

Page 1

VARISPEED F7
Frequenzumrichter mit Vektorsteuerung
BEDIENERHANDBUCH
Manual No.
YEG-TOG-S616-55.1-OY
Page 2

Inhaltsverzeichnis
Warnhinweise............................................................................................... VII
Sicherheits- und Anwendungshinweise....................................................... VIII
Elektromagnetische Verträglichkeit ................................................................ X
Netzfilter ....................................................................................................... XII
Eingetragene Marken ................................................................................... XV
1 Handhabung von Frequenzumrichtern................................. 1-1
Einführung ...................................................................................................1-2
Einsatzmöglichkeiten .....................................................................................................1-2
Modelle ..........................................................................................................................1-2
Überprüfungen bei Anlieferung ....................................................................1-4
Prüfungen ......................................................................................................................1-4
Informationen zum Typenschild .....................................................................................1-4
Bezeichnungen der Komponenten ................................................................................1-6
Außen- und Einbauabmessungen ...............................................................1-8
Frequenzumrichter in offener Bauweise (IP00) .............................................................1-8
Frequenzumrichter in geschlossener Bauweise zur Wandmontage (NEMA 1 - IEC IP20) 1-9
Überprüfung des Installationsortes ............................................................1-11
Installationsort ..............................................................................................................1-11
Umgebungstemperatur ................................................................................................1-11
Schutz des Frequenzumrichters gegen Fremdkörper .................................................1-11
Ausrichtung und Freiräume bei der Installation .........................................1-12
Abnehmen und Anbringen der Klemmenabdeckung .................................1-13
Entfernen der Klemmenabdeckung .............................................................................1-13
Anbringen der Klemmenabdeckung ............................................................................1-13
Abnehmen/Anbringen der digitalen
Bedienkonsole und der Frontabdeckung ...................................................1-14
Frequenzumrichter bis einschließlich 18,5 kW ............................................................1-14
Frequenzumrichter ab 22 kW ......................................................................................1-17
2 Verdrahtung ............................................................................ 2-1
Anschluss von Peripheriegeräten ................................................................2-2
Anschlussschema ........................................................................................2-3
Aufbau des Klemmenblocks ........................................................................2-5
Verdrahtung der Leistungsklemmen ............................................................2-6
Geeignete Kabelquerschnitte und Kabelschuhe ............................................................2-6
Funktionen der Leistungsklemmen ..............................................................................2-11
Aufbau des Leistungsteiles ..........................................................................................2-12
Standard-Anschlussschemata .....................................................................................2-13
Verdrahtung der Leistungsklemmen ............................................................................2-14
Verdrahtung der Steuerklemmen ..............................................................2-20
Leiterquerschnitte ........................................................................................................2-20
Funktionen der Steuerklemmen ...................................................................................2-22
Beschaltung der Steuerklemmen .................................................................................2-26
Sicherheitshinweise für die Verdrahtung der Steuerklemmen .....................................2-26
I
Page 3

Prüfung der Verdrahtung ...........................................................................2-27
Installation und Verdrahtung von Optionskarten .......................................2-28
Optionskarten-Modelle und Spezifikationen ................................................................ 2-28
Installation ...................................................................................................................2-28
Impulsgeberkarten – Klemmen und Spezifikationen ...................................................2-30
Verdrahtung ................................................................................................................. 2-31
Verdrahtung der Klemmenblöcke ................................................................................ 2-33
3 Digitale Bedienkonsole und Betriebsarten ...........................3-1
Digitale Bedienkonsole ................................................................................ 3-2
Anzeige der digitalen Bedienkonsole ............................................................................ 3-2
Tasten der digitalen Bedienkonsole .............................................................................. 3-2
Betriebsarten ...............................................................................................3-4
Frequenzumrichter-Betriebsarten .................................................................................. 3-4
Wechsel der Betriebsart ................................................................................................3-5
Betriebsart „Betrieb“ ...................................................................................................... 3-6
Betriebsart „Schnellstart“ ............................................................................................... 3-7
Betriebsart „Programmierung“ ....................................................................................... 3-8
Betriebsart „geänderte Parameter“ .............................................................................. 3-10
Betriebsart „Autotuning“ ..............................................................................................3-11
4 Testbetrieb ...............................................................................4-1
Ablauf Testbetrieb .......................................................................................4-2
Testbetrieb .................................................................................................. 4-3
Einstellung der Belastung entsprechend der Anwendung ............................................. 4-3
Setzen des Eingangsspannungs-Jumpers
(nur Frequenzumrichter der 400-V-Klasse ab 75 kW) ................................................... 4-3
Einschalten der Spannungsversorgung ........................................................................ 4-4
Überprüfung des Anzeigestatus .................................................................................... 4-4
Grundeinstellungen ....................................................................................................... 4-5
Einstellungen für die Regelbetriebsarten ...................................................................... 4-7
Autotuning .....................................................................................................................4-8
Anwendungseinstellungen .......................................................................................... 4-12
Lastfreier Betrieb ......................................................................................................... 4-12
Lastbetrieb ................................................................................................................... 4-13
Überprüfen und Dokumentieren der Parameter .......................................................... 4-14
Empfohlene Einstellungen ........................................................................4-15
5 Anwenderparameter................................................................5-1
Beschreibung der Anwenderparameter ...................................................... 5-2
Funktionen und Ebenen der digitalen Bedienkonsole .................................5-3
In der Betriebsart „Schnellstart“ verfügbare Anwenderparameter ................................ 5-4
II
Anwenderparameter-Tabellen .....................................................................5-7
Konfigurationseinstellungen: A ...................................................................................... 5-7
Anwendungsparameter: b ............................................................................................. 5-9
Tuning-Parameter: C ................................................................................................... 5-19
Page 4

Sollwertparameter: d ....................................................................................................5-25
Motorparameter: E .......................................................................................................5-30
Optionsparameter: F ....................................................................................................5-35
Klemmenkonfigurations-Parameter: H .........................................................................5-41
Schutzfunktions-Parameter: L .....................................................................................5-50
Besondere Einstellungen: N ........................................................................................5-58
Parameter für die digitale Bedienkonsole: o ................................................................5-60
Autotuning: T ...............................................................................................................5-63
Anzeigeparameter: U ...................................................................................................5-64
Werkseinstellungen, die sich bei einem Wechsel
der Regelbetriebsart (A1-02) ändern ...........................................................................5-70
Werkseinstellungen, die sich mit der Leistung
des Frequenzumrichters ändern (o2-04) .....................................................................5-72
Werkseinstellungen von Parametern, die sich mit der
Einstellung von C6-01 ändern .....................................................................................5-74
6 Parametereinstellungen nach Funktion ............................... 6-1
Anwendung und Überlasteinstellungen .......................................................6-2
Auswahl der Überlastbarkeit entsprechend der Anwendung .........................................6-2
Frequenzsollwert .........................................................................................6-7
Auswahl der Quelle für den Frequenzsollwert ...............................................................6-7
Betrieb mit Festdrehzahlen ..........................................................................................6-10
Methoden zur Eingabe des START-Befehls ..............................................6-12
Auswahl der Quelle des START-Befehls .....................................................................6-12
Stoppverfahren ..........................................................................................6-14
Auswahl des bei Eingabe des STOPP-Befehls verwendeten Stoppverfahrens .......... 6-14
DC-Bremsung ..............................................................................................................6-17
Nothalt .........................................................................................................................6-18
Beschleunigungs- und Verzögerungscharakteristika ................................6-19
Einstellen der Beschleunigungs- und Verzögerungszeiten .........................................6-19
Beschleunigen und Verzögern schwerer Lasten (Verweilzeitfunktion) ........................6-22
Verhinderung von Motorblockaden bei Beschleunigung
(Blockierschutzfunktion bei Beschleunigung) ..............................................................6-22
Verhinderung von Überspannungen während der Verzögerung ................................. 6-24
Einstellen von Frequenzsollwerten ............................................................6-26
Einstellen der analogen Frequenzsollwerte .................................................................6-26
Vermeiden von Resonanzfrequenzen (Sprungfrequenz-Funktion) .............................6-28
Drehzahlbegrenzung (Frequenzsollwert-Grenzwerte) ...............................6-30
Begrenzen der zulässigen Ausgangsfrequenz (Obergrenze) ......................................6-30
Begrenzen der zulässigen Ausgangsfrequenz (Untergrenze) .....................................6-30
Frequenzerkennung ..................................................................................6-31
Drehzahl-Übereinstimmungsfunktion ...........................................................................6-31
Verbesserung der Betriebsleistung ...........................................................6-33
Verringern der Drehzahlschwankungen des Motors
(Schlupfkompensationsfunktion) ..................................................................................6-33
Drehmomentkompensation für ausreichendes Drehmoment
beim Start und bei niedrigen Drehzahlen ....................................................................6-35
Automatische Drehzahlregelung (ASR): ......................................................................6-36
Schwingungskompensation .........................................................................................6-41
III
Page 5

Drehzahlstabilisierung (Automatischer Frequenzregler, AFR) .................................... 6-42
Maschinenschutz ......................................................................................6-43
Begrenzung des Motordrehmoments (Drehmoment-Grenzwertfunktion) ................... 6-43
Verhinderung von Motorblockaden während des Betriebs ..........................................6-45
Motor-Drehmomenterkennung .................................................................................... 6-46
Motorüberlastschutz ....................................................................................................6-48
Motorüberhitzungsschutz über PTC-Thermistoreingänge ........................................... 6-50
Sperren des Rückwärtslaufs und Ausgangsphasendrehung ...................................... 6-51
Automatischer Wiederanlauf .....................................................................6-52
Automatischer Neustart nach kurzzeitigem Netzausfall .............................................. 6-52
Drehzahlbestimmung .................................................................................................. 6-53
Fortsetzung des Betriebs mit konstanter Drehzahl
bei Verlust des Frequenzsollwerts .............................................................................. 6-57
Neustart nach kurzzeitigem Fehler (automatische Neustartfunktion) .......................... 6-58
Schutz des Frequenzumrichters ...............................................................6-59
Überhitzungsschutz bei eingebauten Bremswiderständen ......................................... 6-59
Schutz des Frequenzumrichters gegen Überhitzung .................................................. 6-60
Eingangsphasen-Ausfallschutz ................................................................................... 6-60
Ausgangsphasen-Ausfallschutz .................................................................................. 6-61
Schutz gegen Erdschluss ............................................................................................6-61
Kühllüftersteuerung ..................................................................................................... 6-61
Einstellen der Umgebungstemperatur ......................................................................... 6-62
OL2-Kennwerte bei niedrigen Drehzahlen .................................................................. 6-63
Eingangsklemmen-Funktionen ..................................................................6-64
Vorübergehendes Umschalten der Steuerung
zwischen digitaler Bedienkonsole und Steuerklemmen .............................................. 6-64
Sperren der Frequenzumrichterausgänge (Hardware-Endstufensperrung) ................ 6-64
Externe Überhitzungsvorwarnung (OH2) .................................................................... 6-65
Multifunktions-Analogeingang A2 aktiviert/deaktiviert ................................................. 6-65
Betriebsfreigabe .......................................................................................................... 6-66
Beschleunigung/Verzögerung unterbrechen ............................................................... 6-66
Erhöhen und Verringern von Frequenzsollwerten
mittels Multifunktions-Digitaleingängen (UP/DOWN) ..................................................6-67
Erhöhen und Verringern eines analogen Frequenzsollwerts
um eine feste Frequenz (±-Drehzahl) .......................................................................... 6-69
Erfassen und Halten des analogen Frequenzsollwerts ............................................... 6-71
Umschalten der Befehlsquelle auf eine Kommunikations-Optionskarte ...................... 6-72
Befehl für Vorwärts/Rückwärtslauf mit Jog-Frequenz (FJOG/RJOG) ......................... 6-72
Stoppen des Frequenzumrichters bei Fehlern an externen Geräten
(externe Fehlerfunktion) .............................................................................................. 6-73
Ausgangsklemmenfunktionen ................................................................... 6-74
Überwachungsparameter .......................................................................... 6-77
Verwendung der Multifunktions-Analogausgänge ....................................................... 6-77
Verwendung des Impulsausgangs .............................................................................. 6-78
Spezielle Funktionen .................................................................................6-80
MEMOBUS-Kommunikation ........................................................................................ 6-80
Verwenden der Zeitfunktion ........................................................................................ 6-95
PID-Regelung .............................................................................................................. 6-96
IV
Page 6

Energiesparfunktion ...................................................................................................6-106
Feldschwächung ........................................................................................................6-107
Beschleunigter Feldaufbau ........................................................................................6-108
Einstellen der Motorparameter für Motor 1 ................................................................6-108
Einstellen der U/f-Kennlinie 1 ....................................................................................6-110
Einstellen der Motorparameter für Motor 2 ................................................................6-116
Einstellen der U/f-Kennlinie für Motor 2 .....................................................................6-117
Drehmomentregelung ................................................................................................6-118
Lastabhängige Drehzahlanpassung ..........................................................................6-124
Positionierfunktion .....................................................................................................6-125
KEB-Funktion (Kinetic Energy Buffering) ...................................................................6-127
Bremsen mit hohem Schlupf (HSB, High Slip Braking) .............................................6-128
Funktionen der digitalen Bedienkonsole ..................................................6-130
Einstellen der Funktionen der digitalen Bedienkonsole .............................................6-130
Kopieren von Parametern ..........................................................................................6-132
Parameter-Schreibschutz ..........................................................................................6-136
Einstellen eines Passworts ........................................................................................6-136
Nur anwenderdefinierte Parameter anzeigen ............................................................6-137
Optionskarten ..........................................................................................6-138
Verwendung von Impulsgeber-Optionskarten ...........................................................6-138
Analoge Sollwertkarten ..............................................................................................6-141
Digitale Sollwertkarten ...............................................................................................6-141
7 Fehlersuche und Fehlerbehebung........................................ 7-1
Schutz- und Diagnosefunktionen .................................................................7-2
Fehlererkennung ............................................................................................................7-2
Alarmerkennung ..........................................................................................................7-11
Fehler bei der Programmierung durch den Anwender .................................................7-14
Auto-Tuning-Fehler ......................................................................................................7-17
Kopierfunktionsfehler der digitalen Bedienkonsole ......................................................7-19
Fehlersuche und Fehlerbehebung .............................................................7-20
Ein Parameter kann nicht eingestellt werden ..............................................................7-20
Der Motor funktioniert nicht ordnungsgemäß ..............................................................7-21
Der Motor dreht in umgekehrter Richtung. ..................................................................7-22
Der Motor blockiert oder beschleunigt langsam. .........................................................7-22
Die Motordrehzahl überschreitet den Sollwert. ............................................................7-23
Bei Vektorregelung ohne Rückführung ist die Regelgenauigkeit
bei über der Nenndrehzahl liegenden Drehzahlen gering. ..........................................7-23
Die Motorverzögerung ist langsam. .............................................................................7-23
Der Motor überhitzt. .....................................................................................................7-24
Peripheriegeräte, wie beispielsweise SPS, werden durch
den startenden oder laufenden Frequenzumrichter beeinflusst. .................................7-24
Der Erdschluss-Schutzschalter löst während des Frequenzumrichterbetriebs aus. .... 7-24
Es treten mechanische Schwingungen auf. .................................................................7-25
Der Motor dreht auch bei Abschaltung des Frequenzumrichterausgangs. ..................7-26
Die Ausgangsfrequenz steigt nicht auf den Frequenzsollwert. .................................... 7-26
V
Page 7

8 Wartung und Inspektion .........................................................8-1
Wartung und Inspektion ..............................................................................8-2
Regelmäßige Inspektion ................................................................................................ 8-2
Regelmäßige Wartung von Komponenten .................................................................... 8-3
Austausch des Kühllüfters ............................................................................................. 8-4
Abnehmen und Anbringen der Klemmenkarte .............................................................. 8-6
9 Technische Daten....................................................................9-1
Technische Daten der Standard-Frequenzumrichter ..................................9-2
Technische Daten nach Modell ..................................................................................... 9-2
Gemeinsame technische Daten .................................................................................... 9-4
10 Anhang ...................................................................................10-1
Sicherheitshinweise zum Einsatz von Frequenzumrichtern ......................10-2
Auswahl .......................................................................................................................10-2
Installation ...................................................................................................................10-3
Einstellungen ............................................................................................................... 10-3
Handhabung ................................................................................................................10-4
Sicherheitshinweise zum Einsatz von Motoren ......................................... 10-5
Verwendung des Frequenzumrichters für einen vorhandenen Standardmotor ........... 10-5
Verwendung des Frequenzumrichters für spezielle Motoren ...................................... 10-5
Kraftübertragungsmechanismen (Getriebe, Riemen- und Kettentransmissionen) ...... 10-6
Anwenderkonstanten ................................................................................10-7
VI
Page 8
Warnhinweise
Solange die Versorgungsspannung eingeschaltet ist, dürfen weder Kabel an- oder abgeklemmt
werden, noch dürfen Signalprüfungen durchgeführt werden.
Der Zwischenkreis des Varispeed F7 bleibt auch dann geladen, wenn die Spannungsversorgung
unterbrochen wurde. Trennen Sie den Frequenzumrichter vor Ausführung von Wartungsarbeiten
von der Spannungsversorgung, um einen elektrischen Schlag zu vermeiden. Warten Sie
anschließend mindestens 5 Minuten, bis alle LEDs erloschen sind.
Führen Sie an keinem Teil des Frequenzumrichters Spannungsfestigkeitstests durch. Er enthält
Halbleiter, die für derart hohe Spannungen nicht ausgelegt sind.
Die digitale Bedienkonsole darf nicht bei eingeschalteter Spannungsversorgung abgebaut werden.
Berühren Sie keine Platinen, wenn der Frequenzumrichter an die Spannungsversorgung
angeschlossen ist.
Schließen Sie niemals LC/RC-Entstörfilter, Kondensatoren oder Überspannungsschutzgeräte an den Ein- oder
Ausgang des Frequenzumrichters an, die nicht speziell für den Frequenzumrichter vorgesehen sind.
Vorsicht
Um unnötige Überstromfehler usw. zu vermeiden, müssen die Signalkontakte aller Schütze oder
Schalter, die zwischen Frequenzumrichter und Motor geschaltet sind, in die Steuerungslogik
(z. B. Endstufensperre) eingebunden sein.
Das ist zwingend erforderlich!
Dieses Handbuch muss vor Anschluss und Inbetriebnahme des Frequenzumrichters sorgfältig
durchgelesen werden. Alle Sicherheitshinweise und Anleitungen müssen beachtet werden.
Der Frequenzumrichter muss gemäß Installationsanleitungen in diesem Handbuch mit geeigneten
Netzfiltern betrieben werden. Zudem müssen alle Abdeckungen geschlossen und alle Klemmen
abgedeckt sein.
Nur dann ist ein angemessener Schutz gesichert. Geräte mit sichtbaren Beschädigungen oder
fehlenden Teilen dürfen nicht angeschlossen oder in Betrieb genommen werden. Der Betreiber
der Geräte ist für alle Verletzungen oder Geräteschäden, die aus Nichtbeachtung der Warnhinweise
in diesem Handbuch entstehen, verantwortlich.
VII
Page 9

