

XD-@
C
r
p
a
XtraDrive
Servodriver inteligente. Con funciones de
posicionado y conectividad de red.
• NCT. Técnica no lineal patentada para el control preciso
• Error de seguimiento muy bajo sin sobrepaso (overshoot) y tiempo de estabilización cero
• Ajuste automático de los parámetros del servo para
un tiempo de estabilización óptimo
• OCA. Algoritmo de supresión de oscilación
• Modelos disponibles con interfaz ProfibusDP incorporada.
• Controlador ideal para el control de motores lineales
• Reconocimiento automático de los motores Sigma-II
• Control analógico para velocidad y par
• Control de tren de pulsos para el posicionado
• Osciloscopio disponible mediante la herramienta de
software XtraWare
Valores nominales
• Monofásico 230 Vc.a. de 30 a 800 W
• Trifásico 400 Vc.a. de 0,5 a 3,0 kW
de c.a.
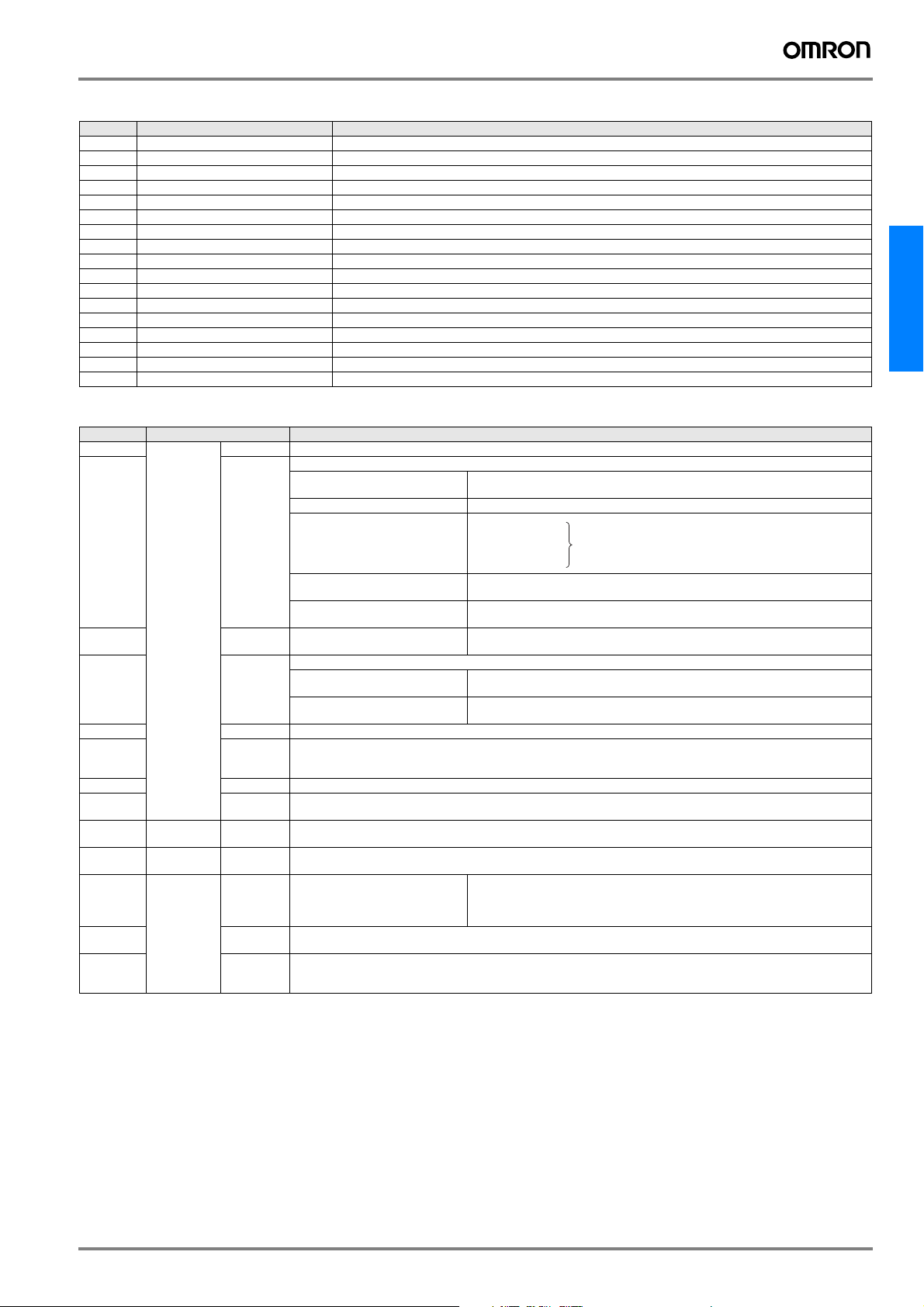
Servoaccionamientos
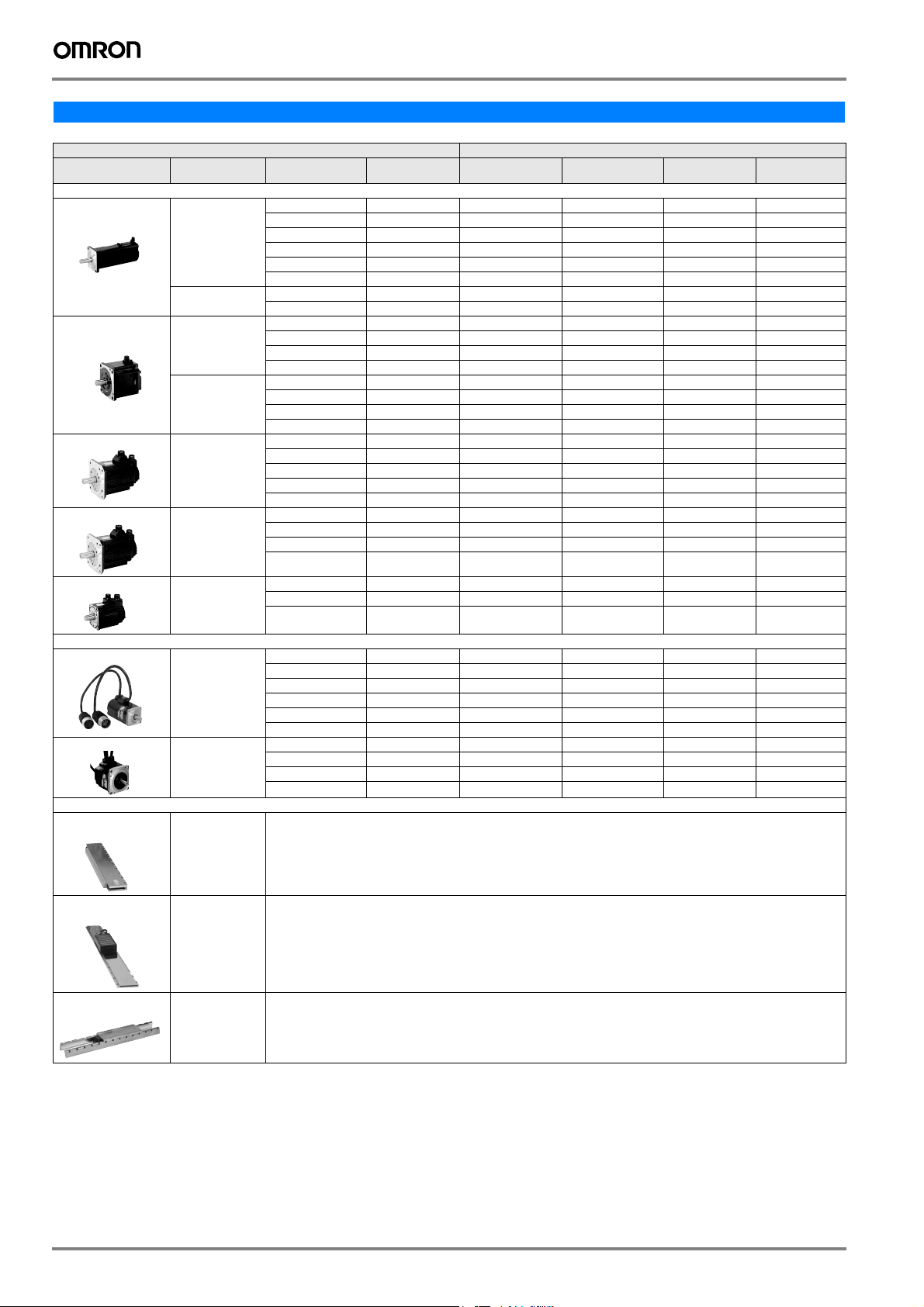
Configuración del sistema
Red PROFIBUS
(Modelos XtraDrive con
PROFIBUS incorporado)
otenci
Cable de
able del encode
Servodriver
XTRADRIVE
Cable de
potencia
Señal de
E/S
Cable del encoder
Cable de monitorización
analógica
Interfaz pasiva
Cable de empleo general
Cable del
encoder
Escala lineal
Cable de potencia
Unidad opcional
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Ordenador personal
Unidad Motion
Control
Unidad de control
de posición
Bloque de terminales
Unidad de
convertidor serie
Servomotor lineal
con núcleo
Servomotor
SGMAH / SGMPH / R7M
Servomotor
SGMGH / SGMSH / SGMUH
Servomotor lineal
SGL
167XtraDrive
Combinación de servomotor/servodriver
Servomotor Servodriver
Tensión Par nominal Capacidad 230 V (monofásico) 230 V (monofásico)
Motores de la serie Sigma-II (consulte el capítulo de Sigma-II para obtener información detallada de los motores)
SGMAH (3000 min
-1
) 230 V 0,0955 N.m 30 W XD-P3-MN01 XD-P3-MSD0 - -
0,159 N.m 50 W XD-P5-MN01 XD-P5-MSD0 - 0,318 N.m 100 W XD-01-MN01 XD-01-MSD0 - 0,637 N.m 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 N.m 400 W XD-04-MN01 XD-04-MSD0 - 2,39 N.m 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,955 N.m 300 W - - XD-05-TN XD-05-TSD0
SGMPH (3000 min
-1
) 230 V 0,318 N.m 100 W XD-01-MN01 XD-01-MSD0 - -
2,07 N.m 650 W - - XD-10-TN XD-10-TSD0
0,637 N.m 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 N.m 400 W XD-04-MN01 XD-04-MSD0 - 2,39 N.m 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,637 N.m 200 W - - XD-05-TN XD-05-TSD0
1,27 N.m 400 W - - XD-10-TN XD-10-TSD0
2,39 N.m 750 W - - XD-10-TN XD-10-TSD0
SGMGH (1500 min
-1
) 400 V 2,84 N.m 0,45 kW - - XD-05-TN XD-05-TSD0
4,77 N.m 1500 W - - XD-15-TN XD-15-TSD0
5,39 N.m 0,85 kW - - XD-10-TN XD-10-TSD0
8,34 N.m 1,3 kW - - XD-15-TN XD-15-TSD0
11,5 N.m 1,8 kW - - XD-20-TN XD-20-TSD0
SGMSH (3000 min
-1
) 400 V 3,18 N.m 1,0 kW - - XD-10-TN XD-10-TSD0
18,6 N.m 2,9 kW - - XD-30-TN XD-30-TSD0
4,90 N.m 1,5 kW - - XD-15-TN XD-15-TSD0
6,36 N.m 2,0 kW - - XD-20-TN XD-20-TSD0
9,80 N.m 3,0 kW - - XD-30-TN XD-30-TSD0
-1
SGMUH (6000 min
) 400 V 1,59 N.m 1,0 kW - - XD-10-TN XD-10-TSD0
2,45 N.m 1,5 kW - - XD-15-TN XD-15-TSD0
4,9 N.m 3,0 kW - - XD-30-TN XD-30-TSD0
con PROFIBUS
400 V (trifásico) 400 V (trifásico)
con PROFIBUS
Motores de la serie SmartStep (consulte el capítulo de SmartStep para obtener información detallada de los motores)
R7M-A (3000 min
-1
) 230 V 0,0955 N.m 30 W XD-P3-MN01 - - -
0,159 N.m 50 W XD-P5-MN01 - - 0,318 N.m 100 W XD-01-MN01 XD-01-MSD0 - 0,637 N.m 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 N.m 400 W XD-04-MN01 XD-04-MSD0 - -
R7M-AP (3000 min
-1
) 230 V 0,318 N.m 100 W XD-01-MN01 XD-01-MSD0 - -
2,39 N.m 750 W XD-08-MN XD-08-MSD0 - -
0,637 N.m 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 N.m 400 W XD-04-MN01 XD-04-MSD0 - 2,39 N.m 750 W XD-08-MN XD-08-MSD0 - -
Motores lineales Sigma (consulte el capítulo de los motores lineales Sigma para obtener información detallada de los mismos)
SGLGW
230 V Consulte el capítulo de los motores lineales para obtener información detallada
Motores lineales
SGLFW
Motores lineales
SGLTW
Motores lineales
230 V,
Consulte el capítulo de los motores lineales para obtener información detallada
400 V
400 V Consulte el capítulo de los motores lineales para obtener información detallada
168 Servoaccionamientos de c.a.
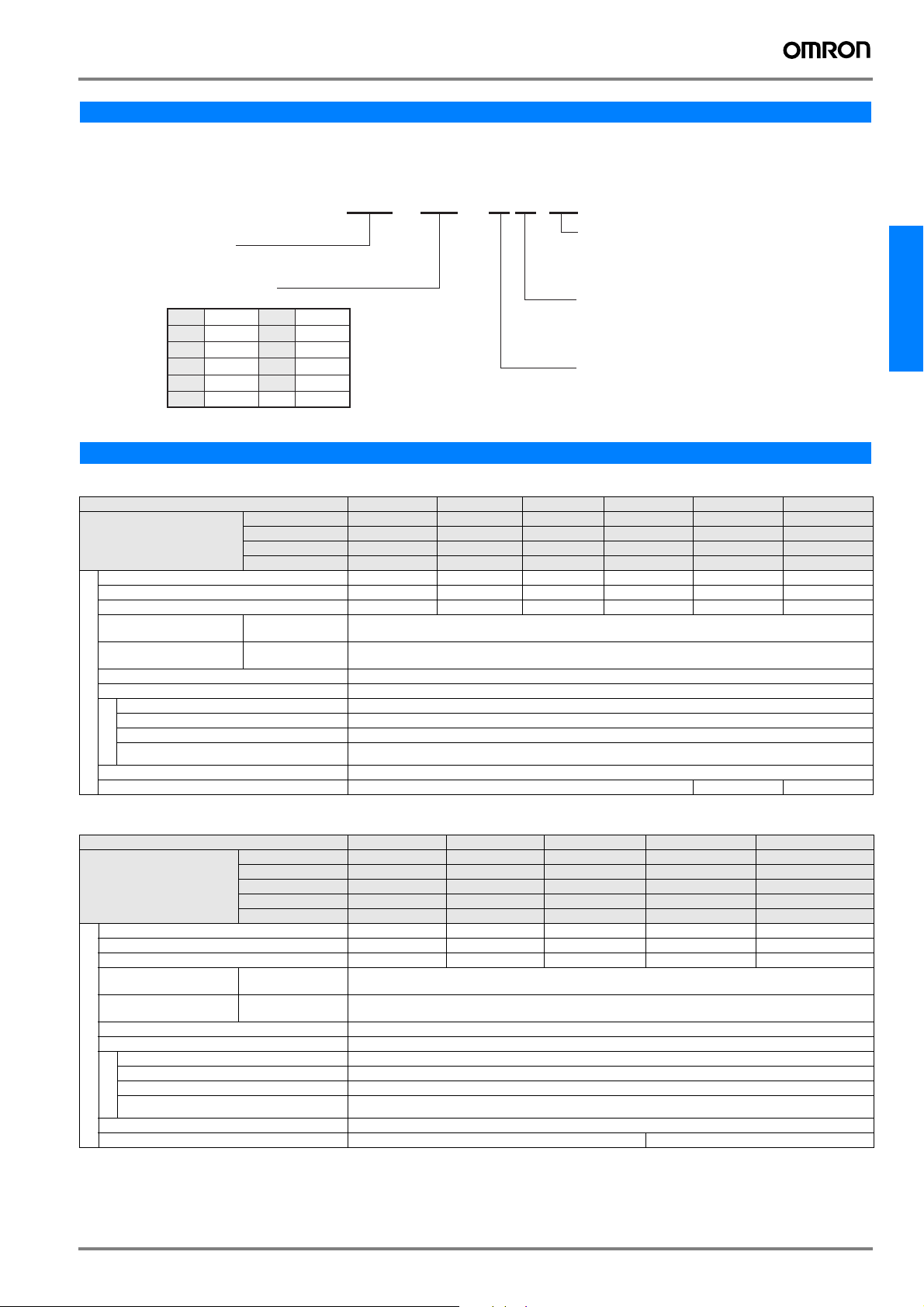
Denominación de tipo
Controlador
XD - 01 - MN 01
XtraDrive
01: Versión de diseño
D0: Profibus incorporado
Capacidad de salida
Funcionalidad ampliada
Nº de versión de diseño (opcional)
P3 30 W
50 W
P5
100 W
01
200 W
02
400 W
04
500 W05
08
10
15
20
30
750 W
1,0 kW
1,5 kW
2,0 kW
3,0 kW
N: Con conector CN10 para unidades opcionales
S: Sin conector CN10
Tensión de entrada
M: 230 V
T: 400 V
Especificaciones del servodriver
Monofásico, 230 V
Tipo de servodriver XD-P3-M@ XD-P3-M@ XD-01-M@ XD-02-M@ XD-04-M@ XD-08-M@
Servomotor
aplicable
Capacidad máxima aplicable del motor W 30 50 100 200 400 750
Corriente de salida permanente A (eficaces) 0.44 0.64 0.91 2.1 2.8 5.7
Corriente de salida máx. A (eficaces) 1.3 2.0 2.8 6.5 8.5 13.9
Fuente de alimentación de
entrada
Fuente de alimentación de
entrada
Método de control Rectificación de onda completa monofásica / IGBT / PWM / método de corriente de onda senoidal
Realimentación Encoder serie (valor incremental/absoluto)
Temperatura de uso/almacenamiento 0 a +55 °C / -20 a 85 °C
Humedad de uso/almacenamiento 90% de HR o inferior (sin condensación)
Altitud 1000 m como máximo por encima del nivel del mar
Especificaciones básicas
Resistencia a vibraciones/golpes 4,9 m/s
Condiciones
Configuración Montado en base
Masa aprox. Kg 0.8 1.1 1.7
SGMAH-@ A3A@ A5A@ 01A@ 02A@ 04A@ 08A@
SGMPH-@ - - 01A@ 02A@ 04A@ 08A@
R7M-@ A03030-@ A05030-@ A10030-@ A20030-@ A40030-@ A75030-@
R7M-@ - - AP10030-@ AP20030-@ AP40030-@ AP75030-@
Circuito
principal
Circuito de
control
Para monofásico, 200 a 230 Vc.a. + 10 a -15%
Para monofásico, 200 a 230 Vc.a. + 10 a -15%
2
/ 19,6m/s
2
de c.a.
Servoaccionamientos
Trifásico, 400 V
Tipo de servodriver XD-05-T@ XD-10-T@ XD-15-T@ XD-20-T@ XD-30-T@
Servomotor
aplicable
Capacidad máxima aplicable del motor kW 0.45 1.0 1.5 2.0 3.0
Corriente de salida permanente A (eficaces) 1.9 3.5 5.4 8.4 11.9
Corriente de salida máx. A (eficaces) 5.5 8.5 14 20 28
Fuente de alimentación de
entrada
Fuente de alimentación de
entrada
Método de control Rectificación de onda completa monofásica / IGBT / PWM / método de corriente de onda senoidal
Realimentación Encoder serie (valor incremental/absoluto)
Temperatura de uso/almacenamiento 0 a +55 °C / -20 a +85 °C
Humedad de uso/almacenamiento 90% de HR o inferior (sin condensación)
Altitud 1000 m como máximo por encima del nivel del mar
Especificaciones básicas
Resistencia a vibraciones/golpes 4,9 m/s
Condiciones
Configuración Montado en base
Masa aprox. Kg 2.8 3.8
SGMAH-@ 03D@ 07D@ - - -
SGMAH-@ 02D@, 04D@ 08D@ 15D@ - -
SGMGH-@ 05D@ 09D@ 13D@ 20D@ 30D@
SGMSH-@ - 10D@ 15D@ 20D@ 30D@
SGMUH-@ - 10D@ 15D@ - 30D@
Circuito principal Para trifásico, 380 a 480 Vc.a. + 10 a -15% (50/60 Hz)
Circuito de control 24 Vc.c. + 15%
2
/ 19,6m/s
2
XtraDrive 169
Especificaciones generales
Rango de control de velocidad 1:5000
Variación de
velocidad
Características de frecuencia 400 Hz (a J
Precisión de control de par (reproducibilidad) ±2%
Rendimiento
Ajuste de tiempo de arranque suave 0 a 10 s (se puede configurar la aceleración y la deceleración)
Entrada
de referencia
de velocidad
Entrada
de referencia
de par
Referencia
Señal de entrada
Modo de control de velocidad/par
de velocidad
de contacto
Configuración de bias 0 a 450 min-1 (resolución de configuración: 1 min-1)
Compensación de realimentación positiva 0 a 100 % (resolución de configuración: 1%)
Configuración de ancho de posicionado finalizado 0 a 250 unidades de comando (resolución de configuración: 1 unidad de comando)
Variación de carga Durante 0 a 100% de la carga ±0,01% máx. (a velocidad nominal)
Variación de tensión Tensión nominal ±10%:0% (a velocidad nominal)
Variación de temperatura 25 ±25 °C: ±0,1 % máx. (a velocidad nominal)
Tensión de referencia ±6 Vc.c. (rotación directa del motor si la referencia es positiva) a velocidad nominal: Se configura en la entrega
Impedancia de entrada Aprox. 14 kΩ
Constante de tiempo de circuito Tensión de referencia ±3Vc.c. (rotación directa si la referencia es positiva) a velocidad nominal: Se configura en la entrega
Impedancia de entrada Aprox. 14 KΩ
Constante de tiempo de circuito Aprox. 47 µs
Selección de dirección de rotación
Selección de velocidad Con señal de límite de corriente directa/inversa (selección de velocidad 1 a 3) el servomotor se para o se utiliza
Rango de configuración variable: ±2 a ±10 Vc.c. a velocidad nominal/tensión de entrada máx.: ±12 V
Rango de configuración variable de ±1 a ±10 Vc.c. en referencia de par nominal
Con señal de control P
otro método de control cuando ambos están en OFF.
= JM)
L
Rendimiento
Comando de
pulsos
Señal de control Señal de borrado (el pulso de entrada es el mismo que el pulso de referencia)
Modo de control de posición
Señal de entrada
Salida de señal de posición Fase A, fase B, fase C (fase S): Salida de line driver. La fase S sólo es para el encoder absoluto.
Señal de entrada de secuencia Servo ON, control P (o cambio de modo de control, fijación cero (Zero clamp), inhibición de pulso de comando),
Señal de salida de secuencia Alarma de servo, códigos de alarma (salida de 3 bits): El terminal de salida CN1 es fijo
Señal de E/S
Comunicaciones Interfaz Operador digital (tipo portátil), puerto RS-422 para PCs, etc. (puertos RS-232C en determinadas condiciones)
Función de autoajuste (auto-tuning) La ganancia de lazo de velocidad de posición y la constante de tiempo de integral se pueden seleccionar auto-
Freno dinámico (DB) Opera durante desconexión de la alimentación principal, alarma de servo, servo OFF o sobrecarrera
Procesamiento regenerativo Resistencia regenerativa montada externamente (opcional)
Función de prevención de sobrecarrera (OT) Parada de DB, parada de deceleración o inicio de parada durante P-OT, operación N-OT
Función de divisor de encoder Es posible la división opcional
Reductor electrónico 0,01< A/B<100
Función de selección de velocidad interna Se pueden seleccionar 3 velocidades internamente
Funciones integradas
Funciones de protección Sobrecorriente, sobretensión, tensión insuficiente, sobrecarga, error del sensor del circuito principal, sobreca-
Funciones de monitorización analógica Integra conectores de monitorización analógica para la supervisión de las señales de referencia de velocidad
Funciones de visualización CHARGE, POWER, 5 LEDs de 7 segmentos (la función de operador digital integrado no está disponible en los
Otros Conexión inversa, búsqueda cero, función de discriminación automática del motor y terminal de conexión de
Tipo de pulso de entrada Tren de pulsos de signo +, pulso de 2 fases desplazadas 90° (fase A + fase B) o
Formato de pulso de entrada Line driver (nivel de +5 V), colector abierto (nivel de +5 V o +12)
Frecuencia de pulsos de entrada 0 a 500 Kpps (200 Kpps máx. en colector abierto)
Comunicaciones 1:N N puede ser igual a 14 como máximo cuando se utiliza un puerto RS-422A
Configuración de dirección de eje Configurado por el usuario
Funciones Visualización del estado, visualización de monitorización de configuración de constantes del usuario, visuali-
Profibus (Sólo en modelos con Profibus) Esclavo Profibus DP, dirección de nodo de 0 a 125 seleccionada mediante
Tren de pulsos CCW/CW
marcha directa/inversa
prohibida, reset de alarma, límite de corriente directa/inversa (o cambio de velocidad interna)
Se pueden enviar tres tipos de señales de entre las siguientes: posicionado finalizado (velocidad alcanzada),
rotación del motor, servo preparado, límite de corriente, límite de velocidad, liberación de freno, advertencia,
NEAR y señal de pulso de punto cero
zación de seguimiento de alarma, operaciones de marcha JOG/autoajuste (auto-tuning)
y funciones gráficas para la señal de comando de velocidad/par, etc.
interruptores rotativos, velocidad de transmisión de 9,6 kbps a 12 Mbps. Indicadores LED: fallo del bus y fallo
del sistema
máticamente.
lentamiento del disipador de calor, pérdida de fase de alimentación, overflow, sobrecarrera, número de revoluciones demasiado alto, error del encoder, exceso de velocidad, error de CPU, error de parámetros, etc.
y par, etc.
modelos con Profibus)
