

Page 1

Panasonic
Minas A4 系列 AC 伺服驱动器
技术资料选编
上海松浩自动化设备有限公司
Page 2
i
Minas A4 系列驱动器技术资料选编
目 录
1.规格型号说明 1
1-1.伺服驱动器型号说明 1
1-2.驱动器与电机的组合
1-3.驱动器与电机的尺寸 3
1-4.技术规格 5
2.外形与接插件 9
2-1.接插件外形与清单
2-2.电源插头 X1、X2 和编码器插头 X6 11
2-3.控制信号接口 X5 12
2-3-1.位置控制模式控制信号接线图
2-3-2.速度控制模式控制信号接线图 13
2-3-3.控制信号接线详解 14
3.接线图 26
3-1.电缆规格与最大长度 26
3-2.I/O 控制信号插头,编码器插头和外部反馈装置插头
3-3.接线指示 26
3-3-1.连接到电源接线端子的电缆 26
3-3-2.连接到控制信号接口 X5
3-3-3.连接到编码器信号接口 X6 34
4.参数 36
4-1.参数概略
4-2.参数详解 39
4-3.电子齿轮功能 56
5.时序图 57
6.保护功能 60
7.操作说 明 65
8.增益调整 72
8-1.调整方法与框图
8-2.实时自动增益调整 73
8-3.常规自动增益调整 76
8-4.适配增益调整
8-5.自动调整功能的禁止 80
8-6.增益自动设置功能 81
8-6.手动调整增益 82
9.控制框图 93
10.销售及技术服务信息 95
-cawin—abridged—jul04-
2
9
12
26
29
36
72
78
Page 3
Minas A4 系列驱动器技术资料选编
1.型号规格说明
1-1.伺服驱动器型号说明
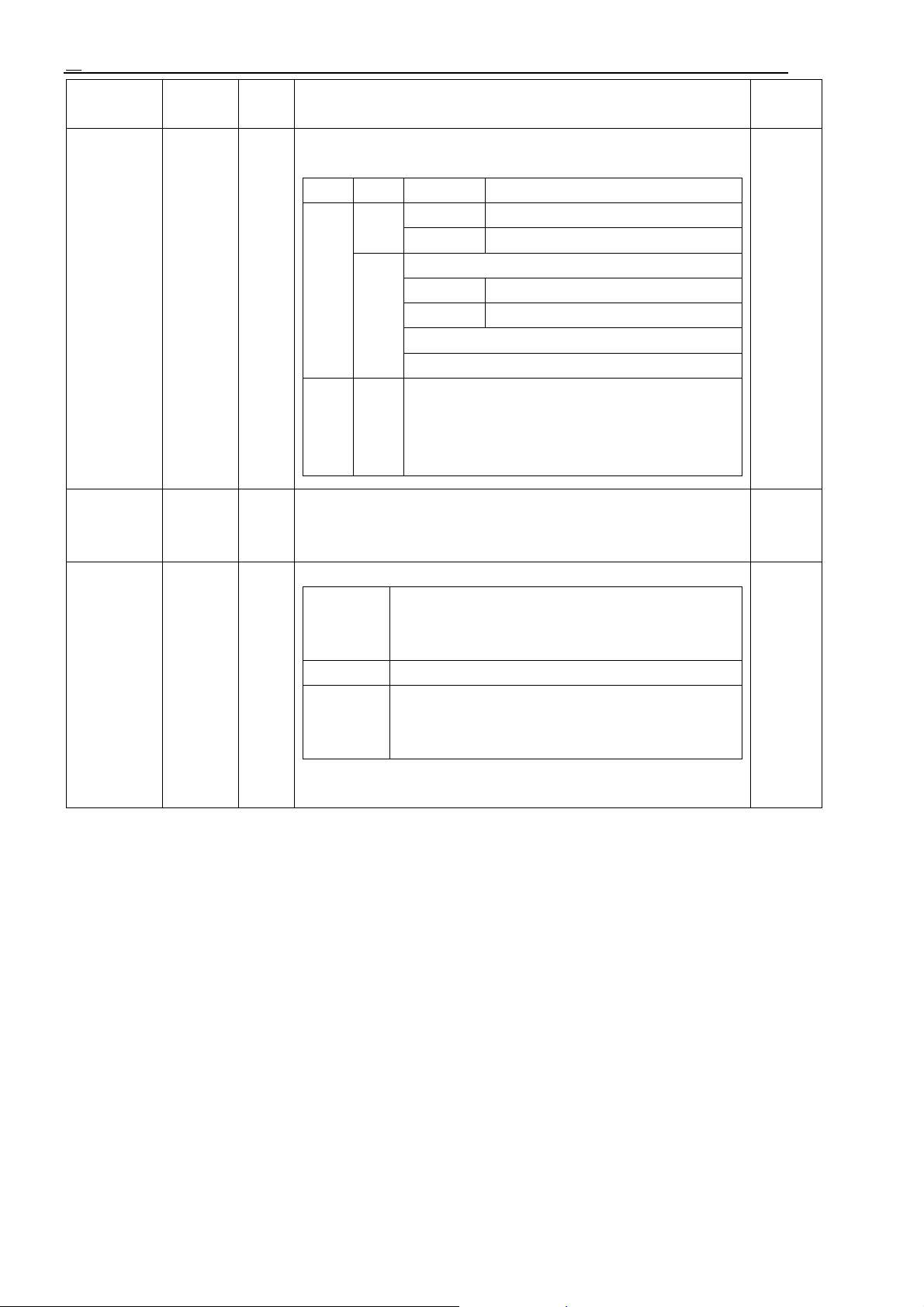
1-1-1.预期使用期限
在如下运行条件下,伺服驱动器预期可以使用 28,000 小时。
输入电源
运行条件
伺服驱动器的可用期限与其运行工况密切相关。
环境温度 55℃
输出转矩 按额定转矩输出
电机转速 按额定转速输出
单相 100VAC,50/60Hz;
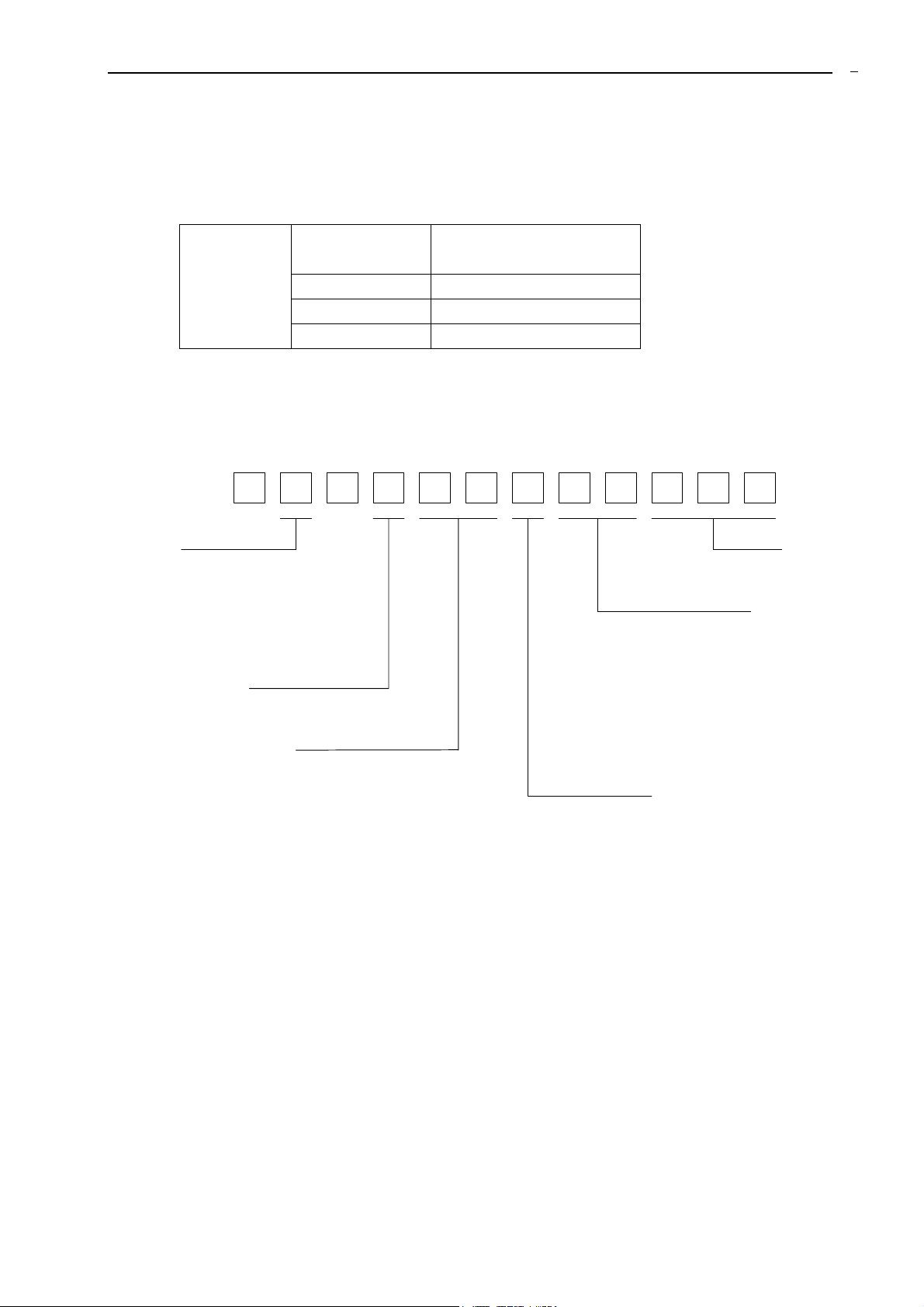
1-1-2.驱动器型号说明
1 2 3 4 5 6 7 8 9 10 11 12
1
三相 200VAC,50/60Hz
M A D D 1 2 0 5
A4系列驱动器类型
A:A型驱动器
B:B型驱动器
C:C型驱动器
D:D型驱动器
E:E型驱动器
F:F型驱动器
交流伺服驱动器
D:A4系列
最大瞬时输出电流
T1:10A
T2:15A
T3:30A
T5:50A
T7:75A
TA:100A
TB:150A
T
定制序号
电流检测器的额定电流
05:5A
07:7.5A
10:10A
20:20A
30:30A
40:40A
64:64A
90:90A
A2:120A
输入电源电压
1:单相100V
2:单相200V
3:三相100V
5:单相/三相200V
Page 4
2
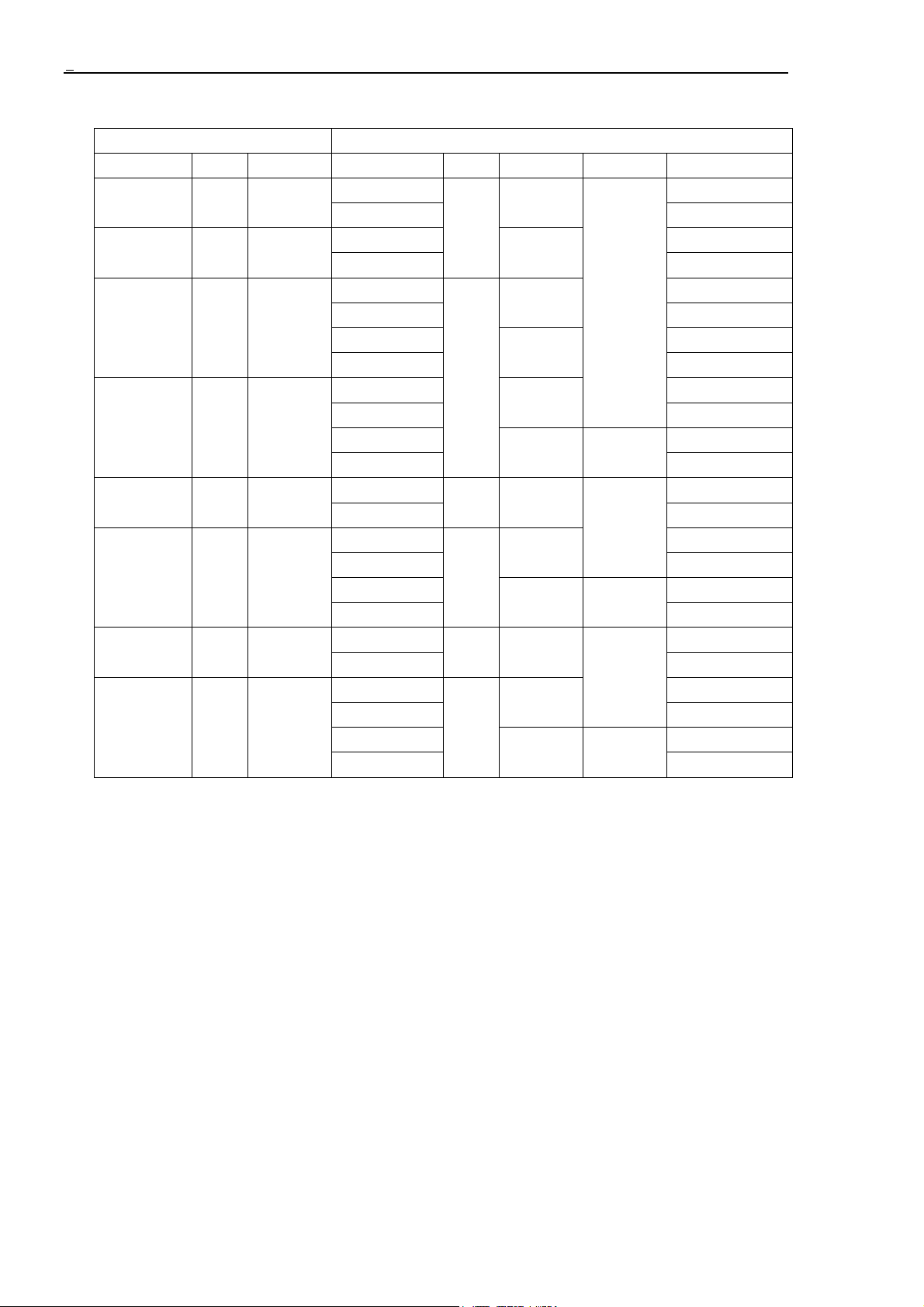
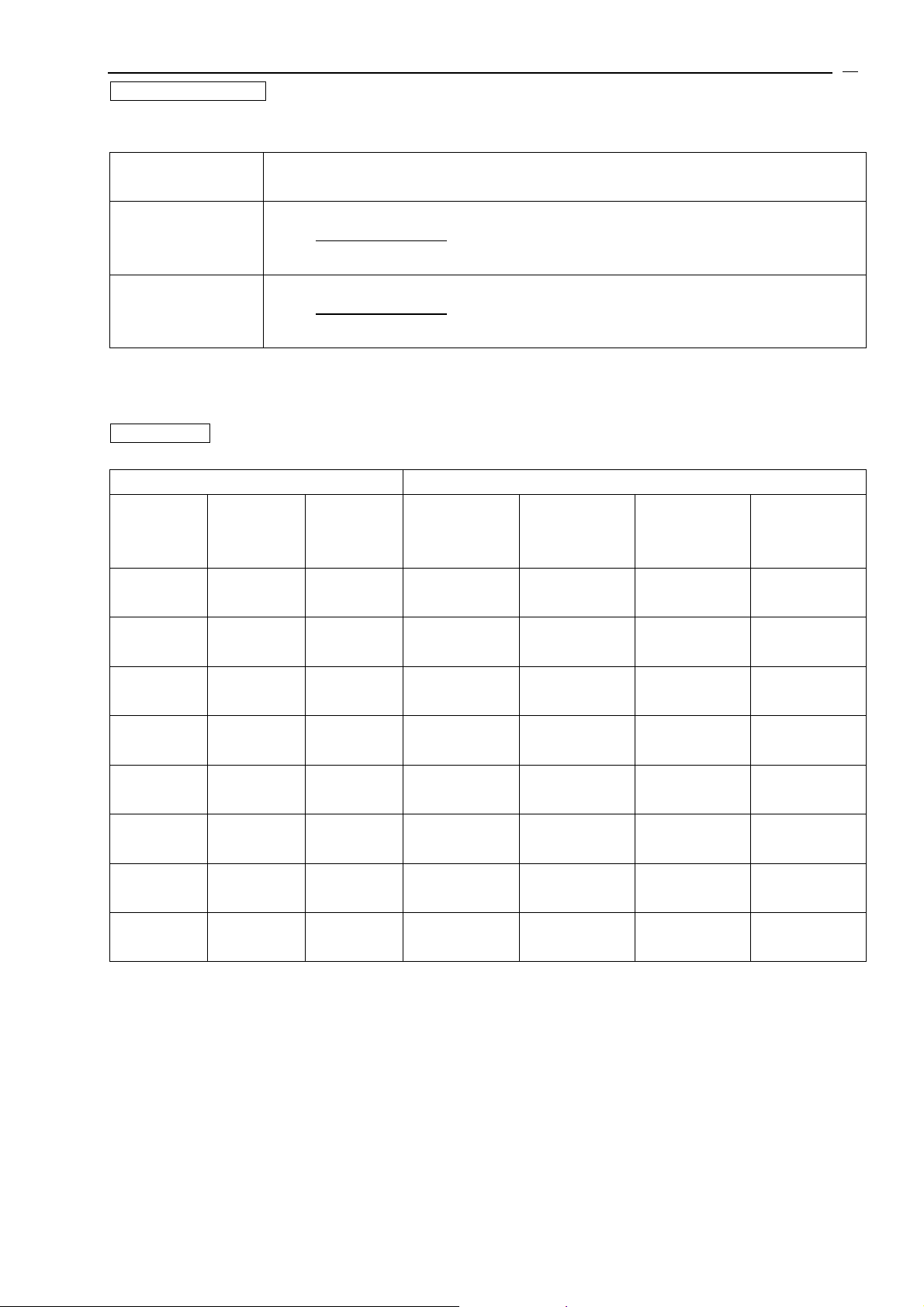
1-2.驱动器与电机的组合
伺服驱动器 适配电机
型号 类型 输入电源 型号 电压 额定功率 额定转速 编码器规格
MADDT1105
MADDT1107
MADDT1205
MADDT1207
MBDDT2110
MBDDT2210
MCDDT3120
MCDDT3520
A 型 单相 100V
单相 100V
A 型
单相 200V
A 型
A 型 单相 200V
B 型 单相 100V
B 型 单相 200V
C 型 单相 100V
C 型
单相/三相
200V
MSMD5AZP1*
MSMD5AZS1*
MSMD011P1*
MSMD011S1*
MSMD5AZP1*
MSMD5AZS1*
MSMD012P1*
MSMD012S1*
MSMD022P1*
MSMD022S1*
MAMA012P1*
MAMA012S1*
MSMD021P1*
MSMD021S1*
MSMD042P1*
MSMD042S1*
MAMA022P1*
MAMA022S1*
MSMD041P1*
MSMD041S1*
MSMD082P1*
MSMD082S1*
MAMD042P1*
MAMD042S1*
50W
100V
100W
50W
100W
200V
200W
100W 5000rpm
100V 200W
400W
200V
200W 5000rpm
100V 400W
750W
200V
400W 5000rpm
Minas A4 系列驱动器技术资料选编
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
3000rpm
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
3000rpm
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
3000rpm
5 线制,2500p/r
7 线制,17 位
5 线制,2500p/r
7 线制,17 位
Page 5
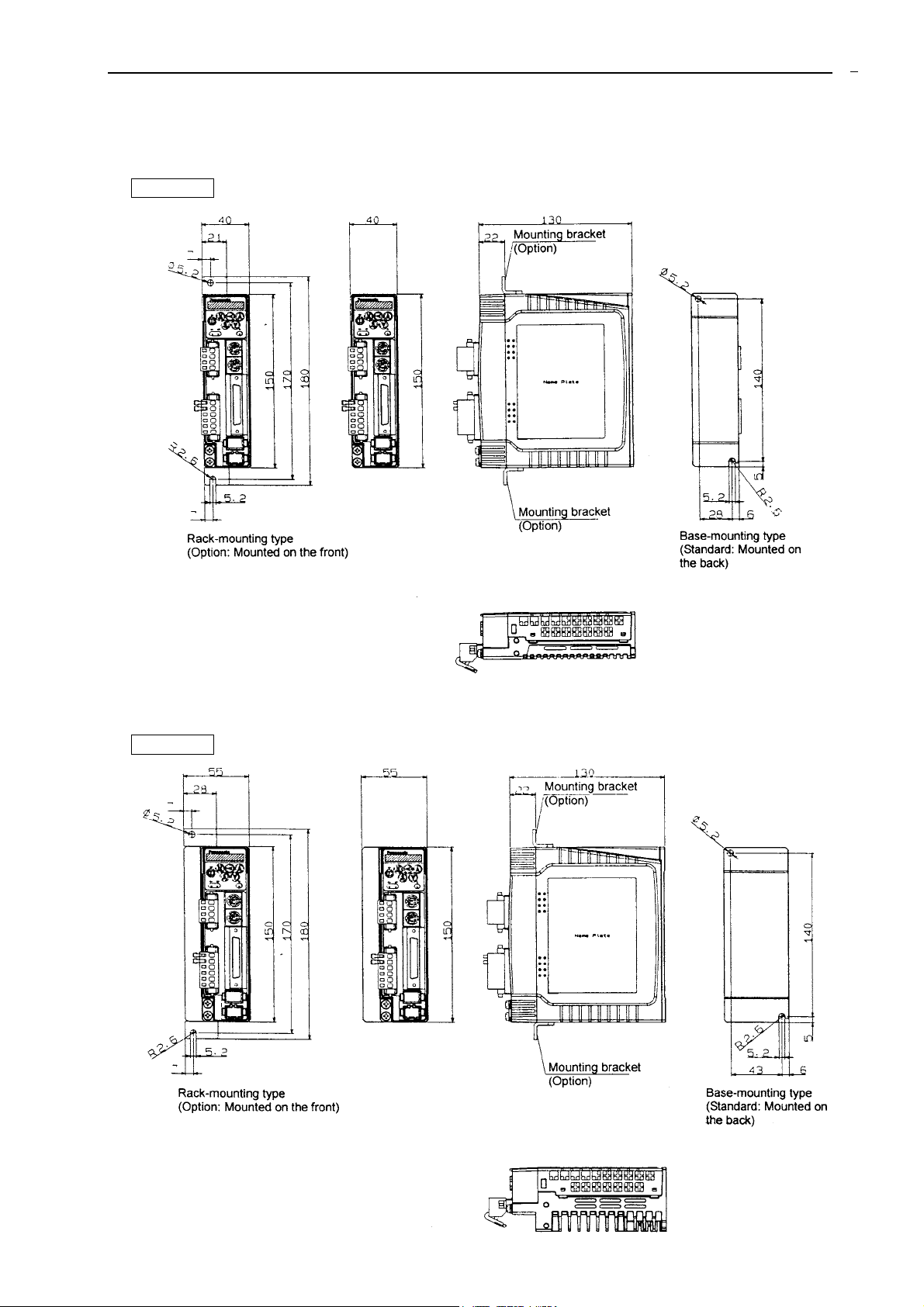
Minas A4 系列驱动器技术资料选编
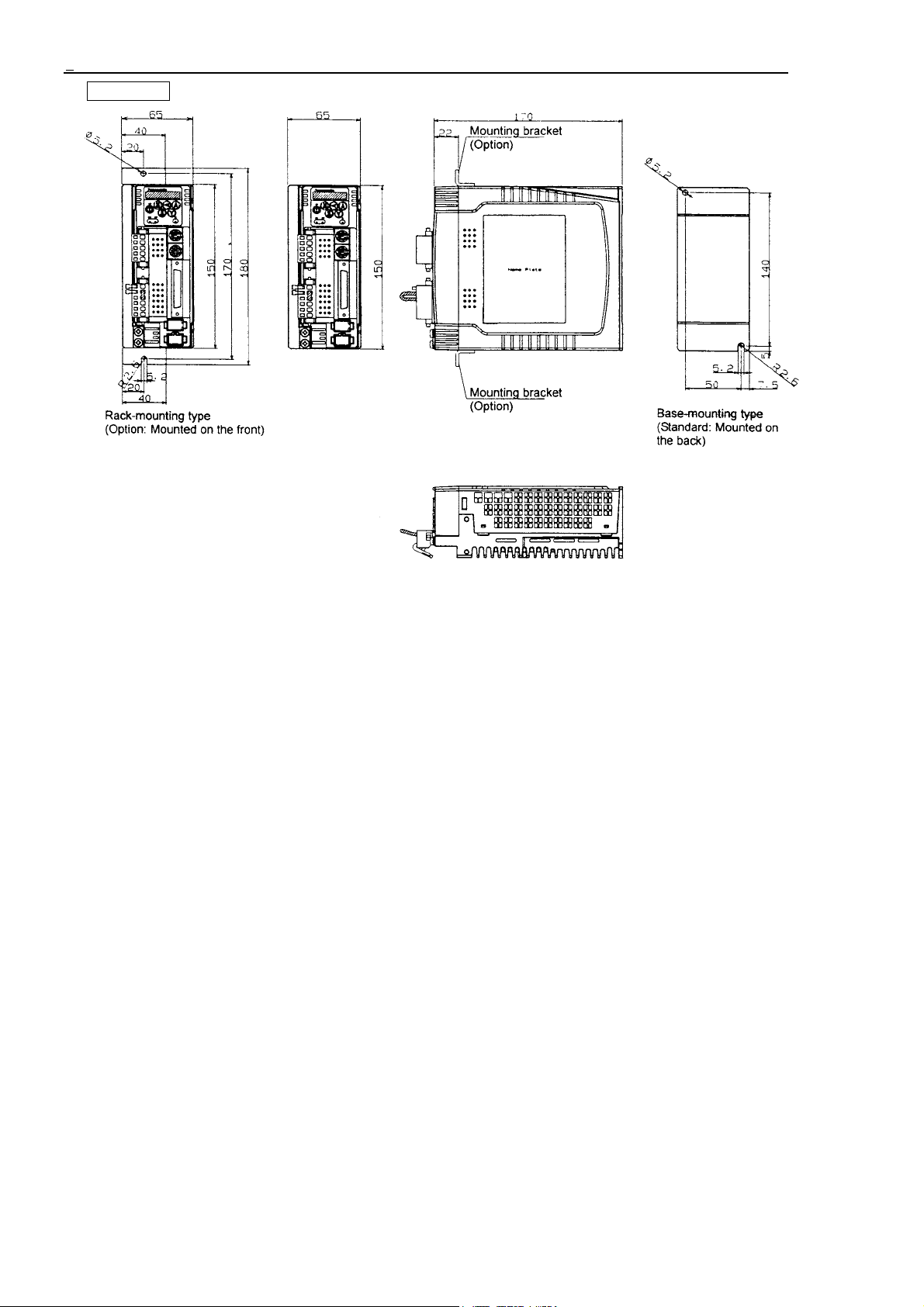
1-3.驱动器与电机的安装尺寸
1-3-1.驱动器的安装尺寸
A型驱动器
3
B型驱动器
Page 6
4
C型驱动器
Minas A4 系列驱动器技术资料选编
1-3-2.电机的安装尺寸
请参考电机样本,此从略。
Page 7
Minas A4 系列驱动器技术资料选编
1-4.技术规格
1-4-1.通用规格
100V
系列
主回路电源
控制回路电源
单相 100~115V
10%
50/60Hz
15%+−
5
基
本
规
格
输入
电源
200V
系列
工况
控制信号
模拟量信号
脉冲信号
通讯功能
显示面板与操作按键
再生放电制动电阻
10%
50/60Hz
15%+−
10%
50/60Hz
15%+−
10%
50/60Hz
15%+−
10%
50/60Hz
15%+−
10%
50/60Hz
15%+−
主回路
电源
控制回
路电源
A、B 型
C、D 型
E、F 型
A~D 型
E、F 型
单相 200~240V
单相/三相 200~240V
三相 100~115V
单相 200~240V
单相 200~230V
温度 工作温度:0~55℃;存温度:-20~80℃
湿度 工作/保存:≤90%RH(无结露)
海拔高度 ≤1,000 米
振动 ≤5.88
2
M/S
,10~60HZ(不允许工作在共振点)
控制方式 IGBT PWM 正弦波控制
编码器反馈
17 位(分辨率:131072),7 线制绝对式编码器;
2500p/r(分辨率:10000),5 线制增量式编码器。
外部反馈装置 可配 AT573A(Mitutoyo 三丰出品)
10 点输出:
输入
①伺服使能(SRV-ON),②控制模式选择(C-MODE),③增益切换(GAIN),
④报警清除(A-CLR);其余与控制模式有关。
6 点输出:
输出
①伺服报警(ALM),②伺服准备好(S-RDY),③制动器释放(BRK-OFF),
④零速检测(ZSP),⑤转矩控制(TLC);其余与控制模式有关。
输入
3 点输入:
①16 位A/D(1 点输入),②10 位 A/D(2 点输入)。
2 点输出(监视器用):
输出
①速度监视器(SP),可以检测电机的实际转速或指令速度;
②转矩监视器(IM),可检测转矩指令、偏差脉冲数或全闭环偏差脉冲数。
输入
①2 点输入:通过光耦电路接收差分信号或集电极开路信号;
②2 点输入:通过差分专用电路接收差分信号。
4 点输出:
输出
编码器信号(A/B/Z 相)或外部反馈装置信号(EXA/EXB/EXZ 相)输出差分
信号;Z 相或EXZ 相也可以输出集电极开路信号。
RS232C
RS485
主机 1:1 通讯
主机 1:n 通讯,n≤15
①5 个按键(
MODE
、
SET
、 、 、 );②6 位 LED 显示
A、B 型驱动器:没有内置制动电阻(只可外接);
C~F 型:内置制动电阻(也可再外接制动电阻)。
动态制动器 内置
控制模式
通过参数选择以下 7 种模式:①位置控制;②速度控制;③转矩控制;④位
置/速度控制;⑤位置/转矩控制;⑥速度/转矩控制;⑦全闭环控制
Page 8
6
Minas A4 系列驱动器技术资料选编
控制输入
⑤CW 方向行程禁止,⑥CCW 方向行程禁止,⑦偏差计数器清零,
⑧脉冲指令输入禁止,⑨指令分倍频切换
控制输出 ⑥定位完成
最大指令脉冲频率 光耦输入:500KPPS;线驱动器输入:2MPPS
位
置
控
制
脉冲
输入
输入脉冲串形式 差分输入;根据参数设定选择:①CCW/CW,②A/B 两相,③指令/方向
017
指令脉冲分倍频
(电子齿轮)
可设定范围:
( 1 10000) 2
~
1 10000
~
~
×
平滑滤波器 对指令脉冲可选择初级延时滤波器或者 FIR 滤波器
模拟量输入 转矩限制指令 可在 CCW、CW 两个方向分别设置转矩限制(3V/额定转矩)
指令跟踪控制 可用
实时速度观测器 可用
振动抑制控制 可用
控制输入
⑤CW 方向行程禁止,⑥CCW 方向行程禁止,⑦内部速度选择 1,
⑧内部速度选择 2,⑨零速箝位
控制输出 ⑥速度到达
速度指令输入 可输入模拟量速度指令,其比例和方向用参数可调(默认值:6V/额定转速)模拟量
转矩限制指令输入 可在 CCW、CW 两个方向分别设置转矩限制(3V/额定转矩)
内部速度指令 通过控制输入点可选 4 段内部速度
软启动/制动功能 可分别设置 0~10s/1000rpm 的加速、减速时间;S 形加减速时间也可设置
零速箝位 可通过零速箝位输入使得内部速度保持为 0
实时速度观测器 可用
功
能
速
输入
度
控
制
速度指令 FIR 滤波器 可用
控制输入 ⑤CW 方向行程禁止,⑥CCW 方向行程禁止,⑦零速箝位
转
矩
控
制
模拟量
输入
控制输出 ⑥速度到达
转矩指令输入 可输入模拟量转矩指令,其比例和方向用参数可调(默认值:3V/额定转矩)
速度限制功能 相关参数可设置速度限制值
控制输入 ⑤外部反馈偏差输入,⑥偏差计数器清零,⑦指令脉冲输入禁止
控制输出 ⑥全闭环定位完成
指令脉冲最大频率 光耦输入:500KPPS;线驱动器输入:2MPPS
脉冲
全
输入
闭
环
控
模拟量输入 转矩限制指令 可在 CCW、CW 两个方向分别设置转矩限制(3V/额定转矩)
制
外部反馈装置分倍频设置
输入脉冲串形式 差分输入;根据参数设定选择:①CCW/CW,②A/B 两相,③指令/方向
017
指令脉冲分倍频
(电子齿轮)
可设定范围:
( 1 10000) 2
~
1 10000
~
~
×
平滑滤波器 对指令脉冲可选择初级延时滤波器或者 FIR 滤波器
017
编码器脉冲数(分子)和外部装置
反馈脉冲数(分母)之比值范围:
( 1 10000) 2
~
1 10000
~
~
×
双绞补偿功能 可用
状态反馈功能 可用
Page 9
Minas A4 系列驱动器技术资料选编
7
负载惯量在电机运行时实时地测量,并根据机械的刚性自动地调整增益;
在 7 种模式都可以有效
驱动电机按指令运行,以测量出负载惯量,并根据机械的刚性自动调整增益;
在①位置控制,⑦全闭环控制模式有效
在位置控制模式往复转动从而自动地搜索出最佳的增益设置;
在①位置控制有效
以下控制输入信号可屏蔽:
①驱动禁止输入,②转矩限制输入,③指令脉冲输入禁止,④零速箝位
功
能
共
同
点
实时模式
自动
调整
常规模式
适配增益调整
非必要引脚的屏蔽功能
编码器反馈脉冲的分频功能 1~16384p/r(编码器反馈最大脉冲数)
硬件出错 过载,欠电压,过速,过热,过电流,编码器出错等 保护
功能
软件出错 位置偏差过大,指令脉冲分倍频出错,EEPROM 出错等
报警记录记忆功能 可记忆包括当前报警在内的 14 个报警记录
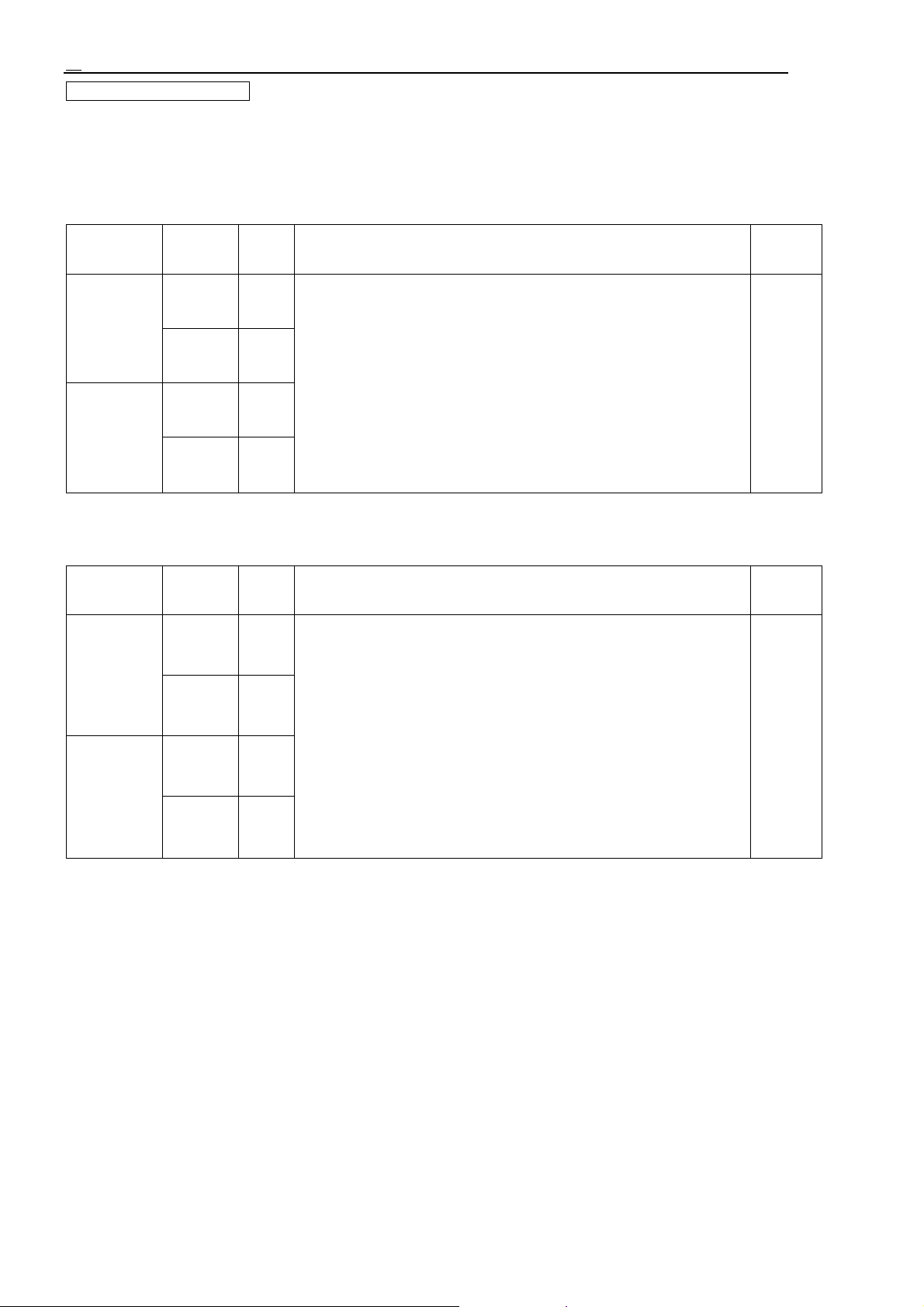
1-4-2.各型号单一规格
驱动器型号
输入电源 单相 100V 单相200V 单相 100V 单相 200V
最大瞬时输出电流
最大连续输出电流
编码器反馈信号
(分辨率)
再生制动电阻 需外接
自动增益调整功能 有
扰动观测器 有
动态制动器 有
绝对式系统 *1 有效 *2
全闭环控制 有效
环境温度 0~55℃
主电源电缆
接地电缆
电机电缆
主电源最大冲击电流
控制电源最大冲击电流
重量 约 0.8kg
外形尺寸 A型
*1 使用 17 位规格编码器时。
*2 绝对式编码器的电池应外接。
MADDCT1105 MADDT1205 MADDT1107 MADDT1207
10A 10A
5A 7.5A
10000 p/r
131072 p/r
HVSF 0.75~2.0mm
AWG 14~18
HVSF 2.0mm2
AWG 14
HVSF 0.75~2.0mm
AWG 14~18
7A 14A 7A 14A
14A 28A 14A 28A
2
2
Page 10
8
Minas A4 系列驱动器技术资料选编
驱动器型号
MBDDCT2110 MBDDT2210 MCDDT3120 MCDDT3520
输入电源 单相 100V 单相 200V 单相 100V 单相/三相 200V
最大瞬时输出电流
最大连续输出电流
编码器反馈信号
(分辨率)
15A 30A
10A 20A
10000 p/r 10000 p/r
131072 p/r 131072 p/r
再生制动电阻 需外接 内置
自动增益调整功能 有 有
扰动观测器 有 有
动态制动器 有 有
绝对式系统 *1 有效 *2 有效 *2
全闭环控制 有效 有效
环境温度 0~55℃ 0~55℃
主电源电缆
HVSF 0.75~2.0mm2 HVSF 0.75~2.0mm
AWG 14~18 AWG 14~18
接地电缆
HVSF 2.0mm2 HVSF 2.0mm2
AWG 14 AWG 14
电机电缆
HVSF 0.75~2.0mm2 HVSF 0.75~2.0mm
AWG 14~18 AWG 14~18
主电源最大冲击电流
控制电源最大冲击电流
7A 14A 30A 60A
14A 28A 14A 28A
重量 约 1.1kg 约 1.5kg
外形尺寸 B型 C型
*1 使用 17 位规格编码器时。
*2 绝对式编码器的电池应外接。
2
2
Page 11
Minas A4 系列驱动器技术资料选编
2.外形与接插件
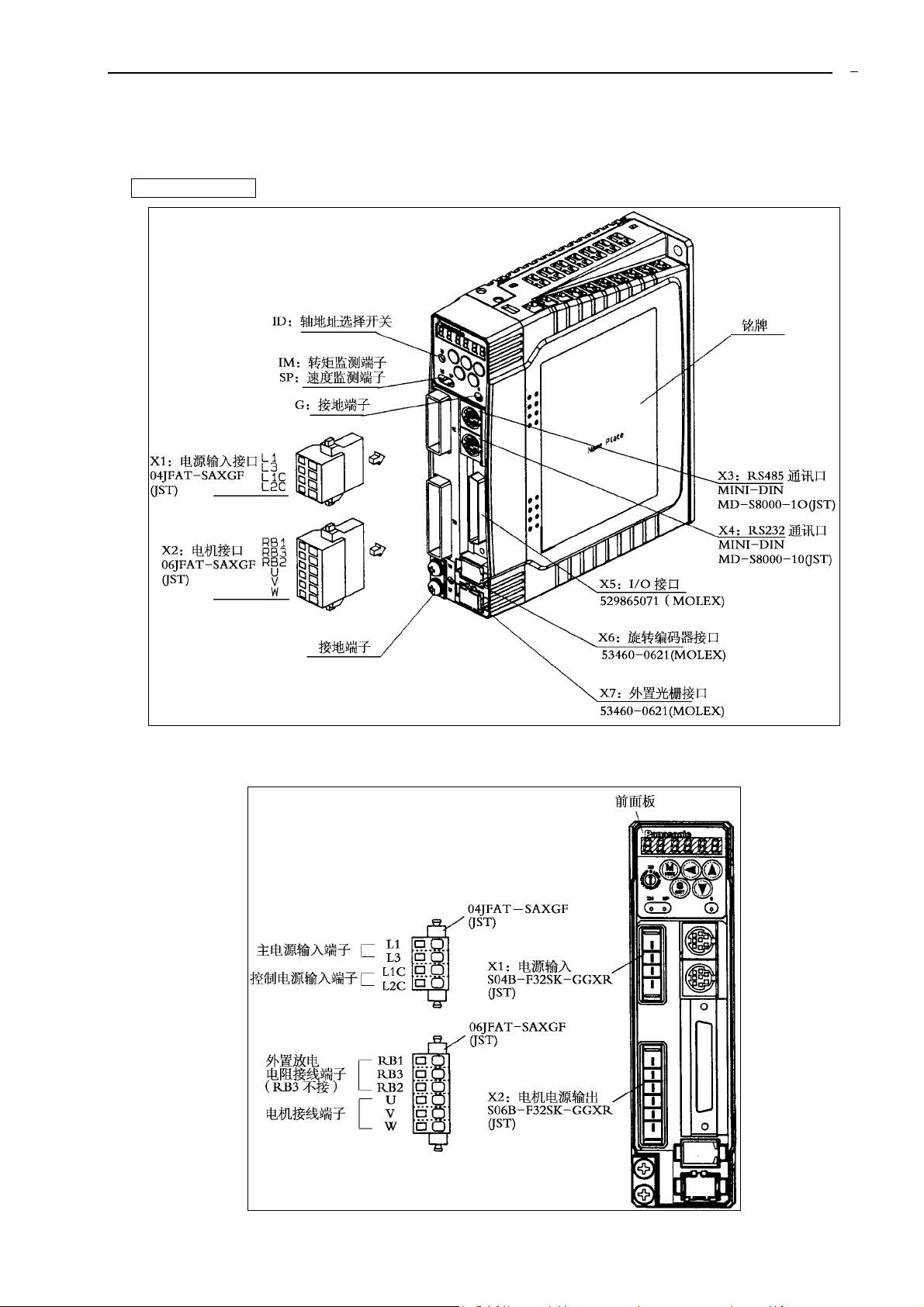
2-1.接插件外形与清单
A4 系列 A、B 型
9
Page 12
10
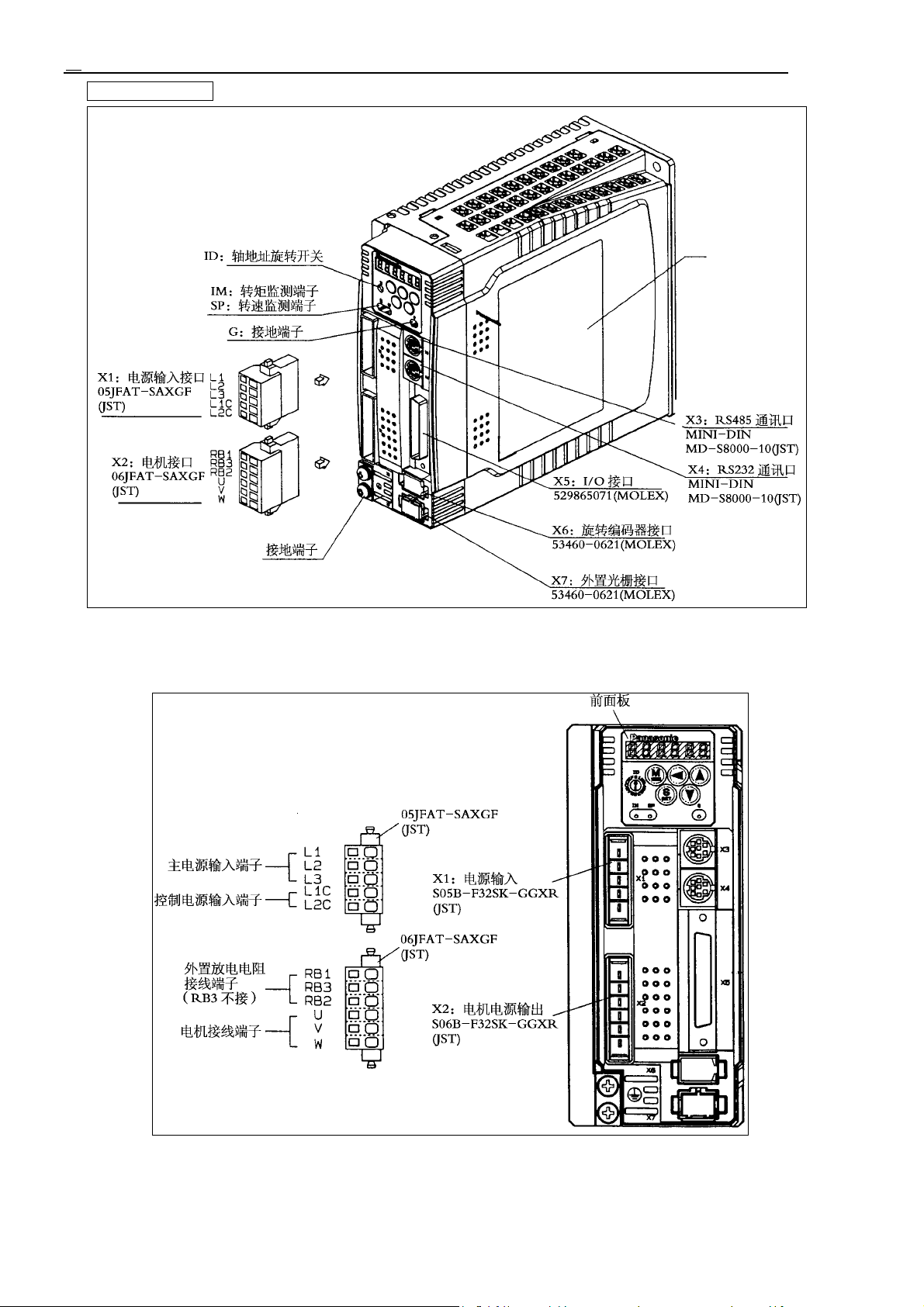
A4 系列 C、D 型
Minas A4 系列驱动器技术资料选编
Page 13
Minas A4 系列驱动器技术资料选编
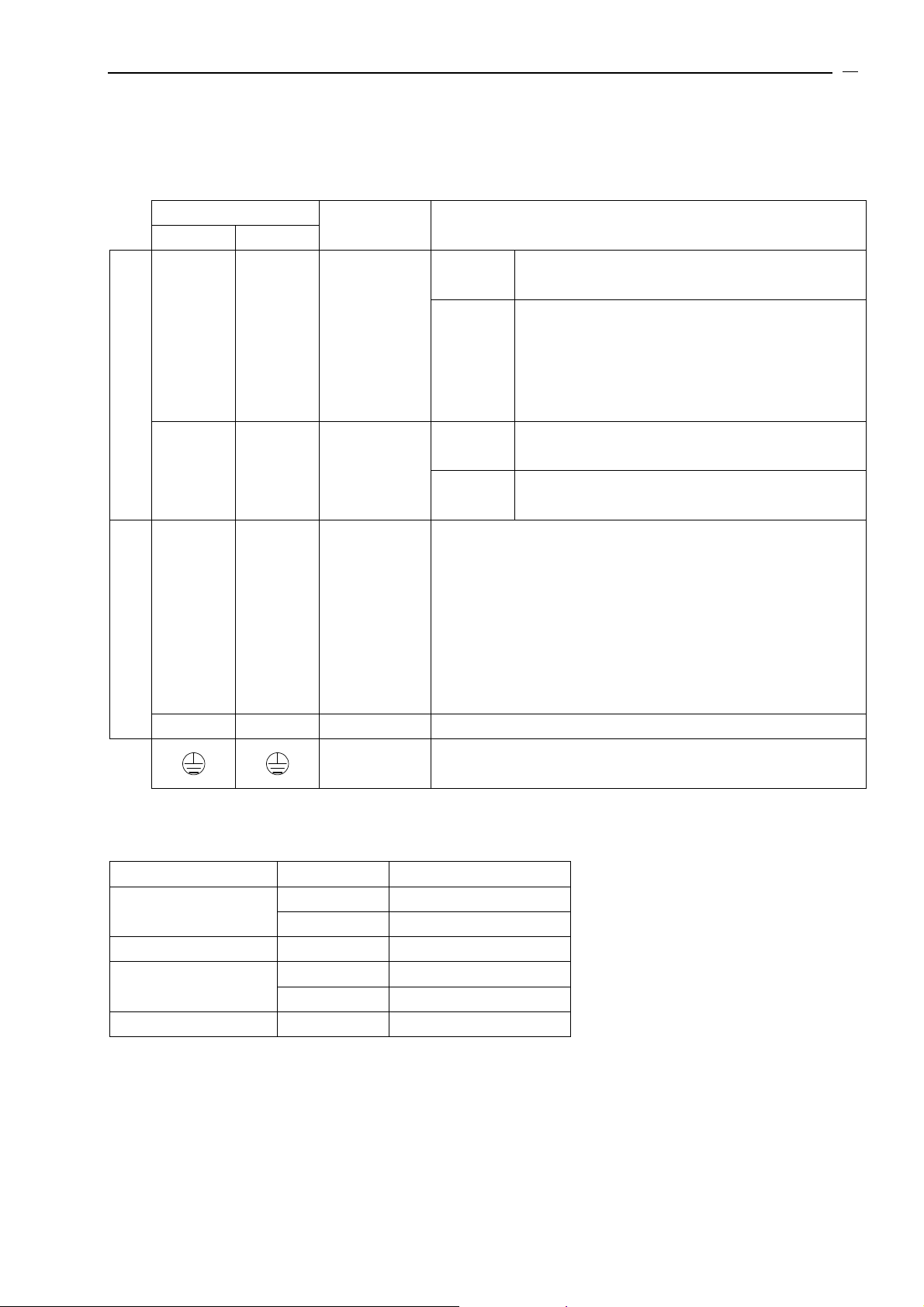
2-2.电源插头 X1、X2 与编码器插头 X6
X1:A、B 型驱动器用,04JFATSAXGF,J.S.T.公司制;
C、D 型驱动器用,05JFATSAXGF,J.S.T.公司制。
X2:A~D 型驱动器用,06JFATSAXGF,J.S.T.公司制。
接线记号
插头 端子排
信号 详情
11
L1,(L2,)
L3
L1,(L2,)
L3
100V
主电源
输入端子
在 L1、L3 端子间输入单相 100~115V
A、B 型:输入单相 200~240V
200V
X1
C、D 型:输入单相/三相 200~240V
单相输入时请只接 L1、L3 端子。
10%
,50/60Hz
15%+−
10%
,50/60Hz
15%+−
L1C,L2C r,t
控制电源
输入端子
100V
200V
输入单相 100~115V
输入单相 200~240V
·通常请将 RB3 和 RB2(B2 和 B1)短路。
·如果发生再生放电电阻过载报警(Err18)而导致驱动器故障,请将
RB3 和 RB2(B2和 B1)断路!然后在 RB1 和 RB2(P和 B2)之间
接入一个制动电阻。
·A4系列的 A、B 型驱动器默认配置是需要外接制动电阻的,因此其
X2
RB1,RB2,
RB3
P,RB2,
RB3
制动电阻
接线端子
RB3 和 RB2(B2 和 B1)通常请不要短接。但是如果发生了 Err18
报警,请在 RB1 和 RB2(P 和 B2)之间接入一个制动电阻。
·如果接入了制动电阻,请将参数 Pr6C 设成除 0 之外的值。
U,V,W U,V,W 电机连接端子 连接到电机的各相绕组,U:U 相,V:V 相,W:W 相。
接地端子 连接到电机的接地端子
10%
15%+−
10%
,50/60Hz;
15%+−
10%
15%+−
,50/60Hz
,50/60Hz;
X6:编码器插头,Molex 制 55100-0600
信号 引脚号码 功能
编码器电源输出
1 E5V
2 E0V *1
未用 3,4 不必接
编码器 I/O 信号
(串行信号)
外壳接地 外壳
5 PS
6 PS
FG
*1 编码器电源输出的 E0V 与控制电路的地相接,也与插头 X5 相连。
Page 14
12
2-3.控制信号插头 X5
X5:控制信号(I/O)用,Molex 制 529865071。
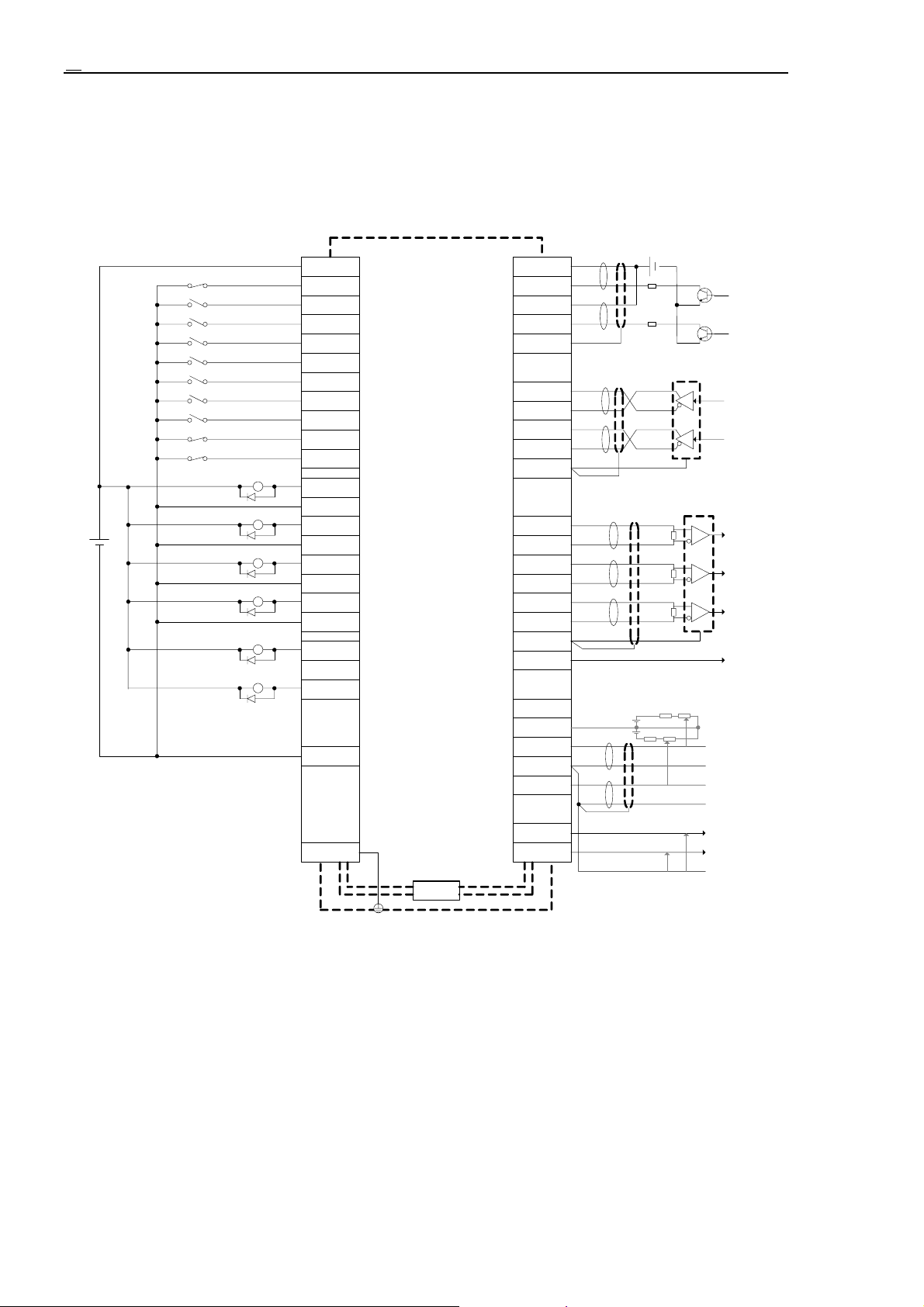
2-3-1.位置控制模式控制信号接线图
Minas A4 系列驱动器技术资料选编
VDC
12~24V
增益/转矩限制切换
指令脉冲分倍频选择
伺服准备好
伺服报警
定位完成
制动器释放
转矩限制
零速检测
指令脉冲输入禁止
偏差计数器清零
伺服使能
振动抑制控制切换
控制模式切换
报警清除
CCW行程限位
CW行程限位
7
33
30
29
27
GAIN/TL-SEL
28
26
32
31
9
8
35
34
37
36
39
38
11
10
40
12
41
50
COM+
INH
CL
SRV-ON
DIV
VS-SEL
C-MODE
A-CLR
CCWL
CWL
S-RDY+
S-RDY-
ALM+
ALM-
COIN+
COIN-
BRK-OFF+
BRK-OFF-
TLC
ZSP
COM-
FG
驱动器内部
PULS1
PULS2
SIGN1
SIGN2
GND
PULSH1
PULSH2
SIGNH1
SIGNH2
GND
OA+
OA-
OB+
OB-
OZ+
OZ-
GND
CZ
SPR/TRQR
GND
CCWTL
GND
CWTL
SP
IM
13
44
45
46
47
13
21
22
48
49
23
24
25
19
14
15
16
17
3
4
5
6
普通的光耦输入电路
注:差分或集电极开
路形式输入皆可
脉冲指令输入
}
差分输入专用电路
脉冲指令输入
}
AM26LS31
AM26LS32
A相脉冲输出
B相脉冲输出
Z相脉冲输出
Z相脉冲集电
极开路输出
CCW转矩限制输入
}
18
43
42
(0~+10V)
CW转矩限制输入
}
(-10~0V)
速度监视器
转矩监视器
CN I/F
Page 15
Minas A4 系列驱动器技术资料选编
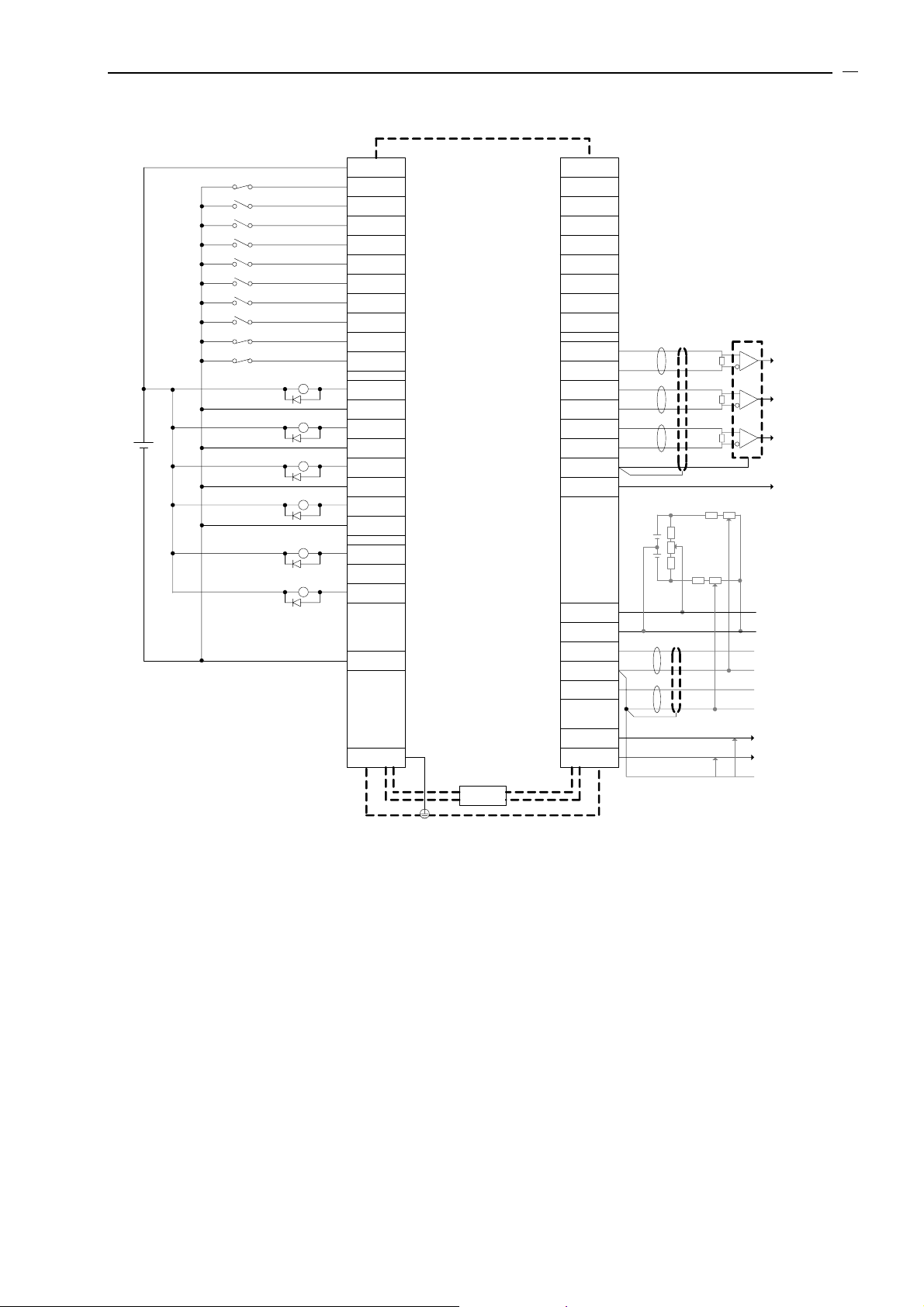
2-3-2.速度控制模式控制信号接线图
13
VDC
12~24V
伺服准备好
伺服报警
速度到达
制动器释放
转矩限制
零速检测
内部速度选择 1
内部速度选择 2
伺服使能
增益/转矩限制切换
内部速度选择 3
零速箝位
控制模式切换
报警清除
CCW行程限位
CW行程限位
7
33
INTSPD1
30
INTSPD2
29
27
GAIN/TL-SEL
28
INTSPD3
26
ZEROSPD
32
C-MODE
31
9
8
35
34
37
36
39
AT-SPEED+
38
AT-SPEED-
11
BRK-OFF+
10
BRK-OFF-
40
12
41
50
COM+
SRV-ON
A-CLR
CCWL
CWL
S-RDY+
S-RDY-
ALM+
ALM-
TLC
ZSP
COM-
FG
驱动器内部
PULS1
PULS2
SIGN1
SIGN2
GND
PULSH1
PULSH2
SIGNH1
SIGNH2
OA+
OA-
OB+
OB-
OZ+
OZ-
GND
CZ
SPR
GND
CCWTL
GND
CWTL
SP
IM
3
4
5
6
13
44
45
46
47
21
22
48
49
23
24
25
19
14
15
16
17
18
43
42
AM26LS32
}
}
}
A相脉冲输出
B相脉冲输出
Z相脉冲输出
Z相脉冲集电
极开路输出
模拟量速度指令
(0~
±
10V)
CCW转矩限制输入
(0~+10V)
CW转矩限制输入
(-10~0V)
速度监视器
转矩监视器
CN I/F
Page 16
14
2-3-3.控制信号接线详解
通用的输入信号及其功能
信号 记号
控制信号
电源
伺服使能
控制模式
切换
CW
行程限位
CCW
行程限位
COM+ 7
COM-
SRV-ON 29
C-MODE 32
CWL 8
CCWL 9
引脚
号码
41
Minas A4 系列驱动器技术资料选编
功能
·连接到外置直流电源(12~24V)的正极(+)。
·电源请采用 12~24V(±5%)。
·连接到外置直流电源(12~24V)的负极(-)。
·电源的容量取决于 I/O 信号的组合应用,建议不小于 0.5A。
·此信号与 COM-短接,即进入伺服使能状态(电机通电)。
·此信号与 COM-短接后,请在至少 100ms 后再输入指令脉冲。
·如果与 COM-的连接断开,则伺服系统进入不使能状态(没有电流进
入电机)。
·伺服不使能(伺服 OFF)状态时动态制动器的动作与偏差计数器清零的
动作可用参数 Pr69 选择。
注意:
·伺服使能信号在电源接通约 2 秒后输入才有效(请参考时序图)。
·请勿用伺服使能信号(ON/OFF)来启动、停止电机。
·请在伺服使能信号接通后至少 100ms 以后再输入脉冲指令。
如果参数 Pr02(控制模式选择)设为 3~5,控制模式的选择如下表所示:
Pr02 值
3
4
5
C-MODE 与 COM-开路
(选择第 1 控制模式)
位置控制 速度控制
位置控制 转矩控制
速度控制 转矩控制
C-MODE 与 COM-短路
(选择第 2 控制模式)
注意:
用 C-MODE 信号切换控制模式时,电机的运转可能会由于对应的控制模式
的指令不同而产生剧烈变化。
·这个引脚可以用来输入 CW(顺时针)方向的行程限位信号。
·设备的移动部件越过了 CW 方向的限位开关时,CWL 信号与 COM-的
连接断开,使得 CW 方向的转矩不再产生。
·如果 CWL 信号与 COM-断路,电机在 CW 方向不产生转矩。
·如果参数 Pr04(行程限位禁止输入无效设置)=1,那么 CWL 信号的
输入是无效的。出厂默认值设为 0(无效)。
·参数 Pr66(行程限位时报警时序)可以用来选择 CWL输入有效时的动
作。出厂默认值(Pr66=0)可以使动态制动器动作从而快速地停止。
含义、用法与 CWL 信号相同。
I/O 信号
接口
i-1
i-1
i-1
i-1
Page 17
Minas A4 系列驱动器技术资料选编
15
信号 记号
偏差计数器
清零
或
内部速度
选择 2
指令脉冲
禁止输入
或
内部速度
选择 1
CL
INTSPD2
INH
INTSPD1
引脚
号码
30
33
功能
这个引脚的功能取决于不同的控制模式。
·可用来将偏差计数器和全闭环偏差计数器的内容清零
(CL 信号)。
·此引脚与 COM-信号短接,即可把计数器内容清零。
·可用 Pr4E(计数器清零输入方式)选择清零方式:
位置控制
全闭环控制
Pr4E 值 功能
0
(出厂值)
CL 信号与 COM-短路(≥100μs),
计数器内容即清零
CL 与 COM-的连接从开路变为短路,
