

Page 1

Cat. No.
TOIPC71067605-03-OY
VARISPEED L7
L´inverter di frequenza per ascensori
MANUALE DI PROGRAMMAZIONE
Page 2

Sommario
Avvertenze ....................................................................................................VII
Precauzioni di sicurezza e istruzioni ........................................................... VIII
Compatibilità elettromagnetica (EMC) ........................................................... X
Filtri di linea ..................................................................................................XII
Marchi registrati .......................................................................................... XIII
1 Installazione degli inverter .................................................... 1-1
Modelli Varispeed L7 ...................................................................................1-2
Controlli dopo la consegna ..........................................................................1-3
Controlli ..........................................................................................................................1-3
Informazioni sulla targa ..................................................................................................1-3
Versione software dell'inverter .......................................................................................1-4
Nomi dei componenti .....................................................................................................1-5
Dimensioni esterne e di installazione ..........................................................1-7
Inverter IP00 ..................................................................................................................1-7
Inverter IP20/NEMA 1 .................................................................................................... 1-7
Controllo del luogo di installazione ..............................................................1-9
Luogo di installazione ....................................................................................................1-9
Controllo della temperatura ambiente ............................................................................1-9
Protezione dell'inverter da sostanze estranee ...............................................................1-9
Posizione corretta di installazione .............................................................1-10
Rimozione e installazione dei copriterminali ..............................................1-11
Rimozione e installazione dei copriterminali. ............................................................... 1-11
Installazione del copriterminali .....................................................................................1-12
Rimozione/installazione console di
programmazione/console a LED e coperchio frontale ...............................1-13
Inverter da 18,5 kW o inferiori ...................................................................................... 1-13
Inverter da 22 kW o superiori .......................................................................................1-15
2 Cablaggio ............................................................................... 2-1
Schema dei collegamenti ............................................................................2-2
Descrizione circuiti .........................................................................................................2-3
Configurazione della morsettiera .................................................................2-4
I
Page 3

Cablaggio dei terminali del circuito principale .............................................2-5
Dimensioni dei cavi e dei terminali a crimpare applicabili ............................................. 2-5
Funzioni dei morsetti del circuito principale ................................................................... 2-9
Configurazioni del circuito principale ........................................................................... 2-10
Schemi dei collegamenti standard .............................................................................. 2-11
Cablaggio dei circuiti principali .................................................................................... 2-12
Cablaggio terminali del circuito di controllo ............................................... 2-17
Dimensioni dei cavi ..................................................................................................... 2-17
Funzioni dei terminali del circuito di controllo .............................................................. 2-18
Collegamenti dei terminali del circuito di controllo ...................................................... 2-20
Cablaggio conforme a EN81-1 con un contattore motore ......................... 2-21
Precauzioni per il cablaggio dei circuiti di controllo ..................................................... 2-22
Controllo cablaggio ...................................................................................2-23
Controlli ....................................................................................................................... 2-23
Installazione e cablaggio delle schede opzionali ....................................... 2-24
Dati tecnici e modelli delle schede opzionali ............................................................... 2-24
Installazione ................................................................................................................ 2-24
Terminali scheda di controllo velocità PG e dati tecnici ............................................... 2-25
Cablaggio delle morsettiere ........................................................................................ 2-31
3 Console a LED/
console di programmazione e modalità operative ..............3-1
Console a LED JVOP-163 ..........................................................................3-2
Console a LED .............................................................................................................. 3-2
Esempi di visualizzazioni LED ....................................................................................... 3-2
Console di programmazione JVOP-160-OY ............................................... 3-3
Display della console di programmazione ..................................................................... 3-3
Tasti della console di programmazione ......................................................................... 3-3
Modalità dell'inverter ...................................................................................................... 3-5
Attivazione delle modalità .............................................................................................. 3-6
Modalità di funzionamento ............................................................................................ 3-7
Modalità di programmazione veloce .............................................................................. 3-8
Modalità di programmazione avanzata ......................................................................... 3-9
Modalità di verifica ....................................................................................................... 3-11
Modalità di autotuning ................................................................................................. 3-12
4 Procedura di avvio .................................................................4-1
Routine di avvio generale ............................................................................ 4-2
II
Avvio .............................................................................................................................. 4-2
Avvio ............................................................................................................4-3
Prima dell'avvio ............................................................................................................. 4-3
Display dopo l'avvio ....................................................................................................... 4-3
Selezione delle modalità di controllo ............................................................................. 4-3
Page 4

Autotuning ...................................................................................................4-4
Selezione della modalità di autotuning ..........................................................................4-4
Precauzioni per l'autotuning ..........................................................................................4-5
Procedura di autotuning con motori a induzione ...........................................................4-6
Procedura di autotuning con motori PM ........................................................................4-7
Tuning dell'offset dell'encoder per motori PM ................................................................ 4-8
Precauzioni per l'autotuning dei motori a induzione ......................................................4-9
Allarmi ed errori di autotuning ......................................................................................4-10
Ottimizzazione delle prestazioni ................................................................ 4-11
5 Parametri utente .................................................................... 5-1
Descrizione parametri utente .......................................................................5-2
Descrizione delle tabelle dei parametri utente ...............................................................5-2
Livelli e funzioni di visualizzazione della console di programmazione ........5-3
Parametri utente disponibili in modalità di programmazione rapida ..............................5-4
Tabelle parametri utente ..............................................................................5-8
Impostazioni di setup: A ................................................................................................. 5-8
Parametri applicativi: b ................................................................................................5-10
Parametri di autotuning: C ...........................................................................................5-12
Parametri di riferimento: d ...........................................................................................5-18
Parametri motore: E .....................................................................................................5-21
Parametri opzionali: F .................................................................................................. 5-26
Parametri per le funzioni dei terminali: H ..................................................................... 5-32
Parametri per le funzioni di protezione: L ...................................................................5-37
Regolazioni speciali: n2/n5 ..........................................................................................5-43
Regolazioni motore PM: n8/n9 ....................................................................................5-45
Parametri console di programmazione/console a LED: o ............................................5-46
Parametri funzioni LIFT: S ...........................................................................................5-48
Autotuning motore: T ................................................................................................... 5-54
Parametri di monitoraggio: U .......................................................................................5-56
Impostazioni che cambiano con la modalità di controllo (A1-02) .................................5-62
Impostazioni di fabbrica che cambiano con la capacità dell'inverter (o2-04) ............... 5-64
6 Impostazione dei parametri in base alla funzione .............. 6-1
Diminuzione frequenza portante e Limitazione di corrente ..........................6-2
Impostazione frequenza portante .................................................................................. 6-2
Livello di limitazione corrente a basse velocità ..............................................................6-2
Sequenza di controllo/frenatura ...................................................................6-3
Comandi Up e Down ...................................................................................................... 6-3
Selezione sorgente velocità di riferimento .....................................................................6-4
Sequenza di selezione velocità usando ingressi digitali ................................................6-5
Arresto di emergenza ..................................................................................................6-10
RUN ispezione ............................................................................................................. 6-11
Sequenza di frenatura .................................................................................................6-13
Funzionamento breve al piano ....................................................................................6-17
III
Page 5

Caratteristiche di accelerazione e decelerazione ...................................... 6-20
Impostazione tempi di accelerazione e decelerazione ................................................ 6-20
Accelerazione ed impostazioni curva a S .................................................................... 6-22
Ritenzione velocità di uscita (funzione di pausa) ......................................................... 6-22
Prevenzione di stallo durante l'accelerazione ............................................................. 6-23
Regolazione dei segnali di ingresso analogico ......................................... 6-25
Regolazione delle frequenze di riferimento analogiche ............................................... 6-25
Rilevazione velocità e limitazione velocità ................................................ 6-26
Funzione accordo velocità ........................................................................................... 6-26
Limitazione velocità elevatore alla velocità di livellamento (d1-17) ............................. 6-28
Miglioramento delle prestazioni di funzionamento .................................... 6-29
Riduzione della fluttuazione della velocità del motore (funzione di compensazione dello
scorrimento) ................................................................................................................. 6-29
Regolazioni funzione compensazione di coppia ......................................................... 6-30
Funzione di compensazione di coppia iniziale (C4-03… C4-05) ................................. 6-32
Regolatore automatico velocità (ASR) (solo vettore ad anello chiuso) ....................... 6-32
Stabilizzazione velocità (Regolatore automatico di frequenza)
(vettore ad anello aperto) ............................................................................................ 6-34
Compensazione inerzia (solo vettore ad anello chiuso) .............................................. 6-35
Tuning del regolatore automatico di corrente (ACR) ................................................... 6-36
Tuning del tempo di ritardo della conversione A/D. ..................................................... 6-37
Miglioramento della precisione di livellamento mediante la
compensazione di scorrimento della velocità di livellamento ...................................... 6-37
Forzamento campo ..................................................................................................... 6-38
Regolazione della corrente di iniezione c.c. ................................................................ 6-39
Regolazione dei livelli di corrente a iniezione c.c. (S1-02/03) ..................................... 6-39
Funzioni protettive ..................................................................................... 6-40
Prevenzione dello stallo del motore durante il funzionamento .................................... 6-40
Rilevamento coppia motore/rilevamento blocco cabina .............................................. 6-40
Limitazione coppia motore (funzione limite di coppia) ................................................. 6-43
Protezione sovraccarico motore .................................................................................. 6-44
Sorveglianza corrente d’uscita .................................................................................... 6-46
Rilevamento accelerazione eccessiva (rilevamento errore "DV6") ............................. 6-46
Protezione dell’inverter .............................................................................. 6-47
Protezione dell’inverter al surriscaldamento ................................................................ 6-47
Protezione fase aperta dell'ingresso* .......................................................................... 6-47
Rilevamento fase aperta dell'uscita ............................................................................. 6-48
Rilevamento errore di terra .......................................................................................... 6-48
Comando ventilatore di raffreddamento ...................................................................... 6-49
Impostazione della temperatura ambiente .................................................................. 6-49
Funzioni terminale ingresso ...................................................................... 6-50
Disattivazione dell'uscita dell'inverter (blocco delle basi) ............................................ 6-50
Arresto dell'inverter in caso di errori su dispositivi esterni (funzione errore esterno) .. 6-51
Uso della funzione di timer .......................................................................................... 6-52
IV
Page 6

Rilevamento risposta contattore motore ......................................................................6-53
Modifica della direzione del PG ................................................................................... 6-54
Selezione motore 2 ...................................................................................................... 6-55
Funzioni terminale di uscita .......................................................................6-56
Configurazione motore e linea caratteristica V/f ........................................6-59
Impostazione parametri del motore per motori a induzione (Motore 1 e 2) ................. 6-59
Impostazione parametri motore per motori PM ...........................................................6-62
Scambio direzione di rotazione del motore ..................................................................6-63
Funzioni della console di programmazione/console a LED .......................6-64
Impostazione delle funzioni della console di programmazione/console a LED ...........6-64
Copia dei parametri (solo JVOP-160-OY) ...................................................................6-66
Proibizione di sovrascrittura dei parametri ...................................................................6-70
Impostazione di una password .................................................................................... 6-70
Visualizzazione di soli parametri impostati dall’utente ................................................. 6-71
Schede PG opzionali .................................................................................6-72
Configurazione PG ......................................................................................................6-72
Rilevamento errore ...................................................................................................... 6-74
Funzione COPY dei dati della macchina ..................................................................... 6-75
Sistema di emergenza ...............................................................................6-77
Ripristino dopo errore automatico .............................................................6-81
Comunicazione MEMOBUS ......................................................................6-83
Configurazione comunicazione MEMOBUS ................................................................ 6-83
Contenuto dei messaggi ..............................................................................................6-83
Codici di errore dell'inverter .........................................................................................6-92
Comando ENTER ........................................................................................................6-92
Codici di errore di comunicazione ................................................................................6-93
7 Soluzione dei problemi ......................................................... 7-1
Funzioni di diagnosi e protezione ................................................................7-2
Rilevamento d’errore .....................................................................................................7-2
Rilevamento allarmi ....................................................................................................... 7-9
Errori di programmazione console ............................................................................... 7-12
Errori di autotuning ......................................................................................................7-14
Errori della funzione COPY della console di programmazione .................................... 7-16
Errori della funzione COPY dei dati della macchina ....................................................7-17
Soluzione dei problemi ..............................................................................7-18
Se Un Parametro Non Può Essere Impostato .............................................................7-18
Se il Motore Non Funziona Correttamente .................................................................. 7-19
Se la Direzione di Rotazione del Motore è all’Indietro .................................................7-19
Se il Motore si Blocca o l’Accelerazione è Lenta .........................................................7-19
Se la Decelerazione del Motore è Lenta ......................................................................7-20
La coppia motore è insufficiente. .................................................................................7-20
Se il Motore si Surriscalda ...........................................................................................7-20
V
Page 7

Se i Dispositivi Periferici sono Influenzati dall’Avvio e dal Funzionamento dell’Inverter.. 7-21
Se l’Interruttore di Dispersione a Terra è in funzione quando l’Inverter è in funzione.... 7-21
Se c’è un’ Oscillazione Meccanica .............................................................................. 7-21
8 Manutenzione e ispezione .....................................................8-1
Manutenzione e ispezione ..........................................................................8-2
Ispezioni periodiche ....................................................................................................... 8-2
Manutenzione periodica dei componenti ....................................................................... 8-3
Sostituzione ventola di raffreddamento ......................................................................... 8-4
Rimozione e montaggio della scheda terminali ............................................................. 8-6
9 Specifiche ................................................................................9-1
Specifiche inverter ....................................................................................... 9-2
Specifiche in base al modello ........................................................................................ 9-2
Specifiche comuni ......................................................................................................... 9-4
Diminuzione ................................................................................................ 9-6
Diminuzione temperatura ambiente .............................................................................. 9-6
Diminuzione frequenza portante ................................................................................... 9-6
Diminuzione altitudine ................................................................................................... 9-7
Reattanza c.a. per compatibilità EN 12015 ................................................. 9-8
Certificati EN 954-1/EN81-1 ........................................................................ 9-9
10 Appendice .............................................................................10-1
Precauzioni relative all'applicazione dell'inverter ......................................10-2
Selezione ..................................................................................................................... 10-2
Installazione ................................................................................................................ 10-2
Impostazioni ................................................................................................................ 10-2
Gestione ...................................................................................................................... 10-3
Precauzioni relative all'applicazione del motore ........................................ 10-4
In caso di utilizzo dell'inverter per un motore standard esistente ................................ 10-4
In caso di utilizzo dell'inverter per motori speciali ........................................................ 10-4
Costanti utente .......................................................................................... 10-5
VI
Page 8
Avvertenze
Non collegare o scollegare dei cavi e non eseguire test di segnale quando l’alimentazione di corrente
è attivata.
Il condensatore del bus in continua Varispeed L7 rimane carico anche dopo la disattivazione dell'alimentazione. Per evitare il pericolo di scosse elettriche scollegare l’inverter dall’alimentazione principale prima di eseguire la manutenzione. Attendere poi almeno 5 minuti affinché tutti i LED siano
spenti.
Non effettuare test di resistenza alla tensione su nessun componente dell’inverter. Contiene dei
semiconduttori che non sono adatti per tensioni così elevate.
Non scollegare la console di programmazione mentre è attivata l'alimentazione. Non toccare nemmeno la scheda di potenza mentre l’inverter è collegato all’alimentazione.
ATTENZIONE
Non collegare mai filtri di soppressione interferenze generali LC/RC, condensatori o strumenti di protezione da
sovratensione all’ingresso o all’uscita dell'inverter.
Per evitare il rilevamento di errori di sovracorrente e simili, i contatti di segnale di ogni contattore o
commutatore posto tra l'inverter e il motore devono essere integrati nella logica di controllo
dell'inverter (ad esempio, in un blocco delle basi).
Indispensabile!
Leggere attentamente e per intero il presente manuale prima di collegare e mettere in funzione
l'inverter. Seguire tutte le precauzioni per la sicurezza e le istruzioni d’uso.
L’inverter deve essere fatto funzionare con filtri di linea appropriati secondo le istruzioni per
l’installazione nel presente manuale e con tutte le coperture chiuse ed i terminali coperti.
Solo in questo modo viene garantita la protezione adeguata. Non collegare o far funzionare nessun
dispositivo con danni visibili o parti mancanti. L'utente è responsabile di eventuali danni a persone o
apparecchiature derivanti dalla non osservanza delle avvertenze contenute nel presente manuale.
VII
Page 9

Precauzioni di sicurezza e istruzioni
1. Generalità
Leggere per intero le seguenti precauzioni di sicurezza e le istruzioni d’uso prima di installare e far funzionare
tale inverter. Leggere anche tutti i cartelli d’avviso sull’inverter e assicurarsi che non siano danneggiati o siano
stati asportati.
È possibile accedere durante il funzionamento a componenti caldi e sotto tensione. Rimuovendo parti
dell’alloggiamento, la console di programmazione o le coperture dei terminali si corre il rischio di ferirsi gravemente o di provocare danni in caso di installazione o funzionamento non corretto. Il fatto che gli inverter
comandano componenti di apparecchiature rotanti potrebbe comportare altri pericoli.
Seguire le istruzioni in questo manuale. L’installazione, il funzionamento e la manutenzione possono essere
eseguiti solo da personale qualificato. A tale proposito per personale qualificato si intendono persone che
hanno familiarità con l’installazione, l’avviamento, il funzionamento e la manutenzione degli inverter e hanno
le qualificazioni adeguate per svolgere questo lavoro. Un funzionamento sicuro di queste unità è possibile solo
se vengono utilizzate correttamente per l’uso a cui sono designate.
I condensatori del bus in continua possono restare in tensione per circa 5 minuti dopo che l’inverter è stato
scollegato dall’alimentazione. È quindi necessario lasciar trascorrere questo periodo di tempo prima di aprire
le coperture. Tutti i terminali dei circuiti principali possono trasportare ancora cariche di tensione pericolose.
Non far accedere a questi inverter bambini o altre persone non autorizzate.
Tenere queste Misure per la Sicurezza ed Istruzioni per l’Uso a portata di mano e consegnarle a tutte le persone che hanno accesso, per qualsiasi motivo, agli inverter.
2. Uso designato
Gli inverter sono stati concepiti per l'installazione su macchine o sistemi elettrici. I sistemi e le macchine
devono essere conformi ai relativi standard e direttive. È necessario rispettare le linee guida pertinenti, quali le
Direttive per le basse tensioni, le Direttive sui macchinari e le Direttive EMC.
Gli inverter possono essere messi in servizio solo se il sistema o la macchina in cui sono installati rispettano le
norme in vigore.
Il simbolo CE si riferisce alla normativa EN 50178 per l'uso dei filtri di linea specificati in questo manuale e
secondo le istruzioni d'installazione appropriate.
3. Trasporto e conservazione
Le istruzioni per il trasporto, la conservazione ed un trattamento adeguato devono essere seguite in conformità
ai dati tecnici.
4. Installazione
VIII
Installare e raffreddare gli inverter come specificato nella documentazione. L’aria di raffreddamento deve
affluire nella direzione specificata. L’inverter può essere quindi installato solo nella posizione specificata (verticale). Mantenere le distanze specificate. Proteggere gli inverter da carichi non consentiti. I componenti non
devono essere piegati e la distanza di isolamento non deve essere modificata. Per evitare danni causati
dall’elettricità statica non toccare nessun componente elettronico.
5. Collegamento elettrico
Svolgere tutti i lavori su apparecchiature sotto tensione in conformità con le norme nazionali sulla sicurezza e
la prevenzione degli incidenti sul lavoro. Effettuare tutte le installazioni elettriche in conformità con le normative in materia. In particolare seguire le istruzioni per l’installazione che garantiscono la compatibilità elettro-
Page 10

magnetica (EMC) schermatura, messa a terra, disposizione filtri e stesura cavi. Questo si riferisce anche ad
apparecchiature con il contrassegno CE. Il produttore del sistema o della macchina è responsabile per la conformità dei limiti EMC.
Contattare il proprio fornitore o il rappresentante di Omron-Yaskawa Motion Control se si utilizzano differenziali o magnetotermici insieme agli inverter.
In alcuni sistemi può essere necessario usare monitor e dispositivi di sicurezza aggiuntivi in conformità con le
normative relative alla sicurezza e alla prevenzione di incidenti. L'hardware degli inverter non deve essere
modificato.
ATTENZIONE
Se un motore PM è azionato da una forza esterna, si genera alta tensione negli avvolgimenti.
• Durante il cablaggio, la manutenzione o l'ispezione, accertarsi che il motore sia spento e non possa
girare.
• Se l'inverter viene spento e il motore deve essere azionato, verificare che le uscite del motore e
dell'inverter siano scollegate elettricamente.
6. Configurazione dell'inverter
Tale inverter L7 è in grado di azionare motori a induzione e motori a magneti permanenti.
Selezionare sempre la modalità di controllo appropriata:
• Per i motori a induzione, utilizzare il controllo V/f, il controllo vettoriale ad anello aperto o il controllo vet-
toriale ad anello chiuso (A1-01 = 0, 2 o 3).
• Per i motori a magneti permanenti, utilizzare esclusivamente la modalità di controllo vettoriale ad anello
chiuso per PM (A1-01 = 6).
La selezione di una modalità di controllo non appropriata può danneggiare l'inverter e il motore.
Se un motore viene sostituito o azionato per la prima volta, impostare sempre i relativi parametri di controllo
del motore utilizzando i dati riportati sulla targhetta oppure eseguire un autotuning. Non modificare i parametri con noncuranza. Per garantire un funzionamento sicuro con motori PM, impostare sempre:
• dati motore corretti
• i parametri di rilevamento circuito aperto PG
• i parametri di rilevamento della variazione di velocità
• i parametri di rilevamento dell'accelerazione eccessiva
L'impostazione di parametri non corretti può provocare un comportamento pericoloso del motore e danni
all'inverter.
ATTENZIONE
Se si utilizza un motore a magneti permanenti, la capacità della corrente di picco del motore dovrebbe
essere superiore alla corrente di uscita massima dell'inverter in modo da prevenire una smagnetizzazione
del motore.
Per informazioni dettagliate sulla corretta procedura di avvio, fare riferimento alla pagina 4-2, Avvio.
7. Note
Gli inverter Varispeed L7 sono certificati CE, UL e c-UL.
IX
Page 11

