

Page 1
EIO0000000321 05/2010
SoMachine
CANopen 管理功能
CAA CiA 405 库指南
05/2010
www.schneider-electric.com
EIO0000000321.01
Page 2

本文档中提供的信息包含有关此处所涉及产品的性能的一般说明和 / 或技术特性。
本文档并非用于 (也不代替)确定这些产品针对特定用户应用的适用性或可靠性。
任何此类用户或集成者都有责任就相关特定应用或使用方面对产品执行适当且完整
的风险分析、评估和测试。 Schneider Electric 或是其任何附属机构或子公司对于误
用此处包含的信息而产生的后果概不负责。如果您有关于改进或更正此出版物的任
何建议,或者从中发现错误,请通知我们。
未经 Schneider Electric 明确书面许可,不得以任何形式、通过任何电子或机械手段
(包括影印)复制本文档的任何部分。
在安装和使用本产品时,必须遵守国家、地区和当地的所有相关的安全法规。出于
安全方面的考虑和为了帮助确保符合归档的系统数据,只允许制造商对各个组件进
行维修。
当设备用于具有技术安全要求的应用时,必须遵守有关的使用说明。
如果在我们的硬件产品上不正确地使用 Schneider Electric 软件或认可的软件,则可
能导致人身伤害、损害或不正确的操作结果。
不遵守此信息可能导致人身伤害或设备损坏。
© 2010 Schneider Electric。 保留所有权利。
2 EIO0000000321 05/2010
Page 3
目录
安全信息 . . . . . . . . . . . . . . . . . . . . . . 5
关于本书 . . . . . . . . . . . . . . . . . . . . . . 7
部分 I 简介 . . . . . . . . . . . . . . . . . . . . . .
章 1 CANopen 协议简介 . . . . . . . . . . . . . . . . .
简介 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
NMT 协议. . . . . . . . . . . . . . . . . . . . . . . . . . . .
PDO 协议. . . . . . . . . . . . . . . . . . . . . . . . . . . .
SDO 协议. . . . . . . . . . . . . . . . . . . . . . . . . . . .
EMCY 协议 . . . . . . . . . . . . . . . . . . . . . . . . . . .
SYNC 协议 . . . . . . . . . . . . . . . . . . . . . . . . . . .
错误控制协议 . . . . . . . . . . . . . . . . . . . . . . . . . . 18
章 2 CiA405 简介 . . . . . . . . . . . . . . . . . . . .
简介 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
部分 II 功能块描述 . . . . . . . . . . . . . . . . . . .
章 3 功能块通用 I/O 和行为 . . . . . . . . . . . . . . . .
3.1
通用 I/O 和行为 . . . . . . . . . . . . . . . . . . . . . . . . .
通用 I/O 描述 . . . . . . . . . . . . . . . . . . . . . . . . . .
CANopen 内核检测到的错误代码 . . . . . . . . . . . . . . . . .
功能块执行图 . . . . . . . . . . . . . . . . . . . . . . . . . . 29
章 4 网络管理功能块 . . . . . . . . . . . . . . . . . . .
4.1
CIA405 .NMT :设备 NMT 状态管理. . . . . . . . . . . . . . . .
设备 NMT 状态管理 . . . . . . . . . . . . . . . . . . . . . . .
4.2
CIA405 .RECV_EMCY :EMCY 消息扫描. . . . . . . . . . . . . .
EMCY 消息扫描 . . . . . . . . . . . . . . . . . . . . . . . . .
4.3
CIA405 .RECV_EMCY_DEV :获取设备 EMCY 消息 . . . . . . . . .
获取设备 EMCY 消息. . . . . . . . . . . . . . . . . . . . . . .
章 5 自有节点 ID 功能块 . . . . . . . . . . . . . . . . .
5.1
CIA405 .GET_LOCAL_NODE_ID :获取控制器 CANopen 节点 ID . . .
获取控制器 CANopen 节点 ID . . . . . . . . . . . . . . . . . . .
9
11
13
14
15
16
17
21
23
25
25
26
28
31
32
32
35
35
36
36
39
39
39
EIO0000000321 05/2010 3
Page 4

章 6 查询状态功能块 . . . . . . . . . . . . . . . . . . .
6.1
CIA405.GET_CANOPEN_KERNEL_STATE :获取 CANopen 内核状态
获取 CANopen 内核状态 . . . . . . . . . . . . . . . . . . . .
6.2
CIA405.GET_STATE :获取 CANopen 设备状态 . . . . . . . . .
获取 CANopen 设备状态 . . . . . . . . . . . . . . . . . . . .
章 7SDO 访问功能块 . . . . . . . . . . . . . . . . . .
7.1
CIA405.SDO_READ :读取任意大小的 CANopen 对象 . . . . . . .
读取任意大小的 CANopen 对象 . . . . . . . . . . . . . . . . .
7.2
CIA405.SDO_READ4 :读取最多 4 个字节的 CANopen 对象 . . . .
读取最多 4 个字节的 CANopen 对象 . . . . . . . . . . . . . . .
7.3
CIA405.SDO_WRITE :写入任意大小的 CANopen 对象 . . . . . .
写入任意大小的 CANopen 对象 . . . . . . . . . . . . . . . . .
7.4
CIA405.SDO_WRITE4 :写入最多 4 个字节的 CANopen 对象 . . .
写入最多 4 个字节的 CANopen 对象 . . . . . . . . . . . . . . .
术语表 . . . . . . . . . . . . . . . . . . . . . . . .
索引 . . . . . . . . . . . . . . . . . . . . . . . .
41
42
42
43
43
45
46
46
49
49
52
52
57
57
59
63
4 EIO0000000321 05/2010
Page 5
重要信息
声明
安全信息
§
在尝试安装、操作或维护设备之前,请仔细阅读下述说明并通过查看来熟悉设备。
下述特别信息可能会在本文其他地方或设备上出现,提示用户潜在的危险,或者提
醒注意有关阐明或简化某一过程的信息。
EIO0000000321 05/2010 5
Page 6
请注意
电气设备的安装、操作、维修和维护工作仅限于合格人员执行。对于使用本资料所
引发的任何后果, Schneider Electric 概不负责。
专业人员是指掌握与电气设备的制造和操作相关的技能和知识的人员,他们经过安
全培训能够发现和避免相关的危险。
6 EIO0000000321 05/2010
Page 7
概览
文档范围
有效性说明
关于产品的资讯
关于本书
本文档介绍用于从控制器应用程序管理和监控 CANopen 网络和设备的 SoMachine
CAA CiA 405 库功能块。
本文档已随 SoMachine V2.0 的发布进行了更新。
警告
意外的设备操作
z 仅使用 Schneider Electric 认可的可与本设备配合使用的软件。
z 每次更改物理硬件配置后,请更新应用程序。
如果不遵守这些说明,将会导致死亡、严重伤害或设备损坏。
EIO0000000321 05/2010 7
Page 8
用户意见
警告
失去控制
z 任何控制方案的设计者都必须考虑到控制路径可能出现故障的情况,并为某些
关键控制功能提供一种方法,使其在出现路径故障时,以及出现路径故障后恢
复至安全状态。紧急停止和越程停止、断电和重启都属于关键控制功能。
z 对于关键控制功能,必须提供单独或冗余的控制路径。
z 系统控制路径可包括通讯链路。必须对暗含的无法预料的传输延迟或链接失效
问题加以考虑。
z 遵守所有事故预防规定和当地的安全指南。
z 为了保证正确运行,在投入使用前,必须对设备的每次执行情况分别进行全面
测试。
如果不遵守这些说明,将会导致死亡、严重伤害或设备损坏。
1
有关详细信息,请参阅 NEMA ICS 1.1 (最新版)中的 “ 安全指导原则 - 固态控制
器的应用、安装和维护 ” 以及 NEMA ICS 7.1 (最新版)中的 “ 结构安全标准及可调
速驱动系统的选择、安装与操作指南 ” 或您特定地区的类似规定。
欢迎对本书提出意见。您可以给我们发邮件,我们的邮件地址是
techcomm@schneider-electric.com。
1
8 EIO0000000321 05/2010
Page 9
概述
简介
EIO0000000321 05/2010
简介
I
本部分概述 CANopen 中使用的各种协议,并介绍 IEC 61131-3 可编程控制器
(CiA405) 的 CANopen 接口和设备配置文件。
注意: 本简介的部分内容摘录并改编自 CAN in Automation (CiA) 网站 (www.can-
cia.org)。 CiA? 和 CANopen® 是 CAN in Automation e.V 的欧盟注册商标。
关于 CiA:CAN in Automation (CiA) 是控制器区域网络 (CAN) 用户和制造商联合组
成的国际性组织。该组织是一家非盈利性协会,提供 CAN(国际标准为 ISO 11898
系列)相关的技术、产品和市场信息。其目标是提升 CAN 的形象,并为 CAN 技术
的未来发展指明方向。该组织的一项重要工作是开发和维护 CANopen 规范,以及
为所有其他基于 CAN 的国际标准化高层次协议提供支持。
本部分包含了哪些内容?
本部分包括以下各章:
章章节标题页
1 CANopen 协议简介 11
2 CiA405 简介 21
EIO0000000321 05/2010 9
Page 10

简介
10
EIO0000000321 05/2010
Page 11
CANopen 协议
EIO0000000321 05/2010
本章包含了哪些内容?
CANopen 协议简介
1
本章包含了以下主题:
主题 页
简介 12
NMT 协议 13
PDO 协议 14
SDO 协议 15
EMCY 协议 16
SYNC 协议 17
错误控制协议 18
EIO0000000321 05/2010 11
Page 12

