

Page 1

Электрические приводы
Тип 5824 без функции безопасности
Тип 5825 с функцией безопасности
Исполнение с позиционером
Инструкция
по монтажу и эксплуатации
EB 5824-2 RU
Версия программного обеспечения 1.04
Издание: декабрь 2012
Page 2

Определение сигнальных слов, используемых в этой инструкции
ОПАСНОСТЬ!
Примечание описывает опасные ситуации,
которые, если их не предотвращать, ведут
к гибели или серьезной травме.
ЗАМЕЧАНИЕ
Примечание предупреждает о
возникновении материального ущерба
Примечание: дополнительные
ПРЕДУПРЕЖДЕНИЕ!
пояснения, информация и подсказки.
Примечание описывает опасные ситуации,
которые, если их не предотвращать, могут
привести к гибели или серьезной травме.
2 ЕВ 5824-2 RU
Page 3

Содержание
Содержание
1
2
Основные правила техники безопасности…………………………………………..……… 5
Конструкция и принцип действия…………………………………………………………..…. 6
2.1 Дополнительное электрическое оборудование………………………………………………… 7
2.2. Технические данные………………………………………………………………………………… 8
3
Монтаж на клапан………………………………………………………………………………….. 10
3.1 Привод Тип 5824…………………………………………………………………………………….. 10
3.1.1 Монтаж с силовым замыканием………………………………………………………………….. 10
3.1.2 Монтаж с геометрическим замыканием…………………………………………………………. 10
3.2 Привод Тип 5825…………………………………………………………………………………….. 11
3.2.1 Монтаж с силовым замыканием………………………………………………………………….. 11
3.2.2 Монтаж с геометрическим замыканием…….…………………………………………………… 12
3.3 Монтажное положение……………………………………………………………………………… 12
3.4. Шкала индикатора хода………………….………………………………………………………… 12
4
5
6
7
Электрическое подключение…………………………………………………………………… 13
Пуск……………………………………………………………………………………………………. 15
Ручное управление………………………………………………………………………………… 15
Дополнительное оборудование……………………………………………………………….. 16
7.1 Конечные выключатели……………..……………………………………………………………… 16
7.2 Приоритетный контур……………………………………………………………………………….. 17
8
9
9.1
9.1.1
9.1.2
9.1.3
9.1.4
9.2
9.2.1
9.2.2
9.2.3
9.3
9.3.1
9.3.2
9.3.3
9.3.4
9.3.5
9.3.6
9.4
Размеры в мм…………………………………………………………………………………........ 18
Цифровой позиционер…………………………………………………………………………… 19
Органы управления…………………………………………………………………………………. 19
Светодиоды…………………………………………………………………………………………… 19
Ползунковый переключатель……………………………………………………………………… 21
Переключатель с двойной функцией…………………………………………………………….. 22
Серийный интерфейс……………………………………………………………………………….. 23
Настройка хода………………………………………………………………………………………. 23
Абсолютная настройка хода……………………………………………………………………….. 23
Настройка хода……………………………….……………………………………………………... 24
Установк а регулировки хода……………………………………………………………………….. 24
Функции
и параметры……………………………………………………………………………….. 25
Входная переменная……………….……………………………………………………………….. 25
Сигнал положения…………………………………………………………………………………… 25
Переменная величина………………………………………………………………………………. 26
Защитная блокировка……………………………………………………………………………….. 27
Ход клапана...………………………………………………………………………………………… 28
Характеристика………………………………………………………………………………………. 29
Ручное управление………………………………………………………………………………….. 30
ЕВ 5824-2 RU
3
Page 4

Содержание
9.5 Командный режим…………………………………………………………………………………….. 31
10 Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.1 Основное..……………………………………………………………………………………………… 32
10.1.1 Требование к системе….…………………………………………………………………………….. 32
10.2 Установк а программного обеспечения TROVIS-VIEW………………………………………….. 33
10.3 Пуск TROVIS-VIEW и выполнение настроек……………………………………………………… 34
10.4 Отображение рабочего состояния………………………………………………………………….. 36
10.5 Изменение уровня пользователя…………………………………………………………………… 36
10.6 Конфигурация………………………………………………………………………………………….. 38
10.7 Рабочие значения………...…………………………………………………………………………… 40
10.8 Диагностика…………………………………………………………………………………………….. 41
10.8.1 Дополнительная диагностика в уровне пользователя Specialist….…………………………... 44
10.9 Рабочие диаграммы данных (Trend Viewer)………………………………………………………. 46
11 Передача данных……………………………………………………………………………………… 48
11.1 Обмен данными между
11.1.1 Режим off-line (непрямая передача данных)…………………...…………………………………. 50
11.1.2 Режим on-line (прямая передача данных)…………………………………………………………. 50
11.2 Перо памяти SAMSON……………………………………………………………………………….. 51
11.2.1 Обмен данными между TROVIS-VIEW и пишущим устройством.……………………………. 53
11.2.2 Обмен данными между приводом и пером памяти………………..……………………………. 54
11.2.3 Функция копирования…………………………………………………………………………………. 55
11.2.4 Регистрация данных…………………………………………………………………………………... 55
11.2.5 Конфигурирование командного режима…………………………………………………………… 57
12
13
14
Список конфигураций и данные заказчика……………………………………………………. 58
Типовой шильдик……………………………………………………………………………………. 59
Текст заказа……………………………………………………………………………………………. 59
TROVIS-VIEW и приводом (соединительный кабель)…...………… 49
32
Версия программного обеспечения
1.03
(предыдущая)
1.04 (новая)
Измененная заводская настройка для установки конечного положения параметра:
Шток привода втягивается (новый: 97%, предыдущий: 99%). См.раздел 9.3.3.
Измененная заводская настройка для параметра Мертвая зона (новый: 2.0%,
предыдущий: 1.0%). См.раздел 9.3.5.
4 ЕВ 5824-2 RU
Page 5
Основные правила безопасности
1. Основные правила техники безопасности
Для собственной безопасности следует соблюдать данную инструкцию по монтажу, вводу в
эксплуатацию и работе с приводом:
Монтаж и пуск в эксплуатацию прибора могут осуществлять только специалисты,
имеющие право на проведение монтажных, пусконаладочных работ и эксплуатацию
такого оборудования.
Под специалистами настоящей инструкцией подразумеваются лица, которые на
основе своего специального образования
норм и стандартов, регламентирующих их работу, могут предусмотреть
возможные угрозы безопасности персонала.
Следует принять необходимые меры по предотвращению угроз безопасности,
которые в регулирующем клапане могут быть обусловлены свойствами рабочей
среды и подвижными частями механизмов.
Приводы предназначены для использования в низковольтных электроустановках.
При подключении
техники безопасности. Следует применять только такие контакторы, которые
имеют защиту от самопроизвольного повторного включения.
Перед подключением привода, отсоединить его от электропитания.
Во избежание неполадок в оборудовании соблюдайте также следующее:
Должны быть предусмотрены специальная транспортировка и хранение таких
приборов.
и обслуживании необходимо соблюдать действующие нормы
и опыта, а также знаний действующих
Примечание: Приводы с маркировкой СЕ соответствуют требованиям
Директивы 2004/108/ЕС и 2006/95/ЕС.
Декларация изготовителя – по запросу
ЕВ 5824-2 RU
5
Page 6
Конструкция и принцип действия
2. Конструкция и принцип
действия
Шаговый электродвигатель дает возможность
подключения любого источника напряжения,
независимо от частоты. Усилие
электродвигателя передается через
передаточный механизм и кривошипный диск
на шток привода (3). Когда шток привода
выдвигается, он давит на шток клапана. При
втягивании штока привода шток клапана
следует за ним за счет возвратной пружины в
клапане (соединение с силовым замыканием).
Привод и клапан соединяются с помощью
накидной гайки (4).
Позиционер обеспечивает регулирование
положения штока привода управляющему
сигналу. Сигнал обратной связи 0…10 В
IN
ПРИМЕЧАНИЕ
Запрещается открывать заднюю крышку корпуса!
OUT
снимается с клемм 32 и 33. Характеристика и
настройки управляющего и выходного
сигнала можно изменять программным
обеспечением TROVIS-VIEW.
Тип 5824 без функции безопасности
Данный привод с функцией безопасности
имеет ручной регулятор (2), с помощью
которого регулирующий клапан может
устанавливаться в заданное положение. Ход
и направление движения показаны на шкале
(9).
Тип 5825 с функцией безопасности
Привод с функцией безопасности во многом
аналогичен Типу 5824. Дополнительно
содержит пружинный накопитель энергии (8) и
электромагнит. Электромагнит
предохранительную цепь, в обесточенном
состоянии прерывает связь привода с
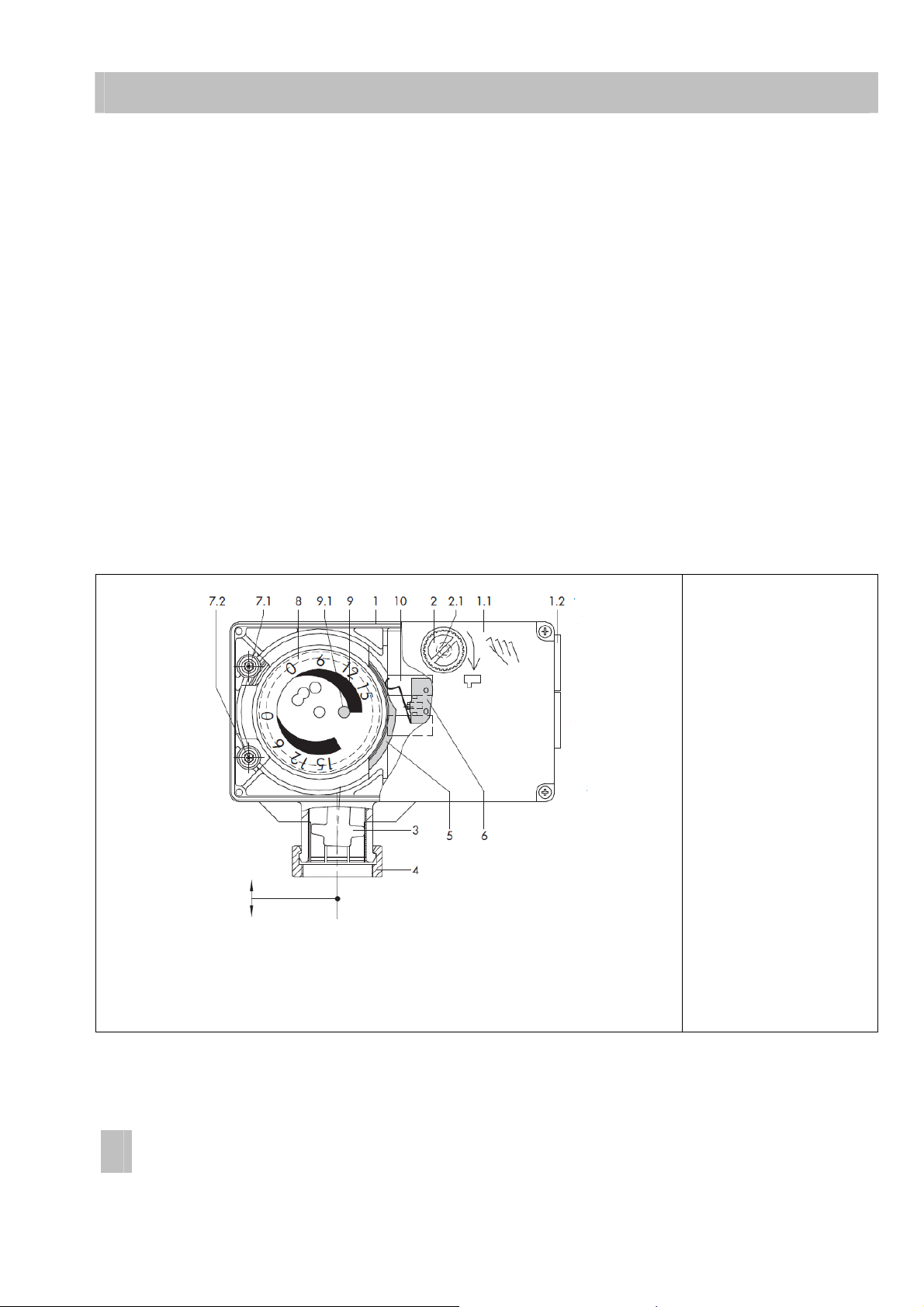
Рис.1 • Привод тип 5824/5825 (передняя крышка открыта), монтаж
на клапан с силовым замыканием
6
ЕВ 5824-2 RU
, включенный в
1. Корпус
1.1 Передняя крышка
корпуса
1.2 Кабельный ввод
2. Маховичек Тип 5824
2.1 Установочная ось
3. Шток привода
4. Накидная гайка
5. Кулачковый диск
6. Конечный
выключатель
7.1 Задатчик конечного
контакта
7.2 Задатчик конечного
контакта
8. Пружинный
аккумулятор,
для типа 5825
9. Шкала индикации хода
9.1 Установочный штифт
10. Конечный
выключатель
предельного момента
вращения
Page 7

