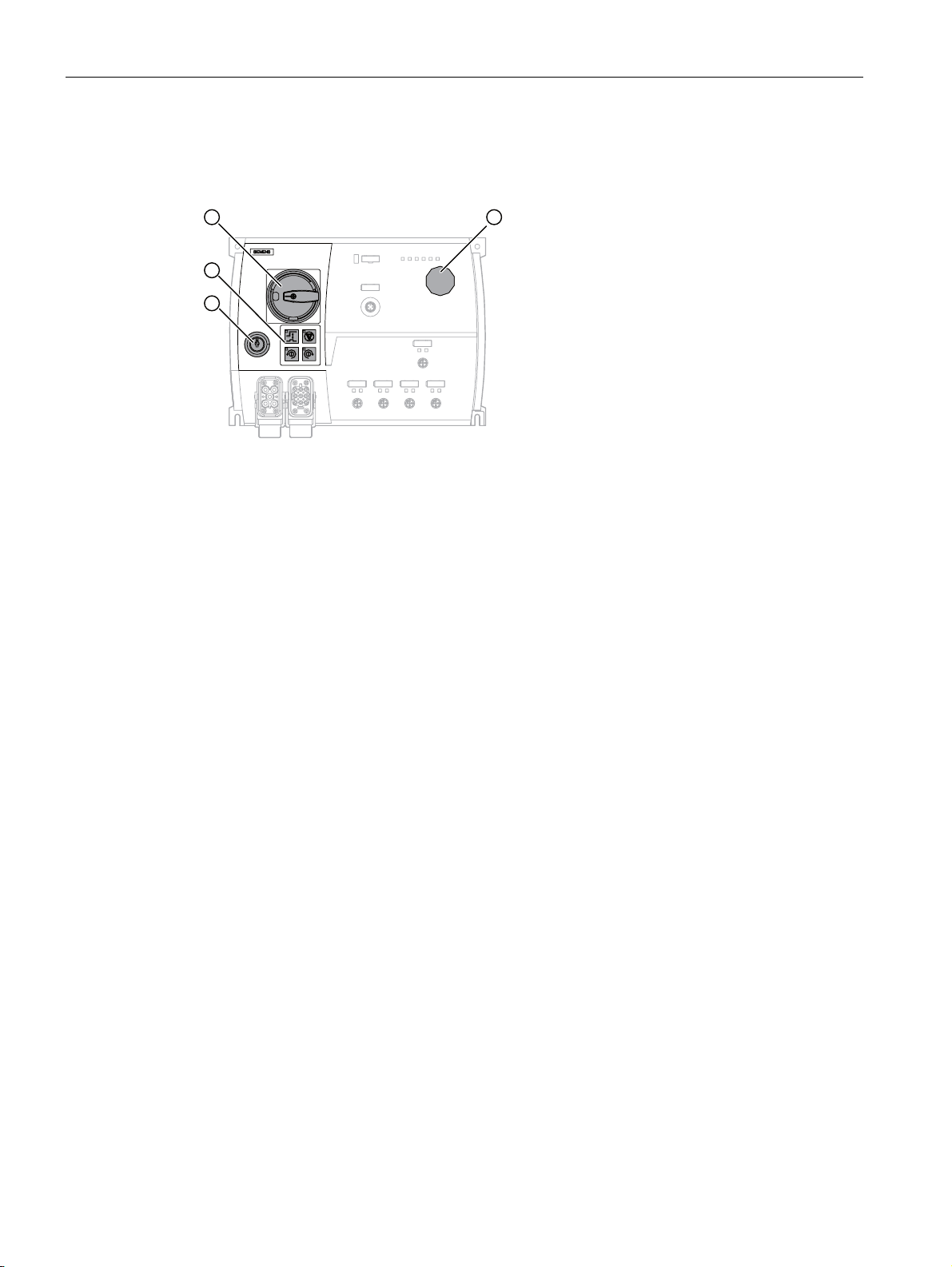
2.3.1 Operator controls
The motor starter is equipped with the following operator controls:
① Key-operated switch (order variant)
② Keypad (order variant)
③ Disconnecting means (circuit breaker)
④ Cover for parameter setting elements
Integrated manual local control (key-operated switch ① and keypad ②; order variant)
A key-operated switch and keypad are used for local operation.
The key can be inserted/removed in three positions.
Disconnecting means ③ (circuit breaker)
The disconnecting means is designed for the following individual functions:
● Disconnecting the series-connected consumers from the supply voltage
● Short-circuit protection of the series-connected consumer
● Switching on inhibited via padlock (max. three padlocks possible)
Parameter settings ④
The following setting elements can be found under the cover of the M200D AS-i Basic:
● Rotary coding switch for:
– Setting the rated operating current
– Deactivating the thermal motor model (class OFF)
● DIP switch for:
– Autoreset (ON / OFF)
– Connector monitoring (ON / OFF)
– Temperature sensor (ON / OFF)
– Temperature sensor (PTC / TC)
M200D AS-Interface Basic
16 Manual, 03/2009, A5E01668085-01
Page 17
Product family
2.3 Design concept
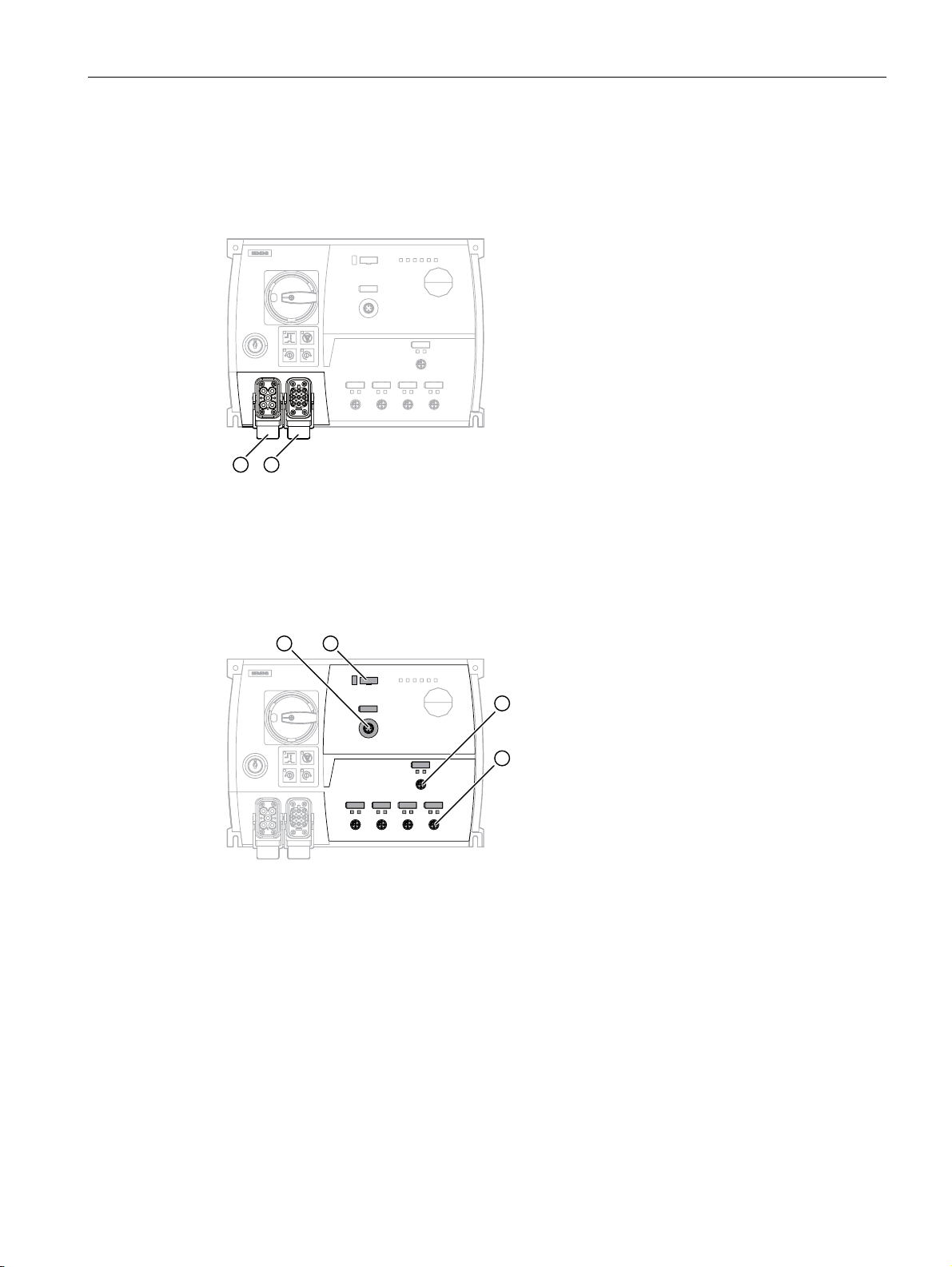
2.3.2 Connections
Power terminals
① Infeed for the three phases as well as the PE and N conductor via power connectors
② Connection of the motor via power connectors
Control circuit / bus
① AS-i bus connection with auxiliary voltage, M12 connector
② Optical device interface (under the labeling strip) for connecting the hand-held device
③ 1 x M12 output
④ 4 x M12 inputs
(HAN Q4/2 with ISO23570 assignment)
(HAN Q8/0 with ISO23570 assignment)
• 2 inputs can be read via AS-i
• 2 inputs with fixed input function
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
17
Page 18
Product family
2.3 Design concept
2.3.3 Status indicators
The following LEDs on the front of the starter indicate the device status:
① Indicators for the device status and communication
② Indicator for output OUT1
③ Indicators for inputs IN1 ... IN4
For a detailed description of the indicators, see "Diagnostics (Page 80)".
M200D AS-Interface Basic
18 Manual, 03/2009, A5E01668085-01
Page 19
Functions
3.1 Overview of the device functions
Device functions Electromechanical (DSte,
Fieldbus interface (Page 22) ●
Control function: reversing starter (Page 23) ○
Brake output 400 V / 230 V AC (Page 23) ○
Brake output 180 V DC (Page 23) ○
Thermal motor model (Page 25) ●
Temperature sensor (thermistor motor protection) (Page 27) ●
Blocking protection (Page 29) ●
Zero-current monitoring (Page 29) ●
Asymmetry monitoring (Page 31) ●
M12 inputs (routed via AS-i) (Page 32) 4 (2)
M12 outputs (routed via AS-i) (Page 35) 1 (0)
Connector monitoring (Page 36) ●
Short-circuit protection (Page 38) ●
Communication
Slave type A/B slave (4I / 3O)
Communication profile (Page 68) 7.A.E
Diagnostics via parameter channel (parameter echo) (Page 84) ●
Support for AS-i S1 status bit (Page 84) ●
Transfer of data sets via AS-i —
Extended cyclic process image —
Access via "Motor Starter ES" —
Additional functions
Self-test (Page 41) ●
Local device interface (Page 43) ●
Disconnecting means (Page 38) ●
Integrated manual local control (Page 44)
(key-operated switch, keypad with LEDs)
Setting elements parameterized on device (Page 72) ●
● Integrated
○ Order variant
3
RSte)/
electronic (sDSte, sRSte)
○
See also
Communication (Page 38)
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
19
Page 20
Functions
3.2 Introduction
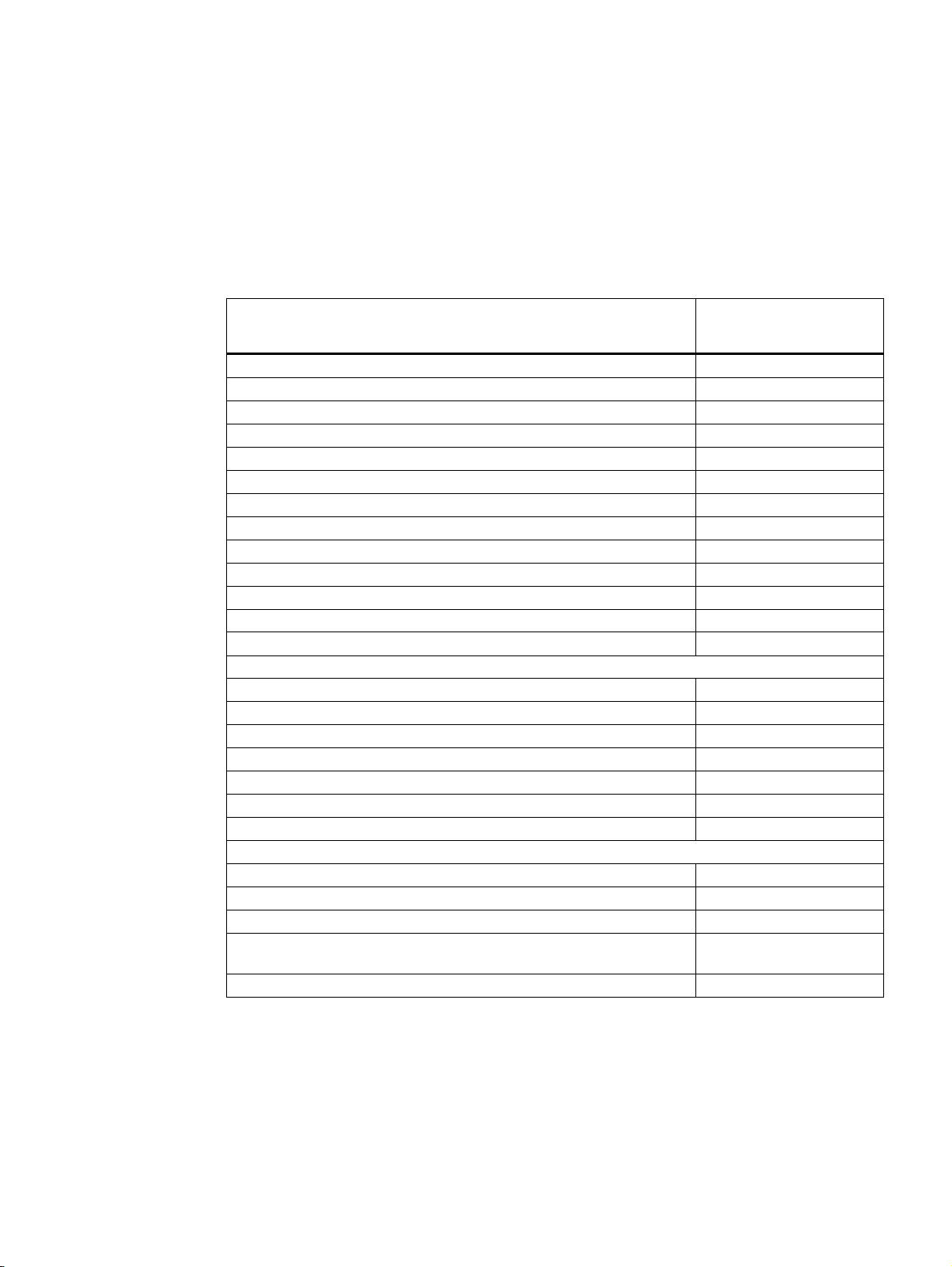
3.2 Introduction
Device functions
This section describes the device functions. All the device functions are assigned inputs (e.g.
device parameters) and outputs (e.g. messages).
The following schematic diagram illustrates the functional principle of the device:
Self-protection
Currents
,QSXWV
'HYLFHSDUDPHWHUV
&RPPDQGV
3URWHFWLRQ
'HYLFHIXQFWLRQ
2XWSXWV
0HDVXUHGYDOXHV
$ODUPV
$FWLRQV
Figure 3-1 Functional principle of the device
The motor protects itself against fatal damage by means of the thermal motor model and
temperature measurements for electronic switching elements.
Note
All current values (e.g. blocking current, current limits) are percentages of the rated
operating current set on the device (e.g. I
= 2 A = 100 %).
e
M200D AS-Interface Basic
20 Manual, 03/2009, A5E01668085-01
Page 21
Functions
3.3 Basic functions / parameters
3.3 Basic functions / parameters
Definition
Basic parameters are "central" parameters required by a range of device functions.
3.3.1 Rated operating current
Here, you can enter the rated operating current that the branch (switchgear and motor) can
carry without interruption. This is usually the rated motor current. The setting range depends
on the output class of the M200D motor starter (0.15 ... 2 A or 1.5 ... 12 A).
NOTICE
The rated operating current is one of the key parameters.
The rated operating current must always be set if motor protection is to be ensured via the
electronic overload relay.
The overload relay can be deactivated.
In this case, motor protection must be ensured by means of a thermistor in the motor.
Notes
● On the motor starter, the default rated operating current is set to the minimum value.
● The rated operating current for the M200D AS-i Basic motor starter is set by means of the
rotary coding switch. For more information, see Parameterization via local setting
(Page 72).
3.3.2 Protection against voltage failure
If the supply voltage fails, the last overload message "Overload" is retained.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
21
Page 22
Functions
3.4 Fieldbus interface
3.4 Fieldbus interface
Response to CPU / master STOP
If the fieldbus interface is interrupted, all control signals are set to 0.
Group diagnosis
Reference
Note
This is only relevant in "automatic" mode.
The controller is informed of whether or not a group fault message is present in the device
when "I/O fault bits" on the SAP status tab (S1 = 1) is set. The AS-i master enters the S1
value in the list of I/O faults (LPF) that have been signaled. The controller can read this list
via the "GET_LPF" command and then query a specific diagnostic value from the slave (see
Diagnostics via parameter channel (parameter echo) (Page 84)).
also
The motor st
arter issues a fault message if a fault is present. In this case, the SF LED lights
up red.
For more information, refer to the documentation for your AS-i master.
M200D AS-Interface Basic
22 Manual, 03/2009, A5E01668085-01
Page 23
Functions
3.5 Motor control
3.5 Motor control
3.5.1 Control function: reversing starter
Description
This control function allows the motor starter to control the direction in which motors rotate.
An internal logic prevents both directions of rotation from being activated simultaneously.
The delayed switchover from one direction of rotation to another is implemented by means of
the lock-out time, which is permanently set to 150 ms.
This function only applies to reversing starters.
3.5.2 Brake output
Description
A motor-mounted mechanical disk or spring-loaded brake is used to brake the motor. The
brake is controlled via the brake output.
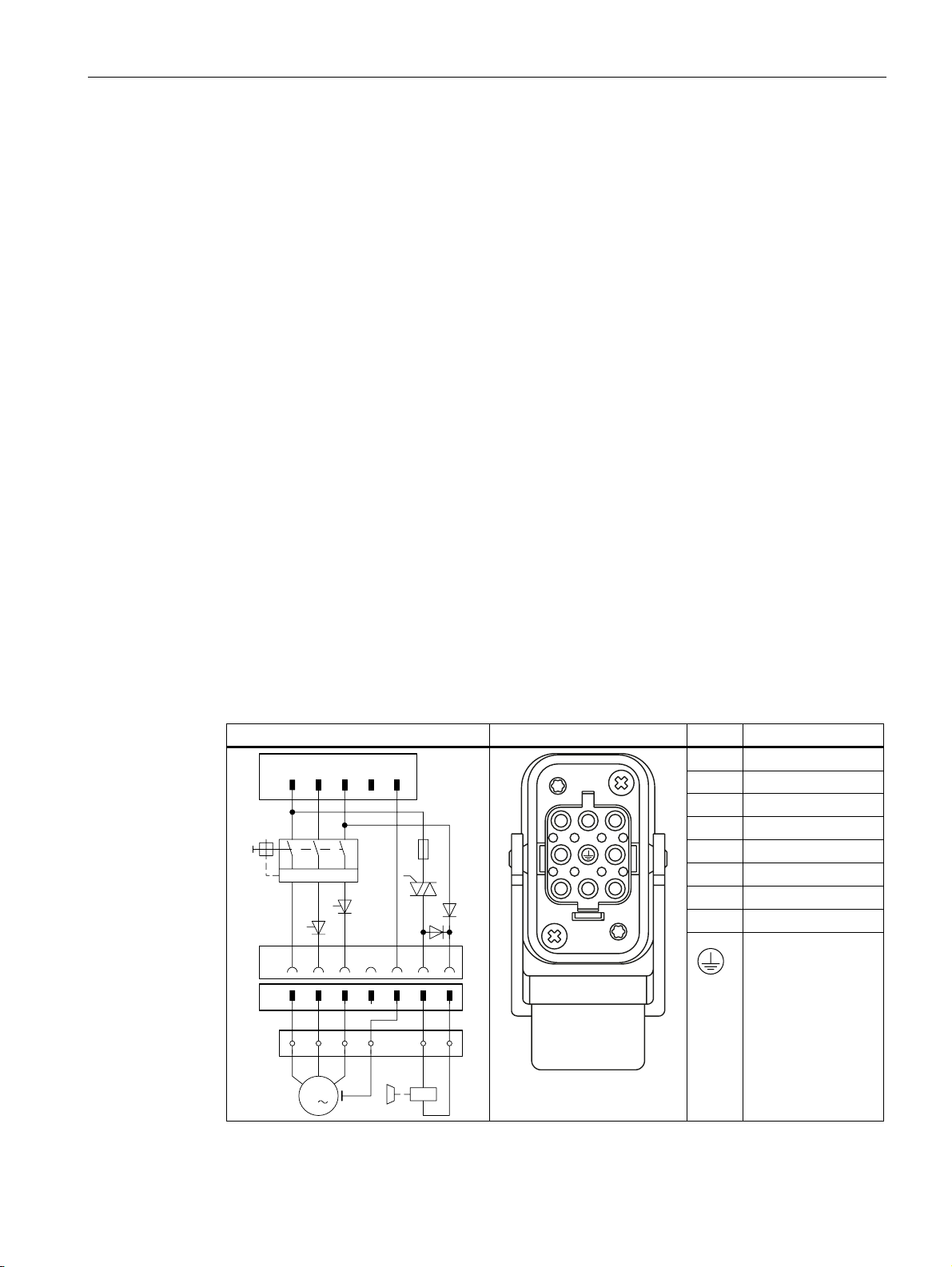
Circuit diagram: example
The following circuit diagram illustrates the mechanical braking procedure with a 180 V DC
brake output:
Circuit diagram Motor connector Pin Name
;
;
13(/ / /
,!!
,!!
,!!
3(
3(
3(
1 Phase L1
2 —
3 Phase L3
4 Brake L1 (switched)
5 Thermistor
6 Brake L3 (direct)
7 Phase L2
8 Thermistor
PE (yellow/green)
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
;
0
23
Page 24

