

Philips TDA5145TS Datasheet
INTEGRATED CIRCUITS
DATA SH EET
TDA5145TS
Brushless DC motor drive circuit
Product specification
File under Integrated Circuits, IC11
1998 Oct 27
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5145TS
FEATURES
• Full-wave commutation (using push-pull drivers at the
output stages) without position sensors
• Built-in start-up circuitry
• Three push-pull outputs:
APPLICATIONS
• General purpose spindle driver e.g.:
– Hard disk drive
– Tape drive
– Optical disk drive.
– Output current 2.0 A (typ.)
– Built-in current limiter
– Soft-switching outputs for low Electromagnetic
Interference (EMI).
• Thermal protection
• Flyback diodes
• Motor brake facility
• Direction control input
GENERAL DESCRIPTION
The TDA5145TS is a bipolar integrated circuit used to
drive 3-phase brushless DC motors in full-wave mode.
The device is sensorless (saving of 3 hall-sensors) using
the back EMF sensing technique to sense the rotor
position. It includes bidirectional control, brake function
and has a special circuit built-in to reduce the EMI
(soft-switching output stages).
• Reset function.
QUICK REFERENCE DATA
Measured over full voltage and temperature range.
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
P
V
i(VMOT)
supply voltage note 1 4 − 18 V
input voltage to the output driver
note 2 1.7 − 16 V
stages
V
I
DO
LIM
drop-out output voltage Io= 100 mA − 0.90 1.05 V
current limiting V
=10V; Ro= 1.2 Ω 1.8 2.0 2.5 A
VMOT
Notes
1. An unstabilized supply can be used.
2. V
VMOT=VP
; all outputs Io= 0 mA.
ORDERING INFORMATION
TYPE
NUMBER
NAME DESCRIPTION VERSION
PACKAGE
TDA5145TS SSOP24 plastic shrink small outline package; 24 leads;
body width 5.3 mm
SOT340-1
1998 Oct 27 2
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5145TS
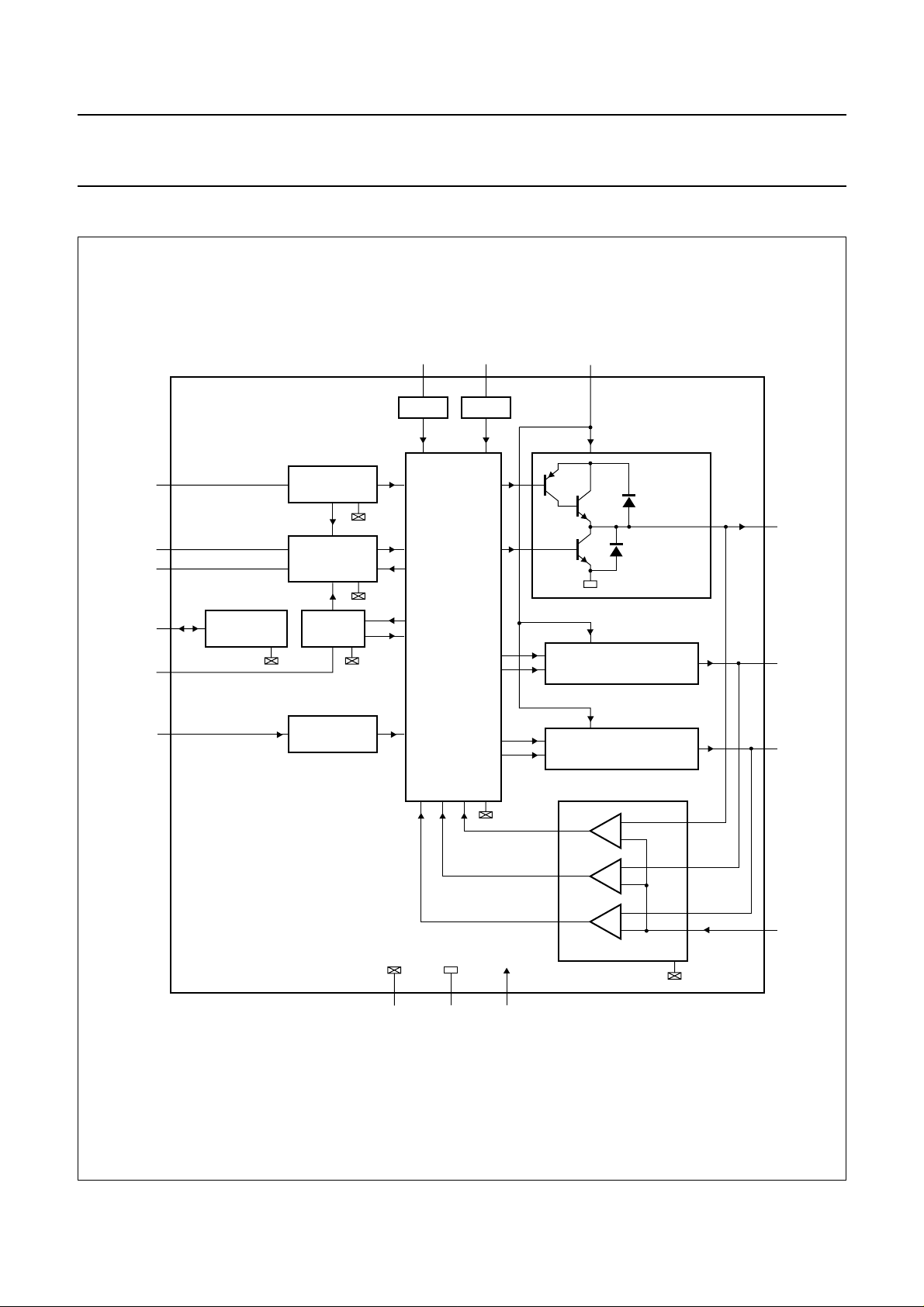
BLOCK DIAGRAM
handbook, full pagewidth
CAP-ST
CAP-DC
CAP-CD
TEST
CAP-TI
DIR
14
13
12
3
15
9
THERMAL
PROTECTION
START-UP
OSCILLATOR
ADAPTIVE
COMMUTATION
DELAY
TIMING
DIRECTION
CONTROL
BRAKE
BRAKE
COMMUTATION
RESET
818
RESET
LOGIC
VMOT
6, 7
PUSH/PULL
FLYBACK
D
H
D
OUTPUT DRIVER
OUTPUT DRIVER
L
STAGE 2
STAGE 3
OUTPUT
DRIVER
STAGE 1
1, 2
4, 5
20,
21
MOT1
MOT2
MOT3
TDA5145TS
10 11
GND2
GND1 V
Fig.1 Block diagram.
1998 Oct 27 3
23, 24
22
MOT0
EMF COMPARATORS
MGR391
P
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5145TS
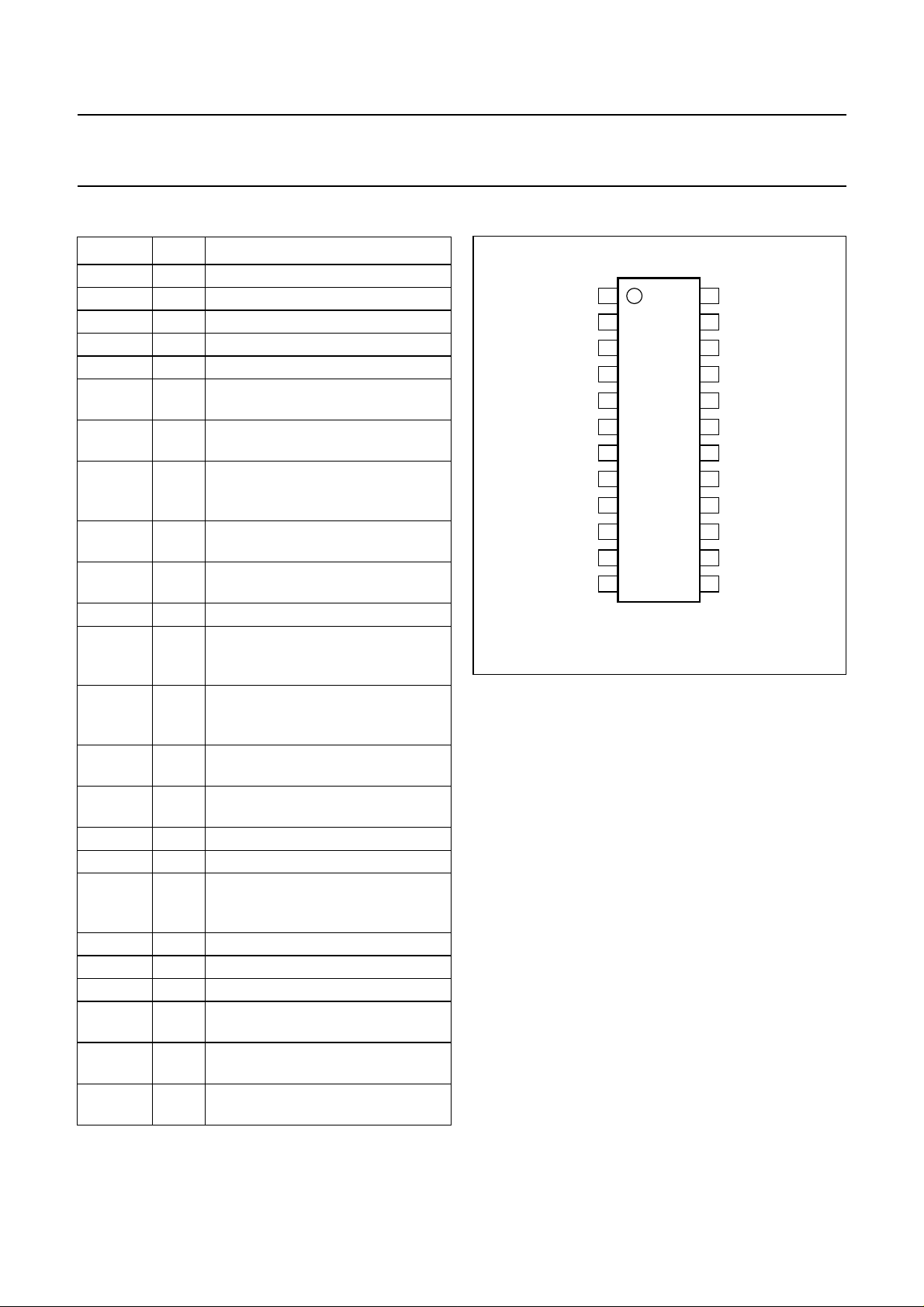
PINNING
SYMBOL PIN DESCRIPTION
MOT1 1 driver output 1
MOT1 2 driver output 1
TEST 3 test input/output
MOT2 4 driver output 2
