

Page 1
昆山科瑞艾特电气有限公司
Add:江苏省昆山市古城路西侧新城翡翠湾 47 幢 505 室
PC: 215300
Tel:0512-50132715
Fax: 0512-50132716
联系人:周贵
手机:15862659855 13338649855
QQ:353850790 35731075 837638847 31740304
EMAIL:
网址:
昆山科瑞艾特电气有限公司是以自动化专业为主体集贸易、技术、工
程成套为一体的专业型公司。
一、经营品牌
1、欧陆 SSD 直流调速器 512C、514C、590C、590+及配件系列;
2、德国西门子全系列产品包括:
西门子 6RA28 系列直流调速器,西门子 6RA70 系列直流调速器;
zhougui8012@163.com
http://www.kunshan-create.com
S5-系列、S7-200 系列、S7-300 系列、S7-400 系列 CPU、功
能模块 FM、扩展模块 SM、接口模块 IM、通讯模块 CP 及相应附件、
配件、软件;
西门子工控机、人机界面 TD、OP、TP、MP、LOGO!、PS 电源、SITOP
电源、PROFIBUS 网络产品;
Page 2

西门子各系列编程组态软件 STEP7-Micro/WIN、STEP7、WINcc、
PROTool;
西门子通用型变频器 MM420、MM430、MM440、6SE70 高性能变频
器、工程变频器
3、富 士:变频器、可编程控制器、伺服、数控系统、触摸屏 .
4、ABB:变频器、直流调速器.
5、AB(罗克韦尔)可编程控制器,变频器.
二、提供 SSD590 系列直流调速器维修服务,主要维修主板及电源板。
三、电控系统(电控成套及设备电控改造):
1、冶金行业:单(可逆)轧机、连轧机、酸洗线、拉弯矫直机、平
整机等;
2、线缆行业:成缆机、拉伸机、护套机、交联生产线;
3、橡塑行业:单/双螺杆挤出机、压延机、流延机、板/型材生产线
等.
4、机床控制系统的改造:龙门刨床,镗床,铣床等。
Page 3
650 Series
AC Drive
Frame 1, 2 & 3
Product Manual
HA464828U003 Issue 7
Compatible with Version 4.9 Software onwards
WARRANTY
Parker SSD Drives warrants the goods against defects in design, materials and workmanship for the period of 12
months from the date of delivery on the terms detailed in Parker SSD Drives Standard Conditions of Sale IA058393C.
Parker SSD Drives reserves the right to change the content and product specification without notice.
© Copyright 2007 Parker SSD Drives, a division of Parker Hannifin Ltd.
All rights strictly reserved. No part of this document may be stored in a retrieval system, or transmitted in any
form or by any means to persons not employed by a Parker SSD Drives company without written permission
from Parker SSD Drives, a division of Parker Hannifin Ltd . Although every effort has been taken to ensure the
accuracy of this document it may be necessary, without notice, to make amendments or correct omissions.
Parker SSD Drives cannot accept responsibility for damage, injury, or expenses resulting therefrom.
Page 4
Requirements
IMPORTANT: Please read this information BEFORE installing the equipment.
Intended Users
This manual is to be made available to all persons who are required to install, configure or
service equipment described herein, or any other associated operation.
The information given is intended to highlight safety issues, EMC considerations, and to enable
the user to obtain maximum benefit from the equipment.
Complete the following table for future reference detailing how the unit is to be installed and
used.
INSTALLATION DETAILS
Serial Number
(see product label)
Where installed
(for your own
information)
Unit used as a:
(refer to Certification
for the Inverter)
Unit fitted:
R Component R Relevant Apparatus
R Wall-mounted R Enclosure
Application Area
The equipment described is intended for industrial motor speed control utilising AC induction or
AC synchronous machines.
Personnel
Installation, operation and maintenance of the equipment should be carried out by qualified
personnel. A qualified person is someone who is technically competent and familiar with all
safety information and established safety practices; with the installation process, operation and
maintenance of this equipment; and with all the hazards involved.
Product Warnings
Caution
Risk of electric
shock
Cont.2
Caution
Refer to
documentation
Earth/Ground
Protective
Conductor
Terminal
Page 5
Hazards
DANGER! - Ignoring the following may result in injury
1. This equipment can endanger life by exposure to
rotating machinery and high voltages.
2. The equipment must be permanently earthed due to
the high earth leakage current, and the drive motor
must be connected to an appropriate safety earth.
3. Ensure all incoming supplies are isolated before
working on the equipment. Be aware that there may
be more than one supply connection to the drive.
5. For measurements use only a meter to IEC 61010 (CAT
III or higher). Always begin using the highest range.
CAT I and CAT II meters must not be used on this
product.
6. Allow at least 5 minutes for the drive's capacitors to
discharge to safe voltage levels (<50V). Use the
specified meter capable of measuring up to 1000V dc &
ac rms to confirm that less than 50V is present between
all power terminals and earth.
4. There may still be dangerous voltages present at
power terminals (motor output, supply input phases,
DC bus and the brake, where fitted) when the motor
is at standstill or is stopped.
7. Unless otherwise stated, this product must NOT be
dismantled. In the event of a fault the drive must be
returned. Refer to "Routine Maintenance and Repair".
WARNING! - Ignoring the following may result in injury or damage to equipment
SAFETY
Where there is conflict between EMC and Safety requirements, personnel safety shall always take precedence.
• Never perform high voltage resistance checks on the
wiring without first disconnecting the drive from the
circuit being tested.
• Whilst ensuring ventilation is sufficient, provide
guarding and /or additional safety systems to
prevent injury or damage to equipment.
• When replacing a drive in an application and before
returning to use, it is essential that all user defined
parameters for the product’s operation are correctly
installed.
• All control and signal terminals are SELV, i.e. protected
by double insulation. Ensure all external wiring is rated
for the highest system voltage.
• Thermal sensors contained within the motor must have
at least basic insulation.
• All exposed metalwork in the Inverter is protected by
basic insulation and bonded to a safety earth.
• RCDs are not recommended for use with this product
but, where their use is mandatory, only Type B RCDs
should be used.
EMC
• In a domestic environment this product may cause
radio interference in which case supplementary
mitigation measures may be required.
• This equipment contains electrostatic discharge
(ESD) sensitive parts. Observe static control
precautions when handling, installing and servicing
this product.
CAUTION!
• This is a product of the restricted sales distribution class
according to IEC 61800-3. It is designated as
“professional equipment” as defined in EN61000-3-2.
Permission of the supply authority shall be obtained
before connection to the low voltage supply.
APPLICATION RISK
• The specifications, processes and circuitry described herein are for guidance only and may need to be adapted to the
user’s specific application. We can not guarantee the suitability of the equipment described in this Manual for
individual applications.
RISK ASSESSMENT
Under fault conditions, power loss or unintended operating conditions, the drive may not operate as intended.
In particular:
• Stored energy might not discharge to safe levels
as quickly as suggested, and can still be present
even though the drive appears to be switched off
A drive is a component within a drive system that may influence its operation or effects under a fault condition.
Consideration must be given to:
• Stored energy • Supply disconnects • Sequencing logic • Unintended operation
• The motor's direction of rotation might not be controlled
• The motor speed might not be controlled
• The motor might be energised
Cont.3
Page 6
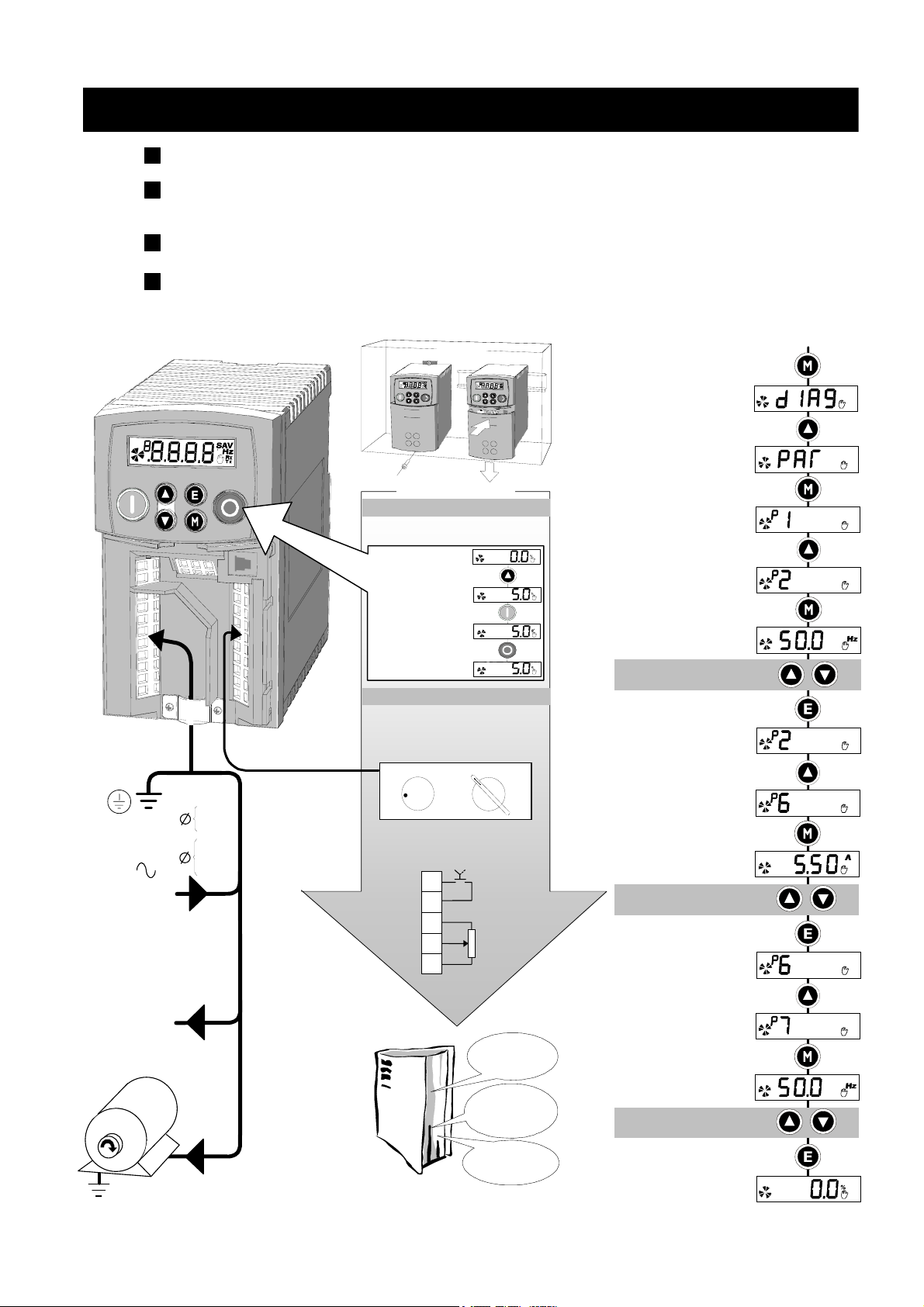
650 Quick Start
Mount the drive vertically in a lockable cubicle.
Is the drive to operate in Local (using the keypad) or Remote Control?
If Remote Control, make Control Connections.
Make Power Connections. Power-on and follow the Quick Set-Up procedure.
Apply a small setpoint. Start and stop the motor.
Frame 1
Mounting Options
Cubicle
Control Options
LOCAL CONTROL (DEFAULT)
Requires Power Connections only
Control is via the Keypad
Local Setpoint
Press to apply
a small setpoint
Press to start the
motor and it will ramp
to the setpoint
Press to stop the
motor and it will ramp
to zero
REMOTE CONTROL
Requires Power Connections and
Control Connections
Control is via your control panel
See Chapter 5 to select Remote
SPEED
STOP START
Quick Set-Up
Hold the M key until
DIAG is displayed
Navigate to the PAR menu
Press to enter the menu
and see the first parameter
Press to show the next
parameter
Press to edit the
MAX SPEED parameter
Adjust MAX SPEED
Press to exit the parameter
Press (4 times) to show P6
POWER-ON
Power
Supply
Motor
Thermistor
(link the terminals
if temperature
sensors not used)
Power Connections
1
3
L1
N
L1
L2
L3
TH1A
TH1B
M1/U
M2/V
M3/W
Match the motor
voltage to the
drive voltage
Refer to the
motor nameplate
for Star/Delta
voltages
0
100
Control Connections
Single Wire Starting
2-position switch
DIN1
+24V
+10V REF
AIN1
0V
7
6
4
2
1
Start
Speed
Reference
Chapters 3 and 4
install and run
the product
Chapter 5
details the
Keypad and
menu system
Chapter 9
holds many of the
technical details
PLEASE READ THE MANUAL
Press to edit the MOTOR
CURRENT parameter
Adjust MOTOR CURRENT
Refer to motor nameplate
Press to exit the parameter
Press to show P7
Press to edit the BASE
FREQUENCY parameter
Adjust BASE FREQUENCY
Press (3 times) to display
the Local Setpoint
Cont.4
Page 7

Contents Page
Contents
Chapter 1 GETTING STARTED
Introduction ..................................................................................................1-1
Equipment Inspection ..............................................................................................1-1
Storage and Packaging ...........................................................................................1-1
About this Manual ........................................................................................1-1
• Software Product Manual ......................................................................1-1
Chapter 2 AN OVERVIEW OF THE D RIVE
Component Identification ............................................................................. 2-1
Chapter 3 INSTALLING THE DRIVE
Mechanical Installation ................................................................................ 3-1
Mounting the Drive..................................................................................................3-1
Ventilation ..............................................................................................................3-1
Electrical Installation .................................................................................... 3-2
Wiring Instructions...................................................................................................3-2
• Local Control Wiring ............................................................................. 3-2
• Remote Control Wiring.......................................................................... 3-2
Connection Diagram............................................................................................... 3-3
• Control Wiring Connections ..................................................................3-4
• Power Wiring Connections ....................................................................3-4
• Terminal Block Acceptance Sizes............................................................ 3-5
Optional Equipment .....................................................................................3-6
• Fitting the Remote 6511 Keypad ............................................................ 3-6
• Fitting the Remote 6521/6901/6911 Keypad......................................... 3-7
• RS485/RS232 Communication Module ..................................................3-8
• Line Choke......................................................................................... 3-10
Chapter 4 OPERATING THE DRIVE
Pre-Operation Checks ..................................................................................4-1
Initial Start-up Routines ...............................................................................4-1
Local Control Operation.......................................................................................... 4-2
Remote Control Operation ......................................................................................4-2
Chapter 5 THE KEYPAD
Controlling the Drive using the Keypad....................................................... 5-1
Control Key Definitions............................................................................................5-1
Display Indications ..................................................................................................5-2
Drive Status Indications............................................................................................5-2
The DIAGNOSTICS Menu ..............................................................................5-2
The Menu System.......................................................................................... 5-3
How To Change a Parameter Value ......................................................................... 5-4
Special Menu Features .................................................................................5-4
Resetting to Factory Defaults (2-button reset).............................................................5-4
Changing the Drive Operating Frequency ................................................................5-4
Selecting Local or Remote Control............................................................................ 5-4
Password Protection ................................................................................................5-5
Quick Application Selection .....................................................................................5-5
Selecting the Menu Detail ........................................................................................ 5-5
Chapter 6 PROGRAMMING YOUR A PPLICATION
MMI Parameters ........................................................................................... 6-1
• Configuring Terminal 10 (Digital Input/Output)......................................6-8
• PID - Tuning Your Drive ........................................................................6-8
• Auto Restart.......................................................................................... 6-9
• Skip Frequencies................................................................................. 6-10
Cont.5
Page 8

