

XD-@
XtraDrive
Servoazionamento intelligente. Unità di
controllo integrata e connettività in rete.
• NCT. tecnica non lineare brevettata per un controllo
estremamente accurato
• Errore di rilevamento bassissimo senza sovraelongazione e con setting time nullo
• Autotuning dei parametri del servoazionamento per un
posizionamento ottimale
• Algoritmo di cancellazione delle oscillazioni
• Profibus integrato nel servoazionamento disponibile
• Servoazionamento ideale per il controllo di
motori lineari
• Identificazione automatica dei motori Sigma II
• Controllo analogico della velocità e della coppia
• Controllo a treno di impulsi del posizionamento
• Oscilloscopio disponibile tramite il software XtraWare
Valori nominali
• Monofase 230 Vc.a. 30 W ... 800 W
• Trifase 400 Vc.a. 0,5 kW ... 3,0 kW
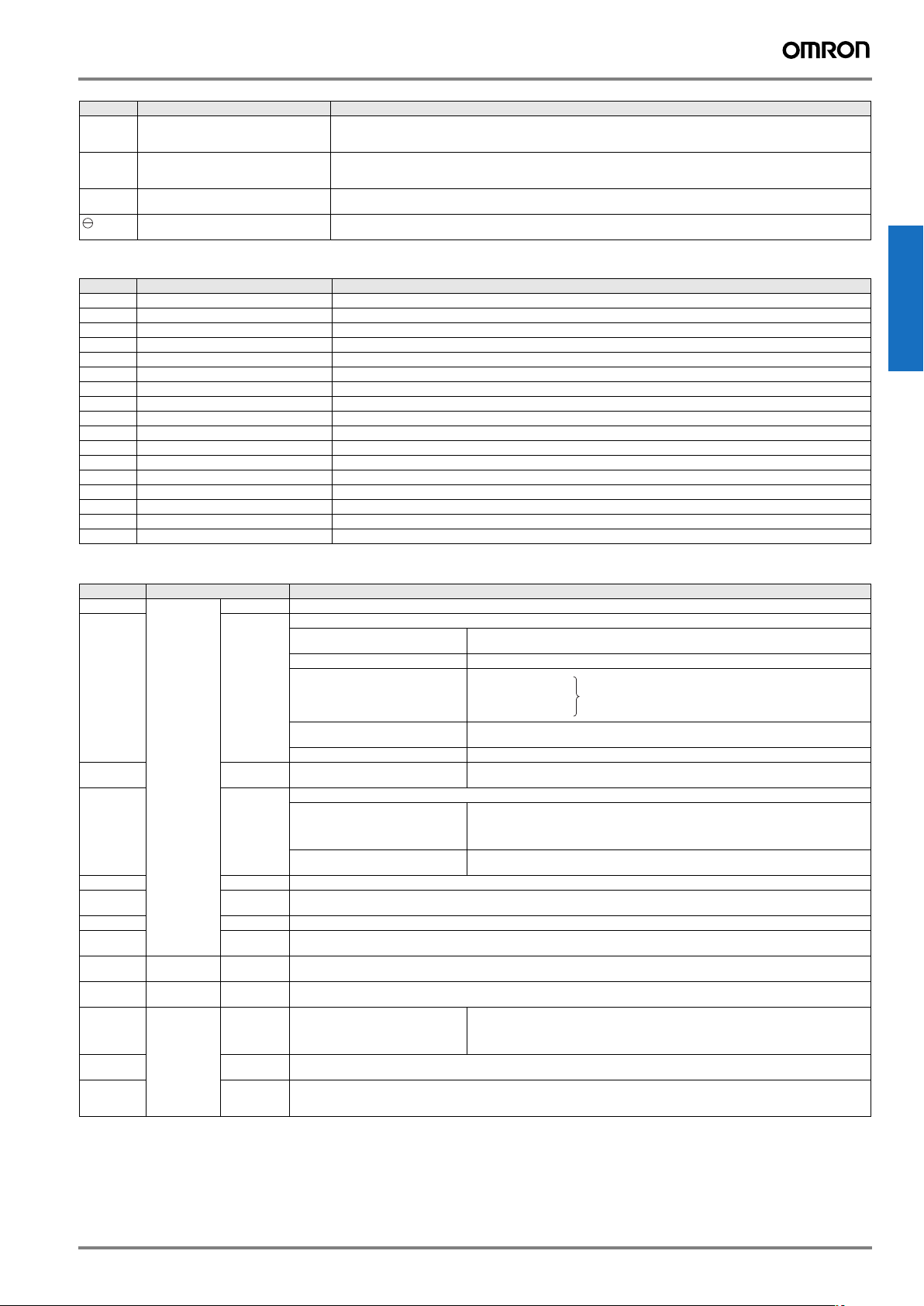
Servosistemi c.a.
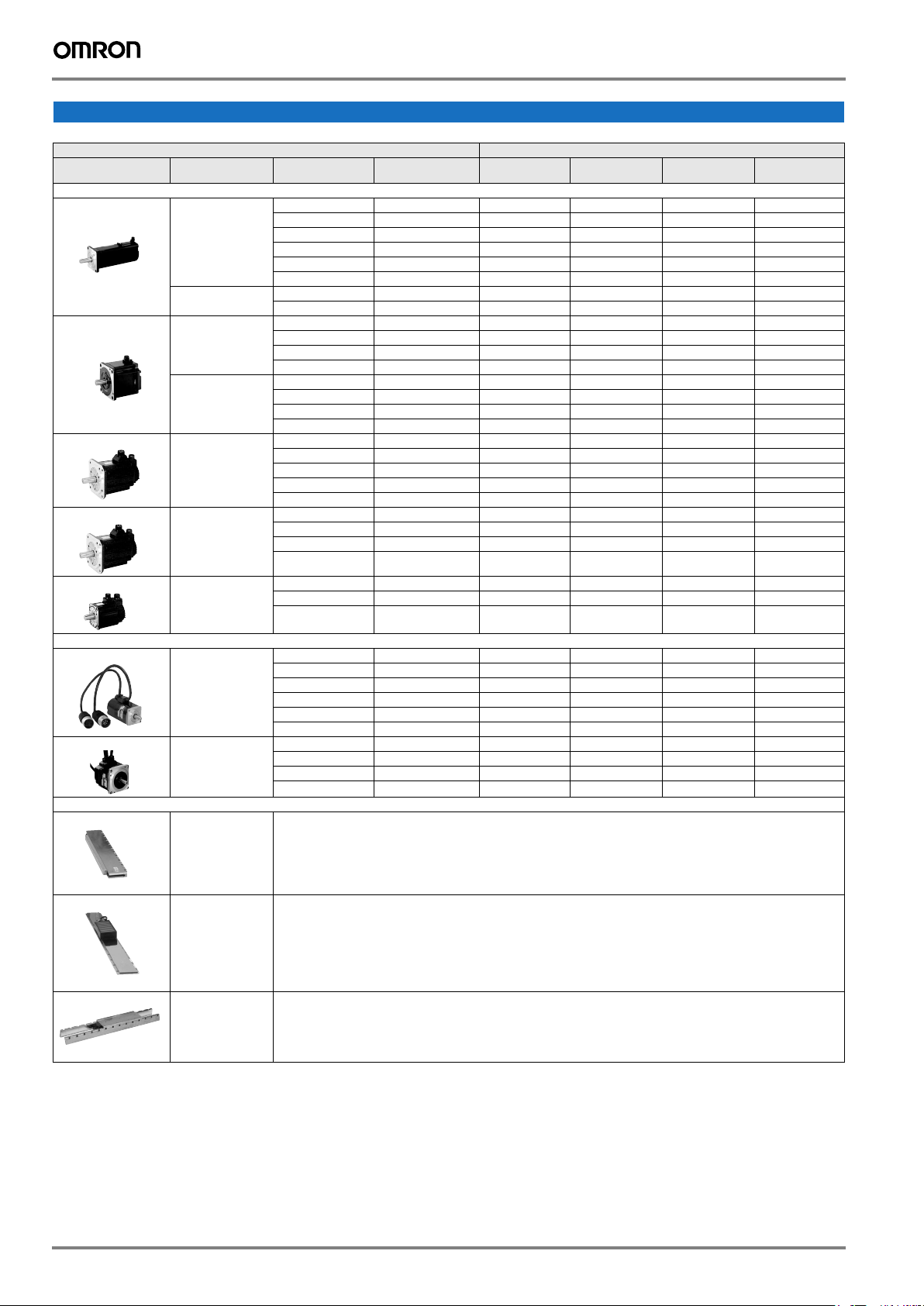
Configurazione del sistema
Rete PROFIBUS
(Modelli XtraDrive con
PROFIBUS integrato)
Cavo di alimentazione
Cavo dell'encoder
Servoazionamento
XTRADRIVE
Cavo di
alimentazione
Segnale
di I/O
Cavo dell'encoder
Cavo per monitoraggio
analogico
Morsettiera per
servoazionamento
Cavo per impieghi generali
Cavo dell'encoder
Encoder lineare
Cavo di alimentazione
Modulo opzionale
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Personal computer
Scheda controllo
assi
Modulo di
posizionamento
Modulo Serial converter
Morsettiera
Servomotore
SGMAH/SGMPH/R7M
Servomotore
SGMGH/SGMSH/SGMUH
Motore lineare
Motore lineare
SGL
167XtraDrive
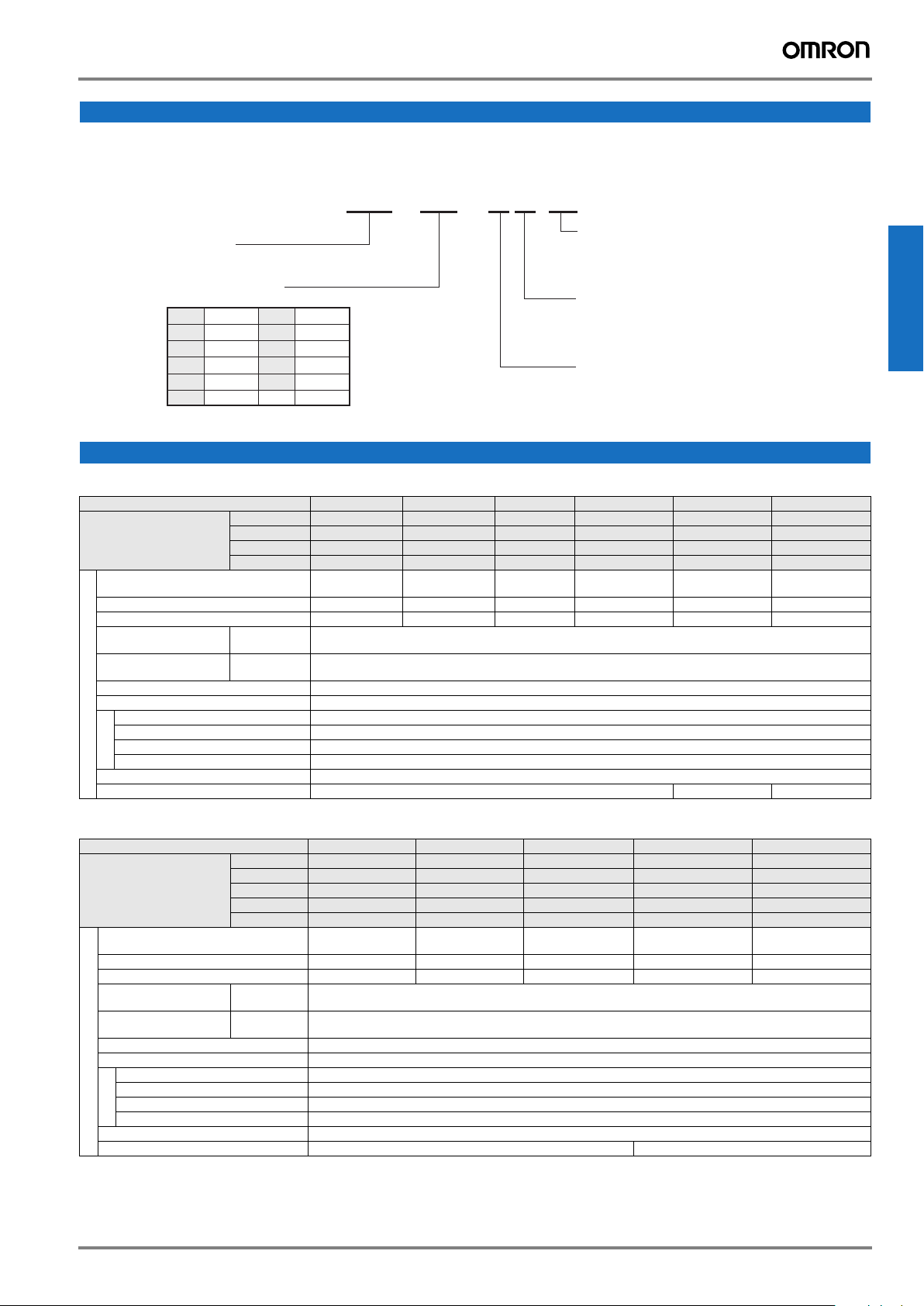
Combinazione di servomotori/servoazionamenti
Servomotore Servoazionamento
Tensione Coppia nominale Potenza 230 V (monofase) 230 V (monofase)
Motori della serie Sigma II (per ulteriori informazioni sui motori, fare riferimento al capitolo relativo a Sigma II)
SGMAH (3000 min
-1
) 230 V 0,0955 Nm 30 W XD-P3-MN01 XD-P3-MSD0 - -
0,159 Nm 50 W XD-P5-MN01 XD-P5-MSD0 - 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - 0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,955 Nm 300 W - - XD-05-TN XD-05-TSD0
SGMPH (3.000 min
-1
) 230 V 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - -
2,07 Nm 650 W - - XD-10-TN XD-10-TSD0
0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,637 Nm 200 W - - XD-05-TN XD-05-TSD0
1,27 Nm 400 W - - XD-10-TN XD-10-TSD0
2,39 Nm 750 W - - XD-10-TN XD-10-TSD0
SGMGH (1.500 min
-1
) 400 V 2,84 Nm 0,45 kW - - XD-05-TN XD-05-TSD0
4,77 Nm 1.500 W - - XD-15-TN XD-15-TSD0
5,39 Nm 0,85 kW - - XD-10-TN XD-10-TSD0
8,34 Nm 1,3 kW - - XD-15-TN XD-15-TSD0
11,5 Nm 1,8 kW - - XD-20-TN XD-20-TSD0
SGMSH (3.000 min
-1
) 400 V 3,18 Nm 1,0 kW - - XD-10-TN XD-10-TSD0
18,6 Nm 2,9 kW - - XD-30-TN XD-30-TSD0
4,90 Nm 1,5 kW - - XD-15-TN XD-15-TSD0
6,36 Nm 2,0 kW - - XD-20-TN XD-20-TSD0
9,80 Nm 3,0 kW - - XD-30-TN XD-30-TSD0
-1
SGMUH (6.000 min
) 400 V 1,59 Nm 1,0 kW - - XD-10-TN XD-10-TSD0
2,45 Nm 1,5 kW - - XD-15-TN XD-15-TSD0
4,9 Nm 3,0 kW - - XD-30-TN XD-30-TSD0
con PROFIBUS
400 V (trifase) 400 V (trifase)
con PROFIBUS
Motori della serie SmartStep (per ulteriori informazioni sui motori, fare riferimento al capitolo relativo a SmartStep)
R7M-A (3.000 min
-1
) 230 V 0,0955 Nm 30 W XD-P3-MN01 - - -
0,159 Nm 50 W XD-P5-MN01 - - 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - 0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - -
R7M-AP (3.000 min
-1
) 230 V 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - -
2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
Motori lineari Sigma (per ulteriori informazioni sui motori, fare riferimento al capitolo relativo ai motori lineari Sigma)
Motori lineari SGLGW 230 V Per ulteriori informazioni, fare riferimento al capitolo relativo ai motori lineari.
Motori lineari SGLFW 230 V,
Per ulteriori informazioni, fare riferimento al capitolo relativo ai motori lineari.
400 V
Motori lineari SGLTW 400 V Per ulteriori informazioni, fare riferimento al capitolo relativo ai motori lineari.
168 Servosistemi c.a.
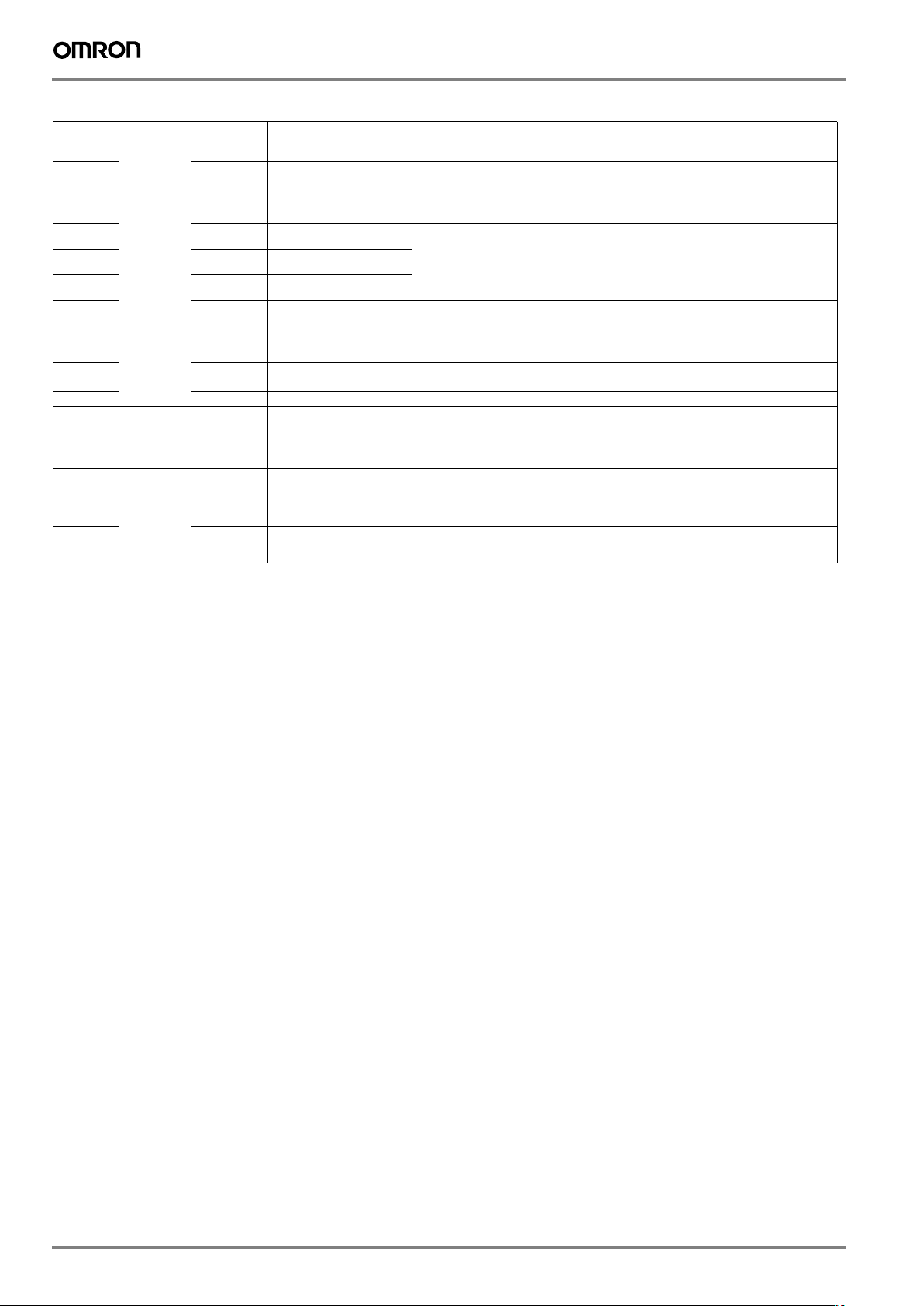
Designazione modello
Servoazionamento
XD - 01 - MN 01
XtraDrive
01: Versione design
D0: Profibus integrato
Potenza di uscita
Funzionalità estesa
Versione design # (opzionale)
P3 30 W
50 W
P5
100 W
01
200 W
02
400 W
04
500 W05
08
10
15
20
30
750 W
1,0 kW
1,5 kW
2,0 kW
3,0 kW
N: Con connettore CN10 per moduli opzionali
S: Senza connettore CN10
Tensione di ingresso
M: 230 V
T: 400 V
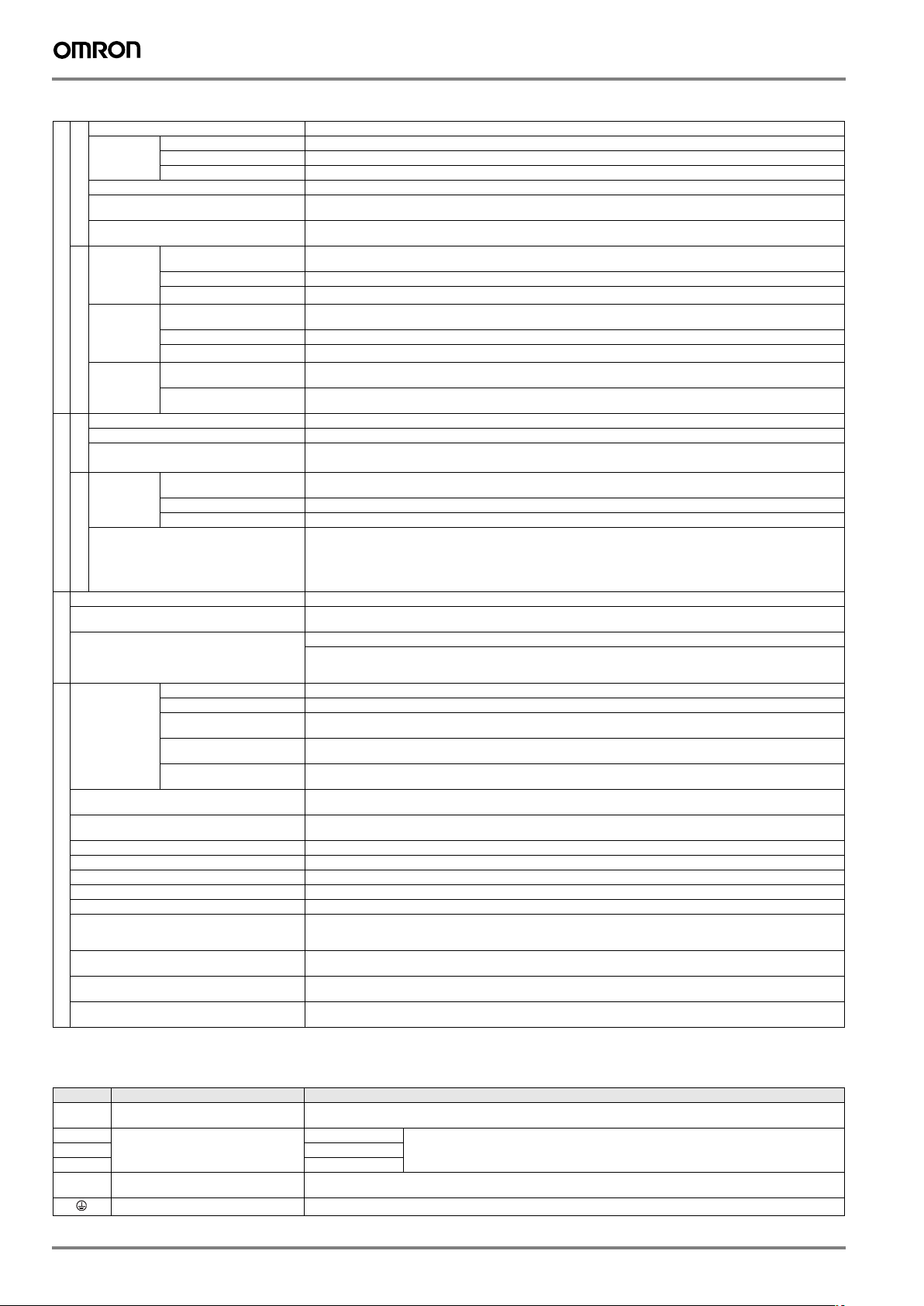
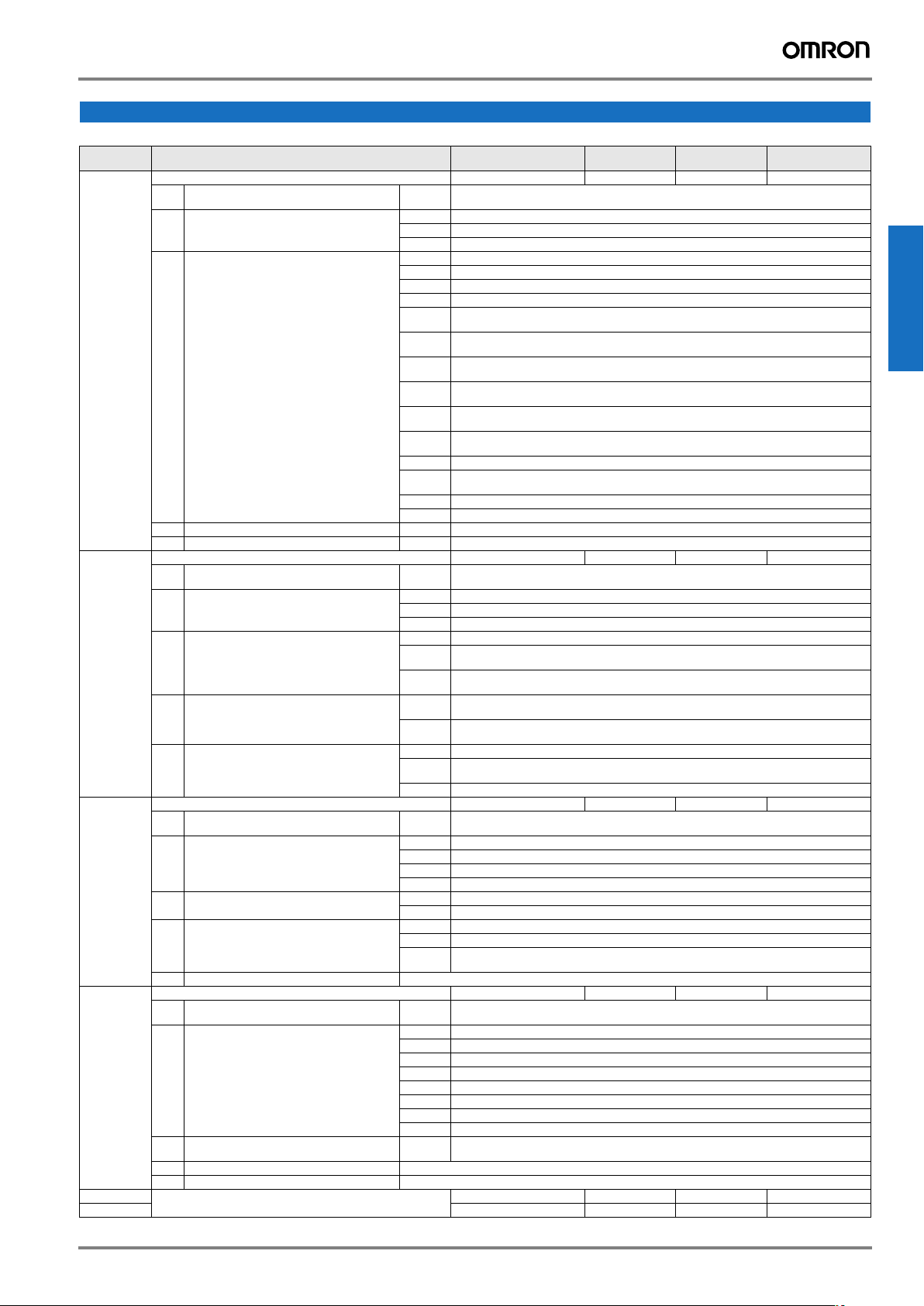
Caratteristiche servoazionamento
Monofase, 230 V
Modello servoazionamento XD-P3-M@ XD-P3-M@ XD-01-M@ XD-02-M@ XD-04-M@ XD-08-M@
Servomotore applicabile SGMAH-@ A3A@ A5A@ 01A@ 02A@ 04A@ 08A@
Capacità del motore massima applicabile
Corrente di uscita continua A (rms) 0,44 0,64 0,91 2,1 2,8 5,7
Corrente di uscita massima A (rms) 1,3 2,0 2,8 6,5 8,5 13,9
Alimentazione di ingresso Circuito
Alimentazione Circuito di
Metodo di controllo IGBT/PWM
Retroazione Encoder seriale (valore incrementale/assoluto)
Temperatura di utilizzo/stoccaggio 0 ... +55 °C/-20 ... 85 °C
Umidità di utilizzo/stoccaggio 90% di umidità relativa o inferiore (senza formazione di condensa)
Caratteristiche di base
Altitudine 1.000 m o inferiore sul livello del mare
Resistenza alle vibrazioni/agli urti 4,9 m/s
Condizioni
Configurazione Montato sulla base
Peso appr ossima tivo kg 0,8 1,1 1 ,7
SGMPH-@ - - 01A@ 02A@ 04A@ 08A@
R7M-@ A03030-@ A05030-@ A10030-@ A20030-@ A40030-@ A75030-@
R7M-@ - - AP10030-@ AP20030-@ AP40030-@ AP75030-@
W
principale
controllo
30 50 100 200 400 750
Per monofase, 200 ... 230 Vc.a. + 10 ... -15%
Per monofase, 200 ... 230 Vc.a. + 10 ... -15%
2
/19,6 m/s
2
Servosistemi c.a.
Trifase, 400 V
Modello servoazionamento XD-05-T@ XD-10-T@ XD-15-T@ XD-20-T@ XD-30-T@
Servomotore applicabile SGMAH-@ 03D@ 07D@ - - -
Capacità del motore massima applicabile
Corrente di uscita continua A (rms) 1,9 3,5 5,4 8,4 11,9
Corrente di uscita massima A (rms) 5,5 8,5 14 20 28
Alimentazione di ingresso Circuito
Alimentazione Circuito di
Metodo di controllo IGBT/PWM
Retroazione Encoder seriale (valore incrementale/assoluto)
Temperatura di utilizzo/stoccaggio 0 ... +55 °C/-20 ... +85 °C
Umidità di utilizzo/stoccaggio 90% di umidità relativa o inferiore (senza formazione di condensa)
Caratteristiche di base
Altitudine 1.000 m o inferiore sul livello del mare
Resistenza alle vibrazioni/agli urti 4,9 m/s
Condizioni
Configurazione Montato sulla base
Pe so app ros simat ivo kg 2, 8 3, 8
SGMAH-@ 02D@, 04D@ 08D@ 15D@ - -
SGMGH-@ 05D@ 09D@ 13D@ 20D@ 30D@
SGMSH-@ - 10D@ 15D@ 20D@ 30D@
SGMUH-@ - 10D@ 15D@ - 30D@
kW
principale
controllo
0,45 1,0 1,5 2,0 3,0
Per trifase, 380 ... 480 Vc.a. + 10 ... -15% (50/60 Hz)
24 Vc.c. + 15%
2
/19,6 m/s
2
XtraDrive 169
Caratteristiche generali
Gamma di controllo della velocità 1:5000
Variazione
velocità
coppia
Caratteristiche della frequenza 400 Hz (a J
Precisione del controllo della coppia
Prestazioni
(riproducibilità)
Impostazione del tempo di avviamento
graduale
Ingresso
velocità di
riferimento
Ingresso
coppia di
riferimento
Velocità di
Segnale di ingresso
riferimento a
Modalità di controllo della velocità e della
contatto
Impostazione della polarizzazione 0 ... 450 min-1 (risoluzione impostazione: 1 min-1)
Compensazione feed-forward 0 ... 100 % (risoluzione impostazione: 1%)
Impostazione dell'ampiezza posizionamento
completato
Prestazioni
Impulso di
comando
Segnale di controllo Segnale di azzeramento (l'impulso di ingresso è uguale all'impulso di riferimento)
Variazione carico Durante 0 ... 100% del carico ±0,01% max. (alla velocità nominale)
Variazione tensione Tensione nominale ±10%:0% (alla velocità nominale)
Variazione temperatura 25 ±25 °C: ±0,1 % max. (alla velocità nominale)
±2%
0 ... 10 s (è possibile impostare sia l'accelerazione che la decelerazione)
Tensione di riferimento ±6 Vc.c. (rotazione motore avanti in caso di riferimento positivo) alla velocità nominale: impostata alla consegna
Impedenza di ingresso Circa 14 kΩ
Costante di tempo del circuito -
Tensione di riferimento ±3 Vc.c. (rotazione avanti in caso di riferimento positivo) alla velocità nominale: impostata alla consegna
Impedenza di ingresso Circa 14 kΩ
Costante di tempo del circuito Circa 47 µs
Selezione della direzione di
rotazione
Selezione della velocità Con il segnale del limite di corrente avanti/indietro (selezione velocità 1 ... 3) il servomotore si arresta o
Tipo di impulso di ingresso Segno + treno di impulsi, impulso bifase con spostamento angolare di 90° (fase A + fase B) o
Formato impulso di ingresso Line driver (livello +5 V), collettore aperto (livello +5 V o +12)
Frequenza impulso di ingresso 0 ... 500 Kpps (200 Kpps max. a collettore aperto)
Gamma di impostazione della variabile: ±2 ... ±10 Vc.c. alla velocità nominale/tensione di ingresso max.: ±12 V
Gamma di impostazione della variabile: ±1 ... ±10 Vc.c. alla coppia di riferimento nominale
Con segnale di controllo P
viene utilizzato un altro metodo di controllo quando sono entrambi OFF.
0 ... 250 unità di comando (risoluzione impostazione: 1 unità di comando)
treno di impulsi CCW/CW
= JM)
L
Segnale di ingresso
Modalità di controllo della posizione
Uscita segnale di posizione Fase A, fase B, fase C, (fase S): uscita line driver. La fase S è solo per l'encoder assoluto.
Segnale di ingresso sequenza Servoazionamento ON, controllo P (o commutazione modalità di controllo, zero clamp, impulso di comando inibito),
Segnale di uscita sequenza Allarme servoazionamento, codici di allarme (uscita a 3 bit): il terminale di uscita CN1 è fisso
Segnale di I/O
Comunicazioni Interfaccia Console di programmazione (portatile), porta RS-422 per PC, ecc. (porte RS-232C in alcune condizioni)
Funzione di autotuning Il guadagno dell'anello della velocità di posizionamento e la costante di tempo integrale possono essere impostati
Frenatura dinamica Entra in funzione in caso di disattivazione dell'alimentazione principale, di allarme del servoazionamento,
Elaborazione di rigenerazione Resistenza di rigenerazione montata esternamente (opzionale)
Funzione di prevenzione extracorsa Arresto mediante frenatura dinamica, per decelerazione o per inerzia in caso di P-OT, N-OT
Funzione divisore encoder Divisione opzionale possibile
Riduzione elettronica 0,01< A/B<100
Funzioni integrate
Funzione di impostazione della velocità interna È possibile impostare 3 velocità internamente
Funzioni protettive Sovracorrente, sovratensione, tensione insufficiente, sovraccarico, errore sensore del circuito principale,
Funzioni di monitoraggio analogico per
la supervisione
Funzioni di visualizzazione 5 LED a 7 segmenti funzione console di programmazione integrata, non disponibile nei modelli con Profibus,
Altro Collegamento invertito, ricerca zero, funzione di identificazione automatica motore e terminale di collegamento
Comunicazioni 1:N Tramite la porta RS-422A è possibile collegare fino a 14 nodi
Impostazione dell'indirizzo
asse
Funzion i Visualizzazione stato, visualizzazione monitoraggio dell'impostazione di costanti utente, visualizzazione registrazione
Profibus (Solo modelli con Profibus) Slave Profibus DP, indirizzo di nodo 0 ... 125 impostato tramite selettori rotativi,
marcia avanti/indietro inibita, reset allarme, limite di corrente avanti/indietro (o commutazione velocità interna)
È possibile emettere tre dei seguenti tipi di segnale: posizionamento completato (raggiungimento velocità),
rotazione motore, stato servoazionamento, limite di corrente, limite di velocità, rilascio freni, avvertimento,
NEAR e impulso punto zero
Definita dall'impostazione dell'utente
degli allarmi, operazioni di jog/autotuning e funzioni grafiche per il segnale di controllo della velocità/coppia, ecc.
velocità di trasmissione compresa tra 9,6 kbps e 12 Mbps. Spie LED: errore del bus ed errore di sistema
automaticamente.
di disattivazione del servoazionamento o di extracorsa
surriscaldamento dissipatore, perdita fase di potenza, overflow, sovravelocità, errore encoder, velocità di fuga,
errore CPU, errore parametro, ecc.
Integra i connettori di monitoraggio analogico per la supervisione dei segnali della velocità e della coppia di
riferimento, ecc.
LED di carica, LED di alimentazione
reattanza c.c. per funzione di soppressione dell'alimentazione a frequenza elevata (eccetto: 6 ... 15 kW)