Compatibilità elettromagnetica (EMC)
1. Introduzione
Il presente manuale è stato redatto per aiutare i produttori di sistemi ad utilizzare gli inverter Omron-Yaskawa
Motion Control per progettare e installare meccanismi elettrici di comando. Descrive anche le misure necessarie per adempiere alle direttive di compatibilità elettromagnetica (EMC) Per questo motivo bisogna seguire le
istruzioni contenute nel manuale per l’installazione ed il cablaggio.
I nostri prodotti vengono testati da enti autorizzati secondo gli standard elencati di seguito.
EN 61800-3:2004
2. Misure per garantire la conformità degli inverter Omron-Yaskawa Motion Control
alle direttive EMC
Gli inverter Omron-Yaskawa Motion Control non devono essere necessariamente installati in un quadro.
Non è possibile fornire informazioni dettagliate per tutte le possibili modalità di installazione. Questo manuale
si limita pertanto a dare direttive di carattere generale.
Tutti gli apparecchi elettrici producono interferenze radio e di linea a varie frequenze. I cavi trasmettono queste interferenze all’ambiente allo stesso modo di una antenna.
Pertanto collegando un apparecchio elettrico (per es. un inverter) all’alimentazione senza un filtro di linea porterebbe ad interferenze di alta o bassa frequenza nell’alimentazione principale.
Contromisure tipiche sono l’isolamento del cablaggio di comando e dei componenti elettrici, una messa a terra
appropriata e la schermatura dei cavi.
Per una messa a terra a bassa impedenza delle interferenze d’alta frequenza è necessaria un’ampia area di contatto. È pertanto consigliabile l’uso di piattine di terra al posto di cavi.
Inoltre le schermature dei cavi devono essere collegate con dei fermi di messa a terra specifici.
3. Stesura dei cavi
Misure contro interferenze portate dalla linea:
Il filtro di linea e l’inverter devono essere montati sulla stessa piastra di metallo. Montare i due componenti il
più possibile vicini uno all’altro mantenendo i cavi il più corto possibile.
Utilizzare un cavo di alimentazione con una buona schermatura di messa a terra. Utilizzare un cavo motore
schermato che non superi i 20 metri di lunghezza. Disporre tutti i punti di messa a terra in modo tale da massimizzare l’area all’estremità del conduttore isolato a contatto con il collegamento a terra (per es. piastra di
metallo).
Cavo schermato:
– Utilizzare un cavo con schermatura intrecciata.
X
– Mettere a terra l’area massima consentita della schermatura. È consigliabile mettere a terra la schermatura
collegando il cavo alla piastra di terra con fermi in metallo (vedere la figura seguente).
Page 12
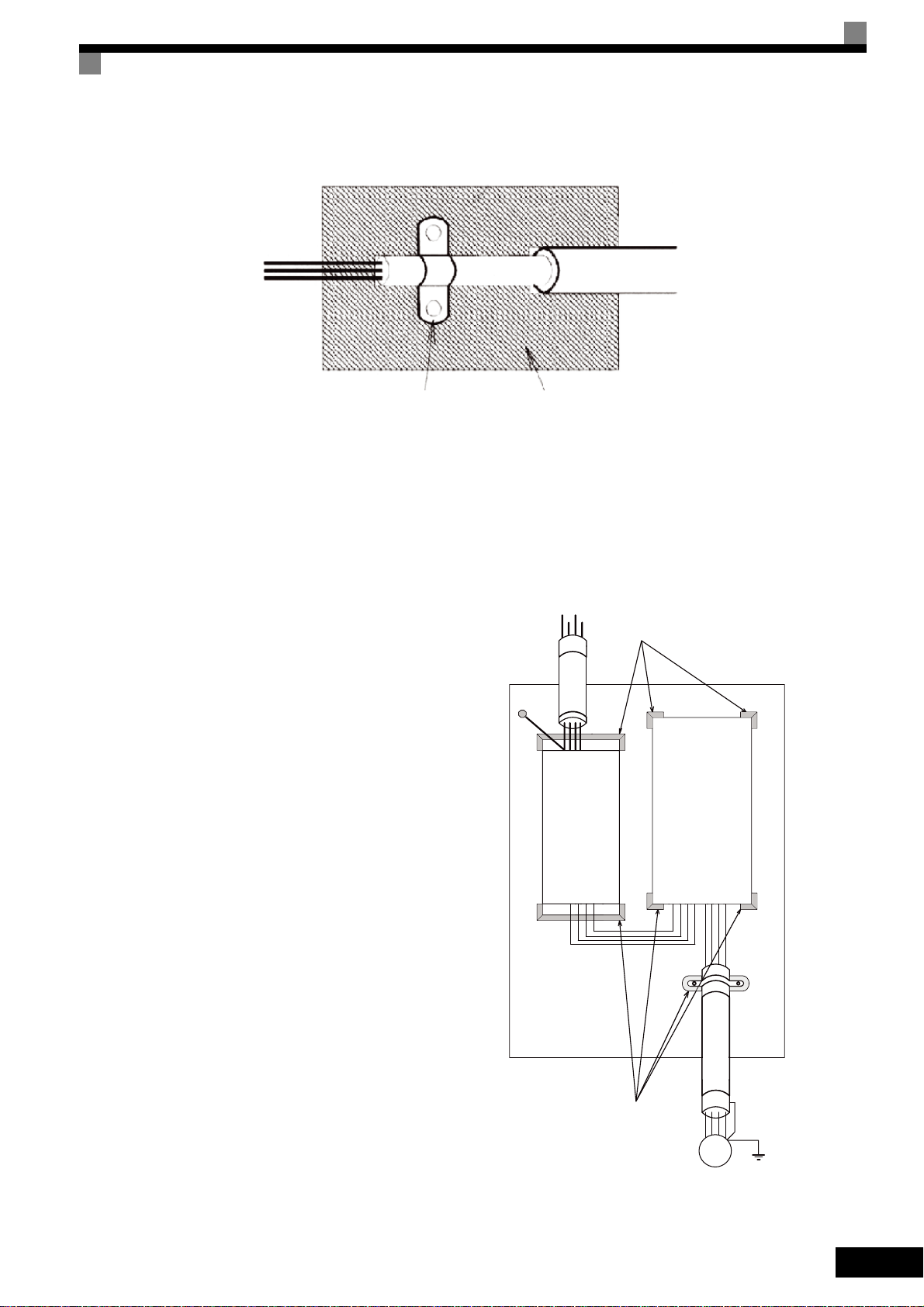
Fermo di messa a terra
Piastra di messa a terra
Le superfici di terra devono essere in metallo non isolato altamente conduttivo. Asportare eventuali strati di
vernice o colore.
– Mettere a terra le schermature su entrambi i lati del cavo.
– Mettere a terra il motore della macchina.
Installazione inverter e filtri EMC
Tenere in considerazione i seguenti punti per
un'installazione conforme alle normative EMC:
• Utilizzare un filtro di linea.
• Utilizzare cavi motore schermati.
• Montare l'inverter e il filtro su una piastra con-
duttiva messa a terra.
• Rimuovere qualsiasi traccia di vernice o sporci-
zia prima di montare i componenti, al fine di
ottenere un'impedenza di messa a terra il più
bassa possibile.
PEL1L2
L3
PE
Linea
Filtro
Carico
Lunghezza del cavo
più corta possibile
Piastra metallica
di messa a terra
Collegamenti di messa a terra
Eliminare qualsiasi traccia di vernice
Inverter
L2
GND
V
GND
W
U
L1
L3
Collegamenti di messa a terra
Eliminare qualsiasi traccia di
vernice
Cavo motore
schermato
M
~3
XI
Page 13
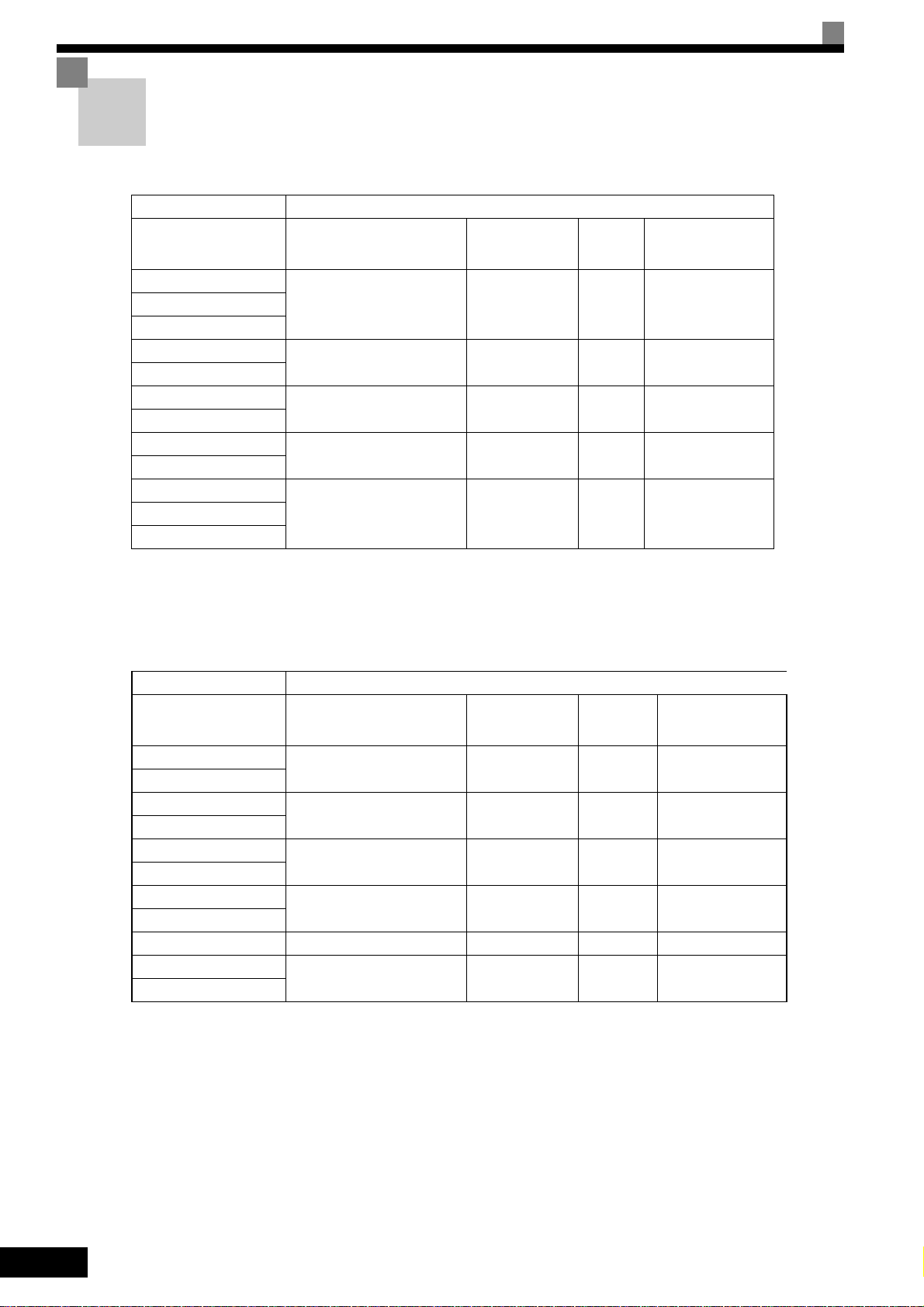
Filtri di linea
Filtri di linea raccomandati per Varispeed L7
Modello inverter Filtro di linea
Varispeed L7 Modello
CIMR-L7Z43P77
3G3RV-PFI3018-SE 18 1,3 141 x 46 x 330CIMR-L7Z44P07
CIMR-L7Z45P57
CIMR-L7Z47P57
CIMR-L7Z40117
CIMR-L7Z40157
CIMR-L7Z40187
CIMR-L7Z40227
CIMR-L7Z40307
CIMR-L7Z40377
CIMR-L7Z40557
Tensione massima: 480 Vc.a. trifase
Temperatura ambiente: 45°C (max.)
3G3RV-PFI3035-SE 35 2,1 206 x 50 x 355
3G3RV-PFI3060-SE 60 4,0 236 x 65 x 408
3G3RV-PFI3070-SE 70 3,4 80 x 185 x 329
3G3RV-PFI3130-SE 130 4,7 90 x 180 x 366CIMR-L7Z40457
Corrente
(A)
Peso
(kg)
Dimensioni
(L x P x H)
*Emissione consentita per azionamenti elettrici per ambienti commerciali e di industria leggera (EN61800-3,
A11) (disponibilità generale, 1° ambiente)
Modello inverter Filtro di linea
Varispeed L7 Modello
CIMR-L7Z23P77
CIMR-L7Z25P57
CIMR-L7Z27P57 3G3RV-PFI2060-SE 60 3,0 206 x 60 x 355
CIMR-L7Z20117
CIMR-L7Z20157 3G3RV-PFI2100-SE 100 4,9 236 x 80 x 408
CIMR-L7Z20187
CIMR-L7Z20227 3G3RV-PFI2130-SE 130 4,3 90 x 180 x 366
CIMR-L7Z20307
CIMR-L7Z20377 3G3RV-PFI2160-SE 160 6,0 120 x 170 x 451
CIMR-L7Z20457 3G3RV-PFI2200-SE 200 11,0 130 x 240 x 610
CIMR-L7Z20557
Tensione massima : 240 Vc.a. trifase
Temperatura ambiente: 45°C (max.)
3G3RV-PFI2035-SE 35 1,4 141 x 46 x 330
Corrente
(A)
Peso
(kg)
Dimensioni
(L x P x H)
XII
* lunghezza massima cavo motore: 10 m categoria B, 50 m categoria A
Tensione nominale: 240 Vc.a. trifase
Temperatura ambiente: 45°C (max.)
Page 14
Marchi registrati
In questo manuale, vengono utilizzati i marchi registrati riportati di seguito.
• DeviceNet è un marchio registrato della ODVA (Open DeviceNet Vendors Association, Inc.).
• InterBus è un marchio registrato della Phoenix Contact Co.
• Profibus è un marchio registrato della Siemens AG.
• Hiperface
• Klauke
y
è un marchio registrato della Sick Stegmann GmbH.
y
è un marchio registrato di Klauke Textron.
XIII
Page 15
Garanzia e considerazioni sull’applicazione
Leggere attentamente e comprendere
Prima di procedere all'acquisto dei prodotti il cliente si assume l'onere di leggere attentamente e comprendere questo
documento. Per eventuali domande o commenti, rivolgersi all'ufficio OMRON di competenza.
Garanzia e limitazione di responsabilità
GARANZIA
OMRON garantisce i propri prodotti da difetti di materiali e/o vizi di costruzione per un periodo di un anno (o per altro
periodo se specificato) dalla data di consegna. L'onere della prova del difetto è a carico dell'acquirente. La garanzia si
limita alla riparazione del prodotto o, a giudizio insindacabile di OMRON, alla sua sostituzione.
OMRON NON RICONOSCE ALTRA GARANZIA, ESPLICITA O IMPLICITA, COMPRESE IN VIA ESEMPLIFICATIVA
QUELLE DI NON-VIOLAZIONE, DI COMMERCIABILITA' E DI IDONEITA' A FINI PARTICOLARI. L'ACQUIRENTE O
L'UTILIZZATORE RICONOSCE LA PROPRIA ESCLUSIVA RESPONSABILITA' NELL'AVER DETERMINATO
L'IDONEITA' DEL PRODOTTO A SODDISFARE I REQUISITI IMPLICITI NELL'USO PREVISTO DELLO STESSO.
LIMITAZIONE DI RESPONSABILITA’
OMRON NON SARÀ RESPONSABILE DEI DANNI, DELLE PERDITE DI PROFITTO O DELLE PERDITE
COMMERCIALI SPECIALI, INDIRETTE O EMERGENTI IN QUALUNQUE MODO RICONDUCIBILI AI PRODOTTI,
ANCHE QUANDO LE RICHIESTE DI INDENNIZZO POGGINO SU CONTRATTO, GARANZIA, NEGLIGENZA O
RESPONSABILITÀ INCONDIZIONATA.
In nessun caso la responsabilità di OMRON potrà superare il prezzo del singolo prodotto in merito al quale sia stata
definita la responsabilità.
IN NESSUN CASO OMRON SARÀ RESPONSABILE PER GARANZIA, RIPARAZIONE O ALTRA RICHIESTA DI
INDENNIZZO RELATIVA AI PRODOTTI SE L'ANALISI, CONDOTTA DA OMRON, NON CONFERMERÀ CHE I
PRODOTTI SONO STATI CORRETTAMENTE UTILIZZATI, IMMAGAZZINATI, INSTALLATI E SOTTOPOSTI A
MANUTENZIONE, E CHE NON SONO STATI OGGETTO DI CONTAMINAZIONI, ABUSI, USI IMPROPRI,
MODIFICHE O RIPARAZIONI DA PARTE DI CENTRI NON AUTORIZZATI DA OMRON.
Considerazioni sull'applicazione
IDONEITA' ALL'USO PREVISTO
OMRON non sarà responsabile della conformità a normative, regolamenti e leggi applicabili a combinazioni di prodotti
nell'applicazione del cliente o nell'impiego dei prodotti stessi. Il cliente e/o l'utilizzatore hanno la responsabilità di
adottare tutte le misure necessarie a determinare l'idoneità del prodotto ai sistemi, ai macchinari e alle apparecchiature
con i quali verrà utilizzato. Il cliente e/o l'utilizzatore hanno la responsabilita' di conoscere ed osservare tutte le
proibizioni, regole, limitazioni e divieti applicabili all'uso del prodotto e/o al prodotto stesso.
NON UTILIZZARE MAI I PRODOTTI IN APPLICAZIONI CHE IMPLICHINO GRAVI RISCHI PER L'INCOLUMITÀ
DELLE PERSONE O DI DANNI ALLA PROPRIETÀ SENZA PRIMA AVERE APPURATO CHE L'INTERO SISTEMA
SIA STATO PROGETTATO TENENDO IN CONSIDERAZIONE TALI RISCHI E CHE I PRODOTTI OMRON SIANO
STATI VALUTATI, INSTALLATI E PROVATI CORRETTAMENTE IN VISTA DELL'USO AL QUALE SONO DESTINATI
NELL'AMBITO DELL'APPARECCHIATURA O DEL SISTEMA.
Dichiarazione di non responsabilità
DATI SULLE PRESTAZIONI
I dati sulle prestazioni forniti in questo catalogo non costituiscono una garanzia, bensì solo una guida alla scelta delle
soluzioni più adeguate alle esigenze dell'utente. Essendo il risultato delle condizioni di collaudo di OMRON, tali dati
devono essere messi in relazione agli effettivi requisiti di applicazione. Le prestazioni effettive sono soggette alla
Garanzia e Limitazione di Responsabilità di OMRON.
MODIFICHE ALLE SPECIFICHE
Le caratteristiche e gli accessori del prodotto possono essere soggetti a modifiche a scopo di perfezionamento o per
altri motivi. Per confermare le caratteristiche effettive del prodotto acquistato, rivolgersi all'ufficio OMRON di
competenza.
DIMENSIONI E PESI
Pesi e misure sono nominali e non devono essere utilizzati in progettazione o produzione, anche quando sono indicati
i valori di tolleranza.
XIV
Page 16
Installazione degli
inverter
Questo capitolo descrive i controlli che è necessario eseguire quando si riceve o si installa un inverter.
Modelli Varispeed L7.........................................................................................................1-2
Controlli dopo la consegna................................................................................................ 1-3
Dimensioni esterne e di installazione ................................................................................1-7
Controllo del luogo di installazione .................................................................................... 1-9
Posizione corretta di installazione ...................................................................................1-10
Rimozione e installazione dei copriterminali....................................................................1-11
Rimozione/installazione console di programmazione/console a LED e coperchio frontale .1-13
Page 17
1
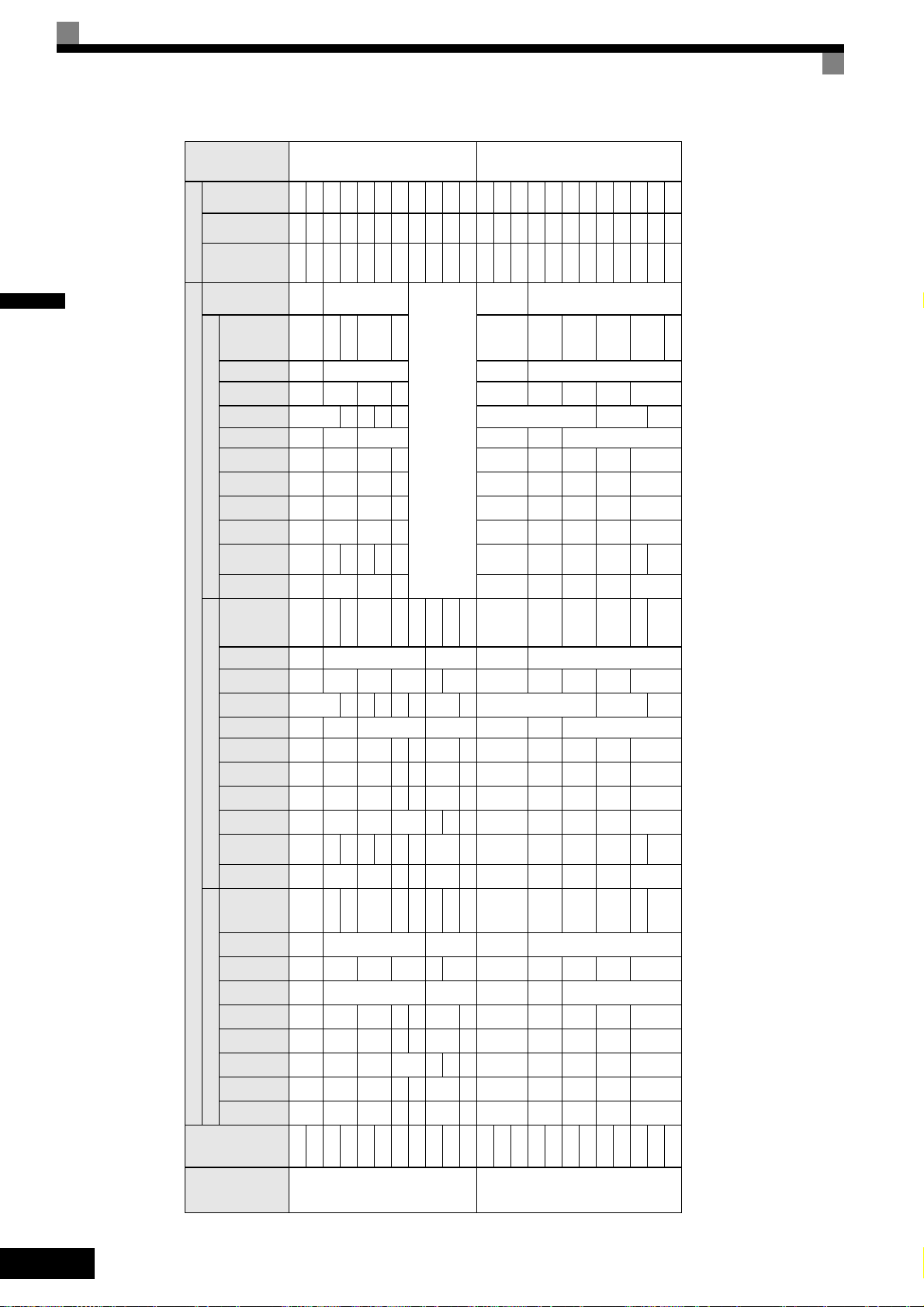
Modelli Varispeed L7
La serie Varispeed L7 comprende inverter di due categorie di voltaggio: da 200 V e da 400 V. Le capacità di
motore massime variano da 3,7 a 55 kW (23 modelli).
Tabella 1.1 Modelli Varispeed L7
Specifiche
dell'ordine)
NEMA 1
CIMR-L7Z
20151
Classe di
tensione
Classe 200 V
Classe 400 V
Capacità
massima
del motore
(kW)
3,7 7 CIMR-L7Z23P7 23P71 23P77
5,5 10 CIMR-L7Z25P5 25P51 25P57
7,5 14 CIMR-L7Z27P5 27P51 27P57
11 20 CIMR-L7Z2011 20111 20117
15 27 CIMR-L7Z2015
18,5 33 CIMR-L7Z2018 20181 20187
22 40 CIMR-L7Z2022 20220 20221 20227
30 54 CIMR-L7Z2030 20300 20301 20307
37 67 CIMR-L7Z2037 20370 20371 20377
45 76 CIMR-L7Z2045 20450 20451 20457
55 93 CIMR-L7Z2055 20550 20551 20557
3,7 7 CIMR-L7Z43P7 43P71 43P77
4,0 9 CIMR-L7Z44P0 44P01 43P77
5,5 12 CIMR-L7Z45P5 45P51 45P57
7,5 15 CIMR-L7Z47P5 47P51 47P57
11 22 CIMR-L7Z4011 40111 40117
15 28 CIMR-L7Z4015 40151 40157
18,5 34 CIMR-L7Z4018 40181 40187
22 40 CIMR-L7Z4022 40220 40221 40227
30 54 CIMR-L7Z4030 40300 40301 40307
37 67 CIMR-L7Z4037 40370 40371 40377
45 80 CIMR-L7Z4045 40450 40451 40457
55 106 CIMR-L7Z4055 40550 40551 40557
Potenza di
uscita kVA
Varispeed L7
Modello base
Numero
(specificare sempre indicando la struttura protettiva al momento
IEC IP00
CIMR-L7Z
IEC IP20
CIMR-L7Z
20157
1-2
Page 18
Controlli dopo la consegna
Controlli
Controllare i seguenti elementi subito dopo la consegna dell'inverter.
Tabella 1.2 Controlli
Caratteristica Metodo
E' stato consegnato il modello esatto di
inverter?
L'inverter risulta danneggiato?
Si sono allentate alcune viti o altri
componenti?
Controllare il numero del modello sulla targa a lato dell'inverter.
Esaminare la superficie esterna dell'inverter per vedere se vi sono graffi o
altri danni dovuti alla spedizione.
Utilizzare un cacciavite o altri attrezzi per controllare il serraggio.
In caso di irregolarità negli elementi sopra riportati, contattare immediatamente il rivenditore presso il quale è
stato acquistato l'inverter o il rappresentate Omron Yaskawa Motion Control di zona.
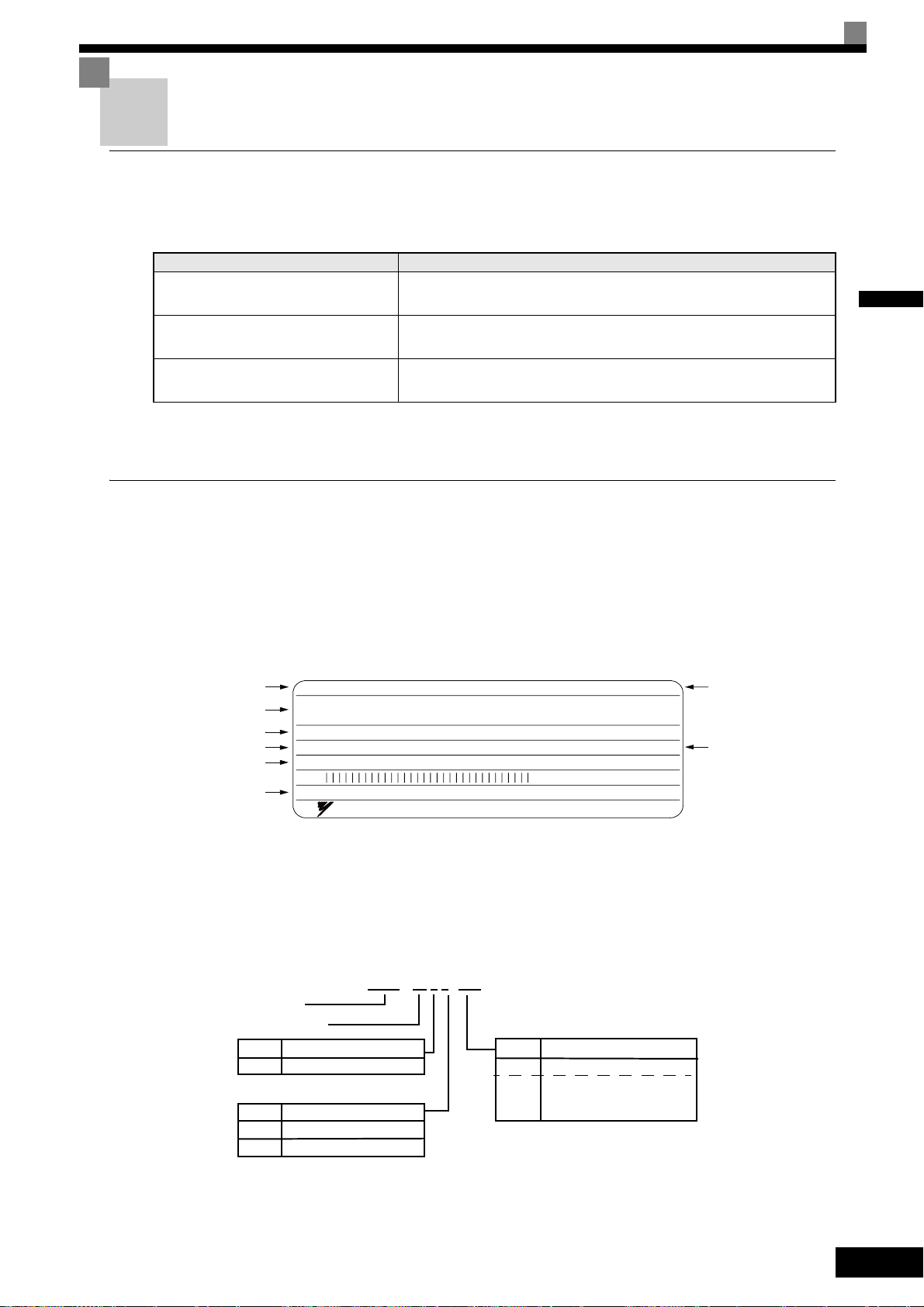
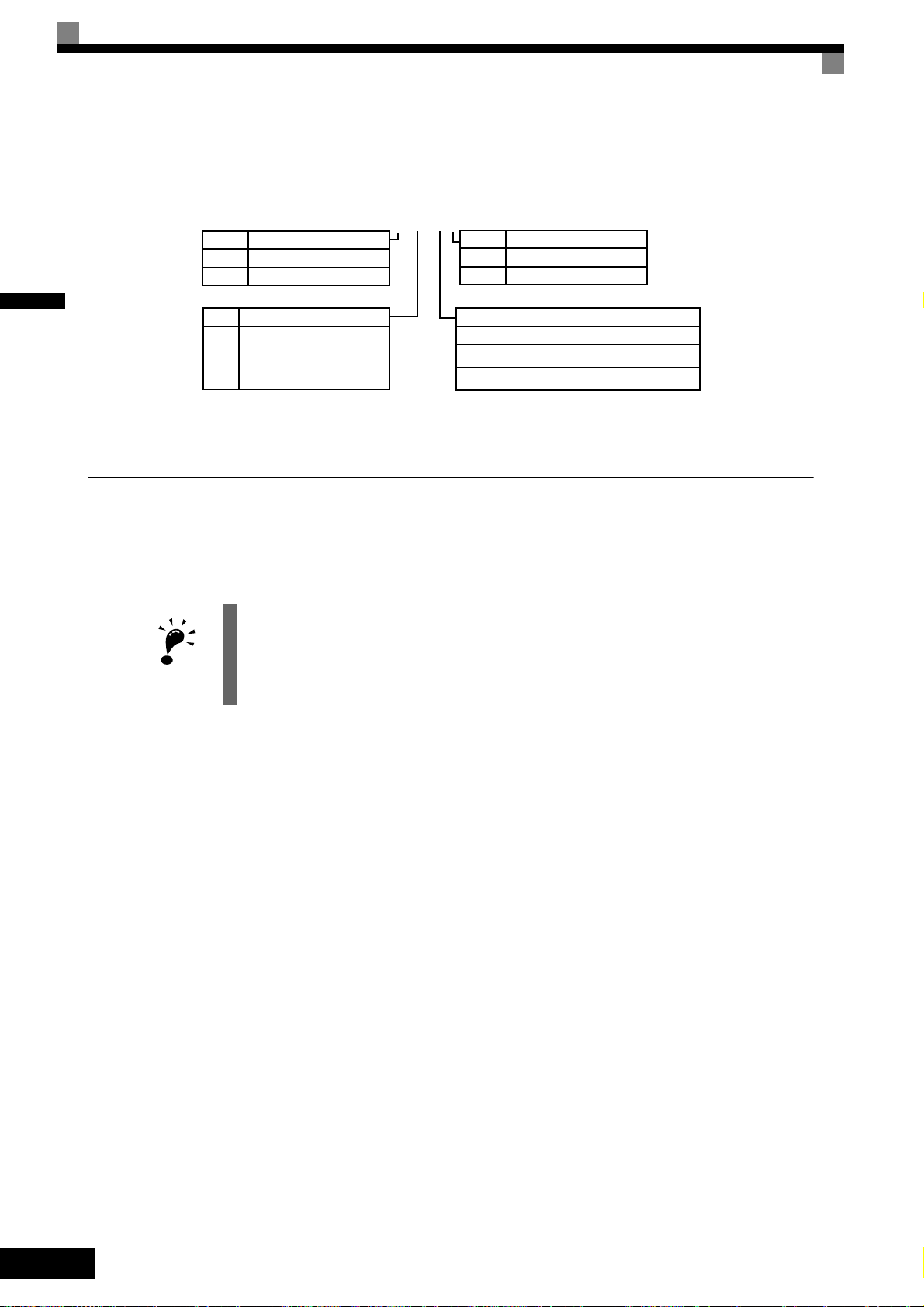
Informazioni sulla targa
Sulla targa posta sul lato di ciascun inverter sono indicati il numero del modello, i dati tecnici, il numero di
lotto, il numero di serie e altre informazioni relative all'inverter.
Esempio di targa
La seguente targa è un esempio di targa per un inverter con standard europei: trifase, 400 Vc.a.,
3,7 kW, standard IEC IP20
Modello inverter
Specifiche degli ingressi
Specifiche delle uscite
Numero lotto
Numero di serie
MODEL
INPUT
OUTPUT AC3PH 0-480V 0-120Hz 8,5A 3min. 50Hz%ED 8,5kVA
O/N
S/N
CIMR-L7Z43P7
AC3PH
380-480V
SPEC: 43P77A
50/60Hz
PESO: 4,0 kg
10,2A
PRG:
Dati tecnici inverter
Peso
1
Numero file UL
FILE NO E 131457
YASKAWA ELECTRIC CORPORARION s
MADE IN JAPAN
M
Figura 1.1 Targa d’identificazione
Numero di modello dell’inverter
Il numero di modello riportato sulla targa indica i dati tecnici, la classe di tensione e la capacità massima del
motore dell'inverter in codici alfanumerici.
CIMR – L7 Z 2 3P7
Inverter
Varispeed L7
N.
Z
N.
2
4
Caratteristica
OYMC European Std.
Classe di tensione
Ingresso c.a., trifase, 200 V
Ingresso c.a., trifase, 400 V
Figura 1.2 Numero di modello dell’inverter
Capacità massima motore
N.
3P7
5P5
a
55
"P" indica il punto decimale.
3,7 kW
5,5 kW
a
55 kW
1-3
Page 19
1
Dati tecnici inverter
I dati tecnici dell'inverter ("SPEC") riportati sulla targa indicano la classe di tensione, la capacità massima del
motore, la struttura protettiva e la revisione dell'inverter in codici alfanumerici.
2
3P7 1 B
N.
2
4
Classe di tensione
Ingresso c.a., trifase, 200 V
Ingresso c.a., trifase, 400 V
N.
Revisione hardware
A
Spec A
Spec B
B
Capacità massima motore
N.
3P7
5P5
a
55
"P" indica il punto decimale
3,7 kW
5,5 kW
a
55 kW
N.
0
1
7
Struttura di protezione
IP00
NEMA 1
IP20
Figura 1.3 Dati tecnici inverter
Versione software dell'inverter
La versione software dell'inverter può essere rilevata dal parametro di monitoraggio U1-14. Il parametro
indica le ultime quattro cifre del numero di software (ad esempio, sul display appare "2031" per la versione
software VSL702031).
Il presente manuale descrive la funzionalità della versione software VSL702031 dell’inverter.
Le precedenti versioni del software potrebbero non supportare tutte le funzioni descritte.
IMPORTANTE
Prima di iniziare a operare con il presente manuale, controllare la versione software.
1-4
Page 20
Nomi dei componenti
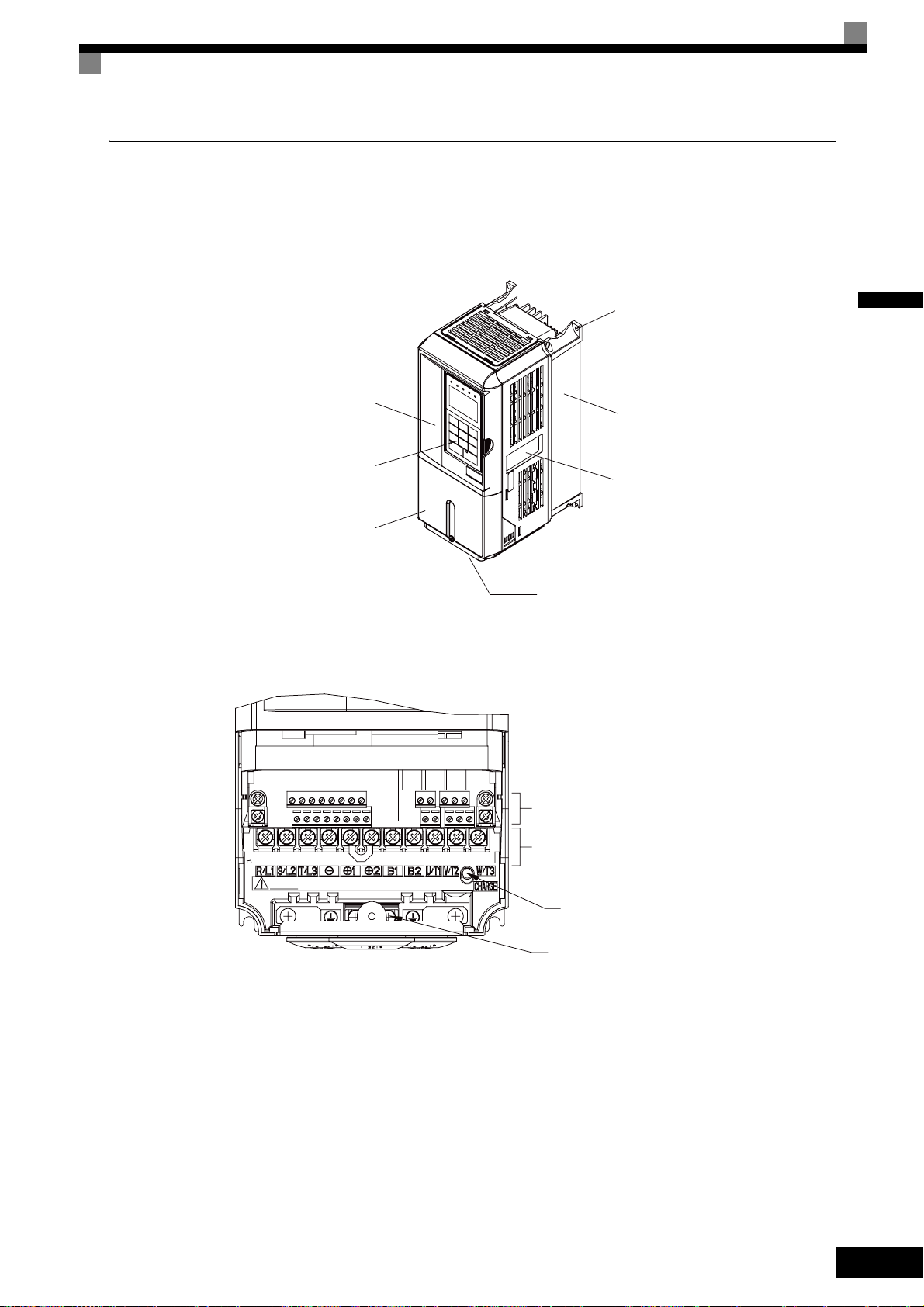
Inverter da 18,5 kW o inferiori
L'aspetto esterno e i nomi dei componenti dell'inverter vengono illustrati nella Figura 1.4. L'inverter senza
copriterminali è illustrato nella Figura 1.5.
Fori di montaggio
Coperchio frontale
Dissipatore
1
Console di programmazione
Copriterminali
Figura 1.4 Vista inverter (da 18,5 kW o inferiori)
Targa
Coperchio di protezione inferiore
Terminali del circuito di controllo
Terminali circuito principale
Indicatore di carica
Terminale di terra
Figura 1.5 Disposizione dei terminali (da 18,5 kW o inferiori)
1-5
Page 21
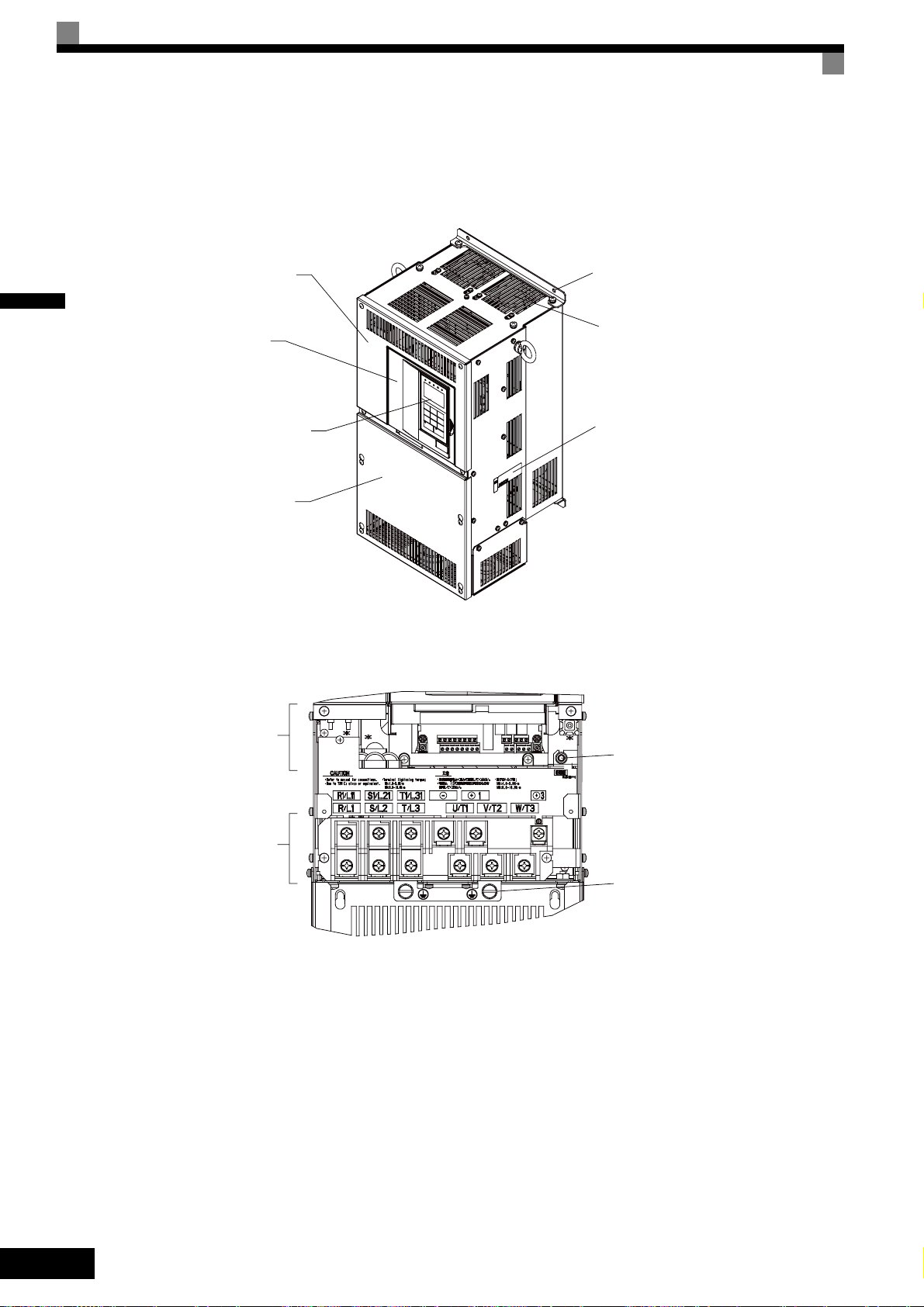
Inverter da 22 kW o superiori
L'aspetto esterno e i nomi dei componenti dell'inverter vengono illustrati nella Figura 1.6. L'inverter senza
copriterminali è illustrato nella Figura 1.7.
1
Coperchio inverter
Coperchio frontale
Console di programmazione
Copriterminali
Fori di installazione
Ventola di raffreddamento
Ta rg a
Figura 1.6 Vista inverter (da 22 kW o superiori)
Terminali circuito
di controllo
Terminali circuito
principale
Indicatore di carica
Terminali di terra
Figura 1.7 Disposizione dei terminali (da 22 kW o superiori)
1-6
Page 22

