

Philips AU5790 Datasheet
INTEGRATED CIRCUITS
AU5790
Single wire CAN transceiver
Preliminary specification
Supersedes data of 1998 Mar 10
IC18 Data Handbook
1999 Oct 28
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
FEATURES
•Supports in-vehicle class B multiplexing via a single bus line with
ground return
•33 kbps CAN bus speed with loading as per J2411, up to
41.6 kbps with modified loading
•83 or 100 kbps high-speed transmission mode
•Low RFI due to output waveshaping
•Direct battery operation with protection against load dump, jump
start and transients
•Bus terminal protected against short-circuits and transients in the
automotive environment
•Built-in loss of ground protection
•Thermal overload protection
•Supports communication between control units even when
network in low-power state
•70 µA typical power consumption in sleep mode
•8-pin SOIC
•Fully integrated receiver filter
•±8kV ESD protection on bus and battery pins
DESCRIPTION
The AU5790 is a line transceiver, primarily intended for in-vehicle
multiplex applications. The device provides interfacing between a
CAN data link controller and a single wire physical bus line. The
achievable bus speed is primarily a function of the network time
constant and bit timing, e.g., up to 41.6 kbps with a network
including 32 bus nodes. The AU5790 provides advanced
sleep-/wake-up functions to minimize power consumption when a
vehicle is parked, while offering the desired control functions of the
network at the same time. Fast transfer of larger blocks of data is
supported using the high-speed data transmission mode.
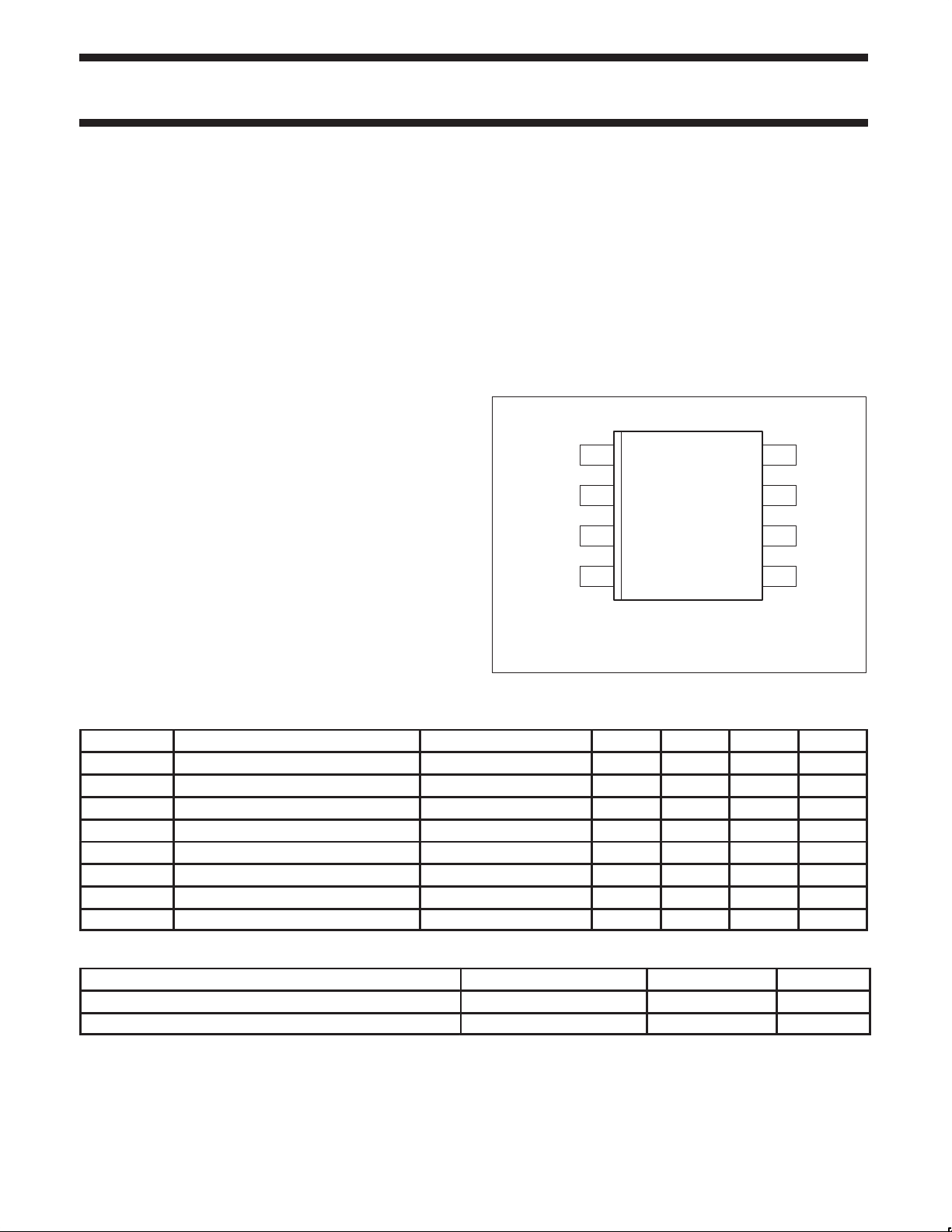
PIN CONFIGURATION
TxD
NSTB (Mode 0)
1
2
8
7
GND
CANH (BUS)
AU5790
EN (Mode 1)
RxD
3
4
SO8
6
5
RTH (Load)
BAT
QUICK REFERENCE DA TA
SYMBOL PARAMETER CONDITIONS MIN. TYP. MAX. UNIT
V
BAT
T
amb
V
BATD
V
CAN_N
V
T
t
BO
t
BI
I
BATS
Operating supply voltage 5.5 12 27 V
Operating ambient temperature –40 +125 °C
Battery voltage load dump; 1s +45 V
Bus output voltage 3.6 4.55 V
Bus input threshold 1.8 2.2 V
Bus output delay 7.2 µs
