

Page 1
XD-@
l
g
-
l
XtraDrive
Intelligenter Servoantrieb. Motion-Controller
und Netzwerkschnittstelle integriert.
• NCT. Patentierte nicht-lineare Regelalgorithmen für
präzise Positioniersteuerung
• Sehr geringer Schleppfehler ohne Überschwingen
und minimale Einregelzeit
• Autotuning der Servoparameter für optimale Einregelzeit
• OCA. Schwingungs-Unterdrückungsalgorithmus
• Mit integrierter PROFIBUS-Schnittstelle erhältlich
• Ideal für die Ansteuerung von Linearmotoren
• Automatische Motorerkennung von Sigma-II-Motoren
• Analoge Drehzahl- und Drehmomentregelung
• Impulsfolgesteuerung zur Positionierung
• Oszilloskop-Funktion (Softwarepaket XtraWare)
Nennwerte
• 230 V AC, einphasig, 30 W bis 800 W
• 400 V AC, dreiphasig, 0,5 kW bis 3,0 kW
AC-Servosysteme
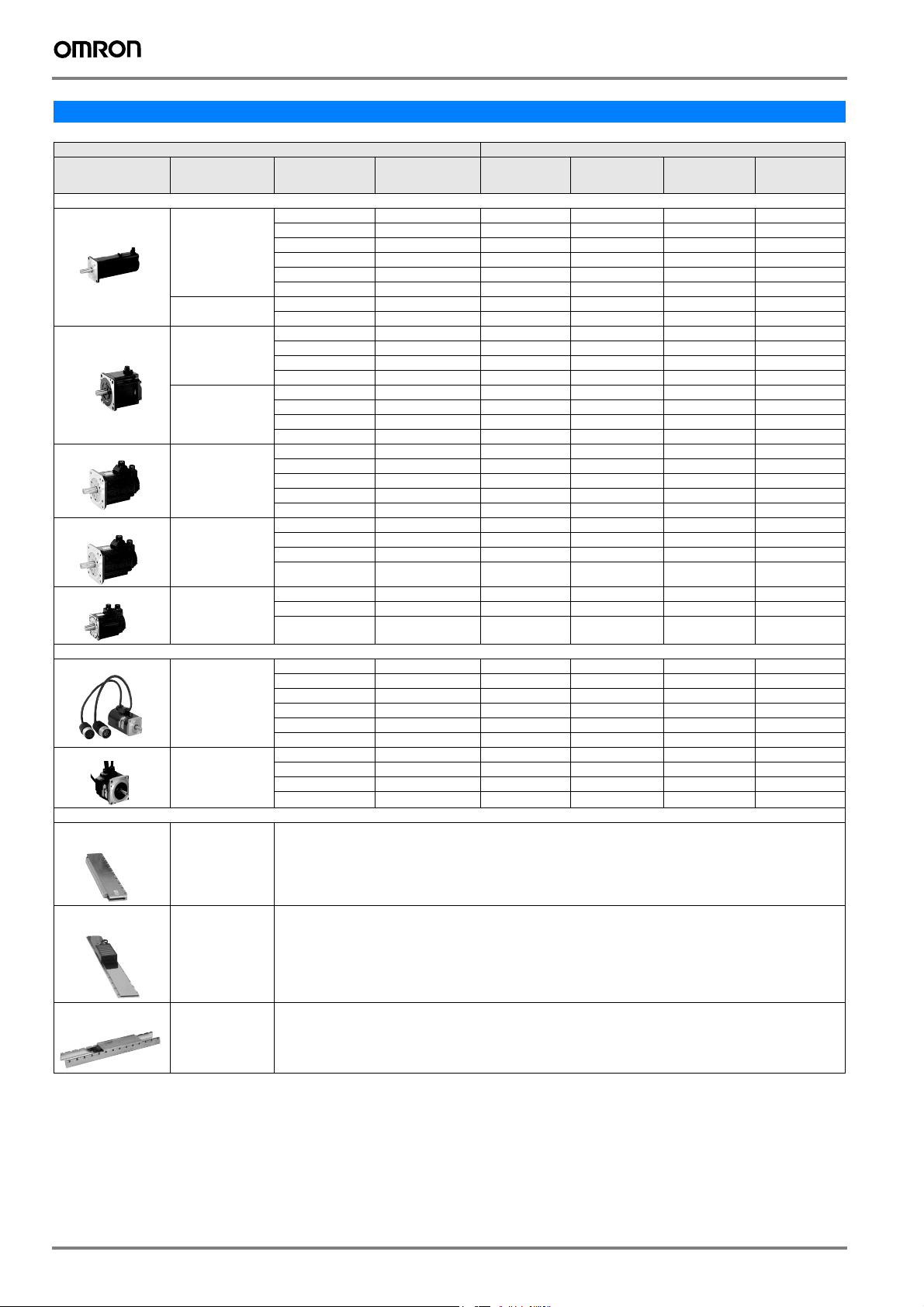
Systemkonfiguration
PROFIBUS-Netzwerk
(XtraDrive-Modelle mit
integrierter PROFIBUS-Schnittstelle)
Spannun
sorgungskabe
Impulsgeber-Kabe
sver
XTRADRIVE
Servoantrieb
Spannungsversorgungskabel
E/ASignal
Impulsgeber-Kabel
AnalogÜberwachungskabel
Universalkabel
Impulsgeber-Kabel
Spannungsversorgungskabel
Optionsbaugruppe
NS115
S
W
1
A
R
S
W
2
C
N
6
A
C
N
6
B
C
N
4
Computer (PC)
Motion-ControllerBaugruppe
Servoklemmenblock
Linearmaßstab
PositionierBaugruppe
Klemmenblock
Serieller Wandler
Linear-Servomotor
mit Eisenkern
SGMAH / SGMPH / R7M
Servomotor
SGMGH / SGMSH / SGMUH
Servomotor
SGL LINEAR-
Servomotor
167XtraDrive
Page 2
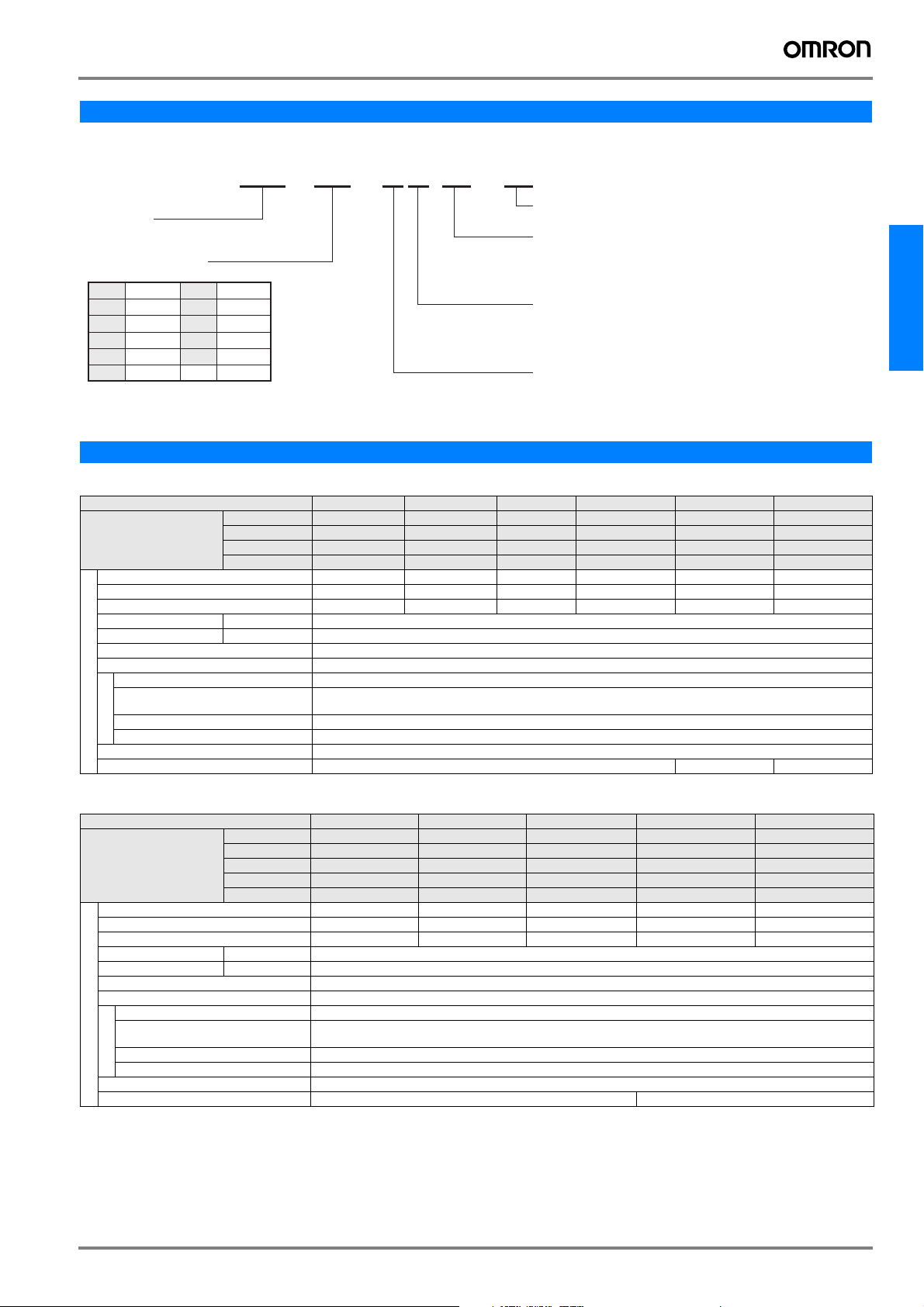
Kombinationen von Servomotor / Servoantrieb
Servomotor Servoantrieb
Spannung Nenndrehmoment Leistung 230 V
Sigma-II-Motoren (Details zu den Motoren sind dem Kapitel zu Sigma-II zu entnehmen)
SGMAH (3000 min
SGMPH (3000 min
SGMGH (1500 min
SGMSH (3000 min
SGMUH (6000 min
-1
) 230 V 0,0955 Nm 30 W XD-P3-MN01 XD-P3-MSD0 - -
0,159 Nm 50 W XD-P5-MN01 XD-P5-MSD0 - 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - 0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,955 Nm 300 W - - XD-05-TN XD-05-TSD0
-1
) 230 V 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - -
2,07 Nm 650 W - - XD-10-TN XD-10-TSD0
0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
400 V 0,637 Nm 200 W - - XD-05-TN XD-05-TSD0
1,27 Nm 400 W - - XD-10-TN XD-10-TSD0
2,39 Nm 750 W - - XD-10-TN XD-10-TSD0
-1
) 400 V 2,84 Nm 0,45 kW - - XD-05-TN XD-05-TSD0
4,77 Nm 1500 W - - XD-15-TN XD-15-TSD0
5,39 Nm 0,85 kW - - XD-10-TN XD-10-TSD0
8,34 Nm 1,3 kW - - XD-15-TN XD-15-TSD0
11,5 Nm 1,8 kW - - XD-20-TN XD-20-TSD0
-1
) 400 V 3,18 Nm 1,0 kW - - XD-10-TN XD-10-TSD0
18,6 Nm 2,9 kW - - XD-30-TN XD-30-TSD0
4,90 Nm 1,5 kW - - XD-15-TN XD-15-TSD0
6,36 Nm 2,0 kW - - XD-20-TN XD-20-TSD0
9,80 Nm 3,0 kW - - XD-30-TN XD-30-TSD0
-1
) 400 V 1,59 Nm 1,0 kW - - XD-10-TN XD-10-TSD0
2,45 Nm 1,5 kW - - XD-15-TN XD-15-TSD0
4,9 Nm 3,0 kW - - XD-30-TN XD-30-TSD0
(einphasig)
230 V (einphasig)
mit PROFIBUS
400 V
(dreiphasig)
400 V
(dreiphasig)
mit PROFIBUS
SmartStep-Motoren (Details zu den Motoren finden Sie im Kapitel zu SmartStep)
R7M-A (3000 min
-1
) 230 V 0,0955 Nm 30 W XD-P3-MN01 - - -
0,159 Nm 50 W XD-P5-MN01 - - 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - 0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - -
R7M-AP (3000 min
-1
) 230 V 0,318 Nm 100 W XD-01-MN01 XD-01-MSD0 - -
2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
0,637 Nm 200 W XD-02-MN01 XD-02-MSD0 - -
1,27 Nm 400 W XD-04-MN01 XD-04-MSD0 - 2,39 Nm 750 W XD-08-MN XD-08-MSD0 - -
Sigma-Linearmotoren (Details zu den Motoren finden Sie im Kapitel zu Sigma-Linearmotoren)
SGLGW
Linearmotoren
SGLFW
Linearmotoren
SGLTW
230 V Einzelheiten sind dem Kapitel zu Linearmotoren zu entnehmen.
230 V,
400 V
Einzelheiten sind dem Kapitel zu Linearmotoren zu entnehmen.
400 V Einzelheiten sind dem Kapitel zu Linearmotoren zu entnehmen.
Linearmotoren
168 AC-Servosysteme
Page 3
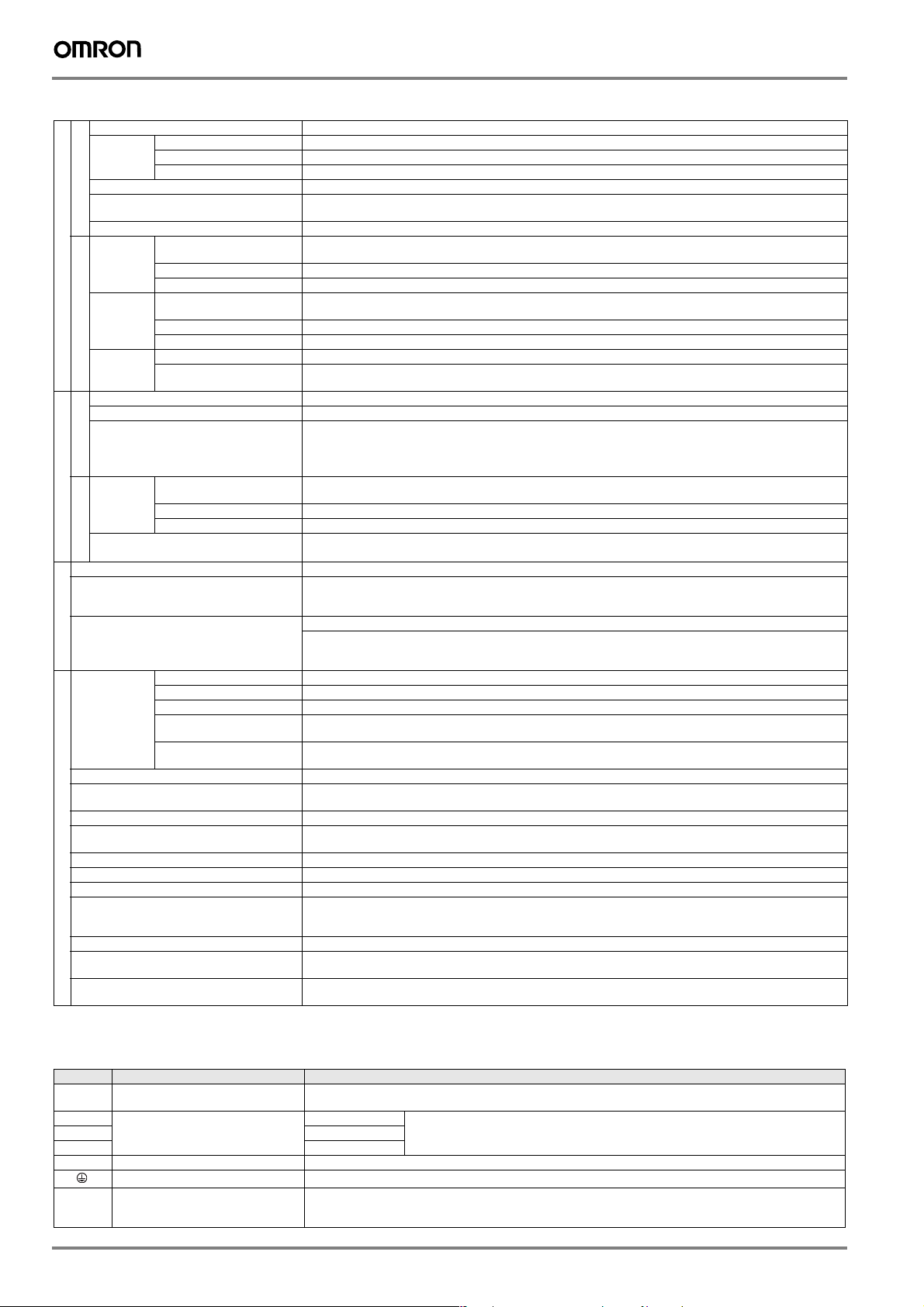
Typenbezeichnung
Antrieb
XD - 01 - MN 01 - E
XtraDrive
mit elektronischer Kurvenscheibenfunktion (ECAM)
Versionsnr. der Ausführung (optional)
Ausgangsleistung
P3 30 W
50 W
P5
100 W
01
200 W
02
400 W
04
500 W05
08
10
15
20
750 W
1,0 kW
1,5 kW
2,0 kW
3,0 kW30
01: Konstruktionsversion
D0: Integrierte Profibus-Schnittstelle
Funktionserweiterungen
N: Mit Steckverbinder CN10 für Optionsbaugruppen
S: Kein Steckverbinder CN10
Eingangsspannung
M: 230 V
T: 400 V
Technische Daten des Servoantriebs
Einphasig, 230 V
Servoantrieb-Produktbezeichnung XD-P3-M@ XD-P3-M@ XD-01-M@ XD-02-M@ XD-04-M@ XD-08-M@
Geeigneter
Servomotor
Max. zulässige Motorleistung W 30 50 100 200 400 750
Dauer-Ausgangsstrom Aeff 0,44 0,64 0,91 2,1 2,8 5,7
Max. Ausgangsstrom Aeff 1,3 2,0 2,8 6,5 8,5 13,9
Eingangsspannung Hauptstromkreis einphasig 200 bis 230 V AC +10% bis -15%
Versorgung Steuerstromkreis einphasig 200 bis 230 V AC +10% bis -15%
Steuerungsart Einphasige Vollwellengleichrichtung / IGBT / Pulsweitenmodulation / Sinusförmige Ansteuerung
Rückführung Serieller Impulsgeber (Inkrementell/Absolutwert)
Betriebs-/Lagertemperatur 0 bis +55 °C / -20 bis 85 °C
Luftfeuchtigkeit bei Betrieb und
Lagerung
Basis-Spezifikationen
Höhenlage max. 1000 m über Meeresspiegel
Vibrations-/Stoßfestigkeit 4,9 m/s
Bedingungen
Konfiguration Aufbaumontage
Gewicht ca. kg 0,8 1,1 1,7
SGMAH-@ A3A@ A5A@ 01A@ 02A@ 04A@ 08A@
SGMPH-@ - - 01A@ 02A@ 04A@ 08A@
R7M-@ A03030-@ A05030-@ A10030-@ A20030-@ A40030-@ A75030-@
R7M-@ - - AP10030-@ AP20030-@ AP40030-@ AP75030-@
max. 90% relative Luftfeuchtigkeit (ohne Kondensatbildung)
2
/ 19,6 m/s
2
AC-Servosysteme
Dreiphasig, 400 V
Servoantrieb-Produktbezeichnung XD-05-T@ XD-10-T@ XD-15-T@ XD-20-T@ XD-30-T@
Geeigneter
Servomotor
Max. zulässige Motorleistung kW 0,45 1,0 1,5 2,0 3,0
Dauer-Ausgangsstrom Aeff 1,9 3,5 5,4 8,4 11,9
Max. Ausgangsstrom Aeff 5,5 8,5 14 20 28
Eingangsspannung Hauptstromkreis dreiphasig 380 bis 480 V AC +10% bis -15% (50/60 Hz)
Versorgung Steuerstromkreis 24 V DC +15%
Steuerungsart Einphasige Vollwellengleichrichtung / IGBT / Pulsweitenmodulation / Sinusförmige Ansteuerung
Rückführung Serieller Impulsgeber (Inkrementell/Absolutwert)
Betriebs-/Lagertemperatur 0 bis +55 °C / -20 bis +85 °C
Luftfeuchtigkeit bei Betrieb und
Lagerung
Basis-Spezifikationen
Höhenlage max. 1000 m über Meeresspiegel
Vibrations-/Stoßfestigkeit 4,9 m/s
Bedingungen
Konfiguration Aufbaumontage
Gewicht ca. kg 2,8 3,8
SGMAH-@ 03D@ 07D@ - - -
SGMAH-@ 02D@, 04D@ 08D@ 15D@ - -
SGMGH-@ 05D@ 09D@ 13D@ 20D@ 30D@
SGMSH-@ - 10D@ 15D@ 20D@ 30D@
SGMUH-@ - 10D@ 15D@ - 30D@
max. 90% relative Luftfeuchtigkeit (ohne Kondensatbildung)
2
/ 19,6 m/s
2
XtraDrive 169
Page 4
Allgemeine technische Daten
Drehzahlregelbereich 1:5000
Drehzahl-
abweichung
Frequenzeigenschaften 400 Hz (bei J
Genauigkeit der Drehmomentregelung
(Reproduzierbarkeit)
Leistungsdaten
Sanftanlaufzeiteinstellung 0 bis 10 s (Beschleunigung und Verzögerung sind getrennt einstellbar.)
DrehzahlSollwertEingang
DrehmomentSollwertEingang
Eingangssignal
Kontakt-
Drehzahl-/Drehmoment-Regelbetriebsart
DrehzahlSollwert
Offset-Einstellung 0 bis 450 min-1 (Einstellungsauflösung: 1 min-1)
Vorsteuerungskompensation 0 bis 100% (Einstellungsauflösung: 1%)
Weiteneinstellung für Positionierung abge-
schlossen
Lastabweichung Bei 0 bis 100% Last max. ±0,01% (bei Nenndrehzahl)
Spannungsabweichung Nennspannung ±10%: 0% (bei Nenndrehzahl)
Temperaturabweichung 25 ±25 °C: max. ±0,1% (bei Nenndrehzahl)
±2%
Sollwert-Spannung ±6 V DC (Vorwärts-Motordrehung bei positivem Sollwert) bei Nenndrehzahl: Voreingestellt
Eingangsimpedanz ca. 14 kΩ
Stromkreis-Zeitkonstante Sollwert-Spannung ±3 V DC (Vorwärtsdrehung bei positivem Sollwert) bei Nenndrehzahl: Voreingestellt
Eingangsimpedanz ca. 14 kΩ
Stromkreis-Zeitkonstante ca. 47 µs
Wahl der Drehrichtung Mit P-Regelsignal
Drehzahlauswahl Mit Vorwärts/Rückwärts-Stromgrenzwertsignal (Drehzahlauswahl 1 bis 3). Der Servomotor wird gestoppt oder es
Variabler Einstellbereich: ±2 bis ±10 V DC bei Nenndrehzahl, max. Eingangsspannung: ±12 V
Variabler Einstellbereich ±1 bis ±10 V DC bei Nenn-Drehmomentsollwert
wird eine andere Regelungsart verwendet, wenn beide Signale ausgeschaltet sind.
0 bis 250 Sollwerteinheiten (Einstellungsauflösung: 1 Sollwerteinheit)
= JM)
L
Leistungsdaten
SollwertImpuls
Steuersignal Löschsignal (Eingangsimpuls entspricht Sollwertimpuls)
Positioniersteuerungsmodus
Eingangssignal
Positionssignalausgabe A-Phase, B-Phase, C-Phase, (S-Phase): Line-Treiber-Ausgang, S-Phase nur bei Absolutwert-Drehgeber.
Sequenzeingabesignal Servo EIN, P-Regelung (oder Umschaltung der Regelbetriebsart, Nullhaltungs Klemmfunktion, Sollwertimpuls-
Sequenzausgangssignal Servoalarm, Alarmcodes (3-Bit-Ausgang): Ausgang CN1 ist fest eingestellt.
E/A-Signal
Kommunikation Schnittstelle Digitale Bedienkonsole (Handgerät), RS-422-Schnittstelle für PCs usw. (gegebenenfalls RS-232C-Schnittstellen)
Autotuning-Funktion Automatische Einstellung von Positions-/Drehzahlregelkreisverstärkung und Integrationszeitkonstante möglich.
Generatorische Bremse (DB) Wird beim Ausfall der Hauptspannungsversorgung, bei Servoalarm, Servo AUS oder Endlagenschalter angefah-
Generatorischer Bremsbetrieb Extern montierter Bremswiderstand (Option)
Endlagenschalter Funktion (OT) Stopp durch generatorisches Bremsen, Stopp über Verzögerungsrampe oder freies Auslaufen, wenn positive End-
Drehgeber-Teilungsfunktion Optionale Teilung möglich
Elektronisches Getriebe 0,01< A/B<100
Interne Festdrehzahlfunktion 3 Drehzahlen intern einstellbar
Integrierte Funktionen
Schutzfunktionen Überstrom, Überspannung, unzureichende Spannung, Überlastung, Sensorfehler Hauptschaltkreis, Kühlkörper-
Analoge Überwachungsfunktionen Integrierte analoge Überwachungsanschlüsse für Drehzahl- und Drehmoment-Sollwertsignale usw.
Anzeigefunktionen LED-Anzeigen CHARGE, POWER, 5-stellige 7-Segment-LED-Anzeige (in die digitale Bedienkonsole integrierte
Sonstige Drehrichtungswechsel, Nullpunkt-Suche, automatische Motorerkennung sowie ZK-Drossel-Anschlussklemme für
Eingangssignaltyp Vorzeichen + Impulsfolge, 90° Phasenversatz, 2-phasiger Impuls (A-Phase + B-Phase) oder
Eingangsimpulsform Line-Treiber (+5-V-Pegel), offener Kollektor (+5-V- oder +12-V-Pegel)
Eingangsimpulsfrequenz 0 bis 500 kImpulse/s (max. 200 kImpulse/s bei offenem Kollektor)
1:N-Kommunikation N = max. 14 bei Verwendung einer RS-422A-Schnittstelle
Achsen-Adresseinstellung Gemäß Anwendereinstellung
Funktionen Statusanzeige, Benutzerkonstanten-Überwachungsanzeige, Alarmprotokollanzeige, JOG-Betrieb / Autotuning-
PROFIBUS (Nur Modelle mit PROFIBUS) PROFIBUS-DP-Slave, Einstellung der Knotenadresse 0-125 mit Drehschaltern,
Impulsfolge im/gegen Uhrzeigersinn
sperre), Vorwärts-/RückwärtslaufSperrung, Alarm-Rücksetzung, Vorwärts-/Rückwärts-Stromgrenzwert (oder interne Festdrehzahlen)
Es können drei der folgenden Signaltypen ausgegeben werden: Positionierung abgeschlossen (Drehzahlübereinstimmung), Motordrehung, Servo bereit, Stromgrenzwert, Drehzahlgrenzwert, Bremslösung, Warnung, NEAR und
Nullpunkt-Impulssignal
Funktionen sowie Diagrammfunktionen für Drehzahl/Drehmoment-Sollwertsignal usw.
Baudrate von 9,6 kBit/s bis 12 MBit/s. LED-Anzeigen: Bus-Fehler und Systemfehler
ren betätigt.
lage (P-OT) oder negative Endlage (N-OT) aktiv ist
überhitzung, Stromphasenausfall, Überlauf, Überdrehzahl, Drehgeberfehler, Durchgang, CPU-Fehler, Parameterfehler usw.
Funktion, bei Modellen mit PROFIBUS nicht verfügbar)
HF-Strom-Unterdrückungsfunktion (ausgenommen 6 bis 15 kW).
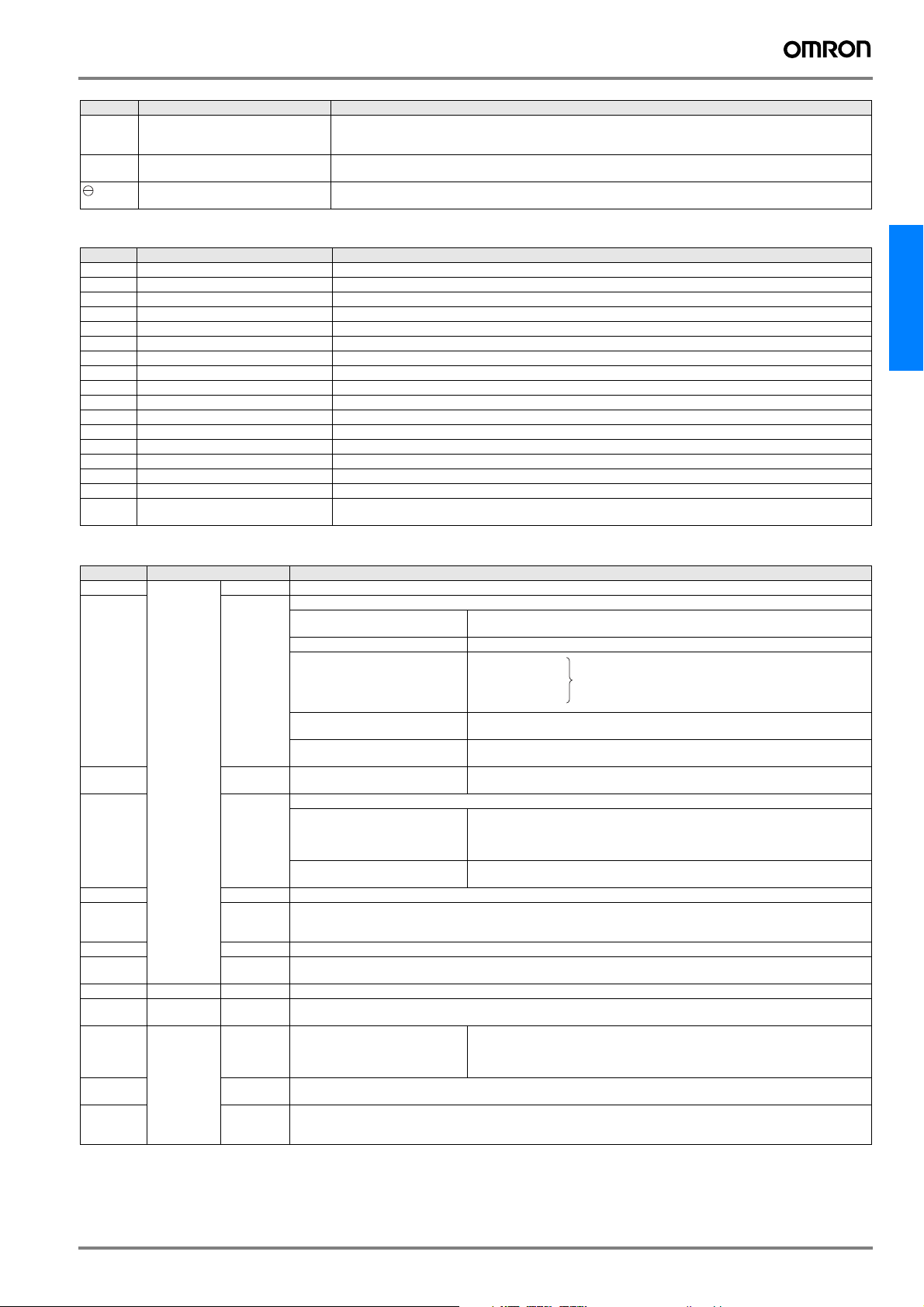
E/A-Spezifikationen
Klemmenbelegung
Symbol Bezeichnung Funktion
L1, L2 oder
L1, L2, L3
U Servomotor-Anschlussklemme rot Klemmen für den Ausgang zum Servomotor
Vweiß
Wblau
