

查询PDIUSBD供应商
INTEGRATED CIRCUITS
PDIUSBD11
USB device with serial interface
Product specification
Product specification 1999 Jul 22
Supersedes data of 1999 Nov 19
Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
FEA TURES
•Complies with the Universal Serial Bus specification Rev. 1.1
•Complies with the ACPI, OnNOW, and USB power management
requirements
•Compliant with USB Human Interface Devices and Monitor
Control Class
•Compliant with System Management Bus Specification Rev. 1.0
•Integrated SIE (Serial Interface Engine), FIFO memory and
transceivers
•Automatic USB protocol handling
•High speed I
2
C Interface (up to 1 Mbit/s)
•Compatible with the PDIUSBH11 software
•Software controllable connection to USB bus (SoftConnect)
•Low frequency 12 MHz crystal oscillator eases EMI design issues
•Programmable output clock frequency
•Bus powered capability with very low suspend current
•Controllable LazyClock output during suspend
•Single 3.3 V supply with 5 V tolerant I/O
•Available in 16-pin DIP and SO packages
•Full-scan design with high fault coverage (>99%) insures high
quality
•Higher than 8 kV in-circuit ESD protection lowers cost of extra
components
DESCRIPTION
The Universal Serial Bus hub PDIUSBD11 is a cost and
feature-optimized USB interface device. It is used in
microcontroller-based systems and communicates with the system
microcontroller over the high speed I
approach to implementing USB functions allows the designer to
choose the optimum system microcontroller from the available wide
variety. This flexibility cuts down the development time, risks, and
costs by allowing the use of the existing architecture and the
firmware investments. This results in the fastest way to develop the
most cost-effective USB peripheral solutions. The PDIUSBD1 1 is
ideally suited for computer monitors, docking stations, keyboards,
and many other applications that use the I
architecture.
The PDIUSBD11 conforms to the USB specification Rev. 1.1, I
serial interface and the SMBus specifications. It is fully compliant
with the Human Interface Device Class and Monitor Control Class
specifications. Its low suspend power consumption along with the
programmable LazyClock output allows for easy implementation of
equipment that is compliant to the ACPI, OnNOW, and USB power
management requirements. The low operating power allows the
implementation of bus-powered function.
The PDIUSBD11 is fully backward compatible to the
PDIUSBH11/PDIUSBH11A software. In addition, it also incorporates
the feature enhancements like SoftConnect, LazyClock,
programmable clock output, lower frequency crystal oscillator,
multiple function endpoints and integration of termination resistors.
All of these feature enhancements contribute to significant cost
savings in the system implementation and at the same time ease the
implementation of advanced USB functionality into the peripherals.
2
C serial bus. This modular
2
C or the SMBus-based
2
C
ORDERING INFORMATION
PACKAGES TEMPERATURE RANGE OUTSIDE NORTH AMERICA NORTH AMERICA PKG. DWG. #
16-pin plastic SO –40°C to +85°C PDIUSBD11 D PDIUSBD11 D SOT162-1
16-pin plastic DIP –40°C to +85°C PDIUSBD11 N PDIUSBD11 N SOT38-4
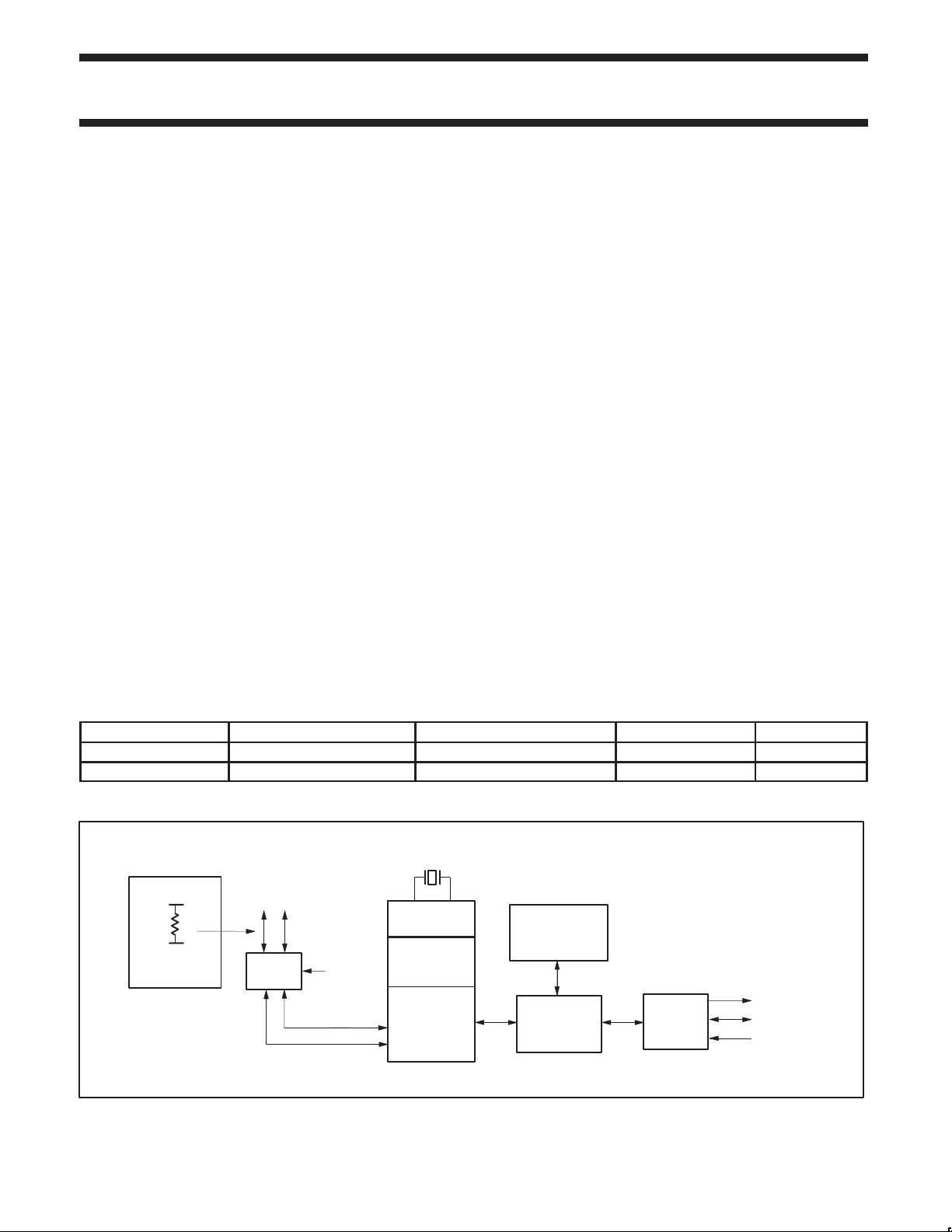
BLOCK DIAGRAM
12 MHz
UPSTREAM
3.3V
1.5kW
D+
SoftConnect
NOTE:
1. This is a conceptual block diagram and does not include each individual signal.
PORT
D+
ANALOG
TX/R
D–
FULL SPEED
X
PLL
BIT CLOCK
RECOVERY
PHILIPS
SIE
INTEGRATED
RAM
MEMORY
MANAGEMENT
UNIT
2
C
I
SLAVE
INTERFACE
INTERRUPT
SDA
SCL
SV00823
1999 Jul 22 853-2050 22023
2
Philips Semiconductors Product specification
03Control
1
Generic
2
Generic
3
Generic
PDIUSBD1 1USB device with serial interface
Analog Transceiver
The transceiver interfaces directly to the USB cables through some
termination resistors. They are capable of transmitting and receiving
serial data at “full speed” (12 Mbit/s) only.
PLL
A 12 MHz to 48 MHz clock multiplier PLL (Phase-Locked Loop) is
integrated on-chip. This allows for the use of low-cost 12 MHz
crystal. EMI is also minimized due to lower frequency crystal. No
external components are needed for the operation of the PLL.
Bit Clock Recovery
The bit clock recovery circuit recovers the clock from the incoming
USB data stream using 4X over-sampling principle. It is able to track
jitter and frequency drift specified by the USB specification.
Philips Serial Interface Engine (PSIE)
The Philips SIE implements the full USB protocol layer. It is
completely hardwired for speed and needs no firmware intervention.
The functions of this block include: synchronization pattern
recognition, parallel/serial conversion, bit stuffing/de-stuffing, CRC
checking/generation, PID verification/generation, address
recognition, handshake evaluation/generation.
Memory Management Unit (MMU) and Integrated
RAM
The MMU and the integrated RAM is used to handle the large
difference in data rate between USB, running in bursts of 12 Mbit/s
and the I
This allows the microcontroller to read and write USB packets at its
own speed through I
2
C interface to the microcontroller, running at up to 1 Mbit/s.
2
C.
I2C Slave Interface
This block implements the necessary I2C interface protocol. A slave
2
I
C allows for simple micro-coding. An interrupt is used to alert the
microcontroller whenever the PDIUSBD1 1 needs attention. As a
2
slave I
C device, the PDIUSBD11 I2C clock: SCL is an input and is
controlled by the microcontroller. The I
1 Mbit/s.
2
C interface can run up to
SoftConnect
The connection to the USB is accomplished by bringing D+ (for
high-speed USB device) high through a 1.5 kW pull-up resistor. In
the PDIUSBD11, the 1.5 kW pull-up resistor is integrated on-chip
and is not connected to V
internal resistor to Vcc is established through a command sent by
the external/system microcontroller. This allows the system
microcontroller to complete its initialization sequence before
deciding to establish connection to the USB. Re-initialization of the
USB bus connection can also be affected without requiring the pull
out of the cable.
The PDIUSBD11 will check for USB VBUS availability before the
connection can be established. VBUS sensing is provided through
