

Page 1

FM353 配置及编程入门
FM353 Configuration and Programming
Getting-started Edition (2010 年-7 月)
Page 2

摘 要 FM353 是用于控制步进电机的定位模块,本文简要介绍了 FM353 的使用方法,包括
硬件接线,参数配置,控制面板调试以及编程。
关键词 FM353,参数配置,编程
Key Words FM353, Parameterization, Programming
IA&DT Service & Support
Page 2-41
Page 3

目 录
FM353 配置及编程入门 ...................................................................................... 1
1.硬件接线 ....................................................................................................... 4
2. 参数配置......................................................................................................... 8
3. 用控制面板调试 ........................................................................................... 18
3.1 点动模式 .................................................................................................................... 21
3.2 开环控制................................................................................................................... 22
3.3 寻找参考点 ..............................................................................................................23
3.4 增量模式.................................................................................................................. 24
3.5 MDI.......................................................................................................................... 25
3.6 自动模式 .................................................................................................................... 26
4. 编程 .............................................................................................................. 27
4.1 点动模式 .................................................................................................................... 30
4.2 开环控制 .................................................................................................................... 32
4.3 寻找参考点 ................................................................................................................33
4.5 MDI............................................................................................................................ 35
4.6 自动模式 .................................................................................................................... 37
IA&DT Service & Support
Page 3-41
Page 4

1.硬件接线
图 1 FM353 X2 接口
图 2 X2 接口定义
X2 接口用于连接驱动器,上图中 Type O 代表输出信号,I 代表输入信号。
PULSE: 脉冲输出
DIRECTION: 步进电机的旋转方向。
ENABLE: 用于驱动器使能。
PWM/BOOST: PWM 功能,可以采用脉宽调制功能,调整步进电机电流。BOOST 功能,可
以用来放大步进电机的电流大小。这些功能需要驱动器支持。
READY1:驱动器准备好信号。
所有的输出信号都是 5V 差分信号(符合 RS422 标准)。驱动器最好可以接收差分信号,如果
驱动器不支持差分式信号,电缆长度不能超过 10 米。下图是输出信号如何接入不同类型的
驱动器。
IA&DT Service & Support
Page 4-41
Page 5

图 3 符合 RS422 标准的差分平衡输入
图 4 带有光耦输入的平衡传输
图 5 带有光耦输入的非平衡传输
图 6 无光耦输入的非平衡传输
输入信号是非隔离的 5V 信号,下图是如何接收不同类型驱动器来的输入信号。
IA&DT Service & Support
Page 5-41
Page 6

图 7 通过开关触点触发 READY1 信号
图 8 通过光耦触发 READY1 信号
图 9 集电极开路输出
IA&DT Service & Support
Page 6-41
Page 7

图 10 20 针前连接器的接线
20 针前连接器包含 4 个输入信号,4 个输出信号,24V 电源输入和 RM_P,RM_N。
RM_P,RM_N 由 MD37 配置,可以配置成以下功能之一
1. 步进电机控制器准备好
2. 找寻原点模式的零脉冲信号
3. 找寻原点模式的外接零脉冲信号
下图是准备好信号如何接到输入端。
图 11 步进电机驱动器触发 RM 信号的方式,由 FM353 提供电源
IA&DT Service & Support
Page 7-41
Page 8

图 12 步进电机驱动器触发 RM 信号的方式,由驱动器提供电源
2. 参数配置
配置参数之前需要首先安装 FM353/FM354 配置软件包,请从以下链接下载。
http://support.automation.siemens.com/CN/view/zh/41306926
打开 STEP7,进入硬件组态界面,双击 FM353,点击 Parameter 进行参数配置。
IA&DT Service & Support
Page 8-41
Page 9

图 13 FM353 参数设置界面
以上是参数配置界面。其中 MD 按钮用来配置机器参数。SM 按钮用于输入增量表。WZK 按
钮输入刀具补偿数据。VP 按钮输入 NC 程序。Startup 按钮启动调试用的控制面板。Error
display 打开故障诊断。Service data 显示一些相关运行数据。Trace 可以显示相关变量的随
时间变化曲线。
首先点击 MD 按钮,打开机器参数的配置界面。下面说明常用的机器参数。
IA&DT Service & Support
Page 9-41
Page 10

图 14: 轴设置
MD7: 测量和工作单位,默认是千分之一毫米为单位。
MD8: 设置为线性轴或旋转轴
MD6: 轴的名字
MD21: 软限位的下限
MD22: 软限位的上限
IA&DT Service & Support
Page 10-41
Page 11

MD18: 寻找参考点的方式
MD16: 参考点坐标值
MD27: 参考点偏移
MD37.24-27: 零脉冲的设置
MD28: 寻找参考点的速度 VA(正常)
MD29: 寻找参考点的速度 VR(低速)
IA&DT Service & Support
图 15 参考点设置
Page 11-41
Page 12

图 16 数字量输入点的功能定义
4 个输入点可以配置为以下功能:
z 外部启动(START 信号,该信号位于用户 DB 的 DBX15.0)
z 使能输入,控制 WAIT_EI 信号(等待外部使能,该信号位于用户 DB 的 DBX23.2)输
入为 1 时,WAIT_EI 为 0
z 外部块改变,NC 程序中 G 代码 G50 使用此输入
z 设置当前值,NC 程序中 G 代码 G87,G88,G89 使用此输入
z 测量功能
z 参考点开关
z 参考点反向开关
IA&DT Service & Support
Page 12-41
Page 13

