

Pioneer CX-3268 Service manual
ORDER NO.
PIONEER CORPORATION 1-1, Shin-ogura, Saiwai-ku, Kawasaki-shi, Kanagawa 212-0031, Japan
PIONEER ELECTRONICS (USA) INC. P.O. Box 1760, Long Beach, CA 90801-1760, U.S.A.
PIONEER EUROPE NV Haven 1087, Keetberglaan 1, 9120 Melsele, Belgium
PIONEER ELECTRONICS ASIACENTRE PTE. LTD. 253 Alexandra Road, #04-01, Singapore 159936
PIONEER CORPORATION 2010
CRT4534
DVD MECHANISM MODULE(MS7)
CX-3268
- This service manual describes the operation of the DVD mechanism module incorporated in models listed in the table below.
- When performing repairs use this manual together with the specific manual for model under repair.
Model Service manual DVD Mechanism Module
AVH-5200BT/XNEW5 CRT4536 CXK6900
AVH-P5200BT/XNUW5
AVH-5200DVD/XNEW5
AVH-P5200BT//XNUC CRT4537 CXK6900
AVH-P5250BT/XNRD
AVH-P5200DVD/XNUC
AVH-P5250DVD/XNRC
AVH-P5250DVD/XNRD
AVH-P5250DVD/XNRI
CONTENTS
1. CIRCUIT DESCRIPTIONS ...............................................................................................................................2
2. MECHANISM DESCRIPTIONS ......................................................................................................................17
3. DISASSEMBLY...............................................................................................................................................21
K-ZZZ. MAR. 2010 Printed in Japan
1234
1234
C
D
F
A
B
E
1. CIRCUIT DESCRIPTIONS
DV5U Chip
(MN2DS0018MAUB : IC1501)
2.2 2.2 2.2 2.2
14
24
25
103
104
105
106
2.2 2.2 2.2 2.2
CDMPD
DVDMP
78 LD
(CD)
65 LD
(DVD)
15
MN2DS0018MAUB is 1-chip LSI for DVD-Player. The DVD-Player system can be constructed by connecting this
LSI with driver IC, SDRAM, Flash-ROM, and Audio-DAC etc.
This LSI has the front end part (SODC / FE) for carrying out RF signal processing / servo processing / decode
processing, the AV decoder part (backend / BE) for carrying out video decode processing of MPEG1 / MPEG2 /
JPEG etc. and audio decode processing of DVD-Audio / Dolby Dijital2 / DTS / MP3 etc., and the system controller
for controlling the system built-in.