VBUS pin.
It should be noted that the tolerance of the internal resistors is
higher (30%) than that specified by the USB specification (5%).
However, the overall V
can still be met with good margin. The decision to make sure of this
feature lies with the users.
SoftConnect is a patent pending technology from Philips
Semiconductors.
by default. The connection of the
CC
voltage specification for the connection
SE
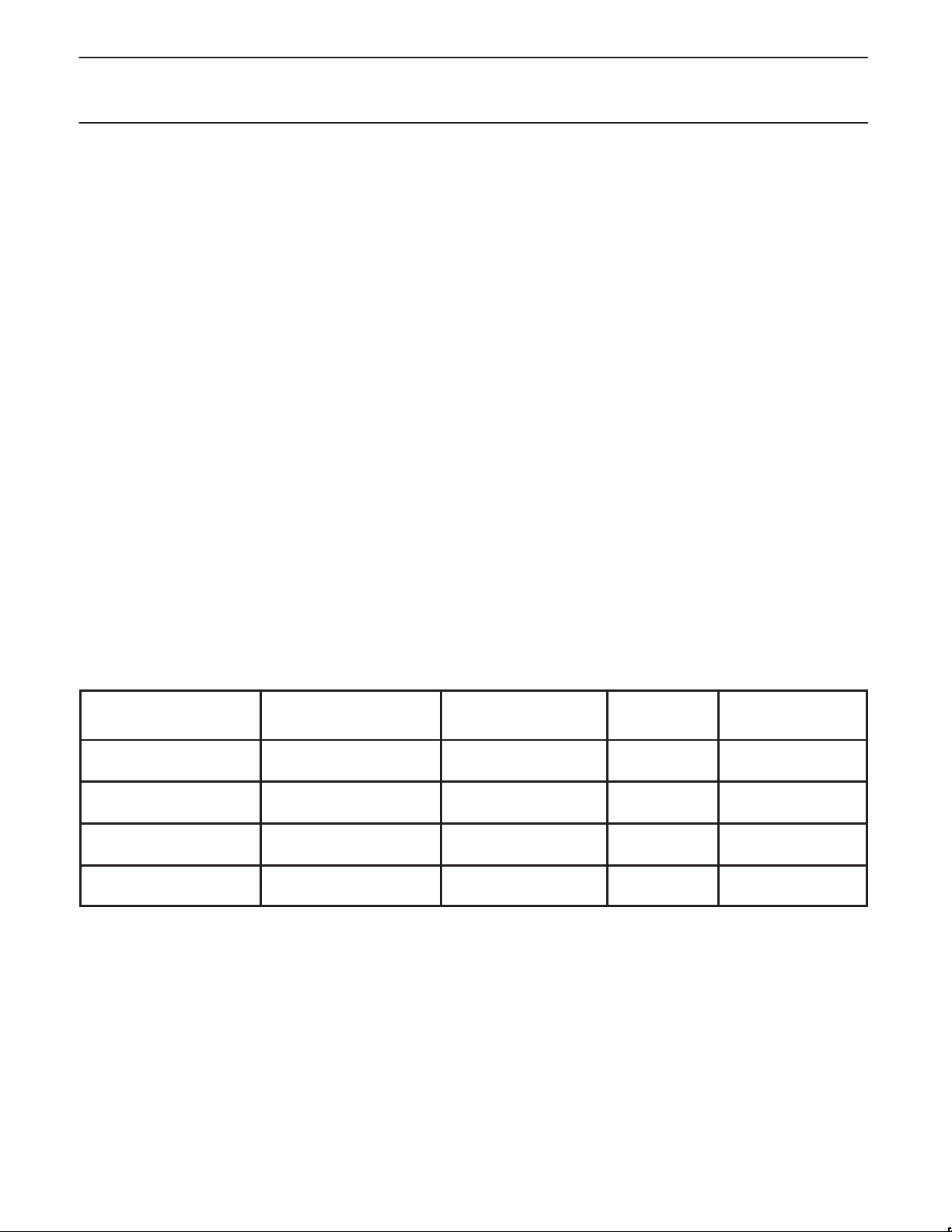
ENDPOINT DESCRIPTIONS
ENDPOINT# ENDPOINT INDEX TRANSFER TYPE DIRECTION
2
5
4
6
7
8
9
NOTE:
1. Generic endpoint can be used for Interrupt or Bulk endpoint.
MAX
PACKET SIZE
(BYTES)
OUT 8
IN 8
OUT 8
IN 8
OUT 8
IN 8
OUT 8
IN 8
1999 Jul 22
3
Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
PIN DESCRIPTION
PIN NO PIN SYMBOL TYPE DRIVE DESCRIPTION
1 TEST Input Connect to GND for normal operation
2 RESET_N Input ST Power-on reset
3 XTAL1 Input Crystal connection 1 (12MHz)
4 XTAL2 Output Crystal connection 2 (12MHz)
5 CLKOUT Output 3 mA Programmable output clock for external devices
6 V
CC
7 SUSPEND Output OD6 Device is in suspended state
8 INT_N Output OD6 Connect to microcontroller interrupt
9 SDA I/O OD6 I2C bi-directional data
10 SCL I/O OD6 I2C bit-clock
11 GND Power Ground reference
12 DP AI/O USB D+ connection
13 DM AI/O USB D– connection
14 AGND Power Analog ground reference
15 AV
CC
16 VBUS Input USB VBUS sensing pin
NOTES:
1. Signals ending in _N indicate active LOW signals.
ST: Schmitt Trigger
OD6: Open Drain with 6 mA drive
AI/O: Analog I/O
Power Voltage supply 3.3V±0.3V
Power Analog voltage supply 3.3V±0.3V
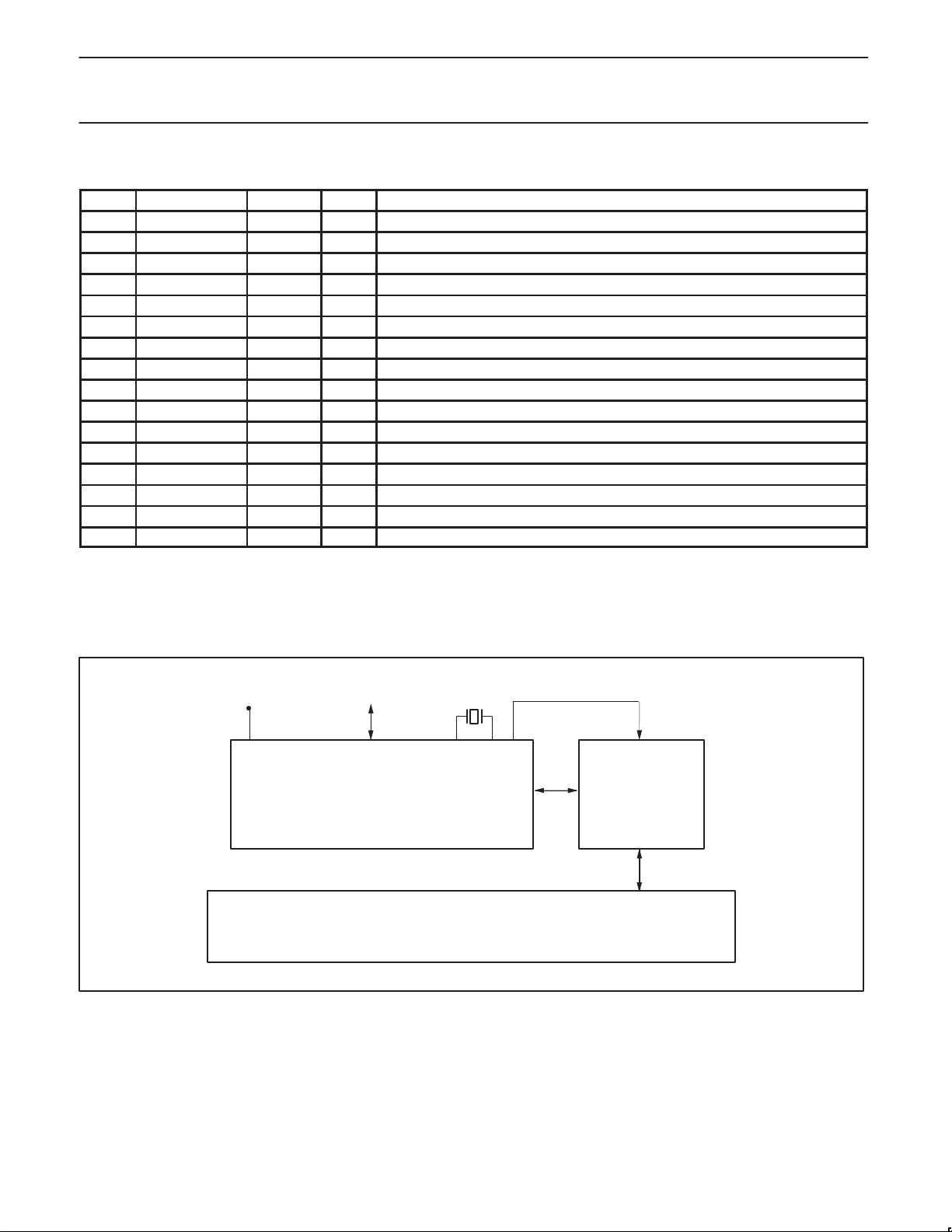
APPLICATION DIAGRAM
3.3V
USB Upstream
D11
e.g. Monitor Control, Mouse, Keyboard, ...
12 MHz
CLKOUT
I2C
µC
FUNCTIONAL BLOCK
SV00824
1999 Jul 22
4
Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
I2C Interface
The I2C bus is used to interface to an external microcontroller
needed to control the operation of the USB device. For cost
consideration, the target system microcontroller can be shared and
utilized for both the functional part as well as the USB protocol
interfacing. The PDIUSBD1 1 implements a slave I
When the PDIUSBD11 needs to communicate with the
microcontroller it asserts an interrupt signal. The microcontroller
services this interrupt by reading the appropriate status register on
the PDIUSBD11 through the I
2
the I
C serial bus, refer to the
9397 750 00013).
2
The I
C interface on the PDIUSBD11 defines two types of
transactions:
2
C bus. (For more information about
I2C Handbook
2
C interface.
, Philips order number
•command transaction – A command transaction is used to
define which data (e.g., status byte, buffer data, ...) will be read
from/written to the USB interface in the next data transaction. A
data transaction usually follows a command transaction.
•data transaction – A data transaction reads data from/writes
data to the USB interface. The meaning of the data is dependent
on the command transaction which was sent before the data
transaction.
Two addresses are used to differentiate between command and
data transactions. Writing to the command address is interpreted as
a command, while reading from/writing to the data address is used
to transfer data between the PDIUSBH11A and the controller.
Protocol
An I2C transaction starts with a Start Condition, followed by an
address. When the address matches either the command or data
address the transaction starts and runs until a Stop Condition or
another Start Condition (repeated start) occurs.
The command address is write-only and is unable to do a read. The
next bytes in the message are interpreted as commands. Several
command bytes can be sent after one command address. Each of
the command bytes is acknowledged and passed on to the Memory
Management Unit inside the PDIUSBD11.
When the Start Condition address matches the data address, the
next bytes are interpreted as data. When the RW bit in the address
indicates a
acknowledged and passed on to the Memory Management Unit. If
the RW bit in the address indicates a
(=‘1’) the PDIUSBD11 will send data to the master. The I2C-master
must acknowledge all data bytes except the last one. In this way the
I2C interface knows when the last byte has been transmitted and it
then releases the SDA line so that the master controller can
generate the Stop Condition.
Repeated start support allows another packet to be sent without
generating a Stop Condition.
master writes data to slave
(=‘0’) the bytes are received,
master reads data from slave
Timing
The I2C interface in the PDIUSBD11 can support clock speeds up to
1 MHz.
ADDRESS TABLE
Type of Address
Command 0011 011
Data 0011 010
Physical Address
MSB to LSB
(Binary)
1999 Jul 22
5
Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
COMMAND SUMMARY
Some commands have the same command code (e.g., Read Buffer and Write Buffer). In these cases, the direction of the Data Phase (read or
write) indicates which command is executed.
COMMAND NAME
Initialization Commands
Set Address/Enable Function D1h Write 1 byte
Set Endpoint Enable Function D8h Write 1 byte
Set Mode Function F3h Write 2 byte
Data Flow Commands
Read Interrupt Register F4h Read 2 bytes
Select Endpoint Control OUT Endpoint 00h Read 1 byte (optional)
Control IN Endpoint 01h Read 1 byte (optional)
Other Endpoints 00h+Endpoint Index Read 1 byte (optional)
Read Last Transaction Status Control OUT Endpoint 40h Read 1 byte
Control IN Endpoint 41h Read 1 byte
Other Endpoints 40h+Endpoint Index Read 1 byte
Read Endpoint Status Control OUT Endpoint 80h Read 1 byte
Control IN Endpoint 81h Read 1 byte
Other Endpoints 80h+Endpoint Index Read 1 byte
Read Buffer Selected Endpoint F0h Read n bytes
Write Buffer Selected Endpoint F0h Write n bytes
Set Endpoint Status Control OUT Endpoint 40h Write 1 byte
Set Endpoint Status Control IN Endpoint 41h Write 1 byte
Other Endpoints 40h+Endpoint Index Write 1 byte
Acknowledge Setup Selected Endpoint F1h None
Clear Buffer Selected Endpoint F2h None
Validate Buf fer Selected Endpoint FAh None
General Commands
Send Resume F6h None
Read Current Frame Number F5h Read 1 or 2 bytes
RECIPIENT CODING DATA PHASE
1999 Jul 22
6