reactancia de c.c. para la función de supresión de alimentación de alta frecuencia (excepto: 6 a 15 kW)
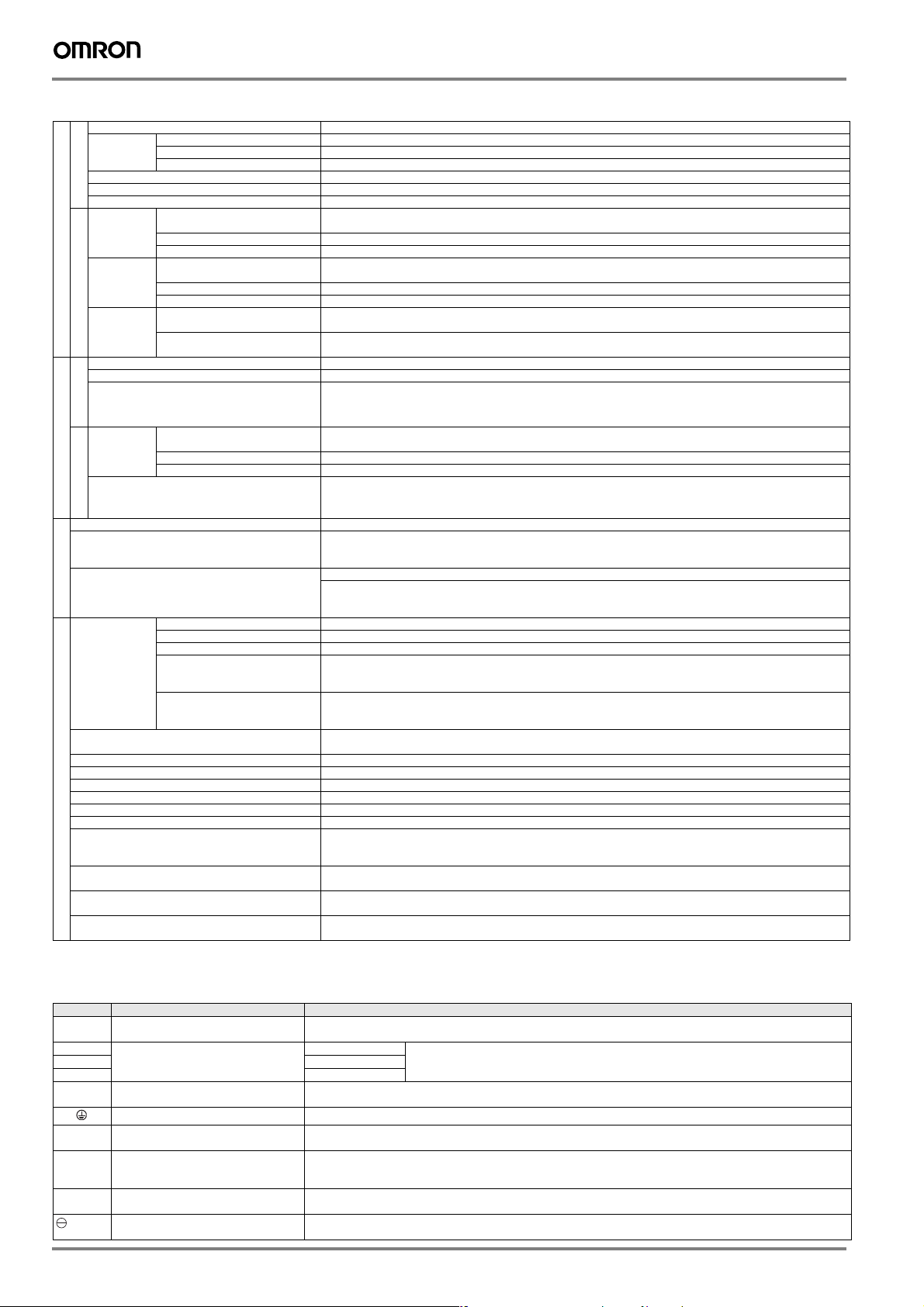
Especificaciones de E/S
Especificaciones de terminales
Símbolo Nombre Función
L1, L2 o
L1, L2, L3
U Terminal de conexión del servomotor Rojo Terminales para las salidas al servomotor.
VBlanco
W Azul
L1C, L2C Terminal de entrada de alimentación de
B1, B2 o
B1, B2, B3
⊕1, ⊕2 Terminal de conexión de reactancia de
⊕ Terminal de salida de c.c. del circuito
Terminal de entrada de c.a. del circuito
principal
control
Tierra de bastidor Terminal de tierra. Puesta a tierra a un máximo de 100 Ω. (Clase 3)
Terminal de salida de c.c. del circuito
principal
c.c. para suprimir armónicos de la
fuente de alimentación
principal (+)
Terminal de salida de c.c. del circuito
principal (n-)
Terminales de entrada de alimentación de c.a. para el circuito principal
Terminales de entrada de alimentación para el circuito de control.
5 kW como máximo: Conecte una resistencia regenerativa externa si la energía regenerativa es alta.
5,5 kW: No hay resistencia regenerativa interna. Asegúrese de conectar una unidad de resistencia regenerativa externa.
Normalmente se puentea ⊕1 y ⊕2. Si se necesita una medida preventiva contra los armónicos de la fuente de
alimentación, conecte una reactancia de c.c. entre ⊕1 y ⊕2.
Normalmente no se conecta.
Este terminal sólo existe en los servodrivers con una capacidad de 6,0 kW como mínimo.
Normalmente no se conecta.
170 Servoaccionamientos de c.a.
Conector del encoder (CN2)
Pin Símbolo Función
1, 2, 3 PPG0V Masa de la alimentación del encoder
4, 5, 6 PPG5V Alimentación del encoder +5 V
7- 8 PS+ Entrada de señal serie del encoder
9PS− Entrada de señal serie del encoder
10 SePG5V Alimentación del encoder serie +5 V (Sigma-II)
11 SePG0V Alimentación del encoder serie GND (Sigma-II)
12 BAT+ Batería + (sólo se utiliza con el encoder absoluto)
13 BAT- Batería - (sólo se utiliza con el encoder absoluto)
14 PC+ Entrada de fase + C del encoder
15 PC− Entrada de fase − C del encoder
16 A+ Entrada de fase + A del encoder
17 A− Entrada de fase − A del encoder
18 B+ Entrada de fase + B del encoder
19 B− Entrada de fase − B del encoder
20 - Carcasa FG Tierra de protección del cable
Señales de E/S (CN1) - Señales de entrada
Nº de pin Nombre de la señal Función
40 Común /S-ON Servo ON: Pone en ON el servomotor cuando se libera el bloqueo de puerta del variador.
41 /P-CON Función seleccionada mediante parámetro.
42
43
45
46
44 /ALM-RST Reset de alarma: Libera el estado de alarma del servo.
47 +24VIN Entrada de fuente de alimentación de control para las señales de secuencia: Los usuarios deben proporcionar la fuente
4 (2) SEN Señal de solicitud de datos iniciales cuando se utiliza un encoder absoluto.
21
22
5 (6) Velocidad V-REF Entrada de referencia de velocidad: ±2 a ±10 V/velocidad nominal del motor (la ganancia de entrada se puede modificar
9 (10) Par T-REF Entrada de referencia de par ±1 a ±10 V/par nominal del motor (la ganancia de entrada se puede modificar mediante un
7
8
11
12
15
14
3
13
18
Posición PULS
P-OT
N-OT
/P-CL
/N-CL
BAT (+)
BAT (-)
/PULS
SIGN
/SIGN
CLR
/CLR
PL1
PL2
PL3
Referencia de control proporcional Cambia el lazo de control de velocidad de PI (proporcional/integral) a control P (pro-
Referencia de dirección Con la velocidad interna seleccionada: Cambia la dirección de rotación.
Cambio de modo
de control
Referencia de fijación cero (Zero
clamp)
Bloqueo de pulsos de referencia Control de posición con parada de pulsos de referencia: Detiene la entrada de pulsos
Marcha directa prohibida
Marcha inversa prohibida
Función seleccionada mediante parámetro.
Límite de par externo directo ON
Límite de par externo inverso ON
Cambio de velocidad interna Con la velocidad interna seleccionada: Cambia la configuración de velocidad
de alimentación de +24 V.
Rango de fluctuación de tensión admisible: 11 a 25 V
Pin de conexión para la batería de reserva del encoder absoluto.
No conectar cuando haya conectada una batería al controlador host.
mediante un parámetro)
parámetro)
Entrada de pulsos de referencia
sólo para line driver
Entrada de borrado de pulso de error de posición: Borra el pulso de error de posición durante el control de posición.
La alimentación de +12 V es suministrada cuando las señales de referencia PULS, SIGN y CLR son
salidas de colector abierto (la fuente de alimentación de +12 V está incorporada en el SERVODRIVER).
porcional) cuando está en ON.
↔
Posición
Posición
Control de velocidad con función de fijación cero: La velocidad de
referencia es cero cuando está en ON.
de referencia cuando está en ON.
Sobrecarrera prohibida: Detiene el servomotor cuando la pieza móvil va más allá del
rango permisible de movimiento.
Función de límite de corriente activada cuando está en ON.
interna.
El modo de entrada se selecciona a partir de los siguientes pulsos.
Tren de pulsos de signo +
Pulso CCW/CW
Pulso de dos fases (90° fase diferencial)
Par
velocidad
↔
par
↔
velocidad
Permite cambiar el
modo de control.
de c.a.
Servoaccionamientos
Nota: 1. Los números de pin entre paréntesis () indican masa.
2. Las funciones asignadas a las señales de entrada /S-ON, /P-CON, P-OT, N-OT, /ALM-RST, /P-CL y /N-CL se pueden cambiar mediante
parámetros.
3. El rango de entrada de tensión para las referencias de velocidad y par es de ±12 V como máximo.
XtraDrive 171
Señales de E/S (CN1) - Señales de salida
Nº de pin Nombre de la señal Función
31
32
27
28
29
30
33 (1)
34
35
36
19
20
48
49
37
38
39 (1)
16 TMON Señal de monitorización analógica
17 VTG Señal de monitorización analógica
Carcasa FG Conectado a tierra de bastidor si el cable apantallado de la señal de E/S está conectado a la carcasa del conector.
25
26
25
26
- Reservado /CLT
23
24
50
Común ALM+
Velocidad /V-CMP+
Posición /COIN+
ALM/TGON+
/TGON-
/S-RDY+
/S-RDY-
PAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
ALO1
ALO2
ALO3
/V-CMP-
/COIN-
/VLT
/BK
/WARN
/NEAR
- Terminales no utilizados
Alarma de servo: Se pondrá en OFF al detectarse un error.
Detección durante la rotación del servomotor: Detecta si el servomotor está rotando
a una velocidad superior a la configuración de velocidad del motor. La velocidad de detección se puede configurar
mediante parámetros.
Servo preparado: ON si no hay alarma de servo cuando se conecta la fuente de alimentación
del circuito de control/principal.
Señal de fase A Señal de salida del encoder de pulsos de dos fases convertidos
Señal de fase B
Señal de fase C
Señal de fase S Con un encoder absoluto: Envía datos serie correspondientes
Salida de código de alarma: Envía códigos de alarma de 3 bits.
Colector abierto: 30 V y 20 mA del máximo nominal
Coincidencia de velocidad (se envía en el modo de control de velocidad): Detecta si la velocidad del
motor está dentro del rango de selección y si coincide con el valor de velocidad de referencia.
Posicionado finalizado (se envía en el modo de control de posición): Se pone en ON si el
número de pulsos de error de posición alcanza el valor seleccionado. El ajuste es el número de pulsos de error de posición seleccionado en unidades de referencia (las unidades de pulsos de entrada se definen mediante el engranaje electrónico).
Terminales reservados
Las funciones asignadas a /TGON, /S-RDY y /V-CMP (/COIN) se pueden cambiar mediante los parámetros. Las señales /CLT, /VLT, /BK, /WARN y /NEAR también se pueden cambiar.
No conecte relés a estos terminales.
(fases A y B) y señal de pulsos de punto cero (fase C): RS-422 o
equivalente
(El receptor de línea correcto es SN75175, fabricado por Texas Instruments, o el equivalente que corresponda a MC3486.)
al número de revoluciones (RS-422 o equivalente)
Nota: 1. Los números de pin entre paréntesis () indican masa.
2. Las funciones asignadas a /TGON, /S-RDY y /V-CMP (/COIN) se pueden cambiar mediante los parámetros. Las señales /CLT, /VLT, /
BK, /WARN y /NEAR también se pueden cambiar.
172 Servoaccionamientos de c.a.
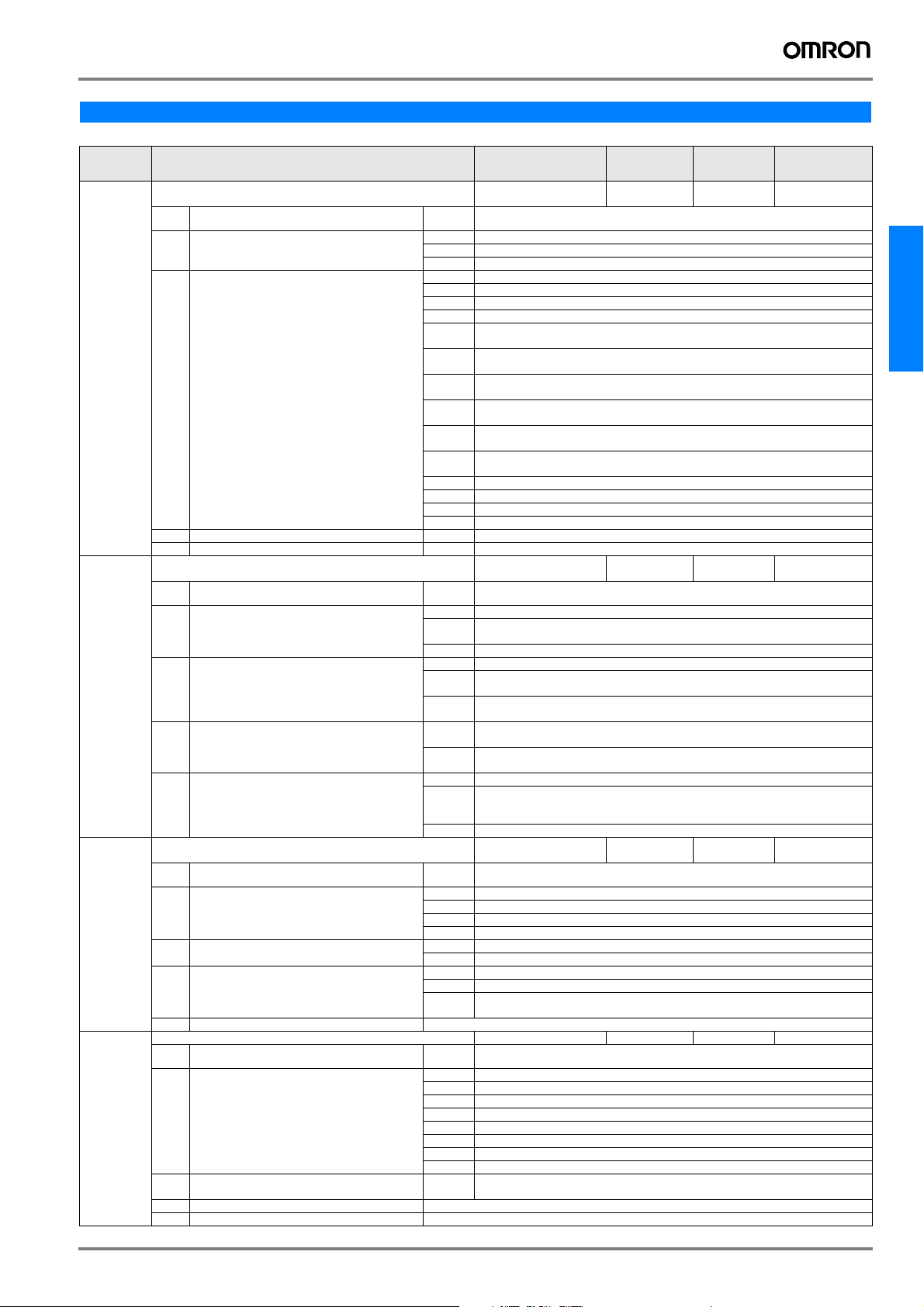
Parámetros
Nº de parámetro
Pn000 Interruptores básicos de selección de función - - 00D0 Después del
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
ración
Descripción
de fábrica
Validación de
configuración
rearranque
0 Selección de dirección 0 Selecciona CCW como dirección directa
1 Selecciona CW como dirección directa (modo de rotación inversa)
2 y 3 Reservado (no cambiar)
1 Selección del método de control 0 Control de velocidad (referencia analógica)
1 Yaskawa OB
2 Control de par (referencia analógica)
3 Control de velocidad interna (referencia de contacto)
4 Control de velocidad interna (referencia de contacto) <> Control de velocidad (refe-
5 Referencia de control de velocidad interna <> Control de posición (referencia de
6 Control de velocidad interna (referencia de contacto) <> Control de par (referencia
7 Control de posición (referencia de tren de pulsos) <> Control de velocidad (referen-
8 Control de posición (referencia de tren de pulsos) <> Control de par (referencia
9 Control de par (referencia analógica) <> Control de velocidad (referencia analó-
rencia analógica)
tren de pulsos)
analógica)
cia analógica)
analógica)
gica)
A Control de velocidad (referencia analógica) <> Fijación cero (Zero clamp).
B Control de posición (referencia de tren de pulsos) <> Control de posición (inhibir)
C Control de posición (tren de pulsos)
D Comando de comunicaciones serie
2 Dirección de eje 0 a F Selecciona la dirección de eje del servodriver.
3 Reservado -
Pn001 Interruptores de aplicación de selección de función 1 - - 0000 Después del
Dígito Nombre de función Configu-
ración
Explicación
rearranque
0 Servo OFF o modo de parada de alarma 0 Para el motor mediante la aplicación del freno dinámico (DB)
1 Para el motor mediante la aplicación del freno dinámico (DB) y, a continuación, libera
el DB
2 Provoca parada por motor libre sin utilizar el freno dinámico (DB)
1 Modo de parada de sobrecarrera (OT) 0 Idéntica configuración que Pn001.0 (para el motor mediante DB o motor libre)
1 Selecciona el par de Pn406 al valor máximo, decelera el motor hasta pararlo y, a
continuación, lo configura en estado de servobloqueo
2 Selecciona el par de Pn406 al valor máximo, decelera el motor hasta pararlo y, a
continuación, lo configura en estado de motor libre
2 Selección de entrada de alimentación de c.a./
c.c.
0 No es aplicable a la entrada de alimentación de c.c.: Fuente de alimentación de c.a.
mediante los terminales L1, L2 (y L3)
1 Aplicable a la entrada de alimentación de c.c.: Fuente de alimentación de c.c. de
entrada mediante los terminales (+)1 y (-).
3 Selección de salida de código de advertencia 0 Sólo salida de códigos de alarma ALO1, ALO2 y ALO3.
1 Salida tanto de códigos de alarma ALO1, ALO2 y ALO3 como de códigos de adver-
tencia. Mientras se envían los códigos de advertencia, la salida de señal ALM per-
manece en ON (estado normal).
2 Utiliza un encoder absoluto como encoder absoluto. Utiliza límite de multigiro.
Pn002 Interruptores de aplicación de selección de función 2 - - 0000 Después del
rearranque
Dígito Nombre de función Configu-
ración
Explicación
0 Opción de control de velocidad 0 Ninguno
1 Utiliza T-REF como entrada de límite de par externo
2 Utiliza T-REF como entrada de realimentación positiva de par
3 Utiliza T-REF cuando P-CL y N-CL están en ON
1 Opción de control de par 0 Ninguno
1 Utiliza V-REF como entrada de límite de velocidad externa.
2 Uso de encoder absoluto 0 Utiliza un encoder absoluto como encoder absoluto
1 Utiliza un encoder absoluto como encoder incremental
2 Utiliza un encoder absoluto como encoder absoluto.
Utiliza límite de multigiro.
3 No se utiliza. -
Pn003 Interruptores de aplicación de selección de función 3 - - 0002 Inmediatamente
Dígito Nombre de función Configu-
0 Monitorización analógica 1: monitorizacion de
referencia de par
ración
0 Velocidad del motor: 1V/1000 min
1 Referencia de velocidad: 1V/1000 min
Explicación
-1
-1
2 Referencia de par: 1 V/100%
3 Error de posición: 0,05 V/1 unidad de referencia
1 Monitorización analógica 2: monitorizacion de
referencia de velocidad
4 Error de posición: 0,05 V/100 unidades de referencia
5 Frecuencia de referencia (conversión a min
6 Velocidad del motor x 4: 1V/250 min
7 Velocidad del motor x 8: 1V/250 min
0 a 7 Igual que Pn003.0 (ver anterior)
-1
-1
-1
: 1V/1000 min
-1
2 No se utiliza 3 No se utiliza -
de c.a.
Servoaccionamientos
XtraDrive 173

