

Page 1

User Manual
RM3000 & RM2000
Geomagnetic Sensor Suite
Page 2

Table of Contents
1 COPYRIGHT & WARRANTY INFORMATION ............................................................ 4
2 INTRODUCTION .......................................................................................................... 5
3 SPECIFICATIONS ....................................................................................................... 6
3.1 GEOMAGNETIC SENSOR SUITE CHARACTERISTICS .............................. 6
3.2 SEN-XY AND SEN-Z CHARACTERISTICS .................................................... 7
3.3 3D MAGIC CHARACTERISTICS .................................................................... 8
3.4 TYPICAL SENSOR SUITE OPERATING PERFORMANCE .......................... 9
3.5 DIMENSIONS AND PACKAGING ................................................................. 13
3.5.1 Sen-XY Dimensions & Packaging .................................................... 13
3.5.2 Sen-Z Dimensions & Packaging ....................................................... 14
3.5.3 Sen-Z Shield Dimensions & Packaging ............................................ 16
3.5.4 3D MagIC Dimensions and Packaging ............................................. 17
3.6 SOLDERING ................................................................................................. 18
4 GEOMAGNETIC SENSOR SUITE OVERVIEW & SET-UP ...................................... 20
4.1 OVERVIEW ................................................................................................... 20
4.2 LAYOUT ........................................................................................................ 22
4.2.1 Sensor Orientation ............................................................................ 22
4.2.2 Local Magnetic Field Considerations ............................................... 22
4.2.3 Other Layout Considerations ............................................................ 23
4.3 3D MAGIC PIN-OUT ..................................................................................... 23
4.4 SPI TIMING REQUIREMENTS ..................................................................... 27
4.5 IDLE MODE ................................................................................................... 28
5 3D MAGIC OPERATION – STANDARD MODE ....................................................... 29
5.1 CYCLE COUNT REGISTERS ....................................................................... 29
5.2 SINGLE-AXIS MEASUREMENT (SAM) OPERATION ................................. 31
5.2.1 SAM SPI Activity Sequence ............................................................. 31
5.2.2 SAM Command Byte ........................................................................ 32
5.2.3 Making a Single-Axis Measurement ................................................. 32
5.3 MULTI-AXIS MEASUREMENT (MAM) OPERATION ................................... 33
5.3.1 MAM SPI Activity Sequence ............................................................. 33
5.3.2 MAM Command Byte ....................................................................... 33
5.3.3 MAM Axes Select Byte ..................................................................... 34
5.3.4 Making a Multi-Axis Measurement ................................................... 34
6 3D MAGIC OPERATION – LEGACY MODE ............................................................. 36
6.1 LEGACY OPERATION .................................................................................. 36
6.1.1 Legacy Operation SPI Activity Sequence......................................... 37
6.1.2 Legacy Command Byte .................................................................... 37
6.1.3 Making a Legacy Measurement ....................................................... 38
6.2 ENHANCED LEGACY OPERATION ............................................................ 39
6.2.1 Clock Divide Command Byte ............................................................ 40
6.2.2 Clock Divide Register ....................................................................... 40
6.2.3 Command Sequence for Setting Clock Divide Value ....................... 41
6.2.4 Changes to the Period Select Value ................................................ 41
Page 3

List of Figures
Figure 3-1: Sample Rate vs. Resolution – Standard Mode ...................................................... 9
Figure 3-2: Gain vs. Cycle Counts – Standard & Legacy Modes ........................................... 10
Figure 3-3: Single-Axis Sample Rate vs. Cycle Counts – Standard & Legacy Modes .......... 10
Figure 3-4: Gain vs. Cycle Counts – Standard Mode ............................................................. 11
Figure 3-5: Single-Axis Sample Rate vs. Cycle Counts – Standard Mode ............................ 11
Figure 3-6: Current Consumption vs. Cycle Counts – Standard Mode .................................. 12
Figure 3-7: Sen-XY Sensor Dimensions ................................................................................ 13
Figure 3-8: Sen-XY Solder Pad Layout .................................................................................. 13
Figure 3-9: Sen-XY Tape and Reel Dimensions .................................................................... 14
Figure 3-10: Sen-Z Sensor Dimensions ................................................................................. 14
Figure 3-11: Sen-Z Solder Pad Layout ................................................................................... 15
Figure 3-12: Sen-Z Tape and Reel Dimensions ..................................................................... 15
Figure 3-13: Sen-Z Shield Sensor Dimensions ...................................................................... 16
Figure 3-14: Sen-Z Shield Solder Pad Layout ........................................................................ 16
Figure 3-15: Sen-Z Shield Tape and Reel Dimensions .......................................................... 17
Figure 3-16: 3D MagIC Mechanical Drawing ......................................................................... 17
Figure 3-17: 3D MagIC Tape Dimensions .............................................................................. 18
Figure 3-20: Recommended Solder Reflow Profile ................................................................ 19
Figure 4-1: RM3000 reference schematic – Standard Mode ................................................. 20
Figure 4-2: LR Oscillator Circuit Biasing Diagram .................................................................. 21
Figure 4-3: RM3000 North-East-Down (NED) Sensor Layout ............................................... 22
Figure 4-4: SPI Timing Diagram ............................................................................................. 27
Figure 5-1: SPI Activity Sequence Diagram for SAM Operation ............................................ 31
Figure 5-2: SPI Activity Sequence Diagram for MAM Operation ........................................... 33
Figure 6-1: SPI Activity Sequence Diagram for Legacy Operation ........................................ 37
List of Tables
Table 3-1: Geomagnetic Sensor Suite Performance................................................................ 6
Table 3-2: Sen-XY and Sen-Z Absolute Maximum Ratings ..................................................... 7
Table 3-3: Sen-XY and Sen-Z Characteristics ......................................................................... 7
Table 3-4: 3D MagIC Absolute Maximum Ratings ................................................................... 8
Table 3-5: 3D MagIC Recommended Operating Conditions .................................................... 8
Table 3-6: Recommended Solder Processing Parameters .................................................... 19
Table 4-1: 3D MagIC Pin Assignments .................................................................................. 24
Table 4-2: SPI Timing Specifications ..................................................................................... 28
Table 5-1: Cycle Count Register Commands ......................................................................... 30
Table 5-2: SAM Axis Select Bits ............................................................................................. 32
Table 5-3: MAM Axes Select Bits ........................................................................................... 34
Table 6-1: Legacy Period Select Bits ..................................................................................... 38
Table 6-2: Legacy Axis Select Bits ......................................................................................... 38
Table 6-3: Clock Divide Bits ................................................................................................... 40
Table 6-4: Enhanced Legacy Mode with CD = 1 .................................................................... 41
RM3000 & RM2000 Sensor Suite User Manual r08 Page 3 of 41
Page 4

