

Philips Semiconductors Product specification
Digital servo processor (DSIC2) TDA1301T
FEATURES
The DSIC2 realizes the following servo functions:
• Diode signal preprocessing
• Focus servo loop
• Radial servo loop
• Sledge motor servo loop
• Three-line serial interface via the microcontroller
The other features include:
• Full digital signal processing
• Low power consumption, down to 30 mW
• Low voltage supply 3 to 5.5 V
• Integrated analog-to-digital converters and digital servo
loop filters
• Double speed possible
• Easy application
– Single supply voltage
– Small number of external components; only
6 decoupling capacitors
– Flexible system oscillator circuitry
– Usable for single/double Foucault and astigmatic
focus
– Full automatic radial error signal initialization offset
control and level initialization for track position
indicator
– No external adjustments required; no component
ageing
– Wide range of adjustable servo characteristics
– Simple 3-line serial command interface
– 28-pin SO package
– Great flexibility towards different CD mechanisms
– Full and transparent application information
• High robustness/shock insensitivity
– Sophisticated track-loss (TL) detection mechanism
– Fast focus restart procedure
– Extended radial error signal
– Adjustable radial shock detector
– Defect drop-out detector
• Fully automatic jump procedure for radial servo
• Automatic focus start-up procedure and built-in FOK
(Focus OK)
• Fast radial jump or access procedure
• Self-operational servo-control without continuous
communication via the microcontroller
• Direct communication to photodiode optics; no external
preprocessing.
GENERAL DESCRIPTION
The TDA1301T is a fully digital servo processor which has
been designed to provide all servo functions, except the
spindle motor control, in two-stage three-spot compact
disc systems. The device offers a high degree of
integration, combined with the low additional cost of
