

SGS Thomson Microelectronics ST7FLITE29F2M6, ST7FLITE29F2B6, ST7FLITE29, ST7FLITE25F2M6, ST7FLITE25F2B6 Datasheet
...
August 2003 1/131
Rev. 2.0
ST7LITE2
8-BIT MCU WITH SINGLE VOLTAGE FLASH MEMORY,
DATA EEPROM, ADC, TIMERS, SPI
■ Memories
– 8 Kbytes single voltag e Flas h Pro gram mem-
ory with read-out protection, In-Circuit Programming and In-Application programming
(ICP and IAP). 10K write/erase cycles guar-
anteed, data retention: 20 years at 55°C.
– 384 bytes RAM
– 256 bytes data EEPROM with read-out pro-
tection. 300K write/erase cycles guarant eed,
data retention: 20 years at 55°C.
■ Clock , Res et and Supp ly Managem e n t
– Enhanced reset system
– Enhanced low voltage supervisor (LVD) for
main supply and an auxiliary voltage detector
(AVD) with interrupt capability for implement-
ing safe power-down procedures
– Clock sources: Internal 1% RC oscillator,
crystal/ceramic resonator or external clock
– Internal 32-MHz input clock for Auto-reload
timer
– Optional x4 or x8 PLL for 4 or 8 MHz internal
clock
– Five Power Saving Modes: Halt, Active-Halt,
Wait and Slow, Auto Wake Up From Halt
■ I/O Ports
– Up to 15 multifunctional bidirectional I/O lines
–7 high sink outputs
■ 4 Timers
– Configurable Watchdog Timer
– Two 8-bit Lite Timers with prescaler,
1 realtime base and 1 input capture
– One 12-bit Auto-reload Timer with 4 PWM
outputs, input capture and output compare
functions
■ 1 Communication Interface
– SPI synchronous serial interface
■ Interrupt M ana g em e n t
– 10 inter r u pt vecto r s plu s TRAP an d RESET
– 15 external interrupt lines (on 4 vectors)
■ A/D Converter
– 7 input channels
– Fixed gain Op-amp
– 13-bit resolution for 0 to 430 mV (@ 5V V
DD
)
– 10-bit resolution for 430 mV to 5V (@ 5V V
DD
)
■ Instruction Set
– 8-bit data manipulation
– 63 basic instruct ions
– 17 main addressing modes
– 8 x 8 unsigned multiply instructions
■ Development Tools
– Full hardware/software development package
– DM (Debug Module)
Device Summary
DIP20
SO20
300”
Features ST7LITE20 ST7LITE25 ST7LITE29
Program memory - bytes 8K
RAM (stack) - byte s 384 (128)
Data EEPROM - bytes - - 256
Peripherals
Lite Timer with Watchdog,
Autoreload Timer, SPI,
10-bit ADC with Op-Amp
Lite Timer with Watchdog,
Autoreload Timer with 32-MHz input clock,
SPI, 10-bit ADC with Op-Amp
Operat ing Supply 2.4V to 5.5V
CPU Frequency
Up to 8Mhz
(w/ ext OS C up to 16 MHz)
Up to 8Mhz (w/ ext OSC up to 16MHz
and int 1MHz RC 1% PLLx 8/4MHz)
Operat i ng T em perature -40°C to +85°C
Packages SO20 300”, DIP20
1

Table of Cont ents
131
2/131
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 PIN DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3 REGISTER & MEMORY MAP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
4 FLASH PROGRAM MEMORY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.2 MAIN FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.3 PROGRAMMING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4 ICC INTERFACE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.5 MEMORY PROTECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.6 RELATED DOCUMENTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4.7 REGISTER DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
5 DATA EEPROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.2 MAIN FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
5.3 MEMORY ACCESS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.4 POWER SAVING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.5 ACCESS ERROR HANDLING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.6 DATA EEPROM READ-OUT PROTECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5.7 REGISTER DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 CENTRAL PROCESSING UNIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.2 MAIN FEATURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
6.3 CPU REGISTERS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7 SUPPLY, RESET AND CLOCK MANAGEMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.1 INTERNAL RC OSCILLATOR ADJUSTMENT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.2 PHASE LOCKED LOOP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
7.3 REGISTER DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
7.4 MULTI-OSCILLATOR (MO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
7.5 RESET SEQUENCE MANAGER (RSM) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
7.6 SYSTEM INTEGRITY MANAGEMENT (SI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
8 INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.1 NON MASKABLE SOFTWARE INTERRUPT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.2 EXTERNAL INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
8.3 PERIPHERAL INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
9 POWER SAVING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
9.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
9.2 SLOW MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
9.3 WAIT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
9.4 HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
9.5 ACTIVE-HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
9.6 AUTO WAKE UP FROM HALT MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
1

Table of Cont ents
3/131
10 I/O PORTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
10.1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
10.2 FUNCTIONAL DESCRIPTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
10.3 I/O PORT IMPLEMENTATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.4 UNUSED I/O PINS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.5 LOW POWER MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.6 INTERRUPTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10.7 DEVICE-SPECIFIC I/O PORT CONFIGURATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
11 ON-CHIP PERIPHERALS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
11.1 WATCHDOG TIMER (WDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
11.2 12-BIT AUTORELOAD TIMER 2 (AT2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
11.3 LITE TIMER 2 (LT2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
11.4 SERIAL PERIPHERAL INTERFACE (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
11.5 10-BIT A/D CONVERTER (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
12 INSTRUCTION SET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
12.1 ST7 ADDRESSING MODES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
12.2 INSTRUCTION GROUPS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
13 ELECTRICAL CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
13.1 PARAMETER CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
13.2 ABSOLUTE MAXIMUM RATINGS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
13.3 OPERATING CONDITIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
13.4 SUPPLY CURRENT CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
13.5 CLOCK AND TIMING CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
13.6 MEMORY CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
13.7 EMC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
13.8 I/O PORT PIN CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
13.9 CONTROL PIN CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
13.10 COMMUNICATION INTERFACE CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . 114
13.11 10-BIT ADC CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
14 PACKAGE CHARACTERISTICS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
14.1 PACKAGE MECHANICAL DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
14.2 SOLDERING AND GLUEABILITY INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
15 DEVICE CONFIGURATION AND ORDERING INFORMATION . . . . . . . . . . . . . . . . . . . . . . . 123
15.1 OPTION BYTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
15.2 DEVICE ORDERING INFORMATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
15.3 DEVELOPMENT TOOLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
15.4 ST7 APPLICATION NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
16 IMPORTANT NOTES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
16.1 EXECUTION OF BTJX INSTRUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
16.2 ADC CONVERSION SPURIOUS RESULTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
16.3 A/ D CONVERTER ACCURACY FOR FIRST CONVERSION . . . . . . . . . . . . . . . . . . . 129
ST7LITE2
4/131
17 SUMMARY OF CHANGES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
To obtain the most recent version of this datasheet,
please check at www.st.com>products>technical literature>datasheet
Please also pay special attention to the Section “IMPORTANT NOTES” on page 129.
ST7LITE2
5/131
1 INTRODUCTION
The ST7LITE2 is a member of the ST7 m icrocontroller family. All ST7 devices are based on a common industry-standard 8-bit core, feat uring an enhanced instruction set.
The ST7LITE2 features FLASH memory with
byte-by-byte In-Circuit Programming (ICP) and InApplication Programming (IAP) capability.
Under software control, the ST 7LITE2 device can
be placed in WAIT, SLOW, or HALT mode, reducing power consumption when the application is in
idle or standby state.
The enhanced instruction set and addressing
modes of the ST7 offer both power and flexibility to
software developers, enabling the design of highly
efficient and compact application code. In addition
to standard 8-bit data management, all ST7 microcontrollers feature true bit manipulation, 8x8 unsigned multiplication and indirect addressing
modes.
For easy reference, all parametric data are located
in section 13 on page 91.
The devices feature an on-chip Debug Module
(DM) to support in-circuit debugging (ICD). F or a
description of the DM registers, refer to the ST7
ICC Protocol Reference Manual.
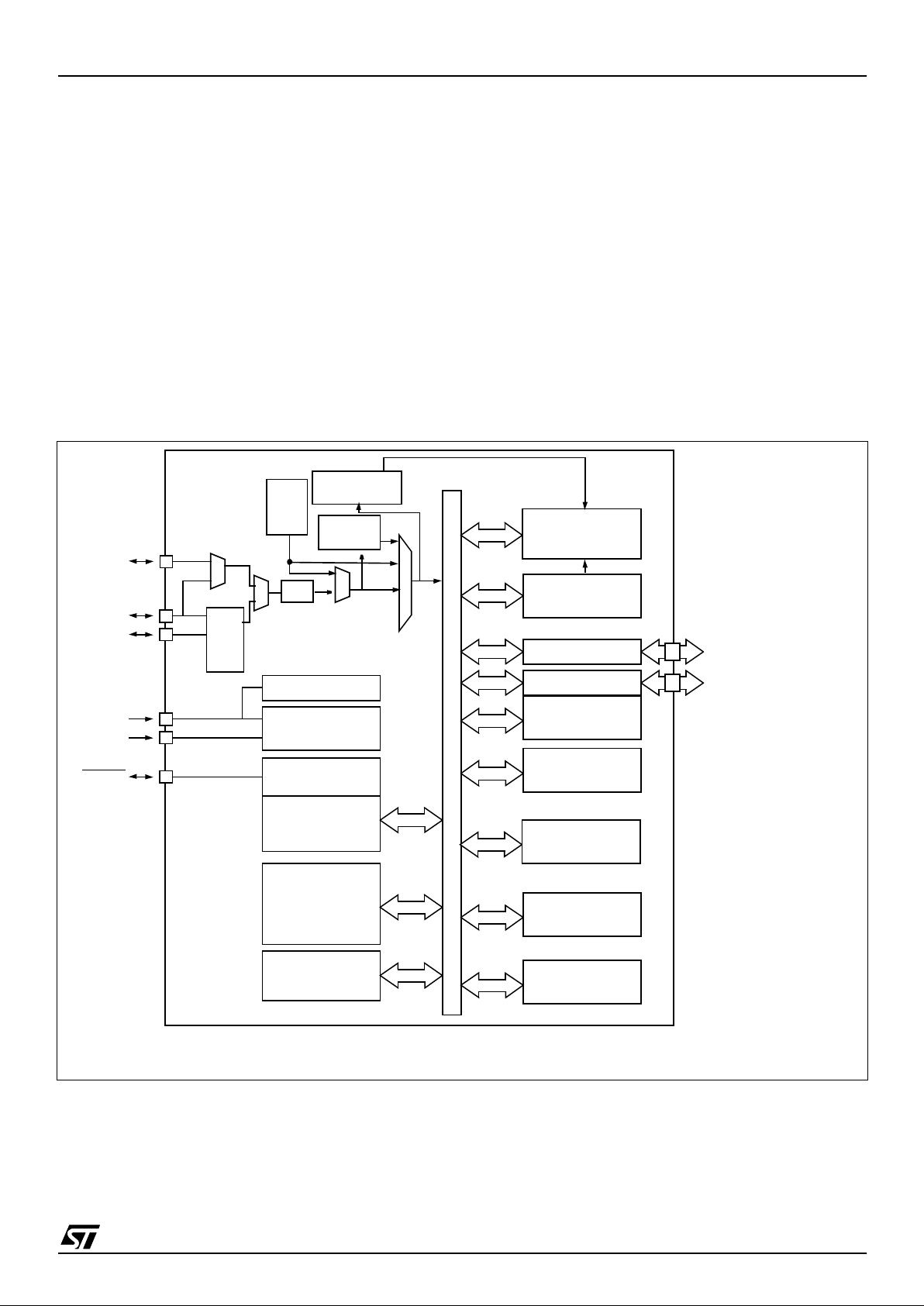
Figure 1. General B lock Diag ram
8-BIT CORE
ALU
ADDRESS AND DATA BUS
OSC1
OSC2
RESET
PORT A
Internal
CLOCK
CONTROL
RAM
(384 Bytes)
PA7:0
(8 bits)
V
SS
V
DD
POWER
SUPPLY
PROGRAM
(8K Bytes)
LVD
MEMORY
PLL x 8
Ext.
1MHz
PLL
Int.
1MHz
8-Bit
LITE TIMER 2
PORT B
SPI
PB6:0
(7 bits)
DATA EEPROM
(256 Bytes)
1% RC
OSC
to
16MHz
ADC
+ OpAmp
12-Bit
Auto-Reload
TIM E R 2
CLKIN
/ 2
or PLL X4
8MHz -> 32MHz
WATCHDOG
Debug Modul e
1
ST7LITE2
6/131
2 PIN DESCRIPTION
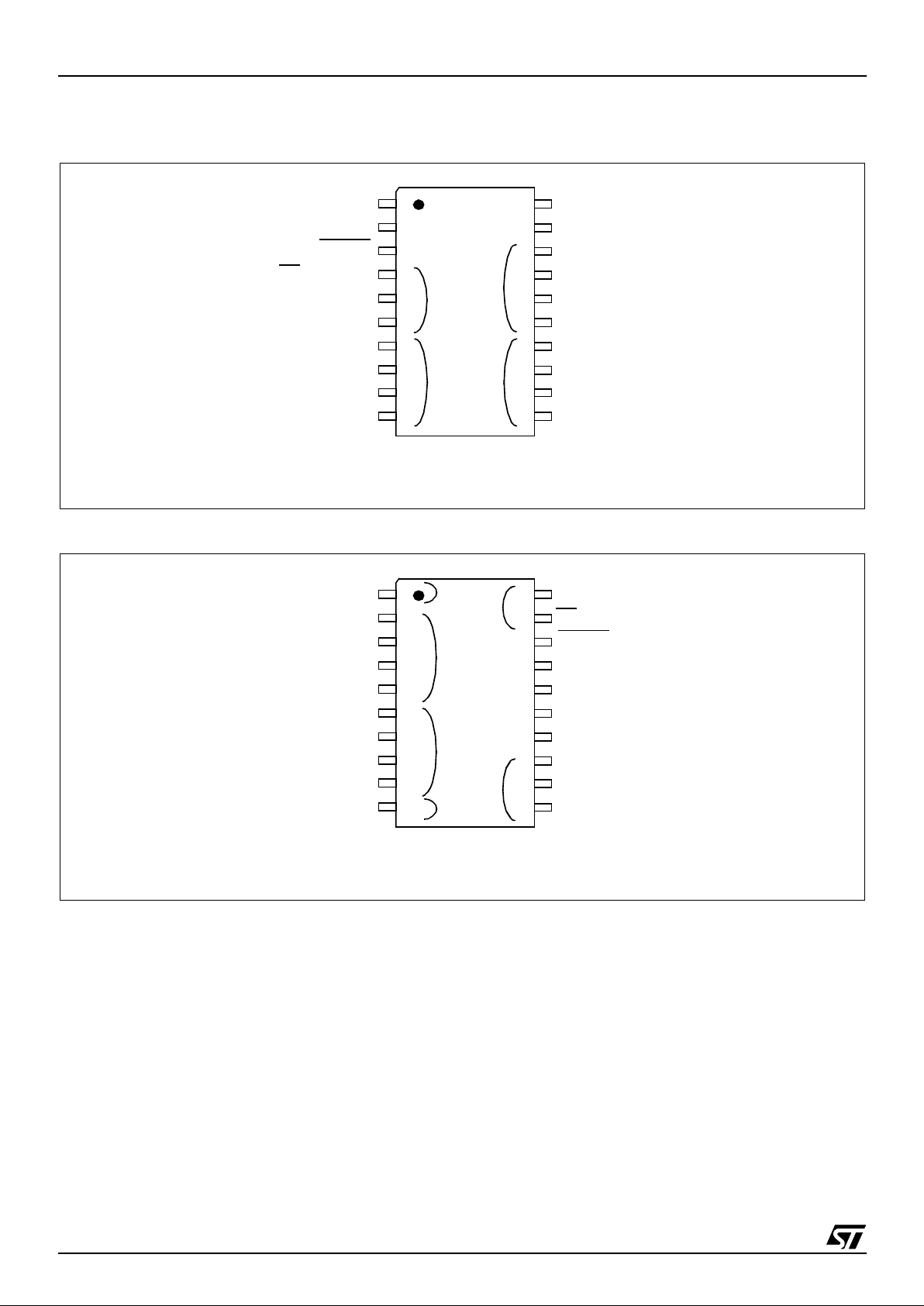
Figure 2. 20-Pin SO Package Pinout
Figure 3. 20-Pin DIP Package Pinout
20
19
18
17
16
15
14
13
1
2
3
4
5
6
7
8
V
SS
V
DD
AIN5/PB5
CLKIN/AIN4/PB4
MOSI/AIN3/PB3
MISO/AIN2/PB2
SCK/AIN1/PB1
SS
/AIN0/PB0
OSC1/CLKIN
OSC2
PA5
(HS)/ATPWM3/ICCDATA
PA4
(HS)/ATPWM2
PA3
(HS)/ATPWM1
PA2
(HS)/ATPWM0
PA1
(HS)/ATIC
PA0
(HS)/LTIC
(HS) 20mA high sink capability
eix associated external interrupt vector
12
11
9
10
AIN6/PB6
PA7(HS)
PA6/MCO/ICCCLK/BREAK
RESET
ei3
ei2
ei0
ei1
20
19
18
17
16
15
14
13
1
2
3
4
5
6
7
8
MISO/AIN2/PB2
MOSI/AIN3/PB3
ATPWM2/PA4(HS)
ATPWM3/ICCDATA/PA5(HS)
MCO/ICCCLK/BREAK/PA6
PA7(HS)
AIN6/PB6
AIN5/PB5
SCK/AIN1/PB1
SS
/AIN0/PB0
PA0(HS)/LTIC
OSC2
OSC1/CLKIN
V
SS
V
DD
RESET
(HS) 20mA high sink capability
eix associated external interrupt vector
12
11
9
10
ATPWM1/PA3(HS)
PA2(HS)/ATPWM0
PA1(HS)/ATIC
CLKIN/AIN4/PB4
ei3
ei3
ei2
ei1
ei0
ei0
1
ST7LITE2
7/131
PIN DESCRIPTION (Cont’d)
Legend / Abbreviations for Table 1 :
Type: I = input, O = output, S = supply
In/Output le v el: C
T
= CMOS 0.3VDD/0.7VDD with input trigger
Output level: HS = 20mA high sink (on N-buffer only)
Port and control configuration:
– Input: float = floating, wpu = weak pull-up, int = interrupt, ana = analog
– Output : OD = open drain, PP = push-pull
The RESET co nf igurati on of eac h pin i s shown in b old whic h is va lid as l ong as the d evice is i n rese t sta te .
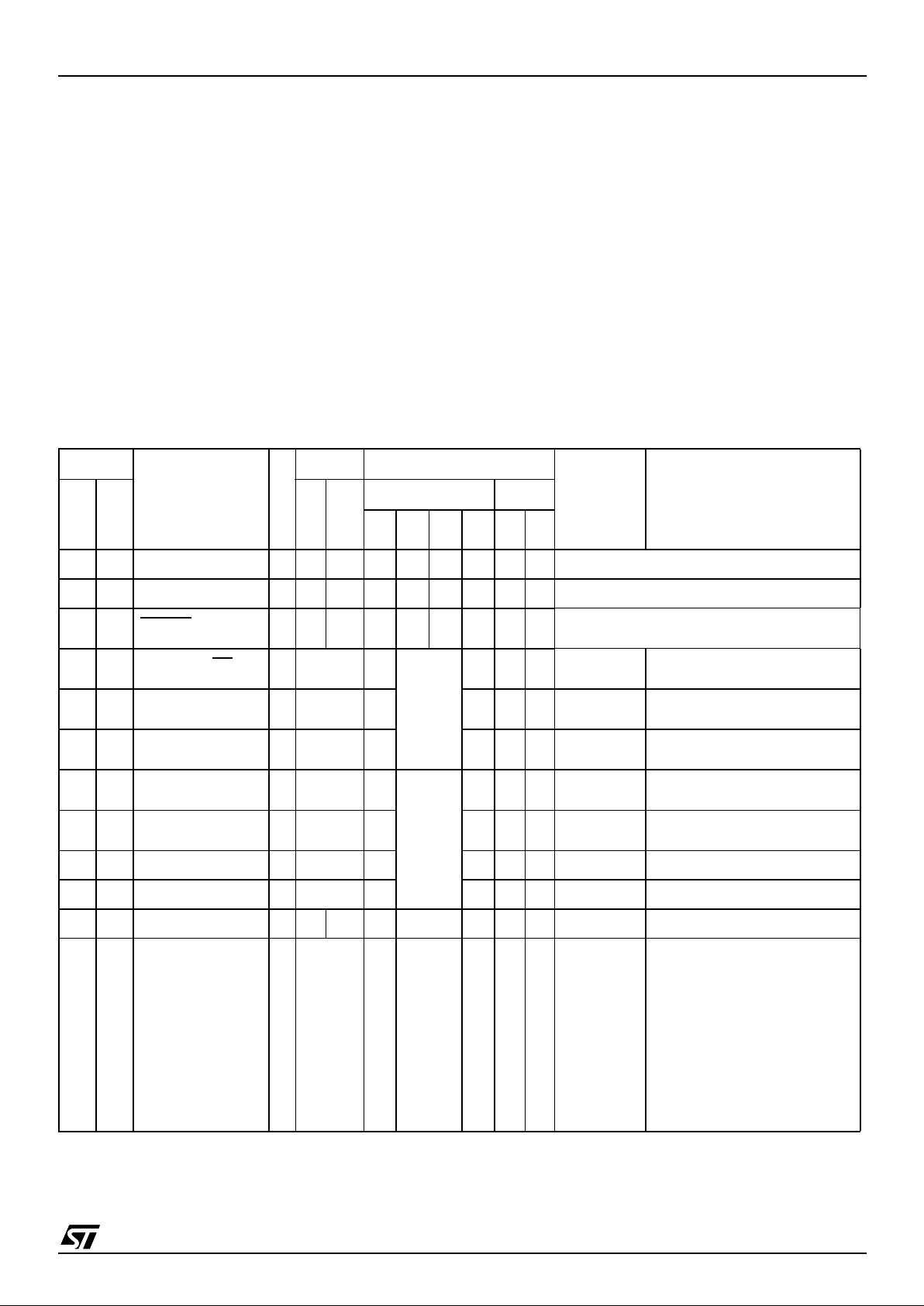
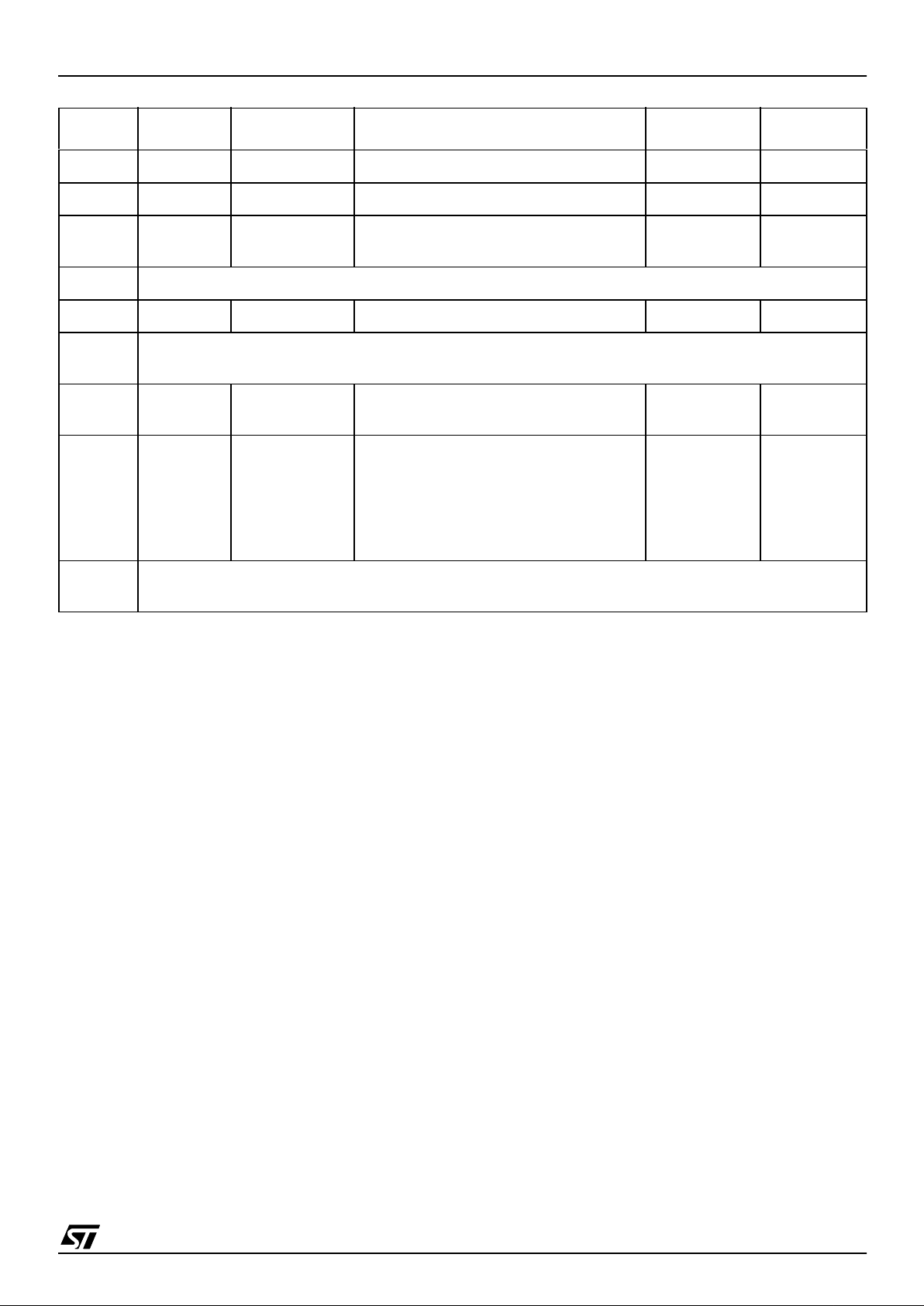
Table 1. Device Pin Description
Pin No.
Pin Name
Type
Level Port / Control
Main
Function
(after reset)
Alternate Function
SO20
DIP20
Input
Output
Input Output
float
wpu
int
ana
OD
PP
116V
SS
S Ground
217V
DD
S Main power supply
3 18 RESET
I/O C
T
XX
Top priority non maskable interrupt (active
low)
4 19 PB0/AIN0/SS
I/O C
T
X
ei3
XXXPort B0
ADC Analog Input 0 or SPI
Slave Select (active low)
5 20 PB1/AIN1/SCK I/O C
T
X XXXPort B1
ADC Analog Input 1 or SPI Serial Clock
6 1 PB2/AIN2/MISO I/O C
T
X XXXPort B2
ADC Analog Input 2 or SPI
Master In/ Slave Out Data
7 2 PB3/AIN3/MOSI I/O C
T
X
ei2
XXXPort B3
ADC Analog Input 3 or SPI
Master Out / Slave In Data
8 3 PB4/AIN4/CLKIN I/O C
T
X XXXPort B4
ADC Analog Input 4 or External clock input
9 4 PB5/AIN5 I/O C
T
X XXXPort B5 ADC Analog Input 5
10 5 PB6/AIN6 I/O C
T
X XXXPort B6 ADC Analog Input 6
11 6 PA7 I/O C
T
HS X ei1 X X Port A7
12 7
PA6 /MCO/
ICCCLK/BREAK
I/O C
T
X ei1 XXPort A6
Main Clock Output or In Circuit
Communication Clock or External BREAK
Caution: During reset, this pin
must be held at high level to
avoid entering ICC mode unexpectedly (this is guaranteed
by the internal pull-up if the application leaves the pin floating).
1
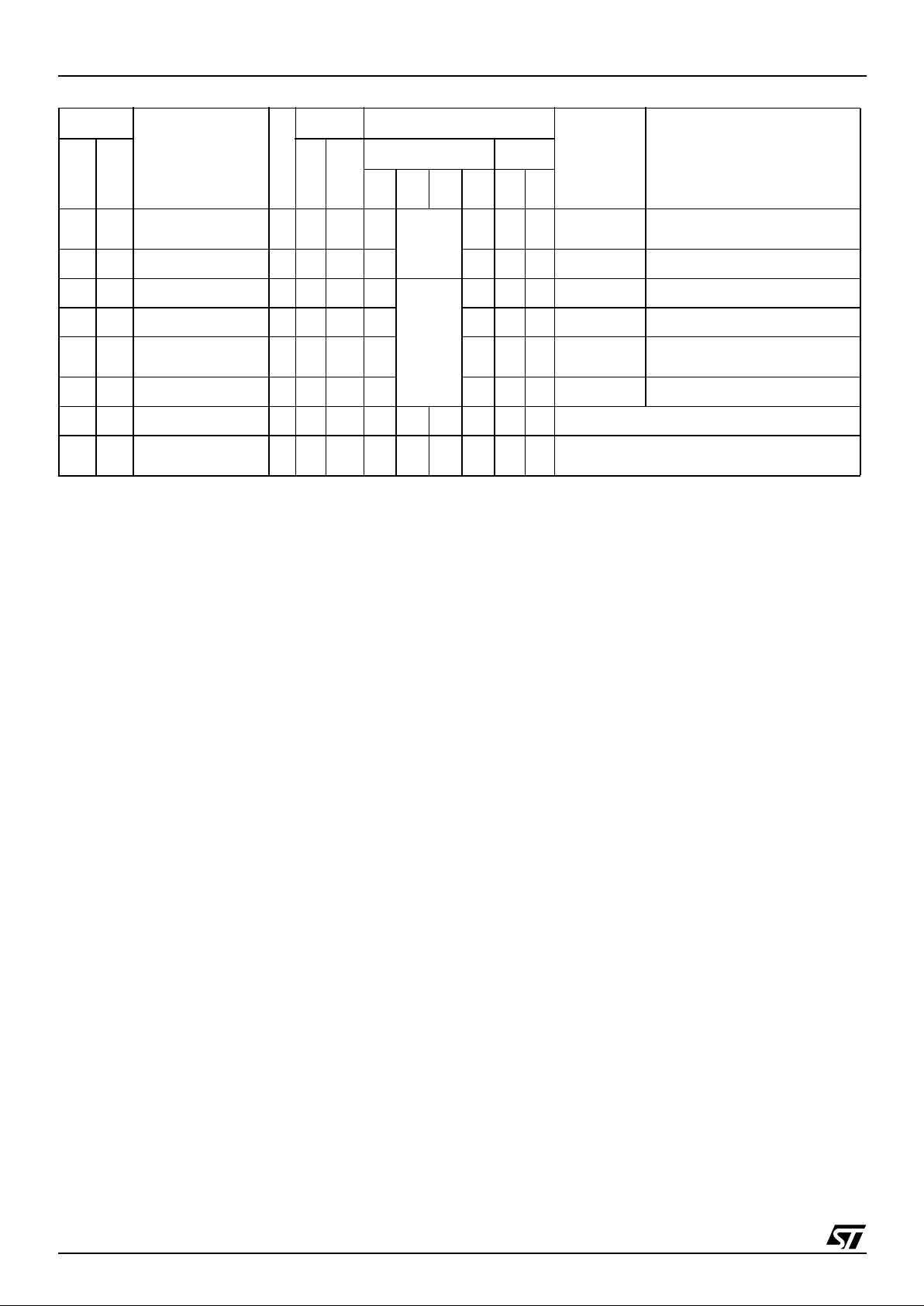
ST7LITE2
8/131
13 8
PA5 /ATPWM3/
ICCDATA
I/O CTHS X
ei1
XXPort A5
Auto-Reload Timer PWM3 or
In Circuit Communication Data
14 9 PA4/ATPWM2 I/O C
T
HS X XXPort A4 Auto-Reload Timer PWM2
15 10 PA3/ATPWM1 I/O C
T
HS X
ei0
XXPort A3 Auto-Reload Timer PWM1
16 11 PA2/ATPWM0 I/O C
T
HS X XXPort A2 Auto-Reload Timer PWM0
17 12 PA1/ATIC I/O C
T
HS X XXPort A1
Auto-Reload Timer Input Capture
18 13 PA0/LTIC I/O C
T
HS X XXPort A0 Lite Timer Input Capture
19 14 OSC2 O Resonator oscillator inverter output
20 15 OSC1/CLKIN I
Resonator oscillator inverter input or External clock input
Pin No.
Pin Name
Type
Level Port / Control
Main
Function
(after reset)
Alternate Function
SO20
DIP20
Input
Output
Input Output
float
wpu
int
ana
OD
PP
1
ST7LITE2
9/131
3 REGISTER & MEMORY MAP
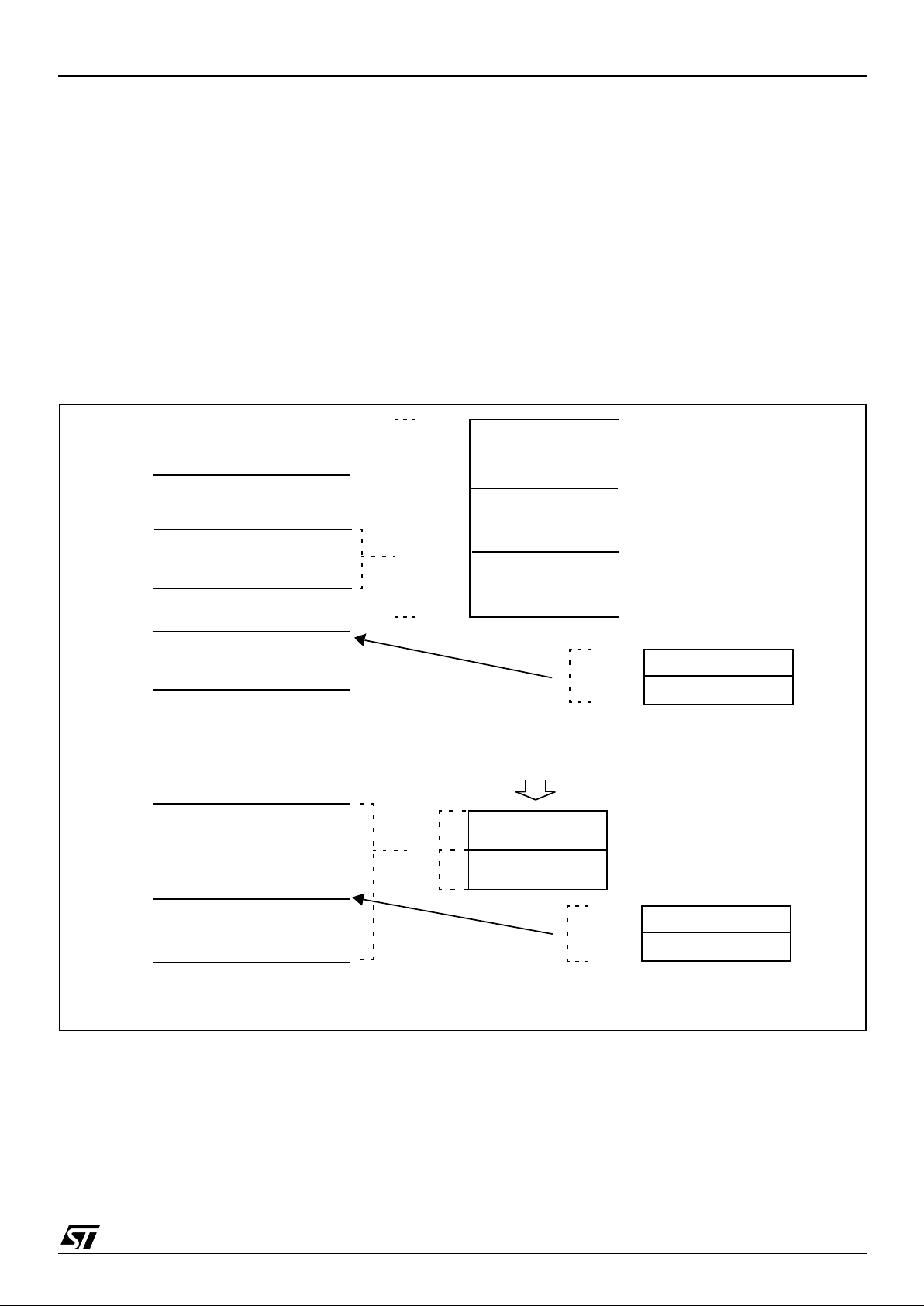
As sho wn i n Figure 4, the MCU is capable of ad-
dressing 64K bytes of memories and I/O registers.
The available memory locations consist of 128
bytes of register locations, 384 bytes of RAM, 256
bytes of data EEPROM and 8 Kbytes of user program memory. The RAM space includes up to 128
bytes for the stack from 180h to 1FFh.
The highest address b ytes contain the user res et
and interrupt vectors.
The Flash mem ory contains two sectors (see Fig -
ure 4) mapped in the upper part of the ST7 ad-
dressing space so the res et and interrupt vectors
are located in Sector 0 (F000h-FFFFh).
The size of Flash Sector 0 and other device options are configurable by Option byte (refer to sec-
tion 15.1 on page 123).
IMPORTANT: Memory locations marked as “Reserved” must ne ver be accessed. Ac cessing a reseved area can have u npredict able effects on t he
device.l
Figure 4. Me m ory M a p
0000h
RAM
Flash Memory
(8K)
Interrupt & Reset Vectors
HW Registers
0080h
007Fh
0FFFh
(see Table 2)
1000h
10FFh
FFE0h
FFFFh
(see Table 5)
0200h
Reserved
01FFh
Short Addressing
RAM (zero page)
128 Bytes Stack
0180h
01FFh
0080h
00FFh
(384 Bytes)
Data EEPROM
(256 Bytes)
E000h
1100h
DFFFh
Reserved
FFDFh
16-bit Addressing
RAM
0100h
017Fh
1 Kbyte
7 Kbytes
SECTOR 1
SECTOR 0
8K FLASH
FFFFh
FC00h
FBFFh
E000h
PROGRAM MEMORY
1000h
1001h
RCCR0
RCCR1
see section 7.1 on page 23
FFDEh
FFDFh
RCCR0
RCCR1
see section 7.1 on page 23
1
ST7LITE2
10/131
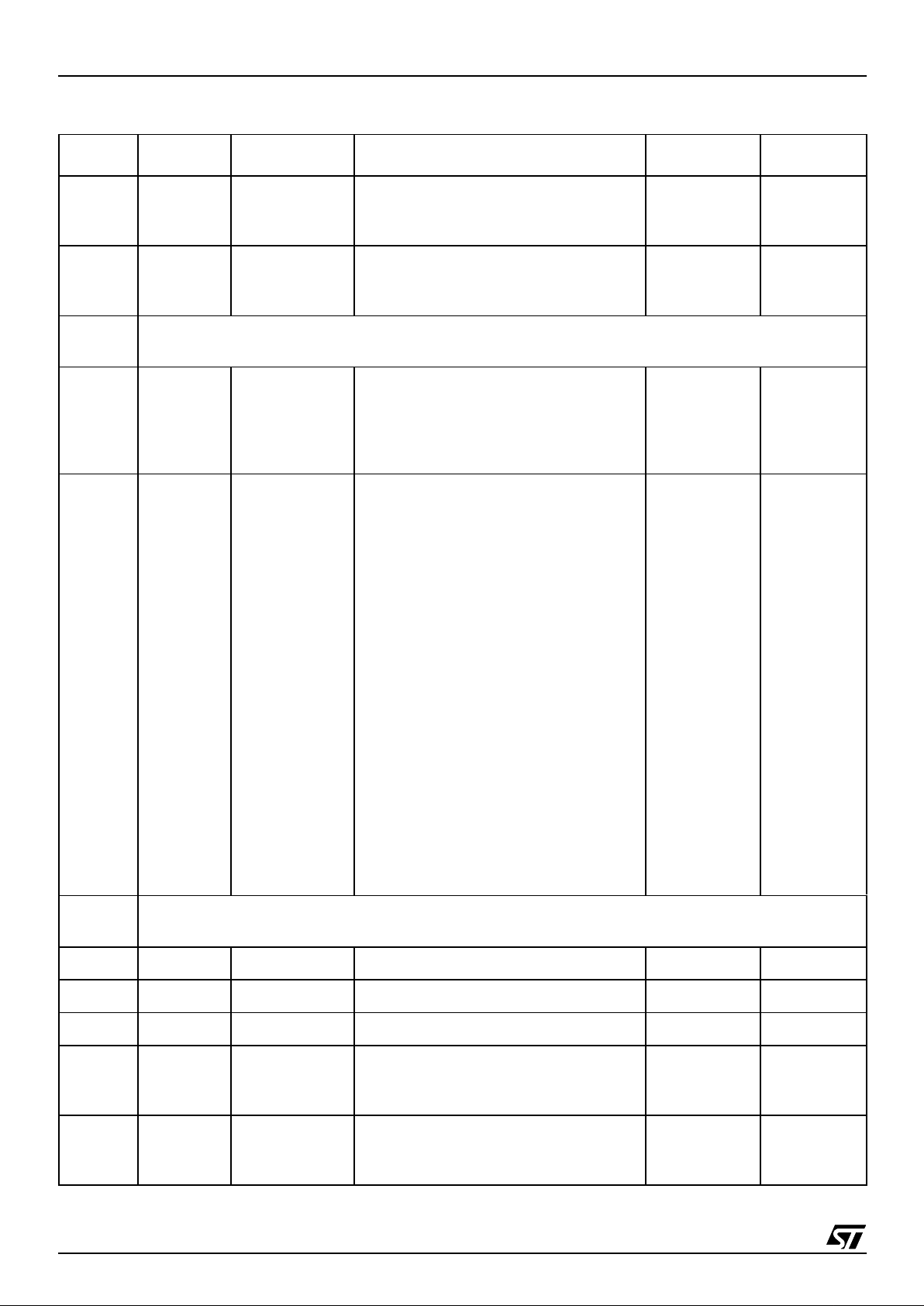
Table 2. Hardware Register M ap
Address Block Register Label Register Name Reset Status Remarks
0000h
0001h
0002h
Port A
PADR
PADDR
PAOR
Port A Data Register
Port A Data Direction Register
Port A Option Register
FFh
1)
00h
40h
R/W
R/W
R/W
0003h
0004h
0005h
Port B
PBDR
PBDDR
PBOR
Port B Data Register
Port B Data Direction Register
Port B Option Register
FFh
1)
00h
00h
R/W
R/W
R/W
2)
0006h
0007h
Reserved Area (2 bytes)
0008h
0009h
000Ah
000Bh
000Ch
LITE
TIMER 2
LTCSR2
LTARR
LTCNTR
LTCSR1
LTICR
Lite Timer Control/Status Register 2
Lite Timer Auto-reload Register
Lite Timer Counter Register
Lite Timer Control/Status Register 1
Lite Timer Input Capture Register
0Fh
00h
00h
0X00 0000h
xxh
R/W
R/W
Read Only
R/W
Read Only
000Dh
000Eh
000Fh
0010h
0011h
0012h
0013h
0014h
0015h
0016h
0017h
0018h
0019h
001Ah
001Bh
001Ch
001Dh
001Eh
001Fh
0020h
0021h
0022h
AUTO-
RELOAD
TIMER 2
ATCSR
CNTRH
CNTRL
ATRH
ATRL
PWMCR
PWM0CSR
PWM1CSR
PWM2CSR
PWM3CSR
DCR0H
DCR0L
DCR1H
DCR1L
DCR2H
DCR2L
DCR3H
DCR3L
ATICRH
ATICRL
TRANCR
BREAKCR
Timer Control/Status Register
Counter Register High
Counter Register Low
Auto-Reload Register High
Auto-Reload Register Low
PWM Output Control Register
PWM 0 Control/Status Register
PWM 1 Control/Status Register
PWM 2 Control/Status Register
PWM 3 Control/Status Register
PWM 0 Duty Cycle Register High
PWM 0 Duty Cycle Register Low
PWM 1 Duty Cycle Register High
PWM 1 Duty Cycle Register Low
PWM 2 Duty Cycle Register High
PWM 2 Duty Cycle Register Low
PWM 3 Duty Cycle Register High
PWM 3 Duty Cycle Register Low
Input Capture Register High
Input Capture Register Low
Transfer Control Register
Break Control Register
0X00 0000h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
00h
01h
00h
R/W
Read Only
Read Only
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
R/W
Read Only
Read Only
R/W
R/W
0023h to
002Dh
Reserved area (11 bytes)
002Eh WDG WD GCR Watchdog Control Register 7Fh R/W
0002Fh FLASH FCSR Flash Control/Status Register 00h R/W
00030h EEPROM EECSR Data EEPROM Control/Status Register 00h R/W
0031h
0032h
0033h
SPI
SPIDR
SPICR
SPICSR
SPI Data I/O Register
SPI Control Register
SPI Control Status Register
xxh
0xh
00h
R/W
R/W
R/W
0034h
0035h
0036h
ADC
ADCCSR
ADCDRH
ADCDRL
A/D Control Status Register
A/D Data Register High
A/D Amplifier Control/Data Low Register
00h
xxh
0xh
R/W
Read Only
R/W
1
ST7LITE2
11/131
Legend: x=undefined, R/W=read/write
Notes:
1. The contents of the I/O port DR regist ers are readable only in out put c onfigurat ion. I n i nput c onfiguration, the values of the I/O pins are returned instead of the DR register contents.
2. The bits associated with unavailable pins must always keep their reset value.
3. For a description of the Debug Module registers, see ICC reference manual.
0037h ITC EICR External Interrupt Control Register 00h R/W
0038h MCC MCCSR Main Clock Control/Status Register 00h R/W
0039h
003Ah
Clock and
Reset
RCCR
SICSR
RC oscillator Control Register
System Integrity Control/Status Register
FFh
0000 0XX0h
R/W
R/W
003Bh Reserved area (1 byte)
003Ch ITC EISR External Interrupt Selection Register 0Ch R/W
003Dh to
0048h
Reserved area (12 bytes)
0049h
004Ah
AWU
AWUPR
AWUCSR
AWU Prescaler Register
AWU Control/Status Register
FFh
00h
R/W
R/W
004Bh
004Ch
004Dh
004Eh
004Fh
0050h
DM
3)
DMCR
DMSR
DMBK1H
DMBK1L
DMBK2H
DMBK2L
DM Control Register
DM Status Register
DM Breakpoint Register 1 High
DM Breakpoint Register 1 Low
DM Breakpoint Register 2 High
DM Breakpoint Register 2 Low
00h
00h
00h
00h
00h
00h
R/W
R/W
R/W
R/W
R/W
R/W
0051h to
007Fh
Reserved area (47 bytes)
Address Block Register Label Register Name Reset Status Remarks
1

