

Page 1
Model Service Manual CD Mechanism Module Mechanism Unit
DEH-P400/X1N/UC
DEH-P4000/X1N/UC CRT2308 CXK5200 CXB3100
DEH-P4050/X1N/ES
DEH-P3000R/X1N/EW CRT2309 CXK5200 CXB3100
DEH-P200/X1N/UC
DEH-P300/X1N/UC CRT2310 CXK5200 CXB3100
DEH-P3000/X1N/UC
DEH-P20/X1N/UC
DEH-P2000/X1N/UC CRT2311 CXK5200 CXB3100
DEH-P2050/X1N/ES
DEH-2000R/X1N/EW
DEH-2020R/X1N/GR CRT2312 CXK5200 CXB3100
DEH-2030R/X1N/EW
DEH-10/X1N/UC
DEH-1000/X1N/UC CRT2313 CXK5200 CXB3100
DEH-1050/X1N/ES
PIONEER ELECTRONIC CORPORATION 4-1, Meguro 1-Chome, Meguro-ku, Tokyo 153-8654, Japan
PIONEER ELECTRONICS SERVICE INC. P.O.Box 1760, Long Beach, CA 90801-1760 U.S.A.
PIONEER ELECTRONIC [EUROPE] N.V. Haven 1087 Keetberglaan 1, 9120 Melsele, Belgium
PIONEER ELECTRONICS ASIACENTRE PTE.LTD. 253 Alexandra Road, #04-01, Singapore 159936
C PIONEER ELECTRONIC CORPORATION 1998
K-FZA. DEC. 1998 Printed in Japan
ORDER NO.
CRT2300
CD MECHANISM MODULE
CX-916
- This service manual describes the operation of the CD mechanism incorporated in models listed in the
table below.
- When performing repairs use this manual together with the specific manual for model under repair.
CONTENTS
1. CIRCUIT DESCRIPTIONS ...........................................2
2. MECHANISM DESCRIPTIONS.................................17
3. DISASSEMBLY .........................................................18
Page 2

