

Page 1
ZETA6104 Indexer/Drive
Installation Guide
Rx
Tx
COM 1 COM 2 ENCODER LIMITS I/O
GND
6104
Rx+
SHLD
INDEXER DRIVE
Rx-
+5V
Tx+
GND
Tx-
Rx
GND
Tx
SHLD
SHLD
GND
ZZ+
BB+
AA+
+5V
GND
HOM
NEG
POS
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
PROGRAMMABLE I/O
Compumotor
95-132 VAC95-132 VAC
50/60 Hz
POWER
STEP
OVER TEMPOVER TEMP
MOTOR FAULTMOTOR FAULT
INTERLOCK
CENTER TAP
A
A+
AEARTH
B+
B-
CENTER TAP
B
INTERLOCK
ZETA
MOTOR
AC POWER
Compumotor Division
Compumotor
Parker Hannifin Corporation
p/n 88-014782-02B September 1997
Page 2
User Information
! !
WARNING
6000 Series products are used to control electrical and mechanical
components of motion control systems. You should test your motion
system for safety under all potential conditions. Failure to do so can result
in damage to equipment and/or serious injury to personnel.
6000 Series products and the information in this user guide are the proprietary property of Parker Hannifin Corporation or its licensers, and
may not be copied, disclosed, or used for any purpose not expressly authorized by the owner thereof.
Since Parker Hannifin constantly strives to improve all of its products, we reserve the right to change this user guide and software and
hardware mentioned therein at any time without notice.
In no event will the provider of the equipment be liable for any incidental, consequential, or special damages of any kind or nature
whatsoever, including but not limited to lost profits arising from or in any way connected with the use of the equipment or this user guide.
© 1995-7, Parker Hannifin Corporation
All Rights Reserved
Motion Architect is a registered trademark of Parker Hannifin Corporation.
Motion Builder, CompuCAM and DDE6000 are trademarks of Parker Hannifin Corporation.
Microsoft and MS-DOS are registered trademarks, and Windows, DDE and NetDDE are trademarks of Microsoft Corporation.
Motion Toolbox is a trademark of Snider Consultants, Inc.
LabVIEW is a registered trademark of National Instruments Corporation.
Technical Assistance
North America and Asia:
Compumotor Division of Parker Hannifin
5500 Business Park Drive
Rohnert Park, CA 94928
Telephone: (800) 358-9070 or (707) 584-7558
Fax: (707) 584-3793
FaxBack: (800) 936-6939 or (707) 586-8586
BBS: (707) 584-4059
e-mail: tech_help@cmotor.com
Internet: http://www.compumotor.com
Automation
Contact your local automation technology center (ATC) or distributor, or ...
Europe (non-German speaking):
Parker Digiplan
21 Balena Close
Poole, Dorset
England BH17 7DX
Telephone: +44 (0)1202 69 9000
Fax: +44 (0)1202 69 5750
Germany, Austria, Switzerland:
HAUSER Elektronik GmbH
Postfach: 77607-1720
Robert-Bosch-Str. 22
D-77656 Offenburg
Telephone: +49 (0)781 509-0
Fax: +49 (0)781 509-176
Product Feedback Welcome
E-mail: 6000user@cmotor.com
Page 3
Change Summary
ZETA6104 Installation Guide
Rev B
September 1997
The following is a summary of the primary technical changes to this document.
This book, p/n 88-014782-02B, supersedes 88-014782-02A and 88-014782-01B.
Revision B Change Wiring diagrams (series/parallel connections) for RSxxx-xxNPS and RSxxx-xxC10 motor
Revision A Changes (from 88-014782-01 B)
Topic Description
New Hardware Revision These are the primary changes resulting from hardware enhancements:
New CE-marked OS Series
and RS Series Motors
Miscellaneous Corrections
and Clarifications
Continued . . .
options have been corrected Ð see page 9.
¥ New input circuit design for
inputs, you must now connect 5-24VDC (from an on-board
V_I/O terminal on the I/O connector. If V_I/O is connected to +5V, AUX-P can be connected
to a supply of up to +24V; if
also be connected to +24V (or to
V_I/O (£1/3 of V_I/O voltage = low, ³2/3 of V_I/O voltage = high).
¥ Jumper JU7 was added to the ZETA6104 PCA. The purpose of JU7 is to select either
4-wire or 2-wire RS-485 communication. The default is 4-wire (JU7 in position 3).
¥ A new chip is used for the programmable output circuit (UDK2559).
This manual has been updated with data to support the new CE-marked OS Series and RS
Series motors that may be ordered with your ZETA6104 system.
Corrections:
¥ Operating temperature range is 32-113°F (0-45°C);
previously documented as 32-122°F (0-50°C).
¥ The ZETA6104 does
¥ The Static Torque specs for the ZETA motors were incorrect. The DMTSTT (static torque)
command setting for the ZETA57-83 motor should be DMTSTT2 (not DMTSTT1).
¥ The parallel motor wiring diagrams (see back cover and page 9) were in error and have
now been corrected.
¥ The encoder test procedure on page 21 was corrected.
¥ The motor inductance requirements for non-Compumotor motors (see page 43) is:
recommended range = 5.0 to 50.0 mH; minimum = 0.5 mH; maximum = 80.0 mH.
Clarifications:
¥ All inputs and outputs are optically isolated from the internal microprocessor (not from the
other inputs and outputs).
¥ The programmable outputs (including
5-24VDC.
¥ You must select
power the
+5V terminal and to an external supply will damage the ZETA6104.
¥ If you are using an RS-232 connection between the host computer and the master
ZETA6104 connected to multiple ZETA6104s in an RS-485 multi-drop, make sure the
master ZETA6104 has these settings executed in the order given (you should place these
settings in your power-up STARTP program):
PORT1 (select RS-232 port, COM1, for configuration)
ECHO3 (echo to both COM ports)
PORT2 (select RS-485 port, COM2, for configuration)
ECHO2 (echo to the other COM port, COM1)
either the on-board +5V terminal or an external 5-24VDC power supply to
AUX-P, IN-P or OUT-P pull-up resistors. Connecting AUX-P, IN-P or OUT-P to the
P-CUT, HOM, NEG, POS, TRG-A and TRG-B. To power these
or external source) to the new
V_I/O is connected to an external +24V supply, AUX-P must
GND). Switching levels depend on the power applied to
not support RS-422 communication as noted in the previous rev.
OUT-A) will sink up to 300mA, or source up to 5mA at
Page 4
LVD and EMC Installation
Guidelines
The ZETA6104 is in compliance with the Low Voltage Directive (72/23/EEC) and the CE
Marking Directive (93/68/EEC) of the European Community.
When installed according to the procedures in the main body of this installation guide, the
ZETA6104 may not necessarily comply with the Low Voltage Directive (LVD). To install the
ZETA6104 so that it is LVD compliant, refer to supplemental installation instructions provided
in Appendix C. If you do not follow these instructions, the protection of the ZETA6104 may be
impaired.
The ZETA6104 is sold as a complex component to professional assemblers. As a component,
it is not required to be compliant with Electromagnetic Compatibility Directive 89/336/EEC.
However, Appendix D provides guidelines on how to install the ZETA6104 in a manner most
likely to minimize the ZETA6104Õs emissions and to maximize the ZETA6104Õs immunity to
externally generated electromagnetic interference.
Page 5
ABOUT THIS GUIDE
Chapter 1. Installation
What You Should Have (ship kit) ........................................................... 2
Before You Begin ..................................................................................... 2
Recommended Installation Process ............................................. 2
Electrical Noise Guidelines ........................................................... 2
General Specifications ............................................................................ 3
Pre-installation Adjustments................................................................... 4
DIP Switch Settings Ð Motor Current, Address, Autobaud .......... 4
Changing the COM 2 Connector from RS-232 to RS-485 .......... 5
Mounting the ZETA6104.......................................................................... 6
Electrical Connections ............................................................................ 7
Grounding System.......................................................................... 7
Pulse Cut-Off (P-CUT) Ñ Emergency Stop Switch ................... 7
Serial Communication ................................................................... 8
Motor (ZETA and OS/RS motors only) ........................................ 9
End-of-Travel and Home Limit Inputs......................................... 11
Encoder ......................................................................................... 12
Trigger Inputs................................................................................ 13
General-Purpose Programmable Inputs & Outputs ................... 14
RP240 Remote Operator Panel................................................... 18
Input Power ................................................................................... 18
Lengthening I/O Cables ................................................................ 19
Testing the Installation........................................................................... 20
Matching the Motor to the ZETA6104 (OPTIONAL) ........................... 22
Mounting & Coupling the Motor ............................................................ 24
Mounting the Motor....................................................................... 24
Coupling the Motor ....................................................................... 25
Optimizing System Performance (OPTIONAL) ................................. 26
Configuring Active Damping........................................................ 26
Configuring Electronic Viscosity (EV) ........................................ 29
Record Your SystemÕs Configuration .................................................. 30
Recommended Set-up Program Elements ................................ 30
WhatÕs Next? ......................................................................................... 32
Program Your Motion Control Functions.................................... 32
Chapter 2. Troubleshooting
Troubleshooting Basics......................................................................... 34
Reducing Electrical Noise ........................................................... 34
Diagnostic LEDs........................................................................... 34
Test Options.................................................................................. 34
Technical Support......................................................................... 34
Common Problems & Solutions........................................................... 35
Troubleshooting Serial Communication Problems............................. 36
Product Return Procedure .................................................................... 37
Appendix A (Resonance, Ringing & Damping) .......................... 39
Appendix B (Using Non-Compumotor Motors) ......................... 43
Appendix C (LVD Installation Instructions) ................................. 47
Appendix D (EMC Installation Guidelines) ................................. 49
Index.................................................................................................. 53
Purpose of This Guide
This document is designed to help you install and troubleshoot your ZETA6104 hardware
system. Programming related issues are covered in the 6000 Series ProgrammerÕs Guide and
the 6000 Series Software Reference.
The ZETA6104 product is often referred to the as the Ò6104Ó because it is part of the 6000
family of products. The ZETA6104Õs software and the 6000 Series software documentation
(i.e., the Software Reference and the ProgrammerÕs Guide) refer to this product as the Ò6104.Ó
What You Should Know
To install and troubleshoot the ZETA6104, you should have a fundamental understanding of:
¥ Electronics concepts, such as voltage, current, switches.
¥ Mechanical motion control concepts, such as inertia, torque, velocity, distance, force.
¥ Serial communication and terminal emulator experience: RS-232C and/or RS-485
Related Publications
¥ 6000 Series Software Reference, Parker Hannifin Corporation, Compumotor Division;
¥ 6000 Series ProgrammerÕs Guide, Parker Hannifin Corporation, Compumotor Division;
¥ Current Parker Compumotor Motion Control Catalog
¥ Schram, Peter (editor). The National Electric Code Handbook (Third Edition). Quincy,
ÒZETA6104Ó Synonymous with Ò6104Ó
part number 88-012966-01
part number 88-014540-01
MA: National Fire Protection Association
Online Manuals
This manual (in Acrobat PDF format) is available from our web site: http://www.compumotor.com
Page 6
LVD Installation Guidelines
The ZETA6104 is in compliance with the Low Voltage Directive (72/23/EEC) and the CE
Marking Directive (93/68/EEC) of the European Community.
When installed according to the procedures in the main body of this installation guide, the
ZETA6104 may not necessarily comply with the Low Voltage Directive (LVD). To install the
ZETA6104 so that it is LVD compliant, refer to supplemental installation instructions
provided in Appendix C. If you do not follow these instructions, the protection of the
ZETA6104 may be impaired.
The ZETA6104 is sold as a complex component to professional assemblers. As a component,
it is not required to be compliant with Electromagnetic Compatibility Directive 89/336/EEC.
However, Appendix D provides guidelines on how to install the ZETA6104 in a manner most
likely to minimize the ZETA6104Õs emissions and to maximize the ZETA6104Õs immunity
to externally generated electromagnetic interference.
ii z ZETA6104 Installation Guide
Page 7
CHAPTER ONE
Installation
1
IN THIS CHAPTER
¥ Product ship kit list
¥ Things to consider before you install the ZETA6104
¥ General specifications table
¥ Optional pre-installation alterations
- DIP switch settings Ð motor current, device address, autobaud feature
- Changing the COM 2 port from RS-232C to RS-485
¥ Mounting the ZETA6104
¥ Connecting all electrical components (includes specifications)
¥ Testing the installation
¥ Matching the motor to the ZETA6104
¥ Motor mounting and coupling guidelines
¥ Using the damping features to optimize performance
¥ Preparing for what to do next
To install the ZETA6104 so that it is LVD compliant, refer to the supplemental instructions in Appendix C. Appendix D provides guidelines on how to install the ZETA6104 in
a manner most likely to minimize the ZETA6104Õs emissions and to maximize the
ZETA6104Õs immunity to externally generated electromagnetic interference.
Page 8
What You Should Have (ship kit)
Part Name Part Number
ZETA6104 standard product (with ship kit).............. ZETA6104
Ship kit:
120VAC power cord.......................................... 44-014768-01
Motor connector ................................................ 43-008755-01
(ZETA series motors are factory wired with a motor connector)
Wire jumpers: Qty. 3....................................... 44-015142-01
Quick-reference magnet
(see side of ZETA6104 chassis) .................................. 87-014873-01
This user guide
(ZETA6104 Installation Guide)......................... 88-014782-02
6000 Series Software Reference ..................... 88-012966-01
6000 Series ProgrammerÕs Guide................... 88-014540-01
Motion Architect disks: Disk 1 ...................... 95-013070-01
If an item is missing, call the factory (see phone numbers on inside front cover).
Qty. 1....................................... 44-015741-01
Disk 2 ...................... 95-013070-02
Driver & Samples... 95-016324-01
MOTORS: These are the motors that can be ordered with the ZETA6104.
ZETA Motors: *
ZETA57-51 .............. Size 23 single-stack (57-51) motor
ZETA57-83 .............. Size 23 double-stack (57-83) motor
ZETA57-102 ............ Size 23 triple-stack (57-102) motor
ZETA83-62 .............. Size 34 single-stack (83-62) motor
ZETA83-93 .............. Size 34 double-stack (83-93) motor
ZETA83-135 ............ Size 34 triple-stack (83-135) motor
* If you ordered a ZETA6104 and a ZETA motor as a ÒsystemÓ, the
product part number reflects the motor size (e.g., ZETA6104-57-83).
OS Motors (CE Marked):
OS2HB-xxx-xx........ Size 23 half-stack (57-40) motor, 170VDC winding
OS21B-xxx-xx......... Size 23 single-stack (57-51) motor, 170VDC winding
OS21B-xxx-xx......... Size 23 double-stack (57-83) motor, 170VDC winding
RS Motors (CE Marked):
RS31B-xxx-xx......... Size 34 single-stack (83-62) motor, 170VDC winding
RS32B-xxx-xx......... Size 34 double-stack (83-93) motor, 170VDC winding
RS33B-xxx-xx......... Size 34 triple-stack (83-135) motor, 170VDC winding
Before You Begin
WARNINGS
The ZETA6104 is used to control your systemÕs electrical and mechanical components.
Therefore, you should test your system for safety under all potential conditions. Failure to do
so can result in damage to equipment and/or serious injury to personnel.
Always remove power to the ZETA6104 before:
¥ Connecting any electrical device (e.g., motor, encoder, inputs, outputs, etc.)
¥ Adjusting the DIP switches, jumpers, or other internal components
Recommended Installation Process
This chapter is
organized
sequentially to best
approximate a typical
installation process.
1. Review the general specifications
2. Perform configuration/adjustments (if necessary)
3. Mount the ZETA6104
4. Connect all electrical system components
5. Test the installation
6. Match the motor to the ZETA6104 Ñ optional
7. Mount the motor and couple the load
8. Optimize performance (using the ZETA6104Õs damping features) Ñ optional
9. Record the system configuration (record on the information label and/or in a set-up program)
10. Program your motion control functions. Programming instructions are provided in the
6000 Series ProgrammerÕs Guide and the 6000 Series Software Reference. We recommend
using the programming tools provided in Motion Architect for Windows (found in your
ship kit). You can also benefit from an optional iconic programming interface called
Motion Builder (sold separately).
Electrical Noise Guidelines
¥ Do not route high-voltage wires and low-level signals in the same conduit.
¥ Ensure that all components are properly grounded.
¥ Ensure that all wiring is properly shielded.
¥ Noise suppression guidelines for I/O cables are provided on page 19.
¥ Appendix D (page 49) provides guidelines on how to install the ZETA6104 in a manner
most likely to minimize the ZETA6104Õs emissions and to maximize the ZETA6104Õs
immunity to externally generated electromagnetic interference.
2 z ZETA6104 Installation Guide
Page 9
General Specifications
Parameter Specification
Power
AC input .................................................................... 95-132VAC, 50/60Hz, single-phase
Status LEDs/fault detection...................................... Refer to Diagnostic LEDs on page 34
Environmental
Operating Temperature .......................................... 32 to 113°F (0 to 45°C) Ñ over-temperature shutdown fault at 131°F (55°C)
Storage Temperature............................................... -22 to 185°F (-30 to 85°C)
Humidity ................................................................... 0 to 95% non-condensing
Performance
Position Range & Stepping Accuracy ..................... Position range: ±2,147,483,648 steps; Stepping accuracy: ±0 steps from preset total
Velocity Range, Accuracy, & Repeatability............ Range: 1-2,000,000 steps/sec; Accuracy: ±0.02% of maximum rate;
Acceleration Range.................................................. 1-24,999,975 steps/sec
Motion Algorithm Update Rate................................ 2 ms
Serial Communication RS-485 requires internal jumper and DIP switch configuration (see page 5).
Connection Options.................................................. RS-232C, 3-wire; RS-485 (default is 4-wire; for 2-wire move JU7 to position 1);
Maximum units in daisy-chain or multi-drop......... 99 (use DIP switch or ADDR command to set individual addresses for each unit)
Communication Parameters................................... 9600 baud (range is 19200-1200Ñsee AutoBaud, page 4), 8 data bits, 1 stop bit, no parity;
Inputs All inputs are optically isolated from the microprocessor (not from the other inputs).
HOM, POS, NEG, TRG-A, TRG-B, P-CUT .................. Powered by voltage applied to V_I/O terminal (switching levels: £1/3 of V_I/O voltage = low,
Encoder..................................................................... Differential comparator accepts two-phase quadrature incremental encoders with differential
16 General-Purpose Programmable ..................... HCMOS compatible* with internal 6.8 KW pull-ups to IN-P terminalÑconnect IN-P to power
Outputs All outputs are optically isolated from the microprocessor (not from the other outputs).
9 Programmable (includes OUT-A)......................... Open collector output with 4.7 KW pull-ups. Can be pulled up by connecting OUT-P to power
+5V Output................................................................ Internally supplied +5VDC. +5V terminals are available on the COM2, ENCODER and I/O
* HCMOS-compatible switching voltage levels: Low £ 1.00V, High ³ 3.25V.
TTL-compatible switching voltage levels: Low £ 0.4V, High ³ 2.4V.
(refer to page 18 for peak power requirements, based on the motor you are using)
Repeatability: ±0.02% of set rate
2
Change internal jumpers JU1-JU6 to position 1 to select RS-485 communication
RS-232: Full duplex; RS-485: Half duplex (change jumper JU6 to position 1)
³2/3 of V_I/O voltage = high). V_I/O can handle 5-24V with max. current of 100mA. Internal
6.8 KW pull-ups to AUX-P terminalÑconnect AUX-P to power source (+5V terminal or an
external 5-24V supply) to source current or connect AUX-P to GND to sink current; AUX-P can
handle 0-24V with max. current of 50mA. Voltage range for these inputs is 0-24V.
(recommended) or single-ended outputs.
Maximum voltage = 5VDC. Switching levels (TTL-compatible): Low £ 0.4V, High ³ 2.4V.
Maximum frequency = 1.6 MHz. Minimum time between transitions = 625 ns.
source (+5V pin #49 or an external 5-24V supply) to source current or connect IN-P to GND to
sink current; IN-P can handle 0-24V with max. current of 100 mA. Voltage range = 0-24V.
source (+5V terminal or an external 5-24V supply); OUT-P can handle 0-24V with max.
current of 50mA. Outputs will sink up to 300mA or source up to 5mA at 5-24VDC.
8 general-purpose outputs on the Programmable I/O connector, OUT-A on the I/O connector.
connectors. Load limit (total load for all I/O connections) is 0.5A.
Motor Specifications
Static Torque oz-in
Rotor Inertia oz-in
Bearings
Thrust load lb
Radial load lb
End play (Reversing load in
equal to 1 lb) (mm)
Radial play in
(Per 0.5 lb load) (mm)
Weight lb
(Motor+Cable+Connector) (kg)
Certifications UL Rec.
(N-m)
2
(kg-m2 x 10Ð6)
(kg)
(kg)
CE (LVD)
CE (LVD & EMC)
Size 23 ZETA Motors Size 34 ZETA Motors Size 23 OS Motors Size 34 RS Motors
ZETA
57-51
65
(0.46)
0.546
(9.998)
25
(11.3)
15
(6.8)
0.005
(0.13)
0.0008
(0.02)
1.6
(0.7)
No
No
No
ZETA
57-83
125
(0.88)
1.1
(20.1 )
25
(11.3)
15
(6.8)
0.005
(0.13)
0.0008
(0.02)
2.4
(1.1)
No
No
No
ZETA
57-102
148
(1.05)
1.69
(30.9)
25
(11.3)
15
(6.8)
0.005
(0.13)
0.0008
(0.02)
3.2
(1.5)
No
No
No
ZETA
83-62
141
(1.00)
3.47
(63.4)
50
(22.6)
25
(11.3)
0.005
(0.13)
0.0008
(0.02)
3.8
(1.7)
No
No
No
ZETA
83-93
292
(2.11)
6.76
(124)
50
(22.6)
25
(11.3)
0.005
(0.13)
0.0008
(0.02)
5.1
(2.3)
No
No
No
ZETA
83-135 OS2HB OS21B OS22B RS31B RS32B RS33B
382
(2.70)43(0.30)82(0.58)
10.47
(191)
50
(22.6)
25
(11.3)
0.005
(0.13)
0.0008
(0.02)
8.3
(3.8)
No
No
No
0.386
(0.070)
13
(5.9)
20
(9.1)
0.001
(0.025)
0.0008
(0.02)
1.0
(0.45)
No
Yes
No
0.656
(0.119)
13
(5.9)
20
(9.1)
0.001
(0.025)
0.0008
(0.02)
1.5
(0.68)
No
Yes
No
155
1.09)
1.390
(0.253)
13
(5.9)
20
(9.1)
0.001
(0.025)
0.0008
(0.02)
2.5
(1.14)
No
Yes
No
141
(1.00)
3.204
(0.583)
180
(81.6)
35
(15.9)
0.001
(0.025)
0.0008
(0.02)
3.2
(1.45)
Yes
Yes
w/C10 & EMC kit
292
(2.06)
6.563
(1.195)
180
(81.6)
35
(15.9)
0.001
(0.025)
0.0008
(0.02)
5.3
(2.41)
Yes
Yes
w/C10 & EMC kit
382
2.70)
9.652
(1.757)
180
(81.6)
35
(15.9)
0.001
(0.025)
0.0008
(0.02)
7.6
(3.45)
Yes
Yes
w/C10 & EMC kit
Speed/Torque Curves ------ Refer to page 10 ------ ------ Refer to page 10 ------ ------ Refer to page 10 ------ ------ Refer to page 10 ------
Dimensions ------ Refer to page 24 ------ ------ Refer to page 24 ------ ------ Refer to page 24 ------ ------ Refer to page 24 ------
Chapter 1. Installation 3
Page 10
Pre-installation Adjustments
y
Factory Settings May Be Sufficient (if so, skip this section):
¥ Device address is set to zero (if daisy-chaining you can automatically establish with the ADDR command).
¥ Serial communication method is RS-232C.
DIP Switch Settings Ð Motor Current, Address, Autobaud
Move the
Cover
CAUTION
Do not set switches 6-11 to ON at the
same time. This invokes a factory test
mode in which the ZETA6104 executes
a motion sequence upon power up.
Top View of ZETA6104
off
12345 12
6 7 8 9 10 11
=
off
=
on
Motor Current
Zeta57-51 Series
Zeta57-83 Series
OS2HB Series
Zeta57-102 Series
OS21B Series
OS22B Series
Zeta83-62 Series
RS31B Series
Zeta57-51 Parallel
Zeta83-93 Series
RS32B Series
OS2HB Parallel
Zeta57-83 Parallel
Zeta57-102 Parallel
Zeta83-135 Series
RS33B Series
OS21B Parallel
Zeta83-xxx Parallel
OS22B Parallel
RS3xB Parallel
Factory Settings: If you ordered a ZETA Series
motor as part of your ZETA6104 ÒsystemÓ (e.g.,
ZETA6104-83-62), then the DIP switches will be
factory-configured to operate your specific motor in
a series wiring configuration.
If you ordered the ZETA6104 without a motor, or
with an OS or RS Series motor, or if you ordered
the ZETA Series motor separately (not as a
ÒsystemÓ), all DIP switches are factory-set to the
OFF position.
(Amps)
0.14 off off off off off
0.26 off off off off on
0.39 off off off on off
0.51 off off off on on
0.64 off off on off off
0.76 off off on off on
0.89 off off on on off
1.01 off off on on on
1.14 off on off off off
1.26 off on off off on
1.38 off on off on off
1.51 off on off on on
1.63 off on on off off
1.76 off on on off on
1.88 off on on on off
2.01 off on on on on
2.14 on off off off off
2.26 on off off off on
2.38 on off off on off
2.51 on off off on on
2.63 on off on off off
2.76 on off on off on
2.88 on off on on off
3.01 on off on on on
3.13 on on off off off
3.26 on on off off on
3.38 on on off on off
3.50 on on off on on
3.63 on on on off off
3.75 on on on off on
3.88 on on on on off
4.00 on on on on on
off off off off off 0 (default)
off off off off on 1
off off off on off 2
off off off on on 3
off off on off off 4
off off on off on 5
off off on on off 6
off off on on on 7
off on off off off 8
off on off off on 9
off on off on off 10
off on off on on 11
off on on off off 12
off on on off on 13
off on on on off 14
off on on on on 15
on off off off off 16
on off off off on 17
on off off on off 18
on off off on on 19
on off on off off 20
on off on off on 21
on off on on off 22
on off on on on 23
on on off off off 24
on on off off on 25
on on off on off 26
on on off on on 27
on on on off off 28
on on on off on 29
on on on on off 30
on on on on on 31
on off
The default baud rate is 9600. As an alternative, you can use
this procedure to automatically match your terminal's speed of
1200, 2400, 4800, 9600, or 19200 baud.
1. Set switch 6 to on and switch 7 to off.
2. Connect the ZETA6104 to the terminal.
3. Power up the terminal.
4. Cycle power to the ZETA6104 and immediately press the
space bar several times.
5. The ZETA6104 should send a message with the baud rate
on the first line of the response. If no baud rate message is
displayed, verify steps 1-3 and repeat step 4.
6. Change switches 6 & 7 to off.
7. Cycle power to the ZETA6104. This stores the baud rate
in non-volatile memor
NOTE: Autobaud works only on the ZETA6104Õs COM 1 serial port.
Automatic Addressing:
If you are connecting multiple
units (see page 8), you can
use the ADDR command to
establish a unique address for
each unit. The ADDR
command overrides the DIP
switch setting. For details,
refer to the 6000 Series
Software Reference or the
6000 Series Programmer's
Guide.
.
Address
AutoBaud
4 z ZETA6104 Installation Guide
Page 11
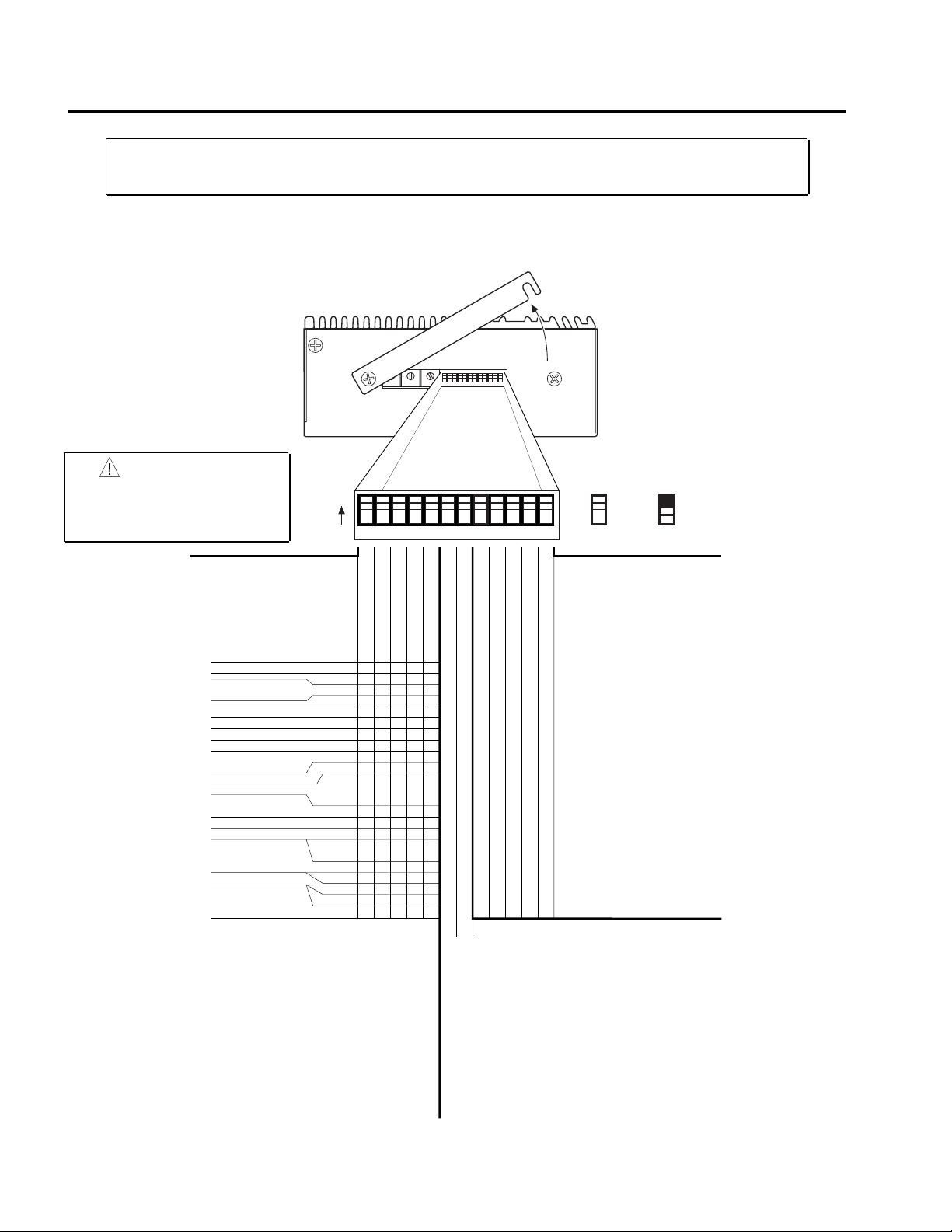
Changing the COM 2 Connector from RS-232 to RS-485
