

Page 1

Пневматический позиционный регулятор
Тип 4765
Ðèñ. 1 Òèï 4765
Издано в мае 1997 г.
Руководство по монтажу и обслуживанию
EB 8359-1 RU
Page 2
Содержание ..............................................ñòð.
Технические характеристики ................................... 3
1. Конструкция и принцип действия........................... 4
2. Подсоединение позиционного регулятора .................... 6
3. Соединительные устройства для воздуховодов ................ 7
4. Обслуживание - установка позиционного регулятора ............ 7
4.1 Соответствие между позиционным регулятором и сервоприводом ..... 7
4.1.1 Установка и изменение эффективного направления ............... 7
4.2 Начало работы и задающая величина ......................... 9
4.3 Настройка клапана .......................................10
4.3.1 Установка Р-диапазона и подачи воздуха .......................10
4.3.2 Установка начала работы и конечного значения у привода:
«выдвигающаяся штанга привода FA» ........................10
4.3.3 Установка начала работы и конечного значения привода:
«вдвигающаяся штанга привода FE»
4.4 Замена измерительной пружины .............................11
5. Преобразование пневматического позиционного регулятора в
электропневматический ..................................12
6. Вспомогательные и сменные детали .........................13
7. Размеры в мм ..........................................14
ПРЕДУПРЕЖДЕНИЕ
Данный прибор могут собирать и пускать в эксплуатацию только
!
2
те специалисты, которые знакомы с монтажом, подготовкой к экс
плуатации и эксплуатацией этого изделия. Обязательным условием
является также соблюдение всех правил транспортировки и скла
дирования.
Опасности, которые могут исходить от рабочей жидкости регули
рующего клапана, давления сервопривода и движущихся деталей,
следует избегать путем осуществления соответствующих мер.
Если из-за высокого давления приточного воздуха в пневма
тическом приводе будут происходить недопустимые движения и
возникать непредусмотренные усилия, следует ограничить давле
ние приточного воздуха с помощью подходящей редукционной
установки.
-
-
-
-
-
Page 3
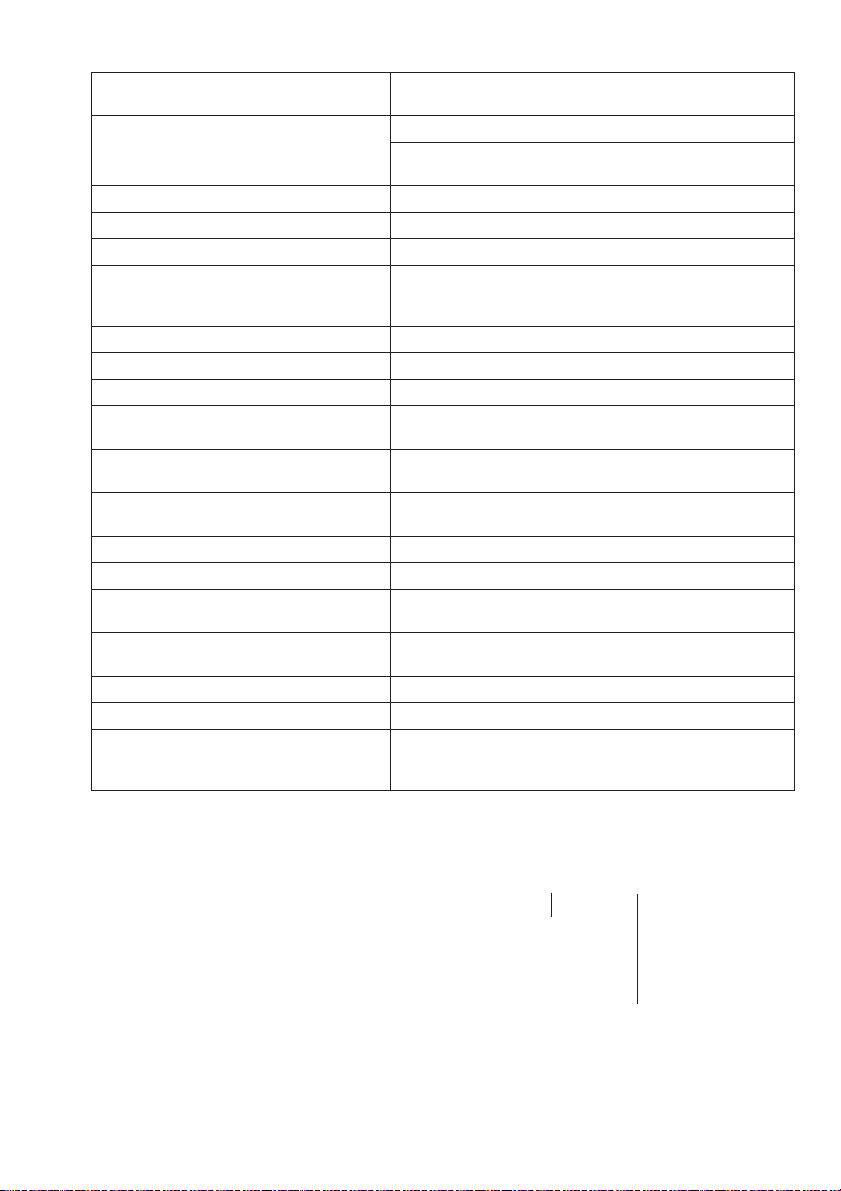
Технические характеристики Давление указано в барах (избыточное давление)
Регулируемая величина
(Диапазон длиныхода) в мм
Задающая величина 0,2 -1 áàð
Разделенный диапазон0-50% или 50-100%
Интервал задающейвеличины
Измерительные пружины Чтобы сделатьотбор, см. табл. 2
Вспомогательная энергия Приточный воздух1,4-6 бар или 20-90 индикаторныхл. с.