MOT2 5 driver output 2
VMOT 6 input voltage for the output driver
stages
VMOT 7 input voltage for the output driver
stages
BRAKE 8 brake input; this pin may not be left
floating, a LOW-level voltage must
be applied to disable this function
DIR 9 direction control input; this pin may
not be left floating
GND2 10 ground supply return for control
circuits
V
P
11 supply voltage
CAP-CD 12 external capacitor connection for
adaptive communication delay
timing
CAP-DC 13 external capacitor connection for
adaptive communication delay
timing copy
CAP-ST 14 external capacitor connection for
start-up oscillator
CAP-TI 15 external capacitor connection for
timing
n.c. 16 not connected
n.c. 17 not connected
RESET 18 reset input; this pin may not be left
floating, a LOW-level voltage must
be applied to disable this function
n.c. 19 not connected
MOT3 20 driver output 3
MOT3 21 driver output 3
MOT0 22 input from the star point of the motor
coils
GND1 23 ground (0 V) motor supply return for
output stages
GND1 24 ground (0 V) motor supply return for
output stages
handbook, halfpage
MOT1
MOT1
TEST
MOT2
MOT2
VMOT
VMOT
BRAKE
DIR
GND2
V
CAP-CD
1
2
3
4
5
6
7
8
9
10
11
P
12
TDA5145TS
MGR392
24
23
22
21
20
19
18
17
16
15
14
13
GND1
GND1
MOT0
MOT3
MOT3
n.c.
