


Cat. No. Z01E-PL-01
ZFX
Czujnik wizyjny z wbudowanym ekranem dotykowym
PODRĘCZNIK KONFIGURACJI

ZFX
Czujnik wizyjny
z wbudowanym ekranem dotykowym
Skrócona instrukcja obsługi
Wersja 1.0, styczeń 2008


SPIS TREŚCI
CZĘŚĆ 1
Przygotowanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1-1 Omówienie systemu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1-2 Podłączanie urządzeń. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1-3 Instalowanie kontrolera . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1-4 Instalowanie inteligentnych kamer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1-5 Instalowanie kamer typu C-mount. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1-6 Instalowanie oświetlenia zewnętrznego
(tylko modele ZFX-SC50/SC90). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1-7 Instalowanie oświetlenia zewnętrznego
(tylko kamera C-mount – ZFX-S/SC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
CZĘŚĆ 2
Użytkowanie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2-1 Tryb pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2-2 Regulacja jasności obrazu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2-3 Przykład ustawienia pomiaru Pattern Search (wyszukiwanie wzoru). . . . . . . . . . . . . . . . . . 20
2-4 Korekta położenia (Position Correction). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2-5 Otrzymywanie czystego obrazu. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2-6 Zmiana wyświetlanych informacji (tryb ADJ/RUN) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2-7 Ponowny pomiar zapisanego obrazu (tryb ADJ). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
CZĘŚĆ 3
Pomiary w trybie RUN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
CZĘŚĆ 4
Omówienie funkcji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4-1 Omówienie funkcji PATTERN SEARCH (wyszukiwanie wzoru) . . . . . . . . . . . . . . . . . . . . 41
4-2 Omówienie funkcji SENSITIVE SEARCH
(wyszukiwanie o dużej dokładności). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4-3 Omówienie funkcji Flexible Search
(wyszukiwanie elastyczne) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4-4 Omówienie funkcji Graphic Search
(wyszukiwanie graficzne) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4-5 Omówienie funkcji AREA (obszar) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4-6 Omówienie funkcji LABELING (oznaczanie) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4-7 Omówienie funkcji POSITION (położenie) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4-8 Omówienie funkcji WIDTH (szerokość). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4-9 Omówienie funkcji COUNT (zliczanie) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4-10 Omówienie funkcji ANGLE (kąt) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4-11 Omówienie funkcji BRIGHT (jasność). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4-12 Omówienie funkcji HUE (kolor) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4-13 Omówienie funkcji DEFECT (defekt). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4-14 Omówienie funkcji GROUPING (grupowanie) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3
CZĘŚĆ 5
Dodatkowe informacje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5-1 Jakie parametry są ustawiane funkcją AUTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5-2 BANK i BANK-Group (grupa banków) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Historia wersji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4
1-1 Omówienie systemu
3 42
1
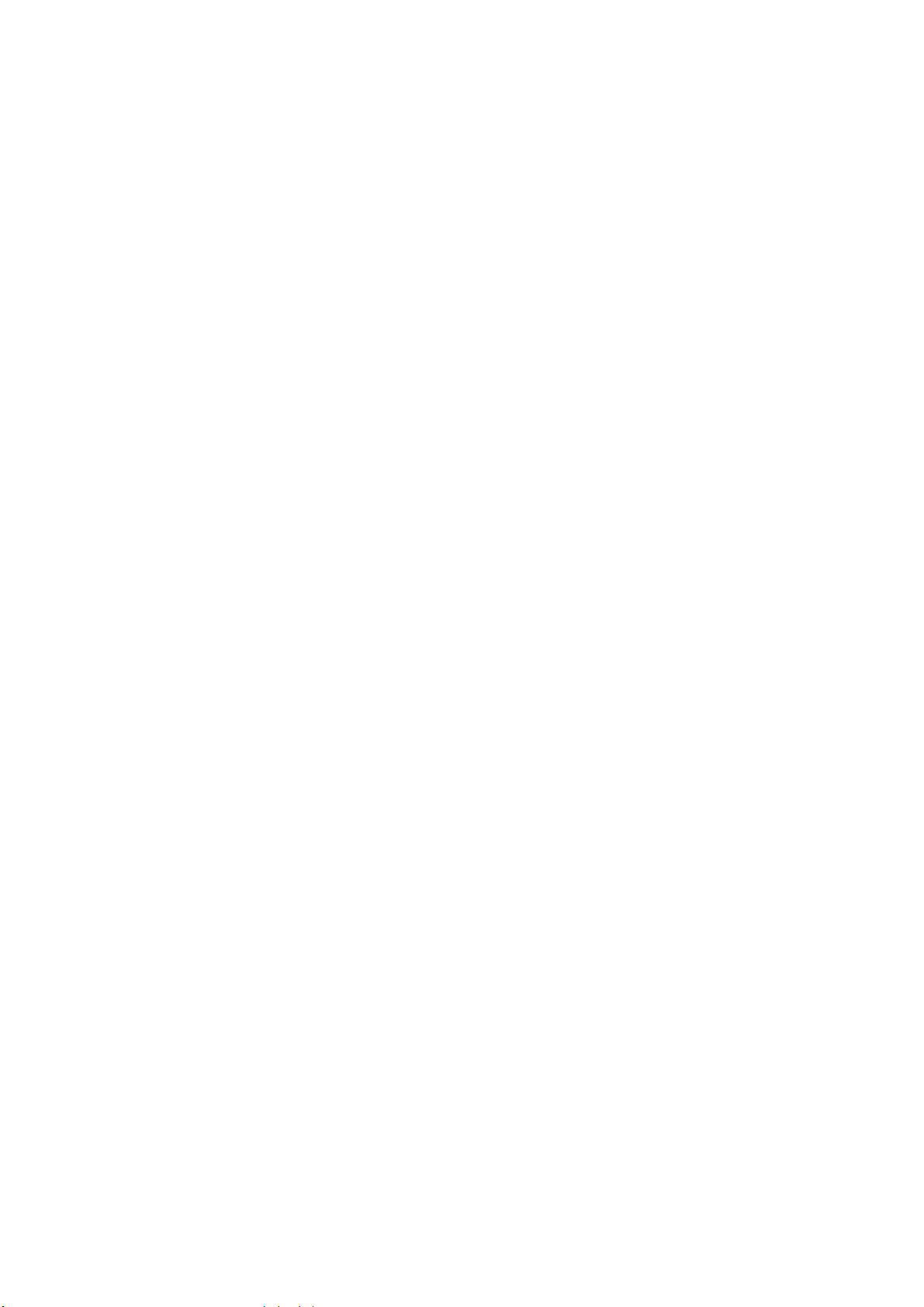
Zasadniczo konfigurowanie czujnika ZFX-C odbywa się za pomocą kontrolera
i kamery.
W zależności od specyficznych wymagań użytkownika wraz z czujnikiem
ZFX-C mogą być używane inne urządzenia zewnętrzne.
Kamery z oświetleniem
(*5)
(wbudowany kabel)
- Kamera kolorowa
ZFX-SC10/SC50/SC50W
ZFX-SC90/SC90W
ZFX-SC150/SC150W
- Kamera monochromatyczna
ZFX-SR10/SR50
Kontroler
ZFX-C10/15/20/25
Kabel monitora
FZ-VM
Karta SD (*4)
CZĘŚĆ 1
Przygotowanie
Monitor LCD (opcja)
FZ-M08 (*2)
PC
USB
Tylko kamera
- Kamera kolorowa
ZFX-SC
- Kamera monochromatyczna
ZFX-S
Wymagany obiektyw CCTV
i źródło światła.
Ethernet
Pióro
dotykowe
(*1)
Kabel kamery
ZFX-VS/VSR
Kabel RS-232C
ZFX-XPT_A
Kabel RS-422
ZFX-XPT_B
Kabel równoległy We/Wy
ZFX-VP
Konsola
ZFX-KP
(*3)
PLC
*1. Pióro dotykowe (ZFX-TP) znajduje się w zestawie kontrolera.
*2. Obraz może być wyświetlany na monitorze LCD kontrolera lub na
oddzielnym monitorze LCD (wyposażenie opcjonalne).
*3. Zamiast klawiszy i przycisków menu kontrolera można używać konsoli.
*4. Karta SD zgodna ze specyfikacją warstwy fizycznej 1.01.
Format plików: FAT16
*5. Czujnik ZFX-C20/25b można połączyć z dwiema kamerami.
5
1-2 Podłączanie urządzeń Przygotowanie
1-2 Podłączanie urządzeń
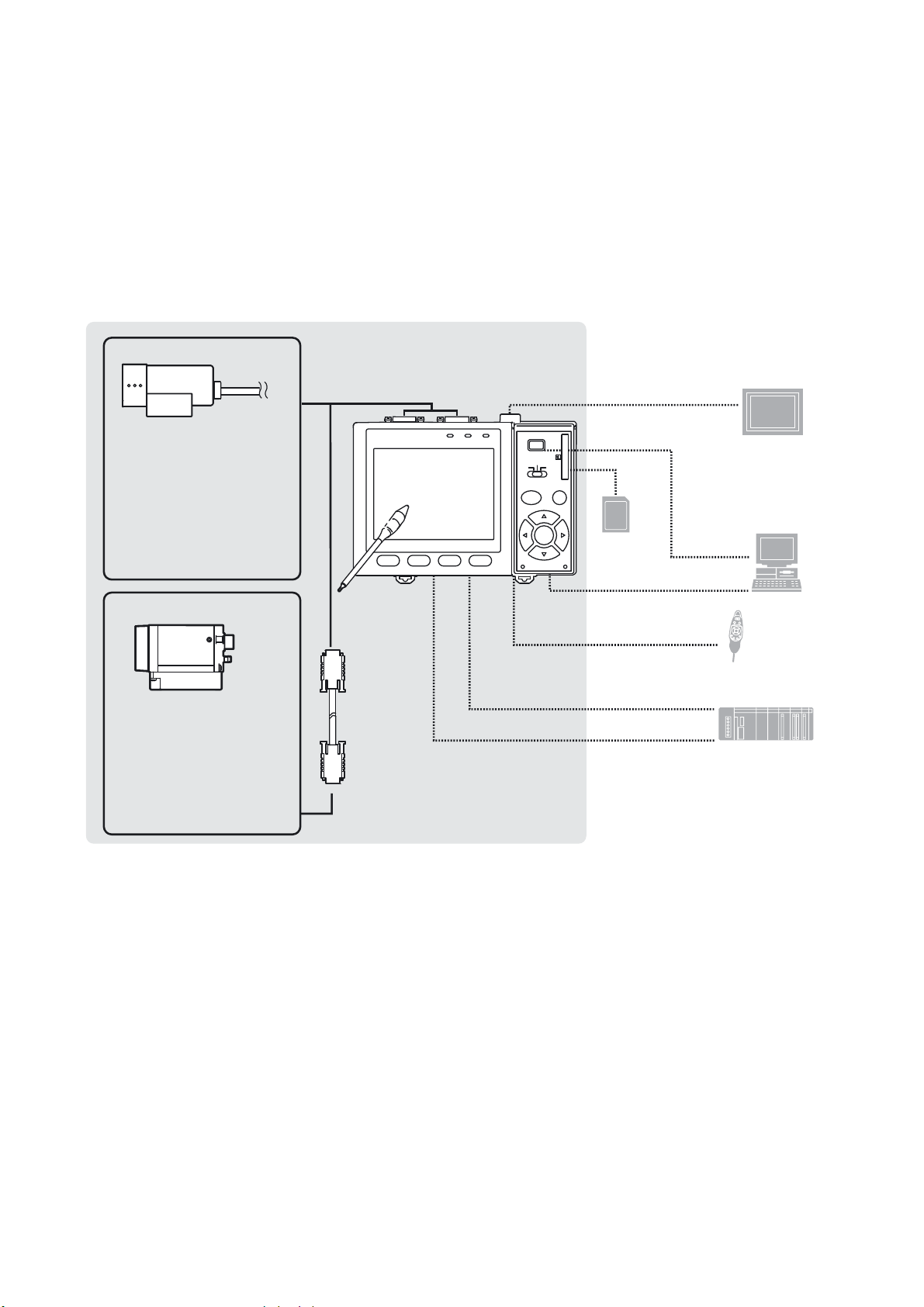
1-2-1 Podłączanie kontrolera do zasilania
Należy użyć zasilacza, który spełnia następujące wymagania techniczne.
Parametr Dane techniczne
Napięcie zasilania Około 24 V DC (21,6–26,4 V DC)
Prąd wyjściowy min. 1,5 A
Zalecany zasilacz S8VS-06024 (24 V DC, 2,5 A)
Zalecany rozmiar przewodu
elektrycznego
0,14–1,5 mm
Ważne Należy używać zasilacza z wbudowanym zabezpieczeniem przed przepięciami
(bezpieczny obwód bardzo niskiego napięcia w obwodzie wtórnym). Jeżeli
