

Pioneer CX-892 Service manual
Model Service Manual CD Mechanism Module Mechanism Unit
CDX-P650/X1N/UC,EW,ES CRT2315 CXK4800 CXB3007
CDX-P656/X1N/UC CRT2317 CXK4805 CXB3007
CDX-P25/X1N/EW CXK4800 CXB3007
CDX-FM657/X1N/UC,EW,ES CRT2316 CXK4815 CXB3007
CDX-FM653/X1N/UC CRT2321 CXK4811 CXB3007
PIONEER ELECTRONIC CORPORATION 4-1, Meguro 1-Chome, Meguro-ku, Tokyo 153-8654, Japan
PIONEER ELECTRONICS SERVICE INC. P.O.Box 1760, Long Beach, CA 90801-1760 U.S.A.
PIONEER ELECTRONIC [EUROPE] N.V. Haven 1087 Keetberglaan 1, 9120 Melsele, Belgium
PIONEER ELECTRONICS ASIACENTRE PTE.LTD. 253 Alexandra Road, #04-01, Singapore 159936
C PIONEER ELECTRONIC CORPORATION 1999
K-ZZU. FEB. 1999 Printed in Japan
ORDER NO.
CRT2356
CD MECHANISM MODULE
CX-892
- This service manual describes the operation of the CD mechanism incorporated in models listed in the
table below.
- When performing repairs use this manual together with the specific manual for model under repair.
CONTENTS
1. CIRCUIT DESCRIPTIONS...........................................2
2. DISASSEMBLY .........................................................18
3. MECHANISM DESCRIPTIONS.................................23
2
C X-892
1. CIRCUIT DESCRIPTIONS
The LSI (UPD63710GC) used on this unit comprises five main blocks ; the pre-amp section, servo, signal processor,
DAC and CD text decoder (not used on this model). It also equips with nine automatic adjustment functions.
1.1 PRE-AMP SECTION
This section processes the pickup output signals to
create the signals for the servo, demodulator and
control.
The pickup output signals are I-V converted by the preamp with the built-in photo-detector in the pickup, then
added by the RF amp to obtain RF, FE, TE, TE zero cross
and other signals.
This pre-amp section is built in the servo LSI
UPD63710GC (IC201). The following describes function
of each section.