1
2
计数器即清零,但仅有一次清零动作。
CL 信号被屏蔽,即输入无效。
·用来输入内部速度选择 2 信号(INTSPD2)。
速度控制
通过与 INH/INTSPD1 信号和 DIV/INTSPD3 信号不同的
组合,可以选择 8 段内部速度。
转矩控制 输入无效。
这个引脚的功能取决于不同的控制模式。
·可用来禁止指令脉冲的输入(INH 信号)。
·这个引脚一旦与 COM-信号断路,位置指令脉冲的输
入即被屏蔽。
位置控制
全闭环控制
·可用参数 Pr43(指令脉冲禁止输入无效设置)选择将
此信号屏蔽:
Pr43 值 功能
0
1(出厂值) INH 信号无效,被屏蔽。
INH 信号有效。
·用来输入内部速度选择 1 信号(INTSPD1)。
速度控制
通过与 CL/INTSPD2信号和 DIV/INTSPD3信号不同的组
合,可以选择 8 段内部速度。
转矩控制 输入无效。
I/O 信号
接口
i-1
i-1
零速箝位
或
振动抑制控
制切换选择
ZEROSPD
VS-SEL
这个引脚的功能取决于不同的控制模式。
·用来输入零速箝位指令(ZEROSPD 信号)。
Pr06
0
速度控制
转矩控制
26
1
2
转矩控制模式中,若 Pr06=2,则 ZEROSPD 信号无效。
·用来输入振动抑制控制切换选择信号(VS-SEL)。
位置控制
全闭环控制
Pr24(振动抑制滤波器切换选择)=1,若此信号与 COM
-的连接断开,则选择第 1 振动抑制滤波器(Pr2B、2C);
若与 COM-短接,则第 2 滤波器(Pr2D、2E)有效。
与 COM- 功能
―― 零速箝位信号无效,被屏蔽。
开路 速度指令为 0,即零速箝位。
短路 正常运行。
开路 速度指令是 CCW 方向的。
短路 速度指令是 CW 方向的。
i-1
Page 18
16
Minas A4 系列驱动器技术资料选编
信号 记号
增益切换
或
转矩限制
切换
报警清除
指令脉冲
分倍频选择
或
内部速度
选择 3
引脚
号码
GAIN
27
TL-SEL
A-CLR 31
DIV
28
INTSPD3
功能
可以用参数 Pr03(转矩限制选择)和 Pr30(第 2 增益动作设置)设定此
引脚的功能。
Pr03 Pr30
与 COM- 功能
开路 速度环:PI(比例/积分)动作
0
短路 速度环:P(比例)动作
并且当 Pr31=2,且 Pr36=2 时:
0~2
1
开路 选择第 1 增益设置(Pr10~14)
短路 选择第 2 增益设置(Pr18~1C)
并且当 Pr31 和 Pr36 都不为 2 时:
无效,被屏蔽
用来输入转矩限制切换信号(TL-SEL)。
――
3
此时,如果此引脚与 COM-的连接断开,则 Pr5E(第
1 转矩限制)即有效;如果短接,则 Pr5F(第 2 转矩
限制)有效。
此信号与 COM-的连接保持闭合 120ms以上,就可以将报警状态清除掉。
报警清除的同时,偏差计数器的内容也会被清零。
某些报警状态无法用此信号清除。
这个引脚的功能取决于不同的控制模式。
·用来输入内部速度选择 3 信号(INTSPD3)。
速度控制
通过与 INH/INTSPD1信号和 CL/INTSPD2信号不同的组
合,可以选择 8 段内部速度。
转矩控制 输入无效。
位置控制
全闭环控制
·可以选择指令脉冲分倍频设置的分子。
如果与 COM-短路,指令脉冲分倍频的分子就从 Pr48
(指令脉冲分倍频第 1 分子)变为 Pr49(第 2 分子)值。
注意:
请不要在切换动作的前/后 10ms 内输入指令脉冲。
I/O 信号
接口
i-1
i-1
i-1
Page 19
Minas A4 系列驱动器技术资料选编
指令脉冲分倍频的分子
·位置控制、全闭环控制模式时,
X5 插头·第 28 引脚
DIV 信号(与 COM-)
17
指令脉冲分倍频设置
开路
Pr 48 2
×
Pr 4A
编码器分辨率 */每转所需指令脉冲数(Pr4B),
或
Pr 4B
短路
Pr 49 2
×
Pr 4A
编码器分辨率 */每转所需指令脉冲数(Pr4B),
或
Pr 4B
内部速度选择
X5 插头·引脚号码·信号(与 COM-的连接) Pr05(内部/外部速度切换选择)值
第 33 引脚
INTSPD1
(INH)
开路 开路 开路
短路 开路 开路
开路 短路 开路
短路 短路 开路
开路 开路 短路
短路 开路 短路
开路 短路 短路
短路 短路 短路
第 30 引脚
INTSPD2
(CL)
第 28 引脚
INTSPD3
(DIV)
0 1 2 3
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
模拟量速度指令
(从第 14 引脚)
第 1 内部速度
(Pr53)
第 2 内部速度
(Pr54)
第 3 内部速度
(Pr55)
第 4 内部速度
(Pr56)
第 5 内部速度
(Pr74)
第 6 内部速度
(Pr75)
第 7 内部速度
(Pr76)
第 8 内部速度
(Pr77)
第 1 内部速度
(Pr53)
第 2 内部速度
(Pr54)
第 3 内部速度
(Pr55)
模拟量速度指令
(从第 14 引脚)
第 1 内部速度
(Pr53)
第 2 内部速度
(Pr54)
第 3 内部速度
(Pr55)
模拟量速度指令
(从第 14 引脚)
* Pr48 自动设为 0。
* Pr49 自动设为 0。
第 1 内部速度
(Pr53)
第 2 内部速度
(Pr54)
第 3 内部速度
(Pr55)
第 4 内部速度
(Pr56)
第 5 内部速度
(Pr74)
第 6 内部速度
(Pr75)
第 7 内部速度
(Pr76)
第 8 内部速度
(Pr77)
Page 20
18
脉冲指令输入信号及其功能
·根据指令脉冲的情况可以在两种接口中选择一个最合适的接口。
① 差分专用电路接口
信号 记号
引脚
号码
·表示一种位置指令脉冲的形式。
指令脉冲
PULSH1 44
输入 1
PULSH2 45
如果参数 Pr40(指令脉冲输入选择)=1,可以选择何种接口电路。
·在不需要脉冲指令的控制模式中比如速度、转矩控制是无效的。
·允许输入的最大脉冲频率为 2Mpps。
·通过 Pr41(指令脉冲旋转方向设置)和 Pr42(指令脉冲输入方式)的
指令脉冲
SIGNH1 46
输入 2
SIGNH2 47
组合设置,可以选择 6 种不同的指令脉冲输入形式。
1)2 相正交脉冲(A 相+B 相);
2)CW 脉冲(PULS)+CCW 脉冲(SIGN);
3)指令脉冲(PULS)+指令方向(SIGN)。
② 普通光耦电路接口
信号 记号
引脚
号码
·表示一种位置指令脉冲的形式。
PULS1 3
指令脉冲
输入 1
PULS2 4
如果参数 Pr40(指令脉冲输入选择)=1,可以选择何种接口电路。
·在不需要脉冲指令的控制模式中比如速度、转矩控制是无效的。
·允许输入的最大脉冲频率为 500kpps(差分电路输入),或 200kpps
(集电极开路输入)。
·通过 Pr41(指令脉冲旋转方向设置)和 Pr42(指令脉冲输入方式)的
SIGN1 5
指令脉冲
输入 2
SIGN2 6
组合设置,可以选择 6 种不同的指令脉冲输入形式。
1)2 相正交脉冲(A 相+B 相);
2)CW 脉冲(PULS)+CCW 脉冲(SIGN);
3)指令脉冲(PULS)+指令方向(SIGN)。
功能
功能
Minas A4 系列驱动器技术资料选编
I/O 信号
接口
Di-2
I/O 信号
接口
Di-1
Page 21
Minas A4 系列驱动器技术资料选编
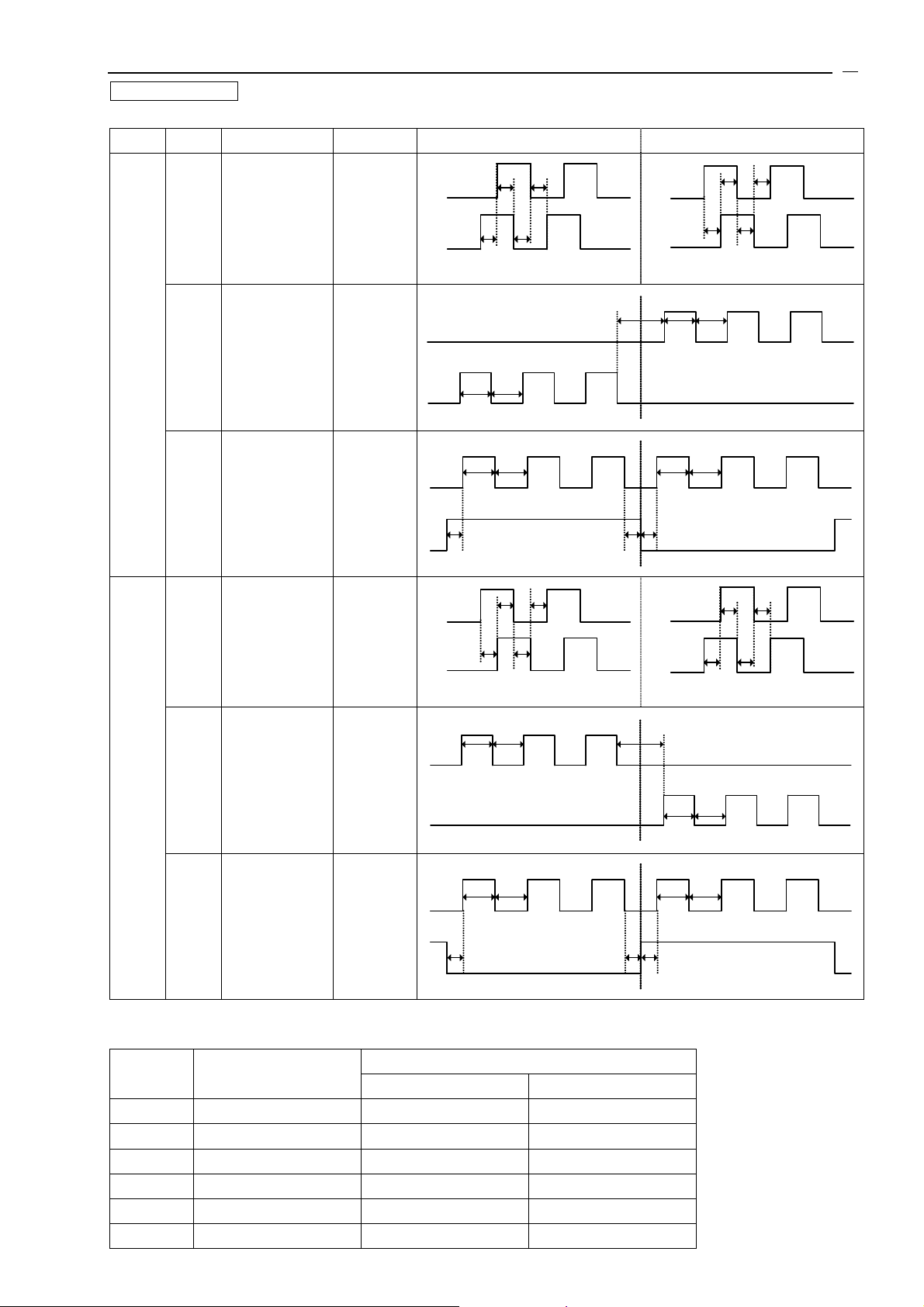
指令脉冲输入形式
Pr41 Pr42
指令脉冲类型 信号记号 CCW 指令 CW 指令
19
0
或
2
正交脉冲
A、B 两相
0
90
相差
PULS
SIGN
A相
B相
t1
t1
B 相脉冲超前 A 相 900
CW 脉冲
0
1
+
CCW 脉冲
PULS
t2
t1
t1
A相
B相
t1
t1
B 相脉冲滞后 A 相 900
t3
t2
t2 t2
t1
t1
SIGN
指令脉冲
3
+
指令方向
PULS
t4
t6
t5
H 高电平
t4
t6
t6
t5
L 低电平
SIGN
t1
t1
0
或
2
正交脉冲
A、B 两相
0
90
相差
PULS
SIGN
A相
B相
t1
t1
B 相脉冲滞后 A 相 900
t1
t1
A相
B相
t1
t1
B 相脉冲超前 A 相 900
CW 脉冲
1
1
+
CCW 脉冲
PULS
t2
t2
t3
t2
t2
SIGN
指令脉冲
3
+
指令方向
PULS
SIGN
t4
L 低电平
t6
t5
t6
t4
t6
t5
H 高电平
② 普通光耦输入电路
t1
t2
t3
t4
t5
t6
① 差分专用输入电路
差分电路输入 集电极开路电路输入
≥500 ns ≥2 µs ≥5 µs
≥250 ns ≥1 µs ≥2.5 µs
≥250 ns ≥1 µs ≥2.5 µs
≥250 ns ≥1 µs ≥2.5 µs
≥250 ns ≥1 µs ≥2.5 µs
≥250 ns ≥1 µs ≥2.5 µs
Page 22
20
模拟量指令输入信号及其功能
信号 记号
速度指令
SPR
引脚
号码
或
转矩指令
TRQR
或
速度限制
SPL
Minas A4 系列驱动器技术资料选编
功能
这个引脚的功能取决于不同的控制模式(Pr02 值)。
Pr02
控制模式 功能
·选择了速度控制模式,即通过速度指令 SPR 信
1
号输入速度指令。
控制
速度
·速度指令的增益、极性、零漂和滤波器分别是:
3
位置/速度
Pr50:速度指令增益,
Pr51:速度指令逻辑取反,
/转矩
速度
5
Pr52:速度指令零漂调整,
Pr57:速度指令滤波器。
取决于 Pr5B(转矩指令选择)不同的设置值。
Pr5B
2
·选择输入转矩指令(TQRQ)信号。
控制
转矩
·转矩指令的增益、极性、零漂调整及
14
4
0
位置/转矩
1
滤波器分别是:Pr5C,Pr5D,Pr52,
Pr57。
·选择了输入速度限制(SPL)信号。
·速度限制值的增益、零漂调整及滤波
器分别是:Pr50,Pr52,Pr57。
取决于 Pr5B(转矩指令选择)不同的设置值。
Pr5B
输入无效,被屏蔽。
0
速度/转矩
5
·选择了输入速度限制(SPL)信号。
·速度限制值的增益、零漂调整及滤
1
波器分别是:Pr50,Pr52,Pr57。
其他 其他模式 输入无效,被屏蔽。
这个信号的 AD 转换器的分辨率是 16 位(包括一位符号位)。
±32767(LSB)=±10V,1(LSB)≈0.3mV。
I/O 信号
接口
功能
Ai-1
功能
注意:
SPR/TRQR/SPL 信号不要输入幅值超过±10V 的模拟量电压指令。
Page 23
Minas A4 系列驱动器技术资料选编
21
信号 记号
CW
转矩限制
CCW
转矩限制
或
转矩指令
引脚
号码
CWTL 18
CCWTL
16
TRQR
功能
这个引脚的功能取决于不同的控制模式(Pr02 值)。
Pr02
控制模式 功能
控制
转矩
2
4
5
4
位置/转矩
速度/转矩
/转矩
位置
选择转矩控制模式时此信号被屏蔽,
任何输入都无效。
·选择输入 CW 方向的模拟量转矩限制(CWTL)。
·CW 方向的转矩被输入的负电压(0~-10V)
/转矩
速度
5
等比例地限制,比值:约-3V/额定转矩。
·Pr03(转矩限制选择)不设为 0,可以使得这
其他 其他模式
个信号的输入无效。
这个信号的 AD 转换器的分辨率是 10 位(包括一位符号位)。
±511(LSB)=±11.9V,1(LSB)≈23mV。
这个引脚的功能取决于不同的控制模式(Pr02 值)。
Pr02
控制模式 功能
取决于 Pr5B(转矩指令选择)不同的设置值。
控制
转矩
2
Pr5B
0
输入无效,被屏蔽。
功能
·选择输入转矩指令(TQRQ)信号。
·转矩指令的增益、极性、零漂调整
4
位置/转矩
1
及滤波器分别是 Pr5C,Pr5D,
Pr52,Pr57。
·选择输入转矩指令(TQRQ)信号。
5
速度/转矩
·转矩指令的增益、极性分别是 Pr5C,Pr5D。
·零漂可以自动地调整,滤波器不可用。
/转矩
位置
4
/转矩
速度
5
其他 其他模式
·选择输入 CCW 方向的模拟量转矩限制信号
(CCWTL)。
·CCW 方向的转矩被输入的负电压(0~-10V)
等比例地限制,比值:约-3V/额定转矩。
·Pr03(转矩限制选择)不设为 0,可以使得这
个信号的输入无效。
这个信号的 AD 转换器的分辨率是 10 位(包括一位符号位)。
±511(LSB)=±11.9V,1(LSB)≈23mV。
I/O 信号
接口
Ai-2
Ai-2
注意:
CWTL 和 CCWTL/TRQR 信号不要输入幅值超过±10V 的模拟量电压指令。
Page 24
22
通用的输出信号及其功能
信号 记号
伺服报警
ALM+ 37
ALM-
伺服准备好
S-RDY+ 35
S-RDY-
BRK-OFF+ 11
制动器释放
BRK-OFF-
ZSP 12
零速检测
(COM-)
TLC 40
转矩限制
(COM-)
定位完成
COIN+
COIN-
或
全闭环
定位完成
EX- COIN+
EX- COIN-
或
速度到达
AT-SPEED+
AT-SPEED-
引脚
号码
36
34
10
41
41
39
38
Minas A4 系列驱动器技术资料选编
功能
报警状态发生时,此输出晶体管关断。
当控制电源/主电源接通,而且没有报警发生时,此输出晶体管导通。
·请先设置电机的保持制动器动作的时序。
·当保持制动器释放时,此输出晶体管导通。
·此输出信号的时序可用参数 Pr6A(电机停止时机械制动器延迟时间)
和 Pr6B(电机运转时机械制动器延迟时间)设置。
·用参数 Pr0A(ZSP 输出选择)选择这个输出信号的输出内容。
·Pr0A 出厂默认值是 1,即此信号输出零速检测信号。
·请参考 TLC、ZSP 信号的选择。
·用参数 Pr09(TLC 输出选择)选择这个输出信号的输出内容。
·Pr09 出厂默认值是 0,即此信号输出转矩限制控制信号。
·请参考 TLC、ZSP 信号的选择。
这个引脚的功能取决于不同的控制模式(Pr02 值)。
·输出定位完成信号(COIN)。
·当位置偏差脉冲数(绝对数值)小于参数 Pr60(定位
位置控制
完成范围)设置值时,此输出晶体管导通。
·参数 Pr63(定位完成信号输出设置)可以用来选择定
位完成信号(COIN)的输出条件。
全闭环
控制
速度控制
转矩控制
·输出全闭环定位完成信号(EX-COIN)。
·位置偏差脉冲数(绝对数值)小于 Pr60 值,即导通。
·Pr63 可用来选择输出条件。
·输出速度到达信号(AT-SPEED)。
·如果电机的实际转速超过了参数 Pr62(到达速度)的
设置值,此输出晶体管即导通。
I/O 信号
接口
o-1
o-1
o-2
o-2
o-2
o-1
选择 TLC,ZSP 信号的输出内容
Pr09 或
Pr0A 值
0
1
2
3
4
5
6
TLC(X5 插头,第 40 引脚)的输出信号 ZSP(X5 插头,第 12 引脚)的输出信号
转矩限制信号。在伺服使能状态中转矩指令被转矩限制时,此输出晶体管即导通。
零速检测。电机转速低于参数 Pr61 设定值,此输出晶体管即导通。
报警状态发生。再生电阻过载、电机过载、电池、风扇报警或外部反馈装置报警中任一报警发生时,即有输出。
放电电阻过载报警。当放电电阻的负载率超过 85%或更多时,此输出晶体管即导通。
过载报警。当电机的转矩输出超过 85%或更多时,此输出晶体管即导通。
电池报警。绝对式编码器用的电池电压低于 3.2V,此输出晶体管即导通。
风扇锁定报警。风扇停止超过 1 秒,此输出晶体管即导通。
外部反馈装置报警。仅在全闭环控制模式有效。
7
外部反馈装置温度超过 65℃,或信号强度太弱(装置有必要调整安装等),此输出晶体管即导通。
速度一致性输出(V-COIN)。仅在速度和转矩控制模式有效。
8
如果速度指令(在加减速之前)和电机减速到低于 Pr61 设定值时的那个速度有差异,此输出晶体管即导通。
Page 25
Minas A4 系列驱动器技术资料选编
脉冲输出信号及其功能
信号 记号
OA+ 21
A 相输出
OA-
引脚
号码
22
·输出经过分频处理的编码器信号或外部反馈装置信号(A、B、Z 相),
等效于 RS422 信号。
·可以用参数 Pr44(反馈脉冲分倍频分子)和 Pr45(反馈脉冲分倍频分
母)设置输出脉冲信号的分倍频比例。
OB+ 48
B 相输出
OB-
·可以用参数 Pr46(反馈脉冲逻辑取反)设置输出的 B 相信号相对于 A
49
相的的逻辑关系。
·如果输出脉冲来自于外部反馈装置,参数 Pr47(外部反馈装置 Z 相脉
冲设置)可以用来设置 Z 相脉冲的输出相位。
·此输出电路的差分驱动器的地与信号地(GND)相接,不隔离。
·输出脉冲的最高频率是 4Mpps(4 倍频之后)。
·输出 Z 相信号的集电极开路信号。
·此输出晶体管的发射极与信号地(GND)相接,不隔离。
Z 相输出
Z 相输出
OZ+ 23
OZ-
24
CZ 19
模拟量输出信号及其功能
信号 记号
引脚
号码
用参数 Pr07(速度监视器(SP)选择)选择这个信号的输出内容。
输出内容 功能
速度监视器
输出
SP 43
Pr07
0~4 电机转速 输出带极性的、等比于电机转速的模拟电压。
5~9 指令速度 输出带极性的、等比于电机转速的模拟电压。
比例关系请参考参数 Pr07 的说明。
+:电机按 CCW(逆时针)方向旋转;-:按 CW(顺时针)方向旋转。
用参数 Pr08(转矩监视器(IM)选择)选择这个信号的输出内容。
输出内容 功能
0
转矩指令
输出带极性的、等比于电机输出转矩或位置偏
差脉冲数的模拟电压。
+:电机产生 CCW 转矩;-:产生 CW 转矩。
位置偏差
脉冲数
全闭环偏
差
脉冲数
输出带极性、等比于位置偏差脉冲数的电压。
+:位置指令是 CCW 方向的;
-:位置指令是 CW 方向的。
输出带极性的、等比于外部反馈装置的位置偏
差脉冲数的模拟电压。
+:位置指令是 CCW 方向的;
-:位置指令是 CW 方向的。
转矩监视器
输出
IM 42
6~10
Pr08
11
12
1~5
比例关系请参考参数 Pr08 的说明。
其他信号及其功能
信号 记号 引脚号码 功能
外壳地
信号地
FG 50
GND
13,15,17,25 ·信号地。内部与控制电源(COM-)相隔离。
·内部连接到驱动器上的接地端子。
功能
功能
23
I/O 信号
接口
Do-1
Do-2
I/O 信号
接口
Ao-1
Ao-1
I/O 信号
接口
――
――
Page 26
24
I/O 信号接口
i-1 o-1
Ai-1 o-2
Minas A4 系列驱动器技术资料选编
Ai-2 Ao-1
Page 27
Minas A4 系列驱动器技术资料选编
Di-1 Do-1
Do-2
25
Di-2
Page 28
26
Minas A4 系列驱动器技术资料选编
3.接线图
3-1.电缆规格与最大长度
名 称 符号标记 最大长度 规 格
主电源电缆 L1,L2,L3 ―――
控制电源电缆 L1C,L2C/r,t ―――
电机电缆 U,V,W,
地线
编码器电缆
I/O 控制信号电缆
注:电机插头采用 Tyco-AMP 生产的 172167-1 或 172159-1 时,最大线径可为 1.3mm2。
X5 20m
X6 3m
20m
1m
HVSF 0.75mm
对绞线,带屏蔽层
线径:≥0.18mm
3-2.I/O 控制信号插头,编码器插头和外部反馈装置插头
插头标记 部件名称 部件产品号 制造商
X6
X5
X7
请采用上述产品或等效品。
插头 55100-0600
端子座 54306-5011
外壳 54331-0501
插头 55100-0600
3-3.接线指示
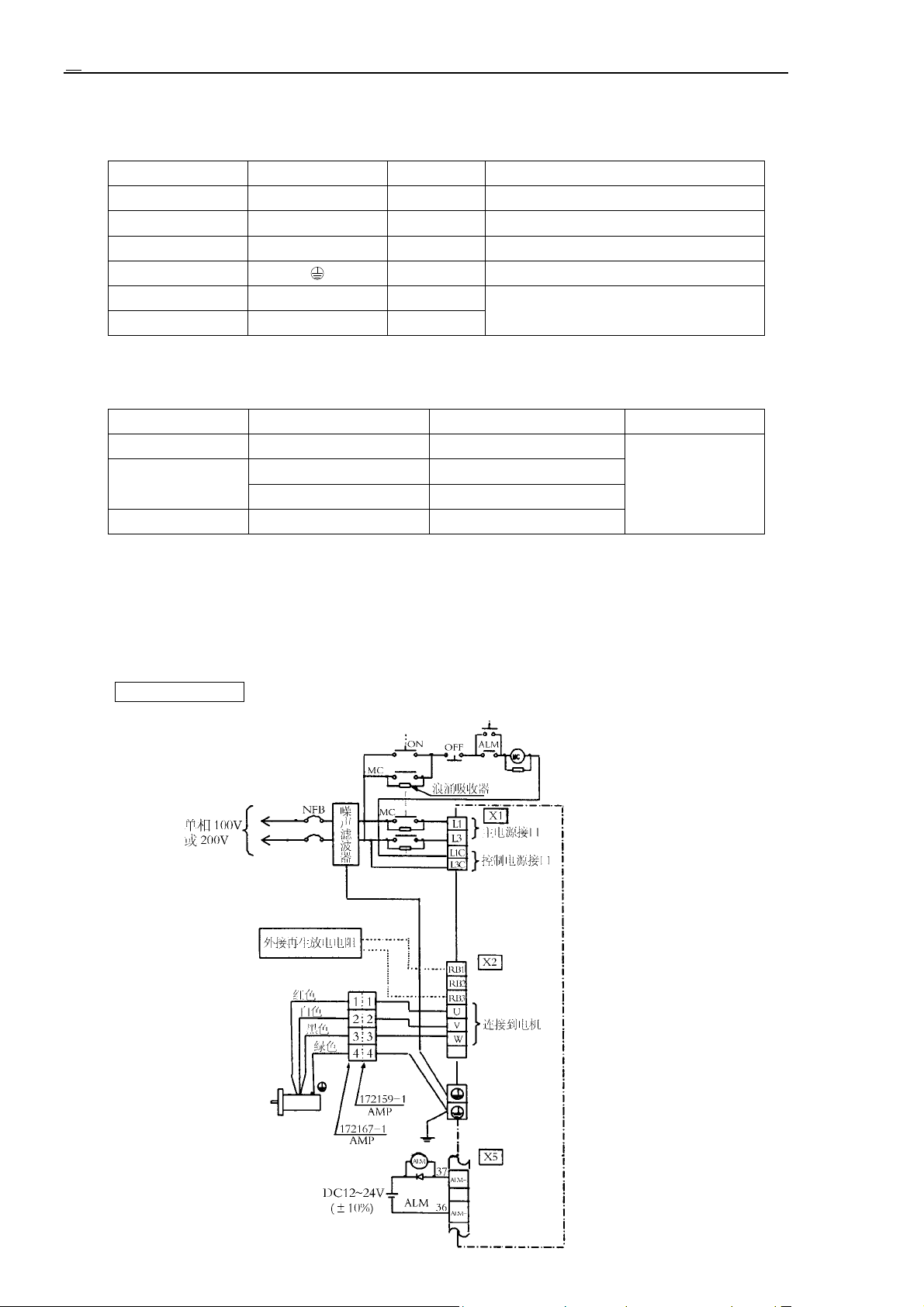
3-3-1.连接到电源接线端子的电缆
驱动器 A 型、B 型
2
2
Molex
Page 29
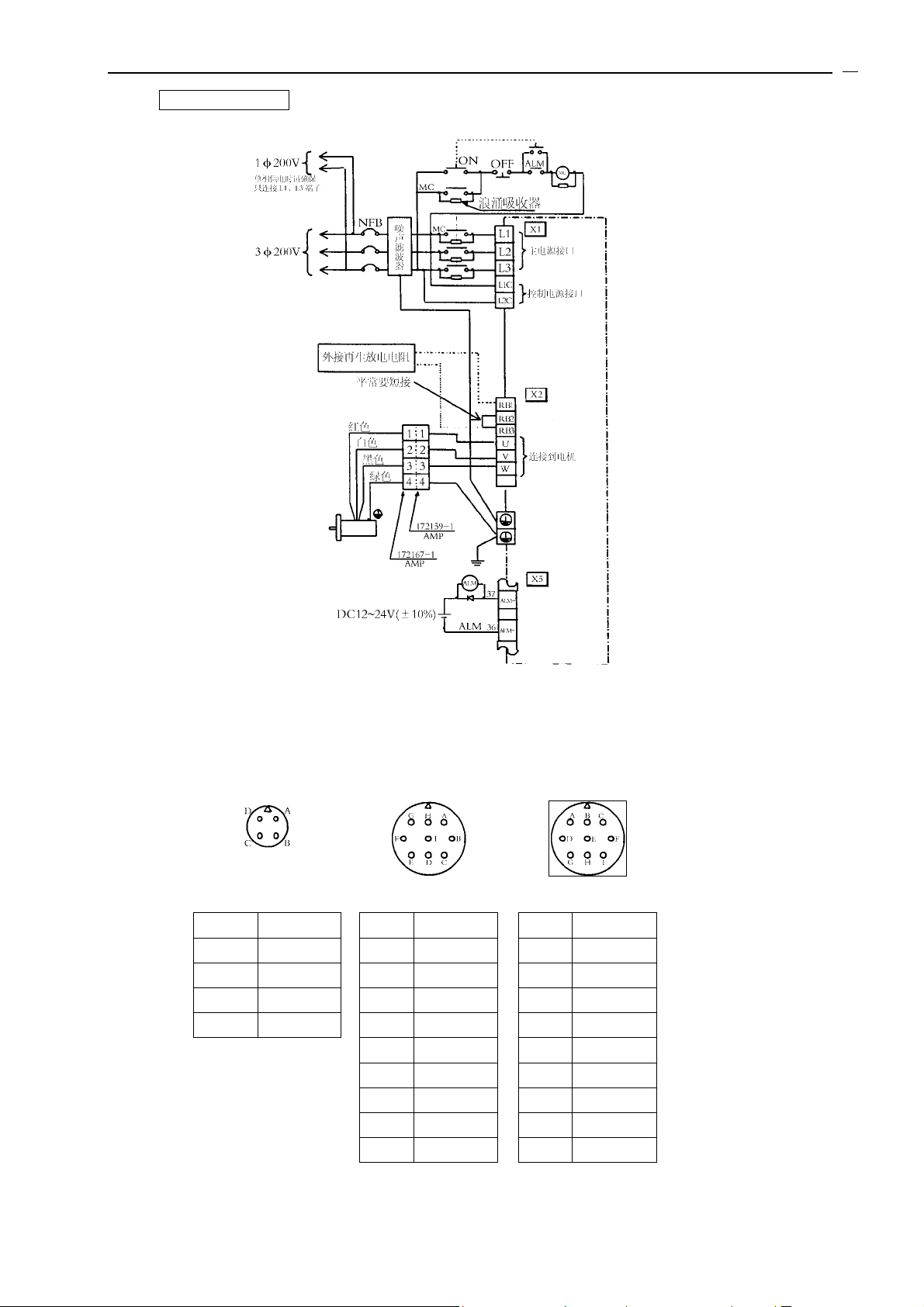
Minas A4 系列驱动器技术资料选编
驱动器 C 型、D 型
注:D 型驱动器与除 MSMA082***和 MAMA082***之外的电机连接时,请参考下表。
27
JL04V-2E20-4PE-B
JL04HV-2E22-22PE-B
脚号 用法
A
B
C
D
I
B
E
D
C
U 相
V 相
W 相
接地
JL04V-2E20-18PE-B JL04V-2E24-11PE-B
脚号 用法 脚号 用法
G
H
A
F
制动器
制动器
NC(不接)
U 相
V 相
W 相
接地
接地
NC(不接)
A
B
C
D
E
F
G
H
I
制动器
制动器
NC(不接)
NC(不接)
U 相
V 相
W 相
接地
接地
Page 30
28
注意事项:
① C 型、D 型驱动器用单相供电时,只连接主电源接线端子的 L1、L3;L2 端子不必接。
② 连接电缆到每个接线端子时,要采用有绝缘套的压线端子以保证绝缘屏蔽。
③ 接线前,要请先卸下接线端子排盖板的紧固螺丝,移开盖板。
④ 不安装外接放电电阻时,请将 RB2(B1)和 RB3(B2)端子短接起来。
如果驱动器由于发生再生放电电阻过载(Err18)而跳闸,请务必再外接一个放电电阻。此时,请拆除 RB2(B1)和
RB3(B2)之间的连接线,再在 RB1(P)和 RB2(B1)之间接入电阻。
通常情况,A4 系列 A 型、B型驱动器由于已指定需要外接电阻,而不需要将 RB2 和 RB3 端子短接起来。但是如果发
生再生放电电阻过载(Err18)报警,请在 RB1 和 RB2 之间接入电阻。
使用外接放电电阻时,请正确设置参数 Pr6C 的值(设成 0 以外之值)。
⑤ 电源电压请务必按照驱动器铭牌上的指示。
⑥ 主电源接线端子(L1、L2、L3)和电机接线端子(U、V、W)不要混淆。
⑦ 电机接线端子(U、V、W)不可以接地或短路。
Minas A4 系列驱动器技术资料选编
⑧ 禁止触摸电源接线端子 X1 、
⑨ 安装了一个断路器(最大电流 20A)时,750W(或更高功率)最大可输入 240V、5000A(有效值)。
⑩ 交流伺服电机的旋转方向不可以象感应电机一样通过交换三相相序来改变。
必须确保伺服驱动器上的电机连接端子(U、V、W)与其连接电缆的色标(或航空插头的脚号)一致。
⑪ 电机的接地端子和驱动器的接地端子以及噪声滤波器的接地端子必须保证可靠的连接到同一个接地点上。机身也必
须要接地。请确保铝线和铜线不接触,以免金属腐蚀。
⑫ 为了避免噪声,请给电磁接触器、继电器、电机电磁制动器安装一个浪涌吸收器。
⑬ 确保安装一个非熔断断路器(NFB),紧急情况下可以用来切断驱动器侧的电源输入。
如果安装了漏电断路器,请采用有抗高次谐波措施的型号。
⑭ 安装一个噪声滤波器,以消除接线端子上的噪声电压。
⑮ 电机上的电磁制动器的电源请自备。
⑯ 接线工作完成后,请接通电源电压。
⑰ 外接放电电阻,建议参考下表所列规格配置。
驱动器
类型
A
B DVOP3631 45M03 100 10
C
D DVOP1981 RH150M 100 90
E DVOP1982 RH220M 30 120
F
制造商:Iwaki Radio Laboratory Co., Ltd.
单相 100V 单相或三相 200V
DVOP3630:1 DVOP3631:1
DVOP1980:1 DVOP1981:1
――――
输入电源电压 规格
X2 和接线端子排,因为有高电压。否则可能会导致触电事故。
DVOP1982:1
(并联)
或 DVOP1983:1
选购部件号 制造商型号
DVOP3630 45M03 50 10
DVOP1980 RH150M 50 90
DVOP1983 RH500M 20 300
注:请安装一个热熔断保险丝以保护 DVOP3630 和
DVOP3631。热熔断保险丝可在 130±2℃时起到保护作用。
额定阻值(Ω) 额定功率(W)
Page 31