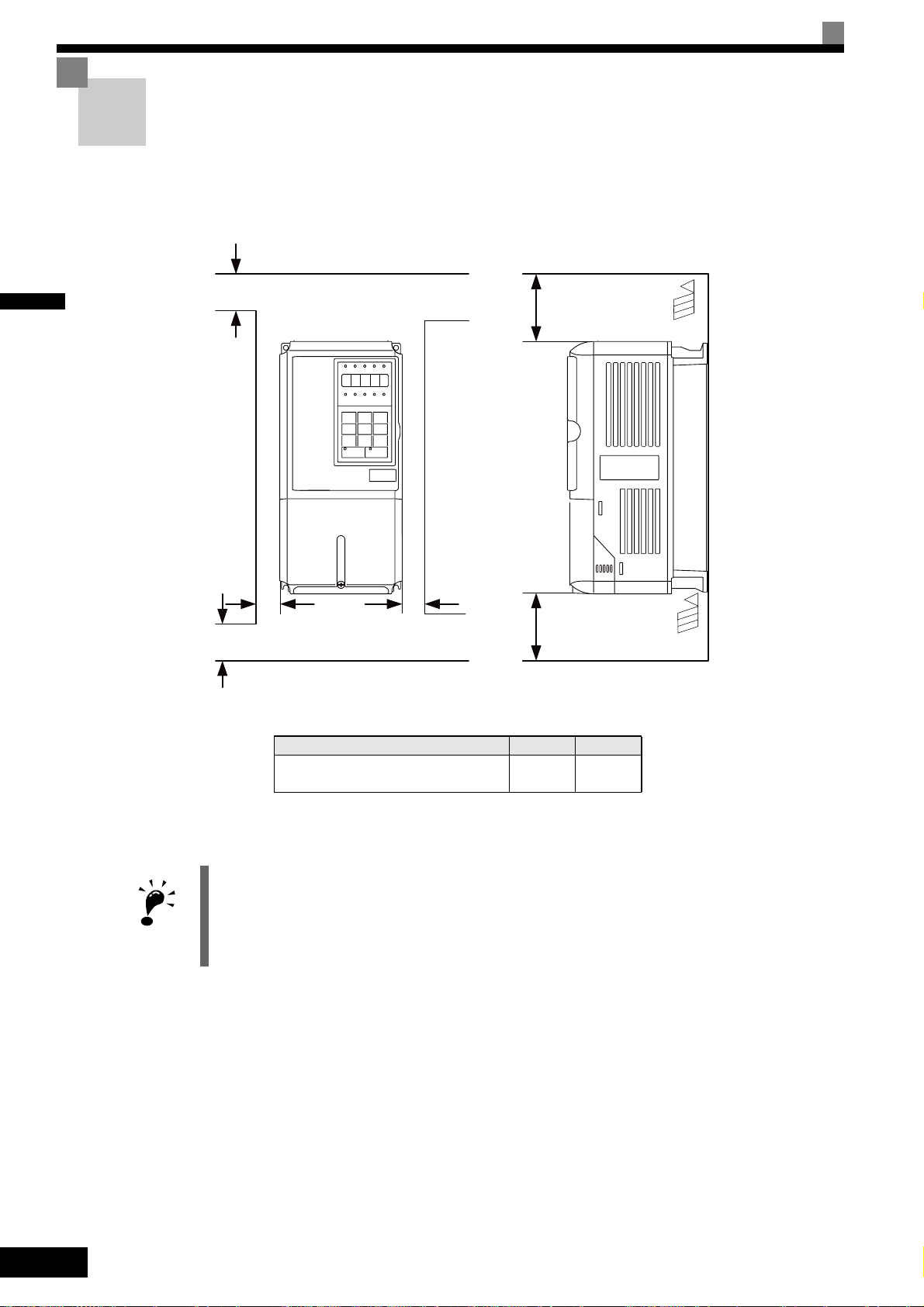
Dimensioni esterne e di installazione
Inverter IP00
Di seguito sono riportati gli schemi esterni degli inverter IP00.
W1
4-d
H1H2DH
W1
4-d
H1H2
1
H10
t1
W
3
Inverter di classe 200 V/400 V da 0,55 a 18,5 kW
D1
Max.
Figura 1.8 Schemi esterni degli inverter IP00
Inverter IP20/NEMA 1
Di seguito sono riportati gli schemi esterni degli inverter IP20/NEMA1.
W1
4-d
H1H2DH0
H3 H0
10
Inverter di classe 200 V da 22 o da 55 kW
Inverter di classe 400 V da 22 a 55 kW
W
W1
10
Max.
Boccola isolante
4-d
H1H2
Max.
H10
t1
D1
D5
t1
4H
W
Inverter di classe 200/400 V da 3,7 a 18,5 kW Inverter di classe 200 V da 22 kW o da 55 kW
H3
D1
3
10
Max.
Inverter di classe 400 V da 22 kW o da 55 kW
W
Boccola isolante
Max.
10
H3 H0
Max.
Figura 1.9 Schemi esterni degli inverter IP20/NEMA1
t1
D1
D5
1-7
Page 23
di raf-
Metodo
calore
Tot al e
In-
mento
fredda-
gene-
terno
rato
Ventola
Ventola
1
Esterno
d*
mon-
taggio
Fori di
Peso
mativo
approssi-
W H D W1 H0 H1 H2 H3 D1 t1
Peso
mativo
approssi-
Dimensioni (mm) Potere calorifico (W)
209
12.
62 1266 505 1771
3.2
5
130
80 68 148
59 5 4 M5
59 5 4 140 280 177 126 280 266 7
193 114 307
0
0
6
6 200 300 197 186 300 285 8 65.5
326 172 498
784 360 1144
100 19
100 20 279 514.5 258 220 450 435
64
7.5
85
7.5
614
35
34
901 415 1316
79.
283 260 550 535 105
329
5
466 259 725
M6
2.3
78 10
2.3
78 10 240 350 207 216 350 335
112 74 186
59 5 4 M5
0
59 5 4 140 280 177 126 280 266 7
0
219 113 332
6
300
6
197 186 300 285 8 65.5
200
429 183 612
M6
2.3
0
350
0
78 11
207 216 350 335
2.3
78 11 240
7.5
7.5
57 1015 411 1426
20 254 464 258 195 400 385 64 100 19 586 274 860
100
100
IP00 NEMA1 IP20
Potenza
di uscita
mas-
motore
Classe di
W H D W1 H0 H1 H2 H3 D1 t1
Peso
approssi-
W H D W1 H1 H2 D1 t1
sima
applica-
tensione
mativo
bile
[kW]
3.7
195 400 385 135
250 600 575
275 450 258 220 435 100 17 279 535 258 220 450 435
7.5
30 678 317 995
635
31
37
283 260 550 535 105
329
325 550 283 260 535 105
45
30 715 165 34 629.5
Tabella 1.3 Peso (kg) e dimensioni (mm) inverter
55 33 1203 495 1698
258
17 254 535
100
195 385
258
22 250 400
(trifase)
30 275 450 220 435 20 279 615 220 450 435 165 23 865 352 1217
298
52
100
298
37
380 809
250 575
375 600
57 328
3.2
12.5
45 328
130
55 450 725 348 325 700 78 453 1027 350 325 725 700 302 86 1588 619 2207
3.7
140 280 177 126 266 7 59 5 4 140 280 177 126 280 266 7
4.0 91 70 161
6 200 300 197 186 300 285 8 65.5
2.3
78 10 240 350 207 216 350 335
200 300 197 186 285 8 65.5
240 350 207 216 335
11 252 158 410
5.5 127 82 209
7.5
15
400 V
(trifase)
18.5 426 208 634
22
197 186 300 285 8 65.5
207 216 350 335
300
350
200
6
2.3
65.5
7.5
140 280 177 126 266 7 59 5 4 140 280 177 126 280 266 7
5.5 164 84 248
7.5
200 300 197 186 285
240 350 207 216 335 78 11 240
11 7 310 10 7 310 10 7 374 170 544
15
18.5 380 30 380 30 501 211 712
200 V
1-8
Page 24
Controllo del luogo di installazione
Installare l'inverter nel luogo di installazione descritto di seguito e mantenere delle condizioni ottimali.
Luogo di installazione
Installare l'inverter con le seguenti condizioni e in un ambiente con un inquinamento di grado 2.
Tabella 1.4 Luogo di installazione
1
Tipo
NEMA1/IP20 Da -10 a + 40 °C 95% RH o inferiore (senza condensa)
IEC IP00 Da -10 a + 45 °C 95% RH o inferiore (senza condensa)
Delle coperture di protezione sono attaccate sulla parte superiore e sulla parte inferiore dell'inverter. Accertarsi
di rimuovere le coperture di protezione prima di installare un inverter di classe 200 o 400 V con un'uscita da
18,5 kW o inferiore in un pannello.
Durante l'installazione dell'inverter, è necessario osservare le precauzioni riportate di seguito.
• Installare l'inverter in un ambiente pulito privo di polvere di olio. E' possibile installare l'inverter in un pan-
nello completamente chiuso e protetto dalla polvere.
• Durante l'installazione o il funzionamento dell'inverter, proteggerlo sempre dal contatto con polveri metal-
liche, olio, acqua o altre sostanze.
• Non installare l'inverter su un materiale combustibile, come il legno.
• Installare l'inverter in un ambiente privo di materiali radioattivi e combustibili.
• Installare l'inverter in un ambiente in cui non sono presenti liquidi e gas nocivi.
• Installare l'inverter in un ambiente senza troppe oscillazioni.
• Installare l'inverter in un ambiente in cui non è presente del cloruro.
• Installare l'inverter in un ambiente non esposto alla luce diretta del sole.
Temperatura ambiente di
funzionamento
Umidità
Controllo della temperatura ambiente
Per aumentarne l'affidabilità, è necessario installare l'inverter in un ambiente non soggetto a eccessivi aumenti
di temperatura. Se l'inverter viene installato in un ambiente chiuso (ad esempio un quadro), utilizzare una ventola di raffreddamento o un condizionatore d'aria per mantenere la temperatura interna al di sotto dei 45°C.
Protezione dell'inverter da sostanze estranee
Coprire l'inverter durante l'installazione per proteggerlo dalla polvere metallica prodotta dalla foratura.
Rimuovere sempre il coperchio dall'inverter una volta completata l'installazione. In caso contrario, la ventilazione diminuirà provocando il surriscaldamento dell'inverter.
1-9
Page 25
1
E
Posizione corretta di installazione
Installare l'inverter in posizione verticale in modo da non ridurre l'effetto di raffreddamento. Durante l'installazione dell'inverter, accertarsi sempre che lo spazio di installazione sia sufficiente per consentire una normale
dispersione di calore.
A
B
Aria
IMPORTANT
30 mm
30 mm min.
min.
Ingombro orizzontale
Inverter di classe 200 V, da 3,7 a 55 kW
Inverter di classe 400 V, da 3,7 a 55 kW
Figura 1.10 Posizione corretta di installazione dell'inverter
1. Per gli inverter IP00, IP20 e NEMA 1, è richiesto lo stesso spazio sia orizzontale che verticale.
2. Rimuovere sempre il coperchio di protezione superiore dopo aver installato in un pannello un inverter con
un'uscita da 18,5 kW o inferiore.
Quando si installa in un quadro un inverter con uscita da 22 kW (o superiore), accertarsi sempre che vi
sia abbastanza spazio per i bulloni a occhiello di sospensione e le linee del circuito principale.
30 mm min.
120 mm min.
Aria
Ingombro verticale
A B
50 mm 120 mm
1-10
Page 26
Rimozione e installazione dei copriterminali
Rimuovere il copriterminali per collegare i cavi ai terminali del circuito di controllo e del circuito principale.
Prima di aprire il copriterminali, disattivare l'alimentazione e attendere almeno 5 minuti per accertarsi che
il bus in continua sia scarico.
IMPORTANTE
Rimozione e installazione dei copriterminali.
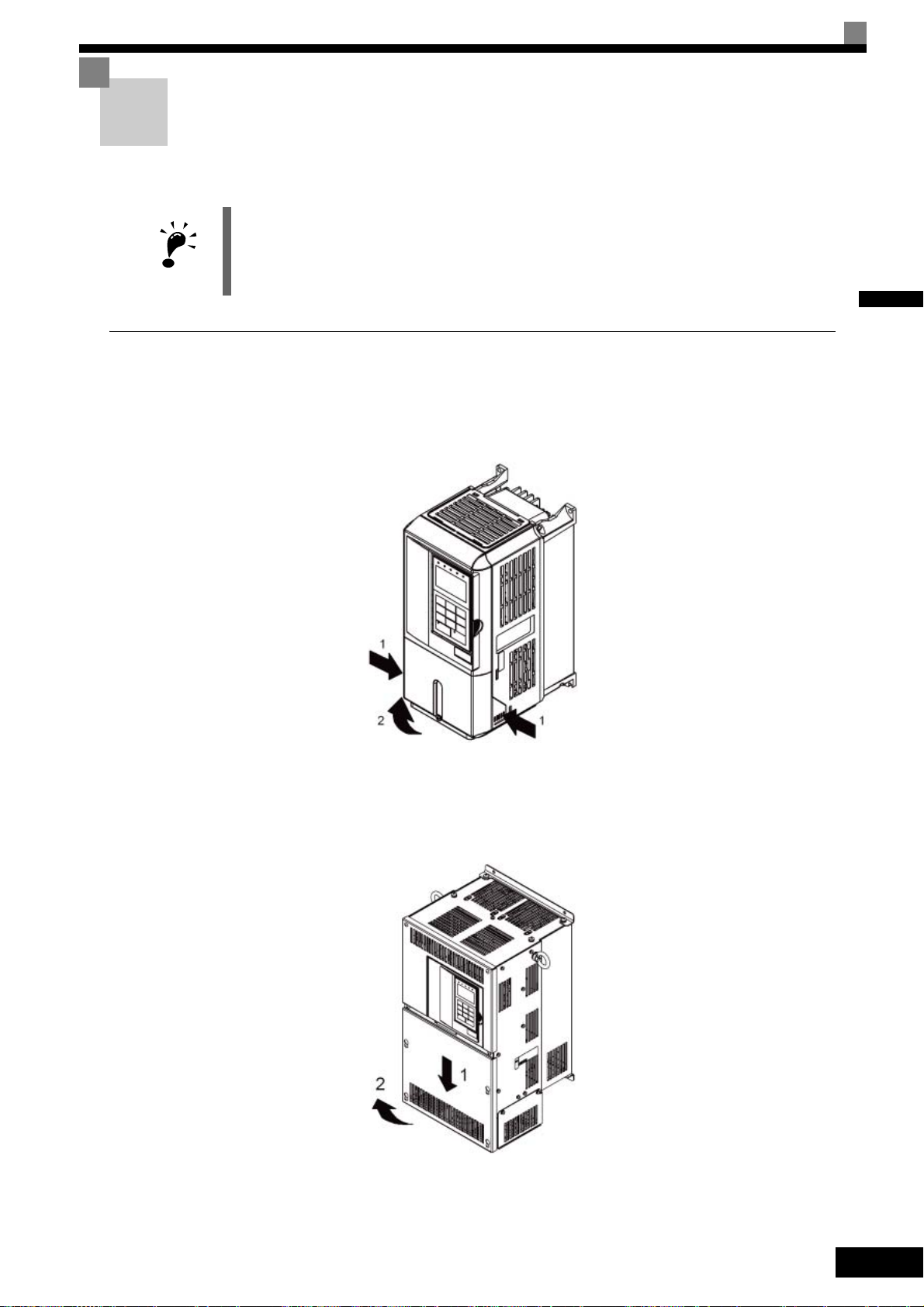
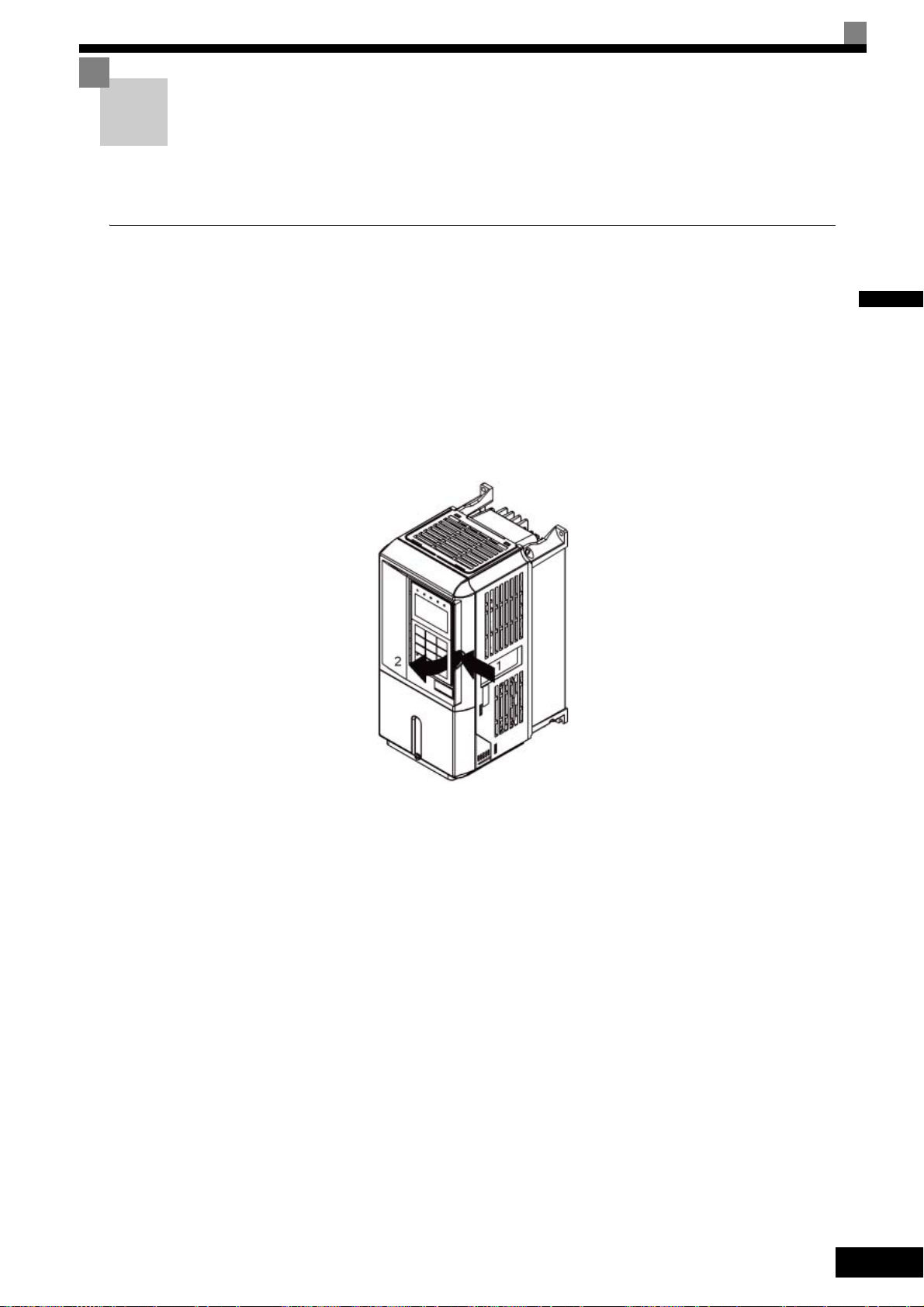
Inverter da 18,5 kW o inferiori
Allentare la vite sulla parte inferiore del copriterminali, esercitare una pressione su entrambi i lati del copriterminali in direzione della freccia 1 e sollevarlo in direzione della freccia 2.
1
Figura 1.11 Rimozione del copriterminali (modello CIMR-L7Z43P7 illustrato sopra)
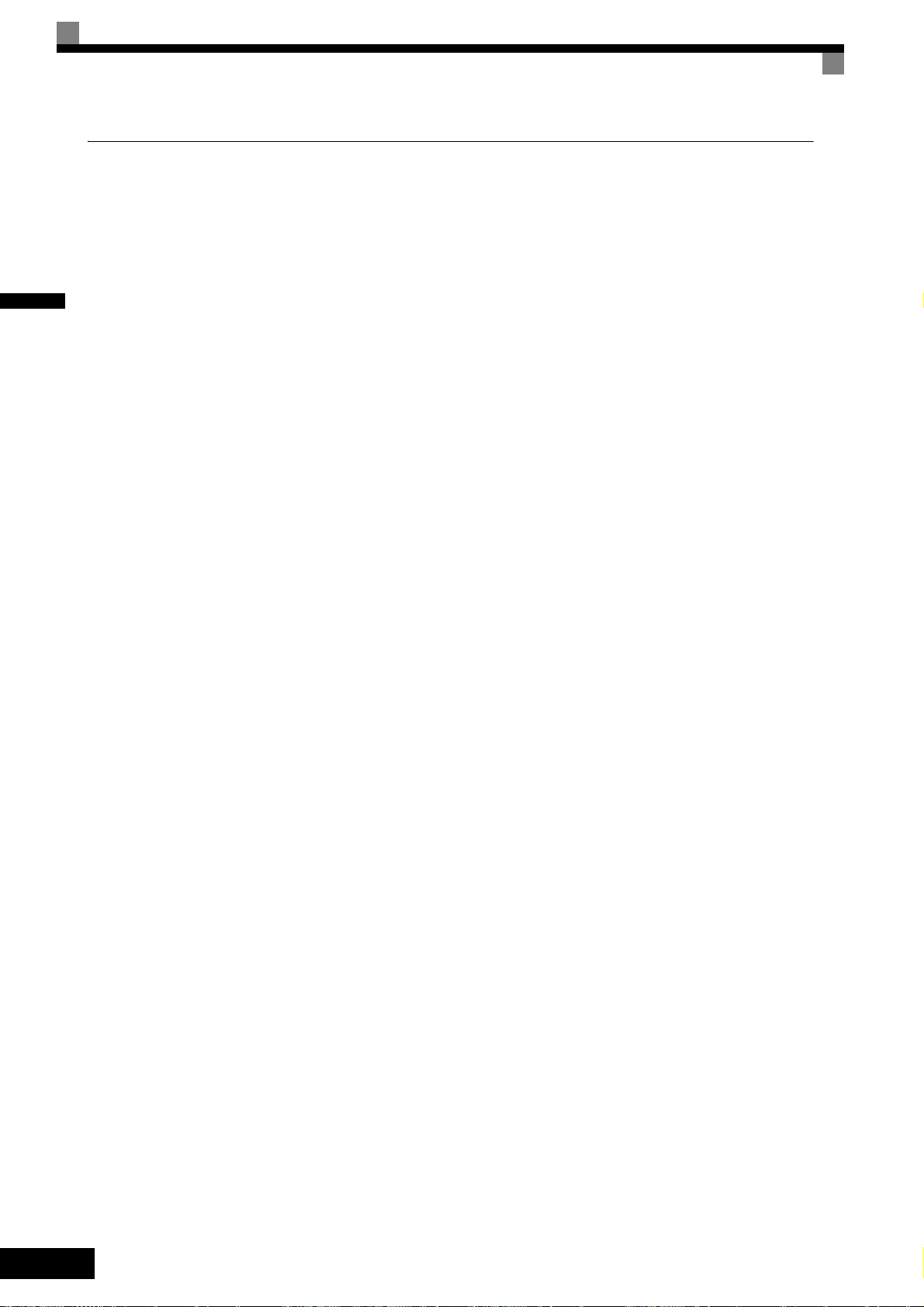
Inverter da 22 kW o superiori
Allentare le viti che si trovano sulla parte superiore del copriterminali a sinistra e a destra, estrarre la copertura
in direzione della freccia 1 e sollevarla in direzione della freccia 2.
Figura 1.12 Rimozione del copriterminali (modello CIMR-L7Z4022 illustrato sopra)
1-11
Page 27
1
Installazione del copriterminali
Una volta terminato il cablaggio della morsettiera, installare il copriterminali eseguendo la procedura inversa a
quella di rimozione.
Per gli inverter con un'uscita da 18,5 kW o inferiore, inserire la linguetta che si trova sulla parte superiore del
copriterminali nella scanalatura dell'inverter e premere sulla parte inferiore del copriterminali fino ad incastrarlo.
1-12
Page 28
Rimozione/installazione console di programmazione/console a LED e coperchio frontale
Inverter da 18,5 kW o inferiori
Per installare le schede opzionali o sostituire il connettore della scheda del terminale, rimuovere la console di
programmazione/console a LED e il coperchio frontale oltre al copriterminali. Rimuovere sempre la console
di programmazione/console a LED dal coperchio frontale prima di rimuovere il coperchio stesso.
Di seguito vengono riportate le procedure di rimozione e installazione.
Rimozione della console di programmazione/console a LED
Premere la leva che si trova sul lato della console di programmazione/console a LED in direzione della freccia
1 per sbloccare la console e sollevarla in direzione della freccia 2 per rimuoverla, come mostrato nell'illustrazione seguente.
1
Figura 1.13 Rimozione della console di programmazione/console a LED (modello CIMR-L7Z43P7 illustrato sopra)
1-13
Page 29
1
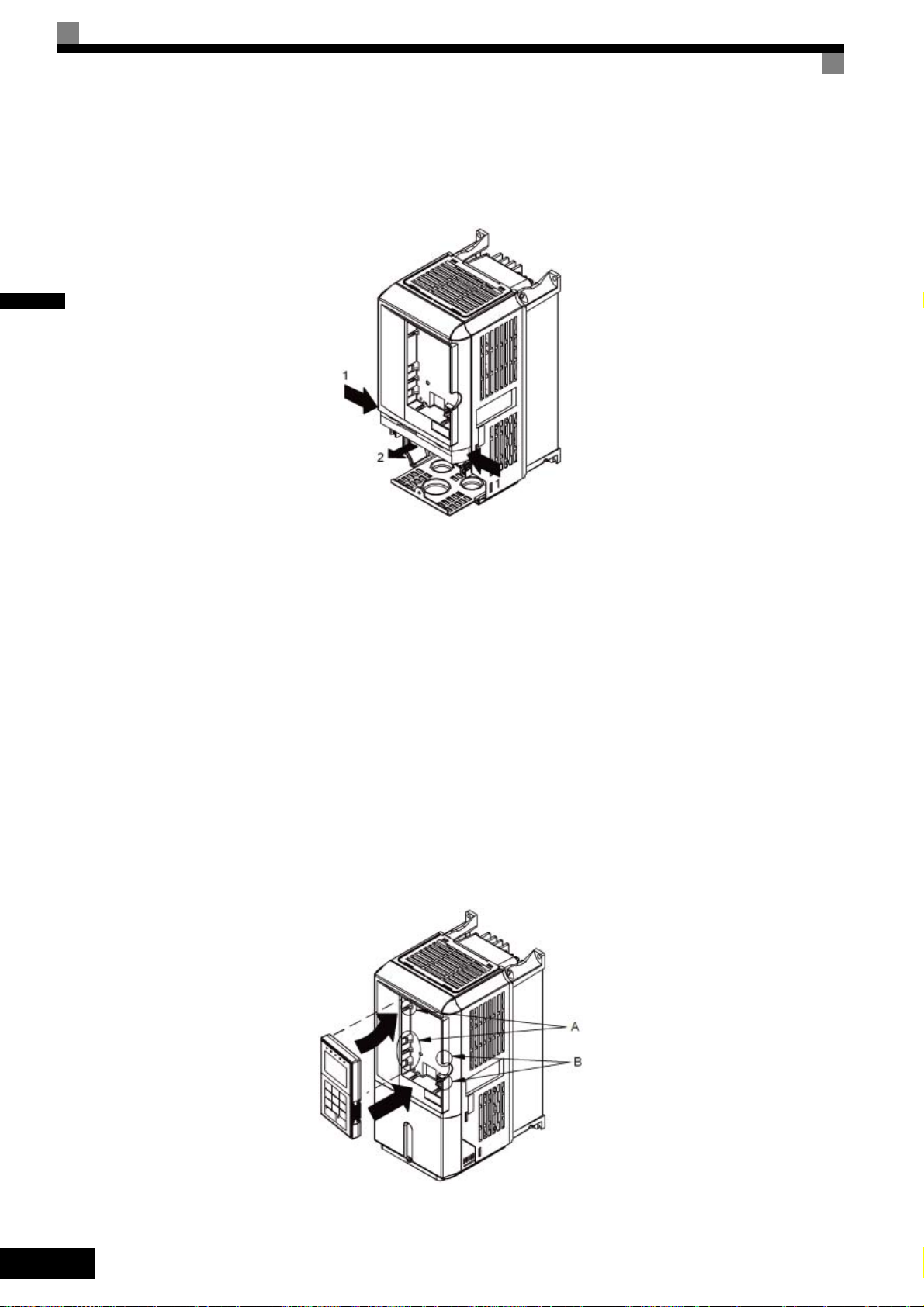
Rimozione del coperchio frontale
Esercitare una pressione sui lati sinistro e destro del coperchio frontale in direzione della freccia 1 e sollevare
la parte inferiore del coperchio in direzione della freccia 2 per rimuoverlo, come mostrato nell'illustrazione
seguente.
Figura 1.14 Rimozione del coperchio frontale (modello CIMR-L7Z43P7 illustrato sopra)
Montaggio del coperchio frontale
Una volta terminato il cablaggio dei terminali, montare il coperchio frontale sull'inverter eseguendo la procedura inversa a quella di rimozione.
1. Non montare il coperchio frontale se su di esso è installata la console di programmazione/console a LED,
in quanto potrebbe verificarsi un malfunzionamento della console dovuto ad un contatto difettoso.
2. Inserire la linguetta che si trova sulla parte superiore del coperchio frontale nella scanalatura dell'inverter e
premere la parte inferiore del coperchio frontale sull'inverter finché i ganci del coperchio non si chiudono.
Montaggio della console di programmazione/console a LED
Una volta installato il copriterminali, montare la console di programmazione/console a LED sull'inverter
seguendo la procedura riportata di seguito.
1. Agganciare la console di programmazione/console a LED su A (due lati) sul coperchio frontale in direzione della freccia 1, come mostrato nell'illustrazione seguente.
2. Spingere la console di programmazione/console a LED in direzione della freccia 2 finché non si aggancia
su B (due lati).
1-14
Figura 1.15 Montaggio della console di programmazione/console a LED
Page 30
1. Non rimuovere o installare la console di programmazione/console a LED o il coperchio frontale utilizzando metodi differenti da quelli descritti in precedenza, altrimenti potrebbe verificarsi un'interruzione o
un malfunzionamento dell'inverter dovuto ad un contatto difettoso.
IMPORTANTE
2. Non installare mai il coperchio frontale sull'inverter se sul coperchio è montata la console di programmazione/console a LED. Il contatto potrebbe risultare difettoso.
Installare prima il coperchio frontale sull'inverter, quindi montare la console di programmazione/console a
LED.
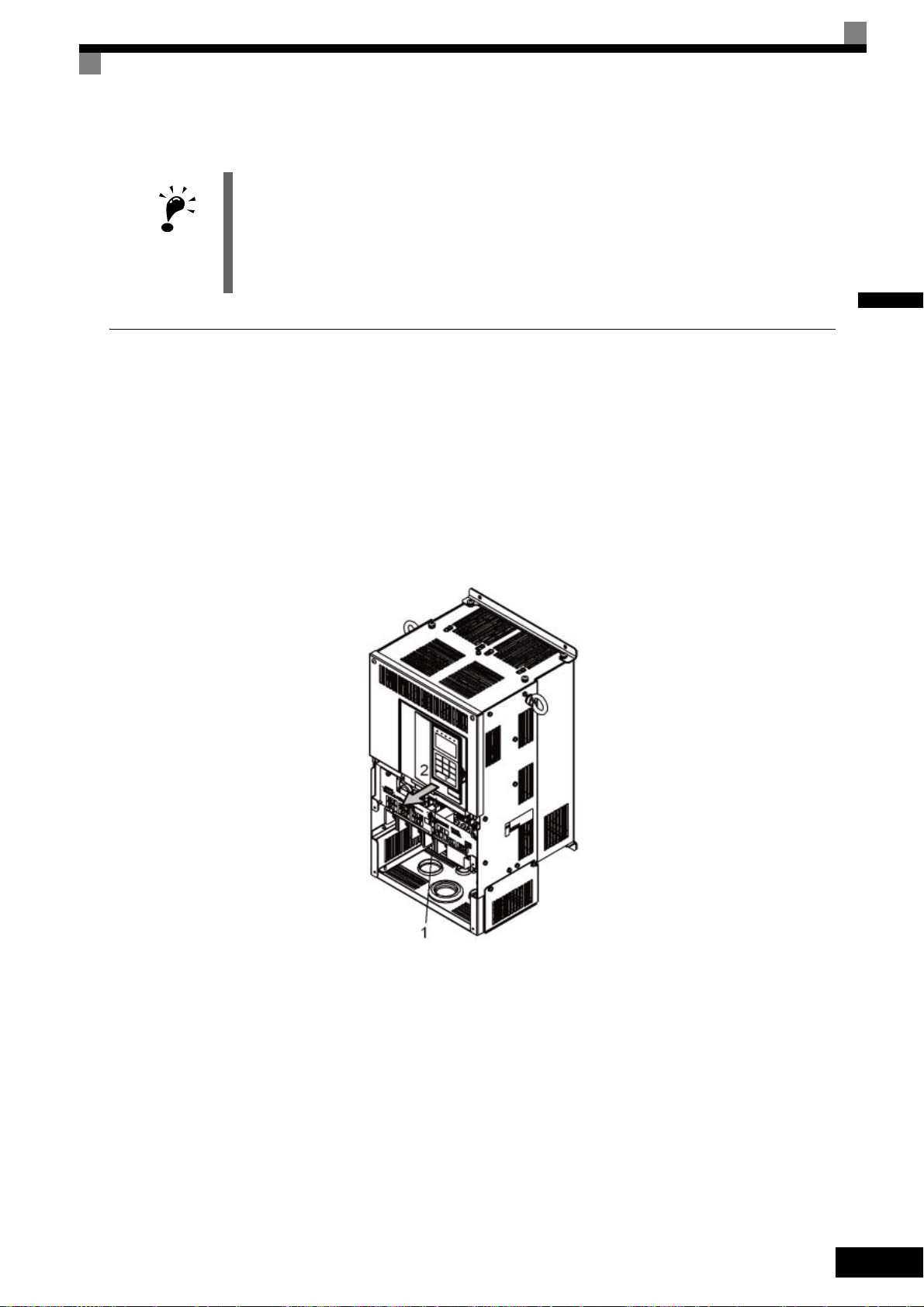
Inverter da 22 kW o superiori
Per gli inverter con un'uscita da 22 kW o superiori, rimuovere il copriterminali e seguire la procedura riportata
di seguito per rimuovere la console di programmazione/console a LED e il coperchio frontale.
Rimozione della console di programmazione/console a LED
Eseguire la stessa procedura utilizzata per gli inverter con un'uscita da 18,5 kW o inferiori.
Rimozione del coperchio frontale
Sollevare l'elemento di posizione 1 sulla parte superiore della scheda dei terminali del circuito di controllo in
direzione della freccia 2.
1
Figura 1.16 Rimozione del coperchio frontale (modello CIMR-L7Z4022 illustrato sopra)
Installazione del coperchio frontale
Una volta terminate le operazioni necessarie, come l'installazione di una scheda opzionale o l'impostazione
della scheda dei terminali, installare il coperchio frontale eseguendo la procedura inversa a quella di rimozione.
1. Verificare che la console di programmazione/console a LED non sia montata sul coperchio frontale. Se si
installa il coperchio con montata la console di programmazione/console a LED, potrebbero verificarsi
degli errori di contatto.
2. Inserire la linguetta che si trova sulla parte superiore del coperchio frontale nella fessura sull'inverter e premere sul coperchio finché non si incastra nell'inverter.
Installazione della console di programmazione/console a LED
Eseguire la stessa procedura utilizzata per gli inverter con un'uscita da 18,5 kW o inferiori.
1-15
Page 31

