

Page 1

VARISPEED V7 IP65
Inverter compatto con controllo vettoriale sensorless
MANUALE DELL'OPERATORE
Manuale No.
I161E-IT-01
Page 2
PREFAZIONE
Il modello V7 IP65 di Omron Yaskawa Motion Control (qui di seguito
denominata OYMC) è un inverter compatto e semplice per un montaggio a parete diretto, con una copertura altamente protettiva, facile
da utilizzare come un contattore. Questo manuale di istruzioni
descrive l'installazione, la manutenzione, l'ispezione, la diagnostica e
le specifiche di V7 IP65. Leggere attentamente il manuale di istruzioni prima di utilizzare il prodotto.
OMRON YASKAWA MOTION CONTROL
Precauzioni generali
• In alcune delle illustrazioni all'interno del manuale, il prodotto viene
rappresentato con le schermature o i coperchi di protezione rimossi
per rappresentare con maggiore chiarezza i dettagli. Prima di
utilizzare il prodotto, accertarsi di sostituire tutti i coperchi e le
schermature.
• Al manuale possono essere apportate modifiche in qualsiasi
momento per riflettere migliorie, aggiornamenti o modifiche del
prodotto.
Eventuali modifiche vengono indicate mediante una revisione del
numero di manuale.
• Per ordinare una copia di questo manuale, o se la propria copia è
danneggiata o è andata perduta, rivolgersi al proprio rappresentante
OMRON.
• OMRON YASKAWA non è responsabile per modifiche apportate al
prodotto dall'utente, in quanto tali alterazioni annullano la garanzia.
1
Page 3
INDICAZIONI PER LE PRECAUZIONI DI SICUREZZA
Leggere attentamente il manuale di istruzioni prima di installare, utilizzare, effettuare la manutenzione o ispezionare il modello V7 IP65. Nel
presente manuale, le precauzioni di sicurezza vengono classificate come
pericoli o avvertenze e vengono indicate come riportato di seguito.
AVVERTENZA
Indica una situazione di potenziale pericolo che, se non evitata, può
essere causa di lesioni gravi o mortali.
ATTENZIONE
Indica una situazione di potenziale pericolo che, se non evitata, può
essere causa di lesioni non gravi a persone o danni all'apparecchiatura.
Questa indicazione può essere anche utilizzata per avvertire sulle azioni
pericolose.
Persino gli elementi classificati come avvertenze potrebbero causare
gravi incidenti in determinate situazioni. Attenersi sempre a queste
importanti precauzioni.
: Indica un'informazione per garantire un funzionamento
NOTA
appropriato.
PRECAUZIONI PER LA MARCHIATURA CE
• Con i terminali del circuito di comando viene fornito solo un
isolamento di base per la conformità ai requisiti di classe di
protezione 1 e categoria di sovratensione II.
Il prodotto finale potrebbe richiedere un isolamento aggiuntivo per
essere conforme allo standard CE.
• Per gli inverter di classe 400 V, accertarsi di mettere a terra la fase
neutra dell'alimentazione per garantire la conformità allo standard
CE.
2
Page 4
RICEZIONE DEL PRODOTTO
ATTENZIONE
• Non installare o utilizzare l'inverter se è danneggiato o
mancano dei componenti.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni o danni all'apparecchiatura.
INSTALLAZIONE
ATTENZIONE
• Installare l'inverter su materiale non infiammabile
(ad esempio metallo).
La mancata osservanza di questa avvertenza potrebbe
provocare un incendio.
• Durante il montaggio degli inverter, accertarsi che la
temperatura ambiente non superi i 40 °C (105 °F)
Un surriscaldamento potrebbe provocare un incendio o
danneggiare l'inverter.
• Il V7 IP65 genera calore. Per un raffreddamento efficace,
installarlo in verticale.
Fare riferimento alla figura in Scelta della posizione di
montaggio dell'inverter a pagina 24.
(Pagina rif.)
18
(Pagina rif.)
23
23
24
3
Page 5
CABLAGGIO
AVVERTENZA
• Eseguire il cablaggio solo dopo aver verificato che non sia
presente alimentazione.
La mancata osservanza di questa avvertenza implica il
rischio di scosse elettriche e potrebbe provocare un
incendio.
• Il cablaggio deve essere eseguito solo da personale
qualificato.
La mancata osservanza di questa avvertenza può
generare scosse elettriche o provocare un incendio.
• Verificare con attenzione il cablaggio del circuito di arresto
di emergenza prima di avviare il funzionamento.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Collegare sempre a terra il terminale di messa a terra
in base alle normative locali.
La mancata osservanza di questa avvertenza può
generare scosse elettriche o provocare un incendio.
• L'attivazione dell'alimentazione in concomitanza con un
segnale di comando di marcia avanti o indietro causa
l'avvio automatico del motore.
Attivare l'alimentazione solo dopo aver verificato che il
segnale RUN è disattivato.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Se è impostata la sequenza a 3 fili, non eseguire cablaggi
per il circuito di comando a meno che non sia stato
impostato il parametro del terminale di ingresso
multifunzione.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
(Pagina rif.)
27
27
27
32
35
113
4
Page 6
ATTENZIONE
• Verificare che la tensione nominale dell'inverter
corrisponda alla tensione dell'alimentazione c.a.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni fisiche o provocare un incendio.
• Non eseguire test per verificare la tensione di resistenza
sull'inverter.
L'esecuzione di tali test potrebbe danneggiare componenti
dei semiconduttori.
• Per collegare una resistenza o un circuito di frenatura,
seguire la procedura descritta all'interno del presente
manuale.
Un collegamento errato può provocare un incendio.
• Serrare sempre le viti dei terminali del circuito principale e
di comando. La mancata osservanza di questa avvertenza
potrebbe causare malfunzionamenti o provocare danni o
incendi.
• Non collegare mai l'alimentazione del circuito principale
c.a. ai terminali di uscita U/T1, V/T2, W/T3, B1, B2, -,
+1, o +2. L'inverter verrà danneggiato e la garanzia
annullata.
• Non collegare o scollegare fili o connettori mentre i circuiti
sono alimentati.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Non verificare segnali durante il funzionamento.
Questa operazione potrebbe danneggiare la macchina o
l'inverter.
• Se si desidera poter memorizzare una costante mediante
un comando di invio, accertarsi di avere adottato le misure
necessarie per eseguire un arresto di emergenza
utilizzando i terminali esterni.
Un ritardo nella risposta potrebbe causare lesioni o danni
alla macchina.
(Pagina rif.)
27
27
32
27
27
27
27
159
5
Page 7
FUNZIONAMENTO
AVVERTENZA
• Attivare l'alimentazione di ingresso solo dopo aver verificato
la presenza della console di programmazione o del coperchio opzionale. Non rimuovere la console di programmazione o i coperchi in presenza di corrente. La mancata
osservanza di questa avvertenza implica il rischio di scosse
elettriche.
• Non utilizzare mai la console di programmazione o i DIP
switch con le mani bagnate.
La mancata osservanza di questa avvertenza implica il
rischio di scosse elettriche.
• Non toccare mai i terminali in presenza di corrente, anche
se l'inverter è in fase di arresto.
La mancata osservanza di questa avvertenza implica il
rischio di scosse elettriche.
• Se la funzione di ripresa in caso di errore è selezionata,
mantenersi a distanza dall'inverter e dal carico, in quanto
l'inverter potrebbe ripartire improvvisamente dopo un arresto (progettare il sistema affinché garantisca la sicurezza
anche se l'inverter viene riavviato). La mancanza osservanza di questa avvertenzapuò essere causa di lesioni.
• Se l'inverter è configurato in modo che il funzionamento
continua dopo il ripristino dell'alimentazione, mantenersi a
distanza dall'inverter e dal carico, in quanto l'inverter
potrebbe ripartire improvvisamente dopo un arresto (progettare il sistema affinché garantisca la sicurezza anche se
l'inverter viene riavviato). La mancanza osservanza di questa avvertenzapuò essere causa di lesioni.
• Se l'inverter è configurato in modo da disabilitare il tasto
STOP della console di programmazione, installare un
pulsante di arresto di emergenza separato. La mancata
osservanza di questa avvertenza potrebbe essere causa di
lesioni.
6
(Pagina rif.)
36
36
36
83
78
97
Page 8
AVVERTENZA
• Poiché il reset di un allarme mentre il segnale di
funzionamento è ON riavvia automaticamente l'inverter,
eseguire il reset di un allarme solo dopo aver verificato che
il segnale di funzionamento è OFF.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Se è impostata la sequenza a 3 fili, non eseguire cablaggi
per il circuito di comando a meno che non sia stato
impostato il parametro del terminale di ingresso
multifunzione.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• L'impostazione n001=5 consente la ricezione di un
comando di marcia anche durante la modifica di una constante. In tal caso, ad esempio durante una marcia di prova,
accertarsi di osservare tutte le precauzioni di sicurezza.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
ATTENZIONE
• Non toccare mai il dissipatore di calore perché potrebbe
essere molto caldo.
La mancata osservanza di questa avvertenza potrebbe
causare gravi bruciature al corpo.
• È facile passare da un funzionamento a bassa velocità a un
funzionamento ad alta velocità. Verificare la gamma di
utilizzo sicuro del motore e della macchina prima del
funzionamento.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni o danni alla macchina.
(Pagina rif.)
35
113
45, 51
(Pagina rif.)
36
36
7
Page 9
ATTENZIONE
• Se necessario, installare un freno di stazionamento
separato.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Se si utilizza l'inverter con un elevatore, adottare le misure
di sicurezza necessarie per impedirne la caduta.
La mancata osservanza di questa avvertenza potrebbe
essere causa di lesioni.
• Non verificare segnali durante il funzionamento.
Questa operazione potrebbe danneggiare la macchina o
l'inverter.
• Tutte le costanti sono state impostate nell'inverter sui valori
di fabbrica. Non modificare le impostazioni se non
strettamente necessario.
L'inverter potrebbe danneggiarsi.
(Pagina rif.)
36
191
36
36
8
Page 10
MANUTENZIONE E ISPEZIONE
AVVERTENZA
• Non toccare mai i terminali ad alta tensione
sull'inverter.
La mancata osservanza di questa avvertenza implica
il rischio di scosse elettriche.
• Scollegare tutte le fonti di alimentazione prima di
eseguire interventi di manutenzione o ispezione,
quindi attendere almeno un minuto. Per gli inverter di
classe 400 V, verificare che tutte le spie siano spente
prima di procedere.
Se le spie non sono spente, i condensatori
potrebbero essere ancora carichi e quindi pericolosi.
• Non effettuare test di resistenza alla tensione su
nessun componente del V7 IP65.
Essendo un dispositivo elettronico che utilizza
semiconduttori, l'inverter non deve essere esposto ad
alte tensioni.
• La manutenzione, l'ispezione o la sostituzione di
componenti deve essere eseguita solo da personale
autorizzato.
Rimuovere qualsiasi oggetto metallico (orologi,
braccialetti e così via) prima di incominciare a
lavorare.
(Utilizzare strumenti con isolante per evitare le
scosse elettriche.)
La mancata osservanza di queste avvertenze implica
il rischio di scosse elettriche.
(Pagina rif.)
196
196
196
196
9
Page 11
ATTENZIONE
• La PCB di controllo utilizza circuiti integrati CMOS.
Non toccare i componenti CMOS.
Tali componenti possono essere facilmente
danneggiati da scariche elettrostatiche.
• Non collegare o scollegare fili, connettori o la ventola
di raffreddamento mentre il circuito è alimentato.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
ALTRO
AVVERTENZA
• Non modificare il prodotto in nessun caso.
La mancata osservanza di questa avvertenza implica il rischio di
scosse elettriche, potrebbe essere causa di lesioni e annulla la
garanzia.
ATTENZIONE
• Non esporre l'inverter a gas alogeni, quali miscele contenenti fluoro,
cloro, bromo o iodio, nemmeno durante il trasporto o l'installazione.
La mancata osservanza di questa avvertenza potrebbe danneggiare
l'inverter o bruciare componenti interni.
(Pagina rif.)
196
196
10
Page 12
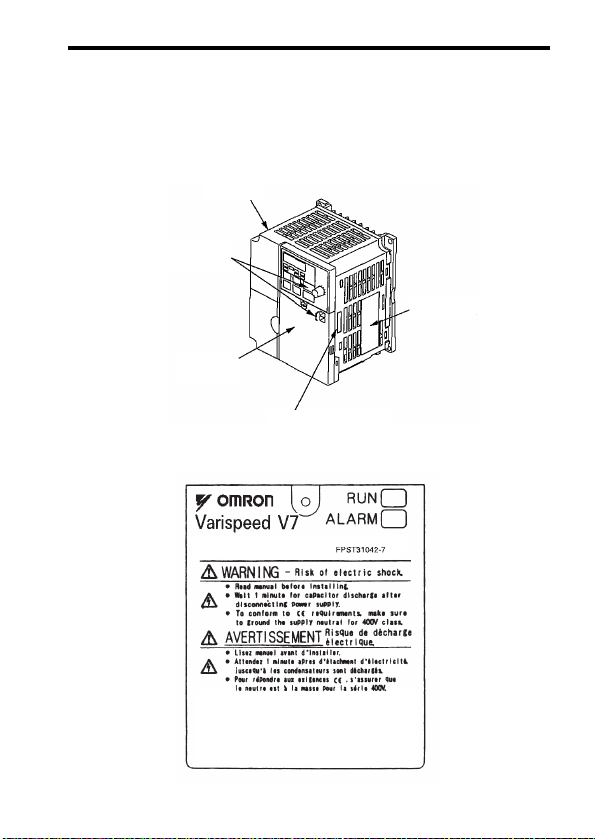
ETICHETTA DI AVVISO
FPST31042-74
8
FPST31042-8
Una etichetta di avviso è applicata sul coperchio frontale dell'inverter,
come illustrato di seguito. Per maneggiare l'inverter, seguire le indicazioni
di avvertenza.
Custodia in plastica
Spie di stato
Targa
Posizione delle
etichette di avviso
Marchio di certificazione
Etichette di avviso
FPST31042-
11
Page 13

12
Page 14

SOMMARIO
INDICAZIONI PER LE PRECAUZIONI
DI SICUREZZA - - - - - - - - - - - - - - - - - - - - - - - - - - 2
Ricezione del prodotto - - - - - - - - - - - - - - - - - - - - 18
Controllo della targa - - - - - - - - - - - - - - - - - - - - - - 19
Identificazione dei componenti - - - - - - - - - - - - - - 20
Montaggio - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 23
Scelta della posizione di montaggio dell'inverter - - - - - - - - - - - - 23
Dimensioni di montaggio - - - - - - - - - - - - - - - - - - - 24
Cablaggio - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 27
Dimensioni dei cavi e delle viti dei terminali - - - - - - - - - - - - - - - - 29
Cablaggio del circuiti principali - - - - - - - - - - - - - - - - - - - - - - - - - 32
Cablaggio dei circuiti di comando - - - - - - - - - - - - - - - - - - - - - - - 32
Ispezione del cablaggio - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 35
Funzionamento dell'inverter - - - - - - - - - - - - - - - - 36
Marcia di prova - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 37
Selezione della direzione di rotazione - - - - - - - - - - - - - - - - - - - - 40
Punti di controllo del funzionamento - - - - - - - - - - - - - - - - - - - - - 40
Funzionamento della console di programmazione - - - - - - - - - - - 41
Descrizione delle spie di stato - - - - - - - - - - - - - - - - - - - - - - - - - 42
Descrizione delle spie di funzione - - - - - - - - - - - - - - - - - - - - - - - 44
MNTR Monitoraggio multifunzione - - - - - - - - - - - - - - - - - - - - - - 46
Stato terminali di ingresso/uscita - - - - - - - - - - - - - - - - - - - - - - - 48
Visualizzazione errore ricezione dati - - - - - - - - - - - - - - - - - - - - - 48
Caratteristiche di programmazione - - - - - - - - - - - 50
Hardware - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
Software (Costante) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 50
Inizializzazione e impostazione costanti - - - - - - - - - - - - - - - - - - 51
Inizializzazione/selezione costanti (n001) - - - - - - - - - - - - - - - - - 51
13
Page 15
Uso della modalità di controllo V/f - - - - - - - - - - - - - - - - - - - - - - 53
Regolazione della coppia in base all'applicazione - - - - - - - - - - - 53
Uso della modalità di controllo vettoriale - - - - - - - - - - - - - - - - - 56
Precauzioni per l'applicazione del controllo vettoriale
della tensione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 56
Calcolo della costante del motore - - - - - - - - - - - - - - - - - - - - - - 57
Caratteristica V/f durante il controllo vettoriale - - - - - - - - - - - - - 58
Passaggio alla modalità LOCALE/REMOTA - - - - - - - - - - - - - - - 59
Come selezionare la modalità LOCALE/REMOTA - - - - - - - - - - - 60
Selezione dei comandi di marcia/arresto - - - - - - - - - - - - - - - - - 60
Modalità LOCALE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 60
Modalità REMOTA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 61
Funzionamento (comandi di marcia/arresto)
tramite comunicazione - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 62
Selezione della frequenza di riferimento - - - - - - - - - - - - - - - - - - 62
Modalità LOCALE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 62
Modalità REMOTA - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 63
Impostazione condizioni di funzionamento - - - - - - - - - - - - - - - - 64
Selezione autotuning (n139) - - - - - - - - - - - - - - - - - - - - - - - - - - 64
Marcia indietro inibita (n006) - - - - - - - - - - - - - - - - - - - - - - - - - - 73
Selezione multivelocità - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 73
Funzionamento a bassa velocità - - - - - - - - - - - - - - - - - - - - - - - 74
Regolazione del segnale di impostazione velocità - - - - - - - - - - - 75
Regolazione dei limiti inferiori e superiori della frequenza - - - - - 76
Uso di quattro tempi di accelerazione/decelerazione - - - - - - - - - 76
Metodo inerziale dopo caduta di tensione momentanea (n081) - 78
Selezione curva a S (n023) - - - - - - - - - - - - - - - - - - - - - - - - - - - 79
Rilevamento coppia - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 80
Livello di rilevamento frequenza (n095) - - - - - - - - - - - - - - - - - - 82
Frequenza di salto (n083 … n086) - - - - - - - - - - - - - - - - - - - - - - 83
Funzionamento riavvio automatico (n082) - - - - - - - - - - - - - - - - 83
Selezione offset della frequenza (n146) - - - - - - - - - - - - - - - - - - 84
Azionamento di un motore con movimento di inerzia
senza scatti - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 87
Mantenimento temporaneo accelerazione/decelerazione - - - - - - 88
Monitoraggio analogico esterno (n066) - - - - - - - - - - - - - - - - - - 89
Taratura frequenzimetro o amperometro (n067) - - - - - - - - - - - - 90
Uso dell'uscita analogica come uscita a treno di impulsi (n065) - 91
Selezione frequenza portante (n080)14 kHz max. - - - - - - - - - - - 93
Selezione tasto Stop console di programmazione (n007) - - - - - - 97
Selezione del secondo motore - - - - - - - - - - - - - - - - - - - - - - - - 98
Selezione del metodo di arresto - - - - - - - - - - - - - - - - - - - - - - -106
14
Page 16

