

SGS Thomson Microelectronics ST72T251G2, ST72T251G1, ST72251G2, ST72251G1, ST72251 Datasheet
September 1999 1/99
ST72251
8-BIT MCU WITH 4 TO 8K ROM/OTP/EPROM,
256 BYTES RAM, ADC, WDG, SPI, I2C AND 2 TIMERS
DATASHEET
■ User Program Memory (ROM/OTP/EPROM):
4 to8K bytes
■ Data RAM: 256 bytes, including 64 bytes of
stack
■ Master Resetand Power-On Reset
■ Run, Wait, Slow and Halt modes
■ 22 multifunctionalbidirectional I/O lines:
– 22 programmable interrupt inputs
– 8 high sinkoutputs
– 6 Analog alternateinputs
– 16 Alternate Functions
– EMI filtering
■ Programmable watchdog (WDG)
■ Two 16-bit Timers, each featuring:
– 2 Input Captures
– 2 Output Compares
– External Clock input (on Timer A only)
– PWM and Pulse Generator modes
■ Synchronous Serial Peripheral Interface (SPI)
■ Full I
2
C multiple Master/Slave interface
■ 8-bit Analog-to-Digital converter (6 channels)
■ 8-bit Data Manipulation
■ 63 Basic Instructions
■ 17 mainAddressing Modes
■ 8 x8 Unsigned Multiply Instruction
■ True BitManipulation
■ Complete Development Support on PC/DOS-
WINDOWSTMReal-Time Emulator
■ Full Software Package on DOS/WINDOWS
TM
(C-Compiler, Cross-Assembler, Debugger)
Device Summary
Features ST72251G1 ST72251G2
Program Memory
- bytes
4K 8K
RAM (stack) - bytes 256 (64)
Peripherals Watchdog, Timers, SPI, I
2
C, ADC
Operating Supply 3 to 5.5 V
CPU Frequency
8MHz max (16MHz oscillator)
4MHz max over 85°C
Temperature Range - 40°C to + 125°C
Package SO28 - SDIP32
SO28
PSDIP32
CSDIP32W
(See ordering information at the end of datasheet)
Rev. 1.7
1

2/99
Table of Contents
95
2
1 GENERAL DESCRIPTION . . . . . . ................................................ 5
1.1 INTRODUCTION . . . . . . . . . . . . . ............................................ 5
1.2 PIN DESCRIPTION . . ..................................................... 6
1.3 EXTERNAL CONNECTIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ......... 8
1.4 MEMORY MAP . . . . . .. . . . ................................................ 9
2 CENTRAL PROCESSING UNIT . . ............................................... 12
2.1 INTRODUCTION . . . . . . . . . . . . . ...........................................12
2.2 MAIN FEATURES . . . .. . . . . . . . . . . . . . . . . . . . . .............................. 12
2.3 CPU REGISTERS . . . .................................................... 12
3 CLOCKS, RESET, INTERRUPTS & POWER SAVING MODES . . . . . .. . . . . . . ...........15
3.1 CLOCK SYSTEM . . . . . .. . . . . . . ...........................................15
3.1.1 General Description . . . .. . ...........................................15
3.2 RESET . . . . . . . . . . . . . . . . . . . .. . . . . . .. . . . . . . .............................. 16
3.2.1 Introduction . . . .................................................... 16
3.2.2 External Reset . . . . . . ...............................................16
3.2.3 Reset Operation . . . . . . . . . . . . . . . . . . . . . . . . . ........................... 16
3.2.4 Power-on Reset .................................................... 16
3.3 INTERRUPTS . . . .. . . . . . . . . . . . . . . . . .. . . . . . . . . . .. . . . . . . . . .. . . . . . . .. . . . . . . 17
3.4 POWER SAVING MODES . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . .. . . . . . . ........ 20
3.4.1 Introduction . . . .................................................... 20
3.4.2 Slow Mode . . .. . . . . . . . . . . . . . . . . . . . ................................. 20
3.4.3 Wait Mode . . . . . . . . . . . . . . .. ........................................ 20
3.4.4 Halt Mode . . . . . .................................................... 21
3.5 MISCELLANEOUS REGISTER . . . . . . . . . . . .................................. 22
4 ON-CHIP PERIPHERALS . . . . . . . . . . . ...........................................23
4.1 I/O PORTS . . . . . . . . . . . . . . . . . . ........................................... 23
4.1.1 Introduction . . . .................................................... 23
4.1.2 Functional Description . . . . ...........................................23
4.1.3 I/O Port Implementation . . . . . . . . . . . . . . . . . . . ........................... 24
4.1.4 Register Description . . . . . . ...........................................27
4.2 WATCHDOG TIMER (WDG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 29
4.2.1 Introduction . . . .................................................... 29
4.2.2 Main Features . .. . . . ...............................................29
4.2.3 Functional Description . . . . ...........................................30
4.2.4 Low Power Modes . . . ............................................... 30
4.2.5 Interrupts . . . . . .. . . . . . . . . . .. . . . . . . ................................. 30
4.2.6 Register Description . . . . . . ...........................................30
4.3 16-BIT TIMER . . . . . . . . . . . . . .. . . . ........................................ 31
4.3.1 Introduction . . . .................................................... 31
4.3.2 Main Features . .. . . . ...............................................31
4.3.3 Functional Description . . . . ...........................................31
4.3.4 Low Power Modes . . ............................................... 42
4.3.5 Interrupts . . .. . .................................................... 42
4.3.6 Register Description . . . . . . ...........................................43
4.4 I2C BUSINTERFACE (I2C) . . . . . ...........................................48

3/99
Table of Contents
3
4.4.1 Introduction . . . .................................................... 48
4.4.2 Main Features . .. . . . ...............................................48
4.4.3 General Description . . . .. . ...........................................48
4.4.4 Functional Description . . . . ...........................................50
4.4.5 Low Power Modes . . . ............................................... 54
4.4.6 Interrupts . . . . . .. . . . . . . . . . .. . . . . . . ................................. 54
4.4.7 Register Description . . . . . . ...........................................55
4.4.8 Application Considerations . . . ........................................60
4.5 SERIAL PERIPHERAL INTERFACE (SPI) . . . . . . . . . . . . . . . . . . . . . . . . . ...........63
4.5.1 Introduction . . . .................................................... 63
4.5.2 Main Features . .. . . . ...............................................63
4.5.3 General description . . . . . .. . . . . . . . .. . . .. . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 63
4.5.4 Functional Description . . . . ...........................................65
4.5.5 Low Power Modes . . . ............................................... 72
4.5.6 Interrupts . . .. . .................................................... 72
4.5.7 Register Description . . . . . . ...........................................73
4.6 8-BIT A/D CONVERTER (ADC) . . . . . .. . . . . . . . . . . . ........................... 76
4.6.1 Introduction . . . .................................................... 76
4.6.2 Main Features . .. . . . ...............................................76
4.6.3 Functional Description . . . . ...........................................77
4.6.4 Low Power Modes . . . ............................................... 77
4.6.5 Interrupts . . . . . .. . . . . . . . . . .. . . . . . . ................................. 77