электродвигателем и освобождает
пружинный накопитель энергии. Шток
привода перемещается в положение OUT
(выдвигается) или IN (втягивается)
пружинным механизмом.
Приводы Тип 5825 изготавливается с
функцией безопасности Шток привода
выдвигается (шток привода выдвигается
при отключении питания) или Шток
привода втягивается (шток привода
втягивается при отключении питания).
ПРИМЕЧАНИЕ
Функции безопасности нельзя
использовать для задач регулирования
У привода Типа 5825 нет ручного дублера
сверху. Ручное управление возможно после
снятия передней крышки корпуса с помощью
4 мм шестигранного ключа. Привод приходит
в исходное положение, как только
шестигранный ключ отпускается.
Типовые испытания по DIN EN 14597
Электрические приводы Тип 5825 с
положением безопасности «Шток привода
выдвигается» для соединения силовым
замыканием сертифицированы немецким
объединением
согласно DIN EN 14597 в комбинации с
различными клапанами SAMSON.
Регистрационный номер – по запросу.
технического надзора TÜV
Конструкция и принцип действия
2.1 Дополнительное
электрическое оборудование
Приводы с источником питания 24 В могут
оснащаться следующим оборудованием:
По запросу приводы могут оснащаться
двумя сигнализаторами конечных положений,
которые включаются регулируемыми
дисковыми кулачками.
Напряжение питания, входы и выходы не
имеют гальванической развязки. Оба
сигнализатора конечных положений не могут
быть установлены в уже существующий
привод.
Вместе с сигнализаторами конечных
положений дополнительно привод может
оснащаться приоритетным контуром.
ЕВ 5824-2 RU
7
Page 8

Конструкция и принцип действия
2.2 Технические характеристики
Тип
Функция безопасности Нет Есть
Направление действия - Шток выдвигается Шток втягивается
Номинальный ход мм 6 12 15 61) 12 15 61) 12 15
Время перестановки без функции безопасности
Время перестановки при переходе в положение
безопасности сек
Номинальное усилие шток выдвигается Н 700 500 280 280 500 280
Номинальное усилие пружины безопасности Н - 500 280 280 -4) 280
2), 3)
сек
31/17
5824 5825
-10 -20 -30 -10 -20 -30 -15 -25 -35
45/
89/
111/
61/33
76/41
– 4 6 7 4 6 7
45/
31/17
89/
61/33
111/
76/41
45/
31/17
89/
61/33
111/
76/41
Монтаж клапана
Напряжение питания
24 V DC (-10%, +20%) • •
24 V, 50 и 60 Hz6) • •
85…264 V, 50 и 60 Hz • •
Потребляемая мощность
24 V DC (-10%, +20%) VA 3 4.5
24 V, 50 и 60 Hz
85…264 V, 50 и 60 Hz VA 9 12
Ручное управление Есть Опция2)
Допустимые температуры
Окружающей среды 0…50 ºС
Хранения -20…70 ºС
При присоединении штока 0…130 ºС
Степень защиты IP 54 (монтаж вертикально по EN 60529)
Класс защиты II (по EN 61140)
Категория защиты от перенапряжения II (по EN 60664)
Степень загрязнения 2 (по EN 60664)
Электромагнитная совместимость По EN 61000-6-2, EN 61000-6-3 и EN 61326
Вес, прибл. кг 0.75 1.00
Силовое замыкание • • • • • •
на раме • • •
6)
VA 7 10
8
ЕВ 5824-2 RU
Page 9
Конструкция и принцип действия
Тип
Функция безопасности Нет есть
Дополнительное электрическое оборудование (только для исполнения с напряжением питания 24 В)
2 конечных выключателя •
Макс. 230 V, 3 А; без возможности
модифицирования!
Материалы
Корпус, передняя крышка корпуса Пластик (РРО с упрочнением стекловолокном)
Накидная гайка Латунь
1)
Приводы с ходом 6 мм также могут использоваться для клапанов с ходом 7.5 мм
2)
С возможностью выбора, время переключения по умолчанию выделено жирным шрифтом
3)
При напряжении в 24 V или более быстрой скорости хода напряжение не должно падать ниже установленного
значения
4)
Пружины безопасности втягивают шток в конечное положение; клапан управляется пружинами
5)
Ручная перестановка с помощью 4 мм торцевого ключа после снятия крышки корпуса, всегда возвращает в
положение безопасности
6)
Использовать только блоки питания в соответствии с DIN VDE 0100-410
-10 -20 -30 -10 -20 -30 -15 -25 -35
5824 5825
• •
ЕВ 5824-2 RU
9
Page 10
Монтаж на клапан
3. Монтаж на клапан
Исполнительный привод в зависимости от
конструкции клапана допускает прямой монтаж,
либо монтаж на раме (рис.2).
3.1 Привод тип 5824
3.1.1Соединение силовым
замыканием
1. Маховичок (2) необходимо поворачивать
против часовой стрелки, чтобы шток привода
втянулся внутрь.
2. Установить привод на соединительную часть
клапана и крепко затянуть накидную гайку (4)
(момент затяжки 20 Нм).
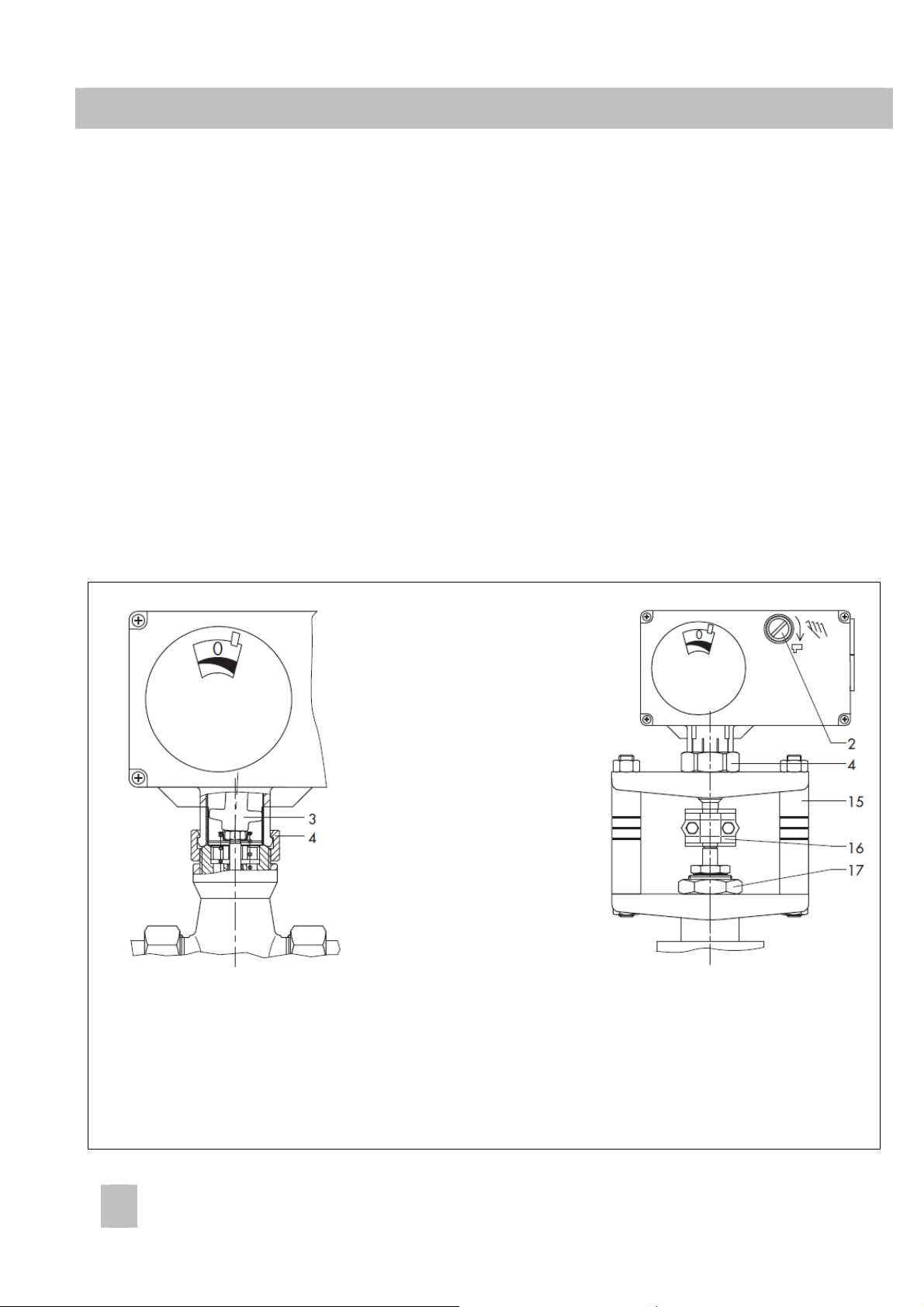
2. Маховичок
3. Шток привода
4. Накидная гайка
15. Стержневая рама
16. Соединительная
муфта
17. Гайка
3.1.2 Соединение геометрическим
замыканием
1. Установить привод на раме со стержневым
исполнением и крепко затянуть накидную
гайку (4) (момент затяжки 20 Нм).
2. Установить привод с рамой (15) на клапан и
закрепить гайкой (17) (момент затяжки не
менее 150 Нм).
3. Подтянуть шток плунжера к штоку привода,
либо выдвинуть шток привода с помощью
маховичка (2).
4. Установить из комплекта принадлежностей
муфтовые скобы (16)
винтами.
и крепко затянуть
Соединение с силовым
замыканием с накидной гайкой,
например, на клапан тип 3222
Рис.2 • Монтаж привода на клапан
10 ЕВ 5824-2 RU
Монтаж на стержневой раме с
соединительной муфтой,
например, на клапан Серии
V2001
Page 11
3.2 Привод тип 5825
3.2.1 Соединение силовым
замыканием
Положение безопасности «Шток привода
выдвигается»
Перед монтажом привода на клапан
необходимо втянуть шток привода. Это можно
сделать как вручную, так и с помощью
электричества. Оба метода описаны ниже.
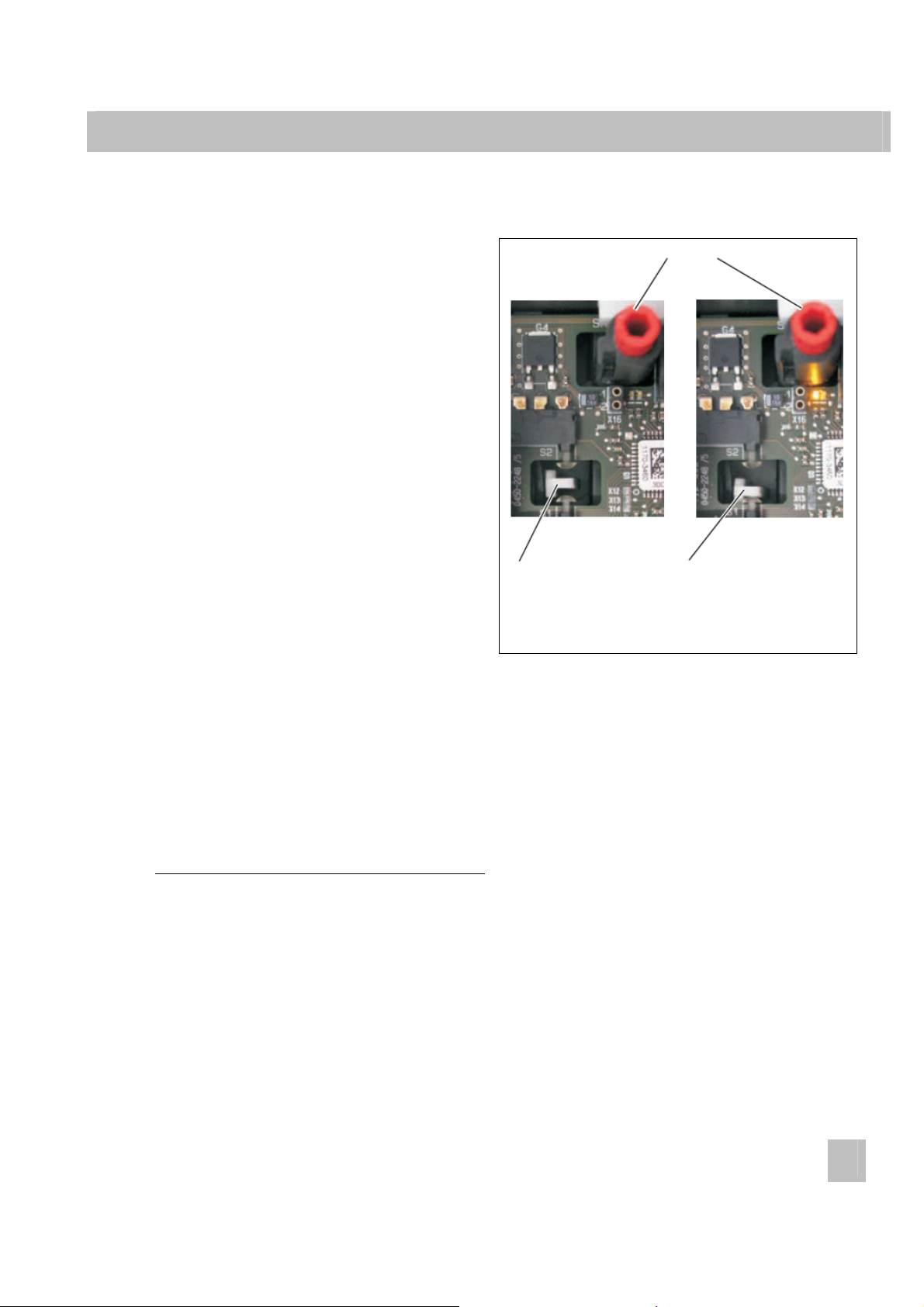
Механическое втягивание штока привода
1. Отвинтите переднюю крышку привода и
вставьте торцевой шестигранный ключ
размером 4мм в красную установочную
ось.
2. Заведите внутрь
с помощью шестигранного торцевого
ключа, поворачивая его при этом только
против часовой стрелки и только до того
положения, когда сработает нижний
выключатель предельного момента
вращения (выключение электродвигателя,
рис.3).
_____________________________________
Внимание!
Дальнейшее вращение ключа сверх
вышеуказанных ограничений приведет к
поломке привода
_____________________________________
3. Удерживая ключ, соедините накидной
гайкой привод с клапаном (момент затяжки
резьбы 20 Нм). Аккуратно прикрепите
переднюю крышку на место.
шток привода:
Монтаж на клапан
Шток привода
Переключатель Переключатель предельного
значения хода
(переключатель момента
вращения включен)
Рис.3 · Переключатель
Втягивание штока привода с помощью
электричества
1. Отвинтить переднюю крышку
2. Подсоедините электрические провода
согласно рис.5 и аккуратно привинтите
переднюю крышку на место.
3. Введите внутрь шток привода:
Подайте напряжение питания и
установите источник сигнала 10 В или 20
мА. Втяните шток привода с помощью
электричества, пока он не достигнет
предельного положения (переключатель
момента
Как вариант, внутри прибора
устанавливается ползунок (рис.7, раздел
9.1.2) на возрастание/убывание (<>).
Управляющий сигнал теперь должен быть
0 V или 0 mА.
4. Соедините накидной гайкой привод с
клапаном (момент затяжки 20 Нм).
вращения выключит мотор).
ЕВ 5824-2 RU
11
Page 12