system ma spełniać wymagania normy UL, należy użyć zasilacza UL klasy II.
1. Poluzować za pomocą płaskiego
śrubokrętu dwie śruby u góry złącza
(męskiego) zasilania.
2. Włożyć zacisk DC zasilania
(przewód) do złącza (męskiego)
zasilania i dokręcić śrubokrętem
dwie śruby u góry złącza, aby
umocować zaciski.
Moment dokręcania: 0,22–0,25 Nm.
3. Włożyć złącze (męskie) zasilania do
złącza (żeńskiego) w kontrolerze.
4. Dokręcić śrubokrętem dwie śruby po
lewej i prawej stronie złącza (męskiego) zasilania, aby je umocować.
Moment dokręcania: 0,22–0,25 Nm.
2
(maks. 1 m)
+
-
24 V DC
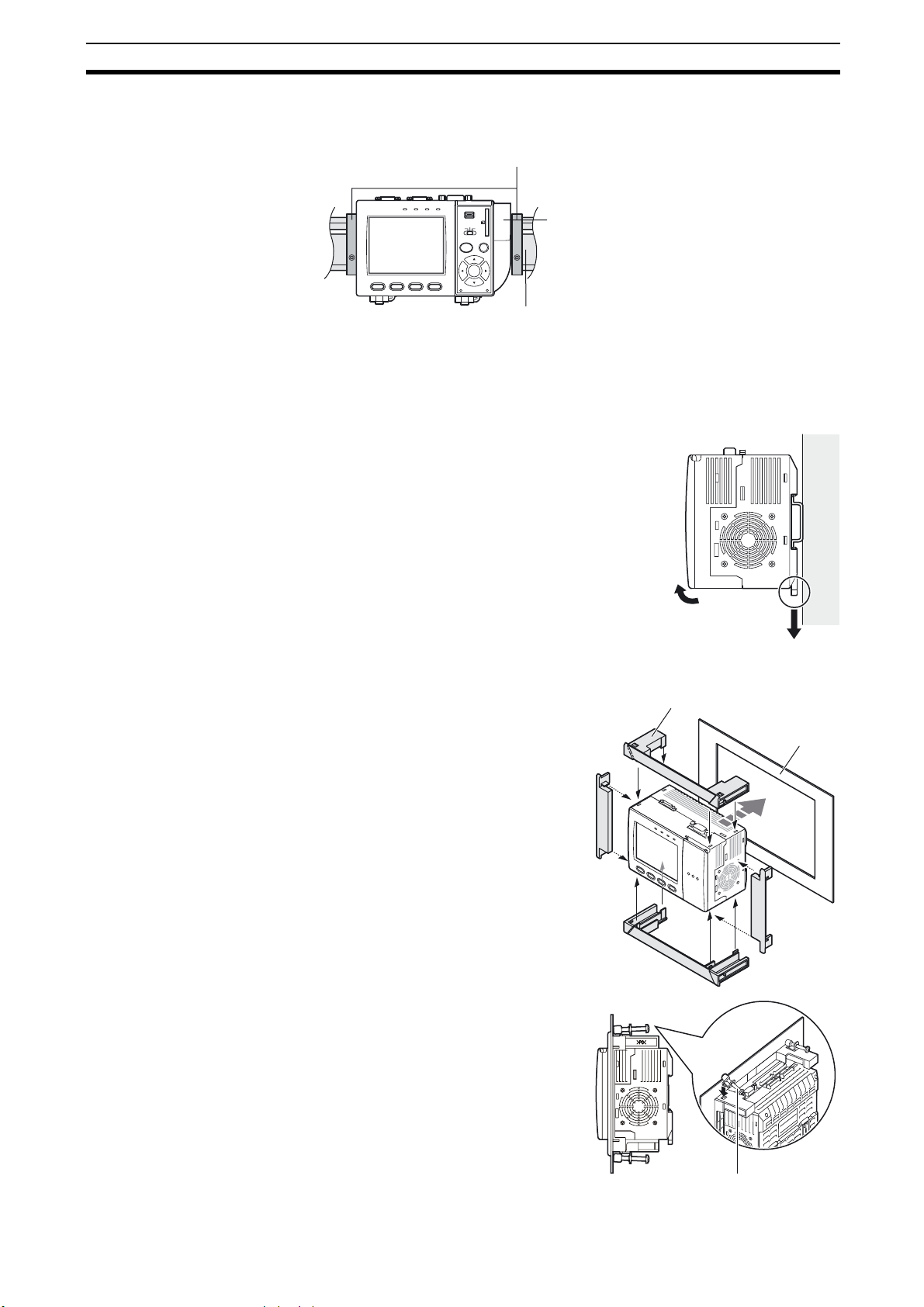
1-2-2 Mocowanie rdzeni ferrytowych
Umocować rdzenie ferrytowe (dostarczone) na obu końcach kabla kamery
i kabla zasilającego kontrolera.
Rdzeń ferrytowyRdzeń ferrytowy
Rdzeń ferrytowy
Mocując rdzenie ferrytowe
na kablu zasilania kontrolera,
należy przeprowadzić kabel
przez każdy rdzeń.
-
+
Zasilacz DC
6
1-2 Podłączanie urządzeń
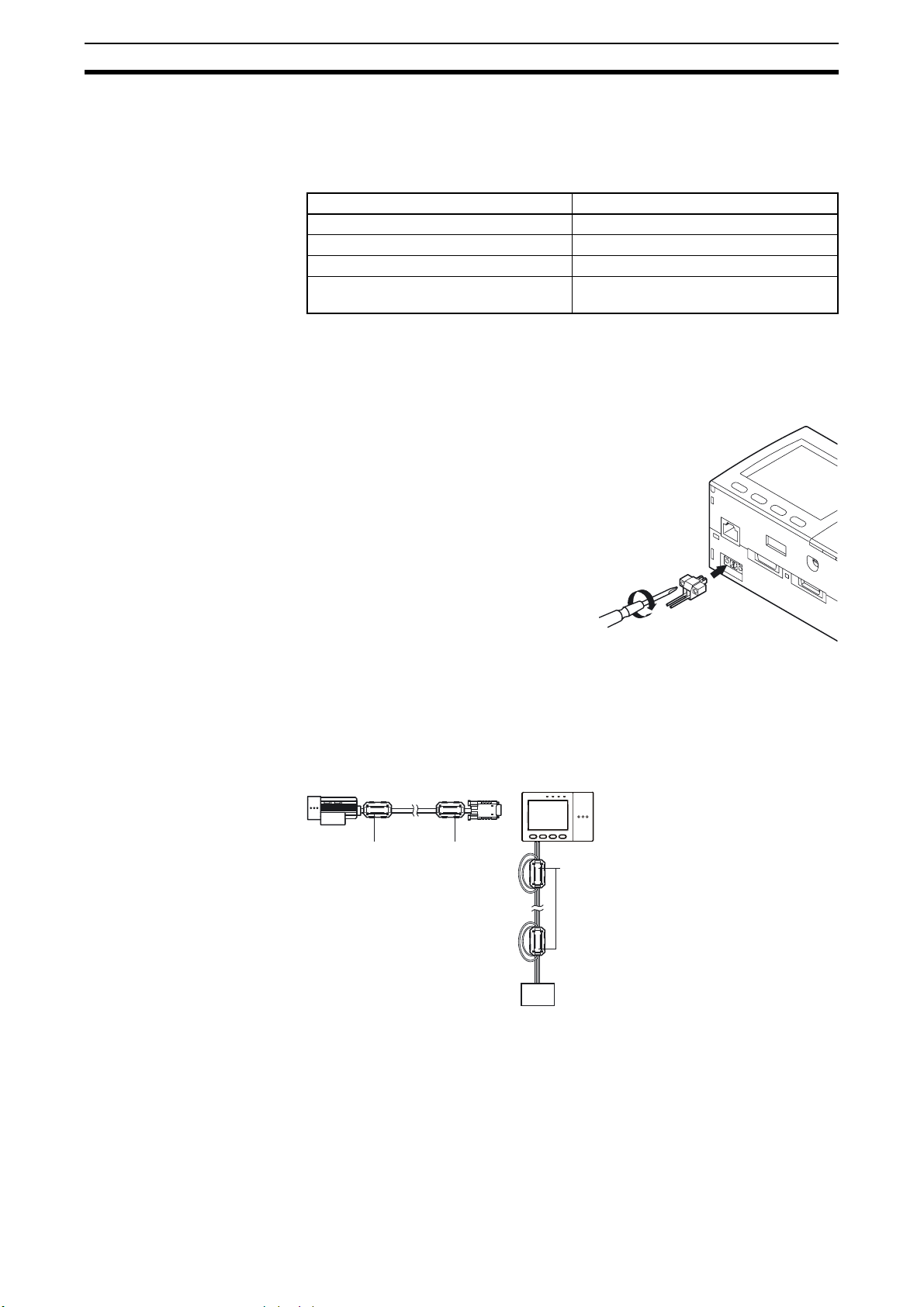
1-2-3 Podłączanie kamery do kontrolera
1. Włożyć złącze kamery do
odpowiedniego złącza kontrolera.
2. Dokręcić dwie śruby mocujące złącza
kamery na kontrolerze.
Moment dokręcania: 0,15 Nm.
Ważne Nie dotykać styków złącza.
Ważne Umocować złącze, tak by nie było ono narażone na wibracje lub uderzenie.
Ważne Zamontować kontroler w taki sposób, by złącze nie było stale narażone na
obciążenie, np. wskutek naprężenia kabla.
Przygotowanie
Rozłączanie
Poluzować śruby mocujące(w dwóch miejscach), aby odblokować kabel
kamery, następnie pociągnąć prosto złącze kabla.
Ważne Pamiętać, aby chwycić i pociągnąć złącze kamery. W przeciwnym razie
można uszkodzić kabel kamery.
Ważne Nie dotykać styków złącza.
7
1-3 Instalowanie kontrolera Przygotowanie
1-3 Instalowanie kontrolera
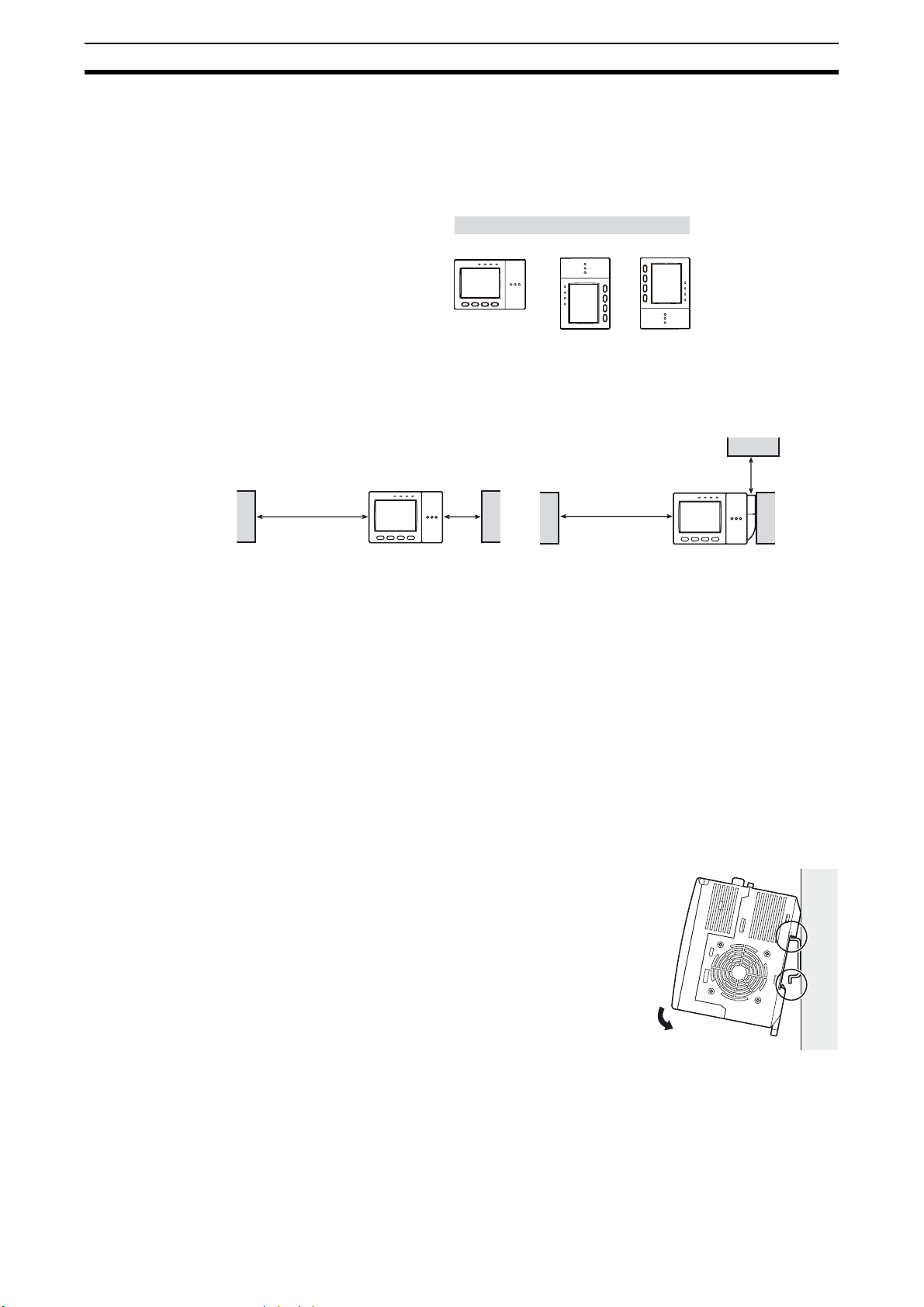
1-3-1 Warunki instalacji
Aby poprawić rozpraszanie ciepła, kontroler należy instalować w położeniu,
jak pokazano poniżej.
Góra
Prawidłowo
Ważne Aby zapewnić lepszą wentylację, kontroler należy instalować w odległości od
innych urządzeń nie mniejszej niż pokazano na poniższym rysunku.
Instalacja samego kontrolera:
Nieprawdłowo Nieprawdłowo
Instalacja kontrolera z dołączoną dmuchawą:
min. 15 mm
min.
50 mm
Ważne Temperatura otoczenia powinna być utrzymywana poniżej 50°C. Jeśli
temperatura otoczenia jest wyższa niż 50°C, należy zainstalować system
wymuszonego chłodzenia lub klimatyzację, aby utrzymywać temperaturę
poniżej 50°C.
Ważne Unikać montażu na panelach, na których są zainstalowane urządzenia
emitujące wysokiego napięcia, aby zapobiec narażeniu czujnika ZFX-C na
szumy.
Ważne Aby utrzymać szumy w środowisku pracy na niskim poziomie, należy
instalować kontroler w odległości co najmniej 10 m od linii energetycznych.
1-3-2 Instalowanie na szynie DIN
1. Zawiesić górny zaczep kontrolera na szynie
DIN.
2. Popchnąć kontroler na szynie w dół, aż dolny
zaczep zatrzaśnie się na właściwym miejscu.
min.
15 mm
min.
50 mm
1
2
Ważne Zamocować zacisk końcowy (sprzedawany oddzielnie) na szynie DIN po obu
stronach kontrolera.
8
1-3 Instalowanie kontrolera
Ważne Instalując na tej samej szynie DIN w sąsiedztwie kontrolera inne urządzenia,
Przygotowanie
należy zamontować do niego dmuchawę (dołączona w zestawie).
Zaciski końcowe (sprzedawane oddzielnie)
PFP-M
Zdejmowanie
OMRON
OUTPUT
RUN
ZFX-C10
1234
USB
ENABLE
ERROR
Szyna DIN (sprzedawana oddzielnie)
SD
CARD
ADJ
MENU RUN
AUTO ESC
SET
PULL OPEN
PFP-100N (1 m)
PFP-50N (0,5 m)
PFP-100N2 (1 m)
Dmuchawa
1. Pociągnąć dolny zaczep kontrolera w dół.
2. Podnieść kontroler od dołu, aby zdjąć go
zszyny DIN.
1
2
1-3-3 Montaż w panelu
1. Włożyć długie adaptery do
2. Włożyć krótkie adaptery do
3. Włożyć kontroler z zamonto-
4. Zawiesić zaczepy uchwytu
5. Sprawdzić, czy kontroler jest
montażu w panelu w cztery
otwory kontrolera.
montażu w panelu w dwa otwory
długich adapterów.
wanymi adapterami w panel
z przodu.
montażowego w dwóch otworach
(u góry i u dołu) długiego
adaptera montażowego i dokręcić
śruby.
Moment dokręcania: 1,2 Nm.
mocno umocowany w panelu.
Adaptery do montażu w panelu
Panel
1
3
2
2
1
4
Uchwyt montażowy
9
1-4 Instalowanie inteligentnych kamer Przygotowanie
0
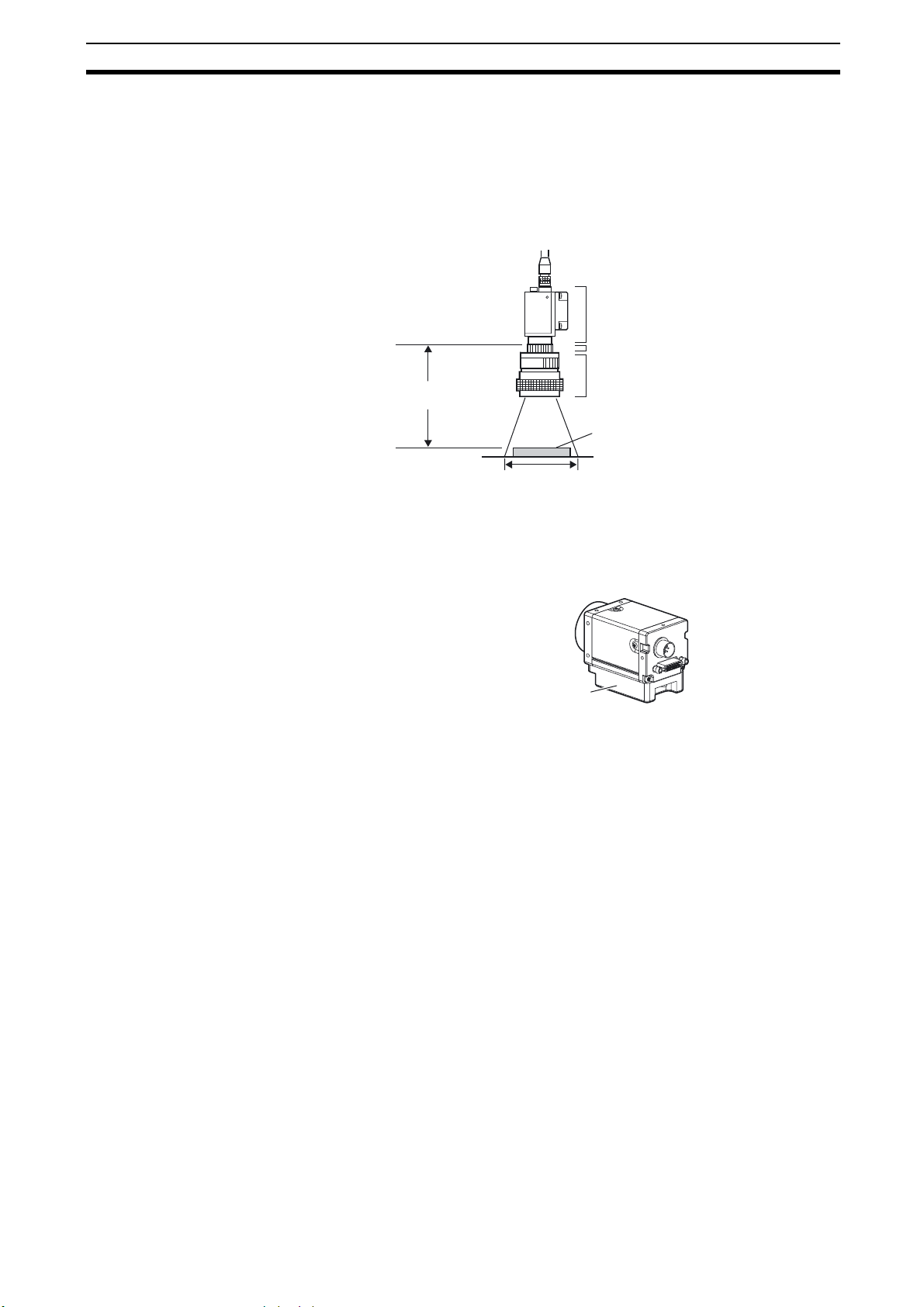
1-4 Instalowanie inteligentnych kamer
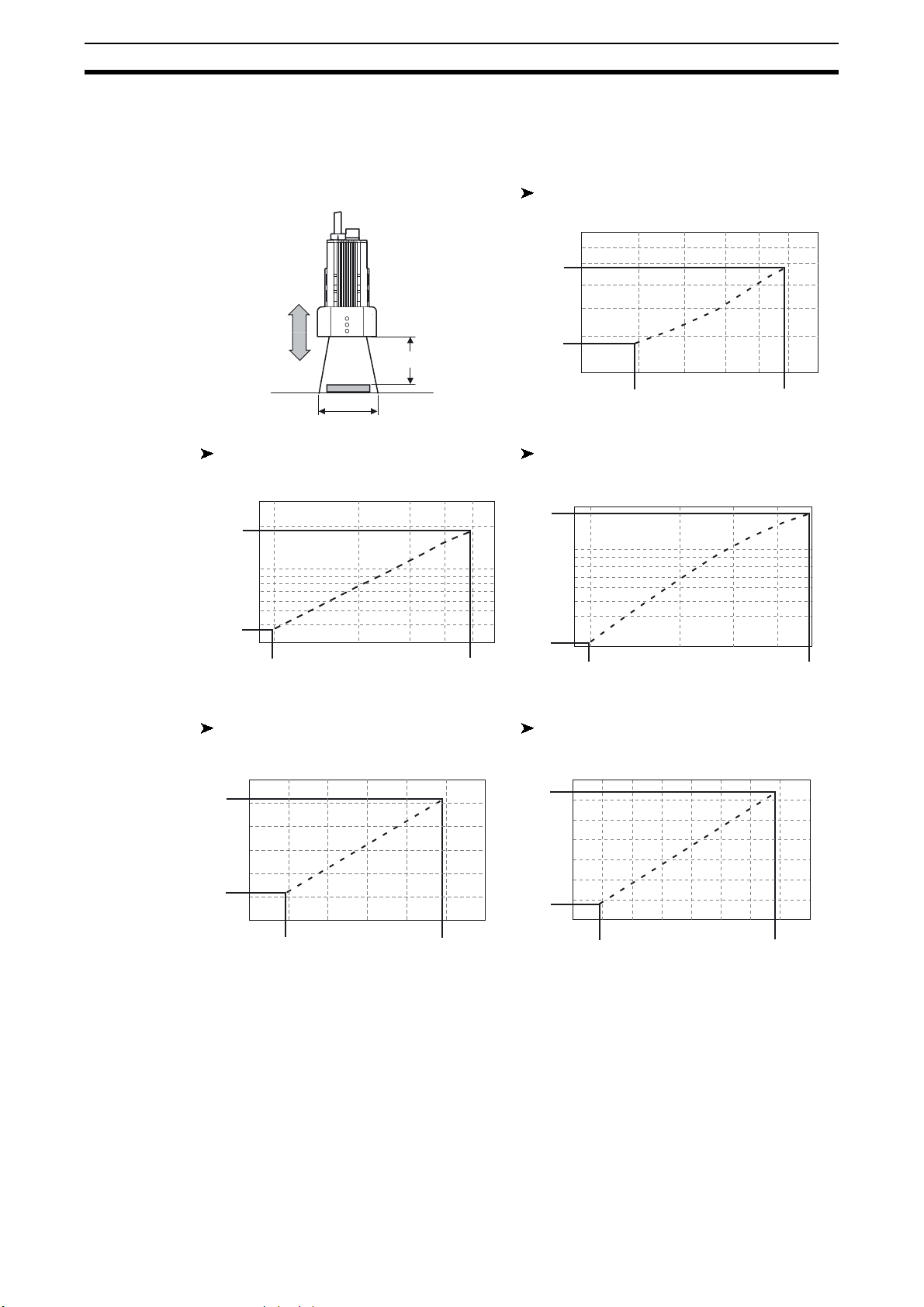
1-4-1 Wykres optyczny
ZFX-SC10/SR10
Ustawienie odległości L (mm)
60
50
49
Ustawienie
odległości (L)
Pole widzenia H (w poziomie)
ZFX-SR50 ZFX-SC50/SC50W
Ustawienie odległości L (mm)
300
194
100
38
30
9
9,8 49
Pole widzenia H (mm)
ZFX-SC90/SC90W ZFX-SC150/SC150W
Ustawienie odległości L (mm)
160
142
6
34
0
Ustawienie odległości L (mm)
190
187
100
31
30
9,8
Ustawienie odległości L (mm)
240
227
4,9
Pole widzenia H (mm)
Pole widzenia H (mm)
104
8,9
49
10
67
100
40
49
70
Pole widzenia H (mm)
10040
89
115
180
100
89
12080
148
Pole widzenia H (mm)
Uwaga • Obiektyw ma stałą ogniskową. Rzeczywiste pole widzenia i ogniskowa są
różne w różnych obiektywach, dlatego po wymianie obiektywu lub kamery
należy wyregulować odległość do mierzonego obiektu.
• Odległości montażu kamery podane w poniższych tabelach należy
traktować jako przybliżone. Kamerę należy zamontować w taki sposób, aby
można było łatwo wyregulować odległość do mierzonego obiektu.
• Jeśli rozmiar obiektu i pole widzenia są niedopasowane, należy użyć
kamery (bez wbudowanego oświetlenia), standardowego obiektywu CCTV
i źródła światła.
160