4.6.6 Register Description . . . . . . ...........................................78
5 INSTRUCTION SET . . . . . . . . . . . . . . . . . . ........................................ 79
5.1 ST7 ADDRESSING MODES . .. . . . . . . . . . . . . . . . . . . .. . . . . . . .. . . . . . . . . . . . . . . . . 79
5.1.1 Inherent . . . . . . . . . . . ...............................................80
5.1.2 Immediate . .. . . . . . .. . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . .. . . . . . . .. . . . . . . 80
5.1.3 Direct . ........................................................... 80
5.1.4 Indexed (No Offset, Short, Long) . . . . . . . . . . . . ........................... 80
5.1.5 Indirect (Short, Long) . . . . .. . . . . . . . . . .. . . . . . . . . . . . .. . . .. . . . . . . . . . . . . . . 80
5.1.6 Indirect Indexed (Short,Long) . ........................................81
5.1.7 Relative mode (Direct,Indirect) . . . .. . . . . . . . . . . . . . . . . . . . . . . .. . . .. . . . . . . . 81
5.2 INSTRUCTION GROUPS . . .. . . . . . . . . . . . . .................................82
6 ELECTRICALCHARACTERISTICS . . . . . . . . . . . . . . . . .............................. 85
6.1 ABSOLUTE MAXIMUM RATINGS . . . ........................................85
6.2 RECOMMENDED OPERATING CONDITIONS . . . .............................. 86
6.3 DC ELECTRICAL CHARACTERISTICS . . . . . .. . . . . . . .. . . .. . . . . . . . . ...........87
6.4 RESET CHARACTERISTICS . . . . . . . . . ..................................... 88
6.5 OSCILLATOR CHARACTERISTICS . . . .. . . . . . . .............................. 88
6.6 A/D CONVERTERCHARACTERISTICS . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . 89
6.7 SPI CHARACTERISTICS . . ...............................................91
6.8 I2C CHARACTERISTICS . . . . . . . ...........................................94

4/99
Table of Contents
95
7 GENERAL INFORMATION . . . . . . . . . . ........................................... 95
7.1 EPROM ERASURE . . .. . . . . . .. . . . . . .. . . . . . . .............................. 95
7.2 PACKAGE MECHANICALDATA . . . . . . . . . . . . .. . . . ........................... 95
7.3 ORDERING INFORMATION . . . . . .. . . . . . . .................................. 97
7.3.1 Transfer Of CustomerCode . . . . . . . . . . . .. . . .. . . . . . . . . . . . ............... 97
8 SUMMARY OF CHANGES . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
1
5/99
ST72251
1 GENERAL DESCRIPTION
1.1 INTRODUCTION
The ST72251 HCMOS Microcontroller Unit is a
member of theST7 family of Microcontrollers. The
device isbased on an industry-standard 8-bit core
and featuresan enhanced instruction set. The device normally operates at a 16MHz oscillator frequency. Under software control, the ST72251 may
be placed in either WAIT,SLOW or HALTmodes,
thus reducing power consumption. The enhanced
instruction set and addressing modes afford real
programming potential. In addition to standard 8bit data management, the ST72251 features true
bit manipulation, 8x8 unsigned multiplication and
indirect addressing modes on the whole memory.
The device includes an on-chip oscillator, CPU,
program memory (ROM/OTP/EPROM versions),
RAM, 22 I/O lines and the following on-chip peripherals: Analog-to-Digital converter(ADC) with 6
multiplexed analog inputs, industry standard synchronous SPI serial interface, I2C multiple Master/
Slave interface, digital Watchdog, two independent 16-bit Timers, one featuring an External Clock
Input, and both featuringPulse Generator capabilities, 2 Input Captures and 2 OutputCompares.
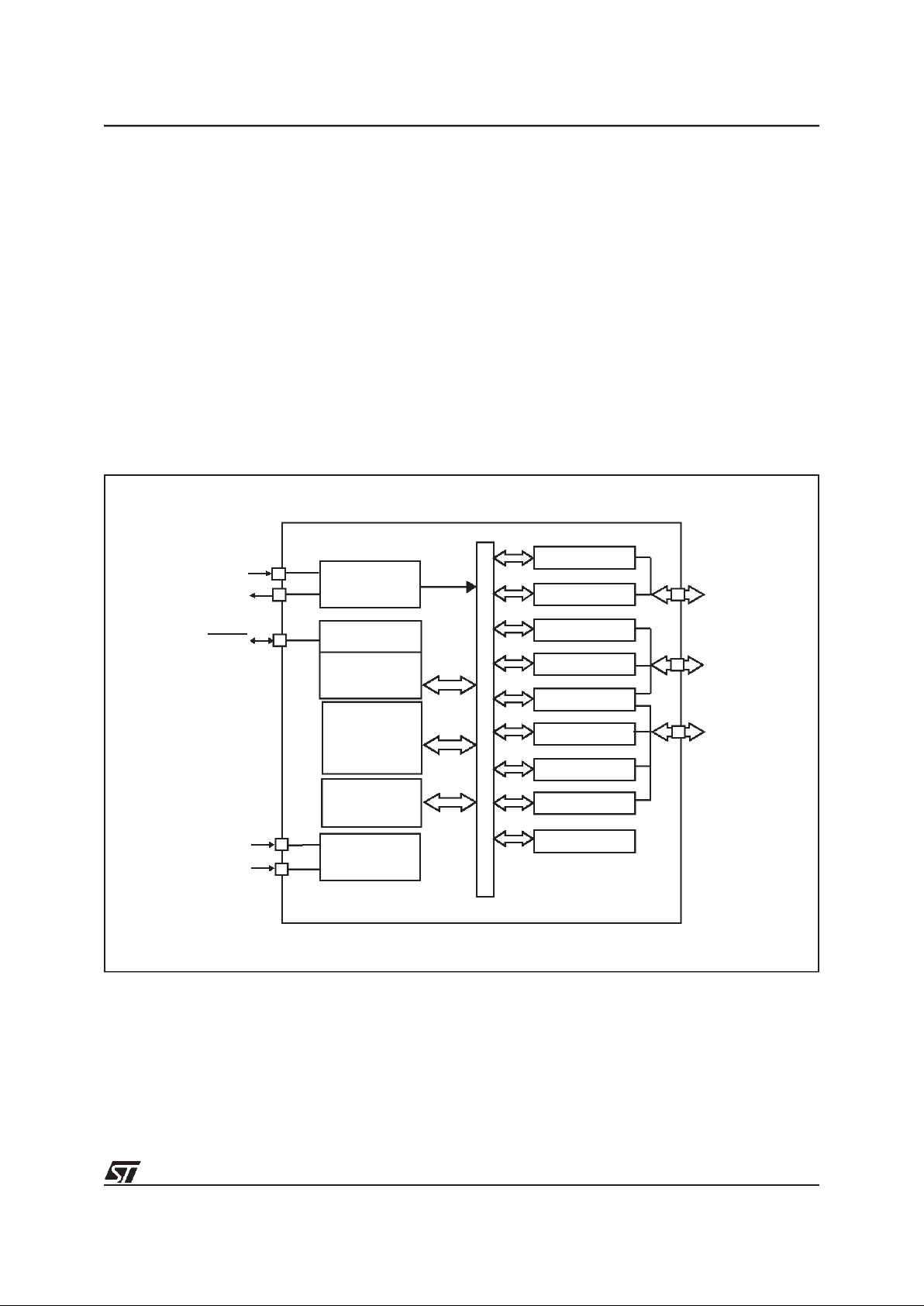
Figure 1. ST72251 Block Diagram
8-BIT CORE
ALU
ADDRESS AND DATA BUS
OSCIN
OSCOUT
RESET
PORT B
TIMER A
PORT A
SPI
PORT C
8-BIT ADC
WATCHDOG
PB0 -> PB7
(8 bits)
PC0 -> PC5
(6 bits)
OSC
Internal
CLOCK
CONTROL
RAM
(256 Bytes)
I
2
C
PA0 -> PA7
(8 bits)
V
SS
V
DD
POWER
SUPPLY
TIMER B
PROGRAM
(4 - 8K Bytes)
MEMORY
4
6/99
ST72251
1.2 PIN DESCRIPTION
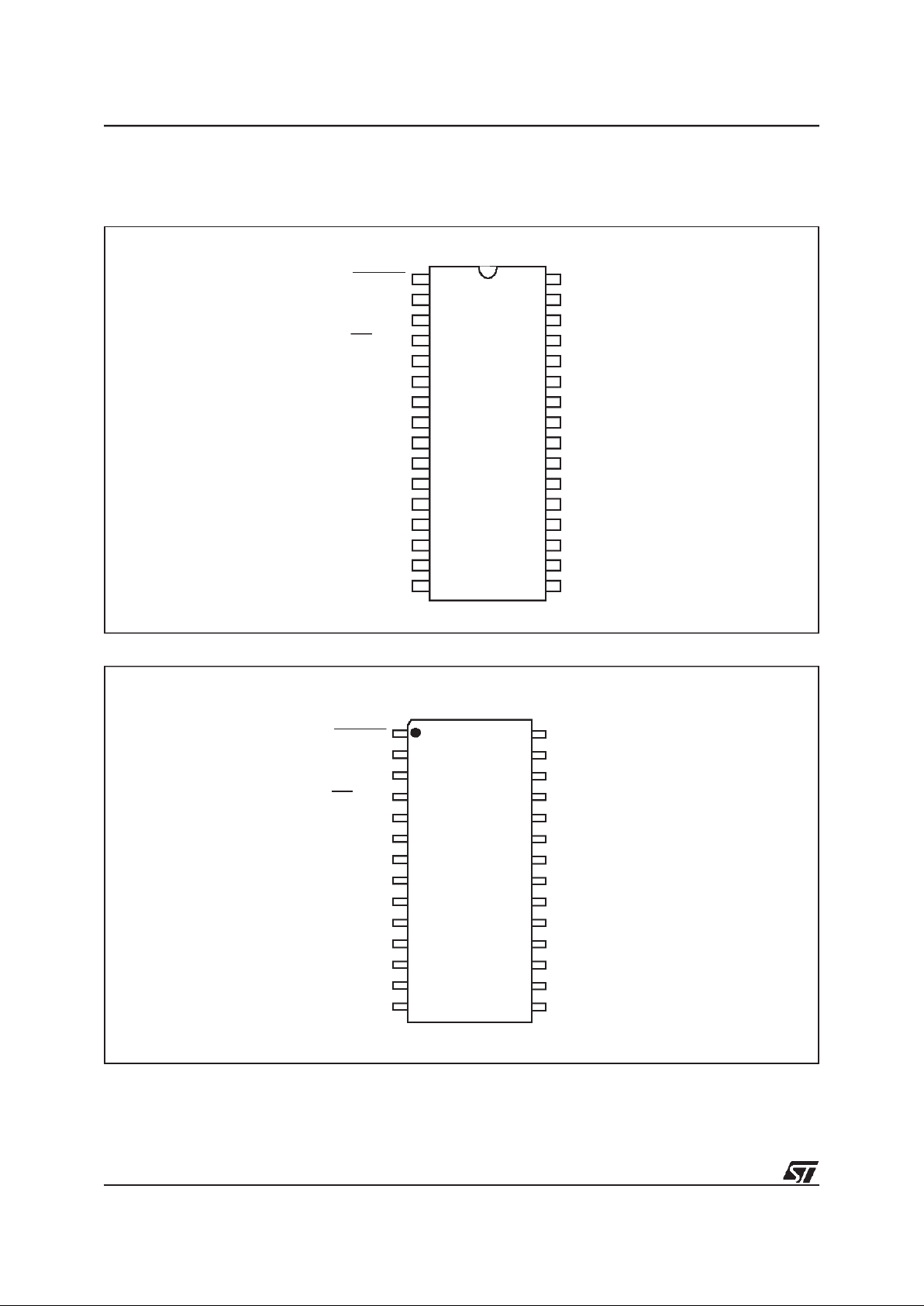
Figure 2. ST72251 Pinout (SDIP32)
Figure 3. ST72251 Pinout (SO28)
V
DD
V
SS
TEST/V
PP
1)
PA0
PA1
PA2
PA3
PA4/SCL
PA5
PA6/SDA
PA7
PC0/ICAP1_B/AIN0
PC1/OCMP1_B/AIN1
PC2/CLKOUT/AIN2
RESET
OSCIN
OSCOUT
SS/PB7
SCK/PB6
MISO/PB5
MOSI/PB4
OCMP2_A/PB3
ICAP2_A/PB2
OCMP1_A/PB1
ICAP1_A/PB0
AIN5/EXTCLK_A/PC5
AIN4/OCMP2_B/PC4
AIN3/ICAP2_B/PC3
28
27
26
25
24
23
22
21
20
19
18
17
16
15
1
2
3
4
5
6
7
8
9
10
11
12
13
14
29
30
31
32
NC
NC
NC
NC
1) VPPon EPROM/OTP only
V
DD
V
SS
TEST/V
PP
1)
PA0
PA1
PA2
PA3
PA4/SCL
PA5
PA6/SDA
PA7
PC0/ICAP1_B/AIN0
PC1/OCMP1_B/AIN1
PC2/CLKOUT/AIN2
RESET
OSCIN
OSCOUT
SS/PB7
SCK/PB6
MISO/PB5
MOSI/PB4
OCMP2_A/PB3
ICAP2_A/PB2
OCMP1_A/PB1
ICAP1_A/PB0
AIN5/EXTCLK_A/PC5
AIN4/OCMP2_B/PC4
AIN3/ICAP2_B/PC3
15
16
17
18
19
20
28
27
26
25
24
23
22
21
1
2
3
4
5
6
7
8
9
10
11
12
13
14
1) VPPon EPROM/OTP only
5
7/99
ST72251
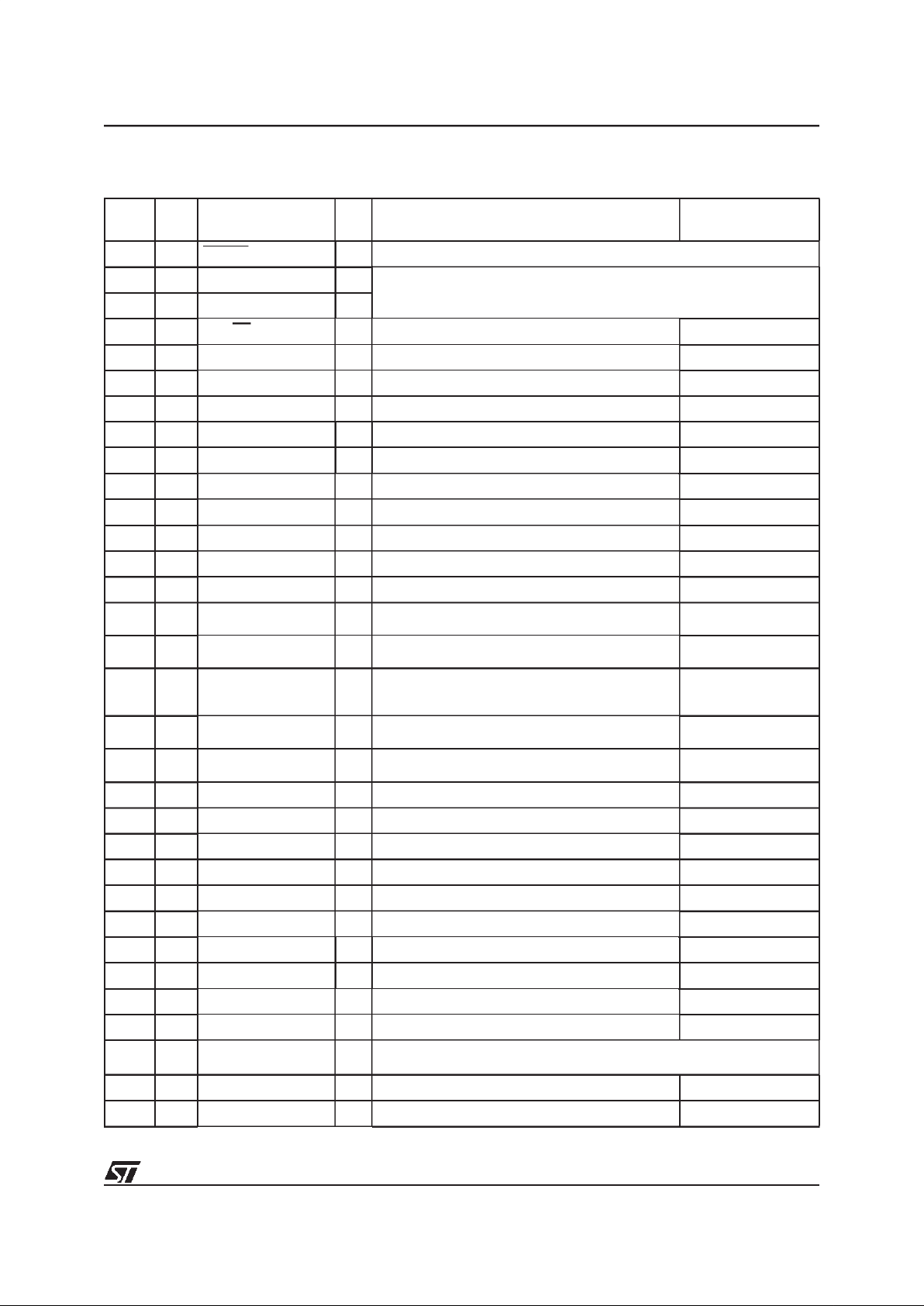
Table 1. ST72251 Pin Configuration
Pin n°
SDIP32
Pinn°
SO28
Pin Name Type Description Remarks
1 1 RESET I/O Bidirectional. Active low. Top priority non maskable interrupt.
2 2 OSCIN I
Input/Output Oscillator pin. These pinsconnect aparallel-resonant crystal,
or an external source to the on-chip oscillator.
3 3 OSCOUT O
4 4 PB7/SS I/O Port B7 or SPI Slave Select (active low) External Interrupt: EI1
5 5 PB6/SCK I/O Port B6 or SPI Serial Clock External Interrupt: EI1
6 6 PB5/MISO I/O Port B5 or SPI Master In/ Slave Out Data External Interrupt: EI1
7 7 PB4/MOSI I/O Port B4 or SPI Master Out / Slave In Data External Interrupt: EI1
8 NC Not Connected
9 NC Not Connected
10 8 PB3/OCMP2_A I/O Port B3 or TimerA Output Compare 2 External Interrupt: EI1
11 9 PB2/ICAP2_A I/O Port B2 or TimerA Input Capture 2 External Interrupt: EI1
12 10 PB1/OCMP1_A I/O Port B1 or TimerA Output Compare 1 External Interrupt: EI1
13 11 PB0/ICAP1_A I/O Port B0 or TimerA Input Capture 1 External Interrupt: EI1
14 12 PC5/EXTCLK_A/AIN5 I/O PortC5 orTimerAInput Clockor ADC Analog Input 5 External Interrupt: EI1
15 13 PC4/OCMP2_B/AIN4 I/O
Port C4 or TimerB Output Compare 2 or ADC
Analog Input 4
External Interrupt: EI1
16 14 PC3/ICAP2_B/AIN3 I/O
Port C3 or TimerB Input Capture 2or ADC Analog
Input 3
External Interrupt: EI1
17 15 PC2/CLKOUT/AIN2 I/O
Port C2or Internal Clock Frequency outputor ADC
Analog Input 2. Clockout is driven by the MCO bit
of the miscellaneous register.
External Interrupt: EI1
18 16 PC1/OCMP1_B/AIN1 I/O
Port C1 or TimerB Output Compare 1 or ADC
Analog Input 1
External Interrupt: EI1
19 17 PC0/ICAP1_B/AIN0 I/O
Port C0 or TimerB Input Capture 1or ADC Analog
Input 0
External Interrupt: EI1
20 18 PA7 I/O Port A7, High Sink External Interrupt: EI0
21 19 PA6/SDA I/O Port A6 or I
2
C Data, High Sink External Interrupt: EI0
22 20 PA5 I/O Port A5, High Sink External Interrupt: EI0
23 21 PA4/SCL I/O Port A4 or I
2
C Clock, High Sink External Interrupt: EI0
24 NC Not Connected
25 NC Not Connected
26 22 PA3 I/O Port A3, High Sink External Interrupt: EI0
27 23 PA2 I/O Port A2, High Sink External Interrupt: EI0
28 24 PA1 I/O Port A1, High Sink External Interrupt: EI0
29 25 PA0 I/O Port A0, High Sink External Interrupt: EI0
30 26 TEST/V
PP
I/S
Test mode pin (should be tiedlow inuser mode). In the EPROM programming mode, this pin acts as the programming voltage input V
PP.
31 27 V
SS
S Ground
32 28 V
DD
S Main power supply
6
8/99
ST72251
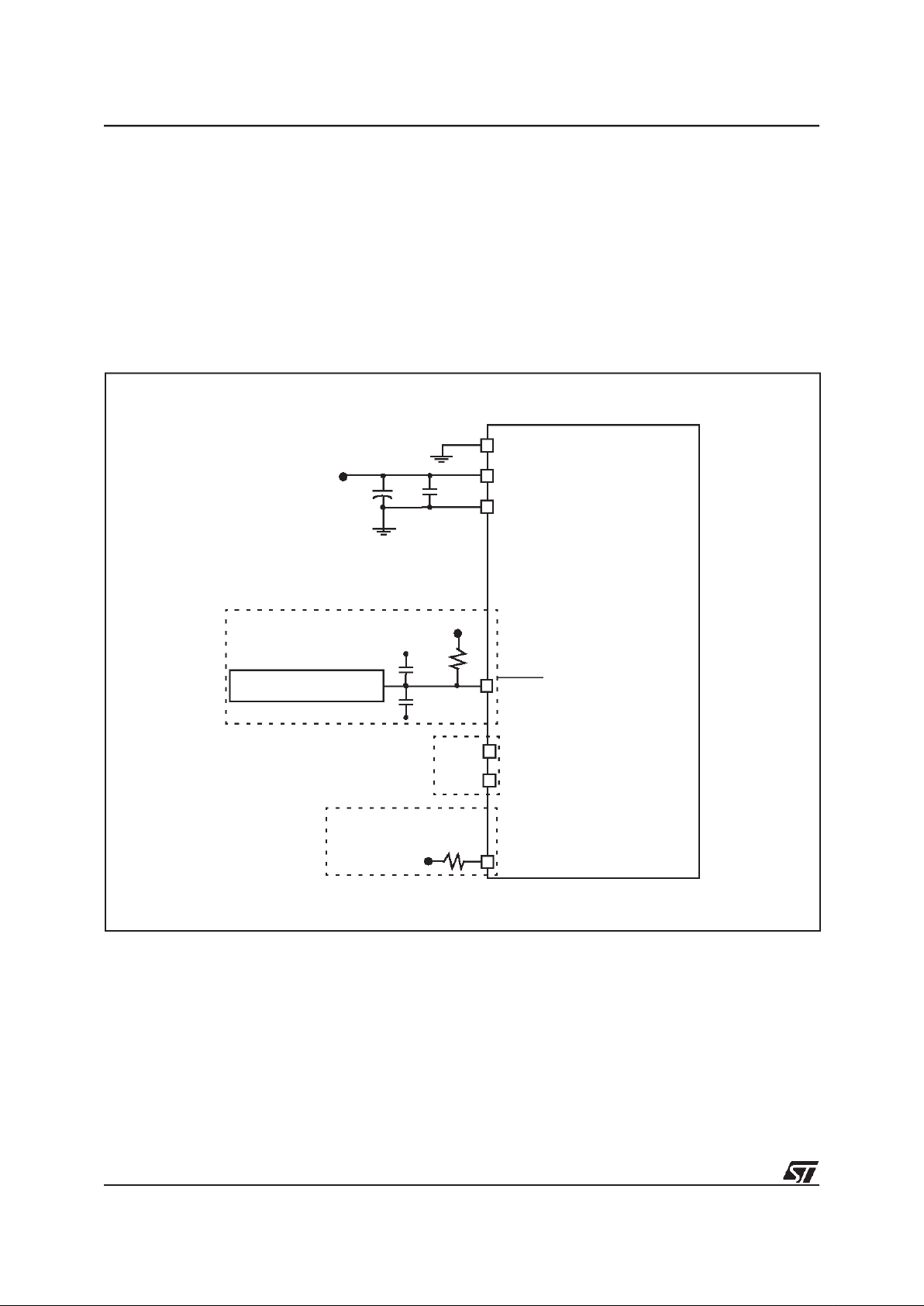
1.3 EXTERNAL CONNECTIONS
The following figure shows the recommended external connections for the device.