图 17 数字量输出的功能定义
数字量输出可以定义为以下功能:
到达定位点
轴正向运行
轴反向运行
M 功能输出(97)
M 功能输出(98)
启动使能
直接输出
IA&DT Service & Support
Page 13-41
Page 14
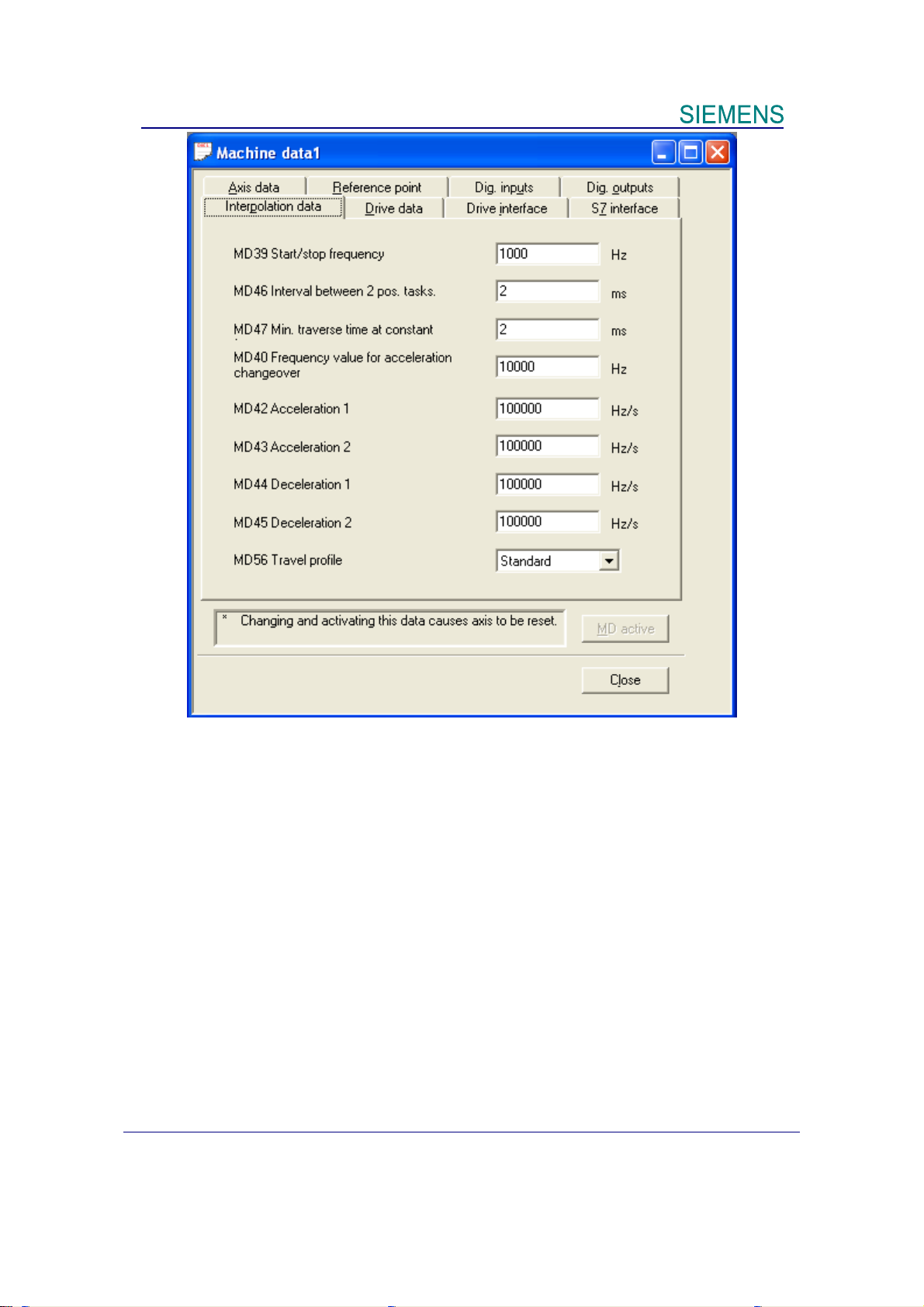
图 18 插补数据
MD39: 启动,停止频率
MD46: 两次定位任务之间的时间间隔
MD47: 恒定频率下的最小运行时间
MD40: 加速转换频率
MD42: 加速度 1
MD43: 加速度 2
MD44: 减速度 1
MD45: 减速度 2
关于这些参数的详细说明请参考手册第七章。
IA&DT Service & Support
Page 14-41
Page 15

图 19 驱动数据
MD11/MD12: 电机转动一圈被控定位对象的位移
MD13: 电机转一圈需要的脉冲数
MD38: 每电流源周期的增量数。即电机旋转一周所产生的步进数被电机的极对数除后的结
果。
如电机旋转一周的步进数:1000, 电机的极对数:50 MD38=1000/50=20
MD41: FM353 输出的脉冲最大最大频率,由步进电机和实际工艺确定。
MD37.17-19 是否使用 BOOST/PWM 功能,该功能需要驱动器支持
IA&DT Service & Support
Page 15-41
Page 16

图 20 驱动接口
MD37: 15 针接头中的 ENABLE 信号是否起作用
READY1 信号是否起作用,可以选择信号来自 15 针接头或 DI 输入
脉冲输出反向
方向输出反向
MD30: 间隙补偿,比如使用丝杠时,丝杠的间隙会导致定位精度下降,需要设置该参数。
MD31: 间隙补偿方向
MD52: 间隙补偿速度
MD53: 间隙补偿模式
IA&DT Service & Support
Page 16-41
Page 17