ST7LITE2
12/131
4 FLASH PROGRAM MEMORY
4.1 Introduction
The ST7 single voltage extended Flash (XFlash) is
a non-volatile memory that can be electrically
erased and programmed either on a byte-by-byte
basis or up to 32 bytes in parallel.
The XFlash devices can be programmed off-board
(plugged in a programming tool) or on-board using
In-Circuit Programming or In-Application Programming.
The array matrix organ isation allows each sector
to be erased and reprogramm ed without affecting
other sectors.
4.2 Main Features
■ ICP (In-Circuit Programming)
■ IAP (In-Application Programming)
■ ICT (In-Circuit Testing) for downloading and
executing user application test patterns in RAM
■ Sector 0 size configurable by option byte
■ Read-out and write protection against piracy
4.3 PROGRAMMING MODES
The ST7 can be programmed in three different
ways:
– Insertion in a programming tool. In this m ode,
FLASH sectors 0 and 1, option byte row and
data EEPROM (if present) can be programmed or erased.
– In-Circuit Programming. In this mode, FLA SH
sectors 0 and 1, option byte row and data
EEPROM (if present) can be programme d or
erased without removing the device from the
application board.
– In-Application Programming. In this mode,
sector 1 and data EEPROM (if present) can
be programmed or erased without removing
the device from the application board and
while the application is running.
4.3.1 In-Circuit Programming (ICP)
ICP us es a pr otoco l c al l e d IC C ( I n- Ci r c ui t C om mu nication) which allows an ST7 plugged on a printed circuit board (PCB) to communicate with an external programming device connected via cable.
ICP is performed in three steps:
Switch the ST7 to ICC mode (In-Circuit Communications). This is done by driving a specific signal
sequence on the ICCCLK/DATA pins while the
RESET pin is pulled low. When the ST7 enters
ICC mode, it fetches a specific RESET vector
which points to the ST7 System Memory containing the ICC protocol routine. This routine enables
the ST7 to receive bytes from the ICC interface.
– Download ICP Driver c ode in RAM from the
ICCDATA pin
– Execute ICP Driver code in RAM to program
the FLASH memory
Depending on the IC P Driver c ode downl oaded in
RAM, FLASH m emory programming can be fully
customized (number of bytes to program, program
locations, or selection of the serial communication
interface for downloading).
4.3.2 In Application Programming (IAP)
This mode uses an IAP Driver program previously
programmed in Sector 0 by the user (in ICP
mode).
This mode is fully controlled by user software. This
allows it to be adapted to the user application, (user-defined strategy for entering programming
mode, choice of communications protocol us ed to
fetch the data to be stored etc.)
IAP mode can be used to program any memory areas except Sector 0, which is write/erase prot ected to allow recovery in case errors occur during
the programming operation.
1
ST7LITE2
13/131
FLASH PROGRAM MEMORY (Cont’d)
4.4 ICC interface
ICP needs a minimum of 4 and u p to 6 pins to be
connected to the programming tool. These pins
are:
– RESET
: device reset
–V
SS
: device power supply ground
– ICCCLK: ICC output serial clock pin
– ICCDATA: ICC input serial data pin
– OSC1: main clock input for external source
(not required on devices without OSC1/OSC2
pins)
–V
DD
: application board power supply (option-
al, see Note 3)
Notes:
1. If the ICCCLK or ICCDATA pins are only u sed
as outputs in t he ap plication, n o s ign al iso lation is
necessary. As soon as the Programming Tool is
plugged to the board, even if an ICC session is not
in progress, the ICCCLK and ICCDATA pins are
not available for the application. If they are used as
inputs by the application, isolation such as a serial
resistor has to be implemented in case another device forces the signal. Refer to the Programming
Tool documentation for recommended resistor values.
2. During the ICP session, the programming tool
must control the RESET
pin. This can lead to con-
flicts between the programming tool and the appli-
cation reset circuit if it drives more than 5mA at
high level (push pull output or pull-up resistor<1K).
A schottky diode can be u sed to isolat e the application RESET circuit in this case. When using a
classical RC network with R>1K or a reset management IC with open drain ou tput and pu ll-up resistor>1K, no additional com ponents are needed.
In all cases the user must ensure that no external
reset is generated by the application during the
ICC session.
3. The use of Pin 7 of the ICC con nector de pends
on the Programming Tool architecture. This pin
must be connected when using most ST Programming Tools (it is used to monitor the application
power supply). Please refer to the Programming
Tool manual.
4. Pin 9 has to be connected t o the OSC1 pin of
the ST7 when the clock is n ot available in the application or if the selected clock option is no t programmed in the option byte. ST7 devices with multi-oscillator capability need to have OSC2 grounded in this case.
5. During reset, this pin must be held at high level
to avoid entering ICC mode unexpec tedly (this is
guaranteed by the internal pull-up if the application
leaves the pin floating).
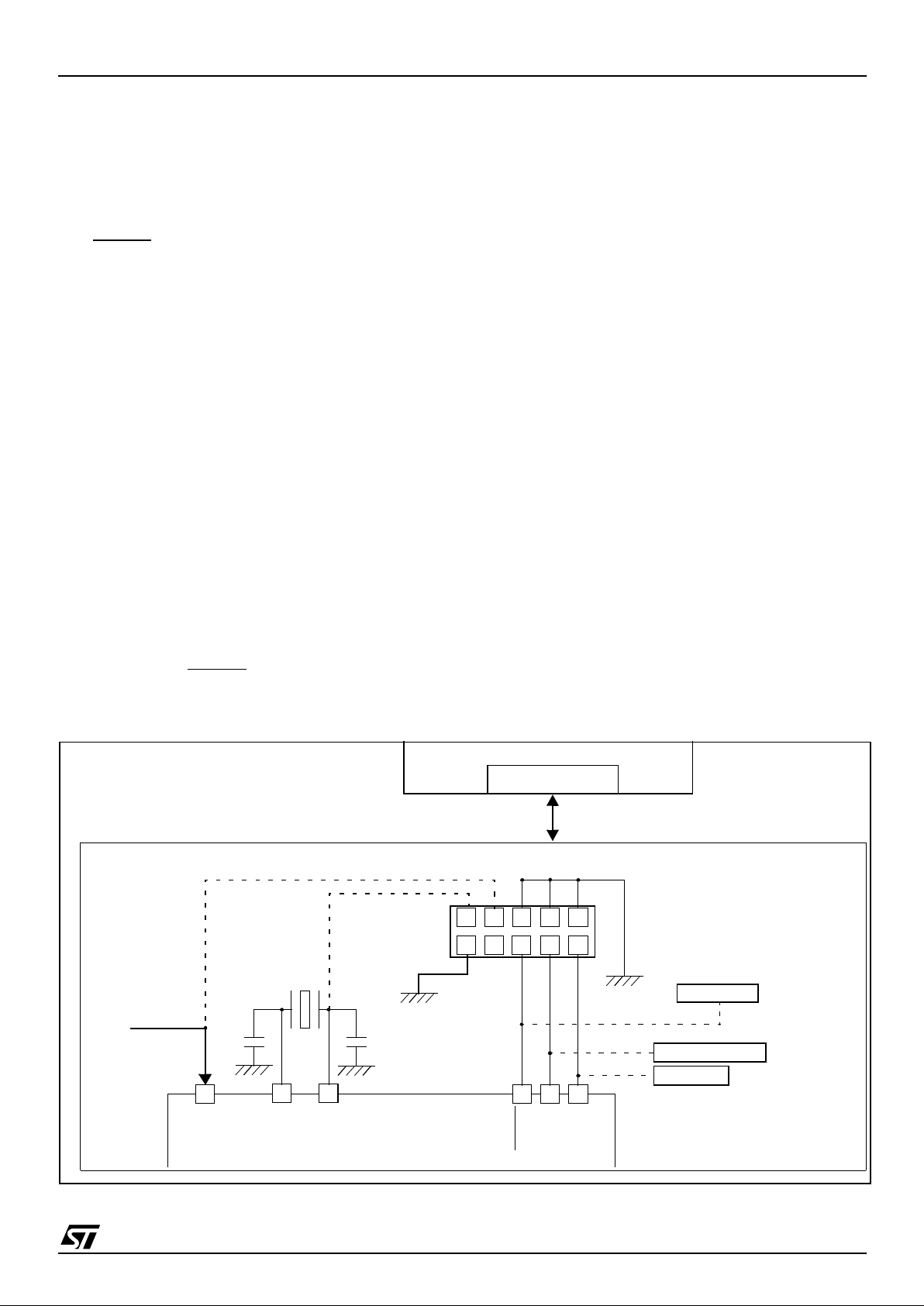
Figure 5. Typical ICC Interface
ICC CONNECTOR
ICCDATA
ICCCLK
RESET
VDD
HE10 CONNECTORTYPE
APPLICATION
POWER SUPPLY
1
246810
975 3
PROGRAMMING TOOL
ICC CONNECTOR
APPLICAT ION BOARD
ICC C a ble
OPTIONAL
(See No te 3)
ST7
C
L2
C
L1
OSC1
OSC2
OPTIONAL
See Note 1
See Notes 1 and 5
See Note 2
APPLICATION
RESET SOURCE
APPLICATION
I/O
(See No te 4)
1
ST7LITE2
14/131
FLASH PROGRAM MEMORY (Cont’d)
4.5 Memory Protection
There are two different types of memory protection: Read Out Protection and Write/Erase Protection which can be applied individually.
4.5.1 Read out Protection
Read out protection, when select ed, makes it impossible to extract the memory content from the
microcontroller, thus preventing piracy. Both program and data E
2
memory are protected.
In flash devices, this protection is removed by reprogramming the option. In this case, both program and data E
2
memory are automatically
erased and the device can be reprogrammed .
Read-out protection selection depends on the de-
vice type:
– In Flash dev ices it is enabled and remo ved
through the FMP_R bit in the option byte.
– In ROM devices it is enabled by mask option
specified in the Option List.
4.5.2 Flash Write/Erase Protection
Write/erase protection, when set, makes it impossible to both overwrite and erase program mem ory. It does not apply to E
2
data. Its purpose is to
provide advanced security to applications and prevent any change bei ng made to the m emory content.
Warning: Once set, Write/erase protection can
never be removed. A write-protected flash device
is no longer reprogrammable.
Write/erase protection is enabled through the
FMP_W bit in the option byte.
4.6 Related Documentation
For details on Flash program ming and ICC protocol, refer to the ST7 Flash Programming Reference Manual and to the ST7 ICC Protocol Re ference Manual
.
4.7 Register Description
FLASH CONTROL/STATUS REGISTER (FCSR)
Read/Write
Reset Value: 000 0000 (00h)
1st RASS Key: 0101 0110 (56h)
2nd RASS Key: 1010 1110 (AEh)
Note: This register is reserved for programming
using ICP, IAP or oth er programming methods. It
controls the XFlash programming and eras ing operations.
When an EPB or another programming tool is
used (in socket or ICP m ode), the RASS key s are
sent automatically.
70
00000OPTLATPGM
1
ST7LITE2
15/131
5 DATA EEPROM
5.1 INTRODUCTION
The Electrically Erasable Programmable Read
Only Memory can be used as a non volatile backup for storing data. Using the EEPROM requires a
basic access protocol described in this chapter.
5.2 MAIN FEATURES
■ Up to 32 Bytes programmed in the same cycle
■ EEPROM mono-voltage (charge pump)
■ Chained er ase and progr ammi ng cycle s
■ Intern a l c ont rol of the global programming cycl e
duration
■ WAIT mode management
■ Readout protection against piracy
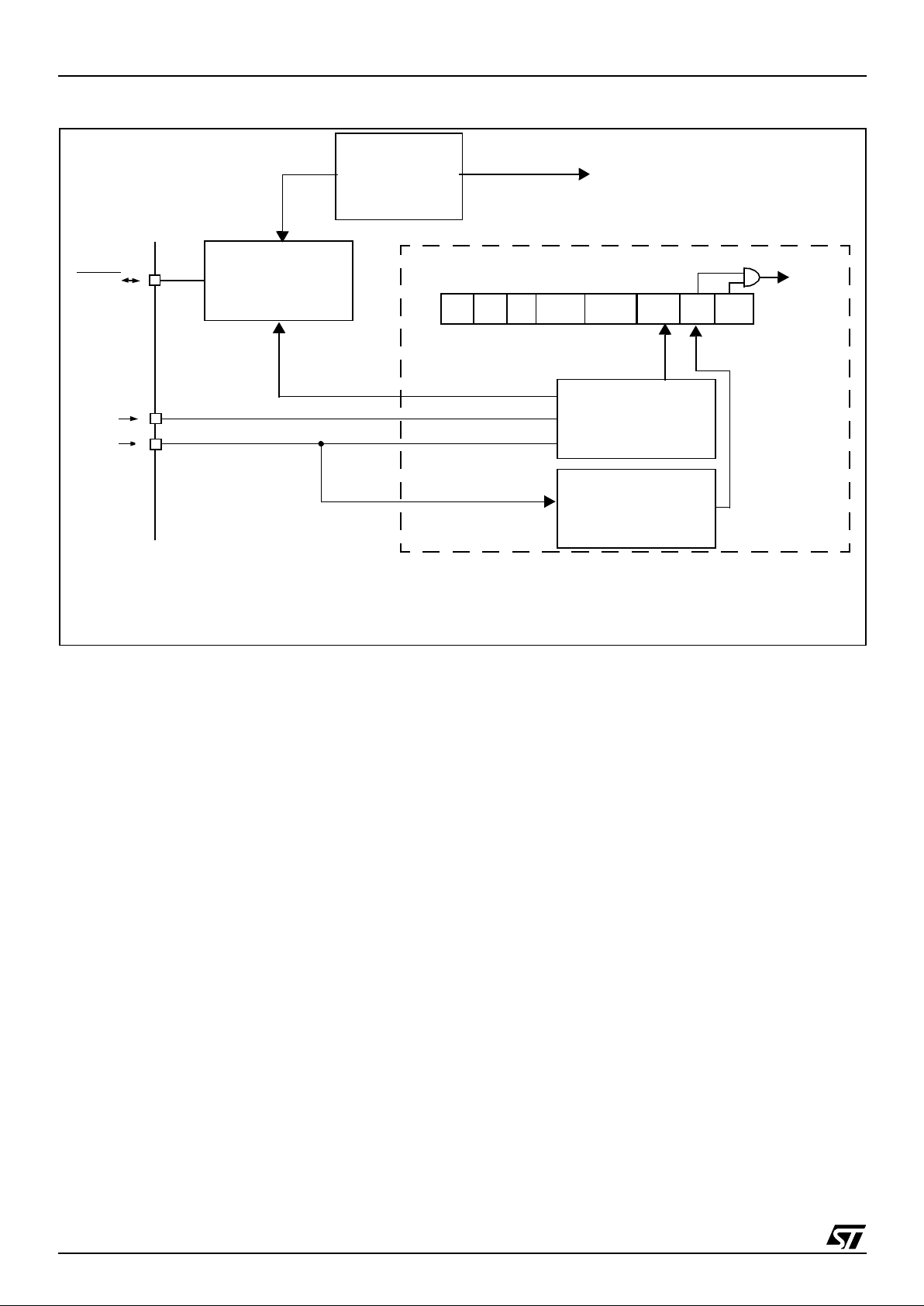
Figure 6. EEP ROM Block D ia gram
EECSR
HIGH VOLTAGE
PUMP
0 E2LAT00 0 0 0 E2PGM
EEPRO M
MEMORY MA TRIX
(1 ROW = 32 x 8 BITS)
ADDR ESS
DECODER
DATA
MULTIPLEXER
32 x 8 BITS
DATA LATCHES
ROW
DECODE R
DATA BUS
4
4
4
128128
ADDRESS BU S
1
ST7LITE2
16/131
DATA EEPROM (Cont’d)
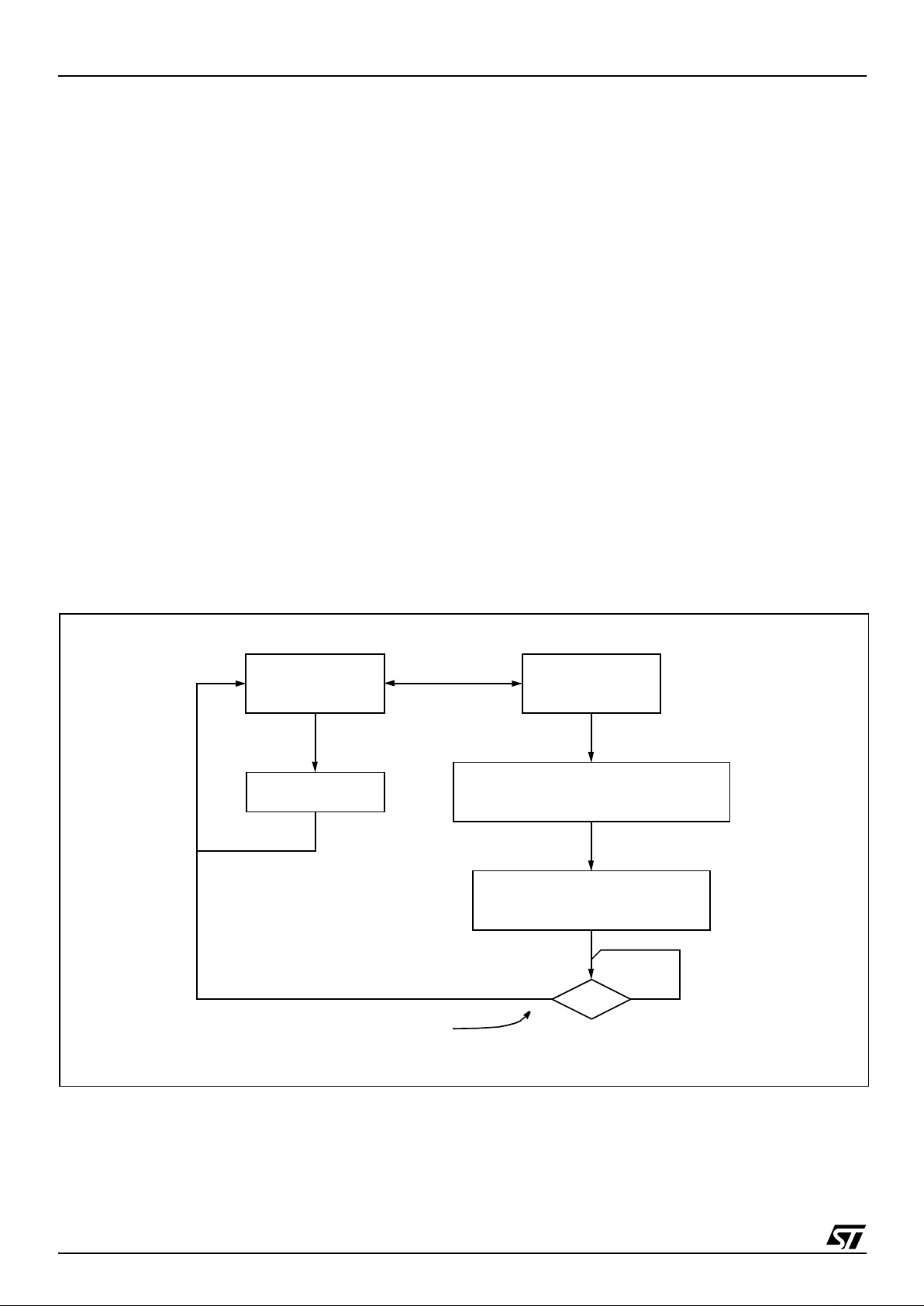
5.3 MEMORY ACCESS
The Data EEPROM memory read/write access
modes are co ntr olle d by th e E2LAT b it of t he EEPROM Control/Status register (EECSR). The flowchart in Figure 7 describes these different memory
access modes.
Read Operation (E2L AT=0 )
The EEPROM can be read as a normal ROM location when the E2LAT bit of the EEC SR register is
cleared. In a read cycle, the byte to be accessed is
put on the data bus in less t han 1 CPU clock cycl e.
This means that reading data from EEPROM
takes the same time as reading data from
EPROM, but this memory canno t be used to execute machine code.
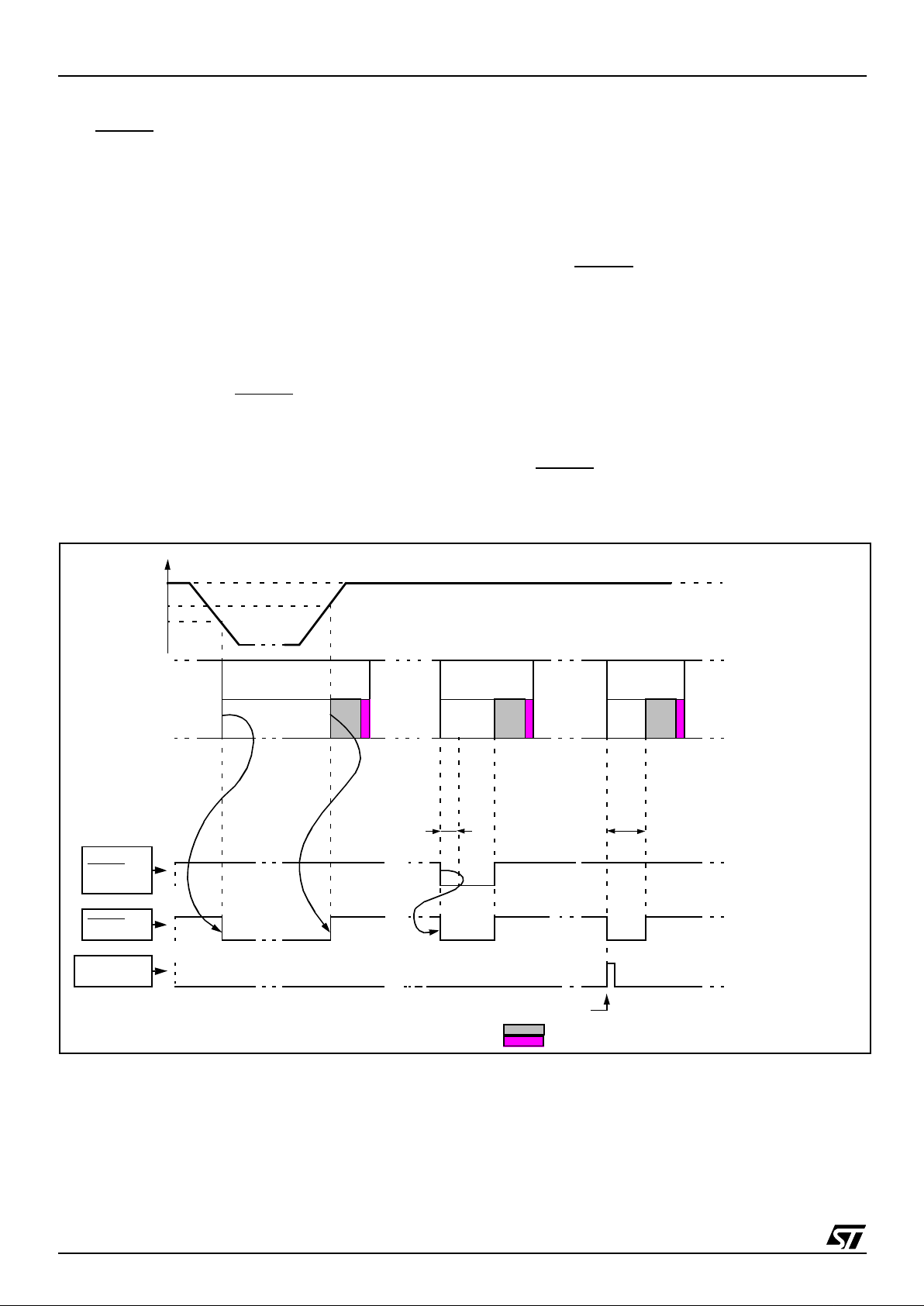
Write Operation (E2LAT=1)
To access the write mode, the E2LAT bit has to be
set by software (the E2PGM bit remains cleared).
When a write access to the EEPROM area occurs,
the value is latched inside the 32 dat a latches according to its address.
When PGM bit is set by the software, all the previous bytes written in the data latches (up to 32) are
programmed in the EEP ROM cells. The effective
high address (row) is determined by the last E EPROM write sequence. To avoid wrong programming, the user must take care that all the bytes
written between two programming sequences
have the same high address: only the five Least
Significant Bits of the address can change.
At the end of the programming cycle, the PGM and
LAT bits are cleared simultaneously.
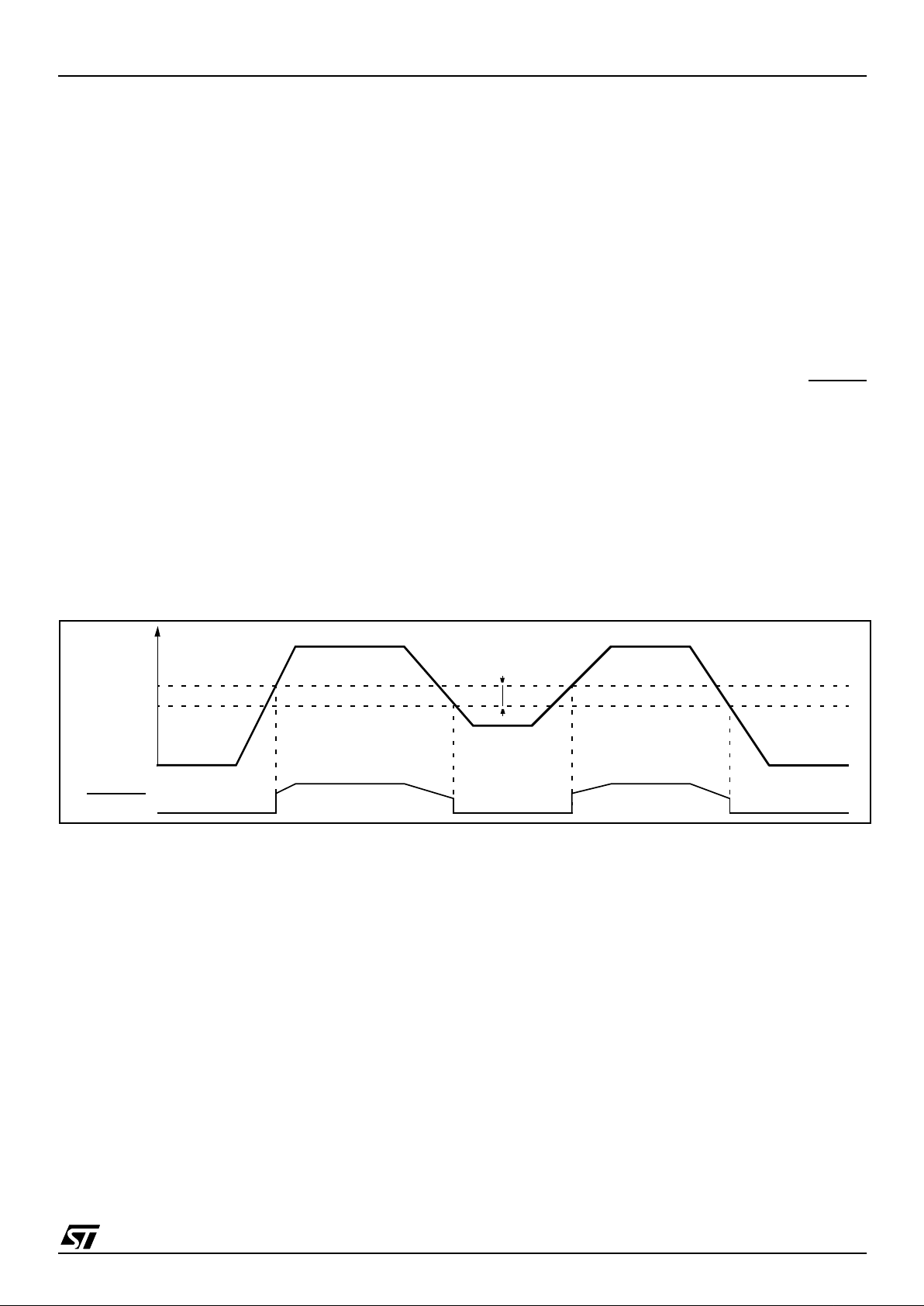
Note: Care should be taken during the programming cycle. Writing to the same memory location
will over-program the memory (logical AND between the two w rite ac cess d ata result) because
the data latches are on ly cleared at t he end of the
programming cycle and by the fall ing edge of the
E2LAT bit.
It is not possible to read the latched data.
This note is ilustrated by the Figure 9.
Figure 7. Dat a EEP R OM Program m i ng Fl owchart
READ MODE
E2LAT=0
E2PGM=0
WRITE M ODE
E2LAT=1
E2PGM = 0
REA D BYTES
IN EEPROM AREA
WRITEUPTO32BYTES
IN EEPROM AREA
(with the same 11 MSB of the address)
START PROGR AMM I NG CY CL E
E2LAT=1
E2PGM=1 (set by software)
E2LAT
01
CLEARED BY HARDWARE
1
ST7LITE2
17/131
DATA EEPROM (Cont’d)
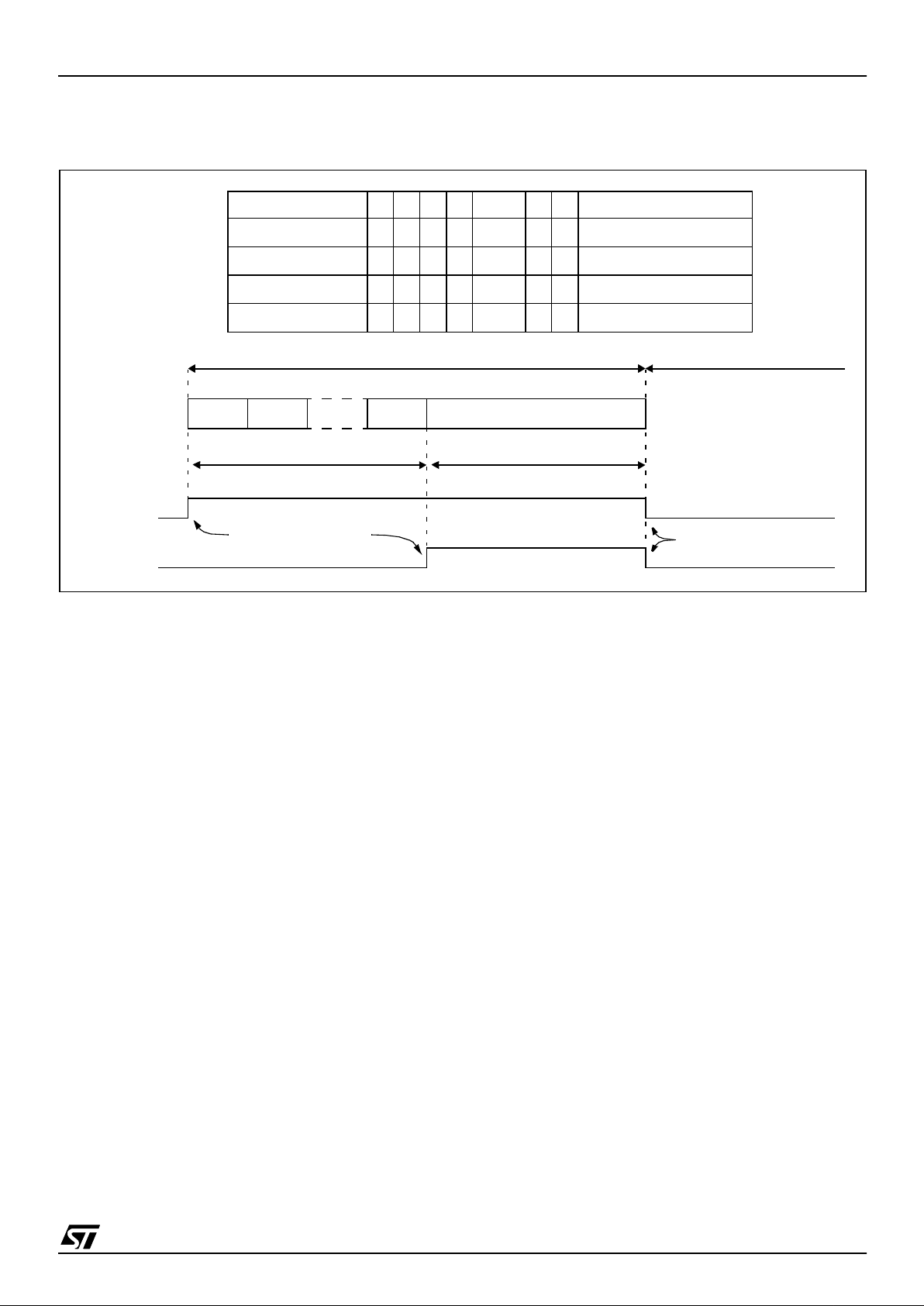
Figure 8. Dat a E
2
PROM Write Operation
Note: If a programming cycle is interrupted (by software or a reset action), the integrity of the data in mem-
ory is not guaranteed.
Byte 1 Byte 2 Byte 32
PHASE 1
Programming cycle
Read operation impossible
PHASE 2
Read operation possible
E2LAT bit
E2PGM bit
Writing data latches Waiting E2PGM and E2LAT to fall
Set by USER applicatio n
Cleared by hardware
⇓
Row / Byte
⇒
0 1 2 3 ... 30 31 Physical Address
0
00h...1Fh
1
20h...3Fh
...
N
Nx20h...Nx20h+1Fh
ROW
DEFINITION
1
ST7LITE2
18/131
DATA EEPROM (Cont’d)
5.4 POWER SAVI N G MO DES
Wait mode
The DATA EEPROM can enter WAIT mode on execution of the WFI instruction of the m icrocontroller or when the microcontroller enters Active-HALT
mode.The DATA EEPROM will immediately enter
this mode if there is no programming i n progress,
otherwise the DATA EEPROM will finish the c ycle
and then enter WAIT mode.
Active-Halt mode
Refer to Wait mode.
Halt mode
The DATA EEPROM immediately enters HALT
mode if the microcontroller ex ecutes the HALT i nstruction. Therefore the EEPROM will stop the
function in progress, and data may be corrupted.
5.5 ACCESS ERROR HANDLING
If a read access occurs while E2LAT=1, then the
data bus will not be driven.
If a write access occurs while E2LAT=0, t hen the
data on the b us w ill n ot b e latc hed.
If a programming cycl e is interrupted (by software/
RESET action), the memory data will not be guaranteed.
5.6 Data EEPROM Read-out Protection
The read-out protection is enabled through an option bit (see section 15.1 on page 123).
When this option is selected, the programs and
data stored in the EEPROM memory are protected
against read-out piracy (including a re-write protection). In Flash devices, when this protection is
removed by reprogram ming t he Option Byte, the
entire Program memeory a nd EEPROM is fi rst automatically erased.
Note: Both Pr ogram Me mory and da ta EEPROM
are protected using the same option bit.
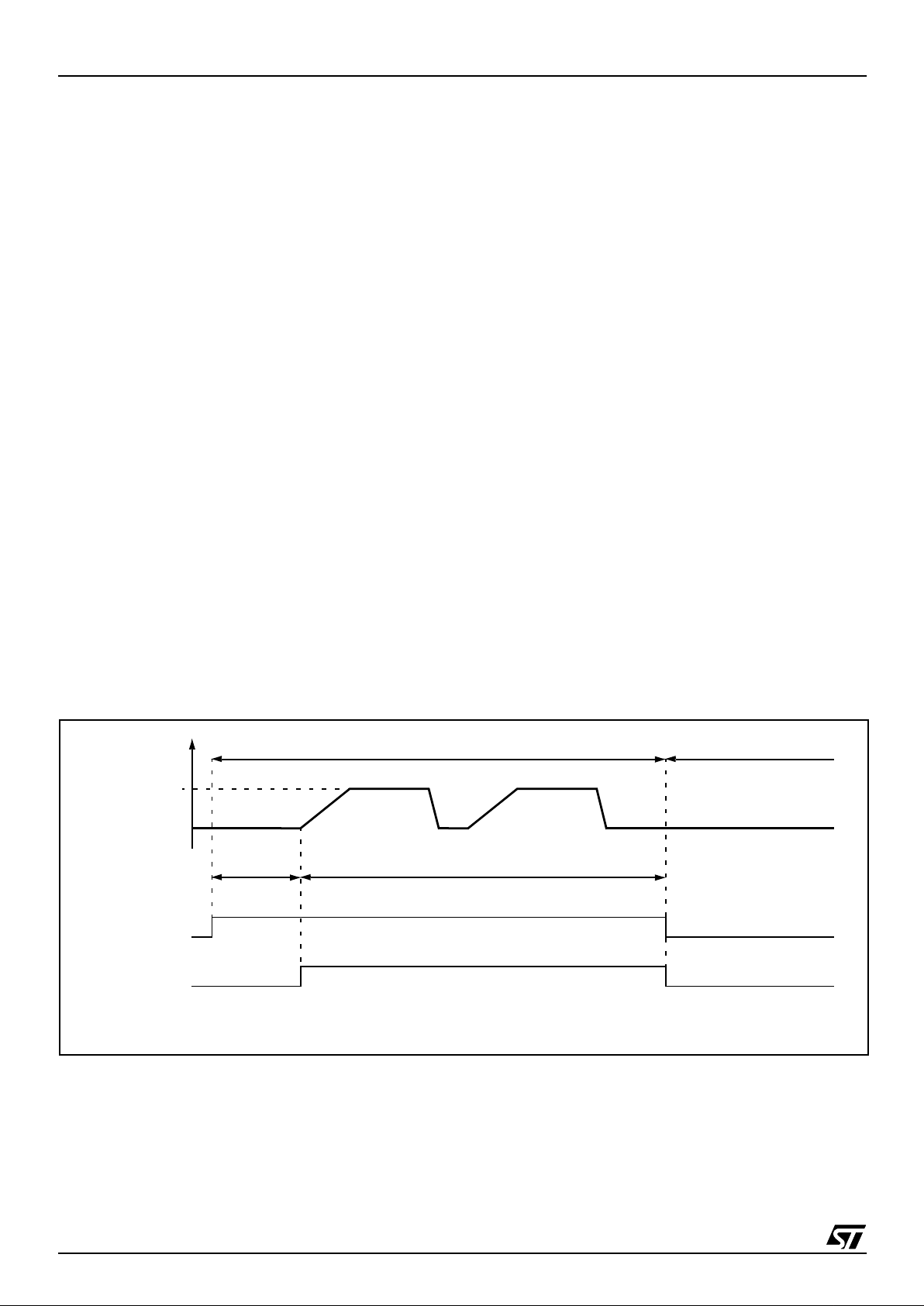
Figure 9. Dat a EEP R OM Program m i ng C yc l e
LAT
ERASE CYCLE WRITE CYCLE
PGM
t
PROG
READ OPERATION NOT POSSIBLE
WRITEOF
DATA LATCHES
READ OPERATION POSSIBLE
INTERNAL
PROGRAMMING
VOLTAGE
1
ST7LITE2
19/131
DATA EEPROM (Cont’d)
5.7 REGISTER DESCRIPTION
EEPROM CONTROL/STATUS REGISTER (EEC-
SR)
Read/Write
Reset Value: 0000 0000 (00h)
Bits 7:2 = Reserved, forced by hardware to 0.
Bit 1 = E2LAT
Latch Access Transfe r
This bit is set by software. It is cleared by hardware at the end of the programming cycle. It can
only be cleared by software if the E2PGM bit is
cleared.
0: Read mode
1: Write mode
Bit 0 = E2PGM
Programming control and status
This bit is set by software to begin the programming
cycle. At the end of the programming cycle, this bit
is cleared by hardware.
0: Programming finished or not yet started
1: Programming cycle is in progress
Note: if the E2PGM bit is cleared during the programming cycle, the m emory data is not guaranteed
Table 3. DATA EEPROM Register M ap and Reset Values
70
000000E2LATE2PGM
Address
(Hex.)
Register
Label
76543210
0030h
EECSR
Reset Value
000000
E2LAT0E2PGM
0
1
ST7LITE2
20/131
6 CENTRAL PRO CESSING UNIT
6.1 INTRODUCTION
This CPU has a full 8-bit architecture and contains
six internal registers allowing efficient 8-bit data
manipulation.
6.2 MAIN FEATURES
■ 63 basic instructions
■ Fast 8-bit by 8-bit multiply
■ 17 main addressing modes
■ Two 8-bit index registers
■ 16-bit stack pointer
■ Low po wer modes
■ Maskable hardware interrupts
■ Non-maskable software interrupt
6.3 CPU REGISTERS
The 6 CPU registers shown in Figure 10 are not
present in the memory mapping and are accessed
by specific instructions.
Accumulator (A)
The Accumulator is an 8-bit general purpose register used to hold operands and the res ults of the
arithmetic and logic calculations and to manipulate
data.
Index Registers (X and Y)
In indexed addressing modes, these 8-bit registers
are used to create either effective addresses or
temporary storage areas for data manipulation.
(The Cross-Assembler generates a precede instruction (PRE) to indicate that the following instruction refers to the Y register.)
The Y register is not affected by the interrupt automatic procedures (not pushed to and popped from
the stack).
Program Counter (PC)
The program counter is a 16-bit register containing
the address of the next instruction to be executed
by the CPU. It is made of two 8-bit registers PCL
(Program Counter Low which is the LSB) and PCH
(Program Counter High which is the MSB).
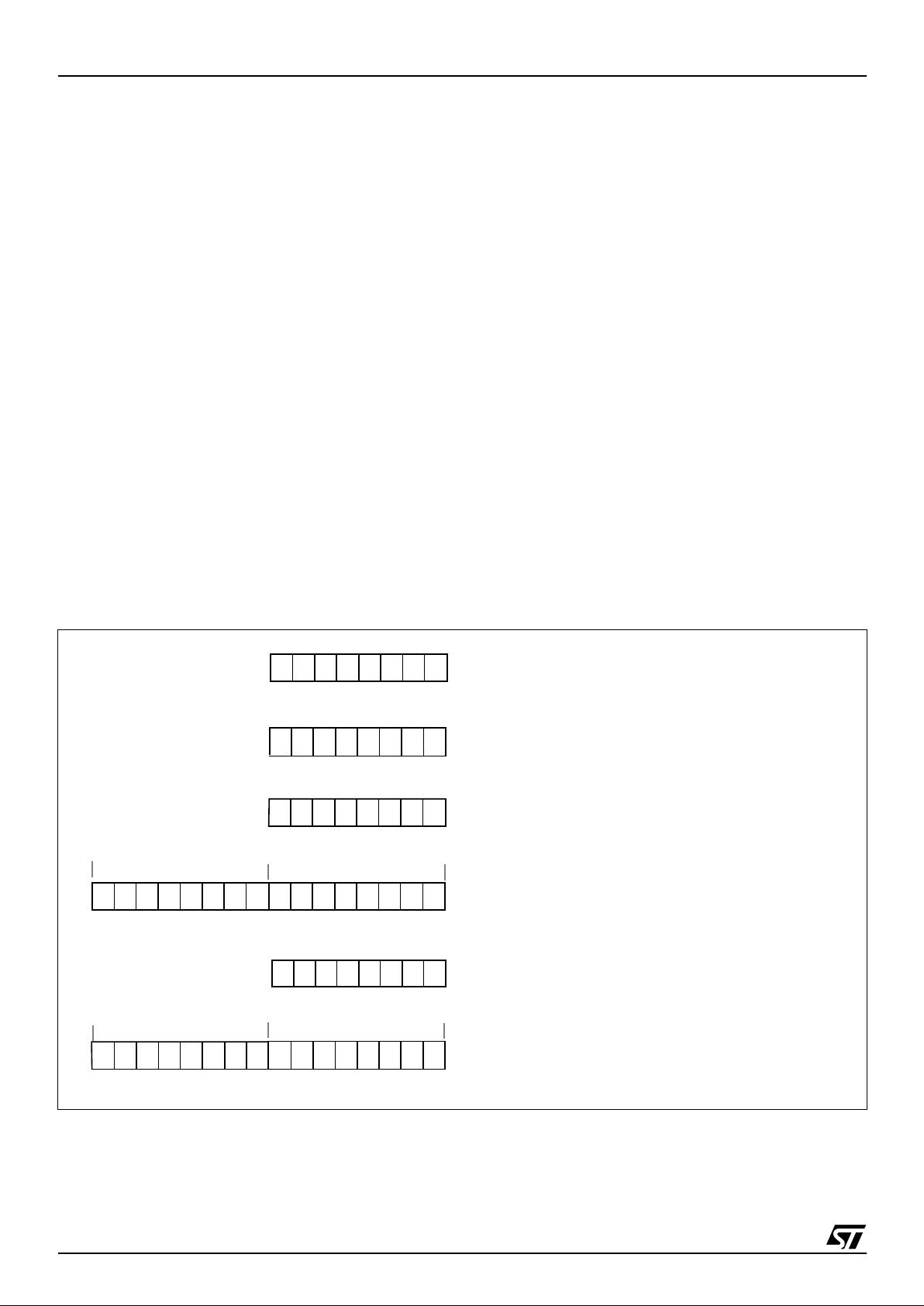
Figure 10. CPU Registers
ACCUMULATOR
X INDEX REGISTER
Y INDEX REGISTER
STACK POINTER
CONDITION CODE REGISTER
PROGRAM COUNTER
70
1C11HI NZ
RESET VALUE = RESET VECTOR @ FFFEh-FFFFh
70
70
70
0
7
15 8
PCH
PCL
15
8
70
RESET VALUE = STACK HIGHER ADDRESS
RESET VALUE =
1X11X1XX
RESET VALUE = XXh
RESET VALUE = XXh
RESET VALUE = XXh
X = Undefined Value
1
ST7LITE2
21/131
CPU REGISTERS (Cont’d)
CONDITION CODE REGISTER (CC)
Read/Write
Reset Value: 111x1xxx
The 8-bit Condition Code regist er contains the i nterrupt mask and four flags repres entative of the
result of the instruction just executed. This register
can also be handled by the PUSH and POP instructions.
These bits can be individually tested and/or controlled by specific instructions.
Bit 4 = H
Half carry
.
This bit is set by hardware when a carry occurs between bits 3 and 4 of t he ALU during an ADD or
ADC instruction. It is reset by hardware during the
same instructions.
0: No half carry has occurred.
1: A half carry has occurred.
This bit is tested using the JRH or JRNH instruction. The H bit is useful in BCD arithmetic subroutine s .
Bit 3 = I
Interrupt mask
.
This bit is set by hardware when entering in interrupt or by software to disable all inte rrupts except
the TRAP software interrupt. This bit is cleared by
software.
0: Interrupts are enabled.
1: Interrupts are disabled.
This bit is controlled by the RIM, SIM and IRET instructions and is tested by the JRM and JR NM instructions.
Note: Interrupts requested while I is set are
latched and can be process ed when I is cleared.
By default an interrupt routine is not in terruptable
because the I bi t is set by h ardware at the start of
the routine and reset by the IRET instruction at the
end of the routine. If the I bit is cleared by software
in the interrupt routine, pending interrupts are
