


Cat. No.
8U0108-DE2-01
XtraDrive (XD-)-SERIE
AC-Servotreiber
BEDIENERHANDBUCH

Copyright 2003 by YET, Yaskawa Eshed Technology Ltd.
XtraDrive Bedienerhandbuch
Kat.-Nr. 8U0108, Revision C
November 2003
Alle Rechte vorbehalten. Kein Teil dieser Publikation darf ohne vorherige
schriftliche Erlaubnis des Herausgebers in einem Datenabfragesystem
gespeichert oder auf irgendeine Weise reproduziert werden, einschließlich aber
nicht ausschließlich als Fotokopie, Fotografie, als magnetische oder andere
Aufzeichnung. Programmaufzeichnungen können in ein Computersystem
eingegeben, gespeichert und ausgeführt werden, dürfen jedoch nicht zur
Veröffentlichung reproduziert werden.
Diese Anleitung dient der Bereitstellung von Informationen über die XtraDriveHardware. Die hierin enthaltenen Informationen wurden mit bestmöglicher
Genauigkeit und Vollständigkeit zusammengestellt. Es wird jedoch keine
Garantie für die Eignung und Zweckmäßigkeit übernommen, weder explizit
noch impliziert. YET Ltd. übernimmt gegenüber Personen oder Organisationen
keine Haftung oder Verantwortung für Verlust oder Beschädigung in
Verbindung mit oder durch die Verwendung des XtraDrive und/oder der in
dieser Publikation enthaltenen Informationen.
YET Ltd. übernimmt keine Verantwortung für Fehler, die in dieser Publikation
enthalten sein könnten, und behält sich das Recht vor, Produkte und
Anleitungen ohne vorherige Ankündigung zu ändern.
YET Ltd. ISRAEL YET US Inc.
13 Hamelacha St., Tel: +1-866-YET-8080
Afeq Industrial Estate USA
Rosh Ha’ayin 48091 USinfo@yetmotion.com
ISRAEL
Tel: +972-3-9004114
Fax: +972-3-9030412
info@yetmotion.com
YET Vertriebsvertretung Deutschland:
OMRON Electronics GmbH
Elisabeth-Selbert-Straße 17
D-40764 Langenfeld
Tel: +49-2173 6800 0
Fax:+49-2173 6800 400
VORSICHT
YET produziert Komponententeile, die ihren Einsatz in vielfältigen Industrieanwendungen finden.
Die Auswahl und Anwendung von YET-Produkten liegt im Verantwortungsbereich des
Anlagenkonstrukteurs bzw. Endnutzers. YET übernimmt keinerlei Verantwortung für die
Integration der Produkte in das Endsystem.
Unter keinen Umständen darf ein YET-Produkt als alleinige Sicherheitssteuerung in ein Produkt
oder eine Konstruktion integriert werden. Alle Steuerungen ohne Ausnahme müssen so ausgelegt
werden, dass Fehler dynamisch und ausfallsicher unter allen Umständen erfasst werden. Alle
Produkte, in denen ein von YET hergestelltes Komponententeil enthalten ist, müssen bei der
Übergabe an den Endnutzer entsprechende Warnhinweise und Anweisungen für eine sichere
Verwendung und einen sicheren Betrieb aufweisen. Alle von YET bereitgestellten Warnhinweise
müssen unmittelbar an den Endnutzer weitergegeben werden.
YET übernimmt eine ausdrückliche Garantie ausschließlich für die Qualität eigener Produkte
in Übereinstimmung mit den Standards und Spezifikationen wie sie in dem YET-Handbuch
angegeben sind. ALLE ÜBRIGEN IMPLIZITEN UND EXPLIZITEN GEWÄHRLEISTUNGEN
WERDEN AUSGESCHLOSSEN. YET übernimmt keine Haftung für Verletzungen,
Produktbeschädigungen, Verlust oder Forderungen, die durch falsche Anwendung der Produkte
auftreten.
ii
Sicherheitshinweise
•
Nachfolgend werden die in diesem Handbuch verwendeten Symbole definiert,
um die Sicherheitshinweise einzustufen und den damit verbundenen
Gefahrengrad zu kennzeichnen. Eine Missachtung der in diesem Handbuch
angegebenen Vorsichtsmaßnahmen kann zu ernsthaften oder sogar fatalen
Verletzungen, und/oder Personenschäden, Schäden an Produkten, Anlagen und
Systemen führen.
VORSICHT
• VORSICHT: Kennzeichnet eine potenziell gefährliche Situation, die zum
Tod oder zu schweren Verletzungen führen kann, wenn sie nicht vermieden
wird.
ACHTUNG
ACHTUNG: Kennzeichnet eine potenziell gefährliche Situation, die zu
leichten oder mittelschweren Verletzungen führen kann, wenn sie nicht
vermieden wird.
iii

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
Zu diesem Handbuch
Zielgruppe
Dieses Handbuch ist für folgende Anwender vorgesehen.
• Personen, die für die Konstruktion der Servoantriebssysteme der
XtraDrive XD-
• Personen, die für die Installation und Verdrahtung der Servoantriebe
der XtraDrive XD--Serie zuständig sind
• Personen, die Testläufe oder Einstellungen der Servoantriebe der
XtraDrive XD-
• Personen, die für die Wartung und Inspektion der Servoantriebe der
ExtraDrive XD-
-Serie zuständig sind
-Serie durchführen
-Serie zuständig sind
Beschreibung technischer Begriffe
In diesem Handbuch werden die folgenden Begriffe wie folgt definiert:
• Servomotor = SGMAH/SGMPH/SGMGH/SGMSH oder andere
kompatible Servomotoren.
• Servoverstärker = Servoverstärker der XtraDrive XD--Serie.
• Servodrive = Ein Satz bestehend aus Servomotor und
Servoverstärker.
• Servosystem = Ein Servosteuerungssystem, das aus einem
Servoantrieb mit Host-Computer und Peripheriegeräten besteht.
Angabe invertierter Signale
In diesem Handbuch werden die Namen invertierter Signale (gültig
wenn tiefgestellt) mit einem Schrägstrich (/) vor dem Signalnamen
angegeben, wie in den folgenden Gleichungen dargestellt:
• S–ON = /S–ON
• P–CON = /P–CON
iv
XtraDrive Bedienerhandbuch Inhaltsverzeichnis
•
Sicherheitshinweise
Anhand folgender Sicherheitshinweise wird das Produkt bei der Lieferung,
Installation, Verdrahtung, Wartung, Inspektion und während des Betriebs
überprüft.
Produktprüfung bei Lieferung
ACHTUNG
• Verwenden Sie den Servomotor und Servoverstärker nur in einer der angegebenen
Kombinationen.
Anderenfalls besteht die Gefahr von Bränden oder Fehlfunktionen.
Installation
ACHTUNG
• Verwenden Sie die Produkte nicht in Umgebungen, in denen sie Wasser, korrosiven
Gasen, entzündbaren Gasen oder Brennstoffen ausgesetzt sind.
Anderenfalls besteht die Gefahr eines elektrischen Schlages oder Brandes.
Verdrahtung
VORSICHT
• Verbinden Sie den Erdungsanschluss an eine Masse der Klasse 3 (max. 100.).
Durch eine falsche Erdung kann ein elektrischer Schlag oder ein Brand verursacht werden.
ACHTUNG
• Schließen Sie an die Ausgangsklemmen U, V oder W keine dreiphasige
Versorgungsspannung an.
Anderenfalls besteht Verletzungs- oder Brandgefahr.
• Ziehen Sie die Klemmenschrauben der Spannungsversorgung sowie die
Ausgangsklemmenschrauben des Motors sicher fest.
Anderenfalls besteht Brandgefahr.
Betrieb
ACHTUNG
Berühren Sie bei laufendem Motor niemals drehende Motorteile.
Anderenfalls besteht Verletzungsgefahr.
v
XtraDrive Bedienerhandbuch Inhaltsverzeichnis
ACHTUNG
• Führen Sie den Testlauf nur mit dem Servomotor durch. Dabei muss die Motorwelle
von der Maschine getrennt sein, um unvorhersehbare Unfälle zu vermeiden.
Anderenfalls besteht Verletzungsgefahr.
• Bevor Sie den Betrieb mit angeschlossener Maschine starten, ändern Sie die
Einstellungen unter Berücksichtigung der Parameter der Maschine.
Wenn Sie den Betrieb ohne Berücksichtigung der korrekten Einstellungen starten, kann die
Maschine außer Kontrolle geraten oder Fehlfunktionen verursachen.
• Bevor Sie den Betrieb mit angeschlossener Maschine starten, stellen Sie sicher, dass
jederzeit ein Not-Stopp ausgeführt werden kann.
Anderenfalls besteht Verletzungsgefahr.
• Berühren Sie während des Betriebs keine Kühlkörper.
Anderenfalls könnten die hohen Temperaturen Brandverletzungen verursachen.
Wartung und Inspektion
VORSICHT
• Versuchen Sie nicht, bei eingeschalteter Spannung die Frontabdeckung zu entfernen.
Es besteht die Gefahr eines elektrischen Schlags.
• Warten Sie nach Abschalten der Spannungsversorgung fünf Minuten, bevor Sie die
Klemmen berühren.
Durch die Restspannung besteht die Gefahr eines elektrischen Schlags.
• Berühren Sie niemals Komponenten im Inneren des Servoverstärkers.
Es besteht die Gefahr eines elektrischen Schlags.
ACHTUNG
• Zerlegen Sie den Servomotor nicht.
Anderenfalls besteht die Gefahr eines elektrischen Schlags oder Verletzungsgefahr.
• Versuchen Sie nicht, die Verdrahtung bei eingeschalteter Spannungsversorgung zu
verändern.
Anderenfalls besteht die Gefahr eines elektrischen Schlags oder Verletzungsgefahr.
vi
XtraDrive Bedienerhandbuch Inhaltsverzeichnis
Allgemeine Sicherheitshinweise
BEACHTEN SIE FOLGENDE HINWEISE
FÜR EINE SICHERE ANWENDUNG:
• Bei einigen Abbildungen in diesem Handbuch ist das Produkt mit abgenommenen
Schutzabdeckungen oder Abschirmungen dargestellt. Ersetzen Sie stets die Schutzabdeckung
oder Abschirmung wie angegeben, bevor Sie das Produkt entsprechend den Angaben in dem
Handbuch in Betrieb nehmen.
• Die Abbildungen in diesem Handbuch dienen als typische Beispiele und können von Ihrem
tatsächlichen Produkt abweichen.
• Aufgrund von Produktverbesserungen, Änderung von Spezifikationen und
Handbuchüberarbeitung behalten wir uns Änderungen des Handbuchs vor. Bei Überarbeitung
des Handbuchs wird die Katalognummer aktualisiert und das neue Handbuch als neue Edition
herausgegeben. Die Katalognummer wird auf der Vorder- und Rückseite des Handbuchs
angegeben.
• Falls Sie ein Handbuch aufgrund von Verlust oder Beschädigung nachbestellen möchten,
setzen Sie sich bitte mit Ihrem nächsten YET-Vertriebspartner oder einem auf der Rückseite
des Handbuchs angegebenem Vertriebsbüro in Verbindung.
• YET übernimmt keinerlei Verantwortung für Resultate, die aus nicht autorisierten
Änderungen des Produkts entstehen. YET übernimmt keine Haftung für Schäden oder
Störungen, die durch nicht autorisierte Änderungen entstanden sind.
vii

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
Inhaltsverzeichnis
1. Überprüfung des Produkts und der Bezeichnungen von Komponenten.....1-1
1.1. Überprüfung der Produkte der XtraDrive-Serie bei Lieferung .....................1-2
1.1.1. Servoverstärker............................................................................................... 1-2
1.2. Bezeichnungen der Produktkomponenten .....................................................1-3
1.2.1. Servoverstärker............................................................................................... 1-3
1.2.2. Modellnummern.............................................................................................1-4
2. Installation .........................................................................................................2-1
2.1. Servoverstärker...............................................................................................2-2
2.1.1. Lagerbedingungen.......................................................................................... 2-2
2.1.2. Installationsort ................................................................................................2-2
2.1.3. Installationsrichtung....................................................................................... 2-3
2.1.4. Installation ...................................................................................................... 2-3
3. Anschlussplan....................................................................................................3-1
3.1. Anschluss an Peripheriegeräte .......................................................................3-2
3.1.1. 100 V/200 V Hauptschaltkreis, einphasig..................................................... 3-3
3.1.2. 200 V Hauptschaltkreis, 0,8 kW und 1,5 kW, einphasig .............................3-4
3.1.3. 200 V Hauptschaltkreis, dreiphasig...............................................................3-5
3.1.4. 400 V Hauptschaltkreis, dreiphasig...............................................................3-6
3.2. Interne Blockschaltbilder der XtraDrive-Serie..............................................3-7
3.2.1. Modelle mit 30 W bis 800 W, 100 V/200 V, einphasig............................... 3-7
3.2.2. Modelle mit 1 kW bis 3 kW, 200 V, dreiphasig........................................... 3-8
3.2.3. Modelle mit 0,5 kW bis 3,0 kW, 400 V, dreiphasig.....................................3-9
3.2.4. Modelle mit 5 kW, 400 V, dreiphasig.........................................................3-10
3.3. Verdrahtung des Hauptschaltkreises............................................................3-11
3.3.1. Bezeichnungen und Beschreibung der Leistungsklemmen .......................3-12
3.3.2. Typisches Verdrahtungsbeispiel des Hauptschaltkreises ...........................3-13
3.3.3. Verlustleistung des Servoverstärkers .......................................................... 3-14
3.3.4. Verdrahtung der Leistungsklemmenblöcke................................................3-15
3.4. E/A-Signale ..................................................................................................3-16
3.4.1. Typisches Anschlussbeispiele für E/A-Signalleitungen.............................3-16
3.4.2. Liste der CN1-Klemmen..............................................................................3-17
3.4.3. Bezeichnungen und Funktionen der E/A-Signale ......................................3-18
3.4.4. Schnittstellenschaltkreise.............................................................................3-20
3.5. Verdrahtung von Drehgebern
(nur für Motoren des Typs SGMGH und SGMSH)....................................3-24
3.5.1. Drehgeberanschlüsse....................................................................................3-24
3.5.2. CN2-Klemmenzuordnung und -typen des Drehgebers..............................3-26
3.5.3. Drehgeber-Kabelverbindungen ...................................................................3-27
3.6. Beispiele für Standardverbindungen............................................................3-29
viii

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
4. Testbetrieb .........................................................................................................4-1
4.1. Testbetrieb in zwei Schritten..........................................................................4-2
4.1.1. Schritt 1: Testbetrieb für Servomotor ohne Last .......................................... 4-3
4.1.2. Schritt 2: Testbetrieb für Servomotor, der an eine Maschine
angeschlossen ist............................................................................................ 4-9
4.2. Zusätzliche Einrichtungsverfahren während des Testbetriebs ....................4-10
4.2.1. Servomotoren mit Bremsen .........................................................................4-10
4.2.2. Positioniersteuerung über den Host-Controller ..........................................4-11
4.3. Minimale Parameter und Eingangssignale ..................................................4-12
4.3.1. Parameter......................................................................................................4-12
4.3.2. Eingangssignale............................................................................................ 4-12
5. Parametereinstellungen und Funktionen........................................................5-1
5.1. Einstellungen gemäß den Gerätekenndaten...................................................5-4
5.1.1. Umschalten der Servomotor-Drehrichtung................................................... 5-4
5.1.2. Einstellung der Endlagenschalter-Funktion ..................................................5-5
5.1.3. Drehmomentbegrenzung ...............................................................................5-8
5.2. Einstellungen gemäß Host-Controller .........................................................5-12
5.2.1. Drehzahlsollwert .......................................................................................... 5-12
5.2.2. Positionssollwert .......................................................................................... 5-14
5.2.3. Verwendung des Drehgeber-Signalausgangs .............................................5-20
5.2.4. Sequenz-E/A-Signale...................................................................................5-23
5.2.5. Verwendung der Funktion für das elektronische Übersetzungsverhältnis ..5-25
5.2.6. Kontakteingang-Drehzahlregelung ............................................................. 5-29
5.2.7. Verwendung der Drehmomentregelung......................................................5-34
5.2.8. Drehmoment-Vorsteuerungsfunktion ......................................................... 5-40
5.2.9. Drehmomentbegrenzung durch analogen Spannungssollwert...................5-42
5.2.10. Sollwertimpuls-Sperrfunktion (/INHIBIT).................................................5-44
5.3. Einstellung des Servoverstärkers .................................................................5-45
5.3.1. Parameter......................................................................................................5-45
5.3.2. JOG-Drehzahl...............................................................................................5-46
5.3.3. Eingangs-Signalzuordnung.......................................................................... 5-46
5.3.4. Ausgangs-Signalzuordnung......................................................................... 5-50
5.3.5. Auswahl Regelungsart .................................................................................5-52
5.4. Einstellung der Stoppfunktionen..................................................................5-54
5.4.1. Offset-Einstellung ........................................................................................ 5-54
5.4.2. Auswahl Servo AUS-Stoppmodus..............................................................5-55
5.4.3. Verwendung der Nullhaltungsfunktion.......................................................5-56
5.4.4. Verwendung der Haltebremse..................................................................... 5-58
5.5. Aufbau einer Schutzsequenz........................................................................5-61
5.5.1. Verwendung von Servoalarm- und Alarmcode-Ausgängen ....................5-61
5.5.2. Verwendung des Servo-EIN-Eingangssignals (/S-ON).............................5-63
5.5.3. Verwendung des „Positionierung abgeschlossen“-
Ausgangssignals (/COIN)............................................................................5-64
5.5.4. Drehzahlübereinstimmungsausgang (/V-CMP) .........................................5-65
5.5.5. Verwendung des Betriebsausgangssignals (/TGON).................................5-67
5.5.6. Verwendung des Servo-bereit-Ausgangssignals (/S-RDY).......................5-68
5.5.7. Verwendung des Warnausgangssignals (/WARN) ....................................5-69
5.5.8. Vorgehensweise bei einem Spannungsausfall ............................................5-71
5.6. Auswahl eines Bremswiderstands................................................................5-72
5.6.1. Externer Bremswiderstand...........................................................................5-73
5.6.2. Berechnung der Leistung des Bremswiderstands....................................... 5-74
ix

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
5.7. Absolutwert-Drehgeber................................................................................5-78
5.7.1. Schnittstellenschaltkreis...............................................................................5-79
5.7.2. Konfiguration eines Absolutwert-Drehgebers ............................................5-80
5.7.3. Einstellung des Absolutwert-Drehgebers....................................................5-81
5.7.4. Empfangssequenz des Absolutwert-Drehgeber.......................................... 5-84
5.8. AB-Drehgeber..............................................................................................5-89
5.9. Definition der Anwendereinheiten und Einstellung ....................................5-91
5.9.1. Positioniersteuerung.....................................................................................5-91
5.9.1.1. Definition der Anwendereinheiten für Motion-Profile ..........................5-91
5.9.1.2. Positionseinheiten ....................................................................................5-91
5.9.1.3. Drehzahleinheiten ....................................................................................5-92
5.9.1.4. Beschleunigungseinheiten ....................................................................... 5-93
5.9.1.5. Standardeinstellung für Motion-Profil-Parameter..................................5-94
5.9.1.6. Profil-Drehzahl (Pn2A2, Pn2A3)............................................................5-95
5.9.1.7. Profil-Beschleunigung (Pn2A4, Pn2A5) ................................................5-95
5.9.1.8. Standardwert S-Kurve (Pn2A6).............................................................. 5-95
5.9.1.9. Schnellstopp-Verzögerung (Pn2A8, Pn2A9) .........................................5-96
5.9.1.10. Fenster Positionierung beendet (Pn2C0) ................................................5-96
5.9.2. Drehmomentregelung .................................................................................. 5-96
5.9.2.1. Drehmomentanstieg (Pn2C1)..................................................................5-96
5.9.3. Nullpunktverfahren ......................................................................................5-97
5.9.4. Digitale E/A..................................................................................................5-98
5.9.5. Auto-Tuning .................................................................................................5-99
5.10. Automatischer Ablauf des Benutzerprogramms..........................................5-99
6. Servoeinstellung ................................................................................................6-1
6.1. Auswahl der Regelungsart .............................................................................6-2
6.2. Drehzahlregelung mit analogem Eingang oder Kontakteingang ..................6-3
6.2.1. Prinzip und Blockdiagramm der Drehzahlregelung .....................................6-3
6.2.2. Parameter der Drehzahlregelung ...................................................................6-4
6.2.3. Einstellung der Eingangsverstärkung............................................................ 6-4
6.2.4. Offset–Einstellung.......................................................................................... 6-5
6.2.5. Verwendung der Sanftanlauffunktion........................................................... 6-6
6.2.6. Einstellung des Lastverhältnisses .................................................................. 6-7
6.2.7. Einstellung der Drehzahlregelkreisverstärkung............................................6-8
6.2.8. Einstellung der Drehmomentsollwert–Filterzeitkonstante........................... 6-9
6.2.9. Sperrfilter........................................................................................................6-9
6.2.10. Einstellung der Drehzahlregelkreisverstärkung.......................................... 6-10
6.3. NCT–Positioniersteuerung...........................................................................6-12
6.3.1. Einstellung des Lastverhältnisses................................................................ 6-12
6.3.2. Blockdiagram für Positioniersteuerung.......................................................6-14
6.3.3. NCT–Verstärkungsparameter...................................................................... 6-15
6.3.4. OCA – Schwingungs–Unterdrückungsalgorithmus...................................6-16
6.3.5. Zusätzliches Parameter–Tuning ..................................................................6-17
6.3.6. Filter..............................................................................................................6-17
6.3.7. Flexible Systemparameter ...........................................................................6-18
6.3.8. Verstärkungsfaktor.......................................................................................6-19
6.3.9. Integral–Löschparameter .............................................................................6-19
6.3.10. Tuning–Verfahren für Positioniersteuerungsparameter............................. 6-20
6.4. Analogüberwachung ....................................................................................6-22
x

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
7. Verwendung der Bedienkonsole......................................................................7-1
7.1. Grundfunktion ................................................................................................7-2
7.1.1. Bedienkonsole ................................................................................................7-2
7.1.2. Zurücksetzen von Servoalarmen ...................................................................7-3
7.1.3. Basismodus-Auswahl..................................................................................... 7-3
7.1.4. Statusanzeigemodus....................................................................................... 7-4
7.1.5. Betrieb im Parametereinstellungsmodus....................................................... 7-6
7.1.6. Betrieb im Überwachungsmodus ................................................................7-11
7.2. Angewandte Funktionen ..............................................................................7-16
7.2.1. Betrieb im Alarmprotokollmodus ............................................................... 7-17
7.2.2. Schrittbetrieb (JOG).....................................................................................7-18
7.2.3. Automatische Offset-Einstellung des Drehzahl-
und Drehmomentsollwerts ..........................................................................7-20
7.2.4. Manuelle Offset-Einstellung des Drehzahl- und Drehmomentsollwerts ..7-22
7.2.5. Löschen der Alarmprotokolldaten...............................................................7-25
7.2.6. Überprüfen des Motormodells.....................................................................7-26
7.2.7. Prüfung der Software-Version.....................................................................7-27
7.2.8. Nullpunkt-Suchmodus .................................................................................7-28
7.2.9. Initialisieren der Parametereinstellungen ....................................................7-30
7.2.10. Manuelle Nulleinstellung und Verstärkungseinstellung des analogen
Überwachungsausgangs ..............................................................................7-31
7.2.11. Offset-Einstellung der Motorstrom-Erkennung ..................................... 7-34
7.2.12. Schreibschutz-Einstellung .......................................................................7-36
7.2.13. Löschen des Optionsbaugruppen-Erkennungsalarms............................7-37
8. Nennwerte, Spezifikationen und Abmessungen.............................................8-1
8.1. Nennwerte und Spezifikationen.....................................................................8-2
8.2. Kombinationen aus einphasigen 100 V-XtraDrive und Motoren .................8-6
8.3. Kombinationen aus einphasigen 200 V-XtraDrive und Motoren .................8-7
8.4. Kombinationen aus dreiphasigen 200 V-XtraDrive und Motoren ................8-8
8.5. Kombinationen aus dreiphasigen 400 V-XtraDrive und Motoren ................8-9
8.6. Abmessungen zur Grundflächenmontage....................................................8-11
8.6.1. XD-P3 bis -01 (einphasig 100 V, 30 bis 100 W)
XD-P3 bis -02 (einphasig 200 V, 30 bis 200 W) .......................................8-11
8.6.2. XD-02 (einphasig, 100 V, 200 W) XD-04 (einphasig, 200 V, 400 W)..........8-12
8.6.3. XD-08 (einphasig, 200 V, 0,75 kW)
XD-10 (dreiphasig, 200 V, 1,0 kW) ...........................................................8-13
8.6.4. XD-05, 10, 15 (dreiphasig, 400 V, 0,5 bis 1,5 kW) ................................... 8-14
8.6.5. XD-20, -30 (dreiphasig, 200 V, 400 V, 2,0 und 3,0 kW)
XD-15 (einphasig, 200 V, 1,5 kW).............................................................8-15
8.6.6. XD-50 (dreiphasig, 400 V, 5,0 kW)............................................................8-16
8.7. Abmessungen zur Bauträgermontage ..........................................................8-17
8.7.1. XD-P3 bis -01 (einphasig 100 V, 30 bis 100 W)
XD-P3 bis -02 (einphasig 200 V, 30 bis 200 W) .......................................8-17
8.7.2. XD-02 (einphasig, 100 V, 200 W) XD-04 (einphasig, 200 V, 400 W) .... 8-17
8.7.3. XD-08 (einphasig, 200 V, 0,75 kW)
XD-10 (dreiphasig, 200 V, 1,0 kW) ...........................................................8-18
8.7.4. XD-05, 10, 15 (dreiphasig, 400 V, 0,5 bis 1,5 kW) ................................... 8-18
8.7.5. XD-20, -30 (dreiphasig, 200 V, 400 V, 2,0 und 3,0 kW)
XD-15 (einphasig, 200 V, 1,5 kW).............................................................8-19
8.7.6. XD-50 (dreiphasig, 400 V, 5,0 kW)............................................................8-20
xi

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
9. Inspektion, Wartung und Fehlerbehebung ....................................................9-1
9.1. Inspektion und Wartung des XtraDrive.........................................................9-2
9.1.1. Inspektion des Servomotors........................................................................... 9-2
9.1.2. Inspektion des Servoverstärkers .................................................................... 9-2
9.1.3. Austausch der Batterie für den Absolutwert-Drehgeber .............................. 9-3
9.2. Fehlerbehebung..............................................................................................9-4
9.2.1. Fehlerbehebung von Problemen mit Alarmanzeigen ...................................9-4
9.2.2. Fehlerbehebung von Problemen ohne Alarmanzeige................................. 9-25
9.2.3. Tabelle der Alarmanzeige............................................................................9-26
9.2.4. Warnanzeigen...............................................................................................9-28
Appendix A. Anschlussbeispiele für den Host-Controller..............................A-1
A.1. Anschluss des MC20 Motion Modul der GL-Serie......................................A-2
A.2. Anschluss des CP-9200SH Servo Controller (SVA)....................................A-3
A.3. Anschluss der B2813 Positioniersteuerung der GL-Serie ............................A-4
A.4. Anschluss der C500-NC222 Positionier-Baugruppe von OMRON.............A-5
A.5. Anschluss der C500-NC112 Positionier-Baugruppe von OMRON.............A-6
A.6. Anschluss der AD72 Positionier-Baugruppe von MITSUBISHI ................A-7
A.7. Anschluss der AD75 Positionier-Baugruppe von MITSUBISHI ................A-8
Appendix B. Spezielle Verdrahtung..................................................................B-1
B.1. Verdrahtungsvorsichtsmaßnahmen............................................................... B-2
B.2. Verdrahtung des Störschutzes.......................................................................B-5
B.3. Verwendung mehrerer XtraDrive .................................................................B-9
B.4. Verlängerung der Drehgeberkabel..............................................................B-10
B.5. 400-V-Versorgungsspannung .....................................................................B-12
B.6. Drossel für Oberwellenglättung..................................................................B-14
Appendix C. Kenndaten für Peripheriegeräte.................................................C-1
C.1. Steckverbinder-Klemmenblock für Steuersignale mit
Schraubklemmen JUSP-TA50P ...................................................................C-2
C.2. Externe Bremswiderstände ...........................................................................C-4
C.3. DC-Drosseln für Spannungsversorgungen, die für minimale
Oberwellen ausgelegt sind............................................................................ C-6
C.4. Spannungsversorgung für die Bremse ..........................................................C-8
C.5. Überspannungsschutz....................................................................................C-9
C.6. Netzschütz .....................................................................................................C-9
C.7. Vorwiderstand für die Drehzahleinstellung..................................................C-9
C.8. CN1-E/A-Signalsteckverbindung .................................................................C-9
C.9. Anschluss eines A/B-Impulsdrehgebers ohne C-Impuls (Indeximpuls)....C-10
C.10. Batterie für Absolutwert-Drehgeber........................................................... C-11
C.11. Kabel zum Anschluss eines PC an den XtraDrive .....................................C-12
C.11.1. RS-232-Kommunikationskabel.............................................................. C-12
C.11.2. Kabel mit RS-232 bis RS-422 aktivem Adapter ................................... C-14
C.12. Anschluss von Bremswiderständen ............................................................C-15
xii

XtraDrive Bedienerhandbuch Inhaltsverzeichnis
Appendix D. Parameterliste...............................................................................D-1
D.1. Parameter.......................................................................................................D-2
D.2. Schalter..........................................................................................................D-7
D.3. Eingangssignal-Auswahl.............................................................................D-12
D.3.1. Nullpunktschalter....................................................................................D-13
D.3.2. Erweiterte Eingangssignal-Auswahl......................................................D-13
D.4. Ausgangssignal-Auswahl............................................................................D-14
D.4.1. Erweiterte Ausgangssignal-Auswahl.....................................................D-14
D.5. Zusatzfunktionen.........................................................................................D-15
D.6. Überwachungsmodi ....................................................................................D-15
Appendix E. Bestellinformationen und Zubehör ............................................E-1
xiii