Functions
3.5 Motor control
Brake output
Externally-supplied motor brakes are usually powered via a jumper on the motor terminal
board.
Since switching the motor and brake simultaneously can increase wear and tear to the
brake, all M200D motor starters can be fitted with an optional electronic brake controller.
Depending on the order variant, the following externally-supplied brake coils can be
controlled:
● 400 V AC / 230 V
(The brake rectifier must be installed in the motor. The rectifier input is controlled via the
motor starter).
● 180 V DC
(A rectifier is not required for the brake in the motor because the motor starter provides
the 180 V DC. In this way, brake coils for 180 V DC can be switched directly).
The brake voltage is fed to the motor together with the motor infeed via a joint cable (e.g.
2
6 x 1.5 mm
). For more information about connecting the brake output, see section Brake
output (Page 60).
Brake release delay at startup
A fixed ON-delay time of 40 ms is set for the M200D AS-i Basic motor starter to prevent wear
and tear to the brake (e.g. the motor output is activated 40 ms after the brake output).
In reversing mode, the release delay does not begin until the lock-out time has expired.
M200D AS-Interface Basic
24 Manual, 03/2009, A5E01668085-01
Page 25
Functions
3.6 Motor protection
3.6 Motor protection
3.6.1 Thermal motor model
Description
The approximate temperature of the motor is calculated using the measured motor currents
and device parameters "Rated operating current" and "Tripping class". This indicates
whether the motor is overloaded or functioning in the normal operating range.
Motor protection shutdown response
You use this device parameter to specify how the motor starter is to respond in an overload
situation:
● Shutdown without restart (AUTO RESET = off)
Following an overload situation, the shutdown command cannot be reset until the motor
model has fallen below the reset threshold and after a reset command has been issued
(trip reset).
● Shutdown with restart (AUTO RESET = on)
WARNING
Motor restarts automatically if AUTO RESET is on.
Can Cause Death, Serious Injury, or Property Damage
The motor starter restarts automatically after the recovery time if a start command is
present (autoreset). (autoreset).
Make sure that you take appropriate measures to exclude the risk of hazardous conditions.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
25
Page 26
Functions
3.6 Motor protection
Trip class
The trip class (CLASS) specifies the maximum time within which a protective device must
trip from a cold state at 7.2 x the setting current (motor protection to IEC 60947). The M200D
AS-i Basic trip class is set permanently to CLASS 10 and can be deactivated.
If the setting is changed to CLASS OFF, the "thermal motor model" function is deactivated
along with the accompanying messages. With the M200D AS-i Basic, the thermal motor
model is deactivated by means of the rotary coding switch for setting the operating current
(CLASS OFF position).
V0LQ
Note
&/$66
A
t
[I
SROHV\PPHWULFDOORDG SLQORDG
&/$66
e
0LQ
V
&/$66
A
t
I
DLOXUHRISKDVHRU
FXUUHQWLPEDODQFH!
[I
&/$66
e
Deactivation rule
To ensure motor protection, the motor cannot be switched on when the temperature sensor
is deactivated and, at the same time, CLASS OFF is set. This is indicated on the M200D ASi Basic with either an alarm (if an ON command is not present) or a fault (if an ON command
is present).
Recovery time
The recovery time is the time defined for cooling after which the system can be reset
following an overload trip. The recovery time for the M200D AS-i Basic is set permanently to
90 s.
Trip reset signals present during the recovery time have no effect.
Voltage losses occurring before this time expires can prolong the recovery time.
M200D AS-Interface Basic
26 Manual, 03/2009, A5E01668085-01
Page 27
Functions
3.6 Motor protection
Prewarning limit for motor heating
The motor starter also assumes a prewarning role, that is, it issues a warning if the motor
temperature limit is exceeded. The prewarning limit for the M200D AS-i Basic is 90 % of the
motor heating value. The motor is shut down at 100 %.
The alarm can be read via Diagnostics via parameter channel (pa
for the starter.
Settings
Device parameter Default setting Setting range
Motor protection shutdown
response
Trip class CLASS 10
3.6.2 Temperature sensor
Description
Temperature sensors are used to directly monitor the motor winding temperature. This
indicates whether the motor is overloaded or functioning normally. If temperature sensors
are installed in the motor stator winding (order option for the motor), the M200D motor starter
can use these to monitor the motor.
Shutdown without restart
rameter echo) (Page 84)
• Shutdown without restart
• Shutdown with restart
• CLASS 10
• CLASS OFF
M200D motor starters can evaluate one temperature sensor circuit.
Temperature sensor
You can activate or deactivate this parameter depending on whether or not a temperature
sensor is installed in the motor. The setting is made by means of the DIP switch on the
device.
Two types of temperature sensor are supported:
● Thermoclick.
This is a switch that opens at a certain winding temperature.
● PTC type A.
This is a PTC thermistor with a characteristic to IEC 60947-8.
When the PTC type A temperature sensor is active, temperature sensor monitoring is also
activated (see below).
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
27
Page 28
Functions
3.6 Motor protection
Motor protection shutdown response
You can use this parameter to determine how the motor starter is to respond to a
temperature sensor or thermal motor model overload:
● Shutdown without restart (AUTO RESET = off)
● Shutdown with restart (AUTO RESET = on)
WARNING
Motor restarts automatically if AUTO RESET is on.
Can Cause Death, Serious Injury, or Property Damage
The motor starter restarts automatically after the recovery time if a start command is
present (autoreset). (autoreset).
Make sure that you take appropriate measures to exclude the risk of hazardous conditions.
Temperature sensor monitoring
Temperature sensor monitoring is activated when a PTC type A temperature sensor is
parameterized.
This device parameter monitors the temperature sensor cable for interruptions (wire
breakage) and short-circuits. The motor is shut down if either of these scenarios occurs.
Settings
The possible settings for the M200D AS-i Basic motor starter can be found in section
Parameterization via local setting (Page 72).
M200D AS-Interface Basic
28 Manual, 03/2009, A5E01668085-01
Page 29
Functions
3.7 System monitoring
3.7 System monitoring
3.7.1 Current limit values
Description
The motor current and current limit values can be used to determine different system
statuses:
System status Current value Protection by
Motor blocked Very high current flowing Blocking protection
Motor runs at no load (e.g.
because system is damaged)
Response to residual current detection
Residual current detection responds when the motor current in all three phases falls below
18.75 % of the set rated operating current. In this case, the motor starter shuts down the
motor.
Very low current flowing
(< 18.75 % of Ie)
Residual current detection
Residual current detection is deactivated by setting the rotary coding switch to
"CLASS OFF".
Note
When the motor is switched on, residual current detection is suppressed for around 1
second.
Blocking current monitoring
The blocking current specifies how much current is consumed by the motor (at rated voltage)
when the axis blocked.
The blocking current monitoring function detects when a motor axis is blocked mechanically.
The block causes the motor to consume more power. The "blocking current" is a defined
monitoring threshold for the motor current consumption.
It is monitored as follows:
When the motor starts, the tripping limit for the blocking current is set permanently to 800 %
of the rated operating current for a period of 10 s. During operation, the "blocking current"
tripping limit is set permanently to 400 % of the rated operating current.
If the blocking current is exceeded, the motor starter detects blocking. Blocking time
monitoring is activated as of the point at which the blocking current is exceeded. If the
blocking current flows for longer than the blocking time, the motor starter automatically
generates a shutdown command.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
29
Page 30
Functions
3.7 System monitoring
The blocking current monitoring function is deactivated by setting the rotary coding switch to
"CLASS OFF".
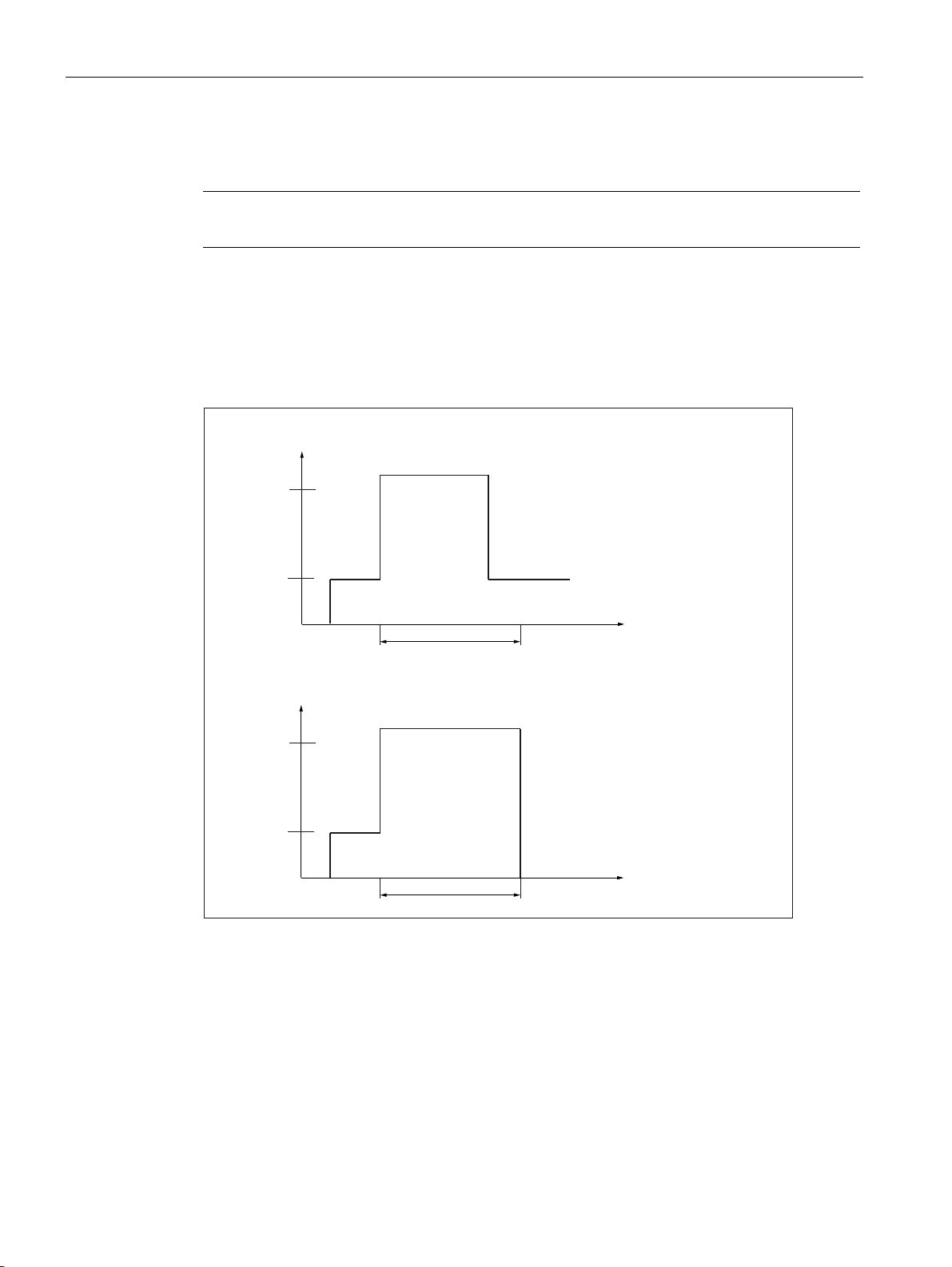
Blocking time
Note
If the blocking time expires and the system is still blocked, the motor starter is shut down.
The blocking time is the time a block can be present before the motor shuts down. If the
blocking time expires and the system is still blocked, the motor starter is shut down. The
blocking time in the M200D AS-i Basic is set permanently to 1 s.
6FHQDULR0RWRUFRQWLQXHVWRUXQ
6WDOOHGURWRU
%ORFNLQJ
FXUUHQW
0RWRU
FXUUHQW
%ORFNLQJWLPH
%ORFNFDQFHOHGZLWKLQEORFNLQJ
WLPH
0RWRUFRQWLQXHVWRUXQ
W
6FHQDULR0RWRULVVKXWGRZQ
6WDOOHGURWRU
%ORFNLQJ
FXUUHQW
0RWRU
FXUUHQW
%ORFNLQJWLPH
Figure 3-2 Block protection principle
%ORFNVWLOOSUHVHQWDIWHUEORFNLQJ
WLPHKDVHODSVHG
0RWRULVVKXWGRZQ
W
M200D AS-Interface Basic
30 Manual, 03/2009, A5E01668085-01
Page 31