Sicherheits- und Anwendungshinweise
Allgemein
Lesen Sie diese Sicherheits- und Anwendungshinweise vor Installation und Inbetriebnahme dieses
Frequenzumrichters. Lesen Sie auch alle Warnhinweise, die auf dem Frequenzumrichter angebracht sind, und
achten Sie darauf, dass diese nicht beschädigt oder entfernt werden.
Während des Betriebs können unter Spannung stehende oder heiße Bauteile zugänglich sein. Durch Entfernen
von Verkleidungsteilen, der digitalen Bedienkonsole oder Klemmenabdeckungen besteht im Falle einer
fehlerhaften Installation oder Bedienung das Risiko von ernsthaften Verletzungen. Durch die Tatsache, dass
Frequenzumrichter drehende mechanische Teile von Maschinen steuern, können weitere Gefahren entstehen.
Den Anleitungen in diesem Handbuch muss Folge geleistet werden. Installation, Bedienung oder Wartung
darf nur durch qualifiziertes Personal erfolgen. Aus Sicherheitsgründen sind als qualifizierte Mitarbeiter nur
solche anzusehen, die mit der Installation, dem Starten, der Bedienung und der Wartung von
Frequenzumrichtern vertraut sind und für diese Arbeiten entsprechende Qualifikationen besitzen. Ein sicherer
Betrieb dieser Geräte ist nur möglich, wenn diese auch für den vorgesehenen Zweck eingesetzt werden.
Der Zwischenkreis kann nach Abschalten der Versorgungsspannung des Frequenzumrichters noch ca.
5 Minuten lang unter Spannung stehen. Aus diesem Grund muss diese Zeitspanne vor dem Öffnen von
Geräteabdeckungen abgewartet werden. Alle Klemmen des Hauptstromkreises können noch gefährliche
Spannungen führen.
Kinder und andere, nicht autorisierte Personen dürfen keinen Zugang zu Frequenzumrichtern haben.
Bewahren Sie diese Sicherheitshinweise und -anleitungen griffbereit auf, und lassen Sie sie allen Personen
zukommen, die Zugang zu den Frequenzumrichtern haben.
Vorgesehener Verwendungszweck
Frequenzumrichter sind für den Einbau in elektrische Systeme oder Maschinen gedacht.
Ihr Einbau in Maschinen oder Systeme muss folgenden Produktstandards der Niederspannungsrichtlinie
entsprechen:
EN 50178, 1997-10 Ausrüstung von Starkstromanlagen mit elektronischen Betriebsmitteln
EN 60204-1, 1997-12 Sicherheit von Maschinen - Elektrische Ausrüstung von Maschinen
Teil 1: Allgemeine Anforderungen (IEC 60204-1:1997)
Bitte beachten Sie: Enthält Ergänzungen von September 1998
EN 61010-1, A2, 1995 Sicherheitsbestimmungen für elektrische Mess-, Steuer-, Regel- und Laborgeräte
(IEC 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modifiziert)
Die CE-Kennzeichnung erfolgt gemäß EN 50178 bei Verwendung der in diesem Handbuch spezifizierten
Netzfilter und dem Befolgen der entsprechenden Installationsanleitungen.
Transport und Lagerung
VIII
Die Anleitungen für Transport, Lagerung und richtige Handhabung müssen unter Beachtung der technischen
Daten befolgt werden.
Installation
Installieren und kühlen Sie Frequenzumrichter wie in der Dokumentation spezifiziert. Die Kühlluft muss in
der angegebenen Richtung strömen. Der Frequenzumrichter darf dementsprechend nur in der spezifizierten
Position (z. B. aufrecht) betrieben werden. Halten Sie die angegebenen Freiräume ein. Schützen Sie die
Frequenzumrichter gegen unzulässige mechanische Belastungen. Bauteile dürfen nicht verbogen werden.
Isolationsabstände dürfen nicht geändert werden. Berühren Sie keine elektronischen Bauteile oder Kontakte,
um Beschädigungen durch statische Elektrizität zu vermeiden.
Page 10

Elektrischer Anschluss
Führen Sie jegliche Arbeiten an unter Spannung stehenden Geräten gemäß der gültigen Sicherheits- und
Unfallverhütungsvorschriften durch. Führen Sie die elektrische Installation in Übereinstimmung mit den
geltenden Vorschriften durch. Insbesondere müssen Sie die Anweisungen zur Sicherstellung der
elektromagnetischen Verträglichkeit (EMV), z. B. Abschirmung, Erdung, Filteranordnung und Verlegung von
Kabeln, beachten. Das gilt auch für Geräte, die das CE-Zeichen tragen. Es liegt in der Verantwortung des
Herstellers von System oder Maschine, die Konformität mit den EMV-Richtlinien zu gewährleisten.
Wenden Sie sich an Ihren Lieferanten oder die OYMC-Vertretung, wenn Fehlerstrom-Schutzschalter in
Verbindung mit Frequenzumrichtern Verwendung finden.
Für bestimmte Systeme kann es erforderlich sein, gemäß der gültigen Sicherheits- und Unfallverhütungsvorschriften zusätzliche Überwachungs- und Sicherheitseinrichtungen zu verwenden. An der Hardware des
Frequenzumrichters dürfen keine Änderungen vorgenommen werden.
Hinweise
Die Frequenzumrichter VARISPEED F7 sind gemäß CE, UL und c-UL zertifiziert.
IX
Page 11

Elektromagnetische Verträglichkeit
Einführung
Dieses Kapitel wurde erstellt, um Systemhersteller, die OYMC-Frequenzumrichter verwenden, bei der
Konstruktion und Installation von elektrischen Schaltgeräten zu unterstützen. Zudem werden die zur
Einhaltung der EMV-Richtlinie erforderlichen Maßnahmen beschrieben. Die Anleitungen zur Installation und
Verdrahtung in diesem Handbuch müssen deshalb befolgt werden.
Unsere Produkte sind durch autorisierte Stellen unter Anwendung der nachstehend aufgelisteten Normen
getestet.
Produktnorm: EN 61800-3:1996
EN 61800-3; A11:2000
Maßnahmen zur Sicherstellung der Konformität von OYMC-Frequenzumrichtern
mit der EMV-Richtlinie
OYMC-Frequenzumrichter müssen nicht unbedingt in einem Schaltschrank eingebaut werden.
Detaillierte Anleitungen für alle möglichen Installationsarten können nicht gegeben werden. Dieses Handbuch
muss daher auf allgemeine Leitlinien begrenzt bleiben.
Alle elektrischen Geräte produzieren Funkstörungen und leitungsgeführte Störungen mit unterschiedlichen
Frequenzen. Die Kabel leiten diese Störungen wie eine Antenne an die Umgebung weiter.
Der Anschluss eines elektrischen Geräts (z. B. Frequenzumrichter) ohne Netzfilter an ein Stromnetz kann
deshalb bewirken, dass HF- oder NF-Störungen in das Stromnetz gelangen.
Die grundlegenden Gegenmaßnahmen sind die räumliche Trennung der Kabel von Steuer- und
Leistungskomponenten, ordnungsgemäße Erdung sowie die Abschirmung von Kabeln.
Für eine Niedrigimpedanz-Erdung von HF-Störungen ist eine große Kontaktfläche erforderlich. Die
Verwendung von Erdungsbändern anstelle von Kabeln wird ausdrücklich empfohlen.
Des weiteren müssen Kabelabschirmungen mit entsprechenden Erdungsschellen verbunden werden.
Verlegen von Kabeln
Maßnahmen gegen leitungsbedingte Störungen:
Netzfilter und Frequenzumrichter müssen auf die selbe Metallplatte montiert werden. Montieren Sie die
beiden Bauteile so nah wie möglich nebeneinander, und halten Sie die Kabel so kurz wie möglich.
Verwenden Sie ein Netzkabel mit gut geerdeter Abschirmung. Verwenden Sie ein abgeschirmtes Motorkabel.
Ordnen Sie alle Erdungen so an, dass die Fläche des Kabelendes, die mit der Erdungsklemme in Kontakt ist
(z. B. Metallplatte), möglichst groß ist.
Abgeschirmtes Kabel:
• Verwenden Sie ein Kabel mit geflochtener Abschirmung.
• Erden Sie die größtmögliche Fläche der Abschirmung. Es ist ratsam, die Abschirmung durch Verbinden
des Kabels mit der Erdungsplatte durch Metallschellen (siehe nachfolgende Abbildung) zu erden.
X
Page 12
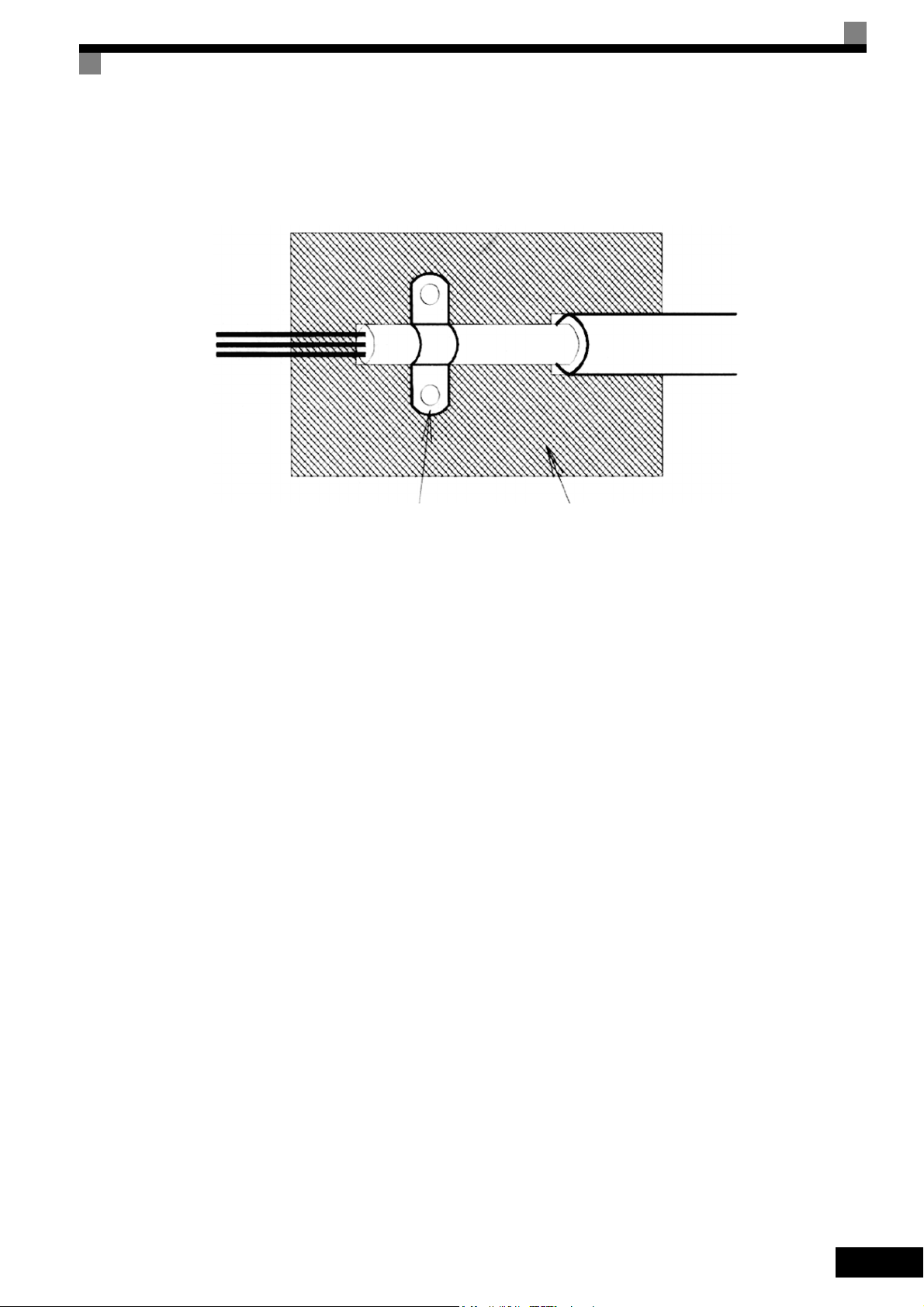
Erdungsschelle Erdungsplatte
Die Erdungsflächen müssen aus hoch leitfähigem, blankem Metall bestehen. Entfernen Sie Lack- und
Farbbeschichtungen.
• Erden Sie die Kabelabschirmungen an beiden Enden.
• Erden Sie den Motor der Maschine.
Beachten Sie die Angaben der Broschüre EZZ006543 „Making OYMC Inverter Products Conform with the
EMC Directive“. Sie erhalten diese Broschüre von Ihrer Omron Niederlassung.
XI
Page 13
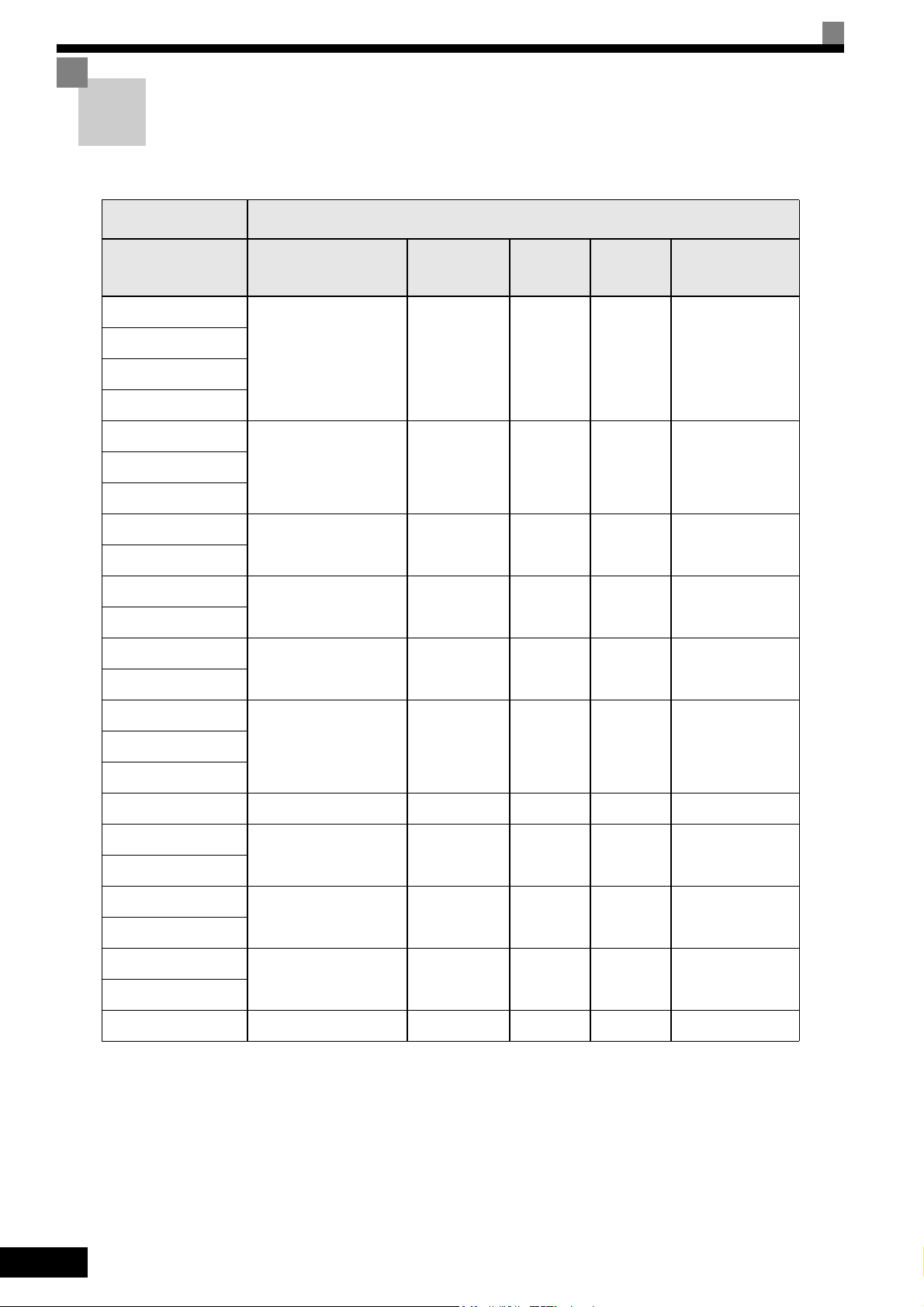
Netzfilter
Empfohlene Netzfilter für Varispeed F7
Frequenz-
umrichtermodell
Varispeed F7
CIMR-F7Z40P4
CIMR-F7Z40P7
CIMR-F7Z41P5
CIMR-F7Z42P2
CIMR-F7Z43P7
CIMR-F7Z45P5
CIMR-F7Z47P5
CIMR-F7Z4011
CIMR-F7Z4015
CIMR-F7Z4018
CIMR-F7Z4022
CIMR-F7Z4030
Produkt-
bezeichnung
3G3RV-PFI3010-SE
3G3RV-PFI3018-SE
3G3RV-PFI3035-SE
3G3RV-PFI3060-SE
3G3RV-PFI3070-SE
Klassifizie-
rung nach
EN 55011*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
A, 100 m
A, 100 m
Netzfilter
Strom
(A)
10 1,1 141 x 46 x 330
18 1,3 141 x 46 x 330CIMR-F7Z44P0
35 2,1 206 x 50 x 355
60 4,0 236 x 65 x 408
70 3,4 80x185x329
Gewicht
(kg)
Abmessungen
BxTxH
CIMR-F7Z4037
3G3RV-PFI3130-SE
CIMR-F7Z4055
CIMR-F7Z4075 3G3RV-PFI3170-SE A, 100 m 170 6,0 120 x 170 x 451
CIMR-F7Z4090
3G3RV-PFI3200-SE
CIMR-F7Z4110
CIMR-F7Z4132
3G3RV-PFI3400-SE
CIMR-F7Z4160
CIMR-F7Z4185
3G3RV-PFI3600-SE
CIMR-F7Z4220
CIMR-F7Z4300 3G3RV-PFI3800-SE A, 100 m 800 31,0 300 x 160 x 716
* Klasse A, 100 m
Erlaubte Emissionen von elektrischen Steuersystemen für kommerzielle Umgebungen und Beleuchtung
(EN61800-3, A11) (allgemeine Verfügbarkeit, 1. Umgebung)
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
A, 100 m
130 4,7 90 x 180 x 366CIMR-F7Z4045
250 11,0 130 x 240 x 610
400 18,5 300 x 160 x 610
600 11,0 260 x 135 x 386
XII
Page 14
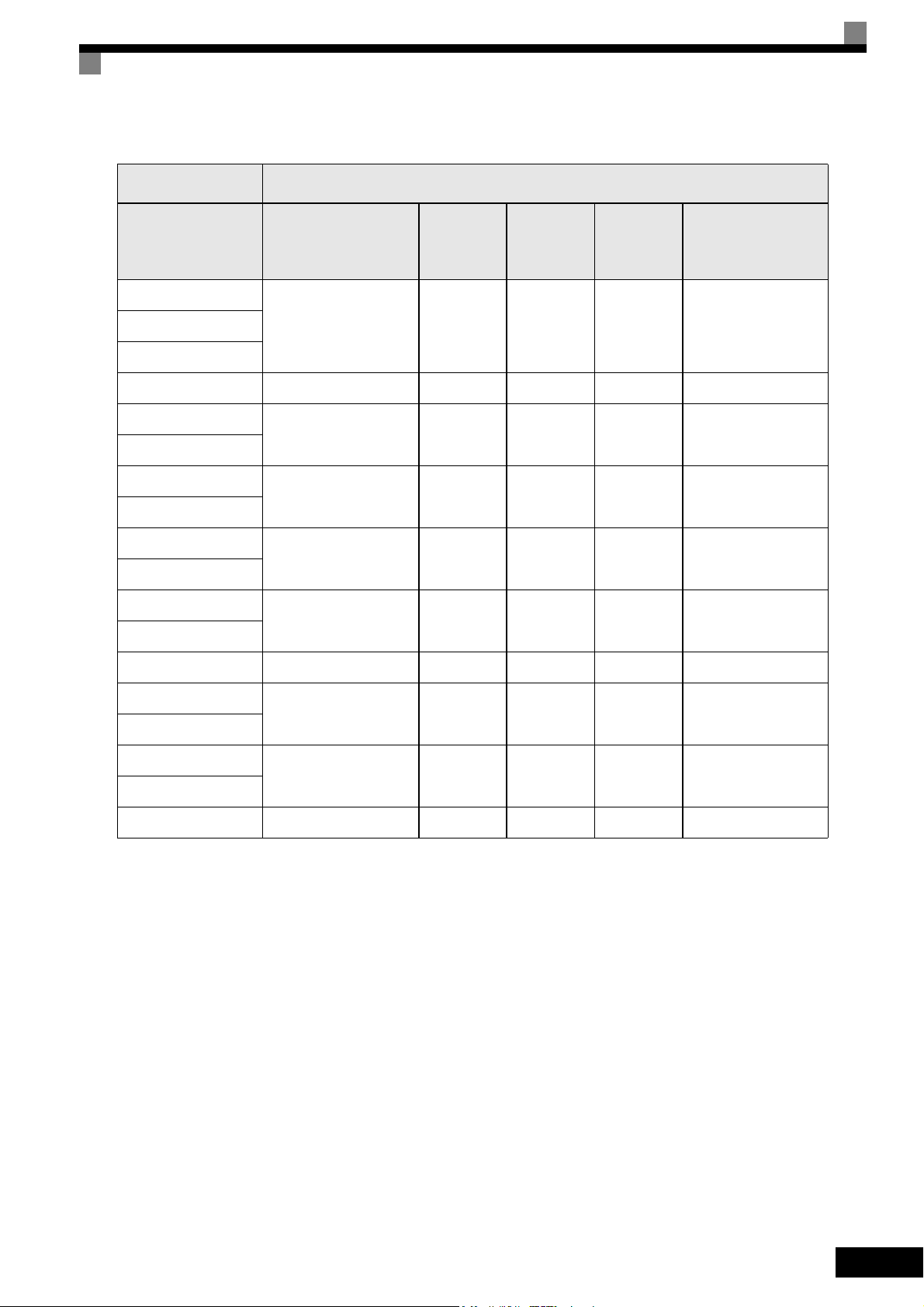
Frequenzumrich-
termodell
Varispeed F7
Produkt-
bezeichnung
Klassifi-
zierung
nach
EN 55011
Netzfilter
Strom
(A)
Gewicht
(kg)
Abmessungen
BxTxH
CIMR-F7Z20P4
3G3RV-PFI3010-SE
CIMR-F7Z21P5
CIMR-F7Z22P2 3G3RV-PFI3018-SE B, 25 m* 18 1,3 141 x 46 x 330
CIMR-F7Z23P7
3G3RV-PFI2035-SE
CIMR-F7Z25P5
CIMR-F7Z27P5
3G3RV-PFI2060-SE
CIMR-F7Z2011
CIMR-F7Z2015
3G3RV-PFI2100-SE
CIMR-F7Z2018
CIMR-F7Z2022
3G3RV-PFI2130-SE
CIMR-F7Z2030
CIMR-F7Z2037 3G3RV-PFI2160-SE A, 100 m 160 6,0 120 x 170 x 451
CIMR-F7Z2045
3G3RV-PFI2200-SE
CIMR-F7Z2055
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
B, 25 m*
A, 100 m
A, 100 m
A, 100 m
A, 100 m
10 1,1 141 x 45 x 330CIMR-F7Z20P7
35 1,4 141 x 46 x 330
60 3,0 206 x 60 x 355
100 4,9 236x80x408
130 4,3 90x180x366
200 11,0 130 x 240 x 610
CIMR-F7Z2075
3G3RV-PFI3400-SE
CIMR-F7Z2090
CIMR-F7Z2110 3G3RV-PFI3600-SE A, 100 m 600 11,0 260 x 135 x 386
* Klasse A, 100 m
A, 100 m
400 18,5 300 x 160 x 564
A, 100 m
XIII
Page 15
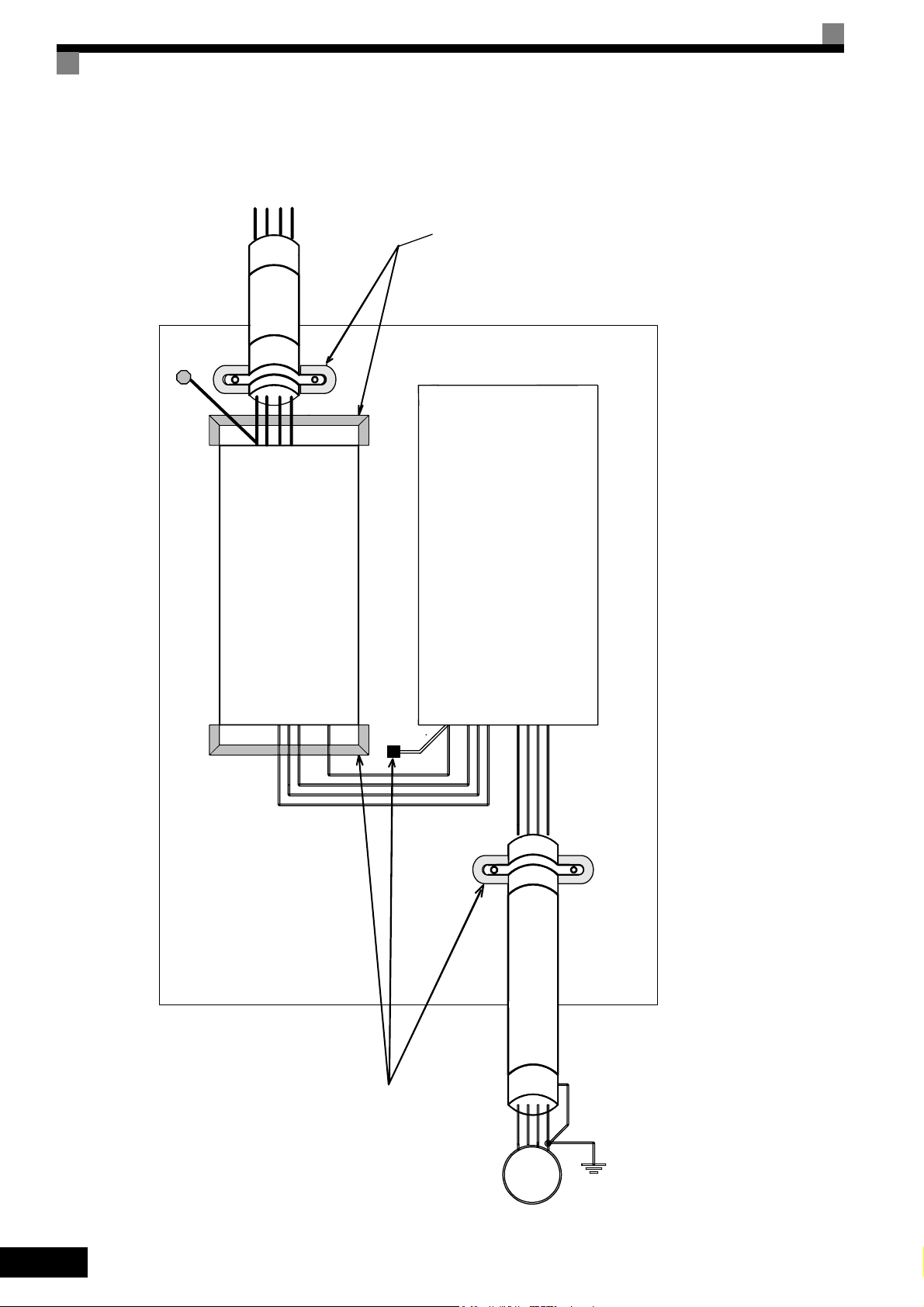
Installation von Frequenzumrichtern und EMV-Filtern
L1 L3
Schutzerdung
Schutz-
erdung
L2
Erdungspunkte
(Lack vollständig
entfernen)
Netz
Frequenz-
umrichter
Filter
Last
Kabel so kurz wie
möglich halten
Metallplatte
(Lack vollständig
Schutz-
erdung
Erdungspunkte
entfernen)
L1L2L3
Schutz-
U
W
erdung
V
Abgeschirmtes
Motorkabel
XIV
M
3~
Page 16