图 21 S7 接口
MD32: M 功能输出类型
MD33: M 功能输出时间
MD5: 中断产生:位置到达,测量结束,运行中块改变,运行中测量
IA&DT Service & Support
Page 17-41
Page 18
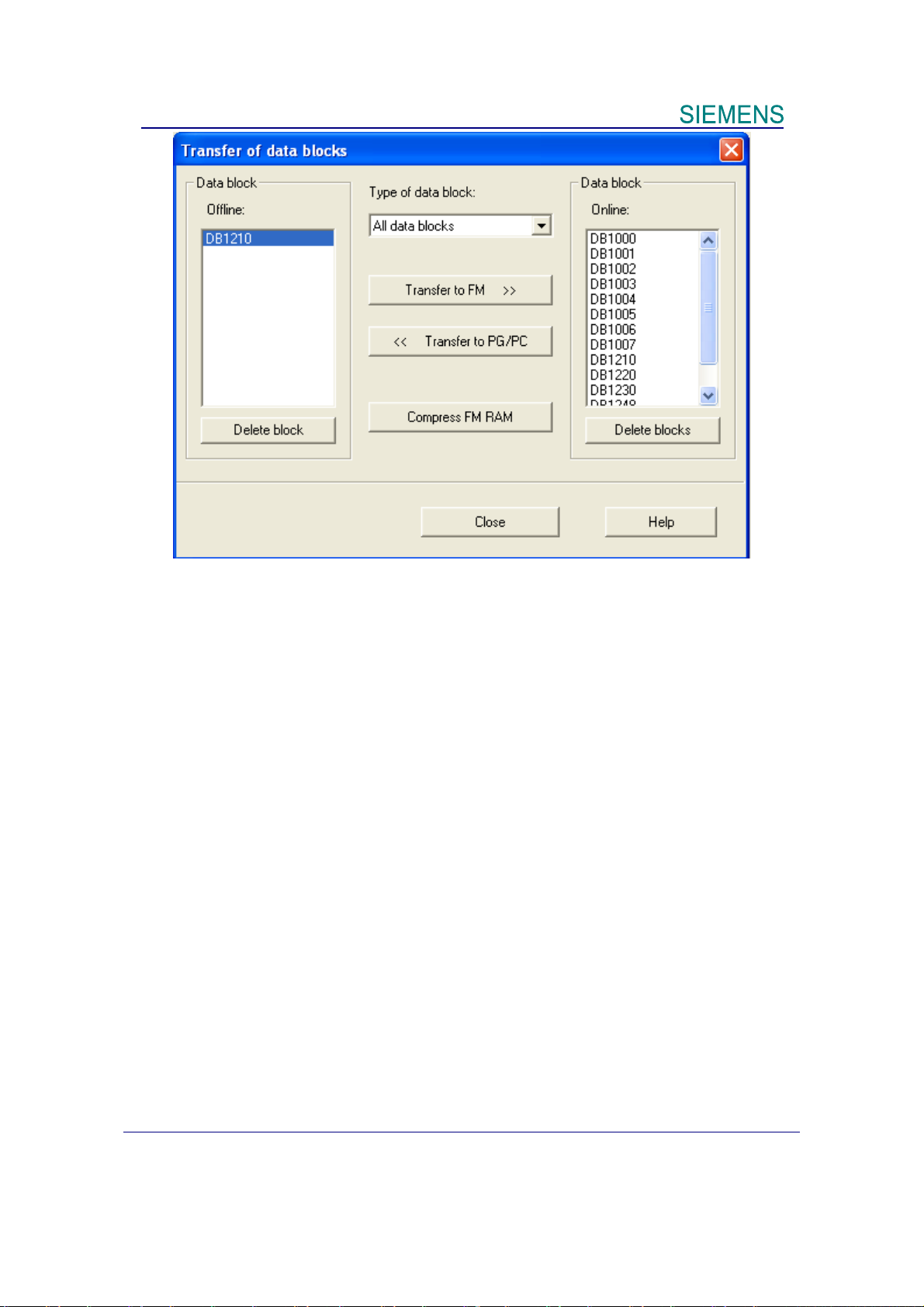
图 22 配置完成后将数据块传输到 FM 或 PG
参数配置完成后,点击 File-Save 保存配置好的参数,然后关闭配置界面。点击图 13 中的按
钮,“Transfer data to FM”,将“Data block Offline”中的 DB1210 传输到 FM353 中。最终调试
完成后点击按钮“Create SDB”,上述 DB 块中存储的参数就会保存到 SDB 中。下载 SDB
后,CPU 上电时会自动将参数写到 FM353 中。这样即使更换 FM353 也不需要重新将这些
DB 导入 FM353。关于各个 DB 的作用,请参考 FM353 手册 5.3 章。
如果更改完 MD 参数,点击控制面板的“MD Active”按钮使修改后的 MD 参数立即生效。否则
某些 MD 参数需要重新上电才能生效。
注意:CPU 断电前最好点击“Create SDB”按钮生成 SDB,然后下载 SDB,防止 CPU 重新
上电后原有 SDB 中的参数将 FM353 中修改好的参数覆盖掉。
完成上述设置后,将 CPU 切换到 STOP 状态,点击“Startup”图标,打开如下界面。可以在
线调试 FM353。
3. 用控制面板调试
IA&DT Service & Support
Page 18-41
Page 19