1-4 Instalowanie inteligentnych kamer
1-4-2 Instalowanie uchwytu montażowego
Uchwyt montażowy można zainstalować na wszystkich czterech
powierzchniach montażowych.
1. Wyrównać dwa zaczepy po jednej
stronie uchwytu montażowego
z rowkami w korpusie kamery.
2. Wcisnąć zaczep po drugiej
stronie w dół, aż do zatrzaśnięcia.
Upewnić się, czy uchwyt montażowy jest dokładnie zamocowany na
kamerze.
3. Zamocować uchwyt montażowy
śrubami w miejscu montażu.
Moment dokręcania
M4: 1,2 Nm
1/4"-20 UNC: 2,6 Nm
Zdejmowanie
1. Włożyć śrubokręt w jedną z dwóch
szczelin pomiędzy uchwytem
montażowym a obudową kamery
i zdjąć uchwyt montażowy.
Przygotowanie
Zaczepy
Uchwyt montażowy
Rowki na kamerze
1-4-3 Regulacja ogniskowej kamery
1. Wyregulować odległość pomiędzy
kamerą a mierzonym obiektem
i umocować kamerę.
Biorąc pod uwagę wykres
optyczny, wyregulować położenie
kamery tak, aby obszar, który ma
być sprawdzany, znajdował się
wewnątrz obszaru widzenia
(monitor LCD).
„Wykres optyczny” str. 10.
2. Obrócić pokrętłem regulacji
ostrości w lewo i w prawo, aby
wyregulować ostrość.
Uchwyt montażowy
Ustawienie odległości (L)
Pole widzenia H (w poziomie)
Pokrętło
regulacji
ostrości
Uwaga Najpierw nieznacznie obrócić pokrętłem regulacji ostrości w lewo i w prawo,
aby sprawdzić, czy nie znajduje się ono w skrajnych położeniach. W skrajnych
położeniach nie stosować siły, aby nie uszkodzić pokrętła.
(W modelu ZFX-SC90_/SC150_ pokrętło przestaje się obracać w najbliższym
położeniu. W najdalszym położeniu pokrętło obraca się swobodnie).
11
1-5 Instalowanie kamer typu C-mount Przygotowanie
1-5 Instalowanie kamer typu C-mount
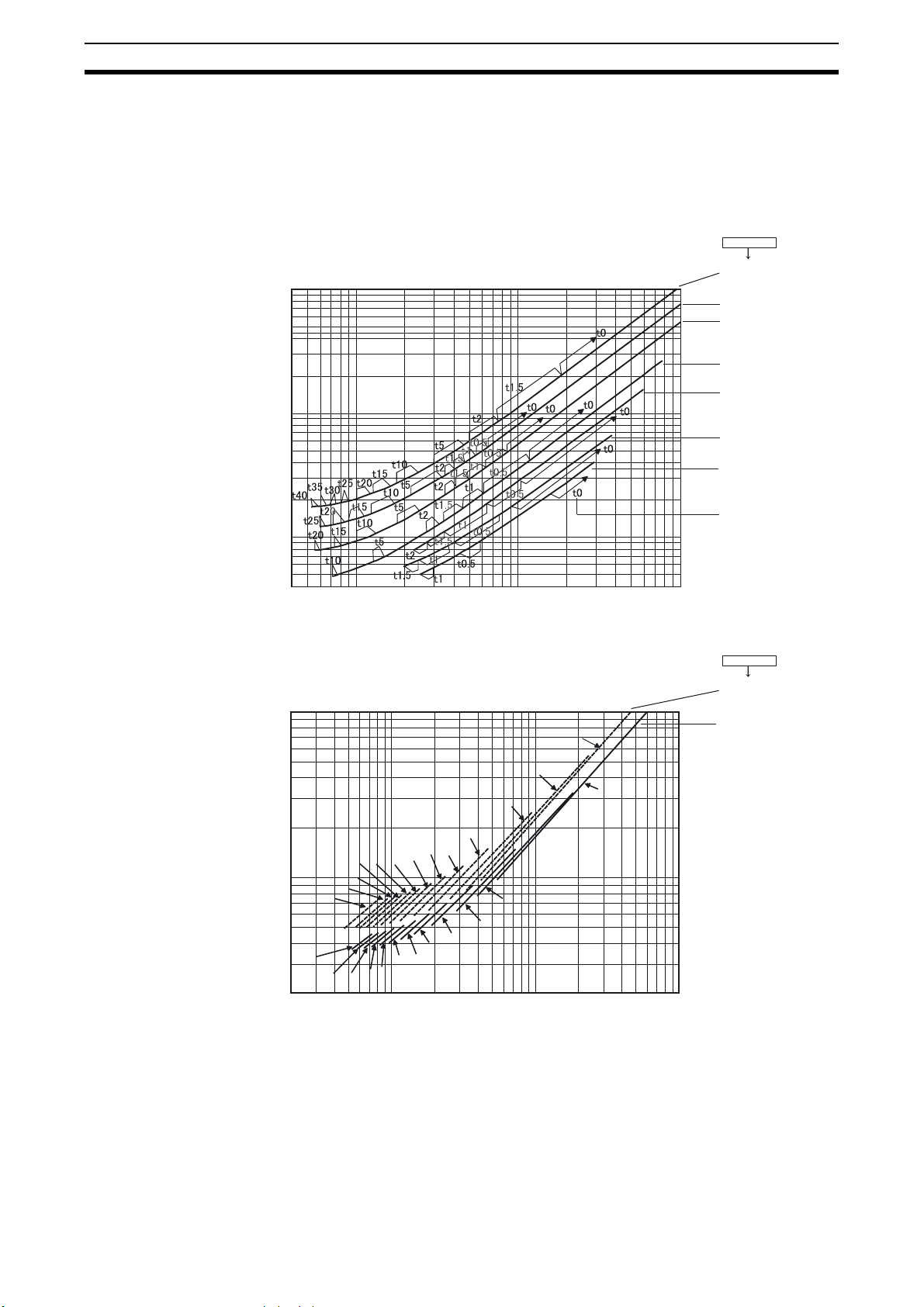
1-5-1 Wykres optyczny
Wartości na poniższym wykresie są przybliżone. Po zamontowaniu kamery
należy wykonać regulację.
Model obektywu
3Z4S-LE
ML-5018
10000
1000
Odległość kamery A (mm)Odległość kamery A (mm)
ML-3519
ML-2514
ML-1614
ML-1214
ML-0813
ML-0614
100
40
4 10 100 1000
Pole widzenia (mm)
10000
t0
t2
t5
t10
t20
t15
t25
t35
t40
t30
t50
t60
t45
t50
t45
t40
t35
t30
t25
t20
t15
t2
t5
t10
1000
200
2 10 100 1000
t0
Pole widzenia (mm)
t: Pierścień
rozszerzający
Przykład
t0: pierścień
t5: wymagany jest
Typ obiektywu
3Z4S-LE
ML-10035
ML-7527
rozszerzający nie
jest wymagany.
pierścień
rozszerzający
w rozmiarze 5 mm.
12
Oś X wykresu optycznego przedstawia pole widzenia L (mm), a oś Y –
odległość kamery A (mm). Krzywe na wykresie pokazują w przypadku
każdego typu obiektywu CCTV zależność pomiędzy polem widzenia a
odległością kamery. Te wartości znacznie się różnią w zależności od
obiektywu, dlatego przed skorzystaniem z tego wykresu należy sprawdzić typ
obiektywu. Wartość „t” wskazuje długość pierścienia rozszerzającego.
Wartość „t0” wskazuje przypadek, gdy pierścień rozszerzający nie jest
1-5 Instalowanie kamer typu C-mount
wymagany, a „t5” – przypadek, gdy jest wymagany pierścień rozszerzający
o rozmiarze 5 mm.
Przykład
W przypadku użycia obiektywu 3Z4S-LE ML-5018 CCTV, jeśli w mierzonym
obiekcie jest wymagane 40-milimetrowe pole widzenia, należy umieścić
kamerę w odległości 500 mm i zastosować pierścień rozszerzający
o rozmiarze 5 mm.
Przygotowanie
Kamera
Pierścień rozszerzający t_ (mm)
Obiektyw
Odległość kamery A (mm)
Obiekt pomiaru
Pole widzenia L (mm)
1-5-2 Instalowanie podstawy montażowej kamery
Podstawa montażowa u dołu kamery może być umieszczona na wszystkich
czterech powierzchniach montażowych. Aby zmienić powierzchnię
montażową, należy odkręcić trzy śruby montażowe (M2 x 6) od kamery.
Podstawa montażowa
• Moment dokręcania podczas mocowania podstawy montażowej na
miejscu montażu
M4: 1,2 Nm
1/4"-20 UNC: 2,6 Nm
13
1-6 Instalowanie oświetlenia zewnętrznego (tylko modele ZFX-SC50/SC90) Przygotowanie
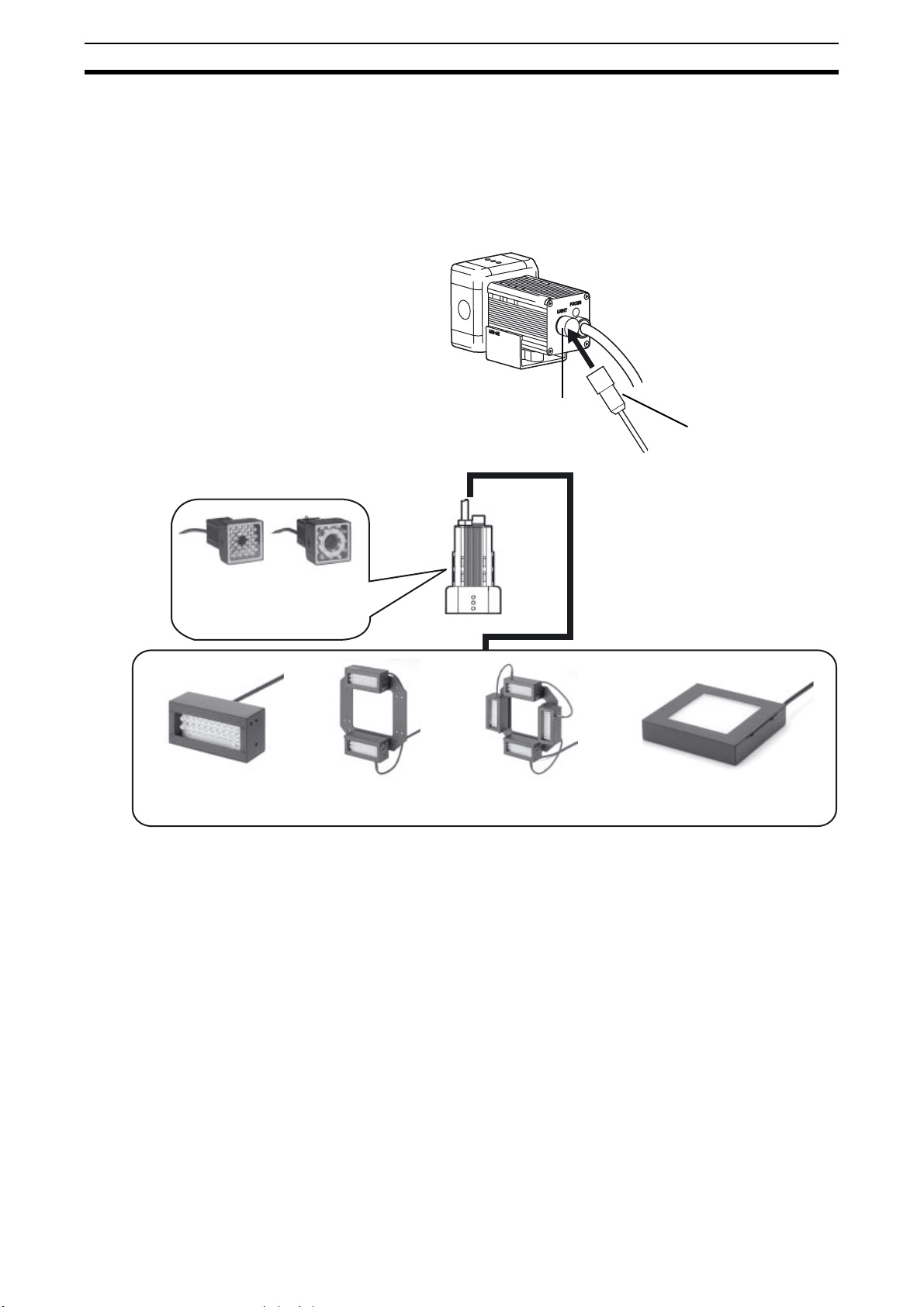
1-6 Instalowanie oświetlenia zewnętrznego
(tylko modele ZFX-SC50/SC90)
1-6-1 Podłączanie opcjonalnego oświetlenia do kamery
Opcjonalne oświetlenie może być podłączone do tylnego złącza kamery
(ZFX-SC50_/SC90_). Do opcjonalnego oświetlenia nie jest potrzebne
oddzielne zasilanie, gdyż jest ono dostarczane przez kamerę.
ZFX-SC50 ZFX-SC90
Opcjonalne oświetlenie może być
używanez tymi dwiema kamerami.
Ramka świecąca
Podwójna ramka świecąca
ZFV-LTL01
Zdjąć zatyczkę złącza opcjonalnego
oświetlenia z tyłu kamery.
Niskokątowa ramka świecąca
ZFV-LTL02
ZFV-LTL04
Złącze opcjonalnego
oświetlenia
Oświetlenie z wiązką
przechodzącą
ZFV-LTF01
14
1-7 Instalowanie oświetlenia zewnętrznego (tylko kamera C-mount – ZFX-S/SC)
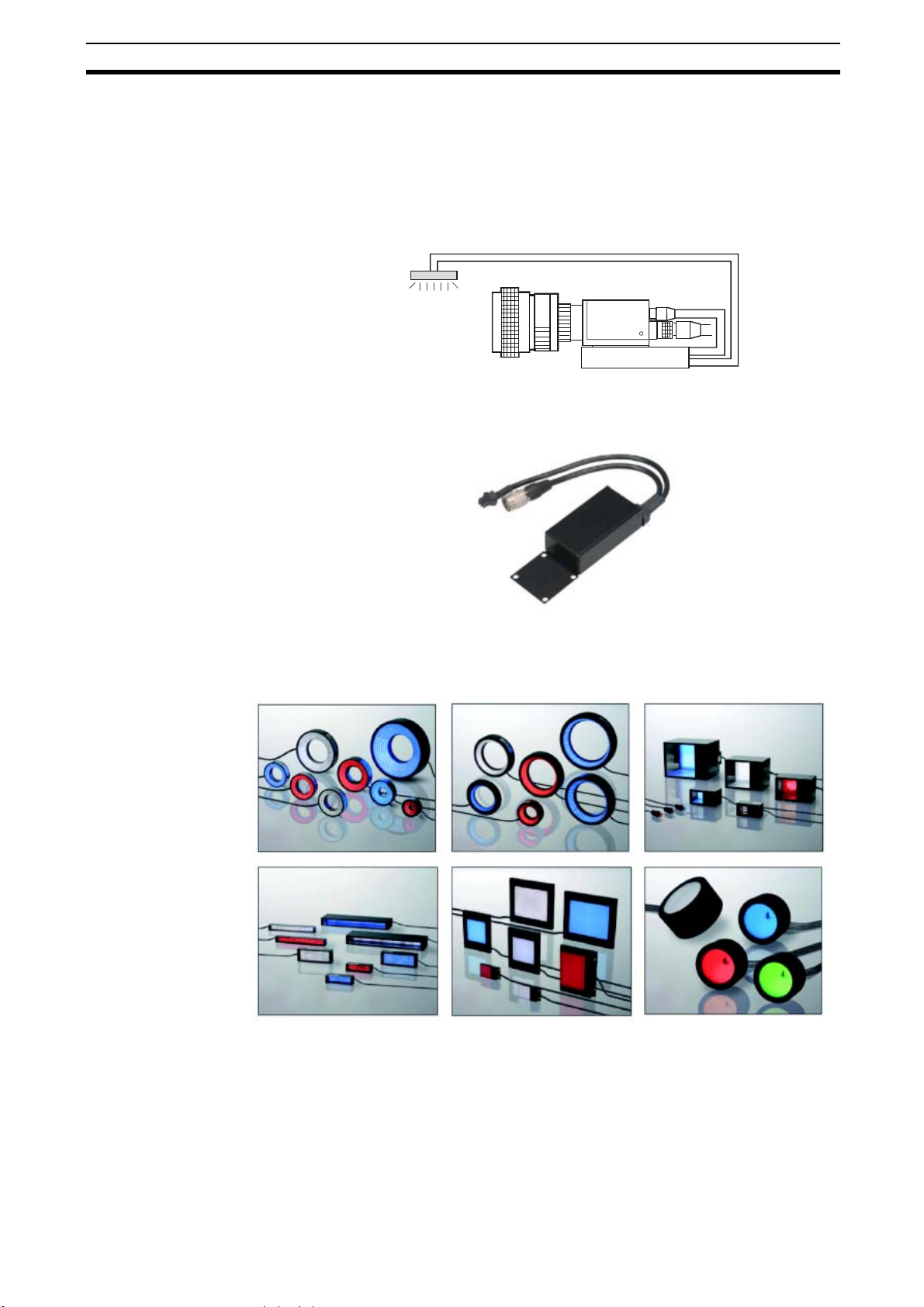
1-7 Instalowanie oświetlenia zewnętrznego
(tylko kamera C-mount – ZFX-S/SC)
1-7-1 Podłączanie opcjonalnego oświetlenia do kamery
Opcjonalne oświetlenie może być podłączone do kontrolera stroboskopowego. Sterownik stroboskopowy można podłączyć do kamery (ZFX-S/SC).
Do opcjonalnego oświetlenia nie jest potrzebne oddzielne zasilanie.
Sterownik
stroboskopowy
Sterownik stroboskopowy
3Z4S-LT MLEK-C100E1TSX
Przygotowanie
Oświetlenie zewnętrzne
Seria 3Z4S-LT
Można podłączyć oświetlenie o poborze prądu 1,0 A lub mniejszym
15