Functions
3.7 System monitoring
3.7.2 Asymmetry monitoring
Description
Three-phase induction motors respond to slight asymmetries in the supply voltage with a
higher asymmetric current consumption, which causes the temperature in the stator and
rotor windings to increase. In this case, the M200D motor starter protects the motor against
overload by shutting it down.
Note
When the motor is switched on, asymmetry evaluation is suppressed for approx. 0.5 s.
Asymmetry limit value
The asymmetry limit is a percentage value by which the motor current is allowed to deviate
in each phase.
Asymmetry occurs when the difference between the lowest and highest phase current is
greater than the asymmetry limit value. The asymmetry limit for the M200D AS-i Basic is set
permanently to 30 %.
The reference value for the evaluation is the maximum phase current in one of the 3 phases.
Response to asymmetry
If the asymmetry limit value is exceeded, the motor starter is shut down.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
31
Page 32

Functions
3.7 System monitoring
3.7.3 Inputs
Description
The motor starter can use the "inputs" function to execute various actions, whereby the
signals at the digital inputs are evaluated. You can connect the inputs directly to sensors
(PNP) (2 and 3-wire system).
The input actions of the individual digital inputs affect the motor starter functions (=OR
operation) independently of one another.
Input function
,QSXWVLJQDOGHOD\
DIIHFWVDOOLQSXWV
The signals of inputs IN1 and IN2 are transferred cyclically via the process image.
NOTICE
Potential transfer
With AS-i, digital inputs must not be connected to digital outputs because this can establish
an impermissible connection between the U
,1[
5HVHWVLJQDO
0RWRU2))
4XLFNbVWRSGLVDEOH
PVIL[HG
3URFHVVLPDJH
AS-i
and U
5W6
4
UHWHQWLYH
IRUTXLFNVWRSRQO\
voltages.
AUX
1RWUHWHQWLYH
,QSXW
QVLJQDO
$FWLRQ
,QSXWQDFWLRQ
4XLFNVWRS
(PHUJHQF\VWDUW
7ULSSLQJOLPLWSRVLWLRQ&:
7ULSSLQJOLPLWSRVLWLRQ&&:
6KXWGRZQZLWKUHVWDUW
Figure 3-3 Overview of input parameters
M200D AS-Interface Basic
32 Manual, 03/2009, A5E01668085-01
Page 33

Functions
3.7 System monitoring
Input n signal
The input level of the digital inputs is stored for inputs IN1 and IN2, that is, the active edge
executes the input action assigned to the corresponding input. Regardless of the input signal
present, the action can only be deactivated again by a further event.
The input level is not stored for inputs IN3 and IN4. This input action is active as long as the
input is active.
Input n level
The input logic for the M200D AS-i Basic is set to "NO contact".
Device parameter
.DS... .RS...
Input signal delay 10 ms 10 ms
Input 1 level
Input 2 level
Input 3 level
Input 4 level
Input 1 action Quick stop Quick stop
Input 2 action No action No action
Input 3 action Emergency start Tripping limit position CW
Input 4 action Shutdown with restart Tripping limit position CCW
Input 1 signal Latching (edge evaluation) Latching (edge evaluation)
Input 2 signal
Input 3 signal
Input 4 signal
NO contact NO contact
Unlatching (level evaluation) Unlatching (level evaluation)
Setting
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
33
Page 34

Functions
3.7 System monitoring
Description of the actions
Quick stop
● The motor and brake output are shut down without a group fault.
● "Quick stop" has priority over "Motor CW" and "Motor CCW".
● The input action responds to the active edge of the input signal, which means that
deactivation is possible when the static input signal "Quick stop" is present.
● The input trigger is reset when the "Motor CW"/"Motor CCW" control commands are
canceled or by means of "Disable quick stop" (in the process image).
Note
When bit DO2 (PIO) (Disable quick stop) is set, input 1 in the PII can be used as a free
input because the input function "Quick stop" is deactivated.
Example:
'2PRWRUULJKW
',LQSXW
4XLFNVWRSIXQFWLRQ
'2'LVDEOHTXLFNVWRS
0RWRU
Figure 3-4 Example: quick stop
Emergency start
● Starts the motor when an ON command is issued despite the fact that an internal
shutdown command is present.
● Switches on the brake output too if an ON command is present for this.
● The self-protection function of the motor starter remains active and prevents the device
from being destroyed.
Tripping limit position CW/CCW
● The motor and the brake output are tripped regardless of the direction of rotation.
● The brake output can be switched on again once the "Brake" and "Motor CW / CCW"
control commands have been canceled.
● Tripping limit position CW: The motor can only be switched on again with the opposite
command ("Motor CCW").
● Tripping limit position CCW: The motor can only be switched on again with the opposite
command ("Motor CW").
M200D AS-Interface Basic
34 Manual, 03/2009, A5E01668085-01
Page 35

Functions
3.7 System monitoring
Shutdown with restart
● Causes the motor and brake to shut down.
● Acknowledged automatically once the cause of the shutdown has been rectified (initial
status).
3.7.4 Outputs
Description
The motor starter can use the "outputs" function to control various actuators (e.g. indicator
lights, signal transmitters, or contactor relays).
With the M200D AS-i Basic, the output is active in the event of...
● Group faults (permanently assigned)
...and outputs a continuous signal.
The digital output is overload/short-circuit proof and is supplied from U
NOTICE
AUX
.
Potential transfer
With AS-i, digital inputs must not be connected to digital outputs because this can establish
an impermissible connection between the U
AS-i
and U
voltages.
AUX
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
35
Page 36

Functions
3.7 System monitoring
3.7.5 Connector monitoring
3.7.5.1 Power connector
The motor starter monitors whether the infeed connector on the line side of the motor starter
is plugged in. Connector monitoring is implemented by means of an input activated via a
jumper between pins 11 and 12, which informs the motor starter that the connector is
plugged in.
Note
When you use the "connector monitoring" function, you have to connect pin 11 to pin 12 in
the connector.
;
; ;
// 1/ 3(
3(
_!_!_!
//7 3( 1%2%2
7
/
/7 %27
/ / 3(%2 1
/
/
/
1
3(
6XSSO\IRUPDLQSRZHU
// 1/ 3(
3(
0
37&RU
WKHUPRFOLFN
① Temperature sensor monitoring
② Connector monitoring
M200D AS-Interface Basic
;
36 Manual, 03/2009, A5E01668085-01
Page 37

