

Page 1

. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hawk 2 Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST12400N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST11900N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 2

Page 3

. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hawk 2 Family:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST12400N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ST11900N/ND/NC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Product Manual, Volume 1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Page 4

1995 Seagate Technology , Inc. All rights reserved
Publication Number: 77767450, Revision E
March 1995
Seagate, Seagate Technology and the Seagate logo are registered trademarks of Seagate Technology , Inc.
Hawk™, SeaFAX, SeaFone, SeaTDD and SeaBOARD are trademarks of Seagate Technology, Inc.
Other product names are registered trademarks or trademarks of their owners.
Seagate reserves the right to change, without notice, product offerings or specifications. No part of this publica-
tion may be reproduced in any f orm without written permission of Seagate Technology , Inc.
Page 5
Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E v
_________________________________________________________________________________________
Revision status summary sheet
Revision Authority Date Writer/Eng. Sheets Affected
A Issue 9/27/93 D . Ashby v thru viii, 1 thru 71.
B PLD: 84283 94 Mar 07 SS v thru viii, 1 thru 71.
(technical changes pages 46, 47,
52, 53 and 54.)
C PLD: 84224 5/26/94 SS v, vi, 6, 8, 11, 12, 15, 16, 21, 23, 24, 25,
29, 30, 31, 34, 35, 37, 46, 47, 51 - 54,
56, 60, 64.
D PLD: 84392 6/14/94 D . Ashby v , 2, 14 and 26.
E PLD: 84542 03/17/95 J. Rust/J. Bentley v, 24, 25, 69, 70, 71
Notice.
Product Manual 77767450 is Volume 1 of a two Volume document with the SCSI interface information in
the Volume 2 SCSI Interface Product Manual, P/N 77738479.
If the SCSI Interface information is needed the V olume 2 Interface Manual should be ordered, P/N 77738479.
Page 6

vi Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
________________________________________________________________________________________
T ab le of contents
1.0 Scope........................................................................................................................................... 1
2.0 Applicable standards and reference documentation............................................................... 2
2.1 Standards ........................................................................................................................ 2
2.2 Applicable reference documents...................................................................................... 2
3.0 General description.................................................................................................................... 3
4.0 Standards features ..................................................................................................................... 5
4.1. Performance .................................................................................................................... 5
4.1.1 Reliability ............................................................................................................ 5
4.2 Unformatted and formatted capacities ............................................................................. 6
4.3 Options (factory installed) ................................................................................................ 6
4.4 Optional accessories (user installed) ............................................................................... 6
4.5 Installation........................................................................................................................ 7
5.0 Performance characteristics...................................................................................................... 8
5.1 Internal drive characteristics (transparent to user) ........................................................... 8
5.2 SCSI drive Seek, Read and Write perf ormance characteristics (Visible to User) ............. 8
5.2.1 Seek command execution time ........................................................................... 8
5.2.2 Format drive command execution time ............................................................... 9
5.2.3 Read data command execution time................................................................... 9
5.2.4 Write data command execution time ................................................................... 9
5.3 Generalized performance characteristics ........................................................................ 10
5.3.1 Notes for sections 5.2 and 5.3 ............................................................................ 1 1
5.4 Start/stop time 1 1
5.5 Prefetch/multi segmented cache control .......................................................................... 12
5.5.1 Cache operation.................................................................................................. 12
5.5.2 Prefetch operation............................................................................................... 13
5.6 Caching write data ........................................................................................................... 14
5.7 Synchronized spindle operation ....................................................................................... 14
6.0 Reliability specifications ............................................................................................................ 18
6.1 Error rates........................................................................................................................ 18
6.1.1 Read errors ....................................................................................................... 18
6.1.2 Environmental interference................................................................................ 18
6.1.3 Write errors ....................................................................................................... 19
6.1.4 Seek errors........................................................................................................ 19
6.2 Reliability and service ...................................................................................................... 19
6.2.1 Mean time between failure................................................................................. 19
6.2.2 Preventive maintenance .................................................................................... 19
6.2.3 Service life......................................................................................................... 19
6.2.4 Service philosophy ............................................................................................ 20
6.2.5 Installation ......................................................................................................... 20
6.2.6 Service tools...................................................................................................... 20
6.2.7 Product Warranty............................................................................................... 20
Page 7

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B vii
_________________________________________________________________________________________
T ab le of contents
7.0 Physical/electrical specifications .............................................................................................. 21
7.1 AC power requirements ................................................................................................... 21
7.2 DC power requirements ................................................................................................... 21
7.2.1 Conducted noise immunity ................................................................................ 22
7.2.2 Power sequencing............................................................................................. 22
7.2.3 12 V - current profile.......................................................................................... 22
7.3 Heat/power dissipation..................................................................................................... 23
7.4 Environmental limits......................................................................................................... 23
7.4.1 T emper ature ...................................................................................................... 24
7.4.2 Relative humidity ............................................................................................... 26
7.4.3 Effective altitude (sea level ref).......................................................................... 26
7.4.4 Shock and vibration........................................................................................... 26
7.4.5 Air cleanliness ................................................................................................... 28
7.5 Electromagnetic compatibility........................................................................................... 28
7.5.1 Electromagnetic susceptibility ........................................................................... 28
7.6 Mechanical specifications ................................................................................................ 29
7.6.1 Drive orientation ................................................................................................ 31
7.6.2 Cooling .............................................................................................................. 31
7.6.3 Drive mounting .................................................................................................. 31
8.0 Media characteristics ................................................................................................................. 32
8.1 Media description............................................................................................................. 32
9.0 Defect and error management ................................................................................................... 33
9.1 Drive internal defects/errors............................................................................................. 33
9.2 SCSI systems error considerations.................................................................................. 33
10.0 Option/configuration headers.................................................................................................... 34
10.1 Drive ID/option select header........................................................................................... 34
10.2 Synchronized spindles interface ...................................................................................... 37
10.2.1 electrical description.......................................................................................... 37
10.3 Grounding........................................................................................................................ 38
11.0 Interface requirement ................................................................................................................. 39
11.1 General description.......................................................................................................... 39
11.2 SCSI interface messages supported................................................................................ 39
11.3 SCSI interface commands supported .............................................................................. 40
11.3.1 Inquiry data ....................................................................................................... 42
11.3.2 Mode sense data............................................................................................... 43
11.4 SCSI bus conditions and miscellaneous features supported............................................ 48
11.5 Synchronous data transfer............................................................................................... 49
11.5.1 Synchronous data transfer periods supported ................................................... 49
11.5.2 REQ/ACK offset ................................................................................................ 49
11.6 Physical interface............................................................................................................. 49
11.6.1 DC cable and connector.................................................................................... 51
11.6.2 Physical characteristics ..................................................................................... 51
11.6.3 Connector requirements.................................................................................... 53
11.6.4 Electrical description ......................................................................................... 60
11.7 Disc drive timing .............................................................................................................. 65
Page 8

viii Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
T ab le of contents
12.0 Options........................................................................................................................................ 67
12.1 Front panel....................................................................................................................... 67
12.2 Single unit shipping pack ................................................................................................. 67
13.0 Accessories ................................................................................................................................ 68
13.1 Front panel kit .................................................................................................................. 68
13.2 Installation manual ........................................................................................................... 68
14.0 Te chnical support services ........................................................................................................ 69
Seagate Peripheral Family ...................................................................................................................... 70
Page 9
Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 1
_________________________________________________________________________________________
1.0 Scope
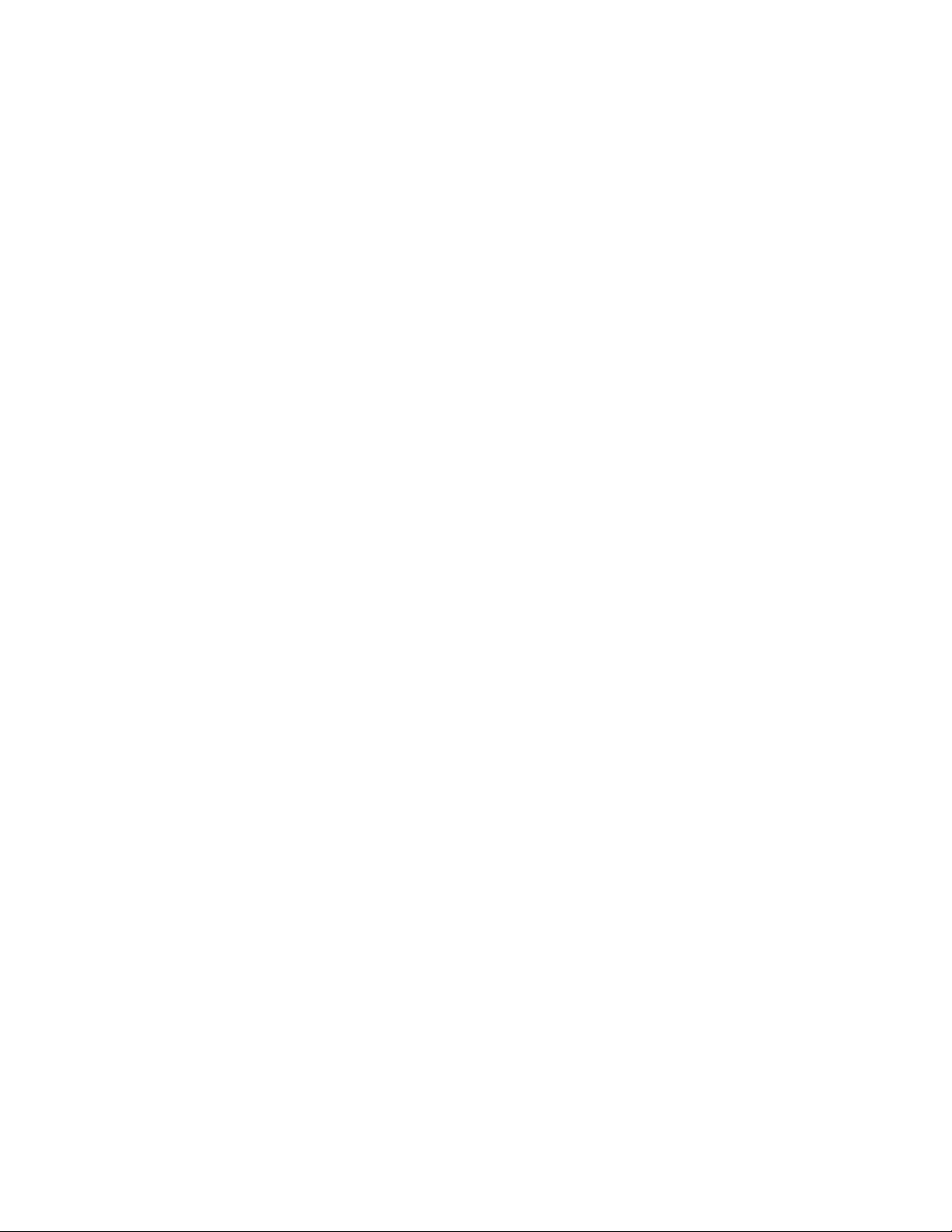
This specification describes the Seagate Technology, Inc. Ha wk 2 Model ST12400 Disc Drive. This high capacity,
high performance member of the Seagate 3.5 inch rigid disc family has a new HD A (Head/Disc Assembly) design
having improvements o ver previous 3.5-inch Seagate models . It has an embedded SCSI controller . P erformance
information is given in Section 5. The Hawk 2 Family Model ST12400 drive interface is defined for functional
compatibility to a subset of the Seagate SCSI-2 Interface Specification 77738479, and the ANSI SCSI-2 standard. The Hawk 2 Family drives are classified as “Intelligent” peripherals. The Hawk 2 Family provides Level 2
conformance (highest level) with the ANSI SCSI-1 standard. Details of the Ha wk 2 Family driv e SCSI implementation are provided in Section 11 of this specification, (V ol. 1) and in the SCSI-2/SCSI-3 Interface Product Manual
P/N 77738479 (Vol. 2; Ver. 2).
The Hawk 2 family of drives consists of the ST12400N/ND/NC and ST11900N/ND/NC driv es.
From this point on in this Product Manual the reference to Hawk 2 Family is referred to as “the drive” (unless
reference to individual models are necessary).
The drive printed circuit board is referred to as a PCB.
*
50 pin SCSI I/O and 4 pin DC power connector shown. "NC" drive models have a
*
single 80 pin connector and no separate DC power connector.
Figure 1-1. Hwk 2 family drive
SEAGATE
Page 10

2 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. D
_________________________________________________________________________________________
2.0 Applicable standards and reference documentation
The drive has been developed as a system peripheral to the highest standards of design and construction. The
drive depends upon its host equipment to provide adequate power and environment in order to achieve optimum
performance and compliance with applicable industry and governmental regulations. Special attention must be
given in the areas of safety, power distribution, shielding, audible noise control, and temperature regulation. In
particular, the drive must be securely mounted in order to guarantee the specified performance characteristics.
2.1 Standards
The Hawk 2 Family complies with Seagate standards as noted in the appropriate sections of this specification
and the Seagate SCSI-2/SCSI-3 Interface Specification, P/N 77738479 (Vol. 2, Version 2).
The Hawk 2 Family is a UL Recognized component per UL 1950 and a CSA Certified component per CAN/CSAC22.2 No. 950-M89. It also meets the requirements of DIN VDE 0805/05.90 and EN60950: 1988 (IEC 950).
The Hawk 2, as delivered, is designed for system integration and installation into a suitable enclosure prior to
use. As such the Hawk 2 is supplied as a sub-assembly and is not subject to Subpart J of Part 15 of the FCC
Rules and Regulations nor the Radio Interference Regulations of the Canadian Department of Communications.
Howev er , the unit has been tested using proper shielding and g rounding and found to be compliant with Class A
limits of the FCC Rules and the Regulations of The Canadian Department of Communications.
The physical design characteristics of the Hawk 2 serve to minimize radiation when installed in an enclosure that
provides reasonable shielding. As such, the Hawk 2 is capable of meeting the Class B limits of the FCC Rules
and Regulations of the Canadian Department of Communication. Howe ver , it is the users responsibility to assure
that the Hawk 2 meets the appropriate EMI requirements in their system. Shielded I/O cables may be required if
the enclosure does not provide adequate shielding. If the I/O cables are external to the enclosure, shielded
cables should be used, with the shields grounded to the enclosure and to the host controller .
Caution. To avoid potential service problems, observe the f ollowing precautions:
The Manufacturers installed labels must not be removed from the drive or covered with additional
labels, as they contain information required when servicing the product.
2.2 Applicable reference documents
Installation Guide Seagate P/N 77767451
Product Manual - SCSI-2 Interface Seagate P/N 77738479
ANSI Small Computer System Interface (SCSI): Document Number ANSI3.131-1986 (X3T9/84.40 Rev. 1B)
(X3T9.2/82-2 Rev. 17B) and X3T9.2/86-109 Re vision 10H (SCSI-2).
Package Test Specification Seagate P/N 30190-001 (under 100 lb.)
Package Test Specification Seagate P/N 30191-001 (over 100 lb.)
In case of conflict between this document and any referenced document, this document shall take precedence.
Page 11