1-7 Instalowanie oświetlenia zewnętrznego (tylko kamera C-mount – ZFX-S/SC) Przygotowanie
16
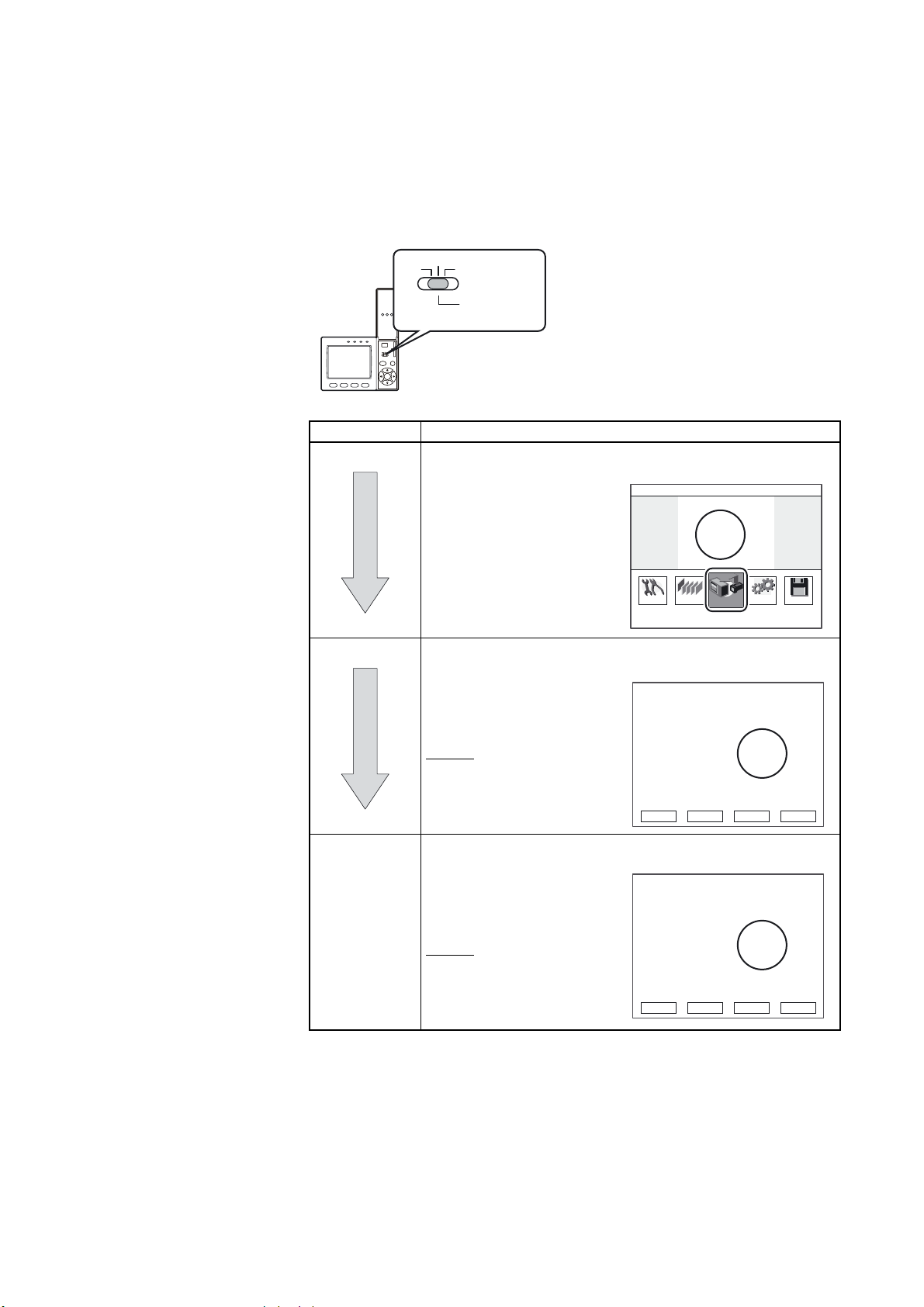
2-1 Tryb pracy
ADJ
MENU
RUN
Czujnik ZFX-C ma trzy następujące
ADJ
MENU
RUN
Przełącznik
trybu pracy
Tryb Opis
Tryb MENU Ten tryb służy do ustawienia
warunków pomiaru. Dzięki
łatwo rozpoznawalnym
ikonom obsługa tego trybu
pracy jest intuicyjna.
tryby pracy. Przed rozpoczęciem
działania należy przełączyć czujnik
w żądany tryb. Do tego celu służy
przełącznik trybu pracy.
CZĘŚĆ 2
Użytkowanie
Góra ekranu
Top menu
LIVE
TEA
Tryb ADJ Ten tryb służy do
sprawdzenia statusu
pomiaru i regulacji. Wyniki
pomiaru są wyświetlane
tylko na ekranie i nie są
podawane na wyjście.
Ważne
Wejście wyzwalania nie jest
akceptowane
Tryb RU N Ten tryb jest używany do
wykonywania pomiaru.
Wyniki pomiaru są
wyświetlane na ekranie
monitora i są podawane na
wyjście.
Ważne
Aby wyzwolić pomiar
z menu, należy nacisnąć
przyciski [SET] i [UP]
Tool
Bank
Setup
System
Góra ekranu
353ms
OK
Camera 0
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next
Individual result
TEA
Dsplay SW
Góra ekranu
Individual result
353ms
OK
Camera 0
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next Dsplay SW Capture
TEA
Save
Adjust
17
2-2 Regulacja jasności obrazu Użytkowanie
2-2 Regulacja jasności obrazu
2-2-1 Natężenie oświetlenia (tylko w przypadku inteligentnych kamer)
Tryb MENU – [Setup] – [Cameras] – [Light Control]
1. Nacisnąć
przycisk
Auto.
Sterowanie oświetleniem
A
DB
C
5
5
5B5
A
D
ALL
Auto
C
CancelApply Capture
Zostaną wyświetlone miniatury obrazów automatycznie
przechwyconych przy różnych wzorach oświetlenia.
Sterowanie oświetleniem
TEA TEA TEA TEA
TEA TEA TEA TEA
TEA TEA TEA
TEA
SD
Jak są wyświetlane bloki
Powierzchnia górna (oznaczona numerem modelu)
Widok od tej
strony
SD
A
D
C
2. Wybrać obraz
B
Apply
Cancel
Capture
3. Nacisnąć przycisk
Apply (zastosuj).
Zostaną wyświetlone warunki
oświetlenia wybranego obrazu.
4. Wyregulować warunki zgodnie z potrzebami.
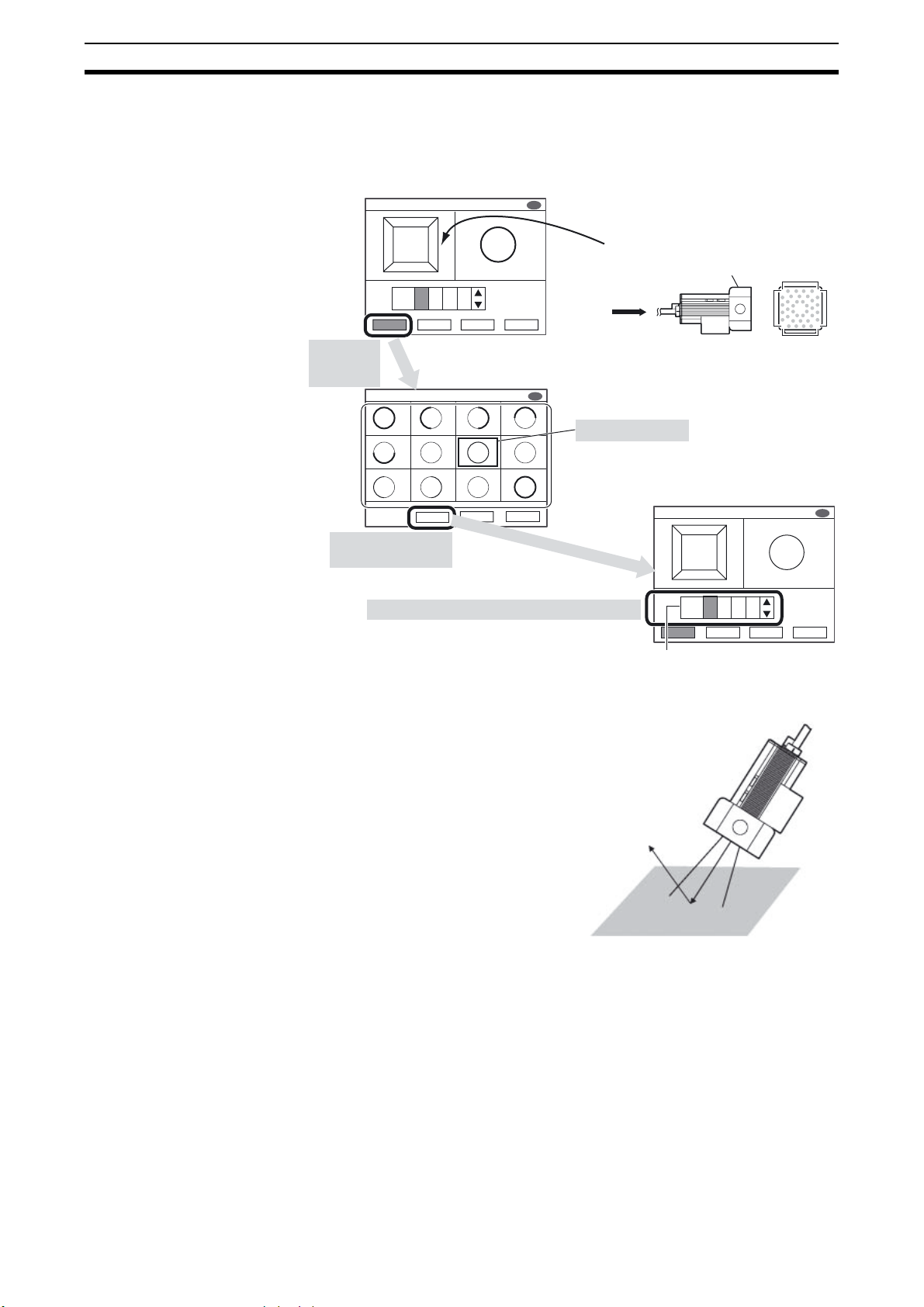
Ważne Jeśli obiekt jest błyszczący, kamerę
należy zainstalować pod kątem, aby
uniknąć światła odbitego lustrzanie
w kierunku kamery.
D
ALL
Auto
Auto
Wielkość emitowanego światła
Światło odbite
od powierzchni
lustrzanej
Sterowanie oświetleniem
A
B
C
2A3B2C3
Apply Cancel Capture
TEA
D
SD
18

2-2 Regulacja jasności obrazu Użytkowanie
2-2-2 Szybkość migawki
Nastawić szybkość migawki odpowiednio do szybkości ruchu mierzonego
obiektu i warunków oświetlenia.
Tryb MENU – [Setup] – [Cameras] – [Shutter Speed]
Nastawa Opis
od 1/170 do
1/20 000 s
Ustawia szybkość migawki na żądaną wartość. Wyświetlane
są tylko te szybkości migawki, które w danych warunkach
mogą być wybrane. Wartości te zależą od podłączonej
kamery i parametrów konfiguracji.
Uwaga Wskazówki dotyczące ustawienia szybkości migawki
Charakterystyka szybkości migawki jest następująca. Należy wybrać
szybkość migawki odpowiednią do wymagań kontroli.
Szybkość migawki Szybkość ruchu mierzonego obiektu
1/170 s
•
1/20 000 s
Wolny
•
Szybki
2-2-3 Ustawienie wzmocnienia
Jeżeli za pomocą tylko wyboru szybkości migawki i sterowania oświetleniem
nie można uzyskać jasnego obrazu, można regulować wielkość wzmocnienia
(czułość) czujnika.
Tryb MENU – [Setup] – [Cameras] – [Gain]
Nastawa Opis
x 1.0, x 1.5, x 2.0 Ustawia współczynnik wzmocnienia.
x 1.0: współczynnik wzmocnienia pozostaje bez zmiany
(wartość domyślna)
x 1.5: współczynnik wzmocnienia zwiększa się 1,5 raza
x 2.0: współczynnik wzmocnienia zwiększa się 2,0 razy
Uwaga Wskazówki dotyczące ustawienia wzmocnienia
Dzięki zwiększeniu wzmocnienia obraz staje się jaśniejszy, jednak składowa
szumu obecna w obrazie staje się również bardziej widoczna. Należy wybrać
współczynnik wzmocnienia odpowiedni do wymagań kontroli.
Wzmocnienie Obraz Jakość obrazu
x 1.0
•
x 2.0
Ciemny
↑ ↓
Jasny
Dobra (mały szum)
↑ ↓
Gorsza (widoczny szum)
19

2-3 Przykład ustawienia pomiaru Pattern Search (wyszukiwanie wzoru) Użytkowanie
ADJ
MENU
RUN
2-3 Przykład ustawienia pomiaru Pattern Search (wyszukiwanie wzoru)
OK NIE
Wybrać pozycję Pattern Search
(wyszukiwanie wzoru).
1. Przełączyć do trybu MENU.
2. Wybrać ikonę [Setup].
3. Wybrać ikonę pomiaru Pattern Search
(wyszukiwanie wzoru).
Tool
Shape
Size
Edge
Bright&Color
Application
Cameras
LIVE
Bank
Register
MENU
Top menu
TEA
Setup
Pattern
Item
ADJ
System
Position
RUN
Przełącznik
trybu pracy
Save
Sensiti.
Add func
20
Zarejestrować obraz produktu bez wad jako obraz modelowy (standard
pomiaru).
4. Wybrać pozycję [Register model].
Register model
Reference model
Search region
Reference point
Img Adj
Inspect
Region
Detail
TEA
Limits
5. Wybrać kształt regionu modelu.
Elipse
Circle
Box
Circum
Inspect
Polygon
Img Adj
Region
Detail
TEA
Limits

2-3 Przykład ustawienia pomiaru Pattern Search (wyszukiwanie wzoru) Użytkowanie
AUTO
ESC
ADJ
MENU
RUN
a
6. Otoczyć region modelu.
• Najpierw przesunąć region.
• Następnie wybrać przycisk [Size]
(rozmiar) i dostosować rozmiar
regionu.
•
Wybrać przycisk [Apply] (zastosuj).
Automatyczne ustawianie parametrów
7. Wybrać [AUTO]
(przycisk lub ikona na ekranie).
Nastąpi wybór najlepszego filtru
koloru i rejestracja modelu.
New
Move
TEA
Size Apply Cancel
AUTO
[130,140]
ESC
Przycisk
AUTO
Register model
Reference model
Search region
Reference point
Img Adj
Auto
Region
TEA
Detail
Limits
Sprawdzić status pomiaru, wykonując pomiar kilku próbek.
8. Przełączyć do trybu ADJ.
Uwagi
• Czy pomiar poruszającego się
obiektu jest stabilny?
• Czy jest wyraźna różnica korelacji
pomiędzy próbkami uznanymi za
poprawne (OK) i odrzuconymi
MENU
OK
Camera 0
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
ADJ
353ms
RUN
Przełącznik trybu pr
Individual result
(NIE)?
Previous Next
W razie potrzeby należy zmienić granice (progi) korelacji.
9. Wybrać przycisk [Adjust].
Previous Next
Display sw
10. Wybrać przycisk [Limits].
Limits
Region
Img Adj
11. Zmienić granice korelacji.
L granica dolna H granica górna
TEA
Dsplay SW
Adjust
Adjust
Próbki
wadliwe
Próbki bez
wad
85
L: 100 H: 100
Korelacja
1000
21

2-4 Korekta położenia (Position Correction) Użytkowanie
2-4 Korekta położenia (Position Correction)
Tę funkcję stosuje się, gdy położenie lub orientacja mierzonego obiektu mogą
się zmieniać. Jeśli ta funkcja jest włączona, to przed wykonaniem pomiaru
jest obliczana wielkość przesunięcia od położenia odniesienia i jest
przeprowadzana korekta położenia mierzonego regionu.
Wejście obrazu
Proces UCZENIA się
korekty położenia
Proces UCZENIA się
elementu pomiaru
Proces
UCZENIA
Wejście obrazu Korekta położenia Pomiar
Kontrola
z korektą
położenia
Korekta położenia rozpoznaje
wielkość przesunięcia położenia.
Korekta położenia ustala
położenie mierzonego regionu.
Ważne Ustawiając korektę położenia, należy używać zapisanego obrazu.
Jeśli zostanie użyty obraz inny niż był stosowany pierwotnie do określenia
korekty położenia, korekta może być wykonana nieprawidłowo. Używając
innego obrazu, należy ponownie ustawić elementy pomiaru.
Zalecana procedura
Pomiar obszaru
części szarej
Rejestrowanie aktualnego obrazu (Live image)
Tryb MENU - [Setup] - [Register] - [Image 0] - [Register image] - [Live image]
Korekta położenia obiektu
Region0.Pattern
Register model
Reference model
Search region
Reference point
Img Adj
Inspect
Region
Image sw
Detail
Setup menu
TEA
Limits
Capture
Zapisywanie obrazu na karcie SD
Tryb MENU - [Setup] - [Register] - [Image 0] - [Save to SD card]
--> W przypadku dopasowania korekty położenia można użyć tego samego
obrazu na karcie SD (polecenie [Save to SD card]).
SD
Nacisnąć przycisk [Image SW],
aby przełączyć obraz, który jest
używany do określenia korekty
położenia.
22

2-4 Korekta położenia (Position Correction) Użytkowanie
Kąt położenia
obiektu nie
zmienia się.
Mierzony
obiekt jest
pod kątem.
Zmiany jasności
Obraz można
zbinaryzować.
Mierzony obiekt ma
charakterystyczny wzór.
Wymagana jest bardzo
dokładna korekta.
Obraz można
zbinaryzować.
Położenie krawędzi
Oznaczanie
1 model
2 modele
Obszar
Położenie jest wykrywane i korygowane na
podstawie wyszukiwania położenia krawędzi.
Sposób programowania jak dla metody POSITION
Obraz jest binaryzowany w celu wykrycia grupy
(label) mierzonego obiektu i korekty położenia.
Sposób programowania jak dla metody LABELING
Jeśli mierzony obiekt ma charakterystyczny wzór,
korekta położenia jest wykonywana na podstawie
wyszukiwania tego wzoru.
Sposób programowania jak dla metody PATTERN
SEARCH
Dwa modele są rejestrowane, a różnica położeń jest
korygowana na podstawie współrzędnych środka linii
prostej łączącej te dwa modele i kąta pomiędzy tą
linią a linią poziomą.
Sposób programowania jak dla metody PATTERN
SEARCH
Obraz jest binaryzowany ( zamieniany na czarne i
białe piksele) w celu wykrycia położenia obszaru
koloru mierzonego obiektu i korekty położenia.
Sposób programowania jak dla metody AREA
Zmiany jasności
Niejednakowa struktura
Kąt
Wyszukiwanie graficzne
Dwa położenia są wykrywane na podstawie
położenia krawędzi, a różnica położeń jest
korygowana na podstawie współrzędnych środka linii
prostej łączącej te dwa położenia.
Sposób programowania jak dla metody ANGLE
Położenie obikety jest wykrywane i korygowane przy użyciu
informacji o jego profilu. Pomiar może być wykonany
pewnie nawet wtedy, gdy struktura jest niejednakowa.
Sposób programowania jak dla metody GRAPHIC
SEARCH
23

2-5 Otrzymywanie czystego obrazu Użytkowanie
{
2-5 Otrzymywanie czystego obrazu
2-5-1 Filtr koloru (Color Filter)
Do czego służy funkcja filtru koloru?
Ta funkcja zwiększa kontrast obrazów kolorowych.
Zwykle ustawienie AUTO umożliwia wybór najlepszego filtru koloru. Jednak
w razie potrzeby można samodzielnie wybrać najlepszy spośród typowych lub
niestandardowych filtrów. Ta funkcja jest dostępna tylko wtedy, gdy do
kontrolera jest podłączona kamera kolorowa.
Standardowa
monochromatyczna
Red
Red
(AUTO)
(AUTO)
konwersja obrazu
Filtr koloru
Obraz o małym
kontraście
Kontrast został
zwiększony!
Magenta
Magenta
(AUTO)
(AUTO)
Blue
Blue
(AUTO)
(AUTO)
Yellow
Yellow
(AUTO)
(AUTO)
Gray
Gray
(AUTO)
(AUTO)
Cyan
Cyan
(AUTO)
(AUTO)
Green
Green
(AUTO)
(AUTO)
AUTO: Filtr koloru zostanie wybrany automatycznie.
SELECT: Użytkownik może wybrać spośród 7
typowych filtrów.
SELECT - CUSTOM: Użytkownik może wybrać filtr
Color filter is available in the below items.
• (Shape) Pattern Search
• (Shape) Sensitive Search
• (Shape) Flexible Search (only C20/25)
• (Shape) Graphic Search (only C20/25)
• (Edge) Position
•(Edge) Width
• (Edge) Count
• (Edge) Angle
• (Bright&Color) Bright
• (Application) Defect
• (Application) Grouping (only C20/25)
dowolnego koloru na pasku
kolorów.
24