1 Copyright & Warranty Information
© Copyright PNI Sensor Corporation 2010
All Rights Reserved. Reproduction, adaptation, or translation without prior written permission is prohibited, except as allowed under copyright laws.
Revised July 2012: for the most recent version visit our website at www.pnicorp.com
PNI Sensor Corporation
133 Aviation Blvd, Suite 101
Santa Rosa, CA 95403, USA
Tel: (707) 566-2260
Fax: (707) 566-2261
Warranty and Limitation of Liability. PNI Sensor Corporation ("PNI") manufactures its Products from parts and components that are new or
equivalent to new in performance. PNI warrants that each Product to be delivered hereunder, if properly used, will, for ninety (90) days following the
date of shipment unless a different warranty time period for such Product is specified: (i) in PNI’s Price List in effect at time of order acceptance; or (ii)
on PNI’s web site (www.pnicorp.com) at time of order acceptance, be free from defects in material and workmanship and will operate in accordance
with PNI’s published specifications and documentation for the Product in effect at time of order. PNI will make no changes to the specifications or
manufacturing processes that affect form, fit, or function of the Product without written notice to the Customer, however, PNI may at any time, without
such notice, make minor changes to specifications or manufacturing processes that do not affect the form, fit, or function of the Product. This warranty
will be void if the Products’ serial number, or other identification marks have been defaced, damaged, or removed. This warranty does not cover wear
and tear due to normal use, or damage to the Product as the result of improper usage, neglect of care, alteration, accident, or unauthorized repair.
THE ABOVE WARRANTY IS IN LIEU OF ANY OTHER WARRANTY, WHETHER EXPRESS, IMPLIED, OR STATUTORY, INCLUDING, BUT NOT
LIMITED TO, ANY WARRANTY OF MERCHANTABILITY, FITNESS FOR ANY PARTICULAR PURPOSE, OR ANY WARRANTY OTHERWISE
ARISING OUT OF ANY PROPOSAL, SPECIFICATION, OR SAMPLE. PNI NEITHER ASSUMES NOR AUTHORIZES ANY PERSON TO ASSUME
FOR IT ANY OTHER LIABILITY.
If any Product furnished hereunder fails to conform to the above warranty, Customer’s sole and exclusive remedy and PNI’s sole and exclusive liability
will be, at PNI’s option, to repair, replace, or credit Customer’s account with an amount equal to the price paid for any such Product which fails during
the applicable warranty period provided that (i) Customer promptly notifies PNI in writing that such Product is defective and furnishes an explanation of
the deficiency; (ii) such Product is returned to PNI’s service facility at Customer’s risk and expense; and (iii) PNI is satisfied that claimed deficiencies
exist and were not caused by accident, misuse, neglect, alteration, repair, improper installation, or improper testing. If a Product is defective,
transportation charges for the return of the Product to Customer within the United States and Canada will be paid by PNI. For all other locations, the
warranty excludes all costs of shipping, customs clearance, and other related charges. PNI will have a reasonable time to make repairs or to replace
the Product or to credit Customer’s account. PNI warrants any such repaired or replacement Product to be free from defects in material and
workmanship on the same terms as the Product originally purchased.
Except for the breach of warranty remedies set forth herein, or for personal injury, PNI shall have no liability for any indirect or speculative damages
(including, but not limited to, consequential, incidental, punitive and special damages) relating to the use of or inability to use this Product, whether
arising out of contract, negligence, tort, or under any warranty theory, or for infringement of any other party’s intellectual property rights, irrespective of
whether PNI had advance notice of the possibility of any such damages, including, but not limited to, loss of use, revenue or profit. In no event shall
PNI’s total liability for all claims regarding a Product exceed the price paid for the Product. PNI neither assumes nor authorizes any person to assume
for it any other liabilities.
Some states and provinces do not allow limitations on how long an implied warranty lasts or the exclusion or limitation of incidental or consequential
damages, so the above limitations or exclusions may not apply to you. This warranty gives you specific legal rights and you may have other rights that
vary by state or province.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 4 of 41
Page 5

2 Introduction
Thank you for purchasing PNI Sensor Corporation’s RM2000 or RM3000 Geomagnetic Sensor
Suite (pn 90042 and pn 90043, respectively). The RM2000 is comprised of two Sen-XY
Geomagnetic Sensors (pn 12683) and a 3D MagIC ASIC controller (pn 12927), and this forms
the basis for a 2-axis digital compass. The RM3000 is the same as the RM2000 but adds a Sen-Z
Geomagnetic Sensor (pn 12779), such that compassing measurements are not constricted to the
horizontal plane.
When implementing a Geomagnetic Sensor Suite, each Geomagnetic Sensor serves as the
inductive element in a simple LR relaxation oscillation circuit, with the sensor’s effective
inductance proportional to the magnetic field parallel to the sensor axis. The LR circuit is driven
by the 3D MagIC, and the circuit’s oscillation frequency varies with the strength of the magnetic
field parallel to the sensor. The 3D MagIC’s internal clock measures the circuit’s oscillation
frequency, and the magnetic field strength is derived from this. The 3D MagIC also contains
interface circuitry to communicate with the host microprocessor on an SPI bus. The 3D MagIC
can control and measure up to three PNI Geomagnetic Sensors, with each sensor individually
selected for measurement and individually configured for measurement gain.
Since the Geomagnetic Sensor Suite works in the frequency domain, resolution and noise are
established cleanly by the number of cycle counts. In comparison, fluxgate and MR technologies
require expensive and complex signal processing to obtain similar resolution and noise, and in
many respects the Geomagnetic Sensor Suite’s performance simply cannot be matched. Also,
the output from the 3D MagIC is inherently digital and can be fed directly into a microprocessor,
eliminating the need for signal conditioning or an analog/digital interface between the sensor and
a microprocessor. The simplicity of the Geomagnetic Sensor Suite combined with the lack of
signal conditioning makes it easier and less expensive to implement than alternative fluxgate or
magneto-resistive (MR) technologies.
For more information on PNI’s magneto-inductive sensor technology, see PNI’s whitepaper
“Magneto-Inductive Technology Overview” at http://www.pnicorp.com/technology/papers.
Note: PNI’s Sen-Z Shield is available as an option to provide mechanical protection to the Sen-Z sensor
since the solder joint that attaches the Sen-Z to the user’s PCB may break if the Sen-Z is impacted. The
Sen-Z shield generally should not be required in a well-controlled, high-volume production environment,
but may be advisable for product development and testing or in less-controlled production environments.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 5 of 41
Page 6

Parameter
Min
Typical
Max
Units
Field measurement range2
-1100
+1100
T
Gain @ 200 Cycle Counts3
45
counts/ T
Noise @ 200 Cycle Counts3
35 nT
Maximum Sample Rate, Single Axis @
200 Cycle Counts4
450
Hz
Linearity - best fit over 200 T
0.6
1.0
% of 200 T
Average Current per Axis @ 35 Hz and
@ 200 Cycle Counts5
0.3
mA
Bias Resistance (RB)
2.6 V to 3.3 V
68
1.6 V to 2.6V
33 + (V-1.6)*35
External Timing Resistor for Clock (R
EXT
)
33
k
Circuit Oscillation Frequency
185
kHz
High Speed Clock Frequency
45
MHz
Operating Temperature
-40 +85
C
3 Specifications
3.1 Geomagnetic Sensor Suite Characteristics
Table 3-1: Geomagnetic Sensor Suite Performance1
Footnotes:
1. Specifications subject to change. Unless otherwise noted, performance characteristics assume
the user implements the recommended bias resistors and external timing resistor for the highspeed clock (as indicated in Figure 4-1 ), the DC supply voltage is 3.3 V, and the 3D MagIC is
operated in Standard Mode. Other bias resistors, external timing resistors and operating voltages
may be used, but performance may differ from the values listed.
2. Field measurement range is defined as the monotonic region of the output characteristic curve.
3. Gain and noise are related to useable resolution. Below ~200 cycle counts the gain setting
dominates the usable resolution (resolution = 1/gain) while above ~200 cycle counts the system
noise dominates. The user establishes the gain value by setting the Cycle Count Register value.
See Figure 3-4 for the typical relationship between cycle counts, gain, and resolution. Above
~200 cycle counts noise is relatively constant and there are diminishing returns in usable
resolution as the cycle count value increases. Also, performance will vary from sensor to sensor:
~50% of the sensors will have performance greater than “Typical” and ~50% less than “Typical”.
4. The maximum sample rate and gain/resolution are inversely related, so higher sample rates can
be obtained by reducing the number of cycle counts, but this also results in reduced gain and
resolution. Also see Figure 3-4 and Figure 3-5.
5. Operating at reduced cycle counts reduces current consumption, but also reduces resolution.
Operating at greater cycle counts increases current consumption but, due to system noise, does
not significantly increase useable resolution. Also see Figure 3-6.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 6 of 41
Page 7

