

Siemens SINAMICS G120D, CU250D-2 DP-F, CU250D-2 PN-F, CU250D-2 PN-F PP, CU250D-2 PN-F FO Original Instructions Manual
Page 1

Page 2

Page 3

Converter with control units CU250D-2
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
___________________
SINAMICS
SINAMICS G120D
Converter with control units
CU250D-2
Operating Instructions
Edition 04/2014, Firmware V4.7
Original instructions
04/2014, FW V4.7
A5E34261542B AA
Changes in this manual
Fundamental safety
instructions
1
Introduction
2
Description
3
Installation
4
Commissioning
5
Adapt inputs and outputs
6
Configuring the fieldbus
7
Setting functions
8
Backing up data and series
commissioning
9
Corrective maintenance
10
Alarms, faults and system
messages
11
Technical data
12
Appendix
A
Page 4
Siemens AG
Industry Sector
Postfach 48 48
90026 NÜRNBERG
GERMANY
A5E34261542B AA
Ⓟ
Copyright © Siemens AG 2012 - 2014.
All rights reserved
Legal information
Warning notice system
DANGER
indicates that death or severe personal injury will result if proper precautions are not taken.
WARNING
indicates that death or severe personal injury may result if proper precautions are not taken.
CAUTION
indicates that minor personal injury can result if proper precautions are not taken.
NOTICE
indicates that property damage can result if proper precautions are not taken.
Qualified Personnel
personnel qualified
Proper use of Siemens products
WARNING
Siemens products may only be used for the applications described in the catalog and in the relevant technical
maintenance are required to ensure that the products operate safely and without any problems. The permissible
ambient conditions must be complied with. The information in the relevant documentation must be observed.
Trademarks
Disclaimer of Liability
This manual contains notices you have to observe in order to ensure your personal safety, as well as to prevent
damage to property. The notices referring to your personal safety are highlighted in the manual by a safety alert
symbol, notices referring only to property damage have no safety alert symbol. These notices shown below are
graded according to the degree of danger.
If more than one degree of danger is present, the warning notice representing the highest degree of danger will
be used. A notice warning of injury to persons with a safety alert symbol may also include a warning relating to
property damage.
The product/system described in this documentation may be operated only by
task in accordance with the relevant documentation, in particular its warning notices and safety instructions.
Qualified personnel are those who, based on their training and experience, are capable of identifying risks and
avoiding potential hazards when working with these products/systems.
for the specific
Note the following:
documentation. If products and components from other manufacturers are used, these must be recommended
or approved by Siemens. Proper transport, storage, installation, assembly, commissioning, operation and
All names identified by ® are registered trademarks of Siemens AG. The remaining trademarks in this publication
may be trademarks whose use by third parties for their own purposes could violate the rights of the owner.
We have reviewed the contents of this publication to ensure consistency with the hardware and software
described. Since variance cannot be precluded entirely, we cannot guarantee full consistency. However, the
information in this publication is reviewed regularly and any necessary corrections are included in subsequent
editions.
07/2014 Subject to change
Page 5
Changes in this manual
Important changes with respect to the Manual, 01/2013 Edition
New hardware
in Chapter
Connections and cables (Page 36)
New Firmware Functions for V4.7
In Chapter
limit in the case of high-inertia starting.
(Page 209)
(I&M1 … 4)
(I&M) (Page 310)
Revised descriptions
In Chapter
(Page 237)
Corrections
in Chapter
±15 %, but rather -15 % / +20 %.
(Page 325)
New CU250D-2 PN-F FO Control Units with fieldbus via
fiber-optic cable
Reducing the pulse frequency and increasing the current
Supporting the identification & maintenance data
An overview of all the new and changed functions in the V4.7 firmware can be found in
Section New and extended functions (Page 337).
STO safety function Safe Torque Off (STO) safety function
The tolerance of the 24 V power supply of the inverter is not
The current carrying capacity of connector X01 is not 7 A,
but rather 8 A.
SINAMICS G120D CU250D-2 Inverter
(Page 23)
Inverter temperature monitoring
Identification & maintenance data
Performance ratings Control Unit
Cascading of the 24 V supply
(Page 51)
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
5
Page 6

Changes in this manual
Converter with control units CU250D-2
6 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 7

Table of contents
Changes in this manual ........................................................................................................................... 5
1 Fundamental safety instructions ............................................................................................................ 13
2 Introduction ........................................................................................................................................... 21
3 Description ............................................................................................................................................ 23
4 Installation ............................................................................................................................................ 29
5 Commissioning ..................................................................................................................................... 55
1.1 General safety instructions .......................................................................................................... 13
1.2 Safety instructions for electromagnetic fields (EMF) ................................................................... 17
1.3 Handling electrostatic sensitive devices (ESD) ........................................................................... 17
1.4 Industrial security ......................................................................................................................... 18
1.5 Residual risks of power drive systems ......................................................................................... 19
2.1 About this manual ........................................................................................................................ 21
2.2 Guide through this manual ........................................................................................................... 22
3.1 SINAMICS G120D CU250D-2 Inverter ........................................................................................ 23
3.2 Commissioning tools .................................................................................................................... 25
3.3 Supported motor series ................................................................................................................ 27
4.1 Mechanical Installation ................................................................................................................. 29
4.1.1 Drill pattern SINAMICS G120D .................................................................................................... 30
4.2 Electrical Installation .................................................................................................................... 32
4.2.1 Permissible line supplies .............................................................................................................. 32
4.2.2 Electrical data ............................................................................................................................... 33
4.2.3 Basic EMC Rules ......................................................................................................................... 34
4.2.4 Overview of the interfaces ........................................................................................................... 35
4.2.5 Connections and cables ............................................................................................................... 36
4.2.6 Connecting the motor holding brake ............................................................................................ 44
4.2.7 Factory settings of the inputs and outputs ................................................................................... 45
4.2.8 Default settings of inputs and outputs .......................................................................................... 46
4.2.9 Connecting the PROFINET interface ........................................................................................... 46
4.2.10 Encoders examples ..................................................................................................................... 47
4.2.11 Grounding converter and motor ................................................................................................... 47
4.2.12 Cable protection and cascading of the 400 V supply................................................................... 49
4.2.13 Cascading of the 24 V supply ...................................................................................................... 51
4.2.14 Connections and interference suppression ................................................................................. 51
4.2.15 Equipotential bonding .................................................................................................................. 52
5.1 Commissioning guidelines ........................................................................................................... 55
5.2 Preparing for commissioning ....................................................................................................... 57
5.2.1 Which motor fits the converter? ................................................................................................... 58
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
7
Page 8

Table of contents
6 Adapt inputs and outputs ...................................................................................................................... 79
7 Configuring the fieldbus ........................................................................................................................ 85
5.2.2 Introduction, V/f control, vector control ....................................................................................... 58
5.2.3 Defining additional requirements for the application ................................................................... 60
5.2.4 Encoder assignment ................................................................................................................... 60
5.3 Restoring the factory setting ....................................................................................................... 62
5.4 Basic commissioning with IOP .................................................................................................... 64
5.5 Basic commissioning with STARTER ......................................................................................... 68
5.5.1 Generating a STARTER project .................................................................................................. 69
5.5.2 Transfer inverters connected via USB into the project ............................................................... 69
5.5.3 Configuring a drive ...................................................................................................................... 71
5.5.4 Carry-out basic commissioning ................................................................................................... 72
5.5.5 Adapting the encoder data .......................................................................................................... 75
5.5.6 Loading the configured data into the drive .................................................................................. 76
5.5.7 Identifying motor data .................................................................................................................. 76
6.1 Digital inputs ................................................................................................................................ 80
6.2 Fail-safe digital input ................................................................................................................... 81
6.3 Digital outputs ............................................................................................................................. 83
7.1 Fieldbus versions of the Control Unit .......................................................................................... 85
7.2 Communication via PROFINET .................................................................................................. 86
7.2.1 What do you need for communication via PROFINET? ............................................................. 87
7.2.2 Integrating converters into PROFINET ....................................................................................... 88
7.2.3 Configuring communication to the control ................................................................................... 88
7.2.4 Select telegram ........................................................................................................................... 89
7.2.5 Activating diagnostics via the control .......................................................................................... 90
7.3 Communication via PROFIBUS .................................................................................................. 91
7.3.1 What do you need for communication via PROFIBUS? ............................................................. 91
7.3.2 Integrating the inverter in PROFIBUS ......................................................................................... 91
7.3.3 Configuring the communication using SIMATIC S7 control ........................................................ 92
7.3.4 Setting the address ..................................................................................................................... 92
7.3.5 Select telegram ........................................................................................................................... 93
7.4 PROFIdrive profile for PROFIBUS and PROFINET ................................................................... 94
7.4.1 Cyclic communication ................................................................................................................. 94
7.4.1.1 Positioner: Cyclic communication ............................................................................................... 94
7.4.1.2 Control and status word 1 ........................................................................................................... 97
7.4.1.3 Control and status word 2 ........................................................................................................... 99
7.4.1.4 Control and status word for the positioner ................................................................................ 100
7.4.1.5 Control and status word 1 for the positioner ............................................................................. 102
7.4.1.6 Control and status word 2 for the positioner ............................................................................. 104
7.4.1.7 Control word block selection ..................................................................................................... 106
7.4.1.8 Control word MDI mode ............................................................................................................ 107
7.4.1.9 Status word messages .............................................................................................................. 108
7.4.1.10 Function block FB283 ............................................................................................................... 109
7.4.1.11 Extend telegrams and change signal interconnection .............................................................. 109
7.4.1.12 Slave-to-slave communication .................................................................................................. 110
7.4.2 Acyclic communication .............................................................................................................. 110
Converter with control units CU250D-2
8 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 9

Table of contents
8 Setting functions ................................................................................................................................. 111
8.1 Overview of the converter functions........................................................................................... 111
8.2 Inverter control ........................................................................................................................... 113
8.2.1 Switching the motor on and off .................................................................................................. 113
8.2.2 Running the motor in jog mode (JOG function) ......................................................................... 115
8.2.3 Switching over the inverter control (command data set)............................................................ 117
8.3 Setpoints .................................................................................................................................... 119
8.3.1 Overview .................................................................................................................................... 119
8.3.2 Specifying the setpoint via the fieldbus ...................................................................................... 120
8.3.3 Motorized potentiometer as setpoint source .............................................................................. 120
8.3.4 Fixed speed as setpoint source ................................................................................................. 123
8.4 Setpoint calculation .................................................................................................................... 126
8.4.1 Overview of setpoint preparation ............................................................................................... 126
8.4.2 Invert setpoint ............................................................................................................................. 127
8.4.3 Inhibit direction of rotation .......................................................................................................... 128
8.4.4 Skip frequency bands and minimum speed ............................................................................... 129
8.4.5 Speed limitation.......................................................................................................................... 130
8.4.6 Ramp-function generator ........................................................................................................... 131
8.5 Motor control .............................................................................................................................. 136
8.5.1 V/f control ................................................................................................................................... 136
8.5.1.1 Characteristics of U/f control ...................................................................................................... 137
8.5.1.2 Selecting the U/f characteristic .................................................................................................. 138
8.5.1.3 Optimizing with a high break loose torque and brief overload ................................................... 138
8.5.2 Vector control ............................................................................................................................. 140
8.5.2.1 Checking the encoder signal ...................................................................................................... 141
8.5.2.2 Select motor control ................................................................................................................... 141
8.5.2.3 Optimizing the speed controller ................................................................................................. 142
8.5.2.4 Advanced settings ...................................................................................................................... 144
8.5.3 Operating the converter without position controller ................................................................... 145
8.6 Basic positioner and position control ......................................................................................... 147
8.6.1 Basic positioner and position control ......................................................................................... 147
8.6.2 Commissioning sequence .......................................................................................................... 148
8.6.3 Normalizing the encoder signal.................................................................................................. 149
8.6.3.1 Define the resolution .................................................................................................................. 149
8.6.3.2 Modulo range setting ................................................................................................................. 151
8.6.3.3 Checking the actual position value ............................................................................................ 153
8.6.3.4 Setting the backlash ................................................................................................................... 154
8.6.4 Limiting the positioning range .................................................................................................... 156
8.6.5 Setting the position controller ..................................................................................................... 158
8.6.5.1 Precontrol and gain .................................................................................................................... 158
8.6.5.2 Optimizing the position controller ............................................................................................... 159
8.6.5.3 Limiting the traversing profile ..................................................................................................... 162
8.6.6 Setting the monitoring functions................................................................................................. 164
8.6.6.1 Standstill and positioning monitoring ......................................................................................... 164
8.6.6.2 Following error monitoring ......................................................................................................... 166
8.6.6.3 Cam sequencer .......................................................................................................................... 168
8.6.7 Referencing ................................................................................................................................ 169
8.6.7.1 Referencing methods ................................................................................................................. 169
8.6.7.2 Setting the reference point approach ......................................................................................... 170
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
9
Page 10

Table of contents
9 Backing up data and series commissioning .......................................................................................... 257
8.6.7.3 Setting the flying referencing..................................................................................................... 176
8.6.7.4 Set reference point .................................................................................................................... 181
8.6.7.5 Absolute encoder adjustment ................................................................................................... 183
8.6.8 Jogging ...................................................................................................................................... 185
8.6.8.1 Jog velocity................................................................................................................................ 185
8.6.8.2 Incremental jogging ................................................................................................................... 186
8.6.8.3 Setting jogging .......................................................................................................................... 186
8.6.9 Traversing blocks ...................................................................................................................... 188
8.6.9.1 Travel to fixed stop .................................................................................................................... 196
8.6.9.2 Examples................................................................................................................................... 201
8.6.10 Direct setpoint input (MDI) ........................................................................................................ 203
8.7 Protection and monitoring functions .......................................................................................... 209
8.7.1 Inverter temperature monitoring ................................................................................................ 209
8.7.2 Motor temperature monitoring using a temperature sensor ...................................................... 212
8.7.3 Protecting the motor by calculating the motor temperature ...................................................... 215
8.7.4 Overcurrent protection .............................................................................................................. 217
8.8 Application-specific functions .................................................................................................... 218
8.8.1 Functions that match the application ........................................................................................ 218
8.8.2 Unit changeover ........................................................................................................................ 219
8.8.2.1 Changing over the motor standard ........................................................................................... 220
8.8.2.2 Changing over the unit system ................................................................................................. 221
8.8.2.3 Switching units with STARTER ................................................................................................. 222
8.8.3 Electrically braking the motor .................................................................................................... 224
8.8.3.1 DC braking ................................................................................................................................ 224
8.8.3.2 Braking with regenerative feedback to the line ......................................................................... 227
8.8.4 Motor holding brake .................................................................................................................. 228
8.8.5 Monitoring the load torque (system protection)......................................................................... 232
8.8.6 Load failure monitoring .............................................................................................................. 234
8.8.7 Speed deviation monitoring....................................................................................................... 235
8.9 Safe Torque Off (STO) safety function ..................................................................................... 237
8.9.1 Function description .................................................................................................................. 237
8.9.2 Prerequisite for STO use ........................................................................................................... 239
8.9.3 Commissioning STO ................................................................................................................. 239
8.9.3.1 Commissioning tools ................................................................................................................. 239
8.9.3.2 Protection of the settings from unauthorized changes .............................................................. 240
8.9.3.3 Resetting the safety function parameters to the factory setting ................................................ 240
8.9.3.4 Changing settings ..................................................................................................................... 241
8.9.3.5 Interconnecting the "STO active" signal .................................................................................... 242
8.9.3.6 Setting the filter for safety-related inputs .................................................................................. 243
8.9.3.7 Setting the forced checking procedure (test stop) .................................................................... 246
8.9.3.8 Activate settings ........................................................................................................................ 247
8.9.3.9 Checking the assignment of the digital inputs........................................................................... 248
8.9.3.10 Acceptance - completion of commissioning .............................................................................. 250
8.10 Switchover between different settings ...................................................................................... 254
9.1 Saving settings on a memory card ............................................................................................ 258
9.1.1 Saving settings to the memory card .......................................................................................... 259
9.1.2 Transferring the settings from the memory card ....................................................................... 260
9.1.3 Safely remove the memory card ............................................................................................... 261
Converter with control units CU250D-2
10 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 11
Table of contents
10 Corrective maintenance ...................................................................................................................... 275
11 Alarms, faults and system messages .................................................................................................. 299
12 Technical data .................................................................................................................................... 325
9.2 Backing up and transferring settings using STARTER .............................................................. 263
9.3 Saving settings and transferring them using an operator panel ................................................ 265
9.4 Other ways to back up settings .................................................................................................. 266
9.5 Write and know-how protection .................................................................................................. 267
9.5.1 Write protection .......................................................................................................................... 267
9.5.2 Know-how protection ................................................................................................................. 269
9.5.2.1 Settings for the know-how protection ......................................................................................... 271
9.5.2.2 Creating an exception list for the know-how protection ............................................................. 273
10.1 Spare parts - external fan .......................................................................................................... 275
10.2 Overview of replacing converter components ............................................................................ 276
10.3 Replacing a Control Unit with enabled safety function .............................................................. 278
10.4 Replacing the Control Unit without the safety functions enabled .............................................. 282
10.5 Replacing the Control Unit without data backup ........................................................................ 284
10.6 Replacing a Control Unit with active know-how protection ........................................................ 285
10.7 Replacing a Power Module with enabled safety function .......................................................... 287
10.8 Replacing a Power Module without the safety function being enabled ..................................... 288
10.9 Upgrading firmware .................................................................................................................... 289
10.10 Firmware downgrade ................................................................................................................. 292
10.11 Correcting a failed firmware upgrade or downgrade.................................................................. 295
10.12 Reduced acceptance test after component replacement .......................................................... 296
10.13 If the converter no longer responds ........................................................................................... 297
11.1 Alarms ........................................................................................................................................ 299
11.2 Faults ......................................................................................................................................... 303
11.3 Status LED overview .................................................................................................................. 308
11.4 Identification & maintenance data (I&M) .................................................................................... 310
11.5 System runtime .......................................................................................................................... 311
11.6 List of alarms and faults ............................................................................................................. 312
12.1 Performance ratings Control Unit ............................................................................................... 325
12.2 Performance ratings Power Module........................................................................................... 327
12.3 SINAMICS G120D specifications ............................................................................................... 328
12.4 Ambient operating conditions ..................................................................................................... 329
12.5 Current and voltage derating dependent on the installation altitude ......................................... 330
12.6 Pulse frequency and current reduction ...................................................................................... 331
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
11
Page 12