Bus input delay 1 µs
Sleep mode supply current 70 µA
ORDERING INFORMATION
DESCRIPTION TEMPERATURE RANGE ORDER CODE DWG #
SO8: 8-pin plastic small outline package; packed in tubes
SO8: 8-pin plastic small outline package; packed on tape and reel
–40_ to +125_C
–40_ to +125_C
AU5790D SOT96–1
AU5790D–T SOT96–1
SL01198
1999 Oct 28
2
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
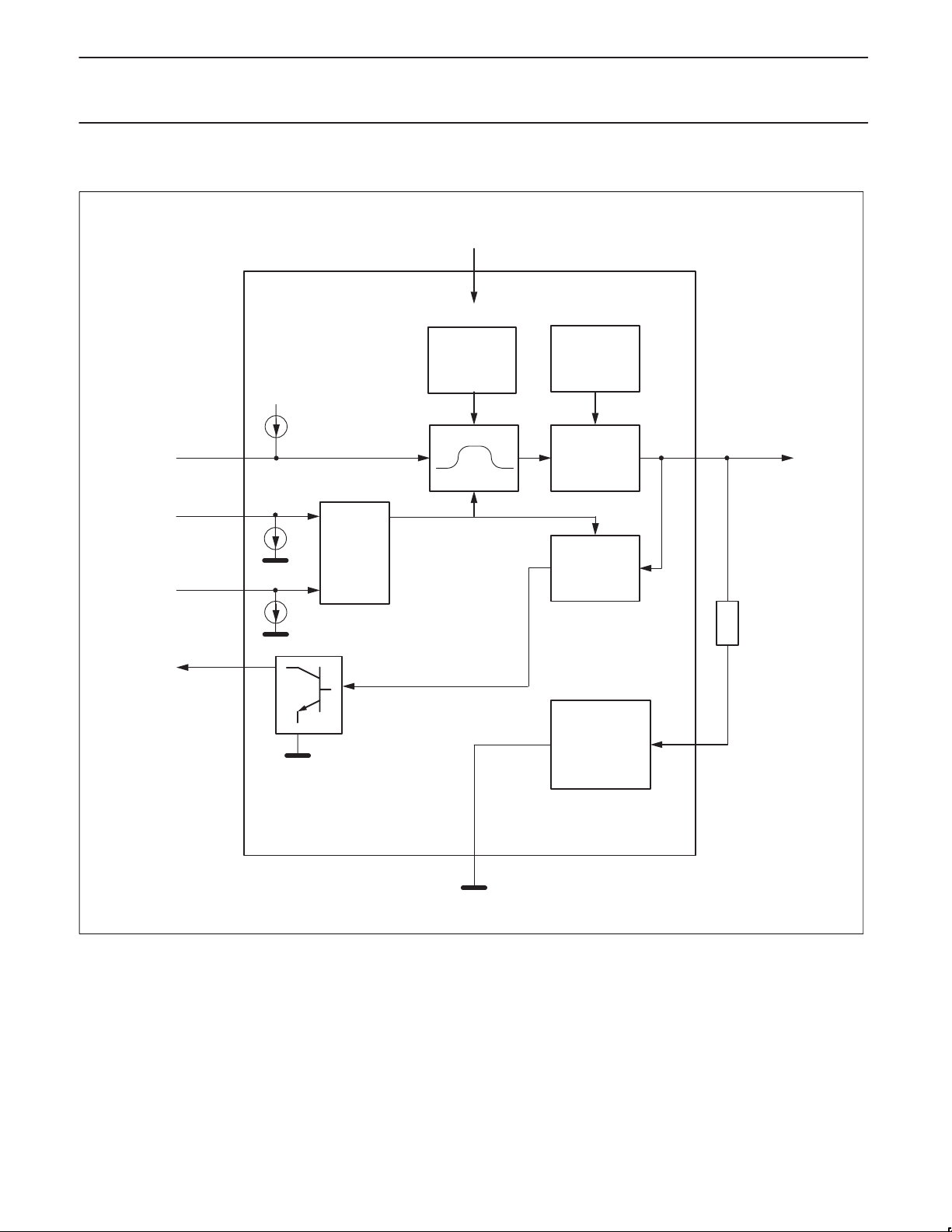
BLOCK DIAGRAM
BATTERY (+12V)
BAT
1
TxD
NSTB
(Mode 0)
(Mode 1)
RxD
EN
VOLTAGE
REFERENCE
3
MODE
6
4
CONTROL
TEMP.
PROTECTION
OUTPUT
BUFFER
BUS
RECEIVER
LOSS OF
GROUND
PROTECTION
CANH
7
R
T
5
RTH
(LOAD)
1999 Oct 28
AU5790
8
GND
SL01199
Figure 1. Block Diagram
3
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
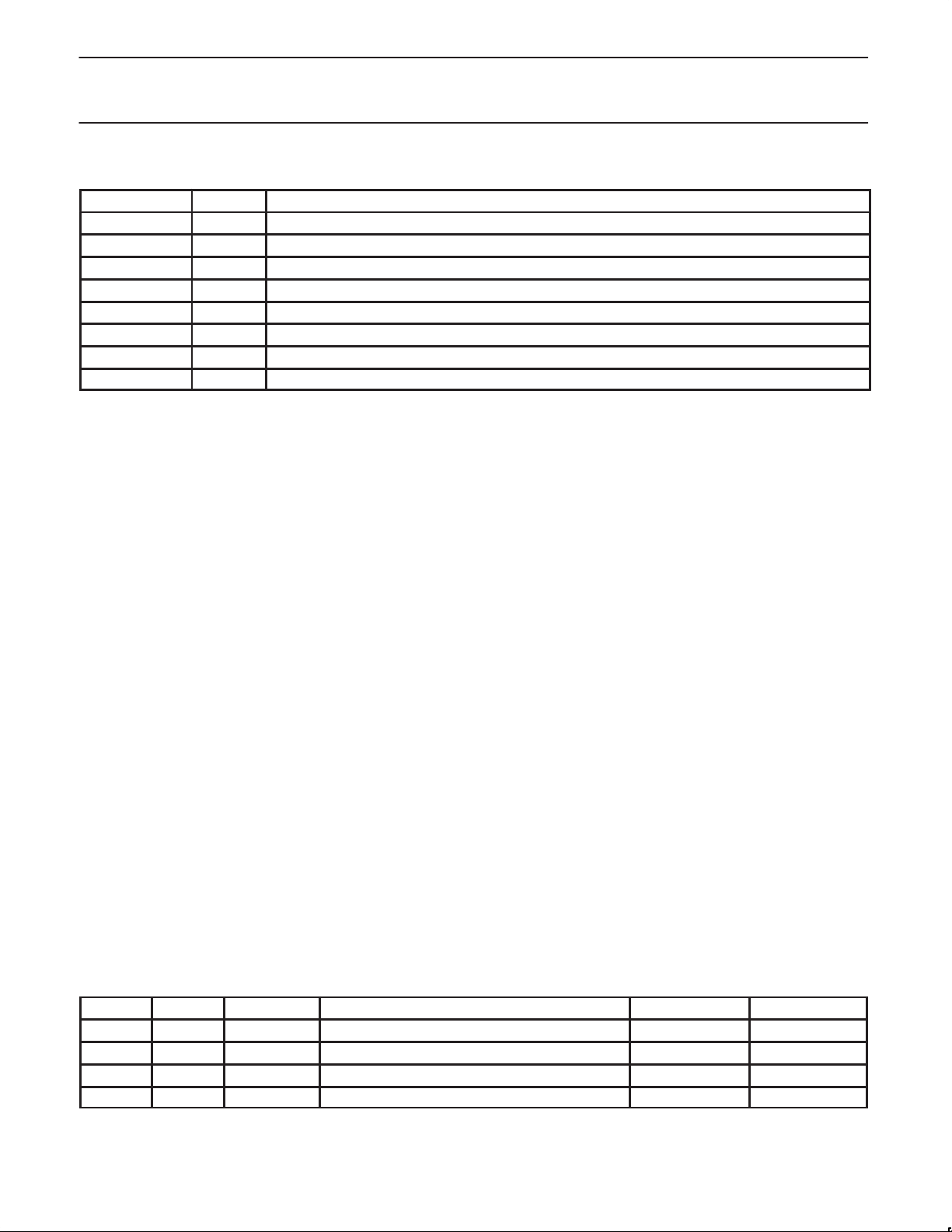
PIN DESCRIPTION
SYMBOL PIN DESCRIPTION
TxD 1 Transmit data input; high: transmitter passive; low: transmitter active
NSTB (Mode 0) 2 Stand-by control; high: normal and high-speed mode; low: sleep and wake-up mode
EN (Mode 1) 3 Enable control; high: normal and wake-up mode; low: sleep and high-speed mode
RxD 4 Receive data output; low: active bus condition detected; float/high: passive bus condition detected
BAT 5 Battery supply input (12V nom.)
RTH 6 Switched ground pin, pulls the load to ground, except in case the module ground is disconnected
CANH 7 Bus line transmit input/output
GND 8 Ground
FUNCTIONAL DESCRIPTION
The AU5790 is an integrated line transceiver IC that interfaces a
CAN protocol controller to the vehicle’s multiplexed bus line. It is
primarily intended for automotive “Class B” multiplexing applications
in passenger cars using a single wire bus line with ground return.
The achievable bit rate is primarily a function of the network time
constant and the bit timing parameters. For example, the maximum
bus speed is 33 kbps with bus loading as specified in J2411 for a full
32 node bus, while 41.6 kbps is possible with modified bus loading.
The AU5790 also supports a low-power sleep mode to help meet
ignition-off current draw requirements.