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 3
________________________________________________________________________________________
3.0 General description
The drives are a member of a family of low cost, high performance, highly reliable, random access storage
devices designed to meet the needs of the OEM marketplace.
The drive records and recovers data on ten 3.7 inch (95 mm) fixed discs.
The drive supports the Small Computer System Interface-2 (SCSI-2) as described in the ANSI SCSI and SCSI-
2 Interface Specifications to the extent described in this product specification (Vol. 1), which defines the product
performance characteristics of the Hawk 2 Family of drives, and the SCSI-2 Interface Product Manual P/N 77738479
(V ol. 2, Version 2) which describes the general interface characteristics of this and other families of Seagate 3.5inch drives.
The drive interface supports multiple initiators, disconnect/reconnect, self configuring host software and automatic features that relieve the host from the necessity of knowing the physical characteristics of the targets
(logical block addressing is used).
The Head/Disc Assembly (HDA) is en vironmentally sealed at the factory. Air recirculates within the HD A through
a nonreplaceable filter to maintain a contamination free head/disc environment.
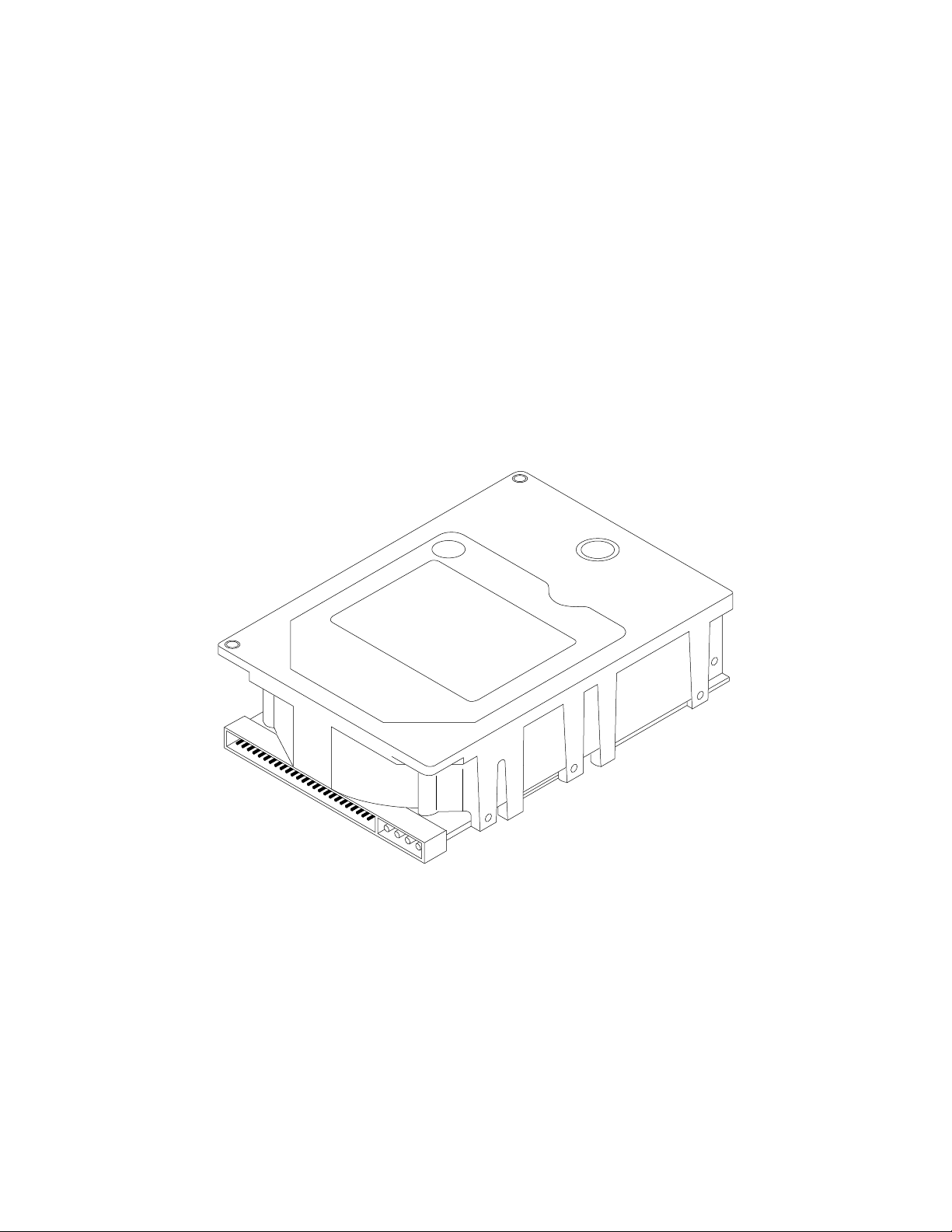
Refer to Figure 3.0-1 for an exploded view of the drive. NEVER disassemble the Head/Disc Assembly (HDA).
This exploded view is f or information only. Do not attempt to service items in the sealed environmental enclosure
(heads, media, actuator, etc.) as this requires special facilities. The drive contains no par ts replaceable by the
user. The drive warranty is voided if the HDA is opened.
The Hawk 2 Family drives use a dedicated landing zone at the innermost radius of the media to eliminate the
possibility of destroying or degrading data b y landing in the data zone. The drive automatically goes to the landing
zone when the power is removed.
The Hawk 2 Family drives incorporate an automatic shipping lock which prevents potential damage to the heads
and discs that result from movement during shipping and handling. The shipping loc k disengages when power is
applied to the drive and the head load process begins.
The Hawk 2 Family drives decode Track 0 location from the dedicated servo surface to eliminate mechanical
transducer adjustments and related reliability concerns.
The Hawk 2 Family drives use a high performance actuator assembly that consists of a low inertia, balanced,
patented, straight arm design that provides excellent performance with minimum power dissipation.
Page 12
4 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
ST12400N/ND
Family PCB
Figure 3.0-1. Hawk 2 family drive
ST12400NC
Family PCB
Page 13

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 5
________________________________________________________________________________________
4.0 Standard features
The Hawk 2 Family has the following standard features:
• Integrated SCSI Controller
• Single Ended and Differential SCSI drivers and receivers
• Asynchronous and Synchronous data transfer protocol
• Firmware downloadable via SCSI interface
• Selectable sector size from 256 to 4096 bytes/sector
• Programmable sector reallocation scheme
• Flawed sector reallocation at format time
• Programmable auto write and read reallocation
• Reallocation of defects on command (Post Format)
• 96 bit Reed-Solomon error correcting code
• Sealed Head/Disc Assembly
• No preventative maintenance or adjustment required
• Dedicated head landing zone
• Automatic shipping lock
• Automatic Thermal Compensation
• Patented Tri-Phase Servo with embedded Grey Code track address to guarantee servo positioning.
• Self diagnostics performed at power on
• 1:1 Interleave
• Zoned Bit Recording (ZBR)
• Vertical, horizontal, or top down mounting
• Dynamic spindle brake
• Synchronous spindle capability
• 256 K byte data buffer (Optional 1 MB available)
• Permanently mounted terminators (for model ST12400N only), enabled by installation of a jumper plug.
4.1 Performance
• Programmable multi-segmentable cache buff er
• 5411 RPM Spindle. A v erage latency = 5.54 ms
• Command Queuing of up to 64 commands per initiator
• Background processing of queue
• Supports start and stop commands
• Provides synchronized spindle capability
• Low audible noise for office environment
• Low power consumption
4.1.1 Reliability
• 500,000 hour MTBF
• Adaptive seek velocity. Improved seek performance
• LSI circuitry
• Balanced low mass rotary voice coil actuator
• 5 year warranty
Page 14
6 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
4.2 Unformatted and formatted capacities
Formatted capacity depends on the number of spare reallocation sectors reserved and the number of bytes per
sector. The f ollowing table shows some typical formatted capacities.
Spare Sectors or Cylinders ST12400N/ND/NC ST11900N/ND/NC
Reserved for reallocation 512[1] 1024[1] 512[1] 1024[1]
MB MB
No Spares 2165 2279 1709 1799
12 Spare Sectors Per Cylinder [2]
2 Spare Cylinders per Unit [3] 2148 2245 1700 1758
One Spare Sector per Cylinder
2 Spare Cyl. per Unit [3] 2162 2275 1707 1795
Unformatted Capacity 2537 2003
Notes.
[1] Bytes per sector. Sector size selectable at f ormat time. Users having the necessary equipment may modify
the data block size before issuing a format command and obtain different formatted capacities than those
listed. User available capacity depends on spare reallocation scheme selected. See Mode Select Command
and Format Command in the SCSI Interface Product Manual P/N 77738479.
[2] Twelve spare sectors are on one track. ST11900 has 6 spare sectors per cylinder.
[3] Spare cylinders are on the inner tracks.
The standard OEM model is as follows:
Formatted Data Block Size* Unformatted
512 Byte/Sector
ST12400N/ND/NC 2148 MB 2537 MB
ST11900N/ND/NC 1700 MB 2003 MB
*Twelve spare sectors per cylinder, two spare cylinders/unit for ST12400
Six spare sectors per cylinder, two spare cylinders/unit f or ST11900
4.3 Options (factory installed)
The capacities shown in paragraph 4.2 are available upon request. Other capacities can be ordered depending
on sparing scheme and sector size requested.
The following options are incorporated at the time of production. See Section 12.0.
• Front panel (green LED) - See Figure 3.0-1
• Installation Manual P/N 77767451
4.4 Optional accessories (user installed)
The following accessories are availab le. All kits may be installed in the field. See Section 13.0.
• Front Panel Kit (with green LED) - See Figure 3.0-1
• Single Unit shipping pack kit
• Installation Guide P/N 77767451
• Adapter Accessory Fr ame Kit P/N 75790701 (adapts 3.5-inch drive to fit in 5.25-inch drive mounting
space)
Page 15

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 7
_________________________________________________________________________________________
4.5 Installation
For option jumper locations and definitions refer to Figure 10.1-1. Drive default mode parameters are not normally needed for installation. Refer to Section 11.3.2 for default mode parameters if they are needed.
• Ensure that the SCSI ID of the drive is not the same as the host adapter. Most host adapters use SCSI ID 7.
• If multiple devices are on the bus set the drive SCSI ID to one that is not presently used by other devices on
the bus.
• If the drive is the only device on the bus, attach it to the end of the SCSI bus cable. Permanently installed
terminators must be enabled on the drive for ST12400N models using a jumper plug (see Figure 10.1-1), For
ST12400ND models, terminators must be installed external to the drive. These external terminators must be
provided by the user , systems integ rator or host equipment man uf acturer.
• If the drive is attached to a bus that contains other devices, and the new drive is not attached to the end of the
bus, the terminator enable jumper should be removed from the new drive.
• Set all appropriate option jumpers for desired operation prior to power on. If jumpers are changed after power
has been applied, recycle the drive power to make the ne w settings effective.
Installation instructions are provided by host system documentation or with any additionally purchased drive
installation software. If necessary see section 14.0 for Seagate support services telephone numbers.
Formatting
• It is not necessary to low level format this drive. The drive is shipped from the factory low level formatted in
512 byte sectors.
• Reformat the drive if one of the following occurs.
- A different sector size is selected.
- A different spare sector allocation scheme is selected.
Page 16

8 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
5.0 Performance characteristics
5.1 Internal drive characteristics (transparent to user)
ST12400N/ND/NC ST11900N/ND/NC
Drive Capacity 2537 2003 MByte (UNF)
Read/Write Heads 19 15 Data (Max)
Bytes/T rac k 50,945 50,945 Bytes (Avg)
Bytes/Surface 131.3 131.3 Mbytes (UNF)
Tracks/Surface, Total 2621 2621 Tracks (user
accessible)
Tracks/Inch 3000 3000 TPI
Servo Heads 1 1
Internal Data Rate 26.8 to 45.6 26.8 to 45.6 Mbits/sec
(variable with
zone)
Disc Rotational Speed 5411 +0.5% 5411 +0.5% r/min
Aver age Rotational Latency 5.54 5.54 ms
5.2 SCSI Seek, Read and Write performance characteristics (visible to user) [8]
Refer to Section 11.7 and to the SCSI-2 Interf ace Product Manual 77738479 f or additional timing details.
5.2.1 Seek time
Drive Level
ST12400N/ND/NC ST11900N/ND/NC
Read Write Read Write
ms ms
Average - Typical [3]* 9.3 10.8 9.3 10.8
Max. [2] 11.1 12.6 11.1 12.6
Single Track - Typical [3] 1.0 1.7 1.0 1.7
Max. [2] 1.5 2.0 1.5 2.0
Full Stroke - Typical [3] 21.0 22.5 21.0 22.5
Max. [2] 23.0 24.0 23.0 24.0
Including Controller Overhead
(without disconnect) [1] [4]
ST12400N/ND/NC ST11900N/ND/NC
Read Write Read Write
ms ms
Average - Typical [3] 10.3 11.8 10.3 11.8
Max. [2] 12.1 13.6 12.1 13.6
Single Track - Typical [3] 2.0 2.7 2.0 2.7
Max. [2] 2.5 4.0 2.5 4.0
Full Stroke - Typical [3] 22.0 23.5 22.0 23.5
Max. [2] 24.0 25.0 24.0 25.0
Page 17

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 9
_________________________________________________________________________________________
5.2.2 Format drive command execution time (minutes) [1]
ST12400N/ND/NC ST11900N/ND/NC
Maximum (with verify) 45 Min. 37 Min
Maximum (no verify) 31 Min. 27 Min.
*[ ] All notes are listed in Section 5.3.1.
5.2.3 Read data command execution time [4]
(512 byte sector size, without disconnect and with read look ahead cache disabled). latency
time is included.
a. From CDB reception to the drive request for the first data byte to be transferred to the Host
1. Typical (Zero Stroke Seek) 7.32 ms [3]*
2. Typical (Average Seek) 16.84 ms [3]
3. Maximum (Full Stroke Seek) 31.38 ms [2]
b. Single Sector Read and Transfer of data to Host (time from receipt of last byte of the CDB to the request for
a status byte transfer to Host) [7].
1. Typical (Zero Stroke Seek) 7.42 ms [3]
2. Typical (Average Seek) 16.95 ms [3]
3. Maximum (Full Stroke Seek) 31.49 ms [2]
5.2.4 Write data command execution time [4]
(512 byte sector size, without disconnect and with read look ahead disabled) latency time
is included.
a. From CDB reception to the request for the first byte of write data from the Host.
1. Typical 1.49 ms 2. Maximum 1.61 ms
b. Single Sector Write and Data Transfer from Host [7] [6]
(Time from receipt of the last byte of the CDB to the request for a completion status transf er to the Host)
1. Typical (Zero Stroke Seek) 7.72 ms [3]
2. Typical (Average Seek) 17.10 ms [3]
3. Maximum (Full Stroke Seek) 31.93 ms [2]
*[ ] All notes are listed in Section 5.3.1.
Page 18
10 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
5.3 Generalized performance characteristics
Minimum Sector Interleave 1 to 1
Data Buffer To/From Disc Media
Data transfer rate (< 1 sector) - 512 Byte Sector
Min. [4]* 3.35 MByte/sec
Avg. [4] 4.59 MByte/sec
Max. [4] 5.35 MByte/sec
Data Buffer To/From Disc Media
Data Transfer Rate (< 1 Track) - 512 Byte Sector
Min. [4] 2.88 MByte/sec divided by (Interleave Factor)
Avg. [4] 3.94 MByte/sec divided by (Interleave Factor)
Max. [4] 4.6 Mbyte/sec divided by (Interleave Factor)
SCSI Interface Data
Transfer Rate (Asynchronous) [5]
ST12400N/NC/ST11900N/NC ST12400ND/ST11900ND
-Maximum Instantaneous ** 5.2 MBytes/sec 3.3 MBytes/sec
-Maximum Av erage *** 3.1 MBytes/sec 2.4 MBytes/sec
Sector Sizes 512 user data blocks (default)
Variable (256 to 4096) in even sector sizes
Synchronous Transfer Rate
From 1.25 MByte/sec to 10.0 MBytes/sec (See section 11.5.)
Read/Write consecutive sectors on a track Yes
Flaw reallocation performance impact (For flaws reallocated using the spare Negligible
sectors per track reallocation scheme.)
Flaw reallocation performance impact (For flaws reallocated using the spare Negligible
sectors per cylinder reallocation scheme.)
Flaw reallocation performance impact (For flaws reallocated using the spare tracks 35 ms (typical)
per volume reallocation scheme.)
Overhead time for head switch (512 byte sectors) 1 ms
Overhead time for one track cylinder switch <3 ms Typical
Aver age rotational latency 5.54 ms
* [ ] All notes are listed in Section 5.3.1.
** Assumes system ability to support 5.2 Mb/s and no cable loss.
*** Assumes typical host delays and cable losses.
Page 19

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 11
_________________________________________________________________________________________
5.3.1 Notes for sections 5.2 and 5.3.
[1] Execution time measured from receipt of the last Byte of the Command Descriptor Block (CDB) to the re-
quest for a Status Byte Transfer to the Initiator (excluding connect/disconnect).
[2] Maximum times are specified over the worst case conditions of temperature, voltage margins and drive
orientation. When comparing specified seek times, care should be taken to distinguish between typical seek
times and maximum seek times. The best comparison is obtained by system benchmark tests conducted
under identical conditions. Maxim um times do not include error reco v ery.
[3] T ypical Seek values are measured under nominal conditions of temperature, v oltage, and horizontal orienta-
tion as measured on a representative sample of drives.
[4] Assumes no errors and no sector has been relocated.
[5] Rate measured from the start of the first sector transfer to or from the Host.
[6] Assumes the Initiator immediately sends Write Data to the drive when requested.
[7] Command execution requires a data transfer phase (data to or from the disc media). Assumes the initiator is
instantly ready to send/receive the data when the drive generates first request for a data byte transfer, and
assumes an average data transfer rate between the drive and the Initiator as specified in section 5.3.
[8] All performance characteristics assume that automatic adaptive temperature compensation is not in process
when the SCSI command is received. A SCSI command being executed is not interrupted for automatic
adaptive temperature compensation. If adaptive thermal compensation is in process when a SCSI command
is received, the command is queued until the compensation for the specific head being compensated com-
pletes. When compensation completes for the specific head being compensated, the first queued SCSI
command is executed. When execution of the first queued command is complete, the drive continues the
compensation for the remaining head(s). The abo ve procedure continues until compensation f or all heads is
completed, or until one minute has elapsed. If the compensation for all heads is not complete in one minute,
the drive performs compensation for all of the remaining heads sequentially without any interruption. The
drive initiates an automatic adaptive temperature compensation cycle approximately one minute after power-
on, and approximately once ever y 10 minutes thereafter. Automatic adaptive temperature compensation
takes less than 0.1% of bus time. Automatic temperature compensation also occurs at other times, but
should be transparent to the user (e.g., during format, Rezero Command, at spindle up, during read error
recovery, and during Reassign Block functions). A Rezero command can be used to reset the thermal com-
pensation timer back to its start so that the host can know when the interruption for thermal compensation will
occur.
5.4 Start/stop time
After DC power has been applied, the drive becomes ready within 25 seconds if the Motor Start Option is disabled (i.e. the motor starts as soon as the power has been applied). During this time the drive responds to some
commands over the SCSI interface*. Stop time is less than 20 seconds from removal of DC pow er.
Page 20