L1C, L2C Steuerspannungs-Eingangsklemme Spannungsversorgungsklemmen für die Steuerschaltung
B1, B2
oder
B1, B2, B3
AC-Netzeingangsanschluss AC-Netzeingangsklemmen für den Hauptstromkreis
Gehäuseerdung Erdungsklemme. Max. Erdungswiderstand: 100 Ω (Klasse 3).
Hauptschaltkreis-DC-Ausgangs-
klemme
bis zu 5 kW: Schließen Sie bei hoher generatorischer Energie einen externen Bremswiderstand an.
5,5 kW: Es ist kein interner Bremswiderstand vorhanden. Es muss eine externe Bremswiderstandseinheit angeschlossen werden.
170 AC-Servosysteme
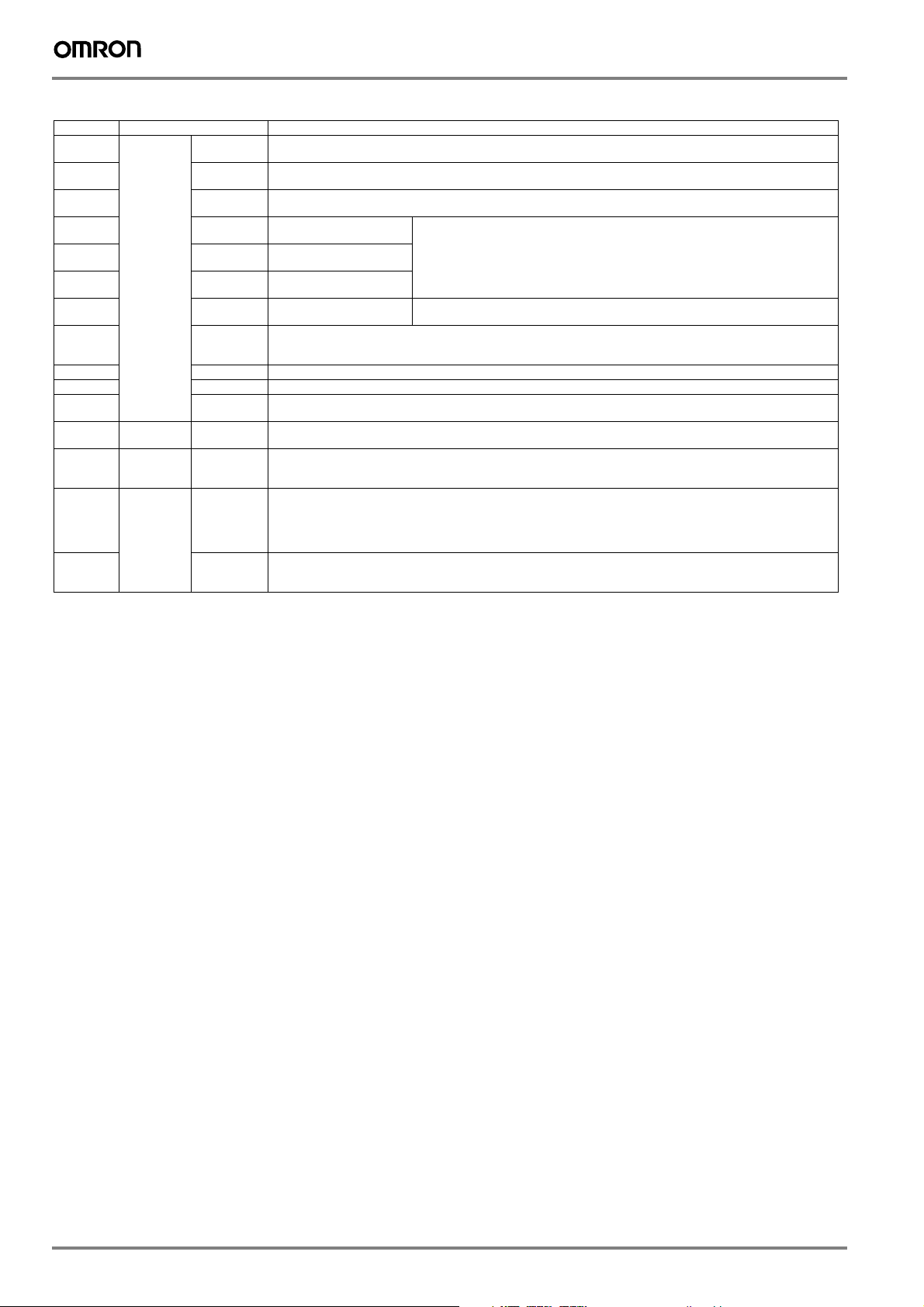
Page 5
Symbol Bezeichnung Funktion
⊕1, ⊕2 Anschlussklemme für ZK-Drossel
⊕ Hauptschaltkreis-DC-Ausgangs-
zur Spannungsversorgungs-Oberwellenglättung
klemme (+)
Hauptschaltkreis-DC-Ausgangs-
Normalerweise werden die Klemmen ⊕1 und ⊕2 miteinander verbunden. Wenn Gegenmaßnahmen gegen
Versorgungsspannungs-Oberwellen erforderlich sind, schließen Sie eine ZK-Drossel zwischen ⊕1 und ⊕2 an.
Normalerweise nicht angeschlossen.
Diese Klemme ist nur bei Servoantrieben mit einer Leistung ab 6,0 kW vorhanden.
Normalerweise nicht angeschlossen.
klemme (n-)
Gebersteckverbindung (CN2)
Stift Symbol Funktion
1, 2, 3 PPG0V Masse der Drehgeber-Spannungsversorgung (GND)
4, 5, 6 PPG5V Drehgeber-Spannungsversorgung +5 V
7- 8 PS+ Signaleingang für seriellen Drehgeber
9PS− Signaleingang für seriellen Drehgeber
10 SePG5V +5 V Spannungsversorgung für seriellen Drehgeber (Sigma-II)
11 SePG0V Masse der Spannungsversorgung für seriellen Drehgeber (Sigma-II)
12 BAT+ Batterie-Plus (nur in Verbindung mit Absolutwert-Drehgeber)
13 BAT- Batterie-Minus (nur in Verbindung mit Absolutwert-Drehgeber)
14 PC+ Drehgeber + Phase-C-Eingang
15 PC− Drehgeber − Phase-C-Eingang
16 A+ Drehgeber + Phase-A-Eingang
17 A− Drehgeber − Phase-A-Eingang
18 B+ Drehgeber + Phase-B-Eingang
19 B− Drehgeber − Phase-B-Eingang
20 - Steckerge-
FG Kabelabschirmung (Erde)
häuse
E/A-Signale (CN1) - Eingangssignale
Stift-Nr. Signalbezeichnung Funktion
40 Allgemein /S-ON Servo EIN: Der Servomotor wird eingeschaltet, wenn die Gate-Sperrung im Leistungsteil aufgehoben wird.
41 /P-CON Funktionswahl durch Parameter.
42
43
45
46
P-OT
N-OT
/P-CL
/N-CL
44 /ALM-RST Alarm-Rücksetzung: Aufhebung des Servoalarms.
47 +24VIN Steuerspannungsversorgungseingang für Sequenzsignale: Die 24-V-Spannungsversorgung muss vom Anwender bereit-
4 (2) SEN Anfangs-Datenanforderungssignal bei Verwendung eines Absolutwert-Drehgebers
21
22
BAT (+)
BAT (-)
5 (6) Drehzahl V-REF Drehzahlsollwert-Analogeingang: ±2 bis ±10 V/Motornenndrehzahl (Eingangsverstärkung mittels Parameter änderbar.)
9 (10) Drehmoment T-REF Drehmomentsollwert-Analogeingang: ±1 bis ±10 V/Motornenndrehmoment (Eingangsverstärkung mittels Parameter
7
8
11
12
15
14
3
13
18
Position PULS
/PULS
SIGN
/SIGN
CLR
/CLR
PL1
PL2
PL3
Hinweis: 1. Die Stift-Nummern in Klammern () bezeichnen Signalmassen.
2. Die den Eingangssignalen /S-ON, /P-CON, P-OT, N-OT, /ALM-RST, /P-CL und /N-CL zugeordneten Funktionen können über die Para-
meter geändert werden.
3. Der maximale Eingangsspannungsbereich für den Drehzahl- und Drehmomentsollwert beträgt ±12 V.
Proportionalregelungs-Sollwert EIN: Umschaltung des Drehzahlregelkreises von PI (proportional/integral) auf P
(proportional)
Richtungssollwert Bei Auswahl der internen Festdrehzahlen: Umschaltung der Drehrichtung.
Umschaltung der
Regelbetriebsart
Nullhaltungs-Sollwert Drehzahlregelung mit Nullhaltungs-Funktion: Bei EIN:
Sollwert-Impulssperre Positioniersteuerung mit Sollwertimpuls-Stopp: Bei EIN: Eingabe von Sollwert-
Vorwärtslauf gesperrt
Rückwärtslauf gesperrt
↔
Position Drehzahl
Position
Dreh-
moment
↔
↔
Drehmoment
Drehzahl
Ermöglicht Umschaltung
der Regelbetriebsart
Drehzahlsollwert = 0
impulsen wird gestoppt.
Nachlaufweg gesperrt: Der Servomotor wird gestoppt, wenn das bewegliche Teil die
Grenze des zulässigen Bewegungsbereichs überschreitet.
Funktionswahl durch Parameter.
Externer Vorwärts-Drehmoment-
grenzwert EIN
Externer Rückwärts-Drehmomentgrenzwert EIN
Interne Festdrehzahlen Bei Auswahl der internen Festdrehzahlen: Umschaltung der internen Drehmoment-
gestellt werden.
Zulässiger Spannungsschwankungsbereich: 11 bis 25 V
Anschlussstift für die Speicherbatterie des Absolutwert-Drehgebers.
Nicht anschließen, wenn eine Batterie an den Host-Controller angeschlossen ist.
Bei EIN: Stromgrenzwertfunktion aktiviert.
einstellungen.
änderbar.)
Sollwert-Impulseingang
nur für Line-Treiber
Die Eingangsart wird anhand der folgenden Impulse eingestellt.
Vorzeichen + Impulsfolge
Impuls im/gegen Uhrzeigersinn
Zweiphasiger Impuls (90° Phasendifferenz)
Positionsfehlerimpuls-Löschen-Eingang: Löschen des Positionsfehlerimpulses während der Positioniersteuerung.
+12 V Pull-up-Spannung wird angelegt, wenn die Sollwertsignale PULS, SIGN und CLR
offene Kollektorausgänge sind (+12-V-Spannungsversorgung im SERVOPACK integriert).
AC-Servosysteme
XtraDrive 171
Page 6
E/A-Signale (CN1) - Ausgangssignale
Stift-Nr. Signalbezeichnung Funktion
31
32
27
28
29
30
33 (1)
34
35
36
19
20
48
49
37
38
39 (1)
16 TMON Analoges Überwachungssignal
17 VTG Analoges Überwachungssignal
Steckerge-
häuse
25
26
25
26
- Reserviert /CLT
23
24
50
Allgemein ALM+
Drehzahl /V-CMP+
Position /COIN+
ALM/TGON+
/TGON/S-RDY+
/S-RDYPAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
ALO1
ALO2
ALO3
FG Angeschlossen an die Gehäuseerdung, wenn die Abschirmung des E/A-Signalkabels mit dem Steckergehäuse verbun-
/V-CMP-
/COIN-
/VLT
/BK
/WARN
/NEAR
- Nicht belegte Klemmen
Servoalarm: Schaltet AUS, wenn ein Fehler erkannt wird.
Erkennung während der Drehbewegung des Servomotors: Erkennt, ob der Servomotor mit höherer als der eingestellten
Motordrehzahl dreht. Die Drehzahlerkennung kann über die Parameter eingestellt werden.
Servo bereit: EIN, wenn beim Einschalten der Steuer-/Hauptstromkreis-Spannungsversorgung kein Servoalarm vorliegt.
Phase-A-Signal Umgerechnetes zweiphasiges (Phasen A und B) Drehgeber-Ausgangssignal und Null-
Phase-B-Signal
Phase-C-Signal
Phase-S-Signal Mit Absolutwert-Drehgeber: Ausgabe serieller Daten entsprechend der Anzahl der
Alarmcodeausgang: Ausgabe von 3-Bit-Alarmcodes.
Offener Kollektor: Nennleistung max. 30 V, 20 mA
den ist.
Drehzahlübereinstimmung (Ausgabe in Drehzahlregelbetriebsart): Erkennt, ob die Motordrehzahl im Einstellbereich
liegt und dem Drehzahl-Sollwert entspricht.
Positionierung abgeschlossen (Ausgabe in Positioniersteuerungsbetriebsart): Schaltet EIN, wenn die Anzahl der
Positionsfehlerimpulse den eingestellten Wert erreicht. Die Einstellung entspricht der Anzahl der in Sollwerteinheiten
eingestellten Positionsfehlerimpulsen (Eingangsimpulseinheiten gemäß elektronischer Übersetzung).
Reservierte Klemmen
Die /TGON, /S-RDY und /V-CMP (/COIN) zugeordneten Funktionen können über die Parameter geändert werden.
Auch die Signale /CLT, /VLT, /BK, /WARN und /NEAR können geändert werden.
Schließen Sie keine Relais an diese Klemmen an.
punkt-Impulssignal (Phase C): RS-422 oder vergleichbar (Korrekter Line-Empfänger:
SN75175 von Texas Instruments oder gleichwertig entsprechend MC3486.)
Umdrehungen (RS-422 oder vergleichbar)
Hinweis: 1. Die Stift-Nummern in Klammern () bezeichnen Signalmassen.
2. Die /TGON, /S-RDY und /V-CMP (/COIN) zugeordneten Funktionen können über die Parameter geändert werden. Auch die Signale /
CLT, /VLT, /BK, /WARN und /NEAR können geändert werden.
172 AC-Servosysteme
Page 7
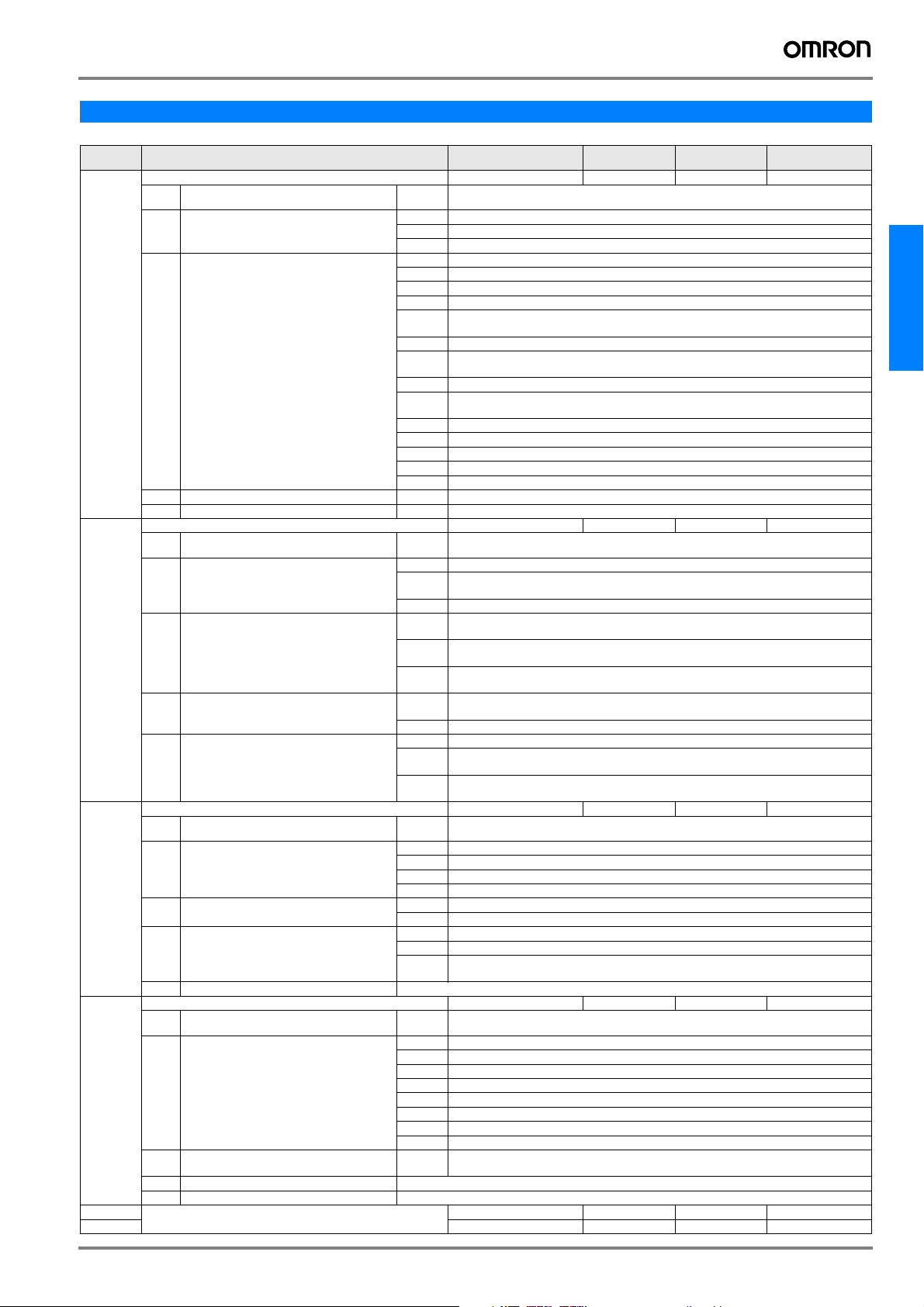
Parameter
ParameterNr.
Bezeichnung Einstellbereich Einheit Werks-
einstellung
Einstellungsaktivierung
Pn000 Basis-Funktionswahlschalter - - 00D0 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Beschreibung
0 Drehrichtungswahl 0 Gegen den Uhrzeigersinn wird als Vorwärtsrichtung definiert
1 Im Uhrzeigersinn wird als Vorwärtsrichtung definiert (umgekehrte Drehrichtung)
2 und 3 Reserviert (nicht ändern)
1 Auswahl der Regelungsart 0 Drehzahlregelung (analoger Sollwert)
1 Yaskawa Optionskarte (OB)
2 Drehmomentregelung (analoger Sollwert)
3 Regelung mit interner Festdrehzahl (Kontakt-Sollwert)
4 Regelung mit interner Festdrehzahl (Kontakt-Sollwert)<>Drehzahlregelung
(analoger Sollwert)
5 Intern eingestellte Festdrehzahl <> Positioniersteuerung (Impulsfolgen-Sollwert)
6 Regelung mit interner Festdrehzahl (Kontakt-Sollwert)<>Drehmomentregelung
(analoger Sollwert)
7 Positioniersteuerung (Impulsfolgen-Sollwert)<>Drehzahlregelung (analoger Sollwert)
8 Positioniersteuerung (Impulsfolgen-Sollwert)<>Drehmomentregelung
(analoger Sollwert)
9 Drehmomentregelung (analoger Sollwert)<>Drehzahlregelung (analoger Sollwert)
A Drehzahlregelung (analoger Sollwert)<>Nullhaltung
B Positioniersteuerung (Impulsfolgen-Sollwert)<>Positioniersteuerung (Sperre)
C Positioniersteuerung (Impulsfolge)
D Serieller Kommunikationsbefehl
2 Achsen-Adresse 0 bis F Einstellung der Achsenadresse des Servoverstärkers
3 Reserviert -
Pn001 Funktionswahl-Anwendungsschalter 1 - - 0000 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Servo AUS oder Alarmstopp-Modus 0 Stoppt den Motor durch Aktivierung der generatorischen Bremse (DB)
1 Stoppt den Motor durch Aktivierung der generatorischen Bremse (DB), anschließend
wird die DB freigegeben
2 Motor läuft ohne Anwendung der generatorischen Bremse (DB) bis zum Stillstand aus.
1 Stoppmodus für Endlagenschalter Funktion
(OT)
0 Gleiche Einstellung wie Pn001.0 (Motor wird durch Aktivierung der DB oder durch Aus-
1 Einstellung des Drehmoments von Pn406 auf den Höchstwert, Verzögerung des Motors
laufen angehalten).
bis zum Stillstand und anschließend Einstellung auf Servosperre.
2 Einstellung des Drehmoments von Pn406 auf den Höchstwert, Verzögerung des Motors
bis zum Stillstand und anschließend Einstellung auf Freilauf.
2 Auswahl der AC/DC-Eingangsspannung 0 Gilt nicht für DC-Eingangsspannung: AC-Spannungsvorsorgung über die Klemmen L1,
L2 (und L3)
1 Für DC-Eingangsspannung: DC-Spannungsversorgung über Klemmen (+)1 und (-)
3 Auswahl der Warncodeausgabe 0 Über ALO1, ALO2 und ALO3 nur Ausgabe von Alarmcodes.
1 Über ALO1, ALO2 und ALO3 Ausgabe von Alarmcodes und Warncodes. Während der
Ausgabe von Warncodes bleibt der ALM-Signalausgang eingeschaltet (Normalzustand).
2 Absolutwert-Drehgeber wird als Absolutwert-Drehgeber verwendet. Mit Multi-
Umdrehungs-Grenzwert.
Pn002 Funktionswahl-Anwendungsschalter 2 - - 0000 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Drehzahlregelungsoption 0 Ohne
1 Verwendung von T-REF als externer Drehmomentgrenzwert-Eingang.
2 T-REF wird als Drehmoment-Vorsteuerungseingang verwendet
3 Verwendung von T-REF, wenn P-CL und N-CL eingeschaltet sind.
1 Drehmomentregelungsoption 0 Ohne
1 Verwendung von V-REF als externer Drehzahlgrenzwert-Eingang.
2 Verwendung des Absolutwert-Drehgebers 0 Absolutwert-Drehgeber wird als Absolutwert-Drehgeber verwendet.
1 Absolutwert-Drehgeber wird als Inkremental-Drehgeber verwendet.
2 Absolutwert-Drehgeber wird als Absolutwert-Drehgeber verwendet.
Mit Multi-Umdrehungs-Grenzwert.
3 Nicht verwendet. -
Pn003 Funktionswahl-Anwendungsschalter 3 - - 0002 Sofort
Stelle Funktionsbezeichnung Einstel-
0 Analogüberwachung 1 Drehmoment-
Sollwertüberwachung
lung
0 Motordrehzahl: 1 V/1000 min
1 Drehzahlsollwert: 1 V/1000 min
Erläuterung
-1
-1
2 Drehmomentsollwert: 1 V/100%
3 Positionsfehler: 0,05 V/1 Sollwerteinheit
1 Analogüberwachung 2 Drehzahl-Sollwert-
überwachung
4 Positionsfehler: 0,05 V/100 Sollwerteinheiten
5 Sollwertimpulsfrequenz (umgerechnet in min
6 Motordrehzahl x 4: 1 V/250 min
7 Motordrehzahl x 8: 1 V/250 min
-1
-1
0 bis 7 Wie Pn003.0 (siehe oben)
-1
: 1 V/1000 min
-1
2 Nicht verwendet -
3 Nicht verwendet Pn004 Reserviert (nicht ändern) - - 0000 Pn005 - - 0000 -
AC-Servosysteme
XtraDrive 173
Page 8