Eingetragene Marken
In diesem Handbuch werden die folgenden eingetragenen Marken verwendet.
• DeviceNet ist eine eingetragene Marke der ODVA (Open DeviceNet Vendors Association, Inc.).
• InterBus ist eine eingetragene Marke der Phoenix Contact Co.
• Profibus ist eine eingetragene Marke der Siemens AG.
XV
Page 17

XVI
Page 18
1
Handhabung von
Frequenzumrichtern
In diesem Kapitel werden die Prüfungen erläutert, die bei Erhalt
oder Installation eines Frequenzumrichters erforderlich sind.
Einführung...............................................................................1-2
Überprüfungen bei Anlieferung ...............................................1-4
Außen- und Einbauabmessungen ..........................................1-8
Überprüfung des Installationsortes .......................................1-11
Ausrichtung und Freiräume bei der Installation ....................1-12
Abnehmen und Anbringen der Klemmenabdeckung ............1-13
Abnehmen/Anbringen der digitalen Bedienkonsole
und der Frontabdeckung.......................................................1-14
Page 19
1
Einführung
Einsatzmöglichkeiten
Der Varispeed F7 eignet sich ideal für folgende Anwendungen:
• Lüfter-, Gebläse- und Pumpen
• Förderbänder, Schieber, Werkzeugmaschinen usw.
Im Interesse einer optimalen Nutzung des Frequenzumrichters müssen dessen Einstellungen an die
Anforderungen der jeweiligen Anwendung angepasst werden (siehe Kapitel 4, Testbetrieb).
Modelle
Die Varispeed F7-Serie umfasst Frequenzumrichter in zwei Spannungsklassen: 200 V und 400 V. Die
maximalen Motorleistungen reichen von 0,55 bis 300 kW (42 Modelle).
Tabelle 1.1 Varispeed F7-Modelle
Spezifikationen
Span-
nungs-
klasse
200-V-
Klasse
Max.
Motor-
leistung
(kW)
0,55 1,2 CIMR-F7Z20P4
0,75 1,6 CIMR-F7Z20P7 20P71
1,5 2,7 CIMR-F7Z21P5 21P51
2,2 3,7 CIMR-F7Z22P2 22P21
3,7 5,7 CIMR-F7Z23P7 23P71
5,5 8,8 CIMR-F7Z25P5 25P51
7,5 12 CIMR-F7Z27P5 27P51
11 17 CIMR-F7Z2011 20111
15 22 CIMR-F7Z2015 20151
18,5 27 CIMR-F7Z2018 20181
22 32 CIMR-F7Z2022 20220 20221
30 44 CIMR-F7Z2030 20300 20301
37 55 CIMR-F7Z2037 20370 20371
45 69 CIMR-F7Z2045 20450 20451
55 82 CIMR-F7Z2055 20550 20551
75 110 CIMR-F7Z2075 20750 20751
90 130 CIMR-F7Z2090 20900 –
110 160 CIMR-F7Z2110 21100 –
Aus-
gangs-
leistung
(kVA)
Varispeed F7
Modellnummer
des Grundmodells
(Spezifizieren Sie das Modell bei Bestellung
immer anhand der Schutzklasse)
Offene Bauweise
(IEC IP00)
CIMR-F7Z
Entfernen Sie die obere und
untere Abdeckung von der
Ausführung in geschlossener
Bauweise zur Wandmontage.
Geschlossene Bauweise
zur Wandmontage
(NEMA 1 - IEC IP20)
CIMR-F7Z
20P41
1-2
Page 20
Span-
nungs-
klasse
400-V-
Klasse
Spezifikationen
Max.
Motor-
leistung
(kW)
0,55 1,4 CIMR-F7Z40P4
0,75 1,6 CIMR-F7Z40P7 40P71
1,5 2,8 CIMR-F7Z41P5 41P51
2,2 4,0 CIMR-F7Z42P2 42P21
3,7 5,8 CIMR-F7Z43P7 43P71
4,0 6,6 CIMR-F7Z44P0 44P01
5,5 9,5 CIMR-F7Z45P5 45P51
7,5 13 CIMR-F7Z47P5 47P51
11 18 CIMR-F7Z4011 40111
15 24 CIMR-F7Z4015 40151
18,5 30 CIMR-F7Z4018 40181
22 34 CIMR-F7Z4022 40220 40221
30 46 CIMR-F7Z4030 40300 40301
37 57 CIMR-F7Z4037 40370 40371
45 69 CIMR-F7Z4045 40450 40451
55 85 CIMR-F7Z4055 40550 40551
75 110 CIMR-F7Z4075 40750 40751
90 140 CIMR-F7Z4090 40900 40901
110 160 CIMR-F7Z4110 41100 41101
132 200 CIMR-F7Z4132 41320 41321
160 230 CIMR-F7Z4160 41600 41601
185 280 CIMR-F7Z4185 41850 –
220 390 CIMR-F7Z4220 42200 –
300 510 CIMR-F7Z4300 43000 –
Aus-
gangs-
leistung
(kVA)
Varispeed F7
Modellnummer
des Grundmodells
(Spezifizieren Sie das Modell bei Bestellung
immer anhand der Schutzklasse)
Offene Bauweise
(IEC IP00)
CIMR-F7Z
Entfernen Sie die obere und
untere Abdeckung von der
Ausführung in geschlossener
Bauweise zur Wandmontage.
Geschlossene Bauweise
zur Wandmontage
(NEMA 1 - IEC IP20)
CIMR-F7Z
40P41
1
1-3
Page 21
1
Überprüfungen bei Anlieferung
Prüfungen
Prüfen Sie sofort bei Erhalt des Frequenzumrichters folgende Punkte:
Überprüfung Vorgehensweise
Wurde das richtige
Frequenzumrichtermodell geliefert?
Ist der Frequenzumrichter irgendwie
beschädigt?
Sind Schrauben oder andere Bauteile
lose?
Wenn Sie bei den oben genannten Punkten Unregelmäßigkeiten finden, teilen Sie dies sofort Ihrem Händler
oder Ihrer OYMC-Vertretung mit.
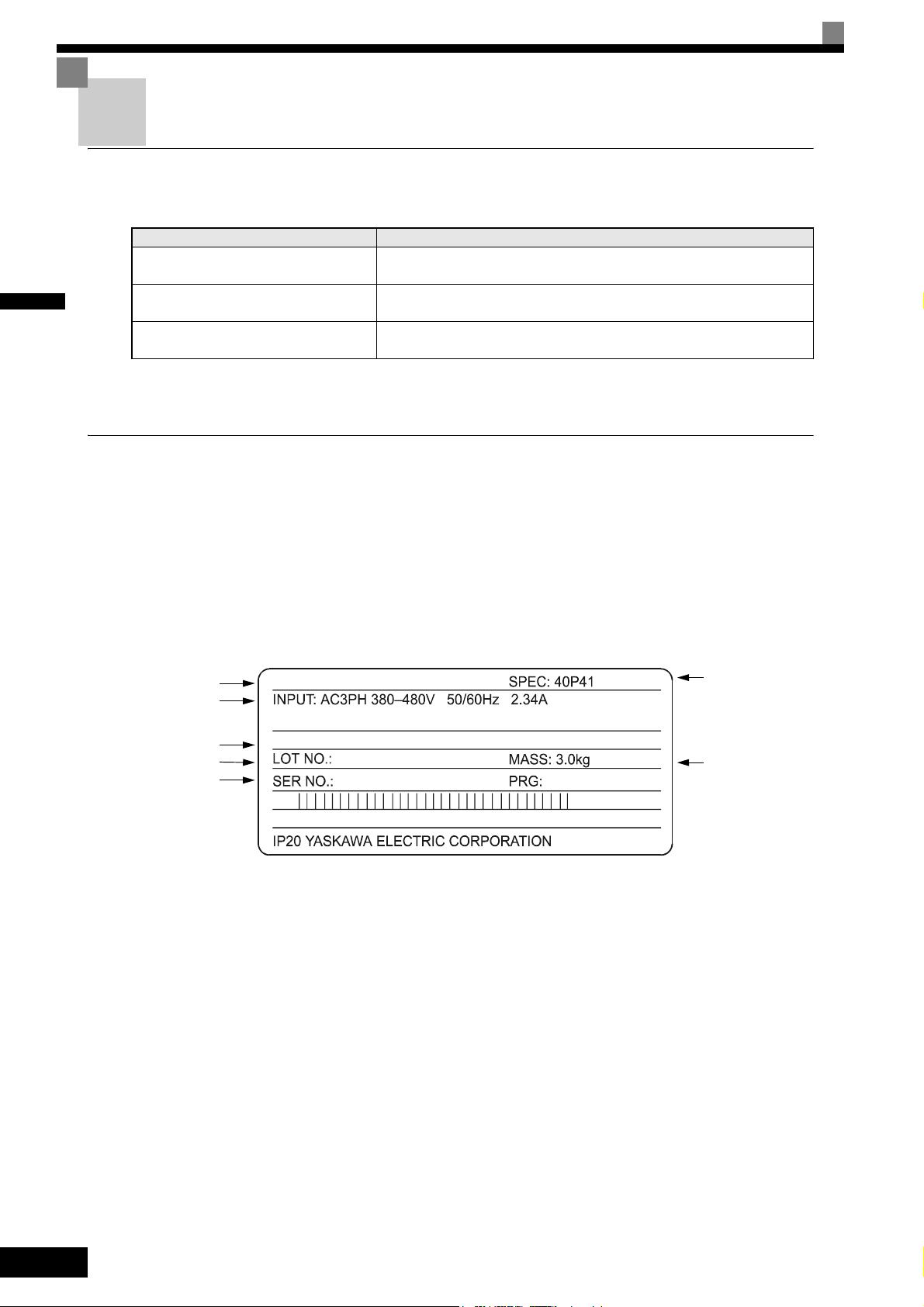
Informationen zum Typenschild
An der Seite jedes Frequenzumrichters befindet sich ein Typenschild. Das Typenschild enthält Informationen
zu Modellnummer, Spezifikationen, Lot-Nr., Seriennummer und weitere Informationen über den
Frequenzumrichter.
Prüfen Sie die Modellnummer auf dem Typenschild an der Seite des
Frequenzumrichters.
Prüfen Sie das gesamte Gehäuse des Frequenzumrichters, um Kratzer
oder sonstige Transportschäden zu entdecken.
Verwenden Sie einen Schraubendreher oder andere Werkzeuge, um alle
Schrauben und Bauteile auf festen Sitz zu prüfen.
Beispiel-Typenschild
Das folgende Typenschild ist ein Beispiel eines Standard-Frequenzumrichters für den europäischen Markt:
Dreiphasig, 400 V AC, 0,55 kW, NEMA 1 - IEC IP20
Frequenzumrichtermodell
Eingangsspezifikationen
Ausgangsspezifikationen
Lot-Nummer
Seriennummer
MODEL: CIMR-F7Z40P4
OUTPUT: AC3PH 0-480V 0-400Hz 1.8A 1.4kVA
Abb. 1.1 Typenschild
Frequenzumrichterausführung
Gewicht
1-4
Page 22
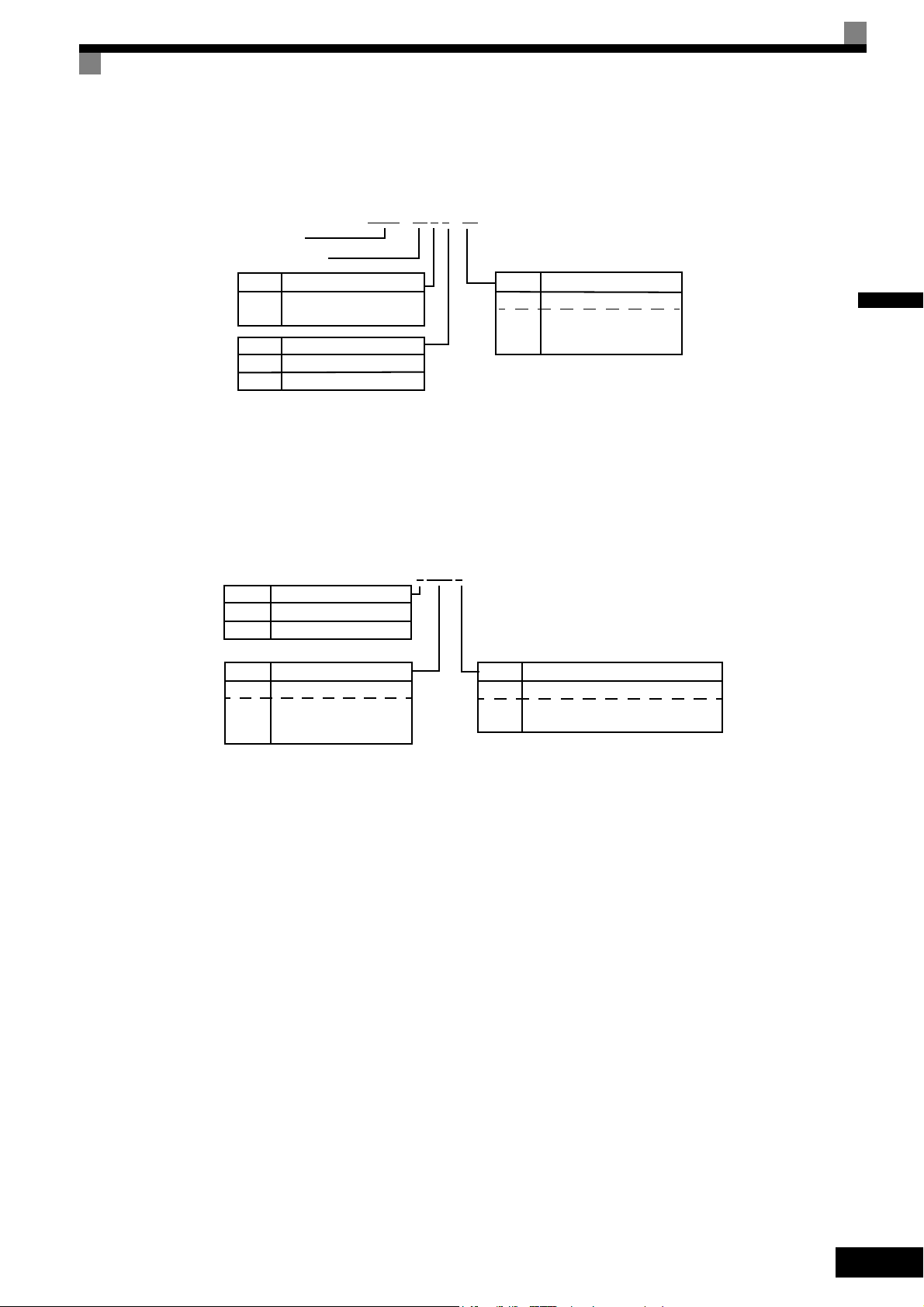
Frequenzumrichter-Modellnummern
Die Modellnummer des Frequenzumrichters auf dem Typenschild gibt die Spezifikation, die Spannungsklasse
sowie die maximale Motorleistung des Frequenzumrichters in einem alphanumerischen Code an.
Frequenzumrichter
Varispeed F7
Code
Z
Code
2
4
Spezifikation
OYMC-Standardmodell für
den europäischen Markt
Spannungsklasse
AC-Eingang, 3-phasig, 200 V
AC-Eingang, 3-phasig, 400 V
CIMR – F7 Z 2 0 P4
bis
300
Max. Motorleistung
0,55 kW
0,75 kW
300 kW
Code
0P4
0P7
„P“ steht für den Dezimalpunkt.
Abb. 1.2 Frequenzumrichter-Modellnummern
bis
Frequenzumrichter-Ausführungen
Die Frequenzumrichter-Ausführung („SPEC“) auf dem Typenschild enthält Angaben zu Spannungsklasse,
maximaler Motorleistung, Schutzklasse und Revisionsstand des Frequenzumrichters als alphanumerischen
Code.
2 0P 4 1
Code
2
4
Spannungsklasse
AC-Eingang, 3-phasig, 200 V
AC-Eingang, 3-phasig, 400 V
1
0P4
0P7
bis
300
Max. Motorleistung
0,55 kW
0,75 kW
bis
300 kW
Code
„P“ steht für den Dezimalpunkt.
Abb. 1.3 Frequenzumrichter-Ausführungen
Code
0
Geschlossene Bauweise zur Wand-
1
montage (NEMA 1 - IEC IP20)
Schutzklasse
Offene Bauweise (IP00)
1-5
Page 23
1
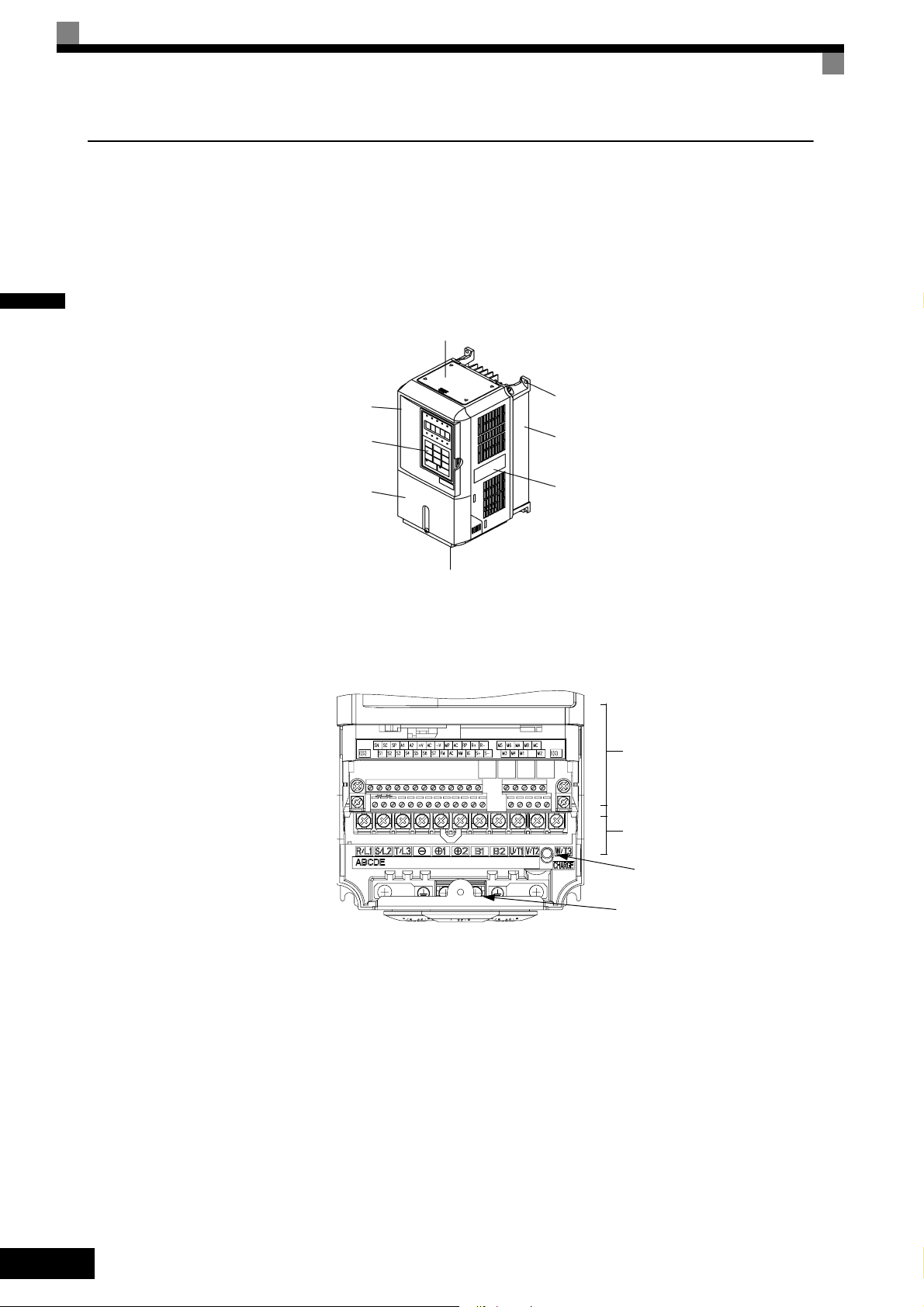
Bezeichnungen der Komponenten
Frequenzumrichter mit bis zu 18,5 kW
Das äußere Erscheinungsbild und die Bezeichnungen der Komponenten des Frequenzumrichters sind in
Abb. 1.4 gezeigt. Abb. 1.5 zeigt den Frequenzumrichter mit abgenommener Klemmenabdeckung.
Obere Schutzabdeckung (nur bei den Ausführungen in geschlossener
Bauweise zur Wandmontage (NEMA 1 - IEC IP20))
Frontabdeckung
Digitale Bedienkonsole
Klemmenabdeckung
Untere Schutzabdeckung
Abb. 1.4 Produktansicht des Frequenzumrichters (bis zu 18,5 kW)
Befestigungsbohrung
Druckgussgehäuse
Typenschild
Steuerklemmen
Leistungsklemmen
1-6
Ladungsanzeige (CHARGE)
Erdungsklemme
Abb. 1.5 Klemmenanordnung (bis zu 18,5 kW)
Page 24
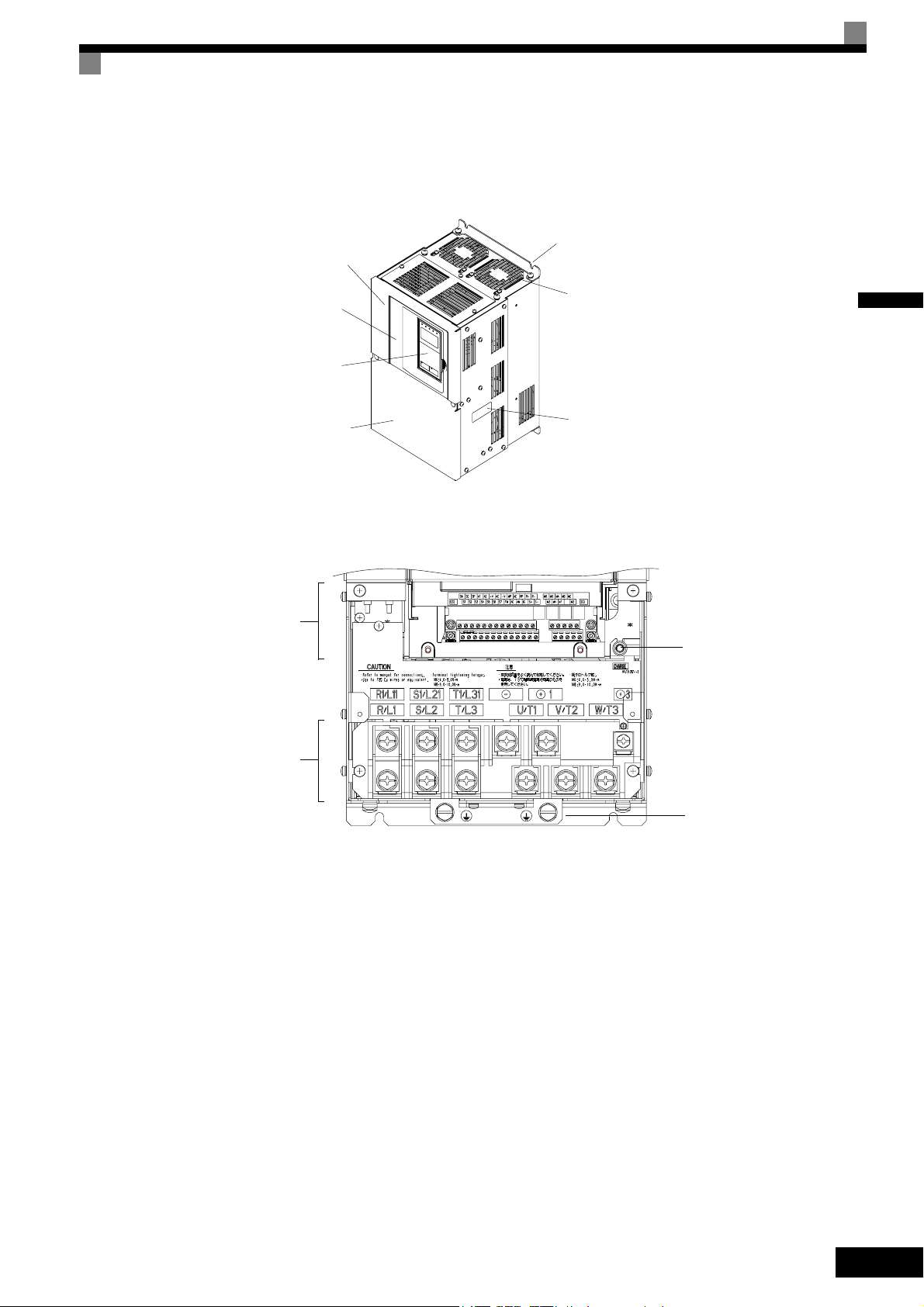
Frequenzumrichter ab 22 kW
Abb. 1.6 zeigt das äußere Erscheinungsbild und die Bezeichnungen der Komponenten des
Frequenzumrichters. Abb. 1.7 zeigt den Frequenzumrichter mit abgenommener Klemmenabdeckung.
Frequenzumrichter-
abdeckung
Frontabdeckung
Digitale Bedienkonsole
Klemmenabdeckung
Abb. 1.6 Produktansicht des Frequenzumrichters (ab 22 kW)
Steuerklemmen
Befestigungsbohrungen
1
Kühllüfter
Typenschild
Ladungsanzeige
(CHARGE)
Leistungsklemmen
Erdungsklemme
Abb. 1.7 Klemmenanordnung (ab 22 kW)
1-7
Page 25
1
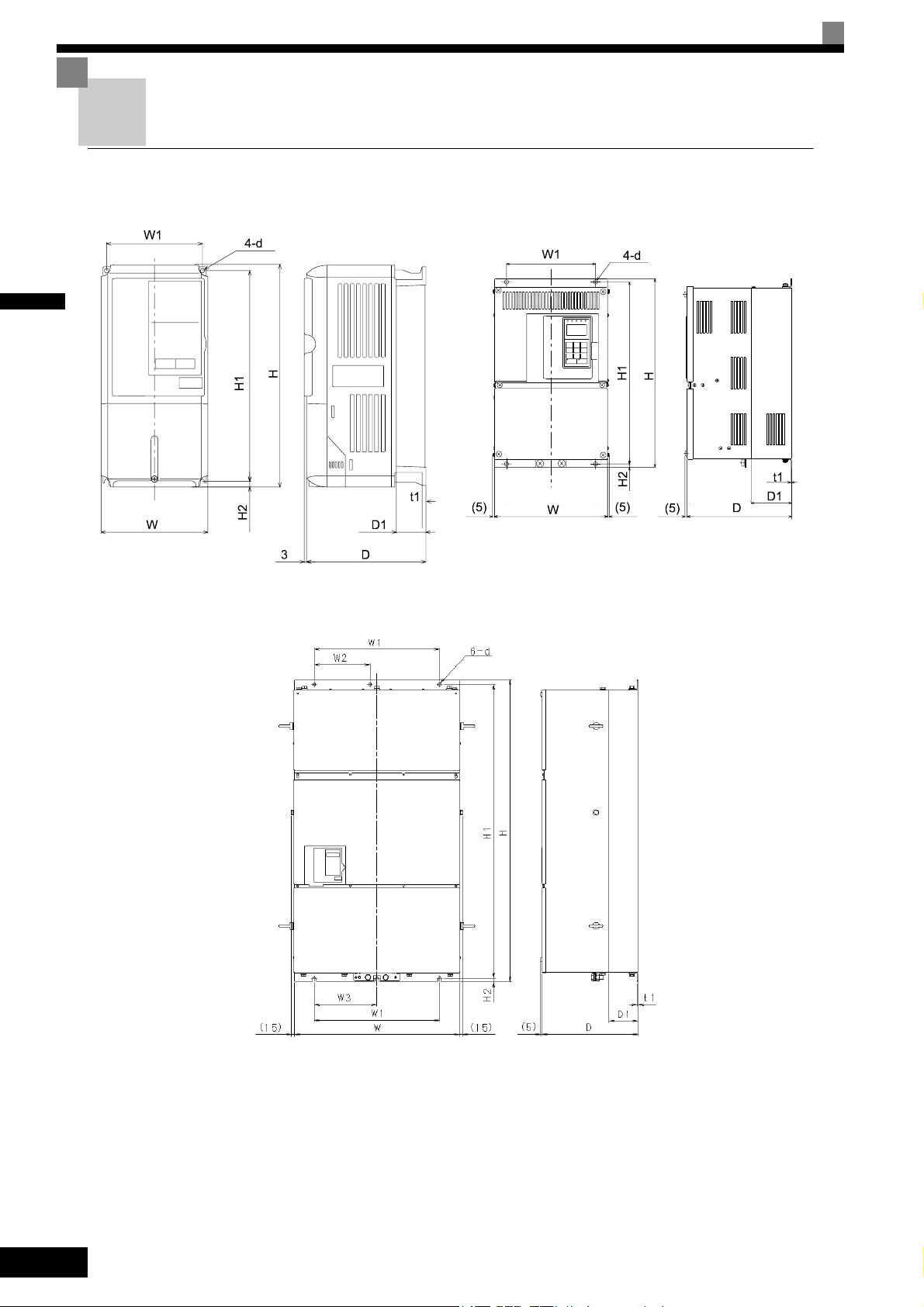
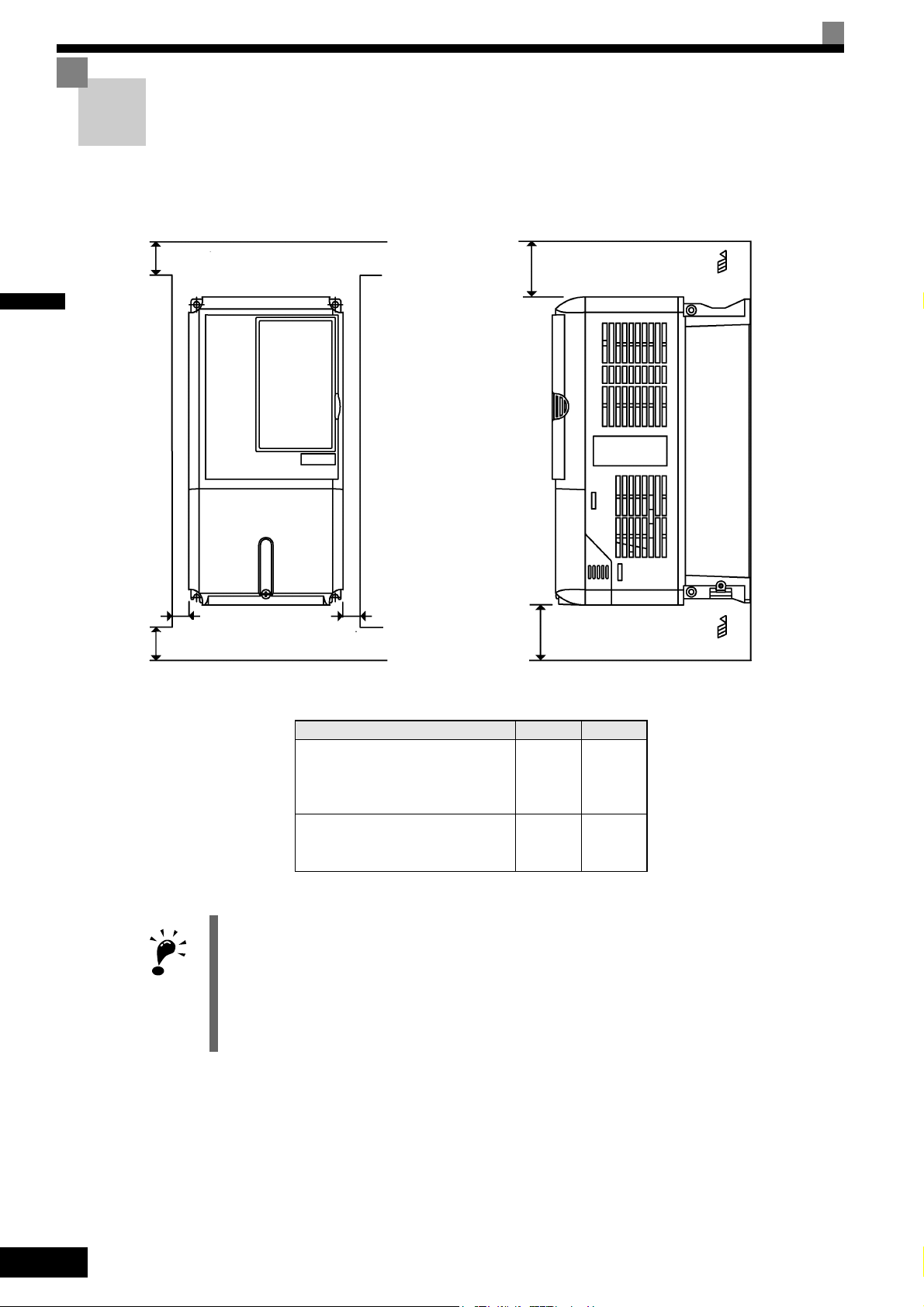
Außen- und Einbauabmessungen
Frequenzumrichter in offener Bauweise (IP00)
Nachstehend sind bemaßte Außenansichten der Frequenzumrichter dargestellt.