图 23 在线调试界面
在调试界面中首先选则操作模式。共有 7 种操作模式可以选择。
关于各个操作模式的介绍,请参考下载中心的文档编号“A0337 FM353/FM354 操作模式简
介”。在此不再一一赘述。
http://www.ad.siemens.com.cn/download/
下面分别介绍如何在控制面板中调试各种操作模式。
IA&DT Service & Support
Page 19-41
Page 20

图 24 Alarm 界面
在调试过程中,控制面板的 Operator error 或 Data error 指示灯可能会亮起,这时指示有错
误产生。点击图 13 的 Error Display 按钮,会显示上述界面。在这里可以看到详细的出错信
息。通过 Ack 按钮应答 Operator error,通过 DIQ 按钮应答 Data error 错误。
IA&DT Service & Support
Page 20-41
Page 21

3.1 点动模式
图 25 点动模式
选中 Controller enable,Drive enable。如果想在模拟模式下测试(电机不动),勾选
Simulation。在 Level 1 中填写速度级别 1 的值,在 Level 2 中填写速度级别 2 的值。选中速
度级别 1 或 2。在 Override 参数中填写实际速度与设定速度的百分比。在这里填写 100%,
即按照设定速度的 100%运行。选中 R+(正向运行)或 R-(反向运行),按下空格键,电机即
会在点动模式运行。
如果运行中报错,可以通过 Error Display 查看报错信息,通过 Ack 确认错误。
IA&DT Service & Support
Page 21-41
Page 22

3.2 开环控制
图 26 开环控制方式
开环控制的调试与点动模式类似,选中 Controller enable,Drive enable。如果想在模拟模式
下测试(电机不动),勾选 Simulation。在 Level 1 中填写运行频率级别 1 的值,在 Level 2
中填写运行频率级别 2 的值。选中 R+(正向运行)或 R-(反向运行),按下空格键,电机会
以设定的频率值运行。
IA&DT Service & Support
Page 22-41
Page 23

3.3 寻找参考点
图 27 寻找参考点模式
选中 Controller enable,Drive enable。设置寻找参考点的参数和方向。点击 Start 开始寻找
参考点。如果没有在 Machine Data 的数字量输入页面分配参考点开关,找参考点工作立即
完成,SYN 指示灯亮。如果已经分配了参考点开关,会按照设置的找参考点方式运动,找参
考点结束后,SYN 指示灯亮。选中 Simulation,找参考点工作立即完成,SYN 指示灯亮。
IA&DT Service & Support
Page 23-41
Page 24

3.4 增量模式
图 28 增量表
点击 SM 按钮,设置增量表。第一列是增量表的行号,第二列是对应的相对位移。配置完后
增量表保存在 DB1230 中。所以需要使用“Transfer data to FM”将 DB1230 传给 FM353。
IA&DT Service & Support
图 29 增量模式
Page 24-41
Page 25

选中 Controller enable,Drive enable。设置 Override。可以在 Setpoint No 中填写增量表的
行号,或者直接在 Increment 中填写要走的增量值,然后填写 Speed 参数。选中 R+或 R-,
通过空格键开始增量运行。
3.5 MDI
图 30 MDI 调试
选中 Controller enable,Drive enable。设置 Override。选中 Simulation,在模拟方式下运
行。在 Current MDI block 中写 MDI 程序,如图所示。G91 X500.0 F500.0 表示以增量方式
运行,从当前位置正向运行 500mm,速度是 500mm/min。点击 Transfer 按钮将 MDI 块传
输到 FM353。然后点击 Start 按钮开始运行。可以在运行过程中改变 MDI 块。在 Current
MDI block on-the-fly 中写入需要在运行中使能的 MDI 块。G90 X100.0 F1000.0 表示以绝对
位置方式运行,运行到绝对位置 100.0mm,速度 1000mm/min。点击 Transfer on-the-fly,
FM353 会放弃当前正在运行的 MDI 块,转而运行 Current MDI block on-the-fly 中的块。
IA&DT Service & Support
Page 25-41
Page 26

3.6 自动模式 点击参数设置中的 VP 按钮,打开如下对话框。点击 Open,会自动生成 DB1001,自己编写
的 NC 程序会存储在 DB1001 中。
图 31 选择 NC 程序 DB
图 32 编写 NC 程序
%1 表示程序号为 1,N**代表行号。在行号前的“/”表示该行可以被跳过。
G90 X500.0 F1000.0 表示从当前位置运动到坐标 500mm 处,速度 1000mm/min
G04 X3000 表示停止 3000ms.
G91 X500.0 表示运动从当前位置运动 500mm。
更多关于 NC 程序的说明,请参考手册第 10 章。
编写完后将 DB1001 传输给 FM353。
IA&DT Service & Support
Page 26-41
Page 27