Монтаж на клапан
Положение безопасности «Шток привода
втягивается»
Установить привод на клапан и крепко
затянуть накидную гайку (4) (момент затяжки
20 Нм).
3.2.2 Монтаж с геометрическим
замыканием
Для положений безопасности «Шток привода
втягивается» и «Шток привода выдвигается»
установите привод, как описано в разделе
3.1.2.
3.3 Монтажное положение
Регулирующий клапан монтируется на
трубопровод вместе с приводом Тип
5824/5825 вверх приводом с целью
достижения заданной степени защиты.
3.4 Шкала индикатора хода
Шкала индикатора хода состоит из двух
противоположных шкал, необходимых для
согласования с клапанами различных
исполнений. Использование одной из двух
шкал зависит от исполнения клапана
(рис.4).
Проходные и 3-ходовые
распределительные клапаны • При
отгрузке прибора (стандартно) шкала
выставлена таким образом, что
установочный штифт находится в позиции 0.
3-ходовые смесительные клапаны •
Извлеките шкалу, поверните ее и установите
вновь так, чтобы отверстие ( 6, 12 или 15)
соответствовало номинальному ходу 6, 12
или 15 мм и совпадало с установочным
штифтом.
Замена шкалы для предыдущих моделей
привода – по запросу.
Отверстия для
установочного
штифта для
смесительного
3-ходового
клапана
12 ЕВ 5824-2 RU
Установочный
штифт в позиции 0;
положение шкалы
для проходного и
распределительного
3-ходового клапана
(поставляется в
данном положении)
Рис.4 • Установка шкалы хода
Page 13
Электрическое подключение
4. Электрическое подключение
Риск поражения электрическим
током!
При прокладке электрических
коммуникаций обязательно следует
соблюдать предписания DIN VDE 0100
по оборудованию силовых
электроустановок, а также местные
нормы и правила.
Следует применять такие
электрические коммуникации, которые
как в случае нормальной работы
оборудования, так и при его
неисправности исключают попадание
опасного напряжения на привод.
Подключение силовых коммуникаций
проводить только
при отключенном
напряжении. Принять меры против
случайного включения напряжения!
В случае применения напряжения 24 V
должны использоваться провода с
достаточно широким поперечным
сечением, чтобы не допускать
отклонение напряжения ±10%.
ВНИМАНИЕ!
Сразу после электрического подключения
привода автоматически выполняется
калибровка нуля, если установлена настройка
полного хода (состояние поставки), приводя в
движение шток привода.
Во избежание риска повреждения рук и пальцев
запрещается дотрагиваться до штока
привода или препятствовать его движению.
ПРИМЕЧАНИЕ
Во время калибровки нуля регулирующй
клапанпроходит часть рабочего хода.
Запрещается выполнять электрическое
подключение во время процесса. Наоборот,
сначала закройте запорные
вентили в
установке.
1. Подсоединение кабельных вводов согласно
рис.5.
.
ЕВ 5824-2 RU
13
Page 14
ур
Электрическое подключение
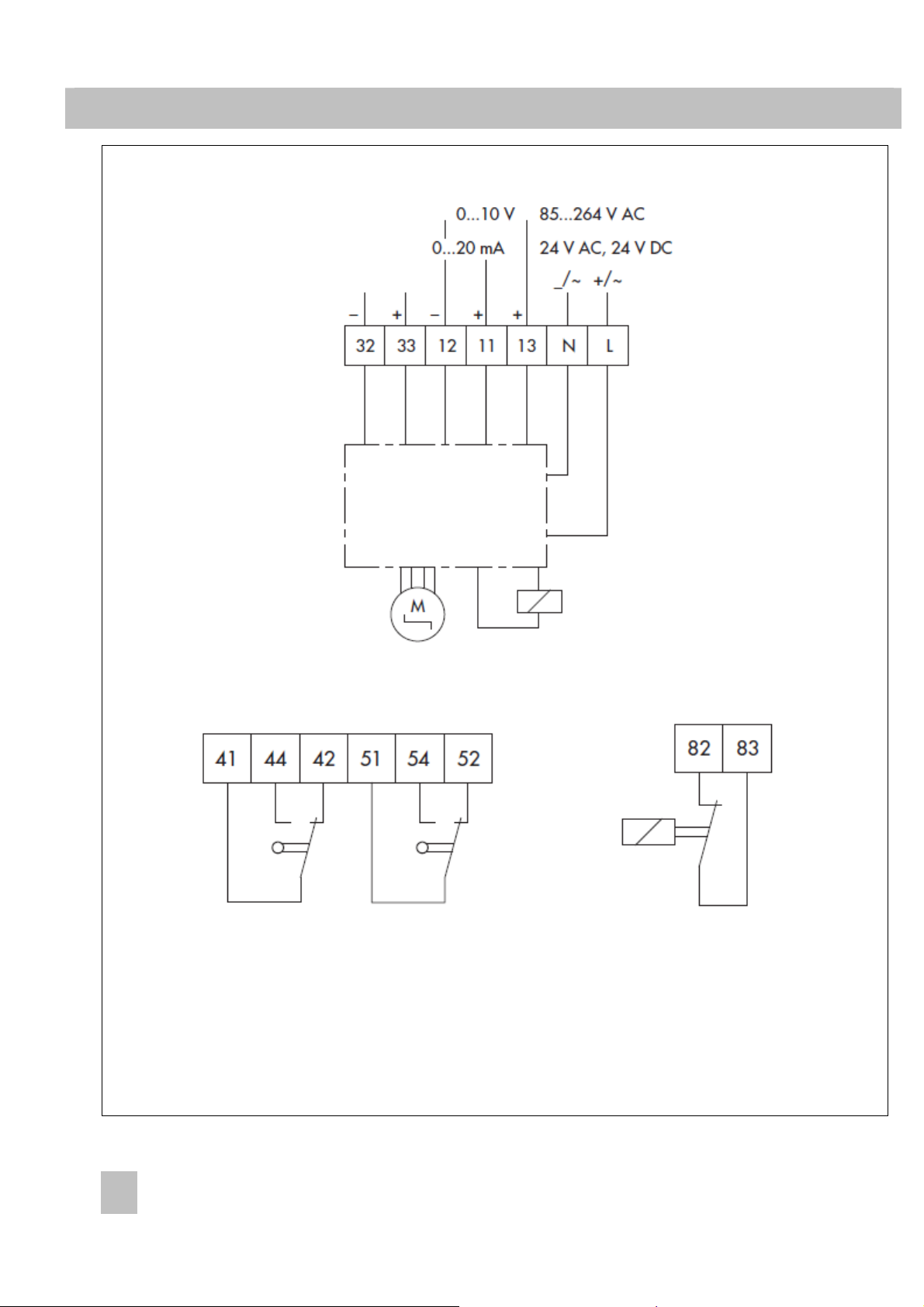
Выход
Вход
Зависит от исполнения
Дополнительное электрическое оснащение (только для исполнения с 24 V)
Конечные
выключатели
Рис.5 • Электрическое подключение привода
Приоритетный
конт
14 ЕВ 5824-2 RU
Page 15
Ручное управление
5. Пуск
После подачи напряжения на привод
автоматически выполняется калибровка нуля.
Показателем этого будет мигающий красный
светодиод (см.стр.21).
Для правильной обратной связи надо
запустить инициализацию (см.стр.22 ).
Если настройка хода установлена на
«относительное» использование программного
обеспечения TROVIS-VIEW, автоматическая
калибровка нуля не выполняется. В данном
случае может выполняться ручная
инициализация (см.стр.22 ).
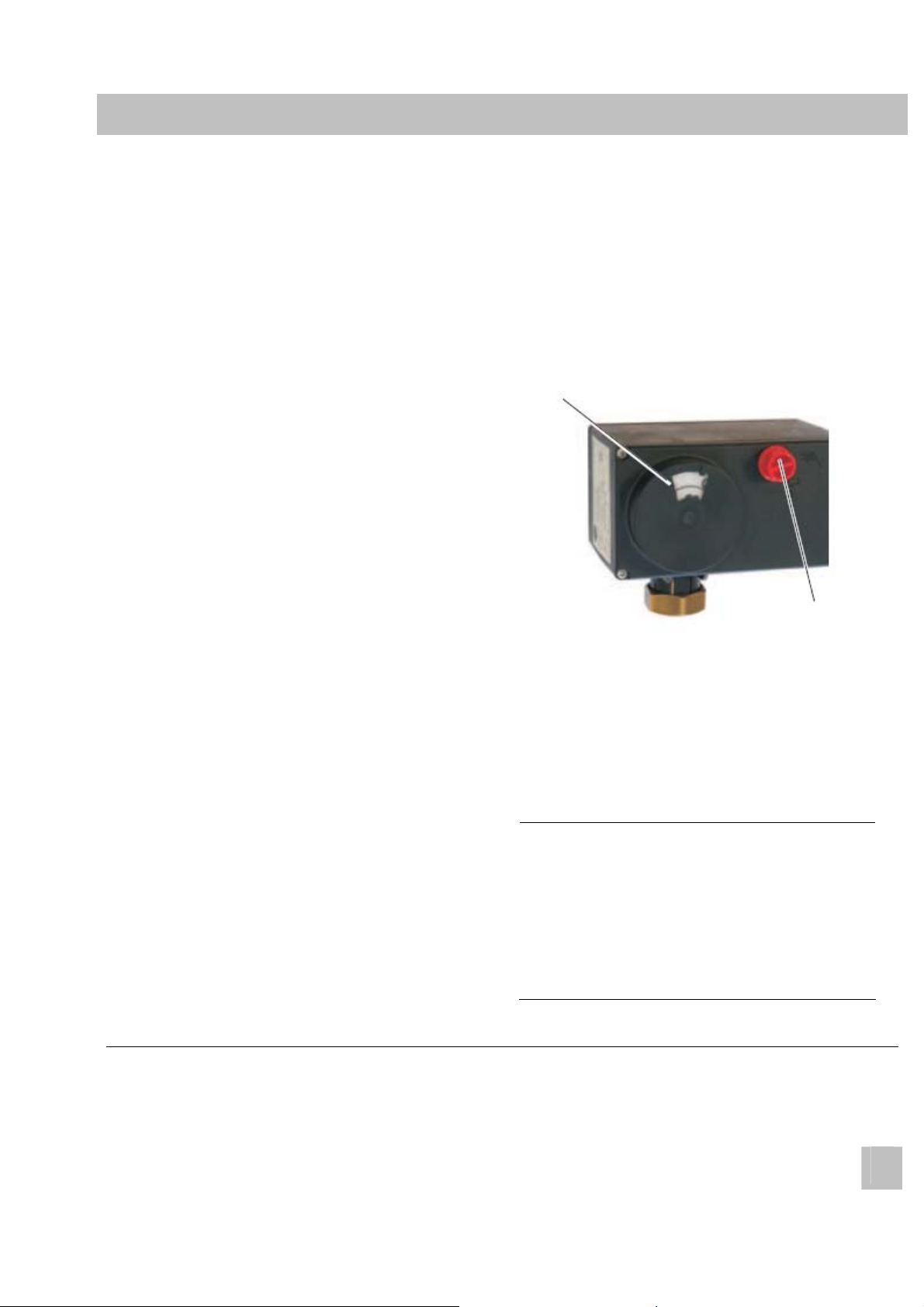
6. Ручное управление
С помощью маховичка устанавливается
необходимая величина хода (1 мм рабочего
хода соответствует примерно 4 оборотам).
Направление движения и ход отображает
шкала индикатора хода (рис.6).
Шкала индикатора хода
Маховичок только
тип 5824
Рис.6 Электрический привод тип 5824
При вращении по часовой стрелке шток
привода выдвигается
При вращении против часовой стрелки –
втягивается
ПРИМЕЧАНИЕ
При вращении маховичка во время
работы привода меняется положение
клапана. При вращении маховичка
нулевая отметка и обратная связь
положения не совпадают со значениями,
откалиброванными позиционером.
Калибровка нуля
выполнена снова.
должна быть
ЕВ 5824-2 RU
15
Page 16
Дополнительное оборудование
Ручное управление с приводом
Тип 5825
Риск поражения электрическим
током!
1. Отвинтите переднюю крышку привода и
вставьте торцевой шестигранный ключ 4
мм в красную установочную ось.
Поверните шестигранный ключ: для
исполнения с положением безопасности
«Шток выдвигается» - только против
часовой стрелки. Для исполнения с
положением безопасности «Шток
втягивается» - по часовой стрелке.
Поверните ключ только до того
положения, когда сработает нижний
конечный выключатель предельного
момента вращения (выключение
электродвигателя).
Внимание!
Дальнейшее вращение ключа сверх
вышеуказанных ограничений приведет
к поломке привода
После безопасного отключения магнита привод
не может оставаться в том же положении.
Пружинный механизм выталкивает шток привода
обратно в положение безопасности.
3. Снимите торцевой ключ и аккуратно
прикрепите переднюю крышку на место.
16 ЕВ 5824-2 RU
7.Дополнительное оборудование
Приводы с напряжением питания 24 V могут
оснащаться следующим дополнительным
оборудованием.
7.1 Конечные выключатели
Конечные выключатели (6, рис.1)
применяются выборочно, как контакты
переключения, закрытия или открытия.
Назначение клемм (рис.5):
Клеммы 41, 44 и 42: нижний кулачковый диск,
задатчик 7.1
Клеммы 51, 54 и 52: верхний кулачковый
диск, задатчик 7.2
Риск поражения электрическим
1. Открутите переднюю крышку корпуса.
2. Поверните привод до положения хода,
при котором устанавливается точка
переключения.
3. С помощью шестигранного ключа 4 мм
поворачивайте задатчики (7.1 или 7.2 на
рис.1) до положения, когда сработает
конечный выключатель предельного
момента вращения. Угол поворота
кулачковых дисков ограничен. Поэтому
верхний задатчик (7.1) желательно
должен быть использован для верхнего
диапазона хода, а нижний задатчик (7.2)
– для нижнего диапазона хода.
током!
Page 17