)
RS-232C Users
+5V
COM 2
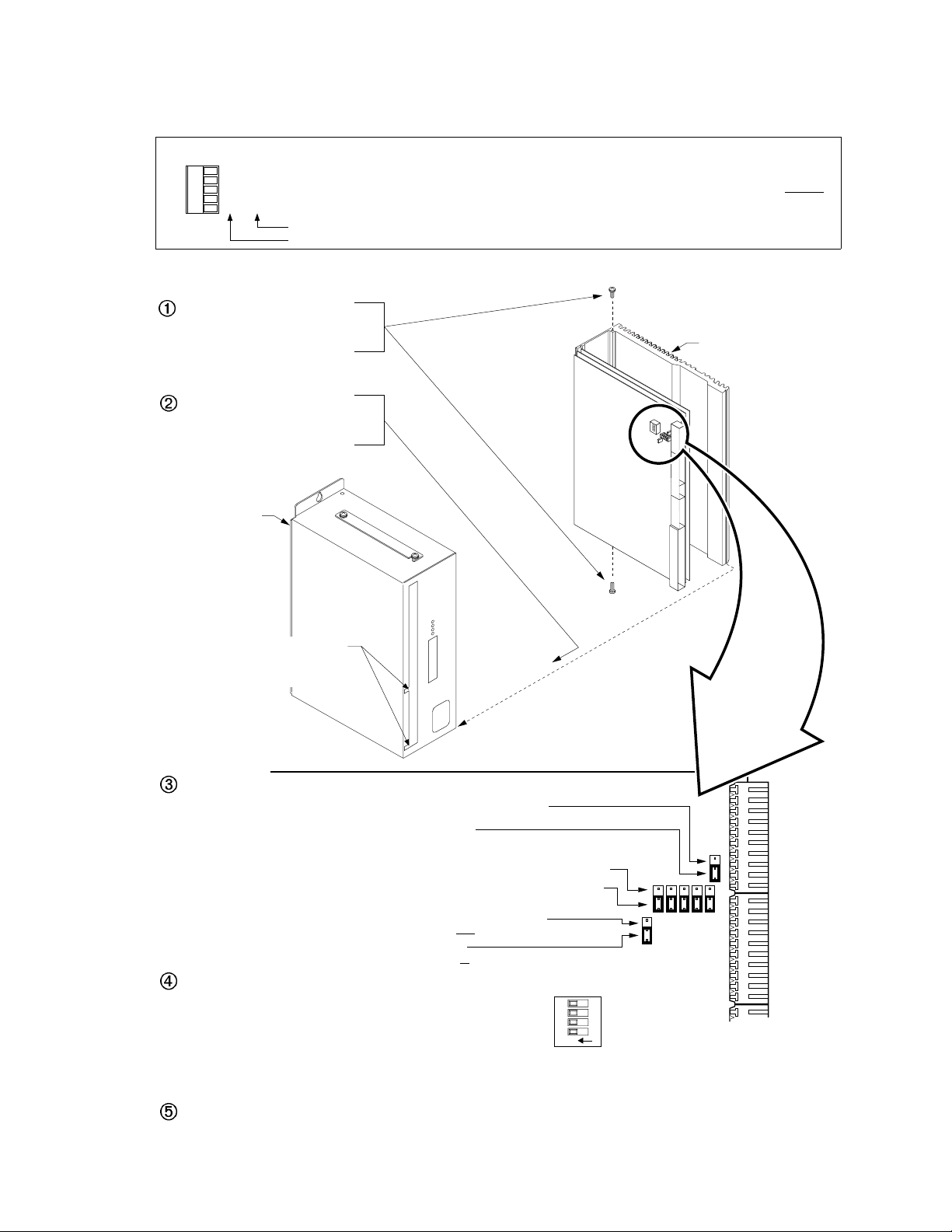
Remove the two retainer screws.
(one on the top of the chassis,
one on the bottom of the chassis)
Slide the chassis forward, then
away from the heat sink.
(follow the dashed arrow)
GND
Rx
Tx
SHLD
Chassis
Rx+
RxÐ
Tx+
TxÐ
GND
RS-485 (optional)
RS-232 (factory default
The ZETA6104Õs COM 2 port is factory configured for RS-232C
communication (use the left-hand pin descriptions). If you
need to use RS-485 communication, you may ignore this section
and proceed to the Mounting instructions.
do not
Heatsink
Be careful not to catch
the 50-pin header clips
on the chassis.
Set the jumpers.
RS-232: Leave JU6 set to position 3 (factory default).
RS-485: Set jumper JU6 to position 1
(disables power-up messages, error messages, & echo).
COM 2 port for RS-232, set JU1-JU5 to position 3 (factory default).
COM 2 port for RS-485, set JU1-JU5 to position 1 (as illustrated).
4-wire RS-485, set JU7 to position 3 (factory default).
2-wire RS-485, set JU7 to position 1.
Set the DIP switches.
DIP switch #4: Rx Termination Resistor...........120 W
DIP switch #3: Tx+ Bias Resistor.....................681 W
DIP switch #2: Tx Termination Resistor...........120 W
DIP switch #1: TxÐ Bias Resistor.....................681 W
NOTE: Set the switches to ON (as illustrated) to use the internal resistors. Do this for a single unit or for the
last unit in a multi-drop only. If these resistor values are not appropriate for your application, set the switches
to OFF and connect your own external resistors. See page 8 for resistor calculations and wiring instructions.
(4-wire is full duplex: transmit and receive at the same time)
(2-wire is half duplex: transmit or
receive at any time)
1234
N
O
Reattach the chassis and replace the two retainer screws.
Chapter 1. Installation 5
Page 12
Mounting the ZETA6104
)
)
Before you mount the ZETA6104
Check the list below to make sure you have performed all the necessary configuration tasks that require
accessing internal components (DIP switches, potentiometers, and jumpers). You may, however, be able to
adjust DIP switches and pots after mounting, if you allow access to the top of the ZETA6104 chassis.
¥ Select motor current (DIP switches). If you ordered a ZETA motor with your system (e.g., ZETA6104-57-83) and you
intend to use series motor winding, use the factory setting. If you need to change this setting, refer to page 4 for instructions.
¥ Select device address (DIP switches). If you are not connecting multiple ZETA6104 units in an RS-232C daisy chain or an
RS-485 multi-drop, use the factory setting. If you need to change this setting, refer to page 4 for instructions.
¥ Select serial communication method (jumpers & DIP switches). If you are using RS-232C to communicate with the
ZETA6104, use the factory settings. If you need to change these settings (i.e., for RS-485), refer to page 5 for instructions.
¥ Be aware that if you exercise the motor matching procedures on page 22, you will need to access the potentiometers at the top
of the ZETA6104 chassis. (The motor matching procedures are placed after the Electrical Connections section of this manual
because the process requires that you first understand how to connect the motor, serial communication, and AC power.)
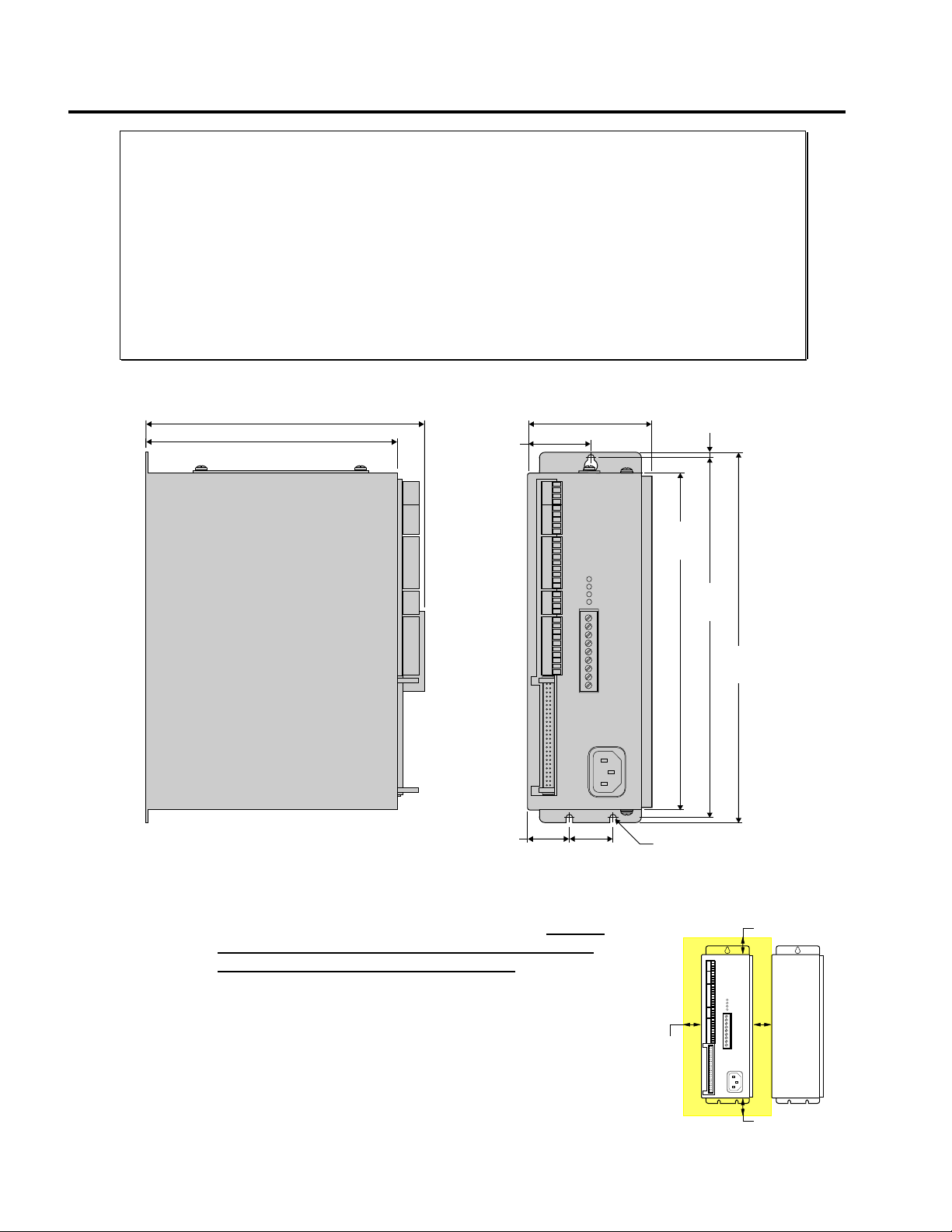
6.813 (173.1)
5.970 (151.6)
Dimensions in inches (millimeters).
1.465
(37.2)
0.965
(24.5)
4.000
(101.6)
1.000
(25.4)
0.133
(3.4)
8.000
(203.2)
8.600
(218.4)
8.850
(224.8)
3x ¯0.156 (3.9)
(clearance for #6 (M3.5)
mounting screw
Environmental
Considerations
Temperature. Operate the ZETA6104 in ambient
temperatures between 32°F (0°C) and 113°F (45°C). Provide a
minimum of 1 inch (25.4 mm) of unrestricted air-flow space
around the ZETA6104 chassis (see illustration). The ZETA6104
will shut itself down if its internal sensor reaches 131°F (55°C).
Humidity. Keep below 95%, non-condensing.
Airborne Contaminants, Liquids. Particulate
contaminants, especially electrically conductive material, such as
metal shavings and grinding dust, can damage the ZETA6104 and
the Zeta motor. Do not allow liquids or fluids to come in
contact with the ZETA6104 or its cables.
6 z ZETA6104 Installation Guide
Minimum Airflow Space = 1 inch
1.0 (25.4)
1.0
(25.4)
1.0 (25.4
Page 13
Electrical Connections
To install the ZETA6104 so that it is LVD compliant, refer also to the supplemental instructions in Appendix C. Appendix D provides guidelines on how to install the ZETA6104 in a
manner most likely to minimize the ZETA6104Õs emissions and to maximize the
ZETA6104Õs immunity to externally generated electromagnetic interference.
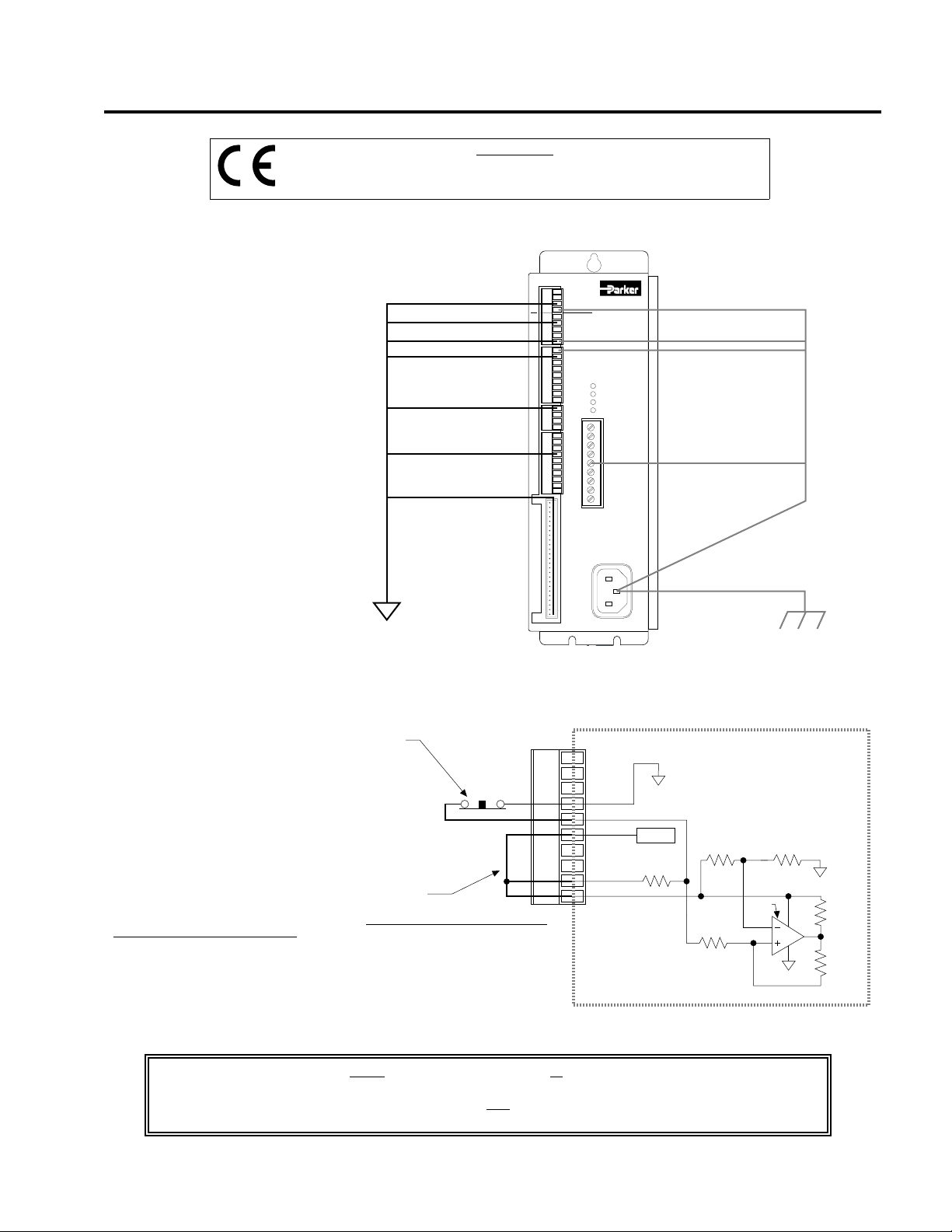
Grounding System
* The function of COM2Õs terminals depends
on whether it is configured for RS-232 (the
factory default configuration) or for RS-485
(see page 5 for configuration).
GND
GND (if COM2 is RS-232) *
GND (if COM2 is RS-485) *
GND
COM 1 COM 2
ENCODER
GND
SHLD
GND
SHLD
SHLD
GND
SHLD
GND
SHLD (if COM2 is RS-232) *
SHLD
NOTE: The inputs and outputs are isolated
from the internal microprocessor, but are not
isolated from the other inputs and outputs.
GND
GND
GND (even number pins)
LIMITS
GND
GND
I/O
1
2
PROGRAMMABLE I/O
49
50
Isolated
Ground
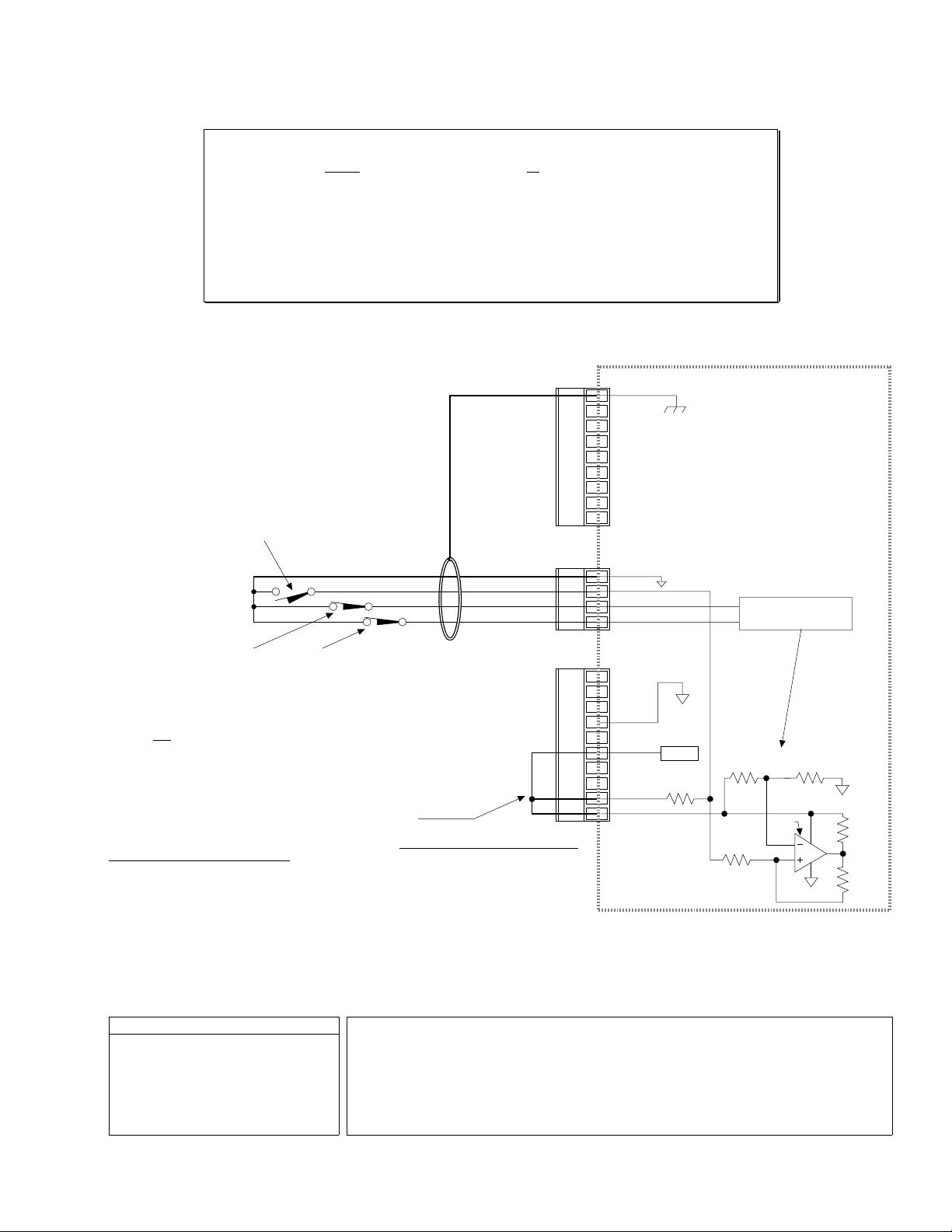
Pulse Cut-Off (P-CUT) Ñ Emergency Stop Switch
P-CUT connected to GND (normally-closed switch).
If this connection is opened, motion is killed and the
program in progress is terminated.
If the P-CUT input is not grounded when motion is
commanded, motion will not occur and the error message
ÒWARNING: PULSE CUTOFF ACTIVEÓ will be displayed in
the terminal emulator.
+5V connected to AUX-P and V_I/O (sourcing current).
Provides +5V power to the P-CUT pull-up resistor. As an alternative, you can
connect AUX-P to an external supply of up to +24V (but do not use both the on-board +5V
terminal and an external 5-24V supply). If V_I/O is connected to a +5V supply (on-board or
external), AUX-P can be connected to a supply of up to +24V. If V_I/O is connected to an
external +24V supply, AUX-P must also be connected to +24V (or to GND).
Switching levels depend on the voltage applied to V_I/O:
LOW £ 1/3 of V_I/O voltage; HIGH ³ 2/3 of V_I/O voltage
NOTE: AUX-P and V_I/O are also used by the HOM, NEG, POS & TRG inputs.
SINKING CURRENT: To make P-CUT (as well as HOM, NEG, POS & TRG) sink current,
connect AUX-P to GND.
I/O Connector
Compumotor
95-132 VAC
50/60 Hz
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
INTERLOCK
A
CENTER TAP
A+
A-
EARTH
B+
B-
CENTER TAP
B
INTERLOCK
MOTOR
AC POWER
ISO GND
+5VDC
6.8 KW
EARTH
Ground Pin
20.0 KW 18.2 KW
12.1 KW
EARTH
Internal Schematic
LM 339
10.0 KW
30.1 KW
CAUTION: You must select either the on-board +5V terminal or an external power supply to power the
AUX-P pull-up resistor (for the P-CUT, HOM, NEG, POS, TRG-A, and TRG-B inputs).
Connecting AUX-P to the +5V terminal and an external supply will damage the
ZETA6104. (The same rule applies to the IN-P and OUT-P terminals, see page 14.)
Chapter 1. Installation 7
Page 14
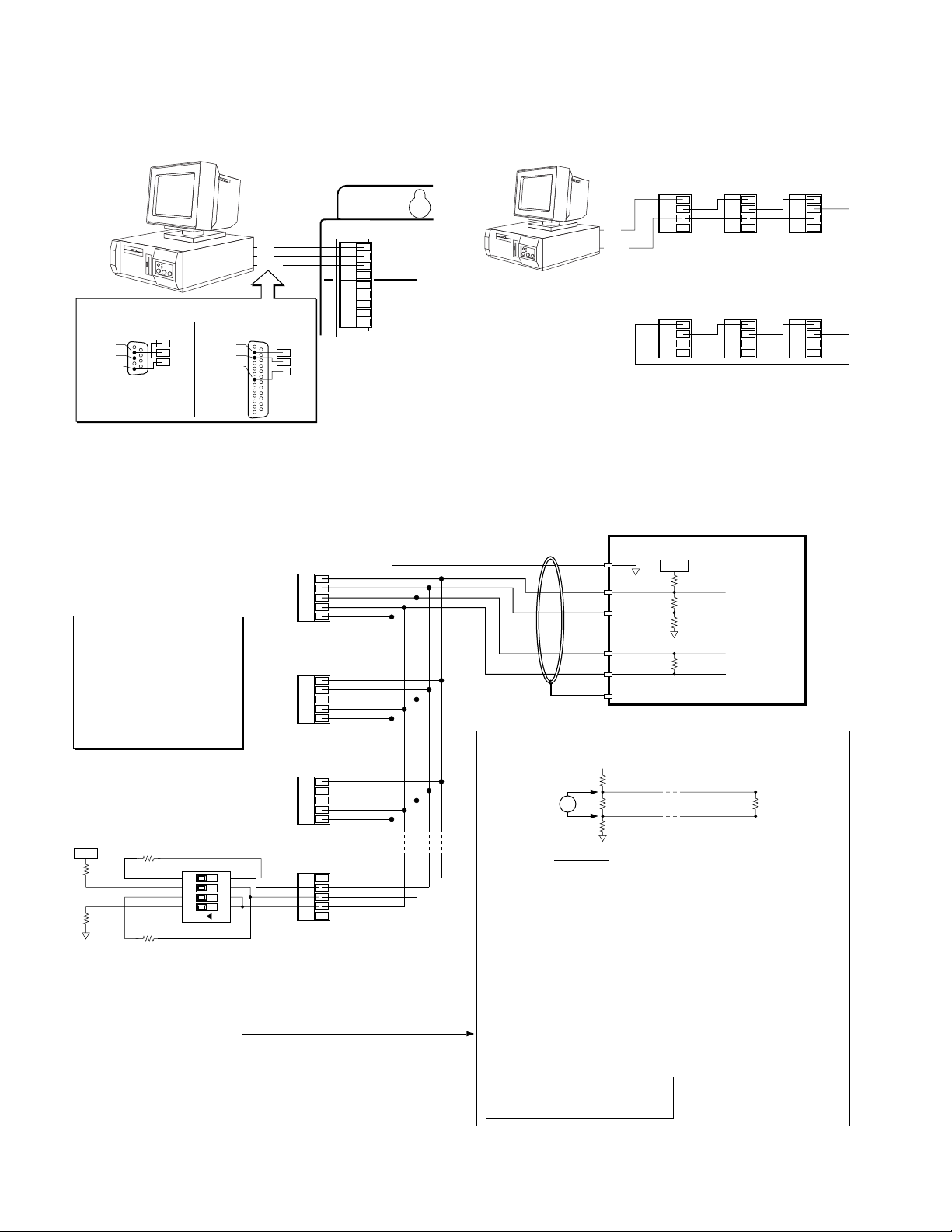
Serial Communication
RS-232C Connections
Tx
Rx
GND
COM 1 COM 2
Serial Port Connection
25-Pin COM Port:9-Pin COM Port:
Pin 2 (Rx)
Pin 3 (Tx)
Pin 5 (GND)
NOTE: Maximum RS-232C cable length is 50 feet (15.25 meters)
Rx
Tx
GND
Pin 2 (Tx)
Pin 3 (Rx)
Pin 7 (GND)
Rx
Tx
GND
Rx
Tx
GND
SHLD
+5V
GND
Rx
Tx
SHLD
Rx+
RxÐ
Tx+
TxÐ
GND
RS-485 Connections (4-wire interface, plus ground)
Unit #1
Rx+
COM 2
RS-485 Configuration
Before you can use RS-485
communication, you must reconfigure the COM 2 port by
setting internal jumpers JU1-JU6
Unit #2
COM 2
to position 1. 4-wire is default
(to use 2-wire, set JU7 to
position 1).
Refer to page 5 for instructions.
Unit #3
COM 2
681W
681W
120 W
120 W
34
12
O
Unit #31
COM 2
N
5VDC
DIP switch selects internal resistor values (ON selects the resistor).
Use these resistors only for the last unit (or for a single unit).
If your application requires terminating resistors other than 120W,
and/or bias resistors other than 681W, then make sure the internal
DIP switches are set to OFF and connect your own external resistors.
To calculate resistor values:
NOTE: Maximum RS-485 cable length is 4000 feet (1220 meters)
+5V
GND
Rx
Tx
SHLD
+5V
GND
Rx
Tx
SHLD
+5V
GND
Rx
Tx
SHLD
+5V
GND
Rx
Tx
SHLD
RxÐ
Tx+
TxÐ
GND
Rx+
RxÐ
Tx+
TxÐ
GND
Rx+
RxÐ
Tx+
TxÐ
GND
Rx+
RxÐ
Tx+
TxÐ
GND
RS-232C Daisy-Chain Connections*
Unit 0
Tx
Rx
GND
Daisy Chain to a Computer or Terminal
Unit 0
Stand-Alone Daisy Chain
Be sure to set unique devices addresses for each unit.
*
To set the address, use the DIP switch (see page 4),
or use the ADDR command (see 6000 Series ProgrammerÕs Guide).
Ground
TxÐ
Rx+
RxÐ
Shield
+5VDC
120 W
120 W
Calculating Resistor Values
Vcc
Ra
Balanced Cable.
Vb Rb
Example
Step 1 Calculate the equivalent resistance (Req)* of Rc / / Rb:
Step 2 Calculate the pull-up and pull-down resistor values knowing that
Assumptions: The cable's characteristic impedance (Zo) = 120W.
Rc / / Rb = 120W / / 120W = 60W
the FAILSAFE bias is 200mV and Vcc = 5V:
Vb = Vcc (Req / (Ra + Req + Rd))
solving for R' (defined as Ra + Rd)
R' = ((Req) Vcc / Vb) - Req
R' = ((60W) 5V / 0.2V) - 60W = 1440W
Since Ra and Rd are equal, Ra = Rd = 1440W / 2 = 720W
Step 3 Recalculate the equivalent resistance of RC / / (Ra + Rd):
Rc / / (Ra + Rd) = 120W / / (720W + 720W) = 110.77W
Since the equivalent resistance is close (within 10%) to the characteristic
impedance of the cable (Zo), no further adjustment of resistor values is
required.
* Actual calculation
for equivalent resistance
(e.g., R1 / / R2):
Rc
Rd
Rc and Rb are equal and are selected to match Zo
(Rc = Rb = Zo = 120W).
R1R
2
(R1 + R2)
Unit 1
Rx
Tx
GND
SHLD
Rx
Tx
GND
SHLD
Unit 1
Rx
Tx
GND
SHLD
Rx
Tx
GND
SHLD
Master
UnitTx+
For further information,
consult a communications
interface reference.
Unit 2
Unit 2
Rx
Tx
GND
SHLD
Rx
Tx
GND
SHLD
8 z ZETA6104 Installation Guide
Page 15
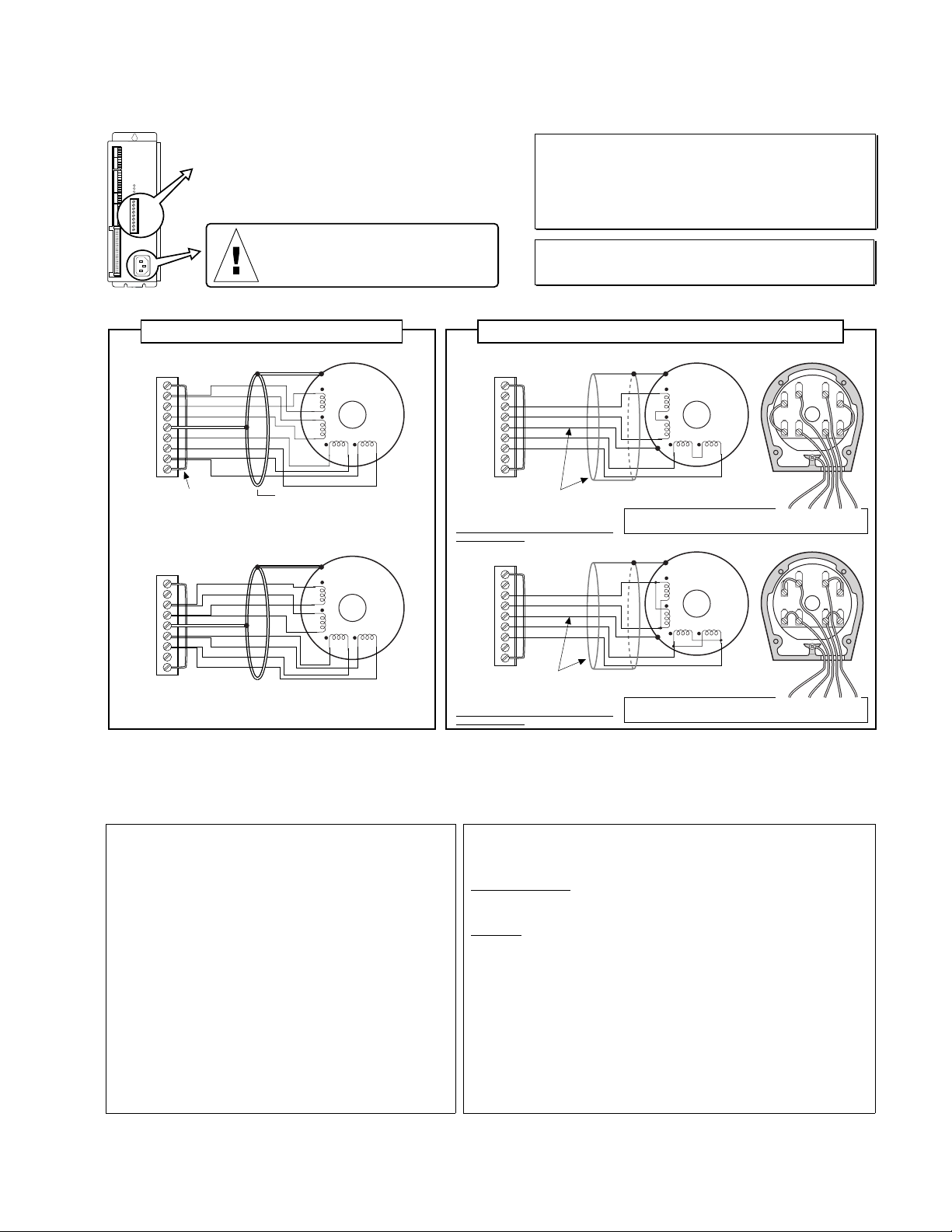
Motor (ZETA and OS/RS motors only)
Motor Connector
Specifications Ð see page 3.
ZETA, OS and RS Motors
Speed/Torque curves Ð see page 10.
Considerations for series & parallel wiring Ð see page 10.
INTERLOCK
A
CENTERTAP
A+
AÐ
EARTH
B+
BÐ
CENTERTAP
B
INTERLOCK
MOTOR
WARNING:
Remove AC power
before connecting or disconnecting
the motor. Lethal voltages are
present on the screw terminals
Current settings Ð see page 4. Dimensions Ð see page 24.
Cable extension Ð see table below.
ZETA & RSxxx-xxC10 motors include a rubber boot for safety.
Non-Compumotor Motors
If you intend to use a non-Compumotor motor, refer to
Appendix B for connection instructions and current selection.
ZETA, OS and RS Motor Connections RSxxx-xxNPS and RSxxx-xxC10 Motor Connections
Series Connection
INTERLOCK
ACENTERTAP
A+
AÐ
EARTH
B+
BÐ
B
CENTERTAP
INTERLOCK
Do not lengthen or
remove this jumper.
NOTE: ZETA motors are shipped from the factory wired to the connector in series.
Yellow
Blue
Red
Black
Shield
White
Green
Orange
Brown
Shield is connected to the motor case and
is internally connected to the ground pin
on the ZETA6104Õs AC power connector.
Parallel Connection
INTERLOCK
ACENTERTAP
EARTH
B
CENTERTAP
INTERLOCK
A+
AÐ
B+
BÐ
Red
Blue
Yellow
Black
Shield
White
Brown
Orange
Green
See page 10 for guidelines about using a motor in parallel.
Motor
Phase A
Windings
PM
Motor
Phase A
Windings
PM
Phase B
Windings
Phase B
Windings
Series Connection
INTERLOCK
ACENTERTAP
A+
AÐ
EARTH
B+
BÐ
B
CENTERTAP
INTERLOCK
The green/yellow (Gnd) wire is for safety
purposes. The shield connection to the motor
case is for EMI purposes (the C10 cable kit
provides hardware for the shield connection).
C10 cable assembly instructions are provided
in the C10 cable kit.
Wire #1
Wire #3
Gnd (Grn/Ylw)
Wire #2
Wire #4
Parallel Connection
INTERLOCK
ACENTERTAP
A+
AÐ
EARTH
B+
BÐ
B
CENTERTAP
INTERLOCK
The green/yellow (Gnd) wire is for safety
purposes. The shield connection to the motor
case is for EMI purposes (the C10 cable kit
provides hardware for the shield connection).
C10 cable assembly instructions are provided
in the C10 cable kit.
Wire #1
Wire #3
Gnd (Grn/Ylw)
Wire #2
Wire #4
Phase A
Windings
1
6
PM
5
3
Motor Terminal Number/Wire Number:
ZETA6104 Motor Connector Terminal:
1
6
5
3
Motor Terminal Number/Wire Number:
ZETA6104 Motor Connector Terminal:
Phase B
Windings
28 74
Phase A
Windings
PM
Phase B
Windings
28
74
End Cover RemovedSchematic View
4
3
6
8
7
5
2
1
Gnd1324
EARTH A+ A- B+ B-
4
3
6
8
7
5
2
1
Gnd1324
EARTH A+ A- B+ B-
Auto Current Standy Mode: Reduces motor current by 50% when step pulses from the ZETA6104 have stopped for one second
(CAUTION: torque is also reduced). Full current is restored upon the first step pulse. Enable with
the DAUTOS1 command; disable with the DAUTOS¯ command (default is disabled). For more
information, refer to the DAUTOS command in the 6000 Series Software Reference.
Extending ZETA Motor Cables
Standard length is 10 ft (3 m);
maximum extended length is 200 ft (61 m).
CAUTION: Cables longer than 50 feet (15 m) may degrade
performance.
Motor Type (amps) AWG mm
Max. Current < 100 ft (30 m) 100-200 ft (30-60 m)
ZETA57-51(S) 1.26 22 0.34 20 0.50
ZETA57-51(P) 2.38 22 0.34 20 0.50
ZETA57-83(S) 1.51 22 0.34 20 0.50
ZETA57-83(P) 3.13 22 0.34 20 0.50
ZETA57-102(S) 1.76 22 0.34 20 0.50
ZETA57-102(P) 3.50 20 0.50 18 0.75
ZETA83-62(S) 2.26 22 0.34 20 0.50
ZETA83-62(P) 4.00 20 0.50 18 0.75
ZETA83-93(S) 2.88 22 0.34 20 0.50
ZETA83-93(P) 4.00 20 0.50 18 0.75
ZETA83-135(S) 3.50 20 0.50 18 0.75
ZETA83-135(P) 4.00 20 0.50 18 0.75
(S) = Series Configuration (P) = Parallel Configuration
NOTE: Rated current in wire sizes shown may result in a maximum temperature rise of 18°F (10°C) above ambient.
2
AWG mm
2
-L10, -R10 & -C10 motors are shipped with 10 ft (3 m) cables;
-FLY motor is shipped with 1 ft (0.3 m) flying leads.
-NPS motor does not include cable/leads; 10-foot: use 18 AWG (0.75 mm2) wire.
LVD COMPLIANCE: Maximum DC resistance between the ZETA6104Õs
ÒEARTHÓ terminal (Òprotective conductor terminalÓ) and motor body must not
exceed 0.1ÊW. (This criteria must be taken into consideration when sizing
cross-section (gage) for extended cable lengths.)
NON-LVD: Maximum extended length is 200 ft (61 m), but cables longer than 50
feet (15 m) may degrade performance. See table below for guidelines:
Motor Type (amps) AWG mm
OS2HB(S) 1.51 22 0.34 20 0.50
OS2HB(P) 3.01 22 0.34 20 0.50
OS21B(S) 1.88 22 0.34 20 0.50
OS21B(P) 3.75 20 0.50 18 0.75
OS22B(S) 2.14 22 0.34 20 0.50
OS22B(P) 4.00 20 0.50 18 0.75
RS31B(S) 2.26 22 0.34 20 0.50
RS31B(P) 4.00 20 0.50 18 0.75
ZETA83-93(S) 2.88 22 0.34 20 0.50
ZETA83-93(P) 4.00 20 0.50 18 0.75
ZETA83-135(S) 3.50 20 0.50 18 0.75
ZETA83-135(P) 4.00 20 0.50 18 0.75
Extending OS and RS Motor Cables
Max. Current < 100 ft (30 m) 100-200 ft (30-60 m)
2
AWG mm
Chapter 1. Installation 9
2
Page 16
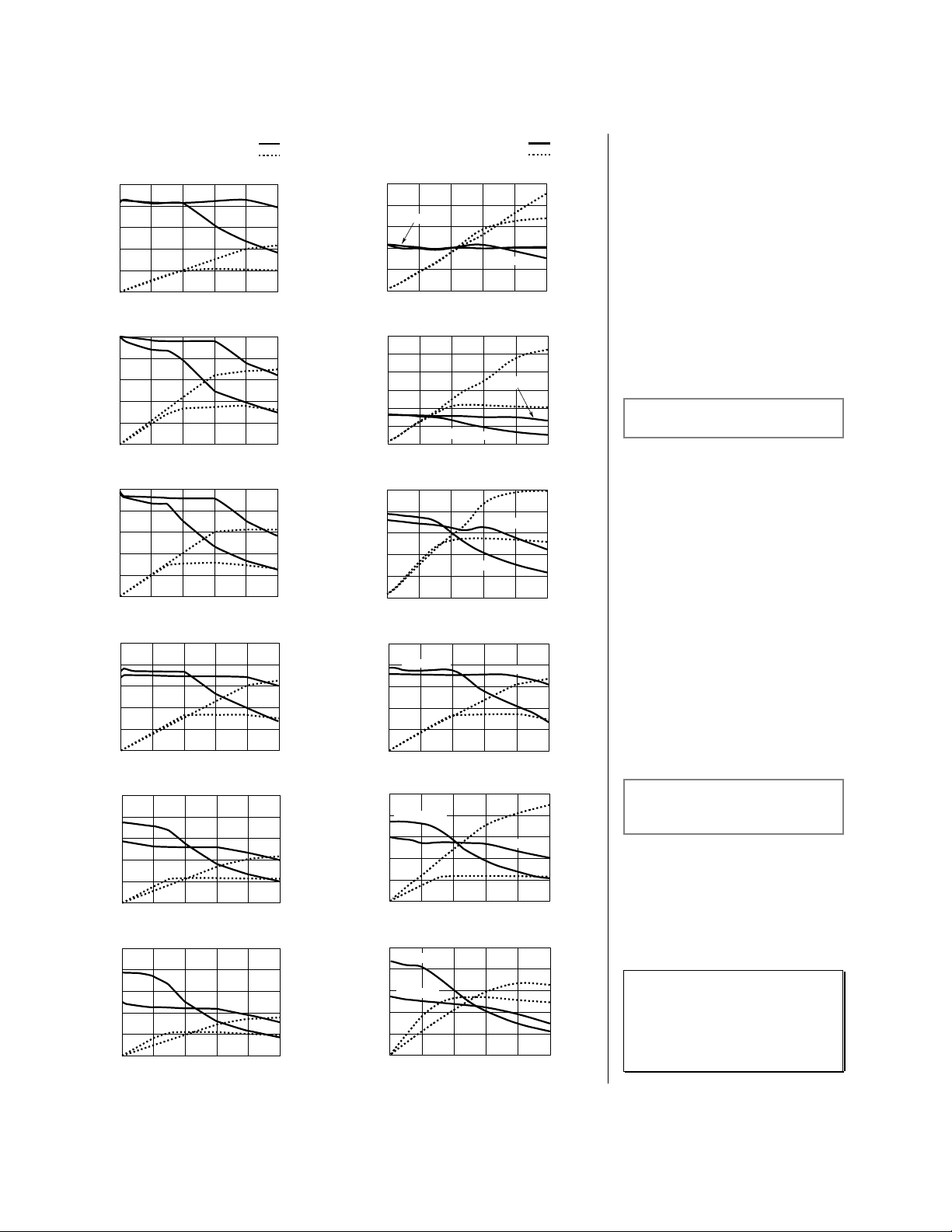
Selecting Series or Parallel Motor Wiring
Zeta Motor Curves
oz-in
(N-m) Power
75
(0.53)
60
(0.42)
45
(0.32)
Torque
30
(0.21)
15
(0.11)
0
0
oz-in
(N-m) Power
125
(0.88)
100
(0.70)
75
(0.53)
Torque
50
(0.35)
25
(0.18)
0
0
oz-in
(N-m) Power
150
(1.05)
120
(0.84)
90
(0.63)
Torque
60
(0.42)
30
(0.21)
0
0
oz-in
(N-m) Power
200
(1.40)
160
(1.12)
120
(0.84)
Torque
80
(0.56)
40
(0.28)
0
0
oz-in
(N-m) Power
400
(2.80)
320
(2.24)
240
(1.68)
Torque
160
(1.12)
80
(0.56)
0
0
oz-in
(N-m) Power
500
(3.50)
400
(2.80)
300
(2.10)
Torque
200
(1.40)
100
(0.70)
0
0
Parallel
ZETA57Ð51
20 30 40 50
10
Speed-RPS
ZETA57Ð83
Series
20 30 40 50
10
Speed-RPS
ZETA57Ð102
Series
20 30 40 50
10
Speed-RPS
ZETA83Ð62
Series
20 30 40 50
10
Speed-RPS
ZETA83Ð93
Series
Parallel
20 30 40 50
10
Speed-RPS
ZETA83Ð135
Series
20 30 40 50
10
Speed-RPS
Parallel
Series
Parallel
Parallel
Parallel
= Torque
= Power
watts (hp)
Parallel
129 (0.18)
Series
60 (0.08)
watts (hp)
Parallel
175 (0.23)
Series
80 (0.11)
watts (hp)
Parallel
186 (0.25)
Series
80 (0.11)
watts (hp)
Parallel
260 (0.35)
Series
120 (0.16)
watts (hp)
Parallel
350 (0.47)
Series
180 (0.24)
watts (hp)
Parallel
355 (0.48)
Series
193 (0.26)
O & R Motor Curves
oz-in
(N-m) Power
100
(0.70)
80
(0.56)
Parallel (3.01A
60
(0.43)
Torque
40
(0.28)
20
(0.14)
0
0
oz-in
(N-m) Power
300
(2.13)
205
(1.42)
200
(1.42)
Torque
150
(1.07)
100 (0.71)
50
(0.36)
0
0
oz-in
(N-m) Power
200
(1.42)
160
(1.14)
120
(0.85)
Torque
80
(0.56)
40
(0.28)
0
0
oz-in
(N-m) Power
200
(1.40)
160
(1.12)
120
(0.84)
Torque
80
(0.56)
40
(0.28)
0
0
oz-in
(N-m) Power
400
(2.80)
Series (2.88A
320
(2.24)
240
(1.68)
Torque
160
(1.12)
80
(0.56)
0
0
oz-in
(N-m) Power
500
(3.50)
Series (3.5A
400
(2.80)
300
(2.10)
Torque
Parallel (4A
200
(1.40)
100
(0.70)
0
0
OS2HB
pk)
20 30 40 50
10
Speed-RPS
OS21B
Series (1.88A
20 30 40 50
10
Speed-RPS
OS22B
20 30 40 50
10
Speed-RPS
RS31B
Series (2.26A
pk)
20 30 40 50
10
pk)
20 30 40 50
10
pk)
pk)
20 30 40 50
10
Series (2.26A
Speed-RPS
RS32B
Speed-RPS
RS33B
Speed-RPS
Series (1.51A
Parallel (3.75A
pk)
Parallel (4A
pk)
Parallel (4.0A
Parallel (4A
= Torque
= Power
watts (hp)
Parallel
91 (0.12)
Series
68 (0.09)
Use series wiring if your
application permits.
ZETA motors come from the factory
with a permanently attached motor
cable wired to the motor connector
for series motor current. The O and
R Series motors have flying leads or
pk)
pigtails that you must wire to the
motor connector yourself. The
operating temperature of a motor
connected in series will be lower
watts (hp)
Parallel
263 (0.36)
pk)
Series
102 (0.14)
watts (hp)
Parallel
199 (0.27)
pk)
Series
104 (0.14)
than that of a motor connected in
parallel. Typically, series
connections work well in high
torque/low speed applications.
Series motor wiring diagrams are
provided on page 9.
When to use parallel wiring.
At higher speeds, a motor connected
in parallel will produce more torque
than the same motor connected in
series. Use caution, however,
because the operating temperature of
watts (hp)
pk)
Parallel
230 (0.31)
the motor in parallel will be much
hotter. If you operate your motor in
parallel, measure motor temperature
under actual operating conditions. If
the motor exceeds its maximum case
Series
120 (0.16)
temperature, reduce the duty cycle to
limit motor heating. Compumotorsupplied motors have maximum
case temperatures of 212°F (100°C).
watts (hp)
Parallel
359 (0.48)
pk)
Series
186 (0.25)
watts (hp)
Parallel
327 (0.44)
Series
246 (0.33)
To wire the motor for parallel
motor current, refer to the wiring
diagrams on page 9.
Non-Compumotor Motors:
If you are using a nonCompumotor motor, refer to
Appendix B for connection
instructions and current-select
DIP switch settings.
10 z ZETA6104 Installation Guide
Page 17
End-of-Travel and Home Limit Inputs
¥ CAUTION: Use either the on-board +5V terminal or an external power supply to power
the AUX-P pull-up resistor (using both will damage the ZETA6104).
¥ Motion will not occur until you do one of the following:
- Install end-of-travel (POS & NEG) limit switches.
- Disable the limits with the LH¯ command (recommended only if load is not coupled).
- Change the active level of the limits with the LHLVL command.
¥ Refer to the Basic Operation Setup chapter in the 6000 Series ProgrammerÕs Guide for
in-depth discussions about using end-of-travel limits and homing.
CONNECTIONS & INTERNAL SCHEMATICS
NOTES
ENCODER Connector
SHLD
HOM connected to GND
The home limit input is used during a homing move, which
is initiated with the HOM command. After initiating the
homing move, the controller waits for the home switch to
close, indicating that the load has reached the ÒhomeÓ
reference position. The active level (default is active low)
can be changed with the HOMLVL command. You can
also use an encoderÕs Z channel pulse, in conjunction with
the home switch, to determine the home position (this
feature is enabled with the HOMZ1 command).
(normally-open switch).
GND
ZZ+
BB+
AA+
+5V
LIMITS Connector
GND
HOM
NEG
POS
POS & NEG connected to GND
Mount each switch such that the load forces it to open before it
reaches the physical travel limit (leave enough room for the load to
stop). When the load opens the switch, the axis stops at the decel
value set with the LHAD command. The motor will not be able to
move in that same direction until you execute a move in the opposite
direction and
the limits with the LH¯ command, but this is recommended only if the
motor is not coupled to the load). The active level (default is active
low) can be changed with the LHLVL command.
+5V connected to AUX-P and V_I/O
Provides +5V power to the POS, NEG, and HOM input pull-up resistors. As an alternative,
you can connect AUX-P to an external supply of up to +24V (but do not use both the on-board +5V
terminal and an external 5-24V supply). If V_I/O is connected to a +5V supply (on-board or external),
AUX-P can be connected to a supply of up to +24V. If V_I/O is connected to an external +24V supply,
AUX-P must also be connected to +24V (or to GND).
Switching levels depend on voltage at V_I/O (LOW £ 1/3 of V_I/O volts; HIGH ³ 2/3 of V_I/O volts).
NOTE: AUX-P and V_I/O are also used by the P-CUT & TRG inputs.
SINKING CURRENT: To make the limit inputs (as well as P-CUT & TRG) sink current, connect AUX-P to GND.
clear the limit by closing the switch (or you can disable
(normally-closed switches).
(sourcing current).
I/O Connector
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
Chassis Ground
Iso Ground
Iso
Ground
+5VDC
6.8 KW
Internal Schematic
Similar circuits for NEG
and POS inputs.
20.0 KW 18.2 KW
LM 339
12.1 KW
10.0 KW
30.1 KW
PIN OUTS & SPECIFICATIONS (4-pin LIMITS Connector)
Name In/Out Description Specification for all limit inputs
GND
HOM
NEG
POS
Ñ
IN
IN
Isolated ground.
Home limit input.
Negative-direction endof-travel limit input.
IN
Positive-direction endof-travel limit input.
¥ Powered by voltage applied to V_I/O terminal (switching levels: Low £1/3 of V_I/O voltage,
High ³2/3 of V_I/O voltage). V_I/O can handle 5-24V with max. current of 100mA. Internal 6.8 KW
pull-ups to AUX-P terminalÑconnect AUX-P to power source (+5V terminal or an external 5-24V
supply) to source current, or connect AUX-P to GND to sink current; AUX-P can handle 0-24V with
max. current of 50mA. Voltage range for these inputs is 0-24V.
¥ Active level for HOM is set with HOMLVL (default is active low, requires n.o. switch).
¥ Active level for POS & NEG is set with LHLVL (default is active low, requires n.c. switch).
Chapter 1. Installation 11
Page 18
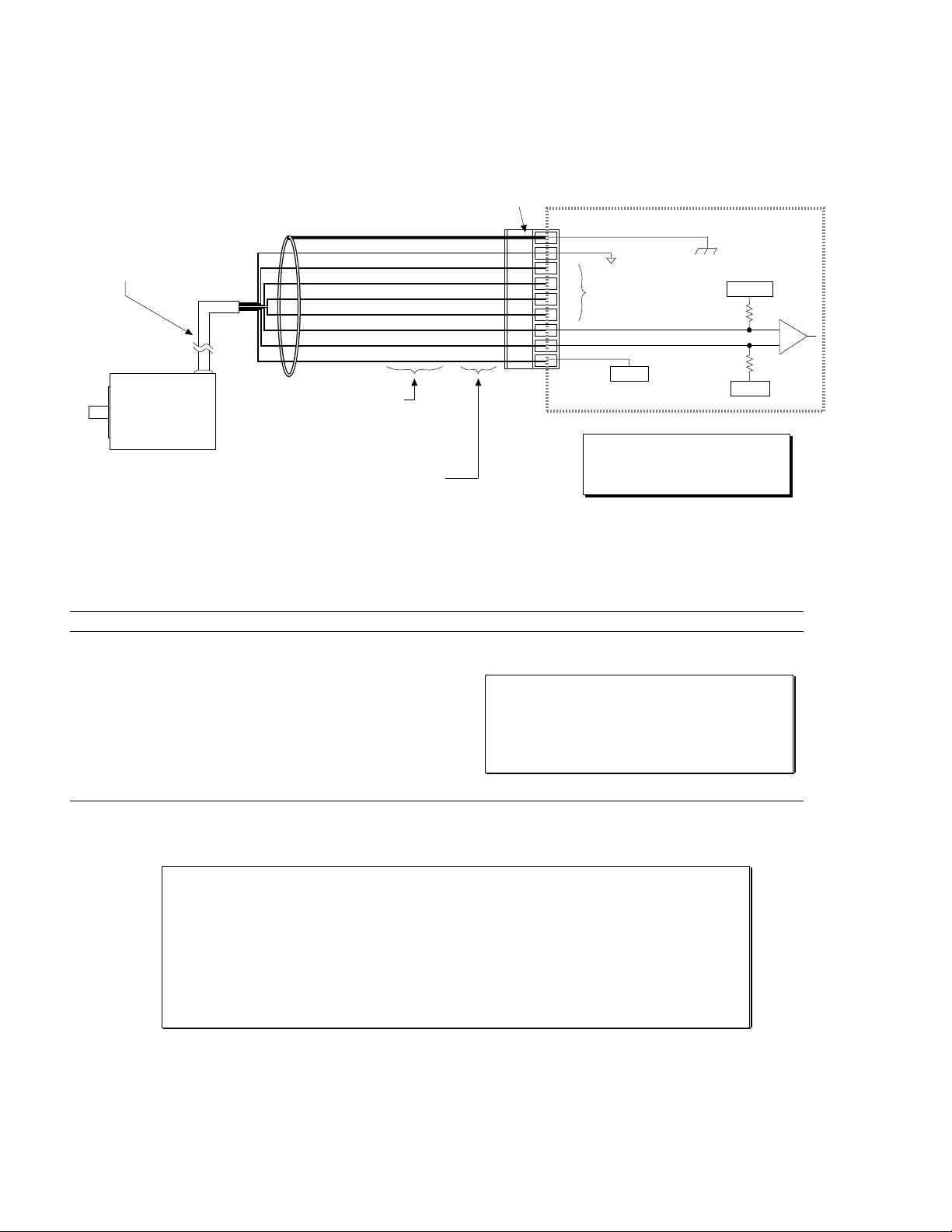
Encoder
CONNECTIONS & INTERNAL SCHEMATICS
Shield Shield Shield
Max. Cable Length is 100 feet.
Use 22 AWG wire.
Incremental
Encoder
Colors for Compumotor-supplied Encoders:
-E Series encoders
-RE encoder on OS motor (OSxxx-xxx-RE)
-RC encoder on OS motor (OSxxx-xxx-RC)
-EC encoder on RS motor (RSxxx-xxx-EC)
Colors for -HJ encoder on OS motor (OSxxx-xxx-HJ).
Ground Black Black
Z Channel Ð Orange/White (n/a)
Z Channel + Orange Blue
B Channel Ð Green/White (n/a)
B Channel + Green Brown
A Channel Ð Brown/White (n/a)
A Channel + Brown White
+5VDC Red Red
ENCODER Connector
SHLD
GND
ZZ+
BB+
AA+
+5V
Internal Schematic
Isolated Ground
Same Circuit
as A Channel
+5VDC
Chassis Ground
+1.8VDC
22 KW
22 KW
+5VDC
NOTE
If you are using a single-ended encoder,
leave the A-, B-, and Z- terminals on the
ZETA6104 unconnected.
PIN OUTS & SPECIFICATIONS (9-pin ENCODER Connector)
Pin Name In/Out Description
SHLD
GND
ZÐ
Z+
BÐ
B+
AÐ
A+
+5V
-----
-----
IN
IN
IN
IN
IN
IN
OUT
ShieldÑInternally connected to chassis ground (earth).
Isolated logic ground.
ZÐ Channel signal input.
Z+ Channel signal input.
BÐ Channel quadrature signal input.
B+ Channel quadrature signal input.
AÐ Channel quadrature signal input.
A+ Channel quadrature signal input.
+5VDC output to power the encoder.
Differential comparator accepts two-phase quadrature
incremental encoders with differential (recommended) or
single-ended outputs. Max. frequency is 1.6 MHz.
Minimum time between transitions is 625 ns.
TTL-compatible voltage levels: Low £ 0.4V, High ³ 2.4V.
Maximum input voltage is 5VDC.
Requirements for Non-Compumotor Encoders
¥ Use incremental encoders with two-phase quadrature output. An index or Z channel
output is optional. Differential outputs are recommended.
¥ It must be a 5V (< 200mA) encoder to use the ZETA6104Õs +5V output. Otherwise, it must
be separately powered with TTL-compatible (low £ 0.4V, high ³ 2.4V) or open-collector
outputs.
¥ The decoded quadrature resolution should be less than the motor resolution by a factor of
four to take advantage of the ZETA6104Õs position maintenance capability.
Specification for all encoder inputs
12 z ZETA6104 Installation Guide
Page 19
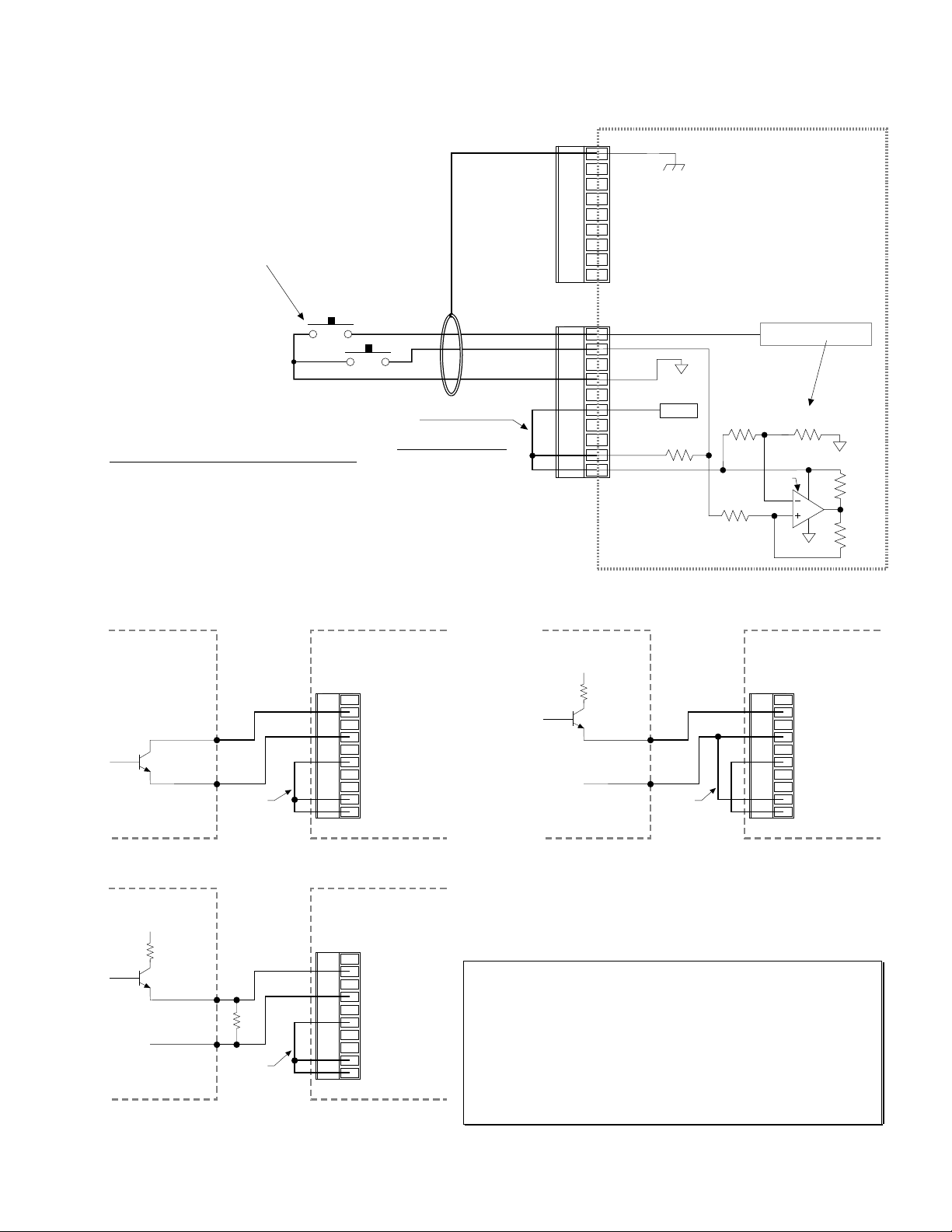
Trigger Inputs
ENCODER Connector
TRG-A/B connected to GND
The active level (default is active low) can be changed with the
INLVL command.
These inputs are like the general-purpose inputs on the 50-pin
header. The differences are (1) the triggers are pulled up via
the AUX-P pull-up terminal and powered by the voltage applied
to the V_I/O terminal; and (2) the triggers can be programmed
with the INFNCi-H command to function as position capture
inputs and registration inputs.
(normally-open switches).
I/O Connector
+5V connected to AUX-P and V_I/O
Provides +5V power to the TRG-A & TRG-B input pull-up resistors. As an alternative,
you can connect AUX-P to an external supply of up to +24V (but do not use both the
on-board +5V terminal and an external 5-24V supply). If V_I/O is connected to a +5V
supply (on-board or external), AUX-P can be connected to a supply of up to +24V.
If V_I/O is connected to an external +24V supply, AUX-P must also be connected to
+24V (or to GND).
Switching levels depend on voltage at V_I/O (LOW £ 1/3 of V_I/O volts; HIGH ³ 2/3 of V_I/O volts).
NOTE: AUX-P and V_I/O are also used by the HOM, NEG, POS & P-CUT inputs.
SINKING CURRENT: To make the trigger inputs (as well as HOM, NEG, POS & P-CUT) sink
current, connect AUX-P to GND.
(sourcing current).
SHLD
GND
ZZ+
BB+
AA+
+5V
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
Iso
Ground
+5VDC
6.8 KW
Chassis Ground
20.0 KW 18.2 KW
12.1 KW
Internal Schematic
Similar circuit for TRG-A.
LM 339
10.0 KW
30.1 KW
Connection to a Sinking Output Device Connection to a Sourcing Output Device
Electronic Device
The output should
be able to sink at
least 1mA of current.
Out 5-24 Volts
Output
Ground
Pulled up
to +5V
(sourcing)
ZETA6104
I/O Connector
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
(see schematic
drawing above)
Electronic Device ZETA6104
V
1
R
1
Out 5-24 Volts
Output
Ground
Pulled
down to
ground
(sinking)
I/O Connector
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
(see schematic
drawing above)
Connection to a Combination of Sinking & Sourcing Outputs
Electronic Device ZETA6104
V
1
R
1
Output
Out 5-24 Volts
Ground
Typical value for R = 450W (assuming R1 = 0)
Note: The value of R may vary depending on the value of R1 and V1.
R
Pulled up
to +5V
(sourcing)
I/O Connector
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
(see schematic
drawing above)
If you will be connecting to a combination of sourcing and sinking outputs,
connect AUX-P to +5-24V to accommodate sinking output devices. Then for each
individual input connected to a sourcing output, wire an external resistor between
the ZETA6104Õs trigger input terminal and ground (see illustration). The resistor
provides a path for current to flow from the device when the output is active.
PROGRAMMING TIP
Connecting to a sinking output? Set the trigger inputÕs active level to low
with the INLVL command (¯ = active low, default setting).
Connecting to a sourcing output? Set the trigger inputÕs active level to
high with the INLVL command (1 = active high).
Thus, when the output is active, the TIN status command will report a Ò1Ó
(indicates that the input is active), regardless of the type of output that is
connected.
For details on setting the active level and checking the input status refer to the
INLVL and TIN command descriptions in the 6000 Series Software
Reference.
Chapter 1. Installation 13
Page 20