Contents Page
Contents
• Minimum Speed Mode........................................................................6-11
Product-Related Default Values ..............................................................................6-11
• * Frequency Dependent Parameters .....................................................6-11
• ** Power Dependent Parameters.......................................................... 6-12
Chapter 7 TRIPS AND FAULT FINDING
Trips .............................................................................................................. 7-1
Trip Warning Message ............................................................................................7-1
What Happens when a Trip Occurs..........................................................................7-1
Resetting a Trip Condition........................................................................................7-1
Using the Keypad to Manage Trips...........................................................................7-1
Hexadecimal Representation of Trips........................................................................7-4
Fault Finding................................................................................................. 7-5
Chapter 8 ROUTINE MAINTENANCE AND R EPAIR
Routine Maintenance.................................................................................... 8-1
Repair ...........................................................................................................8-1
Saving Your Application Data ..................................................................................8-1
Returning the Unit to Parker SSD Drives....................................................................8-1
Disposal ................................................................................................................. 8-1
Chapter 9 TECHNICAL SPECIFICATIONS
Understanding the Product Code .............................................................................9-1
• Model Number (Europe)........................................................................9-1
• Catalog Number (North America)..........................................................9-2
Environmental Details..............................................................................................9-3
Power Details..........................................................................................................9-3
User Relay ..............................................................................................................9-3
Electrical Ratings ..................................................................................................... 9-4
Analog Inputs/Outputs ............................................................................................9-5
Digital Inputs ..........................................................................................................9-5
Digital Outputs .......................................................................................................9-5
Cabling Requirements for EMC Compliance............................................................. 9-5
Internal Dynamic Braking Circuit..............................................................................9-6
External Brake Resistor ............................................................................................9-6
Supply Harmonic Analysis (230V filtered) ................................................................9-7
Supply Harmonic Analysis (400V filtered) ................................................................9-8
Supply Harmonic Analysis (230V unfiltered)............................................................. 9-9
Supply Harmonic Analysis (400V unfiltered)...........................................................9-10
Chapter 10 C ERTIFICATION FOR THE DRIVE
Requirements for EMC Compliance ............................................................10-1
Earthing Requirements...........................................................................................10-1
Requirements for UL Compliance ............................................................... 10-1
European Directives and the CE Mark........................................................ 10-3
CE Marking for Low Voltage Directive ....................................................................10-3
CE Marking for EMC - Who is Responsible? ...........................................................10-3
EMC Compliance .........................................................................................10-3
Certificates ...........................................................................................................10-4
Chapter 11 S ERIAL COMMUNICATIONS
Connection to the P3 Port ........................................................................... 11-1
Chapter 12 A PPLICATIONS
The Default Application ..............................................................................12-1
How to Load an Application .......................................................................12-1
Application Description ..............................................................................12-1
Cont.6
Page 9
1GETTING STARTED
Introduction
The 650 Series AC Drive provides simple, compact, and low-cost speed control for 3-phase
induction motors.
It operates as an Open-loop Inverter (V/F Fluxing).
This manual describes the low-power end of the 650 product range for the following motor
power ratings:
Getting Started 1-1
Frame 1 230V 1 0.25 – 0.75kW 0.3 - 1.0 Hp
Frame 2 230V 1 1.1 – 1.5kW 1.5 - 2.0 Hp
Frame 2 400V 3 0.37 – 2.2kW 0.5 - 3.0 Hp
Frame 3 230V 1 2.2kW 3.0 Hp
Frame 3 230V 3 2.2 – 4.0kW 3.0 - 5.0 Hp
Frame 3 400V 3 3.0 – 7.5kW 4.0 - 10.0 Hp
The drive features:
• Local or Remote mode operation
• Support for RS485 and Modbus RTU comms protocols
• SELV control terminals (Safe Extra Low Volts)
• Intelligent monitoring strategy to avoid nuisance tripping
• In-built protection of the unit against overloads, excessive voltages, phase-to-phase and
phase-to-earth short circuits
• An internal RFI filter is fitted as standard
• An internal dynamic brake switch for connection to an external resistor (Frame 3: 230V, and
400V units only)
• Quiet operation
Note: Do not attempt to control motors whose rated current is less than 50% of the drive rated
current. Poor motor control or Autotune problems may occur if you do.
Nominal Input Voltage Phase Drive Power
Equipment Inspection
• Check for signs of transit damage
• Check the drive is suitable for your requirements by reading the Product Code on the rating
label. Refer to Chapter 9: “Technical Specifications” - Understanding the Product Code.
If the unit is damaged, refer to Chapter 8: “Routine Maintenance and Repair” for information on
returning damaged goods.
Storage and Packaging
Save the packaging in case of return. Improper packaging can result in transit damage.
If the unit is not being installed immediately, store the unit in a well-ventilated place away from
high temperatures, humidity, dust or metal particles.
About this Manual
This manual is intended for use by the installer, user and programmer of the drive. It assumes a
reasonable level of understanding in these three disciplines.
Note: Please read all Safety Information before proceeding with the installation and operation
of this unit.
It is important that you pass the manual on to any new user of this unit.
Software Product Manual
An accompanying Software Product Manual is available for download from the Parker SSD
Drives website: www.SSDdrives.com.
650 Series AC Drive
Page 10
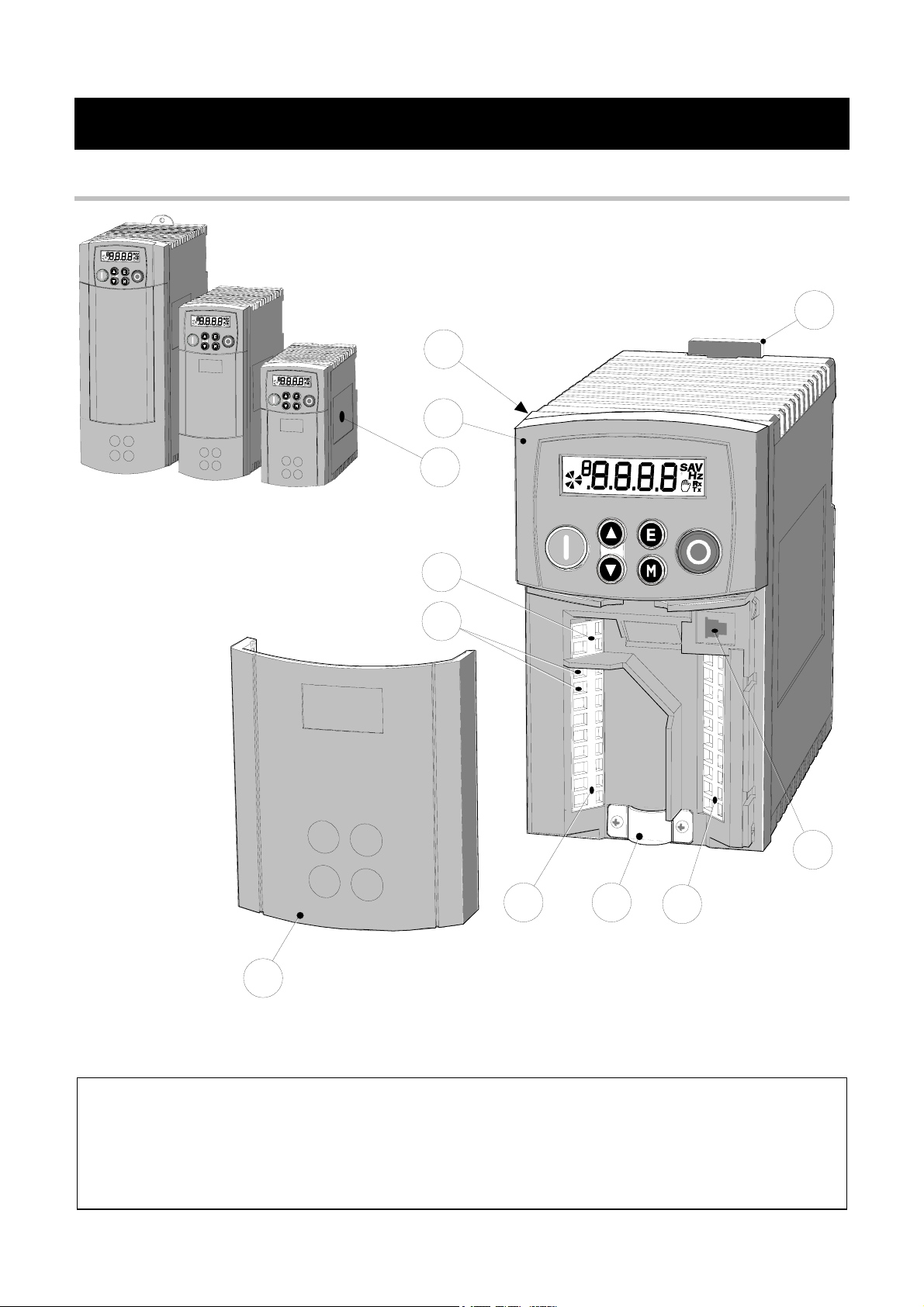
2-1 An Overview of the Drive
1AN OVERVIEW OF THE DRIVE
Component Identification
1
2
9
Frame 2 Frame 1Frame 3
3
8
10
5
4
Figure 2-1 View of Component Parts (Frame 1 illustrated)
6
11
7
1
Main drive assembly
2
Keypad
3
DIN clip/fixing bracket
4
Terminal cover
5
Power terminals
6
Motor cable screen clamp
7
Control terminals
8
Volt-free relay contacts
9
Product rating label
10
Motor thermistor terminals
11
RS232 port - P3 (optional)
650 Series AC Drive
Page 11
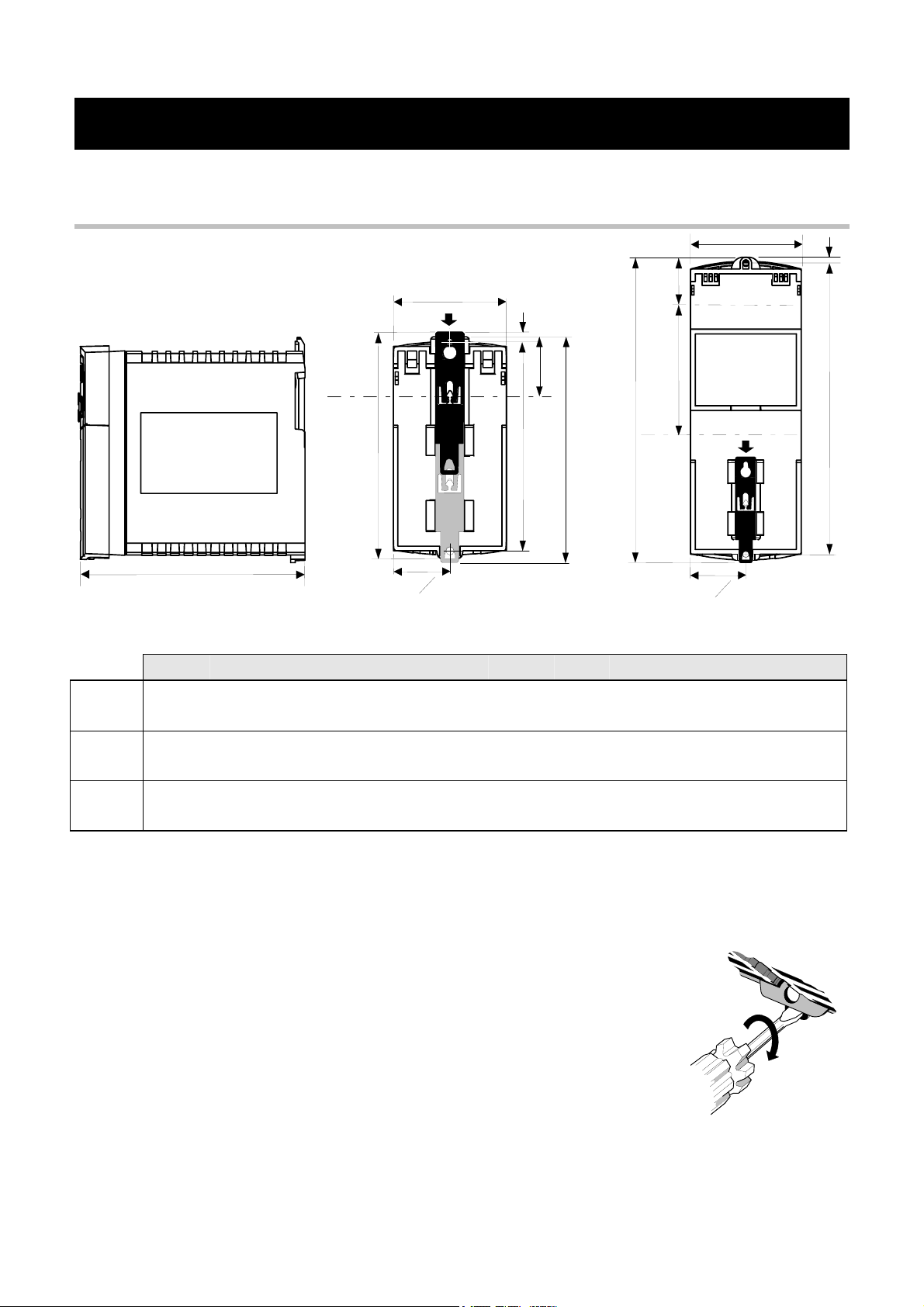
0INSTALLING THE DRIVE
IMPORTANT: Read Chapter 10: “Certification for the Drive” before installing this unit.
Mechanical Installation
Installing the Drive 3-1
D
SIDE VIEW - Frame 1 illustrated
The DIN clip is repositioned on Frames 1 and 2
to provide the upper fixing hole when wall-mounting
W
C
H1
H3
H4
DIN
centreline
H2
W
2
REAR VIEW - Frame 1 illustrated
(Frame 2 similar)
H2
W
H3
DIN
centreline
H4
DIN centreline
W
2
REAR VIEW - Frame 3
C
H1
Fixing Torque Weight H1 Fixing Centres H2 H3 H4 C W D
Frame 1 M4 1.5Nm 0.85kg 132 143 35 139 6 73 142
(5.2”) (5.6”) (1.4”) (5.5”) (0.2”) (2.9”) (5.6”)
Frame 2 M5 3.0Nm 1.4kg 188 201 35 194 6.5 73 173
(7.4”) (7.9”) (1.4”) (7.7”) (0.24”) (2.9”) (6.8”)
Frame 3 M5 3.0Nm 2.7kg 242 260 38 112 5 96 200
(9.5”) (10.2”) (1.5”) (4.4”) (0.2”) (3.8”) (7.9”)
Dimensions are in millimetres ( inches )
Mounting the Drive
Ventilation
650 Series AC Drive
To maintain compliance with European Electrical Safety Standard VDE0160(1994)/EN50178
(1998) the unit must be mounted inside a control cubicle that requires a tool for opening. The
cubicle should provide 15dB attenuation to radiated emissions between 30-100MHz.
Mount the drive vertically on a solid, flat, non-flammable, vertical
surface. It can be panel-mounted, or rail-mounted on a rail
complying with EN50022 (35mm DIN).
DIN Mounting
To DIN mount the unit, hang the unit on the top DIN rail and push
the unit onto the bottom DIN rail until it snaps in to position. Secure
with a lower screw fixing. To release the unit, use a flat bladed
screwdriver as shown.
Maintain a minimum air clearance for ventilation of 100mm (4 inches) above and below the
unit. When mounting two or more 650 units together, these clearances are additive. Ensure that
the mounting surface is normally cool. Be aware that adjacent equipment may generate heat and
also have clearance requirements. Provided the minimum clearance for ventilation is maintained,
650 drives may be mounted side-by-side.
lower
fixing
hole
Page 12
3-2 Installing the Drive
Electrical Installation
IMPORTANT: Read the Safety Information on page Cont. 2 before proceeding.
Wiring Instructions
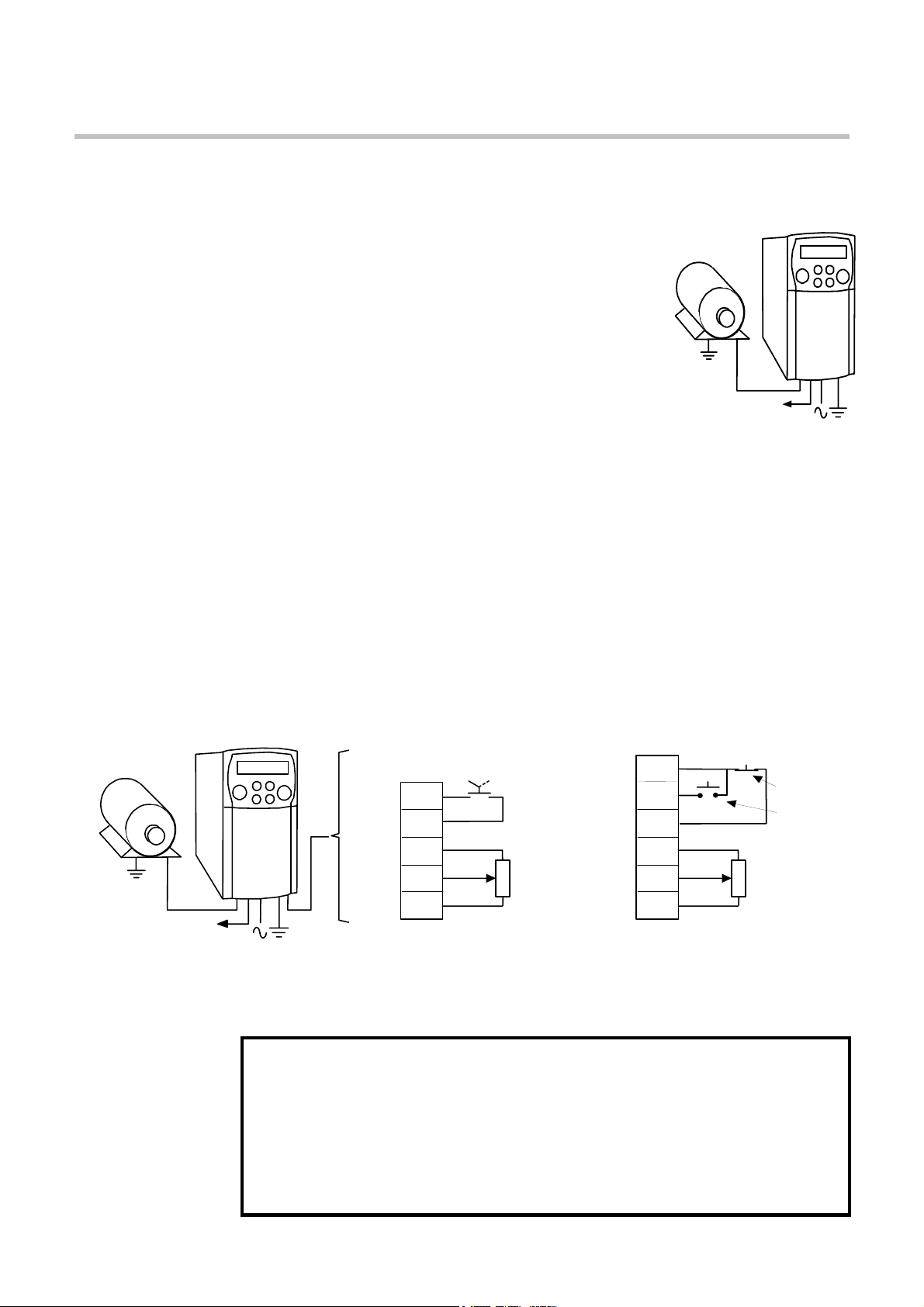
Local Control Wiring
This is the simplest installation. Every new drive will operate in
Local Control when first powered-up. The keypad is used to start
and stop the drive.
Refer to the Connection Diagram and install the:
• Thermistor cable, or link/jumper terminals TH1A and TH1B
if not used (we recommend you use a thermistor)
• Motor cable
• Supply cable
• Follow the earthing/grounding and screening advice
Refer to Chapter 4: "Operating the Drive"- Local Control
Operation.
Minimum Connections
To motor thermistor,
or link terminals
TH1A and TH1B
Remote Control Wiring
If operating in Remote Control you will use your control panel to start and stop the drive, via a
speed potentiometer and switches or push-buttons.
Your wiring of the control terminals will be governed by the Application you use: refer to
Chapter 12 for an explanation of the various Applications you can select and the appropriate
control wiring. Application 1 is the default Application.
The diagram below shows the minimum connections to operate the drive for single-wire
(switch) starting, and push-button starting. Other control connections for your Application,
shown in Chapter 12, and can be made to suit your system.
Referring to the Connection Diagram:
• Follow the instructions for Local Control Wiring, as detailed above
• Install using minimum connections (suitable for Application 1only), or refer to Chapter 12
and install the appropriate control wiring for your system
Minimum Connections for Application 1:
+10V REF
To motor thermistor,
or link terminals
TH1A and TH1B
Note: You can still operate the drive in Local mode, if necessary, with any Application selected.
Refer to Chapter 4: "Operating the Drive" and follow the relevant instructions for Single Wire
Starting or Push-Button Starting.
This product is designated as “professional equipment”
as defined in EN61000-3-2. Where enforced, permission of the supply authority shall
be obtained before connection to the low voltage domestic supply.
Ensure that all wiring is electrically isolated and cannot be made “live”
The drive is suitable for use with both earth referenced supplies (TN) and non-
earth referenced supplies (IT) when fitted with an internal ac supply EMC filter.
Single Wire Starting
DIN1
+24V
7
6
4
0V
2
1
unintentionally by other personnel.
AIN1
2-position
switch
Start
WARNING!
Speed
Reference
DIN4/DOUT2
DIN1
+24V
+10V REF
AIN1
0V
Push-Button Starting
10
Stop
Start
7
6
4
2
1
normally-closed
pushbutton
normally-open
pushbutton
Speed
Reference
650 Series AC Drive
Page 13
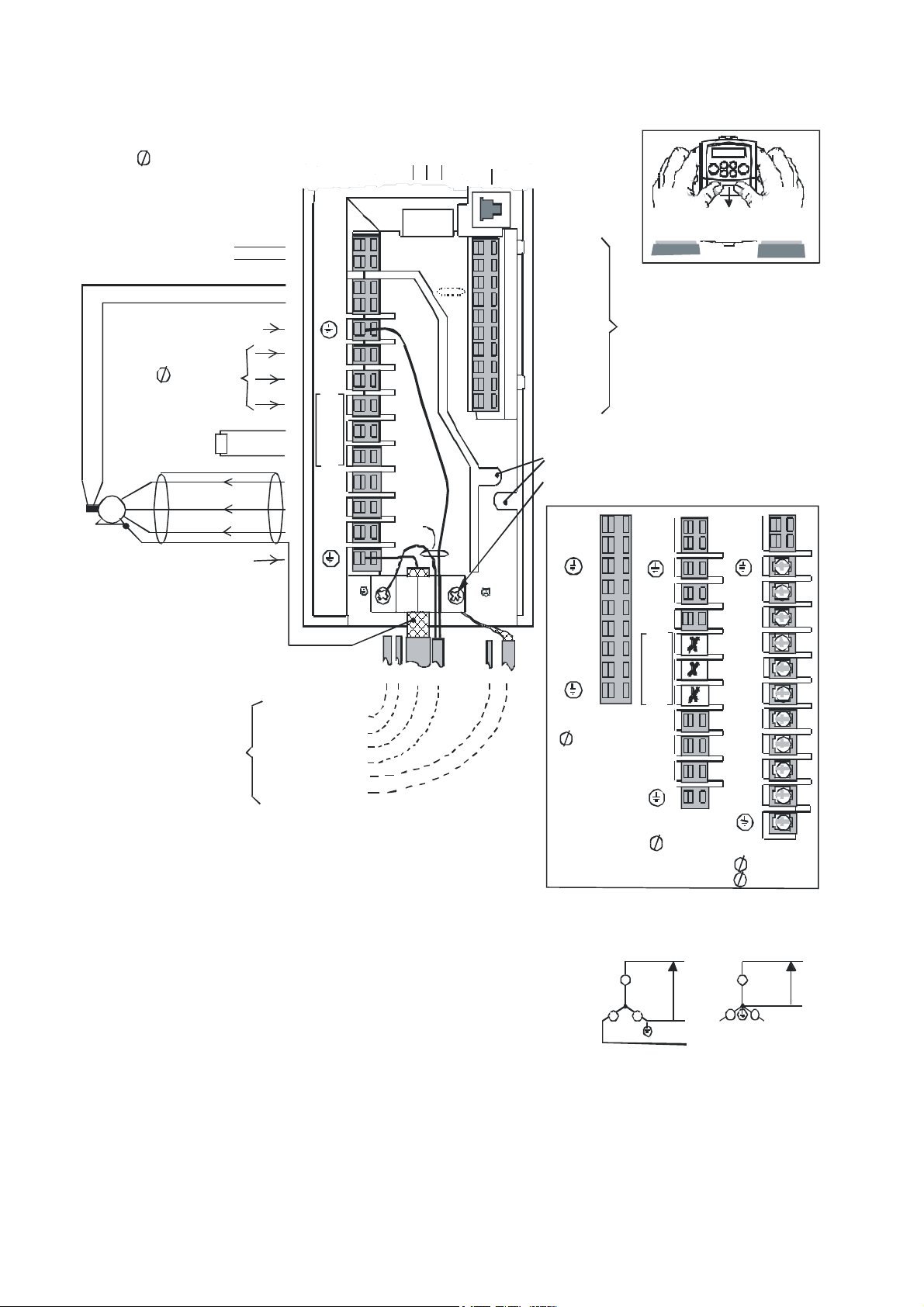
Connection Diagram
Frame 2
3 380-460V ac
(see Power Terminal Variations
inset for other frame sizes)
free
Volt Contacts
Motor Thermistor
Supply Prot ective Eart h/ Gr ound
380-46 0V ac
3
ext ernal b rake resis tor
(400V unit only)
M
Motor Protective Earth/Ground
screen
Installing the Drive 3-3
RS232
port
(fut ure op tio n)
13 12 11
fix cable
tie here
RL1A
RL1B
TH1A
TH1B
See Note 1
See
Note 2
L1
L2/N
L3
DC+
DBR
M1/U
M2/V
M3/W
use
two
separate
p rot ec t iv e
earth
wires
P3
To remove the Terminal Cover
press her e and slide down
10
DIN4/ DOUT 2
9
DIN3/ DOUT 1
8
DIN2
7
DIN1
6
+24V
5
AOUT1
4
+10V REF
3
AIN2
2
AIN1 *
1
0V
Wire Retain ers
Scre en Ear th/G roun d
TH1A
TH1B
Refer to Chapter 12: "Applications"
for specific cont rol wiring for each
Application
* If AIN1 is not used, connect to 0V
TH1A
TH1B
TH1A
TH1B
L1
1 : RL1 A, RL1B
Volt-free relay terminals can
be us ed a s ei t her `l iv e ’ or S ELV.
2 :TH1A, TH1B
Motor thermis tor connections are
regarded as a `live circuit’ and
mu s t no t be con n e ct e d to SELV ci rc uits .
Connect the 0V/COMMON t o protective earth/ground.
*
In a system comprisi ng more t han on e co ntrol ler,
connect the 0V/COMMON signals and join to
pr otec ti ve ear th/ gr oun d a t one poi nt onl y.
This is mandatory to meet the EMC spec ification stated.
Wiring Instructions
1 Remove the terminal cover from the drive.
2 Loose n the motor cable screen cla mp.
3 Connect the powe r supp ly cable, moto r cable and co ntro l c a bl es (if required ) .
4 Fast en the motor cable in place with the motor ca ble screen clamp.
Secure any control cable screen connections under the right hand screw.
Frames 2 & 3 only : Secure control cables under the wire retainers.
5 Connect t he the rmisto r an d u ser-rel ay i f re quired.
Frames 2 & 3 only: connect the dynamic brake if required (3 phase units only).
6 Us e a cable t ie an d secure al l the con trol cab le s and user - rel ay cables (i f fitte d)
as close to the control terminals as possible.
7 Co nnect the ancillary eq ui pment a s shown, for exampl e, an externa l br a ke resi stor.
8 Re-fit the terminal cover.
IMPORTANT:
Note that the 650 unit must be permanently earthed using two independent protective earth/ground incoming supply conductors.
screen and
connections
only
earth wire
shown for
clarit y
Motor Screen Earth/Ground
Dynamic Brake Cab le
Ther mi stor Cabl e
Motor Cable
Supply Cable
User Relay Cable
Cont rol C ables
L2/N
M1/U
M2/V
M3/W
Frame 1
1
220-240V ac
Power Terminal
Variations
Non-ea rth referenced
L1
L2/N
L3
DC+
DBR
M1/U
M2/V
M3/W
Frame 2
1 220-24 0V ac
IT
supply
The dri ve is s uitabl e for use with earth
refer enced supp lies (T N) and non -ea rth
refer enced supp lies (IT) when
fitted with an internal ac supply EMC filter.
L1
L2
L3
DC+
DBR
-
DC
M1/U
M2/V
M3/W
Frame 3
3 220-24 0V ac
3 380-46 0V ac
TN
Earth r eferenced
supply
650 Series AC Drive
Page 14
3-4 Installing the Drive
Control Wiring Connections
Terminal
(SELV)
P3 P3 RS232 port for use with remote-mounted RS232 keypad or
RL1A User Relay Volt-free contact 0-250Vac/24Vdc 4A
RL1B User Relay Volt-free contact 0-250Vac/24Vdc 4A
10 DIN4/
9 DIN3/
8 DIN2 Direction – configurable digital input:
7 DIN1 Run – configurable digital input: 0V = Stop, 24V = Run 0-24V
6 +24V 24V – 24V supply for digital I/O 50mA maximum
5 AOUT1 Ramp Output – configurable analog output (10mA loading) 0-10V
4 10VREF 10V - 10V reference (10mA maximum loading) 10V
3 AIN2 Feedback – analog input 2 0-10V, 4-20mA
2 AIN1 Setpoint – analog input 1.
1 0V 0V - 0V reference for analog/digital I/O 0V
Description Application 1 Default Function
(for other Applications refer to Chapter 12: “Applications”)
programming PC
Configurable digital input/output
DOUT2
DOUT1
Not Stop (input):
0V = No latching of Run (DIN1), 24V = Run latched
Jog – configurable digital input:
0V = Stop, 24V = Jog
0V = Forward, 24V = Reverse
If AIN 1 is not used, connect to 0V.
Power Wiring Connections
Range
-
0-24V source open
collector 50mA
maximum
0-24V
0-24V
0-10V
Terminal Description Function Range
200V 1-Phase 200V/400V 3-Phase
TH1A Thermistor Connection to motor
thermistor
TH1B Thermistor Connection to motor
thermistor
Reference
Terminal
L1 Power Input Single and three
L2/N
L2
L3 Power Input Three phase live
DC- No user connection
DC+ Dynamic
DBR Dynamic
M1/U
M2/V
M3/W
Power Input Single phase neutral
Brake
Brake
Motor
Outputs
Reference
Terminal
Supply protective earth (PE). This terminal must be connected to a protective (earth)
ground for permanent earthing.
phase live
connection
(or L2 three phase
live connection)
connection
Connection to
external brake
resistor
Connection to
external brake
resistor
Connection for
motor
Supply protective earth (PE). This terminal must be connected to a protective (earth)
ground for permanent earthing.
It is good practice to protect motors by fitting temperature
sensitive resistors. A typical resistance (up to a reference
temperature of 125°C) is 200Ω, rising rapidly to 2000Ω above
this temperature. Connect devices in series between TH1A and
TH1B. Link the terminals if temperature sensors are not used.
220/240V ac ±10% rms with
respect to L2/N. 50-60Hz
(IT/TN)
220/240V ac ±10% with
respect to L1. 50-60Hz
(IT/TN)
Not applicable 220/240V or 380/460V ac
Not applicable Frame 2 (high volt only) & 3.
Not applicable Frame 2 (high volt only) & 3.
Motor rated at:
0 to 220/240V ac
0 to 240Hz
220/240V or 380/460V ac
±10% rms with respect to L2, L3
phase-to-phase. 50-60Hz
(IT/TN)
220/240V or 380/460V ac
±10% with respect to L1, L3.
50-60Hz (IT/TN)
±10% with respect to L1, L2.
50-60Hz (IT/TN)
See “Internal Dynamic Brake
Switch” table
See “Internal Dynamic Brake
Switch” table
Motor rated at:
0 to 220/240V or 380/460V ac
0 to 240Hz
650 Series AC Drive
Page 15
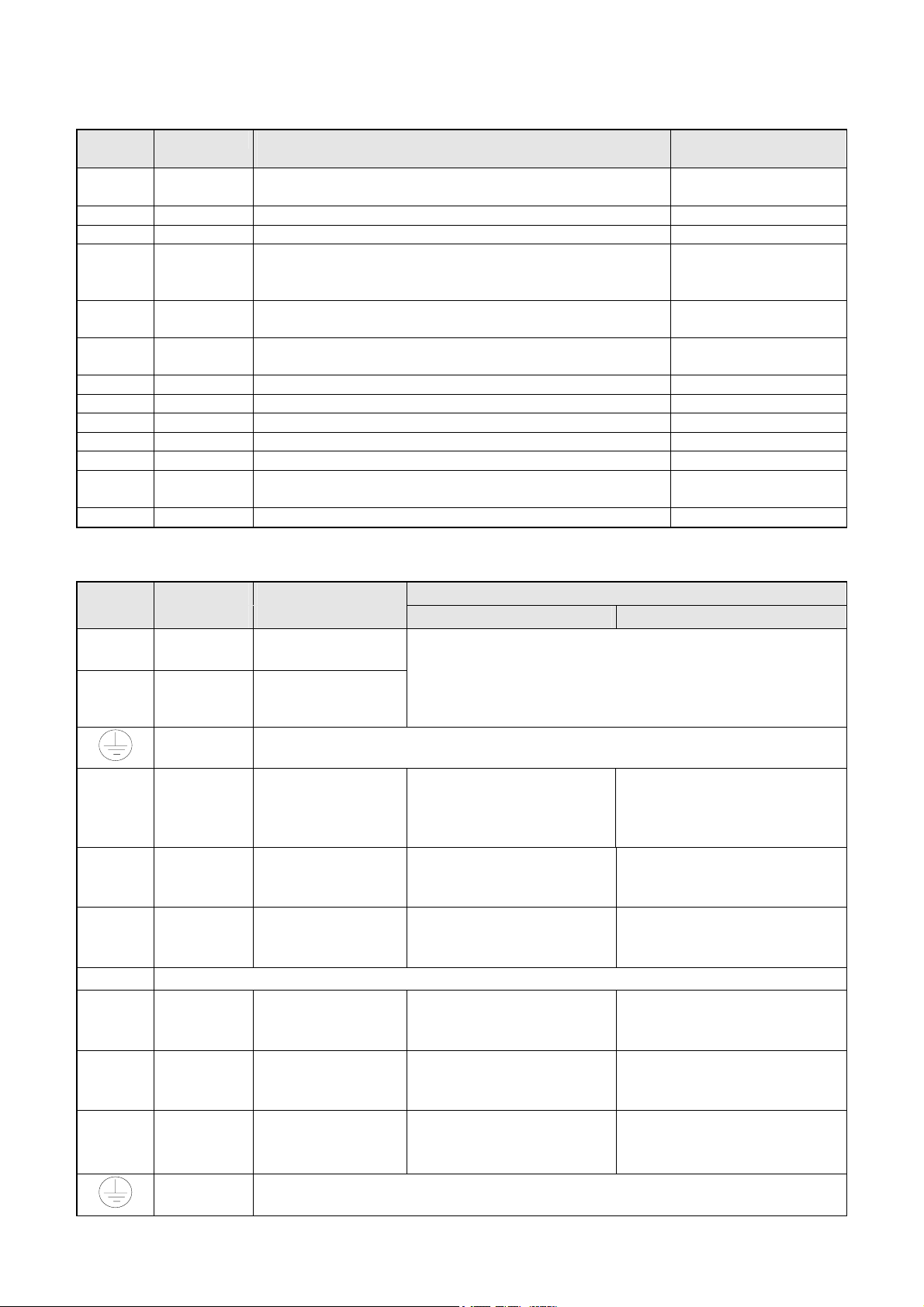
Installing the Drive 3-5
Terminal Block Acceptance Sizes
Wire sizes should be chosen with respect to the operating conditions and your local National
Electrical Safety Installation Requirements. Local wiring regulations always take precedence.
Frame Size Power Terminals
(maximum wire size)
Brake Terminals
(maximum wire size)
Thermistor/Control
Terminals
(maximum wire size)
Frame 1 2.5mm2/12 AWG Not Applicable 2.5mm2/12 AWG
Frame 2
200V
Frame 2
400V
Frame 3
230V
Frame 3
400V
2.5mm
2.5mm
6.0mm
6.0mm
2
/12 AWG Not Applicable 2.5mm2/12 AWG
2
/12 AWG 2.5mm2/12 AWG 2.5mm2/12 AWG
2
/10 AWG 6.0mm2/10 AWG 2.5mm2/12 AWG
2
/10 AWG 6.0mm2/10 AWG 2.5mm2/12 AWG
Power Wiring
Note: For specified EMC emission and immunity performance, install to EMC Installation
Instructions. Refer to Chapter 10: “Certification for the Drive” - for more information
Terminal tightening torque for Frame 3 power connections is 20 lb.in (2.26Nm).
Protect the incoming mains supply using the specified fuse, or RCD circuit breaker Type B.
IMPORTANT: We do not recommend the use of circuit breakers (e.g. RCD, ELCB, GFCI), however,
where their use is mandatory, they must:
• Operate correctly with dc and ac protective earth currents (i.e. type B RCDs as in
Amendment 2 of IEC755).
• Have adjustable trip amplitude and time characteristics to prevent nuisance tripping
on switch-on.
Control Wiring
Control wiring of between 0.08mm2 (28AWG) and 2.5mm2 (12AWG) can be used. Ensure all
wiring is rated for the highest system voltage. All control terminals are SELV (Safe Extra Low
Voltage), i.e. double-insulated from power circuits.
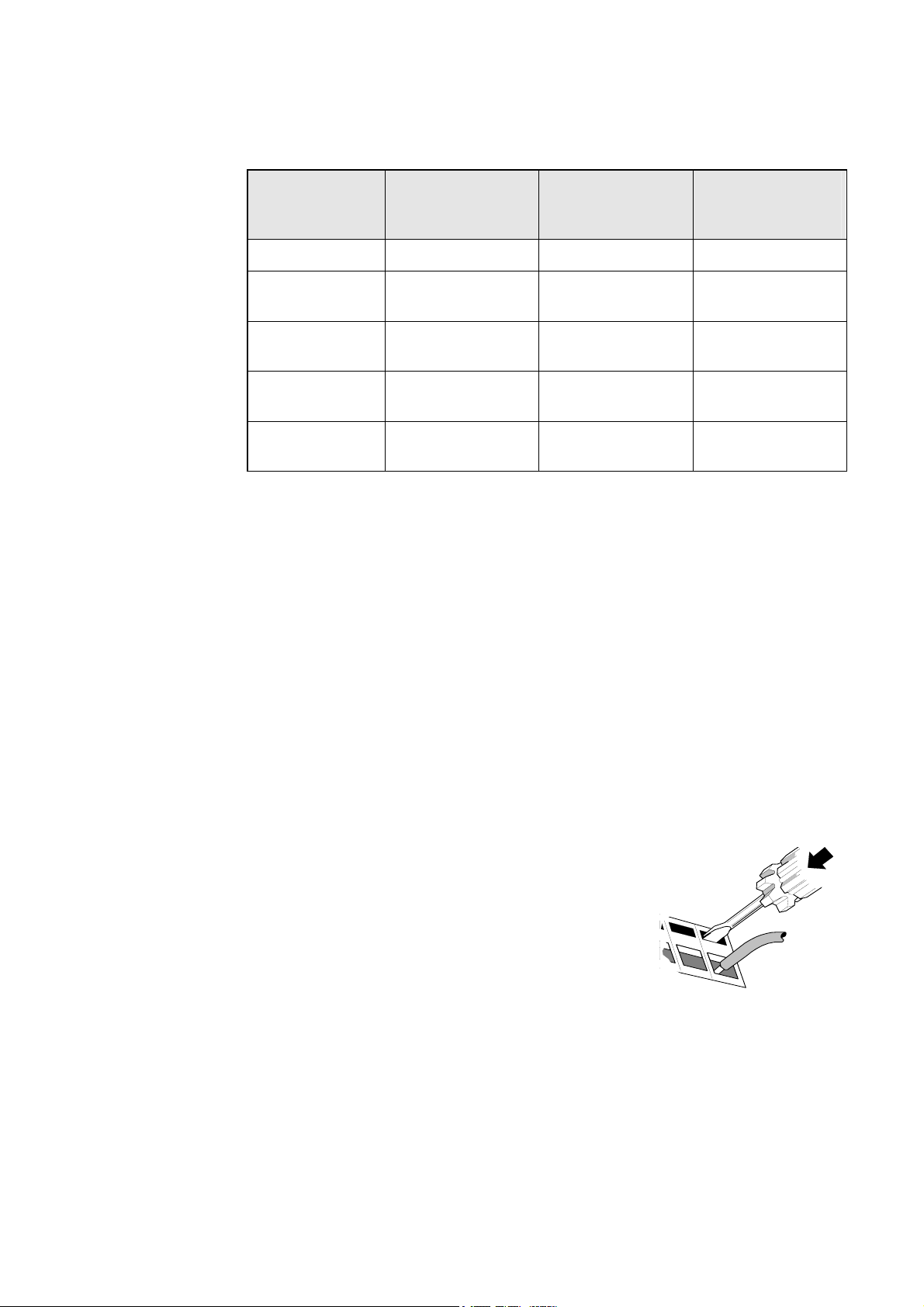
Using Cage Clamp Terminals
Strip the wire insulation to 5-6mm (0.20-0.24 inches), or
alternatively use wire-crimps. Insert a flat-bladed screwdriver,
maximum blade size 3.5mm. The cage provides the correct
force for a secure connection.
IMPORTANT: DO NOT lever or turn the screwdriver.
650 Series AC Drive
Page 16
3-6 Installing the Drive
Optional Equipment
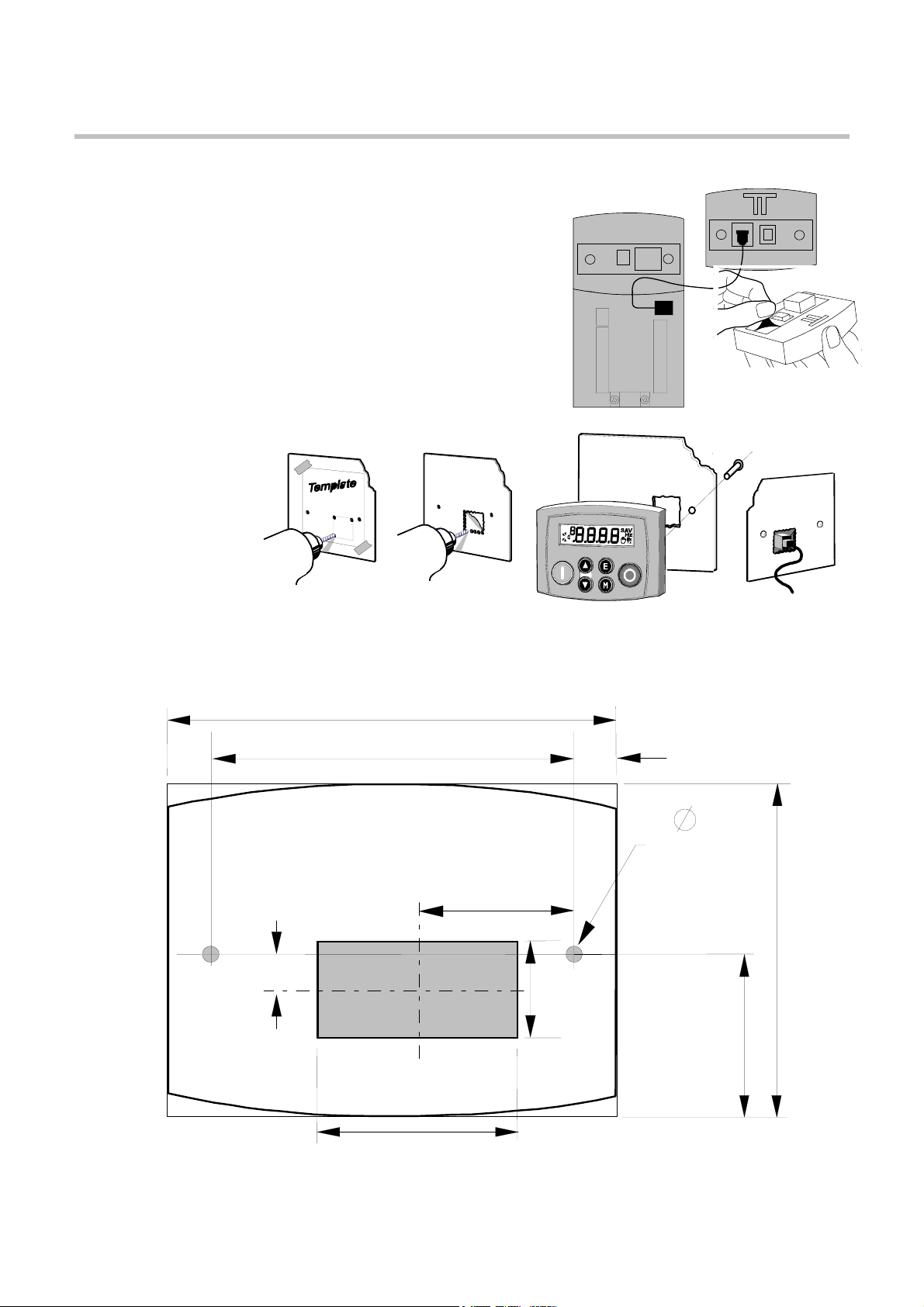
Fitting the Remote 6511 Keypad
You can remote-mount the drive-mounted Keypad using:
• the (optional) RS232 (P3) port located under
the terminal cover
• A standard P3 lead, Parker SSD Drives' Part
Number CM057375U300, which is used to
connect the Keypad to the drive.
Two self-tapping screws are provided with the
Keypad. Remove the protective film from the
gasket. An enclosure rating of IP54 is achieved
for the remote Keypad when correctly mounted.
Assembly Procedure
1
P3
21
3
4
Cut-out Dimensions
The drawing below can be photocopied actual size (100%) and used as a template.
72mm
±
0.5
58
mm
Template
7mm
3.5
±
0.5
mm
15.5
±
mm
1
0
26mm
±
0.5
25
mm 5.5
Cut-out
±
0.5
0
P3
mm
54mm
32
2
±
mm
0
650 Series AC Drive
Page 17
Installing the Drive 3-7
Fitting the Remote 6521/6901/6911 Keypad
The 6052 Mounting Kit is required to remote-mount a 6521 Keypad. An enclosure rating of
IP54 is achieved for the remote Keypad when correctly mounted using the 6052 Mounting Kit.
6052 Mounting Kit Parts for the Remote Keypad
Tools Required
No. 2 Posidrive
screwdriver.
Assembly Procedure
Cutout Dimensions
An actual size template is provided with
the Keypad/6052 Mounting Kit.
Figure 3-1 Mounting Dimensions for
the Remote-Mounted Keypad
6521/6901/6911
650 Series AC Drive
6901
The 6901/6911 keypad,
supplied with 690+
products, may be
remote mounted and
connected to the 650V
drive in the same way.
Page 18
3-8 Installing the Drive
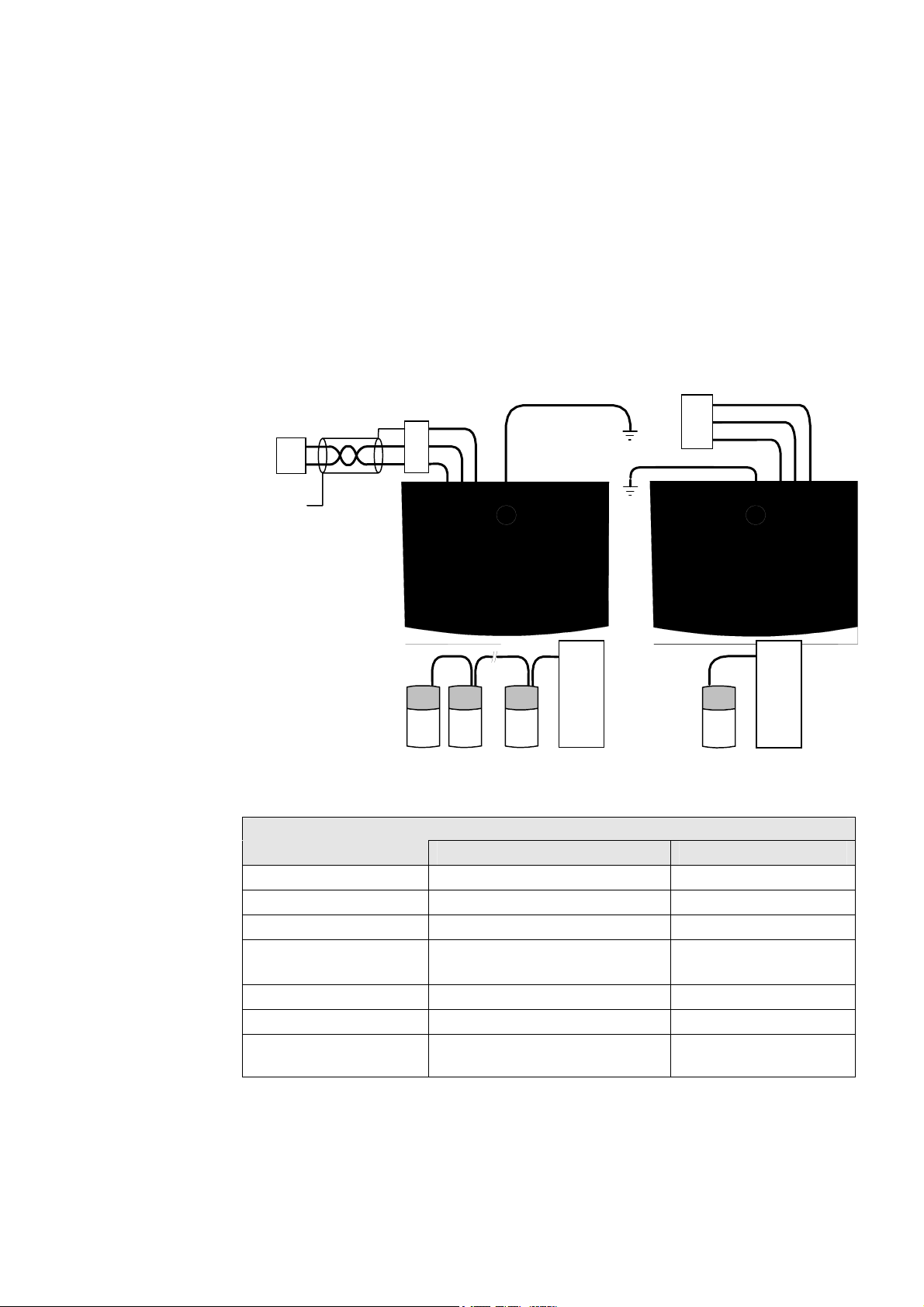
RS485/RS232 Communication Module
You can create a network of drives by linking a Master (PC/PLC) to one or more 650 drives
fitted with this module.
Plug this Communication Module on to the front of the 650 drive, replacing the keypad.
It converts signals from the host 650 drive into RS485 or RS232, and vice versa, so that
information can be shared between the Master and 650 drive(s).
Wiring is very simple - all connections are SELV (Safe Extra Low Voltage). Select to use
RS485 or RS232 by wiring to the appropriate terminal on the module.
Note: RS485 and RS232 terminals cannot be used simultaneously.
We recommend you ground the module to the system earth using the Functional Earth terminal.
PC/PLC
9-Way / 25-Way
D-Type
Connector
B
A
To PC/PLC
Chassis
650 Drive
with
Module
Scn
B
A
Functional
Earth
PC/PLC
9-Way or 25-Way
D-Type Connector
0V
Tx
Rx
PC/PLC
Master
Drive Drive Drive
master to single/multiple slave
RS485 Connections
PC/PLC
Master
Drive
master to single slave only
RS232 Connections
Wiring Specifications
RS485 Connections RS232 Connections
Network Type
Connections
Signal Levels
Receiver Input
Impedance
Maximum Cable Length
Maximum Baud Rate
Maximum Number of
Units
2-Wire Shielded Twisted-Pair 3-Wire Un-Shielded Cable
A=RxA/TxA, B=RxB/TxB, Shield Rx, Tx, Ground (0V)
To RS485 Standard To RS232 Standard
¼ Unit Load
3 kΩ minimum
7kΩ maximum
1200m (4000ft) 3 metres
57.6kbaud 57.6kbaud
32 including slaves and masters
2: 1 master and 1 slave
only
650 Series AC Drive
Page 19
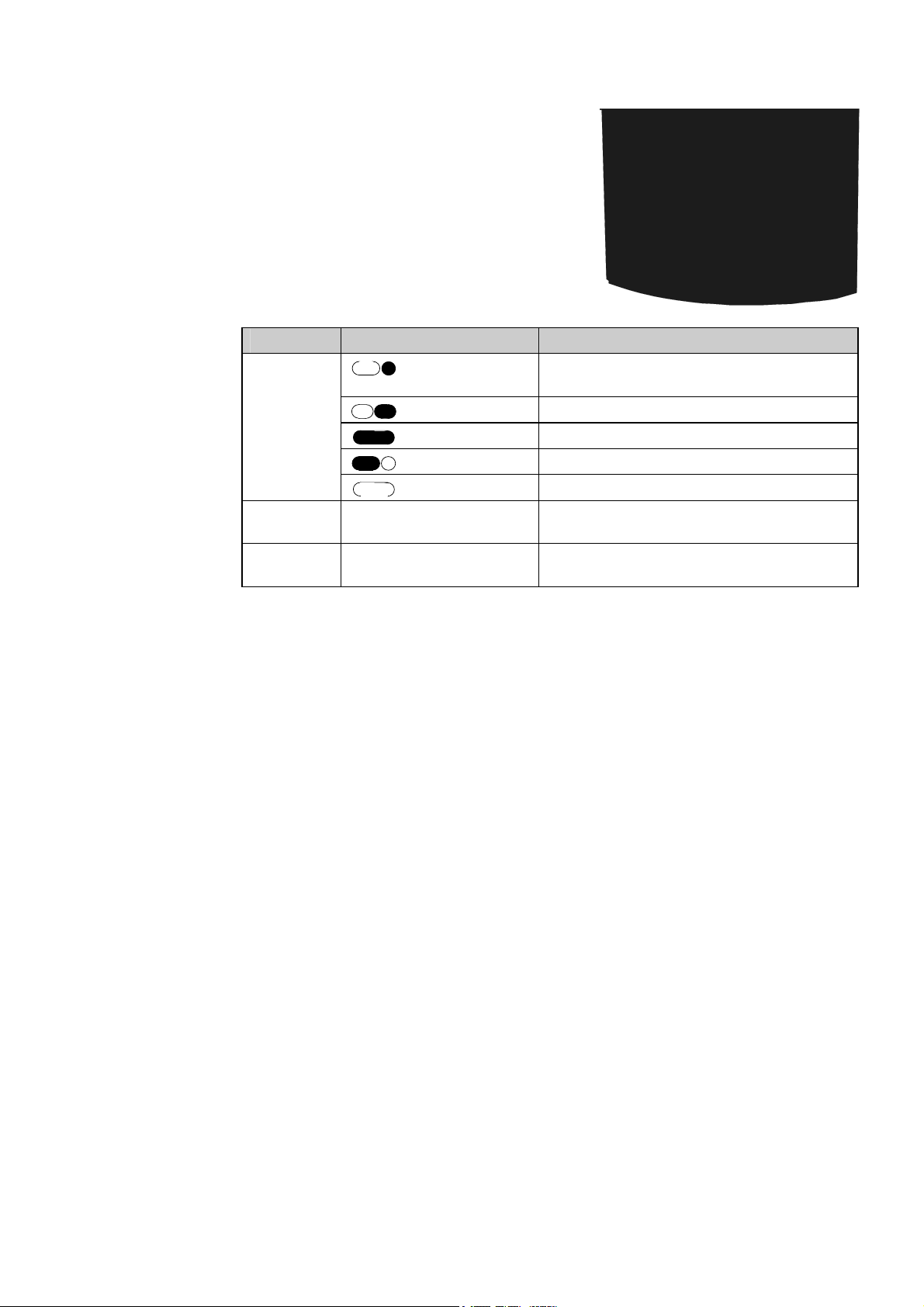
LED Indications
The module has three LEDs providing diagnostic
information about the 650 host drive's ‘Health’,
‘Receive’ and ‘Transmit’ activity.
HEALTH = Green, Rx = Red, Tx =Red
LED Name LED Duty Drive State
HEALTH
Rx
Tx
SHORT FLASH
EQUAL FLASH
ON
LONG FLASH
OFF
INTERMITTENT
INTERMITTENT
Re-configuration, or corrupted non-volatile
memory at power-up
Tripped
Healthy
Braking
No drive power, or serious hardware fault
Indicates activity on the ‘receive’ line carrying
data from the Master
Indicates activity on the ‘transmit’ line carrying
data to the Master
Installing the Drive 3-9
Configure the Drive
Before the module can be used you must configure the drive to your system. Set-up the
parameters in the SERIAL menu as appropriate. Refer to Chapter 6: "Programming Your
Application" - SET::SERL Menu, parameters
For Tag number information refer to the 650 Software Product Manual, available on the Parker
SSD Drives website: www.SSDdrives.com.
Note: This Option can only be used on drives using software version 4.1 or higher.
S
SE01 to SSE08.
650 Series AC Drive
Page 20
3-10 Installing the Drive
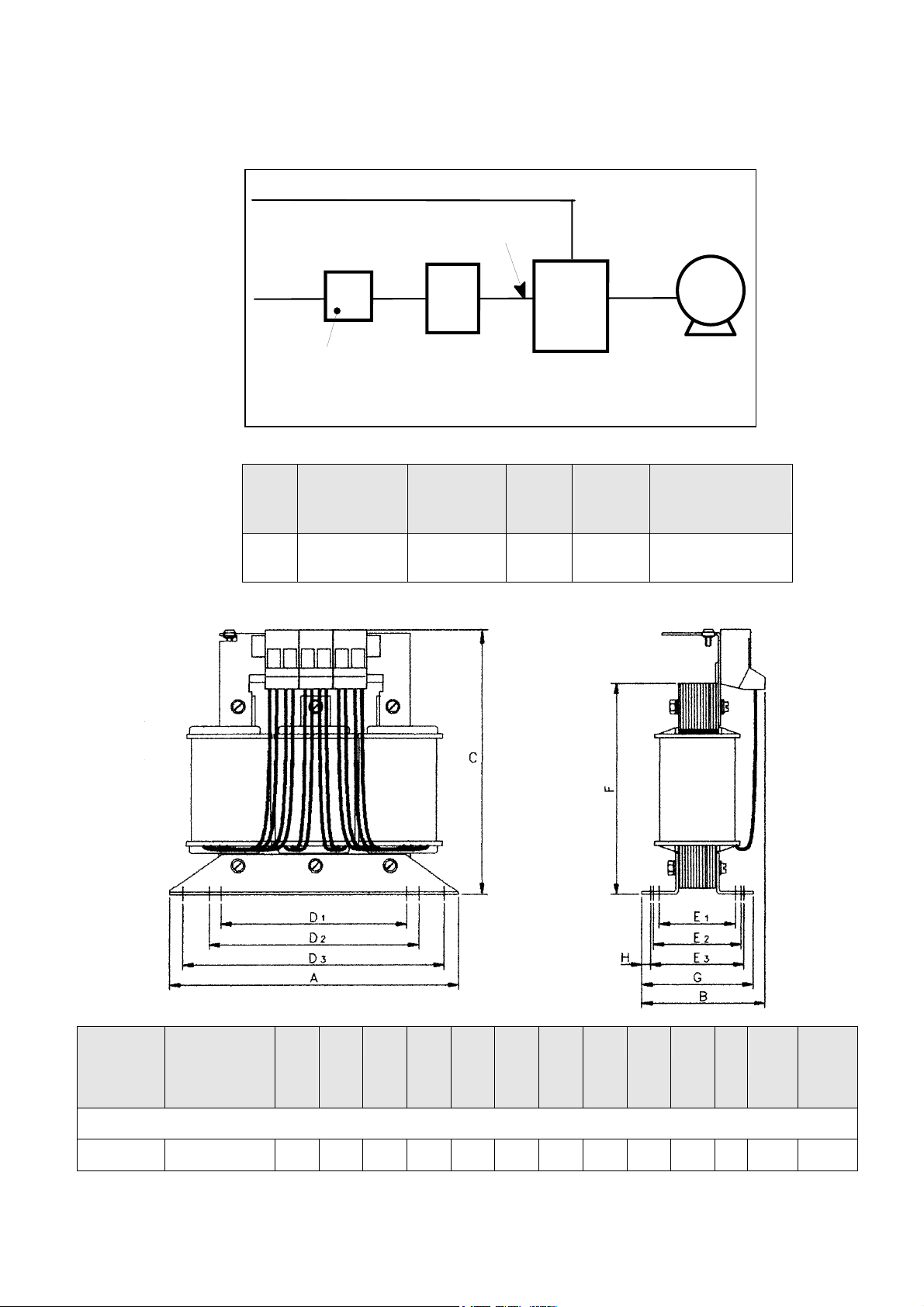
Line Choke
Cables are considered to be electrically sensitive, clean or noisy. A line choke is used to reduce
harmonic emission to meet the limits of EN61000-3-2.
signal/control cable
(sensitive)
power
supply
cable
(clean)
fuse or suitable
circuit breaker
(RCD not
recommended)
The choke is for use on the following drive:
line
choke
(noisy)
drive
motor
cable
(noisy)
motor
Phase Drive Nominal
Input Voltage
(V)
3 400 0.37/0.5 6 4.88
Drive Power
(kW/hp)
Rated
Current
(Aeff)
Rated
Inductivity
(mH)
Choke
Part Number
CO467763U003
(Europe)
Rated
Current
(Aeff)
6 4.88 148 76 151 90 100 136 39 45 49 110 69 M4 2.1/
Rated
Inductivity
(mH)
* dimension is dependent of the air gap
A
B C D1 D2 D3 E1 E2 E3 F* G Fixing
(mm)
650 Frame 2, 3-phase, 400V, 0.37kW/0.5Hp
Weight
Screws
(kg/lbs)
650 Series AC Drive
Page 21
Operating the Drive 4-1
g
1OPERATING THE DRIVE
Pre-Operation Checks
WARNING!
Wait for 5 minutes after disconnecting power before working on any part of the system or removing the
terminal cover from the drive.
Initial checks before applying power:
• Check for damage to equipment.
• Mains power supply voltage is correct.
• Motor is of correct voltage rating and is connected in either star or delta, as appropriate.
• Check all external wiring circuits - power, control, motor and earth connections.
Note: Completely disconnect the drive before point to point checking with a buzzer, or when checking
insulation with a Meggar.
• Check for loose ends, clippings, drilling swarf etc. lodged in the drive and system.
• If possible check that the motor can be turned freely, and that any cooling fans are intact and free from obstruction.
Ensure the safety of the complete system before the drive is energised:
• Ensure that rotation of the motor in either direction will not cause damage.
• Ensure that nobody else is working on another part of the system which will be affected by powering up.
• Ensure that other equipment will not be adversely affected by powering up.
Prepare to energise the drive and system as follows:
• Remove the supply fuses, or isolate using the supply circuit breaker.
• Disconnect the load from the motor shaft, if possible.
• If any of the drives control terminals are not being used, check whether these unused terminals need to be tied high
or low.
• If the motor thermistor terminals are not connected to a motor thermistor, connect these terminals together.
• Check external run contacts are open. Check external speed setpoints are all zero.
Re-apply power to the drive and system
Initial Start-up Routines
Note: Refer to Chapter 5: “Using the Keypad” to familiarise yourself with the keypad’s
indications, and how to use the keys and menu structure.
!
!
IMPORTANT
When power
is applied to
IMPORTANT
the drive in
On power-up
Remote
in Remote
Control, it will
Control, the
immediately
drive will
start running if
immediately
the RUN
start running if
signal is
the RUN
active.
nal is
si
Note: If during the start-up routine the display shows either an alarm
The drive can be started in either Remote Control or Local Control. By default, the drive will
start in Local Control.
These routines assume that the drive’s control terminals are wired as shown in the Control
Wiring Connections in Chapter 3.
Connected in this way, a positive setpoint will rotate the motor in a clockwise direction when
viewed down the shaft, looking toward the motor.
(indicated by the letter “A”) or a flashing Warning message,
refer to Chapter 7: “Trips and Fault Finding”.
Unpredictable motion, especially if motor parameters are incorrect.
Ensure no personnel are in the vicinity of the motor or any connected machinery.
Ensure that machinery connected to the motor will not be damaged by
Ensure that the emergency stop circuits function correctly before running the motor
WARNING!
unpredictable motion.
for the first time.
A typical alarm
650 Series AC Drive
Page 22
4-2 Operating the Drive
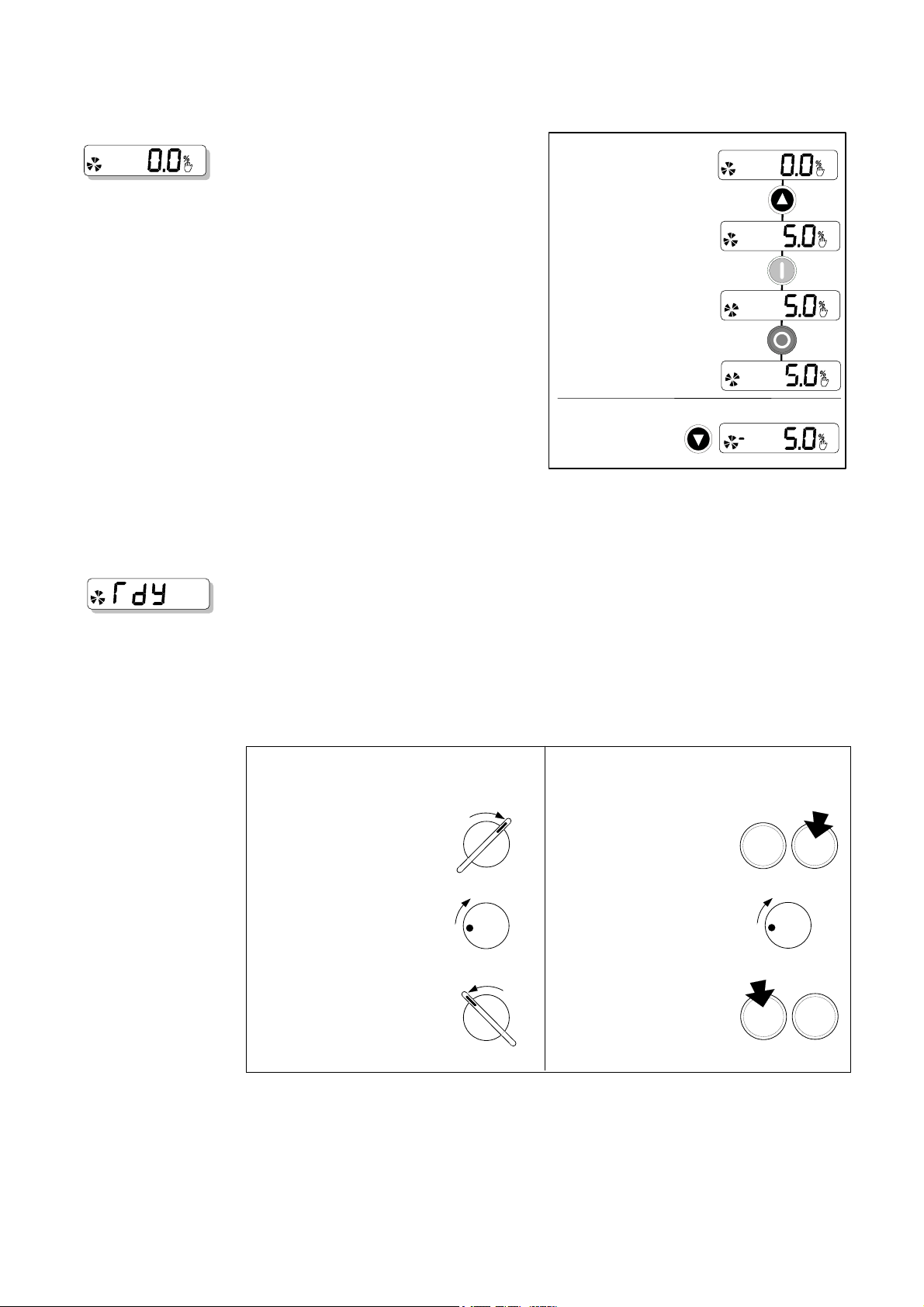
Local Control Operation
LOCAL
This is the simplest method of operating the
drive. Connect the keypad to the drive and
power -up the unit.
The drive will display the Local screen. If not,
refer to Chapter 5 and select Local Control.
Follow the instructions opposite to start and
stop the motor.
Reverse: Instead of setting a negative
setpoint, you can reverse the motor direction
by pressing STOP + T, or START + T.
To change the direction to forwards, (the
normal direction), press STOP + S or
START + S.
LOCAL
Press to apply a small setpoint
(see Reverse below)
Press to start the motor
and it will ramp to the setpoint
Press to stop the motor
and it will ramp to zero
Note that the Setpoint parameter will not
change sign to indicate this change, however
the rotating indicator on the MMI will show
the direction.
Reverse
From zero, release
and press again for
a negative setpoint
We recommend that you use the STOP key commands if the motor is stopped, and the START
key commands if the motor is running. The keys should be pressed and released together.
Remote Control Operation
REMOTE
IMPORTANT: Ensure that the speed potentiometer is set to zero.
Connect the keypad to the drive and power-up the unit.
The drive will display the Local screen. Refer to Chapter 5 and select Remote Control.
Follow the instructions below to start and stop the motor using your control panel.
Reverse the motor’s direction of rotation using the DIN2 connection (0V = forward, +24V =
reverse). Alternatively, swap two of the motor phases (WARNING: Disconnect the mains
supply first).
Single Wire Starting Push-button Starting
STOP START
Close the RUN switch (DIN1)
Apply a small speed setpoint
and the motor will ramp to
the setpoint
Open the RUN switch (DIN1)
and the motor will ramp to zero
RUN SWITCH
5
0
POTENTIOMETER
STOP START
RUN SWITCH
Press the Start button
(DIN1)
Apply a small speed setpoint
and the motor will ramp to
100
the setpoint
Press the Stop button
(DIN4/DOUT2)
and the motor will ramp
to zero
(Applications 1 & 5 only)
STOP
PUSHBUTTONS
0
POTENTIOMETER
STOP
PUSHBUTTONS
START
5
100
START
The installation of your drive is now complete:
The drive will operate as an open-loop drive. It is programmed to control an induction motor of
equivalent power, current, and voltage rating to the drive.
The drive's default parameters will operate effectively under most circumstances, however you
may wish to refer to Chapter 6 to tune the drive to your system.
650 Series AC Drive
Page 23