ParameterNr.
Bezeichnung Einstellbereich Einheit Werks-
einstellung
Einstellungsaktivierung
Pn006 Verstärkungs-Anwendungsschalter - - 0000 Sofort
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Analogüberwachung 1 0 Servo-Positionsfehler: 1 V/10 Drehgeberimpulse
1 Servo-Positionsfehler: 1 V/5 Anwendereinheiten
2 Solldrehzahl 1 V/500 U/min
3 Solldrehzahl nach Sollwertglättung 1 V/500 U/min
4 Drehmomentsollwert: 10 V/Max. Drehmoment
5 Motordrehzahl: 1 V/500 U/min.
6 Sollbeschleunigung nach Sollwertglättung: 10 V/max. Beschleunigung zulässig
1 Analogüberwachung 1 - Auswahl des
Quellenparameters
0 Pn003.0 wird für Analogüberwachung 1 verwendet.
1 Pn006.0 wird für Analogüberwachung 1 verwendet.
2 Analogüberwachung 1 - Auswahl der Quelle 0-4 0: x1, 1: x10, 2: x100, 3: x1/10, 4: x1/100
3 Nicht verwendet 0 -
Pn007 Verstärkungs-Anwendungsschalter - - 0000 Sofort
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Analogüberwachung 2 0 Servo-Positionsfehler: 1 V/10 Drehgeberimpulse
1 Servo-Positionsfehler: 1 V/5 Anwendereinheiten
2 Solldrehzahl 1 V/500 U/min
3 Solldrehzahl nach Sollwertglättung 1 V/500 U/min
4 Drehmomentsollwert: 10 V/Max. Drehmoment
5 Motordrehzahl: 1 V/500 U/min
6 Sollbeschleunigung nach Sollwertglättung: 10 V/max. Beschleunigung zulässig
1 Analogüberwachung 2 - Auswahl des
Quellenparameters
0 Pn003.0 wird für Analogüberwachung 2 verwendet.
1 Pn007.0 wird für Analogüberwachung 2 verwendet.
2 Analogüberwachung 2 0-4 0: x1, 1: x10, 2: x100, 3: x1/10, 4: x1/100
3 Nicht verwendet 0 -
Pn080
(Nur
Linearmotoren)
Linearmotor-Kommutierungsschalter - - 0011 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Kommutierungssensor-Schalter 0 Mit Kommutierungssensoren
1 Ohne Kommutierungssensoren
1 Kommutierungssensor-Reihenfolge 0 UVW
1UWV
2 Reserviert - 3 Reserviert - -
Pn100 Drehzahlregelkreisverstärkung 1 bis 2000 Hz 1 Hz 40 Hz Sofort
Pn101 Drehzahlregelkreis-Integrationszeitkonstante 0,15 bis 512,00 ms 0,01 ms 20,00 ms Sofort
Pn102 Positionsregelkreisverstärkung 1 bis 2000/s 1/s 40/s Sofort
Pn103 Trägheitsmoment-Verhältnis 0 bis 10.000% 1% 0% Sofort
Pn104 2. Drehzahlregelkreisverstärkung 1 bis 2000 Hz 1 Hz 40 Sofort
Pn105 2. Drehzahlregelkreis-Integrationszeitkonstante 0,15 bis 512,00 ms 0,01 ms 20,00 ms Sofort
Pn106 2. Positionsregelkreisverstärkung 1 bis 2000/s 1/s 40/s Sofort
Pn107 Offset 0 bis 450 min
Pn108 Offsetbreitenzugabe 0 bis 250 Sollwerteinheiten Sollwerteinheit 7 Sollwert-
-1
1 min
-1
-1
0 min
einheiten
Sofort
Sofort
Pn109 Vorsteuerung 0 bis 100% 1% 0% Sofort
Pn110 Online-Autotuning-Schalter - - 0010 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Online-Autotuning-Methode 0 Tuning nur bei Betriebsbeginn
1 Tuning zu jedem Zeitpunkt
2 Kein Autotuning
1 Auswahl der Drehzahlistwert-Kompensation 0 Aktiviert
1 Deaktiviert
2 Auswahl der Reibungskompensation 0 Reibungskompensation: Deaktiviert
1 Reibungskompensation: Gering
2 Reibungskompensation: Hoch
3 Reserviert 0 - 3 Reservierter Parameter (nicht ändern)
Pn10A Vorsteuerungs-Filterzeitkonstante 0,00 bis 64,00 ms 0,01 ms 0,00 ms Sofort
Pn10B Steht noch aus - - 0000 Pn10C Betriebsartwechsel-Drehmomentsollwert 0 bis 800% 1% 200% Sofort
Pn10D Betriebsartwechsel-Drehzahlsollwert 0 bis 10000 min
Pn10E Betriebsartwechsel-Beschleunigung 0 bis 3000 min
Pn10F Betriebsartwechsel-Fehlerimpuls 0 bis 10000 Sollwert-
einheiten
-1
-1
/s 1 min-1/s 0 min-1/s Sofort
-1
1 min
1 Sollwerteinheit 0 Sollwert-
-1
0 min
einheiten
Sofort
Sofort
Pn111 Drehzahlistwert-Kompensation 1 bis 500% 1% 100% Sofort
174 AC-Servosysteme
Page 9