Nº de parámetro
Nombre Rango de configuración Unidades Configuración
de fábrica
Validación de
configuración
Pn004 Reservado (no cambiar) - - 0000 Pn005 - - 0000 Pn006 Interruptores de aplicación de ganancia - - 0000 Inmediatamente
Dígito Nombre de función Configu-
ración
Explicación
0 Monitorización analógica 1 0 Error de posición de servo: 1V/10 contajes de encoder
1 Error de posición de servo: 1V/5 unidades del usuario
2 Velocidad objetivo 1 V/500 rpm.
3 Velocidad objetivo después de aplicar atenuación de comando 1 V/500 rpm
4 Referencia de par: 10 V/par máx.
5 Velocidad del motor: 1 V/500 rpm
1 Selección de parámetro fuente de monitoriza-
ción analógica 1
6 Aceleración objetivo después de aplicar atenuación de comando: 10 V/ máx. ace-
0 Pn003.0 se utiliza para monitorización analógica 1.
1 Pn006.0 se utiliza para monitorización analógica 1.
leración admisible.
2 Selección de fuente de monitorización analógica 10-4 0:x1, 1:x10, 2:x100, 3:x1/10, 4:x1/100
3 No se utiliza 0 -
Pn007 Interruptores de aplicación de ganancia - - 0000 Inmediatamente
Dígito Nombre de función Configu-
ración
Explicación
0 Monitorización analógica 2 0 Error de posición de servo: 1V/10 contajes de encoder
1 Error de posición de servo: 1V/5 unidades del usuario
2 Velocidad objetivo 1 V/500 rpm.
3 Velocidad objetivo después de aplicar atenuación de comando 1 V/500 rpm
4 Referencia de par: 10 V/par máx.
5 Velocidad del motor: 1 V/500 rpm
1 Selección de parámetro fuente de monitoriza-
ción analógica 2
6 Aceleración objetivo después de aplicar atenuación de comando: 10 V/ máx. ace-
0 Pn003.0 se utiliza para monitorización analógica 2.
1 Pn007.0 se utiliza para monitorización analógica 2.
leración admisible.
2 Monitorización analógica 2 0-4 0:x1, 1:x10, 2:x100, 3:x1/10, 4:x1/100
3 No se utiliza 0 Pn080
(sólo
motores lineales)
Interruptor de conmutación de motor lineal - - 0011 Después del
Dígito Nombre de función Configu-
ración
Explicación
rearranque
0 Interruptor de sensor de conmutación 0 Con sensores de conmutación
1 Sin sensores de conmutación
1 Orden de los sensores de conmutación 0 UVW
1UWV
2 Reservado - 3 Reservado - -
Pn100 Ganancia de lazo de velocidad 1 a 2000 Hz 1 Hz 40 Hz Inmediatamente
Pn101 Constante de tiempo de integral del lazo de velocidad 0,15 a 512,00 ms 0,01 ms 20,00 ms Inmediatamente
Pn102 Ganancia de lazo de posición 1 a 2000 s 1/s 40/s Inmediatamente
Pn103 Índice de momento de inercia 0 a 10000% 1% 0% Inmediatamente
Pn104 Ganancia de segundo lazo de velocidad 1 a 2000 Hz 1 Hz 40 Inmediatamente
Pn105 Constante de tiempo de integral del segundo lazo de velocidad 0,15 a 512,00 ms 0,01 ms 20,00 ms Inmediatamente
Pn106 Ganancia de segundo lazo de posición 1 a 2000 s 1/s 40/s Inmediatamente
Pn107 Bias 0 a 450 min
Pn108 Suma de ancho de bias 0 a 250 unidades de refe-
rencia
-1
-1
1 min
Unidad de referencia
-1
0 min
7 unidades de
referencia
Inmediatamente
Inmediatamente
Pn109 Realimentación positiva 0 a 100% 1% 0% Inmediatamente
Pn110 Interruptores de autoajuste (autotuning) online - - 0010 Después del
rearranque
Dígito Nombre de función Configu-
ración
Explicación
0 Método de autoajuste (autotuning) online 0 Sólo se realiza el ajuste al inicio de la operación.
1 Se realiza siempre el ajuste.
2 No se realiza autoajuste (autotuning).
1 Selección de compensación de realimentación
de velocidad
0 Habilitada
1 Deshabilitada
2 Selección de compensación de fricción 0 Compensación de fricción: Deshabilitada
1 Compensación de fricción: Pequeña
2 Compensación de fricción: Grande
3 Reservado 0 - 3 Parámetro reservado (no cambiar)
Pn10A Constante de tiempo de filtro de realimentación positiva 0,00 a 64,00 ms 0,01 ms 0,00 ms Inmediatamente
Pn10B Pendiente - - 0000 Pn10C Referencia de par para conmutar modo 0 a 800% 1% 200% Inmediatamente
Pn10D Referencia de velocidad para conmutar modo 0 a 10000 min
Pn10E Aceleración para conmutar modo 0 a 3000 min
Pn10F Pulso de error para conmutar modo 0 a 10000 unidades de
referencia
-1
-1
/s 1 min-1/s 0 min-1/s Inmediatamente
-1
1 min
1 unidad de referencia
-1
0 min
0 unidades de
referencia
Inmediatamente
Inmediatamente
Pn111 Compensación de realimentación de velocidad 1 a 500% 1% 100% Inmediatamente
174 Servoaccionamientos de c.a.