Caratteristiche di I/O
Caratteristiche dei terminali
Simbolo Nome Funzione
L1, L2 o
L1, L2, L3
U Terminale di collegamento del
VBianco
WBlu
L1C, L2C Terminale di ingresso alimentazione
Terminale di ingresso c.a. del
circuito principale
servomotore
di controllo
Messa a terra dell'involucro Terminale di messa a terra. Messa a terra fino a 100Ω (classe 3)
Terminali di ingresso di alimentazione c.a. per il circuito principale
Rosso Terminali per le uscite al servomotore.
Terminali di ingresso di alimentazione per il circuito di controllo
170 Servosistemi c.a.
Simbolo Nome Funzione
B1, B2 o
B1, B2, B3
⊕1, ⊕2 Terminale di collegamento della
⊕ Terminale di uscita c.c. del
Terminale di uscita c.c. del
circuito principale
reattanza c.c. per la soppressione
dell'armonica dell'alimentazione
circuito principale (+)
Terminale di uscita c.c. del
circuito principale (n-)
5 kW o inferiore: collegare una resistenza di rigenerazione esterna se l'energia di rigenerazione è elevata.
5,5 kW: non è presente alcuna resistenza di rigenerazione interna. Accertarsi di collegare una resistenza di
rigenerazione esterna.
Generalmente ⊕1 e ⊕2 vengono messi in cortocircuito. Se è necessario adottare una contromisura per l'armonica
dell'alimentazione, collegare una reattanza c.c. tra ⊕1 e ⊕2.
Normalmente non collegato.
Questo terminale esiste solo sui servoazionamenti con una capacità di almeno 6,0 kW.
Normalmente non collegato.
Connettore encoder (CN2)
Pin Simbolo Funzione
1, 2, 3 PPG0V GND alimentazione encoder
4, 5, 6 PPG5V Alimentazione encoder +5 V
7- 8 PS+ Ingresso segnale encoder seriale
9PS− Ingresso segnale encoder seriale
10 SePG5V Alimentazione encoder seriale +5 V (Sigma II)
11 SePG0V Alimentazione encoder seriale GND (Sigma II)
12 BAT+ Batteria + (utilizzato solo con encoder assoluto)
13 BAT- Batteria - (utilizzato solo con encoder assoluto)
14 PC+ Ingresso fase C + encoder
15 PC− Ingresso fase C − encoder
16 A+ Ingresso fase A + encoder
17 A− Ingresso fase A − encoder
18 B+ Ingresso fase B + encoder
19 B− Ingresso fase B − encoder
20 - Guscio FG Terra di schermatura cavo
Servosistemi c.a.
Segnali di I/O (CN1) - Segnali di ingresso
Numero pin Nome segnale Funzione
40 Comune /S-ON Servoazionamento ON: attiva il servomotore quando viene rilasciato il blocco dell'inverter.
41 /P-CON Funzione selezionata tramite parametro
42
43
45
46
44 /ALM-RST Reset allarme: cancella lo stato di allarme del servoazionamento.
47 +24VIN Ingresso alimentazione di controllo per segnali di sequenza: gli utenti devono fornire un'alimentazione a +24 V.
4 (2) SEN Segnale di richiesta dati iniziale quando si utilizza un encoder assoluto.
21
22
5 (6) Velocità V-REF Ingresso della velocità di riferimento: ±2 ... ±10 V/velocità nominale motore (il guadagno di ingresso può essere modificato
9 (10) Coppia T-REF Ingresso della coppia di riferimento: ±1 ... ±10 V/coppia nominale motore (il guadagno di ingresso può essere modificato
7
8
11
12
15
14
3
13
18
Posizione PULS
P-OT
N-OT
/P-CL
/N-CL
BAT (+)
BAT (-)
/PULS
SIGN
/SIGN
CLR
/CLR
PL1
PL2
PL3
Riferimento controllo proporzionale Cambia l'anello di controllo della velocità da PI (proporzionale/integrale) a
Direzione di riferimento Con la velocità impostata internamente selezionata, cambia la direzione di rotazione.
Commutazione
modalità di controllo
Zero clamp di riferimento Controllo della velocità con funzione di zero clamp: la velocità di
Inibizione impulsi di riferimento Inibisce l'ingresso di impulsi di riferimento quando è impostato su ON.
Marcia avanti inibita
Marcia indietro inibita
Funzione selezionata tramite parametro
Limite di coppia esterna durante la
marcia avanti ON
Limite di coppia esterna durante la
marcia indietro ON
Commutazione velocità interna Con la velocità impostata internamente selezionata, cambia le impostazioni della
Gamma della variazione di tensione ammessa: 11 … 25 V
Pin di collegamento per la batteria di backup dell'encoder assoluto.
Non collegare quando al controllo principale è collegata una batteria.
mediante parametro)
mediante parametro.)
Ingresso impulsi di riferimento
line driver
Ingresso di azzeramento impulsi errore di posizione: azzera l'errore di posizione durante il controllo della posizione.
Un'alimentazione di pull-up pari a +12 V viene fornita quando i segnali di riferimento PULS, SIGN e CLR sono
uscite a collettore aperto (l'alimentazione a +12 V è integrata nel SERVOPACK).
P (proporzionale) quando è impostato su ON.
Posizione Velocità
Posizione
riferimento è zero quando è impostato su ON.
Extracorsa inibita: arresta il servomotore quando la parte mobile supera la gamma di
movimento consentita.
Funzione limite di corrente abilitata quando è impostato su ON.
velocità interna.
E' possibile impostare la modalità di ingresso
Treno di impulsi + segno
Impulsi CCW/CW
Impulsi bifase (onde sfasate)
↔
↔
Coppia
↔
Coppia Velocità
Abilita il passaggio ad una
modalità di controllo
Nota: 1. I numeri di pin tra parentesi () indicano le messe a terra dei segnali.
2. Le funzioni assegnate ai segnali di ingresso /S-ON, /P-CON, P-OT, N-OT, /ALM-RST, /P-CL e /N-CL possono essere modificate mediante
parametri.
3. La gamma dell'ingresso di tensione per la velocità e la coppia di riferimento è pari a un massimo di ±12 V.
XtraDrive 171
Segnali di I/O (CN1) - Segnali di uscita
Numero pin Nome segnale Funzione
31
32
27
28
29
30
33 (1)
34
35
36
19
20
48
49
37
38
39 (1)
16 TMON Segnale di monitoraggio analogico
17 VTG Segnale di monitoraggio analogico
Guscio FG Collegato alla messa a terra dell'involucro se lo schermo del cavo del segnale di I/O è collegata al guscio del connettore.
25
26
25
26
- Riservato /CLT
23
24
50
Comune ALM+
Velocità /V-CMP+
Posizione /COIN+
ALM/TGON+
/TGON-
/S-RDY+
/S-RDY-
PAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
ALO1
ALO2
ALO3
/V-CMP-
/COIN-
/VLT
/BK
/WARN
/NEAR
- Terminali non utilizzati
Allarme servoazionamento: disattivato quando viene rilevato un errore.
Rilevamento durante la rotazione del servomotore: rileva quando il servomotore ruota
a una velocità superiore all'impostazione della velocità del motore. È possibile impostare la velocità di rilevamento
mediante parametri.
Stato servoazionamento: ON se non è presente alcun allarme del servoazionamento quando
viene attivata l'alimentazione del circuito principale e di controllo.
Segnale fase A Segnale di uscita dell'encoder (fasi A e B)
Segnale fase B
Segnale fase C
Segnale fase S Con un encoder assoluto: emissione di dati seriali corrispondenti
Uscita codice di allarme: emissione di codici di allarme a 3 bit.
Collettore aperto: valori nominali massimi pari a 30 V e 20 mA
Coincidenza della velocità (uscita in modalità di controllo della velocità): rileva se la velocità del
motore rientra nella gamma di impostazione e se corrisponde al valore della velocità di riferimento.
Posizionamento completato (uscita in modalità di controllo della posizione): viene attivata quando il
numero di impulsi di errore di posizione raggiunge il valore impostato. L'impostazione è il numero di impulsi di errore di
posizione impostato in unità di riferimento (moduli di impulso di ingresso definiti dalla marcia elettronica).
Terminali riservati
È possibile modificare le funzioni assegnate a /TGON, /S-RDY e /V-CMP (/COIN) mediante parametri, nonché i segnali
/CLT, /VLT, /BK, /WARN e /NEAR.
Non collegare relè a questi terminali.
e segnale di zero (fase C): RS-422 o equivalente
al numero di giri (RS-422 o equivalente)
Nota: 1. I numeri di pin tra parentesi () indicano le messe a terra dei segnali.
2. È possibile modificare le funzioni assegnate a /TGON, /S-RDY e /V-CMP (/COIN) mediante parametri, nonché i segnali /CLT, /VLT, /BK,
/WARN e /NEAR.
172 Servosistemi c.a.
Parametri
N. parametro Nome Gamma di impostazione Moduli Impostazione di
fabbrica
Convalida
impostazioni
Pn000 Selettori di base di selezione funzione - - 00D0 Dopo il riavvio
Cifra Nome della funzione Imposta-
zione
Descrizione
0 Selezione direzione 0 Imposta CCW (senso antiorario) come direzione avanti
1 Imposta CW (senso orario) come direzione avanti (modalità rotazione all'indietro)
2 e 3 Riservate (non modificare)
1 Selezione metodo di controllo 0 Controllo della velocità (riferimento analogico)
1 Yaskawa OB
2 Controllo della coppia (riferimento analogico)
3 Controllo della velocità impostata internamente (riferimento a contatto)
4 Controllo della velocità impostata internamente (riferimento a contatto)<>Controllo della
5 Controllo della velocità impostata internamente<>Controllo della posizione
6 Controllo della velocità impostata internamente (riferimento a contatto)<>Controllo della
7 Controllo della posizione (riferimento a treno di impulsi)<>Controllo della velocità
8 Controllo della posizione (riferimento a treno di impulsi)<>Controllo della coppia
9 Controllo della coppia (riferimento analogico)<>Controllo della velocità
velocità (riferimento analogico)
(riferimento a treno di impulsi)
coppia (riferimento analogico)
(riferimento analogico)
(riferimento analogico)
(riferimento analogico)
A Controllo della velocità (riferimento analogico)<>Zero clamp
B Controllo della posizione (riferimento a treno di impulsi)<>Controllo della posizione
(inibito)
C Controllo della posizione (treno di impulsi)
D Comando di comunicazione seriale
2 Indirizzo asse 0 ... F Imposta l'indirizzo dell'asse del servoamplificatore.
3 Riservata -
Pn001 Selettori dell'applicazione di selezione funzione 1 - - 0000 Dopo il riavvio
Cifra Nome della funzione Imposta-
0 Modalità di arresto allarme o servoaziona-
mento OFF
zione
0 Arresta il motore mediante frenatura dinamica
1 Arresta il motore mediante applicazione e successivo rilascio della frenatura dinamica
Spiegazione
2 Arresta il motore per inerzia senza ricorrere alla frenatura dinamica
1 Modalità di arresto con extracorsa (OT) 0 Stessa impostazione di Pn001.0 (arresta il motore mediante frenatura dinamica o inerzia)
1 Imposta la coppia di Pn406 sul valore massimo, decelera il motore fino ad arresto e
2 Imposta la coppia di Pn406 sul valore massimo, decelera il motore fino ad arresto e
2 Selezione ingresso alimentazione c.a./c.c. 0 Non applicabile a ingresso di alimentazione in c.c.; fornita alimentazione in c.a. tramite
1 Applicabile a ingresso di alimentazione in c.c.; fornita alimentazione in c.c. tramite i
quindi imposta lo stato di blocco servo per il motore
quindi imposta lo stato di blocco di inerzia per il motore
i terminali L1, L2 e (L3)
terminali (+)1 e (-).
3 Selezione uscita codice di avvertimento 0 Uscite ALO1, ALO2 e ALO3 solo per codici di allarme.
1 Uscite ALO1, ALO2 e ALO3 sia per codici di allarme che di avvertimento. Mentre vengono
emessi i codici di avvertimento, l'uscita del segnale ALM rimane ON (stato normale).
2 Utilizza l'encoder assoluto come tale. Utilizza il limite multigiro.
Pn002 Selettori dell'applicazione di selezione funzione 2 - - 0000 Dopo il riavvio
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Opzione di controllo della velocità 0 Nessuno
1 Utilizza T-REF come ingresso del limite di coppia esterna
2 Utilizza T-REF come ingresso feed-forward della coppia
3 Utilizza T-REF quando P-CL e N-CL sono ON
1 Opzione di controllo della coppia 0 Nessuno
1 Utilizza V-REF come ingresso del limite di velocità esterna.
2 Utilizzo encoder assoluto 0 Utilizza l'encoder assoluto come tale
1 Utilizza l'encoder assoluto come encoder incrementale
2 Utilizza l'encoder assoluto come tale.
Utilizza il limite multigiro.
3 Non utilizzata -
Pn003 Selettori dell'applicazione di selezione funzione 3 - - 0002 Immediatamente
Cifra Nome della funzione Imposta-
0 Monitoraggio della coppia di riferimento per
monitoraggio analogico 1
zione
0 Velocità motore: 1 V/1000 min
1 Velocità di riferimento: 1 V/1000 min
Spiegazione
-1
-1
2 Coppia di riferimento: 1 V/100%
3 Errore di posizione: 0,05 V/1 unità di riferimento
1 Monitoraggio della velocità di riferimento per
monitoraggio analogico 2
4 Errore di posizione: 0,05 V/100 unità di riferimento
5 Frequenza di impulsi di riferimento (convertita in min
6 Velocità motore x 4: 1 V/250 min
7 Velocità motore x 8: 1 V/250 min
-1
-1
0 ... 7 Come Pn003.0 (vedere sopra)
-1
): 1 V/1000 min
-1
2 Non utilizzata -
3 Non utilizzata Pn004 Riservati (non modificare) - - 0000 Pn005 - - 0000 -
Servosistemi c.a.
XtraDrive 173