1
1-16
Page 32

Cablaggio
Questo capitolo descrive i terminali, i collegamenti dei terminali del circuito principale, le specifiche per il
cablaggio dei terminali del circuito principale, i terminali del circuito di controllo e le specifiche per il cablaggio
del circuito di controllo.
Schema dei collegamenti ..................................................................................................2-2
Configurazione della morsettiera.......................................................................................2-4
Cablaggio dei terminali del circuito principale ...................................................................2-5
Cablaggio terminali del circuito di controllo .....................................................................2-17
Cablaggio conforme a EN81-1 con un contattore motore ...............................................2-21
Controllo cablaggio..........................................................................................................2-23
Installazione e cablaggio delle schede opzionali.............................................................2-24
Page 33

Schema dei collegamenti
Lo schema dei collegamenti per l'inverter è riportato nella Figura 2.1.
Se si utilizza la console di programmazione, è possibile azionare il motore cablando solo i circuiti principali.
2
Potenza trifase
380…480 V
50/60 Hz
Ingressi
multifunzione
(impostazione di
fabbrica)
Contattore
magnetico
L1
L2
L3
PE
Marcia avanti/arresto
Marcia indietro/arresto
Velocità nominale
Ispezione Run
Velocità intermedia
Velocità di livellamento
Non utilizzato
Blocco delle basi hardware
(nota 3)
Ingresso analogico
(velocità di riferimento)
Regolazione
di tensione
2 kOhm
Filtro
di linea
2 kOhm
Da 0 a 10 V
P
Schede opzionali
di ingresso
Reattanza c.c. per migliorare il
fattore di potenza
Collegamento
(+1) (+2)
L1(R)
L2(S)
L3(T)
S1
S2
S3
S4
S5
S6
S7
BB
BB1
SC
CN5 (impostazioni NPN)
E(G)
Alimentazione
ingresso
+V
analogico +15 V,
20 mA
A1
Velocità di
riferimento
master 0 … 10 V
c.a.
0 V
2CN
(-)
+24 V, 8 mA
IP24V (24 V)
frenatura (opzionale)
B1
PG-X2
(opzionale)
Unità modulo di
B2
U/T1
V/T2
W/T3
TA1
TA3
TA2
MA
MB
MC
M1
M2
M3
M4
M5
M6
1
Impulso A
Impulso B
Impulso Z
Comando freno
(impostazione di
fabbrica)
Controllo
contattore
(impostazione di
fabbrica)
Inverter pronto
(impostazione di
fabbrica)
Uscita di monitoraggio a
impulsi RS-422
(100 m o inferiore)
2
3
Uscita contatto errore
250 Vc.a., max. 1 A
30 Vc.c., max. 1 A
Motore
IM/PM
P
P
Uscita contatto
multifunzione
250 Vc.a., max. 1 A
30 Vc.c., max. 1 A
PG
2-2
Ingresso alimentazione
di controllo opzionale per
funzionamento di emergenza
Nota:
1. I terminali del circuito principale sono indicati da due cerchi,
mentre quelli del circuito di controllo sono indicati da un solo cerchio.
2. L'impostazione di fabbrica predefinita di CN5 è NPN.
3. Per attivare l'inverter, entrambi gli ingressi BB e BB1 devono essere
chiusi. Se solo uno degli ingressi è chiuso, sul pannello di controllo
verrà visualizzato "BB" e non sarà possibile avviare l'inverter.
al terminale B1
al terminale -
Figura 2.1 Schema dei collegamenti (modello CIMR-L7Z43P7 illustrato sopra)
P0
Ingresso alimentazione
N0
1
di controllo
Cavi
schermati
3CN
Cavi a doppini
intrecciati
Schede opzionali
di uscita
2
Page 34

Descrizione circuiti
Fare riferimento ai numeri indicati nella Figura 2.1
1 Tali circuiti sono pericolosi e sono separati da superfici accessibili con pannelli di separazione
protettivi.
2 Tali circuiti sono separati da tutti gli altri circuiti tramite pannelli di separazione protettivi dotati di
materiale isolante doppio e rinforzato. Tali circuiti possono essere collegati con circuiti SELV
equivalenti) o con circuiti non SELV
3 Inverter alimentati mediante una sorgente di sistema a 4 fili (neutro a terra)
Sono circuiti SELV
di materiale isolante doppio e rinforzato. Tali circuiti possono essere collegati solo con altri circuiti
*
(o equivalenti).
SELV
Inverter alimentati mediante una sorgente di sistema a 3 fili (un filo o nessun filo messo a
terra)
Tali circuiti sono separati da tutti gli altri circuiti pericolosi tramite pannelli di separazione protettivi unicamente dotati di materiale isolante semplice. Tali circuiti non devono essere collegati con
altri circuiti accessibili a meno che non siano isolati mediante materiale isolante aggiuntivo.
* I circuiti SELV (Safety Extra Low Voltage, bassissima tensione di sicurezza) sono privi di collegamento diretto all'alimentazione primaria e vengono
alimentati mediante un trasformatore o dispositivo isolante equivalente. I circuiti sono realizzati e protetti in modo tale che, in condizioni normali e di
guasto, la tensione non superi mai un valore di sicurezza.
(Vedere IEC 61010)
*
separati da tutti gli altri circuiti tramite pannelli di separazione protettivi dotati
*
, ma non con entrambi.
*
(o
2
IMPORTANTE
1. I terminali del circuito di controllo sono disposti nel modo riportato di seguito..
SC SC SC
E (G)
2. La capacità della corrente di uscita del terminale +V è di 20 mA.
3. I morsetti del circuito principale sono indicati da due cerchi, mentre quelli del circuito di comando sono
indicati da un solo cerchio.
4. Il cablaggio degli ingressi digitali da S1 a S7 e BB sono predisposti per il collegamento a contatto o
transistor NPN (0V e modalità NPN). Questa è l'impostazione di default.
Per il collegamento PNP o per usare un alimentazione esterna di 24V vedere Tabella 2.9.
5. Una reattanza c.c. può essere usata solo per inverter da 18,5 kW o inferiore. Rimuovere la barra di corto
circuito prima di collegare una reattanza c.c.
S1
S2
BB
S3 S4
+V
A1 c.a.
S5 S6 S7 BB1
M5
M6
M3
MA MB MC
M4
M1
M2
E(G)
2-3
Page 35

Configurazione della morsettiera
La disposizione dei terminali viene illustrata nella Figura 2.2 e nella Figura 2.3.
Terminali circuito di controllo
2
Terminali circuito di
controllo
Terminali circuito
principale
Terminali circuito principale
Indicatore di carica
Terminale di terra
Figura 2.2 Disposizione dei morsetti (classe 200 V/400 V inverter di 3,7 kW)
Indicatore di carica
Terminali di terra
2-4
Figura 2.3 Disposizione dei terminali (inverter di classe 200 V/400 V da 22 kW o superiore)
Page 36

Cablaggio dei terminali del circuito principale
Dimensioni dei cavi e dei terminali a crimpare applicabili
Selezionare i cavi ed i terminali a crimpare appropriati utilizzando Tabella 2.1 … 1.. Per informazioni sulle
dimensioni dei cavi relativi ai moduli resistenza di frenatura e ai moduli di frenatura, consultare il manuale
d'istruzioni TOE-C726-2.
Dimensioni dei cavi
Tabella 2.1 Dimensioni cavi per la classe 200 V
Modello
inverter
CIMR-
L7Z23P7
Codice terminale
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
Viti di
morsetto
M4 1,2…1,5
Coppia di
serraggio
(N•m)
Dimensione
cavi
consentita
2
mm
(AWG)
4
(12… 10)
Dimensione cavi
consigliata
(AWG)
4
(12)
*1
mm
2
Tipo di cavi
2
L7Z25P5
L7Z27P5
L7Z2011
L7Z2015
L7Z2018
L7Z2022
L7Z2030
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, PO, NO
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
M4 1,2… 1,5
M5 2,5
M5 2,5
M6 4,0… 5,0
M6 4,0… 5,0
M8 9,0… 10,0
M6 4,0… 5,0
M8 9,0… 10,0
M6 4,0… 5,0
M8 9,0… 10,0
M8 9,0… 10,0
M6 4,0… 5,0
M8 9,0… 10,0
6
(10)
10
(8… 6)
16
(6… 4)
25
(4… 2)
10
(8… 6)
25
(4)
25… 35
(3 … 2)
10… 16
(8… 6)
25
(4)
25… 35
(3… 1)
10… 16
(8… 4)
25… 35
(4… 2)
50
(1…1/0)
10… 16
(8… 4)
25… 35
(4… 2)
6
(10)
10
(8)
16
(6)
25
(4)
-
25
(4)
25
(3)
-
25
(4)
25
(3)
-
25
(4)
50
(1)
-
25
(4)
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2-5
Page 37

2
Modello
inverter
CIMR-
L7Z2037
L7Z2045
Codice terminale
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
Viti di
morsetto
M10 17,6 … 22,5
M8 8,8 … 10,8
Coppia di
serraggio
(N•m)
M10 17,6 … 22,5
r/l1, ∆/l2 M4 1,3… 1,4
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
M10 17,6 … 22,5
M8 8,8 … 10,8
M10 17,6 … 22,5
r/l1, ∆/l2 M4 1,3… 1,4
R/L1, S/L2, T/L3, , 1, NO
M12 31,4… 39,2
Dimensione
consentita
mm
70 … 95
(2/0 … 4/0)
(10 … 4)
35 … 70
(2 … 2/0)
(20… 10)
(3/0 … 4/0)
(10 … 4)
50 … 70
(1 … 2/0)
(20… 10)
50… 95
(1/0…4/0)
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31 M10 17,6… 22,5
L7Z2055
3, PO
r/l1, ∆/l2 M4 1,3 … 1,4
*1. La dimensione dei cavi è valida per un cavo in rame isolato in PVC, con temperatura ambiente pari a 30°
M8 8,8… 10,8
M10 17,6… 22,5
(10…2/0)
35… 95
(3 … 4/0)
0,5 … 4
(20 … 10)
cavi
2
(AWG)
6 … 16
0,5… 4
95
6 … 16
0,5… 4
90
(4/0)
6… 70
Dimensione cavi
consigliata
(AWG)
*1
mm
70
(2/0)
–
35
(2)
1.5
(16)
95
(3/0)
–
50
(1)
1.5
(16)
50 × 2P
(1/0 × 2P)
90
(4/0)
–
50
(1/0)
1.5
(16)
2
Tipo di cavi
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
Modello
inverter
CIMR-
L7Z43P7
L7Z44P0
L7Z45P5
L7Z47P5
L7Z4011
Tabella 2.2 Dimensioni cavi per la classe 400 V
Codice terminale
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3, NO, PO
Viti di
morsetto
Coppia di
serraggio
(N•m)
M4 1,2… 1,5
M4 1,2… 1,5
M4 1,2… 1,5
M4 1,2 … 1,5
M5 2,5
Dimensione
cavi
consentita
2
(AWG)
mm
2,5… 4
(14… 10)
2,5… 4
(14… 10)
4
(12… 10)
2,5… 4
(14… 10)
6 … 10
(10 … 6)
6… 10
(10… 6)
Dimensione cavi
consigliata
(AWG)
*1
mm
4
(12)
2.5
(14)
4
(12)
2.5
(14)
4
(12)
2.5
(14)
6
(10)
4
(12)
10
(8)
6
(10)
2
Tipo di cavi
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2-6
Page 38

Modello
inverter
CIMR-
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
L7Z4015
L7Z4018
L7Z4022
L7Z4030
L7Z4037
L7Z4045
L7Z4055
*1. La dimensione dei cavi è valida per un cavo in rame isolato in PVC, con temperatura ambiente pari a 30°
U/T1, V/T2, W/T3, NO, PO
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3, NO
B1, B2, PO M5 2,5
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO, PO
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3,
R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/T3,
R1/L11, S1/L21, T1/L31, NO
3, PO
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31, NO
3, PO
Codice terminale
Viti di
morsetto
M5 2,5
M5
(M6)
M6 4,0… 5,0
M6 4,0… 5,0
M6 4,0… 5,0
M8 9,0… 10,0
M6 4,0 … 5,0
M8 9,0 … 10,0
M8 9,0… 10,0
M6 4,0… 5,0
M8 9,0… 10,0
M8 9,0… 10,0
M6 4,0… 5,0
M8 9,0… 10,0
M8 9,0… 10,0
M6 4,0 … 5,0
M8 9,0 … 10,0
Coppia di
serraggio
(N•m)
2,5
(4,0 … 5,0)
Dimensione
consentita
mm
cavi
2
(AWG)
10
(8 … 6)
6 … 10
(10 … 6)
10… 35
(8… 2)
10
(8)
10… 25
(8… 4)
16
(6… 4)
16… 35
(6… 2)
25
(4)
25 … 35
(4 … 2)
25… 50
(4…1/0)
10… 16
(8… 4)
25… 35
(4… 2)
35… 50
(2…1/0)
10… 16
(8… 4)
25… 35
(4… 2)
50
(1…1/0)
10 … 16
(8 … 4)
25 … 35
(4 … 2)
Dimensione cavi
(AWG)
10
(8)
6
(10)
10
(8)
10
(8)
10
(8)
16
(6)
16
(6)
25
(4)
25
(4)
35
(2)
-
25
(4)
35
(2)
-
25
(4)
50
(1)
-
25
(4)
*1
mm
consigliata
2
Tipo di cavi
Cavi di
alimentazione,
ad esempio in
vinile da 600 V
2
2-7
Page 39

2
Dimensioni terminali a crimpare consigliate (tipo ad anello)
1. Dimensioni terminali a crimpare
Tipo di terminale a crimpare
Sezione del filo (mm2)
0,5 - 1,0 M4 620/4 1620/4 GS4-1
1,5 M4 630/4 1620/4 GS4-1
2,5 M4 630/4 1630/4 GS4-2.5
4 M4 650/4 1650/4 GS4-6
6
10
16
25
35
50
70
95
*1. Non applicabile per L7Z2011
Viti dei terminali
M4 650/4 1650/4 GS4-6
M5 101 R/5 1650/5 GS5-6
M6 101 R/6 1650/6 GS6-6
M8 101 R/8 1650/8 GS6-8
M5 102 R/5 1652/5 GS5-10
M6 102 R/6 1652/6 GS6-10
M8 102 R/8 1652/8 GS8-10
M5
M6 103 R/6 1653/6 GS6-16
M8 103 R/8 1653/8 GS8-16
M6 104 R/6 1654/6 GS6-25
M8 104 R/8 1654/8 GS8-25
M6 105 R/6 1655/6 GS6-35
M8 105 R/8 1655/8 GS8-35
M10 105 R/10 1655/10 GS10-35
M8 106 R/8 1656/8 GS8-50
M10 106 R/10 1656/10 GS10-50
M12 106 R/12 1656/12 GS12-50
M8 107 R/8 1657/8 GS8-70
M10 107 R/10 1657/10 GS10-70
M12 107 R/12 1657/12 GS12-70
M10 108 R/10 1658/10 GS10-95
M12 108 R/12 1658/12 GS12-95
103 R/5
Klauke
A B
*1
y
1653/5 GS5-16
JST
2-8
IMPORTANTE
Selezionare le dimensioni dei cavi per il circuito principale in modo che la caduta di tensione della
linea rientri nel 2% della tensione nominale. La caduta di tensione viene calcolata nel modo seguente:
Caduta tensione di linea (V) =
x resistenza cavi (Ω/km) x lunghezza cavi (m) x corrente (A) x 10
3
-3
Page 40

Funzioni dei morsetti del circuito principale
Le funzioni dei morsetti del circuito principale sono riepilogate nella Tabella 2.3 a seconda dei simboli dei ter-
minali. Cablare i morsetti correttamente per lo scopo desiderato.
Tabella 2.3 Funzioni dei terminali del circuito principale (classi 200 V e 400 V)
Funzione Codice morsetti
Ingresso alimentazione circuito
principale
Uscite inverter U/T1, V/T2, W/T3 23P7… 2055 43P7… 4055
Collegamenti bus in continua
Collegamento modulo di frenatura B1, B2 23P7… 2018 43P7… 4018
Collegamento reattanza c.c.
Collegamento modulo di frenatura
Terra 23P7 … 2055 43P7 … 4055
Alimentazione di controllo PO, NO 23P7 … 2055 43P7 … 4055
R/L1, S/L2, T/L3 23P7… 2055 43P7… 4055
R1/L11, S1/L21, T1/L31 2022… 2055 4022… 4055
1,
1, 2
3,
Modello: CIMR-L7Z
Classe 200 V Classe 400 V
23P7… 2055 43P7… 4055
23P7… 2018 43P7… 4018
2022 … 2055 4022 … 4055
2
2-9
Page 41