Nº de parámetro
Pn112 Reservado (no configurar) - - 100 Pn113 1000
Pn114 200
Pn115 32
Pn116 16
Pn117 100
Pn118 100
Pn119 50
Pn11A 1000
Pn11B 50
Pn11C 70
Pn11D Reservado (no cambiar) - - 100 Pn11E 100
Pn11F 0
Pn120 0
Pn121 50
Pn122 0
Pn123 0
Pn124 0
Pn125 100
Pn131 0
Pn132 0
Pn133 0
Pn134 0
Pn135 0
Pn136 0
Pn137 0
Pn138 0
Pn139 0
Pn13A 0
Pn140 200
Pn141 800
Pn142 0
Pn143 0
Pn144 1000
Pn145 0
Pn190 Interruptores de selección de motor - - 0000 Después del
Pn191 Interruptores de selección de motor - - 1000 Después del
Pn192 Número de pulsos de encoder A cuádruple B (bajo) 0-999 pulsos/rev. Pulsos/rev. 2048 Después del
Pn193 Número de pulsos de encoder A cuádruple B (alto) 0-419 pulsos*10000/rev. Pulso*10000/rev. 0 Después del
Pn194 Reservado (no cambiar) - - 2 Pn195 20
Pn196 20
Pn197 88
Pn198 0
Pn199 Contajes de encoder por paso de escala de motor lineal 1-256 contajes/paso de
Pn1A0 Reservado (no cambiar) - - 60 Pn1A1 60
Pn1A2 40
Pn1A3 40
Pn1A4 20
Pn1A5 0
Pn1A6 40
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
0 Modelo de motor 0 Yaskawa A cuádruple B modelo SGM
1 Tipo de encoder 0 Encoder A cuádruple B incremental
2 Selección de encoder 0 Encoder serie Yaskawa
3 Máscara de fase C 0 Señal de fase C utilizada
Dígito Nombre de función Configu-
0 Orden de fases de motor 0 No definido
1-3 No se utiliza 0 -
ración
1 Yaskawa A cuádruple B modelo SGMP
2 Motor rotativo no Yaskawa
3 Motor lineal no Yaskawa
1 Encoder A cuádruple B absoluto Yaskawa
1 Encoder A cuádruple B
2 Encoder A cuádruple B con sensores de conmutación (U,V,W)
3 Encoder A cuádruple B con sensores de conmutación
1 Máscara de señal de fase C
ración
1UVW
2UWV
Explicación
(/U,/V,/W)
Explicación
escala
Contajes/paso
de escala
de fábrica
1 Después del
Validación de
configuración
rearranque
rearranque
rearranque
rearranque
rearranque
de c.a.
Servoaccionamientos
XtraDrive 175