N. parametro Nome Gamma di impostazione Moduli Impostazione di
fabbrica
Convalida
impostazioni
Pn006 Selettori dell'applicazione del guadagno - - 0000 Immediatamente
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Monitoraggio analogico 1 0 Errore di posizione del servoazionamento: 1 V/10 conteggi encoder
1 Errore di posizione del servoazionamento: 1 V/5 unità utente
2 Velocità di riferimento 1 V/500 giri/min
3 Velocità di riferimento dopo l'applicazione del comando di livellamento a 1 V/500 giri/min
4 Coppia di riferimento: 10 V/coppia max.
5 Velocità del motore: 1 V/500 giri/min
1 Monitoraggio analogico 1 - Selezione del
parametro di origine
2 Monitoraggio analogico 1 - Selezione
dell'origine
6 Accelerazione di riferimento dopo l'applicazione del comando di livellamento:
0 Pn003.0 utilizzato per il monitoraggio analogico 1.
1 Pn006.0 utilizzato per il monitoraggio analogico 1.
0-4 0:x1, 1:x10, 2:x100, 3:x1/10, 4:x1/100
10 V/accelerazione max. consentita.
3 Non utilizzata 0 -
Pn007 Selettori dell'applicazione del guadagno - - 0000 Immediatamente
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Monitoraggio analogico 2 0 Errore di posizione del servoazionamento: 1 V/10 conteggi encoder
1 Errore di posizione del servoazionamento: 1 V/5 unità utente
2 Velocità di riferimento 1 V/500 giri/min
3 Velocità di riferimento dopo l'applicazione del comando di livellamento a 1 V/500 giri/min
4 Coppia di riferimento: 10 V/coppia max.
5 Velocità del motore: 1 V/500 giri/min
1 Monitoraggio analogico 2 - Selezione del
parametro di origine
6 Accelerazione di riferimento dopo l'applicazione del comando di livellamento:
0 Pn003.0 utilizzato per il monitoraggio analogico 2.
1 Pn007.0 utilizzato per il monitoraggio analogico 2.
10 V/accelerazione max. consentita.
2 Monitoraggio analogico 2 0-4 0:x1, 1:x10, 2:x100, 3:x1/10, 4:x1/100
3 Non utilizzata 0 -
Pn080
(solo motori
lineari)
Selettore di commutazione motore lineare - - 0011 Dopo il riavvio
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Selettore del sensore di comunicazione 0 Con sensori di commutazione
1 Senza sensori di commutazione
1 Ordine sensore di comunicazione 0 UVW
1UWV
2 Riservata - 3 Riservata - -
Pn100 Guadagno anello di velocità 1 … 2.000 Hz 1 Hz 40 Hz Immediatamente
Pn101 Costante tempo integrale anello di velocità 0,15 ... 512,00 ms 0,01 ms 20,00 ms Immediatamente
Pn102 Guadagno anello di posizione 1 ... 2.000/s 1/s 40/s Immediatamente
Pn103 Coefficiente momento di inerzia 0 ... 10.000% 1% 0% Immediatamente
Pn104 Secondo guadagno anello di velocità 1 … 2.000 Hz 1 Hz 40 Immediatamente
Pn105 Seconda costante tempo integrale anello di velocità 0,15 ... 512,00 ms 0,01 ms 20,00 ms Immediatamente
Pn106 Secondo guadagno anello di posizione 1 ... 2.000/s 1/s 40/s Immediatamente
Pn107 Polarizzazione 0 ... 450 min
Pn108 Aggiunta ampiezza polarizzazione 0 ... 250 unità di
riferimento
-1
-1
1 min
Unità di
riferimento
-1
0 min
7 unità di
riferimento
Immediatamente
Immediatamente
Pn109 Feed-forward 0 ... 100% 1% 0% Immediatamente
Pn110 Selettori di on-line autotuning - - 0010 Dopo il riavvio
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Metodo di on-line autotuning 0 Autotuning solo all'avvio del funzionamento
1 Autotuning continuo
2 Autotuning non eseguito
1 Selezione compensazione retroazione della
velocità
0 Abilitata
1 Disabilitata
2 Selezione compensazione degli attriti 0 Compensazione degli attriti: disabilitata
1 Compensazione degli attriti: bassa
2 Compensazione degli attriti: elevata
3 Riservata 0 - 3 Parametro riservato (non modificare)
Pn10A Costante di tempo filtro feed-forward 0,00 ... 64,00 ms 0,01 ms 0,00 ms Immediatamente
Pn10B In sospeso - - 0000 Pn10C Coppia di riferimento per cambio modalità 0 ... 800% 1% 200% Immediatamente
Pn10D Velocità di riferimento per cambio modalità 0 ... 10.000 min
Pn10E Accelerazione per cambio modalità 0 ... 3.000 min
Pn10F Impulso di errore per cambio modalità 0 ... 10.000 unità di
riferimento
-1
-1
/s 1 min-1/s 0 min-1/s Immediatamente
-1
1 min
1 unità di
riferimento
-1
0 min
0 unità di
riferimento
Immediatamente
Immediatamente
Pn111 Compensazione retroazione della velocità 1 ... 500% 1% 100% Immediatamente
174 Servosistemi c.a.