Functions
3.7 System monitoring
Connector monitoring
Line-side connector monitoring can be deactivated via the DIP switch.
For more information, see
Response when connector is unplugged
When the connector is unplugged, the motor starter outputs a group fault.
Settings
Device parameter Default setting Setting range
Connector monitoring Line side
3.7.5.2 Motor connector
The "connector monitoring" function is only valid for the infeed connector.
A connector monitoring function for the motor connector can be logically combined with the
thermistor cable and/or thermistor evaluation function.
If a motor is operated without a thermistor, you can activate thermistor monitoring
(thermoclick) and use it to monitor the connector by means of a wire jumper on the motor
terminal board or in the motor connector.
Parameterization via local setting (Page 72).
• Deactivated
• Line side
Note
The "overload" message must be interpreted to mean that the motor connector has been
unplugged.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
37
Page 38

Functions
3.8 Short-circuit protection (circuit breaker / disconnecting means)
3.8 Short-circuit protection (circuit breaker / disconnecting means)
Description
The motor starter is equipped with an integrated circuit breaker for short-circuit protection to
ensure that the system is safe and to protect personnel. Short-circuits between one phase
and ground (= ground fault) as well as between two phases are monitored.
Properties of the circuit breaker
The circuit breaker / disconnecting means is designed for the following functions:
● Disconnecting the series-connected starter and consumer from the supply voltage
● Closing lockout by means of a padlock on the rotating element
● Short-circuit protection for the series-connected consumer with circuit breaker
Response when circuit breaker is OFF:
If a short circuit occurs or the circuit breaker is tripped manually, the motor starter responds
with a group fault.
3.9 Communication
Description
Communication is a higher-level device function comprising a number of sub-functions:
● Mode monitoring
● Fieldbus interface
● Data plausibility check
● Message output
M200D AS-Interface Basic
38 Manual, 03/2009, A5E01668085-01
Page 39

Functions
3.9 Communication
3.9.1 Mode monitoring
Data channels
The M200D AS-i Basic motor starter has three different data channels:
● Local optical device interface (for hand-held device)
● Control with integrated manual local control in "Manual operation local" mode
(key-operated switch + keypad; order variant)
● Via the fieldbus interface AS-Interface:
– Cyclic data via AS-i
The data channel used for control purposes depends on the operating mode.
Operating modes
The following operating modes are available (in ascending order of priority):
● Automatic (lowest priority)
The motor starter can only be controlled with the PLC via the fieldbus.
● Manual operation local
The motor starter can be controlled with:
– Integrated manual local control (key-operated switch + keypad; order variant)
– Local device interface (e.g. hand-held device) (highest priority)
In this operating mode, the message "Manual local operation" is output when diagnosis is
performed via the parameter channel.
3.9.2 Plausibility check for settings
Description
The motor starter checks all the parameters that have been set to ensure that they are valid
and plausible.
Motor protection deactivation rule
At least one of the motor protection functions supported by the motor starter (thermal motor
model, temperature sensor) must always be active at any one time, that is, you are not
permitted to deactivate all the motor protection functions by means of parameterization.
If the temperature sensor is deactivated via the DIP switch and, at the same time, the rotary
coding switch is set to "Class OFF", the following applies:
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
39
Page 40

Functions
3.9 Communication
● If no motor ON command is present, a group alarm is output.
The alarm is canceled when motor protection is reactivated.
● If a motor ON command is present, a group fault is output immediately and a
corresponding internal shutdown command generated, which must be acknowledged with
"trip reset".
– If the motor ON command remains, the fault can only be acknowledged with "trip
reset" once the fault has been rectified (activate at least one motor protection
function).
– If the motor ON command is reset, the group fault can be "downgraded" to a group
alarm even if a setting is incorrect.
3.9.3 Message output
Message Meaning Output via
General messages
Ready (automatic)
Group fault At least one fault is set.
Group alarm At least one alarm is present.
• Device can be controlled via BUS
• Automatic mode
• No fault
Process image of inputs
• LED
• Diagnostics via parameter
channel
• LED
• Diagnostics via parameter
channel
Mode monitoring
Manual operation
local mode
Manual operation via integrated
manual local control or via the local
device interface (hand-held device)
Diagnostics via parameter channel
M200D AS-Interface Basic
40 Manual, 03/2009, A5E01668085-01
Page 41

Functions
3.10 Trip reset
3.10 Trip reset
Trip reset acknowledges all the faults that are currently present in the starter and that can be
acknowledged. A fault can be acknowledged if its cause has been rectified or if it is no longer
present.
The trip reset can be triggered by:
● Remote reset via the bus interface (DO 0 CW ON and DO 1 CCW ON simultaneously)
● Local reset via the key-operated switch (0 position; order option)
● Local reset via the device interface (hand-held device)
3.11 Self-test
Description
Two types of self-test can be carried out:
Self-test fault
● Self-test at startup
This is automatically selected when the device is switched on or initialized.
● Self-test during operation:
The motor starter monitors (cyclically) specific device components and signals any faults
(device faults).
If a fault occurs, the "DEVICE" LED lights up red. The fault can only be acknowledged by
switching the device off and then on again. If the fault is still present, the self-test will return a
fault again when the device is switched on. In this case, the motor starter must be replaced.
Note
Specific device components are monitored continuously (internally) by the motor starter and
the results signaled with the message "Device fault".
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
41
Page 42

Functions
3.12 Solid-state/mechanical switching technology
3.12 Solid-state/mechanical switching technology
Solid-state switching
The motor starter controls the motor (two phases) with thyristors. Phase L1 is not switched
but is instead looped through from the 400 V power connection to the motor connection via
the integrated disconnecting means.
DANGER
Hazardous voltage
Can cause death or serious injury.
If the line voltage is present at the 400 V power connection of the motor starter, hazardous
voltage may still be present at the motor starter output even if a start command has not
been issued.
When carrying out any work on the branch, make sure that you disconnect it via the
disconnecting means.
Mechanical switching
The motor starter controls the motor (three phases) with contactors.
On device versions with a rated operating current of 0.15 - 2A (3RK13..-6KS41) RC
elements are integrated on the motor output side to dampen interference pulses.
Contact block defective
If a contact block is defective (contactor welded / thyristor failure), the motor starter cannot
shut down the motor.
If necessary, evaluate the message "Device fault" and shut down the branch on the basis of
this by means of an upstream contact block.
M200D AS-Interface Basic
42 Manual, 03/2009, A5E01668085-01
Page 43

Functions
3.13 Local device interface
3.13 Local device interface
Description
The local optical device interface can be used to connect the motor starter to a hand-held
device (order no.: 3RK1922-3BA00; RS232 interface cable: 3RK1922-2BP00). This control
source has the highest priority.
To stop the fiber-optic cable for the device interface from getting dirty, it is located under the
removable unit labeling plate.
Figure 3-5 Optical device interface
NOTICE
To ensure that data can be transferred without any problems, make sure that the device
interface is clean at all times.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
43
Page 44

Functions
2
2
3.14 Integrated manual local control
3.14 Integrated manual local control
Integrated manual local control (order variant) for the M200D motor starter involves a keyoperated switch and a keypad with four pushbuttons.
Key-operated switch
2
Figure 3-6 Key-operated switch
The key-operated switch can be set to three different positions.
Position Meaning Function
Automatic mode The keys on the keypad have no function. The LEDs on
the "QUICK STOP DISABLE", "RIGHT", and "LEFT" keys,
however, are active. They are used for indicating the status
(= status of control via the PIO).
Manual mode Control priority is assumed by a lower-priority control
source (automatic mode) and transferred to the keypad.
When you switch back to "REMOTE", control priority is
always initially passed to the CPU/master.
OFF / Reset When you switch to this position, a fault that is present can
be acknowledged with trip reset (provided that it can be
reset). If the key-operated switch remains in this position,
2
Note
The key can be inserted/removed in any position.
the motor starter is in the "O" position once the "Reset"
command has been issued. The motor starter does not
execute any control commands in this position (regardless
of the control source).
M200D AS-Interface Basic
44 Manual, 03/2009, A5E01668085-01
Page 45

Functions
3.14 Integrated manual local control
Keypad
The keypad has four pushbuttons arranged in a square.
Note
They are only active when the key-operated switch is set to manual mode.
Figure 3-7 Keypad
Pushbutton Meaning Function
Continuous
operation / jog
mode
The mode switches every time you press this pushbutton (continuous / jog).
"Continuous" mode is indicated via the corresponding LED (yellow, lit up) (in
manual mode only).
When manual mode is deactivated, jog mode is reset.
Quick stop
DISABLE
Clockwise
rotation
CCW rotation This pushbutton is only enabled for reversing starters.
The "QUICK STOP" input actions are deactivated for all inputs.
This pushbutton is active in jog mode and continuous operation. In continuous
operation, the "QUICK STOP DISABLE" function can be activated by pressing the
pushbutton once and deactivated by pressing it again.
The yellow LED lights up regardless of the operating mode (as long as the function
is active).
The main circuit for CW operation is activated.
In continuous operation, the main circuit can be activated by pressing the
pushbutton once and deactivated by pressing it again.
With reversing starters, an ongoing action can also be interrupted in continuous
operation by pressing the "CCW rotation" pushbutton.
The green LED lights up regardless of the operating mode (as long as the selected
function is active).
The main circuit for CCW operation is activated.
In continuous operation, the main circuit can be activated by pressing the
pushbutton once and deactivated by pressing it again.
In continuous operation, an ongoing action can also be interrupted by pressing the
"CCW rotation" pushbutton.
The green LED lights up regardless of the operating mode (as long as the selected
function is active).
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
45
Page 46

Functions
3.14 Integrated manual local control
Note
If the "CW rotation" and "CCW rotation" pushbuttons are pressed simultaneously, this is
classed as an operation fault. A function cannot be restarted. A function that is being
executed is interrupted (the starter shuts down).
A function cannot be restarted until both pushbuttons have been released.
M200D AS-Interface Basic
46 Manual, 03/2009, A5E01668085-01
Page 47

Installation / connection
4.1 Installation
4.1.1 Installation rules
Simple installation
DANGER
Hazardous voltage
Can Cause Death, Serious Injury, or Property Damage
Before starting work, disconnect the system and devices from the power supply.
The distributed M200D AS-i motor starter is designed as a complete device that is easy to
install. Carry out the following steps:
4
1. If you are using the optional protection guards, install these first.
2. Install the motor starter on a flat surface.
Installation position
The M200D AS-i motor starter is designed for the following installation positions on a flat
surface:
Figure 4-1 Installation positions: horizontal, vertical, flat; must not be positioned as shown on the right
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
47
Page 48

Installation / connection
4.1 Installation
4.1.2 Derating
What is derating?
Derating allows devices to be used even in severe operating conditions by selectively
restricting the output capacity.
Derating factors
When M200D AS-i motor starters are operated under harsh conditions, the following factors
must be taken into account:
● Ambient temperature T
– The ambient temperature T
u:
is the temperature of the air surrounding the motor starter
u
housing.
The lower the maximum ambient temperature T
, the higher the current load on the
u
motor starter can be.
– The installation position affects how quickly the motor starter cools.
● Absolute current load:
– The lower the current flowing through the motor starter, the lower the power loss
(= heat) inside the device. If slight self-heating occurs, the ambient temperature T
be higher.
– In the case of soft starters in which the soft start function has been deactivated, the
maximum permissible rated operating current I
is restricted to 9 A (≡ electronic direct
e
starter; sDSte).
can
u
M200D AS-Interface Basic
48 Manual, 03/2009, A5E01668085-01
Page 49

Installation / connection
4.1 Installation
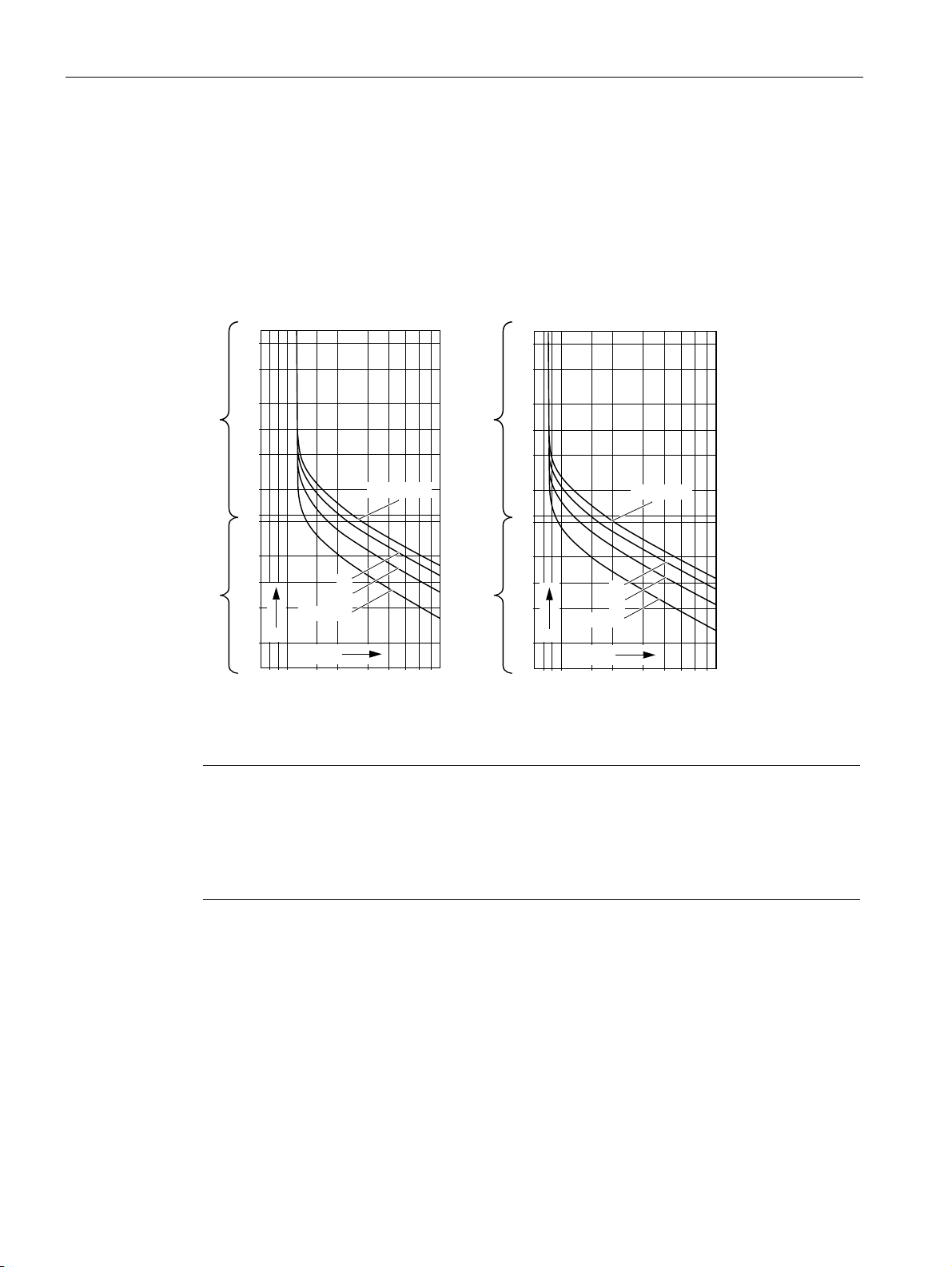
Derating diagrams
You can use the following diagrams to determine the derating factors for horizontal, vertical,
or flat installation.
>$ @
H
,
7
>r&@
X
① DSte, RSte
② sDSte, sRSte
Figure 4-2 Derating for horizontal installation (Basic)
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
49
Page 50