0THE KEYPAD
The Keypad (Man-Machine Interface, MMI)
provides for local control of the drive, monitoring,
and complete access for application programming.
The 650 can be fitted with either a Standard or
Remote Keypad. Both Keypads fit on the front of
the drive, but the Remote Keypad (with its extra
connector) can also be remote-mounted up to 3
metres away using a connecting lead: refer to
Chapter 3: “Installing the Drive” – Fitting the
Remote Keypad.
The Keypad 5-1
To remove a Keypad, simply pull it away from the
drive. To refit it, push it back into place.
The product rating label identifies the
Drive/Keypad type: refer to Chapter 9: “Technical Specifications” – Understanding the Product
Code.
Local
Control
Key
The Power-Up Condition
On initial power-up, direct from the factory, the drive is in Local Control and the MMI will
display the Local Setpoint,
All parameters will be at factory default settings. Any changes to these conditions are
automatically saved. The drive will initialise on subsequent power-ups with the previously saved
settings and control mode, Local or Remote Control.
.
Controlling the Drive using the Keypad
Control Key Definitions
Key Operation Description
Navigation – Displays the previous level’s menu
Escape
Menu
Increment
Decrement
Run
Stop
Parameter – Returns to the parameter list
Trip Display– Removes Trip or Error message from display
allowing investigation of parameters
Navigation – Displays the next menu level, or the first
parameter of the current Menu
Parameter – Moves cursor to the left when the parameter is
adjustable
Navigation – Move upwards through the menu system
Parameter – Increase value of the displayed parameter
Local Mode – Increase value of the local setpoint
Navigation – Move down through the menu system
Parameter – Decrease value of the displayed parameter
Local Mode – Decrease value of the local setpoint
Local Mode – Run the drive
Trip Reset – Resets trip condition allowing drive to resume
operation
Local Mode – Stops the drive. Trip Reset in all modes
Navigation – Press and hold to toggle between Local and
Remote Control modes (refer to page 5.
Trip Reset – Resets trip condition allowing drive to resume
operation
Programming Keys
4)
Local
Control
Key
650 Series AC Drive
Page 24

