

Pioneer PeopleBot User Manual

TM
Pioneer 2 / PeopleBot
Operations Manual
for P2OS-based ActivMedia Robots
PIONEER 2-DXE PIONEER 2-AT PEOPLEBOT
TM

Copyright © 2002, ActivMedia
Robotics, LLC. All rights reserved.
Under international copyright laws, this manual or any portion of it may not be copied or
in any way duplicated without the expressed written consent of ActivMedia
The software on disk and on the microcontroller ROM, which accompany the robot, and
are available for network download by ActivMedia
Robotics customers, are solely
owned and copyrighted or are licensed products distributed by ActivMedia
Developers and users are authorized by revocable license to develop and operate
custom software for personal research and educational use only. Duplication,
distribution, reverse-engineering, or commercial application of the ActivMedia
software and hardware without the expressed written consent of ActivMedia Robotics,
LLC, is explicitly forbidden.
The various names and logos for products used in this manual are often registered
trademarks or trademarks of their respective companies. Mention of any third-party
hardware or software constitutes neither an endorsement nor a recommendation.
Robotics.
Robotics.
Robotics
ActivMedia Robotics Pioneer 2/PeopleBot Operations Manual v10, July 2002
ii

ActivMedia Robotics
Important Safety Instructions
! Read the installation and operations instructions before using the equipment.
! Avoid using power extension cords.
! To prevent fire or shock hazard, do not expose the equipm en t to rain or moisture.
! Refrain from opening the unit or any of its accessories.
! Keep wheels away from long hair or fur.
Inappropriate Operation
Inappropriate operation voids your warranty! Inappropriate operation includes, but is
not limited to:
! Dropping the robot, running it off a ledge, or otherwise operating it in an
irresponsible manner
! Overloading the robot above its payload capacity
! Getting the robot wet
! Continuing to run the robot after hair, yarn, string, or any other items have
become wound around the robot’s axles or wheels
! All other forms of inappropriate operation or care
iii

Table of Contents
CHAPTER 1 INTRODUCTION................................................................................................................. 1
ROBOT PACKAGE ........................................................................................................................................ 1
Basic Components (all shipments).......................................................................................................... 1
Optional Components and Attachments (partial list)............................................................................. 1
User-Supplied Components / System Requirements ...............................................................................2
ADDITIONAL RESOURCES............................................................................................................................ 2
Software.................................................................................................................................................. 2
Newsgroups ............................................................................................................................................2
Support ...................................................................................................................................................3
CHAPTER 2 WHAT IS PIONEER? .......................................................................................................... 4
CLIENT SOFTWARE...................................................................................................................................... 4
ActivMedia Robotics Basic Suite ...................................................................................... 5
ARIA ....................................................................................................................................................... 6
Saphira ................................................................................................................................................... 6
THE PIONEER LEGACY................................................................................................................................. 7
Pioneer 1 ................................................................................................................................................ 7
Pioneer 2 and PeopleBot........................................................................................................................ 7
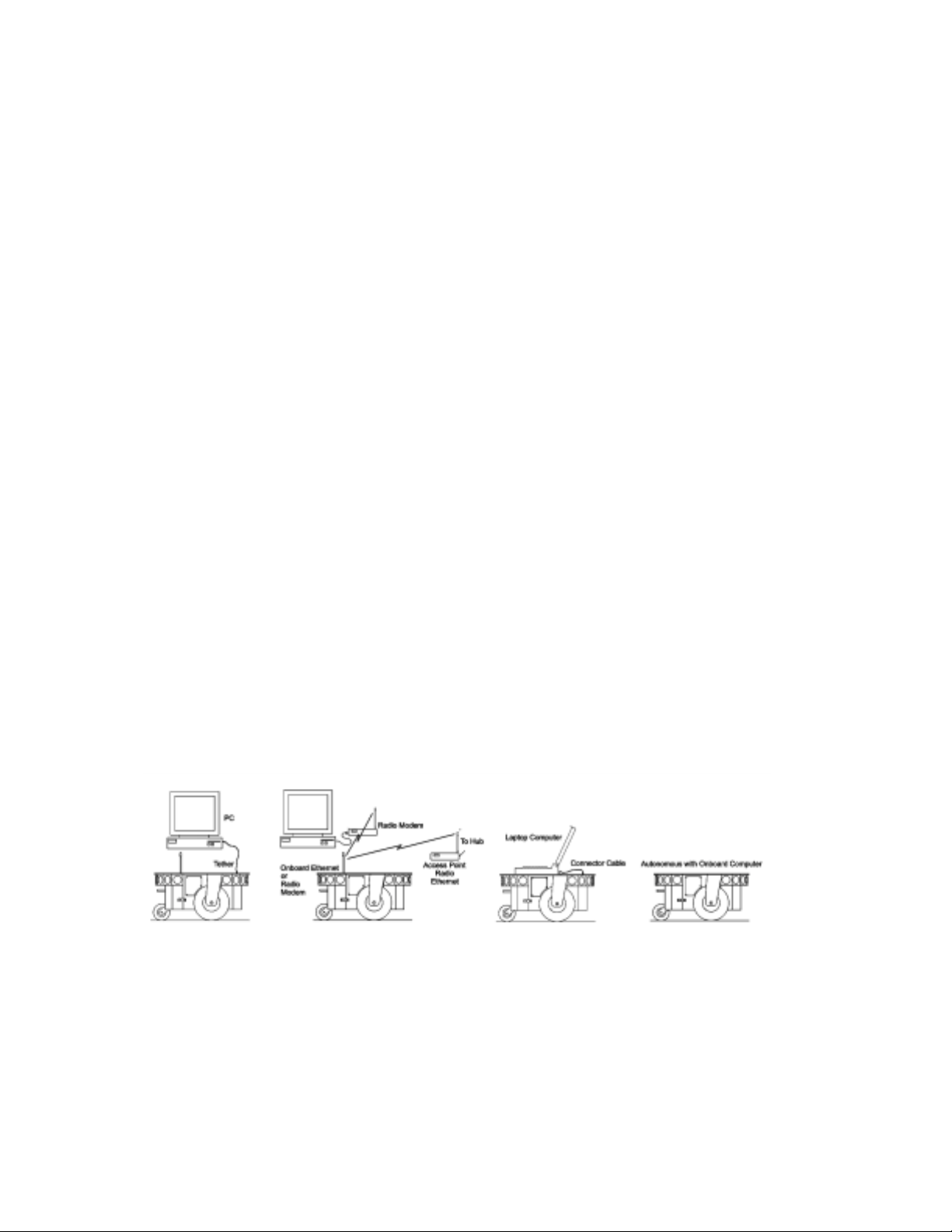
MODES OF OPERATION................................................................................................................................9
CHAPTER 3 SPECIFICATIONS & CONTROLS ................................................................................. 10
PHYSICAL CHARACTERISTICS....................................................................................................................10
MAIN COMPONENTS.................................................................................................................................. 10
Deck(s) and Console............................................................................................................................. 11
Body, Nose, and Accessory Panels....................................................................................................... 12
Sonar Arrays with Gain Adjustment..................................................................................................... 13
Motors and Position Encoders ............................................................................................................. 14
Batteries and Power ............................................................................................................................. 14
ELECTRONICS............................................................................................................................................ 14
Motor-Power Board ............................................................................................................................. 15
Microcontroller .................................................................................................................................... 15
Sonar Boards........................................................................................................................................ 15
CONTROLS, PORTS, AND INDICATORS ....................................................................................................... 15
Main Power, Fuse, and Indicator......................................................................................................... 15
Recharge/Power Port........................................................................................................................... 15
Liquid-Crystal Display & Contrast Adjustment ................................................................................... 16
RESET and MOTORS...........................................................................................................................16
SERIAL................................................................................................................................................. 17
RADIO.................................................................................................................................................. 17
FLASH.................................................................................................................................................. 17
PEOPLEBOT SENSORS AND EMERGENCY STOP......................................................................................... 18
Pioneer 2 Arm-related SIPs and Commands...........................................Error! Bookmark not defined.