Selezione metodo di arresto (n005) - - - - - - - - - - - - - - - - - - - - 106
Applicazione della frenatura ad iniezione c.c. - - - - - - - - - - - - - 107
Controllo del posizionamento semplice all'arresto - - - - - - - - - - 108
Realizzazione di circuiti di interfaccia con
dispositivi esterni - - - - - - - - - - - - - - - - - - - - - - - 110
Uso dei segnali di ingresso - - - - - - - - - - - - - - - - - - - - - - - - - - 110
Uso degli ingressi analogici multifunzione - - - - - - - - - - - - - - - - 122
Uso dei segnali di uscita - - - - - - - - - - - - - - - - - - - - - - - - - - - - 125
Impostazione frequenza mediante ingresso di riferimento
della corrente - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 127
Frequenza di riferimento tramite ingresso a treno di impulsi - - - 129
Sequenza a due fili 2 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 130
Prevenzione dello stallo del motore (Limite di corrente) - - - - - - 132
Prevenzione dello stallo durante il funzionamento - - - - - - - - - - 134
Riduzione della fluttuazione della velocità motore - - - - - - - - - - 136
Compensazione dello scorrimento (n002 = 0) - - - - - - - - - - - - - 136
Protezione motore - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 137
Rilevamento sovraccarico motore - - - - - - - - - - - - - - - - - - - - - - 137
Ingresso termistore PTC per la protezione da
surriscaldamento del motore - - - - - - - - - - - - - - - - - - - - - - - - - 139
Selezione funzionamento della ventola di raffreddamento - - - - - 142
Uso della comunicazione MEMOBUS (MODBUS) - - - - - - - - - - 142
Comunicazione MEMOBUS (MODBUS) - - - - - - - - - - - - - - - - - 142
Specifiche di comunicazione - - - - - - - - - - - - - - - - - - - - - - - - - 143
Terminale di collegamento per la comunicazione - - - - - - - - - - - 143
Impostazione delle costanti necessarie per la comunicazione - - 144
Formato dei messaggi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 146
Memorizzazione delle costanti [comando di invio] - - - - - - - - - - 159
Esecuzione di autodiagnostica - - - - - - - - - - - - - - - - - - - - - - - - 162
Utilizzo della modalità di controllo PID - - - - - - - - - - - - - - - - - - 163
Selezione controllo PID (n128) - - - - - - - - - - - - - - - - - - - - - - - - 163
Comando di posizione analogico con uscita PID bidirezionale - - 167
Comando di riferimento bidirezionale - - - - - - - - - - - - - - - - - - - 168
Uso della funzione di copia costanti - - - - - - - - - - - - - - - - - - - - 172
Funzione di copia costanti - - - - - - - - - - - - - - - - - - - - - - - - - - - 172
Funzione READ - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 174
Funzione COPY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 176
Funzione VERIFY - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 178
Visualizzazione capacità inverter - - - - - - - - - - - - - - - - - - - - - - 180
Visualizzazione versione software - - - - - - - - - - - - - - - - - - - - - 182
15
Page 17

Elenco delle visualizzazioni - - - - - - - - - - - - - - - - - - - - - - - - - 183
Scala di visualizzazione specifica dell'utente - - - - - - - - - - - - - 185
Selezione elaborazione per la perdita della frequenza
di riferimento (n064) - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 187
Rilevamento fase aperta ingresso/uscita - - - - - - - - - - - - - - - - 188
Rilevamento sottocoppia - - - - - - - - - - - - - - - - - - - - - - - - - - - 189
Uso dell'inverter per le macchine elevatrici - - - - - - - - - - - - - - - 191
Sequenza ON/OFF del freno - - - - - - - - - - - - - - - - - - - - - - - - 191
Prevenzione dello stallo durante decelerazione - - - - - - - - - - - 193
Impostazione per caratteristiche V/f e costanti del motore - - - - 193
Riavvio dopo caduta di tensione momentanea e riavvio
dopo errore - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 193
Protezione fase aperta I/O e rilevamento sovracoppia - - - - - - - 193
Frequenza portante - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 193
Segnale blocco delle basi esterno - - - - - - - - - - - - - - - - - - - - - 194
Tempo di accelerazione/decelerazione - - - - - - - - - - - - - - - - - - 194
Contattore sul lato di uscita dell'inverter - - - - - - - - - - - - - - - - - 194
Uso della comunicazione MECHATROLINK-II - - - - - - - - - - - - 195
Manutenzione e ispezione - - - - - - - - - - - - - - - - 196
Ispezioni periodiche - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -197
Sostituzione dei componenti - - - - - - - - - - - - - - - - - - - - - - - - - -198
Sostituzione ventola di raffreddamento - - - - - - - - - - - - - - - - - - 199
Diagnostica errori - - - - - - - - - - - - - - - - - - - - - - 200
Funzioni di diagnosi e protezione - - - - - - - - - - - - - - - - - - - - - - 200
Azioni correttive dei modelli con coperchio - - - - - - - - - - - - - - - - 200
Azioni correttive dei modelli con console di programmazione - - - 201
Soluzione dei problemi - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 214
Caratteristiche - - - - - - - - - - - - - - - - - - - - - - - - - 216
Specifiche standard (Classe 200 V) - - - - - - - - - - - - - - - - - - - - - 216
Specifiche standard (Classe 400 V) - - - - - - - - - - - - - - - - - - - - - 221
Cablaggio standard (inverter incorporato) - - - - - - - - - - - - - - - - 224
Collegamento ingresso sequenza con transistor NPN/PNP - - - - 228
Dimensioni/Dissipazione di calore - - - - - - - - - - - - - - - - - - - - - - 230
Dispositivi periferici raccomandati - - - - - - - - - - - - - - - - - - - - - - 232
Elenco delle costanti - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 234
16
Page 18

Conformità alle marcature CE - - - - - - - - - - - - - - 246
Marcature CE - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 246
Requisiti per la conformità alle marcature CE - - - - - - - - - - - - - 246
Direttiva per le basse tensioni (LVD) - - - - - - - - - - - - - - - - - - - - 246
Direttiva sulla compatibilità elettromagnetica (EMC) - - - - - - - - - 247
17
Page 19

1 Ricezione del prodotto
ATTENZIONE
Dopo aver rimosso il V7 IP65 dall'imballaggio, effettuare le seguenti
verifiche.
• Verificare che il numero del modello corrisponda all'ordine di
acquisto o alla distinta di imballaggio.
• Controllare che l'inverter non presenti segni di danneggiamento
fisico che possono essersi verificati durante la spedizione.
Qualora dovesse mancare o risultare danneggiato qualsiasi
componente del V7 IP65, rivolgersi immediatamente al centro di
assistenza.
Non installare o utilizzare l'inverter se è danneggiato o mancano dei componenti.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni o danni
all'apparecchiatura.
18
Page 20
1 Ricezione del prodotto
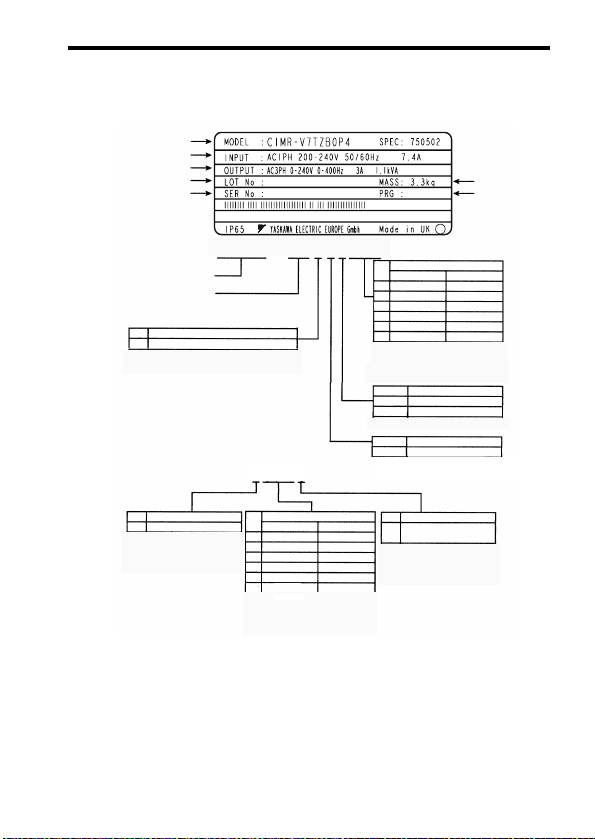
Controllo della targa
Esempio di inverter monofase, 200 V c.a., 0,4 kW (0,5 HP)
per gli standard europei
Modello di inverter
Spec. ingresso
Spec. uscita
Lotto n.
N. di serie
Peso
Numero software
Modello
Invertitore
Serie V7TZ
Numero
Tipo
Con console di programmazione (senza potenziometro)
T
Caratteristiche
CIMR - V7 T Z B 0P4 - 05
0P4
0P7
1P5
2P2
3P0
4P0
Numero
Numero
Uscita massima applicabile del motore
Classe 200 V Classe 400 V
0,55 kW
0,55 kW
1,1 kW
1,1 kW
1,5 kW
1,5 kW
2,2 kW
2,2 kW
3,0 kW
4,0 kW
Classe di tensione
B
Monofase, 200 VAC
4
Trifase, 400 VAC
Caratteristiche
Standard europei
Z
B0P4 - 05
B
Monofase, 200 VAC
4
Trifase, 400 VAC
Uscita massima applicabile del motore
Classe 200 V Classe 400 V
0P4
0,55 kW
1,1 kW
1,5 kW
2,2 kW
0,55 kW
1,1 kW
1,5 kW
2,2 kW
3,0 kW
4,0 kW
0P7
1P5
2P2
3P0
4P0
Grado di protezione
Numero
05
IP65
Versione software inverter
È possibile ricavare la versione del software dell'inverter dal parametro di monitoraggio
U-10 o dal parametro n179. Il parametro mostra le ultime quattro cifre del numero di
software (ad esempio, sul display appare “5740” per la versione software VSP015740).
Il presente manuale descrive la funzionalità del software dell'inverter, versione
VSP015740 (da 0,4 a 4,0 kW).
19
Page 21
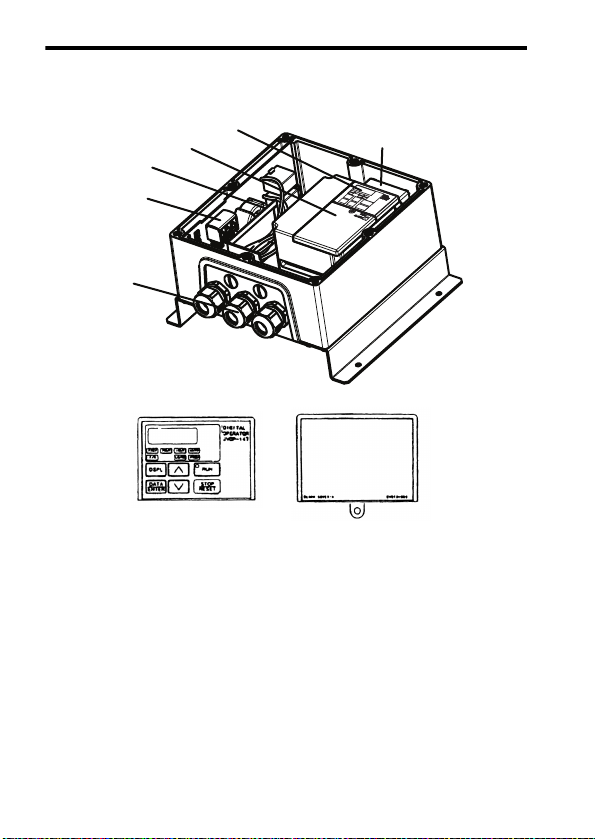
2 Identificazione dei componenti
console di programmazione
inverter
filtro di ingresso
terminali di
alimentazione
pressacavi
Console di
programmazione
(senza potenziometro)
JVOP-147
Utilizzata per impostare
o modificare le costanti.
Inverter V7 IP65 con coperchi rimossi
ventola di raffreddamento
Coperchio
Nei modelli privi di
console di
programmazione, al
suo posto viene
montato il coperchio.
20
Page 22
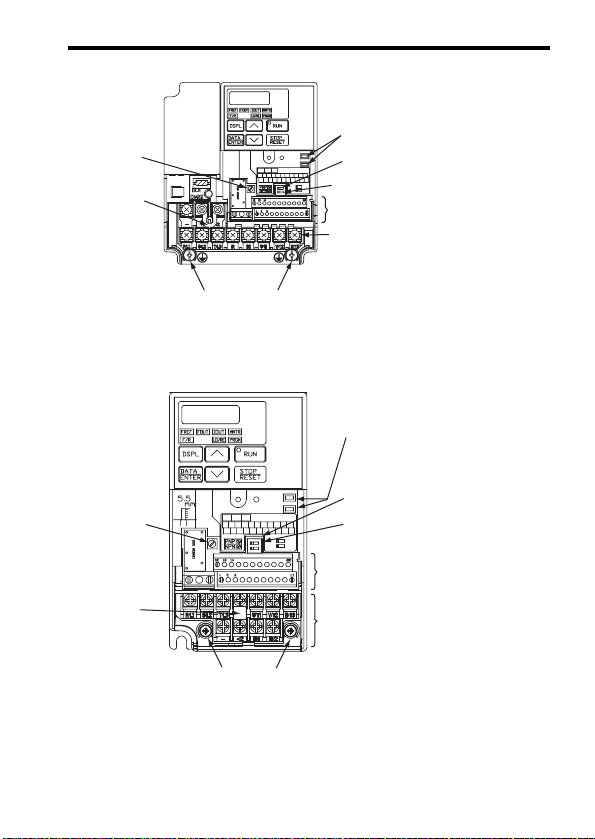
Selettore
polarità
di ingresso
Barra di
cortocircuito
Esempio di inverter trifase (classe 400 V, 1,5 kW)
Selettore polarità
di ingresso
CONSOLE DI
PROGRAMMAZIONE
JVOP-147
Terminali di messa a terra
CONSOLE DI
PROGRAMMAZIONE
JVOP-147
2 Identificazione dei componenti
Indicatori di stato del
funzionamento dell'inverter
Selettore resistenza dei terminali
per circuito di comunicazione
Selettore tensione/corrente per ingresso
della frequenza di riferimento analogica
Morsettiera del circuito di comando
Morsettiera del circuito principale
Indicatori di stato del
funzionamento dell'inverter
Selettore resistenza dei terminali
per circuito di comunicazione
Selettore tensione/corrente per
ingresso della frequenza di
riferimento analogica
Morsettiera del circuito di comando
Barra di
cortocircuito
Morsettiera del circuito
Terminali di messa a terra
Esempio di inverter trifase (classe 200 V, 0,55 kW)
Disposizione dei terminali del circuito principale
21
Page 23
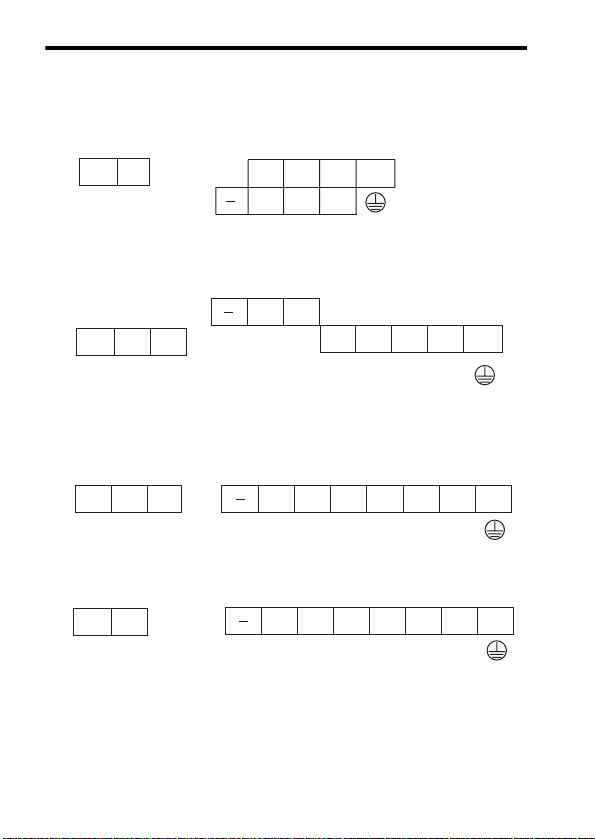
La disposizione dei terminali del circuito principale dipende dal
modello di inverter. Tenere presente che l'alimentazione in ingresso
deve essere collegata direttamente al filtro di ingresso.
CIMR-V7TZB0P1 a B0P4
LN
collegamento al filtro
CIMR-V7TZB0P7, B1P5, 40P2 a 42P2
L1/L L2/N L3
collegamento al filtro
CIMR-V7TZB2P2, 43P0, 44P0
L1/L L2/N L3
collegamento al filtro
CIMR-V7TZB4P0
LN
collegamento al filtro
+1
+2 B1 B2
+1 +2
U/T1 V/T2 W/T3
collegamento all'inverter
B1 B2 U/T1 V/T2 W/T3
+1 +2 B1 B2 U/T1 V/T2 W/T3
collegamento all'inverter
+1 +2 B1 B2 U/T1 V/T2 W/T3
collegamento all'inverter
collegamento
all'inverter
22
Page 24

