

Philips PCA82C250-N4, PCA82C250T-N4 Datasheet

DATA SH EET
Product specification
Supersedes data of 1997 Oct 21
File under Integrated Circuits, IC18
2000 Jan 13
INTEGRATED CIRCUITS
PCA82C250
CAN controller interface
2000 Jan 13 2
Philips Semiconductors Product specification
CAN controller interface PCA82C250
FEATURES
• Fully compatible with the
“ISO 11898”
standard
• High speed (up to 1 Mbaud)
• Bus lines protected against transients in an automotive
environment
• Slope control to reduce Radio Frequency Interference
(RFI)
• Differential receiver with wide common-mode range for
high immunity against ElectroMagnetic Interference
(EMI)
• Thermally protected
• Short-circuit proof to battery and ground
• Low-current standby mode
• An unpowered node does not disturb the bus lines
• At least 110 nodes can be connected.
APPLICATIONS
• High-speed applications (up to 1 Mbaud) in cars.
GENERAL DESCRIPTION
The PCA82C250 is the interface between the CAN
protocol controller and the physical bus. The device
provides differential transmit capability to the bus and
differential receive capability to the CAN controller.
QUICK REFERENCE DATA
ORDERING INFORMATION
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
CC
supply voltage 4.5 5.5 V
I
CC
supply current standby mode − 170 µA
1/t
bit
maximum transmission speed non-return-to-zero 1 − Mbaud
V
CAN
CANH, CANL input/output voltage −8 +18 V
V
diff
differential bus voltage 1.5 3.0 V
t
PD
propagation delay high-speed mode − 50 ns
T
amb
ambient temperature −40 +125 °C
TYPE
NUMBER
PACKAGE
NAME DESCRIPTION CODE
PCA82C250 DIP8 plastic dual in-line package; 8 leads (300 mil) SOT97-1
PCA82C250T SO8 plastic small outline package; 8 leads; body width 3.9 mm SOT96-1
PCA82C250U − bare die; 2790 × 1780 × 380 µm −

2000 Jan 13 3
Philips Semiconductors Product specification
CAN controller interface PCA82C250
BLOCK DIAGRAM
handbook, full pagewidth
MKA669
RECEIVER
HS
REFERENCE
VOLTAGE
SLOPE/
STANDBY
PROTECTION
DRIVER
3
2
5
4
8
1
6
7
GND
CANL
CANH
V
ref
TXD
Rs
RXD
V
CC
PCA82C250
Fig.1 Block diagram.
PINNING
SYMBOL PIN DESCRIPTION
TXD 1 transmit data input
GND 2 ground
V
CC
3 supply voltage
RXD 4 receive data output
V
ref
5 reference voltage output
CANL 6 LOW-level CAN voltage
input/output
CANH 7 HIGH-level CAN voltage
input/output
Rs 8 slope resistor input
handbook, halfpage
1
2
3
4
8
7
6
5
MKA670
PCA82C250
Rs
CANHGND
CANL
V
ref
RXD
V
CC
TXD
Fig.2 Pin configuration.

2000 Jan 13 4
Philips Semiconductors Product specification
CAN controller interface PCA82C250
FUNCTIONAL DESCRIPTION
The PCA82C250 is the interface between the CAN
protocol controller and the physical bus. It is primarily
intended for high-speed applications (up to 1 Mbaud) in
cars. Thedevice provides differential transmit capability to
the bus and differential receive capability to the CAN
controller. It is fully compatible with the
“ISO 11898”
standard.
A current limiting circuit protects the transmitter output
stage againstshort-circuit to positive and negative battery
voltage. Although the power dissipation is increased
during this fault condition, this feature will prevent
destruction of the transmitter output stage.
If the junction temperature exceeds a value of
approximately 160 °C, the limiting current of both
transmitter outputs is decreased. Because the transmitter
is responsible for the major part of the power dissipation,
this will result in a reduced powerdissipation and hence a
lowerchip temperature.All otherparts of theIC willremain
in operation.The thermal protection is particularly needed
when a bus line is short-circuited.
The CANH and CANL lines are also protected against
electrical transients which may occur in an automotive
environment.
Pin 8 (Rs) allows three different modes of operation to be
selected: high-speed, slope control or standby.
For high-speed operation, the transmitter output
transistors are simply switched on and off as fast as
possible. In this mode, no measures are taken to limit the
rise and fall slope. Use of a shielded cable is
recommended to avoid RFI problems. The high-speed
mode is selected by connecting pin 8 to ground.
For lower speeds or shorter bus length, an unshielded
twisted pair or a parallel pair of wires can be used for the
bus. To reduce RFI, the rise and fall slope should be
limited. The rise and fall slope can be programmed with a
resistor connected from pin 8 to ground. The slope is
proportional to the current output at pin 8.
If a HIGH level is applied to pin 8, the circuit enters a low
current standby mode. In this mode, the transmitter is
switched off and the receiver is switched to a low current.