SAFETY WATCHDOGS AND CONFIGURATION.............................................................................................18
CHAPTER 4 QUICK START................................................................................................................... 19
PREPARATIVE ASSEMBLY.......................................................................................................................... 19
Saphira Client Installation ................................................................................................................... 19
SAPHIRA CLIENT START-UP ...................................................................................................................... 20
ROBOT COLD START-UP ........................................................................................................................... 20
RADIO ON............................................................................................................................................ 21
STARTING CLIENT-SERVER COMMUNICATIONS......................................................................................... 21
iv

ActivMedia Robotics
A SUCCESSFUL CONNECTION.....................................................................................................................21
OPERATING THE SAPHIRA DEMONSTRATION CLIENT .................................................................................22
DISCONNECTING SERIAL COMMUNICATIONS (INTENTIONALLY OR UNINTENTION ALLY) ....................................23
QUICKSTART TROUBLESHOOTING..............................................................................................................23
CHAPTER 5 JOYDRIVE AND SELF-TESTS ........................................................................................25
JOYSTICK CONNECTION .............................................................................................................................25
JOYDRIVE OPERATION ...............................................................................................................................25
ENGAGING SELF-TESTS..............................................................................................................................26
MOTORS TEST............................................................................................................................................26
SONAR TEST...............................................................................................................................................27
BUMPERS ...................................................................................................................................................27
GRIPPER.....................................................................................................................................................27
COMPASS ...................................................................................................................................................27
DIGIN AND DIGOUT TEST.......................................................................................................................28
ANALOG TESTS.......................................................................................................................................28
USER PWMS..............................................................................................................................................28
CHAPTER 6 PIONEER 2 OPERATING SYSTEM................................................................................29
COMMUNICATION PACKET PROTOCOL.......................................................................................................29
Packet Data Types................................................................................................................................. 30
Packet Checksum...................................................................................................................................30
Packet Errors ........................................................................................................................................30
SERVER INFORMATION PACKETS ...............................................................................................................32
CLIENT COMMANDS...................................................................................................................................32
Client Command Argument Types.........................................................................................................34
Saphira Client Command Support.........................................................................................................35
PROGRAMMING P2OS................................................................................................................................35
Establishing a Client-Server Connection—SYNC.................................................................................35
Autoconfiguration..................................................................................................................................35
Opening the Servers—OPEN ................................................................................................................35
Keeping the Beat—PULSE....................................................................................................................36
Closing the Connection—CLOSE..........................................................................................................36
MOVEMENT COMMANDS............................................................................................................................36
Pioneer in Motion..................................................................................................................................37
PID Controls.........................................................................................................................................37
Position Integration...............................................................................................................................38
SONAR .......................................................................................................................................................38
BUMP_STALL.........................................................................................................................................39
E_STOP AND E_STALL...........................................................................................................................39
EXTENDED PACKETS..................................................................................................................................40
Packet Processing.................................................................................................................................40
CONFIGpac and CONFIG Command..................................................................................................40
SERAUXpac and GETAUX...................................................................................................................41
ENCODERpac and ENCODER Command...........................................................................................42
GRIPPERpac and GRIPREQUEST.......................................................................................................42
PLAYLISTpac and PLAYLIST Command..............................................................................................42
TCM2pac and TCM2 Command ...........................................................................................................43
INPUT / OUTPUT (I/O) ................................................................................................................................ 43
DIGIN, TIMER, and ADSEL.................................................................................................................43
DIGOUT and PSUPOS.........................................................................................................................44
IOpac and IOREQUEST .......................................................................................................................44
Pioneer 2 Arm-related SIPs and Commands.........................................................................................45
PERFORMANCE PEOPLEBOT IRS ................................................................................................................ 45
CHAPTER 7 UPDATING & RECONFIGURING P2OS........................................................................46
WHERE TO GET P2OS SOFTWARE .............................................................................................................46
INSTALLING THE P2OS UTILITIES ..............................................................................................................46
UPDATING P2OS........................................................................................................................................46
Step 1. Serial Connection from Computer to Robot..............................................................................46
v

Step 2: Enable FLASH.......................................................................................................................... 47
Step 3: Put Microcontroller into Download Mode............................................................................... 47
Step 4: Run p2osdl................................................................................................................................ 47
Download Troubleshooting.................................................................................................................. 47
CONFIGURING P2OS OPERATING PARAMETERS........................................................................................ 48
Steps 1–3: Preparing for Configuration............................................................................................... 48
Step 4: Run p2oscf................................................................................................................................ 48
Step 5: Changing Configuration Parameters.......................................................................................48
Step 6: Save Your Work........................................................................................................................ 49
EDITING P2OS PARAMETERS .................................................................................................................... 49
SAVING AND RESTORING...........................................................................................................................50
ARM PARAMETERS.................................................................................................................................... 50
PID PARAMETERS ..................................................................................................................................... 52
ENCODER AND REVCOUNT ........................................................................................................................ 52
CALIBRATION TOOLS - REVCOUNTCAL AND COMPASSCAL ........................................................................ 53
CHAPTER 8 MAINTENANCE & REPAIR............................................................................................ 55
DRIVE LUBRICATION................................................................................................................................. 55
BATTERIES ................................................................................................................................................ 55
Changing Batteries............................................................................................................................... 55
Hot-Swapping the Batteries..................................................................................................................55
Charging the Battery............................................................................................................................ 55
Alternative Battery Chargers................................................................................................................ 56
GETTING INSIDE ........................................................................................................................................ 56
Removing the Nose ............................................................................................................................... 56
Opening the Deck ................................................................................................................................. 57
FACTORY REPAIRS .................................................................................................................................... 57
FACTORY REPAIRS .................................................................................................................................... 58
APPENDIX A.............................................................................................................................................. 59
INTERNAL SERIAL CONNECTORS ............................................................................................................... 60
USER I/O EXPANSION PORT ...................................................................................................................... 60
PERFORMANCE PEOPLEBOT I/O................................................................................................................ 61
THE GENERAL I/O BUS ............................................................................................................................. 62
APPENDIX B.............................................................................................................................................. 63
USER POWER CONNECTIONS ..................................................................................................................... 63
ONBOARD COMPUTER OPTION.................................................................................................................. 63
Power Switch (J7) and Delayed Shutdown Logic................................................................................ 63
Power-State Logic ................................................................................................................................ 64
Computer Power................................................................................................................................... 64
APPENDIX C.............................................................................................................................................. 65
JOYSTICK CONNECTOR.............................................................................................................................. 65
APPENDIX D.............................................................................................................................................. 66
SPECIFICATIONS ........................................................................................................................................ 66
INDEX ......................................................................................................................................................... 68
WARRANTY & LIABILITIES ................................................................................................................ 70
vi
ActivMedia Robotics
Chapter 1
Congratulations on your purchase and welcome to
the rapidly growing community of researchers,
developers, and enthusiasts of ActivMedia Robotics’
intelligent mobile robots.
This Pioneer 2 Operations Manual provides both the
general and technical details you need to operate
your Pioneer 2-DX, -CE, -DXe, -AT, or PeopleBot Mobile
Robot and to begin developing your own Robotics
hardware and software. Please consult the Pioneer 2
H8 or the Performance PeopleBot manuals if you own
a newer, Hitachi H8S-based robot.
Introduction
Figure 1. The Pioneer 2-DX
and -AT Mobile Robots first
appeared commercially in
1995.
Robot Package
Our experienced manufacturing staff put your mobile robot and accessories through a
“burn in” period and carefully tested them before shipping the products to you. In
addition to the companion resources listed above, we warranty your ActivMedia robot
and our manufactured accessories against mechanical, electronic, and labor defects
for one year. Third-party accessories are warranted by their manufacturers, typically for
90 days.
Even though we’ve made every effort to make your ActivMedia Robotics package
complete, please check the components carefully after you unpack them from the
shipping crate.
Basic Components (all shipments)
! One fully assembled mobile robot with battery
! CD-ROM containing licensed copies of ActivMedia software and documentation
! Hex wrenches and assorted replacement screws
! Replacement fuse
! Set of manuals
! Registration and Account Sheet
Optional Components and Attachments (partial list)
! Battery charger (some contain power receptacle and 220VAC adapters)
! Onboard PC computer with PC104+ bus, hard-drive and other accessories
! Radio Ethernet and/or serial modems; one mounted inside the robot
! Companion radio for LAN or basestation connection
! Supplementary and replacement batteries
! 3-Battery Charge Station (110/220 VAC)
! Added sonar arrays
! Gripper
! 5-DOF Arm with gripper
! ActivMedia Color Tracking System (ACTS)
! Stereo Vision Systems
! Pan-Tilt-Zoom Surveillance Cameras
! Custom Vision System
! Range-finding laser
! Global Positioning System
! Compass
! Bumper rings
1
Congratulations
! Serial cables for external connections
! Many more…
User-Supplied Components / System Requirements
! Client computer: 586-class or later PC with Microsoft Windows© 9x/ME, or
©
RedHat
Linux operating system
! One RS-232-compatible serial port
! Four megabytes of available hard-disk storage
Additional Resources
New ActivMedia Robotics Pioneer 2 and PeopleBot customer get three additional and
valuable resources:
! A private account on our Internet server for downloading software, updates, and
manuals
! Access to private newsgroups
! Direct access to the ActivMedia Robotics technical support team
Software
We maintain a 24-hour, seven-day per week Web server where customers may obtain
software and support materials:
http://robots.activmedia.com
Some areas of the website are restricted to licensed customers. To gain access, enter
the username and password written on the Registration & Account Sheet that
accompanied your robot.