Дополнительное оборудование
7.2 Приоритетный контур
В комбинации с конечными выключателями
привод может оснащаться приоритетным
контуром.
Эта функция может быть активирована в
программном обеспечении TROVIS-VIEW. В
данном случае положение штока также может
определяться при активированном
приоритетном контуре.
Для использования приоритетного контура
нужно подключить клеммы 82 и 83. Если
подключение прерывается, шток привода
движется в определенном направлении
конечного положения, пока выключатель
предельного момента вращения выключит
двигатель.
Приоритетный контур активируется путем
прерывания подключения между клеммами 82 и
83.
Если заново установить контакт на клеммах 82 и
83, входной сигнал привода снова определяет
положение клапана.
Примечание: приоритетный контур не
оказывает влияние на работу привода
Тип 5825 в положении безопасности.
ЕВ 5824-2 RU
17
Page 18
Размеры в мм
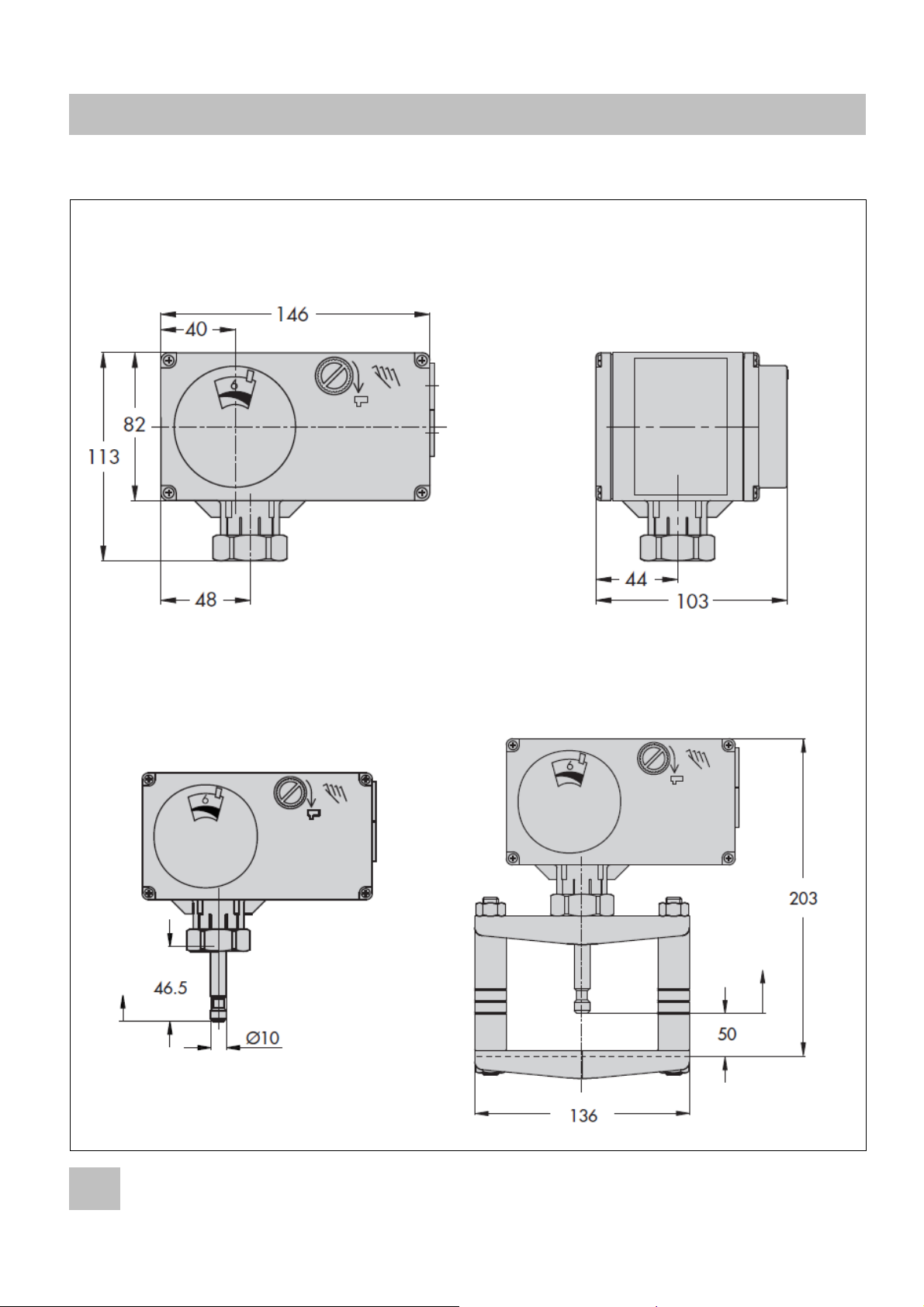
8. Размеры в мм
Тип 5824-10 и Типы 5825-10/-15/-25
Типы 5824-30, 5825-30/-35
Привод без рамы
Ход 15
Привод с рамой 1400-7414
Ход 15
18 ЕВ 5824-2 RU
Page 19