CANopen 协议
简介
CANopen 协议
设备对象字典
CANopen 协议为实时数据 (过程数据对象 (PDO))、配置数据 (服务数据对象
(SDO))和网络管理数据 (启动消息、 NMT 消息和错误控制消息)以及其他功能
(时间标记、 SYNC 消息、紧急消息)提供标准化的通讯对象 (COB)。所有通讯对
象都可通过设备对象字典中的 CAN 网络进行访问。这些对象可通过 16 位索引进行
寻址。对于数组和记录对象,还存在另一个 8 位子索引。通讯对象在 CANopen 网
络上由专用且唯一的标识符 (COB ID) 来标识。
CANopen 设备的对象字典条目在电子数据表 (EDS) 文件中进行介绍。CANopen 主
站和从站参数可以在 SoMachine CANopen 配置程序中进行调整。有关 CANopen
配置的详细信息,请参阅在线帮助 CoDeSys 部分的 “ 编辑器 / 设备编辑器 /CANbus
配置编辑器 ” 一章。
12
EIO0000000321 05/2010
Page 13
NMT 协议
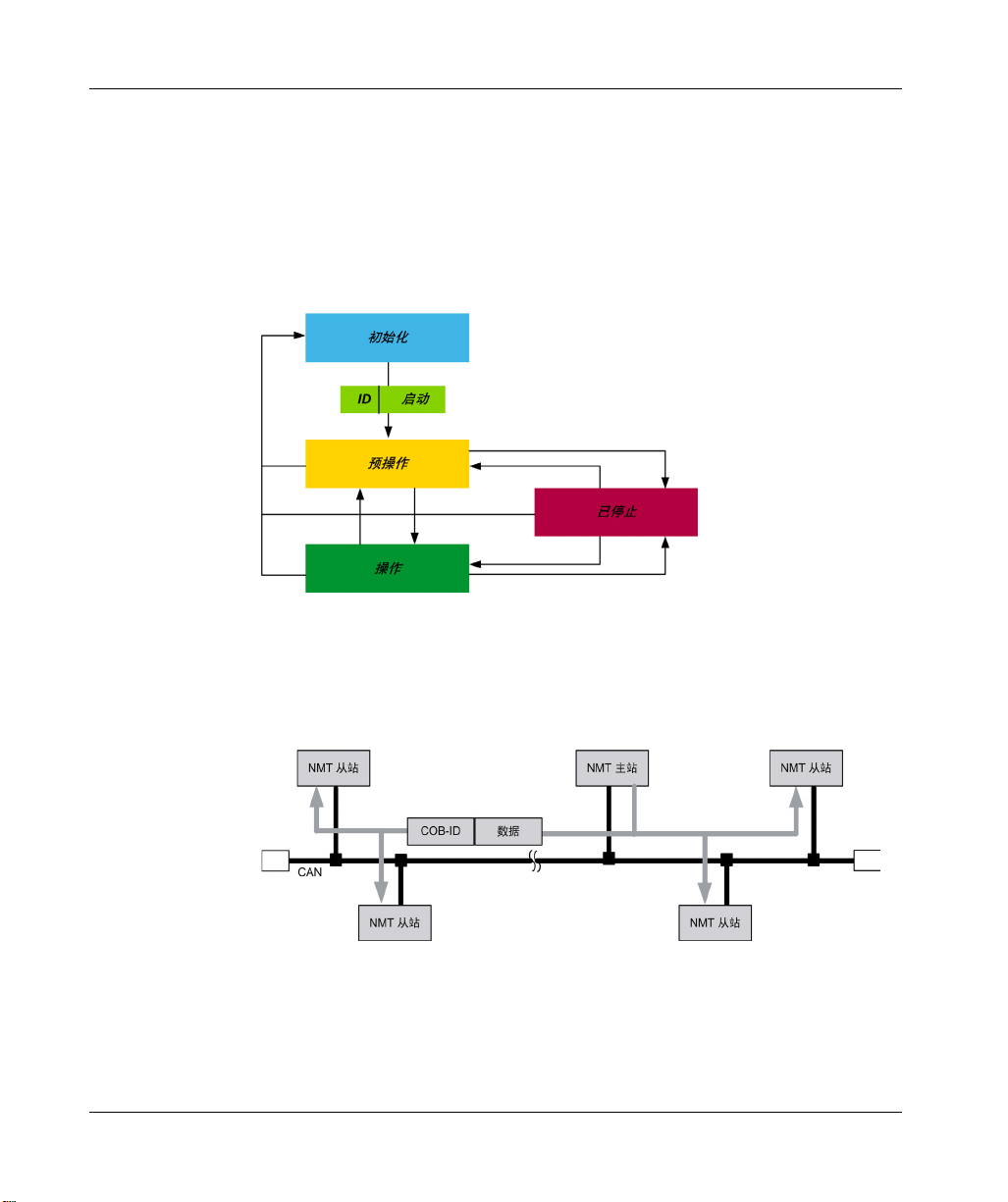
网络管理 (NMT) 协议
网络管理 (NMT) 协议用于控制 CANopen NMT 从站设备的网络行为。单个专用网络
组成部分或所有网络组成部分均可以通过其 NMT 从站状态机中的 NMT 协议进行交
换。
下图显示的是 CANopen NMT 从站状态机。
基于主站 - 从站关系的 NMT 服务
所有 CANopen 设备都会计算传入的 NMT 命令(NMT 消息中的命令说明符 (CS) 代
码)。只有具有 NMT 主站功能的 CANopen 设备才能传输 NMT 消息。在 CANopen
网络中,只有一个 NMT 主站处于活动状态。
CANopen 协议
EIO0000000321 05/2010 13
Page 14
CANopen 协议
PDO 协议
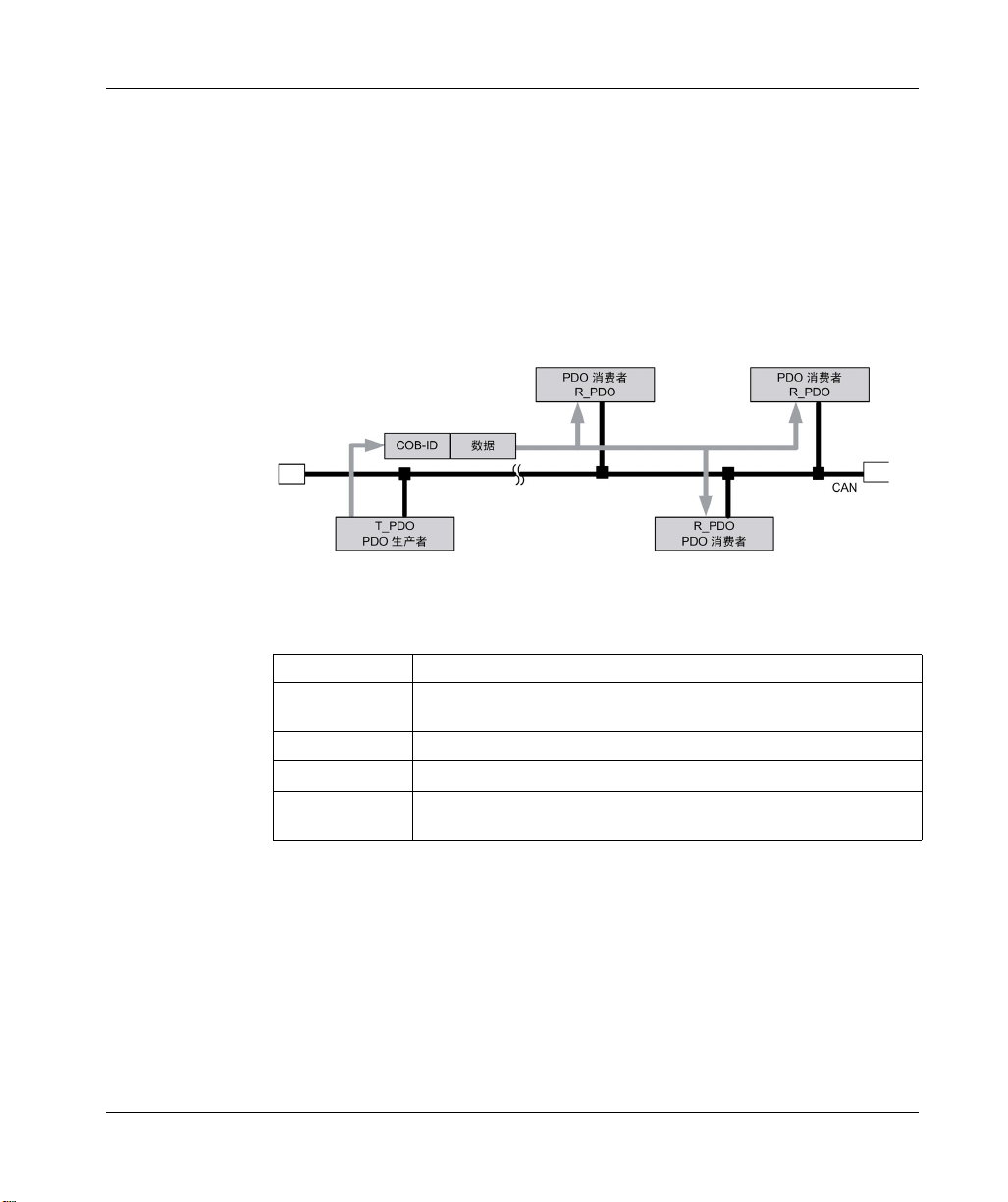
过程数据对象 (PDO) 协议
过程数据对象 (PDO) 是通过广播传输的高优先级短 (最多 8 个字节) CAN 消息。
因此, PDO 适用于实时数据 (如驱动器或 I/O 模块的控制和状态信息、传感器提
供的测量值等)的传输。
PDO 以未确认方式进行传输。这表示即使有特定的网络组成部分接收到信息,也不