12 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
If the Motor Start Option is enabled the internal controller accepts the commands listed in the SCSI Interface
Product Manual* less than 3 seconds after DC power has been applied. After the Motor Start Command has been
received the drive becomes ready for normal operations within 25 seconds. The Motor Start Command can also
be used to command the drive to stop the spindle*.
There is no power control switch on the drive.
5.5 Prefetch/multi-segmented cache control
The drive provides prefetch (read look-ahead) and multi-segmented cache control algorithms that in many cases
can enhance system performance. “Cache” as used herein refers to the drive buffer storage space when it is
used in “cache” oper ations. To select prefetch and cache features the host sends the Mode Select command with
the proper values in the applicable bytes in Mode Page 08h*. Prefetch and cache operation are independent
features from the standpoint that each is enabled and disabled independently via the Mode Select command.
However, in actual operation the prefetch feature overlaps cache operation somewhat as is noted in sections
5.5.1 and 5.5.2.
All default cache and prefetch Mode parameter values (Mode Page 08h) for standard OEM versions of this drive
family are given in Tables 11.3.2-1 through 11.3.2-4.
5.5.1 Cache operation
In general, 240 Kbytes of the 256 Kbytes of ph ysical b uffer space in the drive can be used as storage space for
cache operations (984 Kbytes of 1 MB f or drives having the optional 1 MB b uff er). The buff er can be divided into
logical segments (Mode Select Page 08h, byte 13) from which data is read and to which data is written. The drive
maintains a table of logical block disk medium addresses of the data stored in each segment of the buffer. If
cache operation is enabled (RCD bit = 0 in Mode Page 08h, byte 2, bit 0. See SCSI Interface Product Manual*),
data requested by the host with a Read command is retrieved from the buffer (if it is there), before any disc
access is initiated. If cache operation is not enabled, the buffer (still segmented with required number of segments) is still used, but only as circular buff er segments during disc medium read operations (disregarding Prefetch
operation for the moment). That is, the drive does not chec k in the buffer segments for the requested read data,
but goes directly to the medium to retrieve it. The retrie ved data merely passes through some b uff er segment on
the way to the host. All data tr ansfers to the host are in accordance with “buffer-full” ratio rules. See explanations
associated with Mod page 02h (disconnect/reconnect control) in the SCSI Interface Product Manual*.
The following is a simplified description of a read operation with cache operation enabled:
Case A - A Read command is received and the first logical block (LB) is already in cache:
1. Drive transfers to the initiator the first LB requested plus all subsequent contiguous LB’s that are already in
the cache. This data may be in multiple segments.
2. When the requested LB is reached that is not in any cache segment, the drive fetches it and any remaining
requested LB’s from the disc and puts them in a segment of the cache. The drive transfers the remaining
requested LB’s from the cache to the host in accordance with the disconnect/reconnect specification men-
tioned above.
3. If the prefetch feature is enabled, refer to section 5.5.2 for operation from this point.
_________
*SCSI Interface Product Manual P/N 77738479.
Page 21

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 13
________________________________________________________________________________________
Case B - A Read command requests data, the first LB of which is not in any segment of the cache:
1. The drive fetches the requested LB’ s from the disc and transf ers them into a segment, and from there to the
host in accordance with the disconnect/reconnect specification referred to in case A.
2. If the prefetch feature is enabled, refer to section 5.5.2 for operation from this point.
Each buffer segment is actually a self-contained circular storage (wr ap-around occurs), the length of which is an
integer number of disc medium sectors. The wrap-around capability of the individual segments greatly enhances
the buffer’s overall performance as a cache storage, allowing a wide range of user selectable configurations,
which includes their use in the prefetch operation (if enabled), even when cache operation is disabled (see
section 5.5.2). For the Hawk 2 family the
but the
specification. The size in Kbytes of each segment is reported by the Mode Sense command page 08h, bytes 14
and 15. If a size specification is sent by the host in a Mode Select command (bytes 14 and 15) no new segment
size is set up by the drive, and if the “STRICT” bit in Mode page 00h (byte 2, bit 1) is set to one, the drive responds
as it does for any attempt to change unchangeable parameters (see SCSI I/O Product Manual*). The Hawk 2
family of drives supports operation of any integer number of segments from 1 to 16. Divide the 245,760 bytes
(1,007,616 bytes for the optional 1 MB b uffer) in the b uffer b y the number of segments to get the size (in bytes) of
each segment.
5.5.2 Prefetch operation
size
can not be directly selected.
number
Size
of segments may be selected using the Mode Select command,
is selected only as a by-product of selecting the segment
number
If the Prefetch feature is enabled, data in contiguous logical blocks on the disc immediately beyond that which
was requested by a Read command can be retrieved and stored in the buffer for immediate transfer from the
buffer to the host on subsequent Read commands that request those logical blocks (this is true even if “cache”
operation is disabled). Though the prefetch operation uses the buff er as a “cache”, finding the requested data in
the buffer is a prefetch “hit”, not a “cache” operation “hit”. Prefetch is enabled using Mode Select page 08h, byte
12, bit 5 (Disable Read Ahead - DRA bit). DRA bit = 0 enables prefetch. Since data that is prefetched replaces
data already in some buffer segment(s), the host can limit the amount of pref etch data to optimize system performance. The drive never prefetches more logical blocks than the number specified in the prefetch logical blocks
ceiling bytes (8 and 9) of Mode page 08h.
During a prefetch operation, the drive crosses a cylinder boundary to fetch more data
(DISC) bit is set to one in bit 4 of byte 2 of Mode parameters page 08h.
The operation of the prefetch feature (when enabled by DRA = 0) can be modified to an adaptable prefetch mode,
wherein prefetch is disabled as long as two sequential read operations are
two sequential Read operations request contiguous logical blocks of data, the drive automatically enables the
prefetch feature for the end of the second Read operation. As long as sequential Read operations request contiguous LB’s of data, pref etch operation remains enabled.
If the host uses software interleave, there will not likely ever be two sequential Read operations for contiguous
LB’s, so the adaptiv e pref etch feature keeps prefetch disabled, ev en if the DRA bit enab les it. Adaptive prefetch
is enabled when the IC (Initiator Control) bit (Mode page 08h, byte 2, bit 7) is set to 0 and when DRA. = 0 (prefetch
enabled).
not
for contiguous blocks of data. If
only
if the Discontinuity
__________
*SCSI Interface Product Manual, P/N 77738479.
Page 22

14 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. D
_________________________________________________________________________________________
5.6 Caching write data
Write caching is a write operation by the drive that makes use of a drive buff er storage area where the data to be
written to the medium is stored in one or more segments while the drive performs the write command.
Write caching is enabled along with read caching. F or write caching, the same buff er space and segmentation is
used as set up for read functions. The buff er segmentation scheme is set up or changed independently, having
nothing to do with whether or not read and write caching is enabled or disabled. When a write command is issued,
the cache is first checked to see if any logical blocks that are to be written are already stored in the cache from a
previous read or write command. If there are, the respective cache segments are cleared. The new data is
cached for subsequent Read commands.
If the number of write data logical blocks exceeds the size of the segment being written into when the end of the
segment is reached, the data is written into the beginning of the same cache segment, overwriting the data that
was written there at the beginning of the operation. However, the drive does not overwrite data that has not yet
been written to the medium.
Tables 11.3.2-1 through 11.3.2-4 show Mode def ault settings f or the Ha wk 2 f amily of drives .
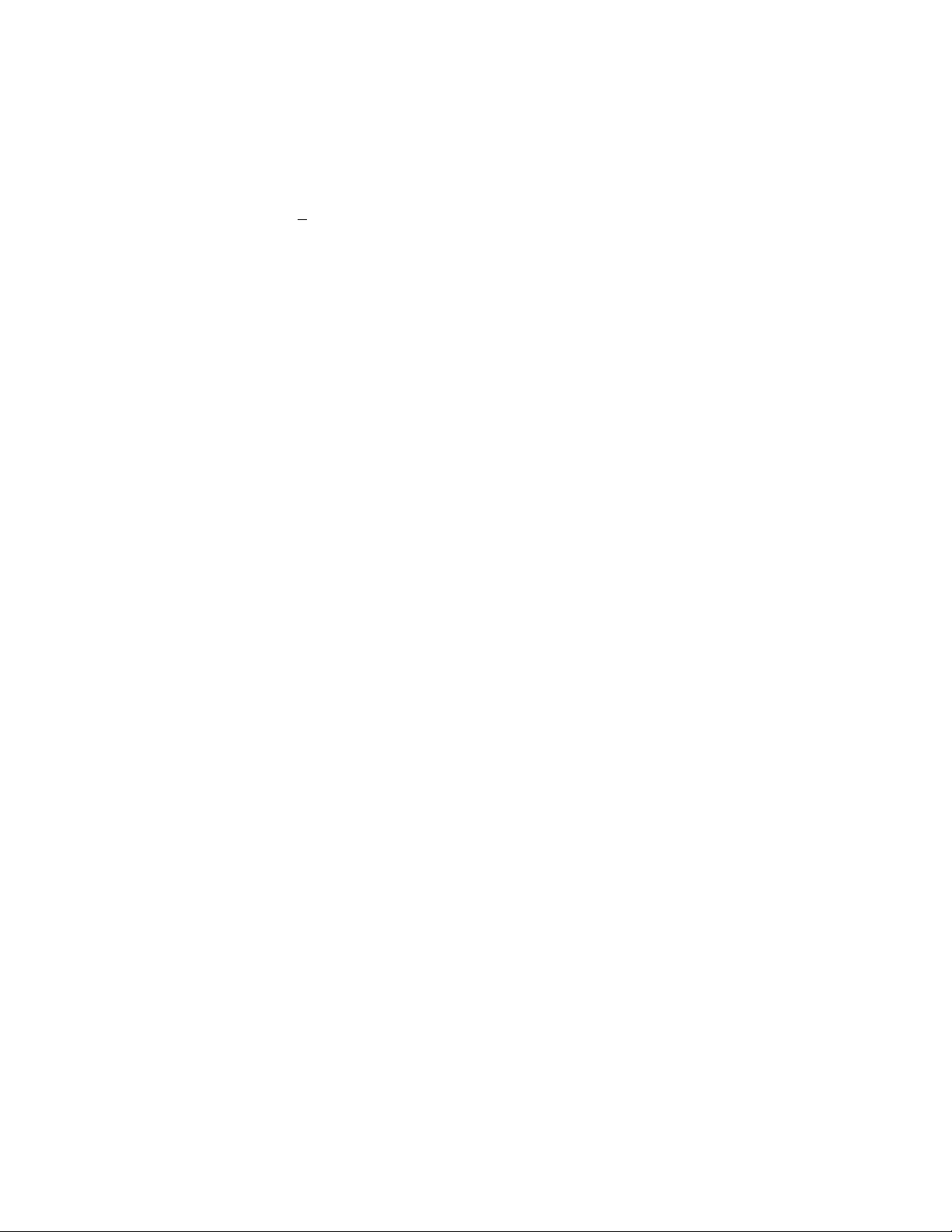
5.7 Synchronized spindle operation
The synchronized spindles operation allows several drives operating from the same host to operate their spindles
at the same synchronized rotational rate. Drives operating in a system in synchronized mode can increase the
system capacity and transfer rate in a cost effective manner.
For Hawk 2 models the interface consists of a twisted pair cable that connects the drives in the synchronized
system in a daisy-chain configuration as shown in Figure 5.7-1. For models "NC", the reference index signal
(SYNC) signal is on pin J1-37 of the 80-pin I/O connector. Master/Sla ve operation is autoarbitr ated by each drive
after head load. Alternatively, each drive in the system can be configured by the host (using the Mode Select
command Rigid Disc Drive Geometry page*) to operate in either the master or slave mode.
After loading heads, a drive autoarbitrates for occurrences of the Reference Index Signal (REFIND+). If the drive
detects no REFIND+ signal on the line, it assumes master status and begins generating the REFIND+ signal.
This signal will not be visible on the line until the last drive has powered up, since any unpowered drive holds the
line low .
Using Mode Select command, drives can be re-configured by the host to be master or slave any time after the last
drive has powered up . The master provides the ref erence signal to which all other drives phase lock, including the
master. The master can be a drive or the host computer . All the drives may be configured as slav es, allo wing the
host to provide the REFIND+ signal. All drives def ault to the synchroniz ed mode when pow er up , unless J6 pins
5 and 6 are jumpered.
Each drive can be configured (jumpered for the non-synchronized mode in which it ignores any reference signal
that might be present. The connection of the synchronized ref erence signal to the host is required only if the host
is to provide the reference signal. If the host does not provide the reference signal, the host should not be
connected.
__________
*SCSI Interface Product Manual P/N 77738479.
Page 23
Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 15
_________________________________________________________________________________________
Bottom side of PCB
DLYIND+
2
6
J7
32
Sync Interface
Master Sync
Source
Spindle
37
[2]
Drive 1
37
[2]
Drive 2
37
[2]
Drive n
Control
+5V
R
Spindle
Control
+5V
R
Spindle
Control
+5V
R
Host
(or other drive)
4
SCSI Bus
System
Interface
J2
J1
J1
J1
T
T
T
REFIND +
J6
6
5
[1]
J6
6
5
[1]
J6
6
5
[1]
J1
Notes.
[1] Configuration Select Header (See Figure 10.1-1 and 10.2.1-1).
[2] This connection is only available on model ST12400NC.
Figure 5.7-1. Synchronized drive interconnect diagram
Page 24
16 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
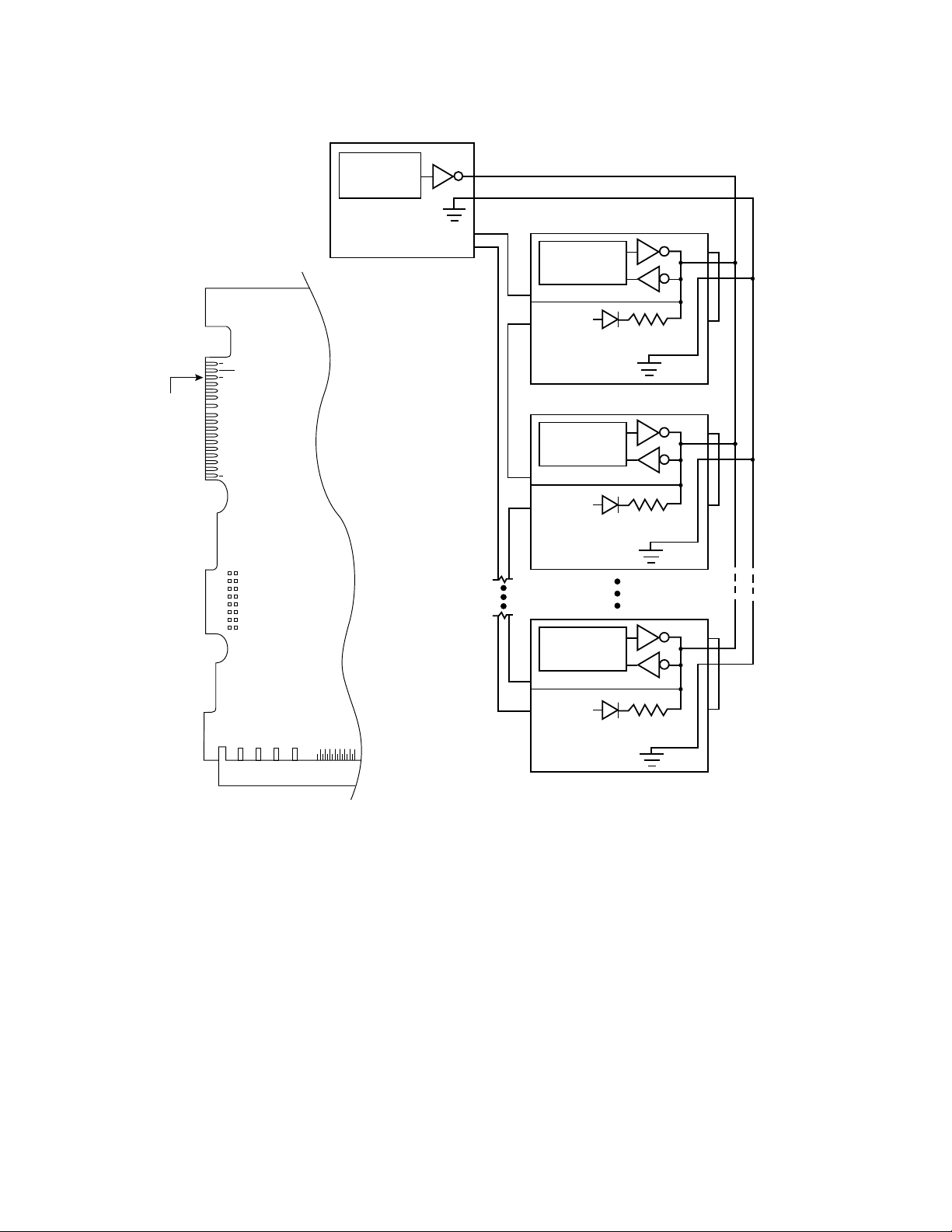
The servo/read-write LSI on the master drive provides the reference signal (REFIND+). It is a 90.18 Hz crystal
generated signal. The signal is normally false/negated (nominal 0 V) and makes a tr ansition to the true/asserted
(nominal +5 V) le vel to indicate the reference position during the re volution period. The trailing (falling) edge of the
reference signal is used by the master and the slave drives to phase lock their spindles. A maximum of 10
seconds is allowed for a slave to synchronize with the reference signal. Figure 5.7-2 shows the characteristics of
the reference signal. The DLYIND+ signal (available on J7-6. See Figure 5.7-1) of each synchronized drive shall
occur 85.2 µsec +20 µsec after the REFIND+ signal. Figure 5.7-2 shows the characteristics of the reference
signal.
T
1
REFIND +
0
0.5 usec min.
500 usec max.
T = 0.0111 second (+/- 1.0% max); +/- 10 usec cycle to cycle variance.
Figure 5.7-2. Synchronized reference signal characteristics
Page 25
Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 17
_________________________________________________________________________________________
SCSI Interface Factors
The Rotational Position Locking (RPL) field in byte 17 (bits 0 and 1) of the Rigid Disc Drive Geometry mode
parameters page (page 04h) is used for enabling/disabling spindle synchronization mode*. If the target fails to
achieve synchronization, it shall create a unit attention to all initiators. The sense ke y shall be set to UNIT A TTENTION and the additional sense code set to RPL STATUS CHANGE. However, in automatic arbitration mode,
UNIT ATTENTION and the RPL STATUS CHANGE is not set.
If subsequent to achieving synchronization the target detects a change of synchronization:
1) and, if the logical unit is not presently executing an I/O process for the initiator , the target shall create a unit
attention condition. The sense key shall be set to UNIT ATTENTION and the additional sense code set to
RPL STATUS CHANGE.
2) and, if the logical unit is presently executing an I/O process and no other error occurs, the target shall return
CHECK CONDITION status. The sense key shall be set to RECOVERED ERROR if the target is able to
complete the I/O process or HARDWARE ERROR if the target is unable to complete the I/O process. The
additional sense code is set to RPL STATUS CHANGE.
The drive may be operated with a rotational skew when synchronized. The rotational skew is applied in the
retarded direction (lagging the synchronized spindle master control). A rotational offset of up to 255/256 of a
revolution lagging ma y be selected. The amount of offset is selected by using the Mode Select command, Rigid
Disc Drive Geometry page (page 04), byte 18*. The value in byte 18 (0 - FFh) is the numerator of a fractional
multiplier that has 256 as the denominator. F or example , 40h selects 40h/FFh or 1/4 of a revolution lagging sk ew ,
80h selects 1/2 revolution lagging sk ew and etc. Since the drive supports all offset values from 0 to 255, values
sent by the initiator are not rounded off. The drive translation of the digital offset values to physical rotational
offsets results in offset values whose phase error lies within the + or - 20 usec phase error with respect to the
supplied 90.18 Hz reference signal.
The drive does not have the capability to adjust the rotational offset v alue requested by the initiator to a ph ysical
offset in the drive that corresponds in any way to sector boundaries or changes in ZBR z ones. Such correspondences or changes, if required, must be formulated by the initiator in order f or it to calculate the value of offset it
sends to the drive.
__________
*SCSI Interface Product Manual P/N 77738479.
Page 26