Installation / connection
4.1 Installation
>$ @
H
,
7
>r&@
X
① DSte, RSte
② sDSte, sRSte
Figure 4-3 Derating for vertical installation
>$ @
H
,
>r&@
7
X
① DSte, RSte
② sDSte, sRSte
Figure 4-4 Derating for flat installation
M200D AS-Interface Basic
50 Manual, 03/2009, A5E01668085-01
Page 51

Installation / connection
4.1 Installation
4.1.3 Installing the protection guards
Protection guard (accessory)
CAUTION
The protection guards are designed for a maximum load of 10 kg.
To prevent mechanical damage to the motor starter cables and connections, you can install
protection guards on the side and top (order no.: 3RK1911-3BA00).
To secure the protection guards, the angled ends can be used as clamping bolts, which are
secured in the device base by means of eccentric elements.
1. Insert the eccentric elements in the locating holes on the bottom of the motor starter.
2. Push the ends of the protection guards into the holder until they engage.
3. Turn the eccentric elements clockwise until the protection guard is secure.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
Make sure that the holes are aligned for the protection guards.
51
Page 52

Installation / connection
4.1 Installation
4.1.4 Installing the motor starter
Carry out the following steps to install the motor starter:
Step Description
1 Find a flat surface for mounting the device.
2 Drill four holes for the screws.
3 Secure the motor starter using four screws (M5). If necessary, use plain washers and
spring washers.
4.1.5 Functional ground
The motor starter must be connected to functional ground. The connection to functional
ground is required to discharge interference and ensure EMC resistance. Unlike the
protective conductor, functional ground does not offer protection against electric shock,
which is why it must be routed separately.
The contact plate at the fixing point on the bottom right is connected to functional ground
within the device. This connection must be connected to the ground potential with as little
resistance as possible.
Figure 4-5 Connection for functional ground
If you do not install the motor starter on a grounded, conductive base, you have to establish
a connection with the ground potential (grounding cable with cable lug, spring washer, and
plain washer).
M200D AS-Interface Basic
52 Manual, 03/2009, A5E01668085-01
Page 53

Installation / connection
4.1 Installation
4.1.6 Setting the AS-i address
Unique addressing
In the factory setting, an I/O module (slave) has the address 0. It is detected by the master
as a new slave that has not yet been addressed and, in this condition, has not yet been
integrated in standard communication/data exchange.
To enable data to be exchanged between the master and slaves, you have to assign a
unique address for each slave (i.e. each slave address must be different) when
commissioning the AS-Interface network.
You can select any address in the address space from 1A to 31A and 1B to 31B.
Thus a maximum of 62 nodes are possible in one AS-Interface network.
Addressing the slaves
You can set the slave address in different ways:
● Offline with the addressing unit at the AS-i connection.
Recommended if you want to assign addresses for the entire system. The direct
connection between the slave (motor starter) and addressing unit ensures that the slaves
are not mixed up.
● Online by the AS-i master or in the PLC configuration software.
Recommended if you want to assign addresses to individual slaves if an addressing unit
is not available.
Before assigning addresses, you must ensure that each address exists only once in the
AS-i network, that is, several new, additional modules (with address 0 in as-delivered
condition) must not be connected to the AS-i cable.
CAUTION
As soon as you have assigned a valid address outputs can be set or inputs read that result
in follow-up switching operations. To prevent a hazardous condition switch off the voltage
.
U
AUX
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
53
Page 54

Installation / connection
4.1 Installation
Offlline addressing with the addressing unit
The motor starter is addressed via the AS-i connection socket.
Note
When assigning the address via the addressing unit, unscrew the encoders (sensors) from
the digital inputs to prevent the addressing unit from being overloaded by their power
consumption.
If the older version of the addressing unit (3RK1904-2AB00) is used, a special addressing
cable (3RK1901-3RA00) is required to connect the module to the addressing unit.
ASI-
1. Connect the motor starter to the addressing unit (3RK1904-2AB01) using a standard M12
connection cable (2 or 3 pin) (e.g. 3RX8000-0GF32-1AB5).
(4 or 5-pin connection cables must not be used for addressing purposes.)
2. Assign an address to the module.
• Set the selector switch to ADDR.
• Press
• Select the address by choosing
• To transfer the address to the module, choose
ASI+
4132
. The address of the connected module is read and displayed.
.
.
3. Unplug the addressing cable and reconnect the motor starter using the AS-i cable.
Online addressing with the AS-i master and in the PLC configuration software
For instructions on how to address the motor starter using the AS-i master or in the
configuration software, refer to the manual for the AS-i master you are using.
M200D AS-Interface Basic
54 Manual, 03/2009, A5E01668085-01
Page 55

Installation / connection
4.2 Connection
4.2 Connection
More connection technology products can be found in "Siemens Solution Partners"
(www.siemens.com/automation/partnerfinder
4.2.1 Required components/cables
Selecting the power cables
) under "Distributed Field Installation System".
DANGER
Hazardous voltage
Can Cause Death, Serious Injury, or Property Damage
Before starting work, disconnect the system and devices from the power supply.
The cross-section of the power cables must be suitable for the prevailing ambient conditions.
The following factors determine the cross-section:
● The current set on the device
● The cable installation type
● The ambient temperature
● The type of material (PVC, rubber)
The following maximum current-carrying capacities apply for PVC power cables when
installed, for example, in the cable duct (depending on the ambient temperature):
Cross-section TU = 30 °C TU = 40 °C TU = 45 °C TU = 50 °C TU = 55 °C
1.5 mm2 14 A 12.2 A 11.1 A 9.9 A 8.5 A
2.5 mm2 19 A 16.5 A 15.0 A 13.5 A 11.6 A
4.0 mm2 26 A 22.6 A 20.5 A 18.5 A 15.9 A
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
55
Page 56

Installation / connection
4.2 Connection
Note the following rules when carrying out wiring:
Rules for flexible cables Data
Current-carrying capacity of the plug connection as a function of the
connectable core cross-sections and ambient temperature
1.5 mm2 12 A 15 A
2.5 mm2 20 A 25 A
4.0 mm2 30 A 35 A
TU =
55 °C
TU =
40 °C
Unused connections
Seal unused connections by means of the sealing caps enclosed since this is the only way to
ensure degree of protection IP65.
The sealing caps are also available as accessories:
Item Quantity Order no.
Sealing cap M12 10 pieces 3RX9802-0AA00
4.2.2 Prefabricating power cables
To prefabricate power cables, you require the following:
● A crimping tool for attaching the sockets and pins on the individual wires
● For infeed on motor starters
Assignment of X1: see section Power terminal (Page 58):
– A flexible Cu
cable with 4 x 2.5 mm
(for motor starters with 230 V AC brake output: 5-core cable; 3 wire + N + PE)
– Han Q4/2 socket power connector
Item Quantity Order no.
Contact socket 2.5 mm2, for Han Q4/2 sockets 5 3RK1911-2BE50
Contact socket 4 mm2, for Han Q4/2 sockets 5 3RK1911-2BE10
Contact socket 6 mm2, for Han Q4/2 sockets 5 3RK1911-2BE30
Crimping tool ≤ 4 mm² 1 3RK1902-0CT00
Crimping tool 4 / 6 mm² 1 3RK1902-0CW00
2
/ 4 mm2 / 6 mm2 (3 wire + PE)
M200D AS-Interface Basic
56 Manual, 03/2009, A5E01668085-01
Page 57

Installation / connection
4.2 Connection
Consumer connection on the motor starter
For the assignment of X2, see Power terminal (Page 58):
● A flexible Cu cable with 1.5 mm
2
or 2.5 mm2
– Without brake control: 3 wire + PE
– With brake control: 5 wire + PE
– With temperature sensor: 2 additional wires
– Han Q8/0 pin power connector
Item Order no.
Connector set, 8 X 1.5 mm2, 9 pin, complete with PG16 cable entry 3RK1902-0CE00
Connector set, 8 X 2.5 mm2, 9 pin, complete with PG16 cable entry 3RK1902-0CC00
4.2.3 Installing and wiring power connectors
DANGER
Hazardous voltage
Can Cause Death, Serious Injury, or Property Damage
Before starting work, disconnect the system and devices from the power supply.
Installa and wire the power connectors as follows:
Step Procedure
1
2 Strip the cable over a length of 20 mm.
3 Strip the cores over a length of 8 mm.
4 Secure the contact sockets/pins on the cores by crimping or soldering them.
5 Sort the contact sockets/pins in the socket/pin insert in accordance with the assignments (see section Power
6 Make sure that the position of the coding is correct, pull the cable back, and secure the socket/pin insert in the
7 Secure the cable gland. When doing so, make sure that the cable is not twisted against the connector housing.
Route the cable through the cable gland, sealing insert (enclosed), and the connector housing. The sealing
insert is available in the following gradings:
Permissible external diameter of the cable Sealing insert
7.0 to 10.5 mm
9.0 to 13.0 mm
11.5 to 15.5 mm
terminal (Page 58)). The contact sockets/pins should not engage yet. Make sure that they are correctly
assigned. Push the contact sockets/pins into the socket/pin insert until they engage. Use a suitable tool to
remove contact sockets/pins that have already been installed (Han Q4/2: 3RK1902-0AB00, Han Q8/0:
3RK1902-0AJ00.
connector housing using the cross-recessed screws enclosed.
Green
Red
White
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
57
Page 58

Installation / connection
4.2 Connection
4.2.4 Power terminal
Wiring X1 (power supply) and X2 (motor connection)
The supply voltage is fed via power connector X1.
The motor is supplied via power connector X2.
NOTICE
When inserting the pin/socket insert into the connector housing, make sure that the coding
is positioned correctly.
Socket X2
with
180 V DC
brake
Brake L1
(switched) "-"
2)
Brake L3
(direct) "+"
2)
; ;
Pin Connector
X1
1 Phase L1 L1 out L1 out L1 out
2 Phase L2 --- N --3 Phase L3 L3 out L3 out L3 out
4 N --- Brake L1
5 ---
6 --- --- Brake L3
7 --- L2 out L2 out L2 out
8 --11
12
1)
--- --- ---
1)
--- --- ---
PE PE PE PE
Socket X2
without brake
2)
2)
Socket X2
with 400 V /
230 V AC
brake
(switched)
2)
(direct)
2)
1)
Connector monitoring
2)
Temperature sensor
M200D AS-Interface Basic
58 Manual, 03/2009, A5E01668085-01
Page 59

Installation / connection
4.2 Connection
Power supply: Han Q4/2 socket (connection for X1)
Socket Assignment
&RQWDFWVRFNHW
&RGLQJ
&RQQHFWRUKRXVLQJ
&DEOHJODQG
ZLWKVHDOLQJLQVHUW
1 Phase L1
2 Phase L2
3 Phase L3
4 N
11 Connector monitoring
12 Connector monitoring
PE (yellow/green)
&RGLQJ
PE
43
1211
21
6RFNHWLQVHU W
Note
When you use the "connector monitoring" function, you have to connect pin 11 to pin 12 in
the connector.
Motor connection Han Q8/0 pin (connection for X2)
Pin Assignment
&RQQHFWRUKRXVLQJ
&RQWDFWSLQV
&RGLQJ
&DEOHJODQG
ZLWKVHDOLQJLQVHUW
1 L1 out
2 N1)
3 L3 out
4 Brake L1 (switched)1)
5 Temperature sensor
6 Brake L3 (direct)1)
7 L2 out
8 Temperature sensor
PE (yellow/green)
&RGLQJ
7
8
5
3
PE
6
4
2
1
0DOHLQVHU W
1)
See brake variants
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
59
Page 60

Installation / connection
4.2 Connection
Brake variants
400 V AC 230 V AC 180 V DC
;
b9$&
/
/
b9$&
;
/
1
9'&
/
/
;
4.2.5 Brake output
M200D motor starters can be equipped with an optional electronic brake control (order
variant). The brake control is suitable for externally-suppled brakes with the coil voltages
shown below:
● 400 V AC / 230 V
The brake rectifier must be installed in the motor. The rectifier input is controlled via the
motor starter.
● 180 V DC
A rectifier is not required for the brake in the motor because the 180 V DC is provided by
the motor starter. In this way, brake coils for 180 V DC can be switched directly.
M200D AS-Interface Basic
60 Manual, 03/2009, A5E01668085-01
Page 61

Installation / connection
4.2 Connection
The brake output for the M200D motor starter
/ / / 3(1
/ / / 3(
;
0
9$&
0
3(
3(
3(
9$&
;
0
b9b'&
3(
3(
The brake voltage is fed to the motor together with the motor infeed via a joint cable (e.g.
2
6 x 1.5 mm
).
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
61
Page 62