The VPPpin is only used for programming OTP
and EPROM devices and must betied to ground in
user mode.
The 10 nF and 0.1 µF decoupling capacitors on
the power supply lines are a suggested EMC performance/cost tradeoff.
The external reset network is intended to protect
the device against parasitic resets, especially in
noisy environments.
Unused I/Os should be tied high to avoid any unnecessary power consumption on floating lines.
An alternative solution is to program the unused
ports as inputs with pull-up.
Figure 4. Recommended External Connections
V
PP
V
DD
V
SS
OSCIN
OSCOUT
RESET
V
DD
0.1µF
+
See
Clocks
Section
V
DD
0.1µF
0.1µF
EXTERNAL RESET CIRCUIT
Or configure unused I/O ports
Unused I/O
10nF
4.7K
10K
by software as input with pull-up
V
DD
7
9/99
ST72251
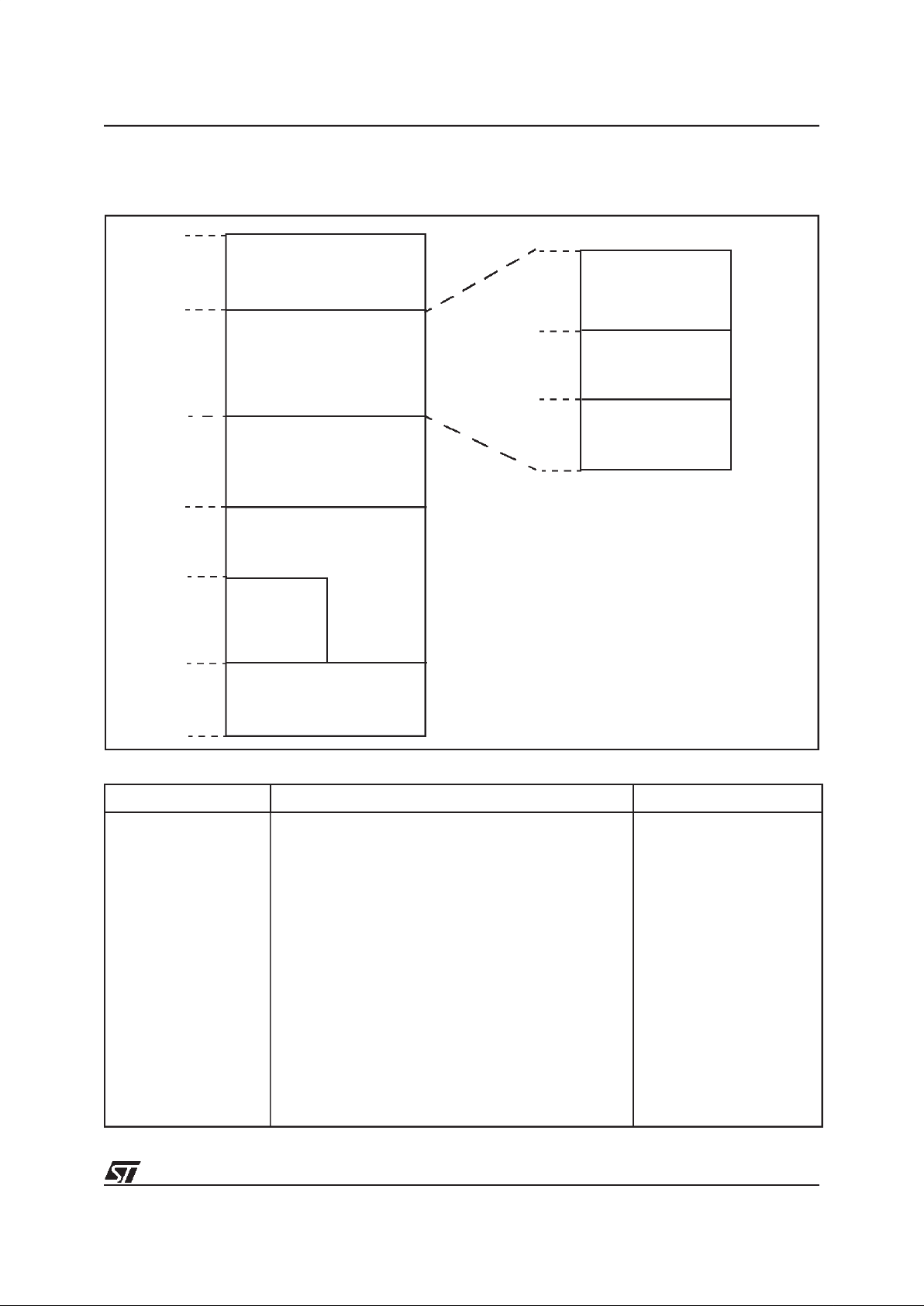
1.4 MEMORY MAP
Figure 5. Memory Map
Table 2. Interrupt Vector Map
Vector Address Description Remarks
FFE0-FFE1h
FFE2-FFE3h
FFE4-FFE5h
FFE6-FFE7h
FFE8-FFE9h
FFEA-FFEBh
FFEC-FFEDh
FFEE-FFEFh
FFF0-FFF1h
FFF2-FFF3h
FFF4-FFF5h
FFF6-FFF7h
FFF8-FFF9h
FFFA-FFFBh
FFFC-FFFDh
FFFE-FFFFh
Not Used
Not Used
I
2
C Interrupt Vector
Not Used
Not Used
Not Used
Not Used
TIMER B Interrupt Vector
Not Used
TIMER A Interrupt Vector
SPI Interrupt Vector
Not Used
External Interrupt Vector EI1
External Interrupt Vector EI0
TRAP (software) Interrupt Vector
RESET Vector
Internal Interrupt
Internal Interrupt
Internal Interrupt
Internal Interrupt
External Interrupt
External Interrupt
CPU Interrupt
0000h
8K Bytes
Interrupt & Reset Vectors
HW Registers
017Fh
0080h
007Fh
0180h
DFFFh
Reserved
(see Table 3)
E000h
FFDFh
FFE0h
FFFFh
(see Table 2)
4K Bytes
F000h
256 Bytes RAM
Short Addressing
RAM (zero page)
16-bit Addressing
RAM
0100h
0140h
017Fh
0080h
00FFh
013Fh
64 Bytes Stack/
16-bit Addressing RAM
Program Memory
Program
Memory
8
10/99
ST72251
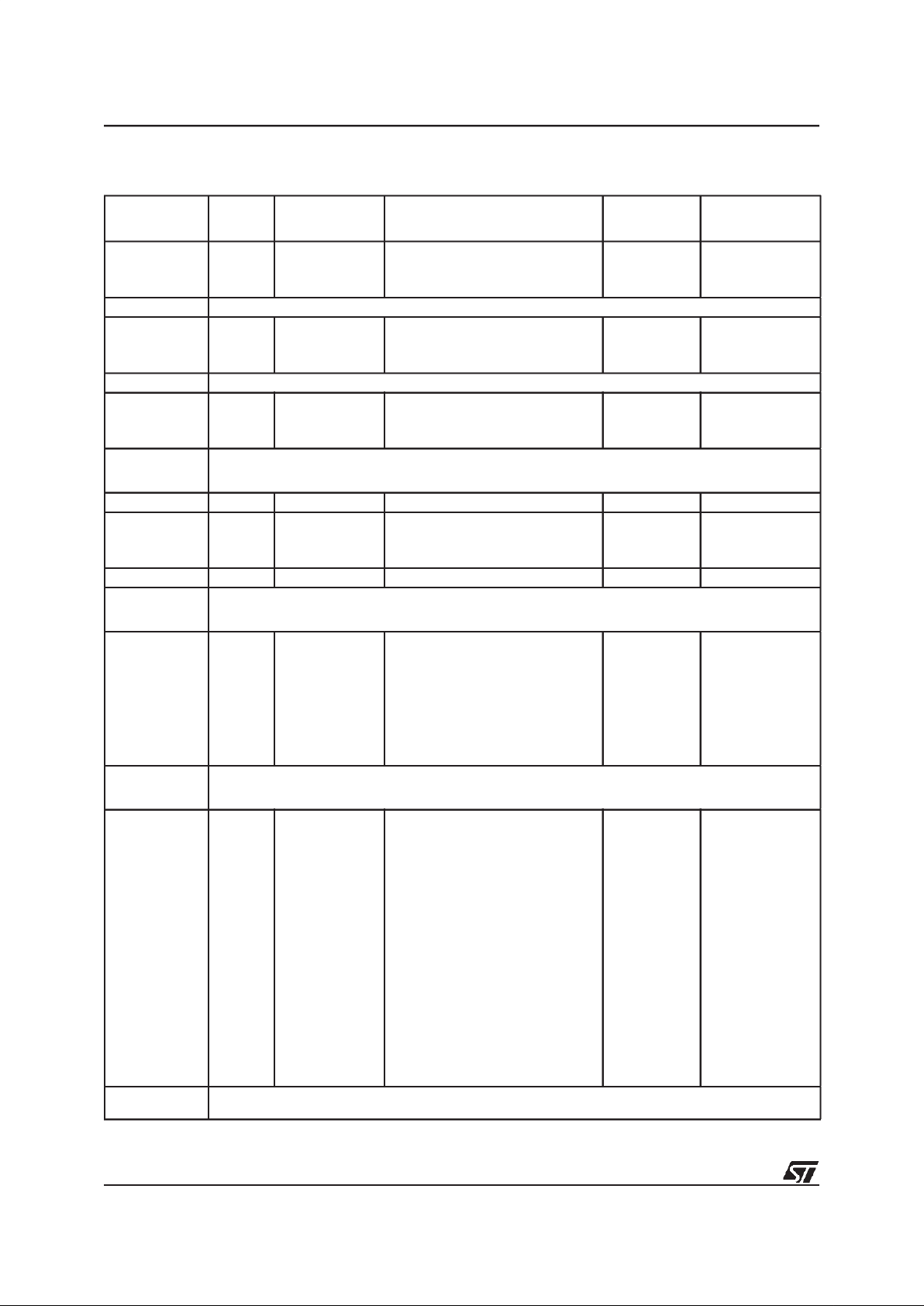
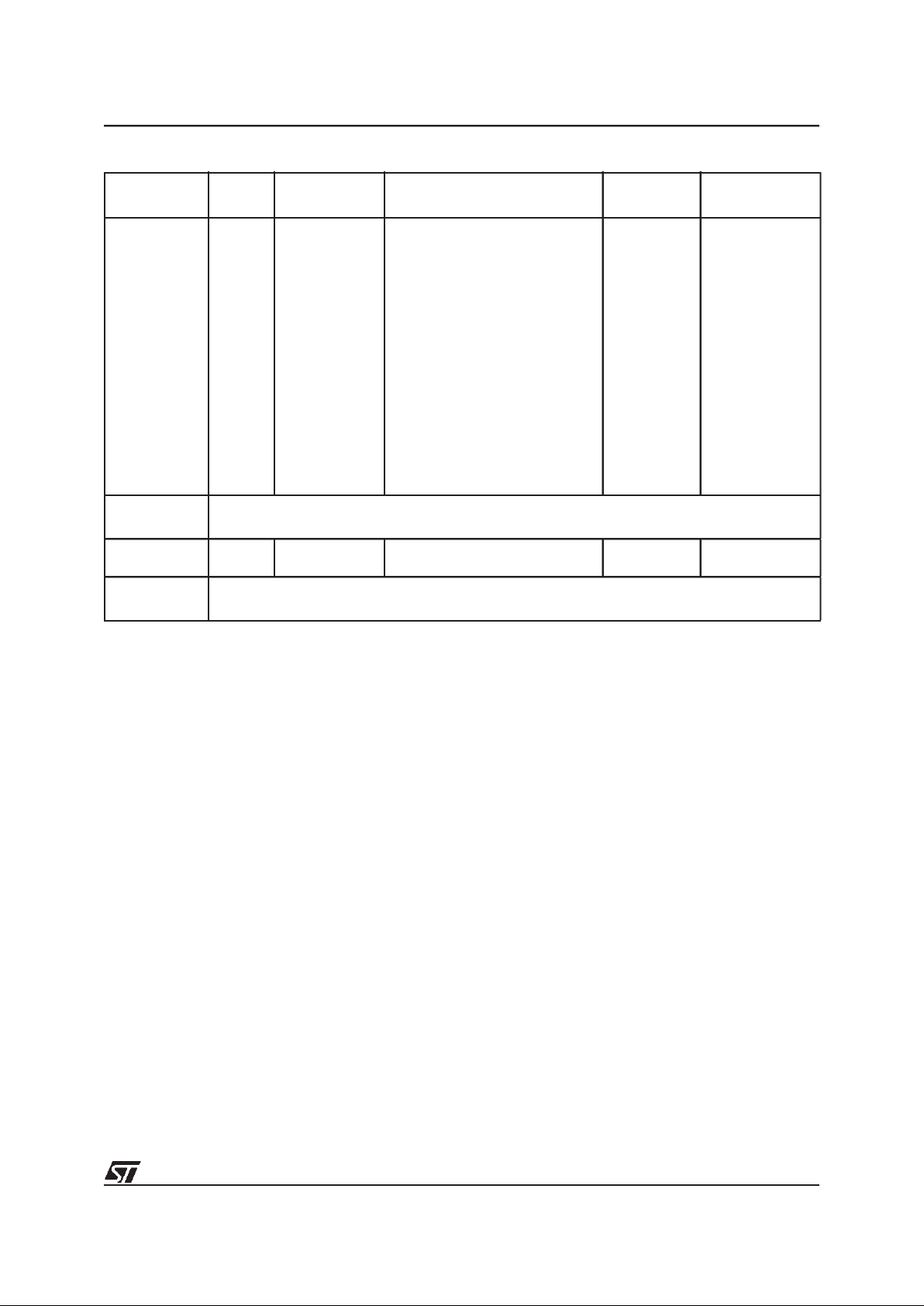
Table 3. Hardware Register Memory Map
Address
Block
Name
Register Label Register name Reset Status Remarks
0000h
0001h
0002h
Port C
PCDR
PCDDR
PCOR
Data Register
Data Direction Register
Option Register
00h
00h
00h
R/W
R/W
R/W
0003h Reserved Area (1 Byte)
0004h
0005h
0006h
Port B
PBDR
PBDDR
PBOR
Data Register
Data Direction Register
Option Register
00h
00h
00h
R/W
R/W
R/W
0007h Reserved Area (1 Byte)
0008h
0009h
000Ah
Port A
PADR
PADDR
PAOR
Data Register
Data Direction Register
Option Register
00h
00h
00h
R/W
R/W
R/W
000Bh to
001Fh
Reserved Area (21 Bytes)
0020h MISCR Miscellaneous Register 00h
0021h
0022h
0023h
SPI
SPIDR
SPICR
SPISR
Data I/O Register
Control Register
Status Register
xxh
0xh
00h
R/W
R/W
Read Only
0024h WDG WDGCR Watchdog Control register 7Fh R/W
0025h to
0027h
Reserved Area (3 Bytes)
0028h
0029h
002Ah
002Bh
002Ch
002Dh
002Eh
I
2
C
I2CCR
I2CSR1
I2CSR2
I2CCCR
I2COAR1
I2COAR2
I2CDR
Control Register
Status Register 1
Status Register 2
Clock Control Register
Own Address Register 1
Own Address Register 2
Data Register
00h
00h
00h
00h
00h
40h
00h
R/W
Read Only
Read Only
R/W
R/W
R/W
R/W
002Fh
0030h
Reserved Area (2 Bytes)
0031h
0032h
0033h
0034h-0035h
0036h-0037h
0038h-0039h
003Ah-003Bh
003Ch-003Dh
003Eh-003Fh
Timer A
TACR2
TACR1
TASR
TAIC1HR
TAIC1LR
TAOC1HR
TAOC1LR
TACHR
TACLR
TAACHR
TAACLR
TAIC2HR
TAIC2LR
TAOC2HR
TAOC2LR
Control Register2
Control Register1
Status Register
Input Capture1 High Register
Input Capture1 Low Register
Output Compare1 High Register
Output Compare1 Low Register
Counter High Register
Counter Low Register
Alternate Counter High Register
Alternate Counter Low Register
Input Capture2 High Register
Input Capture2 Low Register
Output Compare2 High Register
Output Compare2 Low Register
00h
00h
00h
xxh
xxh
80h
00h
FFh
FCh
FFh
FCh
xxh
xxh
80h
00h
R/W
R/W
Read Only
Read Only
Read Only
R/W
R/W
Read Only
Read Only
Read Only
Read Only
Read Only
Read Only
R/W
R/W
0040h Reserved Area (1 Byte)
9
11/99
ST72251
0041h
0042h
0043h
0044h-0045h
0046h-0047h
0048h-0049h
004Ah-004Bh
004Ch-004Dh
004Eh-004Fh
Timer B
TBCR2
TBCR1
TBSR
TBIC1HR
TBIC1LR
TBOC1HR
TBOC1LR
TBCHR
TBCLR
TBACHR
TBACLR
TBIC2HR
TBIC2LR
TBOC2HR
TBOC2LR
Control Register2
Control Register1
Status Register
Input Capture1 High Register
Input Capture1 Low Register
Output Compare1 High Register
Output Compare1 Low Register
Counter High Register
Counter Low Register
Alternate Counter High Register
Alternate Counter Low Register
Input Capture2 High Register
Input Capture2 Low Register
Output Compare2 High Register
Output Compare2 Low Register
00h
00h
00h
xxh
xxh
80h
00h
FFh
FCh
FFh
FCh
xxh
xxh
80h
00h
R/W
R/W
Read Only
Read Only
Read Only
R/W
R/W
Read Only
Read Only
Read Only
Read Only
Read Only
Read Only
R/W
R/W
0050h to
006Fh
Reserved Area (32 Bytes)
0070h
0071h
ADC
ADCDR
ADCCSR
Data Register
Control/Status Register
00h
00h
Read Only
R/W
0072h to
007Fh
Reserved Area (14 Bytes)
Address
Block
Name
Register Label Register name Reset Status Remarks
10
12/99
ST72251
2 CENTRAL PROCESSING UNIT
2.1 INTRODUCTION
This CPU hasa full 8-bit architecture andcontains
six internal registers allowing efficient 8-bit data
manipulation.