18 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
6.0 Reliability specifications
The following reliability specifications assume correct host/drive operational interface, including all interface timings, power supply voltages, and environmental requirements.
Seek Errors Less than 1 in 107 seeks
Read Error Rates [1]
Unrecovered Data Less than 1 sector in 10
bits transferred
Miscorrected Data Less than 1 sector in 10
bits transferred
MTBF 500,000 hours
Service Life 5 years
Preventive Maintenance None required
Note. [1]Error rate specified with automatic retries and data correction with ECC enabled and all flaws reallo-
cated.
6.1 Error rates
The error rates stated in this specification assume the following:
14
21
a. The drive is operated per this specification using DC Power as defined in this specification (see Section 7.2).
b. The drive has been formatted with the SCSI FORMAT commands.
c. Errors caused by media defects or host system failures are excluded from error rate computations. Refer to
Paragraph 8.0, Media Characteristics.
6.1.1 Read errors
Before determination or measurement of read error rates:
a. The data that is to be used for measurement of read error rates must be verified as being written correctly on
the media.
b. All media defect induced errors must be excluded from error rate calculations.
6.1.2 Environmental interference
When evaluating systems operation under conditions of Electromagnetic Interference (EMI), the performance of
the drive within the system shall be considered acceptable if the drive does not generate an unrecoverable
condition.
An unrecoverab le error, or condition, is defined as one that:
1. Is not detected and corrected by the drive itself;
2. Is not capable of being detected from the error or fault status provided through
the drive or SCSI interface; or
3. Is not capable of being recovered by normal drive or system recovery
procedures without operator intervention.
Page 27

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 19
_________________________________________________________________________________________
6.1.3 Write errors
Write errors can occur as a result of media defects, environmental interf erence, or equipment malfunction. Therefore, write errors are not predictable as a function of the number of bits passed.
If an unrecoverable write error occurs because of an equipment malfunction in the drive, the error is classified as
a failure affecting MTBF. Unreco v er ab le write errors are those which cannot be corrected within two attempts at
writing the record with a read verify after each attempt (excluding media defects).
6.1.4 Seek errors
A seek error is defined as a failure of the drive to position the heads to the addressed track. There shall be no
more than one recoverable seek error in 107 physical seek operations. After detecting an initial seek error, the
drive automatically reseeks to the addressed track up to 3 times. If a reseek is successful, the Extended Sense
reports a seek positioning error (15h), no seek complete error (02h), or track follow error (09h), and the sense key
reports a recovered error (1h). If all three reseeks fail, a seek positioning error (15h) is reported with a Medium
(3h) or Hardware error (4h) reported in the Sense Key. This is an unrecoverable seek error . Unrecoverab le seek
errors are classified as failures for MTBF calculations. Ref. section 5.1.1.2 of SCSI-2 Interface Product Manual P/
N 77738479.
6.2 Reliability and service
6.2.1 Mean time between failure
The production disc drive shall achieve an MTBF of 500,000 hours when operated in a benign atmosphere at an
average disc drive ambient temperature of 95°F (35°C) or less as measured per this Product Specification,
paragraph 7.4.1. Short term excursions up to the specification limits of the operating environment will not affect
MTBF performance.
The following expression defines MTBF:
MTBF per measurement period =
Estimated power-on operation hours means power-up hours per disc drive times the total number of disc drives
in service. Each disc drive shall have accumulated at least nine months of operation. Data shall be calculated on
a rolling average base for a minimum period of six months.
Drive failure means any stoppage or substandard performance caused by drive malfunction.
6.2.2 Preventive maintenance
No routine scheduled preventive maintenance shall be required.
6.2.3 Service life
The drive shall have a useful service life of five years. Depot repair or replacement of major parts is permitted
during the lifetime (6.2.4).
Estimated power-on operating hours in the period
Number of drive failures in the period
Page 28

20 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
________________________________________________________________________________________
6.2.4 Service philosophy
Special equipment is required to repair the drive HDA. In order to achieve the above service life, repairs must be
performed only at a properly equipped and staffed service and repair facility . Troubleshooting and repair of PCBs
in the field is not recommended, because of the extensive diagnostic equipment required f or eff ectiv e servicing.
Also, there are no spare parts available for this drive. Drive warranty is voided if the HDA is opened.
6.2.5 Installation
The drive is designed, manufactured, and tested with a “Plug in and Play” installation philosophy. This philosoph y
minimizes the requirements for highly trained personnel to integrate the drive into the OEM’s system, whether in
a factory or field environment.
The drive has been low level formatted at the factory and should not be reformatted, unless the sector size or
sparing allocation scheme is changed.
6.2.6 Service tools
No special tools are required for site installation or recommended for site maintenance. Refer to Paragraph 6.2.4.
The depot repair philosophy of the drive precludes the necessity for special tools. Field repair of the drive is not
practical since there are no user purchasable parts in the drive.
6.2.7 Product Warranty
Beginning on the date of shipment to customer and continuing for a period of 5 years, Seagate warrants that each
product (including components and sub-assemblies) or spare part that fails to function properly under normal use
due to defect in materials on workmanship or due to non conformance to the applicable specifications will be
repaired or replaced, at Seagate’s option and at no charge to customer, if returned by customer at customer’s
expense to Seagate’ s designated facility in accordance with Seagate’ s W arranty Procedure. Seagate will pay for
transporting the repaired or replacement item to customer. For more detailed warranty information refer to the
Standard terms and conditions of Purchase for Seagate products.
Page 29

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 21
_________________________________________________________________________________________
7.0 Physical/electrical specifications
7.1 AC power requirements: None
7.2 DC Power requirements
The voltage and current requirements for a single drive are sho wn in the following tab le. V alues indicated apply at
the drive power connector.
Table 7.2-1. DC power requirements
Single Ended Differential
Voltage +5 V +12 V +5 V +12 V
Regulation [5] +5% +5%[2] +5% +5%[2]
Maximum Operating Current [1] 1.0 A 1.0 A 1.2 A 1.0 A
Typical Idle Current [1] [3] 0.42 A 0.57 A 0.57 A 0.57 A
Maximum Starting Current (Peak) 0.8 A 2.4 A 0.9 A 2.4 A
Delayed Motor Start (Max) [4] 0.6 A 0.4 A 0.6 A 0.4 A
Peak Operating Current [6]
T yp . [1] 0.76 A 0.58 A 1.01 A 0.58 A
Max. [1] 1.0 A 1.0 A 1.2 A 1.0 A
Max. (Peak) - 2.4 A - 2.4 A
[1] Measured with average reading DC ammeter. Instantaneous +12 V currentpeaks will exceed these values.
[2] A droop of up to -10% is permissible during power up. The +5% must be maintained after the drive signifies
that its power up sequence has been completed and that the drive is able to accept selection by the Host
Initiator.
[3] See +12 V current profile lev el T6 in Figure 7.2.2-1.
[4] This condition occurs when the Motor Start Option is enabled and the drivehas not yet received a Start Mo-
tor command.
[5] See paragraph 7.2.1 “Conducted Noise Immunity”.
[6] Instantaneous peaks less than 5 msec. in duration are allowed.
General Notes from Table 7.2-1:
1. At powerup, the motor current regulator limits the 12 volt current to a peak value of less than 2.4 amperes,
although instantaneous peaks may exceed this value. These peaks should measure 5 msec. duration or
less.
2. Operating condition is defined as Random Seek Reads of 64 blocks.
3. Minimum current loading for each supply voltage is not less than 30% of the maximum operating current
shown.
4. The +5 and +12 volt supplies shall employ separate ground returns.
5. Where power is provided to multiple drives from a common supply, careful consideration for individual drive
power requirements should be noted. Where multiple units are powered on simultaneously, the peak starting
current must be available to each device.
Page 30

22 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
7.2.1 Conducted noise immunity
Noise is specified as a periodic and random distribution of frequencies covering a band from DC to 10 mHz.
Maximum allowed noise values given below are peak to peak measurements and apply at the drive power
connector.
+5 V = 150 mV pp from 0 to 100 kHz and 45 mA pp from 100 kHz to 10 mHz.
+12 V = 150 mV pp from 0 to 100 kHz and 60 mA pp from 100 kHz to 10 mHz.
7.2.2 Power sequencing
The drive does not require power sequencing. The drive protects against inadvertent writing during power up and
down. Daisy-chain operation requires that power be maintained on the terminated drive to ensure proper termination of the peripheral I/O cables.
7.2.3 12 V - current profile
Figure 7.2.2-1 identifies the drive +5 V and +12 V current profile. The current during the various times is as
shown:
T - Power is applied to the drive.
T1 - Controller self tests are performed.
T2 - Spindle begins to accelerate under current limiting after performing internal diagnostics. See Note 1
of T able 7.2-1.
T3 - The spindle is up to speed and the Head-Arm restraint is unlocked.
T4 - The heads move from the landing zone to the data area.
T5 - The adaptive calibration sequence is performed.
T6 - Calibration is complete and the drive is ready for reading and writing.
Page 31

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 23
_________________________________________________________________________________________
Note. All times and currents are typical. See Table 7.2-1 for maximum current requirements.
1.0
Power Save
5V
Current
.5
Cut-in
CH1 GND
T1
2.0
1.5
12V
Current
1
T
.5
CH2 GND
02468
Figure 7.2.2-1. Typical Hawk 2 family drive +5 V +12 V current profile
T2
Seconds
T3
T4
10 12 14 16 18
7.3 Heat/power dissipation
T5
T6
Channel 1
2 s .5 Amps
Channel 2
2 s .5 Amps
For drives with single ended interface circuits, typical operating power dissipation is 10.8 watts (36.8 BTUs per
hour) of DC power average at nominal v oltages. Typical power dissipation under idle conditions is 8.9 watts (30.4
BTUs per hour).
For drives ha ving differential interf ace circuits, typical operating power dissipation is 12 w atts (41 BTUs per hour)
of DC power aver age at nominal voltages. Typical power dissipation under idle conditions is 10 watts (34.2 BTUs
per hour).
7.4 Environmental limits
Temperature and humidity values experienced by the drive must be such that condensation does not occur on
any drive part. Altitude and atmospheric pressure specifications are referenced to a standard day at 58.7°F
(14.8°C). Maxim um Wet Bulb temperature is 82°F (28°C).
Page 32

24 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E
_________________________________________________________________________________________
7.4.1 Temperature
a. Operating
The drive meets all specifications over a 41°F to 122°F (5°C to 50°C) drive ambient temperature range with
a maximum gradient of 36°F (20°C) per hour. The enclosure for the drive should be designed such that the
temperatures at the locations specified in Table 7.4.1-1, column 1 are not exceeded. Air flow is needed to
achieve these temperature v alues. Operation at case temperatures abov e these values may adv ersely affect
the drive's ability to meet specifications.
The MTBF specification for the drive is based on operating at an ambient temperature of 95°F (35°C) with no
air flow. Occasional excursions to drive ambient temperatures of 50°C or 5°C may occur without impact to
specified MTBF. To achieve the specified MTBF, the values of Table 7.4.1-1 Column 2 must be considered
maximum average operating case temperatures. Continual or sustained operation at case temperatures
above the values shown in Column 2 may degrade MTBF.
Table 7.4.1-1. PCB and HDA temperatures
Items Column 1 Column 2
in Maximum Case Typical Case
Figure Temperatures (°C) Temperatures (°C)
7.4.1-1 Operating 50°C Ambient[3] at 35°C Ambient[1]
HDA 60 [2] 56
U2 80 72
U8 65 50
Q2 64 63
Q13 72 67
Note.
[1] The temperatures in Column 2 were measurements made in an enclosed box with no air flow at a pressure
of one atmosphere with random seeks.
[2] No point on the top of the HDA shall exceed this temperature.
[3] Ambient temperature is measured at the side of the drive 0.25" (6.4 mm) from the case. Airflow is 3.5 cfm,
min.
b. Non-Operating
-40° to 158°F (-40° to 70°C) package ambient with a maximum gradient of 45°F (25°C) per hour . This speci-
fication assumes that the drive is packaged in the shipping container designed by Seagate for use with the
drive.
Page 33

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E 25
_________________________________________________________________________________________
HDA
SEAGATE
**
Single Ended I/O PCB
U17
U7
U16
U15
U2Ø
U18
U19
U8
U11
U1Ø
U3
U4
U5
U2
U1
*
Q13
Q4
Q1
Q2
Differential I/O PCB
U17
U16
U15
U2Ø
U18
U19
U1Ø
U8
U11
U7
U5
U3
U4
*
U2
U1
U24
Q13
Q4
Q1
Q2
J1
**
* Bottom side of PCB.
** J1 is a single 80 pin connector on "NC" models. Shown is a 50 pin
SCSI I/O connector and the 4 pin DC power connector.
Figure 7.4.1-1. Locations of components listed in Table 7.4.1-1
J1
**
Page 34

26 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. D
_________________________________________________________________________________________
7.4.2 Relative humidity
The values below assume that no condensation on the drive occurs.
a. Operating
8% to 80% relative humidity with a maximum gradient of 10% per hour.
b. Non-Operating
5% to 95% relative humidity.
7.4.3 Effective altitude (Sea level reference)
a. Operating
-1000 to +10,000 feet (-305 to +3048 metres)
b. Non-Operating
-1000 to +40,000 feet (-305 to +12,210 metres)
7.4.4 Shock and vibration
Shock and vibration limits specified in this document are measured directly on the drive chassis. If the drive is
installed in an enclosure to which the stated shock and/or vibration criteria is applied, resonance’s may occur
internally to the enclosure resulting in drive movement in excess of the stated limits. If this situation is apparent,
it may be necessary to modify the enclosure to minimize drive movement.
The limits of shock and vibration defined within this document are specified with the drive mounted by any of the
four methods shown in Figure 7.4.4-1. Orientation of the side nearest the LED may be up or down, though the
figure shows it down.
7.4.4.1 Shock
a. Operating
The drive, as installed for normal operation, shall operate error free while subjected to intermittent shock not
exceeding 10 g’s at a maximum duration of 11 ms (half sinewave). Shock may be applied in the X, Y, or Z
axis.
b. Nonoperating
The limits of nonoperating shock shall apply to all conditions of handling and transportation. This includes
both isolated drives and integrated drives.
The drive subjected to nonrepetitive shock not exceeding 60 g’s at a maximum duration of 11 ms (half
sinewav e) shall not exhibit de vice damage or perf ormance degradation. Shock ma y be applied in the X, Y , or
Z axis.
c. Packaged
The drive as packaged in a single or multiple drive pack of gross weight 20 pounds (8.95 kg) or less by
Seagate for general freight shipment shall withstand drop test from heights listed below against a concrete
floor or equivalent. For additional details refer to specification 30190-001 (under 100 lbs) or 30191-001 (over
100 lbs).
Package Size Drop Height
600 - 1800 in3 (9,832 - 29,502 cm3) 48 in (121 cm)
>1800 in3 (>29,502 cm3) 42 in (106 cm)
Page 35

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 27
________________________________________________________________________________________
SEAGATE
1
B
1
B
1
A
A
B
1
A
B
E
A
D
X
Z
E
Y
1
C
1
D
SEAGATE
E
1
D
1
C
1
C
1
Z
Y
X
E
D
C
Figure 7.4.4-1. Recommended mounting
Page 36

28 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
7.4.4.2 Vibration
a. Operating
The drive, as installed for normal operation, shall operate error free while subjected to continuous vibration
not exceeding
5-22 Hz @ 0.040 inches (1.03 mm) displacement
22-400 Hz @ 1.0 g
Vibration may be applied in the X, Y, or Z axis.
b. Nonoperating
The limits of nonoperating vibration shall apply to all conditions of handling and transportation. This includes
both isolated drives and integrated drives.
The drive shall not incur physical damage or degraded performance as a result of continuous vibration not
exceeding
5-22 Hz @ 0.081 inches (2.05 mm) displacement
22-400 Hz @ 2.00 g’s
Vibration may be applied in the X, Y, or Z axis.
7.4.5 Air cleanliness
The drive is designed to operate in a typical office environment with minimal environmental control.
7.5 Electromagnetic compatibility
7.5.1 Electromagnetic susceptibility
As a component assembly , the drive is not required to meet an y susceptibility performance requirements. It is the
responsibility of the system integrator to perform those tests required to ensure that equipment operating in the
same system as the drive does not adversely affect the performance of the dr ive. See section 6.1.2, and see
Table 7.2-1, DC Power Requirements.
Page 37