Since this system has a single power supply (+5V), the
reference voltage for this LSI and pickup are set to
REFO (2.5V). The REFO is obtained by passing the
REFOUT from the LSI through the buffer amplifier. The
REFO is output from Pin 89 of this LSI. All
measurements are done using this REFO as reference.
Note : During the measurement, do not try to short the
REFO and GND.
1) APC Circuit (Automatic Power Control)
When the laser diode is driven with constant current,
the optical output has large negative temperature
characteristics. Thus, the current must be controlled
from the monitor diode so that the output may be
constant. APC circuit is for it. The LD current is obtained
by measuring the voltage between LD1 and V+5. The
value of this current is about 35mA.
71
72
74
76
AGCI
77
RFO
75
78
79
80
73
91
90
93
92
C-3T
FEO
FE-
TEO
TE-
85
86
87
E
97
PD
99
PN
F
D
82
83
84
B
C
A
RF-
EQ1
EQ2
AGCO
RFI
ASY
EFM
PEAK DET.
LPF
BOTTOM DET.
S/H
D/A
A/D
D/A
A/D
94
98
TE2
LD
VREG
GND
APN
LDON
EFM
DEFECT
FOK
A3T
MIRR
To the
following stage
of the LSI
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
Vref
·····Vref(+2.5V)
97
PD
99
PN
98
LD
VREG
GND
AMP_PN
(H:Nch L:Pch)
LDON
(H:LD MOVE L:STOP)
Vref
·····Vref(+2.5V)
14
5
R102
10
R101
12
Q101
2SB1132
C102
0.1µF
C103
100µF/6.3V
PU UNIT
R103
2.2k
C105
0.33µF
+5V
1k
110k
3pF
3pF
150k
100k
100k
16k
1k
Fig.1 : BLOCK DIAGRAM OF BUILT-IN RF AMPLIFIER
Fig.2 : APC CIRCUIT
C X-892
3
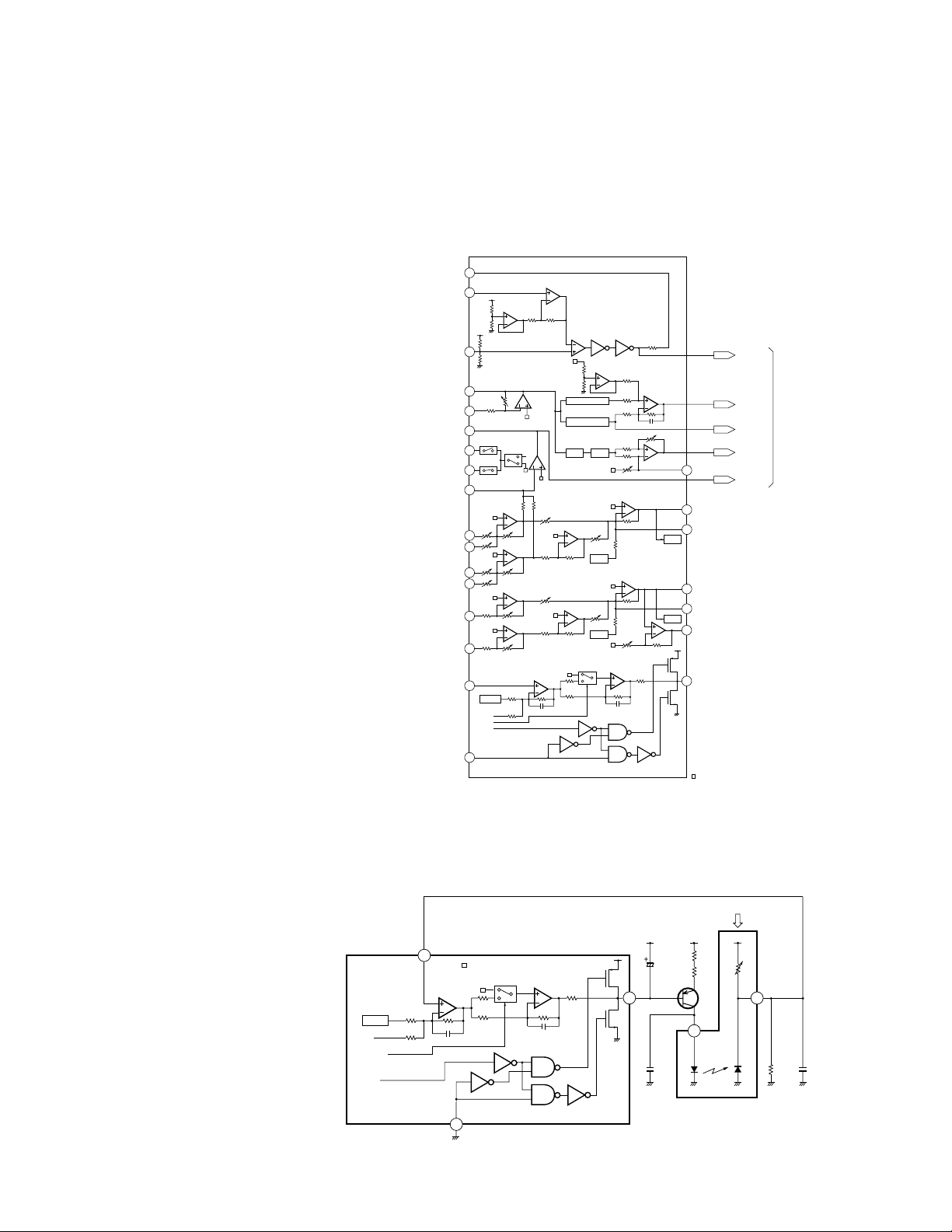
2) RF Amplifier and RFAGC Amplifier
The photo-detector outputs (A +C) and (B +D) are
added, amplified and equalized on this LSI and then
output to the RFI terminal as the RF signal. (The eye
pattern can be checked by this signal.)
The RFI voltage low frequency component is :
RFI = (A
+B +C +
D) ×3.2
RFI is used on the FOK generator circuit and RF offset
adjusting circuit.
R215 is an offset resistor for maintaining the bottom