2
CX-916
1. CIRCUIT DESCRIPTIONS
The LSI (UPD63710GC) used on this unit comprises five main blocks ; the pre-amp section, servo, signal processor,
DAC and CD text decoder (not used on this model). It also equips with nine automatic adjustment functions.
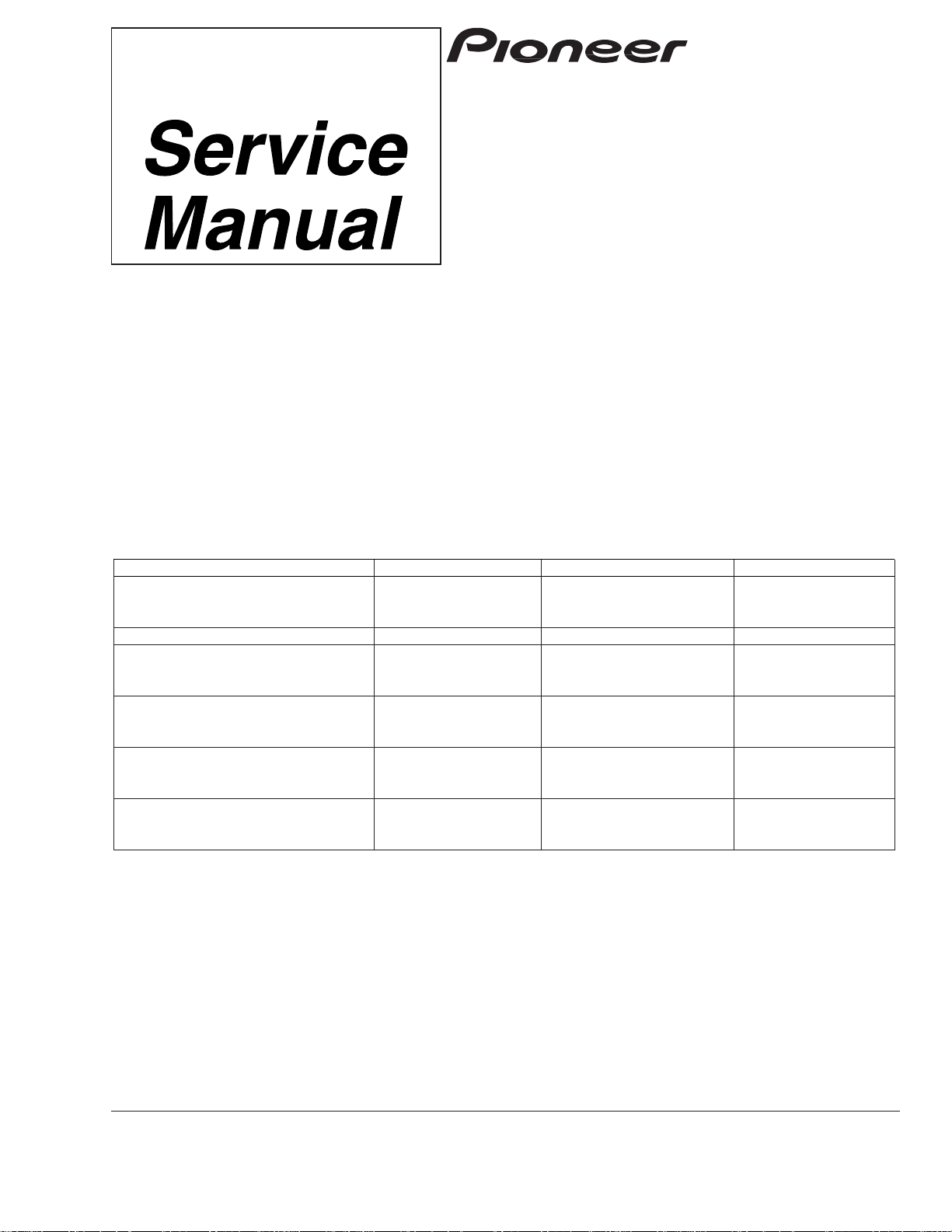
1.1 PRE-AMP SECTION
This section processes the pickup output signals to
create the signals for the servo, demodulator and
control.
The pickup output signals are I-V converted by the preamp with the built-in photo-detector in the pickup, then
added by the RF amp to obtain RF, FE, TE, TE zero cross
and other signals.
This pre-amp section is built in the servo LSI
UPD63710GC (IC201). The following describes function
of each section.
Since this system has a single power supply (+5V), the
reference voltage for this LSI and pickup are set to
REFO (2.5V). The REFO is obtained by passing the
REFOUT from the LSI through the buffer amplifier. The
REFO is output from Pin 89 of this LSI. All
measurements are done using this REFO as reference.
Note : During the measurement, do not try to short the
REFO and GND.
1) APC Circuit (Automatic Power Control)
When the laser diode is driven with constant current,
the optical output has large negative temperature
characteristics. Thus, the current must be controlled
from the monitor diode so that the output may be
constant. APC circuit is for it. The LD current is obtained
by measuring the voltage between LD1 and V+5. The
value of this current is about 35mA.
71
72
74
76
AGCI
77
RFO
75
78
79
80
73
91
90
93
92
C-3T
FEO
FE-
TEO
TE-
85
86
87
E
97
PD
99
PN
F
D
82
83
84
B
C
A
RF-
EQ1
EQ2
AGCO
RFI
ASY
EFM
PEAK DET.
LPF
BOTTOM DET.
S/H
D/A
A/D
D/A
A/D
94
98
TE2
LD
VREG
GND
APN
LDON
EFM
DEFECT
FOK
A3T
MIRR
To the
following stage
of the LSI
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
·····Vref(+2.5V)
97
PD
99
PN
98
LD
VREG
GND
AMP_PN
(H:Nch L:Pch)
LDON
(H:LD MOVE L:STOP)
Vref
·····Vref(+2.5V)
14
5
R102
10
R101
12
Q101
2SB1132
C102
0.1µF
C103
100µF/6.3V
PU UNIT
R103
2.2k
C105
0.33µF
+5V
1k
110k
3p
3p
150k
100k
100k
16k
1k
Fig.1 : BLOCK DIAGRAM OF BUILT-IN RF AMPLIFIER
Fig.2 : APC CIRCUIT
Page 3
CX-916
3
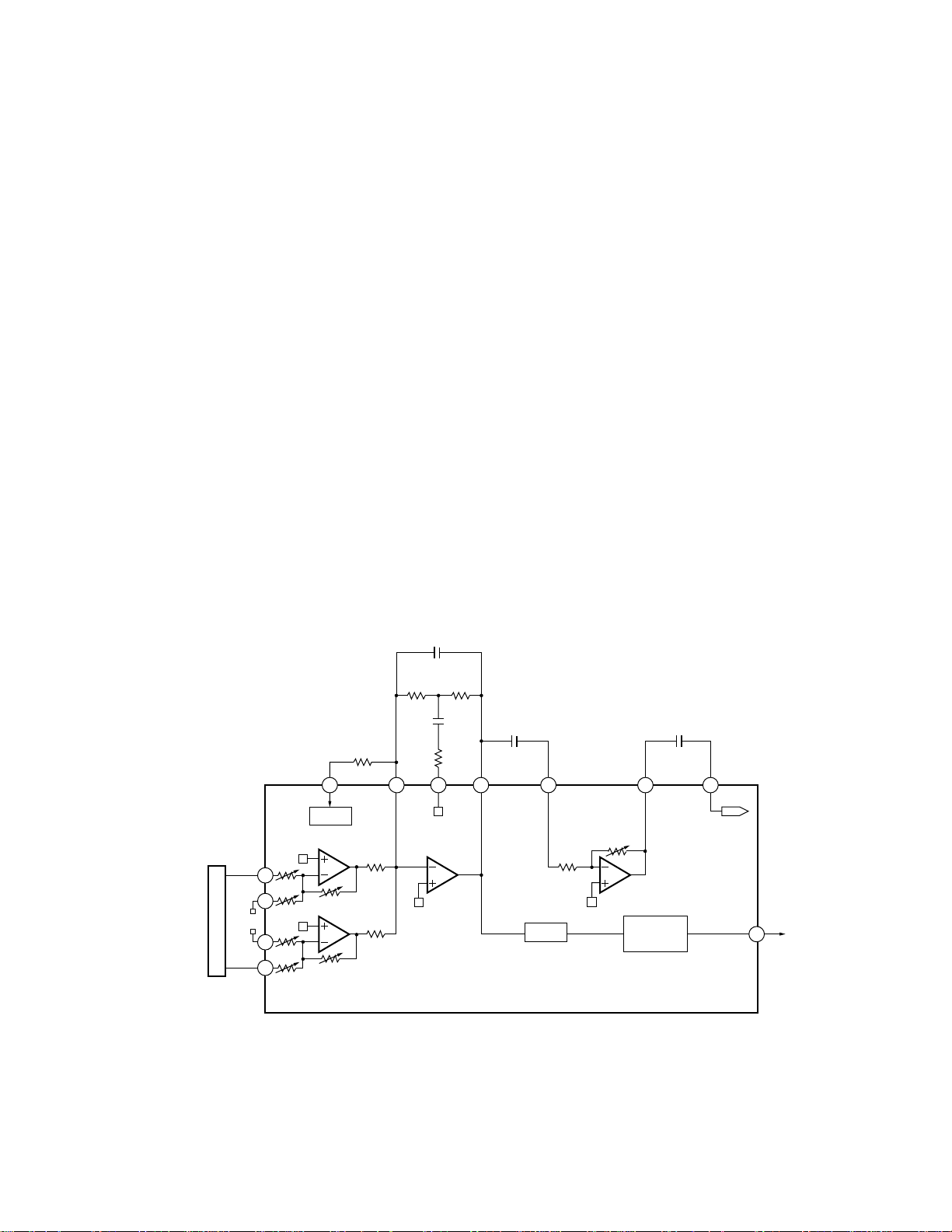
2) RF Amplifier and RFAGC Amplifier
The photo-detector outputs (A +C) and (B +D) are
added, amplified and equalized on this LSI and then
output to the RFI terminal as the RF signal. (The eye
pattern can be checked by this signal.)
The RFI voltage low frequency component is :
RFI = (A +B +C +D) ×3.2
RFI is used on the FOK generator circuit and RF offset
adjusting circuit.
R214 is an offset resistor for maintaining the bottom
reference voltage of the RFI signal at 1.5 VDC. The D/A
output used for the RF offset adjustment (to be
described later) is entered via this resistor.
After the RFI signal from Pin 77 is externally AC
coupled, entered to Pin 76 again, then amplified on the
RFAGC amplifier to obtain the RFO signal.
The RFAGC adjustment function (to be described later)
built-in the LSI is used for switching feedback gain of
the RFAGC amplifier so that the RFO output may go to
1.5 ±0.3Vpp.
The RFO signal is used for the EFM, DFCT, MIRR and
RFAGC adjustment circuits.
3) RFOK Circuit
This circuit generates the signal that is used for
indicating the timing of closing the focus or state of the
focus close currently being played. This signal is output
from Pin 4 as the FOK signal. It goes high when the
focus close and in-play.
The RFOK signal is generated by holding DC level of the
RFI at its peak with the succeeding digital section, then
comparing it at a specific threshold level. Thus, the
RFOK signal goes high even if the pit is absent. It
indicates that the focus close can take place on the disc
mirror surface, too.
This signal is also supplied to the micro computer via
the low pass filter as the FOK signal and used for the
protection and the RF amplifier gain switching.
CN101
84
6
13
83
82
10k
10k
85
FOK
CIRCUIT
A/D
4
A+C
16k
B+D
10k
16k
10k
R214
12k
C209 3pF
R212
10k
R207
1.8k
C206
27pF
R213
10k
80 79 74757677
D/A
12k
66
10k
RFOAGCIRFI
C207
0.22µF
C206
3900pF
FOK
TO EFM
CIRCUIT
Fig.3 : RFAMP, RFAGC AND FOK CIRCUIT
Page 4
4
CX-916
Fig.5 TRACKING ERROR AMPLIFIER AND TRACKING ZERO CROSSING AMPLIFIER
4) Focus Error Amplifier
The photo-detector outputs (A+C) and (B+D) are passed
through a differential amplifier and an error amplifier, and
then (A+C−B−D) is output from Pin 91 as the FE signal.
The FE voltage low frequency component is :
FE = (A + C − B − D) ××
= (A + C − B − D) × 5
Using REFO as the reference, an S-curve of approximately 1.5
Vpp is obtained for the FE output. The final-stage amplifier