The front end part realizes various processing such as optical head signal arithmetic processing, RF signal processing,
digital signal processing of DVD standard-compliant DVD-ROM play (16-8 demodulation, error correction), digital
signal processing of CD-DA / CD-ROM (error correction), AV decoder transfer, servo control, spindle motor control,
and seeking control.
With MN2DS0018MAUB, the waveform of servo system of front end such as FE, TE, AS cannot be seen in a same
way as DVD mechanism module (LS1) CX-3250. Keep it in mind.
1.1 Analog block (MN2DS0018MAUB : IC1501)
1 Front end part (MN2DS0018MAUB : IC1501)
The functions of analog block are as below:
1. Reference power supply circuit
2. SERVO system / DPD system signal processing circuit
Gain switching amplifier and Low Pass Filter (LPF)
3. RF signal processing circuit
RF adder circuit, in-lining circuit, Variable Gain Amplifier (VGA) circuit
4. Laser power control (LPC) circuit
5. A/D converter for SERVO (10bit), DPD system comparator, PWM
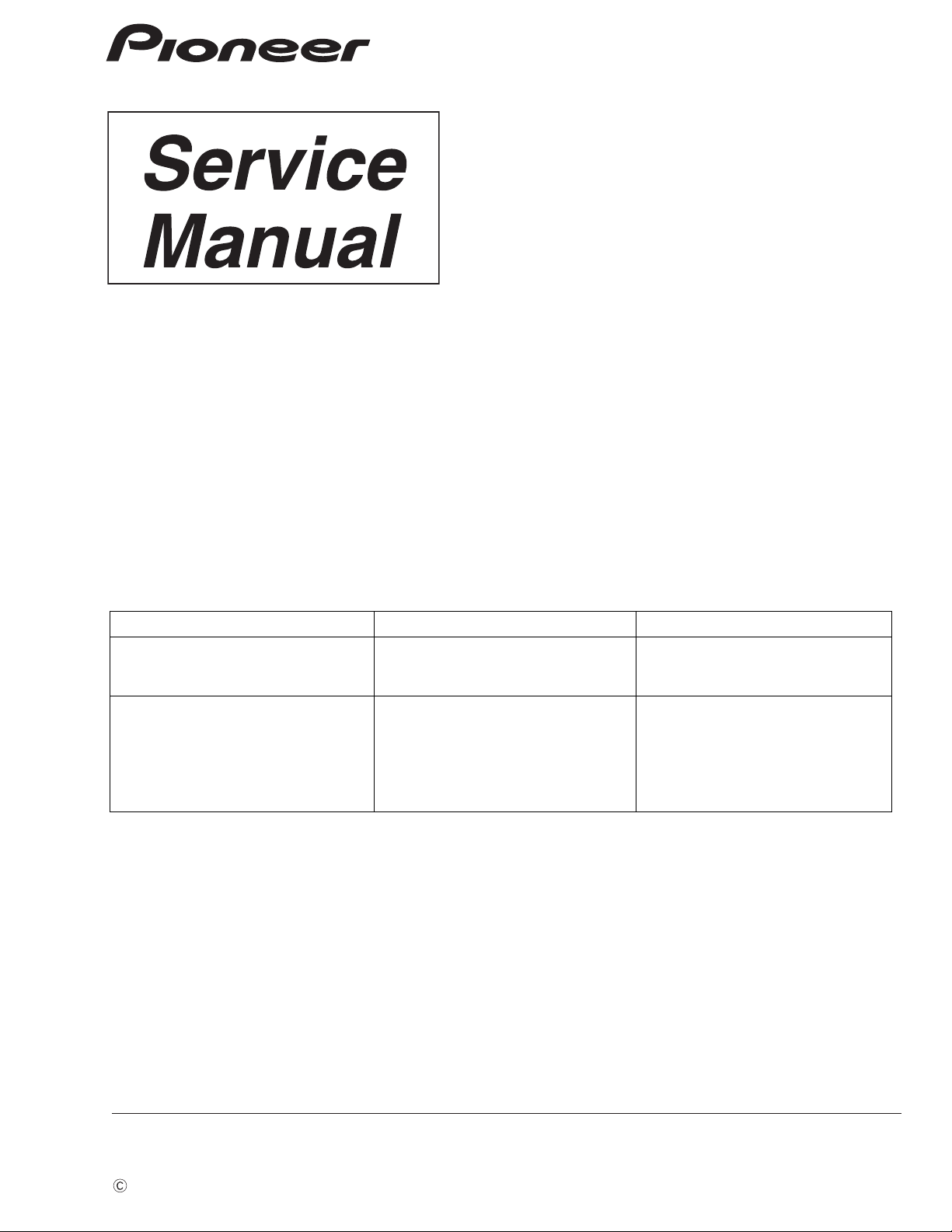
1.1.1 APC circuit
The optical output of laser diode (LD) has a large negative temperature character.
Consequently, if LD is driven at the rated current, a constant optical output cannot be obtained.
APC circuit is the circuit for controlling the current so that the output becomes constant for the monitor diode (MD).
MN2DS0018MAUB has two types of APC circuit for DVD and CD built-in.
In case of DVD (CD), the LD current can be obtained by dividing the voltage measurement value between
DVDLD1 (CDLD1) and 5 V by 8.8 ohm (2.2 ohm x 4 = 8.8 ohm). In case of DVD (CD), the LD current
becomes approximately 45 mA (40 mA). The voltage difference between DVDLD1 (CDLD1) and 5 V will be
396 mV (352 mV).
PU unit
2
CX-3268
5 678
56
7
8
C
D
F
A
B
E
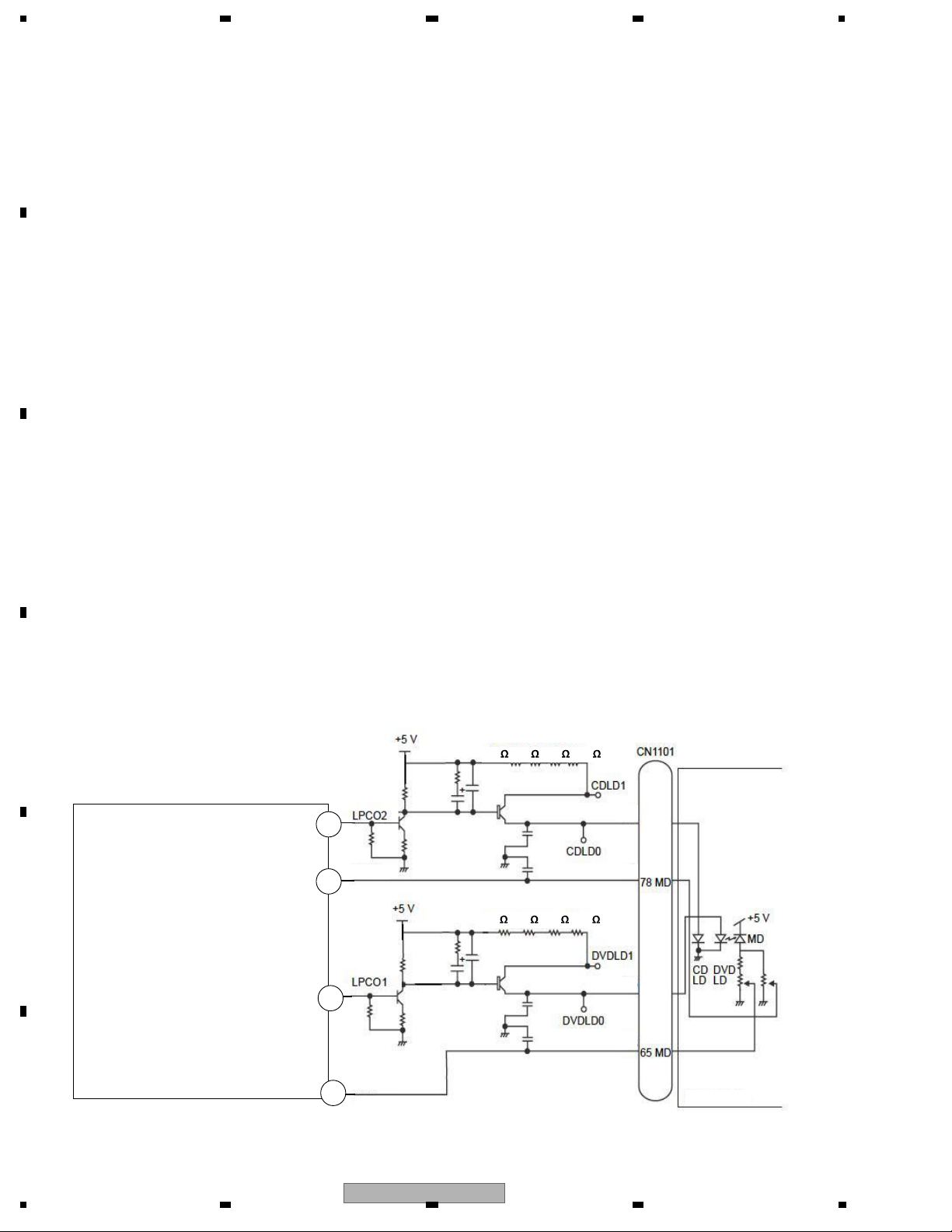
1.1.2 FE generation circuit
Focus error (FE) generation circuit
The signals FE1 and FE2 from PU are AD-converted in IC1501 and imported. Then, the differential is taken by
taking the offset cancel into account and it becomes FE.