reference voltage of the RFI signal at 1.5 VDC. The D/A
output used for the RF offset adjustment (to be
described later) is entered via this resistor.
After the RFI signal from Pin 77 is externally AC
coupled, entered to Pin 76 again, then amplified on the
RFAGC amplifier to obtain the RFO signal.
The RFAGC adjustment function (to be described later)
built-in the LSI is used for switching feedback gain of
the RFAGC amplifier so that the RFO output may go to
1.5
±
0.3Vpp.
The RFO signal is used for the EFM, DFCT, MIRR and
RFAGC adjustment circuits.
3) FOK Circuit
This circuit generates the signal that is used for
indicating the timing of closing the focus or state of the
focus close currently being played. This signal is output
from Pin 4 as the FOK signal. It goes high when the
focus close and in-play.
The RFOK signal is generated by holding DC level of the
RFI at its peak with the succeeding digital section, then
comparing it at a specific threshold level. Thus, the
RFOK signal goes high even if the pit is absent. It
indicates that the focus close can take place on the disc
mirror surface, too.
This signal is also supplied to the micro computer via
the low pass filter as the FOK signal and used for the
protection and the RF amplifier gain switching.
CN101
84
18
25
83
82
10k
10k
85
FOK
CIRCUIT
A/D
4
A+C
16k
B+D
10k
16k
10k
R215
12k
C209 3pF
R214
10k
R207
1.8k
C208
27pF
R213
10k
80 79 74757677
D/A
12k
66
10k
RFOAGCIRFI
C207
0.22µF
C206
3900pF
FOK
TO EFM
CIRCUIT
Fig.3 : RFAMP, RFAGC AND FOK CIRCUIT
4
C X-892
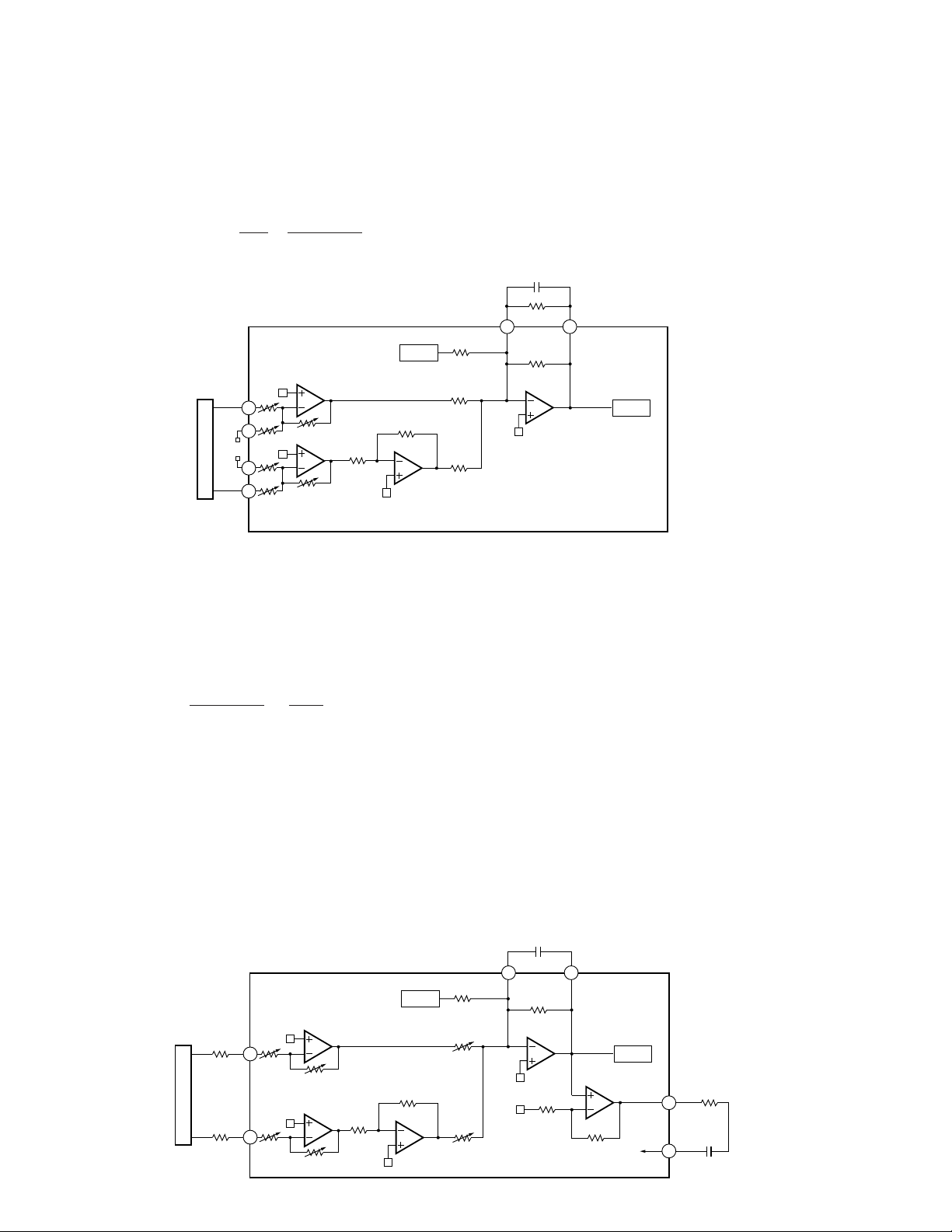
Fig.5 TRACKING ERROR AMPLIFIER AND TRACKING ZERO CROSSING AMPLIFIER
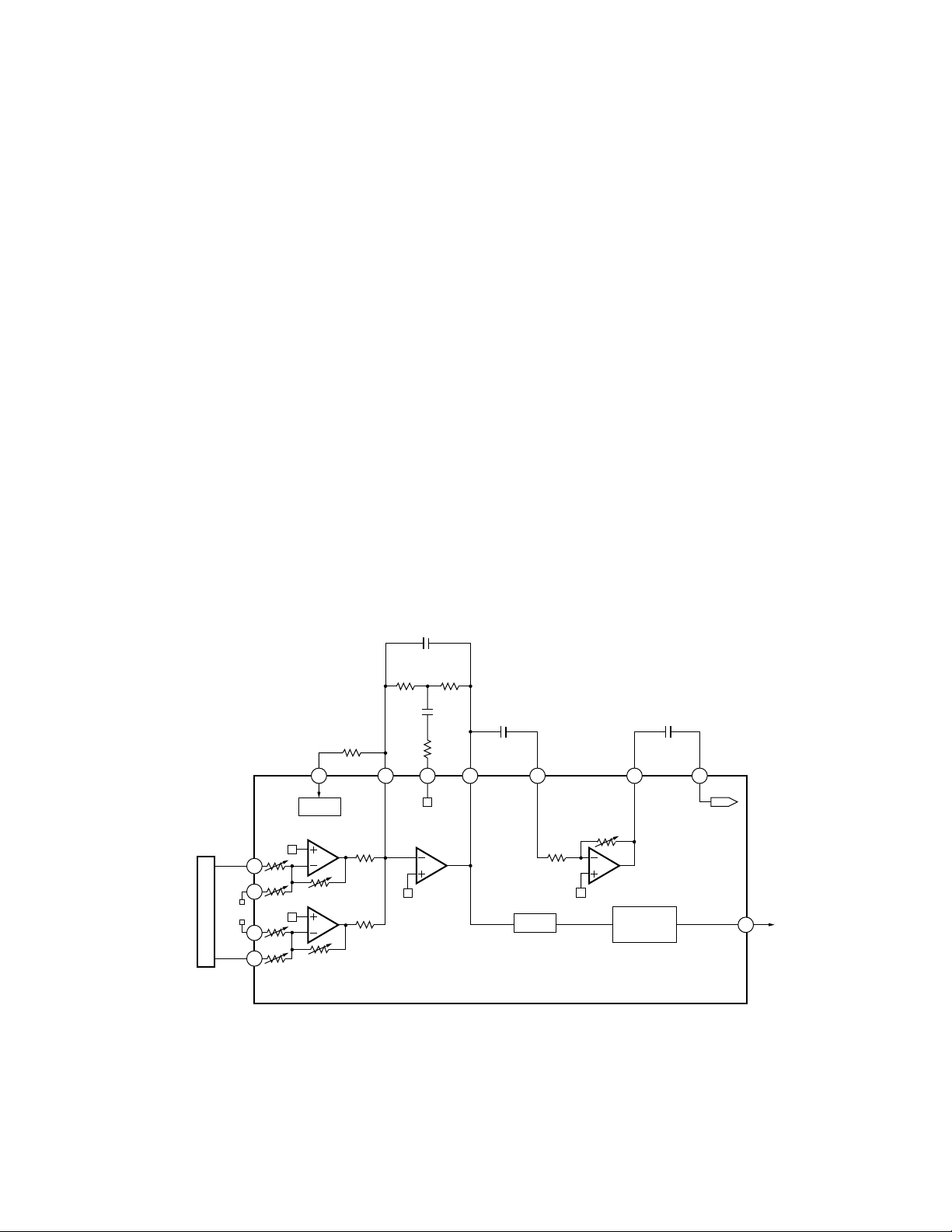
4) Focus Error Amplifier
The photo-detector outputs (A+C) and (B+D) are passed
through a differential amplifier and an error amplifier, and
then (A
+C−B−
D) is output from Pin 91 as the FE signal.