2-5 Otrzymywanie czystego obrazu Użytkowanie
AUTO
ESC
AUTO
Filtr koloru zostanie wybrany
automatycznie. Zostanie wybrany filtr
zwiększający kontrast pomiędzy
kolorem zajmującym największy obszar
AUTO
ESC
Przycisk
AUTO
a kolorem zajmującym drugi co do
wielkości obszar w regionie (*1).
(*1) Region modelu: (Pattern Search / Sensitive
Search / Graphic Search / Flexible Search /
Grouping). Mierzony region: (Area / Labeling /
Position / Width / Count / Bright / Hue / Defect).
Należy wybrać [AUTO] (przycisk lub
ikona na ekranie).
Register model
Reference model
Search region
Reference point
Img Adj
Auto
Region
TEA
Detail
Limits
Wybór filtru koloru
MENU mode
- [Setup] icon
- [Item] icon
- [Img Adj] icon
- [Select Camera] menu (only C20/25)
- [Color Filter] menu
- [Select filter] menu
Select the color.
1, Red
2, Blue
3, Green
4, Yellow
5, Cyan
6, Magenta
7, Gray
8, Custom
You can select any color from the color bar.
Uwagi
Aby zachować filtr koloru, należy ustawić
funkcję [Auto function] w pozycji [OFF]
(wyłączona). Jeśli funkcja jest w pozycji [ON]
(włączona), filtr koloru może zostać
zmieniony po wybraniu opcji AUTO.
25

2-5 Otrzymywanie czystego obrazu Użytkowanie
2-5-2 Color pickup (wzmacnianie wybranego koloru)
Do czego służy funkcja color pickup?
Ta funkcja jest potrzebna do binaryzacji (digitalizacji) obrazu. Po wzmocnieniu
wybranych kolorów funkcją color pickup obraz z kamery jest konwertowany na
obraz binarny, gdzie obszary o wybranych kolorach stają się białe natomiast
pozostałe - czarne.
Dla elementu mierzonego można wybrać maksymalnie 4 kolory docelowe,
które zostaną wzmocnione.
Ta funkcja jest dostępna tylko wtedy, gdy do sterownika jest podłączona
kamera kolorowa. Jeśli podłączona jest kamera monochromatyczna, można
ustawić poziom binarny.
Color pickup jest dostępne dla następujących elementów.
• AREA (rozmiar)
• LABELING (rozmiar), (tylko C20/25)
• POSITION (krawędź)*
• WIDTH (krawędź)*
• COUNT (krawędź)*
• ANGLE (krawędź)*
* Można wybrać wzmacnianie koloru w menu [Detail] – [Color mode]
Wskazówka dotycząca funkcji color pickup
Kolor ma trzy parametry. Można korygować te trzy parametry.
Jasność
100 (biały)
0 (kolor
achromatyczny)
0 (czarny)
359
100 (jaskrawy)
0
Nasycenie
Barwa
Wykres chromatyczny
Parametr Opis
HUE (Barwa) Nazwa koloru, np.
czerwony, żółty lub
niebieski. Odcień jest
prezentowany na
wykresie chromatycznym.
SATURATION
(Nasycenie)
Stopień mieszania
danego koloru z białym.
Jeśli kolor ma małe
nasycenie, staje się
kolorem achromatycznym. Im większe
nasycenie, tym czystszy
odcień koloru.
BRIGHTNESS
(Jasność)
Stopień natężenia światła
w kolorze.
26

2-5 Otrzymywanie czystego obrazu Użytkowanie
Automatyczne wzmacnianie kolorów
MENU mode
- [Setup] icon
- [Item] icon
- [Img Adj] icon
- [Select Camera] menu (only C20/25)
- [Color Filter] menu
- [Region] menu
1. Narysować region i kliknąć przycisk
[Apply].
Ważne
Ten region nie jest mierzonym regionem. Ten
region ma otaczać część, w której znajduje
się żądany kolor.
2. Wybrać przycisk [Pickup] (wzmocnij).
3. Wybrać przycisk [Auto].
Zostaną wybrane cztery kolory.
4. Sprawdzić, czy żądany kolor został
wzmocniony.
Wybrać ikonę jednego z możliwych
kolorów. Zostanie wyświetlony tylko
jeden obraz odpowiedniego koloru.
5. Jeśli nie są używane niektóre kolory jako
kolor mierzonego obiektu, należy wybrać
[Disable] (wyłącz).
[Enable/Disable][-Disable]
27

2-5 Otrzymywanie czystego obrazu Użytkowanie
Dokładna regulacja koloru
6. Wybierz [Hue/Saturation/Value] (odcień, nasycenie, jasność).
Jeśli odpowiedni kolor nie zostanie określony w trybie [AUTO], należy
skorygować trzy parametry (odcień, nasycenie i jasność). Obraz można
korygować, porównując obraz oryginalny z obrazem ze wzmocnionym
kolorem.
Uwagi
Aby zachować wzmocniony kolor, należy ustawić funkcję [Auto function]
w pozycji [OFF] (wyłączona). Jeśli funkcja jest w pozycji [ON] (włączona),
wzmocniony kolor może zostać zmieniony po wybraniu opcji AUTO.
28

2-5 Otrzymywanie czystego obrazu Użytkowanie
2-5-3 Wstępne przetwarzanie
Do czego służy wstępne przetwarzanie?
Ta funkcja zmienia obraz otrzymany z kamery na obraz, który jest łatwiejszy
do pomiaru poprzez zastosowanie specjalnych filtrów monochromatycznych.
Ważne Można ustawić różne procedury wstępnego przetwarzania dla każdej korekty
położenia i elementu pomiaru.
Tryb MENU – [Setup] – [Item] – [Img Adj] – [Select camera] – [Filtering]
Filtrowanie Obraz docelowy Opis filtrowania
OFF (wartość
domyślna)
Smooth Mierzone obiekty zawierają nieznaczne
EROSION Mierzone czarne obiekty zawierają biały
DILATION Mierzone białe obiekty zawierają czarny
MEDIAN Mierzone obiekty zawierają nieznaczne
SHARPEN Mierzone obiekty zawierają rozmyte
V EDGE Trudno wzmocnić kolor ze względu na
H EDGE Trudno wzmocnić kolor ze względu na
ALL EDGE Trudno wzmocnić kolor ze względu na
––
niejednorodności powierzchni
szum
szum
niejednorodności powierzchni
obszary (zmienne oświetlenie itd.).
słaby kontrast
słaby kontrast
słaby kontrast
Tworzy efekt rozmycia, aby zmniejszyć
niejednorodności.
Zmniejsza białą składową, aby wyeliminować szum.
Wzmacnia jasne obszary, aby wyeliminować czarny
szum.
Łagodzi niejednorodności, zachowując kontury
obiektu.
Wzmacnia granice pomiędzy jasnymi a ciemnymi
obszarami obrazu.
Wyodrębnia pionowe linie graniczne (kontrast)
obrazu
Wyodrębnia poziome linie graniczne (kontrast)
obrazu
Wyodrębnia wszystkie linie graniczne (kontrast)
obrazu
Smooth
Median
H Edge
Uwaga Filter Strenght (Moc filtru)
Stosując funkcję filtrowania obrazu, można wybrać moc filtru. Każdy wybór
opcji [5x5 filter] lub [3x3 filter] na ekranie konfiguracji filtrowania przełącza
moc filtru.
Erosion Dilation
V EdgeSharpen
All Edge
29

2-5 Otrzymywanie czystego obrazu Użytkowanie
2-5-4 Eliminacja tła (BGS Level)
Na czym polega eliminacja tła?
Ta funkcja służy do usuwania niepotrzebnego tła obrazu.
Można ustawić dolną i górną granicę. Jasność pomiędzy tymi dwiema
granicami jest przekształcana na tonację w skali 0 do 255.
Ważne Można ustawić różne procedury wstępnego przetwarzania dla każdej korekty
położenia i elementu pomiaru.
Tryb MENU – [Setup] – [Item] – [Img Adj] – [Select camera] – [BGS level]
Przykład: Ustawić dolną granicę na 100, a górną na 220.
Obraz przed usunięciem tła Obraz po usunięciu tła
BGS level0.Pattern
L[ 060] H[ 200]
Wartość granicy dolnej: 100 Wartość granicy górnej: 220
Jasność tła
0 255
Jasność mierzonego obiektu
• Wszystkie części obrazu mające jasność
mniejszą lub równą 100 zostaną w mierzonym
obiekcie pominięte i przekształcone na 0.
• Tylko części obrazu mające jasność w zakresie
od 100 do 220 zostaną potraktowane jako
mierzony obiekt i rozszerzone do tonacji w skali
od 0 do 255.
Granica dolna Granica górna
255
Obraz po
konwersji
2550
Obraz oryginalny
30

2-6 Zmiana wyświetlanych informacji (tryb ADJ/RUN) Użytkowanie
2-6 Zmiana wyświetlanych informacji (tryb ADJ/RUN)
Wyniki pomiarów i inne informacje są wyświetlane na ekranie LCD. Zapisane
obrazy można wyświetlać w trybie ADJ. Aktualnie zapisane dane pomiaru
można także sprawdzać, używając monitora rejestracji i danych
statystycznych (dotyczy tylko modelu C20/25). Aby przełączyć ekran
wyświetlania, należy wybrać opcję [Display SW] lub nacisnąć klawisz F3.
Wyniki indywidualne Wszystkie wyniki/Region Wszystkie wyniki/Ocena
Individual result
353 ms
OK
Camera 0
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next
TEA
Dsplay SW
Wyświetlane są
indywidualne wyniki
każdego elementu
pomiaru.
OK
Capture
Wyświetlany jest cały
mierzony region.
353 ms
All results/Region
TEA
Dsplay SW
Capture
All results/Judge
353 ms
OK
0
12345678
0
1
2
3
4
5
6
7
8
9
10
11
12
Dsplay SW
9
Capture
Wszystkie wyniki pomiarów są
wyświetlane na liście.
Oś pozioma: najmniej znacząca cyfra
Oś pionowa: dwie najbardziej znaczące
Koło zielone: OK
Koło czerwone: NG
numeru elementu
cyfry numeru elementu
Korekta położenia obiektu Lista zmiennych Lista danych
Position
353 ms
OK
Camera 0
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next
X direction 20.111
TEA
Y direction 42.513
Angle 12.652
Dsplay sw
Capture
Wyświetlany jest wynik
korekty położenia.
OK
Var.0 *******.***
Var.1 *******.***
Var.2 *******.***
Var.3 *******.***
Var.4 *******.***
Var.5 *******.***
Var.6 *******.***
Var.7 *******.***
Previous Next
Var.8 *******.***
Var.9 *******.***
Var.10 *******.***
Var.11 *******.***
Var.12 *******.***
Var.13 *******.***
Var.14 *******.***
Var.15 *******.***
Dsplay SW
Capture
Variables list (0-15)
353 ms
Wyniki danych są
wyświetlane w postaci listy.
OK
Data0 *******.***
Data1 *******.***
Data2 *******.***
Data3 *******.***
Data4 *******.***
Data5 *******.***
Data6 *******.***
Data7 *******.***
Previous Next
Wyniki zmiennych są
wyświetlane w postaci listy.
353 ms
Data list (0-15)
Data8 *******.***
Data9 *******.***
Data10 *******.***
Data11 *******.***
Data12 *******.***
Data13 *******.***
Data14 *******.***
Data15 *******.***
Dsplay SW
Lista ocen Obraz zapisany Monitor rejestracji
Judges list(0-15)
353 ms
OK
Judge0 *******.***
Judge1 *******.***
Judge2 *******.***
Judge3 *******.***
Judge4 *******.***
Judge5 *******.***
Judge6 *******.***
Judge7 *******.***
Previous Next
Judge8 *******.***
Judge9 *******.***
Judge10 *******.***
Judge11 *******.***
Judge12 *******.***
Judge13 *******.***
Judge14 *******.***
Judge15 *******.***
Dsplay SW
Capture
Wyniki ocen są wyświetlane
w postaci listy.
Dane statystyczne
Statistical data/Data0
Maximum 462
Minimum 370
Average 423
Deviation 210
Count 100
NG Count 5
NG Rate 5%
Alarm Cou 20
OK
Previous Next
Wyświetlane są zapisane
obrazy.
Tylko w trybie ADJ
353 ms
Stored image
TEA
Dsplay SW
Logging monitor/Data0
350
300
250
50 100 150 200
Data 276.000
Log SW
Warning
Display SW
Warunki można ustawiać,
przeglądając wyniki zapisane
przez monitor rejestracji.
Tylko w modelach
ZFX-C20/25
Capture
Time 15:10:00
Capture
Display SW
Log SW
Capture
Wyświetlane są dane
statystyczne zapisane
przez monitor rejestracji.
Tylko w modelach
ZFX-C20/25
31

2-7 Ponowny pomiar zapisanego obrazu (tryb ADJ) Użytkowanie
Przy wyświetlaniu wyników indywidualnych i korekty położenia można
ukrywać lub zmniejszać rozmiar obrazów, które są wyświetlane jednocześnie
z informacjami o pomiarze. Każde naciśnięcie klawisza
strzałka w dół zmienia wyświetlany obraz w następujący sposób:
Pełny rozmiar obrazu 1/4 rozmiaru obrazu Bez obrazu
Individual result
353ms
OK
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next
TEA
Display sw
Adjust
Ważne Tylko w trybie ADJ:
Obrazy zapisane są wyświetlane albo w pełnym rozmiarze, albo w 1/4.
Individual result
353ms
OK
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Previous Next
Display sw
TEA
Adjust
Opcja 1/4 rozmiaru
jest dostępna tylko
przy wyświetlaniu
indywidualnych
wyników i korekty
położenia.
↑ strzałka w górę lub ↓
Individual result
353ms
OK
0.Bank00
0.Pattern Search
Judge OK
Correlation 92
Position X 462
Position Y 352
Angle 15
Prev. Next
Display sw
Adjust
2-7 Ponowny pomiar zapisanego obrazu (tryb ADJ)
Na obrazach zapisanych w pamięci wewnętrznej można wykonać ponowny
pomiar. Obrazy są zapisywane do pamięci wewnętrznej w trybie RUN. Jeśli
podczas wyświetlania indywidualnych wyników lub wszystkich wyników/
regionu zostanie naciśnięty klawisz
przełączy się na zapisany obraz i zostanie wykonany ponowny pomiar.
← lewej lub → prawej strzałki, ekran
32

Pomiary w trybie RUN
Istnieją dwa tryby pomiaru. W trybie TRIG po podaniu sygnału TRIG jest
wykonywany jeden pomiar. W trybie pomiaru ciągłego po wydaniu polecenia
pomiaru pomiary są wykonywane w sposób ciągły, aż do wydania polecenia
zatrzymania.
Tryb pomiaru TRIG Tryb pomiaru ciągłego
CZĘŚĆ 3
TRIG
Rodzaj wejścia
TRIG
Pomiar
Wyjście wyników
Oczekiwanie na następny
sygnał TRIG
1. Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet.
Polecenie musi być wysłane z urządzenia zewnętrznego (np. sterownika
PC, PLC).
Szczegółowe informacje można znaleźć w dokumencie
referencyjne dotyczące wydawania poleceń za pomocą komunikacji
szeregowej”
2. Komunikacja równoległa (sygnał TRIG)
Wykonywany jest jeden pomiar po przejściu sygnału TRIG do pozycji ON.
Polecenie wykonywania pomiaru ciągłego
Pomiar
Wyjście wyników
Nie
Zatrzymać polecenie?
Tak
Koniec
„Materiały
Polecenie wykonywania pomiaru ciągłego i zatrzymania
Rodzaj wejścia
1. Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet.
Polecenie musi być wysłane z urządzenia zewnętrznego (np. sterownika
PC, PLC). Szczegółowe informacje można znaleźć w dokumencie
„Materiały referencyjne dotyczące wydawania poleceń za pomocą
komunikacji szeregowej”.
2. Komunikacja równoległa
• Polecenie wykonywania pomiaru ciągłego
Polecenie musi być wysłane z urządzenia zewnętrznego (np.
sterownika PLC).
Szczegółowe informacje można znaleźć w „Podręczniku użytkownika”
Podczas wykonywania pomiaru ciągłego sprawdzany jest status
polecenia wejściowego.
• Polecenie zatrzymania (warunek zatrzymania)
Zmiana statusu polecenia pomiaru ciągłego kończy pomiar.
33

Wyniki pomiaru
Dostępne są trzy rodzaje wyników.
Definiowanie oceny indywidualnej
Tryb MENU – [Setup] –[Add func] – [Calculation] – [Judge]
Można zdefiniować do 32 (od 0 do 31) ocen indywidualnych. Każda jest
wyrażona następującymi parametrami lub funkcjami i ma określone progi
górny i dolny. Jeśli wynik wyrażenia znajduje się pomiędzy progami, ocena
otrzymuje wartość OK (spełnione).
Parametry i funkcje
Individual Judgement (Ocena
Pomiary w trybie RUN
• Ocena ogólna
• Ocena indywidualna (można zdefiniować 32 oceny)
• Dane indywidualne (można zdefiniować 32 dane)
Parametr każdego elementu Parametr elementu pomiaru i korekty położenia
Ex) Ocena wyszukiwania wzoru
Ex) Położenie środka ciężkości obszaru
Lista funkcji Więcej szczegółów można znaleźć
Lista operatorów +, –, x, /
Liczba stałych Ex)
Individual Data (Dane
indywidualne)
indywidualna)
Variables (Zmienne) Można zdefiniować oryginalną zmienną
w podręczniku użytkownika.
Dostępnych jest 16 funkcji.
Ex) MAX: Największa wartość z czterech
argumentów
Ex) DIST: Odległość pomiędzy dwoma
punktami (środek ciężkości i środek
modelu)
Ex) OR: Suma logiczna dwóch argumentów
Można użyć danych indywidualnych już
zdefiniowanych.
Można użyć oceny indywidualnej, która została
już zdefiniowana.
(w liczbie do 32). Zmienne mogą składać się
z wyrażeń takich samych jak oceny
indywidualne.
Definiowanie danych indywidualnych
Tryb MENU – [Setup] – [Add func] – [Calculation] – [Data]
Można zdefiniować do 32 (od 0 do 31) danych indywidualnych. Każda z nich
jest wyrażana przez parametry lub funkcje takie same jak w przypadku ocen
indywidualnych (patrz tabela powyżej). Wynik wyrażenia można wyprowadzić
na wyjście.
34