3 Montaggio
3 Montaggio
Scelta della posizione di montaggio dell'inverter
Accertarsi che l'inverter sia protetto dalle condizioni riportate di
seguito.
• Freddo o caldo molto intensi. Utilizzare unicamente entro
l'intervallo di temperatura ambiente specificato:
–10 ... 40 °C (14 ... 105 °F)
• Pioggia diretta
• Schizzi e spruzzi di olio
• Salsedine
• Luce solare diretta (evitare l'uso all'esterno.)
• Liquidi o gas corrosivi (ad esempio, gas solforato)
• Particelle metalliche nell'aria
• Vibrazione o urti meccanici
• Disturbi magnetici
(esempi: saldatrici, dispositivi di potenza e così via)
• Sostanze radioattive
• Combustibili, come diluenti o solventi
23
Page 25
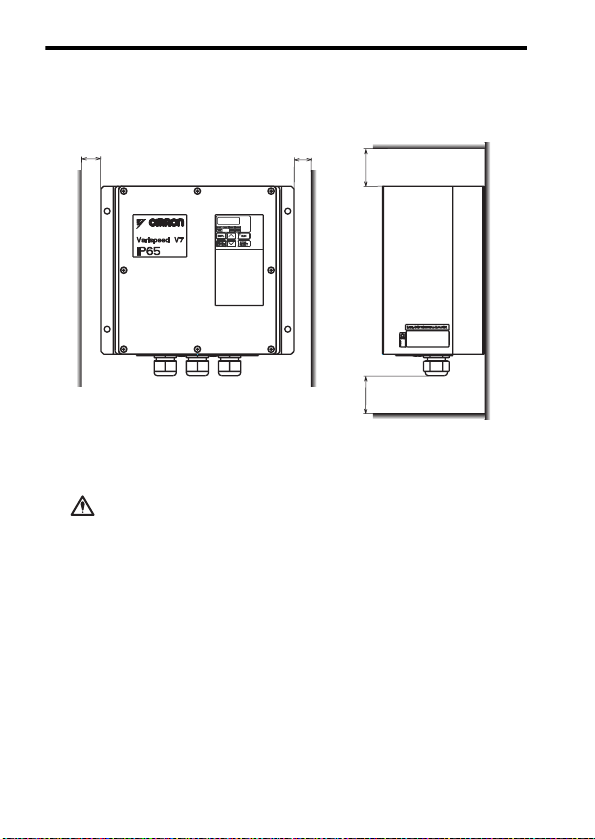
Dimensioni di montaggio
Per montare il V7 IP65, sono richieste le dimensioni riportate di
seguito.
30
ATTENZIONE
30
120
CONSOLE DI
PROGRAMMAZIONE
JVOP-147
120
• Il V7 IP65 genera calore. Per un raffreddamento
efficace, installarlo in verticale.
24
Page 26
3 Montaggio
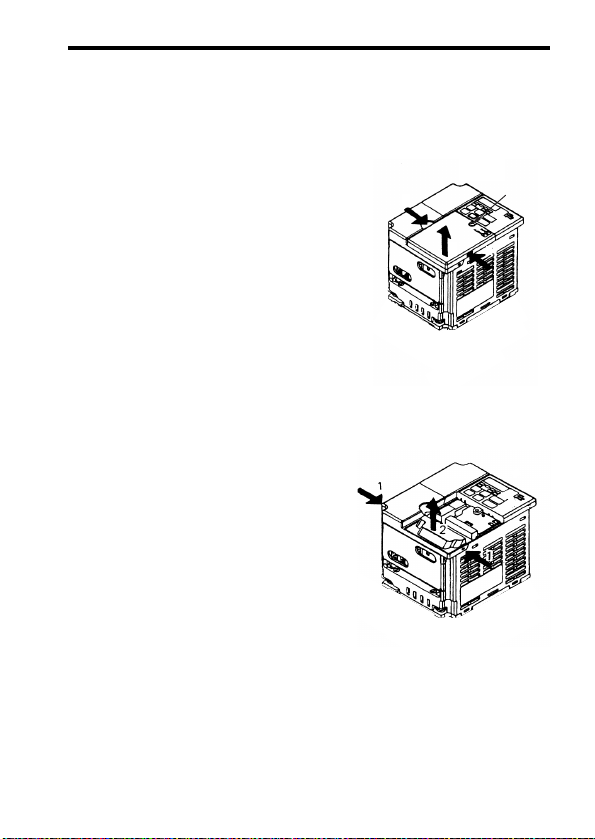
Montaggio/rimozione dei componenti
Rimozione e montaggio della console di programmazione e dei
coperchi (viene illustrato solo l'inverter incorporato, Non l'intera
unità IP65)
Rimozione del coperchio frontale
Utilizzare un cacciavite per allentare
la vite (sezione A) sul coperchio frontale. (per evitare che vada perduta,
questa vite non può essere rimossa).
Esercitare, quindi, una pressione sul
lato destro e sul lato sinistro nella
direzione 1 e sollevare il coperchio
frontale nella direzione 2.
Montaggio del coperchio frontale
Montare il coperchio frontale
seguendo la procedura utilizzata per
la rimozione ma in ordine inverso.
Rimozione del copriterminali
• Inverter di classe 200 V da 1,1 kW
e più e tutti gli inverter di classe
400 V:
Dopo aver rimosso il coperchio
frontale, esercitare una pressione sul lato destro e sul lato
sinistro del copriterminali nella
direzione 1 e sollevare il copriterminali nella direzione 2.
1
2
A
1
25
Page 27
Montaggio del copriterminali
Montare il copriterminali seguendo
la procedura utilizzata per la rimozione ma in ordine inverso.
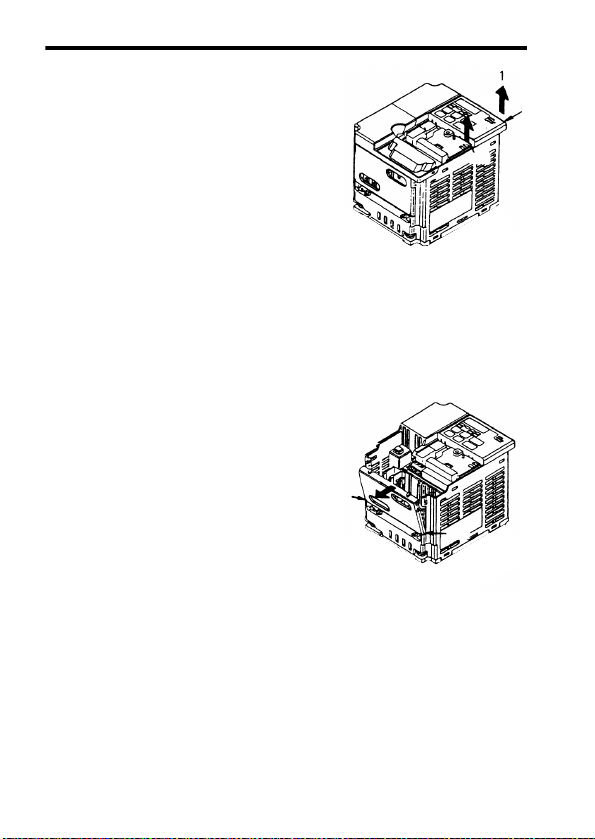
Rimozione della console di
programmazione
Dopo aver rimosso il coperchio
frontale, (seguire la procedura a
pagina 25) sollevare il lato superiore e il lato inferiore (sezione C)
della parte destra della console di
programmazione nella direzione 1.
Installazione della console di programmazione
Montare la console di
programmazione seguendo la
procedura utilizzata per la
rimozione ma in ordine inverso.
Rimozione del coperchio inferiore
• Inverter di classe 200 V da 1,1 kW
e più e tutti gli inverter di classe
400 V:
Dopo aver rimosso il coperchio
A
frontale e il copriterminali, inclinare il coperchio inferiore nella
direzione 1 sfruttando la sezione
A come punto di appoggio.
C
A
Montaggio del coperchio inferiore
Montare il coperchio inferiore
seguendo la procedura utilizzata per
la rimozione ma in ordine inverso.
26
Page 28
4 Cablaggio
AVVERTENZA
4 Cablaggio
• Eseguire il cablaggio solo dopo aver verificato
che non sia presente alimentazione.
La mancata osservanza di questa avvertenza
implica il rischio di scosse elettriche e potrebbe
provocare un incendio.
• Il cablaggio deve essere eseguito solo da personale qualificato. La mancata osservanza di questa avvertenza implica il rischio di scosse
elettriche e potrebbe provocare un incendio.
• Verificare con attenzione il cablaggio del circuito
di arresto di emergenza prima di avviare il funzionamento. La mancata osservanza di questa
avvertenza potrebbe essere causa di lesioni.
ATTENZIONE
• Verificare che la tensione nominale dell'inverter
corrisponda alla tensione dell'alimentazione c.a.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni fisiche o provocare un incendio.
• Non eseguire test per verificare la tensione di
resistenza sull'inverter.
L'esecuzione di tali test potrebbe danneggiare
componenti dei semiconduttori.
• Serrare sempre le viti dei terminali del circuito
principale e di controllo. La mancata osservanza
di questa avvertenza potrebbe causare malfunzionamenti o provocare danni o incendi.
• Non collegare mai l'alimentazione del circuito
principale c.a. ai terminali di uscita U/T1, V/T2,
W/T3, B1, B2, -, +1, o +2. L'inverter verrà danneggiato e la garanzia annullata.
• Non collegare o scollegare fili o connettori mentre i circuiti sono alimentati. La mancata osservanza di questa avvertenza potrebbe essere
causa di lesioni.
• Non verificare segnali durante il funzionamento.
Questa operazione potrebbe danneggiare la
macchina o l'inverter.
• Se si desidera poter memorizzare una costante
mediante un comando di invio, accertarsi di
27
Page 29
avere adottato le misure necessarie per eseguire un arresto di emergenza utilizzando i terminali esterni. Un ritardo nella risposta potrebbe
causare lesioni o danni alla macchina.
Istruzioni di cablaggio
NOTA
1. Collegare sempre l'alimentazione per gli ingressi del
circuito principale ai terminali di ingresso dell'alimentazione L1, L2 e L3 del filtro di ingresso mediante un
dispositivo di sezionamento (MCCB) o un fusibile. Non
collegare mai l'alimentazione ai terminali U/T1, V/T2,
W/T3, B1, B2, −, +1 o +2. L'inverter potrebbe danneggiarsi. Per gli inverter monofase, utilizzare sempre i terminali L e N del filtro di ingresso. I fusibili devono
essere RK5 di classe UL o equivalente.
Per i dispositivi periferici raccomandati fare riferimento
alla pagina 232.
Terminali di collegamento per l'alimentazione dell'inverter
Inverter CIMR-V7B con
alimentazione in ingresso mono-
fase da 200-V
Collegare ai terminali L e
N del filtro di ingresso
Inverter CIMR-V74 con
alimentazione in ingresso trifase
Collegare ai terminali L1,
L2 e L3 del filtro di ingresso
2. Se la distanza di cablaggio tra l'inverter e il motore è
elevata, ridurre la frequenza portante dell'inverter Per
ulteriori dettagli vedere Selezione frequenza portante
(n080)14 kHz max. a pagina 93.
3. Il cablaggio di controllo deve avere una lunghezza
inferiore a 50 m e deve essere separato dal cablaggio
dell'alimentazione. Quando si immette il segnale della
frequenza esternamente, utilizzare cavi a doppini
intrecciati schermati.
4. Con i terminali del circuito di comando viene fornito
solo un isolamento di base per la conformità ai requisiti di classe di protezione 1 e categoria di sovratensione II. Il prodotto finale potrebbe richiedere un
isolamento aggiuntivo per essere conforme allo standard CE.
28
da 400-V
Page 30
5. Per il cablaggio dei terminali del circuito principale, si
devono utilizzare connettori a circuito chiuso.
6. Quando si stabiliscono le dimensioni dei cavi, è
necessario tenere presente la caduta di tensione.
La caduta di tensione può essere calcolata utilizzando
la seguente equazione:
Caduta di tensione da fase a fase (V)
= × resistenza cavi (Ω/km) × distanza cablaggio
3
(m) × corrente
-3
(A) × 10
Scegliere le dimensioni dei cavi in modo che la caduta
di tensione sia inferiore al 2% della normale tensione
nominale.
7. Se l'inverter è collegato a un trasformatore di potenza
che supera 600 kVA, è possibile che nel circuito di alimentazione in ingresso la corrente raggiunga un
picco eccessivo e provochi la rottura della sezione del
convertitore. In questo caso, collegare una reattanza
c.a. opzionale sul lato di ingresso dell'inverter o una
reattanza c.c. opzionale sui terminali di collegamento
della reattanza c.c.
Dimensioni dei cavi e delle viti dei terminali
1. Circuiti di comando
Modello Codice
terminale
Stesso
MA, MB, MC M3 0,5
per tutti i
modelli
S1 - S7, P1, P2,
SC, PC, R+, R-,
S+, S-, FS, FR,
FC, AM, AC, RP
2. Circuiti principali
Viti Coppia di serrag-
gio
N•m (lb•pollici)
...
0,6
(4,44
...
5,33)
M2 0,22 ... 0,25
(1,94 ... 2,21)
Dimensioni applicabili Dimensioni
2
mm
Cavi intrecciati:
0,5 ... 1,25
Singolo: 0,5 ... 1,25
Cavi intrecciati:
0,5 ... 0,75
Singolo: 0,5 ... 1,25
AWG
20 ... 16,
20 ... 16
20 ... 18,
20 ... 16
Cavi
raccomandate
mm
0,75 18 Schermato o
0,75 18
4 Cablaggio
Tipo
2
AWG
equivalente
29
Page 31

Inverter ingresso monofase di classe 200 V
Modello Codice terminale Viti Coppia di ser-
L, N, -, +1, +2, B1,
CIMR-
ΤΖ
B2, U/T1, V/T2, W/
V7
B0P4
CIMR-
V7
B0P7
ΤΖ
T3
L, N, -, +1, +2, B1,
B2, U/T1, V/T2, W/
T3
raggio
N•m (lb•pollici)
M3.5 0,8 ... 1,0
(7,1 ... 8,88)
M4 1,2 ... 1,5
(10,65 ... 13,31)
Cavi
Dimensioni applicabili Dimensioni racco-
2
AWG
mm
0,75 ... 2 18 ... 14 2 14 Rivestito in
2 ... 5,5 14 ... 10 3,5 12
mm
mandate
2
AWG
Tipo
vinile o equi-
valente da
600-V
CIMR-
V7
B1P5
CIMR-
V7
B2P2
ΤΖ
ΤΖ
L, N, -, +1, +2, B1,
B2, U/T1, V/T2, W/
T3
L, N, -, +1, +2, B1,
B2, U/T1, V/T2, W/
T3
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
2 ... 5,5 14 ... 10 5,5 10
2 ... 5,5 14 ... 10 5,5 10
Nota: 1. Le dimensioni dei cavi si riferiscono ai cavi in rame ad una
temperatura di 75°C (160°F).
30
Page 32

Inverter ingresso trifase classe 400 V
Modello Codice terminale Viti Coppia di ser-
L1, L2, L3, -, +1,
CIMR-
ΤΖ
+2, B1, B2, U/T1, V/
V7
40P4
T2, W/T3
CIMR-
L1, L2, L3, -, +1,
V7
ΤΖ
+2, B1, B2, U/T1, V/
40P7
T2, W/T3
CIMR-
L1, L2, L3, -, +1,
V7
ΤΖ
+2, B1, B2, U/T1, V/
41P5
T2, W/T3
CIMR-
L1, L2, L3, -, +1,
V7
ΤΖ
+2, B1, B2, U/T1, V/
42P2
T2, W/T3
CIMR-
L1, L2, L3, -, +1,
V7
ΤΖ
+2, B1, B2, U/T1, V/
43P0
T2, W/T3
CIMR-
L1, L2, L3, -, +1,
V7
ΤΖ
+2, B1, B2, U/T1, V/
44P0
T2, W/T3
raggio
N•m (lb•pollici)
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
M4 1,2 ... 1,5
(10,65 ... 13,31)
Dimensioni applicabili Dimensioni racco-
2
mm
2 ... 5,5 14 ... 10 2 14 Rivestito in
2 ... 5,5 14 ... 10 2 14
2 ... 5,5 14 ... 10 2 14
2 ... 5,5 14 ... 10 2 14
2 ... 5,5 14 ... 10 2 14
2 ... 5,5 14 ... 10 2 14
AWG
Cavi
mm
3,5 12
3,5 12
Nota: Le dimensioni dei cavi si riferiscono ai cavi in rame ad una
temperatura di 75°C (160°F).
4 Cablaggio
mandate
2
AWG
Tipo
vinile o equi-
valente da
600-V
31
Page 33

Cablaggio del circuiti principali
Cablaggio circuito principale
Esempio di inverter trifase classe
400 V 0,55 kW
Inverter
Terminali del motore
Terminali
filtro di
ingresso
Terminale
di messa a
terra
L1
L2
L3
PE
L1 L2 L3
M
3
• Alimentazione in ingresso circuito principale
1. Collegare sempre la linea di alimentazione ai terminali di ingresso
L1, L2 e L3 del filtro di ingresso. Questi ultimi non devono essere
mai collegati ai terminali U/T1, V/T2, W/T3, B1, B2, −, +1 o +2. Il
collegamento di terminali errati potrebbe danneggiare l'inverter.
NOTA
Per gli inverter monofase, utilizzare sempre i terminali L
e N del filtro di ingresso. Non collegare mai i terminali di
ingresso R/L1, S/L2 e T/L3 dell'inverter.
• Messa a terra (Uso del terminale di messa a terra .)
AVVERTENZA
Collegare sempre a terra il terminale di messa a terra
in base alle normative locali.
La mancata osservanza di questa avvertenza implica il rischio
di scosse elettriche e potrebbe provocare un incendio.
Non collegare mai a terra il V7 IP65 sullo stesso collegamento
a terra di saldatrici, motori o altre apparecchiature elettriche.
Se si utilizzano più inverter V7
IP65 affiancati, collegare a
terra ciascuno di essi come
illustrato negli esempi riportati
di seguito. Evitare che i cavi di
terra formino un circuito.
Buona
Buona
32
Scarsa
Page 34

4 Cablaggio
• Collegamento resistenza di frenatura (disponibile a richiesta)
AVVERTENZA
Eseguire la stessa procedura per il collegamento di un modulo di
resistenza di frenatura.
Fare riferimento alla pagina 225.
• Uscita inverter
Collegare i terminali del motore a U/T1, V/T2 e W/T3.
• Cablaggio dei terminali del circuito principale
Per collegare questi terminali, far passare i cavi attraverso il foro di
cablaggio. Reinstallare sempre il coperchio.
Per collegare la resistenza di frenatura, tagliare
l'elemento di protezione sui terminali B1 e B2.
Per proteggere la resistenza di frenatura dal
surriscaldamento, installare un relé di protezione
termica tra la resistenza di frenatura e l'inverter. In
questo modo si ottiene una sequenza che
disattiva l'alimentazione con i contatti del relé di
protezione termica.
La mancata osservanza di questa avvertenza
potrebbe provocare un incendio.
Collegare mediante un cacciavite Phillips.
33
Page 35

Cablaggio dei circuiti di comando
Per i terminali del circuito di comando viene fornito solo un isolamento di base.
Il prodotto finale potrebbe richiedere un isolamento aggiuntivo.
• Terminali del circuito di controllo (dell'inverter incorporato)
Per effettuare il collegamento, far passare il cavo attraverso il
foro di cablaggio. Reinstallare sempre il coperchio.
Uscita a contatto
SW1 può essere modificato in base alla polarità del segnale
degli ingressi (S1 ... S7).
Comune 0 V: lato NPN (impostazione di fabbrica)
Comune +24 V: lato PNP
Per SW1. fare riferimento alle pagine 228 e 229.
Per SW2. fare riferimento alle pagine 127 e 143.
Larghezza lama del cacciaviteCablaggio terminali del circuito di comando
34
0,4 mm max
(0,016 pollici)
2,5 mm max.
(0,098 pollici)
Inserire il cavo nella parte inferiore della morsettiera e
collegarlo saldamente con un cacciavite.
Page 36

4 Cablaggio
NOTA
• Mantenere il cacciavite in posizione verticale
sull'inverter.
• Per le coppie di serraggio, fare riferimento alla
pagina 29.
5,5 mm
(0,22 pollici)
La lunghezza di spelatura del rivestimento
del cavo deve essere di 5,5 mm (0,22 pollici).
Aprire il coperchio frontale e verificare che la lunghezza di
spelatura sia 5,5 mm (0,22 pollici).
5,5 mm
Scala
SW1
USCITA A CONTATTO
SW2
Ispezione del cablaggio
Dopo aver completato il cablaggio, verificare che:
• il cablaggio sia corretto;
• non siano rimaste mollette dei cavi o viti all'interno dell'inverter;
• le viti siano serrate saldamente;
• i fili scoperti nei terminali non siano in contatto con altri terminali.
AVVERTENZA
NOTA
L'attivazione dell'alimentazione in concomitanza
con un segnale di comando di marcia avanti o
indietro causa l'avvio automatico del motore.
Attivare l'alimentazione solo dopo aver verificato
che il segnale RUN è disattivato.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
1. L'attivazione del segnale di comando di marcia avanti
o indietro in concomitanza con la selezione del
comando di marcia (n003 = 1) proveniente dal terminale del circuito di comando causa l'avvio automatico
del motore dopo la disattivazione dell'alimentazione in
ingresso del circuito principale.
2. Per configurare la sequenza a 3 fili, impostare il terminale S3 (n052) su 0.
35
Page 37

5 Funzionamento dell'inverter
La Selezione modalità di controllo (n002) è inizialmente impostata
sulla modalità di controllo V/f.
AVVERTENZA
ATTENZIONE
36
• Attivare l'alimentazione di ingresso solo dopo
aver verificato la presenza della console di programmazione o del coperchio opzionale. Non
rimuovere la console di programmazione o i
coperchi in presenza di corrente.
La mancata osservanza di questa avvertenza
implica il rischio di scosse elettriche.
• Non utilizzare mai la console di programmazione o i DIP switch con le mani bagnate.
La mancata osservanza di questa avvertenza
implica il rischio di scosse elettriche.
• Non toccare mai i terminali in presenza di corrente, anche se l'inverter è in fase di arresto.
La mancata osservanza di questa avvertenza
implica il rischio di scosse elettriche.
• Non toccare mai il dissipatore di calore perché
potrebbe essere molto caldo.
La mancata osservanza di questa avvertenza
potrebbe causare gravi bruciature al corpo.
• È facile passare da un funzionamento a bassa
velocità a un funzionamento ad alta velocità.
Verificare la gamma di utilizzo sicuro del motore
e della macchina prima del funzionamento.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni o danni alla
macchina.
• Se necessario, installare un freno di stazionamento separato.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
• Non verificare segnali durante il funzionamento.
Questa operazione potrebbe danneggiare la
macchina o l'inverter.
• Tutte le costanti sono state impostate nell'inverter sui valori di fabbrica. Non modificare le
impostazioni se non strettamente necessario.
L'inverter potrebbe danneggiarsi.
Page 38