The FE voltage low frequency component is :
FE
= (A + C − B − D) ××
=
(A + C − B − D) × 5
Using REFO as the reference, an S-curve of approximately 1.5
Vpp is obtained for the FE output. The final-stage amplifier
cutoff frequency is 11.4 kHz.
5) Tracking Error Amplifier
The photo-detector outputs E and F are passed through
a differential amplifier and an error amplifier, and then
(E −F) is output from Pin 93 as the TE signal. The TE
voltage low frequency component is :
TE
=
(E −F)
××
=
(E −F) ×5.7 (Effective LSI output is 5.0).
Using REFO as the reference, the TE waveform of
approximately 1.3 Vpp is obtained for the TE output.
The final-stage amplifier cutoff frequency is 20 kHz.
6) Tracking Zero Crossing Amplifier
TEC signal (the tracking zero crossing signal) is
obtained by multiplying the TE signal four times. It is
used for locating the zero crossing points of the
tracking error. The zero cross point detection is done for
the following two reasons :
1
To count tracks for carriage moves and track jumps.
2
To detect the direction in which the lens is moving
when the tracking is closed (it is used on the
tracking brake circuit to be described later).
The TEC signal frequency range is 300 Hz to 20 kHz.
TEC voltage
=
TE level ×4
Theoretical TEC level is 5.2V. The signal exceeds Drange of the operational amplifier and thus is clipped.
It, however, can be ignored since this signal is used by
the servo LSI only at the zero crossing point.
20k
CN101
84
18
25
83
82
10k
20k
85
A+C
16k
B+D
48k
16k
10k
9190
D/A
80k
110k
FE
C210 220pF
R208 300k
A/D
FE OFFSET
TO DIG. EQ
48k
38k
CN101
21
23
86
56k
38k
87
F
E
F
224k
E
48k
224k
56k
9392
D/A
80k
110k
TE
C211 100pF
A/D
TE OFFSET
TO DIG. EQ
48k
R216
27k
R215
27k
60k
20k
95
94
TE2
TEC
R212
0
C212
6800pF
16k
10k
(80k//300k)
20k
Fig.4 : FOCUS ERROR AMPLIFIER
224k
(56k
+27k)
80k
38k
C X-892
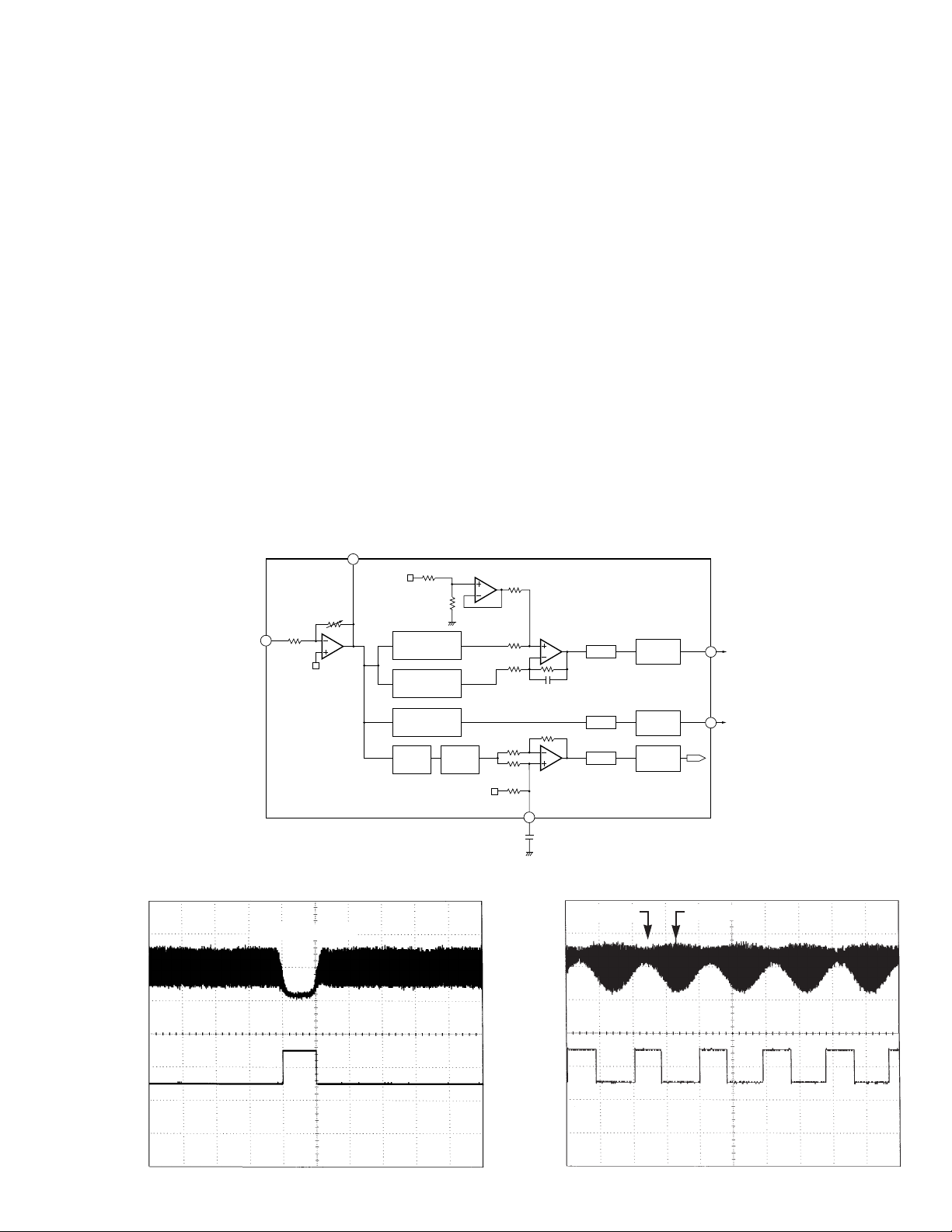
7) DFCT (Defect) Circuit
The DFCT signal is used for detecting defects on the
mirrored disc surface. It allows monitoring from the
HOLD pin (Pin 2). It goes high when defects are found
on the mirrored surface.