Parameter
Minimum
Maximum
Units
Input Pin Current @ 25 C
50
mA
Storage Temperature
-40
+85
C
Parameter
Min
Typical
Max
Units
Inductance1
400-600
H
DC resistance @ 25C 15C
30 45
Resistance versus
temperature
0.4
%/C
Weight
Sen-XY
0.06 [0.002]
gm [oz]
Sen-Z
0.09 [0.003]
gm [oz]
Operating Temperature
-40 +85
C
3.2 Sen-XY and Sen-Z Characteristics
Table 3-2: Sen-XY and Sen-Z Absolute Maximum Ratings
CAUTION:
Stresses beyond those listed above may cause permanent damage to the device. These
are stress ratings only. Assuming operation with the 3D MagIC per the guidelines in this
manual, these maximum ratings will not be violated.
Table 3-3: Sen-XY and Sen-Z Characteristics1
Footnote:
1. 1 V peak-to-peak across the coil @ 100 kHz (sinewave). No DC bias resistance.
Measured orthogonal to Earth’s magnetic field.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 7 of 41
Page 8

Parameter
Minimum
Maximum
Units
Analog/Digital DC Supply Voltage (AVDD & DVDD)
-0.3
+3.7
VDC
Input Pin Voltage
-0.3
AVDD or DVDD
VDC
Input Pin Current @ 25C
-10.0
+10.0
mA
Storage Temperature
-40°
+125°
C
Parameter
Symbol
Min
Typ
Max
Units
Analog/Digital DC Supply Voltage
AVDD,
DVDD
1.6
3.3
3.6
VDC
Supply Voltage
Difference
(DVDD-AVDD)
During Operation
∆V
DD_OP
-0.1
0
+0.1
VDC
Analog Unpowered
∆V
DD_OFF
DVDD-0.1
DVDD
DVDD+0.1
VDC
Supply Voltage Ripple on AVDD or DVDD
V
DD_ripple
0.05
VPP
High level input voltage
VIH
0.7*DVDD
DVDD
VDC
Low level input voltage
VIL 0
0.3*DVDD
VDC
High level output current
IOH
-1
mA
Low level output current
IOL 1 mA
Idle Mode Current
1 µA
Leakage Current @ DVDD pin
(AVDD=AVSS=DVSS=0V, DVDD=3.6V)
100
nA
Operating Temperature
TOP
-40 +85
C
3.3 3D MagIC Characteristics
Table 3-4: 3D MagIC Absolute Maximum Ratings
CAUTION:
Stresses beyond those listed above may cause permanent damage to the device. These
are stress ratings only. Operation of the device at these or other conditions beyond those
indicated in the operational sections of the specifications is not implied.
Table 3-5: 3D MagIC Recommended Operating Conditions
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 8 of 41
Page 9

0
30
60
90
120
150
300 600 900 1200 1500 1800 2100 2400
Gain-determined Resolution (nT)
Single-Axis Sample Rate (Hz)
3.4 Typical Sensor Suite Operating Performance
Figure 3-1 plots typical gain-determined resolution as a function of the single axis sample
rate. The plot starts at 300 Hz since the usable resolution is limited by best-case system noise
of ~15 nT. The plot stops at 2400 Hz because this represents a cycle count of ~30, and
operating at cycle counts much lower than this introduces significant quantization error.
(The number of cycle counts is determined by the user, as explained in Sections 5.1 and 6.2.)
Figure 3-1: Sample Rate vs. Resolution – Standard Mode
(Usable resolution will be limited by system noise at lower sample rates)
The plots below are representative of performance as a function of the number of cycle
counts, which is a parameter directly controlled by the user. The first two plots show
performance for operation in both Standard Mode and the default Legacy Mode out to 10,000
cycle counts. The maximum number of cycle counts in Legacy Mode is 4096. In Standard
Mode the maximum cycle counts is 65.5k, but there’s rarely a reason to operate in Standard
Mode much beyond 200 cycle counts, as discussed in the following paragraph.
Figure 3-4, Figure 3-5, and Figure 3-6 show performance when operating in Standard Mode
out to 200 cycle counts. Operation in Standard Mode at more than 200 cycle counts usually
is inefficient since more time and power is consumed per measurement, with diminishing
returns in usable (noise-limited) resolution.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 9 of 41
Page 10

0.1
1
10
100
1000
10000
10 100 1000 10000
Gain (counts/µT)
Cycle Counts
Standard Mode
Legacy Mode (default config.)
1
10
100
1000
10000
10 100 1000 10000
Maximum Single-Axis Sample Rate (Hz)
Cycle Counts
Standard Mode
Legacy Mode (default config.)
Figure 3-2: Gain vs. Cycle Counts – Standard & Legacy Modes
(Resolution = 1/Gain, to the system’s noise limit)
Figure 3-3: Single-Axis Sample Rate vs. Cycle Counts – Standard & Legacy Modes
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 10 of 41
Page 11

0
5
10
15
20
25
30
35
40
45
50
0 20 40 60 80 100 120 140 160 180 200
Gain (counts/µT)
Cycle Counts
0
300
600
900
1200
1500
1800
2100
2400
2700
3000
0 20 40 60 80 100 120 140 160 180 200
Maximum Single-Axis Sample Rate (Hz)
Cycle Counts
Figure 3-4: Gain vs. Cycle Counts – Standard Mode
(Resolution = 1/Gain, to the system’s noise limit)
Figure 3-5: Single-Axis Sample Rate vs. Cycle Counts – Standard Mode
RM3000 & RM2000 Sensor Suite User Manual r08 Page 11 of 41
Page 12

0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0 20 40 60 80 100 120 140 160 180 200
Current Consumption @ 35 Hz
Single-Axis Sample Rate (mA)
Cycle Counts
Figure 3-6: Current Consumption vs. Cycle Counts – Standard Mode
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 12 of 41
Page 13