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
COMMAND DESCRIPTIONS
Command Procedure
There are three basic types of commands: Initialization, Data Flow,
and General commands. Respectively , these are used to initialize
the function; for data flow between the function and the host; and
some general commands.
Initialization Commands
Initialization commands are used during the enumeration process of
the USB network. These commands are used to enable the function
endpoints. They are also used to set the USB assigned address.
Set Address / Enable
Command : D1h, (Function)
Data : Write 1 byte
This command is used to set the USB assigned address and enable
the function.
7654320100
000000
POWER ON VALUE
ADDRESS
ENABLE
SV00825
Address The value written becomes the address.
Enable A ‘1’ enables this function.
Set Endpoint Enable
Command : D8h
Data : Write 1 byte
The generic endpoints can only be enabled when the function is
enabled via the Set Address/Enable command.
76543201X0
XXXXXX
POWER ON VALUE
RESERVED; WRITE 0
FUNCTION GENERIC ENDPOINTS
RESERVED; WRITE 0
SV00826
Set Mode
Command : F3h
Data : Write 2 bytes
The Set Mode command is followed by two data writes. The first
byte contains the configuration byte values. The second byte is the
clock division factor byte.
Configuration Byte
7654320110
Remote Wakeup A ‘1’ indicates that a remote wakeup feature is
No LazyClock A ‘1’ indicates that CLKOUT will not switch to
Clock Running A ‘1’ indicates that the internal clocks and PLL
Debug Mode A ‘1’ indicates that all errors and “NAKing” are
SoftConnect A ‘1’ indicates that the upstream pull-up resistor
FutureMode Write a ‘1’.
11X01X
POWER ON VALUE
REMOTE WAKEUP
NO LAZYCLOCK
CLOCK RUNNING
DEBUG MODE
SoftConnect
RESERVED; WRITE 0
FUTURE MODE
SV00827
ON. Bus reset will set this bit to ‘1’.
LazyClock. A ‘0’ indicates that the CLKOUT
switches to LazyClock 1ms after the Suspend
pin goes high. LazyClock frequency is 30KHz
±40%. The programmed value will not be
changed by a bus reset.
are always running even during Suspend state.
A ‘0’ indicates that the internal clock, crystal
oscillator and PLL are stopped whenever not
needed. To meet the strict Suspend current
requirement, this bit needs to be set to ‘0’. The
programmed value will not be changed by a bus
reset.
reported and a ‘0’ indicates that only OK and
babbling are reported. The programmed value
will not be changed by a bus reset.
will be connected if VBUS is available. A ‘0’
means that the upstream resistor will not be
connected. The programmed value will not be
changed by a bus reset.
Function Generic Endpoint A value of ‘1’ indicates the
function generic endpoints are
enabled.
1999 Jul 22
7