9. Цифровой позиционер
Исполнение 24 V
Исполнение 85…264 V
Серийный интерфейс
Ползунковый выключатель
в положении
ВЫКЛ (влево):
увеличение/увеличение
ВКЛ (вправо):
увеличение/уменьшение
Двойная функция выключателя в
положении выключателя 1
1 (влево): 0…10 V или 0…20 mA
ВКЛ (вправо): 2…10 V или 4…20 mA
Серийный интерфейс
Двойная функция выключателя в положении
выключателя ВЫКЛ
ВЫКЛ (влево): 0…10 V или 0…20 mA
ВКЛ (вправо): 2…10 V или 4…20 mA
Ползунковый выключатель в положении
выключателя ВЫКЛ
ВЫКЛ (влево): увеличение/увеличение
ВКЛ (вправо): увеличение/уменьшение
Рис.7 Расположение органов управления под передней крышкой корпуса
9.1 Органы управления
9.1.1 Светодиоды (LED)
Привод имеет красный и желтый светодиоды (LED), отображающие рабочее состояние привода.
Светодиоды (LED) расположены под крышкой сверху привода.
ЕВ 5824-2 RU
19
Page 20

Цифровой позиционер
Мигание желтого светодиода (LED)
• Привод включен, выполняется передача данных
On
Off
• Положение штока относительное
On
Off
• Выполняется блокировка защиты (см. раздел 9.3.4)
On
Off
Время (сек.)
Время (сек.)
Время (сек.)
Примечание: Когда перо памяти вставлено, желтый светодиод (LED) также отображает
действие, которое должно быть выполнено пишущим устройством (см.раздел 11.2).
Мигание красного светодиода (LED)
• Привод начинает работать после того, как сброс или ошибки выключателя предельного момента
вращения или переключатель с двойной функцией активированы
On
Off
Время (сек.)
• Распознана ошибка входной сигнала (см.раздел 9.3.3)
On
Off
Время (сек.)
20 ЕВ 5824-2 RU
Page 21

Цифровой позиционер
• Ошибка флэш-памяти
On
Off
• Выполняется калибровка нуля (см.раздел 9.2.1)
On
Off
• Выполняется измерение время переключения
On
Off
Время (сек.)
Время (сек.)
Время (сек.)
• Выполняется инициализация (см.раздел 9.1.3)
On
Off
Время (сек.)
9.1.2 Ползунковый переключатель
Ползунковым переключателем определяется направление действия привода (рис.7):
Ползунковый переключатель передвинут влево (исполнение 24 V) или в положение OFF (исполнение
85…264 V)
Направление движения >> возрастание/возрастание
Шток привода втягивается при возрастании входного сигнала.
Для проходных клапанов направление движения привода >>:
Входной сигнал = 0 V → Клапан закрыт
Входной сигнал = 10 V → Клапан открыт на максимум
Ползунковый переключатель передвинут вправо (исполнение 24 V) или в положение ON (исполнение
85…264 V)
Направление движения >> возрастание/убывание
Шток привода выдвигается при возрастании входного сигнала.
ЕВ 5824-2 RU
21
Page 22

Цифровой позиционер
Для проходных клапанов направление движения привода <>:
Входной сигнал = 0 V → Клапан открыт на максимум
Входной сигнал = 10 V → Клапан закрыт
Значения, установленные для нижнего и верхнего диапазонов, применяются в обоих случаях.
9.1.3 Переключатель с двойной функцией
Двойная функция переключения позволяет определить диапазон управляющего сигнала и запустить
инициализацию вручную.
Определение входной переменной
Положение переключателя ON:
Входной сигнал 2…10 V или 4…20 mA
Примечание: установка входной переменной в TROVIS-VIEW игнорируются!
Положение переключателя 1 (исполнение 24 V) или OFF (исполнение 85..264 V):
Входной сигнал 0…10 V или 4…20 mA
Примечание: установки входной переменной в TROVIS-VIEW игнорируются!
Привод поставляется с положением переключателя «1» или OFF.
Ручная инициализация
ПРЕДУПРЕЖДЕНИЕ!
Во время инициализации шток привода приходит в движение.
Во избежание риска повреждения рук и пальцев запрещается дотрагиваться до штока
привода или препятствовать его движению.
ПРИМЕЧАНИЕ
Во время инициализации клапан проходит полный рабочий ход. Поэтому запрещается
выполнять инициализацию во время процесса. Наоборот, сначала закройте запорные
вентили на трубопроводе.
Примечание: Для получения правильной позиционной обратной связи должна быть
выполнена инициализация. Это также необходимо, когда происходят изменения настроек
на приводе.
Для начала инициализации необходимо резко переключить переключатель с двойной
функцией в другое положение, а затем вернуть в обратное.
22 ЕВ 5824-2 RU
Page 23

Цифровой позиционер
Красный светодиод (LED) означает выполнение инициализации:
On
Off
Время (сек.)
9.1.4 Серийный интерфейс
Привод может быть сконфигурирован на компьютере с помощью Конфигурации TROVIS-VIEW и
Интерфейс Оператора. Привод подсоединен к компьютеру через его цифровой серийный
интерфейс.
Перо памяти также подсоединено к серийному интерфейсу. Подробности см. в разделе 10.2.
9.2 Настройка хода
ПРИМЕЧАНИЕ
При вращении маховичка во время работы привода меняется положение клапана. Если при
вращении маховичка нулевая отметка и обратная связь положения не совпадают со значениями
откалиброванного позиционера, калибровка нуля должна быть выполнена заново.
Настройка хода может быть либо абсолютной, либо относительной. Тип настройки хода определяет
режим регулирования привода.
9.2.1 Абсолютная настройка хода
Абсолютная настройка хода перемещает штока привода в положение, определяемое входной
переменной. Для этого выполняется автоматическая калибровка нуля после каждого пуска, чтобы
получить истинное значение для нулевой отметки.
Позиционная обратная связь отображает положение штока привода.
Калибровка нуля
Красный светодиод (LED) означает выполнение калибровки нуля:
On
Off
Время (сек.)
ЕВ 5824-2 RU
23
Page 24

Цифровой позиционер
Шток привода выдвигается, пока не достигнет конечного положения. Как только оно достигнуто,
красный светодиод (LED) выключается, и шток привода двигается в положение, определяемое
управляющим сигналом.
9.2.2 Условная настройка хода
Условная настройка хода вызывает изменение входного сигнала за счет положения штока привода.
Шток привода выдвигается или втягивается из текущего положения хода в соответствии с
изменением сигнала. После пуска привода калибровка нуля не выполняется. При запуске положение
штока неизвестно и, таким образом, условно. Позиционная обратная связь отображает положение
штока привода относительно
стартового значения.
9.2.3 Установка настройки хода
В режиме обратной связи управление позиционером должно выполняться с настройкой абсолютного
хода. Это настройка по умолчанию.
Измените настройку хода в разделе Конфигурация.
Дальнейшее описание относится к работе с настройкой абсолютного хода, если не указано другое.
24 ЕВ 5824-2 RU
Page 25

Цифровой позиционер
9.3 Функции и параметры
Привод конфигурируется на компьютере с помощью Конфигурации TROVIS-VIEW и Интерфейса
Оператора. В разделе 10 приведена информация относительно TROVIS-VIEW.
9.3.1 Входная переменная
Входная переменная (Управляющий сигнал ) определяют положение штока привода. В качестве
задающей команды используется сигнал напряжения (V) или токовый сигнал (mA).
Значения по умолчанию для Значения нижнего диапазона и Значения верхнего диапазона
управляющго сигнала – 0 и 10 V или 0 и 20 mА. Диапазон управляющего сигнала можно настроить,
например, чтобы получить характеристику работы установки путем подключения двух и
приводов параллельно (разбивка диапазона).
Например: два клапана регулируют рабочую среду в одном трубопроводе для увеличения
диапазона регулирования. Первый клапан открывается при входном сигнале 0…5 V, тогда как
второй также открывается при увеличенном входном сигнале (5…10 V), а первый остается
открытым. Оба клапана закрываются в обратной последовательности.
Примечание: Как минимум 2.5 V или 5 mA должны разделять верхний
диапазона.
Конфигурация – входная переменная
Нижнее значение диапазона 0.0 V или 0.0 mA 0.0…7.5 V или 0.0…15.0 mA
Верхнее значение диапазона 10.0 V или 20.0 mA 2.5…10 V или 5.0…20 mA
Заводская настройка* Диапазон настройки
и нижний значения
более
9.3.2 Сигнал положения
Сигнал обратной связи показывает положение штока привода (см.раздел 9.2).
Диапазон сигнала обратной связи регулируется через параметры Значения нижнего диапазона и
Значения верхнего диапазона.
Конфигурация – сигнал обратной
связи положения
Нижнее значение диапазона 0.0 V 0.0…10.0 V
Верхнее значение диапазона 10.0 V 0.0…10.0 V
*WE = Заводская настройка
Заводская настройка Диапазон настройки
ЕВ 5824-2 RU
25
Page 26