3.5 Dimensions and Packaging
3.5.1 Sen-XY Dimensions & Packaging
Figure 3-7: Sen-XY Sensor Dimensions
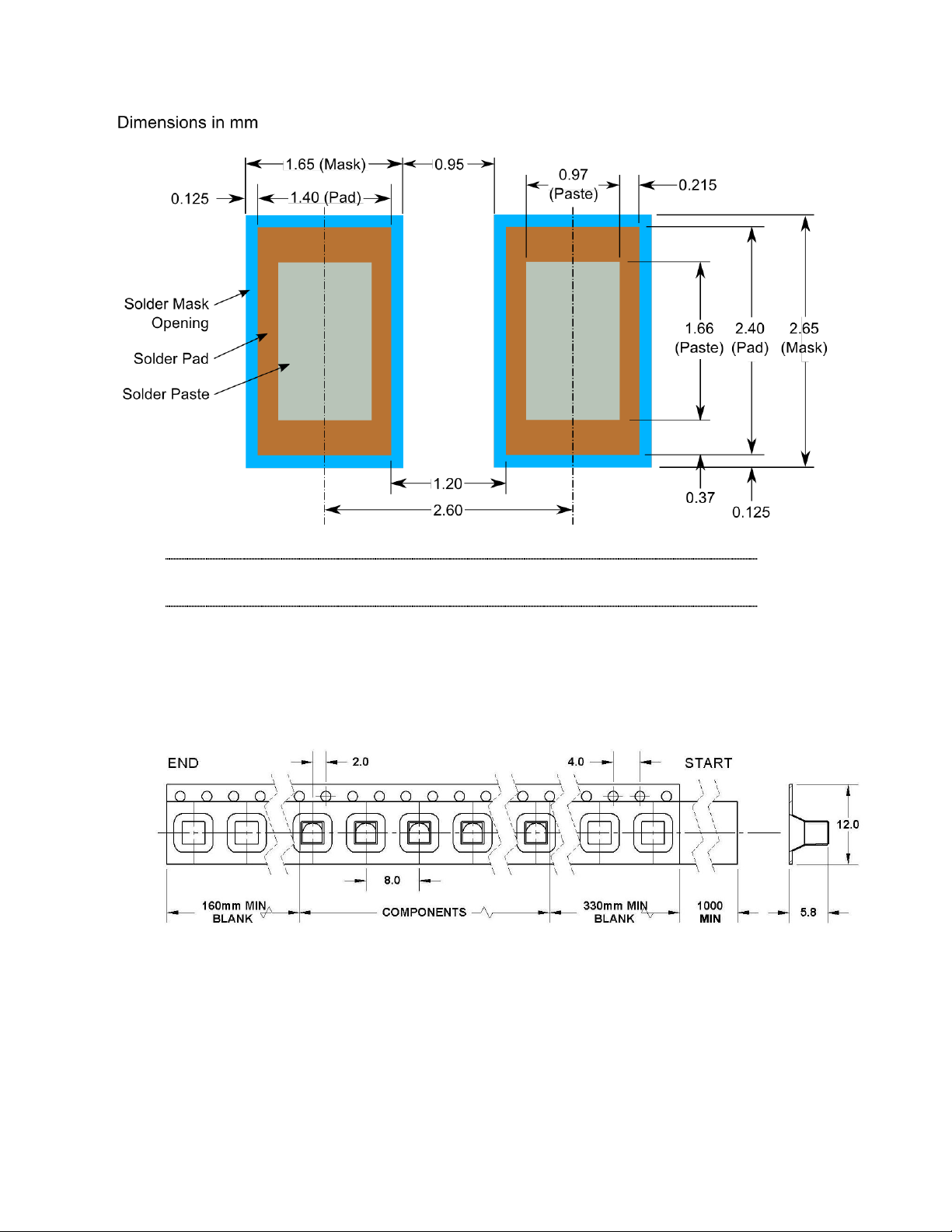
Note: PNI recommends using a 5 mil stencil and halide-free solder paste. Also, the
above layout allows for rework: for minimal footprint please contact PNI.
Figure 3-8: Sen-XY Solder Pad Layout
RM3000 & RM2000 Sensor Suite User Manual r08 Page 13 of 41
Page 14

Figure 3-9: Sen-XY Tape and Reel Dimensions
3.5.2 Sen-Z Dimensions & Packaging
Figure 3-10: Sen-Z Sensor Dimensions
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 14 of 41
Page 15
Dimensions: mm
Full reel is 1200 pcs. Smaller quantities on cut-tape.
Tape & Reel meets ANSI/EIA standard EIA-418-B
Note: PNI recommends using a 5 mil stencil and halide-free solder paste. Also, the
above layout allows for rework: for minimal footprint please contact PNI.
Figure 3-11: Sen-Z Solder Pad Layout
RM3000 & RM2000 Sensor Suite User Manual r08 Page 15 of 41
Figure 3-12: Sen-Z Tape and Reel Dimensions
Page 16

3.5.3 Sen-Z Shield Dimensions & Packaging
Figure 3-13: Sen-Z Shield Sensor Dimensions
Figure 3-14: Sen-Z Shield Solder Pad Layout
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 16 of 41
Page 17

User Direction of Unreeling
Dimensions: mm
Full reel is 600 pcs. Smaller quantities on cut-tape.
Tape & Reel meets ANSI/EIA standard EIA-418
Figure 3-15: Sen-Z Shield Tape and Reel Dimensions
3.5.4 3D MagIC Dimensions and Packaging
RM3000 & RM2000 Sensor Suite User Manual r08 Page 17 of 41
Figure 3-16: 3D MagIC Mechanical Drawing
Page 18

Dimensions: mm
Full reel is 5000 pcs. Smaller quantities on cut-tape.
Tape & Reel meets ANSI/EIA standard EIA-418
Figure 3-17: 3D MagIC Tape Dimensions
3.6 Soldering
Figure 3-18 and Table 3-6 provide the recommended solder reflow profile and processing
parameters for Geomagnetic Sensor Suite components. After soldering PNI components to a
board, it is possible to wave solder the opposite side of the PCB.
IMPORTANT: PNI sensors require the use of halide-free solder pastes and processes for
reflow and cleaning. Please contact PNI if you would like recommendations.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 18 of 41
Page 19

Parameter
Symbol
Value
Preheat Temperature, Minimum
T
Smin
150°C
Preheat Temperature, Maximum
T
Smax
200°C
Preheat Time (T
Smin
to T
Smax
)
60 – 180 seconds
Solder Melt Temperature
TL
>218°C
Ramp-Up Rate (T
Smax
to TL)
3°C/second maximum
Peak Temperature
TP
<260°C
Time from 25°C to Peak (TP)
6 minutes maximum
Time above TL
tL
60 – 120 seconds
Soak Time (within 5°C of TP)
tP
10 – 20 seconds
Rampdown Rate
4°C/second maximum
PB
Figure 3-18: Recommended Solder Reflow Profile
Table 3-6: Recommended Solder Processing Parameters1
Footnote:
1. Meets IPC/JEDEC J-STD-020 profile recommendations. Sen-XY and Sen-Z
classified as moisture sensitivity level 1. 3D MagIC classified as moisture
sensitivity level 3.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 19 of 41
Page 20

4 Geomagnetic Sensor Suite Overview & Set-Up
4.1 Overview
Figure 4-1 provides a basic schematic for implementing the RM3000 Sensor Suite in
Standard Mode. The 3D MagIC is at the center of the schematic, as it ties the user’s host
controller, on the left, to the three Geomagnetic Sensors on the right. To implement the
RM2000, simply do not connect the Sen-Z sensor. The 3D MagIC also can operate only one
sensor if desired. Unused sensor connections should remain floating. To implement either
Geomagnetic Sensor Suite in Legacy Mode, the Mode pin (pin #12) should be connected to
DVDD, rather than tied to ground.
Note: RM3000 and RM2000 Geomagnetic Sensor Suites typically are used in compassing
applications, where each channel represents a Cartesian coordinate axis (x, y, or z). For this reason,
the term “axis” generally is used instead of “channel”.
Figure 4-1: RM3000 reference schematic – Standard Mode
The Sen-XY and/or Sen-Z sensors serve as the inductive element in a simple LR relaxation
oscillation circuit which is composed of an external bias resistor along with digital gates and
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 20 of 41
Page 21

a comparator internal to the 3D MagIC. The sensor’s inductance varies with respect to the
magnetic field. As such, the frequency of oscillation of the circuit varies with the strength of
the total magnetic field parallel to the sensor. To make a measurement, one side of the
sensor is grounded while the other side is alternately driven with positive and negative
current through the oscillator. The circuit is driven for a user-specified number of circuit
oscillations (the cycle counts), and the time to complete the specified number of cycle counts
is measured using the 3D MagIC’s internal high-speed clock. The 3D MagIC next switches
the bias connection to the sensor and makes another measurement. The side that was
previously grounded is now charged and discharged while the other is now grounded. Since
the total magnetic field represents the sum of the external magnetic field and the circuitinduced magnetic field, and since the circuit-induced magnetic field has the same magnitude
but opposite direction for the two bias polarities, the external magnetic field is proportional
to the difference in the time to complete the user-defined number of cycle counts (i.e. the
difference in the total measured magnetic field). The difference in the number of high-speed
clock oscillations between the forward and reverse bias directions is output from the 3D
MagIC, and this number is directly proportional to the strength of the local magnetic field in
the direction of the sensor. Note that only one sensor can be measured at a time and the
number of cycle counts is individually set for each sensor. Also, the greater the number of
cycle counts, the higher the resolution of the measurement (to the noise limit) and the longer
the sample time. Figure 4-2, below, provides a detail of the biasing circuit. For additional
information on PNI’s magneto-inductive sensor technology, please refer to the “MagnetoInductive Technology Overview” white paper found on PNI’s website.
Figure 4-2: LR Oscillator Circuit Biasing Diagram
Since the Geomagnetic Sensor Suite works in the frequency domain, resolution is cleanly
established by the number of cycle counts. Also, the output from the 3D MagIC is inherently
digital and can be fed directly into a microprocessor, which eliminates the need for signal
conditioning or an analog/digital interface between the sensor and host processor.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 21 of 41
Page 22