RESET
n.c.
n.c.
CAP-TI
CAP-ST
CAP-DC
Fig.2 Pin configuration.
FUNCTIONAL DESCRIPTION
The TDA5145TS offers a sensorless 3-phase motor drive
function. It is unique in its combination of sensorless motor
drive and full-wave drive. The TDA5145TS offers
protected outputs capable of handling high currents and
can be used with star or delta connected motors. It can
easily be adapted for different motors and applications.
The TDA5145TS offers the following features:
• Sensorless commutation by using the motor EMF
• Built-in start-up circuit
• Optimum commutation, independent of motor type or
motor loading
• Built-in flyback diodes
• Three phase full-wave drive
• High output current (2.0 A)
• Outputs protected by current limiting and thermal
protection of each output transistor
• Low current consumption by adaptive base-drive
• Soft-switching pulse output for low radiation
• Direction of rotation controlled by one pin
• Brake function.
1998 Oct 27 4
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5145TS
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 134).
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
P
V
I(n)
V
I(VMOT)
V
O
V
I(n1)
T
stg
T
amb
P
tot
V
es
supply voltage − 18 V
input voltage; all pins except
VI<18V −0.3 VP+ 0.5 V
VMOT
VMOT input voltage −0.5 +17 V
output voltage MOT0, MOT1,
−1V
VMOT+VdFD
V
MOT2 and MOT3
input voltage CAP-ST, CAP-TI,
− 2.5 V
CAP-CD and CAP-DC
storage temperature −55 +150 °C
operating ambient temperature 0 +70 °C
total power dissipation see Fig. 3 −− W
electrostatic handling see Chapter “Handling” − 2000 V
HANDLING
Every pin withstands the ESD test according to
“MIL-STD-883C class 2”
positive and 3 pulses negative on each pin referenced to ground.
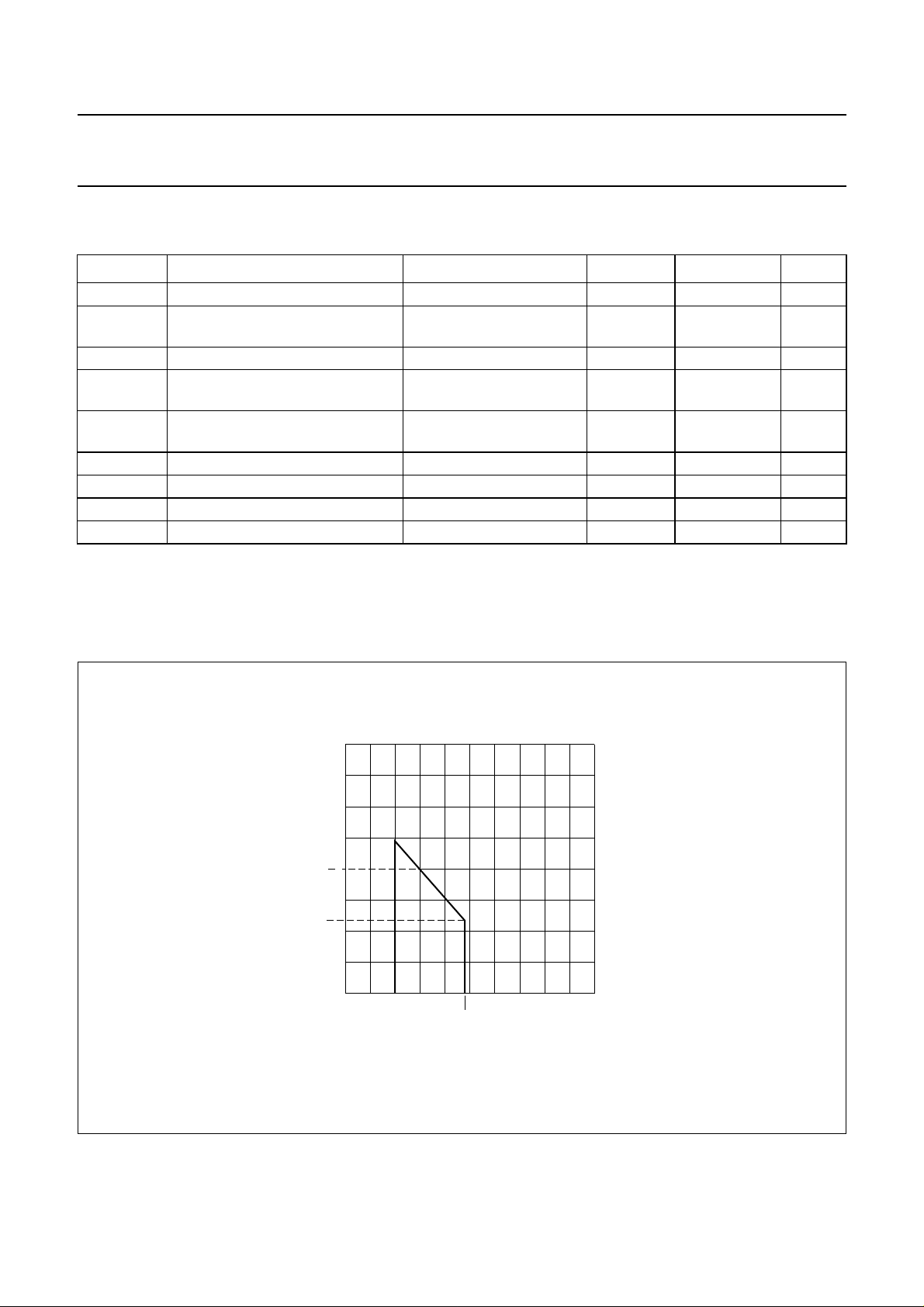
1.00
0.57
P
(W)
2
tot
1
0
−50
0 200
50 100 150
70
handbook, halfpage
. Method 3015 (HBM 1500 Ω; 100 pF) 3 pulses
MGL529
T
(°C)
amb
Fig.3 Power derating curve.
1998 Oct 27 5
Philips Semiconductors Product specification
Brushless DC motor drive circuit TDA5145TS
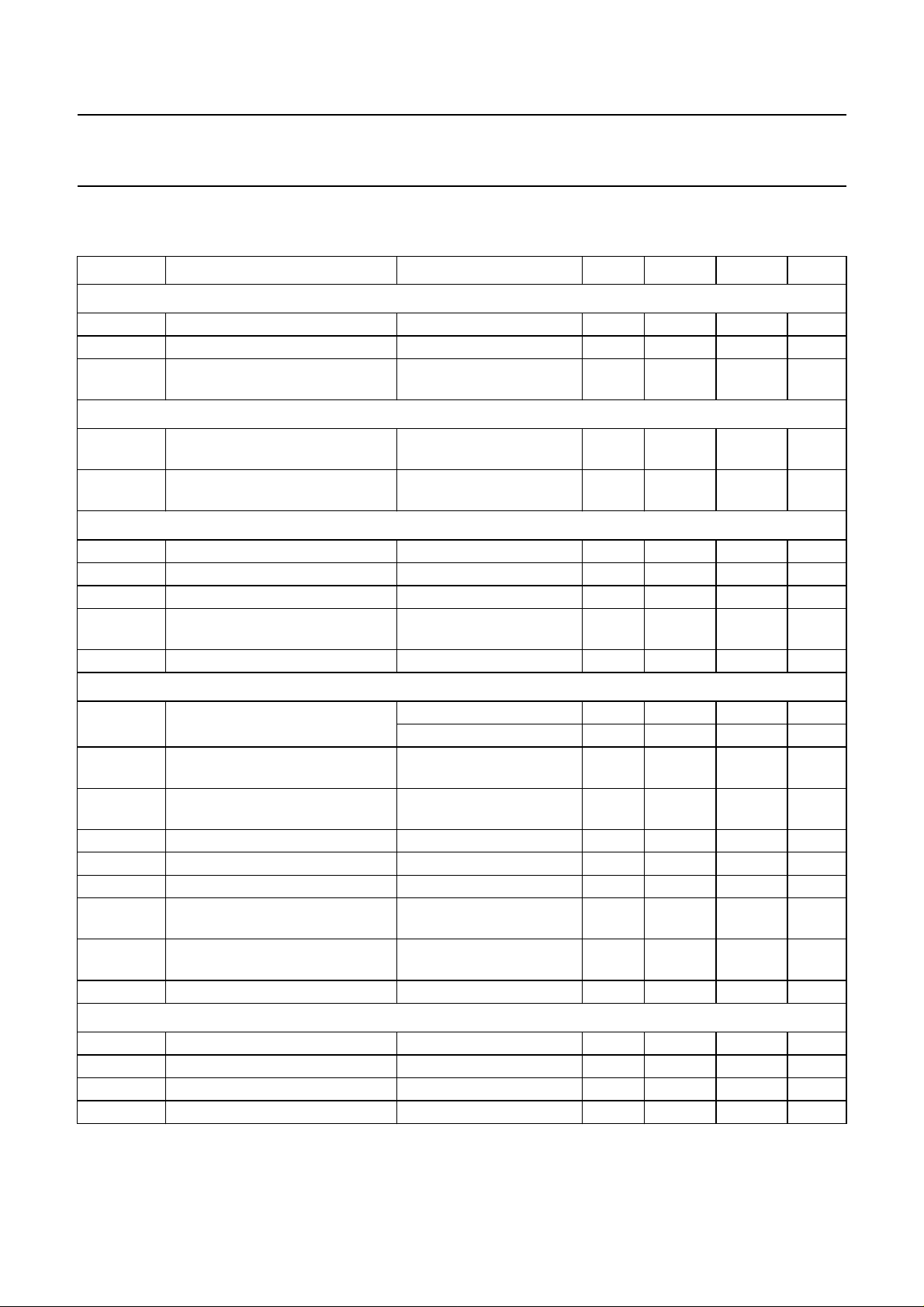
CHARACTERISTICS
V
= 14.5 V; T
P
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Supply
V
P
I
P
V
i(VMOT)
Thermal protection
T
SD
∆T reduction in temperature before
MOT0; centre tap
V
i
I
bias
V
CSW
∆V
CSW
V
hys
MOT1, MOT2 and MOT3; see Fig.4
V
DO
∆V
sat(lt)
∆V
sat(ut)
I
LIM
t
r
t
f
V
dF(DH)
V
dF(DL)
I
dM
DIR
V
IH
V
IL
I
IL
I
IH
=25°C; unless otherwise specified.
amb
supply voltage note 1 4 − 18 V