2.2 MAIN FEATURES
■ 63 basicinstructions
■ Fast 8-bit by 8-bit multiply
■ 17 main addressing modes (with indirect
addressing mode)
■ Two 8-bit index registers
■ 16-bit stackpointer
■ 8 MHzCPU internal frequency
■ Low power modes
■ Maskable hardware interrupts
■ Non-maskable software interrupt
2.3 CPU REGISTERS
The 6 CPU registers shown in Figure 6 are not
present in thememory mapping and are accessed
by specificinstructions.
Accumulator (A)
The Accumulator is an 8-bit general purpose register used to hold operands and the results of the
arithmetic and logic calculations andto manipulate
data.
Index Registers (Xand Y)
In indexedaddressingmodes, these 8-bit registers
are used to create either effective addresses or
temporary storage areas for data manipulation.
(The Cross-Assembler generates a precede instruction (PRE) to indicate that the following instruction refers to the Y register.)
The Y register is notaffected by theinterrupt automatic procedures (notpushed toand popped from
the stack).
Program Counter (PC)
The program counteris a16-bit register containing
the address of the next instruction to be executed
by the CPU. It is made of two 8-bit registers PCL
(Program CounterLow whichis the LSB) and PCH
(Program Counter High which is the MSB).
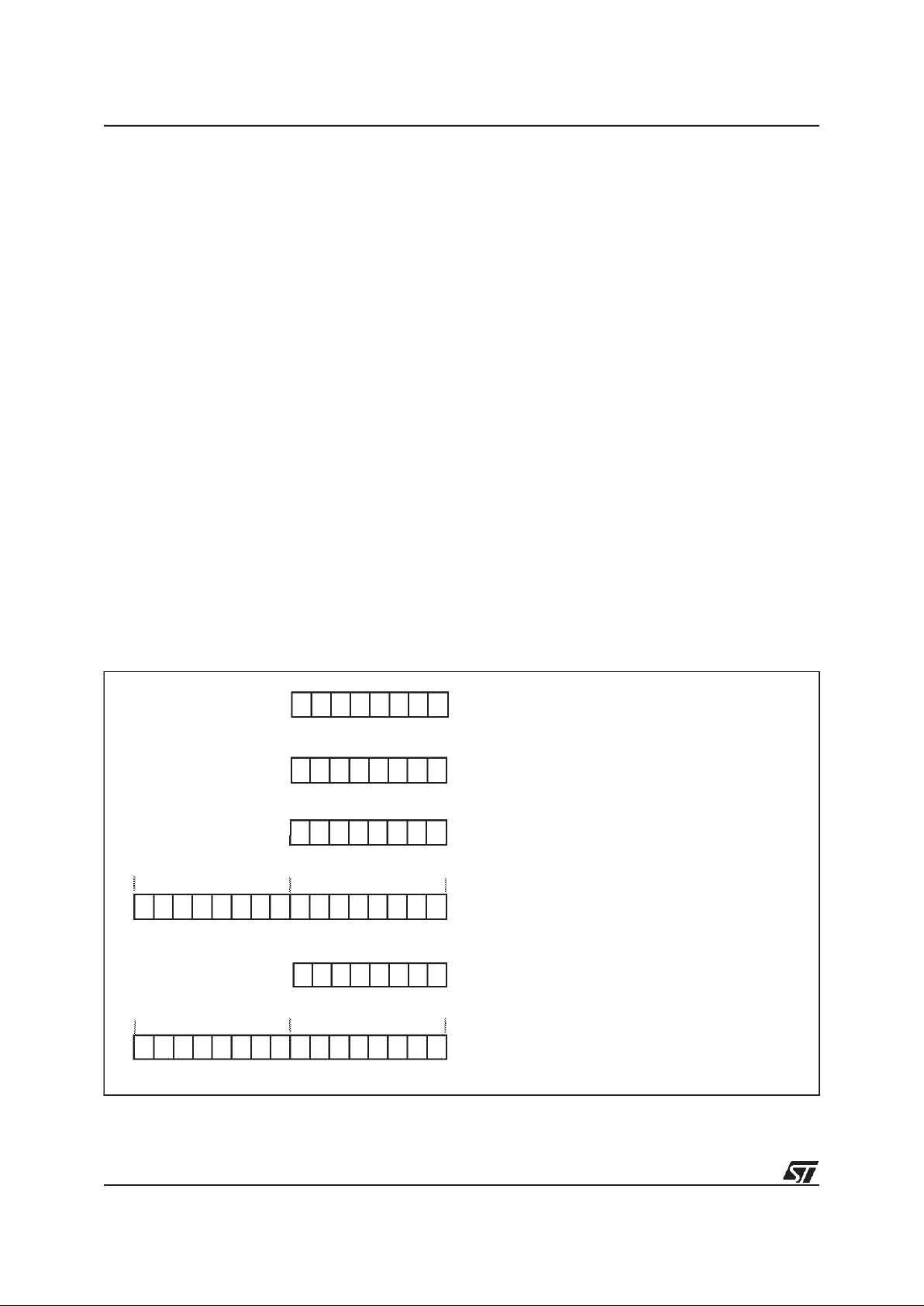
Figure 6. CPU Registers
ACCUMULATOR
X INDEX REGISTER
Y INDEX REGISTER
STACK POINTER
CONDITION CODE REGISTER
PROGRAM COUNTER
70
1C11HINZ
RESET VALUE= RESET VECTOR @ FFFEh-FFFFh
70
70
70
0
7
15 8
PCH
PCL
15
87 0
RESET VALUE = STACKHIGHER ADDRESS
RESET VALUE =
1X11X1XX
RESET VALUE = XXh
RESET VALUE= XXh
RESET VALUE = XXh
X = Undefined Value
11
13/99
ST72251
CENTRAL PROCESSING UNIT (Cont’d)
CONDITION CODE REGISTER (CC)
Read/Write
Reset Value: 111x1xxx
The 8-bit Condition Code register contains the interrupt mask and four flags representative of the
result of the instructionjust executed. This register
can also be handled by the PUSH and POP instructions.
These bits can be individually tested and/or controlled by specific instructions.
Bit 4 = H
Half carry
.
This bit isset byhardware when a carry occurs between bits 3 and 4 of the ALU during an ADD or
ADC instruction.Itis reset by hardware during the
same instructions.
0: No half carry has occurred.
1: A half carry has occurred.
This bit is tested using the JRH or JRNH instruction. The H bit is useful in BCD arithmetic subroutines.
Bit 3 = I
Interrupt mask
.
This bit is set by hardware when entering in interrupt or by software to disable all interrupts except
the TRAP software interrupt. This bit is cleared by
software.
0: Interrupts are enabled.
1: Interrupts are disabled.
This bit is controlled by the RIM, SIM and IRET instructions andis tested bythe JRM and JRNM instructions.
Note: Interrupts requested while I is set are
latched and can be processed when I is cleared.
By default an interrupt routine is not interruptable
because the I bit is set by hardware when you en-
ter it and resetby the IRET instruction at theend of
the interrupt routine. If the I bit is cleared by software inthe interrupt routine, pending interruptsare
serviced regardless of the priority levelof the current interrupt routine.
Bit 2 = N
Negative
.
This bit is set and cleared by hardware.It is representative of the result sign of the last arithmetic,
logical or data manipulation. It is a copy of the 7
th
bit of the result.
0:Theresult of the last operation is positiveor null.
1: The result of the last operation is negative
(i.e. the most significant bit is a logic 1).
This bit isaccessed by the JRMIand JRPL instructions.
Bit 1 = Z
Zero
.
This bit is set and clearedby hardware. Thisbit indicates that the result of the last arithmetic, logical
or data manipulation is zero.
0: The result of the last operation is different from
zero.
1: The result of the last operation is zero.
This bit is accessed by the JREQ and JRNE test
instructions.
Bit 0 = C
Carry/borrow.
This bit is set and cleared by hardware and software. It indicates an overflow or anunderflow has
occurred during the last arithmetic operation.
0: No overflowor underflow has occurred.
1: An overflow or underflow has occurred.
This bit is driven by the SCFand RCF instructions
and tested by theJRC andJRNC instructions.It is
also affected by the“bit test and branch”, shift and
rotate instructions.
70
111HINZC
12
14/99
ST72251
CENTRAL PROCESSING UNIT (Cont’d)
Stack Pointer (SP)
Read/Write
Reset Value: 01 7Fh
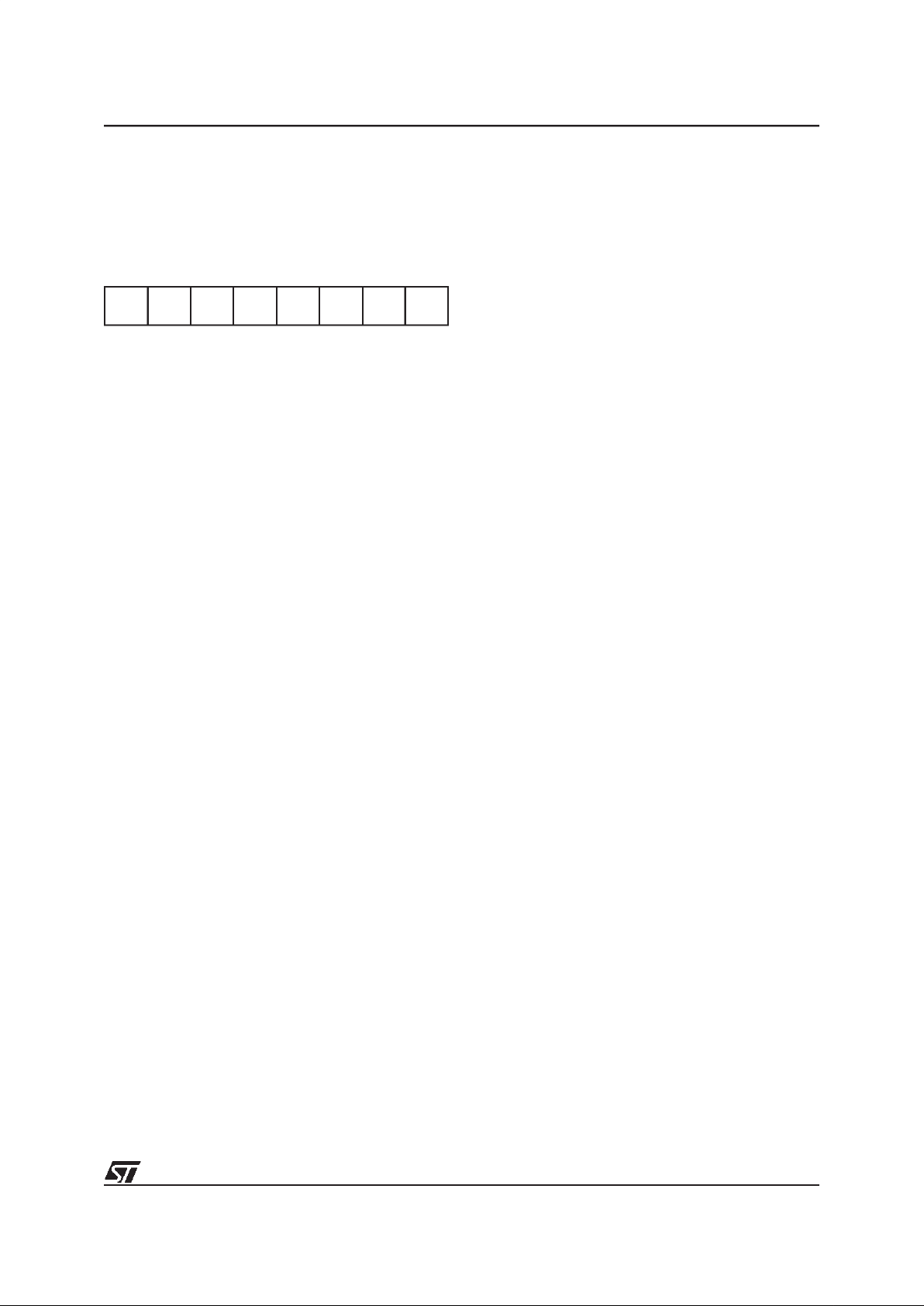
The Stack Pointer is a 16-bit register which is always pointingto the next free location in the stack.
It isthen decremented after datahas been pushed
onto the stack and incremented before data is
popped from the stack (see Figure 7).
Since the stack is 64 bytes deep, the 10 most significant bits are forced by hardware. Following an
MCU Reset, or after a Reset Stack Pointer instruction (RSP), the Stack Pointer contains its reset value (the SP5 to SP0 bits are set) which is the stack
higher address.
The least significant byte of the Stack Pointer
(called S) can be directly accessed by a LD instruction.
Note: When the lower limit is exceeded, the Stack
Pointer wraps around tothe stackupper limit, without indicating the stack overflow. The previously
stored information is then overwritten and therefore lost.The stackalso wrapsin caseof anunderflow.
The stack is used to save the return address during a subroutine call and the CPU context during
an interrupt.Theuser may also directly manipulate
the stack by means of the PUSH and POP instructions. In the case ofan interrupt, the PCLis stored
at the first location pointed to by the SP. Then the
other registers are stored in the next locations as
shown in Figure 7.