cutoff frequency is 11.4 kHz.
5) Tracking Error Amplifier
The photo-detector outputs E and F are passed through
a differential amplifier and an error amplifier, and then
(E −F) is output from Pin 93 as the TE signal. The TE
voltage low frequency component is :
TE =(E −F)
××
=
(E −F) ×5.7 (Effective LSI output is 5.0).
Using REFO as the reference, the TE waveform of
approximately 1.3 Vpp is obtained for the TE output.
The final-stage amplifier cutoff frequency is 20 kHz.
6) Tracking Zero Crossing Amplifier
TEC signal (the tracking zero crossing signal) is
obtained by multiplying the TE signal four times. It is
used for locating the zero crossing points of the
tracking error. The zero cross point detection is done for
the following two reasons :
1
To count tracks for carriage moves and track jumps.
2
To detect the direction in which the lens is moving
when the tracking is closed (it is used on the
tracking brake circuit to be described later).
The TEC signal frequency range is 300 Hz to 20 kHz.
TEC voltage =TE level ×4
Theoretical TEC level is 5.2V. The signal exceeds Drange of the operational amplifier and thus is clipped.
It, however, can be ignored since this signal is used by
the servo LSI only at the zero crossing point.
20k
CN101
84
6
13
83
82
10k
20k
85
A+C
16k
B+D
48k
16k
10k
9190
D/A
80k
110k
FE
C210 220pF
R200 300k
A/D
FE OFFSET
TO DIG. EQ
48k
38k
CN101
9
11
86
56k
38k
87
F
E
F
224k
E
48k
224k
56k
9392
D/A
80k
110k
TE
C211 100pF
A/D
TE OFFSET
TO DIG. EQ
48k
R216
27k
R215
27k
60k
20k
95
94
TE2
TEC
R210
0
C212
6800pF
16k
10k
(80k//300k)
20k
Fig.4 : FOCUS ERROR AMPLIFIER
224k
(56k+27k)
80k
38k
Page 5
CX-916
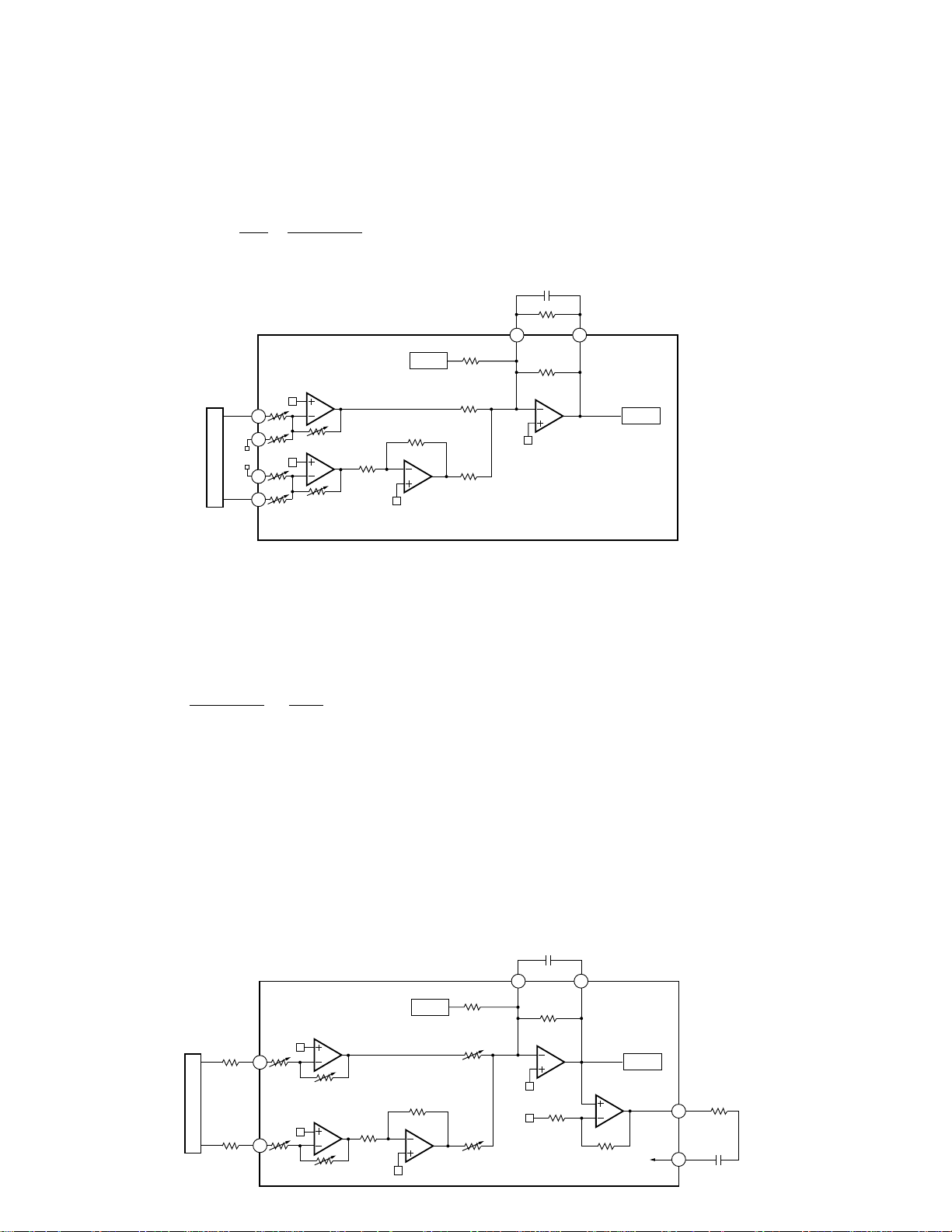
7) DFCT (Defect) Circuit
The DFCT signal is used for detecting defects on the
mirrored disc surface. It allows monitoring from the
HOLD pin (Pin 2). It goes high when defects are found
on the mirrored surface.
The DFCT signal is generated by comparing the RF
amplified signal (which is obtained by bottom holding
the RFO signal) at a specific threshold level by the
succeeding digital section.
Stains or scratches on the disc can constitute the
defects on the mirrored disc surface. Thus, as long as
the DFCT signal remains high in the LSI, the focus and
tracking servo drives are held in the current state so
that a better defect prevention may be ensured.
8) 3TOUT Circuit
The 3TOUT signal is generated by entering disturbance
to the focus servo loop, comparing phase of
fluctuations of the RF signal 3T component against that
of the FE signal at that time, then converting the signal
to DC level. This signal is used for adjusting bias of the
FE signal (to be described later). This signal is not
output from the LSI, thus its monitoring is not available.
9) MIRR (Mirror) Circuit
The MIRR signal shows the on track and off track data,
and is output from Pin 3.
When the laser beam is
On track : MIRR ="L"
Off track : MIRR ="H"
This signal is used on the brake circuit (to be described
later) and also as the trigger to turn on track counting
when jumping take place.
The MIRR signal is supplied to the micro computer, too,
for the protection purpose.
A/D
MIRR
CIRCUIT
3T
CIRCUIT
DFCT
CIRCUIT
BOTTOM DETECT
BOTTOM DETECT
PEAK DETECT
LPFS/H
A/D
A/D
76
75
73
3
2
40k
20k
20k
40k
40k
40k
200k
200k
C205
0.1µF
C3T
AGCI
RFO
12k
10k
20k
30k
MIRR
HOLD
Fig.6 : DFCT, MIRR AND 3T DETECTION CIRCUIT
Fig.7 : HOLD OUTPUT WAVEFORM
(When surface defects are present)
Fig.8 : MIRR OUTPUT WAVEFORM
(When an access is made)
5
Surface defects
RFI
HOLD
RFI
MIRR
OFF Track ON Track
Page 6
6
CX-916
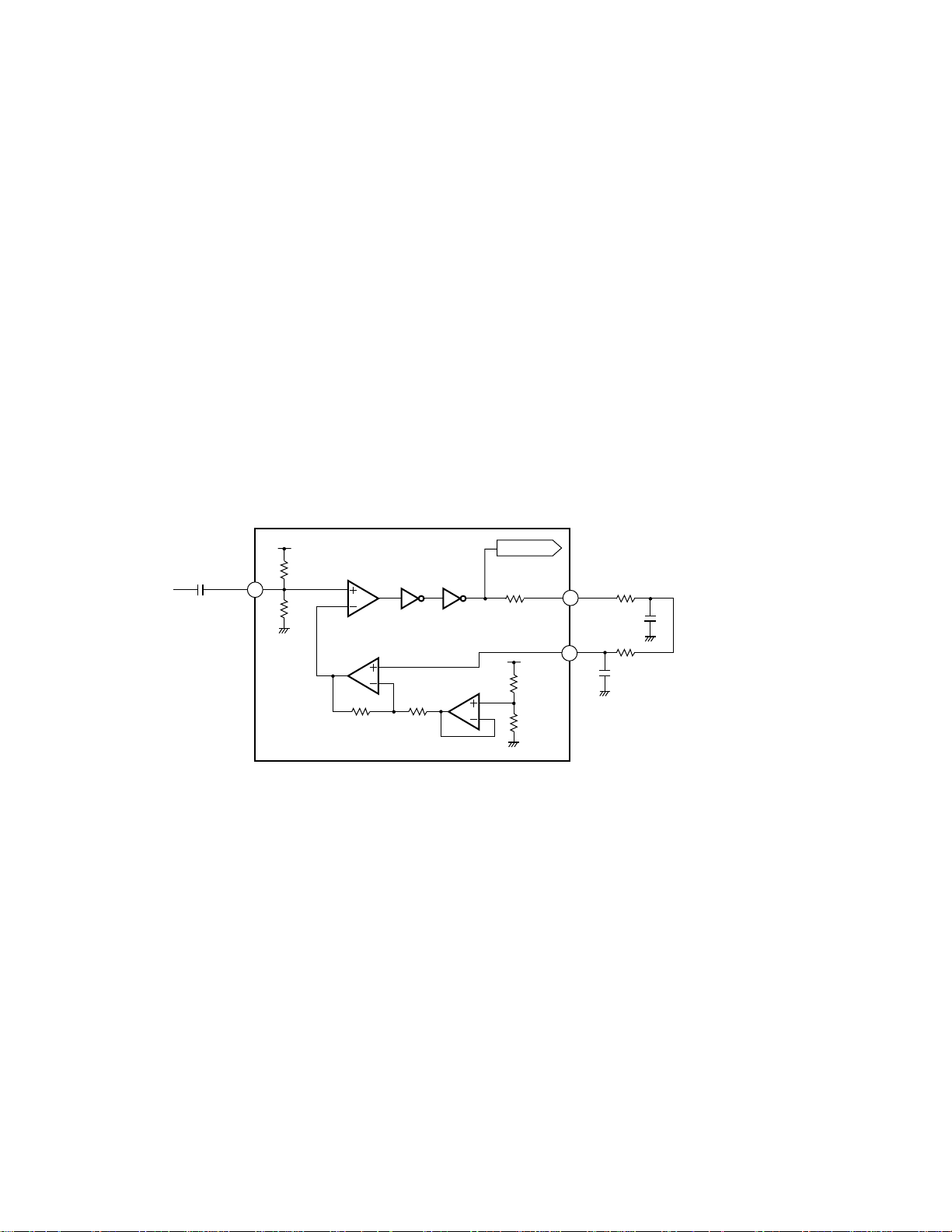
10) EFM Circuit
This circuit is used for converting the RF signal to
digital signal consisting of “0” and “1”. The RFO signal
from Pin 75 is externally AC coupled, entered to Pin 74,
then applied to the EFM circuit.
Loss of the RF signal due to scratches or stains on the
disc, or vertical asymmetry of the RF due to variations
in the discs manufactured can’t be eliminated by AC
coupling alone. This circuit, therefore, controls the
reference voltage ASY on the EFM comparator by use
of the fact that “0” and “1” appear fifty fifty in the EFM
signal. By this arrangement, the comparate level is
constantly maintained at almost center of the RFO
signal level. The reference voltage ASY is generated
when the EFM comparator output is passed through
the low pass filter. The EFM signal is output from Pin
71. It is a 2.5 Vp-p amplitude signal centering on REFO.
74
RFI
40k
40k
C206
3900pF
72
71
ASY
EFM
40k
40k
15k75k
2k
R205
10k
R206
39k
C203
0.1µF
C204
3300pF
EFM. SIG
Fig.9 : EFM CIRCUIT
Page 7