Installation / connection
4.2 Connection
4.2.6 Digital inputs/outputs
Socket assignment
The digital inputs and output are available with standard 5-pin M12 sockets:
Assignment Pin Input Output
1 + 24 V (PWR+) N/C
2 N/C N/C
3 0 V (PWR-) 0 V (PWR AUX-)
4 DIx OUT1
5 FE FE
NOTICE
Potential transfer
With AS-i, digital inputs must not be connected to digital outputs because this can establish
an impermissible connection between the U
4.2.6.1 Digital inputs
The motor starters are equipped with four digital inputs, which you can connect directly to
sensors (PNP) (2 and 3-wire system).
Connectors (M12, 5 pin) are used for this purpose. The motor starter is equipped with a
range of sockets.
NOTICE
Short-circuit hazard
Do not use an external power supply since this can result in a short-circuit.
AS-i
and U
voltages.
AUX
M200D AS-Interface Basic
62 Manual, 03/2009, A5E01668085-01
Page 63

Installation / connection
4.2 Connection
Pin assignment
The following diagrams show examples of circuits (2 and 3-wire system):
2-wire system 3-wire system
Note
The supply voltage for the digital inputs is short-circuit proof. The current is limited to max.
200 mA. If a short-circuit or overload situation occurs in the sensor supply, the contact block
(motor) and brake output are shut down and a group fault is output. You must acknowledge
this fault with a trip reset.
4.2.6.2 Digital output
The motor starter is equipped with a digital output, which you can connect directly to an
actuator. The output is active when a group fault is present.
The output can be loaded to max. 0.5 A and protected electronically against short-circuits.
A connector (M12, 4 or 5 pin) is used for establishing the connection. The motor starter is
equipped with a range of sockets.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
Example: Connecting the digital output
63
Page 64

Installation / connection
4.2 Connection
4.2.7 AS-Interface
Pin assignment
Pin Assignment
1 U
2 PWR-AUX 3 U
4 PWR-AUX +
AS-i+
AS-i–
4.2.8 Connection options for AS-Interface
The different methods of connecting the motor starter to the AS-Interface bus cable and the
24 V DC auxiliary voltage are shown in the following table:
Motor starter AS-i connection with U
Plus M12 branch with integral
cable
Plus M12 branch with socket plus
separate M12 cable 1)
Plus 4 x M12 branch plus separate
M12 cable
1)
AUX
3RK1901-1NR21 (1 m)
3RK1901-1NR22 (2 m)
3RK1901-1NR20
3RK1901-1NR00
1)
Prefabricated versions of this cable as M12 cable connectors/plugs:
3RX8000-0GF42-1AA6: 0.5 m
3RX8000-0GF42-1AB0: 1.0 m
3RX8000-0GF42-1AB5: 1.5 m
When longer cables are required to connect the distributor and module, cables that can be cut as
required and have an M12 cable plug and open cable end can be used, fitted with an M12 connector
(straight: 3RX8000-0CD45, angle: 3RX8000-0CE45) and connected to the distributor. These cables
are available in two versions:
3RX8000-0CB42-1AF0: 5 m, with M12 cable plug
3RX8000-0CC42-1AF0: 5 m, with M12 angle cable plug
M200D AS-Interface Basic
64 Manual, 03/2009, A5E01668085-01
Page 65

Installation / connection
4.2 Connection
Connection examples for motor starters
The installation guidelines for AS-Interface must always be observed:
● The maximum permissible current for all M12 connection cables is restricted to 4 A.
The cross-section of these cables is just 0.34 mm². To connect the motor starter, you can
use the M12 connection cables mentioned above as spur lines.
● The voltage drop induced by the ohmic resistance (approx. 0.11 Ω/m) must be taken into
account.
● The following maximum lengths apply to round cable connections in which AS-i and U
are routed in the same cable:
– For each spur line from the branch to the module: max. 5 m
– Total of round cable components in one AS-Interface network: max. 20 m
AS-Interface M12 branches and distributor
AUX
Closed Open
Note
If you are using a non-angled connector, you are advised to install the protection guards
(accessories) to protect the AS-i connection against mechanical damage (refer to
the protec
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
Installing
tion guards (Page 51)).
65
Page 66

Installation / connection
4.2 Connection
M200D AS-Interface Basic
66 Manual, 03/2009, A5E01668085-01
Page 67

Configuration / parameterization
5.1 Configuration
Configuration involves integrating the motor starter in the overall system by assigning
addresses and parameters.
Master requirements
The M200D AS-i Basic motor starter requires at least one AS-i master to AS-i spec. 2.1 with
master profile M3.
5
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
67
Page 68

Configuration / parameterization
5.2 Configuration on the AS-i master CP 343-2
5.2 Configuration on the AS-i master CP 343-2
Requirement
The CP 343-2 communications processor has already been configured.
Procedure
1. Double-click CP 343-2 DP. The Properties window is displayed.
2. Choose the Slave Configuration tab. Open the object properties by double-clicking the
address (in this case, row 1A) to which the M200D AS-i Basic motor starter is to be
configured.
M200D AS-Interface Basic
68 Manual, 03/2009, A5E01668085-01
Page 69

Configuration / parameterization
5.2 Configuration on the AS-i master CP 343-2
3. Choose the Configuration tab. When you click Selection..., the slave selection dialog is
displayed.
4. Select AS-i A/B Slave Universal by double-clicking it.
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
69
Page 70

Configuration / parameterization
5.2 Configuration on the AS-i master CP 343-2
5. Enter the following values for the AS-i profile:
NOTICE
ID1 code
The default setting of the ID1 code for M200D AS-i Basic is 7 (F).
A different setting is not permitted.
Field Value
IO code: 7 (B B B E)
ID code: A
ID1 code: 7 (F)
ID2 code: E
6. This completes the process of configuring the M200D AS-i Basic motor starter on the
CP 343-2 DP.
M200D AS-Interface Basic
70 Manual, 03/2009, A5E01668085-01
Page 71

Configuration / parameterization
5.3 Parameterization
5.3 Parameterization
5.3.1 Parameterization
The motor starter can be parameterized in the following ways:
● Rotary coding switch for:
– Setting the rated operating current I
e
– Deactivating the thermal motor model (class OFF)
● DIP switch
– To (de)activate the temperature sensor
– To set the temperature sensor type
– To (de)activate connector monitoring
– To set the shutdown response of thermal motor protection
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
71
Page 72

Configuration / parameterization
5.3 Parameterization
5.3.2 Parameterization via local setting
Setting the current limit value
The rotary coding switch for setting the operating current Ie (0.15 … 2 A, 1.5 … 9 A or
1.5 … 12 A depending on the device version) is located under the cover on the front of the
starter.
0,4
0,3
0,8
1
1,2
0,6
0,2
CLASS
OFF
0,15
l
e
Figure 5-1 Rotary coding switch with 2 A scale
Before commissioning the motor starter, set the operating current Ie for the overload trip:
Step Procedure
1 Open the transparent cover at the top of the housing for the motor starter.
2 Use a screwdriver to set the operating current Ie on the scale of the rotary coding switch.
3 Close the transparent cover.
2A
1,5
1,8
M200D AS-Interface Basic
72 Manual, 03/2009, A5E01668085-01
Note
In the delivery condition, the minimum current limit is set.
Changes to the position of the rotary coding switch require approx. 500 ms to take effect.
Page 73

Configuration / parameterization
5.3 Parameterization
Setting the device parameters on the DIP switch
Diagram Switch Function Setting
1 Temperature sensor 0: deactivated
1: activated
2 Temperature sensor 0: PTC type A
1: Thermoclick
3 Line-side connector
4 Shutdown response of
monitoring
thermal motor protection
0: deactivated
1: activated
0: with restart (= autoreset)
1: no restart
'HOLYHU\FRQGLWLRQ
ჷ
Figure 5-2 DIP switch labeling
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
73
Page 74

Configuration / parameterization
5.4 Process images
5.4 Process images
Definition of process image
The process image is a component of the AS-i master system memory.
At the start of the cyclic program, the signal states of the inputs are transferred to the
process image for the inputs.
At the end of the cyclic program, the process image of the output is transferred to the slave
as a signal state.
Input process image (PII)
The following table contains process data and a process image for inputs DI 0 to DI 3:
Byte / bit Process image Signal: 1 = HIGH, 0 = LOW
DI 0 Ready (automatic) 0: Starter not ready for host / PLC
1: Starter ready to be operated via host
DI 1 Motor ON 0: OFF
1: ON (CW / CCW)
DI 2 Input 1
(input action: quick stop)
DI 3 Input 2
(no action)
0: Not active
1: Active
0: Not active
1: Active
Output process image (PIO)
The following table contains process data and a process image for outputs DO 0 to DO 3:
Byte / bit Process image Signal: 1 = HIGH, 0 = LOW
DO 0 Motor RIGHT 0: Motor OFF
DO 1 Motor CCW 0: Motor OFF
DO 2 Disable quick stop 0: Not active
DO 3 A / B switchover 0: A slave activated
Reference
For more information about system integration and data management in the controller, refer
to the "System AS-Interface"
http://support.automation.siemens.com
(
1: Motor ON
1: Motor ON
1: activated
1: B slave activated
/WW/view/en/26250840) system manual.
M200D AS-Interface Basic
74 Manual, 03/2009, A5E01668085-01
Page 75

Commissioning
6.1 Prerequisites
Software requirements
Configuration software used Explanations
Configuration software for the AS-i master used See the manual for the AS-i master
Commissioning requirements
Prior activity For more information, see ...
1. Motor starter installed "Installation"
2. Address set on motor starter "Installation"
3. Supply voltage for motor starter switched on —
4. Supply voltage for load switched on (if
necessary)
5. Motor starter configured (configured and
parameterized)
6. Supply voltage for AS-i master switched on —
7. AS-i master switched to RUN mode Manual for AS-i master
6
See manual for motor
"Configuration / parameterization"
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
75
Page 76

Commissioning
6.2 M200D AS-i components
6.2 M200D AS-i components
Minimum configuration
The overview shows the components you need for operation:
3/&
$6,QWHUIDFH
3RZHUVXSSO\
Figure 6-1 Minimum configuration of a motor controller
$6L/LQN
0RWRUVWDUWHU
0'
0RWRU
%UDNHRSWLRQDO
3RZHUVXSSO\XQLWV
$6L
8
$8;
8
Required components
For this example, you need the following components:
● A higher-level controller (e.g. S7 series)
● A suitable AS-i master to AS-i spec. 2.1, profile M3
● The motor starter
● Power supply units for the AS-i bus (U
) and the AS-i auxiliary voltage (U
AS-i
● Connection material:
– PLC ⇒ AS-i link
– AS-i branch M12 with a yellow AS-i cable and black auxiliary voltage cable or
AS-i round cable M12 (with auxiliary voltage supply)
– Power connection cable (X1)
– Motor connection cable (X2)
M200D AS-Interface Basic
76 Manual, 03/2009, A5E01668085-01
AUX
)
Page 77

Commissioning
6.3 Procedure
6.3 Procedure
Commissioning procedure
The following chart shows a logical, step-by-step commissioning procedure.
$GGUHVVLQJ
,QVWDOODWLRQ
$VVHPEO\
&RQQHFWLRQ
$6LFDEOH
6HQVRUVDFWXDWRUV
3RZHUVXSSO\
0RWRU
3DUDPHWHUL]DWLRQSURJUDPPLQJ
67(3
Figure 6-2 Commissioning procedure
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
77
Page 78

Commissioning
6.3 Procedure
M200D AS-Interface Basic
78 Manual, 03/2009, A5E01668085-01
Page 79

Diagnostics
7.1 Diagnostics
Diagnostics data can be read from the motor starter in a number of different ways:
● Diagnostics on the device:
– Status LEDs
● Diagnostics via AS-Interface
– S1 bit in the AS-i status register
– Parameter echo after AS-i command "Write_Parameter"
P0 = 0 → messages, alarms
P0 = 1 → fault messages
● Further diagnostics options:
– Addressing and diagnostic unit
– AS-Interface analyzer
7
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
79
Page 80

Diagnostics
7.2 Diagnostics with LED
7.2 Diagnostics with LED
7.2.1 Statuses of the individual LEDs
The following LEDs indicate the status of the motor starter:
$6L
6)
'(9
SF LED (possible colors: red / OFF)
Status Meaning Dependencies
OFF No fault
Red Device detects fault
DEVICE LED (possible colors: red / green / yellow / OFF)
Status Meaning Cause
OFF Device not ready System fault:
)$8/7
67$7 3:5
Device fault
• Current flowing with no ON command
• Self-test fault
Device detects system fault:
• Residual current detected
• No U
• External encoder supply short-circuit
$8;
3:5
AUX
• No supply voltage for electronics or power
supply is < 18 V
Green Device ready —
Flashing green Device not starting Device not initialized in factory or no startup
parameters received (parameter bits from master)
Yellow Internal trip —
Flashing yellow Group alarm The device has detected a system fault and
issues a group alarm due to:
• Prewarning limit of thermal motor model being
exceeded
• Incorrect parameter value:
therm. motor model + temperature sensor
deactivated (motor protection deactivation
rule)
Red Device defective A device defect was detected during the self-test.
M200D AS-Interface Basic
80 Manual, 03/2009, A5E01668085-01
Page 81