Frequenzumrichter der 200/400-V-Klasse mit 0,55 bis 18,5 kW
Frequenzumrichter der 200-V-Klasse mit 22 bis 110 kW
Frequenzumrichter der 400-V-Klasse mit 22 bis 160 kW
1-8
Frequenzumrichter der 400-V-Klasse mit 185 bis 300 kW
Abb. 1.8 Bemaßte Außenansichten der Frequenzumrichter in offener Bauweise
Page 26
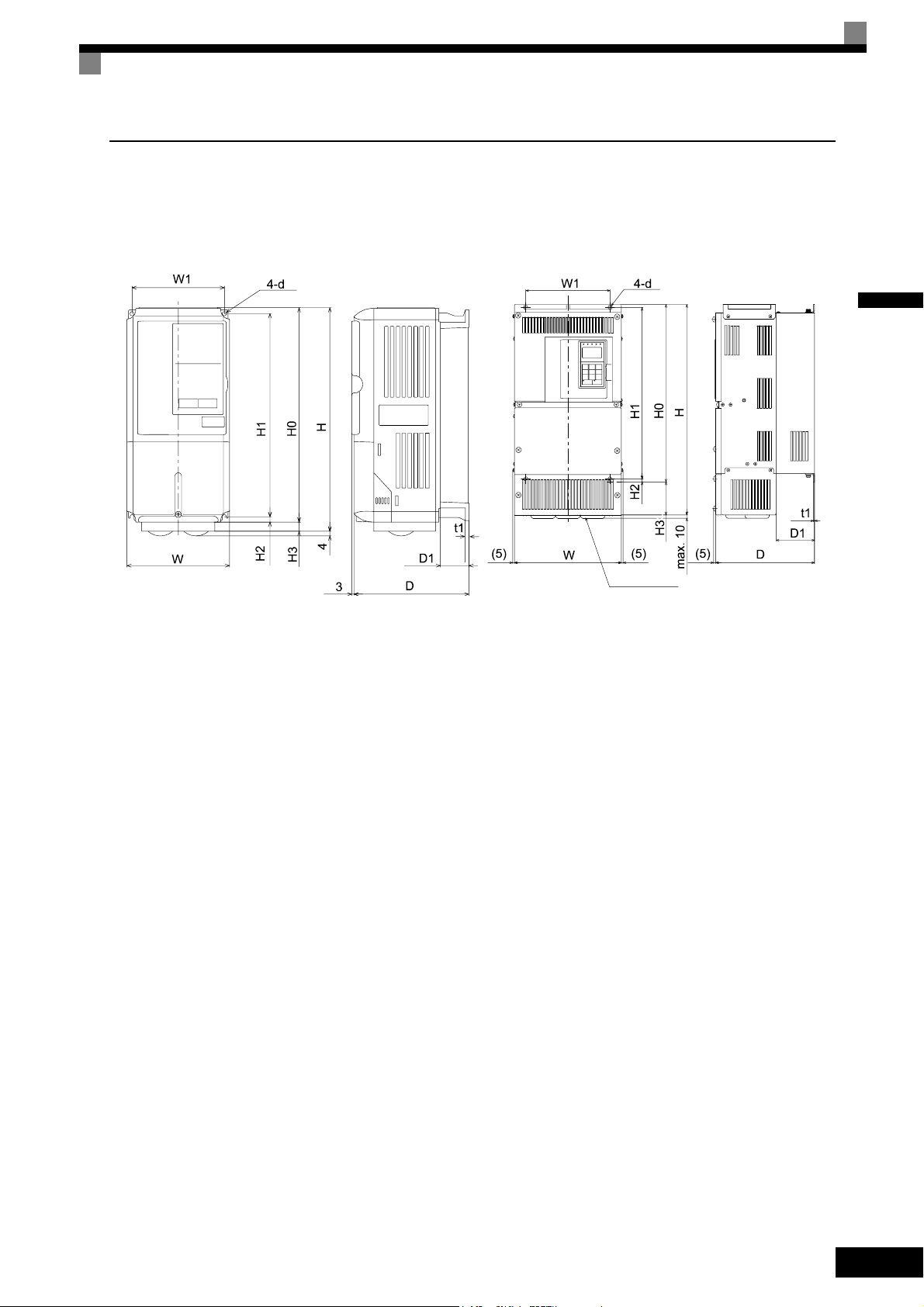
Frequenzumrichter in geschlossener Bauweise zur Wandmontage
(NEMA1 - IEC IP20)
Nachstehend sind bemaßte Außenansichten der Frequenzumrichter in geschlossener Bauweise zur
Wandmontage (NEMA1 - IEC IP20) dargestellt.
Kabeldurchführung
1
Frequenzumrichter der 200/400-V-Klasse mit 0,55 bis 18,5 kW
Abb. 1.9 Bemaßte Außenansichten der Frequenzumrichter in geschlossener Bauweise zur Wandmontage.
Frequenzumrichter der 200-V-Klasse mit 22 bis 75 kW
Frequenzumrichter der 400-V-Klasse mit 22 bis 160 kW
1-9
Page 27
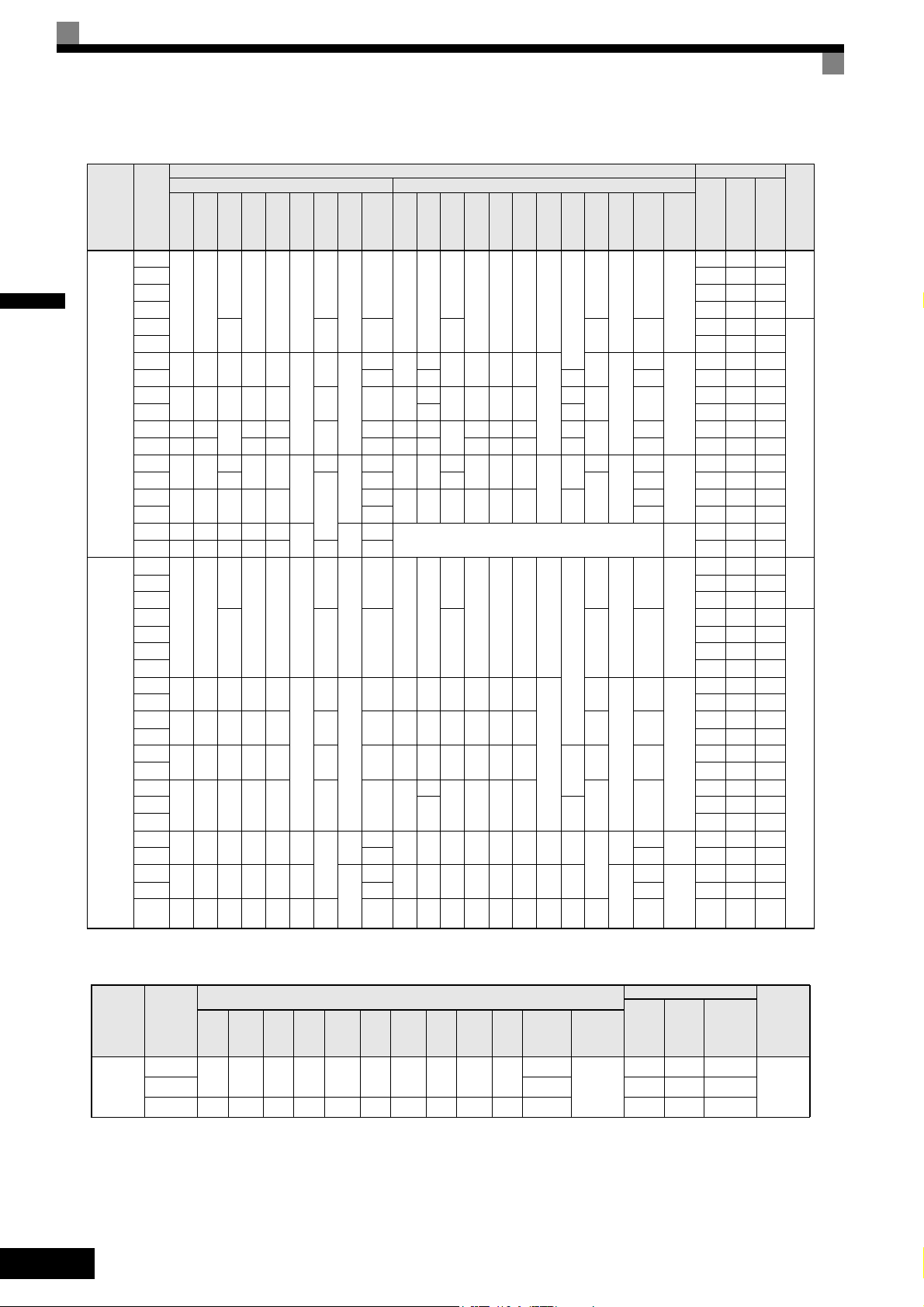
1
Tabelle 1.2 Abmessungen und Gewicht der F7 Frequenzumrichter von 0,4 bis 160 kW
Offene Bauweise (IP00) Geschlossene Bauweise zur Wandmontage (NEMA 1 - IEC IP20)
Spannungs
klasse
Max.
Motor-
leistung
B H T B1 H1 H2 T1 t1
[kW]
0,55
200 V
(drei-
phasig)
0,75 27 42 69
1,5 50 50 100
140 280
2,2 70 59 129
3,7
5,5 16484248
7,5
200 300 197 186 285
11 7 310 10 7 374 170 544
15
240 350 207 216 335 78 11 240
18,5 380 30 501 211 712
22 250 400
30 275 450 220 435 24 275 615 220 450 435 165 27 865 352 1217
37
375 600
45 330
55
450 725 350 325 700
75 87 95 2019 838 2857
90 500 850 360 378 820
110 575 885 380 445 855 140 150 2733 1242 3975
157
126 266 7
177 59 4 177 59 4
7,5
195 385
258
300
250 575
13
15 4,5
0,55
0,75 17 41 58
157
1,5 36 48 84
140 280
2,2
3,7 80 68 148
4,0 70 91 161
126 266 7
177 59 4 177 59 4
5,5 12782209
7,5
200 300 197 186 285
11 252 158 410
15
400 V
(drei-
phasig)
240 350 207 216 335 78 10 240 350 207 216 350 335 78 10
18,5 426 208 634
22
275 450 258 220 435 100 21 275 535 258 220 450 435
30 678 317 995
7,5
37
325 550 283 260 535 105 36 325
45
55 1203 495 1698
75
450 725 350 325 700 13
90 89 97 1614 671 2285
110
500 850 360 370 820 14
132 120 130 2388 1002 3390
160 575 916 378 445 855 46 140 160 579
* Bei Frequenzumrichtern in offener Bauweise und in geschlossener Bauweise zur Wandmontage identisch.
Abmessungen (mm) und Gewicht (kg) Wärmeabgabe (W)
Ge-
wicht
B H T B1 H0 H1 H2 H3 T1 t1
(ca.)
39
65,5
100
100
130
3
5
6
2,3
21 250 535
57
63 330
3,2
86
140 280
300
200
350
380 890
110
455
157
126 280 266 7
197 186 300 285
207 216 350 335
195 400 385 135
258
300
250 600 575
350 325 725 700 305
0
108
39
65,5
3
5
140 280
157
6 200 300 197 186 300 285
126 280 266 7
2,3
635
283 260 550 535 105 40
715 165
130
3,2
4,5
88
102
455
505
110
350 325 725 700 13 305
0
124
360 370 850 820 15 395
5
132
378 445 916 855 46 408 140 170 2791 1147 3938
4
Befesti-
Ge-
gungs-
wicht
bohrun-
(ca.)
gen
d*
7,5
13
210
0
65,5
0
100
100
130
39
78 11
3
5
M5
6
2,3
M6
24 586 274 860
62
68 1266 505 1771
3,2
M10
94 1588 619 2207
--- M12
39
3
5
M5
0
7,5
65,5
100 24
85
130
2,3
3,2
4,5
96
122
6
M6
M10
M12
Extern Intern
Ge-
samt
20 39 59
112 74 186
219 113 332
429 183 612
1015 411 1426
2437 997 3434
14 39 53
59 56 115
193 114 307
326 172 498
466 259 725
784 360 1144
901 415 1316
1399 575 1974
2097 853 2950
Art der
Kühlung
Kon-
vektion
Lüf-
ter
Kon-
vektion
Lüf-
ter
1-10
Span nungsklasse
400 V
(drei-
phasig)
Tabelle 1.3 Abmessungen und Gewicht der F7 Frequenzumrichter von 185 bis 160 kW
Abmessungen (mm) und Gewicht (kg)
Max.
Motor-
leistung
[kW]
185
B H T B1 B2 B3 H1 H2 T1 t1
710 1305 413 540 240 270 1270 15 125,5 4,5
Offene Bauweise (IP00)
Gewicht
(ca.)
260
Befesti-
gungs-
bohrungen
d
M12
300 916 1475 413 730 365 365 1440 15 125,5 4,5 405 5838 2320 8158
Wärmeabgabe (W)
Extern Intern Gesamt
3237 1372 4609
Art der
Kühlung
Lüfter220 280 3740 1537 5277
Page 28
Überprüfung des Installationsortes
Installieren Sie den Frequenzumrichter an einem Installationsort, der die nachstehend beschriebenen Kriterien
erfüllt, und sorgen Sie für eine Beibehaltung optimaler Bedingungen.
Installationsort
Installieren Sie den Frequenzumrichter an einem Ort, der die folgenden Bedingungen erfüllt, in einer
Umgebung mit Verschmutzungsgrad 2.
Ausführung Temperatur der Betriebsumgebung Luftfeuchtigkeit
Geschlossene Bauweise
zur Wandmontage
Offene Bauweise -10 bis + 45° C
An Ober- und Unterseite des Frequenzumrichters sind Schutzabdeckungen angebracht. Achten Sie darauf,
dass vor der Installation eines Frequenzumrichters der 200- oder 400-V-Klasse mit einer Ausgangsleistung bis
zu 18,5 kW in einen Schaltschrank die Schutzabdeckungen entfernt werden.
Beachten Sie bei der Installation des Frequenzumrichters die folgenden Sicherheitshinweise.
• Installieren Sie den Frequenzumrichter an einem sauberen Ort, der frei von Ölnebeln und Staub ist.
Er kann in einem vollständig geschlossenen und staubdichten Schaltschrank installiert werden.
• Bei Installation oder Betrieb des Frequenzumrichters müssen Sie besonders darauf achten, dass kein
Metallpulver, Öl, Wasser oder sonstige Fremdstoffe in den Frequenzumrichter gelangen.
• Installieren Sie den Frequenzumrichter nicht auf brennbarem Material, wie z. B. Holz.
• Installieren Sie den Frequenzumrichter an einem Ort, der frei von radioaktiven oder brennbaren
Materialien ist.
• Installieren Sie den Frequenzumrichter an einem Ort, der frei von schädlichen Gasen oder Flüssigkeiten
ist.
• Installieren Sie den Frequenzumrichter an einem Ort ohne übermäßige Schwingungen.
• Installieren Sie den Frequenzumrichter an einem Ort, der frei von Chloriden ist.
• Installieren Sie den Frequenzumrichter nicht an einen Ort mit direkter Sonneneinstrahlung.
-10 bis + 40 °C
max. 95 % relative Luftfeuchtigkeit
(ohne Kondensatbildung)
max. 95 % relative Luftfeuchtigkeit
(ohne Kondensatbildung)
1
Umgebungstemperatur
Um die Betriebszuverlässigkeit zu verbessern, muss der Frequenzumrichter an einem Ort ohne extreme
Temperaturschwankungen installiert werden. Wenn der Frequenzumrichter in einer geschlossenen Umgebung,
wie z. B. einem Gehäuse, installiert wird, verwenden Sie einen Lüfter oder eine Klimaanlage, um die
Lufttemperatur im Inneren unter 45 °C zu halten.
Schutz des Frequenzumrichters gegen Fremdkörper
Decken Sie den Frequenzumrichter während der Installation ab, um ihn gegen das Eindringen der beim
Bohren entstehenden Metallspäne zu schützen.
Nach erfolgter Installation muss die Abdeckung unbedingt vom Frequenzumrichter entfernt werden.
Andernfalls ist die Luftzirkulation eingeschränkt, wodurch der Frequenzumrichter überhitzt.
1-11
Page 29
Ausrichtung und Freiräume bei der Installation
Installieren Sie den Frequenzumrichter stets aufrecht, damit die Kühlung nicht beeinträchtigt wird. Bei der
Installation des Frequenzumrichters müssen immer die nachfolgend angegebenen Einbauabstände vorhanden
sein, um eine Wärmeabgabe durch Konvektion zu ermöglichen.
1
A
min. 30 mm
min. 50 mm
Horizontaler Freiraum
min. 30 mm
B
Luft
min. 120 mm
Luft
Vertikaler Freiraum
WICHTIG
A B
200-V-Frequenzumrichter,
0,55 bis 90 kW
400-V-Frequenzumrichter,
0,55 bis 132 kW
200-V-Frequenzumrichter, 110 kW
400-V-Frequenzumrichter,
160 bis 220 kW
Abb. 1.10 Ausrichtung und Freiräume bei der Installation des Frequenzumrichters
1. Frequenzumrichter der offenen Bauart (IP00) und der geschlossenen Bauart zur Wandmontage
(NEMA 1 - IEC IP20) haben in horizontaler und vertikaler Richtung den gleichen Platzbedarf.
2. Achten Sie unbedingt darauf, dass vor der Installation eines Frequenzumrichters der 200- oder
400-V-Klasse mit einer Ausgangsleistung bis zu 18,5 kW in einen Schaltschrank die Schutzabdeckungen entfernt werden.
Lassen Sie beim Einbau eines Frequenzumrichters der 200- oder 400-V-Klasse mit einer Ausgangsleistung von 22 kW und mehr in einen Schaltschrank immer ausreichend Platz für die Ringschrauben
zur Aufhängung und für die Hauptstromkabel.
50 mm 120 mm
120 mm 120 mm
1-12
Page 30