Minas A4 系列驱动器技术资料选编
29
3-3-2.连接到控制信号接口 X5
① 连接到 COM+和 COM-端子之间的控制信号用电源 DC12~24V 请用户自备。
② 伺服驱动器与周边设备请放置在尽可能近的距离(不大于 3m),以缩短连接电缆长度。
③ 控制信号电缆与电源电缆(L1、L2、L3,L1C(r)、L2C(t),U、V、W 和接地)请尽可能的远(不小于 30cm)。
这两种电缆请不要放在同一线槽内,或捆扎成一束。
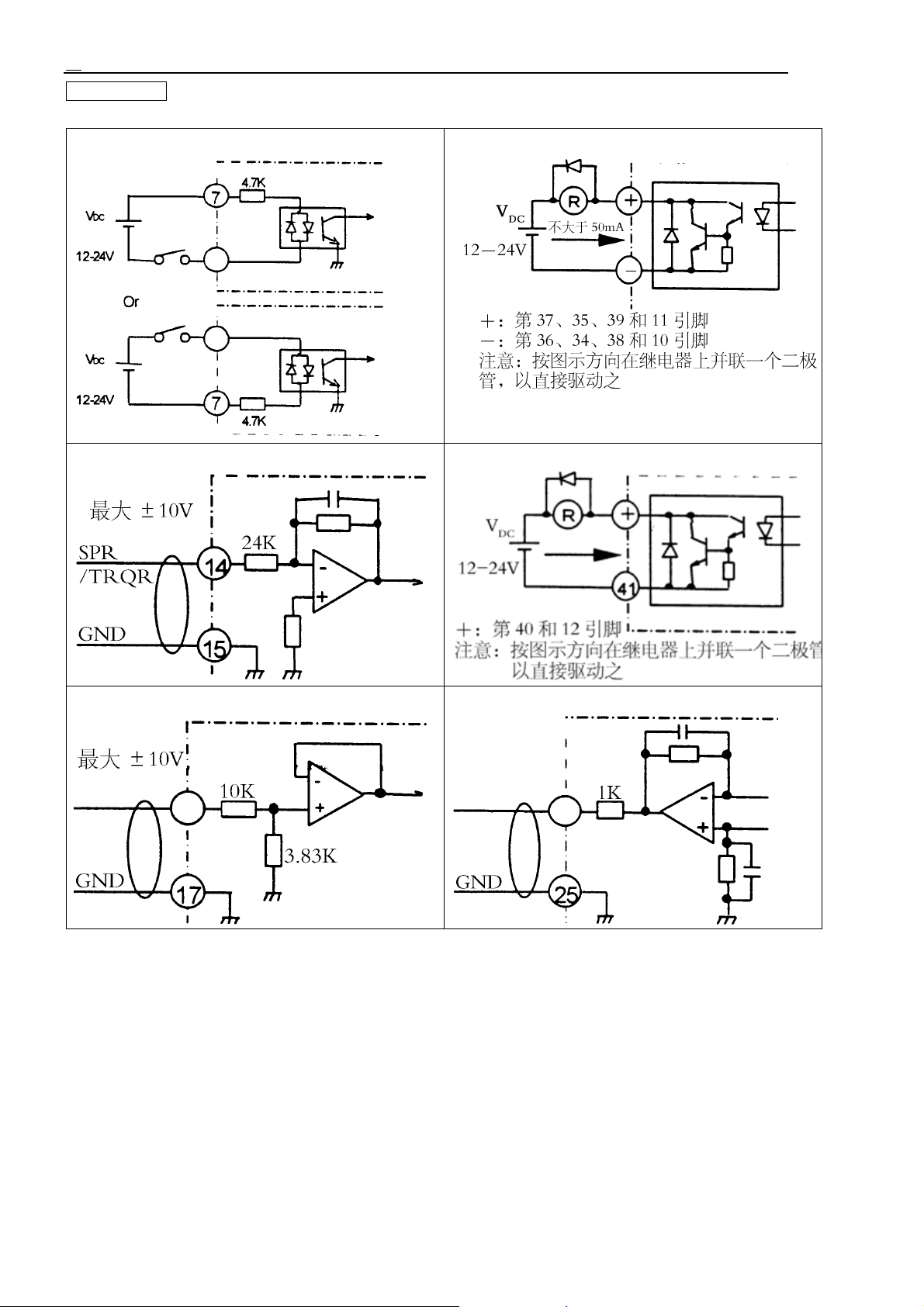
控制信号输入
Page 32