General-Purpose Programmable Inputs & Outputs
0
VM50 ADAPTOR Ñ for screw-terminal connections
Color stripe
1
PROGRAMMABLE I/O
50
2-Foot Cable
(provided with VM50)
Color stripe
(pin #1)
(pin #1)
Pin outs on the VM50 are identical
to the pin outs for the 50-pin
connectors (only if the cable is
connected as illustrated).
The VM50 snaps
on to any standard
DIN rail.
PIN OUTS & SPECIFICATIONS
Pin Function Internal Schematics Specifications
1 Input #16 (MSB of inputs)
1
PROGRAMMABLE I/O
49
50-pin plug is
compatible with
OPTO-22ª
signal
conditioning
equipment.
3 Input #15
2
5 Input #14
7 Input #13
9 Input #12
11 Input #11
13 Input #10
15 Input #9
17 Output #8 (MSB of outputs)
19 Output #7
21 Output #6
23 Output #5
25 Input #8
27 Input #7
29 Input #6
31 Input #5
33 Output #4
5
35 Output #3
37 Output #2
39 Output #1 (LSB of outputs)
41 Input #4
43 Input #3
45 Input #2
47 Input #1 (LSB of inputs)
49 +5VDC
NOTE: All even-numbered pins are connected to a common logic ground (DC ground) Ñ see drawing on page 7.
LSB = least significant bit; MSB = most significant bit
2 4 6 8 10 12 14 16 18 20
1 3 5 7 9 11 13 15 17 19
22 24 26232825302732293431363338354037423944414643484550
VM50 Adaptor Board
Inputs
External 5-24VDC Supply
(an alternative to using the
on-board +5V terminal)
When connecting to a
sinking output device,
connect IN-P to the
+5V terminal OR to a
user-supplied external
supply of up to 24VDC
(but not to both).
Connection
Ground
Connection
ZETA6104
GND
+5V
IN-P
Input
Outputs (including OUT-A)
External 5-24VDC Supply
(an alternative to using the
on-board +5V terminal)
Pull-up:
Connect OUT-P to the
+5V terminal OR to a
user-supplied external
supply of up to 24VDC
(but not to both).
Output
Connection
Ground
Connection
ZETA6104
GND
+5V
OUT-P
UDK2559
+5VDC
6.8 KW
47 KW
+5VDC
4.7 KW
ISO GND
74HCxx
ISO GND
ISO GND
ISO GND
47 4921
Inputs
HCMOS-compatible voltage levels
(low £ 1.00V, high ³ 3.25V).
Voltage range = 0-24V.
Sourcing Current: On the I/O connector,
connect IN-P to +5V or connect IN-P to an
external 5-24VDC power supply (but not to
both).
Sinking Current: On the I/O connector,
connect IN-P to GND.
STATUS: Check with TIN or INFNC.
Active level: Default is active low, but can
be changed to active high with the INLVL
command.
Outputs (including OUT-A)
Open collector output.
Pull-up connection on I/O connector:
Connect OUT-P to +5V, or to an external
5-24VDC power supply (but not to both).
Outputs will sink up to 300mA or source up
to 5mA at 5-24VDC.
STATUS: Check with TOUT or OUTFNC.
Active level: Default is active low, but can
Open
Collector
be changed to active high with the OUTLVL
command.
ISO
GND
CAUTION: You must select either the on-board +5V terminal or an external power supply to power the
IN-P and OUT-P pull-up resistors. Connecting IN-P or OUT-P to the +5V terminal and an
external supply will damage the ZETA6104. (The same rule applies to the AUX-P terminal.)
14 z ZETA6104 Installation Guide
Page 21