supply current note 2 − 6.8 7.8 mA
input voltage to the output driver
see Fig.1 1.7 − 16 V
stages
local temperature at temperature
130 140 150 °C
sensor causing shut-down
after shut-down − T
− 30 − K
SD
switch-on
input voltage −0.5 − V
input bias current 0.5 V < Vi<V
− 1.5 V −10 −−µA
VMOT
VMOT
V
comparator switching level note 3 ±20 ±25 ±30 mV
variation in comparator switching
−− 3mV
levels
comparator input hysteresis − 75 −µV
drop-out output voltage Io= 100 mA − 0.9 1.05 V
I
= 1000 mA − 1.6 1.85 V
o
variation in saturation voltage
Io= 100 mA −− 180 mV
between lower transistors
variation in saturation voltage
Io= −100 mA −− 180 mV
between upper transistors
current limiting V
rise time switching output V
fall time switching output V
diode forward voltage (diode DH)Io=−500 mA;
=10V; Ro= 1.2 Ω 1.8 2.0 2.5 A
VMOT
= 15 V; see Fig.5 5 10 15 µs
VMOT
= 15 V; see Fig.5 10 15 20 µs
VMOT
−− 1.5 V
notes 4 and 5; see Fig.1
diode forward voltage (diode DL)Io= 500 mA;
−1.5 −−V
notes 4 and 5; see Fig.1
peak diode current note 5 −− 2.5 A
HIGH-level input voltage 4V<VP< 18 V 2.0 −−V
LOW-level input voltage 4V<VP<18V −− 0.8 V
LOW-level input current −−20 −µA
HIGH-level input current − 20 −µA
1998 Oct 27 6
 Loading...
Loading...