5 Funzionamento dell'inverter
Marcia di prova
L'inverter funziona quando è impostata una frequenza (velocità).
Sono disponibili quattro modalità operative per V7 IP65:
1. Comando di marcia dalla console di programmazione (impostazione digitale)
2. Comando di marcia dai terminali del circuito di comando
3. Comando di marcia dalla comunicazione MEMOBUS
4. Comando di marcia dalla scheda di comunicazione (opzionale)
Prima della spedizione, l'inverter viene impostato per ricevere il
comando di marcia e la frequenza di riferimento dalla console di
programmazione. Di seguito sono riportate le istruzioni per azionare l'inverter V7 IP65 mediante la console di programmazione
JVOP-147 (senza potenziometro).
Le costanti del funzionamento di riferimento o della frequenza di
riferimento possono essere selezionate separatamente come
mostrato di seguito.
Descri-
zione
Selezione
comando
di marcia
n003= 0 --- Abilita la marcia, l'arresto e il reset dalla
console di programmazione.
= 1 --- Abilita la marcia e l'arresto dai terminali del
circuito di comando.
= 2 --- Abilita la comunicazione MEMOBUS.
= 3 --- Abilita la scheda di comunicazione (opzionale).
Costante
37
Page 39

Descri-
zione
Sele-
zione fre-
quenza di
riferi-
mento
Costante
n004= 0 --- Abilita l'impostazione del potenziometro
della console di programmazione.
= 1 --- Abilita la frequenza di riferimento 1 (costante
n024).
= 2 --- Abilita una tensione di riferimento (0 ... 10 V) al
terminale del circuito di
controllo.
= 3 --- Abilita una corrente di riferimento (4 ... 20 mA)
al terminale del circuito di
controllo.
= 4 --- Abilita una corrente di riferimento (0 ... 20 mA)
al terminale del circuito di
controllo.
= 5 --- Abilita un riferimento a treno di impulsi al
terminale del circuito di controllo.
= 6 --- Abilita la comunicazione MEMOBUS.
= 7 --- Abilita una tensione di riferimento
(0 ... 10 V) al terminale del circuito della
console di programmazione.
= 8 --- Abilita una corrente di riferimento
(4 ... 20 mA) al terminale del circuito della
console di programmazione.
= 9 --- Abilita la scheda di comunicazione (opzionale).
38
Page 40

5 Funzionamento dell'inverter
A
A
A
A
A
Passaggi per il funzionamento Display con-
sole di pro-
grammazione
1. Attivare l'alimentazione. 6,00
2. Impostare la costante n004 su 1. 1
3. Impostare le seguenti costanti.
n019: 15.0 (tempo di accelerazione)
n020: 5.0 (tempo di decelerazione)
15,0
5,0
4. Selezionare la marcia avanti o
indietro premendo il tasto o .
NOTA
Non selezionare
mai la marcia indietro quando questa
Avanti
oppure
Indietro
non è consentita.
5. Impostare il valore di riferimento
60,00
premendo il tasto o .
6. Premere .
7. Premere per arrestare.
RUN
STOP
0,00→60,
00
60,00→0,
00
Spie di fun-
zione
FREF
PRGM
PRGM
F/R
FREF
FOUT
FOUT
Spie
di stato
RUN
LARM
RUN
LARM
RUN
LARM
RUN
LARM
RUN
ALARM
RUN
LARM
RUN
ALARM
Spie di stato : Accesa : Lampeggiante (lampeggio lungo) : Lampeggiante : Spenta
39
Page 41

Selezione della direzione di rotazione
È possibile selezionare la direzione di rotazione del motore
quando viene eseguito il comando di marcia avanti.
Il motore ruota nella direzione opposta quando viene eseguito il
comando di marcia indietro.
Impo-
sta-
zione
n040
0 Quando viene eseguito il comando di marcia avanti, il motore
ruota in senso antiorario (osservandolo dal carico).
1 Quando viene eseguito il comando di marcia avanti, il motore
ruota in senso orario (osservandolo dal carico).
Descrizione
Punti di controllo del funzionamento
• Il motore ruota in modo regolare.
• Il motore ruota nella direzione corretta.
• Il motore non presenta vibrazioni o rumori anomali.
• L'accelerazione e la decelerazione sono uniformi.
• Il consumo di corrente del motore corrisponde alla condizione
di carico.
• Le spie di stato e il display della console di programmazione
sono corretti.
40
Page 42

5 Funzionamento dell'inverter
Funzionamento della console di programmazione
Tutte le funzioni di V7 IP65 vengono impostate utilizzando la console di programmazione. Di seguito vengono riportate le descrizioni del display e delle sezioni del tastierino.
Console di programmazione JVOP-147
Sezione di visualizzazione dati
Indicatori di funzione
Gli indicatori passano a un'altra
funzione ogni volta che
viene premuto.
È possibile modificare i dati
visualizzati.
Premere questo tasto per
passare da una
funzione all'altra.
Premere questo tasto
per accedere ai dati
delle costanti.
Visualizza i dati della
costante quando si
seleziona un
n. di costante
per l'indicatore PRGM.
(Retro della console di
programmazione)
CN2-1: Terminale del circuito della
console di programmazione
(tensione di riferimento)
Premere questo
tasto per aumentare
il valore n.
costante/dati.
Terminale CN2 della
console di programmazione*
Premere questo
tasto per
ridurre il valore
n. costante/dati.
CN2-2: Terminale del circuito della console di programmazione
(corrente di riferimento)
* Per ulteriori dettagli vedere Diagramma a blocchi di velocità da ingresso analogico a
Dettagli sulle spie (Tra parentesi sono indicati i colori delle spie.)
FREF
Impostazione/
monitoraggio
frequenza di riferimento
(VERDE)
F/R
Selezione comando
marcia avanti/indietro
da console
(VERDE)
FOUT
Monitoraggio
frequenza
di uscita
(VERDE)
Sezione spie/display
CONSOLE DI
PROGRAMMAZIONE
JVOP-147
Spia di stato
(stessa funzione
dell'indicatore
RUN)
CN2-3: GND per terminale del circuito
della console di programmazione
IOUT
Monitoraggio corrente
di uscita
(VERDE)
LO/RE
Selezione
LOCALE/REMOTA
(ROSSO)
Premere
questo tasto
per avviare
il motore.
Premere questo tasto per
arrestare il motore
(Premere per effettuare il
ripristino dopo un errore.)
MNTR
Monitoraggio
multifunzione
(VERDE)
PRGM
N. costante/dati
(ROSSO)
41
Page 43

Descrizione delle spie di stato
Nella sezione centrale destra della superficie del V7 IP65, sono
presenti due indicatori di stato del funzionamento dell'inverter. Le
combinazioni di tali indicatori indicano lo stato dell'inverter (ON,
lampeggiante e OFF). L'indicatore RUN e l'indicatore di stato sul
RUN
tasto hanno la stessa funzione.
RUN
ALARM
:Accesa
(Verde)
(Rosso)
:Lampeggiante
(lampeggio lungo)
Pronto per il
funzionamento
(Durante l'arresto)
:Lampeggiante :Spenta
Arresto per
inerzia
La tabella riportata di seguito mostra il rapporto tra le condizioni
dell'inverter e la spia sul tasto RUN della console di programmazione, nonché le spie RUN e ALARM sulla parte frontale di V7
IP65.
Le spie possono essere accese, spente o lampeggianti a
seconda dell'ordine di priorità.
Priorità
1
2
3
4
5
Console di
program-
mazione
Superficie frontale
di V7 IP65
RUN RUN ALARM
Condizioni
L'alimentazione è spenta.
Finché l'inverter non è pronto dopo l'attivazione
dell'alimentazione.
Errore
Arresto di emergenza (il comando di arresto viene
inviato dalla console di programmazione quando i
terminali del circuito di comando sono stati utilizzati
per azionare l'inverter.)
Arresto di emergenza (l'allarme di arresto di
emergenza viene inviato dal terminale del circuito di
comando.)
Nota: Le spie si comportano come in caso di allarme
(arresto) che si verifica dopo l'arresto dell'inverter.
Arresto di emergenza (l'errore di arresto di
emergenza viene inviato dal terminale del circuito di
comando.)
Nota: Le spie si comportano come in caso di errore
che si verifica dopo l'arresto dell'inverter.
Allarme (arresto)
Funzionamento
normale
42
Page 44

5 Funzionamento dell'inverter
Priorità
6
7
8
9
Console di
program-
mazione
Superficie frontale
di V7 IP65
RUN RUN ALARM
Condizioni
Allarme (funzionamento)
Il comando di marcia viene eseguito quando viene
emesso il comando di blocco delle basi esterno che
utilizza il terminale di ingresso del contatto
multifunzione.
Arresto (durante il blocco delle basi)
Funzionamento (Incluso lo stato di funzionamento
dell'inverter a una frequenza inferiore alla frequenza
di uscita minima.)
Durante la frenatura dinamica all'avvio.
Durante la decelerazione fino ad arresto
Durante la frenatura dinamica all'arresto.
Per ulteriori dettagli sul funzionamento delle spie di stato per gli
errori dell'inverter fare riferimento a Capitolo 8 Diagnostica errori.
Se si verifica un errore, la spia ALARM si accende.
È possibile eseguire il reset dell'errore attivando il
NOTA
segnale Ripristino dopo errore (oppure premendo il
STOP
tasto sulla console di programmazione) con il
RESET
segnale di funzionamento disattivato, o disattivando
l'alimentazione. Se il segnale di funzionamento è ON,
non è possibile eseguire il reset dell'errore usando il
segnale Ripristino dopo errore.
43
Page 45

Descrizione delle spie di funzione
Premendo sulla console di programmazione, è possibile
selezionare ciascuna spia di funzione.
Il diagramma seguente descrive ciascuna spia di funzione.
Monitoraggio/impostazione frequenza di
Monitoraggio/impostazione frequenza di
riferimento (Hz)
riferimento (Hz)
Imposta la velocità operativa di V7TZ
Imposta la velocità operativa di V7TZ
Monitoraggio frequenza di uscita (Hz)
Monitoraggio frequenza di uscita (Hz)
Visualizza la frequenza attualmente
Visualizza la frequenza attualmente
emessa da V7TZ.
emessa da V7TZ.
Impostazione disabilitata.
Impostazione disabilitata.
Monitoraggio corrente di uscita (A)
Monitoraggio corrente di uscita (A)
Visualizza la corrente attualmente
Visualizza la corrente attualmente
emessa da V7 IP65.
emessa da V7 IP65.
Impostazione disabilitata.
Impostazione disabilitata.
Monitoraggio multifunzione
Monitoraggio multifunzione
Viene visualizzata la descrizione del
Viene visualizzata la descrizione del
monitoraggio selezionato.
monitoraggio selezionato.
46
Selezione marcia avanti/indietro
Selezione marcia avanti/indietro
Imposta la direzione di rotazione del motore quando
Imposta la direzione di rotazione del motore quando
viene emesso il comando RUN dalla console di
viene emesso il comando RUN dalla console di
programmazione. È possibile modificare l'impostazione
programmazione. È possibile modificare l'impostazione
utilizzando il tasto o
utilizzando il tasto o
DSPL
Accensione
Accensione
(marcia avanti) (marcia indietro)
(marcia avanti) (marcia indietro)
In caso di interruzione di corrente
In caso di interruzione di corrente
con una di queste modalità
con una di queste modalità
attive, V7 IP65 torna all'
attive, V7 IP65 torna all'
ultima modalità una volta
ultima modalità una volta
ripristinata l'alimentazione.
ripristinata l'alimentazione.
N. monitoraggio
N. monitoraggio
U-01: Frequenza di riferimento (FREF)
U-01: Frequenza di riferimento (FREF)
U-02: Frequenza di uscita (FOUT)
U-02: Frequenza di uscita (FOUT)
U-03: Corrente di uscita (IOUT)
U-03: Corrente di uscita (IOUT)
U-04: Tensione di riferimento c.c. (unità: 1V)
U-04: Tensione di riferimento c.c. (unità: 1V)
U-05: Tensione c.c. (unità: 1V)
U-05: Tensione c.c. (unità: 1V)
U-06: Stato dei terminali di ingresso
U-06: Stato dei terminali di ingresso
U-07: Stato dei terminali di uscita
U-07: Stato dei terminali di uscita
U-08: Monitoraggio della coppia
U-08: Monitoraggio della coppia
U-09: Storico errori (ultimi 4 errori)
U-09: Storico errori (ultimi 4 errori)
U-10: Numero software
U-10: Numero software
U-11: Potenza di uscita
U-11: Potenza di uscita
U-12: Monitoraggio offset della frequenza
U-12: Monitoraggio offset della frequenza
U-14: Codice ASCII dal PLC
U-14: Codice ASCII dal PLC
U-15: Errore ricezione dati
U-15: Errore ricezione dati
U-16: Retroazione PID
U-16: Retroazione PID
U-17: Ingresso PID
U-17: Ingresso PID
U-18: Uscita PID
U-18: Uscita PID
U-19: Polarizzazione della frequenza
U-19: Polarizzazione della frequenza
di riferimento
di riferimento
44
Page 46

5 Funzionamento dell'inverter
Selezione LOCALE/REMOTA
Questa funzione consente di passare da un funzionamento
all'altro: funzionamento mediante la console di programmazione
inclusa l'impostazione della frequenza con il potenziometro,
funzionamento mediante i terminali di ingresso oppure
funzionamento mediante comunicazioni. L'impostazione può
essere modificata utilizzando il tasto o .
(Locale)
N. costante./dati
Imposta e modifica i dati per un n. di costante
(Per ulteriori dettagli fare riferimento alla pagina 49).
Torna a
AVVERTENZA
L'impostazione n001=5 consente la ricezione di
un comando di marcia anche durante la modifica
di una constante. In tal caso, ad esempio durante
una marcia di prova, accertarsi di osservare tutte
le precauzioni di sicurezza.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
(Remota)
Se V7 IP65 viene arrestato
dopo essere stato impostato
su un'altra di queste
modalità durante il
funzionamento, V7AZ
cambia dalla modalità di
programmazione alla
modalità di funzionamento.
Anche se il comando di
marcia viene attivato
nuovamente, V7 IP65 non
entra in funzione.
L'impostazione n001=5,
tuttavia, consente di
ricevere il comando di
marcia e V7 IP65 entra in
funzione.
45
Page 47

MNTR Monitoraggio multifunzione
Selezione del monitoraggio
Premere il tasto . Quando è impostata su ON, è possibile
visualizzare i dati selezionando il numero del parametro da monitorare.
Ad esempio, Monitoraggio della tensione di riferimento di uscita
Selezionare U-04
premendo il tasto
o .
Viene visualizzata la tensione
di uscita di riferimento.
oppure
Monitoraggio
Gli elementi riportati di seguito possono essere monitorati
usando le costanti U.
N.
costante
U-01 Frequenza di riferimento
U-02 Frequenza di uscita
U-03 Corrente di uscita
U-04 Tensione di uscita V È possibile monitorare la tensione di uscita.
U-05 Tensione c.c. V È possibile monitorare la tensione c.c. del circuito
U-06 Stato terminali di
U-07
Descrizione Unità Descrizione
Hz È possibile monitorare la frequenza di r iferimento.
1
(FREF)*
1
(FOUT)*
1
(IOUT)*
2
ingresso*
Stato terminali di uscita*
(Come FREF)
Hz È possibile monitorare la frequenza di uscita.
(Come FOUT)
A È possibile monitorare la corrente di uscita.
(Come IOUT)
principale.
- È p ossibile monitorare lo stato dei terminali di
ingresso del circuito di comando.
2
- È p ossibile monitorare lo stato dei terminali di uscita
del circuito di comando.
46
Page 48

5 Funzionamento dell'inverter
N.
costante
U-08 Monitoraggio della
U-09 Stor ico errori
U-10 Versione software - È possibile controllare la versione del software.
U-11
U-12
U-14
U-15
U-16 Retroazione PID % Frequenza di uscita massima/ingresso 100(%) o
U-17 PID Input % ±100(%)/± frequenza di uscita max.
U-18 PID Output % ±100(%)/± frequenza di uscita max.
U-19 Monitoraggio
Descrizione Unità Descrizione
coppia
(ultimi 4 errori)
Potenza di uscita *
Errore ricezione dati*
polarizzazione della
frequenza di riferimento
5
*
% È possibile monitorare la quantità della coppia di
uscita per coppia nominale del motore. Se è
selezionata la modalità di controllo V/f, viene
visualizzato "---".
- Vengono visualizzati gli ultimi quattro errori registrati.
3
kW È possibile monitorare la potenza di uscita.
4
- È p ossibile controllare il contenuto dell'errore di
ricezione dati della comunicazione MEMOBUS.
(Il contenuto del registro di trasmissione n. 003DH è
lo stesso.)
equivalente
% La polarizzazione può essere monitorata quando
viene utilizzato il comando Up/Down 2.
* 1. La spia di stato non è accesa.
* 2. Per informazioni sullo stato dei terminali di ingresso/uscita, fare
riferimento alla pagina successiva.
* 3. Il valore visualizzato è compreso tra −99,9 a 99,99 kW.
Durante la rigenerazione, la potenza di uscita viene visualizzata in unità di 0,01 kW quando inferiore o uguale a −9,99 kW
e in unità di 0,1 kW quando superiore a −9,99 kW.
In modalità di controllo vettoriale, viene visualizzato "---".
* 4. Per informazioni sull'errore di ricezione dati, fare riferimento alla
pagina successiva.
* 5. Visualizzata in unità di 0,1% quando inferiore a 100% e in unità di
1% quando superiore o uguale a 100%. Il valore visualizzato è
compreso tra −999% e 999%.
47
Page 49

Stato terminali di ingresso/uscita
Stato terminali di ingresso
1: Il terminale S1 è chiuso.
1: Il terminale S2 è chiuso.
1: Il terminale S3 è chiuso.
1: Il terminale S4 è chiuso.
1: Il terminale S5 è chiuso.
1: Il terminale S6 è chiuso.
1: Il terminale S7 è chiuso.
Non usato
Stato terminale di uscita
1: Il terminale MA-MC è chiuso.
1: Il terminale P1-PC è chiuso.
1: Il terminale P2-PC è chiuso.
Non usato
Visualizzazione errore ricezione dati
1: Errore CRC
1: Errore lunghezza dati
Non usato
1: Errore di parità
1: Errore di overrun
1: Errore di frame
1: Timeout
Non usato
Metodo di visualizzazione storico errori
Quando U-09 è selezionato, viene visualizzata una casella per
quattro cifre. Le tre cifre da destra indicano la descrizione
dell'errore, mentre la cifra a sinistra indica l'ordine di errore (da
uno a quattro). Il numero 1 rappresenta l'errore più recente,
mentre i numeri 2, 3, 4 rappresentano gli altri errori in ordine
crescente della comparsa dell'errore.
Ad esempio,
yyyyyy numero a 4 cifre
48
Page 50

5 Funzionamento dell'inverter
: Ordine dell'errore (1 ... 4)
: Descrizione errore
se non vi sono errori viene visualizzato "---".
(Per ulteriori dettagli fare riferimento al Capitolo 8 Diagnostica
errori).
Passaggio da una registrazione all'altra dello storico errori
L'errore che viene visualizzato può essere modificato utilizzando
il tasto o .
Cancellazione dello storico errori
Impostare la costante n001 su 6 per cancellare lo storico errori.
Una volta effettuata l'impostazione su 6, il display torna su n001.
Nota: È possibile cancellare lo storico errori anche inizializzando le
costanti (n001=12, 13).
Impostazione e riferimento delle costanti
Lo schema seguente mostra come selezionare e modificare le
costanti.
Selezione
REMOTA/LOCALE
• Impostazione n003 (selezione comando di marcia)
N. costante/
dati
n003
Selezione
funzionamento
di riferimento
Impostazione di
fabbrica: 0
Console di
programmazione
di riferimento
Impostata su 1
Terminale del circuito di
controllo di riferimento
(lampeggiante durante la
modifica)
Torna alla
visualizzazione del
n. costante dopo
1 secondo
Dato impostato
49
Page 51