If dominant bits are detected (differential bus voltage
>0.9 V), RXD will be switched to a LOW level.
The microcontroller should react to this condition by
switching the transceiver back to normal operation (via
pin 8). Because the receiver is slow in standby mode, the
first message will be lost.
Table 1 Truth table of the CAN transceiver
Note
1. X = don’t care.
Table 2 Pin Rs summary
SUPPLY TXD CANH CANL BUS STATE RXD
4.5 to 5.5 V 0 HIGH LOW dominant 0
4.5 to 5.5 V 1 (or floating) floating floating recessive 1
<2 V (not powered) X
(1)
floating floating recessive X
(1)
2V<VCC< 4.5 V >0.75V
CC
floating floating recessive X
(1)
2V<VCC< 4.5 V X
(1)
floating if
VRs> 0.75V
CC
floating if
VRs> 0.75V
CC
recessive X
(1)
CONDITION FORCED AT PIN Rs MODE RESULTING VOLTAGE OR CURRENT AT PIN Rs
V
Rs
> 0.75V
CC
standby IRs< 10 µA
−10 µA<I
Rs
< −200 µA slope control 0.4VCC<VRs< 0.6V
CC
VRs< 0.3V
CC
high-speed IRs< −500 µA
2000 Jan 13 5
Philips Semiconductors Product specification
CAN controller interface PCA82C250
LIMITING VALUES
In accordance with the Absolute Maximum Rating System (IEC 60134); all voltages are referenced to pin 2;
positive input current.
Notes
1. In accordance with
“IEC 60747-1”
. An alternative definition of virtual junction temperature is:
Tvj=T
amb+Pd×Rth(vj-a)
, where R
th(j-a)
is a fixed value to be used for the calculation of Tvj. The rating for Tvj limits
the allowable combinations of power dissipation (Pd) and ambient temperature (T
amb
).
2. Classification A: human body model; C = 100 pF; R = 1500 Ω; V = ±2000 V.
3. Classification B: machine model; C = 200 pF; R = 25 Ω; V = ±200 V.
THERMAL CHARACTERISTICS
QUALITY SPECIFICATION
According to
“SNW-FQ-611 part E”
.
SYMBOL PARAMETER CONDITIONS MIN. MAX. UNIT
V
CC
supply voltage −0.3 +9.0 V
V
n
DC voltage at pins 1, 4, 5 and 8 −0.3 VCC+ 0.3 V
V
6, 7
DC voltage at pins 6 and 7 0 V < VCC< 5.5 V;
no time limit
−8.0 +18.0 V
V
trt
transient voltage at pins 6 and 7 see Fig.8 −150 +100 V
T
stg
storage temperature −55 +150 °C
T
amb
ambient temperature −40 +125 °C
T
vj
virtual junction temperature note 1 −40 +150 °C
V
esd
electrostatic discharge voltage note 2 −2000 +2000 V