5-2 The Keypad
e
g
Display Indications
when in the Parameter menu
when in the Setup menu
when displaying an Alarm code
a negative parameter value
Indicates the
ive is running in
Control Mode
erating mode.
if not visible.
Represents a rotating shaft:
clockwise = drive running forward
anticlockwise = drive running in reverse
Indicates parameter numbers or values,
trip information, error codes etc.
See "Drive Status Indications" below.
Drive Status Indications
The keypad can display the following status information:
Display Status Indication and Meaning Possible Cause
READY/HEALTHY No alarms
present. Remote mode selected
PASSWORD Current password
must be entered before this
parameter may be altered.
LOCAL Local Control selected,
healthy, no alarms present
RUN Not possible to change
between Local/Remote mode
JOG Not possible to change
between Local/Remote mode
Displays the units for the value:
S for time in seconds, A for current in Amps
V for voltage in Volts, % for percentage
Hz for frequency in Hertz
Indicates control
via fieldbus
communications
Indicates the drive is in Local control.
Drive is in remote control when not visible.
Enter password to change the
parameter. Refer to page 5.
5
Added or removed from the
display letter-by-letter to indicate
entering or leaving Local Control
The drive is running in Local
mode or the Remote run signal is
active
The Remote jog signal is active
The DIAGNOSTICS Menu
Display Name Description
FREQUENCY The current output frequency in Hertz
SPEED SETPOINT The set point as a percentage of MAX SPEED
DC LINK VOLTS
MOTOR CURRENT The current load value in Amps
Vac (rms) x √2 = dc link Volts
(when motor stopped)
650 Series AC Drive
Page 25

M
M
P
M
The Menu System
The menu system is divided into a “tree” structure with 3 menu levels.
The Keypad 5-3
enu Level 1
PARAMETER MENU
REMOTE CONTROL
HOLD FOR
2 SECONDS
LOCAL CONTROL
(showing LOCAL SETPOINT)
HOLD FOR
1 SECOND
SETUP MENU
enu Level 2
DIAGNOSTIC MENU
enu Level 3
INPUTS MENU
arameter Level
The first visit to a menu after power-up will
display the first parameter in each menu.
On subsequent visits, you will be returned to the
previously-displayed parameter for each menu.
Software Version Number
This is displayed on power-up, for up to
8 seconds. For example, version 4.7:
It can also be displayed by pressing the E key
for 2 seconds when at the top of the MMI tree,
Menu Level 1.
MISCELLANEOUS SETUP MENU
OUTPUTS MENU
TRIPS MENU
SERIAL MENU
650 Series AC Drive
Page 26

5-4 The Keypad
How To Change a Parameter Value
You can change the values of parameters stored in the and menus. Refer to Chapter
6: “Programming Your Application” – Configurable Parameters for further information.
• View the parameter to be edited and press
• Select the digit to be changed (pressing the
• Use the
marginally, or hold the key to make rapid changes; the rate of change varies with the time
held.
• Press
to return to the parameter display. The new value is stored.
keys to adjust the value. Hold the key momentarily to adjust the value
Special Menu Features
Resetting to Factory Defaults (2-button reset)
Power-up the drive whilst holding the keys as
shown to return to factory default settings.
This loads Application 1. Then press the
key.
Changing the Drive Operating Frequency
Power-up the drive whilst holding the keys as
shown to display the Engineers Menu.
IMPORTANT: This menu contains sensitive parameters that
can dramatically alter the running of the drive.
to display the parameter’s value.
key moves the cursor from right to left).
Hold down the keys opposite:
Power-up the drive, continue
to hold for at least 1 second
Hold down the keys opposite:
Power-up the drive, continue
to hold for at least 1 second
HOLD
HOLD
E
This displays parameter
edit the parameter: 0 = 50Hz (default), 1 = 60Hz. Select the required frequency then press the
key.
Power-down the drive. No permanent change has been made to the drive at this point. To save
the change to parameter
that this will return the drive to its factory default settings for the selected default frequency.
0.01. Press the key to navigate to E0.02. Press the
E
0.02, you must now perform a 2-button reset (as above). Please note
Selecting Local or Remote Control
The drive can operate in one of two ways:
Remote Control: Allowing access for application programming using digital and
analog inputs and outputs
Local Control: Providing local control and monitoring of the drive using the
Keypad
Local control keys are inactive when Remote Control is selected.
In Remote Control, the drive uses a remote setpoint. In Local Control, it uses the Local Setpoint
parameter whose value is adjusted on the MMI.
Note: You can only change between Local and Remote Control when the drive is “stopped”,
and either
Remote to Local Control:
or the Local Setpoint is displayed.
Hold this key down until
the display shows
key to
Hold this key down until
the display spells
Release the key to display
the Local Setpoint
REMOTE
LOCAL
650 Series AC Drive
Page 27

Local to Remote Control:
The Keypad 5-5
Steps
1
2
3
View the Local Setpoint
Hold this key down until
is removed from the display
Release the key to display
Note: For safety reasons, the drive will not return to Remote Control if this will cause the drive to
start. Check RUN and JOG inputs are low.
LOCAL
REMOTE
Password Protection
When activated, an odd-numbered password prevents unauthorised parameter modification by
making all parameters read-only. The local setpoint is not made read-only if an even-numbered
password is used. Password protection is set-up using the
ACTIVATE TEMPORARY DE-ACTIVATION REMOVE PASSWORD
Actions Display Actions Display Actions Display
Go to
Press
Enter new
password using
Press
repeatedly until
top of menu is
reached
for example
, Remote
Setpoint or
Local Setpoint
Try to edit any
parameter with
password activated
Enter current
password using
Press
→
for example
Original
parameter
displayed,
password
de-activated
parameter
Go to
Press
Enter current
password using
Press
Reset to 0000
using
for example
→
4
Press
activate
password
Default = 0000, de-activated
Any other value is a password
to
, Remote
Setpoint or
Local Setpoint
A drive will power-up with the last
password status. Temporary deactivation is lost on power-down.
Quick Application Selection
You can navigate immediately to the
APPLICATION parameter,
shown opposite.
Then, press the
Application. Press again to allow the parameter to be changed.
Use the
Press the
Refer to Chapter 12: "Applications" for further information.
keys to select the appropriate Application by number.
key to load the Application.
P
1, from power-up, as
key to display the current
Selecting the Menu Detail
For ease of operation the drive can display full or reduced menus. Refer to Chapter 6 to see how
the setting changes the displayed menu. Additional parameters are indicated with F in the table.
Press
remove
password
Hold down the key opposite:
Power-up the drive, continue
to hold for at least 1 second
to
HOLD
650 Series AC Drive
Navigate to the parameter (SET::SETP::ST99) and press the
or partial menu detail. The default setting of 0 provides partial menu detail. Set the parameter to
1 for full menu detail.
key. This toggles full
Page 28