Abnehmen und Anbringen der Klemmenabdeckung
Entfernen Sie die Klemmenabdeckung zum Anschließen von Kabeln an die Klemmen des Steuerstromkreises
und des Hauptstromkreises.
Entfernen der Klemmenabdeckung
Frequenzumrichter bis einschließlich 18,5 kW
Lösen Sie die Schraube an der Unterseite der Klemmenabdeckung, drücken Sie die Seiten der
Klemmenabdeckung in Richtung von Pfeil 1 ein, und heben Sie die Klemmenabdeckung dann in Richtung
von Pfeil 2 ab.
1
2
1
Abb. 1.11 Abnehmen der Klemmenabdeckung (hier Modell CIMR-F7Z45P5 gezeigt)
1
Frequenzumrichter ab 22 kW
Lösen Sie die Schrauben links und rechts oben an der Klemmenabdeckung, ziehen Sie die
Klemmenabdeckung in Richtung von Pfeil 1, und heben Sie sie dann in Richtung von Pfeil 2 ab.
1
2
Abb. 1.12 Abnehmen der Klemmenabdeckung (hier Modell CIMR-F7Z4022 gezeigt)
Anbringen der Klemmenabdeckung
Wenn die Verdrahtung des Klemmenblocks abgeschlossen ist, bringen Sie die Klemmenabdeckung wieder an,
indem Sie den Vorgang zum Abnehmen umkehren.
Bei Frequenzumrichtern mit einer Ausgangsleistung von bis zu 18,5 kW setzen Sie die Lasche oben auf der
Klemmenabdeckung in die Nut im Frequenzumrichter ein und drücken auf das Unterteil der
Klemmenabdeckung, bis sie einrastet.
1-13
Page 31