会对接收进行确认。
下图显示了从生产者 (传输 PDO)到消费者 (接收 PDO)的 PDO 传输。
PDO 传输的触发事件
下面定义了 PDO 传输的触发事件。
触发事件 定义
事件或定时器驱动 设备内部事件可触发 PDO 传输 (例如,值更改、温度值超出特定限制、
事件定时器已过时等)
远程请求 收到远程传输请求 (RTR),请求进行 PDO 传输。
循环同步 PDO 的传输与 SYNC 消息的接收紧密相关。
非循环同步 定义的设备特定事件可触发 PDO,而 PDO 在接收到下一个 SYNC 消息
时传输。
14
EIO0000000321 05/2010
Page 15
SDO 协议
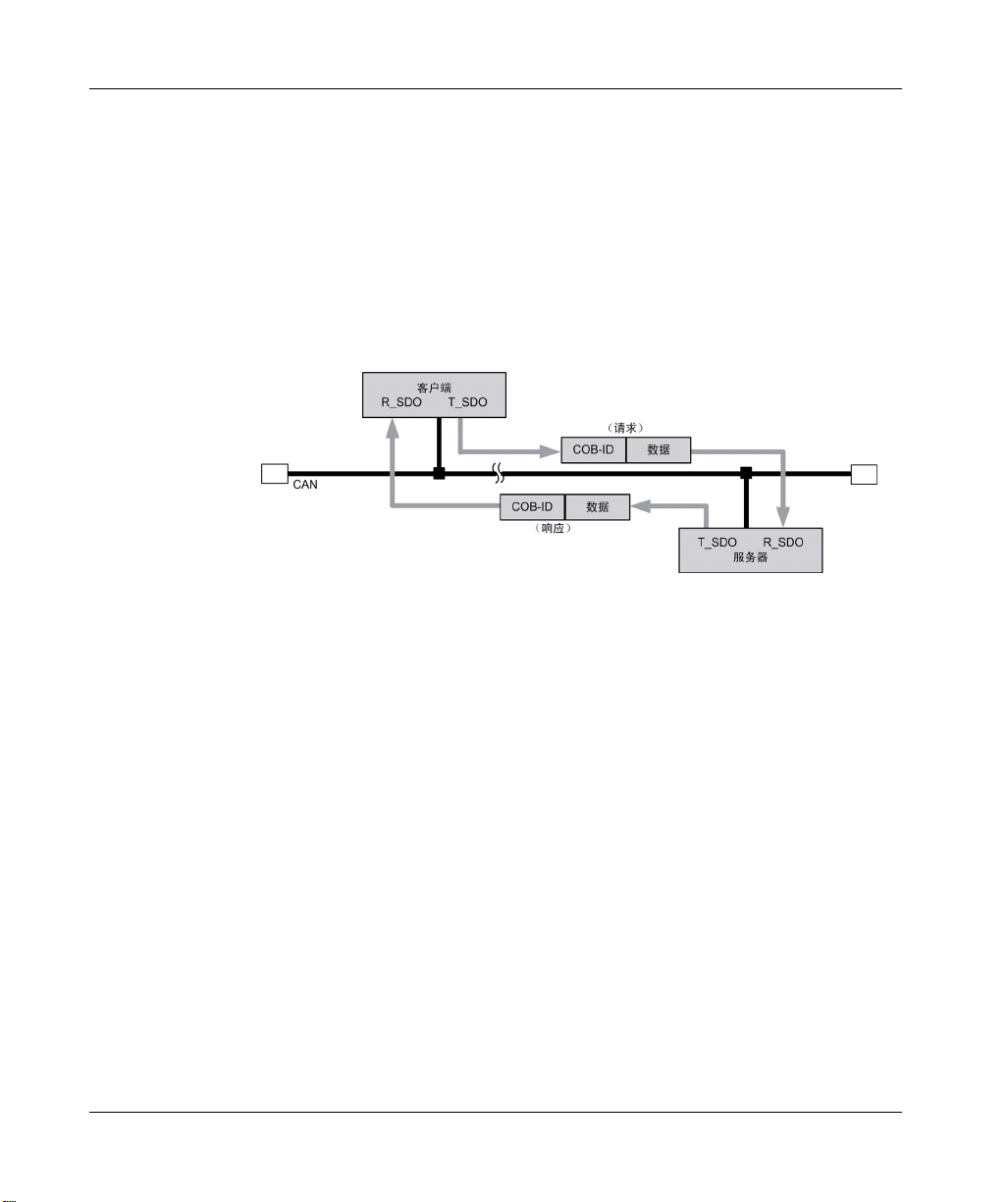
服务数据对象 (SDO) 协议
通过服务数据对象 (SDO) 可以访问 CANopen 对象字典 (OD) 的任何条目。SDO 将
在两个设备之间建立 P2P 通讯通道。此外,通过 SDO 协议还可采用分段方式传输
任何数据量。因此, SDO 协议主要用于与配置数据通讯。
通过分别使用客户端通道配置相关 SDO 服务器,可建立两个设备之间的 SDO 连
接。 SDO 传输是一项确认服务。
下图显示的带有请求和响应的 SDO 交换。
CANopen 协议
EIO0000000321 05/2010 15
Page 16
CANopen 协议
EMCY 协议
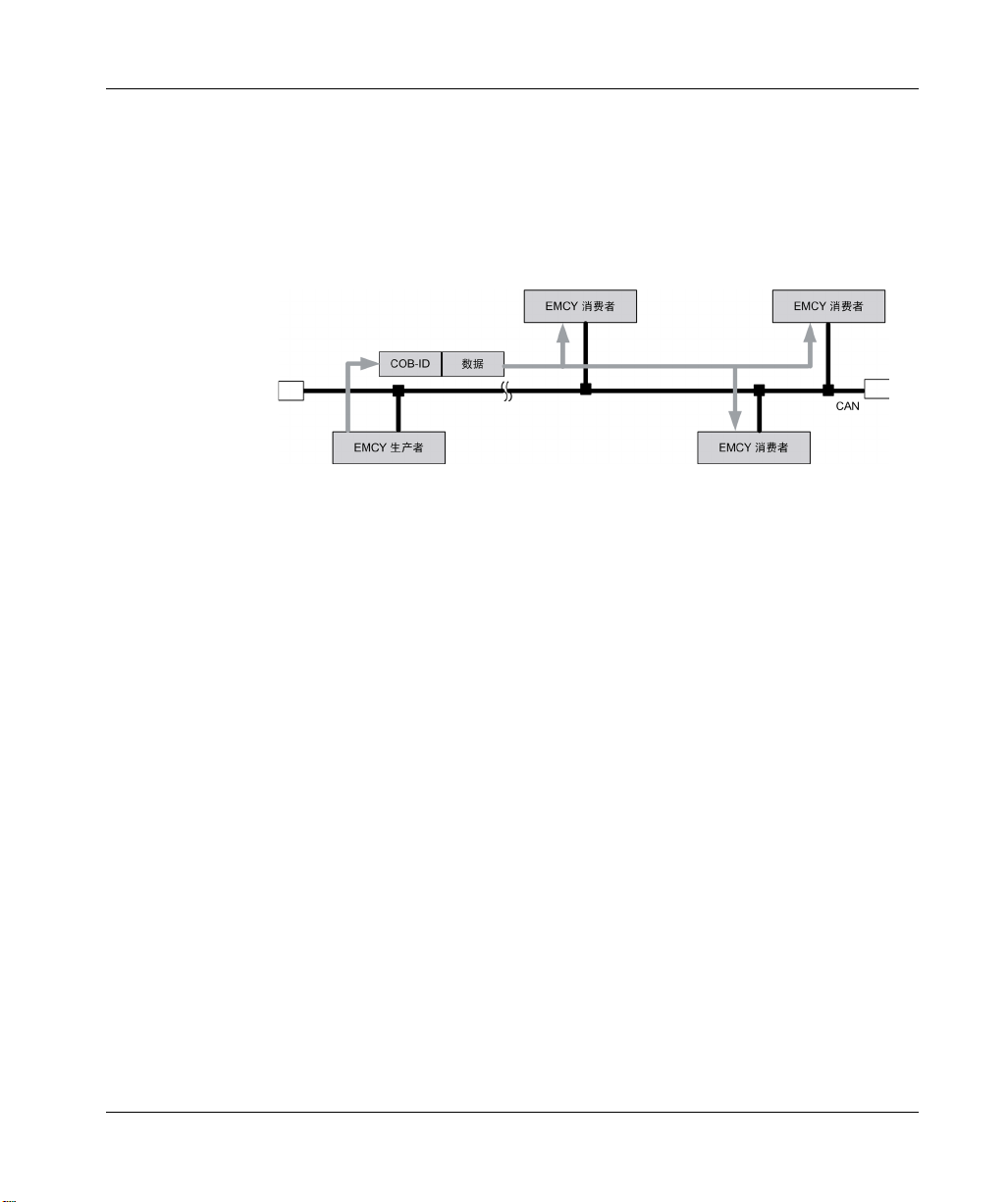
紧急 (EMCY) 协议
EMCY 消息
紧急 (EMCY) 对象可以让设备指示检测到设备内部错误。接收到此信号后,其他网
络组成部分可以评估接收到的信息,并启动相应的特定于制造商的对策。
下图显示的是通过 EMCY 对象检测到的错误消息。
从其他 CANopen 设备接收到的 EMCY 消息存储在 EMCY 存储表中。对于每个
EMCY 生产者,如果没有收到 EMCY 消息,或者只要最新的 EMCY 消息是
无错误
消息,则 EMCY 消费者会认为 EMCY 生产者未检测到内部错误。
16
EIO0000000321 05/2010
Page 17
SYNC 协议
同步 (SYNC) 协议
SYNC 行为的控制变量
CANopen 协议
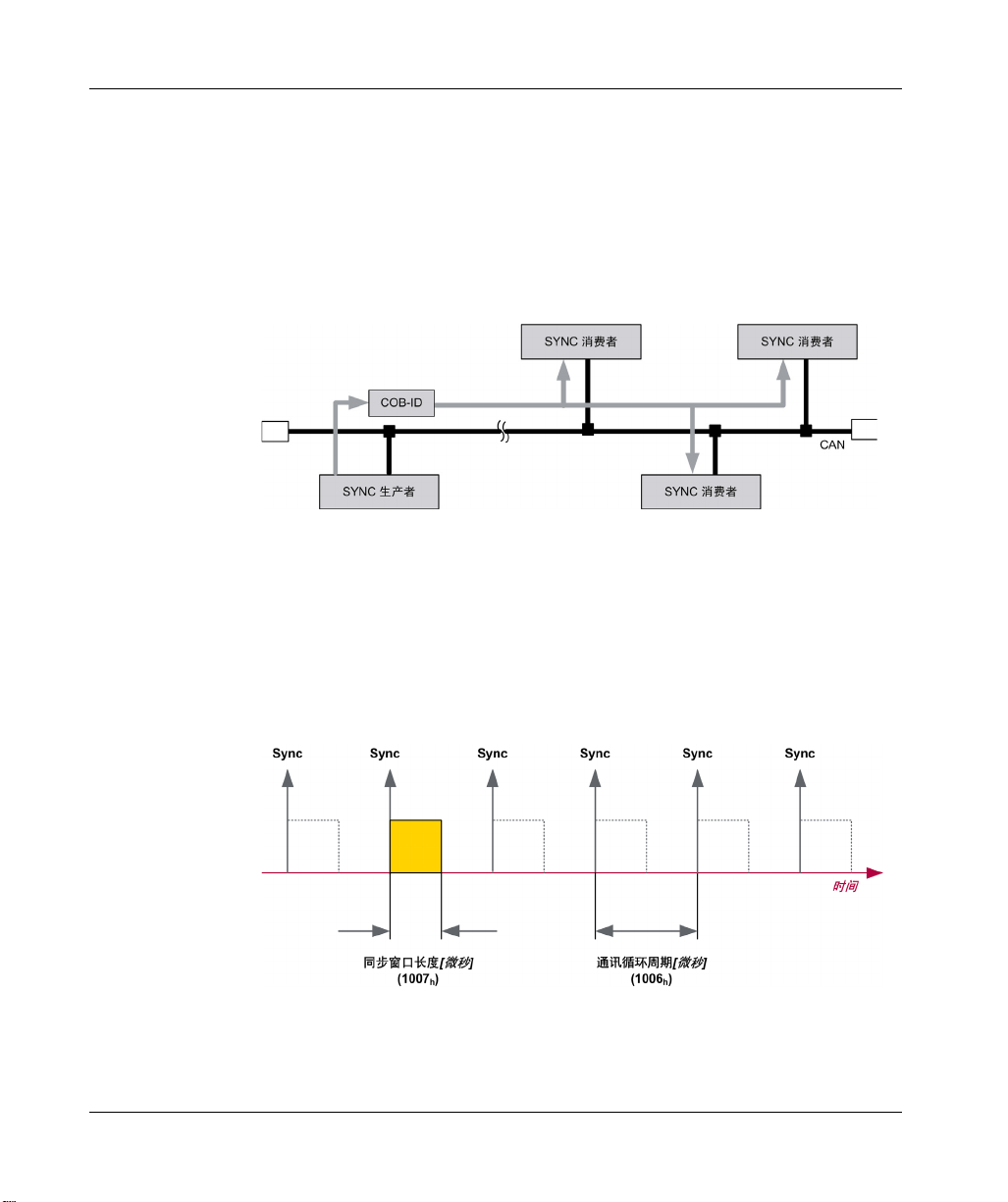