Table of contents
A Appendix ............................................................................................................................................. 337
Index ................................................................................................................................................... 375
12.7 Standards (PM250D) ................................................................................................................ 332
12.8 Electromagnetic Compatibility ................................................................................................... 333
A.1 New and extended functions ..................................................................................................... 337
A.2 Star-delta motor connection and application examples ............................................................ 340
A.3 Parameter.................................................................................................................................. 341
A.4 Handling STARTER .................................................................................................................. 344
A.4.1 Change settings ........................................................................................................................ 344
A.4.2 Optimize the drive using the trace function ............................................................................... 346
A.5 Interconnecting signals in the inverter ...................................................................................... 349
A.5.1 Fundamentals ........................................................................................................................... 349
A.5.2 Example .................................................................................................................................... 351
A.6 Application Examples ................................................................................................................ 353
A.6.1 Setting an absolute encoder ..................................................................................................... 353
A.6.2 Go online with STARTER via PROFINET ................................................................................. 357
A.6.2.1 Adapting the PROFINET interface ............................................................................................ 357
A.6.2.2 Create a reference for STARTERS ........................................................................................... 358
A.6.2.3 Call the STARTER and go online ............................................................................................. 359
A.6.3 Connecting the safety-related input .......................................................................................... 359
A.6.4 Connecting fail-safe digital inputs ............................................................................................. 360
A.7 Setting a non standard HTL encoder ........................................................................................ 361
A.8 Setting a non standard SSI encoder ......................................................................................... 362
A.9 Acceptance tests for the safety functions ................................................................................. 365
A.9.1 Recommended acceptance test ............................................................................................... 365
A.9.2 Machine documentation ............................................................................................................ 368
A.9.3 Log the settings for the basic functions, firmware V4.4 ... V4.7 ................................................ 370
A.10 Manuals and technical support ................................................................................................. 371
A.10.1 Manuals for your inverter .......................................................................................................... 371
A.10.2 Configuring support ................................................................................................................... 372
A.10.3 Product Support ........................................................................................................................ 372
A.11 Mistakes and improvements ..................................................................................................... 373
Converter with control units CU250D-2
12 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 13
1
1.1
General safety instructions
DANGER
Danger to life due to live parts and other energy sources
WARNING
Danger to life through a hazardous voltage when connecting an unsuitable power supply
Death or serious injury can result when live parts are touched.
• Only work on electrical devices when you are qualified for this job.
• Always observe the country-specific safety rules.
Generally, six steps apply when establishing safety:
1. Prepare for shutdown and notify all those who will be affected by the procedure.
2. Disconnect the machine from the supply.
– Switch off the machine.
– Wait until the discharge time specified on the warning labels has elapsed.
– Check that it really is in a no-voltage condition, from phase conductor to phase
conductor and phase conductor to protective conductor.
– Check whether the existing auxiliary supply circuits are de-energized.
– Ensure that the motors cannot move.
3. Identify all other dangerous energy sources, e.g. compressed air, hydraulic systems, or
water.
4. Isolate or neutralize all hazardous energy sources by closing switches, grounding or
short-circuiting or closing valves, for example.
5. Secure the energy sources against switching on again.
6. Ensure that the correct machine is completely interlocked.
After you have completed the work, restore the operational readiness in the inverse
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
sequence.
Touching live components can result in death or severe injury.
• Only use power supplies that provide SELV (Safety Extra Low Voltage) or PELV-
(Protective Extra Low Voltage) output voltages for all connections and terminals of the
electronics modules.
13
Page 14
Fundamental safety instructions
WARNING
Danger to life when live parts are touched on damaged devices
WARNING
Danger to life through electric shock due to unconnected cable shields
WARNING
Danger to life due to electric shock when not grounded
WARNING
Danger to life due to electric shock when opening plug connections in operation
WARNING
Danger to life due to fire spreading if housing is inadequate
1.1 General safety instructions
Improper handling of devices can cause damage.
For damaged devices, hazardous voltages can be present at the enclosure or at exposed
components; if touched, this can result in death or severe injury.
• Ensure compliance with the limit values specified in the technical data during transport,
storage and operation.
• Do not use any damaged devices.
Hazardous touch voltages can occur through capacitive cross-coupling due to unconnected
cable shields.
• As a minimum, connect cable shields and the conductors of power cables that are not
used (e.g. brake cores) at one end at the grounded housing potential.
For missing or incorrectly implemented protective conductor connection for devices with
protection class I, high voltages can be present at open, exposed parts, which when
touched, can result in death or severe injury.
• Ground the device in compliance with the applicable regulations.
When opening plug connections in operation, arcs can result in severe injury or death.
• Only open plug connections when the equipment is in a no-voltage state, unless it has
been explicitly stated that they can be opened in operation.
Fire and smoke development can cause severe personal injury or material damage.
• Install devices without a protective housing in a metal control cabinet (or protect the
device by another equivalent measure) in such a way that contact with fire is prevented.
• Ensure that smoke can only escape via controlled and monitored paths.
Converter with control units CU250D-2
14 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 15
Fundamental safety instructions
WARNING
Danger to life through unexpected movement of machines when using mobile wireless
devices or mobile phones
WARNING
Danger to life due to the motor catching fire in the event of insulation overload
WARNING
Danger to life due to fire if overheating occurs because of insufficient ventilation clearances
WARNING
Danger of an accident occurring due to missing or illegible warning labels
1.1 General safety instructions
Using mobile wireless devices or mobile phones with a transmit power > 1 W closer than
approx. 2 m to the components may cause the devices to malfunction, influence the
functional safety of machines therefore putting people at risk or causing material damage.
• Switch the wireless devices or mobile phones off in the immediate vicinity of the
components.
There is higher stress on the motor insulation through a ground fault in an IT system. If the
insulation fails, it is possible that death or severe injury can occur as a result of smoke and
fire.
• Use a monitoring device that signals an insulation fault.
• Correct the fault as quickly as possible so the motor insulation is not overloaded.
Inadequate ventilation clearances can cause overheating of components with subsequent
fire and smoke. This can cause severe injury or even death. This can also result in
increased downtime and reduced service lives for devices/systems.
• Ensure compliance with the specified minimum clearance as ventilation clearance for
the respective component.
Missing or illegible warning labels can result in accidents involving death or serious injury.
• Check that the warning labels are complete based on the documentation.
• Attach any missing warning labels to the components, in the national language if
necessary.
• Replace illegible warning labels.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
15
Page 16
Fundamental safety instructions
NOTICE
Device damage caused by incorrect voltage/insulation tests
WARNING
Danger to life when safety functions are inactive
Note
Important safety notices for Safety Integrated functions
If you want to use Safety In
Safety Integrated manuals.
WARNING
Danger to life or malfunctions of the machine as a result of incorrect or changed
parameterization
1.1 General safety instructions
Incorrect voltage/insulation tests can damage the device.
• Before carrying out a voltage/insulation check of the system/machine, disconnect the
devices as all converters and motors have been subject to a high voltage test by the
manufacturer, and therefore it is not necessary to perform an additional test within the
system/machine.
Safety functions that are inactive or that have not been adjusted accordingly can cause
operational faults on machines that could lead to serious injury or death.
• Observe the information in the appropriate product documentation before
commissioning.
• Carry out a safety inspection for functions relevant to safety on the entire system,
including all safety-related components.
• Ensure that the safety functions used in your drives and automation tasks are adjusted
and activated through appropriate parameterizing.
• Perform a function test.
• Only put your plant into live operation once you have guaranteed that the functions
relevant to safety are running correctly.
tegrated functions, you must observe the safety notices in the
As a result of incorrect or changed parameterization, machines can malfunction, which in
turn can lead to injuries or death.
• Protect the parameterization (parameter assignments) against unauthorized access.
• Respond to possible malfunctions by applying suitable measures (e.g. EMERGENCY
STOP or EMERGENCY OFF).
Converter with control units CU250D-2
16 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 17
Fundamental safety instructions
1.2
Safety instructions for electromagnetic fields (EMF)
WARNING
Danger to life from electromagnetic fields
1.3
Handling electrostatic sensitive devices (ESD)
NOTICE
Damage through electric fields or electrostatic discharge
1.2 Safety instructions for electromagnetic fields (EMF)
Electromagnetic fields (EMF) are generated by the operation of electrical power equipment
such as transformers, converters or motors.
People with pacemakers or implants are at a special risk in the immediate vicinity of these
devices/systems.
• Ensure that the persons involved are the necessary distance away (minimum 2 m).
Electrostatic sensitive devices (ESD) are individual components, integrated circuits, modules
or devices that may be damaged by either electric fields or electrostatic discharge.
Electric fields or electrostatic discharge can cause malfunctions through damaged
individual components, integrated circuits, modules or devices.
• Only pack, store, transport and send electronic components, modules or devices in their
original packaging or in other suitable materials, e.g conductive foam rubber of
aluminum foil.
• Only touch components, modules and devices when you are grounded by one of the
following methods:
– Wearing an ESD wrist strap
– Wearing ESD shoes or ESD grounding straps in ESD areas with conductive flooring
• Only place electronic components, modules or devices on conductive surfaces (table
with ESD surface, conductive ESD foam, ESD packaging, ESD transport container).
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
17
Page 18
Fundamental safety instructions
1.4
Industrial security
Note
Industrial security
Siemens provides products and solutions with industrial security functions that support the
secure operation of plants, solutions, machines, equipment and/or networks. They are
important components in a holistic industrial secur
products and solutions undergo continuous development. Siemens recommends strongly
that you regularly check for product updates.
For the secure operation of Siemens products and solutions, it is necessary to take su
preventive action (e.g. cell protection concept) and integrate each component into a holistic,
state
also be considered. For more information about industrial sec
(
To stay informed about product updates as they occur, sign up for a product
newsletter. For more information, visi
(
WARNING
Danger as a result of unsafe operating states resulting from software manipulation
1.4 Industrial security
ity concept. With this in mind, Siemens’
itable
-of-the-art industrial security concept. Third-party products that may be in use should
urity, visit Hotspot-Text
http://www.siemens.com/industrialsecurity).
-specific
t Hotspot-Text
http://support.automation.siemens.com).
Software manipulation (e.g. by viruses, Trojan horses, malware, worms) can cause unsafe
operating states to develop in your installation which can result in death, severe injuries
and/or material damage.
• Keep the software up to date.
You will find relevant information and newsletters at this address
(http://support.automation.siemens.com).
• Incorporate the automation and drive components into a holistic, state-of-the-art
industrial security concept for the installation or machine.
You will find further information at this address
(http://www.siemens.com/industrialsecurity).
• Make sure that you include all installed products into the holistic industrial security
concept.
Converter with control units CU250D-2
18 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 19