Configurazioni del circuito principale
Le configurazioni per il circuito principale dell'inverter sono indicate in Tabella 2.4.
Tabella 2.4 Configurazioni per il circuito principale dell'inverter
Classe 200 V Classe 400 V
2
R/L1
S/L2
T/L3
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L3 1
CIMR- L7Z23P7 … 2018
R/L1
S/L2
T/L3
B2
B1
1
+
2
+
-
B2
B1
1
+
+
2
-
N0
Alimen-
tazione
Circuito di
controllo
P0
U/T1
V/T2
W/T3
CIMR - L7Z2022,2030
3
+
+
1
U/T1
V/T2
W/T3
-
P
Circuito
di controllo
Alimen-
N0
tazione
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L3 1
+
1
-
CIMR-L7Z43P7 … 4018
Sistema di
alimentazione
N0
di controllo
P0
CIMR - L7Z4022,4055
3
+
Alimen-
tazione
P
N0
Circuito
Circuito
di controllo
U/T1
V/T2
W/T3
U/T1
V/T2
W/T3
CIMR - L7Z2037 … 2055
+
3
+1
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L31
r/l1
∆200/
l200
Alimentazione
N0
P0
Circuito
di controllo
U/T1
V/T2
W/T3
Nota: Per l'uso di un raddrizzatore a 12 fasi, consultare il rappresentante Omron Yaskawa Motion Control.
2-10
Page 42

Schemi dei collegamenti standard
Gli schemi dei collegamenti standard per gli inverter sono riportati nella Figura 2.4. Gli schemi riportati sono
identici per gli inverter di classe 200 V e per quelli di classe 400 V. I collegamenti dipendono dalla capacità
dell'inverter.
CIMR-L7Z23P7 … 2018 e 43P7 … 4018
Reattanza
(opzionale)
+1- + 2 B1 B2
R/L1
S/L2
Trifase,
200 Vc.a. o 400 Vc.a.
T/L 3
Accertarsi di rimuovere la barra di corto circuito prima di
collegare la reattanza c.c.
c.c.
Resistenza
di frenatura
(opzionale)
U/T1
V/T2
W/T3
M
CIMR-L7Z2037… 2055
Resistenza
di frenatura (opzionale)
Modulo di frenatura
CDBR (opzionale)
Trifase
200 Vc.a. o 400 Vc.a.
+1 -+3
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L 31
r / l1
/ l2
U/T1
V/T2
W/T3
M
CIMR-L7Z2022, 2030 e 4022 … 4055
Resistenza di frenatura
(opzionale)
Modulo di frenatura
(opzionale)
Trifase
200 Vc.a. o 400 Vc.a.
La reattanza c.c. è incorporata.
+1 -+3
R/L1
S/L2
T/L3
R1/L11
S1/L21
T1/L 31
U/T1
V/T2
W/T3
2
M
L'alimentazione viene fornita interamente mediante bus in continua a tutti i modelli di inverter.
Figura 2.4 Collegamenti dei terminali del circuito principale
2-11
Page 43

2
Cablaggio dei circuiti principali
In questa sezione viene descritto il cablaggio per le uscite e gli ingressi del circuito principale
Cablaggio degli ingressi del circuito principale
Tenere in considerazione le seguenti precauzioni per l'ingresso di alimentazione del circuito principale.
Installazione fusibili
Per proteggere l'inverter è consigliabile utilizzare dei fusibili del tipo indicato nella tabella seguente.
Tabella 2.5 Fusibili di ingresso
Corrente di
Tipo di
inverter
23P7 21 240 30 82~220 A60Q30-2 600 V/30 A 132
25P5 25 240 40 220~610 A50P50-4 500 V/50 A 250
27P5 40 240 60 290~1300 A50P80-4 500 V/80 A 640
2011 52 240 80 450~5000 A50P80-4 500 V/80 A 640
2015 68 240 100 1200~7200 A50P125-4 500 V/125 A 1600
2018 96 240 130 1800~7200 A50P150-4 500 V/150 A 2200
2022 115 240 150 870~16200 A50P150-4 500 V/150 A 2200
2030 156 240 180 1500~23000 A50P200-4 500 V/200 A 4000
2037 176 240 240 2100~19000 A50P250-4 500 V/250 A 6200
2045 220 240 300 2700~55000 A50P300-4 500 V/300 A 9000
2055 269 240 350 4000~55000 A50P350-4 500 V/350 A 12000
ingresso
nominale
dell'inverter
(A)
Tensi o n e (V) Corrente (A)
Selezione fusibili Esempio di selezione (FERRAZ)
I2t (A2s)
Modello Classificazione I²t (A²s)
43P7 10,2 480 15 34~72 A60Q20-2 600 V/20 A 41
44P0 13,2 480 20 50~570 A60Q30-2 600 V/30 A 132
45P5 17 480 25 100~570 A60Q30-2 600 V/30 A 132
47P5 22 480 30 100~640 A60Q30-2 600 V/30 A 132
4011 32 480 50 150~1300 A70P50-4 700 V/50 A 300
4015 41 480 60 400~1800 A70P70-4 700 V/70 A 590
4018 49 480 70 700~4100 A70P80-4 700 V/80 A 770
4022 58 480 80 240~5800 A70P80-4 700 V/80 A 770
4030 78 480 100 500~5800 A70P100-4 700 V/100 A 1200
4037 96 480 125 750~5800 A70P125-4 700 V/125 A 1900
4045 115 480 150 920~13000 A70P150-4 700 V/150 A 2700
4055 154 480 200 1500~13000 A70P200-4 700 V/200 A 4800
2-12
Page 44

Installazione dispositivo di sezionamento
Se si utilizza un dispositivo di sezionamento per il collegamento dell'alimentazione (R/L1, S/L2 e T/L3), verificare che sia adatto per l'inverter.
• L'MCCB deve avere una capacità da 1,5 a 2 volte la corrente nominale dell'inverter.
• Per la selezione delle caratteristiche di temporizzazione dell'MCCB, è necessario considerare la protezione
di sovraccarico dell'inverter (un minuto al 150% della corrente nominale).
Installazione di un interruttore di dispersione a terra
È necessario utilizzare un interruttore di dispersione a terra in grado di rilevare tutti i tipi di corrente per garantire un rilevamento sicuro della corrente di dispersione a terra.
• Se si utilizza un interruttore di dispersione a terra specifico per inverter, la relativa corrente di attuazione
dovrebbe essere di almeno 30 mA per inverter.
• Se si utilizza un interruttore di dispersione a terra standard, la relativa corrente di attuazione dovrebbe
essere di 200 mA o superiore per inverter e il tempo di attuazione di 0,1 s o superiore.
Installazione di un contattore magnetico sull’ingresso
Se l'alimentazione del circuito principale viene disattivato da un circuito di controllo, è possibile utilizzare un
contattore magnetico.
Bisogna tener conto di quanto segue:
• L'inverter può essere avviato ed arrestato aprendo e chiudendo il contattore magnetico sul lato principale.
Tuttavia, l'apertura e la chiusura frequenti del contattore magnetico possono causare un guasto nell'inverter. Non accendere il contattore più di una volta all'ora.
• Quando l'inverter viene azionato utilizzando la console di programmazione, non è consentito il funziona-
mento automatico dopo il ripristino in seguito ad un'interruzione dell'alimentazione.
2
Collegamento dell'alimentazione di ingresso sulla morsettiera
L'alimentazione di ingresso può essere collegata in qualsiasi sequenza ai terminali R, S o T della morsettiera
poiché la sequenza di fase di ingresso non incide sulla sequenza di fase in uscita.
Installazione di una reattanza c.a. di ingresso
Se si collega l'inverter ad un trasformatore ad alta capacità (600 kW o superiore) o si commuta un condensatore di rifasatura, è possibile che una corrente di punta eccessiva passi attraverso il circuito di ingresso provocando un guasto dell'inverter. Come contromisura, è possibile installare una reattanza c.a. opzionale
sull'ingresso dell'inverter o una reattanza c.c. sui terminali di collegamento della reattanza c.c.
Per soddisfare le direttive EN12015, è necessario installare una reattanza c.a. Vedere Capitolo 9, Reattanza
c.a. per compatibilità EN 12015 per le reattanze disponibili. È necessario installare la reattanza c.a. tra l'ali-
mentazione e il filtro EMC (come indicato nella Figura 2.5)
Alimentazione Reattanza c.c.
L1
L2
Filtro
L7Z
Inverter
M
L3
Figura 2.5 Installazione di una reattanza c.a.
Installazione di un assorbitore di sovracorrente
Utilizzare sempre assorbitori di sovracorrente o diodi per i carichi induttivi situati nei pressi dell'inverter. I
carichi induttivi comprendono contattori magnetici, relè elettromagnetici, valvole a solenoide, solenoidi e
freni magnetici.
2-13
Page 45

2
Cablaggio del lato di uscita del circuito principale
È necessario tenere in considerazione le seguenti precauzioni per il cablaggio del circuito di uscita.
Collegamento dell'inverter al motore
È necessario collegare i terminali di uscita U/T1, V/T2 e W/T3 in base ai cavi del conduttore motore U, V e W.
Il motore deve ruotare in avanti quando si aziona il comando di marcia avanti. In caso contrario, è possibile
commutare due dei cavi del motore.
Evitare di collegare l'alimentazione ai terminali di uscita
Non collegare mai un'alimentazione ai terminali di uscita U/T1, V/T2, e W/T3 per evitare di danneggiare i circuiti interni dell'inverter.
Evitare i corto circuiti o la messa a terra dei terminali di uscita
Nel caso in cui i terminali di uscita vengano toccati senza alcuna protezione sulle mani o i cavi di uscita
entrino in contatto con l'involucro esterno dell'inverter, potrebbero verificarsi scosse elettriche o corto circuiti.
Evitare l'uso di condensatori di rifasatura.
Non collegare mai un condensatore di rifasatura al circuito di uscita dell'inverter. I componenti ad alta frequenza dell'uscita dell'inverter potrebbero surriscaldarsi o danneggiare l'uscita stessa oppure bruciare altri
componenti.
Installazione di un contattore magnetico
Durante il funzionamento dell'inverter, è necessario attivare o disattivare un contattore magnetico (MC) tra
l'inverter e il motore. Se si attiva l'MC durante il funzionamento dell'inverter, si genererà una corrente di
spunta molto alta e verrà attivato il meccanismo di protezione da sovracorrente all'interno dell'inverter.
Cablaggio di terra
È necessario tenere in considerazione le seguenti precauzioni per il collegamento a terra.
• Utilizzare sempre il terminale di terra dell'inverter 200 V con una resistenza di massa inferiore a 100 Ω e
quello dell'inverter 400 V con una resistenza di massa inferiore a 10 Ω.
• Evitare che i cavi di terra vengano condivisi con altri dispositivi come saldatrici o strumenti di alimenta-
zione.
• È necessario utilizzare un cavo di terra conforme agli standard tecnici delle apparecchiature elettriche. La
lunghezza del cavo di terra deve essere il più corta possibile.
Poiché la corrente di dispersione passa per l'inverter, il potenziale sul terminale di terra dell'inverter diventerà instabile se vi è troppa distanza tra l'elettrodo e il terminale di terra.
• Quando si utilizza più di un inverter, è necessario evitare che i cavi di terra formino un circuito.
OK
NO
2-14
Figura 2.6 Cablaggio di terra
Page 46

Collegamento di una resistenza di frenatura e di un modulo di frenatura (CDBR)
È possibile collegare una resistenza di frenatura e un modulo di frenatura all'inverter come indicato nella
Figura 2.7.
Per prevenire il surriscaldamento del modulo di frenatura/resistenza di frenatura, arrestare il funzionamento
dell'inverter quando vengono azionati i contatti di sovraccarico.
Inverter di classe 200 V e 400 V con capacità di uscita da 3,7 a 18,5 kW
Resistenza di frenatura
Inverter
Relè di sovraccarico
termico
Inverter di classe 200 V e 400 V con capacità di uscita da 22 kW o superiore
Modulo di frenatura CDBR
Inverter
Relè di sovraccarico
termico
Figura 2.7 Collegamento resistenza di frenatura e modulo di frenatura
Resistenza di frenatura
Relè di sovraccarico
termico
2
2-15
Page 47

Collegamento dei moduli di frenatura in parallelo
Quando si collegano due o più moduli di frenatura in parallelo, le impostazioni per il cablaggio e i cavi di collegamento devono essere eseguite come indicato indicati nella Figura 2.8. Sono disponibili dei cavi di collegamento per stabilire se ogni modulo di frenatura è un master o uno slave. Selezionare "Master" solo per il
primo modulo di frenatura e "Slave" per tutti gli altri moduli (ad esempio, a partire dal secondo modulo).
2
Inverter
Modulo di frenatura #1
Relè di sovraccarico
termico
Modulo
resistenza
di frenatura
MASTER
SLAVE
Modulo di frenatura
Relè di sovraccarico
termico
Modulo
resistenza
di frenatura
MASTER
SLAVE
Modulo di frenatura
#2
Relè di sovraccarico
termico
Relè di sovraccarico
termico
Figura 2.8 Collegamento dei moduli di frenatura in parallelo
Relè di sovraccarico
termico
Modulo
resistenza
di frenatura
MASTER
SLAVE
#3
Relè di sovraccarico
termico
Collegamento alimentazione di controllo
L'unità di controllo del Varispeed L7 può essere alimentata da un generatore di tensione esterno durante il funzionamento di emergenza utilizzando i cavi intrecciati contrassegnati come P0 e N0. Al momento della spedizione, i cavi vengono collegati al terminale B1 del circuito principale (unità fino a 18,5 kW) o al terminale +3
(unità da 22 kW e superiori) e al terminale -.
B1 /B2+ 3
U/T1
L1
L2
L3
Figura 2.9 Collegamento alimentazione di controllo
R/L1
S/L2
T/L3
-
P0
N0
Alimentazione
Circuito
di controllo
V/T2
W/T3
2-16
Fare riferimento alla pagina 6-77, Sistema di emergenza per informazioni dettagliate sul funzionamento di
emergenza.
Page 48

Cablaggio terminali del circuito di controllo
Dimensioni dei cavi
Per il funzionamento in modalità remota tramite l'uso di segnali analogici, la lunghezza delle linee di controllo
tra la console di programmazione o i segnali operativi e l'inverter deve essere inferiore a 30 m. È necessario
separare sempre i cavi dell'unità di controllo dalle linee di alimentazione principali o da altri circuiti di controllo al fine di evitare disturbi.
Si consiglia di utilizzare cavi schermati a coppie intrecciate e mettere a terra la schermatura per l'area di contatto maggiore tra la schermatura e la messa a terra.
I numeri dei morsetti e le dimensioni dei cavi sono indicati nella Tabella 2.6.
Tabella 2.6 Numeri dei terminali e dimensioni dei cavi (uguali per tutti i modelli)
(20
*1:
Dimensione
consigliata
cavi mm
(AWG)
0,75
(18)
1,0
(12)
2
Tipo di cavi
• Cavo schermato a coppie
intrecciate
• Cavo schermato in vinile con
rivestimento di polietilene
Morsetti
AC, SC, A1, +V, S1, S2, S3,
S4, S5, S6, S7, BB, MA,
MB, MC, M1, M2, M3, M4,
M5, M6
E (G) M3.5 0,8 … 1,0
*1. Si consiglia di utilizzare ghiere con tubi di plastica per le linee dei segnali per semplificare il cablaggio e migliorare l'affidabilità.
Viti di
morsetto
Tipo
Phoenix
Coppia di
serraggio
(N•m)
0,5 … 0,6
Dimensione
possibile cavi
2
(AWG)
mm
Cavo solido
0,5 … 2,5
A filo
intrecciato:
0,5 … 1,5
(26 … 14)
0,5 … 2,5
… 14)
Ghiere per linee dei segnali
Nella tabella seguente sono riportati i modelli e le dimensioni delle ghiere con tubi di plastica per le linee dei
segnali.
Tabella 2.7 Dimensioni delle ghiere
Dimensione cavi mm
(AWG)
0,25 (24) AI 0.25 - 8 YE 0,8 2 12,5
0,5 (20) AI 0.5 - 8 WH 1,1 2,5 14
0,75 (18) AI 0.75 - 8 GY 1,3 2,8 14
1,5 (16) AI 1.5 - 8 BK 1,8 3,4 14
2 (14) AI 2.5 - 8 BU 2,3 4,2 14
2
Modello d1 d2 L Produttore
Contatto Phoenix
2
d1
8 mm
14 mm
d2
Figura 2.10 Dimensioni delle ghiere
2-17
Page 49

2
Funzioni dei terminali del circuito di controllo
Le funzioni dei terminali del circuito di controllo sono indicate nella Tabella 2.8. Scegliere i terminali appro-
priati.
Tabella 2.8 Terminali del circuito di controllo con impostazioni predefinite
Tipo N. Nome del segnale Funzione Livello del segnale
S1 Comando Forward/Stop Avanti quando è ON; Stop quando è OFF.
S2 Comando Reverse/Stop Indietro quando è ON; Stop quando è OFF.
S3 Velocità nominale Velocità nominale se ON
Segnali
di
ingresso
digitale
S4 Ispezione Run Ispezione RUN se ON.
S5 Velocità intermedia Velocità intermedia se ON.
S6 Velocità di livellamento
Velocità di livellamento se
ON.
Le funzioni vengono
selezionate impostando i parametri da
H1-01 a H1-05.
S7 Non utilizzato –
BB Blocco delle basi hardware – –
*1
BB1
Blocco delle basi hardware 1 – –
SC Comune ingressi digitali – –
Segnali
ingresso
analo-
gico
Uscite
digitali
+V
di
Alimentazione da 15 V
A1 Riferimento di frequenza 0…+10 V/100% 0… +10 V (20 kΩ)
AC Comune riferimenti analogici – –
Cavi schermati, collegamento
E (G)
opzionale linee di terra
M1
Comando freno
(contatto NO 1)
M2
M3
Controllo contattore
(1 contatto NO)
M4
M5
Inverter pronto
(1 contatto NO)
M6
MA
Segnale uscita errore (SPDT)
MB
(1 contatto in scambio)
MC
*1. Tale terminale è disponibile solo su inverter con hardware SPEC B (nella pagina 1-4, Dati tecnici inverter viene spiegato come trovare la
versione hardware dell'inverter).
*2. Non utilizzare tale alimentazione per alimentare altri apparecchi esterni.
*3. Quando si aziona un carico reattivo, ad esempio la bobina di un relè con alimentazione c.c, inserire sempre un diodo volano come indicato nella Fi-
gura 2.11.
*2
Alimentazione da 15 V per i riferimenti analogici
––
Comando freno se ON
Controllo contattore se ON
Uscite multifunzione
Inverter pronto se ON
Presenza di errore quando l'uscita è chiusa da
MA a MC
Presenza di errore quando l'uscita è aperta da
MB a MC
Figura 2.11 Collegamento del diodo volano
24 Vc.c., 8 mA
Fotoaccoppiatore
15 V
(Corrente max.: 20 mA)
Contatti relè
Capacità contatto:
1 A max. a 250 Vc.a.
1 A max. a 30 Vc.c.
*3
2-18
Alimentazione esterna:
30 Vc.c. max.
Bobina
1 A max.
Diodo volano
Il coefficiente del diodo
volano deve essere almeno
pari alla tensione del circuito
Page 50

Modalità sinking/sourcing (selezione NPN/PNP)
È possibile attivare alternativamente la modalità sinking (comune 0 V, NPN) e quella sourcing (comune +
24V, PNP) per la logica del terminale di ingresso utilizzando il ponticello CN5. È, inoltre, supportata un'alimentazione esterna in grado di garantire maggiore flessibilità per i metodi d'ingresso dei segnali.
Tabella 2.9 Modalità NPN/PNP e segnali d'ingresso
Alimentazione interna – modalità sinking (NPN)
S1
S2
IP24V
CN5
SC
(+24 V)
Alimentazione interna – modalità PNP
S1
S2
CN5
SC
IP24V
(+24 V)
Alimentazione esterna – modalità sinking (NPN)
S1
S2
CN5
SC
24 Vc.c.
IP24V
(+24 V)
Alimentazione esterna – modalità PNP
S1
S2
CN5
SC
24 Vc.c.
IP24V
(+24 V)
2
2-19
Page 51

2
Collegamenti dei terminali del circuito di controllo
I collegamenti ai terminali del circuito di controllo dell'inverter sono indicati nella Figura 2.12.
S1
Ingressi
multifunzione
(impostazione di
fabbrica)
Marcia avanti/arresto
Marcia indietro/arresto
Velocità nominale
Ispezione Run
Velocità intermedia
Velocità di livellamento
Non utilizzato
Blocco delle basi hardware
(nota 2)
S2
S3
S4
S5
S6
S7
BB
BB1
+24 V, 8 mA
Regolazione
di tensione
Ingresso analogico
(velocità di riferimento)
2 kOhm
Nota:
1. L'impostazione di fabbrica predefinita di CN5 è NPN.
2. Per attivare l'inverter, entrambi gli ingressi BB e BB1 devono essere
chiusi. Se solo uno degli ingressi è chiuso, sul pannello di controllo
verrà visualizzato "BB" e non sarà possibile avviare l'inverter.
2 kOhm
0 … 10 V
P
Figura 2.12 Collegamenti dei terminali del circuito di controllo
Il circuito del blocco delle basi è un circuito a due canali, ovvero è necessario abilitare sempre entrambi i
canali (terminali BB e BB1) per attivare l'uscita dell'inverter.
INFO
Generalmente, i terminali BB e BB1 possono essere collegati direttamente ai terminali. Tuttavia, se è
richiesta una soluzione di un contattore del motore conforme a EN81-1, il cablaggio dei terminali BB e
BB1 consigliato dipende dall'installazione.
1. Se l'unità di controllo e l'inverter sono montati nello stesso quadro, i terminali BB e BB1 possono
essere collegati direttamente alla morsettiera dell'inverter. È sufficiente far passare un solo cavo
dall'unità di controllo all'ingresso del blocco delle basi dell'inverter.
2. Se l'inverter è installato separatamente dal quadro dell'unità di controllo, è necessario utilizzare due
cavi fisicamente distinti per i terminali BB e BB1, per mantenere la ridondanza in caso di guasto di una
delle linee dei segnali.
SC
E (G)
+V
A1
c.a.
IP24V (24 V)
CN5 (impostazione NPN)
Alimentazione ingresso
analogico +15 V, 20 mA
Velocità di riferimento
master 0 … 10 V
0 V
Cavi
schermati
MA
MB
MC
M1
M2
M3
M4
M5
M6
Cavi a doppini
intrecciati
Uscita contatto errore
250 Vc.a., max. 1 A
30 Vc.c., max. 1 A
Comando freno
(impostazione di
fabbrica)
Controllo
contattore
(impostazione di
fabbrica)
Inverter pronto
(impostazione di
fabbrica)
Uscita contatto
multifunzione
250 Vc.a., max. 1 A
30 Vc.c., max. 1 A
2-20
Page 52

Cablaggio conforme a EN81-1 con un contattore motore
Per utilizzare l'L7Z con un solo contattore motore invece di due e mantenere allo stesso tempo la conformità a
EN81-1:1998, è necessario rispettare le seguenti regole:
• Per attivare/disattivare l'inverter, è necessario utilizzare la funzione di blocco delle basi con i terminali BB
e BB1. La logica di ingresso deve essere PNP.
• In caso di apertura della catena di sicurezza dell'elevatore, è necessario interrompere l'uscita dell'inverter.
Ciò significa che i segnali di blocco delle basi sui terminali BB e BB1 devono essere aperti (ad esempio,
tramite un relè di inserimento).
• È necessario programmare la funzione di monitoraggio del blocco delle basi per una delle uscite multifun-
zione (H2- = 46/47). È necessario implementare il relativo contatto di uscita digitale nel circuito di
supervisione del contattore dell'unità di controllo per evitare un riavvio in caso di un malfunzionamento
del contattore motore o blocco delle basi dell'inverter.
• Tutti i contattori devono essere conformi a EN81-1:1998, paragrafo 13.2.
Nella Figura 2.13 è un esempio di cablaggio EN81-1:1998.
Circuito catena
di sicurezza
Unità di controllo elevatore
2
Comando chiusura
contattore
K01
K1
K2
24 Vc.c. *1
BB BB1
Yaskawa
CIMR-L7xxxx
Su/giù; selezione
velocità; …
Monitor BB
Verifica contattore
(autorizzazione al riavvio)
(NC)
M
Figura 2.13 Cablaggio conforme a EN81-1 con un contattore motore (esempio)
Le regole per il cablaggio e l'esempio di cablaggio sono approvati da TUEV Sued, Germany. Per ulteriori dettagli, contattare il rappresentante OYMC.
2-21
Page 53

2
Precauzioni per il cablaggio dei circuiti di controllo
È necessario tenere in considerazione le seguenti precauzioni per il cablaggio dei circuiti di controllo.
• È necessario separare il cablaggio dei circuiti di controllo dal cablaggio del circuito principale (R/L1,
S/L2, T/L3, B1, B2, U/T1, V/T2, W/T3, , 1, 2 e 3, PO, NO) e dalle altre linee ad alta potenza.
• È necessario separare il cablaggio per i terminali dei circuiti di controllo MA, MB, MC, M1, M2, M3, M4,
M5 e M6 (uscite contatti) dal cablaggio degli altri terminali dei circuiti di controllo.
• Se si utilizza un'alimentazione esterna opzionale, è necessario utilizzare un'alimentazione di Classe 2 con-
forme allo standard UL.
• Utilizzare cavi schermati a coppie intrecciate oppure cavi a coppie intrecciate per i circuiti di controllo per
prevenire errori di funzionamento.
• Le schermature del cavo devono essere collegate alla messa a terra con un'area di contatto molto ampia.
• Mettere a terra le schermature in corrispondenza di entrambe le estremità del cavo.
2-22
Page 54

Controllo cablaggio
Controlli
Accertarsi di aver collegato correttamente tutti i cavi. Evitare di effettuare il controllo di continuità sui circuiti
di controllo. Effettuare i seguenti controlli durante il cablaggio.
• Ci sono errori nei collegamenti?
• Sono state controllate tutte le viti, le mollette dei cavi e il resto?
• Le viti sono tutte ben strette?
• C'è qualche cavo che tocca altri morsetti?
2
2-23
Page 55

2
Installazione e cablaggio delle schede opzionali
Dati tecnici e modelli delle schede opzionali
E' possibile installare contemporaneamente un massimo di tre schede opzionali nell'inverter. Tutti e tre gli zoccoli della scheda opzionale sulla scheda di controllo (A, C e D) possono supportare una scheda opzionale
come indicato nella Figura 2.14.
Nella Tabella 2.10 sono riportate le schede opzionali disponibili e i relativi dati tecnici.
Tabella 2.10 Dati tecnici della scheda opzionale
Scheda Modello Dati tecnici
PG-B2
Schede di controllo della
velocità PG
Schede di comunicazione
Scheda opzionale PLC
Scheda di ingresso analogico AI-14B
Schede uscita analogica
Schede di uscita digitale
PG-X2
PG-F2
3G3RV-PDRT2 Scheda opzionale intelligente DeviceNet C
SI-P1 Scheda opzionale per reti Profibus-DP C
SI-R1 Scheda opzionale per reti InterBus-S C
SI-S1 Scheda opzionale per reti CANOpen C
S1-J Scheda opzionale per LONworks C
3G3RV-P10ST8-E Scheda opzionale PLC C
3G3RV-P10ST8-DRT-E
AO-08
AO-12
DO-08
DO-02C Uscita con contatto a relè a 2 canali D
Bifase (fase A e B), ingressi da +12 V, frequenza di
risposta massima: 50 kHz
Trifase (fase A, B e Z), ingressi line driver (RS422),
frequenza di risposta massima: 300 kHz
Scheda interfaccia Hiperfacey o EnDat 2.1
Scheda opzionale PLC con porta di comunicazione
DeviceNet (Slave)
Scheda di ingresso analogico a 3 canali
Livello segnale: -10 … 10 V o 0 … 10 V
Risoluzione: 13 bit + segno
Scheda di uscita analogica a 2 canali
Livello segnale: 0…10 V
Risoluzione: 8 bit
Scheda di uscita analogica ad alta risoluzione a 2 canali
Livello segnale: -10…+10 V
Risoluzione: 11 bit + segno
Scheda di uscita digitale a 6 canali per monitoraggio
stato inverter (errore, velocità zero, in funzione, etc.)
Posizione di
installazione
A
A
A
C
C
D
D
D
2-24
Installazione
Prima di installare una scheda opzionale, rimuovere il copriterminali ed accertarsi che la spia di carica
all'interno dell'inverter sia spenta. Dopodiché, rimuovere il coperchio anteriore e la console di programmazione/console a LED e installare la scheda opzionale.
Per le istruzioni sull'installazione, consultare la documentazione fornita con la scheda opzionale.
Page 56

Come fissare i connettori delle schede opzionali C e D
Dopo aver installato una scheda opzionale nello slot C o D, inserire una clip per bloccare il lato con il connettore. E' possibile rimuovere la clip opzionale tenendola per la parte sporgente ed estraendola tirando.
Connettore scheda
opzionale C (CN2)
Distanziale per montaggio
(fornito con scheda opzionale A)
(per evitare il sollevamento della
scheda opzionale A
Clip opzionale
scheda opzionale C)
Foro distanziale per montaggio
scheda opzionale A
Connettore scheda
opzionale A (CN4)
Scheda opzionale A
Distanziale per montaggio
scheda opzionale C
Scheda opzionale C
Distanziale per montaggio
scheda opzionale A
Figura 2.14 Montaggio schede opzionali
Terminali scheda di controllo velocità PG e dati tecnici
2
Scheda opzionale PG-B2
Dati tecnici degli ingressi/uscite
Tabella 2.11 Caratteristiche degli I/O PG-B2
Terminale N. Contenuto Dati tecnici
1
Alimentazione per il generatore di impulsi
2 0 Vc.c. (GND per l'alimentazione)
3
TA1
TA2
TA3 (E) Terminale di collegamento schermatura -
Ingresso fase A
4GND fase A
5
Ingresso fase A
6GND fase B
1
Monitor treno di impulsi
fase A
2
3
Monitor treno di impulsi
fase B
4
12 Vc.c. (±5%), 200 mA max.
H: +8…12 V (frequenza max. d’ingresso: 50 kHz)
H: +8…12 V (frequenza max. d’ingresso: 50 kHz)
Uscita a collettore aperto, 24 Vc.c., 30 mA max.
Uscita a collettore aperto, 24 Vc.c., 30 mA max.
2-25
Page 57