Newsgroups
We maintain several email-based newsgroups through which ActivMedia robot owners
share ideas, software, and questions about the robot. Visit the support
http://robots.activmedia.com website for more details. To sign up for pioneer-users,
for example, send an e-mail message to the –requests automated newsgroup server:
To: pioneer-users-requests@activmedia.com
From: <your return e-mail address goes here>
Subject: <choose one command:>
help (returns instructions)
lists (returns list of newsgroups)
subscribe
unsubscribe
Our SmartList-based listserv er will respond automatically. After you subscribe, send your
email comments, suggestions, and questions intended for the worldwide community of
Pioneer users:1
To: pioneer-users@activmedia.com
From: <your return e-mail address goes here>
Subject: <something of interest to pioneer users>
Access to the pioneer-users newslist is limited to subscribers, so your address is safe
from spam. However, the list currently is unmoderated, so please confine your
comments and inquiries to issues concerning the operation and programming of Pioneer
or PeopleBot robots.
1
Note: Leave out the –requests part of the email address when sending messages to the newsgroup.
2

ActivMedia Robotics
Support
Have a problem? Can’t find the answer in this or any of the accompanying manuals? Or
do you know a way that we might improve our robots? Share your thoughts and
questions directly with us:
support@activmedia.com
Please include your robot's serial number (look for it beside the Main Power switch)we
often need to understand your robot's configuration to best answer your question.
Your message goes directly to the ActivMedia Robotics technical support team. There a
staff member will help you or point you to a place where you can find help.
Because this is a support option, not a general-interest newsgroup like pioneer-users,
we reserve the option to reply only to questions about problems with your robot or
software.
See Chapter 8, Maintenance & Repair, for more details.
3
What Is Pioneer? Chapter 2
Pioneer is a family of mobile robots, both
two-wheel and four-wheel drive, including
the Pioneer 2-DX, -DXe, -CE, and -AT, and
the PeopleBot (V1 and Performance)
Mobile Robots. All are intelligent mobile
robots, whose client-server architecture
was originally developed by Kurt Konolige,
Ph.D., of SRI International, Inc. and Stanford
University.
ActivMedia’s robots are truly intelligent, offthe-shelf mobile platforms, containing all of
the basic components for sensing and
navigation in a real-world environment,
including battery power, drive motors and
wheels, position-speed encoders, integ-
Figure 2. ActivMedia Robots
rated sensors, and accessories. They are all
managed by an onboard microcontroller
and mobile-robot server software.
Your ActivMedia robot also has a variety of expansion power and I/O ports for
attachment and close integration of additional sensors and other accessories.
Expansion includes an addressable I/O bus for up to 16 devices, two RS-232 serial ports,
eight digital I/O ports, five A/D ports, PSU controllers and more—all accessible through a
common application interface to the robot server software, P2OS.
With the onboard computer option, your ActivMedia robot becomes an autonomous
agent. With Ethernet-ready onboard autonomy, your robot even becomes an agent for
multi-intelligence work.
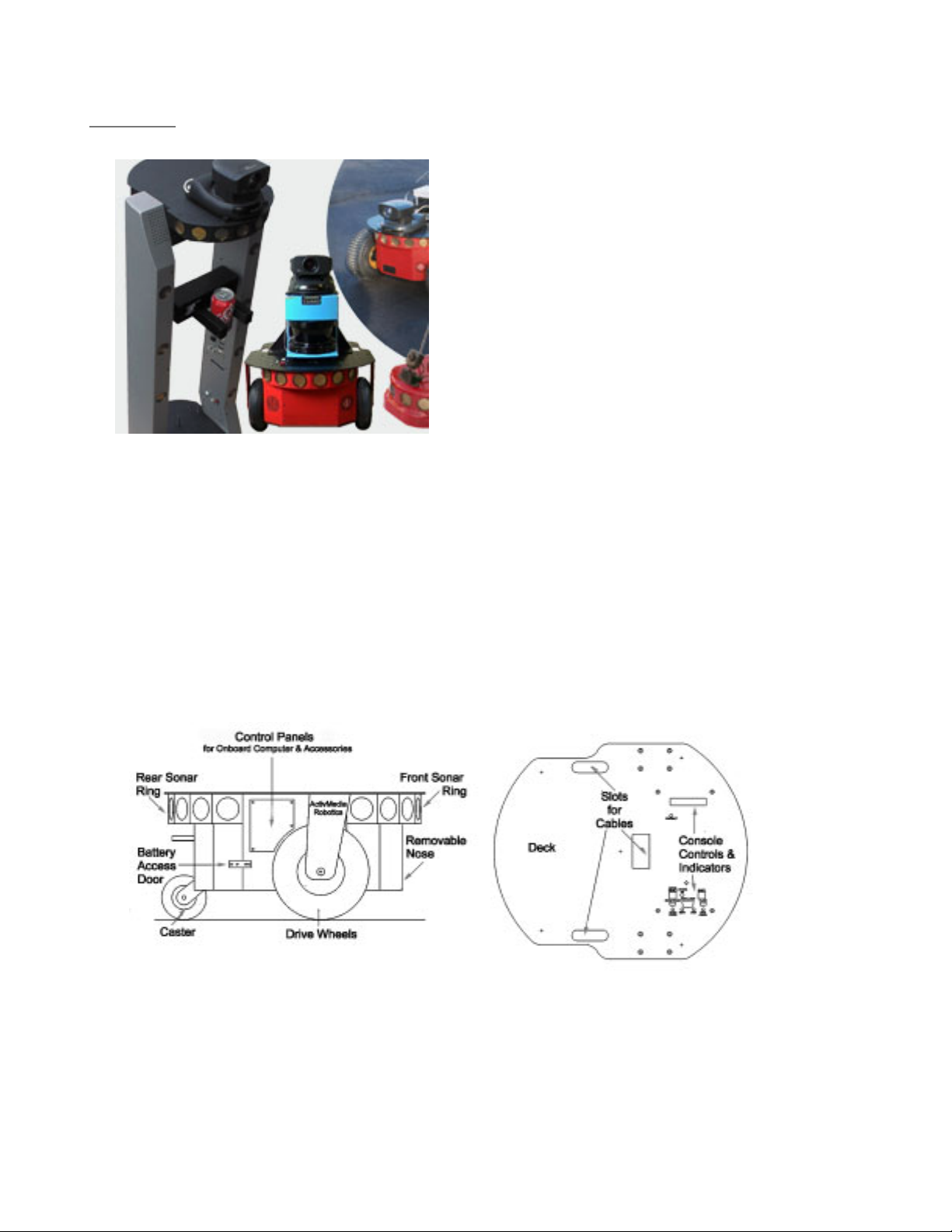
Figure 3. Components and some accessories of the Pione er 2 - DX, many of which
are identical for the Pioneer 2-DXE and CE.
Client Software
Your ActivMedia robot is the server in a client-server environment: It handles the lowlevel details of mobile robotics, including maintaining the platform’s drive speed and
heading over uneven terrain, acquiring sensor readings, such as the sonar, and
4
ActivMedia Robotics
r
managing attached accessories like the Gripper. To complete the client-server
architecture, ActivMedia robots require a client connection: software running on a
computer workstation connected with the robot’s controller via a serial link that provides
the high-level, intelligent robot controls, including obstacle avoidance, path planning,
features recognition, localization, and so on.
An important benefit of ActivMedia Robotics’ client-server architecture is that different
robot servers can be run using the same high-level client. For example, we provide a
robot simulator that runs on the host machine that can look and act just like your real
robot. With the Simulator, you may conveniently perfect your application software, then
run it without modification on any ActivMedia robot. Several clients also may share
responsibility for controlling a single mobile server, which permits experimentation in
distributed communication, planning, and control.
Currently available client software and development environments for the Microsoft
©
Win32- or Red Hat
Linux-based computing platform of your choice include:2
! ActivMedia Robotics Basic Suite with WorldLink Internet surveillance and control
! ActivMedia Robotics Interface for Applications (ARIA)
! ActivMedia robo t s i mulator
! The Saphira client development suite with Colbert
Versions and updates for supported computing platforms are available to passwordregistered customers for download from our software website:
http://robots.activmedia.com
ActivMedia Robotics Basic Suite
To better support our customers, ActivMedia Robotics software designers have blended
and refined the best of advanced mobile robotics software found in the many
development environments into a suite of state-of-the-art software tools and
applications. We call this suite ActivMedia Robotics Basic Suite, and it includes the
following five modules plus a robot simulator:
! NAVIGATOR is the crown jewel—a sophisticated
graphical-user control module with which you
access your ActivMedia robot’s many intelligent
capabilities, from guarded teleoperation to self-
guided navigation along a planned path to a
goal that you select onscreen with a click of the
mouse.
Navigator also lets you remotely share,
connect and operate the robot from the
Internet, or a local area network. You can see
and hear from afar what your robot sees and
hears through its camera and microphone.
Navigator even lets you chat and exchange
audio and video with others who may be
connected simultaneously.
Figure 4. Navigator and
WorldPass guide your
obot to a goal with a
click of the mouse.