6 Caratteristiche di programmazione
Nelle caselle a sfondo grigio delle tabelle sono indicate le impostazioni di fabbrica. Una volta completato il cablaggio, accertarsi di eseguire le seguenti impostazioni prima di avviare il funzionamento.
Hardware
Eseguire le seguenti impostazioni prima di accendere l'inverter.
Verifica Pagina
Selezione della polarità del segnale degli ingressi (S1 ... S7) 228
Selezione ingresso corrente di riferimento/tensione di riferimento del
terminale FR del circuito di comando
Software (Costante)
Ver if ic a Pag in a
Impostazioni
ambientali
Impostazione
caratteristiche di base
e frequenza di
riferimento
Protezione motore Corrente nominale del motore (n036) 137
Misure protettive per
rumore e corrente di
dispersione
Uso di una resistenza
di frenatura opzionale
Inizializzazione/selezione costanti (n001) 51
Selezione modalità di controllo (n002) 56
Selezione comando di marcia (n003) 60
Selezione frequenza di riferimento (n004) 62
Selezione metodo di arresto (n005) 106
Impostazione caratteristica V/f (n011 ... n017) 53
Tempo di accelerazione 1 (n019),
Tempo di decelerazione 1 (n020)
Frequenza di riferimento 1 ... 8
(n024 ... n031)
Selezione protezione termica
elettrica del motore (n037)
Frequenza portante di riferimento (n080) 93
Prevenzione dello stallo durante decelerazione
(n092)
rif.
127
rif.
76
73
137
135
50
Page 52

6 Caratteristiche di programmazione
Inizializzazione e impostazione costanti
Inizializzazione/selezione costanti (n001)
AVVERTENZA
Nella tabella riportata di seguito sono elencati i dati che possono
essere configurati o letti quando è impostato n001. Impostando
questa costante, è possibile cancellare lo storico errori e inizializzare le costanti. Le costanti non utilizzate tra n001 e n179 non
vengono visualizzate.
Impostazione
n001
0 n001 n001 ... n179
1
2
3
4
5
6 Storico errori cancellato
7 ... 11 Non usato
12 Inizializzazione
13
* 1. Escluse le costanti disabilitate per impostazione.
* 2. Fare riferimento alla pagina 112.
NOTA
L'impostazione n001=5 consente la ricezione di
un comando di marcia anche durante la modifica
di una constante. In tal caso, ad esempio durante
una marcia di prova, accertarsi di osservare tutte
le precauzioni di sicurezza.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
Costante configurabile Costante di riferimento
n001 ... n049
n001 ... n079
n001 ... n119
n001 ... n179
n001 ... n179
*1
*1
*1
*1
*1
(è possibile ricevere il comando di marcia nella modalità
di programmazione.)
Inizializzazione (sequenza a 3 fili)
*2
viene visualizzato sul display per un secondo e i
dati impostati tornano ai valori iniziali nei casi seguenti:
51
Page 53

1. Se i valori impostati di Selezioni ingresso multifunzione 1 ... 7 (n050 ... n056) sono gli stessi
2. Se nell'impostazione della caratteristica V/f non vengono soddisfatte le seguenti condizioni:
Frequenza di uscita massima (n011)≥ Frequenza di
uscita in tensione
massima (n013)
> Frequenza Frequenza di uscita
(n014)
≥ Frequenza di uscita min.
(n016)
Nota: La frequenza di uscita media (n014) viene utilizzata anche per le impostazioni del motore 2, la
costante n014 deve essere inferiore a n140 e n147.
Per ulteriori dettagli vedere Regolazione della coppia
in base all'applicazione (Impostazione caratteristica
V/f) a pagina 53.
3. Se nelle impostazioni della frequenza di salto non
vengono soddisfatte le seguenti condizioni:
Frequenza di salto 3 (n085) ≤ Frequenza di salto 2
(n084)
(n083)
4. Se limite inferiore della frequenza di riferimento
(n034) ≤ limite superiore della frequenza di riferimento (n033)
5. Se corrente nominale del motore (n036) ≤ 150%
della corrente nominale dell'inverter
6. Se una delle impostazioni di tempo di accelerazione/
decelerazione (n019 ... n022) supera 600,0 sec. e si
è tentato di impostare n018 su 1 (Unità di tempo di
accelerazione/decelerazione 0,01 sec).
≤ Frequenza di salto 1
52
Page 54

6 Caratteristiche di programmazione
Uso della modalità di controllo V/f
La modalità di controllo V/f viene impostata sui valori di fabbrica.
Selezione modalità di controllo (n002) =0: Modalità di controllo
V/f (impostazione di fabbrica)
1: Modalità di controllo vettoriale
Regolazione della coppia in base all'applicazione
Regolare la coppia del motore utilizzando le impostazioni della
caratteristica V/f e dell'incremento automatico della coppia ad
ampia gamma.
Impostazione caratteristica V/f
Impostare la caratteristica V/f in n011 - n017 come descritto di
seguito. Impostare ciascuna caratteristica quando si utilizza un
motore speciale (per es., motore ad alte velocità) o quando è
richiesta una regolazione di coppia speciale della macchina.
V: (Tensione)
(Frequenza)
N.
costante
n011
n012
n013
n014
n015
n016
n017
Descrizione Unità Gamma di impo-
Frequenza di uscita massima
Tensione massima
Frequenza di uscita in tensione
massima (Frequenza di base)
La frequenza Frequenza di
uscita
La frequenza di uscita media
del motore 2
Frequenza di uscita minima
Tensione della frequenza di
uscita minima
Nota: I valori tra parentesi sono relativi alla classe 400 V di inverter.
Accertarsi che vengano soddisfatte
le seguenti condizioni per le
impostazioni da n=11 a n017.
n016 ≤ n014 < n013 ≤ n011
Se n016 = n014, l'impostazione di
n015 verrà disattivata.
Nota: n014 viene utilizzata anche
f
per le impostazioni del motore 2.
(n014 < n140, n147)
stazione
0,1 Hz 50,0 ... 400,0 Hz 50,0 Hz
0,1 V
0,1 … 255,0 V
(0,1 … 510,0 V)
0,1 Hz 0,2 ... 400,0 Hz 50,0 Hz
0,1 Hz 0,1 ... 399,9 Hz 1,3 Hz
0,1 V 0,1 … 255,0 V
(0,1 … 510,0 V)
0,1 Hz 0,1 ... 10,0 Hz 1,3 Hz
0,1 V 0,1 ... 50,0 V
(0,1 … 100,0 V)
Impostazione
di fabbrica
200,0 V
(400,0 V)
12,0 V
(24,0 V)
12,0 V
(24,0 V)
53
Page 55

Impostazione tipica della caratteristica V/f
Impostare la caratteristica V/f in base all'applicazione come
descritto di seguito. Per inverter di classe 400-V, i valori della tensione (n012, n015 e n017) devono essere raddoppiati. Quando si
opera a una frequenza superiore a 50/60 Hz, modificare la frequenza di uscita massima (n011).
Nota:Impostare sempre la frequenza di uscita massima in base alle
caratteristiche del motore.
1. Per applicazioni di uso generico
Caratteristiche del motore: 60 Hz
Caratteristiche del motore: 50 Hz
(impostazione di fabbrica)
2. Per ventole/pompe
Caratteristiche del motore: 60 Hz Caratteristiche del motore: 50 Hz
200
V
200
V
50
10
1.5 30 60 f
50
10
1.3 25 50 f
3. Per applicazioni che richiedono una coppia iniziale elevata
Caratteristiche del motore: 60 Hz Caratteristiche del motore: 50 Hz
200
V
24
18
1.5
360f
200
V
24
18
1.3 2.5
50 f
Con l'aumento della tensione della caratteristica V/f viene
incrementata la coppia del motore; un aumento eccessivo, tuttavia, potrebbe causare una sovraeccitazione del motore, un
surriscaldamento del motore o delle vibrazioni.
Nota:La costante n012 deve essere impostata sulla tensione nominale
del motore.
54
Page 56

6 Caratteristiche di programmazione
Incremento automatico della coppia ad ampia gamma
(quando è selezionata la modalità V/f: n002=0)
I requisiti di coppia del motore cambiano in base alle condizioni di
carico. L'incremento automatico della coppia ad ampia gamma
regola la tensione della caratteristica V/f in base ai requisiti. V7
IP65 regola automaticamente la tensione durante il funzionamento a velocità costante e durante l'accelerazione.
La coppia richiesta viene calcolata dall'inverter.
In questo modo viene garantito un funzionamento senza errori
con notevole risparmio di energia.
Tensione di uscita
Funzionamento
(Tensione)
Guadagno di compensazione della coppia (n103)
V
Coppia richiesta
f (Frequenza)
Coppia richiesta
Aumento tensione
Generalmente, non sono necessarie regolazioni per il guadagno
di compensazione della coppia (n103, impostazione di fabbrica:
1.0). Quando la distanza di cablaggio tra l'inverter e il motore è
elevata, o quando il motore genera vibrazioni, modificare il guadagno dell'incremento automatico della coppia. In questi casi,
impostare la caratteristica V/f (n011 ... n017).
In genere, la regolazione della costante di tempo di compensazione della coppia (n104) e della perdita nel ferro per compensazione di coppia (n105) non è richiesta.
Regolare la costante di tempo di compensazione della coppia
nelle seguenti condizioni:
• Aumentare il valore se il motore genera vibrazioni.
• Ridurre il valore se la risposta è lenta.
55
Page 57

Uso della modalità di controllo vettoriale
Per utilizzare la modalità di controllo vettoriale, impostare la Selezione modalità di controllo (n002).
n002 =0: Modalità di controllo V/f (impostazione di fabbrica)
1: Modalità di controllo vettoriale
Precauzioni per l'applicazione del controllo vettoriale della
tensione
Il controllo vettoriale richiede le costanti del motore. Le costanti
delle impostazioni di fabbrica sono impostate ai valori di fabbrica
prima della spedizione. Pertanto, quando viene utilizzato un
motore progettato per un inverter o quando viene azionato un
motore di qualsiasi altro produttore, le caratteristiche della coppia
o le caratteristiche del controllo della velocità richieste potrebbero
non essere mantenute perché le costanti non sono adatte. Impostare le seguenti costanti in modo che corrispondano con le
costanti richieste del motore.
costante
n106
n107
n036
n110
56
N.
Descrizione Unità Gamma di impo-
Scorrimento
nominale del motore
Resistenza da linea a
neutra del motore
Corrente nominale
del motore
Corrente a vuoto del
motore
0,1 Hz 0,0 ... 20,0 Hz *
0,001 Ω
(inferiore a 10 Ω)
0,01 Ω
(10Ω o superiore)
0,1 A 0% ... 150% della
1% 0% … 99% (100%
stazione
0,000 ... 65,50
corrente nominale
dell'inverter
= corrente nominale del motore)
Ω
* L'impostazione dipende dalla potenza dell'inverter. (Fare riferimento
alle pagine 245 e 245.)
In genere, la regolazione del guadagno di compensazione della
coppia (n103) e della costante di tempo di compensazione della
coppia (n104) non è richiesta.
Regolare la costante di tempo di compensazione della coppia
nelle seguenti condizioni:
• Aumentare il valore se il motore genera vibrazioni.
• Ridurre il valore se la risposta è lenta.
Regolare il guadagno di compensazione dello scorrimento (n111)
quando si aziona il carico in modo che venga raggiunta la velocità
di riferimento. Aumentare o ridurre l'impostazione in incrementi di
Impostazione
di fabbrica
*
*
*
Page 58

6 Caratteristiche di programmazione
0,1.
• Se la velocità è inferiore al valore di riferimento, aumentare il
guadagno di compensazione dello scorrimento.
• Se la velocità è superiore al valore di riferimento, ridurre il guadagno di compensazione dello scorrimento.
In genere, la regolazione della costante di tempo di compensazione dello scorrimento (n112) non è richiesta. Regolarla nei
seguenti casi:
• Ridurre il valore se la risposta è lenta.
• Aumentare il valore se la velocità non è stabile.
Selezionare lo stato di compensazione dello scorrimento durante
la rigenerazione nel modo seguente:
Impostazione n113 Correzione scorrimento durante rigenerazione
0 Disabilitata
1 Abilitata
Calcolo della costante del motore
Di seguito è illustrato un esempio di calcolo della costante del
motore.
1. Scorrimento nominale del motore (n106)
120 × Frequenza nominale motore (Hz)*
Numero poli motore
120/Numero poli motore
2. Resistenza da linea a neutra del motore (n107)
I calcoli si basano sulla resistenza line-to-line e sul grado di
1
Velocità nominale motore (min
-1
isolamento del rapporto di test del motore.
Isolamento di tipo E: Rapporto di test della resistenza line-to-line a 75°C (Ω) × 0,92 ×
Isolamento di tipo B: Rapporto di test della resistenza line-to-line a 75°C (Ω) × 0,92 ×
Isolamento di tipo F: Rapporto di test della resistenza line-to-line a 115°C (Ω) × 0,87 ×
3. Corrente nominale del motore (n036)
= Corrente nominale alla frequenza nominale del motore
(Hz)*1 (A)
4. Corrente a vuoto del motore (n110)
Corrente a vuoto (A) alla frequenza nominale del motore (Hz)*
Corrente nominale (A) alla frequenza nominale del motore (Hz)*
1
100 (%)
1
* 1. Frequenza di base (Hz) durante il controllo dell'uscita costante
2
)*
57
Page 59

* 2. Velocità nominale (giri/min) alla frequenza di base durante il con-
trollo dell'uscita costante posizione
Impostare n106 (Scorrimento nominale del motore), n036 (Corrente nominale del motore), n107 (Resistenza da linea a neutra del
motore) e n110 (Corrente a vuoto del motore) in base al rapporto
di test del motore.
Per collegare una reattanza tra l'inverter e il motore, impostare n108
sulla somma del valore iniziale di n108 (induttanza di dispersione
del motore) e dell'induttanza della reattanza esterna. A meno che
non sia collegata una reattanza, n108 (Induttanza di dispersione
del motore) non deve essere impostato in base al motore.
Caratteristica V/f durante il controllo vettoriale
Impostare la caratteristica V/f come indicato di seguito durante il
controllo vettoriale:
Gli esempi riportati si riferiscono ai motori della classe da 200 V.
Quando si utilizzano motori di classe 400 V, raddoppiare i valori
della tensione (n012, n015 e n017).
V/f standard
(V)
[Caratteristiche del motore: 60 Hz]
(V)
[Caratteristiche del motore: 50 Hz]
58
V/f coppia iniziale elevata
(V)
[Caratteristiche del motore: 60 Hz]
(Hz)
(Hz)
(V)
[Caratteristiche del motore: 50 Hz]
(Hz)
(Hz)
Page 60

6 Caratteristiche di programmazione
Quando si opera a una frequenza superiore a 60/50 Hz, modificare soltanto la frequenza di uscita massima (n011).
Coppia costante
n012
=200 V
Uscita costante o
uscita variabile
Punto base
n013
=60 o 50 Hz
n011
=90 Hz
Passaggio alla modalità LOCALE/REMOTA
Le seguenti funzioni possono essere selezionate impostando la
modalità LOCALE o REMOTA. Per selezionare il comando di
marcia/arresto o la frequenza di riferimento, modificare prima la
modalità in base alle seguenti applicazioni.
• Modalità LOCALE: Abilita la console di programmazione per i
• Modalità REMOTA: Abilita la selezione comando di marcia
comandi di marcia/arresto e i comandi di
marcia avanti/indietro. È possibile impostare la frequenza di riferimento utilizzando il tasto
o .
(n003).
La frequenza di riferimento può essere
impostata usando la selezione frequenza
di riferimento (n004).
59
Page 61

Come selezionare la modalità LOCALE/REMOTA
Quando la funzione di
commutazione LOCALE/
REMOTA è impostata
per la selezione ingresso
multifunzione
(Quando non è impostato 17
per qualsiasi costante
da n050 a n056)
Quando la funzione di
commutazione LOCALE/
REMOTA è impostata
per la selezione ingresso
multifunzione
(Quando è impostato 17
per qualsiasi costante
da n050 a n056)
Selezionare Lo per
la selezione LO/RE
della console di
programmazione.
Modalità LOCALE
Selezionare rE per
la selezione LO/RE
della console di
programmazione.
Attivare il terminale
di ingresso
multifunzione.
Modalità REMOTA
Selezione dei comandi di marcia/arresto
Per selezionare la modalità LOCALE o la modalità REMOTA, fare
riferimento a Passaggio alla modalità LOCALE/REMOTA (pagina
59).
Il metodo di funzionamento (comandi di marcia/arresto, comandi
di marcia avanti/indietro) può essere selezionato nel modo
descritto di seguito.
Modalità LOCALE
Quando si seleziona Lo (modalità locale) per la modalità ON
della console di programmazione, oppure quando si
LO/RE
imposta la funzione di commutazione LOCALE/REMOTA e i terminali di ingressi sono ON, il funzionamento viene abilitato da
o sulla console di programmazione, mentre la mar-
STOP
cia avanti/indietro viene abilitata dalla modalità ON (tramite
il tasto o ).
60
RUN
Disattivare il
terminale di ingresso
multifunzione.
F/R
Page 62

6 Caratteristiche di programmazione
Modalità REMOTA
1. Selezionare la modalità REMOTA.
Per selezionare la modalità REMOTA, è possibile utilizzare i
due metodi seguenti:
• Selezionare rE (modalità REMOTA) per la selezione
.
LO/RE
• Quando la funzione di commutazione LOCALE/REMOTA è
selezionata per la selezione ingresso multifunzione, spegnere il terminale di ingresso per selezionare la modalità
REMOTA.
2. Selezionare il metodo di funzionamento impostando la
costante n003.
n003=0: Abilita la console di programmazione (come per la
modalità LOCALE).
=1: Abilita il terminale di ingresso multifunzione (vedere
fig. sotto).
=2: Abilita le comunicazioni (fare riferimento alla pagina
142).
=3: Abilita la scheda di comunicazione (opzionale).
• Esempio in caso di utilizzo del terminale di ingresso multifunzione come funzionamento di riferimento (sequenza a 2
fili)
Marcia avanti/Arresto
Marcia indietro/Arresto
n003: 1 (Impostazione di fabbrica: 0)
n050: 1 (Impostazione di fabbrica)
n051: 2 (Impostazione di fabbrica)
• Per un esempio della sequenza a 3 fili, fare riferimento alla
pagina 113.
• Per ulteriori informazioni sulla selezione della polarità di
sequenza fare riferimento alla pagina 228.
Nota:Quando l'inverter viene azionato senza la console di programma-
zione, impostare sempre la costante n010 su 0.
n010=0: Rileva il contatto errori della console di programmazione
(impostazione di fabbrica)
=1: Non rileva il contatto errori della console di programmazione
61
Page 63

Funzionamento (comandi di marcia/arresto) tramite comuni-
cazione
Impostando la costante n003 su 2 nella modalità REMOTA si abilita l'uso dei comandi di marcia/arresto tramite la comunicazione
MEMOBUS. Per i comandi con l'uso della comunicazione, fare
riferimento alla pagina 142.
Selezione della frequenza di riferimento
Selezionare innanzitutto la modalità REMOTA o LOCALE. Per
informazioni sulla selezione della modalità, fare riferimento alla
pagina 60.
Modalità LOCALE
Selezionare il metodo di comando utilizzando la costante n008.
n008=0: Abilita l'uso del potenziometro sulla console di programmazione.
=1: Abilita l'impostazione digitale sulla console di program-
mazione
(impostazione di fabbrica).
L'impostazione di fabbrica per i modelli con console di
programmazione
senza potenziometro (JVOP-147) è n008=1.
• Impostazione digitale mediante console di programmazione
Immettere la frequenza mentre è acceso (premere
dopo aver impostato il valore numerico).
ENTER
L'impostazione della frequenza di riferimento diventa effettiva
quando viene impostato 1 (impostazione di fabbrica: 0) per la
costante n009 invece di premere .
n009 =0: Abilita l'impostazione della frequenza di riferimento
utilizzando il tasto .
=1: Disabilita l'impostazione della frequenza di riferimento
utilizzando il tasto .
ENTER
ENTER
FREF
ENTER
62
Page 64