ParameterNr.
Pn112 Reserviert (nicht einstellen) - - 100 Pn113 1000
Pn114 200
Pn115 32
Pn116 16
Pn117 100
Pn118 100
Pn119 50
Pn11A 1000
Pn11B 50
Pn11C 70
Pn11D Reserviert (nicht ändern) - - 100 Pn11E 100
Pn11F 0
Pn120 0
Pn121 50
Pn122 0
Pn123 0
Pn124 0
Pn125 100
Pn131 0
Pn132 0
Pn133 0
Pn134 0
Pn135 0
Pn136 0
Pn137 0
Pn138 0
Pn139 0
Pn13A 0
Pn140 200
Pn141 800
Pn142 0
Pn143 0
Pn144 1000
Pn145 0
Pn190 Motor-Auswahlschalter - - 0000 Nach Neustart
Pn191 Motor-Auswahlschalter - - 1000 Nach Neustart
Pn192 Anzahl Impulse des A-Quad-B-Gebers (niedrig) 0-999 Impulse/Umdrehung Impulse/
Pn193 Anzahl Impulse des A-Quad-B-Gebers (hoch) 0-419 Impulse*10000/
Pn194 Reserviert (nicht ändern) - - 2 Pn195 20
Pn196 20
Pn197 88
Pn198 0
Pn199 Geberimpulse je Skalenintervall des Linearmotors 1-256 Impulse/
Bezeichnung Einstellbereich Einheit Werks-
Stelle Funktionsbezeichnung Einstel-
0 Motormodell 0 Yaskawa A Quad B, Modell SGM
1 Drehgebertyp 0 A-Quad-B-Inkrementalwertgeber
2 Drehgeberauswahl 0 Serieller Yaskawa-Drehgeber
3 Phase-C-Ausblendung 0 Phase-C-Signal wird verwendet
Stelle Funktionsbezeichnung Einstel-
0 Motorphasen-Reihenfolge 0 Nicht definiert
1-3 Nicht verwendet 0 -
lung
1 Yaskawa A Quad B, Modell SGMP
2 Nicht von Yaskawa hergestellter rotatorischer Motor
3 Nicht von Yaskawa hergestellter Linearmotor
1 Yaskawa A-Quad-B-Absolutwertgeber
1 A-Quad-B-Drehgeber
2 A-Quad-B-Geber mit Kommutierungssensoren (U,V,W)
3 A-Quad-B-Geber mit Kommutierungssensoren (/U,/V,/W)
1 Phase-C-Signal-Ausblendung
lung
1UVW
2UWV
Erläuterung
Erläuterung
Umdrehung
Skalenintervall
Umdrehung
Impulse*10000/
Umdrehung
Impulse/
Skalenintervall
einstellung
2048 Nach Neustart
0 Nach Neustart
1 Nach Neustart
Einstellungsaktivierung
AC-Servosysteme
Pn1A0 Reserviert (nicht ändern) - - 60 Pn1A1 60
Pn1A2 40
Pn1A3 40
Pn1A4 20
Pn1A5 0
Pn1A6 40
XtraDrive 175
Page 10