Nº de parámetro
Pn1A7 Interruptores de selección de motor - - 0001 Inmediatamente
Pn1A8 Reservado (no cambiar) - - 0 Pn1A9 40
Pn1AA 40
Pn1AB 30
Pn1AC 80
Pn1AD 0
Pn1AE 300
Pn1AF 0
Pn1B0 Reservado (no cambiar) - - 40 Pn1B1 40
Pn1B2 40
Pn1B3 2000
Pn1B4 0
Pn1B5 160
Pn1B6 150
Pn1B7 20
Pn1B8 100
Pn1B9 600
Pn1BA 0
Pn1BB 2000
Pn1BC 300
Pn1BD 2000
Pn1BE 0
Pn1BF 3
Pn1C0 0
Pn1C1 3
Pn1C2 0
Pn200 Interruptores de selección de referencias de control de posición - - 0000 Después del
Pn201 Pulso de división de PG (16 bits como máximo) 0,17 a 65535 P/rev. 1 P/rev. 2048 P/rev. Después del
Pn202 Relación de engranaje electrónico (numerador) 1 a 65535 - 4 Después del
Pn203 Relación de engranaje electrónico (denominador) 1 a 65535 - 1 Después del
Pn204 Constante de tiempo de aceleración/deceleración de referencia de
Pn205 Configuración de límite multigiro 0 a 65535 rev. rev. 65535 rev. Después del
Pn206 Reservado (no cambiar) - - 16384 Pn207 Pendiente - 0 Pn208 Tiempo promedio de movimiento de referencia de posición 0,00 a 64,00 ms 0,01 ms 0,00 ms Después del
Pn209 Reservado (no cambiar) - - 0 Pn216 Atenuación de comando 1 a 65535 ms 0,1 ms 0 Inmediatamente
Pn281 Reservado (motores lineales) - - - -
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
0 Modo de integral 0 Desactivar función integral de borrado
1-3 No se utiliza 0 No se utiliza
Dígito Nombre de función Configu-
0 Formato de pulso de referencia 0 Signo + pulso, lógica positiva
1 Formato de señal de borrado del contador de
errores
2 Operación de borrado 0 Borrar contador de errores en baseblock
3 Selección de filtro 0 Filtro de entrada de referencia para las señales de line driver
posición
ración
1 Activar función integral de borrado
ración
1 CW + CCW, lógica positiva
2 Fase A + fase B (x 1), lógica positiva
3 Fase A + fase B (x 2), lógica positiva
4 Fase A + fase B (x 4), lógica positiva
5 Signo + pulso, lógica negativa
6 CW + CCW, lógica negativa
7 Fase A + fase B (x 1), lógica negativa
8 Fase A + fase B (x 2), lógica negativa
9 Fase A + fase B (x 4), lógica negativa
0 Borra el contador de errores cuando la señal está en el nivel H
1 Borra el contador de errores en el flanco de subida de la señal
2 Borra el contador de errores cuando la señal está en el nivel L
3 Borra el contador de errores en el flanco de bajada de la señal
1 No borra el contador de errores (sólo es posible borrar el contador de errores con
2 Borra el contador de errores si se produce una alarma.
3 Ignorar señal de borrado
1 Filtro de entrada de referencia para las señales de colector abierto
Explicación
Explicación
la señal CLR)
0,00 a 64,00 ms 0,01 ms 0,00 ms Inmediatamente
de fábrica
Validación de
configuración
rearranque
rearranque
rearranque
rearranque
rearranque
rearranque
176 Servoaccionamientos de c.a.

Nº de parámetro
Pn2A0 Reservado (no cambiar) - - 16 Pn2A1 0
Pn2A2 0
Pn2A3 0
Pn2A4 0
Pn2A5 0
Pn2A6 0
Pn2A7 0
Pn2A8 65535
Pn2A9 256
Pn2B0 1
Pn2B1 0
Pn2B2 1
Pn2B3 0
Pn2B4 1
Pn2B5 0
Pn2B6 1
Pn2B7 0
Pn2B8 1
Pn2B9 0
Pn2BA 1
Pn2BB 0
Pn2C0 Reservado (no cambiar) - - 7 Pn2C1 24000
Pn2C2 0
Pn2C3 0
Pn2C4 0
Pn2C5 2
Pn2C6 Interruptor de comunicaciones - - 0200 Inmediatamente
Pn2C7 Interruptores de búsqueda de origen - - 0008 Después del
Pn2C8 Reservado (no cambiar) - - 400 Pn2C9 50
Pn2CA 50
Pn2CB 50
Pn2CC 0
Pn2CC 0
Pn2CD 0
Pn2CE 60
Pn2CF 0
Pn2D0 8888
Pn2D1 Selección de señal de entrada ampliada - - 0078 Después del
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
0 Suma de comprobación 0 No utilizar suma de comprobación
1 No se utiliza. 2
3
Dígito Nombre de función Configu-
0 Entrada de interruptor de búsqueda de origen 0 Entrada desde SI0 (CN1-40). Terminal de entrada
1 Reservado 2 Reservado 3 Reservado -
Dígito Nombre de función Configu-
0 Entrada de emergencia 0-F Idéntico a Pn2C7.0
1 Abilitazione nuovo movimento 0-F Idéntico a Pn2C7.0
2 Reservado -- 3 Reservado -- --
ración
1 Utilizar suma de comprobación
ración
1 Entrada desde SI1 (CN1-41). Terminal de entrada
2 Entrada desde SI2 (CN1-42). Terminal de entrada
3 Entrada desde SI3 (CN1-43). Terminal de entrada
4 Entrada desde SI4 (CN1-44). Terminal de entrada
5 Entrada desde SI5 (CN1-45). Terminal de entrada
6 Entrada desde SI6 (CN1-46). Terminal de entrada
7 Configura la señal en ON
8 Configura la señal en OFF
9 Entrada de la señal inversa desde el terminal de entrada SI0 (CN1-40)
A Entrada de la señal inversa desde el terminal de entrada SI1 (CN1-41)
B Entrada de la señal inversa desde el terminal de entrada SI2 (CN1-42)
C Entrada de la señal inversa desde el terminal de entrada SI3 (CN1-43)
D Entrada de la señal inversa desde el terminal de entrada SI4 (CN1-44)
E Entrada de la señal inversa desde el terminal de entrada SI5 (CN1-45)
F Entrada de la señal inversa desde el terminal de entrada SI6 (CN1-46)
ración
Explicación
Explicación
Explicación
de fábrica
Validación de
configuración
rearranque
rearranque
de c.a.
Servoaccionamientos
XtraDrive 177

Nº de parámetro
Pn2D2 Selección de señal de salida ampliada - - 0000 Después del
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
ración
Explicación
de fábrica
Validación de
configuración
rearranque
0 Asignación de señal /COIN 0 Deshabilitada
1 Salida desde el terminal de salida SO1 (CN1-25, 26)
2 Salida desde el terminal de salida SO2 (CN1-27, 28)
3 Salida desde el terminal de salida SO3 (CN1-29, 30)
1 No se utiliza 2
3
Pn2D3 Reservado (no cambiar) - - 2000 Pn2D4 Interruptor de modo de supresión de oscilación - - 0001 Inmediatamente
Dígito Nombre de función Configu-
ración
Explicación
0 Modo de supresión de oscilación 0 Modo de supresión de oscilación no está activo
1 Modo de supresión de oscilación está activo
1 No se utiliza 2
3
Pn300 Ganancia de entrada de referencia de velocidad 1,50 a 30,00 V/ velocidad
Pn301 Velocidad 1 (motor rotativo) 0 a 10000 min
Pn302 Velocidad 2 0 a 10000 min
Pn303 Velocidad 3 0 a 10000 min
Pn304 Velocidad de la operación jog 0 a 10000 min
nominal
-1
-1
-1
-1
0,01 V/ velocidad
nominal
-1
1 min
-1
1 min
-1
1 min
-1
1 min
6,00 V/ velocidad nominal
-1
100 min
-1
200 min
-1
300 min
-1
500 min
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
Pn305 Tiempo de aceleración de arranque suave 0 a 10000 ms 1 ms 0 ms Inmediatamente
Pn306 Tiempo de deceleración de arranque suave 0 a 10000 ms 1 ms 0 ms Inmediatamente
Pn307 Constante de tiempo de filtro de referencia de velocidad 0,00 a 655,35 ms 0,01 ms 0,40 ms Inmediatamente
Pn308 Constante de tiempo de filtro de realimentación de velocidad 0,00 a 655,35 ms 0,01 ms 0,00 ms Inmediatamente
Pn380 Velocidad de motor lineal 1 (sólo para motores lineales) 0-5000 mm/s mm/s 10 Inmediatamente
Pn381 Velocidad de motor lineal 2 (sólo para motores lineales) 0-5000 mm/s mm/s 20 Inmediatamente
Pn382 Velocidad de motor lineal 3 (sólo para motores lineales) 0-5000 mm/s mm/s 30 Inmediatamente
Pn383 Velocidad de operación jog de motor lineal (sólo para motores
0-5000 mm/s mm/s 40 Inmediatamente
lineales)
Pn400 Ganancia de entrada de referencia de par 1,0 a 10,0 V/par nominal 0.1 V/par nomi-
nal
3,0 V/par nominal
Inmediatamente
Pn401 Constante de tiempo de filtro de referencia de par 0,00 a 655,35 ms 0,01 ms 1,00 ms Inmediatamente
Pn402 Límite de par directo 0 a 800% 1% 800% Inmediatamente
Pn403 Límite de par inverso 0 a 800% 1% 800% Inmediatamente
Pn404 Límite de par externo directo 0 a 800% 1% 100% Inmediatamente
Pn405 Límite de par externo inverso 0 a 800% 1% 100% Inmediatamente
Pn406 Par de parada de emergencia 0 a 800% 1% 800% Inmediatamente
Pn407 Límite de velocidad durante control de par 0 a 10000 min
-1
1 min
-1
10000 min-1Inmediatamente
Pn408 Interruptores de función de control de par - - 0000 Inmediatamente
Dígito Nombre de función Configu-
ración
Explicación
0 Selección de filtro notch 0 Deshabilitada
1 Utiliza un filtro notch para referencia de par
1 No se utiliza - 2
3
Pn409 Frecuencia de filtro notch 50 a 2000 Hz 1 Hz 2000 Hz Inmediatamente
Pn40A Ancho de filtro notch 70 a 1000 Hz 1 Hz 70(0.70) Inmediatamente
Pn40B Reservado (no cambiar)
Pn40C 2000
Pn40D 70
Pn40E 1000
-
-
1000 -
Pn480 Reservado (no cambiar), sólo disponible para motores lineales - - - Pn483
Pn484
Pn500 Ancho de posicionado finalizado 0 a 250 unidades de refe-
Pn501 Nivel de fijación cero (Zero clamp) 0 a 10000 min
rencia
Pn502 Nivel de detección de rotación 1 a 10000 min
Pn503 Ancho de salida de señal de coincidencia de velocidad 0 a 100 min
-1
-1
-1
Pn504 Ancho de la señal NEAR 1 a 250 unidades de refe-
rencia
Pn505 Nivel de overflow 1 a 32767 unidades de
referencia
Pn506 Referencia de freno - Tiempo de retardo de servo en
OFF
Pn507 Nivel de velocidad de salida de referencia de freno 0 a 10000 min
Pn508 Temporización para salida de referencia de freno
durante la operación del motor
0 a 50 (0 a 500 ms) 10 ms 0 ms Inmediatamente
-1
10 a 100
(100 a 1000 ms)
1 unidades de
referencia
-1
1 min
-1
1 min
-1
1 min
1 unidad de referencia
256 unidades de
referencia
-1
1 min
7 unidades de
referencia
-1
10 min
-1
20 min
-1
10 min
7 unidades de
referencia
1024 unidades
de referencia
-1
100 min
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
Inmediatamente
10 ms 500 ms Inmediatamente
Pn509 Tiempo de retención instantánea 20 a 1000 ms 1 ms 20 ms Inmediatamente
178 Servoaccionamientos de c.a.