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
Clock Division Factor Byte
7654321110
10XXXX
POWER ON VALUE
CLOCK DIVISION FACTOR
RESERVED
SV00828
Clock Division Factor The value indicates clock division factor for
CLKOUT. The output frequency is
48 MHz/(N+1) where N is the Clock Division
Factor. The reset value is 11. This will
produce the output frequency of 4 MHz
which can then be programmed up (or down)
by the user. The minimum value is one giving
the range of frequency from 4 to 24 MHz.
The PDIUSBD11 design ensures no
glitching during frequency change. The
programmed value will not be changed by a
bus reset.
Data Flow Commands
Data flow commands are used to manage the data transmission
between the USB endpoints and the monitor. Much of the data flow
is initiated via an interrupt to the microcontroller. The microcontroller
utilizes these commands to access and determine whether the
endpoint FIFOs have valid data.
Read Interrupt Register
Command : F4h
Data : Read 2 bytes
Interrupt Register Byte 2
7654320100
XXXXX0
POWER ON VALUE
ENDPOINT INDEX 8
ENDPOINT INDEX 9
RESERVED
BUS RESET
RESERVED
SV00830
Select Endpoint
Command : 00-0Dh
Data : Optional Read 1 byte
The Select Endpoint command initializes an internal pointer to the
start of the Selected buffer. Optionally, this command can be
followed by a data read, which returns ‘0’ if the buffer is empty and
‘1’ if the buffer is full.
765432X100
XXXXXX
Full/Empty A ‘1’ indicates the buffer is full, ‘0’ indicates an
empty buffer.
POWER ON VALUE
FULL/EMPTY
RESERVED
SV00831
Interrupt Register Byte 1
765432X1X0
000000
POWER ON VALUE
RESERVED
CONTROL OUT ENDPOINT
CONTROL IN ENDPOINT
ENDPOINT INDEX 4
ENDPOINT INDEX 5
ENDPOINT INDEX 6
ENDPOINT INDEX 7
SV00829
This command indicates the origin of an interrupt. A ‘1’ indicates an
interrupt occurred at this endpoint. The bits are cleared by reading
the endpoint status register through the Read Endpoint Status
command.
After a bus reset, an interrupt will be generated and bit 6 of the
Interrupt Register Byte 2 will be ‘1’. The interrupt is internally cleared
by reading the interrupt register. A bus reset is completely identical
to the hardware reset through the RESET_N pin with the sole
difference of interrupt notification.
1999 Jul 22
8