INPUT CONNECTIONS Ñ Connecting to electronic devices such as PLCs
Connection to a
Sinking Output
Device
Connection to a
Sourcing Output
Device
Connection to a
Combination of
Sinking &
Sourcing
Outputs
Electronic
Device
The output should
be able to sink at
least 1mA of current.
Out 5-24 Volts
Output
Ground
Electronic
Device
V
1
R
1
Output
Out 5-24 Volts
Ground
Electronic
Device
V
1
R
1
Output
Out 5-24 Volts
Ground
Pulled up
to +5V
(sourcing)
Connection
Connection
Pulled
down to
ground
(sinking)
Connection
Connection
Pulled up
to +5V
(sourcing)
Connection
R
Connection
GND
+5V
IN-P
Input
Ground
GND
+5V
IN-P
Input
Ground
GND
+5V
IN-P
Input
Ground
ZETA6104
+5VDC
6.8 KW
47 KW
ISO GND
ZETA6104
+5VDC
6.8 KW
47 KW
ISO GND
ZETA6104
+5VDC
6.8 KW
47 KW
ISO GND
ISO GND
74HCxx
ISO GND
74HCxx
ISO GND
74HCxx
PROGRAMMING TIP
Connecting to a
sinking output? Set the
inputÕs active level to low
with the INLVL command
(¯ = active low).
Connecting to a
sourcing output? Set
the inputÕs active level to
high with the INLVL
command (1 = active high).
Thus, when the output is
active, the TIN status
command will report a Ò1Ó
(indicates that the input is
active), regardless of the
type of output that is
connected.
Details on setting the active
level and checking the input
status are provided in the
6000 Series ProgrammerÕs
Guide. Refer also to the
INLVL and TIN command
descriptions in the 6000
Series Software Reference.
Typical value for R = 450W (assuming R1 = 0)
Note: The value of R may vary depending on the value of R1 and V1.
NOTE: If you will be connecting to a combination of sourcing and sinking outputs, connect IN-P to +5V (or to an
external 5-24VDC supply) to accommodate sinking output devices. Then for each individual input
connected to a sourcing output, wire an external resistor between the ZETA6104Õs programmable input
terminal and ground (see ÒRÓ in above drawing). The resistor provides a path for current to flow from the
device when the output is active.
Chapter 1. Installation 15
Page 22

OUTPUT CONNECTIONS (includes OUT-A) Ñ for electronic devices such as PLCs
Connection to a Sinking Input (active high) Connection to a Sourcing Input (active low)
External Supply
Electronic
Device
Input
Ground
(up to 24VDC)
+
Ð
GND
+5V
OUT-P
Output
Connection
Ground
Connection
ZETA6104
ISO GND
+5VDC
4.7 KW
UDK2559
(open collector)
ISO GND
Connection to a Combination of Sinking & Sourcing Inputs
External Supply
Electronic
Devices
Sourcing Input
Sinking Input
V+
Input
Ground
Input
Ground
(up to 24VDC)
+
Ð
GND
OUT-P
Output 1
Output 2
Ground
Connection
+5V
ZETA6104
ISO GND
+5VDC
4.7 KW
UDK2559
(open collector)
4.7 KW
UDK2559
(open collector)
ISO GND
Combinations of sourcing
and sinking inputs can be
accommodated at the same
voltage level. Be aware of
the input impedance of the
sourcing input module, and
make sure that there is
enough current flowing
through the input module
while in parallel with the
OUT-P pull-up resistor.
Connection to an Inductive Load (active low)
External Supply
(up to 24VDC)
+
Ð
GND
OUT-P
Output
Connection
+5V
ZETA6104
ISO GND
+5VDC
4.7 KW
UDK2559
(open collector)
Use an external diode when driving
inductive loads. Connect the diode in
parallel to the inductive load,
attaching the anode to the ZETA6104
output and the cathode to the supply
voltage of the inductive load.
Electronic
Device
V+
Input
Ground
External Supply
(up to 24VDC)
+
Ð
GND
OUT-P
Output
Connection
Ground
Connection
+5V
ZETA6104
ISO GND
+5VDC
4.7 KW
UDK2559
(open collector)
ISO GND
PROGRAMMING TIP
Connecting to an activehigh sinking input? Set
the outputÕs active level to
high with the OUTLVL command
(1 = active high).
Connecting to an activelow sourcing input? Set
the outputÕs active level to low
with the OUTLVL command
(¯ = active low).
Thus, when the ZETA6104Õs
output is activated, current will
flow through the attached
input and the TOUT status
command will report a Ò1Ó
(indicates that the output is
active), regardless of the type
of input that is connected.
Details on setting the active
level and checking the output
status are provided in the
6000 Series ProgrammerÕs
Guide. Refer also to the
OUTLVL and TOUT command
descriptions in the 6000
Series Software Reference.
16 z ZETA6104 Installation Guide
Page 23

THUMBWHEEL CONNECTIONS Ñ for entering BCD data
Connection to the Compumotor TM8 Module
TM8 Thumbwheel Module
+ 1 2 3 4 5 6 7 8
+5 GND I5 I4 I3 I2 I1 O5 O4 O3 O2 O1
ZETA6104
Programmable Input #1
Programmable Input #2
Programmable Input #3
Programmable Input #4
Programmable Input #5
Pin #49 (+5VDC)
Pin #48 (GND)
Programmable Output #1
Programmable Output #2
Programmable Output #3
Optional Sign Bit
Connection to your own Thumbwheel Module
Thumbwheel#1Thumbwheel#2Thumbwheel#3Thumbwheel#4Thumbwheel#5Thumbwheel#6Thumbwheel#7Thumbwheel
Sign
Bit
Input #9 (sign)
Input #8 MSB
Input #7
Input #6
Input #5 LSB
Input #4 MSB
Input #3
Input #2
Input #1 LSB
most
significant
digit
least
significant
digit
ZETA6104
#8
Output #4
Output #3
Output #2
Output #1
I/O GND
Chapter 1. Installation 17
Page 24

RP240 Remote Operator Panel
RP240 Back Plane
GND
Rx
Tx
+5V
Input Power
COM 1 COM 2
Rx
Tx
GND
SHLD
+5V
GND
Rx
Tx
SHLD
Rx+
RxÐ
Tx+
TxÐ
GND
RP240 Connections when using RS-485
GND
Rx
Tx
+5V
If you will use RS-485 serial communication,
you must connect the RP240 to the
connector (and connect the RP240's +5V lead
to the
+5V terminal on the I/O connector).
In addition, you will have to issue these
commands to configure the ZETA6104 to
communicate successfully with the RP240
connected to
connected to
PORT1........Select COM 1 as the affected port.
DRPCHK1.... On powerup, check for RP240 on COM 1.
PORT2........Select COM 2 as the affected port.
DRPCHK¯.... On powerup, do not check for RP240
..................on COM 2.
COM 1 and with RS-485
COM 2.
COM 1
COM 1 COM 2
Rx
Tx
GND
SHLD
+5V
GND
Rx
Tx
SHLD
SHLD
GND
ENCODER
ZÐ
Z+
BÐ
B+
AÐ
A+
+5V
LIMITS
GND
HOM
NEG
POS
TRG-A
TRG-B
OUT-A
GND
I/O
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
12
PROG
Rx+
RxÐ
Tx+
TxÐ
GND
SHLD
6104
SHLD
SHLD
INDEXER DRIVE
POWER
STEP
OVER TEMP
MOTOR FAULT
EARTH
Compumotor
95-132 VAC
50/60 Hz
ZETA
AC POWER
Power Cable
Provided in ship kit (p/n 44-014768-01)
Length: 6.6 ft (2.0 m)
WARNING: The motor case (via the EARTH terminal) and the ZETA6104Õs SHLD
terminals are grounded through the AC power connector ground pin. You must provide
a proper AC power ground for safety purposes.
Power Input Specification
95-132VAC, 50/60Hz, single-phase
Peak Power requirements depend on the motor you use:
Motor Current Cabinet Peak Motor Peak Shaft Peak Total Volt-Amp
Type (Amps) Loss (W) Loss (W) Power (W) Power (W) Rating (VA)
ZETA57-51(S) 1.26 11.9 25 60 97 145
ZETA57-51(P) 2.38 16.1 50 129 195 293
ZETA57-83(S) 1.51 12.7 27 80 120 180
ZETA57-83P 3.13 19.6 54 175 249 373
ZETA57-102(S) 1.76 13.6 30 80 124 185
ZETA57-102P 3.50 21.7 60 186 268 402
ZETA83-62(S) 2.26 15.5 50 120 186 278
ZETA83-62P 4.00 24.8 88 260 373 560
ZETA83-93(S) 2.88 18.4 52 180 250 376
ZETA83-93P 4.00 24.8 72 350 447 671
ZETA83-135(S) 3.50 21.7 57 193 272 408
ZETA83-135P 4.00 24.8 65 355 445 667
OS2HB(S) 1.51 21.1 67 34 122 199
OS2HB(P) 3.01 39.1 187 79 305 466
OS21B(S) 1.88 22.6 61 67 150 240
OS21B(P) 3.75 48.8 180 114 343 509
OS22B(S) 2.14 20.4 55 89 165 262
OS22B(P) 4.00 44.5 147 165 357 542
RS31B(S) 2.26 20.0 50 120 200 300
RS31B(P) 4.00 40.0 110 240 400 600
RS32B(S) 2.88 30.4 61 149 241 372
RS32B(P) 4.00 48.8 170 226 445 668
RS33B(S) 3.50 33.3 73 210 316 493
RS33B(P) 4.00 56.6 164 299 519 769
(S): Series Configuration (P): Parallel Configuration
LEDs (after power is applied):
POWER .................. On (green).
STEP ....................... Off. Or green if motion is commanded.
OVER TEMP ........... Off. Or red if the internal sensor reaches 131°F (55°C).
MOTOR FAULT ...... Off. Or red if there is a short in the motor windings or motor cable,
or if the INTERLOCK jumper on the motor connector is removed or extended.
18 z ZETA6104 Installation Guide
Page 25

Lengthening I/O Cables
Bear in mind that lengthening cables increases noise sensitivity. (The maximum length of
cables is ultimately determined by the environment in which the equipment will be used.)
If you lengthen the cables, follow the precautions below to minimize noise problems.
¥ Use a minimum wire size of 22 AWG.
¥ Use twisted pair shielded cables and connect the shield to a SHLD terminal on the
ZETA6104. Leave the other end of the shield disconnected.
¥ Do not route I/O signals in the same conduit or wiring trays as high-voltage AC wiring
or motor cables.
Reducing noise on limit, trigger, and P-CUT inputs. If you are experiencing
noise problems, try adding resistors to reduce noise sensitivity (see illustration below).
You must use either the on-board +5V
terminal or an external power supply to
power the AUX-P pull-up resistor (for the
P-CUT, HOM, NEG, POS, TRG-A, and
TRG-B inputs). Connecting AUX-P to the
+5V terminal and an external supply will
damage the ZETA6104.
ZETA6104
Terminal could be:
P-CUT,
HOM, NEG, POS,
TRG-A, or TRG-B
Input Terminal
Isolated
Ground
Earth
5V
V_I/O
AUX-P
GND
Shield
Power Supply Options
OPTIONAL
External Power Supply
(5-24VDC)
Add a resistor between the input and the power supply (this will lower
the input impedance and reduce noise sensitivity). Use a value
between 330W and 2.2KW, depending on noise suppression required.
Output Device,
Switch, etc.
Long Shielded Cable
Chapter 1. Installation 19
Page 26