Цифровой позиционер
9.3.3 Управляющий сигнал
Распознать ошибку входного сигнала
ПРИМЕЧАНИЕ
Позиционер может распознать ошибку входного сигнала, если нижний диапазон входного
сигнала сконфигурирован на 0.5 V или 1 mA
Позиционер распознает ошибку
опускается ниже значения нижнего диапазона на 0.3 V или 0.6 mA. Ошибка входного сигнала
регистрируется в поле Диагностика [>Ошибки] и отображается красным светодиодом (LED):
On
Off
входного сигнала, как только значение управляющего сигнала
Время (сек.)
Если функция Распознать ошибку входного сигнала активна, параметр Исходное значение на
основании ошибки входного сигнала определяет, каким образом привод реагирует при
исчезновении управляющего сигнала.
- Заданное значение при отказе управляющего сигнала = Internal (внутренний)
При исчезновении управляющего сигнала шток привода двигается в положение, определенное
параметром внутреннего заданного значения.
- Заданное
значение при отказе управляющего сигнала = Последнее положение
перемещения.
Шток привода остается в последнем положении перемещения, в котором остался клапан, при
исчезновением входного сигнала.
Сообщение об ошибке сбрасывается и привод возвращается цепью обратной связи к работе,
если величина входного сигнала достигает 0.2 V или 0.4 mA Нижнего значения диапазона.
Конфигурация – управляющий сигнал
Заводская настройка Диапазон настройки
Распознать ошибку входного сигнала Нет Да, нет
Заданное значение при отказе входного
сигнала
Внутреннее Внутреннее, значение
последнего хода
Внутреннее заданное значение 0.0% 0.0..100.0%
26 ЕВ 5824-2 RU
Page 27

Цифровой позиционер
Приоритетное положение
Примечание: Шток может доходить до своего конечного приоритетного положения, только
если у привода есть приоритетный контур (см.раздел 7.2).
При исчезновении входного сигнала шток привода двигается в направлении выбранного конечного
положения (шток выдвигается или втягивается) и далее, пока выключатель предельного момента
вращения не отключит мотор.
Конфигурация – Управляющий сигнал
Приоритетное положение Нет Да, нет
Приоритетное положение при штоке Выдвинут Выдвинут/втянут
Направление конечного положения
Шток привода начинает преждевременно двигаться в направлении конечного положения, если
функция End position guiding активна:
- Конечное положение направляющей: шток привода выдвинут
Шток привода движется в направлении закрытого положения, если управляющий сигнал
достигает значения, заложенного в функции Конечное положение направляющей: шток привода
выдвигается.
- Конечное положение направляющей: шток
Шток привода движется в направлении максимально открытого положения, если задающая
величина достигает значения, заложенного в функции Конечное положение направляющей:
шток привода втягивается.
Примечание: Введите 0% (Конечное положение направляющей: шток привода выдвигается)
или 100% (Конечное положение направляющей: шток привода втягивается), чтобы сделать
эту функцию не активной.
Конфигурация – управляющий сигнал
Конечное положение направляющей:
Шток привода выдвигается
Конечное положение направляющей:
шток привода втягивается
Заводская настройка Диапазон настройки
приводание втягивается
аводская настройка Диапазон настройки
1.0% 0.0…49.9%
97.0% 50.0…100.0%
9.3.4 Защитная блокировка
Защитная блокировка предотвращает клапан от задиров. Если шток привода находится закрытом
положении (0%), он немного выдвигается и затем движется обратно в закрытое положение через 24
часа после последнего перемещения.
ЕВ 5824-2 RU
27
Page 28

Цифровой позиционер
Желтый светодиод (LED) отображает движение штока привода в рамках функции защитной
блокировки.
On
Off
Время (сек.)
Конфигурация – функция
Защитная блокировка клапана Нет Да, нет
аводская настройка Диапазон настройки
9.3.5 Ход клапана
Ход
Параметр Travel определяет в процентном соотношении, максимальный ход штока. Номинальный
ход является исходной величиной.
Конфигурация – ход клапана
Ход 100.0% 30.0…130.0%
Скорость движения штока
Шток привода движется в направлении положения, определяемого входным сигналом при
выбранной скорости хода. Существуют 3 разные скорости.
Низкая = 0.135 мм/сек
Нормальная = 0.197 мм/сек
Быстрая = 0.365 мм/сек
Конфигурация – ход клапана
Скорость движения штока Нормальная Низкая, нормальная, быстрая
Примечание: Время перестановки рассчитывается от хода и скорости движения штока.
Время перестановки – время, которое нужно штоку привода, чтобы пройти полный заданный
ход. Применяется следующая формула:
Время перестановки (сек.) =
28 ЕВ 5824-2 RU
Заводская настройка Диапазон настройки
Заводская настройка Диапазон настройки
)(
ммХод
штокадвиженияСкорость
мм/сек][
Page 29

Цифровой позиционер
Мертвая зона (диапазон переключения)
Мертвая зона определяет, насколько чувствительно реагирует привод. Изменение управляющего
сигнала при гистерезисе сначала вызывает минимально небольшое изменение в положении
клапана.
Конфигурация – задающая величина
Мертвая зона (диапазон переключения) 2.0% 0.5…5.0%
Заводская настройка Диапазон настройки
9.3.6 Характеристика
Характеристика показывает зависимость положения штока привода от управляющего сигнала.
Линейная
Ход пропорционален управляющей величине
Равнопроцентная
Ход в геометрической прогрессии зависит от
управляющего сигнала
ЕВ 5824-2 RU
29
Page 30

Цифровой позиционер
Быстрооткрывающаяся характеристика
Ход в обратной геометрической прогрессии зависит от
управляющего сигнала
Задаваемая пользователем
Новая характеристика на основе
последней используемой
характеристики, определяется с
помощью 11 точек, задаваемых
пользователем
Конфигурация – Характеристика
Тип характеристики Линейная Линейная, Равнопроцентная,
WE Диапазон настройки
Быстрооткрывающаяся,
Задаваемая
9.4 Ручное управление
Маховик
Маховик (см.раздел 6) используется для того, чтобы привести шток привода в движение после того,
как привод был отключен от источника питания. Работа с маховиком запрещена во время рабочего
процесса (настройка абсолютного хода), в противном случае сигнал обратной связи будет смещен.
При выполнением калибровки нуля, инициализации или измерения времени перестановки
необходимых для перенастройки сигнала обратной связи.
Ручной режим в TROVIS-VIEW
Привод можно перевести в ручной режим управления с помощью TROVIS-VIEW, если он доступен в
режиме on-line (Запуск параметра ручного режима = ON (иконка
30 ЕВ 5824-2 RU
)).
,
Page 31

Цифровой позиционер
В ручном режиме можно совершать следующие действия:
- Шток привода втягивается: ON/OFF
- Шток привода выдвигается ON/OFF
- Перемещение штока в соответствующее сигналу положение: ON/OFF
Сначала введите требуемое значение в зависимости от диапазона управляющего сигнала
(соответствующее сигналу положение).
- Нормализованное сообщение о положении штока: ON/OFF
Сначала войдите в сообщение о положении штока относительно диапазона сигнала
положении (Нормализованное сообщение о положении штока).
- Сообщение об ошибке: ON/OFF
- LED для управления (желтая): ON/OFF
- LED для отображения ошибки (красная): ON/OFF
Привод выходит из ручного режима, как только отключается ручной режим или режим on-line в
TROVIS-VIEW.
9.5 Командный режим
Перо памяти может быть сконфигурировано в TROVIS-VIEW и выполнять функции командного. С
помощью командного пера пользователь может перемещать клапан в открытое и закрытое
положение.
Примечание: Абсолютный приоритет отдается выдвижению и втягиванию штока привода
командами пера памяти. Привод в данном случае не реагирует на входной сигнал.
Конфигурация пера памяти описана в разделе 11.2.5.
5824-2 RU
о
31
Page 32

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10. Конфигурация и управление с помощью программного
обеспечения TROVIS-VIEW
10.1 Основное
Программное обеспечение TROVIS-VIEW позволяет конфигурировать различные
интеллектуальные устройства SAMSON через общий интерфейс оператора. Он состоит из
интерфейса оператора, шлюзового процессора и зависящего от устройства модуля. Контроль и
содержание программного обеспечения аналогично Windows® Explorer. Полная конфигурация
цифрового позиционера в приводе может выполняться через Интерфейс оператора и
Конфигурацию TROVIS-VIEW.
Программное обеспечение TROVIS-VIEW можно загрузить из Интернета (http://www.samson.de
разделе Сервисы>Программное обеспечение. Также можно заказать диск с программой.
Примечание: Следующие инструции включают в себя описание основных функций
программного обеспечения TROVIS-VIEW в сочетании с цифровым позиционером. Для
подробного описания обратитесь в поддержку on-line.
) в
10.1.1 Требования к системе
Жесткий диск
- ПК с процессором Pentium II или его эквивалент (300 МГц и более), рекомендовано 500 МГц
- Серийный интерфейс и адаптер USB/RS-232
- Мин. 96 MB RAM, рекомендовано 192 MB RAM
- Свободная память на жестком диске мин. 150 МВ и приблизительно от 10 до 15 МВ
дополнительно свободной памяти жесткого диска для модуля SAMSON
- Графическая карта SVGA (мин. 8 х 600)
- Дисковод CD-ROM
Рекомендации для ПО
- Операционная система: Windows® 2000 (мин.SP2), Windows® ХР, Windows® Vista, Windows® 7
- Microsoft®. NET Framework версия 2.0 (добавляется при установке CD-ROM)
- Интернет браузер: например, Microsoft® Internet Explorer (версия 6.0 и выше)
32 ЕВ 5824-2 RU
Page 33

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.2 Установка программного обеспечения TROVIS-VIEW
1. Запустите setup.exe для установки программы.
Установка программы через скаченный заархивированный ZIP файл:
Скачайте и разархивируйте ZIP файл на вашем компьютере перед началом установки.
Установка программы с CD-ROM:
Как только CD-ROM вставлен, он автоматически начинает установку программы, в
зависимости от конфигурации операционной системы. Запускать setup.exe не требуется.
2. Пользуйтесь экранными подсказками и указаниями по установке программы.
ЕВ 5824-2 RU
33
Page 34

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.3 Пуск TROVIS-VIEW и выполнение настроек
Вы можете выполнить настройки в TROVIS-VIEW либо при подключенном к компьютеру приборе
(Online), либо не подключенном (offline).
Примечание: Если прибор не подключен, установки по умолчанию появляются на
интерфейсе оператора или, как альтернатива, сохраненный файл TROVIS-VIEW (*.tro) может
быть загружен и записан поверх через меню Open in the File.
1. Пуск TROVIS-VIEW.
Интерфейс оператора появляется на экране.
Вы можете прочитать основную информацию на экране:
Режим online/offline: Иконка
на панели on-line высвечивается в режиме on-line
(см.раздел 10.1.2).
Рабочее состояние: Текущее рабочее состояние отображается справа на информационной
панели (см.раздел 10.4).
Уровень пользователя: Активный уровень пользователя (Заказчик или Специалист) отображен
на панели состояния (см.раздел 10.5).
34 ЕВ 5824-2 RU
Page 35

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
2. В меню View выберите необходимые настройки
для интерфейса оператора.
Все опции проверяются в настройке по
умолчанию данного меню.
Если необходимо, отмените проверку отдельных
опций.
3. В меню Options выберите Language, чтобы
изменить язык интерфейса.
Примечание: неактивные языки не доступны и не
могут быть выбраны.
Вы можете выбрать другой язык в любое время.
TROVIS-VIEW сразу переключает на выбранный
язык.
4. Если необходимо, создайте файл TROVIS- VIEW
в меню Options на основании типа, даты и
выбираемых параметров. Название файла,
созданного таким образом, можно
предварительно посмотреть перед сохранением
(например, VIEW3_5824_2009-Jul-07.tro).
ЕВ 5824-2 RU
35
Page 36