N. parametro Nome Gamma di impostazione Moduli Impostazione di
Pn112 Riservati (non impostare) - - 100 Pn113 1000
Pn114 200
Pn115 32
Pn116 16
Pn117 100
Pn118 100
Pn119 50
Pn11A 1000
Pn11B 50
Pn11C 70
Pn11D Riservati (non modificare) - - 100 Pn11E 100
Pn11F 0
Pn120 0
Pn121 50
Pn122 0
Pn123 0
Pn124 0
Pn125 100
Pn131 0
Pn132 0
Pn133 0
Pn134 0
Pn135 0
Pn136 0
Pn137 0
Pn138 0
Pn139 0
Pn13A 0
Pn140 200
Pn141 800
Pn142 0
Pn143 0
Pn144 1000
Pn145 0
Pn190 Selettori di selezione motore - - 0000 Dopo il riavvio
Pn191 Selettori di selezione motore - - 1000 Dopo il riavvio
Pn192 Numero di impulsi dell'encoder A quad B (basso) 0 ... 999 impulsi/giro Impulsi/giro 2048 Dopo il riavvio
Pn193 Numero di impulsi dell'encoder A quad B (alto) 0 ... 419 impulsi*10.000/giro Impulsi*10.000/
Pn194 Riservati (non modificare) - - 2 Pn195 20
Pn196 20
Pn197 88
Pn198 0
Pn199 Conteggi encoder per passo scala del motore lineare 1 ... 256 conteggi/passo
Pn1A0 Riservati (non modificare) - - 60 Pn1A1 60
Pn1A2 40
Pn1A3 40
Pn1A4 20
Pn1A5 0
Pn1A6 40
Cifra Nome della funzione Imposta-
0 Modello motore 0 Modello Yaskawa A quad B SGM
1 Tipo di encoder 0 Encoder A quad B incrementale
2 Selezione encoder 0 Encoder seriale Yaskawa
3 Maschera fase C 0 Segnale fase C utilizzato
Cifra Nome della funzione Imposta-
0 Ordine delle fasi motore 0 Non definito
1-3 Non utilizzate 0 -
zione
1 Modello Yaskawa A quad B SGMP
2 Motore rotativo non Yaskawa
3 Motore lineare non Yaskawa
1 Encoder A quad B assoluto Yaskawa
1 Encoder A quad B
2 Encoder A quad B con sensori di commutazione (U, V, W)
3 Encoder A quad B con sensori di commutazione (/U,/V,/W)
1 Maschera segnale fase C
zione
1UVW
2UWV
Spiegazione
Spiegazione
scala
giro
Conteggi/passo
scala
fabbrica
0 Dopo il riavvio
1 Dopo il riavvio
Convalida
impostazioni
Servosistemi c.a.
XtraDrive 175