Äавление сервоприводар
Характеристика Линейный основнойтип характеристики
Гистерезис <0,5 %
Чувствительность <0,1 %
Эффективное направление Обратимо
Зона пропорциональности Х
приточного воздуха
Расход воздухапри установившемся
состоянии, Х
Подача воздуха 3 ì
Подача воздуха 3 ì
Влияние (Х
Зависимость отположения при
повороте на180°
Вид защиты IP 54 (IP 65 cпецконструкция)
Âåñ около 1,1кг
Материалы Корпус: отлитиз алюминия под давлением,
=1%
p
= 1%) Температура:
p
(выход) Макс. 0-6бар или 0-90 индикаторных л.с.
st
Отклонение отхарактеристики при установке
неподвижной точки:<1,5%
ïðè 1,4áàð
ð
1-3% приналичии пружин 1 и 2,1-5% при наличии
При давленииприточного
воздуха 1,4бар
3
0,13 ì
n
3
/÷ 8,5 ì
n
<0,02%/°Ñ
хромирован ипокрыт слоем из пластмассы
Внешние детали:коррозионностойкая сталь
7,5-60
с удлинениемрычага 90
0,2 -0,6 áàð è 0,6 -1 áàð
пружины 3
При давленииприточного
воздуха 6бар
/÷ 0,33 ì
3
3
/÷ 8,5ì
n
<3,5 %
/÷
n
Вспомогательная энергия:
<0,2%/0,1 áàð
3
/÷
n
3
/÷
n
Модели позиционного регулятора
Модель 4765 - 0 1 ¨ 00¨ 1
Измерительные пружины
11
22
33
Пневматическое подсоединение
1
G
NPT
/
4
1
/
4
1
3
3
Page 4
1. Конструкция и принцип действия
Пневматический позиционный регуля
тор обеспечивает соответствие между
положением клапана (регулируемая ве
личина) и регулирующим сигналом (за
дающей величиной). При этом регули
рующий сигнал, исходящий от регули
рующего или управляющего устрой
ства, сравнивается с длиной хода регу
лирующего клапана и происходит упра
вление давлением пневматического
сервопривода (исходная величина).
Позиционный регулятор состоит, в прин
ципе, из рычага с валом и измеритель
ной пружиной, мембраны и пневмати
ческой системы управления с соплом,
соплозаслонкой и усилителем. По жела
нию заказчика дополнительно может
быть установлено по одному мано
метру для регулирующего сигнала
(вход) и давления сервопривода (выходной сигнал).