7
CX-916
1.2 SERVO SECTION (UPD63710GC :
IC201)
The servo section controls the operations such as error
signal equalizing, in focus, track jump and carriage
move. The DSP is the signal processing section used
for data decoding, error correction and interpolation
processing, among others.
This circuit implements analog to digital conversion of
the FE and TE signals generated on the pre-amplifier,
then outputs them through the servo block as the drive
signal used on the focus, tracking and carriage system.
The EFM signal is decoded on the signal processing
section and finally output via the D/A converter as the
audio signal. The decoding process also generates the
spindle servo error signals which is fed to the spindle
servo block to generate the spindle drive signal.
The focus, tracking, carriage and spindle drive signals
are then amplified on the driver IC BA5985FM (IC301)
and fed to respective actuators and motors.
1) Focus Servo System
The focus servo main equalizer is consisted of the
digital equalizer. Fig.10 shows the focus servo block
diagram.
When implementing the focus close on the focus servo
system, the lens must be brought within the in-focus
range. Therefore, the lens is moved up and down
according to the triangular focus search voltage to find
the focus point. During this time, the spindle motor is
kicked and kept rotating as a set speed.
The servo LSI monitors the FE and RFOK signals and
automatically carries out the focus close at an
appropriate point.
The focus closing is carried out when the following
three conditions are met :
1
The lens approaches the disc from its current
position.
2
RFOK ="H"
3
The FZC signal is latched at high after it has once
crossed the threshold set on the FZD register (Edge
of the FZD).
As the result, the FE ( =REFO) is forced to low.
FE
AMP
DIG.
EQ
82
A+C
B+D
FD
FOP
FOM
IC301
BA5985FM
LENS
IC201 UPD63710GC
85
62
27
16
15
FOCUS SEARCH
TRIANGULAR
WAVE GENERATOR
DAC
CONTROL
A/D
R309
47k
Fig.10 : FOCUS SERVO BLOCK DIAGRAM
Page 8