Fundamental safety instructions
1.5
Residual risks of power drive systems
1.5 Residual risks of power drive systems
The control and drive components of a drive system are approved for industrial and
commercial use in industrial line supplies. Their use in public line supplies requires a
different configuration and/or additional measures.
These components may only be operated in closed housings or in higher-level control
cabinets with protective covers that are closed, and when all of the protective devices are
used.
These components may only be handled by qualified and trained technical personnel who
are knowledgeable and observe all of the safety instructions on the components and in the
associated technical user documentation.
When assessing the machine's risk in accordance with the respective local regulations (e.g.,
EC Machinery Directive), the machine manufacturer must take into account the following
residual risks emanating from the control and drive components of a drive system:
1. Unintentional movements of driven machine components during commissioning,
operation, maintenance, and repairs caused by, for example,
– Hardware and/or software errors in the sensors, control system, actuators, and cables
and connections
– Response times of the control system and of the drive
– Operation and/or environmental conditions outside the specification
– Condensation/conductive contamination
– Parameterization, programming, cabling, and installation errors
– Use of wireless devices/mobile phones in the immediate vicinity of the control system
– External influences/damage
2. In the event of a fault, exceptionally high temperatures, including an open fire, as well as
emissions of light, noise, particles, gases, etc. can occur inside and outside the inverter,
e.g.:
– Component failure
– Software errors
– Operation and/or environmental conditions outside the specification
– External influences/damage
Inverters of the Open Type/IP20 degree of protection must be installed in a metal control
cabinet (or protected by another equivalent measure) such that contact with fire inside
and outside the inverter is not possible.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
19
Page 20
Fundamental safety instructions
Note
The components must be protected against conductive contamination (e.g. by installing them
in a control cabinet with degree of protection IP54 according to IEC 60529 or NEMA 12).
Assuming that conductive contamination at the installation site can definitely be excluded, a
lower degree of cabinet protection may be permitted.
1.5 Residual risks of power drive systems
3. Hazardous shock voltages caused by, for example,
– Component failure
– Influence during electrostatic charging
– Induction of voltages in moving motors
– Operation and/or environmental conditions outside the specification
– Condensation/conductive contamination
– External influences/damage
4. Electrical, magnetic and electromagnetic fields generated in operation that can pose a
risk to people with a pacemaker, implants or metal replacement joints, etc., if they are too
close
5. Release of environmental pollutants or emissions as a result of improper operation of the
system and/or failure to dispose of components safely and correctly
For more information about residual risks of the components in a drive system, see the
relevant sections in the technical user documentation.
Converter with control units CU250D-2
20 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 21
2
2.1
About this manual
Who requires the operating instructions and what for?
What is described in the operating instructions?
What is the meaning of the symbols in the manual?
An operating instruction starts here.
This concludes the operating instru
The subsequent text is applicable for an operator panel.
Th
Exampl
The description of the corresponding inverter function starts with one
of these symbols.
See also:
These operating instructions primarily address fitters, commissioning engineers and machine
operators. The operating instructions describe the devices and device components and
enable the target groups being addressed to install, connect-up, set, and commission the
converters safely and in the correct manner.
These operating instructions provide a summary of all of the information required to operate
the converter under normal, safe conditions.
The information provided in the operating instructions has been compiled in such a way that
it is sufficient for all standard applications and enables drives to be commissioned as
efficiently as possible. Where it appears useful, additional information for entry level
personnel has been added.
The operating instructions also contain information about special applications. Since it is
assumed that readers already have a sound technical knowledge of how to configure and
parameterize these applications, the relevant information is summarized accordingly. This
relates, e.g. to operation with fieldbus systems and safety-related applications.
e following text applies if you are using a PC with STARTER.
es of the inverter-function symbols
Overview of the converter functions (Page 111).
ction.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
21
Page 22
Introduction
2.2
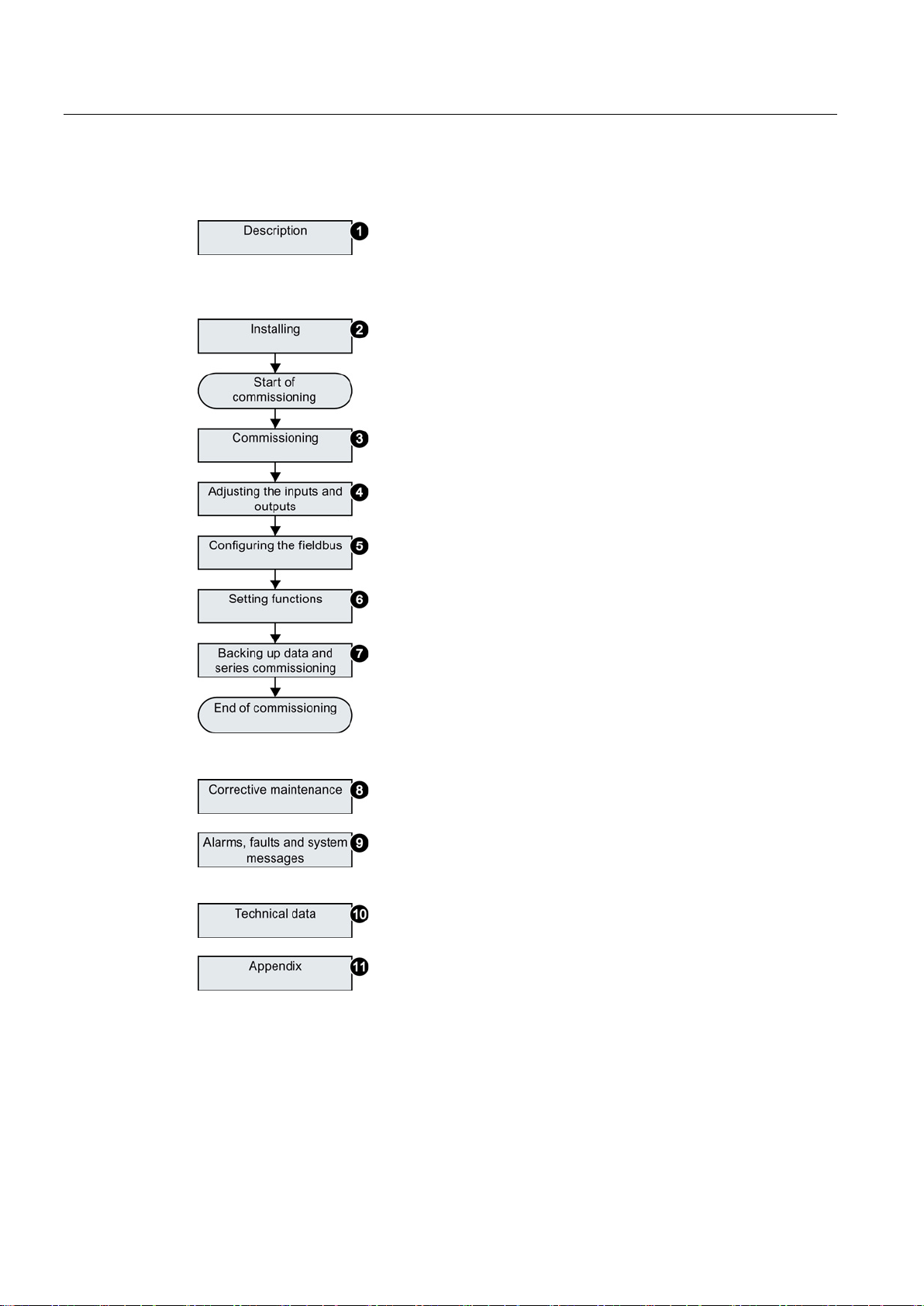
Guide through this manual
①
Inverter components and accessories.
Permissible motors.
Tools for commissioning.
②
Install and wire the inverter and its components.
Install the inverter in accordance with EMC.
③
Prepare for commissioning.
Restore the inverter to factory settings.
Define the inverter’s basic settings.
④
Adjust the function of the inputs and outputs.
⑤
Configure communication via PROFIBUS or PROFINET.
Communicati
"Fieldbus" function manual; see also:
support (Page 371).
⑥
Set up the funct
and protection functions.
⑦
Backup the inverter’s settings to an external data storage
medium, e.g. a memory card or an operator panel.
⑧
Replace the inverter and its components.
Firmware update.
⑨
Meaning of the LEDs on the front of the inverter.
System runtime.
Faults and warnings.
⑩
The most important technical data of the inverter.
⑪
Setting up the new inverter functions.
Application examples.
2.2 Guide through this manual
on using other fieldbuses can be found in the
ions, e.g. setpoint processing, motor control
Manuals and technical
Converter with control units CU250D-2
22 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 23
3
Use for the intended purpose
3.1
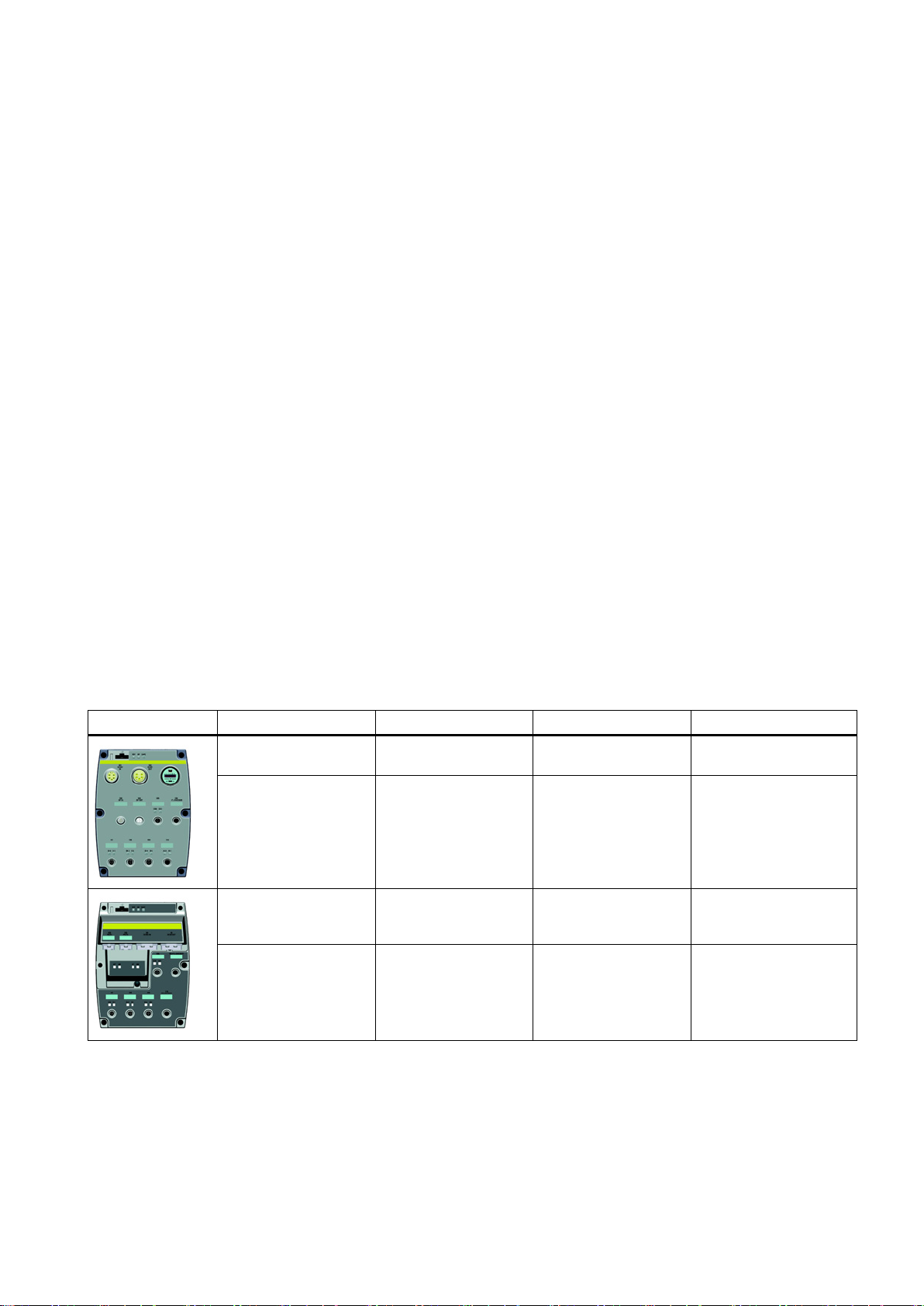
SINAMICS G120D CU250D-2 Inverter
Overview
Designation
Interface
Encoder type
Order number
SSI Absolute Encoder
Push-Pull connections
The inverter described in this manual is a device for controlling an induction motor. The
inverter is designed for installation in electrical installations or machines.
It has been approved for industrial and commercial use on industrial networks. Additional
measures have to be taken when connected to public grids.
The technical specifications and information about connection conditions are indicated on
the rating plate and in the operating instructions.
The SINAMICS G120D is a converter for controlling the position of a drive. The converter
consists of two parts, the Control Unit (CU) and the Power Module (PM).
Table 3- 1 CU250D-2 Control Units
CU250D-2 DP-F PROFIBUS HTL Encoder
CU250D-2 PN-F PROFINET,
CU250D-2 PN-F PP PROFINET,
CU250D-2 PN-F FO PROFINET,
EtherNet/IP
EtherNet/IP
EtherNet/IP
Fibre optic connections
HTL Encoder
SSI Absolute Encoder
HTL Encoder
SSI Absolute Encoder
HTL Encoder
SSI Absolute Encoder
6SL3546-0FB21-1PA0
6SL3546-0FB21-1FA0
6SL3546-0FB21-1FB0
6SL3546-0FB21-1FC0
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
23
Page 24
Description
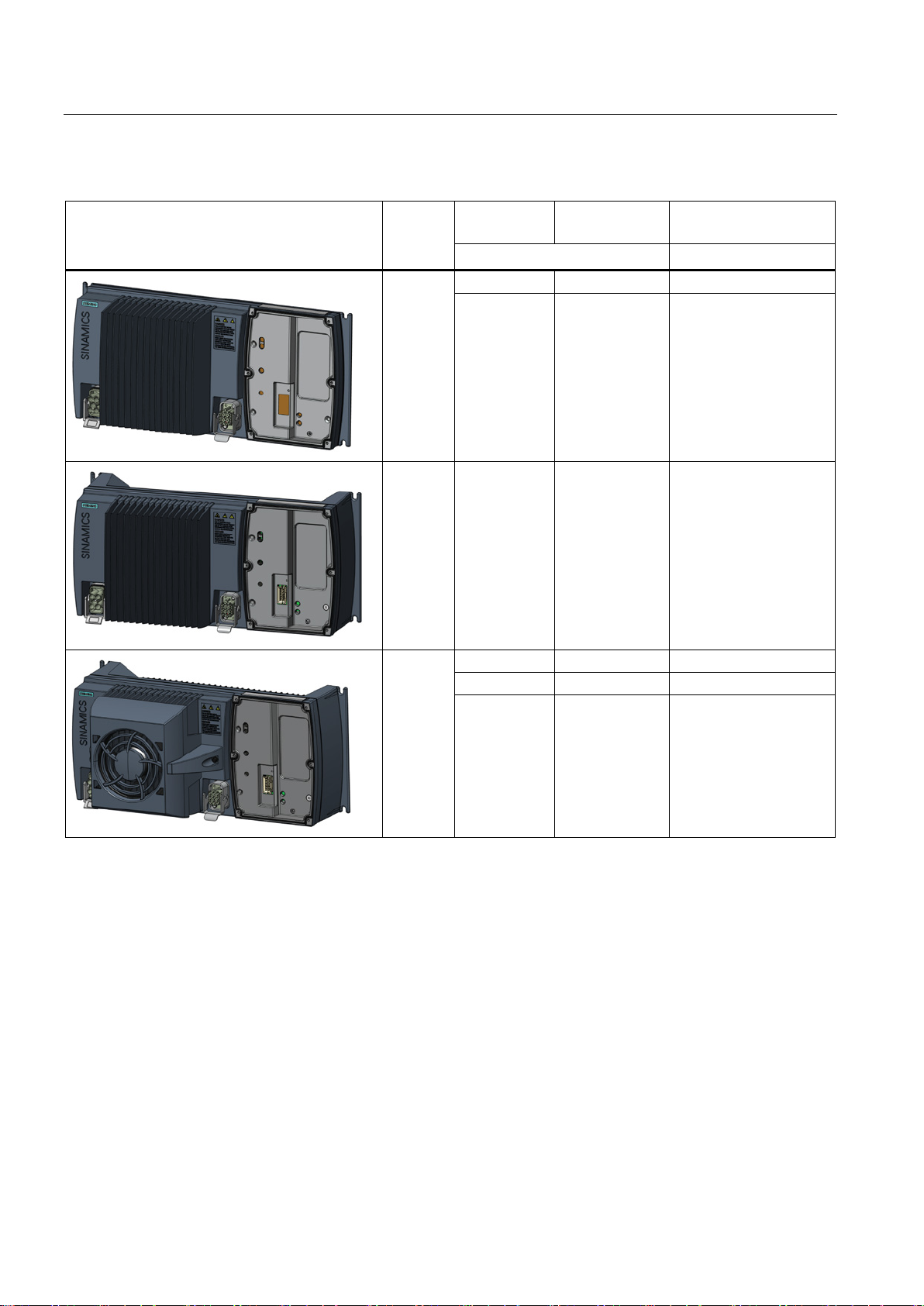
Frame
size
Rated output
power
Rated output
current
Order number
based on High Overload (HO)
0.75 kW
2.2 A
6SL3525-0PE17-5AA1
4.0 kW
10.2 A
6SL3525-0PE24-0AA1
5.5 kW
13.2 A
6SL3525-0PE25-5AA1
3.1 SINAMICS G120D CU250D-2 Inverter
Table 3- 2 PM250D Power Modules
FSA
1.5 kW 4.1 A 6SL3525-0PE21-5AA1
FSB 3.0 kW 7.7 A 6SL3525-0PE23-0AA1
FSC
7.5 kW 19.0 A 6SL3525-0PE27-5AA1
Converter with control units CU250D-2
24 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 25
Description
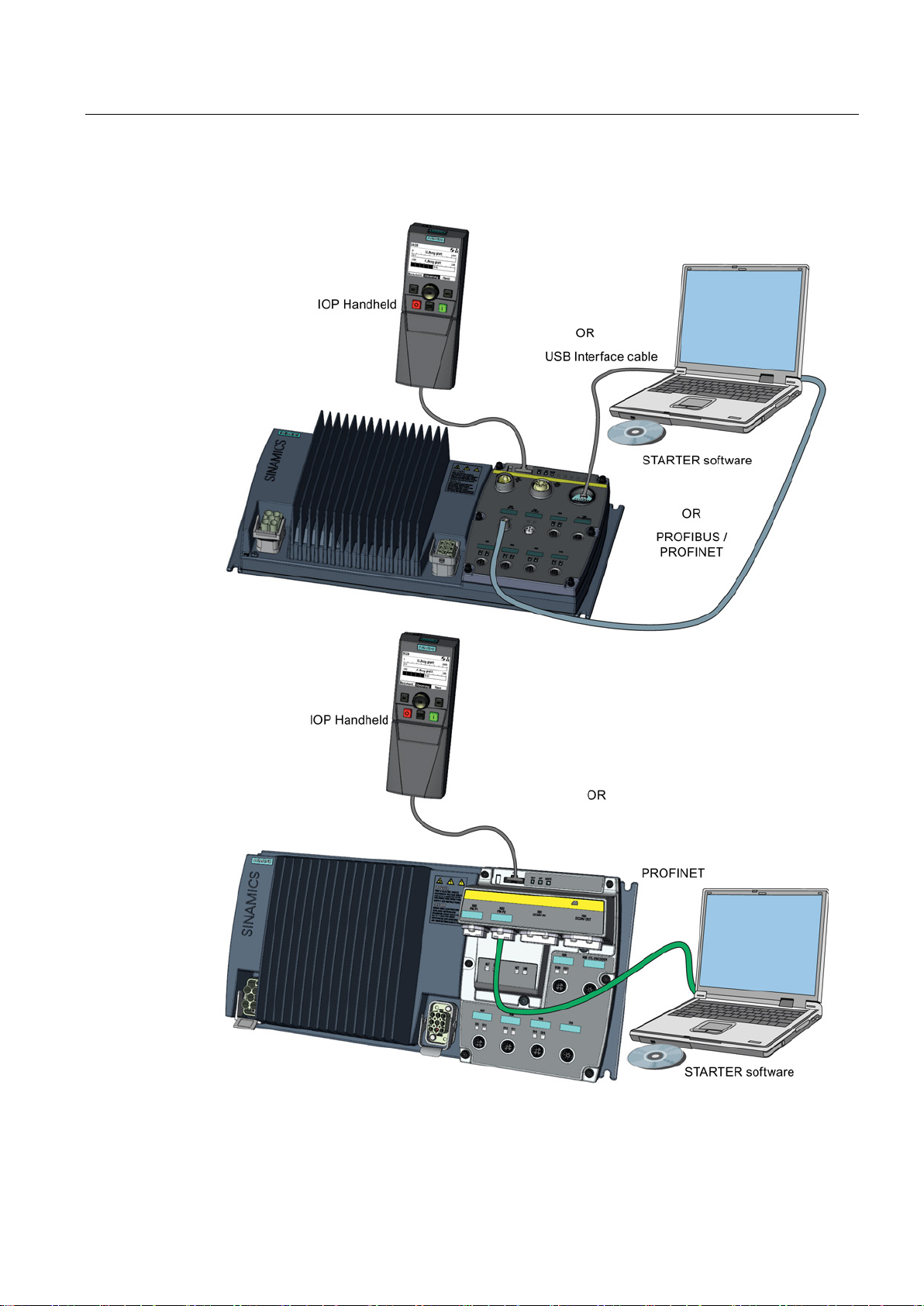
3.2
Commissioning tools
3.2 Commissioning tools
Figure 3-1 Commissioning tools - PC or IOP Handheld Kit
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
25
Page 26
Description
Component or tool
Order number
Operator Panel
IOP Handheld
6SL3255-0AA00-4HA0
ns.com/WW/view/en/26233208)
PC Connection Kit
Comprising USB cable (3 m).
6SL3255-0AA00-2CA0
Memory cards
3.2 Commissioning tools
Table 3- 3 Components and tools for commissioning
STARTER Commissioning tool (PC
software)
You obtain STARTER on a DVD
(Order number: 6SL30720AA00-0AG0)
and it can be downloaded:
Download STARTER
(http://support.automation.sieme
The following memory cards are available as medium to back up converter settings:
● Card without firmware: Order No. 6SL3054-4AG00-2AA0.
● Card with firmware: Order No. 6SL3054-7Ex00-2BA0.
The digit at position x designates the firmware version:
4.6 ≙ EG, 4.7 ≙ EH
Converter with control units CU250D-2
26 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 27
Description
3.3
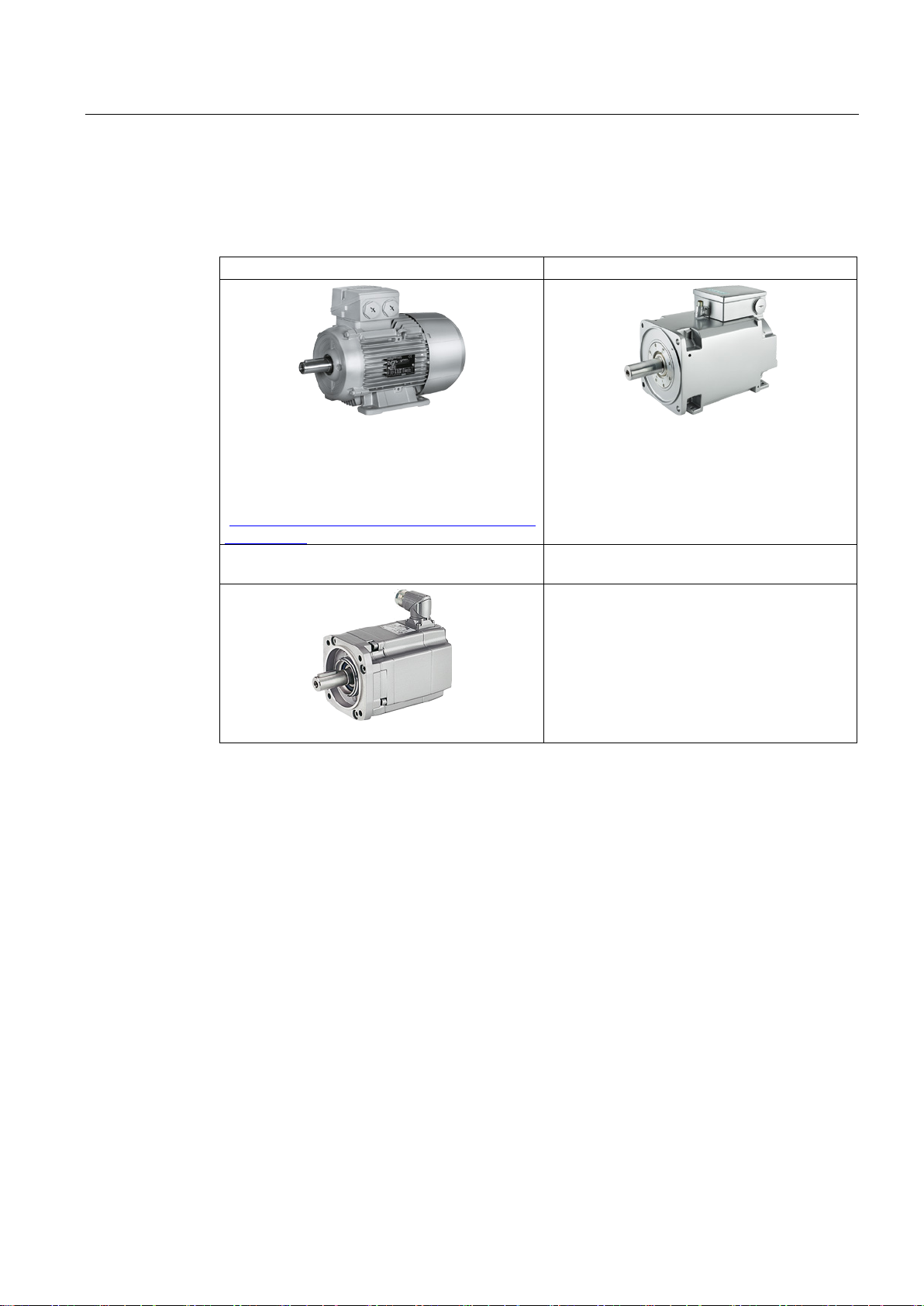
Supported motor series
SIMOTICS GP, SIMOTICS SD IEC motors
SIMOTICS M main motors
en/84049346).
On request: Encoderless permanently excited
synchronous motors SIMOTICS S
Motors from other manufacturers
3.3 Supported motor series
The inverter is designed for the following motor series:
1LG6, 1LA7, 1LA9 and 1LE1 standard induction
motors
Multi-motor drive is permissible, i.e. multiple
motors operated on one inverter. See also: Multimotor drive
(http://support.automation.siemens.com/WW/view/
1FK7 synchronous motors
1PH8 induction motors
Standard induction motors
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
27
Page 28