XtraDrive Benutzerhandbuch Kapitel 1: Überprüfung des Produkts und der Bezeichnungen von Komponenten
1. Überprüfung des Produkts und der
Bezeichnungen von Komponenten
Dieses Kapitel beschreibt die Überprüfung des Produkts bei Lieferung sowie die
Bezeichnungen von Produktkomponenten.
1. Überprüfung des Produkts und der Bezeichnungen von Komponenten.....1-1
1.1. Überprüfung der Produkte der XtraDrive-Serie bei Lieferung...................1-2
1.1.1. Servoverstärker ...................................................................................1-2
1.2. Bezeichnungen der Produktkomponenten ..................................................1-3
1.2.1. Servoverstärker ...................................................................................1-3
1.2.2. Modellnummern..................................................................................1-4
1-1
XtraDrive Benutzerhandbuch Kapitel 1: Überprüfung des Produkts und der Bezeichnungen von Komponenten
1.1. Überprüfung der Produkte der XtraDrive-Serie bei Lieferung
Das folgende Verfahren wird zur Überprüfung der Produkte der
XtraDrive-Serie bei Lieferung empfohlen.
Verwenden Sie die folgende Prüfliste, um Produkte der XtraDrive-Serie bei
Lieferung zu überprüfen.
Erste Inspektion Anmerkungen
Entsprechen die gelieferten
Produkte den bestellten
Produkten?
Dreht sich die Welle des
Servomotors leichtgängig?
Liegen Beschädigungen vor? Überprüfen Sie das gesamte Äußere
Sind Schrauben locker? Überprüfen Sie mit einem
Falls einer der oben genannten Fehler aufgetreten ist, setzen Sie sich mit YET
oder einem autorisierten Vertreter in Verbindung.
Prüfen Sie die Modellnummern auf
dem Typenschild des Servomotors
und des Servoverstärkers.
(Detaillierte Informationen zu den
Modellnummern finden Sie auf den
folgenden Seiten).
Die Welle des Servomotors ist in
Ordnung, wenn sie leichtgängig per
Hand gedreht werden kann.
Servomotoren mit Bremsen können
allerdings nicht manuell gedreht
werden.
und untersuchen Sie das Gerät auf
Beschädigungen und Kratzer, die
während des Versands aufgetreten
sein könnten.
Schraubendreher, ob Schrauben
locker sind.
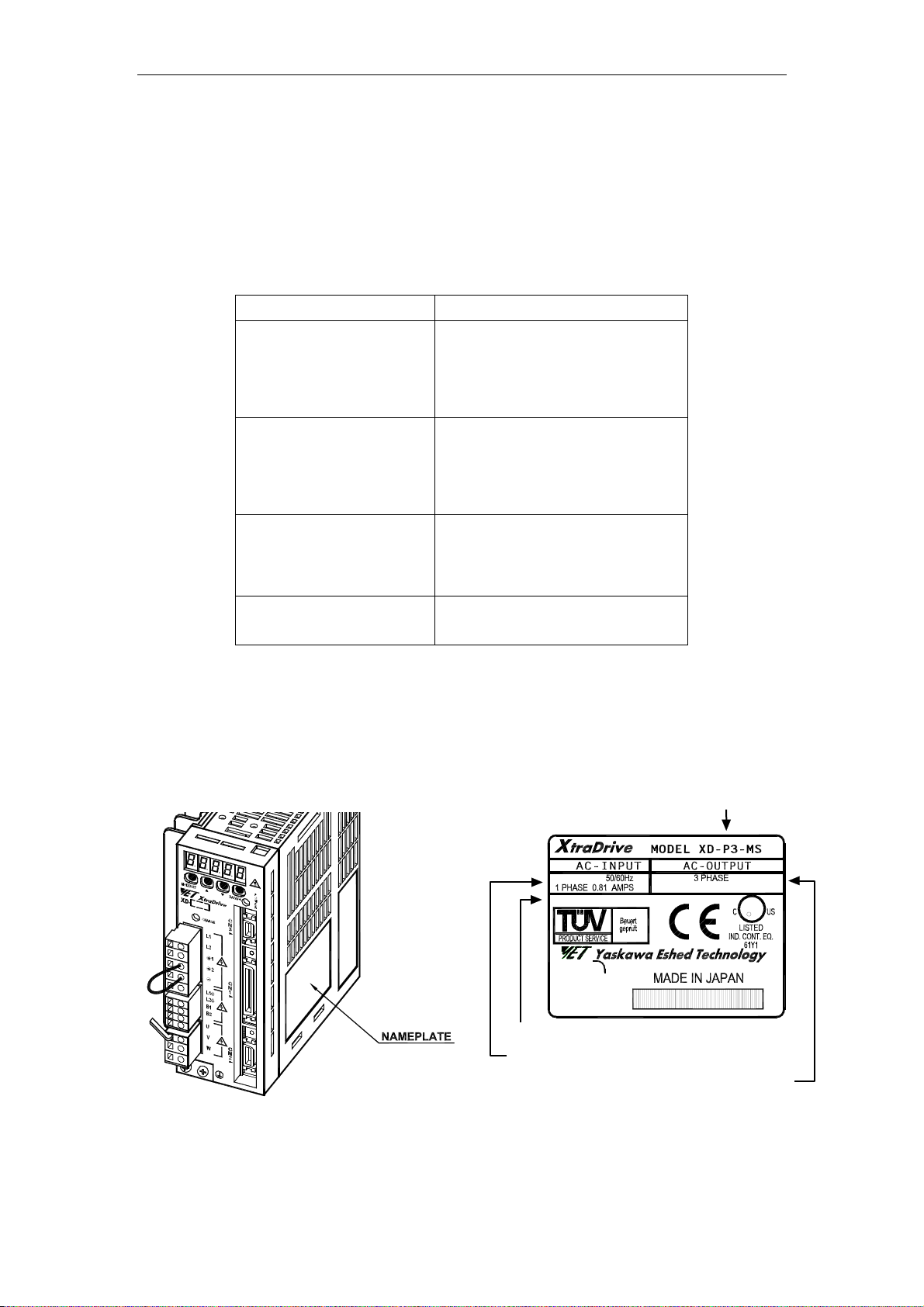
1.1.1. Servoverstärker
Äußere Abmessungen und Beispiele für Typenschilder
TYPE
200-230V 0-230V
S/N 002006000000000
SERIENNUMMER
GEEIGNETE STROMVERSORGUNG
0.03(0.04)kW(hp)
SERVOMOTORAUSGANG
0.33 AMPS
U
L
R
1-2
XtraDrive Benutzerhandbuch Kapitel 1: Überprüfung des Produkts und der Bezeichnungen von Komponenten
-
5
(
)
1.2. Bezeichnungen der Produktkomponenten
Dieser Abschnitt beschreibt die Bezeichnungen der Produktkomponenten.
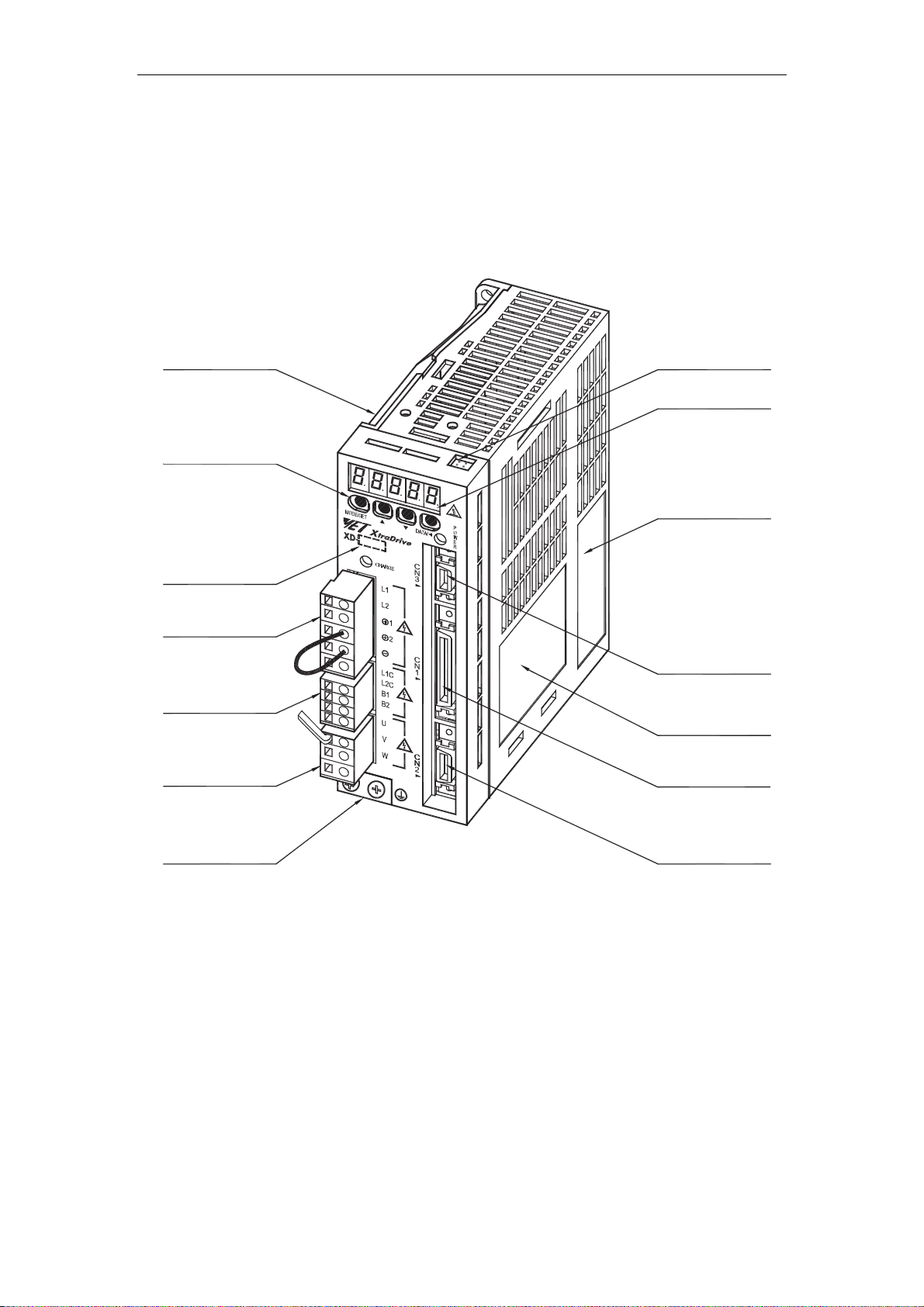
1.2.1. Servoverstärker
Die nachstehende Abbildung zeigt die Bezeichnungen der
Komponenten von Servoverstärkern.
KÜHLKÖRPER
SCHALTER
MODELLBEZEICHNUNG
STROMVERSORGUNGSKLEMMEN
STEUERSPANNUNGSEINGANGSKLEMME
MOTORANSCHLUSSKLEMME
ÜBERWACHUNG CN
ANALOG
WARNAUFKLEBER
STECKVERBINDUNG
FÜR SERIELLE
STECKVERBINDUNG
FÜR SERIELLE
KOMMUNIKATION (CN3)
TYPENSCHILD
STECK-
VERBINDUNG
E/A-SIGNALE (CN1)
ERDUNGSKLEMME
GEBERSTECK-
VERBINDUNG
CN2
1-3

XtraDrive Benutzerhandbuch Kapitel 1: Überprüfung des Produkts und der Bezeichnungen von Komponenten
r
r
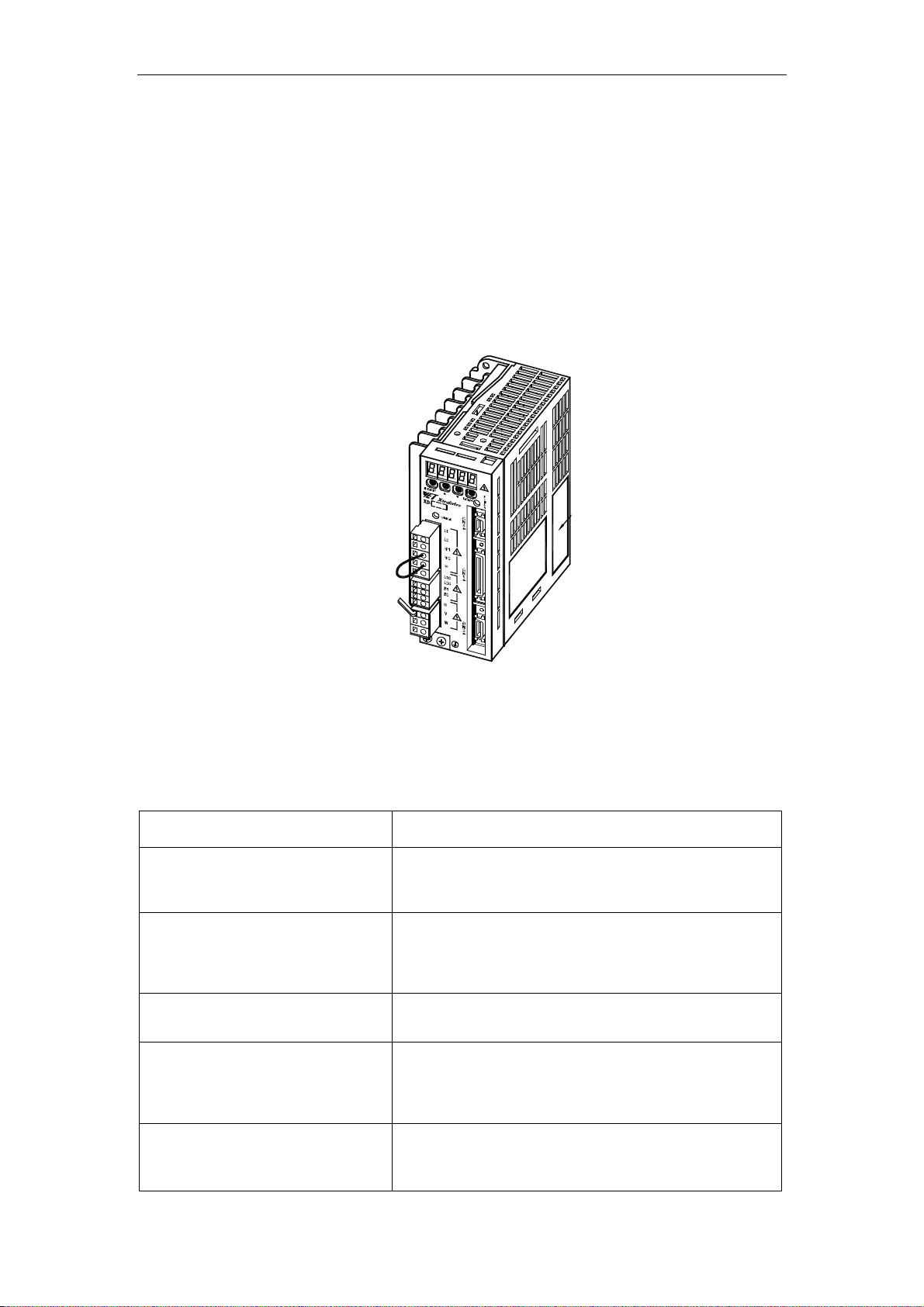
1.2.2. Modellnummern
XtraDrive Serie
Max. zulässige
Servomotorleistung
(siehe nachstehende Tabelle)
Eingangsspannung
100 V AC, oder
L
-
200 V AC, oder
M
-
T
400 V AC
-
Erweiterte Funktionen
durch Optionsmodule:
S - Kein Steckverbinder CN10
N - mit Steckverbinder CN10
Konstruktionsversion #
Leer oder 01-FF
(optional)
Leer, ode
R - Einbau in Baugruppenträger, ode
V – Platinenbeschichtung
(optional)
XD - 05 -T S
01 R Y999
Leer oder „Y“, gefolgt von drei 1 bis 3 Ziffern
zur Kennzeichnung der Kundenanwendungen
(optional)
Ausgangsleistung
scode
P3 0,03
P5 0,05
01 0,10
02 0,20
04 0,40
08 0,75
10 1,0
15 1,5
20 2,0
30 3,0
50 5,0
Max. zulässige
Servomotorleistung
(kW)
1-4

XtraDrive Benutzerhandbuch Kapitel 2: Installation
2. Installation
Dieses Kapitel beschreibt die Vorsichtsmaßnahmen für die Installation des
Servomotors und Servorverstärkers der XtraDrive-Serie.
2.1. Servoverstärker ...............................................................................................2-2
2.1.1. Lagerbedingungen...................................................................................2-2
2.1.2. Installationsort.........................................................................................2-2
2.1.3. Installationsrichtung................................................................................2-3
2.1.4. Installation...............................................................................................2-3
2-1
XtraDrive Benutzerhandbuch Kapitel 2: Installation
2.1. Servoverstärker
Die XtraDrive-Servoverstärker sind zur Installation auf Grundflächen
ausgelegt. Durch falsche Installationen können Störungen auftreten. Beachten
Sie die nachfolgenden Installationsanweisungen.
2.1.1. Lagerbedingungen
Lagern Sie den Serververstärker innerhalb des folgenden
Temperaturbereichs, sofern das Spannungskabel getrennt ist.
–20 bis 85 °C
2.1.2. Installationsort
Berücksichtigen Sie die folgenden Vorsichtsmaßnahmen bezüglich des
Installationsorts.
Situation Installationsvorsichtmaßnahmen
Installation im Schaltschrank
Installation in der Nähe eines
Heizelements
Installation in der Nähe einer
Schwingungsquelle
Installation an einem Ort, der
korrosiven Gasen ausgesetzt ist
Sonstiges
Legen Sie die Schaltschrankgröße, die
Baugruppenkonstruktion und die Kühlmethode so aus, dass
die Temperatur um den Servoverstärker herum 55 °C nicht
überschreitet.
Achten Sie darauf, die von dem Heizelement abgestrahlte
Wärme sowie einen möglichen Temperaturanstieg aufgrund
von natürlicher Wärmekonvektion gering zu halten, damit
die Temperatur um den Servoverstärker herum 55 °C nicht
überschreitet.
Installieren Sie neben dem Servoverstärker eine
Schwingungsisolation, damit das Gerät keinen
Schwingungen ausgesetzt ist.
Korrosive Gase haben keine direkte Auswirkung auf den
Servoverstärker. Sie können jedoch Störungen an
elektronischen Bauteilen und Geräten mit Schützen
hervorrufen. Leiten Sie entsprechende Maßnahmen ein,
um korrosive Gase zu vermeiden.
Installieren Sie den Serververstärker nicht an heißen oder
feuchten Orten oder Orten, an denen das Gerät
übermäßigem Staub oder Eisenstaub ausgesetzt ist.
2-2
XtraDrive Benutzerhandbuch Kapitel 2: Installation
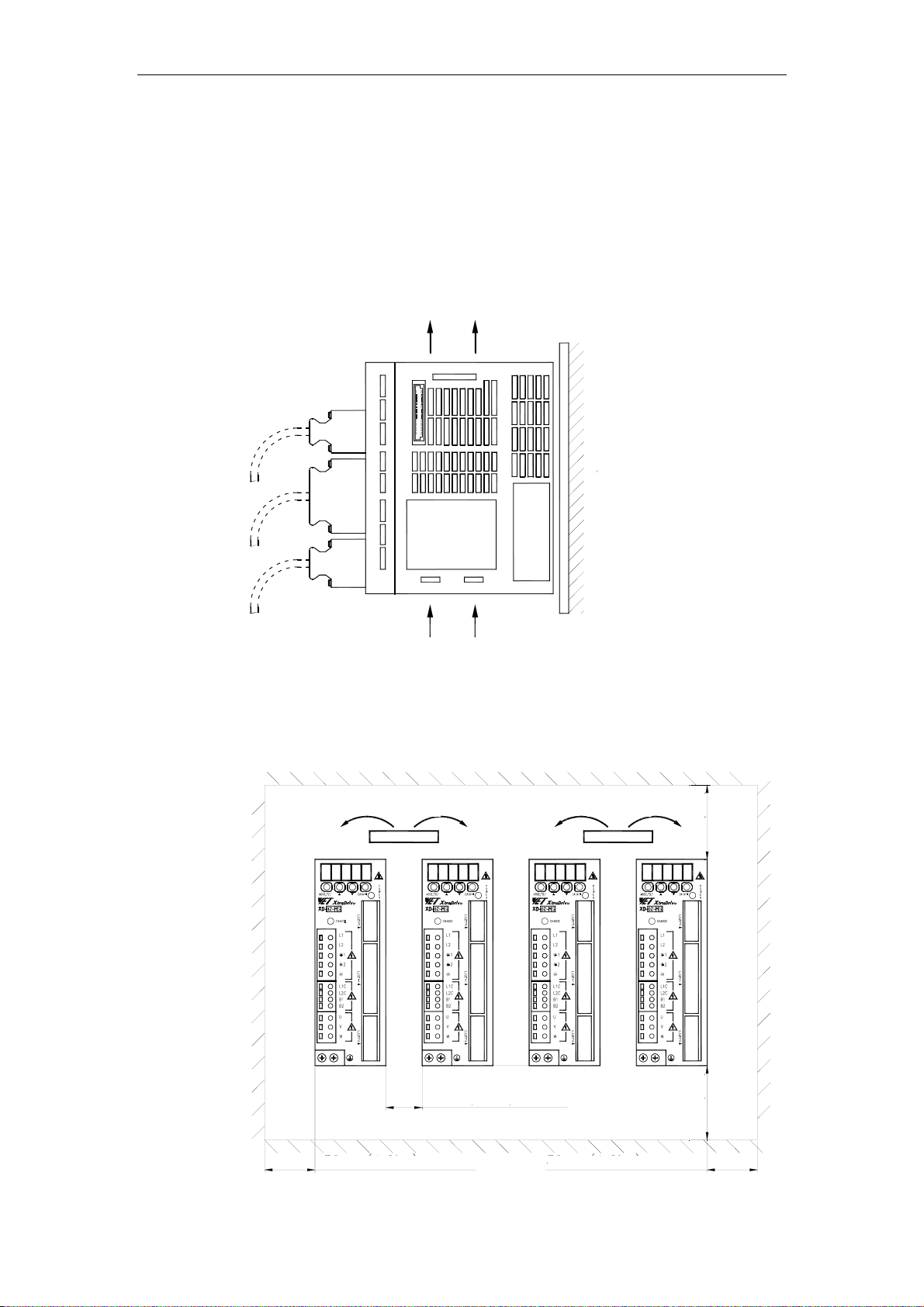
2.1.3. Installationsrichtung
Installieren Sie den Servoverstärker senkrecht zur Wand, wie in der
folgenden Abbildung dargestellt. Der Servoverstärker muss auf diese
Weise ausgerichtet werden, da er für eine Kühlung durch natürliche
Wärmekonvektion oder durch einen Kühllüfter ausgelegt ist.
Verwenden Sie die Montagebohrungen, um den Servoverstärker zu
sichern. Die Anzahl der Bohrungen variiert (zwischen zwei und vier)
je nach Rahmengröße des Servoverstärkers.
Wand
2.1.4. Installation
Gehen Sie wie nachfolgend beschrieben vor, um mehrere
Servoverstärker nebeneinander auf einer Schalttafel zu installieren.
Belüftung
LÜFTER LÜFTER
min. 50 mm min. 50 mm
min. 10 mm oder mehr
min. 30 mm min. 30 mm
2-3

XtraDrive Benutzerhandbuch Kapitel 2: Installation
Ausrichtung des Servoverstärkers
Installieren Sie den Servoverstärker senkrecht zur Wand, so dass die
Steckverbinder der Fronttafel nach außen weisen.
Kühlung
Wie in der obigen Abbildung dargestellt, muss zwischen den
Serververstärkern ausreichend Platz für die Kühlung durch Kühllüfter
oder durch natürliche Wärmekonvektion vorgesehen werden.
Nebeneinander-Installation
Wenn Sie wie in der obigen Abbildung dargestellt mehrere
Servoverstärker nebeneinander installieren, muss zwischen den Geräten
mindestens 10 mm und über und unter den Geräten mindestens 50 mm
Freiraum eingehalten werden. Installieren Sie über den Servoverstärkern
Kühllüfter, um einen übermäßigen Temperaturanstieg zu vermeiden und
eine konstante Temperatur in dem Schaltschrank zu halten.
Umgebungsbedingungen im Schaltschrank
• Umgebungstemperatur: 0 bis 55 °C
• Luftfeuchtigkeit: max. 90 %
• Vibrationen: 0,5 G (4,9m/s2)
• Kondensatbildung und Eisbildung Keine
• Umgebungstemperatur für langfristige Zuverlässigkeit: max. 45 °C
2-4

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3. Anschlussplan
Dieses Kapitel beschreibt, wie die Geräte der XtraDrive-Serie an
Peripheriegeräte angeschlossen werden und liefert Beispiele für die Verdrahtung
des Hauptstromkreises und der E/A-Signalleitungen.
3.1. Anschluss an Peripheriegeräte ...........................................................................2
3.1.1. 100 V/200 V Hauptschaltkreis, einphasig .................................................3
3.1.2. 200 V Hauptschaltkreis, 0,8 kW und 1,5 kW, einphasig...........................4
3.1.3. 200 V Hauptschaltkreis, dreiphasig ...........................................................5
3.1.4. 400 V Hauptschaltkreis, dreiphasig ...........................................................6
3.2. Interne Blockschaltbilder der XtraDrive-Serie ..................................................7
3.2.1. Modelle mit 30 W bis 800 W, 100 V/200 V, einphasig ............................7
3.2.2. Modelle mit 1 kW bis 3 kW, 200 V, dreiphasig ........................................8
3.2.3. Modelle mit 0,5 kW bis 3,0 kW, 400 V, dreiphasig ..................................9
3.2.4. Modelle mit 5 kW, 400 V, dreiphasig......................................................10
3.3. Verdrahtung des Hauptschaltkreises................................................................11
3.3.1. Bezeichnungen und Beschreibung der Leistungsklemmen .....................12
3.3.2. Typisches Verdrahtungsbeispiel des Hauptschaltkreises.........................13
3.3.3. Verlustleistung des Servoverstärkers.......................................................14
3.3.4. Verdrahtung der Leistungsklemmenblöcke .............................................15
3.4. E/A-Signale......................................................................................................16
3.4.1. Typisches Anschlussbeispiele für E/A-Signalleitungen ..........................16
3.4.2. Liste der CN1-Klemmen..........................................................................17
3.4.3. Bezeichnungen und Funktionen der E/A-Signale....................................18
3.4.4. Schnittstellenschaltkreise.........................................................................20
3.5. Verdrahtung von Drehgebern
(nur für Motoren des Typs SGMGH und SGMSH).........................................24
3.5.1. Drehgeberanschlüsse................................................................................24
3.5.2. CN2-Klemmenzuordnung und -typen des Drehgebers............................26
3.5.3. Drehgeber-Kabelverbindungen................................................................27
3.6. Beispiele für Standardverbindungen................................................................29
3-1