Pomiary w trybie RUN
Overall Judgement (Ocena ogólna)
Wyprowadzanie na wyjście oceny ogólnej (wyjście OR)
1. Sygnał OR na wyjściu równoległym
Sygnał OR (stan ON/OFF) wskazuje ocenę całkowitą – OK (spełnione) lub
NG (niespełnione). Jeśli którykolwiek z warunków w którymkolwiek
obszarze otrzyma wynik NG sygnalizowane jest to na wyjściu OR.
Ustawienia dotyczące oceny ogólnej
Ustawianie odzwierciedlenia wyników
indywidualnych
Włączenie/wyłączenie sygnału Tryb MENU – [System] – [Output] – [Total jg. output] – [Parallel]
Polaryzacja wyjścia
(OR, DO[0:15])
Tryb wyjścia OR Tryb MENU – [System] – [Comm] – [OR output]
Czas wyjścia OR Tryb MENU – [System] – [Comm] – [OR output]
Tryb MENU – [Setup] – [Add func] – [OR setting]
Można wybrać, które wyniki zostaną odzwierciedlone w ocenie ogólnej, podając
je na wyjście sygnału OR interfejsu równoległego.
Element pomiaru ON (domyślne)/OFF
Korekta położenia obiektu
Oblicz./zmienna (Individual Data)
Oblicz./ocena (Individual Judge)
Oblicz./alarm (Logging Monitor Alarm) ON/OFF (domyślne)
Po wybraniu OFF sygnał OR jest wyłączony.
ON (domyślne)/OFF
Tryb MENU – [System] – [Comm] – [Parallel] – [Polarity]
Warunek załączenia wyjść OR i oceny indywidualnej
NG=ON: Sygnał znajduje się w pozycji ON, jeśli oceną jest NG (domyślne)
OK=ON: Sygnał znajduje się w pozycji ON, jeśli oceną jest OK.
Impulsowe: Sygnał OR zmienia stan na OR na określony czas,
wtedy gdy warunek ON jest spełniony
O stałym poziomie: Stan ON/OFF sygnału OR utrzymuje się do czasu
następnej zmiany stanu (ustawienie domyślne)
Czas utrzymywania wartości sygnału OR przy wyjściu impulsowym
Zakres: 0–255 ms (domyślnie: 0 ms)
35

Individual Judgement (Ocena indywidualna)
Wyprowadzanie na wyjście oceny indywidualnej
1. Wyjście równoległe sygnały DO od 0 do 31
Wyjście cyfrowe DO[0:15] sygnału (ON/OFF) wskazuje ocenę
indywidualną (OK lub NG).
Wynik oceny dla wyrażeń od 0 do 15
DO15
Pierwszy raz
DO14 DO13 DO12 DO11 DO10
Pomiary w trybie RUN
DO9 DO8 DO7 DO6 DO5 DO4 DO3 DO2 DO1 DO0
Drugi raz
Wyrażenie 15
Wynik oceny dla wyrażeń od 16 do 31
DO15 DO14 DO13 DO12 DO11 DO10
Wyrażenie 31 Wyrażenie 16
DO9 DO8 DO7 DO6 DO5 DO4 DO3 DO2 DO1 DO0
Wyrażenie 0
Ustawienia dotyczące oceny indywidualnej
Able/Disable
(Włączenie/wyłączenie sygnału)
Tryb MENU – [System] – [Comm] – [Parallel]
Output Polarity (Polaryzacja wyjścia)
(OR, DO[0:15])
Output cycle (Cykl wyjścia) Czas trwania cyklu wyjścia. Należy ustawić czas, który jest nie krótszy niż “Gate
Gate ON delay
(Opóźnienie sygnału GATE)
Gate ON time
(Czas trwania sygnału GATE)
Handshaking (Uzgadnianie) Ustawić metodę wyjścia.
Timeout (Przekroczenie limitu czasu) W przypadku gdy uzgadnianie jest włączone (Handshaking = ON) i nie zostanie
Tryb MENU – [System] – [Output] – [Judgement output] – [Parallel]
Po wybraniu ON oceny są wysyłane na wyjście.
ON (domyślne)/OFF
Warunki załączenia wyjścia OR i oceny indywidualnej
NG=ON: Sygnał zmienia stan na ON, jeśli oceną jest NG (domyślne).
OK=ON: Sygnał zmienia stan na ON, jeśli oceną jest OK.
ON delay + Gate ON time”, ale krótszy niż cykl pomiaru.
Zakres: 2,0–10 000,0 ms (domyślnie: 10,0 ms)
Czas opóźnienia od uzyskania wyniku pomiaru do DO[0:15], aż sygnał GATE się
włączy.
Zakres: 1,0–10 000,0 ms (domyślnie: 1,0 ms)
Zakres: 1,0–10 000,0 ms (domyślnie: 5,0 ms)
OFF: Wyniki pomiaru są wyprowadzane asynchronicznie
na urządzenie zewnętrzne. (ustawienie domyślne).
OFF: Wyniki pomiaru są wyprowadzane synchronicznie na urządzenie
zewnętrzne.
otrzymana odpowiedź z urządzenia zewnętrznego w określonym czasie, wystąpi
błąd przekroczenia limitu czasu.
Zakres: 1,0–60,0 s (domyślnie: 10 s)
36

Individual Data (Dane indywidualne)
Wyprowadzanie na wyjście danych indywidualnych
1. Wyjście równoległe sygnały DO od 0 do 31
Na wyjście są wysyłane tylko wartości liczb całkowitych. (Dane są
zaokrąglane do najbliższej liczby całkowitej). Dane są przesyłane
w formacie uzupełnienia dwójkowego po 16 bitów naraz. Jeśli
zdefiniowano dwie lub więcej danych, ich 16-bitowe wartości są
przesyłane sekwencyjnie.
Jeśli wartością pomiaru jest „+1234”
DO15 DO14 DO13 DO12 DO11 DO10 DO9 DO8 DO7 DO6 DO5 DO4 DO3 DO2 DO1 DO0
00 00 110 00100100 1
2. Wyjście szeregowe RS-232C/422, USB, Ethernet
Wartość nie musi być wysłana z urządzenia zewnętrznego (np. sterownika
PC, PLC). Jeśli włączono wyjście danych (Data output = ON) – patrz opis
ustawień poniżej – dane indywidualne są automatycznie wyprowadzane
na wyjście po zakończeniu pomiaru.
3. Na kartę SD
Jeśli włączono wyjście danych (Data output = ON) – patrz opis ustawień
poniżej – dane indywidualne są automatycznie wyprowadzane na wyjście
po zakończeniu pomiaru.
Pomiary w trybie RUN
Ustawienia dotyczące danych indywidualnych
Tryb MENU – [System] – [Output] – [Data output]
Element Opis
RS-232C/422 Ustawienie „ON” dla wysyłania danych przez interfejs
RS-232C/422 (wartość domyślna: OFF)
Parallel Ustawienie „ON” dla wysyłania danych przez port równoległy
(wartość domyślna: OFF)
SD card Ustawienie „ON” dla wysyłania danych na kartę SD
(wartość domyślna: OFF)
USB Ustawienie „ON” dla wysyłania danych przez port USB
(wartość domyślna: OFF)
Ethernet Ustawienie „ON” dla wysyłania danych przez Ethernet
(wartość domyślna: OFF)
Ustawienia dotyczące danych indywidualnych (port równoległy)
Tryb MENU – [System] – [Comm] – [Parallel]
Output Polarity (OR, DO[0:15]) Te ustawienia są takie same jak dla
Output cycle
Gate ON delay
Gate ON time
Handshaking
Timeout
oceny indywidualnej
(patrz tabela na poprzedniej stronie).
37

Pomiary w trybie RUN
k
Ustawienia dotyczące danych indywidualnych (port szeregowy, karta SD) [format ASCII]
Tryb MENU – [System] – [Output] – [Date format (Serial)/(SD Card)]
Element Opis
Output form Ustawia format ASCII.
Digits of integer Ustawia ilość cyfr wyjściowych dla liczb całkowitych (integer).
Digits of decimal Ustawia ilość cyfr po przecinku.
Field separator Ustawia separator pomiędzy indywidualnymi elementami danych.
Decimal
separator
Record separator Ustawia separator pomiędzy indywidualnymi rekordami
Display at time Poprzedza dane wyjściowe informacjami o czasie.
File name Ustawia nazwę pliku wyjściowego (tylko wtedy, gdy wybrano
Jeśli ustawiono 0, zostaną wyprowadzone wszystkie cyfry
danych przesunięte do lewej strony.
Jeśli wyprowadzana liczba ma mniej cyfr niż ustawiono, zostaną
dołączone zera.
Jeśli wyprowadzana liczba ma więcej cyfr niż ustawiono,
wszystkie ustawione cyfry są zastępowane przez cyfrę 9.
Zakres: 0–8 (wartość domyślna: 8)
Jeśli ustawiono 0, cyfry ułamka dziesiętnego są zaokrąglane do
najbliższej liczby całkowitej.
Zakres: 0–3 (wartość domyślna: 3)
Zakres: brak, przecinek (wartość domyślna), tabulator, odstęp,
średnik
Ustawia ilość cyfr po kropce dziesiętnej.
Zakres: brak, kropka (wartość domyślna), przecinek
wyjściowymi danych.
Zakres: brak, przecinek, tabulator, odstęp, ogranicznik
(wartość domyślna)
Zakres: OFF (wartość domyślna), ON
wyjście na kartę SD). W katalogu głównym karty SD tworzony
jest automatycznie katalog „OUTFILE”. Plik wyjściowy zostaje
zapisany w tym katalogu.
Format wyjścia
< Wartości pomiaru danych 0 >,
< Wartości pomiaru danych 1 >... < Wartości pomiaru danych 31 > Ogranicznik
Separator pól
Separator rekordów
Jeśli włączono wyświetlanie czasu, informacja o czasie poprzedza zapis
wartości pomiaru.
<rok/miesiąc/dzień>, <godziny/minuty/sekundy>, <Wartości pomiaru danej 0>, <Wartości pomiaru danych 1> ... < Wartości pomiaru danych 31 > Ograniczni
Przykład:
1 sierpnia 2007
→
)2007/8/1
(
Przykład:
1 minuta i 20 sekund po 12:00
→
)12:01:20
(
38

Pomiary w trybie RUN
Ustawienia dotyczące danych indywidualnych (port szeregowy, karta SD) [format binarny]
Tryb MENU – [System] – [Output] – [Date format (Serial)/(SD Card)]
Element Opis
Output form Ustawia format binarny.
Display at time Poprzedza dane wyjściowe informacjami o czasie.
Zakres: OFF (wartość domyślna), ON
File name Ustawia nazwę pliku wyjściowego (tylko wtedy, gdy wybrano
wyjście na kartę SD).
Format wyjścia
Wartość jest mnożona przez 1000, a pojedynczy element danych zajmuje 4
kolejne bajty. Liczby ujemne są reprezentowane w uzupełnieniu dwójkowym.
< Wartości pomiaru danych 0 x 1000> < Wartości pomiaru danych 1 x 1000> ... < Wartości pomiaru danych 31 x 1000>
4 bajty 4 bajty 4 bajty
Przykład: Dane 0 mają wartość "256,324", a dane 1 wartość "-1,000"
$00 $44$03 $FF$E9 $FF$FC $18
Dane 0: 25 6324 Dane 1: -1000
256,324 × 1000)
(-1.000 x 1000)
Jeśli włączono wyświetlanie czasu, informacja o czasie poprzedza zapis
wartości pomiaru.
< Wartości pomiaru danych 0 x 1000> < Wartości pomiaru danych 1 x 1000> ... < Wartości pomiaru danych 31 x 1000>
4 bajty 4 bajty 4 bajty
Przykład: Dane 0 mają wartość "256,324", a dane 1 wartość "-1,000"
$00 $44$03 $FF$E9 $FF$FC $18
Dane 0: 25 6324 Dane 1: -1000
256,324 × 1000)
(-1.000 x 1000)
39

Przebieg czasowy dla interfejsu równoległego
Ex.) Pomiar wyzwalany TRIG, Handshaking: OFF
OFF
RUN
ON
(1)
T1
T2
(2)
T3
(6)
(5)
Ocena ogólna
(3)
Dane 0
T4
T5
Dane 1
Dane 31
T6
TRIG
ENABLE
OR
DO
GATE
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
(4)
Ocena
0 do 15
Ocena
16 do 31
Pomiary w trybie RUN
T1
T2
Dane 0
T1:
Ustawiony sygnał ON przez co najmniej 0,5 ms.
Czas na wejściu
wyzwalania
T2:
Czas pomiaru
T3:
Czas równy „wejście obrazu” + „pomiar”. Ten czas można zmienić tylko na „wejście obrazu” lub
„wejście obrazu” + „pomiar” + „wyświetlanie”.
Czas oczekiwania na stabilizację wyjścia danych. Ten czas można zmienić.
Opóźnienie sygnału
GATE
T4:
Czas sygnału GATE
T5:
Czas potrzebny na pobranie przez urządzenie zewnętrzne danych wyjściowych ze kontrolera.
Ten czas można zmienić.
Przedział czasu, w którym następuje zmiana stanu sygnału DO. Ten czas można zmienić.
Cykl wyjścia
T6:
Całkowity czas
wyjścia
Czas równy „czas cyklu (T5) x liczba elementów danych wyjściowych”. Wyzwalania powinny
następować w odstępach dłuższych niż T6. Jeśli całkowity czas wyjścia jest dłuższy niż T2, dane
wyjściowe nie są akumulowane w kontrolerze podczas następnego pomiaru do czasu przesłania
wyników pomiaru. Kiedy kontroler wypełni się tymi nieprzesłanymi danymi, nie mogą one być dłużej
w nim akumulowane. W takim przypadku przesyłanie pozostałych danych jest kontynuowane, ale
następny pomiar nie jest możliwy do czasu, aż zakończy się akumulacja kolejkowanych danych.
Opis sposobu działania
1. Po otrzymaniu sygnału wyzwolenia pomiaru (sygnał TRIG) z urządzenia zewnętrznego pomiar jest
wykonywany synchronicznie do narastającego zbocza sygnału TRIG (OFF -> ON).
2. Sygnał GATE jest używany do sterowania przebiegiem czasowym pobierania wyników pomiaru przez
urządzenie zewnętrzne. Należy tak ustawić opóźnienie sygnału GATE (T3) i czas sygnału GATE (T4), że
T3+T4 < T5.
3. Jeśli jako docelowe wyjście danych jest ustawione wyjście równoległe, dane są wysyłane tyle razy, ile
danych zostało stworzonych w sekcji „Calculation (data)” (maksymalnie 32 razy). Jeśli wyjście równoległe
jest wyłączone (pozycja OFF), dane nie są wyprowadzane na wyjście.
4. Jeśli jako docelowe wyjście oceny jest ustawiony port równoległy (pozycja ON), dane są wysyłane tyle razy,
ile ile ocen zostało stworzonych w sekcji „Calculation (judgement)” (maksymalnie dwa razy). Jeśli wyjście
równoległe jest wyłączone (pozycja OFF), wyniki ocen nie są wyprowadzane na wyjście.
5. Ocena ogólna jest wyprowadzana na wyjście. Oceną ogólną jest NG (niespełnione), jeśli wystąpiła chociaż
jedna ocena NG dla ustawionych elementów pomiaru i wyników ocen w wyrażeniach. W przypadku wyjścia
o stałym poziomie, stan ON/OFF sygnału OR nie zmienia się do czasu następnego wyjścia, jak pokazano
na tym przykładzie.
6. Jeśli czas wystawiania sygnału ENABLE jest ustawiony na „koniec wejścia obrazu”, wyprowadzanie danych
na wyjścia jest opóźnione do momentu zmiany sygnału ENABLE na ON podobnie jak rozpoczęcie
przetwarzania obrazu. Do czasu zakończenia pomiaru nie należy wyzwalać następnego pomiaru.
40

CZĘŚĆ 4
Omówienie funkcji
4-1 Omówienie funkcji PATTERN SEARCH (wyszukiwanie wzoru)
Obiekt wzorcowy jest rejestrowany wcześniej jako model i funkcja ta
wyszukuje część obrazu, która najbardziej przypomina ten zarejestrowany
model. Na wyjście można wyprowadzić wartość korelacji ( podobieństwa do
wzorca), położenie w osi X i Y części najbardziej przypominających model
i ich kąt obrotu względem wzorca.
Ustawienie Pomiar
Wyszukiwanie elementów przypominających model
Region wyszukiwania
(modelu)
Punkt odniesienia
Model
(wzór wyszukiwany na obrazie)
Proces i tryb wyszukiwania
1. Wyszukiwanie zgrubne
Części przypominające model są wyszukiwane
w całym obrazie w sposób mniej dokładny.
2. Wyszukiwanie szczegółowe (standardowe)
Po wykonaniu wyszukiwania zgrubnego wokół
wyszukanych położeń jest wykonywane
wyszukiwanie szczegółowe. Szczegółowo są
mierzone korelacja i położenie.
3. Wyszukiwanie precyzyjne
Po wykonaniu wyszukiwania szczegółowego
wokół wyszukanych położeń jest wykonywane
wyszukiwanie precyzyjne. Dokładnie są
mierzone korelacja i położenie obiektu
subpikselach.
Inne ustawienia
Search mode
(Tryb
wyszukiwania)
Rotation
Range
Kąt przeskoku
Patrz wyżej
Hi-speed Wyszukiwanie wykonywane z dużą szybkością
Normal (domyślne) Wyszukiwanie jest wykonywane z normalną
szybkością i precyzją.
Precision Położenie jest obliczane z dużą precyzją i
uwzględnieniem subpikseli (elementy mniejsze
niż piksel).
Zakres obrotu: 0–180 (wartość domyślna: 0)
Skipping angle (Kąt przeskoku): 1, 2, 3, 5, 10, 15, 20, 30 (wartość
domyślna: 10)
Możliwe jest znalezienie najbardziej przypominającego obrazu
nawet jeśli jest on obrócony. Jeśli zakres obrotu jest ustawiony na
więcej niż 0, automatycznie jest rejestrowanych wiele modeli.
Proces wyszukiwania jest wykonywany dla każdego z tych modeli.
Przykład, zakres obrotu: 15, kąt przeskoku: 5
Tryb wyszukiwania
Duża
szybkość (1)
Normalnie
(1)+(2)
Precyzyjnie
(1)+(2)+(3)
-15 -10 -5 0 +5 +10 +15
A
A
A
A
A
A
A
41

4-1 Omówienie funkcji PATTERN SEARCH (wyszukiwanie wzoru) Omówienie funkcji
Interpolation
(Interpolacja)
Verification
(Sprawdzanie)
Na poziomie
ON/OFF (domyślne)
Kąt uzyskany z obrotu o kąt przeskoku jest obliczany jako wartość
liczbowa z dokładnością do trzech miejsc po przecinku. Należy
pamiętać przy tym, że czas przetwarzania wzrośnie.
Ta funkcja jest dostępna tylko w trybie wyszukiwania normalnym lub
w trybie precyzyjnym.
ON/OFF (domyślne)
0–100 (wartość domyślna: 60)
W przypadku, gdy sprawdzanie jest włączone (pozycja ON).
W rejonie wyszukiwania wykonywane jest wyszukiwanie
zgrubne w celu znalezienia punktów,
które są podobne do wzorca.
+
+
Sprawdzanie włączone (pozycja ON)
Wokół wszystkich
punktów, które mogą
+
wchodzić w rachubę,
+
jest wykonywane
wyszukiwanie
szczegółowe.
42