Description
3.3 Supported motor series
Converter with control units CU250D-2
28 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 29
4
4.1
Mechanical Installation
Fitting the Control Unit to the Power Module
CAUTION
Seals fitted correctly
TN and TT mains supplies
The inverter is delivered as two separate components - the Power Module (PM) and the
Control Unit (CU). The CU must be fitted to the PM prior to any further commissioning taking
place.
It is important that when assembling the Power Module and the Control Unit that all the
seals are fitted correctly to ensure IP65 rating.
The SINAMICS PM250D Power Module with the Class A integrated mains filter is only
suitable for operation on TN and TT mains supplies.
The CU is fitted to the PM as shown in the diagram below.
Figure 4-1 Fitting the Control Unit to the Power Module
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
29
Page 30

Installation
4.1.1
Drill pattern SINAMICS G120D
Drill pattern and dimensions
4.1 Mechanical Installation
The inverter has an identical drill pattern for all frame sizes. The drill pattern, depth and
tightening torques are shown in the diagram below.
Figure 4-2 SINAMICS G120D drill pattern
Converter with control units CU250D-2
30 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 31

Installation
Mounting orientation
Restrictions due to vertical mounting
4.1 Mechanical Installation
Mount the converter on a table or on a wall. The minimum clearance distances are as
follows:
● Side-by-side - no clearance distance is required
● Above and below the inverter 150 mm (5.9 inches).
Figure 4-3 Mounting orientation: correct (✓), impermissible (X), permissible with restrictions (!)
If the converter is mounted in the vertical position, the maximum ambient temperature is
40°C.
Additionally you have to reduce the converter output current to 80 % of rated converter
current.
If the output current derating adversely affects the application, you have to use an converter
of the next highest power rating.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
31
Page 32

Installation
4.2
Electrical Installation
NOTICE
Material damage from inappropriate supply system Vt > 1%
4.2.1
Permissible line supplies
Operation on an IT line system is not permitted.
Operation on TN and TT line systems
TN line system
TT system
Prohibited operation
4.2 Electrical Installation
Operating the converter on an inappropriate supply system can cause damage to the
converter and other loads.
• Only operate the converter on supply systems with V
≤ 1%.
t
In an IT line system, all of the conductors are insulated with respect to the PE protective
conductor – or connected to the PE protective conductor through an impedance.
Operation on IT line systems is not permitted.
The TN line system in accordance with IEC 60364-1 (2005) transmits the PE conductor to
the installation via a conductor.
Generally, in a TN line system the neutral point is grounded. There are versions of a TN line
supply with a grounded line the conductor, e.g. with grounded L1.
A TN line system can transfer the neutral conductor N and the PE protective conductor either
separately or combined.
In a TT line system, the transformer grounding and the installation grounding are
independent of one another.
There are TT line supplies where the neutral conductor N is either transferred – or not.
Operation of the inverter on the TN and TT line system
The inverter is designed for TN and TT line systems with a grounded neutral point
Above an installation altitude of 2000 m, the permissible line supplies are restricted. See
also: Current and voltage derating dependent on the installation altitude (Page 330).
● Operation on TN line systems with grounded external conductors is prohibited.
● Operation on TT line systems without grounded neutral points is prohibited.
Converter with control units CU250D-2
32 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 33

Installation
4.2.2
Electrical data
Power Module specifications - 3AC 380 V ... 500 V ± 10 %
Product
Frame size
Rated output
HO
Fuse
Rated output
current
Rated input
current
3NA3…
6SL3525-…
kW A A A Type
0PE17-5AA1
A
0.75
2.2
2.1
10
803-
0PE21-5AA1
A
1.5
4.1
3.8
10
803-
0PE23-0AA1
B 3 7.7
7.2
16
805-
0PE24-0AA1
C 4 10.2
9.5
20
807-
0PE25-5AA1
C
5.5
13.2
12.2
20
807-
0PE27-5AA1
C
7.5
19
17.7
32
812-
Standby current
Converter
Standby current (A)
50 Hz
60 Hz
380 V
400 V
415 V
380 V
440 V
480 V
0.75 - 1.5 kW
0.6
0.63
0.66
0.7
0.8
0.91
3.0 - 4.0 kW
2.2
2.32
2.40
2.7
3.2
3.33
5.5 - 7.5 kW
2.9
3.05
3.15
3.5
4.0
4.40
Brake voltage
4.2 Electrical Installation
Table 4- 1 Rated Output, Input and Fuses
If the converter is powered-up, but the motor is still switched off, the converter requires a
standby current.
You have to consider the standby current when calculating the size of the conductors and
selecting the correct protective devices on the line supply.
Table 4- 2 Standby currents of the converter
For more comprehensive information on the standby current, please read the following FAQ:
Standby currents for PM250D
(http://support.automation.siemens.com/WW/view/en/31764702)
The brake voltage of 180 V DC is suitable for brakes which require 400 V AC with rectifier.
Remove the rectifier module and connect the brake output of the converter directly to the
brake coil.
The UL approved current rating for the brake output is 600 mA.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
33
Page 34

Installation
4.2.3
Basic EMC Rules
Measures to limit Electromagnetic Interference (EMI)
Cables
Cable shields
4.2 Electrical Installation
Listed below are the necessary measures that must be taken to ensure the correct
installation of the Inverter within a system, which will minimize the effect of EMI.
● Keep all cable lengths to the minimum possible length; avoid excessive cable lengths.
● Route always signal and data cables, as well as their associated equipotential bonding
cables, in parallel and with as short a distance as possible.
● Don't route signal and data cables and line supply cables in parallel to motor cables.
● Signal and data cables and line supply cables should not cross motor cables; if crossing
is necessary, they should cross at an angle of 90 °.
● Shield signal and data cables.
● Route particularly sensitive signal cables, such as setpoint and actual value cables, with
optimum shield bonding at both ends and without any interruptions of the shield.
● Ground spare wires for signal and data cables at both ends.
● Route all power cables (line supply cables, as well as motor cables) separately from
signal and data cables. The minimum distance should be approximately 25 cm.
Exception: hybrid motor cables with integrated shielded temperature sensor and brake
control wires are allowed.
● Shield the power cable between inverter and motor. We recommend shielded cables with
symmetrical three-phase conductors (L1, L2, and L3) and an integrated, 3-wire, and
symmetrically arranged PE conductor.
● Use shielded cables with finely stranded braided shields. Foil shields are not suitable
since they are much less effective.
● Connect shields to the grounded housings at both ends with excellent electrical
conductivity and a large contact area.
● Bond the cable shields to the plug connectors of the inverter.
● Don't interrupt cable shields by intermediate terminals.
● In the case of both, the power cables and the signal and data cables, the cable shields
should be connected by means of suitable EMC shield clips or via electrically conductive
PG glands. These must connect the shields to the shield bonding options for cables and
the unit housing respectively with excellent electrical conductivity and a large contact
area.
● Use only metallic or metallized connector housings for shielded data cables (e. g.
PROFIBUS cables).
Converter with control units CU250D-2
34 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 35

Installation
4.2.4
Overview of the interfaces
Interfaces of the converter
①
Digital inputs 0 … 5 with status LED
⑧
HTL Encoder connection
②
PROFIBUS)
⑨
③
⑩
Unit
④
handheld
⑪
⑤
Converter status LED
⑫
PE grounding terminal
⑥
termination switch for PROFIBUS
⑬
⑦
⑭
connections
4.2 Electrical Installation
Fieldbus IN and OUT (PROFINET or
24 V DC supply IN and OUT
Optical interface for operator panel IOP
USB PC connection, address and bus
Digital outputs 0 and 1 with status LED
Figure 4-4 Interfaces on the converter variants
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
SSI Encoder connection
Slot for a memory card at rear of the Control
PROFINET status LED
Mains supply connection
Motor, brake and temperature sensor
35
Page 36