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.1. Anschluss an Peripheriegeräte
Der vorliegende Abschnitt enthält Beispiele für den Anschluss von Geräten
der XtraDrive-Serie an Peripheriegeräte.
Zusätzlich wird kurz beschrieben, wie jedes Peripheriegerät angeschlossen
wird.
3-2
XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
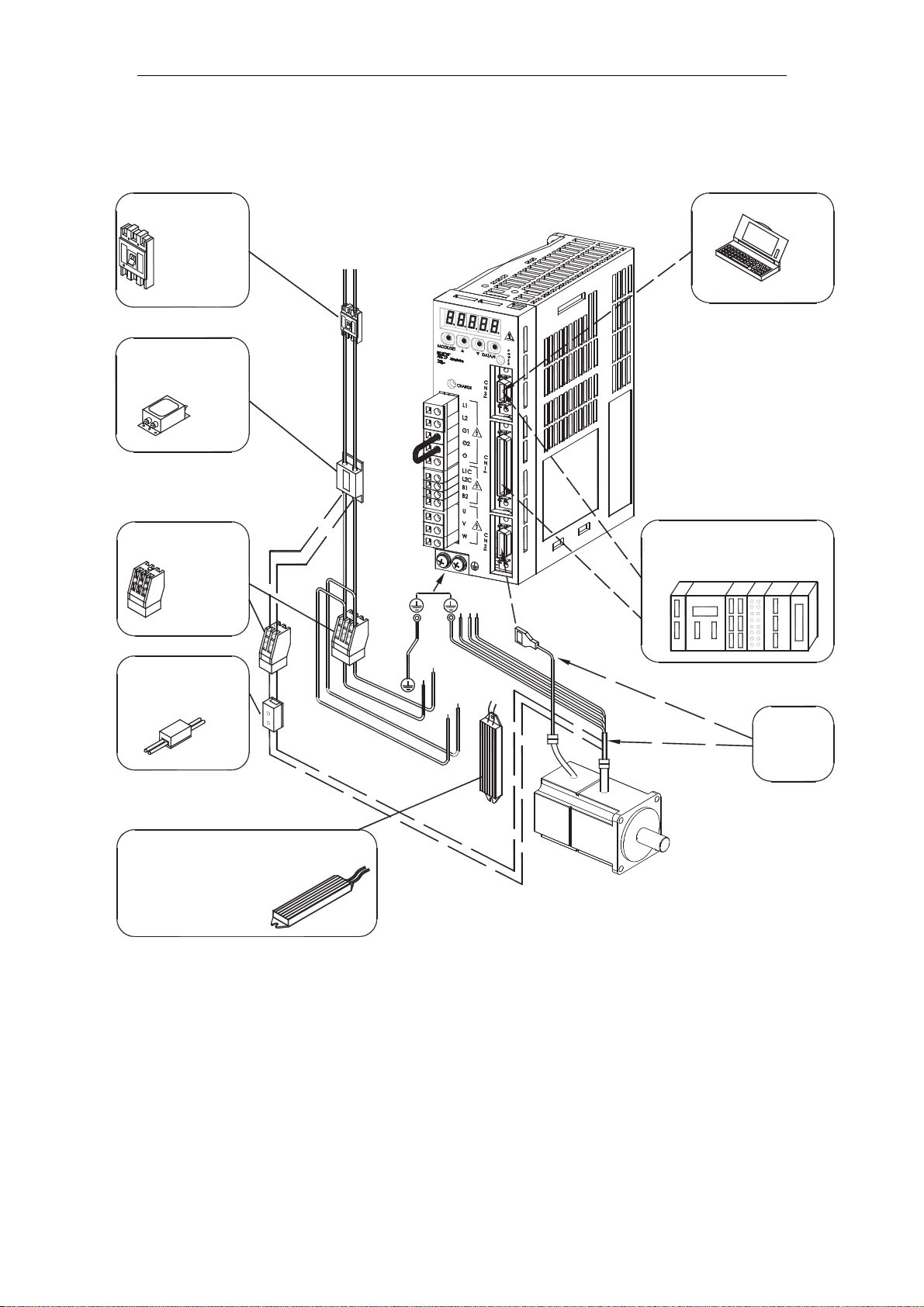
3.1.1. 100 V/200 V Hauptschaltkreis, einphasig
Kompakt-Schutzschalter
(MCCB)
Wird verwendet, um externe
Störungen von der
Stromversorgungsleitung
zu entfernen.
hutzZum Sc der
Spannungsversorgungslei ung.
Schaltet den
Stromkreis aus, wenn
ein Überstrom erkannt
wird.
Entstörfilter
Netzschütz
Schaltet den Servo
EIN oder AUS.
Verwenden Sie
einen
Überspannungssch
utz für das
Netzschütz.
t
KompaktSchutzschalter
Entstörfilter
Netzschütz
Spannungsversorgung
1 Phase 100/200 V AC
R T
Netzschütz
U V W
Computer
Kabelausführung: P/N 004145
Host-Controller
XtraDrive ist mit den meisten PLC Motion
Controller und Impulszähler kompatibel.
Spannungsversorgung für
Bremse
Typ:
LPSE-2H01
(für 200 V-Eingang)
Bremswiderstands-Einheit
Wenn die Leistung des
Bremswiderstands unzureichend
ist, schließen Sie die externe
Bremswiderstandseinheit zwischen
den Klemmen B1 und B2 an.
versorgung für
Bremse
-Spannungs
Schutzmasse
L2
L1
L2C
L1C
Bremswiderstand
(Option)
B1B2
Kabel und
Steckverbinder
für Drehgeber
und Motor
3-3
XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
1. Schließen Sie die Hauptspannungsvorsorgung wie unten dargestellt an die
2. Schließen Sie die Klemmen B2 und B3 mit Hilfe des internen Bremswiderstands
Kompakt-Schutzschalter
(MCCB)
Z
um Schutz der
Spannungsversorgungsleitung. Schaltet den Stromkreis
aus, wenn ein Überstrom
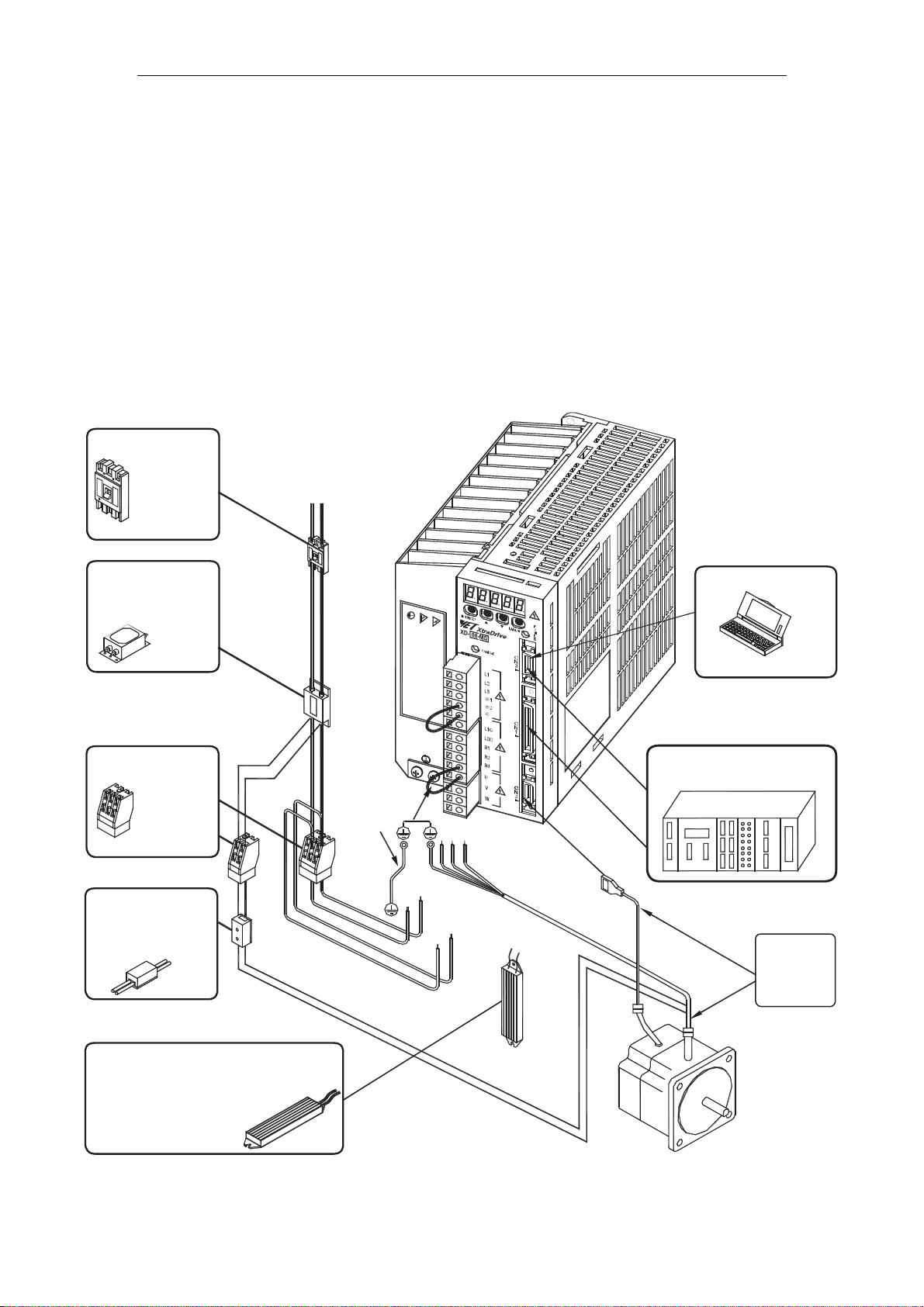
3.1.2. 200 V Hauptschaltkreis, 0,8 kW und 1,5 kW, einphasig
Beachten Sie die folgenden Punkte.
Klemmen L1 und L3 an. Die Spannungsversorgung ist einphasig, 220 bis
230 V AC +10 % bis –15 %, 50/60Hz. Wenn eine Spannungsversorgung von
187 V (–15 % von 220 V) oder weniger verwendet wird, zeigt der Alarm A.41
den Spannungsmangel an, wenn mit einem max. Motordrehmoment bis zur max.
Drehzahl beschleunigt wird.
kurz. Wenn die Leistung des Bremswiderstands unzureichend ist, entfernen Sie die
Kabelführung zwischen den Klemmen B2 und B3 und schließen Sie eine externe
Bremswiderstandseinheit zwischen den Klemmen B1 und B2 an.
Spannungsversorgung
einphasig, 200 V AC
RT
erkannt wird.
Entstörfilter
Wird verwendet, um externe
Störungen von der Stromversorgungsleitung zu entfernen.
Netzschütz
Schaltet Sie Servo
EIN oder AUS.
Verwenden Sie
einen Überspannungsschutz
für das Netzschütz.
Spannungsversorgung
für Bremse
Typ: LPSE-2H01
(für 100-V-Eingang)
KompaktSchutzschalter
Entstörfilter
Netzschütz
Spannungsversorgung
für Bremse
Grün/gelbes
Kabel
Netzschütz
Schutzmasse
Computer
Kabelausführung: P/N 004145
Host-Controller
XtraDrive ist mit den meisten PLC Motion
Controller und Impulszähler kompatibel.
UV W
L3
L1
L2C
L1C
B1
B2
Kabel und
Steckverbinder
für Drehgeber
und Motor
Bremswiderstands-Einheit
Wenn die Leistung des integrierten
Bremswiderstands unzureichend ist,
schließen Sie eine externe
Bremswiderstandseinheit zwischen
den Klemmen B1 und B2 an.
Bremswiderstand
(Option)
3-4
XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
r
3.1.3. 200 V Hauptschaltkreis, dreiphasig
Kompakt-Schutzschalter
(MCCB)
Wird zum Schutz des
Stromversorgungska
bels verwendet.
Schaltet bei
Erkennung einer
Überspannung den
Stromkreis ab.
Entstörfilter
ende
Wird verw t, um externe
Störungen von der
Stromversorgungsleitung zu
entfernen.
Netzschütz
Schaltet den
Servo EIN oder
AUS.
Verwenden Sie
einen
Überspannungsschutz für das
Netzschütz.
versorgung dreiphasig,
200 V AC
Kompakt-
Schutzschalter
(MCCB)
Entstörfilter
Netzschütz Netzschütz
Optionsmodul
- Spannungs
Computer
Kabelausführung: P/N 004145
Host-Controller
XtraDrive ist mit den meisten PLC Motion
Controller und Impulszähler kompatibel.
Spannungsversorgungart für
Bremse
LPSE-2H01
(für 200 V-Eingang)
Bremswiderstands-Einheit
Wenn die Leistung des
Bremswiderstands unzureichend ist,
schließen Sie die ext
Bremswiderstandseinheit zwischen
den Klemmen B1 und B2 an.
erne
Spannungsversorgungart
Schutz-
masse
Grün/gelbes
Kabel
Bremswiderstand
(Option)
Kabel und
Steckverbinder fü
Drehgeber und
Motor
3-5

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
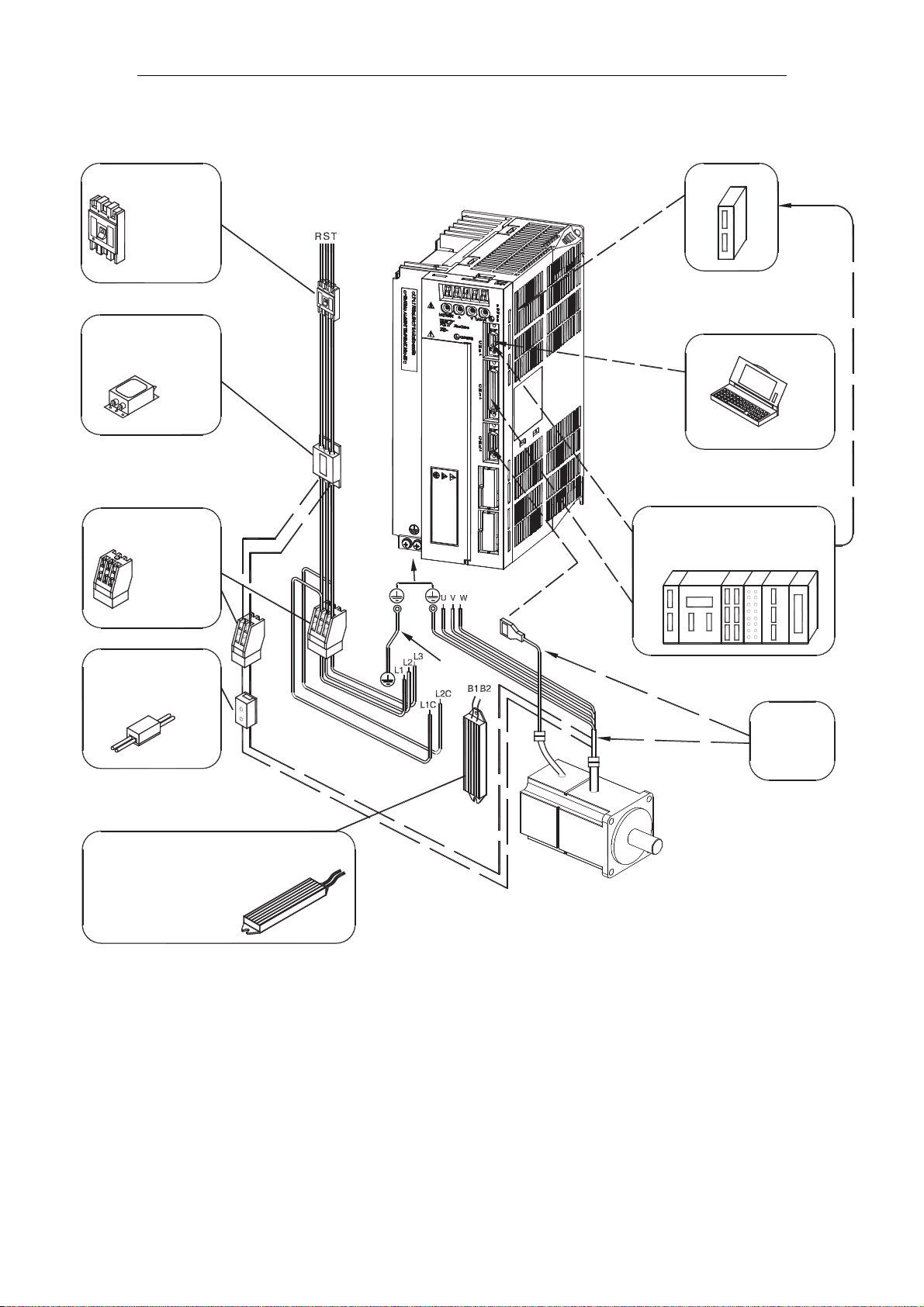
3.1.4. 400 V Hauptschaltkreis, dreiphasig
Spannungsversorgung für
Bremse
Eingangsspannung 200 V AC
oder 24 V DC für Servomotor
mit 24 V DC-Bremse.
Kompakt-Schutzschalter
(MCCB)
Wird zum Schut des
Stromversorgungska
rzew
bels v endet.
Schaltet bei
Erkennung einer
Überspannung den
Stromkreis ab.
Entstörfilter
Wird verwendet, um externe
Störungen von der
Stromversorgungsleitung zu
e
entf rnen.
Netzschütz
Schaltet den
Servo EIN oder
AUS.
Verwenden Sie
einen
Überspannungsschutz für das
Netzschütz.
Spannungs-
versorgung dreiphasig,
200 V AC
Kompakt-
Schutzschalter
(MCCB)
Entstörfilter
Netzschütz Netzschütz
Optionsmodul
Computer
Kabelausführung: P/N 004145
Host-Controller
XtraDrive ist mit den meisten PLC Motion
Controller und Impulszähler kompatibel.
Spannungsversorgungart für
Bremse
LPSE-2H01
(für 200 V-Eingang)
Bremswiderstands-Einheit
Wenn die Leistung des
Bremswiderstands unzureichend ist,
schließen Sie die externe
Bremswiderstandseinheit zwischen
den Klemmen B1 und B2 an.
Spannungsversorgung für
Bremse
Schutzmasse
Spannungsversorgung
(24 V)
Grün/gelbes
Kabel
Bremswiderstand
(Option)
Kabel und
Steckverbinder
für Drehgeber
und Motor
3-6
XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.2. Interne Blockschaltbilder der XtraDrive-Serie
Die folgenden Abschnitte zeigen die internen Blockschaltbilder der
Servoverstärker.
3.2.1. Modelle mit 30 W bis 800 W, 100 V/200 V, einphasig
Drehgeber
Drehgeber-
ausgang
Drehzahl- und
Drehmoment-
Sollwerteingang
Sequenz E/A
E/A
CPU
steuerung
LÜFT
AC-Servomotor
UVW
±12 V
D2 D3D3 D4
PM1
UVW
THS1
CN2
Strom-
sensor
ASIC
Teilung
CN1
A/D
Positionier-
Sollwert-
Impulsverarbeitung
Drehgeber-Sig-
PWM-
Generator
+15 V
DC/DC-
Span-
+
+
~
+5 V
nungs-
wandler
-
-
~
nalverarbeitung
Digitaler
Stromverstärker
+5 V
±12 V
0 V
Gate-
Überstromschutz
Ansteuerung
sensor
ansteuerung
Spannungs-
sensor
Schnittstelle
±5 V
P2
B1 B2 B3
R2
Relais 1
FU1
CHARGE
+
P
R
N2
Gate-
Spannungs-
–
C1
S
Relais-
N
T
Drehzahl-
regelung
Stromsollwert-
Berechnung
POWER
Analogspan-
nungswandler
Überwachungsanzeige
Serielle Schnittstelle
Computer (PC)
CN5 CN3
Analoger
Überwachungsausgang
für Kontrolle
1
2
+10 %
-15 %
Dreiphasig,
200 bis 230 V
(50/60 Hz)
XX3
XX1
L1L3L2
L1
Entstörfilter
XX2
3-7
L1C
L2C
Schütz
Schütz
Spannung
EIN
Spannung
AUS
Über-
spannungs-
schutz
Offen während Servoalarm
Schütz
(Relais 5)
XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
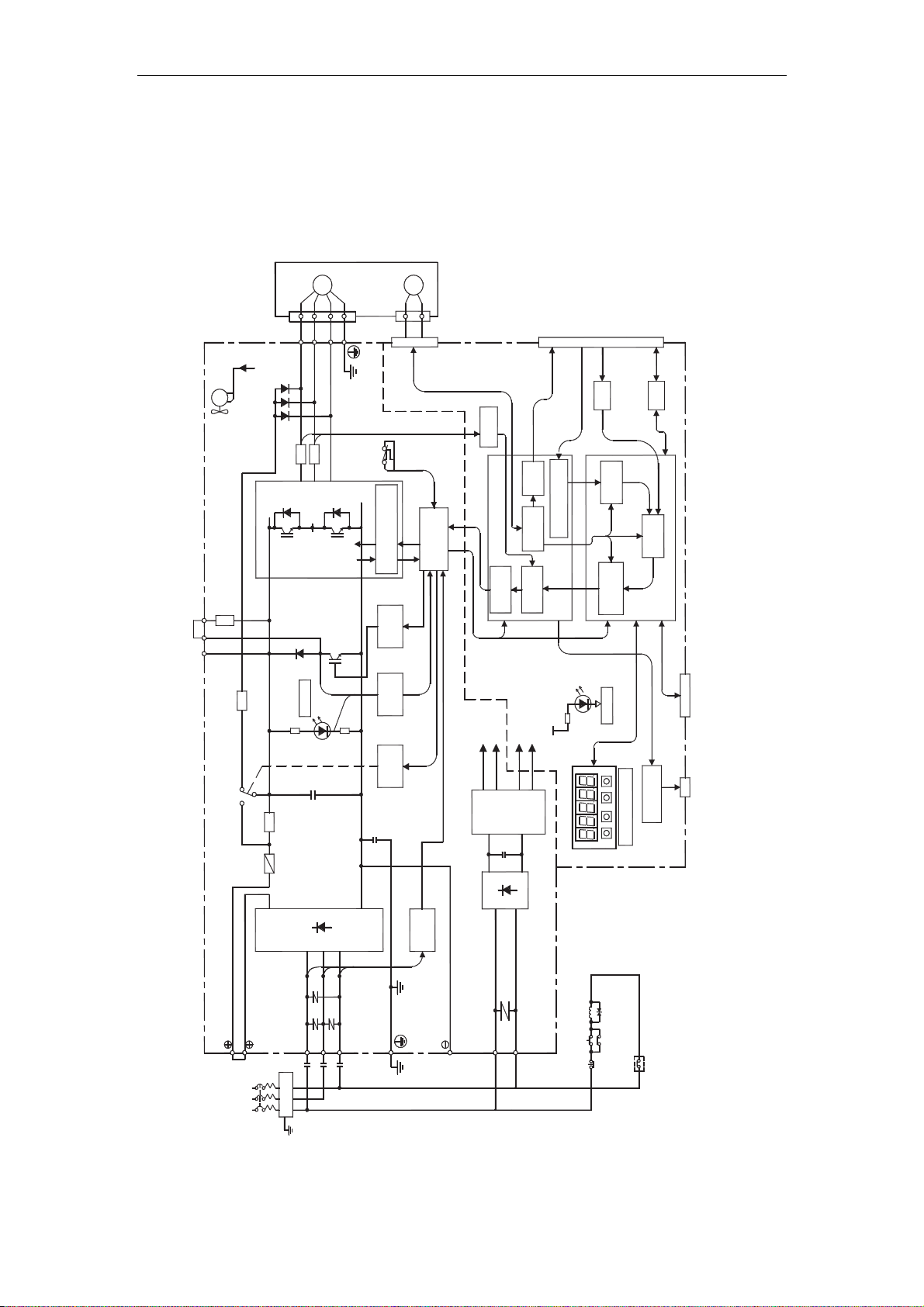
3.2.2. Modelle mit 1 kW bis 3 kW, 200 V, dreiphasig
Drehgeber
Drehgeber-
LÜFT
AC-Servomotor
UVW
±12 V
D2 D3D3 D4
PM1
P2
UVW
N2
CN2
THS1
Gate-
Überstromschutz
Schnittstelle
Strom-
sensor
ASIC
ausgang
CN1
Teilung
Sollwert-
Impulsverarbeitung
Drehgeber-Sig-
nalverarbeitung
Drehzahl- und
Drehmoment-
Sollwerteingang
A/D
Positionier-
steuerung
Sequenz E/A
E/A
CPU
Drehzahl-
regelung
B1 B2 B3
R2
Relais 1
FU1
PWM-
Generator
Digitaler
Stromverstärker
Gate-
Ansteuerung
Spannungs-
N
sensor
Relais-
ansteuerung
Spannungs-
sensor
±5 V
+15 V
DC/DC-
+
Span-
nungs-
-
+
~
+5 V
wandler
-
~
+5 V
±12 V
CHARGE
–
+
C1
P
R
S
T
XX3
Stromsollwert-
Berechnung
0 V
POWER
Überwachungsanzeige
Serielle Schnittstelle
CN5 CN3
Analogspan-
nungswandler
Computer (PC)
Analoger
Überwachungsausgang
für Kontrolle
1
2
+10 %
-15 %
Dreiphasig,
200 bis 230 V
(50/60 Hz)
XX1
L1L3L2
L1
Entstörfilter
XX2
3-8
L1C
L2C
Schütz
Schütz
Spannung
EIN
Spannung
AUS
Über-
spannungs-
schutz
Schütz
Offen während Servoalarm
(Relais 5)

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
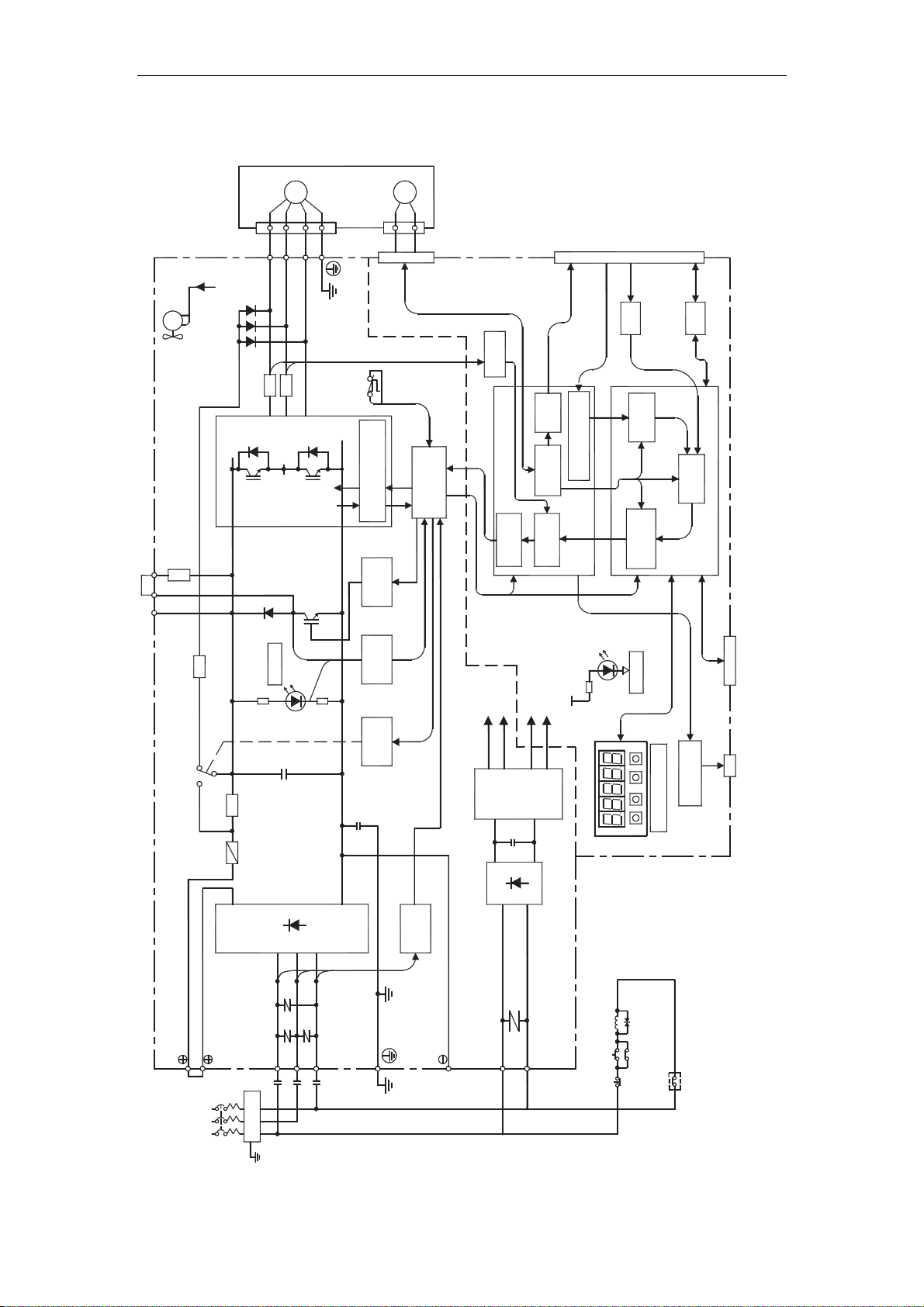
3.2.3. Modelle mit 0,5 kW bis 3,0 kW, 400 V, dreiphasig
B1 B2 B3
FAN1
R2
AC-Servomotor
V
U
±12 V
D2 D3
D1
R7
U
PM1-2
P
CHARGE
Drehgeber
Drehgeberausgang
Sollwert-
Impulseingang
Drehzahl-
und Drehmoment-
Sollwerteingang
Sequenz E/A
W
CN2
sensor
R8
V
W
Gate-
N
Überstromschutz
Gate-
Ansteuerung
sensor
Spannungs-
Schnittstelle
Spannungs-
ASIC
PWM-
Generator
+15 V (x4 Stromkreise)
+7,5 V
CN1
Teilung
beitung
Drehgeber-
Signalverar-
stärker
Digitaler
Stromver-
+5 V
±12 V
A/D
Positionier-
Sollwert-
Impulsverarbeitung
Stromsoll-
+5 V
steuerung
wert-
Berechnung
0
POWER
E/A
CPU
gelung
Drehzahlre-
Serielle
Digitale
Bedienkonsole/PC
1
+10 %
-15 %
2
FU1
P
C1
-+-
+
R
XX1 XX3
L1
L2
1KM
Entstörfilter
S
C2
L3
Relais 1
N
T
Relais-
Ansteuerung
Spannungs-
Steuerspannung
sensor
FU2
24 V
+-
+24 V DC
(nicht bereitgestellt)
DC/DC-
wandler
Spannungs-
+
-
0 V
Analog-
wandler
spannungs-
Überwachungsanzeige
AC-Spannungsversorgung
(100/200 V)
(Relais 1)
Relais 2
Alarm
Während
Offen
Servo
Spannung
EIN
Spannung
AUS
CN10 CN5 CN3
Relais 2
1KM
1 KM
Hochgeschwin-
digkeitsdiode
Analoger
Überwachung-
sausgang
für Kontrolle
Steckver-
binder
für Options-
baugruppe
Dreiphasig,
380 bis 480 V
(50/60 Hz)
3-9

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
r
g
)
r
A
A
A
3.2.4. Modelle mit 5 kW, 400 V, dreiphasig
Lüfter
ASIC
Drehgeberausgang
C-Servomotor
sensor
Spannungs-
Relais-
Ansteuerung
Schnittstelle
Gate-Überstromschutz
nsteuerung
Gate-
Spannungs-
sensor
(x4 Stromkreise
(PWM-Regelung, usw.)
Drehzahl- und Drehmoment-
Pulseingang
Sollwerteingang
CPU
SPANNUNG
Sequenz E/
(Positions- /
Drehzahlberechnung, usw.)
Computer
nsteuerung
Relais-
wandler
andler
DC/DC-
Spannungs-
Spannungs-
senso
(100/200 V)
C-Spannungsversorgung
Spannung
Entstörfilte
estellt
Steuerspannung
+24V DC (nicht
bereit
Analogspannungs-
Überwachungsanzeige
Offen während
Servoalarm
EIN
US
Spannung
Dreiphasig
Schnell
Diode
naloger Überwachungs-
ausgang für Drehmoment
und Drehzahl
Steckverbinder
als Option
3-10

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.3. Verdrahtung des Hauptschaltkreises
Dieser Abschnitt zeigt typische Beispiele für die Verdrahtung des
Hauptschaltkreises für Servoprodukte der XtraDrive-Serie, sowie die
Funktionen der Leistungsklemmen und die Spannungseinschaltsequenz.
Beachten Sie bei der Verdrahtung die folgenden Sicherheitshinweise.
ACHTUNG
• Bündeln und betreiben Sie Stromversorgungs- und Signalleitungen nicht zusammen
in demselben Leitungskanal. Halten Sie Stromversorgungs- und Signalleitungen
mindestens 30 cm getrennt voneinander.
Andernfalls können Fehlfunktionen auftreten.
• Verwenden Sie für die Signal- und Drehgeber (PG)-Rückführungsleitungen nur Kabel
mit paarweise verdrillten Adern oder abgeschirmte Kabel mit mehreren Adern.
Die maximale Länge beträgt 3 m für Sollwerteingangsleitungen und 20 m für DrehgeberRückführleitungen.
• Berühren Sie die Leistungsklemmen nach Ausschalten der Spannungsversorgung für
5 Minuten nicht, da in dem Servoverstärker immer noch hohe Spannungen auftreten
können.
Stellen Sie zunächst sicher, dass die Ladeanzeige ausgeschaltet ist, bevor Sie eine Inspektion
durchführen.
• Vermeiden Sie häufiges Ein- und Ausschalten der Spannungsversorgung. Schalten Sie
die Spannungsversorgung höchstens einmal pro Minute ein und wieder aus.
Da der Servoverstärker mit einem Kondensator in der Spannungsversorgung ausgestattet ist,
fließt nach Einschalten der Spannungsversorgung für 0,2 Sek. ein hoher Ladestrom. Durch
häufiges Ein- und Ausschalten der Spannungsversorgung verschlechtert sich die Leistung
von Hauptstromgeräten wie Kondensatoren und Sicherungen, wodurch unerwartete Störungen
auftreten können.
3-11

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.3.1. Bezeichnungen und Beschreibung der
Leistungsklemmen
In der folgenden Tabelle finden Sie die Bezeichnungen sowie eine
Beschreibung der Leistungsklemmen.
Tabelle 3.1: Bezeichnungen und Beschreibung der Leistungsklemmen
Klemmen-
symbol
L1, L2
L1, L2, L3*
U, V, W
L1C, L2C
24 V, 0 V
(2 Stellen)
B1, B2
oder
B1, B2, B3
1, 2
Bezeichnung Beschreibung
30 W bis 1 kW Einphasig 200 bis 230 V (+10 %, –15 %), 50/60 Hz
AC-Netzeingangsklemme
ServomotorAnschlussklemme
SteuerspannungsEingangsklemme
Erdungsklemme
Anschlussklemmen
für externen
Bremswiderstand
DC-Drosselklemme für
Oberwellenglättung des
Versorgungsstroms
Positive Klemme für
Hauptschaltkreis
1 kW bis 3 kW Dreiphasig 200 bis 230 V (+10 %, –15 %), 50/60 Hz
2 kW bis 5,0 kW 400 V Dreiphasig 380 bis 480 V (+10 %, –15 %), 50/60 Hz
Anschluss an den Servomotor.
Einphasig 200 bis 230 V (+10 %, –15 %), 50/60 Hz
30 W bis 5,0 kW
Anschluss an die Erdungsklemmen der Spannungsversorgung und des
Motors.
30 W bis 400 W
800 W bis 5,0 kW
Normalerweise Kurzschluss zwischen 1 und 2.
Wenn Gegenmaßnahmen gegen Versorgungsspannungs-Oberwellen
erforderlich sind, schließen Sie eine DC-Drossel zwischen
Bei Versand des Verstärkers sind diese Klemmen werksseitig
kurzgeschlossen. Einzelheiten finden Sie unter 5.8.6 Drossel für
Oberwellenglättung.
Normalerweise nicht angeschlossen.
Dreiphasig 200 bis 230 V (+10%, –15%), 50/60 Hz
24 V DC (±15 %) nur 400 V-Einheiten
Normalerweise nicht angeschlossen.
Anschluss an externen Bremswiderstand
(vom Kunden bereitzustellen) zwischen B1 und
B2, wenn die generatorische Leistung
unzureichend ist.
Hinweis: Keine B3-Klemme.
Normalerweise für Kurzschluss zwischen B2
und B3 (für einen internen Bremswiderstand).
Entfernen Sie den Draht zwischen B2 und B3 und
schließen Sie einen externen Bremswiderstand
(vom Kunden bereitzustellen) zwischen B1 und B2
an, wenn die Leistung des internen
Bremswiderstands unzureichend ist.
1 und 2 an.
Negative Klemme für
Hauptschaltkreis
Normalerweise nicht angeschlossen.
*Die Modelle XD-08 und XD-15-MS besitzen einphasige 200-V-Spannungsversorgungen.
Schließen Sie folgende Spannungsversorgung zwischen L1 und L3 an.
Einphasig 220 bis 230 V AC (+10 %, –15 %), 50/60 Hz
Wenn eine Spannungsversorgung von 187 V (–15 % von 220 V) oder weniger verwendet
wird, zeigt der Alarm 41 den Spannungsmangel an, wenn mit einem max.
Motordrehmoment bis zur max. Drehzahl beschleunigt wird.
3-12