ORLDPASS is a free version of Navigator that lets
! W
you share you robot with colleagues, friends, and family. WorldPass provides all
the networking and remote-control functionality of Navigator, including network
video and audio, but only connects with a robot through a host running
Navigator, not to one directly. You may distribute WorldPass to anyone you want
2
Some software may come bundled with your robot. Other packages require purchase for licensing. Some
software also are available for alternative operating systems, such as Macintosh, SunOS, Solaris, and BSD Unix.
5
to use your robot, but it will not appear on your own menu since it c opies
functionalities of Navigator, which you may not distribute.
APPER provides the tools you need to construct a map of your robot’s real
! M
operating space (“world”). Navigator and WorldPass use this map floor plan to
plan a path from one point to another within a space.
! T
RAINER is a programming editor and robot interface in which you create and
perfect your own intelligent mobile robot-control programs with the simple, yet
powerful Colbert programming language.
! S
IMULATOR is not a separate mo dule of Basic Suit e. It is a connection option that
provides a virtual replacement for your robot. By connecting to the simulator
instead of a real robot, you can test Colbert programs, maps, and so on, when
the real robot isn’t practical or available.
MIGOSOUNDS is for AmigoBot only. With AmigoSounds, you assemble recorded
! A
sounds stored on your PC’s disk into a playlist of sounds for your AmigoBot. With
AmigoSounds, you may give AmigoBot different audio-based personalities.
ARIA
The ActivMedia Robotics Interface for Applications (ARIA) is C++-based open-source
development environment that provides a robust client-side interface to a variety of
intelligent robotics systems, including your ActivMedia robot’s controller and accessory
systems.
ARIA is the ideal platform for integration of your own robot-control software, since it
neatly handles the lower-level details of client-server interactions, including serial
communications, command and server-information packet processing, cycle timing,
and multithreading, as well as a variety of accessory controls, such as for the PTZ robotic
camera, the P2-Gripper, scanning laser-range finder, and motion gyros, among many
others.
What’s more, it comes with source code so that you may examine the software and
modify it for your own sensors and applications.
Figure 5. ActivMedia robots require a computer, typically a Windows© 9x/ME- or
©
RedHat
Linux-based PC, to run client software for intelligent robotics command
and control operations.
Saphira
Saphira, including the Colbert language, is a full-featured robotics control environment
developed at SRI International’s Artificial Intelligence Center. Saphira and its ARIA
foundation form the robotics-control and applications-development foundation for
6

ActivMedia Robotics
much of the ActivMedia Robotics Basic Suite and many other ventures. The complete,
licensed Saphira robotics development environment, including C/C++ libraries, GUI
interface and Simulator, comes bundled with your ActivMedia robot.
The Pioneer Legacy
Commercially introduced in August of 1995, Pioneer 1 was the original Pioneer platform.
It introduced a single-board 68HC11-based robot microcontroller and the Pioneer Server
Operating System (PSOS) software. It’s low-cost and high-performance caused an
explosion in the number of researchers and developers who now have access to a real,
intelligent mobile robotic platform.
Pioneer 1
Intended mostly for indoor use on hard, flat surfaces, the Pioneer 1 has solid rubber tires
and a two-wheel differential, reversible drive system with a re ar caster for balance. The
Pioneer 1 came standard with seven sonar range finders (two side-facing and five
forward-facing) and integrated wheel encoders.
Software-wise, the Pioneer 1 initially served as a
platform for SRI International's AI/fuzzy logic-based
Saphira robotics applications development. But it
wasn't long before it's open architecture became
the popular platform for the development of a
variety of alternative robotics software
environments.
Many developers created software that interfaced
directly with PSOS. Others extended the capabilities
of Saphira (PAI and P-LOGO are two good
examples), while others have implemented
alternative robotics-control architectures, such as
the subsumption-like Ayllu.
Functionally and programmatically identical to the
Pioneer 1, the four-wheel drive, skid-steering Pioneer
AT was introduced in the Summer of 1997 for
operation in uneven indoor and outdoor
environments, including loose, rough terrain.
Figure 6. All ActivMedia
robots may be configured
with a variety of integ rated
Except for the drive system, there are virtually no
operational differences between the Pioneer AT and
the Pioneer 1: The integrated sonar arrays and
microcontrollers are the same. The accessories
available for the Pioneer 1 also work with the Pioneer
AT. Further, applications developed for the Pioneer
1 work with little or no porting to the Pioneer 2s.
accessories, including (DX
shown here) a very high-
performance laser range-
finder and robotic pan-tilt-
zoom color camera with
onboard PC and
framegrabber for color-
tracking and surveillance.
Pioneer 2 and PeopleBot
The next generation of Pioneer Mobile Robots—including the Pioneer 2-DX, -CE, and -AT,
introduced in Fall 1998 through Summer 1999, improved upon the Pioneer 1 legacy while
3
retaining its many important advantages.
Indeed in most respects, particularly with
applications software, Pioneer 2 works identically with Pioneer 1 models.
3
Price/performance ratio included! The much more capable and expandable Pioneer 2 was introduced f our
years later for just a few hundred dollars (US) more than the original Pioneer 1.
7

Sporting a more holonomic body, larger wheels and stronger motors for better indoor
performance, the Pioneer 2-DX and CE models, like Pioneer 1, were two-wheel,
differential-drive mobile robots.
The four-wheel drive Pioneer 2-AT has
independent motor drivers, as well as
a stall-detection system. And unlike
its predecessor, the Pioneer 2-AT
comes with inflatable pneumatic tires
and metal wheels for much more
robust operation in rough terrain, as
well as the ability to carry nearly 30
kilograms (66 lbs) of payload and
climb a 60-percent grade! The
newest version of the 2-AT, introduced
in mid-2001, includes an integrated
joystick port for manual operation
and a hinged top-plate for easy
access to the internal systems.
Figure 7. Nearly identical to its research
predecessor (right), the Performance
PeopleBot (left) sp orts an attr active bo dy
design and bundled systems, including
integrated Gripper, for commercia l -
consumer human-interaction applications.
The PeopleBot robots were
introduced in 2000. They are
architecturally Pioneer 2 robots, but
with stronger motors and integrated
human-interaction features, including
a pedestal extension, integrated
voice and sound synthesis and
recognition.
The Performance PeopleBot is a fully redesigned, but very Pioneer 2-like syst em. Becau se
of its attractive, non-threatening, and human-accessible body, Performance PeopleBot
is ideal for human-interaction studies as well as for commercial and consumer mobilerobotics applications.
The latest Pioneer 2—the new Pioneer 2-DXe (Summer 2001)—replaces the DX. The DXe
comes with pneumatic rubber tires for better mobility and a hinged top-plate for easy
access to internal components.
All ActivMedia Robotics Pioneer 2 and PeopleBot robots use a high-performance 20 MHz
Siemens 88C166-based microcontroller, with independent motor/power and sonarcontroller boards for a versatile operating environment. The controller has two RS232standard communications ports and an expansion bus to support the many accessories
available for your ActivMedia robot, as well as your own custom attachments.
ActivMedia robots also supports a full complement of 32 sonar in four arrays for nearly
seamless object detection.
Software-wise, the Pioneer 2 is upwardly compatible with Pioneer 1: The Pioneer 2
Operating System (P2OS) software extends—but does not replace—the original PSOS.
This means that even programs that interface at the lowest communication levels will
work with both Pioneer 1 and with Pioneer 2 platforms. This also means that the higher
level clients, such as Saphira, ARIA, and others including your own software, will work with
P2OS and any host Pioneer 2 or PeopleBot platform just as they had worked with Pioneer
4
Of course, you will have to extend your client software, as we have done with
1.
Saphira, ARIA, and others, in order to take full advantage of P2OS.
4
The two-time gold medal winners of the International RoboCup robot soccer competition used Pioneer 1s one
year and quickly converted to Pioneer 2s in the next year.
8

ActivMedia Robotics
To the relief of those who have invested years in developing software for Pioneer 1,
Pioneer 2 truly does combine the best of the new mobile robot technologies with the
tried-and-true Pioneer architecture.
Modes of Operation
You may operate your Pioneer 2 or PeopleBot robot in one of four modes:
! Joydrive
! Self-test
! Server
! Standalone
The Pioneer 2/PeopleBot microcontroller comes with 32K flash-programmable, read-only
memory (FLASH-ROM) as part of its Siemens 88C166 microprocessor, and an additional
32K of dynamic RAM: 64K total memory space for your standalone robotics programs.
But we don't recommend that you start learning C166 programming. Rather, the robot
comes to you installed with the latest P2OS robotics server software.
In conjunction with client software, such as ARIA, or Saphira running on an onboard PC or
other user-supplied computer, P2OS lets you take advantage of modern client-server
and robot-control technologies to perform advanced robot tasks. (See Chapter 6,
Pioneer 2 Operating System, for details.)
Most users run their ActivMedia robot in server mode, because it gives them quick, easy
access to its robotics functionality while working with high-level software on a familiar
host computer.
For experiments in microcontroller-level operation of your robot’s functions, you may
reprogram the onboard flash-ROM and RAM for direct and standalone operation of your
ActivMedia robot. We supply the means to download, but not the microcontroller's
programming software, for you to work in standalone mode.