Testing the Installation
This test procedure allows you to control I/O and produce motion. Make sure that
exercising the I/O will not damage equipment or injure personnel. We recommend that you
leave the motor uncoupled from the load, but if you have coupled the load to the motor,
make sure that you can move the load without damaging equipment or injuring personnel.
Test Setup
Computer
or
Terminal
Terminal Emulation for IBM/Compatibles
To communicate with the ZETA6104, you will
need a terminal emulation program. We
recommend you use Motion Architect, a Windowsbased program that is provided in your ship kit.
Motion Architect provides terminal emulation and
program editor features as part of its ensemble of
programming tools.
Using Motion Architect:
1. To install, insert Disk 1 into your disk drive
and run the Setup program (setup.exe).
2. After the Setup program is finished
click on ÒRun Motion ArchitectÓ.
3. From the Product/Selection dialog box,
select ÒZETA6104Ó and click OK.
4. Click on ÒTerminalÓ from the main menu to
run the terminal emulator.
WARNING
COM 1 COM 2
Serial Connection:
RS-232C
or
RS-485
(see page 8)
I/O Connections
(see pages 7-19)
ENCODER
LIMITS
I/O PROGRAMMABLE I/O
1
49
50
Rx
Tx
GND
SHLD
+5V
GND
Rx
Tx
SHLD
SHLD
GND
ZÐ
Z+
BÐ
B+
AÐ
A+
+5V
GND
HOM
NEG
POS
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
V_I/O
2
Rx+
RxÐ
Tx+
TxÐ
GND
POWER
STEP
OVER TEMP
MOTOR FAULT
Compumotor
95-132 VAC
50/60 Hz
6104
INDEXER DRIVE
INTERLOCK
A
CENTER TAP
A+
A-
EARTH
B+
B-
CENTER TAP
B
INTERLOCK
ZETA
MOTOR
AC POWER
If you use a different terminal emulation software
package, make sure to configure it as follows:
9600 Baud
8 Data Bits
No Parity
1 Stop Bit
Full Duplex
Enable XON/XOFF
Having serial communication problems?
Refer to page 35 and 36 for help.
The test procedures below are based on the factory-default active levels for the ZETA6104Õs
inputs and outputs. Verify these settings with the following status commands:
Command Entered Response Should Be
INLVL *INLVL¯¯¯¯_¯¯¯¯_¯¯¯¯_¯¯¯¯_¯¯
HOMLVL *HOMLVL¯
LHLVL *LHLVL¯¯
OUTLVL *OUTLVL¯¯¯¯_¯¯¯¯_¯
20 z ZETA6104 Installation Guide
Connect to
grounded
120VAC
(see page 18)
The installation test will cause motion.
Make sure the motor is secured in place.
If you have coupled the load to the motor,
make sure that the load can move without
causing injury to equipment or personnel.
NOTE
Motor
Page 27

Connections Test Procedure Response Format (left to right)
End-of-travel
and
Home Limits
NOTE: If you are not using end-of-travel limits, issue the Disable Limits (LH¯) command
and ignore the first two bits in each response field.
1. Enable the hardware end-of-travel limits with the LH3 command.
2. Close the end-of-travel switches and open the home switch.
TLIM response:
bit 1= POS (positive travel) limit
bit 2= NEG (negative travel) limit
bit 3 = HOM (home) limit
3. Enter the TLIM command. The response should be *TLIM11¯.
4. Open the end-of-travel switches and close the home switch.
5. Enter the TLIM command. The response should be *TLIM¯¯1.
6. Close the end-of-travel switches and open the home switch (return to original config.).
7. Enter the TLIM command. The response should be *TLIM11¯.
Motor and
Encoder
(motion)
1. Enter the ENC¯ command to enable the motor step mode.
Enter the PSET¯ command to set the motor position to zero.
Enter the TPM command to determine the motor position. The response should be
TPM response = motor counts
TPE response = encoder counts
*TPM+¯ (motor is at position zero).
Enter the D25¯¯¯ command, followed by the GO command. The motor will move one
revolution (25000 steps) in the clockwise direction (viewed from the flange end).
Enter the TPM command to determine the motor position. The response should be
*TPM+25¯¯¯ (motor is at position 25000).
2. NOTE: Ignore this step if you are not using encoder feedback. This test assumes you are
Direction of rotation:
using a 1000-line encoder yielding a 4000 count/rev resolution.
Enter the ENC1 command to enable the encoder step mode.
Enter the PSET¯ command to set the encoder position to zero.
Enter the TPE command to determine the encoder position. The response should be
*TPE+¯ (encoder is at position zero).
Clockwise
(positive counts)
Counter-clockwise
(negative counts)
If the encoder is coupled to the motor shaft: Enter the D4¯¯¯ command, followed by
the GO command. The encoder (and motor) will move one revolution (4000 counts) in the
clockwise direction (viewed from the flange end).
If the encoder is not coupled to the motor shaft: Manually rotate the encoder shaft
one revolution in the clockwise direction (viewed from the flange end).
Enter the TPE command to determine the encoder position. The response should be
*TPE+4¯¯¯ (encoder is at position 4000).
Enter the ENC¯ command to return the ZETA6104 to the default motor step mode.
Programmable
Inputs
(incl. triggers)
1. Open the input switches or turn off the device driving the inputs.
2. Enter the TIN command.
The response should be *TIN¯¯¯¯_¯¯¯¯_¯¯¯¯_¯¯¯¯_¯¯.
TIN response:
bits 1-16 = prog. inputs 1-16
bits 17 & 18 = TRG-A & TRG-B
3. Close the input switches or turn on the device driving the inputs.
4. Enter the TIN command.
The response should be *TIN1111_1111_1111_1111_11.
Programmable
Outputs
1. Enter the OUTALL1,9,1 command to turn on (sink current on) all programmable
outputs. Verify that the device(s) connected to the outputs activated properly.
2. Enter the TOUT command. The response should be *TOUT1111_1111_1.
TOUT response:
bits 1-8 = prog. outputs 1-8
bit 9 = OUT-A
3. Enter the OUTALL1,9,¯ command to turn off all programmable outputs. Verify that the
device(s) connected to the outputs de-activated properly.
4. Enter the TOUT command. The response should be *TOUT¯¯¯¯_¯¯¯¯_¯.
RP240
Pulse Cut
1. Cycle power to the ZETA6104.
2. If the RP240 is connected properly, the RP240Õs status LED should be green and one of the
lines on the computer or terminal display should read *RP24¯ CONNECTED.
If the RP240Õs status LED is off, check to make sure the +5V connection is secure.
If the RP240Õs status LED is green, but the message on the terminal reads *NO REMOTE
PANEL, the RP240 Rx and Tx lines are probably switched. Remove power and correct.
3. Assuming you have not written a program to manipulate the RP240 display, the RP240
screen should display the following:
COMPUMOTOR 6104 INDEXER/DRIVE
RUN JOG STATUS DRIVE DISPLAY ETC
1. Open the P-CUT switch or turn off the device driving the P-CUT input.
2. Enter the TINO command (note the condition of the 6th bit from the left).
The response should be *TINO¯¯¯¯_¯¯¯¯.
ASSUMPTIONS
¥ RP240 connected to COM 2
¥ COM 2 (PORT2) configured
for RP240. To verify, type
these commands:
PORT2 <cr>
DRPCHK<cr>
The system response should
report Ò*DRPCHK3Ó.
TINO response:
bit 6 = pulse cut input
bits 1-5, 7 & 8 are not used
3. Close the P-CUT switch or turn on the device driving the P-CUT input.
4. Enter the TINO command.
The response should be *TINO¯¯¯¯_¯1¯¯.
Chapter 1. Installation 21
Page 28

Matching the Motor to the ZETA6104 (OPTIONAL)
Due to slight manufacturing variations, each motor has its own particular characteristics. In
the procedure below, you will adjust three potentiometers (pots), to match your ZETA6104 to
your specific motor. You will also select the best current waveform to use with your motor.
If you purchased a ZETA6104 and ZETA motor system (not applicable to OS and RS
motors), the ZETA6104 and the ZETA motor were matched to each other at the factory.
However, you may still want to perform the matching procedure below, because your
operating conditions may not be the same as factory conditions.
The ZETA6104Õs pots are located behind the removable metal cover on top of the chassis.
Phase Balance (Magnitude of Phase B with respect to Phase A)
Phase A Offset (DC Offset of Phase A motor current)
Phase B Offset (DC Offset of Phase B motor current)
123456789101112
Before You Start
¥ Note that if you replace the ZETA6104 unit or the motor, you will have to redo this procedure.
¥ Set up a serial communication link and terminal emulator (see installation test on page 20).
¥ Connect the motor to the ZETA6104.
¥ Secure the motor in a location such that you can turn the pots and feel or hear the motor at the
same time. (You should perform this procedure with the motor not coupled to the load,
because the characteristics you are matching are those only of the drive/motor combination.)
¥ Apply AC power when necessary to perform the steps below.
Step 1
Apply power to the ZETA6104, and allow it to reach a stable operating temperature. This
may take up to 30 minutes. For optimum results, perform the matching procedure at the
same ambient temperature at which your application will operate.
Step 2
For the adjustments that follow, consult the table below to find the speed at which to run the
motor. These are speeds that cause resonance in the unloaded motor. When the motor is running
at a resonant speed, you will notice increased noise and vibration. To make resonance the most
noticeable, you may need to vary the speed around the value given below for your motor. You
can find the resonant speed by touching the motor lightly with your fingertips as you vary the
speed. When you feel the strongest vibrations, the motor is running at resonant speed.
Motor Offset Adjust (rps) Balance Adjust (rps) Waveform Adjust (rps)
ZETA57-51 .......... 4.72 ................ 2.36 ................. 1.18
ZETA57-83 .......... 4.66 ................ 2.33 ................. 1.17
ZETA57-102.......... 4.12 ................ 2.06 ................. 1.03
ZETA83-62 .......... 2.96 ................ 1.48 ................. 0.74
ZETA83-93 .......... 2.96 ................ 1.48 ................. 0.74
ZETA83-135.......... 2.89 ................ 1.45 ................. 0.73
OS2HB ............. 4.52 ................ 2.26 ................. 1.13
OS21B ............. 4.49 ................ 2.24 ................. 1.12
OS22B ............. 4.51 ................ 2.26 ................. 1.13
RS31B ............. 2.79 ................ 1.40 ................. 0.70
RS32B ............. 2.72 ................ 1.36 ................. 0.68
RS33B ............. 2.65 ................ 1.32 ................. 0.66
22 z ZETA6104 Installation Guide
Page 29

Step 3
Run your motor at the resonant speed listed in the Offset Adjust column. Vary the speed
slightly until you find the resonance point.
To initiate motion, type these commands (followed by a carriage return) to the ZETA6104
from the terminal emulator:
MC1 (This command makes the motion run continuously until you issue a !S command.)
Vn (This command sets the velocity to n . For example, V4.66 sets the velocity to 4.66 rps.)
GO (This command initiate motion.)
To vary the speed while the motor is moving, type these immediate commands:
!Vn (This command selects the new velocity of n.)
!GO (This command changes the motorÕs velocity to the new velocity value of n.)
NOTE: To stop the motor during this procedure, issue the !S command.
Re-issue the GO command to resume motion.
Step 4
Step 5
Step 6
Step 7
Step 8
Step 9
Adjust the Phase A Offset and Phase B Offset pots for minimum motor vibration and smoothest
operation. Alternate between Phase A and PhaseÊB to find the minimum vibration point.
Run your motor at the resonant speed listed in the Balance Adjust column. Vary the speed
slightly until you find the resonance point.
Adjust the balance pot until you find the setting that provides minimum motor vibration and
smoothest operation.
Repeat steps 3Ð6.
Run the motor at the resonant speed listed in the Waveform Adjust column. Vary the speed
slightly until you find the resonance point.
Choose the current waveform that provides minimum motor vibrations and smoothest
operation at the speed you selected in step 8. To find the best waveform, compare motor
performance as you select different waveforms using the !DWAVEF command.
Waveform DWAVEF Setting
-4% 3rd harmonic !DWAVEF1 ¬ Factory default
-10% 3rd harmonic !DWAVEF2
-6% 3rd harmonic !DWAVEF3
Pure sine !DWAVEF4 ¬ Do not use if drive resolution (DRES) is set to 200 steps/rev
NOTE: The DWAVEF command setting is NOT automatically saved in non-volatile memory; therefore, if
DWAVEF1 in not adequate, you have to place an alternative DWAVEF setting in a set-up (STARTP)
program. Refer to page 31 for an example.
Step 10
Step 11
Disconnect AC power to turn off the ZETA6104. Replace the cover over the pots. This
completes the matching procedure.
Proceed to the next section to mount and couple the motor.
Chapter 1. Installation 23
Page 30

Mounting & Coupling the Motor
WARNINGS
¥ Improper motor mounting and coupling can jeopardize personal safety, and compromise system performance.
¥ Never disassemble the motor; doing so will cause contamination, significant reduction in magnetization, and loss of torque.
¥ Improper shaft machining will destroy the motorÕs bearings, and void the warranty. Consult a factory Applications Engineer
(see phone number on inside of front cover) before you machine the motor shaft.
Mounting the Motor
Use flange bolts to mount rotary step motors. The pilot, or centering flange on the motorÕs front face, can help you
position the motor.
Do not use a foot-mount or cradle configuration, because the motorÕs torque is not evenly distributed around the
motor case. When a foot mount is used, for example, any radial load on the motor shaft is multiplied by a much
longer lever arm.
The motors can produce very high torque and acceleration. If the mounting is inadequate, this combination of high
torque/high acceleration can shear shafts and mounting hardware. Because of shock and vibration that high
accelerations can produce, you may need heavier hardware than for static loads of the same magnitude.
Under certain move profiles, the motor can produce low-frequency vibrations in the mounting structure that can cause
fatigue in structural members. A mechanical engineer should check the machine design to ensure that the mounting
structure is adequate.
Motor Dimensions (xxxx) denotes millimeters
ZETA Series, 23 Frame
Model A
ZETA57-51 2.00 (1150.23)
ZETA57-83 3.10 (1175.23)
ZETA57-102 4.10 (101.60)
0.215
(5.461)
2.27
max
(4.953)
dia (4)
1.856
(47.14)
0.195
on 2.625 (66.67) BC
(57.66)
1.502
1.498
120
(305) 8 wire
shielded
(38.15)
(38.05)
0.82
(20.83)
0.72
(18.29)
0.2500
(6.35)
0.2495
(6.34)
Shaft Dia (2)
A
0.063(1.60)
0.19 (4.83)
0.83
(21.08)
0.73
(18.54)
#6-32 UNC-2B Thd
x 0.25 DP
(6.50)
(3) Equally Spaced
on 1.865 BC
(47.37)
1.118
(28.40) dia
60
ZETA Series, 34 Frame
Model A
ZETA83-62 2.50 (1162.00)
ZETA83-93 3.70 (1193.98)
ZETA83-135 4.10 (129.00)
O Series, 23 Frame
Model Lmax
OS2HB 1.60 (40.70)
OS21B 2.06 (52.40)
OS22B 3.10 (78.80)
3.25
(82.55)
max
0.2500
(6.35
-A-
+
0.0000
-
0.0005
+
0.000)
-
0.127)
0.002 (0.05
3.40
(86.36)
Max Casting Size
2.877
(73.07)
2.873
(72.97)
)
0.81
(20.57)
120 (305)
8 wire
shielded
2.730
(69.34)
2.750
(69.85)
0.228
dia
0.218
on 3.875 (98.42) BC
0.25
(6.35)
13.5
(342.9)
0.20
(5.08)
0.055
(1.40)
L
max.
(5.79)
(5.54)
(31.24)
(29.21)
dia (4)
0.003 (0.076)-B-0.003 (0.076)-A-
1.23
1.15
(18.29)
(19.05)
Encoder (optional)
1
0.2500
(6.35
0.72
max.
0.75
0.063
(1.60)
0.19
(4.83)
+
-
+
-
0.002 (0.05
-B-
A
0.0000
0.0005
0.000)
0.127)
)
1
2
1.21
1.17
(30.70)
(29.72)
0.3750
(9.52)
0.3745
(9.51)
Shaft Dia (2)
Flexible rubber boot may be bent
as shown. Nominal height 1.0 (25.4)
Motor painted black
18.0
(457.2)
min.
1.06
(26.92)
#6-32 UNC-2B Thd
x 0.25 DP
(6.50)
(4) Equally Spaced
30
on 2.952 BC
0.750
(19.05) dia
x 0.050 Deep
(1.27)
Bore Min
10¡
2.44
(61.98)
(74.98)
24 z ZETA6104 Installation Guide
Page 31

R Series, 23 Frame
End Bell Construction (NPS)
Model Lmax L2
RS31B- NPS 3.62 (nn91.95) 2.87 (nn72.90)
RS32B- NPS 4.77 (121.16) 4.02 (102.11)
RS32B- NPS 6.05 (153.67) 5.30 (134.62)
(85.85)
2 x 45¡
+
¯2.875 0.002
-
+
(73.025 0.051)
-
0.003 (0.077)-A-
3.38
4 x ¯0.218 (5.46) thru
equally spaced on a
¯3.875 (98.43) B.C.
+
0.0000
¯0.3750
-
0.0005
+
0.000)
(9.53
-
0.013)
)
0.002 (0.051
-A-
1.25
(31.75)
0.003 (0.077)-A-
L
max.
0.06 (1.52)
0.18 (4.57)
L2
R 1.72
(43.69)
2.02
(51.31)
max.
Removable
insulating bushing
Construction = conduit. Connection
(1/2 NPS TAP) with 0.56 (14.22)
I.D. removable insulating bushing
R Series, 34 Frame
Regular Construction (R10)
Model Lmax
RS31B- R10 2.58 (nn65.54)
RS32B- R10 3.76 (nn95.51)
RS32B- R10 5.06 (128.53)
0.75 (19.05)
full depth
0.344 (8.738)
1.25 (31.75)
Flat Configuration = F Rear Shaft Configuration = D
0.75 (19.05)
full depth
0.344
(8.738)
1.25 (31.75)
Flat Configuration = F
3.38
(85.85)
2 x 45¡
Standard Front Shaft Configurations Double Shaft Configuration
+
0.374
+
0.50 0.02
-
+
(12.7 0.051)
-
+
0.0469 0.0050
-
+
(1.191 0.128)
-
-
+
(9.50
-
1.25 (31.75)
#303 Woodruff Key Configuration = W
4 x ¯0.218 (5.46) thru
equally spaced on a
¯3.875 (98.43) B.C.
+
¯2.875 0.002
-
+
(73.025 0.051)
-
0.003 (0.077)-A-
¯.3750
(9.53
0.002 (0.051
-A-
+
0.0000
-
0.0005
+
0.000)
-
0.013)
1.25 (31.75)
)
0.000
0.010
0.00)
0.26)
+
1.43 0.04
-
+
(36.32 1.02)
-
Indicated dimension
1
applies from end of
extension to face of
rear end bell (cover
and gasket removed)
L max.
0.06 (1.52)
0.18 (4.57)
1
0.003 (0.077)-A-
Motor leads (fly)
or with 10 ft
cable (R10)
Standard Front Shaft Configurations Standard Double Shaft Configuration
+
0.50 0.02
-
+
(12.7 0.051)
-
+
0.0469 0.0050
-
+
(1.191 0.128)
-
+
0.374
-
+
(9.50
-
1.25 (31.75)
0.000
0.010
0.00)
0.26)
¯0.3750
(9.53
+
1.12 0.04
-
+
(28.45 1.02)
-
+
0.0000
-
0.0005
+
0.000)
-
0.013)
0.002 (0.051
#303 Woodruff Key Configuration = W
¯0.3750
(9.53
0.002 (0.051
)
+
0.0000
-
0.0005
+
0.000)
-
0.013)
)
Motor Temperature & Cooling
The motorÕs face flange is used not only for mounting; it is also a heatsink. Mount the face flange to a large thermal
mass, such as a thick steel plate. This is the best way to cool the motor. Heat will be conducted from inside the motor,
through the face flange, and dissipated in the thermal mass. You can also use a fan to blow air across the motor for
increased cooling, if you do not get enough cooling by conduction through the face flange.
In addition, the ZETA6104 has an automatic standby current feature that reduces motor current by 50% if no step
pulses have been commanded for a period of 1 second or more. (WARNING:Êtorque is also reduced.) Full current is
restored upon the first step pulse. To enable this feature use, the DAUTOS1 command (default is disabled, DAUTOS¯).
The DAUTOS command setting is NOT automatically saved in non-volatile memory; therefore, if you intend to use this
mode on power up, you have to place the DAUTOS1 command in a set-up (STARTP) programÑsee example on page 31.
Coupling the Motor
To ensure maximum performance, align the motor shaft and load as accurately as possible (although
some misalignment may be unavoidable. The type of misalignment will affect your choice of coupler.
Single-Flex Coupling: Use for angular misalignment only. One (only) one of the shafts must be
free to move in the radial direction without constraint.
Do not use a single-flex coupling with parallel
misalignmentÑthis will bend the shafts, causing excessive bearing loads and premature failure.
Double-Flex Coupling: Use whenever two shafts are joined with parallel misalignment, or a combination of angular and
parallel misalignment. Single-flex and double-flex couplings may or may not accept end play, depending on their design.
Rigid Coupling: Not recommended, because they cannot compensate for any misalignment. Use only if the motor or load is
on some form of floating mounts that allow for alignment compensation. Rigid couplings can also be used when the load is
supported entirely by the motorÕs bearings. A small mirror connected to a motor shaft is an example of such an application.
Coupling Manufacturers: HUCO, 70 Mitchell Blvd, Suite 201, San Rafael, CA 94903, (415) 492-0278
ROCOM CORP., 5957 Engineer Drive, Huntington Beach, CA 92649, (714) 891-9922
Aligned
End Float
Angular Misalignment
Parallel Misalignment
Combined Parallel & Angular Misalignment
Chapter 1. Installation 25
Page 32

Optimizing System Performance (OPTIONAL)
The ZETA6104 is equipped with three damping circuits that minimize resonance and ringing,
and thus enhance stepper performance:
¥ Anti-Resonance Ð General-purpose damping circuit. The ZETA6104 ships from the
factory with anti-resonance enabled (see DAREN command). No configuration is necessary.
The ZETA6104
automatically
switches between
the damping
circuits, based
upon the motorÕs
speed.
Anti-resonance provides aggressive and effective damping at speeds greater than 3
revolutions per second (rps). If you are using a high-inductance motor (not applicable to
ZETA, OS or RS motors), you should disable anti-resonance with the DAREN¯ command.
¥ Active Damping Ð Extremely powerful damping circuit at speeds greater than 3 rps.
The ZETA6104 ships from the factory with active damping disabled. To enable active
damping and optimize it for a specific motor size and load, refer to the Configuring
Active Damping procedure below.
¥ Electronic Viscosity Ð Provides passive damping at lower speeds (from rest to 3 rps).
The ZETA6104 ships with electronic viscosity disabled. To enable electronic viscosity
and optimize it for a specific application, refer to the Configuring Electronic Viscosity
procedure below.
For a theoretical discussion about these three circuits and how they minimize resonance and
ringing, refer to Appendix A.
NOTE: You need to "match the motor to the ZETA6104Ó before you can configure active
damping or electronic viscosity. Refer to the matching procedure on page 22.
Configuring Active Damping
¥ Couple the motor to the load (see pages 24-25 for details). Active damping must be
configured under the normal mechanical operating conditions for your application.
¥ Record the setup command settings. The procedure below helps you identify the
appropriate set-up commands (DMTIND, DMTSTT, and DACTDP) that will prepare your system
for optimized performance. These commands are saved in non-volatile memory. However,
you may still want to record these values so you can later place them in a set-up program (a
set-up program executes user-specified commands that establish power-up operational
defaults for your application). Page 31 shows an example of how to place these commands
in a set-up (STARTP) program.
Step 1
Verify correct motor-to-ZETA6104 matching. See Matching the Motor to the
ZETA6104 on page 22. To be fully effective, the active damping circuit requires proper
matching. If you are replacing a component (new ZETA6104 or motor in an existing
application), you must rematch your system.
Before You Start
26 z ZETA6104 Installation Guide
Page 33

Step 2
Establish appropriate inductance and static torque settings. If you ordered a
ZETA6104 and a ZETA motor together as a ÒsystemÓ, these settings were made at the factory
(OS and RS motors may not be ordered as a ÒsystemÓ). Use the DMTIND command to set the
inductance, and use the DMTSTT command to set the static torque (see table below). The
DMTIND and DMTSTT values are automatically saved in battery-backed RAM.
Motor --- INDUCTANCE ---
Range DMTIND
MH Setting
ZETA57-51(S) 20.08 & greater DMTIND1 * 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
ZETA57-51(P) 5.03 Ð 10.30 DMTIND3 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
ZETA57-83(S) 20.08 & greater DMTIND1 * 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
ZETA57-83(P) 5.03 Ð 10.30 DMTIND3 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
ZETA57-102(S) 20.08 & greater DMTIND1 * 0.73 Ð 1.41 101 Ð 200 DMTSTT2
ZETA57-102(P) 5.03 Ð 10.30 DMTIND3 0.73 Ð 1.41 101 Ð 200 DMTSTT2
ZETA83-62(S) 10.31 Ð 20.07 DMTIND2 0.73 Ð 1.41 101 Ð 200 DMTSTT2
ZETA83-62(P) less than 5.02 DMTIND4 0.73 Ð 1.41 101 Ð 200 DMTSTT2
ZETA83-93(S) 10.31 Ð 20.07 DMTIND2 1.42 Ð 2.33 201 Ð 330 DMTSTT3
ZETA83-93(P) less than 5.02 DMTIND4 1.42 Ð 2.33 201 Ð 330 DMTSTT3
ZETA83-135(S) 10.31 Ð 20.07 DMTIND2 2.34 Ð 3.48 331 Ð 492 DMTSTT4
ZETA83-135(P) less than 5.02 DMTIND4 1.42 Ð 2.33 201 Ð 330 DMTSTT2
OS2HB(S) 5.03 Ð 10.30 DMTIND3 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
OS2HB(P) less than 5.02 DMTIND4 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
OS21B(S) 10.31 Ð 20.07 DMTIND2 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
OS21B(P) less than 5.02 DMTIND4 0.26 Ð 0.72 36 Ð 100 DMTSTT1 *
OS22B(S) 10.31 Ð 20.07 DMTIND2 0.73 Ð 1.41 101 Ð 200 DMTSTT2
OS22B(P) less than 5.02 DMTIND4 0.73 Ð 1.41 101 Ð 200 DMTSTT2
RS31B(S) 10.31 Ð 20.07 DMTIND2 0.73 Ð 1.41 101 Ð 200 DMTSTT2
RS31B(P) less than 5.02 DMTIND4 0.73 Ð 1.41 101 Ð 200 DMTSTT2
RS32B(S) 10.31 Ð 20.07 DMTIND2 1.42 Ð 2.33 201 Ð 330 DMTSTT3
RS32B(P) less than 5.02 DMTIND4 1.42 Ð 2.33 201 Ð 330 DMTSTT3
RS33B(S) 5.03 Ð 10.30 DMTIND3 2.34 Ð 3.48 331 Ð 492 DMTSTT4
RS33B(P) less than 5.02 DMTIND4 2.34 Ð 3.48 331 Ð 492 DMTSTT4
(S) = Series Connection; (P) = Parallel Connection
* = Factory default setting (unless you ordered the ZETA6104 with a ZETA motor as a ÒsystemÓ).
Range DMTSTT
N-m Oz-in Setting
--- STATIC TORQUE ---
Step 3
Calculate only the maximum Active Damping (DACTDP) setting.
CAUTION
The purpose of this step is to identify the maximum DACTDP value for your system Ð DO NOT
enter the DACTDP command now. In steps 5-7 of this procedure, never set the DACTDP value
higher than this maximum setting.
To calculate the maximum DACTDP value, first calculate your systemÕs total inertia (include
the motorÕs rotor inertiaÑsee table on page 3). Then consult the table of inertia ranges below
to find the DACTDP setting that corresponds to your systemÕs total inertia. If you are on the
boundary between two settings, pick the lower of the two numbers.
DACTDP Setting Total Inertia kg-cm
DACTDP15 0.088 to 0.205 8.8 to 20.5 0.481 to 1.121
DACTDP14 0.205 to 0.572 20.5 to 57.2 1.121 to 3.144
DACTDP13 0.572 to 1.069 57.2 to 106.9 3.127 to 5.845
DACTDP12 1.069 to 1.754 106.9 to 175.4 5.845 to 9.590
DACTDP11 1.754 to 2.727 175.4 to 272.7 9.590 to 14.910
DACTDP1¯ 2.727 to 3.715 272.7 to 371.5 14.910 to 20.312
DACTDP9 3.715 to 5.020 371.5 to 502.0 20.312 to 27.447
DACTDP8 5.020 to 6.275 502.0 to 627.5 27.447 to 34.308
DACTDP7 6.275 to 8.045 627.5 to 804.5 34.308 to 43.986
DACTDP6 8.045 to 9.595 804.5 to 959.5 43.986 to 52.460
DACTDP5 9.595 to 11.760 959.5 to 1176.0 52.460 to 64.297
DACTDP4 11.760 to 14.250 1176.0 to 1425.0 64.297 to 77.884
DACTDP3 14.250 to 15.900 1425.0 to 1590.0 77.884 to 86.905
DACTDP2 15.900 to 17.770 1590.0 to 1777.0 86.905 to 97.129
DACTDP1 17.770 to 20.570 1777.0 to 2057.0 97.129 to 112.465
DACTDP¯ Active Damping Disabled (factory default)
2
Total Inertia kg-m2 x 10-6 Total Inertia oz-in
2
Chapter 1. Installation 27
Page 34