N. parametro Nome Gamma di impostazione Moduli Impostazione di
Pn1A7 Selettori di selezione servomotore - - 0001 Immediatamente
Pn1A8 Riservati (non modificare) - - 0 Pn1A9 40
Pn1AA 40
Pn1AB 30
Pn1AC 80
Pn1AD 0
Pn1AE 300
Pn1AF 0
Pn1B0 Riservati (non modificare) - - 40 Pn1B1 40
Pn1B2 40
Pn1B3 2000
Pn1B4 0
Pn1B5 160
Pn1B6 150
Pn1B7 20
Pn1B8 100
Pn1B9 600
Pn1BA 0
Pn1BB 2000
Pn1BC 300
Pn1BD 2000
Pn1BE 0
Pn1BF 3
Pn1C0 0
Pn1C1 3
Pn1C2 0
Pn200 Selettori di selezione dei riferimenti per il controllo della posizione - - 0000 Dopo il ria vvio
Pn201 Impulso di divisione PG (16 bit o inferiore) 0,17 ... 65.535 impulsi/giro 1 impulso/giro 2.048 impulsi/giro Dopo il riavvio
Pn202 Rapporto di riduzione elettronico (numeratore) 1 ... 65.535 - 4 Dopo il riavvio
Pn203 Rapporto di riduzione elettronico (denominatore) 1 ... 65.535 - 1 Dopo il riavvio
Pn204 Costante di tempo di accelerazione/decelerazione posizione
Pn205 Impostazione limite multigiro 0 ... 65.535 giri giro 65.535 giri Dopo il riavvio
Pn206 Riservato (non modificare) - - 16384 Pn207 In sospeso - 0 Pn208 Tempo medio spostamento posizione di riferimento 0,00 ... 64,00 ms 0,01 ms 0,00 ms Dopo il riavvio
Pn209 Riservato (non modificare) - - 0 Pn216 Comando di livellamento 1 ... 65.535 ms 0,1 ms 0 Immediatamente
Pn281 Riservato (motori lineari) - - - -
Cifra Nome della funzione Imposta-
0 Modalità integrale 0 Disabilita la funzione di azzeramento integrale
1-3 Non utilizzate 0 Non utilizzata
Cifra Nome della funzione Imposta-
0 Tipo impulso di riferimento 0 Segno + impulso, logica positiva
1 Tipo segnale di azzeramento del contatore
d'errore
2 Operazione di azzeramento 0 Azzera il contatore d'errore quando si verifica il blocco delle basi
3 Selezione filtro 0 Filtro di ingresso di riferimento per segnali line driver
di riferimento
zione
1 Abilita la funzione di azzeramento integrale
zione
1 CW + CCW, logica positiva
2 Fase A + Fase B (x 1), logica positiva
3 Fase A + Fase B (x 2), logica positiva
4 Fase A + Fase B (x 4), logica positiva
5 Segno + impulso, logica negativa
6 CW + CCW, logica negativa
7 Fase A + Fase B (x 1), logica negativa
8 Fase A + Fase B (x 2), logica negativa
9 Fase A + Fase B (x 4), logica negativa
0 Azzera il contatore d'errore quando il segnale è alto
1 Azzera il contatore d'errore sul fronte di salita del segnale
2 Azzera il contatore d'errore quando il segnale è basso.
3 Azzera il contatore d'errore sul fronte di discesa del segnale
1 Non azzera il contatore d'errore (il contatore degli errori può essere azzerato solo con il
2 Azzera il contatore d'errore quando viene generato un allarme.
3 Ignora il segnale di azzeramento
1 Filtro di ingresso di riferimento per segnali a collettore aperto
Spiegazione
Spiegazione
segnale CLR)
0,00 ... 64,00 ms 0,01 ms 0,00 ms Immediatamente
fabbrica
Convalida
impostazioni
176 Servosistemi c.a.

N. parametro Nome Gamma di impostazione Moduli Impostazione di
Pn2A0 Riservati (non modificare) - - 16 Pn2A1 0
Pn2A2 0
Pn2A3 0
Pn2A4 0
Pn2A5 0
Pn2A6 0
Pn2A7 0
Pn2A8 65535
Pn2A9 256
Pn2B0 1
Pn2B1 0
Pn2B2 1
Pn2B3 0
Pn2B4 1
Pn2B5 0
Pn2B6 1
Pn2B7 0
Pn2B8 1
Pn2B9 0
Pn2BA 1
Pn2BB 0
Pn2C0 Riservati (non modificare) - - 7 Pn2C1 24000
Pn2C2 0
Pn2C3 0
Pn2C4 0
Pn2C5 2
Pn2C6 Selettore di comunicazione - - 0200 Immediatamente
Pn2C7 Selettori di ritorno alla posizione iniziale - - 0008 Dopo il riavvio
Pn2C8 Riservati (non modificare) - - 400 Pn2C9 50
Pn2CA 50
Pn2CB 50
Pn2CC 0
Pn2CC 0
Pn2CD 0
Pn2CE 60
Pn2CF 0
Pn2D0 8888
Pn2D1 Selezione segnale di ingresso estesa - - 0078 Dopo il riavvio
Cifra Nome della funzione Imposta-
0 Checksum 0 Non utilizza checksum
1 Non utilizzate 2
3
Cifra Nome della funzione Imposta-
0 Ingresso selettore di ritorno alla posizione
iniziale
1 Riservata 2 Riservata 3 Riservata -
Cifra Nome della funzione Imposta-
0 Ingresso di emergenza 0 ... F Come Pn2C7.0
1 Abilitazione nuovo movimento 0 ... F Come Pn2C7.0
2 Riservata -- 3 Riservata -- --
zione
1 Utilizza checksum
zione
0 Immissione da SI0 (CN1-40). Terminale di ingresso
1 Immissione da SI1 (CN1-41). Terminale di ingresso
2 Immissione da SI2 (CN1-42). Terminale di ingresso
3 Immissione da SI3 (CN1-43). Terminale di ingresso
4 Immissione da SI4 (CN1-44). Terminale di ingresso
5 Immissione da SI5 (CN1-45). Terminale di ingresso
6 Immissione da SI6 (CN1-46). Terminale di ingresso
7 Imposta il segnale su ON
8 Imposta il segnale su OFF
9 Immissione del segnale indietro dal terminale di ingresso SI0 (CN1-40)
A Immissione del segnale indietro dal terminale di ingresso SI1 (CN1-41)
B Immissione del segnale indietro dal terminale di ingresso SI2 (CN1-42)
C Immissione del segnale indietro dal terminale di ingresso SI3 (CN1-43)
D Immissione del segnale indietro dal terminale di ingresso SI4 (CN1-44)
E Immissione del segnale indietro dal terminale di ingresso SI5 (CN1-45)
F Immissione del segnale indietro dal terminale di ingresso SI6 (CN1-46)
zione
Spiegazione
Spiegazione
Spiegazione
fabbrica
Convalida
impostazioni
Servosistemi c.a.
XtraDrive 177