In fact, the download utilities we provide for you to reprogram the 88C166-based
controller's FLASH and RAM also are used to update and upgrade your P2OS. We
typically provide the upgrades free for download from our website, so be sure to sign up
for the pioneer-users email newslist. That's where we notify our customers of the
upgrades, as well as where we provide access to Pioneer and PeopleBot users
worldwide.
Finally, we provide onboard software that lets you drive the robot from a tethered
joystick. And we provide some self-test programs that exercise your robot’s
microcontroller hardware and software. We examine these modes in some detail in
Chapter 5, Joydrive and Self-Tests.
9
Specifications and Controls
Specifications & Controls
Chapter 3
ActivMedia’s robots may be smaller than most, but they pack an impressive array of
intelligent mobile robot capabilities that rival bigger and much more expensive
machines. For example, the Pioneer 2-DXe with onboard PC is a fully autonomous
intelligent mobile robot, but unlike other commercially available robots, the DXe’s
modest size lends itself very well to navigation in tight quarters and cluttered spaces,
such as classrooms, laboratories, and small offices.
At the same time, the powerful P2OS server with ActivMedia Robotics client software, is
fully capable of mapping its environment, finding its way home, and performing other
sophisticated path planning tasks .
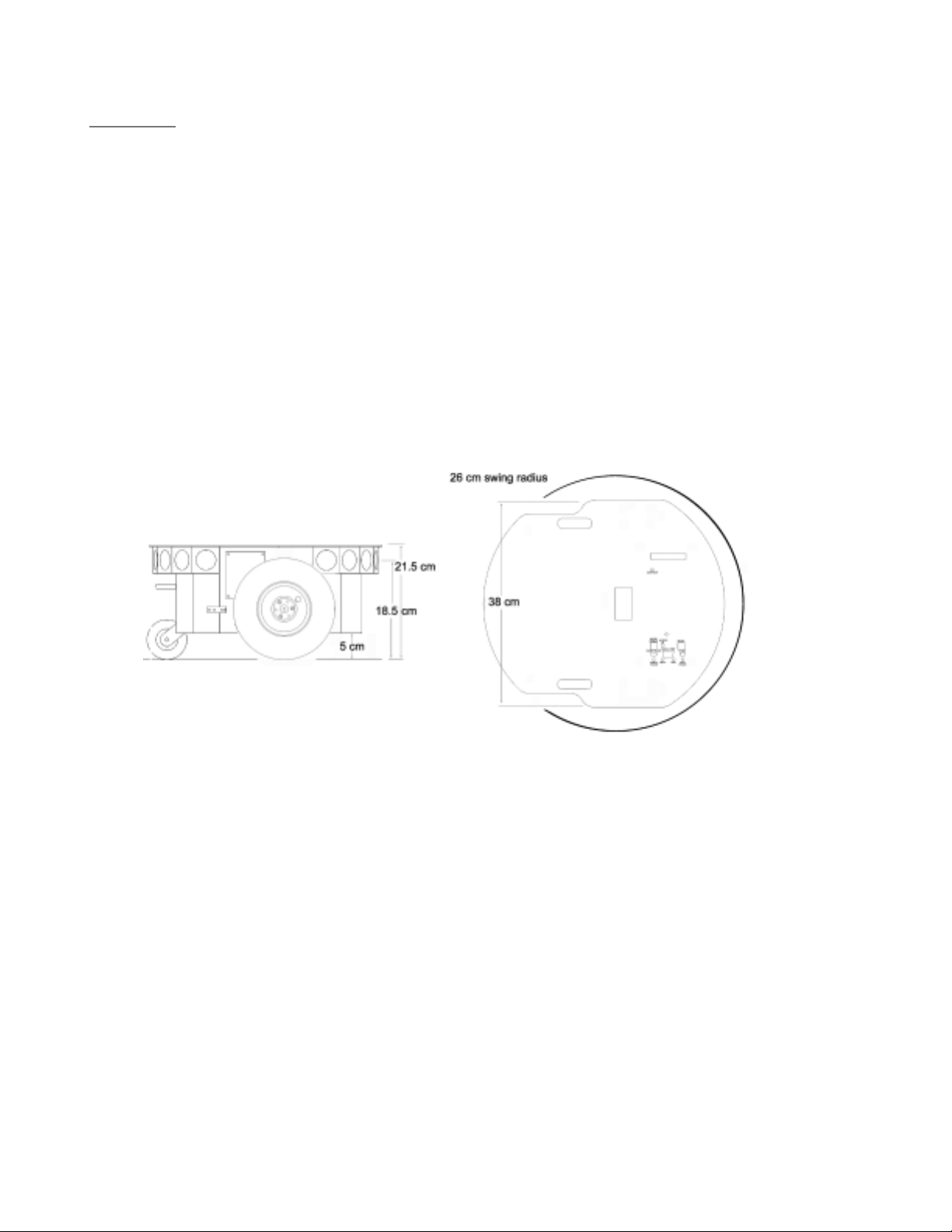
Physical Characteristics
Weighing only 9 kg (20 pounds with one battery), the basic Pioneer 2-DXe Mobile Robot
is lightweight, but its strong aluminum body materials and solid construction make it
virtually indestructible.
Figure 8. The Pioneer 2-DXE’s physical dimensions and swing radius
These characteristics also permit it to carry extraordinary payloads: The DXe can carry
up to 23 Kg (50 lbs.) additional weight; the Pioneer 2-AT can carry over 30 Kg (66 lbs.)
more! Yet the Pioneer 2 is lightweight enough that it is also as easy to transport as a
suitcasea task made even easier by the DXe's built-in handle.
Main Components
ActivMedia robots are composed of several main parts:
! Deck(s) and Console
! Body, Nose, and Accessory Panels
! Sonar Array(s)
! Motors and encoders
! Batteries and Power
10
ActivMedia Robotics
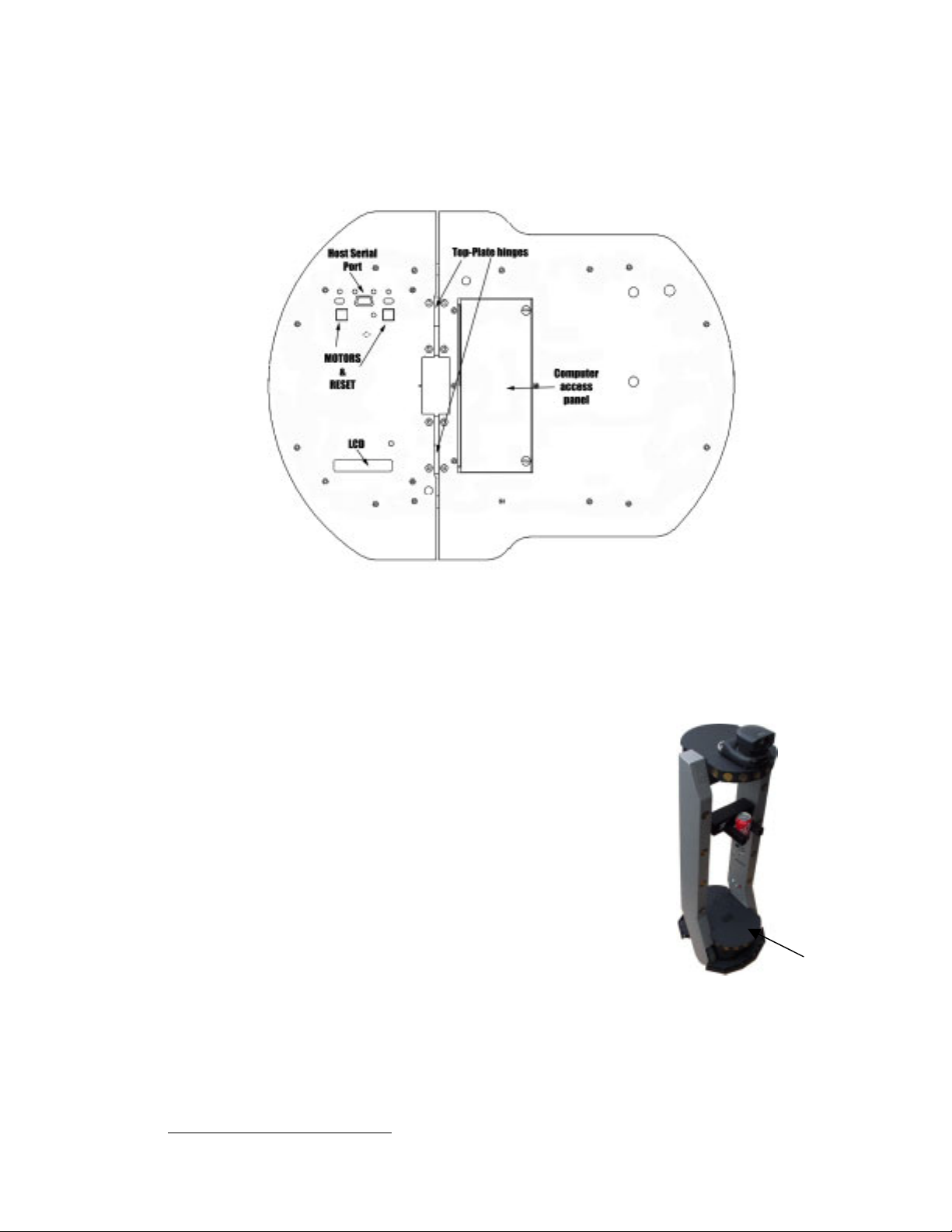
Deck(s) and Console
The original Pioneer 2-DX, -CE, and -AT Decks are one piecethe top plate of the robot.