4-2 Omówienie funkcji SENSITIVE SEARCH (wyszukiwanie o dużej dokładności)
4-2 Omówienie funkcji SENSITIVE SEARCH
(wyszukiwanie o dużej dokładności)
Wyszukiwanie o dużej dokładności to funkcja użyteczna do wykrywania nawet
bardzo małych różnic w stosunku do wzorca, które są trudne do określenia
przez PATTERN SEARCH. Stopień zgodności jest sprawdzany szczegółowo
przez automatyczne wykonywanie podpodziałów zarejestrowanych modeli.
Region wyszukiwania
(region wyszukiwania
modelu)
Model
(wzór wyszukiwany na obrazie)
Proces wyszukiwania
1. Pattern Search (Wyszukiwanie wzoru)
Wyszukiwanie wzoru jest wykonywane bez podpodziałów zarejestrowanych modeli. Do wykonania pomiaru (o dużej szybkości, standardowego
lub precyzyjnego) brany jest obszar o największej wartości korelacji.
2. Sensitive Search (Wyszukiwanie o dużej dokładności – metoda
oryginalna)
Wydzielone podmodele są porównywane z położeniem określonym
w kroku 1 i część z najlepszą wartością korelacji stanowi wyście.
Omówienie funkcji
Podpodziały
Inne ustawienia
Tryb
wyszukiwania
Sensitivity
(Czułość)
Rotation Range
(Zakres obrotu)
Skipping angle
(Kąt przeskoku)
Interpolation
(Interpolacja)
Verification
(Sprawdzanie)
Candidate level
(korelacja
obszarukandydata)
Solid Color
Check
(Sprawdzanie
jednolitości
koloru)
Hi-speed / Normal / Precision (domyślne)
Te ustawienia są takie same jak dla wyszukiwania wzoru (patrz
punkt „PATTERN SEARCH”).
Mała, średnia (domyślne), duża
dokładność: mała < średnia < duża
szybkość pomiaru: mała > średnia > duża
Mała Średnia Duża
Mała: do 9 modeli
Średnia: do 25 modeli
Duża: do 100 modeli
Zakres obrotu: 0–180 (wartość domyślna: 0)
Skipping angle (Kąt przeskoku): 1, 2, 3, 5, 10, 15, 20, 30 (wartość
domyślna: 10)
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt „Pattern Search”).
ON /OFF (domyślne)
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt „Pattern Search”).
ON/OFF (domyślne)
0–100 (wartość domyślna: 60)
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt „Pattern Search”).
Nie jest możliwe obliczanie wartości
korelacji w obszarach niepokrytych
wzorem. Dlatego jeśli jest włączone
sprawdzanie jednolitości koloru,
obszar, w którym brak jest wzoru, jest
porównywany na podstawie zmian
jasności. Wartość: 0 do 100
Im wartość bliższa 100, tym większa
jednolitość.
43

4-3 Omówienie funkcji Flexible Search (wyszukiwanie elastyczne) Omówienie funkcji
4-3 Omówienie funkcji Flexible Search
(wyszukiwanie elastyczne)
Tej funkcji należy używać, gdy produkty prawidłowe mają różnice. Rejestrując
do 36 wzorów jako modele, można uniknąć odrzucenia dobrego produktu.
Obliczane są korelacje pomiędzy obrazem wejściowym a wszystkimi
modelami i na wyjście jest przesyłana wartość największej korelacji oraz
położenie mierzonego obiektu.
Ustawienie Pomiar
Region wyszukiwania
(region wyszukiwania
modelu)
Produkty prawidłowe
Zarejestrowanych jest kilka modeli
Wszystkie modele są
porównywane z obrazem
wejściowym i jest obliczana
korelacja.
Wartość największej korelacji
jest wyprowadzana.
Inne ustawienia
Seach mode Duża szybkość, normalnie (domyślne), precyzyjnie
Verification ON/OFF (domyślne)
Candidate level
0–100 (wartość domyślna: 60)
Te ustawienia są takie same jak dla wyszukiwania wzoru (patrz
punkt „Wyszukiwanie wzoru”).
UWAGA
W tej funkcji nie można wyszukiwać obiektów obróconych. Jeśli mierzony
obiekt może się obracać, należy ustawić tyle samo wyszukiwań wzorów, ile
modeli ma być zarejestrowanych.
44

4-4 Omówienie funkcji Graphic Search (wyszukiwanie graficzne)
4-4 Omówienie funkcji Graphic Search
(wyszukiwanie graficzne)
Tej funkcji należy użyć, gdy trudno jest wyszukiwać model ze względu na
dużą różnicę wględem wzorca lub jego mały kontrast. W metodzie
wyszukiwania wzoru pomiar oparty jest na informacji o kontraście. W tej
metodzie pomiar jest oparty na informacji o profilu.
Omówienie funkcji
Ustawienie Pomiar
Region wyszukiwania
(modelu)
Stabilne wyszukiwanie elementów przypominających model
również w takich warunkach.
Duży szum Częściowo urwane
Punkt odniesienia
Model
(wzór wyszukiwany na obrazie)
Mały kontrast Pochylone
Procedura rejestracji modelu,
gdy obiekt ma kształt prostokąta, elipsy lub linii.
1. Wybrać [Box], [Ellipse] lub [Line] prostokąt), (elipsa) (linia).
2. Odnaleźć profil obiektu. Następnie wybrać przycisk [Apply].
-->Profil zostanie znaleziony.
Procedura rejestracji modelu,
gdy kształt obiektu nie jest prosty.
1. Wybrać [Auto] i zaznaczyć obszar, w którym profil ma być znaleziony.
2. Wybrać przycisk [Auto] wyświetlony w lewym dolnym rogu ekranu.
-->Profil zostanie znaleziony.
3. Jeśli profil jest częściowo urwany, należy użyć opcji [Free], [Box], [Ellipse]
lub [Line].
4. Za pomocą narzędzia [Erase] (gumka) usunąć znaleziony szum.
Inne ustawienia
Search mode Duża szybkość, normalnie (domyślne), precyzyjnie
Te ustawienia są takie same jak dla „pattern search“ (patrz punkt
„Wyszukiwanie wzoru”).
Rotation Range Zakres obrotu: 0–180 (wartość domyślna: 0)
Skipping angle
Interpolation ON/OFF (domyślne)
Candidate level 0–100 (wartość domyślna: 60)
Kąt przeskoku: 1, 2, 3, 5, 10, 15, 20, 30 (wartość domyślna: 10)
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt “Pattern Search”).
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt „Pattern Search”).
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt “Pattern Search”).
45

4-5 Omówienie funkcji AREA (obszar) Omówienie funkcji
ą
4-5 Omówienie funkcji AREA (obszar)
Można mierzyć powierzchnię, środek ciężkości i kąt nachylenia obszaru
o określonym kolorze. Dlatego można sprawdzać rozmiar, położenie
i nachylenie mierzonego obiektu.
Jeśli do kontrolera jest podłączona kamera kolorowa, można określić pomiar
czterech kolorów.
Jeśli jest podłączona kamera monochromatyczne, czarno-biały obraz zostaje
zdigitalizowany. W pomiarze uczestniczą białe piksele.
Ustawienie Pomiar
Region
pomiaru
Kolory mierzonego obiektu
zostały wzmocnione.
Inne ustawienia
Measure axis
angle (Pomiar
kąta osi)
Fill profile
(Wypełnianie
profilu)
θ
Środek ciężkości
Obszar (powierzchnia)
Powierzchnię, środek ciężkości i kąt
nachylenia obszaru o żądanym kolorze
można obliczyć na podstawie całkowitej
liczby pikseli żądanego koloru.
Kąt
ON/OFF (domyślne)
Ustawić, czy kąt ma być mierzony.
(Przy ustawieniu [ON] czas przetwarzania wzrasta).
ON/OFF (domyślne)
To ustawienie jest użyteczne, gdy produkty prawidłowe nie mają
jednolitego wnętrza, ale mają ten sam kształt zewnętrzny.
Produkty prawidłowe
Aby mierzyć kształt zewnętrzny mierzonego obiektu, należy
ustawić [ON]. Przy ustawieniu [ON] cały obszar pomiędzy punktem
początkowym a końcowym wewnątrz mierzonego regionu jest
mierzony jako ten sam kolor mierzonego obiektu.
Punkt początkowy:kolor nieistotny --> kolor istotny
Punkt końcowy:kolor istotny --> kolor nieistotny
Obraz wejściowy (wypełnianie profilu: OFF) Wypełnianie profilu: ON
46
Punkt
począt-
kowy
Piksele, które są koloru mierzonego obiektu, nie zostaną rozpoznane
jako punkt początkowy, gdyż piksele, które są innego koloru
niż kolor mierzonego obiektu, zostan
Punkt
końcowy
zeskanowane wcześniej.
Uwaga:
Wzmacnianie koloru nie jest wykonywane po
wybraniu [AUTO] na ekranie pomiaru. Można to
zrobić tylko na ekranie wzmacniania koloru.
Register model
Reference model
Search region
Reference point
Img Adj
AUTO
Region
TEA
Detail
Limits

4-6 Omówienie funkcji LABELING (oznaczanie)
4-6 Omówienie funkcji LABELING (oznaczanie)
Grupa mierzonych kolorów otrzymuje swoje etykiety. Etykietom można
przypisać numery po uporządkowaniu ich w kolejności rozmiaru i położenia.
Całkowitą liczbę etykiet i rozmiar oraz położenie każdej z nich można
przekazać na wyjście.
Jeśli do kontrolera jest podłączona kamera kolorowa, można określić pomiar
czterech kolorów.
Jeśli jest podłączona kamera monochromatyczne, czarno-biały obraz zostaje
zdigitalizowany. W pomiarze są stosowane białe piksele.
Omówienie funkcji
Ustawienie Pomiar
Kolory mierzonego obiektu
zostały wzmocnione.
Labeling mode
(Tryb etykietowania)
Sort mode (Sposób
sortowania)
Label No.
(Nr etykiety)
Measure axis angle
(Pomiar kąta)
Measure perimeter
(Pomiar obwodu)
Measure roundness
(Mierzenie
okrągłości)
Filling up holes
(Wypełnianie dziur)
Gdy numery etykiet są
przyporządkowane w kolejności
Region
pomiaru
malejących obszarów
(od największego do najmniejszego)
Etykieta 0
Etykieta 1
Etykieta 2
Inne ustawienia
Normal (domyślne), Precision
Jeśli wybrano „Normal”, obraz jest mierzony z dużą szybkością po skompresowaniu do 1/2 rozmiaru
w osi poziomej i pionowej.
Area descending order Od powierzchni największej do najmniejszej
Area ascending order Od powierzchni najmniejszej do największej
X gravity descending order Od największej do najmniejszej współrzędnej X
X gravity ascending order Od najmniejszej do największej współrzędnej X
Y gravity descending order Od największej do najmniejszej współrzędnej Y
Y gravity ascending order Od najmniejszej do największej współrzędnej Y
0–2499 (wartość domyślna: 0)
Ustawia numer etykiety, której dane (powierzchnia oraz położenie) mają być wysłane na wyjście.
ON/OFF (domyślne)
Ustawić, czy kąt ma być mierzony. (Przy ustawieniu [ON] czas przetwarzania wzrasta).
ON/OFF (domyślne)
Ustawić, czy mają być mierzone następujące parametry,
czy też nie.
(Przy ustawieniu [ON] czas przetwarzania wzrasta).
- Obwód
- Długość X
- Długość Y
ON/OFF (domyślne)
Ustawić, czy mierzyć stopień okrągłości obiektu, czy też nie.
(Przy ustawieniu [ON] czas przetwarzania wzrasta).
Okrągłość = 4π x powierzchnia)/(długość x długość)
ON/OFF (domyślne)
Ustawić, jak przetwarzać części o kolorze innym niż docelowy (istotny) otoczone kolorem
docelowym, np. pączek. Przy ustawieniu [ON] te części są przetwarzane tak jak kolor docelowy.
(Przy ustawieniu [ON] czas przetwarzania wzrasta).
Obraz wejściowy Wypełnianie dziur: ON
Długość X
Długość Y
Obiekt
mierzony
47

4-6 Omówienie funkcji LABELING (oznaczanie) Omówienie funkcji
Outside trimming
(Wyrównywanie
brzegów)
Ocena wielkości
powierzchni
ON/OFF (domyślne)
Ta funkcja jest użyteczna, jeśli wokół mierzonego regionu znajdują się kolory, które nie muszą być
uwzględnione w pomiarze.
Na przykład
Mierzony region
Mierzony obiekt
Kolor, który nie jest uwzględniany
w pomiarze
Przy ustawieniu [ON] cały obszar na zewnątrz mierzonego regionu jest traktowany tak jak mierzony
kolor. (Przy ustawieniu [ON] czas przetwarzania wzrasta).
Wyrównywanie brzegów: ON
Największa etykieta
Druga co do wielkości etykieta (mierzony obiekt)
Sposób sortowania w porządku malejącej powierzchni
Jeśli numer etykiety jest ustawiony na 1, można łatwo otrzymać położenie i powierzchnię
mierzonego obiektu.
0–9999999,999 (wartość domyślna: 0)
Ustawić minimalną wielkość powierzchni, która ma być liczona jako etykieta. Ustawić wartość
większą niż rozmiar szumu, jeśli szum jest liczony jako etykieta.
Na przykład
Obraz wejściowy Ustawić na wartość większą niż szum
Podobna wielkość
Mierzony obiekt
Szum
Sposób sortowania w porządku malejącej współrzędnej X środka ciężkości
Jeśli numer etykiety jest ustawiony na 0, można łatwo otrzymać położenie i powierzchnię
mierzonego obiektu.
Uwaga:
Wzmacnianie koloru nie jest wykonywane po
wybraniu [AUTO] na ekranie pomiaru. Można to
wykonać tylko na ekranie wzmacniania koloru.
Register model
Reference model
Search region
Reference point
Img Adj
AUTO
Region
TEA
Detail
Limits
48

4-7 Omówienie funkcji POSITION (położenie)
ą
4-7 Omówienie funkcji POSITION (położenie)
Ta funkcja wykrywa położenie krawędzi na podstawie zmiany jasności. Można
jej używać do określenia współrzędnych mierzonego obiektu.
Omówienie funkcji
Ustawienie
Mierzony region
Zmiana jasności: jasny --> ciemny
Pomiar
Krawędź w mierzonym regionie
jest wykrywana zgodnie
z ustawionym kierunkiem
wyszukiwania i zmianą jasności
Kierunek wyszukiwania krawędzi
Krawędzie są wyszukiwane od punktu początkowego do punktu końcowego
mierzonego regionu.
Punkt początkowy
Punkt
Punkt
początkowy
Punkt
końcowy
Punkt końcowy
Punkt
pocz
tkowy
końcowy
Inne ustawienia
Measurement mode
(Tryb pomiaru)
Average (domyślne) / Peak / bottom
Określić definicję położenia krawędzi.
Dół (część najbliższa do punktu początkowego)
Color mode
(Tryb koloru)
Punkt
końcowy
Wybrać metodę korygowania obrazu.
Filter mode Filtr koloru jest stosowany do skorygowania
Punkt początkowy
Średnia
Szczyt (część najdalsza od punktu początkowego)
obrazu.
Pickup mode Wzmacnianie koloru jest stosowane do
skorygowania obrazu.
Split size (Wielkość
rozdzielenia)
1–99 (wartość domyślna: 1)
Ustawić szerokość pola
podziału przy pomiarze
położenia szczytowego,
Punkt
końcowy
dolnego, pośredniego.
(Aby zmierzyć położenie
szczytowe, dolne lub
pośrednie, mierzony region
jest dzielony na mniejsze
obszary).
Color Light (jasny)-->Dark (ciemny) (domyślne) /
Dark (ciemny)-->Light (jasny)
Wybrać kierunek zmiany jasności.
Wielkość
rozdzielenia
Punkt początkowy
49

4-7 Omówienie funkcji POSITION (położenie) Omówienie funkcji
j
Edge level (poziom
krawędzi)
Noise level (poziom
szumu)
Noise width
(szerokość szumu)
0–100% (wartość domyślna: 50)
Ustawić poziom zmiany jasności, który posłuży do oceny
wystąpienia krawędzi.
Krawędź jest wykrywana w następujący sposób:
1. Obliczany jest rozkład jasności w całym mierzonym regionie.
2. Wartość maksymalna zostaje ustawiona jako 100%, minimalna – jako 0%.
3. Miejsce, w którym jasność jest równa ustawionemu poziomowi krawędzi, jest
wykrywane jako krawędź.
Mierzony region
100%
50%
0%
Wartość największej jasności
Poziom krawędzi
Wartość najmniejszej jasności
0–255 (wartość domyślna: 20)
Ustawić poziom, który będzie oceniany jako szum.
Zwykle można pozostawić wartość domyślną 20. Jeśli jednak
szum jest wykrywany jako krawędź, należy zwiększyć tę
wartość
Na przykład
(Maksymalna jasność – minimalna jasność) < poziom szumu -->
ocena: „brak krawędzi”
(Maksymalna jasność – minimalna jasność) > poziom szumu -->
ocena: „krawędź”
Mierzony region Mierzony region
Wartość największej jasności 60
Wartość najmniejszej jasności 15
60-15>30
Wynik pomiaru zostanie oceniony
ako wystąpienie krawędzi.
25-10<30
Przetworzone jako brak krawędzi.
(Wynik pomiaru NG).
Wartość największej jasności 25
Wartość najmniejszej jasności 10
0–255 (wartość domyślna: 0)
Ustawić poziom, który będzie oceniany jako szum.
Zwykle można pozostawić wartość domyślną 0. Jeśli jednak
szum jest wykrywany jako krawędź, należy zwiększyć tę
wartość
Punkt wykrycia krawędzi
Mierzony region
Jeśli w ustawionym
Szerokość szumu (w pikselach)
zakresie rozkład jasności
jest na poziomie krawędzi
lub niższy, występuje szum.
Poziom krawędzi50%
50

4-8 Omówienie funkcji WIDTH (szerokość)
ę
4-8 Omówienie funkcji WIDTH (szerokość)
Ta funkcja wykrywa dwie krawędzie na podstawie zmiany jasności. Można jej
używać do określenia odległości pomiędzy dwiema krawędziami mierzonego
obiektu.
Ustawienie Pomiar
Mierzony region
Punkt
początkowy
Punkt
końcowy
(po stronie punktu
początkowego)
Inne ustawienia
Measurement mode
(Tryb pomiaru)
Krawędź 1
Wymiar
Krawędź 1 jest wyszukiwana od punktu początkowego do końcowego.
Kraw
dź 2 jest wyszukiwana od punktu końcowego do początkowego.
Pośredni (domyślne), maksimum, minimum
Określić definicję odległości.
Omówienie funkcji
Krawędź 2
(po stronie punktu końcowego)
Color mode
(Tryb koloru)
Split size (Wielkość
rozdzielenia)
Color 1, 2 (Kolor
1, 2)
Edge level 1, 2
(Poziom krawędzi 1,
2)
Noise level 1, 2
(Poziom szumu 1, 2)
Noise width 1, 2
(Szerokość szumu 1,
2)
Szerokość, gdy wybrano [Maximum]
Wielkość
rozdzielenia
Punkt
początkowy
Szerokość, gdy wybrano [Minimum]
Punkt końcowy
Filtrowanie (domyślne), wzmocnienie koloru
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
1–99 (wartość domyślna: 1)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
Light (jasny)--> Dark (ciemny) (domyślne)/Dark (ciemny)-->
Light (jasny)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
0–100% (wartość domyślna: 50)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
0–255 (wartość domyślna: 20)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
0–255 (wartość domyślna: 0)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
51

4-9 Omówienie funkcji COUNT (zliczanie) Omówienie funkcji
4-9 Omówienie funkcji COUNT (zliczanie)
Ta funkcja wykrywa ilość obszarów na podstawie zmiany jasności
i wykrywania krawędzi. Można jej używać do określenia liczby, szerokości
i odległości między obszarami o określonej jasności.
Ustawienie Pomiar
Mierzony region
Kolor docelowy: ciemny
Inne ustawienia
Measurement
mode (tryb
pomiaru)
Color mode
(Tryb koloru)
Target color
(Kolor
docelowy)
Edge level 1, 2
(Poziom
krawędzi 1, 2)
Szerokość
Liczba krawędzi
Normal
(Normalnie-
Wybrać ustawienie „Normalnie”, gdy szerokość
i odległość mają co najmniej dwa piksele.
domyślne)
Fine (Precyzyjnie) Wybrać ustawienie „Precyzyjnie”, aby stabilnie
mierzyć szerokość i odległość większą niż przy
ustawieniu „Normalnie”.
Filter mode (Filtrowanie-domyślne), Pickup mode (wzmocnienie
koloru)
Te ustawienia są takie same jak przy określaniu położenia (patrz
funkcja „Position”).
Light (Jasny-domyślne)/Dark (Ciemny)
Wybrać kolor docelowy.
0–100% (wartość domyślna: 50)
Krawędzie są wykrywane metodą obliczania pochodnej rozkładu.
Krawędź jest wykrywana w następujący sposób:
1. Obliczana jest wielkość zmiany w kierunku jasny --> ciemny i ciemny --> jasny.
2. Wartość maksymalna zostaje ustawiona jako 100%, minimalna – jako 0%.
3. Miejsca, w których wielkość zmiany przekracza ustawiony poziom krawędzi, są
rozpoznawane jako krawędzie.
Odległość (pomiędzy punktami środkowymi)
52
Noise level 1, 2
(Poziom szumu
1, 2)
Noise width 1, 2
(Szerokość
szumu 1, 2)
Mierzony region
100%
50%
0%
Maks. wartość różnicy jasności
Poziom krawędzi
Min. wartość różnicy jasności
0–255 (wartość domyślna: 20)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).
0–255 (wartość domyślna: 0)
Te ustawienia są takie same jak przy określaniu położenia
(patrz funkcja „Position”).