图 33 自动模式调试
选中“Controller enable”,“Drive enable”。设置“Override”。选中“Simulation”,在模拟方式下
运行。“P No” 填写 1。选中“EFG”,点击按钮 “Prog. Preselection”,在“Current block” 中显
示当前运行的 NC 程序行,在“Next block” 中显示下一条要运行的程序行。点击“Start” 按钮
开始逐条运行 NC 程序。如果想跳过行号前标记“/”的 NC 程序行,选中“SA”即可。
第 7 种模式是自动单步模式,与自动模式类似,只是限制每次只能运行一条 NC 程序,运行
完成后程序停止,需要再次触发才能运行下一条程序,在此不再赘述。
4. 编程
在 SIMATIC MANAGER 的文件菜单下选择“打开”,在打开项目的对话框中选择页面“例子项
目”,找到项目“zEn13_02_FM353_EX”,并打开。
IA&DT Service & Support
Page 27-41
Page 28
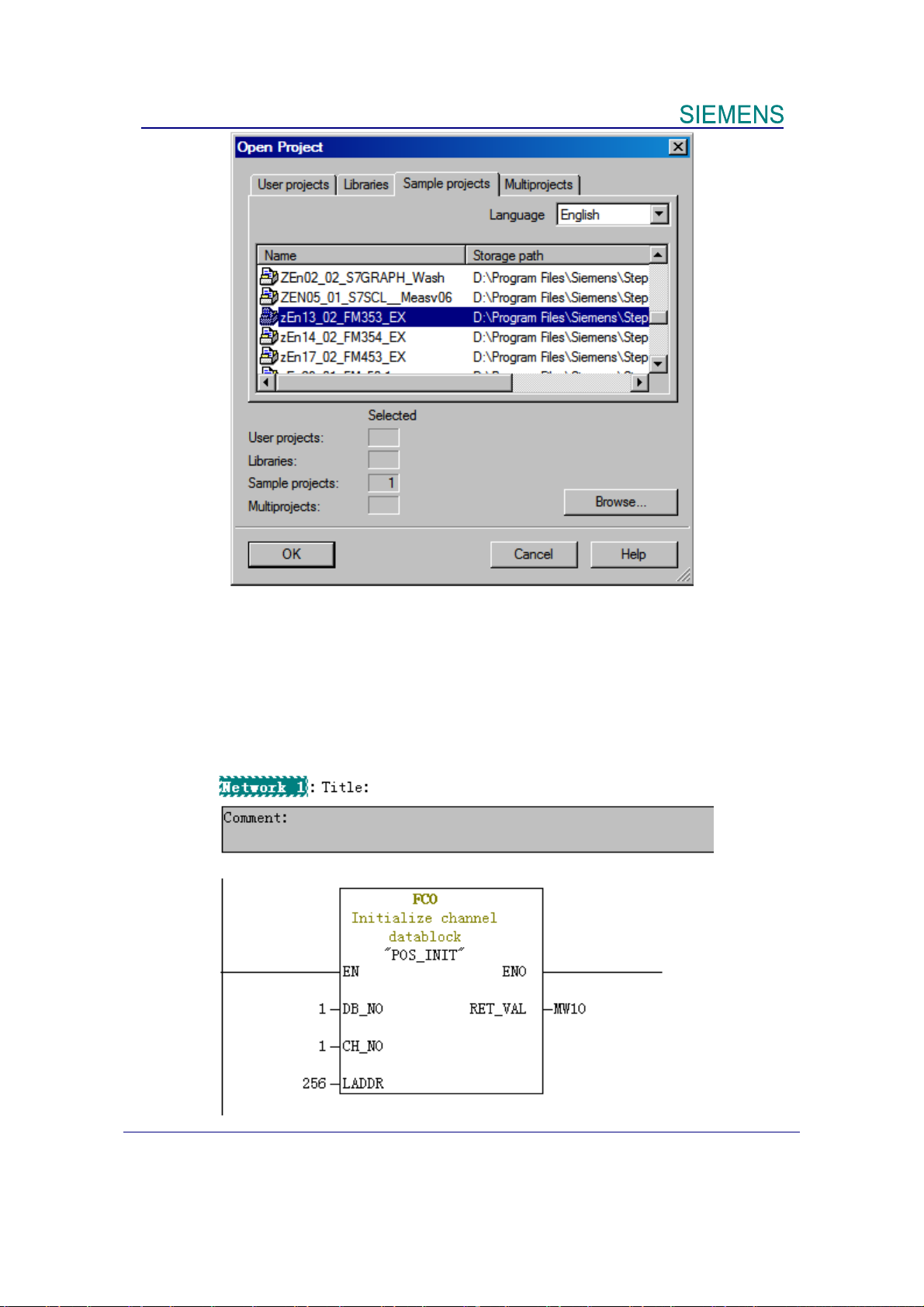
图 34 FM353 例子程序
将其中的 FC0,FC1,FC2,FC3,UDT1,DB1 拷贝到自己的项目中。可以直接使用 DB1