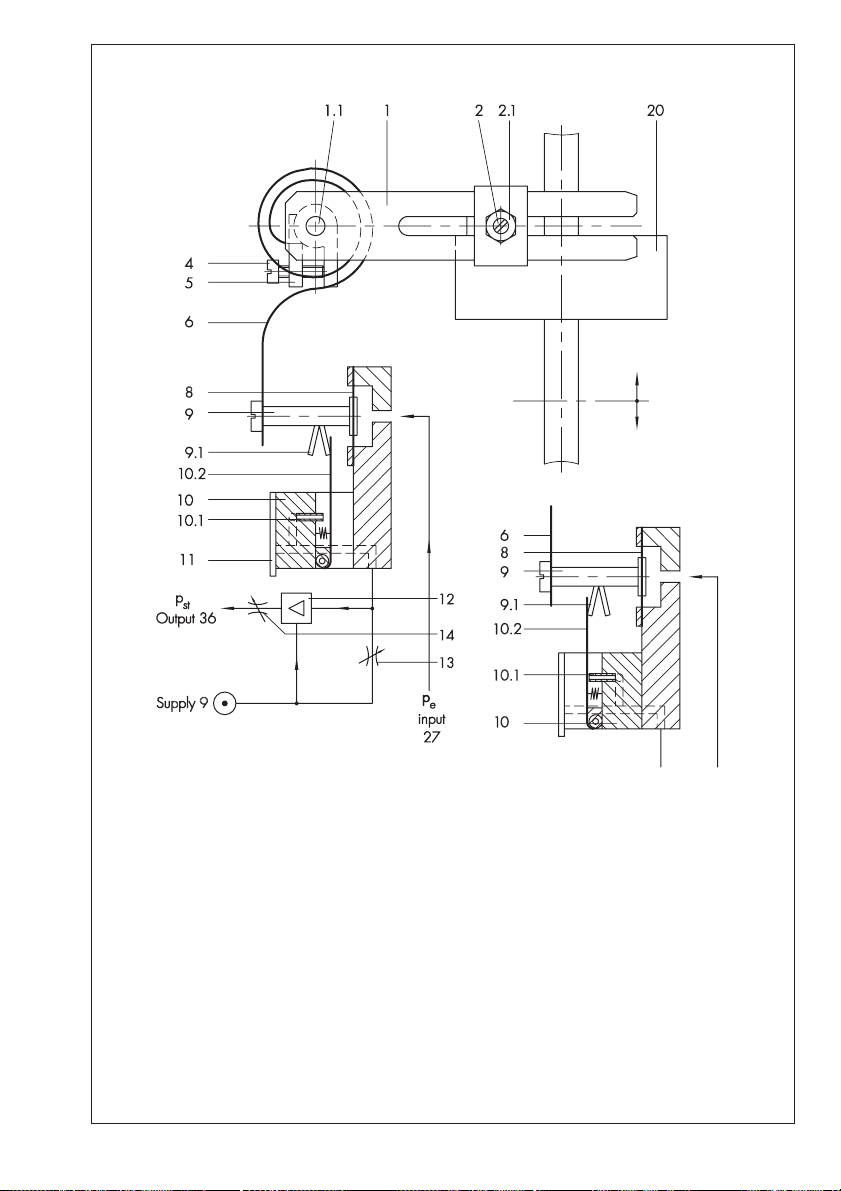
Позиционный регулятор работает в соответствии с методом компенсации усилий. Движение штанги привода или заслонки передается в качестве регулируемой величины Х через пластину (20)
на рычаг (1) и измерительную пружину
(6). При этом происходит вращение этой
пружины и изменение силы ее давления.
Задающая величина, регулирующий
-
сигнал (р
) предвключенного регулято
å
ра создает на мембране (8) перестано
вочное усилие, которое сравнивается с
силой измерительной пружины (6).
Одновременно движение мембраны
передается через контактный щуп (9.1)
на соплозаслонку (10.2), благодаря чему
происходит управление соплом (10.1).
Приточный воздух питает пневмати
ческий усилитель (12) и поступает че
-дроссель (13) и сопло (10.1) на
ðåç Õ
ð
соплозаслонку (10.2).
-
-
Изменения регулирующего сигнала р
-
или позиции клапана приводят к изме
нению давления перед и после усили
-
теля. Воздух, управляемый усилителем
(давление сервопривода р
-
через объемный дроссель (14) на пнев
), поступает
st
матический сервопривод и приводит к
тому, что штанга заслонки занимает положение, соответствующее задающей
величине. Регулируемые дроссели (13
и 14) служат оптимизации позиционной
системы регулирования.
Измерительная пружина (6) соответствует номинальной длине хода клапана
и номинальному интервалу задающей
величины и может быть заменена.