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
Read Last Transaction Status
Command : 40–4Dh
Data : Read 1 byte
The Read Last Transaction Status command is followed by one data
read that returns the status of the last transaction of the endpoint.
This command also resets the corresponding interrupt flag in the
interrupt register, and clears the status, indicating that it was read.
This command is useful for debugging purposes. Since it keeps
track of every transaction, the status information is overwritten for
each new transaction.
7654320100
000000
POWER ON VALUE
DATA RECEIVE/TRANSMIT SUCCESS
ERROR CODE (SEE TABLE)
SETUP PACKET
DATA 0/1 PACKET
PREVIOUS STATUS NOT READ
SV00832
Data Receive/
Transmit Success A ‘1’ indicates data has been received
or transmitted successfully.
Error Code See Table 1, Error Codes.
Setup Packet A ‘1’ indicates the last successful
received packet had a SETUP token
(this will always read ‘0’ for IN buffers).
Data 0/1 Packet A ‘1’ indicates the last successful
received or sent packet had a DATA1
PID.
Previous Status not Read A ‘1’ indicates a second event occurred
before the previous status was read.
Table 1. ERROR CODES
ERROR
CODE
0000 No Error
0001
PID encoding Error; bits 7–4 are not the inversion of
bits 3–0
0010 PID unknown; encoding is valid, but PID does not exist
Unexpected packet; packet is not of the type expected
0011
(= token, data or acknowledge), or SETUP token to a
non-control endpoint
0100 Token CRC Error
0101 Data CRC Error
0110 Time Out Error
0111 Babble Error
1000 Unexpected End-of-packet
1001 Sent or received NAK
1010
1011
Sent Stall, a token was received, but the endpoint was
stalled
Overflow Error, the received packet was longer than
the available buffer space
1101 Bitstuff Error
1111
Wrong DATA PID; the received DATA PID was not the
expected one
RESULT
Read Endpoint Status
Command : 80–8Dh
Data : Read 1 byte
765432X1X0
0000XX
POWER ON VALUE
RESERVED
SETUP PACKET
STALL
DATA 0/1 PACKET
BUFFER FULL
RESERVED
SV00833
Setup Packet A ‘1’ indicates the last received packet had a
SETUP token.
STALL A ‘1’ indicates the endpoint is stalled.
Data 0/1 Packet A ‘1’ indicates if the last received or sent packet
had a DATA1 PID.
Buffer Full A ‘1’ indicates that the buffer is full.
Read Buffer
Command : F0h
Data : Read multiple bytes (max 10)
The Read Buffer command is followed by a number of data reads,
which return the contents of the selected endpoint data buffer. After
each read, the internal buffer pointer is incremented by 1.
The buffer pointer is not reset to the buffer start by the Read Buffer
command. This means that reading or writing a buffer can be
interrupted by any other command (except for Select Endpoint), or
can be done by more than one I
2
C transaction (read the first 2 bytes
to get the number of data bytes, then read the rest in other
transactions).
The data in the buffer are organized as follows:
•byte 0: Reserved: can have any value
•byte 1: Number/length of data bytes
•byte 2: Data byte 1
•byte 3: Data byte 2
. . . . . .
Write Buffer
Command : F0h
Data : Write multiple bytes (max 10)
The Write Buffer command is followed by a number of data writes,
which load the endpoints buffer. The data must be organized in the
same way as described in the Read Buffer command. The first byte
(reserved) should always be ‘0’. As in the Read Buffer command,
the data can be split up into different I
WARNING:
There is no protection against writing or reading over a buffer’s
boundary or against writing into an OUT buffer or reading from an IN
buffer . Any of these actions could cause an incorrect operation. Data
in an OUT buffer are only meaningful after a successful transaction.
2
C data transactions.
1999 Jul 22
9