Nº de parámetro
Pn50A Selecciones de señal de entrada 1 - - 2100 Después del
Pn50B Selecciones de señal de entrada 2 - - 6543 Después del
Pn50C Selecciones de señal de entrada 3 - - 8888 Después del
Pn50D Selecciones de señal de entrada 4 -- 8888 Después del
Pn50E Selecciones de señal de salida 1 - - 3211 Después del
Pn50F Selecciones de señal de salida 2 -- 0000 Después del
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
0 Modo de asignación de la señal de entrada 0 Configura la asignación de la señal de entrada para la secuencia del mismo modo
1 Asignación de señal /S-ON
(Servo ON cuando está bajo)
2 Asignación de señal /P-CON (control P cuando
está bajo)
3 Asignación de señal /P-OT (sobrecarrera
cuando está alto)
Dígito Nombre de función Configu-
0 Asignación de señal N-OT (sobrecarrera cuando
está alto)
1 Asignación de señal /ALM-RST (reset de alarma
cuando está bajo)
2 Asignación de señal /P-CL (control de par
cuando está bajo)
3 Asignación de señal /N-CL (control de par
cuando está bajo)
Dígito Nombre de función Configu-
0 Asignación de señal /SPD-D (selección de velo-
cidad interna)
1 Asignación de señal /SPD-A (selección de velo-
cidad interna)
2 Asignación de señal /SPD-D (selección de velo-
cidad interna)
3 Asignación de señal /C-SEL (cambio de modo
de control)
Dígito Nombre de función Configu-
0 Asignación de señal /ZCLAMP (fijación cero,
Zero clamp)
1 Asignación de señal /INHIBIT (deshabilitación
de pulso de referencia)
2 Asignación de señal /G-SEL (cambio de ganancia) 0 a F Idéntico a Pn50A.1
3 (Reservado) 0 a F Idéntico a Pn50A.1
Dígito Nombre de función Configu-
0 Asignación de señal /COIN 0 Deshabilitada
1 Asignación de señal /V-CMP 0 a 3 Idéntico
2 Asignación de señal /TGON 0 a 3 Idéntico
3 Asignación de señal /S-RDY 0 a 3 Idéntico
Dígito Nombre de función Configu-
0 Asignación de señal /CLT 0 a 3 Idéntico a Pn50E.0
1 Asignación de señal de detección de límite de
velocidad (/VLT)
2 Asignación de señal de bloqueo del freno (/BK) 0 a 3 Idéntico a Pn50E.0
3 Asignación de señal de advertencia (/WARN) 0 a 3 Idéntico a Pn50E.0
ración
1 Es posible asignar las señales de entrada libremente
0 Entrada desde SI0 (CN1-40). Terminal de entrada
1 Entrada desde SI1 (CN1-41). Terminal de entrada
2 Entrada desde SI2 (CN1-42). Terminal de entrada
3 Entrada desde SI3 (CN1-43). Terminal de entrada
4 Entrada desde SI4 (CN1-44). Terminal de entrada
5 Entrada desde SI5 (CN1-45). Terminal de entrada
6 Entrada desde SI6 (CN1-46). Terminal de entrada
7 Configura la señal en ON
8 Configura la señal en OFF
9 Entrada de la señal inversa desde el terminal de entrada SI0 (CN1-40)
A Entrada de la señal inversa desde el terminal de entrada SI1 (CN1-41)
B Entrada de la señal inversa desde el terminal de entrada SI2 (CN1-42)
C Entrada de la señal inversa desde el terminal de entrada SI3 (CN1-43)
D Entrada de la señal inversa desde el terminal de entrada SI4 (CN1-44)
E Entrada de la señal inversa desde el terminal de entrada SI5 (CN1-45)
F Entrada de la señal inversa desde el terminal de entrada SI6 (CN1-46)
0 a F Idéntico
0 a F Idéntico
ración
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
0 a 8 Idéntico a Pn50A.1
ración
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
ración
0 a F Idéntico a Pn50A.1
0 a F Idéntico a Pn50A.1
ración
1 Salida desde el terminal de salida SO1 (CN1-25, 26)
2 Salida desde el terminal de salida SO2 (CN1-27, 28)
3 Salida desde el terminal de salida SO3 (CN1-29, 30)
ración
0 a 3 Idéntico a Pn50E.0
Explicación
que para el servoamplificador especial de Yaskawa
Explicación
Explicación
Explicación
Explicación
Explicación
de fábrica
Validación de
configuración
rearranque
rearranque
rearranque
rearranque
rearranque
rearranque
de c.a.
Servoaccionamientos
XtraDrive 179

Nº de parámetro
Pn510 Selecciones de señal de salida 3 - - 0000 Después del
Pn511 Reservado (no cambiar)
Pn512 0000
Pn51A 10
Pn550 100
Pn551 100
Pn580 Reservado (no cambiar), sólo disponible para motores lineales - - 10 Pn581 20
Pn582 10
Pn583 100
Pn600 Capacidad de resistencia regenerativa Depende de la capacidad
Pn601 Reservado (no cambiar) Depende de la capacidad
Nombre Rango de configuración Unidades Configuración
Dígito Nombre de función Configu-
0 Asignación de señal de proximidad (/NEAR) 0 a 3 Idéntico a Pn50E.0
1 Reservado (no cambiar) 0 a 3 Idéntico a Pn50E.0
2 No se utiliza 0
3 No se utiliza 0
ración
Explicación
-
del SERVODRIVER
del SERVODRIVER
-
10 W 0 W Inmediatamente
∗2
- 0 W Inmediatamente
∗2
de fábrica
8888 -
Validación de
configuración
rearranque
Detalles del modo de monitorización
Nº monitor Elemento monitorizado Unidad Explicación
Un000 Realimentación de velocidad min
Un001 Comando de velocidad min
Un002 Comando de par % Muestra el valor de comando para un lazo de corriente que se expresa tomando el par nominal
Un003 Número de pulsos de la fase Z Pulsos Muestra el número de pulsos de la fase Z en unidades de resolución del encoder (por 4).
Un004 Ángulo eléctrico grados Muestra el ángulo eléctrico del motor.
Un005 Monitorización de señal de entrada --- Muestra el estado de señal de E/S del controlador poniendo en ON u OFF cada bit de señal.
Un006 Monitorización de señal de salida --Un007 Visualización de velocidad de
Un008 Desviación de posición (contador de
Un009 Índice de carga del motor % Muestra el par efectivo a intervalos de 10 s que se expresa tomando el par nominal como el 100%.
Un00A Índice de carga de regeneración % Muestra la cantidad de energía de regeneración absorbida a intervalos de 10 s que se expresa
Un00B Índice de carga de resistencia del
Un00C Contador de pulsos de entrada Unidades
Un00D Contador de pulsos de realimenta-
comando de pulsos
errores)
freno dinámico
ción
-1
Muestra la velocidad real del motor.
-1
Muestra el valor del comando de velocidad o el valor de velocidad seleccionada internamente
durante el control de velocidad. Se muestra 0 durante el control de entrada de tren de pulsos.
como el 100%.
rpm Muestra la frecuencia de comando de pulsos convertida en rpm.
Unidades
de referencia
% Muestra el factor de carga de resistencia a intervalos de 10 s que se expresa tomando el factor de
de referencia
Pulsos Muestra el número de pulsos de realimentación de encoder contados en notación hexadecimal
Muestra el número de pulsos acumulados en el contador de errores (desviación de posición) que
se convierten en unidades de referencia (referencias de pulsos de entrada).
tomando el ajuste Pn600 (capacidad de resistencia regenerativa) como el 100%.
carga nominal como el 100%.
Muestra el número de pulsos de entrada contados en notación hexadecimal.
(multiplicado por 4).
Lista de modos de función
Nº de parámetro Función
Fn000 Visualización de datos de seguimiento de alarma
Fn001 Ajuste de rigidez durante autoajuste (autotuning) online
Fn002 Operación de modo jog
Fn003 Modo de búsqueda de punto cero
Fn004 Parámetro fijo
Fn005 Inicialización de configuración de parámetros
Fn006 Borrado de datos de seguimiento de alarma
Fn007 Escritura en EEPROM de los datos de índice de momento de
Fn008 Reset de multigiro de encoder absoluto y reset de alarma de
Fn009 Ajuste automático del offset de referencia analógico (veloci-
Fn00A Ajuste manual del offset de referencia de velocidad
Fn00B Ajuste manual del offset de referencia de par
Fn00C Ajuste manual a cero de la salida de monitorización analógica
Fn00D Ajuste manual de ganancia de la salida de monitorización
Fn00E Ajuste automático de offset de la señal de detección de
Fn00F Ajuste manual de offset de la señal de detección de corriente
Fn010 Configuración de contraseña (impide que se cambien los
Fn011 Visualización del modelo de motor
Fn012 Visualización de la versión de software
Fn013 Cambio de configuración de límite de multigiro cuando se pro-
Fn014 Borrado de los resultados de detección del módulo de aplica-
inercia obtenidos durante el autoajuste (autotuning) online
encoder
dad, par)
analógica
corriente del motor
del motor
parámetros)
duce una alarma de discrepancia de límite de multigiro (A.CC)
ción
180 Servoaccionamientos de c.a.

Dimensiones
Servodrivers
XD-P3-M@ a XD-02-M@ (230 V, 30 a 200W)
Bloque de
terminales
160
6
CN3
CHARGE
CN1
CN2
Diagrama de taladro de montaje
2×taladros de tornillo M4
5,5
CN10
ER
OW
P
CN3
39
CN1
de c.a.
Servoaccionamientos
106
CN2
160
149,5±0,5
(Paso de montaje)
Terminal de masa
2×tornillos M4
XD-04-M@ (230 V, 400 W)
Terminal de masa
XD-08-M@ (230 V, 750 W)
96,2
Ventilador
5,5
Bloque de
terminales
160
149,5
6
(5)
6
2×taladros φ5
5
Bloque de
terminales
94,4
160
15
55
CHARGE
10
8
75
130
5
5
55
Diagrama de taladro de montaje
2×taladros de tornillo M4
5,5
CN10
ER
OW
P
CN3
CN1
CN2
10
5
CN3
39
CN1
106
CN2
6
Taladro φ5
CN3
CHARGE
CN1
CN2
Terminal de masa
2×tornillos M4
10
35
55
90
160
149,5±0,5
(Paso de montaje)
5
12
Diagrama de taladro de montaje
R
E
W
O
P
CN3
39
CN10
CN1
106
CN2
75
180
5,5
,5
160
149,5±0
(Paso de montaje)
5
2×taladros
de tornillo M4
27
90
8
XtraDrive 181

XD-05-T@ a -15-T@ (400 V, 0,5 a 1,5 kW)
2×taladros φ5
Disipador térmico
ER
OW
P
CN3
CHARGE
160
CN1
-
CN2
Terminal
de masa
5
2×tornillos M4
110
XD-20-T@, XD-30-T@ (400 V, 2/3 kW)
2×taladros φ6
6
CN10
CN3
39
CN1
106
CN2
Bloque de
terminales
8
75
Disipador térmico
CHARGE POWER
CN3
CN1
39
CN3
CN1
CN10
180
Diagrama de taladro de montaje
4×taladros de tornillo M4
5,5
160
149,5±0,5
(Paso de montaje)
100±0,5
(Paso de montaje)
4
5
5
110
Diagrama de taladro de montaje
6
4×cubierta M5
5
Terminal de 14 pines
Tornillo de
montaje M4
Terminal de masa
2×tornillos M4
250
5,5
5
238,5
6
Placa
100
110
CN2
CN2
196
250
238,5±0,5
(Paso de montaje)
100±0.5
5
5,5
5
8
75
180
4
(Paso de montaje)
110
5
182 Servoaccionamientos de c.a.