-
-
-
-
å
-
-
-
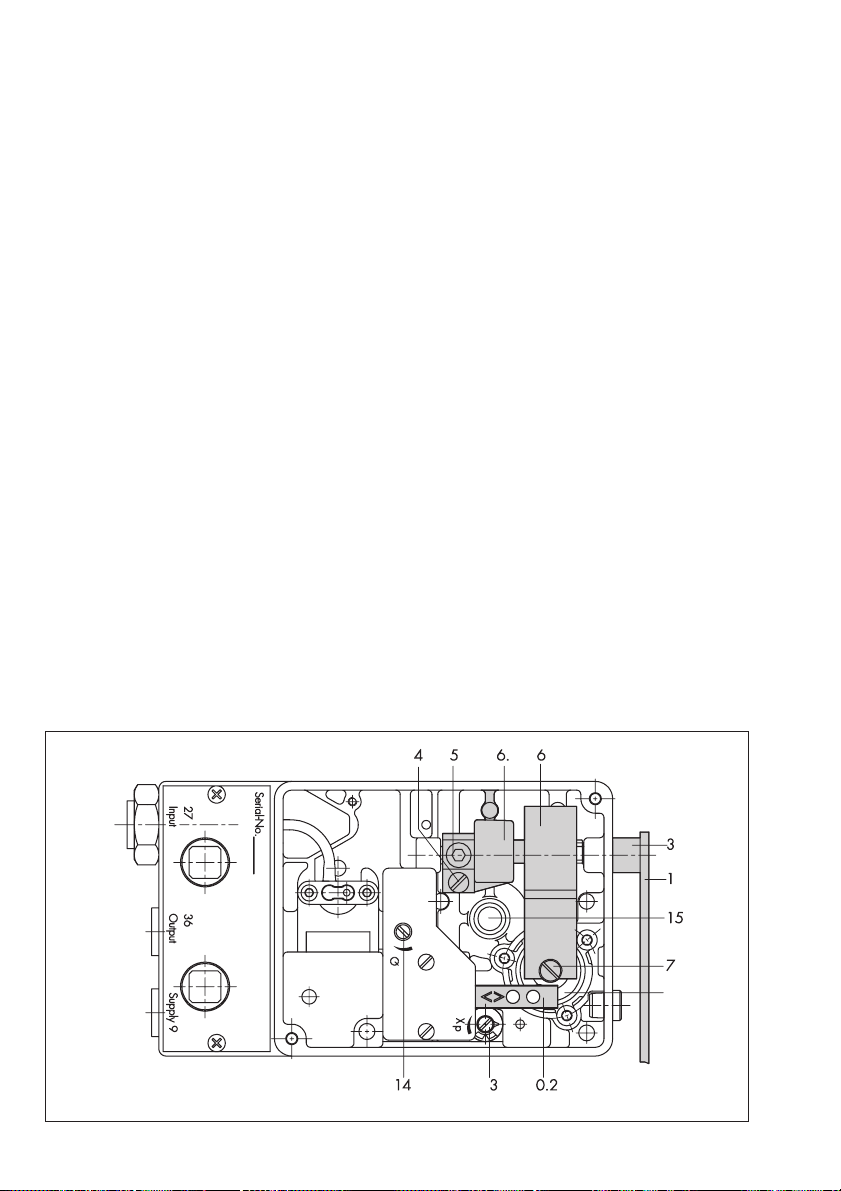
Рис. 2 Позиционный регулятор в положении «открыто»
4
1
8
1
1
Page 5
Õîä
Расположение сопла и соплозаслонки
при инверсионном эффективном
направлении <>
1 Рычаг для хода клапана
1.1 Âàë
2 Штифт
2.1 Гайка
3 Втулка
4 Установка нулевой точки
«Çåðî»
5 Крепежный винт
6 Измерительная пружина
6.1 Упорный угольник
7 Крепежный винт
8 Измерительная
9 Мембранный диск
9.1 Контактный щуп
10 Стойка сопла
10.1 Сопло
10.2 Соплозаслонка
Рис 3 Функциональная схема
мембрана
11 Стальная крышка
12 Усилитель
13 X
-дроссель
p
14 Объемный дроссель Q
15 Отверстие для крепежного винта
20 Пластина для подсоединения
к штангепривода или
заслонки регулирующего
клапана
5
Page 6

2. Подсоединение
Для подсоединения позиционного регу
лятора к клапанам с литой станиной
используются соединительные детали
(номер изделия 1400-5745), для клапа
нов штанговой модификации (распор
ный болт) применяется набор соедини
тельных деталей (номер изделия 14005745 и дополнительно 1400-5342).
Перед непосредственным подсоедине
нием позиционного регулятора необхо
димо установить соответствие между
позиционным регулятором и сервопри
водом, поскольку подсоединение мо
жет осуществляться на клапане справа
или слева. Обращайте внимание на со
ответствующие рис. 6-9 в разделе 4.1.
2.1 Подсоединение к клапану с литой
станиной (ðèñ. 4)
Закрепите пластину (20) с помощью
винта (21) на зажиме муфты (22). Отвинтите крышку позиционного регулятора и закрепите прибор с помощью
крепежного винта (15) на станине
клапана. Обращайте при этом свое внимание на то, чтобы штифт (2) проходил
внутри хомутика и зажимался тем са
мым пластиной (20).
-
2.2 Подсоединение к клапану штан
говой конструкции (ðèñ. 5)
Соедините пластину (20) с помощью
винта (21) несоосно на указателе длины
хода (24) штанги заслонки (23).
Наложите стойку (28) и крепежную пла
стину (26) на распорный болт и слегка
привинтите их. Передвигайте стойку до
тех пор, пока при половинной длине
хода клапана середина пластины (20) и
стойка (28) не будут находиться на
одной прямой, затем закрепите пози
ционный регулятор на стойке с помо
щью крепежного винта (15). Обращайте
при этом свое внимание на то, чтобы
штифт (2) проходил внутри хомутика и
зажимался тем самым пластиной (20).