Diagnostics
7.2 Diagnostics with LED
AS-i / fault LED (possible colors: red / green / OFF)
Status Meaning Cause
OFF Device not ready
• No power supply for electronics
• Hardware fault in AS-i slave
Green Device ready Communication active, normal operation
Flashing red/yellow Slave address = 0 —
Flashing red/green I/O fault S1 bit set
Flashing red Serious I/O fault
Red No data exchange
• Hardware fault in AS-i slave
• Master in stop mode
• Slave not entered in LPS
• Slave has wrong IO/ID code
• Slave in reset mode
STATE LED (possible colors: red / green / yellow / OFF)
Status Meaning Cause
OFF No activation Contact block OFF
Green Activation Contact block ON
by means of controller or hand-held device
Flickering green Manual local control mode
control by input
Flashing yellow Mode fault Contact block OFF
Flickering yellow Manual local control mode
control by input
Red Contact block defective Switching status ≠ switching command
Contact block ON
by input action
manual mode connection interruption without
reset to automatic mode
Contact block OFF
by input control function
(e.g. quick stop)
PWR LED (possible colors: green / OFF)
Status Meaning Cause
OFF No U
Green U
No AS-i voltage
AS-i
present AS-i voltage present
AS-i
PWR AUX LED (possible colors: green / OFF)
Status Meaning Cause
OFF No U
Green U
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
No auxiliary voltage
AUX
present Auxiliary voltage present
AUX
81
Page 82

Diagnostics
7.2 Diagnostics with LED
Input LEDs IN1 ... IN4 (possible colors: green / OFF)
Status Meaning Cause
OFF No 24 V DC No input signal
Green 24 V DC present Input signal present
Output LED OUT1 (possible colors: green / OFF)
Status Meaning Cause
OFF No 24 V DC No output signal
Green 24 V DC present Output signal present
7.2.2 LED display combinations
You can define certain faults more accurately by looking at the combination of indicator
statuses.
Device status / operating mode
SF LED STATE LED DEVICE LED Device status / operating mode
OFF Green Green Motor ON; no fault
OFF OFF Green Motor OFF; no fault
OFF Flashing yellow Green Manual mode connection interruption without reset
OFF Flickering yellow Green Shutdown by input control function
OFF OFF Flashing green Device not initialized in factory or no startup
Device faults
Note
Acknowledging device faults
A device fault can only be acknowledged by switching the power off and then on again.
If the fault occurs again, however, the motor starter must be replaced.
to automatic mode
(e.g. quick stop)
parameters received (parameter bits from master)
M200D AS-Interface Basic
82 Manual, 03/2009, A5E01668085-01
Page 83

Diagnostics
7.2 Diagnostics with LED
SF LED STATE LED DEVICE LED Device faults
Red Red Red Current flowing with no ON command
(e.g.: contact welded, thyristor failure)
Red OFF Red Electronics defective, self-test fault
Red OFF OFF No connection with AS-i
System fault/alarm
SF LED STATE LED DEVICE LED System fault/alarm
Red OFF Yellow
• Current not flowing despite ON command
(residual current detected)
• Internal trip
– Connector monitoring
– Circuit breaker tripped / shut down
• No contact block supply voltage
• External encoder supply short-circuit
Group fault
OFF Green
(when contact
block is ON)
OFF OFF OFF No supply voltage for electronics
Flashing yellow Group alarm due to:
• Thermal motor model overload
• Temperature sensor overload
• Asymmetry
• Incorrect parameter value
SF LED STATE LED DEVICE LED Group fault
Red OFF OFF Device diagnosis available
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
83
Page 84

Diagnostics
7.3 Diagnostics via parameter channel (parameter echo)
7.3 Diagnostics via parameter channel (parameter echo)
Diagnostics (diagnostic message and diagnostic read procedure)
In the PLC, you can tell whether a fault has occurred by looking at the "I/O fault bit" (S1) on
the slave status tab page. The AS-i master enters the S1 value in the list of I/O faults (LPF)
that have been signaled. The PLC can read this list via the "GET_LPF" command and then
signal a specific diagnostic value from the slave.
Slave diagnostics echo (parameter echo)
Bit P0 defines whether a fault diagnosis (P0 = 1) or alarm/message diagnosis (P0 = 0) is
returned to the master as a slave response.
The parameter value (P0 = (0 / 1); P1 = x; P2 = x; P3 = x) is sent to the master via the
"Write_Parameter" command.
Note
In the parameter echo, only one fault or message is output at any one time; this is always the
one with the highest priority. No further messages/faults can be output while this
message/fault is present.
Call (master to slave):
P3 P2 P1 P0
A/B x (free) x (free) 0
Feedback (slave to master):
Parameter echo – alarms (A) / messages (M)
P3 P2 P1 P0 Decimal Message / alarm
0 0 0 0 00 No alarm / message
0 1 0 0 04 (M) Thermal motor model deactivated
1 0 1 0 10 (M) Manual local control
1 0 1 1 11 (A) Prewarning limit of motor model exceeded
1 1 0 0 12 (M) Temperature sensor deactivated
M200D AS-Interface Basic
84 Manual, 03/2009, A5E01668085-01
Page 85

Diagnostics
7.3 Diagnostics via parameter channel (parameter echo)
Call (master to slave):
P3 P2 P1 P0
A/B x (free) x (free) 1
Feedback (slave to master):
Parameter echo – faults (F)
P3 P2 P1 P0 Decimal Fault
0 0 0 0 00 No fault
0 0 1 0 02 (F) Main circuit breaker OFF
0 0 1 1 03 (F) Residual current tripping
0 1 0 0 04 (F) Overload
0 1 0 1 05 (F) Device fault
0 1 1 0 06 (F) No contact block supply voltage
1 0 0 1 09 (F) Connector disconnected on line side
1 0 1 0 10 (F) Electronics supply voltage too low
1 1 0 0 12 (F) Short-circuit trip
1 1 0 1 13 (F) Asymmetry tripping
1 1 1 0 14 (F) Incorrect parameter value
1 1 1 1 15 (F) Group fault
Sample program
Sample program: slave diagnostics echo (parameter echo). The standard function ASi_3422
(FC7) of the AS-i master (PROFIBUS-ASi) is used for this purpose.
For a description of the block, refer to the manual for the AS-i master (DP-ASi Link, CP343-
2). This also describes the call interfaces and commands.
Block ASi_3422 must be called up once when the system is rebooted (OB100).
Call in OB100:
CALL "ASi_3422"
ACT :=FALSE
ACT :=FALSE // not required
STARTUP:=TRUE
LADDR :=W#16#14 // I / O address AS-i master
SEND := P#M 4.0 BYTE 1 // irrelevant
RECV := P#M 4.0 BYTE 1 // irrelevant
DONE :=M19.2
ERROR :=M19.3
STATUS :=MD24
To read the parameter echo, the "Write_Parameter" command must be sent to the M200D
AS-i Basic motor starter.
Structure of the "Write_Parameter" command:
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
85
Page 86

Diagnostics
7.3 Diagnostics via parameter channel (parameter echo)
Structure of the job data in the send buffer
Meaning Byte
Bit 7 Bit 4 Bit 3 Bit 0
0 Command number: 02H
1 Slave address
2 0 Parameter
&$//$6LB
Structure of the job data in the receive buffer
Meaning Byte
Bit 7 Bit 4 Bit 3 Bit 0
0 0 Parameter echo
With this command, however, all four parameter bits (P0 … P3) must be sent to the starter.
Sample program:
// Parameters in memory byte MB4
SET
R M 4.0 // read messages / alarms from starter
//: Bit P0=0
// or
SET
S M 4.0 // read faults from starter: Bit P0=1
// trigger parameter echo
// command for SEND buffer
L 2 // "Write_Parameter" command
T MB 2
L 2 // slave address of starter
T MB 3
// job parameters are in MB4
// write parameters to starter: "Write_Parameter_Value"
// create job for SEND buffer:
CALL "ASi_3422"
ACT :=M10.4 // trigger for writing parameters
STARTUP:=FALSE // not required in cycle
LADDR :=W#16#14 // address of AS-i master
SEND := P#M 2.0 BYTE 3 // command data range
RECV := P#M 6.0 BYTE 1 // range for response
DONE :=M10.5
ERROR :=M10.6
STATUS :=MD16
// parameter echo stored in MB6
M200D AS-Interface Basic
86 Manual, 03/2009, A5E01668085-01
Page 87

Diagnostics
7.4 Diagnostics with the addressing and diagnostics unit
7.4 Diagnostics with the addressing and diagnostics unit
Diagnostics functions
The addressing and diagnostics unit (order no.: 3RK1904-2AB01) features a range of
diagnostics functions, such as:
● Detecting incorrect polarity or overload
● Measuring the AS-i supply voltage
● Detecting faults (with comments)
● Displaying I/O faults
For more information, refer to the operating instructions for the addressing and diagnostics
unit.
7.5 Troubleshooting
7.5.1 Response to faults
Description
In some cases, the device can be set in such a way that it responds to faults by either
issuing an alarm or by shutting down. Examples: "Response to asymmetry", "response to
temperature sensor overload".
The following table shows how the motor starter responds (depending on how it has been
parameterized):
Response 1 Response 2
Response: Alarm Shutdown
Message bit: Group alarm set Group fault set
LED display: DEVICE flashes yellow DEVICE lights up yellow
Motor and brake: Not shut down Shut down
Note
With certain faults (e.g. "process mapping error" or device faults, such as "Contact block
defective"), however, the device always responds by shutting down.
This response cannot be changed.
Fault
SF lights up red
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
87
Page 88

Diagnostics
7.5 Troubleshooting
7.5.2 Acknowledging faults
Restart after device-internal shutdown
If the motor starter shuts down the contact blocks automatically, it does not restart until:
● The fault has been rectified
● The fault has been acknowledged
Acknowledgement
You can acknowledge faults as follows:
● With "trip reset"
– DO0 and DO1 in process image (PIO) of controller simultaneously
– Key-operated switch (order variant) in position O
● Parameterized "shutdown with restart" (autoreset)
● With the opposite command, e.g. "motor OFF" (process mapping errors only)
NOTICE
Trip reset is edge-triggered.
If trip reset is present permanently, acknowledgement is only triggered once.
PV
!PV
7ULJJHUWULS5(6(7
'HOHWHPHVVDJHELWV
5HVXOWVDUHLQWKHGLDJQRVWLFVEXIIHU
M200D AS-Interface Basic
88 Manual, 03/2009, A5E01668085-01
Page 89

Technical specifications
8
8.1 General technical specifications
Location In the plant Wall mounted (near motor)
Permissible mounting
positions
Degree of protection IP65 Waterproof to IEC 529 (DIN 40050)
Protection class 1 IEC 60364-4-41 (DIN VDE 0100-410)
Touch protection Finger-safe
Degree of pollution 3 To IEC 60664
Cooling Convection No additional cooling required
Operating temperature –25°C to + 40°C
Transport and storage
temperature
Air humidity 10 % to 95 % Condensation must not be allowed to form
Max. temperature change 1 K / min IEC 60068, Part 2-14
Chemical environment
conditions
Installation altitude 1000 m
Vibration resistance 2 g To IEC 60 068, Part 2-6
Shock 12 g with 11 ms
Free fall 0.6 m In product packaging
ESD 8 kV air discharge
Electromagnetic fields 10 V/m IEC 61000-4-3 Severity grade 3
BURST 2 kV / 5 kHz supply voltage
SURGE
Installation class 1 to 3 1)
Emitted interference Limit value class A EN 55011
1)
If the starter is used in installation class 3 (increased overvoltage due to parallel cable installation), an overvoltage
protection module (3RK1901-1GA00 and 3RG9030-0AA00) must be used.
Vertical, horizontal, flat
max. 55°C
–40°C to + 70°C —
3C3 conforming to IEC 60721-3-3
2000 m
without influencing point of contact:
9.8 g / 5 ms or 5.9 g / 10 ms
4 kV contact discharge
2 kV / 5 kHz data cables
2 kV / 5 kHz process cables
1 / 2 kV IEC 61000-4-5 Severity grade 3
With reduction of Ie (see "Derating")
No restrictions
With restrictions (reduction of Ie by 1 % every
100 m up to 2000 m)
To IEC 60 068, Part 2-27
half-sine
IEC 61000-4-2 Severity grade 3
IEC 61000-4-4 Severity grade 3
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
89
Page 90

Technical specifications
8.2 Motor starter
Note
This product is designed for environment A (industrial environments). In household
environments, this device can cause unwanted radio interference. The user may be required
to implement appropriate measures in this case.
8.2 Motor starter
Motor starter version DSte / RSte sDSte / sRSte
Installation dimensions mm
(in parentheses: with protection guards)
Weight (g) 2880 g / 3130 g 3220 g / 3420 g
Control circuit (AS-i interface)
Slave type A/B slave
Suitable for AS-i master to spec.... (or higher) AS-i Spec. 2.1 (M3)
AS-i slave profile IO.ID.ID2 7.A.E
ID1 code (factory setting) 7
Operating voltage U
Auxiliary voltage U
26.5 ... 31.6 V DC
AS-i
20.4 ... 28.8 V DC
AUX
Current consumption from AS-i (incl. 200 mA sensor supply) < 300 mA
Current consumption from U
at 24 V (without digital output) Max. 155 mA
AUX
Main circuit
Max. power of three-phase motors at 400 V 5.5 kW 4 kW
Max. rated operating current Ie
AC-1 / 2 / 3
AC-4
AC-53a (8 h operation)
Rated operating current
- Certification to EN 60947-1 Appendix N
- Certification to CSA and UL
Switching times
at 0.85 ... 1.1 x U
e
Mechanical service life of contactor 10 million —
Electrical service life of contactor See diagram —
Permissible switching frequency — See diagram or
Width
Height
Depth
Typ. 75 mA
At 400 V
At 500 V
12 A
9 A
At 400 V 4 A —
At 400 V — 9 A
400 V AC
600 V AC
- Closing delay
- Opening delay
25 … 60 ms
15 … 40 ms
294 (320)
215 (228)
159 (230)
Max. 15 mA / 175 mA
Typ. 10 mA / 75 mA
—
400 V AC
480 V AC
—
—
separate section
M200D AS-Interface Basic
90 Manual, 03/2009, A5E01668085-01
Page 91