6-1 Programming Your Application
1PROGRAMMING YOUR APPLICATION
You can program the drive to your specific application. This programming simply involves
changing parameter values. For instance, parameter
be used as starting points for application-specific programming.
Each Application internally re-wires the drive for a different use when it is loaded. The default
for the parameter is "1". Changing this parameter's setting to "2" will load Application 2. Refer
to Chapter 12: “Applications” for further information.
If necessary, there are three parameters for tuning your drive. Refer to
page 6-
8.
Saving Your Modifications
When parameter values are modified or an Application is loaded, the new settings are saved
automatically. The drive will retain the new settings during power-down.
MMI Parameters
This table provides information about each parameter accessible using the keypad, or MMI
(Man Machine Interface). For more information, refer to the 650 Software Product Manual on
our website: www.SSDdrives.com.
Key to MMI Parameters Table
F
M Parameters indicated with M are Motor Parameters. They are not reset by changing
Parameters indicated with F are visible with full menus only. Refer to the
DETAILED MENUS parameter (
Application using parameter
P
1 selects various Applications which can
PID - Tuning Your Drive,
ST
99).
P
1; all other parameters are reset to default values.
Note: The “Range” for a parameter value is given in the Configurable Parameters Table.
Ranges for outputs are given as “—.xx %”, for example, indicating an indeterminate
integer for the value, to two decimal places.
MMI Parameters Table
MMI Parameters Table
Display Parameter Description Range Default
SET::PAR Menu
APPLICATION This parameter selects and loads the Application to
be used. APP 0 will not control a motor. APP 6, 7,
8 & 9 are reserved for future use.
Refer to the 650 Software Product Manual,
Chapter 5: "Applications" which gives detailed
information about each Application.
Note: Parameter values are changed to
factory settings by loading a new
Application, except Motor Parameters
(indicated M)
MAX SPEED
M
MIN SPEED The minimum frequency at which the 650 will run,
ACCEL TIME
M
DECEL TIME
M
The frequency at which the 650 will run when
maximum setpoint is applied. The default can be
either 50 or 60Hz.
as a percentage of the MAX SPEED parameter
The time taken for the 650 output frequency to
ramp up from zero to MAX SPEED
The time taken for the 650 output frequency to
ramp down from MAX SPEED to zero
0= NULL
1= STANDARD
2= LOCAL/REM
(AUTO/MANUAL)
3= PRESETS
4= RAISE/LOWER
5= PID
6= APP 6
7= APP 7
8= APP 8
9= APP 9
7.5 to 300Hz product
-100.0 to 100.0% 0.0%
0.0 to 3000.0s product
0.0 to 3000.0s product
1
code
dependent
code
dependent
code
dependent
650 Series AC Drive
Page 29

Programming Your Application 6-2
MMI Parameters Table
Display Parameter Description Range Default
MOTOR
CURRENT
M
BASE
FREQUENCY
M
JOG SETPOINT Speed the 650 will run at if the Jog input is high,
RUN STOP MODE RAMPED : The motor speed is reduced to zero at a
V/F SHAPE LINEAR LAW: This gives a constant flux
This parameter contains the motor nameplate fullload line current
The output frequency at which maximum voltage is
reached. The default can be either 50 or 60Hz.
as a percentage of the MAX SPEED parameter
rate set by DECEL TIME (
P
5). A 2 second DC pulse
is applied at end of ramp
COAST : The motor is allowed to freewheel to a
standstill
DC INJECTION : On a stop command, the motor
volts are rapidly reduced at constant frequency to
deflux the motor. A low frequency braking current
is then applied until the motor speed is almost
zero. This is followed by a timed DC pulse to hold
the motor shaft.
characteristic up to the BASE FREQUENCY
FAN LAW: This gives a quadratic flux characteristic
up to the BASE FREQUENCY. This matches the
load requirement for fan and most pump
applications
Refer to
P
12
0.01 to 999.99A product
code
dependent
7.5 to 240Hz product
code
dependent
-100.0 to 100.0% 10.0%
0=RAMPED
0
1=COAST
2=DC INJECTION
0=LINEAR LAW
0
1=FAN LAW
NORMAL DUTY
OUTPUT VOLTS
100%
f
B
= BASE FREQUENCY
LINEAR
QUADRATIC LAW
f
B
CONSTANT
POWER RANGE
FREQUENCY
% OF RATED MOTOR CURRENT
150%
127.5%
105%
100%
100% overload for 30s (Heavy Duty)
30 60
TIME (s)
FALSE - HEAVY DUTY: Inverse time allows 150%
overload for 30s, then ramps back the current limit
to 105% over a 10s period. At a lower load, the
overload area remains the same, e.g. at 127.5%
load for 60s - after 60s has expired, the output of
the inverse time function is ramped back over a
10s period from 150% as before.
TRUE - NORMAL DUTY: current limit is set to
110% motor current, inverse time delay is set to
30s
P
When
11 is changed from FAN LAW to LINEAR
P
LAW,
12 is set to 0 (HEAVY DUTY)
P
When
11 is changed from LINEAR LAW to FAN
P
LAW,
12 is set to 1 (NORMAL DUTY)
P
12 can be changed independently
0=FALSE
1=TRUE
NORMAL DUTY was
previously referred to
as Quadratic Torque
in past Eurotherm
Drives' manuals.
0
650 Series AC Drive
Page 30

6-3 Programming Your Application
MMI Parameters Table
Display Parameter Description Range Default
FIXED BOOST
M VF
PASSWORD A password may be set to prohibit unauthorised
Parameters P301 to P308 are visible in the PAR menu when Application 3 is selected in parameter P1
PRESET 0 A user-adjustable speed preset, set by
PRESET 1 A user-adjustable speed preset -100.00 to 100.00 20.00
PRESET 2 A user-adjustable speed preset -100.00 to 100.00 50.00
PRESET 3 A user-adjustable speed preset -100.00 to 100.00 100.00
PRESET 4 A user-adjustable speed preset -100.00 to 100.00 -10.00
PRESET 5 A user-adjustable speed preset -100.00 to 100.00 -20.00
PRESET 6 A user-adjustable speed preset -100.00 to 100.00 -50.00
PRESET 7 A user-adjustable speed preset -100.00 to 100.00 -100.00
Parameters P401 to P404 are visible in the PAR menu when Application 4 is selected in parameter P1
R/L RAMP TIME The time taken to ramp the Raise/Lower output
R/L MAX VALUE The maximum value for the ramp output -100.00 to 100.00% 100.00%
R/L MIN VALUE The minimum value for the ramp output -100.00 to 100.00% 0.00%
R/L RESET VALUE The value the output is set to when Reset is TRUE,
Parameters P501 and P506 are visible in the PAR menu when Application 5 is selected in parameter P1
PI P GAIN The PI proportional gain 0.00 to 100.00 0.10
PI I GAIN The PI integral gain 0.00 to 100.00 1.00
PID D GAIN
F
PID D FILTER TC F In order to help attenuate high frequency noise on
PID FEEDBACK
GAIN
F
PID LIMIT
F
PID SCALING
F
Used to correctly flux the motor at low speeds. This
allows the drive to produce greater starting torque
for high friction loads. It increases the motor volts
0.00 to 25.00% product
code
dependent
above the selected V/F characteristic at the lower
end of the speed range
OUTPUT VOLTS
f
B
CONSTANT
POWER RANGE
FREQUENCY
P
99 is set to
0000 – FFFF 0000
100%
INCREASED
TORQUE
25%
0%
FLUXING
f
B
= BASE FREQUENCY
NORMAL FLUXING
INCREASING
BOOST
adjustment of parameters. When
non-zero you will be required to match this value
before parameters can be adjusted
-100.00 to 100.00 -
potentiometer
0.0 to 600.0s 10.0s
from 0.00% to 100.00% of its value
-100.00 to 100.00% 0.00%
when DIN4 (terminal 10) is 24V in Application 4
The PID derivative gain 0.00 to 100.00 0.00
0.05 to 10.00s 0.05s
the derivative term, a first order lag has been
provided. This parameter determines the filter time
constant.
A multiplier applied to the feedback signal of the
-10.00 to 10.00 1.00
PID
Determines the maximum positive and negative
0.00 to 300.00% 300.00%
excursion (Limit) of the PID output
This parameter represents an overall scaling factor
-3.0000 to 3.0000 1.0000
which is applied after the PID positive and negative
limit clamps
650 Series AC Drive
Page 31

Programming Your Application 6-4
MMI Parameters Table
Display Parameter Description Range Default
PID ERROR
F
PID OUTPUT
F
DIN 1 INVERT Inverts the value of the signal, TRUE or FALSE. 0= FALSE
DIN 2 INVERT As SIP01 As
DIN 3 INVERT As SIP01 As
DIN 4 INVERT As SIP01 As SIP01 0
AIN 1 SCALE -300.0 to 300.0% 100.0%
AIN 1 OFFSET -300.0 to 300.0% 0.0%
AIN 1 TYPE
AIN 2 SCALE -300.0 to 300.0% 100.0%
AIN 2 OFFSET -300.0 to 300.0% 0.0%
AIN 2 TYPE
DIN 1 VALUE
F
DIN 2 VALUE
F
DIN 3 VALUE
F
DIN 4 VALUE
F
AIN 1 VALUE
F
AIN 2 VALUE
F
The result of SETPOINT - FEEDBACK x FEEDBACK
GAIN
The output of the PID function block
—.xx % —.xx%
—.xx % —.xx %
SET::IN Menu
1= TRUE
S
IP01 0
S
IP01 0
TYPE
UNPROCESSED
INPUT
0 to 100% of selected TYPE
TYPE
UNPROCESSED
INPUT
0 to 100% of selected TYPE
The TRUE or FALSE input (after any inversion) 0=FALSE
The TRUE or FALSE input (after any inversion) 0=FALSE
The TRUE or FALSE input (after any inversion) 0=FALSE
The TRUE or FALSE input (after any inversion) 0=FALSE
The input reading with scaling and offset applied
The input reading with scaling and offset applied
SCALE
X
SCALE
X
OFFSET
+
OFFSET
+
VALUE
VALUE
0= 0-10V
1= 0-5V
0= 0-10V
1= 0-5V
2= 0-20mA
3= 4-20mA
1=TRUE
1=TRUE
1=TRUE
1=TRUE
⎯.x%
⎯.x%
0
0
3
-
-
-
-
—.x%
—.x%
650 Series AC Drive
SET::OUT Menu
AOUT 1 SOURCE
AOUT 1 SCALE -300.00 to 300.00% 100.00%
AOUT 1 OFFSET -300.00 to 300.00% 0.00%
AOUT 1
ABSOLUTE
AOUT 1 VALUE
F
ANALOG OUTPUT
0 NONE
1 DEMAND %
2 CURRENT %
3 PI ERROR %
4 RAISE/LOWER %
OUTPUT
SCALE
VALUE
X
SCALE
OFFSET
ABSOLUTE
OFFSET
+
100%
CLAMP
ABS
X
OUTPUT
0%
0= NONE
1= DEMAND
2= CURRENT
0-10V
3= PID ERROR
4= RAISE/LOWER
OUTPUT
0= FALSE
(not absolute)
1= TRUE (absolute)
-300.0 to 300.0% 0.0%
1
1
Page 32

6-5 Programming Your Application
MMI Parameters Table
Display Parameter Description Range Default
DOUT 2 SOURCE
Refer to
Configuring
Terminal 10
(Digital
Input/Output)
page 6-8.
DIN4 / DOUT2
0 NONE
1 HEALTH
2 TRIPPED
3 RUNNING
4 AT ZERO
,
5 AT SPEED
INVERT (output)
0= NONE
1= HEALTH
2= TRIPPED
3= RUNNING
4= AT ZERO
5= AT SPEED
DOUT 2 INVERT (OUTPUT) As SIP01. Set to 0 for applications 1 & 5. As SIP01 0
DOUT 2 VALUE
F
RELAY SOURCE NONE : Relay is open
The TRUE or FALSE output demand. 0=FALSE
1=TRUE
As SOP21 1
Relay is closed when:
HEALTH : the Run signal is not present, or no trip
is active
TRIPPED : a trip is present
RUNNING : the motor is running
AT ZERO : the output frequency is below 1% of
MAX SPEED (
P
2)
AT SPEED : the output frequency is at or near
Setpoint and within ±1% of MAX SPEED, set by
P
(
2). For example: if MAX SPEED = 50Hz and
Setpoint = 30Hz, then 1% of MAX SPEED = 0.5Hz.
So AT LOAD is True between 30 ±0.5Hz.
RELAY
0 NONE
1 HEALTH
2 TRIPPED
3 RUNNING
4 AT ZERO
5 AT SPEED
INVERT (output)
RELAY INVERT Inverts the value of the signal, TRUE or FALSE. 0=FALSE
RELAY VALUE
F
The TRUE or FALSE output demand.
1=TRUE
0=FALSE
1=TRUE
0
0
0
0
SET::TRIP Menu
DISABLE LOOP Disables LOST I LOOP trip (4-20mA) 0= TRIP ENABLED
AIN2 OVERLOAD Disables the overload trip (Terminal 3) As
DISABLE STALL Disables STALL trip As
DISABLE MOTOR
OVERTEMP
Disables the motor thermistor trip As
INVERSE TIME Disables the inverse time trip As
1= TRIP DISABLED
S
LOOP 0
S
LOOP 0
S
LOOP 0
S
LOOP 1
DISPLAY
(KEYPAD)
Disables the display (keypad) trip As SLOOP 0
DC LINK RIPPLE F Disables the DC link ripple trip As SLOOP 0
1
650 Series AC Drive
Page 33

Programming Your Application 6-6
MMI Parameters Table
Display Parameter Description Range Default
SET::SERL Menu
REMOTE COMMS
SEL
F
COMMS
TIMEOUT
F
COMMS
ADDRESS
F
BAUD RATE
F
PARITY
F
REPLY DELAY ms The time in milliseconds between the drive
OP PORT
PROTOCOL
F
P3 PORT
PROTOCOL
F
Selects the type of remote communications mode:
0 : FALSE, and in REMOTE mode then control is
from the terminals.
1 : TRUE, and in REMOTE mode then control is
from the communications.
Sets the maximum time allowed between
refreshing the COMMS COMMAND parameter.
The drive will trip if this time is exceeded. Set the
time to 0.00 seconds to disable this feature.
The drives identity address.
Note: if set to 0, it will only respond to broadcast
messages.
Selects the Baud Rate for the MODBUS protocol. 0 : 1200
Selects the Parity for the MODBUS protocol. 0= NONE
receiving the complete request from the
communications master (PLC/PC) and replying to
this request.
Selects the protocol to be used by the keypad port
on the front of the drive. When EIBISYNC ASCII is
selected, BAUD RATE is 19200 and PARITY is
EVEN. FIELDBUS is reserved for future use.
Selects the protocol to be used by the RS232
programming port on the drive's control board.
When EIBISYNC ASCII is selected, BAUD RATE is
19200 and PARITY is EVEN. FIELDBUS is reserved
for future use.
0=FALSE
1=TRUE
0.0 to 600.0s 0.0s
0 to 255 0
1 : 2400
2 : 4800
3 : 7200
4 : 9600
5 : 14400
6 : 19200
7 : 38400
8 : 57600
1= ODD
2= EVEN
0 to 200 5
0= AUTOMATIC
1= KEYPAD
2=EIBISYNC ASCII
3= MODBUS
4= FIELDBUS
S
As
SE07 0
0
4
0
0
650 Series AC Drive
SET::SETP Menu
JOG ACCEL TIME As
JOG DECEL TIME As P5, for Jog 0.0 to 3000.0s 1.0
RAMP TYPE Selects the ramp type 0=LINEAR
S RAMP JERK Rate of change of acceleration of the curve in units
S RAMP
CONTINUOUS
MIN SPEED
MODE
F
P
4, for Jog 0.0 to 3000.0s 1.0
1=S
0.01 to 100.00 s3 10.00
per second³
When TRUE and the S ramp is selected, forces a
smooth transition if the speed setpoint is changed
when ramping. The curve is controlled by the S
RAMP JERK parameter. When FALSE, there is an
immediate transition from the old curve to the new
curve
Selects a mode to determine how the drive will
follow a reference: Proportional : minimum limit,
Linear : between minimum and maximum.
0=FALSE
1=TRUE
0=PROP.W/MIN.
1=LINEAR (used by
the 601 product)
0
1
0
Page 34

6-7 Programming Your Application
SKIP FREQUENCY 1 This parameter contains the centre frequency of
SKIP FREQUENCY
BAND 1
SKIP FREQUENCY 2 This parameter contains the centre frequency of
SKIP FREQUENCY
BAND 2
AUTO RESTART
ATTEMPTS
AUTO RESTART
DELAY
AUTO RESTART
TRIGGERS
AUTO RESTART
TRIGGERS+
LOCAL MIN
SPEED
F
ENABLED KEYS F The following keys on the 6901 keypad can be
6901
6911
Parameter Setting RUN L/R JOG DIR
0000
0010
0020
0030
0040
0050
0060
0070
0080
0090
00A0
00B0
00C0
00D0
00E0
00F0
skip band 1 in Hz
The width of skip band 1 in Hz 0.0 to 60.0 Hz 0.0
skip band 2 in Hz
The width of skip band 2 in Hz 0.0 to 60.0 Hz 0.0
Determines the number of restarts that will be
permitted before requiring an external fault reset
Determines the delay between restart attempts for
a trip included in AUTO RESTART TRIGGERS and
AUTO RESTART TRIGGERS+. The delay is
measured from all error conditions clearing
Allows Auto Restart to be enabled for a selection of
trip conditions.
Refer to Chapter 6: "Trips and Fault Finding" Hexadecimal Representation of Trips
Allows Auto Restart to be enabled for a selection of
trip conditions.
Refer to Chapter 6: "Trips and Fault Finding" Hexadecimal Representation of Trips
The magnitude of the minimum setpoint that will
be used when running in Local Mode.
enabled or disabled separately. The combination
produces the parameter setting as in the table
below. The default of FFFF enables all keys.
-
-
-
-
-
-
-
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
-
-
-
ENABLED
ENABLED
ENABLED
ENABLED
-
-
-
ENABLED
ENABLED
ENABLED
ENABLED
-
ENABLED
ENABLED
-
ENABLED
ENABLED
-
ENABLED
ENABLED
-
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
ENABLED
0.0 to 240.0 Hz 0.0
0.0 to 240.0 Hz 0.0
0 to 10 0
0.0 to 600.0 s 10.0
0x0000 to 0xFFFF 0x0000
0x0000 to 0xFFFF 0x0000
0.0 to 100.0 % 0.0 %
0000 to FFFF FFFF
6511
When using the standard 6511 and 6521 keypad,
disabling the DIR key prevents the local setpoint
going negative (for reverse). Similarly, disabling
6521
APPLICATION
LOCK
F
DETAILED MENUS Selects Full menu detail when TRUE. The additional
the L/R key prevents the drive being changed from
Local to Remote, or Remote to Local modes.
Setting this parameter to TRUE prevents editing of
parameter
Set this parameter to FALSE to edit parameter
parameters in the Full menus are indicated in this
table by F
P
1.
P
1.
0=FALSE
1=TRUE
0=FALSE
1=TRUE
0
0
650 Series AC Drive
Page 35

Programming Your Application 6-8
Configuring Terminal 10 (Digital Input/Output)
Terminal 10 can be operated as digital input DIN 4 or digital output DOUT2. It is configured
via the keypad. The default for terminal 10 is to operate as a digital input, and the input logic is
non-inverted.
Configure for use as a Digital Input (default)
For example, to use terminal 10 as an input, the output circuitry must be disabled by setting
S
OP21 and SOP22 to zero. You can invert this logic using parameter SIP04.
Parameter Setting
DOUT2 SOURCE
DOUT2 INVERT
DIN4 INVERT
0
0
Default is 0, setting to 1 inverts the input logic
Configure for use as a Digital Output
For example, to use terminal 10 as an output, select SOP21 to be 1, 2, 3, 4 , 5 or 6. For instance,
you could set parameter
running, operating an external relay or lamp. You can invert this logic using parameter
Parameter Setting
DOUT2 SOURCE
S
OP21 to 3 to have the output go high (24V) whenever the motor is
The output is high when:
S
OP22.
1 = HEALTH The Run signal is not present, or no
trip is active
2 = TRIPPED A trip is present
3 = RUNNING The motor is running
4 = AT ZERO The output frequency is below 1% of
MAX SPEED (
P
2)
5 = AT SPEED The output frequency is at or near
Setpoint and within ±1% of MAX
SPEED, set by (P2). For example:
if MAX SPEED = 50Hz and Setpoint
= 30Hz, then 1% of MAX SPEED =
0.5Hz. So AT LOAD is True
between 30 ±0.5Hz.
650 Series AC Drive
Always set SIP04 to 0 if using Applications 1 and 5 –
refer to Chapter 12.
DOUT2 INVERT
Default is 0, setting to 1 inverts the output logic
PID - Tuning Your Drive
Parameters P501 to P509: PID is used to control the response of any closed loop system. It is
used specifically in system applications involving the control of drives to provide zero steady
state error between Setpoint and Feedback, together with good transient performance.
Proportional Gain (P501)
This is used to adjust the basic response of the closed loop control system. The PI error is
multiplied by the Proportional Gain to produce an output.
Page 36

6-9 Programming Your Application
Integral (P502)
The Integral term is used to reduce steady state error between the setpoint and feedback values
of the PI. If the integral is set to zero, then in most systems there will always be a steady state
error.
Derivative (P503)
This is used to correct for certain types of control loop instability, and therefore improve
response. It is sometimes used when heavy or large inertia rolls are being controlled. The
derivative term has an associated filter to suppress high frequency signals.
Error
Setpoint
(AIN1)
Feedback
(AIN2)
A Method for Setting-up the PI Gains
The gains should be set-up so that a critically damped response is achieved for a step change in
setpoint. An underdamped or oscillatory system can be thought of as having too much gain, and
an overdamped system has too little.
+
-
• Functions as P, PI, PID controller
• Single symmetric limit on output
P Gain
I Gain dt
D Gain
+
+
+
d
dt
Output
Underdamped (oscillatory)
OUTPUT
SETPOINT
Critically Damped
Overdamped
To set up the P gain, set the I gain to zero. Apply a step change in setpoint that is typical for the
System, and observe the response. Increase the gain and repeat the test until the system becomes
oscillatory. At this point, reduce the P gain until the oscillations disappear. This is the maximum
value of P gain achievable.
If a steady state error is present, i.e. the feedback never reaches the setpoint value, the I gain
needs to be increased. As before, increase the I gain and apply the step change. Monitor the
output. If the output becomes oscillatory, reduce the P gain slightly. This should reduce the
steady state error. Increasing the I gain further may reduce the time to achieve zero steady state
error.
These values of P and I can now be adjusted to provide the exact response required for this step
change.
Auto Restart
Parameters SST21 to SST24 provide the facility to automatically reset a choice of trip events and
restart the drive with a programmed number of attempts. If the drive is not successfully started,
a manual or remote trip reset is required.
The number of attempted restarts are recorded. This count is cleared after a trip-free period of
operation (5 minutes or 4 x AUTO RESTART DELAY, whichever is the longer); or after a
successful manual or remote trip reset; or by removing the Run signal (Terminal 7, DIN1).
Refer to Chapter 7: "Trips and Fault Finding" - Hexadecimal Representation of Trips.
650 Series AC Drive
Page 37