ParameterNr.
Pn1A7 Motor-Auswahlschalter - - 0001 Sofort
Pn1A8 Reserviert (nicht ändern) - - 0 Pn1A9 40
Pn1AA 40
Pn1AB 30
Pn1AC 80
Pn1AD 0
Pn1AE 300
Pn1AF 0
Pn1B0 Reserviert (nicht ändern) - - 40 Pn1B1 40
Pn1B2 40
Pn1B3 2000
Pn1B4 0
Pn1B5 160
Pn1B6 150
Pn1B7 20
Pn1B8 100
Pn1B9 600
Pn1BA 0
Pn1BB 2000
Pn1BC 300
Pn1BD 2000
Pn1BE 0
Pn1BF 3
Pn1C0 0
Pn1C1 3
Pn1C2 0
Pn200 Positioniersteuerungssollwerte-Auswahlschalter - - 0000 Nach Neustart
Pn201 Impulsgeber-Teilungsimpuls (16 Bit oder weniger) 0,17 bis 65535 Impulse/
Pn202 Elektronisches Übersetzungsverhältnis (Zähler) 1 bis 65535 - 4 Nach Neustart
Pn203 Elektronisches Übersetzungsverhältnis (Nenner) 1 bis 65535 - 1 Nach Neustart
Pn204 Beschleunigungs-/Verzögerungszeitkonstante für
Pn205 Multi-Umdrehungs-Grenzwerteinstellung 0 bis 65535 Umdrehungen Umdrehungen 65535
Pn206 Reserviert (nicht ändern) - - 16384 Pn207 Steht noch aus - 0 Pn208 Positionssollwertverschiebung-Mittelwertbildungszeit 0,00 bis 64,00 ms 0,01 ms 0,00 ms Nach Neustart
Pn209 Reserviert (nicht ändern) - - 0 Pn216 Sollwertglättung 1 bis 65535 ms 0,1 ms 0 Sofort
Pn281 Reserviert (Linearmotoren) - - - -
Bezeichnung Einstellbereich Einheit Werks-
Stelle Funktionsbezeichnung Einstel-
0 Integrationsmodus 0 Löschen der Integrationsfunktion deaktivieren
1-3 Nicht verwendet 0 Nicht verwendet
Stelle Funktionsbezeichnung Einstel-
0 Sollwertimpulsform 0 Vorzeichen + Impuls, positive Logik
1 Signalform für das Löschen des
Fehlerzählers
2 Löschvorgang 0 Löschen des Fehlerzählers bei Endstufensperre
3 Filterauswahl 0 Sollwert-Eingangsfilter für Line-Treiber-Signale
Positionssollwert
lung
1 Löschen der Integrationsfunktion aktivieren
lung
1 Im + gegen Uhrzeigersinn, positive Logik
2 Phase A + Phase B (x 1), positive Logik
3 Phase A + Phase B (x 2), positive Logik
4 Phase A + Phase B (x 4), positive Logik
5 Vorzeichen + Impuls, negative Logik
6 Im + gegen Uhrzeigersinn, negative Logik
7 Phase A + Phase B (x 1), negative Logik
8 Phase A + Phase B (x 2), negative Logik
9 Phase A + Phase B (x 4), negative Logik
0 Der Fehlerzähler wird gelöscht, wenn das Signal den H-Pegel hat.
1 Der Fehlerzähler wird an der steigenden Flanke des Signals gelöscht.
2 Der Fehlerzähler wird gelöscht, wenn das Signal den L-Pegel hat.
3 Der Fehlerzähler wird an der fallenden Flanke des Signals gelöscht.
1 Fehlerzähler wird nicht gelöscht (Fehlerzählerlöschung nur mit CLR-Signal möglich)
2 Fehlerzähler wird gelöscht, wenn ein Alarm auftritt.
3 Ignorieren des Löschsignals
1 Sollwert-Eingangsfilter für offene Kollektor-Signale
Erläuterung
Erläuterung
Umdrehung
0,00 bis 64,00 ms 0,01 ms 0,00 ms Sofort
1 Impuls/Umdrehung
einstellung
2048 Impulse/
Umdrehung
Umdrehungen
Einstellungsaktivierung
Nach Neustart
Nach Neustart
176 AC-Servosysteme
Page 11

ParameterNr.
Pn2A0 Reserviert (nicht ändern) - - 16 Pn2A1 0
Pn2A2 0
Pn2A3 0
Pn2A4 0
Pn2A5 0
Pn2A6 0
Pn2A7 0
Pn2A8 65535
Pn2A9 256
Pn2B0 1
Pn2B1 0
Pn2B2 1
Pn2B3 0
Pn2B4 1
Pn2B5 0
Pn2B6 1
Pn2B7 0
Pn2B8 1
Pn2B9 0
Pn2BA 1
Pn2BB 0
Pn2C0 Reserviert (nicht ändern) - - 7 Pn2C1 24000
Pn2C2 0
Pn2C3 0
Pn2C4 0
Pn2C5 2
Pn2C6 Kommunikationsschalter - - 0200 Sofort
Pn2C7 Nullpunktschalter - - 0008 Nach Neustart
Pn2C8 Reserviert (nicht ändern) - - 400 Pn2C9 50
Pn2CA 50
Pn2CB 50
Pn2CC 0
Pn2CC 0
Pn2CD 0
Pn2CE 60
Pn2CF 0
Pn2D0 8888
Pn2D1 Erweiterte Eingangssignal-Auswahl - - 0078 Nach Neustart
Bezeichnung Einstellbereich Einheit Werks-
Stelle Funktionsbezeichnung Einstel-
0 Prüfsumme 0 Prüfsumme nicht verwenden
1 Nicht verwendet. 2
3
Stelle Funktionsbezeichnung Einstel-
0 Eingang Nullpunktschalter 0 Eingang über Eingangsklemme SI0 (CN1-40).
1 Reserviert 2 Reserviert 3 Reserviert -
Stelle Funktionsbezeichnung Einstel-
0 Not-Halt-Eingang 0-F Wie Parameter Pn2C7.0
1 Neue Bewegung aktivieren 0-F Wie Parameter Pn2C7.0
2 Reserviert -- 3 Reserviert -- --
lung
1 Prüfsumme verwenden
lung
1 Eingang über Eingangsklemme SI1 (CN1-41)
2 Eingang über Eingangsklemme SI2 (CN1-42)
3 Eingang über Eingangsklemme SI3 (CN1-43)
4 Eingang über Eingangsklemme SI4 (CN1-44)
5 Eingang über Eingangsklemme SI5 (CN1-45)
6 Eingang über Eingangsklemme SI6 (CN1-46)
7 Signal wird auf EIN gesetzt
8 Signal wird auf AUS gesetzt
9 Invertiertes Eingangssignal über Eingangsklemme SI0 (CN1-40)
A Invertiertes Eingangssignal über Eingangsklemme SI1 (CN1-41)
B Invertiertes Eingangssignal über Eingangsklemme SI2 (CN1-42)
C Invertiertes Eingangssignal über Eingangsklemme SI3 (CN1-43)
D Invertiertes Eingangssignal über Eingangsklemme SI4 (CN1-44)
E Invertiertes Eingangssignal über Eingangsklemme SI5 (CN1-45)
F Invertiertes Eingangssignal über Eingangsklemme SI6 (CN1-46)
lung
Erläuterung
Erläuterung
Erläuterung
einstellung
Einstellungsaktivierung
AC-Servosysteme
XtraDrive 177
Page 12