– Whenan interrupt isreceived, the SP is decre-
mented and the context is pushed on the stack.
– Onreturn from interrupt, the SP is incremented
and thecontext is popped from the stack.
A subroutine call occupies twolocations and aninterrupt five locations in the stack area.
Figure 7. Stack Manipulation Example
15 8
00000001
70
0 1 SP5 SP4 SP3 SP2 SP1 SP0
PCH
PCL
SP
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
PCL
PCH
X
A
CC
PCH
PCL
SP
SP
Y
CALL
Subroutine
Interrupt
Event
PUSH Y POP Y IRET
RET
or RSP
@ 017Fh
@ 0140h
Stack Lower Address = 0140h
Stack Higher Address =
017Fh
13
15/99
ST72251
3 CLOCKS, RESET, INTERRUPTS & POWER SAVING MODES
3.1 CLOCK SYSTEM
3.1.1 General Description
The MCU accepts either a Crystal or Ceramicresonator, or an external clock signal to drive the internal oscillator. The internal clock (f
CPU
) is de-
rived fromthe external oscillator frequency (f
OSC).
The external Oscillator clock is first divided by 2,
and a division factor of 32 can be applied if Slow
Mode is selected by settingthe SMS bit in the Miscellaneous Register. This reduces the frequency
of the f
CPU
; the clock signal is also routed to the
on-chip peripherals.
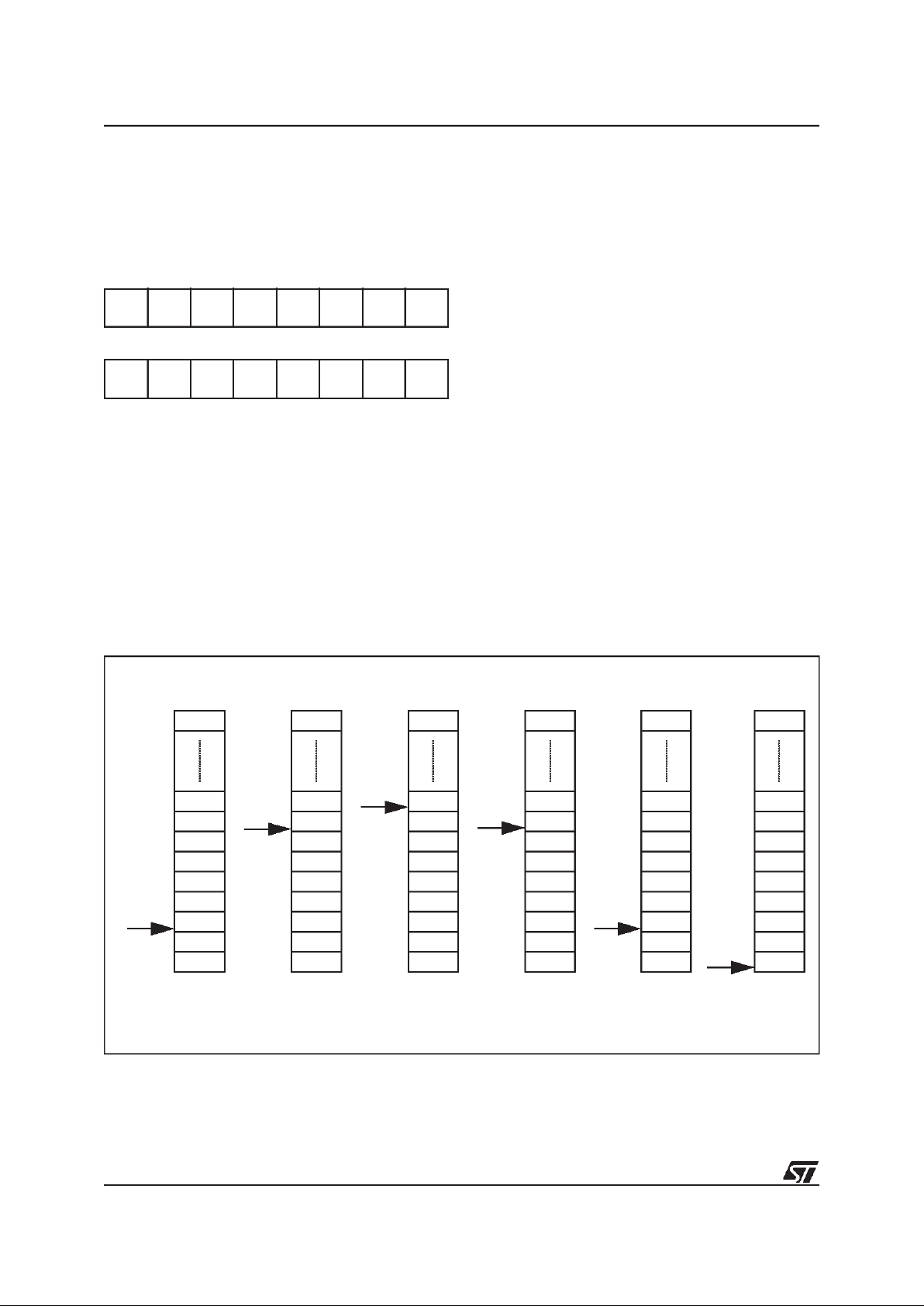
The internal oscillator is designed to operate with
an AT-cut parallel resonant quartz crystal resonator in the frequency range specified for f
osc
.The
circuit shown in Figure 9 is recommended when
using a crystal, and Table 4 lists the recommended capacitance and feedback resistance values.
The crystal and associated componentsshould be
mounted as close as possible to the input pins in
order to minimize output distortion and start-up
stabilisation time.
Use of an external CMOS oscillator is recommended when crystals outside the specified frequency ranges are to be used.
Table 4. .Recommended Values for 16 MHz
Crystal Resonator (C0< 7pF)
C0: parasitic shunt capacitance of the quartz crys-
tal.
R
SMAX
: equivalent serialresistor of the crystal (up-
er limit, see crystal specification).
C
OSCOUT,COSCIN
: maximum total capacitance on
OSCIN and OSCOUT, including the external capacitance plus the parasitic capacitance of the
board and the device.
Figure 8. ExternalClock Source Connections
Figure 9. Crystal/Ceramic Resonator
Figure 10. Clock Prescaler Block Diagram
R
SMAX
40 Ω 60 Ω 150 Ω
C
OSCIN
56pF 47pF 22pF
C
OSCOUT
56pF 47pF 22pF
OSCIN OSCOUT
EXTERNAL
CLOCK
NC
OSCIN OSCOUT
C
OSCIN
C
OSCOUT
OSCIN OSCOUT
C
OSCIN
C
OSCOUT
%2 % 16
f
CPU
to CPU and
Peripherals
14
16/99
ST72251
3.2 RESET
3.2.1 Introduction
There are three sources of Reset:
– RESET pin (externalsource)
– Power-On Reset (Internal source)
– WATCHDOG (Internal Source)
The Reset Service Routine vectoris located at ad-
dress FFFEh-FFFFh.
3.2.2 External Reset
The RESET pin is both an input and an open-drain
output with integrated pull-up resistor. When one
of the internal Reset sources is active, the Reset
pin is driven low, for a duration of t
RESET,
to reset
the whole application.
3.2.3 ResetOperation
The duration of the Reset state is a minimum of
4096 internal CPU Clock cycles. During the Reset
state, all I/Os take their reset value.
A Reset signal originating from an externalsource
must have a duration of at least t
PULSE
in order to
be recognised. This detection is asynchronous
and therefore the MCU can enter Reset state even
in Halt mode.
At the end of the Reset cycle, the MCU may be
held in the Reset state by an External Reset signal. The RESET pin may thus be used to ensure
VDDhas risen to a point where theMCU can operate correctly before the user program is run. Fol-
lowing a Reset event, or after exiting Halt mode, a
4096 CPU Clock cycle delay period is initiated in
order to allow the oscillator to stabilise and to ensure that recovery hastaken place from the Reset
state.
In the high state, the RESET pin is connected internally to a pull-up resistor (RON). This resistor
can be pulled low by external circuitry to reset the
device.
The RESET pin is an asynchronous signal which
plays a majorrole in EMS performance. In a noisy
environment, it is recommended to use the external connections shown in Figure4.
3.2.4 Power-on Reset
This circuit detects the ramping up of VDD, and
generates a pulse that is used to reset the application (at approximately VDD= 2V).
Power-On Reset is designed exclusively to cope
with power-up conditions, and should not be used
in order to attempt to detect a drop in the power
supply voltage.
Caution:
to re-initialize the Power-On Reset, the
power supply must fall below approximately 0.8V
(Vtn), prior to rising above 2V. If this condition is
not respected, on subsequent power-upthe Reset
pulse may not be generated. An external Reset
pulse may be required to correctly reactivate the
circuit.
Figure 11. Reset Block Diagram
INTERNAL
RESET
WATCHDOG RESET
OSCILLATOR
SIGNAL
COUNTER
RESET
TO ST7
RESET
POWER-ON RESET
V
DD
R
ON
15

17/99
ST72251
3.3 INTERRUPTS
The ST7 coremaybe interruptedby one of two different methods: maskable hardware interrupts as
listed in the Interrupt Mapping Table and a nonmaskable software interrupt (TRAP). The Interrupt
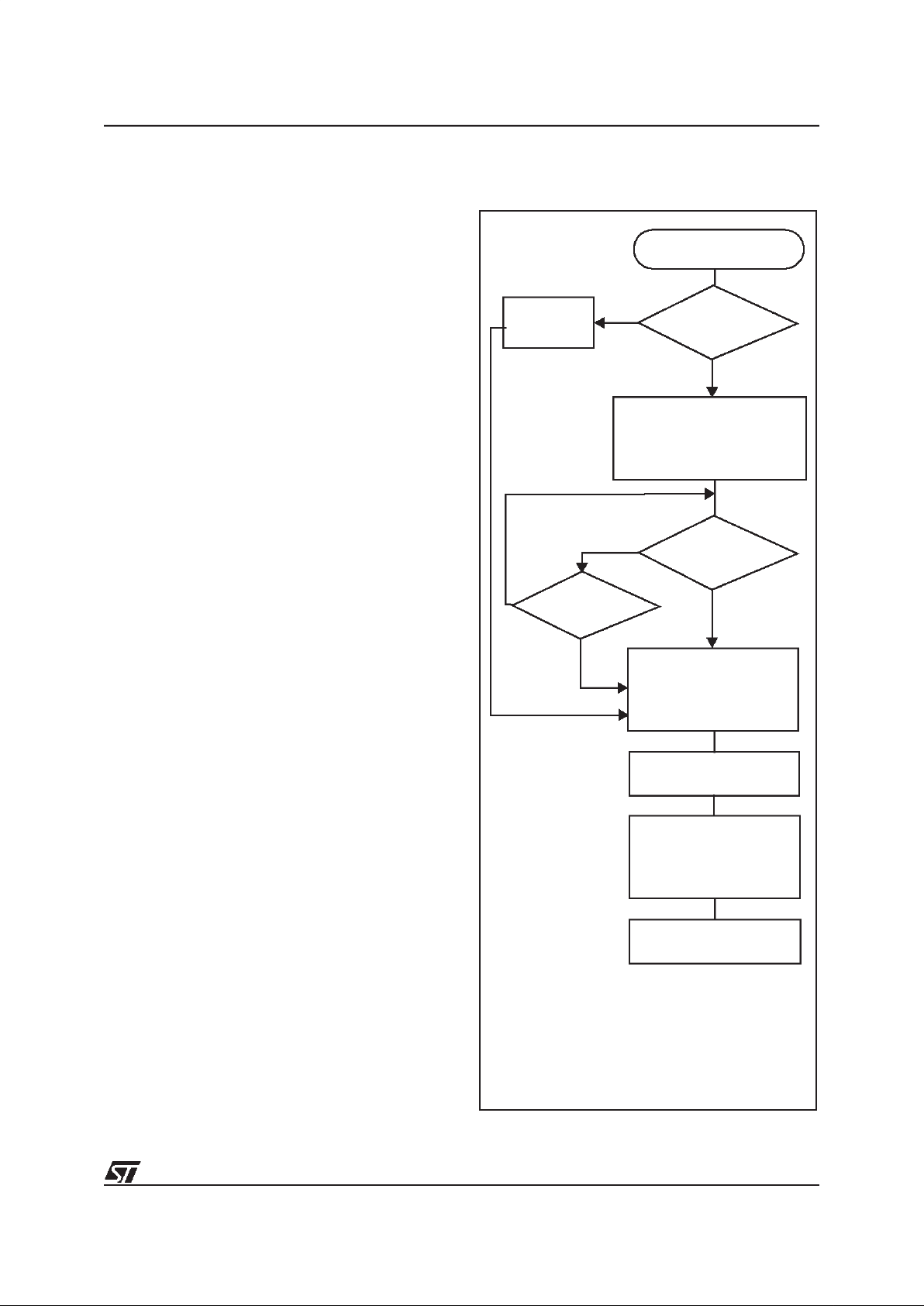
processing flowchartis shown in Figure12.
The maskable interrupts mustbe enabled clearing
the I bitin order to be serviced. However, disabled
interrupts may be latched and processed when
they are enabled (see external interrupts subsection).
When an interrupt has to be serviced:
– Normal processing is suspended at the end of
the current instruction execution.
– The PC, X, A and CC registersare saved onto
the stack.
– The I bit of the CC register is set to prevent addi-
tional interrupts.
– ThePC is thenloaded with theinterrupt vector of
the interrupt to service and the first instructionof
the interrupt serviceroutine is fetched(refer to
the Interrupt Mapping Table for vector addresses).
The interrupt service routine should finish with the
IRET instruction which causes the contents of the
saved registersto be recovered from thestack.
Note: As a consequence of the IRET instruction,
the I bit will be cleared and the main program will
resume.
Priority management
By default, a servicing interrupt can not be interrupted because the I bit is set by hardware entering in interrupt routine.
In the case several interrupts are simultaneously
pending, an hardware priority defines which one
will be serviced first (seethe Interrupt Mapping Table).
Non Maskable Software Interrupts
This interrupt is entered when the TRAP instruction is executed regardless of the state of theI bit.
It will be serviced according to the flowchart on
Figure 12.
Interrupts and Low power mode
All interrupts allowthe processorto leave the Wait
low power mode. Only external and specific mentioned interrupts allow the processor to leave the
Halt low power mode(referto the “Exit from HALT“
column in the Interrupt Mapping Table).
External Interrupts
External interrupt vectorscan be loaded in the PC
register if the corresponding external interrupt occurred and if the I bit is cleared. These interrupts
allow the processor to leave the Halt low power
mode.
The external interrupt polarity is selected through
the miscellaneous register or interrupt register (if
available).
External interrupt triggered on edge will be latched
and the interrupt request automatically cleared
upon entering the interrupt service routine.
If several input pins, connected to the same interrupt vector, are configured as interrupts, their signals are logically ANDed before entering theedge/
level detection block.
Warning: The type of sensitivity defined in the
Miscellaneous or Interrupt register (if available)
applies to the EI source. In case of an ANDed
source (as described on the I/O ports section), a
low level on an I/O pin configured as input with interrupt, masks the interrupt request even in case
of rising-edge sensitivity.
Peripheral Interrupts
Different peripheral interrupt flags in the status
register are able to cause an interrupt when they
are active if both:
– TheI bit of the CC register is cleared.
– Thecorresponding enablebit is set in thecontrol
register.
If any of these two conditions is false, theinterrupt
is latched and thus remains pending.
Clearing an interrupt request is done by:
– writing “0” to the corresponding bit in the status
register or
– anaccess to the status register while the flag is
set followed bya read or write of anassociated
register.
Note: the clearing sequence resets the internal
latch. A pending interrupt (i.e. waiting for being enabled) will therefore be lost ifthe clear sequence is
executed.