FE = (FE1) - (FE2)
CN1101
FE2
FE1
FE1
FE2
116
12
11
115
After 10bit ADC
Offset cancel
Input AMP BufferLPF
VIN8
Gain switching
-6dB, 0dB, 9 5dB
VIN7
1+Pfbal0,1/0x0100
1-Pfbal0,1/0x0100
LPF
50k Hz
LPF
50k Hz
FE signal generation circuit
Fbal coarse adjustment value
DV5U Chip
G=0dB
+
-
Selector
DV5U Chip
AMP
Buffer AMP ADC drive AMP
Gain switching
FE
3dB, 9dB
Gain switching
6/7.5/9/10.5/
12/13.5/15/
16.5/18/19.5d
ADCSelector
ADC
CX-3268
3
1234
1234
C
D
F
A
B
E
After 10bit ADC
CN1101
F+H_G+H
E+G_E+F
21
22
112
111
E+G_E+F
F+H_G+H
Gain switching
-6dB, 0dB,
LPF
50k Hz
LPFInput AMP
G=0dB
Buffer
LPF
50k Hz
Buffer AMP
Gain switching
3dB, 9dB
Gain switching
6/7.5/9/10.5/
12/13.5/15/
16.5/18/19.5d
ADCSelector
Selector
ADC
AMP
DV5U Chip
TE signal generation circuit
+
-
1+Ptbal0,1/0x0100
1-Ptbal0,1/0x0100
Offset cancel
Tbal adjustment value
TE
AMP
DV5U Chip
0.1uF
TE signal generation circuit
A
B
C
D
7
8
9
10
0.1uF
0.1uF
0.1uF
CN1101
LPF
Gain switching
G=0,3,6,9,12,15dB
HPF
LPF
11.3M
/5.7M Hz
LPF
11.3M
/5.7M Hz
LPF
11.3M
/5.7M Hz
LPF
11.3M
/5.7M Hz
HPF
1MHz/2.5MHz/through
HPF
1MHz/2.5MHz/through
HPF
1MHz/2.5MHz/through
HPF
1MHz/2.5MHz/through
100
97
VIN3RF
VIN1RF
VIN4RF
VIN2RF
98
99
Gain switching
-6dB, 0dB, 3.5dB
Input AMP
CMP
DAC
DAC
CMP
CMP
CMP
DAC
DAC
DAC control
filter
DAC control
filter
DAC control
filter
DAC control
filter
Phase comparator
Phase
comparator
LPF (integrator)
AMP
D
+
TE
+
F+H_G+H
E+G_E+F
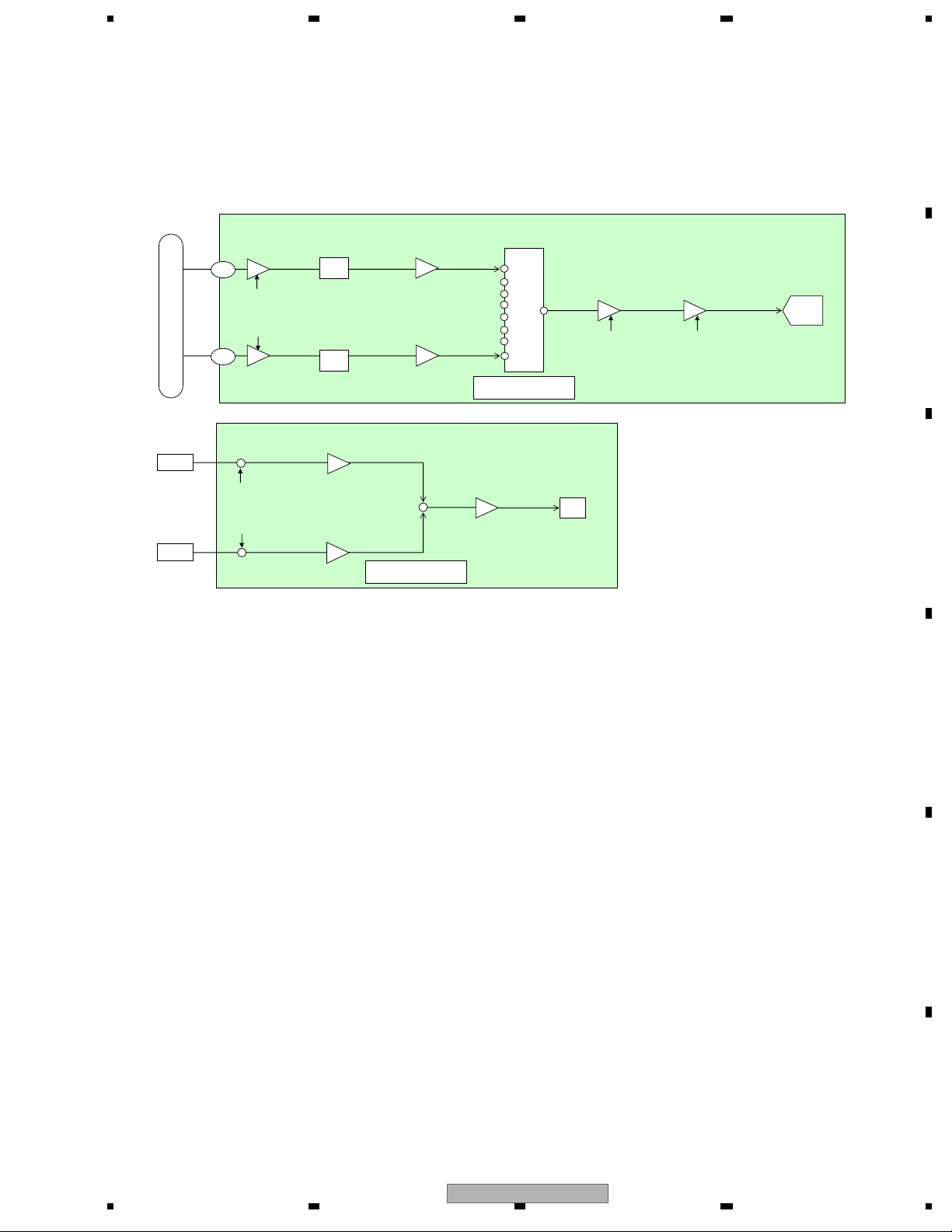
1.1.3 TE generation circuit