30
控制信号输出
④ 请注意控制信号用电源的极性。连接时极性颠倒会导致驱动器损坏。(详见上页图)
⑤ 如下图所示,请在继电器上并联一个二极管,以直接驱动之。
二极管不接或极性接反会导致驱动器损坏。
⑥ 如果输出信号是用逻辑电路比如门电路来接收,请注意避免噪声干扰。
⑦ 请确保输出信号的电流不超过 50mA。
模拟量指令信号输入
Minas A4 系列驱动器技术资料选编
Page 33

Minas A4 系列驱动器技术资料选编
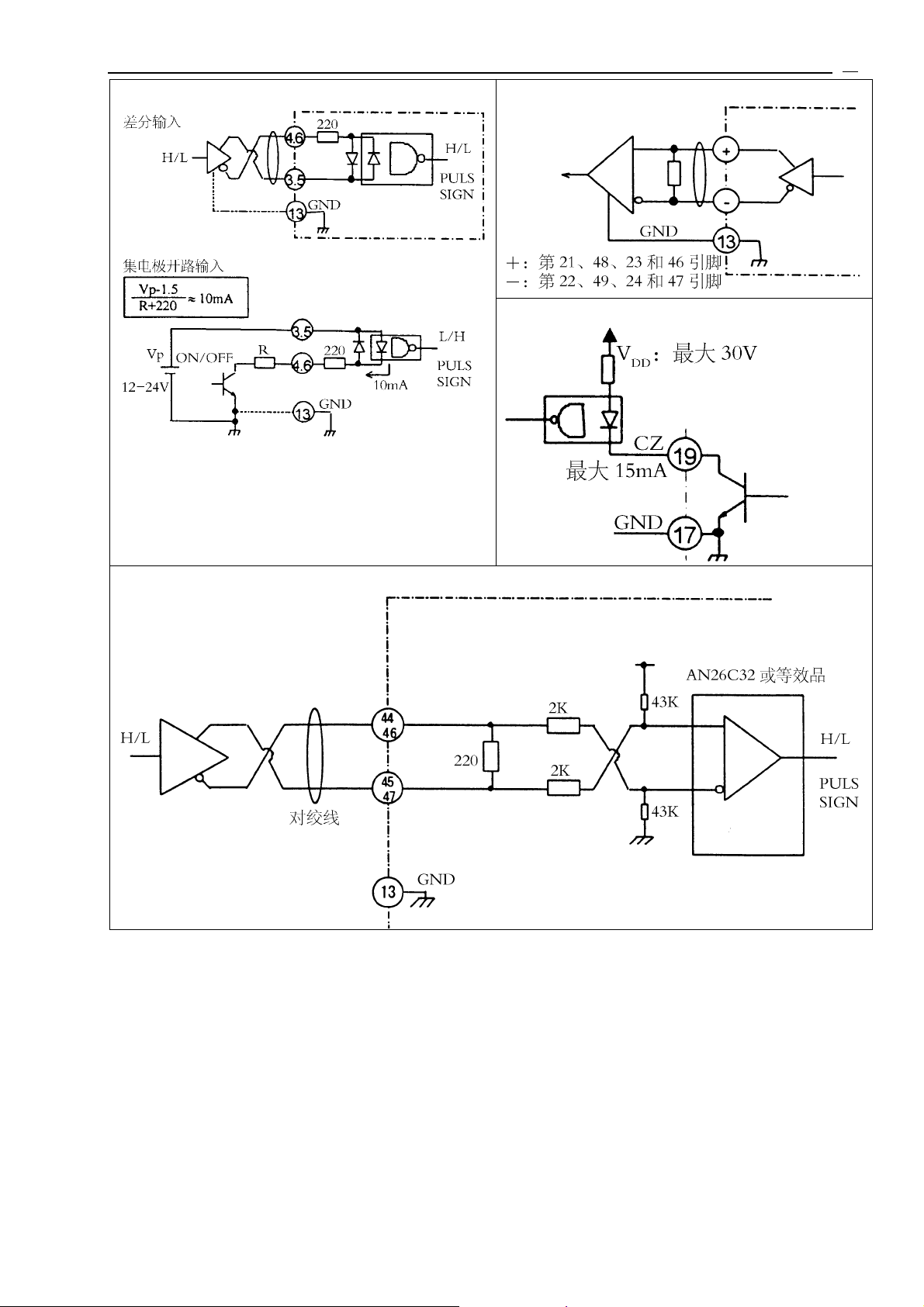
脉冲串指令信号输入
A.差分电路专用的脉冲串接口
B.普通的脉冲串指令接口
·差分电路
脉冲串指令可以通过差分电路或集电极开路(OC)电 路 接
口输入。
建议采用差分电路以提高信号传输的可靠性。
31
Page 34

32
·集电极开路(OC)电路
1.5
Vp
−
R
+
220
10
mA
≈
Minas A4 系列驱动器技术资料选编
注:集电极开路(OC)电路接线指示
·连接电缆请尽可能的短(不大于 1m)。
·集电极开路(OC)接法,指令脉冲的最高频率是 200kpps;而差分电路的最高频率是 500kpps。
Page 35

Minas A4 系列驱动器技术资料选编
旋转编码器反馈脉冲信号输出
注:1)只有 Z 相信号既可以差分输出,又可以集电极开路输出(CZ,第 19 引脚)。
对于 CZ 信号,请注意防止噪声干扰。
2)请采用差分信号接收器(AM26C32 或等效品)来接收反馈脉冲输出信号。
此时请在差分信号接收器的输入引脚之间接入一个终端电阻(约 330Ω)。
3)请注意 Z 相信号差分输出(OZ)与集电极开路输出(CZ)的逻辑是相反的。
4)反馈脉冲的最大输出频率不大于 1.7MHz(在 4 倍频之前)。
33
Page 36

34
Minas A4 系列驱动器技术资料选编
3-3-3.连接到编码器信号接口 X6
① 编码器信号连接电缆,请选用带有屏蔽层的双绞电缆,其线径不小于 0.18mm2。
② 电缆最长不超过 20m。
5V 电源供电、电缆较长时,建议电源双接线,以免电压跌落。
③ 请将编码器电缆的屏蔽层接到电机侧的接地端子上。
确保将编码器电缆的屏蔽层接到驱动器侧插头 X6 的外壳(FG)上。
④ 如果是航空插头,请将编码器电缆的屏蔽层接到电机侧的 J 端子上。
⑤ 编码器信号电缆与电源电缆(L1、L2、L3,L1C(r)、L2C(t),U、V、W 和接地)请尽可能的远(不小于 30cm)。
这两种电缆请不要放在同一线槽内,或捆扎成一束。
⑥ 插头 X6 上未用到的引脚不必接线。
7线制绝对式编码器电缆
绝对式编码器用电池(建议型号:3.6V,ER6V,Toshiba 东芝),接到第 1 和第 2 引脚之间。
上图所示的电池的固定装置和连接电缆请用户自备。
绝对式编码器用电池(建议型号:3.6V,ER6V,Toshiba 东芝),接到航空插头的 T、S 引脚之间。
上图所示的电池的固定装置和连接电缆请用户自备。
Page 37

Minas A4 系列驱动器技术资料选编
5线制增量式编码器电缆
35
Page 38

36
4.参数
4-1.参数概略
A4 系列各型号的通用参数
编号 Pr.
00
01
02
03
04
05
06
07
08
09
0A
0B
0C
0D
0E
0F
10
11
12
13
14
15
16
17
18
19
1A
1B
1C
1D
1E
1F
20
21
22
23
24
25
26
27
转矩限制中(TLC)输出选择
实时自动增益的机械刚性选择
LED 初始状态
控制模式选择
转矩限制选择
行程限位禁止输入无效设置
内部/外部速度切换选择
零速箝位(ZEROSPD)选择
速度监视器(SP)选择
转矩监视器(IM)选择
零速检测(ZSP)输出选择
绝对式编码器设置
RS232C 波特率设置
RS485 波特率设置
操作面板锁定设置
制造商参数
第 1 位置环增益 (27)
第 1 速度环增益 (30)
第 1 速度环积分时间常数 (18)
第 1 速度检测滤波器 (0)
第 1 转矩滤波器时间常数 (75)
速度前馈滤波器时间常数 (50)
制造商参数
第 2 位置环增益 (32)
第 2 速度环增益 (30)
第 2 速度环积分时间常数 (1000)
第 2 速度检测滤波器 (0)
第 2 转矩滤波器时间常数 (75)
第 1 陷波频率
第 1 陷波宽度选择
制造商参数
实时自动增益设置
自适应滤波器模式
振动抑制滤波器切换选择
常规自动调整模式设置
制造商参数
速度观测器 (0)
参数名称 缺省值
轴地址
速度前馈 (300)
惯量比 (100)
1
1
1
1
1
0
0
3
0
0
1
1
2
2
0
0
0
1500
2
0
1
4
1
0
0
0
编号 Pr.
28
29
2A
2B
2C
2D
2E
2F
30
31
32
33
34
35
36
37
38
39
3A
3B
3C
3D
3E
3F
40
41
42
43
44
45
46
47
48
49
4A
4B
4C
4D
4E
4F
Minas A4 系列驱动器技术资料选编
参数名称 缺省值
第 2 陷波频率
第 2 陷波宽度选择
第 2 陷波深度选择
第 1 振动抑制滤波器频率
第 1 振动抑制滤波器
第 2 振动抑制滤波器频率
第 2 振动抑制滤波器
自适应滤波器频率
第 2 增益动作设置 (1)
第 1 控制切换模式 (0)
第 1 控制切换延迟时间 (30)
第 1 控制切换水平 (50)
第 1 控制切换迟滞 (33)
位置环增益切换时间 (20)
第 2 控制切换模式 (0)
第 2 控制切换延迟时间
第 2 控制切换水平
第 2 控制切换迟滞
制造商参数
制造商参数
制造商参数
JOG 速度设置
制造商参数
制造商参数
指令脉冲输入选择
指令脉冲旋转方向设置
指令脉冲输入方式
指令脉冲禁止输入无效设置
反馈脉冲分倍频分子
反馈脉冲分倍频分母
反馈脉冲逻辑取反
外部反馈装置 Z 相脉冲设置
指令脉冲分倍频第 1 分子(*1)
指令脉冲分倍频第 2 分子(*1)
指令脉冲分倍频分子倍率(*1)
指令脉冲分倍频分母(*1)
平滑滤波器
FIR 滤波器
计数器清零输入方式
制造商参数
1500
2
0
0
0
0
0
0
0
0
0
0
0
0
3000
0
0
0
0
1
1
2500
0
0
0
0
0
0
10000
1
0
1
0
Page 39

Minas A4 系列驱动器技术资料选编
37
编号 Pr.
50
51
52
53
54
55
56
57
58
59
5A
5B
5C
5D
5E
5F
60
61
62
63
64
65
66
67
*1 关于参数 Pr48~Pr4B,请参照本章末“4-3. 电子齿轮功能”。
*2 参数 Pr5E(转矩限制设置)根据不同的电机可以设置不同的最大值。
*3 参数 Pr6C(外接制动电阻设置)的缺省值因不同的驱动器而不同。
*4 缺省值带()的参数可以在实时自动增益调整或常规自动增益调整时自动设定。
主电源关断时欠电压报警时序
参数名称 缺省值
速度指令增益
速度指令逻辑取反
速度指令零漂调整
第 1 内部速度
第 2 内部速度
第 3 内部速度
第 4 内部速度
速度指令滤波器
加速时间设置
减速时间设置
S 形加减速时间设置
转矩指令选择
转矩指令增益
转矩指令逻辑取反
第 1 转矩限制(*2)
第 2 转矩限制(*2)
定位完成范围
零速
到达速度
定位完成信号输出设置
制造商参数
行程限位时报警时序
主电源关断时报警时序
500
1
0
0
0
0
0
0
0
0
0
0
30
0
500
500
131
50
1000
0
0
1
0
0
编号 Pr.
68
69
6A
6B
6C
6D
6E
6F
70
71
72
73
74
75
76
77
78
79
7A
7B
7C
7D
7E
7F
伺服报警时相关时序
伺服 OFF 时相关时序
电机停止时机械制动器延迟时间
电机运转时机械制动器延迟时间
外接制动电阻设置(*3) 0/3
主电源关断检测时间
紧停时转矩设置
位置偏差过大水平
模拟量指令偏差过大水平
外部反馈脉冲分倍频分子
外部反馈脉冲分倍频分子倍频
外部反馈脉冲分倍频分母
混合控制偏差过大水平
外部反馈脉冲方向设置
参数名称 缺省值
制造商参数
25000
过载水平
过速水平
第 5 内部速度
第 6 内部速度
第 7 内部速度
第 8 内部速度
制造商参数
制造商参数
制造商参数
10000
0
0
0
0
35
0
0
0
0
0
0
0
0
0
0
0
100
0
0
0
0
Page 40

38
A4 系列 Pr5E(转矩限制设置)的最大可设值
驱动器型号 适配电机
A 型
MADDCT1205
MADDCT1207
B 型
MBDDT2210
C 型
MCDDT3520
D 型
MDDDT3530
MDDDT5540
MSMD5AZP1* 300 MADDCT1105
MSMD5AZS1* 300
MSMD011P1* 300 MADDCT1107
MSMD011S1* 300
MSMD5AZP1* 300
MSMD5AZS1* 300
MSMD012P1* 300
MSMD012S1* 300
MSMD022P1* 300
MSMD022S1* 300
MAMA012P1* 500
MAMA012S1* 500
MSMD021P1* 300 MBDDT2110
MSMD021S1* 300
MSMD042P1* 300
MSMD042S1* 300
MAMA022P1* 500
MAMA022S1* 500
MSMD042P1* 300 MCDDT3120
MSMD041S1* 300
MSMD082P1* 300
MSMD082S1* 300
MAMA042P1* 500
MAMA042S1* 500
MFMA042P1* 300
MFMA042S1* 300
MHMA052P1* 255
MHMA052S1* 255
MDMA102P1* 300
MDMA102S1* 300
MHMA102P1* 300
MHMA102S1* 300
MGMA092P1* 225
MGMA092S1* 225
MSMA102P1* 300
MSMA102S1* 300
MHMA152P1* 300
MHMA152S1* 300
MDMA152P1* 300
MDMA152S1* 300
Pr5E 最大
可设值
Minas A4 系列驱动器技术资料选编
驱动器型号 适配电机
D 型
E 型
F 型
MDDDT5540
MEDDT7364
MEDDTA390
MFDDTB3A2
MSMA152P1* 300
MSMA152S1* 300
MFMA152P1* 300
MFMA152S1* 300
MAMA082P1* 500
MAMA082S1* 500
MDMA202P1* 300
MDMA202S1* 300
MSMA202P1* 300
MSMA202S1* 300
MHMA202P1* 300
MHMA202S1* 300
MFMA252P1* 300
MFMA252S1* 300
MGMA202P1* 230
MGMA202S1* 230
MDMA302P1* 300
MDMA302S1* 300
MHMA302P1* 300
MHMA302S1* 300
MSMA302P1* 300
MSMA302S1* 300
MGMA302P1* 235
MGMA302S1* 235
MDMA402P1* 300
MDMA402S1* 300
MHMA402P1* 300
MHMA402S1* 300
MSMA402P1* 300
MSMA402S1* 300
MFMA452P1* 300
MFMA452S1* 300
MGMA452P1* 255
MGMA452S1* 255
MDMA502P1* 300
MDMA502S1* 300
MHMA502P1* 300
MHMA502S1* 300
MSMA502P1* 300
MSMA502S1* 300
Pr5E 最大
可设值
Page 41