16
18/99
ST72251
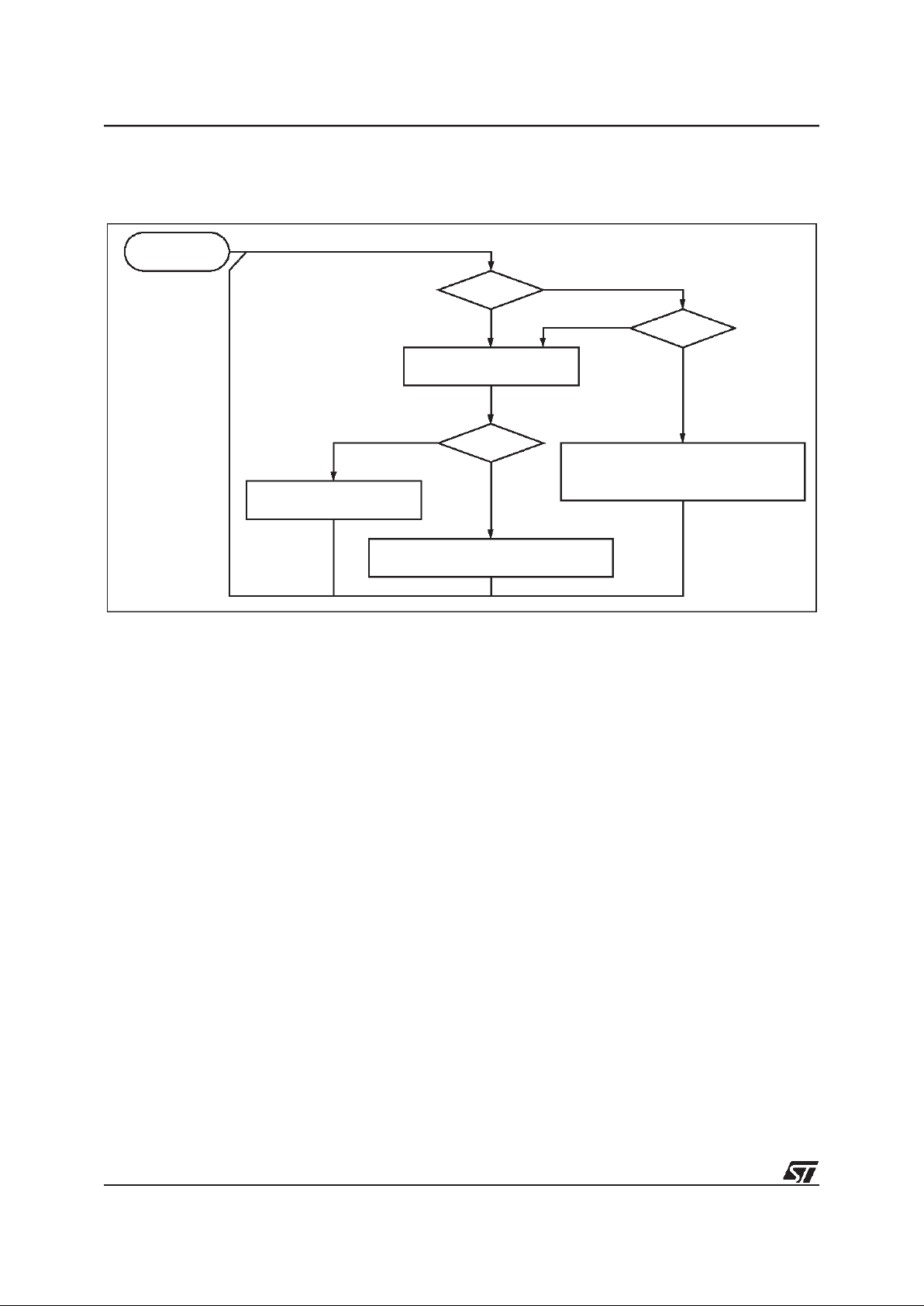
INTERRUPTS (Cont’d)
Figure 12. Interrupt Processing Flowchart
BIT I SET
Y
N
IRET
Y
N
FROM RESET
LOAD PC FROM INTERRUPT VECTOR
STACK PC, X, A, CC
SET I BIT
FETCH NEXT INSTRUCTION
EXECUTE INSTRUCTION
THIS CLEARS I BIT BY DEFAULT
RESTORE PC, X, A,CC FROM STACK
BIT I SET
Y
N
17
19/99
ST72251
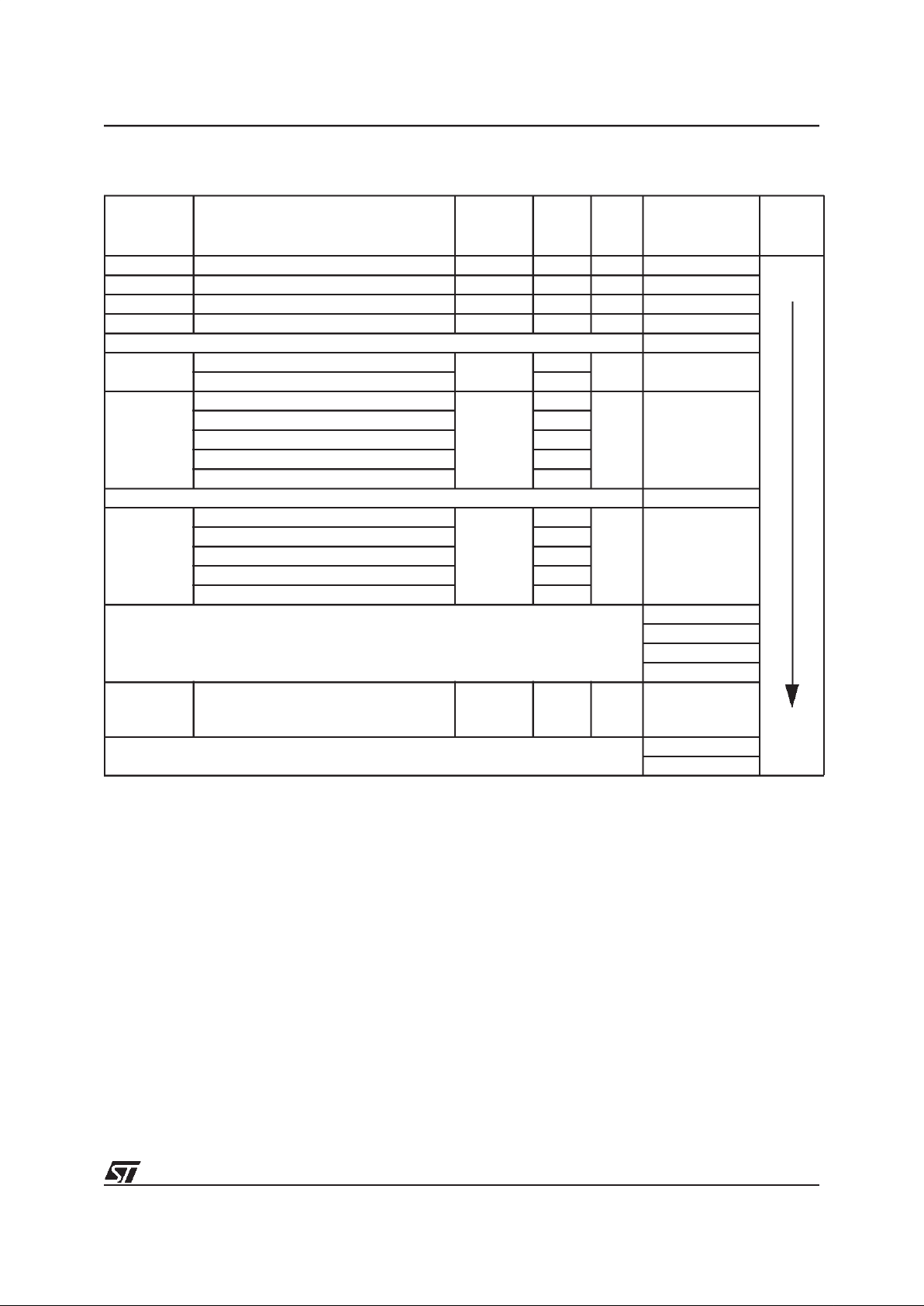
Table 5. Interrupt Mapping
** Many flags can cause an interrupt, see peripheral interrupt status register description.
Source
Block
Description
Register
Label
Flag
Exit
from
HALT
Vector
Address
Priority
Order
RESET Reset N/A N/A yes FFFEh-FFFFh
TRAP Software N/A N/A no FFFCh-FFFDh
EI0 External Interrupt PA0:PA7 N/A N/A yes FFFAh-FFFBh
EI1 External Interrupt PB0:PB7, PC0:PC5 N/A N/A yes FFF8h-FFF9h
Not Used FFF6h-FFF7h
SPI
Transfer Complete
SPISR
SPIF
no FFF4h-FFF5h
Mode Fault MODF
TIMER A
Input Capture 1
TASR
ICF1_A
no FFF2h-FFF3h
Output Compare 1 OCF1_A
Input Capture 2 ICF2_A
Output Compare 2 OCF2_A
Timer Overflow TOF_A
Not Used FFF0h-FFF1h
TIMER B
Input Capture 1
TBSR
ICF1_B
no FFEEh-FFEFh
Output Compare 1 OCF1_B
Input Capture 2 ICF2_B
Output Compare 2 OCF2_B
Timer Overflow TOF_B
Not Used
FFECh-FFEDh
FFEAh-FFEBh
FFE8h-FFE9h
FFE6h-FFE7h
I2C I2C Peripheral Interrupts
I2CSR1
I2CSR2
** no FFE4h-FFE5h
Not Used
FFE2h-FFE3h
FFE0h-FFE1h
Highest
Priority
Priority
Lowest
18
20/99
ST72251
3.4 POWER SAVING MODES
3.4.1 Introduction
There are threePower Saving modes. SlowMode
is selected by setting the relevant bits in the Miscellaneous register. Wait and Halt modes may be
entered usingthe WFI and HALT instructions.
3.4.2 Slow Mode
In Slow mode, the oscillator frequency can be divided by a value defined in the Miscellaneous
Register. The CPU and peripherals are clocked at
this lower frequency. Slow mode isused to reduce
power consumption, andenables the user to adapt
clock frequencyto available supply voltage.
3.4.3 Wait Mode
Wait mode places the MCU in a low power consumption mode by stoppingthe CPU. Allperipherals remain active. During Wait mode, the I bit (CC
Register) is cleared, so as to enable all interrupts.
All otherregisters and memory remain unchanged.
The MCU will remain in Wait mode until an Interrupt or Reset occurs, whereupon the Program
Counter branches to the starting address of the Interrupt orReset Service Routine.
The MCU will remain in Wait mode until a Reset or
an Interrupt occurs, causing it to wake up.
Refer to Figure 13 below.
Figure 13. WAIT Flow Chart
WFI INSTRUCTION
RESET
INTERRUPT
Y
N
N
Y
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
I-BIT
ON
ON
CLEARED
OFF
Note: Before servicing an interrupt, the CC register is
pushed on the stack. The I-Bit is set during the interrupt routine and cleared when the CC register is
popped.
4096 CPU CLOCK
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CYCLES DELAY
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
I-BIT
ON
ON
SET
ON
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
I-BIT
ON
ON
SET
ON
19
21/99
ST72251
POWER SAVINGMODES (Cont’d)
3.4.4 Halt Mode
The Halt mode is the MCU lowest power consumption mode. The Halt mode is entered byexecuting theHALT instruction. The internal oscillator
is then turnedoff, causing allinternal processing to
be stopped, including the operation of the on-chip
peripherals. The Halt mode cannot be used when
the watchdog isenabled, ifthe HALT instruction is
executed while the watchdog system is enabled,a
watchdog reset is generatedthus resetting the entire MCU.
When entering Halt mode, the Ibit in the CC Register is clearedso as toenable ExternalInterrupts.
If an interrupt occurs, the CPU becomes active.
The MCU canexit theHalt mode upon reception of
an interrupt or a reset. Refer to the Interrupt Mapping Table. The oscillator is then turned on and a
stabilization time is provided beforereleasing CPU
operation. Thestabilization timeis 4096 CPU clock
cycles.
After the start up delay, the CPU continuesoperation byservicingthe interrupt whichwakes it up or
by fetching the reset vector if a reset wakes it up.
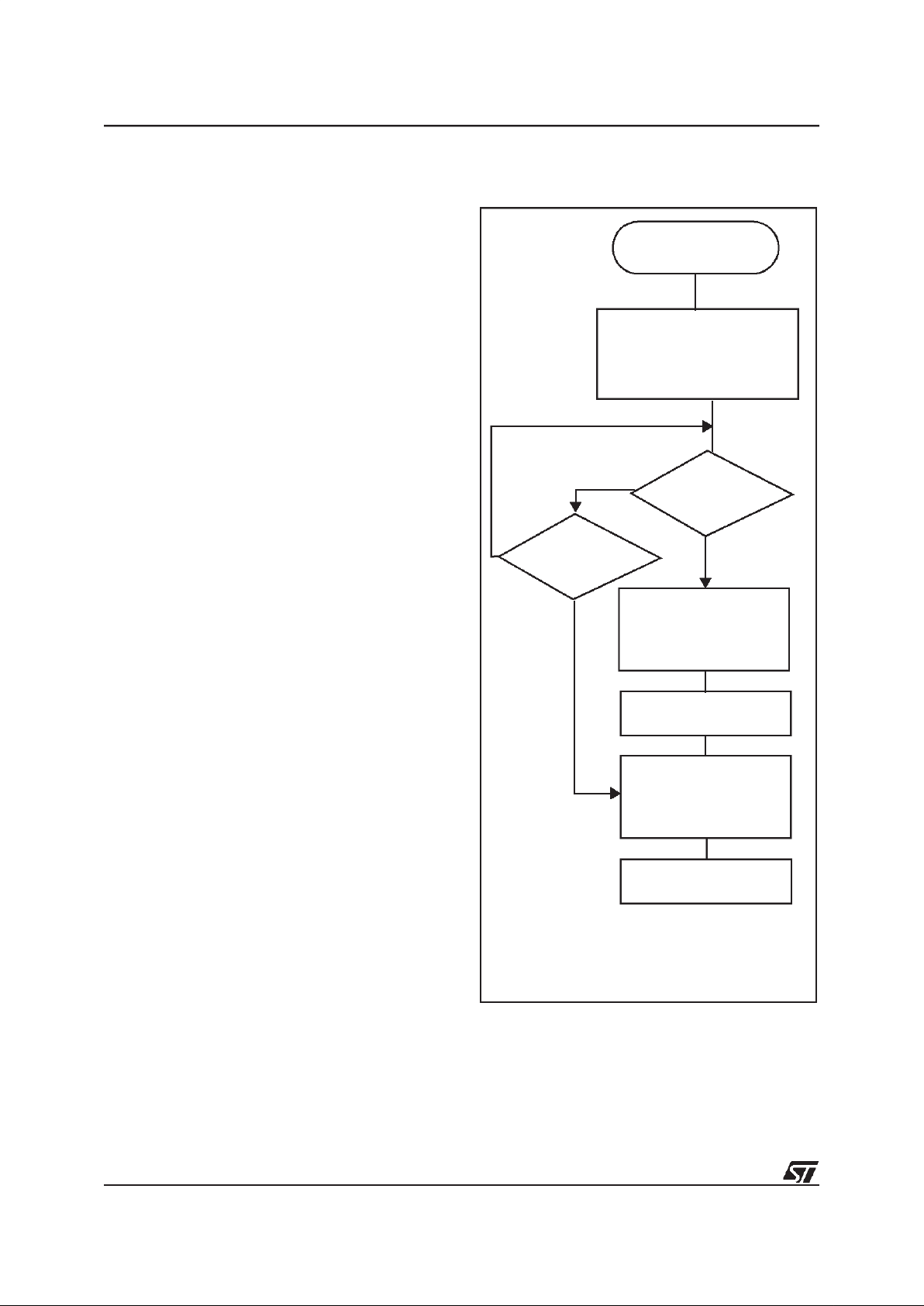
Figure 14. HALT Flow Chart
N
N
EXTERNAL
INTERRUPT
1)
RESET
HALT INSTRUCTION
4096 CPU CLOCK
FETCH RESET VECTOR
OR SERVICE INTERRUPT
CYCLES DELAY
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
2)
I-BIT
ON
OFF
SET
ON
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
I-BIT
OFF
OFF
CLEARED
OFF
Y
Y
WDG
ENABLED?