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.3.2. Typisches Verdrahtungsbeispiel des Hauptschaltkreises
Die folgende Abbildung zeigt ein typisches Beispiel für die
Verdrahtung des Hauptschaltkreises.
(Für Servo-Alarmanzeige)
Haupt-
Hauptspannungsversorgung
spannungs-
AUS
versorgung
EIN
Aufbau einer Spannungseinschaltsequenz
Beachten Sie beim Aufbau einer Spannungseinschaltsequenz die
folgenden Punkte.
• Legen Sie die Spannungseinschaltsequenz so aus, dass die
Spannung bei der Ausgabe eines Servoalarmsignals ausschaltet.
(Siehe Schaltkreis oben)
• Halten Sie die Spannungseinschalttaste mindestens 2 Sekunden lang
gedrückt. Der Servoverstärker gibt nach Einschalten der Spannung
für max. 2 Sekunden ein Servoalarmsignal aus. Dieses Signal ist für
die Initialisierung des Servoverstärkers erforderlich.
Spannungsversorgung
Servoalarm (ALM)Ausgangssignal
max. 2,0 s
3-13

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.3.3. Verlustleistung des Servoverstärkers
Die folgende Tabelle zeigt die Verlustleitung des Servoverstärkers bei
Nennlast.
Tabelle 3.1: Verlustleistung des Servoverstärkers bei Nennlast
Haupt-
strom-
kreis-
Span-
nungs-
versor-
gung
200 V,
einpha-
sig
200 V,
einpha-
sig
200 V,
drei-
phasig
400 V,
drei-
phasig
Max.
zulässige
Servomotor-
leistung
[kW]
0,03 XD-P3-L* 0,66 3,5 16,5
0,05 XD-P5-L* 0,95 5,2 18,2
0,1 XD-01-L* 2,4 12 25
0,2 XD-02-L* 3,0 16,4
0,10 XD-01-M* 0,91 6,7 19,7
0,20 XD-02-M* 2,1 13,3 26,3
0,40 XD-04-M* 2,8 20
0,75 XD-08-M* 4,4 47 12 15 74
1,0 XD-10-M* 7,6 55 12 82
2,0 XD-20-M* 18,5 120 163
3,0 XD-30-M* 7,5 60
0,45 XD-05-T* 1,9 19 48
1,0 XD-10-T* 3,5 35 64
1,5 XD-15-T* 5,4 53
2,0 XD-20-T* 8,4 83 126
3,0 XD-30-T* 11,9 118
5,0
Servoverstärker
-Modell
XD-50-T*
Aus-
gangs-
strom
(Effektivwert) [A]
16,5 192 36 15 243
Haupt-
strom-
kreis-
Ver-
lustlei-
stung
[W]
Steuer-
Bremswider-
stands-
Verlustleistung
[W]
— 13
— 13
28
14
28
strom-
kreisVerlustleistung
[W]
15
15
Gesamt
Verlustleistung
[W]
29,4
33
198
82
161
Hinweis: Bremswiderstands- Verlustleistung sind zulässige Verluste. Ergreifen Sie folgende Maßnahmen,
wenn dieser Wert überschritten wird.
• Trennen Sie den internen Bremswiderstand im Servoverstärker, indem Sie den Draht
zwischen B2 und B3 entfernen.
• Schließen Sie einen externen Bremswiderstand zwischen den Klemmen B1 und B2 an.
Weitere Informationen zu den Widerständen finden Sie in Abschnitt 5.6 Auswahl eines
Bremswiderstands.
3-14

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.3.4. Verdrahtung der Leistungsklemmenblöcke
Beachten Sie bei der Verdrahtung der Leistungsklemmenblöcke die
folgenden Sicherheitshinweise.
ACHTUNG
• Bauen Sie vor der Verdrahtung den Klemmenblock vom Servoverstärker ab.
• Setzen Sie nur ein Draht pro Klemme am Klemmenblock ein.
• Achten Sie darauf, dass der Draht nicht mit benachbarten Drähten elektrisch kurzgeschlossen ist.
• Schließen Sie alle Drähte, die versehentlich gelöst wurden, wieder an.
Servoverstärker mit einer Leistung unter 1,5 kW besitzen SteckverbinderKlemmenblöcke für die Leistungsklemmen. Gehen Sie beim Anschluss des
Klemmenblocks wie nachfolgend beschrieben vor.
Anschlussverfahren
• Ziehen Sie die Enden des Drahts ab, wobei die Enden zusammen
verdrillt bleiben.
8 bis 9 mm Abisoliert
• Öffnen Sie den Drahtsteckplatz des Klemmenblocks (Stecker) mit
einem Werkzeug und gehen Sie dabei nach einem auf der folgenden
Seite beschriebenen Verfahren in Abb. A und Abb. B vor.
1.
Abb. A: Verwenden Sie den vorhandenen Hebel, um den
Drahtsteckplatz zu öffnen.
Abb. B: Verwenden Sie einen herkömmlichen
Schlitzschraubendreher (3,0 bis 3,5 mm), drücken Sie den
Schraubendreher fest in den Steckplatz, um den Drahtsteckplatz
freizugeben.
Abb. A
2.
Abb. B
Abb. A und B: Setzen Sie das Drahtende in die Öffnung und
klemmen Sie dieses fest, indem Sie den Hebel oder den
Schraubendreher freigeben.
3-15

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.4. E/A-Signale
Dieser Abschnitt beschreibt die E/A-Signale für den XtraDriveServoverstärker.
3.4.1. Typisches Anschlussbeispiele für E/A-Signalleitungen
XtraDrive
Sollwertdrehzahl
±2 bis ±10 V/Nennmotordrehzahl
Externe Drehmomentsteuerung/
Drehmoment-Vorsteuerung
±1 bis ±10 V/Nennmotordrehmoment.
PULS
CW
[
Phase A
]
SIGN
CCW
[
Positionssollwert
Phase B
CLR
]
Offener KollektorSollwertspannungsversorgung
Speicherbatterie 2,8 bis 4,5 V
SEN-Signaleingang
Servo EIN
(Servo EIN bei EIN)
P-Regelung
(P-Regelung bei EIN)
Vorwärtslauf gesperrt
(Gesperrt bei AUS)
Rückwärtslauf gesperrt
(Gesperrt bei AUS)
Alarmpause
(Pause bei EIN)
Vorwärts-Strombegrenzung
(Strombegrenzung bei EIN)
Rückwärts-Strombegrenzung
(Strombegrenzung bei EIN)
*3
*3
+5 V
0 V
+24 V
+
-
V-REF
P
T-REF
P
*1
PULS
P
/PULS
SIGN
P
/SIGN
CLR
P
/CLR
PL1
PL2
PL3
BAT (+)
P
BAT (–)
SEN
P
SG
/S-ON
/P-CON
P-OT
N-OT
/ALM-RST
/P-CL
/N-CL
*5
*2
5
SG
SG
LPF
6
9
10
150 Ω
7
8
11
12
15
14
1 kΩ
3
13
18
21
22
4
2
3,3 kΩ
47
40
41
42
43
44
45
46
*2
LPF
A/D
+12 V
Servo EIN
Proportional
(P-Regelung)
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
Alarm-Rücksetzung
Vorwärts-
Strombegrenzung
EIN
RückwärtsStrombegrenzung
EIN
FG
Abschirmung mit Steckergehäuse verbinden.
37
ALO1
38
ALO3
39
ALO3
Alarmcodeausgang
Maximale Betriebsspannung
30 V DC
Maximaler Betriebsstrom
20 mA
33
PAO
34
/PAO
Drehgeber-Teilungsverhältnisausgang
35
PBO
36
/PBO
Anwendbarer Leitungsempfänger:
SN75175 von TI,
19
PCO
20
/PCO
48
*4
PSO
49
/PSO
1
SG
25
/COIN +
26
/COIN -
27
/T-GON+
28
/T-GON-
29
/S-RDY+
30
/S-RDY-
31
ALM+
32
ALM-
MC3486 von
ON-SEMI oder gleichwertig
Serieller Datenausgang
der S-Phasen-Drehung
Signalmasse
Positionierung abgeschlossen
(EIN bei abgeschlossener
Positionierung)
TGON-Ausgang
(EIN bei Überschreitung
der Einstellung)
Servo-bereit-Ausgang
(EIN bei „Bereit“)
Servo-Alarmausgang
(AUS bei Alarm)
Max. Ausgangsbetriebsspannung
des Opptokopplers 30 V DC
Betriebsstrom 50 mA
3-16

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.4.2. Liste der CN1-Klemmen
In der folgenden Tabelle werden die Zuordnung und Spezifikationen
der CN1-Klemmen dargestellt.
Tabelle 3.2: CN1-Klemmenzuordnung
DrehzahlübereinstimmungsErkennungsausgang
TGONSignalausgang
Servo-bereitAusgang
2 SG GND
4 SEN
6 SG GND
SEN-Signaleingang
1 SG GND
Offener
3 PL1
5 V-REF
KollektorSollwertspannungsversorgung
Sollwertdrehzahleingang
27 /TGON+
29 /SRDY+
31 ALM+
TGONSignalausgang
Servo-bereitAusgang
Servo-Alarmausgang
/V-CMP-
26
(/COIN-)
28 /TGON
30 /S-RDY
8 /PULS
10 SG GND
12 /SIGN
14 /CLR Löscheingang
16 TMON
18 PL3
20 /PCO
22 BAT (-) Batterie (-)
24 — —
SollwertImpulseingang
SollwertSymboleingang
Analoger
Überwachungsausgang
Offener
KollektorSollwertspannungsversorgung
ImpulsgeberTeilungsausgang
Phase C
7 PULS
9 T-REF
11 SIGN
13 PL2
15 CLR Löscheingang
17 VTG
19 PCO
21 BAT (+) Batterie (+)
23 — —
/V-CMP+
25
(/COIN+)
SollwertImpulseingang
DrehmomentSollwerteingang
SollwertSignaleingang
Offener
KollektorSollwertspannungsversorgung
Analoger Über-
wachungs-
ausgang
ImpulsgeberTeilungsausgang
Phase C
DrehzahlübereinstimmungsErkennungsausgang
Hinweis: 1. Unbelegte Klemmen nicht für Relais verwenden.
2. Bringen Sie die Abschirmung des E/A-Signalkabel am Steckergehäuse an.
3. Schließen Sie die FG (Gehäuseerdung) am Steckverbinder des Servoverstärkers an.
33 PAO
35 PBO
37 AL01
39 AL03
41 P-CON
43 N-OT
45 /P-CL
47 +24V -IN
49 /PSO
ImpulsgeberTeilungsausgang
Phase A
ImpulsgeberTeilungsausgang
Phase B
Alarmcodeausgang
Offener
Kollektorausgang
P-Betriebseingang
Eingang
Endlage
rückwärts
Eingang
VorwärtsStrombegrenzung EIN
Externe
Eingangsspannungsversorgung
Signalausgang
Phase S
32 ALM
34 /PAO
36 /PBO
38 AL02
40 /S-ON
42 P-OT
44 /ALMRST
46 /N-CL
48 PSO
50 — —
ServoAlarmausgang
Impuls-geberTeilungsausgang
Phase A
Impuls-geberTeilungsausgang
Phase B
Alarmcodeausgang
Servo EINEingang
Eingang
Endlage
vorwärts
AlarmRücksetzeingang
Eingang
RückwärtsStrombegrenzung EIN
Signalausgang
Phase S
CN1-Spezifikationen
Interner
Steckverbinder XtraDrive
10250-52A2JL oder
gleichwertig, 50-poliger
rechtwinkliger Stecker
Steckverbinder Gehäuse Hersteller
MDR 10150-3000VE 50-polig 10350-52A0-008 Sumitomo 3M Co.
Anwendbarer Steckersatz (YET P/N: 4J4003)
3-17

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.4.3. Bezeichnungen und Funktionen der E/A-Signale
Der folgende Abschnitt beschreibt die Bezeichnungen und Funktionen
der E/A-Signale für den Servoverstärker.
Eingangssignale
Signalbezeichnung Stift-Nr. Funktion Siehe
Allgemein
/S-ON
/P-CON
Drehzahlsollwert
DrehmomentSollwert
Positionsso
llwert
CLR
PL1
P-OT
N-OT
/P-CL
/N-CL
/ALM
-RST
+24VIN 47
SEN 4 (2)
BAT+
BAT-
V-REF 5 (6)
T-REF 9 (10)
PULS
/PULS
SIGN
/SIGN
/CLR
PL2
PL3
40
41
42
43
45
46
44 Alarm-Rücksetzung: Aufhebung des Servoalarms. 5.5.1
21
22
11
12
15
14
13
18
Hinweis: 1. Die den Eingangssignalen /S-ON, /P-CON, P-OT, N-OT, /ALM-RST, /P-CL und /N-CL zugeordneten
Funktionen können über die Parameter geändert werden. (Siehe 5.3.3 Eingangsschaltkreis Signalzuordnung.)
2. Die Stift-Nummern in Klammern () bezeichnen Signalmassen.
3. Der maximale Eingangsspannungsbereich für den Drehzahl- und Drehmomentsollwert beträgt ±12 V.
Servo EIN: Der Servomotor wird eingeschaltet, wenn die GateSperrung im Leistungsteil aufgehoben wird.
* Funktionswahl durch Parameter.
Proportional-
betriebs-Sollwert
Richtungs-
sollwert
Umschaltung der
Regel-betriebsart
Nullhaltungs-
Sollwert
Sollwert-
Impulssperre
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
* Funktionswahl durch Parameter. —
Vorwärts-
Strombegrenzung
EIN
Rückwärts-
Strombegrenzung
EIN
Interne
Festdrehzahlen
Steuerspannungsversorgungseingang für Sequenzsignale: Die
24-V-Spannungsversorgung muss vom Anwender bereitgestellt
werden.
Anfangs-Datenanforderungssignal bei Verwendung eines
Absolutwert-Drehgebers
Anschlussstifte für die Speicherbatterie des AbsolutwertDrehgebers.
Drehzahlsollwerteingang: ±2 bis ±10 V/Motornenndrehzahl
(Eingangsverstärkung mittels Parameter änderbar.)
Drehmomentsollwert-Analogeingang: ±1 bis
±10 V/Motornenndrehzahl (Eingangsverstärkung mittels
Parameter änderbar.)
7
8
3
Entspricht
SollwertImpulseingang
Leitungstreiber
Offener
Kollektor
Löschen des Fehlerzählers: Löschen des Fehlerimpulses
während der Positioniersteuerung.
+12 V Pull-up-Spannung wird angelegt, wenn die Sollwertsignale
PULS, SIGN und CLR offene Kollektorausgänge sind
(+12-V-Spannungsversorgung im Servoverstärker integriert).
EIN: Umschaltung des Drehzahlregelkreises
von PI (proportional/integral)
auf P (proportional)
Bei Auswahl der internen Festdrehzahlen:
Umschaltung der Drehrichtung.
Position Drehzahl
Drehzahl Drehmoment
Drehmoment Drehzahl
Drehzahlregelung mit Nullhaltungs-Funktion:
Bei EIN: Drehzahlsollwert = 0
Positioniersteuerung mit Sollwertimpuls-Stopp:
Bei EIN: Eingabe von Sollwertimpulsen wird
gestoppt.
Nachlaufweg gesperrt: Der Servomotor wird
gestoppt, wenn das bewegliche Teil die
Grenze des zulässigen Bewegungsbereichs
überschreitet.
Bei EIN: Stromgrenzwertfunktion aktiviert. 5.1.3
Bei Auswahl der internen Festdrehzahlen:
Umschaltung der internen
Drehmomenteinstellungen.
Ermöglicht
Umschaltung
der
Regelbetriebsart
5.5.2
5.2.1
5.2.7
5.2.1
5.2.6
5.2.7
5.4.3
5.2.10
5.1.2
5.2.6
5.2.4
5.2.3
5.2.3
5.2.1
5.2.1
5.2.1
5.2.1
5.2.1
3-18

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
Ausgangssignale
Signalbezeichnung Stift-Nr. Funktion Siehe
Allgemein
Drehzahl
Position
Nicht
verwendet
Hinweis: 1. Die Stift-Nummern in Klammern () bezeichnen Signalmassen.
ALM+
ALM-
/TGON+
/TGON-
/S-RDY+
/S-RDY- 9 30
PAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
ALO1
ALO2
ALO3
TMON 16 Analoges Überwachungssignal
VTG
/V-CMP+
/V-CMP-
/COIN +
/COIN -
31
32
27
28
33 (1)
34
35
36
19
20
48
49
37
38
39 (1)
17 Analoges Überwachungssignal
25
26
25
26
23
24
50
Servoalarm: Schaltet AUS, wenn ein Fehler erkannt wird. 5.5.1
Erkennung während der Drehbewegung des Servomotors:
Erkennt, ob der Servomotor mit höherer als der eingestellten
Motordrehzahl dreht. Motordrehzahlerkennung ist über
Parameter einstellbar.
Servo bereit: EIN, wenn beim Einschalten der Steuer/Hauptstromkreis-Spannungsversorgung kein
Servoalarm vorliegt.
Phase-A-Signal
Phase-B-Signal
Phase-C-Signal
Phase-S-Signal
Alarmcodeausgang: Ausgabe von 3-Bit-Alarmcodes.
Offener Kollektor: 30 V und 20 mA max. Nennleistung.
Drehzahlübereinstimmung (Ausgabe in
Drehzahlregelbetriebsart): Erkennt, ob die Motordrehzahl im
Einstellbereich liegt und dem Drehzahl-Sollwert entspricht.
Positionierung abgeschlossen (Ausgabe in
Positioniersteuerungsbetriebsart): Schaltet EIN, wenn die
Anzahl der Fehlerimpulse den eingestellten Wert erreicht.
Die Einstellung entspricht der Anzahl der in
Sollwerteinheiten eingestellten Fehlerimpulsen
(Eingangsimpulseinheiten gemäß elektronischer
Übersetzung).
Diese Klemmen sind nicht belegt.
Schließen Sie keine Relais an diese Klemmen an.
Umgerechnetes zweiphasiges (Phasen
A und B) Drehgeber-Ausgangssignal
und Nullpunkt-Impulssignal (Phase C):
RS-422 oder vergleichbar.
Mit Absolutwert-Drehgeber: Ausgabe
serieller Daten entsprechend der Anzahl
der Umdrehungen (RS-422 oder
vergleichbar)
5.5.5
5.5.6
5.2.3
5.5.1
5.5.4
5.5.3
—
2. Die /TGON, /S-RDY und /V-CMP (/COIN) zugeordneten Funktionen können über die Parameter
geändert werden. Auch die Signale /CLT, /VCT, /BK, /WARN und /NEAR können gändert
werden. (Siehe 5.3.4 Ausgangsschaltkreis-Signalzuordnung.)
3-19

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.4.4. Schnittstellenschaltkreise
Dieser Abschnitt zeigt Anschlussbeispiele für Servoverstärker-E/ASignale an den Host-Controller.
Schnittstelle für Sollwerteingangsschaltkreis
Analogeingangsschaltkreis
Analogsignale sind entweder Drehzahl- oder DrehmomentSollwertsignal bei der unten angegebenen Impedanz.
• Drehzahlsollwerteingang: ca. 14 kΩ
• Drehmomentsollwerteingang: ca. 14 kΩ
Die maximal zulässige Spannung für Eingangssignale beträgt ±12 V.
XtraDrive
1,8 kΩ (1/2 W) min.
12 V
25HP-10B
2 kΩ
3
2
1
1000:1
V-REF oder
T-REF
SG
0 V
Ca. 14 kΩ
Pulssollwert-Eingangsschaltkreis
Ein Ausgangsschaltkreis für das Sollwertimpuls- und FehlerzählerLöschsignal am Host-Controller kann entweder ein
Leitungstreiberausgang oder Offener Kollektorausgang darstellen.
Diese beiden Typen sind nachstehend dargestellt.
• Beispiel für Leitungstreiberausgang:
Host-Controller
Anwendbarer Leitungstreiber
SN75174 hergestellt von
T/I oder gleichwertig
• Beispiel 1 für Offener Kollektorausgang: Externe
Spannungsversorgung
XtraDrive
150 Ω 4,7 kΩ
7
8
CN1
2,8 V ≤ (H-Pegel) - (L-Pegel) ≤ 3,7 V
Host-Controller-Ende
Vcc
R1
Tr1
XtraDrive
i
150 Ω 4,7 kΩ
7
8
CN1
V
= 1,5 bis 1,8 V
F
V
F
3-20

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
Die folgenden Beispiele zeigen, wie der Pull-Up-Widerstand R1
ausgewählt wird, damit der Eingangsstrom (I) auf einen Wert zwischen
7 und 15 mA fällt.
Anwendungsbeispiele
R1 =2,2 kΩ mit
V
= 24 V ±5 %
CC
R1 =1 kΩ mit
V
= 12 V ±5 %
CC
R1 =180 Ω mit
VCC = 5 V ±5 %
• Beispiel 2 für Offener Kollektorausgang: Verwendung eines
Servoverstärkers mit interner 12-V-Spannungsversorgung
Dieser Schaltkreis verwendet eine im Servoverstärker integrierte
12-V-Spannungsversorgung. In diesem Fall ist der Eingang nicht
isoliert.
XtraDrive-seitig
CN1-Klemmen
+12 V
Host-Controller-Seite
Offener
Kollektorausgang
max. 1,5 V
wenn EIN
Ca.
9 mA
3 (13,18)
7
8
2
0 V
PL1 (PL2, PL3)
1,0 kΩ
150 Ω
Schnittstelle des Sequenzeingangsschaltkreises
Die Schnittstelle des Sequenzeingangsschaltkreises wird über den
Schaltkreis eines Relais, offenen Kollektortransistors oder NPN-Sensors
angeschlossen. Wählen Sie ein Relais mit niedrigem Stromverbrauch,
andernfalls kann ein Fehlerkontakt auftreten.
RELAIS
24 V DC
mind. 50 mA
XtraDrive XtraDrive
47
3,3 kΩ
OFFENER KOLLEKTOR
24 V DC
mind. 50 mA
47
3,3 kΩ
40
CN1
NPN-SENSOR
24 V DC
mind. 50 mA
NPN
Sensor
Hinweis: Die Eingänge sind sowohl in NPN als auch in PNP beschaltbar.
47
40
XtraDrive
3,3 kΩ
CN1
3-21
40
CN1

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
Schnittstellen des Ausgangsschaltkreises
Die folgenden drei Typen von Servoverstärker-Ausgangsschaltkreisen
können verwendet werden. Schließen Sie nach diesen Schaltkreistypen
einen Eingangsschaltkreis am Host-Controller an.
• Anschluss eines Leitungstreiber-Ausgangsschaltkreises
Serielle Daten des Drehgebers, umgerechnet in zweiphasige
(Phase A und B) Impulsausgangssignale (PAO, /PAO, PBO, /PBO),
Nullpunktimpulssignale (PCO, /PCO) und S-Phasen-Gebersignale
(PSO, /PSO) werden über die Leitungstreiber-Ausgangsschaltkreise
ausgegeben, die in der Regel das Positioniersteuerungssystem am
Host-Controller beinhalten. Schließen Sie den LeitungstreiberAusgangsschaltkreis über einen Leitungsempfänger-Schaltkreis
am Host-Controller an.
Host-Controller
Leitungsempfänger
Drosselspule
Zwischenkreis-
Abschirmung
Steht für paarweise verdrillte Kabel
kondensator
Anschlussbeispiele für Schaltkreise finden Sie unter 3.5
Verdrahtung von Drehgebern.
• Anschluss eines Offenen Kollektor-Ausgangsschaltkreises
Alarmcodesignale werden über die Offenen KollektorAusgangsschaltkreise ausgegeben.
(ALO1 – CN1-37, ALO2 – CN1 - 38, ALO3 – CN1-39)
Schließen Sie einen Offenen Kollektor-Ausgangsschaltkreis über
einen Optokopplerrelais- oder Leitungstreiberschaltkreis an.
Opptokoppler
Relais
Leitungsempfänger
Hinweis: Die maximal zulässigen Spannungs- und Stromwerte für Offene Kollektor-Schaltkreise sind wie folgt:
• Spannung: 30 V DC
• Strom: 20 mA DC
3-22

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
• Anschluss eines Optokoppler-Ausgangsschaltkreises
Optokoppler-Ausgangsschaltkreise werden für die Schaltkreise von
Servoalarmsignalen, Servo bereit-Signalen und anderen
Sequenzausgangssignalen verwendet.
Schließen Sie einen Optokoppler-Ausgangsschaltkreis über einen
Relais- oder Leitungsempfängerschaltkreis an.
XtraDrive
5 bis 24 V DC
25
26
0 V
Relais
XtraDrive
25
26
FG
5 bis 12 V DC
Leitungsempfänger
P
0 V
Hinweis: Die maximal zulässige Leistungswerte für Optokoppler-Ausgangsschaltkreise sind wie folgt:
• Spannung: 30 V DC
• Strom: 50 mA DC
• Anschluss von zwei XtraDrives (Master-Slave-Betriebsart)
Schließen Sie den Ausgang des “Master” XtraDrive an den Eingang
des “Slave” XtraDrives an.
+24 V
XD Master
CN1
CN1
47
XD Slave
3,3 kΩ
25
26
24VGND
40
• Anschluss einer externen Last an den Ausgang des XtraDrives.
Maximalstrom: 50 mA
XtraDrive
CN1
25
26
Last
24VGND
+24 V (5 V – 28 V)
+
PSU
–
3-23

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.5. Verdrahtung von Drehgebern
(nur für Motoren des Typs SGMGH und SGMSH)
In den folgenden Abschnitten wird beschrieben, wie ein Servoverstärker an
den Drehgeber angeschlossen wird.
3.5.1. Drehgeberanschlüsse
Die folgenden Diagramme zeigen die Verdrahtung des Drehgeberausgangs
des Motors mit CN2 des Servoverstärkers sowie die PG-Ausgangssignale
von CN1 mit dem Controller. Dies gilt für Inkrementalwertgeber und
Absolutwert-Drehgeber nur für die Motoren des Typs SGMGH und SGMSH.
Serielle Inkrementalwertgeber
XtraDrive
Phase A
Serieller
(Hinweis)
Inkrementalwertgeber
(Hinweis)
Phase B
CN2
C (5)
D (6)
blau
weiß/blau
P PS 2 - 8
2 - 9
/PS
Phase C
Ausgangsleitungstreiber
Drehgeber
H(1)
G(2)
(Steckergehäuse)
J
rot
schwar
z
0,33 mm
2
Abschirmung
SN75ALS194
hergestellt von TI
oder gleichwertig
2 - 10
PG5V
2 - 11
PG0V
Steckergehäuse
Serielle Absolutwert-Drehgeber
CN1
1-33 PAO P
1-34 /PAO
1-35 PBO P
1-36 /PBO
1-19 PCO P
1-20 /PCO
1-1
0 V
Steckergehäuse
SG
(Hinweis)
Anwendbarer
Leitungsempfänger
SN75175
hergestellt
vonTI oder
gleichwertig
0 V
(Kundenseitig)
Serieller AbsolutwertDrehgeber
C (5)
D (6)
Drehgeber
H(1)
G(2)
schwarz
0,33 mm
T(3) orange
S(4) weiß/orange
(Steckergehäuse) Abschirmung
P
Hinweis:
P steht für paarweise verdrillte Kabel.
blau
weiß/blau
rot
(Hinweis)
2
P
PS
/PS
P
XtraDrive
Phase A 1-33 PAO P
1-34 /PAO
Phase B 1-35 PBO P
1-36 /PBO
CN2
2-8
Phase C 1-19 PCO P
2-9
1-20 /PCO
Phase S 1-48 PSO P
1-49 /PSO
Ausgangsleitungstreiber
SN75ALS194
hergestellt von TI
oder gleichwertig
2-10
2-11
2-12
2-13
Steckergehäuse
PG5V
PG0V
0 V
Steckergehäuse
3-24
CN1
1-4 SEN P
1-2 SG
1-1 SG
1-21 BAT (+) P
1-22 BAT (-)
(Hinweis)
Anwendbarer
Leitungsempfänger
SN75175
hergestellt
von TI oder
gleichwertig
+5 V
0 V
+
Batterie
-
(Kundenseitig)

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
A/B+C-Inkrementalwertgeber
Inkrementaler A/B+C
Drehgeber
(Hinweis)
CN2
1
blau
weiß/blau
2
gelb
Drehgeber
(Steckergehäuse)
Hinweis: P steht für paarweise verdrillte Kabel.
3
4
weiß
5
grün
weiß/grün
6
rot
8
schwarz
7
orange
15
weiß
14
P
9
Abschirmung
P A 2-16
/A 2-17
P B 2-18
/B 2-19
P C 2-14
/C 2-15
2-4,5,6
2-1,2,3
P
2-12
2-13
Steckergehäuse
XtraDrive
CN1
A Phase
B Phase
C Phase
S Phase
Ausgangsleitungstreiber
SN75ALS194
hergestellt von TI
oder gleichwertig
1-33 PAO P
1-34
1-35 PBO P
1-36
1-19 PCO P
1-20
1-48 PSO P
1-49
PG5V
PG0V
1-4
1-2
1-1
0 V
1-21
1-22
Steckergehäuse
(Hinweis)
/PAO
/PBO
/PCO
/PSO
SEN P
SG
SG
BAT (+) P
BAT (–)
Anwendbarer
Leitungsempfänger
SN75175
hergestellt von
TI oder gleichwertig
+5 V
0 V
+
Batterie
–
(Kundenseitig)
A/B+C-Inkrementalwertgeber mit Hall-Effekt-Sensoren
(für Motoren anderer Hersteller außer Yaskawa)
Inkrementaler A/B+C
Drehgeber mit Hall-Effekt
(Hinweis)
P A 2-16
/A 2-17
Drehgeber
P B 2-18
/B 2-19
P C 2-14
/C 2-15
2-4,5,6
2-1,2,3
2-10
/UIN 2-7
/VIN 2-9
/WIN 2-20
2-11
(Abschirmung)
Hinweis: P steht für paarweise verdrillte Kabel.
P
XtraDrive
A Phase 1-33 PAO P
1-34 /PAO
B Phase 1-35 PBO P
CN2
Steckergehäuse
1-36 /PBO
C Phase 1-19 PCO P
1-20 /PCO
S Phase 1-48 PSO P
1-49 /PSO
Ausgangsleitungstreiber
SN75ALS194
hergestellt
von TI oder gleichwertig
+5 V
1-4 SEN P
1-2 SG
1-1 SG
0 V
PG5V
PG0V
0 V
Steckergehäuse
CN1
(Hinweis)
Anwendbarer
Leitungsempfänger
SN75175
hergestellt von
TI oder gleichwertig
+5 V
0 V
(Kundenseitig)
3-25