ParameterNr.
Bezeichnung Einstellbereich Einheit Werks-
einstellung
Einstellungsaktivierung
Pn2D2 Erweiterte Ausgangssignal-Auswahl - - 0000 Nach Neustart
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 /COIN Signalzuordnung 0 Deaktiviert
1 Ausgabe über Ausgangsklemme SO1 (CN1-25, 26)
2 Ausgabe über Ausgangsklemme SO2 (CN1-27, 28)
3 Ausgabe über Ausgangsklemme SO3 (CN1-29, 30)
1 Nicht verwendet 2
3
Pn2D3 Reserviert (nicht ändern) - - 2000 Pn2D4 Schwingungsunterdrückungsmodus-Schalter - - 0001 Sofort
Stelle Funktionsbezeichnung Einstel-
Erläuterung
lung
0 Schwingungs-Unterdrückungsmodus 0 Schwingungsunterdrückung (OCA) ist nicht aktiv
1 Schwingungsunterdrückung (OCA) ist aktiv
1 Nicht verwendet 2
3
Pn300 Drehzahlsollwert-Eingangsverstärkung 1,50 bis 30,00 V/Nenn-
Pn301 Drehzahl 1 (rotatorischer Motor) 0 bis 10000 min
Pn302 Drehzahl 2 0 bis 10000 min
Pn303 Drehzahl 3 0 bis 10000 min
Pn304 JOG-Drehzahl 0 bis 10000 min
drehzahl
-1
-1
-1
-1
0,01 V/Nenndrehzahl
-1
1 min
-1
1 min
-1
1 min
-1
1 min
6,00 V/Nenndrehzahl
-1
100 min
-1
200 min
-1
300 min
-1
500 min
Sofort
Sofort
Sofort
Sofort
Sofort
Pn305 Sanftanlauf-Beschleunigungszeit 0 bis 10000 ms 1 ms 0 ms Sofort
Pn306 Sanftanlauf-Verzögerungszeit 0 bis 10000 ms 1 ms 0 ms Sofort
Pn307 Drehzahlsollwert-Filterzeitkonstante 0,00 bis 655,35 ms 0,01 ms 0,40 ms Sofort
Pn308 Drehzahlistwert-Filterzeitkonstante 0,00 bis 655,35 ms 0,01 ms 0,00 ms Sofort
Pn380 Linearmotor-Geschwindigkeit 1 (nur für Linearmotoren) 0-5000 mm/s mm/s 10 Sofort
Pn381 Linearmotor-Geschwindigkeit 2 (nur für Linearmotoren) 0-5000 mm/s mm/s 20 Sofort
Pn382 Linearmotor-Geschwindigkeit 3 (nur für Linearmotoren) 0-5000 mm/s mm/s 30 Sofort
Pn383 Linearmotor-JOG-Geschwindigkeit (nur für Linearmotoren) 0-5000 mm/s mm/s 40 Sofort
Pn400 Drehmomentsollwert-Eingangsverstärkung 1,0 bis 10,0 V/Nenn-
drehmoment
0,1 V/Nenndrehmoment
3,0 V/Nenndrehmoment
Sofort
Pn401 Drehmomentsollwert-Filterzeitkonstante 0,00 bis 655,35 ms 0,01 ms 1,00 ms Sofort
Pn402 Vorwärts-Drehmomentgrenzwert 0 bis 800% 1% 800% Sofort
Pn403 Rückwärts-Drehmomentgrenzwert 0 bis 800% 1% 800% Sofort
Pn404 Externer Vorwärts-Drehmomentgrenzwert 0 bis 800% 1% 100% Sofort
Pn405 Externer Rückwärts-Drehmomentgrenzwert 0 bis 800% 1% 100% Sofort
Pn406 Not-Halt-Drehmoment 0 bis 800% 1% 800% Sofort
Pn407 Drehzahlgrenzwert während Drehmomentregelung 0 bis 10000 min
-1
1 min
-1
10000 min
-1
Sofort
Pn408 Drehmomentregelung-Funktionsschalter - - 0000 Sofort
Stelle Funktionsbezeichnung Einstel-
lung
Erläuterung
0 Sperrfilterauswahl 0 Deaktiviert
1 Verwendung eines Sperrfilters für den Drehmomentsollwert
1 Nicht verwendet - 2
3
Pn409 Sperrfilterfrequenz 50 bis 2000 Hz 1 Hz 2000 Hz Sofort
Pn40A Sperrfilterbreite 70 bis 1000 Hz 1 Hz 70 (0,70) Sofort
Pn40B Reserviert (nicht ändern) - - 1000 Pn40C 2000
Pn40D 70
Pn40E 1000
Pn480 Reserviert (nicht ändern), nur für Linearmotoren verfügbar - - - Pn483
Pn484
Pn500 Positionierung-abgeschlossen-Weite 0 bis 250 Sollwerteinheiten 1 Sollwerteinheit 7 Sollwer-
Pn501 Nullhaltungs-Grenzwert 0 bis 10000 min
Pn502 Drehungs-Erkennungsgrenzwert 1 bis 10000 min
Pn503 Drehzahlübereinstimmungssignal-Ausgabeweite 0 bis 100 min
-1
-1
-1
1 min
1 min
1 min
-1
-1
-1
Pn504 NEAR-Signalweite 1 bis 250 Sollwerteinheiten 1 Sollwerteinheit 7 Sollwert-
Pn505 Überlauf-Grenzwert 1 bis 32767 Sollwert-
Pn506 Zeitverzögerung zw. Bremsenansteuerung und
Servo AUS
Pn507 Drehzahlpegel zur Ansteuerung der Bremse 0 bis 10000 min
einheiten
0 bis 50 (0 bis 500 ms) 10 ms 0 ms Sofort
-1
Pn508 Ausschaltverzögerung der Bremse bei Motorbetrieb 10 bis 100
256 Sollwerteinheiten
-1
1 min
10 ms 500 ms Sofort
teinheiten
-1
10 min
-1
20 min
-1
10 min
einheiten
1024 Sollwert-
einheiten
-1
100 min
Sofort
Sofort
Sofort
Sofort
Sofort
Sofort
Sofort
(100 bis 1000 ms)
Pn509 Kurzzeit-Haltezeit 20 bis 1000 ms 1 ms 20 ms Sofort
178 AC-Servosysteme
Page 13

ParameterNr.
Pn50A Eingangssignal-Auswahl 1 - - 2100 Nach Neustart
Pn50B Eingangssignal-Auswahl 2 - - 6543 Nach Neustart
Pn50C Eingangssignal-Auswahl 3 - - 8888 Nach Neustart
Pn50D Eingangssignal-Auswahl 4 -- 8888 Nach Neustart
Pn50E Ausgangssignal-Auswahl 1 - - 3211 Nach Neustart
Pn50F Ausgangssignal-Auswahl 2 -- 0000 Nach Neustart
Bezeichnung Einstellbereich Einheit Werks-
Stelle Funktionsbezeichnung Einstel-
0 Eingangssignal-Zuordnungsmodus 0 Verwendung der Sequenzeingangssignalklemmen mit Yaskawa Standardzuordnung.
1 /S-ON Signalzuordnung
(Servo EIN bei niedrig)
2 /P-CON Signalzuordnung
(P-Regelung bei L-Pegel)
3 /P-OT Signalzuordnung
(Nachlaufweg bei H-Pegel)
Stelle Funktionsbezeichnung Einstel-
0 N-OT Signalzuordnung
(Nachlaufweg bei H-Pegel)
1 /ALM-RST Signalzuordnung
(Alarmrücksetzung bei L-Pegel)
2 /P-CL Signalzuordnung
(Drehmomentregelung bei L-Pegel)
3 /N-CL Signalzuordnung
(Drehmomentregelung bei L-Pegel)
Stelle Funktionsbezeichnung Einstel-
0 /SPD-D Signalzuordnung
(Auswahl der internen Festdrehzahlen)
1 /SPD-A Signalzuordnung
(Auswahl der internen Festdrehzahlen)
2 /SPD-D Signalzuordnung
(Auswahl der internen Festdrehzahlen)
3 /C-SEL Signalzuordnung
(Umschaltung der Regelbetriebsart)
Stelle Funktionsbezeichnung Einstel-
0 /ZCLAMP Signalzuordnung (Nullhaltung) 0 bis F Wie bei Pn50A.1
1 /INHIBIT Signalzuordnung
(Deaktivieren des Sollwertimpulses)
2 /G-SEL Signalzuordnung
(Verstärkungsumschaltung)
3 (Reserviert) 0 bis F Wie bei Pn50A.1
Stelle Funktionsbezeichnung Einstel-
0 /COIN Signalzuordnung 0 Deaktiviert
1 /V-CMP Signalzuordnung 0 bis 3 Wie oben
2 /TGON Signalzuordnung 0 bis 3 Wie oben
3 /S-RDY Signalzuordnung 0 bis 3 Wie oben
Stelle Funktionsbezeichnung Einstel-
0 /CLT Signalzuordnung 0 bis 3 Wie bei Pn50E.0
1 Signalzuordnung für Drehzahlgrenzwert-
erkennung (/VLT)
2 Signalzuordnung für Bremsverriegelung
(/BK)
3 Signalzuordnung für Warnungen (/WARN) 0 bis 3 Wie bei Pn50E.0
lung
1 Die Eingangssignale können frei zugewiesen werden.
0 Eingang über Eingangsklemme SI0 (CN1-40)
1 Eingang über Eingangsklemme SI1 (CN1-41)
2 Eingang über Eingangsklemme SI2 (CN1-42)
3 Eingang über Eingangsklemme SI3 (CN1-43)
4 Eingang über Eingangsklemme SI4 (CN1-44)
5 Eingang über Eingangsklemme SI5 (CN1-45)
6 Eingang über Eingangsklemme SI6 (CN1-46)
7 Signal wird auf EIN gesetzt
8 Signal wird auf AUS gesetzt
9 Invertiertes Eingangssignal über Eingangsklemme SI0 (CN1-40)
A Invertiertes Eingangssignal über Eingangsklemme SI1 (CN1-41)
B Invertiertes Eingangssignal über Eingangsklemme SI2 (CN1-42)
C Invertiertes Eingangssignal über Eingangsklemme SI3 (CN1-43)
D Invertiertes Eingangssignal über Eingangsklemme SI4 (CN1-44)
E Invertiertes Eingangssignal über Eingangsklemme SI5 (CN1-45)
F Invertiertes Eingangssignal über Eingangsklemme SI6 (CN1-46)
0 bis F Wie oben
0 bis F Wie oben
lung
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
0 bis 8 Wie bei Pn50A.1
lung
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
lung
0 bis F Wie bei Pn50A.1
0 bis F Wie bei Pn50A.1
lung
1 Ausgabe über Ausgangsklemme SO1 (CN1-25, 26)
2 Ausgabe über Ausgangsklemme SO2 (CN1-27, 28)
3 Ausgabe über Ausgangsklemme SO3 (CN1-29, 30)
lung
0 bis 3 Wie bei Pn50E.0
0 bis 3 Wie bei Pn50E.0
Erläuterung
Erläuterung
Erläuterung
Erläuterung
Erläuterung
Erläuterung
einstellung
Einstellungsaktivierung
AC-Servosysteme
XtraDrive 179
Page 14

ParameterNr.
Pn510 Ausgangssignal-Auswahl 3 - - 0000 Nach Neustart
Pn511 Reserviert (nicht ändern) - - 8888 Pn512 0000
Pn51A 10
Pn550 100
Pn551 100
Pn580 Reserviert (nicht ändern), nur für Linearmotoren verfügbar - - 10 Pn581 20
Pn582 10
Pn583 100
Pn600 Leistung des Bremswiderstands Abhängig von der SERVO-
Pn601 Reserviert (nicht ändern) Abhängig von der SERVO-
Bezeichnung Einstellbereich Einheit Werks-
Stelle Funktionsbezeichnung Einstel-
0 NEAR-Signalzuordnung (/NEAR) 0 bis 3 Wie bei Pn50E.0
1 Reserviert (nicht ändern) 0 bis 3 Wie bei Pn50E.0
2 Nicht verwendet 0
3 Nicht verwendet 0
lung
Erläuterung
PACK-Leistung
PACK-Leistung
∗2
∗2
10 W 0 W Sofort
- 0 W Sofort
einstellung
Einstellungsaktivierung
Details zum Überwachungsmodus
Überwachungs-Nr.
Un000 Drehzahlistwert min
Un001 Drehzahl-Sollwert min
Un002 Drehmoment-Sollwert % Angezeigt wird der Sollwert für den aktuellen Regelkreis als Prozentsatz des Nenndrehmoments.
Un003 Anzahl der Impulse aus der Z-Phase Impulse Zeigt die Anzahl der Impulse aus der Z-Phase in Drehgeber-Auflösungseinheiten (x 4) an.
Un004 Elektrischer Winkel Grad Zeigt den elektrischen Winkel des Motors an.
Un005 Eingangssignalüberwachung --- Anzeige des E/A-Signalstatus des Treibers durch Ein- oder Ausschalten der einzelnen Signal-Bits.
Un006 Ausgangssignalüberwachung --Un007 Sollimpulsgeschwindigkeitsanzeige U/min Zeigt die Sollimpulsfrequenz in U/min umgerechnet an.
Un008 Positionsabweichung (Fehlerzähler) Sollwert-
Un009 Motor-Lastquotient % Zeigt das effektive Drehmoment in 10-s-Intervallen als Prozentsatz des Nenndrehmoments an.
Un00A Generatorischer Lastquotient % Zeigt die Menge der absorbierten generatorischen Energie in 10-s-Intervallen als Prozentsatz des
Un00B Lastquotient des generatorischen
Un00C Eingangssignalzähler Sollwert-
Un00D Istwertimpulszähler Impulse Zeigt die Anzahl der gezählten Impulsgeber-Istwertimpulse als Hexadezimalwert (multipliziert
Überwachungselement Einheit Erläuterung
-1
Die tatsächliche Motordrehzahl wird angezeigt.
-1
Angezeigt wird der Drehzahlsollwert oder der bei Drehzahlregelung intern eingestellte Drehzahlwert. Bei Regelung über Impulsfolgeeingabe wird 0 angezeigt.
Zeigt die Anzahl der im Fehlerzähler (Positionsabweichung) registrierten Impulse an, die in Sollwerteinheiten (Eingangsimpuls-Sollwerte) umgerechnet werden.
Einstellwerts für Pn600 (Leistung des Bremswiderstands) an.
quotienten an.
Zeigt die Anzahl der gezählten Eingangssignale als Hexadezimalwert an.
mit 4) an.
Bremswiderstands
einheiten
% Zeigt den Lastfaktor des Bremswiderstands in 10-s-Intervallen als Prozentsatz des Nennlast-
einheiten
Liste der Funktionsmodi
Parameter-Nr. Funktion
Fn000 Alarmprotokoll-Datenanzeige
Fn001 Maschinensteifigkeit während des Online-Autotunings
Fn002 Schrittbetrieb (JOG)
Fn003 Nullpunkt-Suchmodus
Fn004 Fester Parameter
Fn005 Werksinitialisierung der Parametereinstellung
Fn006 Löschung der Alarmprotokoll-Daten
Fn007 Speichern der im Rahmen des Online-Autotunings gesammelten Daten zum
Fn008 Multi-Drehungs-Rücksetzung des Absolutwert-Drehgebers und Rücksetzung
Fn009 Autotuning des Offsets für den analogen Sollwert (Drehzahl, Drehmoment)
Fn00A Manuelle Offset-Einstellung des Drehzahlsollwerts
Fn00B Manuelle Offset-Einstellung des Drehmomentsollwerts
Fn00C Manuelle Nulleinstellung des analogen Überwachungsausgangs
Fn00D Manuelle Verstärkungseinstellung des analogen Überwachungsausgangs
Fn00E Automatische Offset-Einstellung des Motorstrom-Erkennungssignals
Fn00F Manuelle Offset-Einstellung des Motorstrom-Erkennungssignals
Fn010 Passworteinstellung (verhindert Parameteränderungen)
Fn011 Motormodellanzeige
Fn012 Software-Versionsanzeige
Fn013 Änderung der Multi-Drehung-Grenzwerteinstellung bei Auftreten eines Multi-
Fn014 Löschen der Ergebnisse der Optionskartenkennung
Trägheitsverhältnis im EEPROM
des Drehgeber-Alarms
Drehung-Grenzwert-Abweichungsalarms (A.CC).
180 AC-Servosysteme
Page 15