N
Y
RESET
WATCHDOG
1) or some specific interrupts
Note: Before servicing an interrupt, the CC register is
pushed on the stack. The I-Bit is set during the interrupt routine and cleared when the CC register is
popped.
CPU CLOCK
OSCILLATOR
PERIPH. CLOCK
I-BIT
ON
ON
SET
ON
2) if reset PERIPH. CLOCK = ON ;if interrupt
PERIPH. CLOCK = OFF
20
22/99
ST72251
3.5 MISCELLANEOUS REGISTER
The Miscellaneous register allows to select the
SLOW operatingmode, the polarity of external interrupt requestsand to output the internal clock.
Register Address:0020h — Read/Write
Reset Value: 0000 0000 (00h)
Bit 7:6 = PEI[3:2]
External Interrupt EI1 Polarity
Option
.
These bits are set and cleared by software. They
determine which event on EI1 causes the external interrupt according to Table 6.
Refer to the Pin Description Table at the beginning of this document for the list of pins connected to EI1.
Table 6. EI1ExternalInterrupt Polarity Options
Note: Any modification of one of these twobits re-
sets the interrupt request related to this interrupt
vector.
Bit 5 = MCO
Main Clock Out
This bit isset andcleared by software. When set, it
enables the output of the Internal Clock on the
PC2 I/Oport.
0 - PC2 is a generalpurpose I/O port.
1 - MCO alternate function (f
CPU
is output on PC2
pin).
Bit 4:3 = PEI[1:0]
External Interrupt EI0 Polarity
Option
.
These bits are set and cleared by software. They
determine which event on EI0 causes the external interrupt according to Table 7.
Refer to the Pin Description Table at the beginning of this document for the list of pins connected to EI0.
Table 7. EI0 External Interrupt Polarity Options
Note:
Any modificationof one of thesetwo bits resets the
interrupt request related to this interrupt vector.
Bit 1:2 = Unused, always read at 0.
Warning:
Software must write 1 to these bits for
compatibility with future products.
Bit 0 = SMS
Slow Mode Select
This bit is set andcleared by software.
0- Normal mode - f
CPU
= Oscillator frequency / 2
(Reset state)
1- Slow mode - f
CPU
= Oscillatorfrequency /32
70
PEI3 PEI2 MCO PEI1 PEI0 - - SMS
MODE PEI3 PEI2
Falling edge and low level
(Reset state)
00
Falling edge only 1 0
Rising edge only 0 1
Rising and falling edge 1 1
MODE PEI1 PEI0
Falling edge and low level
(Reset state)
00
Falling edge only 1 0
Rising edge only 0 1
Rising and falling edge 1 1
21

23/99
ST72251
4 ON-CHIP PERIPHERALS
4.1 I/O PORTS
4.1.1 Introduction
The I/O ports offer different functional modes:
– transferof data through digital inputsand outputs
and forspecific pins:
– analog signal input (ADC)
– alternate signal input/output for the on-chip pe-
ripherals.
– external interrupt generation
An I/O port is composed of up to 8 pins. Each pin
can be programmedindependently as digital input
(with or without interrupt generation) or digital output.
4.1.2 Functional Description
Each portis associated to 2 main registers:
– Data Register (DR)
– Data Direction Register (DDR)
and someof them to an optional register:
– Option Register (OR)
Each I/Opin may beprogrammed using thecorre-
sponding register bits inDDR and ORregisters: bit
X corresponding to pin Xof the port.The same correspondence is used for the DR register.
The following description takes into account the
OR register, for specific ports whichdo not provide
this register refer to the I/O Port Implementation
Section 4.1.3. The generic I/O block diagram is
shown onFigure 16.
4.1.2.1 Input Modes
The input configuration isselected by clearing the
corresponding DDRregister bit.
In this case, reading the DR register returns the
digital value applied to the external I/O pin.
Different input modes can beselected by software
through theOR register.
Notes:
1. All the inputs are triggered by a Schmitt trigger.
2. When switching from input mode to output
mode, the DR register should be written first to
output the correct value as soon as the port is configured as an output.
Interrupt function
When an I/O is configured in Input with Interrupt,
an event on this I/O can generate an external Interrupt request to the CPU. Theinterrupt polarity is
given independently according to the description
mentioned in the Miscellaneous register or in the
interrupt register (where available).
Each pin can independently generate an Interrupt
request.
Each external interrupt vector is linked to a dedicated group of I/O port pins (see Interrupts section). If several input pins are configured as inputs
to the same interrupt vector, their signals are logically ANDed before entering the edge/level detection block. For this reason if one of the interrupt
pins is tied low, it masks the other ones.
4.1.2.2 Output Mode
The pin is configured in output mode bysetting the
corresponding DDR registerbit.
In this mode, writing “0” or “1” to the DR register
applies this digital value to the I/O pin through the
latch. Then reading the DR register returns the
previously stored value.
Note: In this mode, the interrupt function is disabled.
4.1.2.3 Digital Alternate Function
When an on-chipperipheral is configured to use a
pin, the alternate function is automatically selected. This alternate function takes priority over
standard I/O programming. When the signal is
coming from an on-chip peripheral, the I/O pin is
automatically configuredin output mode (push-pull
or open drain according to theperipheral).
When the signal is going to an on-chip peripheral,
the I/O pin has to be configured ininput mode. In
this case, the pin’s state is also digitally readable
by addressing the DR register.
Notes:
1. Input pull-up configuration can cause an unexpected value atthe input of the alternate peripheral input.
2. When the on-chip peripheral uses apin asinput
and output, this pin must be configured as an input
(DDR = 0).
Warning
: The alternate function must not be acti-
vated as long as the pin isconfigured as inputwith
interrupt, in order to avoid generating spurious interrupts.
22
24/99
ST72251
I/O PORTS (Cont’d)
4.1.2.4 Analog Alternate Function
When the pin isused asan ADC input theI/O must
be configured as input, floating. The analog multiplexer (controlled by the ADC registers) switches
the analog voltage present on the selected pin to
the common analog rail which is connected to the
ADC input.
It isrecommended not to change the voltage level
or loading on any port pin while conversion is in
progress. Furthermore it is recommended not to
have clocking pins located close to a selected analog pin.
Warning
: The analog input voltage level must be
within the limits stated in the Absolute Maximum
Ratings.
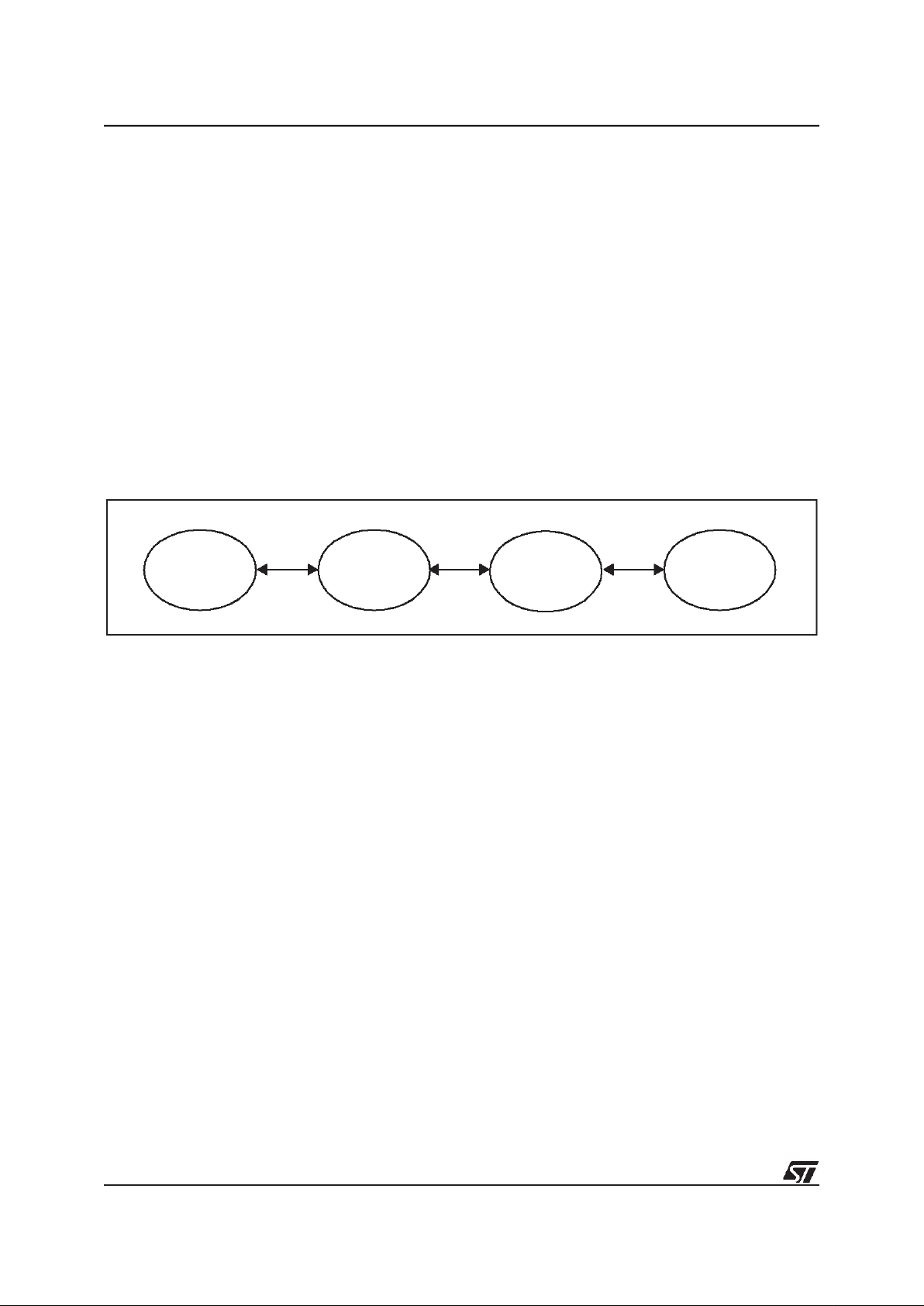
4.1.3 I/O Port Implementation
The hardware implementation oneach I/O port depends on the settingsin theDDR andOR registers
and specific feature ofthe I/O portsuch as ADCInput (see Figure 16) or true open drain. Switching
these I/O ports from one state to another should
be done in a sequence that prevents unwanted
side effects. Recommended safetransitions areillustrated in Figure 15. Other transitions are potentially risky and should be avoided, since they are
likely to present unwanted side-effects such as
spurious interrupt generation.
Figure 15. Recommended I/O State Transition Diagram
with interrupt
INPUT
OUTPUT
no interrupt
INPUT
push-pullopen-drain
OUTPUT
23
25/99
ST72251
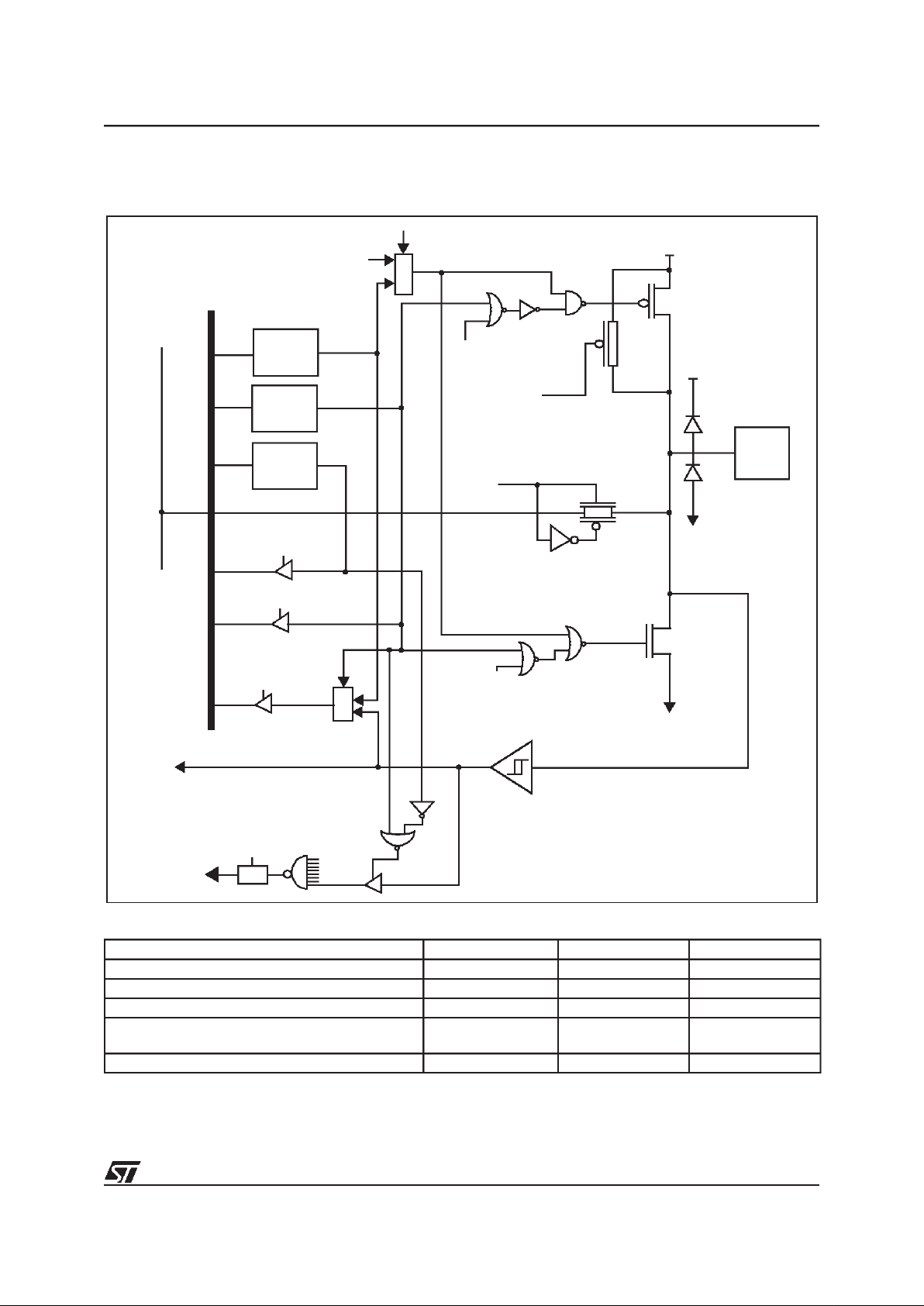
I/O PORTS (Cont’d)
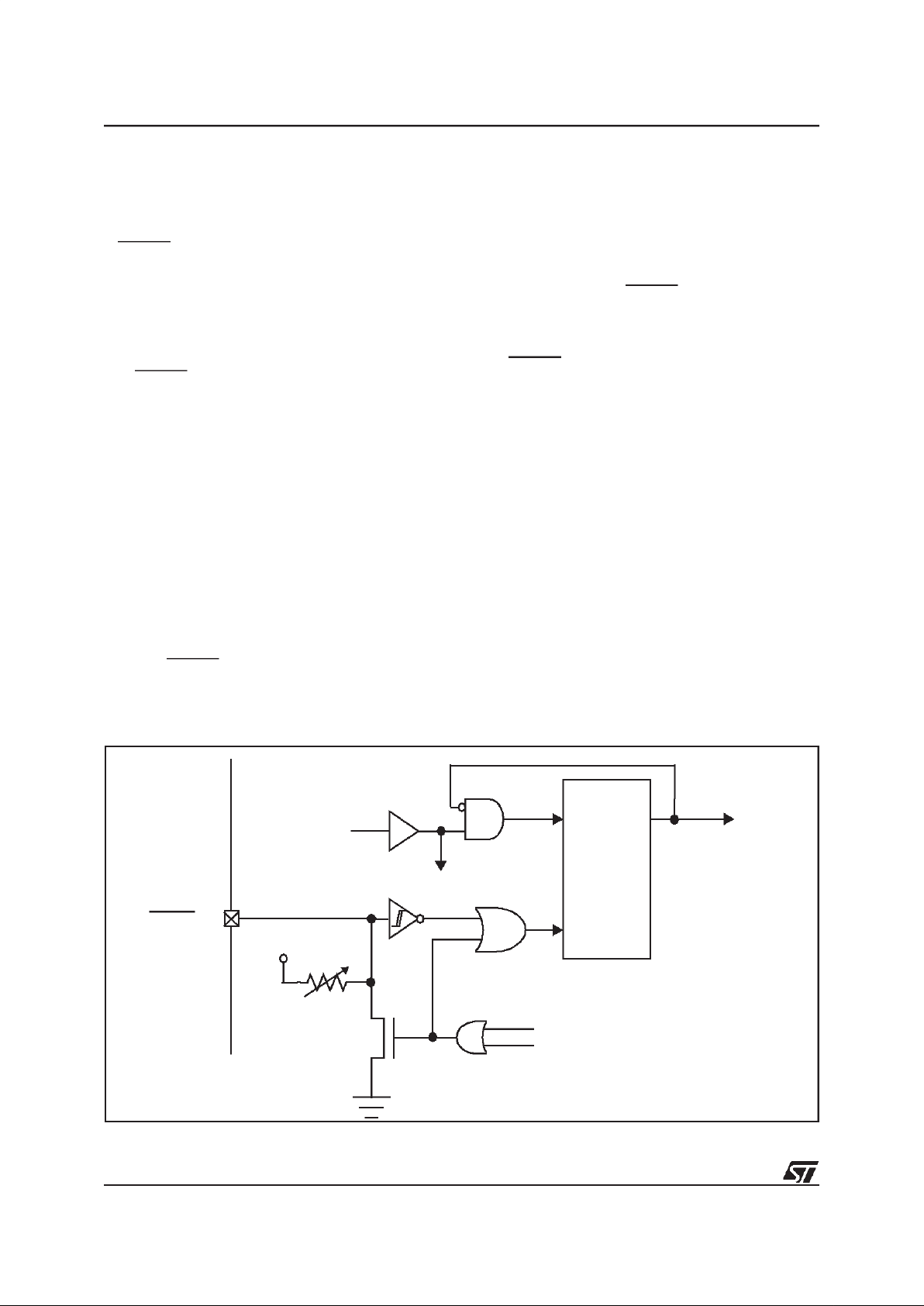
Figure 16. I/O BlockDiagram
Table 8. Port Mode Configuration
Legend:
0 - present, not activated
1 - present and activated
Notes:
– No OR Register on some ports (see register map).