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 29
_________________________________________________________________________________________
7.6 Mechanical specifications
The following nominal dimensions are e xclusive of the decorativ e front panel accessory . Refer to Figure 7.6-1 f or
detailed mounting configuration dimensions. See section 7.6.3, Drive mounting.
Height: 1.62 in 41.1 mm
Width: 4.00 in 101.6 mm
Depth: 5.74 in 145.8 mm
Weight: 2.1 pounds 0.93 kilograms
[4]
[3]
C
[1]
A
B
J
[2]
H
K
N
[4]
M
G
F
D
E
Notes:
Mounting holes three on each side, 6-32 UNC. Max
[1]
screw length into side of drive 0.15 in. (3.81 mm).
Screw tightening torque 6.0 in-lb (.675 NM) max with
minimum thread engagement of 0.12 in. (3.00 mm).
Mounting holes four on bottom, 6-32 UNC. Max
[2]
screw length into bottom of drive 0.20 in. (5.08 mm).
Screw tightening torque 6.0 in-lb (.675 NM) max with
minimum thread engagement of 0.12 in. (3.00 mm).
Power and interface connections can extend past the "A"
[3]
dimension by 0.040 in. (1.02 mm).
Decorative front panel.
[4]
A
5.74
B
4.00
C
1.62
D
2.362
E
.620
F
4.000
G
.250
H
1.750
J
3.750
K
2.370
L
P
1.725
M
4.100
N
0.19
P
0.015
L
Inches Millimeters
.25
41.15
60.00
15.75
6.35
44.45
95.25
60.20
43.82
4.83
0.381
±
±
+
–
±
±
±
+
–
±
±
±
±
±
±
max
.25
.66
.12
.25
.25
.25
.25
.12
.25
.25
.25
.25
.25
.25
±
±
+
–
±
±
±
+
–
±
±
±
±
±
±
max
0.010
0.010
0.026
0.010
0.010
0.010
0.010
0.010
0.005
0.010
0.010
0.010
0.010
0.010
0.010
145.80
101.60
101.60
104.14
Figure 7.6-1a. Mounting configuration dimensions for “N/ND” model drives
Page 38

30 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
[3]
C
[1]
L
Pin 1
Connector Centerline
[2]
H
K
G
F
A
[4]
B
J
D
E
Notes:
Mounting holes three on each side, 6-32 UNC. Max
[1]
screw length into side of drive 0.15 in. (3.81 mm).
Screw tightening torque 6.0 in-lb (.675 NM) max with
minimum thread engagement of 0.12 in. (3.00 mm).
Mounting holes four on bottom, 6-32 UNC. Max
[2]
screw length into bottom of drive 0.20 in. (5.08 mm).
Screw tightening torque 6.0 in-lb (.675 NM) max with
minimum thread engagement of 0.12 in. (3.00 mm).
Power and interface connections can extend past the
[3]
"A" dimension by 0.040 in. (1.02 mm).
Connector is centered (side to side) on drive within
[4]
±0.020 in. (.508 mm).
Inches Millimeters
5.74
A
B
C
D
E
F
G
H
J
K
L
4.00
1.620
2.362
.620
4.000
.250
1.750
3.750
2.370
0.181
±
±
+
–
±
±
±
+
–
±
±
±
+
–
0.010
0.010
0.026
0.010
0.010
0.010
0.010
0.010
0.005
0.010
0.010
0.010
0.018
0.013
145.80
101.60
41.15
60.00
15.75
101.60
6.35
44.45
95.25
60.20
4.597
±
.25
±
.25
+
.66
–
.25
±
.25
±
.25
±
.25
+
.25
–
.12
±
.25
±
.25
±
.25
+
.45
–
.33
Figure 7.6-1b. Mounting configuration details for “”NC” model drives
Page 39

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 31
__________________________________________________________________________________________
7.6.1 Drive Orientation
The balanced rotary arm actuator design of the drive allows it to be mounted in any orientation. All drive performance characterization, howev er, has been done with the driv e in horizontal (discs level) and v ertical (drive on its
side) orientations, and these are the two preferred mounting orientations.
7.6.2 Cooling
Cabinet cooling must be designed by the customer so that the ambient temperature immediately surrounding the
drive will not exceed temperature conditions specified in 7.4.1. Specific consideration should be given to make
sure adequate air circulation is present around the PCBs to meet the requirements of 7.4.1.
7.6.3 Drive Mounting
When mounting the drive using the bottom holes care must be taken to ensure that the drive is not physically
distorted due to a stiff non-flat mounting surface. The allowable mounting surface stiffness is 80 lb/in (14.0 N/
mm). The following equation and paragraph define the allow a ble mounting surface stiffness:
k * x = 80 lb (14.0 N)
where ‘k’ represents the mounting surface stiffness (units of lb/in or N/mm), and, ‘x’ represents the out-of plane
mounting surface distortion (units of inches or millimetres). The out-of plane distortion (‘x’) is deter mined by
defining a plane with three of the four mounting points fixed and evaluating the out-of-plane deflection of the
fourth mounting point when a known force is applied to the fourth point.
Page 40

32 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
________________________________________________________________________________________
8.0 Media characteristics
8.1 Media description
The media used on the drive has a diameter of approximately 95 mm (appro ximately 3.7 inches). The aluminum
substrate is coated with a thin film magnetic material, overcoated with a proprietary protective layer for improved
durability and environmental protection.
Page 41

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 33
________________________________________________________________________________________
9.0 Defect and error management
The drive, as delivered, complies with this specification. The read error rate and specified storage capacity are
not dependent upon use of defect management routines by the host (initiator).
Defect and error management in the SCSI system involves the drive internal defect/error management and SCSI
systems error considerations (errors in communications between Initiator and the drive). Tools for use in designing a defect/error management plan are briefly outlined in this section, with references to other sections where
further details are given.
9.1 Drive internal defects/errors
Identified defects are recorded on the drive defects list tracks (referred to as the primary or ETF defect list).
These known defects are reallocated during the initial drive format operation at the factor y. (See Format Unit
command Section 5.2.1.2 in SCSI-2/SCSI-3 Interface Product Manual P/N 77738479*). Data correction by ECC
is applied to recover data from additional flaws if the y occur.
Details of the SCSI commands supported by the drive are described in SCSI-2/SCSI-3 Product Interface Manual,
P/N 77738479. Also, more information on the drive Error Recovery philosophy is presented in Section 6 of the
SCSI-2 Interface Product Manual.
9.2 SCSI systems error considerations
Information on the reporting of operational errors or faults across the interface is given in SCSI-2/SCSI-3 Interface Product Manual. Message Protocol System is described in the SCSI Interface Product Manual. Several of
the messages are used in the SCSI systems error management system. The Request Sense command returns
information to the host about numerous kinds of errors or faults. The Receive Diagnostic Results reports the
results of diagnostic operations performed by the drive.
Status returned by the drive to the Initiator is described in the SCSI-2/SCSI-3 Interface Manual*. Status reporting
plays a role in the SCSI systems error management and its use in that respect is described in sections where the
various commands are discussed.
__________
*SCSI Interface Product Manual P/N 77738479.
Page 42

34 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
10.0 Option/configuration headers
10.1 Drive ID/option select header
Figure 10.1-1 shows a bottom view of the drive (PCB toward viewer) for the purpose of showing the drive ID
select and configuration option select jumper connectors. The notes following the figures describe the functions
of the various jumper positions on the 3 connectors J2, J5 and J6.
Side View of Drive
Pin 1
[2]
J5
A0A1A
SCSI ID = 0
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
Notes:
PCB part number label here.[1]
[2]
The PCB on "NC" models does not
have connector J5, and has a
single 80 pin combined SCSI I/O
and DC power connector instead
of the normal 50 pin SCSI I/O and
4 pin DC power connectors.
Included among the 80 pins are
the SCSI ID, Motor Start and
Delayed Motor Start select functions, and the synchronous spindle
master sync signal and the remote
LED signals. Do not use J2 and J6
for these five functions if the host
uses the ones included in the 80
pin connector. See Table 11.6.3-1c
for a list of pin numbers vs. signals
for the 80 pin connector.
Not applicable to "NC" model drives.[3]
HDA
J1
2
SCSI ID = 0
SCSI ID = 1
SCSI ID = 2
SCSI ID = 3
SCSI ID = 4
SCSI ID = 5
SCSI ID = 6
SCSI ID = 7
Sync
Spindle
Remote
LED
Reserved
Drive with HDA up,
PCB down,
viewed from front
HDA
S
A2A1A
S
P
0
3
4
Pin 1
L
E
D
SCSI I/O
Connector
Pin 1
End
J6
Drive Front
Pin 1
J5
[2]
J1
[1]
[2]
DC Power
Connector
J2
J6
R
E
S
Jumper
Positions
J2
R
ESDSMEWPPETETPT
Pin 1
P
Reserved
Delay
Motor Start
Enable
Motor Start
Write Protect
Parity Option
Enable
Terminators
Term. Power
from Drive
Term. Power
to SCSI Bus
Term. Power
from SCSI Bus
[3]
[3]
[3]
[3]
Position A
CATH
Figure 10.1-1. ST12400N/ND/NC family drive ID and option select header.
Page 43

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 35
_________________________________________________________________________________________
Notes for Figure 10.1-1:
[1] Notes explaining the functions of the various jumpers on jumper header connectors J2, J5 and J6 are given
below in left to right order of jumper position. The term “default” means as standard OEM units are configured when shipped from factory . “Off” means no jumper is installed; “On” means a jumper is installed. “Off” or
“On” underlined is factory default condition.
[2] The PCB on “NC” models does not have connector J5, and has a single 80 pin combined SCSI I/O and DC
power connector instead of the normal 50 pin SCSI I/O and 4 pin DC power connectors. Included among the
80 pins are the SCSI ID, Motor Start and Delayed Motor Start select functions, and the synchronous spindle
master sync signal and the remote LED signals. Do not use J2 and J6 for these five functions if the host uses
the ones included in the 80 pin connector. See Table 11.6.3-1c for a list of pin numbers vs. signals for the 80
pin connector.
J2
Jumper
Installation Jumper Function Description
RES
Off/On Reserved. Default is no jumper installed.
DS ME
Off Off Spindle starts immediately after power up - Default setting.
Off On Drive spindle does not start until Start Unit command received from host.
On Off Spindle Startup is delayed by SCSI ID times 12 seconds after power is applied, i.e., drive 0
spindle starts immediately when DC power connected, drive 1 starts after 12 second delay , drive
2 starts after 24 second delay , etc.
On On Drive spindle starts when Start Unit command received from host. Delayed start feature is over-
ridden and does not apply when ME jumper is installed.
WP
On Entire drive is write protected.
Off Drive is not write proteccted. Default is no WP jumper installed.
PE
On Parity checking and parity error reporting by the drive is enabled.
Off Drive does not report result of parity checking to host. Default is no PE jumper installed.
TE
On With the jumper installed, the On-board (non-removable) terminator circuits are enabled (con-
nected to the I/O lines). Default is jumper installed.
Off Terminator circuits not connected to I/O lines.
TP TP
Off Off No terminator power is connected to drive terminators or SCSI bus I/O pin 26.
On Off Drive supplies its own teminator power only. Jumper on this position is factory default for "N"
models only.
Off On Drive supplies power to I/O pin 26 of SCSI bus; none to internal terminators. When drives have
differential I/O circuits, a jumper on the right TP position is needed to po wer external terminators
(see system documentation). The ST12400ND drive has differential I/O circuits which have no
terminator circuits on the drive. The ST12400NC drive has no provisions for terminators and no
provisions for terminator power in the 80 pin I/O connector. Factory default for "ND" models
only.
On On Drive supplies terminator power to itself (internal connection) and to I/O pin 26 of SCSI bus. This
is a legal jumper setting.
Page 44

36 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
continued from previous page
TP Position A
On This horizontally positioned jumper across the two TP positions nearest PCB edge, connects
terminator power from SCSI bus I/O pin 26 to the drive’ s internal terminators (for single-ended I/
O only).
Off See above explanations for TP jumpers.
J5
Jumper
Installation Jumper Function Description
A0,A1,A
J6
Jumper
Installation Jumper Function Description
A2,A1,A
SSP Used only as a cable connection for the reference index signal (REFIND+) (J6 Pin 6, bottom) for
LED No jumper e ver installed. These pins used to connect a cable for a remote LED indicator. Pin 3
2
0
Drive ID on SCSI Bus (J6 may be used instead). The drive ID is binary coded position-wise i.e.,
jumper in position A2 is drive ID 4, in position A1 is ID 2, position A0 is ID 1 and no jumpers is ID
0. Default is ID = 0.
J5 does not exist on “NC” model drives. The drive ID signals are included in the 80 pin I/O
connector and J6.
Drive ID on SCSI bus. Either J5 or J6 (optional) may be used to select drive ID. Both should
not be used at the same time, because at some future time when the ID is changed the user
could fail to configure both J5 and J6 the same. Default is ID = 0. On “NC” model drives, drive
ID signals are also included in tthe 80 pin I/O connector.
sync spindle feature. J6 pin 5 is GRD. See paragraphs 10.2, 5.7 for description of synchronized
spindle operation. A jumper is installed when no cab le is installed. Default is jumper installed.
(top, nearest HDA), the anode connection, connects in the drive to the +5V supply through a
pull-up resistor. Pin 4 (bottom), the cathode connection connects in the drive to signal common
through the emitter-collector junction of a transistor switch that controls the LED on/off condition.
RES Reserved position. No jumper to be installed.
Page 45

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 37
_________________________________________________________________________________________
10.2 Synchronized spindles interface
The Synchronized Spindles Interface (SSI) allows several drives operating from the same host to operate their
spindles at a synchronized rotational rate. Details of the electrical and physical interfaces follow in paragraphs
10.2.1 and 10.2.1.2 and 10.2.1.3. The system operation is described in paragraph 5.7.
10.2.1 Electrical description
The electrical interface consists of one digital TTL ref erence inde x signal and ground. The ref erence index signal
(REFIND+) is an output if the drive is configured as a master and is an input otherwise. The reference index
signal is connected from drive to drive in a daisy-chain fashion as shown in Figure 5.7-1.
10.2.1.1 Drivers and receivers
Figure 10.2.1-1 shows a diagram of the driver/receiver circuit. The driver circuits have the following electrical
specifications.
Negated (False): 0.0 V to +0.4 V @ I = - 48 mA (max).
Asserted (True):+ 2.24 V to +5.25 V @ I = +250 uA.
Main PCB
Driver Receiver
2.0K Ohm [2]
SYNC
REFIND +
+5V
J1 - 37 [1]
J6 - 6
J6 - 5
GND
Notes.
[1] This connection is found only on "NC" drive models.
[2] See paragraph 10.2.1.1
Figure 10.2.1-1. SCSI reference index signal driver/receiver combination
10.2.1.2 Termination
The reference index signal (REFIND+) is terminated with a 2.0 K ohm resistor. Each drive has a termination
resistor located on the Main PCB. The terminator resistor is not removable and is always in the circuit.
Page 46

38 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
10.2.1.3 Physical interface
The dimensions of the connector (J6) mounted on the Main PCB to interconnect the drives is shown in Figure
10.2.1-2. It is a 12 pin, 6 jumper position gold header type connector. Only pins 5 and 6 are used f or connecting
the Reference Index signal cable, as shown in Figure 10.2.1-2. Pin 6 is REFIND+ and Pin 5 is ground.
.485 max
.020 +/- .001
(square)
.157
+/- .010
.0787
typ
.394 +/- .010
Figure 10.2.1-2. Configuration select header specification. (Connector used has 12 pins).
.0787 typ
.157
+/- .010
.236 max
.090
-.128
.048 min
.033 +/- .004
10.3 Grounding
Signal ground (PCB) and HDA ground are connected together in the ST12400 drive and cannot be separated by
the user. The equipment in which the drive is mounted is connected directly to the HDA and PCB with no electrically isolating shock mounts. If it is desired for the system chassis to not be connected to the HDA/PCB ground,
the systems integrator or user must provide a nonconductive (electrically isolating) method of mounting the drive
in the host equipment.
The interface physical characteristics for the “NC” models are given in Figure 11.6.3-1b and in Table 11.6.3-1c.
The “sync”” signal is included among the 80 pins of the I/O connector.
Page 47

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 39
_________________________________________________________________________________________
11.0 Interface requirements
11.1 General description
This section partially describes the interface requirements as implemented on the drives. The major portion of
the interface requirements/implementation is described in the Seagate SCSI Interface Product Manual, P/N
77738479. This section has tables that give the Hawk 2 Family drives version of the SCSI implementation described in the 77738479 document.
11.2 SCSI interface messages supported
Table 11.2-1 following lists the messages supported by the SCSI-1 and SCSI-2 modes of the Hawk 2 Family
drives.
Table 11.2-1. SCSI messages supported by ST12400N/ND/NC family drives
Msg Supported by:
Code SCSI-1 SCSI-2Message Name
01h [1] Y Y Extended messages
06h Y Y Abort
0Dh Y Y Abort tag
0Ch Y Y Bus device reset
0Eh N Y Clear queue
00h Y Y Command complete
04h Y Y Disconnect
80h-FFh Y Y Identify
23h N N Ignore wide residue (two bytes)
0Fh N N Initiate recovery
05h Y Y Initiator detected error
0Ah N N Linked command complete [2]
0Bh N N Linked command complete with flag [2]
09h Y Y Message parity error
07h Y Y Message reject
[1] N Y Modify data pointer
08h Y Y No operation
Queue tag messages (two bytes)
21h N Y Head of queue tag
22h N Y Ordered queue tag
20h N Y Simple queue tag
10h N N Release recovery
03h Y Y Restore pointers
02h Y Y Save data pointer
[1] Y Y Synchronous data transfer req.
11 h N N T erminate I/O process
[1] N N Wide data transfer request
Notes.
[1] Extended messages (see P/N 77738479 SCSI-2 Interface Product Manual).
[2] Customer Unique
Page 48