使用 SYNC 协议可以实现同步网络行为。循环传输的 SYNC 消息表示消费者启动了
其特定于应用程序的行为,该行为与 SYNC 消息的接收紧密相关。
一旦收到数据,同步 PDO 会在收到 SYNC 消息时认为该数据有效。
下图显示的是 SYNC 协议的 SYNC 消息传输。
两个连续 SYNC 消息之间的时间段称为
通讯循环周期
,可以在 SYNC 生产者的对象
字典 (对象索引为十六进制的 1006)中进行调整。
同步传输 PDO 在接收到 SYNC 消息后的指定时间范围内开始传输。此时间范围称
为
同步窗口长度
,可在所有必须传输同步 PDO 的设备的对象字典 (对象索引为十
六进制的 1007)中进行配置。
下图显示的是同步窗口长度和通讯循环周期。
EIO0000000321 05/2010 17
Page 18
CANopen 协议
错误控制协议
错误控制协议
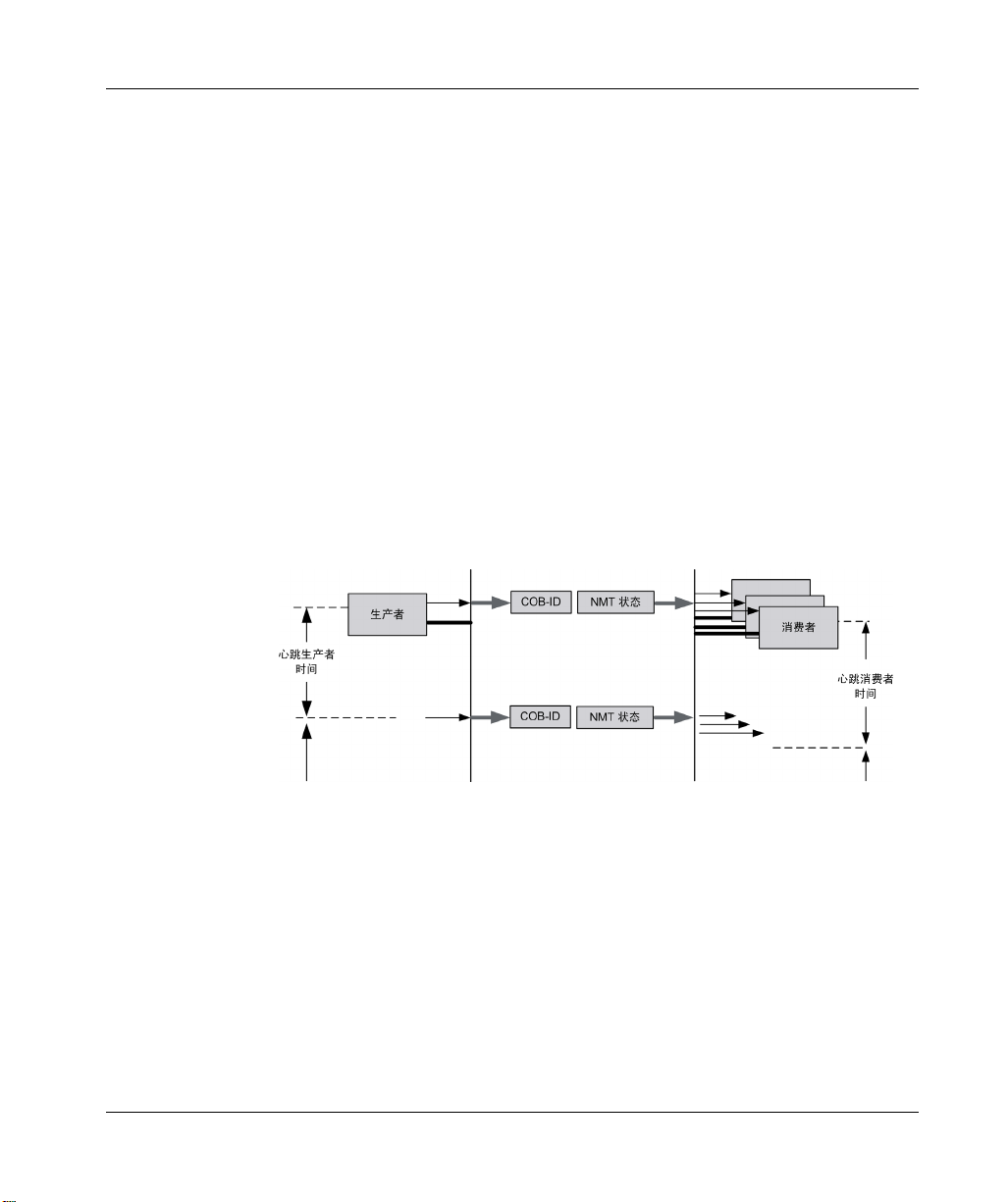
心跳
心跳或保护服务是用于检查网络组成部分是否存在并获取其状态的网络管理 (NMT)
服务。
CANopen 中存在两种类型的错误控制协议:
z 心跳
z 节点保护 / 寿命保护
心跳协议是较灵活的协议,在没有远程传输请求 (RTR) 的情况下也可以工作,因
此,只要 CANopen 设备支持此协议,就应使用该协议。
CANopen 设备将循环传输其心跳。此循环时间称为
心跳生产者时间
。接收到心跳
消息后,心跳消费者 (例如 CANopen 管理器)将评估相关设备是否仍在正常运行
以及是否处于正确的 NMT 状态。在特定时间段内,消费者必须从相关的心跳生产
者至少接收一条心跳消息,该时间段 (心跳消费者时间)在消费者中进行配置。
下图显示的是错误控制协议的心跳与时间间隔。
18
EIO0000000321 05/2010
Page 19
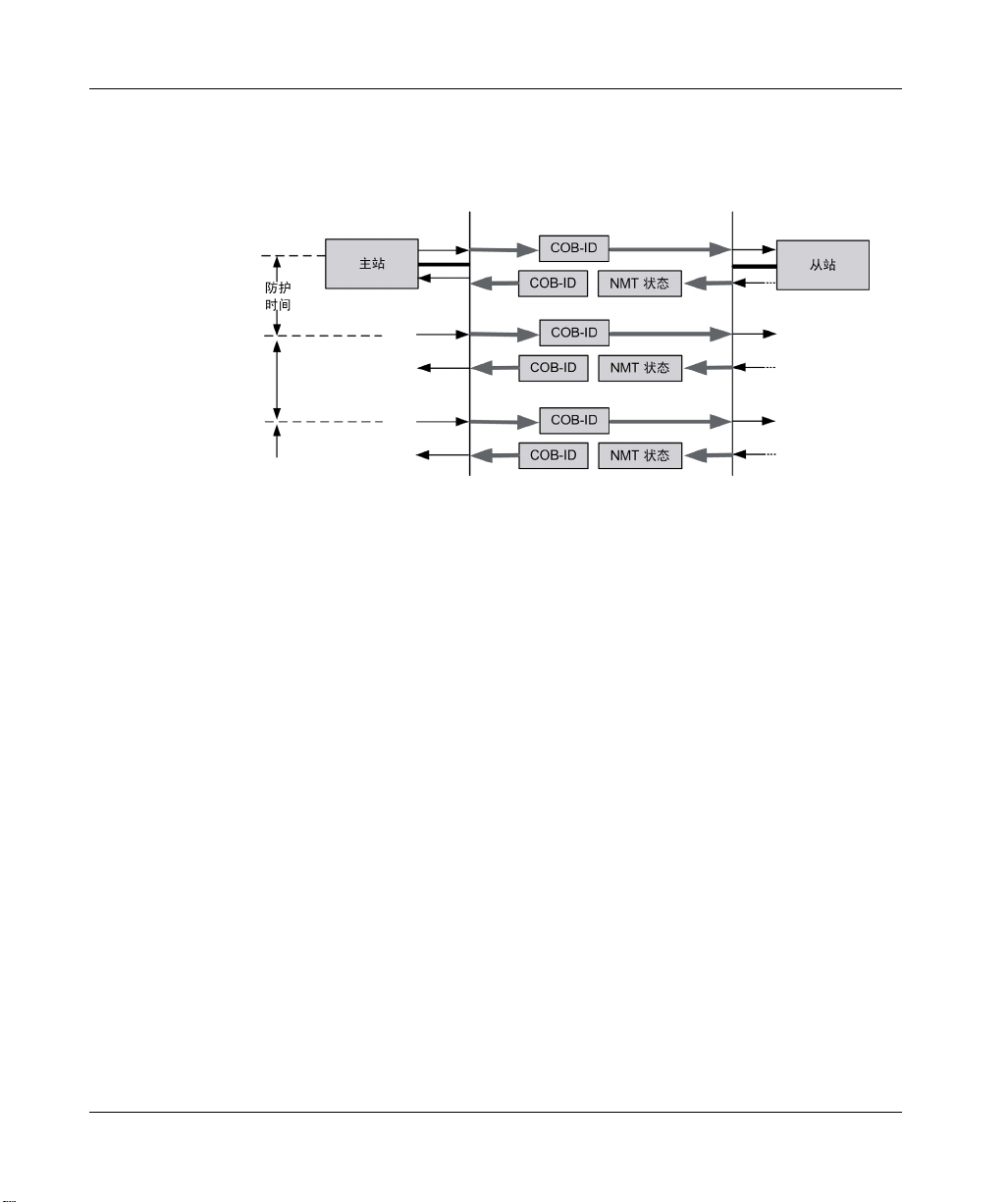
节点保护 / 寿命保护
CANopen 协议
CANopen 管理器通过远程传输请求 (RTR) 来请求错误控制消息。受保护的设备会
回复一个 CAN 数据帧,以指示当前的 NMT 状态。
主站: 主站监控从站的 NMT 状态 (节点保护)
寿命
从站 : 从站监控主站的
信号 (寿命保护)
EIO0000000321 05/2010 19
Page 20