1
Abnehmen/Anbringen der digitalen Bedienkonsole und der Frontabdeckung
Frequenzumrichter bis einschließlich 18,5 kW
Zum Einbau optionaler Karten oder zum Wechseln des Klemmenkarten-Steckverbinders müssen Sie
zusätzlich zu der Klemmenabdeckung die digitale Bedienkonsole sowie die Frontabdeckung abnehmen.
Vor dem Abnehmen der Frontabdeckung muss stets die digitale Bedienkonsole von der Frontabdeckung
entfernt werden.
Die Arbeitsschritte für das Abnehmen und Anbringen werden nachfolgend beschrieben.
Abnehmen der digitalen Bedienkonsole
Drücken Sie den Hebel auf der Seite der digitalen Bedienkonsole in Richtung von Pfeil 1, um die digitale
Bedienkonsole zu entriegeln, und heben Sie die digitale Bedienkonsole in Richtung von Pfeil 2 an, um sie
abzunehmen (siehe Abbildung).
Abb. 1.13 Abnehmen der digitalen Bedienkonsole (hier Modell CIMR-F7Z45P5 gezeigt)
1-14
Page 32

Abnehmen der Frontabdeckung
Drücken Sie die linke und rechte Seite der Frontabdeckung in Richtung von Pfeil 1 ein, und heben Sie die
Abdeckung an der Unterseite in Richtung von Pfeil 2 ab, um diese abzunehmen (siehe Abbildung).
1
2
Abb. 1.14 Abnehmen der Frontabdeckung (hier Modell CIMR-F7Z45P5 gezeigt)
1
Anbringen der Frontabdeckung
Nach dem Verdrahten der Klemmen bringen Sie die Frontabdeckung wieder am Frequenzumrichter an, indem
Sie die Schritte zum Abnehmen in umgekehrter Reihenfolge ausführen.
1. Bringen Sie die Frontabdeckung nicht an, während die digitale Bedienkonsole an der Frontabdeckung
befestigt ist, ansonsten kann es bei der digitalen Bedienkonsole aufgrund von mangelhaftem Kontakt zu
Fehlfunktionen kommen.
2. Setzen Sie die Lasche am oberen Teil der Frontabdeckung in die Nut des Frequenzumrichters ein, und
drücken Sie den unteren Teil der Frontabdeckung gegen den Frequenzumrichter, bis die Frontabdeckung
einrastet.
1-15
Page 33

1
Anbringen der digitalen Bedienkonsole
Nach dem Anbringen der Frontabdeckung bringen Sie die digitale Bedienkonsole am Frequenzumrichter an.
Gehen Sie dazu wie folgt vor.
1. Haken Sie die digitale Bedienkonsole bei A (zwei Stellen) an der Frontabdeckung in Richtung von Pfeil 1
ein (siehe Abbildung).
2. Drücken Sie die digitale Bedienkonsole in Richtung von Pfeil 2, bis sie an B (zwei Stellen) einrastet.
A
B
WICHTIG
Abb. 1.15 Anbringen der digitalen Bedienkonsole
1. Beim Abnehmen oder Anbringen der Frontabdeckung darf die digitale Bedienkonsole nicht an der
Frontabdeckung befestigt sein, da es andernfalls aufgrund von mangelhaftem Kontakt zu Fehlfunktionen oder einer Beschädigung des Frequenzumrichters kommen kann.
2. Bringen Sie die Frontabdeckung niemals am Frequenzumrichter an, wenn die digitale Bedienkonsole
an der Frontabdeckung angebracht ist. Dies kann mangelhaften Kontakt zur Folge haben.
Bringen Sie die Frontabdeckung immer zuerst allein am Frequenzumrichter an, und befestigen Sie die
digitale Bedienkonsole anschließend.
1-16
Page 34

Frequenzumrichter ab 22 kW
Nehmen Sie bei Frequenzumrichtern mit einer Ausgangsleistung ab 22 kW zuerst die Klemmenabdeckung ab,
und gehen Sie dann nach den folgenden Arbeitsschritten vor, um die digitale Bedienkonsole und die
Frontabdeckung abzunehmen.
Abnehmen der digitalen Bedienkonsole
Gehen Sie auf die gleiche Weise vor, wie sie für Frequenzumrichter mit einer Ausgangsleistung bis
einschließlich 18,5 kW beschrieben ist.
Abnehmen der Frontabdeckung
Drücken Sie die mit 1 markierten Stelle oberhalb der Steuerstromkreis-Klemmenkarte in Richtung von Pfeil 2
nach oben.
2
1
1
Abb. 1.16 Abnehmen der Frontabdeckung (hier Modell CIMR-F7Z4022 gezeigt)
Anbringen der Frontabdeckung
Nach Beendigung der erforderlichen Arbeiten, wie z. B. der Installation einer Optionskarte oder dem
Anschließen der Klemmenkarte, wird die Frontabdeckung wie folgt wieder angebracht.
1. Achten Sie darauf, dass die digitale Bedienkonsole nicht an der Frontabdeckung angebracht ist. Es kann zu
Kontaktfehlern kommen, wenn die Abdeckung angebracht wird, während die digitale Bedienkonsole an
ihr befestigt ist.
2. Setzen Sie die Lasche an der Oberseite der Frontabdeckung in den Schlitz am Frequenzumrichter ein, und
drücken Sie auf die Abdeckung, bis sie am Frequenzumrichter einrastet.
Anbringen der digitalen Bedienkonsole
Gehen Sie auf die gleiche Weise vor, wie sie für Frequenzumrichter mit einer Ausgangsleistung bis
einschließlich 18,5 kW beschrieben ist.
1-17
Page 35

1
1-18
Page 36

2
Verdrahtung
In diesem Kapitel werden die Spezifikationen von Leistungs- und Steuerklemmen
sowie deren Verdrahtung beschrieben.
Anschluss von Peripheriegeräten ...........................................2-2
Anschlussschema ...................................................................2-3
Aufbau des Klemmenblocks ...................................................2-5
Verdrahtung der Leistungsklemmen .......................................2-6
Verdrahtung der Steuerklemmen..........................................2-20
Prüfung der Verdrahtung ......................................................2-27
Installation und Verdrahtung von Optionskarten...................2-28
Page 37

2
Anschluss von Peripheriegeräten
Abb. 2.1 zeigt mögliche Verbindungen des Frequenzumrichters mit Peripheriegeräten.
Spannungsversorgung
KompaktSchutzschalter
Netzschütz
AC-Drossel zur
Verbesserung des
Leistungsfaktors
Netzfilter
Frequenzumrichter
Erdung
Ausgangs-Entstörfilter
Bremswiderstand
DC-Drossel zur
Verbesserung des
Leistungsfaktors
2-2
Motor
Erdung
Abb. 2.1 Beispiele für Verbindungen mit Peripheriegeräten
Page 38

Anschlussschema
In Abb. 2.2 ist das Anschlussschema des Frequenzumrichters gezeigt.
Bei Verwendung der digitalen Bedienkonsole kann der Motor ohne Beschaltung der Steuerklemmen betrieben
werden.
AC-Drossel zur Optimierung
3-Phasige Spannungs-
versorgung
380 bis 480 V
50/60 Hz
MultifunktionsKontakteingänge
(Werkseinstellung)
L1
L2
L3
PE
Netzschütz
Sicherungen
Netz-
filter
Vorwärts Start/Stopp S1
Rückwärts Start/Stopp S2
Fehler-Rücksetzung
Festdrehzahl Bit 0
Festdrehzahl Bit 1
Jog-Frequenz-Auswahl
AnalogeingangEinstellung
3
Ω
2 k
0 bis 10 V
2
1
4 bis 20 mA
MEMOBUSKommunikation
RS-485/422
PP
des Eingangsleistungsfaktors
Kurzschluss-
brücke
R/L1
S/L2
T/L3
S3Externer Fehler
S4
S5
S6
S7
SN
SC
SP
E(G)
RP
+V
Ω
2 k
A1
A2
AC
-V
R+
P
R-
S+
P
S-
IG
(optional)
U X
1 2 B1 B2
CIMR-F7Z47P5
24 V
Abschirmungsklemme
Impulseingang
[Werkseinstellung:
Frequenzsollwerteingang]
0 bis 32kHz
Analogeingangs-Spannungsversorgung, +15 V, 20 mA
Analogeingang 1:
Master-Frequenzsollwert
-10 bis +10 V (20 kΩ)
Multifunktions-Analogeingang 2:
[Werkseinstellung: FrequenzOffset] 4 bis 20mA (250
0 V
Analogeingang-Spannungsversorgung -15 V, 20 mA
Bremswiderstands-Einheit
Varispeed F7
Ω
)]
Abschlusswiderstand
(optional)
Abschirmungsklemme
U/T1
V/T2
W/T3
MA
MB
MC
M1
M2
M3
M4
M5
M6
E(G)
MP
AC
FM
AM
AC
1
2
Fehler-Kontaktausgang
max. 250 V AC, 1 A
max. 30 V DC, 1 A
Kontaktausgang 1
(Werkseinstellung:
In Betrieb)
Kontaktausgang 2
(Werkseinstellung:
Nulldrehzahl)
Kontaktausgang 3
(Werkseinstellung:
Frequenzübereinstimmung)
3
Impulsausgang
0 bis 32 kHz (2,2 k
(Werkseinstellung: Ausgangsstrom)
Einstellung, 20 kΩ
+
Einstellung, 20 kΩ
+
M
MultifunktionsKontakt-Ausgang
max. 250 V AC, 1 A
max. 30 V DC, 1 A
Ω)
Multifunktions-Analogausgang 1
-
(-10 bis +10 V, 2 mA / 4 bis 20 mA)
FM
[Werkseinstellung: Ausgangsfrequenz,
0 bis +10 V]
Multifunktions-Analogausgang 2
-
(-10 bis +10 V, 2 mA / 4 bis 20 mA)
AM
[Werkseinstellung: Ausgangsstrom,
0 bis +10 V]
2
Abgeschirmte
Kabel
Abgeschirmte, paarweise
P
verdrillte Drähte
Abb. 2.2 Anschlussschema (Modell CIMR-F7Z47P5 gezeigt)
2-3
Page 39