Abmessungen
Servoantriebe
XD-P3-M@ bis XD-02-M@ (230 V, 30 bis 200 W)
R
E
W
PO
Klemmenblock
160
6
CN3
CHARGE
CN1
CN2
39
106
CN3
CN1
CN2
CN10
Abmessungen der Befestigungsbohrungen
2 × M4-Bohrungen
5,5
160
149,5 ±0,5
(Befestigungsabstand)
AC-Servosysteme
Erdungsklemme
2 × M4Schrauben
XD-04-M@ (230 V, 400 W)
Erdungsklemme
2 × M4Schrauben
5,5
Klemmenblock
160
149,5
(5)
6
6
12
10
55
8
2 × φ 5 Bohrungen
R
E
W
PO
CN3
CHARGE
39
CN1
106
CN2
10
6
5
63
75
8
CN3
CN1
CN2
75
CN10
75
5
130
5
55
Abmessungen der Befestigungsbohrungen
2 × M4-Bohrungen
5,5
nd)
sabsta
160
149,5 ±0,5
(Befestigung
5
130
12
75
XD-08-M@ (230 V, 750 W)
96,2
Kühllüfter
94,4
Klemmenblock
160
5
15
φ 5 Bohrung
CHARGE
Erdungsklemme
2 × M4-Schrauben
10
35
55
90
R
E
W
O
P
CN3
CN1
39
CN3
CN1
CN10
106
CN2
CN2
75
8
Abmessungen der Befestigungsbohrungen
5,5
160
149,5 ±0,5
(Befestigungsabstand)
5
180
2 × M4Bohrungen
27
90
XtraDrive 181
Page 16

XD-05-T@ bis -15-T@ (400 V, 0,5 bis 1,5 kW)
2 × φ 5 Bohrungen
Kühlkörper
POWER
CN3
CHARGE
160
CN1
-
CN2
Erdungsklemme
2 × M4-
5
Schrauben
110
XD-20-T@, XD-30-T@ (400 V, 2/3 kW)
2× φ 6 Bohrungen
6
CN3
39
CN1
106
CN2
Klemmenblock
8
Kühlkörper
CHARGE POWER
CN3
CN1
CN10
CN3
39
CN1
75
CN10
180
Abmessungen der Befestigungsbohrungen
4 × M4-Bohrungen
5,5
160
149,5 ±0,5
(Befestigungsabstand)
100 ±0,5
(Befestigungsabstand)
4
5
5
110
Abmessungen der Befestigungsbohrungen
6
4 × M5-Gewindebohrung
5
14-poliger
Klemmenblock
M4-Befestigungs-
schraube
Erdungsklemme
2 × M4Schrauben
250
5,5
5
238,5
6
100
110
Typenschild
CN2
CN2
238,5 ±0,5
196
250
(Befestigungsabstand)
100 ±0,5
5
5,5
5
8
75
180
4
(Befestigungsabstand)
110
5
182 AC-Servosysteme
Page 17

Filter
R88A-FIW104-SE
Maßeinheit: mm (Zoll)
1
(0,20)
(0,04)
11,5 (0,45)
33 (1,30)
15 (0,59)
28,25 (1,11)
φ 5
56 (2,20)
(φ 0,20)
5,5 (0,22)
14 (0,55)
19 (0,75)
32 (1,26)
M4
φ 10 (φ 0,39)
70 (2,76)
+0,20
0
+5
0
240 (9,45 )
202 (7,95)
192 (7,56)
149,5 (5,89)
Drähte AWG16
(1,3 mm²)
GNYE
168 (6,61)
5
M4 (2×)
+0,20
0
6 (0,24)
+5
0
M4
265 (10,43 )
R88A-FIW107-SE, R88A-FIW115-SE
Produktbezeichnung R88A-FIW107-SE R88A-FIW115-SE
Abmessungen
in mm
A 75 90
B 240
+5
300+5
C 50 60
D 12 15
E1 1,2
Einheit: mm
32
16
202
192
15028
M4
A
φ 5
φ 10
5,5
14
19
B
70
168
Drähte AWG16
(1,3 mm²)
GNYE
M4
M4 (2×)
+5
E
D
5
C
0
265
15
R88A-FIW4006-SE, R88A-FIW4010-SE
Produktbezeichnung R88A-FIW4006-SE R88A-FIW4010-SE
Abmessungen
in mm (Zoll)
A 32 (1,26) 35 (1,38)
B 16 (0,63) 18 (0,71)
C 202 (7,95) 291 (11,46)
D 192 (7,56) 281 (11,06)
E 150 (5,91) 239 (9,41)
F 300 (11,81) 270 (10,63)
G 70 (2,76) 90 (3,54)
H 168 (6,61) 257 (10,12)
AC-Servosysteme
Maßeinheit: mm (Zoll)
A
B
1,2
C
D
28 (1,10)
L1 L2 L3
M4
118 (4,65)
φ 10 (φ 0,39)
φ 5
(φ 0,20)
5,5 (0,22)
14 (0,55)
19 (0,75) H 15 (0,59)
F
G
E
Drähte AWG16
(1,3 mm²)
GNYE
M4
+0,20
0
+5
0
310 (12,20 )
5 (0,20)
M4 (4×)
(0,05)
10 (0,39)
19 (0,75)80 (3,15)
100 (3,94)
XtraDrive 183
Page 18

Installation
Einphasig, 230 V AC
LEISTUNGS-
SCHALTER
EINPHASIG, 200 BIS 230 V AC
SPANNUNG
ENTSTÖRFILTER
AUS
5
SPANNUNG
EIN
ALARMVERARBEITUNG
SCHÜTZ
Unbedingt erden.
DREHZAHLSOLLWERT
±2 BIS ±10 V/MOTOR-NENNDREHZAHL
DREHMOMENTSOLLWERT
±1 BIS ±10 V/MOTOR-NENNDREHMOMENT
CW
A-PHASE
CCW
POSITIONSSOLLWERT
SICHERUNGSBATTERIE *2
2,8 BIS 4,5V
SEN-SIGNALEINGANG *
SERVO EIN BEI Relais1 EIN
P CONTROL BEI Relais2 EIN
VORWÄRTSANTRIEB GESPERRT
BEI P-LS OFFEN
RÜCKWÄRTSANTRIEB GESPERRT
BEI N-LS OFFEN
ALARMRÜCKSETZUNG BEI Relais3 EIN
VORWÄRTSSTROMBEGRENZUNG EIN
BEI Relais6 EIN
RÜCKWÄRTSSTROMBEGRENZUNG EIN
BEI Relais7 EIN
B-PHASE
SOLLWERT OFFENER
KOLLEKTOR
SPANNUNGSVERSORGUNG
2
2
2
+ 24 V NPN (0 V PNP)
Relais1
Relais2
P–LS
N–LS
Relais3
Relais6
Relais7
SCHÜTZ
1MC
,
SUP
XtraDrive
1
1
Bringen Sie unbedingt einen Überspannungsschutz
an der Erregerspule von Schützen und Relais an.
4
3
SERVO EIN
PROPORTIONALREGELUNG
(P-REGELUNG)
VORWÄRTSANTRIEB
GESPERRT
RÜCKWÄRTSANTRIEB
GESPERRT
ALARM-RÜCKSETZUNG
VORWÄRTSSTROMBEGRENZUNG EIN
RÜCKWÄRTSSTROMBEGRENZUNG EIN
STECKERGEHÄUSE
ABSCHIRMUNG MIT STECKERGEHÄUSE VERBINDEN.
SERVOMOTOR
OPTISCHER DREHGEBER
IMPULSGEBER
Erden Sie das Ende der Abschirmung
ordnungsgemäß.
ALARMCODEAUSGANG
MAXIMALE BETRIEBSSPANNUNG: 30 V DC
MAXIMALER BETRIEBSSTROM: 20 mA DC
IMPULSGEBER-TEILUNGSVERHÄLTNISAUSGANG
GEEIGNETER LINE-RECEIVER
SN75175 ODER MC3486 (HERGESTELLT VON TI*
6
)
*
ODER GLEICHWERTIG
BETRAG S-PHASEN-DREHUNG
SERIELLER DATENAUSGANG
GEEIGNETER LINE-RECEIVER
SN75175 ODER MC3486
(HERGESTELLT VON TI*
ODER GLEICHWERTIG
DREHZAHL-ÜBEREINSTIMMUNGS-ERKENNUNG
EIN BEI DREHZAHLÜBEREINSTIMMUNG
POSITIONIERUNG ABGESCHLOSSEN
(EIN BEI ABGESCHLOSSENER POSITIONIERUNG)
TGON-AUSGANG
(EIN BEI ALLEN WERTEN ÜBER EINSTELLUNG)
SERVO-BEREIT-AUSGANG
(EIN BEI BEREITSCHAFT)
SERVOALARM-AUSGANG
(BEI BEREITSCHAFT AUS)
OPTOKOPPLER-AUSGANG
MAXIMALE BETRIEBSSPANNUNG: 30 V DC
MAXIMALER BETRIEBSSTROM: 50 mA DC
(
6
)
6
)
*1 Die Zeitkonstante für den Primärfilter beträgt 47 µs.
*2 Bei Verwendung eines Absolutwert-Drehgebers anschließen.
*3 Verwendung nur in Verbindung mit einem Absolutwert-Drehgeber.
*4 Der Bremswiderstand kann zwischen B1 und B2 angeschlossen werden.
*5 Spannung bei den Typen XD-08-M@ 220 bis 230 V AC (+10% -15%)
*6 TI steht für Texas Instruments Inc.
184 AC-Servosysteme
Page 19

Dreiphasig, 400 V AC
DREIPHASIG, 380 BIS 480 V AC
L1 L2 L3
ENTSTÖRFILTER
SPANNUNGSVERSORGUNG
24 V DC ±15%
DREHZAHLSOLLWERT
±2 BIS ±10 V/MOTORNENNDREHZAHL
DREHMOMENTSOLLWERT
±1 BIS ±10 V/MOTOR-NENNDREHMOMENT
POSITIONSSOLLWERT
SICHERUNGSBATTERIE *2
2,8 BIS 4,5V
SEN-SIGNALEINGANG *
SERVO EIN BEI Relais1 EIN
P CONTROL BEI Relais2 EIN
VORWÄRTSANTRIEB GESPERRT BEI
P-LS OFFEN
RÜCKWÄRTSANTRIEB GESPERRT BEI
N-LS OFFEN
ALARMRÜCKSETZUNG BEI Relais3 EIN
VORWÄRTSSTROMBEGRENZUNG EIN
BEI Relais6 EIN
RÜCKWÄRTSSTROMBEGRENZUNG EIN
BEI Relais7 EIN
5
Unbedingt erden.
CW
A-PHASE
CCW
B-PHASE
SOLLWERT OFFENER
KOLLEKTOR
SPANNUNGSVERSORGUNG
2
2
2
+24 V NPN (0 V PNP)
Relais1
Relais2
P–LS
N–LS
Relais3
Relais6
Relais7
SPANNUNG
AUS
SCHÜTZ
SPANNUNG
EIN
SCHÜTZ
1
1
,
ALARMVERARBEITUNG
SCHÜTZ
4
XtraDrive
SERVO EIN
PROPORTIONALREGELUNG
(P-REGELUNG)
VORWÄRTSANTRIEB
GESPERRT
RÜCKWÄRTSANTRIEB
GESPERRT
ALARM-RÜCKSETZUNG
VORWÄRTSSTROMBEGRENZUNG EIN
RÜCKWÄRTSSTROMBEGRENZUNG EIN
Bringen Sie unbedingt einen Überspannungsschutz
an der Erregerspule von Schützen und Relais an.
Erden Sie das Ende der Abschirmung
ordnungsgemäß.
3
STECKERGEHÄUSE
ABSCHIRMUNG MIT STECKERGEHÄUSE VERBINDEN.
SERVOMOTOR
OPTISCHER DREHGEBER
IMPULSGEBER
ALARMCODEAUSGANG
MAXIMALE BETRIEBSSPANNUNG: 30 V DC
MAXIMALER BETRIEBSSTROM: 20 mA DC
IMPULSGEBER-TEILUNGSVERHÄLTNISAUSGANG
GEEIGNETER LINE-RECEIVER
SN75175 ODER MC3486 (HERGESTELLT
6
)
*
6
) ODER GLEICHWERTIG
VON TI*
BETRAG S-PHASEN-DREHUNG
SERIELLER DATENAUSGANG
GEEIGNETER LINE-RECEIVER
SN75175 ODER MC3486
(
(HERGESTELLT VON TI*
ODER GLEICHWERTIG
DREHZAHL-ÜBEREINSTIMMUNGS-ERKENNUNG
EIN BEI DREHZAHLÜBEREINSTIMMUNG
POSITIONIERUNG ABGESCHLOSSEN
(EIN BEI ABGESCHLOSSENER POSITIONIERUNG)
TGON-AUSGANG
(EIN BEI ALLEN WERTEN ÜBER EINSTELLUNG)
SERVO-BEREIT-AUSGANG
(EIN BEI BEREITSCHAFT)
SERVOALARM-AUSGANG
(BEI BEREITSCHAFT AUS)
OPTOKOPPLER-AUSGANG
MAXIMALE BETRIEBSSPANNUNG: 30 V DC
MAXIMALER BETRIEBSSTROM: 50 mA DC
(
*6)
6
)
AC-Servosysteme
*1 Die Zeitkonstante für den Primärfilter beträgt 47 µs.
*2 Bei Verwendung eines Absolutwert-Drehgebers anschließen.
*3 Verwendung nur in Verbindung mit einem Absolutwert-Drehgeber.
*4 Anschluss des externen Bremswiderstands zwischen B1 und B2.
*5 Die 24-V-DC-Spannungsversorgung ist vom Benutzer bereitzustellen.
*6 TI steht für Texas Instruments Inc.
XtraDrive 185
Page 20