– ADC Switch on ports with analog alternate functions.
DR
DDR
LATCH
LATCH
DATA BUS
DR SEL
DDR SEL
V
DD
PAD
ANALOG
SWITCH
ANALOG ENABLE
(ADC)
M
U
X
ALTERNATE
ALTERNATE
ALTERNATE ENABLE
COMMON ANALOG RAIL
ALTERNATE
M
U
X
ALTERNATE INPUT
PULL-UP
OUTPUT
P-BUFFER
(S
EE TABLE BELOW)
N-BUFFER
1
0
1
0
OR
LATCH
ORSEL
FROM
OTHER
BITS
EXTERNAL
PULL-UP
CONDITION
ENABLE
ENABLE
GND
(S
EE TABLE BELOW)
(S
EE NOTE BELOW)
CMOS
SCHMITT TRIGGER
SOURCE (EIx)
INTERRUPT
POLARITY
SEL
GND
V
DD
DIODE
(SEE TABLEBELOW)
Configuration Mode Pull-up P-buffer V
DD
Diode
Floating 0 0 1
Pull-up 1 0 1
Push-pull 0 1 1
True Open Drain not present not present
not present in OTP
and EPROM devices
Open Drain (logic level) 0 0 1
24
26/99
ST72251
Table 9. Port Configuration
* Reset State
Port
Pin
Name
Input (DDR = 0) Output (DDR = 1)
OR = 0 OR = 1 OR = 0 OR = 1
Port A PA0:PA7 Floating* Floating with Interrupt
True Open Drain,
High Sink Capability
Reserved
Port B PB0:PB7 Floating* Pull-up with Interrupt Open Drain (Logic level) Push-pull
Port C PC0:PC5 Floating* Pull-up with Interrupt Open Drain (Logic level) Push-pull
25
27/99
ST72251
I/O PORTS (Cont’d)
4.1.4 Register Description
4.1.4.1 Data registers
Port A Data Register (PADR)
Port B Data Register (PBDR)
Port C Data Register (PCDR)
Read/Write
Reset Value: 0000 0000 (00h)
Bit 7:0 = D7-D0
Data Register 8 bits.
The DR register has a specific behaviour according to the selected input/output configuration. Writing the DR register is always taken in account
even if the pin is configured as an input. Reading
the DR register returns either theDR register latch
content (pin configuredas output) or the digital value applied to the I/O pin (pin configured as input).
4.1.4.2 Data direction registers
Port A Data Direction Register (PADDR)
Port B Data Direction Register (PBDDR)
Port C Data Direction Register (PCDDR)
Read/Write
Reset Value: 0000 0000 (00h) (input mode)
Bit 7:0 = DD7-DD0
Data Direction Register 8 bits.
The DDR register gives the input/output direction
configuration of the pins. Each bit is set and
cleared by software.
0: Input mode
1: Output mode
4.1.4.3 Option registers
Port A OptionRegister (PAOR)
Port B OptionRegister (PBOR)
Port C Option Register (PCOR)
Read/Write
Reset Value: 0000 0000 (00h) (nointerrupt)
Bit 7:0 = O7-O0
Option Register8 bits.
For specific I/O pins, thisregister is not implemented. In this case the DDR register is enough to select the I/O pin configuration.
The OR register allow to distinguish: in input mode
if the interrupt capability or the floating configuration is selected, in output mode if the push-pull or
open drain configuration is selected.
Each bit is set and clearedby software.
Input mode:
0: floating input
1: input interrupt with or without pull-up
Output mode (only for PB0:PB7, PC0:PC5):
0: output open drain (with P-Bufferinactivated)
1: output push-pull
Output mode (only for PA0:PA7):
0: output open drain
1: reserved
70
D7 D6 D5 D4 D3 D2 D1 D0
70
DD7 DD6 DD5 DD4 DD3
DD
2
DD1 DD0
70
O7 O6 O5 O4 O3 O2 O1 O0
26
28/99
ST72251
I/O PORTS (Cont’d)
Table 10. I/O Port RegisterMap and Reset Values
Address
(Hex.)
Register
Label
76543210
0000h
PCDR
Reset Value
D7
0
D6
0
D5
0
D4
0
D37
0
D2
0
D1
0
D0
0
0001h
PCDDR
Reset Value
DD7
0
DD6
0
DD5
0
DD4
0
DD3
0
DD2
0
DD1
0
DD0
0
0002h
PCOR
Reset Value
O7
0
O6
0
O5
0
O4
0
O3
0
O2
0
O1
0
O0
0
0004h
PBDR
Reset Value
D7
0
D6
0
D5
0
D4
0
D37
0
D2
0
D1
0
D0
0
0005h
PBDDR
Reset Value
DD7
0
DD6
0
DD5
0
DD4
0
DD3
0
DD2
0
DD1
0
DD0
0
0006h
PBOR
Reset Value
O7
0
O6
0
O5
0
O4
0
O3
0
O2
0
O1
0
O0
0
0008h
PADR
Reset Value
D7
0
D6
0
D5
0
D4
0
D37
0
D2
0
D1
0
D0
0
0009h
PADDR
Reset Value
DD7
0
DD6
0
DD5
0
DD4
0
DD3
0
DD2
0
DD1
0
DD0
0
000Ah
PAOR
Reset Value
O7
0
O6
0
O5
0
O4
0
O3
0
O2
0
O1
0
O0
0
27
29/99
ST72251
4.2 WATCHDOG TIMER (WDG)
4.2.1 Introduction
The Watchdog timer is used to detect the occurrence of a software fault, usually generated by external interference or by unforeseen logical conditions, which causes the application program to
abandon its normal sequence. The Watchdog circuit generates an MCU reset on expiry of a programmed time period, unless theprogram refreshes the counter’s contents before the T6 bit becomes cleared.
4.2.2 Main Features
■ Programmable timer (64 increments of 12288
CPU cycles)
■ Programmablereset
■ Reset (if watchdog activated) after a HALT
instruction or whenthe T6 bit reaches zero
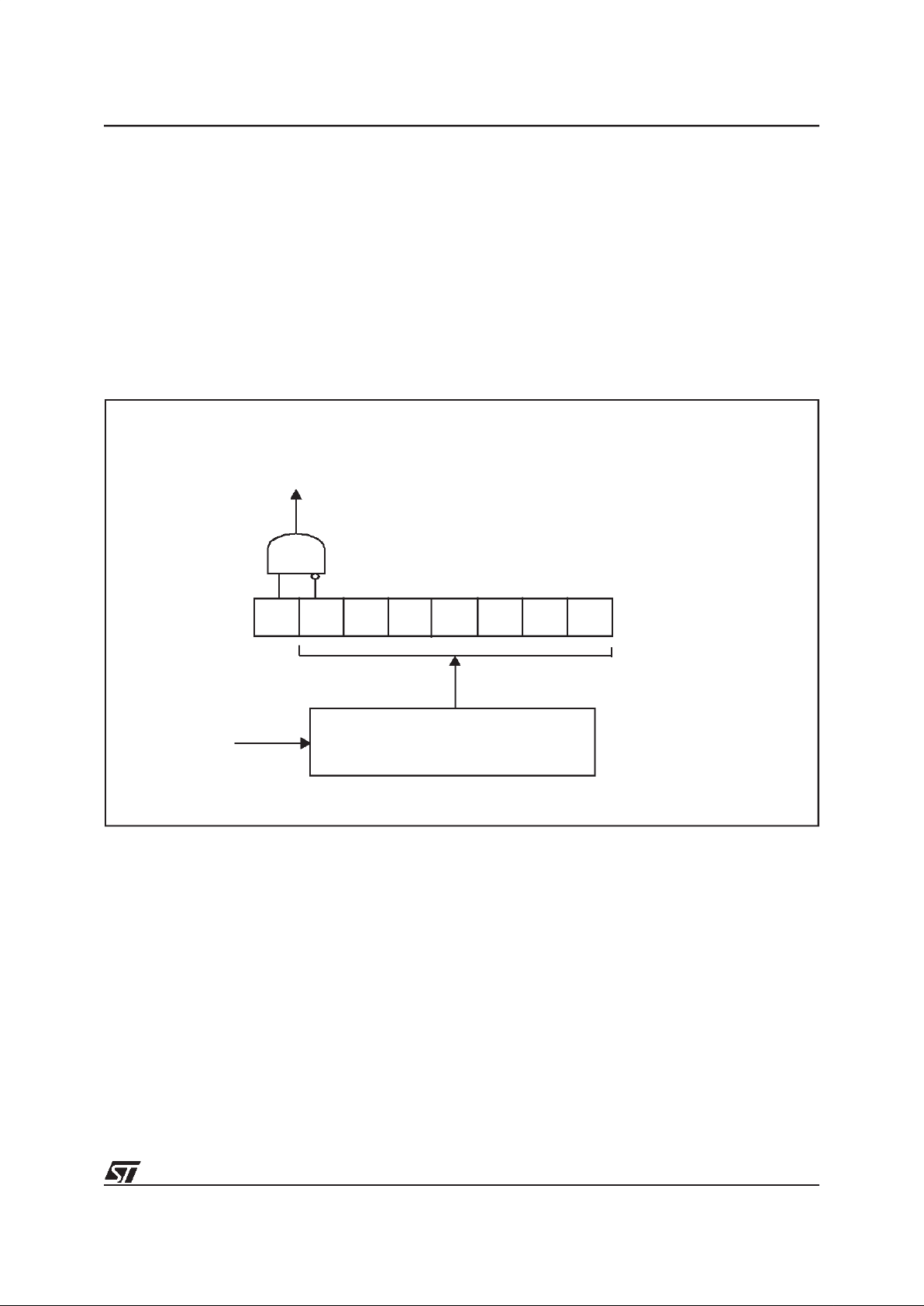
Figure 17. Watchdog Block Diagram
RESET
WDGA
7-BIT DOWNCOUNTER
f
CPU
T6 T0
CLOCK DIVIDER
WATCHDOG CONTROL REGISTER (CR)
÷12288
T1
T2
T3
T4
T5
28
30/99
ST72251
WATCHDOG TIMER (Cont’d)
4.2.3 Functional Description
The counter value stored in the CR register (bits
T6:T0), is decremented every 12,288 machine cycles, and the length of the timeout period can be
programmed by the user in 64increments.
If the watchdog is activated (the WDGA bit is set)
and when the 7-bit timer (bits T6:T0) rolls over
from 40h to 3Fh (T6 becomes cleared), it initiates
a reset cycle pulling low the reset pin for typically
500ns.
The application program must write in theCR register at regular intervals during normal operation to
prevent an MCU reset. The value to be stored in
the CR register must be between FFh and C0h
(see Table 11):
– The WDGA bit is set (watchdog enabled)
– The T6 bit is set to prevent generating an imme-
diate reset
– TheT5:T0 bits containthenumber ofincrements
which represents the time delay before the
watchdog produces areset.
Table 11. Watchdog Timing (f
CPU
= 8MHz)
Notes: Following a reset, the watchdog is disa-
bled. Onceactivated it cannot be disabled, except
by areset.
The T6 bit can be used to generate a software reset (the WDGA bitis set and the T6 bit is cleared).
If the watchdog is activated, the HALT instruction
will generate a Reset.
4.2.4 Low Power Modes
4.2.5 Interrupts
None.
4.2.6 Register Description
CONTROL REGISTER (CR)
Read/Write
Reset Value: 0111 1111 (7Fh)
Bit 7 = WDGA
Activation bit
.
This bit is set by software and only cleared by
hardware after a reset. When WDGA = 1, the
watchdog can generatea reset.
0: Watchdog disabled
1: Watchdog enabled
Bit 6:0 = T[6:0]
7-bit timer (MSB to LSB).
These bits contain the decremented value. A reset
is produced when it rolls overfrom 40h to 3Fh(T6
becomes cleared).
Table 12. Watchdog Timer Register Map and Reset Values
CR Register
initial value
WDG timeout period
(ms)
Max FFh 98.304
Min C0h 1.536
Mode Description
WAIT No effect on Watchdog.
HALT
Immediate reset generation assoon as
the HALT instruction is executed ifthe
Watchdog is activated(WDGA bit is
set).
70
WDGA T6 T5 T4 T3 T2 T1 T0
Address
(Hex.)
Register
Label
76543210
0024h
WDGCR
Reset Value
WDGA
0
T6
1
T5
1
T4
1
T3
1
T2
1
T1
1
T0
1
29
 Loading...
Loading...