2
1 Von diesen Stromkreisen geht eine Gefahr aus. Daher sind sie durch Schutzvorrichtungen von
zugänglichen Teilen getrennt.
2 Diese Stromkreise sind von allen anderen Stromkreisen durch eine doppelte und verstärkte
*
Isolierung getrennt. Diese Stromkreise können entweder mit SELV
*
nicht-SELV
-Stromkreisen zusammengeschaltet werden, aber nicht mit beiden.
- (oder gleichwertigen) oder
3 Frequenzumrichter, die über eine Stromquelle mit Vier-Leiter-System versorgt werden
(Neutral geerdet)
*
Diese Stromkreise sind SELV
Schutzvorrichtungen getrennt, die aus doppelter und verstärkter Isolierung bestehen. Diese
Stromkreise dürfen nur mit anderen SELV
zusammengeschaltet werden.
Frequenzumrichter, die von einer Stromquelle mit Drei-Leiter-System (ungeerdet oder
Motorgehäuseerdung) versorgt werden
Diese Stromkreise sind nicht von gefährlichen Stromkreisen getrennt, von anderen Stromkreisen
jedoch durch Schutztrennung mit Basisisolierung. Diese Stromkreise dürfen nicht mit anderen
zugänglichen Stromkreisen zusammengeschaltet werden, es sei denn, sie sind durch zusätzliche
Isolierung von diesen getrennt.
* SELV = Safety Extra Low Voltage (Sicherheitskleinspannung)
1. Die Steuerklemmen sind wie nachstehend gezeigt angeordnet.
-Stromkreise und von allen anderen Stromkreisen durch
*
-Stromkreisen (oder gleichwertigen Stromkreisen)
WICHTIG
2. Die Ausgangsstrombelastbarkeit der +V Klemme beträgt 20 mA.
3. Leistungsklemmen sind durch doppelte Kreise, die Steuerklemmen durch einfache Kreise gekennzeichnet.
4. Die Verdrahtung der digitalen Eingänge S1 bis S7 ist für den Anschluss von Kontakten oder Transistoren gezeigt
(0 V Bezugspunkt und NPN-Modus). Dies ist die Standardeinstellung.
Für den Anschluss von PNP-Transistoren oder für die Verwendung einer externen 24-V-Spannungsversorgung
siehe Seite 2-25, NPN/PNP-Eingangsbetriebsart.
5. Der Parameter H3-13 bestimmt, ob die Einstellung der Solldrehzahl über die Klemme A1 (Standardeinstellung)
oder die Klemme A2 erfolgt.
6. Die analogen Multifunktionsausgänge sind ausschließlich für die Ansteuerung analoger Anzeigen (Frequenz-,
Strom-, Spannungs-, Leistungsmessgeräte usw.) vorgesehen und dürfen nicht für Steuerungszwecke welcher Art
auch immer eingesetzt werden.
7. Die Frequenzumrichter der 200-V-Klasse von 22 bis 110 kW und die Frequenzumrichter der 400-V-Klasse von
22 bis 300 kW verfügen über integrierte DC-Drosseln für die Verbesserung des Eingangs-Leistungsfaktors. Für
Frequenzumrichter mit max. 18,5 kW sind DC-Drosseln optional erhältlich. Entfernen Sie beim Anschluss einer
DC-Drossel die Kurzschlussbrücke.
2-4
Page 40

Aufbau des Klemmenblocks
Die Anordnung der Klemmen ist in Abb. 2.3 und Abb. 2.4 gezeigt.
Steuerklemmen
Leistungsklemmen
Ladeanzeige
Erdungsklemme
Abb. 2.3 Anordnung der Klemmen (Frequenzumrichter der 200/400-V-Klasse mit 0,4 kW)
Steuerklemmen
Ladeanzeige
Leistungsklemmen
Erdungsklemme
2
Abb. 2.4 Anordnung der Klemmen (Frequenzumrichter der 200/400-V-Klasse ab 22 kW)
2-5
Page 41

2
Verdrahtung der Leistungsklemmen
Geeignete Kabelquerschnitte und Kabelschuhe
Wählen Sie die geeigneten Kabel und Crimp-Kabelschuhe aus Tabelle 2.1 und Tabelle 2.2 aus. Leiter-
querschnitte für Bremswiderstände und Bremseinheiten entnehmen Sie bitte dem Handbuch TOE-C726-2.
Tabelle 2.1 Leiterquerschnitte – 200-V-Klasse
Frequenz-
umrichter-
modell
CIMR-
F7Z20P4
Klemmensymbol
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
Klem-
men-
schrau-
ben
M4 1,2 bis 1,5
Anzugs-
drehmoment
(Nm)
Mögliche
Leiter-
querschnitte
mm2 (AWG)
1,5 bis 4
(14 bis 10)
Empfohlene
Leiter-
querschnitte
mm2 (AWG)
2,5
(14)
Kabeltyp
F7Z20P7
F7Z21P5
F7Z22P2
F7Z23P7
F7Z25P5
F7Z27P5
F7Z2011
F7Z2015
F7Z2018
F7Z2022
F7Z2030
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M5 2,5
M5 2,5
M6 4,0 bis 5,0
M5 2,5
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M5 2,5
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
1,5 bis 4
(14 bis 10)
1,5 bis 4
(14 bis 10)
1,5 bis 4
(14 bis 10)
4
(12 bis 10)
6
(10)
10
(8 bis 6)
16
(6 bis 4)
25
(4 bis 2)
10
(8 bis 6)
25
(4)
25 bis 35
(3 bis 2)
10
(8 bis 6)
25
(4)
25 bis 35
(3 bis 1)
10 bis 16
(8 bis 4)
25 bis 35
(4 bis 2)
50
(1 bis 1/0)
10 bis 16
(8 bis 4)
25 bis 35
(4 bis 2)
2,5
(14)
2,5
(14)
2
(14)
4
(12)
6
(10)
10
(8)
16
(6)
25
(4)
-
25
(4)
25
(3)
-
25
(4)
25
(3)
-
25
(4)
50
(1)
-
25
(4)
Starkstromkabel,
z. B.
600-V-Vinyl-
Starkstromkabel
2-6
Page 42

Tabelle 2.1 Leiterquerschnitte – 200-V-Klasse
Frequenzumrichter-
modell
CIMR-
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2037
3
r/l1, ∆/l2
R/L1, S/L2, T/L3, , 1 U/T1,
V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2045
3
r/l1, ∆/l2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2055
3
r/l1, ∆/l2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2075
3
r/l1, ∆/l2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2090
3
r/l1, ∆/l2
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
F7Z2110
3
r/l1, ∆/l2
* Die angegebenen Leiterquerschnitte gelten für Kupferkabel bei 75 °C.
Klemmensymbol
Klem-
men-
schrau-
ben
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 17,6 bis 22,5
M4 1,3 bis 1,4
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 17,6 bis 22,5
M4 1,3 bis 1,4
M12 31,4 bis 39,2
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 17,6 bis 22,5
M4 1,3 bis 1,4
M12 31,4 bis 39,2
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 17,6 bis 22,5
M4 1,3 bis 1,4
M12 31,4 bis 39,2
M8 8,8 bis 10,8
M12 31,4 bis 39,2
M4 1,3 bis 1,4
M12 31,4 bis 39,2
M8 8,8 bis 10,8
M12 31,4 bis 39,2
M4 1,3 bis 1,4
Anzugs-
drehmoment
(Nm)
Mögliche
Leiter-
querschnitte
mm2 (AWG)
70 bis 95
(2/0 bis 4/0)
6 bis 16
(10 bis 4)
35 bis 70
(2 bis 2/0)
0,5 bis 4
(20 bis 10)
95
(3/0 bis 4/0)
6 bis 16
(10 bis 4)
50 bis 70
(1 bis 2/0)
0,5 bis 4
(20 bis 10)
50 bis 95
(1/0 bis 4/0)
90
(4/0)
6 bis 70
(10 bis 2/0)
35 bis 95
(3 bis 4/0)
0,5 bis 4
(20 bis 10)
95 bis 122
(3/0 bis 250)
95
(3/0 bis 4/0)
6 bis 70
(10 bis 2/0)
95 bis 185
(3/0 bis 400)
0,5 bis 4
(20 bis 10)
150 bis 185
(250 bis 400)
95 bis 150
(4/0 bis 300)
6 bis 70
(10 bis 2/0)
70 bis 150
(2/0 bis 300)
0,5 bis 4
(20 bis 10)
240 bis 300
(350 bis 600)
150 bis 300
(300 bis 600)
6 bis 70
(10 bis 2/0)
150
(300)
0,5 bis 4
(20 bis 10)
Empfohlene
Leiter-
querschnitte
mm2 (AWG)
70
(2/0)
–
35
(2)
1,5
(16)
95
(3/0)
–
50
(1)
1,5
(16)
50 × 2P
(1/0 × 2P)
90
(4/0)
–
50
(1/0)
1,5
(16)
95 × 2P
(3/0 × 2P)
95 × 2P
(3/0 × 2P)
–
95
(3/0)
1,5
(16)
150 × 2P
(250 × 2P)
95 × 2P
(4/0 × 2P)
–
70 × 2P
(2/0 × 2P)
1,5
(16)
240 × 2P oder
50 × 4P
(350 × 2P
oder 1/0 × 2P)
150 × 2P oder
50 × 4P
(300 × 2P oder
1/0 × 4P)
–
150 × 2P
(300 × 2P)
1,5
(16)
Kabeltyp
Starkstromkabel,
z. B.
600-V-Vinyl-
Starkstromkabel
2
2-7
Page 43

Frequenz-
umrichter-
modell
CIMR-
F7Z40P4
Tabelle 2.2 Leiterquerschnitte – 400-V-Klasse
Klemmensymbol
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
Klem-
men-
schrau-
ben
M4 1,2 bis 1,5
Anzugs-
drehmoment
(Nm)
Mögliche
Leiter-
querschnitte
mm2 (AWG)
1,5 bis 4
(14 bis 10)
Empfohlene
Leiter-
querschnitte
mm2 (AWG)
2,5
(14)
Kabeltyp
2
F7Z40P7
F7Z41P5
F7Z42P2
F7Z43P7
F7Z44P0
F7Z45P5
F7Z47P5
F7Z4011
F7Z4015
F7Z4018
F7Z4022
F7Z4030
F7Z4037
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, B1, B2,
U/T1, V/T2, W/T3
R/L1, S/L2, T/L3, , 1, 2, U/T1, V/T2,
W/T3
B1, B2
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
R/L1, S/L2, T/L3, , 1, 3, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/
T3, R1/L11, S1/L21, T1/L31
3
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M4 1,2 bis 1,5
M5 2,5
M5 2,5
M5
(M6)
M6 4,0 bis 5,0
M5 2,5
M6 4,0 bis 5,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
2,5
(4,0 bis 5,0)
1,5 bis 4
(14 bis 10)
1,5 bis 4
(14 bis 10)
1,5 bis 4
(14 bis 10)
2,5 bis 4
(14 bis 10)
2,5 bis 4
(14 bis 10)
4
(12 bis 10)
2,5 bis 4
(14 bis 10)
6
(10)
4
(12 bis 10)
6 bis 10
(10 bis 6)
10
(8 bis 6)
6 bis 10
(10 bis 6)
10 bis 35
(8 bis 2)
10
(8)
10 bis 16
(8 bis 4)
16
(6 bis 4)
16 bis 25
(6 bis 2)
25
(4)
25 bis 35
(4 bis 2)
25 bis 50
(4 bis 1/0)
10 bis 16
(8 bis 4)
25 bis 35
(4 bis 2)
2,5
(14)
2,5
(14)
2,5
(14)
(12)
2,5
(14)
(12)
2,5
(14)
(12)
2,5
(14)
(10)
(12)
10
(8)
(10)
10
(8)
(10)
10
(8)
10
(8)
10
(8)
16
(6)
16
(6)
25
(4)
25
(4)
35
(2)
25
(4)
4
4
4
6
4
6
6
-
Starkstromkabel,
z. B.
600-V-Vinyl-
Starkstromkabel
2-8
Page 44

Frequenzumrichter-
modell
CIMR-
F7Z4045
F7Z4055
F7Z4075
F7Z4090
F7Z4110
F7Z4132
F7Z4160
Tabelle 2.2 Leiterquerschnitte – 400-V-Klasse
Klemmensymbol
R/L1, S/L2, T/L3, , 1, U/T1, V/T2, W/
T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1, U/T1, V/T2,
W/T3, R1/L11, S1/L21, T1/L31
3
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3, , 1
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L31
3
r/l1, ∆200/l2200, ∆400/l2400
Klem-
men-
schrau-
ben
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M8 9,0 bis 10,0
M6 4,0 bis 5,0
M8 9,0 bis 10,0
M10 31,4 bis 39,2
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 31,4 bis 39,2
M4 1,3 bis 1,4
M10 31,4 bis 39,2
M10 17,6 bis 22,5
M8 8,8 bis 10,8
M10 31,4 bis 39,2
M4 1,3 bis 1,4
M10 31,4 bis 39,2
M8 8,8 bis 10,8
M12 31,4 bis 39,2
M4 1,3 bis 1,4
M10 31,4 bis 39,2
M8 8,8 bis 10,8
M12 31,4 bis 39,2
M4 1,3 bis 1,4
M12 31,4 bis 39,2
M8 8,8 bis 10,8
M12 31,4 bis 39,2
M4 1,3 bis 1,4
Anzugs-
drehmoment
(Nm)
Mögliche
Leiter-
querschnitte
mm2 (AWG)
35 bis 50
(2 bis 1/0)
10 bis 16
(8 bis 4)
25 bis 35
(4 bis 2)
50
(1 bis 1/0)
10 bis 16
(8 bis 4)
25 bis 35
(4 bis 2)
70 bis 95
(2/0 bis 4/0)
50 bis 100
(1/0 bis 4/0)
6 bis 16
(10 bis 4)
35 bis 70
(2 bis 2/0)
0,5 bis 4
(20 bis 10)
95
(3/0 bis 4/0)
95
(3/0 bis 4/0)
10 bis 16
(8 bis 4)
50 bis 95
(1 bis 4/0)
0,5 bis 4
(20 bis 10)
50 bis 95
(1/0 bis 4/0)
10 bis 70
(8 bis 2/0)
70 bis 150
(2/0 bis 300)
0,5 bis 4
(20 bis 10)
95
(3/0 bis 4/0)
75 bis 95
(2/0 bis 4/0)
10 bis 70
(8 bis 2/0)
95 bis 150
(4/0 bis 300)
0,5 bis 4
(20 bis 10)
95 bis 185
(4/0 bis 400)
95 bis 185
(3/0 bis 400)
10 bis 70
(8 bis 2/0)
50 bis 150
(1/0 bis 300)
0,5 bis 4
(20 bis 10)
Empfohlene
Leiter-
querschnitte
mm2 (AWG)
35
(2)
-
25
(4)
50
(1)
-
25
(4)
70
(2/0)
50
(1/0)
-
35
(2)
1,5
(16)
95
(4/0)
95
(4/0)
-
50
(1)
1,5
(16)
50
×
2P
(1/0 × 2P)
-
70
(2/0)
1,5
(16)
×
2P
95
(3/0 × 2P)
75 × 2P
(2/0 × 2P)
-
95
(4/0)
1,5
(16)
×
2P
95
(4/0 × 2P)
95 × 2P
(3/0 × 2P)
-
50 × 2P
(1/0 × 2P)
1,5
(16)
Kabeltyp
Starkstromkabel,
z. B.
600-V-Vinyl-
Starkstromkabel
2
2-9
Page 45

2
Tabelle 2.2 Leiterquerschnitte – 400-V-Klasse
Frequenz-
umrichter-
modell
CIMR-
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
F7Z4185
, 1
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3, R1/L11, S1/L21, T1/L33
F7Z4220
, 1
3
r/l1, ∆200/l2200, ∆400/l2400
R/L1, S/L2, T/L3
R1/L11, S1/L21, T1/L31
U/T1, V/T2, W/T3
F7Z4300
, 1
3
r/l1, ∆200/l2200, ∆400/l2400
* Die angegebenen Leiterquerschnitte gelten für Kupferkabel bei 75 °C.
Klemmensymbol
Klem-
men-
schrau-
ben
M16 78,4 bis 98
M4 1,3 bis 1,4
M16 78,4 bis 98
M4 1,3 bis 1,4
M16 78,4 bis 98
M4 1,3 bis 1,4
Anzugs-
drehmoment
(Nm)
Mögliche
Leiter-
querschnitte
mm2 (AWG)
95 bis 300
(4/0 bis 600)
0,5 bis 4
(20 bis 10)
95 bis 300
(4/0 bis 600)
0,5 bis 4
(20 bis 10)
95 bis 300
(4/0 bis 600)
0,5 bis 4
(20 bis 10)
Empfohlene
Leiter-
querschnitte
mm2 (AWG)
150 × 2P
(300 × 2P)
120 × 2P
(250 × 2P)
300 × 2P
(600 × 2P)
–
95 × 2P
(3/0 × 2P
1,5
(16)
240 × 2P
(500 × 2P)
240 × 2P
(400 × 2P)
120 × 4P
(250 × 4P)
–
120 × 2P
(250 × 2P)
1,5
(16)
120 × 4P
(250 × 4P)
120 × 4P
(4/0 × 4P)
240 × 4P
(400 × 4P)
–
120 × 2P
(250 × 2P
1,5
(16)
Kabeltyp
Starkstromkabel,
z. B.
600-V-Vinyl-
Starkstromkabel
WICHTIG
Wählen Sie den Leiterquerschnitt für den Leistungskreis so, dass der Spannungsabfall weniger als 2 %
der Nennspannung beträgt. Der Spannungsabfall in der Leitung wird wie folgt berechnet:
x Kabelwiderstand (W/km) x Kabellänge (m)
Spannungsabfall in der Leitung (V) =
x Strom (A) x 10
-3
3
2-10
Page 46