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
5. Если необходимо, выберите Customer data в меню
Edit, чтобы ввести данные по установке, например,
номер проекта, расположение установки, оператор.
6. Если необходимо, выберите Load Factory Defaults в
меню Edit, если вы хотите загрузить настройки по
умолчанию в интерфейс управления.
10.4 Отображение рабочего состояния
Текущее рабочее состояние отображается с правой
стороны информационной панели.
Папка Diagnostics содержит более подробную
информацию о погрешностях (см.раздел 10.8).
10.5 Изменение уровня пользователя
Применение: Уровень пользователя можно изменить только в режиме offline.
1. Выберите User Level и меню Device.
2. Выберите “Specialist” из «выпадающего списка»
3. Введите пароль. При поставке название пароля
“samson”.
Кликните на кнопку Modify Password, чтобы открыть окно, в
котором можно поменять пароль.
36 ЕВ 5824-2 RU
Page 37

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
Свойства исходных данных обозначаются символами при кликании на папку:
Иконка Значение
Данные не могут быть изменены
Данные могут быть изменены
Точки данных могут быть выполнены
Точки данных определяются пользователем
Знак для обозначения состояния/ошибки
Значение превысило максимальный предел
Значение ниже минимального предела
Источник данных:
Значение было изменено вручную
Значение было загружено с помощью устройства.
В режиме online Х в символе означает, что значение было обновлено
Значение происходит от сохраненного файла
Значение получено от пишущего устройства
ЕВ 5824-2 RU
37
Page 38

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.6 Конфигурация
Примечание: Раздел 9.3 содержит описание функций и параметров.
1. Кликните на папку Configuration
Появятся функции и параметры вместе с текущими настройками.
2.Изменение
настроек
Функции (Да/Нет)
Двойным кликом по
нужной функции
происходит активация
(Yes) или
деактивация (No).
Нажмите правой
кнопкой мышки на
нужную функцию,
чтобы открыть
«всплывающее» окно
для модификации
настроек.
38 ЕВ 5824-2 RU
Page 39

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
[Modify] Открывает «всплывающее» окно для модификации функциональных настроек
[Read] Загружает состояние функции с привода.
На экране отображается только в режиме offline (см.раздел 11.1.1)
[Write] Загружает состояние функции в привод.
На экране отображается только в режиме offline (см.раздел 11.1.1)
[Default:…] Сбрасывает функцию на настройку по умолчанию (настройка серым цветом для
указания, что состояние функции такое
же, как настройка по умолчанию)
Параметры
Сделайте двойной клик по нужному
значению параметра, чтобы открыть
«всплывающее» окно для модификации
настроек.
Нажмите правой кнопкой мышки на нужный
параметр, чтобы открыть «всплывающее»
окно, отображающее опции:
[Modify] Открывает «всплывающее» окно для модификации настроек параметра
[Read] Загружает значение параметра с привода.
На экране отображается только в режиме offline (см.раздел 11.1.1)
[Write] Загружает значение параметра в привод.
На экране отображается только в режиме offline (см.раздел 11.1.1)
[Default:…] Сбрасывает параметр на настройку по умолчанию (настройка серым цветом для
указания, что значение параметра такое же
, как настройка по умолчанию)
[Min…] Настройте параметр на минимальное значение на дисплее (параметр серым
цветом для указания, что значение параметра такое же, как минимальное значение)
[Max…] Настройте параметр на максимальное значение на дисплее (параметр серым
цветом для указания, что значение параметра такое же, как максимальное
значение)
ЕВ 5824-2 RU
39
Page 40

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.7 Рабочие значения
Примечание: Значения в папке Operating values не могут быть изменены
В режиме online (высвечивается иконка ) на экране отображаются текущие рабочие
значения.
Примечание: Уровень пользователя устанавливается в TROVIS-VIEW на “Customer” по
умолчанию. Текущий уровень пользователя отображается в панели состояния. Когда уровень
пользователя установлен на “Specialist”, выводится дополнительная информация Input in [V],
Actuator travel in [mm], Valve position feedback in [V], Actuator stem retracted, Actuator stem extended
и Zero calibration.
Измените уровень пользователя на Specialist, выбрав User Level в меню Device (см.раздел
10.5).
40 ЕВ 5824-2 RU
Page 41

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.8 Диагностика
Папка Diagonistics имеет подразделы Information, Errors, Manual Level, Status messages и
Statistics.
Information ( Информация )
Errors (Ошибки)
Примечание: Рабочее состояние и ошибки также отображаются светодиодами LED
(см.раздел 9.1.1).
ЕВ 5824-2 RU
41
Page 42

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
Manual level (Ручной уровень)
Примечание: Ручной уровень описан в разделе 9.4.
Status messages ( Статус сообщений )
42 ЕВ 5824-2 RU
Page 43

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
Statistics ( Статистика )
ЕВ 5824-2 RU
43
Page 44

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.8.1 Дополнительная диагностика в уровне пользователя Specialist
В TROVIS-VIEW уровень пользователя по умолчанию – “Customer”. Текущий уровень
пользователя отображается на экране в панели состояния. Когда уровень пользователя
переключается на “Specialist”, в папке Diagnostics появляется подкаталог Test и Calibration.
Выберите User Level в меню Device для изменения уровня пользователя на Specialist (см.раздел
10.5).
Test ( Испытания )
Start zero calibration:
Привод движется в конечное положение (шток выдвинут). После завершения калибровки нуля,
настраивается время переключения и привод готов для работы. Шток привода движется в
положение, определяемое входным сигналом.
Initialization:
Инициализация позволяет зафиксировать время срабатывания. После изменений на приводе
нужно произвести его новую инициализацию.
Reset:
Происходит перезапуск привода.
Default settings:
При выполнении конфигурации
происходит сброс на настройки по умолчанию.
Determine actuator transit time:
Измеряет время, необходимое для перемещения из одного конечного положения в другое.
Enter/transmit rated travel:
Номинальный ход привода может быть установлен на 6, 12 или 15 мм.
44 ЕВ 5824-2 RU
Page 45

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
Calibration ( Калибровка )
ЕВ 5824-2 RU
45
Page 46

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
10.9 Рабочие диаграммы данных (Trend Viewer)
Trend Viewer отображается на дисплее только тогда, когда Trend
Viewer отмечен галочкой (
Все данные активированного перечня параметров загружаются с привода в режиме on-line, если
Trend Viewer активирован.
) в меню View (см.раздел 10.3).
Диаграмма может быть экранизирована. Входной сигнал и/или ход привода можно вывести на
экран, если их параметры помечены галочкой.
Помимо возможно выбора отметок данных можно сместить оси
передвигая курсор-перекрестие по диаграмме (появляются значения изменения оси). Также
можно увеличивать и уменьшать диаграмму.
Нажмите на кнопку
чтобы экспортировать данные файлом CSV, XML или XLS. CSV файлы – это текстовые файлы,
которые можно редактировать в текстовом редакторе, например Excel. Точки ввода данных
прописаны в файле в строчках и разделены запятой.
46 ЕВ 5824-2 RU
, чтобы вывести точки ввода данных в таблице и нажмите на кнопку ,
х и у, и настроить шкалу,
Page 47

Конфигурация и управление с помощью программного обеспечения TROVIS-VIEW
Выполнение настроек
Вы можете добавить новые точки ввода данных путем перетаскивания и вставки их в окно Trend
Viewer. Это можно сделать, нажав левой кнопкой мышки на необходимую точку ввода данных в
поле. Держите кнопку мышки нажатой и перетаскивайте курсор в Trend Viewer. Вы можете
добавить новую точку ввода данных в существующую или новую
диаграмму, в зависимости от
того, как она расположена на экране. При необходимости можно подстроить свойства
диаграммы двойным кликом мышки или нажатием правой кнопки мышки (контекстно-зависимое
меню) по названию точки ввода данных, диапазона значений, оси времени или цвету. Пометьте
галочкой или, наоборот, уберите ее в окошке для пометки точки ввода данных
, чтобы
активировать или соответственно деактивировать отдельные точки или всю диаграмму в целом.
Выберите Online в меню Device для установки связи и отображения выбранных точек данных в
Trend Viewer согласно ранее сделанным настройкам.
Помимо вывода на экран и передачи зарегистрированных данных, также возможно сохранять
эти точки зарегистрированных данных циклически в файле. Кликните
правой кнопкой мышки по
диаграмме и выберете Save logging automatically из контекстно-зависимого меню, чтобы выбрать
направление цели, куда сохранить регистрацию. Выберете Modify storage address for logging из
контекстно-зависимого меню для изменения направления цели. Регистрация автоматически
сохраняется каждые пять минут после того, как режим on-line запущен в файл с названием даты,
времени и типа модуля с расширением
.“log” (например, Дата-Время-Модуль type.log), а также
при выходе из режима on-line. Этот файл можно редактировать при необходимости.
Для подробностей выберете поддержку on-line.
ЕВ 5824-2 RU
47
Page 48

д
р
р
Обмен данными
11. Передача данных
Примечание: Передача данных возможна
только в приводах с цифровыми
позиционерами
ПО TROVIS-VIEW, установленное на вашем
компьютере, позволяет конфигурировать
привод в режиме offline (привод не
подсоединен к компьютеру) или в режиме online (прибор присоединен к компьютеру). Для
Соединительный кабель
активации режима on-line кликните
на
панели инструментов. Сначала
конфигурируется коммуникационный порт
(см.раздел 11.1).
Режим Online
(прямая передача
данных). Прибор и TROVIS-VIEW
беспрерывно связаны во время работы в
режиме on-line. Текущая конфигурация и
рабочие данные скачиваются с прибора
циклически и отображаются в TROVIS-VIEW.
Настройки, сконфигурированные в TROVISVIEW, могут передаваться в прибор
напрямую. Для установлении связи с ПК
подсоедините серийный интерфейс (порт
COM) к серийному интерфейсу (RJ-12 jack)
прибора с помощью соединительного кабеля
SAMSON.
Если у компьютера нет порта COM, может
быть использован USB/RS-232 адаптер.
Режим Online
(непрямая передача
данных). Между компьютером и прибором
нет постоянной передачи данных. Сначала
должна быть установлена связь для
скачивания с прибора или загрузки данных в
прибор.
Перо памяти - 64
Комплекс аппаратных средств
Соединительный кабель
Номер заказа 1400-7699
Номе
заказа 1400-9998
Модульный
а
апте
Модульный
адаптер
Номер заказа
1400-7698
USB/RS-232 адаптер
Номер заказа 8812-2001
Перо памяти – 64
Номер заказа 1400-9753
Рис.8 Приспособления для передачи данных
48 ЕВ 5824-2 RU
Page 49