Step 4
Make a baseline move with active damping disabled. This is your baseline move.
Notice the sound, amount of motor vibration, etc. This move shows how your system
operates with anti-resonance enabled, and active damping disabled. Each time you adjust the
DACTDP setting (in steps 5-7), you will compare results against this baseline move.
1. Issue the DACTDP¯ command to disable active damping.
2. Make a move that is representative of your application, with similar velocity and
acceleration. The velocity must be greater than 3Êrps, in order for the ZETA6104 to
activate anti-resonance or active damping.
WARNING
Make sure that causing motion will not damage equipment or injure personnel.
The following six commands illustrate a simple incremental point-to-point move:
MC0 ; select the preset positioning mode
MA0 ; select the incremental preset positioning mode
A10 ; set the acceleration to 10 revs/sec/sec
V8 ; set the velocity to 8 revs/sec/sec
D250000 ; set the distance to 250,000 steps, equal to 10 revs
GO ; initiate the move
; **************************************************************
; * NOTE: To stop a move in progress, issue the !S command. *
; * To repeat the move, issue the GO command. To reverse *
; * direction, issue the D~ command and the GO command. *
; **************************************************************
Step 5
Step 6
Step 7
Make a move with active damping enabled. Compare the sound and vibration to the
baseline move.
1. Issue the DACTDP1 command to enable active damping. This enables active damping
at its lowest setting, and inhibits anti-resonance.
2. Make a move that is representative of your application. Use the same motion
parameters that you set up in step 4. If you have not changed these settings, simply
issue the GO command.
Increase the setting. Issue the DACTDP2 command (unless DACTDP1 is your calculated
maximumÑsee step 3). Make the move again. Compare the sound and vibration to the
levels obtained at DACTDP1.
Find the ideal DACTDP setting. Continue to increase the DACTDP setting by single
increments. During a repetitive move, you can change the setting Òon the flyÓ (while the
move is in progress) if you precede the DACTDP command with a Ò!Ó (e.g., !DACTDP2).
This allows you to immediately compare two different settings.
Increase the setting until you obtain optimum results for your move. This will be the setting
that yields the lowest audible noise and smoothest motor operation. Write down this setting
so that you can include it in your programming (perhaps in the set-up program).
Never exceed your maximum setting (see step 3). For many applications, you will
not need to go as high as the maximum setting. If you do not see perceptible improvement
from one switch setting to the next, use the lower switch setting.
Higher switch settings result in higher dynamic motor current during transients, which can
cause increased motor heating. Higher current also increases motor torque, resulting in sharper
accelerations that can jerk or stress the mechanics in your system. If you test each
intermediate DACTDP setting, you can evaluate the effects on your mechanics as you gradually
increase damping.
28 z ZETA6104 Installation Guide
Page 35

Configuring Electronic Viscosity (EV)
¥ If you configured active damping (see procedure above), leave the DACTDP setting set at the
value you chose. You do not need to disable active damping while you configure EV.
¥ Couple the motor to the load (see pages 24-25 for details). EV must be configured
under the normal mechanical operating conditions for your application.
¥ Record the DELVIS command setting. The procedure below helps you identify the
appropriate set-up command (DELVIS) that will prepare your system for optimized
performance. DELVIS is not saved in non-volatile memory. Therefore, you should write down
this command as you qualify it in this procedure, then place it in a program. Page 31 shows
an example of how to place DELVIS in a set-up (STARTP) program (a set-up program executes
user-specified commands that establish power-up operational defaults for your application).
Before You Start
Step 1
Step 2
Verify correct motor-to-ZETA6104 matching. See Matching the Motor to the
ZETA6104 on page 22. To be fully effective, the active damping circuit requires proper
matching. If you are replacing a component (new ZETA6104 or motor) in an existing
application, you must rematch your system.
Make a baseline move with EV disabled. This is your baseline move. Notice the
sound, amount of motor vibration, perceptible ringing, etc. This move shows how your
system operates with EV disabled. Each time you adjust the DELVIS setting (in steps 3 & 4),
you will compare results against this baseline move.
1. Issue the DELVIS¯ command to disable active damping.
2. Make a move that is representative of your application, with similar velocity and
acceleration. The velocity must 3Êrps or less, in order for the ZETA6104 to activate EV.
WARNING
Make sure that causing motion will not damage equipment or injure personnel.
The following six commands illustrate a simple incremental point-to-point move:
MC0 ; select the preset positioning mode
MA0 ; select the incremental preset positioning mode
A10 ; set the acceleration to 10 revs/sec/sec
V2 ; set the velocity to 2 revs/sec/sec
D250000 ; set the distance to 250,000 steps, equal to 10 revs
GO ; initiate the move
; **************************************************************
; * NOTE: To stop a move in progress, issue the !S command. *
; * To repeat the move, issue the GO command. To reverse *
; * direction, issue the D~ command and the GO command. *
; **************************************************************
Step 3
Step 4
Make a move with EV enabled. Compare the results with the baseline move.
1. Issue the DELVIS1 command to enable EV.
2. Make a move that is representative of your application. Use the same motion
parameters that you set up in step 1. If you have not changed these settings, simply
issue the GO command.
Find the ideal EV setting. Continue to increase the DELVIS setting by single
increments (the maximum setting is DELVIS7), and executing a move. Repeat this step
until you find the setting that gives the best performance. You can try all seven settings.
Incorrect settings will not cause damage.
During a repetitive move, you can change the setting Òon the flyÓ (while the move is in
progress) if you precede the DELVIS command with a Ò!Ó (e.g., !DELVIS2). This allows
you to immediately compare two different settings.
Chapter 1. Installation 29
Page 36

Record Your SystemÕs Configuration
You may wish to record your configuration information in the chart below.
Axis Name
Motor Inductance Setting (
Motor Static Torque Setting (
Waveform Setting (
Electronic Viscosity Setting (
Active Damping Setting (
Anti-Resonance Enabled? (
Current Standby Enabled? (
COM 1 Serial Port Function
COM 2 Serial Port Function
RS-485 Resistor Values
DIP Switch Settings
This chart is repeated, along with other facts, on the magnetic information label located on the
side of the ZETA6104 chassis. You can leave the label on the ZETA6104, or you can remove it
and place it in a convenient location near the ZETA6104 (e.g., on an equipment cabinet door).
Use a marker or pen to write configuration information in the spaces at the bottom of the label.
If you have multiple ZETA6104s, you can remove the labels and stack them on top of each
other, with the bottom edge of each visible. This shows information about all axes at a glance.
Motor Size
DMTIND
DMTSTT
DWAVEF
DELVIS
DACTDP
DAREN1
DAUTOS1
OFF
ON
)
)
)
)
)
)
Yes
)
Yes
RS-232 RP240
RS-232
Terminate Bias
123456789101112
S
No
No
RP240 RS-485
P
¬COM port functions set with internal jumpers
and the PORT and DRPCHK commands.
¬ RS-485 resistors are selected with internal DIP
switches, or connected externally.
Recommended Set-up Program Elements
Most of the software configuration commands (see table below) are not saved in non-volatile
NOTE
In most applications,
the factory default
settings are adequate.
Command Function Factory Default Setting
DACTDP Enable/disable active damping. Active damping is automatically inhibited at or
DAREN Enable/disable anti-resonance. Anti-resonance is automatically inhibited at or
DAUTOS Enable/disable automatic current standby mode in which current to the motor is
DELVIS Enable/disable electronic viscosity. Electronic viscosity is automatically inhibited
DMTIND Match the inductance of your motor (used only for active damping). DMTIND1 (³ 20 MH) *
DMTSTT Match the motorÕs static torque (used only for active damping). DMTSTT1 (0.26-0.72 N-m; 36-100 Oz-in) *
DRPCHK Establish the type of check for an RP240. In general, this command is necessary
DWAVEF Match the motor waveform (required for matching the motor to the ZETA6104). DWAVEF1 (-4% 3rd harmonic)
ECHO Enable/disable echoing of characters. If communicating over RS-232 to the
PORT Identify the COM port to be affected by subsequent serial communication set-up
* These commands are automatically saved in non-volatile memory.
If ordered as a system (with a motor), the ZETA6104 is shipped with the DMTIND and DMTSTT commands set to match the motor.
below 3 rps. If active damping is enabled, anti-resonance is automatically
inhibited. (See set-up procedure on page 26.)
below 3 rps, and it is inhibited if active damping is enabled.
reduced to 50% if no pulses are commanded for 1 second. Full current is restored
upon the next pulse command.
above 3 rps. (See set-up procedure on page 29.)
only if you are using RS-485, which forces the RP240 to be connected to the COM
connector, instead of being connected to the COM 2 connector.
1
master ZETA6104 in an RS-485 multi-drop, see setup requirements on page 36.
commands (DRPCHK, E, ECHO, EOT, BOT, EOL, ERROK, ERRBAD, ERRDEF,
XONOFF, and ERRLVL).
memory and therefore must be executed every time the ZETA6104 is powered up or reset.
Therefore, you may wish to include the software configuration commands in the set-up program.
The set-up program is automatically executed when the ZETA6104 is powered up or reset; in it,
you place the configuration commands that establish the operational readiness you require for
your particular application. A sample set-up program is provided below. For more detailed
information on creating a set-up program, refer to the 6000 Series ProgrammerÕs Guide.
DACTDP¯ (disabled)
DAREN1 (enabled)
DAUTOS¯ (disabled)
DELVIS¯ (disabled)
DRPCHK3 *
ECHO1 (enabled; but if using RS-485,
COMÊ2 is changed to ECHO¯ by default)
PORT1 (COM 1 is affected)
30 z ZETA6104 Installation Guide
Page 37

Set-up Program Example
Assumptions: The ZETA6104 is used with a Zeta83-93 motor wired in series.
RS-232C is connected to the COM 1 serial port.
An RP240 is connected to the COM 2 serial port.
DEF SETUP ; Begin definition of the program called setup
DWAVEF1 ; Select -4% 3rd harmonic waveform
DMTIND2 ; Set motor inductance for ZETA83-93 motor in series
DMTSTT3 ; Set motor static torque for ZETA83-93 motor in series
DACTDP7 ; Enable active damping for total inertia of 40 oz-in
DELVIS2 ; Enable electronic viscosity with value of 2
DAREN1 ; Enable anti-resonance
PORT1 ; Subsequent serial communication setup affects COM1 port
DRPCHK0 ; COM1 to be used for 6000 language commands
PORT2 ; Subsequent serial communication setup affects COM2 port
DRPCHK1 ; Check COM2 for RP240 -- If no RP240, use for 6000 commands
PORT1 ; Subsequent serial-related commands will affect COM1 port
; *************************************************************************
: * Insert other appropriate commands in the setup program (e.g., custom *
; * power-up message, scaling factors, input function assignments, output *
; * function assignments, etc.). *
; * See Programmer's Guide, chapter 3, for more information. *
; *************************************************************************
END ; End definition of program called setup
STARTP SETUP ; Assign the program named setup as the program to be executed
; on power up or reset
Chapter 1. Installation 31
Page 38

WhatÕs Next?
By now, you should have completed the following tasks, as instructed earlier in this chapter:
1. Review the general specifications Ñ see page 3
2. Perform configuration/adjustments, as necessary Ñ see pages 4-5
3. Mount the ZETA6104 Ñ see page 6
4. Connect all electrical system components Ñ see pages 7-19
Supplemental installation instructions for LVD-compliance are provided in Appendix C.
5. Test the installation Ñ see pages 20-21
6. Match the motor to the ZETA6104 (OPTIONAL) Ñ see pages 22-23
7. Mount the motor and couple the load Ñ see pages 24-25
8. Optimize system performance (OPTIONAL)
by implementing Active Damping and Electronic Viscosity Ñ see pages 26-29
9. Record your system configuration information Ñ see pages 30-31
Program Your Motion Control Functions
You should now be ready to program your ZETA6104 for your application. Knowing your
systemÕs motion control requirements, refer now to the 6000 Series ProgrammerÕs Guide for
descriptions of the ZETA6104Õs software features and instructions on how to implement them
in your application. Be sure to keep the 6000 Series Software Reference at hand as a reference
for the 6000 Series command descriptions.
For assistance with your programming effort, we recommend that you use the programming
tools provided in Motion Architect for Windows (found in your ship kit). Additional powerful
programming and product interface tools are available (see below).
Motion Architect Motion Architect¨ is a Microsoft¨ Windowsª based 6000 product programming tool
(included in your ship kit). Motion Architect provides these features (refer to the Motion
Architect User Guide for detailed information):
¥ System configurator and code generator: Automatically generate controller code
for basic system set-up parameters (I/O definitions, feedback device operations, etc.).
¥ Program editor: Create blocks or lines of 6000 controller code, or copy portions of
code from previous files. You can save program editor files for later use in BASIC, C,
etc., or in the terminal emulator or test panel.
¥ Terminal emulator: Communicating directly with the ZETA6104, you can type in
and execute controller code, transfer code files to and from the ZETA6104.
¥ Test panel and program tester: You can create your own test panel to run your
programs and check the activity of I/O, motion, system status, etc. This can be
invaluable during start-ups and when fine tuning machine performance.
¥ On-line context-sensitive help and technical references: These on-line
resources provide help information about Motion Architect, as well as access to hypertext
versions of the 6000 Series Software Reference and the 6000 Series ProgrammerÕs Guide.
Other Software
Tools Available
To Order these
software packages,
contact your local
Automation
Technology Center
(ATC) or distributor.
Motion Builderª. A Windows-based iconic programming interface that removes the
requirement to learn the 6000 programming language.
DDE6000ª. Facilitates data exchange between the ZETA6104 and Windowsª applications
that support the dynamic data exchange (DDE) protocol. NetDDEª compatible.
Motion Toolboxª. A library of LabVIEW
monitoring the ZETA6104. Available for the Windows environment.
¨
virtual instruments (VIs) for programming and
32 z ZETA6104 Installation Guide
Page 39

CHAPTER TWO
Troubleshooting
2
IN THIS CHAPTER
¥ Troubleshooting basics:
- Reducing electrical noise
- Diagnostic LEDs
- Test options
- Technical support
¥ Solutions to common problems
¥ Resolving serial communication problems
¥ Product return procedure
Page 40

Troubleshooting Basics
When your system does not function properly (or as you expect it to operate), the first thing
that you must do is identify and isolate the problem. When you have accomplished this, you
can effectively begin to resolve the problem.
The first step is to isolate each system component and ensure that each component functions
properly when it is run independently. You may have to dismantle your system and put it
back together piece by piece to detect the problem. If you have additional units available, you
may want to exchange them with existing components in your system to help identify the
source of the problem.
Determine if the problem is mechanical, electrical, or software-related. Can you repeat or recreate the problem? Random events may appear to be related, but they are not necessarily
contributing factors to your problem. You may be experiencing more than one problem. You
must isolate and solve one problem at a time.
Log (document) all testing and problem isolation procedures. You may need to review and
consult these notes later. This will also prevent you from duplicating your testing efforts.
Once you isolate the problem, refer to the problem solutions contained in this chapter. If the
problem persists, contact your local technical support resource (see Technical Support below).
Reducing Electrical Noise
Refer to the guidelines on page 19. General information on reducing electrical noise can be
found in the Engineering Reference section of the Parker Compumotor/Digiplan catalog.
Appendix D (page 49) provides guidelines on how to install the ZETA6104 in a manner most
likely to minimize the ZETA6104Õs emissions and to maximize the ZETA6104Õs immunity
to externally generated electromagnetic interference.
Diagnostic LEDs
Test Options
Technical Support
POWER ............. On (green) if 120VAC connected. Off if no power.
STEP................. Flashes on (green) with each pulse sent to the motor. Off if no pulses.
OVER TEMP ........ On (red) if internal sensor reaches 131°F (55°C). Off = O.K.
MOTOR FAULT.... On (red) if there is a short in the motor windings, if the motor cable is
disconnected or shorted, or if the INTERLOCK jumper on the MOTOR
connector is removed or extended. Off = O.K.
¥ Test Panel. Motion ArchitectÕs Panel Module allows you to set up displays for testing
system I/O and operating parameters. Refer to the Motion Architect User Guide for details.
¥ Hardware Test Procedure (see pages 20-21).
¥ Motion Test. A test program is available to verify that the ZETA6104 is sending
pulses to the motor and that the motor is functioning properly. The test program can be
initiated by issuing the TEST command over the serial interface, or by accessing the
RP240 TEST menu (see 6000 Series ProgrammerÕs Guide for RP240 menu structure).
WARNING
The TEST program causes the end-of-travel limits to be ignored. If necessary, disconnect
the load to ensure the test moves do not damage your equipment or injure personnel.
If you cannot solve your system problems using this documentation, contact your local
Automation Technology Center (ATC) or distributor for assistance. If you need to talk to our
in-house application engineers, please contact us at the numbers listed on the inside cover of
this manual. (These numbers are also provided when you issue the HELP command.)
NOTE: Compumotor maintains a BBS that contains the latest software upgrades and latebreaking product documentation, a FaxBack system, and a tech support email address.
34 z ZETA6104 Installation Guide
Page 41

Common Problems & Solutions
NOTE: Some software-related causes are provided because it is sometimes difficult to identify a problem as either hardware or software related.
Problem Cause Solution
Communication
(serial) not operative,
or receive garbled
characters
Direction is reversed. 1. Phase of step motor reversed (motor
Distance, velocity, and
accel are incorrect as
programmed.
Encoder counts
missing.
Erratic operation. 1. Electrical noise and/or improper
LEDs See Diagnostic LEDs above (page 34)
Motion does not occur. 1. Check LEDs.
Motor creeps at slow
velocity in encoder
mode (ENC1).
Programmable inputs
not working.
Programmable outputs
not working.
Torque, loss of. 1. Improper wiring.
Trigger, home, end-oftravel, or P-CUT
inputs not working.
1. Improper interface connections or
communication protocol
2. COM port disabled
3. In daisy chain or multi-drop, the unit
may not be set to proper address
does not move in the commanded
direction).
2. Phase of encoder reversed (reported
TPE direction is reversed).
1. Incorrect resolution setting. 1.a. Set the drive resolution to 25,000 steps/rev (DRES25¯¯¯ command).
1. Improper wiring.
2. Encoder slipping.
3. Encoder too hot.
4. Electrical noise.
5. Encoder frequency too high.
shielding.
2. Improper wiring.
2. End-of-travel limits are active.
3. P-CUT (Pulse cut-off) not grounded.
4. Drive fault detected.
5. Undervoltage (AC supply < 95 VAC)
6. Improper wiring.
7. Load is jammed.
8. No torque from motor.
1. Encoder direction opposite of motor
direction.
2. Encoder connected to wrong axis.
1. IN-P (input pull-up) not connected to a
power supply.
2. If external power supply is used, the
grounds must be connected together.
3. Improper wiring.
1. Output connected such that it must
source current (pull to positive voltage).
2. OUT-P not connected to power source.
3. If external power supply is used, the
grounds must be connected together.
4. Improper wiring.
2. No power (POWER LED off).
3. Overtemp, low voltage, or motor fault.
4. Drive shutdown.
5. Current standby mode enabled
1. If external power supply is used, the
grounds must be connected together.
2. Improper wiring.
1. See Troubleshooting Serial Communication section below.
2.a. Enable serial communication with the E1 command.
2.b. If using RS-485, make sure the internal jumpers are set accordingly (see
page 5). Make sure COM 2 port is enabled for sending 6000 language
commands (execute the PORT2 and DRPCHK¯ commands).
3. Verify DIP switch settings (see page 4), or proper use of ADDR command.
1. Swap the A+ and AÐ connection at the MOTOR connector.
2. Swap the A+ and AÐ connection at the ENCODER connector.
SOFTWARE ALTERNATIVE: If the motor (and the encoder if one is used) is
reversed, you can use the CMDDIR1 command to reverse the polarity of both
the commanded direction and the polarity of the encoder feedback counts).
1.b. Set the ERES command setting (default setting is 4,000 counts/rev) to
match the post-quadrature resolution of the encoder. Compumotor encoders:
E Series Encoders .................................................... ERES4000
OS motor with -HJ encoder (OSxxx-xxx-HJ) ........ ERES2048
OS motor with -RE encoder (OSxxx-xxx-RE) ....... ERES4000
OS motor with -RC encoder (OSxxx-xxx-RC) ...... ERES4000
RS motor with -EC encoder (RSxxx-xxx-EC) ....... ERES4000
1. Check wiring.
2. Check and tighten encoder coupling.
3. Reduce encoder temperature with heatsink, thermal insulator, etc.
4.a. Shield wiring.
4.b. Use encoder with differential outputs.
5. Peak encoder frequency must be below 1.6MHz post-quadrature. Peak
frequency must account for velocity ripple.
1.a. Reduce electrical noise or move ZETA6104 away from noise source.
1.b. Refer to Reducing Electrical Noise on page 34.
2. Check wiring for opens, shorts, & mis-wired connections.
1. See Diagnostic LEDs above.
2.a. Move load off of limits or disable limits with the LH¯ command.
2.b. Set LSPOS to a value greater than LSNEG.
3. Ground the P-CUT connection.
4. Check status with TASXF command (see bit #4).
5. Check status with TASXF command (see bit #2). Check AC supply.
6. Check motor and end-of-travel limit connections.
7. Remove power and clear jam.
8. See problem: Torque, loss of.
1. Switch encoder connections A+ & A- with B+ & B-.
2. Check encoder wiring.
1.a. When inputs will be pulled down to 0V by an external device, connect IN-P
to +5V supplied or to an external 5-24V positive supply (but not to both).
1b. When inputs are pulled to 5-24V by an external device, connect IN-P to 0V.
2. Connect external power supply's ground to ZETA6104Õs ground (GND).
3. Check wiring for opens, shorts, and mis-wired connections.
1. Outputs are open-collector and can only sink current -- change wiring.
2. Connect OUT-P to the +5V terminal or to an external supply of up to 24V.
3. Connect the external power supplyÕs ground to the ZETA6104Õs ground
(GND).
4. Check wiring for opens, shorts, and mis-wired connections.
1. Check wiring to the motor, as well as other system wiring.
2. Check power connection (POWER LED should be on.
3. Check LED status (see Diagnostic LEDs above).
4. Enable drive with the DRIVE1 command.
5. If more torque is needed at rest, disable standby mode (DAUTOS¯ command)
1. Connect external power supplyÕs ground to ZETA6104Õs ground (GND).
2.a. Check wiring for opens, shorts, and mis-wired connections.
2.b. When inputs are pulled down to 0V by an external device, connect AUX-P
to +5V supplied or to an external +5-24V supply (but not to both).
2.c. When inputs are pulled to 5-24V by external device, connect AUX-P to 0V.
2.d. Make sure a 5-24V power source is connected to the V_I/O terminal.
Chapter 2. Troubleshooting 35
Page 42

Troubleshooting Serial Communication Problems
General Notes ¥ Power up your computer or terminal BEFORE you power up the ZETA6104.
¥ Make sure the serial interface is connected as instructed on page 8. Shield the cable to earth
ground at one end only. The maximum RS-232 cable length is 50 feet (15.25 meters).
¥ RS-232: Handshaking must be disabled. Most software packages allow you to do this.
You can also disable handshaking by jumpering some terminals on the computerÕs/
terminalÕs serial port: connect RTS to CTS (usually pins 4 and 5) and connect DSR to
DTR (usually pins 6 and 20).
¥ RS-485: Make sure the internal DIP switches and jumpers are configured as instructed on
page 5.
Test the Interface 1. Power up the computer or terminal and launch the terminal emulator.
2. Power up the ZETA6104. A power-up message (similar to the following) should be
displayed, followed by a prompt (>):
*PARKER COMPUMOTOR 6104 Ð SINGLE AXIS INDEXER/DRIVE
*RP240 CONNECTED
>
3. Type ÒTREVÓ and press the ENTER key. (The TREV command reports the software
revision.) The screen should now look as follows (if not, see Problem/Remedy table
below).
*PARKER COMPUMOTOR 6104 Ð SINGLE AXIS INDEXER/DRIVE
*RP240 CONNECTED
>TREV
*TREV92-014630-01-4.7 6104
Problem Remedy (based on the possible causes)
No Response ¥ COM port not enabled for 6000 language communication.
If RS-232 connected to COM 1: issue ÒPORT1Ó and ÒDRPCHK¯Ó commands.
If RS-232 connected to COM 2: issue ÒPORT2Ó and ÒDRPCHK¯Ó commands.
If RS-485 connected to COM 2: issue ÒPORT2Ó and ÒDRPCHK¯Ó commands.
¥ RS-232: Echo may be disabled; enable with the ECHO1 command.
¥ If you are using an RS-232 connection between the host computer and the master
ZETA6104 connected to multiple ZETA6104s in an RS-485 multi-drop, make sure
the master ZETA6104 has these settings executed in the order given (you should
place these settings in your power-up STARTP program):
PORT1 (select RS-232 port, COM1, for configuration)
ECHO3 (echo to both COM ports)
PORT2 (select RS-485 port, COM2, for configuration)
ECHO2 (echo to the other COM port, COM1)
¥ Faulty wiring. See instructions on page 8. RS-485: verify internal DIP switch and
jumper settings on page 5. Also check for shorts or opens.
¥ Is the cable or computer/terminal bad? HereÕs a test:
1. Disconnect the serial cable from the ZETA6104 end only.
2. Connect the cableÕs Rx and Tx lines together (this echoes the characters back
to the host).
3. Issue the TREV command. If nothing happens, the cable or computer/terminal
may be faulty.
¥ The controller may be executing a program. Issue the !K command or the
<ctrl>K command to kill the program.
36 z ZETA6104 Installation Guide
Page 43

Problem/Remedy Table (continued)
Problem Remedy (based on the possible causes)
Garbled Characters ¥ Verify setup: 9600 baud (range is 19200-1200Ñsee AutoBaud, page 4),
Double Characters ¥ Your terminal emulator is set to half-duplex; set it to full-duplex.
Product Return Procedure
8 data bits, 1 stop bit, no parity; RS-232: Full duplex; RS-485: Half duplex
(change internal jumper JU6 to position 1).
¥ RS-485: Transmission line not properly terminated. See page 5 for internal DIP
switch and jumper settings. See page 8 for connections and calculating
termination resistors (if not using the internal resistors via internal DIP switches).
¥ Faulty wiring. See instructions on page 8. RS-485: verify internal DIP switch and
jumper settings on page 5. Also check for shorts or opens.
Step 1
Step 2
Step 3
Obtain the serial number and the model number of the defective unit, and secure a purchase order number to
cover repair costs in the event the unit is determined by the manufacturers to be out of warranty.
Before you return the unit, have someone from your organization with a technical understanding of the
ZETA6104 system and its application include answers to the following questions:
¥ What is the extent of the failure/reason for return?
¥ How long did it operate?
¥ Did any other items fail at the same time?
¥ What was happening when the unit failed (e.g., installing the unit, cycling power, starting other
equipment, etc.)?
¥ How was the product configured (in detail)?
¥ Which, if any, cables were modified and how?
¥ With what equipment is the unit interfaced?
¥ What was the application?
¥ What was the system environment (temperature, enclosure, spacing, contaminants, etc.)?
¥ What upgrades, if any, are required (hardware, software, user guide)?
Call for return authorization. Refer to the Technical Assistance phone numbers provided on the inside
front cover of this document. The support personnel will also provide shipping guidelines.
Chapter 2. Troubleshooting 37
Page 44