2.3 Крышка корпуса
После подсоединения позиционного
регулятора обращайте внимание на то,
чтобы после монтажа клапана вентиляционная заглушка на крышке корпуса
была направлена вниз.
-
-
-
-
-
1 Рычаг
2 Штифт
2.1 Гайка
15 Крепежный винт
20 Пластина
21 Винт
Рис. 4 Подсоединение при наличии
модели с литой станиной (например,
серия 240)
6
22 Муфта
23 Штанга заслонки
24 Указатель длины хода
26 Крепежная пластина
27 Штанга клапана (распор. болт)
28 Стойка
Рис. 5 Подсоединение при наличии
клапана штанговой модели
Page 7

3. Соединительные устройства для
воздуховодов
Соединительные устройства для возду
ховодов представляют собой отверстия
с резьбой NPT 1/4 èëè ISO 228 /1-G 1/4.
Можно использовать обычные резьбо
вые штуцерные соединения для метал
лических и медных труб или шлангов из
искусственных материалов. Приточный
воздух должен быть сухим, не содер
жать пыль и масла. В обязательном по
рядке следует соблюдать инструкции
по уходу за предвключенными редук
ционными установками.
Перед присоединением необходимо как
следует продуть воздуховоды.
Давление сервопривода (выход) будет
подаваться согласно рисункам 6-9 на
верхнюю и нижнюю стороны привода.
Важно: Вспомогательная энергия (приточный воздух) должна устанавливаться на 0,2 бар выше конечного значения диапазона номинального сигнала
при положении безопасности «выдви
гающаяся штанга привода» (см. диапа
зон пружин на фирменной табличке), а
для положения «вдвигающаяся штанга»
выше требуемого давления сервопри
вода (см. раздел 4.3).
-
-
4. Обслуживание
4.1 Соответствие между позицион
-
ным регулятором и сервоприводом
О соответствии между сервоприводом,
задающей величиной, эффективным на
правлением и позицией при подсоеди
нении можно узнать из рис. 6-9. Любая
последующая перестановка как, напри
мер, перемена эффективного направ
ления позиционной системы регулиро
вания или изменение режима работы
привода «выдвигающаяся штанга при
вода» на режим «вдвигающаяся штанга
привода» или наоборот означает также
и изменение положения подсоединения
позиционного регулятора.
Привод: выдвигающаяся под действием силы пружины штанга привода FA
-
-
-
-
-
-
-
-
-
-
1
Рис. 6 Эффективное направление <<,
подсоединение слева
Рис. 7 Эффективное направление <>,
подсоединение справа
Привод: вдвигающаяся под действием силы пружины штанга привода FE
Рис. 8 Эффективное направление <<,
подсоединение справа
Рис. 9 Эффективное направление <>,
подсоединение слева
7
Page 8

4.1.1 Установка и изменение эффек
тивного направления (ðèñ. 6-9 è ðèñ.10)
При росте входного сигнала р
å
(çàäà
ющая величина) давление сервоприво
может повышаться (прямое эф
äà ð
st
фективное направление <<) или пони
жаться (инверсионное эффективное
направление <>).
Сходная картина имеет место при па
дении входного сигнала р
, при прямом
å
эффективном направлении >> давле
ние сервопривода падает, а при инвер
сионном эффективном направлении
<> оно возрастает.
На соплозаслонке (10.2) находятся обо
значения для эффективного направ
ления (<< и <>). В зависимости от
-
положения соплозаслонки для эффек
тивного направления (<< è<>). Â
зависимости от положения соплоза
слонки можно увидеть установленное
эффективное направление с ее марки
ровкой.
Если эффективное направление, необ
ходимое для функционирования, не
совпадает с видимой маркировкой или
же если это направление надо изме
нить, действуйте тогда следующим об
разом:
Вывинтите оба винта на крышке из
листового металла и снимите сопловые
стойки вместе с этой крышкой.
-
-
-
-
-
-
-
Крышка из
листового
металла
Сопловая
стойка
Прямое эффективноенаправление <<
повышение/ повышение
Соплозаслонка подконтактным щупом
Измерительная
пружина
Контактный щуп
Рис. 10 Положение сопловой стойки
Õîä
Регулирующая
величина
Рис. 11 Обычный режим
Маркировка
Инверсионное эффективноенаправление <>
повышение/понижение
Соплозаслонка надконтактным щупом
Õîä
Соплозаслонка
Клапан 1Клапан 2
Зона
нечувствитель
ности
Рис. 12 Встречное движение
двух регулирующих клапанов
в режиме разделенного диапазона
-
8
Page 9

Повернув сопловую стойку (10) на 180°,
вновь насадите ее с крышкой из листо
вой стали и прочно завинтите.