8
CX-916
When the above conditions are all met and the focus is
closed, the XSI pin goes to low from the current high,
then 40 ms later, the microcomputer begins to monitor
the RFOK signal after it that has been passed through
the low pass filter.
When the RFOK signal is recognized as low, the micro
computer carries out various actions including
protection.
Fig.11 a series of operations carried out relevant to the
focus close (the figure shows the case where focus
close is not available).
You can check the S-curve, search voltage and actual
lens behavior by selecting the Display 01 for the focus
mode select in the test mode, and then pressing the
focus close button.
REFO
FD
LENS POSITION
RELATIVE TO DISC
NEAR
FAR
"JUST FOCUSED"
MD
REFO
Expanding around "Just Focused Point"
REFO
RFI
FOK
FE
FZD
THRESHOLD
LEVEL
FZD
(INTERNAL SIGNAL)
Focus closing would normally take place at these points
XSI
(IN THE EVENT
FOCUS IS
CLOSED)
LEVEL
Fig.11 : FOCUS CLOSE SEQUENCE
Page 9

9
CX-916
2) Tracking Servo System
The digital equalizer is employed for the main equalizer
on the tracking servo. Fig.12 shows the tracking servo
block diagram.
a) Track jump
When the LSI receives the track jump command from
the microcomputer, the operation is carried out
automatically by the auto sequence function of the LSI.
This system has five types of track jumps used for the
search : 1, 4, 10, 32 and 32 ×3. In the test mode, in
addition to three jumps (1, 32 and 32 ×3), move of the
carriage can be check by mode selection. For track
jumps, the microcomputer sets almost half of tracks (5
tracks for 10 tracks, for instance) and counts the set
number of tracks using the TEC signals. When the
microcomputer has counted the set number of tracks, it
outputs the brake pulse for a fixed period of time
(duration can be specified with the command) to stop
the lens. In this way, the tracking is closed and normal
play is continued.
To improve the servo loop retracting performance just
after the track jump, the brake circuit is turned on for 50
ms after the brake pulse has been terminated to
increase gain of the tracking servo.
Fast forward and reverse operations are realized by
through consecutive signal track jumps. The speed is
about 10 times as fast as that in the normal mode.
TE
AMP
DIG.
EQ
86
F
E
TD
TOP
TOM
IC301
BA5985FM
LENS
IC201 UPD63710GC
87
63
24
17
18
JUMP
PARAMETERS
DAC
CONTROL
A/D
R310
47k
t1
t2
GAIN NORMAL
TD
KICK
BRAKE
TEC
T. BRAKE
EQUALIZER
T. SERVO
CLOSED
OPEN
NORMAL
GAIN UP
OFF
ON
t1
TD
TEC
(10 TRACK)
EQUALIZER
T. BRAKE
SERVO
SD
2.9mS (4.10 TRACK JUMP)
5.8mS (32 TRACK JUMP)
GAIN UP
NORMAL
ON
OFF
OPEN
CLOSED
t2
50mS
t
Fig.12 : TRACKING SERVO BLOCK DIAGRAM
Fig.13 : SINGLE TRACK JUMP
Fig.14 : MULTI-TRACK JUMP
Page 10