Обмен данными
Данные могут передаваться на серийный интерфейс через соединительный кабель SAMSON
или перо памяти вместе с модульным адаптером.
Перо памяти позволяет копировать данные на другие приспособления.
ПРИМЕЧАНИЕ
Передача данных в привод может осуществляться только после выполнения электрического
соединения, как описано в разделе 4, после чего привод подготовлен для работы.
11.1 Обмен данными между TROVIS-VIEW и приводом
(соединительный кабель
1. Подсоедините серийный порт компьютера к
серийному интерфейсу привода с помощью
соединительного кабеля SAMSON.
2. Выберете Communications в меню Options, чтобы
открыть окно настроек сервера. Нажмите на кнопку
Server settings.
3. Поставьте галочку в окошке Local connection
Automatically local connect и нажмите ОК для
подтверждения настроек сервера.
Вновь появится окошко Communication.
4. Нажмите на кнопку Port settings.
5. Открывается окошко настроек и State: в
Automatic detection появляется not searched yet.
Щелкните на кнопку Start. TROVIS-VIEW нашел
прибор при State: появляется Device found on
COM… Щелкните на ОК два раза для
подтверждения настроек.
)
поле
ЕВ 5824-2 RU
49
Page 50

Обмен данными
11.1.1 Режим off-line (непрямая передача данных)
В режиме offline нет постоянного обмена данными между компьютером и приводом. Сначала
должна быть установлена связь для скачивания данных с привода и загрузки в прибор.
Загрузка данных в привод:
Выберете Download to the device в меню Device для переноса данных на привод. Задача
управления выполняется после того ,как данные скачиваются из TROVIS-VIEW.
Скачивание данных с прибора:
Выберете Upload from device в меню Device для переноса всех данных с привода. Считанные
данные отображены в TROVIS-VIEW иконкой
Примечание: Передачу данных можно также осуществить путем клика на иконки в панели
инструментов привода: щелкните на
для загрузки данных с привода и отображения их на дисплее в TROVIS-VIEW.
и
.
для перекачивания данных с TROVIS-VIEW в привод
11.1.2 Режим on-line (прямая передача данных)
Приводы и TROVIS-VIEW постоянно соединены в режиме on-line. Текущая конфигурация и
рабочие данные загружаются с привода циклически и отображаются на дисплее в TROVIS-VIEW.
Подобным образом любые настройки в TROVIS-VIEW передаются напрямую в привода.
Активировать режим on-line:
Выберете Online в меню Device для активации режима online.
В режиме on-line явится иконка
Деактивировать режим on-line:
Выберете Online в меню Device, пока режима online активирован.
Режим on-line отменен.
в панели on-line.
Примечание: Альтернативно щелкните на
для деактивации режима on-line.
50 ЕВ 5824-2 RU
в панели инструментов для активации и
Page 51

Обмен данными
11.2 Перо памяти SAMSON
Перо памяти SAMSON является носителем данных, в которое можно загрузить и хранить
информацию в долговременной памяти.
В перо памяти можно загрузить данные, сконфигурированные в TROVIS-VIEW и настройки,
передаваемые на один или несколько приводов одного типа и исполнения.
Таким же образом перо памяти может быть использовано для скачивания информации с
привода, позволяя тем
одинакового типа и исполнения на другой.
Функция регистрации данных позволяет регистрировать рабочие данные (см.раздел 11.2.4).
Примечание: При установке пера памяти, которое пусто или содержит информацию,
скаченную с привода другого типа или привода, в серийный интерфейс привода, данные
привода переписываются в перо памяти
другие данные в перо памяти будут переписаны сверху.
Действия и ошибки, связанные с пером памяти, отображаются желтым светодиодом LED на
приводе.
• Загрузка пера памяти выполнена
On
Off
Время (сек.)
• Готовится к считыванию данных с пера памяти (см.раздел 11.2.2)
On
Off
самым просто копировать данные конфигурации с одного привода
независимо от состояния пера памяти и любые
Время (сек.)
• Готовится к записи данных на перо памяти (см.раздел 11.2.2)
On
Off
Время (сек.)
ЕВ 5824-2 RU
51
Page 52

Обмен данными
• Регистрация данных в стадии подготовки (см.раздел 11.2.4)
On
Off
• Регистрация данных в процессе (см.раздел 11.2.4)
On
Off
Время (сек.)
• Ошибка достоверности в пишущем устройстве
On
Off
Время (сек.)
• Ошибка EEPROM в пишущем устройстве
On
Off
Время (сек.)
52 ЕВ 5824-2 RU
Время (сек.)
Page 53

Обмен данными
11.2.1 Обмен данными между TROVIS-VIEW и пером памяти
ЕВ 5824-2 RU
53
Page 54

Обмен данными
11.2.2 Обмен данными между приводом и пером памяти
3. Перо памяти
4. Серийный интерфейс
(RJ 12 jack)
Рис.10 Подключение пера памяти к приводу
1. Вставьте перо памяти (3) вместе с модульным адаптером (2) в серийный интерфейс (порт
COM) компьютера (1) (рис.9).
Перекачивание данных с привода на перо
памяти
2.Выберите Modify memory pen status в меню
Memory pen
В диалоговом окне поставьте галочку напротив
Automatically write to memory pen.
Нажмите ОК для подтверждения.
3.Извлеките перо памяти из компьютера и
вставьте его в серийный интерфейс привода
(рис.10).
Желтый
что передача данных в процессе. Передача
светодиод LED привода показывает,
данных завершена, когда желтый
светодиод LED начинает гореть
непрерывно. Извлеките перо памяти
из привода.
Время (сек.)
54 ЕВ 5824-2 RU
Page 55

Обмен данными
Перекачивание данных из пера памяти в
привод
2. Выберите Modify memory pen status в меню
Memory pen.
В диалоговом окне поставьте галочку напротив
Automatically write to memory pen.
Нажмите ОК для подтверждения.
1. Извлеките перо памяти из компьютера и
вставьте его в серийный интерфейс
привода (рис.10).
Желтый светодиод LED привода показывает,
что идет процесс передачи данных. Передача
данных завершена, когда желтый светодиод
LED начинает гореть непрерывно. Извлеките
перо памяти из привода.
Время (сек.)
11.2.3 Функция копирования
Как только данные привода были перенесены в перо памяти, они могут использоваться
(переносятся пером памяти) для настройки других приводов Тип 5824/5825 .
Примечание: «Automatically write to memory pen» (Автоматическая запись в перо памяти)
сбрасывается после того ,как первичные данные были перенесены с привода.
11.2.4 Регистрация данных
Перо памяти – 64 позволяет сохранять следующие данные:
Входной сигнал [%]
Ход привода [%]
Сигнализация положения [%]
Температура внутри привода [ºС]
Концевой выключатель: Шток привода втянут
Концевой выключатель: Шток привода выдвинут
Сигнализация положения относительная
Сбой в работе
ЕВ 5824-2 RU
55
Page 56

Обмен данными
Неполадки управляющей величины
Переключатель направления действия
Переключатель с двойной функцией для ручной инициализации
Регистрация данных прекращается, если перо памяти заполнено.
Можно сохранить данные, записанные в перо памяти, в файле (*.log) при помощи TROVIS-VIEW.
Регистрация данных
1. Подсоедините перо памяти к серийному интерфейсу привода (рис.10).
Желтый светодиод (LED) на приводе
показывает, что регистрация данных в стадии подготовки:
On
Off
Время (сек.)
Как только желтый светодиод (LED) перестанет мигать, перенос данных в перо памяти
завершен.
On
Off
Время (сек.)
2. Регистрация данных завершается, когда вынимается перо памяти из серийного интерфейса
привода.
Примечание: Можно загрузить файл регистрации данных в Trend Viewer, выбрав the Load a
graph в контекстно-зависимом меню.
56 ЕВ 5824-2 RU
Page 57

Обмен данными
Перенос данных на компьютер
1. Вставьте перо памяти (3) с модульным
адаптером (2) в серийный интерфейс
(порт COM) компьютера (1) (рис.9).
2. В меню Memory pen выберете Upload
logged.
3. Выберете нужную директорию.
Если она не изменена, данные сохранятся в
следующей директории>SAMSON>Type 5824.
4. Введите название файла.
5. Нажмите Save, чтобы начать передачу
данных.
11.2.5 Конфигурирование командного режима
Пока привод находится в режиме регулирования, его можно перевести в ручной режим с
помощью пера памяти:
1. Вставьте перо памяти (3) с модульным
адаптером (2) в серийный интерфейс
(порт COM) компьютера (1) (рис.9).
2. В меню Memory pen выберете Set
command mode.
3. Настройте на нужное действие (Stem
retracts или Stem extends).
4. Нажмите OK.
5. Извлеките перо памяти из компьютера
и
вставьте его в серийный интерфейс
привода (рис.10).
Шток привода выдвинут или втянут в
зависимости от выбранной настройки.
6. После того как перо памяти удалено из
привода, привод возвращается в
стандартное управление с обратной
связью.
ЕВ 5824-2 RU
57
Page 58

Список конфигураций и данные заказчика
12. Список конфигураций и данные заказчика
Конфигурация
Заводская
настройка
Входная переменная
Нижнее значение диапазона 0.0 V
0.0 mA
Верхнее значение диапазона 10.0 V
20.0 mA
Единица измерения V V/mA
Сигнал положения
Нижнее значение диапазона 0.0 V 0.0…10.0 V
Верхнее значение диапазона 10.0 V 0.0…10.0 V
Управляющий сигнал
Индикация отсутствия
Нет Нет/есть
управляющего сигнала
Заданное значение при
Внутреннее Внутреннее/Значение
исчезновении управляющего
сигнала
Внутреннее заданное значение 0.0% 0.0…100.0%
Приоритетное положение Нет Нет/есть
Приоритетное положение когда
Выдвинут Выдвинут/втянут
шток
Конечное положение
1.0% 0.0…49.9%
направляющей: шток привода
выдвигается
Конечное положение
97.0% 50.0…100.0%
направляющей: шток привода
втягивается
Функции
Защитная блокировка клапана Нет Нет/есть
Ход клапана
Ход 100.0% 30.0…130.0%
Настройка хода Абсолютная Абсолютная/Относительная
Скорость перемещения штока Стандартная Низкая/стандартная/быстрая
Мертвая зона (диапазон
2.0% 0.5…5.0%
переключения)
Характеристика Линейная Линейная/равнопроцентная/
58 ЕВ 5824-2 RU
Диапазон настройки Данные
заказчика
0.0…7.5 V
0.0…15.0 mA
2.5…10.0 V
5.0…20.0 mA
последнего хода
реверсивная равнопроцентная/
определятся пользователем
Page 59

Типовой шильдик
13. Типовой шильдик
1. Тип, обозначение
2. Год выпуска
3. Конфигурация ID (Var.-ID)
4. Назначение модели (только для Типа 5825)
5. Серийный номер
6. Регистрационный номер DIN (только для Типа 5825)
7. Номинальная тяга
8. Номинальный ход
9. Номинальное время полного хода
10. Напряжение питания
11. Номинальная частота
12. Потребляемая мощность
13. Положение безопасности (только для Типа 5825)
14. Текст заказа
Укажите следующие данные
Тип
Конфигурация ID (Var.-ID)
Серийный номер
Версия ПО
Шток выдвигается Шток втягивается
Конечный выключатель
14. Входные сигналы
15. Выходные сигналы
16. Версия ПО
17.
Приоритетный контур
ЕВ 5824-2 RU
59
Page 60

Samson AG • MESS- UND
REGELTECHNIK
Weismüllerstraße 3 • D-60314
Frankfurt am Main
Telefon (0 69) 4 00 90 • Telefax (0 69)
4 00 95 07
Internet: http://www..samson.de
EB 5824-2
 Loading...
Loading...