Следует в обязательном порядке со
блюдать правильное расположение со
пловой стойки с соплозаслонкой по
отношению к контактному щупу (9.1),
как это изображено на рисунке.
Если же после однажды установлен
ного соответствия между позиционным
регулятором и сервоприводом надо
будет изменить эффективное направ
ление, помните в этом случае, что,
кроме перестановки сопловой стойки,
придется менять также и положение
подсоединяемого позиционного регу
лятора.
Положение рычага (1) по отношению к
пластине (20), прилегающего к ней
сверху или снизу согласно рис. 6-9,
должно учитываться в обязательном
порядке.
4.2 Начало работы и задающая величина
Смонтированный рычаг и установленные измерительные пружины позиционного регулятора находятся в соответствии с номинальной длиной хода клапана и задающей величиной (входной
сигнал) согласно таблице 2, стр. 9.
Обычно интервал задающей величины
составляет 0,8 бар. Лишь для режима
разделенного диапазона (рис. 12) необ
ходим меньшийинтервал, напр., 0,4 бар.
-
-
За счет замены (раздел 4.5) измеритель
ных пружин можно изменять диапазон.
Во время настройки позиционного
регулятора длина хода должна быть
согласована с задающей величиной и
наоборот. При интервале задающей
величины в 0,8 бар (например, от 0,2 до
1 бара) весь свой диапазон от 0 до
100% длина хода должна проработать
безостановочно. Тогда работа будет
начинаться при 0,2, а конечное значе
ние составит 1 бар.
В режиме разделенного диапазона сиг
нал регулятора для управления двумя
регулирующими клапанами разделя
ется таким образом, что они при соответственно половинном входном сигнале проходят свой полный ход (например, первый регулирующий клапан,
установленный на 0,2 - 0,6 бар и второй
регулирующий клапан на 0,6 - 1 бар).
Чтобы избежать перекрытия клапанов,
а также нечувствительной зоны ±0,5
бар, пользуйтесь данными рис. 12.
Начало работы (нулевая точка) устанавливается винтом (4), интервал зада
-
-
-
-
-
-
Таблица 2
Номинальная
длина хода
ìì
Стандартные длиныхода для клапановфирмы «Самсон» срычагом I (длиной 40 - 127 мм)
15 7,5 …15
30 14 … 32
60 30 … 70 100 % 3
Другие диапазоныдлин ходов срычагом I иудлинением рычага (длина 40 - 200 мм)
20 7,5 …26
40 14 … 50
>60 30 …90 100 % 3
Мин./макс.
длина хода
ìì
Задающая
величина
(входной сигнал)
100 %
50 %
100 %
50 %
100 %
50 %
100 %
50 %
Измерительные
пружины
1
2
2
3
1
2
2
3
9
Page 10

ющей величины и тем самым конечное
значение штифтом (2). Для настройки
необходимо соединить вход устанавли
вающего сигнала (Input) через задаю
щее устройство и контрольный мано
метр с источником сжатого воздуха
макс. давления в 1 бар, а вход вспо
могательной энергии (Supply 9) с при
точным воздухом.
4.3 Настройка клапана
4.3.1 Установка Р-диапазона Х
ð
èïî
дачи воздуха (объемный дроссель Q)
Установите сначала задающую величи
ну на входе примерно на 50% ее диапа
зона, затем поворачивайте винт нуле
вой точки (4) до тех пор, пока ход
клапана не будет находиться примерно
на 50%.
При установке Х
-дросселя принимайте
ð
во внимание его зависимость от давления приточного воздуха согласно рис.
13. При нормальной установке Х
ð
должно быть равным примерно 3%.
Установите объемный дроссель Q на
среднее значение, если же привод большой, откройте дроссель полностью.
Проверьте подверженность штанги заслонки вибрации и скорость ее перестановки посредством кратковременного нажатия на измерительную пружи
ну (6) до упора.
Если штанга заслонки несколько раз
совершит колебания с большой ампли
тудой, тогда сначала продроссели
Приточный Питание
воздух
Zul. Supply Alim.
Рис. 13 Установка Хр-дросселя
10
руйте с помощью объемного дросселя
Q производительность позиционного
регулятора по воздуху согласно же
лаемой прирабатываемости к клапану.
После этого, в случае необходимости,
установите Х
чтобы штанга заслонки после кратко
временного нажатия на измерительную
-
-дроссель таким образом,
ð
пружину совершила колебание с боль
шой амплитудой только один раз.
Важно: Установка Х
-
производиться всегда до установки на
чала работы. Дополнительное измене
ние передвигает нулевую точку!