4.2 Layout
4.2.1 Sensor Orientation
Figure 4-3 indicates how the three Geomagnetic Sensors in a RM3000 Suite should be
oriented for a system referenced as north-east-down (NED). The arrow represents the
direction of travel or pointing. Positioning of the sensors is not critical, other than
ensuring they are not positioned close to a magnetic component, such as a speaker.
Figure 4-3: RM3000 North-East-Down (NED) Sensor Layout
If the Sen-Z sensor is flipped to the bottom of the board such that the curved portion of
the sensor still points forward, then to retain NED the Sen-Z’s ZDRVN and ZDRVP pads
should be as shown above, except on the bottom of the board. Since the pads on the
Sen-Z have switched positions, the connections to the Sen-Z sensor will be reversed.
4.2.2 Local Magnetic Field Considerations
Since the sensors measure magnetic field, it is important to consider what items in the
vicinity of the sensors can affect the sensor readings. Specifically:
The sensors have a linear regime of 200 T. (Earth’s field is ~50 T.) To
ensure the sensors operate in their linear regime, do not place the sensors close to
large electric currents, large masses of ferrous material, or devices incorporating
permanent magnets, such as speakers and electric motors.
Locate the sensors away from changing magnetic fields. While it is possible to
calibrate the sensors to accommodate local magnetic distortion that is fixed
relative to the sensors, changing local magnetic fields generally cannot be
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 22 of 41
Page 23

accommodated. When the local magnetic field will change, try to take readings
only when the field is in a known state. For instance, if a motor will be running
part of the time, take readings only when the motor is in a known state (e.g. off).
If you are uncertain about the effect a specific component may have on the
system, the RM3000 Evaluation Board can be used to help ascertain this. Place
the RM3000 Evaluation Board on a firm surface and gradually bring the
component in question close to the board, then note when the magnetic field starts
to change. If the component cannot be moved, then gradually move the RM3000
Evaluation Board towards the component; however it is necessary to ensure the
orientation of the board remains constant while doing this. If an RM3000
Evaluation Board is not available, gradually bring the component in question
closer to one of the Geomagnetic Sensors and observe when the sensor reading
starts to change. Note that the affect of a local magnetic distortion drops off as
1/distance3.
4.2.3 Other Layout Considerations
Other design considerations include:
To minimize the effect of gradients in the magnetic field, position the sensors as
close to each other as possible.
To reduce coupling to and from other signals, keep the two traces from the 3D
MagIC to each sensor as close as possible to each other. (The 3D MagIC can be
located up to 0.5 m away from the sensors.)
Keep capacitors (especially tantalum capacitors) far away from the sensors.
4.3 3D MagIC Pin-Out
The 3D MagIC’s pin-out is summarized in Table 4-1. Pin numbers run counterclockwise
(when looking from the top), starting at the Pin 1 designator as shown in Figure 3-16.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 23 of 41
Page 24

Pin#
Name
Description
1
MOSI
SPI interface – Master Output, Slave Input Serial Data
2
NC
Do not connect
3
SSN
SPI interface – Active low to select port
4
AVDD
Supply voltage for analog section of ASIC
5
AVSS
Ground pin for analog section of ASIC
6
Z
DRVP
Z sensor drive output
7
Z
INP
Z sensor measurement input
8
Z
INN
Z sensor measurement input
9
Z
DRVN
Z sensor drive output
10
Y
DRVP
Y sensor drive output
11
Y
INP
Y sensor measurement input
12
MODE
Mode Select: tie to DVSS for Standard, DVDD for Legacy
13
Y
INN
Y sensor measurement input
14
Y
DRVN
Y sensor drive output
15
X
DRVP
X sensor drive output
16
X
INP
X sensor measurement input
17
X
INN
X sensor measurement input
18
X
DRVN
X sensor drive output
19
DVSS
Ground pin for digital section of ASIC
20
NC
Do not connect
21
NC
Do not connect
22
CLEAR
Clear Command Register
23
DRDY
Data ready command
24
NC
Do not connect
25
R
EXT
External timing resistor for high speed clock.
26
DVDD
Supply voltage for digital section of ASIC.
27
SCLK
SPI interface - Serial clock input
28
MISO
SPI interface – Master Input, Slave Output
Table 4-1: 3D MagIC Pin Assignments
MODE
The MODE pin establishes whether communication with the 3D MagIC will comply
with Standard Mode protocol (see Section 5) or Legacy Mode protocol (see
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 24 of 41
Page 25

Section 6). The MODE pin should be grounded (connected to DVSS) to operate in
Standard Mode, and set HIGH (connected to DVDD) to operate in Legacy Mode.
SCLK (SPI Serial Clock Input)
SCLK is a SPI input used to synchronize the data sent in and out through the MISO
and MOSI pins. SCLK is generated by the customer-supplied master device and
should be 1 MHz or less. One byte of data is exchanged over eight clock cycles.
Data is captured by the master device on the rising edge of SCLK. Data is shifted out
and presented to the 3D MagIC on the MOSI pin on the falling edge of SCLK, except
for the first bit (MSB) which must be present before the first rising edge of SCLK.
SSN (SPI Slave Select)
This signal sets the 3D MagIC as the operating slave device on the SPI bus. The SSN
pin must be LOW prior to data transfer in either direction, and must stay LOW during
the entire transfer.
The SSN pin must transition from HIGH to LOW prior to initiating a multi-axis
measurement (MAM) command and prior to reading or writing to the Cycle Count
Register or Clock Divide Register. It must stay LOW for the remainder of the
operation.
After communication between the 3D MagIC and master device is finished, the SPI
bus can be freed up (SSN pin set HIGH) to communicate with other slave devices
while the 3D MagIC takes a measurement or is idle.
MISO (SPI Serial Out)
MISO is a SPI output that sends data from the 3D MagIC to the master device. Data
is transferred most significant bit first and is captured by the master device on the
rising edge of SCLK. The MISO pin is placed in a high impedance state if the 3D
MagIC is not selected (i.e. if SSN=1).
MOSI (SPI Serial In)
MOSI is a SPI input that provides data from the master device to the 3D MagIC.
Data is transferred most significant bit first. Data must be presented at least 50 ns
before the rising edge of SCLK, and remain valid for 50 ns after the edge. New data
typically is presented to the MOSI pin on the falling edge of SCLK.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 25 of 41
Page 26