6 Caratteristiche di programmazione
Modalità REMOTA
Selezionare il metodo di comando nella costante n004.
n004 =0: Abilita l'impostazione della frequenza di riferimento
utilizzando il potenziometro
della console di programmazione.
=1: Abilita l'uso della frequenza di riferimento 1 (n024)
(impostazione di fabbrica).
L'impostazione di fabbrica per i modelli con console di
programmazione senza
potenziometro (JVOP-147) è n004=1.
=2: Abilita una tensione di riferimento (0 ... 10 V) (fare
riferimento alla figura
a pagina 63).
=3: Abilita una corrente di riferimento (4 … 20 mA) (fare
riferimento alla pagina 127).
=4: Abilita una corrente di riferimento (0 … 20 mA) (fare
riferimento alla pagina 127).
=5: Abilita un riferimento a treno di impulsi (fare riferimento
alla pagina 129).
=6: Abilita la comunicazione (fare riferimento alla
pagina142).
=7: Abilita una tensione di riferimento (0 ... 10 V) sul
terminale CN2 del circuito
della console di programmazione.
=8: Abilita una corrente di riferimento (4 ... 20 mA) sul
terminale CN2 del circuito
della console di programmazione.
=9: Abilita la scheda di comunicazione (opzionale).
Esempio di frequenza di riferimento mediante segnale di
tensione
n004=2
IM
(impostazione di fabbrica: 1)
Frequenza di
riferimento
master
2 kΩ
(0 ... +10 V)
(Alimentazione impostazione frequenza
FS
+12 V, 20 mA)
FR (Frequenza di riferimento master)
FC (0 V)
63
Page 65

Impostazione condizioni di funzionamento
Selezione autotuning (n139)
I dati del motore richiesti per il controllo vettoriale possono essere
misurati e impostati immettendo i dati della targhetta del motore
da utilizzare ed eseguendo l'autotuning per il motore. L'autotuning è possibile unicamente per il motore 1.
Non è possibile accedere alla modalità di autotuning
NOTA
quando si seleziona il motore 2 utilizzando un comando
di commutazione del motore assegnato a un ingresso
multifunzione (ovvero, non è possibile effettuare l'impostazione della selezione autotuning (n139)).
N.
costante
n139 Selezione autotuning - 0 ... 2 0
Descrizione Unità Gamma di
impostazione
Impostazione n139
Impostazione Funzione
0 Disabilitata
1 Autotuning rotante (motore 1)
2 Autotuning stazionario solo per resistenza da
linea a neutra del motore (motore 1)
Nota:Non è possibile effettuare l'impostazione quando il motore 2 viene
selezionato mediante un comando di commutazione motore assegnato a un ingresso multifunzione. (sulla console di programmazione viene visualizzato "Err", e l'impostazione torna al valore
precedente alla modifica.)
Attenersi alla seguente procedura per eseguire l'autotuning e
impostare automaticamente le costanti del motore quando si utilizza il metodo di controllo V/f, quando il cavo è lungo, ecc.
Impostazione della modalità autotuning
Si può impostare una delle due modalità di autotuning seguenti.
• Autotuning rotante
• Autotuning stazionario solo per resistenza da linea a neutra del
motore
Leggere sempre le avvertenze prima di effettuare l'autotuning.
64
Impostazione
di fabbrica
Page 66

6 Caratteristiche di programmazione
• Autotuning rotante (n139 = 1)
L'autotuning rotante viene utilizzato soltanto per il controllo vettoriale aperto. Impostare n139 su 1, immettere i dati dalla targhetta,
premere quindi il tasto RUN sulla console di programmazione.
L'inverter arresterà il motore per circa 1 minuto e imposterà le
costanti del motore richieste automaticamente facendo funzionare contemporaneamente il motore per un altro minuto circa.
1. Quando si esegue l'autotuning rotante, accertarsi di
NOTA
separare il motore dalla macchina dopo aver verificato che la rotazione del motore è consentita.
2. Per una macchina il cui motore non può essere sottoposto a rotazione, impostare i valori dal rapporto di
test del motore.
3. Se la rotazione automatica non comporta problemi,
effettuare l'autotuning rotante per garantire prestazioni sufficienti.
• Autotuning stazionario solo per resistenza da linea a neutra del
motore (n139 = 2)
L'autotuning può essere utilizzato per impedire gli errori di controllo quando il cavo del motore è lungo o la lunghezza del cavo è
stata modificata dopo l'installazione o quando il motore e l'inverter hanno capacità differenti.
Impostare n139 su 2 per il controllo vettoriale a circuito aperto,
premere quindi il tasto RUN sulla console di programmazione.
L'inverter fornirà potenza al motore stazionario per circa 20
secondi e la resistenza da linea a neutra del motore (n107) e la
resistenza del cavo verranno misurate automaticamente.
1. Il motore verrà alimentato di corrente quando viene
NOTA
eseguito l'autotuning stazionario per la resistenza da
linea a neutra del motore anche se il motore non è
acceso. Non toccare il motore fino a quando l’autotuning non è stato completato.
2. Quando si esegue l'autotuning stazionario solo per
resistenza da linea a neutra di un motore collegata a
un convogliatore o a un'altra macchina, accertarsi
che il freno di stazionamento non sia inserito.
65
Page 67

Precauzioni prima di usare l'autotuning
Leggere le seguenti avvertenze prima di usare l'autotuning.
• L'autotuning dell'inverter è completamente differente rispetto
all'autotuning di un servosistema. L'autotuning dell'inverter
regola automaticamente i parametri in base alle costanti del
motore rilevate, mentre l'autotuning del servosistema regola i
parametri in base alle dimensioni rilevate del carico.
• Quando è richiesta precisione per la velocità ad alte velocità
(pari o superiore al 90% della velocità nominale), utilizzare un
motore con una tensione nominale inferiore di circa 20 V rispetto
alla tensione di alimentazione di ingresso per gli inverter di
classe 200 V e di 40 V per gli inverter di classe 400 V. Se la tensione nominale del motore corrisponde alla tensione di alimentazione di ingresso, l'uscita di tensione dall'inverter non sarà
stabile ad alte velocità e non si otterranno prestazioni sufficienti.
• Utilizzare l'autotuning stazionario per la resistenza da linea a
neutra del motore soltanto ogni volta che si esegue l'autotuning
per un motore collegato a un carico. (Per garantire prestazioni
sufficienti, impostare il valore dal rapporto di test del motore.)
• L'uso dell'autotuning rotante è possibile se il motore non è collegato a un carico.
• Se si esegue l'autotuning rotante per un motore collegato a un
carico, le costanti del motore rilevate non saranno precise e il
funzionamento potrebbe risultare anomalo. Non eseguire mai
l'autotuning rotante per un motore collegato a un carico.
• Nella tabella riportata di seguito viene indicato lo stato degli
ingressi e delle uscite multifunzione durante l'autotuning.
Quando si esegue l'autotuning con un motore collegato a un
carico, accertarsi che il freno di stazionamento non sia inserito
durante l'autotuning, specialmente per sistemi di convogliamento o apparecchiature simili.
Modalità di sintonizzazione Ingressi multifunzione Uscite multifunzione
Autotuning rotante Non azionare. Come durante il funziona-
Autotuning stazionario solo
per resistenza da linea a
neutra del motore
Non azionare. Mantengono lo stato che
mento normale
avevano al momento
dell'avvio dell'autotuning.
• Per annullare l'autotuning, utilizzare sempre il tasto
sulla console di programmazione.
66
STOP
Page 68

6 Caratteristiche di programmazione
Precauzioni per l'uso dell'autotuning (quando tensione motore > tensione di alimentazione)
Attenersi alla seguente procedura per eseguire l'autotuning se si utilizza un motore
con tensione nominale superiore all'alimentazione di ingresso dell'inverter.
1. Immettere la tensione nominale dalla targhetta del motore per la tensione
massima (n012).
2. Impostare la frequenza di uscita in tensione massima (n013) sulla frequenza
di base della targhetta del motore.
3. Eseguire l'autotuning.
4. Registrare la corrente a vuoto del motore (n110).
5. Calcolare la corrente secondaria nominale del motore utilizzando la seguente
equazione:
Corrente secondaria nominale (Corrente nominale)² – (Corrente a vuoto)²=
6. Immettere la tensione di alimentazione per la tensione massima (n012).
7. Immettere il valore calcolato seguente per l'uscita di tensione massima
Frequenza (n013):
Frequenza di uscita in tensione massima =
Frequenza di base sulla targhetta del motore × Voltaggio tensione di alimentazione
8. Eseguire nuovamente l'autotuning.
9. Registrare una seconda volta la corrente a vuoto del motore (n110).
10.Calcolare la corrente secondaria nominale del motore utilizzando la seguente
Corrente secondaria nominale =
Corrente secondaria nominale calcolata nel passaggio 5 × Tensione nominale sulla targhetta del motore
Scorrimento nominale del motore =
Frequenza di base dalla targhetta del motore – Velocità nominale dalla targhetta del motore ×
equazione:
11.Immettere il valore calcolato seguente per lo scorrimento nominale del motore
(n106):
Corrente a vuoto nel passaggio 9 ×
NOTA
Tensione nominale sulla targhetta del motore
Voltaggio tensione di alimentazione
Numero di poli
Corrente a vuoto nel passaggio 4
Corrente secondaria nominale nel passaggio 5
1. Se è necessaria una velocità precisa a velocità elevate (90% della
velocità nominale o superiore), impostare n012 (tensione
massima) alla tensione di alimentazione potenza d'ingresso × 0,9.
2. Quando si opera a velocità elevate (pari o superiore al 90% della
velocità nominale), la corrente in uscita aumenterà ad alte velocità
nel momento in cui viene ridotta la tensione della potenza
d'alimentazione in ingresso. Accertarsi che vi sia un margine
sufficiente nella corrente dell'inverter.
120
67
Page 69

Procedura
1. Effettuare le seguenti verifiche:
• Il motore è separato dal sistema della macchina.
• La chiave di blocco dell'albero del motore è rimossa.
• Il freno, se presente, è rilasciato.
• Il cablaggio è corretto.
2. L'alimentazione dell'inverter è attivata.
3. Non sono presenti errori.
4. Selezionare la modalità di programmazione tenendo premuto
il relativo pulsante finché non si accende.
5. Impostare le seguenti costanti del motore selezionato sui
valori della targhetta.
N.
costante
n012 Tensione massima 0,1 … 255,0 Impostare alla tensione nominale dalla
n013 Frequenza di uscita in
n036 Corrente nominale del
n106 Scorrimento nominale
Descrizione Gamma di
tensione massima
motore
del motore
impostazione
targhetta.
0,2 … 400,0 Impostare alla frequenza di base dalla
0,0 … 999,9 Impostare alla corrente nominale dalla
0,0 ... 20,0 Hz Impostare sul valore della seguente
targhetta.
targhetta.
equazione utilizzando i dati dalla
targhetta:
Frequenza di base − Velocità nominale
×
Numero di poli/120
Commenti
Quando si eseguono impostazioni precise (ovvero, quando si
esegue l'autotuning utilizzando un report di test del motore o i
dati di progetto), i dati di ingresso da impostare per l'autotuning
saranno diversi. Fare riferimento alla tabella riportata di seguito.
Descrizione Impostazione semplice Impostazione precisa
Tensione massima Tensione nominale motore Tensione in condizioni a vuoto
Frequenza di uscita in
tensione massima
Scorrimento nominale
del motore
Frequenza base motore Frequenza in condizioni a vuoto
Frequenza di base − Velocità
nominale × Numero di poli/120
alla velocità nominale motore
alla velocità nominale
Scorrimento a coppia nominale
68
Page 70

6 Caratteristiche di programmazione
6. Impostare la selezione autotuning (n139).
7. Premere il tasto per selezionare la modalità di
DSPL
autotuning.
• La console di programmazione visualizzerà "TUn."
mostra il metodo di autotuning selezionato per n139.
• Tutte le spie di funzione si spengono.
• Le spie di stato tornano allo stato di pronto per il funzionamento.
• Nella modalità di autotuning sono consentiti unicamente i
tasti , e .
RUN
DSPL
STOP
• L'autotuning viene avviato automaticamente quando si
preme il tasto .
RUN
• L'autotuning viene annullato quando si preme il tasto
.
STOP
• Quando si preme il tasto , lo stato torna nuovamente
DSPL
alla modalità di programmazione, è quindi possibile modificare le costanti.
8. Premere il tasto per eseguire l'autotuning. L'alimenta-
RUN
zione viene fornita al motore con il metodo di autotuning selezionato.
• Durante l'autotuning, "TUn" lampeggia.
• Tutte le spie di funzione si spengono.
• Le spie di stato indicano il funzionamento normale.
9. Tuning completato
• Una volta che l'autotuning viene completato correttamente,
viene visualizzata la scritta "End" e le costanti verranno
impostate in base ai risultati di tuning.
• Una volta completato l'autotuning rotante, la tensione della
frequenza di uscita media e la tensione della frequenza di
uscita minima verranno calcolate e impostate in base alla
tensione massima selezionata come mostrato nella
seguente tabella.
69
Page 71

N.
costante
n015 Tensione della
n017 Tensione della
Descrizione Gamma di
frequenza di
uscita media
frequenza di
uscita minima
10.Premere il tasto per selezionare la modalità di funzio-
impostazione
0,1 … 255,0 (Tensione della frequenza di uscita media im-
0,1 … 50,0 (Tensione della frequenza di uscita minima
DSPL
postata in fabbrica)
tensione massima)/(Tensione massima impostata in fabbrica)
impostata in fabbrica) × (Valore impostato della tensione massima)/(Tensione massima impostata in fabbrica)
Commenti
×
(Valore impostato della
namento. L'autotuning viene completato.
Elaborazione degli errori durante l'autotuning
• Gli errori e gli allarmi che si verificano durante il normale funzionamento vengono rilevati anche durante l'autotuning.
• Se si verifica un errore o un allarme, il motore si arresta per
inerzia (blocco basi) e l'autotuning viene annullato.
• Se si verifica un errore di misurazione o se è stato premuto il
tasto durante l'autotuning, viene visualizzato un errore
STOP
EXX, il motore si arresta per inerzia e l'autotuning viene annullato. Questo messaggio di errore, tuttavia, non viene registrato
tra gli errori nel log. Per informazioni sugli errori, fare riferimento alla pagina 213.
• Se l'autotuning viene annullato, le costanti modificate dall'autotuning tornano ai valori iniziali prima dell'avvio dell'autotuning.
• Se si verifica un errore durante la decelerazione fino all'arresto
al termine dell'autotuning, sulla console di programmazione
viene visualizzato un errore, ma l'elaborazione dell'autotuning
non viene annullata. I risultati dell'autotuning sono validi.
70
Page 72

6 Caratteristiche di programmazione
Precauzioni dopo l'uso dell'autotuning
Per una zona a uscita fissa, la caratteristica V/f per il punto massimo della zona di uscita deve essere impostata dopo il completamento dell'autotuning. Per aumentare la velocità nominale del
motore di 1 … 1,2 volte o quando si usa un motore a uscita fissa,
effettuare le seguenti modifiche dopo l'autotuning. Non modificare n012 (Tensione massima) o n013 (Frequenza di uscita in
tensione massima).
• Aumento della velocità nominale del motore di 1 … 1,2 volte
Per aumentare la velocità nominale del motore di 1 … 1,2 volte,
utilizzare la seguente formula che consente di modificare l'impostazione della frequenza di uscita massima (n011):
Frequenza di uscita massima = (velocità nominale motore) x (n.
di poli motore)/120 (Hz) x 1 … 1,2)
Se la velocità del motore viene aumentata oltre la velocità nominale, a velocità elevate verranno utilizzate caratteristiche a uscita
fissa e la coppia motore verrà ridotta.
• Applicazioni sui motori a uscita costante come i motori per
macchine utensili
Utilizzare la seguente formula per modificare le impostazioni di
n011 (Frequenza di uscita massima) quando si utilizza un motore
con uscita fissa, ad esempio un motore per macchina utensile:
n011 = Frequenza (Hz) a velocità massima in condizioni a vuoto
(velocità di carico = 0)
Non modificare le costanti del motore dopo aver eseguito l'autotuning.
71
Page 73

Visualizzazioni della console di programmazione durante
l'autotuning
Le spie di funzione della console di programmazione cambiano
durante l'autotuning come indicato nei seguenti schemi.
Indicatori di
funzione
Imposta costanti richieste per l'autotuning.
PRGM
• Tensione massima
• Frequenza di tensione massima
Acceso
• Corrente nominale motore
• Scorrimento nominale del motore
Imposta selezione autotuning.
• Rotante/stazionario solo per
resistenza
Display della
console di pro-
Modalità autotuning
grammazione
(Attesa per ingresso RUN)
TUn
• Imposta le costanti per il tuning.
Acceso
Display della
console di pro-
Tuning resistenza
grammazione
Display della
console di programmazione
• Tensione c.c. (20%, 40%, 60%)
TUn
Lampeggiante
applicata.
Stazionario solo
per resistenza
Tuning corrente a vuoto
• Accelerazione
• Tuning
• Decelerazione
• Ripristina le costanti impostate per il tuning
sui valori originali.
• Scrive le costanti sottoposte a tuning.
Autotuning completato.
Fine
Acceso
DSPL
Indicatori di
Impostazione/monitoraggio
funzione
frequenza di riferimento
FREF
Acceso
DSPLDSPL
RUN
Rotante
STOP
STOP
Display della console
di programmazione
E03
STOP
Acceso
Display della console
di programmazione
Annullato per errore rilevamento
E12
corrente.
Acceso
Display della console
di programmazione
Annullato per errore resistenza.
E04
Acceso
Display della console
di programmazione
Annullato per errore
E09
accelerazione.
Acceso
Display della console
di programmazione
Annullato per errore corrente a
E05
vuoto.
Acceso
Display della console
di programmazione
Annullato per normale
XXX
rilevamento errore.
Acceso
Annullato per tasto
STOP
RESET
(RIPRISTINO)
72
Page 74

6 Caratteristiche di programmazione
Marcia indietro inibita (n006)
L'impostazione Marcia indietro inibita viene disabilitata consentendo un comando di marcia indietro dal terminale del circuito di
comando o dalla console di programmazione. Questa impostazione viene utilizzata per applicazioni in cui un comando di marcia indietro può causare problemi.
Impostazione Descrizione
0 Marcia indietro abilitata.
1 Marcia indietro disabilitata.
Selezione multivelocità
È possibile impostare fino a 17 velocità (inclusa la frequenza di
riferimento funzione jog) utilizzando le seguenti combinazioni di
selezioni del terminale di ingresso e frequenza di riferimento.
Modifica velocità a 8 fasi
n003=1 (Selezione modalità di funzionamento)
n004=1 (Selezione frequenza di riferimento)
n024=25,0 Hz (Frequenza di riferimento 1)
n025=30,0 Hz (Frequenza di riferimento 2)
n026=35,0 Hz (Frequenza di riferimento 3)
n027=40,0 Hz (Frequenza di riferimento 4)
n028=45,0 Hz (Frequenza di riferimento 5)
n029=50,0 Hz (Frequenza di riferimento 6)
n030=55,0 Hz (Frequenza di riferimento 7)
n031=60,0 Hz (Frequenza di riferimento 8)
* Per ulteriori informazioni sulla selezione
della tensione di sequenza e dell'ingresso
in corrente fare riferimento alla pagina 228.
Quando tutti gli ingressi multifunzione
NOTA
di riferimento sono disattivati, la
frequenza di riferimento selezionata
mediante la costante n004 (Selezione
frequenza di riferimento) diventa
effettiva.
n054=6 (Terminale di ingresso del contatto multifunzione S5)
n055=7 (Terminale di ingresso del contatto multifunzione S6)
n056=8 (Terminale di ingresso del contatto multifunzione S7)
n053=1
Marcia
Marcia/Arresto
Marcia indietro/Arresto
Multivelocità
di riferimento 1
Multivelocità
di riferimento 2
Multivelocità
di riferimento 3
External Fault
dopo errore
S1
S2
S5
S6
S7
S3
S4
SC
73
Page 75