Сдвиг нулевой точки может быть вы
зван также изменением установлен
-дросселя должна
ð
ного давления приточного воздуха.
Проверьте позицию нулевой точки
«Зеро» в установке в случае необхо
димости в производственных условиях
и если надо, отрегулируйте.
4.3.2 Установка начала работы и конечного значения у привода
Выдвигающаяся штанга привода
Важно: Для полной деаэрации привода
в положении «закрыто» у регулирующего клапана установите его при эффективном направлении << примерно
на 0,23 бар и при эффективном направ
лении <> примерно на 0,97 бар.
Начало работы (нулевая точка) (напри
-
ìåð, 0,2 áàð)
-
Установите входной сигнал с помощью
задающего устройства на 0,2 бар.
Поворачивайте винт нулевой точки (4)
до тех пор, пока штанга заслонки не
начнет движение из своего положения
покоя (наблюдайте за штангой за
слонки с помощью индикации хода).
Снимите входной сигнал на задающем
устройстве и медленно запустите его
снова, проверяя, начинает ли штанга
заслонки свое движение при 0, 23 бар,
в случае необходимости произведите
корректировку.
Конечное значение (диапазон), напри
мер, 1 бар
-
-
-
-
-
-
-
-
-
-
-
-
Page 11

После установки начала работы запус
кайте входной сигнал посредством за
дающего устройства до 1 бара.
При конечном значении ровно 0,2 бар
штанга заслонки должна остановиться,
проработав тем самым 100% длины
хода (Наблюдайте за индикацией хода
на клапане!). Если конечное значение
неверно, тогда для корректировки не
обходимо следующим образом перед
вигать штифт (2):
При передвижении к концу рычага →
длина шага возрастает,
При передвижении к центру вращения
→ длина шага уменьшается.
После коррекции уберите и вновь запу
стите входной сигнал.
Проверьте сначала начало работы, за
тем конечное значение.
При наличии манометра для измерения
давления сервопривода проверьте,
полностью ли деаэрирован привод при
входном сигнале величиной ровно 0,2
бар (при <<) и соответственно ровно
1,0 бара (при <> ).
4.3.3 Установка начала работы и конечного значения у привода:
Вдвигающаяся штанга привода
Важно: У этого привода камера мем-
браны должна быть загружена при
верхнем конечном значении задающей
величины (1 бар) и эффективного
направления <<, а также при нижнем
конечном значении (0,2 бар) задающей
величины и эффективного направле
ния <> посредством такого давления
сервопривода, которого будет доста
точно для плотного закрывания регу
лирующего клапана также и при имею
щемся исходном давлении со стороны
установки. (Величину требуемого дав
ления сервопривода можно узнать из
таблички, наклеенной на позиционный
регулятор).
треб. Давление сервопривода
2
dð
[áàð] =
∆
À
4
+F
be
=0,4
d=диаметр седла [см]
-
∆p=перепад давлений р
A = площадь привода [см
= конечное значение пружинного
F
be
1–ð2
2
]
диапазона (конечное значение
диапазона номинального
сигнала) привода [бар]
При отсутствии данных следует посту
пать следующим образом:
-
-
требуемое давление = конечное значе
ние пружинного диапазона + 1 бар
Начало работы =, например, 1 бару
Установите входной сигнал с помощью
задающего устройства на 1 бар. Пово
рачивайте винт нулевой точки (4) до тех
пор, пока регулирующий клапан не нач
нет движения из исходного положения.
Увеличьте входной сигнал и затем
медленно снижайте его до 1 бара, про
контролируйте при этом, чтобы регулирующий клапан начинал свое движение
точно при одном баре.
Отклонение можно исправить с помощью винта нулевой точки (4), при повороте влево регулирующий клапан начинает двигаться из своего конечного
положения раньше, а при повороте
вправо - позже.
Конечное значение (диапазон) =, на
пример, 0,2 бар
После установки начала работы запу
стите входной сигнал с помощью за
дающего устройства до 0,2 бар. При
конечном значении ровно 0,2 бар
штанга заслонки должна остановиться,
проработав тем самым 100% длины
хода (Наблюдайте за индикацией хода
на клапане!). Если конечное значение
неверно, тогда для исправления надо
сдвинуть штифт (2).
После коррекции вновь установите
входной сигнал на 1 бар и снова пово
рачивайте винт нулевой точки (4) до тех
пор, пока контрольный манометр не
будет показывать требуемое давление
сервопривода.
[áàð]
-
-
-
-
-
-
-
-
-
11
Page 12

4.4 Замена измерительной пружины
(ðèñ. 3)
При необходимости изменить диапазон
и переставить режим разделенного
диапазона следует следующим обра
зом заменить измерительную пружину:
Сначала вывинтите винт (7) на измери
тельной пружине, затем винт с вну
тренним шестигранником (5) и выньте
рычаг с валом. Замените измеритель
ную пружину, затем протолкните рычаг
с валом через втулку (3), корпус и упор
ный угольник (6,1). Закрепите измери
тельную пружину с помощью винта (7).