serviced regardless of the priority level of the current interrupt routine.
Bit 2 = N
Negative
.
This bit is set and cleared by hardware. It is representative of the result sign of the last arithm etic,
logical or data manipulation. It is a copy of the 7
th
bit of the result.
0: The result of the last operation is positive or null.
1: The result of the last operation is negative
(i.e. the most significant bit is a logic 1).
This bit is accessed by the JRMI and JRPL instructions.
Bit 1 = Z
Zero
.
This bit is set and cleared by hardware. This bit indicates that the result of the last arithmetic, logical
or data manipulation is zero.
0: The result of the last operation is different from
zero.
1: The result of the last operation is zero.
This bit is accessed by the JREQ and JRNE test
instructions.
Bit 0 = C
Carry/borrow.
This bit is set and cleared b y hardware and software. It indicates an overflow or an un derflow has
occurred during the last arithmetic operation.
0: No overflow or underflow has occurred.
1: An overflow or underflow has occurred.
This bit is driven by the SCF and RCF instructions
and tested by the JRC and JRNC instructions. It i s
also affected by the “bit test and branch”, shift and
rotate instructions.
70
111HINZC
1
ST7LITE2
22/131
CPU REGISTERS (Cont’d)
STACK POINTER (SP)
Read/Write
Reset Value: 01FFh
The Stack Pointer is a 16-bit register which is always pointing to the next free location in the stack.
It is then decremented after data has been pushed
onto the stack and incremented before data is
popped from the stack (see Figure 11).
Since the stack is 128 bytes deep, the 9 most significant bits are forced by hard ware. Following a n
MCU Reset, or after a Reset Stack Pointer instruction (RSP), the Stack Pointer contains its reset value (the SP6 to SP0 bits are set) which is the stack
higher address.
The least significant byte of the Stack Pointer
(called S) can be directly accessed by a LD instruction.
Note: When the lower limit is exceeded, the Stack
Pointer wraps around to the stack upper limit, without indicating the stack overflow. The previously
stored information is then o verwritten and therefore lost. The stack also wraps in case of an underflow.
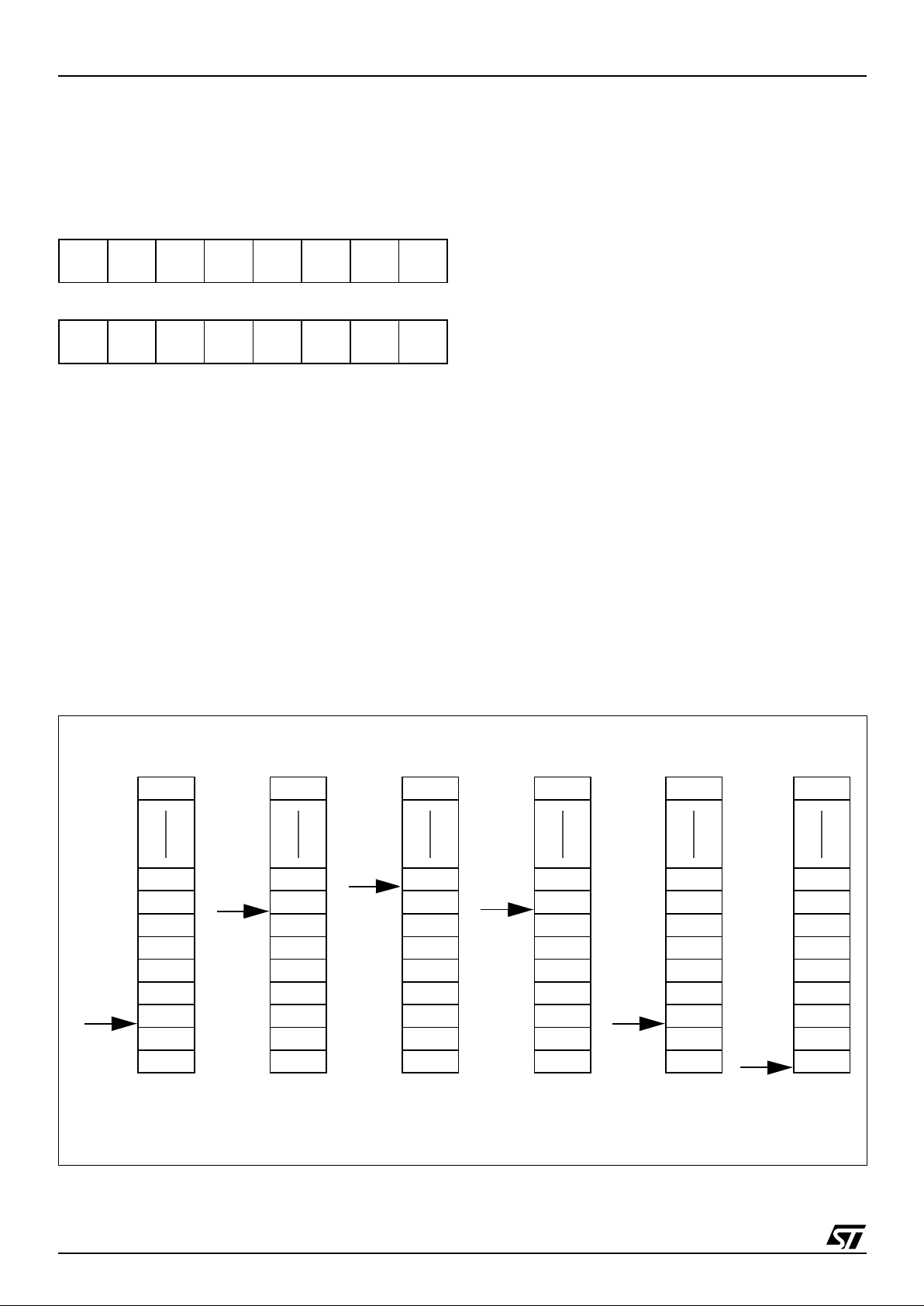
The stack is used to sav e the return address during a subroutine call and the CPU context during
an interrupt. The user may also directly manipulate
the stack by means of the PUSH and POP instructions. In the case of an interrupt, the PCL is stored
at the first location po inted t o by t he SP. Th en t he
other registers are stored in the next locations as
shown in Figure 11.
– When an interrupt is received, the SP is decre-
mented and the context is pushed on the stack.
– On return from interrupt, the SP is incremented
and the context is popped from the stack.
A subroutine call occupies two locations and an interrupt five locat ion s i n the stack ar ea.
Figure 11. Stack Manipulation Examp le
15 8
00000001
70
1 SP6 SP5 SP4 SP3 SP2 S P1 SP0
PCH
PCL
SP
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
SP
Y
CALL
Subroutine
Interrupt
Event
PUSH Y POP Y IRET
RET
or RSP
@ 01FFh
@ 0180h
Stack Higher Address = 01FFh
Stack Lower Address =
0180h
1
ST7LITE2
23/131
7 SUPPLY, RESET AND CLOCK MANAGEMENT
The device includes a range of utility features for
securing the application in critical situations (for
example in case of a power brown-out), and reducing the number of external components.
Main features
■ Clock Management
– 1 MHz internal RC oscillator (enabled by op-
tion byte, available on ST7LITE25 and
ST7LITE29 devices only)
– 1 to 16 MHz or 32kHz External crystal/ceramic
resonator (selected by option byte)
– External Clock Input (enabled by option byte)
– PLL for multiplying the frequency by 8 or 4
(enabled by option byte)
– For clock ART counter on ly: PLL32 for multi-
plying the 8 MHz f requency by 4 (enabled by
option byte). The 8 MHz input frequency is
mandatory and can be obtained in the following ways:
–1 MHz RC + PLLx8
–16 MHz external clock (internally divided
by 2)
–2 MHz. external clock (internally divided by
2) + PLLx8
–Crystal oscillator with 16 MHz output fre-
quency (internally divided by 2)
■ Reset Sequence Manager (RSM)
■ System Integrity Management (SI)
– Main supply Low voltage detection (LVD) with
reset generation (enabled by option byte)
– Auxiliary Voltage detector (AVD) with interrupt
capability for monitoring the main suppl y (enabled by option byte)
7.1 INTERNAL RC OSCILLATOR ADJUSTMENT
The device contains an internal RC oscillator with
an accuracy of 1% for a given device, temperature
and voltage range (4.5V-5.5V). It must be calibrated to obtain the frequency required in the appl ication. This is done by software writing a calibration
value in the RCCR (RC Control Register).
Whenever the microcontroller i s reset, the RCCR
returns to its def ault value (F F h), i.e. each time the
device is reset, the calibration value must be loaded in the RCCR. Predefined calibration values are
stored in EEPROM for 3 and 5V V
DD
supply volt-
ages at 25°C, as shown in the following table.
Note:
– See “ELECTRICAL CHARACTERISTICS” on
page 91. for more information on the frequency
and accuracy of the RC oscillator.
– To improve clock stability, it is recommended to
place a decoupling capacitor between the V
DD
and V
SS
pins.
– These two byte s are syst ematicall y programmed
by ST, including on FASTROM devices. Consequently, customers intending to use FASTROM
service must not use these two bytes.
– RCCR0 and RCCR1 calibration values will be
erased if the read-out protection bit is reset after
it has been set. See “Read out Protection” on
page 14.
Caution: If the voltage or temperature conditions
change in the application, the frequency may need
to be recalibrated.
Refer to application note AN1324 f or information
on how to calibrate the RC frequency using an external reference signal.
7.2 PHASE LOCKED LOOP
The PLL can be used to multiply a 1MHz frequency from the RC oscillator or the external clock by 4
or 8 to obtain f
OSC
of 4 or 8 MHz. The PLL is enabled and the multiplication factor of 4 or 8 is selected by 2 option bits.
– The x4 PLL is intended for operation with V
DD
in
the 2.4V to 3.3V range
– The x8 PLL is intended for operation with V
DD
in
the 3.3V to 5.5V range
Refer to Section 15.1 for the option byte descrip-
tion.
If the PLL is disabled and the RC oscillator is enabled, then f
OSC =
1MHz.
If both the RC oscillator and the PLL are disabled,
f
OSC
is driven by the external clock.
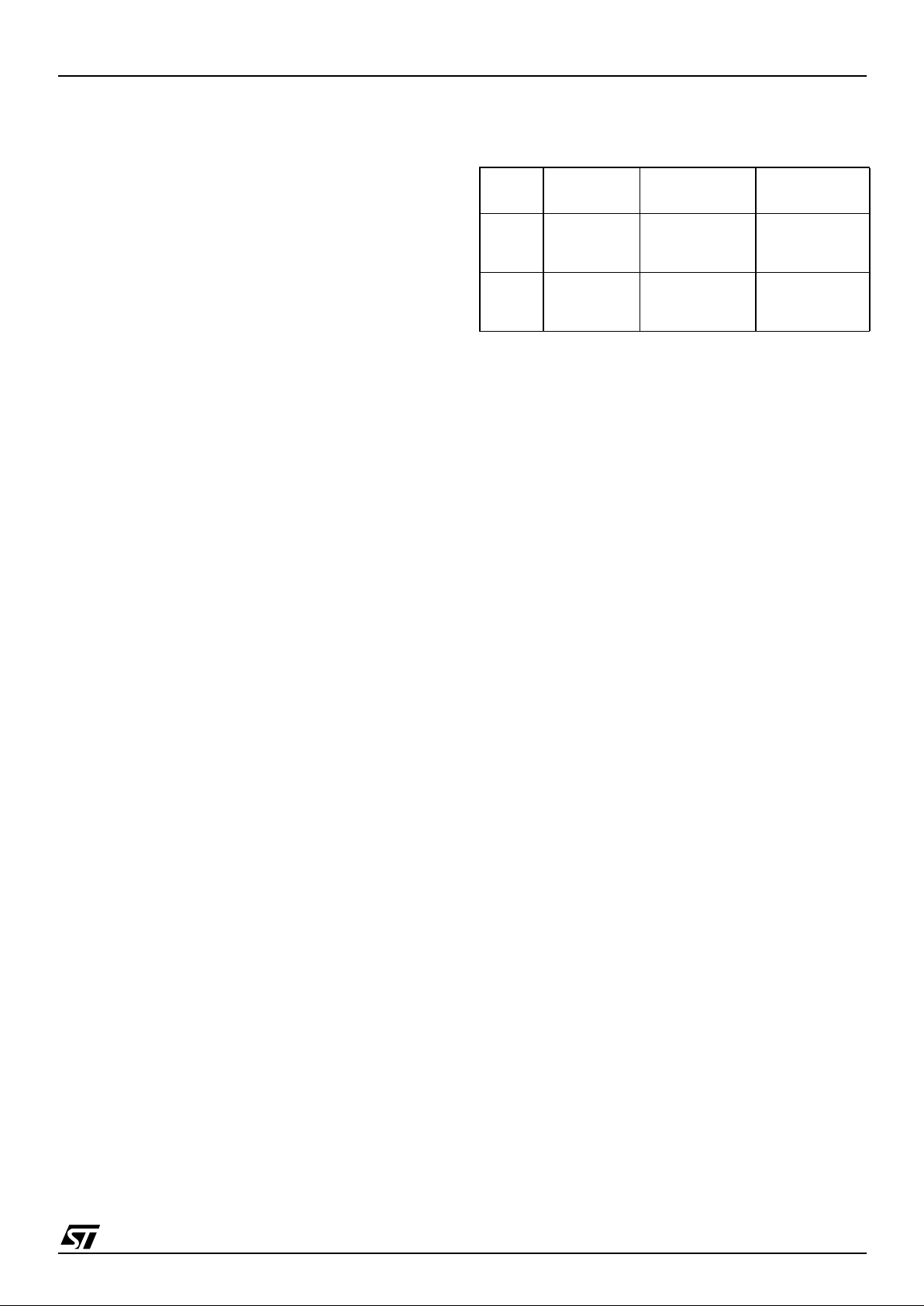
RCCR Conditions
ST7LITE29
Address
ST7LITE25
Address
RCCR0
V
DD
=5V
T
A
=25°C
f
RC
=1MHz
1000h
and FFDEh
FFDEh
RCCR1
V
DD
=3V
T
A
=25°C
f
RC
=700KHz
1001h
and FFDFh
FFDFh
1
ST7LITE2
24/131
PHASE LOCKED LOOP (Cont’d)
Figure 12. PLL Output Frequency Timing
Diagram
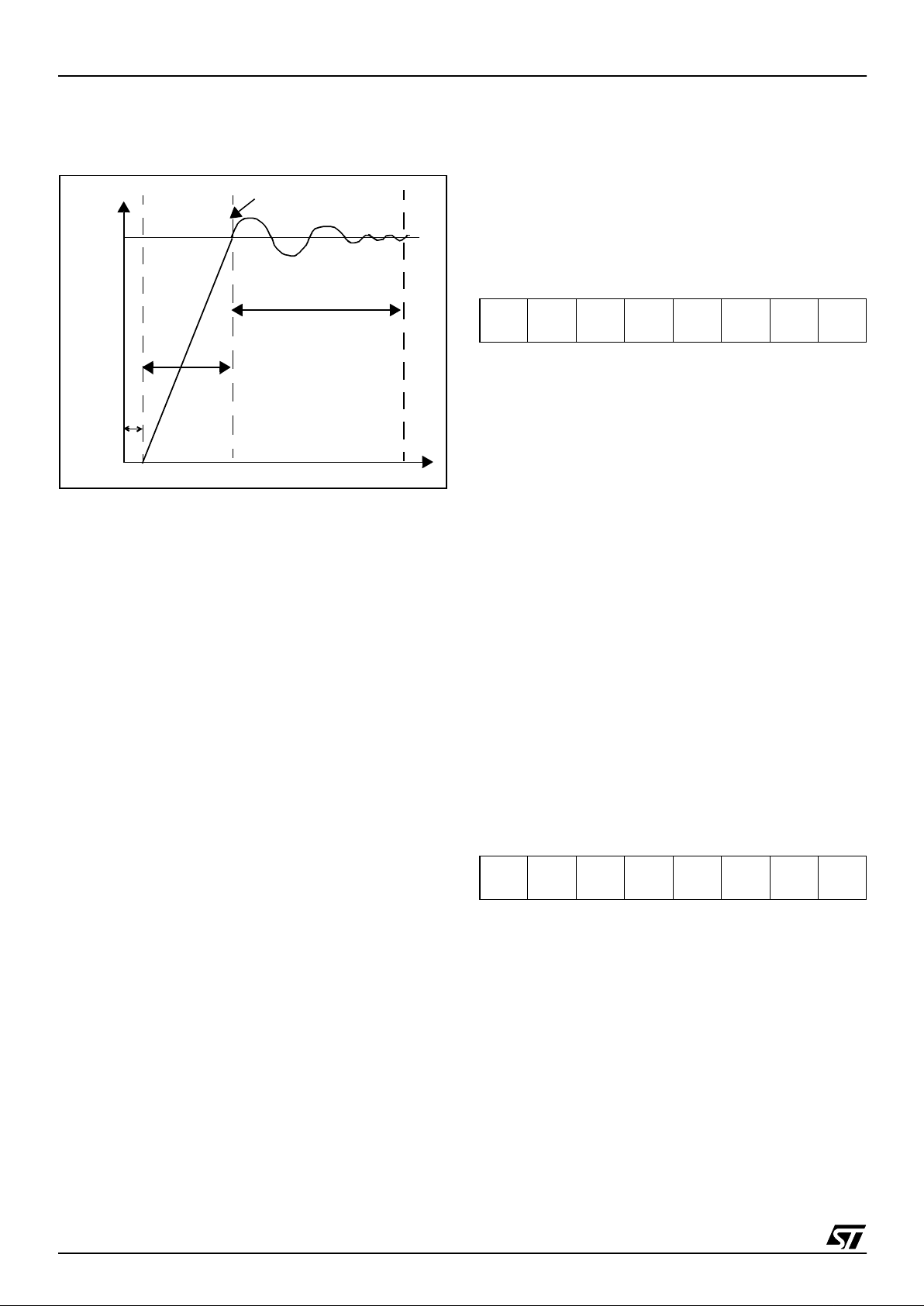
When the PLL is started, after reset or wakeup
from Halt mode or AWUFH mode, it outputs the
clock after a delay of t
STARTUP
.
When the PLL output signal reaches the operating
frequency, the LOCKED bit in the SICSCR register
is set. Full PLL accuracy (ACC
PLL
) is reached after
a stabilization time of t
STAB
(see Figure 12 and
13.3.4 Internal RC Oscillator and PLL)
Refe r to section 7.6.4 on page 33 for a description
of the LOCKED bit in the SICSR register.
7.3 REGISTER DESCRIPTION
MAIN CLOCK CONTROL/STATUS REGISTER
(MCCSR)
Read / Write
Reset Value: 0000 0000 (00h)
Bits 7:2 = Reserved, must be kept cleared.
Bit 1 = MCO
Main Clock Out enable
This bit is read /write by software and cleared by
hardware after a reset. This bit allows to enable
the MCO output clock.
0: MCO clock disabled, I/O port free for general
purpose I/O.
1: MCO clock enabled.
Bit 0 = SMS
Slow Mode select
This bit is read /write by software and cleared by
hardware after a reset. This bit selects the input
clock f
OSC
or f
OSC
/32.
0: Normal mode (f
CPU = fOSC
1: Slow mode (f
CPU = fOSC
/32)
RC CONTROL REGISTER (RCCR)
Read / Write
Reset Value: 1111 1111 (FFh)
Bits 7:0 = CR[7:0]
RC Oscillator Frequency Ad-
justment Bits
These bits must be written immediately after reset
to adjust the RC oscillator frequency and to obtain
an accuracy of 1%. The applica tion can store the
correct value for each voltage range in EEPROM
and write it to this register at start-up.
00h = maximum available frequency
FFh = lowest available frequency
Note: To tune the oscillator, write a series of different values in the register until the correct frequency is reached. The fastest method is to use a dichotomy starting with 80h.
4/8 x
freq.
LOCKED bit set
t
STAB
t
LOCK
input
Output freq.
t
STARTUP
t
70
000000
MCO SMS
70
CR70 CR60 CR50 CR40 CR30 CR20 CR10
CR
0
1
ST7LITE2
25/131
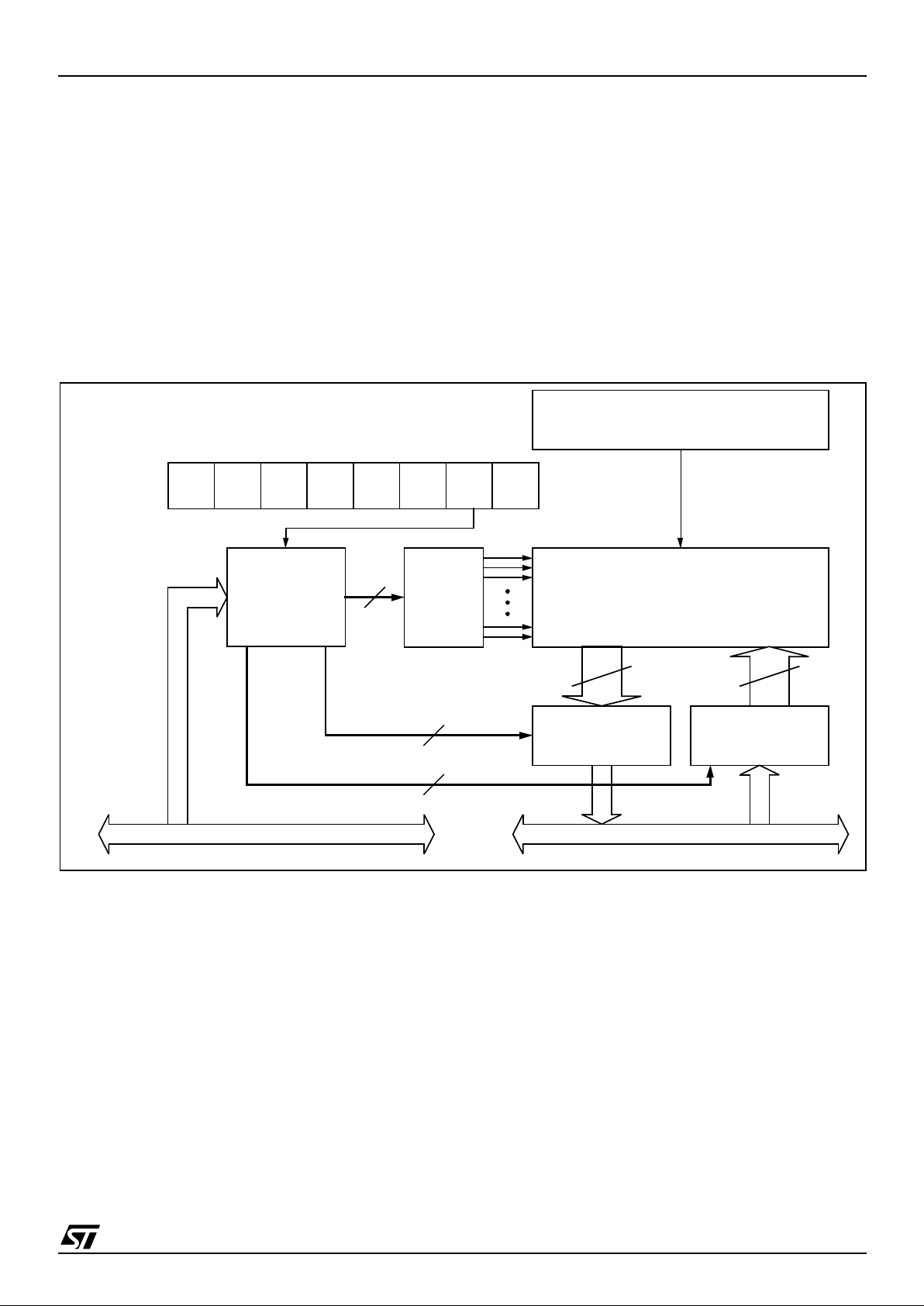
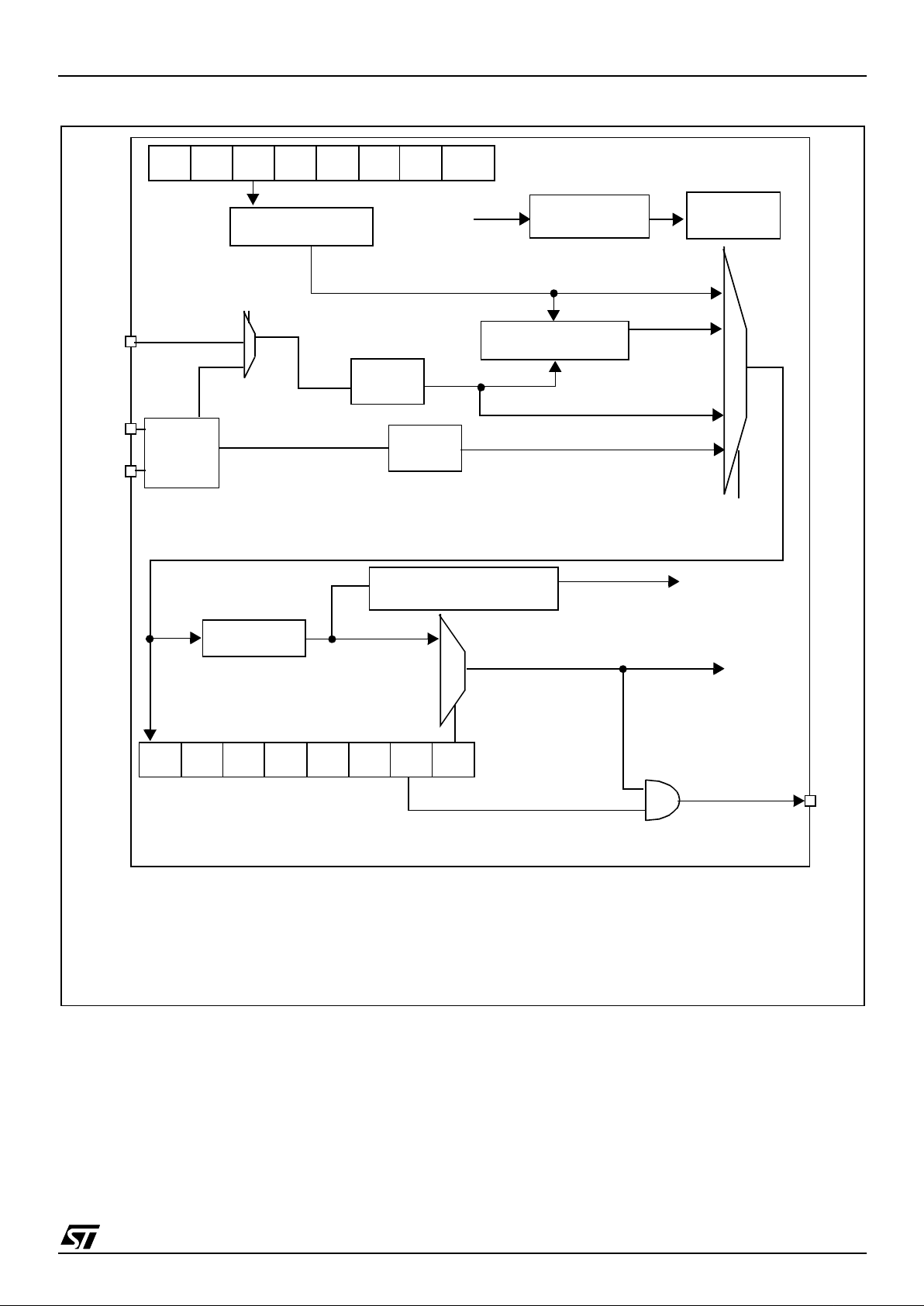
Figure 13. Clock Management Block Diagram
CR4CR7 CR0CR1CR2CR3CR6 CR5 RCCR
f
OSC
MCCSR
SMS
MCO
MCO
f
CPU
f
CPU
TO CPU AND
PERIPHERALS
(1ms timebase @ 8 MHz f
OSC
)
/32 DIVIDER
f
OSC
f
OSC
/32
f
OSC
f
LTIMER
1
0
LITE TIMER 2 COUNTER
8-BIT
AT TIMER 2
12-BIT
PLL
8MHz -> 32MHz
f
CPU
CLKIN
OSC2
CLKIN
Tunable
Oscillator1% RC
PLL 1MHz -> 8MHz
PLL 1MHz -> 4MHz
RC OSC
PLLx4x8
/2
DIVIDER
Option bits
OSC,PLLOFF,
OSCRANGE[2:0]
OSC
1-16 MHZ
or 32kHz
CLKIN
CLKIN
/OSC1
OSC
/2
DIVIDER
OSC/2
CLKIN/2
CLKIN/2
Option bits
OSC,PLLOFF,
OSCRANGE[2:0]
1
ST7LITE2
26/131
7.4 MULTI-OSCILLATOR (MO)
The main clock of the ST7 can be generated by
four different source types coming from the multioscillator block (1 to 16MHz or 32kHz):
■ an external source
■ 5 crystal or ceramic resonator oscillators
■ an internal high frequency RC oscillator
Each oscillator is optimized for a given freq uency
range in terms of consumption and is selectable
through the option byte. The assoc iated hardware
configurations are shown in Table 4. Refer to the
electrical characteristics section for more details.
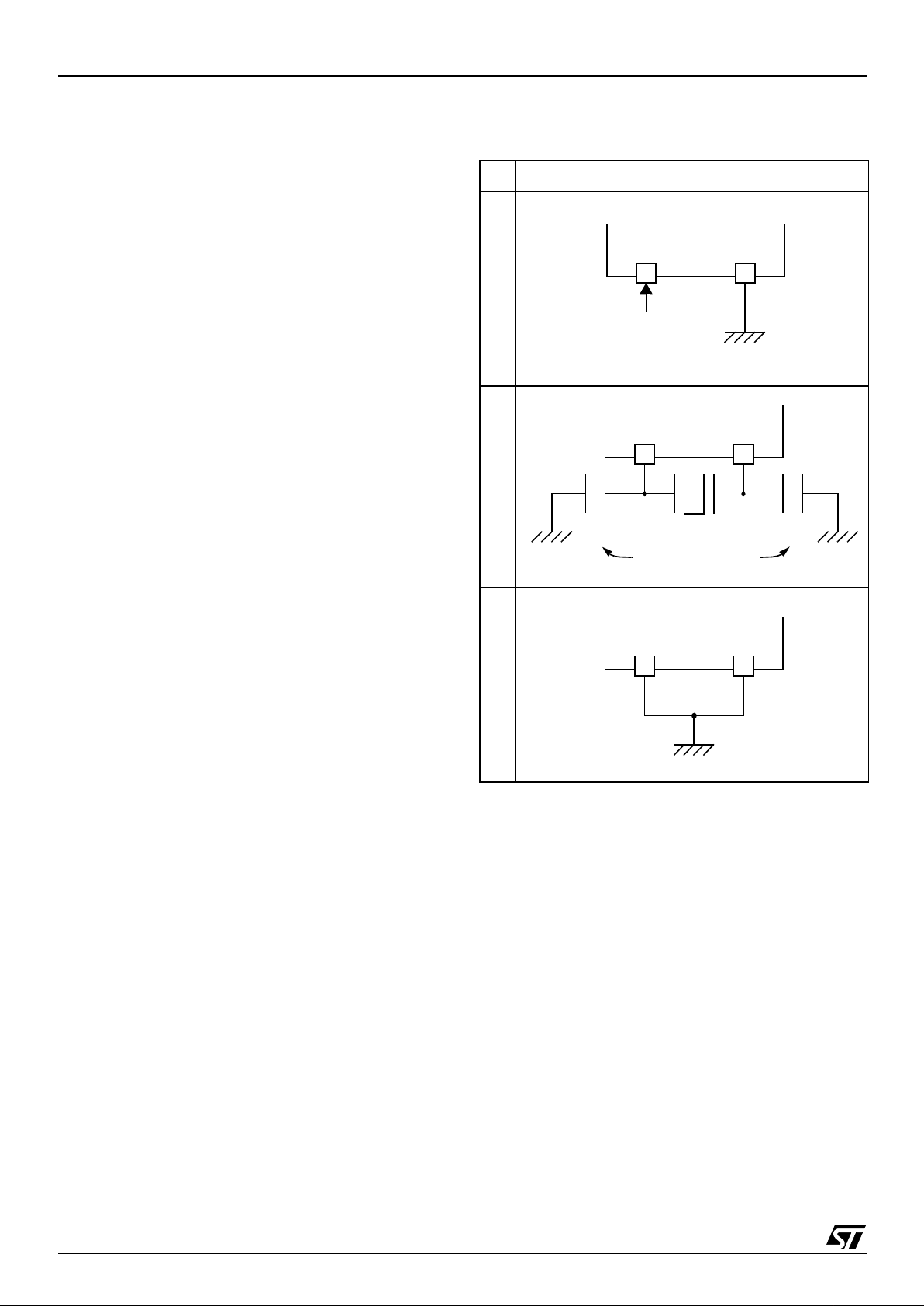
External Clock Source
In this external clock mode, a clock signal (square,
sinus or triangle) with ~50% duty cycle has to drive
the OSC1 pin while the OSC2 pin is tied to ground.
Note: when the Multi-Oscillator is not used, PB4 is
selected by default as external clock.
Crystal/Ceramic Oscillators
This family of oscillators has the advantage of producing a very accurate rate on the main clock of
the ST7. The s election within a list of 4 os cillators
with different frequency ran ges has to be done by
option byte in order to redu ce consumption (refer
to section 15.1 on page 123 for more details on the
frequency ranges). In this mode of the multi-oscillator, the resonator and the load c apacitors have
to be placed as close as possible to t he oscillator
pins in order to minimize output distortion and
start-up stabilization time. The loading capacitance values must be adjusted according to the
selected osci lla tor .
These oscillators are not stopped during the
RESET phase to avoid losing time in the oscillator
start-up phase.
Internal RC Oscillator
In this mode, the tunable 1%RC oscilla tor is use d
as main clock source. The two oscillator pins have
to be tied to ground.
Table 4. ST7 Clock Sources
Hardware Configuration
External ClockCrystal/Ceramic ResonatorsInternal RC Oscillator
OSC1 OSC2
EXTERNAL
ST7
SOURCE
OSC1 OSC2
LOAD
CAPACITORS
ST7
C
L2
C
L1
OSC1 OSC2
ST7
1
ST7LITE2
27/131
7.5 RESET SEQUENCE MANAGER (RSM)
7.5.1 Introd uc tion
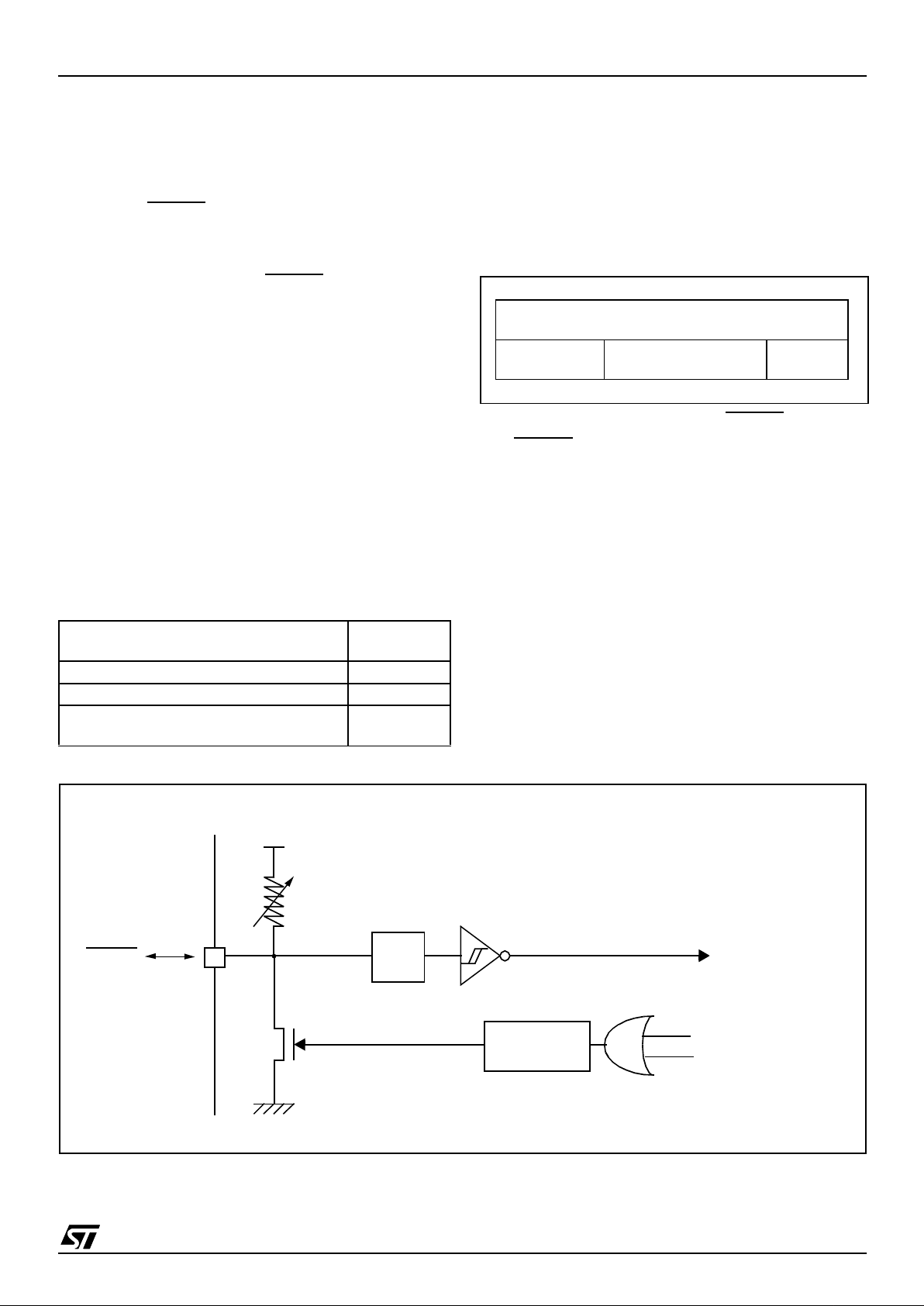
The reset sequence manager in cludes three RESET sources as shown in Figure 15:
■ External RESET source pulse
■ Internal LVD RESET (Low Voltage Detection)
■ Internal WATCHDOG RESET
These sources act on the RESET
pin and it is al-
ways kept low during the delay phase.
The RESET service routine vector is fixed at ad-
dresses FFFEh-FFFFh in the ST7 memory map.
The basic RE SET sequence consists of 3 phases
as shown in Figure 14:
■ Active Phase depending on the RESET source
■ 256 or 40 96 CPU clock cy cle delay (see table
below)
■ RESET vector fetch
The 256 or 4096 CPU clock cycle delay allows the
oscillator to stabilise and ensures that recovery
has taken place from t he Reset st ate. T he short er
or longer clock cycle delay is automatically selected dependi ng on the clock source chosen by option byte:
The RESET vector fetch phase duration is 2 clock
cycles.
If the PLL is en abled by opt ion by te, it ou tpu ts the
clock after an additional delay of t
STARTUP
(see
Figure 12).
Figure 14. RESET Sequence Phases
7.5.2 Async hr onous External RESET
pin
The RESET
pin is both an input and an open-drain
output with integrated R
ON
weak pull-up resistor.
This pull-up has no fixed value but varies in accordance with the input voltage. It
can be pulled
low by external circuitry to reset the device. See
Electrical Characteristic section for more details.
A RESET signal originating from an external
source must have a duration of at least t
h(RSTL)in
in
order to be recognized (see Figure 16). This detection is asynchronous and therefore the MCU
can enter reset state even in HALT mode.
Figure 15. Reset Block Diagram
Clock Source
CPU clock
cycle delay
Internal RC Oscillator 256
External clock (connected to CLKIN pin) 256
External Crystal/Ceramic Oscillator
(connected to OSC1/OSC2 pins)
4096
RESET
Active Phase
INTERNAL RESET
256 or 4096 CLOCK CYCLES
FETCH
VECTOR
RESET
R
ON
V
DD
WATCHDOG RESET
LVD RESET
INTERNAL
RESET
PULSE
GENERATOR
Filter
1
ST7LITE2
28/131
RESET SEQUENCE MANAGER (Cont’d)
The RESET
pin is an asynchronous signal which
plays a major role in EMS performance. In a noisy
environment, it is recommended to follow the
guidelines mentioned in the elect rical characteristics section.
7.5.3 External Power-On RESET
If the LVD is disabled by option byte, to start up the
microcontroller correctly, the user must ensure by
means of an external reset circuit that the reset
signal is held low until V
DD
is over the minimum
level specified for the selected f
OSC
frequency.
A proper reset signal for a slow rising V
DD
supply
can generally be provide d by a n external R C network connected to the RESET
pin.
7.5.4 Internal Low Voltage Detector (LVD)
RESET
Two differe nt RESET sequences caused by the internal LVD circuitry can be distinguished:
■ Power-On RESET
■ Voltage Drop RESET
The device RESET
pin acts as an output that is
pulled low when V
DD<VIT+
(rising edge) or
V
DD<VIT-
(falling edge) as shown in Figure 16.
The LVD filters spikes on V
DD
larger than t
g(VDD)
to
avoid parasitic resets.
7.5.5 Internal Watchdog RESET
The RESET sequence generated by a internal
Watchdog counter overflow is shown in Figure 16.
Starting from the Watchdog counter underflow, the
device RESET
pin acts as an output that is pulled
low during at least t
w(RSTL)out
.
Figure 16. RESET Sequences
V
DD
RUN
RESET PIN
EXTERNAL
WATCHDOG
ACTIVE PHASE
V
IT+(LVD)
V
IT-(LVD)
t
h(RSTL)in
RUN
WATCHDOG UNDERFLOW
t
w(RSTL)out
RUN RUN
RESET
RESET
SOURCE
EXTERNAL
RESET
LVD
RESET
WATCHD O G
RESET
INTERNAL RESET (256 or 4096 T
CPU
)
VECTOR FETCH
ACTIVE
PHASE
ACTIVE
PHASE
1
ST7LITE2
29/131
7.6 SYSTEM INTEGRITY MANAGEMENT (SI)
The System Integrity Mana gement block co ntains
the Low voltage Detector (LVD) and Auxiliary Voltage Detector (AVD) functions. It is managed by
the SICSR register.
7.6.1 Low Voltage Detector (LVD)
The Low Voltage Dete ctor function (LVD ) generates a static reset when the V
DD
supply voltage is
below a V
IT-(LVD)
reference value. This means that
it secures the power-up as well as the power-down
keeping the ST7 in reset.
The V
IT-(LVD)
reference value for a voltage drop is
lower than the V
IT+(LVD)
reference value for poweron in order to avoid a parasitic reset when the
MCU starts running and sinks current on the supply (hysteresis).
The LVD Reset circuitry generat es a reset when
V
DD
is below:
–V
IT+(LVD)
when VDD is rising
–V
IT-(LVD)
when VDD is falling
The LVD func t io n is illustrat ed in F igure 17.
The voltage threshold can be configured by option
byte to be low, medium or high.
Provided the minimum V
DD
value (guaranteed for
the oscillator frequency) is above V
IT-(LVD)
, the
MCU can only be in two modes:
– under full software control
– in static safe reset
In these conditions, secure operation is always ensured for the application without the need for external reset hardware.
During a Low Voltage Detector Reset, the RESET
pin is held low, thus p ermitting the MCU to reset
other devices.
Notes:
The LVD allows the device to be used without any
external RESET circuitry.
The LVD is an optional func tion which can be se-
lected by option byte.
Figure 17. Low Voltage Detector vs Reset
V
DD
V
IT+
(LVD)
RESET
V
IT-
(LVD)
V
hys
1
ST7LITE2
30/131
Figure 18. Reset and Supply Management Block Diagram
LOW VOLTA G E
DETECTOR
(LVD)
AUXILIARY VOLTAGE
DETECTOR
(AVD)
RESET
V
SS
V
DD
RESET SEQUENCE
MANAGER
(RSM)
AVD Interrupt Reque st
SYSTEM INTEGRITY MANAGEMENT
WATCHDOG
SICSR
TIMER (WDG)
AVDIEAVDF
STATUS FLAG
00 LVDRFLOCKEDWDGRF0
1