作为用户数据块,或者用 UDT1 生成用户数据块,两者是等效的。
IA&DT Service & Support
Page 28-41
Page 29
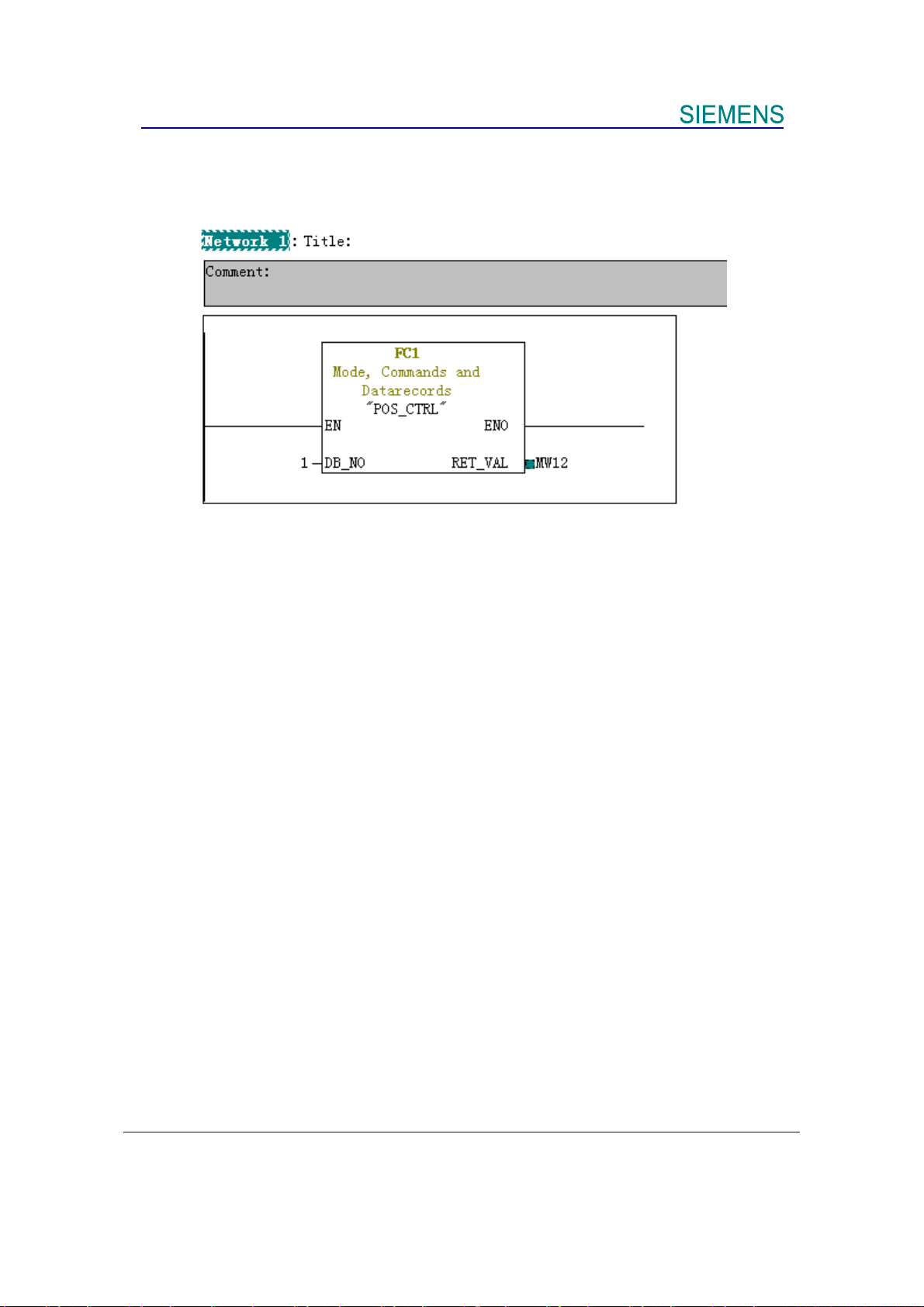
图 35 OB100 中调用 FCO
在 OB100 中调用 FC0,DB_NO 是 UDT1 生成的用户 DB 的块号,CH_NO 填写 1,LADDR
填写 FM353 的硬件地址。如果 FM353 放在 ET200M 上,还需要在 OB86 中调用 FC0。
图 36 OB1 中调用 FC1
在 OB1 中调用 FC1,DB_NO 是用户 DB 的块号。
为了简化操作,下面的测试使用变量表进行。变量表参考附件程序。
IA&DT Service & Support
Page 29-41
Page 30
4.1 点动模式
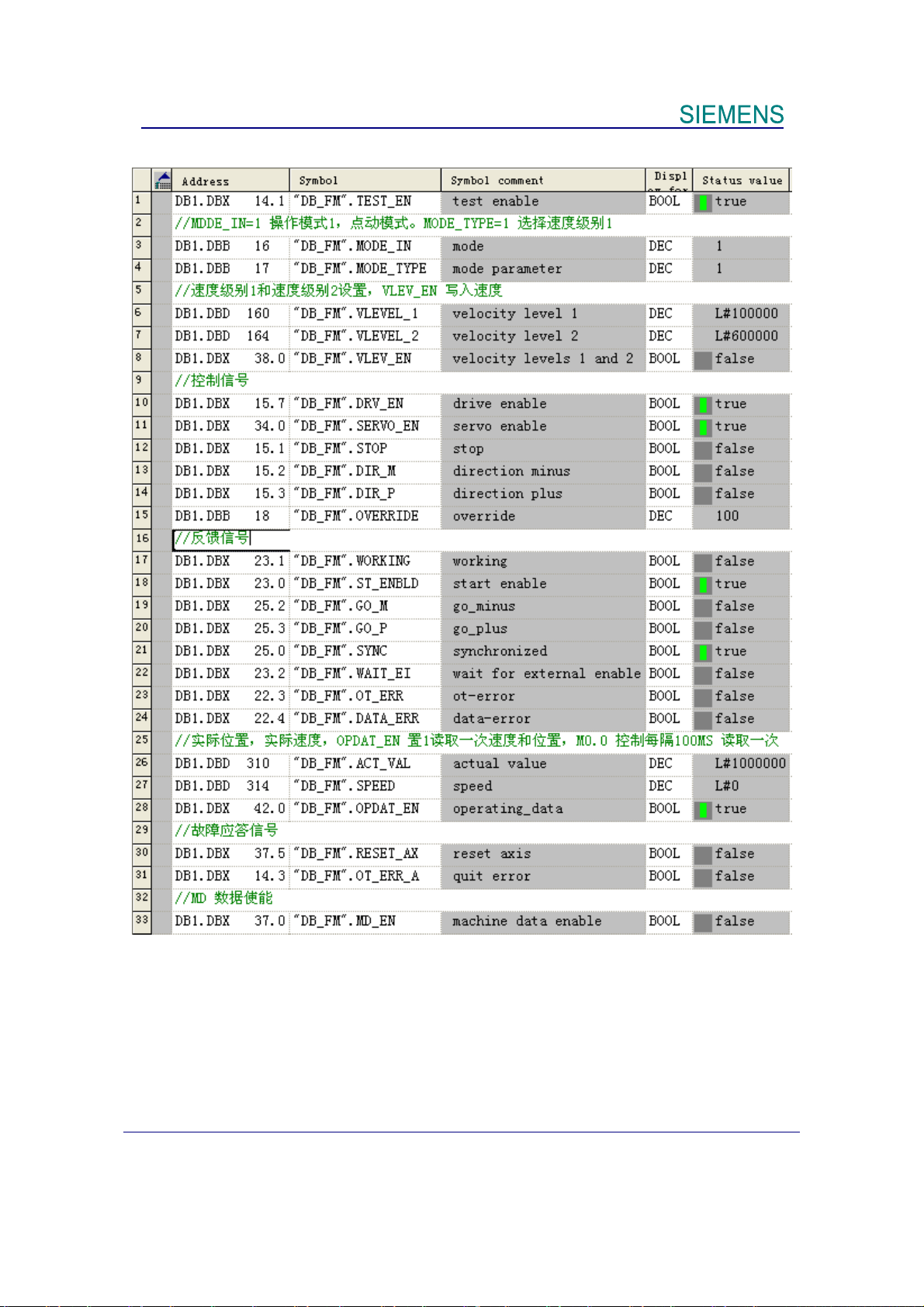
图 37 点动模式程序调试
以上是点动模式的程序调试。TEST_EN 信号用于选择是通过控制面板控制还是程序控制。
该信号置 1,使用控制面板调试。置 0,使用程序控制,这时控制面板只能监视,不能控
制。
IA&DT Service & Support
Page 30-41
Page 31