The DFCT signal is generated by comparing the RF
amplified signal (which is obtained by bottom holding
the RFO signal) at a specific threshold level by the
succeeding digital section.
Stains or scratches on the disc can constitute the
defects on the mirrored disc surface. Thus, as long as
the DFCT signal remains high in the LSI, the focus and
tracking servo drives are held in the current state so
that a better defect prevention may be ensured.
8) 3TOUT Circuit
The 3TOUT signal is generated by entering disturbance
to the focus servo loop, comparing phase of
fluctuations of the RF signal 3T component against that
of the FE signal at that time, then converting the signal
to DC level. This signal is used for adjusting bias of the
FE signal (to be described later). This signal is not
output from the LSI, thus its monitoring is not available.
9) MIRR (Mirror) Circuit
The MIRR signal shows the on track and off track data,
and is output from Pin 3.
When the laser beam is
On track : MIRR ="L"
Off track : MIRR
=
"H"
This signal is used on the brake circuit (to be described
later) and also as the trigger to turn on track counting
when jumping take place.
The MIRR signal is supplied to the micro computer, too,
for the protection purpose.
A/D
MIRR
CIRCUIT
3T
CIRCUIT
DFCT
CIRCUIT
BOTTOM DETECT
BOTTOM DETECT
PEAK DETECT
LPFS/H
A/D
A/D
76
75
73
3
2
40k
20k
20k
40k
40k
40k
200k
200k
C205
0.1µF
C3T
AGCI
RFO
12k
10k
20k
30k
MIRR
HOLD
Fig.6 : DFCT, MIRR AND 3T DETECTION CIRCUIT
Fig.7 : HOLD OUTPUT WAVEFORM
(When surface defects are present)
Fig.8 : MIRR OUTPUT WAVEFORM
(When an access is made)
5
Surface defects
RFI
HOLD
RFI
MIRR
OFF Track ON Track
6
C X-892
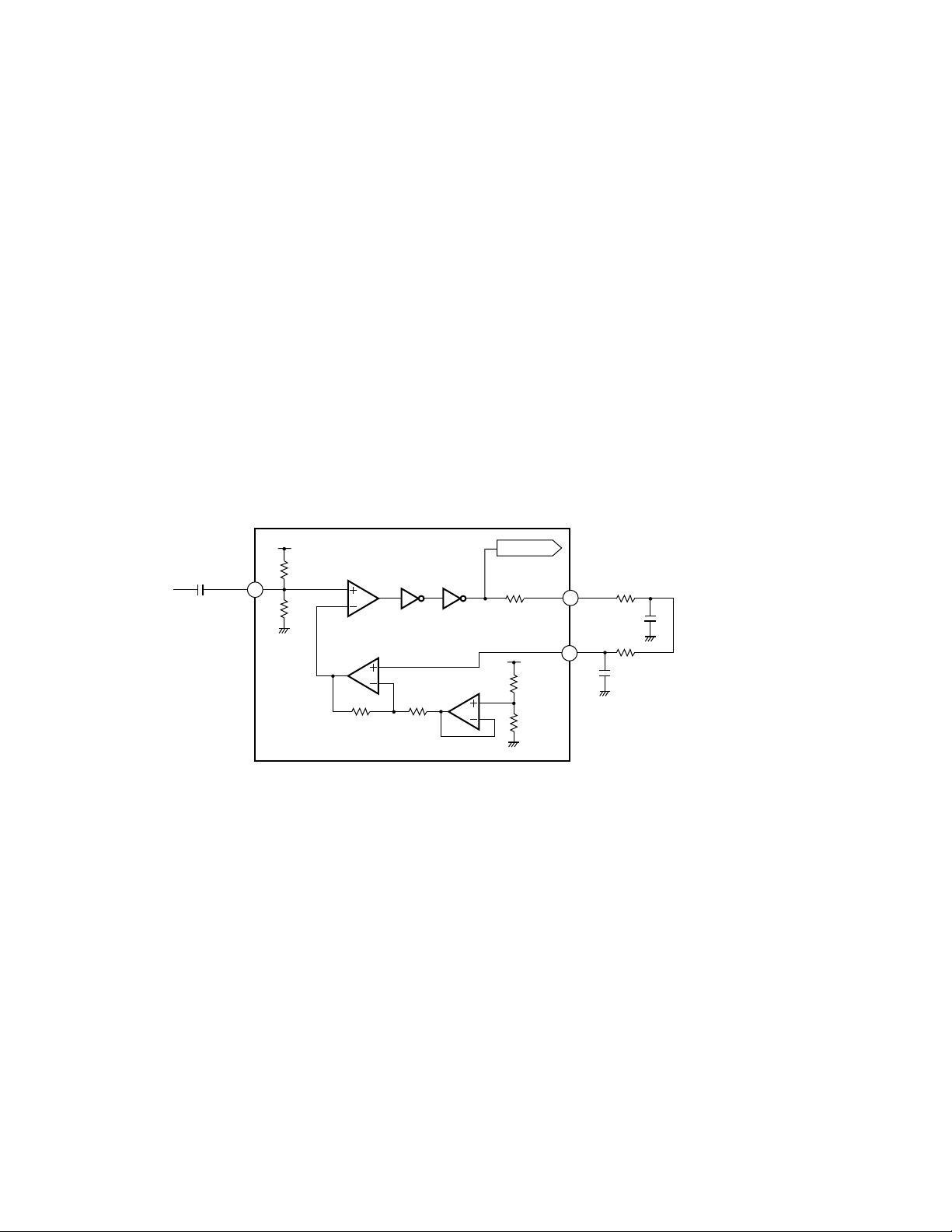
10) EFM Circuit
This circuit is used for converting the RF signal to
digital signal consisting of “0” and “1”. The RFO signal
from Pin 75 is externally AC coupled, entered to Pin 74,
then applied to the EFM circuit.