ST7LITE2
31/131
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
7.6.2 Auxiliary Voltage Detector (AVD)
The Voltage Detector function (AVD) is based on
an analog comparison between a V
IT-(AVD)
and
V
IT+(AVD)
reference value and the VDD main sup-
ply voltage (V
AVD
). The V
IT-(AVD)
reference value
for falling voltage is lower than the V
IT+(AVD)
reference value for rising voltage in order to avoid parasitic detection (hysteresis).
The output of the AVD comparator is directly readable by the application software through a real
time status bit (AVDF) in t he S ICS R regi ster. This
bit is read only.
Caution: The AVD functions only if the LVD is en-
abled through the option byte.
7.6.2.1 Monitoring the V
DD
Main Supply
The AVD vol tage thres hold value is relative to t he
selected LVD threshold configured by option b yte
(see section 15.1 on page 123).
If the AVD interrupt is enabled, an interrupt is generated when the vol tage crosses the V
IT+(LVD)
or
V
IT-(AVD)
threshold (AVDF bit is set).
In the case of a drop i n v oltage, t he A V D i nterrupt
acts as an early warning, allowing software to shut
down safely before the LV D resets the microcontroller. See Figure 19.
Figure 19. Using the AVD to Monitor V
DD
V
DD
V
IT+(AVD)
V
IT-(AVD)
AVDF bit
01
RESET
IF AVDIE bit = 1
V
hyst
AVD INTERRUPT
REQUEST
INTERRUPT C leared by
V
IT+(LVD)
V
IT-(LVD)
LVD RESET
Early Warning Interrupt
(Power has dropped, MCU not
not yet in reset)
01
hardware
INTERRUPT Cleared by
reset
1