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.5.2. CN2-Klemmenzuordnung und -typen des Drehgebers
In den folgenden Tabellen sind die CN2-Klemmenzuordnung und typen aufgeführt.
CN2-Klemmenzuordnung
1 PPG0V
3 PPG0V PG GND
5 PPG5V
7 NC* -
9 /PS
Impulsgeber
GND
Impulsgeber
+5 V
Serieller
Impulsgeber
Phase/S
2 PPG0V PG GND
4 PPG5V PG +5 V
6 PPG5V PG +5 V
8 PS
10 SPG5V
Serieller
Impulsgeber
Phase S
Serieller
Impulsgeber
+5 V
11 SPG0V
13 BAT-
15 /PC
17 /PA
19 /PB
Hinweis: NC* – Kontakt offen lassen.
Optional: Klemmenzuordnung des CN2-
Steckverbinders mit Kommutierungssensoren
1 PPG0V
3 PPG0V
5 PPG5V
7 /UIN
9 /VIN
Hinweis: NC* – Kontakt offen lassen.
Impulsgeber
GND
Impulsgeber
GND
Impulsgeber
+5 V
Phase U
Hall-Effekt
Phase V
Hall-Effekt
2 PPG0V
4 PPG5V
6 PPG5V
8 NC* -
10 SPG5V +5 V
Impulsgeber
GND
Impulsgeber
+5 V
Impulsgeber
+5 V
11 SPG0V GND
13 BAT-
15 /PC
17 /PA
19 /PB
Serieller
Impulsgeber
GND
Batterie “–”
Eingang
Impulsgeber
Phase/C
Impulsgeber
Phase/A
Impulsgeber
Phase/B
Batterie “–”
Eingang
Impulsgeber
Phase/C
Impulsgeber
Phase/A
Impulsgeber
Phase/B
12 BAT+
14 PC
16 PA
18 PB
20 NC* -
12 BAT+
14 PC
16 PA
18 PB
20 /WIN
Batterie “+”
Eingang
Impulsgeber
Phase C
Impulsgeber
Phase A
Impulsgeber
Phase B
Batterie "+"
Eingang
Impulsgeber
Phase C
Impulsgeber
Phase A
Impulsgeber
Phase B
Phase W
Hall-Effekt
CN2-Steckverbinderausführungen
Interner
Steckverbinder
XtraDrive
10220-52A2JL
20-polig
Hinweis: Die Relaisbuchse auf der Motorseite wird mit dem Drehgeber-Steckverbinder für Servomotoren des
Typs SGMAH und SGMPH verbunden.
MDR 10120-3000VE 20-polig
Lötstecker Gehäuse
(YET P/N: 4J4001)
Anwendbarer Stecker (für Buchse)
10320-52A0-008
(YET P/N: 4J0101)
3-26
Lötstecker
(Seite des
Servomotors)
54280-0600 6-polig
(YET P/N: 4J1521)

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.5.3. Drehgeber-Kabelverbindungen
Dieser Abschnitt zeigt die Verbindungen für alle standardmäßigen
Drehgeberkabel, die von YET verfügbar sind (siehe
YET-Teilenummern). Informationen über zusätzliche Drehgebertypen
(wie z. B. Kommunikationssensoren usw.) erhalten Sie von Ihrem
YET-Vertreter.
Kabel für A/B-Absolutwert-Drehgeber
Für Yaskawa SGM-Motoren.
BAT+ 1
BAT- 2
Batterie-
stecker
Gehäusemasse
XtraDrive seitig,
20 poliger Stecker
PPG0V1,2,3
PPG5V4,5,6,10
12
13
PC 14
/PC 15
PA 16
/PA 17
PB 18
/PB 19
SCHWARZ
ROT
ORANGE
WEISS
GRÜN
WEISS/GRÜN
BLAU
WEISS/BLAU
GELB
WEISS
GELB/GRÜN
15 poliger Stecker
P
P
P
P
Kabelschirm
P - 2-adrig verdrillte Leitung
Kabel für A/B-Inkrementalwert-Drehgeber
Für Yaskawa SGM-Motoren.
Motor seitig,
7 0 V
8 +5 V
15 +3,6 V
14 0 V
5
C
6 /C
1 A
2 /A
3 B
4 /B
9 FG
XtraDrive seitig,
20 poliger Stecker
PPG0V 1,2,3
PPG5V 4,5,6,10
PC 14
/PC 15
PA 16
/PA 17
PB 18
/PB 19
Gehäusemasse
Motor seitig,
9 poliger Stecker
SCHWARZ
ROT
GRÜN
WEISS/GRÜN
BLAU
WEISS/BLAU
GELB
WEISS
GELB/GRÜN
P
P
P
Kabelschirm
P - 2-adrig verdrillte Leitung
3-27
0 V
+5 V
C
/C
A
/A
B
/B
FG

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
Kabel für seriellen Absolutwert-Drehgeber
Für Yaskawa SGMAH-Motoren.
Batterie-
stecker
BAT+ 1
BAT- 2
Gehäusemasse
XtraDrive seitig,
20 poliger Stecker
SPG5V 10
SPG0V 11
12
13
PS 8
/PS
9
ROT
SCHWARZ
ORANGE
WEISS/ORANGE
BLAU
WEISS/BLAU
Kabelschirm
Motor seitig,
6 poliger Stecker
P
P
P - 2-adrig verdrillte Leitung
Kabel für seriellen Inkrementalwert-Drehgeber
Für Yaskawa SGMAH-Motoren.
XtraDrive seitig,
20 poliger Stecker
SPG5V 10
SPG0V 11
BAT+ 12
BAT- 13
8
PS
/PS 9
Gehäusemasse
ROT
SCHWARZ
ORANGE
WEISS/ORANGE
BLAU
WEISS/BLAU
Kabelschirm
Motor seitig,
6 poliger Steck
1 PG5V
2 GND
3 PGBAT+
P
4 PGBAT5
P
PS
6 /PS
Gehäusemasse
1 PG5V
2 GND
3 PGBAT+
4 PGBAT-
5
PS
6 /PS
Gehäusemasse
P - 2-adrig verdrillte Leitung
Kabel für A/B-Inkrementalwert-Drehgeber mit Hall-Effekt
Für Motoren anderer Hersteller außer Yaskawa.
XtraDrive seitig,
20 poliger Stecker
PPG0V 1,2,3,11
PPG5V 4,5,6,10
PC 14
/PC 15
PA 16
/PA 17
PB 18
/PB 19
/UIN 7
/VIN 9
/WIN 20
FG Gehäusemasse
GELB/GRÜN
Kabelschirm
P - 2-adrig verdrillte Leitung
P
P
P
Motor seitig
0 V
+5 V
C
/C
A
/A
B
/B
U-Phase Hall-Sensor
V-Phase Hall-Sensor
W-Phase Hall-Sensor
FG
3-28

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
3.6. Beispiele für Standardverbindungen
Die folgenden Diagramme zeigen Beispiele für standardmäßige Verbindungen
von Servoverstärkern nach Kenndaten und Regelungsart unterteilt.
Hinweis für einphasige Spannungsversorgung:
XtraDrive XD-08-M* und XD-15-M* sind einphasige Treiber.
Anschlussklemmen der Hauptspannungsversorgung (L1, L2, L3) sind geblieben.
Diese Geräte besitzen Klemme B3 und einen internen Bremswiderstand.
Beachten Sie die folgenden Punkte.
1. Schließen Sie die Hauptspannungsvorsorgung wie unten dargestellt an die
Klemmen L1 und L3 an. Die Spannungsversorgung ist einphasig, 220 bis
230 V AC +10 % bis –15 %, 50/60Hz. Wenn eine Spannungsversorgung
von 187 V (–15 % von 220 V) oder weniger verwendet wird, zeigt der
Alarm A.41 den Spannungsmangel an, wenn mit einem max.
Motordrehmoment bis zur max. Drehzahl beschleunigt wird.
2. Schließen Sie die Klemmen B2 und B3 mit Hilfe des internen
Bremswiderstands kurz. Wenn die Leistung des Bremswiderstands
unzureichend ist, entfernen Sie die Kabelführung zwischen den Klemmen
B2 und B3 und schließen Sie eine externe Bremswiderstandseinheit
zwischen den Klemmen B1 und B2 an.
Kompakt-Schutzschalter
(MCCB)
Z
um Schutz der
Spannungsversorgungsleitung. Schaltet den Stromkreis
aus, wenn ein Über-
erkannt wird.
strom
Entstörfilter
Wird verwendet, um externe
Störungen von der Stromversorgungsleitung zu entfernen.
Netzschütz
Schaltet Sie Servo
EIN oder AUS.
Verwenden Sie
einen Überspannungsschutz
für das Netzschütz.
Spannungsversorgung
für Bremse
Typ: LPSE-2H01
(für 100-V-Eingang)
Spannungsversorgung
einphasig, 200 V AC
KompaktSchutzschalter
Entstörfilter
Netzschütz
Spannungsversorgung
für Bremse
RT
Grün/gelbes
Kabel
Netzschütz
Schutzmasse
Computer
Kabelausführung: P/N 004145
Host-Controller
XtraDrive ist mit den meisten PLC Motion
Controller und Impulszähler kompatibel.
UV W
L3
L1
L2C
L1C
B1
B2
Kabel und
Steckverbinder
für Drehgeber
und Motor
Bremswiderstands-Einheit
Wenn die Leistung des integrierten
Bremswiderstands unzureichend ist,
schließen Sie eine externe
Bremswiderstandseinheit zwischen
den Klemmen B1 und B2 an.
Bremswiderstand
(Option)
3-29

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
/
Positioniersteuerungsmodus
Spannung
AUS
+10%
-15%
Spannung
EIN
Schütz
Alarmverarbeitung
Dreiphasig, 380 bis 480 V AC
(50/60 Hz)
R S T
Leistungsschalter
Entstörfilter
Schütz
Schütz
Ordnungsgemäß mit
Schutzmasse
verbinden.
+24 V
Sollwertdrehzahl
±2 bis ±10 V/Nennmotordrehzahl
Externe Drehmomentsteuerung/
Drehmoment-Vorsteuerung
1 bis ±10 V
Nennmotordrehmoment.
Positionssollwert
Speicherbatterie 2,8 bis 4,5 V
SEN-Signaleingang
Servo EIN bei Relais 1 EIN
P-Regelung bei Relais 2 EIN
Vorwärtslauf gesperrt
bei P-LS OFFEN
Rückwärtslauf gesperrt
bei N-LS OFFEN
Alarm-Rücksetzung bei Relais 2 EIN
Rückwärts-Strombegrenzung EIN
bei Relais 6 EIN
Vorwärts-Strombegrenzung EIN
bei Relais 7 EIN
PULS
CW
[]
Phase A
SIGN
CCW
[]
Phase B
CLR
Offener KollektorSollwertspannungsversorgung
*3
*3
+24 V
+
P
P
+5 V
P
0 V
*8
Relais 1
/S-ON
Relais 2
P-CON
P-LS
P-OT
N-LS
N-OT
/ALM-
Relais 3
RST
Relais 6
/P-CL
Relais 7
/N-CL
V-REF
P
SG
T-REF
P
SG
*1
PULS
P
/PULS
SIGN
P
/SIGN
CLR
P
/CLR
PL1
PL2
PL3
BAT (+)
BAT (–)
SEN
SG
*11
L1
L2
L3
1
2
24 V
0 V
5
LPF
6
*2
9
LPF
10
150 Ω
7
8
11
12
15
14
1 kΩ
3
13
18
21
22
4
2
3,3 kΩ
47
40
41
42
43
44
45
46
CN1 CN1
B2 B3
*5
*9
A/D
+12 V
Servo EIN
Proportional
(P-Regelung)
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
Alarmpause
Vorwärts-Strombegrenzung EIN
Rückwärts-Strombegrenzung EIN
Abschirmung mit Steckergehäuse
*1. P steht für paarweise verdrillte Kabel.
*2. Die Zeitkonstante für den Primärfilter beträgt 47 µs.
*3. Anschluss nur in Verbindung mit einem Absolutwert-Drehgeber.
*4. Verwendung nur in Verbindung mit einem Absolutwert Drehgeber.
Achten Sie darauf, den Spannungsschutz an der
Erregerspule des Netzschützes und Relais anzubringen.
XD- -T
XtraDrive
Schutzmasse
CN2
U
V
W
*10
CN3
*4
FG
FG
37
38
39
33
34
35
36
19
20
48
49
1
25
26
27
28
29
30
31
32
U
V
W
*6
Optionale
*7
Kabelabschirmung
Kabelabschirmung
ALO1
ALO3
ALO3
PAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
SG
/V-CMP+
(/COIN+)
/V-CMP(/COIN-)
/T-GON+
/T-GON-
/S-RDY+
/S-RDY-
ALM+
ALM-
Servomotor
A (1)
B (2)
C (3)
D (4)
RS-232C/RS-422
Alarmcodeausgang
Maximale Betriebsspannung
30 V DC
Maximaler Betriebsstrom
20 mA
Drehgeber-Teilungsverhältnisausgang
Anwendbarer Leitungsempfänger:
SN75175 von TI,
MC3486 von
ON-SEMI oder gleichwertig
Serieller Datenausgang der
S-Phasen-Umdrehungszählung
Signalmasse
Drehzahlübereinstimmungs-Erkennung
(EIN bei Übereinstimmung der Drehzahl)
Positionierung abgeschlossen
(EIN bei abgeschlossener
Positionierung)
TGON-Ausgang
(EIN bei Überschreitung
der Einstellung)
Servo-bereit-Ausgang
(EIN bei „Bereit“)
Servo-Alarmausgang
(AUS bei Alarm)
Max. Ausgangsbetriebsspannung
des Opptokopplers 30 V DC
Betriebsstrom 50 mA
M
Optionaler Drehgeber
(A/B+C)
Drehgeber
Kommutierungssensoren
Optionaler Drehgeber,
seriell
Drehgeber
*7. Diese Stromkreise sind SELV-Stromkreise und müssen
daher von allen anderen Stromkreisen durch eine
doppelte und verstärkte Isolierung getrennt werden.
*8. Verwenden Sie eine doppelt isolierte 24-V DC Spannungsversorgung.
*9. Optional – nicht für alle Modelle verfügbar. *5. Schließen Sie einen externen Bremswiderstand zwischen den
Klemmen B1 und B2 an. (für XtraDrives mit großer Leistung) *10. Widerstände sind für alle Modelle unterschiedlich.
*6. Diese Stromkreise sind gefährlich und müssen daher durch
*11. ∅ Steht für Kontakte des CN1-Steckverbinders.
Schutzvorrichtungen getrennt werden.
3-30

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
Drehzahlregelungsart
Spannung
AUS
Schütz
V-REF
P
P
T-REF
P
*1
SG
SG
+10 %
-15 %
Spannung
EIN
Schütz
L1
L2
L3
24 V
0 V
5
6
9
10
Dreiphasig, 380 bis 480 V AC
(50/60 Hz)
R S T
Leistungsschalter
Entstörfilter
Ordnungsgemäß mit
Schutzmasse verbinden.
Sollwertdrehzahl
±2 bis ±10 V/Nennmotordrehzahl
Externe Drehmomentsteuerung/
Drehmoment-Vorsteuerung
±1 bis ±10 V /Nennmotordrehmoment.
+24 V
Alarmverarbeitung
Schütz
Achten Sie darauf, den Spannungsschutz an der
Erregerspule des Netzschützes und Relais anzubringen.
B2B1 B3
*5
1
2
LPF
*2
A/D
LPF
Schutzmasse
U
V
W
CN2
CN3
*6
Servomotor
U
V
W
Optionale
*7
Kabelabschirmung
FG
Kabelabschirmung
37
ALO1
38
ALO3
39
ALO3
A (1)
B (2)
M
C (3)
D (4)
Optionaler Drehgeber
(A/B+C)
Drehgeber
Kommutierungssensoren
Optionaler Drehgeber,
seriell
Drehgeber
RS-232C/RS-422
Alarmcodeausgang
Maximale Betriebsspannung
30 V DC
Maximaler Betriebsstrom
20 mA
BAT (+)
*8
+24 V
+
–
+5 V
0 V
Relais 1
Relais 2
P-LS
Relais 3
Relais 6
Relais 7
N-LS
P
BAT (-)
SEN
P
SG
/S-ON
P-CON
P-OT
N-OT
/ALMRST
/P-CL
/N-CL
*9
Speicherbatterie 2,8 bis 4,5 V
SEN-Signaleingang
Servo EIN bei Relais 1 EIN
P-Regelung bei Relais 2 EIN
Vorwärtslauf gesperrt
bei P-LS OFFEN
Rückwärtslauf gesperrt
beiN -LS OFFEN
Alarm-Rücksetzung bei Relais 3 EIN
Rückwärts-Strombegrenzung EIN
bei Relais 6 EIN
Vorwärts-Strombegrenzung EIN
bei Relais 7 EIN
*1. P steht für paarweise verdrillte Kabel.
*3
*3
*2. Die Zeitkonstante für den Primärfilter beträgt 47 µs.
*3. Nur mit einem Absolutwert-Drehgeber verbinden.
*4. Verwendung nur in Verbindung mit einem
Absolutwert-Drehgeber.
zwischen den Klemmen B1 und B2 an.
(für XtraDrives mit großer Leistung)
*6. Diese Stromkreise sind gefährlich und müssen
daher durch Schutzvorrichtungen getrennt werden.
21
22
4
2
3,3 kΩ
47
40
41
42
43
44
45
46
CN1
Abschirmung mit Steckergehäuse verbinden.
Servo EIN
Proportional
(P-Regelung)
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
Alarm-Rücksetzung
Vorwärts-Strombegrenzung EIN
Rückwärts-Strombegrenzung EIN
*7. Diese Stromkreise sind SELV-Stromkreise und müssen
daher von allen anderen Stromkreisen durch eine
doppelte und verstärkte Isolierung getrennt werden.
*8. Verwenden Sie eine doppelt isolierte 24-V DC Spannungsversorgung.
*9. Optional – nicht für alle Modelle verfügbar. *5. Schließen Sie einen externen Bremswiderstand
*10. Widerstände sind für alle Modelle unterschiedlich.
*11. ∅ Steht für Kontakte des CN1-Steckverbinders.
33
PAO
34
/PAO
35
PBO
36
/PBO
PCO
19
/PCO
20
48
*4
CN1
FG
PSO
49
/PSO
1
SG
25
/V-CMP+
(/COIN+)
26
/V-CMP(/COIN-)
27
/T-GON+
28
/T-GON-
29
/S-RDY+
30
/S-RDY-
31
ALM+
ALM-
32
Drehgeber-Teilungsverhältnisausgang
Anwendbarer Leitungsempfänger:
SN75175 von TI,
MC3486 von
ON-SEMI oder gleichwertig
Serieller Datenausgang der
S-Phasen-Umdrehungszählung
Signalmasse
Drehzahlübereinstimmungs-Erkennung
(EIN bei Übereinstimmung der Drehzahl)
Positionierung abgeschlossen
(EIN bei abgeschlossener
Positionierung)
TGON-Ausgang
(EIN bei Überschreitung
der Einstellung)
Servo-bereit-Ausgang
(EIN bei „Bereit“)
Servo-Alarmausgang
(AUS bei Alarm)
Max. Ausgangsbetriebsspannung
des Opptokopplers 30 V DC
Betriebsstrom 50 mA
3-31

XtraDrive Benutzerhandbuch Kapitel 3: Anschlussplan
/
Drehmomentregelungsart
Spannung
AUS
+10%
-15%
Spannung
EIN
Schütz
Alarmverarbeitung
Dreiphasig, 380 bis 480 V AC
(50/60 Hz)
R S T
Leistungsschalter
Entstörfilter
Schütz
Schütz
Ordnungsgemäß mit
Schutzmasse
verbinden.
+24 V
Sollwertdrehzahl
±2 bis ±10 V/Nennmotordrehzahl
Externe Drehmomentsteuerung/
Drehmoment-Vorsteuerung
1 bis ±10 V
Nennmotordrehmoment.
Positionssollwert
Speicherbatterie 2,8 bis 4,5 V
SEN-Signaleingang
Servo EIN bei Relais 1 EIN
P-Regelung bei Relais 2 EIN
Vorwärtslauf gesperrt
bei P-LS OFFEN
Rückwärtslauf gesperrt
bei N-LS OFFEN
Alarm-Rücksetzung bei Relais 2 EIN
Rückwärts-Strombegrenzung EIN
bei Relais 6 EIN
Vorwärts-Strombegrenzung EIN
bei Relais 7 EIN
*1. P steht für paarweise verdrillte Kabel.
*2. Die Zeitkonstante für den Primärfilter beträgt 47 µs.
*3. Anschluss nur in Verbindung mit einem Absolutwert Drehgeber.
*4. Verwendung nur in Verbindung mit einem Absolutwert Drehgeber.
zwischen den Klemmen B1 und B2 an.
(für XtraDrives mit großer Leistung)
*6. Diese Stromkreise sind gefährlich und müssen daher
durch Schutzvorrichtungen getrennt werden.
PULS
CW
[]
Phase A
SIGN
CCW
[]
Phase B
CLR
Offener KollektorSollwertspannungsversorgung
*3
*3
+24 V
+
P
P
+5 V
P
0 V
*8
Relais 1
/S-ON
Relais 2
P-CON
P-LS
P-OT
N-LS
N-OT
/ALM-
Relais 3
RST
Relais 6
/P-CL
Relais 7
/N-CL
V-REF
P
SG
T-REF
P
SG
*1
PULS
P
/PULS
SIGN
P
/SIGN
CLR
P
/CLR
PL1
PL2
PL3
BAT (+)
BAT (–)
SEN
SG
*11
L1
L2
L3
1
2
24 V
0 V
5
LPF
6
*2
9
LPF
10
150 Ω
7
8
11
12
15
14
1 kΩ
3
13
18
21
22
4
2
3,3 kΩ
47
40
41
42
43
44
45
46
CN1 CN1
B2 B3
*5
*9
A/D
+12 V
Servo EIN
Proportional
(P-Regelung)
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
Alarmpause
Vorwärts-Strombegrenzung EIN
Rückwärts-Strombegrenzung EIN
Abschirmung mit Steckergehäuse
Achten Sie darauf, den Spannungsschutz an der
Erregerspule des Netzschützes und Relais anzubringen.
XD- -T
XtraDrive
Schutzmasse
U
V
W
*10
*4
FG
*7. Diese Stromkreise sind SELV-Stromkreise und müssen
daher von allen anderen Stromkreisen durch eine
doppelte und verstärkte Isolierung getrennt werden.
*8. Verwenden Sie eine doppelt isolierte 24-V DC Spannungsversorgung.
*9. Optional – nicht für alle Modelle verfügbar. *5. Schließen Sie einen externen Bremswiderstand
CN2
CN3
FG
U
V
W
37
38
39
33
34
35
36
19
20
48
49
1
25
26
27
28
29
30
31
32
*6
Optionale
*7
Kabelabschirmung
Kabelabschirmung
ALO1
ALO3
ALO3
PAO
/PAO
PBO
/PBO
PCO
/PCO
PSO
/PSO
SG
/V-CMP+
(/COIN+)
/V-CMP(/COIN-)
/T-GON+
/T-GON-
/S-RDY+
/S-RDY-
ALM+
ALM-
Servomotor
A (1)
B (2)
C (3)
D (4)
RS-232C/RS-422
Alarmcodeausgang
Maximale Betriebsspannung
30 V DC
Maximaler Betriebsstrom
20 mA
Drehgeber-Teilungsverhältnisausgang
Anwendbarer Leitungsempfänger:
SN75175 von TI,
MC3486 von
ON-SEMI oder gleichwertig
Serieller Datenausgang der
S-Phasen-Umdrehungszählung
Signalmasse
Drehzahlübereinstimmungs-Erkennung
(EIN bei Übereinstimmung der Drehzahl)
Positionierung abgeschlossen
(EIN bei abgeschlossener
Positionierung)
TGON-Ausgang
(EIN bei Überschreitung
der Einstellung)
Servo-bereit-Ausgang
(EIN bei „Bereit“)
Servo-Alarmausgang
(AUS bei Alarm)
Max. Ausgangsbetriebsspannung
des Opptokopplers 30 V DC
Betriebsstrom 50 mA
M
Optionaler Drehgeber
(A/B+C)
Drehgeber
Kommutierungssensoren
Optionaler Drehgeber,
seriell
Drehgeber
*10. Widerstände sind für alle Modelle unterschiedlich.
*11. ∅ Steht für Kontakte des CN1-Steckverbinders.
3-32

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4. Testbetrieb
In diesem Kapitel sind den Testbetrieb in zwei Schritten. Führen Sie zunächst
Schritt 1 aus, bevor Sie Schritt 2 durchführen.
4.1. Testbetrieb in zwei Schritten ......................................................................4-2
4.1.1. Schritt 1: Testbetrieb für Servomotor ohne Last .................................4-3
4.1.2. Schritt 2: Testbetrieb für Servomotor, der an eine Maschine
angeschlossen ist .................................................................................4-9
4.2. Zusätzliche Einrichtungsverfahren während des Testbetriebs .................4-10
4.2.1. Servomotoren mit Bremsen...............................................................4-10
4.2.2. Positioniersteuerung über den Host-Controller.................................4-11
4.3. Minimale Parameter und Eingangssignale ...............................................4-12
4.3.1. Parameter...........................................................................................4-12
4.3.2. Eingangssignale.................................................................................4-12
4-1

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4.1. Testbetrieb in zwei Schritten
Achten Sie darauf, dass alle Verdrahtungen abgeschlossen sind, bevor Sie mit
dem Testbetrieb beginnen.
Führen Sie zur eigenen Sicherheit den Testbetrieb in der unten angegebenen
Reihenfolge durch (Schritt 1 und 2). Einzelheiten über den Testbetrieb finden
Sie unter 4.1.1 Testbetrieb für Servomotor ohne Last und 4.1.2 Testbetrieb
für Servomotor, der an eine Maschine angeschlossen ist.
Schritt 1: Testbetrieb für Servomotor ohne Last
Stellen Sie sicher, dass der Servomotor ordnungsgemäß verdrahtet
ist und drehen Sie anschließend die Welle, bevor Sie den Servomotor
an das Gerät anschließen.
Prüfen Sie
die Verdrahtung.
Nicht an das Gerät anschließen.
Schritt 2: Testbetrieb für Servomotor mit Last
Stellen Sie den Servomotor gemäß den Gerätekenndaten ein,
schließen Sie den Servomotor an das Gerät und führen Sie den
Testbetrieb durch.
Stellen Sie die Drehzahl durch Autotuning ein.
Servomotor
XtraDrive
An das Gerät anschließen
4-2

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4.1.1. Schritt 1: Testbetrieb für Servomotor ohne Last
Achtung
• Bedienen Sie den Servomotor nicht, solange er an das Gerät angeschlossen ist.
Führen Sie zur Vermeidung von Unfällen zunächst Schritt 1 aus, wobei der Testbetrieb ohne
Last durchgeführt wird (alle Kopplungen und Riemen sind getrennt).
Achten Sie in Schritt 1 darauf, dass der Servomotor ordnungsgemäß wie
unten gezeigt verdrahtet ist. Eine unsachgemäße Verdrahtung ist häufig
die Ursache für einen fehlerhaften Betrieb des Servomotors während
des Testbetriebs.
• Überprüfen Sie die Verdrahtung des Hauptstromkreises.
• Überprüfen Sie die Verdrahtung des Servomotors.
• Überprüfen Sie die Verdrahtung der CN1 E/A-Signalleitungen.
Achten Sie darauf, dass der Host-Controller und andere
Einstellungen weit möglichst in Schritt 1 abgeschlossen werden
(d.h. bevor der Servomotor an das Gerät angeschlossen wird).
Prüfen Sie die
Verdrahtung.
Nicht an die Maschine
anschließen
Hinweis: Überprüfen Sie während des Testbetriebs des Servomotors die Punkte auf den folgenden Seiten
in der angegeben Reihenfolge.
Falls Sie einen Servomotor mit Bremsen verwenden siehe Abschnitt 4.2.1 Servomotoren mit Bremsen.
4-3

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
1. Befestigen Sie den Servomotor.
Die Montageplatte des Servomotors
an das Gerät anschließen.
Keine Anschlüsse
an der Welle vornehmen
(Keine Last-Bedingungen).
Befestigen Sie die Montageplatte des Servomotors , damit sich
der Servomotors während des Betriebs nicht bewegen kann.
2. Prüfen Sie die Verdrahtung.
Trennen Sie den
CN1-Steckverbinder.
Trennen Sie den CN1-Steckverbinder und überprüfen Sie
die Verdrahtung des Servomotors in dem Stromkreis.
Es werden keine CN1 E/A-Signalleitungen verwendet.
Lassen Sie den Steckverbinder daher frei.
3. Schalten Sie die Spannungsversorgung ein.
Normale Anzeige
Alternative Anzeige
Beispiel für Alarmanzeige
Schalten Sie die Spannungsversorgung des Servoverstärkers ein.
Wenn der Servoverstärker normal eingeschaltet wurde, erscheint
die LED-Anzeige auf der Fronttafel wie nachfolgend dargestellt.
Der Servomotor wird nicht mit Spannung versorgt, da der Servo
ausgeschaltet ist.
Wenn auf der LED-Anzeige wie unten gezeigt eine Alarmanzeige
auftritt, liegt ein Fehler im Stromkreis, in der Verdrahtung
des Servomotors oder des Drehgebers vor. Schalten Sie in diesem
Fall die Spannung aus und leiten Sie entsprechende Maßnahmen
ein. Siehe 9.2 Fehlerbehebung.
Hinweis: Bei Verwendung eines Absolutwert-Drehgebers muss dieser eingerichtet werden. Siehe Abschnitt
5.7.4 Einstellung des Absolutwert-Drehgebers.
4-4

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
/
/
/
/
/
4. Bedienung über die Bedienkonsole.
Bedienelement
Bedienen Sie den Servomotor über die Bedienkonsole.
Stellen Sie sicher, dass der Servomotor normal läuft.
Weitere Einzelheiten zum Verfahren finden Sie unter
7.2.2 JOG-Betrieb.
5. Schließen Sie die Signalleitungen an.
Schließen Sie den
CN1-Steckverbinder an.
Gehen Sie zum Anschließen des CN1-Steckverbinders wie folgt vor.
a) Schalten Sie die Spannungsversorgung aus.
b) Schließen Sie den CN1-Steckverbinder an.
c) Schalten Sie die Spannungsversorgung wieder ein.
6. Überprüfen Sie die Eingangssignale.
Überprüfen Sie im Überwachungsmodus mit Hilfe der Bedienkonsole
die Verdrahtung der Eingangssignalleitungen. Weitere Einzelheiten
zum Verfahren finden Sie unter 7.1.6 Betrieb im Überwachungsmodus.
Schalten Sie alle Signalleitungen ein und aus, um festzustellen,
ob sich die LED-Anzeige des Überwachungsbits auf der Konsole
wie nachfolgend dargestellt ändert.
Eingangs-Signal-Überwachung
OT
PN
OT
-
ALM
-RST
CL
P-
CL
N-
SEN
P-CON
S-ON
Obere Leuchten wenn AUS (H-Pegel)
Untere Leuchten wenn EIN (L-Pegel)
4-5