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
Clear Buffer
Command : F2h
Data : None
When a packet is received completely, an internal endpoint buffer
full flag is set. All subsequent packets will be refused by returning a
NAK. When the microcontroller has read the data, it should free the
buffer by the Clear Buffer command. When the buffer is cleared,
new packets will be accepted.
Validate Buffer
Command : FAh
Data : None
When the microprocessor has written data into an IN buffer, it should
set the buffer full flag by the Validate Buffer command. This indicates
that the data in the buffer are valid and can be sent to the host when
the next IN token is received.
Set Endpoint Status
Command : 40–4Dh
Data : Write 1 byte
A stalled control endpoint is automatically unstalled when it receives
a SETUP token, regardless of the content of the packet. If the
endpoint should stay in its stalled state, the microcontroller can
re-stall it.
When a stalled endpoint is unstalled (either by the Set Endpoint
Status command or by receiving a SETUP token), it is also
re-initialized. This flushes the buffer and if it is an OUT buffer it waits
for a DATA 0 PID, if it is an IN buffer it writes a DATA 0 PID.
Even when unstalled, writing Set Endpoint Status to ‘0’ initializes the
endpoint.
Acknowledge Setup
Command : F1h
Data : None
The arrival of a SETUP packet flushes the IN buffer and disables the
Validate Buffer and Clear Buffer commands for both IN and OUT
endpoints.
The microcontroller needs to re-enable these commands by the
Acknowledge Setup command. This ensures that the last SETUP
packet stays in the buffer and no packet can be sent back to the
host until the microcontroller has acknowledged explicitly that it has
seen the SETUP packet.
The microcontroller must send the Acknowledge Setup command to
both the IN and OUT endpoints.
GENERAL COMMANDS
Send Resume
Command : F6h
Data : None
Sends an upstream resume signal for 10 ms. This command is
normally issued when the device is in suspend. The RESUME
command is not followed by a data read or write.
Read Current Frame Number
Command : F5h
Data : Read One or T wo Bytes
This command is followed by one or two data reads and returns the
frame number of the last successfully received SOF. The frame
number is returned Least Significant Byte first.
765432X100
XXXXXX
POWER ON VALUE
STALLED
RESERVED
SV00834
Stalled A ‘1’ indicates the endpoint is stalled.
1999 Jul 22
10
765432X1X0
765432X1X0
XXXXXX
XXXXXX
LEAST SIGNIFICANT BYTE
MOST SIGNIFICANT BYTE
SV00835

Philips Semiconductors Product specification
VOLLOW level output voltage
VOHHIGH level output voltage
PDIUSBD1 1USB device with serial interface
RECOMMENDED OPERATING CONDITIONS
SYMBOL PARAMETER TEST CONDITIONS MIN MAX UNIT
V
T
V
V
V
AI/O
V
amb
DC supply voltage 3.0 3.6 V
CC
DC input voltage range 0 5.5 V
I
DC input voltage range for I/O 0 5.5 V
I/O
DC input voltage range for analog I/O 0 V
DC output voltage range 0 V
O
Operating ambient temperature range in free air See DC and AC characteristics per device –40 85 °C
CC
CC
V
V
ABSOLUTE MAXIMUM RATINGS
SYMBOL
V
CC
I
IK
V
I
V
I/O
I
OK
V
O
I
O
I
O
I
, I
GND
CC
T
STG
P
TOT
DC supply voltage –0.5 +4.6 V
DC input diode current VI < 0 –50 mA
DC input voltage Note 2 –0.5 +5.5 V
DC input voltage range for I/O –0.5 VCC + 0.5 V
DC output diode current VO > VCC or VO < 0 ±50 mA
DC output voltage Note 2 –0.5 VCC + 0.5 V
DC output sink or source current for other pins VO = 0 to V
DC output sink or source current for D+/D– pins VO = 0 to V
DC VCC or GND current ±100 mA
Storage temperature range –60 +150 °C
Power dissipation per package
PARAMETER TEST CONDITIONS MIN MAX UNIT
1
CC
CC
±15 mA
±50 mA
NOTES:
1. Stresses beyond those listed may cause damage to the device. These are stress ratings only and functional operation of the device at these
or any other conditions beyond those listed in the RECOMMENDED OPERATING CONDITIONS table is not implied. Exposure to absolute
maximum rated conditions for extended periods may affect device reliability .
2. The input and output voltage ratings may be exceeded if the input and output current ratings are observed.
DC CHARACTERISTICS (Digital pins)
SYMBOL PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Input Levels
V
VIH
V
TLH
V
THL
V
HYS
Output Levels
Leakage Current
I
OZ
I
I
I
LOW level input voltage 0.6 V
IL
HIGH level input voltage 2.7 V
LOW to HIGH threshold voltage ST (Schmitt Trigger) pins 1.4 1.9 V
HIGH to LOW threshold voltage ST pins 0.9 1.5 V
Hysteresis voltage ST pins 0.4 0.7 V
p
p
IOL = rated drive 0.4
IOL = 20 µA 0.1 V
IOH = rated drive 2.4
IOH = 20 µA VCC – 0.1 V
OFF state current OD (Open Drain) pins ±5 µA
Input leakage current ±5 µA
L
Suspend current
S
Operating current I2C operating 10 mA
O
Oscillator stopped &
inputs to GND/V
CC
V
V
15 µA
1999 Jul 22
11