The new DXe and AT models now have hinged top-plates which let you much more
easily access the internal components of the robot.
Figure 9. Pioneer 2-AT Console and hinged Deck
The robot’s Deck is simply the flat surface for mounting projects and accessories, such as
the PTZ Robotic Camera or a laser range finder. The PeopleBot’ s have lower an d upper
Decks.
Feed-through slots on each side of the DX, CE, and DXe
Deck let you conveniently route cables to the accessory
panels on each side of the robot. A removable plug in
5
the middle of the Deck on all models
gives you
convenient access to the interior of the robot.
In general, you should try to center the robot's payload
over the drive wheels. If you must add a heavy
accessory to the edge of the Deck, counterbalance the
weight with a heavy object on the opposite end. A full
complement of batteries helps balance the robot, too.
The Pioneer 2’s or PeopleBot’s Console consists of a
liquid-crystal display (LCD), MOTORS, and RESET control
buttons and indicators, and an RS232-compatible serial
port with a 9-pin DSUB connector. The Pioneer 2 and
PeopleBot V1 Consoles sit at the front of the Deck. The
Performance PeopleBot’s Console is in the left column.
Figure 10. The Console is in
the left column of the
Performance PeopleBot.
Attached directly underneath the Console is the robot’s
microcontroller. Operations details are provided in the next chapter, Quick Start.
5
Lower Deck of the PeopleBot’s.
11

Specifications and Controls
r
Body, Nose, and Accessory Panels
Your ActivMedia robot’s sturdy, but lightweight aluminum Body houses the batteries,
drive motors, electronics, and other common components, including the front and rear
sonar arrays. The Body also has sufficient room, with power and signal connectors, to
support a variety of robotics accessories inside, including an A/V wireless surveillance
system, radio modems or radio Ethernet, onboard computer, and more.
On all models except the DE, a hinged rear door gives you easy access to the batteries,
which you may quickly hot-swap to refresh any of up to three batteries.
The PeopleBot V1 has a removable pedestal
mounted to its base Deck. A removable
back panel gives you access to internal
wiring and components, including stereo
speakers, A/V and Ethernet radios, and
microphone preamplifier. On top of the
pedestal is the upper Deck where you may
add components like the PTZ Robotic
Camera that normally mounts to t he Deck of
a Pioneer 2. PeopleBot’s also have an
additional front sonar array.
Both PeopleBot models include front and
rear bump rings for stability as well as
sensitive collision detection.
The Noses of Pioneer 2s and PeopleBots are
empty, except when equipped with an
onboard PC. The Nose is readily removable
for access: Simply remove two screws from
underneath the front sonar array. With the 2AT, a third screw holds the Nose to the
bottom of the Body; the DXe’s Nose is hinged
at the bottom.
Earlier Pioneer 2 models and the PeopleBots
have a Nose that is secured by a single
screw beneath the front sonar array and one
on the bottom of the robot.
Once the mounting screws are removed, simply pull the Nose away from the Body.
Figure 11. The PeopleBot V1 has a
emovable pedestal with top Deck and
sonar array. A rear panel gives you
access to th e p edestal’s in te rnal
components and connectors.
6
This
provides a quick and easy way to get to the accessory boards and disk drive of the
onboard PC, as well as to the sonar gain adjustment for the front sonar array. The Nose
also is an ideal place for you to attach your own custom accessories and sensors.
The Pioneer 2-DX, -DXe, -CE, and PeopleBot V1 robots come with removable panels on
each side through which you may install accessory connectors and controls. A special
side panel comes with the onboard PC option, for example, which gives users monitor,
keyboard, mouse, and 10Base-T Ethernet access, as well as the means to reset and
switch power for the onboard computer.
The AT comes with a single accessory panel in the Deck. Fastened down with finger-tight
screws, the AT panel is accessible through a hinged door.
6
With older Pioneer 2 models, you also need to remove the Gripper before removing the Nose.
With the DXE and newer AT, the Nose and Gripper come off toge ther, so you only need to
remove the Nose’s mounting screws. See Chapter 8,
12
Maintenance & Repair for details.
ActivMedia Robotics
All models come with an access port near the center of the Deck through which to run
cables to the internal components.
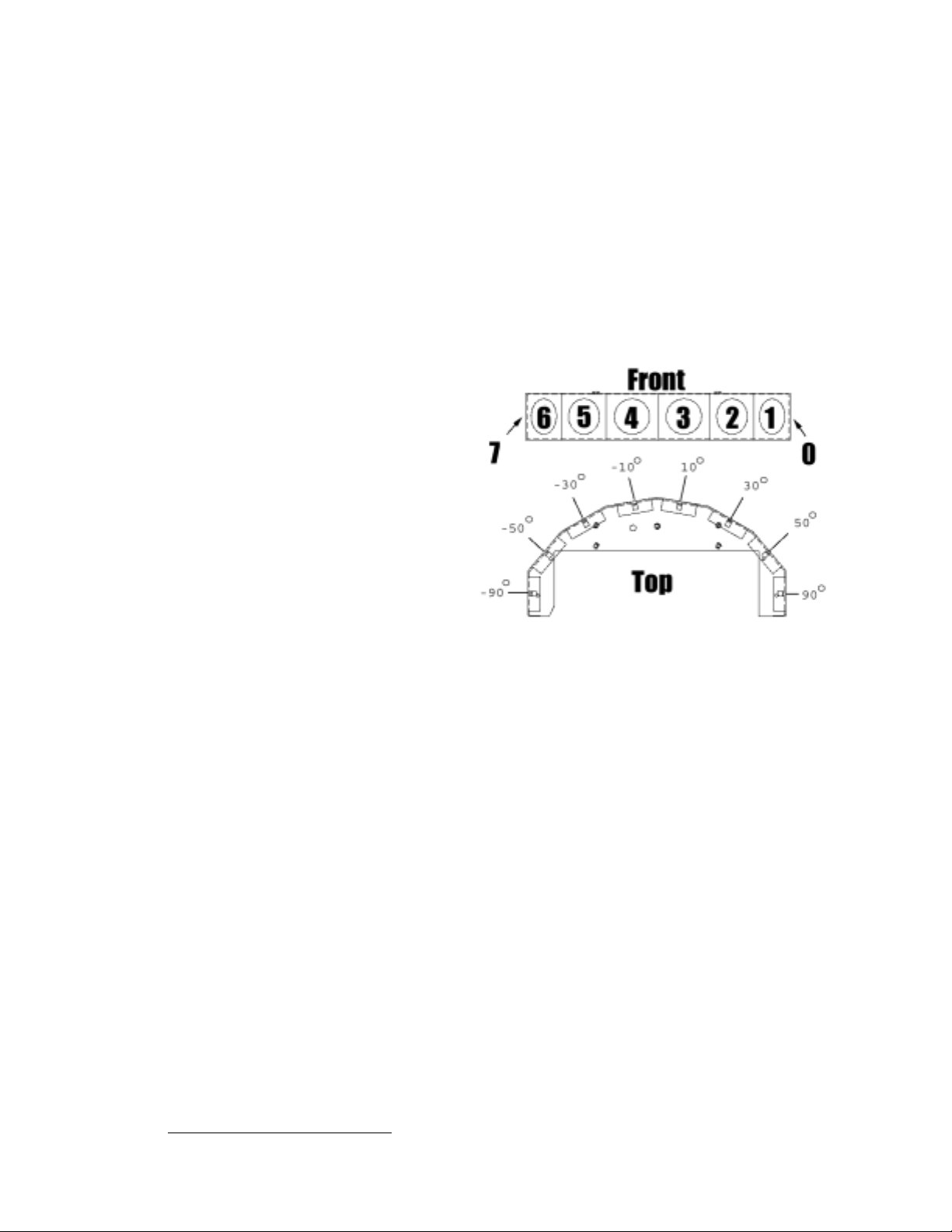
Sonar Arrays with Gain Adjustment
Natively, ActivMedia robots support both front and rear sonar arrays, each with eight
transducers that provide object detection and range information for features
recognition, as well as navigation around obstacles. With sonar expansion electronics,
you may add up to 16 more sonar in two additional arrays of eight sonar each.
PeopleBots, for instance, have an additional array at the front of the upper Deck.