Minas A4 系列驱动器技术资料选编
4-2.参数详解
编号
Pr.
00
01
02
注 1:号码带*之参数,其设定值必须在控制电源断电重启之后才能修改成功。
注 2:号码标有 RT 之参数,其设定值在执行实时自动增益调整时自动的修改。
如果手动设置其数值,请先将 Pr21(实时自动增益调整设置)设为 0,即取消实时自动调整功能,再输入新的数
注 3:All 表示全部的控制模式。
*
*
*
参数名称
轴地址
LED
初始状态
控制模式选
择
值。
相关
模式
All
All
All
设置
范围
0~15
0~17
0~6
功能与含义
面板上旋转开关 ID 的设定值在控制电源接通时下载到驱动器。
通常用于串行通讯。
此设定值不影响伺服操作与功能。
可以选择电源接通时在 7 段 LED 上初始显示的内容。
0:位置偏差脉冲总数
1:电机转速
2:转矩输出负载率
3:控制模式
4:I/O 信号状态
5:报警代码/历史记录
6:软件版本
7:报警状态
8:放电电阻负载率
9:过载率
10:惯量比
11:反馈脉冲总数
12:指令脉冲总数
13:外部反馈装置偏差脉冲总数
14:外部反馈装置反馈脉冲总数
15:电机自动识别功能
16:模拟量指令输入值
17:电机不转的原因
显示内容的细节请参考“7.显示面板与操作按钮”。
选择伺服驱动器的控制模式。
设置的参数值在控制电源重新上电后才有效。
Pr02 值 控制模式 相关代码
0
1
2
3 注 位置(第 1)/速度(第 2)控制
4 注 位置(第 1)/转矩(第 2)控制
5 注 速度(第 1)/转矩(第 2)控制
6
注:当设成混合控制方式(Pr02=3,4,5)时,用控制模式切换输入端子
(C-MODE,X5 插头第 32 引脚)来选择第 1 或第 2 控制模式。
C-MODE(与 COM-)开路:选择第 1 控制模式;
C-MODE(与 COM-)短路:选择第 2 控制模式;
切换 C-MODE 信号至少 10ms 后才能输入指令信号。
位置控制
速度控制
转矩控制
全闭环控制
P
S
T
P/S
P/T
S/T
F
39
Page 42

40
Minas A4 系列驱动器技术资料选编
编号
Pr.
03
03
*
05
06
07
08
参数名称
转矩限制
选择
行程限位
禁止输入
无效设置
内部/
外部速度
切换选择
零速箝位
(ZEROSPD)
选择
速度监视器
(SP)选择
转矩监视器
(IM)选择
相关
模式
设置
范围
P,
S, F 0~3
All
S
0~2
0~3
S,T 0~2
All
All
0~9
0~9
功能与含义
可以设置逆时针(CCW)和顺时针(CW)两个方向转矩限制信号(CCWTL,
X5 插头第 16 引脚;CWTL,第 18 引脚)的输入是否有效。
Pr03 值
CCW CW
0 CCWTL CWTL
1
2
CCW、CW 方向的限制值都由 Pr5E 设定
由 Pr5E 设定 由 Pr5F 设定
GAIN/TL-SEL(与 COM-)开路:由 Pr5E 设定
3
GAIN/TL-SEL(与 COM-)短路:由 Pr5F 设定
当 Pr03=0,Pr5E(第 1 转矩限制)即是设置 CCWTL 和 CWTL 的限制值。
转矩控制模式中,Pr5E 设置 CCW、CW 方向的转矩限制值,而与此参数无关。
设置两个行程限位信号(CCWL,X5 插头第 8 引脚;CCWL,第 9 引脚)的输
入是否有效。
0:行程限位动作发生时,按 Pr66 设定的时序发生动作。
1:行程限位信号输入无效。
2:CCWL或 CWL 信号(与 COM-)断路,都会发生 Err38 行程限位禁止输入
信号出错报警。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
选择速度控制模式下的速度指令种类。
0:模拟量速度指令输入(SPR,X5 插头第 14 引脚)
1:内部指令(第 1~第 4 内部速度:Pr53~Pr56 设定值)
2:内部指令(第 1~第 3 内部速度:Pr53~Pr55),模拟量指令输入(SPR).
3:内部指令(第 1~第 8 内部速度,Pr53~Pr56 和 Pr74~Pr77)
关于此参数,请参照“4. ”的说明。
选择零速箝位信号(ZEROSPD,X5 插头第 26 引脚)的功能。
0:零速箝位无效
1:零速箝位
2:速度指令代码
转矩控制模式中,Pr06=2 表示零速箝位无效。
选择模拟量速度监视器信号(SP,X5 插头第 43 引脚,或显示面板上的接线端
子)的输出内容。
0~4:实际转速,单位:rpm
0:47,1:188,2:750,3:3000,4:12000
5~9:指令速度,单位:rpm
5:47,6:188,7:750,8:3000,9:12000
选择模拟量转矩监视器信号(IM,X5插头第 42 引脚,或显示面板上的接线端
子)的输出内容。
括号()内的数值表示当监视器输出约 3V 时的值。
0:转矩指令 100%
1~5:位置偏差脉冲个数
1:31,2:125,3:500,4:2000,5:8000
6~10:全闭环偏差脉冲个数
6:31,7:125,8:500,9:2000,10:8000
11:转矩指令 200%
12:转矩指令 400%
Page 43

Minas A4 系列驱动器技术资料选编
41
编号
Pr.
09
0A
0B
*
0C
*
0D
*
0E
*
0F
参数名称
转矩限制
控制(TLC)
输出选择
零速检测
(ZSP)
输出选择
绝对式
编码器设置
RS232C
波特率设置
RS485
波特率设置
操作面板
锁定设置
制造商参数
相关
模式
设置
范围
分别用来选择转矩限制控制信号(TLC,X5 插头第 40 引脚)或零速检测信号
(ZSP,第 12 引脚)的检测、输出内容。
0:转矩限制控制
1:零速检测
2:有任何报警
All
0~8
3:放电电阻过载报警
4:过载报警
5:电池报警
6:风扇锁定报警
7:外部反馈装置报警
8:速度一致性输出
选择绝对式编码器的用法:
0:用作绝对式编码器
All
0~5
1:用作增量式编码器
2:用作绝对式编码器,但不考虑计数器溢出
其设定值必须在控制电源断电重启之后才能修改、写入成功。
分别用来选择 RS232C 或 RS485 方式的通讯速度。
0:2400
1:4800
2:9600
All
0~5
3:19200
4:38400
5:57600
(单位:bps,误差:±5%)
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
可以把操作面板锁定到监视器状态,以免发生误操作,比如修改参数设置等。
0:不锁定,全部功能可操作
All
0~1
1:锁定到监视器状态。
即使此参数设为 1,通过通讯方式也可以进行修改参数。
请使用 PANATERM 软件或控制器将此参数复位到 0。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
功能与含义
Page 44

42
Minas A4 系列驱动器技术资料选编
编号
Pr.
10
(RT)
11
(RT)
12
(RT)
13
(RT)
14
(RT)
15
(RT)
16
(RT)
17
18
(RT)
19
(RT)
1A
(RT)
1B
(RT)
1C
(RT)
1D
1E
1F
参数名称
第 1
位置环增益
第 1
速度环增益
第 1速度环积
分时间常数
第 1 速度
检测滤波器
第 1转矩滤波
器时间常数
速度前馈 P,F
速度前馈滤波
器时间常数
制造商参数
第 2
位置环增益
第 2
速度环增益
第 2速度环积
分时间常数
第 2 速度
检测滤波器
第 2转矩滤波
器时间常数
第 1
陷波频率
第 1 陷波
宽度选择
制造商参数
相关
模式
设置
范围
定义位置环增益的大小。
P,F 0~3000
单位:1/s。
增大此增益值,可以提高位置控制的伺服刚性。
但是过高的增益会导致振荡。
定义速度环增益的大小。
All
1~3500
如果 Pr20(惯量比)设置准确,则此参数单位是 Hz。
增大此增益值,速度控制的响应速度可以提高。
减小此参数值可以加快积分动作。
All
1~1000
单位:ms。
设为 999 可以保持积分动作;
设为 1000 可以使积分动作无效。
选择速度检测滤波器的类型。
All
0~5
0~5:设定值越高,电机噪音越小。
当 Pr27=1(瞬时速度观测器功能有效),此参数的设置才有效。
定义插入到转矩指令后的初级延时滤波器的时间常数。
All
0~2500
单位:×10μs。
设置转矩滤波器参数可以减轻机器振动。
用来设置速度前馈值。
-2000
~2000
P,F 0~6400
单位:×0.1%。
设得越高,可在较小的位置偏差达到较快反应;尤其是在需要高速响应的场合。
可以设置速度前馈的初级延时滤波器的时间常数。
单位:×10μs。
0~3000
All
1~3500
All
这些参数的功能与意义请参考上述的“第 1”参数。
All
1~1000
只有启用了两档增益切换功能,才需要设置这些参数。
All
All
0~5
0~2500
用来设置抑制共振的第 1 陷波滤波器的频率。单位:Hz。
陷波滤波器可以模拟出机械的共振频率,从而抑制掉共振频率。
All
100
~1500
100~1499:滤波器有效
1500:无效
注:如果同时也设置了自适应滤波器,那么此参数可能会改变。
设置抑制共振的第 1 陷波滤波器的陷波宽度。
All
0~4
较大的设定值可以获得较大的陷波宽度。
注:如果同时也设置了自适应滤波器,那么此参数可能会改变。
功能与含义
这两者合用时,请使用第 2 陷波滤波器。
这两者合用时,请使用第 2 陷波滤波器。
Page 45

Minas A4 系列驱动器技术资料选编
43
编号
Pr.
20
21
22
23
24
25
26
参数名称
惯量比
实时自动
增益设置
实时自动
增益的机械
刚性选择
自适应
滤波器模式
振动抑制
滤波器
切换选择
常规自动调
整模式设置
制造商参数
相关
模式
设置
范围
设置机械负载惯量对电机转子惯量之比率。单位:%。
All
0
~10000
设定值(%)=(负载惯量/转子惯量)×100。
实时自动增益调整时,此参数可自动估算并每 30 分钟在 EEPROM 中刷新保存。
用来设置实时自动增益调整功能的运行模式。
根据负载惯量在运行时的变化情况,此参数值设得越大,响应越快。
但是由于运行条件的限制,实时的调整也可能不稳定。
通常情况请设成 1 或 4。如果电机用于垂直轴请设成 4~6。
All
0~6
可以选择实时自动增益调整时的机械刚性。
All
0~15
此参数值设得越大,响应越快。
如果此参数突然设得很大,系统增益会发生显著变化,导致机器有较大冲击。
建议先设一个较小值,在监视机器运行状况的同时逐步选择较大的刚性。
设置自适应滤波器的工作模式。
P,S,
F
0~2
0:无效
1:有效
2:保留(自适应滤波器的频率被保留)
请选择正确的切换模式以选通合适的振动抑制滤波器。
0:不切换(第 1、第 2 滤波器都有效)。
1:通过振动抑制控制切换选择端子(VS-SEL,X5 插头第 26 引脚)来选择第
P,F 0~2
2:根据转动方向来切换滤波器,
逆时针(CCW)方向转动:选择第 1 滤波器(Pr2B、Pr2C);
顺时针(CW)方向转动:选择第 2 滤波器(Pr2D、Pr2E)。
设置常规自动增益调整时电机的运行模式。
All
0~7
例)Pr25=0,则电机先逆时针(CCW)转 2 圈,再顺时针(CW)转 2 圈。
功能与含义
Pr21
0
1
2
3
4
5
6
实时自动调整 运行时负载惯量的变化情况
无效 ――――
没有变化
常规模式
变化很小
变化很大
没有变化
垂直轴模式
变化很小
变化很大
1 或第 2 滤波器;此时,
VS-SEL 端子(与 COM-)开路:选择第 1 滤波器(Pr2B、Pr2C);
VS-SEL 端子(与 COM-)短路:选择第 2 滤波器(Pr2D、Pr2E)。
Pr25
0
1
2
3
4
5
6
7
旋转圈数 旋转方向
CCW→CW
CW→CCW
2
CCW→CCW
CW→CW
CCW→CW
CW→CCW
1
CCW→CCW
CW→CW
Page 46

44
Minas A4 系列驱动器技术资料选编
编号
Pr.
27
(RT)
28
29
2A
2B
2C
2D
2E
2F
参数名称
速度观测器 P,S 0~1
第 2
陷波频率
第 2 陷波
宽度选择
第 2 陷波
深度选择
第 1振动抑制
滤波器频率
第 1 振动
抑制滤波器
第 2振动抑制
滤波器频率
第 2振动抑制
滤波器
自适应
滤波器频率
相关
模式
All
All
All
P,F 0~2000
P,F
P,F
P,F
P,S,
F
设置
范围
100
~1500
0~4
0~99
-200
~2000
0~2000
-200
~2000
0~64
功能与含义
这是一个瞬时的速度观测器,可以改善速度检测的精度,从而既可以获得高响
应,又能减弱电机停止时的振动。
0:瞬时速度观测器无效。
1:观测器有效;此时,第 1、第 2 速度检测滤波器(Pr13 和 Pr1B)即无效。
使用此观测器功能,首先要尽可能准确的设置好惯量比(Pr20)。
设置抑制共振的第 2 陷波滤波器的频率。单位:Hz。
陷波滤波器可以模拟出机械的共振频率,从而抑制掉共振频率。
100~1499:滤波器有效
1500:无效
设置抑制共振的第 2 陷波滤波器的陷波宽度。
较大的设定值可以获得较大的陷波宽度。
设置抑制共振的第 2 陷波滤波器的陷波深度。
较大的设定值可以获得较大的陷波深度和相移(相位延迟)。
振动抑制滤波器可以用来抑制在机械负载的前端发生的振动。
单位:×0.1Hz。
100~2000:振动抑制滤波器有效。
0~99:振动抑制滤波器功能无效。
设置第 1 振动抑制滤波器(Pr2B)时,如果出现转矩饱和,那么可以将此参数
值设得较小。如果需要较快的运行,可以设得大一点。
通常请设为 0。单位:Hz。
与上述第 1 振动抑制滤波器(Pr2B、Pr2C)参数的意义相同。
根据代表号码来选择自适应滤波器的频率。
自适应滤波器功能有效(Pr23≠0)时,其频率(Pr2F)是自动设定,而不能
手工修改。
0~4:滤波器无效;
5~48:滤波器有效;
49~64:有效与否取决于参数 Pr22 设定值。
如果自适应滤波器功能有效,此参数可自动估算并每 30 分钟在 EEPROM 中刷
新保存。
如果下次上电开机时自适应滤波器功能生效,那么存储在 EEPROM 里的数据就
作为运行的初始值。
如果此参数要清零、复位,请先将自适应滤波器功能取消,再重新使之有效。
Page 47

Minas A4 系列驱动器技术资料选编
45
编号
Pr.
30
(RT)
31
(RT)
32
(RT)
33
(RT)
34
(RT)
35
(RT)
36
(RT)
37
38
39
参数名称
第 2 增益
动作设置
第 1 控制
切换模式
第 1控制切换
延迟时间
第 1 控制
切换水平
第 1 控制
切换迟滞
位置环增益
切换时间
第 2 控制
切换模式
第 2控制切换
延迟时间
第 2 控制
切换水平
第 2 控制
切换迟滞
相关
模式
All
All
All
All
All
P,F
设置
范围
0~1
0~10
0
~10000
0
~20000
0
~20000
0
~10000
S,T 0~5
S,T
S,T
S,T
0
~10000
0
~20000
0
~20000
功能与含义
可以用来选择是否采用两档增益切换。
0:选择第 1 增益设置(Pr10~14),此 时 PI/P(比例积分/比例)操作可切换。
1:可以在第 1 增益设置(Pr10~14)和第 2 增益设置(Pr18~1C)之间切换。
PI/P 操作的切换,可通过增益切换端子(GAIN,X5 插头第 27 引脚)进行。
如果 Pr30=0 并且 Pr03=3,则固定为 PI 操作。
定义在第 1 控制切换模式中两档增益设置切换的触发条件。
Pr31
0
1
2
3
4
5
6
7
8
9
10
增益切换端子(GAIN)有信号输入即选择第 2 增益
转矩指令有较大变化,即选择第 2 增益
速度指令幅值有变化,即选择第 2 增益
有速度指令输入,即选择第 2 增益
位置偏差较大变化,即选择第 2 增益
有位置指令输入,即选择第 2 增益
(定位)没有到位即选择第 2 增益
位置指令+速度,即选择第 2 增益
增益切换条件
固定到第 1 增益
固定到第 2 增益
速度即选择第 2 增益
如果 Pr31=2 且 Pr03=3,则固定为第 1 增益的设置。
触发条件的内容可能由于控制模式的不同而不同。
当 Pr31=3~10 时,可以设置在第 2 增益设置切换到第 1 增益设置的过程中从
触发条件的检测到切换动作的发生这一段的延迟时间。单位:×166μs。
当 Pr31=3~10 时,可以设置增益切换的触发水平。
单位:取决于 Pr31 的设置。
当 Pr31=3~6,9 或 10 时,可以设置增益切换的触发判断动作的迟滞。
单位:取决于 Pr31 的设置。
如果从第 2 位置环增益切换到第 1 位置环增益有一个很大的变化,可以用这个
参数来抑制切换过程中的快速冲击。
如果位置环增益变大,则其切换时间=(Pr35+1)×166μs。
定义在第 2 控制切换模式中两档增益设置切换的触发条件。
Pr31
0
1
2
3
4
5
增益切换端子(GAIN)有信号输入即选择第 2 增益
转矩指令有较大变化,即选择第 2 增益
速度指令有较大变化,即选择第 2 增益
有速度指令输入,即选择第 2 增益
增益切换条件
固定到第 1 增益
固定到第 2 增益
触发条件的内容可能由于控制模式的不同而不同。
如果 Pr36=2 且 Pr03=3,则固定为第 1 增益的设置。
当 Pr36=3 或 5,可以设置在第 2 增益设置切换到第 1 增益设置的过程中从触
发条件的检测到切换动作的发生这一段的延迟时间。单位:×166μs。
当 Pr36=3~5 时,可以设置增益切换的触发水平。
单位:取决于 Pr36 的设置。
当 Pr31=3~5 时,可以设置增益切换的触发判断动作的迟滞。
单位:取决于 Pr36 的设置。
Page 48

46
Minas A4 系列驱动器技术资料选编
编号
Pr.
3A
3B
3C
3D
3E
3F
参数名称
制造商参数
制造商参数
制造商参数
JOG
速度设置
制造商参数
制造商参数
相关
模式
All
设置
范围
0~500
功能与含义
设置 JOG(试运转)速度。
单位:rpm。
使用前请参照操作说明。
Page 49

Minas A4 系列驱动器技术资料选编
47
编号
Pr.
40
41
*
42
*
43
参数名称
指令脉冲
输入选择
指令脉冲旋
转方向设置
指令脉冲
输入方式
指令脉冲
禁止输入
无效设置
相关
模式
设置
范围
功能与含义
用来选择是否直接通过差分电路输入指令脉冲信号。
0:通过光耦电路输入
(X5 插头,PULS1:第 3 引脚,PULS2:第 4 引脚,SIGN1:第 5 引脚,
P,F 0~1
SIGN2:第 6 引脚)
1:通过差分专用电路输入
(X5 插头,PULSH1:第 44 引脚,PULSH2:第 45 引脚,SIGNH1:第 46
引脚,SIGNH2:第 47 引脚)
根据输入的指令脉冲的类型来设置相应的旋转方向和脉冲形式。
P,F 0~1
P,F 0~3
Pr41 Pr42
0
或
2
0
1
3
0
或
2
1
1
3
指令脉冲
类型
正交脉冲,
A、B 两相
0
90
相差
CW 脉冲
+
CCW 脉冲
指令脉冲
+
指令方向
正交脉冲,
A、B 两相
0
90
相差
CW 脉冲
+
CCW 脉冲
指令脉冲
+
指令方向
信号
名
PULS
SIGN
PULS
SIGN
PULS
SIGN
PULS
SIGN
PULS
SIGN
PULS
SIGN
CCW 指令 CW 指令
A相
B相
B 相脉冲超前 A 相 900 B 相脉冲滞后 A 相 90
H 高电平
A相
B相
B 相脉冲滞后 A 相 900 B 相脉冲超前 A 相 90
L 低电平
L 低电平
H 高电平
0
0
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
P,F 0~1 此参数设为 1,则指令脉冲禁止输入端子(INH,X5插头第 33 引脚)被屏蔽。
Page 50

48
Minas A4 系列驱动器技术资料选编
编号
Pr.
44
*
参数名称
反馈脉冲
分倍频分子
相关
模式
All
设置
范围
1
~32767
功能与含义
可以设置电机每转一圈从反馈信号接口输出的脉冲个数。
(反馈信号接口:X5 插头,OA+:第 21 引脚,OA-:第 22 引脚,OB+:
第 48 引脚,OB-:第 49 引脚)
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
·如果输出的是编码器反馈的脉冲信号(即位置、速度、或转矩控制模式或 Pr46
=0 或 1),
① Pr45=0:每转反馈脉冲数=Pr44×4。
② Pr45≠0:每转反馈脉冲数=(Pr44/Pr45)×编码器分辨率
注:
1) 编码器分辨率:如果是 17 位编码器,那就是 131072(p/r);
2500p/r、5 线制增量式编码器则是 10000(p/r)。
2) 每转反馈脉冲数不可能超过(最高就是等于)编码器的分辨率。
3) 电机每转一圈输出一个 Z 相脉冲信号。
如果根据上式计算出的是 4 倍系数(Pr44/Pr45),那 么输 出 的 Z相信号
与 A 相同步。否则就是基于编码器的分辨率,Z 相不与 A 相同步,而且其
宽度比 A 相信号窄。
Pr44/Pr45=4 Pr44/Pr45≠4
A
B
Z
同步
A
B
Z
不同步
45
*
反馈脉冲
分倍频分母
All
0
~32767
·若输出外部反馈装置反馈的脉冲信号(即全闭环控制模式或 Pr46=2 或 3),
① Pr45=0:不作分频处理。
② Pr45≠0:每输出脉冲的位移量通过下式进行分频:
每输出脉冲的位移量 =(Pr44/Pr45)×外部反馈装置的脉冲当量
注:
① 外部反馈装置的脉冲当量:AT500系列 0.05μm;ST771 系列 0.5μm。
② Pr44值不能设得比 Pr45 大(Pr44>Pr45 就相当于不作分频处理)。
③ Z相信号只有在驱动器控制电源接通后、越过外部反馈装置的绝对 0 位置
时与 A 相同步。此后 Z 相信号在 A 相的间隔里输出,这个可以通过 Pr47
(外部反馈装置 Z 相脉冲设置)来设置。
Page 51

Minas A4 系列驱动器技术资料选编
49
编号
Pr.
46
*
47
*
参数名称
反馈脉冲
逻辑取反
外部反馈装
置 Z 相脉冲
设置
相关
模式
All
F
设置
范围
0~3
0
~32767
功能与含义
可以设置从反馈信号接口(X5 插头,OB+:第 48 引脚,OB-:第 49 引脚)
输出的 B 相信号的逻辑电平是否取反以及反馈信号的来源。。
0:不取反
1:取反(编码器反馈信号)
2:不取反
2:取反(外部装置反馈信号或全闭环控制模式)
用此参数可以设置 B 相信号对于 A 相的相位关系。
电机逆时针(CCW)转动 电机顺时针(CW)转动
A 相( OA)
Pr46
0 或2 B 相( OB)
不取反
1 或3 B 相( OB)
取反
设定 Pr46 参数值必须在控制电源断电重启之后才能修改、写入成功。
Pr46
0
1
2 *
3 *
B 相信号逻辑 反馈信号来源
不取反 编码器
取反 编码器
不取反 外部反馈装置
取反 外部反馈装置
* 全闭环控制模式下才可以把 Pr46 设为 2 或 3。
如果反馈脉冲信号来源于外部反馈装置(即 Pr02=6 且 Pr46=2或 3),可用
此参数来设置 Z 相脉冲的输出位置,即与 A 相脉冲的相位关系(在 4 倍频处理
之前)。
① Pr47=0:
Z 相信号不输出。
② Pr47=1~32767:
Z 相信号只有在驱动器控制电源接通后、越过外部反馈装置的绝对 0 位置
时与 A 相同步。此后 Z 相信号在 A 相的间隔里输出。
Page 52

50
Minas A4 系列驱动器技术资料选编
编号
Pr.
48
49
4A
4B
4C
4D
*
4E
4F
参数名称
指令脉冲分
倍频第 1分子
指令脉冲分
倍频第 2分子
指令脉冲
分倍频
分子倍率
指令脉冲
分倍频分母
平滑滤波器 P,F 0~7
FIR 滤波器 P,F 0~31
计数器清零
输入方式
制造商参数
相关
模式
P,F
P,F 0~17
P,F
P,F 0~2
设置
范围
0
~10000
0
~10000
功能与含义
用来对指令脉冲的频率进行分频或倍频设置。分倍频比率计算公式如下:
分倍频分子(Pr48或Pr49) × 2
指令脉冲分倍频 分母(Pr4B)
或
分倍频分子倍率(Pr4A)
编码器分辨率
每转所需指令脉冲数(Pr4B)
① 如果分子(Pr48或 Pr49)=0,则实际分子(Pr48×2
码器分辨率,Pr4B 即可设为电机每转一圈所需的指令脉冲数。
② 如果分子(Pr48或 Pr49)≠0,那么分倍频比率根据上式计算。
而每转所需指令脉冲数的计算如下式:
Pr4A
)计算值等于编
Pr4B
编码器分辨率每转所需指令脉冲数
=
Pr4A
注:实际分子(Pr48×2
设置插入到脉冲指令后的初级延时滤波器参数。
提高此参数值,可以进一步平滑指令脉冲,但会延迟对脉冲指令的响应。
0:滤波器无效;
1~7:滤波器有效。
可以设置指令脉冲的 FIR 滤波器。
FIR 滤波器用来对指令脉冲微分取平均值,平均值=Pr4D 值+1。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
设置计数器清零信号(CL,X5 插头第 30 引脚)的功能。
0:用电平方式对位置偏差计数器和全闭环偏差计数器清零(CL 与 COM-端子
短路至少 100μs);
1:用上升沿清零(开路→短路至少 100μs);
2:无效,屏蔽此端子的输入。
)计算值的上限是(4194304/Pr4D 设定值+1)。
×
Pr48(或Pr49) × 2
Pr4A
Page 53

Minas A4 系列驱动器技术资料选编
51
编号
Pr.
50
51
52
53
54
55
56
57
58
59
5A
5B
5C
5D
5E
5F
参数名称
速度指令
增益
速度指令
逻辑取反
速度指令
零漂调整
第 1内部速度
第 2内部速度
第 3内部速度
第 4内部速度
速度指令
滤波器
加速时间
设置
减速时间
设置
S 形加减速
时间设置
转矩指令
选择
转矩指令
增益
转矩指令
逻辑取反
第 1转矩限制
第 2转矩限制
相关
模式
S,T
S
S,T
S
~20000
S,T
S,T 0~6400
S
S
S
T
10~100
T
T
All
设置
范围
10
~2000
0~1
-2047
~2047
-20000
0~500
0~500
0~500
0~1
0~1
0~500
功能与含义
用来设置电机转速与加到模拟量速度指令/模拟量速度限制输入端子(SPR,
X5 插头第 14 引脚)的电压的比例关系。
此参数设定值=输入 1V 电压时所需电机转速(rpm)。
可以设置输入的模拟量速度指令(SPR,X5 插头第 14 引脚)的逻辑电平。
0:输入“+”电压指令则逆时针(CCW)旋转;
1:输入“—”电压指令则顺时针(CW)旋转。
如果 Pr06=2(零速箝位(ZEROSPD)选择),那么这个参数的设置是无效的。
用来调整输入的模拟量速度指令/模拟量速度限制(SPR,X5 插头第 14 引脚)
的零漂。
分别设置内部速度指令的第 1~第 4 速度。
单位:rpm。
取决于于 Pr73(过速水平)的设定值。
设置插入到模拟量速度指令/模拟量转矩指令/模拟量速度限制(SPR,X5 插
头第 14 引脚)之后的初级延时滤波器的参数。
单位:×10μs。
设置速度控制模式时的加速时间。单位:s。
此参数设定值(s)=电机从 0 加速到 1000rpm 所需时间×500。
设置速度控制模式时的加速或减速时间。单位:s。
此参数设定值(s)=电机从 1000rpm 减速到 0 所需时间×500。
设置速度控制模式时的 S 形加减速时间。
单位:×2ms。
选择输入模拟量转矩指令或者模拟量速度限制。
Pr5B
0
设置电机转矩与加到模拟量转矩指令输入端子(SPR/TRQR,X5 插头第 14
引脚或 CCWTL/TRQR,第 16 引脚)的电压的比例关系。
单位:×0.1V/100%。
设置输入的模拟量转矩指令(SPR,X5 插头第 14 引脚)的逻辑电平。
0:输入“+”电压指令则有逆时针(CCW)方向的转矩输出;
1:输入“—”电压指令则有顺时针(CW)方向的转矩输出。
设置电机输出转矩的第 1 或第 2 限制值。
单位:%。
转矩限制的选择请参考 Pr03(转矩限制选择)的说明。
1
转矩指令 速度限制
SPR/TRQR/SPL
CCWTL/TRQR SPR/TRQR/SPL
Pr56
Page 54