ST7LITE2
32/131
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
7.6.3 Low Power Modes
7.6.3.1 Interrupts
The AVD interrupt event generates an interrupt if
the corresponding Enable Control Bit (AVDIE) is
set and the interrupt mask in the CC register is reset (RIM instruction).
Mode Description
WAIT
No effect on SI. AVD interrupts cause the
device to exit from Wait mode.
HALT
The CRSR register is frozen.
The AVD remains active.
Interrupt Event
Event
Flag
Enable
Control
Bit
Exit
from
Wait
Exit
from
Halt
AVD event AVDF AVDIE Yes No
1

ST7LITE2
33/131
SYSTEM INTEGRITY MANAGEMENT (Cont’d)
7.6.4 Register Description
SYSTEM INTE GRITY (SI) CONTROL/STAT U S REGISTER (SICSR)
Read/Write
Reset Value: 0000 0xx0 (0xh)
Bit 7:5 = Reserved, must be kept cleared.
Bit 4 = WDGRF
Watchdog reset flag
This bit indicates that the last Reset was generated by the Watchd og peripheral. It is set by hardware (watchdog reset) and cleared by software
(writing zero) or an LVD Reset (to ensure a stable
cleared state of the WDGRF flag when CPU
starts).
Combined with the LVDRF flag information, the
flag description is given by the following table.
Bit 3 = L OCKED
PLL Locked Flag
This bit is set and cleared by hardware. It is set automatically when the PLL reaches its operating frequency.
0: PLL not locked
1: PLL locked
Bit 2 = LVDRF
LVD reset flag
This bit indicates that the last Reset was generated by the LVD block. It is set by hardware (LVD reset) and cleared by software (by reading). When
the LVD is disabled by OPTION BYTE, the LVDRF
bit value is undefined.
Bit 1 = AVDF
Voltage Detector flag
This read-only bit is set and cleared by hardware.
If the AVDIE bit is set, an interrupt reques t is generated when the AV DF bit is set. Refer to Figure
19 and to Section 7.6.2.1 for additional details.
0: V
DD
over AVD threshold
1: V
DD
under AVD threshold
Bit 0 = AVDIE
Voltage Detector interrupt enable
This bit is set and cleared by software. It enables
an interrupt to be generated when the AVDF flag is
set. The pending interrupt information is automatically cleared when sof tware ent ers t he A V D in terrup t rout ine.
0: AVD interrupt disabled
1: AVD interrupt enabled
Applicatio n notes
The LVDRF flag i s not cleared when another RE SET type occurs (external or watchdog), the
LVDRF flag remains set to ke ep trace of the original failure.
In this case, a watchdog res et can be detected by
software while an external reset can not.
70
000
WDG
RF
LOCKED LVDRF AVDF AVDIE
RESET Sources LVDRF WDGRF
External RESE T
pin 0 0
Watchdog 0 1
LVD 1 X
1

ST7LITE2
34/131
8 INTERRUP T S
The ST7 core may be interrupted by one of two different methods: maskable hardware interrupts as
listed in the Interrupt Mapping Table and a nonmaskable software interrupt (TRAP). The Interrupt
processing flowchart is shown in Figure 20.
The maskable interrupts must be enabled by
clearing the I bit in order to be serviced. However,
disabled interrupts may be latched and processed
when they are enabled (see external interrupts
subsection).
Note: After reset, all interrupts are disabled.
When an interrupt has to be serviced:
– Normal processing is susp ended at the end of
the current instruction execution.
– The PC, X, A and CC registers are saved onto
the stack.
– The I bit of the CC register is set to prevent addi-
tional interrupts.
– The PC is then loaded with the interrupt vector of
the interrupt to service and the first instruction of
the interrupt service routine is fetched (refer to
the Interrupt Mapping Table for vector addresses).
The interrupt service routine should finish with the
IRET instruction w hich causes the contents of the
saved registers to be recovered from the stack.
Note: As a consequence of the IRET instruction,
the I bit will be cl eared and the main p rogram will
resume.
Priority Management
By default, a servicing interrupt cannot be interrupted because the I bi t is set by hardware ent ering in interrupt routine.
In the case when several int e rrupts a re simultaneously pending, an hardware priority defines which
one will be serviced first (see the Interrupt Mapping Table).
Interrupts and Low Power Mode
All interrupts allow the processor to leave the
WAIT low power mode. Only external and specifically mentioned interrupts allow the proces sor to
leave the HALT low power mode (refer to the “Exit
from HALT“ column in th e Interrupt Mapping Table).
8.1 NON MASKABLE SOFTWARE INTERRUPT
This interrupt is entered when the TRAP instruction is executed regardless of the state of the I bit.
It will be serviced according to the flowchart on
Figure 20.
8.2 EXTERNAL INTERRUPTS
External interrupt vectors can be loaded into the
PC register if the corresponding ex ternal interrupt
occurred and if the I bit is cleared. These interrupts
allow the processor to leave the Halt low power
mode.
The external interru pt polarity is selected thro ugh
the miscellaneous register or interrupt register (if
available).
An external interrupt triggered on edge will be
latched and the interrupt request automatically
cleared upon entering the interrupt service routine.
If several input pins, connected to the same interrupt vector, are configured as interrupts, their signals are logically NANDed before entering the
edge/level detection block.
Caution: The type of sensitivity defined in the Miscellaneous or Interrupt register (if available) applies to the ei source. In case of a NANDed source
(as described on the I/O ports section), a low level
on an I/O pin configured as input with interrupt,
masks the interrupt request even in case of risingedge sensitivity.
8.3 PERIPHERAL INTERRUPTS
Different peripheral interrupt flags in the status
register are able to cause an interrupt when they
are active if both:
– The I bit of the CC register is cleared.
– The corresponding enable bit is set in the control
register.
If any of these two conditions is false, the interrupt
is latched and thus remains pending.
Clearing an interrupt request is done by:
– Writing “0” to the corresponding bit in the status
register or
– Access to the status register while t he flag is set
followed by a read or write of an associated register.
Note: the clearing sequence resets the internal
latch. A pending interrupt (i.e. waiting for being enabled) will therefore be lost if the clear sequence is
executed.
1

ST7LITE2
35/131
INTERRUPTS (Cont’d)
Figure 20. Int errupt Processing Flowchart
Table 5. I nte rrupt Mapping
Note 1: This interrupt exits the MCU from “Auto Wake-up from Halt” mode only.
N°
Source
Block
Description
Register
Label
Priority
Order
Exit
from
HALT or
AWUFH
Exit
from
ACTIVE
-HALT
Address
Vector
RESET Reset
N/A
Highest
Priority
Lowest
Priority
yes yes FFFEh-FFFFh
TRAP Software Interrupt no
no
FFFCh-FFFDh
0 AWU Auto Wake Up Interrupt AWUCSR yes
1)
FFFAh-FFFBh
1 ei0 External Interrupt 0
N/A
yes
FFF8h-FFF9h
2 ei1 External Interrupt 1 FFF6h-FFF7h
3 ei2 External Interrupt 2 FFF4h-FFF5h
4 ei3 External Interrupt 3 FFF2h-FFF3h
5 LITE TIMER LITE TIMER RTC2 interrupt LTCSR2 no FFF0h-FFF1h
6 Not used FFEEh-FFEFh
7 SI AVD interrupt SICSR
no
no
FFECh-FFEDh
8
AT TIMER
AT TIMER Output Compare Interrupt
or Input Capture Interrupt
PWMxCSR
or ATCSR
FFEAh-FFEBh
9 AT TIMER Overflow Interrupt ATCSR yes FFE8h-FFE9h
10
LITE TIMER
LITE TIMER Input Capture Interrup t LTCSR no FFE 6h-FF E7h
11 LITE TIMER RTC1 Interrupt LTCSR yes FFE4h-FFE5h
12 SPI SPI Peripheral Interrupts SPICSR yes no FFE2h-FFE3h
13 Not usedNot used FFE0h-FFE1h
I BIT SET?
Y
N
IRET?
Y
N
FROM RESET
LOAD PC FROM INTERRUPT VECTOR
STACK PC, X, A, CC
SET I BIT
FETCH NEXT INSTRUCTION
EXECUTE INSTRUCTION
THIS CLEARS I BIT BY DEFAULT
RESTORE PC, X, A, CC FROM STACK
INTERRUPT
Y
N
PENDING?
1

ST7LITE2
36/131
INTERRUPTS (Cont’d)
EXTERNAL INTERRUPT CONTROL REGISTER
(EICR)
Read/Write
Reset Value: 0000 0000 (00h)
Bit 7:6 = IS3[1:0]
ei3 sensitivity
These bits define the interrupt sensitivity for ei3
(Port B0) according to Table 6.
Bit 5:4 = IS2[1:0]
ei2 sensitivity
These bits define the interrupt sensitivity for ei2
(Port B3) according to Table 6.
Bit 3:2 = IS1[1:0]
ei1 sensitivity
These bits define the interrupt sensitivity for ei1
(Port A7) according to Table 6.
Bit 1:0 = IS0[1:0]
ei0 sensitivity
These bits define the interrupt sensitivity for ei0
(Port A0) according to Table 6.
Note: These 8 bits can be written only when the I
bit in the CC register is set.
Table 6. I nte rrupt Sensitivity Bi t s
.
EXTERNAL INTERRUPT SELECTION REGISTER (EISR)
Read/Write
Reset Value: 0000 1100 (0Ch)
Bit 7:6 = ei3[1:0]
ei3 pin selection
These bits are written by software. They select the
Port B I/O pin used for the ei3 external interrupt according to the table below.
External Interrupt I/O pin selecti on
* Reset State
Bit 5:4 = ei2[1:0]
ei2 pin selection
These bits are written by software. They select the
Port B I/O pin used for the ei2 external interrupt according to the table below.
External Interrupt I/O pin selecti on
* Reset State
70
IS31 IS30 IS21 IS20 IS11 IS 10 IS01 IS00
ISx1 ISx 0 External Interr upt Sensit ivity
0 0 Falling edge & low level
0 1 Rising edge only
1 0 Falling edge only
1 1 Rising and falling edge
70
ei31 ei30 ei21 ei20 ei11 ei10 ei01 ei00
ei31 ei30 I/O Pin
0 0 PB0 *
01 PB1
10 PB2
ei21 ei20 I/O Pin
0 0 PB3 *
01 PB4
10 PB5
11 PB6
1

ST7LITE2
37/131
INTERRUPTS (Cont’d)
Bit 3:2 = ei1[1:0]
ei1 pin selection
These bits are written by software. They s elect t he
Port A I/O pin used for the ei1 external interrupt according to the table below.
Ext ernal Interrupt I/O pin se lection
* Reset State
Bit 1:0 = ei0[1:0]
ei0 pin selection
These bits are written by software. They s elect t he
Port A I/O pin used for the ei0 external interrupt according to the table below.
External Interrupt I/O pin selecti on
* Reset State
Bits 1:0 = Reserved.
ei11 ei10 I/O Pin
0 0 PA4
0 1 PA5
1 0 PA6
11 PA7*
ei01 ei00 I/O Pin
0 0 PA0 *
01 PA1
10 PA2
11 PA3
1

ST7LITE2
38/131
9 POWER SAVING MO DES
9.1 INTRODUCTION
To give a large measure of flexibility to the application in terms of power consumption, five main power saving modes are implemented in the ST7 (see
Figure 21):
■ Slow
■ Wait (and Slow-Wait)
■ Active Halt
■ Auto Wake up From Halt (AWUFH)
■ Halt
After a RESET the normal operating mode is s elected by default (RUN mode). This mode drives
the device (CPU and embedded peripherals) by
means of a master clock which is based on the
main oscillator frequency divided or multiplied by 2
(f
OSC2
).
From RUN mode, the different power saving
modes may be selected by setting the relevant
register bits or by calling the specific ST7 software
instruction whose action depends on the oscillator
status.
Figure 21. P ower Sav in g Mo de Tr a nsi t io ns
9.2 SLOW MODE
This mode has two targets:
– To reduce power consumption by decreasing the
internal clock in the device,
– To adapt the internal clock frequency (f
CPU
) to
the available supply voltage.
SLOW mode is controlled by the SMS bit in the
MCCSR register which enables or disables Slow
mode.
In this mode, the oscillator frequency is divided by
32. The CPU and peripherals are clocked at this
lower frequency.
Note: SLOW-WAIT mode is activated when enter-
ing WAIT mode while the device is already in
SLOW mode.
Figure 22. SLOW Mode Clock Transition
POWER CONSUMPTION
WAIT
SLOW
RUN
ACTIVE HALT
High
Low
SLOW WAIT
AUTO WAKE UP FROM HALT
HALT
SMS
f
CPU
NORMAL RUN MODE
REQUEST
f
OSC
f
OSC
/32 f
OSC
1

ST7LITE2
39/131
POWER SAVING MODES (Cont’d)
9.3 WAIT MODE
WAIT mode places the MCU in a low power c onsumption mode by stopping the CPU.
This pow e r s a v ing mo de is selected by callin g the
‘WFI’ inst ru c ti on .
All peripherals remain active. During WAIT mode,
the I bit of the CC register is cleared, to enabl e all
interrupts. All other registers and memory remain
unchanged. The MCU remains in WAIT mode until
an interrupt or RESET occurs, whereupon the Program Counter branches to the starting address of
the interrupt or Reset service routine.
The MCU w ill re mai n in W AIT mo de unt il a Res et
or an Interrupt occurs, causing it to wake up.
Refer to Figure 23.
Figure 23. WAIT Mode Flow-chart
Note:
1. Before servicing an interrupt, the CC register is
pushed on the stack. The I bit of the CC register is
set during the interrupt routine and cleared when
the CC register is popped.
WFI INSTRUCTION
RESET
INTERRUPT
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
I BIT
ON
ON
0
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
I BIT
ON
OFF
0
ON
CPU
OSCILLATOR
PERIPHERALS
IBIT
ON
ON
X
1)
ON
CYCLE DELAY
256 OR 4096 CPU CLOCK
1

ST7LITE2
40/131
POWER SAVING MODES (Cont’d)
9.4 HALT MODE
The HALT mode is the lowest power consumption
mode of the MCU. It is entered by executing the
‘HALT’ instruction when ACTIVE-HALT is disabled
(see section 9.5 on page 41 for more details) and
when the AWUEN bit in the AWUCSR register is
cleared.
The MCU can e xit HAL T mode on reception of either a specific interrupt (see Table 5, “Interrupt
Mapping,” on page 35 ) or a RESET. When exiting
HALT mode by means of a RESET or an interrupt,
the oscillator is immediately turned on and the 256
or 4096 CPU cycle delay is used to stabilize the
oscillator. After the start up delay, the CPU
resumes operation by s ervicing the i nterrupt o r by
fetching the reset vector which woke it up (see Fig-
ure 25).
When entering HALT mode, the I bit in the CC register is forced to 0 to enable interrupts. Therefore,
if an interrupt is pending, the MCU wakes up immediately.
In HALT mode, the main oscillator is turned off
causing all internal processing to be stopped, including the operation of the on-chip peripherals.
All peripherals are not clocked except the ones
which get their clock supply from another clock
generator (such as an external or auxiliary oscillator).
The compatibility of Watchdog operation with
HALT mode is configured by t he “WDGHALT” option bit of the option byte. The HALT instruction
when executed while the Watchdog system is enabled, can generate a Watchdog RESET (see sec-
tion 15.1 on page 123 for more details).
Figure 24. HALT Timing Overview
Figure 25. HALT Mode Flow- c hart
Notes:
1. WDGHALT is an option bit. See option byte sec-
tion for more details.
2. Peripheral clocked with an external clock source
can still be active.
3. Only some sp ecific interrupt s can exit the MCU
from HALT mode (such as ext ernal inte rrupt). Refer to Table 5 Interrupt Mapping for more details.
4. Before servicing an interrupt, the CC register is
pushed on the stack. The I bit of the CC register is
set during the interrupt routine and cleared whenthe CC register is popped.
5. If the PLL is enabled by option byte, it outputs
the clock after a delay of t
STARTUP
(see Figure 12).
HALTRUN RUN
256 OR 4096 CPU
CYCLE DELAY
RESET
OR
INTERRUPT
HALT
INSTRUCTION
FETCH
VECTOR
[Active Halt disabled]
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
2)
IBIT
OFF
OFF
0
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
IBIT
ON
OFF
X
4)
ON
CPU
OSCILLATOR
PERIPHERALS
IBIT
ON
ON
X
4)
ON
256 OR 4096 CPU CLOCK
DELAY
5)
WATCHDOG
ENABLE
DISABLE
WDGHALT
1)
0
WATCHDOG
RESET
1
CYCLE
HALT INSTRUCTION
(Active Halt disabled)
(AWUCSR.AWUEN=0)
1

ST7LITE2
41/131
POWER SAVING MODES (Cont’d)
9.4.1 Halt Mode Recommendations
– M ake s ure that an external event is available to
wake up the microcontroller from Halt mode.
– When using an external interrupt to wake up the
microcontroller, reinitialize the corresponding I/O
as “Input Pull-up with Interrupt” before executing
the HALT instruction. The main reason for this is
that the I/O may be wrongly configured due to external interference or by an unforeseen logical
condition.
– For the same reason, reinitialize the level sensi-
tiveness of each external interrupt as a precautionary measure.
– The opcode for the HALT instruction is 0x8E. To
avoid an unexpected HALT instruction due to a
program counter failure, it is advised to clear all
occurrences of the data value 0x8E from memory. For example, avoid defining a constant in program memory with the value 0x8E.
– As the HALT instruction clears the interrupt mask
in the CC register to allow interrupts, the user
may choose to clear all pending interrupt bits before executing the HALT instruction. This avoids
entering other peripheral interrupt routines after
executing the external interrupt routine corresponding to the wake-up event (reset or external
interrupt).
9.5 ACTIVE-HALT MODE
ACTIVE-HALT mode is the lowest power consumption mode of the M CU with a real time c lock
available. It is entered by ex ecut ing the ‘HALT’ instruction. The decision to enter either in ACTIVEHALT or HALT mode is given by the LTCSR/ATCSR register status as shown in the following table:
The MCU can exit ACTIVE-HALT mode on reception of a specific interrupt (see Table 5, “Interrupt
Mapping,” on page 35) or a RESET.
– When exiting ACTIVE-HALT mode by means of
a RESET, a 256 or 4096 CPU cycle delay occurs. After the start up delay, the CPU resumes
operation by fetching the reset vector which
woke it up (see Figure 27).
– When exiting ACTIVE-HALT mode by means of
an interrupt, the CPU immediately resumes operation by servicing the interrupt vector which woke
it up (see Figure 27).
When entering ACTIVE-HALT mode, the I bit in
the CC register is cleared to enable interrupts.
Therefore, if an interrupt is pending, the MCU
wakes up immediately (see Note 3).
In ACTIVE-HALT mode, only the main oscillator
and the selected timer counter (LT/AT) are running
to keep a wake-up time base. All other peripherals
are not clocked except those whic h get their clock
supply from another clock g enerator (such as external or auxiliary oscillator).
Note: As soon as ACTIVE-HALT is enabled, executing a HALT instruction while the Watchdog is
active does not generate a RESET.
This means that the device cannot spend more
than a defined delay in this power saving mode.
LTCSR1
TB1IE bit
ATCSR
OVFIE
bit
ATCSR
CK1 bit
ATCSR
CK0 bit
Meaning
0xx0
ACTIVE-HALT
mode disabled
00xx
1 xxx
ACTIVE-HALT
mode enabled
x 101
1

ST7LITE2
42/131
POWER SAVING MODES (Cont’d)
Figure 26. ACTIVE-HALT Timing Overview
Figure 27. ACTIV E - H ALT Mode Flow-chart
Notes:
1. This delay occurs only if the MCU exits ACTIVE-
HALT mode by means of a RESET.
2. Peripherals clocked with an external clock
source can still be active.
3. Only the RTC1 interrupt and some specific interrupts can exit the MCU from ACTIVE-HALT mode.
Refer to Table 5, “Interrupt Mapping,” on page 3 5
for more details.
4. Before s ervicing an interrupt, the CC register is
pushed on the stack. The I bit of the CC register is
set during the interrupt routine and cleared when
the CC register is popped.
9.6 AUTO WAKE UP FROM HALT MODE
Auto Wake Up From Halt (AWUFH) mode is similar to Halt mode with the addition of a specific internal RC oscillator for wake-up (Auto Wake Up
from Halt Osc illator ). Com pare d to ACT IVE -HAL T
mode, AWUFH has lower power consumption (the
main clock is not kept running , but there is no accurate realtime clock available.
It is entered by executing the HALT instruction
when the AWUEN bit in the AWUCSR register has
been set.
Figure 28. AWUFH Mode Block Diagram
As soon as HALT mode is entered, and if the
AWUEN bit has been set in the AWUCSR register,
the AWU RC oscillator provides a clock signal
(f
AWU_RC
). Its frequency is divided by a fixed divider and a programmable prescaler controlled by the
AWUPR register. The output of this prescaler provides the delay time. When the delay has elapsed
the AWUF flag is set by hardware and an interrupt
wakes-up the MCU from Halt mode. At the same
time the main oscillator is imme diately turn ed on
and a 256 or 4096 cycle delay is used to stabilize
it. After this start-up delay, the CPU resumes operation by servicing the AWUFH interrupt. The AWU
flag and its associated interrupt are cleared by
software reading the AWUCSR register.
To compensate for any frequency dispersion of
the AWU RC oscillator, it can be calibrated by
measuring the clock frequency f
AWU_RC
and then
calculating the right prescaler value. Measurement
mode is enabled by setting the AWUM bit in the
AWUCSR register in Run mode. This connects
f
AWU_RC
to the input capture of the 12-bit Auto-Re-
load timer, allowing the f
AWU_RC
to be measured
using the main oscillator clock as a reference timebase.
HALTRUN RUN
256 OR 4096 CPU
CYCLE DELAY
1)
RESET
OR
INTERRUPT
HALT
INSTRUCTION
FETCH
VECTOR
ACTIVE
[Active Halt Enabled]
HALT INSTRUCTION
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
OSCILLATOR
PERIPHERALS
2)
I BIT
ON
OFF
0
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
OSCILLATOR
PERIPHERALS
2)
I BIT
ON
OFF
X
4)
ON
CPU
OSCILLATOR
PERIPHERALS
I BIT
ON
ON
X
4)
ON
256 OR 4096 CPU CLOCK
DELAY
(Active Halt enabled)
(AWUCSR.AWUEN=0)
CYCLE
AWU RC
AWUFH
f
AWU_RC
AWUFH
(ei0 source)
oscillator
prescaler/1 .. 255
interrupt
/64
divider
to Timer input capture
1

ST7LITE2
43/131
POWER SAVING MODES (Cont’d)
Similarities with Halt mode
The following AWUFH mode behaviour is the
same as normal Halt mode:
– The MCU can exit AWUFH mode by means of
any interrupt with exit from Halt capability or a reset (see Section 9.4 HALT MODE).
– When entering AWUFH mode, the I bit in the CC
register is forced to 0 to enable interrupts. Therefore, if an interrupt is pending, the MCU wakes
up immediately.
– In AWUFH mode, the main oscillator is turned off
causing all internal processing to be stopped, including the operation of the on-chip peripherals.
None of the peripherals are clocked except those
which get their clock supply from another clock
generator (such as an external or auxiliary oscillator like the AWU osc illator).
– The compatibility of Watchdog operation with
AWUFH mode is configured by the WDGHALT
option bit in the option byte. Depending on this
setting, the HALT instruction when executed
while the Watchdog system is enabled, can generate a Watch d og R ESET .
Figure 29. AWUF Halt Timing Diagram
AWUFH interrupt
f
CPU
RUN MODE HALT MODE 256 OR 4096 t
CPU
RUN MODE
f
AWU_RC
Clear
by software
t
AWU
1

ST7LITE2
44/131
POWER SAVING MODES (Cont’d)
Figure 30. AWUFH Mode Flow-chart Notes:
1. WDGHALT is an option bit. See option byte sec-
tion for more details.
2. Peripheral clocked with an external clock source
can still be active.
3. Only an AWUFH interrupt and some specific interrupts can exit the MCU from HALT mode (s uch
as external interrupt). Refer t o Table 5, “Interrupt
Mapping,” on page 35 for more details.
4. Before servicing an interrupt, the CC register is
pushed on the stack. The I[1:0] bits of the CC register are set to the current software priority level of
the interrupt routine and recovered when the CC
register is popped.
5. If the PLL is enabled by option byte, it outputs
the clock after an additional delay of t
STARTUP
(see
Figure 12).
RESET
INTERRUPT
3)
Y
N
N
Y
CPU
MAIN OSC
PERIPHERALS
2)
I[1:0] BITS
OFF
OFF
10
OFF
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CPU
MAIN OSC
PERIPHERALS
I[1:0] BITS
ON
OFF
XX
4)
ON
CPU
MAIN OSC
PERIPHERALS
I[1:0] BITS
ON
ON
XX
4)
ON
256 OR 4096 CPU CLOCK
DELAY
5)
WATCHDOG
ENABLE
DISABLE
WDGHALT
1)
0
WATCHDOG
RESET
1
CYCLE
AWU RC OSC ON
AWU RC OSC OFF
AWU RC OSC OFF
HALT INSTRUCTION
(Active-Halt disabled)
(AWUCSR.AWUEN=1)
1

ST7LITE2
45/131
POWER SAVING MODES (Cont’d)
9.6.0.1 Register Description
AWUFH CONTROL/STATUS REGISTER
(AWUCSR)
Read/Write
Reset Value: 0000 0000 (00h)
Bits 7:3 = Reserved.
Bit 1= AWUF
Auto Wake Up Flag
This bit is set by hardware when the AWU module
generates an interrupt and cleared by software on
reading AWUCSR. Writing to this bit does not
change its value.
0: No AWU interrupt occurred
1: AWU interrupt occurred
Bit 1= AWUM
Auto Wake Up Measurement
This bit enables t he AWU RC oscillat or and connects its output to the inputcapture of the 12-bit
Auto-Reload timer. This allows the timer to be
used to measure the AWU RC oscillator dispersion and then compens ate this d ispersion by providing the right value in the AWUPRE register.
0: Measurement disabled
1: Measurement enabled
Bit 0 = AWUEN
Auto Wake Up From Halt Enabled
This bit enables the Auto Wake Up From Halt feature: once HALT mode is entered, the AWUFH
wakes up the microcontroller after a time delay dependent on the AWU prescaler value. It is set and
cleared by software.
0: AWUFH (Auto Wake Up From Halt) mode disa-
bled
1: AWUFH (Auto Wake Up From Halt) mode ena-
bled
AWUFH PRESCALER REGISTER (AWUPR)
Read/Write
Bits 7:0= AWUPR[7:0]
Auto Wake Up Prescaler
These 8 bits define the AWUPR Dividing factor (as
explained below:
In AWU mode, the p eriod that the MCU stays in
Halt Mode (t
AWU
in Figure 29 o n page 43) is de-
fined by
This prescaler register can be programmed to
modify the time that the MCU s tays in Halt mode
before waking up automatically.
Note: If 00h is written to AWUPR, depending on
the product, an interrupt is generat ed imm ediately
after a HALT instruction, or the AWUPR remains
inchanged.
Table 7. AWU Register Map and Reset Values
70
00000
AWUFAWUMAWU
EN
70
AWU
PR7
AWU
PR6
AWU
PR5
AWU
PR4
AWU
PR3
AWU
PR2
AWU
PR1
AWU
PR0
AWUPR[7:0
] Dividing factor
00h Forbidden
01h 1
... ...
FEh 254
FFh 255
t
AWU
64 AWUPR
×
1
f
AWURC
--------------------------t
RCSTRT
+
×
=
Address
(Hex.)
Register
Label
76543210
0049h
AWUPR
Reset Value
AWUPR71AWUPR61AWUPR51AWUPR41AWUPR31AWUPR21AWUPR11AWUPR0
1
004Ah
AWUCSR
Reset Value
00000AWUFAWUMAWUEN
1

ST7LITE2
46/131
10 I/O P ORTS
10.1 INTRODUCTION
The I/O ports allow data transfer. An I/O port can
contain up to 8 pins. Each pin can be programmed
independently either as a digital input or digital
output. In addition, specific pins may have several
other functions. These functions can include external interrupt, alternate signal input/output for onchip peripherals or analog input.
10.2 FUNCTIONAL DESCRIPTION
A Data Register (DR) and a Data Direction Register (DDR) are always associated with each port.
The Option Register (OR), which allows input/output options, may or may not be imple men ted. The
following description takes into account the OR
register. Refer to the Port Configuration table for
device specific information.
An I/O pin is programmed using the corresponding
bits in the DDR, DR and OR registers: bit x corresponding to pin x of the port.
Figure 31 shows the generic I/O block diagram.
10.2.1 Input Modes
Clearing the DDRx bit selects input mode. In this
mode, reading its DR b it returns the digital value
from that I/O pin.
If an OR bit is available, different input modes can
be configured by software: floating or pull-up. Refer to I/O Port Implementation section f or configuration.
Notes:
1. Writing to the DR modifies the latch val ue but
does not change the state of the input pin.
2. Do not use read/modify/write instructions
(BSET/BRES) to modify the DR register.
Ext ernal Interrupt Function
Depending on the device, setting the ORx bit while
in input mode can configure an I/O as an input with
interrupt. In this configuration, a signal edge or level input on the I/O gene rates an interrupt request
via the corresponding interrupt vector (eix).
Falling or rising edge sensitivity is programmed independently for each interrupt vector. The External Interrupt Control Register (EICR) or the Miscellaneous Register controls this sensitivity, depending on the device.
A device may have up to 7 external interrupts.
Several pins may be tied to on e external interrupt
vector. Refer to Pin Description to see which ports
have external interrupts.
If several I/O interrupt pins on the same interrupt
vector are selected simultaneously, they are l ogically combined. For t his reason if one of the in terrupt pins is tied low, it may mask the othe rs.
External interrupts are hardware interrupts. Fetching the corresponding interrupt vector automatically clears the request latch. Modifying the sensitivity
bits will clear any pending interrupts.
10.2.2 Output Modes
Setting the DDRx bit selects output mode. Writing
to the DR bits applies a digital value to the I/O
through the latch. Reading the DR bits returns the
previously stored value.
If an OR bit is available, different output modes
can be selected by software: push-pull or opendrain. Refer to I/O Port Implementation section for
configuration.
DR Value and Output Pin Status
10.2.3 Alternate Functions
Many ST7s I/Os hav e one or more alternate functions. These m ay include output signals from, or
input signals to, on-c hip peripherals. The Device
Pin Description table describes which peripheral
signals can be input/output to which ports.
A signal coming from an on-chip peripheral can be
output on an I/O. To do this, enable the on-chip
peripheral as an output (enable bit in the peripher-
al’s control register). The peripheral configures the
I/O as an output and takes priority over standard I/
O programming. The I/O’s state is readable by addressing the corresponding I/O data register.
Configuring an I/O as floating enables alternate
function input. It is not recommended to configure
an I/O as pull-up as this will increase current consumption. Before us ing an I/O as an alternate input, configure it without interrupt. Otherwise spurious interrupts can occur.
Configure an I/O as input floating for an on-chip
peripheral signal which can be input and output.
Caution:
I/Os which can b e configured as both an analog
and digital alternate function need special attention. The user must control the peripherals s o that
the signals do not arrive at the same time on the
same pin. If an external clock is used, only the
clock alternate function should be employed on
that I/O pin and not the other alternate function.
DR Push-Pull Open-Drain
0V
OL
V
OL
1VOHFloating
1