The protocol controller feeds the transmit data stream to the
transceiver’s TxD input. The AU5790 transceiver converts the TxD
data input to a bus signal with controlled slew rate and waveshaping
to minimize emissions. The bus output signal is transmitted via the
CANH in/output, connected to the physical bus line. If TxD is low,
then a typical voltage of 4V is output at the CANH pin. If TxD is high,
then the CANH output is pulled passive low via the local bus load
resistance R
module ground, the resistor R
AU5790. By providing this switched ground pin, no current can flow
from the floating module ground to the bus. The bus receiver detects
the data stream on the bus line. The data signal is output at the RxD
pin being connected to a CAN controller. The AU5790 provides
appropriate filtering to ensure low susceptibility against
electromagnetic interference. Further enhancement is possible by
applying an external capacitor between CANH and ground potential.
The device features low bus output leakage current at power supply
failure situations.
If the NSTB and EN control inputs are pulled low or floating, the
AU5790 enters a low-power or “sleep” mode. This mode is
dedicated to minimizing ignition-off current drain, to enhance system
efficiency. In sleep mode, the bus transmit function is disabled,
. To provide protection against disconnection of the
T
is connected to the RTH pin of the
T
e.g., the CANH output is inactive even when TxD is pulled low. An
internal network active detector monitors the bus for any occurrence
of signal edges on the bus line. If such edges are detected, this will
be signalled to the CAN controller via the RxD output. Normal
transmission mode will be entered again upon a high level being
applied to the NSTB and EN control inputs. These signals are
typically being provided by a controller device.
Sleeping bus nodes will generally ignore normal communication on
the bus. They should be activated using the dedicated wake-up
mode. When NSTB is low and EN is high the AU5790 enters
wake-up mode, i.e., it sends data with an increased signal level.
This will result in an activation of other bus nodes being attached to
the network.
The AU5790 also provides a high-speed transmission mode,
supporting bit rates up to 100 kbps. If the NSTB input is pulled high
and the EN input is low, then the internal waveshaping function is
disabled, i.e., the bus driver is turned on and off as fast as possible
to support high-speed transmission of data. Consequently, the EMC
performance is degraded in this mode compared to the normal
transmission mode. In high-speed transmission mode the AU5790
supports the bus signal levels as specified for the CANH output of
the fault-tolerant CAN transceiver TJA1054.
The AU5790 features special robustness at its BAT and CANH pins.
Hence the device is well suited for applications in the automotive
environment. The BA T input is protected against 45V load dump and
jump start conditions. The CANH output is protected against wiring
fault conditions, e.g., short circuit to ground or battery voltage as
well as typical automotive transients. In addition, an over-temperature
shutdown function with hysteresis is incorporated protecting the
device under system fault conditions. In case of the chip
temperature reaching the trip point, the AU5790 will latch-off the
transmit function. The transmit function is available again after a
small decrease of the chip temperature.
Table 1. Control Input Summary
NSTB EN TxD Description CANH RxD
0 0 don’t care Sleep mode 0V float (high)
0 1 Tx-data Wake-up transmission mode 0V, 12V bus state
1 0 Tx-data High-speed transmission mode 0V, 4V bus state
1 1 Tx-data Normal transmission mode 0V, 4V bus state
NOTE:
1. RxD outputs the bus state. If the bus level is below the receiver threshold (i.e., all transmitters passive), then RxD will be floating (i.e., high,
considering external pull-up resistance). Otherwise, if the bus level is above the receiver threshold (i.e., at least one transmitter is active),
then RxD will be low.