52
Minas A4 系列驱动器技术资料选编
编号
Pr.
60
61
62
63
64
65
66
*
参数名称
定位完成
范围
相关
模式
P,F
零速
到达速度 S,T
定位完成信
号输出设置
P,F 0~3
制造商参数
主电源关断
时欠电压
报警时序
行程限位时
报警时序
设置
范围
可以设置定位完成的范围,即允许的脉冲个数。
0
~32767
如果位置偏差脉冲数小于此设定值,定位完成信号(COIN)有输出。
位置控制模式是编码器的反馈脉冲数。
全闭环控制模式是外部反馈装置的反馈脉冲。
可以设置零速检测信号(ZSP,X5 插头第 12 引脚,或 TLC,第 40引脚)的检
All
10
~20000
测阈值。单位:rpm。
如果检测的是速度一致性,那么要根据速度指令来设置合适的速度。
注)零速检测与速度一致性检测之间存在 10rpm 的迟滞。
可以设置速度到达信号(COIN+,X5 插头第 39 引脚,COIN-,第 38 引脚)
10
~20000
的检测阈值。单位:rpm。
注)到达速度的检测存在 10rpm 的迟滞。
可以设置定位完成信号(COIN)的输出条件。
Pr63
此后(有输出后),COIN 在下一个指令到达之前一直保持有输出(ON)。
可以设置在伺服使能状态中从主电源关断开始、由 Pr6D(主电源关断检测时
间)设定的那一段检测时间里的时序。
0:对应于 Pr67(主电源关断时报警时序),伺服关断(SRV-ON 信号断开)。
All
0~1
1:主电源欠电压报警(Err13)发生时伺服跳闸。
如果 Pr6D=1000,则此参数被屏蔽。
如果由于 Pr6D 设得太久,导致在检测到主电源关断之前主电源逆变器上 P-N
间相电压就已跌落至规定值之下,那么就会出现一个电压故障(Err13)。
设置行程限位信号(CWL,X5 插头第 8 引脚;CCWL,X5 第 9 引脚)触发或
有效之后电机减速过程中的驱动条件。
All
0~2
2
(DB:动态制动器动作)
如果 Pr66=2,减速过程中的转矩限制就是 Pr6E 的设定值。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
功能与含义
COIN 输出条件
如果位置偏差脉冲数在定位完成范围之内,
0
则 COIN 信号有输出(ON)
如果没有位置指令,且位置偏差脉冲数在定位完成范围之内,
1
则 COIN 信号有输出
如果没有位置指令,零速检测信号有输出(ON),并且位置
2
偏差脉冲数减少到定位完成范围之内,则 COIN 信号有输出
如果没有位置指令,并且位置偏差脉冲数减少到定位完成范围
3
之内,则 COIN 信号有输出
Pr66
减速过程中 电机停转后 偏差计数器内容
发生限位报警方
0 DB
发生限位报警方
1
控制模式
P,F
向的转矩指令=0
伺服锁定
(位置指令=0)
零速箝位
S,T
(位置指令=0)
(减速时间=0)
向的转矩指令=0
发生限位报警方
向的转矩指令=0
发生限位报警方
向的位置指令=0
发生限位报警方
向的速度指令=0
保持
保持
减速前或后
即清零
――
Page 55

Minas A4 系列驱动器技术资料选编
53
编号
Pr.
67
68
69
6A
6B
参数名称
主电源关断
时报警时序
伺服报警时
相关时序
伺服 OFF 时
相关时序
电机停止时
机械制动器
延迟时间
电机运转时
机械制动器
延迟时间
相关
模式
All
All
All
All
All
设置
范围
0~9
0~3
0~9
0~100
0~100
功能与含义
如果 Pr65=0,可以设置在主电源关断之后,
1)电机减速过程中和停转后的驱动条件;以及
2)偏差计数器内容清零。
Pr67
0 DB DB
1
2 DB
3
4 DB DB
5
6 DB
7
控制模式
P,F
8
S,T
P,F
9
S,T
(DB:动态制动器动作)
如果 Pr67=8 或 9,减速过程中的转矩限制就是 Pr6E 的设定值。
设置由于驱动器保护功能触发的报警动作后,在电机减速过程中或停转后的驱
动条件。
Pr68
0 DB DB
1
2 DB
3
(DB:动态制动器动作)
可以设置在伺服关断(SRV-ON,X5 插头第 29 引脚断开)之后,
1)电机减速过程中和停转后的驱动条件;以及
2)偏差计数器内容清零。
此参数的功能与设定值的意义同 Pr67。
可以设置在电机停止(伺服锁定)状态中关断伺服使能信号(SRV-ON,X5 插
头第 29 引脚)时,从机械制动器释放信号(BRK-OFF,第 10、11 引脚)断开
到电机断电的延迟时间。单位:×2ms。
用来设置电机运转状态中伺服使能信号(SRV-ON 断开)关断时,从机械制动
器释放信号(BRK-OFF)断开到电机断电的延迟时间。单位:×2ms。
如果在设定的这个时间之前电机速度就降到约 30rpm,BRK-OFF 信号即关断。
减速过程中 电机停转后
自由滑行
自由滑行 自由滑行 清零
自由滑行
自由滑行 自由滑行 保持
伺服锁定
(位置指令=0)
零速箝位
(速度指令=0)
(减速时间=0)
伺服锁定
(位置指令=0)
零速箝位
(速度指令=0)
(减速时间=0)
减速过程中 电机停转后
自由滑行
自由滑行 自由滑行 清零
驱动条件
DB
自由滑行 清零
DB
自由滑行 保持
DB
DB
自由滑行 清零
自由滑行 ――
驱动条件
DB
自由滑行 清零
偏差计数器
内容
清零
清零
保持
保持
清零
――
偏差计数器
内容
清零
清零
Page 56

54
Minas A4 系列驱动器技术资料选编
编号
Pr.
6C
*
6D
*
6E
6F
参数名称
外接制动
电阻设置
主电源关断
检测时间
紧停时
转矩设置
制造商参数
相关
模式
All
All
All
设置
范围
0~3
35
~1000
0~500
对制动电阻及其过载保护(Err18)功能进行设置。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
设置从主电源关断到主电源检测功能启动的延迟时间。
单位:×2ms。
如果设为 1000,则取消断电检测功能。
设定此参数值必须在控制电源断电重启之后才能修改、写入成功。
对以下情况的转矩限制值进行设置:
① 若 Pr66=2,行程限位时的减速过程;
② 若 Pr67=8 或 9,减速过程;
③ 若 Pr69=8 或 9,减速过程。
如果此参数设为 0,就是使用通常的转矩限制。
设定值 保护功能
0
1
2
3
只用内置制动电阻,并对其启用保护功能
若制动电阻操作限制值超过 10%,则过载报警 Err18
发生后伺服跳闸(失控)
不启用保护功能
不用制动电阻电路,完全依靠内置电容放电
功能与含义
Page 57

Minas A4 系列驱动器技术资料选编
55
编号
Pr.
70
71
72
73
参数名称
位置偏差
过大水平
模拟量指令
偏差过大
水平
过载水平
过速水平
相关
模式
P,F
S,T 0~100
All
All
设置
范围
1
~32767
1~500
1
~20000
功能与含义
设置位置偏差脉冲数过大的检测范围。
单位:×256×编码器分辨率。
位置控制模式是编码器的反馈脉冲数。
全闭环控制模式是外部反馈装置的反馈脉冲。
如果此参数设为 0,则位置偏差过大检测功能被取消。
用来设置输入的模拟量速度指令或转矩指令(SPR,X5 插头第 14 引脚)在零
漂补偿后检测电压是否过高的判断水平。
单位:×0.1V。
如果此参数设为 0,则模拟量指令过大检测功能被取消。
可以设置电机的过载水平。单位:%。
如果设为 0,则过载水平即为 115%。通常请设为 0。
此参数值最高可设为电机额定转矩的 115%。
如果需要较低的过载水平,请预先设置此参数。
设置电机的过速水平。单位:rpm。
如果设为 0,则过速水平即为电机最高速度×1.2。通常请设为 0。
此参数值最高可设为电机最高转速的 1.2 倍。
注)7 线制绝对式编码器的检测误差为±3rpm;
5 线制增量式编码器时是±36rpm。
第 5内部速度
74
第 6内部速度
75
第 7内部速度
76
第 8内部速度
77
*
*
*
*
*
外部反馈
脉冲分倍频
分子
外部反馈
脉冲分倍频
分子倍频
外部反馈
脉冲分倍频
分母
混合控制偏
差过大水平
外部反馈脉
冲方向设置
制造商参数
制造商参数
制造商参数
78
79
7A
7B
7C
7D
7E
7F
S
-20000
~20000
F
F
F
F
F
0
~32767
0~17
1
~32767
1
~10000
0~1
分别设置内部速度指令的第 5~第 8 速度。
单位:rpm。
取决于于 Pr73(过速水平)的设定值。
设置全闭环控制模式时编码器与外部反馈装置分辨率之比率(分倍频比率)。
Pr7A
Pr79
编码器分辨率
外部反馈装置分辨率
Pr78=0:分子即等于编码器分辨率,Pr7A 即可设为外部反馈装置的分辨率;
Pr78≠0:根据上式设置外部反馈装置每转分辨率。
注:
· 分辨率:电机转一圈对应的脉冲数。
· 实际分子(Pr78×2
超过此值的计算结果是无效的,并自动以上限值替代。
· 请在伺服 OFF 状态下修改此参数。
可以设置全闭环控制模式中分别由电机编码器与外部反馈装置检测出的位置
的容许偏差。
单位:×16×外部反馈装置的分辨率。
设置外部反馈装置的绝对式数据的逻辑。
0:当检测的数据头正向运动(计数器数据+向变化)时串行数据增大;
1:当检测的数据头负向运动(计数器数据-向变化)时串行数据减小。
Pr79
)计算出来的上限是 131072。
Pr78 × 2
=
Page 58

56
Minas A4 系列驱动器技术资料选编
4-3.电子齿轮功能
用途
① 电子齿轮功能,可以用来任意的设置每单位指令脉冲对应的电机速度和位移量(脉冲当量);
② 当上位控制器的脉冲发生器能力(最高可输出频率)不足以获得所需速度时,可以用电子齿轮功能(指令脉
冲倍频)来对指令脉冲作×m 倍频。
·注意:分子的计算值最高可达 4194304。高于此数的分子设定值无效,并自动设成上限 4194304。
通过指令脉冲分倍频选择(DIV)端子可以选择指令脉冲分倍频第 1 分子或第 2 分子。
举例
·如果编码器分辨率(10000,或 217=131072)记作 F(单位:脉冲 pulse),而电机每转一圈所需脉冲数是 f(单位:
脉冲 pulse),那么指令脉冲分倍频的分子 Pr48 或 Pr49、分子倍率 Pr4A 和分母 Pr4B 必须满足:
·如果 Pr48 或 Pr49 设为 0,那么(Pr48 或 Pr49)×2
编码器分辨率 F 2
F=f
(Pr48 Pr49) 2
或
×
Pr4B
Pr4A
自动设为编码器的分辨率。
17
(131072) 10000(2500p/r×4 倍频)
×
Pr4A
例 1
指令脉冲 f=5000(单位:脉冲 pulse),
即 5000 个脉冲驱动电机转一圈
例 2
指令脉冲 f=40000(单位:脉冲 pulse),
即 40000 个脉冲驱动电机转一圈
Pr48
Pr48
1
Pr4B
1
Pr4B
× 2
5000
× 2
10000
17
15
Pr4A
Pr4A
Pr4A
Pr48
10000
Pr48
Pr4B
2500
Pr4B
× 2
5000
× 2
10000
0
Pr4A
0
Page 59

Minas A4 系列驱动器技术资料选编
5.时序图
5-1.电源接通后的时序
57
控制电源
(L1C,L2C)
内部控制电源
CPU
主电源
(L1,L2,L 3)
S-RDY信号输出
X5接口 第35、34引脚
伺服ON信号输入
X5接口 第29引脚 ON
OFF
OFF
约700ms
≥0s
OFF
OFF
(初始化)
约2s
约10ms或更多
ON
激活
ON
ON
*2
约10ms或更多
ON
*2
≥0s
约2ms
动态制动器
电机通电
BRK-OFF信号输出
X5接口 第10、11引脚
位置/速度/
转矩指令输入
ON
电机未通电
OFF(制动器动作)
没有指令输入
- 上图说明的是交流电源接通到指令输入时的时序。
- 请参照上图来激活伺服 ON 信号(SRV-ON)和输入外部指令。
*1:在此阶段,SRV-ON 信号仅仅是强制的输入,实际上没有接受。
*2:主电源接通,CPU 初始化完成之后,S-RDY 信号才有输出(ON)。
OFF
约40ms
通电
约2ms
ON(制动器释放)
*1
约100ms或更多
输入指令信号
Page 60

58
5-2.电机停转(伺服锁定)时伺服 ON/OFF 动作的时序
正常情况下,请在电机停转后再进行伺服 ON/OFF 的动作。
Minas A4 系列驱动器技术资料选编
伺服ON信号输入
(SRV-ON)
动态制动器
OFF OFF
约2ms
制动 *3
ON
约1~5ms
释放
t1 *1
电机通电
电磁制动器释放
信号(BRK-OFF)
*1:t1 取决于 Pr6A 的设定值。
*2:伺服 OFF 状态下动态制动器的动作,请参考第 4 章“参数”中 Pr69 的解释。
*3:电机转速下降到大约 30rpm 之后,伺服 ON(SRV-ON)的输入才有效。
5-3.电机运转时伺服 ON/OFF 动作的时序
下图说明了报警发生或失控时的时序。不可以反复的进行伺服 ON/OFF(SRV-ON)。
未通电
约40ms
制动(OFF)
通电
约2ms
制动器释放(ON)
制动(OFF)
制动 *2
未通电
伺服ON信号输入
(SRV-ON)
动态制动器
电机通电
电磁制动器释放
信号(BRK-OFF)
电机转速
*1:t1 值,即 Pr6B 设定值或电机减速到大约 30rpm 所需时间,取两者中较小者。
*2:电机减速时,即使 SRV-ON 信号激活变 ON,也要在电机停转之后才真正有效。
*3:伺服 OFF 状态下动态制动器的动作,请参考第 4 章“参数”中 Pr69 的解释。
*4:电机转速下降到大约 30rpm 之后,伺服 ON(SRV-ON)的输入才有效。
*5:伺服 OFF 状态下电机在减速时的电流情况,也请参考第 4 章“参数”中 Pr69 的解释。
OFF OFF
*4
制动 *3
未通电
约40ms
制动(OFF)
电机转速
伺服使能
在电机速度未降到大约30rpm前
伺服ON信号(SRV-ON)输入无效
ON
释放
通电
约2ms
制动器释放(ON)
电机转速A
约30rpm
约30rpm
制动器释放(ON) 制动器制动(ON)
电机转速B
约30rpm
约1~5ms
t1 *1
Pr6B设定值
t1 *1
Pr6B设定值
t1 *1
制动 *3
未通电
制动(OFF)
先达到Pr6B
的设定值
电机先减
速到30rpm
Page 61

Minas A4 系列驱动器技术资料选编
5-4.伺服 ON(SRV-ON 信号有效)时,发生报警时的时序
59
报警的有无
动态制动器
电机通电
伺服准备好信号
(S-RDY)输出
伺服报警信号
(ALM)输出
制动器释放信号
(BRK-OFF)输出
正常
1~5ms
释放
通电
准备好
未报警
释放(ON)
电机转速A
约30rpm
出错
动作
未通电
未准备好
报警
Pr6B设定值
动作,制动(OFF)
t1 *1
当Pr6B设定了一
个较快的速度时
Pr6B设定值
动作,制动(OFF)释放(ON)
电机转速B
约30rpm
t1 *1
当快速的减到30rpm
或更小的一个转速时
*1:t1 值,即 Pr6B 设定值或电机减速到大约 30rpm 所需时间,取两者中较小者。
*2:出现报警时的动态制动器的动作,请参考第 4 章“参数”中 Pr68 的解释。
5-5.伺服 ON(SRV-ON 信号有效)时,报警清除时的时序
报警清除信号
(A-CLR)输入
动态制动器
电机通电
制动器释放信号
(BRK-OFF)输出
动作,制动(OF F)
120ms或更多
清除报警
动作 释放
未通电
约40ms
约10ms
通电
释放(ON)
伺服准备好信号
(S-RDY)输出
伺服报警信号
(ALM)输出
位置/速度/
转矩指令输入
未准备好
报警
指令输入禁止
准备好
没有报警
100ms或更多
指令输入允许
Page 62

60
Minas A4 系列驱动器技术资料选编
6.保护功能
Minas A4 驱动器具有不同的保护功能。当其中任一功能激活时,驱动器切断电流,报警输出信号(ALM)没有输出。
显示面板上的 7 段 LED 会闪烁显示相应的报警代码。
保护功能
控制电源
欠电压
过电压
主电源
欠电压
过电流
和
接地错误
报警
代码
11
12
13
14 *
控制电源逆变器上 P、N 间电压低于规定值。
1)交流电源电压太低。瞬时失电。
2)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
3)驱动器(内部电路)有缺陷。
电源电压高过了允许输入电压的范围。
逆变器上 P、N 间电压超过了规定值。
电源电压太高。
存在容性负载或 UPS(不间断电源),使得
线电压升高。
1)未接再生放电电阻。
2)外接的再生放电电阻不匹配,无法吸收再
生能量。
3)驱动器(内部电路)有缺陷。
当参数 Pr65(主电源关断时欠电压报警触发
选择)设成 1 时,L1、L3 相间电压发生瞬时
跌落,但至少是参数 Pr6D(主电源关断检测
时间)所设定的时间;或者,在伺服使能
(Servo-ON)状态下主电源逆变器 P-N 间相
电压下降到规定值以下。
1)主电源电压太低。发生瞬时失电。
2)发生瞬时断电。
3)电源容量太小。
电源接通瞬间的冲击电流导致电压跌落。
4)缺相:应该输入 3 相交流电的驱动器实际
输入的是单相电。
5)驱动器(内部电路)有缺陷。
流入逆变器的电缆超过了规定值。
1)驱动器(内部电路、IGBT 或其他部件)
有缺陷。
2)电机电缆(U、V、W)短路了。
3)电机电缆(U、V、W)接地了。
4)电机烧坏了。
5)电机电缆接触不良。
6)频繁的伺服 ON/OFF(SRV-ON)动作导
故障原因 应对措施
测量 L1C、L2C 和 r、t 之间电压。
1)提高电源电压。更换电源。
2)增大电源容量。
3)请换用新的驱动器。
测量 L1、L2 和 L3 之间的相电压。
配备电压正确的电源。
排除容性负载。
1)用电表测量驱动器上 P、B 间外接电阻阻值。
如果读数是“∞”,说明电阻没有真正地接入。
请换一个。
2)换用一个阻值和功率符合规定值的外接电
阻。
3)请换用新的驱动器。
测量 L1、L2、L3 端子之间的相电压。
1)提高电源电压。
换用新的电源。
排除电磁继电器故障后再重新接通电源。
2)检查 Pr6D 设定值,纠正各相接线。
3)请参照“附件清单”,增大电源容量。
4)正确连接电源的各相(L1、L2、L3)线路。
单相电源请只接 L1、L3 端子。
5)请换用新的驱动器。
1)断开电机电缆,激活伺服 ON 信号。如果马
上出现此报警,请换用新驱动器。
2)检查电机电缆,确保 U、V、W 没有短路。
正确的连接电机电缆。
3)检查 U、V、W与“地线”各自的绝缘电阻。
如果绝缘破坏,请换用新机器。
4)检查电机电缆 U、V、W 之间的阻值。如果
阻值不平衡,请换用新驱动器。
5)检查电机的 U、V、W 端子是否有松动或未
接,应保证可靠的电气接触。
6)请换用新驱动器。
Page 63

Minas A4 系列驱动器技术资料选编
61
保护功能
过电流
和
接地错误
电机 和/或
驱动器过热
过载
报警
代码
15 *
16
故障原因 应对措施
致动态制动器的继电器触点熔化而粘连。
7)电机与此驱动器不匹配。
8)脉冲的输入与伺服 ON 动作同时激活,甚
至更早。
伺服驱动器的散热片或功率器件的温度高过
了规定值。
1)驱动器的环境温度超过了规定值。
2)驱动器过载了。
转矩指令实际值超过参数Pr72 设定的过载水
平时,按照电机的过载保护时限特性,过载
保护功能激活。
1)电机长时间重载运行,其有效转矩超过了
额定值。
2)增益设置不恰当,导致振动或振荡。电机
出现震动或异常响声。
参数 Pr20(惯量比)设得不正确。
3)电机电缆连接错误或断开。
4)机器碰到重物,或负载变重,或被缠绕住。
5)电磁制动器被接通制动(ON)。
6)多个电机接线时,某些电机电缆接错到了
别的轴上。
请勿用伺服 ON/OFF 信号(SRV-ON)来启
动或停止电机。
7)检查驱动器铭牌,按照上面的提示换用匹配
的电机。
8)在伺服 ON 后至少等待 100ms 再输入脉冲
指令。
1)降低环境温度,改善冷却条件。
2)增大驱动器与电机的容量。
延长加/减速时间。
减轻负载。
用 PANATERM 波形图功能监测转矩(电流)的
振荡或波动。检查 PANATERM 上的过载报警显
示内容和负载率。
1)增大驱动器与电机的容量。
延长加/减速时间。
减轻负载。
2)重新调整增益。
3)按照接线图,正确连接电机电缆。
4)清除缠绕物。减轻负载。
5)测量施加到制动器上的电压。断开其连接。
6)将电机电缆和编码器电缆正确的连接到对应
的轴上。
再生放电电阻
过载
18 *
过载时间 t:
过载时间常数取决于电机特性。
再生的能量超过了放电电阻的容量。
1)惯量很大的负载在减速过程中产生的能量
抬高了逆变器电压,而且由于放电电阻无法
有效的吸收再生能量而继续升高。
2)电机转速太高,无法在规定时间内吸收产
生的再生能量。
3)外接电阻被限制为工作周期的 10%。
Pr6C 设为 2,首先要确保外接电阻有保护措施,比如采用了热熔断保险丝。如果没有
保护措施,放电电阻可能会过热,进而导致电机烧坏。
() () ln( )
ts s=− ×
过载时间常数 1-
过载水平
转矩指令
在 PANATERM 波形图上监测放电电阻负载率。
放电电阻不可以用来连续的再生制动。
1)检查运行状况(在速度监视器上)。检查电
阻负载率和过载报警显示内容。
增大驱动器与电机的容量。延长加/减速时
间。外接一个电阻放电。
2)检查运行状况(在速度监视器上)。检查电
阻负载率和过载报警显示内容。
增大驱动器与电机的容量。延长加/减速时
间。降低电机速度。外接一个电阻放电。
3)将参数 Pr6C 值设为 2。
(%)
(%)
Page 64

62
Minas A4 系列驱动器技术资料选编
保护功能
编码器
通讯出错
编码器
通讯数据出错
位置偏差
过大
混合控制位置
偏差过大
过速
指令脉冲
分倍频出错
外部反馈装置
通讯数据出错
偏差计数器
溢出
外部反馈装置
通讯出错
报警
代码
21 *
23 *
24
25 *
26
27
28 *
29
35 *
故障原因 应对措施
编码器与驱动器之间的通讯中断,并激活了
通讯中断检测功能。
主要是噪声引起了一个错误数据,数据不能
被发送到驱动器。即使编码器电缆已连接,
但通讯的数据有问题。
位置偏差脉冲计数器之值大于参数 Pr70(位
置偏差过大水平)的设定值。
1)电机没有按照指令脉冲正确的运转。
2)Pr70 值设得太小。
由外部反馈装置检测出的负载位置与编码器
检测出的电机位置不吻合,超过了参数 Pr7B
(混合控制偏差过大水平)的设定值。
电机的转速超过了参数 Pr73(过速水平)的
设定值。
参数 Pr48~Pr4B(电子齿轮的第一、第二分
子、分母)设置不正确。
外部反馈装置的数据出现通讯异常。
主要是因为噪声导致的数据出错。
不管连接线路是否正确,都可能有此报警。
位置偏差计数器的数值超过了 2
(134217728)。
外部反馈装置与驱动器之间的通讯中断,并
激活了通讯中断检测功能。
按照接线图,正确连接编码器线路。
纠正错误接线。注意编码器电缆应接到 X6。
♦ 确保编码器电源电压是 DC5V±5%(4.75~
5.25V),尤其是电缆很长时必须特别注意。
♦ 如果电机电缆与编码器电缆捆绑在一起,请
分隔开来布线。
♦ 参照接线图,将屏蔽线接到 FG 上。
1)确保电机按照指令脉冲正确的运转。
监测转矩监视器,确保输出转矩不饱和。
调整增益。
将 Pr5E 和 Pr5F 设到最大。
按照接线图,正确连接编码器线路。
2)增大 Pr70 数值。
♦ 检查电机与负载的连接。
♦ 检查外部反馈装置与驱动器的连线。
♦ 检查当负载运转时,电机位置的变化(编码
器反馈脉冲数值)和负载位置的变化(外部
反馈脉冲数值)是否是同一极性(+/-)。
♦ 检查参数 Pr74、75 和 76 以及 Pr7C 的值设
置是否正确。
♦ 避免指令速度过高。
♦ 检查指令脉冲频率和分倍频比率。
♦ 对于不恰当的增益引起的过冲,请正确的调
整增益。
♦ 按照接线图,正确连接编码器线路。
♦ 检查 Pr48~Pr4B 参数值。
♦ 设置正确的分倍频比率,保证经过电子齿轮
后的指令脉冲频率最大不超过 2Mpps,以及
输入到偏差计数器里的脉冲不超过
500kpps。
♦ 确保外部反馈装置的电源电压是 DC5V±5
%(4.75~5.25V),尤其是在采用 一个较
长的反馈装置时。
♦ 如果电机电缆与外部反馈装置的连接线捆
绑在一起,请分隔开来布线。
♦ 参照接线图,将屏蔽线接到 FG 上。
♦ 确保电机按照指令脉冲正确运转。
♦ 监测转矩监视器,确保输出转矩不饱和。
27
♦ 调整增益。
♦ 将 Pr5E 和 Pr5F 设到最大。
♦ 按照接线图,正确连接编码器线路。
♦ 定期检查外部反馈装置的接线。
纠正接线错误。
Page 65

Minas A4 系列驱动器技术资料选编
63
保护功能
EEPROM
参数出错
EEPROM
校验码出错
行程限位
禁止输入信号
出错
模拟量指令
过电压
绝对式编码器
系统断电
绝对式编码器
计数器溢出
绝对式编码器
过速
绝对式编码器
单圈数据出错
绝对式编码器
多圈数据出错
绝对式编码器
状态出错
编码器
Z 相信号出错
编码器
通讯信号出错
外部反馈装置
0 号报警
外部反馈装置
1 号报警
报警
代码
36 *
37 *
38
39
40 *
41 *
42 *
44 *
45 *
47
48 *
49 *
50 *
51 *
故障原因 应对措施
电源接通瞬间从 EEPROM 读取数据时,存储
在内存里的数据受损。
电源接通瞬间从 EEPROM 读取数据时,
EEPROM 的校验码受损。
当参数 Pr04(行程限位禁止输入无效)值设
为 0 时,CW 和 CCW 方向行程禁止输入端子
(CWL:X5 第 8 引脚,CCWL:X5 第 9 引脚)
与 COM-端子的连接都是开路。或者是 Pr04
设为 2 时,CWL、CCWL 与 COM-的连接有
一个是开路。
输入到模拟量速度指令端子 SPR(X5 第 14
引脚)的电压超过了参数Pr71所设定的数值。
SPR/TRQR/SPL有输入时此保护功能才工作。
并且若满足以下条件可更精确的工作
1)速度控制模式
参数 Pr02=1、3 或 5,且 Pr05=0 或 2,
即选择了输入模拟量指令,以及零速箝位无
效(速度指令不是 0)。
2)转矩控制模式
Pr02=2 或 4,且 Pr5B=0。
3)转矩控制模式
Pr02=2、4 或 5,且 Pr5B=1,以及零速
箝位无效(即速度指令不是 0)。
绝对式编码器电源断电。
编码器多圈计数器的数据超过了规定值。
只用电池供电时,编码器转速超过规定值。
编码器检测到其单圈计数器有一个错误。
编码器检测到其多圈计数器有一个错误。
电源接通时,编码器转速超过规定值。 避免电机在接通电源那一片刻的运动。
没有检测到 Z 相脉冲信号。
编码器可能有故障。
编码器 CS 信号逻辑异常。
编码器可能有故障。
外部装置反馈出来的数据的校验码的第 0 位
数据变成了 1。
外部装置反馈出来的数据的校验码的第 1 位
数据变成了 1。
♦ 重新设置所有的参数。
♦ 若仍然出错,请换用新的驱动器。并将此台
驱动器送经销商检修。
伺服驱动器可能有故障,请换用新的。并将此
台驱动器送经销商检修。
检查限位开关、连接电缆以及 CW、CCW 限位
开关的电源。尤其要注意检查控制信号用的直
流电源(12~24V),确保信号接通(ON)时
没有延时。
♦ 正确设置参数 Pr71(模拟量指令偏差水平)
值。
检查插头 X5 的接线状况。
♦ 提高参数 Pr57(速度指令滤波器)的设定
值。
♦ 将 Pr71 设为 0,取消此保护功能。
重新接上电池,将绝对式编码器的数据清零。
只有将数据清零后才能清除掉此报警。
♦ 正确设置 Pr0B 参数值。
♦ 调整从原点开始的运动,使得脉冲数不超过
32767。
♦ 检查编码器侧的电源电压(DC5V±5%)。
♦ 检查插头 X5 接线是否有误。
只有将数据清零后才能清除掉此报警。
电机可能有故障,请更换新电机。
电机可能有故障,请更换新电机。
♦ 检查外部反馈装置的具体规格说明。
♦ 在排除此问题后清除外部反馈装置的数据。
♦ 然后关断控制电源再重启。
Page 66