CANopen 协议
20
EIO0000000321 05/2010
Page 21

CiA405
EIO0000000321 05/2010
CiA405 简介
简介
访问 CANopen 网络的方法
IEC 61131-3 可编程控制器 (CiA405) 的 CANopen 接口和设备配置文件介绍了两种
从控制器访问 CANopen 网络的方法:
z 网络变量
z 功能块
网络变量
网络变量通常会映射到要接收或要传输的 PDO 中。在对象字典中,可在定义的索
引范围内访问 IEC 61131-3 变量。
2
功能块
配置文件还定义了一些特定于 CANopen 的功能块,例如 SDO、 NMT 和紧急通讯
服务。
CAA CiA 405 库
CAA CiA 405 库提供了一组满足 CiA405 要求的功能块,用于从控制器(CANopen
主站)的应用程序 (IEC61131-3 程序)访问 CANopen 网络。将 CANopen 管理器
添加到控制器 CAN 总线接口后,控制器库管理器会自动声明该库。
在该库中,按如下方式组织功能块:
z 网络管理 功能块:
z CIA405 .NMT :控制 CANopen 设备 NMT 状态
z CIA405 .RECV_EMCY :扫描所有设备的 EMCY 存储
z CIA405 .RECV_EMCY_DEV :获取指定设备的最后一条存储的 EMCY 消息
z 自有节点 id 功能块:
z CIA405 .GET_LOCAL_NODE_ID :获取控制器 CANopen 管理器节点 ID
z 查询状态 功能块:
EIO0000000321 05/2010 21
Page 22

CiA405
命名空间
z CIA405 .GET_CANOPEN_KERNEL_STATE :获取 CANopen 内核当前状态
z CIA405 .GET_STATE :获取指定设备的当前状态
z SDO 访问 功能块:
z CIA405 .SDO_READ :读取指定设备的任意大小的对象
z CIA405 .SDO_READ4 :读取指定设备的最多 4 个字节的对象
z CIA405 .SDO_WRITE :写入指定设备的任意大小的对象
z CIA405 .SDO_WRITE4 :写入指定设备的最多 4 个字节的对象
注意: 要在 CANopen 上控制 Altivar 驱动器和 Lexium 运动驱动器,最好使用专用
PLCopen 功能块 (请参阅 Altivar
、集成
Lexium 和 Lexium
库指南
)。
CAA CiA 405 库命名空间为 CIA405 。库功能块、变量和常量必须与库命名空间一
起使用。
功能块实例和变量声明示例:
VAR
ReadObject:CIA405.SDO_READ;
SDOabort_info:CIA405.SDO_ERROR;
END_VAR
22
EIO0000000321 05/2010
Page 23

功能块描述
EIO0000000321 05/2010
功能块描述
概述
本部分概述用于从控制器应用程序管理和监控 CANopen 网络和设备的 CAA CiA
405 库的各个功能块。
本部分包含了哪些内容?
本部分包括以下各章:
II
章章节标题页
3 功能块通用 I/O 和行为 25
4 网络管理功能块 31
5 自有节点 ID 功能块 39
6 查询状态功能块 41
7SDO 访问功能块 45
EIO0000000321 05/2010 23
Page 24

功能块描述
24
EIO0000000321 05/2010
Page 25

功能块通用 I/O 和行为
EIO0000000321 05/2010
功能块通用 I/O 和行为
3
3.1
本节包含了哪些内容?
通用 I/O 和行为
本节包含了以下主题:
主题 页
通用 I/O 描述 26
CANopen 内核检测到的错误代码 28
功能块执行图 29
EIO0000000321 05/2010 25
Page 26

功能块通用 I/O 和行为
通用 I/O 描述
简介
图形表示形式
通用输入变量描述
本主题以 CIA405 .RECV_EMCY 功能块为示例,介绍 CAA CiA 405 库功能块的常
规管理和执行。下文介绍了通用于所有功能块的 I/O。这些功能块继承自
CiA405Base 内部隐藏功能块。
下图中突出显示了 CAA CiA 405 库中所有功能块共有的参数:
下表介绍了 CAA CiA 405 库的所有功能块共有的输入参数。
输入 数据类型 说明
网络
ENABLE BOOL
TIMEOUT UDINT
USINT
必须在其上执行所请求服务的 CAN 通道。
1 (缺省值) = 第一个 CAN 总线接口
2 = 第二个 CAN 总线接口 (如果存在)
启用功能块的执行。
在上升沿:执行开始。
在下降沿:如果执行未完成,则取消执行。否则,输出数据会
复位为 0。
最大执行时间 (以毫秒为单位)。如果在收到响应之前达到超
时,则执行会因超时错误而中止。
0 (出厂设置) = 禁用超时。
1...65535 = 超时值 (以毫秒为单位)。
26
EIO0000000321 05/2010
Page 27

通用输出变量描述
下表介绍了 CAA CiA 405 库的所有功能块共有的输出变量。
输出 数据类型 说明
CONFIRM BOOL
错误
CANOPEN_KERNEL_ERROR
(USINT)
成功完成执行时为 TRUE。
包含 CANopen 内核返回的检测到错误代码的执行。
00 (十六进制) = 未检测到任何执行错误。
01 (十六进制) = 检测到错误,但是代码在另一个
功能块输出上提供 (而不是来自 CANopen 内核)。
02…FF (十六进制) = CANopen 内核检测到的错
误代码。
功能块通用 I/O 和行为
EIO0000000321 05/2010 27
Page 28

功能块通用 I/O 和行为
CANopen 内核检测到的错误代码
说明
库提供一个包含预定义错误代码变量的 CIA405
.CANOPEN_KERNEL_ERROR_CODES 全局变量列表。
检测到的错误代码
下面提供了错误代码及关联全局变量和说明。
检测到的错误代码 说明
CANOPEN_KERNEL_NO_ERROR = 00 (十六进制) CANopen 内核未检测到错误。
CANOPEN_KERNEL_OTHER_ERROR = 01 (十六进制) 如果 ERROR 输出 = 01 (十六进制),则已检
测到错误;如果在功能块上存在其他错误代码
输出,则该输出包含更加具体的信息。
示例:
z CIA405 .SDO_READ 和 CIA405
.SDO_WRITE 功能块:ERRORINFO 输出
包含 SDO 中止消息的内容。
z CIA405 .RECV_EMCY 和 CIA405
.RECV_EMCY_DEV 功能块:ERRORINFO
输出包含接收到的 EMCY 消息的内容。如
果 ERRORINFO 输出中提供了紧急消息,
则 ERROR 输出 = 1 且 CONFIRM 输出 = 0。
z CIA405 .GET_CANOPEN_KERNEL_STATE
功能块:绝不会提供十六进制 01 值,因为
不存在任何其他错误代码输出。
CANOPEN_KERNEL_DATA_OVERFLOW = 02 (十六进制) CANopen 对象的发送缓冲区或接收缓冲区溢
出。
CANOPEN_KERNEL_TIMEOUT = 03 (十六进制) 发生功能块执行超时。
CANOPEN_KERNEL_CANBUS_OFF = 10 (十六进制) CANopen 节点从 CAN 总线断开连接。
CANOPEN_KERNEL_CAN_ERROR_PASSIVE = 11 (十六进制) CANopen 节点处于错误被动状态:节点能够
通讯,但是不允许在检测到错误时发送活动错
误标志。
CANOPEN_INTERNAL_FB_ERROR = 21 (十六进制) 特定制造商错误代码。
注意: 21 (十六进制)到 FF (十六进制)为
设备制造商专用值。
28
EIO0000000321 05/2010
Page 29