2
Cablaggio della scheda PG-B2
Le figure seguenti mostrano esempi di cablaggio per la PG-B2 tramite l'uso dell'alimentazione con schede
opzionali o una fonte di alimentazione esterna per la PG.
Trifase, 200 Vc.a.
(400 Vc.a.)
R/L1
S/L2
T/L3
Figura 2.15 Cablaggio PG-B2 tramite l'uso dell'alimentazione con schede opzionali
Inverter
Alimentazione +12 V
Alimentazione 0 V
Ingresso a impulsi fase A
GND fase B
Ingresso a impulsi fase B
GND fase B
Monitor treno d'impulsi fase A
Monitor treno d'impulsi fase B
PG
TA1
PG
TA3
Figura 2.16 Cablaggio della PG-B2 tramite l'uso dell'alimentazione esterna a 12 V
Precauzioni:
• Il cavo per il collegamento del generatore di impulsi non deve essere più lungo di 100 metri.
• La direzione di rotazione della scheda PG può essere impostata nel parametro utente F1-05. Di fabbrica
viene impostata su Fase A che implica un avanzamento in avanti (rotazione in senso antiorario
dell'albero motore vista dal lato dell'albero motore).
Rotazione in avanti del motore standard (PG)
L'asse di uscita del motore ruota in
senso antiorario durante
il commando avanti dell'inverter.
Rotazione (CCW)
Comando
avanti
2-26
Fase A
La fase A conduce (CCW) quando la rotazione del motore è in avanti
Fase B
• E' possibile modificare il fattore di uscita monitoraggio impulsi utilizzando il parametro F1-05.
• Per precauzioni generali, fare riferimento alla pagina 2-31, Precauzioni per il cablaggio.
Page 58

Scheda opzionale PG-X2
Dati tecnici degli ingressi/uscite
Tabella 2.12 Caratteristiche degli I/O PG-X2
Terminale N. Contenuto Dati tecnici
1
2 0 Vc.c. (GND per l'alimentazione)
Alimentazione per il generatore di impulsi
3
4 Ingresso fase A (+)
TA1
TA2
TA3 (E) Terminale di collegamento schermatura –
*1. Non è possibile utilizzare contemporaneamente un'alimentazione da 5 Vc.c. e 12 Vc.c.
5 Ingresso fase A (–)
6 Ingresso fase B (+)
7 Ingresso fase B (–)
8 Ingresso fase Z (+)
9 Ingresso fase Z (–)
10 Comune ingressi –
1 Monitor treno di impulsi fase A (+)
2 Monitor treno di impulsi fase A (–)
3 Monitor treno di impulsi fase B (+)
4 Monitor treno di impulsi fase B (–)
5 Monitor treno di impulsi fase Z (+)
6 Monitor treno di impulsi fase Z (–)
7 Comune uscite monitor –
12 Vc.c. (±5%), 200 mA max.
5 Vc.c. (±5%), 200 mA max.
Ingresso line driver (RS422)
(frequenza di risposta massima: 300 kHz)
Uscita line driver (RS422)
*1
*1
2
2-27
Page 59

Cablaggio della scheda PG-X2
Le figure seguenti mostrano esempi di cablaggio per la PG-X2 tramite l'uso dell'alimentazione con schede
opzionali o una fonte di alimentazione esterna per la PG.
Trifase
200 Vc.a.
(400 Vc.a.)
2
PG-X2
0V
+5 Vc.c.
Ingresso fase
A+
Ingresso fase
AB+
Ingresso fase
Ingresso fase
B-
Ingresso fase
Z+
Ingresso fase
Z-
Uscita fase A
Uscita fase B
Uscita fase Z
P
P
P
Figura 2.17 Cablaggio della scheda PG-X2 tramite l'uso di un'alimentazione con schede opzionali
PG-X2
TA1
c.a.
+5 V
0 V
0 V
+5 V
PG
2-28
TA3
Figura 2.18 Cablaggio scheda PG-X2 tramite un'alimentazione esterna da 5 V
Precauzioni:
• Il cavo per il collegamento del generatore di impulsi non deve essere più lungo di 100 metri.
• La direzione di rotazione della scheda PG può essere impostata nel parametro utente F1-05. Di fabbrica
viene impostata su Fase A che implica un avanzamento in avanti (rotazione in senso antiorario
dell'albero motore vista dal lato dell'albero motore).
• Per precauzioni generali, fare riferimento alla pagina 2-31, Precauzioni per il cablaggio.
Page 60

Scheda opzionale PG-F2
Encoder supportati
La scheda opzionale PG-F2 può essere utilizzata insieme ai seguenti tipi di encoder:
• Hiperface
• EnDat 2.1: ECN1313, ECN113, ECN413
La velocità massima dell'encoder non deve superare i 1.200 min
y
:SRS60/70
-1
.
Dati tecnici degli ingressi/uscite
Tabella 2.13 Caratteristiche degli I/O PG-F2
Terminale N.
1 Us 7-12V
2 GND
3REFSIN
TB1
TB2
TB3
TB4 (E) Terminale di collegamento rivestimento schermato
4+SIN B+
5REFCOS A-
6+COS A+
7 DATA+ DATA
8 DATA - / D ATA
1- CLOCK
2- /CLOCK
1 Monitoraggio a impulsi A+
2 Monitoraggio a impulsi A3 Monitoraggio a impulsi B+
4 Monitoraggio a impulsi B-
Hiperface
Contenuto
y
Sensore U
Sensore U
B-
EnDat
e UP da 5 V
P
e 0V da 0 V
N
Dati tecnici
EnDat: 5 Vc.c. (±5%, max. 250 mA)
Hiperface
0 V
Ingressi differenziali
Canale dati RS-485
Resistenza di terminazione: 130 Ohm
Uscita differenziale,
Frequenza orologio: 100 kHz
Uscite a collettore aperto
max 24 Vc.c., 30 mA
y
: 8 Vc.c. (±5%, max. 150 mA)
2
Selezione della tensione di alimentazione dell'encoder
La tensione di alimentazione dell'encoder deve essere impostata in base al tipo di encoder utilizzando il selettore S1 sulla scheda PG-F2. È possibile regolare con precisione la tensione di alimentazione dell'encoder utilizzando il potenziometro RH1. L'impostazione di fabbrica del selettore S1 è OFF (preselezione di EnDat)
L'alimentazione dell'encoder è preregolato su 5,0~5,25 V al momento della spedizione.
I: 8 V (Us = 7,5 … 10,5 V) per HIPERFACE
S1
RH1
Figura 2.19 Selezione della tensione di alimentazione dell'encoder PG-F2
OFF: 5 V (Us = 5 V +- 5%) per EnDat, (impostazione di fabbrica)
S1 = I: 7,5 … 10,5 V, per HIPERFACE
S1 = OFF: 4,85 … 6,5 V per EnDat
(impostazione di fabbrica: 5,0 … 5,25 V)
2-29
Page 61

2
Cablaggio della scheda PG-F2
L'illustrazione seguente mostra il cablaggio della scheda PG-F2 con l'encoder Hiperface
Trifase
200 Vc.a.
(400 Vc.a.)
PG-X2
0V
+5 Vc.c.
Ingresso fase
A+
Ingresso fase
AB+
Ingresso fase
Ingresso fase
B-
Ingresso fase
Z+
Ingresso fase
Z-
Uscita fase A
Uscita fase B
Uscita fase Z
P
P
P
y
o EnDat 2.1.
Figura 2.20 Cablaggio scheda PG-F2 (nome dei segnali EnDat tra parentesi)
Precauzioni:
• La lunghezza del cablaggio del generatore di impulsi non deve superare i 50 m per le linee dei segnali e
i 30 m per l'uscita di monitoraggio sul terminale TB3.
• La direzione di rotazione della PG deve essere impostata nel parametro utente F1-05 (rotazione PG). Di
fabbrica viene impostata su Fase A che implica un avanzamento in avanti (rotazione in senso antiorario
dell'albero motore vista dal lato dell'albero motore).
SIN
COS
Impulsi A
Impulsi B
• Per precauzioni generali, fare riferimento alla pagina 2-31, Precauzioni per il cablaggio.
• I livelli di tensione dei segnali devono rispettare i seguenti limiti:
Offset REFSIN (B-), REFCOS (A-): 2,2 … 2,8 V
Tensione picco a picco +SIN (B+), +COS (B-) 0,9 … 1,1 V
2-30
Page 62

Cablaggio delle morsettiere
Dimensioni dei cavi (uguali per tutti i modelli di schede PG)
Le dimensioni dei cavi per i terminali sono indicate nella Tabella 2.14. Per i tipi di ghiera, fare riferimento alla
Tabella 2.7.
Tabella 2.14 Dimensioni dei cavi
Terminale
Alimentatore generatore di
impulsi
Terminale di ingresso a treno
di impulsi
Monitor treno di impulsi
Terminale di collegamento
schermatura
Precauzioni per il cablaggio
Tenere in considerazione le seguenti precauzioni per il cablaggio.
• Per le linee dei segnali è necessario utilizzare cavi schermati a coppie intrecciate. Utilizzare solo cavi con-
sigliati dal produttore dell'encoder.
• Per il collegamento dei cavi all'encoder utilizzare solo connettori consigliati dal produttore dell'encoder.
• È necessario utilizzare delle ghiere (fare riferimento alla Tabella 2.7).
• Le linee dei segnali della scheda di controllo velocità PG deve essere separata dalle linee di alimentazione
e da altri circuiti di controllo.
• La schermatura deve essere collegata (cavo di messa a terra verde della scheda opzionale) al terminale di
terra per evitare errori di funzionamento causati da eventuali disturbi.
• Le estremità dei cavi non devono essere saldate, in quanto ciò potrebbe provocare errori di contatto.
• È necessario utilizzare l'alimentazione delle schede PG solo per il generatore di impulsi (encoder). In caso
contrario, potrebbero verificarsi degli guasti dovuti ai disturbi.
• Se il consumo di alimentazione della scheda PG è superiore a 200 mA, è necessaria un'alimentazione sepa-
rata. Per gestire un'interruzione temporanea di potenza, utilizzare un condensatore di backup o un altro
metodo.
• Evitare di superare la frequenza massima di ingresso delle schede PG. La frequenza di uscita del genera-
tore di impulsi può essere calcolata usando la seguente formula.
f
(PG)
Velocità motore con frequenza di uscita massima (min
(Hz) =
Viti dei
terminali
• max. 1,0 mm² per cavo flessibile
• max. 0,5 mm² per cavo flessibile
-
• max. 1,5 mm² per cavo solido
M3.5 0,5 … 2,5 mm² -
Spessore cavi Tipo di cavo Coppia di serraggio
Cavo schermato a coppie
con ghiere
60
intrecciate
Cavo schermato in vinile
con rivestimento di
polietilene
–1
)
x valori tipici PG (impulsi/giro)
2
0,22 Nm
2-31
Page 63

2
2-32
Page 64

Console a LED/
console di
programmazione e
modalità operative
Il Varispeed L7 è dotato di una console a LED JVOP-163 che indica lo stato di funzionamento. È possibile utilizzare la console di programmazione opzionale JVOP-160-OY per regolare i parametri in base alle necessità.
Questo capitolo, oltre a descrivere i display della console di programmazione e le relative funzioni, fornisce informazioni generali sulle modalità operative e sui metodi per attivarle.
Console a LED JVOP-163.................................................................................................3-2
Console di programmazione JVOP-160-OY......................................................................3-3
Page 65

Console a LED JVOP-163
Console a LED
La console a LED indica lo stato operativo tramite combinazioni di visualizzazioni LED (spie accese, spie
lampeggianti e spie spente) di RUN, DS1 e DS2.
La combinazione dei LED per ogni modalità è la seguente.
Spie modalità operative
RUN: lampeggia mentre l’inverter è in funzione, si spenge se
l'inverter si arresta.
DS1: Drive Status 1
DS2: Drive Status 2
La combinazione di questi tre LED Run, DS1 e DS2 indica lo
stato di funzionamento.
3
Spie stato di funzionamento
Spie di allarme
Spie di errore
Figura 3.1 Nomi dei componenti della console di programmazione e relative funzioni
Esempi di visualizzazioni LED
Funzionamento normale: la seguente figura mostra la visualizzazione dei LED quando il funzionamento è
attivo e non vi è alcun segnale di FWD/REV attivo.
RUN DS1 DS2 POWER
3-2
Allarme: la figura sotto riproduce un esempio di visualizzazione LED quando si verifica un errore.
Consultare il Capitolo 6 e adottare le contromisure appropriate.
RUN DS1 DS2 POWER
Errore: la seguente figura riproduce un esempio di visualizzazione LED quando si verifica un errore OV o
UV.
RUN DS1 DS2 POWER
Page 66

Console di programmazione JVOP-160-OY
Display della console di programmazione
Di seguito vengono elencati i nomi e le funzioni dei tasti della console di programmazione.
Spie dello stato di funzionamento
FWD: si accende quando viene inserito un comando di marcia
REV: si accende quando viene inserito un comando di marcia
SEQ: si accende quando viene selezionata una sorgente di
REF: si accende quando viene selezionata una sorgente di
ALARM: si accende quando si verifica un errore o
Visualizzazione dati
Visualizza i dati di monitoraggio, i valori dei parametri e le
impostazioni dei parametri.
Modalità operativa (visualizzata nella parte superiore
sinistra del display)
DRIVE: modalità di funzionamento
QUICK: modalità di programmazione rapida
ADV: modalità di programmazione avanzata
VERIFY: modalità di verifica
A. TUNE: modalità di autotuning.
avanti.
indietro.
comando di marcia diversa dalla console di
programmazione.
riferimento frequenza diversa dalla console di
programmazione
viene attivato un allarme.
3
Tas ti
Utilizzati per l'impostazione dei parametri,
il monitoraggio, la marcia a impulsi e la autotuning.
Figura 3.2 Nomi dei componenti della console di programmazione e relative funzioni
Tasti della console di programmazione
I nomi e le funzioni dei tasti della console di programmazione sono descritti nella Tabella 3.1.
Tabella 3.1 Funzioni dei tasti
Tasto Nome Funzione
Consente di attivare alternativamente la modalità di funzionamento
dalla console di programmazione (LOCAL) e le impostazioni in
Tasto LOCAL/REMOTE
b1-01 e b1-02 (REMOTE).
Tale tasto può essere attivato o disattivato impostando il parametro
o2-01.
Tasto MENU Consente di selezionare le voci di menu (modalità).
Tasto ESC Ripristina lo stato precedente alla pressione del tasto DATA/ENTER.
Tasto JOG
Attiva il funzionamento jog quando l'inverter viene comandato dalla
console di programmazione e d1-18 è impostato su 0.
3-3
Page 67

Tasto Nome Funzione
3
Tasto FWD/REV
Tasto Shift/RESET
Consente di selezionare la direzione di rotazione del motore quando
l'inverter viene comandato dalla console di programmazione.
Definisce la cifra attiva durante la programmazione dei parametri.
Funziona anche come tasto Reset quando si verifica un errore.
Seleziona le voci di menu, imposta i numeri dei parametri e aumenta
Tasto freccia su
i valori delle impostazioni.
Utilizzato per passare alla voce o ai dati successivi.
Consente di selezionare le voci di menu, impostare i numeri dei
Tasto freccia giù
parametri e ridurre i valori delle impostazioni.
Utilizzato per passare alla voce o ai dati precedenti.
Tasto DATA/ENTER
Tasto RUN
Consente di accedere ai menu e ai parametri e confermare le
modifiche dei parametri.
Attiva l'inverter quando viene azionato dalla console di
programmazione.
Interrompe il funzionamento dell'inverter.
Tas to STOP
Tale tasto può essere attivato o disattivato utilizzando il parametro
o2-02 quando il funzionamento viene gestito da una sorgente diversa
dalla console di programmazione.
Nota: Tranne che negli schemi, si farà riferimento ai tasti utilizzando i nomi riportati in questa tabella.
Nella parte superiore sinistra dei tasti RUN e STOP della console di programmazione vi sono delle spie. che
lampeggeranno o si accenderanno con luce fissa per indicare i diversi stati operativi dell'inverter.
La spia del tasto RUN lampeggia e quella del tasto STOP si illumina durante l'eccitazione iniziale o la
frenatura c.c. Nella Figura 3.3. è indicato il rapporto esistente tra le spie dei tasti RUN e STOP e lo stato
dell'inverter.
Frequenza di uscita inverter
Stop
Frequenza di riferimento
RUN
STOP
Accesa
Lampeggiamento
Off
Figura 3.3 Spie dei tasti RUN e STOP
RUN
STOP
3-4
Page 68

Modalità dell'inverter
I parametri dell’inverter e le funzioni di monitoraggio sono organizzati in cinque gruppi che semplificano la
lettura e l'impostazione dei parametri.
Le 5 modalità e le funzioni primarie sono indicate nella Tabella 3.2.
Tabella 3.2 Modalità
Modalità Funzione primaria
Utilizzare tale modalità per avviare/arrestare l’inverter, per monitorare valori quali
Modalità inverter
Modalità di programmazione
veloce
Modalità di programmazione
avanzata
Modalità di verifica
Modalità di autotuning
*1. Eseguire sempre l'autotuning con il motore prima di attivare le modalità di controllo vettoriale.
*1
la frequenza di riferimento, la corrente di uscita, nonché per leggere le informazioni
sugli errori o sulla cronologia degli errori.
Utilizzare questa modalità per leggere ed impostare tutti i parametri di base.
Utilizzare tale modalità per leggere e impostare tutti i parametri.
Utilizzare tale modalità per leggere e impostare i parametri modificati rispetto ai
valori predefiniti.
Utilizzare questa modalità quando si usa un motore con dei dati sconosciuti nelle
modalità di controllo vettoriale. I dati del motore vengono misurati/calcolati ed
impostati automaticamente.
Tale modalità consente anche di misurare solo la resistenza di linea del motore.
3
3-5
Page 69

Attivazione delle modalità
La modalità viene visualizzata quando si preme il pulsante MENU. Utilizzare il tasto MENU dal display di
selezione della modalità per passare da una modalità all'altra.
Premere il tasto DATA/ENTER per attivare una modalità e passare dal display di monitoraggio a quello di
impostazione.
Display durante
funzionamento
3
Display di selezione
delle modalità
Display di monitoraggio
Display di impostazione
Verrà visualizzato il numero di costante se
è stata cambiata una costante. Premere il
tasto DATA/ENTER per convalidare la modifica.
3-6
INFO
Figura 3.4 Passaggi di modalità
Per azionare l'inverter dopo aver visualizzato/modificato dei parametri, premere il tasto MENU e il tasto
DATA/ENTER in sequenza per attivare la modalità inverter. Un comando Run non viene accettato sino a
quando l’inverter è in un'altra modalità.
Per attivare i comandi Run dai terminali durante la programmazione impostare il parametro b1-08 su "1".
Page 70

Modalità di funzionamento
L'inverter può essere azionato in questa modalità. In tale modalità è possibile visualizzare tutti i parametri di
monitoraggio (U1-), le informazioni sugli errori e lo storico degli errori.
Quando si imposta b1-01 (selezione frequenza di riferimento) su 0, 1 o 3, è possibile modificare il valore della
frequenza di riferimento (d1-) dal display d'impostazione della frequenza utilizzando i tasti Freccia su,
Freccia giù, Shift/RESET ed ENTER. Una volta confermata la modifica con il tasto ENTER, viene ripristinato
il display di monitoraggio.
Esempio di funzionamento
La figura seguente mostra un esempio relativo alle funzioni dei tasti nella modalità di funzionamento.
Display durante funzionamento
3
Display di selezione
delle modalità
Display di monitoraggio
Display di impostazione della frequenza
Il display di impostazione
della frequenza
non verrà visualizzato quando
si utilizza un riferimento analogico.
Il nome dell'errore viene
visualizzato se è stato premuto il tasto
DATA/ENTER durante la visualizzazione di
una costante per la quale è stato visualizzato
un codice d'errore.
Figura 3.5 Modalità di funzionamento
Nota: Quando si modifica il display con i tasti Freccia su/Freccia giù, dopo l'ultimo parametro di monitoraggio viene nuovamente visualizzato il primo
parametro di monitoraggio e vice versa (ad esempio, U1-55 è seguito da U1-01).
All'accensione, viene visualizzato il display per il primo parametro di monitoraggio (frequenza di riferimento). L'elemento da monitorare visualizzato
all'avvio può essere impostato su o1-02 (Selezione monitoraggio dopo l'accensione).
3-7
Page 71

Modalità di programmazione veloce
Nella modalità di programmazione veloce, è possibile monitorare ed impostare i parametri necessari per le
operazioni di sollevamento come velocità, tempi di accelerazione/decelerazione e così via.
I parametri possono essere modificati dalle schermate delle impostazioni. Per modificare la frequenza, utilizzare i tasti Freccia su, Freccia giù e Shift/RESET. Quando si preme il tasto DATA/ENTER, il parametro viene
scritto e viene ripristinato il display di monitoraggio.
Per informazioni dettagliate, fare riferimento alla pagina 5-4, Parametri utente disponibili in modalità di
programmazione rapida.
Esempio di funzionamento
La figura seguente mostra un esempio relativo alle funzioni dei tasti nella modalità di programmazione veloce.
3
Display di selezione delle modalità
Display di monitoraggio
Display di impostazione
3-8
Figura 3.6 Funzionamento nella modalità di programmazione veloce
Page 72

Modalità di programmazione avanzata
Nella modalità di programmazione avanzata, è possibile impostare e monitorare tutti i parametri dell'inverter.
I parametri possono essere modificati dalle schermate delle impostazioni usando i tasti Freccia su, Freccia giù
e Shift/RESET. Quando si preme il tasto DATA/ENTER, il parametro viene salvato e viene ripristinato il
display di monitoraggio.
Per informazioni dettagliate sui parametri fare riferimento alla pagina 5-1, Parametri utente.
Esempio di funzionamento
La figura seguente mostra un esempio relativo alle funzioni dei tasti nella modalità di programmazione
avanzata.
Display di selezione delle modalità
Display di monitoraggio
Display di impostazione
3
Figura 3.7 Funzionamento nella modalità di programmazione avanzata
3-9
Page 73

Impostazione parametri
Di seguito è riportata la procedura per modificare il parametro C1-01 (Tempo di accelerazione 1) passando da
1,5 s a 2,5 s.
Tabella 3.3 Impostazione dei parametri nella modalità di programmazione avanzata
N.
passo
1 Accensione alimentazione
2
Display della console di
programmazione
-DRIVE-
Frequency Ref
Rdy
U1- 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
** Main Menu **
Operation
Descrizione
3
-QUICK-
3
4
5
6
7
8
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-ADV-
Initialization
A1-00=1
Select Language
-ADV-
Accel / Decel
C1
-01 = 1.50sec
Accel Time 1
-ADV-
Accel Time 1
C1-01 =
0 01.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Accel Time 1
C1-01 =
0 01.50sec
(0.00 ~ 600.0)
"1.50sec"
Premere il tasto MENU tre volte per passare alla modalità di
programmazione avanzata.
Premere il tasto DATA/ENTER per accedere al display di
monitoraggio.
Premere il tasto Freccia su o Freccia giù per visualizzare il
parametro C1-01 (Tempo di accelerazione 1).
Premere il tasto DATA/ENTER per accedere al display di
impostazione Viene visualizzato il valore di impostazione corrente
del parametro C1-01.
Premere il tasto Shift/RESET per spostare a destra la cifra che
lampeggia.
3-10
-ADV-
Accel Time 1
C1-01 =
9 Premere il tasto Freccia su per impostare il valore su 2,50 s.
10 Premere il tasto DATA/ENTER per salvare i dati impostati.
11
0 0 1.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Accel Time 1
C1-01 =
0 0 2.50sec
(0.00 ~ 600.0)
"1.50sec"
-ADV-
Entry Accepted
Una volta premuto il tasto DATA/ENTER, per circa 1 secondo sul
display appare un messaggio che conferma l'accettazione del
valore immesso.
-ADV-
Accel Time 1
12 Viene ripristinato il display di monitoraggio del parametro C1-01.
C1-01 =
2.50sec
(0.00 ~ 600.0)
"1.50sec"
Page 74

Modalità di verifica
La modalità di verifica consente di visualizzare i parametri che sono stati modificati rispetto alle loro impostazioni predefinite mediante la modalità di programmazione o l'autotuning. Se non è stata modificata nessuna
impostazione, viene visualizzata l'indicazione "None"
Il parametro A1-02 è il solo parametro del gruppo A1- che verrà visualizzato nell’elenco delle costanti
modificate se è stato cambiato in precedenza. Gli altri parametri non verranno visualizzati anche se sono
diversi dai valori predefiniti.
Nella modalità di verifica, è possibile utilizzare le stesse procedure utilizzate nella modalità di programmazione per modificare le impostazioni. Per modificare un'impostazione, utilizzare i tasti Freccia su, Freccia giù
e Shift/RESET. Quando si preme il tasto DATA/ENTER, l'impostazione del parametro viene scritta e viene
nuovamente visualizzato il display di monitoraggio.
Esempio di funzionamento
Nell’esempio di seguito le impostazioni sono state cambiate rispetto a quelle predefinite:
• C1-01 (tempo di accelerazione 1).
• C1-02 (tempo di accelerazione 2).
• E1-01 (Impostazione della tensione di ingresso)
• E2-01 (Corrente nominale del motore)
Display di selezione delle modalità
Display di monitoraggio
Display di impostazione della
3
Figura 3.8 Funzionamento nella modalità di verifica
3-11
Page 75

3
Modalità di autotuning
L’autotuning misura ed imposta automaticamente i dati del motore necessari per ottenere la massima prestazione. Eseguire sempre l'autotuning prima di attivare il funzionamento con la modalità di controllo vettoriale.
Quando si seleziona la modalità di controllo V/f, è possibile attivare l'autotuning statico solo per la resistenza
linea a linea.
Quando non è possibile far funzionare il motore (per es. se non si possono rimuovere i cavi dalla puleggia) e si
deve utilizzare un metodo di controllo vettoriale ad anello aperto o chiuso, eseguire l’autotuning statico.
Esempio per un controllo V/f
Il metodo di regolazione per il controllo V/f misura la resistenza (T1-01=1). Inserire la potenza di uscita nominale e la corrente nominale specificate sulla targhetta del motore e, quindi, premere il tasto RUN. I dati del
motore vengono misurati automaticamente.
Impostare sempre i parametri sopra menzionati, altrimenti non sarà possibile attivare l'autotuning, ad esempio
non potrà essere attivato dallo schermo della tensione nominale del motore.
I parametri possono essere modificati dalle schermate delle impostazioni utilizzando i tasti Freccia su, Freccia
giù e Shift/RESET. Il parametro viene salvato quando si preme il tasto DATA/ENTER.
Il diagramma seguente mostra un esempio di autotuning del controllo V/f.
Display di selezione delle modalità
Display di monitoraggio
Il display cambierà
automaticamente a seconda
dello stato dell'autotuning.
Display di impostazione della frequenza
3-12
Figura 3.9 Funzionamento in modalità di autotuning
In caso di errore durante l’autotuning, vedere pagina 7-14, Errori di autotuning.
Page 76

Procedura di avvio
In questo capitolo viene descritta la procedura di avvio di base e l'autotuning dei dati motore per ciascuna
modalità di controllo e vengono forniti consigli in caso di problemi.
Routine di avvio generale..................................................................................................4-2
Avvio..................................................................................................................................4-3
Autotuning .........................................................................................................................4-4
Precauzioni per l'autotuning ..............................................................................................4-5
Procedura di autotuning con motori a induzione ...............................................................4-6
Procedura di autotuning con motori PM ............................................................................4-7
Tuning dell'offset dell'encoder per motori PM....................................................................4-8
Ottimizzazione delle prestazioni ......................................................................................4-11
Page 77

Routine di avvio generale
Avvio
Il seguente diagramma mostra la sequenza di avvio di base.
INIZIO
Installazione meccanica
Cablaggio dei circuiti di controllo e principale
4
Controllare la selezione dell'alimentazione
Attivare l'alimentazione
Selezionare la modalità di controllo nel
Eseguire l'autotuning dell'offset dell'encoder/dei dati motore
* Controllo V/f
* Controllo vettoriale ad anello aperto
* Controllo vettoriale ad anello chiuso
* Controllo vettoriale ad anello chiuso per PM
Sorgente velocità
di riferimento
Ingresso analogico
Impostare gli I/O digitali/analogici nei
parametri H1-xx, H2-xx e H3-xx
dell'encoder
* (solo anello chiuso)
parametro A1-02
pagina 4-6, Procedura di autotuning con motori a induzione
pagina 4-7, Procedura di autotuning con motori PM
Console di programmazione (b1-02 = 0)
Selezionare la sequenza di controllo
Impostare gli I/O digitali nei parametri
nel parametro d1-18
H1-xx e H2-xx
4-2
Impostare
* Tempi di accelerazione/decelerazione (C1-xx)
* Curve ad S (strappi) (C2-x)
Effettuare marce di prova
Regolazione di precisione
* Tuning della sequenza di frenatura
* Impostazione funzioni speciali
FINE
Figura 4.1 Sequenza di avvio di base
Impostare
* Valori di velocità preimpostati (d1-xx)
* Tempi di accelerazione/decelerazione (C1-xx)
* Curve ad S (strappi) (C2-xx)
Page 78