Programming Your Application 6-10
Skip Frequencies
Parameters SST11 to SST14 control two programmable skip frequencies that can prevent the
drive from operating at frequencies that cause mechanical resonance in the load.
• Enter the value of the frequency that causes the resonance into the SKIP FREQUENCY
parameter.
• Enter a width for the skip band into the SKIP FREQUENCY BAND parameter.
The drive will then avoid sustained operation within the forbidden band as shown in the
diagram. The skip frequencies are symmetrical and thus work in forward and reverse.
Setting SKIP FREQUENCY or SKIP FREQUENCY BAND to 0 disables the corresponding
band.
Drive
Frequency
Drive
Frequency
Drive
Frequency
Skip band
Skip Frequency
Frequency 1
Frequency 2
Setpoint
Setpoint
650 Series AC Drive
Frequency 1 Frequency 2
Setpoint
Page 38

6-11 Programming Your Application
Minimum Speed Mode
There are two operating modes for the minimum speed feature.
Proportional with Minimum
In this mode the speed setpoint is clamped to be
between the minimum speed value (P3) and 100%.
This is the default for the minimum speed feature.
Linear
In this mode the speed setpoint is
first clamped to be in the range 0 to
100%. It is then rescaled so that the
output goes linearly between the
minimum speed value (P3) and
100% for an input setpoint that goes
between 0% and 100%. If the
minimum speed value (P3) is
negative the speed setpoint will be
internally set to 0%.
output
100
Min
0 100%
output
100
input
Min
-100
0 100%
max =
300.00% – (2 x min)
input
200%
Product-Related Default Values
All examples given in this book are based on a UK, 230V, 50Hz, 0.25kW drive. This manual
provides information about each parameter accessible using the keypad, or MMI (Man Machine
Interface). For more information, refer to the 650 Software Product Manual on our web site:
www.SSDdrives.com.
* Frequency Dependent Parameters
These parameter values (marked with “*” in the Application diagrams) are dependent upon the
drive’s "default frequency".
Changing the "default frequency" parameter from 50Hz to 60Hz, and vice versa, causes the
values of the parameters in the table below to be changed.
To change the "default frequency", power-down the drive. Power-up the drive holding down the
STOP and DOWN keys on the keypad. Release the keys to display the
You are now in a menu containing some sensitive and important parameters.
Press the UP key to display the e 0.02 parameter. Press the M key. The values for this parameter
are: 0 = 50Hz default, 1 = 60Hz default. Select the setting using the UP/DOWN keys and then
press the E key. Power-down the drive and power-up again holding down the UP and DOWN
keys. This resets ALL parameters to their correct default values, including Motor Parameters.
Caution
e
0.01 parameter.
Frequency Dependent Defaults
Display Parameter Function Block Tag 50Hz Operation 60Hz Operation
BASE FREQUENCY MOTOR DATA 1159 50Hz 60Hz
MAX SPEED REFERENCE 57 50Hz 60Hz
650 Series AC Drive
Page 39

Programming Your Application 6-12
** Power Dependent Parameters
These parameters (marked with “**” in the Application diagrams) are set to a value depending
on the drive's overall “power-build” indicated by the Product Code. We recommend that you do
not change the Product Code.
230V Build Power Dependent Defaults
Frame 1 Frame 2
Parameter Function Block Tag 0.25kW 0.37kW 0.55kW 0.75kW 1.1kW 1.5kW
MOTOR CURRENT MOTOR DATA 64
FIXED BOOST FLUXING 107 5.00 % 5.00 % 5.00 % 5.00 % 5.00 % 5.00 %
ACCEL TIME REFERENCE RAMP 258 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s
DECEL TIME REFERENCE RAMP 259 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s
230V Build Power Dependent Defaults
Frame 3
Parameter Function Block Tag 2.2kW 3.0kW 4.0kW
MOTOR CURRENT MOTOR DATA 64
FIXED BOOST FLUXING 107
ACCEL TIME REFERENCE RAMP 258
DECEL TIME REFERENCE RAMP 259
1.50 A 2.20 A 3.00 A 4.00 A 5.50 A 7.00 A
9.60 A 12.30 A 16.40 A
3.00 % 3.00 % 3.00 %
10.0 s 10.0 s 10.0 s
10.0 s 10.0 s 10.0 s
400V Build Power Dependent Defaults
Frame 2
Parameter Function Block Tag 0.37kW 0.55kW 0.75kW 1.1kW 1.5kW 2.2kW
MOTOR CURRENT MOTOR DATA 64
FIXED BOOST FLUXING 107
ACCEL TIME REFERENCE RAMP 258
DECEL TIME REFERENCE RAMP 259
1.50 A 2.00 A 2.50 A 3.50 A 4.50 A 5.50 A
5.00 % 5.00 % 5.00 % 5.00 % 5.00 % 5.00 %
10.0 s 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s
10.0 s 10.0 s 10.0 s 10.0 s 10.0 s 10.0 s
400V Build Power Dependent Defaults
Frame 3
Parameter Function Block Tag 3.0kW 4.0kW 5.5kW 7.5kW
MOTOR CURRENT MOTOR DATA 64
FIXED BOOST FLUXING 107
ACCEL TIME REFERENCE RAMP 258
DECEL TIME REFERENCE RAMP 259
6.80 A 9.00 A 12.00 A 16.00 A
3.00 % 3.00 % 3.00 % 3.00 %
10.0 s 10.0 s 10.0 s 10.0 s
10.0 s 10.0 s 10.0 s 10.0 s
650 Series AC Drive
Page 40

7-1 Trips and Fault Finding
1TRIPS AND FAULT FINDING
Trips
Trip Warning Message
The trip display message is flashed repeatedly on the screen to warn of an imminent trip. Some
trip conditions need time to take effect. The warning can allow you time to rectify the situation.
The message will clear when you use the Keypad, but after a short time will reappear until the
problem is resolved, or the drive trips.
What Happens when a Trip Occurs
When a trip occurs, the drive’s power stage is immediately disabled causing the motor and load
to coast to a stop. The trip is latched until action is taken to reset it. This ensures that trips due to
transient conditions are captured and the drive is disabled, even when the original cause of the
trip is no longer present.
Keypad Indications
If a trip condition is detected the activated alarm is displayed on the MMI display.
Resetting a Trip Condition
All trips must be reset before the drive can be re-enabled. A trip can only be reset once the trip
condition is no longer active, i.e. a trip due to a heatsink over-temperature will not reset until the
temperature is below the trip level.
You can reset the trip as follows:
1. Press the
2. Remove and then re-apply the RUN command and the drive will run normally.
Success is indicated by either
(STOP) key to reset the trip and clear the alarm from the display.
or the Local Setpoint being displayed.
Using the Keypad to Manage Trips
Trip Messages
If the drive trips, then the display immediately shows a message indicating the reason for the
trip. The possible trip messages are given in the table below.
ID Trip Name Possible Reason for Trip
1 OVERVOLTAGE
2 UNDERVOLTAGE
The drive internal dc link voltage is too high:
• The supply voltage is too high
• Trying to decelerate a large inertia load too quickly;
DECEL TIME time too short
The brake resistor is open circuit
DC link low trip:
Supply is too low/power down
650 Series AC Drive
Page 41

Trips and Fault Finding 7-2
ID Trip Name Possible Reason for Trip
3 OVERCURRENT
4 HEATSINK
5 EXTERNAL TRIP
6 INVERSE TIME
7 CURRENT LOOP
8 MOTOR STALLED
9 ANIN FAULT
12 DISPLAY/KEYPAD
13 LOST COMMS
14 CONTACTOR FBK
17 MOTOR
OVERTEMP
The motor current being drawn from the drive is too high:
• Trying to accelerate a large inertia load too quickly;
ACCEL TIME time too short
• Trying to decelerate a large inertia load too quickly;
DECEL TIME time too short
• Application of shock load to motor
• Short circuit between motor phases
• Short circuit between motor phase and earth
• Motor output cables too long or too many parallel
motors connected to the drive
• FIXED BOOST level set too high
Drive heatsink temperature > 100ºC:
• The ambient air temperature is too high
Poor ventilation or spacing between drives
The external trip input is high:
• Check configuration to identify the source of the signal
(non-standard configuration)
A prolonged overload condition, exceeding the Inverse Time
allowance, has caused the trip:
• Remove the overload condition - refer to Chapter 5:
A current of less than 1mA is present when 4-20mA setpoint
is selected:
• Look for a wire break
The motor has stalled (not rotating) Drive in current limit
>200 seconds:
• Motor loading too great
• FIXED BOOST level set too high
AIN2 overload on terminal 3:
• Overcurrent applied in Current mode to terminal 3
Keypad has been disconnected from drive whilst drive is
running in Local Control:
• Keypad accidentally disconnected from drive (indicated
over Comms, or by second keypad)
Lost communications:
• COMMS TIMEOUT parameter set too short
• Master device failed
• Wiring broken
• Incorrect Comms setup
Contactor feedback signal lost:
• Check connection to the terminal wired to "contactor
closed" parameter in Sequencing Logic (non-standard
configuration)
The motor temperature is too high:
• Excessive load
• Motor voltage rating incorrect
• FIXED BOOST level set too high
• Prolonged operation of the motor at low speed without
forced cooling
• Break in motor thermistor connection
P
12
650 Series AC Drive
Page 42

7-3 Trips and Fault Finding
ID Trip Name Possible Reason for Trip
18 CURRENT LIMIT
21 LOW SPEED OVER I
22 10V FAULT
24 DESATURATION
25 DC LINK RIPPLE
26 BRAKE SHORT CCT
28 ANOUT FAULT
29 DIGIO 1 (T9)
FAULT
30 DIGIO 2 (T10)
FAULT
31 UNKNOWN
33 ICAL
- Product Code Error
Software overcurrent trip:
• If the current exceeds 180% of stack rated current for a
period of 1 second, the drive will trip. This is caused by
shock loads. Remove the shock load.
• ACCEL TIME and/or FIXED BOOSTset too high
• DECEL TIME set too low
The motor is drawing too much current (>100%) at zero
output frequency:
• FIXED BOOST level set too high
10V fault:
• +10V REF overload warning (terminal 4) -
10mA maximum
Desaturation:
• Instantaneous overcurrent. Refer to OVERCURRENT in
this table.
The dc link ripple voltage is too high:
• Check for a missing input phase
Brake resistor overcurrent:
• Check brake resistor value is greater than minimum
allowed
AOUT overload on terminal 5:
• 10mA maximum
DIN3 overload on terminal 9:
• 20mA maximum
DOUT2 overload on terminal 10:
• 50mA maximum
Unknown trip
Zero I Current Calibration:
• Current sensor calibration fault. Switch unit off/on. If
persistent, return to factory.
Switch unit off/on. If persistent, return unit to factory
- Calibration Data
Error
- Configuration Data
Error
Switch unit off/on. If persistent, return unit to factory
Press the
persistent, return unit to factory
key to accept the default configuration. If
650 Series AC Drive
Page 43

Trips and Fault Finding 7-4
Hexadecimal Representation of Trips
The tables below show the possible parameter values for the AUTO RESTART TRIGGERS and
AUTO RESTART TRIGGERS+ parameters,
Software Product Manual, "Trips Status" (on our website: www.SSDdrives.com) for additional
trip information that is available over the Comms.
Each trip has a unique, four-digit hexadecimal number number as shown in the tables below.
S
ST23 : AUTO RESTART TRIGGERS
ID User
1 OVERVOLTAGE DCHI 0x0001
2 UNDERVOLTAGE DCLO 0x0002
3 OVERCURRENT OC 0x0004
4 HEATSINK HOT 0x0008
5 EXTERNAL TRIP ET 0x0010
6
7
8
9
12
13 LOST COMMS SCI 0x1000
14 CONTACTOR FBK CNTC 0x2000
Trip Name
(MMI 6901)
INVERSE TIME
CURRENT LOOP
MOTOR STALLED
ANIN FAULT
DISPLAY/KEYPAD
(MMI 6511 & 6521)
S
ST23 and SST24 respectively. Refer to the 650V
Trip Name
Mask
0x0020
0x0040
0x0080
0x0100
0x0800
Disable
9
9
9
9
9
9
9
S
ST24 : AUTO RESTART TRIGGERS+
ID User
17
18 CURRENT LIMIT I HI 0x0002
21 LOW SPEED OVER I LSPD 0x0010
22 10V FAULT T 4 0x0020
24 SHRT SHRT 0x0080
25 DC LINK RIPPLE DCRP 0x0100
26 DBSC DBSC 0x0200
28 ANOUT FAULT T 5 0x0800
29 DIGIO 1 (T9) FAULT T 9 0x1000
30 DIGIO 2 (T10) FAULT T 10 0x2000
31 UNKNOWN TRIP 0x4000
33 ICAL ICAL 0x8000
Keypads (MMIs):
Trips shown as MMI displays in the tables above, i.e. , can be disabled using the
keypads in the TRIPS menu. Other trips, as indicated, can be disabled over the Comms.
Trip Name
(MMI 6901)
MOTOR OVERTEMP
Trip Name
(MMI 6511 & 6521)
Mask +
0x0001
Disable
9
9
9
9
9
9
650 Series AC Drive
6511
6901
6521
Page 44

7-5 Trips and Fault Finding
When more than one trip is to be represented at the same time then the trip codes are simply
added together to form the value displayed. Within each digit, values between 10 and 15 are
displayed as letters A to F
For example referring to the tables above, if the AUTO RESTART TRIGGERS parameter is set
to 04A0, then this represents:
a “4” in digit 3
an “8” and a “2” in digit 2
(8+2 = 10, displayed as A)
an “0” in digit 1
This in turn represents the trips BRAKE SWITCH, ANIN FAULT, MOTOR STALLED and
INVERSE TIME.
In the same way, the AUTO RESTART TRIGGERS+ parameter set to 04A0 would represent
OVERSPEED, ANIN FAULT, DESAT OVER I and 10V FAULT.
Fault Finding
Problem Possible Cause Remedy
Drive will not power-up Fuse blown Check supply details, fit correct fuse.
Check Product Code against Model No.
Faulty cabling Check all connections are correct/secure.
Check cable continuity
Drive fuse keeps blowing Faulty cabling or connections
wrong
Faulty drive Contact Parker SSD Drives
Cannot obtain power-on state Incorrect or no supply available Check supply details
Motor will not run at switch-on Motor jammed Stop the drive and clear the jam
Motor runs and stops Motor becomes jammed Stop the drive and clear the jam
Open circuit speed reference
potentiometer
Check for problem and rectify before
replacing with correct fuse
Check terminal
650 Series AC Drive
Page 45

Routine Maintenance and Repair 8-1
8ROUTINE MAINTENANCE AND REPAIR
Routine Maintenance
Periodically inspect the drive for build-up of dust or obstructions that may affect ventilation of
the unit. Remove this using dry air.
Repair
There are no user-serviceable components.
IMPORTANT: MAKE NO ATTEMPT TO REPAIR THE UNIT - RETURN IT TO PARKER SSD DRIVES.
Saving Your Application Data
In the event of a repair, application data will be saved whenever possible. However, we advise
you to make a note of your application settings before returning the unit.
Returning the Unit to Parker SSD Drives
Please have the following information available:
• The model and serial number - see the unit’s rating label
• Details of the fault
Contact your nearest Parker SSD Drives Service Centre to arrange return of the item.
You will be given a Returned Material Authorisation. Use this as a reference on all paperwork
you return with the faulty item. Pack and despatch the item in the original packing materials; or
at least an anti-static enclosure. Do not allow packaging chips to enter the unit.
Disposal
This product contains materials which are consignable waste under the Special Waste
Regulations 1996 which complies with the EC Hazardous Waste Directive - Directive
91/689/EEC.
We recommend you dispose of the appropriate materials in accordance with the valid
environmental control laws. The following table shows which materials can be recycled and
which have to be disposed of in a special way.
Material Recycle Disposal
metal yes no
plastics material yes no
printed circuit board no yes
The printed circuit board should be disposed of in one of two ways:
1. High temperature incineration (minimum temperature 1200°C) by an incinerator authorised
under parts A or B of the Environmental Protection Act
650 Series AC Drive
2. Disposal in an engineered land fill site that is licensed to take aluminium electrolytic
capacitors. Do not dispose of in a land fill site set aside for domestic waste.
Packaging
During transport our products are protected by suitable packaging. This is entirely
environmentally compatible and should be taken for central disposal as secondary raw material.
Page 46

9-1 Technical Specifications
1Technical Specifications
Understanding the Product Code
Model Number (Europe)
The unit is fully identified using a nine block alphanumeric code which records how the drive
was calibrated, and its various settings when despatched from the factory.
The Product Code appears as the “Model No.” on the product rating label. Each block of the
Product Code is identified as below:
650/003/230/F/00/DISP/UK/0/0
Block 1 2 3 4 5 6 7 8 9
example product code
Frame 1, 2, 3 – Model Number (Europe)
Block No. Variable Description
1 650 Generic Volts/Hertz product
2 XXX Three numbers specifying the power output:
002 = 0.25kW
003 = 0.37kW
005 = 0.55kW
007 = 0.75kW
3 XXX Three numbers specifying the nominal input voltage rating:
4 X One character specifying the use of the Internal RFI Filter:
5 XX Two digits specifying the livery:
6 X Characters speciifying the use of the Keypad:
230 = 220 to 240V (±10%) 50/60Hz
400 = 380 to 460V (±10%) 50/60Hz
0 = Not fitted
F = Internal Supply Filter fitted:
Class A - 400V product
Class A - 230V product, 2.2 to 4.0kW
Class B - 230V product, 0.25 to 1.5kW
00 = Standard Parker SSD Drives Livery
05 = Distributor Livery
(01-04, 06-99 – Defined customer liveries)
0 = Not fitted
DISP = TTL Keypad fitted (not remote mountable)
Block 8 must = 0 with this selection.
DISPR = RS232 Keypad fitted (remote
mountable). Block 8 must = RS0 with this
selection.
011 = 1.1kW
015 = 1.5kW
022 = 2.2kW
030 = 3.0kW
040 = 4.0kW
055 = 5.5kW
075 = 7.5kW
650 Series AC Drive
7 XX Two Characters specifying the user labelling language:
FR French (50Hz)
GR German (50Hz)
IT Italian (50Hz)
SP Spanish (50Hz)
(figures in brackets are the drive’s default base frequency
setting,
P
7)
UK English (50Hz )
US English (60Hz)
Page 47

Technical Specifications 9-2
Frame 1, 2, 3 – Model Number (Europe)
Block No. Variable Description
8 X Characters specifying the RS232 (P3) port fitting:
0 = No RS232 port (drive uses TTL Keypad)
RS0 = RS232 port (drive uses RS232 Keypad)
9 X
Numbers specifying any special option:
0 = Standard Product
001-999 = special option fitted
Catalog Number (North America)
The unit is identified using a 4 block alphanumeric code which records how the drive was
calibrated, and its various settings when dispatched from the factory.
The Product Code appears as the “Cat No.”. Each block of the Product Code is identified as
below:
650/00F3/230/F
Block 1 2 3 4
example product code
Products with TTL Keypad
Frame 1, 2, 3 – Catalog Number (North America)
Block
No.
Variable Description
1 650 Generic product
2 XXXX Four characters specifying the power output in Hp:
00F3 = 0.3Hp
00F5 = 0.5Hp
00F7 = 0.75Hp
0001 = 1Hp
3 XXX Three numbers specifying the nominal input voltage rating:
4 X One character specifying the use of the Internal RFI Filter:
230 230 (±10%) 50/60Hz
460 380 to 460V (±10%) 50/60Hz
0 = Not fitted
F = Internal Supply Filter fitted:
Class A - 400V product
Class B - 230V product
01F5 = 1.5Hp
0002 = 2Hp
0003 = 3Hp
0005 = 5Hp
0007 = 7Hp
0010 = 10Hp
650 Series AC Drive
Page 48

9-3 Technical Specifications
Environmental Details
Operating Temperature
Storage Temperature
Shipping Temperature
Product Enclosure
Rating
Cubicle Rating Cubicle to provide 15dB attenuation to radiated emissions between 30-100MHz. It
Altitude If >1000 metres (3300 feet) above sea level, derate Motor Power Rating by 1% per
Humidity
Atmosphere Non flammable, non corrosive and dust free
Climatic Conditions Class 3k3, as defined by EN50178 (1998)
Vibration
0°C to 40°C
-25°C to +55°C
-25°C to +70°C
IP20 (UL Open Type) suitable for cubicle mount only
must also require a security tool for opening
100 metres (330 feet)
Maximum 85% relative humidity at 40°C non-condensing
Test Fc of EN60068-2-6
10Hz<=f<=57Hz sinusoidal 0.075mm amplitude
57Hz<=f<=150Hz sinusoidal 1g
10 sweep cycles per axis on each of three mutually perpendicular axis
Safety
Pollution Degree
Overvoltage Category
Pollution Degree ll (non-conductive pollution, except for temporary condensation)
Overvoltage Category III (numeral defining an impulse withstand level)
Power Details
1-Phase Supply 220-240V ac ±10%,50/60Hz ±10%, ground referenced (TN) or
non-ground referenced (IT)
3-Phase Supply 220-240V or 380-460V ac ±10%,50/60Hz ±10%, ground referenced (TN) or
non-ground referenced (IT)
Supply Power Factor
(lag)
Output Frequency 0 – 240Hz
Overload 150% for 30 seconds
Maximum Supply Short
Circuit Rating
0.9 (@ 50/60Hz)
220-240V 1φ product -5000A, 220-240V 3φ product -7500A
380-460V 3φ product -10000A
User Relay
Terminals RL1A, RL1B.
Maximum Voltage 250Vac
Maximum Current 4A resistive load
Sample Interval 10ms
650 Series AC Drive
Page 49

Technical Specifications 9-4
Electrical Ratings
Motor power, output current and input current must not be exceeded under steady state
operating conditions.
Maximum Motor dv/dt = 10,000V/μs. This can be reduced by adding a motor choke in series
with the motor. Contact Eurotherm Drives for recommended choke details.
Local wiring regulations always take precedence. Select cable rated for the drive.
The supply must be protected with a fuse (or Type B RCD) rated to the supply cable.
Note: For 3-phase units Frames 2 & 3, the Surge Current is less than the running current.
FRAME 1 : 1-Phase (IT/TN), 230V
Drive
Power
(kW/hp)
0.25/0.3 19/12 4.2 1.5 26
0.37/0.5 19/12 6.2 2.2 32
0.55/0.75 20/14 7.9 3.0 41
0.75/1.0 22/15 10.5 4.0 52
Drive
Power
(kW/hp)
1.1/1.5 24/17 13.8 5.5 65
1.5/2.0 25/18 16.0 7.0 82
Drive
Power
(kW/hp)
0.37/0.5 2.5 1.5 26
0.55/0.75 3.3 2.0 32
0.75/1.0 4.1 2.5 40
1.1/1.5 5.9 3.5 55
1.5/2.0 7.5 4.5 61
2.2/3.0 9.4 5.5 70
Drive
Power
(kW/hp)
* 2.2/3.0
Drive
Power
(kW/hp)
* 2.2/3.0
3.0/4 18.1 12.3 133
4.0/5 23.1 16.4 180
Drive
Power
(kW/hp)
3.0/4 11.1 6.8 80
4.0/5 13.9 9.0 100
5.5/7.5 18.0 12.0 136
7.5/10 23.6 16.0 180
Input Current @ 5kA
Surge Current
peak/rms for 10ms (A)
FRAME 2 : 1-Phase (IT/TN), 230V
Input Current @ 5kA
Surge Current
peak/rms for 10ms (A)
FRAME 2 : 3-Phase (IT/TN), 400V
Input Current @ 10kA
(A)
FRAME 3 : 1-Phase (IT/TN), 230V
Input Current @ 7.5kA
(A)
22.0 9.6 112
FRAME 3 : 3-Phase (IT/TN), 230V
Input Current @ 7.5kA
(A)
14.3 9.6 103
FRAME 3 : 3-Phase (IT/TN), 400V
Input Current @ 10kA
(A)
(A)
(A)
Output Current @ 40 oC
(A) ac
Output Current @ 40 oC
(A) ac
Output Current @ 40 oC
(A) ac
Output Current @ 40 oC
(A) ac
Output Current @ 40 oC
(A) ac
Output Current @ 40 oC
(A) ac
Maximum Power
Loss
(W)
Maximum Power
Loss
(W)
Maximum Power
Loss
(W)
Maximum Power
Loss
(W)
Maximum Power
Loss
(W)
Maximum Power
Loss
(W)
* The Frame 3, 2.2kW drive is capable of operating on a 1-phase or 3-phase supply.
650 Series AC Drive
Page 50