N. parametro Nome Gamma di impostazione Moduli Impostazione di
fabbrica
Convalida
impostazioni
Pn2D2 Selezione segnale di uscita estesa - - 0000 Dopo il riavvio
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Mapping segnale /COIN 0 Disabilitato
1 Emissione dal terminale di uscita SO1 (CN1-25, 26)
2 Emissione dal terminale di uscita SO2 (CN1-27, 28)
3 Emissione dal terminale di uscita SO3 (CN1-29, 30)
1 Non utilizzate 2
3
Pn2D3 Riservato (non modificare) - - 2000 Pn2D4 Selettore modalità di annullamento oscillazioni - - 0001 Immediatamente
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Modalità di annullamento oscillazioni 0 Modalità non attiva
1 Modalità attiva
1 Non utilizzate 2
3
Pn300 Guadagno ingresso velocità di riferimento 1,50 ... 30,00 V/velocità
Pn301 Velocità 1 (motore rotativo) 0 ... 10.000 min
Pn302 Velocità 2 0 ... 10.000 min
Pn303 Velocità 3 0 ... 10.000 min
Pn304 Velocità di jog 0 ... 10.000 min
nominale
-1
-1
-1
-1
0,01 V/velocità
nominale
-1
1 min
-1
1 min
-1
1 min
-1
1 min
6,00 V/velocità
nominale
-1
100 min
-1
200 min
-1
300 min
-1
500 min
Immediatamente
Immediatamente
Immediatamente
Immediatamente
Immediatamente
Pn305 Tempo di accelerazione avviamento graduale 0 ... 10.000 ms 1 ms 0 ms Immediatamente
Pn306 Tempo di decelerazione avviamento graduale 0 ... 10.000 ms 1 ms 0 ms Immediatamente
Pn307 Costante di tempo filtro velocità di riferimento 0,00 ... 655,35 ms 0,01 ms 0,40 ms Immediatamente
Pn308 Costante di tempo filtro retroazione velocità 0,00 ... 655,35 ms 0,01 ms 0,00 ms Immediatamente
Pn380 Velocità motore lineare 1 (solo per motori lineari) 0 ... 5.000 mm/s mm/s 10 Immediatamente
Pn381 Velocità motore lineare 2 (solo per motori lineari) 0 ... 5.000 mm/s mm/s 20 Immediatamente
Pn382 Velocità motore lineare 3 (solo per motori lineari) 0 ... 5.000 mm/s mm/s 30 Immediatamente
Pn383 Velocità di jog motore lineare (solo per motori lineari) 0 ... 5.000 mm/s mm/s 40 Immediatamente
Pn400 Guadagno ingresso coppia di riferimento 1,0 ... 10,0 V/coppia
nominale
0,1 V/coppia
nominale
3,0 V/coppia
nominale
Immediatamente
Pn401 Costante di tempo filtro coppia di riferimento 0,00 ... 655,35 ms 0,01 ms 1,00 ms Immediatamente
Pn402 Limite di coppia durante la marcia avanti 0 ... 800% 1% 800% Immediatamente
Pn403 Limite di coppia durante la marcia indietro 0 ... 800% 1% 800% Immediatamente
Pn404 Limite di coppia esterna durante la marcia avanti 0 ... 800% 1% 100% Immediatamente
Pn405 Limite di coppia esterna durante la marcia indietro 0 ... 800% 1% 100% Immediatamente
Pn406 Coppia arresto di emergenza 0 ... 800% 1% 800% Immediatamente
Pn407 Limite velocità durante controllo della coppia 0 ... 10.000 min
-1
1 min
-1
10.000 min
-1
Immediatamente
Pn408 Selettori funzione di controllo della coppia - - 0000 Immediatamente
Cifra Nome della funzione Imposta-
zione
Spiegazione
0 Selezione Notch Filter 0 Disabilitato
1 Utilizza un Notch Filter per la coppia di riferimento.
1 Non utilizzate - 2
3
Pn409 Frequenza Notch Filter 50 … 2.000 Hz 1 Hz 2.000 Hz Immediatamente
Pn40A Ampiezza Notch Filter 70 … 1.000 Hz 1 Hz 70(0,70) Immediatamente
Pn480 Riservati (non modificare) (disponibili solo per motori lineari) - - - Pn483
Pn484
Pn500 Ampiezza posizionamento completato 0 ... 250 unità di
Pn501 Livello zero clamp 0 ... 10.000 min
Pn502 Livello di rilevamento rotazione 1 ... 10.000 min
Pn503 Ampiezza di uscita del segnale di coincidenza della
velocità
Pn504 Ampiezza del segnale NEAR 1 ... 250 unità di
Pn505 Livello di overflow 1 ... 32.767 unità di
Pn506 Ritardo di disattivazione servoazionamento durante
l'intervento del freno
Pn507 Livello velocità di uscita per l'intervento del freno 0 ... 10.000 min
Pn508 Temporizzazione dell'intervento del freno durante il
funzionamento del motore
riferimento
0 ... 100 min
-1
-1
-1
riferimento
riferimento
0 ... 50 (0 ... 500 ms) 10 ms 0 ms Immediatamente
-1
10 ... 100
(100 ... 1000 ms)
1 unità di
riferimento
-1
1 min
-1
1 min
-1
1 min
1 unità di
riferimento
256 unità di
riferimento
-1
1 min
7 unità di
riferimento
-1
10 min
-1
20 min
-1
10 min
7 unità di
riferimento
1.024 unità di
riferimento
-1
100 min
Immediatamente
Immediatamente
Immediatamente
Immediatamente
Immediatamente
Immediatamente
Immediatamente
10 ms 500 ms Immediatamente
Pn509 Tempo di ritenzione temporanea 20 ... 1.000 ms 1 ms 20 ms Immediatamente
178 Servosistemi c.a.

N. parametro Nome Gamma di impostazione Moduli Impostazione di
Pn50A Selezioni segnale di ingresso 1 - - 2100 Dopo il riavvio
Pn50B Selezioni segnale di ingresso 2 - - 6543 Dopo il riavvio
Pn50C Selezioni segnale di ingresso 3 - - 8888 Dopo il riavvio
Pn50D Selezioni segnale di ingresso 4 -- 8888 Dopo il riavvio
Pn50E Selezioni segnale di uscita 1 - - 3211 Dopo il riavvio
Pn50F Selezioni segnale di uscita 2 -- 0000 Dopo il riavvio
Pn510 Selezioni segnale di uscita 3 - - 0000 Dopo il riavvio
Cifra Nome della funzione Imposta-
0 Modalità assegnazione segnale di ingresso 0 Imposta l'assegnazione del segnale di ingresso per la sequenza in modo che sia uguale
1 Mapping segnale /S-ON
(servoazionamento ON quando il segnale è
basso)
2 Mapping segnale /P-CON (controllo P
quando il segnale è basso)
3 Mapping segnale P-OT (extracorsa quando il
segnale è alto)
Cifra Nome della funzione Imposta-
0 Mapping segnale N-OT (extracorsa quando
il segnale è alto)
1 Mapping segnale /ALM-RST (reset allarme
quando il segnale è basso)
2 Mapping segnale /P-CL (controllo della
coppia quando il segnale è basso)
3 Mapping segnale /N-CL (controllo della
coppia quando il segnale è basso)
Cifra Nome della funzione Imposta-
0 Mapping segnale /SPD-D (selezione velocità
impostata internamente)
1 Mapping segnale /SPD-A (selezione velocità
impostata internamente)
2 Mapping segnale /SPD-D (selezione velocità
impostata internamente)
3 Mapping segnale /C-SEL (cambio modalità
di controllo)
Cifra Nome della funzione Imposta-
0 Mapping segnale /ZCLAMP (zero clamp) 0 ... F Come Pn50A.1
1 Mapping segnale /INHIBIT (disabilitazione
dell'impulso di riferimento)
2 Mapping segnale /G-SEL (commutazione
del guadagno)
3 (Riservata) 0 ... F Come Pn50A.1
Cifra Nome della funzione Imposta-
0 Mapping segnale /COIN 0 Disabilitato
1 Mapping segnale /V-CMP 0 ... 3 Vedere sopra
2 Mapping segnale /TGON 0 ... 3 Vedere sopra
3 Mapping segnale /S-RDY 0 ... 3 Vedere sopra
Cifra Nome della funzione Imposta-
0 Mapping segnale /CLT 0 ... 3 Come Pn50E.0
1 Mapping segnale rilevamento limite di
velocità (/VLT)
2 Mapping segnale di interblocco freni (/BK) 0 ... 3 Come Pn50E.0
3 Mapping segnale di avvertimento (/WARN) 0 ... 3 Come Pn50E.0
Cifra Nome della funzione Imposta-
0 Mapping segnale di avvicinamento (/NEAR) 0 ... 3 Come Pn50E.0
1 Riservata (non modificare) 0 ... 3 Come Pn50E.0
2 Non utilizzata 0
3 Non utilizzata 0
zione
1 Possibile assegnare liberamente segnali di ingresso
0 Immissione da SI0 (CN1-40). Terminale di ingresso
1 Immissione da SI1 (CN1-41). Terminale di ingresso
2 Immissione da SI2 (CN1-42). Terminale di ingresso
3 Immissione da SI3 (CN1-43). Terminale di ingresso
4 Immissione da SI4 (CN1-44). Terminale di ingresso
5 Immissione da SI5 (CN1-45). Terminale di ingresso
6 Immissione da SI6 (CN1-46). Terminale di ingresso
7 Imposta il segnale su ON
8 Imposta il segnale su OFF
9 Immissione del segnale indietro dal terminale di ingresso SI0 (CN1-40)
A Immissione del segnale indietro dal terminale di ingresso SI1 (CN1-41)
B Immissione del segnale indietro dal terminale di ingresso SI2 (CN1-42)
C Immissione del segnale indietro dal terminale di ingresso SI3 (CN1-43)
D Immissione del segnale indietro dal terminale di ingresso SI4 (CN1-44)
E Immissione del segnale indietro dal terminale di ingresso SI5 (CN1-45)
F Immissione del segnale indietro dal terminale di ingresso SI6 (CN1-46)
0 ... F Vedere sopra
0 ... F Vedere sopra
zione
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
0 ... 8 Come Pn50A.1
zione
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
zione
0 ... F Come Pn50A.1
0 ... F Come Pn50A.1
zione
1 Emissione dal terminale di uscita SO1 (CN1-25, 26)
2 Emissione dal terminale di uscita SO2 (CN1-27, 28)
3 Emissione dal terminale di uscita SO3 (CN1-29, 30)
zione
0 ... 3 Come Pn50E.0
zione
Spiegazione
a quella del servoamplificatore speciale Yaskawa
Spiegazione
Spiegazione
Spiegazione
Spiegazione
Spiegazione
Spiegazione
fabbrica
Convalida
impostazioni
Servosistemi c.a.
XtraDrive 179

N. parametro Nome Gamma di impostazione Moduli Impostazione di
Pn511 Riservati (non modificare)
Pn512 0000
Pn51A 10
Pn550 100
Pn551 100
Pn580 Riservati (non modificare) (disponibili solo per motori lineari) - - 10 Pn581 20
Pn582 10
Pn583 100
Pn600 Capacità resistenza di rigenerazione Dipende dalla capacità del
Pn601 Riservato (non modificare) Dipende dalla capacità del
-
SERVOPACK
SERVOPACK
-
∗2
∗2
10 W 0 W Immediatamente
- 0 W Immediatamente
fabbrica
8888 -
Convalida
impostazioni
Dettagli della modalità Monitor
N. monitoraggio Parametro da monitorare Unità Spiegazione
Un000 Retroazione velocità min
Un001 Comando di velocità min
Un002 Comando di coppia % Visualizza il valore del comando per un anello corrente considerando la coppia nominale pari
Un003 Numero di impulsi dalla fase Z Impulsi Visualizza il numero di impulsi emessi dalla fase Z in unità di risoluzione dell'encoder (x 4).
Un004 Angolo elettrico Gradi Visualizza l'angolo elettrico del motore.
Un005 Monitoraggio del segnale di
Un006 Monitoraggio del segnale di uscita --Un007 Visualizzazione della velocità degli
Un008 Errore di posizione (contatore
Un009 Percentuale di carico del motore % Visualizza la coppia effettiva a intervalli di 10 s espressa considerando la coppia nominale pari
Un00A Percentuale di carico di rigenerazione % Visualizza la quantità di energia di rigenerazione assorbita a intervalli di 10 s espressa
Un00B Percentuale di carico della
Un00C Contatore degli impulsi di ingresso Unità di
Un00D Contatore degli impulsi di retroazione Impulsi Visualizza il numero di impulsi di retroazione dell'encoder in formato esadecimale (x4).
ingresso
impulsi di comando
d'errore)
resistenza di frenatura dinamica
-1
Visualizza la velocità effettiva del motore.
-1
Visualizza il valore del comando di velocità o il valore della velocità impostata internamente
durante il controllo della velocità. Viene visualizzato 0 durante il controllo con ingresso a treno
di impulsi.
al 100%.
--- Visualizza lo stato del segnale di I/O del servoazionamento attivando o disattivando ciascun bit
giri/min Visualizza la frequenza degli impulsi di comando convertita in giri/min.
Unità di
riferimento
% Visualizza il fattore del carico di resistenza a intervalli di 10 s espresso considerando il fattore di
riferimento
di segnale.
Visualizza il numero di impulsi accumulati nel contatore d'errore (errore di posizione) convertiti in
unità di riferimento (riferimenti degli impulsi di ingresso).
al 100%.
considerando il valore di Pn600 (capacità resistenza di rigenerazione) pari al 100%.
carico nominale pari al 100%.
Visualizza il numero di impulsi di ingresso in formato esadecimale.
Elenco delle modalità di funzionamento
N. parametro Funzione
Fn000 Visualizzazione dei dati di registrazione degli allarmi
Fn001 Impostazione della rigidità durante l'on-line autotuning
Fn002 Funzionamento in modalità di jog
Fn003 Modalità di ricerca del punto zero
Fn004 Parametro fisso
Fn005 Inizializzazione delle impostazioni dei parametri
Fn006 Azzeramento dei dati di registrazione degli allarmi
Fn007 Scrittura nella EEPROM dei dati del coefficiente del momento di inerzia ottenuti dall'on-line autotuning
Fn008 Reset multigiro dell'encoder assoluto e dell'allarme dell'encoder
Fn009 Autotuning dell'offset di riferimento analogico (velocità, coppia)
Fn00A Regolazione manuale dell'offset della velocità di riferimento
Fn00B Regolazione manuale dell'offset della coppia di riferimento
Fn00C Azzeramento manuale dell'uscita analogica di monitor
Fn00D Regolazione manuale del guadagno dell'uscita analogica di monitor
Fn00E Regolazione automatica dell'offset del segnale di rilevamento della corrente del motore
Fn00F Regolazione manuale dell'offset del segnale di rilevamento della corrente del motore
Fn010 Impostazione password (impedisce la modifica dei parametri)
Fn011 Visualizzazione dei modelli del motore
Fn012 Visualizzazione della versione del software
Fn013 Modifica dell'impostazione del limite multigiro quando viene generato un allarme di mancato raggiungimento del limite multigiro (A.CC)
Fn014 Azzeramento dei risultati del rilevamento dei moduli applicativi
180 Servosistemi c.a.