功能块执行图
控制信号的行为
下面介绍了控制信号 ENABLE 、 CONFIRM 和 ERROR 的三个典型行为:
z 执行在没有检测到错误的情况下结束
z 执行被应用程序取消
z 执行在检测到错误时中止或结束
执行在没有检测到错误的情况下结束
一旦对当前请求做出响应,并且没有检测到任何错误,输出 CONFIRM 便会立即设
置为 TRUE,并保留 TRUE 值 (前提是在输入 ENABLE 为 TRUE 的情况下调用了
该功能块)。如果在 ENABLE 被复位为 FALSE 的情况下调用了该功能块,则
CONFIRM 会复位为 FALSE,并且功能块可以开始新执行。
功能块通用 I/O 和行为
EIO0000000321 05/2010 29
Page 30

功能块通用 I/O 和行为
执行被应用程序取消
如果在当前执行结束之前,在 ENABLE 复位为 FALSE 的情况下调用该功能块,则
会取消功能块执行。可能目前已对取消的请求做出回应,或该响应稍后将到达,但
这些回应此时会被忽略。
执行在检测到错误时中止或结束
一旦当前执行由于收到 SDO 中止消息而中止,或由于检测到错误而结束,输出
ERROR 就会被设置为除 0 以外的值 (有关检测到的错误代码的更多信息,请参阅
CANopen 内核检测到的错误代码 (
的情况下调用该功能块,则输出 ERROR 会复位为 0,并且功能块可以开始新执行。
参见第 28 页
))。如果在 ENABLE 复位为 FALSE
30
EIO0000000321 05/2010
Page 31

网络管理功能块
EIO0000000321 05/2010
本章包含了哪些内容?
网络管理功能块
4
本章包含了以下部分:
节主题页
4.1
4.2
4.3
CIA405 .NMT :设备 NMT 状态管理 32
CIA405 .RECV_EMCY :EMCY 消息扫描 35
CIA405 .RECV_EMCY_DEV :获取设备 EMCY 消息 36
EIO0000000321 05/2010 31
Page 32

网络管理功能块
4.1
CIA405 .NMT :设备 NMT 状态管理
设备 NMT 状态管理
功能块描述
使用 CIA405 .NMT 功能块可以从控制器应用程序控制 CANopen 设备的 NMT 状
态。该功能块通过执行对 CANopen 目标设备的 NMT 服务请求,来执行请求的
NMT 状态转换。
图形表示形式
特定输入变量描述
输入 数据类型 说明
DEVICE DEVICE(USINT)
STATE
TRANSITION_STATE 。有关详细信息,
请参阅下文
CANopen 目标设备节点 ID。
0 (缺省值) = 所有 NMT 从站设备
1...127 = 目标设备节点 ID
请求的 NMT 状态转换。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
32
) 一章。
EIO0000000321 05/2010
Page 33

CIA405 .TRANSITION_STATE ENUM
NMT 状态机描述主要操作中的 NMT 从站的初始化和状态。
下图显示的是 NMT 状态、关联的可用通讯对象 (PDO、 SDO、 SYNC、 EMCY
和 NMT)和 5 种状态转换 (A 到 E)。
CIA405 .TRANSITION_STATE 枚举类型包含下表中介绍的 NMT 状态转换命令。
网络管理功能块
枚举器 值 (十六进制) 说明
STOP_REMOTE_NODE 0004
START_REMOTE_NODE 0005
RESET_NODE 0006
RESET_COMMUNICATION 0007
ENTER_PRE_OPERATIONAL 007F
ALL_EXCEPT_NMT_AND_SENDER 0800
EIO0000000321 05/2010 33
切换到
停止
状态。
(转换 B)
切换到
正常操作
(转换 A)
切换到
复位应用程序
备配置文件的已保存数据,并自动
从
复位通讯
(转换 D)
切换到
复位通讯
置文件的已存储数据,并自动切换
到
预操作
(转换 E)
切换到
预操作
(转换 C)
未实现 (无效参数)
状态。
切换到
状态。加载通讯配
状态。
状态。
状态。加载设
预操作
状态。
Page 34

网络管理功能块
示例
以下示例显示了如何在超时 1 秒(1000 毫秒)的情况下,将 “ 复位节点 ” 命令发送
到连接到第一个 CAN 总线接口的 CANopen 节点 5。该命令在布尔变量
EN_ResetNode 设置为 TRUE (由用户在线设置或应用程序设置)时发送。当执
行成功结束 (输出 CONFIRM = TRUE)或检测到错误 (输出 ERROR <> 0)时,
EN_ResetNode 命令会复位为 FALSE。
34
EIO0000000321 05/2010
Page 35

网络管理功能块
4.2
EMCY 消息扫描
功能块描述
图形表示形式
CIA405 .RECV_EMCY :EMCY 消息扫描
CIA405.RECV_EMCY 功能块会在一个循环中对所有现有 CANopen 设备的紧急
(EMCY) 消息存储进行扫描,并返回找到的 EMCY 消息。
启用该功能块后, EMCY 存储扫描将从上一个扫描停止点开始启动:
z 如果找到一条
EMCY 消息及关联设备节点 ID。
z 如果找到一条
此点结束,功能块返回值为 0 的 EMCY 消息及关联设备节点 ID。
z 如果没有
误
EMCY 消息,则功能块会返回值为 0 的 EMCY 消息和值为 0 的设备节点 ID。
无错误
之外的 EMCY 消息,则扫描会在此点结束,功能块返回该
无错误
EMCY 消息,但该消息以前不是
无错误
之外的 EMCY 消息,且在一个完整扫描过程中未找到新的
无错误
消息,则扫描会在
无错
特定输出变量描述
输出 数据类型 说明
DEVICE DEVICE(USINT)
ERRORINFO
CS.EMCY_ERROR 。
有关详细信息,请参
阅 CS.EMCY_ERROR
结构 (
参见第 37 页
与返回的 EMCY 消息关联的 CANopen 设备的节点 ID。
0 = 未找到任何 EMCY 消息
1...127 = 设备节点 ID
从节点 ID 为 DEVICE 的 CANopen 设备接收的最后一
个 EMCY 消息。
)
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
EIO0000000321 05/2010 35
) 一章。
Page 36

网络管理功能块
4.3
CIA405 .RECV_EMCY_DEV :获取设备 EMCY 消息
获取设备 EMCY 消息
功能块描述
CIA405 .RECV_EMCY_DEV 功能块返回从指定 CANopen 设备接收的最后一条存储
的紧急 (EMCY) 消息。
图形表示形式
特定输入变量描述
输入 类型 说明
DEVICE DEVICE(USINT)
要检查的 CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1…127 = 设备节点 ID
特定输出变量描述
36
输出 类型 说明
ERRORINFO
CS.EMCY_ERROR 。(有关详
细信息,请参阅下文)
从节点 ID 为 DEVICE 的 CANopen 设备接收
的最后一个 EMCY 消息。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
) 一章。
EIO0000000321 05/2010
Page 37

CS.EMCY_ERROR 结构
CS.EMCY_ERROR 是与 EMCY 消息内容关联的结构(有关具体 EMCY 消息内容的
更多信息,请参阅您的设备 CANopen 指南)。 CS.EMCY_ERROR 包含以下元素。
元素 类型 说明
EMCY_ERROR_CODE
ERROR_REGISTER
ERROR_FIELD ARRAY[1...5] OF
注意: 此结构在 CAA CANopen 栈库 (命名空间 = CS )中声明。这是为什么要使
用结构全名 (< 命名空间 >.< 数据类型 >)的原因。 CAA CiA 405 库命名空间为
CIA405 。
网络管理功能块
字 EMCY 消息的错误代码
字节 EMCY 消息的错误寄存器 (位字段)
EMCY 消息的特定设备制造商错误字段
BYTE
EIO0000000321 05/2010 37
Page 38

网络管理功能块
38
EIO0000000321 05/2010
Page 39

自有节点 ID 功能块
EIO0000000321 05/2010
自有节点 ID 功能块
5
5.1
CIA405 .GET_LOCAL_NODE_ID :获取控制器
CANopen 节点 ID
获取控制器 CANopen 节点 ID
功能块描述
CIA405 .GET_LOCAL_NODE_ID 功能块返回指定 CAN 总线接口上的控制器
CANopen 节点 ID。
图形表示形式
特定输出变量描述
输出 类型 说明
DEVICE DEVICE
(USINT )
控制器的 CANopen 节点 ID。
0 = 无效
1...127 = 控制器节点 ID
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
EIO0000000321 05/2010 39
) 一章。
Page 40

自有节点 ID 功能块
40
EIO0000000321 05/2010
Page 41

查询状态功能块
EIO0000000321 05/2010
本章包含了哪些内容?
查询状态功能块
6
本章包含了以下部分:
节主题页
6.1
6.2
CIA405.GET_CANOPEN_KERNEL_STATE :获取 CANopen
内核状态
CIA405.GET_STATE :获取 CANopen 设备状态 43
42
EIO0000000321 05/2010 41
Page 42