9-5 Technical Specifications
Analog Inputs/Outputs
Terminals AIN1, AIN2, AOUT1.
Inputs Output
Range 0-10V and 0-5V (no sign) set via parameter SIP13 (AIN1)
0-10V, 0-5V, 0-20mA or 4-20mA (no sign) set via
parameter
S
IP23 (AIN2)
Absolute maximum input current 25mA in current mode
Absolute maximum input voltage 24V dc in voltage mode
Impedance
Voltage input 20kΩ
Current Input <6V @ 20mA
Resolution 10 bits (1 in 1024) 10 bits (1 in 1024)
Dynamic Response Sampled every 10ms Bandwidth 15Hz
Digital Inputs
Terminals DIN1, DIN2, DIN3, DIN4.
Operating Range 0-5V dc = OFF, 15-24V dc = ON
(absolute maximum input voltage ±30V dc)
IEC1131
Input Current 7.5mA @ 24V
Sample Interval 10ms
0-10V (no sign)
Maximum rated output
current 10mA, with short
circuit protection
24V
ON
15V
undefined state
5V
OFF
0V
Digital Outputs
Terminals DOUT2 (DOUT1 is reserved for future models).
Nominal Open Circuit Output Voltage 23V (minimum 19V)
Nominal Output Impedance
33Ω
Rated Output Current 50mA
Cabling Requirements for EMC Compliance
Power Supply Cable Motor Cable Brake Resistor Cable Signal/Control Cable
Cable Type
(for EMC Compliance)
Segregation
Length Limitations
With Internal AC Supply
EMC Filter
Length Limitations
Without Internal AC
Supply EMC Filter
Screen to Earth
Connection
Output Choke
* Maximum motor cable length under any circumstances
Unscreened Screened/armoured Screened/armoured Screened
From all other wiring
(clean)
Unlimited *25 metres
Unlimited 25 metres 25 metres 25 metres
Both ends Both ends Drive end only
From all other wiring (noisy)
25 metres
300 metres
maximum
From all other wiring
(sensitive)
25 metres
650 Series AC Drive
Page 51

Technical Specifications 9-6
(
)
(
)
Internal Dynamic Braking Circuit
The dynamic braking circuit is intended for with short term stopping or braking.
DC link brake voltage : 750V
Motor Power
(kW/Hp)
0.37/0.5 1.5 1.5 1.1/1.5 500
0.55/0.75 1.5 1.5 1.1/1.5 500
0.75/1.0 1.5 1.5 1.1/1.5 500
1.1/1.5 1.5 1.5 1.1/1.5 500
1.5/2.0 3.75 3.75 2.8/3.75 200
2.2/3.0 3.75 3.75 2.8/3.75 200
2.2/3.0 7.0 7.0 2.72 56
2.2/3.0 7.0 7.0 2.72 56
3.0/4 10.8 10.8 4.23 36
4.0/5 14.0 14.0 5.44 28
3.0/4 7.5 2.3 5.6/7.5 100
4.0/5 7.5 2.3 5.6/7.5 100
5.5/7.5 13.5 4.0 10/13.4 56
7.5/10 13.5 4.0 10/13.4 56
Brake Switch
Peak Current
(A)
Brake Switch
Continuous Current
(A)
Frame 2 : 3 Phase (IT/TN), 400V, 100% duty
Frame 3 : 1 Phase (IT/TN), 230V, 100% duty
Frame 3 : 3 Phase (IT/TN), 230V, 100% duty
Frame 3 : 3 Phase (IT/TN), 400V, 30% duty
Peak Brake
Dissipation
(kW/Hp)
Minimum Brake
Resistor Value
(Ω)
External Brake Resistor
All 650 units are supplied without braking resistors. The dynamic brake switch terminals
(where fitted) allow easy connection to an external resistor. These resistors should be
mounted on a heatsink (back panel) and covered to prevent injury from burning.
Recommended Brake Resistors
The following brake resistors are avialable from Parker SSD Drives:
Brake Resistor Value : Frame 2 : 200Ω, 100W - CZ467714; 500Ω, 60W - CZ467715
Frame 3 : 28Ω, 500W (2 x 56Ω in parallel) - CZ467716; 36Ω, 500W - CZ388396;
56Ω, 500W - CZ467716; 100Ω, 200W - CZ467717
Alternative Brake Resistor Selection
Brake resistor assemblies must be rated to absorb both peak braking power during
deceleration and the average power over the repeated cycles.
2
Peak brakingpower P
pk
Average braking power P
00055 n n
=
=
av
J
t
b
P
pk
x tb
t
c
×−
×
.
1
2
2
W
J- total inertia (kgm
- initial speed (rpm)
n
1
- final speed (rpm)
n
2
- braking time (s)
t
b
- cycle time (s)
t
c
Obtain information on the peak power rating and the average power rating of the resistors from the resistor
manufacturer. If this information is not available, a large safety margin must be incorporated to ensure that the resistors
are not overloaded. By connecting these resistors in series and in parallel the braking capacity can be selected for the
application.
IMPORTANT: The minimum resistance of the combination and maximum dc link voltage must be as
specified.
Resistor Derating Graph
chassis mounted
free air
Ambient Temp (C)
% of Rated
Power
120
100
80
60
40
20
0
0 25 50 75 100 125 150 175 200
2
)
650 Series AC Drive
Page 52

9-7 Technical Specifications
∑
Q
Supply Harmonic Analysis (230V filtered)
Assumptions: (Short circuit fault to Neutral)
5kA short circuit supply capability at 230V 1φ, equivalent to 146μH supply impedance
7.5kA short circuit supply capability at 230V 3φ, equivalent to 56μH supply impedance
10kA short circuit supply capability at 400V 3φ, equivalent to 73μH supply impedance
=
h2
2
h
THD(V) x 100
where Q
The results conform to stage 1 and stage 2 of the Engineering Recommendation G.5/4 February 2001,
Classification ‘C’: Limits for Harmonics in the UK Electricity Industry.
Drive Type 650
Motor Power (kW) 0.25 0.37 0.55 0.75 1.1 1.5 2.2 3.0 4.0
Fundamental Voltage (V) 230 230 230 230 230 230 230 230 230
Typical Motor Efficiency % 85 85 85 85 85 85 85 85 85
Harmonic No. RMS Current (A)
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
40
Total RMS Current (A) 8.2 7.5 9.3 9.9 10.9 12.5
THD (V) % 0.3559 0.0972 0.5426 0.5733 0.6277 0.7055
is the rated rms value of the fundamental voltage of the supply transformer.
1n
7.4 7.5 7.8 8.2 9.0 10.3 TBA TBA TBA
1.4 0.2 1.9 2.2 2.9 3.9
2.9 0.4 4.4 4.6 4.8 5.2
1.1 0.5 1.9 2.0 2.3 2.5
0.2 0.2 0.2 0.3 0.4 0.4
0.1 0.1 0.2 0.2 0.2 0.3
0.0 0.1 0.1 0.1 0.1 0.1
0.1 0.0 0.1 0.1 0.1 0.1
0.0 0.1 0.0 0.0 0.0 0.1
0.0 0.0 0.0 0.0 0.0 0.1
0.0 0.0 0.0 0.0 0.0 0.1
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0
=
Q
1n
=
h40
%
650 Series AC Drive
Page 53

Technical Specifications 9-8
∑
Q
Supply Harmonic Analysis (400V filtered)
Assumptions: (Short circuit fault to Neutral)
5kA short circuit supply capability at 230V 1φ, equivalent to 146μH supply impedance
7.5kA short circuit supply capability at 230V 3φ, equivalent to 56μH supply impedance
10kA short circuit supply capability at 400V 3φ, equivalent to 73μH supply impedance
=
h2
2
h
THD(V) x 100
where Q
The results conform to stage 1 and stage 2 of the Engineering Recommendation G.5/4 February 2001,
Classification ‘C’: Limits for Harmonics in the UK Electricity Industry.
Drive Type 650
Motor Power (kW) 0.37 0.55 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5
Fundamental Voltage (V) 400 400 400 400 400 400 400 400 400 400
Typical Motor Efficiency % 85 85 85 85 85 85 85 85 85 85
is the rated rms value of the fundamental voltage of the supply transformer.
1n
=
Q
1n
=
h40
Harmonic No. RMS Current (A)
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
40
Total RMS Current (A) 1.4 2.1 2.8 4.0 5.1 7.2 9.5 12.0 15.8 20.8
THD (V) % 0.1561 0.2158 0.2776 0.3859 0.4393 0.5745 0.6994 0.8111 0.9899 1.2110
0.6 1.0 1.3 1.9 2.6 3.8 5.2 6.9 9.5 12.9
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.6 0.9 1.2 1.8 2.4 3.5 4.7 6.2 8.3 11.1
0.6 0.9 1.2 1.7 2.3 3.3 4.3 5.5 7.3 9.5
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.5 0.8 1.0 1.5 1.9 2.6 3.3 3.9 4.8 5.7
0.0 0.7 0.9 1.3 1.6 2.2 2.7 3.0 3.5 3.9
0.4 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.4 0.6 0.7 1.0 1.1 1.4 1.6 1.5 1.4 1.2
0.0 0.5 0.6 0.9 0.9 1.1 1.1 0.9 0.8 0.7
0.3 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.2 0.3 0.4 0.6 0.5 0.5 0.4 0.3 0.5 0.7
0.0 0.3 0.3 0.4 0.3 0.3 0.2 0.4 0.5 0.7
0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.1 0.2 0.2 0.2 0.1 0.2 0.3 0.4 0.4 0.4
0.0 0.1 0.1 0.1 0.1 0.2 0.3 0.3 0.3 0.3
0.1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.1 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.3
0.0 0.1 0.1 0.1 0.1 0.2 0.1 0.1 0.2 0.3
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
%
650 Series AC Drive
Page 54

9-9 Technical Specifications
∑
Q
Supply Harmonic Analysis (230V unfiltered)
Assumptions: (Short circuit fault to Neutral)
5kA short circuit supply capability at 230V 1φ, equivalent to 146μH supply impedance
7.5kA short circuit supply capability at 230V 3φ, equivalent to 56μH supply impedance
10kA short circuit supply capability at 400V 3φ, equivalent to 73μH supply impedance
=
h2
2
h
THD(V) x 100
where Q
The results conform to stage 1, stage 2 and stage 3 of the Engineering Recommendation G.5/3 September
1976, Classification ‘C’: Limits for Harmonics in the UK Electricity Industry.
Drive Type 650
Motor Power (kW)
Fundamental Voltage (V)
Typical Motor Efficiency %
Harmonic No. RMS Current (A)
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
40
Total RMS Current (A) 3.2 4.8 6.7 8.3 11.7 15.3
THD (V) % 0.5633 0.8016 1.0340 1.0944 1.4611 1.7778
is the rated rms value of the fundamental voltage of the supply transformer.
1n
0.25 0.37 0.55 0.75 1.1 1.5 2.2 3.0 4.0
230 230 230 230 230 230 230 230 230
85 85 85 85 85 85 85 85 85
1.3 2.0 2.9 3.9 5.7 7.8 TBA TBA TBA
1.3 1.9 2.9 3.8 5.5 7.4
1.2 1.9 2.7 3.5 5.0 6.7
1.1 1.7 2.5 3.1 4.4 5.4
1.1 1.6 2.2 2.7 3.7 4.6
1.0 1.4 1.9 2.2 2.9 3.4
0.8 1.2 1.6 1.6 2.1 2.3
0.7 1.0 1.3 1.2 1.4 1.4
0.6 0.8 1.0 0.8 0.8 0.7
0.5 0.7 0.7 0.4 0.4 0.3
0.4 0.5 0.5 0.2 0.2 0.4
0.3 0.3 0.3 0.2 0.3 0.4
0.2 0.2 0.1 0.2 0.3 0.4
0.1 0.1 0.1 0.2 0.3 0.3
0.1 0.1 0.1 0.2 0.2 0.2
0.0 0.1 0.1 0.1 0.1 0.1
0.0 0.1 0.1 0.1 0.1 0.2
0.0 0.1 0.1 0.1 0.1 0.2
0.1 0.1 0.1 0.1 0.1 0.1
0.0 0.1 0.1 0.1 0.1 0.1
0.0 0.0 0.0 0.0 0.0 0.0
=
Q
1n
=
h40
%
650 Series AC Drive
Page 55

Technical Specifications 9-10
∑
Q
Supply Harmonic Analysis (400V unfiltered)
Assumptions: (Short circuit fault to Neutral)
5kA short circuit supply capability at 230V 1φ, equivalent to 146μH supply impedance
7.5kA short circuit supply capability at 230V 3φ, equivalent to 56μH supply impedance
10kA short circuit supply capability at 400V 3φ, equivalent to 73μH supply impedance
=
h2
2
h
THD(V) x 100
where Q
The results conform to stage 1, stage 2 and stage 3 of the Engineering Recommendation G.5/3 September
1976, Classification ‘C’: Limits for Harmonics in the UK Electricity Industry.
Drive Type 650
Motor Power (kW)
Fundamental Voltage (V)
Typical Motor Efficiency %
is the rated rms value of the fundamental voltage of the supply transformer.
1n
0.37 0.55 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5
400 400 400 400 400 400 400 400 400 400
85 85 85 85 85 85 85 85 85 85
=
Q
1n
=
h40
Harmonic No. RMS Current (A)
1
3
5
7
9
11
13
15
17
19
21
23
25
27
29
31
33
35
37
39
40
Total RMS Current (A) 1.5 2.1 2.8 4.0 5.1 7.4 9.5 12.4 16.0 20.6
THD (V) % 0.1634 0.2209 0.2817 0.3569 0.4444 0.5886 0.7107 0.8896 1.0127 1.2138
0.6 0.9 1.3 1.9 2.6 3.8 5.2 6.9 9.5 12.7
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.6 0.9 1.2 1.8 2.4 3.6 4.7 6.3 8.4 11.0
0.6 0.9 1.2 1.7 2.3 3.3 4.3 5.7 7.4 9.5
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.5 0.8 1.0 1.5 1.9 2.6 3.3 4.2 4.9 5.8
0.5 0.7 0.9 1.3 1.6 2.2 2.7 3.4 3.7 4.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.4 0.6 0.7 0.9 1.2 1.5 1.6 1.9 1.5 1.3
0.4 0.5 0.6 0.8 0.9 1.1 1.1 1.3 0.8 0.7
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.3 0.4 0.4 0.5 0.5 0.5 0.4 0.4 0.5 0.7
0.2 0.3 0.3 0.3 0.4 0.3 0.2 0.3 0.5 0.7
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.1 0.2 0.2 0.2 0.1 0.2 0.2 0.3 0.4 0.4
0.1 0.1 0.1 0.1 0.1 0.2 0.3 0.3 0.3 0.3
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.1 0.1 0.1 0.1 0.1 0.2 0.2 0.2 0.2 0.3
0.0 0.1 0.1 0.1 0.1 0.2 0.2 0.1 0.2 0.2
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
%
650 Series AC Drive
Page 56

10-1 Certification for the Drive
9CERTIFICATION FOR THE DRIVE
Requirements for EMC Compliance
Earthing Requirements
IMPORTANT: Protective earthing always takes precedence over EMC earthing.
Protective Earth (PE) Connections
Note: In accordance with installations to EN60204, only one protective earth conductor is
permitted at each protective earth terminal contacting point.
Local wiring regulations may require the protective earth connection of the motor to be
connected locally, i.e. not as specified in these instructions. This will not cause shielding
problems because of the relatively high RF impedance of the local earth connection.
EMC Earth Connections
For compliance with EMC requirements, the “0V/signal ground” is to be separately earthed.
When a number of units are used in a system, these terminals should be connected together at a
single, local earthing point.
Control and signal cables connections should be made with screeened cables, with the screen
connected only at the VSD end. However, if high frequency noise is still a problem, earth screen
at the non VSD end via a 0.1μF capacitor.
Note: Connect the screen (at the VSD end) to the VSD protective earth point, and not to the
control board terminals.
Requirements for UL Compliance
Solid-State Motor Overload Protection
These devices provide Class 10 motor overload protection. The maximum internal overload
protection level (current limit) is 150% for 30 seconds.
An external motor overload protective device must be provided by the installer where the motor
has a full-load ampere rating of less than 50% of the drive output rating; or when the DISABLE
STALL trip (
Short Circuit Rating
The following drives are suitable for use on a circuit capable of delivering not more than:
220-240V product, 1φ - 5000 RMS Symmetrical Amperes
220-240V product, 3φ - 7500 RMS Symmetrical Amperes
380-460V product, 3φ -10000 RMS Symmetrical Amperes
Solid-State Short-Circuit Protection
These devices are provided with Solid-State Short-Circuit (output) Protection. Branch circuit
protection requirements must be in accordance with the latest edition of the National Electrical
Code NEC/NFPA-70.
S
STLL) is set to True (1).
650 Series AC Drive
Recommended Branch Circuit Protection
It is recommended that UL Listed (JDDZ) non-renewable cartridge fuses, Class K5 or H; or UL
Listed (JDRX) renewable cartridge fuses, Class H, are installed upstream of the drive.
Motor Base Frequency
The motor base frequency rating is 240Hz maximum.
Field Wiring Temperature Rating
Use 75°C Copper conductors only.
Page 57

Certification for the Drive 10-2
Field Wiring Terminal Markings
For correct field wiring connections that are to be made to each terminal refer to Chapter 3:
“Installing the Drive” - Wiring Guidelines.
Terminal Tightening Torque
Refer to Chapter 3: “Installing the Drive” – Terminal Tightening Torque.
Terminal/Wire Sizes
North American wire sizes (AWG) are based on NEC/NFPA-70 for ampacities of
thermoplastic-insulated (75ºC) copper conductors.
Power input and output wire sizes should allow for an ampacity of 125% of the rated input and
output amperes for motor branch-circuit conductors as specified in NEC/NFPA-70. Refer to
Chapter 3: “Installing the Drive” – Terminal Block Acceptance Sizes.
Input Fuse Ratings
If fitted, fuses should be in accordance with NEC/NFPA-70.
FRAME 1 : 1-Phase (IT/TN), 230V
Input Current @ 5kA Drive Power
(kW/hp)
0.25/0.3 4.2 10
0.37/0.5 6.2 10
0.55/0.75 7.9 10
0.75/1.0 10.5 15
FRAME 2 : 1-Phase (IT/TN), 230V
Input Current @ 5kA Drive Power
(kW/hp)
1.1/1.5 13.8 20
1.5/2.0 16.0 20
FRAME 2 : 3-Phase (IT/TN), 400V
Drive Power
(kW/hp)
0.37/0.5 2.5 10
0.55/0.75 3.3 10
0.75/1.0 4.1 10
1.1/1.5 5.9 10
1.5/2.0 7.5 10
2.2/3.0 9.4 15
Drive Power
(kW/hp)
2.2/3.0 22.0 30
Drive Power
(kW/hp)
2.2/3.0 14.3 20
3.0/4 18.1 25
4.0/5 23.1 30
Drive Power
(kW/hp)
3.0/4 11.1 15
4.0/5 13.9 20
5.5/7.5 18.0 25
7.5/10 23.6 30
Input Current @ 10kA
FRAME 3 : 1-Phase (IT/TN), 230V
Input Current @ 7.5kA
FRAME 3 : 3-Phase (IT/TN), 230V
Input Current @ 7.5kA
FRAME 3 : 3-Phase (IT/TN), 400V
Input Current @ 10kA
(A)
(A)
(A)
(A)
(A)
(A)
Supply Fuse Rating (A)
10 x 38mm
Supply Fuse Rating (A)
10 x 38mm
Supply Fuse Rating (A)
10 x 38mm
Supply Fuse Rating (A)
10 x 38mm
Supply Fuse Rating (A)
10 x 38mm
Supply Fuse Rating (A)
10 x 38mm
650 Series AC Drive
Page 58

10-3 Certification for the Drive
Field Grounding Terminals
The field grounding terminals are identified with the International Grounding Symbol
(IEC Publication 417, Symbol 5019).
Operating Ambient Temperature
Devices are considered acceptable for use in a maximum ambient temperature of 40°C (can be
derated up to 50°C).
European Directives and the CE Mark
CE Marking for Low Voltage Directive
When installed in accordance with this manual, the 650 Series AC Drive is CE marked by
Parker SSD Drives in accordance with the low voltage directive (S.I. No. 3260 implements this
LVD directive into UK law). An EC Declaration of Conformity (low voltage directive) is
included at the end of this chapter.
CE Marking for EMC - Who is Responsible?
Note: The specified EMC emission and immunity performance of this unit can only be achieved
when the unit is installed to the EMC Installation Instructions given in this manual.
According to S.I. No. 2373 which implements the EMC directive into UK law, the requirement
for CE marking this unit falls into two categories:
1. Where the supplied unit has an intrinsic/direct function to the end user, then the unit is
classed as relevant apparatus. In this situation the responsibility for certification rests with
Parker SSD Drives. The Declaration of Conformity is included at the end of this Chapter.
2. Where the supplied unit is incorporated into a higher system/apparatus or machine which
includes (at least) the motor, cable and a driven load but is unable to function without this
unit, then the unit is classed as a component. In this circumstance, the reponsibility rests
with the manufacturer/supplier/installer of the system/apparatus/machine.
EMC Compliance
All Models
All models are compliant with BS EN61800-3.
Radiated Emissions EN50081-1(1992) and EN61800-3 unrestricted distribution when mounted inside the
specified cubicle, see above. Control and motor cables must be screened and
correctly fitted with glands where they exit the cubicle. Control 0V must be connected
to protective earth/ground.
Immunity EN50082-1 (1997), EN61800-3 (1997), EN61000-6-2 (1999)
FRAME 1 & 2: 1-Phase (TN only),
Conducted Emissions EN50081-1(1992), EN61800-3 unrestricted distribution,
maximum motor cable length: 25m
FRAME 2 & 3 : 3-Phase, FRAME 3 : 1-Phase (TN only)
Conducted Emissions EN50081-2(1993), EN61800-3 restricted distribution
maximum motor cable length: 25m
650 Series AC Drive
Page 59