Dimensioni
Servoazionamenti
XD-P3-M@ ... XD-02-M@ (230 V, 30 ... 200 W)
CN3
Morsettiera
160
6
CHARGE
CN1
CN2
Schema fori di montaggio
2×Fori per viti M4
5,5
CN10
ER
W
PO
CN3
39
CN1
160
106
CN2
149,5±0,5
di montaggio)
Servosistemi c.a.
(Distanza interasse fori
Terminale
di messa a terra
2×Viti M4
XD-04-M@ (230 V, 400 W)
Terminale
di messa a terra
2×Viti M4
XD-08-M@ (230 V, 750 W)
96,2
Ventola di raffreddamento
160
5,5
Morsettiera
149,5
6
(5)
12
6
94,4
10
55
2×φ5, fori
CHARGE
5
63
75
Morsettiera
160
5
15
8
POWER
CN3
CN1
CN2
10
Foro φ5
CHARGE
Terminale di messa a terra
2×Viti M4
10
35
55
90
39
106
8
CN3
CN1
CN2
6
CN3
CN1
CN2
R
E
W
O
P
39
106
8
75
CN3
CN1
CN2
CN10
75
CN10
75
130
130
180
5
5
55
Schema fori di montaggio
2×Fori per viti M4
5,5
i
160
149,5±0,5
i montaggio)
d
stanza interasse for
(Di
5
12
75
Schema fori di montaggio
5,5
2×Fori per
viti M4
,5
160
149,5±0
di montaggio)
(Distanza interasse fori
27
5
90
XtraDrive 181

XD-05-T@ ... -15-T@ (400 V, 0,5 ... 1,5 kW)
Fori 2×φ5
Dissipatore
CN3
CHARGE
160
CN1
-
CN2
Terminale di
messa a terra
5
2×Viti M4
110
XD-20-T@, XD-30-T@ (400 V, 2/3 kW)
Fori 2×φ6
6
POWER
39
106
Morsettiera
Dissipatore
CN3
CN1
CN2
8
CHARGE POWER
Schema fori di montaggio
4
×
5,5
Fori per viti M4
CN10
160
149,5±0,5
di montaggio)
(Distanza interasse fori
5
75
180
4
5
5
100±0,5
(Distanza interasse fori
d
i
m
o
ntaggio)
110
Schema fori di montaggio
4
×
6
Foro M5
CN10
CN3
39
CN3
CN1
CN1
Terminale
a 14 pin
Vite di
montaggio M4
Terminale di
messa a terra
2×Viti M4
250
5,5
5
238,5
6
Targa
110
100
CN2
CN2
196
250
238,5±0,5
di montaggio)
(Distanza interasse fori
5
5,5
5
8
75
180
4
100±0,5
(Distanza interasse
fori di montaggio)
110
5
182 Servosistemi c.a.

Filtri
R88A-FIW104-SE
Unità di misura: mm
32
28,25
202
192
149,5
1
11,5
M4
56
φ5
5,5
14
19
φ10
70
Fili AWG16
+5
0
240
GNYE
M4
168
M4(2×)
+5
0
265
5
6
33
15
R88A-FIW107-SE, R88A-FIW115-SE
Modello R88A-FIW107-SE R88A-FIW115-SE
Dimensioni
in mm
A 75 90
B 240
+5
300+5
C 50 60
D 12 15
E1 1,2
Unità di misura: mm
32
16
202
192
15028
M4
A
φ5
φ10
5,5
14
19
B
70
168
Fili AWG16
GNYE
M4(2×)
+5
M4
E
D
5
C
0
265
15
R88A-FIW4006-SE, R88A-FIW4010-SE
Modello R88A-FIW4006-SE R88A-FIW4010-SE
Dimensioni
in mm
A32 35
B 16 18
C 202 291
D 192 281
E 150 239
F 300 270
G 70 90
H 168 257
Servosistemi c.a.
Unità di misura: mm
A
B
C
D
28
L1 L2 L3
M4
118
φ10
φ5
5,5
14
19 H 15
F
G
E
Fili AWG16
GNYE
M4
M4(4×)
+5
0
310
1,2
10
19
5
80
100
XtraDrive 183

Installazione
Monofase, 230 Vc.a.
MONOFASE 200 ... 230 VC.A.
5
FILTRO
ANTIDISTURBI
Accertarsi di collegare
la messa a terra.
VELOCITÀ DI RIFERIMENTO
±2 ... ±10 V/VELOCITÀ MOTORE NOMINALE
COPPIA DI RIFERIMENTO
±1 ... ±10 V/COPPIA MOTORE NOMINALE
FASE A
CW
FASE B
POSIZIONE DI
RIFERIMENTO
SERVOAZIONAMENTO ON
CON 1Ry ON
INGRESSO SEGNALE SEN *
SERVOAZIONAMENTO ON CON
1Ry ON
CONTROLLO P CON 2Ry ON
MARCIA AVANTI INIBITA
CON P-LS APERTO
MARCIA INDIETRO INIBITA
CON N-LS APERTO
RESET ALLARME CON 3Ry ON
LIMITE CORRENTE DI ROTAZIONE
AVANTI ON CON 6Ry ON
LIMITE CORRENTE DI ROTAZIONE
INDIETRO ON CON 7Ry ON
CCW
RIFERIMENTO A
COLLETTORE APERTO
ALIMENTAZIONE
2
2
2
SPEGNI-
MENTO
ACCEN-
SIONE
,
ELABORAZIONE
ALLARME
Accertarsidi collegare un soppressore di sovracorrente alla bobina
di eccitazione del contattore magnetico e al relè.
4
SERVOMOTORE
XtraDrive
Accertarsi di preparare l'estremità del filo
1
1
3
SERVOAZIONAMENTO
ON
CONTROLLO PROPORZIONALE
(CONTROLLO P)
MARCIA
AVANTI INIBITA
MARCIA
INDIETRO INIBITA
RESET ALLARME
LIMITE CORRENTE DI
ROTAZIONE AVANTI ON
LIMITE CORRENTE DI
ROTAZIONE INDIETRO ON
GUSCIO DEL CONNETTORE
COLLEGARE LA SCHERMATURA AL GUSCIO DEL CONNETTORE
schermato correttamente
ENCODER OTTICO
USCITA CODICE DI ALLARME
TENSIONE MASSIMA DI FUNZIONAMENTO: 30 VC.C.
CORRENTE MASSIMA DI FUNZIONAMENTO: 20 mA C.C.
ENCODER SIMULATO IN USCITA
6
)
*
USCITA DATI SERIALI DEL NUMERO DI
ROTAZIONI PER LA FASE S
RILEVAMENTO COINCIDENZA DELLA VELOCITÀ
(ON QUANDO LA VELOCITÀ COINCIDE)
POSIZIONAMENTO COMPLETATO (ON QUANDO
IL POSIZIONAMENTO È STATO COMPLETATO)
USCITA TGON
(ON QUANDO I LIVELLI SUPERANO LE
IMPOSTAZIONI)
USCITA DI STATO DEL SERVOAZIONAMENTO
(ON QUANDO PRONTO)
USCITA DI ALLARME DEL SERVOAZIONAMENTO
(OFF IN PRESENZA DI UN ALLARME)
USCITA FOTOACCOPPIATORE
TENSIONE MASSIMA DI FUNZIONAMENTO: 30 VC.C.
CORRENTE MASSIMA DI FUNZIONAMENTO: 50 mA C.C.
(
*1 La costante di tempo del filtro primario è 47 µs.
*2 Collegare quando si utilizza un encoder assoluto.
*3 Utilizzato solo con un encoder assoluto.
*4 La resistenza di rigenerazione può essere collegata tra B1 e B2.
*5 Per i modelli XD-08-M@ la tensione è 220 ... 230 Vc.a. (+10% -15%).
184 Servosistemi c.a.

Trifase, 400 Vc.a.
TRIFASE 380 ... 480 VC.A
L1 L2 L3
FILTRO ANTIDISTURBI
POSIZIONE DI
RIFERIMENTO
5
Accertarsi di collegare
la messa a terra.
FASE A
CW
FASE B
CCW
RIFERIMENTO A
COLLETTORE APERTO
ALIMENTAZIONE
2
2
2
ALIMENTAZIONE
24 VC.C ±15%
VELOCITÀ DI RIFERIMENTO
±2 ... ±10 V/VELOCITÀ MOTORE NOMINALE
COPPIA DI RIFERIMENTO
±1 ... ±10 V/COPPIA MOTORE NOMINALE
SERVOAZIONAMENTO ON
CON 1Ry ON
INGRESSO SEGNALE SEN *
SPEGNI-
MENTO
ACCEN-
SIONE
1
1
ELABORAZIONE
ALLARME
4
XtraDrive
Accertarsidi collegare un soppressore di sovracorrente alla bobina
di eccitazione del contattore magnetico e al relè.
SERVOMOTORE
ENCODER OTTICO
Accertarsi di preparare l'estremità del filo
schermato correttamente
USCITA CODICE DI ALLARME
TENSIONE MASSIMA DI FUNZIONAMENTO: 30 VC.C.
CORRENTE MASSIMA DI FUNZIONAMENTO: 20 mA C.C.
ENCODER SIMULATO IN USCITA
6
)
*
3
USCITA DATI SERIALI DEL NUMERO DI
ROTAZIONI PER LA FASE S
(
(
Servosistemi c.a.
*6)
,
SERVOAZIONAMENTO
SERVOAZIONAMENTO ON CON
1Ry ON
CONTROLLO P CON 2Ry ON
MARCIA AVANTI INIBITA
CON P-LS APERTO
MARCIA INDIETRO INIBITA
CON N-LS APERTO
RESET ALLARME CON 3Ry ON
LIMITE CORRENTE DI ROTAZIONE
AVANTI ON CON 6Ry ON
LIMITE CORRENTE DI ROTAZIONE
INDIETRO ON CON 7Ry ON
ON
CONTROLLO PROPORZIONALE
(CONTROLLO P)
MARCIA
AVANTI INIBITA
MARCIA
INDIETRO INIBITA
RESET ALLARME
LIMITE CORRENTE DI
ROTAZIONE AVANTI ON
LIMITE CORRENTE DI
ROTAZIONE INDIETRO ON
GUSCIO DEL CONNETTORE
COLLEGARE LA SCHERMATURA AL GUSCIO DEL CONNETTORE
*1 La costante di tempo del filtro primario è 47 µs.
*2 Collegare quando si utilizza un encoder assoluto.
*3 Utilizzato solo con un encoder assoluto.
*4 Se si utilizza una resistenza di rigenerazione esterna, collegarla tra B1 e B2.
*5 L'alimentazione a 24 Vc.c. è fornita dall'utente.
RILEVAMENTO COINCIDENZA DELLA VELOCITÀ
(ON QUANDO LA VELOCITÀ COINCIDE)
POSIZIONAMENTO COMPLETATO (ON QUANDO
IL POSIZIONAMENTO È STATO COMPLETATO)
USCITA TGON
(ON QUANDO I LIVELLI SUPERANO LE IMPOSTAZIONI)
USCITA DI STATO DEL SERVOAZIONAMENTO
(ON QUANDO PRONTO)
USCITA DI ALLARME DEL SERVOAZIONAMENTO
(OFF IN PRESENZA DI UN ALLARME)
USCITA FOTOACCOPPIATORE
TENSIONE MASSIMA DI FUNZIONAMENTO: 30 VC.C.
CORRENTE MASSIMA DI FUNZIONAMENTO: 50 mA C.C.
XtraDrive 185