note 3 −200 +200 V
SYMBOL PARAMETER CONDITIONS VALUE UNIT
R
th(j-a)
thermal resistance from junction to ambient in free air
PCA82C250 100 K/W
PCA82C250T 160 K/W
2000 Jan 13 6
Philips Semiconductors Product specification
CAN controller interface PCA82C250
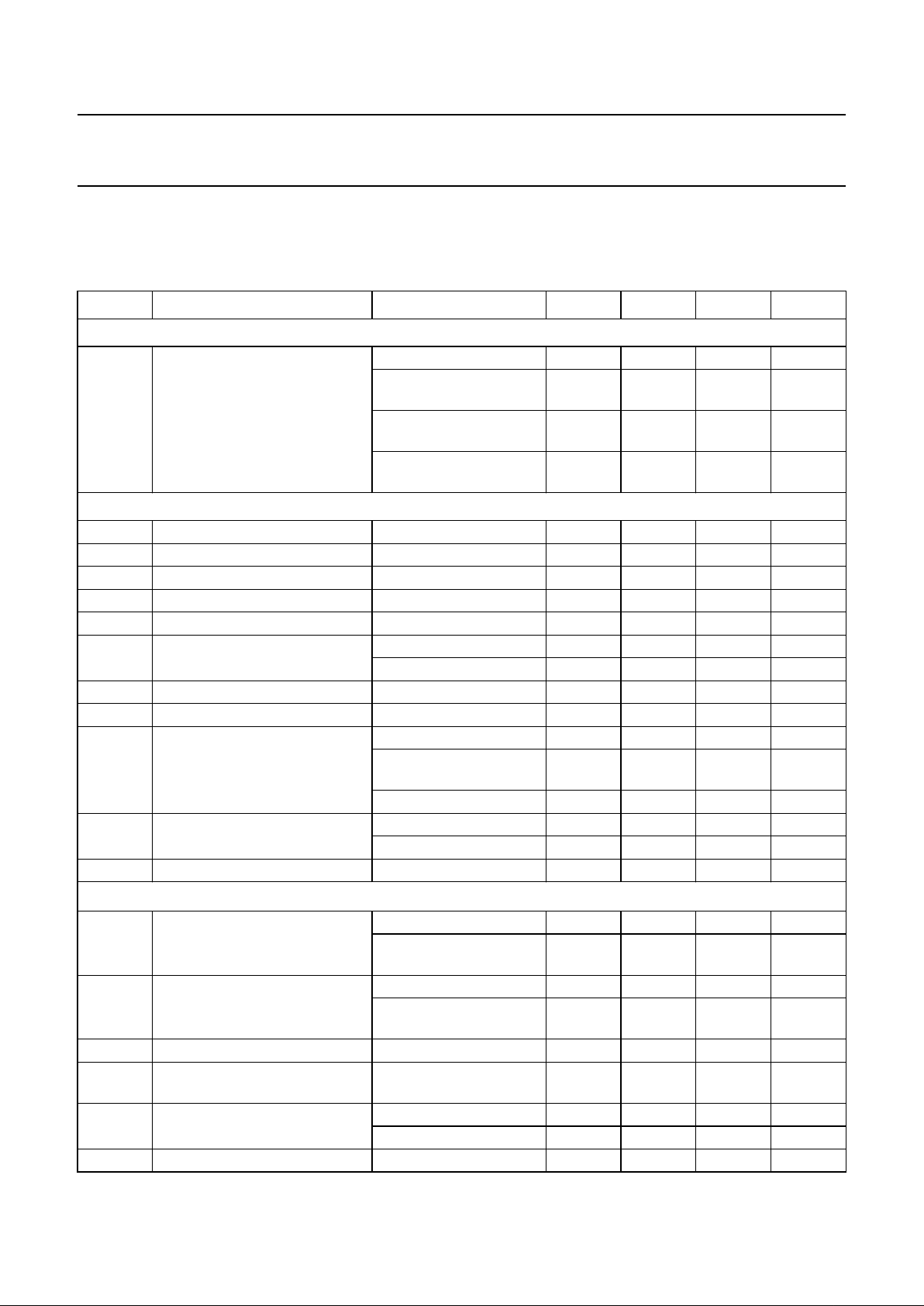
CHARACTERISTICS
VCC= 4.5 to 5.5 V; T
amb
= −40 to +125 °C; RL=60Ω; I8> −10 µA; unless otherwise specified; all voltages referenced
to ground (pin 2); positive input current; all parameters are guaranteed over the ambient temperature range by design,
but only 100% tested at +25 °C.
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
Supply
I
3
supply current dominant; V1=1V −−70 mA
recessive; V
1
=4V;
R8=47kΩ
−−14 mA
recessive; V
1
=4V;
V8=1V
−−18 mA
standby; T
amb
<90°C;
note 1
− 100 170 µA
DC bus transmitter
V
IH
HIGH-level input voltage output recessive 0.7V
CC
− VCC+ 0.3 V
V
IL
LOW-level input voltage output dominant −0.3 − 0.3V
CC
V
I
IH
HIGH-level input current V1=4V −200 − +30 µA
I
IL
LOW-level input current V1=1V −100 −−600 µA
V
6,7
recessive bus voltage V1= 4 V; no load 2.0 − 3.0 V
I
LO
off-state output leakage current −2V<(V6,V7)<7V −2 − +1 mA
−5V<(V
6,V7
)<18V −5 − +12 mA
V
7
CANH output voltage V1= 1 V 2.75 − 4.5 V
V
6
CANL output voltage V1= 1 V 0.5 − 2.25 V
∆V
6, 7
difference between output
voltage at pins 6 and 7
V1= 1 V 1.5 − 3.0 V
V
1
=1V; RL=45Ω;
VCC≥ 4.9 V
1.5 −−V
V
1
= 4 V; no load −500 − +50 mV
I
sc7
short-circuit CANH current V7= −5 V; VCC≤ 5V −−−105 mA
V
7
= −5 V; VCC= 5.5 V −−−120 mA
I
sc6
short-circuit CANL current V6=18V −−160 mA
DC bus receiver: V1= 4 V; pins 6 and 7 externally driven; −2V<(V6,V7) < 7 V; unless otherwise specified
V
diff(r)
differential input voltage
(recessive)
−1.0 − +0.5 V
−7V<(V
6,V7
)<12V;
not standby mode
−1.0 − +0.4 V
V
diff(d)
differential input voltage
(dominant)
0.9 − 5.0 V
−7V<(V
6,V7
)<12V;
not standby mode
1.0 − 5.0 V
V
diff(hys)
differential input hysteresis see Fig.5 − 150 − mV
V
OH
HIGH-level output voltage
(pin 4)
I4= −100 µA 0.8V
CC
− V
CC
V
V
OL
LOW-level output voltage (pin 4) I4=1mA 0 − 0.2V
CC
V
I
4
=10mA 0 − 1.5 V
R
i
CANH, CANL input resistance 5 − 25 kΩ
 Loading...
Loading...