Page 45

Appendix A
Resonance, Ringing & DampingÑ
Discussion & Theory
In this appendix we will discuss resonance and ringing in step motors. This
information will help you configure the ZETA6104Õs damping featuresÑantiresonance, active damping, and electronic viscosity.
All step motors have natural resonant frequencies, due to the nature of their
mechanical construction. Internally, the rotor acts very similarly to a mass
suspended on a springÑit can oscillate about its commanded position.
Externally, the machine, mounting structure, and drive electronics can also be
resonant, and interact with the motor. During a move, two types of problems
can arise from these causes: resonance and ringing transients.
Resonance (Steady State Response)
Resonance is a steady state phenomenonÑit occurs when
the motorÕs natural resonant frequencies are excited at
particular velocities. It is not caused by transient
commands that we give the motor. If you slowly increase
your motorÕs speed from zero to 20 rps, for example, you
may notice ÒroughÓ spots at certain speeds. The
roughness is resonance; it is depicted in the next drawing.
Actual
Velocity
Instead of moving at the commanded velocity, the motor
is oscillating between speeds faster and slower than
commanded. This causes error in rotor position.
Resonance points can differ in intensity. The drawing
shows a typical caseÑas motor speed increases,
resonances of varying levels occur. Usually, the motor
can accelerate through the resonance point, and run
smoothly at a higher speed. However, if the resonance is
extreme, the rotor can be so far out of position that it
causes the motor to stall.
Resonance is affected by the load. Some loads are
resonant, and can make motor resonance worse. Other
loads can damp motor resonance. To solve resonance
problems, system designers will sometimes attach a
Resonances
Commanded
Time
damping load, such as an inertial damper, to the back of
the motor. However, such a load has the unwanted effect
of decreasing overall performance, and increasing system
cost.
The ZETA6104 has internal electronics that can damp
resonance, and increase system performance. No external
devices are necessary.
Ringing (Transient Response)
Inside a step motor, the rotor behaves like a mass on a
spring, as mentioned above. When commanded to quickly
accelerate to a given velocity, the rotor will ÒringÓ about
that velocity, oscillating back and forth. As shown in the
next drawing, the ringing decaysÑgrows smaller over
timeÑand the rotor eventually settles at the commanded
velocity.
Ringing
Transients
Velocity
CommandedActual
Time
Notice that ringing can be caused both by accelerating or
decelerating to a commanded velocity, and decelerating to a
stop. In any of these cases, ringing causes error in rotor
position.
Ringing is a transient phenomenon (unlike resonance,
which occurs during steady state operations). It is a
Page 46

response to a sudden change that we impose on the
system, such as ÒAccelerate to VelocityÓ or ÒStop.Ó
Several problems are associated with ringing. It can cause
audible noise; the motor must have a margin of extra
torque to overcome the ringing; and longer settling times
can decrease throughput.
To eliminate these problems, system designers use
damping to force the ringing to decay quickly. Inertial
dampers have been used as components in passive
damping methods. Accelerometers, encoders, and
tachometers have been used as components in active
damping methods. These devices can have the unwanted
effect of limiting performance, adding complexity, and
increasing cost.
The ZETA6104 has internal electronics that can damp
ringing transients, and cause them to decay quickly. No
external devices are necessary.
Electronic Viscosity Ð Provides passive damping
at lower speeds. The ZETA6104 ships with electronic
viscosity disabled. You must use the DELVIS
command to enable electronic viscosity, and optimize
it for a specific application (see procedure on page 29).
The first two damping circuitsÑanti-resonance and active
dampingÑwork at speeds greater than three revolutions
per second (rps). Electronic viscosity works at speeds
from rest up to three rps. The ZETA6104 will
automatically switch between the damping circuits, based
upon the motorÕs speed. The next drawing shows the
effective range of each circuit.
Anti-Resonance or
Velocity
3 rps 3 rps
Active Damping
(above 3 rps)
Electronic Viscosity
(below 3 rps)
Time
Damping in the ZETA6104
The ZETA6104 has three different circuits that can damp
resonance and ringing.
Anti-Resonance Ð General-purpose damping circuit.
The ZETA6104 ships from the factory with antiresonance enabled. No configuration is necessary.
Anti-resonance provides aggressive and effective
damping.
Active Damping Ð Extremely powerful damping
circuit. The ZETA6104 ships from the factory with
active damping disabled. You must use the DACTDP
command to enable active damping and optimize it for a
specific motor size and load (see procedure on page 26).
ZETA6104 Ð Internal Circuitry
Current Command
Current
Command
Modulator
Power
Amplifier
Above 3Êrps, the ZETA6104 automatically enables either
anti-resonance or active dampingÑbut not both at the
same time. They are mutually exclusive.
If active damping is set to zero (DACTDP¯), the
ZETA6104 enables anti-resonance. If the DACTDP
command is set to any setting other than zero, the
ZETA6104 enables active damping. This relationship is
shown in the next drawingÑnotice in the drawing that
anti-resonance can also be disabled with a command
(DAREN¯).
Differences between anti-resonance and active damping are
described next; refer to the block diagram below.
Motor
Terminal
Voltages
Motor
Anti-Resonance
Enable: DAREN1
Disable: DAREN¯
Dynamic Error Modulates
Current Command
(above 3 rps only)
Drawing shows factory default settings:
¥ Anti-Resonance enabled (DAREN1)
¥ Active Damping disabled (DACTDP¯)
40 z ZETA6104 Installation Guide
Anti-
Resonance
(DACTDP¯)
Active
Damping
(DACTDP1-15)
0
1
2
14
15
Scaling for Motor Parameters:
¥ Static Torque (DMTSTT command)
¥ Inductance (DMTIND command)
Scaling for
System Inertia
(DACTDP command)
Page 47

Anti-Resonance (AR)
Anti-resonance monitors the ZETA6104Õs motor
terminals, and looks at power exchange between the
ZETA6104 and motor. From this, it extracts information
about error in rotor position caused by resonance or
ringing. It modifies the internal motor current command
to correct for the error.
Anti-resonance is a general-purpose circuit. It corrects
rotor position error, without knowledge about the
systemÑwhether the motor is large or small, or the
system inertia is high or low. You cannot modify the
circuitÕs gains, or customize it for a particular
applicationÑbut, anti-resonance is easy to use. When
enabled via the DAREN1 command, it works
automatically.
Active Damping (AD)
Active damping monitors the ZETA6104Õs motor
terminals and, like anti-resonance, uses the same current
command modulator to modify motor current.
Active damping uses a different method to extract
information about rotor position error, however. The
circuitÕs gains are adjustableÑyou can configure it for
your particular system. The DMTIND and DMTSTT
commands scale the circuit for motor inductance and static
torque, respectively. The DACTDP command scales the
circuit for system inertia.
The active damping circuit uses this information for two
purposes:
1. It determines error in rotor position very accurately.
2. It adjusts the gains of its feedback loop, based upon
how much inertia the system has, and how much
torque the motor can produce.
If the rotor rings or vibrates, the active damping circuit
will detect the corresponding error in rotor position. It
will then modify the motor current command to damp the
ringing.
DIP switches on top of the ZETA6104 set the amount of
motor current during normal operations; this current is
constant. To damp ringing, the active damping circuit can
cause the ZETA6104 to produce up to twice as much
current as is set by the DIP switches. The extra current is
only applied during damping oscillations, and lasts a very
brief time.
the bandwidth down to 150ÊHz. With this lower
bandwidth, the drive electronics become Òsluggish.Ó
Ordinarily, when the rotor oscillates, it generates current
in the motorÕs coils; but with EVÕs lower bandwidth, the
driveÕs electronics impede the flow of current caused by
oscillations.
The effect on the motor is as if there were a viscous drag
on the rotor. At the end of a move, oscillations are
damped, and the rotor quickly comes to rest. After
accelerating or decelerating to velocities below 3 rps, the
rotor quickly settles at the commanded velocity. During
moves below 3 rps, EV significantly reduces low speed
velocity ripple.
EV is a ÒpassiveÓ circuit. It imposes viscosity on the
system, but has no feedback loop to monitor the effect of
the viscosity. EV keeps the amount of viscosity the
same, regardless of the response of the system.
You can adjust the amount of viscosity by using the
DELVIS command. This allows you to tailor the circuit
for different motor sizes and system inertias, and adapt it
to your application.
Recommendations
We recommend that you configure active damping and
electronic viscosity. Even if you believe resonance and
ringing will not cause problems in your system, you may
find that the ZETA6104Õs damping circuits provide
increased smoothness, reduced audible noise, and better
performance. Refer to the configuration procedures
beginning on page 26.
If you choose not to use active damping and electronic
viscosity, at least use anti-resonance. The ZETA6104 is
shipped from the factory with anti-resonance enabled
(DAREN1).
Electronic Viscosity (EV)
The ZETA6104 uses closed-loop current control to
develop and maintain precise currents in the motor phases.
When EV is off, the current loops have a bandwidth of
approximately 1000 Hz. Because this bandwidth is well
beyond the knee of step motor speed-torque curves, the
current loop dynamics do not limit the response of the
motor.
EV monitors motor velocity, and turns on below 3 rps. It
ÒdetunesÓ the current loop compensation values and brings
Appendix A Ð Resonance, Ringing & Damping 41
Page 48

Page 49

Appendix B
Using Non-Compumotor Motors
We recommend that you use Compumotor motors with the ZETA6104. If you use a nonCompumotor motor, it must meet the following requirements:
¥ Inductance: 0.5 mH minimum; 5.0 to 50.0 mH recommended range; 80.0 mH maximum.
¥ A minimum of 500VDC high-pot insulation rating from phase-to-phase and phase-to-ground.
¥ The motor must be designed for use with a bipolar drive (no common center tap).
¥ The motor must not have riveted rotors or stators.
¥ Do not use solid rotor motors.
¥ Test all motors carefully. Verify that the motor temperature in your application is within the
system limitations. The motor manufacturerÕs maximum allowable motor case temperature
must not be exceeded. You should test the motor over a 2-to-3 hour period. Motors tend to
have a long thermal time constant, but can still overheat, which results in motor damage.
CAUTION: Consult your motor vendor to verify that your motor meets the above
specifications. If you have questions regarding the use of a non-Compumotor motor with the
ZETA6104, consult your local Automation Technology Center (ATC) or distributor, or refer to
the numbers listed under Technical Assistance on the inside front cover of this document.
Wiring Configurations
Refer to the manufacturerÕs motor specification document
to determine the motorÕs wiring configuration. You can
also determine the wiring configuration with an ohmmeter
using the procedures below (4-Lead Motor, 6-Lead Motor,
8-Lead Motor). Once you determine the correct motor
wiring configuration, use the terminal connection diagram,
shown at the end of this section, that applies to your
configuration.
4-Lead Motor
1. Label one motor lead A+.
2. Connect one lead of an ohmmeter to the A+ lead and
touch the other lead of the ohmmeter to the three
remaining motor leads until you find the lead that
creates continuity. Label this lead AÐ.
3. Label the two remaining leads B+ and BÐ. Verify that
there is continuity between the B+ and BÐ leads.
4. Proceed to the Terminal Connections section below.
6-Lead Motor
1. Determine, with an ohmmeter, which three of the six
motor leads are common (one phase).
2. Label each one of these three motor leads A.
3. Using the ohmmeter, verify that the remaining three
leads are common.
4. Label the remaining three leads B.
5. Set the ohmmeter range to the 100 ohm scale
(approximately).
6. Connect the ohmmeterÕs negative lead to one of the
motor leads labeled A. Alternately measure the
resistance to the two remaining motor leads also
labeled A. The resistance measurements will reflect
one of the following two scenarios.
Scenario #1 Ñ The resistance measurements to
the two remaining motor leads are virtually identical.
Label the two remaining motor leads A+ and AÐ.
Label the motor lead connected to the negative lead
of the ohmmeter AÊCENTER TAP (this is the center
tap lead for Phase A of the motor).
Scenario #2 Ñ The resistance measurement to the
second of the three motor leads measures 50% of the
resistance measurement to the third of the three
motor leads. Label the second motor lead AÊCENTER
TAP (this is the center tap lead for Phase A of the
motor). Label the third motor lead AÐ. Label the
motor lead connected to the ohmmeter A+.
7. Repeat the procedure as outlined in step 6 for the
three leads labeled B (BÊCENTER TAP is the center
tap lead for Phase B of the motor).
8. Proceed to the Terminal Connections section below.
Page 50

8-Lead Motor
Because of the complexity involved in phasing an 8-lead
motor, you must refer to the manufacturerÕs motor
specification document. You can configure the 8-lead
motor in parallel or series. Using the manufacturerÕs
specifications, label the motor leads as shown in the next
drawing.
1
2
3
4
PM
Phase A Windings
Phase B Windings
21 43
Series Configuration Procedure:
1. Connect A2 & A3 together and relabel this common
point AÊCENTER TAP.
2. Connect B2 & B3 together and relabel this common
point BÊCENTER TAP.
3. Relabel the A1 lead A+.
4. Relabel the A4 lead A-.
5. Relabel the B1 lead B+.
6. Relabel the B4 lead B-.
7. Proceed to the Terminal Connections section below.
Parallel Configuration Procedure:
1. Connect motor leads A1 & A3 together and relabel
this common point A+.
2. Connect motor leads A2 & A4 together and relabel
this common point AÐ.
3. Connect motor leads B1 & B3 together and relabel
this common point B+.
4. Connect motor leads B2 & B4 together and relabel
this common point BÐ.
5. Proceed to the Terminal Connections section below.
Terminal Connections
After you determine the motorÕs wiring configuration,
connect the motor leads to the ZETA6104Õs 9-pin MOTOR
connector according to the appropriate diagram below.
4-Lead Motor
A+
ZETA6104
INTERLOCK
CENTER TAP
A
B
A
B
A
B
A
B
EARTH
CENTER TAP
INTERLOCK
INTERLOCK
CENTER TAP
EARTH
CENTER TAP
INTERLOCK
INTERLOCK
CENTER TAP
EARTH
CENTER TAP
INTERLOCK
INTERLOCK
CENTER TAP
EARTH
CENTER TAP
INTERLOCK
A+
AÐ
B+
BÐ
ZETA6104
A+
AÐ
B+
BÐ
ZETA6104
A+
AÐ
B+
BÐ
ZETA6104
A+
AÐ
B+
BÐ
AÐ
B+
BÐ
6-Lead Motor
A+
A-CT
AÐ
B+
B-CT
BÐ
8-Lead Motor
Series
A1
A2
A3
A4
B1
B2
B3
B4
8-Lead Motor
Parallel
A1
A2
A3
A4
B1
B2
B3
B4
44 z ZETA6104 Installation Guide
Page 51

Direction of Motor Rotation
The procedures above do not determine the direction of
motor shaft rotation. To find out which direction the shaft
turns, you must power up your system and command
motion. If the shaft turns in the opposite direction than
you desire, exchange the motor leads connected to A+ and
AÐ to reverse the direction of rotation.
CAUTION
Motor shaft rotation may be opposite than you
expect. Do not connect a load to the shaft until you
first determine the direction of shaft rotation.
Setting Motor Current
To set motor current for a non-Compumotor motor, refer
to the formulas below that correspond to your motor (4lead, 6-lead, 8-lead) and use the current settings shown on
page 4 to set the motorÕs current.
WARNING
Do not connect or disconnect the motor with the
power on. Doing so will damage the contacts of the
motor connector and may cause personal injury.
¥ If you wire the motor in series, use the DIP switch
tableÕs current settings and the converted value to set
the motor current.
¥ If you wire the motor in parallel, you must double
the converted value and use the DIP switch tableÕs
current settings to set the motor current.
Bipolar Rating: If the manufacturer specifies the
motor current as a bipolar series rating:
¥ If you wire the motor in series, use the DIP switch
tableÕs current settings directly.
¥ If you wire the motor in parallel, you must double
the manufacturerÕs rating and then use the DIP switch
tableÕs current settings to set the motor current.
If you have any questions about setting motor current,
consult your local Automation Technology Center (ATC)
or distributor, or refer to the numbers listed under
Technical Assistance on the inside front cover of this
document.
4-Lead Motors
If you use a 4-lead motor, the manufacturerÕs current
specification will translate directly to the values shown for
current in the DIP switch table on page 4.
6-Lead Motors
If you use a 6-lead motor, and the manufacturer specifies
the motor current as a bipolar rating, you can use the DIP
switch tableÕs current settings directly (no conversion) to
set motor current.
If the manufacturer specifies the motor current as a
unipolar rating, use the following formula to convert the
unipolar current rating to the correct bipolar rating:
Unipolar Current * 0.707 = Bipolar Current
After you make the conversion, use the values shown for
current in the DIP switch table to set the motor current.
8-Lead Motors
Manufacturers generally use either a unipolar rating or a
bipolar rating for motor current in 8-lead motors.
Unipolar Rating: If the manufacturer specifies the
motor current as a unipolar rating:
¥ Use the following formula to convert the unipolar
current rating to the correct bipolar rating:
Unipolar Current * 0.707 = Bipolar Current
Appendix B Ð Using Non-Compumotor Motors 45
Page 52

Page 53

Appendix C
LVD Installation Instructions
For more information about the Low Voltage Directive (LVD), see 73/23/EEC
and 93/68/EEC, published by the European Economic Community (EEC).
Environmental Conditions
Pollution Degree: The ZETA6104 is designed for
pollution degree 2.
Installation Category: The ZETA6104 is designed for
installation category II.
Electrical
Connecting & Disconnecting Power Mains
The ZETA6104Õs protective earth connection is provided
through its make-first/break-last earth terminal on the
power mains connector. You must reliably earth the
ZETA6104Õs protective earth connection.
Using an Isolation Transformer
The ZETA6104Õs mains voltage is limited to 120 VAC
nominal. If your mains voltage is higher, use an isolation
transformer located between the power mains and the
ZETA6104. Your isolation transformer should be
insulated toÊ~2300V rms.
Do not interrupt the protective earth conductor between the
source mains and the isolation transformerÕs secondary.
The core of the isolation transformer and the driveÕs
protective conductor terminal must both be connected to
the mains protective earth conductor.
CAUTION Ñ Do not use an autotransformer.
Adding Line Fuses
Line fuses need to be added to protect the transformer and
associated wiring. If the live wire cannot be readily
identified, fuse both phase conductors. The value of fuse
required is given by: (1.5 x VA)/(supply volts) [amps]
Fuse types should be anti-surge HBC.
WARNING Ñ Safety Ground (Earth Ground)
should never be fused.
Providing a Protective Earth Connection
for Motors
You must provide a connection from the motor to a
reliable protective earth contact point. This connection
provides a protective earth for the motor, and is in addition
to the earth connection provided by the drain wire in the
motorÕs power cable. The motorÕs protective earth
connection is important for safety reasons, and must not
be omitted.
Make connections according to the diagram and
instructions below:
Motor
Safety Earth
Cable
(green/yellow)
1. Use a spade lug in combination with a star washer and
mounting bolt to make good contact with the bare
metal surface of the motorÕs mounting flange.
2. Use a green and yellow striped wire to make the
connection between the motor and earth. Wire gauge
must be no thinner than the current carrying wire in the
motorÕs power cable.
3. Resistance between the motor and earth must be no
greater than 0.1 W. Use thicker gauge wire if the
resistance is too high.
Page 54

Mechanical
Installing in an Enclosure: The ZETA6104 must be
installed within an enclosure. The enclosureÕs interior
must not be accessible to the operator. The enclosure
should be opened only by skilled or trained service
personnel.
Table of Graphic Symbols & Warnings
The following symbols may appear in this manual, and
may be affixed to the products discussed in this manual.
Symbol Description
Earth Terminal
Servicing the ZETA6104
Changing Firmware: Only skilled or trained personnel
should change firmware.
Changing Batteries: The ZETA6104 contains a
replaceable lithium battery, of type Duracell DL2450, or
Sanyo CR2450, or equivalent. Only skilled or trained
personnel should change batteries. Dispose of batteries in
accordance with local regulations.
Do Not Replace Fuses: The ZETA6104 has no fuses
designed to be replaced by the user. Fuse failure indicates
that other components have also failed. Fuses and other
components should only be replaced by Compumotor or
its designated repair facilities.
Thermal Safety
The Motor May Be HOT: The motor may reach high
temperatures during normal operations, and may remain
hot after power is removed.
Sonic Pressure
High Sound Level: The sound level from some large
frame step motors (NEMA 34, NEMA 42, and larger) may
exceed 85 dBA. Actual sound level is application
dependent, and varies with motor loads and mounting
conditions. Measure the sound level in your application; if
it exceeds 85 dBA, install the motor in an enclosure to
provide sound baffling, or provide ear protection for
personnel.
BATTERY
Protective Conductor Terminal
Frame or ChassisTerminal
Equipotentiality
Caution, Risk of Electric Shock
Caution, Refer to Accompanying Text
Hot Surface
Recycle Battery
48 z ZETA6104 Installation Guide
Page 55

Appendix D
EMC Installation Guidelines
General Product Philosophy
The ZETA6104 was not designed originally for EMC compliance. Therefore, it will require specific measures to
be taken during installation. The ultimate responsibility for ensuring that the EMC requirements are met rests
with the systems builder.
It is important to remember that for specific installations, the full protection requirements of the EMC Directive
89/336/EEC need to be met before the system is put into service. This must be verified either by inspection or
by testing. The following EMC installation instructions are intended to assist in ensuring that the requirements
of the EMC directive are met. It may be necessary to take additional measures in certain circumstances and at
specific locations.
It should be stressed that although these recommendations are based on expertise acquired during tests carried
out on the ZETA6104, it is impossible for Compumotor to guarantee the compliance of any particular
installation. This will be strongly influenced by the physical and electrical details of the installation and the
performance of other system components. Nevertheless, it is important to follow all the installation
instructions if an adequate level of compliance is to be achieved.
Safety Considerations
The ZETA6104 is intended for installation according to
the appropriate safety procedures including those laid down
by the local supply authority regulations. The
recommendations provided are based on the requirements of
the Low Voltage Directive and specifically on EN60204.
It should be remembered that safety must never be
compromised for the purpose of achieving EMC
compliance. Therefore in the event of a conflict occurring
Handling & Installing Ferrite Absorbers
Take care when handling the absorbersÑthey can shatter if
dropped on a hard surface. For this reason the suggested
method of installation is to use a short length of 19mm
diameter heat-shrink sleeving (see Figure 1). This gives a
degree of physical protection while the cable is being
installed. The sleeving should have a shrink ratio of at
least 2.5:1. Cable ties may be used as an alternative,
however they give no physical protection to the absorber.
between the safety regulations and the following
recommendations, the safety regulations always
take precedence.
Ferrite absorber
retained by
Ferrite Absorbers and P-Clips
Figure 1. Ferrite Sleeve Installation
heatshrink sleeving
Ferrite Absorber Specifications
The absorbers described in these installation
recommendations are made from a low-grade ferrite
material which has high losses at radio frequencies. They
therefore act like a high impedance in this waveband.
P-Clip Installation Details
The function of the P-clip is to provide a 360-degree
metallic contact and thus a convenient means of ensuring a
proper R.F. ground. When dealing with EMI issues, it is
important to remember that continuity, a DC connection,
The recommended components are produced by Parker
Chomerics (617-935-4850) and are suitable for use with
cable having an outside diameter up to 10-13mm. The
specification is as follows:
Chomerics part # 83-10-M248-1000 83-10-A637-1000
Outside diameter 17.5mm 28.5mm
Inside diameter 10.7mm 13.77mm
Length 28.5mm 28.57mm
Impedance at 25MHz 80W 135W
Impedance at 100MHz 120W 210W
Curie temperature 130°C 130°C
(the device should not be operated near this temperature)
does not at all speak to the integrity of an AC (highfrequency) connection. High-Frequency bonding typically
involves wide, flat cabling to establish a suitable system
ground. When applied properly, the P-clip has been shown
to give an adequate high-frequency contact.
When installing a P-clip (see Figure 2), install as close to
the cable end as possible, provided a suitable ground,
backplane, earth stud or bus bar is accessible, (this may
mean removing the paint from a cabinet or panel).
Remove only the outer (vinyl) jacket of the braided screen
Page 56

cable (this allows the braid to continue to the cable
connector), be careful not to damage the braid. Snap the
P-clip over the exposed braid, and adjust for a tight fit.
Secure the clip to the designated ground with a machine
screw and lock washer. The use of brass or other inert
conductive metal P-clip is recommended. Cover any
exposed bare metal with petroleum jelly to resist
corrosion.
A filter must be installed between the incoming AC
supply and the input to the drive. The manufacturerÕs part
numbers for suitable filters are:
Corcom 10VV1
Corcom World Headquarters
Phone: 847-680-7400
Fax: 847-680-8169
Schaffner FN670-10/06
Schaffner EMC Inc.
Phone: 201-379-7778
Fax: 201-379-1151
Mount the filter within 2 inches (50mm) of the
ZETA6104 as shown in Figure 3 below. Ensure that there
is no paint on the mounting panel under the filter
mounting lugsÑit is vital that there is good large-area
contact between the filter and the panel.
P-Clip
Figure 2. P-Clip Installation
Remove outer jacket only
do not cut braid
Connect the incoming AC supply cable to the push-on
terminals on the filter, with the earth lead connected to a
local earth stud, bus bar or metal back-plane. Route the
supply cable so that it runs close to the walls of the
Installation
External Enclosure
Introduction
The measures described in this section are primarily for the
purpose of controlling conducted emissions. To control
radiated emissions, all drive and control systems must be
installed in a steel equipment cabinet which will give
adequate screening against radiated emissions. This
external enclosure is also required for safety reasons. There
must be no user access while the equipment is operating.
This is usually achieved by fitting an isolator switch to the
door assembly.
To achieve adequate screening of radiated emissions, all
panels of the enclosure must be bonded to a central earth
point. The enclosure may also contain other equipment and
the EMC requirements of these must be considered during
installation. Always ensure that drives and controllers are
mounted in such a way that there is adequate ventilation.
enclosure. Connect the earth terminal on the filter case to
the earth stud.
Fit a ferrite absorber over the cable before wiring the filter
output terminals to the AC input on the drive. Locate the
absorber as close as possible to the drive using heat-shrink
sleeving (see Figure 1 above). Take the ZETA6104 earth
connection from the same stud that retains the filter case
earth, as shown in Figure 3 below.
Motor Connections
Compumotor Motors
Parker Compumotor ZETA Series step motor systems
ship with motors that do not incorporate the use of a
braided screen for the control of conducted emissions.
Therefore, when used in installations where the motor
cable is not within earthed conduit the entire length of
travel, the standard motor cable should not be used.
At the drive end of the motor cable, fit a ferrite absorber
Preparing the ZETA6104: The ZETA6104 must be
mounted to a conductive panel. Before mounting the
ZETA6104, remove the paint from the rear face of the
mounting hole that will be closest to the input filter
location as shown in Figure 3 below, and if necessary
from the corresponding area on the rear panel of the
enclosure. This is to guarantee a good high-frequency
connection between the drive case and the cabinet. After
mounting the unit use petroleum jelly on the exposed
metal to minimize the risk of future corrosion.
over the cable before wiring to the motor connector (it
may be necessary to remove the existing connector).
Locate the absorber as close as possible to the connector
using heat-shrink sleeving.
For motors with exposed cabling (not within earthed
conduit), follow the guidelines below:
¥ Removable Cabling: Remove the motor cable from
the standard motor, and replace with a suitable cable
described below, see Motor Cables.
¥ Permanent Cabling: Cut off cable in excess of
Filtering the AC Supply
Introduction
These recommendations are based on the use of proprietary
screen filter units which are readily available. However, the
full EMC test includes a simulated lightning strike which
will damage the filter unless adequate surge suppression
devices are fitted. These are not normally incorporated into
commercial filters since the lightning strike test can be
destructive. This test is normally carried out on the overall
system and not on individual components; therefore, the
surge protection should be provided at the system
boundary.
approximately 4 inches (10 cm). Configure the motor
for series or parallel operation and attach a suitable
braided screen cable to the motor, see Motor Cables
below.
Termination of the braid shield at the motor must be made
using a 360° bond to the motor body, and this may be
achieved by using a suitable clamp. Many stepper motors
are designed to accommodate an appropriate terminal gland
which can be used for this purpose. If this is not the case,
P-clip the braid to the rear end bell of the motor housing,
as shown in Figure 4. This will not only provide a good
high-frequency bond, but strain relief as well.
50 z ZETA6104 Installation Guide
Page 57