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
DC CHARACTERISTICS (AI/O pins)
SYMBOL PARAMETER TEST CONDITIONS MIN MAX UNIT
Leakage Current
I
LO
Input Levels
V
V
CM
V
Output Levels
V
V
Capacitance
C
Output Resistance
Z
DRV
Integrated Resistance
Z
Z
NOTES:
1. D+ is the symbol for the USB positive data pin: DP.
D– is the symbol for the USB negative data pin: DM.
2. Includes external resistors of 22 W ± 1% each on D+ and D–.
Hi-Z state data line leakage 0V < VIN < 3.3V ±10 µA
Differential input sensitivity |(D+) – (D–)|
DI
1
0.2 V
Differential common mode range Includes VDI range 0.8 2.5 V
Single-ended receiver threshold 0.8 2.0 V
SE
Static output LOW
OL
Static output HIGH
OH
Transceiver capacitance Pin to GND 20 pF
IN
2
Driver output resistance Steady state drive 29 44
Pull-up resistance SoftConnect = ON 1.1 1.9
PU
Pull-down resistance Pull-down = ON 11 19
PD
RL of 1.5kW to 3.6V
RL of 15kW to GND
2.8 3.6 V
0.3 V
W
kW
kW
LOAD FOR D+/D–
UPSTREAM: 1.5kW IS INTERNAL
TEST POINT
D. U. T .
C
= 50pF, FULL SPEED
L
CL = 50PF, LOW SPEED (MIN TIMING)
CL = 350PF, LOW SPEED (MAX TIMING)
* 1.5kW ON D– (LOW SPEED) OR D+ (FULL SPEED) ONLY
22W
15kW
S1
C
L
TEST S1
D–/LS CLOSE
D+/LS OPEN
D–/FS OPEN
D+/FS CLOSE
V
CC
1.5kW*
SV00836
1999 Jul 22
12

Philips Semiconductors Product specification
Between 10% and 90%
PDIUSBD1 1USB device with serial interface
AC CHARACTERISTICS (AI/O pins, FULL speed)
SYMBOL PARAMETER TEST CONDITIONS MIN MAX UNIT
Driver characteristics CL = 50 pF;
Transition Time:
V
t
RFM
CRS
t
r
t
f
Rise time
Fall time
Rise/fall time matching (tr/tf) 90 110 %
Output signal crossover voltage 1.3 2.0 V
Driver Timings
t
EOPT
t
DEOP
Source EOP width Figure 1 160 175 ns
Differential data to EOP transition skew Figure 1 –2 5 ns
Receiver Timings
Receiver Data Jitter Tolerance
t
t
JR1
JR2
To next transition Characterized and not tested.
For paired transitions
EOP Width at Receiver
t
EOPR1
t
EOPR2
Must reject as EOP Figure 1 40 ns
Must accept 82 ns
= 1.5 kW on D+ to V
R
pu
Guaranteed by design.
CC
4 20 ns
4 20 ns
–18.5 18.5 ns
–9 9 ns
t
PERIOD
DIFFERENTIAL
DATA LINES
CROSSOVER POINT
CROSSOVER POINT
DIFFERENTIAL DATA TO
SEO/EOP SKEW
N * t
PERIOD
+ t
DEOP
EXTENDED
SOURCE EOP WIDTH: t
RECEIVER EOP WIDTH: t
Figure 1. Differential data to EOP transition skew and EOP width
EOPT
EOPR1
, t
EOPR2
SV00837
1999 Jul 22
13

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
AC CHARACTERISTICS (I2C pins)
All timing values are valid within the operating supply voltage and ambient temperature range and reference to VIL and VIH with an input voltage
swing of V
SYMBOL
F
t
SU;STA
t
HD;STA
t
t
t
SU;DAT
t
HD;DAT
t
VD;DAT
t
SU;STO
A detailed description of the I2C-bus specification, with applications, is given in the brochure “
be ordered using the Philips order number 9398 393 40011.
SCL
t
BUF
LOW
HIGH
t
t
and VDD.
SS
PARAMETER TEST CONDITIONS MIN MAX UNIT
SCL clock frequency 1000 kHz
Bus free time 0.5
Start condition set-up time 0.25
Start condition hold time 0.25
SCL LOW time 0.45
SCL HIGH time 0.45
SCL and SDA rise time 0.3
r
SCL and SDA fall time 0.1
f
Data set-up time 100 ns
Data hold time 0 ns
SCL LOW to data out valid 0.4
Stop condition set-up time 0.25
The I2C-bus and how to use it
ms
ms
ms
ms
ms
ms
ms
ms
ms
”. This brochure may
PROTOCOL
SCL
SDA
START
CONDITION
(S)
t
SU;STA
t
BUF
t
HD;STA
t
LOW
BIT 7
MSB
(A7)
t
HIGH
t
r
t
f
t
SU;DAT
1/f
BIT 6
(A6)
SCL
t
HD;DAT
BIT 0
LSB
(R/W)
ACKNOWLEDGE
(A)
t
VD:DAT
STOP
CONDITION
(P)
t
SU;STO
SV00756
Figure 2. I2C-bus timing diagram
1999 Jul 22
14

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
SO16: plastic small outline package; 16 leads; body width 7.5 mm SOT162-1
1999 Jul 22
15

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
DIP16: plastic dual in-line package; 16 leads (300 mil) SOT38-4
1999 Jul 22
16