MODE_IN 设置为 1,表示点动模式,MODE_TYPE 设置为 1,表示选择速度级别 1,设置
为 2 表示选择速度级别 2。在 VLEVEL_1,VLEVEL_2 中分别设置速度级别 1 和速度级别 2
的值。设置完后将 VLEV_EN 置 1,使能设置的值,使能完成后 VLEV_EN 自动清 0。
置位信号 DRV_EN,SERVO_EN,设置 OVERRIDE,最后置位 DIR_P 或 DIR_M 控制电机
正反转。
当前位置可以从 ACT_VAL 读取到,当前速度从 SPEED 读取到。OPDAT_EN 置 1,可以将
实际的速度和位置读取到上面的两个变量中,读取完成后,OPDAT_EN 自动清 0。在程序
中,利用时钟脉冲 M0.0 每隔 100 毫秒读取一次。
IA&DT Service & Support
Page 31-41
Page 32

4.2 开环控制
图 38 开环控制方式
以上是开环控制模式的程序调试。MODE_IN 设置为 2,表示开环控制模式,MODE_TYPE
设置为 1,表示选择频率级别 1,设置为 2 表示选择频率级别 2。
在 CLEVEL_1,CLEVEL _2 中分别设置频率级别 1 和频率级别 2 的值。设置完后将
CLEV_EN 置 1,使能设置的值,使能完成后 CLEV_EN 自动清 0。
IA&DT Service & Support
Page 32-41
Page 33

置位信号 DRV_EN,SERVO_EN,设置 OVERRIDE,最后置位 DIR_P 或 DIR_M 控制电机
正反转。
当前位置可以从 ACT_VAL 读取到,当前速度从 SPEED 读取到。OPDAT_EN 置 1,可以将
实际的速度和位置读取到上面的两个变量中,读取完成后,OPDAT_EN 自动清 0。在程序
中,利用时钟脉冲 M0.0 每隔 100 毫秒读取一次。
4.3 寻找参考点
图 39 寻找参考点
以上是寻找参考点的控制方式。MODE_IN 设置为 3,表示寻找参考点模式。置位信号
DRV_EN,SERVO_EN。置位 START,开始寻找参考点。寻找参考点结束后 SYNC 置 1。
本例程中没有分配参考点开关,所以 START 启动后,SYNC 立即置 1。
IA&DT Service & Support
Page 33-41
Page 34

4.4 增量模式
图 40 增量模式
在调试增量模式前,首先需要回原点,SYNC 信号置 1。MODE_IN 设置为 4,表示增量模
式。MODE_TYP 设置为 1 到 100 之间的值,用于选择增量表的行号。MODE_TYP 设置为
254(-2),使用 TRG254 直接设置增量值。使用 TRG254_EN 使能设置完的增量值。
IA&DT Service & Support
Page 34-41
Page 35

设置 VLEVEL_1 和 VLEVEL_2,设置完后使能 VLEV_EN 写入。
置位信号 DRV_EN,SERVO_EN。置位 DIR_P 或 DIR_M 正转或反转。
4.5 MDI
图 41 MDI 模式调试 1
在调试 MDI 模式前,首先需要回原点,SYNC 信号置 1。MODE_IN 设置为 6,表示 MDI 模
式。置位信号 DRV_EN,SERVO_EN。设置 Override。
IA&DT Service & Support
Page 35-41
Page 36