Loss of the RF signal due to scratches or stains on the
disc, or vertical asymmetry of the RF due to variations
in the discs manufactured can’t be eliminated by AC
coupling alone. This circuit, therefore, controls the
reference voltage ASY on the EFM comparator by use
of the fact that “0” and “1” appear fifty fifty in the EFM
signal. By this arrangement, the comparate level is
constantly maintained at almost center of the RFO
signal level. The reference voltage ASY is generated
when the EFM comparator output is passed through
the low pass filter. The EFM signal is output from Pin
71. It is a 2.5 Vp-p amplitude signal centering on REFO.
74
RFI
40k
40k
C206
3900pF
72
71
ASY
EFM
40k
40k
15k75k
2k
R205
10k
R206
39k
C203
0.1µF
C204
3300pF
EFM. SIG
Fig.9 : EFM CIRCUIT
7
C X-892
1.2 SERVO SECTION (UPD63710GC :
IC201)
The servo section controls the operations such as error
signal equalizing, in focus, track jump and carriage
move. The DSP is the signal processing section used
for data decoding, error correction and interpolation
processing, among others.
This circuit implements analog to digital conversion of
the FE and TE signals generated on the pre-amplifier,
then outputs them through the servo block as the drive
signal used on the focus, tracking and carriage system.
The EFM signal is decoded on the signal processing
section and finally output via the D/A converter as the
audio signal. The decoding process also generates the
spindle servo error signals which is fed to the spindle
servo block to generate the spindle drive signal.
The focus, tracking, carriage and spindle drive signals
are then amplified on the driver IC BA5986FM (IC301)
and fed to respective actuators and motors.
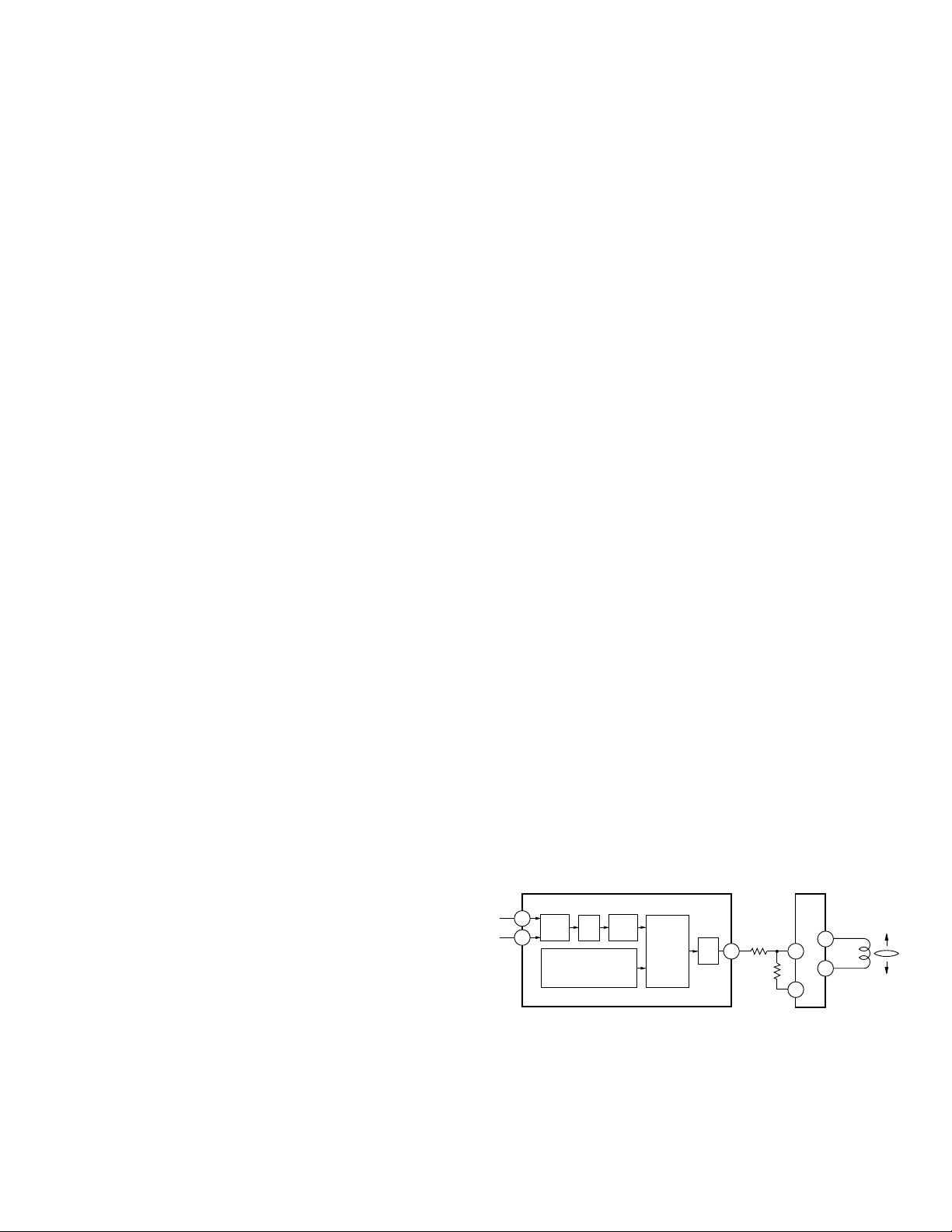
1) Focus Servo System
The focus servo main equalizer is consisted of the
digital equalizer. Fig.10 shows the focus servo block
diagram.