external components. The servo characteristics have a
wide range of adjustment via a three-line serial interface.
This offers an enormous flexibility with respect to
applications for different CD mechanisms. The circuit is
optimized for low-power low-voltage applications.
QUICK REFERENCE DATA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
DDD
V
DDA
I
DDD
I
DDA
I
DDD(q)
I
i(cd)
I
i(sd)
P
tot
T
amb
digital supply voltage 3.0 − 5.5 V
analog supply voltage 3.0 − 5.5 V
digital supply current − 5 − mA
analog supply current − 5 − mA
digital quiescent supply current − − 10 µA
central diode input currents (D1 to D4) note 1 − − 15.8 µA
satellite diode input currents (R1 and R2) note 1 − − 7.9 µA
total power dissipation − 50 − mW
operating ambient temperature −40 − +85 °C
Note
1. f
= 4.2336 MHz; VRL = 0 V; VRH = 2.5 V (externally applied).
sys
March 1994 2
Philips Semiconductors Product specification
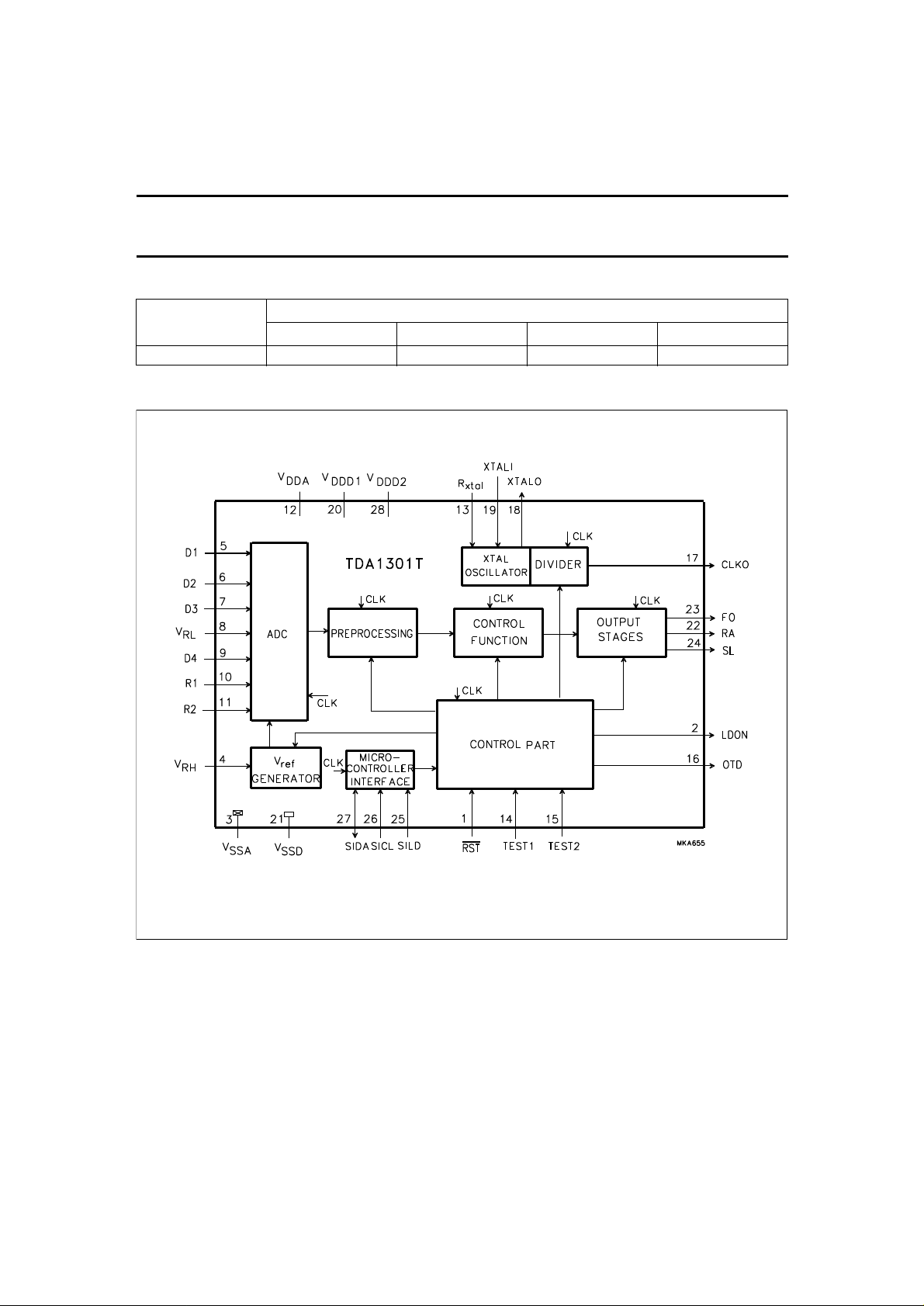
Fig.1 Block diagram.
Digital servo processor (DSIC2) TDA1301T
ORDERING INFORMATION
EXTENDED TYPE
NUMBER
TDA1301T 28 SO28L plastic SOT136A
BLOCK DIAGRAM
PINS PIN POSITION MATERIAL CODE
PACKAGE
March 1994 3

Philips Semiconductors Product specification
Fig.2 Pin configuration.
Digital servo processor (DSIC2) TDA1301T
PINNING
SYMBOL PIN DESCRIPTION
RST 1 reset input (active LOW)
LDON 2 laser drive on output
V
SSA
V
RH
D1 5 unipolar current input
D2 6 unipolar current input
D3 7 unipolar current input
V
RL
D4 9 unipolar current input
R1 10 unipolar current input
R2 11 unipolar current input
V
DDA
XTAL
TEST1 14 test input 1
TEST2 15 test input 2
OTD 16 off-track detector output
CLKO 17 clock output
XTALO 18 oscillator output
XTALI 19 oscillator input
V
DDD1
V
SSD
RA 22 radial actuator output
FO 23 focus actuator output
SL 24 sledge output
SILD 25 serial interface load input
SICL 26 serial interface clock input
SIDA 27 serial interface data input/output
V
DDD2
3 analog ground
4 reference input for reference voltage