图 42 MDI 模式调试 2
然后与在控制面板中调试类似,写入 MDI 程序。同样,MDI 程序分为 MDI 和 MDI on_the-
fly。在 MDI 程序运行过程中,可以通过 MDIFLY_EN 激活 MDI on-the-fly 程序,MDI 程序立
即放弃运行,转到 MDI on-the-fly 程序运行。
图 43 DBB178 和 DBB224 的结构
DBB178 的结构如上图,用于使能 G1,G2 和 X/t。赋值 2#0001_0001 表示使能 G1,X/t。
DBB224 与此结构相同,用于 MDI on-the-fly 代码的设置。
IA&DT Service & Support
Page 36-41
Page 37

图 44 DBB179 和 DBB225 的结构
DBB179 的结构如上图,用于使能 F(进给速度),M1,M2,M3。赋值 2#0000_0001 表示使
能 F。DBB225 与此结构相同,用于 MDI on-the-fly 代码的设置。
然后写入与控制面板 MDI 调试相同的 NC 程序。
MDI G91 X500.000 F500.000
MDI on-the-fly G90 X100.000 F1000.000
使能 MDI_EN(DBX38.3) 装入 MDI 块。使能 START,开始 MDI 块的运行。在 MDI 块运行过
程中,可以使能 MDIFLY_EN(DBX38.4)。这时放弃 MDI 块的运行,转到 MDI on-the-fly 块
运行。
4.6 自动模式
在调试自动模式前,首先需要回原点,SYNC 信号置 1。MODE_IN 设置为 8,表示自动模
式。置位信号 DRV_EN,SERVO_EN。设置 Override。
在 PROGS_NO 填写编写好的 NC 程序号,在这里填写 1 号。BLCK_NO 表示从程序的哪一
行开始运行。PROG_DIR 表示程序的运行方向。0 表示正向运行,1 表示反向运行。
SKIP_BLK 表示是否跳过行号前有“/”标记的程序。READ_EN 必须设置为 1
。完成上述操作
后使能 PROGS_EN,读入 NC 程序。读取的 NC 程序在图 46 中显示。启动 START,程序
开始执行,图 46 中显示当前正在执行的程序和下一条要执行的程序。
IA&DT Service & Support
Page 37-41
Page 38

IA&DT Service & Support
图 45 自动模式 1
Page 38-41
Page 39

图46 自动模式2
如果您对该文档有任何建议,请将您的宝贵建议提交至下载中心留言板。
该文档的文档编号:A0477
IA&DT Service & Support
Page 39-41
Page 40

附录-推荐网址
自动化系统
西门子(中国)有限公司
工业自动化与驱动技术集团 客户服务与支持中心
网站首页:
自动化系统 下载中心:
http://www.ad.siemens.com.cn/download/DocList.aspx?TypeId=0&CatFirst=1
自动化系统 全球技术资源:
http://support.automation.siemens.com/CN/view/zh/10805045/130000
“找答案”自动化系统版区:
http://www.ad.siemens.com.cn/service/answer/category.asp?cid=1027
通信/网络
西门子(中国)有限公司
工业自动化与驱动技术集团 客户服务与支持中心
网站首页:
通信/网络 下载中心:
http://www.ad.siemens.com.cn/download/DocList.aspx?TypeId=0&CatFirst=12
通信/网络 全球技术资源:
http://support.automation.siemens.com/CN/view/zh/10805868/130000
“找答案”Net版区:
http://www.ad.siemens.com.cn/service/answer/category.asp?cid=1031
驱动技术
西门子(中国)有限公司
工业自动化与驱动技术集团 客户服务与支持中心
网站首页:
驱动技术 下载中心:
http://www.ad.siemens.com.cn/download/DocList.aspx?TypeId=0&CatFirst=85
驱动技术 全球技术资源:
http://support.automation.siemens.com/CN/view/zh/10803928/130000
“找答案”驱动技术版区:
http://www.ad.siemens.com.cn/service/answer/category.asp?cid=1038
www.4008104288.com.cn
www.4008104288.com.cn
www.4008104288.com.cn
IA&DT Service & Support
Page 40-41
Page 41

注意事项
应用示例与所示电路、设备及任何可能结果没有必然联系,并不完全相关。应用示例不表示
客户的具体解决方案。它们仅对典型应用提供支持。用户负责确保所述产品的正确使用。这
些应用示例不能免除用户在确保安全、专业使用、安装、操作和维护设备方面的责任。当使
用这些应用示例时,应意识到西门子不对在所述责任条款范围之外的任何损坏/索赔承担责
任。我们保留随时修改这些应用示例的权利,恕不另行通知。如果这些应用示例与其它西门
子出版物(例如,目录)给出的建议不同,则以其它文档的内容为准。
声明
我们已核对过本手册的内容与所描述的硬件和软件相符。由于差错难以完全避免,我们不能
保证完全一致。我们会经常对手册中的数据进行检查,并在后续的版本中进行必要的更正。
欢迎您提出宝贵意见。
版权© 西门子(中国)有限公司 2001-2008 版权保留
复制、传播或者使用该文件或文件内容必须经过权利人书面明确同意。侵权者将承担权利人
的全部损失。权利人保留一切权利,包括复制、发行,以及改编、汇编的权利。
西门子(中国)有限公司
IA&DT Service & Support
Page 41-41
 Loading...
Loading...