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
A
r
Eingangssignalstatus LED-Anzeige
AUS (hoher Signalpegel) Obere LED-Anzeigen leuchten.
EIN (niedriger Signalpegel) Untere LED-Anzeigen leuchten.
Hinweis: Bei einer unsachgemäßen Verdrahtung der folgenden Signalleitungen, läuft der Servomotor nicht
ordnungsgemäß. Verdrahten Sie diese Leitungen immer ordnungsgemäß. Schließen Sie nicht
verwendete Signalleitungen kurz. Durch Eingangssignalauswahlen (Parameter Pn50A bis Pn50D)
kann die Notwendigkeit eines externen Kurzschlusses hinfällig gemacht werden.
Signalsymbol Stecker-
Beschreibung
Stiftnummer
Der Servomotor kann sich in Vorwärtsrichtung
P-OT CN1-42
drehen, wenn diese Signalleitung niedrigen
Pegel hat (0V).
Der Servomotor kann sich in
N-OT CN1-43
Rückwärtsrichtung drehen, wenn diese
Signalleitung niedrigen Pegel hat (0V).
Der Servomotor wird eingeschaltet, wenn
/S-ON CN1-40
+24VIN CN1-47
Hinweis: Bei Verwendung eines Absolutwert-Drehgebers schaltet der Servo nicht ein, wenn das Servo-EIN-
Signal (/S-ON) eingegeben wird, außer das SEN-Signal ist ebenfalls eingeschaltet.
Wenn das SEN-Signal im Überwachungsmodus überprüft wird, leuchtet der obere Teil der LED,
da das SEN-Signal im eingeschalteten Zustand einen hohen Signalpegel besitzt.
diese Signalleitung niedrigen Pegel hat (0V).
Lassen Sie den Servomotor ausgeschaltet.
Steuerspannungsversorgungsklemme für
Sequenzsignale.
7. Schalten Sie den Servo ein.
XtraDrive
Servomoto
/S-ON
CN1-40
0 V
Servo einschalten
Schalten Sie den Servo wie nachfolgend beschrieben ein.
a) Stellen Sie sicher, dass keine Sollwertsignaleingänge vorhanden
sind.
• Stellen Sie V-REF (CN1-5) und T-REF (CN1-9) für die
Drehzahl- und Drehmomentregelung auf 0 V.
• Stellen Sie PULS (CN1-7) und SIGN (CN1-11) für die
Positioniersteuerung auf niedrig.
b) Schalten Sie das Servo-EIN-Signal ein.
nzeige mit eingeschaltetem Servo
4-6

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
Stellen Sie /S-ON (CN1-40) auf 0 V. Wenn alles in Ordnung ist,
schaltet der Servomotor auf EIN und die LED-Anzeige auf der
Fronttafel erscheint wie oben dargestellt. Wenn eine Alarmanzeige
auftritt, leiten Sie wie unter Abschnitt 9.2 Fehlerbehebung
beschrieben entsprechende Maßnahmen ein.
Hinweis: Wenn eine Störung in der Sollwertspannung für die Drehzahlregelung vorliegt, blinkt „-“ links auf
der 7-Segment-LED.
Betrieb mit Sollwerteingabe
Das hier verwendete Betriebsverfahren hängt von den
Parametereinstellungen ab (Auswahl im Steuermodus an
Speicherschalter Pn000.1). Verwenden Sie für den Betrieb mit
Drehzahl- und Positioniersteuerung die folgende Vorgehensweise.
Verfahren in der Drehzahlregelbetriebsart: Stellen Sie
Pn000.1 auf 0
Diese Beschreibung gilt für die standardmäßige Einstellung der
Drehzahlregelung.
V-REF
SG
XtraDrive
CN1-5
CN1-6
Servomotor
Der Servomotor dreht sich mit einer Drehzahl,
die proportional zur Sollwertspannung verläuft.
1. Erhöhen Sie die Spannung des Sollwertdrehzahleingangs
(V-REF, CN1-5) gleichmäßig. Der Servomotor dreht sich.
2. Überprüfen Sie im Überwachungsmodus die folgenden Punkte.
Siehe 7.1.6 Betrieb im Überwachungsmodus.
Un000 Ist-Motordrehzahl
Un001 Sollwertdrehzahl
• Wurde die Sollwertdrehzahl eingegeben?
• Ist die Motordrehzahl wie vorgegeben?
• Stimmt die Sollwertdrehzahl mit der Ist-Motordrehzahl überein?
• Stoppt der Servomotor, wenn der Drehzahlsollwert 0 ist?
3. Wenn sich der Servomotor mit extrem geringer Drehzahl dreht und
0 V als Sollwertspannung festgelegt ist, korrigieren Sie die OffsetEinstellung des Sollwerts wie in Abschnitt 7.2.3 Automatische
Offset-Einstellung des Drehzahl- und Drehmomentsollwerts oder
7.2.4 Manuelle Offset-Einstellung des Drehzahl- und
Drehmomentsollwerts beschrieben.
4. Setzen Sie die folgenden Parameter zurück, um die Motordrehzahl
oder die Drehrichtung zu ändern.
Stellt die Drehzahlsollwert-
Pn300
Pn000.0
Eingangsverstärkung ein.
Siehe 5.2.1 Drehzahlsollwert.
Wählt die Drehrichtung.
Siehe 5.1.1 Umschaltung der Drehrichtung des
Servomotors.
4-7

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
r
/
Verfahren im Positioniersteuerungsmodus:
Stellen Sie Pn000.1 auf 1
5. Stellen Sie Parameter Pn200.0 so ein, dass die Sollwertimpulsform
mit Ausgangsform des Host-Controllers übereinstimmt.
Zum Auswählen der Sollwertimpulsform: Siehe 5.2.2
Positionssollwert.
6. Geben Sie über den Host-Controller einen langsamen
Drehzahlimpuls ein und führen Sie den Betrieb mit geringer
Drehzahl durch.
Sollwertimpuls
Host–Controlle
PULS
PULS
SIGN
/SIGN
XtraDrive
Servomotor
CN1-7
CN1-8
CN1-11
CN1-12
7. Überprüfen Sie im Überwachungsmodus die folgenden Daten.
Siehe 7.1.6 Betrieb im Überwachungsmodus.
Un000 Ist-Motordrehzahl
Un007 Sollwertimpuls-Geschwindigkeitsanzeige
Un008 Positions-Offset
• Wurde der Sollwertimpuls eingegeben?
• Ist die Motordrehzahl wie vorgegeben?
• Stimmt die Sollwertdrehzahl mit der Ist-Motordrehzahl überein?
• Stoppt der Servomotor, wenn der Drehzahlsollwert 0 ist?
8. Setzen Sie die folgenden Parameter zurück, um die Motordrehzahl
oder die Drehrichtung zu ändern.
Elektronisches Übersetzungsverhältnis
Pn202, Pn203
Pn000.0
Siehe 5.2.5 Verwendung der Funktion für das
elektronische Übersetzungsverhältnis.
Wählt die Drehrichtung.
Siehe 5.1.1 Umschaltung der Drehrichtung des
Servomotors.
Wenn ein Alarm auftritt oder der Servomotor während des oben
beschriebenen Verfahrens den Betrieb abbricht, ist die Verdrahtung
des CN1-Steckverbinders falsch oder die Parametereinstellungen
stimmen nicht mit den Spezifikationen des Host-Controllers
überein. Überprüfen Sie die Verdrahtung und die
Parametereinstellungen und wiederholen Sie anschließend Schritt 1.
Hinweis: Referenzen
• Alarmliste: Siehe 9.2.3 Tabelle der Alarmanzeigen.
• Parameterliste: Siehe Anhang D Parameterliste.
4-8

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4.1.2. Schritt 2: Testbetrieb für Servomotor, der an eine
Maschine angeschlossen ist
Warnung
Befolgen Sie das nachfolgende Verfahren für Schritt 2 genauestens.
Störungen, die nach Anschluss des Servomotors auftreten, können nicht nur das Gerät
beschädigen, sondern auch zu Verletzungen oder tödlichen Unfällen führen.
Bevor Sie mit Schritt 2 fortfahren, wiederholen Sie Schritt 1
(Testbetrieb für Servomotor ohne Last), bis alle möglichen Fehler,
einschließlich Parametereinstellungen und Verdrahtung, zur vollsten
Zufriedenheit ausgeführt wurden.
Wenn Schritt 1 abgeschlossen ist, fahren Sie mit Schritt 2 fort, um den
Testbetrieb für den Servomotor, der an eine Maschine angeschlossen
ist, durchzuführen. Der Servoverstärker wird nun wie nachfolgend
beschrieben eingestellt, damit er mit den speziellen Kenndaten
der Maschine übereinstimmt.
• Anwendung des Autotuning, um den Servoverstärker mit
den Kenndaten der Maschine abzustimmen.
• Übereinstimmung der Drehrichtung und Drehzahl mit
den Kenndaten der Maschine.
• Prüfung der endgültigen Regelungsform.
XtraDri ve
Servomotor
An die Maschine anschließen
Gehen Sie zur Durchführung des Testbetriebs wie folgt vor.
1. Stellen Sie sicher, dass die Spannungsversorgung ausgeschaltet ist.
2. Schließen Sie den Servomotor an die Maschine an.
Weitere Einzelheiten zum Anschluss des Servomotors finden
Sie in Abschnitt 2.1 Servomotoren.
3. Verwenden Sie das Autotuning, um den Servoverstärker
mit den Kenndaten der Maschine abzustimmen.
Siehe Abschnitt 6.3 Autotuning.
4. Betreiben Sie den Servomotor über den Sollwerteingang.
Betreiben Sie den Servomotor wie in Schritt 1 (Testbetrieb für
Servomotor ohne Last) über den Sollwerteingang wie in Abschnitt
4.1.1 Schritt 1: Testbetrieb für Servomotor ohne Last beschrieben.
Führen Sie gleichzeitig das Tuning durch, um den Host-Controller
anzupassen.
5. Nehmen Sie die Benutzereinstellungen vor und zeichnen Sie diese auf.
Stellen Sie die Parameter nach Bedarf ein und zeichnen Sie alle
Einstellungen für eine spätere Verwendung bei Wartungen auf.
4-9

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4.2. Zusätzliche Einrichtungsverfahren während des Testbetriebs
Bei Konfigurationen mit zwei Geräten, die in den folgenden Abschnitten
näher beschrieben werden, müssen vor Beginn des Testbetriebs
sicherheitstechnische Einrichtungsverfahren durchgeführt werden.
4.2.1. Servomotoren mit Bremsen
Verwenden Sie für vertikale Wellenanwendungen oder für
Anwendungen, bei denen eine externe Kraft auf die Welle wirkt, einen
Servomotor mit Bremse, um eine Drehung aufgrund von Schwerkraft
oder aufgrund einer externen Kraft während eines Spannungsabfalls
zu vermeiden.
Der Servoverstärker verwendet das Bremssperren-Ausgangssignal
(/BK), um den Betrieb der Haltebremse zu steuern, wenn ein
Servomotor mit Bremse verwendet wird.
Vertikale Welle
Servomotor
Welle mit extern angewandter Kraft
Haltebremse
Verhindert, dass
sich der Servomotor
aufgrund von
Schwerkraft dreht.
Externe
Kraft
Servomotor
Hinweis: Um bei Anwendung der Schwerkraft oder einer externen Kraft einen fehlerhaften Betrieb zu
vermeiden, stellen Sie zunächst sicher, dass sowohl der Servomotor als auch die Haltebremse
ordnungsgemäß funktionieren. Wenn beide Geräte korrekt funktionieren, schließen Sie den
Servomotor vollständig an das Gerät an, um den Testbetrieb zu starten.
Die folgende Abbildung zeigt die Verdrahtung eines Servomotors mit
Bremsen. Einzelheiten zur Verdrahtung finden Sie in Abschnitt 5.4.4
Verwendung der Haltebremse.
Spannungsversorgung
Einphasig, 200 V
XtraDrive
U,V,W
Servomotoren mit Bremsen
Drehgeber
M
Drehgeber
Einphasig,
200 V
Netzschütz
CN2
(90 V DC)
Spannungsversorgung für Bremse
LPSE-2H01 (200-V-Eingang)
4-10

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
r
4.2.2. Positioniersteuerung über den Host-Controller
Falls der Positioniersteuerungs-Algorithmus des Host-Controllers
noch nicht eingerichtet oder fertig gestellt wurde, trennen Sie den
Servomotor von dem Gerät, bevor Sie einen Testbetrieb durchführen.
Dadurch wird verhindert, dass der Servomotor außer Kontrolle gerät
und das Gerät beschädigt.
Sollwertdrehzahl
Host–
Controlle
XtraDrive
M
Drehzahlregelung
Servomotor-Testbetrieb
ohne Last
Prüfen Sie den Betrieb des Servomotors wie in der folgenden Tabelle
beschrieben.
Controller-Sollwert Überprüfung Verfahren Beschreibung
Überprüfen Sie die
Motordrehzahl wie
folgt:
• Verwenden Sie die
Drehzahlüberwachung
(Un000) auf der
JOG-Betrieb
(konstanter
Drehzahlsollwerteingang
vom Host- Controller)
Einfache Positionierung
Nachlaufweg
(P-OT und
N-OT verwendet)
Motordrehzahl
Anzahl der
Motorumdrehungen
Prüft ob der
Servomotor die
Drehung stoppt,
wenn P-OT- und NOT-Signale
anliegen.
Bedienkonsole.
• Lassen Sie den
Servomotor bei
niedriger Drehzahl
laufen. Geben Sie
einen
Drehzahlsollwert von
beispielsweise 60
U/min ein, um
festzustellen, ob der
Servomotor eine
Drehung pro Sekunde
macht.
Geben Sie ein
Sollwert-Äquivalent
für ine ServomotorUmdrehung ein und
nehmen Sie eine
Sichtprüfung vor, um
festzustellen, ob die
Welle eine
Umdrehung macht.
Prüfen Sie, ob der
Servomotor stoppt,
wenn während des
Dauerbetriebs des
Servomotors die
P-OT- und N-OTSignale eingegeben
werden.
Überprüfen Sie die
Parametereinstellung in
Pn300, um festzustellen,
ob die
Drehzahlsollwertverstärkung
korrekt ist.
Überprüfen Sie die
Parametereinstellung in
Pn201, um festzustellen,
ob die Anzahl der
Teilungsimpulse korrekt ist.
Überprüfen Sie die
Verdrahtung der P-OT- und
N-OT-Signalleitungen, wenn
der Servomotor nicht stoppt.
4-11

XtraDrive Benutzerhandbuch Kapitel 4: Testbetrieb
4.3. Minimale Parameter und Eingangssignale
Dieser Abschnitt beschreibt die minimalen Parameter und Eingangssignale,
die für einen Testbetrieb erforderlich sind.
4.3.1. Parameter
Weitere Einzelheiten über die Einstellung der Parameter finden Sie
unter 7.1.5 Betrieb im Parametereinstellungsmodus.
Stellen Sie die Spannungsversorgung nach jeder Änderung der
Parameter, außer Pn300, aus. Die Änderung wird erst nach Aus- und
wieder Einschalten der Spannungsversorgung gültig.
Basisparameter
Pn000.1
Basis-Funktionswahlschalter:
Auswahl Steuermodus
Siehe 5.3.5
Drehzahlregelung
Pn300 Drehzahlsollwert Siehe 5.2.1
Pn201 Verwendung des Drehgeber-Signalausgangs Siehe 5.2.3
Positioniersteuerungs
Pn200.0 Positionssollwert Siehe 5.2.2
Pn202
Pn203
Änderung der Servomotor-Drehrichtung
Wenn sich die festgelegte Drehrichtung von der tatsächlichen
Drehrichtung unterscheidet, könnte die Verdrahtung falsch sein.
Überprüfen Sie bei Bedarf die Verdrahtung erneut. Verwenden Sie zum
Umkehren der Drehrichtung den folgenden Parameter.
Pn000.0 Umschalten der Servomotor-Drehrichtung Siehe 5.1.1
4.3.2. Eingangssignale
Durch Einstellung der Eingangssignalauswahlen über Parameter kann
eine externe Beschaltung entfallen.
Signalbezeichnung Stiftnummer Beschreibung
/S-ON Servo EIN CN1-40
P-OT
N-OT
Verwendung der Funktion für das elektronische
Übersetzungsverhältnis (Zähler)
Verwendung der Funktion für das elektronische
Übersetzungsverhältnis (Nenner)
Weitere Einzelheiten zum Ein-
und Ausschalten des Servomotors
finden Sie in Abschnitt 5.5.2.
Vorwärtslauf
gesperrt
Rückwärtslauf
gesperrt
CN1-42
CN1-43
Weitere Informationen zu
Endlagenschaltern finden
Sie in Abschnitt 5.1.2.
Siehe 5.2.5
Siehe 5.2.5
4-12

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5. Parametereinstellungen und Funktionen
5.1. Einstellungen gemäß den Gerätekenndaten ....................................................5-4
5.1.1. Umschalten der Servomotor-Drehrichtung.............................................5-4
5.1.2. Einstellung der Endlagenschalter-Funktion............................................5-5
5.1.3. Drehmomentbegrenzung.........................................................................5-8
5.2. Einstellungen gemäß Host-Controller...........................................................5-12
5.2.1. Drehzahlsollwert...................................................................................5-12
5.2.2. Positionssollwert...................................................................................5-14
5.2.3. Verwendung des Drehgeber-Signalausgangs .......................................5-20
5.2.4. Sequenz-E/A-Signale............................................................................5-23
5.2.5. Verwendung der Funktion für das elektronische
Übersetzungsverhältnis ..........................................................................5-25
5.2.6. Kontakteingang-Drehzahlregelung.......................................................5-29
5.2.7. Verwendung der Drehmomentregelung................................................5-34
5.2.8. Drehmoment-Vorsteuerungsfunktion ...................................................5-40
5.2.9. Drehmomentbegrenzung durch analogen Spannungssollwert..............5-42
5.2.10. Sollwertimpuls-Sperrfunktion (/INHIBIT)...........................................5-44
5.3. Einstellung des Servoverstärkers ..................................................................5-45
5.3.1. Parameter ..............................................................................................5-45
5.3.2. JOG-Drehzahl .......................................................................................5-46
5.3.3. Eingangs-Signalzuordnung...................................................................5-46
5.3.4. Ausgangs-Signalzuordnung ..................................................................5-50
5.3.5. Auswahl Regelungsart ..........................................................................5-52
5.4. Einstellung der Stoppfunktionen...................................................................5-54
5.4.1. Offset-Einstellung.................................................................................5-54
5.4.2. Auswahl Servo AUS-Stoppmodus........................................................5-55
5.4.3. Verwendung der Nullhaltungsfunktion.................................................5-56
5.4.4. Verwendung der Haltebremse...............................................................5-58
5.5. Aufbau einer Schutzsequenz.........................................................................5-61
5.5.1. Verwendung von Servoalarm- und Alarmcode-Ausgängen...................5-61
5.5.2. Verwendung des Servo-EIN-Eingangssignals (/S-ON)........................5-63
5.5.3. Verwendung des „Positionierung abgeschlossen“-Ausgangssignals
(/COIN).................................................................................................5-64
5.5.4. Drehzahlübereinstimmungsausgang (/V-CMP)....................................5-65
5.5.5. Verwendung des Betriebsausgangssignals (/TGON)............................5-67
5.5.6. Verwendung des Servo-bereit-Ausgangssignals (/S-RDY)..................5-68
5.5.7. Verwendung des Warnausgangssignals (/WARN)...............................5-69
5.5.8. Vorgehensweise bei einem Spannungsausfall ......................................5-71
5.6. Auswahl eines Bremswiderstands.................................................................5-72
5.6.1. Externer Bremswiderstand....................................................................5-73
5.6.2. Berechnung der Leistung des Bremswiderstands .................................5-74
5.7. Absolutwert-Drehgeber.................................................................................5-78
5.7.1. Schnittstellenschaltkreis........................................................................5-79
5.7.2. Konfiguration eines Absolutwert-Drehgebers ......................................5-80
5.7.3. Einstellung des Absolutwert-Drehgebers .............................................5-81
5.7.4. Empfangssequenz des Absolutwert-Drehgeber ....................................5-84
5.8. AB-Drehgeber...............................................................................................5-89
5.9. Definition der Anwendereinheiten und Einstellung .....................................5-91
5-1

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.9.1. Positioniersteuerung..............................................................................5-91
5.9.1.1. Definition der Anwendereinheiten für Motion-Profile ............................5-91
5.9.1.2. Positionseinheiten .............................................................................5-91
5.9.1.3. Drehzahleinheiten .............................................................................5-92
5.9.1.4. Beschleunigungseinheiten.................................................................5-93
5.9.1.5. Standardeinstellung für Motion-Profil-Parameter ............................5-94
5.9.1.6. Profil-Drehzahl (Pn2A2, Pn2A3)......................................................5-95
5.9.1.7. Profil-Beschleunigung (Pn2A4, Pn2A5) ..........................................5-95
5.9.1.8. Standardwert S-Kurve (Pn2A6)........................................................5-95
5.9.1.9. Schnellstopp-Verzögerung (Pn2A8, Pn2A9)....................................5-96
5.9.1.10. Fenster Positionierung beendet (Pn2C0) ..........................................5-96
5.9.2. Drehmomentregelung ...........................................................................5-96
5.9.2.1. Drehmomentanstieg (Pn2C1)............................................................5-96
5.9.3. Nullpunktverfahren...............................................................................5-97
5.9.4. Digitale E/A ..........................................................................................5-98
5.9.5. Auto-Tuning..........................................................................................5-99
5.10. Automatischer Ablauf des Benutzerprogramms.......................................5-99
5-2

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Bevor Sie dieses Kapitel lesen
Dieses Kapitel beschreibt die Verwendung der einzelnen
CN1-Steckverbinder-E/A-Signale in dem XtraDrive-Servoverstärker
sowie das Verfahren zur Einstellung der entsprechenden Parameter für
den vorgesehenen Zweck.
Die folgenden Abschnitte dienen als Referenz für dieses Kapitel.
• Liste der CN1-E/A-Signale: Siehe 3.4.3 Bezeichnungen und
Funktionen der E/A-Signale
• CN1-E/A-Signalklemmenzuordnung: Siehe 3.4.2 Liste der
CN1-Klemmen
• Parameterliste: Anhang D Parameterliste.
• Parameter-Einstellungsverfahren: 7.1.5 Betrieb im
Parametereinstellungsmodus
Der CN1-Steckverbinder wird für den Austausch von Signalen mit dem
Host-Controller und externen Stromkreisen verwendet.
Parameterkonfigurationen
Die Parameter setzen sich aus den in der folgenden Tabelle
aufgeführten Typen zusammen. Siehe Anhang D Parameterliste.
Typ Parameter-Nr. Beschreibung
Funktionsauswahlkonstanten
Servoverstärkung und andere
Konstanten
Positioniersteuerungs-Konstanten
Drehzahlregelungskonstanten Pn300 bis Pn308
Drehmomentregelungskonstanten
Sequenzkonstanten
Weitere Pn600 bis Pn601
Pn000 bis Pn007
Pn550 bis Pn551
Pn100 bis
Pn11E
Pn1A0 bis
Pn1C0
Pn200 bis Pn216
Pn2A2 bis
Pn2CB
Pn400 bis
Pn40A
Pn500 bis Pn511
Pn200 bis
Pn2D2
Auswahl der Basis- und Anwendungsfunktionen,
wie z. B. die Regelungsart oder den bei Auftreten
eines Alarms verwendeten Stoppmodus.
Einstellung der numerischen Werte
(Drehzahlregelung)
Einstellung der numerischen Werte
(Positioniersteuerung)
Einstellung der Positioniersteuerungs-Parameter
wie z. B. SollwertimpulseingangsformÜbersetzungsverhältnis und
Anwendungseinstellung.
Einstellung der Drehzahlregelungsparameter
wie z. B. DrehzahlsollwertEingangsverstärkung und SanftanlaufVerzögerungszeit.
Einstellung der Drehmomentregelungsparameter
wie z. B. DrehmomentsollwertEingangsverstärkung und Vorwärts-/RückwärtsDrehmomentgrenzwerte.
Einstellung der Ausgangsbedingungen für alle
Sequenzsignale und Änderung der E/ASignalauswahl und -zuordnung.
Festlegung der Leistung für einen externen
Bremswiderstand und reservierte Konstanten.
Zusatzfunktion-Ausführung Fn000 bis Fn014
Überwachungsmodi
Drehgeberauswahl Pn190 bis Pn192 Drehgebertypauswahl
Un000 bis
Un00D
Ausführung von Zusatzfunktionen wie
z. B. Schrittbetrieb (JOG).
Aktivierung der Drehzahl- und DrehmomentSollwertüberwachung sowie Überwachung des
E/A-Signalstatus (EIN oder AUS).
5-3

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.1. Einstellungen gemäß den Gerätekenndaten
Dieser Abschnitt beschreibt das Verfahren zur Einstellung der Parameter
gemäß der Abmessungen und Leistungskenndaten des verwendeten Geräts.
5.1.1. Umschalten der Servomotor-Drehrichtung
XtraDrive besitzt einen Drehrichtungsumkehrmodus, mit dem die
Drehrichtung des Servomotors ohne neue Verkabelung umgekehrt wird.
Die Vorwärtsdrehrichtung wird in der Standardeinstellung von der Last
aus gesehen als Drehung gegen den Uhrzeigersinn definiert.
Mit Hilfe des Drehrichtungsumkehrmodus kann die Drehrichtung des
Servomotors ohne Änderung anderer Parameter geändert werden. Nur
die Richtung (+, −) der Wellenbewegung wird umgekehrt.
Standardeinstellung Drehrichtungsumkehrmodus
Vorwärtssollwert
Rückwärtssollwert
Drehgeberausgang
ccw
vom XtraDrive
PAO (Phase A)
PBO (Phase B)
Drehgeberausgang
cw
des XtraDrive
PAO (phase A)
PBO (phase B)
Drehgeberausgang
cw
des XtraDrive
PAO (phase A)
PBO (phase B)
Drehgeberausgang
ccw
vom XtraDrive
PAO (Phase A)
PBO (Phase B)
Einstellung der Drehrichtung
Verwenden Sie Parameter Pn000.0.
Parameter Signal Einstellung Regelbetriebsart
Drehzahl-
Pn000.0 Drehrichtungswahl Standardeinstellung: 0
Verwenden Sie die folgenden Einstellungen für die Auswahl der
Drehrichtung des Servomotors.
Einstellung Beschreibung
Die Vorwärtsdrehrichtung wird von der Last aus
0
1
gesehen als Drehung gegen den Uhrzeigersinn
(CCW) definiert.
Die Vorwärtsdrehrichtung wird von der Last aus
gesehen als Drehung im Uhrzeigersinn (CW) definiert.
/Drehmomentregelung,
Positioniersteuerung
(Standardeinstellung)
(Drehrichtungsumkehrmodus)
5-4

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.1.2. Einstellung der Endlagenschalter-Funktion
Mit der Endlagenschalter-Funktion werden bewegliche Teile zum
Stoppen gebracht, wenn diese den zulässigen Bewegungsbereich
überschreiten.
Verwendung der Endlagenschalter-Funktion
Schließen Sie zur Verwendung der Nachlaufweg-Funktion die
nachfolgend angegebenen Eingangssignalklemmen des
Endlagenschalter an die korrekten CN1-Steckverbinderstifte des
Servoverstärkers an.
Eingang Ö P-OT CN1-42
Eingang Ö N-OT CN1-43
Schließen Sie die nachfolgend dargestellten Grenzschalter an, um
Beschädigungen des Geräts während der linearen Bewegung zu
vermeiden.
Rückwärtsdrehrichtungsende
Vorwärtsdrehung gesperrt
(Nachlaufweg vorwärts)
Rückwärtsdrehung gesperrt
(Nachlaufweg rückwärts)
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Vorwärtsdrehrichtungsende
Servomotor
P-OT
N-OT
XtraDrive
CN1-42
CN1-43
Die folgende Tabelle zeigt den Betriebsstatus mit ein- oder
ausgeschaltetem Eingangssignal.
Signal Status Eingangspegel Beschreibung
EIN CN1-42: niedrig
P-OT
AUS CN1-42: hoch
EIN CN1-43: niedrig
N-OT
AUS CN1-43: hoch
Vorwärtsdrehung zulässig
(normaler Betriebsstatus)
Vorwärtsdrehung gesperrt
(Rückwärtsdrehung zulässig)
Rückwärtsdrehung zulässig
(normaler Betriebsstatus)
Rückwärtsdrehung gesperrt
(Vorwärtsdrehung zulässig)
Aktivieren/Deaktivieren der Eingangssignale
Stellen Sie die folgenden Parameter ein, um festzulegen, ob die
Eingangssignale für den Nachlaufweg verwendet werden sollen. Die
Standardeinstellung ist „NICHT VERWENDET“.
Parameter Signal Einstellung Regelbetriebsart
Pn50A.3
Pn50B.0
P-OT Signalzuordnung
(Vorwärtslauf gesperrtEingangssignal)
N-OT Signalzuordnung
(Rückwärtslauf gesperrtEingangssignal)
Standardeinstellung: 8
Standardeinstellung: 8
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
5-5

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Servomotor Stoppmodus für P-OT- und
N-OT-Eingangssignale
Stellen Sie die folgenden Parameter ein, um den Servomotor-Stoppmodus
bei Verwendung der P-OT- und N-OT-Eingangssignale zu spezifizieren.
Spezifizieren Sie den Servomotor-Stoppmodus, wenn eines der
folgenden Signale während des Servomotorbetriebs eingegeben wird.
• Vorwärtslauf gesperrt-Eingang (P-OT, CN1-42)
• Rückwärtslauf gesperrt-Eingang (N-OT, CN1-43)
• Stellen Sie die Parameter gemäß dem Grenzschaltertyp ein
(Schließer oder Öffner).
Parameter Signal Einstellung Beschreibung
Verwendet P-OT-Eingangssignal zur
Vermeidung der Vorwärtsdrehung.
Beispiel: 2
P-OT
Signalzuordnung
Pn50A.3
(Vorwärtslauf
gesperrtEingangssignal)
Standardeinstellung:
8
Beispiel: B
Weitere Optionen der Parameter Pn50A.3 und Pn50B.0 finden Sie in Anhang D.3.
Eingangssignal-Auswahl
N-OT
Signalzuordnung
Pn50B.0
(Rückwärtslauf
gesperrtEingangssignal)
Beispiel: 3
Standardeinstellung:
8
Beispiel: C
Anschlussbeispiel:
Öffnertyp
P-OT
XtraDrive
CN1-42
N-OT
CN1-43
(Vorwärtsdrehung ist gesperrt, wenn
CN1-42 offen ist und zulässig, wenn
CN1-42 auf 0 V gesetzt ist).
Verwendet das P-OT-Eingangssignal
nicht zur Vermeidung der
Vorwärtsdrehung. (Vorwärtsdrehung ist
immer zulässig und hat dieselbe
Wirkung wie ein Kurzschluss von
CN1-42 mit 0 V).
Invertiertes Eingangssignal über
Eingangsklemme CN1-42
Verwendet N-OT-Eingangssignal zur
Vermeidung der Rückwärtsdrehung.
(Rückwärtsdrehung ist gesperrt, wenn
CN1-43 offen ist und zulässig, wenn
CN1-43 auf 0 V gesetzt ist).
Verwendet das N-OT-Eingangssignal
nicht zur Vermeidung der
Rückwärtsdrehung. (Rückwärtsdrehung
ist immer zulässig und hat dieselbe
Wirkung wie ein Kurzschluss von
CN1-43 mit 0 V).
Invertiertes Eingangssignal über
Eingangsklemme CN1-43
COM von 24V
5-6