Installation
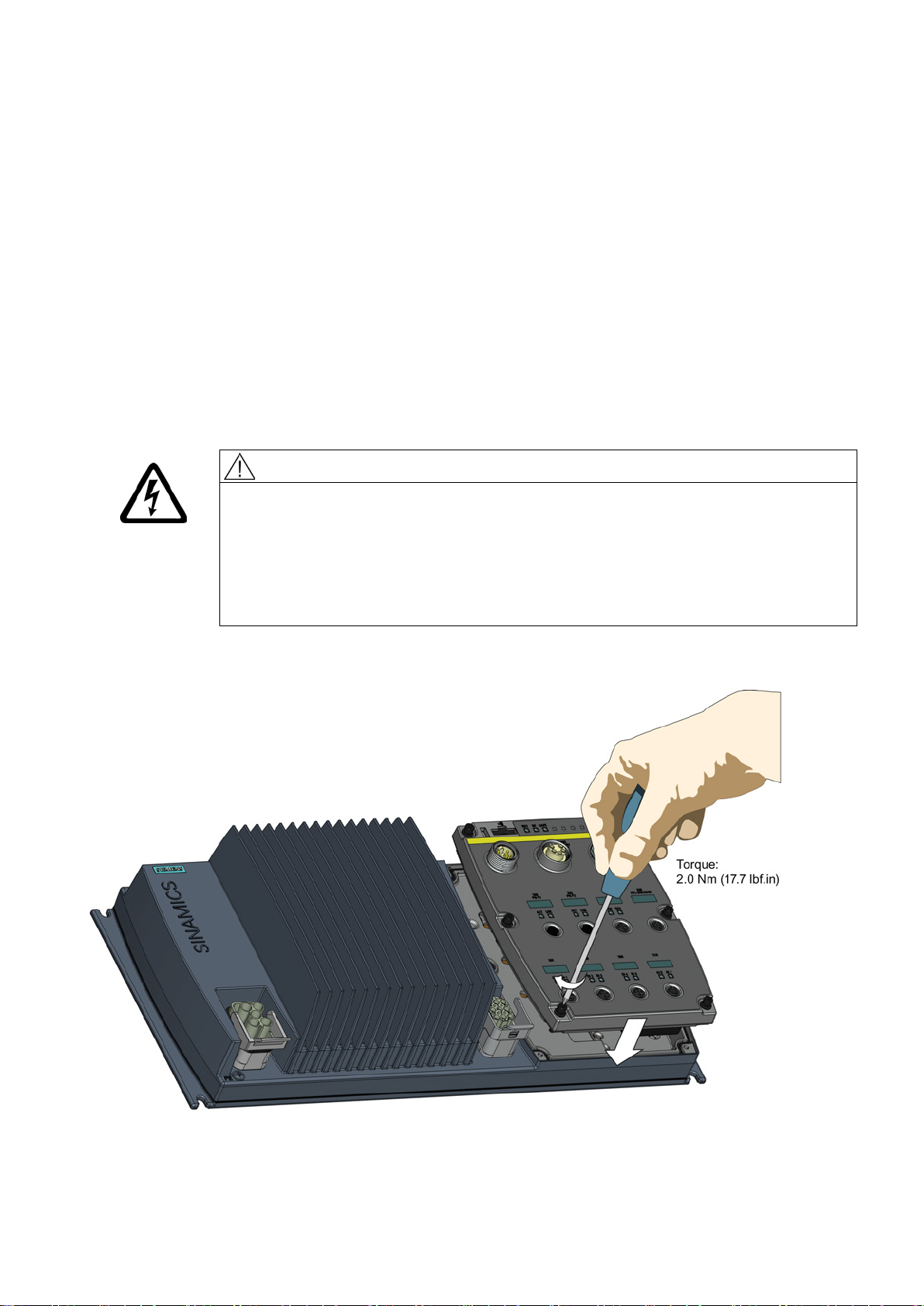
4.2.5
Connections and cables
DANGER
Danger of electrical shock by touching the pins in the motor terminal box
NOTICE
Damage of the converter by disconnecting the motor during operation
Connectors
"Switched" and "unswitched" 24 V power supply
4.2 Electrical Installation
The temperature sensor and motor holding brake connections are at DC link negative
potential. Touching the pins in the motor terminal box can lead to death due electrical
shock.
• Keep the motor terminal box closed whenever the mains is applied to the converter.
• Insulate the cables that are not used.
• Use appropriate insulation on the cables.
The disconnection of the motor cable by a switch or contactor during operation may
damage the converter.
• Disconnect converter and motor during operation only if it is necessary in terms of
personal security or machine protection.
The unswitched 24 V power supply (1L+) is required for the device to function.
The switched 24 V (2L+) supplies the two digital outputs. Switching brings all of the actuators
connected to the digital outputs into the no-voltage state.
If you don't need the switching of 2L+ power supply, then both the switched as well as the
non-switched 24 V may come from the same supply.
Converter with control units CU250D-2
36 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 37

Installation
4.2 Electrical Installation
Figure 4-5 G120D CU250D-2 PROFIBUS connectors
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
37
Page 38

Installation
4.2 Electrical Installation
Figure 4-6 G120D CU250D-2 PROFINET connectors
Converter with control units CU250D-2
38 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 39

Installation
4.2 Electrical Installation
Figure 4-7 G120D CU250D-2 PROFINET Push-Pull connectors
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
39
Page 40

Installation
4.2 Electrical Installation
Figure 4-8 G120D CU250D-2 PROFINET FO terminal diagram
Converter with control units CU250D-2
40 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 41

Installation
Cable, connectors and tools specifications
Note
NFPA compatibility
These devices are intended only for installation on industrial machines in accordance with
the "Electrical Standard for Industrial Machinery" (NFPA79). Due to the nature of these
devices they may not be suitable for installation accordance with
Code" (NFPA70).
Order number
Crimp tool (Q8/0 and Q4/2)
3RK1902-0AH00
Removal tool (Q4/2)
Harting part number 0999-000-0305
No special tools are required for the Control Unit connectors
4.2 Electrical Installation
Figure 4-9 PM250D connectors
The detailed specifications for the cables, connectors and tools required to manufacture the
necessary cables for the SINAMICS G120D are listed in the following tables. The
connections that are detailed in this section relate to the physical connections that exist on
the Inverter. Information for the preparation and construction of the individual connectors
have separate detailed instructions delivered with the ordered parts, direct from the
manufacturers. Use 75 °C copper wire only.
Table 4- 3 Tools
Removal tool (Q8/0) 3RK1902-0AJ00
the "National Electrical
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
41
Page 42

Installation
Connector
Order number
Straight connector
Right-angle connector
24 V DC power supply In (7/8" )
6GK1905-0FB00
3RK1902-3DA00
24 V DC power supply Out (7/8" )
6GK1905-0FA00
3RK1902-3BA00
PROFIBUS In (M12 )
6GK1905-0EB00
3RK1902-1DA00
PROFIBUS Out (M12 )
6GK1905-0EA00
3RK1902-1BA00
PROFINET Port 1 and Port 2 (M12)
6GK1901-0DB20-6AA0
3RK1902-2DA00
profile/siemens-solution-partner)
Digital input and output (M12 )
3RK1902-4BA00-5AA0
3RK1902-4DA00-5AA0
Connector
Order number
24 V DC power supply
6GK1907-0AB10-6AA0
RJ45 PROFINET
6GK1901-1BB10-6AA0
Connector
Order number
IE SC RJ POF PLUG PRO
6GK1900-0MB00-6AA0
IE SC RJ PCF PLUG PRO
6GK1900-0NB00-6AA0
Power rating
cable size
Order number
0.75 kW … 1.50 kW
2.5 mm2 (14 AWG)
3RK1911-2BE50
3.00 kW … 4.00 kW
4 mm2 (12 or 10 AWG)
3RK1911-2BE10
5.50 kW … 7.50 kW
6 mm2 (10 AWG)
3RK1911-2BE30
4.2 Electrical Installation
Table 4- 4 Control unit connectors
Encoder (M12 ) Via KnorrTec: Knorrtec
(http://www.knorrtec.de/index.php/en/company-
Table 4- 5 Push-Pull variant PROFINET and POWER connectors
Table 4- 6 Fibre optic connectors
Table 4- 7 Mains connector
Order motor connector including temperature sensor and motor holding brake via solution
partner: Solution partner
(https://www.automation.siemens.com/solutionpartner/partnerfinder/Partner-
Finder.aspx?lang=en)
Converter with control units CU250D-2
42 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 43

Installation
Cable lengths
Cable
Screening
Max. length
Screened
15 m (49 ft)
Unscreened
30 m (98 ft)
Screened
15 m (49 ft)
Unscreened
30 m (98 ft)
Screened
15 m (49 ft)
Unscreened
30 m (98 ft)
Digital inputs
Screened
30 m (98 ft)
Digital outputs
Screened
30 m (98 ft)
Encoder (SSI and HTL)
Screened
30 m (98 ft)
1)
cable which is connected to the Power Module using a Harting connector.
4.2 Electrical Installation
1)
Motor
Temperature sensor
Motor holding brake
1)
1)
The motor, temperature sensor and motor holding brake connections are all carried in a single
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
43
Page 44

Installation
4.2.6
Connecting the motor holding brake
WARNING
NOTICE
Device damage by earthing the motor cable
4.2 Electrical Installation
Danger to life when live parts are touched in the motor terminal box
The temperature sensor and motor holding brake connections are at DC link negative
potential. Touching these connections can result in death or severe injury.
• Keep the motor terminal box closed whenever the mains is applied to the converter.
• Use appropriate insulation on the cables.
• Insulate cables that are not used
The temperature sensor and motor holding brake connections are at DC link negative
potential. Earthing these connections will damage the device.
• Use appropriate insulation on the cables.
• Insulate cables that are not used.
• Do not earth cables that are not used.
The brake is connected to the converter using Pin 4 - Brake (-) and Pin 6 - Brake (+) of the
motor connector.
The converter supplies 180 V DC to the brake.
Figure 4-10 Principle of connectiong the motor holding brake to the converter
Converter with control units CU250D-2
44 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 45

Installation
4.2.7
Factory settings of the inputs and outputs
Factory settings of the inputs and outputs of the CU250D-2 control unit
Changing the function of terminals
4.2 Electrical Installation
In the factory settings, the fieldbus interface of the inverter is not active.
Figure 4-11 Factory settings of the CU250D-2 control units
The function of every color-coded terminal can be set.
In order that you do not have to successively change terminal for terminal, several terminals
can be jointly set using default settings.
The factory setting of the terminals described above corresponds to the default setting 7
(switchover between fieldbus and a jog using DI 3).
See also: Default settings of inputs and outputs (Page 46).
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
45
Page 46

Installation
4.2.8
Default settings of inputs and outputs
Default settings of inputs and outputs (CU250D-2)
Default setting 26: Basic positioner via inputs and outputs;
factory settings
Default setting 27: Basic positioner via fieldbus
4.2.9
Connecting the PROFINET interface
Industrial Ethernet Cables and cable length
Max. Cable Length
Order Number
Industrial Ethernet FC TP Flexible Cable GP 2 x 2
85 m (278 ft)
6XV1870–2B
Industrial Ethernet FC Trailing Cable 2 x 2
85 m (278 ft)
6XV1840–3AH10
Industrial Ethernet FC Marine Cable 2 x 2
85 m (278 ft)
6XV1840–4AH10
Cable screening
4.2 Electrical Installation
The fieldbus interface is not active.
Listed in the table below are the recommended Ethernet cables.
Table 4- 8 Recommended PROFINET cables
Industrial Ethernet FC TP Standard Cable GP 2 x 2 100 m (328 ft) 6XV1840-2AH10
Industrial Ethernet FC Trailing Cable GP 2 x 2 85 m (278 ft) 6XV1870–2D
PROFIdrive telegram 111
The screen of the PROFINET cable must be connected with the protective earth. The solid
copper core must not be scored when the insulation is removed from the core ends.
Converter with control units CU250D-2
46 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 47

Installation
4.2.10
Encoders examples
Examples
Manufacturer
Type / order number
Details
Setting
Note
SIEMENS
6FX2001-5xS12
Singleturn encoder
p0400 = 3081
6FX2001-5xS24
CEV-65
AFM60…
Single- and multiturn
encoder
Heidenhain
EQN 425
Multiturn
4.2.11
Grounding converter and motor
Grounding the converter
4.2 Electrical Installation
The following SSI encoders have been commissioned successfully in several applications
with the CU250D-2:
Table 4- 9 SSI encoders
---
SIEMENS 1XP80X4-20 /
T&R CEW-58, CEV-58,
CEH-58, CEW-65;
SICK /
Stegmann
DME4000 Laser distance
Multiturn encoder p0400 = 3082
Programmable
encoder
measuring unit,
programmable
p0400 = 9999.
Set the encoder
data manually.
We can not
guarantee the
function of these
encoders in any
circumstance.
● Ground the converter via the PE connection in the mains supply connector.
● Ground the connectors as shown in the diagram below.
Figure 4-12 Grounding the line supply and motor connectors
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
47
Page 48

Installation
•
•
•
•
•
Grounding the motor
EMC cable glands
Connection thread/length
Clamping range
without inlet
max/min [mm]
Clamping range
max/min [mm]
Spanner width
SW * E
Order No.
A
D [mm]
C [mm]
M20 x 1.5
6.5
29
14 … 9
12 … 7
24 x 26.5
bg220mstri
M32 x 1.5
8.0
32
25 … 20
20 … 13
36 x 39.5
bg232mstri
4.2 Electrical Installation
Connect the PE terminal on the left-hand
side of the converter to the metal frame it is
mounted on.
Recommended cable cross section: 10 mm²
Use a short wire connection preferably.
Clean the connection to the steel
construction from paint or dirt.
Use a ring clamp to ensure a good physical
connection which is resistant to accidental
disconnection.
● Ground the motor via the PE connection in the motor connector.
● Ground the connector as shown in the diagram above (grounding the converter).
Although the line and motor connectors are of a different type, the principle of grounding
them is the same.
● If possible, ground the motor housing.
Where cable glands are used within the installation of the system, it is recommended that
EMC glands are used.
The cable gland provides protection to the IP68 standard when fitted correctly.
Figure 4-13 Example of a Blueglobe EMC cable gland
Table 4- 10 Brass-nickel plated EMC cable gland with metric thread as per EN50262.
Converter with control units CU250D-2
48 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
M16 x 1.5 6.0 29 11 … 7 9 … 7 20 x 22.2 bg216mstri
M25 x 1.5 7.5 29 20 … 13 16… 10 30 x 33 bg255mstri
Page 49

Installation
4.2.12
Cable protection and cascading of the 400 V supply
Cable protection for individual inverters
Rated power
Power Module
Frame size
Fuse
Circuit-breaker
0.75 kW
6SL3525-0PE17-5AA1
FSA
10 A
3NA3803
3RV1021-1JA10
1.5 kW
6SL3525-0PE17-5AA1
FSA
10 A
3NA3803
3RV1021-1JA10
3 kW
6SL3525-0PE17-5AA1
FSB
16 A
3NA3805
3RV1021-4AA10
4 kW
6SL3525-0PE17-5AA1
FSC
20 A
3NA3807
3RV1021-4BA10
5.5 kW
6SL3525-0PE17-5AA1
FSC
20 A
3NA3807
3RV1021-4BA10
7.5 kW
6SL3525-0PE17-5AA1
FSC
32 A
3NA3812
3RV2021-4PA10
Installation with power bus
Protection of the 400V cable
4.2 Electrical Installation
If you individually protect an inverter, then you must protect the inverter feeder cable using a
fuse.
Table 4- 11 Individual fuse protection
UL-approved fuses must be used in North America. For additional information, please refer
to Catalog D31.
For installations with several inverters, the inverters are normally supplied from a 400 V
power bus using T distributors.
Figure 4-14 Inverter supplied via a power bus
The following options are available for the 24 V supply of the inverter:
1. A T distributor with integrated power supply unit supplies the 24 V.
Advantage: Low installation costs.
2. An external power supply unit supplies the 24 V.
Advantage: You can disconnect the 400 V without interrupting the 24 V supply and
therefore without interrupting the fieldbus communication of the inverter.
The inverter can conduct a maximum current of 8 A through its 24 V connector.
Cable protection depends on the following conditions:
● Cable routing type.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
● Limit values of the cables and system components, e.g. the T distributor.
● Country-specific guidelines.
49
Page 50

Installation
Rated power of the smallest inverter
connected to the power bus
Maximum permissible fusing 1
Circuit-breaker
0.75 kW
32 A
3NA3812
3RV1031-4FA10
1.5 kW
32 A
3NA3812
3RV1031-4FA10
3 kW
32 A
3NA3812
3RV1031-4FA10
4 kW
35 A
3NA3814
3RV1031-4FA10
5.5 kW
45 A
3NA3820
3RV1031-4HA10
7.5 kW
63 A
3NA3822
3RV1041-4KA10
1
The values do not apply to installations conforming to UL specifications.
Example
4.2 Electrical Installation
If no other restrictions apply, then select the power bus fusing according to the following
table.
Table 4- 12 Maximum fusing of the power bus
Figure 4-15 Fusing several inverters connected to a power bus
The maximum permissible fusing of 32 A is based on the inverter with the lowest rated
power of 3 kW.
If the inverters are never simultaneously in operation, then also lower cable cross-sections
are permissible and smaller fuses are required.
Converter with control units CU250D-2
50 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 51