Technical specifications
8.3 Brake control
Motor starter version DSte / RSte sDSte / sRSte
Isolation stability
Rated surge capacity U
Rated insulation voltage Ui 500 V
Safe isolation between main and control circuits
to IEC60947-1 Appendix N
Short-circuit protection
Instantaneous overcurrent release
- I
= 2 A
e max
- I
= 9 / 12 A
e max
Rated ultimate short-circuit breaking capacity Iq at 400 V 50 kA
6 kV
imp
400 V
26 A
208 A
Note
To change the direction of rotation, a mechanically-switching reversing contactor is
integrated in reversing starters with solid-state switching. The preferred position of this
contactor is "CW rotation". When the direction is changed to CCW rotation, the reversing
contactor is activated and, after a 150 ms delay, the electronic contacts. This delay is only
relevant (active) whenever the direction of rotation is changed.
After 1 hour (implemented time: 65 min) without a "CCW ON" command, the reversing
contactor automatically reverts to its preferred position (CW rotation).
8.3 Brake control
Brake version 400 V AC / 230 V 180 V DC
Rated operating voltage 400 V AC 180 V DC
Continuous current < 0.5 A < 0.8 A
Inrush current at t < 120 ms < 5 A < 5 A
Switching capacity to IEC60947-5-1
- AC 15, at 400 V AC
- DC 13, at 180 V DC
Fault message with non-controlled brake No
Protective measures
Short-circuit protection Yes, 1 A melting fuse
Inductive interference protection Integrated varistors
0.4 A
-
-
0.8 A
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
91
Page 92

Technical specifications
8.4 Inputs
8.4 Inputs
Input characteristic to IEC60947-1 Appendix S Type 1
Input voltage - Rated value
- for signal "0"
- for signal "1"
Input current for signal "1" 7 mA, typ.
Connection of 2-wire BEROs Possible
Permissible residual current 1.5 mA, max.
Input signal delay 10 ms fixed setting
Supply from U
Sensor supply 16.5 to 30 V DC
Summation current sensor supply Max. 200 mA (sensor supply is short-circuit proof)
Connection M12 connectors
Assignment of inputs
IN1
IN2
IN3
IN4
Short circuit and overload proof
AS-i
24 V DC
-3 ... +5 V
11 ... 30 V
Input 1 (PII DI2)
Input 2 (PII DI3)
Input 3
Input 4
8.5 Output
Number of digital outputs 1
Switching capacity 0.5 A continuous current
Cable length Shielded
Unshielded
Short-circuit protection
Response threshold
Limiting of inductive shutdown voltage Integrated free-wheeling diode
Lamp load 5 W, max.
Sets an AS-i digital input Not permissible
Voltage drop For signal 1 U
Residual current For signal 0 0.5 mA max.
Assignment of output
OUT1 Output 1
30 m, max.
Electronic
> 0.7 A, typ.
+ (- 0.8 V), min.
AUX
M200D AS-Interface Basic
92 Manual, 03/2009, A5E01668085-01
Page 93

Technical specifications
8.6 Thermistor motor protection
8.6 Thermistor motor protection
Temperature sensor PTC Thermoclick
Evaluation characteristic to IEC 60947-8 Type A —
Summation cold resistance sensor circuit < 1.5 kΩ
No-load voltage of sensor circuit < 30 V
Short-circuit current sensor circuit < 1.2 mA
Trip level 3.4 … 3.8 kΩ
Reset level 1.5 … 1.65 kΩ
Short-circuit detection < 30 Ω No
Electrical isolation vis-à-vis Main circuit
U
AS-i
U
PWR
Yes (U
= 400 V)
i
Yes (Ui = 400 V)
Yes (U
= 400 V)
i
8.7 Switching frequency
If motors are switched too often, this causes the thermal motor model to respond.
The maximum permissible switching frequency depends on the following operating data:
Direct and reversing starters, electronic (sDSte / sRSte) up to 4 kW
3RK1315-5KS71-.AA. (0.15 A to 2 A)
Class 10
Device setup Vertical Horizontal
Rated current Ie 2 A 2 A 2 A 2 A 2 A 2 A
Ambient temperature 40 °C 50 °C 55 °C 40 °C 50 °C 55 °C
Degree of protection
Direct start ED=30 %
) / 0.4 s
(8xI
e
1)
150 1000 150 1000 150 1000 150 1000 150 1000 150 1000
ED=70 % (8xIe) / 0.4 s 90 500 90 500 90 500 90 500 90 500 90 500
ED=30 % (8xIe) / 0.8 s 75 490 75 490 75 490 75 490 75 490 75 490
ED=70 % (8xIe) / 0.8 s 45 250 45 250 45 250 45 250 45 250 45 250
1) Duty cycle current rms value = 1.15 x Ie → motor protection
2) Duty cycle limit for motor starter. The motor should be protected against overload here by means of a thermistor.
2)
1)
2)
1)
2)
1)
2)
1)
2)
1)
2)
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
93
Page 94

Technical specifications
8.7 Switching frequency
3RK1315-5NS71-.AA. (1.5 A to 9 A)
Class 10
Device setup Vertical Horizontal
Rated current Ie 5 A 5 A 5 A 5 A 5 A 4.5 A
Ambient temperature 40 °C 50 °C 55 °C 40 °C 50 °C 55 °C
Degree of protection
1)
2)
1)
2)
1)
2)
1)
2)
1)
2)
1)
2)
ED=30 % (8xIe) / 0,5 s 120 700 120 520 120 420 120 580 120 430 120 430
ED=70 % (8xIe) / 0,5 s 70 400 70 280 70 200 70 340 70 200 70 200
ED=30 % (8xIe) / 1 s 60 350 60 260 60 220 60 290 60 220 60 220
ED=70 % (8xIe) / 1 s 37 190 37 140 37 100 37 170 37 100 37 100
1) Duty cycle current rms value = 1.15 x Ie → motor protection
2) Duty cycle limit for motor starter. The motor should be protected against overload here by means of a thermistor.
3RK1315-5NS71-.AA. (1.5 A to 9 A)
Class 10
Device setup Vertical Horizontal
Rated current Ie 7 A 5.8 A 5 A 6 A 5 A 4.5 A
Ambient temperature 40 °C 50 °C 55 °C 40 °C 50 °C 55 °C
Degree of protection
1) 2)
ED = 30 %, start 4xIe/2 s 120 290 120 300 120 320 120 320 120 320 120 320
ED = 70 %, start 4xIe/2 s 70 130 70 130 70 130 70 140 70 140 70 140
ED = 30 %, start 4xIe/4 s 60 145 60 150 60 160 60 160 60 160 60 160
ED = 70 %, start 4xIe/4 s 37 65 37 65 37 70 37 70 37 70 37 70
1) Duty cycle current rms value = 1.15 x Ie → motor protection
2) Duty cycle limit for motor starter. The motor should be protected against overload here by means of a thermistor.
1) 2)
1) 2)
1) 2)
1) 2)
1) 2)
3RK1315-5NS71-.AA. (1.5 A to 9 A)
Class 10
Device setup Vertical Horizontal
Rated current Ie 9 A 9 A 9 A 9 A 9 A 9 A
Ambient temperature 40 °C 50 °C 55 °C 40 °C 50 °C 55 °C
Degree of protection
1) 2)
1) 2)
1) 2)
1) 2)
1) 2)
1) 2)
ED = 30 %, start 4xIe/2 s 120 170 120 120 105 105 120 145 105 105 88 88
ED = 70 %, start 4xIe/2 s 70 140 70 100 70 80 70 120 70 82 63 63
ED = 30 %, start 4xIe/4 s 60 85 60 60 53 53 60 72 53 53 44 44
ED = 70 %, start 4xIe/4 s 38 72 38 50 38 38 38 60 38 41 31 31
1) Duty cycle current rms value = 1.15 x Ie → motor protection
2) Duty cycle limit for motor starter. The motor should be protected against overload here by means of a thermistor.
M200D AS-Interface Basic
94 Manual, 03/2009, A5E01668085-01
Page 95

Technical specifications
8.7 Switching frequency
ON period (ED)
The relative ON period (ED) in % is the ratio between load duration and cycle duration for
loads that are often switched on and off.
The ON period (ED) can be calculated using the following formula:
ts + t
ED =
ED ON period [%]
t
Start time [s]
s
t
Operating time [s]
b
t
Pause interval [s]
p
Graphics-based representation:
,
H
ts+tb+t
b
p
W
V
Figure 8-1 ON period (ED)
W
E
W
W
S
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
95
Page 96

Technical specifications
8.8 Electrical service life of contactor
8.8 Electrical service life of contactor
Service life of main contacts (DSte / RSte) to 5.5 kW
The curves show the contact service life of contactors when switching ohmic and inductive
three-phase loads (AC-1/AC-3) as a function of breaking current and rated operating voltage.
The prerequisite for this are command devices that switch at random, i.e. not synchronously
to the phase angle of the line.
The rated operating current I
in accordance with utilization category AC-4 (breaking of 6
e
times the rated operating current) is determined for a contact service life of at least 200 000
operating cycles.
If a smaller contact service life is sufficient, the rated operating current I
/AC-4 can be
e
increased.
If mixed operation is available, i.e. if normal switching operation (breaking of rated operating
current in accordance with utilization category AC-3) is mixed with occasional inching
(breaking of the multiple rated operating current in accordance with utilzation category AC-
4), the service life of the contacts can be calculated approximately with the following formula:
A
X =
1+C/100(A/B-1)
X Contact service life for mixed operation in operating cycles
A Contact service life for normal operation (I
B Contact service life for inching (I
C Proportion of inching operations in the total operations as a percentage
= Ie) in operating cycles
a
= multiple of Ie) in operating cycles
a
M200D AS-Interface Basic
96 Manual, 03/2009, A5E01668085-01
Page 97

Technical specifications
8.8 Electrical service life of contactor
2SHUDWLQJF\FOHVIRU
9
FRQWDFWRUW\SH
9
57
N:
,
,
$
D
$
H
N:
PN Rated power of three-phase motors at 400 V
I
Breaking current
a
I
Rated operating current
e
Figure 8-2 Service life of main contacts for contactor 3RT1017
3
1
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
97
Page 98

Technical specifications
8.9 Dimension drawing
8.9 Dimension drawing
294
215
Figure 8-3 M200D AS-i motor starter without protection guard
320
231
159
228
Figure 8-4 M200D AS-i motor starter with protection guard
M200D AS-Interface Basic
98 Manual, 03/2009, A5E01668085-01
Page 99

Appendix
A.1 Order numbers
A.1.1 Order numbers
Position
1 – 7 — 8 9 10 11 12 — 13 14 15 16
3RK1315
– 6 ⇓ S ⇓ 1 ⇓ A A ⇓ M200D starter
K ⇓ ⇓ ⇓ 0.15 - 2.0 A
N ⇓ ⇓ ⇓ 1.5 - 9.0 A
L ⇓ ⇓ ⇓ 1.5 - 12.0 A
4 ⇓ ⇓ Electromechanical
7 ⇓ ⇓ Electronic
0 ⇓ Direct starter without OCM
1 ⇓ Reversing starter without OCM
2 ⇓ Direct starter with OCM
3 ⇓ Reversing starter with OCM
0 Without brake output
3 Brake output 400 V / 230 V AC
5 Brake output 180 V DC
A
Meaning
(only for electronic motor starters)
(only for electromechanical motor starters)
You can combine the key numbers/letters to create the MLFB of the required motor starter:
Position
1 – 7 — 8 9 10 11 12 — 13 14 15 16
3RK1315 – 6 L S 7 1 – 1 A A 3 Reversing starter without OCM, 1.5 - 12.0 A,
M200D AS-Interface Basic
Manual, 03/2009, A5E01668085-01
Meaning
electronic, with brake output 400 V AC /
230 V AC
99
Page 100

Appendix
A.1 Order numbers
A.1.2 Spare parts/accessories
Power supply
Designation Order no.
Power outlet connector, connector set consisting of coupling housing,
straight cable outlet (with clip), pin insert for HAN Q4/2, incl. cable
gland
2
5 pins 2.5 mm
5 pins 6 mm2
5 pins 4 mm2
Power connector, connector set for connection to M200D motor
starters, consisting of socket shell, angled outlet, socket insert for
HAN Q4/2, incl. gland
5 socket contacts 2.5 mm
2
, 2 socket contacts 0.5 mm2
5 socket contacts 4 mm2, 2 socket contacts 0.5 mm2
5 socket contacts 6 mm2, 2 socket contacts 0.5 mm2
Power supply cable, one end prefabricated, with "N" und jumper pin
11 und 12 for connector monitoring, with HAN Q4/2, angled; one end
open; 5 x 4 mm2
Length 1.5 m
Length 5.0 m
3RK1911-2BS60
3RK1911-2BS20
3RK1911-2BS40
3RK1911-2BE50
3RK1911-2BE10
3RK1911-2BE30
3RK1911-0DC13
3RK1911-0DC33
Motor cable
Designation Order no.
Motor connector for connection to M200D motor starters, consisting of
socket shell, angled outlet, pin insert for HAN Q8/0, incl. gland
8 pins 1.5 mm
6 pins 2.5 mm
2
2
3RK1902-0CE00
3RK1902-0CC00
Motor connector for connection to motor, consisting of socket shell,
angled outlet, socket insert for HAN 10e, incl. neutral bridge, incl.
gland
7 socket contacts 1.5 mm
7 socket contacts 2.5 mm
2
2
Motor cable, one end prefabricated, one end open, HAN Q8/0,
angled, length 5 m
for motor without brake for M200D, 4x1.5mm
2
for motor with brake 400 V AC / 180 V DC, 6 x 1.5 mm2
for motor with brake 230 V AC and thermistor, 8 x 1.5 mm2
3RK1911-2BM21
3RK1911-2BM22
3RK1911-0EB31
3RK1911-0ED31
3RK1911-0EE31
M200D AS-Interface Basic
100 Manual, 03/2009, A5E01668085-01
 Loading...
Loading...