The sonar positions in all arrays are fixed: one on each side, and six facing outward at 20degree intervals. Together, fore and aft sonar arrays provide 360 degrees of nearly
seamless sensing for the platform.
Each sonar array comes with its own
driver electronics for independent
control. Each arrays’ sonar are
multiplexed; the sonar acquisition
rate is 25 Hz (40 milliseconds per sonar
per array. Sensitivity ranges from ten
centimeters (six inches) to nearly five
meters (16 feet). You may control the
sonar’s firing pattern through
software; the default is left-to-right in
sequence 0 to 7 for each array.
The driver electronics for each array is
calibrated at the factory. However,
you may adjust the array’s sensitivity
and range to accommodate
differing operating environments.
The sonar gain control is on the
Figure 12. ActivMedia robot sonar array
underside of the sonar driver board,
which is attached to the floor of each sonar module.
Sonar sensit ivity adjustment contr ols are accessible directly, although you may need to
7
remove the Gripper to access the front sonar, if you have that accessory attached.
For
the front sonar, for instance, locate a hole near the front underside of the array through
which you can see the cap of the sonar-gain adjustment potentiometer. Using a small
flat-blade screwdriver, turn the gain control counterclockwise to make the sonar less
sensitive to external noise and fal se echoes.
Low sonar-gain settings reduce the robot’s ability to see small objects. Under some
circumstances, that is desirable. For instance, attenuate the sonar if you are operating in
a noisy environment or on uneven or highly reflective floora heavy shag carpet, for
example. If the sonar are too sensitive, they will “see” the carpet immediately ahead of
the robot as an obstacle.
Increase the sensitivity of the sonar by turning the gain-adjustment screw clockwise,
making them more likely to see small objects or objects at a greater distance. For
instance, increase the gain if you are operating in a relatively quiet and open
environment with a smooth floor surface.
7
It’s easier to remove the DXE’s Nose with Gripper attached.
13
Specifications and Controls
Motors and Position Encoders
Pioneer 2 and PeopleBot drive systems use high-speed, high-torque, reversible-DC
motors, each equipped with a high-resolution optical quadrature shaft encoder for
precise position and speed sensing and advanced dead-reckoning. Motor gearhead
ratios and encoder ticks per revolution vary by robot model. See Appendix D for details.
Batteries and Power
Except the 2-CE, Pioneer 2 and PeopleBot robots may contain up to three, hotswappable, seven ampere-hour, 12 volts direct-current (VDC) sealed lead/acid batteries
(total of 252 watt-hours), accessible though a hinged and latched back door. We
provide a suction cup tool to help grab and slide each battery out of its bay. Spring
contacts on the robot’s battery power board alleviate the need for manually attaching
and detaching power cables or connectors.
Balance the batteries in your robot.
Batte ry life, of co urse, depe nds on the con figuration of accessories and motor activity.
Pioneer 2-AT and PeopleBot charge life typically ranges from two to three hours. The
Pioneer 2-DX and -DXe run continuously for six hours or more; up to four hours with
onboard computer. If you don’t use the motors, your robot’s microcontroller will run for
several days on a single battery charge.
IMPORTANT: Batteries have a significant impact on the balance and operation of your
robot. Under most conditions, we recommend operating with three batteries.
Otherwise, a single battery should be mounted in the center, or two batteries inserted on
each side of the battery container.
Typical recharge time using the recommended accessory (800 mA) charger varies
according to the discharge state; it is roughly equal to three hours per volt pe r battery.
The Power Cube accessory allows simultaneous recharge of three swappable batteries
outside the robot.
With the optional high-speed (4A maximum current) charger, recharge time is greatly
reduced. It also supplies sufficient current to continuously operate the robot and
onboard accessories, such as the onboard PC and radios. But with the higher-current
charger, care must be taken to charge at least two batteries at once. A single battery
may overcharge and thereby damage both itself and the robot.
Both recommended chargers are specifically designed for optimal and safe lead-acid
battery recharging. Indicators on the module’s face show fast-charge mode (typically
an orange LED) in which the discharged batteries are given the maximal current, and
trickle mode (green LED indicator) which the batteries are given only enough current to
remain at full charge.
Electronics
Pioneer 2 and PeopleBot standard electronics reside on two main boards: a
microcontroller and a motor-power distribution board. Each sonar array also has a
controller board mounted in its base. A special I/O expansion board found inside the
left column strut of the Performance PeopleBot distributes User I/O for use by the robot’s
joystick port as well as it’s tabletop and breakbeam IR sensors.
A Main Power switch at the back of the robot controls power for the entire system.
Processor control switches and indicators fit through the Console.
14

ActivMedia Robotics
Motor-Power Board
Inside the robot, mounted to the battery box, is the Motor-Power board. It supplies both
the 12 and five volts direct-current (VDC) power requirements of your robot’s systems.
The standard Motor-Power board has a 12-pin User-Power connector that supports four
sets of five- and 12-VDC power ports (total 1.5 ampere) for custom accessories.
An optional computer-power section to the board supplies power for the onboard PC . It
includes a special low-power and power-down circuit that lets you gently shut down the
onboard PC without direct connection through a keyboard or monitor. (See Appendix B
in this manual and the Computer Tech Notes that may accompany your robot for
details.)
Microcontroller
The Pioneer 2/PeopleBot microcontroller has a 20 MHz Siemens 88C166 microprocessor
with integrated 32K FLASH-ROM. It also has 32K of dynamic RAM, two RS232-compatible
serial ports, several digital and analog-to-digital, and PSU I/O user-accessible ports, and
an eight-bit expansion bus. (See Appendix A for I/O port details.)
All of the I/O ports, except those used for the motors, encoders, and sonar, are available
to the user for accessory hardware. The embedded operating software (P2OS) lets you
support and manage each of these I/O ports. Connector pinouts and electronics details
appear in the Appendices.
Sonar Boards
Associated with each sonar arrayforward and rearis a sonar multiplexer/firing board.
Wire leads to the individual sonar plug into a 16-pin connector on the board. A 10conductor power/signal cable connects the sonar board with the microcontroller.
Controls, Ports, and Indicators
Main Power, Fuse, and Indicator
A single slide-switch on the rear left panel of Pioneer 2 and PeopleBot robots controls
power to the entire robot and all its integrated accessories. Up is ON; down is OFF. A
red LED on the Console indicates Main Power.
Inside, on the top right side of the battery box (accessible through the hinged back door)
is the Main Power Fuse. It is an automotive-type (spade terminals) 15A (DX, DXe, CE, and
PeopleBots) or 20A (AT) fuse designed for tool-less replacement. To the left of the fuse,
on the same battery connection board, is the main power relay, which isolates the highampere draw of the robot system from the Main Power Switch.
Recharge/Power Port
Below the Main Power Switch is the battery recharger port. It provides 12 VDC power to
the robot's electronics, motors, and accessories, even without batteries. Use the
recommended accessory power charger or equivalent.
You should maintain your robot’s batteries in a charged state above 11 VDC, as
indicated on the Console LCD. We recommend recharging the battery when it falls
below 11 VDC, even though the robot may continue to operate below 10 VDC. The
microcontroller will sound a warning when the battery voltage falls below that level (see
Chapter 7, Updating & Reconfiguring P2OS), and the optional computer power circuitry
15
Specifications and Controls
will automatically shut down the onboard PC. Discharging the batteries below 10 VDC
may permanently damage them.
You may continue to operate the robot while
charging its batteries, although that will
lengthen the recharge time. Because the
onboard PC draws much current, even the
high-speed 4A charger will not be able to fully
recharge the batteries unless you power down
8
the PC.
If you have only one battery onboard, plug
your robot into the charger before “hotswapping” the exhausted battery for a fresh
one. To hot-swap two or three batteries,
replace each battery one-at-a-time, leaving
at least one battery in place to supply power
to the robot.
The Power Cube accessory is a convenient
way to externally recharge one to three of the
hot-swapped batteries.