• DVD (phase difference TE)
• CD (3-beam TE)
Tracking error (TE) generation circuit
In case of DVD, the phase difference method is used for generating TE and TE is generated from the phase
difference between (A+C) and (B+D). In case of CD, the AD conversion is carried out using 3-beam method after
inserting it in the variable amplifier, and TE is generated based on the formula TE=(F+H_G+H)-(E+G_E+F).
4
CX-3268

5 678
56
7
8
C
D
F
A
B
E
1.2 Servo block (MN2DS0018MAUB : IC1501)
The servo block carries out the servo control for focus, tracking, traverse, the control of spindle motor and
seeking control.
1.2.1 Focus close
After the focus close command is issued, both of DVD and CD carry out the following processing.
1. Measurement and optimization of signal level
First, the lens of PU is driven in the direction vanishing from the disc, and next, it is driven in the direction coming
close to the disc.
Each signal level of FE, AS and RFENV is measured at the focusing point passing through this time, and for
FE and AS, the level is optimized (1, 2 in the figure).
2. Focus leading-in
Next, the lens is driven in the direction vanishing from the disc and the leading-in level of FE and AS is detected,
and then the focus loop filter is actuated and the focus is drawn (3 to 6).
3. Leading-in check
The leading-in is checked at AS and RFENV signal levels (6, 7).
With the focus search in the test mode, the signal level of FE, AS, RFENV and the focus drive voltage can be checked.