64
Minas A4 系列驱动器技术资料选编
保护功能
外部反馈装置
2 号报警
外部反馈装置
3 号报警
外部反馈装置
4 号报警
外部反馈装置
5 号报警
CCWTL 指令
过电压
CWTL 指令
过电压
电机自动识别
出错
其他出错信息
激活报警清除输入(A-CLR:X5 第 31 引脚),或者在显示面板上进行相关操作,可以清除保护功能。
报警代码带*号的保护功能,无法用报警清除输入(A-CLR)来清除。
请在排除故障原因后,关断控制电源再重启,可以清除掉报警。
过载保护(报警代码 16)一旦激活,必须要等待 10 秒后才可以清除。
由于噪声干扰导致伺服驱动器内部控制电路出故障,显示面板上可能会显示为:
出现这种情况,请立即切断电源。
控制电源欠电压(报警代码 11)、主电源欠电压(报警代码 13)、EEPROM 参数出错(报警代码 36)、EEPROM 校
验码出错(报警代码 37)、行程限位禁止输入信号出错(报警代码 38)和电机自动识别出错(报警代码 95),不会存储在
报警的历史记录里。
报警
代码
52 *
53 *
54 *
55 *
65
66
95 *
其他
数字
*
外部装置反馈出来的数据的校验码的第 2 位
数据变成了 1。
外部装置反馈出来的数据的校验码的第 3 位
数据变成了 1。
外部装置反馈出来的数据的校验码的第 4 位
数据变成了 1。
外部装置反馈出来的数据的校验码的第 5 位
数据变成了 1。
输入到端子 CCWTL(X5第 16 引脚)的模拟
量转矩指令超过了规定值(+10V 或-10V)。
CCWTL 有输入时此保护功能才工作。
并且若满足以下条件可更精确的工作。
1)转矩控制模式:
Pr02=5;
或者 Pr02=2 或 4,且 Pr5B=1。
2)位置/速度/全闭环控制模式:
Pr03=0。
输入到端子 CWTL(X5 第 18 引脚)的模拟
量转矩指令超过了规定值(+10V 或-10V)。
CWTL 有输入时此保护功能才工作。
并且若满足以下条件可更精确的工作。
1)位置/速度/全闭环控制模式:
Pr03=0。
电机与此驱动器不匹配。 换用匹配的电机。
噪声过大导致控制电路发生故障。
伺服驱动器的自诊断功能由于内部出错而激
活。
故障原因 应对措施
♦ 检查外部反馈装置的具体规格说明。
♦ 在排除此问题后清除外部反馈装置的数据。
然后关断控制电源再重启。
♦ 检查插头 X5 的接线。
♦ 可输入 CCWTL 的最高电压为±10V。
♦ 可输入 CWTL 的最高电压为±10V。
♦ 关断电源,再重新上电。
♦ 如果仍旧报警,驱动器可能有故障。停止使
用,更换成新的电机与驱动器。并将此台驱
动器送经销商检修。
Page 67

Minas A4 系列驱动器技术资料选编
7.操作说明
7-1.显示面板与操作按钮
7-1-1.显示面板
65
7-1-2.按钮说明
按键 激活条件 功能
MODE
SET
在以下 5 种模式之间切换:
1)监视器模式;
在模式显示时有效
一直有效 用来在模式显示和执行显示之间切换
2)参数设置模式;
3)EEPROM 写入模式
4)自动调整模式;
5)辅助功能模式。
改变各模式里的显示内容、更改参数、选择参
仅对有闪烁小数点的那一位数据
有效
数或执行选中的操作
把可移动的小数点移动到更高位数
7-1-3.操作方法
Minas A4 系列伺服驱动器面板和按钮的操作方法,请参照 Minas A 系列的说明书,两者是一样的
Page 68

66
7-2.显示内容
监视器模式(选择监视器显示内容) 监视器模式(执行显示动作)
注:
位置偏差脉冲总数
电机转速(rpm)
电机输出转矩
控制模式
I/O 信号状态
报警状态
(原因与历史记录)
驱动器软件版本
报警
再生放电电阻负载率
电机过载比率
负载惯量比
反馈脉冲总数
指令脉冲总数
外部装置偏差脉冲总数
外部装置反馈脉冲总数
电机自动识别功能
模拟量指令输入值
电机不转的原因
Minas A4 系列驱动器技术资料选编
偏差计数器里有 5个剩余脉冲
当前转速 1000rpm
当前输出 100%的转矩
(相对于额定转矩)
当前是位置控制模式
输入信号,第 0 号:有效
当前没有出错、报警
版本 1.00
没有报警信息
当前达到放电电阻允许负载
的 30%
电机过载比率 28%
当前负载惯量比为 100%
(相对于电机转子惯量)
当前反馈脉冲有 50 个
累计收到指令脉冲 10 个
外部反馈装置的偏差计数器
里有 5 个脉冲
当前外部反馈装置反馈了 500
个脉冲
自动识别功能有效
当前输入的模拟量速度指令
是+10.0V
没有伺服使能信号输入
按上箭头
按按钮
、下箭头 可以在监视器模式里选择不同的显示内容;
SET
可以执行显示动作,从而显示出具体的内容。
Page 69

Minas A4 系列驱动器技术资料选编
7-2-1.I/O 信号状态
输入信号(显示为:in) 输出信号(显示为:ot)
编号
伺服使能
00
报警清除
01
CW 行程限位
02
CCW 行程限位
03
控制模式切换
04
零速箝位
05
指令脉冲分倍频选择
06
指令脉冲输入禁止
08
增益切换
09
偏差计数器清零
0A
内部速度选择 1
0C
内部速度选择 2
0D
振动抑制控制切换
13
内部速度选择 3
14
转矩限制切换
15
信号名称 记号
7-2-2.电机自动识别功能
67
X5 上
引脚号
SRV-ON 29 0
A-CLR 31 1
CWL 8 2
CCWL 9 3
C-MODE 32 4
ZEROSPD 26 5
DIV 28 6
INH 33 7
GAIN 27 8
编号
伺服准备好
伺服报警
位置到达
制动器释放
零速检测
转矩限制
速度一致性
速度到达
全闭环位置到达
信号名称 记号
S-RDY
ALM
COIN
BRK-OFF
ZSP 12
TLC 40
V-COIN 12/40
COIN
EX-COIN
X5 上
引脚号
35,34
37,36
39,38
11,10
39,38
39,38
CL 30 9
INTSPD1 33 A
INTSPD2 30
VS-SEL 26
INTSPD3 28
TL-SEL 27
7-2-3.模拟量指令输入值
↑ ↑
输入的模拟量信号 输入电压值(V)
·按上箭头
注:指令电压若超过±10V 可能无法精确地显示。
、下箭头 可以选择需要显示的模拟量信号:
模拟量速度指令(SPR 信号)输入值,包括零漂,单位:V。
CCW 转矩限制指令(CCWTL 信号)输入值,单位:V。
CW 转矩限制指令(CWTL 信号)输入值,单位:V。
电机自动识别功能有效
电机自动识别功能无效
Page 70

68
Minas A4 系列驱动器技术资料选编
7-2-4.反馈脉冲总数、指令脉冲总数和外部反馈装置反馈脉冲总数
上图中,“50”表示控制电源接通后脉冲计数器里的脉冲总数。计数器的数据溢出,请参考下图。
99999 9999999999
00
(控制电源接通)
CW
按住上箭头 保持约 3 秒钟,可以同时将反馈脉冲、指令脉冲和外部装置反馈脉冲的数据清零。但此方法不能将
PANATERM 软件里显示的类似数据清零。
(操作过程演示)
按住
小数点“·”
逐位向左移动,
如右图所示。
,
↓
↓
CCW
0
↓
注:如果指令脉冲禁止输入信号(INH)有效,或者使用了常规自动增益调整功能或 PANATERM 软件的频率特性测量功能,
那么这里显示出的指令脉冲总数可能与实际输入的指令脉冲不符。
↓
7-2-5.外部反馈装置偏差脉冲总数
数据“5”带极性,“+”表示 CCW 方向,“-”表示 CW 方向,上限是±99999(个脉冲)。
注:在实施常规自动增益调整或者电机试运转(JOG)之后,外部反馈装置偏差脉冲计数器里的数据会清零。
Page 71

Minas A4 系列驱动器技术资料选编
7-2-6.电机不转的原因
如果电机由于某些原因不转,可以在监视器模式下执行显示出对应的原因代码。
控制模式 原因代码
位置控制
速度控制
转矩控制
全闭环控制
显示代码
闪烁 发生报警
没有原因
0
主电源断电
1
伺服使能信号未输入
2
行程限位信号有效
3
转矩限制设得太小
4
转矩限制有效 P,S,F
5
指令脉冲禁止输入(INH)
6
信号有效
指令脉冲频率太低 P,F
7
CL 信号输入有效 P,F
8
零速箝位(ZEROSPD)信 号
9
输入有效
10
11
12
13
14
注意:即使显示着以上 1~14 表示不转的代码,电机仍可能会旋转。
外部模拟量速度指令太低
内部速度指令为 0
转矩指令太小
速度限制设得太小
其他原因
内容
相关模式
All
All
All
All
All
All
P,F
发生了报警或驱动器警告信息。
没有检测到对应的电机不转的原因。电机在正常运转。
伺服驱动器的主电源未接通。
伺服使能信号(SRV-ON)没有与 COM-信号短接。
参数 Pr04=0(行程限位信号输入有效),且:
·CCW 行程限位信号(CCWL)与 COM-断开,并输入了 CCW 方向
的速度指令;
·CW 行程限位信号(CWL)断开,并输入了 CW 方向的速度指令。
转矩限制设置有效,且限制值(参数 Pr5E 或 Pr5F)没有超过额定转
矩值的 5%。
参数 P03=0(模拟量转矩限制输入有效),且:
·CCWTL 信号输入的是负电压,并输入了 CCW 方向的速度指令;
·CWTL 信号输入的是正电压,并输入了 CW 方向的速度指令。
参数 Pr43(指令脉冲禁止输入无效设置)=0,且 INH 信号与 COM
-的连接是开路的。
·指令脉冲输入不正确;
·参数 Pr40(指令脉冲输入选择)的设置与实际输入电路不符;
·参数 Pr41(指令脉冲旋转方向设置)或 Pr42(指令脉冲输入方式)
的设置与实际输入脉冲情况不符。
·一个控制周期所需的指令脉冲不足一个脉冲。
Pr4E=0(计数器用电平清零),并且 CL 信号与 COM-相短接。
S,T
S
S
T
T
All
参数 Pr06=1(零速箝位信号输入有效),且 ZEROSPD 信号与 COM
-的连接是开路。
输入模拟量速度指令信号时,指令电压太小,不超过 0.06V。
选择输入内部速度指令时,设置的内部速度不超过 30rpm。
模拟量转矩指令(TQRQ 或 CCWTL)太小,不超过额定转矩的 5%。
·当 Pr5B=0(用第 4 内部速度作为速度限制值)时,Pr56(第 4 内
部速度)的设置值不超过 30rpm;
·当 Pr5B=1(用输入 SPR 信号的电压值作为速度限制值)时,模拟
量速度限制(SPR)输入电压太低,不超过 0.06V。
即使排除了以上 1~13 种原因,电机仍然以 20rpm 或更低的速度旋
转,这可能是由于:太小的指令速度,负载过重,电机被锁死,负载
有撞击,驱动器或电机失控等等。
69
说明
Page 72

70
Minas A4 系列驱动器技术资料选编
7-3.自动增益调整模式的有关操作
7-3-1.自动增益调整的操作步骤
首先请检查型号,确定您所用的驱动器和电机是否具有自动增益调整功能。
注:
① 关于自动增益调整模式,请参考“
② 在自动增益调整过程中,伺服驱动器根据特定的调整模式自动地驱动电机运转。
这个调整模式可用参数 Pr25(常规自动调整模式设置)来选择。
必须确保执行自动增益调整时负载位置的改变不会导致出现任何危险。
③ 调整完成之后负载可能会发生振动。
请确保采取了有关安全措施,比如设置了 Pr70(位置偏差过大水平)、Pr73(过速水平)等等。
1)选择显示
8.增益调整”;执行自动增益调整之前,请务必了解其适用范围和注意事项。
↑
·按上箭头
2)执行操作
·按按钮
执行自动调整前,请先禁止指令输入,再激活伺服使能信号(SRV-ON)。
然后按住上箭头
、下箭头 可以选择机械刚性的大小。
SET
可以显示执行自动调整: 。
,直到显示 。
按住 保持约 5 秒钟,
一个横条会出现并增加,
如右图所示。
↓
↓
↓
电机开始转动
↓
机械刚性(0~15)
调整结束。
注意:由于下列原因,调整过程中可能会出错,
① 调整过程中,发生了出错报警、伺服断电、偏差计数器被清零、主电源关断或行程限位开关动作;
② 由于惯量太大、负载太重等,输出转矩发生饱和,或者出现共振,导致自动增益调整无法进行。
如果发生调整出错,所有的增益参数恢复到原来的可用值。
但即使不出现出错信息,最终的调整结果也可能导致机器共振,因此还是要注意保证安全。
↓
↓ ↓
调整完毕。 调整出错。
Page 73

Minas A4 系列驱动器技术资料选编
7-3-2.适配增益调整的操作
1)选择显示
适配增益调整窗口
2)执行操作
SET
·按按钮
位数: [6][5][4][3][2][1]
可以显示执行的窗口:
71
·按下箭头
用上箭头
·各位数显示数字的意义:
① 第[1]位数:表示实时自动增益调整的机械刚性或适配增益调整开始。
按 、
可调整大小
② 第[2]位数:表示实时自动增益调整模式的设置。
按 、
可调整大小
③ 第[3]位数:表示实时自动增益调整状态(仅有显示作用)。
④ 第[4]位数:表示自适应滤波器的操作切换。
按 、
可调整大小
⑤ 第[5]位数:表示自适应滤波器的操作状态(仅有显示作用)。
⑥ 第[6]位数:表示写入 EEPROM。
可以移动小数点到第[1]、[2]或[4]位。
、下箭头 可以开始适配增益功能,或者更改、存储实时自动增益调整和自适应滤波器。
显示数字 表示意义 扩展功能
F
1
0
显示数字 表示意义 扩展功能
6
5
4
3
2
1
0
啊
―
▁ 或 ▔
显示数字 表示意义 扩展功能
2
1
0
啊
―
▁ 或 ▔
机械刚性 15
机械刚性 1
机械刚性 0
垂直轴模式,负载惯量变化很大
垂直轴模式,负载惯量变化很小
垂直轴模式,负载惯量没有变化
常规模式,负载惯量变化很大
常规模式,负载惯量变化很小
常规模式,负载惯量没有变化
实时调整功能无效
无效
有效
正在测量负载惯量
保持数据
有效
无效
无效
有效
正在运行调整
自适应滤波器有效(显示为 2)时 ,按 住
前的自适应滤波器数据复制为第 1 陷波滤波器参数(Pr1D、Pr1E);
自适应滤波器无效(显示为 0)时 ,按 住
1 陷波滤波器参数(Pr1D、Pr1E)的设置清零。
将小数点移到 0,按住 保持约 3 秒钟,
即可开始适配增益调整。
在显示为 0 的时候,按住 保持约 3 秒钟,
即可将实时自动增益调整功能禁止掉。
保持约 3 秒钟,可以将当
保持约 3 秒钟,可以将第
[·]表示写入有效:按住
保持约 3 秒钟,就把当前的设定值写入 EEPROM。
Page 74

72
8.增益调整
8-1.调整方法与框图
开始调整
执行
自动调整?
是
Minas A4 系列驱动器技术资料选编
否
指令输入
允许?
是
实时自动调整增益
指令输入
允许?
是
运转正常?
否
否
实时自动
增益调整
否
常规自动调整增益
运转正常?
是
自动调整功能启动
从自动设定
启动?
否
是
否
增益自动
调整功能
是
负载特性
有波动?
是
写入到EEPROM
调整结束
手动调整增益
否
自动调整
功能启动
运转正常?
否
是
与经销商、服务商联系
Page 75

Minas A4 系列驱动器技术资料选编
8-2.实时自动增益调整
8-2-1.要点
可以实时地测量负载的惯量,并在此测量结果上自动地设定最佳的增益。
发生共振的机械也可以通过设置自适应滤波器来实时调整增益。
73
位置/速度
指令
实际运动条件下的运动指令
增益自动设定
位置环/速度环
控制
滤波器自动调整
实时自动增益调整
8-2-2.适用范围
进行实时调整必须满足以下条件:
控制模式
任何控制模式。
但当电机处于试运转状态或者正在使用 PANATERM 软件的频率特性测量功能时,不会测量负载惯量。
·伺服使能(ON)
其他
·除了控制参数的其他信号(例如偏差计数器清零输入禁止信号、转矩限制信号等);
并且电机旋转起来不会有问题
8-2-3.注意事项
在以下情况,实时增益调整功能可能不会正确地起到作用。
在这种情况,请使用常规自动增益调整功能或手动的调整增益。
以下情况,无法进行实时增益调整
负载惯量
操作条件
负载
·负载惯量比电机转子惯量太大(超过 20 倍),或太小(小于 3 倍)
·负载惯量有波动
·机械刚性特别的低
·机械部件连接不牢固,比如存在反向间隙
·存在连续的低速(小于 100rpm)的运转
·软加/减速时间不大于 2000(rpm)/s
·不小于 100rpm 的速度和不小于 2000(rpm)/s 的加速时间没有持续至少 50ms
·加/减速转矩比不平滑负载/摩擦转矩小
自适应
滤波器
谐振频率测定
惯量比测定
转矩指令 电机电流
实时增益调整的条件
电流环
控制
伺服驱动器
电机转速
电机
编码器
Page 76

74
Minas A4 系列驱动器技术资料选编
8-2-4.如何操作
① 停止电机(伺服 OFF)。
② 将 Pr21(实时自动增益设置)设为 1~6。出厂缺省值是 1。
Pr21 值 实时自动调整 运行时负载惯量的变化情况
0
1
2
3
4
5
6
如果负载惯量变化很大,请将 Pr21 设为 3 或 6;
如果电机是用于垂直轴上,请设为 4~6;
如果考虑共振的影响,请设置 Pr23(自适应滤波器模式)使得自适应滤波器功能有效。
③ 将 Pr22(实时自动增益的机械刚性选择)设为 0 或较小的数值。
④ 给出伺服使能信号(伺服 ON),让电机正常的运转。
⑤ 逐步增大 Pr22 参数值可以提高响应特性。如果出现噪音或振动,请将 Pr22 值减小。
无效
常规模式
垂直轴模式
――――
没有变化
变化很小
变化很大
没有变化
变化很小
变化很大
⑥ 将数据写入到 EEPROM,即保存测量结果。
8-2-5.自动设置的参数
下列参数的值在实时调整增益时自动地设置。
参数号 参数名
Pr10
Pr11
Pr12
Pr13
Pr14
Pr18
Pr19
Pr1A
Pr1B
Pr1C
Pr20
下列参数自动地设置为固定数值。
参数号 参数名 固定值
Pr15
Pr16
Pr27
Pr30
Pr31
Pr32
Pr33
Pr34
Pr35
Pr36
*1 如果是位置控制或全闭环控制模式,固定值为 10;如果是速度控制或转矩控制模式,则是 0。
第 1 位置环增益
第 1 速度环增益
第 1 速度环积分时间常数
第 1 速度检测滤波器
第 1 转矩滤波器时间常数
第 2 位置环增益
第 2 速度环增益
第 2 速度环积分时间常数
第 2 速度检测滤波器
第 2 转矩滤波器时间常数
惯量比
速度前馈
速度前馈滤波器时间常数
速度观测器
第 2 增益动作设置
第 1 控制切换模式
第 1 控制切换延迟时间
第 1 控制切换水平
第 1 控制切换迟滞
位置环增益切换时间
第 2 控制切换模式
300
50
0
1
10 *1
30
50
33
20
0
Page 77

Minas A4 系列驱动器技术资料选编
8-2-6.自适应滤波器
Pr23(自适应滤波器模式)设为 0 之外的任意值,则自适应滤波器功能有效。
在实际的运转状态中,可以根据电机速度里表现出来的振动因素测量其共振频率;对转矩指令设置自适应滤波器,可
以抑制振动因素,从而减弱共振点的振动。
在某些情况下自适应滤波器可能不会起作用。此时,请手动操作,用第 1 陷波滤波器(Pr1D、Pr1E)和第 2 陷波滤
波器(Pr28~Pr2A)进行反共振点的测量。
·共振频率≤300Hz
共振点
负载 ·电机速度波动,其高频分量是由于非线性因素,比如反向间隙。
指令条件 ·加/减速时间太陡,比如≥30000(rpm)/s。
如果设定 Pr2F(自适应滤波器频率)≤4,则自适应滤波器功能无效;
如果设定 Pr2F(自适应滤波器频率)≤4,即使 Pr23 不设为 0,自适应滤波器也可能是无效的。
·共振峰值太低,或控制增益太低;而且其影响不在电机速度中表现出来
·存在多个共振点
以下情况,自适应滤波器不起作用
8-2-7.注意事项 2
① 伺服使能(SRV-ON)之后,或者 Pr22 刚性设定好之后,在负载惯量测定完毕或自适应滤波器稳定之前,有的时候会
出现噪音或振动,不过等到机器稳定之后就会恢复正常的。
但是如果噪音、振动这样的问题在 3 个往复的运转周期中出现,例如重复出现,请采取以下步骤:
1)将正常操作的参数结果写入 EEPROM;
2)减小 Pr22 参数值;
3)将 Pr23 设为 0,使得自适应滤波器无效;
4)手动设置陷波滤波器。
② 如果出现噪音或振动,Pr20(惯量比)和/或 Pr2F(自适应滤波器频率)的值可能会变化极大。
如果这样,也请采取上述调整步骤。
③ 作为实时自动调整增益的结果,Pr20 和 Pr2F 的值会每 30 分钟在 EEPROM 里更新写入。
并且上电重启后,写入的数值就作为初始值启动。
④ 如果实时自动增益调整功能设为有效,则 Pr27(速度观测器)即自动无效(变为 0)。
⑤ 转矩控制模式时自适应滤波器通常是无效的。
然而如果 Pr02 设为 4 或 5 即选择转矩控制模式,在控制模式切换前已设置的自适应滤波器继续保持作用。
75
Page 78

76
Minas A4 系列驱动器技术资料选编
8-3.常规自动增益调整
8-3-1.要点
电机可以根据驱动器内部自动发生的位置指令运转,在所需转矩基础上测量出负载惯量,从而自动地设置增益。
内部位置
指令发生器
位置指令
常规自动增益调整
负载惯量测量
增益自动调整
位置环/速度环
控制
电机转矩
转矩指令
电机加速
电流环
控制
伺服驱动器
电机电流
电机转速
电机
编码器
8-3-2.适用范围
常规自动增益调整必须满足以下条件:
控制模式 任何控制模式。
其他
注:请将 Pr03(转矩限制选择)和 Pr04(行程限位禁止输入无效设置)都设为 1。
如果这两个参数设成其他值,则不可以进行常规自动增益调整。
·伺服使能(ON)状态
·偏差计数器清零信号没有输入
常规自动增益调整的条件
8-3-3.注意事项
以下情况无法进行常规自动增益的调整。
此时,请手动设置相关参数。
负载惯量
负载
如果在常规自动调整过程中发生出错报警、伺服 OFF 或者偏差计数器内容清零,那么就会调整出错。
即使进行了常规自动调整的操作,但如果惯量的测量失败,那么增益值是不变的,而且仍旧保持以前的数值。
常规自动调整过程中可以允许输出的电机转矩是由 Pr5E(第 1 转矩限制)设定,并且 CW/CCW 方向的行程限位信
号被屏蔽。
·负载惯量比电机转子惯量太大(超过 20 倍),或太小(小于 3 倍)
·负载惯量有波动
·机械刚性特别低
·机械部件连接不牢固,比如存在反向间隙
以下情况,无法进行常规自动增益调整
请务必注意运转安全!
如果发生振动,请即切断电源或关闭伺服,然后将增益参数值恢复到出厂缺省值。
Page 79

Minas A4 系列驱动器技术资料选编
8-3-4.常规自动增益调整的模式
① 常规自动增益调整时,响应特性是通过机械刚性大小的选择来设定的。
机械刚性
·机械刚性是用来选择机械的刚性大小的程度的。可设置数值范围为 0~15。
如果机械刚性较高,那么就可以设选择较大参数值,从而获得较高的增益。
·通常,调整时请从较小的刚性开始,再逐步提高刚性,一直到不出现较大的噪音或振动为止。
② Pr25(常规自动调整模式设置)可设置调整模式,电机最高可重复转动 5 圈。从第 3 圈开始,电机转速每圈提高 2
倍。
根据负载情况,可能无需转动 5 圈即可完成调整,或者调整时电机不必提高速度。这不是出错。
8-3-5.如何操作
① 设定 Pr25 选择调整模式;
② 将负载移动到一个安全的位置,即使调整时也能确保可靠的位置;
③ 确保没有指令信号输入;
④ 给出伺服使能信号(伺服 ON);
⑤ 开始常规自动调整。可以用 PANATERM 软件或者面板进行操作。
77
⑥ 选择合适的机械刚性大小,直到获得合适的响应,而且也不会出现振动;
⑦ 如果调整的结果没有问题,就将数据写入到 EEPROM。
8-3-6.自动设置的参数
下列参数的值在实时调整增益时自动地设置。
参数号 参数名
Pr10
Pr11
Pr12
Pr13
Pr14
Pr18
Pr19
Pr1A
Pr1B
Pr1C
Pr20
下列参数自动地设置为固定数值。
参数号 参数名 固定值
Pr15
Pr16
Pr27
Pr30
Pr31
Pr32
Pr33
Pr34
Pr35
Pr36
*1 如果是位置控制或全闭环控制模式,固定值为 10;如果是速度控制或转矩控制模式,则是 0。
第 1 位置环增益
第 1 速度环增益
第 1 速度环积分时间常数
第 1 速度检测滤波器
第 1 转矩滤波器时间常数
第 2 位置环增益
第 2 速度环增益
第 2 速度环积分时间常数
第 2 速度检测滤波器
第 2 转矩滤波器时间常数
惯量比
速度前馈
速度前馈滤波器时间常数
速度观测器
第 2 增益动作设置
第 1 控制切换模式
第 1 控制切换延迟时间
第 1 控制切换水平
第 1 控制切换迟滞
位置环增益切换时间
第 2 控制切换模式
300
50
0
1
10 *1
30
50
33
20
0
Page 80

78
Minas A4 系列驱动器技术资料选编
8-4.适配增益调整
8-4-1.要点
目的是为了提高位置控制模式时实时自动增益调整的精度,适配增益功能的作用就相当于自动加入一个增益,使稳定
(停止到位)时间最短。
位置指令
(梯形周期脉冲波)
+
-
位置偏差
位置环/
速度环控制
实时自动增益调整
在刚性/增益表中
滤波器自动调整
自动搜索
适配增益调整
自适应
滤波器
谐振频率测定
惯量比测量
(振动检测)(调整时间)
转矩指令
电流环
控制
伺服驱动器
3-4-2.适用范围
适配增益调整起作用必须满足以下条件:
实时自动增益
调整设置
自适应滤波器
控制模式
操作条件
·实时调整已采用并且运行正常。
·自适应滤波器必须有效:
Pr23=1。
·选择位置控制模式:
Pr02=0,位置控制模式;
Pr02=3,位置/速度控制模式的第 1 模式;
Pr02=4,位置/转矩控制模式的第 1 模式。
·定位指令是往复运动的;
·定位指令的周期≥50ms;
·定位指令的最小频率≥1kpps(因此需要考虑指令的启停)。
适配增益调整的条件
8-4-3.注意事项
在以下情况,实时增益调整功能可能不能正确地起到作用。此时,请使用一般的实时自动增益调整。
以下情况,无法进行适配增益调整
≥50ms
OFF
≥0s
操作条件
·第一个定位指令极短,如小于 2 圈。;
·前一个定位指令结束后一直到发出后续的一个指令,才完成(前一个指令的)定位;
·加/减速斜率太陡,如 30000(rpm)/s。
优化的
加/减速
指令波形
定位完成
ON
电机电流
电机转速
电机
编码器
Page 81

Minas A4 系列驱动器技术资料选编
3-4-4.如何操作
① 设置参数 Pr60(定位完成范围)作为定位完成时间的判断依据。
Pr60 出厂缺省值是 131(个脉冲)。
对于 17 位编码器,请设置一个不小于 20(个脉冲)的数值;对于 2500p/r 编码器,请设得不小于 10(个脉冲)。
② 在显示面板上的适配增益窗口检查实时自动增益调整是否有效,然后开始进行适配增益调整。
③ 显示面板上显示内容变成 000.000 。右三位数字表示正在调整中的当前设置,左三位数字表示调整的结果。
④ 给出一个满足上文所述条件的定位指令,然后正常的操作机器。
⑤ 在适配增益调整的过程中,显示面板上显示的内容会发生变化。
⑥ 当增益搜索成功后,会显示 Finish ;
如果搜索不成功,则显示 Error (按任意键即可清除此显示信息)。
⑦ 将得到的数据写入 EEPROM,即可保存调整的结果。
8-4-5.注意事项 2
一般来说,在适配增益调整过程中会产生噪声或振动,不过增益会自动降低,所以不会有问题。
但是如果噪声或振动持续下去,可以在面板上按任意键来中止适配增益调整。
3-4-6.自动设置的参数
下列参数的值在实时调整增益时自动地设置。
参数号 参数名
Pr10
Pr11
Pr12
Pr13
Pr14
Pr18
Pr19
Pr1A
Pr1B
Pr1C
Pr20
Pr22
下列参数自动地设置为固定数值。
参数号 参数名 固定值
Pr15
Pr16
Pr27
Pr30
Pr31
Pr32
Pr33
Pr34
Pr35
Pr36
第 1 位置环增益
第 1 速度环增益
第 1 速度环积分时间常数
第 1 速度检测滤波器
第 1 转矩滤波器时间常数
第 2 位置环增益
第 2 速度环增益
第 2 速度环积分时间常数
第 2 速度检测滤波器
第 2 转矩滤波器时间常数
惯量比
实时自动增益的机械刚性选择
速度前馈
速度前馈滤波器时间常数
速度观测器
第 2 增益动作设置
第 1 控制切换模式
第 1 控制切换延迟时间
第 1 控制切换水平
第 1 控制切换迟滞
位置环增益切换时间
第 2 控制切换模式
300
50
0
1
10
30
50
33
20
0
79
Page 82