Avvio
Prima dell'avvio
È necessario verificare attentamente quanto riportato di seguito prima di attivare l'alimentazione.
• L'alimentazione deve essere conforme alle specifiche dell'inverter, vedere pagina 9-2, Specifiche in base al
modello).
• I cavi di alimentazione devono essere saldamente collegati ai terminali di destra (L1, L2, L3).
• I cavi motore devono essere saldamente collegati ai terminali di destra sia sul lato dell'inverter (U, V, W)
sia sul lato del motore.
• Il modulo di frenatura/resistenza di frenatura deve essere collegato correttamente.
• Il terminale del circuito di controllo dell'inverter e il dispositivo di controllo devono essere cablati corretta-
mente.
• Tutti i terminali del circuito di controllo devono essere disattivati.
• Quando si utilizza un scheda PG, verificare che sia cablata in modo corretto.
Display dopo l'avvio
Dopo un avvio normale e privo di problemi, il display della console di programmazione mostra i seguenti
messaggi.
Display per il funzionamento
standard
-DRIVE-
Base Block
BB
Rdy
Il messaggio di blocco delle basi lampeggia.
4
Quando si verifica un errore o si attiva un allarme, viene visualizzato un messaggio di errore o di allarme. In
questo caso, fare riferimento a Capitolo 7, Soluzione dei problemi.
Viene visualizzato un messaggio di errore
o di allarme sul display.
L'esempio mostra un allarme di bassa
Display in caso di errore
-DRIVE-
UV
Main Power Loss
tensione.
Selezione delle modalità di controllo
La prima operazione da eseguire dopo l'accensione è la selezione di una delle quattro modalità di controllo a
seconda del tipo di macchina.
Tabella 4.1 Selezione delle modalità di controllo
Tipo di macchina Modalità di controllo
Motore a induzione senza encoder
Motore a induzione con encoder incrementale
Motore a magneti permanenti con encoder Hiperface
EnDat 2.1
Motori Yaskawa IPM con encoder incrementale
Controllo V/f 0 -
Controllo vettoriale ad anello
Controllo vettoriale ad anello
y
o
Controllo vettoriale ad anello
Controllo vettoriale ad anello
aperto
chiuso
chiuso per motori PM
chiuso per motori PM
Impostazione di
A1-02
2-
3 PG-B2/PG-X2
6PG-F2
6PG-X2
Scheda PG
ATTENZIONE
• Per i motori a magneti permanenti, utilizzare unicamente la modalità di controllo vettoriale ad anello
chiuso per PM (A1-02 = 6). L'uso di un'altra modalità di controllo può danneggiare l'apparecchiatura o
causare un comportamento pericoloso.
4-3
Page 79

4
Autotuning
La funzione di autotuning dei dati motore imposta automaticamente i parametri della linea caratteristica V/f
(E1-), i parametri dei dati motore (E2-, E5-) e i dati dell'encoder (F1-01). La procedura che deve
essere eseguita durante l'autotuning dipende dalla selezione della modalità di tuning. Vedere pagina 5-54,
Autotuning motore: T per informazioni generali sui parametri di autotuning.
Selezione della modalità di autotuning
La modalità di autotuning deve essere selezionata in base alla modalità di controllo selezionata e al sistema
meccanico (possibilità o meno di rotazione a vuoto del motore). La Tabella 4.1 indica la modalità di tuning
selezionabile per ciascuna modalità di controllo.
Tabella 4.2 Modalità di autotuning dati motore
Modalità di autotuning Funzione
Tuning standard con motore in
rotazione
Tuning IM con motore non in
rotazione
Tuning resistenza linea a linea IM
Tuning offset encoder
Autotuning di tutti i parametri
del motore.
Autotuning dei parametri di
base del motore.
Autotuning della sola resistenza
linea a linea
Autotuning dell'offset tra
l'encoder e la posizione zero
magnetica.
Selezione
della
modalità di
autotuning
(T1-01)
0 NoSìSìSì
1NoSìSìNo
2 SìSìSìNo
4 NoNoNo Sì
V/f
Modalità di controllo
Vettore ad
anello
aperto
Vettore ad
anello
chiuso
Vettore ad
anello
chiuso
(PM)
Modalità di autotuning
Autotuning con motore in rotazione (T1-01 = 0)
Questa modalità di autotuning può essere utilizzata con qualsiasi modalità di controllo vettoriale. Dopo l'inserimento dei dati della targhetta del motore, l'inverter azionerà il motore per circa 1/2 minuti e imposterà automaticamente i parametri del motore richiesti.
Utilizzare questa modalità di tuning solo se il motore può girare liberamente, il che significa che le
corde devono essere asportate e il freno deve essere aperto. Il cambio può rimanere collegato al
IMPORTANTE
Autotuning con motore non in rotazione (T1-01 = 1)
Questa modalità di autotuning può essere utilizzata solo per il controllo vettoriale ad anello aperto e chiuso per
IM. L'inverter fornisce potenza al motore per circa 1 minuto e alcuni dei parametri del motore vengono impostati automaticamente mentre il motore non è in rotazione. La corrente a vuoto del motore e il valore di scorrimento nominale verranno regolati automaticamente di precisione durante il primo funzionamento.
Verificare il valore nominale di scorrimento (E2-02) e la corrente a vuoto (E2-03) dopo la prima marcia a
velocità nominale.
Autotuning per resistenza linea a linea (T1-01 = 2)
motore.
4-4
L'autotuning non rotante per la resistenza linea a linea può essere utilizzato per il controllo V/f, il controllo
vettoriale ad anello aperto e il controllo vettoriale ad anello chiuso. L'inverter fornisce potenza al motore per
circa 20 secondi per misurare la resistenza linea a linea del motore e la resistenza del cavo. Durante questa
procedura di autotuning il motore non gira.
Page 80

Tuning offset encoder (T1-01=4)
Questa modalità di tuning è disponibile solo per il controllo vettoriale ad anello chiuso per motori PM. Essa
imposta automaticamente l'offset tra il polo magnetico e la posizione zero dell'encoder. Può essere utilizzata
per eseguire nuovamente il tuning dell'offset dopo la sostituzione di un encoder senza la modifica delle impostazioni dei dati motore.
Precauzioni per l'autotuning
Precauzioni generali:
1. Utilizzare l'autotuning rotante tutte le volte in cui è richiesta una precisione elevata oppure per un
motore che non è collegato a un carico.
IMPORTANTE
2. Utilizzare l'autotuning non rotante ogni volta che il carico non può essere scollegato dal motore
(ad esempio le corde non possono essere rimosse).
3. Verificare che il freno meccanico non sia aperto per l'autotuning non rotante.
4. Durante l'autotuning, i contattori del motore devono essere chiusi.
5. Per l'autotuning, i segnali BB e BB1 devono essere attivi (l'inverter non deve trovarsi nella condizione
di blocco delle basi).
6. Verificare che il motore sia meccanicamente fisso e che non possa muoversi.
7. Durante l'autotuning il motore viene alimentato, anche se non è acceso. Non toccare il motore fino al
termine dell'autotuning.
8. Rimuovere la chiavetta dall'albero motore prima di eseguire un tuning con un motore autonomo in
rotazione (non deve essere montata alcuna puleggia o alcun ingranaggio).
9. Per cancellare l'autotuning premere il tasto STOP sulla console di programmazione.
Precauzioni da osservare per l'autotuning rotante e dell'offset dell'encoder:
1. Il carico deve essere scollegato, vale a dire che le corde devono essere rimosse e il freno deve
essere aperto.
2. Se il carico non può essere rimosso, il tuning può essere effettuato con una cabina bilanciata. La precisione dei risultati del tuning sarà inferiore, il che può dare luogo a perdita di prestazioni.
3. Accertarsi che il freno sia aperto durante l'autotuning.
4. Durante l'autotuning, il motore può essere avviato e arrestato ripetutamente. Al termine
dell'autotuning, sul pannello operatore verrà visualizzato "END". Non toccare il motore
fino a quando la scritta "END" non scompare dal display e il motore non è completamente fermo.
4
4-5
Page 81

Procedura di autotuning con motori a induzione
Nella Figura 4.2 viene indicata la procedura di autotuning per un motore a induzione con o senza encoder per
il controllo V/f, vettoriale ad anello aperto e vettoriale ad anello chiuso.
INIZIO
Impostare gli ingressi del blocco
delle basi BB e BB1
4
No
Controllo V/f?
(A1-02 = 0)
Inserire la modalità di autotuning e
impostare il parametro T1-01 = 2
T1-02 - Potenza nominale del motore
T1-04 - Corrente nominale del motore
non viene visualizzato "Tuning Ready"
Impostare:
Premere il pulsante UP finché
(A1-02 = 2/3)
Sì
Sì
Il motore può ruotare
liberamente?
No
Inserire la modalità di autotuning e
impostare il parametro T1-01 = 1
T1-02 - Potenza nominale del motore
T1-03 - Tensione nominale del motore
T1-04 - Corrente nominale del motore
T1-05 - Frequenza nominale del motore
T1-06 - Numero poli del motore
T1-07 - Velocità nominale del motore
T1-08 - Numero di impulsi PG*
non viene visualizzato "Tuning Ready"
Impostare:
(*solo CLV)
Premere il pulsante UP finché
(Pronto per tuning)
Chiudere i contattori del motore
(corde rimosse?)
Inserire la modalità di autotuning e
impostare il parametro T1-01 = 0
T1-02 - Potenza nominale del motore
T1-03 - Tensione nominale del motore
T1-04 - Corrente nominale del motore
T1-05 - Frequenza nominale del motore
T1-06 - Numero poli del motore
T1-07 - Velocità nominale del motore
T1-08 - Numero di impulsi PG*
non viene visualizzato "Tuning Ready"
Impostare:
(*solo CLV)
Premere il pulsante UP finché
(Pronto per tuning)
Aprire il freno
4-6
Vedere
pagina 7-14, Errori di autotu-
ed eliminare la fonte di errore
Premere il pulsante RUN.
Tuning
(Viene visualizzato il codice
No
di errore)
un motore rotante, aprire i contattori e gli
ingressi di blocco delle basi e chiudere il freno.
Se è stato eseguito l'autotuning con
riuscito?
(Viene visualizzato il messaggio
"Tuning successful"
("Tuning riuscito"))
FINE
Figura 4.2 Autotuning per motori a induzione
Sì
Page 82

Procedura di autotuning con motori PM
La Figura 4.3 mostra la procedura di autotuning per motori a magneti permanenti. Prima del tuning, accertarsi
che la modalità di controllo sia impostata sul controllo vettoriale ad anello chiuso PM (A1-02 = 6).
INIZIO
* Rimuovere le corde in modo che il motore possa
ruotare liberamente
* Impostare gli ingressi del blocco delle basi BB e BB1
Attivare l'alimentazione qualora fosse disattivata
Si verifica un errore
OPE06?
No
Si verifica un errore
CPF24?
No
Si verifica un errore
OPE02?
No
S3-13 - Di ametro pul eggia
S3-14 - Cor de
far girare il motore lentamente in marcia avanti*1 e controllare il
T1- 01 = 0 - T uning rot ante
T2- 01 - Potenza nom inal e del motor e
T2- 02 - Fr equenza di bas e del motor e
T2- 03 - Tens ione nomi nale del m otore
Prem ere i l pulsant e UP finc hé non viene vi suali zzato "Tuning R eady"
Chi udere i c ontattori del mot ore e prem ere il pulsante R UN
Impostare le costanti meccaniche:
Aprire il freno, chiudere il contattore del motore,
parametro di monitoraggio U1-05.
PGO (nessuna feedback
Il segno del valore
Impostare i param etri di autotuning:
Attender e fino al t ermi ne del tuning
S3-15 - Rappor to di
ri duzione
Si verifica un
dell'encoder)?
No
U1-05 è positivo
(non -)?
Sì
T2- 04 - Cor rente nom inale del motor e
T2-05 - Numero poli del motore
T2- 09 - Ri soluz ione encoder
T2- 10 - Cos tante di tens ione del m otore
Sì
Sì
No
Controllare il parametro
* F1-01
* n8-35
* Controllare il parametro n8-35
Sì
Sì
* Se viene utilizzato un EnDat / Hiperface
- controllare l'alimentazione dell'encoder
- controllare il cablaggio dei segnali CLOCK e DATA
* Disattivare l'alimentazione.
*
Controllare se sono state impostate la costante PG
corretta (F1-01) e la risoluzione encoder assoluta (F1-21).
* Vedere:
pagina 7-12, Errori di programmazione console
ed eliminare la fonte di errore
* Control lare i l cabl aggio
* Control lare/r egolar e nuovamente
l' alim entazi one dell' encoder
Disattivare l'alimentazione e
verificare che sia stata
installata correttamente la
scheda PG appropriata
* Control lare i l cabl aggio dell 'encoder
* Modificare il parametro F1-05
Vedere
pagina 7-14, Errori di autotuning
ed eli minar e la fonte di error e
4
Tuni ng rius cito?
(Vi ene vis ualizz ato il m essaggi o "Tuni ng success ful")
Apri re i contattori , apri re gli ingres si di blocco
dell e basi e chi udere i l freno
Figura 4.3 Autotuning per motori a magneti permanenti
Sì
FINE
No
(Vi ene vis ualizz ato il c odice di error e)
* 1. Direzione avanti indica:
la direzione di rotazione del motore con un comando UP sul terminale S1 (ossia con un'alimentazione trifase in rotazione oraria e
cablaggio U-U, V-V, W-W tra l'inverter e il motore). In genere, la
direzione oraria è considerata dal lato albero motore (puleggia).
Per i dettagli sulla direzione di rotazione, fare riferimento al
manuale di istruzioni del motore o consultare il produttore.
4-7
Page 83

Tuning dell'offset dell'encoder per motori PM
La Figura 4.4 mostra la procedura di autotuning dell'offset dell'encoder. La procedura deve essere eseguita se
l'encoder è stato sostituito o non è stato allineato correttamente. Prima del tuning, accertarsi che sia selezionato il controllo vettoriale ad anello chiuso PM (A1-02 = 6) e che i parametri E1- ed E5- siano impostati correttamente.
INIZIO
4
È possibile rimuovere
le corde?
Sì
Rimuovere le corde.
Impostare gli ingressi del blocco delle
basi BB e BB1
Attivare l'alimentazione qualora fosse disattivata
Si verifica un errore
OPE06?
No
Si verifica un errore
CPF24?
No
Si verifica un errore
OPE02?
No
Aprire il freno, chiudere il contattore del motore,
far girare il motore lentamente in marcia avanti*
lare il parametro di monitoraggio U1-05.
No
Controllare il parametro
* F1-01
Sì
1
* n8-35
Sì
Sì
e control-
Bilanciare la cabina in modo da evitarne
il movimento con i freni aperti.
Nota: in questa modalità la precisione
di tuning sarà inferiore
Disattivare l'alimentazione e
controllare che la scheda PG
sia stata installata
correttamente
* Controllare il parametro n8-35
* Se viene utilizzato un EnDat/Hiperface
- controllare l'alimentazione dell'encoder
- controllare il cablaggio dei segnali CLOCK e DATA
* Disattivare l'alimentazione.
* Controllare che siano state impostate la costante PG
corretta (F1-01) e la risoluzione encoder assoluta (F1-21).
* Vedere:
pagina 7-12, Errori di programmazione console
ed eliminare la fonte di errore
T1-01 = 4 - Tuning offset encoder
Premere il pulsante UP finché non viene
Chiudere i contattori del motore e
Attendere fino al termine del tuning.
(Viene visualizzato il messaggio
"Tuning successful")
Aprire i contattori, aprire gli ingressi di
blocco delle basi e chiudere il freno
Si verifica un
PGO (nessuna feed-
back dell'encoder)?
No
Il segno del valore
U1-05 è positivo
(non -)?
Sì
Impostare:
visualizzato "Tuning Ready".
premere il pulsante RUN.
Tuning riuscito?
Sì
FINE
* Cont roll are il cablaggi o
Sì
* Cont roll are/r egolare nuov amente
l' alim entazi one dell' encoder
No
Vedere
pagina 7-14, Errori di autotuning
ed eliminare la fonte di errore.
No
(Viene visualizzato il codice
di errore)
* 1. Direzione avanti indica:
la direzione di rotazione del motore con un comando UP sul terminale
S1 (ossia con un'alimentazione trifase in rotazione oraria e cablaggio
U-U, V-V, W-W tra l'inverter e il motore). In genere, la direzione oraria
è considerata dal lato albero motore (puleggia).
Per i dettagli sulla direzione di rotazione, fare riferimento al manuale di
istruzioni del motore o consultare il produttore.
Figura 4.4 Autotuning dell'offset dell'encoder
* Cont roll are il cablaggi o dell' encoder
* Modificare il parametro F1-05
4-8
Page 84

Precauzioni per l'autotuning dei motori a induzione
Se la tensione nominale del motore è superiore alla tensione di alimentazione
Se la tensione nominale del motore è superiore alla tensione di alimentazione, ridurre il valore di tensione di
base così come indicato nella Figura 4.5 per evitare la saturazione della tensione di uscita dell'inverter. Usare
la seguente procedura per eseguire l’autotuning:
1. Inserire la tensione dell’alimentazione di potenza immessa in T1-03 (tensione nominale del motore).
2. Inserire i risultati della formula seguente in T1-05 (frequenza base del motore):
T1-03
T1-05 Base frequency from motor nameplate
3. Eseguire l’autotuning.
Una volta completato l'autotuning, impostare il parametro E1-04 (Frequenza di uscita massima) sulla frequenza di base indicata sulla targhetta del motore.
Tensione di uscita
Tensione nominale
riportata sulla
targhetta del
motore
-----------------------------------------------
×=
Motor rated voltage
4
Frequenza di uscita
riportata sulla targhetta del motore
riportata sulla targhetta del motore
Frequenza di base
------------------------------------Tensione nominale
Frequenza di base
riportata sulla
targhetta del motore
Figura 4.5 Impostazione frequenza base motore e tensione di ingresso inverter
Se è richiesta una velocità precisa a velocità elevate (ovvero, 90% della velocità nominale o superiore), impostare T1-03 (Tensione nominale del motore) sulla tensione di alimentazione di egresso × 0.9. In questo caso, la
corrente in uscita aumenterà ad alte velocità nel momento in cui viene ridotta la tensione di alimentazione di
ingresso. Accertarsi che vi sia un margine sufficiente nella corrente dell’inverter.
Se la frequenza massima è superiore alla frequenza di base del motore
Una volta eseguito l'autotuning, impostare la frequenza di uscita massima nel parametro E1-04.
4-9
Page 85

4
Allarmi ed errori di autotuning
Errori di immissione dati
L'inverter mostra il messaggio "Data Invalid" (Dati non validi) e non esegue l'autotuning se:
• la velocità del motore, la frequenza nominale e il numero delle coppie di poli non corrispondono.
Base Frequency 60⋅
Motor Speed
• la corrente nominale non corrisponde al valore di potenza nominale
L'inverter calcola la potenza del motore utilizzando il valore di corrente di ingresso e i dati ricavati dalla
tabella dei dati interni del motore. Il valore calcolato deve essere compreso tra il 50% e il 150% del valore
di ingresso per la potenza nominale.
Altri allarmi ed errori durante l'autotuning
Per informazioni generali su possibili allarmi o errori durante l'autotuning e le relative azioni correttive,
vedere pagina 7-14, Errori di autotuning.
-------------------------------------------------
<
2 Motor pole⋅
4-10
Page 86

Ottimizzazione delle prestazioni
Nella tabella seguente sono riportati consigli sulla regolazione per il miglioramento delle prestazioni dopo
l'esecuzione della configurazione di base.
Tabella 4.3 Ottimizzazione delle prestazioni
Problema Possibile causa Contromisura
• Aumentare la corrente di iniezione c.c.
all'avvio nel parametro S1-02.
• Impostare un tempo di iniezione
all'avvio (S1-04) il più breve possibile,
ma accertarsi che il freno si apra
completamente prima che il motore inizi
a girare.
• Aumentare le tensioni minima (E1-10) e
media (E1-08) della linea caratteristica
V/f. Accertarsi che la corrente di avvio e
livellamento non aumenti troppo.
• Aumentare il guadagno ASR all'avvio
(C5-03) e diminuire il tempo ASR I
all'avvio (C5-04). Se si verificano delle
vibrazioni ripristinare i valori precedenti
in piccole fasi.
• Aumentare il guadagno servoazionamento a zero nel parametro S1-20.
Rollback all'avvio
V/f e
• Coppia troppo bassa all'apertura del freno
OLV
• Risposta ASR troppo lenta all'apertura del
CLV
freno
4
Strappi all'avvio
Vibrazioni nelle
zone di bassa e
media velocità
Comune
Comune
V/f
OLV
CLV
• La coppia motore non è completamente
stabilita all'apertura del freno.
• I contattori del motore si chiudono troppo
tardi
• Il motore inizia a girare quando il freno
non è completamente aperto oppure opera
contro la frenatura
• Modifica della percentuale di
accelerazione troppo veloce
• Tensione di uscita troppo alta
• Compensazione di coppia troppo veloce
• Tensione di uscita troppo alta
• Impostazioni ASR troppo alte
• Valore di scorrimento del motore errato
• Allungare il tempo di ritardo rilascio
freno (S1-06) e il tempo della funzione
c.c./servoazionamento a zero all'avvio
(S1-04)
• Accertarsi che i contattori del motore
siano chiusi prima di impostare il
comando up/down.
• Aumentare il tempo di iniezione c.c.
all'avvio (S1-04).
• Aumentare la curva a S all'avvio
(C2-01)
• Ridurre le impostazioni della linea
caratteristica V/f (E1-08 / E1-10)
• Aumentare il tempo di ritardo della
compensazione di coppia (C4-02)
• Ridurre le impostazioni della linea
caratteristica V/f (E1-08 / E1-10)
• Diminuire C5-01 / C5-03 e aumentare
C5-02 / C5-04
• Verificare il valore di scorrimento del
motore nel parametro E2-02.
Aumentarlo o diminuirlo in stadi di
0,2 Hz.
Vibrazioni nelle
zone di alta e
massima velocità
OLV
• Compensazione di coppia troppo veloce
CLV
• Impostazioni ASR troppo alte
• Aumentare il tempo di ritardo della
compensazione di coppia (C4-02)
• Diminuire C5-01 / C5-03 e aumentare
C5-02 / C5-04
4-11
Page 87

Problema Possibile causa Contromisura
• Aumentare il tempo di ritardo della
Strappi causati da
una sovraelongazione quando si
raggiunge la
velocità superiore
• Compensazione di scorrimento o
OLV
CLV
compensazione di coppia troppo veloce
• Impostazioni dell'unità di controllo ASR
troppo graduali o troppo dure
• Dati motore errati
compensazione di coppia (C4-02)
• Aumentare il tempo di ritardo della
compensazione di scorrimento (C3-02)
• Regolare nuovamente il guadagno ASR
P (C5-01) e il tempo integrale ASR
(C5-02)
• Regolare nuovamente i dati del motore
(E2-), sopratutto i valori di scorrimento (E2-02) di corrente a vuoto
(E2-03) oppure eseguire un autotuning
4
Il motore si arresta in breve tempo
quando viene raggiunta la velocità
di livellamento
(sottoelongazione)
Comune
V/f
OLV
CLV
Comune
• Modifica dell'accelerazione troppo dura
• Coppia a bassa velocità troppo bassa
• Coppia a bassa velocità troppo bassa
• Dati motore errati
• Sovracompensazione di scorrimento
• Dati motore errati
• Unità di controllo ASR troppo lenta
• Modifica della percentuale di
decelerazione troppo veloce
• Aumentare la curva a S al termine
dell'accelerazione (C2-02)
• Aumentare le tensioni minima (E1-10) e
media (E1-08) della linea caratteristica
V/f. Accertarsi che la corrente di avvio e
livellamento non aumenti troppo.
• Aumentare le tensioni minima (E1-10) e
media (E1-08) della linea caratteristica
V/f. Accertarsi che la corrente di avvio e
livellamento non aumenti troppo.
• Regolare nuovamente i dati del motore
(E2-), sopratutto i valori di scorrimento (E2-02) di corrente a vuoto
(E2-03) oppure eseguire un autotuning
• Regolare nuovamente i dati del motore
(E2-), sopratutto i valori di scorrimento (E2-02) di corrente a vuoto
(E2-03) oppure eseguire un autotuning
• Aumentare il guadagno ASR P (C5-09)
e diminuire il tempo integrale ASR
(C5-10)
• Aumentare la curva a S al termine
dell'accelerazione (C2-04)
4-12
Strappi all'arresto
Rumorosità del
motore ad alta
frequenza
Vibrazioni che
aumentano con la
velocità
Comune
Comune
CLV
Comune
• Il freno è stato chiuso troppo presto e,
pertanto, il motore opera contro la frenatura
• Il contattore del motore si apre quando il
freno non è ancora completamente chiuso
• La frequenza portante è troppo bassa.
• L'encoder vibra
• Problemi meccanici • Verificare i cuscinetti e il cambio
• Le parti rotanti (armatura del motore,
volante, tamburo/disco del freno) sono sbilanciate
• Aumentare il tempo di ritardo chiusura
freno (S1-07) e, se necessario, il tempo
di iniezione c.c. all'arresto (S1-05)
• Verificare la sequenza del contattore del
motore.
• Aumentare la frequenza portante nel
parametro C6-02 or C6-11. Se la
frequenza portante supera
l'impostazione di fabbrica, è necessario
tenere in considerazione una
diminuzione di corrente (vedere pagina
9-6, Diminuzione frequenza portante).
• Verificare l'installazione e la posizione
dell'encoder sull'albero motore
• Bilanciare le parti rotanti
Page 88

Parametri utente
Questo capitolo descrive tutti i parametri utente che possono essere impostati nell'inverter.
Descrizione parametri utente ........................................................................................5-2
Livelli e funzioni di visualizzazione della console di programmazione ..........................5-3
Tabelle parametri utente ...............................................................................................5-8
Impostazioni di setup: A ................................................................................................5-8
Parametri applicativi: b ................................................................................................5-10
Parametri di autotuning: C...........................................................................................5-12
Parametri di riferimento: d ...........................................................................................5-18
Parametri motore: E ....................................................................................................5-21
Parametri opzionali: F .................................................................................................5-26
Parametri per le funzioni dei terminali: H ....................................................................5-32
Parametri per le funzioni di protezione: L....................................................................5-37
Regolazioni speciali: n2/n5..........................................................................................5-43
Regolazioni motore PM: n8/n9 ....................................................................................5-45
Parametri funzioni LIFT: S...........................................................................................5-48
Autotuning motore: T...................................................................................................5-54
Parametri di monitoraggio: U.......................................................................................5-56
Impostazioni che cambiano con la modalità di controllo (A1-02) ................................5-62
Impostazioni di fabbrica che cambiano con la capacità dell'inverter (o2-04) ..............5-64
Page 89

5
Descrizione parametri utente
Descrizione delle tabelle dei parametri utente
Le tabelle dei parametri utente sono strutturate come indicato di seguito. Nell'esempio viene preso in considerazione il parametro b1-01 (selezione del riferimento di frequenza).
Nu-
mero
del
parametro
b1-01
Nome
Display
Selezione
frequenza di
riferimento
Descrizione
Consente di impostare il metodo
di ingresso per la frequenza di
riferimento.
0:Console di programmazione
1:Terminale del circuito di
controllo (ingresso analogico)
2:Comunicazione MEMOBUS
3:Scheda opzionale
sta-
Modifi-
che
durante il
funziona-
mento
Campo
di impostazione
0 … 3 0 No Q Q Q Q 180H -
Impo-
zione di
fabbrica
• Numero del parametro: Il numero del parametro utente.
• Nome: Il nome del parametro utente.
• Display Il display della console di programmazione JVOP-160-OY
• Descrizione: Dettagli sulla funzione o le impostazioni del parametro utente.
• Campo di impostazione: Il campo di regolazione per i parametri utente.
L'impostazione di fabbrica (ciascun metodo di controllo ha una
propria impostazione di fabbrica; quindi, l'impostazione di fabbrica
• Impostazione di fabbrica:
varia in base al metodo di controllo).
Vedere pagina pagina 5-62, Impostazioni che cambiano con la
modalità di controllo (A1-02) per le impostazioni di fabbrica
modificate impostando il metodo di controllo.
• Modifiche durante il
funzionamento:
indica se il parametro può essere modificato quando l'inverter è in
funzionamento.
Sì: modifiche possibili durante il funzionamento.
N.: modifiche non possibili durante il funzionamento.
• Metodi di controllo:
indica i metodi di controllo in cui è possibile monitorare o impostare
il parametro utente.
I dati possono essere monitorati e impostati sia nella
Q:
modalità di programmazione veloce che nella modalità
di programmazione avanzata.
A:
N.:
I dati possono essere monitorati e impostati solo nella
modalità di programmazione avanzata.
I dati non possono essere monitorati o impostati in questo metodo di controllo.
• Registro MEMOBUS: Il numero di registro utilizzato per le comunicazioni MEMOBUS.
• Pagina: pagina di riferimento con informazioni dettagliate sul parametro.
Metodi di controllo
Vettore
ad
V/f
anello
aperto
Vettore
ad
anello
chiuso
Vettore
ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
Pa-
gina
5-2
Page 90

Livelli e funzioni di visualizzazione della console di programmazione
Nella figura seguente è riportata la gerarchia di visualizzazione della console di programmazione per l'inverter.
N. Funzione Pagina
MENU
Modalità di funzionamento
Consente di azionare l'inverter
e visualizzarne lo stato.
Modalità di programmazione
impostare i parametri minimi
Modalità di programmazione
impostare tutti i parametri non
impostati sui valori predefiniti.
Imposta automaticamente i
line-to-line del controllo V/f.
veloce
Consente di monitorare o
necessari per il funziona-
mento.
avanzata
Consente di monitorare o
impostare tutti i parametri.
Modalità di verifica
Consente di monitorare o
Modalità di autotuning
parametri del motore per il
controllo vettoriale oppure
misura la resistenza
U1 Parametri di monitoraggio stato
U2 Fault Trace
U3 Fault History
A1 Modalità di inizializzazione
Modalità impostazioni definite
A2
b1 Selezioni delle modalità operative
b2 Frenatura ad iniezione c.c.
b4 Funzione temporizzatore
b6 Funzioni di pausa
C1 Accelerazione/Decelerazione
C2 Accelerazione/decelerazione curva a S
Compensazione dello scorrimento del
C3
C4 Compensazione di coppia
C5 Controllo della velocità (ASR)
C6 Frequenza portante
d1 Velocità di riferimento
d6 Forzamento di campo
E1 Linea caratteristica V/f 1
E2 Configurazione del motore 1
E3 Linea caratteristica V/f 2
E4 Configurazione del motore 2
E5 Configurazione motore PM
F1 Configurazione opzione PG
F4 Scheda di monitoraggio analogico
F5 Scheda di uscita digitale
F6 Impostazioni comunicazione seriale
H1 Ingressi digitali multifunzione
H2 Uscite digitali multifunzione
H3 Ingressi analogici multifunzione
L1 Sovraccarico motore
Funzionamento inerziale dopo perdita
L2
L3 Blocco di protezione
L4 Rilevamento riferimento
L5 Riavvio d’errore
L6 Rilevamento coppia
L7 Limiti di coppia
L8 Protezione hardware
n2 Regolatore automatico di frequenza
n5 Controllo feed-forward
n8 Regolazione motore PM
o1 Selezione monitoraggio
o2 Console di programmazione
o3 Funzione di copia
S1 Sequenza di frenatura
S2 Compensazione allo scorrimento
S3 Sequenza funzioni speciali
T1 Autotuning motore 1
T2 Autotuning motore 2
motore
di potenza
5-56
5-60
5-61
5-8
5-9
5-10
5-10
5-11
5-11
5-12
5-13
5-14
5-15
5-16
5-16
5-18
5-20
5-21
5-22
5-23
5-24
5-25
5-26
5-29
5-30
5-31
5-32
5-33
5-35
5-37
5-37
5-38
5-38
5-39
5-40
5-41
5-41
5-43
5-43
5-45
5-46
5-47
5-48
5-48
5-51
5-52
5-54
5-55
5
5-3
Page 91