10
CX-916
b) Brake Circuit
The servo retracting performance can be deteriorate
during the setup or track jump operation. In this
connection, the brake circuit is used to ensure steady
retract of the tracking servo. The brake circuit detects in
which direction the lens is moving, then slows down its
move by outputting the drive signal that moves the
lens into the opposite direction alone. Track slippage
direction is determined by referencing the TEC and
MIRR signals and their phase.
TEC
TZC
(TEC "SQUARED UP" )
(INTERNAL SIGNAL )
MIRR
MIRR LATCHED AT
TZC EDGES
=
SWITCHING PULSE
EQUALIZER OUTPUT
(SWITCHED)
DRIVE DIRECTION
Note : Equalizer output assumed to hava same phase as TEC.
FORWARD
LENS MOVING FORWARDS
(INNER TRACK TO OUTER)
LENS MOVING BACKWARDS
Time
REVERSE
Fig.15 : TRACKING BRAKE CIRCUIT
Page 11

11
CX-916
3) Carriage Servo System
The carriage servo supplies the tracking equalizer’s
low-frequency component (lens position data) output to
the carriage equalizer, then, after providing a fixed
amount of gain to it, outputs the drive signal from the
LSI. This signal is then applied to the carriage motor via
the driver IC.
When the lens offset reaches a certain level during play,
the entire pickup must be moved into the forward
direction. Therefore, the equalizer gain is set to the
level that allows to generate a voltage higher than the
carriage motor starting voltage. In actual operations, a
certain threshold level is set for the equalizer output by
the servo LSI so that the drive voltage may be output
from the servo LSI only when the equalizer output
exceeds the threshold level. This arrangement helps
reducing power consumption. Also, due to disc
eccentricity or other factors, the equalizer output may
cross the threshold level a number of times. In this
case, the drive voltage output from the LSI will have
pulse-like waveform.
DIG.
EQ
SD
COP
COM
IC301
BA5985FM
CARRIAGE
MOTOR
IC201 UPD63710GC
64
2
14
13
KICK, BRAKE
REGISTERS
DAC
CONTROL
FROM
TRACK. EQ
M
DRIVE ON/OFF THRESHOLD
CARRIAGE MOVED AT THESE POINTS
TRACKING DRIVE
(LOW FREQUENCY)
LENS POSITION
CRG DRIVE
(INSIDE UPD63710GC)
CRG MOTOR VOLTAGE
Fig.16 : CARRIAGE SERVO BLOCK DIAGRAM
Fig.17 : CARRIAGE SIGNAL WAVEFORM
Page 12

12
CX-916
4) Spindle Servo System
The spindle servo has the following modes.
1
Kick :
This mode is used for accelerating the disc rotation
during setup.
2
Offset :
(a) After the kick is over in the setup, this mode is
turned on until changing to rough servo mode.
(b) When focus is lost during play, this mode is
turned on until the focus is restored.
Both of the above are used for maintaining the disc
rotation rate near to the specified rate.
3
Applicable servo :
The CLV servo mode is turned on for the normal
operations.
In the EFM demodulation block, the frame sync
signal and internal counter output signal are
sampled for every WFCK/16 and a signal is produced
for indicating whether or not they are matching.
They are determined to be asynchronous only when
this signal fails to match 8 times in succession. In all
other cases, above two signals are assumed to be
synchronous. In the applicable servo mode, the
retracting servo is automatically selected if the two
signals are synchronous. If not, the regular servo is
automatically selected.
4
Brake :
This mode is turned on when stopping the spindle
motor.
The microcomputer outputs the brake voltage
through the servo LSI. The LSI monitors the EFM
waveform and, if its longest pattern exceeds a
certain interval (if the rotation is sufficiently slow),
the flag is set the LSI and the microcomputer turns
off the brake voltage. When the flag is not up within
a specified period time, the microcomputer switches
the mode from the brake to the stop mode, and
maintains this mode for a fixed period of time. If this
stop mode is continued for a fixed period of time,
the disc will be ejected.
5
Stop :
This mode is used for powering on the system and
the eject operation. When this mode is turned on,
voltage across the spindle motor is 0V.
6
Rough servo :
This mode is used for when the carriage feed
(carriage mode for the long search, etc.) is turned on.
The linear speed is calculated from the EFM
waveform and high or low level is entered to the
spindle equalizer. In the test mode, this mode is also
used for the grating check.
DSP
BLOCK
DIG.
EQ
MD
SOP
SOM
IC301
BA5985FM
SPINDLE
MOTOR
IC201 UPD63710GC
65
5
12
11
DAC
EFM
SIGNAL
M
SPEED ERROR SIGNAL
PHASE ERROR SIGNAL
Fig.18 : SPINDLE SERVO MOTOR BLOCK DIAGRAM
Page 13