(n031) 60,0 Hz
(n030) 55,0 Hz
(n029) 50,0 Hz
(n028) 45,0 Hz
(n027) 40,0 Hz
(n026) 35,0 Hz
Frequenza di
riferimento
Marcia avanti (indietro)/Arresto
Multivelocità di riferimento 1
(terminale S5)
Multivelocità di riferimento 2
(terminale S6)
Multivelocità di riferimento 3
(terminale S7)
(n025) 30,0 Hz
(n024) 25,0 Hz
n050 = 1 (Terminale di ingresso S1) (impostazione di fabbrica)
n051 = 2 (Terminale di ingresso S2) (impostazione di fabbrica)
n052 = 3 (Terminale di ingresso S3) (impostazione di fabbrica)
n053 = 5 (Terminale di ingresso S4) (impostazione di fabbrica)
n054 = 6 (Terminale di ingresso S5) (impostazione di fabbrica)
n055 = 7 (Terminale di ingresso S6) (impostazione di fabbrica)
n056 = 8 (Terminale di ingresso S7) (Modifica l'impostazione a 8.)
Funzionamento velocità a 16 fasi
Impostare le frequenze di riferimento 9 … 16 per n120 … n127.
Impostare il terminale di ingresso per una multivelocità di riferi-
mento utilizzando la selezione ingresso multifunzione.
Funzionamento a bassa velocità
Inserendo un comando di jog e in seguito un comando di marcia
avanti (indietro), il funzionamento viene abilitato alla frequenza di
jog impostata in n032. Quando le multivelocità di riferimento 1, 2,
3 o 4 vengono immesse simultaneamente con il comando di jog,
quest'ultimo acquisisce la priorità.
N. costante Descrizione Impostazione
n032 Frequenza di jog Impostazione di fabbrica:
6,00 Hz
n050 … n056 Jog di riferimento Impostato a 10 per qualsiasi
costante.
74
Ora
Page 76

6 Caratteristiche di programmazione
Regolazione del segnale di impostazione velocità
Il rapporto tra gli ingressi analogici e la frequenza di riferimento
può essere impostato per fornire la frequenza di riferimento come
ingressi analogici al terminale del circuito di comando FR o FC.
Frequenza di riferimento
GUADAGNO X della frequenza di
uscita massima
POLARIZZAZIONE X della
frequenza di uscita massima
100
100
( ) indica il valore relativo alla selezione di un ingresso
di corrente di riferimento
0 V
(4 mA)
(0 mA)
10 V
(20 mA)
(20 mA)
1. Guadagno della frequenza di riferimento analogica (n060)
La frequenza di riferimento fornita quando l'ingresso analogico
è pari a 10 V (o 20 mA) può essere impostata in unità di 1%.
(Frequenza di uscita massima n011=100%)
* Impostazione di fabbrica: 100%
2. Polarizzazione della frequenza di riferimento analogica (n061)
La frequenza di riferimento fornita quando l'ingresso analogico
è pari a 0 V
(4 mA o 0 mA) può essere impostata in unità di 1%.
(Frequenza di uscita massima n011=100%)
* Impostazione di fabbrica: 0%
Impostazioni tipiche
• Per azionare l'inverter con una frequenza di riferimento
0% ... 100% a una tensione di ingresso 0 ... 5 V
Frequenza massima (100%)
Guadagno n060 = 200
Polarizzazione n061 = 0
75
Page 77

• Per azionare l'inverter con una frequenza di riferimento
50% ... 100% a una tensione di ingresso 0 ... 10 V
Frequenza massima (100%)
Guadagno n060 = 100
Polarizzazione n061 = 50
0 V 10 V
Regolazione dei limiti inferiori e superiori della frequenza
• Limite superiore frequenza di riferimento
Limite
Frequenza
di riferimento
interna
Frequenza di riferimento impostata
Limite
inferiore frequenza
(n034)
superiore
frequenza
(n033)
(n033)
Imposta il limite superiore della frequenza
di riferimento in unità di 1%.
(n011: Frequenza di uscita massima =
100%)
Impostazione di fabbrica: 100%
• Limite inferiore frequenza di riferimento (n034)
Imposta il limite inferiore della frequenza di riferimento in unità di
1%.
(n011: Frequenza di uscita massima = 100%)
Quando si opera a una frequenza di riferimento da 0, il funzionamento continua a un limite inferiore della frequenza di riferimento.
Tuttavia, se il limite inferiore della frequenza di riferimento è impostata a un valore inferiore rispetto alla frequenza di uscita minima
(n016), l'azionamento non avviene.
Impostazione di fabbrica: 0%
Uso di quattro tempi di accelerazione/decelerazione
Frequenza
di uscita
Comando di marcia
avanti (indietro)
Multivelocità
di riferimento
Selezione tempo di
accel/decel. 1
Selezione tempo di
accel/decel. 2
Tempo di
accel. 2
(n021)
Tempo di
accel. 1
(n019)
Tempo di
decel. 2
(n022)
Accesa
Tempo di
decel. 1
(n020)
Tempo di
accel. 3
(n041)
Accesa
Accesa
Tempo di
accel. 4
(n043)
Accesa
Accesa
Tempo di
decel. 4*
(n044)
76
Tempo di
decel. 3*
(n042)
Ora
Page 78

6 Caratteristiche di programmazione
* Quando viene selezionata la decelerazione fino ad arresto (n005 = 0).
Impostando una selezione ingresso multifunzione (n050 ... n056)
su 11 (selezione tempo di accelerazione/decelerazione 1) o 27
(selezione tempo di accelerazione/decelerazione 2), il tempo di
accelerazione/decelerazione viene selezionato mediante le combinazioni ON/OFF della selezione tempo di accelerazione/decelerazione 1 e selezione tempo di accelerazione/decelerazione 2
(terminali S1 ... S7).
Le combinazioni delle impostazioni di tempo accelerazione/
decelerazione sono indicate di seguito.
Selezione tempo di
accelerazione/
decelerazione 1
Selezione tempo di
accelerazione/
decelerazione 2
Spenta Spenta Tempo di accelera-
Accesa Spenta Tempo di accelera-
Spenta Accesa Tempo di accelera-
Accesa Accesa Tempo di accelera-
Temp o d i
accelerazione
zione 1 (n019)
zione 2 (n021)
zione 3 (n041)
zione 4 (n043)
decelerazione
Tempo di decelera-
zione 1 (n020)
Tempo di decelera-
zione 2 (n022)
Tempo di decelera-
zione 3 (n042)
Tempo di decelera-
zione 4 (n044)
Tempo di
Numero Descrizione Unità Gamma di
n019 Tempo di accelerazione 1 Dipende
n020 Tempo di decelerazione 1 10,0 s
n021 Tempo di accelerazione 2 10,0 s
n022 Tempo di decelerazione 2 10,0 s
n041 Tempo di accelerazione 3 10,0 s
n042 Tempo di decelerazione 3 10,0 s
n043 Tempo di accelerazione 4 10,0 s
n044 Tempo di decelerazione 4 10,0 s
dall'impostazione di n018.
(vedere tabella
successiva).
impostazione
Dipende
dall'imposta-
zione di n018.
(vedere tabella
successiva).
Imposta-
zione di
fabbrica
10,0 s
77
Page 79

Impostazioni n018
Numero Unità Gamma di impostazione
n018
0 0,1 s 0,0 … 999,9 s (999,9 s o inferiore)
1 s 1000 … 6000 s (1000 s o superiore)
1 0,01 s 0,00 … 99,99 s (99,99 s o inferiore)
0,1 s 100,0 … 600,0 s (100 s o superiore)
Nota:La costante n018 può essere impostata in fase di arresto.
Se per il tempo di accelerazione/decelerazione viene impostato
un valore superiore a 600,0 s quando n018=0 (in unità di 0,1 s),
non è possibile impostare 1 per n018.
• Tempo di accelerazione
Imposta il tempo necessario affinché la frequenza di uscita passi
dallo 0% al 100%.
• Tempo di decelerazione
Imposta il tempo necessario affinché la frequenza di uscita passi
dallo 100% al 0%.
(Frequenza di uscita massima n011 = 100%)
Metodo inerziale dopo caduta di tensione momentanea (n081)
AVVERTENZA
Se l'inverter è configurato in modo che il funziona-
mento continua dopo il ripristino dell'alimentazione, mantenersi a distanza dall'inverter e dal
carico, in quanto l'inverter potrebbe ripartire
improvvisamente dopo un arresto (progettare il
sistema affinché garantisca la sicurezza anche se
l'inverter viene riavviato). La mancata osservanza
di questa avvertenzapuò provocare delle lesioni.
Quando la costante n018 è impostata su 1 o 2, il funzionamento
riparte automaticamente anche se si verifica una momentanea
caduta di tensione.
Impostazione
*3
0 Continuazione del funzionamento dopo una momenta-
*1
1
nea caduta di tensione non abilitata.
Continuazione del funzionamento dopo il ripristino
dell'alimentazione entro un tempo inerziale dopo una
Descrizione
momentanea caduta di tensione di 0,5 s
78
Page 80

6 Caratteristiche di programmazione
Impostazione
* 1. Mantiene il segnale di funzionamento per la continuazione del
* 2. Quando è selezionato 2, l'inverter viene riavviato in caso di
*3
*1, *2
2
funzionamento dopo il ripristino dell'alimentazione da una
momentanea caduta di tensione.
ripristino della tensione di alimentazione mentre viene mantenuta
l'alimentazione di controllo.
Non viene emesso alcun segnale di errore.
Continuazione del funzionamento dopo il ripristino
dell'alimentazione (uscita errore non prodotta).
Descrizione
Selezione curva a S (n023)
Per impedire scosse elettriche all'avvio e all'arresto della macchina, è possibile eseguire un'accelerazione o una decelerazione
utilizzando una configurazione con curva a S.
Impostazione Selezione curva a S
0 Caratteristica curva a S non fornita.
1 0,2 s
2 0,5 s
3 1,0 s
Nota: 1. Le caratteristiche della curva a S non sono supportate per il
controllo del posizionamento semplice, utilizzare pertanto il
valore impostato 0.
2. Il tempo caratteristico della curva S è il tempo compreso tra la
velocità di accelerazione/decelerazione 0 e la velocità di accelerazione/decelerazione normale stabilito dal tempo di accelerazione/decelerazione impostato.
Frequenza
di riferimento
Frequenza di
uscita
Frequenza di
uscita
Tempo caratteristico della curva S (Ts)
Ora
Il seguente diagramma di funzionamento mostra il passaggio tra
la marcia avanti/indietro durante la decelerazione fino all'arresto.
79
Page 81

Comando di marcia avanti
Comando di marcia indietro
Frequenza di uscita
Accelerazione
Caratteristiche della curva S in
Frequenza di uscita
min. n016
Decelerazione
Frequenza di uscita min.
Accelerazione
n016
Tempo di frenatura
ad iniezione c.c. all'arresto
n090
Decelerazione
Rilevamento coppia
Se alla macchina viene applicato un carico eccessivo, è possibile
rilevare un aumento della corrente di uscita ed emettere un
segnale di allarme al terminale di uscita multifunzione MA, MB, P1
o P2.
Per emettere un segnale di rilevamento sovracoppia, impostare
una delle selezioni funzione di terminale di uscita n057 ... n059
per il rilevamento sovracoppia (Impostazione: 6 (contatto NO) o 7
(contatto NC)).
Corrente del motore
Segnale di uscita multifunzione
(Segnale di rilevamento sovracoppia)
Terminale MA, MB, P1 o P2
* La larghezza di rilascio del rilevamento sovracoppia (isteresi) è
impostata al 5% circa della corrente nominale dell'inverter.
Selezione funzione di rilevamento sovracoppia 1 (n096)
Impostazione Descrizione
0 Rilevamento sovracoppia non fornito.
1 Rilevamento durante il funzionamento a velocità
costante. Il funzionamento continua dopo il rilevamento.
2 Rilevamento durante il funzionamento a velocità
costante. Il funzionamento si interrompe durante il
rilevamento.
80
Ora
Page 82

6 Caratteristiche di programmazione
Impostazione Descrizione
3 Rilevamento durante il funzionamento. Il funzionamento
4 Rilevamento durante il funzionamento. Il funzionamento
1. Per rilevare la sovracoppia durante l'accelerazione/la
decelerazione, impostare n096 su 3 o 4.
2. Per continuare il funzionamento dopo il rilevamento sovracoppia,
impostare n096 su 1 o 3.
Durante il rilevamento, sulla console di programmazione viene
visualizzato un allarme (lampeggiante).
3. Per arrestare l'inverter e generare un errore al rilevamento sovracoppia, impostare n096 su 2 o 4. Al rilevamento, sulla console di
programmazione viene visualizzato l'errore (ON).
continua dopo il rilevamento.
si interrompe durante il rilevamento.
Livello di rilevamento sovracoppia (n098)
Impostare il livello corrente di rilevamento sovracoppia in unità di
1%. (Corrente nominale inverter = 100%) Quando è selezionato il
rilevamento mediante coppia, la coppia nominale del motore
diventa 100%.
Impostazione di fabbrica: 160%
Tempo di rilevamento sovracoppia (n099)
Se il tempo in cui la corrente del motore supera il livello di rilevamento sovracoppia (n098) è più lungo rispetto al tempo di rilevamento sovracoppia (n099), verrà azionata la funzione di
rilevamento sovracoppia.
Impostazione di fabbrica: 0,1 s
Selezione funzione di rilevamento sovracoppia/sottocoppia 2
(n097)
Se è selezionata la modalità di controllo vettoriale, il rilevamento
sovracoppia/sottocoppia può essere eseguito rilevando la corrente
di uscita o la coppia di uscita.
Se è selezionata la modalità di controllo V/f, l'impostazione di n097
non è valida e la sovracoppia/sottocoppia viene rilevata mediante
la corrente di uscita.
Impostazione Descrizione
0 Rilevamento mediante coppia di uscita
1 Rilevamento mediante corrente di uscita
81
Page 83

Livello di rilevamento frequenza (n095)
Effettivo quando uno o più selezioni uscita multifunzione n057,
n058 e n059 sono impostate per il rilevamento frequenza (impostazione: 4 o 5). Il rilevamento della frequenza si attiva quando la
frequenza di uscita è superiore o inferiore rispetto all'impostazione per il livello di rilevamento frequenza (n095).
Rilevamento frequenza 1
Frequenza di uscita ≥ Livello di rilevamento frequenza n095
(Impostare n057, n058 o n059 su 4.)
Larghezza di
Livello rilevamento
frequenza [Hz] (n095)
Frequenza di
uscita
Segnale
rilevamento
frequenza
rilascio
2Hz
−
Rilevamento frequenza 2
Frequenza di uscita ≤ Livello di rilevamento frequenza n095
(Impostare n057, n058 o n059 su 5.)
Larghezza
Frequenza di
uscita
Segnale
rilevamento
frequenza
di rilascio
+2 Hz
Livello
rilevamento
frequenza (Hz)
(n095)
82
Page 84

6 Caratteristiche di programmazione
Frequenza di salto (n083 … n086)
Questa funzione consente di vietare o "saltare" frequenze critiche
in modo da far funzionare il motore senza risonanza causata dal
sistema della macchina. Questa funzione viene utilizzata anche
per il controllo della zona morta. Impostando i valori su 0,00 Hz
questa funzione viene disabilitata.
Impostare le frequenze non consentite 1, 2 e 3 nel modo
seguente:
Frequenza di uscita
n083 ≥ n084 ≥ n085
Se questa condizione non viene
rispettata, l'inverter visualizza per
un secondo e ripristina i
Frequenza di riferimento
dati sulle impostazioni iniziali.
Il funzionamento non è consentito entro la gamma della frequenza
di salto.
Tuttavia, il motore funzionerà senza salti durante l'accelerazione/la
decelerazione.
Funzionamento riavvio automatico (n082)
AVVERTENZA
Se la funzione di ripresa in caso di errore è selezio-
nata, mantenersi a distanza dall'inverter e dal
carico, in quanto l'inverter potrebbe ripartire
improvvisamente dopo un arresto (progettare il
sistema affinché garantisca la sicurezza anche se
l'inverter viene riavviato). La mancata osservanza
di questa avvertenzapuò provocare delle lesioni.
L'inverter può essere impostato per riavviare e ripristinare il rilevamento errori in caso di errore. È possibile impostare fino a un
massimo di 10 tentativi e tentativi di autodiagnostica in n082.
L'inverter viene riavviato automaticamente dopo i seguenti errori:
OC (sovracorrente)
OV (sovratensione)
Il numero di tentativi viene portato a 0 nei seguenti casi:
83
Page 85

1. Se non si verificano altri errori entro 10 minuti dopo il tentativo
2. Quando il segnale Ripristino dopo errore è attivo dopo il rilevamento dell'errore
3. In assenza di alimentazione.
Selezione offset della frequenza (n146)
Una frequenza offset (che può essere impostata con una costante)
può essere aggiunta o sottratta dalla frequenza di riferimento utilizzando gli ingressi multifunzione.
N.
costante
Descrizione Descrizione Impostazione
n083 Frequenza di
salto 1
(frequenza
offset 1)
n084 Frequenza di
salto 2
(frequenza
offset 2)
n085 Frequenza di
salto 3
(frequenza
offset 3)
la 1a cifra di n146 è 0 o 1:
Unità di impostazione: 0.01 Hz
Gamma di impostazione: 0.00 ... 400,0 Hz
la 1a cifra di n146 è 2:
Unità di impostazione: 0,01%
Gamma di impostazione: 0,00% … 100,0%
(percentuale della frequenza di uscita massima)
la 1a cifra di n146 è 0 o 1:
Unità di impostazione: 0,01 Hz
Gamma di impostazione: 0,00 ... 400,0 Hz
la 1a cifra di n146 è 2:
Unità di impostazione: 0,01%
Gamma di impostazione: 0,00% … 100,0%
(percentuale della frequenza di uscita massima)
la 1a cifra di n146 è 0 o 1:
Unità di impostazione: 0,01 Hz
Gamma di impostazione: 0,00 ... 400,0 Hz
la 1a cifra di n146 è 2:
Unità di impostazione: 0,01%
Gamma di impostazione: 0,00% … 100,0%
(percentuale della frequenza di uscita massima)
di fabbrica
0,00 Hz
0,00 Hz
0,00 Hz
84
Page 86

6 Caratteristiche di programmazione
N.
Descrizione Descrizione Impostazione
costante
n146 Offset della
frequenza
Selezione
n146 è separata in 2 cifre (n146=xy). La prima
cifra "x" indica l'uso di parametri n083 ... n085:
n146= 0y:
Disabilitato (n083 … n085 sono
frequenze di salto)
n146= 1y:
Abilitato (n083 … n085 sono
frequenze offset in Hz)
n146= 2y:
Abilitato (n083 … n085 sono
frequenze offset in percentuale)
La 2a cifra "y" indica il segno delle frequenze offset. Per le combinazioni possibili fare riferimento alla seguente tabella:
y n083 n084 n085
0+++
1 − ++
2+− +
3 −−+
4++−
5 − + −
6+−−
7 −−−
8 −−−
9 −−−
Nota: Quando la 2a cifra di n146 viene modifi-
cata, i valori impostati di n083 ... n085
verranno inizializzati a 0.
• Se la 1a cifra "x" della selezione offset della frequenza (n146)
è 0 (offset della frequenza disabilitati), i valori impostati delle
costanti n083 … n085 fungeranno da frequenze di salto.
di fabbrica
0
85
Page 87