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Parameter Signal Einstellung Regelbetriebsart
Drehzahl/Drehmomentregelung,
Positioniersteuerung
Pn001.1
NachlaufwegStoppmodus
Standardeinstellung: 0
Nachlaufweg
Pn001.0 = 0
Pn001.1 = 0
Stoppmodus Nach dem Stoppen
Stoppen
mit dynamischer
Bremse
1
2
Auslaufen
bis zum
Stillstand
Auslauf-
Status
Nullhaltung
Verzögerung bis
Pn001.1 = 1 oder 2
zum Stillstand
Auslauf-
Status
Hinweis: Bei der Drehmomentregelung wird der Servomotor unabhängig von der Einstellung von Pn001.1
entweder nach dem Abbremsen oder nach dem Auslaufen bis zum Stillstand (gemäß dem in Pn001.0
eingestellten Stoppmodus) in den Freilaufstatus gesetzt.
Pn001.1Einstellung
0
1
2
Parameter Signal Einstellung Regelbetriebsart
Stoppt den Servomotor wie bei Ausschalten
des Servo (gemäß Pn001.0).
Bremst den Servomotor bis zum Stillstand mit
dem voreingestellten Drehmoment ab und sperrt
den Servomotor dann im Nullhaltungsmodus.
Drehmomenteinstellung: Pn406 Not-HaltDrehmoment
Bremst den Servomotor bis zum Stillstand mit
dem voreingestellten Drehmoment ab und
setzt den Servomotor in den Freilaufstatus.
Drehmomenteinstellung: Pn406 Not-HaltDrehmoment
Pn001.1
0
1
Nachlaufweg-
Stoppmodus
2
Pn406 spezifiziert das für den Nachlaufweg angewandte
Stoppdrehmoment, wenn das Eingangssignal für die gesperrte
Vorwärts- oder Rückwärtsdrehung verwendet wird.
Der Drehmomentgrenzwert wird als Prozentsatz des Nenndrehmoments
spezifiziert.
Parameter Signal Einstellung (%) Regelbetriebsart
Pn406
Not-Halt-Drehmoment
(Gültig wenn Pn001.1
auf 1 oder 2 gesetzt ist)
Bereich: 0% des max.
Drehmoments
Standardeinstellung: 800
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Stoppmodus
Vorwärtslauf
gesperrt-Eingang
P-OT (CN1-42)
Rückwärtslauf
gesperrt-Eingang
N-OT (CN1-43)
Stoppen mit dynamischer Bremse
Auslaufen bis zum Stillstand
Verzögerung bis zum Stillstand
Max. Drehmomenteinstellung
für NOT-AUS
Pn406
5-7

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.1.3. Drehmomentbegrenzung
Der XtraDrive-Servoverstärker begrenzt das Drehmoment wie folgt:
• Level 1: Begrenzung des maximalen Ausgangsdrehmoments, um das
Gerät oder Werkstück zu schützen.
• Level 2: Begrenzung des Drehmoments nachdem der Servomotor das
Gerät an eine festgelegte Position bewegt hat (externe
Drehmomentbegrenzung).
• Level 3: Begrenzung des Ausgangsdrehmoment anstelle der Drehzahl.
• Level 4: Umschaltung zwischen Drehzahl- und
Drehmomentgrenzwert.
Die Anwendung von Level 1 und 2 in der
Drehmomentbegrenzungsfunktion wird nachfolgend beschrieben.
Einstellung Level 1: Interne Drehmomentgrenzwerte
Das maximale Drehmoment ist auf die in den folgenden Parametern
eingestellten Werte begrenzt.
Parameter Signal Einstellung (%) Regelbetriebsart
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Pn402
Pn403
VorwärtsDrehmomentgrenzwert
RückwärtsDrehmomentgrenzwert
Bereich: 0 bis 800
Standardeinstellung: 800
Bereich: 0 bis 800
Standardeinstellung: 800
Stellt die maximalen Drehmoment-Grenzwerte für die Vorwärts- und
Rückwärtsdrehung ein.
Wird verwendet, wenn das Drehmoment aufgrund von
Gerätebedingungen begrenzt werden muss.
Die Drehmomentbegrenzungsfunktion überwacht bei Erreichen des
Grenzwerts das Drehmoment und gibt die in der folgenden Tabelle
aufgeführten Signale aus.
Signal Beschreibung
/CLT
Überwachungsmodus (Un006) Ausgangssignalüberwachung
Wird erzeugt, wenn Pn50F.0 einer Ausgangsklemme von SO1 bis
SO3 zugewiesen ist.
Drehmomentgrenzwerte werden als Prozentsatz des Nenndrehmoments
spezifiziert.
Hinweis: Wenn der Drehmomentgrenzwert auf einen höheren Wert als das maximale Drehmoment des
Servomotors eingestellt ist, dann ist das maximale Drehmoment des Servomotors der Grenzwert.
Anwendungsbeispiel: Geräteschutz
Motordrehzahl
Drehmomentgrenzwert
Ein zu geringer Drehmomentgrenzwert
führt zu einem unzureichenden Drehmoment
während der Beschleunigung/Verzögerung.
Drehmoment
5-8

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Verwendung des /CLT-Signals
Der folgende Abschnitt beschreibt die Verwendung des /CLT Kontaktausgangssignals als Drehmomentgrenzwert-Ausgangssignal.
E/A-Spannungsversorgung
+24 V 0 V
Optokoppler-Ausgang
(je Ausgang)
Maximale Betriebsspannung:
30 V DC
Maximaler Ausgangsstrom:
50 mA DC
XtraDrive
CN1-
CN1-
*1
CLT+
*2
CLT-
Ausgang Ö /CLT CN1-*1 Drehmomentgrenzwertausgang
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Dieses Signal gibt an, ob das Ausgangsdrehmoment (Strom)
des Servomotors begrenzt wird.
Status Bedingungen Beschreibung
Das Ausgangsdrehmoment
des Servomotors wird begrenzt.
(Der interne Drehmomentsollwert ist größer
als die Einstellung des Grenzwerts.)
Das Ausgangsdrehmoment des
Servomotors wird nicht begrenzt.
(Der interne Drehmomentsollwert ist niedriger
als die Einstellung des Grenzwerts.)
EIN
AUS
Der Stromkreis zwischen CN1-1
und 2 ist geschlossen.
CN1-1 ist auf L-Pegel.
Der Stromkreis zwischen CN1-1
und 2 ist offen.
CN1-1 ist auf H-Pegel.
Einstellungen: PN402 (Vorwärts-Drehmomentgrenzwert)
Pn403 (Rückwärts-Drehmomentgrenzwert)
Pn404 (Externer Vorwärts-Drehmomentgrenzwert):
Nur /P-CL-Eingang
Pn405 (Externer Rückwärts-Drehmomentgrenzwert):
Nur /N-CL-Eingang
Bei Verwendung des /CLT-Signals muss der folgende Parameter
für die Auswahl des Ausgangssignals verwendet werden.
Parameter Signal Einstellung Regelbetriebsart
Pn50F Ausgangssignal-Auswahl 2
Standardeinstellung:
0000
Drehzahl/Drehmomentregelung,
Positioniersteuerung
Pn50F.0
/CLT
Drehmoment-
grenzwert-
Erkennung
Ausgangsklemme
CN1-25, 26 (SO1)
CN1-27, 28 (SO2)
CN1-29, 30 (SO3)
Verwenden Sie die folgende Tabelle, um auszuwählen welche Klemme das /CLT-
Signal ausgeben soll.
Parameter Einstellung
0 — —
Pn50F.0
Hinweis: Wenn mehrere Signale demselben Ausgangsstromkreis zugeordnet sind, werden die Daten mit Hilfe
der OR-Logik ausgegeben. Stellen Sie andere Ausgangssignale auf einen anderen Wert als den,
der dem /CLT-Signal zugeordnet ist, damit nur das /CLT-Ausgangssignal verwendet wird.
Siehe 5.3.4 Ausgangs-Signalzuordnung.
1 25 26
2 27 28
3 29 30
Ausgangsklemme (CN1-)
*
1
*
2
5-9

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Einstellung Level 2: Externer Drehmomentgrenzwert
Um die in den Parametern zuvor eingestellten Drehmomentgrenzwerte
(Strom) zu aktivieren, wird ein Kontakteingangssignal verwendet.
Drehmomentgrenzwerte können für die Vorwärts- und Rückwärtsdrehung
separate eingestellt werden.
XtraDrive
/P-CL
CN1-45
/N-CL
CN1-46
Ö Eingang /P-CL CN1-45
Ö Ausgang /N-CL CN1-46
Dies ist der externe Drehmomentgrenzwert (Strom) für die Vorwärtsund Rückwärtsdrehung.
Rückwärtsdrehrichtung
Vorwärtsdrehrichtung
Externer VorwärtsDrehmomentgrenzwert-Eingang
Externer RückwärtsDrehmomentgrenzwert-Eingang
Drehzahl
Drehzahl
Drehzahl
Drehzahl
Drehmoment
Drehmoment
Drehmoment
Drehmoment
Drehmomentgrenzwert
Pn402
Drehmomentgrenzwert
Pn402 oder Pn404
(je nachdem, welcher
Wert kleiner ist)
Drehmomentgrenzwert
Pn403
Drehmomentgrenzwert
Pn403 oder Pn405
(je nachdem, welcher
Wert kleiner ist)
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Überprüfen Sie bei Verwendung dieser Funktion den EingangssignalZuordnungsstatus (siehe 5.3.3 Eingangs-Signalzuordnung.)
Die Standardeinstellungen sind in der folgenden Tabelle aufgeführt.
Signal Signalstatus Anmerkungen Beschreibung
/P-CL
/N-CL
CN1-45 ist auf L-Pegel
wenn EIN
CN1-45 ist auf H-Pegel
wenn AUS
CN1-46 ist auf L-Pegel
wenn EIN
CN1-46 ist auf H-Pegel
wenn AUS
Verwenden Sie den VorwärtsDrehmomentgrenzwert.
Verwenden Sie nicht den VorwärtsDrehmomentgrenzwert. Normaler Betrieb
Verwenden Sie den RückwärtsDrehmomentgrenzwert.
Verwenden Sie nicht den RückwärtsDrehmomentgrenzwert. Normaler Betrieb
Grenzwert Pn404
—
Grenzwert Pn405
—
Bei Begrenzung des Drehmoments werden die folgenden
Ausgangssignale und Überwachungsmethoden verwendet.
Signal Beschreibung
/CLT
Überwachungsmodus (Un006) —
• Un005: Nummern 6 bis 7
(bei tandardeinstellung)
• Un006: Abhängig von den Bedingungen
der Ausgangssignalzuordnung.
Wird erzeugt, wenn Pn50F.0 einer Ausgangsklemme
von SO1 bis SO3 zugewiesen ist.
Siehe 7.1.6 Betrieb im Überwachungsmodus.
—
5-10

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Anwendungsbeispiele:
• Zwangstopp
• Roboter, der ein Werkstück hält
Parameter Signal Einstellung (%) Regelbetriebsart
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Pn404
Pn405
Externer VorwärtsDrehmomentgrenzwert
Externer RückwärtsDrehmomentgrenzwert
Bereich: 0 bis 800
Standardeinstellung: 100
Bereich: 0 bis 800
Standardeinstellung: 100
Stellen Sie die Drehmomentgrenzwerte ein, wenn das Drehmoment
durch einen externen Kontakteingang begrenzt ist.
Signal Beschreibung
/P-CL (CN1-45) Eingang Pn404 Drehmomentgrenzwert angewendet.
/N-CL (CN1-46) Eingang Pn405 Drehmomentgrenzwert angewendet.
Siehe 5.2.9 Drehmomentbegrenzung durch analogen Spannungssollwert.
Verwendung der /P-CL- und /N-CL-Signale
Nachfolgend ist das Verfahren zur Verwendung der /P-CL- und
/N-CL-Signale als Drehmomentgrenzwert-Eingangssignale dargestellt.
E/A-Spannungsversorgung
+24 V
Host-Controller
+24VIN CN1-47
/P-CL
CN1-45
/N-CL CN1-46
XtraDrive
3,3 kΩ
5 mA
Optokoppler
5-11

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.2. Einstellungen gemäß Host-Controller
Dieser Abschnitt beschreibt das Anschlussverfahren eines XtraDriveServoverstärkers an einen Host-Controller sowie das Einstellungsverfahren
der zugehörigen Parameter.
5.2.1. Drehzahlsollwert
Geben Sie den Drehzahlsollwert mit Hilfe des Eingangssignals ein:
Drehzahlsollwerteingang. Da dieses Signal verschiedene Anwendungen
findet, stellen Sie den optimalen Sollwerteingang für das erstellte
System ein.
Drehmomentsollwerteingang
(analoger Spannungseingang)
P
CN1-9
CN1-10
XtraDrive
Drehmomentsollwert
Drehzahlsollwerteingang
(analoger Spannungseingang)
Ö Eingang V-REF CN1-5
Ö Eingang SG CN1-6
Die oben angegebenen Eingänge werden für die Drehzahlregelung
(analoger Sollwert) verwendet. (Pn000.1 = 0, 4, 7, 9, oder A.)
Verdrahtung stets für die normale Drehzahlregelung vornehmen.
Siehe 7.1.6 Betrieb im Überwachungsmodus. Die Motordrehzahl wird
im Verhältnis zur Eingangsspannung zwischen V-REF und SG geregelt.
CN1-5
P
CN1-6
P:
Steht für paarweise verdrillte Kabel.
Drehzahlsollwerteingang Drehzahlregelung
Signalmasse Drehzahlregelung
Motornenndrehzahl
Werksseitige
Einstellung
–8–12
–4
12
8
4
Eingangsspannung (V)
Motornenndrehzahl
Die Steigung wird
in Pn300 eingestellt.
Drehzahlsollwert
Einstellungsbeispiele
Pn300 = 600: Bei dieser Einstellung entspricht 6 V der
Motornenndrehzahl.
Drehzahlsollwert-
eingang
+6V
+1V
-3V
Parameter Pn300 kann zur Änderung des Spannungseingangsbereichs
verwendet werden.
Drehrichtung Motordrehzahl
Vorwärtsdrehrichtung Motornenndrehzahl
Vorwärtsdrehrichtung (1/6) Motornenndrehzahl
Rückwärtsdrehrichtung (1/2) Motornenndrehzahl
5-12
SGMAH-
Servomotor
3000 U/min
500 U/min-1
1500 U/min
-1
-1

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Beispiel für Eingangsschaltkreis
470 Ω, 1/2 W
XtraDrive
+12 V
2 kΩ
T-REF
CN1-9
P
CN1-10
Verwenden Sie für die Verdrahtung des Störschutzes immer paarweise
verdrillte Kabel.
Empfohlener Regelwiderstand: Modell 25HP-10B hergestellt von Sakae
Tsushin Kogyo Co., Ltd.
Schließen Sie bei Verwendung eines Host-Controllers, wie z. B. einen
programmierbaren Controller, für die Positioniersteuerung die
Klemmen V-REF und SG an die Drehzahlsollwert-Ausgangsklemmen
des Host-Controllers an.
Host-Controller
DrehzahlsollwertAusgangsklemmen
RückführungsImpulseingangsklemmen
Impulseingangsklemmen
V-REF
P
P
P
SG
PAO
/PAO
PBO
/PBO
XtraDrive
CN1-5
CN1-6
CN1-33
CN1-34
CN1-35
CN1-36
P: Steht für paarweise verdrillte Kabel.
Stellen Sie Pn300 gemäß der Ausgangsspannungskenndaten des HostControllers ein.
Stellen Sie den Anpassungsfaktor des Drehzahlsollwerteingangs in den
folgenden Parametern ein.
Parameter Signal Einstellung Regelbetriebsart
Pn300
Anpassungsfaktor des
Drehzahlsollwerteingangs
Bereich: 150 bis 3000 x
(0,01V/ Nennmotordrehzahl)
Drehzahlregelung
Stellen Sie den Spannungsbereich für den V-REFDrehzahlsollwerteingang an CN1-5 gemäß dem Host-Controller und
dem Ausgangsbereich des externen Stromkreises ein.
Sollwertddrehzahl (U/min)
Diese Steigung einstellen.
Sollwertspannung (V)
Die Standardeinstellung wird so angepasst, dass ein 6-V-Eingang der
Motornenndrehzahl aller anwendbaren Servomotoren entspricht.
Hinweis: Die maximal zulässige Spannung für den Drehzahlsollwerteingang (zwischen CN1-5 und 6) beträgt ±12 V DC.
5-13

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Verwendung des /P-CON-Signals
Ö Eingang P-CON CN1-41
Mit dem /P-CON-Eingangssignal wird die Drehzahlregelungsart von PI
(proportional-integral) auf P (proportional) umgeschaltet.
Die Proportionalregelung kann auf die folgenden zwei Arten verwendet
werden.
• Wenn eine Funktion durch Senden der Drehzahlsollwerte von dem
Host-Controller an den Servoverstärker durchgeführt wird, kann der
Host-Controller die P-Regelung wahlweise nur für bestimmte
Bedingungen verwenden. Durch dieses Verfahren werden
Überschwingungen verhindert und die Einschwingzeit verkürzt.
• Wenn die PI-Regelungsart bei einem Drehzahlsollwert mit Sollwert-
Offset verwendet wird, könnte der Motor auch bei sehr geringer
Drehzahl drehen und nicht stoppen, selbst wenn 0 als
Drehzahlsollwert festgelegt wird. Verwenden Sie in diesem Fall die
P-Regelungsart, um den Motor zu stoppen.
ProportionalregelungsSollwert
Drehzahlregelung,
Positioniersteuerung
5.2.2. Positionssollwert
Der Sollwertimpuls, Sollwertcode und die Löscheingänge werden für
die Positionssollwerte verwendet. Da dieses Signal auf verschiedene
Arten verwendet werden kann, stellen Sie den optimalen
Sollwerteingang für das erstellte System ein.
Sollwert nach Impulseingang
Die Positioniersteuerung erfolgt durch Eingabe eines Sollwertimpulses
für eine Bewegung.
CN1-7
CN1-8
CN1-11
CN1-12
CN1-15
CN1-14
SollwertImpulseingang
SollwertcodeEingang
Löscheingang
PULS
/PULS
SIGN
/SIGN
CLR
/CLR
P
P
P
XtraDrive
Optokoppler
P: Steht für paarweise verdrillte Kabel.
Eine der folgenden Formen kann für den Positionssollwert verwendet
werden:
• Line-Treiber-Ausgang
• +12-V-Ausgang mit offenem Kollektor
• +5-V-Ausgang mit offenem Kollektor
5-14

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Anschlussbeispiel 1: Line-Treiber-Ausgang
Anwendbarer Leitungstreiber: SN75174, von Texas Instruments Inc.,
MC3487 oder gleichwertig
Host-Controller
Line-Treiber
P
P
P
PULS
/PULS
SIGN
/SIGN
CLR
/CLR
CN1-7
CN1-8
CN1-11
CN1-12
CN1-15
CN1-14
XtraDrive
Optokoppler
150 Ω
Anschlussbeispiel 2: Offener Kollektorausgang
Stellen Sie den Begrenzungswiderstand R1 so ein, dass der
Eingangsstrom I innerhalb des folgenden Bereichs fällt:
Host-Controller
Vcc
TR1
R1
i
PULS
P
/PULS
XtraDrive
Optokoppler
CN1-7
CN1-8
150 Ω
R1
R1
SIGN
CN1-11
P
/SIGN
CN1-12
CLR
CN1-15
P
/CLR
CN1-14
P: Steht für paarweise verdrillte Kabel.
Die folgenden Beispiele zeigen, wie der Pull-Up-Widerstand R1
ausgewählt wird, damit der Eingangsstrom I auf einen Wert zwischen 7
und 15 mA fällt.
Anwendungsbeispiele für V = IR
R1 = 1 kΩ mit V
= 12V ±5 % R1 = 180 Ω mit VCC = 5V ±5 %
CC
Hinweis: Die folgende Tabelle zeigt die Signallogik für einen offenen Kollektorausgang.
Tr1 Ausgangspegel Signallogik
EIN Entspricht Eingang mit hohem Pegel
AUS Entspricht Eingang mit niedrigem
Pegel
5-15

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
r
Dieser Schaltkreis verwendet eine im Servoverstärker integrierte
12-V-Spannungsversorgung. In diesem Fall ist der Eingang nicht
isoliert.
CN1-3
CN1-7
150 Ω
CN1-8
CN1-13
CN1-11
CN1-12
CN1-18
CN1-15
CN1-14
CN1-1
XtraDrive
1 kΩ
+12 V
Optokoppler
Host-Controller
Tr1
EIN: max. 1,5 V
PL1
PULS
ca.
9 mA
/PULS
P
PL2
SIGN
/SIGN
P
PL3
CLR
/CLR
P
P: Steht für paarweise verdrillte Kabel.
Hinweis: Die Störbegrenzung des Eingangssignals wird reduziert, wenn der Sollwertimpuls über einen offenen
Kollektorausgang geliefert wird. Stellen Sie Parameter Pn200.3 auf „1“, wenn die Position aufgrund
von Störungen abweicht.
Auswahl einer Sollwertimpulsform
Verwenden Sie die folgenden Parameter für die Auswahl der
verwendeten Sollwertimpulsform.
Ö Eingang PULS CN1-7 Sollwertimpulseingang Positioniersteuerung
Ö Eingang /PULS CN1-8 Sollwertimpulseingang Positioniersteuerung
Ö Eingang SIGN CN1-11 Sollwertcode-Eingang Positioniersteuerung
Ö Eingang /SIGN CN1-12 Sollwertcode-Eingang Positioniersteuerung
Der Servomotor dreht sich nur bei einem Winkel, der proportional zum
Eingangsimpuls ist.
Parameter Signal Einstellbereich Regelbetriebsart
Pn200.0 Sollwertimpulsform Standardeinstellung: 0 Positioniersteuerung
Stellen Sie den Sollwertimpulsform-Eingang auf den Servoverstärker
von dem Host-Controller.
Hinweis: Diese Funktion ist nur mit einem Impulssollwert nicht mit einem seriellen Befehl möglich.
Positionssollwert-Impuls
XtraDrive
Host–
Controlle
IMPULS
CN1-7
CN1-11
SIGN
Die Sollwertimpulsform kann aus der nachfolgenden Liste ausgewählt
werden. Nehmen Sie die Auswahl entsprechend den Kenndaten
des Host-Controllers vor.
5-16

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
p
(
(
(
)
(
(
(
)
(
(
(
)
(
(
)
(
(
Sollwertim-
pulsform
Pn200.0
Parameter
Multi-
mpuls-
Eingangsi
Vorwärtsdrehrichtungs-
likator
Logik
Sollwert
PULS
0
Vorzeichen +
Impulsfolge
---
CN1-7)
SIGN
CN1-11)
Impuls im
Uhrzeigersinn +
1
Impuls gegen
den
Uhrzeigersinn
2 x1
Zweiphasige
Impulsfolge
3 x2
4
5
6
7 x1
8 x2
9
mit 90°
Phasendifferenz
Vorzeichen +
Impuls-
folge
Impuls im
Uhrzeigersinn +
Impuls gegen
den
Uhrzeigersinn
Zweiphasige
Impulsfolge
mit 90°
Phasendifferenz
---
x4
---
---
x4
PULS
CN1-7)
(
SIGN
Positiv
CN1-11
PULS
(CN1-7)
SIGN
(CN1-11)
PULS
(
CN1-7)
SIGN
CN1-11)
PULS
CN1-7)
SIGN
CN1
Negativ
PULS
(CN1-7)
SIGN
(CN1-11)
-11
Hoch
Niedrig
90°
Niedrig
Hoch
90°
Rückwärtsdrehrichtungs-
Sollwert
PULS
CN1 -7)
(
SIGN
CN1
-11)
PULS
CN1-7)
SIGN
CN1-11
PULS
(CN1-7)
SIGN
(CN1-11)
Niedrig
Niedrig
PULS
CN1 -7)
SIGN
CN1
-11
Hoch
PULS
CN1-7)
SIGN
High
CN1 -11)
PULS
(CN1-7)
SIGN
(CN1-11)
90°
90°
Eingangsimpuls-Multiplikator
8
Anzahl der
ServomotorBewegungsimpulse
PULS
(CN1-7)
SIGN
(CN1-11)
6
4
2
0
Eingangssollwert-Impuls
Die Eingangsimpuls-Multiplikatorfunktion kann verwendet werden,
wenn der Sollwertimpuls eine zweiphasige Impulsfolge mit einer
90°−Phasendifferenz ist. Die Funktion für das elektronische
Übersetzungsverhältnis kann ebenfalls für die Konvertierung von
Eingangsimpulsen verwendet werden.
x4
x2
x1
5-17

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Beispiel für Zeitablauf der E/A-Signalerzeugung
Servo EIN
Endstufensperre
Vorzeichen+
Impulsfolge
CN1-11
CN1-7
+1
+3
EIN
Freigabe
H
H
+2
+1 ≤ 30 ms
+2 ≤ 30 ms
(wenn
Anwenderkonstante
Pn506 auf 0 gesetzt ist)
+3 ≥ 40 ms
PG-Impuls
COIN
CLR
PAO
PBO
H
L
H
L
+4
+5
EIN
+7
EIN
+6
+4,+5,+6 ≤ 2 ms
+7 ≥ 20 µs
Hinweis: 1. Für den zu registrierenden Eingangsimpuls muss das Intervall vom Zeitpunkt der Eingabe des
Servo-EIN-Signals bis zur Eingabe eines Sollwertimpulses mindestens 40 ms betragen.
2. Das Fehlerzähler-Löschsignal muss für mindestens 20µs eingeschaltet sein.
Zeitablauf für Sollwertimpulseingangssignal
Sollwert-
impulsform
Vorzeichen +
Impulsfolgeeingang
(SIGN + PULSSignal)
Maximalsollwertfreq
uenz: 500 kpps
(200 kpps offener
Kollektorausgang)
Impuls im
Uhrzeigersinn und
Impuls gegen den
Uhrzeigersinn
Maximalsollwertfrequenz: 500 kpps
(200 kpps offener
Kollektorausgang)
Zweiphasige
Impulsfolge mit 90°
Phasendifferenz
(Phase A +
Phase B)
Maximalsollwertfre
quenz x1: 500 kpps
(200 kpps offener
Kollektorausgang)
x2: 400 kpps
x4: 200 kpps
SIGN
PULS
Phase A
Phase B
+3
+4
Gegen den
Uhrzeigersinn
Im Uhrzeigersinn
τ
T
Vorwärtssollwert
Phase B-
Leitungen
Phase A um 90˚
+2 +2
+1
+2
Vorwärtssollwert Rückwärtssollwert
Elektrische Kenndaten
+1
τ
T
Vorwärtssoll-
wert
T
+2+1
+5
τ
+3
Rückwärtssollwert
Phase A um 90˚
+7
+6
Rückwärts-
sollwert
Phase B-
Leitungen
+1,+2 ≤ 0,1 µs
+3,+7 ≤ 0,1 µs
+4,+5,+6 ≤ 3 µs
τ ≥ 1,0 µs
(τ/T) x 100 ≤ 50 %
+1,+2 ≤ 0,1µs
+3 > 3µs
τ ≥ 1,0 µs
(τ/T) x 100 ≤ 50 %
+1,+2 ≤ 0,1µs
τ ≥ 1,0 µs
(τ/T) x 100 ≤ 50 %
Bemer-
kungen
Vorzeichen
(SIGN)
H =
Vorwärtssollwert
L =
Rückwärtssollwert
—
Parameter
Pn200.0
wird zum
Umschalten
des
EingangsimpulsMultiplikator
modus
verwendet.
5-18

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
r
(
(
(
A
Fehlerzähler-Löscheingang
Im Folgenden wird das Verfahren zum Löschen des Fehlerzählers
beschrieben.
Ö Eingang CLR CN1-15
Ö Eingang /CLR CN1-14
Folgendes tritt ein, wenn das CLR-Signal auf den H-Pegel gesetzt ist.
• Der Fehlerzähler im Servoverstärker wird auf 0 gesetzt.
• Positionsregelkreissteuerung ist untersagt.
Löscheingang Positioniersteuerung
Löscheingang Positioniersteuerung
XtraDrive
CLR
Löschen
PositionsregelkreisFehlerzähle
Verwenden Sie dieses Signal, um den Fehlerzähler des Host-Controllers
zu löschen, oder wählen Sie die folgende Löschfunktion über Parameter
Pn200.1.
Parameter Signal Einstellbereich Regelbetriebsart
Pn200.1
Signalform für das Löschen
des Fehlerzählers
Standardeinstellung: 0 Positioniersteuerung
Wählen Sie die Impulsform für das Fehlerzähler-Löschsignal CLR
(CN1-15).
Pn200.1-
Einstellung
0
1
2
Der Fehlerzähler wird gelöscht, wenn das CLR-Signal
den H-Pegel besitzt.
Die Fehlerimpulse werden nicht akkumuliert, solange
das Signal den H-Pegel besitzt.
Der Fehlerzähler wird an der steigenden Flanke des
CLR-Signals gelöscht.
Der Fehlerzähler wird nur einmal an der steigenden
Flanke des CLR-Signals gelöscht.
Der Fehlerzähler wird gelöscht, wenn das CLR-Signal
den L-Pegel besitzt.
Die Fehlerimpulse werden nicht akkumuliert, solange
das Signal den L-Pegel besitzt.
Beschreibung Löschzeitablauf
Hoch
CLR
(CN1-15)
CLR
CN1 -15)
An diesem Punkt nur einmal gelöscht
CLR
CN1 -15)
Gelöscht
Hoch
Niedrig
Gelöscht
Der Fehlerzähler wird an der fallenden Flanke des
3
CLR-Signals gelöscht.
Der Fehlerzähler wird nur einmal an der fallenden
Flanke des CLR-Signals gelöscht.
CLR
CN1 -15)
n diesem Punkt nur einmal gelöscht
Niedrig
5-19