80
Minas A4 系列驱动器技术资料选编
8-5.自动调整功能的禁止
8-5-1.要点
实时自动增益调整功能是出厂的缺省设置,本节讲述如何禁止实时调整功能,以及关于自适应滤波器的内容。
3-5-2.注意事项
在禁止自动调整功能之前,必须先中止电机的运转。
8-5-3.实时自动增益调整的禁止
如果 Pr20(实时自动增益设置)=0,那么惯量比(Pr20)的测量即停止,实时自动增益调整功能亦被禁止。
如果 Pr20(惯量比)与原来测量后保持的数值相比,可以判断出不大准确,那么请采用常规自动增益调整方法设置
一个合适的数值,或者直接计算出这个数值。
8-5-4.自适应滤波器的禁止
自适应滤波器是用来自动消除机械共振的,如果 Pr23(自适应滤波器模式)=0,那么这个滤波器就是无效的。
如果在运行时正确地将自适应滤波器设成无效,那么被抑制掉的机械共振可能会导致噪音或振动的出现。
因此,在禁止自适应滤波器之前,请在显示面板上的适配增益设置窗口操作,把自适应滤波器的频率(Pr2F)复制到
第 1 陷波频率(Pr1D);或者把 Pr2F 参数值对应的频率(如下表所示)手动设置为 Pr1D 值。然后再禁止自适应滤波器
工作。
Pr2F
陷波滤波器实际频率(Hz)
0
1
2
3
4
5 1482
6 1426
7 1372
8 1319
9 1269
10 1221
11 1174
12 1130
13 1087
14 1045
15 1005
16 967
17 930
18 895
19 861
20 828
21 796
(禁止)
(禁止)
(禁止)
(禁止)
(禁止)
Pr2F
陷波滤波器实际频率(Hz)
22 766
23 737
24 709
25 682
26 656
27 631
28 607
29 584
30 562
31 540
32 520
33 500
34 481
35 462
36 445
37 428
38 412
39 396
40 381
41 366
42 352
43 339
Pr2F
陷波滤波器实际频率(Hz)
44 326
45 314
46 302
47 290
48 279
269(若 Pr22≥15 即禁止)
49
258(若 Pr22≥15 即禁止)
50
248(若 Pr22≥15 即禁止)
51
239(若 Pr22≥15 即禁止)
52
230(若 Pr22≥15 即禁止)
53
221(若 Pr22≥14 即禁止)
54
213(若 Pr22≥14 即禁止)
55
205(若 Pr22≥14 即禁止)
56
197(若 Pr22≥14 即禁止)
57
189(若 Pr22≥14 即禁止)
58
182(若 Pr22≥13 即禁止)
59
60
61
62
63
64
(禁止)
(禁止)
(禁止)
(禁止)
(禁止)
Page 83

Minas A4 系列驱动器技术资料选编
8-6.增益自动设置功能
8-6-1.要点
在手动调整增益前,增益自动设置功能可以用来初始化控制参数/增益切换参数,从而自动地调整到与机械刚性相应
的增益设置。
8-6-2.注意事项
在执行增益自动设置功能之前,必须先中止电机的运转。
8-6-3.如何操作
① 中止电机的运转;
② 在显示面板上的适配增益窗口开始进行增益的自动设置。
③ 当增益自动设置成功后,会显示 Finish ;
如果设置不成功,则显示 Error (按任意键即可清除此显示信息)。
④ 将得到的数据写入 EEPROM,即可保存调整好的结果。
81
8-6-4.自动设置的参数
下列参数的值在实时调整增益时自动地设置。
参数号 参数名
Pr10
Pr11
Pr12
Pr13
Pr14
Pr18
Pr19
Pr1A
Pr1B
Pr1C
下列参数自动地设置为固定数值。
参数号 参数名 固定值
Pr15
Pr16
Pr27
Pr30
Pr31
Pr32
Pr33
Pr34
Pr35
Pr36
第 1 位置环增益
第 1 速度环增益
第 1 速度环积分时间常数
第 1 速度检测滤波器
第 1 转矩滤波器时间常数
第 2 位置环增益
第 2 速度环增益
第 2 速度环积分时间常数
第 2 速度检测滤波器
第 2 转矩滤波器时间常数
速度前馈
速度前馈滤波器时间常数
速度观测器
第 2 增益动作设置
第 1 控制切换模式
第 1 控制切换延迟时间
第 1 控制切换水平
第 1 控制切换迟滞
位置环增益切换时间
第 2 控制切换模式
300
50
0
1
10
30
50
33
20
0
Page 84

82
Minas A4 系列驱动器技术资料选编
8-7.手动调整增益
8-7-1.要点
如上文所述,Minas A4 系列伺服系统提供自动增益调整功能。但是在某些情况下,比如由于负载条件不允许,即使
执行了自动增益调整也不能达到所需的增益效果,因此需要进一步微调;或者由于负载情况会发生变化,因此需要进行不
同的调整从而得到最佳的响应性能或稳定性。
本节讲述每一种控制模式的手动调整增益的操作方法和步骤。
8-7-2.位置控制模式的调整
A4系列驱动器的位置控制模式的框图如下所示。
本小节中带方框的是基本调整过程,需要调整相关参数,但未采用两档增益切换功能。
脉冲串
PULS
SIGN
输入设定
Pr40
倍频
Pr41
反相
形式
Pr42
脉冲分倍频
第一分子
第二分子
分子倍率
分母
反馈脉冲
OA/OB/OZ
Pr48
Pr49
Pr4A
Pr4B
FIR
平滑滤波器
Pr4D
选通
初级延时
平滑滤波器
选通
Pr4C
指令速度
监视器
分频设置
Pr44
分子
Pr45
分母
Pr46
反相
振动抑制控制
第一频率
第一滤波
第二频率
第二滤波
-
Pr2B
Pr2C
Pr2D
Pr2E
位置偏差
监视器
速度前馈
Pr15
增益
滤波器
Pr16
位置环控制
Pr10
第一
Pr18
第二
++
+
第一
第二
+
-
速度检测
滤波器
Pr13
Pr1B
速度检测
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
监视器
Pr11
Pr12
Pr19
Pr1A
Pr20
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
自适应
滤波器
编码器信号
接收过程
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩指令监视器
转矩滤波器
Pr14
第一时常
第二时常
Pr1C
第一限制
Pr5E
Pr5F
第二限制
串行通讯数据
电机
编码器
位置控制模式框图
调整步骤如下所述:
① 参数的初始设置
将参数值恢复到出厂缺省设置。
如果参数恢复到缺省值之后发生振动,那么请把第 1 速度环增益(Pr11)和第 1 位置环增益(Pr10)减小到相同数
值。
② 惯量比的设置
设置惯量比(Pr20)。
如果惯量比已经通过实时调整的方法得到,那么就采用这个结果(Pr20 参数值)。
如果惯量比可以通过计算得到,那么就直接输入这个数值。
如果惯量比不确定,那么请执行常规自动增益调整来测量机械惯量。
测量结束后,由于控制增益已改变,请回到第①步,重新进行参数的初始设置。
③ 速度环增益上限的确定
增大第 1 速度环增益(Pr11)值,步长为 10。
同时,第 1 位置环增益(Pr10)也要增大到 Pr11 的数值。
如果开始产生共振,请执行第④步。
如果出现了振动,请马上减小 Pr11,Pr10 也要减到一样的数值;然后执行第④步。
Page 85

Minas A4 系列驱动器技术资料选编
④ 陷波滤波器的设置
用监视器输出功能或 PANATERM 软件的波形图或频率特性功能测量转矩指令的共振频率。
在测得的共振频率的基础上,执行以下步骤(A)~(C)。
执行(A)~(C)的操作后,由于 Pr11 值可能会改变,请重新执行第③步确认此上限。
请比较执行上述步骤前后的参数值,如果第 1 速度环增益(Pr11)可以增大很多,那么就采用这个结果继续调整。
(A) 共振频率≥1.5kHz
设置一个较大的第 1 转矩滤波器时间常数(Pr14)。
对于绝对式编码器(7 线制,17 位),Pr14 值可设约 25;增量式(5 线制,2500p/r),Pr14 可设约 63。
仅作为参考量,可以尽量增大此参数值,直到振动降低到可以接受的程度。
如果第 1 转矩滤波器时间常数设得太大,低频段的共振可能会比较大,此时请减小第 1 速度环增益 Pr11。
(B) 600Hz≤共振频率≤1.5kHz
把第 1 陷波频率(Pr1D)设成共振频率值。
如果还是不能消除振动,请慢慢地减小参数 Pr1D 和 Pr1E 设定值。
PANATERM软件的频率特性等功能可以用来测量共振峰值。设置陷波滤波器以削弱共振波峰。
如果发生的振动在 600Hz 以上,请将第 1 转矩滤波器时间常数(Pr14)设得大一点。
(C) 400Hz≤共振频率≤600Hz
请用 PANATERM 软件的频率特性等功能测量共振频率。
把第 1 陷波频率(Pr1D)设成测得的共振频率值。
请重新测量频率特性图,并检查共振的波峰是否已被削弱。
如果共振波峰没有削弱,请调整第 1 陷波宽度选择(Pr1E)和第 1 陷波频率(Pr1D)以削弱之。
对于波峰是低频的、且低于反共振频率的振动,请把第 1 速度环增益(Pr11)设得小一点。
如果共振频率降到大约 350~400Hz,请将第 1 速度环增益(Pr11)增大,并把陷波滤波器频率设成共振发
生点的频率。这样振动可能会减弱。
如果无法减弱振动,请禁用陷波滤波器。这个第 1 速度环增益值就是上限值。
83
Page 86

84
⑤ 转矩滤波器时间常数的设置
用如果操作时有噪音,可以逐步地增大第 1 转矩滤波器时间常数(Pr14)的值。
逐步地减小第 1 转矩滤波器时间常数(Pr14)值并增大第 1 速度环增益(Pr11)值可以提高伺服的响应。
作为参考设定值,对于绝对式编码器(17 位,7 线制),此时间常数最小可设为 10;增量式编码器(2500p/r,5 线
制)最小可设为 25。
⑥ 第 1 速度检测滤波器(Pr13)的设置
逐步地减小第 1 速度检测滤波器(Pr13)值并增大第 1 速度环增益(Pr11)值可以提高伺服的响应。
如果因为减小了第 1 速度检测滤波器(Pr13)值而产生高频噪音,那么请通过 PANATERM 软件的波形图等功能来测
量共振频率。然后根据第④步调整陷波滤波器,或根据第⑤步调整转矩滤波器。
⑦ 第 1 位置环增益(Pr11)的设置
先设置第 1 位置环增益,第 1 位置环增益(Pr10)值=第 1 速度环增益(Pr11)×1.5。
然后粗略的设置 Pr10,以使定位时间缩短到一定程度。
请在位置偏差脉冲数变得较小时修改、设定参数值。
⑧ 第 1 速度环积分时间常数(Pr12)的设置
设置第 1 速度环积分时间常数(Pr12)值=(4000~2000)/(2π×Pr11)。
如果第 1 速度环积分时间常数设得比较小,那么在定位时虽然偏差脉冲有可能会更接近于 0,但是达到稳定状态所需
的时间可能会变长。
如果发生这种情况,可以在运行过程中通过增益切换功能把第 2 速度环积分时间常数(Pr1A)设成 1000(积分作用
被禁止掉),那么可能会有所改善。
⑨ 速度前馈(Pr15)的设置
将速度前馈(Pr15)设为 500(300~700)。
如果速度前馈(Pr15)值设得很大,那么运行时位置偏差可以减小,并且指令输出完成后位置偏差可以很快收敛(为
0),但是超调或振动会频繁出现。
如果设定此参数后运行的噪音变大,请把前馈滤波器时间常数(Pr16)值和平滑滤波器(Pr4C)值设得大一点。
Minas A4 系列驱动器技术资料选编
Page 87

Minas A4 系列驱动器技术资料选编
8-7-3.速度控制模式的调整
A4系列驱动器的速度控制模式的框图如下所示。
其调整步骤请参考“8-7-2 位置控制模式的调整”中的内容。
除了第⑦步位置环增益和第⑨步速度前馈之外,请参照第①~⑥步和第⑧步进行速度控制模式的调整。
指令速度
监视器
转矩指令监视器
85
模拟量
速度指令
SPR
反馈脉冲
OA/OB/OZ
16位A/D
内部速度设置
Pr53
第一
Pr54
第二
Pr55
第三
第四
Pr56
输入设置
增益
极性取反
零漂
滤波器
第五
第六
第七
第八
分频设置
分子
分母
反相
Pr50
Pr51
Pr52
Pr57
Pr74
Pr75
Pr76
Pr77
Pr44
Pr45
Pr46
指令选择
选通
Pr05
加减速限制
Pr58
加速
Pr59
减速
Pr5AS形
+
-
速度检测
滤波器
Pr13
第一
Pr1B
第二
速度检测
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
监视器
Pr11
Pr12
Pr19
Pr1A
Pr20
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
自适应
滤波器
编码器信号
接收过程
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩滤波器
Pr14
第一时常
第二时常
Pr1C
Pr5E
第一限制
Pr5F
第二限制
串行通讯数据
电机
编码器
速度控制模式框图
8-7-4.转矩控制模式的调整
A4系列驱动器的速度控制模式的框图如下所示。
转矩控制模式是基于速度控制环,参数 Pr56(第 4 内部速度)用作速度限制。本节即讲述速度限制的设定过程。
模拟量
转矩指令
SPR/TRQR
16位A/D
输入设置
增益
极性取反
零漂
滤波器
Pr5C
Pr5D
Pr52
Pr57
信号(±)
内部速度限制
Pr05
第四速度
指令速度监视器
×
速度检测
第一
第二
+
-
滤波器
Pr13
Pr1B
绝对数值
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
Pr11
Pr12
Pr19
Pr1A
Pr20
监视器
转矩限制
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
第二深度
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩滤波器
第一时常
第二时常
第一限制
第二限制
转矩指令监视器
Pr14
Pr1C
Pr5E
Pr5F
电机
编码器
速度检测
编码器信号
接收过程
串行通讯数据
反馈脉冲
OA/OB/OZ
分频设置
分频
分频
反相
Pr44
Pr45
Pr46
速度控制模式框图
① 速度限制值的设置
将速度前馈(Pr15)设为 500(300~700)。
电机首先运行于转矩控制模式,即电机服从于模拟量转矩指令;如果电机速度接近于此速度限制值,那么电机就从转
矩控制模式切换到速度控制模式,而此时电机的指令就是第 4 内部速度(Pr56)设置的速度限制值。
为了速度限制模式下运行稳定,就有必要参照“8-7-3 速度控制模式的调整”中调整方法设置好控制增益和滤波器。
如果速度限制值(Pr56,第 4 内部速度)设得太低、速度环增益太低或者速度环积分时间常数设成了 1000(积分作
用被禁止),由于转矩限制的输入也就变得很小(如上图所示),那么模拟量转矩指令就有可能得不到相应的转矩数值。
Page 88

86
Minas A4 系列驱动器技术资料选编
8-7-5.增益切换时的调整
1)要点
通过内部数据或外部信号进行增益切换操作,
① 可以在电机停止(伺服锁定)状态切换到较低增益从而抑制振动;,
② 可以在电机停止状态切换到较高增益以缩短定位时间;
③ 可以在电机运行状态切换到较高增益以获得更好的指令跟踪性能;
④ 可以根据负载设备情况等通过外部信号切换不同的增益设置。
2)应用举例
这里,我们示范如何通过增益切换功能来提高位置控制模式的响应性能。
在定位过程中,通常可以在电机运行状态中关闭速度积分功能来提高增益,从而改善响应性能;
而在停止下来以后,可以降低增益以抑制电机的振动。
运转情况
指令速度
电机状态
增益
设定参数 设定值 内容
Pr30(第 2 增益动作设置)
Pr31(第 1 控制切换模式)
Pr32(第 1 控制切换延迟时间)
Pr35(位置环增益切换时间)
Pr10(第 1 位置环增益)
Pr11(第 1 速度环增益)
Pr12(第 1 速度环积分时间常数)
Pr13(第 1 速度检测滤波器)
Pr14(第 1 转矩滤波器时间常数)
Pr18(第 2 位置环增益)
Pr19(第 2 速度环增益)
Pr1A(第 2 速度环积分时间常数)
Pr1B(第 2 速度检测滤波器)
Pr1C(第 2 转矩滤波器时间常数)
停止
(伺服锁定)
低增益
(第1增益)
运行
停止
(伺服锁定)
高增益
(第2增益)
2ms1ms
减小增益可以抑制振荡
选择第 2 增益。
1
有位置指令输入即选择第 2 增益。
7
12
―― 设置电机在停止状态时的增益。
―― 设置电机在运行状态时的增益。
脉冲指令停止(OFF)状态延续 2ms 之后即切换到第 1 增益
(指令脉冲时间不到 166μs 即为“0”)。
在位置环增益从较低增益切换到较高增益时,设置为 1ms 的斜
5
坡响应,计算公式:(5+1)×166μs=1ms。
时间
低增益
(第1增益)
Page 89

Minas A4 系列驱动器技术资料选编
3)操作步骤
假设负载从位置 A 移动到位置 B,伺服驱动器的内部状态的变化如下图所示。
在这种条件,请根据以下操作步骤设置相关的参数。
① 用下列参数设置增益切换条件。
Pr31(第 1 控制切换模式)
Pr36(第 2 控制切换模式)
电机
AB
87
位置控制
全闭环控制
转矩控制
速度指令的变化
转矩控制
位置指令
位置偏差脉冲
定位完成
速度
速度指令
转矩指令
ON
OFF
ON
Pr31
7
6
8
9
Pr31
或Pr36
55
4
Pr31
或Pr36
转矩指令的变化
选择第1增益(不管状态如何)
选择第2增益(不管状态如何)
用增益切换选择端子(GAIN,X5插头第27引脚)切换
(与COM-开路:选择第1增益;短路:选择第2增益)
333
00,40
1
2
11
22
Page 90

88
② 根据切换条件设置切换水平和迟滞时间。
第1增益
控制模式不同,则切换水平和迟滞时间的参数也不同。
切换水平
迟滞时间
切换条件不同,则参数设置好之后的结果的单位也不同。
切换条件
(Pr31,Pr36)
固定为第 1 增益
0
固定为第 2 增益
1
增益切换端子(GAIN)有信号输入即
2
选择第 2 增益
转矩指令有较大变化,即选择第 2 增益
3
速度指令幅值有变化,即选择第 2 增益
4
有速度指令输入,即选择第 2 增益 *3
5
位置偏差较大变化,即选择第 2 增益
6
有位置指令输入,即选择第 2 增益
7
(定位)没有到位即选择第 2 增益
8
速度即选择第 2 增益 *2 *3
9
位置指令+速度,即选择第 2 增益
10
*1 如果是位置控制或全闭环控制模式,则固定为第 1 增益。
*2 如果是速度控制模式,则固定为第 1 增益。
*3 如果是转矩控制模式,则固定为第 1 增益。
第 1 控制模式 第 2 控制模式
Pr33 Pr38
Pr34 Pr39
*1 *3
*2 *3
*2 *3
*2 *3
*2 *3
第2增益 第1增益
参数 Pr33、34,38、39,3B
不必设置这些参数
0.05%/166μs。
200(根据切换条件,如果在 166μs 内转矩发生 10
%的饱和)
10rpm/s
rpm
脉冲数(pulse)(编码器分辨率)
位置指令脉冲在这一段时间(166μs×n,n≥1)输
入,即切换到第 2 增益
位置偏差脉冲计数器里的数值超过了参数 Pr60(定位
完成范围)的设定值。
rpm
有位置指令脉冲输入即切换到第 2 增益。
脉冲指令停止(OFF)状态延续某一段时间(Pr32 值
×166μs),并且电机转速降到 Pr33、Pr34 设定值
(rpm)或以下之后,则切换到第 1 增益
(指令脉冲时间不到 166μs 即为“0”)。
Minas A4 系列驱动器技术资料选编
迟滞时间
切换水平
设置好之后结果的单位
Page 91

Minas A4 系列驱动器技术资料选编
③ 设置切换延迟时间。
增益切换延迟时间可以用来设置从第 2 增益(Pr18,19,1A,1B,1C)切换到第 1 增益(Pr10,11,12,13,14)
的延迟时间。
在从第 2 增益到第 1 增益的这一段切换延迟时间里,特定的切换条件必须连续地满足。
迟滞时间
89
切换水平
第2增益 第1增益第1增益
④ 设置位置环增益切换时间。
增益切换后,速度环增益、速度环积分时间常数、速度检测滤波器和转矩滤波器是立即完成切换动作的。但是我们可
以逐步地改变位置环增益,从而避免增益快速升高时可能导致的冲击。
因切换条件不同
而可以取消
切换延迟时间
当Pr35(位置环增益切换时间)=0:
高增益
低增益
当Pr35(位置环增益切换时间)=5:
高增益
低增益
166μs
Page 92

90
Minas A4 系列驱动器技术资料选编
8-7-6.速度观测器
1)要点
A4 系列伺服驱动器采用了一个负载模型以估测电机转速从而提高响应性能,并减弱停止后的振动,即时的速度观测
器就是用来提高速度检测精度的。
速度指令
速度环控制 电流环控制
速度估测值
到 位置环控制
速度观测器
负载类型
2)适用范围
·仅适用于位置控制或速度控制模式。
Pr02=0,位置控制模式;
控制模式
Pr02=1,速度控制模式;
Pr02=3,位置/速度控制模式;
Pr02=4、5,仅位置控制模式。
编码器 ·仅适用于 7 线制绝对式编码器。
3)注意事项
·与负载惯量(电机惯量及折算到电机轴上的负载惯量之和)相比,实际设备的惯量差异太大。
负载条件
例)在 300Hz 以下频率区域内存在一个较大的共振点;存在一个非线性的分量比如较大的反向间隙等。
·负载惯量有变化。
·外部有一个高频的扰动转矩分量。
转矩指令
(总惯量)
电机位置
伺服驱动器
电机电流
电机 负载
编码器
速度观测器功能的适用条件
以下情况,速度观测器无效,或者不能达到预料的效果
其他 ·定位设定范围太窄。
4)如何操作
① 设置负载惯量比(Pr20)
惯量比的设置请尽可能的精确。
如果惯量比已经在通常的位置控制模式里用实时自动增益调整方式获得,请直接采用这个结果写入到 Pr20 参数。
如果惯量比是通过计算获得的,请输入计算结果。
如果无法确定惯量比,请通过常规增大增益调整方式测量之。
② 按通常的位置控制模式进行调整。
请参考“8-7-2.位置控制模式的调整”。
③ 设置速度观测器(Pr27)。
如果速度观测器(Pr27)设为 1,速度检测的方式即切换到速度观测器。
如果转矩波形有变化,或者运行中出现噪音,请马上恢复到原先的设置,判明原因,并核对惯量比(Pr20)的设置①。
如果转矩波形有变化或运行中的噪音降低而响应性能有所提高,可以一边观察位置偏差和实际转速的波形,一边对惯
量比(Pr20)做微调,搜索变化最小的设定值。
如果位置环增益或速度环增益有变化,由于惯量比(Pr20)的最佳值也可能会变化,请重新进行微调。
Page 93

Minas A4 系列驱动器技术资料选编
8-7-7.振动抑制控制
1)要点
对于在负载的最前端发生的振动,采用振动抑制控制,可以从指令里消除振动频率分量,从而抑制最前端的振动。
负载最前端
发生振动
振动可用位移
传感器测量
91
驱动器
上位控制器
位置指令
2)适用范围
控制模式
3)注意事项
请务必确保在修改参数或用 VS-SEL 信号端子切换前先停止电机的运转。
在以下情况,振动抑制控制功能可能不能正常地起作用,或者不能达到预想的效果。
负载条件
振动抑制
滤波器
伺服驱动器
速度环/
位置环控制
电机位置
·仅适用于位置控制或全闭环控制模式。
Pr02=0,位置控制模式;
Pr02=3,位置/速度控制模式的位置控制模式;
Pr02=4,位置/转矩控制模式的位置控制模式;
Pr02=6,全闭环控制模式。
·由于除了指令问题还有其他原因(比如外力等),导致振动加剧。
·共振频率与反共振频率之比太大。
·共振频率在 10.0~200.0Hz 区间之外。
转矩指令
以下情况,振动抑制控制功能被禁止发生作用
电流环控制
振动抑制控制的适用条件
电机
电机电流
联轴器
电机 负载
编码器
移动部件
滚珠丝杠
工作台
Page 94

92
4)如何操作
① 振动抑制滤波器频率(第 1 频率:Pr2B,第 2 频率:Pr2D)的设置。
测量在负载最前端发生的振动的频率。
如果这个振动可以用激光干涉仪等直接测出来,请将测得的频率数据(Hz)写入到振动抑制滤波器频率(Pr2B 和
Pr2D)。
如果没有测量仪器,如下图所示,用 PANATERM 软件的波形图功能测量位置偏差的波形,从中可读出残余振动的频
率。
Minas A4 系列驱动器技术资料选编
指令速度
位置偏差(脉冲数)
计算振动频率
② 振动抑制滤波器(第 1 滤波器:Pr2C,第 2 滤波器:Pr2E)的设置。
首先,请将振动抑制滤波器设为 0。
虽然设置较大的参数值可以缩短设置时间,但是在指令的转折点上转矩纹波会加剧,如下图所示。
建议根据实际使用状况来设置,但要保证不会发生转矩饱和。如果发生转矩饱和,振动抑制滤波器的效果会大打折扣。
振动抑制滤波器设置成最佳状态 振动抑制滤波器设得太大
转矩饱和
转矩指令
③ 振动抑制滤波器切换选择(Pr24)的设置。
根据机器设备发生的振动的状态,可以选择在两个振动抑制滤波器间切换操作。
Pr24 值 切换模式
0
1
2
不切换,两个滤波器都有效。
用 VS-SEL 信号端子进行切换:
(与 COM-)开路:选择第 1 振动抑制频率;
(与 COM-)短路:选择第 2 振动抑制频率。
根据脉冲指令信号的方向进行切换:
CCW 方向:选择第 1 振动抑制频率;
CW 方向:选择第 2 振动抑制频率。
Page 95

Minas A4 系列驱动器技术资料选编
9.控制框图
9-1.位置控制框图
当控制模式 Pr02 = 0 时;
当控制模式 Pr02 = 3 ,且是第 1 控制模式时;
当控制模式 Pr02 = 4 ,且是第 1 控制模式时;
93
脉冲串
PULS
SIGN
输入设定
Pr40
倍频
Pr41
反相
Pr42
形式
脉冲分倍频
第一分子
第二分子
分子倍率
分母
Pr48
Pr49
Pr4A
Pr4B
FIR
平滑滤波器
Pr4D
选通
初级延时
平滑滤波器
选通
Pr4C
振动抑制控制
Pr2B
第一频率
第一滤波
Pr2C
Pr2D
第二频率
Pr2E
第二滤波
-
位置偏差
指令速度
监视器
监视器
分频设置
反馈脉冲
OA/OB/OZ
分子
分母
反相
Pr44
Pr45
Pr46
9-2.速度控制框图
当控制模式 Pr02 = 1 时;
当控制模式 Pr02 = 3 ,且是第 2 控制模式时;
当控制模式 Pr02 = 5 ,且是第 1 控制模式时;
速度前馈
Pr15
增益
滤波器
Pr16
位置环控制
Pr10
第一
Pr18
第二
++
+
第一
第二
速度检测
+
-
速度检测
滤波器
Pr13
Pr1B
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
监视器
Pr11
Pr12
Pr19
Pr1A
Pr20
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
自适应
滤波器
编码器信号
接收过程
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩指令监视器
转矩滤波器
Pr14
第一时常
第二时常
Pr1C
第一限制
Pr5E
Pr5F
第二限制
串行通讯数据
电机
编码器
速度指令
模拟量
SPR
反馈脉冲
OA/OB/OZ
16位A/D
内部速度设置
Pr53
第一
第二
Pr54
第三
Pr55
第四
Pr56
输入设置
增益
极性取反
零漂
滤波器
第五
第六
第七
第八
分频设置
分子
分母
反相
Pr50
Pr51
Pr52
Pr57
Pr74
Pr75
Pr76
Pr77
Pr44
Pr45
Pr46
指令选择
选通
Pr05
加减速限制
Pr58
加速
Pr59
减速
Pr5AS形
指令速度
监视器
速度检测
第一
第二
速度检测
+
-
滤波器
Pr13
Pr1B
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
监视器
Pr11
Pr12
Pr19
Pr1A
Pr20
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
自适应
滤波器
编码器信号
接收过程
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩指令监视器
转矩滤波器
Pr14
第一时常
第二时常
Pr1C
第一限制
Pr5E
Pr5F
第二限制
串行通讯数据
电机
编码器
Page 96

94
9-3.转矩控制框图
当控制模式 Pr02 = 2 时;
当控制模式 Pr02 = 4 ,且是第 2 控制模式时;
当控制模式 Pr02 = 5 ,且是第 2 控制模式时;
Minas A4 系列驱动器技术资料选编
模拟量
转矩指令
SPR/TRQR
16位A/D
输入设置
增益
极性取反
零漂
滤波器
Pr5C
Pr5D
Pr52
Pr57
信号(±)
内部速度限制
第四速度
分频设置
反馈脉冲
OA/OB/OZ
分频
分频
反相
Pr44
Pr45
Pr46
9-4.全闭环控制框图
当控制模式 Pr02 = 6 ,
指令速度监视器
Pr05
绝对数值
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
第二深度
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
Pr13
Pr1B
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
Pr11
Pr12
Pr19
Pr1A
Pr20
转矩限制
+
×
-
速度检测
滤波器
第一
第二
监视器
转矩滤波器
第一时常
第二时常
第一限制
第二限制
转矩指令监视器
Pr14
Pr1C
Pr5E
Pr5F
电机
编码器
速度检测
编码器信号
串行通讯数据
接收过程
脉冲串
PULS
SIGN
输入设定
Pr40
倍频
Pr41
反相
Pr42
形式
脉冲分倍频
Pr48
第一分子
第二分子
Pr49
分子倍率
Pr4A
Pr4B
分母
指令速度监视器
位置偏差监视器
反馈脉冲
OA/OB/OZ
FIR
平滑滤波器
Pr4D
选通
初级延时
平滑滤波器
选通
分频设置
分子
分母
反相
Pr4C
外置光栅补偿
分子
分子倍率
分母
Pr44
Pr45
Pr46
Pr78
Pr79
Pr7A
+
-
振动抑制控制
第一频率
第一滤波
第二频率
第二滤波
-
Pr2B
Pr2C
Pr2D
Pr2E
全闭环
偏差监视器
速度前馈
Pr15
增益
滤波器
Pr16
位置环控制
Pr10
第一
Pr18
第二
++
+
第一
第二
+
-
速度检测
滤波器
Pr13
Pr1B
速度检测
速度环控制
第一比例
第一积分
第二比例
第二积分
惯量比
实际速度
监视器
Pr11
Pr12
Pr19
Pr1A
Pr20
陷波滤波器
第一频率
第一宽度
第二频率
第二宽度
第二深度
自适应
滤波器
编码器信号
接收过程
外置光栅信号
接收过程
Pr1D
Pr1E
Pr28
Pr29
Pr2A
Pr2F
转矩指令监视器
转矩滤波器
Pr14
第一时常
第二时常
Pr1C
第一限制
Pr5E
Pr5F
第二限制
串行通讯数据
串行通讯数据
电机
编码器
外置
光栅
Page 97

Minas A4 系列驱动器技术资料选编
10.销售及技术服务信息
中国总经销商:
上海松浩自动化设备有限公司
电话:(86)21-6357 0803,6357 4937
传真:(86)21-6357 0802
地址:上海市闸北区河南北路 441 号锦艺大厦 1601 室
95
邮编:200071
网址:http://www.shservo.com.cn
电邮:sales@shservo.com.cn
Page 98

96
·MEMO(备忘录)
Minas A4 系列驱动器技术资料选编
 Loading...
Loading...