Filtros
R88A-FIW104-SE
Unidades: mm (pulgadas)
1
(0,20)
(0,04)
11,5(0,45)
33(1,30)
15(0,59)
28,25(1,11)
56(2,20)
(φ0,20)
5,5(0,22)
14(0,55)
19(0,75)
32(1,26)
M4
φ5
φ10(φ0,39)
70(2,76)
+0,20
0
+5
0
240 (9,45 )
202(7,95)
192(7,56)
149,5(5,89)
cables AWG16
168(6,61)
GNYE
5
M4(2×)
+0,20
0
6(0,24)
+5
0
M4
265 (10,43 )
R88A-FIW107-SE, R88A-FIW115-SE
Modelo R88A-FIW107-SE R88A-FIW115-SE
Dimensiones
en mm
A 75 90
B 240
+5
300+5
C 50 60
D 12 15
E1 1.2
Unidades: mm
32
16
202
192
15028
M4
A
φ5
φ10
5,5
14
19
B
70
168
cables AWG16
GNYE
M4
M4(2×)
+5
E
D
5
C
0
265
15
R88A-FIW4006-SE, R88A-FIW4010-SE
Modelo R88A-FIW4006-SE R88A-FIW4010-SE
Dimensiones
en mm (pulgadas)
A 32 (1.26) 35 (1.38)
B 16 (0.63) 18 (0.71)
C 202 (7.95) 291 (11.46)
D 192 (7.56) 281 (11.06)
E 150 (5.91) 239 (9.41)
F 300 (11.81) 270 (10.63)
G 70 (2.76) 90 (3.54)
H 168 (6.61) 257 (10.12)
de c.a.
Servoaccionamientos
Unidades: mm (pulgadas)
A
B
1,2
C
D
28(1,10)
L1 L2 L3
M4
118(4,65)
φ10(φ0,39)
φ5
(φ0,20)
5,5(0,22)
14(0,55)
19(0,75) H 15(0,59)
F
G
E
cables AWG16
GNYE
M4
+0.20
0
+5
0
310 (12,20 )
5(0,20)
M4(4×)
(0,05)
19(0,75)80(3,15)
10(0,39)
100(3,94)
XtraDrive 183

Instalación
Monofásico, 230 Vc.a.
MONOFÁSICO 200 A 230 Vc.a.
5
FILTRO DE
RUIDO
Asegúrese de
conectarlo a tierra.
REFERENCIA DE VELOCIDAD
±2 A ±10 V/VELOCIDAD NOMINAL DEL MOTOR
REFERENCIA DE PAR
±1 A ±10 V/PAR NOMINAL DEL MOTOR
CW
FASE A
CCW
REFERENCIA DE
POSICIÓN
BATERÍA DE RESERVA *
2,8 a 4,5 V
ENTRADA DE SEÑAL SEN
FASE B
COLECTOR ABIERTO
REFERENCIA
FUENTE DE
ALIMENTACIÓN
2
2
*2
2
OFF
ALIMENTACIÓN
ALIMENTACIÓN
PROCESAMIENTO
ON
DE ALARMAS
4
Asegúrese de conectar un supresor de sobrecorriente a la
bobina de excitación del contactor magnético y el relé.
SERVOMOTORE
1
1
XtraDrive
Asegúrese de preparar el extremo del
cable apantallado correctamente.
3
ENCODER ÓPTICO
SALIDA DE CÓDIGO DE ALARMA
TENSIÓN DE OPERACIÓN MÁXIMA: 30 Vc.c.
CORRIENTE DE OPERACIÓN MÁXIMA: 20 mA c.c.
SALIDA DE RELACIÓN DE DIVISIÓN PG
RECEPTOR DE LÍNEA APLICABLE
SN75175 O MC3486
6
)
*
(FABRICADO POR TI
CANTIDAD DE ROTACIÓN DE FASE S
SALIDA DE DATOS SERIE
RECEPTOR DE LÍNEA APLICABLE
SN75175 O MC3486
(FABRICADO POR TI
(
*6
) O EQUIVALENTE
*6
) O EQUIVALENTE
SERVO ON CON 1Ry EN ON
CONTROL P CON 2Ry EN ON
MARCHA DIRECTA PROHIBIDA
CUANDO P-LS ABIERTO
MARCHA INVERSA PROHIBIDA
CUANDO N-LS ABIERTO
LÍMITE DE CORRIENTE DIRECTA
ACTIVADO CON 6Ry EN ON
LÍMITE DE CORRIENTE INVERSA
ACTIVADO CON 7Ry EN ON
,
SERVOAZIONAMENTO
ON
CONTROL PROPORCIONAL
(CONTROL P)
MARCHA DIRECTA
PROHIBIDA
MARCHA INVERSA
PROHIBIDA
RESET DE ALARMA
LÍMITE DE CORRIENTE
DIRECTA ACTIVADO
LÍMITE DE CORRIENTE
INVERSA ACTIVADO
CARCASA DEL CONECTOR
CONECTAR PANTALLA A CARCASA DEL CONECTOR.
DETECCIÓN DE COINCIDENCIA DE VELOCIDAD
(ON CUANDO COINCIDE LA VELOCIDAD)
POSICIONAMIENTO FINALIZADO(ON CUANDO
SE HA FINALIZADO EL POSICIONAMIENTO)
SALIDA TGON
(ON EN NIVELES SUPERIORES AL AJUSTE)
SALIDA DE SERVO PREPARADO
(ON CUANDO ESTÁ PREPARADO)
SALIDA DE ALARMA DE SERVO
(OFF CON UNA ALARMA)
SALIDA DE FOTOACOPLADOR
TENSIÓN DE OPERACIÓN MÁXIMA: 30 Vc.c.
CORRIENTE DE OPERACIÓN MÁXIMA: 50 mA c.c.
*1 La constante de tiempo para el filtro principal es de 47 µs.
*2 Se conecta cuando se utiliza un encoder absoluto.
*3 Sólo se utiliza con un encoder absoluto.
*4 La resistencia regenerativa se puede conectar entre B1 y B2.
*5 Para los tipos XD-08-M@, la tensión es de 220 a 230 Vc.a. (+10% -15%).
*6 TI significa Texas Instruments Inc.
184 Servoaccionamientos de c.a.

Trifásico, 400 Vc.a.
MONOFÁSICO 380 A 480 Vc.a
L1 L2 L3
FILTRO DE RUIDO
FUENTE DE
ALIMENTACIÓN
24 Vc.c. ±15%
REFERENCIA DE VELOCIDAD
±2 A ±10V/VELOCIDAD NOMINAL DEL MOTOR
REFERENCIA DE VELOCIDAD
±2 A ±10V/VELOCIDAD NOMINAL DEL MOTOR
BATERÍA DE RESERVA
2,8 a 4,5 V
ENTRADA DE SEÑAL SEN
5
REFERENCIA DE
POSICIÓN
Asegúrese de
conectarlo a tierra.
CW
FASE A
CW
FASE B
COLECTOR ABIERTO
REFERENCIA
FUENTE DE
ALIMENTACIÓN
*2
2
*2
2
ALIMENTACIÓN
OFF
ALIMENTACIÓN
ON
1
1
PROCESAMIENTO
DE ALARMAS
4
XtraDrive
Asegúrese de conectar un supresor de sobrecorriente a la
bobina de excitación del contactor magnético y el relé.
SERVOMOTORE
ENCODER ÓPTICO
Asegúrese de preparar el extremo del
cable apantallado correctamente.
SALIDA DE CÓDIGO DE ALARMA
TENSIÓN DE OPERACIÓN MÁXIMA: 30 Vc.c.
CORRIENTE DE OPERACIÓN MÁXIMA: 20 mA c.c.
SALIDA DE RELACIÓN DE DIVISIÓN PG
RECEPTOR DE LÍNEA APLICABLE
SN75175 O MC3486
6
)
*
(FABRICADO POR TI
3
CANTIDAD DE ROTACIÓN DE FASE S
SALIDA DE DATOS SERIE
RECEPTOR DE LÍNEA APLICABLE
SN75175 O MC3486
(
(FABRICADO POR TI
(
*6
) O EQUIVALENTE
*6)
*6
) O EQUIVALENTE
de c.a.
Servoaccionamientos
,
SERVOAZIONAMENTO
SERVO ON CON 1Ry EN ON
CONTROL P CON 2Ry EN ON
MARCHA DIRECTA PROHIBIDA
CUANDO P-LS ABIERTO
AZIONAMENTO INDIETRO INIBITO
CON N-LS APERTO
MARCHA INVERSA PROHIBIDA
CUANDO N-LS ABIERTO
LÍMITE DE CORRIENTE DIRECTA
ACTIVADO CON 6Ry EN ON
LÍMITE DE CORRIENTE INVERSA
ACTIVADO CON 7Ry EN ON
ON
CONTROL PROPORCIONAL
(CONTROL P)
MARCHA DIRECTA
PROHIBIDA
MARCHA INVERSA
PROHIBIDA
RESET DE ALARMA
LÍMITE DE CORRIENTE
DIRECTA ACTIVADO
LÍMITE DE CORRIENTE
INVERSA ACTIVADO
ARCASA DEL CONECTOR
CONECTAR PANTALLA A CARCASA DEL CONECTOR.
*1 La constante de tiempo para el filtro principal es de 47 µs.
*2 Se conecta cuando se utiliza un encoder absoluto.
*3 Sólo se utiliza con un encoder absoluto.
*4 Para utilizar una resistencia regenerativa externa, conéctela entre B1 y B2.
*5 El usuario debe proporcionar la alimentación de 24 Vc.c.
*6 TI significa Texas Instruments Inc.
DETECCIÓN DE COINCIDENCIA DE VELOCIDAD
(ON CUANDO COINCIDE LA VELOCIDAD)
POSICIONAMIENTO FINALIZADO(ON CUANDO
SE HA FINALIZADO EL POSICIONAMIENTO)
SALIDA TGON
(ON EN NIVELES SUPERIORES AL AJUSTE)
SALIDA DE SERVO PREPARADO
(ON CUANDO ESTÁ PREPARADO)
SALIDA DE ALARMA DE SERVO
(OFF CON UNA ALARMA)
SALIDA DE FOTOACOPLADOR
TENSIÓN DE OPERACIÓN MÁXIMA: 30 Vc.c.
CORRIENTE DE OPERACIÓN MÁXIMA: 50 mA c.c.
XtraDrive 185