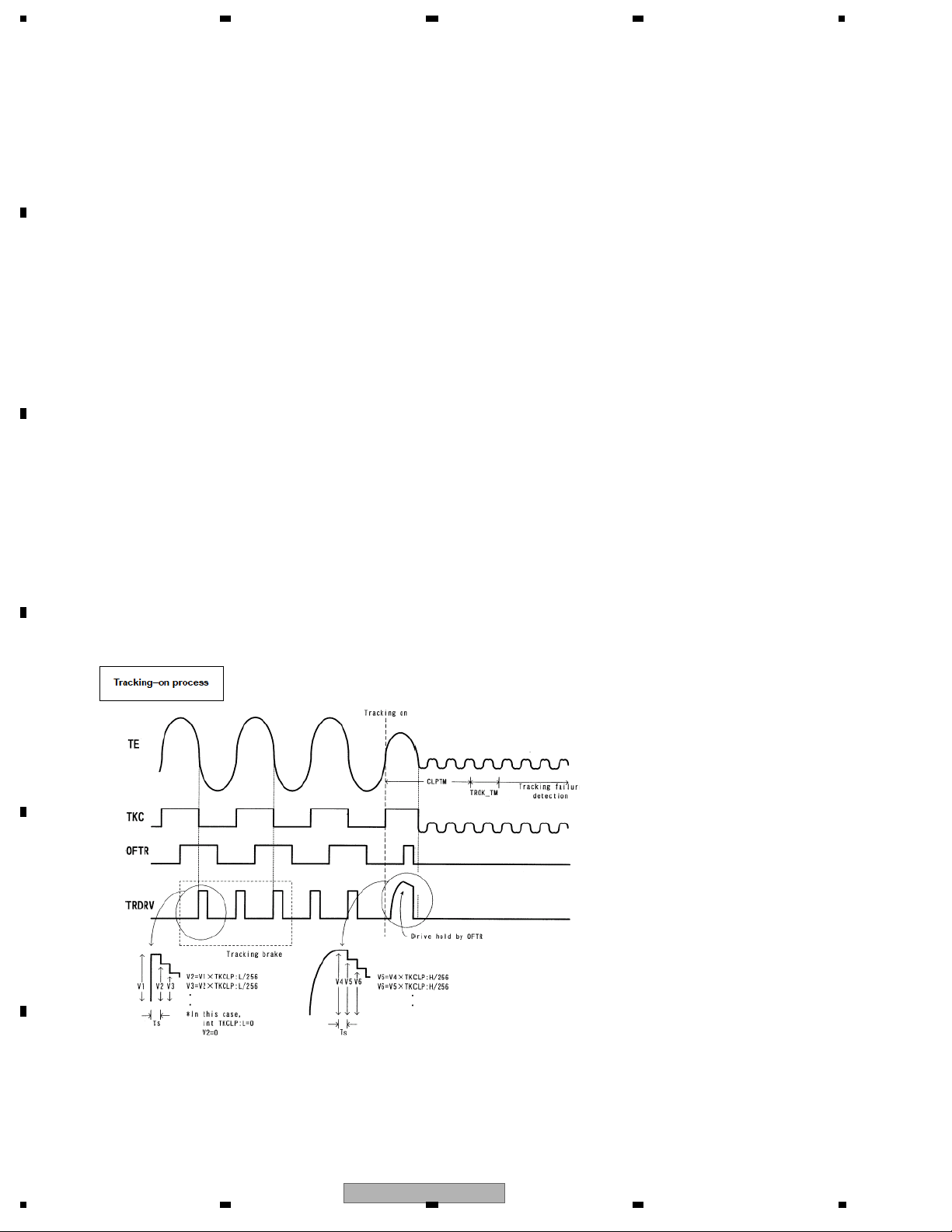
1.2.2 Tracking close
After the tracking close command is issued, both of DVD and CD carry out the following processing.
1. Tracking brake
A half cycle of the track cross is measured and if the cycle is within the specified range, the brake pulse is output.
The output direction of the brake pulse is decided by the phase relationship between OFTR and TKC (signal that
binarizes TE) signals. If the fact that the oscillation of lens to the disc is controlled is checked, the brake is
terminated and the operation shifts to leading-in. If the leading-in condition is not realized within 10msec after the
brake is output, the brake is terminated and the operation shifts to leading-in.
2. Tracking leading-in
The tracking drive hold processing by OFTR signal is carried out.
3. Leading-in check
Whether the number of track jumps within the specified period is within the specified number is checked. The
leading-in check becomes time-out in 8.4msec and the retry is carried out by the command from the microcomputer.
CX-3268
5
1234
1234
C
D
F
A
B
E
With this system, three methods; interval jump, multi-jump, and traverse seeking are selected according to the
target track number.
1. Interval jump
The detailed seeking can be carried out in order to execute the track jump for 1 track repeatedly and it is used
when coming close to the target track or for seeking operation for the neighboring track.
2. Multi-jump
The both edges of track cross signal TKC are counted and the track counting movement of specified number of
tracks is carried out.
The stepping motor is driven according to the number of jumps.
3. Traverse seeking
The stepping motor is controlled by F/W. The track counting by TKC is not carried out, but the stepping motor is
moved according to the number of jumps.
In case of DVD, the seeking is carried out using the middle point servo by microcomputer while keeping the
pickup to the middle point.
The jump switching setting common to DVD and CD is shown below
Number of target movements, type of jump
1.2.3 Track jump
DVD
1~10 Interval jump
11~500 Multi-jump
501~878 Combination of multi-jump and interval jump
879~1756 Traverse seeking (short)