ST7LITE2
47/131
I/O PORTS (Cont’d)
Figure 31. I /O Por t Ge nera l Blo c k D iag ram
Table 8. I/O Port Mode Options
Legend : NI - not implemented
Off - implemented not activated
On - implemented and activated
Note: The diode to V
DD
is not imp lement ed i n t he
true open drain pads. A local protection between
the pad and V
OL
is implemented to protect the de-
vice against positive stress.
Configuration Mode Pull-Up P-Buffer
Diodes
to V
DD
to V
SS
Input
Floating with/without Interrupt Off
Off
On
On
Pull-up with/withou t Interrupt On
Output
Push-pull
Off
On
Open Drain (logic level) Off
True Open Drain NI NI NI (see note)
DR
DDR
OR
DATA BUS
PAD
V
DD
ALTERNATE
ENABLE
ALTERNATE
OUTPUT
1
0
OR SEL
DDR SEL
DR SEL
PULL-UP
CONDITION
P-BUFFER
(see table below)
N-BUFFER
PULL-UP
(see table below)
1
0
ANALOG
INPUT
If implemented
ALTERNATE
INPUT
V
DD
DIODES
(see table below)
FROM
OTHER
BITS
EXTERNAL
REQUEST (eix)
INTERRUP T
SENSITIVITY
SELECTION
CMOS
SCHMITT
TRIGGER
REGISTER
ACCESS
BIT
From on- chip peripheral
To on-chip peri pheral
Note : Refer to the Port C o nfiguratio n
table for device specific information.
Combinational
Logic
1

ST7LITE2
48/131
I/O PORTS (Cont’d)
Table 9. I /O C onfi gurations
Notes:
1. When the I/O port is in input configuration and the associated alternate function is enabled as an output,
reading the DR register will read the alternate function output status.
2. When the I/O port is in output configuration and the associated alternate function is enabled as an input,
the alternate function reads the pin status given by the DR register content.
3. For true open drain, these elements are not implemented.
Hardware Configuration
INPUT
1)
OPEN-DRAIN OUTPUT
2)
PUSH-PULL O UTPUT
2)
NOTE 3
CONDITION
PAD
V
DD
R
PU
EXTERNAL INTERRUPT
POLARITY
DATABUS
PULL-UP
INTERRUPT
DR REGISTER ACCESS
W
R
FROM
OTHER
PINS
SOURCE (ei
x
)
SELECTION
DR
REGISTER
CONDITION
ALTERNATE INPUT
ANALOG INPUT
To on-chip peripheral
COMBINATIONAL
LOGIC
NOTE 3
PAD
R
PU
DATA BUS
DR
DR REGISTER ACCESS
R/W
V
DD
REGISTER
PAD
R
PU
DATA BUS
DR
DR REGISTER ACCESS
R/W
V
DD
ALTERNATEALTERNATE
ENABLE OUTPUT
REGISTER
BIT From on-chi p peripheral
NOTE 3
1

ST7LITE2
49/131
I/O PORTS (Cont’d)
Analog alternate function
Configure the I/O as floating input to use an ADC
input. The analog multiplexer (controlled by the
ADC registers) switches the analog voltage
present on the selected pin to the common analog
rail, connected to the ADC input.
Analog Recommendations
Do not change the voltage level or loading on any
I/O while conversion is in progress. Do not have
clocking pins located close to a selected analog
pin.
WARNING: The analog input voltage level must
be within the limits stated in the absolute maximum r a tings.
10.3 I/ O PORT IMPL EMENTATION
The hardware implementation on each I/O port depends on the settings in t he DDR and OR registers
and specific I/O port features such as ADC input or
open drain.
Switching these I/O ports from one state t o another should be done in a sequence that prevents unwanted side effects. Recommended safe transitions ar e illu strat ed in Figure 32. Ot her transitions
are potentially risky and shou ld be av oided, since
they may present unwanted side-effects such as
spurious interrupt generation.
Figure 32. Interrupt I/O Port State Transitions
10.4 UNUSED I/O PINS
Unused I/O pins m ust be connected to f ixed voltage levels. Refer to Section 13.8.
10.5 LOW POWER MODES
10.6 INTERRUPTS
The external interrupt event generates an interrupt
if the corresponding configuration is selected with
DDR and OR registers and if the I bit in the CC
register is cleared (RIM instruction).
Mode Description
WAIT
No effect on I/O ports. External interrupts
cause the device to exit from WAIT mode.
HALT
No effect on I/O ports. External interrupts
cause the device to exit from HALT mode.
Interrupt Event
Event
Flag
Enable
Control
Bit
Exit
from
Wait
Exit
from
Halt
External interrupt on
selected external
event
-
DDRx
ORx
Yes Yes
01
floating/pull-up
interrupt
INPUT
00
floating
(reset state)
INPUT
10
open-drain
OUTPUT
11
push-pull
OUTPUT
XX
= DDR, OR
1

ST7LITE2
50/131
I/O PORTS (Cont’d)
10.7 DEVICE-SPECIFIC I/O PORT CONFIGURATION
The I/O port register configurations are summarised as follows.
Stan da rd Po rt s
PA7:0, PB6:0
Interrupt P ort s
Ports where the ex ternal i nterrupt capability is
selected using the EISR register
Table 10. P o rt Conf i gu ra tio n ( S ta ndard ports)
Note: On p orts w h er e t he e xter nal int errupt c apability is se lected us ing the EISR r egist er, the c onfigur a-
tion will be as follows:
Table 11. I/O Port Register Map and Reset Values
MODE DDR OR
floating input 0 0
pull-up input 0 1
open drain output 1 0
push-pull output 1 1
MODE DDR OR
floating input 0 0
pull-up interrupt input 0 1
open drain output 1 0
push-pull output 1 1
Port Pin name
Input Output
OR = 0 OR = 1 OR = 0 OR = 1
Port A PA7: 0 floating
pull-up
open drain push-pull
Port B PB6:0 floating pull-up open drain push-pull
Port Pin name
Input Output
OR = 0 OR = 1 OR = 0 OR = 1
Port A PA7:0 floating pull-up interr upt open drain push-pull
Port B PB6:0 floating pull-up interr upt open drain push-pull
Address
(Hex.)
Register
Label
76543210
0000h
PADR
Reset Value
MSB
1111111
LSB
1
0001h
PADDR
Reset Value
MSB
0000000
LSB
0
0002h
PAOR
Reset Value
MSB
0100000
LSB
0
0003h
PBDR
Reset Value
MSB
1111111
LSB
1
0004h
PBDDR
Reset Value
MSB
0000000
LSB
0
0005h
PBOR
Reset Value
MSB
0000000
LSB
0
1

ST7LITE2
51/131
11 ON-CHIP PERIPHERALS
11.1 WATCHDOG TIMER (WDG)
11.1.1 Introduction
The Watchdog t imer is used to d etect the occurrence of a software fault, usually generated by external interference or by unforeseen logical conditions, which causes the application program to
abandon its normal seque nce. The W atchdog circuit generates an MCU reset on ex piry of a programmed time period, unless the program refresh-
es the counter’s contents before the T6 bit becomes cleared.
11.1.2 Main Features
■ Programmable free-running downcounter (64
increments of 16000 CPU cycles)
■ Programmable reset
■ Reset (if watchdog activated) when the T6 bit
reaches zero
■ Optional reset on HALT instruction
(configurable by option byte)
■ Hardware Watchdog selectable by option byte
11.1.3 Functional Description
The counter value stored in the CR register (bits
T[6:0]), is decremented every 16000 m achine cycles, and the length of the timeou t period can be
programmed by the user in 64 increments.
If the watchdog is activated (the WDGA bit is set)
and when the 7-bit timer (bits T[6:0]) rolls over
from 40h to 3Fh (T6 becom es cleared ), it initiates
a reset cycle pulling low the reset pin for typically
36µs.
Figure 33. Watc hdog Block Diagram
RESET
WDGA
7-BIT DOWNCOU NTE R
f
CPU
T6 T0
CLOCK DIVIDER
WATCHDOG CONTROL REGISTER (CR)
÷
16000
T1
T2
T3
T4
T5
1

ST7LITE2
52/131
WATCH DOG TI MER (Cont’d)
The application program must write in the CR reg-
ister at regular intervals during normal operation to
prevent an MCU res et. This d owncounter is f reerunning: it counts down even if the watchdog is
disabled. The value to be stored in the CR register
must be between FFh and C0h (see Table 12
.Watchdog Timing):
– The WDGA bit is set (watchdog enabled)
– The T6 bit is set to prevent generating an imme-
diate reset
– The T[5:0] bits contain the number of increments
which represents the time delay before the
watchdog produces a reset.
Following a reset, the watchdog is disabled. Once
activated it cannot be disabled, except by a reset.
The T6 bit can be used t o generate a s of tw are reset (the WDGA bit is set and the T6 bit is cleared).
If the watchdog is activated, the HALT instruction
will generate a Reset.
Table 12.Watchdo g Timing
Notes:
1. The timing variation shown in Table 12 is due to
the unknown status o f the prescaler when writing
to the CR register.
2. The number of CPU cloc k cycl es a p plie d during
the RESET phase (256 or 4096) must be taken
into account in addition to these timings.
11.1.4 Hardware Watchdo g Option
If Hardware Watchdog is selected by option byte,
the watchdog is always active and the WDGA bit in
the CR is not used.
Refer to the Option Byte description in section 15
on page 123.
11.1.4.1 Using Halt Mode with the WDG
(WDGHALT option)
If Halt mode with Watchdog is en abled by option
byte (No watchdog reset on HALT instruction), it is
recommended before executing the HALT instruction to refresh the WDG counter, to avoid an unexpected WDG reset immediately after waking up
the microcontroller. Same behavior in active-halt
mode.
f
CPU
= 8MHz
WDG
Counter
Code
min
[ms]
max
[ms]
C0h 1 2
FFh 127 128
1

ST7LITE2
53/131
WATCH DOG TI MER (Cont’d)
11.1.5 Interrupts
None.
11.1.6 Register Description
CONTROL REGISTER (CR)
Read/Write
Reset Value: 0111 1111 (7Fh)
Bit 7 = WDGA
Activation bit
.
This bit is set by software and only cleared by
hardware after a reset. When WDGA = 1, the
watchdog can generate a reset.
0: Watchdog disabled
1: Watchdog enabled
Note: This bit is not us ed if the hardware watchdog option is enabled by option byte.
Bit 6:0 = T[6:0]
7-bit timer (MSB to LSB).
These bits contain the decremented value. A reset
is produced when it rolls over from 40h to 3Fh (T6
becomes cleared).
70
WDGA T6 T5 T4 T3 T2 T1 T0
1

ST7LITE2
54/131
WATCH DOG TI MER (Cont’d)
Table 13. Watchdog Time r Register Map and Rese t Values
Address
(Hex.)
Register
Label
76543210
002Eh
WDGCR
Reset Value
WDGA
0
T6
1
T5
1
T4
1
T3
1
T2
1
T1
1
T0
1
1

ST7LITE2
55/131
11.2 12-BIT AUTORELOAD TIMER 2 (AT2)
11.2.1 Introduction
The 12-bit Autoreload T imer c an be used for general-purpose timing functions. It is based on a freerunning 12-bit upcounter with an input capture register and four PWM output channels. There are 6
external pins:
– F our PW M output s
– A T IC pin for the Input Capture function
– BREAK pin for forcing a break condition on the
PWM outputs
11.2.2 Main Features
■ 12-bit upcounter with 12-bit autorelo ad register
(ATR)
■ Maskable overflow interrupt
■ Generation of four independent PWMx signals
■ Frequency 2KHz-4MHz (@ 8 MHz f
CPU
)
– Programmable duty-cycles
– Polarity control
– Programmable output modes
– Maskable Compare interrupt
■ Input Capture
– 12-bit input capture register (ATICR)
– Triggered by rising and falling edges
– Maskable IC interrupt
Figure 34. Block Diagram
ATCSR
CMPIEOVFIEOVFCK0CK1ICIEICF0
12-BIT AUTORELOAD REGISTER
12-BIT UPCOUNTER
CMPF2
CMPF1
CMPF3
CMPF0
CMP
REQUEST
OVF INTERRUPT
REQUEST
f
CPU
ATIC
12-BIT INPUT CAPTURE REGISTER
IC INTERRUPT
REQUEST
ATR
ATICR
f
COUNTER
CNTR
32 MHz
(1 ms
f
LTIMER
@ 8MHz)
CMPFx bit
PWM GENERATION
POLARITY
OPx bit
PWMx
COMP-
PARE
f
PWM
OUTPUT CONTROL
OEx bit
4 PWM Channels
INTERRUPT
timebase
DCR0H
DCR0L
Preload
Preload
on OVF Event
12-BIT DUTY CYCLE VALUE (shadow)
IF TRAN=1
1

ST7LITE2
56/131
12-BIT AUTORELOAD TIMER (Cont’d)
11.2.3 Functional Description
PWM M ode
This mode allows up to four Pulse W idth Mo dulated signals to be generated on the PWMx output
pins. The PWMx output signals can be enabled or
disabled using the OEx b its in the PWMCR register.
PWM Frequency and Duty Cycle
The four PWM signals have the sam e frequency
(f
PWM
) which is controlled by the counter period
and the ATR register value.
f
PWM
= f
COUNTER
/ (4096 - ATR)
Following the above formula,
– If f
COUNTER
is 32 MHz, the maximum value of
f
PWM
is 8 MHz (ATR register value = 4092), the
minimum value is 8 KHz (ATR register value = 0)
– I f f
COUNTER
is 4 Mhz, the max imum val ue of f
PWM
is 2 MHz (ATR register value = 4094),the minimum value is 1 KHz (ATR register value = 0).
Note: The maximum value of ATR is 4094 because it must be lower than the DCR value which
must be 4095 in this case.
At reset, the counter starts counting from 0.
When a upcounter o verflow oc curs (OV F event),
the preloaded Duty cycle values are transferred to
the Duty Cycle registers and the PWMx signals
are set to a high level. When the upcounter matches the DCRx value the PWMx signals are set to a
low level. To obtain a signal on a PWMx pin, the
contents of the corresponding DCRx register must
be greater than the contents of the ATR register.
The polarity bits can be used to invert any of the
four output signals. The inversion is synchronized
with the counter overflow if the TRAN bit in the
TRANCR register is set (reset value). See Figure
35.
Figure 35. PWM Inversion Diagram
The maximum av ailable resolution for the PW Mx
duty cycle is:
Resolution = 1 / (4096 - ATR)
Note: To get the maximum resolution (1/4096), the
ATR register must be 0. With this maximum resolution, 0% and 100% can be obtained by changing
the polarity.
Figure 36. PWM Func t ion
PWMx
PWMx
PIN
counter
overflow
OPx
PWMxCSR Register
inverter
DFF
TRAN
TRANCR Register
DUTY CYCLE
REGISTER
AUTO-RELOAD
REGISTER
PWMx OUTPUT
t
4095
000
WITH OE=1
AND OPx=0
(ATR)
(DCRx)
WITH OE=1
AND OPx=1
COUNTER
1

ST7LITE2
57/131
12-BIT AUTORELOAD TIMER (Cont’d)
Figure 37. PWM Signal from 0% to 100% Duty Cycle
Output Compare Mode
This mode is always available.
To use this function, load a 12-bit value in the
DCRxH and DCRxL registers.
When the 12-bit upcounter (CNTR) reaches the
value stored in the DCRxH and DCRxL registers,
the CMPF bit in the PWMxCSR register is set and
an interrupt request i s generated i f the CM PIE bit
is set.
Note: The output compare function is only available for DCRx values other than 0 (reset value).
Break Function
The break function is used to perform an emergency shutdown of the power converter.
The break function is activated by the external
BREAK pin (active low). In order to use the
BREAK pin it must be previously enabled by software setting the BPEN bit in the BREAKCR register.
When a low level is detected on the BREAK pin,
the BA bit is s et an d the break function i s activated.
Software can set the BA bit to activate the break
function without using the BREAK pin.
When the break function is activated (BA bit =1):
– The break pattern (PWM[3:0] bits in the BREAK-
CR) is forced directly on the PWMx output pins
(after the inverter).
– The 12-bit PWM counter is set to its rese t va l u e .
– The ARR, DCRx and the corresponding shadow
registers are set to their reset values.
– The PWM CR register is reset.
When the break function is deactivated after ap-
plying the break (BA bit goes from 1 to 0 by sof tware):
– The control of PWM outputs is transferred to the
port registers.
COUNTER
PWMx OUTPUTtWITH MOD00=1
AND OPx=0
FFDh FFEh FFFh FFDh FFEh FFFh FFDh FFEh
DCRx=000h
DCRx=FFDh
DCRx=FFEh
DCRx=000h
ATR= FFDh
f
COUNTER
PWMx OUTPUT
WITH MOD00=1
AND OPx=1
1

ST7LITE2
58/131
Figure 38. Block Diagram of Break Function
11.2.3.1 Input Capture
The 12-bit ATICR register is used to latch t he va lue of the 12-bit free running upcounter after a rising or falling edge is detected on the ATIC pin.
When an input captu re oc curs, the I CF bit is set
and the ATICR register contains the value of the
free running upcounter. An IC interrupt is generated if the ICIE bit is set. The ICF bit is reset by reading the ATICR register when the ICF bit is set. The
ATICR is a read only register and always contains
the free running upcounter value which corresponds to the most recent input capture. Any further input capture is inhibited while the ICF bit is
set.
Figure 39. Input Capture Timing Diagram
PWM0
PWM1
PWM2
PWM3
1
0
PWM0
PWM1
PWM2
PWM3
BREAKCR Register
BREAK pin
PWM counter -> Reset value
ARR & DCRx -> Reset value
PWM Mode -> Reset value
When BA is set:
(Active Low)
(Inverters)
Note:
The BREAK pin value is latched by the BA bit.
PWM0PWM1PWM2PWM3BPENBA
COUNTER
t
01h
f
COUNTER
xxh
02h 03h 04h 05h 06h 07h
04h
ATIC PIN
ICF FLAG
ICR REGISTER
INTERRUPT
08h 09h 0Ah
INTERRUPT
ATICR READ
09h
1

ST7LITE2
59/131
12-BIT AUTORELOAD TIMER (Cont’d)
11.2.4 Low Power Mo des
11.2.5 Interrupts
Note 1: The CMP and IC events are connected to
the same interrupt vector.
The OVF event is mapped on a separate vector
(see Interrupts chapter).
They generate an interrupt if the enable bit is set in
the ATCSR register and the interrupt mask in the
CC register is reset (RIM instruction) .
Note 2: Only if CK0=1 and CK1=0
Mode Description
SLOW
The input frequency is divided
by 32
WAIT No effect on AT timer
ACTIVE-HALT
AT timer halted except if CK0=1,
CK1=0 and OVFIE=1
HALT AT timer halted
Interrupt
Event
1)
Event
Flag
Enable
Control
Bit
Exit
from
Wait
Exit
from
Halt
Exit
from
Active-
Halt
Overflow
Event
OVF OVIE Yes No Yes
2)
IC Event ICF ICIE Yes No No
CMP Event CMPF0 CMPIE Yes No No
1

ST7LITE2
60/131
12-BIT AUTORELOAD TIMER (Cont’d)
11.2.6 Register Description
TIMER CONTROL STATUS REGISTER
(ATCSR)
Read / Write
Reset Value: 0x00 0000 (x0h)
Bit 7 = Reserved.
Bit 6 = ICF
Input Capture Flag.
This bit is set by hardware and cleared by soft ware
by reading the ATICR register (a read ac cess to
ATICRH or ATICRL will clear this flag). Writing to
this bit does not change the bit value.
0: No input capture
1: An input capture has occurred
Bit 5 = ICIE
IC Interrupt Enable.
This bit is set and cleared by software.
0: Input capture interrupt disabled
1: Input capture interrupt enabled
Bits 4:3 = CK[1:0]
Counter Clock Selection.
These bits are set and cleared by software and
cleared by hardware after a reset. They select the
clock frequency of the counter. The change becomes effective after an overflow.
Note 1: PWM mode is not available at this frequency.
Note 2: ATICR counter may return inaccurate results when read. It is therefore not recommended
to use Input Capture mode at this frequency.
Bit 2 = OVF
Overflow Flag.
This bit is set by hardware and cleared by software
by reading the TCSR register. It indicates the transition of the counter from FFh to ATR value.
0: No counter overflow occurred
1: Counter overflow occurred
Bit 1 = OVFIE
Overflow Interrupt Enable.
This bit is read /write by software and cleared by
hardware after a reset.
0: OVF interrupt disabled.
1: OVF interrupt enabled.
Bit 0 = CMPIE
Compare Interrupt Enable
.
This bit is read /write by software and cleared by
hardware after a reset. It can be used to mask the
interrupt generated when the CMPF bit is set.
0: CMPF interrupt disabled.
1: CMPF interrupt enabled.
COUNTER REGISTER HIGH (CNTRH)
Read only
Reset Value: 0000 0000 (000h)
COUNTER REGISTER LOW (CNTRL)
Read only
Reset Value: 0000 0000 (000h)
Bits 15:12 = Reserved.
Bits 11:0 = CNTR[11:0]
Counter Value
.
This 12-bit register is read by software and cleared
by hardware after a reset. The counter is incremented continuou sly as soon as a count er clok is
selected. To obtain the 12-bit value, software
should read the co unter value in two cons ecutive
read operations, LSB first. When a counter overflow occurs, the counter restarts from the value
specified in the ATR register.
76 0
0 ICF ICIE CK1 CK0 OVF OVFIE CMPIE
Counter Clock Selection CK1 CK0
OFF 0 0
f
LTIMER
(1 ms timebase @ 8 MHz)
1)
01
f
CPU
10
32 MHz
2)
11
15 8
0000
CNTR11CNTR
10
CNTR9 CNTR8
70
CNTR7 CNTR6 CNTR5 CNTR4 CNTR3 CNTR2 CNTR1 CNTR0
1

ST7LITE2
61/131
12-BIT AUTORELOAD TIMER (Cont’d)
AUTORELOAD REGISTER (ATRH)
Read / Write
Reset Value: 0000 0000 (00h)
AUTORELOAD REGISTER (ATRL)
Read / Write
Reset Value: 0000 0000 (00h)
Bits 11:0 = ATR[11:0]
Autoreload Register.
This is a 12-bit register which is written by software. The ATR register value is automatically
loaded into the upcounter when an overflow occurs. The register value is used to set the PWM
frequency.
PWM OUTPUT CONTROL REGISTER
(PWMCR)
Read/Write
Reset Value: 0000 0000 (00h)
Bits 7:0 = OE[3:0]
PWMx output enable
.
These bits are set and cleared by software and
cleared by hardware after a reset.
0: PWM mode disabled. PWMx Output Alternate
Function disabled (I/O pin free for general purpose I/O)
1: PWM mode enabled
PWMx CONTROL STATUS REGISTER
(PWMxCSR)
Read / Write
Reset Value: 0000 0000 (00h)
Bits 7:2= Reserved, must be kept cleared.
Bit 1 = OPx
PWMx Output Polarity.
This bit is read /write by software and cleared by
hardware after a reset. This bit selects the polarity
of the PWM signal.
0: The PWM signal is not inverted.
1: The PWM signal is inverted.
Bit 0 = CMPFx PW Mx
Compare Flag.
This bit is set by hardware and cleared by software
by reading the PWMxCSR register. It indicates
that the upcounter value matches the DCRx register value.
0: Upcounter value does not match DCR value.
1: Upcounter value matches DCR value.
BREAK CONTROL REGISTER (BREAKCR)
Read/Write
Reset Value: 0000 0000 (00h)
Bits 7:6 = Reserved. Forced by hardware to 0.
Bit 5 = BA
Break Active.
This bit is read/write by software, cleared by hardware after reset and set by hardware when the
BREAK pin is low. It activates/deactivates the
Break function.
0: Break not active
1: Break active
15 8
0 0 0 0 ATR11 ATR10 ATR9 ATR8
70
ATR7 ATR6 ATR5 ATR4 ATR3 ATR2 ATR1 ATR0
70
0OE30OE20OE10OE0
76 0
000000OPxCMPFx
70
0 0 BA BPEN PWM3 PWM2 PWM1 PWM0
1

ST7LITE2
62/131
12-BIT AUTORELOAD TIMER (Cont’d)
Bit 4 = BPEN
Break Pin Enable.
This bit is read/write by software and cleared by
hardware after Reset.
0: Break pin disabled
1: Break pin enabled
Bit 3:0 = PWM[3:0]
Break Pattern.
These bits are read/ write by sof tware and cleared
by hardware after a reset . They are used to forc e
the four PWMx output signals into a stable state
when the Break function is active.
PWMx DUTY CYCLE REGISTER HIGH (DCRxH)
Read / Write
Reset Value: 0000 0000 (00h)
PWMx DUTY CYCLE REGISTER LOW (DCRxL)
Read / Write
Reset Value: 0000 0000 (00h)
Bits 15:12 = Reserved.
Bits 11:0 = DCR[11:0]
PWMx Duty Cycle Valu e
This 12-bit value is written by software. It definesthe duty cycle of th e correspondin g PWM output
signal (see Figure 36).
In PWM mode (OEx=1 in the PWMCR register)
the DCR[11:0] bits define the duty cycle of the
PWMx output signal (see Figure 36). In Output
Compare mode, they define the value to be com pared with the 12-bit upcounter value.
INPUT CAPTURE REGISTER HIGH (ATICRH)
Read only
Reset Value: 0000 0000 (00h)
INPUT CAPTURE REGISTER LOW (ATICRL)
Read only
Reset Value: 0000 0000 (00h)
Bits 15:12 = Reserved.
Bits 11:0 = ICR[11:0]
Input Capture Data
.
This is a 12-bit register which is read able by s oftware and cleared by hardware after a reset. The
ATICR register contains captured the value of the
12-bit CNTR register when a rising or falling e dge
occurs on the ATIC p in. Capture will only be performed when the ICF flag is cleared.
TRANSFER CONTROL REGISTER (TRANCR)
Read/Write
Reset Value: 0000 0001 (01h)
Bits 7:1 Reserved. Forced by hardware to 0.
Bit 0 = TRAN
Transfer enable
This bit is read/write by software, cleared by hardware after each completed transfer and set by
hardware after reset.
It allows the value of the DCRx registers to be
transferred to the DCRx shadow registers after the
next overflow event.
The OPx bits are t ransferred to the shadow OPx
bits in the same way.
15 8
0 0 0 0 DCR11 DCR10 DCR9 DCR8
70
DCR7 DCR6 DCR5 DCR4 DCR3 DCR2 DCR1 DCR0
15 8
0000ICR11ICR10ICR9ICR8
70
ICR7 ICR6 ICR5 ICR4 ICR3 ICR2 ICR1 ICR0
70
0000000TRAN
1

ST7LITE2
63/131
12-BIT AUTORELOAD TIMER (Cont’d)
Table 14. Register Map and Reset Values
Address
(Hex.)
Register
Label
76543210
0D
ATCSR
Reset Value
0
ICF
0
ICIE
0
CK1
0
CK0
0
OVF
0
OVFIE0CMPIE
0
0E
CNTRH
Reset Value
0000
CNTR110CNTR100CNTR90CNTR8
0
0F
CNTRL
Reset Value
CNTR70CNTR80CNTR70CNTR60CNTR30CNTR20CNTR10CNTR0
0
10
ATRH
Reset Value
0000
ATR110ATR10
0
ATR9
0
ATR8
0
11
ATRL
Reset Value
ATR7
0
ATR6
0
ATR5
0
ATR4
0
ATR3
0
ATR2
0
ATR1
0
ATR0
0
12
PWMCR
Reset Value
0
OE3
0
0
OE2
0
0
OE1
0
0
OE0
0
13
PWM0CSR
Reset Value
000000
OP0
0
CMPF0
0
14
PWM1CSR
Reset Value
000000
OP1
0
CMPF1
0
15
PWM2CSR
Reset Value
000000
OP2
0
CMPF2
0
16
PWM3CSR
Reset Value
000000
OP3
0
CMPF3
0
17
DCR0H
Reset Value
0000
DCR110DCR10
0
DCR9
0
DCR8
0
18
DCR0L
Reset Value
DCR7
0
DCR6
0
DCR5
0
DCR4
0
DCR3
0
DCR2
0
DCR1
0
DCR0
0
19
DCR1H
Reset Value
0000
DCR110DCR100DCR9
0
DCR8
0
1A
DCR1L
Reset Value
DCR7
0
DCR6
0
DCR5
0
DCR4
0
DCR3
0
DCR2
0
DCR1
0
DCR0
0
1B
DCR2H
Reset Value
0000
DCR110DCR100DCR9
0
DCR8
0
1C
DCR2L
Reset Value
DCR7
0
DCR6
0
DCR5
0
DCR4
0
DCR3
0
DCR2
0
DCR1
0
DCR0
0
1D
DCR3H
Reset Value
0000
DCR110DCR100DCR9
0
DCR8
0
1E
DCR3L
Reset Value
DCR7
0
DCR6
0
DCR5
0
DCR4
0
DCR3
0
DCR2
0
DCR1
0
DCR0
0
1F
ATICRH
Reset Value
0000
ICR11
0
ICR10
0
ICR9
0
ICR8
0
20
ATICRL
Reset Value
ICR7
0
ICR6
0
ICR5
0
ICR4
0
ICR3
0
ICR2
0
ICR1
0
ICR0
0
1

ST7LITE2
64/131
21
TRANCR
Reset Value
0000000
TRAN
1
22
BREAKCR
Reset Value
00
BA
0
BPEN
0
PWM30PWM2
0
PWM1
0
PWM0
0
Address
(Hex.)
Register
Label
76543210
1

ST7LITE2
65/131
11.3 LITE TIMER 2 (LT2)
11.3.1 Introduction
The Lite Timer can be used for general-purpose
timing functions. It is based on two free-running 8bit upcounters, an 8-bit input capture register.
11.3.2 Main Features
■ Realtime Clock
– One 8-bit upcounter 1 ms o r 2 m s timebase
period (@ 8 MHz f
OSC
)
– One 8-bit upcounter with auto reload and pro-
grammable timebase period from 4µs to
1.024ms in 4µs increments (@ 8 MHz f
OSC
)
– 2 Maskable timebase interrupts
■ Input Capture
– 8-bit input capture register (LTICR)
– Maskable interrupt with wakeup from Halt
Mode capability
Figure 40. Lite Timer 2 Block Diagram
LTCSR1
8-bit TIMEBASE
/2
8-bit
f
LTIMER
8
LTIC
f
OSC
/32
TB1F TB1IETBICFICIE
LTTB1 INTERRUPT REQUEST
LTIC INTERRUPT REQUEST
LTICR
INPUT CAPTURE
REGISTER
1
0
1 or 2 ms
Timebase
(@ 8MHz
f
OSC
)
To 12-bit AT TImer
f
LTIMER
LTCSR2
TB2F
0
TB2IE
0
LTTB2
8-bit TIMEBASE
00
8-bit AUTORELOAD
REGISTER
8
LTCNTR
LTARR
COUNTER 2
COUNTER 1
00
Interrupt request
1

ST7LITE2
66/131
LITE TIMER (Cont’d)
11.3.3 Functional Description
11.3.3.1 Timebase Counter 1
The 8-bit value of Counter 1 cannot be read or
written by software. After an MCU reset, it starts
incrementing from 0 at a frequency of f
OSC
/32. An
overflow event occurs when the c ounter roll s ov er
from F9h to 00h. If f
OSC
= 8 MHz, then the time period between two counter overflow events is 1 ms.
This period can be doubled by setting the TB bit in
the LTCSR1 register.
When Counter 1 overflows, the TB1F bit is set by
hardware and an interrupt reques t is generated if
the TB1IE bit is set. The TB1F bit is cleared by
software reading the LTCSR1 register.
11.3.3.2 Timebase Counter 2
Counter 2 is an 8-bit aut oreload upcoun ter. It can
be read by accessing the LTCNTR register. After
an MCU reset, it increments at a frequency of
f
OSC
/32 starting from the value stored in the
LTARR register. A counter overflow event occurs
when the counter rolls over from FFh to the
LTARR reload value. Software can write a new
value at anytime in the LTARR register, this value
will be automatically loaded in the counter when
the next overflow occurs.
When Counter 2 overflows, the TB2F bit in the
LTCSR2 register is set by hardware and an interrupt request is generated if the TB2IE bit is set.
The TB2F bit is cleared by software reading the
LTCSR2 register.
11.3.3.3 Input Capture
The 8-bit input capture register is used to latch the
free-running upcounter (Counter 1) 1 after a rising
or falling edge is detected on the ICAP1 pin. When
an input capture occurs, the ICF bit is set and the
LTICR1 register con tains the MSB of Counter 1.
An interrupt is generated if the I CIE bit is set. T he
ICF bit is cleared by reading the LTICR register.
The LTICR is a read-only register and always contains the data from the last input capture. Input
capture is inhibited if the ICF bit is set.
Figure 41. Input Capture Timing Diagram.
04h
8-bit COUNTER 1
t
01h
f
OSC
/32
xxh
02h 03h 05h 06h 07h
04h
LTIC PIN
ICF FLAG
LTICRREGISTER
CLEARED
4µs
(@ 8MHz f
OSC
)
f
CPU
BY S/W
07h
READING
LTIC REGISTER
1