查询状态功能块
6.1
CIA405.GET_CANOPEN_KERNEL_STATE :获取
CANopen 内核状态
获取 CANopen 内核状态
功能块描述
CIA405 .GET_CANOPEN_KERNEL_STATE 功能块返回控制器 CANopen 内核的当
前状态。
图形表示形式
特定输出变量描述
输出 类型 说明
STATE CANOPEN_KERNEL_ERROR
DEVICE DEVICE
(有关详细信息,请参阅
CANopen 内核检测到的错误代码
参见第 28 页
(
(USINT )
))
控制器 CANopen 内核的当前状态
控制器的 CANopen 节点 ID。
0 = 无效
1...127 = 控制器节点 ID
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
42
) 一章。
EIO0000000321 05/2010
Page 43

查询状态功能块
6.2
CIA405.GET_STATE :获取 CANopen 设备状态
获取 CANopen 设备状态
功能块描述
CIA405 .GET_STATE 功能块在心跳或节点保护处于活动状态时,返回指定
CANopen 设备的当前 NMT 状态。
图形表示形式
特定输入变量描述
输入 类型 说明
DEVICE DEVICE
(USINT )
要检查的 CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1...127 = 设备节点 ID
特定输出变量描述
输出 类型 说明
STATE DEVICE_STATE
(有关详细信息,请参阅下文)
CANopen 设备的 NMT 状态。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
EIO0000000321 05/2010 43
) 一章。
Page 44

查询状态功能块
CIA405.DEVICE_STATE ENUM
CIA405 .DEVICE_STATE 枚举类型包含 CANopen 设备 NMT 状态的列表。
枚举器 值 说明
INIT 0
RESET_COMM 1
RESET_APP 2
PRE_OPERATIONAL 3
STOPPED 4
OPERATIONAL 5
UNKNOWN 6
NOT_AVAIL 7
示例
以下示例显示了如何在超时 1 秒(1000 毫秒)的情况下,获取连接到第一个 CAN
总线接口的 CANopen 节点 5 的状态。 CIA405.GET_STATE 功能会自动执行,以
进行连续的状态读取。设备 NMT 状态会复制到 CIA405.DEVICE_STATE 类型的
DeviceState 变量中。
初始化状态
复位通讯状态
复位应用程序状态
预操作状态
停止状态
正常操作状态
未知 NMT 状态。
所选设备的节点保护或心跳不处于活动状态,或者控
制器不是心跳消费者。
NMT 状态不可用。
所选设备的节点保护或心跳处于活动状态,但是该设
备在超时之前未正确报告其 NMT 状态。
44
EIO0000000321 05/2010
Page 45

SDO 访问功能块
EIO0000000321 05/2010
本章包含了哪些内容?
SDO 访问功能块
7
本章包含了以下部分:
节主题 页
7.1
7.2
7.3
7.4
CIA405.SDO_READ :读取任意大小的 CANopen 对象 46
CIA405.SDO_READ4 :读取最多 4 个字节的 CANopen 对象 49
CIA405.SDO_WRITE :写入任意大小的 CANopen 对象 52
CIA405.SDO_WRITE4 :写入最多 4 个字节的 CANopen 对象 57
EIO0000000321 05/2010 45
Page 46

SDO 访问功能块
7.1
CIA405.SDO_READ :读取任意大小的 CANopen 对
象
读取任意大小的 CANopen 对象
功能块描述
CIA405 .SDO_READ 功能块用于通过 SDO 消息读取指定设备的任意大小的
CANopen 对象。
必须向该功能块传递以下这些特定参数:
z 设备节点 ID
z SDO 客户端 / 服务器通道 (缺省情况下,仅定义一个通道)
z CANopen 对象索引 / 子索引
z 用来存储对象值的数据缓冲区的指针
z 数据缓冲区大小
如果读取成功结束,则该功能块会返回读取的对象大小。数据在数据缓冲区中提
供。
注意: 如果要读取的对象的大小小于或等于 4 个字节,最好使用 CIA405
.SDO_READ4 功能块。
图形表示形式
46
EIO0000000321 05/2010
Page 47

特定输入变量描述
特定输出变量描述
输入 类型 说明
DEVICE DEVICE
(USINT )
CHANNEL USINT
INDEX WORD
SUBINDEX BYTE
DATA POINTER TO BYTE
输出 类型 说明
ERRORINFO SDO_ERROR
(UDINT )
CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1...127 = 设备节点 ID
SDO 通道编号。
缺省值 = 1
对象索引。
范围:0000 (十六进制) … FFFF (十六进制)
对象子索引。
范围:00 (十六进制) … FF (十六进制)
接收从设备对象读取的数据的数据缓冲区地址。
必须使用 ADR 标准功能定义关联指针。
当 ERROR 输出 = 1 时,返回 SDO 中止消息内容
(大小为 4 个字节)。
SDO 访问功能块
特定输入 / 输出变量描述
输入 / 输出 类型 说明
DATALENGTH UINT
作为输入:数据缓冲区的大小 (以字节为单位)。
注意: 要确保 DATALENGTH 输入正确初始化 (当
功能块执行在 ENABLE 输入上升沿上开始时)为
数据缓冲区大小,请使用 SIZEOF 标准功能。
作为输出:读取的对象的大小 (以字节为单位)。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
EIO0000000321 05/2010 47
) 一章。
Page 48

SDO 访问功能块
示例
以下示例显示了如何在超时 1 秒(1000 毫秒)的情况下,读取连接到第一个 CAN
总线接口的 CANopen 节点 5 的对象索引 203C (十六进制) / 子索引 02 (十六进
制)。 CIA405.SDO_READ 功能块实例 (ReadObject) 会自动执行,以进行连续读
取。
变量 DataSize (UINT 类型):
z 初始化为数据缓冲区大小 (DataBuffer:N 字节的数组)(当功能块的 ENABLE
输入为 FALSE 时,且在启动下一个执行之前)。
z 包含在功能块输出 CONFIRM 的上升沿上读取的数据的大小 (以字节为单位)
(该示例不演示如何从数据缓冲区提取值,也不演示如何管理错误检测)。
48
EIO0000000321 05/2010
Page 49

SDO 访问功能块
7.2
CIA405.SDO_READ4 :读取最多 4 个字节的
CANopen 对象
读取最多 4 个字节的 CANopen 对象
功能块描述
CIA405 .SDO_READ4 功能块用于通过 SDO 消息读取指定设备的最多 4 个字节的
CANopen 对象。
必须向该功能块传递以下这些特定参数:
z 设备节点 ID
z SDO 客户端 / 服务器通道 (缺省情况下,仅定义一个通道)
z CANopen 对象索引 / 子索引
如果读取成功完成,则该功能块会返回读取的对象大小。数据在一个 4 字节数组中
提供。
图形表示形式
EIO0000000321 05/2010 49
Page 50

SDO 访问功能块
特定输入变量描述
特定输出变量描述
输入 类型 说明
DEVICE DEVICE
(USINT )
CHANNEL USINT
INDEX
SUBINDEX
输出 类型 说明
DATA ARRAY[1...4] OF
DATALENGTH USINT
ERRORINFO SDO_ERROR
字 对象索引。
字节 对象子索引。
BYTE
(UDINT )
CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1...127 = 设备节点 ID
SDO 通道编号。
缺省值 = 1
范围:0000 (十六进制) … FFFF (十六进制)
范围:00 (十六进制) … FF (十六进制)
接收从设备对象读取的数据的数据数组。
读取的对象的大小 (以字节为单位)。
当 ERROR 输出 = 1 时,返回 SDO 中止消息内容
(大小为 4 个字节)。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
50
) 一章。
EIO0000000321 05/2010
Page 51

下表显示对象大小及相应的 DATA 数组内容。
SDO 访问功能块
示例
对象大小
示例
1 字节
01 (十六进制)
2 个字节
01 23 (十六进制)
3 个字节
01 23 45 (十六进制)
4 个字节
01 23 45 67 (十六进制)
DATALENGTH DATA(1) DATA(2) DATA(3) DATA(4)
1
01 (十
六进制)
2LSB
23 (十
六进制)
3LSB
45 (十
六进制)
4LSB
67 (十
六进制)
无
效
MSB
01 (十
六进制)
23 (十
六进制)
45 (十
六进制)
无
效
无
效
MSB
01 (十
六进制)
23 (十
六进制)
无
效
无
效
无
效
MSB
01 (十
六进制)
LSB = 低有效字节
MSB = 最高有效字节
以下示例显示了如何在超时 1 秒(1000 毫秒)的情况下,读取连接到第一个 CAN
总线接口的 CANopen 节点 5 的对象索引 203C (十六进制) / 子索引 02 (十六进
制)。 CIA405.SDO_READ4 功能块实例 (Read4Object) 会自动执行,以进行连续
读取。变量 DataBuffer (4 字节数组)包含最后读取的数据的值。变量
DataSize (USINT 类型)包含最后读取的数据的大小 (最大 4 字节)。该示例
不演示如何管理错误检测。
EIO0000000321 05/2010 51
Page 52

SDO 访问功能块
7.3
CIA405.SDO_WRITE :写入任意大小的 CANopen
对象
写入任意大小的 CANopen 对象
功能块描述
CIA405 .SDO_WRITE 功能块用于通过 SDO 消息写入指定设备的任意大小的
CANopen 对象。
必须向该功能块传递以下这些特定参数:
z 设备节点 ID
z SDO 客户端 / 服务器通道 (缺省情况下,仅定义一个通道)
z CANopen 对象索引 / 子索引
z SDO 模式 (定义数据传输模式,有关详细信息,请参阅 SDO_MODE ENUM (
见第 54 页
z 用来存储要写入的对象值的数据缓冲区的指针
z 要写入的字节数
注意: 如果要写入的对象的大小小于或等于 4 个字节,则使用 CIA405
.SDO_WRITE4 功能块。
图形表示形式
))
参
52
EIO0000000321 05/2010
Page 53