40 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
11.3 SCSI interface commands supported
T a ble 11.3-1 following lists the SCSI interf ace commands that are supported in the SCSI-1 and SCSI-2 modes of
the drive. Hawk 2 Family drives can be changed back and forth between SCSI-1 and SCSI-2 modes using the
Change Definition Command. OEM standard drives are shipped set to operate in SCSI-2 mode.
Table 11.3-1. Commands supported by ST12400N/ND/NC family drives
Com’d Supported by:
Code SCSI-1 SCSI-2 Command Name
00h Y Y Test unit ready
01h Y Y Rezero unit
03h Y Y Request sense
Y Y Extended sense
Y Y Field pointer bytes
Y Y Actual retry count bytes
Y Y Deferred error supported
04h Y Y Format unit [1]
07h Y Y Reassign blocks
08h Y Y Read
0Ah Y Y Write
0Bh Y Y Seek
12h Y Y Inquiry
Y Y Vital product data page
Y Y Unit serial number page
Y Y Implemented operating def. page
Y Y Firmware numbers page
Y Y Date code page
Y Y Jumper settings page
15h Y Y Mode select (same pages as mode
sense command, see below)
16h Y Y Reserve
Y Y 3rd party reserve
N N Extent reservation
17h Y Y Release
18h N N Copy
1Ah Y Y Mode sense
Y Y Unit attention page (00h)
Y Y Byte 2 bit 4 (unit attn bit)
Y Y Byte 2 bit 5 (DEID bit
Y Y Error recovery page (01h)
Y Y Disconnect/reconnect Control page (02h)
Y Y Format page (03h)
Y Y Rigid disc drive geometry page (04h)
N Y Verify error recovery page (07h)
N Y Caching parameters page (08h)
N Y Control mode page (0Ah)
N Y Notch and Partition Page (0C) (Media Zones)
[1] ST12400 can format to any even number of bytes per sector from 256 to 4096.
Page 49

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 41
________________________________________________________________________________________
continued from previous page
Com’d Supported by:
Code SCSI-1 SCSI-2 Command Name
1Bh Y Y Start unit/stop unit (spindle ceases rotating)
1Ch Y Y Receive diagnostic results
Y Y Supported diagnostics pages
Y Y Translate page
1Dh Y Y Send diagnostics page
Y Y Supported diagnostics pages
Y Y Translate page
25h Y Y Read capacity
28h Y Y Read extended
2Ah Y Y Write extended
2Bh Y Y Seek extended
2Eh Y Y Write and verify
2Fh Y Y V erify
30h Y Y Search data high
31h Y Y Search data equal
32h Y Y Search data low
33h N N Set limits
34h N N Prefetch
35h N N Synchronize cache
36h N N Lock-unlock-cache
37h Y Y Read defect data
39h N N Compare
3Ah N N Copy and verify
3Bh Y Y Write buffer [1]
3Ch Y Y Read buffer [1]
3Eh Y Y Read long
3Fh Y Y Write long
40h Y Y Change definition
41h N N Write same
42-4Bh N N Not used
4Ch Y Y Log select
4Dh Y Y Log sense
4E-54 N N Not used
55h Y Y Mode select (10)
56-59 N N Not used
5Ah Y Y Mode sense (10)
5B-5F N N Not used
60-BFh N N Not used
C0-DFh N N Not used
EO-FFh N N Not used
[1] If cache is enabled (RCD = 0 in Mode Sense Page 08h), Byte T ransfer Length is 245,756 b ytes (1,007,612
bytes for 1 MB buffer option) plus a 4 byte header.
If cache is disabled (RCD = 1), Byte Transfer length is 245,756 bytes (1,007,612 bytes for 1 MB buffer
option) plus a 4 byte header .
Page 50

42 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
________________________________________________________________________________________
11.3.1 Inquiry data
11.3.1.1 Standard Inquiry data
Table 11.3.1-1 following lists the Standard Inquiry command data that the drive should return to the initiator per
the format given in the SCSI-2 Interface Product Manual P/N 77738479, section 5.1.1.3.
Table 11.3.1-1. ST12400N/ND family drive Standard Inquiry data
Bytes Data (HEX)
0-15 00 00 ** *** 8F 00 00 12 53 45 41 47 41 54 45 20 VENDOR ID
16-31 53 54 [31][32][34] [30][30][4E][20] 20 20 20 20 20 20 20 PRODUCT ID
32-47 R# R# R# R# S# S# S# S# S# S# S# S# 00 00 00 00
48-63 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
64-79 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
80-95 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
96-111 00 43 6F 70 79 72 69 67 68 74 20 28 63 29 20 31* *COPYRIGHT
112-127 39* 39* 33* 20 53 65 61 67 61 74 65 20 41 6C 6C 20 NOTICE
128-143 72 69 67 68 74 73 20 72 65 73 65 72 76 65 64 20
144-148 D# D# D# D#
Notes.
*Copyright Year - changes with actual year.
** 01 means SCSI-1 implemented;
02 means SCSI-2 implemented. ST12400N/ND/NC Family drives can be changed between these two
configurations. Default is 02.
*** 01 means response data is in SCSI-1 format and has compatability with Common Command Set data.
02 means response data is in SCSI-2 format. The drive can be changed between these two configur ations.
Default is 02.
R# Four ASCII digits representing the last four digits of the product Firmware Release number . This inf orma-
tion is also given in the Vital Product data page C0h, together with servo RAM and ROM release numbers.
S# Eight ASCII digits representing the eight digits of the product serial number .
D# Four ASCII digits representing the firmware distribution diskette serial number .
[ ] Bytes 18 through 24 will reflect model of drive. Shown here are hex values for ST12400N. Codes for
ST11900N drive are 31, 31, 39, 30, 30, 4E. Codes for the “ND” model drive add 44, and codes f or the “NC”
model drives add 43.
11.3.1.2 Inquiry Vital Product data
Instead of the standard Inquiry data shown in Table 11.3.1-1, the initiator can request several Vital Product data
pages by setting the Inquiry command EVPD bit to one. The SCSI-2, Version 2 Interface Product Manual P/N
77738479, Section 5.1.1.3.1 lists the Vital Product Data pages supported and describes their formats. A separate
Inquiry command must be sent to the drive for each Vital Product data page the initiator wants the drive to send
back.
Page 51

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 43
________________________________________________________________________________________
11.3.2 Mode Sense data
The Mode Sense command provides a means for the drive to report its operating parameters to the initiator . The
drive maintains four sets of Mode parameters, Default values, Saved values, Current values and Changeable
values.
Default values are hard coded in the drive firmware that is stored in flash E-PROM nonvolitile memory on the
drive PCB. Default v alues can be changed only by downloading ne w firmware into the flash E-PROM. An initiator
can request and receive from the drive a list of Default values and use those in a Mode Select command to set up
new Current and Saved values.
Saved values are stored on the disk media using a Mode Select command. Only parameter values that are
allowed to be changed can be changed by this method. See “Changeable values” defined below. Parameters in
the Saved values list that are not changeable by the Mode Select command get their values from the Default
values storage.
Current values are volitile values currently being used by the drive to control its operation. A mode Select
command can be used to change these values (only those that are changeable). Originally, they are installed
from Saved or Default values after a power on reset, hard reset, or Bus Device Reset message.
Changeable values f orm a bit mask, stored in non-volatile memory , that dictates which of the Current values and
Saved values can be changed by a Mode Select command. A “one” allows a change to a corresponding bit; a
“zero” allows no change. For example , in Table 11.3.2-1a refer to Mode page 01, in the first row entitled “CHG”.
These are hex numbers representing the changeable values for Mode page 01. Note in columns 1 and 2 (bytes
00 and 01), there is 00h, which indicates that in bytes 00 and 01 none of the bits are changeable. Note also that
bytes 04, 05, 06 and 07 are not changeable, because those fields are all zeros. In bytes 02, hex value FF equates
to the binary pattern 1111 1111. If there were a zero in any bit position in the field, it would mean that bit is not
changeable. However, bits 7 - 0 are changeable, because those bits are all ones. In this par ticular case, it
indicates 8 error recovery control bits are all changeable. FF in column 4 indicates all bits in byte 3 are changeable.
The Changeable values list can only be changed by downloading new firmware into the flash E-PROM.
On drives requiring unique Saved values, the required unique Saved values are stored into the Saved values
storage location on the media prior to shipping the drive. Some drives may have unique firmware with unique
Default values also.
On standard OEM drives the Saved values are taken from the Default values list and stored into the Saved
values storage location on the media prior to shipping.
When a drive is powered up, it takes Saved values from the media and stores them to the Current values storage
in volatile memory. It is not possible to change the Current values (or the saved values) with a Mode Select
command before the drive is up to speed and is “ready .” An attempt to do so results in a “Chec k Condition” status
being returned. A subsequent Request Sense command returns Sense Key 02 with an error code of 04 02,
meaning “drive not ready, initializing command required.
Page 52

44 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
________________________________________________________________________________________
The following tables list the values of the data bytes returned by the drive in response to the Mode Sense
command pages for SCSI-1 and SCSI-2 implementation (see SCSI Interface Product Manual, P/N 77738479).
DEFINITIONS:
DEF = Default value. Standard drives are shipped configured this way. Not changeable via Mode
Select command.
CHG = Changeable bits; indicates current and saved values are changeable.
Table 11.3.2-1. Mode sense data, ST12400N/ND/NC default values
(SCSI-1 implementation)
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode
Sense 63 00 00 08
Data 00 00 00 00 00 00 02 00
MODE PAGE HEADERS AND PARAMETER DATA BYTES
Mode
Page
00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
DEF
01 81 06 00 1B 30 00 00 FF
CHG
01 00 00 EF FF 00 00 00 00
DEF
02 82 0A 80 80 00 0A 00 00 00 00 00 00
CHG
02 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
03 83 16 00 13 00 0C 00 00 00 26 00 53 02 00 00 01 00 0E 00 16 40 00 00 00
CHG
03 00 00 FF FF FF FF 00 00 FF FF 00 00 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
04 84 12 00 0A 3D 13 00 00 00 00 00 00 00 00 00 00 00 00 00 00
CHG
04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00
DEF
08 88 12 10 00 FF FF 00 00 FF FF FF FF 80 03 00 00 00 00 00 00
CHG
08 00 00 BD FF FF FF FF FF FF FF 00 00 20 FF FF FF 00 00 00 00
DEF
00 80 02 00 00
CHG
00 00 00 36 FF
Page 53

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 45
_________________________________________________________________________________________
Table 11.3.2-2. Mode sense data, ST12400N/ND/NC default values
(SCSI-2 implementation)
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode 9F 00 00 08
Sense 00 00 00 00 00 00 02 00
Data
MODE PAGE HEADERS AND PARAMETER DATA BYTES
Mode
Page
00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
DEF
01 81 0A 00 1B 30 00 00 00 03 00 FF FF
CHG
01 00 00 EF FF 00 00 00 00 FF 00 00 00
DEF
02 82 0E 80 80 00 0A 00 00 00 00 00 00 00 00 00 00
CHG
02 00 00 FF FF 00 00 00 00 00 00 00 00 80 00 00 00
DEF
03 83 16 00 13 00 0C 00 00 00 26 00 53 02 00 00 01 00 0E 00 16 40 00 00 00
CHG
03 00 00 FF FF FF FF 00 00 FF FF 00 00 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
04 84 16 00 0A 3D 13 00 00 00 00 00 00 00 00 00 00 00 00 00 00 15 23 00 00
CHG
04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00 00 00 00 00
DEF
07 87 0A 00 1B 30 00 00 00 00 00 FF FF
CHG
07 00 00 0F FF 00 00 00 00 00 00 00 00
DEF
08 88 12 10 00 FF FF 00 00 FF FF FF FF 80 03 00 00 00 00 00 00
CHG
08 00 00 BD 00 FF FF FF FF FF FF 00 00 A0 FF FF FF 00 00 00 00
DEF
0A 8A 0A 00 10 00 00 00 00 00 00 00 00
CHG
0A 00 00 01 01 07 00 00 00 00 00 00 00
DEF
0C 8C 16 80 00 00 17 00 00 00 00 00 00 00 0A 3A 12 00 00 00 00 00 00 10 00
CHG
0C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DEF
00 80 02 00 00
CHG
00 00 00 36 00
Page 54

46 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
Table 11.3.2-3. Mode sense data, ST11900N/ND/NC default values
(SCSI-1 implementation)
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode
Sense 63 00 00 08
Data 00 00 00 00 00 00 02 00
MODE PAGE HEADERS AND PARAMETER DATA BYTES
Mode
Page
00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
DEF
01 81 06 00 21 30 00 00 FF
CHG
01 00 00 EF FF 00 00 00 00
DEF
02 82 0A 80 80 00 0A 00 00 00 00 00 00
CHG
02 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
03 83 16 00 0F 00 06 00 00 00 1E 00 54 02 00 00 01 00 0D 00 16 40 00 00 00
CHG
03 00 00 FF FF FF FF 00 00 FF FF 00 00 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
04 84 12 00 0A 3D 0F 00 00 00 00 00 00 00 00 00 00 00 00 00 00
CHG
04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00
DEF
08 88 12 10 00 FF FF 00 00 FF FF FF FF 80 03 00 00 00 00 00 00
CHG
08 00 00 BD FF FF FF FF FF FF FF 00 00 20 FF FF FF 00 00 00 00
DEF
00 80 02 00 00
CHG
00 00 00 36 FF
Page 55

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 47
_________________________________________________________________________________________
Table 11.3.2-4. Mode sense data, ST11900N/ND/NC default values
(SCSI-2 implementation)
Bytes 00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
Mode 90 00 00 08
Sense 00 00 00 00 00 00 02 00
Data
MODE PAGE HEADERS AND PARAMETER DATA BYTES
Mode
Page
00 01 02 03 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 22 23
DEF
01 81 0A 00 21 30 00 00 00 16 00 FF FF
CHG
01 00 00 EF FF 00 00 00 00 FF 00 00 00
DEF
02 82 0E 80 80 00 0A 00 00 00 00 00 00 00 00 00 00
CHG
02 00 00 FF FF 00 00 00 00 00 00 00 00 80 00 00 00
DEF
03 83 16 00 0C 00 06 00 00 00 26 00 54 02 00 00 01 00 0D 00 16 40 00 00 00
CHG
03 00 00 FF FF FF FF 00 00 FF FF 00 00 00 00 FF FF 00 00 00 00 00 00 00 00
DEF
04 84 16 00 0A 3D 0F 00 00 00 00 00 00 00 00 00 00 00 00 00 00 15 23 00 00
CHG
04 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 FF 00 00 00 00 00
DEF
07 87 0A 00 21 30 00 00 00 00 00 FF FF
CHG
07 00 00 0F FF 00 00 00 00 00 00 00 00
DEF
08 88 12 10 00 FF FF 00 00 FF FF FF FF 80 03 00 00 00 00 00 00
CHG
08 00 00 BD 00 FF FF FF FF FF FF 00 00 A0 FF FF FF 00 00 00 00
DEF
0A 8A 0A 00 10 00 00 00 00 00 00 00 00
CHG
0A 00 00 01 01 07 00 00 00 00 00 00 00
DEF
0C 8C 16 80 00 00 17 00 00 00 00 00 00 00 0A 3A 0E 00 00 00 00 00 00 10 00
CHG
0C 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DEF
00 80 02 00 00
CHG
00 00 00 36 00
Page 56

48 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
11.4 SCSI Bus Conditions and Miscellaneous Features Supported
Asynchronous SCSI bus conditions supported by the drive are listed in Table 11.4-1. These conditions cause the
SCSI device to perform certain actions and can alter the phase sequence. Other miscellaneous operating features supported are also listed here.
Table 11.4-1. SCSI bus conditions and other misc. features
Condition/Feature Supported by:
SCSI-1 SCSI-2 Conditions or Feature
Y Y Attention Condition
Y Y Reset Condition
Y Y Contingent Allegiance Condition
N N Asynchronous Event Notification
Y Y Arbitrating System
Y Y Disconnect/Reconnect
Y Y Asynchronous Data Transfer
Y Y Synchronous Data Transfer
Y Y Synchronized (locked) Spindle Operation
Y Y Differential Interface Circuits a vailable
Y Y Segmented Caching
N N Zero Latency Read
Y Y Queue tagging (up to 64 Que tags supported)
Y Y Deferred Error Handling
Y Y Parameter Rounding
Y Y Reporting actual retry count in Extended Sense bytes
15, 16 and 17.
Y Y Adaptive Caching (available only on some drives)
Y Y SMP = 1 in Mode Select command needed to save
RPL and Rotational Offset bytes (in Table 5.2.1-25
of Vol. II).
Y Y Immediate status for Start/Stop command
N N Immediate status for Format Unit and Synchronize
Cache commands
N N Format progress indication
[1] [1] Flag and Link bits in Control byte supported
SCSI-1 SCSI-2 Status Supported
Y Y Good
Y Y Check Condition
N N Condition Met/Good
Y Y Busy
[1] [1] Intermediate/Good
Y Y Intermediate/Condition Met/Good
Y Y Reservation Conflict
Y Y Queue Full
Notes.
[1] Option supported only if customer selected.
Page 57

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 49
_________________________________________________________________________________________
11.5 Synchronous data transfer
11.5.1 Synchronous data transfer periods supported
Table 11.5-1 and 11.5-2 list Synchronous Data transfer periods supported by the drive. The data transfer period
to be used by the drive and the initiator is established by an exchange of messages during the Message Phase
of operation. See the section on message protocol in the SCSI Interface manual.*
Table 11.5-1. Synchronous data transfer periods
M (Decimal) Transfer Period (M times 4 nanoseconds)
25 100
31 125
37 150
50 200
62 250
75 300
87 350
100 400
112 450
125 500
137 550
150 600
162 650
175 700
187 750
200 800
11.5.2 REQ/ACK offset
The maximum REQ/ACK offset supported by the Hawk 2 family is 15 (0Fh).
11.6 Physical interface
Figure 11.6-1 shows the locations of the physical interf ace components for the drive . Shown are the locations of
the D .C. power connector, the SCSI interf ace connector, the I/O line terminators, and the drive select and option
select header.
The “NC” version of this drive has an 80 pin I/O connector that has the SCSI interface signals, DC power and
some option select functions all together in the same 80 pin connector. See Figure 11.6.3-1b and T able 11.6.3-1c.
Details of the physical, electrical and logical characteristics are given in paragraphs following, while the SCSI
operational aspects of Seagate drive interfaces are given in the Seagate SCSI Interface Product Manual, P/N
77738479.
__________
*SCSI Interface Product Manual, P/N 77738479
Page 58