DRDY (Data Ready)
DRDY is used to ensure data is read from the 3D MagIC only when it is available.
After initiating a sensor measurement, DRDY will go HIGH when the measurement
is complete. This signals the host that data is ready to be read. The DRDY pin
should be set LOW prior to initiating a measurement. This is done automatically in
Standard Mode and by toggling the CLEAR pin in Legacy Mode.
Note: If a new command sequence is started before the previous measurement has
completed (before DRDY goes HIGH), the previous command will be overwritten. This will
also stop the measurement cycle. If you try to send a new command during the readout
phase, after DRDY goes HIGH, the command will be ignored until all 16 bits have been
clocked our or the CLEAR pin is set HIGH (then LOW again).
CLEAR (Clear Command Register)
To initiate a clear command in Legacy Mode, the CLEAR pin must be toggled LOWHIGH-LOW. CLEAR is usually LOW. CLEAR will reset the DRDY pin to LOW.
CLEAR can be used to stop any sensor measurement in progress. CLEAR has no
effect on the SPI register state.
Note: The CLEAR pin is similar to the RESET pin on PNI’s legacy ASIC. However in
Standard Mode the 3D MagIC automatically resets the DRDY line, so it is not necessary to
use the CLEAR pin when operating in Standard Mode.
AVDD and DVDD (Supply Voltages)
AVDD and DVDD should be tied to the analog and digital supply voltages,
respectively. The recommend voltages are defined in Table 3-5, and the maximum
voltages are given in Table 3-4. DVDD must be on whenever AVDD is on, so
DVDD should either be brought up first or at precisely the same time as AVDD.
AVDD can be turned off when not making a measurement to conserve power, since
all other operations are supported with DVDD. Under this condition, register values,
such as those in the Cycle Count Register, will be retained as long as DVDD is
powered. Also, AVDD must be within 0.1 V DVDD when AVDD is on.
AVSS and DVSS (Ground Pins)
AVSS and DVSS should be tied to the analog and digital ground, respectively.
Assuming the ground plane is clean, they may share a common ground. They may
have their own ground planes if this is more convenient from the standpoint of the
user’s circuit layout. DVSS and AVSS should be within 0.1 V of each other.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 26 of 41
Page 27

R
(External Timing Resistor)
EXT
R
ties to the external timing resistor for the high-speed clock. The recommended
EXT
value for the resistor and associated clock speed are defined in Table 3-1.
Sensor Drive and Measurement Pins
The various sensor drive and measurement pins should be connected to the
Geomagnetic Sensors. For a north-east-down (NED) reference frame, the
connections should be as defined in Figure 4-3.
4.4 SPI Timing Requirements
When implementing a SPI port, whether a dedicated hardware peripheral port or a softwareimplemented port using general purpose I/O (also known as Bit-Banging), the timing
parameters (defined below in Figure 4-4 and specified in Table 4-2) must be met to ensure
reliable communication. Note that Standard Mode and Legacy Mode timing requirements
are identical with the exception of Legacy Mode utilizing the CLEAR line. The SPI clock
(SCLK) should run at 1 MHz or less. Generally data is considered valid while SCLK is
HIGH, and data is in transition when SCLK is LOW. The clock polarity used with the 3D
MagIC is zero (exclusively CPOL=0). Data is present on MISO or should be presented on
MOSI before the first low to high clock transition (exclusively CPHA = 0).
Figure 4-4: SPI Timing Diagram
RM3000 & RM2000 Sensor Suite User Manual r08 Page 27 of 41
Page 28

Symbol
Description
Min
Max
Units
t
SC
Time from SSN to CLEAR
10 ns
t
CMIN
CLEAR duration
100 ns
t
SSDV
Time from SSN to Command Byte on MOSI
1 us
t
DBSH
Time to setup data before active edge
50 ns
t
DASH
Time to setup data after active edge
50 ns
t
SHDZ
Time from SSN to data tri-state time
100
ns
4.5 Idle Mode
Table 4-2: SPI Timing Specifications
The 3D MagIC incorporates an Idle Mode to reduce power consumption, in which the circuit
automatically idles when it is not exchanging data or taking a measurement. The 3D MagIC
starts in the Idle Mode at power-up and remains in Idle Mode until a measurement is needed.
Note: The 3D MagIC starts in Idle Mode when powered on. This is different from the legacy 11096
ASIC, which required cycling through one measurement request operation to put it into Idle Mode.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 28 of 41
Page 29

5 3D MagIC Operation – Standard Mode
Note: This section discusses how to operate the 3D MagIC in Standard Mode. For a description of
operation in Legacy Mode, see Section 6. The 3D MagIC operates in Standard Mode when pin #12 is
held LOW (grounded to DVSS).
The basic functions to be performed when operating the 3D MagIC are:
Setting the values in the Cycle Count Registers, and
Taking sensor measurements.
The user should first establish the number of cycle counts to be measured for each sensor by
writing to the Cycle Count Registers. This is followed by sending a command or series of
commands to make the sensor measurements. Assuming the user will use the same number of
cycle counts for subsequent measurements, it is not necessary to rewrite to the Cycle Count
Registers for subsequent sensor measurements.
In Standard Mode, the 3D MagIC provides two methods to take sensor measurements, which are
discussed later in this section:
Single-axis measurement (SAM), and
Multi-axis measurement (MAM).
The SAM Command Byte initiates a measurement for one sensor and sets up the 3D MagIC to
write the measured values out on the MISO line. The MAM Command Byte initiates a sensor
measurement for up to 3 sensors, and a later Command Byte sets up the 3D MagIC to write the
measured values out on the MISO line for up to 3 sensors. For two or three axis systems,
normally it is more efficient to operate using the MAM Command Byte.
5.1 Cycle Count Registers
Prior to sending a command to take a sensor measurement, it is necessary to write values to
the Cycle Count Registers. (The default value for the Cycle Count Registers is 512D, but
this was chosen for legacy reasons and is an inefficient value otherwise.) The Cycle Count
Registers establish the number of sensor oscillation cycles that will be counted for each
sensor in both the forward and reverse bias directions during a measurement sequence.
Increasing the cycle count value increases measurement resolution, but system noise limits
the useable resolution such that the maximum efficient cycle count value generally is around
200-300 cycle counts. Lowering the cycle count value reduces acquisition time, which
increases maximum achievable sample rate or, with a fixed sample rate, decreases power
RM3000 & RM2000 Sensor Suite User Manual r08 Page 29 of 41
Page 30

Bit #
7 6 5 4 3 2 1
0
Value
1
R/W 0 0
ADR3
ADR2
ADR1
ADR0
Register Description
Read Command
Byte
Write Command
Byte
X Axis Cycle Count Value - MSB
C3H
83H
X Axis Cycle Count Value - LSB
C4H
84H
Y Axis Cycle Count Value - MSB
C5H
85H
Y Axis Cycle Count Value - LSB
C6H
86H
Z Axis Cycle Count Value - MSB
C7H
87H
Z Axis Cycle Count Value - LSB
C8H
88H
consumption. See Figure 3-4, Figure 3-5, and Figure 3-6 to estimate the appropriate cycle
count value for your application. Once the Cycle Count Registers are set, they do not need to
be repopulated unless the user wants to change the values or the system is powered down (in
which case the default values would populate the register fields when powered up again).
To initiate a read to or write from the Cycle Count Register, the command byte is defined as:
R/W: Read/Write
HIGH signifies a Read operation from the addressed register. LOW signifies a Write
operation to the addressed register.
ADR0 – ADR3: Register Address Bits
Establishes which register will be written to or read from. Each sensor is represented
by two registers, with addresses defined as follows:
Table 5-1: Cycle Count Register Commands
Since the registers are adjacent, it is not necessary to send multiple Command Bytes, as the
3D MagIC automatically will read/write to the next adjacent register.
A sample command sequence is provided below which sets the cycle count value to 100D
(64H) for all 3 axes. This is purely for illustrative purposes and the value could be different
and/or the number of axes to be addressed could be different.
Start with SSN set HIGH, then set SSN to LOW.
Send 83H (this is the Write Command Byte to address the MSB for the X axis)
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 30 of 41
Page 31