5
Parametri utente disponibili in modalità di programmazione rapida
I parametri utente minimi necessari per il funzionamento dell'inverter possono essere monitorati ed impostati
con la modalità di programmazione rapida. I parametri utente visualizzati con la modalità di programmazione
rapida sono elencati nella tabella seguente. Questi parametri vengono anche visualizzati, insieme a tutti gli
altri parametri utente, nella modalità di programmazione avanzata.
Nu-
mero
del
para-
metro
Nome
Display
Descrizione
Campo
di impo-
stazione
Impo-
sta-
zione
di fab-
brica
Modifi-
che
durante
il fun-
ziona-
mento
Utilizzato per impostare il livello di
accesso ai parametri (Set/Read).
Livello di accesso
parametri
0:Solo monitoraggio (monitoraggio e
impostazione per i parametri A1-01 e
A1-04).
1:Utilizzato per selezionare i parame-
A1-01
tri utente (è possibile leggere e impostare solo i parametri compresi
0 … 2 2 Sì Sì Sì Sì Sì 101H
nell'intervallo da A2-01 a A2-32).
Access Level
2:Avanzato
(i parametri possono essere letti ed
impostati nella modalità di programmazione rapida (Q) e in quella di
programmazione avanzata (A).)
Selezione metodo di
controllo
A1-02
Control Method
Imposta il metodo di controllo per
l'inverter.
0:Controllo V/f
2:Controllo vettoriale ad anello aperto
3:Controllo vettoriale ad anello chiuso
6:Controllo vettoriale ad anello chiuso
0 … 6 0 No Sì Sì Sì Sì 102H
per motori PM
C1-01
C1-02
Tempo di
accelerazione 1
Accel Time 1
Tempo di
decelerazione 1
Decel Time 1
Imposta il tempo di accelerazione
necessario per accelerare da 0 Hz fino
alla frequenza di uscita massima.
Imposta il tempo di decelerazione
necessario per decelerare dalla
frequenza di uscita massima a 0 Hz.
0,0 …
600,00
*1
1,50 s Sì Sì Sì Sì Sì
Tempo caratteristico
della curva a S all'avvio
C2-01
dell'accelerazione
0,00 …
2,50
0,50 s No Sì Sì Sì Sì 20BH
S-Crv Acc @ Start
Tempo caratteristico
della curva a S alla fine
C2-02
dell'accelerazione
0,00 …
2,50
0,50 s No Sì Sì Sì Sì 20CH
S-Crv Acc @ End
Tempo caratteristico
della curva a S all'avvio
C2-03
della decelerazione
S-Crv Dec @ Start
Tempo caratteristico
della curva a S alla fine
C2-04
della decelerazione
Quando è impostato il tempo
caratteristico della curva a S, i tempi di
accelerazione/decelerazione
aumenteranno solo della metà di tale
tempo all'inizio ed alla fine.
0,00 …
2,50
0,00 …
2,50
0,50 s No Sì Sì Sì Sì 20DH
0,50 s No Sì Sì Sì Sì 20EH
S-Crv Dec @ End
Tempo caratteristico
della curva a S al di sotto
della velocità di livella-
C2-05
mento
0,00 …
2,50
0,50 s No Sì Sì Sì Sì 232H
Scurve @ leveling
Guadagno proporzio-
nale ASR (P) 1
C5-01
ASR P Gain 1 - 12.00
Tempo integrale ASR 1
C5-02
Imposta il guadagno proporzionale 1 e
il tempo integrale 1 dell'anello di
controllo della velocità (ASR) per la
frequenza minima.
Le impostazioni si attivano solo per
l'accelerazione.
ASR I Time 1 - 0,300 s
0,00 …
300,00
0,000 …
10,000
i
i
Sì - -
Sì - -
Metodi di controllo
Vet -
tore ad
V/f
anello
aperto
Vettore
Vettore
ad
anello
anello
chiuso
chiuso
(PM)
40,00 -
0,500 s -
ad
Regi-
stro
MEMO-
BUS
200H
201H
21BH
21CH
5-4
Page 92

Nu-
mero
del
para-
metro
Nome
Display
Descrizione
Campo
di impo-
stazione
Impo-
sta-
zione
di fab-
brica
Modifi-
che
durante
il funzionamento
Guadagno proporzionale
ASR (P) 2
C5-03
ASR P Gain 2 -6.00
Tempo integrale ASR (I)
2
C5-04
Imposta il guadagno proporzionale 2 e
il tempo integrale 2 dell'anello di controllo della velocità (ASR) per la frequenza massima.
ASR I Time 2
Tempo di ritardo ASR
C5-06
ASR Delay Time
Frequenza di
commutazione ASR
C5-07
ASR Gain SW Freq
Imposta la costante di tempo del filtro;
il tempo dall'anello di velocità all'uscita
del comando di coppia. Generalmente,
non è necessario modificare questo
parametro.
Imposta la frequenza di commutazione
tra il guadagno proporzionale 1, 2 e 3 e
il tempo integrale 1, 2 e 3.
0,00 …
300,00
0,000 …
10,000
0,000 …
0,500
0,0 …
50,0 Hz
0,0 …
100,0 %
i
Sì - -
0,500 s Sì - - Sì Sì 21EH
0,020
sec
i
No - - - Sì 220H
No - -
Guadagno proporzionale
ASR (P) 3
C5-09
ASR P Gain 3 - 12.00
Tempo integrale ASR (I)
3
C5-10
Impostare il guadagno proporzionale 3
e il tempo integrale 3 dell'anello di
controllo della velocità (ASR) per la
frequenza minima.
Le impostazioni si attivano solo per la
decelerazione.
ASR I Time 3 -0,300 s
Velocità di riferimento
nominale
d1-09
Nomin Speed vn
Velocità di riferimento
di ispezione
d1-14
Inspect Speed vi
Velocità di livellamento
di riferimento
d1-17
Level Speed vl
Impostazione tensione di
ingresso
E1-01
Input
Vo l t a g e
Imposta la frequenza di riferimento
quando viene selezionata la velocità
nominale tramite un ingresso digitale.
Imposta la frequenza di riferimento
quando viene selezionata la velocità di
ispezione tramite un ingresso digitale.
Imposta la frequenza di riferimento
quando viene selezionata la velocità di
livellamento tramite un ingresso
digitale.
Imposta la tensione di ingresso
dell'inverter Tale valore sarà il valore di
base per le funzioni di protezione.
0,00 …
300,00
0,000 …
10,000
0 …
120.00
0 …
100,00
0 …
120,00
0 …
100,00
0 …
120.00
0 …
100,00
310 …
510
*2
i
i
i
i
i
400 V
*2
Sì - -
Sì - -
Sì
No Sì Sì Sì Sì 300H
Metodi di controllo
Vet-
Vettore
V/f
tore ad
anello
aperto
ad
anello
chiuso
20.00 -
0,0 Hz -
40,00 -
0,500 s
50,00 Hz50,00 Hz50,00
Hz
-- -
25,00 Hz25,00 Hz25,00
Hz
- - - 50.00%
4,00 Hz4,00 Hz4,00
Hz
- - - 8.00%
Vettore
ad
anello
chiuso
(PM)
- 2.0 %
-
-
100.00
%
-
-
Regi-
stro
MEMO-
BUS
21DH
221H
22EH
231H
5
288H
28FH
292H
5-5
Page 93

5
Nu-
mero
del
para-
metro
Frequenza di uscita
massima (FMAX)
Nome
Display
Descrizione
Campo
di impo-
stazione
40,0 …
120,0
Impo-
sta-
zione
di fab-
brica
Modifi-
che
durante
il fun-
ziona-
mento
Metodi di controllo
Vet -
tore ad
V/f
anello
aperto
50,0 Hz50,0 Hz50,0
(con
PG-F2)
E1-04
Max Frequency
0 …
1.200
(con
i
No
-- -
PG-X2)
0 …
3.600
Tensione max. (VMAX) 0,0 ...
E1-05
Max Voltage
Frequenza di base (FA)
E1-06
Base Frequency
Tensione di uscita (V)
V MAX
E1-05
VBASE
E1-13
VC
E1-08
V MIN
E1-10
F MIN
E1-09
FB
E1-07FAE1-08
F MAX
E1-04
Frequenza (Hz)
0,0 …
PG-F2)
PG-X2)
Tensione frequenza di
uscita media (VB)
E1-08
Mid Voltage A
Frequenza di uscita
minima (FMIN)
E1-09
Imposta la tensione di uscita della
frequenza di base (E1-06).
0,0 …
Min Frequency
Tensione frequenza di
uscita min. (VMIN)
E1-10
Min Voltage
Tensione di base
(VBASE)
E1-13
Base Voltage - - 400 V
Corrente nominale del
motore
E2-01
Mtr Rated Current
Imposta la corrente nominale del
motore in ampere.
Questo valore viene usato come valore
di base per la protezione del motore e il
limite di coppia. Si tratta di un dato di
0,85 ...
510,0
*2
120,0
(con
0 …
1.200
(con
0 …
3.600
0,0 ...
510
*2
120,0
0,0 ...
510,0
*2
0,0 ...
510,0
*2
17,00
*3
380,0
V
*2
i
i
i
i
i
7,00 A
*4
No Sì Sì Sì No 304H
50,0 Hz50,0 Hz50,0
No
-- -
No
No
No
*2
*2
V
0,5
0,3 Hz - - 308H
Hz
19,4
5,0 V
*2
*2
V
25,0 V
37,3
0,0 V 0,0 V
No
No Sì Sì Sì - 30EH
input per l'autotuning.
Scorrimento nominale
del motore
E2-02
Motor Rated Slip
Imposta lo scorrimento nominale del
motore.
Tale valore impostato diventerà il
valore di riferimento per la
compensazione dello scorrimento.
Tale parametro viene impostato
0,00 …
20.00
2,70
Hz
*4
No Sì Sì Sì - 30FH
automaticamente durante l'autotuning.
Corrente a vuoto del
motore
E2-03
No-Load Current
Numero di poli del
motore
E2-04
Number of Poles
Resistenza linea a linea
del motore
E2-05
Ter m R esistance
Potenza nominale uscita
motore
E2-11
Mtr Rated Power
Imposta la corrente a vuoto del motore
Tale parametro viene impostato
automaticamente durante l'autotuning.
Imposta il numero di poli del motore.
Si tratta di un dato di input per
l'autotuning.
Imposta la resistenza da fase a fase del
motore
Tale parametro viene impostato
automaticamente durante l'autotuning.
Imposta la potenza di uscita nominale
del motore.
Tale parametro è un dato di input per
l'autotuning.
2,30 A
0,00 ...
6,99
No Sì Sì Sì - 310H
*4
2 … 48 4 No - - Sì - 311H
3,333
0.000
…
65.000
0,00 …
650,00
Ω
*4
3,70
kW
*4
No Sì Sì Sì - 312H
No Sì Sì Sì No 318H
Vettore
Vettore
anello
chiuso
ad
Hz
ad
anello
chiuso
(PM)
-
150
giri/
min
Hz
-
150
giri/
min
- - 307H
- - 309H
-
-
Regi-
stro
MEMO-
BUS
303H
305H
30CH
5-6
Page 94

Nu-
mero
del
para-
metro
Potenza nominale uscita
motore
E5-02
Rated Power
Corrente nominale del
motore
E5-03
Rated Current
Nome
Display
Descrizione
Imposta la potenza di uscita nominale
del motore.
Imposta la corrente nominale del
motore.
Campo
di impo-
stazione
0,00 …
300,00
0,00 ...
200,00
Impo-
sta-
zione
di fab-
brica
3,70
kW
*4
7,31
*4
A
Modifi-
che
durante
il funzionamento
No - - - Sì 0C2H
No - - - Sì 0C3H
Metodi di controllo
Vet-
tore ad
V/f
anello
aperto
Vettore
ad
anello
chiuso
Numero di poli del
motore
E5-04
Imposta il numero di poli del motore. 4 ... 48 4 No - - - Sì 0C4H
Number of poles
Resistenza di
terminazione del motore
E5-05
Term resistance
Induttanza asse d
E5-06
d-ax inductance
Induttanza asse q
E5-07
q-ax inductance
Costante di tensione del
motore
E5-09
Voltage constant
Costante PG
F1-01
PG Pulses/Rev -
Rotazione PG
F1-05
PG Rotation Sel -1
Imposta la resistenza linea a linea del
motore
Imposta l'induttanza dell'asse d
Imposta l'induttanza dell'asse Q
Imposta la costante di tensione del
motore.
Imposta il numero di impulsi PG per
giri del motore.
0:La fase A prevale con il comando
Run Forward (la fase B prevale con il
comando Run Reverse).
1:La fase B prevale con il comando
Run Forward (la fase A prevale con
il comando Run Reverse).
0,000 ...
65.000
0,00 …
300,00
0,00…
600,00
50,0 ...
4000,0
60000
0 …
0 o 1
1,326
Ohm
*4
19,11
mH
*4
26,08
mH
*4
478,6
mV
*4
i
i
No - - - Sì 0C5H
No - - - Sì 0C6H
No - - - Sì 0C7H
No - - - Sì 0C9H
Sì
No - -
1024
0-
No - -
Vettore
ad
anello
chiuso
(PM)
-
Sì
2048
Regi-
stro
MEMO-
BUS
380H
384H
5
Attivare o disattivare la funzione di
Selezione protezione
motore
protezione di sovracorrente del motore
utilizzando il relè termico elettronico.
0:Disabilitato
0 … 3 1
Sì Sì Sì -
1:Protezione per motore general-
L1-01
purpose (ventilato)
2:Protezione per motore inverter
No
(ventilato esternamente)
3:Protezione per motore speciale per il
MOL Select 0 o 5 5 Sì
controllo vettoriale
5:Motore a magneti permanenti con
coppia costante
Rilevamento della
posizione del polo
magnetico
n8-35
Mag det sel
Imposta il metodo di rilevamento per la
posizione del polo magnetico di un
motore PM.
0:Rilevamento automatico (applica-
bile solo al motore IPM Yaskawa)
4:Hiperfacey Data
0, 4 o 5 5 No - - - Sì 192H
5:EnDat Data
*1. Gli intervalli di impostazione per i tempi di accelerazione/decelerazione dipendono dall'impostazione di C1-10 (Unità di misura per il tempo di
accelerazione/decelerazione). Se C1-10 è impostato su 0, l'intervallo di impostazione va da 0,00 a 600,00 (s).
*2. I valori forniti si riferiscono all'inverter di classe 400 V.
*3. L'intervallo di impostazione è compreso tra il 10% e il 200% della corrente di uscita nominale dell'inverter. I valori forniti si riferiscono all'inverter di classe
400 V da 3,7 kW.
*4. L'impostazione di fabbrica dipende dalla capacità dell'inverter. Il valore fornito si riferisce a un inverter classe 400 V da 3,7 V.
480H
5-7
Page 95

5
Tabelle parametri utente
Impostazioni di setup: A
Modalità di inizializzazione: A1
Nu-
mero
del
para-
metro
A1-00
A1-01
Nome
Display
Selezione lingua per display
console di programmazione
Select
Language
Livello di
accesso
parametri
Access Level
Descrizione
Utilizzato per selezionare la lingua
di visualizzazione della console di
programmazione (solo JVOP-160OY).
0:Inglese
1:Giapponese
2:Tedesco
3:Francese
4:Italiano
5:Spagnolo
6:Portoghese
Tale parametro non viene modificato
al momento dell'inizializzazione.
Utilizzato per impostare il livello di
accesso ai parametri (Set/Read).
0:Solo monitoraggio (monitoraggio
e impostazione per i parametri
A1-01 e A1-04).
1:Utilizzato per selezionare i
parametri utente (è possibile
leggere e impostare solo i
parametri compresi nell'intervallo
da A2-01 a A2-32).
2:Avanzato
(i parametri possono essere letti ed
impostati nella modalità di
programmazione rapida (Q) e in
quella di programmazione
avanzata (A).)
Campo
di impo-
stazione
0 … 6 0 Sì A A A A 100H –
0 … 2 2 Sì Q Q Q Q 101H
Imposta-
zione di
fabbrica
Modifi-
che
durante
il fun-
ziona-
mento
Metodi di controllo
Vet-
tore ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
Pa-
gina
6-70
6-71
A1-02
A1-03
A1-04
Selezione
metodo di
controllo
Control Method
Inizializzazione
Init Parameters
Password
Enter Password
Utilizzato per selezionare il metodo
di controllo per l'inverter.
0: Controllo V/f
2: Vettore ad anello aperto
3: Vettore ad anello chiuso
6: Vettore ad anello chiuso per
motori PM
Tale parametro non viene modificato
al momento dell'inizializzazione.
Utilizzato per inizializzare i parametri utilizzando il metodo specificato.
0: Nessuna inizializzazione
1110: Effettua l'inizializzazione uti-
lizzando i parametri utente
2220: Effettua l'inizializzazione uti-
lizzando una sequenza a 2 fili
(inizializza sull'impostazione di fabbrica).
Inserimento di una password quando
ne è stata impostata una in A1-05.
Questa funzione protegge da scrittura alcuni parametri relativi alla
modalità di inizializzazione.
Se la password viene modificata,
i parametri da A1-01 a A1-03 e da
A2-01 a A2-32 non possono essere
ulteriormente modificati (i parametri
relativi alla modalità di programmazione possono essere modificati).
0 … 6 0 No Q Q Q Q 102H -
0 …
2220
0 …
9999
0NoAAAA103H-
0NoAAAA104H6-70
5-8
Page 96

Nu-
mero
del
para-
metro
A1-05
Nome
Display
Impostazione
password
Select Password
Descrizione
Utilizzato per impostare una
password di quattro cifre.
Generalmente, questo parametro non
viene visualizzato. Quando la
password (A1-04) viene
visualizzata, tenere premuto il tasto
RESET e premere il tasto Menu.
Campo
di impostazione
0 …
9999
Imposta-
zione di
fabbrica
Verrà visualizzata la password.
Parametri impostati dall'utente: A2
Nella tabella seguente sono riportati i parametri impostati dall'utente.
Nu-
mero
del
para-
metro
A2-01
…
A2-32
Nome
Display
Parametri
specificati
dall'utente
User Param
1 to 32
Descrizione
Usato per selezionare la
funzione per ognuno dei
parametri specificati dall'utente.
I parametri utente sono gli unici
parametri accessibili se il livello
di accesso parametri è impostato
su Parametri Utente (A1-01=1).
Campo
di impostazione
b1-01
…
S3-24
Impo-
stazione di
fabbrica
Modifi-
che
durante
il funzionamento
Metodi di controllo
Vet -
tore ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet -
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
0 No A A A A 105H 6-70
Modifi-
che
durante
il fun-
ziona-
mento
Metodi di controllo
Vet-
tore ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
106H
– NoAAAA
…
6-71
125H
Pa-
gina
Pa-
gina
5
5-9
Page 97

Parametri applicativi: b
Selezioni delle modalità operative: b1
Nu-
mero
del
parametro
b1-01
Nome
Display
Selezione
sorgente di
riferimento
Reference
Source
Descrizione
Imposta il metodo di ingresso
della frequenza di riferimento.
0:Console di programmazione
1:Terminale del circuito di
controllo (ingresso analogico)
3:Scheda opzionale
Metodi di controllo
Vet-
tore ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
Pagina
Campo
di impo-
stazione
Impo-
stazione di
fabbrica
Modifi-
che
durante
il funzionamento
0, 1 o 3 0 No A A A A 180H 6-4
5
b1-02
Selezione
sorgente di
comando
RUN
Imposta il metodo di ingresso per
il comando di Run.
0:Console di programmazione
1:Terminale del circuito di
controllo (ingressi digitali
multifunzione)
3:Scheda opzionale
Utilizzato per impostare la
risposta degli ingressi di
controllo (ingressi avanti/indietro
e multifunzione).
0:Lettura veloce
1:Lettura normale (utilizzare per
possibili malfunzionamenti
dovuti a disturbi).
Utilizzato per attivare una disabilitazione del funzionamento nelle
modalità di programmazione.
0:Funzionamento non consentito
1:Funzionamento consentito
(disabilitato se è selezionata la
console di programmazione
come sorgente del comando di
marcia
b1-06
b1-08
Run Source
Scansione
ingresso di
controllo
Cntl Input
Scans
Selezione
comando Run
nelle modalità
di programmazione
RUN CMD at
PRG
(b1-02 = 0)).
Frenatura ad iniezione c.c.: b2
Nu-
mero
del
para-
metro
b2-08
Nome
Display
Vo l u m e
compensazione flusso
magnetico
Field Comp
Descrizione
Imposta la compensazione del
flusso magnetico come
percentuale della corrente a
vuoto.
0, 1 o 3 1 No A A A A 181H 6-3
0 o 1 1 No A A A A 185H -
0 o 1 1 No A A A A 187H -
Metodi di controllo
Vettore
ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
Pa-
gina
Campo
di impostazione
0 …
1000
Modifi-
Impo-
sta-
zione di
fabbrica
che
durante
il funzionamento
0% No - A - - 190H -
5-10
Page 98

Funzione temporizzatore: b4
Nu-
mero
del
para-
metro
b4-01
b4-02
Nome
Display
Funzione timer
ritardo
all'eccitazione
Delay-ON
Timer
Funzione timer
ritardo alla
diseccitazione
Delay-OFF
Timer
Descrizione
Imposta il ritardo all'eccitazione (zona
morta) in unità da 1 secondo per
l'ingresso della funzione di
temporizzatore.
Abilitato quando la funzione di
temporizzatore è impostata in H1-
or H2-.
Imposta il ritardo alla diseccitazione
(zona morta) in unità da 1 secondo per
l'ingresso della funzione di
temporizzatore.
Abilitato quando la funzione di
temporizzatore è impostata in H1-
or H2-.
Funzioni di pausa: b6
Nu-
mero
del
para-
metro
b6-01
b6-02
b6-03
b6-04
Nome
Display
Frequenza di
pausa all'avvio
Dwell Ref
@Start
Tempo di
pausa all'avvio
Dwell Time
@ Start
Frequenza di
pausa
all'arresto
Dwell Ref
@Stop
Tempo di
pausa
all'arresto
Dwell Time
@ Stop
Descrizione
Comando Run
Frequenza di uscita
ON
b6-01 b6-03
b6-02
La funzione di pausa può essere
utilizzata per mantenere
temporaneamente la frequenza di
uscita.
Campo
impo-
di
sta-
zione
Impo-
zione di
fabbrica
0,0 ...
300,0
0,0 ...
300,0
Campo
impo-
zione
0,0 …
120,0
OFF
b6-04
0,0…
Tempo
0,0 …
120,0
0,0 …
Impo-
di
sta-
zione di
sta-
fabbrica
0,0 Hz No A A A A 1B6H 6-22
10,0
0,0 s No A A A A 1B7H 6-22
0,0 Hz No A A A A 1B8H 6-22
10,0
0,0 s No A A A A 1B9H 6-22
Modifi-
che
durante
sta-
il funzionamento
0,0 s No A A A A 1A3H 6-52
0,0 s No A A A A 1A4H 6-52
Modifi-
che
durante
il funzionamento
Metodi di controllo
Vettore
ad
V/f
anello
aperto
Metodi di controllo
Vet tore
ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
Registro
MEMO-
BUS
Pa-
gina
Pa-
gina
5
Monitoraggio della coppia: b8
Nu-
mero
del
para-
metro
b8-17
Nome
Descrizione
Display
Guadagno
monitoraggio
della coppia
Torque Mon
Gain
Campo
di
impo-
sta-
zione
0 ...
2,00
Impo-
sta-
zione di
fabbrica
Modifi-
che
durante
il funzionamento
Metodi di controllo
Vet tore
ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
1,00 No - - - A 1F9H 6-22
Pa-
gina
5-11
Page 99

5
Parametri di autotuning: C
Accelerazione/Decelerazione: C1
Metodi di controllo
Vet-
tore
ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
Registro
MEMO-
BUS
20AH
sta-
Modifi-
che
durante
il fun-
ziona-
mento
Sì Q Q Q Q 200H 6-20
Sì Q Q Q Q 201H 6-20
Sì A A A A 202H 6-20
Sì A A A A 203H 6-20
Sì A A A A 204H 6-20
No A A A A 205H 6-20
No A A A A 206H 6-20
No A A A A 207H 6-20
No A A A A 208H 6-10
Nu-
mero
del
para-
metro
C1-01
C1-02
C1-03
C1-04
C1-05
C1-06
C1-07
C1-08
C1-09
C1-10
Nome
Display
Tempo di
accelerazione 1
Accel Time 1
Tempo di
decelerazione 1
Decel Time 1
Tempo di
accelerazione 2
Accel Time 2
Tempo di
decelerazione 2
Decel Time 2
Tempo di
accelerazione 3
Accel Time 3
Tempo di
decelerazione 3
Decel Time 3
Tempo di
accelerazione 4
Accel Time 4
Tempo di
decelerazione 4
Decel Time 4
Tempo di arresto
d’emergenza
Fast Stop Time
Unità impostazione
tempo di accel/
decel.
Acc/Dec Units
Descrizione
Imposta il tempo di accelerazione necessario per accelerare
da 0 Hz fino alla frequenza di
uscita massima.
Imposta il tempo di
decelerazione necessario per
decelerare dalla frequenza di
uscita massima a 0 Hz.
Imposta il tempo di
accelerazione quando l’ingresso
multifunzione "tempo di accel/
decel 1" è impostato su ON.
Imposta il tempo di
decelerazione quando l'ingresso
multifunzione "tempo di accel/
decel 1" è impostato su ON.
Imposta il tempo di
accelerazione quando l'ingresso
multifunzione "tempo di accel/
decel 2" è impostato su ON.
Imposta il tempo di
decelerazione quando l'ingresso
multifunzione "tempo di accel/
decel 2" è impostato su ON.
Imposta il tempo di accelerazione quando il riferimento di
frequenza è al di sotto del valore
impostato in C1-11.
Imposta il tempo di decelerazione quando il riferimento di
frequenza è al di sotto del valore
impostato in C1-11.
Imposta il tempo di decelerazione quando il riferimento di
frequenza è al di sotto del valore
impostato in C1-11.
Imposta il numero di decimali
per i parametri relativi al tempo
di accelerazione/decelerazione.
0:Unità di 0,01 secondi
1:Unità di 0,1 secondi
Campo
di impo-
stazione
Impo-
zione di
fabbrica
0,00 …
600,00
1,50 s
*1
0 o 1 0 No A A A A 209H -
Imposta la frequenza per la
Frequenza di
commutazione
tempo di decel.
commutazione automatica
dell'accelerazione/
decelerazione.
0,0 …
120.0
0,0 Hz No A A A -
Se la frequenza di uscita è
C1-11
Acc/Dec SW Freq
inferiore alla frequenza
impostata: Tempo di
accelerazione/decelerazione 4
Se la frequenza di uscita è
superiore alla frequenza
0,0 ...
100,0
0.0 % No - - - A
impostata: Tempo di
accelerazione/decelerazione 1
*1. L'intervallo di impostazione per i tempi di accelerazione/decelerazione dipende dall'impostazione di C1-10. Se C1-10 è impostato su 1, l'intervallo per i
tempi di accelerazione/decelerazione passa da 0,0 a 6000,0 secondi.
Pa-
gina
6-20
6-21
5-12
Page 100

Accelerazione/decelerazione curva a S: C2
Nu-
mero
del
para-
metro
C2-01
C2-02
C2-03
C2-04
C2-05
Nome
Display
Tempo caratteristico della
curva a S
all'avvio
dell'accelerazione
S-Crv Acc @
Start
Tempo caratteristico della
curva a S alla
fine dell'accelerazione
S-Crv Acc @
End
Tempo caratteristico della
curva a S
all'avvio della
decelerazione
S-Crv Dec @
Start
Tempo caratteristico della
curva a S alla
fine della
decelerazione
S-Crv Dec @
End
Tempo caratteristico della
curva a S al
di sotto della
velocità di
livellamento
Scurve @
leveling
Descrizione
Impostare i tempi della curva ad S a
velocità variabile per ridurre gli strappi.
È possibile impostare le curve ad S
separatamente per ogni tipo di
cambiamento di velocità.
Tempo
accel
decel
Quando è impostato il tempo
caratteristico della curva a S, i tempi di
accelerazione/decelerazione
aumenteranno solo della metà di tale
tempo all'inizio ed alla fine.
Camp
o di
impo-
sta-
zione
Impo-
sta-
zione
di fab-
brica
Modifi-
che
durante
il funzionamento
Metodi di controllo
Vet tore
ad
V/f
anello
aperto
Vet-
tore ad
anello
chiuso
Vet-
tore ad
anello
chiuso
(PM)
0,00
…
0,50 s No Q Q Q Q 20BH 6-22
2,50
0,00
…
0,50 s No Q Q Q Q 20CH 6-22
2,50
0,00
…
0,50 s No Q Q Q Q 20DH 6-22
2,50
0,00
…
0,50 s No Q Q Q Q 20EH 6-22
2,50
0,00
…
0,50 s No Q Q Q Q 232H 6-22
2,50
Registro
MEMO-
BUS
Pa-
gina
5
5-13
 Loading...
Loading...