At the drive end, run the motor cable down to the
mounting panel, expose a short length of braiding and
anchor to the panel with a P-clip. The ZETA Series
require a safety earth connection to the motor (see green
and yellow striped wire in Figure 4) Ñ take this from the
stud or bus bar. Run the safety earth lead alongside the
motor lead. Note that the motor cable should be kept away
from I/O cables carrying control signals.
Motor Cables
For 10 foot (replacement) cable lengths, use 4-core 1mm
2
(AWG 18) (SWG 20) braided screen cable for the motor
connections on the ZETA6104. At the drive end, fit a
ferrite absorber over the cable before wiring to the motor
connector. Locate the absorber as close as possible to the
connector using heat-shrink sleeving.
All after-market motor connections must be made using a
high quality braided-screen cable. Cables using a
metallized plastic foil for an earth screen are unsuitable and
provide very little screening. Terminating to the screen in
a mechanically stable manner is difficult because the
screen itself is comparatively fragile Ñ bending it in a
tight radius can seriously affect the screening performance.
There must be no break in the 360° coverage that the
screen provides around the cable conductors. If a connector
must be used it should retain the 360° coverage, possibly
by the use of an additional metallic casing where it passes
through the bulkhead of the enclosure. The cable screen
must not be connected to the cabinet at the point of entry.
Its function is to return high-frequency chopping current
back to the drive or controller. This may require mounting
the connector on a sub-panel insulated from the main
cabinet, or using a connector having an internal screen
which is insulated from the connector housing.
Within the cabinet itself, all the motor cables should lie in
the same trunking as far as possible. They must be kept
separate from any low-level control signal cables. This
applies particularly where the control cables are unscreened
and run close to the drive or other sources of electrical noise.
Motor Feedback Cables
Feedback devices such as encoders, tachometers and Hall
effect sensors also require the use of high-quality braided
screen cable. If it is necessary to replace the standard
feedback cable, select a braided screen cable that matches
the gage of the devices original cable and attach as close to
the transducer as possible. Avoid complex and bulky
connections that can cause degradation in feedback signal
quality. If possible, use in-line cable splicing techniques,
and cover the splice point with heat-shrink tubing.
Remove a section of the braided shield cableÕs insulation
to expose the braid, and tie the braid to earth using the
same P-clip 360° bond as shown in Figure 2. Differential
signals should use twisted pair cable to minimize
magnetic coupling. At the receiving end, fit a ferrite
absorber over the feedback cable before wiring the
connector, then P-clip the braid to a suitable ground (metal
back-plane of drive mounting panel, or earth point of
device that receives the feedback)Ñ see Figure 3.
Step Motors
It is preferable to use motors with screw terminations
whenever possible. If flying-lead motors are used, it is
important that the unscreened leads are converted into a
braided-screen cable within 4 inches (10cm) of the motor
body. A separate terminal box may be used for this
purpose but the braided cable screen must be properly
strapped to the motor body, as shown in Figure 4. Motors
fitted with terminal boxes also allow local selection of
series or parallel connection, reducing the cost of the cable
running back to the drive.
Control Signal Connections
High-quality braided screen cable should be used for
control connections. In the case of the ZETA6104, which
has differential step-direction inputs, it is preferable to use
a cable with twisted pairs to minimize magnetic coupling.
No connection is made to the cable screen at the drive
itself. Fit a ferrite absorber close to the I/O connector and
run the cable down to the mounting panel as shown in
Figure 3. Expose a short length of the braided screen and
anchor to the panel with a P-clip.
The level at which the I/O operates means that the signals
are unlikely to meet EMC immunity requirements if taken
outside the enclosure without proper screening.
50-Pin Ribbon Cable: It is recommended when using the
50-Pin Ribbon Cable I/O found on the ZETA6104 that a
terminal break out box such as the VM50 be used (see
Figure 3). Mount the VM50 close to the ZETA6104,
keeping the ribbon cable as short as possible. Bundle any
excess ribbon cable and secure close to a panel wall.
Individual I/O points will require the use of individually
shielded cable runs, with braids bonded to the panel (close
to VM50) with a P-clip.
Communications: In applications that require serial
communications with the ZETA6104, take special care to
assure proper wiring practices are utilized. Good quality
braided screen cable should be used for the communication
cabling. In the specific case of differential mode (RS-485)
protocol, twisted pair cable shall be used. No connection is
made to the cable screen at the drive itself. Fit a ferrite
absorber close to the communications connector and run the
cable down to the mounting panel as shown in Figure 3.
Expose a short length of the braided screen and anchor to
the panel with a P-clip. Avoid routing communication
cables near high power lines, and sources of high energy
impulses.
Remember to route control signal connections well
away (at least 8 inches) from relays and contactors.
Control wiring should not be laid parallel to power or
motor cables and should only cross the path of these
cables at right angles. Bear in mind that control cables
connected to other equipment within the enclosure may
interfere with the controller, particularly if they have come
from outside the cabinet. Take particular care when
connecting external equipment with the cabinet door open,
for instance a computer or terminal; static discharge may
cause damage to unprotected inputs.
Appendix D Ð EMC Installation Guidelines 51
Page 58

Braided-screen
Cables
Comm-
Encoder
Limits Cable
I/O Cable
Motor Cable
(braided-screen)
Rx
Tx
GND
SHLD
+5V
GND
Rx
Tx
SHLD
SHLD
GND
Z-
Z+
B-
B+
A-
A+
+5V
GND
HOM
NEG
POS
TRG-A
TRG-B
OUT-A
GND
P-CUT
+5V
OUT-P
IN-P
AUX-P
Rx+
RxTx+
TxGND
6104
INDEXER DRIVE
POWER
STEP
OVER TEMP
MOTOR FAULT
INTERLOCK
CENTER TAP
A
A+
A-
EARTH
B+
B-
CENTER TAP
B
INTERLOCK
COM 1 COM 2 ENCODER LIMITS I/O
Motor Safety
Earth (grn/yel)
ZETA
MOTOR
Ferrite
absorber
Programmable
I/O Cable
VM50
Figure 3. EMC Connections for ZETA6104
Motor/Encoder
Cable
Ribbon
Cable
AC Input Filter
Remove
paint behind
this area
Step Motor
Compumotor
95-132 VAC
50/60 Hz
AC POWER
PROGRAMMABLE I/O
Braided-screen
AC Input
Cable
Cable
LVD/EMC Compliance for RS Motors
CompumotorÕs RS Series motors may be ordered with
the C10 cable kit for LVD/EMC compliance (part number
is RSxxx-xxC10). The C10 cable kit may also be ordered
separately (part number is C10). Instructions for
assembling the cable are provided in the C10 cable kit.
Exposed Braid
Outter Jacket
Inner Jacket
Safety Earth
Cable
(green/yellow)
Figure 4. EMC Connections for Step Motor Ñ P-Clip, Safety Earth
52 z ZETA6104 Installation Guide
Drive End Motor End
Rubber Moisture Seal
Top Half of Casting
EMI Shield
Motor Cable
(10-foot)
Gland
Brass Contact Sleeve
Base Half of Casting
Thread
Converter
Page 59

INDEX
3rd harmonic 23
4-lead motor (
6-lead motor (
5V power supply
connections
item, like P-CUT, Encoder, etc.)
load limit 3
8-lead motor (
6000user@cmotor.com (
non-Compumotor) wiring 43
non-Compumotor) wiring 43
(see page for connection
non-Compumotor) wiring 44
e-mail address) i
A
AC input power connections & specs
18
acceleration range 3
accuracy
stepping 3
velocity 3
active damping
configuration procedure 26
definition 41
active levels (see polarity)
ADDR (auto addressing) command 4
address
auto-address multiple units 4
DIP switch selection 4
air-flow space, minimum 6
airborne contaminants 6
anti-resonance
configuring 26
definition 41
assumptions (skills & knowledge
required for installation) i
auto addressing multiple units 4
auto baud procedure 4
auto current standby 9, 25
B
balance 22
battery, changing 48
baud rate 3
automatic selection 4
BBS (bulletin board service) 34
BCD input via thumbwheels 17
bearings, zeta & OS/RS motors 3
bias resistors
calculating 8
DIP switch selection 5
bipolar current 45
C
cables
I/O, extending 19
motor 9
serial communication (max. length)
36
calculating bias & termination resistors
8
change summary i
circuit drawings (see back cover of
manual, and Òschematics, internalÓ)
COM 2 port function 5
common problems & solutions 35
communication
Motion Architect 32
serial (see serial communication)
terminal emulation 20
troubleshooting 36
conduit 2, 19
configuration
active damping 26
address 4
anti-resonance 26
autobaud 4
bias resistor selection 5
COM 2 port function 5
electronic viscosity 29
inductance 27
matching the ZETA6104 to the
motor 22
motor current 4
recording 30
RS-485 setup 5
serial communication on COM 2 5
static torque 27
termination resistor selection 5
connections
computer 8, 20
daisy-chain 8
EMC-compliance guidelines 49
encoder 12
end-of-travel limit inputs 11
grounding 7
home limit inputs 11
lengthening cables 19
LVD-compliant installation 47
motor 9
non-Compumotor 44, 45
wiring options 9, 10
multi-drop 8
PLC inputs 16
PLC outputs 15
power (VAC) input 18
programmable inputs 15
programmable outputs 16
pulse cut-off input (P-CUT) 7
RP240 18
RS-232C 8
RS-485 8
terminal 8, 20
testing 20, 21
thumbwheels 17
trigger inputs 13
VM50 screw terminal adaptor 14
contaminants 6
cooling the motor 25
coupling the motor to the load 25
current, motor
automatic reduction (DAUTOS) 9,
25
bipolar rating 45
selecting 4
non-Compumotor motors 45
unipolar rating 45
waveform 23
D
DACTDP (active damping) command 27
part of set-up program 30
daisy-chain connections 8
damping
configuration
active damping 26
anti-resonance 26
electronic viscosity 29
defined 40
DAREN (anti-resonance) command 40
part of set-up program 30
DAUTOS command 9, 25
part of set-up program 30
DDE6000ª 32
DELVIS (electronic viscosity)
command 29
part of set-up program 30
device address (see address)
diagnostic LEDs 34
dimensions
motor 24
ZETA6104 6
Page 60

DIP switch settings
address 4
autobaud feature 4
bias & termination resistors 5
motor current 4
disassembling the ZETA6104 5
DMTIND (inductance) command 27
part of setup program 30
DMTSTT (static torque) command 27
part of set-up program 30
drive resolution 35
drive/motor matching 22
DRPCHK command 18
part of set-up program 30
DWAVEF (waveform) command 23
part of set-up program 30
E
e-mail address for feedback i
ECHO 30
electrical noise 2, 34
EMC installation guidelines 49
suppressing 19
electronic viscosity
configuration procedure 29
definition 41
EMC installation guidelines 49
emergency stop (
encoder
connections 12
testing 21
resolution 35
specifications 12
end-of-travel limits
connections 11
testing 21
environmental specifications 3, 6
extending cables
I/O 19
motor 9
RS-232C 36
pulse cut-off) switch 7
F-H
factory configuration 4
default set-up command values 30
faults (see LEDs, diagnostic)
FAX number for technical support 34
feedback, e-mail address i
ferrite absorbers 49
filtering the AC input supply 50
firmware, changing 48
fuses
adding line fuses 47
internal (do not replace!) 48
grounding 2
EMC guidelines 49
system diagram 7
handshaking, disabling 36
hard limits (see end-of-travel limits)
harmonic, waveform 23
HCMOS-compatible switching levels 3
heat 3
helpful resources (publications) i
home limit input
connections & specs 11
testing 21
humidity 3
I
I/O cabling 19
inductance, configuration (DMTIND) 27
inductive load, connecting outputs to
16
inertia, and active damping 27
information label 30
inputs
encoder 12
end-of-travel limits 11
problems 35
general-purpose programmable 14
problems 35
home limit 11
problems 35
P-CUT 7
problems 35
power (AC) 18
serial communication (see serial
communication)
suppressing noise 19
testing 21
trigger 13
problems 35
installation
connections (see connections)
DIP switch settings (see DIP switch
settings)
EMC guidelines 49
LVD instructions 47
mounting (see mounting)
precautions 2
process overview 2
test 20
interlock jumper 9, 34
J-L
jumper settings 5
LEDs, diagnostic 18, 34
limit input connections 11
line fuses, adding 47
load, coupling 25
LVD installation instructions 47
M
magnetic label 30
matching, ZETA6104 to motor 22
minimum air-flow space 6
motion algorithm update rate 3
Motion Architect 32
Motion Builderª 32
Motion Toolboxª 32
motor
connections 9
non-Compumotor 44, 45
protective earth 47, 50
series or parallel 9, 10
cooling 25
coupling 25
current selection 4
non-Compumotor motors 45
current standby mode 9, 25
dimensions 24
fault 34
modifying 24
motor/drive matching 22
mounting 24
peak power requirements 18
specifications 3
speed/torque curves 10
thermal safety 48
mounting
EMC compliant 50
motor 24
ZETA6104 chassis 6
multi-drop
connections 8
internal configuration 5
N-O
National Electric Code Handbook i
negative-travel limits 11
noise, electrical 2, 34
suppression on I/O cables 19
offset, phase 22
opening the ZETA6104 5
outputs
general-purpose programmable 14
problems 35
OUT-A 14
testing 21
over temp fault 34
P-Q
P-clips 49
P-CUT (pulse cut-off) input
connections & specs 7
parallel motor connection 9, 10
peak power requirements 18
performance specifications 3
phase balance 22
phase offset 22
pin outs (see also back cover)
encoder connector 12
limits connector 11
motor connector 9
programmable inputs 14
programmable outputs 14
PLC connections 15
polarity
commanded direction 35
end-of-travel limit inputs 11
home input 11
programmable inputs 14
programmable outputs 14
trigger inputs 13
PORT command 18
COM 2 function 5
part of set-up program 30
position range 3
positive-travel limits 11
potentiometers 22
power supply
5V load limit 3
AC input connections & specs 18
AC input, filtering 50
for P-CUT, limit inputs, & trigger
inputs 7, 11, 13
for programmable inputs & outputs
14
power up auto test 4
pre-installation changes 4
54 z ZETA6104 Installation Guide
Page 61

precautions
installation 2
mounting 6
process of installation 2
product return procedure 37
programmable I/O
connections & specs 14
testing 21
programming tools available 32
pulse cut-off (P-CUT)
testing 21
R
reference documentation i
removing the ZETA6104 chassis 5
resistors, termination/bias
calculating 8
selecting 5
resolution
drive 35
encoder 12, 35
resonance 39
return procedure 37
ringing 39
rotor inertia, zeta & OS/RS motors 3
RP240, connections 18
testing 21
RS-232C (see serial communication)
RS-485 (see serial communication)
S
safety 2
safety stops (see end-of-travel limits)
schematics, internal (see also back
cover)
encoder inputs 12
limit inputs 11
P-CUT input 7
programmable inputs and outputs
14
trigger inputs 13
serial communication
RS-232C
configuration 5
connections 8
daisy-chain connections 8
disable handshaking 36
specifications 3
troubleshooting 36
RS-485
configuration 5
connections 8
disable handshaking 36
multi-drop connections 8
resistor calculation 8
RP240 connections 18
specifications 3
troubleshooting 36
series motor connection 9, 10
set-up commands 30
set-up program 30
shielding 2
EMC guidelines 49
I/O cables 19
ship kit 2
sinking input device, connecting to 16
sinking output device, connecting to
13, 15
software, update from BBS 34
sonic pressure 48
sourcing input device, connecting to
16
sourcing output device, connecting to
13, 15
specifications
motor 3
peak power requirements 18
speed/torque curves 10
overall list of (see also back cover)
speed/torque curves, ZETA & OS/RS
motors 10
startup (STARTP) program 30
static torque
configuration (DMTSTT) 27
ZETA & OS/RS motor specs 3
status commands (see also back
cover, and test on page 20)
axis (see TASF command)
limit switches (see TLIM command)
motor faults (see TASXF command)
P-CUT input (see TINOF command,
bit 6)
programmable inputs (see TIN
command)
programmable outputs (see TOUT
command)
trigger inputs (see TIN command)
status LEDs 18, 34
stepping accuracy 3
support software available 32
T
technical assistance (see inside of
front cover, and HELP command)
temperature range 3
terminal emulation, set up 20
termination resistors
calculating 8
DIP switch selection 5
test
system installation 20
test panel (Motion Architect) 34
TEST program 34
thermal safety 48
third harmonic 23
thumbwheel connections 17
transformer, isolating 47
travel limits 11
trigger inputs
connections 13
testing 21
troubleshooting 34
common problems & solutions 35
diagnostic LEDs 34
serial communication 36
test panels, Motion Architect 34
test program 34
TTL-compatible switching voltage
levels 3
tuning (see matching)
U-Z
unipolar current 45
velocity accuracy 3
velocity range 3
velocity repeatability 3
VM50 adaptor 14
waveform 23
Z channel output 12
ZETA motor (see motor)
Index 55
Page 62

Page 63

ZETA6104 Indexer/Drive
y
Setup
Connections
Automation
See also pages 7-19
ZETA, OS & RS MOTOR CONNECTIONS
Series Connection
(factory default)
Yellow
Blue
Red
Black
Shield
White
Green
Orange
Brown
Parallel Connection
Red
Blue
Yellow
Black
Shield
White
Brown
Orange
Green
MOTOR MATCHING & CURRENT; ADDRESS
Access through the top of the ZETA6104 chassis (loosen screws, move cover plate).
Phase
Phase A
Balance
Motor matching – see page 22.
Motor Current
Zeta57-51(S)
Zeta57-83(S), OS2HB(S)
Zeta57-102(S)
OS21B(S)
OS22B(S)
Zeta83-62(S), RS31B(S)
Zeta57-51(P)
Zeta83-93(S), RS32B(S)
OS2HB(P)
Zeta57-83(P)
Zeta57-102(P),
Zeta83-135(S), RS33B(S),
OS21B(P)
Zeta83-xxx(P),
OS22B(P), RS3xB(P)
(S) = Series (P) = Parallel
Non-Compumotor motor current settings – see page 4.
AutoBaud (see page 4)
Address
TIP: The ADDR command allows you
to automatically establish addresses
for multiple units in a daisy-chain or multi-drop
(ADDR address overrides the DIP switch setting).
RS-485 CONFIGURATION
1. Change internal jumpers & DIP Switches:
ZETA6104 PCB
Battery
PROMs
Phase B
Offset
Offset
12345 12
12345
Amps
1.26 off on off off on
1.51 off on off on on
1.76 off on on off on
1.88 off on on on off
2.14 on off off off off
2.26 on off off off on
2.38 on off off on off
2.88 on off on on off
3.01 on off on on on
3.13 on on off off off
3.50 on on off on on
3.75 on on on off on
4.00 on on on on on
default
enabled on off
disabled off off
(see also pages 5 & 8)
Position 3 = 4-wire RS-485 (default)
Position 1 = 2-wire RS-485
Rx termination resistor (120 Ω)
4
3
Tx+ bias resistor (681 Ω)
2
Tx termination resistor (120 Ω)
1
O
N
DIP switch: ON selects the resistor. Alternative: Set the switches to OFF
and connect your own external resistors (see page 8 for calculations).
Tx– bias resistor (681 Ω)
(see also pages 9 & 10)
C10 & NPS
Connections
Refer to page 10 for
instructions on
wiring an RS motor
that is ordered with
the -C10 option or
the -NPS option.
Do not lengthen or remove this jumper.
(see also page 4)
6 7 8 9 10 11
67
default
Position 3 = RS-232 (default)
Position 1 = RS-485
All in position 3 = RS-232 (default)
All in position 1 = RS-485
0 off off off off off
1 off off off off on
2 off off off on off
3 off off off on on
4 off off on off off
5 off off on off on
(Binary Weighted)
31 on on on on on
128 9 10 11
2. Execute the PORT2 and DRPCHKØ commands to change the COM 2 port.
SOFTWARE-BASED SETTINGS
(see also page 30)
Setting Factory Default Command
COM 1 Port Function RS-232 PORT & DRPCHK
COM 2 Port Function RP240 PORT & DRPCHK
Electronic Viscocity ** Disabled DELVIS
Active Damping ** Disabled DACTDP
Anti-Resonance Enabled DAREN
Auto Current Standby Disabled DAUTOS
Waveform -4% 3rd harmonic DWAVEF
Motor Inductance * ≥ 20 mH DMTIND
Motor Static Torque * 36-100 Oz-in DMTSTT
* Inductance and static torque are configured for ZETA motors ONLY IF
you ordered your ZETA6104 and ZETA motor together as a “system.”
A configuration procedure (part of
** These features work best if you “match the ZETA6104 to the motor”
(see matching procedure on page 22).
Active Damping configuration procedure – see page 26.
Electronic Viscosity configuration procedure – see page 29.
(0.26-0.72 N-m)
matching
) is provided on page 27.
I/O SPECIFICATIONS & INTERNAL SCHEMATICS
COM 1 COM 2
Rx
Tx
GND
SHLD
Rx+
+5V
Rx–
GND
Tx+
Rx
6104
DRIVEINDEXER
Tx–
Tx
GND
SHLD
SHLD
GND
ENCODER
Z–
Z+
B–
B+
A–
A+
+5V
LIMITS
GND
HOM
NEG
POS
TRG-A
TRG-B
OUT-A
GND
I/O
P-CUT
off
+5V
OUT-P
IN-P
AUX-P
V_I/O
12
PROGRAMMABLE I/O
49 50
POWER
STEP
OVER TEMP
MOTOR FAULT
Compumotor
95-132 VAC
50/60 HZ
INTERLOCK
A
CENTER TAP
A+
AEARTH
B+
B-
CENTER TAP
B
INTERLOCK
ZETA
MOTOR
AC POWER
PROGRAMMABLE I/O
Pin Function
1 Input #16
3 Input #15
5 Input #14
7 Input #13
9 Input #12
11 Input #11
13 Input #10
15 Input #9
17 Output #8 (MSB of outputs)
19 Output #7
21 Output #6
23 Output #5
25 Input #8
27 Input #7
29 Input #6
31 Input #5
33 Output #4
35 Output #3
37 Output #2
39 Output #1 (LSB of outputs)
41 Input #4
43 Input #3
45 Input #2
47 Input #1 (LSB of inputs)
49 +5VDC
Even numbered pins connected
to common logic ground.
(MSB of inputs)
Troubleshooting
• LEDs:
POWER ................. 120VAC power is applied
STEP ..................... Flashes green with each step pulse.
OVER TEMP .......... Max. drive temp limit (131°F, 55°C) exceeded.
MOTOR FAULT ..... Short circuit in motor windings, motor cable is disconnected or shorted,
................................ or INTERLOCK jumper is disconnected or extended.
• Status information (see command descriptions in
General status information .................... TASF, TSSF, TSTAT
Limits (end-of-travel, home) .................. TASF, TLIM
P-CUT input ........................................... TINO (bit #6)
Programmable inputs and TRG-A/B ...... TIN, INFNC
Programmable outputs and OUT-A ....... TOUT, OUTFNC
Motor fault .............................................. TASXF (bit #1)
Low voltage fault .................................... TASXF (bit #2)
Over temperature fault ........................... TASXF (bit #3)
• P-CUT input must be grounded to GND terminal to allow motion.
• NEG & POS inputs must be grounded to GND terminal to allow motion (or disable with LHØ command).
• V_I/O must be connected to 5-24VDC for the P-CUT, HOM, NEG, POS, & TRG-A/B inputs to work.
• To help prevent electrical noise, shield all connections at one end only.
• Error messages while programming or executing programs – see
• Technical support – see phone numbers on inside of front cover, and the HELP command response.
AC Input ........ 95-132VAC, 50/60Hz, single phase
........................ (peak power requirement – see page 18).
Serial Com .... RS-232C 3-wire; RS-485 4-wire (change jumpers
........................ JU1-JU6 to position 1, set JU7 to position 3 if you
........................ need 2-wire, select termination resistors).
........................ Up to 99 units in a daisy chain or multi-drop.
........................ 9600 baud (or use AutoBaud feature – see page 4);
........................ 8 data bits; 1 stop bit; no parity;
Motors ........... Compumotor motors (ZETA, OS and RS motors):
........................ Torque, inertia, bearings, weight – see page 3;
........................ Speed/torque curves – see page 10.
........................ Non-Compumotor motors – see page 43.
Limits, P-CUT, & Trigger Inputs
20 KΩ18.2 KΩ
10 KΩ
30
.1 KΩ
Specs: Low ≤ 1/3 of V_I/O voltage,
12
.1 KΩ
High ≥ 2/3 of V_I/O voltage;
Voltage range = 0-24VDC.
POS, NEG, HOM, P-CUT,
TRG-A, and TRG-B
.8 KΩ
6
AUX-P
V_I/O
Connect AUX-P & V_I/O to
the +5V terminal on the I/O
connector, or to an external
5-24VDC supply. To sink
current, connect AUX-P only
to the GND terminal.
Encoder Inputs
22 KΩ 22 KΩ
–
+
Specs: Differential comparator. Use 2-phase quadrature encoders;
max. frequency = 1.6 MHz; min. time between transitions = 625 ns.
TTL levels (Low ≤ 0.4V, High ≥ 2.4V); range = 0-5VDC.
+1.8VDC+5VDC
A–, B–, or Z–
A+, B+, or Z+
Programmable Inputs
74HCxx
47 KΩ
6.8 KΩ
General-Purpose Programmable Input
IN-P (Connect to the +5V terminal on
the I/O connector, or to an external
supply of up to 24VDC. To sink current,
connect to a GND terminal.) **
Specs: HCMOS-compatible*; voltage range = 0-24VDC.
Programmable Outputs
UDK2559
(open collector)
Specs: Open collector output. Outputs will sink up to 300mA, or
source up to 5mA at 5-24VDC.
4
.7 KΩ
General-Purpose Prog.
OUT-P (connect to the +5V terminal on
the I/O connector, or to an external
supply of up to 24VDC) **
Output & OUT-A
Terminals found on multiple connectors
+5VDC
Grounding
ISO GND
diagram on
page 7.
Chassis GND
* HCMOS-compatible levels: Low ≤ 1.00V, High ≥ 3.25V.
** Disconnect from +5V terminal BEFORE connecting an external 5-24VDC supply.
+5V
5V terminal found on the
COM 2, ENCODER, and I/O
GND
connectors. Total load limit
SHLD
for all connections is 0.5A.
See also pages 33-37
6000 Series Software Reference
6000 Series Programmer's Guide
):
.
We welcome your feedback on our products and user guides. Please send your responses to our email address: 6000user@cmotor.com
our technical questions to your local ATC or distributor, or to the numbers printed on the inside front cover of this document.
Direct
email
 Loading...
Loading...