1757~ Traverse seeking (long)
CD
1~10 Interval jump
11~400 Multi-jump
401~780 Combination of multi-jump and interval jump
781~928 Traverse seeking (short)
929~ Traverse seeking (long)
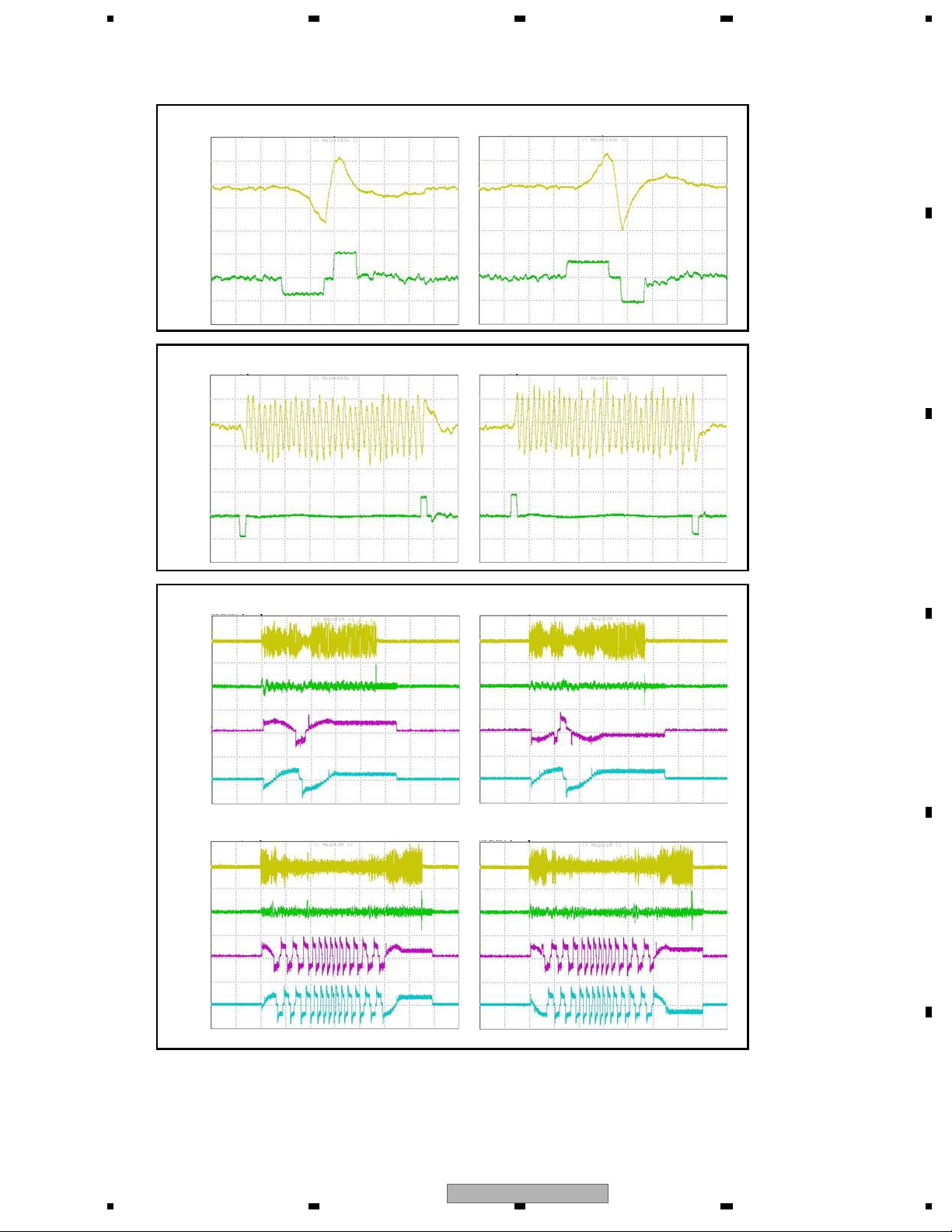
The waveform of the track jump is shown on the next page.
6
CX-3268
5 678
56
7
8
C
D
F
A
B
E
Interval jump (1 track) DVD
TE
TD
Multi-jump (32 track) DVD
TE
TD
Inner circumference jumOuter circumference jump
Inner circumference jumpOuter circumference jump
Traverse seeking (900 track) A± and B± are measured by setting LPF of oscilloscope to 10 kHz
Inner circumference jumpOuter circumference jump
TE
TD
A±
B±
Traverse seeking (1000 track)
Inner circumference jumpOuter circumference jump
TE
TD
A±
B±
CX-3268
7
1234
1234
C
D
F
A
B
E
B
A
D
C
FD
FE
A
B
C
D
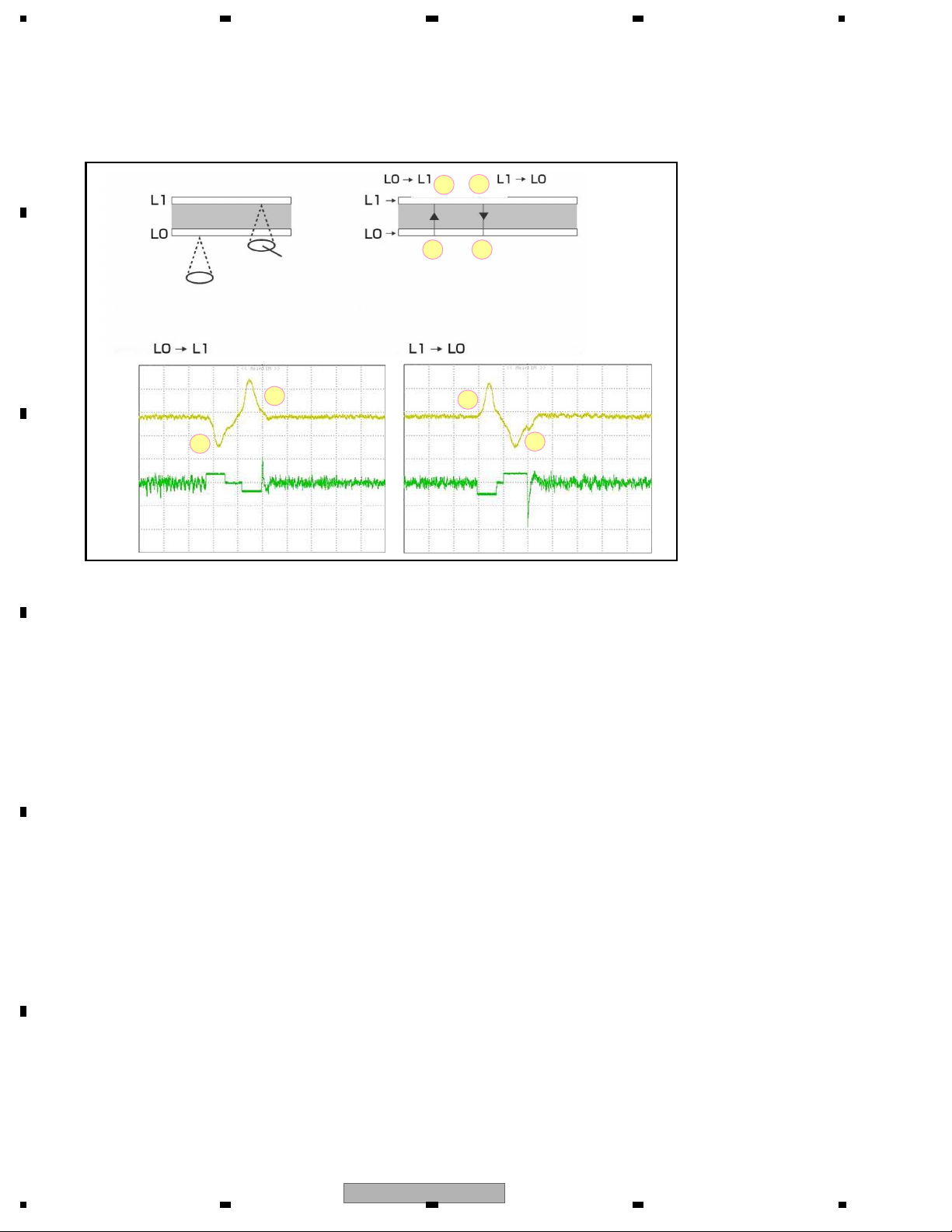
The focus jump is the function corresponding to two layers on one surface or two layers on both surfaces. The nearest
layer and the back layer seen from the object lens are called layer 0 (L0) and layer 1 (L1), respectively.
The flow of the focus jump is shown below.
1. The tracking is opened on the layer that is being played.
2. A command is issued and the jump to the target layer is executed.
3. On the layer after the jump, the tracking is closed and the play is restarted.
The processing when the jump command is issued is shown below.
1. The lens is accelerated to the target layer until the FE signal detects the focus jump acceleration termination level.
However, the acceleration timeout time passes before the acceleration termination level is detected, the acceleration
is forcibly terminated.
2. The drive voltage is not output and the lens is moved through inertia until the FE signal detects the deceleration
start level.
3. The lens is decelerated until the deceleration termination level is detected after the deceleration start level is detected.
However, if the deceleration timeout time passes before the deceleration termination level is detected, the deceleration
is forcibly terminated.
1.2.4 Focus jump
object lens
The waveform of the focus jump is shown below.
Focus jump waveform
8
CX-3268
5 678
56
7
8
C
D
F
A
B
E
1.3 Automatic adjustment function