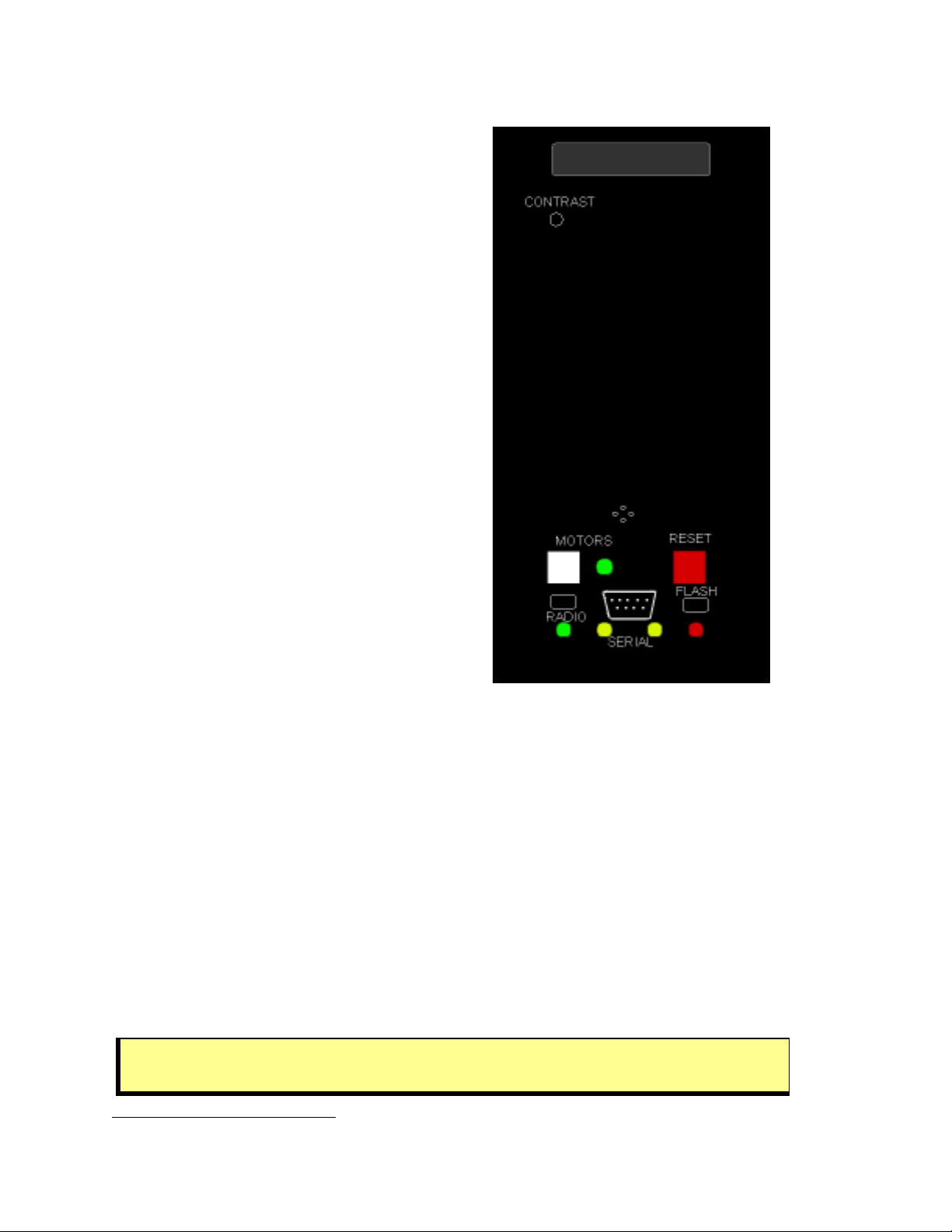
Liquid-Crystal Display & Contrast Adjustment
Information about your robot's state and
connections appears on a 32-character (two
lines) liquid-crystal display (LCD) on the
Console. When under control of the P2OS
servers, for example, the display shows the
state of communication with the client
computer, along with the battery voltage and
a blinking "heartbeat" asterisk (*) in the second
line of text.
Figure 13. The Console
A small, contrast-adjustment potent iometer for
the LCD is inset next to the display. Make sure the Main Power switch is ON and the
battery is well charged. Then, using a small, flat-blade screwdriver, turn the adjustment
screw to darken or lighten the screen so that the characters are clearly visible under your
lighting conditions.
RESET and MOTORS
The RESET (red) and MOTORS (white) push-button switches on the Console affect the
microcontroller’s logic and motor-driver systems.
When pressed alone, RESET puts the microcontroller into its start-up state, disrupting any
running program or client connection. It also disables the drive motors—just as if you
cycle Main Power. But, unlike a cold-power restart, RESET preserves the contents of the
microcontroller's RAM, so any user programs downloaded in standalone mode get
restarted.
The MOTORS pushbutton is not a power switch—it does not directly
control power to the motors.
8
We deliberately limit the charger power to avoid serious damage that can occur from overcharging lead-
acid batteries.
16
ActivMedia Robotics
The MOTORS button and its associated green LED are under software control. Normally,
your ActivMedia robot's motors are disabled when not connected with a client, such as
9
Navigator or Saphira. When first connected with a client,
the motors remain disabled
(LED flashes) until you press and release the MOTORS button. Pressing and releasing the
white MOTORS button then enables/disables the motors as long as the robot remains
connected with a client.
10
The green LED should light continuously when the motors are
enabled and blink ON and OFF when disengaged.
When not connected with a client, pressing and releasing the MOTORS button puts your
robot into joystick-drive mode. A subsequent press and release of the MOTORS button
puts the robot into Self-Test Mode that exercises the robot's drive, controller, and I/O
systems. See Chapter 5, Joydrive and Self-Test Modes, for details.
Press and hold the MOTORS button in combination with the RESET button to put the
microcontroller into a special system-download mode for reprogramming the onboard
FLASH ROM. See Pioneer 2 Operating System and Updating & Reconfiguring P2OS,
Chapter 6 and Chapter 7.
SERIAL
Your ActivMedia robot's microcontroller has two serial ports and three connectors. One
connector, labeled SERIAL, is a standard 9-pin D-SUB receptacle located on the
Console and is for direct RS232-compatible serial data communication between the
microcontroller and a client computer. This “Host” serial port shares its three-line
transmit, r eceive, and grou nd connections w ith one of the two serial connectors that is
inside the robot. See Appendix A for pinouts and cabling connections.
Amber LEDs on each side of the Host serial port light during data-exchange activity
transmitted from or received by the microcontroller.
Remove any tether or laptop connection from the Console SERIAL port
when using the optional radio modems.
RADIO
The RADIO slide switch on your robot’s Console controls power to the optional radio
modem or Ethernet radio. It does not affect the SERIAL port functions directly, but you
must switch the radio modem’s power OFF if you use the Console SERIAL port to
connect a piggyback laptop or another external computer to the robot.
The radio modem gets power as well as signals through the internal, shared Host serial
port and can interfere with Console SERIAL communications. In some cases, you may
have to physically remove the radio serial connection from the microcontroller to
eliminate that interference.
FLASH
A slide switch labeled FLASH is recessed into the Console. It write-protects the FLASH
ROM-stored P2OS software and your robot's operating parameters (see Updating and
Reconfiguring P2OS, Chapter 7). When swit ched forward, FLASH is enabled for writing.
ActivMedia’s P2OS maintenance utilities warn you if FLASH is disabled.
9
See the Quick Start chapter for client connection details.
10
A P2OS command also lets you toggle the motors under client control.
17

Specifications and Controls
PeopleBot Sensors and Emergency STOP
Performance PeopleBot’s tabletop sensors are very reliable diffuse IR dete ctors mounted
to the front of the robot and which detect obstacles, particularly tabletops or rope
barriers, that otherwise aren’t detected by the sonars. The tabletop IR detectors respond
to any surface except glass or other mirrored surfaces, and can detect objects as thin as
a human finger. They are oriented to trigger when an object is 28 cm (11.5 inches) or
nearer to the front of the robot and 3.75 cm (1.5 in ches) at the height of the lower deck.
Two “breakbeam” IR sensors, one on each side 3.75 cm (1.5 inches) forward of the left
and right column struts and between the top and lower Decks of the Performance
PeopleBot, sense objects which intrude into the robot’s profile, but which may not be
otherwise detected by the sonars or tabletop IR sensors.
Since the tabletop and breakbeam IR sensors are connected to User I/O digital ports,
their states are communicated from the P2OS server to a connected client, such as
Saphira, in the standard Server Information Packet. See the . IOpac packet contents
Pioneer 2 Arm-related SIPs and Commands
Please consult the Pioneer 2 Arm Manual for details.
Performance PeopleBot IRs sections in Chapter 6 and in Appendix A for details.
The Performance PeopleBot contains a large, red Emergency STOP button prominently
positioned on the left column just beneath the upper Deck. When pressed, the button
physically disconnects power from the motors and electrically shorts them to brake the
motors. A separate digital sense line to the microcontroller can activate an emergency
stop process in P2OS. See E_STOP and E_STALL in Chapter 6 for details. To release the
Emergency STOP button, press it in and twist.
Safety Watchdogs and Configuration
Pioneer 2’s and PeopleBot’s standard onboard software, P2OS, contains a
communications watchdog that will halt motion if communications between a client
computer and the server are disrupted for a set time interval, nominally two seconds
(watchdog parameter). The robot will automatically resume activity, including motion,
as soon as communications are restored.
P2OS also contains a stall monitor. If the drive exerts a PWM pulse that equals or
exceeds a configurable level and the wheels fail to turn (stallval), motor power is cut
off for a configurable amount of time (stallwait). The server soft ware also notifies the
client which motor is stalled. When the stallwait time elapses, motor power
automatically switches back ON and motion continues under server contro l.
All these “failsafe” mechanisms help ensure that your robot will not cause damage or be
damaged during operation. You may reconfigure the communications, drive current,
and stallwait values to suit your application. See Chapter 7, Updating &
Reconfiguring P2OS, for details.
18
 Loading...
Loading...