Bestellinformationen
l
gung
l
A
B
Systemkonfiguration
PROFIBUS-Netzwerk
(XtraDrive-Modelle mit
integrierter PROFIBUS-Schnittstelle)
XTRADRIVE
Servoantrieb
AnalogÜberwachungskabel
I
Optionsbaugruppe
NS115
S
W
1
A
R
S
W
2
C
N
K
6
A
C
N
6
B
C
N
4
Computer (PC)
Spannungsver-
skabe
sor
Impulsgeber-Kabe
SGMAH / SGMPH / R7M
Servomotor
Spannungsversorgungskabel
A
Impulsgeber-Kabel
SGMGH / SGMSH / SGMUH
Servomotor
E/A-Signal
B
J
C
E
Universalkabel
Spannungsversorgungskabel
Motion-ControllerBaugruppe
Servoklemmenblock
D
G
H
A
Impulsgeber-Kabel
Linearmaßstab
SGL LINEAR-
Servomotor
PositionierBaugruppe
F
Klemmenblock
Serieller Wandler
Linear-Servomotor
mit Eisenkern
Servoantriebe
Beschreibung XtraDrive XtraDrive-DP
Mit PROFIBUS
Einphasig 200 V AC30 W XD-P3-MN01 XD-P3-MSD0 SGMAH-A3A@ R7M-A03030-@ -
50 W XD-P5-MN01 XD-P5-MSD0 SGMAH-A5D@ R7M-A05030-@ SGLGW-30A050@
100 W XD-01-MN01 XD-01-MSD0 SGMAH-01A@, SGMPH-01A@ R7M-A10030-@,
200 W XD-02-MN01 XD-02-MSD0 SGMAH-02A@, SGMPH-02A@ R7M-A20030-@,
400 W XD-04-MN01 XD-04-MSD0 SGMAH-04A@, SGMPH-04A@ R7M-A40030-@,
750 W XD-08-MN XD-08-MSD0 SGMAH-08A@, SGMPH-08A@ R7M-A75030-@,
Dreiphasig 400 V AC0,5 kW XD-05-TN XD-05-TSD0 SGMGH-05D@, SGMAH-03D@,
1,0 kW XD-10-TN XD-10-TSD0 SGMGH-09D@, SGMSH/UH-10D@,
1,5 kW XD-15-TN XD-15-TSD0 SGMGH-13D@, SGMSH/UH-15D@,
2,0 kW XD-20-TN XD-20-TSD0 SGMGH-20D@, SGMSH-20D@ - SGLTW-35D320@, SGLTW-50D320@
3,0 kW XD-30-TN XD-30-TSD0 SGMGH-30D@, SGMSH/UH-30D@ -SGLFW-1ZD380@, SGLTW-40D400@
Hinweis: Bei der Kombination von SGLGW-@ Linearmotoren wird die Verwendung von Standardmagneten vorausgesetzt. Einzelheiten finden Sie
im Kapitel zu Linearmotoren.
Kompatible Servomotoren
Sigma-II SmartStep Sigma-Linearmotoren
R7M-AP10030-@
SGLGW-30A080@, SGLGW-40A140@
SGLFW-20A@, SGLFW-35A120@,
R7M-AP20030-@
R7M-AP40030-@
R7M-AP75030-@
SGLGW-40A253A@,SGLGW-60A140@
SGLGW-40A365A@, SGLGW-60A253A@
SGLFW-35A230@, SGLFW-50A200@,
SGLGW-60A365A@
-SGLFW-35D@
SGMPH-02D@/04D@
SGMAH-07D@, SGMPH-08D@
SGMPH-15D
@
- SGLFW-50D200@, SGLTW-35D170@,
SGLTW-50D170@
- SGLFW-50D380@, SGLFW-1ZD200@
Servomotoren
Hinweis: Einzelheiten finden Sie im Kapitel zu Servosystemen.
186 AC-Servosysteme
Page 21

Motorkabel
Symbol Spezifikationen Produktbezeichnung Produktansicht
A
Für 200-V-Servomotoren ohne Bremse
SGMAH-@@A@@@1D-OY
SGMPH-(01/02/04/08)A@@@1D-OY
R7M-A(P)@@@30-S1-D
Für 200-V-Servomotoren mit Bremse
SGMAH-@@A@@@CD-OY
SGMPH-(01/02/04/08)A@@@CD-OY
R7M-A(P)@@@30-BS1-D
Für 400-V-Servomotoren ohne Bremse
SGMAH-@@D@@@1D-OY
SGMPH-@@D@@@1D-OY
Für 400-V-Servomotoren mit Bremse
SGMAH-@@D@@@CD-OY
SGMPH-@@D@@@CD-OY
Für 400-V-Servomotoren
SGMGH-(05/09/13)D@
SGMSH-(10/15/20)D@
SGMUH-(10/15)D@
Für Servomotoren mit Bremse wird ein separates
Kabel (R88A-CAWC0@@B-E) benötigt.
Für 400-V-Servomotoren
SGMGH-(20/30)D@
SGMSH-30D@
SGMUH-30D@
Für Servomotoren mit Bremse wird ein separates
Kabel (R88A-CAWC0@@B-E) benötigt.
Nur Bremskabel.
Für 400-V-Servomotoren mit Bremse
SGMGH-@@D@
SGMSH-@@D@
SGMUH-@@D@
3 m R88A-CAWA003S-DE
5 m R88A-CAWA005S-DE
10 m R88A-CAWA010S-DE
15 m R88A-CAWA015S-DE
20 m R88A-CAWA020S-DE
3 m R88A-CAWA003B-DE
5 m R88A-CAWA005B-DE
10 m R88A-CAWA010B-DE
15 m R88A-CAWA015B-DE
20 m R88A-CAWA020B-DE
3 m R88A-CAWK003S-DE
5 m R88A-CAWK005S-DE
10 m R88A-CAWK010S-DE
15 m R88A-CAWK015S-DE
20 m R88A-CAWK020S-DE
3 m R88A-CAWK003B-DE
5 m R88A-CAWK005B-DE
10 m R88A-CAWK010B-DE
15 m R88A-CAWK015B-DE
20 m R88A-CAWK020B-DE
3 m R88A-CAWC003S-E
5 m R88A-CAWC005S-E
10 m R88A-CAWC010S-E
15 m R88A-CAWC015S-E
20 m R88A-CAWC020S-E
3 m R88A-CAWD003S-E
5 m R88A-CAWD005S-E
10 m R88A-CAWD010S-E
15 m R88A-CAWD015S-E
20 m R88A-CAWD020S-E
3 m R88A-CAWC003B-E
5 m R88A-CAWC005B-E
10 m R88A-CAWC010B-E
15 m R88A-CAWC015B-E
20 m R88A-CAWC020B-E
U
V
W
O
B
B
AC-Servosysteme
U
V
W
O
B
B
Drehgeberkabel (für CN2)
Symbol Spezifikationen Produktbezeichnung Produktansicht
B
Drehgeber-Kabel für Sigma-IIServomotoren (SGMAH/PH)
SGMAH-@@@@@@@D-OY
SGMPH-@@@@@@@D-OY
Drehgeber-Kabel für SmartStepServomotoren
R7M-A(P)@@@30-S1-D
Drehgeber-Kabel für Sigma-IIServomotoren (SGMGH/SH/UH/BH)
SGMGH-@
SGMSH-@
SGMUH-@
Verbindungskabel Geber/serieller Wandler bei
Sigma-Linearmotoren
Weitere Einzelheiten finden Sie im Kapitel zu
Linearmotoren.
3 m XD-CRWA003-DE
5 m XD-CRWA005-DE
10 m XD-CRWA010-DE
15 m XD-CRWA015-DE
20 m XD-CRWA020-DE
3 m XD-CRA003-DE
5 m XD-CRA005-DE
10 m XD-CRA010-DE
15 m XD-CRA015-DE
20 m XD-CRA020-DE
3 m XD-CRWB003N-E
5 m XD-CRWB005N-E
10 m XD-CRWB010N-E
15 m XD-CRWB015N-E
20 m XD-CRWB020N-E
3 m XD-CLP70-03-E
5 m XD-CLP70-05-E
10 m XD-CLP70-10-E
15 m XD-CLP70-15-E
20 m XD-CLP70-20-E
XtraDrive 187
Page 22

Steuerkabel (für CN1) Kabel (für CN5)
Symbol Beschreibung Anschluss an Produkt-
Steuerkabel
C
(1 Achsen)
Steuerkabel
(2 Achsen)
Klemmenblock
(4 Achsen)
Anschlusskabel
für Servoantrieb
(1 Achse)
SPS-Baugruppen-Steuerkabel
(4 Achsen)
Servoklemmen-
D
block
Kabel zum Servo-
E
antrieb
Anschlusskabel
F
für PositioniersteuerungsBaugruppe
Steuerkabel Für Universal-
G
Kabel für Univer-
H
salklemmenblock
Universalklem-
menblock
Motion-ControllerBaugruppen
CS1W-MC221
CS1W-MC421
C200H-MC221
Motion-ControllerBaugruppen
CS1W-MC221
CS1W-MC421
C200H-MC221
Motion-ControllerBaugruppe
C200HW-MC402-E
CS1W-NC1@3,
CJ1W-NC1@3 oder
C200HW-NC113
PositioniersteuerungsBaugruppe
CS1W-NC2@3/4@3,
CJ1W-NC2@3/4@3
oder C200HWNC213/413
PositioniersteuerungsBaugruppe
CQM1H-PLB21
CQM1-CPU43
CJ1M-CPU22/23 XW2B-20J6-8A
Servoklemmenblöcke
XW2B-@0J6-@B
C200H-NC112 0,5 m XW2Z-050J-A1
C200H-NC211 0,5 m XW2Z-050J-A2
CQM1-CPU43-V1 und
CQM1H-PLB21
CS1W-NC113 und
C200HW-NC113
CS1W-NC213/413
und
C200HW-NC213/413
CS1W-NC133 0,5 m XW2Z-050J-A10
CS1W-NC233/433 0,5 m XW2Z-050J-A11
CJ1W-NC113 0,5 m XW2Z-050J-A14
CJ1W-NC213/413 0,5 m XW2Z-050J-A15
CJ1W-NC133 0,5 m XW2Z-050J-A18
CJ1W-NC233/433 0,5 m XW2Z-050J-A19
CJ1M-CPU22/23 0,5 m XW2Z-050J-A27
Controller
Universal-Controller 1 m R88A-CTW001N
bezeichnung
1 m R88A-CPW001M1
2 m R88A-CPW002M1
3 m R88A-CPW003M1
5 m R88A-CPW005M1
1 m R88A-CPW001M2
2 m R88A-CPW002M2
3 m R88A-CPW003M2
5 m R88A-CPW005M2
- R88A-TC04-E
1 m R88A-CMUK001J3-
E2
1 m R88A-CMX001S-E
1 m R88A-CMX001J1-E
XW2B-20J6-1B
(1 Achse)
XW2B-40J6-2B
(2 Achsen)
XW2B-20J6-3B
(1 Achse)
(1 Achse)
XW2B-40J6-9A
(2 Achsen)
1 m XW2Z-100J-B4
2 m XW2Z-200J-B4
1 m XW2Z-100J-A1
1 m XW2Z-100J-A2
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
0,5 m XW2Z-050J-A6
1 m XW2Z-100J-A6
0,5 m XW2Z-050J-A7
1 m XW2Z-100J-A7
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A27
1 m R88A-CPW001S
oder JZSP-CKI01-1
2 m R88A-CPW002S
oder JZSP-CKI01-1
2 m R88A-CTW002N
- XW2B-50G5
Symbol Bezeichnung Produktbezeichnung
I
Analog-Überwachungskabel R88A-CMW001S
Optionen (für CN3)
Symbol Bezeichnung Produktbezeichnung
J
Computeranschlusskabel R88A-CCW002P2
Optionsbaugruppen (für CN10)
Symbol Bezeichnung Produktbezeichnung
K
DeviceNet-Schnittstellenbaugruppe mit
Positionierungsfunktionalität
Batteriesicherung für Absolutwert-Drehgeber
Bezeichnung Produktbezeichnung
Batterie (erforderlich für Servomotoren mit AbsolutwertDrehgeber)
Steckverbinder
Spezifikationen Produktbezeichnung
E/A-Steuersteckverbinder (für CN1) R88A-CNU11C
XtraDrive 200-V-Steckverbindersatz.
(Für 200-V-Motoren des Typs
SGMAH/PH-@@A@@@D-OY
und R7M-A@-D)
XtraDrive 400-V-Steckverbindersatz.
(Für 400-V-Motoren des Typs
SGMAH/PH-@@D@@@D-OY)
Sigma-II-Antrieb-Gebersteckverbinder (für CN2) DE9406973
Hypertac-Gebersteckverbinder IP67
(Für Motoren des Typs SGMAH/PH-@@@@@@@D-OY
und R7M-A@-D)
Hypertac-Spannungsversorgungs-Steckverbinder IP67,
200 V (Für 200-V-Motoren des Typs SGMAH/
PH-@@A@@@@D-OY und R7M-A@-D)
Hypertac-Spannungsversorgungs-Steckverbinder IP67,
400 V (Für 400-V-Motoren des Typs SGMAH/
PH-@@D@@@@D-OY)
MIL-Gebersteckverbinder IP67
(Für Motoren des Typs SGMGH-@, SGMSH-@,
SGMUH-@)
MIL-Spannungsversorgungs-Steckverbinder IP67
(Für 400-V-Motoren des Typs SGMGH-(05/10/13)D@,
SGMSH-(10/15/20)D@, SGMUH-(10/15)D@)
MIL-Spannungsversorgungs-Steckverbinder IP67
(Für 400-V-Motoren des Typs SGMGH-(20/30)D@,
SGMSH-30D@, SGMUH-30D@)
MIL-Bremsensteckverbinder IP67 (Für 400-V-Servomotoren des Typs SGMGH-@, SGMSH-@, SGMUH-@)
Filter
Spezifikationen
(geeigneter Servoantrieb)
XD-P3-M@, XD-P5-M@, XD-01-M@,
XD-02-M@
XD-04-M@ R88A-FIW107-SE 7 A
XD-08-M@ R88A-FIW115-SE 15 A
XD-05-T@, XD-10-T@, XD-15-T@ R88A-FIW4006-SE 6 A 400 V AC
XD-20-T@, XD-30-T@ R88A-FIW4010-SE 10 A
Computersoftware
Beschreibung Produktbezeichnung
XtraWare MOTION TOOLS
oder DE9404559
oder JZSP-CMS02
JUSP-NS300
JZSP-BA01
ER6VC3 (3,6 V)
Steckverbinder im
Lieferumfang enthalten
DE9406973
SPOC-17H-FRON169
SPOC-06K-FSDN169
Steckverbinder im
Lieferumfang enthalten
DE9406973
SPOC-17H-FRON169
LPRA-06B-FRBN170
Produktbezeichnung
R88A-FIW104-SE 4 A 250 V AC
oder JZSP-CKI9
XD-CN200K-DE
XD-CN400K-DE
oder R88A-CNU01R
SPOC-17H-FRON169
SPOC-06K-FSDN169
LPRA-06B-FRBN170
MS3108E20-29S
MS3108E18-10S
MS3108E22-22S
MS3108E10SL-3S
Nennstrom
Nennspannung
Einphasig
Dreiphasig
SÄMTLICHE ABMESSUNGEN IN MILLIMETER.
Umrechnungsfaktor von Millimeter in Zoll: 0,03937. Umrechnungsfaktor von Gramm in Unzen: 0,03527.
Cat. No. I18E-DE-01
Im Sinne der ständigen Produktverbesserung behalten wir uns Änderungen der technischen Daten ohne vorherige
Ankündigung vor.
188 AC-Servosysteme
 Loading...
Loading...