When implementing the focus close on the focus servo
system, the lens must be brought within the in-focus
range. Therefore, the lens is moved up and down
according to the triangular focus search voltage to find
the focus point. During this time, the spindle motor is
kicked and kept rotating as a set speed.
The servo LSI monitors the FE and RFOK signals and
automatically carries out the focus close at an
appropriate point.
The focus closing is carried out when the following
three conditions are met :
1
The lens approaches the disc from its current
position.
2
RFOK ="H"
3
The FZC signal is latched at high after it has once
crossed the threshold set on the FZD register (Edge
of the FZD).
As the result, the FE (
=
REFO) is forced to low.
FE
AMP
DIG.
EQ
82
A+C
B+D
FD
FOP
FOM
IC301
BA5986FM
LENS
IC201 UPD63710GC
85
62
3
4
14
13
FOCUS SEARCH
TRIANGULAR
WAVE GENERATOR
DAC
CONTROL
A/D
R302
15k
R301
10k
Fig.10 : FOCUS SERVO BLOCK DIAGRAM
8
C X-892
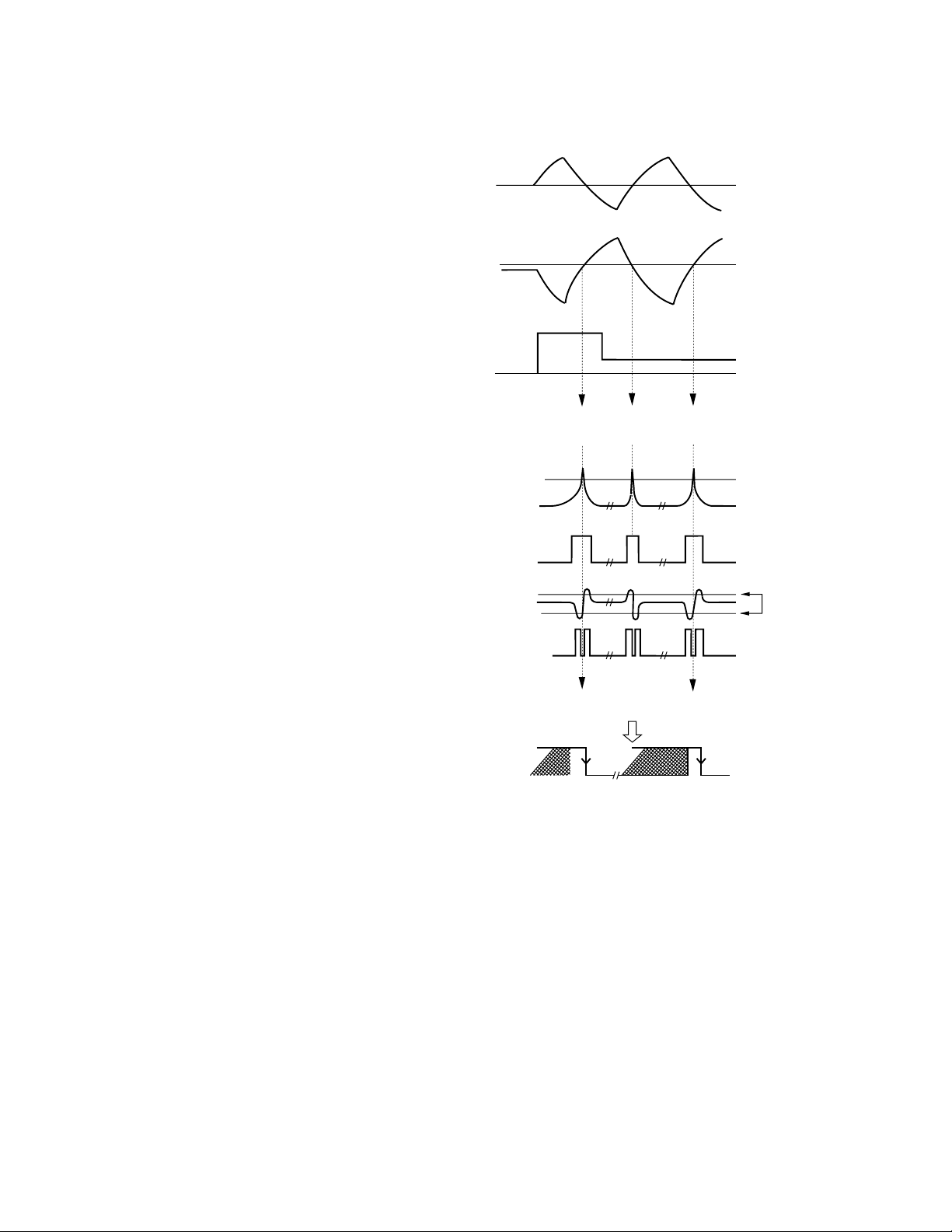
When the above conditions are all met and the focus is
closed, the XSI pin goes to low from the current high,
then 40 ms later, the microcomputer begins to monitor
the RFOK signal after it that has been passed through
the low pass filter.
When the RFOK signal is recognized as low, the micro
computer carries out various actions including
protection.
Fig.11 a series of operations carried out relevant to the
focus close (the figure shows the case where focus
close is not available).
You can check the S-curve, search voltage and actual
lens behavior by selecting the Display 01 for the focus
mode select in the test mode, and then pressing the
focus close button.