50 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
________________________________________________________________________________________
SCSI I/O
Connector
Pin 1
J1
Pin 1
Pin
1
2
3
4
DC Power
Connector
Power
+12V
+12V ret
+ 5V ret
+ 5V
J1
4321
I/O Terminator Module
("N" models only)
(not removable)
J2
J5
Pin 1 End
J4
Figure 11.6-1a. “N” and “ND” model drives physical interface (50 pin SCSI I/O connector)
80 Pin
SCSI I/O
Connector
Pin 1
J4
Figure 11.6-1b. “NC” model drive physical interface (80 pin I/O and DC power connector)
J6
J2
J6
Page 59

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 51
_________________________________________________________________________________________
11.6.1 DC cable and connector
The "N" and "ND" model drives receive DC power through a 4 pin connector mounted at the rear of the main PCB
(see Figure 11.6-1). Recommended part numbers of the mating connector are listed below, but equivalent parts
may be used (see Table 11.6-1).
Table 11.6.1-1. Mating connector parts
Type of cable Connector Contacts (20-14 AWG)
14 AWG AMP 1-480424-0 AMP 60619-4 (Loose Piece)
AMP 61117-4 (Strip)
For "NC" models, the DC power is routed through the SCSI 80 pin I/O connector. Current carrying capacity is for
one drive only, plugged directly into the host 80 pin I/O connector (no cable).
11.6.2 Physical characteristics
This section defines the connectors, cables, signals, terminators and bus timing needed to implement SCSI.
Page 60

52 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
11.6.2.1 Physical description
The "N" and "ND" model drives may be daisy-chained together or with other compatible SCSI devices. "N" and
"ND" models use a common cable. Both ends of the cable must be terminated. The model ST12400N and
ST12400NC drives implement single ended drivers and receivers. The model ST12400ND drive implements
differential drivers and receivers. All signals are common between all SCSI devices. The drive may be daisychained only with SCSI devices having the same type drivers and receivers. Devices having single ended interface circuits cannot be on the same daisy-chain with devices ha ving differential interf ace circuit. A maximum of 8
SCSI devices (including the Host) may be daisy-chained together. The SCSI Devices at both ends of the daisychain are to be terminated. Intermediate SCSI devices shall not be terminated (see Figure 11.6.3-2). Remove the
terminator enble jumper TE, not the terminator power source selector jumper TP (Figure 10.1-1).
"NC" model drives plug into PCB or bulkhead connectors in the Host. They may be connected in a daisy-chain b y
the host backplane wiring or PCB circuit runs that have adequate DC current carrying capacity to support the
number of drives plugged into the PCB or bulkhead connectors. A single 80 pin I/O connector cannot support the
DC current needs of several drives, so no daisy-chain cables should be used. A single drive connected via a
cable to a host 80 pin I/O connector is not recommended.
11.6.2.2 Cable requirements ("N" and "ND" models only)
11.6.2.2.1 Single ended I/O circuits ("N" model)
The maximum total cable length for use with model "N" drives (single ended I/O driver and receiver circuits) shall
be 6 metres (19.7 ft.) when operating at line data transfer rates of 5 Mbytes/sec or less, and 3 metres (9.85 ft.)
when operating at transfer rates greater than 5 Mb ytes/sec (F AST SCSI). A stub length of no more than 0.1 metre
(0.33 ft.) is allowed off the mainline interconnection with any connected equipment. An ideal impedance match
with cable terminators implies a cable characteristic impedance of 132 ohms (see 11.6.2.2.3). Single ended I/O
pin assignments are shown in Table 11.6.3-1a and 11.6.3-1c.
11.6.2.2.2 Differential I/O circuits ("ND" model)
The maximum total cable length f or use with drives having diff erential I/O drivers and receiver circuits shall be 25
metres (82 ft.). A stub length of no more than 0.2 metre (0.66 ft.) is allo wed off the mainline interconnection with
any connected equipment. An ideal impedance match with cable terminators implies a cable characteristic impedance of 122 ohms (see 11.6.2.2.3). Diff erential I/O pin assignments are sho wn in Table 11.6.3-1b.
11.6.2.2.3 General cable characteristics
In general, cables having the characteristic impedance’s given in 11.6.2.2.1 and 11.6.2.2.2 are not available;
howev er , impedance’s that are some what lower are satisf actory . A characteristic impedance of 100 ohm +10% is
recommended for unshielded flat or twisted pair ribbon cable. Howev er , most a v ailable cab les hav e a some what
lower characteristic impedance. To minimize discontinuities and signal reflections, cables of different impedance’ s
should not be used in the same bus. Implementations may require tradeoffs in shielding effectiveness, cable
length, the number of loads, transfer rates, and cost to achieve satisfactory system operation. If shielded and
unshielded cables are mixed within the same SCSI bus, the effect of impedance mismatch must be carefully
considered. Proper impedance matching is especially important in order to maintain adequate margin at FAST
SCSI transfer rates.
Page 61

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C 53
________________________________________________________________________________________
Cable for “N” and “ND” model drives
Only nonshielded cable connectors are applicable. A 50 conductor flat cable or 25 twisted pair cable shall be
used. A minim um conductor size of 28 AWG should be used to minimize noise effects.
Suggested nonshielded flat cable part numbers are:
Flat cable - 35M-3365-50 Twisted pair - Spectra Twist in flat 455-248-50
Equivalent parts may be used.
Cable for “NC” drive models
The 80 pin connector option is intended for use on drives that plug directly into a PCB or wall/bracket mounted
connector in the host equipment. Cable mounted connectors would not be used in such a case. Installations with
cable mounted connectors are not recommended.
Mating connector for “NC” models:
The nonshielded mating connector shall be an 80 pin connector consisting of two rows of 40 male pins with
adjacent pins 50 mils (1.27 mm) apart. The connector is keyed by virtue of its shape. The characteristics of the
drive’s PCB mounted connector see Figure 11.6.3-1b . Recommended connectors for mating wall/brack et mounted
connectors are given in 11.6.3.
11.6.3 Connector requirements
11.6.3.1 Mating connectors for “N” and “ND” drive models
The nonshielded cable connector shall be a 50 conductor connector consisting of two rows of 25 female contacts
with adjacent contents 100 mils apart.
Recommended Mating Flat Cable Connector Part Numbers are:
Closed end 3M-3425-7000 W/O Strain Relief, No Center Key
(for cable ends)*3M-3425-7050 With Strain Relief, No Center Key
Dupont-66900-290 With Strain Relief, With Center Key
Open end 3M-3425-6000 W/O Strain Relief, No Center Key
(In Daisy-chain) 3M-3425-6050 With Strain Relief, No Center Key
Dupont-66900-250 With Strain Relief, With Center Key
*See Figure 11.6.3-2.
The drive device connector is a nonshielded 50 conductor connector consisting of two rows of 25 male pins with
adjacent pins 100 mils apart. The connector is k eyed (see Figure 11.6.3-1).
Page 62

54 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
11.6.3.2 Mating connectors for “NC” models
The non-shielded connector shall be an 80 conductor connector consisting of two rows of 40 contacts with
adjacent contacts 50 mils (1.27 mm) apart. The connector is k eyed b y its shape. The characteristics of the drive’ s
PCB mounted connector are shown in Figure 11.6.3-1b.
Recommended PCB or bulkhead mounted connectors are:
Straight-in connector (most commonly used):
Seagate P/N: 77678703
Amp US P/N: 2-557103-1
Amp Japan P/N: 5-175475-9
Right angle to PCB connector:
Seagate P/N: 77678559
Amp US P/N: 2-557101-1
Amp Japan P/N: 5-175474-9
11.6.3.3 J2 jumper plug part number
Option select header connector J2 on the PCB (see Figure 10.1-1) uses an unusual type of jumperplug, so its
part number is given here for reference:
Molex 52747-0211 (Seagate P/N 77670952).
Page 63

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 55
________________________________________________________________________________________
.370 ± .010
(9.398)
C
L
.100
(2.54)
(4.06)
.051
(1.30)
.16
.037 ref typ
(.94)
.025
Square Contact
(.64)
(50 places)
(10.67)
(2.54)
"D" ± .010
.045
(1.14)
"C" ± .010
"B" ref
"A" ± .010
.42
ref
Pin 1
.100
typ
min typ 3
No. Pos.
50
(15.24)
4
.834 ± .010
(21.18)
"A"
3.767
(95.68)
.60
3
"B"
3.697
(93.90)
12
.20
typ
(5.08)
.065
x 45° chamfer typ
(1.65)
.26
(6.60)
.335 ± .010
.040
(1.02)
"C"
2.720
(69.09)
typ
(8.50)
+.001
–.002
"D"
2.400
dia
.083
(2.1)
Trifurcated Pins
(4 places)
ref
(60.96)
Figure 11.6.3-1a. Non shielded 50 pin SCSI device connector and 4 pin DC power drive PCB connector
Page 64

56 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
__________________________________________________________________________________________
2.70
(.106)
*
Section X–X
1.32
(.052)
Pin 1
Side View
1.52
(.060)
57.87
(2.278)
*
62.15
(2.447)
Housing
0.15
0.15
0
–0.15
+ .000
[
– .006
MYM
–Y–
± 0.15
(± .005)
MYM
7.00
(.276)
12.70
(.500)
[
Front View
Insert cable
X
connector here
1.27
PCB Contacts
Contacts are recessed along the center strip (see side view).
*
0.50
(.020)
0.3
(.012)
MYM
(.05)
Typ
Pin 1
Figure 11.6.3-1b. Non-shielded 80 pin I/O and DC power connector
X
C
of Datum Y
L
Top View
Back View
Page 65

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 57
_________________________________________________________________________________________
T
*
Disc Drive or
Other SCSI
Device
SCSI Device
Host Adapter/Initiator
SCSI Devices
Disc Drive or
Other SCSI
Device
* * *
1 thru 8
** ** *
T
Disc Drive or
Other SCSI
Device
View B (T indicates termination required)
Total interface cable length must not e xceed that specified in paragraph 11.6.2. (including host adapter/initiator).
* Closed end type connector used.
** Open end type (in-line application) connector used.
*** Host need not be on the end of the daisy-chain. Another device can be on the end with the
terminator. The host can be somewhere other than the end, having no terminator.
Figure 11.6.3.-2. Interface cabling
Table 11.6.3-1a. Single ended 50 pin SCSI cable pin assignments
(Nonshielded connector)
Signal Pin Number Signal Pin Number
-DB (0) 2 GROUND 30
-DB (1) 4 -ATN 32
-DB (2) 6 GROUND 34
-DB (3) 8 -BSY 36
-DB (4) 10 -ACK 38
-DB (5) 12 -RST 40
-DB (6) 14 -MSG 42
-DB(7) 16 -SEL 44
-DB (P) 18 -C/D 46
GROUND 20 -REQ 48
GROUND 22 -I/O 50
GROUND 24
TERMPWR 26
GROUND 28
Notes.
1. All odd pins except pin 25 are connected to ground. Pin 25 is left open.
Caution
Pin 25 must not be connected to ground at the HOST end or the drive end of the cable. If the I/O connector should
accidentally be plugged upside down, terminator power on pin 26 will be shorted to ground.
2. The minus sign next to the signals indicates asserted state is the low voltage of the two levels used for logic signals.
Page 66

58 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
Table 11.6.3-1b. Differential cable pin assignments(Nonshielded connector)
+SIGNAL NAME* PIN NUMBER -SIGNAL NAME*
SHIELD GND 1 2 GROUND
+DB(0) 3 4 -DB(0)
+DB(1) 5 6 -DB(1)
+DB(2) 7 8 -DB(2)
+DB(3) 9 10 -DB(3)
+DB(4) 11 12 -DB(4)
+DB(5) 13 14 -DB(5)
+DB(6) 15 16 -DB(6)
+DB(7) 17 18 -DB(7)
+DB(P) 19 20 -DB(P)
DIFFSENS 21 22 GROUND
GROUND 23 24 GROUND
TERMPWR 25 26 TERMPWR
GROUND 27 28 GROUND
+ATN 29 30 -ATN
GROUND 31 32 GROUND
+BSY 33 34 -BSY
+ACK 35 36 -ACK
+RST 37 38 -RST
+MSG 39 40 -MSG
+SEL 41 42 -SEL
+C/D 43 44 -C/D
+REQ 45 46 -REQ
+I/O 47 48 -I/O
GROUND 49 50 GROUND
* See Paragraph 11.6.4.2 f or detailed electrical characteristics of these differential signals .
Page 67

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 59
_________________________________________________________________________________________
Table 11.6.3-1c. Single ended, 80 pin cable pin assignments (Non-shielded connector)
Signal Pin number Signal Pin number
+12 V 1 12 V GND 41
+12 V 2 12 V GND 42
+12 V 3 12 V GND 43
+12 V 4 12 V GND 44
NC 5 NC 45
NC 6 NC 46
NC 7 GND 47
NC 8 GND 48
NC 9 GND 49
NC 10 GND 50
-IO 1 1 GND 51
-REQ 12 GND 52
-CO 13 GND 53
-SEL 14 GND 54
-MSG 15 GND 55
-RST 16 GND 56
-ACK 17 GND 57
-BSY 18 GND 58
-ATN 19 GND 59
-DBP 20 GND 60
-DB7 21 GND 61
-DB6 22 GND 62
-DB5 23 GND 63
-DB4 24 GND 64
-DB3 25 GND 65
-DB2 26 GND 66
-DB1 27 GND 67
-DB0 28 GND 68
NC 29 GND 69
NC 30 GND 70
NC 31 GND 71
NC 32 GND 72
NC 33 GND 73
+5 V 34 5 V GND 74
+5 V 35 5 V GND 75
+5 V 36 5 V GND 76
SYNC [1] 37 LEDC [2] 77
MTRON [3] 38 DLYDST [4] 78
SCSIAO [5] 39 SCSIA1 [5] 79
SCSIA2 [5] 40 SCSIA3 [5] 80
Notes: Signals [1] thru [5] are used in place of installing jumpers and cables on option select connectors J2,
J5 and J6. See also notes following Figure 10.1-1.
[1] Synchronous spindle synchronizing signal, generated by either host or drive.
[2] Front panel LED signal; indicates drive activity for host front panel hard drive activity indicator.
[3] Asserted by host to enable Motor Start option (starts motor via SCSI bus command).
[4] Asserted by host to enable Delayed Motor Start option (motor starts at power on or after a delay of
12 seconds times drive ID). This and [3] above are mutually exclusive options.
[5] Binary code on A3, A2, A1 and A0 asserted by host to set-up SCSI bus ID in drive.
Page 68

60 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
11.6.4 Electrical description
Model ST12400N uses single ended interface signals. These signals must be terminated with 110 ohm active
termination circuits at each end of the total cable. The terminators are enabled (or disabled) by installing (or
removing) jumper plug TE. See Figure 10.1-1. Single Ended circuits use open collector or three state drivers. See
Figure 11.6.4-1 and 11.6-1. The model ST12400NC uses single ended interface signals, but there are no pro visions for terminators on the drive.
The model ST12400ND uses differential interface signals and each of these m ust be terminated at each end of
the total cable with 330 ohms to +5 V and 330 ohms to g round with 150 ohms between each diff erential pair. All
I/O circuits are open collector, three state drivers. See Figure 11.6.4-2 for circuit drawing. Differential I/O drives
are shipped without terminators. These drives have no provisions for adding terminators on the PCB. On these
drives some method of external termination must be provided by the user Systems Integrator or host equipment
manufacturer .
11.6.4.1 Single ended drivers/receivers
Typical single ended driver and receiver circuits for the ST12400N and ST12400NC are shown in Figure 11.6.4-
1. Terminator circuits shown (Note [1]) are to be enabled only when the disc drive is first or last in the daisy-chain.
See paragraph 11.6.4.3.
T ransmitter characteristics
Single ended drives use an ANSI SCSI compatible open collector single ended driver. This driver is capable of
sinking a current of 48 mA with a low level output voltage of 0.4 volt.
Receiver characteristics
Single ended drives use an ANSI SCSI single ended receiver with h ysteresis gate or equivalent as a line receiver .
Page 69

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 61
_________________________________________________________________________________________
Line Driver
Transmitter
(or transceiver)
[2]
TP TP
[4]
Flat
110
Ohm
Cable
Pair
[5]
[3]
[1]
Line Receiver
[4]
110
[1]
Ohm
Receiver
[2]
[1] Part of active terminator circuits. Permanently mounted LSI terminators enabled in the drive (ST12400N
only) when it is first or last in the daisy-chain. See jumper header Figure 10.1-1 for terminator enabling jumper
TE.
[2] ANSI SCSI compatible circuits
[3] T otal interf ace cable length should not e xceed that specified in par agraph 11.6.2.2.1.
[4] Source of drive terminator power is an active circuit which has an input source voltage selected by jumper
plug TP. See Figure 10.1-1. This applies to model ST12400N only.
[5] Interface signals levels and logical sense at the drive I/O connector are defined as follows:
Logic Level Driver Output Receiver Input
Negated (0) >2.5 V: <5.25 V >2.0 V: <5.25 V
Asserted (1) <0.4 V: >0.0 V <0.8 V: >0.0 V
The difference in the voltages between input and output signals is due to the losses in the cab le .
Figure 11.6.4-1. Single ended transmitters and receivers
Page 70