1999 Oct 28
4
1
1
1
Philips Semiconductors Preliminary specification
AU5790Single wire CAN transceiver
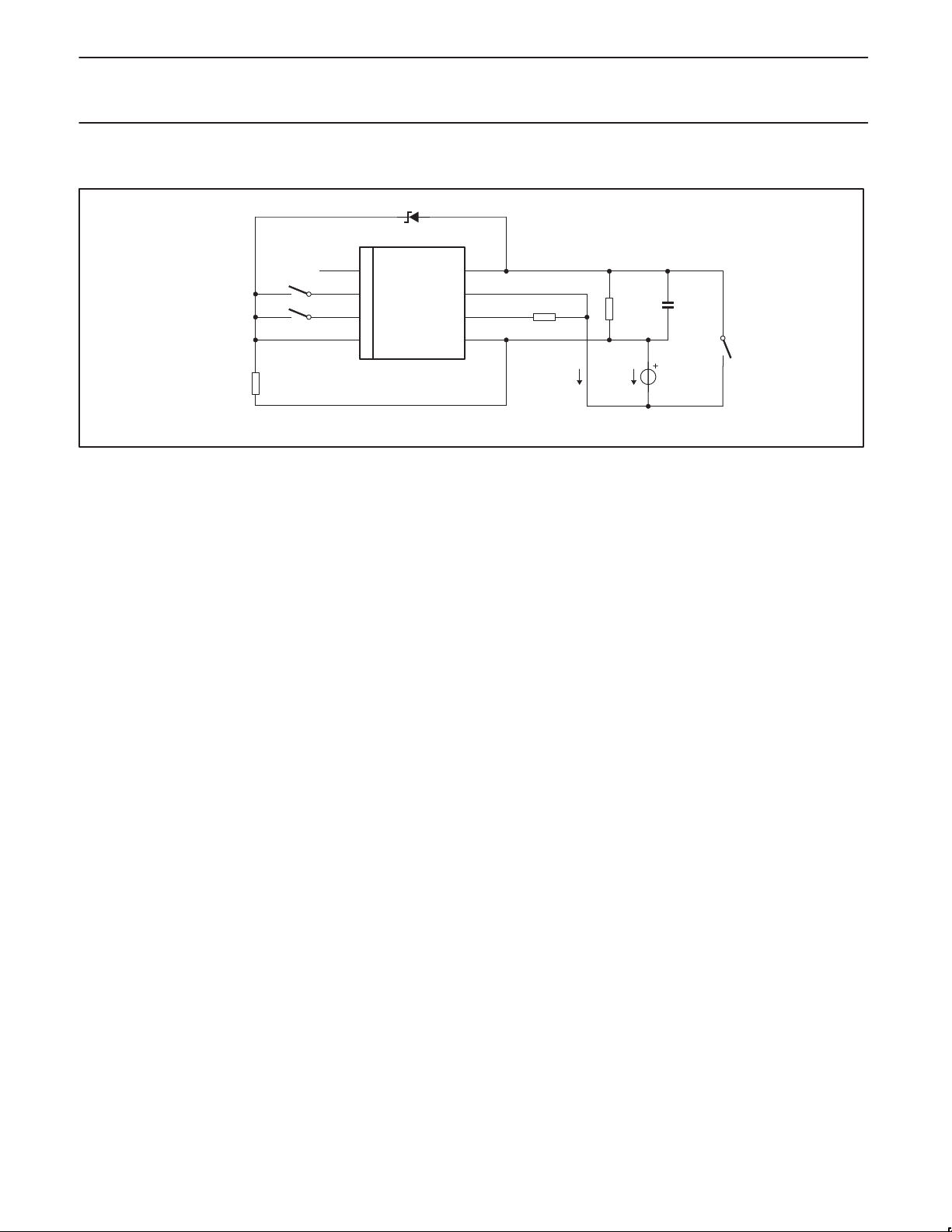
TEST CIRCUITS
5.1V
TxD
NSTB
EN
RxD
2.4 kΩ
NOTES:
Opening S3 simulates loss of module ground.
Check I_CAN_LG with the following switch positions:
1. S1 = open = S2
2. S1 = open, S2 = closed
3. S1 = closed, S2 = open
4. S1 = closed = S2
GND
CANH
AU5790
RTH
BAT
9.1 kΩ
I_CAN_LG
Figure 2. Loss of ground test circuit
2.4 kΩ
1 µF
S3
V
BAT
SL01234
1999 Oct 28
5
 Loading...
Loading...