With this system, the circuit adjustment is fully automated.
The content of each automatic adjustment is described below.
1.3.1 VIN1, VIN2, VIN3, VIN4, VIN7, VIN8, VIN9, and VIN10 offset cancels
Each signal of VIN1 to 4, VIN7 to 10 output from PU is converted to the digital signal by AD converter in the servo block.
The offset cancel is the function for cancelling the input offset of AD converter when the power is turned ON.
1.3.2 VCO gain adjustment (VARI adjustment)
This system is equipped with the function for absorbing VCO gain variation between LSI individuals by learning and
making an automatic adjustment so that VCO gain becomes constant. VCO is locked to the standard frequency for
learning.
The frequency controlling value (FCNT) is read and VARI register is adjusted so that this value becomes equivalent
to the target FCNT value.
1.3.3 FE normalization adjustment
The FE signal level measured when the focus is closed is adjusted to become 190LSB at the digital equalizer input stage
1.3.4 Focus balance (FBAL) adjustment
When the focus is closed, tracking is opened, and the tracking is closed, the focus position is adjusted so that the
RFENV is maximized.
1.3.5 DPD amplitude adjustment
The gain at the analog stage is adjusted so that the input signal of DPD comparator of DVD's TE generation circuit
becomes constant.
1.3.6 Tracking error amplitude learning
When the focus is closed and the tracking is opened, the lens is oscillated in the direction of track and the amplitude
level of TE is adjusted so that it becomes 190LSB at the digital equalizer input stage.
1.3.7 Tracking balance (TBAL) adjustment
When the focus is closed and the tracking is opened, the lens is oscillated in the direction of track and the balance point
where the DC offset becomes zero is found using Newton-Raphson method and an adjustment is made.
1.3.8 OFTR adjustment
For the binarization of OFTR signal, the binarization threshold level is adjusted.
1.3.9 AS normalization adjustment
When the tracking is closed, the AS signal level is measured by the number of specified samplings and A/D is carried out
by ADSC, and then the accurate adjustment is carried out so that it becomes 64LSB at the digital equalizer input stage.