generator
(central diode signal input)
(central diode signal input)
(central diode signal input)
8 reference input for ADC
(central diode signal input)
(satellite diode signal input)
(satellite diode signal input)
12 analog supply voltage
13 oscillator reference input
ref
20 digital power supply 1
21 digital ground
28 digital power supply 2
March 1994 4
Philips Semiconductors Product specification
–
]
]
4–
D3 D4+
----------------------
–=
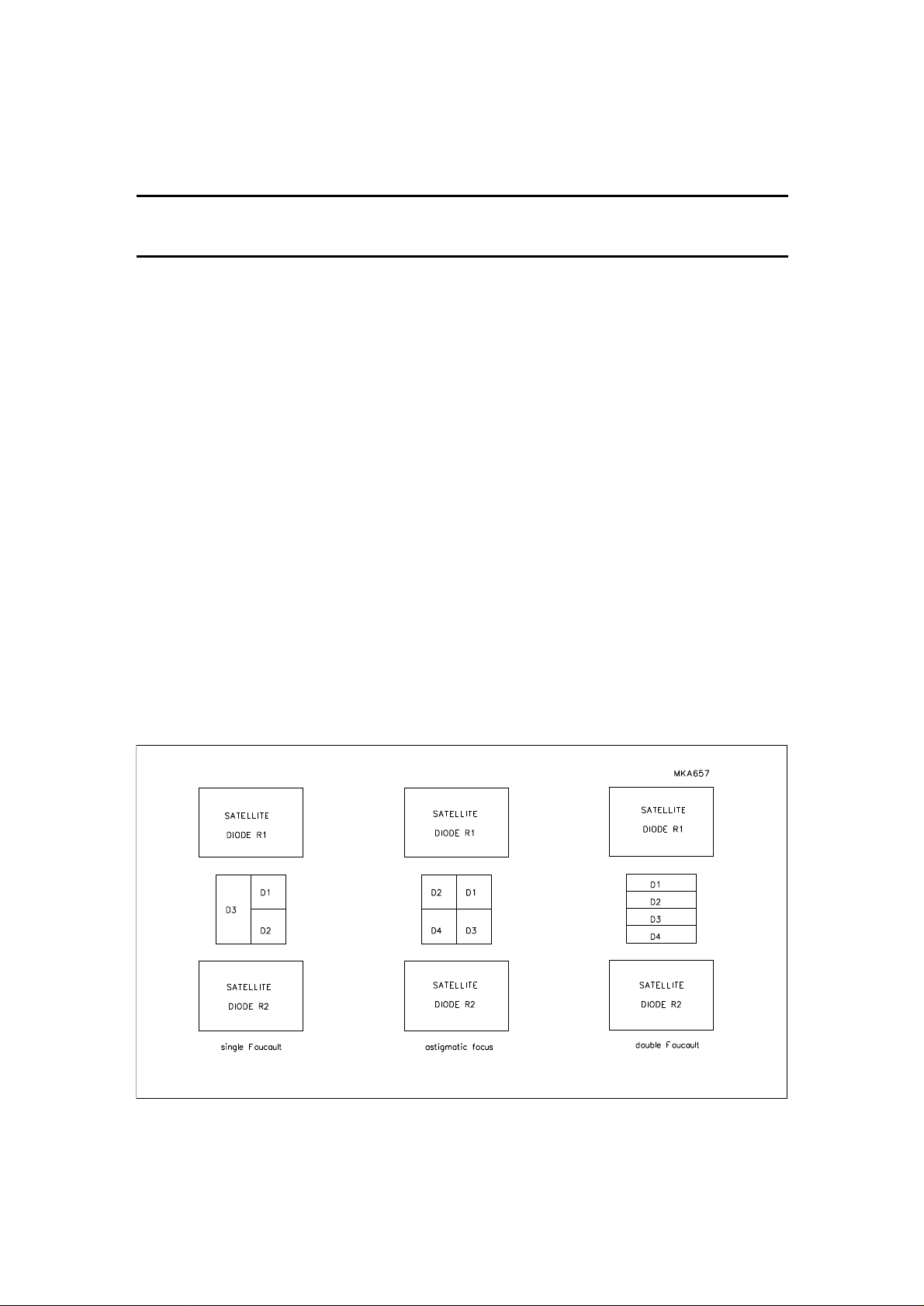
Fig.3 Diode configuration.
Digital servo processor (DSIC2) TDA1301T
FUNCTIONAL DESCRIPTION
Three spots front-end
The photo detector in a two-stage three-spots compact
disc system normally contains six discrete elements. Four
of these elements (in the event of single Foucault: three
elements) carry the central aperture (CA) signal while the
other two elements (satellite signals) carry the radial
tracking information. Besides the HF signal, which is finally
applied to both of the audio channels, the central aperture
also contains information for the focus servo loop. To
enable the HF signal to be processed, the frequency
contents of the central aperture signal must be divided into
an HF data part and an LF servo part. The HF signal is
processed outside the DSIC2 by the TDA1302 or a
discrete amplifier-equalizer. The necessary crossover
point, to extract the LF servo part, is compensated for in
the amplifier.
Diode signal processing
The analog signals from the photo detectors are converted
into a digital representation using analog-to-digital
converters. The ADCs are designed to convert unipolar
currents into a digital code. The dynamic range of the input
currents is adjustable within a given range and is
dependent on the ADC input reference voltages V
and
RL
VRH. The maximum current for the central diodes signals
is given in equation (1).
I
i max( )fsysVRHVRL
( ) 1.5 106–×××= µA[
(1)
The maximum current for the satellite signals is given in
equation (2).