ST7LITE2
67/131
LITE TIMER (Cont’d)
– The opcode for the HALT instruction is 0x8E. To
avoid an unexpected HALT instruction due to a
program counter failure, it is advised to clear all
occurrences of the data value 0x8E from memory. For example, avoid defining a constant in
ROM with the value 0x8E.
– As the HALT instruction clears the I bit in the CC
register to allow interrupts, the user may choose
to clear all pending interrupt bits before executing the HALT instruction. This avoids entering
other peripheral interrupt routines after executing
the external interrupt routine corresponding to
the wake-up event (reset or external interrupt).
11.3.4 Low Power Modes
11.3.5 Interrupts
Note: The TBxF and ICF interrupt events are con-
nected to separate interrupt vectors (see Interrupts chapter).
They generate an interrupt if the enable bit is set in
the LTCSR1 or LTCSR 2 register and the interrupt
mask in the CC register is reset (RIM instruction).
11.3.6 Register Description
LITE TIMER CONTROL/STATUS REGISTER 2
(LTCSR2)
Read / Write
Reset Value: 0x00 0000 (x0h)
Bits 7:2 = Reserved, must be kept cleared.
Bit 1 = TB2IE
Timebase 2 Interrupt enable
.
This bit is set and cleared by software.
0: Timebase (TB2) interrupt disabled
1: Timebase (TB2) interrupt enabled
Bit 0 = TB2F
Timebase 2 Interrupt Flag
.
This bit is set by hardware and cleared by software
reading the LTCSR register. Writing to this bit has
no effect.
0: No Counter 2 overflow
1: A Counter 2 overflow has occurred
LITE TIMER AUTORELOAD REGISTER
(LTARR)
Read / Write
Reset Value: 0000 0000 (00h)
Bits 7:0 = AR[7:0]
Counter 2 Reload Value.
These bits regist er is read/write by s oftware. The
LTARR value is automatically loaded into Counter
2 (LTCNTR) when an overflow occurs.
Mode Description
SLOW
No effect on Lite timer
(this peripheral is driven directly
by f
OSC
/32)
WAIT No effect on Lite timer
ACTIVE-HALT No effect on Lite timer
HALT Lite timer stops counting
Interrupt
Event
Event
Flag
Enable
Control
Bit
Exit
from
Wait
Exit
from
Active
Halt
Exit
from
Halt
Timebase 1
Event
TB1F TB1IE Yes Yes No
Timebase 2
Event
TB2F TB2IE Yes No No
IC Event ICF ICIE Yes No No
70
000000TB2IETB2F
70
AR7 AR7 AR7 AR7 AR3 AR2 AR1 AR0
1

ST7LITE2
68/131
LITE TIMER (Cont’d)
LITE TIMER COUNTER 2 (LTCNTR)
Read only
Reset Value: 0000 0000 (00h)
Bits 7:0 = CNT[7:0]
Counter 2 Reload Value.
This register is read by software. The LTARR value is automatically loaded into Co unter 2 (LTCNTR) when an overflow occurs.
LITE TIMER CONTROL/STATUS REGISTER
(LTCSR1)
Read / Write
Reset Value: 0x00 0000 (x0h)
Bit 7 = ICIE
Interrupt Enable.
This bit is set and cleared by software.
0: Input Capture (IC) interrupt disabled
1: Input Capture (IC) interrupt enabled
Bit 6 = ICF
Input Capture Flag.
This bit is set by hardware and cleared by soft ware
by reading the LTICR register. Writing to this bit
does not change the bit value.
0: No input capture
1: An input capture has occurred
Note: After an MCU reset, software must initialise
the ICF bit by reading the LTICR register
Bit 5 = TB
Timebase period selection.
This bit is set and cleared by software.
0: Timebase period = t
OSC
* 8000 (1ms @ 8 MHz)
1: Timebase period = t
OSC
* 16000 (2ms @ 8
MHz)
Bit 4 = TB1IE
Timebase Interrupt enable
.
This bit is set and cleared by software.
0: Timebase (TB1) interrupt disabled
1: Timebase (TB1) interrupt enabled
Bit 3 = TB1F
Timebase Interrupt Flag
.
This bit is set by hardware and cleared by software
reading the LTCSR register. Writing to this bit has
no effect.
0: No counter overflow
1: A counter overflow has occurred
Bits 2:0 = Reserved
LITE TIMER INPUT CAPTURE REGISTER
(LTICR)
Read only
Reset Value: 0000 0000 (00h)
Bits 7:0 = ICR[7:0]
Input Capture Value
These bits are read by software and cleared by
hardware after a reset. If the ICF bit in the LTCSR
is cleared, the value of the 8-bit up-counter will be
captured when a rising or fa lling edge occurs on
the LTIC pin.
70
CNT7 CNT7 CNT7 CNT7 CNT3 CNT2 CNT1 CNT0
70
ICIE ICF TB TB1IE TB1F - - -
70
ICR7 ICR6 ICR5 ICR4 ICR3 ICR2 ICR1 ICR0
1

ST7LITE2
69/131
LITE TIMER (Cont’d)
Table 15. Lite Timer Register Map and Reset Values
Address
(Hex.)
Register
Label
76543210
08
LTCSR2
Reset Value
000000
TB2IE
0
TB2F
0
09
LTARR
Reset Value
AR7
0
AR6
0
AR5
0
AR4
0
AR3
0
AR2
0
AR1
0
AR0
0
0A
LTCNTR
Reset Value
CNT7
0
CNT6
0
CNT5
0
CNT4
0
CNT3
0
CNT2
0
CNT1
0
CNT0
0
0B
LTCSR1
Reset Value
ICIE
0
ICF
x
TB
0
TB1IE
0
TB1F
0
000
0C
LTICR
Reset Value
ICR7
0
ICR6
0
ICR5
0
ICR4
0
ICR3
0
ICR2
0
ICR1
0
ICR0
0
1

ST7LITE2
70/131
11.4 SERI AL PER IPHERAL INTERFACE (SPI )
11.4.1 Introduction
The Serial Peripheral Interface (SPI) allows fullduplex, synchronous, serial communication with
external devices. An SPI system may cons ist of a
master and one or more slaves or a system in
which devices may be either masters or slaves.
11.4.2 Main Features
■ Full duplex synchronous transfers (on 3 lines)
■ Simplex synchronous transfers (on 2 lines)
■ Master or slave operation
■ Six master mode frequencies (f
CPU
/4 max.)
■ f
CPU
/2 max. slave mode frequency
■ SS Management by software or hardware
■ Programmable clock polarity and phas e
■ End of transfer interrupt flag
■ Write co llision, Master Mo de Fault and Ove r run
flags
11.4.3 General Description
Figure 42 shows the serial peripheral interface
(SPI) block diagram. There are 3 registers:
– SPI Control Register (SPICR)
– SPI Control/Status Register (SPICSR)
– SPI Data Register (SPIDR)
The SPI is connec ted to ext ernal devices th rough
3 pins:
– MISO: Master In / Slave Out data
– MOSI: Master Out / Slave In data
– SCK: Serial Clock out by SPI mas ters and in-
put by SPI slaves
–SS
: Slave select:
This input signal acts as a ‘chip select’ to let
the SPI master communicate with slaves individually and to avoid contention on the data
lines. Slave SS
inputs can be driven by stand-
ard I/O ports on the master
Device.
Figure 42. Serial Peripheral Interface Block Diagram
SPIDR
Read Buffer
8-Bit Shift Register
Write
Read
Data/Address Bus
SPI
SPIE SPE
MSTR
CPHA
SPR0
SPR1CPOL
SERIAL CLOCK
GENERATOR
MOSI
MISO
SS
SCK
CONTROL
STATE
SPICR
SPICSR
Interrupt
request
MASTER
CONTROL
SPR2
07
07
SPIF WCOL MODF
0
OVR SSISSMSOD
SOD
bit
SS
1
0
1

ST7LITE2
71/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.3.1 Functional Description
A basic example of interconnections between a
single master and a single slave is illustrated in
Figure 43.
The MOSI pins are connected together and the
MISO pins are connected together. In this way
data is transferred serially between master and
slave (most significant bit first).
The communication is always initiated by the master. When the master device transmits data to a
slave device via MOSI pin, the slave device re-
sponds by sending da ta to the master device via
the MISO pin. This implies full duplex communication with both data out an d data in synchronized
with the same clock signal (which is provided by
the master device via the SCK pin).
To use a single data line, the MISO and MOSI pins
must be connected at each node ( in this case only
simplex communicati on is possib le).
Four possible data/clock timin g relationships may
be chosen (see Figure 46) but m aster and slave
must be programmed with the same timing mode.
Figure 43. Single Master/ Single Slave Application
8-BIT SHIFT REGISTE R
SPI
CLOCK
GENERATO R
8-BIT SHIFT REGISTE R
MISO
MOSI
MOSI
MISO
SCK
SCK
SLAVE
MASTER
SS
SS
+5V
MSBit LSBit MSBit LSBit
Not used if SS is managed
by software
1

ST7LITE2
72/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.3.2 Slave Select Management
As an alternative to using the SS
pin to control the
Slave Select signal, the appli cation c an choose to
manage the Slave Select signal by softwa re. This
is configured by the SSM bit in the S P ICSR register (see Figure 45)
In software management, the external SS
pin is
free for other application uses and t he i nternal SS
signal level is driven by writing to the SSI bit in the
SPICSR register.
In Master mode:
–SS
internal must be held high continuously
In Slave Mode:
There are two cases depending on the data/clock
timing relationship (see Figure 44):
If CPHA=1 (data latched on 2nd clock edge):
–SS
internal must be held low during the entire
transmission. T his im plies t hat in s in gle s lave
applications the SS
pin either can be t ied to
V
SS
, or made free for standard I/O by manag-
ing the SS
function by software (SSM= 1 and
SSI=0 in the in the SPICSR register)
If CPHA=0 (data latched on 1st clock edge):
–SS
internal must be held low during byte
transmission and pulled high between each
byte to allow the slave to write to the shift register. If SS
is not pulled high, a Write Collision
error will occur when the slave writes to the
shift register (see Section 11.4.5.3).
Figure 44. Generic SS
Timing Dia gram
Figure 45. Hardware/Software Slave Select Management
MOSI/MISO
Master SS
Slave SS
(if CPHA=0)
Slave SS
(if CPHA=1)
Byte 1 Byte 2
Byte 3
1
0
SS internal
SSM bit
SSI bit
SS
external pin
1

ST7LITE2
73/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.3.3 Master Mode Operation
In master mode, the serial clock is output on the
SCK pin. The c lock f requency, polarity an d phase
are configured by software (refer to the description
of the SPICSR register).
Note: The idle state of SCK must correspond to
the polarity selected in the SPICSR register (by
pulling up SCK if CPOL=1 or pulling down SCK if
CPOL=0).
To operate the SPI in master mode, perform the
following two steps in order (if t he SPICSR register
is not written first, the SPICR register setting may
be not taken into account):
1. Write to the SPICSR register:
– Select the clock frequency by configuring the
SPR[2:0] bits.
– Select the clock pola rity and c lock phase by
configuring the CP OL a nd CP HA b its. Figur e
46 shows the four possible configurations.
Note: The slave must have the same CPOL
and CPHA settings as the master.
– Either set the SSM bit and s et the SSI bit or
clear the SSM bit and tie the SS
pin high for
the complete byte transmit sequence.
2. Write to the SPICR register:
– Set the MSTR and SPE bits
Note: MSTR and SPE bits remain set onl y if
SS
is high).
The transmit sequence begins when software
writes a byte in the SPIDR register.
11.4.3.4 Master Mode Transmit Sequen ce
When software writes to the SPIDR register, the
data byte is loaded into the 8-bit shift register and
then shifted out serially to the MOSI pin most significant bit first.
When data transfer is complete:
– The SPIF bit is set by hardware
– An interrupt request is generated if the SPIE
bit is set and the interrupt mask in the C CR
register is cleared.
Clearing the SPIF bit is performed by the following
software sequence:
1. An access to the SPICSR register while the
SPIF bit is set
2. A read to the SPIDR register.
Note: While the SPIF bit is set, all writes to the
SPIDR register are inhibited until the SPICSR register is rea d.
11.4.3.5 Slave Mode Operation
In slave mode, the s erial clock is received on t he
SCK pin from the master device.
To operate the SPI in slave mode:
1. W rite to the SPICSR regist er to perform t he following actions:
– Select the clock po larity and clock phase by
configuring the CPOL and CPHA bits (see
Figure 46).
Note: The slave must have the same CPOL
and CPHA settings as the master.
– Manage the SS
pin as described in Section
11.4.3.2 and Figure 44. If C PHA=1 SS
must
be held low continuously. If CPHA=0 SS
must
be held low during byte transmission and
pulled up between each b yte to let the slave
write in the shift register.
2. W rite to the SP ICR register to cl ear the MS TR
bit and set the SPE bit to enable the SPI I/O
functions.
11.4.3.6 Slave Mode Transmit Seq uence
When software writes to the SPIDR register, the
data byte is loaded into the 8-bit shift register and
then shifted out serially to the MISO pin most significant bit first.
The transmit sequence begins when the slave device receives th e clock si g n al and the most significant bit of the data on its MOSI pin.
When data transfer is c omplete:
– The SPIF bit is set by hardware
– An interrupt request is generated if SPIE bit is
set and interrupt mask in the CCR register is
cleared.
Clearing the SPIF bit is performed by the following
software sequence:
1. An access to the SPICSR register while the
SPIF bit is set.
2. A write or a read to the SPIDR register.
Notes: While the SPIF bit is se t, all writes to the
SPIDR register are inhibited until the SPICSR register is read.
The SPIF bit can be cleared during a second
transmission; however, it m ust be cleared before
the second SPIF bit in order to prevent an Overrun
condition (see Section 11.4.5.2).
1

ST7LITE2
74/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.4 Clock Phase and Clock Polarity
Four possible timing relationships may be cho sen
by software, using the CPOL an d CPHA bits (Se e
Figure 46).
Note: The idle state of SCK must correspond to
the polarity selected in the SPICSR register (by
pulling up SCK if CPOL=1 or pulling down SCK if
CPOL=0).
The combination of the CPOL clock polarity and
CPHA (clock phase) bits selects the data capture
clock edge
Figure 46, shows an SPI transfer with the four
combinations of the CPHA and CPOL bits. The diagram may be interpreted as a master or slave
timing diagram where the SCK pin, the MIS O pin,
the MOSI pin are direct ly connected between the
master and the slave device.
Note: If CPOL is changed at the communication
byte boundaries, the SPI m ust be disabled by resetting the SPE bit.
Figure 46. D ata Clo c k Ti m in g Di a gram
SCK
MSBit Bit 6 Bit 5
Bit 4 Bit3 Bit 2 Bit 1 LSBit
MSBit Bit 6 Bit 5
Bit 4 Bit3 Bit 2 Bit 1 LSBit
MISO
(from master)
MOSI
(from slave)
SS
(to slave)
CAPTURE STROBE
CPHA =1
MSBit Bit 6 Bit 5
Bit 4 Bit3 Bit 2 Bit 1 LSBit
MSBit Bit 6 Bit 5
Bit 4 Bit3 Bit 2 Bit 1 LSBit
MISO
(from master)
MOSI
SS
(to slave)
CAPTUR E STROB E
CPHA =0
Note:
This figure should not be used as a replacement for parametric information.
Refer to the Electrical Characteristics chapter.
(from slave)
(CPOL = 1)
SCK
(CPOL = 0)
SCK
(CPOL = 1)
SCK
(CPOL = 0)
1

ST7LITE2
75/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.5 Error Flags
11.4.5.1 Master Mode Fault (MODF)
Master mode fault occurs when the master device
has its SS
pin pulled low.
When a Master mode fault occurs:
– The MODF bit is set and an SPI interrupt re-
quest is generated if the SPIE bit is set.
– The SPE bit is reset. This blocks all output
from the Device and disables the SPI peripheral.
– The MSTR bit is reset, thus forcing the Device
into slave mode.
Clearing the MODF bit is done through a software
sequence:
1. A read access to the SPICSR register while the
MODF bit is set.
2. A write to the SPICR register.
Notes: To avoid any conflicts in an application
with multiple slaves, the SS
pin must be pulled
high during the MODF bit clearing sequenc e. The
SPE and MSTR bits may be restored to their original state during or after this clearing sequence.
Hardware does not allow the user to set the SPE
and MSTR bits while the MODF bit is set except in
the MODF bit clearing sequence.
In a slave device, the MODF bit can not be set, but
in a multi master configuration the
Device can be in
slave mode with the MODF bit set.
The MODF bit indicates that there might have
been a multi-master conflict and allows software to
handle this using an interrupt routine and either
perform to a reset o r return to an applicat ion defaul t s ta te.
11.4.5.2 Overrun Con ditio n (OVR )
An overrun condition occurs, when the master device has sent a data byte and the slave device has
not cleared the SPIF bit issued from the previously
transmitted byte.
When an Overrun occurs :
– The OVR bit is set and an interrupt request is
generated if the SPIE bit is set.
In this case, the receiver buffer contains t he byte
sent after the SPIF bit was last cleared. A read to
the SPIDR register returns this byte. All other
bytes are lost.
The OVR bit is cleared by reading the SPICSR
register.
11.4.5.3 Write Collision Error (WCOL)
A write collision occurs when the softwa re tries to
write to the SPIDR register while a data transfer is
taking place with an external device. When this
happens, the transfer continues uninterrupted;
and the software write will be unsuccessful.
Write collisions can occur both in master and slave
mode. See also Section 11.4.3.2 Slave Select
Management.
Note: a "read collision" will never occur since the
received data b yte is pl aced in a buffer in which
access is always synchronous with the CPU operation.
The WCOL bit in the SPICSR register is set if a
write collision occurs.
No SPI interrupt is generated when the WCOL bit
is set (the WCOL bit is a status flag only).
Clearing the WCOL bit is done through a software
sequence (see Figure 47).
Figure 47. Clearing the WCOL bit (Write Collision Flag) Software Sequence
Clearing sequence after SPIF = 1 (end of a data byte transfer)
1st Step
Read SPICSR
Read SPIDR
2nd Step
SPIF =0
WCOL=0
Clearing sequence before SPIF = 1 (during a data byte transfer)
1st Step
2nd Step
WCOL=0
Read SPICSR
Read SPIDR
Note: Writing to the SPIDR register instead of reading it does not
reset the WCOL bit
RESULT
RESULT
1

ST7LITE2
76/131
SERIAL PERIPHERAL INTERFACE (Cont ’d)
11.4.5.4 Single Master and Multimaster
Configurations
There are two types of SPI systems:
– Single Master System
– Multimaster System
Single Master System
A typical single master system may be configured,
using a
device as the master and four dev ices as
slaves (see Figure 48).
The master device selects the individual slave de-
vices by using four pins of a parallel port to control
the four SS
pins of the slave devices.
The SS
pins are pulled high during reset since the
master device ports will be forced to be inputs at
that time, thus disabling the slave devices.
Note: T o prevent a b us conflict on the MISO line
the master allows only one active slave device
during a transmission.
For more security, the slave device may respond
to the master with the received data byte. Then the
master will receive the previous byte back from the
slave device if all MISO and MOSI pins are connected and the slave has not written to its SPIDR
register.
Other transmission security methods can use
ports for handshake lines or dat a bytes with co mmand fields.
Multi-Master System
A multi-master system may al so be configured by
the user. Transfer of master control could be implemented using a handshake method through the
I/O ports or by an exchange of code messages
through the serial peripheral interface system.
The multi-master system is principally handled by
the MSTR bit in the SPICR register and the MODF
bit in the SPICSR register.
Figure 48. Single Master / Multiple Slave Configuration
MISO
MOSI
MOSI
MOSI MOSI MOSIMISO MISO MISOMISO
SS
SS SS
SS
SS
SCK SCK
SCK
SCK
SCK
5V
Ports
Slave
Device
Slave
Device
Slave
Device
Slave
Device
Master
Device
1

ST7LITE2
77/131
SERIAL PERIPHERAL INTERFACE (Cont’d)
11.4.6 Low Power Mo des
11.4.6.1 Using the SPI to wak e-up the Device
from Halt mode
In slave configuration, the SPI is able to wake-up
the
Device from HALT mod e through a SPIF inter-
rupt. The data received is subsequen tly read from
the SPIDR register when the software is running
(interrupt vector fetch). If multiple data transfers
have been performed before software clears the
SPIF bit, then the OVR bit is set by hardware.
Note: When waking up f rom Halt mo de, if the SPI
remains in Slave mode, it is recommended to perform an extra communicat ions cycle to bring the
SPI from Halt mode state to normal state. If the
SPI exits from Slave mode, it returns to normal
state immediately.
Caution: The SPI can wake-up the
Device from
Halt mode only if the Slave Select signal (external
SS
pin or the SSI bit in the SPICSR register) is low
when the
Device enters Halt mode. So if Slave se-
lection is configured as external (see Section
11.4.3.2), make sure the master drives a low level
on the SS
pin when the slave enters Halt mode.
11.4.7 Interrupts
Note: The SPI interrupt events are c onnected to
the same interrupt vector (see Interrupts chapter).
They generate an interrupt if the corresponding
Enable Control Bit is set and the in terrupt m ask in
the CC register is reset (RIM instruction).
Mode Description
WAIT
No effect on SPI.
SPI interrupt events cause the Device to exit
from WAIT mode.
HALT
SPI registers are frozen.
In HALT mode, the SPI is inactive. SPI operation resumes when the Device is woken up
by an interrupt with “exit from HALT mode”
capability. The data received is subsequently
read from the SPIDR register when the software is running (interrupt vector fetching). If
several data are received before the wakeup event, then an overrun error is generated.
This error can be detected after the fetch of
the interrupt routine that woke up the Device.
Interrupt Event
Event
Flag
Enable
Control
Bit
Exit
from
Wait
Exit
from
Halt
SPI End of Transfer Event
SPIF
SPIE
Yes Yes
Master Mode
Fault Event
MODF Yes No
Overrun Error OVR Yes No
1

ST7LITE2
78/131
SERIAL PERIPHERAL INTERFACE (Cont ’d)
11.4.8 Register Description
CONTROL REGISTER (SPICR)
Read/Write
Reset Value: 0000 xxxx (0xh)
Bit 7 = SPIE
Serial Peripheral Interrupt Enable.
This bit is set and cleared by software.
0: Interrupt is inhibited
1: An SPI interrupt is generated whenever an End
of Transfer event, Master Mode Fault or Overrun error occurs (SPIF=1, MODF=1 or OVR=1
in the SPICSR register)
Bit 6 = SPE
Serial Peripheral Output Enable.
This bit is set and cl eared by software. It is also
cleared by hardware when, in master mode, SS
=0
(see Section 11.4.5.1 Master Mode Fault
(MODF)). The SPE bit is c leared by reset, so the
SPI peripheral is not initially connected to the exte rnal pi ns.
0: I/O pins free for general purpose I/O
1: SPI I/O pin alternate functions enabled
Bit 5 = SPR2
Divider Enable
.
This bit is set and cleared by software and is
cleared by reset. It is used with the SPR[1:0] bits to
set the baud rate. Refer to Table 16 S PI Mas ter
mode SCK Frequency.
0: Divider by 2 enabled
1: Divider by 2 disabled
Note: This bit has no effect in slave mode.
Bit 4 = MSTR
Master Mode.
This bit is set and cl eared by software. It is also
cleared by hardware when, in master mode, SS
=0
(see Section 11.4.5.1 Master Mode Fault
(MODF)).
0: Slave mode
1: Master mode. The function of the SCK pin
changes from an input to an output and the functions of the MISO and MOSI pins are reversed.
Bit 3 = CPOL
Clock Polarity.
This bit is set and cleared by software. This bit determines the idle state of the serial Clock. The
CPOL bit affects both the master and slave
modes.
0: SCK pin has a low level idle state
1: SCK pin has a high level idle state
Note: If CPOL is changed at the communication
byte boundaries, the SPI m ust be disabled by resetting the SPE bit.
Bit 2 = CPHA
Clock Phase.
This bit is set and cleared by software.
0: The first clock transition is the first data capture
edge.
1: The second clock transition is the first capture
edge.
Note: The s lave must have the same CPOL and
CPHA settings as the master.
Bits 1:0 = SPR[1:0]
Serial Clock Frequency.
These bits are set and cleared by software. Used
with the SPR2 bit, they select the baud rate of the
SPI serial clock SCK output by the SPI in master
mode.
No te : These 2 bits have no effect in slave mode.
Table 16. SPI Master mode SCK Frequency
70
SPIE SPE SPR2 MSTR CPOL CPHA SPR1 SPR0
Serial Clock SPR2 SPR1 SPR0
f
CPU
/4 1 0 0
f
CPU
/8 0 0 0
f
CPU
/16 0 0 1
f
CPU
/32 1 1 0
f
CPU
/64 0 1 0
f
CPU
/128 0 1 1
1

ST7LITE2
79/131
SERIAL PERIPHERAL INTERFACE (Cont ’d)
CONTROL/STATUS REGISTER (SPICSR)
Read/Write (some bits Read Only)
Reset Value: 0000 0000 (00h)
Bit 7 = SPIF
Serial Peripheral Data Transfer Flag
(Read only).
This bit is set by hardware when a t ransfer has
been completed. An interrupt is generated if
SPIE=1 in the SPICR register. It is cleared by a
software sequence (an access to the SPICSR
register followed by a write or a read to the
SPIDR register).
0: Data transfer is in progress or the flag has been
cleared.
1: Data transfer between the
Device and an exter-
nal device has been completed.
Note: While the SPIF bit is set, all writes to the
SPIDR register are inhibited until the SPICSR register is rea d.
Bit 6 = WCOL
Write Collision status (Read only).
This bit is set by hardware when a write to the
SPIDR register is done during a transmit sequence. It is cleared by a software sequence (see
Figure 47).
0: No write collision occurred
1: A write collision has been detected
Bit 5 = OVR S
PI Overrun error (Read only).
This bit is set by hardware when the byte currently
being received in the shift register is ready to b e
transferred into the SPIDR register while SPIF = 1
(See Section 11.4.5.2). An interrupt is generated if
SPIE = 1 in SPICSR register. The OVR bit is
cleared by software reading the SPICSR register.
0: No overrun error
1: Overrun error detected
Bit 4 = MO DF
Mode Fault flag (Read only).
This bit is set by hardware when the SS pin is
pulled low in master mode (see Sect ion 11.4.5.1
Master Mode Fault (MODF)). An SPI interrupt can
be generated if SPIE=1 in the SPICSR register.
This bit is cleared by a software sequence (An access to the SPICSR register while MODF=1 followed by a write to the SPICR register).
0: No master mode fault detected
1: A fault in master mode has been detected
Bit 3 = Reserved, must be kept cleared.
Bit 2 = SOD
SPI Output Disable.
This bit is set and cleared by software. When set, it
disables the alternate function of the SPI output
(MOSI in master mode / MISO in slave mode)
0: SPI output enabled (if SPE=1)
1: SPI output disabled
Bit 1 = SSM
SS Ma nagem ent .
This bit is set and cleared by software. When set, it
disables the alternate func tion of the SPI SS
pin
and uses the SSI bit value instead. See Section
11.4.3.2 Slave Select Management.
0: Hardware management (SS
managed by exter-
nal pin)
1: Software management (internal SS
signal con-
trolled by SSI bit. External SS
pin free for gener-
al-purpose I/O)
Bit 0 = SSI
SS Internal Mode.
This bit is set and cleared by software. It acts as a
‘chip select’ by controlling the level of the SS
slave
select signal when the SSM bit is set.
0 : Slave selected
1 : Slave deselected
DATA I/O REGISTER (SPIDR)
Read/Write
Reset Value: Undefined
The SPIDR register is used to t ransmit and receive
data on the serial bus. In a master device, a write
to this register will initiate transmission/reception
of another byte.
Notes: During the last clock cy cle the SPIF bit is
set, a copy of the received data byte in the shift
register is moved to a buffer. When the user reads
the serial peripheral data I/O register, the buffer is
actually being read.
While the SPIF bit is set, all writes to the SPIDR
register are inhibited until the SPICSR register is
read.
Warning: A write to the SPIDR register places
data directly into the shift register f or t ransmission.
A read to the SPIDR register returns the value located in the buffer and not the co ntent of the shift
register (see Figure 42).
70
SPIF WCOL OVR MO DF - SOD SSM SSI
70
D7 D6 D5 D4 D3 D2 D1 D0
1

ST7LITE2
80/131
Table 17. SPI Register Map and Reset Values
Address
(Hex.)
Register
Label
76543210
0031h
SPIDR
Reset Value
MSB
xxxxxxx
LSB
x
0032h
SPICR
Reset Value
SPIE
0
SPE
0
SPR2
0
MSTR
0
CPOL
x
CPHA
x
SPR1
x
SPR0
x
0033h
SPICSR
Reset Value
SPIF
0
WCOL
0
OVR
0
MODF
00
SOD
0
SSM
0
SSI
0
1

ST7LITE2
81/131
11.5 10-BIT A/D CONVERTER (ADC)
11.5.1 Introduction
The on-chip Analog to Digital Converter (ADC) peripheral is a 10-bit, successive approximation converter with internal sampl e and hold circuitry. This
peripheral has up to 7 multiplexed analog input
channels (refer to device pin out description) that
allow the peripheral to convert the ana log voltage
levels from up to 7 different sources.
The result of the conversion is stored in a 10-bit
Data Register. The A/D converter is controlled
through a Control/Status Register.
11.5.2 Main Features
■ 10-bit conversion
■ Up to 7 channels with multiplexed input
■ Linear successive approximation
■ Data register (DR) which contains the results
■ Conversion complete status flag
■ On/off bit (to reduce consumption)
The block diagram is shown in Figure 49.
11.5.3 Functional Description
11.5.3.1 Analog Power Supply
V
DDA
and V
SSA
are the high and low level reference voltage pins. In some devices (refer to device
pin out description) they are internally connected
to the V
DD
and VSS pins.
Conversion accuracy may therefore be impacted
by voltage drops a nd noise in the event o f h eavily
loaded or badly decoupled power supply lines.
Figure 49. ADC Block Diagram
CH2 CH1EOC SPEEDAD ON 0 CH0
ADCCSR
AIN0
AIN1
ANALOG TO DIGITAL
CONVERTER
AINx
ANALOG
MUX
D4 D3D5D9 D8 D7 D6 D2
ADCDRH
3
D1 D0
ADCDRL 00 0
AMP
SLOW
AMP
0
R
ADC
C
ADC
HOLD CONTROL
x 1 or
x 8
AMPSEL
bit
SEL
f
ADC
f
CPU
0
1
1
0
DIV 2
DIV 4
SLOW
bit
CAL
1

ST7LITE2
82/131
10-BIT A/D CONVERTER (ADC) (Cont’d)
11.5.3.2 Input Voltage Amplifier
The input voltage can be amplified by a factor of 8
by enabling the AMPSEL bit in the ADCDRL register.
When the amplifier is enab led, the input range is
0V to V
DD
/8.
For example, if V
DD
= 5V, then the ADC can convert voltages in the range 0V to 430mV with an
ideal resolution of 0.6mV (equivalent to 13-bit resolution with reference to a V
SS
to VDD range).
For more details, refer to the Electrical characteristics section.
Note: The amp lifier is switched on by the A DON
bit in the ADCCSR register, so no additional startup time is required when the amplifier is selected
by the AMPSEL bit.
11.5.3.3 Digital A/D Conversion Result
The conversion is monotonic, meaning that the result never decreases if the analog i nput does not
and never increases if the analog input does not.
If the input voltage (V
AIN
) is greater than V
DDA
(high-level voltage reference) then the conversion
result is FFh in the ADCDRH register and 03h in
the ADCDRL register (without overflow indication).
If the input voltage (V
AIN
) is lower than V
SSA
(lowlevel voltage reference) then the conversion result
in the ADCDRH and ADCDRL registers is 00 00h.
The A/D converter is linear and the digital result of
the conversion is stored in the ADCDRH and ADCDRL registers. The accuracy of the conversion is
described in the Electrical Characteristics Section.
R
AIN
is the maximum recommended impedance
for an analog input signal. If the impedance is too
high, this will result in a loss of accuracy due to
leakage and sampling not being completed in the
alloted time.
11.5.3.4 A/D Conversion
The analog input ports mus t be con figured as input, no pull-up, no interrupt. Refer to the «I/O
ports» chapter. Using these pins as analog inputs
does not affect the ability of the port to be rea d as
a logic input.
In the ADCCSR register:
– Select the CS[2:0] bits to assign the analog
channel to convert.
ADC Conversion mode
In the ADCCSR register:
Set the ADON bit to enable the A/D converter and
to start the conversion. From this time on, the
ADC performs a continuous conversion of the
selected channel.
When a conversion is complete:
– The EOC bit is set by hardware.
– The result is in the ADCDR registers.
A read to the ADCDRH resets the EOC bit.
To read the 10 bits, perform the following steps:
1. Poll EOC bit
2. Read ADCDRL
3. Read ADCDRH. This clears EOC automatically.
To read only 8 bits, perform the following steps:
1. Poll EOC bit
2. Read ADCDRH. This clears EOC automatically.
11.5.4 Low Power Modes
Note: The A/D converter may be disabled by re-
setting the ADON bit. This feature allows reduced
power consumptio n when no conv ersion is needed and between single shot conversions.
11.5.5 Interrupts
None.
Mode Description
WAIT No effect on A/D Converter
HALT
A/D Converter disabled.
After wakeup from Halt mode, the A/D
Converter requires a stabilization time
t
STAB
(see Electrical Characteristics)
before accurate conversions can be
performed.
1

ST7LITE2
83/131
10-BIT A/D CONVERTER (ADC) (Cont’d)
11.5.6 Register Description
CONTROL/STA TUS REGISTER (ADCCSR)
Read/Write (Except bit 7 read only)
Reset Value: 0000 0000 (00h)
Bit 7 = EO C
End of Conversion
This bit is set by hardware. It is cleared by software reading the ADCDRH register.
0: Conversion is not complete
1: Conversion complete
Bit 6 = SPEED
ADC clock selection
This bit is set and cleared by software. It is used
together with the SLOW bit to configure the ADC
clock speed. Refer to the table in the SLOW bit description.
Bit 5 = ADON
A/D Converter on
This bit is set and cleared by software.
0: A/D converter and amplifier are switched off
1: A/D converter and amplifier are switched on
Bit 4:3 = Reserved. Must be kept cleared.
Bit 2:0 = CH[2:0]
Channel Selection
These bits are set and cleared by software. They
select the analog input to convert.
*The number of chann els is device dependent. Refer to
the device pinout description.
DATA REGISTER HIGH (ADCDRH)
Read Only
Reset Value: xxxx xxxx (xxh)
Bit 7:0 = D[9:2]
MSB of Analog Converted Value
AMP CONTROL/DATA REGISTER LOW (ADCDRL)
Read/Write
Reset Value: 0000 00xx (0xh)
Bit 7:5 = Reserved. Forced by hardware to 0.
Bit 4 = AMPCAL
Amplifier Calibration Bit
This bit is set and cleared by software.
0: Calibration off
1: Calibration on. The input voltage of the amp is
set to 0V.
Bit 3 = SLOW
Slow mode
This bit is set and cleared by software. It is used
together with the SPEED bit to configure the ADC
clock speed as shown on the table below.
Bit 2 = AMPSEL
Amplifier Selection Bit
This bit is set and cleared by software.
0: Amplifier is not selected
1: Amplifier is selected
Note: Wh en AMPSEL=1 it is mandatory that f
ADC
be less than or equal to 2 MHz.
Bit 1:0 = D[1:0]
LSB of Analog Converted Value
70
EOC SPEED ADON 0 CH3 CH2 CH1 CH0
Channel Pin* CH2 CH1 CH0
AIN0 0 0 0
AIN1 0 0 1
AIN2 0 1 0
AIN3 0 1 1
AIN4 1 0 0
AIN5 1 0 1
AIN6 1 1 0
70
D9 D8 D7 D6 D5 D4 D3 D2
70
000
AMP
CAL
SLOW
AMP-
SEL
D1 D0
f
ADC
SLOW SPEED
f
CPU
/2 00
f
CPU
01
f
CPU
/4 1x
1