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
SOLDERING
Introduction
This text gives a very brief insight to a complex technology. A more
in-depth account of soldering ICs can be found in our
Handbook IC26; Integrated Circuit Packages”
number 9398 652 90011).
There is no soldering method that is ideal for all IC packages. Wave
soldering is often preferred when through-hole and surface mount
components are mixed on one printed circuit board. However, wave
soldering is not always suitable for surface mount ICs, or for
printed-circuit boards with high population densities. In these
situations, reflow soldering is often used.
“Data
(document order
Through-hole mount packages
OLDERING BY DIPPING OR BY SOLDER WAVE
S
The maximum permissible temperature of the solder is 260°C;
solder at this temperature must not be in contact with the joints for
more than 5 seconds. The total contact time of successive solder
waves must not exceed 5 seconds.
The device may be mounted up to the seating plane, but the
temperature of the plastic body must not exceed the specified
maximum storage temperature (T
has been pre-heated, forced cooling may be necessary immediately
after soldering to keep the temperature within the permissible limit.
). If the printed-circuit board
stg(max)
MANUAL SOLDERING
Apply the soldering iron (24 V or less) to the lead(s) of the package,
either below the seating plane or not more than 2 mm above it. If the
temperature of the soldering iron bit is less than 300°C, it may
remain in contact for up to 10 seconds. If the bit temperature is
between 300 and 400°C, contact may be made for up to 5 seconds.
Surface mount packages
R
EFLOW SOLDERING
Reflow soldering requires solder paste (a suspension of fine solder
particles, flux and binding agent) to be applied to the printed-circuit
board by screen printing, stencilling or pressure-syringe dispensing
before package placement.
Several methods exist for reflowing; for example, infrared/convection
heating in a conveyor-type oven. Throughput times (preheating,
soldering and cooling) vary between 100 and 200 seconds,
depending on heating method.
Typical reflow peak temperatures range from 215 250°C. The
top-surface temperature of the packages should preferably be kept
below 230°C.
WAVE SOLDERING
Conventional single-wave soldering is not recommended for surface
mount devices (SMDs) or printed-circuit boards with a high
component density , as solder bridging and non-wetting can present
major problems.
To overcome these problems, the double-wave soldering method
was specifically developed.
If wave soldering is used, the following conditions must be observed
for optimal results:
•Use a double-wave soldering method comprising a turbulent wave
with high upward pressure followed by a smooth laminar wave.
•For packages with leads on two sides and a pitch (e):
– larger than or equal to 1.27 mm, the footprint longitudinal axis
is preferred to be parallel to the transport direction of the
printed-circuit board;
– smaller than 1.27 mm, the footprint longitudinal axis must be
parallel to the transport direction of the printed-circuit board.
The footprint must incorporate solder thieves at the downstream
end.
•For packages with leads on four sides, the footprint must be
placed at a 45° angle to the transport direction of the
printed-circuit board. The footprint must incorporate solder thieves
downstream and at the side corners.
During placement, and before soldering, the package must be fixed
with a droplet of adhesive. The adhesive can be applied by screen
printing, pin transfer or syringe dispensing. The package can be
soldered after the adhesive has cured.
Typical dwell time is 4 seconds at 250°C. A mildly-activated flux will
eliminate the need for removal of corrosive residues in most
applications.
MANUAL SOLDERING
Fix the component by first soldering two diagonally-opposite end
leads. Use a low-voltage (24 V or less) soldering iron applied to the
flat part of the lead. Contact time must be limited to 10 seconds at
up to 300°C.
When using a dedicated tool, all other leads can be soldered in one
operation within 2 to 5 seconds between 270 and 320°C.
1999 Jul 22
17

Philips Semiconductors Product specification
Mounting
Package
PDIUSBD1 1USB device with serial interface
SUITABILITY OF IC PACKAGES FOR WAVE, REFLOW AND DIPPING SOLDERING METHODS
Soldering Method
Wave Reflow
Through-hole mount DBS, DIP, HDIP, SDIP, SIL suitable
BGA, SQFP, not suitable suitable –
HLQFP, HSQFP, HSOP, SMS not suitable
Surface mount PLCC, SO, SOJ suitable suitable –
LQFP, QFP, TQFP not recommended
SSOP, TSSOP, VSO not recommended
NOTES:
1. All surface mount (SMD) packages are moisture sensitive. Depending upon the moisture content, the maximum temperature (with respect to
time) and body size of the package, there is a risk that internal or external package cracks may occur due to vaporization of the moisture in
them (the so-called “popcorn” effect). For details, refer to the Drypack information in the
2
3
4, 5
6
“Data Handbook IC26; Integrated Circuit Packages;
Section: Packing Methods”.
2. For SDIP packages, the longitudinal axis must be parallel to the transport direction of the printed-circuit board.
3. These packages are not suitable for wave soldering as a solder joint between the printed-circuit board and heatsink (at bottom version)
cannot be achieved, and as solder may stick to the heatsink (on top version).
4. If wave soldering is considered, then the package must be placed at a 45° angle to the solder wave direction. The package footprint must
incorporate solder thieves downstream and at the side corners.
5. Wave soldering is only suitable for LQFP, QFP, and TQFP packages with a pitch (e) equal to or larger than 0.8 mm; it is definitely not
suitable for packages with a pitch (e) equal to or smaller than 0.65 mm.
6. Wave soldering is only suitable for SSOP and TSSOP packages with a pith (e) equal to or larger than 0.65 mm; it is definitely not suitable for
packages with a pitch (e) equal to or smaller than 0.5 mm.
1
– suitable
suitable –
suitable –
suitable –
Dipping
1999 Jul 22
18

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
NOTES
1999 Jul 22
19

Philips Semiconductors Product specification
PDIUSBD1 1USB device with serial interface
Data sheet status
Data sheet
status
Objective
specification
Preliminary
specification
Product
specification
Product
status
Development
Qualification
Production
Definition
This data sheet contains the design target or goal specifications for product development.
Specification may change in any manner without notice.
This data sheet contains preliminary data, and supplementary data will be published at a later date.
Philips Semiconductors reserves the right to make changes at any time without notice in order to
improve design and supply the best possible product.
This data sheet contains final specifications. Philips Semiconductors reserves the right to make
changes at any time without notice in order to improve design and supply the best possible product.
[1]
[1] Please consult the most recently issued datasheet before initiating or completing a design.
Definitions
Short-form specification — The data in a short-form specification is extracted from a full data sheet with the same type number and title. For
detailed information see the relevant data sheet or data handbook.
Limiting values definition — Limiting values given are in accordance with the Absolute Maximum Rating System (IEC 134). Stress above one
or more of the limiting values may cause permanent damage to the device. These are stress ratings only and operation of the device at these or
at any other conditions above those given in the Characteristics sections of the specification is not implied. Exposure to limiting values for extended
periods may affect device reliability.
Application information — Applications that are described herein for any of these products are for illustrative purposes only. Philips
Semiconductors make no representation or warranty that such applications will be suitable for the specified use without further testing or
modification.
Disclaimers
Life support — These products are not designed for use in life support appliances, devices or systems where malfunction of these products can
reasonably be expected to result in personal injury . Philips Semiconductors customers using or selling these products for use in such applications
do so at their own risk and agree to fully indemnify Philips Semiconductors for any damages resulting from such application.
Right to make changes — Philips Semiconductors reserves the right to make changes, without notice, in the products, including circuits, standard
cells, and/or software, described or contained herein in order to improve design and/or performance. Philips Semiconductors assumes no
responsibility or liability for the use of any of these products, conveys no license or title under any patent, copyright, or mask work right to these
products, and makes no representations or warranties that these products are free from patent, copyright, or mask work right infringement, unless
otherwise specified.
Philips Semiconductors
811 East Arques Avenue
P.O. Box 3409
Sunnyvale, California 94088–3409
Telephone 800-234-7381
Copyright Philips Electronics North America Corporation 1998
All rights reserved. Printed in U.S.A.
Date of release: 07-99
Document order number: 9397–750–06219
1999 Jul 22
20
 Loading...
Loading...