Send 0 (value for the MSB for the X axis)
Send 64H (value for the LSB for the X axis - pointer automatically increments)
Send 0 (value for the MSB for the Y axis - pointer automatically increments)
Send 64H (value for the LSB for the Y axis - pointer automatically increments)
Send 0 (value for the MSB for the Z axis - pointer automatically increments)
Send 64H (value for the LSB for the Z axis - pointer automatically increments)
Set SSN to HIGH
5.2 Single-Axis Measurement (SAM) Operation
The SAM Command Byte initiates a sensor measurement on a single sensor, and sets up the
3D MagIC to output the measured values on the MISO line. Generally SAM operation is not
as efficient as MAM operation, except when only one sensor (in total) is to be measured.
5.2.1 SAM SPI Activity Sequence
The SPI activity sequence for SAM operation is given below. SPI timing is discussed in
Section 4.4. The Return Byte is 9AH. Three (3) data bytes will be clocked out for a
single-axis measurement. The Command Byte is discussed below.
Figure 5-1: SPI Activity Sequence Diagram for SAM Operation
RM3000 & RM2000 Sensor Suite User Manual r08 Page 31 of 41
Page 32

Bit #
7 6 5 4 3 2 1
0
Value
0 0 0 0 0 0 AS1
AS0
Axis Measured
AS1
AS0
No axis measured
0
0
X axis 0 1
Y axis 1 0
Z axis 1 1
5.2.2 SAM Command Byte
The SAM Command Byte is defined as follows:
Table 5-2: SAM Axis Select Bits
5.2.3 Making a Single-Axis Measurement
The steps to make a single-axis sensor measurement are given below. The 3D MagIC
will return the result of a complete forward- reverse measurement of the sensor in a 24 bit
2’s complement format (range: -8388608 to 8388607).
SSN pin is set LOW. This enables communication with the master device.
The SAM Command Byte is clocked into the 3D MagIC on the MOSI pin.
Simultaneously, the 3D MagIC will present a fixed 9AH on the MISO pin. Once
the 8 bits have clocked in, the 3D MagIC will execute the command (i.e. take a
measurement).
The SSN input may be returned HIGH at this point to free up host communication
with another device if desired. This will not affect the measurement process.
A measurement is taken.
At the end of the measurement, the DRDY pin is set HIGH, indicating data is
ready, and the 3D MagIC is placed in Idle Mode.
The SSN input should be set LOW, if it is not already, to read the data.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 32 of 41
The data is clocked out on the MISO pin with the next 24 clock cycles.
If another measurement is immediately made, SSN can remain LOW and the process
repeated. Otherwise it is recommended that SSN is set HIGH to release the SPI bus.
Page 33

5.3 Multi-Axis Measurement (MAM) Operation
An initial MAM Command Byte initiates a sensor measurement for up to 3 sensors. After
the measurements are made and the DRDY line goes HIGH, another MAM Command Byte
sets up the 3D MagIC to output the measured values on the MISO line.
5.3.1 MAM SPI Activity Sequence
The SPI timing sequence is given below for MAM operation. SPI timing is discussed in
Section 4.4. The Return Byte is 9AH. The number of data bytes will be determined by
the number of axes that are to be measured. Each axis is comprised of 3 bytes of data, so
for a 3 axis measurement 9 total bytes would be clocked out to receive all the data. The
Command Byte and Axes Select Byte are discussed below.
Figure 5-2: SPI Activity Sequence Diagram for MAM Operation
5.3.2 MAM Command Byte
The MAM Command Byte either initiates a sensor measurement or initiates placing the
measurement results on the MISO line for the host to read. The MAM Command Byte is
82H to initiate a sensor measurement and is C9H to retrieve the data.
Note: Measurement results are stored in registers within the 3D MagIC. If SCLK continues to
run after the appropriate number of data bytes for the defined number of axes to be measured,
then the information on the MISO line will have little meaning. SCLK should be stopped once the
measurements are clocked out.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 33 of 41
Page 34

Bit #
7 6 5 4 3 2 1
0
Value
0 0 0
AAX1
AAX0
0 0 1
Axes Measured
AAX1
AAX0
X, Y, and Z
0
0
X and Y 0 1
X only 1 0
No axis measured
1
1
5.3.3 MAM Axes Select Byte
The MAM Axes Select Byte establishes which axes are to be measured and is defined as
follows:
Table 5-3: MAM Axes Select Bits
5.3.4 Making a Multi-Axis Measurement
The steps to make a multi-axis sensor measurement are given below. The 3D MagIC will
return the result of a complete forward- reverse measurement of each sensor in a 24 bit
2’s complement format (range: -8388608 to 8388607).
Start with SSN set HIGH, then set SSN to LOW.
Initiate a sensor measurement by sending 82H (MAM Command Byte to write to
the Mode Register) followed by 01H (Mode Register Word to initiate
measurement) on the MOSI pin. The 3D MagIC will now take the prescribed
measurements.
Return SSN to HIGH. This will not affect the measurement process, but will free
up the host to communicate with other devices and ensure the next Command
Byte sent to the 3D MagIC is interpreted properly.
A measurement is taken.
At the end of the measurement, the DRDY pin is set HIGH, indicating data is
ready, and the 3D MagIC is placed in Idle Mode.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 34 of 41
When the host is ready to read the measured values, set SSN to LOW. If SSN
already is LOW, then toggle SSN from LOW to HIGH to LOW.
Page 35

Send C9H (MAM Command Byte to read from the ) on the MOSI pin to initiate
reading the measurement values. Data is clocked out on the MISO pin. Each
sensor reading consists of 3 bytes of data, clocked out MSB first. X-axis data is
presented first, then y-axis data, then z-axis data. The first nine (9) bytes
represent a complete 3-axis measurement.
Return SSN to HIGH to free up the host to communicate with other devices and
to ensure the next Command Byte sent to the 3D MagIC is interpreted properly.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 35 of 41
Page 36

6 3D MagIC Operation – Legacy Mode
Note: This section discusses how to operate the 3D MagIC in Legacy Mode. For a description of
operation in Standard Mode, see Section 5. The 3D MagIC will operate in Legacy Mode when pin #12 is
held HIGH (connected to DVDD).
The intent of Legacy Mode is to enable the user to easily substitute PNI’s 3D MagIC for PNI’s
legacy 11096 ASIC (p/n 12576).
If the user wishes to simply duplicate the performance of the 11096 ASIC (Legacy Operation),
then a measurement is made by sending the Legacy Command Byte. This command byte is the
same as for the 11096 ASIC. The Legacy Command Byte initiates a sensor measurement on a
single sensor, and sets up the 3D MagIC to output the measured values on the MISO line.
Legacy Operation is covered in Section 6.1
If the user wishes to derive the lower power consumption advantages of the 3D MagIC and is
willing to make some code changes but cannot make hardware changes, then Enhanced Legacy
Operation allows for this. (If the user can make both code and hardware changes, then operation
in Standard Mode is recommended.) For Enhanced Legacy Operation, the user first will write to
the Clock Divide Register and after this follow the same process as for Legacy Operation.
Please review both Sections 6.1 and 6.2, as Section 6.1 still applies and Section 6.2 covers the
additional steps required for Enhanced Legacy Operation.
6.1 Legacy Operation
In Legacy Mode a sensor measurement is initiated with the Legacy Command Byte, and this
command also sets up the 3D MagIC to output measurement data on the MISO line once this
data becomes available.
Note the 3D MagIC’s high-speed clock runs at nominally 45 MHz, but the 11096 ASIC runs
at nominally 2 MHz. Consequently, when the 3D MagIC is in default Legacy Mode, the
clock speed is divided by 16 thus reducing the clock speed to 2.8 MHz. At an effective clock
speed of 2.8 MHz the gain of the 3D MagIC circuit will closely match the gain of the 11096
ASIC circuit operating at 2 MHz. (The effective clock speed of the 3D MagIC is not 2 MHz
for gain matching because of differences in the circuit oscillation frequency between the 3D
MagIC and the 11096 ASIC circuits.) As such, the performance of the 3D MagIC closely
matchs that of the 11096 ASIC circuit with no software coding or hardware changes on the
user’s part. But performance is sub-optimized, and specifically power consumption can be
reduced by up to 90% with software changes on the user’s part, as discussed in Section 6.2.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 36 of 41
Page 37