62 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
11.6.4.2 Differential drivers/receivers
Typical differential driver and receiver circuits used by the model ST12400ND are sho wn in Figure 11.6.4-2. The
drive has no provisions for terminator circuits on differential I/O drives.
Differential signals
All differential interface signals consist of two lines denoted +SIGNAL and -SIGNAL. A signal is true when +SIGNAL is more positive than -SIGNAL, and a signal is false when -SIGNAL is more positive than +SIGNAL. All
assigned signals shall be terminated at each end of the cable as shown in Figure 11.6.4-2. Drive user, Systems
integrator or Host equipment manufacturer must provide some external means of termination.
Output characteristics
Each signal driven by differential interf ace driv es shall hav e the f ollo wing output characteristics when measured
at the disc drive SCSI connector:
Low-level output voltage* = 2.0 V maximum at Low-level output current = 55 milliamps.
High-level output voltage* = 3.0 V minimum at High-level output current = -55 milliamps
Differential voltage = 1.0 V minimum with common-mode voltage ranges from -7 V dc to +12 V dc.
*These voltages shall be measured between the output terminal and the SCSI device’s logic ground
reference.
The output characteristics shall additionally conform to EIA RS-485-1983.
Input characteristics
Each signal received by diff erential interface drives shall ha ve the follo wing input characteristics when measured
at the disc drive SCSI connector:
Input current on either input = +2.0 milliamps maximum (includes both receivers and passive drivers).
This requirement shall be met with the input voltage varying between -7 V dc and +12 V dc, with po wer on or off ,
and with the hysteresis equaling 35 mv, minimum.
The input characteristics shall additionally conform to EIA RS-485-1983.
Page 71

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 63
_________________________________________________________________________________________
+5V
5.6K
Transmit/Receive
Enable (1)
DIFFSENS (6) Disable
Transmit or
Receive
Signal (2)
SCSI Device at Beginning of I/O Cable
(usually Host Adaptor/Initiator)
+5V
TE
LSI
XCVR
RE
R2
Term
(5)
Power
330
(4)
Ohm
Twisted or Flat
(3)
1
1
+5V
Transmit/Receive
Enable (1)
DIFFSENS (6)
Transmit or
Receive
Signal (2)
5.6K
150
Ohm
330
Ohm
(7)
+5V
TE
LSI
XCVR
RE
Disable
R2
1
1
Cable Pair
Term
Power
330
Ohm
150
Ohm
330
Ohm
(5)
(4)
SCSI Device at End of I/O Cable
(Drive/Target)
(7)
Notes.
[1] Positive Logic Enables Transmitter (+5 V = Asserted)
Negative Logic Enables Receivers (0 V = Asserted)
[2] Negative Logic Signal (0 V = Asserted)
[3] Total interface cable length should not e xceed value given in paragraph 11.6.2.2 from first SCSI device at
beginning to end of daisy-chain. See section 11.6.4.2 for signal characteristics.
[4] I/O Line terminators. If SCSI device is a Seagate disc drive, terminators and a place to plug them in must
be provided external to the drive by user , systems integrator or host equipment manuf acturer where needed.
The drive has no terminators and there are no provisions on the drive for terminator installation.
[5] Arrangements for connecting terminator power to the terminators must be made by the systems designer .
As a help, drive +5 V power is made available on SCSI bus pin 26 for powering external terminators if the
drive option select header jumper TP (Figure 10.1-1) is installed in rightmost position “TP”.
[6] SCSI I/O line (pin 21) disables I/O circuits if single-ended cable plugged in or cable plugged in upside
down.
[7] SCSI I/O cable ground. See Table 11.6.3-1b.
Figure 11.6.4-2. Typical differential I/O line transmitter/receiver and external terminators
Page 72

64 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. C
_________________________________________________________________________________________
11.6.4.3 Terminator requirements
Internal disc drive I/O termination (provided only in single ended I/O model ST12400N drives) consists of active
circuits in an LSI module that is permanently mounted on the PCB. All single initiator/single target (nondaisychain) applications require that the Initiator and disc drive be terminated. Daisy-chain applications require that
only the units at each end of the daisy-chain be terminated. All other peripherals on the chain must not be
terminated. (See Figure 11.6.3-2).
Note. Remove drive terminator enabling jumper TE (see Figure 10.1-1) where terminators are not required.
Removal of terminator power source selection jumper TP (see Figure 10.1-1) does not disconnect the
terminator resistors from the circuit.
It is highly recommended that ANSI SCSI-2 Standard's Alternative 2 termination (active termination) be used for
single-ended ST12400N and ST12400NC applications, especially if the bus will be operated at transfer rates
above 5 Mbytes/sec. The ST12400N provides on-board activ e termination that can be disabled b y rmoval of the
enable jumper TE (see Figure 10.1-1).
Note. Active terminators are highly recommended for use in the daisy-chain as described above. Active and
passive terminators should not be mixed on the same SCSI bus.
Differential I/O ST12400ND does not have terminators on the PCB. The user, systems integrator or host equipment manufacturer must provide a terminator arrangement external to the drive. Model ST12400NC does not
have terminators on the drive PCB and there is no provision f or terminator power in the 80 pin I/O connector.
11.6.4.4 Terminator power
The drive may be configured to accept terminator power from pin 26 of the SCSI Bus, to supply power to the SCSI
bus or to provide terminator power for internal termination circuits from the drive power connector. See Figures
10.1-1 and 11.6-1. The drive can pro vide power both to its own terminators and to the SCSI Bus terminator power
line (Pin 26) if both “TP” jumpers are on (models ST12400N/ND only).
SCSI devices providing terminator power (TERMPWR)* shall have the following characteristics:
V TERM = 4.50 V to 5.25 V
800 mA min source drive capability
1.0 A maximum
*See Figure 10.1-1 for configuration details.
Page 73

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 65
_________________________________________________________________________________________
11.7 Disc drive SCSI timing
Table 11.7-1. Disc drive SCSI timing
Waveform Waveform
Description Symbol [1] Table [1] T ypical
Target Select Time (no Arbitration) T00 N/A <1 µs
Target Select Time (with Arbitration) T01 4.5-1,2 2.34 µs
Target Select to Command T02 4.5-1 3.82 µs
Target Select to MSG Out T03 4.5-2 1.51 µs
Identify MSG to Command T04 4.5-3 3.56 µs
Command to Status T05 4.5-5 Command Dependent
Command to Data (para. In) T06 4.5-9 Command Dependent
Command to Data (para. Out) T07 4.5-10 Command Dependent
Command to Data (Write to Data Buffer) T08 4.5-10 Command Dependent
Command to Disconnect MSG T09 4.5-6 Command Dependent
Disconnect MSG to Bus Free T10 4.5-6,14 0.68 µs
Disconnect to Arbitration (for Reselect) T11 4.5-6 Command Dependent
This measures disconnected CMD overhead.
Target win Arbitration(for Reselect) T12 4.5-7
Arbitration to Reselect T1 3 4.5-7
Reselect to Identify MSG In T14 4.5-7
Reselect Identify MSG to Status T15 4.5-8 Command Dependent
Reselect Identify MSG to Data (media) T16 4.5-11 Command Dependent
Data to Status T17 4.5-15 Command Dependent
Status to Command Complete MSG T18 4.5-5,8,15
Command Complete MSG to Bus Free T19 4.5-5,8,15
Data to Save Data Pointer MSG T20 4.5-14
Save Data Pointer MSG to Disconnect MSG T 21 4.5-14
Command Byte Transfer T22 4.5-4
Next Command Byte Access 4.5-4
Next CDB Byte Access (Byte 2 of 6) T23.6.2 4.5-4 0.54 µs
Next CDB Byte Access (Byte 3 of 6) T23.6.3 4.5-4 0.11 µs
Next CDB Byte Access (Byte 4 of 6) T23.6.4 4.5-4 0.12 µs
Next CDB Byte Access (Byte 5 of 6) T23.6.5 4.5-4 0.13 µs
Next CDB Byte Access (Byte 6 of 6) T23.6.6 4.5-4 0.11 µs
Page 74

66 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
continued from previous page
Wavef orm Waveform
Description Symbol [1] Table [1] T ypical
Asynchronous Data Transfer Characteristics: (continued)
Next CDB Byte Access (Byte 2 of 10) T23.10.2 4.5-4 0.51 µs
Next CDB Byte Access (Byte 3 of 10) T23.10.3 4.5-4 0.13 µs
Next CDB Byte Access (Byte 4 of 10) T23.10.4 4.5-4 0.11 µs
Next CDB Byte Access (Byte 5 of 10) T23.10.5 4.5-4 0.12 µs
Next CDB Byte Access (Byte 6 of 10) T23.10.6 4.5-4 0.12 µs
Next CDB Byte Access (Byte 7 of 10) T23.10.7 4.5-4 0.11 µs
Next CDB Byte Access (Byte 8 of 10) T23.10.8 4.5-4 0.12 µs
Next CDB Byte Access (Byte 9 of 10) T23.10.9 4.5-4 0.11 µs
Next CDB Byte Access (Byte 10 of 10) T23.10.10 4.5-4 0.13 µs
Data In Byte Transfer (parameter) T24 4.5-12
Data Out Byte Transfer (parameter) T25 4.5-13
Next Data In Byte Access (parameter) T26 4.5-12 0.10 µs
Next Data Out Byte Access (parameter) T27 4.5-13 0.12 µs
Data In Byte Transfer (media) [2] T28 4.5-12 0.04 µs
Data Out Byte Transfer (media) [2] T29 4.5-13 0.04 µs
Next Data In Byte access (media [2] T30 4.5-12 0.12 µs
Next Data Out Byte access (media [2] T31 4.5-13 0.10 µs
MSG IN Byte Transfer T32 4.5-5,7
4.5-8,14,15
MSG OUT Byte Transfer T33 4.5-2
STATUS Byte Transfer T34 4.5-5,8
4.5-15
Synchronous Data Transfer Characteristics:
Request Signal Transfer Period [3] --various
Notes.
[1] See SCSI-2 Interface Manual P/N 77738479 (called Volume II), section 4.5
[2] Maximum SCSI asynchronous interface transfer rate is given in section 5.3.
[3] Synchronous Transfer Period is determined by negotiations between an Initiator and a Drive. The Drive is
capable of setting periods as given in section 11.5. See also sections 3.1.5.2 and 3.5.3.2 of the SCSI-2
Interface Product Manual (P/N 77738479) for a description of synchronous data transfer operation.
General timing diagrams for SCSI interface operation are shown in the SCSI-2/SCSI-3 Interface Product Manual
P/N 77738479, Section 4.5. The specific timing values that apply to this drive are listed in T a b le 11.7-1.
Page 75

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B 67
_________________________________________________________________________________________
12.0 Options
All options are incorporated or packaged at the manufacturing facility.
12.1 Front panel
The normal front panel available is black plastic. Other panel colors may be special ordered. Each panel has a
single rectangular green LED indicator lens which, when glowing, indicates the drive is selected.
12.2 Single unit shipping pack
The drive is normally shipped in bulk packaging to provide maximum protection against transit damage. Units
shipped individually require additional protection as provided by the single unit shipping pack. Users planning
single unit distribution should specify this option.
Page 76

68 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. B
_________________________________________________________________________________________
13.0 Accessories
All accessories are designed for implementation by the customer .
13.1 Front panel kit
Same as 12.1 but includes all mounting hardware to support field installation.
13.2 Installation manual
This manual (P/N 77738480) provides basic information on the care and handling of Winchester disc peripherals
in general. Some information needed when installing the drive is included to assist individuals not familiar with the
product. It also includes basic information to assist in obtaining service for the drive.
Page 77

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E 69
_________________________________________________________________________________________
14.0 Seagate Technical support services
Seagate Technology provides technical support literature and diagnostic utilities to Authorized Distributors. Please
contact your dealer for technical support and installation troubleshooting. Product Technical Support is available
for all Seagate products by calling the SeaFAXTM, SeaFONETM, SeaTDDTM or SeaBOARDTM services. These are
toll calls.
SeaFAX number: United States 408/438-2620 England 44-62-847-7080
You can use a touch-tone telephone to access Seagate’s automated FAX delivery system and select technical
support information by return FAX. This service is available 24 hours a day, 7 days a week.
Seagate Technical Support FAX: 408/438-8137
You can FAX specific questions or comments to Seagate technical support specialists 24 hours daily. Responses
are FAXed between 8:00 a.m. and 5:00 p.m. (Pacific time), Monday through Friday.
SeaFone telephone number: 408/438-8222
The enhanced phone system provides recorded technical information on selected Seagate products while you are
on hold. Technical support specialists are available to answer questions from 8:00 AM to 5:00 PM PST, Monday
through Friday. Recordings are accessible 24 hours a day, 7 days a week.
SeaTDD telephone number: 408/438-5382
TDD is a Telecommunication Device for the Deaf where two people can communicate using a keyboard that is
connected to the phone line. A TDD device is required to access this service. This service is available from 8:00
AM to 5:00 PM PST, Monday through Friday.
SeaBOARD service:
The Seagate Technical Support Bulletin Board System (BBS) is available 24 hours a day, 7 days a week. A modem
is required to access this service. Model required. (300–9600 baud, 8-N-1). This is a toll call.
With this service you can access:
• Specifications and jumper configurations for all Seagate products.
• Reprints of Seagate documentation.
• A directory of information and helpful utilities that you can download to your own computer.
BBS Modem
Location Number
USA, Mexico, Latin America 408/438-8771
England 44-62-847-8011
France 33-1-40-67-1034
Germany 49-89-140-9331
Singapore 65-292-6973
Australia 61-2-756-2359
Korea 82-2-556-7294
Thailand 662-531-8111
CompuServe:
Online technical support for Seagate Products is available on CompuServe. Type "Go Seagate" to access our
technical support forum.
Page 78

70 Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E
_________________________________________________________________________________________
Seagate Peripheral Family
Listed below are some of the SEAGATE Peripheral family members. For specific information on each member,
refer to the appropriate documents.
Model Model Product Unformatted
Name Number Manual Interface Capacity (MB)
HAWK 1 Family
ST11200 ST11200N/ND/NC 77738476(I) SCSI-2 1248*
ST1980N/ND/NC 77738476(I) SCSI-2 1021*
ST1950N 77738476(I) SCSI-2 953
ST1830N 77738476(I) SCSI-2 834
HAWK 2 Family
ST12400 ST12400N/ND/NC 77767450(I) SCSI-2 2537*
ST11900N/ND/NC 77767450(I) SCSI-2 2003*
ST12400 Wide ST12400W/WD/WC 77767457(I) SCSI-2 2537*
HAWK 1LP Family
ST31200 ST31200N/ND/NC 77767452(I) SCSI-2 1258.8*
ST3620N/NC 77767452(I) SCSI-2 651.8*
ST31200 Wide ST31200W/WD/WC 77767461(I) SCSI-2 1258.8*
ST3620W 77767461(I) SCSI-2
HAWK 2LP Family
ST32430 ST32430N/ND 77767471(I) SCSI-2 2.59 GB*
ST31230N/ND 77767471(I) SCSI-2 1.28 GB*
ST32430 Wide ST32430W/WD/WC/DC 77767480(I) SCSI-2 2.59 GB*
ST31230W/WD/WC/DC 77767480(I) SCSI-2 1.28 GB*
HAWK XL Family
ST32151 ST32151N 77767489(I) SCSI-2
ST31051N 77767489(I) SCSI-2
HAWK 4 Family
ST15230 ST15230N/ND 77767472(I) SCSI-2 5170 MB*
ST15230 Wide ST15230W/WD/WC/DC 77767479(I) SCSI-2 5170 MB*
SCSI INTERFACE
SCSI Interface Manual, Vol. 2 77765466 (II)** SCSI-2 N/A**
SCSI Interface Manual; Vol. 2; Ver. 2 77738479 (II)** SCSI-2/SCSI-3 N/A**
* Product Manual covers both Single-Ended and Differential Interfaces.
** Interface Manual for several different Product Manuals (Volume 2 of 2 Volume set).
Page 79

Product Manual - Hawk 2 Family SCSI-2 (Volume 1), Rev. E 71
_________________________________________________________________________________________
continued from previous page
Model Model Product Unformatted
Name Number Manual Interface Capacity
(MB)
ST3600 ST3500N 77738477(I) SCSI-2 502
ST3600N 77738477(I) SCSI-2 617
ST3610N/ND/NC 77738495(I) SCSI-2 635*
ST3600A 77738485 AT (IDE) 617
ST1480 ST1400N 77765458(I) SCSI-2 383
Family ST1401N 77765458(I) SCSI-2 390
ST1480N 77765458(I) SCSI-2 492
ST1481N 77765458(I) SCSI-2 492
ST1581N 77738471(I) SCSI-2 610
ST1480A 77738463 AT (IDE) 490
ST1400A 77738463 AT (IDE) 381
ST1401A 77738463 AT (IDE) 395
WREN 5 ST4442E 77765300 ESDI 442 (15 Hd, 1412 Cyl)
Family ST4383E 77765300 ESDI 383 (13 Hd, 1412 Cyl)
ST4384E 77765300 ESDI 383 (15 Hd, 1224 Cyl)
ST4702N 77765336 SCSI 702
ST4385ND
ST4702ND 77765366 SCSI 385, 702 (Dif. I/O)*
ST4385N 77765378 SCSI 385 (15 Hd, 791 Cyl)
WREN 6 ST4766N/ND 77765353 SCSI 766 (Dif. I/O)*
Family ST4766E 77765358 ESDI 766, 383
WREN 6 HH ST2383N/502N 77765414 SCSI-1 383, 502
Family ST2274A/383A 77765393 AT (IDE) 274, 383
ST2182E/383E 77765369 ESDI 182, 383
WREN 7 ST41200N/ND 77765417 SCSI 1200*
Family ST41200N/ND 77765374 SCSI-2 1200*
WREN 8 ST41650N 77765470 (I) SCSI-2 1650
Family ST41651N/ND 77738474 (I) FAST SCSI-2 1650
WREN 9 ST42100N 77738475 (I) FAST SCSI-2 2200
Family
WRENRNR-2 ST4767N 77765445 (I) SCSI-2 767 (Fast Access)
Family ST4767E/769E 77765457 ESDI 767
* Product Manual covers both Single-Ended and Differential Interfaces.
Page 80

Page 81

Page 82

Seagate Technology, Inc.
920 Disc Drive, Scotts Valley, California 95066-4544, USA
Publication Number: 77767450, Rev. E (3/95) Printed in USA
 Loading...
Loading...