• Se la 1a cifra "x" della selezione offset della frequenza (n146)
è 1 o 2 (offset della frequenza disabilitati), i valori impostati
delle costanti n083 … n085 fungeranno da offset della frequenza.
• Per poter attivare le frequenze offset 1 ... 3 delle selezioni
ingresso multifunzione (n050 … n056), è necessario effettuare
la programmazione su 30, 31 o 33. A seconda dello stato di
ingresso, è possibile utilizzare le combinazioni delle frequenze
offset indicate di seguito. Tenere presente che viene utilizzato il
segno specificato con "y".
Stato ingresso terminali Quantità offset finale
offset
Frequenza
offset 3
Spenta Spenta Spenta Nessuna
Spenta Spenta Accesa n083
Spenta Accesa Spenta n084
Spenta Accesa Accesa n084
Accesa Spenta Spenta n085
Accesa Spenta Accesa n083 + n085
Accesa Accesa Spenta n084 + n085
Accesa Accesa Accesa n083 + n084 + n085
offset
Frequenza
offset 2
offset
Frequenza
offset 1
• La quantità offset abilitata può essere monitorata sul display di
U-12 sulla console di programmazione.
N. moni-
toraggio
U-12 Quantità offset 1a cifra "x" di n146 = 0: visualizzazione "----"
Descrizione Descrizione
1ª cifra "x" di n146 = 1: Valore visualizzato:
−
400 … 400,0 Hz
1ª cifra "x" di n146 = 2: Valore visualizzato:
−
100% ... 100,0%
86
Page 88

6 Caratteristiche di programmazione
Il diagramma a blocchi riportato di seguito illustra la funzione offset della frequenza.
Frequenza di
riferimento
selezionata
n083
n084
n085
Limite superiore
frequenza di
n146,
cifra destra
Ingresso offset
frequenza 1
Ingresso offset
frequenza 2
Ingresso offset
frequenza 3
riferimento
n033 x n011
00
0
+
+
+
+
+
0
n146,
cifra destra
Volume di
offset (U-12)
Frequenze di salto
n085
n084
n083
Limite inferiore
frequenza
di riferimento
n034 x n011
400 Hz
Azionamento di un motore con movimento di inerzia senza
scatti
Per azionare un motore con movimento per inerzia senza scatti,
utilizzare il comando di ricerca della velocità o la frenatura ad iniezione c.c. all'avvio.
Comando di ricerca della velocità
Riavvia un motore con movimento per inerzia senza arrestarlo.
Questa funzione consente un passaggio morbido dal funzionamento ad alimentazione commerciale del motore al funzionamento
dell'inverter.
Impostare una selezione ingresso multifunzione (n050 … n056) su
14 (comando di ricerca dalla frequenza di uscita massima) o 15
(comando di ricerca dalla frequenza impostata).
Effettuare una sequenza in modo che venga immesso un
comando di marcia avanti (indietro) contemporaneamente al
comando di ricerca o dopo il comando di ricerca. Se il comando di
marcia viene immesso prima del comando di ricerca, quest'ultimo
viene disabilitato.
Frequenza
di riferimento
(U-01)
87
Page 89

Diagramma di funzionamento all'ingresso del comando di
ricerca
Comando di marcia avanti
(indietro)
Comando di ricerca
Frequenza di uscita max. o
frequenza di riferimento all'
ingresso del comando di marcia
Frequenza di uscita
Tempo blocco
delle basi min. (0,5 s)
0,5 s minimo
Rilevamento raggiungimento
velocità
Funzionamento
durante ricerca
della velocità
Il tempo di decelerazione per il funzionamento durante la ricerca
della velocità può essere impostato in n101.
Se l'impostazione è 0, tuttavia, verrà utilizzato un valore iniziale di
2,0 s.
La ricerca della velocità ha inizio quando la corrente di uscita
dell'inverter è maggiore o uguale al livello di funzionamento
durante la ricerca della velocità (n102).
Frenatura ad iniezione c.c. all'avvio (n089, n091)
Riavvia un motore con movimento per inerzia dopo averlo arrestato. Impostare il tempo di frenatura ad iniezione c.c. all'avvio in
n091 in unità di 0,1 s. Impostare la corrente di frenatura ad iniezione c.c. in n089 in unità di 1% (corrente nominale inverter
=100%). Quando l'impostazione di n091 è 0, la frenatura ad iniezione c.c. non viene eseguita e l'accelerazione inizia dalla frequenza di uscita minima.
Quando n089 è impostato su 0, l'accelerazione inizia dalla frequenza di uscita
minima dopo il blocco delle basi per il
tempo impostato in n091.
Frequenza di
uscita min.
n016
Tempo di frenatura ad iniezione
c.c. all'avvio
Mantenimento temporaneo accelerazione/decelerazione
Per mantenere l'accelerazione/la decelerazione, immettere un
comando di mantenimento accelerazione/decelerazione. La frequenza di uscita viene mantenuta quando un comando di mantenimento accelerazione/decelerazione viene immesso durante
l'accelerazione o la decelerazione.
Quando il comando di arresto viene immesso durante l'immissione di un comando di mantenimento accelerazione/decelera-
88
n091
Page 90

6 Caratteristiche di programmazione
zione, il mantenimento accelerazione/decelerazione viene
rilasciato e il funzionamento si arresta per inerzia.
Impostare una selezione ingresso multifunzione (n050 … n056)
su 16 (mantenimento accelerazione/decelerazione).
Diagramma di funzionamento per l'ingresso del comando di
mantenimento accelerazione/decelerazione
Comando di marcia
avanti (indietro)
Comando di mantenimento accelerazione/
decelerazione
Frequenza
di riferimento
Frequenza di
uscita
Segnale
raggiungimento
frequenza
Nota:Se un comando di marcia avanti (indietro) viene immesso in conco-
mitanza con un comando di mantenimento accelerazione/decelerazione, il motore non funziona. Tuttavia, se il limite inferiore della
frequenza di riferimento (n034) viene impostato a un valore maggiore o uguale alla frequenza di uscita minima (n016), il motore funziona al limite inferiore della frequenza di riferimento (n034).
Monitoraggio analogico esterno (n066)
Seleziona e trasmette la frequenza di uscita o la corrente di uscita
ai terminali di uscita analogici AM-AC per il monitoraggio.
Impostazione Descrizione
0 Frequenza di uscita
1 Corrente in uscita
2 Tensione c.c. del circuito principale
3 Monitoraggio della coppia
4 Potenza di uscita
5 Tensione di uscita di riferimento
6 Monitoraggio frequenza di riferimento
7 Quantità retroazione PID (10 V/Frequenza di uscita massima
in n011)
89
Page 91

Impostazione Descrizione
8 Trasmissione dati tramite comunicazione (registro MEMOBUS
n. 0007H) (10 V/1000)
Nota:Abilitato solo se n065 è impostato su 0 (uscita monitoraggio
analogico).
Nell'impostazione di fabbrica, la tensione analogica di circa 10 V
viene trasmessa quando la frequenza di uscita (corrente di uscita)
è 100 %.
Frequenza di uscita
Frequenzimetro
FMAM
CA
(Corrente di uscita)
100 %
0
Uscita analogica
Il guadagno del monitoraggio
analogico può essere impostato
da n067.
10 V
Taratura frequenzimetro o amperometro (n067)
Utilizzato per regolare il guadagno di uscita analogico.
Frequenzimetro/Amperometro
(portata 3 V 1 mA)
AM
n067
FM
CA
Frequenza di uscita
(Corrente di uscita)
100 %
0
Uscita analogica
n067 = 0,30
n067 = 1.00
Impostazione di fabbrica
10 V3 V
Impostare la tensione di uscita analogica al 100 % della frequenza
di uscita (corrente di uscita). Il frequenzimetro visualizza 0 …
60 Hz a 0 … 3 V.
10 V x
Impostazione n067
0.30
A questo valore la frequenza
= 3 V
di uscita diventa 100 %.
90
Page 92

6 Caratteristiche di programmazione
Uso dell'uscita analogica come uscita a treno di impulsi
(n065).
L'uscita analogica AM-AC può essere utilizzata come uscita a
treno di impulsi (monitoraggio frequenza di uscita, monitoraggio
frequenza di riferimento).
Impostare n065 su 1 quando si utilizza l'uscita a treno di impulsi.
N. costante Descrizione Unità Gamma di
n065 Tipo di uscita di
monitoraggio
impostazione
-0, 1 0
Impostazione
Impostazione n065
Impostazione
n065
0 Uscita monitoraggio analogico
1 Uscita di monitoraggio a impulsi
Il segnale a treno di impulsi può essere selezionato mediante
l'impostazione in n150.
Impostazione
n150
0 Monitoraggio
1 1F: Frequenza di uscita × 1
6 6F: Frequenza di uscita × 6
12 12F: Frequenza di uscita × 12
24 24F: Frequenza di uscita × 24
36 36F: Frequenza di uscita × 36
(Monitoraggio frequenza di uscita)
frequenza
di uscita
Descrizione
Descrizione
1440 Hz/frequenza massima (n011)
di fabbrica
91
Page 93

Impostazione
Descrizione
n150
40 Monitoraggio
41 1F: Frequenza di uscita × 1
frequenza di
riferimento
1440 Hz/frequenza massima (n011)
42 6F: Frequenza di uscita × 6
43 12F: Frequenza di uscita × 12
44 24F: Frequenza di uscita × 24
45 36F: Frequenza di uscita × 36
50 Trasmissione dati tra-
mite comunicazione
Uscita 0 … 14,400 Hz (registro
MEMOBUS n. 000AH) (1 Hz/1)
Nota:Abilitato solo se n065 è impostato su 1 (uscita monitoraggio a
impulsi).
Nell'impostazione di fabbrica, l'impulso di 1440 Hz può essere
trasmesso quando la frequenza di uscita è 100 %.
Frequenza di uscita
AM
c.a. (0 V)
I dispositivi periferici devono essere collegati in base alle
NOTA
condizioni di carico indicate di seguito durante l'uso
dell'uscita di monitoraggio a impulsi. Se queste condizioni non vengono soddisfatte, la macchina potrebbe
danneggiarsi.
Utilizzata come uscita PNP
Tensione di
uscita VRL (V)
+5 V 1,5 kΩ o superiore
+8 V 3,5 kΩ o superiore
+10 V 10 kΩ o superiore
92
Impulso
Impedenza di carico
(kΩ)
100 %
Uscita di monitoraggio a impulsi
1440 Hz
AM
VRL
c.a. (0 V)
Impedenza
di carico
Page 94

6 Caratteristiche di programmazione
Utilizzata come uscita NPN
Alimentazione
esterna (V)
Corrente assorbita NPN (mA)
+12 Vc.c. ±5% o
inferiore
non oltre 16 mA
AM
c.a. (0 V)
Alimentazione esterna
Corrente
assorbita NPN
Selezione frequenza portante (n080)14 kHz max.
Imposta la frequenza di commutazione dei transistor di uscita
dell'inverter (frequenza portante).
Impostazione Frequenza portante (kHz) Rumore
metallico dal
motore
7 fout 12 (Hz)
8 fout 24 (Hz)
9 fout 36 (Hz)
Superiore
1 2,5 (kHz)
2 5,0 (kHz)
3 7,5 (kHz)
Non
percepibile
4 10,0 (kHz)
12 14 (kHz)
Nota:Quando la frequenza portante è impostata a 14 kHz, utilizzare
una velocità di trasmissione MEMOBUS di 4.800 bps o inferiore.
Impedenza
di carico
(0 V)
Rumore e
corrente di
dispersione
Minore
Maggiore
93
Page 95

Se il valore impostato è 7, 8 o 9, la frequenza portante verrà moltiplicata per lo stesso fattore della frequenza di uscita.
n080=7
fc=12 fout
fc=Frequenza portante
2.5 kHz
1.0 kHz
83.3 Hz 208.3 Hz
fout=Frequenza di uscita
94
n080=8
fc=24 fout
n080=9
fc=36 fout
fc=Frequenza portante
2.5 kHz
1.0 kHz
fc=Frequenza portante
2.5 kHz
1.0 kHz
27.7 Hz 69.4 Hz
41.6 Hz 104.1 Hz
fout=Frequenza di uscita
fout=Frequenza di uscita
Page 96

6 Caratteristiche di programmazione
L'impostazione di fabbrica dipende dalla capacità dell'inverter
(kVA).
Classe di
tensione (V)
200 V
monofase
400 V
trifase
Potenza
Impostazione di fabbrica Corrente di
(kW)
Imposta-
Frequenza
zione
portante
(kHz)
0,55 4 10 3,0 - 2,6 (87%)
1,1 4 10 5,0 - 4,3 (86%)
1,5 3 7,5 8,0 7,0 6,0 (75%)
2,2 3 7,5 11,0 10,0 8,6 (78%)
0,55 3 7,5 1,8 1,6 1,28 (71%)
1,1 3 7,5 3,4 3,0 2,2 (65%)
1,5 3 7,5 4,8 4,0 3,2 (67%)
2,2 3 7,5 5,5 4,8 3,84 (70%)
3,0 3 7,5 7,2 6,3 4,9 (68%)
4,0 3 7,5 9,2 8,1 6,4 (74%)
uscita
continua
massima (A)
ridotta (A)
Corrente
Corrente di
uscita
continua
(riduzione
corrente di
uscita)
(A)
FC =
14 kHz
95
Page 97

1. Ridurre la corrente di uscita continua quando si cam-
NOTA
Lunghezza del
cavo tra inverter e
motore
Frequenza portante (imposta-
zione n080)
2. Impostare la selezione frequenza portante (n080) su
3. Se l'inverter si arresta e si riavvia in modo ripetuto
4. La frequenza portante viene ridotta automatica-
bia la frequenza portante a 4 (10 kHz) per inverter di
classe 200 V (1,5 kW o superiore) e di classe 400 V.
Per la corrente ridotta fare riferimento alla tabella
riportata sopra.
Condizioni di funzionamento
• Tensione di alimentazione di ingresso:
monofase 200 … 240 V (classe 200 V)
trifase 380 … 460 V (classe 400 V)
• Temperatura ambiente:
−10 ... 40°C (14 ... 105°F)
Se la distanza di cablaggio è elevata, ridurre la frequenza portante dell'inverter come descritto di
seguito.
Fino a 50 m Fino a 100 m Più di 100 m
non oltre 10 kHz
(n080=1, 2, 3, 4, 7,
8, 9)
non oltre 5 kHz
(n080=1, 2, 7, 8, 9)
non oltre 2,5 kHz
(n080=1, 7, 8, 9)
1, 2, 3 o 4 quando si usa la modalità di controllo vettoriale. Non impostare a 7, 8 o 9.
con un carico superiore al 120% della corrente nominale dell'inverter entro un periodo di tempo massimo
di 10 minuti, ridurre la frequenza portante a una
velocità bassa. (Impostare la costante n175 su 1).
mente a 2,5 kHz quando la selezione di riduzione
frequenza portante a velocità bassa (n175) è
impostata su 1 e vengono rispettate le seguenti
condizioni:
Frequenza di uscita ≤ 5 Hz
Corrente di uscita ≥ 110%
Impostazione di fabbrica: 0 (disabilitata)
96
Page 98

6 Caratteristiche di programmazione
5. Quando è selezionata una frequenza portante di
14 kHz (n080), la riduzione automatica della frequenza portante durante una sovracorrente a bassa
velocità viene abilitata automaticamente, anche se la
selezione di riduzione frequenza portante a velocità
bassa (n175) è impostata su 0 (disabilitata).
6. Quando la frequenza portante è impostata su
14 kHz, verranno disabilitate le seguenti funzioni:
• Ingresso digitale rapido (AVVIO/ARRESTO)
• UP 2/DOWN 2
• Protezione da surriscaldamento del motore
mediante ingresso termistore PTC
Importante
• Uscita PID bidirezionale
• Offset della frequenza
Selezione tasto Stop console di programmazione (n007)
AVVERTENZA
Il tasto Stop della console di programmazione può
essere disabilitato mediante un'impostazione
dell'inverter. Installare un pulsante di arresto di
emergenza separato.
La mancata osservanza di questa avvertenza
potrebbe essere causa di lesioni.
Impostare l'elaborazione quando il tasto viene premuto
durante il funzionamento mediante terminale di ingresso multi-
STOP
funzione o mediante comunicazione.
Impostazione Descrizione
0
1
Il tasto STOP è valido da un terminale di ingresso
multifunzione o da una comunicazione. Quando
si preme il tasto STOP, l'inverter si arresta in base
all'impostazione della costante n005. A questo
punto, la console di programmazione visualizza
un alarme (lampeggiante). Il comando di
arresto viene mantenuto nell'inverter finché i comandi di marcia avanti e indietro non sono aperti,
o finché il comando di marcia dalla comunicazione non torna a zero.
Il tasto STOP non è valido da terminali di ingresso
multifunzione o da una comunicazione.
97
Page 99

Selezione del secondo motore
Questa funzione consente di passare tra due motori per un solo
inverter. Per il secondo motore deve essere utilizzato il controllo
V/f control. La commutazione è possibile da un ingresso
multifunzione.
Le costanti riportate di seguito vengono utilizzate come costanti
di controllo per il motore 2.
N.
costante
−
n140 Frequenza di uscita
n158 Tensione massima del
n147 Frequenza di uscita in
n159 Tensione della frequenza
n014 Frequenza di uscita
n160 Tensione della frequenza
n161 Corrente nominale del
n162 Scorrimento nominale del
Descrizione Unità Gamma di
Selezione modalità di
controllo
massima del motore 2
motore 2
tensione massima del
motore 2
di uscita media del
motore 2
media
di uscita minima del motore 2
motore 2
motore 2
−
0,1 Hz 50,0 ... 400,0 Hz 50,0 Hz
0,1 V
0,1 Hz 0,2 ... 400,0 Hz 50,0 Hz
0,1 V
0,1 Hz 0,1 ... 399,9 Hz 1,3 Hz
0,1 V
0,1 A 0,0% … 150% della
0,1 Hz 0,0 ... 20,0 Hz *2
Deve essere utilizzato
impostazione
il controllo V/f.
0,1 … 255,0 V*1200,0 V
0,1 … 255,0 V
0,1 … 50,0 V
corrente nominale
dell'inverter
Imposta-
zione di
fabbrica
*1
*1
Nota:Non inizializzato durante l'inizializzazione delle costanti.
* 1. Il limite superiore della gamma di impostazione e l'impostazione di
fabbrica sono doppi per gli inverter classe 400 V.
* 2. Dipendente dalla potenza dell'inverter.
−
12,0 V
*1*2
12,0 V
*1*2
*2
*1
98
Page 100

N.
costante
n057 Selezione uscita multi-
n058 Selezione uscita multi-
n059 Selezione uscita multi-
Descrizione Descrizione Imposta-
funzione 1
(Terminali di uscita a
contatto MA-MB-MC)
funzione 2
(Terminali di uscita a
collettore aperto
PHC1-PHCC)
funzione 3
(Terminali di uscita a
collettore aperto
PHC2-PHCC)
6 Caratteristiche di programmazione
zione di
fabbrica
0: Errore
1: In funzione
2: Raggiungimento frequenza di riferimento
3: Velocità zero
4: Rilevamento frequenza (≥ Livello di
rilevamento)
5: Rilevamento frequenza (≤ Livello di
rilevamento)
6: Rilevamento sovracoppia (uscita a
contatto NO)
7: Rilevamento sovracoppia (uscita a
contatto NC)
8: Rilevamento sottocoppia (uscita a
contatto NO)
9: Rilevamento sottocoppia (uscita a
contatto NC)
10: Errore non grave (viene indicato
l'allarme)
11: Base bloccata
12: Modalità operativa
13: Inverter pronto al funzionamento
14: Ripresa in caso di errore
15: UV
16: Marcia indietro
17: Ricerca della velocità
18: Trasmissione dati tramite
comunicazione
19: Perdita retroazione PID
20: Perdita frequenza di riferimento
21: Avviso surriscaldamento inverter (OH3)
22: Monitoraggio selezione motore
Come costante 57 1
Come costante 57 2
0
99
 Loading...
Loading...