Installation
4.2.13
Cascading of the 24 V supply
Installation using 24 V bus
4.2.14
Connections and interference suppression
4.2 Electrical Installation
The following options are available for the 24 V supply of the inverter:
1. A T distributor with integrated power supply unit supplies the 24 V.
Advantage: Low installation costs.
2. An external power supply unit supplies the 24 V.
Advantage: You can switch off the 400 V without interrupting the 24 V supply and thus
the fieldbus communication of the inverter.
The inverter can conduct a maximum current of 8 A through its 24 V connector.
Figure 4-16 24 V bus from T distributor or with separate power supply
All connections should be made so that they are permanent. Screwed connections on
painted or anodized metal components must be made either by means of special contact
washers, which penetrate the isolating surface and establish a metallically conductive
contact, or by removing the isolating surface on the contact points.
Contactor coils, relays, solenoid valves, and motor holding brakes must have interference
suppressors to reduce high-frequency radiation when the contacts are opened (RC elements
or varistors for AC currentoperated coils, and freewheeling diodes for DC current-operated
coils). The interference suppressors must be connected directly on each coil.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
51
Page 52

Installation
4.2.15
Equipotential bonding
Grounding and high-frequency equipotential bonding measures
4.2 Electrical Installation
Equipotential bonding within the drive system has to be established by connecting all
electrical and mechanical drive components (transformer, motor and driven machine) to the
grounding system. These connections are established by means of standard heavy-power
PE cables, which do not need to have any special high-frequency properties.
In addition to these connections, the inverter (as the source of the high-frequency
interference) and the motor must be interconnected with respect to the high-frequency point
of view:
1. Use a shielded motor cable.
2. Connect the cable shield both to the motor connector on the inverter and to the motor
terminal box.
3. Use a short grounding connection from the PE terminal on the inverter to the metal frame.
The following figure illustrates all grounding and high-frequency equipotential bonding
measures using an example.
Converter with control units CU250D-2
52 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 53

Installation
①
Transformer
②
Second level distribution with PE equipotential bonding
③
Metal frame
④
Short connection from the PE terminal to the metal frame.
⑤
Electrical connection of motor cable shield and connector body.
⑥
shield and motor terminal box via electrically conductive PG
gland.
⑦
Driven machine
⑧
⑨
Foundation ground
4.2 Electrical Installation
Electrical connection of motor cable
Conventional grounding system.
• Standard, heavy-power PE conductors without special high-frequency properties.
• Ensures low frequency equipotential bonding as well as protection against injury.
Figure 4-17 Grounding and high-frequency equipotential bonding measures in the drive system and
in the plant
For general rules for EMC compliant installation see also: EMC design guidelines
(http://support.automation.siemens.com/WW/view/en/60612658/0/en)
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
53
Page 54

Installation
4.2 Electrical Installation
Converter with control units CU250D-2
54 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 55

5
5.1
Commissioning guidelines
Adapting the converter to the drive application
The converter must match the motor and the drive application to be able to optimally operate
and protect the motor. We recommend a certain procedure when commissioning your
converter.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
55
Page 56

Commissioning
Explanation of the commissioning steps:
①
Preparing for commissioning
(Page 57)
②
Restoring the factory setting
(Page 62)
③
Basic commissioning with
STARTER
Panel (Page 64)
④
Adapt inputs and outputs
⑤
Configuring the fieldbus
⑥
Motor control
⑦
Basic positi
(Page 147)
⑧
Setting functions
⑨
Backing up data and series
commissioning (Page 257)
5.1 Commissioning guidelines
(Page 68) orOperator
(Page 136)
oner and position control
(Page 111)
(Page 79)
(Page 85)
Converter with control units CU250D-2
56 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 57

Commissioning
5.2
Preparing for commissioning
Overview
Inverter
What are the data specifications of my inverter?
What inverter interfaces are active?
How is the inverter integrated in the higher-level control system?
What technological requirements must the drive fulfill?
Motor
Which motor is connected to the inverter?
In which region of the world will the motor be used?
How is the motor connected?
What is the ambient temperature of the motor?
5.2 Preparing for commissioning
Before starting commissioning, you must know the answer to the following questions:
●
→ SINAMICS G120D CU250D-2 Inverter (Page 23).
●
→ Connections and cables (Page 36).
●
●
→ Introduction, V/f control, vector control (Page 58).
→ Defining additional requirements for the application (Page 60).
●
If you are using one of the STARTER commissioning tools or Startdrive and a SIEMENS
motor, then you only need the order number of the motor. Otherwise, note down the data
on the motor rating plate.
●
- Europe IEC: 50 Hz [kW]
- North America NEMA: 60 Hz [hp] or 60 Hz [kW]
●
Pay attention to the connection of the motor (star connection [Y] or delta connection [Δ]).
Note the appropriate motor data for connecting.
●
For commissioning, you will need the ambient temperature of the motor if it differs by
more than 10 °C from the factory setting (20 °C).
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
57
Page 58

Commissioning
5.2.1
Which motor fits the converter?
Ratio of the motor and inverter rated currents
5.2.2
Introduction, V/f control, vector control
Specifying the control mode
5.2 Preparing for commissioning
The rated current of the motor must be in the range 13% to 100% of the rated converter
current.
Example: With an inverter with a rated current of 10.2 A, you can operate motors whose
rated currents are within the range of 1.3 A … 10.2 A.
Figure 5-1 The rated currents of inverter and motor match
The converter has three open-loop control and closed-loop control modes for induction
motors:
● Open-loop control with U/f-characteristic (U/f control)
● Field-oriented control (sensorless vector control)
● Speed control (vector control with encoder)
The control modes have different degrees of suitability when it comes to controlling a
position-controlled axis:
Converter with control units CU250D-2
58 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 59

Commissioning
Vector control with encoder
Sensorless vector control
U/f control
It is not permissible to use vector control in the following cases:
Inverter pulse frequency
2 kHz
4 kHz and higher
Pole number of the motor
2-pole
4-pole
6-pole
2-pole
4-pole
6-pole
Maximum motor speed [rpm]
9960
4980
3320
14400
7200
4800
5.2 Preparing for commissioning
With the position control, provides the best
results
Limited functionality of the position
control.
• Low accuracy
• Travel to fixed stop is not
possible
● If the motor is too small in comparison to the inverter (the rated motor power may not be
less than one quarter of the rated inverter power)
● If several motors are connected to one inverter
● If a power contactor is used between the inverter and motor and is opened while the
motor is powered up
● If the maximum motor speed exceeds the following values:
Not recommended in conjunction
with position control.
• Low accuracy
• Low dynamic response
• Travel to fixed stop is not
possible
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
59
Page 60

Commissioning
5.2.3
Defining additional requirements for the application
What speed limits should be set (minimum and maximum speed)?
What motor ramp-up time and ramp-down time are needed for the application?
5.2.4
Encoder assignment
Description
Position controller operates with SSI encoder, speed controller with HTL encoder
5.2 Preparing for commissioning
● Minimum speed - factory setting 0 [rpm]
The minimum speed is the lowest speed of the motor independent of the speed setpoint.
A minimum speed is, for example, useful for fans or pumps.
● Maximum speed - factory setting 1500 [rpm]
The inverter limits the motor speed to this value.
The ramp-up and ramp-down time define the maximum motor acceleration when the speed
setpoint changes. The ramp-up and ramp-down time is the time between motor standstill and
the maximum speed, or between the maximum speed and motor standstill.
● Ramp-up time - factory setting 10 s
● Ramp-down time - factory setting 10 s
The converter offers three options of allocating encoders to the closed-loop control on the
motor and load side.
Figure 5-2 SSI encoder on the load side for the position controller, HTL encoder on the motor axis
for the speed controller
Compared to the other options, the encoder assignment provides this configuration with the
best control results.
Converter with control units CU250D-2
60 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 61

Commissioning
Position and speed controllers operating with HTL encoder
Advantage:
Favorably-priced solution.
Disadvantage:
Depending on the gear ratio, restrictions regarding the accuracy of the
position control.
Position controller operates with SSI encoder, speed controller without an encoder
Advantage:
Favorably-priced solution.
Disadvantages:
•
cy and dynamic performance of the
•
5.2 Preparing for commissioning
Figure 5-3 HTL encoder on the motor axis for position and speed controllers
Figure 5-4 SSI encoder on the load side for the position controller, speed controller without an
encoder
Restrictions regarding the accura
position control
Travel to fixed stop is not possible.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
61
Page 62

Commissioning
5.3
Restoring the factory setting
Restoring the factory settings when the safety functions are enabled
Settings that are not changed when restoring the factory setting
Resetting the safety functions to the factory settings
Procedure
5.3 Restoring the factory setting
There are cases where something goes wrong when commissioning a drive system e.g.:
● The line voltage was interrupted during commissioning and you were not able to complete
commissioning.
● You got confused during the commissioning and you can no longer understand the
individual settings that you made.
● You do not know whether the inverter was already operational.
In cases such as these, reset the inverter to the factory setting.
If your inverter is using safety functions, e.g. "Safe Torque Off" or "Safely Limited Speed",
then you must first always reset the safety functions.
The settings of the safety functions are protected by a password.
The communication settings and the settings of the motor standard (IEC/NEMA) are kept
when restoring the factory setting.
If the safety functions are enabled in your inverter, then the safety function settings are
password-protected. You must know the password to reset the safety function settings.
Proceed as follows to restore the inverter safety functions to the factory settings:
1. Go online
2. Call the safety functions screen form
3. In the "Safety Integrated" screen form, press the button for restoring the factory setting.
4. Enter the correct password.
5. Switch off the inverter supply voltage.
6. Wait until all LEDs on the inverter go dark.
7. Switch on the inverter supply voltage again.
You have restored the safety function settings of your inverter to the factory settings.
Converter with control units CU250D-2
62 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 63

Commissioning
Restoring the inverter to the factory setting
Procedure
5.3 Restoring the factory setting
Proceed as follows to restore the inverter safety functions to the factory settings:
1. p0010 = 30Set
Activate reset settings.
2. p9761 = …
Enter the password for the safety functions
3. Start restoration using p970 = 5.
4. Wait until the inverter sets p0970 = 0.
5. Set p0971 = 1.
6. Wait until the inverter sets p0971 = 0.
7. Switch off the inverter supply voltage.
8. Wait until all LEDs on the inverter go dark.
9. Switch on the inverter supply voltage again.
You have restored the safety function settings of your inverter to the factory settings.
Proceed as follows to reset the inverter to factory settings:
1. Go online
2. Select the button
You have reset the inverter to factory settings.
Proceed as follows to reset the inverter to factory settings:
1. Select the "Extras" menu
2. Select the "Parameter settings" menu
3. Select the entry "Restore drive to factory settings"
You have reset the inverter to factory settings.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
63
Page 64

Commissioning
5.4
Basic commissioning with IOP
Basic commissioning wizard
Procedure
1. Select "Basic Commissioning..." from the Wizards
menu.
2. Select "Yes" or "No" to a factory reset.
The factory reset is performed prior to saving a
parameter changes that have been made during the
basic commissioning process.
3. Select the Control Mode for the attached motor.
4. Select the correct Motor Data for your Inverter and
attached motor.
This data is used to calulate the correct speed and
displayed values for the application.
5.4 Basic commissioning with IOP
The Basic Commissioning wizard detailed below is for Control Units with version 4.4
software or higher.
For performing the basic commissioning of the converter with the IOP operator panel,
proceed the following steps:
ll the
Converter with control units CU250D-2
64 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 65

Commissioning
5. Select the correct frequency for your Inverter and
attached motor.
The use of the 87 Hz characteristic allows the motor to
operate at 1.73 times of its normal speed.
6. At this stage the wizard will begin to ask for the data
relating specifically to the attached motor. The data is
obtained from the motor rating plate.
7. The Motor Data screen indicates the frequency
characteristic of the attached motor.
8. Input the correct Motor Voltage from the motor rating
plate.
9. Input the correct Motor Current from the motor rating
plate.
10. Input the correct Power Rating from the motor rating
plate.
5.4 Basic commissioning with IOP
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
65
Page 66

Commissioning
11. Input the correct Motor Speed from
plate.
This value is given in RPM.
12. Select to run or disable Motor Data Identification
function.
This function, if active, will not start un
command is given to the Inverter.
13. Select either zero pulse on no zero pulse for the
attached encoder.
If no encoder is fitted to the motor,
displayed.
14. Enter the correct pulses per revolution for the encoder.
This information is normally printed on the casing of the
encoder
15. Select the macro that is suitable for your application.
Once selected all inputs, outputs, command sources
and setpoints will be automatically configured b
software.
For further information see the section that details the
precise settings for each macro. Please see installation
section of this manual.
16. Set
should run.
5.4 Basic commissioning with IOP
the motor rating
til the first run
the option will not be
.
y the
the Minimum Speed at which the attached motor
Converter with control units CU250D-2
66 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 67

Commissioning
17. Set the Ramp Up time in seconds.
This is the time the Inverter/motor system will take from
being g
motor speed.
18. Set the Ramp Down time in seconds.
This is the time the Inverter/motor system will take from
bein
a standstill.
19. A summary of all the settings is display.
If the settings are correct, select Continue.
20. The final screen gives two options:
•
•
If save is selected, a factory reset will be performed then
the settings are saved to the Inverter
location of safe data is assigned using the "Parameter
saving mode" function in "Parameter settings" in
"Menu".
5.4 Basic commissioning with IOP
iven the run command, to reaching the selected
g given the OFF1 command, for the motor to reach
Save settings
Cancel Wizard
memory. The
The basic commissioning of your converter is finished.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
67
Page 68

Commissioning
5.5
Basic commissioning with STARTER
STARTER and STARTER screen forms
Preconditions for basic commissioning
Overview of basic commissioning
See also
5.5 Basic commissioning with STARTER
STARTER is a PC-based tool to commission Siemens inverters. The graphic user interface
of STARTER supports you when commissioning your inverter. Most inverter functions are
combined in screen forms in STARTER.
The STARTER screen forms that are shown in this manual show general examples. The
number of setting options available in screen forms depends on the particular inverter type.
You require the following to commission the inverter using STARTER:
● An installed drive (motor and inverter)
● A computer with Windows XP or Windows 7
● The latest version of STARTER. STARTER download
(http://support.automation.siemens.com/WW/view/en/10804985/133100)
● An appropriate USB cable. If you are not using the USB interface, but the PROFINET
interface of the inverter, you can find information in section: Manuals for your inverter
(Page 371).
Commissioning using STARTER includes the following basic steps:
1. Create a STARTER project
2. Integrate an inverter into the project
3. Go online and start basic commissioning
4. Carry out basic commissioning
5. Identify motor data
Steps 1-5 are described below.
Commissioning tools (Page 25)
Go online with STARTER via PROFINET (Page 357)
Converter with control units CU250D-2
68 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 69

Commissioning
5.5.1
Generating a STARTER project
Procedure
5.5.2
Transfer inverters connected via USB into the project
Procedure
5.5 Basic commissioning with STARTER
In order to create a new project, proceed as follows:
1. In the STARTER menu, select "Project" → "New…".
2. Specify a name of your choice for the project.
You have created a new STARTER project.
Proceed as follows to transfer an inverter connected via USB into your project:
1. Switch on the inverter power supply.
2. First insert a USB cable into your PC and then into the inverter.
3. The PC operating system installs the USB driver when you are connecting the inverter
and PC together for the first time.
– Windows 7 installs the driver automatically.
– For Windows XP you must acknowledge several system messages.
4. Start the STARTER commissioning software.
5. In STARTER, press the
6. When the USB interface is appropriately set, then the "Accessible nodes" screen form
shows the inverters that can be accessed.
If you have not correctly set the USB interface, then the following "No additional nodes
found" message is displayed. In this case, follow the description below.
("Accessible nodes") button.
7. Select the inverter ☑.
8. Press the "Accept" button.
You have transferred an inverter accessible via the USB interface into your project.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
69
Page 70

Commissioning
Setting the USB interface
Procedure
5.5 Basic commissioning with STARTER
Proceed as follows to set the USB interface in STARTER:
1. In this case set the "Access point" to "DEVICE (STARTER, Scout)" and the "PG/PC
interface" to "S7USB".
2. Press the "Update" button.
You have set the USB interface.
STARTER now shows the inverters connected via USB.
Converter with control units CU250D-2
70 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 71

Commissioning
5.5.3
Configuring a drive
Starting basic commissioning
Procedure
5.5 Basic commissioning with STARTER
The basic commissioning of the inverter comprises the following steps:
1. Starting basic commissioning
2. Configuring a drive
3. Loading the configured data into the drive
To start the basic commissioning, proceed as follows:
1. In STARTER select the drive you wish to commission.
2. Start the wizard for the device configuration:
You have started the basic commissioning.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
71
Page 72