CX-3268
9
1234
1234
C
D
F
A
B
E
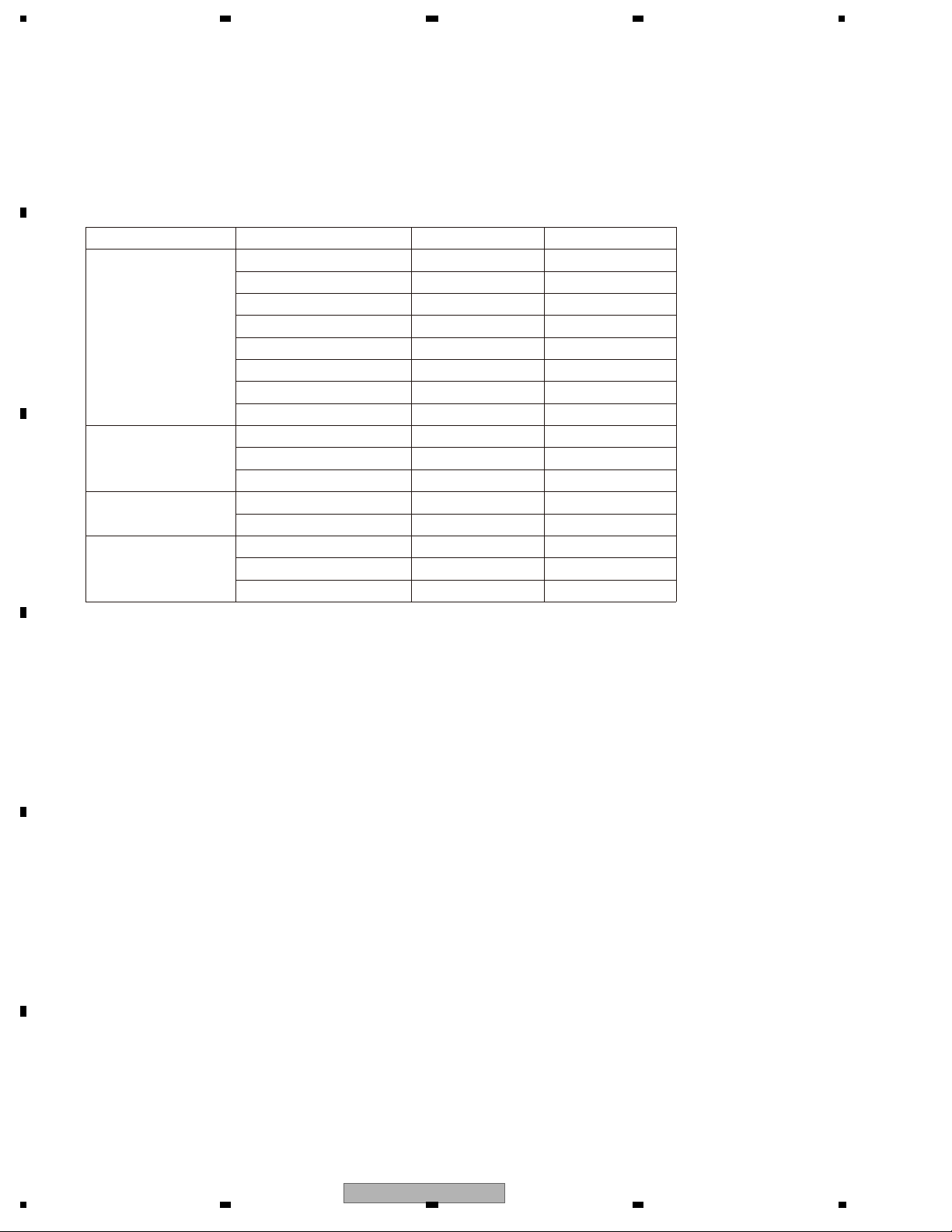
List of automatic adjustment coefficient
1.4 CIRC block (MN2DS0018MAUB : IC1501)
CIRC block has the digital signal processing function (EFM demodulation and error correction) of CD-DA and
CD-ROM and the digital servo processing function of the spindle motor built-in.
1.5 DRC block (MN2DS0018MAUB : IC1501)
The digital read channel (DRC) is equipped with A/D converter, digital equalizer (DEQ), adaptive equalizer, Viterbi
detector, digital PLL circuit, RISC interface, and peripheral circuit for reading the signals of optical disc.
Note) The coefficient value is displayed in hexadecimal notation. The standard in the production line (when PP is
generated) is described for every item.
Concerning the disc, TDV-582 and TCD-792 are used for DVD and CD, respectively.
1.3.10 Focus gain adjustment, tracking gain adjustment
When the tracking is closed, the disturbance is implanted in the servo loop and it is adjusted to the target gain
intersection point.
For all automatic adjustments, the adjustment result can be checked by displaying it in the test mode
Status coefficient DVD CD
Power ON
VIN1 offset 1600 ~ 2400 -
VIN2 offset 1600 ~ 2400 -
VIN3 offset 1600 ~ 2400 -
VIN4 offset 1600 ~ 2400 -
VIN7 offset 1700 ~ 2400 <-
VIN8 offset 1700 ~ 2400 <-
VIN9 offset - 1700 ~ 2400
VIN10 offset - 1700 ~ 2400
F close
FEPP (FEMAX-FEMIN) 1B1F ~ 717C 2A58 ~ B173
AS MAX No standard <-
FE normalization No standard <-
F close (after TBAL)
TEPP (TEMAX-TEMIN) 36B0 ~ 80E8 E42 ~ 6BCD
TE normalization No standard <-
T close
F gain 0100 ~ 0507 0100 ~ 0400
T gain 0100 ~ 0400 <-
AS normalization No standard <-
10
CX-3268
 Loading...
Loading...