Certification for the Drive 10-4
Certificates
650 0.25 - 4.0KW 230V
Issued for
compliance
with the EMC
Directive when
the unit is used
as relevant
apparatus.
This is
provided to aid
your
justification for
EMC
compliance
when the unit
is used as a
component.
EC DECLARATIONS OF CONFORMITY
EMC Directive
In accordance with the EEC Directive
2004/108/EC
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment) is in accordance with the
relevant clauses from the following standard:-
BSEN61800-3 (2004)
Date CE marked first applied: 26/07/2001
MANUFACTURERS DECLARATIONS
EMC Declaration
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment) is in accordance with the
relevant clauses from the following standard:-
BSEN61800-3 (2004)
Low Voltage Directive
In accordance with the EEC Directive
2006/95/EC
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment), is in accordance with the
following standard :-
EN61800 (2007)
Machinery Directive
The above Electronic Products are components
to be incorporated into machinery and may not
be operated alone.
The complete machinery or installation using
this equipment may only be put into service
when the safety considerations of the Directive
89/392/EEC are fully adhered to.
Particular reference should be made to
EN60204-1 (Safety of Machinery - Electrical
Equipment of Machines).
All instructions, warnings and safety
information of the Product Manual must be
adhered to.
The drive is CE
Since the
marked in
accordance with
the low voltage
directive for
electrical
equipment and
appliances in the
voltage range
when installed
correctly.
potential hazards
are mainly
electrical rather
than mechanical,
the drive does not
fall under the
machinery
directive.
However, we do
supply a
manufacturer's
declaration for
when the drive is
used(as a
component) in
machinery.
Dr Martin Payn (Conformance Officer)
# Compliant with these immunity standards without specified EMC filters.
PARKER SSD DRIVES
NEW COURTWICK LANE, LITTLEHAMPTON, WEST SUSSEX BN17 7RZ
TELEPHONE: +44(0)1903 737000 FAX: +44(0)1903 737100
Registered Number: 4806503 England. Registered Office: 55 Maylands Avenue, Hemel Hempstead, Herts HP2 4SJ
650 Series AC Drive
Page 60

10-5 Certification for the Drive
Certificates
650 0.37 - 7.5KW 400V
Issued for
compliance
with the EMC
Directive when
the unit is used
as relevant
apparatus.
This is
provided to aid
your
justification for
EMC
compliance
when the unit
is used as a
component.
EC DECLARATIONS OF CONFORMITY
EMC Directive
In accordance with the EEC Directive
2004/108/EC
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment) is in accordance with the
relevant clauses from the following standard:-
BSEN61800-3 (2004)
Date CE marked first applied: 26/07/2001
MANUFACTURERS DECLARATIONS
EMC Declaration
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment) is in accordance with the
relevant clauses from the following standard:-
BSEN61800-3 (2004)
Low Voltage Directive
In accordance with the EEC Directive
2006/95/EC
We Parker SSD Drives, address as below,
declare under our sole responsibility that the
above Electronic Products when installed and
operated with reference to the instructions in
the Product Manual (provided with each piece
of equipment), is in accordance with the
following standard :-
EN61800 (2007)
Machinery Directive
The above Electronic Products are components
to be incorporated into machinery and may not
be operated alone.
The complete machinery or installation using
this equipment may only be put into service
when the safety considerations of the Directive
89/392/EEC are fully adhered to.
Particular reference should be made to
EN60204-1 (Safety of Machinery - Electrical
Equipment of Machines).
All instructions, warnings and safety
information of the Product Manual must be
adhered to.
The drive is CE
Since the
marked in
accordance with
the low voltage
directive for
electrical
equipment and
appliances in the
voltage range
when installed
correctly.
potential hazards
are mainly
electrical rather
than mechanical,
the drive does not
fall under the
machinery
directive.
However, we do
supply a
manufacturer's
declaration for
when the drive is
used(as a
component) in
machinery.
Dr Martin Payn (Conformance Officer)
# Compliant with these immunity standards without specified EMC filters.
PARKER SSD DRIVES
NEW COURTWICK LANE, LITTLEHAMPTON, WEST SUSSEX BN17 7RZ
TELEPHONE: +44(0)1903 737000 FAX: +44(0)1903 737100
Registered Number: 4806503 England. Registered Office: 55 Maylands Avenue, Hemel Hempstead, Herts HP2 4SJ
650 Series AC Drive
Page 61

5SERIAL COMMUNICATIONS
Connection to the P3 Port
IMPORTANT: The drive MUST be earthed. Failure to do so could damage your communications ports.
The port is an un-isolated RS232, 19200 Baud. Contact Parker SSD Drives for further
information.
The P3 port is located under the terminal cover and is used only by the remote-mounted RS232
Keypad.
P3 Port
A standard P3 lead is used to connect to the drive.
1 2 3 4
Serial Communications 11-1
P3 Port Pin Lead Signal
1 Black 0V
2 Red 5V
3 Green TX
4 Yellow RX
Note: There is 5V present on pin 2 of the P3 port - do not connect this to your PC.
650 Series AC Drive
Page 62

12-1 Applications
12APPLICATIONS
The Default Application
The drive is supplied with 6 Applications, Application 0 to Application 5. Each Application
recalls a pre-programmed structure of internal links when it is loaded.
• Application 0 will not control a motor. Loading Application 0 removes all internal links.
DEFAULT
IMPORTANT: Refer to Chapter 5: The Keypad – Special Menu Features to reset the drive to factory
How to Load an Application
• Application 1 is the factory default application, providing for basic speed control
• Application 2 supplies speed control using a manual or auto setpoint
• Application 3 supplies speed control using preset speeds
• Application 4 is a set-up providing speed control with Raise/Lower Trim
• Application 5 supplies speed control with Run Forward/Run Reverse
default values which are suitable for most applications.
In the menu, go to and press the key twice.
The Applications are stored in this menu.
Use the
Press the
keys to select the appropriate Application by number.
key to load the Application.
Application Description
Control Wiring for Applications
The large Application Diagrams on the following pages show the full wiring for push-button
starting. The diagrams on the reverse show the full wiring for single wire starting.
For the minimum connections to make the drive run refer to Chapter 3: "Installing the Drive" Electrical Installation; the remaining connections can be made to suit your system.
When you load an Application, the input and output parameters shown in these diagrams default
to the settings shown. For alternative user-settings refer to the Software Product Manual,
Chapter 1 "Programming Your Application".
Key to Application Diagrams
normally open contact (relay)
normally open push-button
2-position switch
normally closed push-button
650 Series AC Drive
Page 63

Application 1 : Basic Speed Control (default)
p1 Application
p2 Max speed
p3 Min speed
p4 Accel time
p5 Decel time
p6 Motor current
p7 Base frequency
p8 Jog setpoint
p9 Run stop mode
p11 V/F shape
STANDARD PARAMETERS
p12 Normal duty
p13 Fixed boost, (VF only)
p99 Password
Frequency Hz
DC Link Volts V
Motor Current A
Speed Setpoint %
DIAGNOSTICS
Applications 12-2
SPEED DEMAND
PWM CONTROL
F
V
P5 DECEL TIME
RAMP
P4 ACCEL TIME
= 1
P11 V/F SHAPE
0 = CONSTANT TORQUE
RL1A RL1B
1 = VARIABLE TORQUE
0 NONE
1 HEALTH
OP31 RELAY
R
= 1
Application 1:
NORMAL DUTY AND HEAVY
Basic Speed Control
IDEAL FOR GENERAL PURPOSE APPLICATIONS
Italic text indicates Default
User Relay
50/60Hz base frequency
4 AT ZERO
2 TRIPPED
3 RUNNING
5 AT SPEED
I NOMINAL
P6
P7 BASE FREQ
P13 V BOOST
6 AT LOAD
0 NONE
1 HEALTH
OP21 DIGIO2
F
V
2 TRIPPED
3 RUNNING
4 AT ZERO
5 AT SPEED
V
VT
F
CT
6 AT LOAD
CURRENT LIMIT
I FDBK
V/F SHAPING
LOGIC
SEQUENCING
1 DEMAND%
2 CURRENT%
0 NONE
3 PID ERROR%
4 RAISE/LOWER%
P9 STOP MODE
P8 JOG SPD
P3 MIN SPEED
0 0-10V
1 0-5V
2 0-20mA
OP01 ANOUT
3 4-20mA
FWD/REV
REFERENCE SELECT
MIN/MAX SPEED
0 0-10V
1 0-5V
IP23 AIN2 TYPE
IP13 AIN1 TYPE
P2 MAX SPEED
Speed
650 Series AC Drive
STARTING
PUSH-BUTTON
10
DIN4/
DOUT2
NOT STOP
9
DIN3
JOG
7
8
DIN2
DIN1
DIRECTION
RUN FORWARD
6
+24V
AOUT1
RAMP OUTPUT
4
5
AIN2
+10V REF
= 1
Speed Meter
3
AIN1
SPEED
2
1
0V
= 0
SETPOINT
= 3
SPEED TRIM 4-20mA
Page 64

12-3 Applications
Application 1: Basic Speed Control (default)
This Application is ideal for general purpose applications. It provides push-button or switched start/stop control. The
setpoint is the sum of the two analogue inputs AIN1 and AIN2, providing Speed Setpoint + Speed Trim capability.
Control
Terminal
SINGLE
WIRE
STARTING
A or V
default source
= 4-20mA
10k Speed
Setpoint
10
DIN4/DOUT2 NOT STOP
9
DIN3 JOG 24V = jog
DIN2 DIRECTION 0V = remote forward, 24V = remote reverse
8
7
DIN1 RUN FORWARD 24V = run forward
6
+24V
5
AOUT RAMP OUTPUT
4
+10V REF
AIN2 SPEED TRIM
3
AIN1 SPEED SETPOINT
2
0V
1
24V
+10V REF
0V
24V = RUN FWD & RUN REV signals latched,
0V = RUN FWD & RUN REV signals not latched
= 1
DEMAND (0V = 0%, 10V = 100%)
= 3
4mA = 0%, 20mA = 100%
= 0
0V = 0%, 10V = 100%
User Relay
RL1A
RL1B
DOUT3 RELAY SOURCE
= 1
HEALTH i.e. 0V = not healthy
650 Series AC Drive
Page 65

Application 2 : Auto/Manual Control
Frequency Hz
p1 Application
p2 Max speed
p3 Min speed
p4 Accel time
p5 Decel time
p6 Motor current
p7 Base frequency
p8 Jog setpoint
p9 Run stop mode
p11 V/F shape
STANDARD PARAMETERS
p12 Normal duty
p13 Fixed boost, (VF only)
p99 Password
DC Link Volts V
Motor Current A
Speed Setpoint %
DIAGNOSTICS
Applications 12-4
SPEED DEMAND
PWM CONTROLV/F SHAPING
F
V
P5 DECEL TIME
RAMP
P4 ACCEL TIME
= 2
= 1
Auto/Manual
Application 2:
Level Sensor
WITH LIMIT SWITCHES OR PROXIMITY TRANSDUCERS
IDEAL FOR AUTOMATIC CONTROL APPLICATIONS
Level
Limit
Switch
Italic text indicates Default
User Relay
P11 V/F SHAPE
0 = CONSTANT TORQUE
1 = VARIABLE TORQUE
0 NONE
1 HEALTH
OP31 RELAY
R
RL1A RL1B
P6 I RATED
P7 BASE FREQ
50/60Hz base frequency
4 AT ZERO
2 TRIPPED
3 RUNNING
P13 V BOOST
6 AT LOAD
5 AT SPEED
OP21 DIGIO2
F
V
0 NONE
1 HEALTH
2 TRIPPED
V
VT
CT
3 RUNNING
4 AT ZERO
5 AT SPEED
6 AT LOAD
RUN SELECT
CURRENT LIMIT
I FDBK
F
LOGIC
SEQUENCING
P3 MIN SPEED
0 0-10V
1 0-5V
2 0-20mA
FWD/REV
MIN/MAX SPEED
3 4-20mA
IP23 AIN2 TYPE
P2 MAX SPEED
REF SELECT
0 0-10V
1 0-5V
IP13 AIN1 TYPE
Pump
AUTOMATIC
LEVEL CONTROL
650 Series AC Drive
Auto / Manual Selector
Auto
Speed
Reference
DIN4/
STARTING
PUSH-BUTTON
8
9
10
DIN1
DIN2
DIN3
DOUT2
SELECT
AUTO RUN
REMOTE REVERSE
5
6
7
+24V
AOUT1
MANUAL RUN
Speed Meter
RAMP OUTPUT
3
4
AIN2
+10V REF
= 1
1
2
0V
AIN1
= 0
MANUAL
SETPOINT
= 3
AUTO SETPOINT 4-20mA
Page 66

12-5 Applications
Application 2: Auto/Manual Control
Two Run inputs and two Setpoint inputs are provided. The Auto/Manual switch selects which pair of inputs is active.
The Application is sometimes referred to as Local/Remote.
Control
Terminal
SINGLE
WIRE
STARTING
A or V
default source
= 4-20mA
Auto
Setpoint
Manual
Setpoint
10
DIN4/DOUT2
9
DIN3 SELECT 24V = run forward
DIN2
8
7
DIN1 MANUAL RUN 24V = run forward
6
+24V
5
AOUT RAMP OUTPUT
4
+10V REF
AIN2 AUTO SETPOINT
3
AIN1 MANUAL SETPOINT
2
0V
1
REMOTE REVERSE 0V = remote forward, 24V = remote reverse
AUTO RUN 24V = run forward
24V
+10V REF
0V
DEMAND (0V = 0%, 10V = 100%)
= 1
= 3
4mA = 0%, 20mA = 100%
= 0
0V = 0%, 10V = 100%
User Relay
RL1A
RL1B
DOUT3 (relay)
RELAY SOURCE
= 1
HEALTH i.e. 0V = not healthy
650 Series AC Drive
Page 67

Application 3 : Preset Speeds
p1 Application
p2 Max speed
p3 Min speed
p4 Accel time
p5 Decel time
p6 Motor current
p7 Base frequency
p8 Jog setpoint
p9 Run stop mode
p11 V/F shape
STANDARD PARAMETERS
p12 Normal duty
Frequency Hz
DC Link Volts V
Motor Current A
p13 Fixed boost, (VF only)
p99 Password
Speed Setpoint %
DIAGNOSTICS
Applications 12-6
SPEED DEMAND
SPEED DEMAND
PWM CONTROL
F
V
P5 DECEL TIME
RAMP
ACCEL TIME
P4
= 3
Application 3:
MULTIPLE DISCRETE SPEED LEVELS
Preset Speeds
IDEAL FOR APPLICATIONS REQUIRING
Italic text indicates Default
0 = CONSTANT TORQUE
1 = VARIABLE TORQUE
0 NONE
1 HEALTH
V/F SHAPE
P7 BASE FREQ
P11
50/60Hz base frequency
4 AT ZERO
2 TRIPPED
3 RUNNING
6 AT LOAD
5 AT SPEED
R
I NOMINAL
P6
F
VT
CT
V
P13 V BOOST
1234567
0
DIN3 DIN2 PRESET
SEQUENCING LOGIC
0V 0V 0V
0V 0V 24V
DIN4/
DOUT2
CURRENT LIMIT
F
V/F SHAPING
0V 24V 0V
0V 24V 24V
I FDBK
V
24V 0V 0V
24V 0V 24V
24V 24V 0V
(SCALABLE)
24V 24V 24V
P3 MIN SPEED
0
P301 PRESET 0
P302 PRESET 11P303 PRESET 2
FWD/REV
MIN/MAX SPEED
2
P306 PRESET 5
P305 PRESET 4
P304 PRESET 3
P2 MAX SPEED
6
P307 PRESET 6
P308 PRESET 7
2 Clean
3 Operate 1
4 Operate 2
Preset 1 Setup
Speeds
650 Series AC Drive
OP31 RELAY
RL1A
= 1
User Relay
RL1B
P9 STOP MODE
P9 STOP MODE
9
10
DIN4/
DIN3
DOUT2
STARTING
PUSH-BUTTON
PRESET SELECT 3
PRESET SELECT 2
8
DIN2
PRESET SELECT 1
DIN1
5
6
7
+24V
AOUT1
+10V REF
RUN FORWARD
Speed Meter
RAMP OUTPUT
4
= 1
3
AIN2
2
AIN1
SPEED
SETPOINT
1
0V
= 3
= 0
SPEED TRIM 4-20mA
Page 68

12-7 Applications
Application 3: Preset Speeds
This is ideal for applications requiring multiple discrete speed levels.
The setpoint is selected from either the sum of the analogue inputs, (as in Application 1 and known here as PRESET 0), or
as one of up to seven other pre-defined speed levels. These are selected using DIN2, DIN3 and DIN4, refer to the Truth
Table below.
P
Edit parameters
achieved by entering a negative speed setpoint.
SINGLE
WIRE
STARTING
A or V
default source
= 4-20mA
302 to P308 on the keypad to re-define the speed levels of PRESET 1 to PRESET 7. Reverse direction is
Control
Terminal
10
10
Speed Trim
Speed
Setpoint
DIN4/DOUT2
9
9
DIN3 PRESET SELECT 2 see truth table below
DIN2
8
8
7
7
DIN1 RUN FORWARD 24V = run forward
6
6
+24V
5
5
AOUT RAMP OUTPUT
4
4
+10V REF
3
AIN2 SPEED TRIM
3
2
AIN1 SPEED SETPOINT
2
1
0V
1
PRESET SELECT 3 see truth table below
PRESET SELECT 1 see truth table below
24V
= 1
+10V REF
= 3
= 0
0V
DEMAND (0V = 0%, 10V = 100%)
4mA = 0%, 20mA = 100% (Preset 0)
0V = 0%, 10V = 100% (Preset 0)
User Relay
RL1A
RL1B
DOUT3 (relay)
RELAY SOURCE
HEALTH i.e. 0V = not healthy
= 1
Preset Speed Truth Table
DIN4/DOUT2 DIN3 DIN2 Preset
0V 0V 0V 0
0V 0V 24V 1
0V 24V 0V 2
0V 24V 24V 3
24V 0V 0V 4
24V 0V 24V 5
24V 24V 0V 6
24V 24V 24V 7
650 Series AC Drive
Page 69

Application 4 : Raise/Lower Trim
Applications 12-8
SPEED DEMAND
PWM CONTROLV/F SHAPING
p1 Application
p2 Max speed
p3 Min speed
p4 Accel time
p5 Decel time
p6 Motor current
p7 Base frequency
p8 Jog setpoint
p9 Run stop mode
p11 V/F shape
p12 Normal duty
p13 Fixed boost, (VF only)
STANDARD PARAMETERS
p99 Password
DIAGNOSTICS
= 4
= 1
Application 4:
SPEED CONTROL FROM MULTIPLE
Raise/Lower Trim
IDEAL FOR APPLICATIONS
Italic text indicates Default
Frequency Hz
DC Link Volts V
Motor Current A
Speed Setpoint %
P7 BASE FREQ
P11 V/F SHAPE
0 = CONSTANT TORQUE
50/60Hz base frequency
1 = VARIABLE TORQUE
P6 I NOMINAL
P13 V BOOST
F
F
V
VT
CT
V
CURRENT LIMIT
V
I FDBK
F
P5 DECEL TIME
P3 MIN SPEED
P9 STOP MODE
RAMP
FWD/REV
MIN/MAX SPEED
P4 ACCEL TIME
P2 MAX SPEED
650 Series AC Drive
OP31 RELAY
R
RL1A RL1B
User Relay
0 NONE
2 TRIPPED
1 HEALTH
PUSH-BUTTON
4 AT ZERO
3 RUNNING
6 AT LOAD
5 AT SPEED
STARTING
DOUT2
DIN4/
10
RESET
TIME
VALUE
RAMP TIME
P401
DIN3
MIN VALUE
P403
P402 MAX VALUE
8
9
DIN1
DIN2
RAISE INPUT
LOWER INPUT
Speed
RUN FORWARD
VALUE
RESET VALUE
P404
SEQUENCING LOGIC
5
6
7
+24V
AOUT1
+10V REF
Speed Meter
RAMP OUTPUT
4
= 1
3
AIN2
2
AIN1
RAISE / LOWER
1
0V
Page 70

12-9 Applications
Application 4: Raise/Lower Trim
This Application mimics the operation of a motorised potentiometer. Digital inputs allow the setpoint to be increased and
decreased between limits. The limits and ramp rate can be set using the keypad.
The Application is sometimes referred to as Motorised Potentiometer.
Control
Terminal
SINGLE
WIRE
STARTING
User Relay
10
8
7
6
5
4
3
2
1
RL1A
RL1B
DIN4/DOUT2
9
DIN3 LOWER INPUT 24V = lower input
DIN2
DIN1 RUN FORWARD 24V = run forward
+24V
AOUT RAMP OUTPUT
+10V REF
AIN2 Not Used
AIN1 Not Used
0V
DOUT3 (relay)
RESET 24V = reset Raise/Lower
RAISE INPUT 24V = raise input
24V
+10V REF
0V
RELAY SOURCE HEALTH i.e. 0V = not healthy
DEMAND (0V = 0%, 10V = 100%)
= 1
= 1
650 Series AC Drive
Page 71

Application 5 : PID
Applications 12-10
SPEED DEMAND
PWM CONTROL
p1 Application
p2 Max speed
p3 Min speed
p4 Accel time
p5 Decel time
p6 Motor current
p7 Base frequency
p8 Jog setpoint
p9 Run stop mode
p11 V/F shape
p12 Normal duty
p13 Fixed boost, (VF only)
STANDARD PARAMETERS
p99 Password
= 5
APPLICATIONS REGULATING VOLUME OR PRESSURE,
PI Control
Application 5:
SUCH AS AIR HANDLING OR PUMPING
EASY TUNING FOR SETPOINT/FEEDBACK CONTROL
Italic text indicates Default
Frequency Hz
DC Link Volts V
Motor Current A
Speed Setpoint %
DIAGNOSTICS
P7 BASE FREQ
P11 V/F SHAPE
1 = VARIABLE TORQUE
2 TRIPPED
3 RUNNING
1 HEALTH
50/60Hz base frequency
4 AT ZERO
6 AT LOAD
5 AT SPEED
0 = CONSTANT TORQUE
0 NONE
OP31 RELAY
P6 I NOMINAL
P13 V BOOST
F
F
V
VT
CT
V
CURRENT LIMIT
V
I FDBK
F
V/F SHAPING
P5 DECEL TIME
P8 JOG SPD
P9 STOP MODE
P3 MIN SPEED
LOGIC
SEQUENCING
RAMP
FWD/REV
REFERENCE SELECT
MIN/MAX SPEED
P4 ACCEL TIME
P2 MAX SPEED
Transducer
650 Series AC Drive
R
User Relay
RL1A RL1B
= 1
STARTING
PUSH-BUTTON
Pressure or Volume Feedback
Speed
Setpoint
10
DIN4/
DOUT2
NOT STOP
8
9
DIN2
DIN3
JOG
REMOTE REVERSE
2 CURRENT%
0 NONE
1 DEMAND
3 PID ERROR%
4 RAISE/LOWER%
5
6
7
+24V
AOUT1
+10V REF
DIN1
RUN FORWARD
Speed Meter
RAMP OUTPUT
OP01 ANOUT
3
4
AIN2
= 1
PID CONTROL
1
2
0V
AIN1
= 3
PROCESS
SETPOINT
P GAIN
P501
P502 I GAIN
= 3
PROCESS FEEDBACK 4-20mA
Page 72

12-11 Applications
Application 5: PID
A simple application using a Proportional-Integral-Derivative 3-term controller. The setpoint is taken from AIN1, with
feedback signal from the process on AIN2. The scale and offset features of the analogue input blocks may be used to
correctly scale these signals. The difference between these two signals is taken as the PID error. The output of the PID
block is then used as the drive setpoint.
Control
Terminal
SINGLE
WIRE
STARTING
A or V
default source
= 4-20mA
10k Speed
Setpoint
User Relay
10
RL1A
RL1B
DIN4/DOUT2 NOT STOP
9
DIN3 JOG
DIN2 REMOTE REVERSE
8
7
DIN1 RUN FORWARD
6
+24V
5
AOUT RAMP OUTPUT
4
+10V REF
AIN2 PROCESS FEEDBACK
3
AIN1 PROCESS SETPOINT
2
0V
1
DOUT3 (relay)
24V
+10V REF
0V
RELAY SOURCE HEALTH i.e. 0V = not healthy
24V = RUN FWD & RUN REV signals latched,
0V = RUN FWD & RUN REV signals not latched
24V = jog
0V = remote forward, 24V = remote reverse
24V = run forward
DEMAND (0V = 0%, 10V = 100%)
= 1
4mA = 0%, 20mA = 100%
= 3
= 0
0V = 0%, 10V = 100%
= 1
650 Series AC Drive
 Loading...
Loading...