Commissioning
5.5.4
Carry-out basic commissioning
Procedure
1.
Select the control mode.
See also Section: Introduction, V/f control, vector control (Page 58)
2.
Select the pre
The possible configurations can be found in sections:
ngs of
the inputs and outputs
outputs (Page 46).
3.
Select the application for the inverter:
Low overload for applications that only require a low dynamic
performance, e.g.: pumps or fans.
High overload for ap
e.g. conveyor systems.
4. Select your motor.
5.
Enter the motor data according to the rating plate of your motor.
If you have selected a motor based on its order number, the data has
already been entered.
6.
If you have set the "Vector control" control mode, then we recommend
setting "[1] Identify motor data at standstill and with motor rotating".
With this setting, the inverter
opt
controller.
If one of the following cases is applicable, select the setting "[2]
motor data at standstill":
•
•
7. Set the most important parameters to suit your application.
8.
We recommend the
setting "Calculate motor
data only".
5.5 Basic commissioning with STARTER
Proceed as follows to carry out basic commissioning:
imizes its speed
You have selected "Vector control" as control mode; however, the
motor cannot freely rotate, e.g. for mechanically limited traversing
sections.
You have set "V/f control" as control mode.
-assignment of the inverter interfaces.
Factory setti
(Page 45) and Default settings of inputs and
plications requiring a high dynamic performance,
Identify
Converter with control units CU250D-2
72 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 73

Commissioning
9.
The converter can evaluate up to two encoders (see also Section:
Encoder assignment
1.
2.
If you use an HTL encod
or enter the encoder data, also see section:
(Page
…R: Encoder with zero mark
If you use an SSI encoder, either select one of the standard encoders or
enter the encoder data, also see section:
(Page
5.5 Basic commissioning with STARTER
(Page 60)):
An HTL encoder on the motor shaft.
The HTL encoder can be used for position sensing as well as for
speed measurement for the speed controller.
An encoder with an SSI interface on the load side.
You can use the SSI encoder only for position sensing.
75).
er, either select one of the standard encoders
Adapting the encoder data
75).
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Adapting the encoder data
73
Page 74

Commissioning
10.
Select the encoder that you use for position sensing.
11.
You may skip this screen initially. The settings are explained in the
context of commissioning of the basic positioner in the section:
positioner and pos
12. Set the check mark for "RAM to ROM (save data in the drive)" in order
to save
fails
13.
Close basic commissioning ②
5.5 Basic commissioning with STARTER
Basic
ition control (Page 147).
your data in the converter so that it is not lost when the power
①.
You have entered all of the data that is necessary for the basic commissioning of your
converter.
.
Converter with control units CU250D-2
74 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 75

Commissioning
5.5.5
Adapting the encoder data
Preconditions
Procedure
5.5 Basic commissioning with STARTER
● You have selected an encoder type that does not precisely match your encoder, because
it is not included in the list of default encoder types.
● You have completely configured the drive.
Proceed as follows to adapt the encoder data:
1. Select the "Motor encoder" screen form.
2. Select the "Encoder data" button.
3. You have access to the following settings in the "Encoder data" screen form:
– You can change all of the encoder data.
– You can select another encoder. In this screen form, STARTER only lists the encoder
types, which are permitted for the configured interface.
If you wish to set another encoder interface, then you must reconfigure the inverter.
You have adapted the encoder data.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
75
Page 76

Commissioning
5.5.6
Loading the configured data into the drive
Procedure
5.5.7
Identifying motor data
Preconditions
5.5 Basic commissioning with STARTER
Proceed as follows to load the configured data into the drive:
1. Select your project and go online:
2. STARTER compares your configuration with the real inverter. STARTER signals any
differences in the "Online/offline comparison".
Acknowledge the message by pressing the "Load HW configuration to PG" button.
3. Open "Drive Navigator".
4. Select the "Commissioning" button.
5. Click on "Load data to the drive".
6. ☑ In the screen form, select "After loading copy RAM to ROM".
7. Load your configuration into the inverter.
8. Close the "Commissioning" screen form.
You have loaded your configuration into the drive and therefore performed the basic
commissioning.
.
Converter with control units CU250D-2
76 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
● In the basic commissioning, you have selected the motor identification (MOT ID). In this
case, after the basic commissioning has been completed, the converter issues the alarm
A07991.
● The motor has cooled down to the ambient temperature.
If the motor is too hot, the motor data identification will provide incorrect values and the
vector control will become unstable.
Page 77

Commissioning
DANGER
Risk of injury or material damage as a result of machine movements when switching on the
motor
Procedure
To initiate motor data identification and optimization of
the motor control, proceed as follows:
1.
2.
3.
4.
5.
6.
Self-optimization of the closed-loop control
5.5 Basic commissioning with STARTER
Switching on the motor for identification purposes may result in hazardous machine
movements.
Secure dangerous machine parts before starting motor data identification:
• Before switching on, check that no parts are loose on the machine or can be spun out.
• Before switching on, ensure that nobody is working on the machine or located within its
working area.
• Secure the machine's work area against unintended access.
• Lower hanging/suspended loads to the floor.
Open by double-clicking on the control panel in
STARTER.
Assume master control for the converter.
Set the "Enable signals".
Switch on the motor.
The converter starts the motor data identification.
This measurement can take several minutes. After
the measurement, the converter switches off the
motor.
Relinquish the master control after the motor data
identification.
Click the Save (RAM to ROM) button.
You have now completed motor data identification.
If you have also selected a rotating measurement with self-optimization of the vector control
in addition to the motor data identification, then you must switch on the motor again as
described above and wait for the optimization run to be completed.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
77
Page 78

Commissioning
5.5 Basic commissioning with STARTER
Converter with control units CU250D-2
78 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 79

6
This chapter describes how you adapt the function of individual digital and analog inputs and
outputs of the inverter.
If you adapt the function of an input or output, you overwrite the settings made during the
basic commissioning.
Figure 6-1 Internal interconnection of the inputs and outputs
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
79
Page 80

Adapt inputs and outputs
6.1
Digital inputs
Changing the function of a digital input
Interconnect the status parameter of the digital input with a
binector input of your choice.
Binector inputs are marked with "BI" in the parameter list of
the List Manual.
BI
Significance
BI
Significance
p0810
Command data set selection CDS bit 0
p1036
Motorized potentiometer, setpoint, lower
p0840
ON/OFF1
p1055
Jog bit 0
p0844
OFF2
p1056
Jog bit 1
p0848
OFF3
p1113
Setpoint inversion
p0852
Enable operation
p1201
Flying restart enable signal source
p0855
Unconditionally release holding brake
p2103
1. Acknowledge faults
p0856
Enable speed controller
p2106
External fault 1
p0858
Unconditionally close holding brake
p2112
External alarm 1
p1020
Fixed speed setpoint selection bit 0
p2200
Technology controller enable
command 2
command 3
p1035
Motorized potentiometer, setpoint, raise
Changing the function of a digital input - example
In order to switch on the motor with digital input DI 2, you have
to connect the status parameter of DI
p0840 = 722.2.
Advanced settings
6.1 Digital inputs
Table 6- 1 Binector inputs (BI) of the inverter (selection)
p1021 Fixed speed setpoint selection bit 1 p3330 Two-wire/three-wire control, control
p1022 Fixed speed setpoint selection bit 2 p3331 Two-wire/three-wire control, control
p1023 Fixed speed setpoint selection bit 3 p3332 Two-wire/three-wire control, control
A complete list of the binector outputs is provided in the List Manual.
You can debounce the digital input signal using parameter p0724.
Converter with control units CU250D-2
80 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
For more information, see the parameter list and the function block diagrams 2210 ff of the
List Manual.
command 1
2 to p0840: Set
Page 81

Adapt inputs and outputs
6.2
Fail-safe digital input
Defining a fail-safe digital input
Pins of the fail-safe digital input
Function
safety function (Page 237).
What devices can be connected?
Signal states
Fault detection
6.2 Fail-safe digital input
This manual describes the STO safety function with control using a fail-safe input. Additional
safety functions, additional fail-safe digital inputs, the fail-safe digital output of the converter
and the control of the safety functions using PROFIsafe are described in the Safety
Integrated Function Manual.
The converter combines digital inputs DI 4 and DI 5 to form a fail-safe digital input.
You must enable STO to select the STO safety function (Basic
Safety) via FDI 0.
Further information can be found in section Safe Torque Off (STO)
The safety-related input is designed for the following devices:
● Connection of safety sensors, e.g. emergency stop command devices or light curtains.
● Connection of pre-processing devices, e.g. fail-safe control systems and safety relays.
The inverter expects signals with the same state at its safety-related input:
● High signal: The safety function is deselected.
● Low signal: The safety function is selected.
The inverter evaluates deviations in the two signals of the safety-related input. The inverter
thus detects, for example the following faults:
● Cable break
● Defective sensor
The inverter cannot detect the following faults:
● Cross-circuit of the two cables
● Short-circuit between signal cable and 24 V power supply
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
81
Page 82

Adapt inputs and outputs
Special measures when establishing connections
6.2 Fail-safe digital input
When routing cables over longer distances, e.g. between remote control cabinets, you have
the following options to reduce the risk of damaged cables of your plant or machine:
● Use shielded cables with grounded shield.
● Lay signal cables in steel pipes.
Examples of connecting a safety-related input can be found in Section: Connecting the
safety-related input (Page 359).
Converter with control units CU250D-2
82 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 83

Adapt inputs and outputs
6.3
Digital outputs
Changing the function of a digital output
Interconnect the digital output with a binector output of
your choice.
Binector outputs are marked with "BO" in the parameter list
of the List Manual.
0
Deactivating digital output
r0052.9
Process data control
r0052.0
Drive ready
r0052.10
f_actual >= p1082 (f_max)
r0052.1
Drive ready for operation
r0052.11
Alarm: Motor current/torque limit
r0052.2
Drive running
r0052.12
Brake active
r0052.3
Drive fault active
r0052.13
Motor overload
r0052.4
OFF2 active
r0052.14
Motor CW rotation
r0052.5
OFF3 active
r0052.15
Inverter overload
r0052.6
Closing lockout active
r0053.0
DC braking active
r0052.7
Drive alarm active
r0053.2
f_actual > p1080 (f_min)
r0052.8
Setpoint/actual value discrepancy
r0053.6
f_actual ≥ setpoint (f_setpoint)
Changing the function of a digital output - example
In order to ou
DO
Set p0731 = 52.3.
Advanced settings
6.3 Digital outputs
Table 6- 2 Binector outputs of the inverter (selection)
A complete list of the binector outputs is provided in the List Manual.
1, you have to connect the DO 1 with the fault message:
You can invert the signal of the digital output using parameter p0748.
For more information, see the parameter list and the function block diagram 2241 of the List
Manual.
tput the fault message over the digital output
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
83
Page 84

Adapt inputs and outputs
6.3 Digital outputs
Converter with control units CU250D-2
84 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 85

7
7.1
Fieldbus versions of the Control Unit
Fieldbus interfaces of the Control Units
Fieldbus
Profiles
S7 communi-
cation 2)
Control Unit
PROFIdrive
PROFIsafe 1)
PROFI-
energy 2)
(Page 86)
(Page 91)
CU250D-2 PN-F FO
There are different versions of the Control Units for communication with a higher-level
control system:
PROFIBUS
PROFINET
EtherNet/IP
1)
Information on PROFIsafe can be found in the Safety Integrated function manual.
2)
Information about these fieldbuses, profiles and communication types can be found in the
Fieldbus Function Manual.
See also Section: Manuals for your inverter (Page 371).
2)
--- ---
✓ ✓ --- ✓ CU250D-2 DF-F
✓ ✓ ✓ ✓ CU250D-2 PN-F
CU250D-2 PN-F PP
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
85
Page 86

Configuring the fieldbus
7.2
Communication via PROFINET
7.2 Communication via PROFINET
You can either communicate via Ethernet using the inverter, or integrate the inverter in a
PROFINET network.
● The inverter as an Ethernet station (Page 371)
● PROFINET IO operation (Page 87)
In PROFINET IO operation, the inverter supports the following functions:
– RT
– IRT
The inverter transmits the clock synchronism but does not support clock synchronism.
– MRP
Media redundancy, impulsed with 200 ms
Requirement: Ring topology
– MRPD
Media redundancy, impulse-free
Requirement: IRT and the ring topology created in the control
– Diagnostic alarm
in accordance with the fault classes specified in the PROFIdrive profile. See Activating
diagnostics via the control (Page 90).
– Device replacement without removable medium
Requirement: Topology created in the control
– Shared device
only in the case of control units with fail-safe functions (see Safety function manual)
Converter with control units CU250D-2
86 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 87

Configuring the fieldbus
7.2.1
What do you need for communication via PROFINET?
Questions
Answer/description
Example
the bus network?
PROFINET (Page 88)
match?
controller?
(Page 89)
(Page 94)
7.2 Communication via PROFINET
Further information on PROFINET can be found on the Internet using the following links:
– General information about PROFINET can be found at Industrial Communication
(http://www.automation.siemens.com/mcms/automation/en/industrial-
communications/profinet/Pages/Default.aspx).
– The configuration of the functions is described in the PROFINET system description
(http://support.automation.siemens.com/WW/view/en/19292127) manual.
This manual describes the control of the inverter using primary control. How to access the
inverter as an Ethernet station is described in the Fieldbus function manual (Page 371) in the
section "The inverter as an Ethernet station".
Check the communication settings using the following table. If you answer "Yes" to the
questions, you have correctly set the communication settings and can control the converter
via the fieldbus.
Is the inverter correctly connected to
Do the IP address and device name
in the converter and controller
Is the same telegram set in the
converter as in the higher-level
Are the signals that the converter
and the controller exchange via
PROFINET correctly interconnected?
See: Integrating converters into
See Configuring communication
to the control (Page 88)
Set the telegram in the
converter, see: Select telegram
PROFIdrive-compliant
interconnection in the converter,
see: PROFIdrive profile for
PROFIBUS and PROFINET
See manuals for your
inverter, fieldbus
communication manual
(Page 371)
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
87
Page 88

Configuring the fieldbus
7.2.2
Integrating converters into PROFINET
Procedure
7.2.3
Configuring communication to the control
Configuring the communication using SIMATIC S7 control
Configuring the communication using a non-Siemens control
7.2 Communication via PROFINET
To connect the inverter to a control via PROFINET, proceed as follows:
1. Integrate the inverter in the bus system (e.g. ring topology) of the control using
PROFINET cables and the two PROFINET jacks X03 and X04.
The position of the jacks and the pin assignment can be found in Section Overview of the
interfaces (Page 35).
The maximum permitted cable length from the previous station and to the subsequent
one is 100 m.
2. Externally supply the inverter with 24 V DC through X01.
The external 24 V supply is only required if communications with the control should also
run when the mains voltage is switched off.
You have connected the inverter to the control using PROFINET.
● If the inverter is included in the hardware library of HW-Config, you can configure the
inverter.
● You have the following options, if the inverter is not included in the hardware library:
– Install the more up to date STARTER version
– Install the GSDML of the inverter via "Install options/GSDML file" in HW Config.
Additional information on this topic is provided in the "Fieldbuses" Function Manual, also see
Manuals for your inverter (Page 371).
1. Import the device file (GSDML) of the inverter into the configuring tool of your control
system.
2. Configure the communication.
Converter with control units CU250D-2
88 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 89

Configuring the fieldbus
Installing GSDML
Procedure
7.2.4
Select telegram
PROFIdrive telegrams
If you have not activated the function "Basic positioner" in
telegrams will be available:
p0922
1:
2:
3:
4:
20:
350:
352:
353:
354:
999:
Standard telegram 1, PZD
Standard telegram 2, PZD
Standard telegram 3, PZD
Standard telegram 4, PZD
Standard tel
SIEMENS telegram 350, PZD
SIEMENS telegram 352, PZD
SIEMENS telegram 353, PZD
SIEMENS telegram 354, PZD
Extend telegrams and change signal interconnection (Page 109)
The following values apply if you have enabled the "Basic positioner" function in the inverter:
7:
9:
110:
111:
999:
Standard telegram 7, PZD
Standard telegram 9, PZD
SIE
SIEMENS telegram 111, PZD
Factory setting. See also
interconnection (Page 109)
7.2 Communication via PROFINET
To install the GSDML of the inverter into the configuring tool of your control system, proceed
as follows:
1. Load the GSDML to your PC.
– On the Internet: GSDML
(http://support.automation.siemens.com/WW/view/en/22339653/133100).
– From your inverter:
Insert a memory card into the converter.
Set p0804 = 12.
The inverter writes the GSDML as zipped file (*.zip) into directory
/SIEMENS/SINAMICS/DATA/CFG on the memory card.
2. Unzip the GSDML file to a folder on your computer.
3. Import the GSDML into the configuring tool of your control system.
You have now installed the GSDML.
=
the inverter, the following
-2/2 (factory setting)
-4/4
-5/9
-6/14
egram 20, PZD-2/6
-4/4
-6/6
-2/2, PKW-4/4
-6/6, PKW-4/4
-2/2
-10/5
MENS telegram 110, PZD-12/7
-12/12
Extend telegrams and change signal
A more detailed depiction of the individual telegrams can be found in Section Cyclic
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
communication (Page 94).
89
Page 90