Упорный угольник и вал подвиньте друг
к другу таким образом, чтобы винт (5)
попал на уплощенное место вала.
Затяните до отказа винт (5). При этом
между рычагом (1) и втулкой (3), а так
же между измерительной пружиной (6)
и корпусом должен оставаться зазор
размером 0,05 - 0,15 мм.
5. Преобразование пневматического
позиционного регулятора
Пневматический позиционный регулятор может быть преобразован за счет
соответствующего монтажного набора
в электро-пневматический позицион
ный регулятор типа 4763.
Для необходимого ПИ-элемента типа
6109 или 6112 (см. табл. 3) должны быть
поставлены платы, резьбовое соеди
нение и крепежные винты в качестве
монтажного набора.
Для позиционного регулятора, на
строенного на тип 4763, пригодно
руководство по монтажу и обслужи
ванию ЕВ 8359-2.
Отвинтите соединительную пластину
(6) и выньте ее вместе с уплотнитель
ным элементом (7), снимите шланг (5).
Отвинтите соединительную гайку (4) на
корпусе.
-
Äëÿ òèïà 6109: сдвиньте ПИ-элемент
-
через штекерное соединение до печат
-
ной платы.
Уплотнительный элемент (7) на нижней
-
стороне вставьте в паз печатной платы
таким образом, чтобы дроссель с ситом
-
(8) при встроенном элементе (изобра
-
жен штриховкой на рис. 14) распола
гался справа над внутренним из двух
отверстий в корпусе (приточный воз
дух).
Закрепите элемент двумя, а печатную
плату одним винтом в корпусе, затем
-
установите резьбовое соединение ка
беля (1) посредством уплотнительного
кольца.
Äëÿ òèïà 6112: Установите ИП-элемент
на штекер печатной платы и затяните
боковые зажимные винты.
Проверьте, правильно ли установлены
уплотнительные шланги (10,11) на нижней стороне. Уплотнительный шланг с
дросселем и ситом должен распола-
-
гаться при встроенном элементе (за
штрихован на рис. 14) справа над
внутренним из двух отверстий в кор
пусе (приточный воздух).
-
В заключение установите резьбовое
соединение кабеля (1) посредством
уплотнительного кольца.
-
-
-
-
-
-
-
-
-
-
Таблица 3
Желаемая величинавходного
сигнала
(задающая величина)
4…20ìÀ
0…20ìÀ
1…5 ìÀ
12
Необходимый ПИ-элемент
тип (номерзаказа)
6109-0010
6112-002110
6112-003110
Требующийся дляэтого
монтажный набор
номер заказа
1400-6721
1400-6722
1400-6722
Page 13

1 Резьбовое соединение
2 Печатная плата
3 ПИ-элемент
4 Соединительная гайка
5 Шланг
6 Соединительная пластина
7 Уплотнительный элемент
8 Дроссель
10 Уплотнительный шланг
11 Уплотнительный шланг
с дросселем
i/p Tèï 6109 i/p Tèï 6112
Рис. 14 Переоборудование
6. Вспомогательные и сменные детали
Номер заказа
Измерительная пружина1
Измерительная пружина2
Измерительная пружина3
Рычаг I
Удлинитель рычага
Подсоединение манометра
Подсоединения манометра,без медных деталей
Монтажный набордля клапанов с литой станиной(по NAMUR) 1400-5745
Штанговые клапаны(по NAMUR) для штанг диаметром18-35 мм 1400-5745 è
Ассортимент запчастейс уплотнителями и мембранами
Набор дляпереоборудования на вид защиты IP65
1190-0736
1190-0737
1190-0738
1690-6469
1400-6716
1400-6718
1400-6719
1400-5342
1400-6792
1790-7408
13
Page 14

7. Размеры в мм
157
Резьбовое отверстие G 1/8
у корпусас соединительным
устройством Gили NPT 1/8 у
корпусов ссоединительным
устройством NPT
Полезная длина рычага I:
40 - 127 мм
(с удлинителем рычага 40 - 200 мм)
Пневматические соед. устройства: ISO-228/1-G1/4 èëè 1/4-18 NPT
14
Page 15

15
Page 16

SAMSON AG · MESS- UND REGELTECHNIK
Weismüllerstraße 3 · 60314 Frankfurt am Main · Germany
Phone: +49 69 4009-0 · Fax: +49 69 4009-1507
Internet: http://www.samson.de
EB 8359-1 RU
Va.
 Loading...
Loading...