I
i max( )fsysVRHVRL
V
is generated internally. There are four different levels
RH
–( ) 0.75 106–×××= µA[
(2)
(1.0, 1.5, 2.0 and 2.5 V) which can be selected under
software control. In the application VRL is connected to
V
. It is also possible to drive VRH with an external
SSA
voltage source but in this situation the internal voltage
source has to be switched off (software controlled).
Signal conditioning
The digital codes retrieved from the ADCs are applied to
logic circuitry to obtain the various control signals. The
signals from the central aperture detectors are processed
so that the normalized focus error signal (FE) given in
equation (3) is realized:
FE
n
D1 D2–
---------------------D1 D2+
D3 D
(3)
Where the detector set-up is assumed to be as illustrated
in Fig.3.
March 1994 5

Philips Semiconductors Product specification
( )
R1 R2+( ) Sum_gain×–
[]sin=
Digital servo processor (DSIC2) TDA1301T
In the event of single Foucault focusing method, the DSIC2
signal conditioning can be switched under software control
so that the signal processing conforms to that given in
equation (4).
FEn2
×=
---------------------D1 D2+
(4)
D1 D2–
The FEn thus obtained is further processed by a
proportional integral and differential filter section (PID).
A focus OK flag (FOK) is generated by means of the
central aperture signal and an adjustable reference level.
This signal is used to provide extra protection for the
Track-Loss (TL) generation, the focus start-up procedure
and the drop-out detection. The radial or tracking error
signal is generated by the satellite detector signals R1 and
R2. The radial error signal (RE) can be formulated as per
equation (5).
RE
=
s
R1 R2–( ) RE_gain×
R1 R2+( ) RE_offset×
+
(5)
Where the index ‘s’ indicates the automatic scaling
operation which is performed on the radial error signal.
This scaling is necessary to avoid non-optimum dynamic
range usage in the digital representation and, also, to
reduce radial bandwidth spread. The radial error signal will
also be released from offset during disc start-up. The four
signals from the central aperture detectors, together with
the satellite detector signals, generate a track position
signal (TPI) which can be formulated as per equation (6).
TPI D1 D2 D3 D4+ + +
(6)
Where the weighting factor Sum_gain is generated
internally in the DSIC2 during initialization.
Focus control
The following focus servo functions are incorporated in the
DSIC2 digital controller.
OCUS START-UP
F
Five initially loaded coefficients influence the start-up
behaviour of the focus controller. The automatically
generated triangular voltage can be influenced by
3 parameters, for the height (ramp_heigth) and DC-offset
(ramp_offset) of the triangle and its steepness (ramp_inc).
To protect against false focus point detections two
parameters are available. One is an absolute level on the
CA signal (CA_start) and the other is an absolute level on
the FEn signal (FE_start). When the CA_start level is
reached, the FOK signal becomes true. If the FOK signal
is true when the level on the FEn signal is reached the
focus PID is enabled and switches on when the next zero
crossing is detected in the FEn signal.
FOCUS POSITION CONTROL LOOP
The focus control loop contains a digital PID controller
which has 5 parameters available to the user. These
coefficients influence the integrating (foc_int), proportional
(foc_prop) and differentiating (foc_pole_lead) action of this
PID and the digital low-pass filter (foc_pole_noise) which
follows the PID. The fifth coefficient (foc_gain) influences
the loop gain.
D
ROP-OUT DETECTION
This detector can be influenced by one parameter
(CA_drop). The FOK signal will become false and the
integrator of the PID will hold if the CA signal drops below
the programmed absolute CA level. When the FOK signal
becomes false it is assumed, initially, to be caused by a
black dot.
FOCUS LOSS DETECTION AND FAST RESTART
Whenever FOK is false for longer than approximately
3 ms, it is assumed that the focus point is lost. A fast
restart procedure is initiated which is capable of restarting
the focus loop within 200 to 300 ms depending on the
programmed coefficients set by the microcontroller.
FOCUS LOOP GAIN SWITCHING
The gain of the focus control loop (foc_gain) can be
multiplied by a factor of 2 or divided by a factor of 2 during
normal operation. The integrator value of the PID is
corrected accordingly. The differentiating (foc_pole_lead)
action of the PID can be switched at the same time as the
gain switching is performed.
Radial control
The following radial servo functions are incorporated in
the DSIC2 digital controller.
LEVEL INITIALIZATION
During start-up an automatic adjustment procedure is
activated to set the values of the radial error gain
(RE_gain), offset (RE_offset) and satellite sum signal gain
(Sum_gain) for TPI level generation. The initialization
procedure runs in a radial open-loop situation and is
≤300 ms. This start-up time period may coincide with the
last part of the turn table motor start-up time period.
March 1994 6
 Loading...
Loading...