Configuring the fieldbus
Selecting a telegram
Procedure
7.2.5
Activating diagnostics via the control
7.2 Communication via PROFINET
Proceed as follows to set a specific telegram in the inverter:
Using STARTER or an operator panel, set parameter p0922 to the appropriate value.
You have set a specific telegram in the inverter.
The converter provides the functionality to transmit fault and alarm messages (diagnostic
messages) to the higher-level control according to the PROFIdrive error classes.
You must select the functionality in the higher-level control (see Manuals for your inverter
(Page 371)) and activate it by booting up.
Converter with control units CU250D-2
90 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 91

Configuring the fieldbus
7.3
Communication via PROFIBUS
7.3.1
What do you need for communication via PROFIBUS?
Questions
Description
Examples
connected to the PROFIBUS?
(Page 36).
controller?
Do the addresses in the inverter
match?
level controller and in the
inverter?
7.3.2
Integrating the inverter in PROFIBUS
Procedure
7.3 Communication via PROFIBUS
Check the communication settings using the following table. If you answer "Yes" to the
questions, you have correctly set the communication settings and can control the converter
via the fieldbus.
Is the inverter correctly
Have you configured the
communication between the
inverter and the higher-level
and the higher-level controller
Is the same telegram set in the
higher-
Are the signals that the inverter
and the controller exchange via
PROFIBUS correctly
interconnected?
See Section: Connections and cables
See Section: Configuring the
communication using SIMATIC S7
control (Page 92)
See Section: Setting the address
(Page 92).
Adapt the telegram in the inverter. See
Section: Select telegram (Page 93).
Adapt the interconnection of the signals
in the controller to the inverter. For the
PROFIdrive-compliant interconnection in
the inverter, see also Section:
PROFIdrive profile for PROFIBUS and
PROFINET (Page 94).
---
See Manuals for your
inverter (Page 371)
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
To connect the inverter to a control via PROFIBUS, proceed as follows:
1. Integrate the inverter in the bus system (e.g. line topology) of the control using
PROFIBUS cables and the two PROFIBUS jacks X03 and X04. If your inverter forms the
end of the line, only use jack X03 and connect the bus-terminating resistor.
The position of the jacks and the pin assignment can be found in Section Overview of the
interfaces (Page 35).
The maximum permitted cable length to the previous station and the subsequent one is
100 m at a baud rate of 1 Mbit/s.
2. Externally supply the inverter with 24 V DC through X01.
The external 24 V supply is only required if communications with the control should also
run when the mains voltage is switched off.
You have now connected the inverter to the control using PROFIBUS DP.
91
Page 92

Configuring the fieldbus
7.3.3
Configuring the communication using SIMATIC S7 control
7.3.4
Setting the address
You set the PROFIBUS address of the
the address switch on the Control Unit, in parameter
p0918 or in STARTER.
In parameter p0918 (factory setting: 126) or in
STARTER, you can only set the address, if all address
switches are set to "OFF" (0) or "ON" (1).
If you have specified
switches, this address will always be the one that
takes effect and parameter p0918 cannot be changed.
Procedure
7.3 Communication via PROFIBUS
● If the inverter is listed in the hardware library of HW-Conifg, you can configure the
communication in the SIMATIC control.
● If the inverter is not listed in the hardware library, you can either install the newest
STARTER version or install the GSD of the inverter through "Extras/GSD-Install file" in
HW-Config. See also GSD
(http://support.automation.siemens.com/WW/view/en/22339653/133100).
When you have installed the GSD, configure the communication in the SIMATIC control.
inverter using
a valid address with the address
Valid address range: 1 … 125
The positions of the address switches are described in Section: Overview of the interfaces
(Page 35).
To change the bus address, proceed as follows:
1. Set the address using one of the subsequently listed options:
– using the address switch
– from an operator panel using parameter p0918
– in STARTER using screen form "Control Unit/Communication/PROFIBUS" – or using
the expert list in parameter p0918
After you have changed the address in STARTER, carry out RAM to ROM (
2. Switch on the inverter power supply and, if available, the 24 V power supply for the
Control Unit.
3. Switch on the voltages again after all LEDs at the inverter have gone dark.
).
You have now changed the bus address.
Converter with control units CU250D-2
92 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 93

Configuring the fieldbus
7.3.5
Select telegram
PROFIdrive telegrams
If you have not activated the function "Basic positioner" in the inverter, the following
telegrams will be available:
p0922
1:
2:
3:
4:
20:
350:
352:
353:
354:
999:
Standard te
Standard telegram 2, PZD
Standard telegram 3, PZD
Standard telegram 4, PZD
Standard telegram 20, PZD
SIEMENS telegram 350, PZD
SIEMENS telegram 352, PZD
SIEMENS telegram 353, PZD
SIE
Extend telegrams and change signal interconnection (Page 109)
The following values apply if you have enabled
7:
9:
110:
111:
999:
Standard telegram 7, PZD
Standard telegram 9, PZD
SIEMENS telegram 110, PZD
SIEMENS telegram 111, PZD
Factory setting. See also
interconnection (Page 109)
Selecting a telegram
Procedure
7.3 Communication via PROFIBUS
A more detailed depiction of the individual telegrams can be found in Section Cyclic
communication (Page 94).
=
legram 1, PZD-2/2 (factory setting)
-4/4
-5/9
-6/14
-2/6
-4/4
-6/6
-2/2, PKW-4/4
MENS telegram 354, PZD-6/6, PKW-4/4
the "Basic positioner" function in the inverter:
-2/2
-10/5
-12/7
-12/12
Extend telegrams and change signal
Proceed as follows to set a specific telegram in the inverter:
Using STARTER or an operator panel, set parameter p0922 to the appropriate value.
You have set a specific telegram in the inverter.
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
93
Page 94

Configuring the fieldbus
7.4
PROFIdrive profile for PROFIBUS and PROFINET
7.4.1
Cyclic communication
7.4.1.1
Positioner: Cyclic communication
Abbreviation
Explanation
STW
Control word
ZSW
Status word
(Page 106)
AKTSATZ
Currently selected traversing block
MDI_TARPOS
Position setpoint for direct setpoint input (MDI)
XIST_A
Actual position value (32 bits)
OVERRIDE
Speed setpoint
7.4 PROFIdrive profile for PROFIBUS and PROFINET
The send and receive telegrams of the inverter for cyclic communication are structured as
follows:
Figure 7-1 Telegrams for cyclic communication - Position control
Table 7- 1 Explanation of the abbreviations
SATZANW Selects the traversing block See Control word block selection
Converter with control units CU250D-2
94 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
See Control and status word 1 (Page 97)
See Control and status word 2 (Page 99)
Page 95

Configuring the fieldbus
Abbreviation
Explanation
MSGW
Status word for messages
See Status word messages (Page 108)
NIST_B
Actual speed value (32 bits)
Not assigned
Freely interconnectable
MDI_VELOCITY
MDI velocity
MDI_ACC
MDI acceleration
MDI_DEC
MDI deceleration
input (MDI)
POS_STW
Control word for basic positioner
POS_ZSW
Status word for basic positioner
POS_STW1
Control word 1 for basic positioner
POS_ZSW1
Status word 1 for basic positioner
POS_STW2
Control word 2 for basic positioner
POS_ZSW2
Status word 2 for basic positioner
WARN_CODE
Number of the actual alarm
FAULT_CODE
Number of the actual fault
Interconnection of the process data
7.4 PROFIdrive profile for PROFIBUS and PROFINET
MDI_MOD Selects the positioning mode in the case of direct setpoint
See Control word MDI mode (Page 107)
See Control and status word for the
positioner (Page 100)
See Control and status word 1 for the
positioner (Page 102)
See Control and status word 2 for the
positioner (Page 104)
Figure 7-2 Interconnection of the send words
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
95
Page 96

Configuring the fieldbus
7.4 PROFIdrive profile for PROFIBUS and PROFINET
Figure 7-3 Interconnection of the receive words
If you require an individual telegram for your application, you can adapt one of the predefined telegrams using the parameters p0922 and p2079. For details, please refer to the
List Manual, function diagrams 2420 and 2472.
Converter with control units CU250D-2
96 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 97

Configuring the fieldbus
7.4.1.2
Control and status word 1
Control word 1 (STW1)
Bit
Meaning
Comments
P No.
motor at standstill.
= 1, the converter switches on the motor.
standstill.
1 = No OFF2
It is possible to switch on the motor (ON command).
p1135 down to standstill.
1 = No quick stop (OFF3)
It is possible to switch on the motor (ON command).
0 = Inhibit operation
Immediately switch-off motor (cancel pulses).
1 = Enable operation
Switch-on motor (pulses can be enabled).
deceleration. Converter rejects the actual traversing block.
1 = Do not reject traversing task
Axis can be started or travel to position setpoint.
override. Converter remains in the actual traversing block.
1 = No intermediate stop
Axis can be started or continue to travel to position setpoint.
r2090.6
r2090.6
still active, the converter switches to "closing lockout" state.
r2090.7
r2090.7
r2090.7
0 = No control via PLC
Converter ignores the process data from the fieldbus.
Control via fieldbus, converter accepts the process data from
the fieldbus.
0 = Stop referencing
---
1 = Start referencing
The converter does not start referencing.
12
Reserved
r2090.13
7.4 PROFIdrive profile for PROFIBUS and PROFINET
Table 7- 2 Control word 1 for active basic positioner
0 0 = OFF1 The motor brakes with the ramp-down time p1121 of the
ramp-function generator. The converter switches off the
0 → 1 = ON The converter goes into the "ready" state. If, in addition, bit 3
1 0 = OFF2 Switch off motor immediately, then the motor coasts to a
2 0 = Quick stop (OFF3) Quick stop: the motor brakes with the OFF3 ramp-down time
3
4 0 = Reject traversing job Axis brakes down to standstill with the maximum
p0840[0] =
r2090.0
p0844[0] =
r2090.1
p0848[0] =
r2090.2
p0852[0] =
r2090.3
p2641 =
r2090.4
5 0 = Intermediate stop Axis brakes down to standstill with the specified deceleration
6 0 → 1: Activate traversing job The converter starts axis travel to the setpoint position. p2631 =
0 → 1: Setpoint transfer MDI p2650 =
7 0 → 1: = Acknowledge faults Acknowledge fault in the converter. If the ON command is
8 1 = jogging bit 0 Jogging 1 p2589 =
9 1 = jogging bit 1 Jogging 2 p2590 =
10
1 = Control via PLC
11
13 0 → 1: External block change The axis goes to the next traversing block. p2633 =
14, 15 Reserved
p2640 =
r2090.5
p2103[0] =
p0854[0] =
r2090.10
p2595 =
r2090.11
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
97
Page 98

Configuring the fieldbus
Status word 1 (ZSW1)
Bit
Meaning
Comments
P No.
Telegram 110
Telegram 111
inhibited.
r0899.0
switches on the motor.
r0899.2
r2139.3
r0899.4
r0899.5
command and an additional ON command.
r0899.6
position setpoint is within the permissible tolerance p2546.
r2684.8
the converter.
r0899.9
r2684.10
r2684.11
block active
r2684.12
r2199.0
accelerates
r2684.4
r2684.5
7.4 PROFIdrive profile for PROFIBUS and PROFINET
Table 7- 3 Status word 1 when the basic positioner is active
0 1 = Ready to start Power supply is switched on; electronics initialized; pulses are
1 1 = Ready Motor is switched on (ON command = 1); no fault is active.
With the command "Enable operation" (STW1.3) the converter
2 1 = Operation enabled Motor follows setpoint. See control word 1, bit 3. p2080[2] =
3 1 = Fault present The converter has a fault. Acknowledge fault using STW1.7. p2080[3] =
4 1 = OFF2 inactive Coast down to standstill is not active. p2080[4] =
5 1 = OFF3 inactive Quick stop is not active. p2080[5] =
6 1 = Closing lockout active It is only possible to switch on the motor after an OFF1
7 1 = Alarm present Motor remains switched on; no acknowledgment necessary. p2080[7] =
8 1 = Following error in tolerance The actual difference between the actual position and the
9 1 = Control requested The automation system is requested to accept the control from
10 1 = Position setpoint reached The axis has reached the position setpoint. p2080[10] =
p2080[0] =
p2080[1] =
r0899.1
p2080[6] =
r2139.7
p2080[8] =
p2080[9] =
11 1 = Reference point set The axis is referenced. p2080[11] =
12 0 → 1 = Acknowledgement, traversing
13 1 = Axis is at a standstill The absolute speed is less than p2161. p2080[13] =
14 Reserved 1 = Axis
15 Reserved 1 = Axis brakes --- p2080[15] =
Converter with control units CU250D-2
--- p2080[12] =
--- p2080[14] =
98 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
Page 99

Configuring the fieldbus
7.4.1.3
Control and status word 2
Control word 2 (STW2)
Bit
Meaning
Comments
Interconnection
Telegram 9
Telegrams
110, 111
r2092.0
r2093.0
r2092.1
r2093.1
1 to 6
Reserved
r2092.7
r2093.7
r2092.8
r2093.8
9 to 15
Reserved
Status word 2 (ZSW2)
Bit
Meaning
Description
Interconnection
r0051.0
r0051.1
2 to 4
Reserved
---
r2139.12
r0896.0
r1406.8
9
Reserved
---
r0899.11
r0835.0
7.4 PROFIdrive profile for PROFIBUS and PROFINET
Table 7- 4 Control word 2 and interconnection in the converter
0 Drive data set selection DDS, bit 0 p0820[0] =
1 Drive data set selection DDS, bit 1 p0821[0] =
7 1 = Parking axis selection p0897 =
8 1 = Travel to fixed stop p1545[0] =
p0820[0] =
p0821[0] =
p0897 =
p1545[0] =
Table 7- 5 Control word 2 and interconnection in the converter
0 1 = Drive data set DDS effective, bit 0 p2081[0] =
1 1 = Drive data set DDS effective, bit 1 p2081[1] =
5 1 = Alarm class bit 0 Only for internal diagnostics when using a
SIMOTION control.
6 1 = Alarm class bit 1 p2081[6] =
7 1 = Parking axis active --- p2081[7] =
8 1 = Travel to fixed stop --- p2081[8] =
10 1 = Pulses enabled Motor switched on p2081[10] =
11 to 15 Reserved --- p2081[11] =
p2081[5] =
r2139.11
Converter with control units CU250D-2
Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
99
Page 100

Configuring the fieldbus
7.4.1.4
Control and status word for the positioner
Positioning control word (POS_STW)
Bit
Meaning
Comments
P No.
follow the position actual value.
r2092.0
position actual value and setpoint.
r2092.1
r2092.2
3
4
direction.
end of the traversing range.
6…15
Reserved
---
---
7.4 PROFIdrive profile for PROFIBUS and PROFINET
Table 7- 6 POS_STW and interconnection with parameters in the inverter
0 1 = Follow-up mode The inverter continuously corrects the position setpoint to
1 1 = Set reference point The inverter accepts the reference point coordinate in its
2 1 = Reference cam active The load is currently on the reference cam. p2612 =
Reserved --- ---
5 1 = Incremental jogging active If the jogging command is active, the inverter positions the
load by the specified traversing path in a positive or negative
0 = Jogging velocity active If the jogging command is active, the inverter positions the
load with the jog velocity in the direction of the beginning or
p2655[0] =
p2596 =
p2591 =
r2092.5
Converter with control units CU250D-2
100 Operating Instructions, 04/2014, FW V4.7, A5E34261542B AA
 Loading...
Loading...