Bit #
7 6 5 4 3 2 1
0
Value
0
PS2
PS1
PS0 0 0
AS1
AS0
6.1.1 Legacy Operation SPI Activity Sequence
The SPI activity sequence is given below for Legacy operation. SPI timing is discussed
in Section 4.4. The Return Byte is 9BH. Two (2) data bytes will be clocked out for a
Legacy measurement. The Command Byte is discussed below.
Figure 6-1: SPI Activity Sequence Diagram for Legacy Operation
6.1.2 Legacy Command Byte
The command byte to initiate a sensor measurement is defined as follows:
PS0-PS2: Period Select
Selects the number of sensor circuit oscillation cycles (cycle counts) to be counted
while simultaneously using the internal fixed reference clock to measure the time to
obtain this count.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 37 of 41
Page 38

Table 6-1: Legacy Period Select Bits
Period Select Value
Cycle Counts
PS2
PS1
PS0
0
32
0 0 0 1 64
0 0 1 2 128
0 1 0 3 256
0 1 1 4 512
1 0 0 5 1024
1 0 1 6 2048
1 1 0 7 4096
1 1 1
Axis Measured
AS1
AS0
No axis measured
0
0
X axis 0 1
Y axis 1 0
Z axis 1 1
AS0-AS1: Axis Select
Determines the sensor to be measured.
Table 6-2: Legacy Axis Select Bits
6.1.3 Making a Legacy Measurement
The steps to make a sensor measurement are given below. In Legacy Mode, the 3D
MagIC returns the result of a complete forward- reverse measurement of the sensor in a
16 bit 2’s complement format (range: -32768 to 32767). Note this is different from
Standard Mode, where a 24 bit value is returned.
SSN pin is set LOW. (This enables communication with the master device.)
CLEAR pin is set HIGH, then LOW. This is not required, but is optional to
maintain compatibility with the legacy 11096 ASIC.
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 38 of 41
A command byte is clocked into the 3D MagIC on the MOSI pin. Simultaneously,
the 3D MagIC will present a fixed 9BH on the MISO pin. Once the 8 bits have
clocked in, the 3D MagIC will execute the command (i.e. take a measurement).
Page 39

The SSN input may be returned HIGH at this point to free up host communication
with another device if desired. This will not affect the measurement process.
A measurement is taken, which consists of forward biasing the sensor and making
a period count; then reverse biasing the sensor and counting again; and then
taking the difference between the two directions and presenting this value.
At the end of the measurement, the DRDY pin is set HIGH, indicating data is
ready, and the 3D MagIC is placed in Idle Mode.
The SSN input should be set LOW, if it is not already, to read the data.
The data is clocked out on the MISO pin with the next 16 clock cycles.
If another measurement is to be made immediately, the SSN pin can remain low and the
process repeated. Otherwise, it generally is recommended to set the SSN pin HIGH to
release the SPI serial bus.
6.2 Enhanced Legacy Operation
Note: Enhanced Legacy Operation involves improving performance of a legacy system by
implementing only software changes. If the user can make both software and hardware changes,
then operation in Standard Mode is recommended as it allows for multi-axis measurement operation
and finer granularity in establishing the number of cycle counts.
The 3D MagIC incorporates a Clock Divide Register that effectively divides the 3D MagIC’s
high-speed internal clock by some integer value (Clock Divide Value). In Legacy Mode the
default is 16 as this results in performance matching that of the 11096 ASIC at similar Period
Select values. But for the most efficient operation, the value should be 1 since this gives the
greatest time-based resolution. If a legacy user cannot set pin #12 to DVSS to operate in
Standard Mode, but can make code changes, it is possible to significantly reduce power
consumption (see Table 6-4) by over-writing the Legacy Mode default Clock Divide Value
and using a smaller Period Select value. In this case, the user first will write to the Clock
Divide Register and after this follow the same process as for Legacy Operation, except with a
different Period Select value.
For example, if a user operates in default Legacy Mode and sets the Period Select value to 5,
the cycle count will be 1024 and the effective clock speed with be ~2.8 MHz. By changing
the Clock Divide value from 16 (Legacy Mode default) to 1, the effective clock speed
increases to ~45 MHz. With this significantly higher clock speed, the Period Select value
can be reduced to 1 (64 cycle counts) such that the gain remains unchanged but the time to
take the measurement, and hence power consumption, is dramatically reduced.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 39 of 41
Page 40

Bit #
7 6 5 4 3 2 1
0
Value
1
R/W 0 0 0 0 0 0
Bit #
7 6 5 4 3 2 1 0 Value
0 0 0 0 0
CD2
CD1
CD0
Clock Divide Value
CD2
CD1
CD0
1
(Standard Mode default)
0 0 0
2
0 0 1 4 0 1 0 8 0 1 1
16
(Legacy Mode default)
1 0 0
16
1 0 1
16
1 1 0
16
1 1 1
6.2.1 Clock Divide Command Byte
The Command Byte to initiate reading or writing to the Clock Divide Register is defined
as follows:
R/W: Read/Write
When HIGH signifies a Read operation from the Clock Divide Register. When LOW
signifies a Write operation to the Clock Divide Register.
6.2.2 Clock Divide Register
The Clock Divide Register is defined as follows:
Table 6-3: Clock Divide Bits
PNI Sensor Corporation Doc #1015673 r08
RM3000 & RM2000 Sensor Suite User Manual – July 2012 Page 40 of 41
Page 41

Default Legacy
Enhanced Legacy with CD = 1
Period
Select
Cycle
Counts
Equivalent1
Period Select
Cycle
Counts
Power
Consumption
Gain
0
32 0 32
same
16x greater
1
64 0 32
~40% reduction
8x greater
2
128 0 32
~65% reduction
4x greater
3
256 0 32
~80% reduction
2x greater
4
512 1 64
~90% reduction
Same
5
1024
2
128
~90% reduction
Same
6
2048
3
256
~90% reduction
Same
7
4096
4
512
~90% reduction
Same
6.2.3 Command Sequence for Setting Clock Divide Value
A sample command sequence is given below which sets the Clock Divide Value to “1”.
Set SSN to LOW.
Send 80H (this is the Command Byte to write to the Clock Divide Register)
Send 0 (this sets the Clock Divide Value to “1”)
Set SSN to HIGH
6.2.4 Changes to the Period Select Value
Since the high-speed clock is running faster, the time resolution of the measurement is
increased. Consequently, the number of cycle counts required to achieve a desired
magnetic field resolution is substantially reduced, and the Period Select value in the
Legacy Command Byte should be altered. Generally speaking, the best performance will
be obtained with the Clock Divide Value set to 1.
Table 6-4: Enhanced Legacy Mode with CD = 1
Footnote:
1. Equivalent Period Select is defined as the Period Select Value that provides equivalent gain to
the default Legacy Mode. If the Equivalent Period Select Value cannot be reduced (i.e. is at 0),
then the improvement in Gain is shown.
RM3000 & RM2000 Sensor Suite User Manual r08 Page 41 of 41
 Loading...
Loading...