REFO
FD
LENS POSITION
RELATIVE TO DISC
NEAR
FAR
"JUST FOCUSED"
MD
REFO
Expanding around "Just Focused Point"
REFO
RFI
FOK
FE
FZD
THRESHOLD
LEVEL
FZD
(INTERNAL SIGNAL)
Focus closing would normally take place at these points
XSI
(IN THE EVENT
FOCUS IS
CLOSED)
LEVEL
Fig.11 : FOCUS CLOSE SEQUENCE
9
C X-892
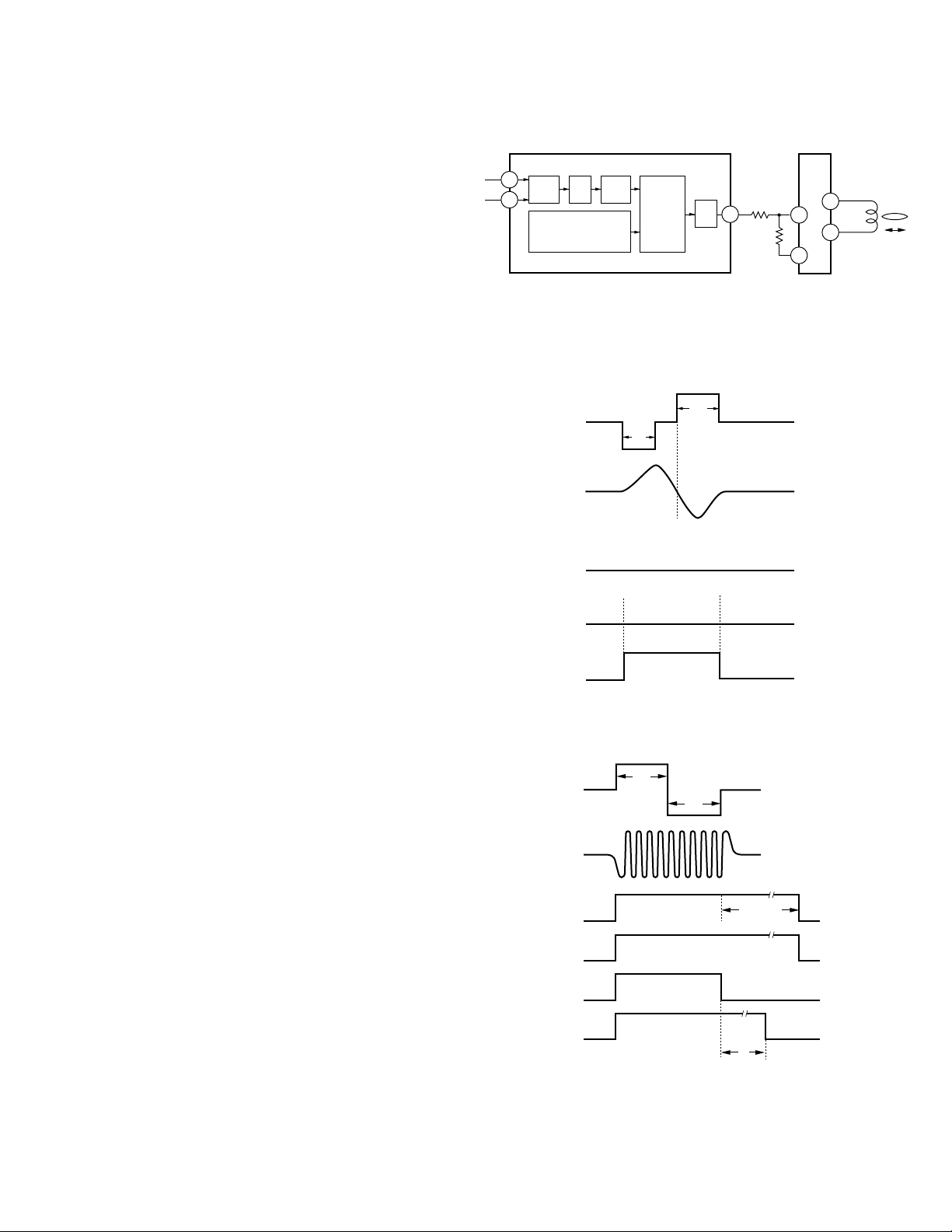
2) Tracking Servo System
The digital equalizer is employed for the main equalizer
on the tracking servo. Fig.12 shows the tracking servo
block diagram.
a) Track jump
When the LSI receives the track jump command from
the microcomputer, the operation is carried out
automatically by the auto sequence function of the LSI.
This system has five types of track jumps used for the
search : 1, 4, 10, 32 and 32 ×3. In the test mode, in
addition to three jumps (1, 32 and 32
×
3), move of the
carriage can be check by mode selection. For track
jumps, the microcomputer sets almost half of tracks (5
tracks for 10 tracks, for instance) and counts the set
number of tracks using the TEC signals. When the
microcomputer has counted the set number of tracks, it
outputs the brake pulse for a fixed period of time
(duration can be specified with the command) to stop
the lens. In this way, the tracking is closed and normal
play is continued.
To improve the servo loop retracting performance just
after the track jump, the brake circuit is turned on for 50
ms after the brake pulse has been terminated to
increase gain of the tracking servo.
Fast forward and reverse operations are realized by
through consecutive signal track jumps. The speed is
about 10 times as fast as that in the normal mode.
TOP
TOM
IC301
BA5986FM
LENS
11
12
6
7
R304
15k
R303
10k
TE
AMP
DIG.
EQ
86
F
E
TD
IC201 UPD63710GC
87
63
JUMP
PARAMETERS
DAC
CONTROL
A/D
t1
t2
GAIN NORMAL
TD
KICK
BRAKE
TEC
T. BRAKE
EQUALIZER
T. SERVO
CLOSED
OPEN
NORMAL
GAIN UP
OFF
ON
t1
TD
TEC
(10 TRACK)
EQUALIZER
T. BRAKE
SERVO
SD
2.9mS (4.10 TRACK JUMP)
5.8mS (32 TRACK JUMP)
GAIN UP
NORMAL
ON
OFF
OPEN
CLOSED
t2
50mS
t
Fig.12 : TRACKING SERVOBLOCK DIAGRAM
Fig.13 : SINGLE TRACK JUMP
Fig.14 : MULTI-TRACK JUMP
 Loading...
Loading...