Modelli disponibili
Configurazione del sistema
Rete PROFIBUS
(Modelli XtraDrive con
PROFIBUS integrato)
Servoazionamento
XTRADRIVE
Cavo per monitoraggio
analogico
I
Modulo opzionale
NS115
S
W
1
A
R
S
W
2
C
N
K
6
A
C
N
6
B
C
N
4
Personal computer
Cavo di alimentazione
A
Cavo dell'encoder
B
Servomotore
SGMAH/SGMPH/R7M
Cavo di
alimentazione
A
Cavo dell'encoder
Servomotore
SGMGH/SGMSH/SGMUH
Segnale
di I/O
B
J
C
Morsettiera per
E
Cavo per impieghi generali
servoazionamento
G
H
Cavo dell'encoder
Encoder lineare
Cavo di alimentazione
Motore lineare
SGL
Scheda controllo
assi
F
D
A
Modulo di
posizionamento
Morsettiera
Modulo Serial converter
Motore lineare
Servoazionamenti
Caratteristiche XtraDrive XtraDrive-DP
con PROFIBUS
Monofase 200 Vc.a. 30 W XD-P3-MN01 XD-P3-MSD0 SGMAH-A3A@ R7M-A03030-@ -
50 W XD-P5-MN01 XD-P5-MSD0 SGMAH-A5D@ R7M-A05030-@ SGLGW-30A050@
100 W XD-01-MN01 XD-01-MSD0 SGMAH-01A@, SGMPH-01A@ R7M-A10030-@,
200 W XD-02-MN01 XD-02-MSD0 SGMAH-02A@, SGMPH-02A@ R7M-A20030-@,
400 W XD-04-MN01 XD-04-MSD0 SGMAH-04A@, SGMPH-04A@ R7M-A40030-@,
750 W XD-08-MN XD-08-MSD0 SGMAH-08A@, SGMPH-08A@ R7M-A75030-@,
Trifase 400 Vc.a. 0,5 kW XD-05-TN XD-05-TSD0 SGMGH-05D@, SGMAH-03D@,
1,0 kW XD-10-TN XD-10-TSD0 SGMGH-09D@, SGMSH/UH-10D@,
1,5 kW XD-15-TN XD-15-TSD0 SGMGH-13D@, SGMSH/UH-15D@,
2,0 kW XD-20-TN XD-20-TSD0 SGMGH-20D@, SGMSH-20D@ - SGLTW-35D320@, SGLTW-50D320@
3,0 kW XD-30-TN XD-30-TSD0 SGMGH-30D@, SGMSH/UH-30D@ - SGLFW-1ZD380@, SGLTW-40D400@
Nota: la combinazione di motori lineari SGLGW-@ viene effettuata assumendo l'uso di magneti standard. Per ulteriori informazioni, fare riferimento
al capitolo relativo ai motori lineari.
Servomotori applicabili
Sigma II SmartStep Motori lineari Sigma
R7M-AP10030-@
SGLGW-30A080@, SGLGW-40A140@
SGLFW-20A@, SGLFW-35A120@,
R7M-AP20030-@
R7M-AP40030-@
R7M-AP75030-@
SGLGW-40A253A@,SGLGW-60A140@
SGLGW-40A365A@, SGLGW-60A253A@
SGLFW-35A230@, SGLFW-50A200@,
SGLGW-60A365A@
- SGLFW-35D@
SGMPH-02D@/04D@
SGMAH-07D@, SGMPH-08D@
SGMPH-15D@
- SGLFW-50D200@, SGLTW-35D170@,
SGLTW-50D170@
- SGLFW-50D380@, SGLFW-1ZD200@
Servomotori
Nota: per ulteriori informazioni, fare riferimento al capitolo relativo ai servosistemi.
186 Servosistemi c.a.

Cavi di alimentazione
Simbolo Caratteristiche Modello Aspetto
A
Per servomotori a 200 V senza freno
SGMAH-@@A@@@1D-OY
SGMPH-(01/02/04/08)A@@@1D-OY
R7M-A(P)@@@30-S1-D
Per servomotori a 200 V con freno
SGMAH-@@A@@@CD-OY
SGMPH-(01/02/04/08)A@@@CD-OY
R7M-A(P)@@@30-BS1-D
Per servomotori a 400 V senza freno
SGMAH-@@D@@@1D-OY
SGMPH-@@D@@@1D-OY
Per servomotori a 400 V con freno
SGMAH-@@D@@@CD-OY
SGMPH-@@D@@@CD-OY
Per servomotori a 400 V
SGMGH-(05/09/13)D@
SGMSH-(10/15/20)D@
SGMUH-(10/15)D@
Per i servomotori con freno è necessario un
cavo separato (R88A-CAWC0@@B-E)
Per servomotori a 400 V
SGMGH-(20/30)D@
SGMSH-30D@
SGMUH-30D@
Per i servomotori con freno è necessario un
cavo separato (R88A-CAWC0@@B-E)
Solo cavo del freno.
Per servomotori a 400 V con freno
SGMGH-@@D@
SGMSH-@@D@
SGMUH-@@D@
3 m R88A-CAWA003S-DE
5 m R88A-CAWA005S-DE
10 m R88A-CAWA010S-DE
15 m R88A-CAWA015S-DE
20 m R88A-CAWA020S-DE
3 m R88A-CAWA003B-DE
5 m R88A-CAWA005B-DE
10 m R88A-CAWA010B-DE
15 m R88A-CAWA015B-DE
20 m R88A-CAWA020B-DE
3 m R88A-CAWK003S-DE
5 m R88A-CAWK005S-DE
10 m R88A-CAWK010S-DE
15 m R88A-CAWK015S-DE
20 m R88A-CAWK020S-DE
3 m R88A-CAWK003B-DE
5 m R88A-CAWK005B-DE
10 m R88A-CAWK010B-DE
15 m R88A-CAWK015B-DE
20 m R88A-CAWK020B-DE
3 m R88A-CAWC003S-E
5 m R88A-CAWC005S-E
10 m R88A-CAWC010S-E
15 m R88A-CAWC015S-E
20 m R88A-CAWC020S-E
3 m R88A-CAWD003S-E
5 m R88A-CAWD005S-E
10 m R88A-CAWD010S-E
15 m R88A-CAWD015S-E
20 m R88A-CAWD020S-E
3 m R88A-CAWC003B-E
5 m R88A-CAWC005B-E
10 m R88A-CAWC010B-E
15 m R88A-CAWC015B-E
20 m R88A-CAWC020B-E
U
V
W
O
B
B
Servosistemi c.a.
U
V
W
O
B
B
Cavi encoder (per CN2)
Simbolo Caratteristiche Modello Aspetto
B
Cavo encoder per servomotori Sigma II
(SGMAH/PH)
SGMAH-@@@@@@@D-OY
SGMPH-@@@@@@@D-OY
Cavo encoder per servomotori SmartStep
R7M-A(P)@@@30-S1-D
Cavo encoder per servomotori Sigma II
(SGMGH/SH/UH/BH)
SGMGH-@
SGMSH-@
SGMUH-@
Cavo encoder per serial converter dei motori
lineari Sigma
(Per ulteriori informazioni, fare riferimento al
capitolo relativo ai motori lineari)
3 m XD-CRWA003-DE
5 m XD-CRWA005-DE
10 m XD-CRWA010-DE
15 m XD-CRWA015-DE
20 m XD-CRWA020-DE
3 m XD-CRA003-DE
5 m XD-CRA005-DE
10 m XD-CRA010-DE
15 m XD-CRA015-DE
20 m XD-CRA020-DE
3 m XD-CRWB003N-E
5 m XD-CRWB005N-E
10 m XD-CRWB010N-E
15 m XD-CRWB015N-E
20 m XD-CRWB020N-E
3 m XD-CLP70-03-E
5 m XD-CLP70-05-E
10 m XD-CLP70-10-E
15 m XD-CLP70-15-E
20 m XD-CLP70-20-E
XtraDrive 187

Cavi di controllo (per CN1) Cavo (per CN5)
Sim-
Descrizione Collegare a Modello
bolo
Cavo di controllo
C
(1 asse)
Cavo di controllo
(2 assi)
Morsettiera
(4 assi)
Cavo di collegamento servoazionamento (1 asse)
Cavi di controllo
Modulo PLC
(4 assi)
Morsettiera Modulo di
D
Cavo di collega-
E
mento servoazionamento
Cavo di collega-
F
mento Modulo di
posizionamento
Cavo di controllo Per controlli
G
Cavo per morset-
H
tiera a relè
Morsettiera a relè - XW2B-50G5
Schede controllo assi
CS1W-MC221
CS1W-MC421
C200H-MC221
Schede controllo assi
CS1W-MC221
CS1W-MC421
C200H-MC221
Scheda controllo assi
C200HW-MC402-E
posizionamento
CS1W-NC1@3,
CJ1W-NC1@3 o
C200HW-NC113
Modulo di
posizionamento
CS1W-NC2@3/4@3,
CJ1W-NC2@3/4@3 o
C200HW-NC213/413
CQM1H-PLB21
CQM1-CPU43
CJ1M-CPU22/23 XW2B-20J6-8A
Morsettiere per
servoazionamenti
XW2B-@0J6-@B
C200H-NC112 0,5 m XW2Z-050J-A1
C200H-NC211 0,5 m XW2Z-050J-A2
CQM1-CPU43-V1 e
CQM1H-PLB21
CS1W-NC113 e
C200HW-NC113
CS1W-NC213/413 e
C200HW-NC213/413
CS1W-NC133 0,5 m XW2Z-050J-A10
CS1W-NC233/433 0,5 m XW2Z-050J-A11
CJ1W-NC113 0,5 m XW2Z-050J-A14
CJ1W-NC213/413 0,5 m XW2Z-050J-A15
CJ1W-NC133 0,5 m XW2Z-050J-A18
CJ1W-NC233/433 0,5 m XW2Z-050J-A19
CJ1M-CPU22/23 0,5 m XW2Z-050J-A27
general-purpose
Controlli
general-purpose
1 m R88A-CPW001M1
2 m R88A-CPW002M1
3 m R88A-CPW003M1
5 m R88A-CPW005M1
1 m R88A-CPW001M2
2 m R88A-CPW002M2
3 m R88A-CPW003M2
5 m R88A-CPW005M2
- R88A-TC04-E
1 m R88A-CMUK001J3-
E2
1 m R88A-CMX001S-E
1 m R88A-CMX001J1-E
XW2B-20J6-1B
(1 asse)
XW2B-40J6-2B
(2 assi)
XW2B-20J6-3B
(1 asse)
(1 asse)
XW2B-40J6-9A
(2 assi)
1 m XW2Z-100J-B4
2 m XW2Z-200J-B4
1 m XW2Z-100J-A1
1 m XW2Z-100J-A2
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
0,5 m XW2Z-050J-A6
1 m XW2Z-100J-A6
0,5 m XW2Z-050J-A7
1 m XW2Z-100J-A7
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A27
1 m R88A-CPW001S
o JZSP-CKI01-1
2 m R88A-CPW002S
o JZSP-CKI01-1
1 m R88A-CTW001N
2 m R88A-CTW002N
Simbolo Nome Modello
I
Cavo per monitoraggio analogico R88A-CMW001S
Opzioni (per CN3)
Simbolo Nome Modello
J
Cavo di collegamento per computer R88A-CCW002P2
Schede opzionali (per CN10)
Simbolo Nome Modello
K
Modulo di interfaccia DeviceNet con
posizionatore integrato
Batteria di backup per encoder assoluto
Nome Modello
Batteria (necessaria per i servomotori con
encoder assoluto)
Connettori
Caratteristica Modello
Connettore I/O di controllo (per CN1) R88A-CNU11C
Kit connettore XtraDrive a 200 V
(Per motori a 200 V
SGMAH/PH-@@A@@@D-OY e
R7M-A@-D)
Kit connettore XtraDrive a 400 V
(Per motori a 400 V
SGMAH/PH-@@D@@@D-OY)
Connettore encoder servoazionamento Sigma II
(per CN2)
Connettore encoder Hypertac IP67
(Per motori SGMAH/PH-@@@@@@@D-OY e
R7M-A@-D)
Connettore di potenza Hypertac IP67, 200 V
(Per motori a 200 V SGMAH/PH-@@A@@@@D-OY e
R7M-A@-D)
Connettore di potenza Hypertac IP67, 400 V
(Per motori a 400 V SGMAH/PH-@@D@@@@D-OY)
Connettore MIL per encoder IP67
(Per motori SGMGH-@, SGMSH-@, SGMUH-@)
Connettore MIL di potenza IP67
[Per motori a 400 V SGMGH-(05/10/13)D@,
SGMSH-(10/15/20)D@ , SGMUH-(10/15)D@]
Connettore MIL di potenza IP67
(Per motori a 400 V SGMGH-(20/30)D@, SGMSH-30D@,
SGMUH-30D@)
Connettore MIL per freno IP67 (Per servomotori a 400 V
SGMGH-@, SGMSH-@, SGMUH-@)
Filtri
Caratteristiche
(servoazionamento applicabile)
XD-P3-M@, XD-P5-M@,
XD-01-M@, XD-02-M@
XD-04-M@ R88A-FIW107-SE 7 A
XD-08-M@ R88A-FIW115-SE 15 A
XD-05-T@, XD-10-T@, XD-15-T@ R88A-FIW4006-SE 6 A 400 Vc.a.
XD-20-T@, XD-30-T@ R88A-FIW4010-SE 10 A
Software per computer
Caratteristiche Modello
XtraWare MOTION TOOLS
o DE9404559
o JZSP-CMS02
JUSP-NS300
JZSP-BA01
ER6VC3 (3,6 V)
Connettori inclusi XD-CN200K-DE
DE9406973
SPOC-17H-FRON169
SPOC-06K-FSDN169
Connettori inclusi XD-CN400K-DE
DE9406973
SPOC-17H-FRON169
LPRA-06B-FRBN170
Modello Corrente
R88A-FIW104-SE 4 A 250 Vc.a.
o JZSP-CKI9
DE9406973
o R88A-CNU01R
SPOC-17H-FRON169
SPOC-06K-FSDN169
LPRA-06B-FRBN170
MS3108E20-29S
MS3108E18-10S
MS3108E22-22S
MS3108E10SL-3S
nominale
Tensione
nominale
monofase
trifase
TUTTE LE DIMENSIONI INDICATE SONO ESPRESSE IN MILLIMETRI.
Per convertire i millimetri in pollici, moltiplicare per 0,03937. Per convertire i grammi in once, moltiplicare per 0,03527.
Cat. No. I18E-IT-01
In una prospettiva di miglioria del prodotto, le informazioni contenute nel presente documento sono soggette a
modifiche senza preavviso.
188 Servosistemi c.a.
 Loading...
Loading...