13
CX-916
1.3 AUTOMATIC ADJUSTMENT FUNCTIONS
Every circuit adjustment on the CD-LSI of this system is
automated.
Every circuit adjustment is automatically implemented
when the disc is inserted or the CD mode is selected
from the source key. The following describes how the
adjustments are executed.
1) FZD Cancel Setting
This setting is used for executing the focus close
operation without fail.
When power is turned on, the FE offset level is read and
a voltage opposite to this offset value is written to the
CRAM on the IC to cancel the offset. In this manner, the
FZD threshold level can be set to a constant value
(+240mV), thereby ensuring to meet one of the
requirements for the IC to execute the focus close that
“the FZD signal is latched at high”.
2) Automatic Adjustment of TE, FE and RF Offset
Using REFO as the reference, this function adjusts the
pre-amp TE, FE and RF offsets to the respective target
value when power is turned on (targets values of the
TE, FE and RF are 0, 0 and −1V, respectively).
The following is the adjustment procedure :
(1) Respective offset (LD off) is read by the
microcomputer via the servo LSI.
(2) The microcomputer calculates the voltages to be
corrected from the read values, then sets them to
the specified field.
3) Automatic Adjustment of Tracking Balance (T.
BAL)
This adjustment is used for eliminating differences
between the pickup E and F channels outputs by
adjusting gain of the amplifier on the LSI. In the actual
operation, the TE waveform is adjusted so that it may
be vertically symmetric with REFO.
The following is the adjustment procedure :
(1) Make sure the focus close is complete.
(2) Kick the lens in the radial direction to generate the
TE waveform.
(3) At this time, the microcomputer reads the TE signal
offset value (via the servo LSI) being calculated by
the LSI.
(4) The microcomputer determines if the read offset
value is positive, negative or zero.
If the offset value =0, the adjustment is terminated.
If the offset value =A positive or negative value,
gain of the E and F channels amplifiers are modified
according the predetermined rule.
Then above steps (2) through (4) are repeated until the
“Offset value =0” or “Specified limit count” is reached.
4) Automatic Adjustment of FE Bias
This adjustment is intended at maximizing the RFI level
by optimizing the focus point in-play. This adjustment
utilizes the phase difference between the RF waveform
3T level and the focus error signal when disturbance is
applied.
Since disturbance is applied to the focus loop, this
adjustment is designed to take place in the same timing
as the auto gain control (to be described later).
The following is the adjustment procedure :
(1) Disturbance is injected to the focus loop by the
command from the microcomputer (within the servo
LSI).
(2) The LSI detects fluctuation of the RF signal 3T
component level.
(3) The LSI determines relationship between fluctuation
of the 3T component and the injected disturbance to
detect magnitude and direction of the off-focus
introduced.
(4) The microcomputer reads the detected results from
the LSI.
(5) The microcomputer calculates necessary correction,
then hands the calculated value to the bias
adjustment term set on the LSI.
This adjustment is repeated several times, as it is so
with the auto gain control, to ensure higher accuracy.
Page 14

CX-916
5) Focus and Tracking Automatic Gain Control
This function is used for implementing automatic
control of the focus and tracking loop gain.
The following is the adjustment procedure :
(1) Inject disturbance to the servo loop.
(2) Extract the error signal (FE and TE) generated at
when the disturbance is applied to obtain the
signals G1 and G2 via the B.P.F.
(3) The microcomputer reads the G1 and G2 signals via
the LSI.
(4) Based on the necessary correction calculated by the
microcomputer, the LSI performs the loop gain
adjustment.
Above adjustments are repeated several times to
ensure higher adjustment accuracy.
6) Automatic RF Level Adjustment (RFAGC)
This adjustment is used for implementing intended
signal transmission successfully by adjusting
unevenness of the RF signal (RFO) levels, that results
from disc and machine relevant factors, to a target
value. The adjustment is actually done by varying gain
of the amplifier provided between the RFI and RFO.
The following is the adjustment procedure :
(1) Using the command, the microcomputer reads the
output from the RF level detection circuit on the
servo LSI.
(2) Based on the read value, the microcomputer
calculates an amplifier gain that will produce the
target RFO level.
(3) The microcomputer sends the corresponding
command to the servo LSI so that the above gain
value may be set.
This adjustment takes place at the following timing :
• When the focus close alone is completed during the
setup process.
• Just before the setup is completed (just before the
play takes place).
• After the off-focus has been corrected during the play.
7) Adjustment of Pre-Amp Stage Gain
It is used for adjusting the entire RFAMP (FE, TE and RF
amplifiers) to +6dB or +12dB depending on given gain
level when reflected light from the disc is significantly
below the required level due to stained lens. This
phenomena can be noticed when playing back the CDRW.
The following is the adjustment procedure :
When reflected light from disc is judged to be
significantly below the required level during the setup,
set the entire RFAMP to +6dB or +12dB. In this case, if
the gain is modified, the setup have to be repeated
from the first step.
Through the adjustment, if you judged the play
becomes available by setting the entire RFAMP to +6dB,
+
6dB should be selected for the setup next time on.
See the figure below :
Play at +6dB increases due to stained lens or other reasons
(the typical gain is employed for the initial setup)
Time
Gain of entire RFAMP
+ 12dB
+ 6dB
TYP
Play the CD-RW with the gain being set to +12dB
Play is started with +6dB
judging the lens is stained
Fig.19 : CONCEPTUAL DIAGRAM OF PRE-AMP GAIN ADJUSTMENT
14
Page 15

15
CX-916
8) Initial Adjusting Values
All the automatic adjustments are implemented using
the previous adjustment values as the initial values
unless the microcomputer power (the backup power) is
not turned off (though there are some exceptions).
When the backup is turned off, automatic adjustment is
executed based on the initial values rather than the
previous adjustment values.
9) Displaying Coefficients After Adjustment
You can display and check results of some automatic
adjustments (FE and RF offset, FZD cancel and F / T /
RFAGC) from the test mode. The following coefficients
are displayed in each automatic adjustment :
(1) FE and RF offset and FZD cancel
Reference value =32 (The coefficient of 32 indicates
that no adjustment was required).
The results are displayed in multiples of
approximately 40 mV.
An example : When FZD cancel coefficient =35
35 −32 =3
3 ×40 mV =120 mV
Since the corrected value is
approximately +120 mV, the FE offset
before adjustment was −120 mV.
(2) F and T gain adjustment
Reference value =Focus/Tracking =20
A coefficient displayed indicates an amount of
adjustment conducted on the reference value.
An example : When AGC coefficient =40
40/20 =Overall gain has bee doubled
(+6dB). (The original loop gain of 1/2
has been doubled to have the targeted
overall gain.)
(3) RF level adjustment (RFAGC)
Reference value =8
Coefficient =9 to 15 ····· The direction in which the
RF level is increased (the
gain is increased).
Coefficient =7 to 0 ······· The direction in which the
RF level is decreased (the
gain is decreased).
Incrementing or decreasing the coefficient by “1”
varies the gain by 0.7 to 1dB.
Maximum gain =Typically +6.5dB. Coefficient at this
time is 15.
Minimum gain =Typically −6.0dB. Coefficient at this
time is 0.
Page 16