特定输入变量描述
特定输出变量描述
输入 类型 说明
DEVICE DEVICE
(USINT )
CHANNEL USINT
INDEX
SUBINDEX
MODE SDO_MODE
DATA POINTER TO
DATALENGTH UINT
字 对象索引。
字节 对象子索引。
(有关详细信息,
请参阅下文)
BYTE
CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1...127 = 设备节点 ID
SDO 通道编号。
缺省值 = 1
范围:0000 (十六进制) … FFFF (十六进制)
范围:00 (十六进制) … FF (十六进制)
数据传输模式。
0 (缺省值) = AUTO (表示自动模式选择)
用来存储要写入的对象值的数据缓冲区的地址。
必须使用 ADR 标准功能定义关联指针。
要写入的对象的大小 (以字节为单位)。
注意: 使用 SIZEOF 标准功能可定义数据缓冲区大小。
SDO 访问功能块
输出 类型 说明
ERRORINFO SDO_ERROR
(UDINT)
当 ERROR 输出 = 1 时,返回 SDO 中止消息内容 (大
小为 4 个字节)。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
EIO0000000321 05/2010 53
) 一章。
Page 54

SDO 访问功能块
CIA405 .SDO_MODE ENUM
CIA405 .SDO_MODE 枚举类型包含 SDO 传输模式的列表。
枚举器 值 说明
AUTO 0
EXPEDITED 1
SEGMENTED 2
BLOCK 3
示例
采用 ST 语言在 CANopen 设备中读取和写入数据的程序示例:
在节点地址 1 上声明一个 ATV71
在节点地址 2 上声明一个 ATV31
要写入或读取的数据为:
INDEX:=16#203C,
SUBINDEX:=2,
写入的值 (SDOWrite_data) 为在每个循环上递增的 0 到 500 的斜坡。
PROGRAM Read_Write_SDO
VAR
WriteSDO_ATV71 :CIA405.SDO_WRITE;
WriteSDO_ATV31 :CIA405.SDO_WRITE;
ReadSDO_ATV31 :CIA405.SDO_READ;
SDOWrite_data :UINT;
SDORead_data :UINT;
ReadSDO_datalength :UINT:=2;
start_test :BOOL;
END_VAR
IF start_test THEN
WriteSDO_ATV31(
自动模式选择。
用于最多 4 个字节的数据的 SDO 加速模式。
数据在一个 SDO 请求中发送。
用于超过 4 个字节的数据的 SDO 分段模式。
数据被分割为 7 字节的段,通过连续的 SDO 确认请求发送。
用于超过 4 个字节的数据的 SDO 块模式。
通过连续帧发送的数据被分割为 7 字节的数据块,这些块不会
进行确认。接收到所有块后,接收方会发送确认。
注意: 这是较快的传输模式,但是您的设备可能不支持,因为
此模式是近期的 CANopen 配置附加项。
54
EIO0000000321 05/2010
Page 55

NETWORK:= ,
ENABLE:= NOT (WriteSDO_ATV31.CONFIRM OR
(WriteSDO_ATV31.ERROR<>0)) ,
TIMEOUT:= ,
DEVICE:=2 ,
CHANNEL:= ,
INDEX:=16#203C ,
SUBINDEX:=2 ,
MODE:= ,
DATA:=ADR(SDOWrite_data) ,
DATALENGTH:=2 ,
CONFIRM=> ,
ERROR=> ,
ERRORINFO=> );
ReadSDO_ATV31(
NETWORK:= ,
ENABLE:=NOT (ReadSDO_ATV31.CONFIRM OR
(ReadSDO_ATV31.ERROR<>0)) ,
TIMEOUT:= ,
DEVICE:=1 ,
CHANNEL:= ,
INDEX:=16#203C ,
SUBINDEX:=2 ,
DATA:=ADR(SDORead_data) ,
DATALENGTH:=ReadSDO_datalength ,
CONFIRM=> ,
ERROR=> ,
ERRORINFO=> );
WriteSDO_ATV71(
NETWORK:= ,
ENABLE:= NOT (WriteSDO_ATV71.CONFIRM OR
(WriteSDO_ATV71.ERROR<>0)) ,
TIMEOUT:= ,
SDO 访问功能块
EIO0000000321 05/2010 55
Page 56

SDO 访问功能块
DEVICE:=1 ,
CHANNEL:= ,
INDEX:=16#203C ,
SUBINDEX:=2 ,
MODE:= ,
DATA:=ADR(SDOWrite_data) ,
DATALENGTH:=2 ,
CONFIRM=> ,
ERROR=> ,
ERRORINFO=> );
IF SDOWrite_data<500
THEN SDOWrite_data:=SDOWrite_data+1;
ELSE SDOWrite_data:=0;
END_IF
END_IF
56
EIO0000000321 05/2010
Page 57

SDO 访问功能块
7.4
CIA405.SDO_WRITE4 :写入最多 4 个字节的
CANopen 对象
写入最多 4 个字节的 CANopen 对象
功能块描述
CIA405 .SDO_WRITE4 功能块用于通过 SDO 消息写入指定设备的最多 4 个字节的
CANopen 对象。
必须向该功能块传递以下这些特定参数:
z 设备节点 ID
z SDO 客户端 / 服务器通道 (缺省情况下,仅定义一个通道)
z CANopen 对象索引 / 子索引
z 要写入的值
z 要写入的字节数 (对象大小)
图形表示形式
特定输入变量描述
输入 类型 说明
DEVICE DEVICE
(USINT )
CHANNEL USINT
EIO0000000321 05/2010 57
CANopen 设备的节点 ID。
0 (缺省值) = 本地设备 (控制器)
1...127 = 设备节点 ID
SDO 通道编号。
缺省值 = 1
Page 58

SDO 访问功能块
特定输出变量描述
输入 类型 说明
INDEX WORD
SUBINDEX BYTE
DATA ARRAY[1...4] OF
BYTE
DATALENGTH USINT
输出 类型 说明
ERRORINFO SDO_ERROR
(UDINT )
对象索引。
范围:0000 (十六进制) … FFFF (十六
进制)
对象子索引。
范围:00 (十六进制) … FF (十六进制)
用来存储要写入的对象值的数据数组。
要写入的对象的大小 (以字节为单位)。
当 ERROR 输出 = 1 时,返回 SDO 中止消
息内容 (大小为 4 个字节)。
注意: 有关功能块通用 I/O 描述和执行行为的信息,请参阅功能块通用 I/O 和行为 (
参见第 25 页
) 一章。
下表显示对象大小及相应的 DATA 数组内容。
对象大小
示例
1 字节
01 (十六进制)
2 字节
01 23 (十六进制)
3 字节
01 23 45 (十六进制)
4 字节
01 23 45 67(十六进制)
DATALENGTH DATA(1) DATA(2) DATA(3) DATA(4)
1
01 (十六
进制)
2LSB
23 (十六
进制)
3LSB
45 (十六
进制)
4LSB
67 (十六
进制)
无
效
MSB
01 (十
六进制)
23 (十
六进制)
45 (十
六进制)
无
效
无
效
MSB
01 (十六
进制)
23 (十六
进制)
无
效
无
效
无
效
MSB
01 (十
六进制)
LSB = 低有效字节
MSB = 最高有效字节
58
EIO0000000321 05/2010
Page 59

协议
毫秒
术语
EIO0000000321 05/2010
术语
0-9
设备在网络上进行相互通讯时使用的一组规则
毫秒
C
CAN
控制器区域网络 (CAN) 是一种串行总线系统,其目的是实现嵌入式控制。
CANopen
CANopen 是用于嵌入式控制系统的符合国际标准 (EN 50325-4) 的基于 CAN 的高层
次协议。
CiA
CAN in Automation (CiA) 是用户和制造商组成的国际组织,致力于开发和支持
CANopen 及其他基于 CAN 的高层次协议。
EIO0000000321 05/2010 59
Page 60

术语
CiA405
COB
EDS
EMCY
hex
IEC 61131-3 可编程控制器的 CANopen 接口和设备配置文件
CANopen 协议通讯对象
E
现场总线设备描述的电子数据表文件。
紧急
H
十六进制
I/O
ID
NMT
60
I
输入 / 输出
标识符
N
CANopen 网络管理
EIO0000000321 05/2010
Page 61

OD
PDO
SDO
术语
O
CANopen 协议对象字典
P
CANopen 协议过程数据对象
S
CANopen 协议服务数据对象
EIO0000000321 05/2010 61
Page 62

术语
62
EIO0000000321 05/2010
Page 63

索引
EIO0000000321 05/2010
索引
B
C
A
SDO 访问功能块
CIA405.SDO_READ:读取任意大小的
CANopen 对象 ,
CIA405.SDO_READ4:读取最多 4 个字
节的 CANopen 对象 ,
CIA405.SDO_WRITE:写入任意大小的
CANopen 对象 ,
CIA405.SDO_WRITE:写入最多 4 个字
节的 CANopen 对象 ,
功能块描述 ,
SDO 访问功能块 ,
功能块通用 I/O 和行为 ,
查询状态功能块 ,
网络管理功能块 ,
自有节点 ID 功能块 ,
功能块通用 I/O 和行为
通用 I/O 和行为 ,
查询状态功能块
CIA405.GET_CANOPEN_KERNEL_ST
ATE:获取 CANopen 内核状态 ,
CIA405.GET_STATE:获取 CANopen
设备状态 ,
简介 ,
9
CANopen 协议简介 ,
CiA405 简介 ,
网络管理功能块
CIA405.NMT:设备 NMT 状态管理 ,
CIA405.RECV_EMCY_DEV:获取设备
EMCY 消息 ,
CIA405.RECV_EMCY:EMCY 消息扫描
,
35
46
49
52
57
23
45
25
41
31
39
25
43
11
21
36
42
32
自有节点 ID 功能块
CIA405.GET_LOCAL_NODE_ID:获取
控制器 CANopen 节点 ID,
39
EIO0000000321 05/2010 63
Page 64

索引
64
EIO0000000321 05/2010
 Loading...
Loading...