Tabla de selección
C
r
Cable de potencia
A
p
p
B
Configuración del sistema
Red PROFIBUS
(Modelos XtraDrive con
PROFIBUS incorporado)
Servodriver
XTRADRIVE
Cable de monitorización
analógica
I
Unidad opcional
NS115
S
W
1
A
R
S
W
2
C
N
K
6
A
C
N
6
B
C
N
4
Ordenador personal
able del encode
Servomotor
SGMAH / SGMPH / R7M
Cable de potencia
A
Cable del encoder
Servomotor
SGMGH / SGMSH / SGMUH
Señal de
E/S
B
J
C
E
Cable de empleo general
Interfaz pasiva
G
Cable del encoder
Escala lineal
Cable de potencia
Servomotor lineal
SGL
Unidad Motion
Control
D
H
A
Unidad de control
de posición
F
Bloque de terminales
Unidad de
convertidor serie
Servomotor lineal
con núcleo
Servodrivers
Especificaciones XtraDrive XtraDrive-DP
Monofásico 200
Vc.a.
30 W XD-P3-MN01 XD-P3-MSD0 SGMAH-A3A@ R7M-A03030-@ -
50 W XD-P5-MN01 XD-P5-MSD0 SGMAH-A5D@ R7M-A05030-@ SGLGW-30A050@
Con PROFIBUS
100 W XD-01-MN01 XD-01-MSD0 SGMAH-01A@, SGMPH-01A@ R7M-A10030-@,
200 W XD-02-MN01 XD-02-MSD0 SGMAH-02A@, SGMPH-02A@ R7M-A20030-@,
400 W XD-04-MN01 XD-04-MSD0 SGMAH-04A@, SGMPH-04A@ R7M-A40030-@,
750 W XD-08-MN XD-08-MSD0 SGMAH-08A@, SGMPH-08A@ R7M-A75030-@,
Trifásico 400 Vc.a. 0,5 kW XD-05-TN XD-05-TSD0 SGMGH-05D@, SGMAH-03D@,
1,0 kW XD-10-TN XD-10-TSD0 SGMGH-09D@, SGMSH/UH-10D@,
1,5 kW XD-15-TN XD-15-TSD0 SGMGH-13D@, SGMSH/UH-15D@,
2,0 kW XD-20-TN XD-20-TSD0 SGMGH-20D@, SGMSH-20D@ - SGLTW-35D320@, SGLTW-50D320@
3,0 kW XD-30-TN XD-30-TSD0 SGMGH-30D@, SGMSH/UH-30D@ -SGLFW-1ZD380@, SGLTW-40D400@
Nota: SGLGW-@ La combinación de motores lineales se realiza teniendo en cuenta el uso de imanes estándar. Consulte el capítulo de los moto-
res lineales para obtener información detallada
Servomotores compatibles
Sigma-II SmartStep Motores lineales Sigma
R7M-AP10030-@
SGLGW-30A080@, SGLGW-40A140@
SGLFW-20A@, SGLFW-35A120@,
R7M-AP20030-@
R7M-AP40030-@
R7M-AP75030-@
SGLGW-40A253A@,SGLGW-60A140@
SGLGW-40A365A@, SGLGW-60A253A@
SGLFW-35A230@, SGLFW-50A200@,
SGLGW-60A365A@
-SGLFW-35D@
SGMPH-02D@/04D@
SGMAH-07D@, SGMPH-08D@
SGMPH-15D@
- SGLFW-50D200@, SGLTW-35D170@,
SGLTW-50D170@
- SGLFW-50D380@, SGLFW-1ZD200
@
Servomotores
Nota: Consulte el capítulo de los servoaccionamientos para obtener información detallada de los motores.
186 Servoaccionamientos de c.a.

Cables de alimentación
Símbolo Especificaciones Modelo Aspecto
A
Para servomotores de 200 V sin freno
SGMAH-@@A@@@1D-OY
SGMPH-(01/02/04/08)A@@@1D-OY
R7M-A(P)@@@30-S1-D
Para servomotores de 200 V con freno
SGMAH-@@A@@@CD-OY
SGMPH-(01/02/04/08)A@@@CD-OY
R7M-A(P)@@@30-BS1-D
Para servomotores de 400 V sin freno
SGMAH-@@D@@@1D-OY
SGMPH-@@D@@@1D-OY
Para servomotores de 400 V con freno
SGMAH-@@D@@@CD-OY
SGMPH-@@D@@@CD-OY
Para servomotores de 400 V
SGMGH-(05/09/13)D@
SGMSH-(10/15/20)D@
SGMUH-(10/15)D@
Para servomotores con freno se necesita un cable
aparte (R88A-CAWC0@@B-E)
Para servomotores de 400 V
SGMGH-(20/30)D@
SGMSH-30D@
SGMUH-30D@
Para servomotores con freno se necesita un cable
aparte (R88A-CAWC0@@B-E)
Sólo cable de freno.
Para servomotores de 400 V con freno
SGMGH-@@D@
SGMSH-@@D@
SGMUH-@@D@
3 m R88A-CAWA003S-DE
5 m R88A-CAWA005S-DE
10 m R88A-CAWA010S-DE
15 m R88A-CAWA015S-DE
20 m R88A-CAWA020S-DE
3 m R88A-CAWA003B-DE
5 m R88A-CAWA005B-DE
10 m R88A-CAWA010B-DE
15 m R88A-CAWA015B-DE
20 m R88A-CAWA020B-DE
3 m R88A-CAWK003S-DE
5 m R88A-CAWK005S-DE
10 m R88A-CAWK010S-DE
15 m R88A-CAWK015S-DE
20 m R88A-CAWK020S-DE
3 m R88A-CAWK003B-DE
5 m R88A-CAWK005B-DE
10 m R88A-CAWK010B-DE
15 m R88A-CAWK015B-DE
20 m R88A-CAWK020B-DE
3 m R88A-CAWC003S-E
5 m R88A-CAWC005S-E
10 m R88A-CAWC010S-E
15 m R88A-CAWC015S-E
20 m R88A-CAWC020S-E
3 m R88A-CAWD003S-E
5 m R88A-CAWD005S-E
10 m R88A-CAWD010S-E
15 m R88A-CAWD015S-E
20 m R88A-CAWD020S-E
3 m R88A-CAWC003B-E
5 m R88A-CAWC005B-E
10 m R88A-CAWC010B-E
15 m R88A-CAWC015B-E
20 m R88A-CAWC020B-E
U
V
W
O
B
B
de c.a.
Servoaccionamientos
U
V
W
O
B
B
Cables de encoder (para CN2)
Símbolo Especificaciones Modelo Aspecto
B
Cable de encoder para servomotores
Sigma-II (SGMAH/PH)
SGMAH-@@@@@@@D-OY
SGMPH-@@@@@@@D-OY
Cable de encoder para servomotores
SmartStep
R7M-A(P)@@@30-S1-D
Cable de encoder para servomotores
Sigma-II (SGMGH/SH/UH/BH)
SGMGH-@
SGMSH-@
SGMUH-@
Cable de encoder al convertidor serie de los
motores lineales Sigma
(Consulte el capítulo de los motores lineales
para obtener información más detallada)
3 m XD-CRWA003-DE
5 m XD-CRWA005-DE
10 m XD-CRWA010-DE
15 m XD-CRWA015-DE
20 m XD-CRWA020-DE
3 m XD-CRA003-DE
5 m XD-CRA005-DE
10 m XD-CRA010-DE
15 m XD-CRA015-DE
20 m XD-CRA020-DE
3 m XD-CRWB003N-E
5 m XD-CRWB005N-E
10 m XD-CRWB010N-E
15 m XD-CRWB015N-E
20 m XD-CRWB020N-E
3 m XD-CLP70-03-E
5 m XD-CLP70-05-E
10 m XD-CLP70-10-E
15 m XD-CLP70-15-E
20 m XD-CLP70-20-E
XtraDrive 187

Cables de control (para CN1)
Sím-
Descripción Conexión Modelo
bolo
Cable de control
C
(1 eje)
Cable de control
(2 ejes)
Bloque de terminales
(4 ejes)
Cable de
conexión de servodriver (1 eje)
Cables de control
de la unidad PLC
(4 ejes)
Interfaz pasiva Unidad de control de
D
Cable a servodri-
E
ver
Cable de
F
conexión de unidad de control de
posición
Cable de control Para controladores de
G
Cable del bloque
H
de terminales de
relé
Bloque de terminales de relé
Unidades Motion Control
CS1W-MC221
CS1W-MC421
C200H-MC221
Unidades Motion Control
CS1W-MC221
CS1W-MC421
C200H-MC221
Unidad Motion Control
C200HW-MC402-E
posición
CS1W-NC1@3,
CJ1W-NC1@3 o
C200HW-NC113
Unidad de control de
posición CS1WNC2@3/4@3, CJ1WNC2@3/4@3 o
C200HW-NC213/413
CQM1H-PLB21
CQM1-CPU43
CJ1M-CPU22/23 XW2B-20J6-8A
Interfaces pasivas
XW2B-@0J6-@B
C200H-NC112 0,5 m XW2Z-050J-A1
C200H-NC211 0,5 m XW2Z-050J-A2
CQM1-CPU43-V1 y
CQM1H-PLB21
CS1W-NC113 y
C200HW-NC113
CS1W-NC213/413 y
C200HW-NC213/413
CS1W-NC133 0,5 m XW2Z-050J-A10
CS1W-NC233/433 0,5 m XW2Z-050J-A11
CJ1W-NC113 0,5 m XW2Z-050J-A14
CJ1W-NC213/413 0,5 m XW2Z-050J-A15
CJ1W-NC133 0,5 m XW2Z-050J-A18
CJ1W-NC233/433 0,5 m XW2Z-050J-A19
CJ1M-CPU22/23 0,5 m XW2Z-050J-A27
empleo general
Controlador de
empleo general
1 m R88A-CPW001M1
2 m R88A-CPW002M1
3 m R88A-CPW003M1
5 m R88A-CPW005M1
1 m R88A-CPW001M2
2 m R88A-CPW002M2
3 m R88A-CPW003M2
5 m R88A-CPW005M2
- R88A-TC04-E
1 M R88A-CMUK001J3-
1 m R88A-CMX001S-E
1 m R88A-CMX001J1-E
1 m XW2Z-100J-B4
2 m XW2Z-200J-B4
1 m XW2Z-100J-A1
1 m XW2Z-100J-A2
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
0,5 m XW2Z-050J-A6
1 m XW2Z-100J-A6
0,5 m XW2Z-050J-A7
1 m XW2Z-100J-A7
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A27
1 m R88A-CPW001S
2 m R88A-CPW002S
1 m R88A-CTW001N
2 m R88A-CTW002N
- XW2B-50G5
Cable (para CN5)
Símbolo Nombre Modelo
I
Cable de monitorización analógica R88A-CMW001S
o DE9404559
E2
XW2B-20J6-1B
(1 eje)
XW2B-40J6-2B
(2 ejes)
XW2B-20J6-3B
(1 eje)
(1 eje)
XW2B-40J6-9A
(2 ejes)
o JZSP-CKI01-1
o JZSP-CKI01-1
Opciones (para CN3)
Símbolo Nombre Modelo
J
Cable de conexión a ordenador R88A-CCW002P2
o JZSP-CMS02
Unidades opcionales (para CN10)
Símbolo Nombre Modelo
K
Unidad de interfaz DeviceNet con
funcionalidad de posicionado
JUSP-NS300
Batería de reserva para encoder absoluto
Nombre Modelo
Batería (necesaria para servomotores con encoder
absoluto)
JZSP-BA01
ER6VC3 (3,6 V)
Conectores
Especificación Modelo
Conector de E/S de control (para CN1) R88A-CNU11C
Kit del conector de 200 V de
XtraDrive.
(Para motores de 200 V
SGMAH/PH-@@A@@@D-OY y
R7M-A@-D)
Kit del conector de 400 V de
XtraDrive.
(Para motores de 400 V
SGMAH/PH-@@D@@@D-OY)
Conector de encoder de controlador Sigma-II (para CN2) DE9406973
Conector de encoder Hypertac IP67
(Para motores SGMAH/PH-@@@@@@@D-OY y
R7M-A@-D)
Conector de alimentación Hypertac IP67, 200 V.
(Para motores de 200 V SGMAH/PH-@@A@@@@D-OY
y R7M-A@-D)
Conector de alimentación Hypertac IP67, 400 V.
(Para motores de 400 V SGMAH/PH-@@D@@@@D-OY)
Conector militar de encoder IP67
(Para motores SGMGH-@, SGMSH-@, SGMUH-@)
Conector militar de potencia IP67
(Para motores de 400 V SGMGH-(05/10/13)D@,
SGMSH-(10/15/20)D@ , SGMUH-(10/15)D@)
Conector militar de potencia IP67
(Para motores de 400 V SGMGH-(20/30)D@, SGMSH-
30D@,
SGMUH-30D@)
Conector militar de freno IP67 (para servomotores de
400 V SGMGH-@, SGMSH-@, SGMUH-@)
Conectores incluidos XD-CN200K-DE
DE9406973
SPOC-17H-FRON169
SPOC-06K-FSDN169
Conectores incluidos XD-CN400K-DE
DE9406973
SPOC-17H-FRON169
LPRA-06B-FRBN170
o JZSP-CKI9
o R88A-CNU01R
SPOC-17H-FRON169
SPOC-06K-FSDN169
LPRA-06B-FRBN170
MS3108E20-29S
MS3108E18-10S
MS3108E22-22S
MS3108E10SL-3S
Filtros
Especificaciones
(servodriver aplicable)
XD-P3-M@, XD-P5-M@, XD-01M@, XD-02-M@
XD-04-M@ R88A-FIW107-SE 7 A
XD-08-M@ R88A-FIW115-SE 15 A
XD-05-T@, XD-10-T@, XD-15-T@ R88A-FIW4006-SE 6 A 400 Vc.a.
XD-20-T@, XD-30-T@ R88A-FIW4010-SE 10 A
Modelo Corriente
R88A-FIW104-SE 4 A 250 Vc.a.
nominal
Tensión
nominal
Monofásico
Trifásico
Software
Especificaciones Modelo
XtraWare MOTION TOOLS
TODAS LAS DIMENSIONES SE ESPECIFICAN EN MILÍMETROS.
Para convertir de milímetros a pulgadas, multiplique por 0,03937. Para convertir de gramos a onzas, multiplique por 0,03527.
Cat. No. I18E-ES-01
Con el fin de mejorar los productos, las especificaciones están sujetas a cambio sin previo aviso.
188 Servoaccionamientos de c.a.
 Loading...
Loading...