16
CX-916
1.4 POWER SUPPLY AND LOADING
SECTION
The power supply of the system uses VD (8.3V) from
the mother board. VD is fed to 5 channel CD driver IC,
5V Reg IC and disc detection LED.
The microcomputer turns on or off the CD driver and
the 5V using “CONT” and “CD5VON”, respectively. The
loading drive is turned on or off by the input signals
“CDEJET” and “CDLOAD”. No control terminal is
provided for turning the loading drive on or off.
IC301
BA5985FM
+5V
LOADING
MOTOR
R801
750
D801
24
5
11
6
7
CN701
VD
CDEJET
CONT
CDLOAD
CD5VON
D802
IC701
BA05SFP
21
8
28
1
1
2
4
9
10
M
R802
750
Fig.20 : POWER SUPPLY AND LOADING SECTION
Page 17

17
CX-916
2. MECHANISM DESCRIPTIONS
- Loading Operation (when a 12 cm disc is used)
1. Insert a 12 cm disc (the sensor turns on the motor
revolution).
2. The disc pushes the Lock Lever in, thereby resetting
the lock currently applied to the Centering Arms.
3. The disc further pushes the Centering Arms in.
4. The right side and left side arms are engaged to
perform centering of the disc.
5. The disc pushes the Disc Detection Arm in, thereby
pushing the Disc Detection Lever forward.
6. Clamping action retracts the Disc Detection Lever
toward forward side, thereby rotating the Relief Arm.
7. The Relief Arm further pushes the Centering Arm in,
thus detaching it from the disc.
- Loading Operation (when a 8 cm disc is used)
1. Insert an 8 cm disc (the sensor turns on the motor
revolution).
2. The disc does not contact against the Lock Lever,
thus centering of the disc is performed by the
Centering Arm being locked.
3. When the right side slot is used, the lock currently
applied to the Centering Arm remains turned on
even if the disc may touch the Lock Lever because
the disc leaves the lever before it reaches the
Centering Arm.
4. Succeeding procedures are the same as that for 12
cm discs.
- Clamping Operation
1. Insert a disc.
2. The Detection Arm pushed forward by the Detection
Lever turns on rotation of the Jump In Rack.
3. The Jump In Rack then engages with the Two Step
Gear and moves toward right.
4. At the same time, the Mode Selector Lever
connected to the Jump In Rack starts moving toward
right, thereby rotating the Lock Arm and resetting
the mechanical lock. The Clamp Up Arm too is
rotated by the above action and, thus, the Clamp Up
Arm now being lifted by shape of the cam of the
Clamp Arm is lowered.
And, the Guide Arm is also moved down because of
shape of the cam of the Mode Selector Lever.
5. By use of the cam shape, the Jump In Rack being
moved toward right retracts the Disc Detection Lever
in forward direction, thereby turning on rotation of
the Relief Arm.
Centering Arm
Centering Arm
Disc Detection Arm
Disc Detection Lever
Relief Arm
Lock Lever
Centering Arm
Centering Arm
Disc Detection Arm
Disc Detection Lever
Relief Arm
Lock Lever
Clamp Up Arm
Two Step
Gear
Disc Detection Arm
Disc Detection Lever
Jump In Rack
Mode Selector Lever
Lock Arm
Page 18

18
CX-916
3. DISASSEMBLY
- Removing the Upper Frame
1. Remove six Springs A, two Springs B and four
Screws.
2. Remove two Tabs situated on rear side of the Upper
Frame, remove two Arms on the front side, then
remove two Tabs on the front side.
- Removing the Carriage Mechanism
1. Disengage the Carriage Mechanism from the two
dampers situated in the front side by driving it up,
then disengage and remove the mechanism from the
two dampers by driving it up aslant into front side
direction.
Note : When assembling the Carriage Mechanism, coat
the dampers with alcohol prior to the assembly.
- Removing the Clamp Arm Assy
1. Remove a Spring A, a B and a Spring C.
2. Drive the Clamp Arm Assy up into rear side direction,
then disengage the arm from its current position
Finally, drive the assembly approximately 45 degrees
upward, then slide the assembly toward right side to
remove it.
B
A
B A
A
A
Arm
Arm
A
B
C
Upper Frame
Carriage Mechanism Section
Clamp Arm Assy Section
A
A
Page 19

19
CX-916
- Removing the Guide Arm Assy
1. Remove a connector, a spring A and B
2. Drive the Guide Arm Assy up aslant into rear side
direction, then remove it from a Pin. Finally, drive the
assembly approximately 45 degrees upward, then
slide the assembly toward left side to remove it.
Note : When assembling the guide arm assembly, route
the cord inside the assembly. In this operation,
care must be exercised so that cord may be
caught by the gear.
- Removing the LO Arm Assy
1. Remove two Pins to dismount the LO Arm Assy.
- Removing the Control Unit and the Spindle
Motor
1. Remove from the connector after mounting the short
pin on the flexible PCB of the pickup unit.
2. Remove two Soldered joints, then remove two
Screws A.
3. Remove two connectors and a Screw B.
4. Disengage the Control Unit from two Tabs, then
dismount the unit by sliding it toward left.
5. Dismount the Spindle Motor.
A
Guide Arm Assy Section
B
Pin
LO Arm Assy Section
Spindle Motor
A
A
Control Unit
Short Pin
B
Page 20

CX-916
- Removing the Loading Motor and Carriage
Motor
1. Remove the Spring and two Screws A.
2. Dismount the Loading Motor.
3. Remove the Belt, a Screw B, two Screws C, a Guide
and a Screw Unit.
4. Dismount the Carriage Motor.
Note : When assembling the Belt, use care so that it
may not be contaminated by grease.
- Removing the Pickup Unit
1. Remove two Screws and a Shaft.
2. Dismount the Pickup Unit.
Pickup Unit
Shaft
C
Guide
B
Screw Unit
Carriage Motor
A
A
C
Belt
Loading Motor
 Loading...
Loading...