ST7LITE2
84/131
Table 18. ADC Register Map and Reset Values
Address
(Hex.)
Register
Label
76543210
0034h
ADCCSR
Reset Value
EOC
0
SPEED0ADON
0
0
0
0
0
CH2
0
CH1
0
CH0
0
0035h
ADCDRH
Reset Value
D9
x
D8
x
D7
x
D6
x
D5
x
D4
x
D3
x
D2
x
0036h
ADCDRL
Reset Value
0
0
0
0
0
0
AMPCAL0SLOW0AMPSEL
0
D1
x
D0
x
1

ST7LITE2
85/131
12 INSTRUCTION SET
12.1 ST7 ADDRESSING MODES
The ST7 Core features 17 different addressing
modes which can be classified in 7 main groups:
The ST7 Instruction set is designed to minimize
the number of bytes required per instruction: To do
so, most of the ad dressing modes may be subdivided in two sub-modes called long and short:
– Long address ing mode is more powerful be-
cause it can use the full 64 Kbyte address space,
however it uses more bytes and more CPU cycles.
– Short addressing mode is less powerful because
it can generally only access page zero (0000h 00FFh range), but the instruction size is more
compact, and faster. All memory to memory instructions use short addressing modes only
(CLR, CPL, NEG, BSET, BRES, BTJT, BTJF,
INC, DEC, RLC, RRC, SLL, SRL, SRA, SWAP)
The ST7 Assembler optimizes the use of long and
short addressing modes.
Table 19. ST7 Addressing Mode Overview
Note 1. At the time the instruction is executed, the Program Counter (PC) points to the instruction follow-
ing JRxx.
Addressing Mode Example
Inherent nop
Immediate ld A,#$55
Direct ld A,$55
Indexed ld A,($55,X)
Indirect ld A,([$55],X)
Relative jrne loop
Bit operation bset byte,#5
Mode Syntax
Destination/
Source
Pointer
Address
(Hex.)
Pointer
Size
(Hex.)
Length
(Bytes)
Inherent nop + 0
Immediate ld A,#$55 + 1
Short Direct ld A,$10 00..FF + 1
Long Direct ld A,$1000 0000..FFFF + 2
No Offset Direct Indexed ld A,(X) 00..FF
+ 0 (with X register)
+ 1 (with Y register)
Short Direct Indexed ld A,($10,X) 00..1FE + 1
Long Direct Indexed ld A,($1000,X) 0000..FFFF + 2
Short Indirect ld A,[$10] 00..FF 00..FF byte + 2
Long Indirect ld A,[$10.w] 0000..FFFF 00..FF word + 2
Short Indirect Indexed ld A,([$10],X) 00..1FE 00..FF byte + 2
Long Indirect Indexed ld A,([$10.w],X) 0000..FFFF 00..FF word + 2
Relative D irect jrne loop PC -128 /PC+1 27
1)
+ 1
Relative I ndire ct jrne [$10] PC-128/PC+1 27
1)
00..FF byte + 2
Bit Direct bset $10,#7 00..FF + 1
Bit Indirect bset [$10],#7 00..FF 00..FF byte + 2
Bit Direct Relative btjt $10,#7,skip 00..FF + 2
Bit Indirect Relative btjt [$10],#7,skip 00..FF 00..FF byte + 3
1

ST7LITE2
86/131
ST7 ADDRESSING MODES (Cont’d)
12.1.1 Inherent
All Inherent instructions consist of a single byte.
The opcode fully specifies all the required information for the CPU to process the operation.
12.1.2 Immediate
Immediate instructions have two bytes, the first
byte contains the opcode, the second byte contains the operand value.
12.1.3 Direct
In Direct instructions, the operands are referenced
by their memory address.
The direct addressin g mode consists of two submodes:
Direct (short)
The address is a byte, thus requires only one byte
after the opcode, but only allows 00 - FF addressing space.
Direct (lon g)
The address is a word, thus allowing 64 Kbyte addressing space, but requires 2 bytes after the opcode.
12.1.4 Indexed (No Offset, Short, Long)
In this mode, the operand is referenced by its
memory address, which is defined by the unsigned
addition of an index register (X or Y) with an offset.
The indirect addressing mode consists of three
sub-modes:
Indexed (No Offset)
There is no offset, (no extra byte after the opcode),
and allows 00 - FF addressing space.
Indexed ( S hort)
The offset is a byte, thus requires only one byte after the opcode and allows 00 - 1FE addressing
space.
Indexed (long)
The offset is a word, thus allowing 64 Kbyte addressing space and requires 2 by tes after the opcode.
12.1.5 Indirect (Short, Long)
The required data byte to do the operation is found
by its memory address, located in memory (pointer).
The pointer ad dress f ollows the opcode. The i ndirect addressing mode consists of two sub-modes:
Indirec t (sho rt )
The pointer address is a byte, the pointer size is a
byte, thus allowing 00 - FF addressing space, and
requires 1 byte after the opcode.
Indirect (long)
The pointer address is a byte, the pointer size is a
word, thus allowing 64 Kbyte addressing space,
and requires 1 byte after the opcode.
Inherent Instruction Function
NOP No operation
TRAP S/W Interrupt
WFI
Wait For Interrupt (Low Power
Mode)
HALT
Halt Oscillator (Lowest Power
Mode)
RET Sub-routine Return
IRET Interrupt Sub-routine Return
SIM Set Interrupt Mask
RIM Reset Interrupt Mask
SCF Set Carry Flag
RCF Reset Carry Flag
RSP Reset Stack Pointer
LD Load
CLR Clear
PUSH/POP Push/Pop to/from the stack
INC/DEC Increment/Decrement
TNZ Test Negative or Zero
CPL, NEG 1 or 2 Complement
MUL Byte Multiplicatio n
SLL, SRL, SRA, RLC,
RRC
Shift and Rotate Operations
SWAP Swap Nibbles
Immediate Instruction Function
LD Load
CP Compare
BCP Bit Compare
AND, OR, XOR Logical Operations
ADC, ADD, SUB, SBC Arithmetic Operations
1

ST7LITE2
87/131
ST7 ADDRESSING MODES (Cont’d)
12.1.6 Indi rect Indexe d (Short, Lo ng )
This is a combination of indirect and short indexed
addressing modes. The operand is referenced by
its memory address, which is defined by the unsigned addition of an index register value (X or Y)
with a pointer value located in memory. The pointer address follows the opcode.
The indirect indexed addressing mode consists of
two sub-modes:
Indirect Indexed (Short)
The pointer address is a byte, the pointer size is a
byte, thus allowing 00 - 1FE addressing space,
and requires 1 byte after the opcode.
Indirect In dex ed (Long)
The pointer address is a byte, the pointer size is a
word, thus allowing 64 Kbyte addressing space,
and requires 1 byte after the opcode.
Table 20. Instructions Supporting Direct,
Indexed, Indirect and Indirect Indexed
Addressing Modes
12.1.7 Relative Mode (Direct, Indirect)
This addressing mode is used to modify the PC
register value by adding an 8-bit signed offset to it.
The relative addressing mode consists of two submodes:
Relative (Direct)
The offset follows the opcode.
Relative (Indirect)
The offset is defined in memory , of which the address follows the opcode.
Long and Short
Instructions
Function
LD Load
CP Compare
AND, OR, XOR Logical Operations
ADC, ADD, SUB, SBC
Arithmetic Addition/subtraction operations
BCP Bit Compare
Short Instructions Only Function
CLR Clear
INC, DEC Increment/Decrement
TNZ Test Negative or Zero
CPL, NEG 1 or 2 Complement
BSET, BRES Bit Operations
BTJT, BTJF
Bit Test and Jump Operations
SLL, SRL, SRA, RLC,
RRC
Shift and Rotate Operations
SWAP Swap Nibbles
CALL, JP Call or Jump subroutine
Available Relative Direct/
Indirect Instructions
Function
JRxx Conditional Jump
CALLR Call Relative
1

ST7LITE2
88/131
12.2 INSTRUCTION GROUPS
The ST7 family devices use an Instruction Set
consisting of 63 instructions. The instructions may
be subdivided into 13 main groups as illustrated in
the following table:
Using a pre-byte
The instructions are described with one to four
bytes.
In order to extend the number of available opcodes for an 8-bit CPU (256 opcodes), three different prebyte opcodes are def ined. These prebytes
modify the meaning of the instruction they precede.
The whole instruction becomes:
PC-2 End of previous instruction
PC-1 Prebyte
PC Opcode
PC+1 A dditional word (0 to 2) according to the
number of bytes required to compute the
effective address
These prebytes enable instruction in Y as well as
indirect addressing modes to be implemented.
They precede the opcode of the instruction in X or
the instruction using direct addressing mode . The
prebytes are:
PDY 90 Replace an X based instruction using
immediate, direct, indexed, or inherent
addressing mode by a Y one.
PIX 92 Repla ce an instruction us ing direct, di-
rect bit, or direct relative addressing
mode to an instruction using the corresponding indirect addressing mode.
It also changes an instruction using X
indexed addressing mode to an instruction using indirect X indexed addressing
mode.
PIY 91 Replace an instructi on using X indirect
indexed addressing mode by a Y one.
Load and Transfer LD CLR
Stack operation PUSH POP RSP
Increment/Decrement INC DEC
Compare and Tests CP TNZ BCP
Logical operations AND OR XOR CPL NEG
Bit Operation BSET BRES
Conditional Bit Test and Branch BTJT BTJF
Arithmetic operations ADC ADD SUB SBC MUL
Shift and Rotates SLL SRL SRA RLC RRC SWAP SLA
Unconditional Jump or Call JRA JRT JRF JP CALL CALLR NOP RET
Conditional Branch JRxx
Interruption management TRAP WFI HALT IRET
Condition Code Flag modification SIM RIM SCF RCF
1

ST7LITE2
89/131
INSTRUCTION GROUPS (Cont’d)
Mnemo Description Function/Example Dst Src H I N Z C
ADC Add with Carry A = A + M + C A M H N Z C
ADD Addition A = A + M A M H N Z C
AND Logical And A = A . M A M N Z
BCP Bit compare A, Memory tst (A . M) A M N Z
BRES Bit Reset bres Byte, #3 M
BSET Bit Set bset Byte, #3 M
BTJF Jump if bit is false (0) btjf Byte, #3, Jmp1 M C
BTJT Jump if bit is true (1) btjt Byte, #3, Jmp1 M C
CALL Call subro utine
CALLR Call subroutine relative
CLR Clear reg, M 0 1
CP Arithmetic Compare tst(Reg - M) reg M N Z C
CPL One Complement A = FFH-A reg, M N Z 1
DEC Decrement dec Y reg, M N Z
HALT Halt 0
IRET Interrupt routine return Pop CC, A, X, PC H I N Z C
INC Increment inc X reg, M N Z
JP Absolute Jump jp [TBL.w]
JRA Jump relative always
JRT Jump relative
JRF Never jump jrf *
JRIH Jump if ext. interrupt = 1
JRIL Jump if ext. interrupt = 0
JRH Jump if H = 1 H = 1 ?
JRNH Jump if H = 0 H = 0 ?
JRM Jump if I = 1 I = 1 ?
JRNM Jump if I = 0 I = 0 ?
JRMI Jump if N = 1 (minus) N = 1 ?
JRPL Jump if N = 0 (plus) N = 0 ?
JREQ Jump if Z = 1 (equal) Z = 1 ?
JRNE Jump if Z = 0 (not equal) Z = 0 ?
JRC Jump if C = 1 C = 1 ?
JRNC Jump if C = 0 C = 0 ?
JRULT Jump if C = 1 Unsigned <
JRUGE Jump if C = 0 Jmp if unsigned >=
JRUGT Jump if (C + Z = 0) Unsigned >
1

ST7LITE2
90/131
INSTRUCTION GROUPS (Cont’d)
Mnemo Description Function/Example Dst Src H I N Z C
JRULE Jump if (C + Z = 1) Unsigned <=
LD Load dst <= src reg, M M, reg N Z
MUL Multiply X,A = X * A A, X, Y X, Y, A 0 0
NEG Negate (2’s compl) neg $10 reg, M N Z C
NOP No Operation
OR OR operation A = A + M A M N Z
POP Pop from the Stack pop reg reg M
pop CC CC M H I N Z C
PUSH Push onto the Stack push Y M reg, CC
RCF Reset carry flag C = 0 0
RET Subroutine Return
RIM Enable Interrupts I = 0 0
RLC Rotate left true C C <= Dst <= C reg, M N Z C
RRC Rotate right true C C => Dst => C reg, M N Z C
RSP Reset Stack Pointer S = Max allowed
SBC Subtract with Carry A = A - M - C A M N Z C
SCF Set carry flag C = 1 1
SIM Disable Interrupts I = 1 1
SLA Shift left Arithmetic C <= Dst <= 0 reg, M N Z C
SLL Shift left Logic C <= Dst <= 0 reg, M N Z C
SRL Shift right Logic 0 => Dst => C reg, M 0 Z C
SRA Shift right Arithmetic Dst7 => Dst => C reg, M N Z C
SUB Subtraction A = A - M A M N Z C
SWAP SWAP nibbles Dst[7..4] <=> Dst[3..0] reg, M N Z
TNZ Test for Neg & Zero tnz lbl1 N Z
TRAP S/W trap S/W interrupt 1
WFI Wait for Interrupt 0
XOR Exclusive OR A = A XOR M A M N Z
1

ST7LITE2
91/131
13 ELECTRICAL CHARACTERISTICS
13.1 PARAMETER CONDITIONS
Unless otherwise specified, all voltages are referred to V
SS
.
13.1.1 Minimum and Maximum val ues
Unless otherwise specified the minimum and maximum values are guaranteed in the worst conditions of am bient temperature, supp ly voltage an d
frequencies by tests in production on 100% of the
devices with an ambient temp erature at T
A
=25°C
and T
A=TA
max (given by the selected temperature
range).
Data based on characterization results, design
simulation and/or technology characteristics are
indicated in the ta ble footnotes a nd are not tested
in production. Based on chara cterization, th e minimum and maximum values refer to sampl e tests
and represent the mean value plus or minus three
times the standard deviation (mean±3Σ).
13.1.2 Typical values
Unless otherwise specified, typical data are based
on T
A
=25°C, VDD=5V (for the 4.5V≤VDD≤5.5V
voltage range) and V
DD
=3.3V (for the 3V≤VDD≤4V
voltage range). They are given only as design
guidelines and are not tested.
13.1.3 Typical curves
Unless otherwise specified, all typical curves are
given only as design guidelines and are not tested.
13.1.4 Loading capacitor
The loading conditions used for pin parameter
measurement are shown in F igure 50.
Figure 50. Pin loading conditions
13.1.5 Pin input voltage
The input voltage measurement on a pin of the device is described in Figure 51.
Figure 51. Pin input voltage
C
L
ST7 PIN
V
IN
ST7 PIN
1

ST7LITE2
92/131
13.2 ABSOLUTE MAXIMUM RATINGS
Stresses above those listed as “absolute maximum ratings” may cause permanent damage to
the device. This is a stress rating only and f unctional operation of the device under these cond i-
tions is not implied. Exposure to maxim um rating
conditions for extended periods may affect device
reliabili ty.
13.2.1 Voltage Characteristics
13.2.2 Current Characteristics
13.2.3 Thermal Characteristics
Notes:
1. Directly connectin g the RES ET
and I/O pins to VDD or V
SS
could damage the dev ice if an uni ntenti onal int ernal re set
is generated or an unexpected change of the I/O configuration occurs (for example, due to a corrupted program counter).
To guarantee safe operation, th is connectio n has to be don e through a p ull-up or pull- down resisto r (typical: 4.7 kΩ for
RESET
, 10kΩ for I/Os). Unused I/O pins must be tied in the same way to VDD or VSS according to their reset configuration.
2. When the current limitation is not possible , the V
IN
absolute m aximum rating m ust be respected, otherwis e refer to
I
INJ(PIN)
specification. A positive injection is induced by VIN>VDD while a negative injection is induced by VIN<VSS.
3. All power (V
DD
) and ground (VSS) lines must always be connected to the external supply.
4. Negative injection disturbs the analog performance of the device. In particular, it induces leakage currents throughout
the device including the analog inputs. To avoid undesirable effects on the analog functions, care must be taken:
- Analog input pins must have a negative injection less than 0.8 mA (assuming that the impedance of the analog voltage
is lower than the specified limits)
- Pure digital pins must have a negative injection less than 1.6mA. In addition, it is recommended to inject the current as
far as possible from the analog input pins.
5. When several inputs are submitted to a current injection , the maximum ΣI
INJ(PIN)
is the absolute sum of the positive
and negative injected currents (instantaneous values). These results are based on characterisation with ΣI
INJ(PIN)
maxi-
mum current injection on four I/O port pins of the device.
Symbol Ratings Maximum value Unit
V
DD
- V
SS
Supply voltage 7.0
V
V
IN
Input voltage on any pin
1) & 2)
VSS-0.3 to VDD+0.3
V
ESD(HBM)
Electrostatic discharge voltage (Human Body Model)
see section 13.7.3 on page 104
V
ESD(MM)
Electrostatic discharge voltage (Machine Model)
Symbol Ratings Maximum value Unit
I
VDD
Total current into VDD power lines (source)
3)
150
mA
I
VSS
Total current out of VSS ground lines (sink)
3)
150
I
IO
Output current sunk by any standard I/O and control pin 25
Output current sunk by any high sink I/O pin 50
Output current source by any I/Os and control pin - 25
I
INJ(PIN)
2) & 4)
Injected current on ISPSEL pin ± 5
Injected current on RESET
pin ± 5
Injected current on OSC1 and OSC2 pins ± 5
Injected current on any other pin
5)
± 5
Σ
I
INJ(PIN)
2)
Total injected current (sum of all I/O and control pins)
5)
± 20
Symbol Ratings Value Unit
T
STG
Storage temperature range -65 to +150 °C
T
J
Maximum junction temperature (see Table 21, “THERMAL CHARACTERISTICS,” on
page 121)
1

ST7LITE2
93/131
13.3 OPERATING CONDITIONS
13.3.1 General Operating Conditions: Suffix 6 Devices
T
A
= -40 to +85°C unless otherwise specified.
Figure 52. f
CLKIN
Maximum Operating Frequ enc y Vers us V
DD
Supply Voltage
Symbol Parameter Conditions Min Max Unit
V
DD
Supply voltage
f
OSC
= 8 MHz. max., TA = 0 to 70°C 2.4 5.5
Vf
OSC
= 8 MHz. max. 2.7 5.5
f
OSC
= 16 MHz. max. 3.3 5.5
f
CLKIN
External clock frequency on
CLKIN pin
V
DD
≥
3.3V 0 16
MHzV
DD
≥
2.4V, T
A =
0 to +70°C
08
V
DD
≥
2.7V
f
CLKIN
[MHz]
SUPPLY VOLTAGE [V]
16
8
4
1
0
2.0 2.4
3.3 3.5 4.0 4.5 5.0
FUNCTIONALITY
NOT GUARANTEED
IN THIS AREA
5.5
FUNCTIONALITY
GUARANTEED
IN THIS AREA
(UNLESS OTHERWISE
STATED IN THE
TABLES OF
PARAME T R I C DAT A)
2.7
FUNCTIONALITY
GUARANTEED
IN THIS AREA
AT T
A
0 to 70° C
1

ST7LITE2
94/131
13.3.2 Operating Condition s with Low Voltage Detector (LVD)
T
A
= -40 to 125°C, unless otherwise specified
Note:
1. Not tested in production.
2. Not tested in production. The V
DD
rise time rate condition is needed to insure a correct device power-on and LVD reset.
When the V
DD
slope is outside these values, the LVD may not ensure a proper reset of the MCU.
13.3.3 Auxiliary Voltage Detector (AVD) Thresholds
T
A
= -40 to 125°C, unless otherwise specified
Note:
1. Not tested in production.
13.3.4 Internal RC Oscillator and PLL
The ST7 internal clock can be supplied by an internal RC oscillator and PLL (selectable by option byte).
Symbol Parameter Conditions Min Typ Max Unit
V
IT+
(LVD)
Reset release threshol d
(V
DD
rise)
High Threshold
Med. Threshold
Low Threshold
4.00
1)
3.40
1)
2.65
1)
4.25
3.60
2.90
4.50
3.80
3.15
V
V
IT-
(LVD)
Reset generation threshold
(V
DD
fall)
High Threshold
Med. Threshold
Low Threshold
3.80
3.20
2.40
4.05
3.40
2.70
4.30
1)
3.65
1)
2.90
1)
V
hys
LVD voltage threshold hysteresis V
IT+
(LVD)
-V
IT-
(LVD)
200 mV
Vt
POR
VDD rise time rate
2)
20 20000
µ
s/V
t
g(VDD)
Filtered glitch delay on V
DD
Not detected by the LVD 150 ns
I
DD(LVD
) LVD/AVD current consumption 245 µA
Symbol Parameter Conditions Min Typ Max Unit
V
IT+
(AVD)
1=>0 AVDF flag toggle threshold
(V
DD
rise)
High Threshold
Med. Threshold
Low Threshold
4.40
1)
3.90
1)
3.20
1)
4.70
4.10
3.40
5.00
4.30
3.60
V
V
IT-
(AVD)
0=>1 AVDF flag toggle threshold
(V
DD
fall)
High Threshold
Med. Threshold
Low Threshold
4.30
3.70
2.90
4.60
3.90
3.20
4.90
1)
4.10
1)
3.40
1)
V
hys
AVD voltage threshold hysteresis V
IT+
(AVD)
-V
IT-
(AVD)
150 mV
∆
V
IT-
Voltage drop between AVD flag set
and LVD reset activation
V
DD
fall 0.45 V
Symbol Parameter Conditions Min Typ Max Unit
V
DD(RC)
Internal RC Oscillator operating voltage 2.4 5.5
VV
DD(x4PLL)
x4 PLL operating voltage 2.4 3.3
V
DD(x8PLL)
x8 PLL operating voltage 3.3 5.5
t
STARTUP
PLL Startup time 60
PLL
input
clock
(f
PLL
)
cycles
1

ST7LITE2
95/131
OPERATING CONDITIONS (Cont’d)
The RC oscillator and PLL characteristics are temperature-dependent and are grouped in four tables.
13.3.4.1 Devices with ‘”6” order code suffix (tested for T
A
= -40 to +85°C) @ VDD = 4.5 to 5.5V
Notes:
1. Data based on characterization results, not tested in production
2. RCCR0 is a factory-calibrated setting for
1000kHz with ±
0.2 accuracy @ T
A
=25°C, VDD=5V. See “INTERNAL RC OS-
CILLATOR ADJUSTMENT” on page 23
3. Guaranteed by design.
4. Averaged over a 4ms period. After the LOCKED bit is set, a period of t
STAB
is required to reach ACC
PLL
accuracy.
5. After the LOCKED bit is set ACC
PLL
is max. 10% until t
STAB
has elapsed. See Figure 12 on page 24.
Symbol Parameter Conditions Min Typ Max Unit
f
RC
Internal RC oscillator frequency
RCCR = FF (reset value), T
A
=25°C,VDD=5V 760
kHz
RCCR = RCCR0
2 )
,TA=25°C,VDD=5V 1000
ACC
RC
Accuracy of Internal RC
oscillator with
RCCR=RCCR0
2)
TA=25°C,VDD=4.5 to 5.5V -1
+
1%
T
A
=-40 to +85°C,VDD=5V -5 +2 %
T
A
=0 to +85°C,VDD=4.5 to 5.5V -2
1)
+2
1)
%
I
DD(RC)
RC oscillator current consumption
T
A
=25°C,VDD=5V 970
1)
µA
t
su(RC)
RC oscillator setup time TA=25°C,VDD=5V 10
2)
µ
s
f
PLL
x8 PLL input clock 1
1)
MHz
t
LOCK
PLL Lock time
5)
2ms
t
STAB
PLL Stabilization time
5)
4ms
ACC
PLL
x8 PLL Accuracy
f
RC
= 1MHz@TA=25°C,VDD=4.5 to 5.5V 0.1
4)
%
f
RC
= 1MHz@TA=-40 to +85°C,VDD=5V 0.1
4)
%
t
w(JIT)
PLL jitter period fRC = 1MHz 8
3)
kHz
JIT
PLL
PLL jitter (∆f
CPU/fCPU
)1
3)
%
I
DD(PLL)
PLL current consumption TA=25°C 600
1)
µA
1

ST7LITE2
96/131
OPERATING CONDITIONS (Cont’d)
13.3.4.2 Devices with ‘”6” order code suffix (tested for T
A
= -40 to +85°C) @ VDD = 2.7 to 3.3V
Notes:
1. Data based on characterization results, not tested in production
2. RCCR1 is a factory-calibrated setting for
700MHz with ±
0.2 accuracy @ T
A
=25°C, VDD=3V. See “INTERNAL RC OS-
CILLATOR ADJUSTMENT” on page 23.
3. Guaranteed by design.
4. Averaged over a 4ms period. After the LOCKED bit is set, a period of t
STAB
is required to reach ACC
PLL
accuracy
5. After the LOCKED bit is set ACC
PLL
is max. 10% until t
STAB
has elapsed. See Figure 12 on page 24.
Symbol Parameter Conditions Min Typ Max Unit
f
RC
Internal RC oscillator frequency
RCCR = FF (reset value), T
A
=25°C, VDD= 3.0V 560
kHz
RCCR=RCCR 1
2)
,TA=25°C,VDD= 3V 700
ACC
RC
Accuracy of Internal RC
oscillator when calibrated
with RCCR=RCCR1
1)2)
TA=25°C,VDD=3V -2 +2 %
T
A
=25°C,VDD=2.7 to 3.3V -25 +25 %
T
A
=-40 to +85°C,VDD=3V -15 15 %
I
DD(RC)
RC oscillator current consumption
T
A
=25°C,VDD=3V 700
1)
µA
t
su(RC)
RC oscillator setup time TA=25°C,VDD=3V 10
2)
µ
s
f
PLL
x4 PLL input clock 1
1)
MHz
t
LOCK
PLL Lock time
5)
2ms
t
STAB
PLL Stabilization time
5)
4ms
ACC
PLL
x4 PLL Accuracy
f
RC
= 1MHz@TA=25°C,VDD=2.7 to 3.3V 0.1
4)
%
f
RC
= 1MHz@TA=40 to +85°C,VDD= 3V 0.1
4)
%
t
w(JIT)
PLL jitter period fRC = 1MHz 8
3)
kHz
JIT
PLL
PLL jitter (∆f
CPU/fCPU
)1
3)
%
I
DD(PLL)
PLL current consumption TA=25°C 190
1)
µA
1

ST7LITE2
97/131
OPERATING CONDITIONS (Cont’d)
Figure 53. RC Osc Freq vs V
DD
@ TA=25°C
(Calibrated with RCCR1: 3V @ 25°C)
Figure 54. RC Osc Freq vs V
DD
(Calibrated with RCCR0: 5V@ 25°C)
Figure 55.
Typical RC oscillator Accuracy vs
temperature @ V
DD
=5V
(Calibrated with RCCR0: 5V @ 25°C
Figure 56. RC Osc Freq vs V
DD
and RCCR Value
0.50
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4
VDD (V)
Output Freq (MHz)
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
1.10
2.5 3 3.5 4 4.5 5 5.5 6
Vdd (V)
Output Freq. (M Hz)
-45°
0°
25°
90°
105°
130°
2
-1
-5
-45 025 85
-2
-4
-3
0
1
(*)
(
*
)
(
*
)
(*) tested in production
Temperature (°C)
RC Accuracy
125
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.4 2.7 3 3.3 3.75 4 4.5 5 5.5 6
Vdd (V)
Output Freq. (MHz)
rccr=00h
rccr=64h
rccr=80h
rccr=C0h
rccr=FFh
1

ST7LITE2
98/131
OPERATING CONDITIONS (Cont’d)
Figure 57. PLL ∆f
CPU/fCPU
versus time
Figure 58. PLLx4 Output vs CLKIN frequency
Note: f
OSC
= f
CLKIN
/2*PLL4
Figure 59. PLLx8 Output vs CLKIN frequency
Note: f
OSC
= f
CLKIN
/2*PLL8
13.3.4.3 32MHz PLL
T
A
= -40 to 125°C, unless otherwise specified
Note 1: 32 MHz is guaranteed within this voltage range.
t
w(JIT)
∆
f
CPU/fCPU
t
Min
Max
0
t
w(JIT)
1.00
2.00
3.00
4.00
5.00
6.00
7.00
1 1.5 2 2.5 3
Ex t ernal I n put Cl oc k Frequency (MHz)
Output Frequency (MHz)
3.3
3
2.7
1.00
3.00
5.00
7.00
9.00
11.00
0.85 0.9 1 1.5 2 2.5
Ex ternal Input Clock Frequency (MHz)
Output Frequency (MHz)
5.5
5
4.5
4
Symbol Parameter Min Typ Max Unit
V
DD
Voltage
1)
4.5 5 5.5 V
f
PLL32
Frequency
1)
32 MHz
f
INPUT
Input Frequency
7
89MHz
1

ST7LITE2
99/131
13.4 SUPPLY CURRENT CHARACTERISTICS
The following current consumption specified for
the ST7 functional operating modes over temperature range does not take into account the clock
source current consumption. To get the total de-
vice consumption, the two current values must be
added (except for HA LT m ode fo r which th e clock
is stopped).
13.4.1 Supply Current
T
A
= -40 to +125°C unless otherwise specified
Notes:
1. CPU running with memory access, all I/O pins in input mode with a static value at V
DD
or VSS (no load), all peripherals
in reset state; clock input (CLKIN) driven by external square wave, LVD disabled.
2. All I/O pins in input mode with a static value at V
DD
or VSS (no load), all peripherals in reset state; clock input (CLKIN)
driven by external square wave, LVD disabled.
3. SLO W mo de sele cted with f
CPU
based on f
OSC
divided by 32. Al l I/O pin s in inpu t mod e with a static v alue at VDD or
V
SS
(no load), all peripherals in reset state; clock input (CLKIN) driven by external square wave, LVD disabled.
4. SLO W-WAIT mod e selected with f
CPU
based on f
OSC
divided by 32. All I/O pins in input mode with a static val ue at
V
DD
or VSS (no load), all peripherals in reset state; clock input (CLKIN) driven by external square wave, LVD disabled.
5. All I/O pins in input mode with a static value at V
DD
or VSS (no load). Data tested in production at VDD max. and f
CPU
max.
6. This consumption refers to the Halt period only and not the associated run period which is software dependent.
Figure 60. Typical IDD in RUN vs. f
CPU
Figure 61. Typical IDD in SLOW vs. f
CPU
Symbol Parameter Conditions Typ Max Unit
I
DD
Supply current in RUN mode
V
DD
=5.5V
f
CPU
=8MHz
1)
7.5 12
mA
Supply current in WAIT mode f
CPU
=8MHz
2)
3.7 6
Supply current in SLOW mode f
CPU
=500kHz
3)
1.6 2.5
Supply current in SLOW WAIT mode f
CPU
=500kHz
4)
1.6 2.5
Supply current in HALT mode
-40°C≤T
A
≤
+85°C
110
µ
AT
A
=
+125°C
15 50
Supply current in AWUFH mode
5)6)
T
A
=
+25°C
20 30
TB
D
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
9.0
2 2.5 3 3.5 4 4.5 5 5.5 6
Vdd (V)
Idd (mA)
8 MHz
4 MHz
1 MHz
TBD
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
22.533.544.555.56
Vdd (V)
Idd (mA)
250 KHz
125 KHz
62.5 Khz
1

ST7LITE2
100/131
SUPPLY CURRENT CHARACTERISITCS (Cont’d)
Figure 62. Typical I
DD
in WAIT vs. f
CPU
Figure 63. Typical IDD in SLOW-WAIT vs. f
CPU
Figure 64. Typical IDD in AWUFH mode
at T
A
=25°C
Figure 65. Typical I
DD
vs. Temperature
at V
DD
= 5V and f
CPU
= 8MHz
13.4.2 On-chip peripherals
1. Data based on a differential IDD measurement between reset configuration (timer stopped) and a timer running in PWM
mode at f
cpu
=8MHz.
2. Data based on a differential I
DD
measurement between reset configuration and a permanent SPI master communica-
tion (data sent equal to 55h).
3. Data based on a differential I
DD
measurement between reset configuration and continuous A/D conversions with am-
plifier off.
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
2 2.5 3 3.5 4 4.5 5 5.5 6
Vdd (V)
Idd (mA)
250 KHz
125 KHz
62.5 Khz
TBD
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
2 2.5 3 3.5 4 4.5 5 5.5 6
Vdd (V)
Idd (mA)
250 KHz
125 KHz
62.5 Khz
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5 6.0
Vdd(V)
Idd(mA)
fawu_rc ~125 KHz
2.0
3.0
4.0
5.0
6.0
7.0
8.0
2.4 2.8 3.2 3.6 4 4.4 4.8 5.2 5.6
Vdd (V)
Idd (mA)
25°
-45°
90°
130°
Symbol Parameter Conditions Typ Unit
I
DD(AT)
12-bit Auto-Reload Timer supply current
1)
f
CPU
=4MHz V
DD
=
3.0V 50
µ
A
f
CPU
=8MHz V
DD
=
5.0V 150
I
DD(SPI)
SPI supply current
2)
f
CPU
=4MHz V
DD
=
3.0V 50
f
CPU
=8MHz V
DD
=
5.0V 300
I
DD(ADC)
ADC supply current when converting
3)
f
ADC
=4MHz
V
DD
=
3.0V TBD
V
DD
=
5.0V TBD
1
 Loading...
Loading...