4-10 Omówienie funkcji ANGLE (kąt)
4-10 Omówienie funkcji ANGLE (kąt)
W tej funkcji są wykorzystywane dwa pomiary położenia krawędzi.
W szczególności funkcja ta służy do znajdywania dwóch krawędzi w dwóch
mierzonych regionach i obliczania kąta pomiędzy dwoma punktami krawędzi.
Ustawienie Pomiar
Omówienie funkcji
Mierzony region
Zmiana jasności: jasny --> ciemny
ANGLE (Kąt)
Kąt jest obliczany w odniesieniu do
położenia tych dwóch krawędzi.
Inne ustawienia
Color mode (Tryb koloru) Filter mode (Filtrowanie-domyślne), Pickup mode
Measurement mode 1, 2
(Tryb pomiaru 1, 2)
Split size 1, 2 (Wielkość
rozdzielenia 1, 2)
Color 1, 2 (Kolor 1, 2) Light (Jasny)--> Dark (ciemny -domyślne)/Dark
Edge level 1, 2
(Poziom krawędzi 1, 2)
Noise level 1, 2
(Poziom szumu 1, 2)
Noise width 1, 2
(Szerokość szumu 1, 2)
Krawędzie są wyszukiwane w dwóch mierzonych regionach zgodnie
z ustawieniami kierunku wyszukiwania i zmiany jasności. Obliczane
jest nachylenie linii prostej wyznaczonej przez dwa punkty.
: Położenie krawędzi 1 : Położenie krawędzi 2
-180-0°
0-180°
(wzmocnienie koloru)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
Pośredni (domyślne), szczyt, dół
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
1–99 (wartość domyślna: 1)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
(Ciemny)--> Light (jasny)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funckja „Position”).
0–100% (wartość domyślna: 50)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
0–255 (wartość domyślna: 20)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
0–255 (wartość domyślna: 0)
Te ustawienia są takie same jak przy określaniu
położenia (patrz funkcja „Position”).
53

4-11 Omówienie funkcji BRIGHT (jasność) Omówienie funkcji
4-11 Omówienie funkcji BRIGHT (jasność)
Ta funkcja służy do pomiaru przeciętnej jasności mierzonego obiektu. Na
wyjście są wyprowadzane: średnia wartość jasności i odchylenie jasności
(fluktuacja jasności).
Ustawienie Pomiar
Mierzony region Średnia jasność,
odchylenie jasności
Jasność: czarny Jasność: biały
Odchylenie jasności: małe Odchylenie: duże
np. 1
Odchylenie (Deviation) obu obiektów wynosi 0.
Różnicę można wykryć dzięki innej jasności
(Brightness),
2550
1270
np. 2
Białe i czarne
Jasność (Brightness) obu obiektów wynosi 127,5.
Różnicę można wykryć dzięki wartości odchylenia
(Deviation).
Wartość pośrednia pomiędzy
białym a czarnym
54

4-12 Omówienie funkcji HUE (kolor)
4-12 Omówienie funkcji HUE (kolor)
Ta funkcja służy do pomiaru koloru mierzonego obiektu. Kolor ma trzy
parametry (barwa, nasycenie, jasność). Na wyjście wyprowadzane są
wartości średnie i odchylenie (fluktuacja) tych trzech parametrów. Funkcja ta
nie jest dostępna, gdy do kontrolera jest podłączona kamera
monochromatyczna.
Ustawienie Pomiar
Omówienie funkcji
Mierzony region
np. 1
W mierzonym regionie
Niebieski (barwa: 240) :
zajmowana powierzchnia 20%
Pomarańczowy (barwa: 60) :
zajmowana powierzchnia 80%
Średnia barwy
240 * 20 + 60 * 80 = 96
np. 2
Obiekt
prawidłowy
Średnia barwa 113 115 102 102
Średnia nasycenia 44 45 44 40
Średnia jasności 42 37 53 47
Odchylenie barwy 6 12 25 10
Odchylenie nasycenia 3410 5
Odchylenie jasności 2 7 3 13
Zabrudzenie
Niejednorodność
koloru
Niejednorodność
jasności
Wartość
odcienia,
nasycenia,
i jasności
Pomiar odchylenia jest stabilny, jeśli nie ma zewnętrznego szumu. Dlatego można
ustawić próg, jeśli różnica pomiędzy produktami prawidłowymi a nieprawidłowymi jest
mała.
Inne ustawienia
Deviation (Odchylenie) ON (domyślne)/OFF
Wybrać, czy wartości odchylenia, odcienia i nasycenia mają być
wyprowadzane na wyjście, czy też nie.
55

4-13 Omówienie funkcji DEFECT (defekt) Omówienie funkcji
4-13 Omówienie funkcji DEFECT (defekt)
Tej funkcji używa się do wykrycia zabrudzeń, zarysowań, odprysków,
zadziorów i innych defektów na jednorodnych, mierzonych obiektach. Na
wyjście są wyprowadzane wielkość i położenie największego defektu. Także
liczba defektów jest wyprowadzana na wyjście.
Ustawienie Pomiar
Podpodziały
Mierzony
region
Zarysowanie
Mierzony region jest dzielony automatycznie
na mniejsze obszary, w których wykrywa się
zmiany ich jasności (density).
Number of defects (Liczba defektów)
Stopień defektu jest obliczany w podregionach,
a regiony, w których defekt osiąga lub przekracza
ustalony próg, określają liczbę defektów.
Nawet jeśli na ekranie widać tylko jeden defekt,
liczba defektów może być większa.
Measurement region (Mierzony region)
Linia Obwód, łuk Obszar (powierzchnia)
Mierzony
region
Służy zwykle do
wykrywania odprysków
i zadziorów. Można
narysować linię prostą.
Służy zwykle do wykrywania
odprysków, zadziorów i
zniekształceń na obiektach o
zaokrąglonych kształtach. Można
narysować obwód lub łuk.
Mierzony
region
Mierzony
region
Służy zwykle do wykrywania
zarysowań i zabrudzeń.
Można narysować
kombinację do pięciu
kształtów (prostokąty,
elipsy, okręgi, wielokąty).
56

4-13 Omówienie funkcji DEFECT (defekt)
Inne ustawienia
Detection size
(Rozmiar
detekcji)
Omówienie funkcji
4–64 (wartość domyślna: 8)
4–64 (wartość domyślna: 8)
Tworzone są małe obszary detekcji odpowiednio do określonego
rozmiaru detekcji i jest definiowana odległość pomiędzy obszarami
przez odstęp detekcji. Obliczana jest jasność każdego obszaru
detekcji, a następnie porównywana ze średnią jasnością obszarów
otaczających.
Noise level
(Poziom
szumu)
Odstęp detekcji Obszar detekcji odpowiadający
0–255 (wartość domyślna: 60)
Ustawić poziom, który będzie oceniany jako szum. Defekty, których
wartość jest mniejsza niż poziom szumu, są usuwane jako szum.
Należy ustawić większą wartość, jeśli szum jest wykrywany jako
defekt, lub mniejszą – jeśli defekt nie jest wykrywany.
rozmiarowi detekcji.
Uwaga Wskazówki dotyczące ustawienia rozmiaru detekcji i odstępu detekcji
• Detection size (Rozmiar detekcji)
Określić rozmiar detekcji zgodnie z rozmiarem defektu, który ma być
wykrywany.
Ustawienie mniejszego rozmiaru detekcji zwiększa czułość, natomiast
większego rozmiaru – zmniejsza czułość.
(1) (2)
Rozmiar detekcji
Defekt
Czułość
Czas przetwarzania
Większa
Dłuższy
Mniejsza
Krótszy
Ustawienie większego rozmiaru detekcji powoduje, że mogą być
wykrywane defekty o dużych rozmiarach lub regularne zmiany kształtu,
gdyż niewielkie defekty mogą nie zmieniać znacząco jasności obszaru (2).
Innymi słowy im więcej tła w obszarze detekcji, tym mniejsza czułość.
• Detection interval (Odstęp detekcji)
Określić odstęp między obszarami porównywanymi zgodnie z rozmiarem
defektu i rozmiarem detekcji.
Im większy odstęp detekcji, tym krótszy czas przetwarzania.
Jeśli obszar detekcji jest większy niż rozmiar defektu, należy ustawić
mniejszy odstęp detekcji.
Jeśli rozmiar defektu jest większy niż obszar detekcji, należy ustawić nieco
większy odstęp detekcji.
W przypadku ustawienia małego odstępu wykrywania, obszary
porównywane są bardzo blisko siebie przez co zmniejsza się wartość
defektu w przypadku defektów regularnie narastających lub o dużych
rozmiarach.
57

4-14 Omówienie funkcji GROUPING (grupowanie) Omówienie funkcji
4-14 Omówienie funkcji GROUPING (grupowanie)
Ta funkcja może być używana do sortowania produktów, np. na linii, na której
jest transportowanych wiele różnych produktów. Można zarejestrować wzory
obrazów, które mają być używane jako obiekty odniesienia (modele) do
sortowania produktów. (Można zarejestrować 64 indeksy i do 4 modeli
w każdym indeksie). Po wykonaniu pomiaru można wyprowadzić na wyjście
następujące informacje:
• Numer indeksu, do którego najbardziej pasuje obiekt wejściowy
• Wartość korelacji wskazującą, jak bardzo obiekt wejściowy przypomina
model
• Położenie mierzonego obiektu
Zarejestrowane jako 0 Zarejestrowane jako 1 Zarejestrowane jako 2
Ustawienie
Indeks
0-63
0
1
2
63
Model
(maksymalnie 4)
zostanie wyprowadzony indeks 1.
Inne ustawienia
Search mode
(Tryb
wyszukiwania)
Verification
(Sprawdzanie)
Candidate level
(Korelacja
kandydata)
Duża szybkość, normalnie (domyślne), precyzyjnie
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz funkcja „Pattern Search”).
ON/OFF (domyślne)
0–100 (wartość domyślna: 60)
Te ustawienia są takie same jak dla wyszukiwania wzoru
(patrz punkt „Wyszukiwanie wzoru”).
Uwaga
W tej funkcji nie można wyszukiwać obrotów.
Pomiar
Obliczany jest numer indeksu
najbardziej podobnego modelu.
Region wyszukiwaniaW tym przypadku
58

Dodatkowe informacje
5-1 Jakie parametry są ustawiane funkcją AUTO
Ustawienie AUTO w funkcjach pomiaru
Register model
Reference model
Search region
Reference point
Img Adj
AUTO
Region
Detail
TEA
Limits
Po narysowaniu regionu (*1) należy kliknąć [AUTO].
Zostaną wykonane następujące ustawienia.
(*1)
Region modelu: (Pattern Search, Sensitive Search,
Graphic Search, Flexible Search, Grouping)
Mierzony region: (Area, Labeling, Position,
Width / Count / Angle / Bright / Hue / Defect)
CZĘŚĆ 5
Ustawienie Dostępne
elementy
Filtr koloru Pattern Search
Sensitive Search
Graphic Search
Flexible Search
Position
Width
Count
Angle
Bright
Defect
Grouping
Obraz modelowy Pattern Search
Sensitive Search
Flexible Search
Wartość progowa Area
Labeling
Position
Width
Count
Angle
Bright
HUE
Kolor wyszukiwanej
krawędzi
Position
Width
Count
Angle
Wartość
odniesienia
Wszystkie metody
pomiarowe
Opis
Obraz (*2) jest analizowany. Następnie
zostaje wybrany najlepszy filtr.
Po automatycznym wybraniu filtru obraz
zostanie zarejestrowany jako model. Jeśli
po ustawieniu AUTO region modelu
zostanie zmieniony, model zostanie
zaktualizowany, ale filtr pozostanie ten
sam.
Wartości progowe są ustawiane
automatycznie.
Kolor wyszukiwanej krawędzi (kierunek
zmiany jasności) w ustawieniach
szczegółowych jest określany
automatycznie.
Wartość pomiaru aktualnie
wyświetlanego obrazu jest rejestrowana
jako wartość odniesienia.
Jeśli region (*2) zostanie zmieniony,
wartość odniesienia zostanie
zaktualizowana.
(*2)
Region modelu: (Pattern Search / Sensitive Search / Graphic Search /
Flexible Search / Grouping
Mierzony region: (Area / Labeling / Position / Width / Count/ Angle / Bright /
Hue / Defect)
59

5-2 BANK i BANK-Group (grupa banków) Dodatkowe informacje
5-2 BANK i BANK-Group (grupa banków)
Podstawowe wiadomości o ustawieniach BANK i BANK-Group
Co to są banki?
Banki zapamiętują ustawienia systemu dla konkretnych, kontrolowanych obiektów.
• Kamera
[szybkość migawki, sterowanie oświetleniem – w przypadku inteligentnej kamery, kalibracja itd.]
• Element pomiaru
[C1*: do 32 elementów/C2*: do 128 elementów]
• Korekta położenia
• Funkcja dodatkowa
[obliczanie, monitor rejestracji (tylko model ZFX-C2*), ustawienie OR]
Top menu
LIVE
Tool
Bank
TEA
Setup
System
Save
Cameras
Register
Item
BANK data
Position
Add func
Co to jest BANK-Group ( grupa banków )?
Grupa banków zawiera do 32 banków.
• Kontroler ZFX-C może mieć jedną grupę banków, jeśli nie ma zainstalowanej karty SD.
• Kontroler ZFX-C może mieć do 32 grup banków, jeśli ma zainstalowaną kartę SD.
Bank group 0
Bank 0
Bank 1
Bank 30
Bank 31
Bank group 0
Bank 0
Bank 1
Bank 30
Bank 31
Karta SD
(pojemność: 256 MB)
Bank 0
Bank 0
Bank 1
Bank 1
Bank 30
Bank 30
Bank 31
Bank 31
1
2
Bank group 31
Bank 0
Bank 1
Bank 30
Bank 31
60
Maks. 1024 banki
Bank Group 0: Dane są zapisywane w wewnętrznej pamięci Flash.
Bank Group 1 do 31: Dane są zapisywane na karcie SD.

5-2 BANK i BANK-Group (grupa banków) Dodatkowe informacje
Która grupa banków lub BANK ma być ustawiona po uruchomieniu kontrolera?
Można to ustawić, korzystając z następującego menu.
Tryb MENU – [System] – [Startup]
Element Opis
Startup Bank Group
(Startowa grupa
Banków)
Startup Bank
(Startowy bank)
Ustawić numer grupy Banków, który ma być wyświetlony po
uruchomieniu kontrolera (wartość domyślna: 0).
Jeśli wybrano jedną z grup Banków o numerze 1–31, kontroler należy
uruchomić z kartą SD, na której są zapisane dane tego banku.
Ustawić numer banku, który ma być wyświetlony po uruchomieniu
kontrolera
Zakres: 0–31 (wartość domyślna: 0)
Przełączanie grupy BANK/BANK
1. Ręcznie w menu
BANK tryb Menu – [Bank] – [Bank] – [Switch]
Grupa BANK tryb Menu – [Bank] – [Bank Group] – [Switch]
2. Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet (*1)
3. Polecenie wydane przez port szeregowy
Polecenie musi być wysłane z urządzenia zewnętrznego (np. sterownika PLC).
Szczegółowe informacje można znaleźć w „Podręczniku użytkownika”
Ładowanie danych grupy BANK/BANK
1. Ładowanie danych BANK 0–31 (grupy BANK 0–31) do kontrolera ZFX z karty SD
a) Ręcznie w menu
BANK tryb Menu – [Tool] – [Backup] – [Bank data] – [Load]Grupa
BANK tryb Menu – [Tool] – [Backup] – [Bank Group data] – [Load]
b) Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet (*1)
2. Ładowanie danych BANK 0–31 (grupy BANK 0–31) do kontrolera ZFX z urządzenia
zewnętrznego (np. sterownika PC / PLC)
a) Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet (*1)
Kopia zapasowa danych grupy BANK/BANK
1. Kopia zapasowa danych BANK 0–31 (grupy BANK 0–31) ze kontrolera ZFX na kartę SD
a) Ręcznie w menu
BANK tryb Menu – [Tool] – [Backup] – [Bank data] – [Save]Grupa
BANK tryb Menu – [Tool] – [Backup] – [Bank Group data] – [Save]
b) Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet (*1)
2. Kopia zapasowa danych BANK 0–31 (grupy BANK 0–31) ze kontrolera ZFX na urządzenie
zewnętrzne (np. sterownik PC / PLC)
a) Polecenie wydane przez port szeregowy RS-232C/422, USB, Ethernet (*1)
Uwaga (*1) Polecenie musi być wysłane z urządzenia zewnętrznego (np. sterownika
PC, PLC).
Szczegółowe informacje można znaleźć w dokumencie „Materiały
referencyjne dotyczące wydawania poleceń za pomocą komunikacji
szeregowej”
61

Historia wersji
Kod wersji instrukcji jest sufiksem numeru katalogowego, który znajduje się na pierwszej stronie okładki
niniejszej instrukcji.
Cat. No. Z01E-PL-01
Kod wersji
W poniższej tabeli znajdują się informacje dotyczące zmian wprowadzonych w każdej wersji instrukcji. Numery
stron odnoszą się do poprzedniej wersji.
Kod wersji Data Zawartość zmieniona
01 Styczeń 2008 Publikacja oryginalna
62
 Loading...
Loading...