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.2.3. Verwendung des Drehgeber-Signalausgangs
Die Drehgeber-Ausgangssignale werden im Servoverstärker aufgeteilt und
können extern ausgegeben werden. Diese Signale können zur Bildung
eines Positionsregelkreises im Host-Controller verwendet werden.
Ausgänge, die hier
beschrieben
werden
XtraDrive
Frequenz-
teilungs-
Stromkreis
CN2
Phase A
Phase B
Phase C
Host-Controller
Drehgeber
Drehgeber
CN1
Der Ausgangsschaltkreis gilt für den Line-Treiber-Ausgang. Schließen Sie
alle Signalleitungen entsprechend dem folgenden Schaltkreisdiagramm an.
XtraDrive
Phase A
Phase B
Phase C
P: Steht für paarweise verdrillte Kabel.
CN1-33
CN1-34
CN1-35
CN1-36 /PBO
CN1-19 PCO
CN1-20 /PCO
0 V
CN1-1
FG
PAO
/PAO
PBO
Abschirmung
P
P
P
Hinweis: Aufteilung bedeutet die Konvertierung einer Eingangsimpulsfolge von dem am Servomotor montierten
Drehgeber gemäß der voreingestellten Impulsdichte sowie Ausgabe des konvertierten Impulses. Die
Einheiten sind Impulse pro Umdrehung (PPR).
Host-Controller
Leitungsempfänger
R2 3
1
65
R
7
R
10 11
9
816
C
0 V
Glättungskondensator
Drosselspule
+5 V
+
-
Phase A
Phase B
Phase C
+5 V
0 V
E/A-Signale
Nachfolgend sind die E/A-Signale beschrieben.
Ausgang Ö PAO CN1-33 Drehgeberausgang Phase A
Ausgang Ö /PAO CN1-34 Drehgeberausgang Phase /A
Ausgang Ö PBO CN1-35 Drehgeberausgang Phase B
Ausgang Ö /PBO CN1-36 Drehgeberausgang Phase /B
Ausgang Ö PCO CN1-19 Drehgeberausgang Phase C
Ausgang Ö /PCO CN1-20 Drehgeberausgang Phase /C
Drehgeber-Teilungssignale sind Ausgänge. Schließen Sie diese Signalklemmen daher
immer an, wenn ein Positionsregelkreis im Host-Controller für die
Positioniersteuerung gebildet wird.
Stellen Sie das Teilungsverhältnis mit Hilfe des folgenden Parameters ein:
Drehgeber-Teilungsverhältnis Pn201
Die Einstellung des Teilungsverhältnisses bezieht sich nicht auf die Einstellung des
Übersetzungsverhältnisses (Pn202 und 203) für die elektronische ÜbersetzungsverhältnisFunktion des Servoverstärkers während der Positioniersteuerung.
5-20
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Ausgangsphasenform
Vorwärtsdrehrichtung
90˚
Rückwärtsdrehrichtung
90˚
t
Ö Eingang SEN CN1-4 SEN Signaleingang Drehzahl-/Drehmomentregelung
Ö Eingang /SEN CN1-2 Signalmasse Drehzahl-/Drehmomentregelung
Ausgang Ö PSO CN1-48 Drehgeberausgang Phase S
Ausgang Ö /PSO CN1-49 Drehgeberausgang Phase /S
Ö Eingang BAT (+) CN1-21
Ö Eingang /BAT (-) CN1-22 Batterie (-)
Batterie (+)
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
t
Verwenden Sie die Signale SEN bis BAT(-) für die Absolutwert-Drehgeber. Weitere
Einzelheiten finden Sie unter Abschnitt 5.7 Absolutwert-Drehgeber.
Ausgang Ö SG CN1-1 Signalmasse
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
SG: Verbinden mit 0 V des Host-Controllers.
WICHTIG
• Wenn Sie das Impulssignal Phase C des Servoverstärkers verwenden, um auf den
Maschinennullpunkt zurückzukehren, lassen Sie den Servomotor mindestens zwei Umdrehungen
ausführen, bevor Sie die Nullpunktrückkehrfunktion starten.
Wenn die Konfiguration des mechanischen Systems ein Drehen des Servomotors vor Starten
der Nullpunktrückkehrfunktion verhindert, führen Sie die Nullpunktrückkehrfunktion mit einer
Servomotordrehzahl von max. 600 U/min durch. Das Impulssignal Phase C kann möglicherweise
nicht korrekt erkannt werden, wenn der Servomotor sich schneller als 600 U/min dreht.
Einstellung der Impulsteilung
Stellen Sie das Impulsteilungsverhältnis mit Hilfe des folgenden
Parameters ein:
Parameter Signal Einstellung (PPR) Regelbetriebsart
Pn201 Impulsgeber-Teilung
Bereich: 0, 17 bis 65535
Standardeinstellung: 2048
Serieller Drehgeber
Stellen Sie die Anzahl der Impulse für die Drehgeber-Ausgangssignale
ein (PAO, /PAO, PBO, /PBO).
XtraDrive
Drehgeber
Dreh-
geber
Serielle
Daten
Frequenz-
teilung
Impulse von dem Servomotor-Drehgeber (PG) werden vor der
Ausgabe durch die voreingestellte Anzahl geteilt.
Mit diesem Parameter wird die Anzahl der Ausgangsimpulse pro
Umdrehung eingestellt. Stellen Sie den Wert mit Hilfe der
Sollwerteinheiten des verwendeten Geräts oder Controllers ein.
Der Einstellbereich variiert je nach verwendetem Drehgeber.
Ausgangsklemmen: PAO (CN1-33)
Phase A
Phase B
Ausgang
Drehzahl/Drehmomentregelung,
Positioniersteuerung
/PAO (CN1-34)
PBO (CN1-35)
/PBO (CN1-36)
5-21

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
×
×
×
Voreingestellter Wert: 16
PAO
PBO
1 Umdrehung
Auflösung
(Bits)
13 2048 16 bis 2048
16
17
Anzahl der
Drehgeberimpulse je
Umdrehung (PPR)
16384 16 bis 16384
Einstellbereich
Hinweis: 1. Stellen Sie die Spannungsversorgung nach jeder Änderung der Parameter einmal
aus und wieder ein.
2. Ein 13-Bit-Drehgeber läuft mit 2048PPR, auch wenn die Einstellung von Pn201
höher als 2049 ist.
A-Quad-B-Drehgeber - Einstellung des Impulsteilungsverhältnisses
65536
Pn
201
PGout
=
Pn
×
4192
×
PGout - Anzahl der erforderlichen Impulse je Umdrehung.
Beispiel: 1000 Impulse je Umdrehung sind mit dem 8000-Impulse-Drehgeber
erforderlich.
8000
100065536
8192
×
201 =
Pn
=
PGout
Counts
6553665536
=
Pn
PGout
4192
=
Hinweis: Wenn ein Verhältnis von 1:1 (für jeden eingehenden Impuls wird ein Ausgangsimpuls
erzeugt) erforderlich ist, stellen Sie Pn201=0.
5-22

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.2.4. Sequenz-E/A-Signale
Sequenz-E/A-Signale werden für die Steuerung des
Servoverstärkerbetriebs eingesetzt. Schließen Sie diese Signalklemmen
nach Bedarf an.
Anschlüsse der Eingangssignale
Schließen Sie die Sequenzeingangssignale wie nachfolgend gezeigt an.
XtraDrive
3,3 kΩ
Optokoppler
Spannungsversorgung
Host-Controller
E/A-
+24VIN
/S-ON
CN1-47
CN1-40
P-OT
N-OT
/P-CL
/N-CL
CN1-41
CN1-42
CN1-43
CN1-44
CN1-45
CN1-46
/P-CON
/ALM-RST
0 V
Hinweis: Stellen Sie eine separate externe E/A-Spannungsversorgung zur Verfügung. Der Servoverstärker
besitzt keine interne 24-V-Spannungsversorgung.
Kenndaten der externen Spannungsversorgung: min. 24 V ±1 VDC, 50 mA
Yaskawa empfiehlt, für die externe Spannungsversorgung denselben Typ auszuwählen wie für die
Ausgangsstromkreise.
Die Funktionszuweisung für Sequenzeingangssignal-Stromkreise kann
geändert werden.
Weitere Einzelheiten finden Sie in Abschnitt 5.3.3 Eingangs-
Signalzuordnung.
Ö Eingang +24VIN CN1-47
Eingang der externen E/ASpannungsversorgung
Drehzahl-/Drehmomentregelung,
Positioniersteuerung
Die Eingangsklemme der externen Spannungsversorgung und die
Sequenzeingangssignale nutzen eine gemeinsame Leitung.
E/A-Spannungsversorgung
+24 V
XtraDrive
CN1-47
Schließen Sie eine externe-E/A-Spannungsversorgung an.
Kontakteingangssignale: /S-ON (CN1-40)
/P-CON (CN1-41)
P-OT (CN1-42)
N-OT (CN1-43)
/ALM-RST (CN1-44)
/P-CL (CN1-45)
/N-CL (CN1-46)
5-23

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Anschlüsse der Ausgangssignale
Schließen Sie die Sequenzausgangssignale wie in der folgenden
Abbildung gezeigt an.
E/A-Spannungsversorgung
+24 V
Host-Controller
0 V
0 V
Optokoppler-Ausgang
je Ausgang
Maximale Betriebsspannung:
30 V DC
Maximaler Ausgangsstrom:
50 mA DC
Offener Kollektorausgang
je Ausgang
Maximale Betriebsspannung:
30 V DC
Maximaler Ausgangsstrom:
200 mA DC
XtraDrive
Optokoppler
CN1
max. 50 mA
max. 50 mA
CN1
max. 20 mA
0 V
31
32
25
26
27
28
29
30
37
38
39
1
ALM+
ALM/V-CMP+
/V-CMP/TGON+
/TGON/S-RDY+
/S-RDY-
ALO1
ALO2
ALO3
SG
Hinweis: Stellen Sie eine separate externe E/A-Spannungsversorgung zur Verfügung. Der Servoverstärker besitzt
keine interne 24-V-Spannungsversorgung. Yaskawa empfiehlt, für die externe Spannungsversorgung
denselben Typ auszuwählen wie für die Eingangsstromkreise.
Die Funktionszuweisung für einige Sequenzausgangssignal-Stromkreise
kann geändert werden.
Weitere Einzelheiten finden Sie in Abschnitt 5.3.4 Ausgangs-
Signalzuordnung.
5-24

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.2.5. Verwendung der Funktion für das elektronische
Übersetzungsverhältnis
Mit der Funktion für das elektronische Übersetzungsverhältnis kann die
Servomotor-Bewegungsdistanz je Eingangssollwertimpuls auf einen
beliebigen Wert gesetzt werden. Die Impulse können von dem HostController, der für die Steuerung verwendet wird, ohne
Berücksichtigung des Übersetzungsverhältnisses des Geräts oder der
Anzahl der Drehgeberimpulse verwendet werden.
Ohne Verwendung der elektronischen
Übersetzungsfunktion
Werkstück
Zur Bewegung eines Werkstückes um 10 mm:
1 Umdrehung beträgt 6 mm. Also
10 ÷ 6 mm = 1,6666 Umdrehungen
2048 x 4 Impulse ist 1 Umdrehung.
Also 1,6666 x 2048 x 4 = 13653
Impulse werden als Sollwert eingegeben.
Die Gleichung muss am Host-Controller
berechnet werden.
Bei Verwendung der elektronischen
Übersetzungsfunktion
Werkstück
Kugelgewindesteigung: 6 mmAnzahl der Drehgeberimpulse: 2048
Die Gerätebedingungen und Sollwerteinheiten
müssen zuvor für die elektronische
Übersetzungsfunktion definiert werden.
Zur Bewegung eines Werkstückes um 10 mm:
Die Sollwerteinheit ist 1
10 mm
= 10000 Impulse
1
µ
m
µ
m. Also
Einstellung des elektronischen Übersetzungsverhältnisses
(für Sollwertimpulse)
Berechnen Sie das elektronische Übersetzungsverhältnis (B/A) anhand
des folgenden Verfahrens und stellen Sie die Werte in Parameter Pn202
und 203 ein.
1. Überprüfen Sie die Kenndaten des Geräts bezüglich des
elektronischen Übersetzungsverhältnisses.
• Verzögerungsrate
• Kugelgewindesteigung
• Scheibendurchmesser
Kugelgewindesteigung
Verzögerungsrate
Drehgebertyp
Inkrementalwertgeber
Absolutwert-Drehgeber
Hinweis: Die Anzahl der Bits, die für die Auflösung des anwendbaren Drehgebers stehen, entspricht nicht der Anzahl
der Drehgeber-Signalimpulse (Phase A und B), die von dem Servoverstärker ausgegeben werden.
Anzahl der Drehgeberimpulse
je Umdrehung (PPR)
13 Bit 2048
16 Bit 16384
17 Bit 32768
16 Bit 16384
17 Bit 32768
5-25

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
2. Legen Sie die zu verwendende Sollwerteinheit fest.
Eine Sollwerteinheit ist die min. Dateneinheit einer
Positionierbaugruppe, die zum Bewegen einer Last verwendet wird
(minimale Sollwerteinheit von dem Host-Controller).
Zur Bewegung eines Tisches in Einheiten von 0,001 mm
Sollwerteinheit: 0,001 mm
Legen Sie die Sollwerteinheit gemäß den
Gerätekenndaten und der Positioniergenauigkeit fest.
Beispiele (in mm):
• Eine Sollwerteinheit kann 0,01 mm oder 0,001 mm usw.
betragen. Eine Sollwerteinheit eines Impulses bewegt die
Last um eine Sollwerteinheit.
• Die Sollwerteinheit beträgt z.B. 1µm
Wenn ein Sollwert von 50000 Einheiten eingegeben wird,
bewegt sich die Last um 50 mm (50000 ⋅ 0,001 mm = 50 mm).
3. Legen Sie die Bewegungsdistanz pro Lastwellenumdrehung in
Sollwerteinheiten fest.
Bewegungsdistanz pro Lastwellenumdrehung =
umdrehungLastwellen pro istanzBewegungsd
nheitSollwertei
• Wenn die Kugelgewindesteigung 5 mm und die Sollwerteinheit
0,001 mm beträgt, dann
20,0
= 5000 (Sollwerteinheiten)
00004,0
Kugelgewinde Scheibentafel Riemen und Scheibe
Lastwelle
1 Umdrehung =
P
P: Steigung
P
Sollwerteinheit
Lastwelle
1 Umdrehung =
360˚
Sollwerteinheit
Lastwelle
1 Umdrehung =
4. Elektronisches Übersetzungsverhältnis wird wie folgt festgelegt:
πD
D: Scheibe
πD
Sollwerteinheit
B
Wenn das Übersetzungsverhältnis des Motors und der Lastwelle als
m
angegeben wird, wobei m die Umdrehung des Motors und n die
n
Umdrehung der Lastwelle ist, dann
B
Elektronisches Übersetzungsverhältnis
Hinweis: Stellen Sie sicher, dass das elektronische Übersetzungsverhältnis der folgenden Bedingung entspricht:
0,01 ≤ Elektronisches Übersetzungsverhältnis
Der Servoverstärker arbeitet fehlerhaft, wenn das elektronische Übersetzungsverhältnis diesen Bereich
überschreitet. Ändern Sie in diesem Fall entweder die Lastkonfiguration oder die Sollwerteinheit.
=
A
4 x mpulseDrehgeberider Anzahl
inheit)(Sollwerte umdrehungLastwellen pro istanzBewegungsd
B
≤ 100
A
x
m
n
A
5-26

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5. Stellen Sie die Parameter ein.
Reduzieren Sie das elektronische Übersetzungsverhältnis so, dass
sowohl A als auch B ganze Zahlenwerte unter 65535 sind, und stellen
Sie anschließend A und B in den entsprechenden Parametern ein.
B
A
Pn202 Elektronisches Übersetzungsverhältnis (Zähler)
Pn203 Elektronisches Übersetzungsverhältnis (Nenner)
Parameter Signal Einstellung Regelbetriebsart
Pn202
Pn203
Elektronisches
Übersetzungsverhältnis
(Zähler)
Elektronisches
Übersetzungsverhältnis
(Nenner)
Bereich: 1 bis 65535
Standardeinstellung: 4
Bereich: 1 bis 65535
Standardeinstellung: 1
Positioniersteuerung
Positioniersteuerung
Stellen Sie das elektronische Übersetzungsverhältnis gemäß den
Kenndaten des Geräts ein.
XtraDrive
Motor
M
Sollwerteingangsimpuls
Elektronische
Übersetzung
B
A
Elektronisches Übersetzungsverhältnis =
B
A
=
202Pn
203Pn
• B = [(Anzahl der Drehgeberimpulse) × 4] × [Motordrehzahl]
• A = [Sollwerteinheiten (Bewegungsdistanz pro Lastwellenumdrehung)]
× [Geschwindigkeit der Lastwellenumdrehung]
Einstellbeispiele für elektronisches Übersetzungsverhältnis
Die folgenden Beispiele zeigen die Einstellungen des elektronischen
Übersetzungsverhältnisses für unterschiedliche Lastmechanismen.
Kugelgewinde
Sollwerteinheit in 0,0001 mm
Lastwelle
13 Bit-Inkrementalwertgeber
Kugelgewindesteigung: 6 mm
Bewegungsdistanz pro Lastwellenumdrehung =
in
24,0
00004,0
Elektronisches Übersetzungsverhältnis
6000
1x 4x 2048
in
=
= 6000
202Pn
203Pn
ellte Werte
B
=
A
Pn202 8192 Voreingest
Pn203 6000
=
Drehteller
=
360
= 3600
°°1,0
B
=
A
Sollwerteinheit: 0,1˚
Lastwelle
Übersetzung: 3:1
Inkrementalwertgeber: 13 Bit
Bewegungsdistanz pro Lastwellenumdrehung =
Elektronisches Übersetzungsverhältnis
3600
3x 4x 2048
=
202Pn
203Pn
llte Werte
Pn202 24576 Voreingeste
Pn203 3600
5-27

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Riemenantrieb
Sollwerteinheit: 0,0254 mm
Lastwelle
Verzögerungsrate:
2,4:1
Stellen Sie ein DrehgeberTeilungsverhältnis ein, das 1024 P/R
für den Absolutwert-Drehgeber entspricht.
Scheibendurchmesser
∅ 100 mm
Bewegungsdistanz pro Lastwellenumdrehung =
= 12566
Elektronisches
B
Übersetzungsverhältnis
=
=
Werte
=
A
196608
12566
12566
20480
=
1309
Pn202 20480 Voreingestellte
Pn203 1309
0010,0
3x 4x 16384
=
Blockdiagram für Regelung
Die folgende Abbildung zeigt ein Blockdiagramm für
die Positioniersteuerung.
inx
41416,3
in
202Pn
203Pn
Sollwertimpuls
DrehgeberSignalausgang
XtraDrive (Positioniersteuerung)
Pn200.0
X1
X2
X3
Pn216
Glättung
Pn202
B
A
Pn203
Pn201
Frequenzteilung
Fehlerzähler
Regelung
Regelung
Stromregelkreis
Servomotor
M
Drehgeber
Drehgeber
5-28

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
r
5.2.6. Kontakteingang-Drehzahlregelung
Diese Funktion bietet eine Methode zur einfachen Drehzahlregelung.
Der Anwender kann zunächst drei unterschiedliche Motordrehzahlen
mit Hilfe der Parameter einstellen und anschließend eine der
Drehzahlen extern über den Kontakteingang auswählen.
/P- CON (/SPD - D)
XtraDrive
CN1-41
Kontakteingang
/P- CL (/SPD - A)
CN1-45
M
Servomotor
/N- CL (/SPD - B)
CN1-46
Drehzahlauswahl
Externe DrehzahlSteller und
Pulsausgänge
sind nicht erforderlich.
DREHZAHL 1
DREHZAHL 2
DREHZAHL 3
Anwenderkonstanten
Pn301
Pn302
Pn303
Der Servomotor dreht sich gemäß
der in der Anwenderkonstanten
eingestellten Drehzahl.
Verwendung der Kontakteingang-Drehzahlregelung
Zur Verwendung der Kontakteingang-Drehzahlregelung befolgen Sie
bitte die Schritte 1 bis 3.
1. Stellen Sie die Kontakteingang-Drehzahlregelung wie nachfolgend
gezeigt ein.
Parameter Signal Einstellung Regelbetriebsart
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Pn000.1
Auswahl
Regelungsart
Standardeinstellung: 0
Die Drehzahl kann über die Kontakteingänge geregelt werden.
Servo arbeitet
mit der intern
eingestellten
Drehzahl
Kontakteingang
DREHZAHL 1
DREHZAHL 2
DREHZAHL 3
M
Servomoto
5-29

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Die Bedeutung folgender Signale ändert sich, wenn die Funktion zur
Kontakteingang-Drehzahlregelung verwendet wird:
Pn000.1
Einstellung
0, 2, 7, 8,
9, A, B, C, D
3, 4, 5, 6
Hinweis: 1. 0: AUS (hoher Signalpegel); 1: EIN (niedriger Signalpegel)
Beschreibung Eingangssignal
/P-CON (CN1-41)
KontakteingangDrehzahlregelung nicht
verwendet.
KontakteingangDrehzahlregelung
verwendet.
2. Die Funktionen /P-CON, /P-CL und /N-CL unterscheiden sich von denen in der obigen Tabelle,
wenn Pn000.1 auf 3, 4, 5 oder 6 gesetzt ist. Die Funktion wird automatisch umgeschaltet, wenn
Pn50A.0 auf 0 gesetzt ist.
3. Die Signale /SPD-D, /SPD-A und /SPD-B können nur verwendet werden, wenn die Signale den
Eingangsstromkreisen zugeordnet sind. Siehe 5.3.3 Eingangs-Signalzuordnung.
/P-CL (CN1-45)
/N-CL (CN1-46)
/P-CON
(/SPD-D)
Drehrichtung
0: Vorwärts
1: Rückwärts
/P-CL
(/SPD-A)
0 0 0 Sollwert etc.
0 1
1 1
1 0
Umschaltung zwischen P- und PIRegelung.
Umschaltung zwischen externer
Vorwärts-Drehmomentgrenzwert EIN
und AUS.
Umschaltung zwischen externer
Rückwärts-Drehmomentgrenzwert EIN
und AUS.
/N-CL
(/SPD-B)
Drehzahl-einstellung
DREHZAHL 1
(Pn301)
DREHZAHL 2
(Pn302)
DREHZAHL 3
(Pn303)
2. Stellen Sie die Motordrehzahlen mit Hilfe der folgenden Parameter ein.
Parameter Signal Einstellung (U/min) Regelbetriebsart
Drehzahl 1
Pn301
Pn302
Pn303
(DREHZAHL 1)
(KontakteingangDrehzahlregelung)
Drehzahl 2
(DREHZAHL 2)
(KontakteingangDrehzahlregelung)
Drehzahl 2
(DREHZAHL 2)
(KontakteingangDrehzahlregelung)
Bereich: 1 bis 10000
Standardeinstellung: 100
Bereich: 1 bis 10000
Standardeinstellung: 200
Bereich: 1 bis 10000
Standardeinstellung: 300
Drehzahlregelung
Drehzahlregelung
Drehzahlregelung
Diese Parameter werden für die Einstellung der Motordrehzahlen
verwendet, wenn die Funktion zur KontakteingangDrehzahlregelung ausgewählt ist. Wenn die Einstellung höher als
die maximale Motordrehzahl des Servomotors ist, dann dreht sich
der Servomotor mit der maximalen Drehzahl.
Hit Hilfe der Drehzahlauswahl-Eingangssignale /P-CL(SPD-A)
(CN1-45) und /N-CL (/SPD-B) (CN1-46) und des DrehrichtungsAuswahlsignals /P-CON (/SPD-D)(CN1-41) kann der Servomotor mit
den voreingestellten Drehzahlen betrieben werden.
5-30

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
3. Stellen Sie die Sanftanlaufzeit ein.
Parameter Signal Einstellung (U/min) Regelbetriebsart
Pn305
Pn306
SanftanlaufBeschleunigungszeit
SanftanlaufVerzögerungszeit
Einstellbereich: 1 bis 10000
Standardeinstellung: 0
Einstellbereich: 1 bis 10000
Standardeinstellung: 0
Drehzahlregelung
Drehzahlregelung
Der interne Drehzahlsollwert des Servoverstärkers regelt die Drehzahl
unter Berücksichtigung dieser Beschleunigungseinstellungen.
Drehzahlsollwert
Sanftanlauf
Max. Drehzahl
Interner
Drehzahlsollwert
des XtraDrive
Pn305: Stellt dieses Zeitintervall ein.
Höchstgeschwindigkeit
Pn306: Stellt dieses Zeitintervall ein.
Eine reibungslose Drehzahlregelung kann durch Eingabe eines
progressiven Drehzahlsollwerts oder durch Verwendung einer
Kontakteingang-Drehzahlregelung durchgeführt werden. Stellen
Sie alle Konstanten für die normale Drehzahlregelung auf 0.
Stellen Sie alle Parameter auf die folgenden Zeitintervalle ein.
• Pn305: Zeitintervall vom Zeitpunkt, wenn der Servomotor
startet bis er die maximale Drehzahl erreicht hat.
• Pn306: Zeitintervall vom Zeitpunkt, wenn der Servomotor die
maximale Drehzahl erreicht bis zu Stoppen.
Betrieb durch die Kontakteingang-Drehzahlregelung
Nachfolgend wird der Betrieb durch die KontakteingangDrehzahlregelung beschrieben.
Start und Stopp
Die folgenden Eingangssignale werden zum Starten und Stoppen des
Servomotors verwendet.
Drehzahlauswahl 1
Ö Eingang /P-CL CN1-45
Ö Eingang /N-CL CN1-46
Hinweis: Die Positioniersteuerung wird in diesem Fall nur von dem Impulssollwert und nicht von dem seriellen
Befehl verwendet.
(Externer VorwärtsDrehmomentgrenzwert-Eingang)
Drehzahlauswahl 2
(Externer RückwärtsDrehmomentgrenzwert-Eingang)
5-31
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
Verwenden Sie bei Verwendung der Kontakteingang-Drehzahlregelung
die folgende Tabelle.
Kontaktsignal Parameter
/P-CON
(/SPD-D)
- 0 0
Drehrichtun
g
0: Vorwärts
1:
Rückwärts
Hinweis: 1. 0: AUS (hoher Signalpegel); 1: EIN (niedriger Signalpegel)
2. Die durch einen horizontalen Balken gekennzeichneten Eingangssignale sind optional.
/P-CL
(/SPD-A)
0 1 DREHZAHL 1 (Pn301)
1 1 DREHZAHL 2 (Pn302)
1 0
/N-CL
(/SPD-B)
Pn000.1
3
4
5
6
3, 4, 5, 6,
Allgemein
Ausgewählte Drehzahl
Wird durch einen internen
Drehzahlsollwert von 0
gestoppt.
DrehzahlsollwertAnalogeingang (V-REF)
Impulssollwerteingang
(Positioniersteuerung)
DrehmomentsollwertAnalogeingang
(Drehmomentregelung)
DREHZAHL 3 (Pn303)
Wenn die Kontakteingang-Drehzahlregelung nicht verwendet wird,
werden die Eingangssignale als externe Drehmomentgrenzwerteingänge
verwendet.
Hinweis: Die Funktion der Kontakteingang-Drehzahlregelung wird nur verwendet, wenn die Signale /SPD-D,
/SPD-A und /SPD-B zugeordnet sind.
Auswahl der Drehrichtung
Das Eingangssignal /P-CON(/SPD-D) wird verwendet, um die
Drehrichtung des Servomotors festzulegen.
Drehzahlauswahl 1
Ö Eingang /P-CON CN1-41
(Externer VorwärtsDrehmomentgrenzwert-Eingang)
• Bei Verwendung der Kontakteingang-Drehzahlregelung legt das
Signal /P-CON (/SPD-D) die Drehrichtung des Servomotors fest.
/P-CON (/SPD-D)
Eingangspegel
0 Vorwärtsdrehrichtung
1 Rückwärtsdrehrichtung
Hinweis: 0: AUS (hoher Signalpegel); 1: EIN (niedriger Signalpegel)
Signallogik
Drehzahl-/
Drehmomentregelung,
Positioniersteuerung
• Wenn die Kontakteingang-Drehzahlregelung nicht verwendet wird,
wird das Signal /P-CON zum Umschalten der Proportionalregelung,
Nullhaltung und der Drehmoment-/Drehzahlregelung verwendet.
• Die Positioniersteuerung wird in diesem Fall nur von dem
Impulssollwert und nicht von dem seriellen Befehl verwendet.
5-32

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
/
Beispiel für den Betrieb der Kontakteingang-
Drehzahlregelung
Das nachfolgende Beispiel beschreibt den Betrieb durch die
Kontakteingang-Drehzahlregelung. Mit der Sanftanlauffunktion wird
der Ruck bei Änderung der Drehzahl reduziert.
Motordrehzahl
+DREHZAHL 3
+DREHZAHL 2
+DREHZAHL 1
-DREHZAHL 1
-DREHZAHL 2
-DREHZAHL 3
/P-CL(/SPD-A)
/N-CL (SPD-B)
P-CON (SPD-D)
Drehzahl 1
Stopp
0
AUS AUS
AUS
EIN
Drehzahl 2
EIN
EIN EIN EIN
Drehzahl 3
Stellen Sie die Beschleunigung
und Verzögerung in Pn305
und Pn306 ein (Sanftanlaufzeiten).
Stopp
Drehzahl 1
Drehzahl 2
EIN EIN
EIN EIN EIN
AUS
AUSAUS
AUS
EIN EIN
AUS AUS AUS
Stopp
Drehzahl 3
AUS
AUS AUS
AUS AUS
Hinweis: Die Sanftanlauffunktion ist nur verfügbar, wenn die Kontakteingang-Drehzahlregelung verwendet wird
und Pn000.1 auf 5 gesetzt ist. Sie ist nicht bei Verwendung eines Impulssollwerteingangs verfügbar.
Wenn die Kontakteingang-Drehzahlregelung auf den Impulssollwert-Eingangsmodus umgeschaltet wird
und der Servomotor mit Drehzahl 1, Drehzahl 2 oder Drehzahl 3 betrieben wird, empfängt der
Servoverstärker kein Sollwertimpuls, bis das Positionierung abgeschlossen-Signal (/COIN) ausgegeben
wird. Starten Sie immer die Impulssollwertausgabe vom Host-Controller, nachdem ein Positionierung
abgeschlossen-Signal vom Servoverstärker ausgegeben wurde.
Signalerzeugungszeit für Positioniersteuerung
Motordrehzahl
0 U/min
/COIN
Sollwertimpuls
t1 t1
/P-CL(/SPD-A)
/N-CL(/SPD-B)
Ausgewählte Drehzahl
Hinweis: 1. Die obige Abbildung zeigt das Zeitverhalten der Signalerzeugung bei Verwendung der
Sanftanlauffunktion.
2. Der Wert von t1 wird nicht durch die Verwendung der Sanftanlauffunktion beeinflusst. Eine
AUS EIN
EIN
Drehzahl 1 Drehzahl 2 Drehzahl 3 Impulssollwert Drehzahl 1
max. Verzögerung von 3 ms tritt ein, wenn das Signal /PC-L(/SPD-A) oder /N-CL(/SPD-B)
ausgelesen wird.
EIN AUS
EIN AUS
AUS EIN
AUS
t1 > 2 ms
5-33

XtraDrive Benutzerhandbuch Kapitel 5: Parametereinstellungen und Funktionen
5.2.7. Verwendung der Drehmomentregelung
Der XtraDrive-Servoverstärker begrenzt das Drehmoment wie
nachfolgend beschrieben.
• Level 1: Begrenzung des maximalen Ausgangsdrehmoments, um
das Gerät oder Werkstück zu schützen.
• Level 2: Begrenzung des Drehmoments nachdem der Servomotor
das Gerät an eine festgelegte Position bewegt hat
(externe Drehmomentbegrenzung).
• Level 3: Regelung des Drehmomentausgangs anstelle des
Drehzahlausgangs.
• Level 4: Umschaltung zwischen Drehzahl- und
Drehmomentregelung.
Nachfolgend wird die Verwendung von Level 3 und 3 in der
Drehmomentregelung beschrieben.
Auswahl der Drehmomentregelung
Stellen Sie die folgenden Parameter ein, um die in Level 3 und 4
beschriebene Regelungsart auszuwählen.
Parameter Signal Einstellung Regelbetriebsart
Drehzahl/Drehmomentregelung,
Positioniersteuerung
Pn000.1
Auswahl der
Regelungsart
Standardeinstellung: 0
Weitere Erklärungen zu den Einstellungen finden Sie in Anhang D.2
Schalter.
Für die Regelung des Drehmoments wird vom Host-Controller ein
Drehmomentsollwert an den Servoverstärker übertragen.
5-34
 Loading...
Loading...