Funktionen der Leistungsklemmen
Die Funktionen der Leistungsklemmen werden entsprechend der Klemmensymbole in Ta be ll e 2 .3
zusammengefasst. Verdrahten Sie die Klemmen ordnungsgemäß für den gewünschten Zweck.
Zweck Klemmensymbol
Spannungsversorgung
Frequenzumrichterausgänge U/T1, V/T2, W/T3 20P4 bis 2110 40P4 bis 4300
Zwischenkreis-Klemmen
Bremswiderstand-Anschluss B1, B2 20P4 bis 2018 40P4 bis 4018
DC-Drossel-Anschluss
R/L1, S/L2, T/L3 20P4 bis 2110 40P4 bis 4300
R1/L11, S1/L21, T1/L31 2022 bis 2110 4022 bis 4300
1,
1, 2
Modell: CIMR-F7Z
200-V-Klasse 400-V-Klasse
20P4 bis 2110 40P4 bis 4300
20P4 bis 2018 40P4 bis 4018
2
Anschluss für Bremseinheit
Erdung 20P4 bis 2110 40P4 bis 4300
Tabelle 2.3 Funktionen der Leistungsklemmen (200- und 400-V-Klasse)
3,
2022 bis 2110 4022 bis 4300
2-11
Page 47

2
CIMR-F7Z20P4 bis 2018
CIMR-F7Z40P4 bis 4018
Aufbau des Leistungsteiles
In Tabelle 2.4 ist der Aufbau des Leistungsteiles beschrieben
200-V-Klasse 400-V-Klasse
Spannun
gs-
Steuerschaltun
CIMR-F7Z2022, 2030
Spannungsversorgung
Steuerschaltungen
CIMR-F7Z2037 bis 2110
Spannun
gs-
Steuerschaltun
CIMR-F7Z4022 bis 4055
Spannungsversorgung
Steuerschaltungen
CIMR-F7Z4075 bis 4300
2-12
Hinweis: Wenden Sie sich vor der Verwendung einer 12-Phasen-Gleichrichtung an Ihre OYMC-Vertretung.
Spannungsversorgung
Steuerschaltungen
Spannungsversorgung
Tabelle 2.4 Aufbau des Leistungsteiles des Frequenzumrichters
Steuerschaltungen
Page 48

Standard-Anschlussschemata
In Abb. 2.5 sind Standard-Anschlussschemata für Frequenzumrichter dargestellt. Diese sind für Frequenzumrichter der 200- und 400-V-Klasse identisch. Die Beschaltung hängt von der Frequenzumrichterleistung ab.
CIMR-F7Z20P4 bis 2018 und
40P4 bis 4018
DC-Drossel
(optional)
3 Phasen, 200 V AC
(400 V AC)
Vor dem Anschluss der DC-Drossel muss die Kurzschlussbrücke
entfernt werden.
BremswiderstandEinheit (optional)
CIMR-F7Z2022, 2030 und
4022 bis 4055
3 Phasen, 200 V
AC (400 V AC)
Die DC-Drossel ist eingebaut.
CIMR-F7Z2037 bis 2110 CIMR-F7Z4075 bis 4300
BremswiderstandEinheit (optional)
Bremseinheit
(optional)
BremswiderstandEinheit (optional)
Bremseinheit
(optional)
BremswiderstandEinheit (optional)
Bremseinheit
(optional)
2
3 Phasen,
200 V AC
3 Phasen,
400 V AC
Die Steuerspannungsversorgung erfolgt bei allen Frequenzumrichtermodellen intern aus dem Zwischenkreis.
Abb. 2.5 Beschaltung der Leistungsklemmen
2-13
Page 49

Verdrahtung der Leistungsklemmen
In diesem Abschnitt wird die Verdrahtung der Ein- und Ausgänge des Leistungskreises beschrieben.
Verdrahtung der Spannungsversorgung
Beachten Sie die folgenden Sicherheitshinweise für die Spannungsversorgungseingänge.
Installation von Sicherungen
2
Zum Schutz des Frequenzumrichters wird die Verwendung von Halbleitersicherungen empfohlen, wie sie in
der nachstehenden Tabelle aufgeführt sind.
Tabelle 2.5 Eingangssicherungen
Frequenz-
umrichtertyp
20P4 240 10 12~25
20P7 240 10 12~25
21P5 240 15 23~55
22P2 240 20 34~98
23P7 240 30 82~220
25P5 240 40 220~610
27P5 240 60 290~1300
2011 240 80 450~5000
2015 240 100 1200~7200
2018 240 130 1800~7200
2022 240 150 870~16200
2030 240 180 1500~23000
2037 240 240 2100~19000
2045 240 300 2700~55000
2055 240 350 4000~55000
2075 240 450 7100~64000
2090 240 550 11000~64000
2110 240 600 13000~83000
40P4 480 5 6~55
40P7 480 5 6~55
41P5 480 10 10~55
42P2 480 10 18~55
43P7 480 15 34~72
44P0 480 20 50~570
45P5 480 25 100~570
47P5 480 30 100~640
4011 480 50 150~1300
4015 480 60 400~1800
4018 480 70 700~4100
4022 480 80 240~5800
4030 480 100 500~5800
4037 480 125 750~5800
4045 480 150 920~13000
4055 480 150 1500~13000
4075 480 250 3000~55000
4090 480 300 3800~55000
4110 480 350 5400~23000
4132 480 400 7900~64000
4160 480 450 14000~250000
4185 480 600 20000~250000
4220 480 700 34000~400000
4300 480 900 52000~920000
Spannung (V) Strom (A)
Sicherung
I2t (A2s)
2-14
Page 50

Installation eines Kompakt-Schutzschalters
Bei Anschluss der Netzeingangsklemmen (R/L1, S/L2 und T/L3) an die Spannungsversorgung unter
Verwendung eines Kompakt-Schutzschalters (MCCB) ist darauf zu achten, dass der Schutzschalter für den
Frequenzumrichter geeignet ist.
• Wählen Sie einen Kompakt-Schutzschalter mit einem Bemessungsstrom des 1,5- bis 2-fachen des
Frequenzumrichter-Nennstroms.
• Bei der Zeitcharakteristik des Schutzschalters muss der Überlastschutz des Frequenzumrichters beachtet
werden (eine Minute bei 150 % des Nennausgangsstroms).
Installation eines Fehlerstrom-Schutzschalters
Für den Ausgang des Frequenzumrichters werden hohe Taktfrequenzen verwendet, so dass ein hochfrequenter
Fehlerstrom erzeugt wird. Falls ein Fehlerstrom-Schutzschalter verwendet werden soll, wählen Sie einen aus,
der nur bei einem Fehlerstrom auslöst, der in einem für Menschen gefährlichen Frequenzbereich liegt, nicht
aber bei hochfrequenten Erdschlussströmen.
• Ein spezieller Fehlerstrom-Schutzschalter für Frequenzumrichter muss eine Empfindlichkeit von
mindestens 30 mA pro Frequenzumrichter aufweisen.
• Bei Verwendung eines universellen Fehlerstrom-Schutzschalter muss dieser eine Empfindlichkeit von
mindestens 200 mA pro Frequenzumrichter und eine Auslösezeit von 0,1 s oder mehr aufweisen.
Installation eines Netzschützes
Wenn die Spannungsversorgung des Leistungskreises durch einen Steuerstromkreis abschaltbar ausgeführt
werden soll, kann hierfür ein Schütz verwendet werden.
2
Dabei ist Folgendes zu beachten:
• Der Frequenzumrichter kann durch Öffnen und Schließen des Netzschützes auf der Primärseite gestartet
und gestoppt werden. Häufiges Öffnen und Schließen des Netzschützes kann allerdings einen Ausfall des
Frequenzumrichters bewirken. Die Netzspannung darf nicht mehr als ein Mal pro Stunde eingeschaltet
werden.
• Wird der Frequenzumrichter über die digitale Bedienkonsole bedient, kann bei Wiederherstellen der
Spannungsversorgung nach einer Unterbrechung kein automatischer Anlauf erfolgen.
Anschließen der Eingangsspannungsversorgung an den Klemmenblock
Die Eingangsspannungsversorgung kann an die Klemmen mit den Bezeichnungen R, S und T am
Klemmenblock angeschlossen werden. Die Phasensequenz der Eingangsspannungsversorgung ist ohne
Bedeutung für die Ausgangsphasensequenz.
Installation einer AC-Drossel
Wenn der Frequenzumrichter an einen Transformator mit hoher Leistung (600 kW oder mehr) angeschlossen
wird oder ein Phasenschieber-Kondensator geschaltet wird, kann es zu einer Spannungserhöhung im
Eingangskreis kommen, wodurch der Frequenzumrichter ausfällt.
Um das zu verhindern, muss eine optionale AC-Drossel an der Eingangsseite des Frequenzumrichters oder
eine DC-Drossel an die Anschlussklemmen für die DC-Drossel angeschlossen werden.
Diese Maßnahme verbessert auch den Leistungsfaktor auf der Spannungsversorgungsseite.
Installation eines Überspannungsableiters
Verwenden Sie immer einen Überspannungsableiter oder eine Diode, wenn induktive Lasten in der Nähe des
Frequenzumrichter geschaltet werden. Zu diesen induktiven Lasten gehören Schütze, elektromagnetische
Relais, Magnetventile, Magnetspulen und Magnetbremsen.
2-15
Page 51

Verdrahtung der Ausgangsseite des Leistungskreises
Beachten Sie bei der Verdrahtung der Ausgänge des Leistungskreises die folgenden Sicherheitshinweise.
Anschluss des Motors an den Frequenzumrichter
Schließen Sie die Motorkabel U, V und W an die entsprechenden Ausgangsklemmen U/T1, V/T2 und W/T3 an.
Prüfen Sie, ob der Motor mit dem Vorwärts-Befehl auch vorwärts läuft. Falls der Motor beim Vorwärts-Befehl
rückwärts läuft, vertauschen Sie zwei der Anschlüsse an den Ausgangsklemmen miteinander und schließen
Sie sie wieder an.
2
Schließen Sie die Versorgungsspannung niemals an die Ausgangsklemmen an
Schließen Sie die Versorgungsspannung auf keinen Fall an die Ausgangsklemmen U/T1, V/T2 und W/T3 an.
Wird an die Ausgangsklemmen Spannung angelegt, werden die internen Schaltungen des Frequenzumrichters
beschädigt.
Ausgangsklemmen dürfen niemals kurzgeschlossen oder geerdet werden
Wenn die Ausgangsklemmen mit bloßen Händen berührt werden oder die Ausgangsleiter in Kontakt mit dem
Frequenzumrichtergehäuse kommen, kann dies zu einem elektrischen Schlag oder einer Erdung der Klemmen
führen. Das ist extrem gefährlich! Schließen Sie die Ausgangsleitungen auf keinen Fall kurz.
Verwenden Sie keinen Phasenschieber-Kondensator
Schließen Sie niemals einen Phasenschieber-Kondensator an einen Ausgangskreis an. Die HochfrequenzBauteile des Frequenzumrichterausgangs können überhitzen und beschädigt werden und andere Teile in Brand
setzen.
Verwenden Sie kein Schütz im Ausgangskreis
Schalten Sie niemals ein Schütz zwischen Frequenzumrichter und Motor, um den Motor über dieses ein- und
ausschalten zu können. Beim Einschalten des Schützes, während der Frequenzumrichter in Betrieb ist, wird
ein hoher Einschaltstrom erzeugt, wodurch der Überstromschutz des Frequenzumrichters ausgelöst wird.
Wenn Sie ein Schütz im Ausgangskreis verwenden, um beispielsweise zwischen zwei Motoren umschalten zu
können, muss vor Betätigung des Schützes der Frequenzumrichterausgang ausgeschaltet werden.
2-16
Installation eines Überlastrelais (Thermorelais) als Motorschutz
Diese Frequenzumrichter verfügen über einen elektronischen Überhitzungsschutz, um den Motor vor einer
Überhitzung zu schützen. Sind jedoch mehrere Motoren oder ein mehrpoliger Motor an einen
Frequenzumrichter angeschlossen, muss ein thermisches Überlastrelais zwischen Frequenzumrichter und
Motor geschaltet und die Motorschutzfunktion des Frequenzumrichters deaktiviert werden (L1-01 = 0). Die
Steuerschaltung muss in diesem Fall so ausgelegt werden, dass der Arbeitskontakt des Überlast-Thermorelais
das Schütz im Eingangsstromkreis ausschaltet.
Kabellänge zwischen Frequenzumrichter und Motor
Bei einem langen Kabel zwischen Frequenzumrichter und Motor kommt es zu einer Zunahme des
hochfrequenten Leckstroms und damit zu einer Zunahme des Frequenzumrichter-Ausgangsstroms. Dies kann
Peripheriegeräte beeinflussen. Durch Anpassung der in C6-01 und C6-02 eingestellten Taktfrequenz an die
Kabellänge gemäß Ta be ll e 2 . 6 können Sie dies verhindern. (Einzelheiten finden Sie in Kapitel 5,
Anwenderparameter.)
Tabelle 2.6 Kabellänge zwischen Frequenzumrichter und Motor
Kabellänge max. 50 m max. 100 m über 100 m
Taktfrequenz max. 15 kHz max. 10 kHz max. 5 kHz
Page 52

Verdrahtung der Erdung
Beachten Sie bei der Verdrahtung des Erdungsleiters die folgenden Sicherheitshinweise.
• Schließen Sie die Erdungsklemme eines Frequenzumrichters immer gemäß den örtlichen Bestimmungen
an. In jedem Fall muss der Erdungswiderstand bei einem 200-V-Frequenzumrichter weniger als 100 Ω und
bei einem 400-V-Frequenzumrichter weniger als 10 Ω betragen.
• Verwenden Sie den Erdungsleiter nicht noch für andere Geräte, wie z. B. Schweißgeräte oder
Elektrowerkzeuge.
• Verwenden Sie stets einen Erdungsleiter, der den technischen Normen für Elektrogeräte entspricht, und
halten Sie die Länge des Erdungsleiters so kurz wie möglich.
Durch den Frequenzumrichter fließt ein Leckstrom. Wenn der Abstand zwischen der Erdungselektrode
und der Erdungsklemme zu groß ist, wird das Potenzial an der Erdungsklemme des Frequenzumrichters
instabil.
• Bei Einsatz von mehr als einem Frequenzumrichter müssen Sie darauf achten, dass der Erdungsleiter keine
Schleife bildet.
2
OK
Abb. 2.6 Verdrahtung der Erdung
Nicht
zulässig
Anschluss eines an der Rückseite des Frequenzumrichters installierten
Bremswiderstands
An die Rückseite von Frequenzumrichtern der 200- und 400-V-Klasse mit 0,4 bis 11 kW Ausgangsleistung
kann ein Bremswiderstand montiert werden. Bei Verwendung eines solchen Widerstands kann der interne
Bremswiderstandüberhitzungsschutz aktiviert werden (siehe nachstehende Tabelle).
Schließen Sie den Bremswiderstand wie in Abb. 2.7 gezeigt an.
L8-01 (Schutzauswahl für den internen DC-Bremswiderstand) 1 (Überhitzungsschutz aktiviert)
L3-04 (Blockierschutzauswahl bei Verzögerung)
(Wählen Sie eine dieser Einstellungen aus.)
Frequenzumrichter
0 (Blockierschutz deaktiviert)
3 (Blockierschutz mit Bremswiderstand aktiviert)
Bremswiderstand
WICHTIG
Abb. 2.7 Anschluss des Bremswiderstands
Der Anschluss des Bremswiderstands erfolgt an den Klemmen B1 und B2. Der Bremswiderstand darf
keineswegs an andere Klemmen angeschlossen werden, da andernfalls der Widerstand und andere
Komponenten beschädigt werden können.
2-17
Page 53

Anschluss einer Bremswiderstandeinheit (LKEB) und einer Bremseinheit (CDBR)
Schließen Sie eine Bremswiderstandeinheit und eine Bremseinheit wie in Abb. 2.8 gezeigt an den Frequenzumrichter an. In dieser Konfiguration muss der interne Bremswiderstandüberhitzungsschutz deaktiviert
werden (siehe nachstehende Tabelle).
L8-01 (Schutzauswahl für den internen DC-Bremswiderstand) 0 (Überhitzungsschutz deaktiviert)
2
L3-04 (Blockierschutzauswahl bei Verzögerung)
(Wählen Sie eine dieser Einstellungen aus.)
0 (Blockierschutz deaktiviert)
3 (Blockierschutz mit Bremswiderstand aktiviert)
Ist L3-04 auf 1 gesetzt (d. h. der Blockierschutz bei Verzögerung ist aktiviert), funktioniert die Bremswiderstandeinheit nicht ordnungsgemäß. Dadurch ist die Verzögerungszeit möglicherweise länger als eingestellt
(C1-02/04/06/08).
Um die Bremseinheit/den Bremswiderstand vor Überhitzung zu schützen, legen Sie den Steuerstromkreis so
aus, dass die thermischen Überlast-Relaiskontakte der Geräte die Versorgungsspannung zum
Frequenzumrichter ausschalten, wie in Abb. 2.8 gezeigt.
Frequenzumrichter der 200- und 400-V-Klasse mit 0,4 bis 18,5 kW Ausgangsleistung
Bremswiderstandeinheit (LKEB)
Frequenzumrichter
Kontakt des
thermischen
Überlastrelais
Frequenzumrichter der 200- und 400-V-Klasse ab 22 kW Ausgangsleistung
Frequenzumrichter
CDBR Bremseinheit
Kontakt des thermischen
Überlastrelais
Abb. 2.8 Anschluss von Bremswiderstand und Bremseinheit
Bremswiderstandeinheit (LKEB)
Kontakt des thermischen
Überlastrelais
2-18
Page 54

Parallelschaltung von Bremseinheiten
Bei Parallelschaltung von zwei oder mehr Bremseinheiten verwenden Sie das Verdrahtungsschema und die
Jumper-Einstellungen, wie sie in Abb. 2.9 gezeigt werden. Der Jumper dient zur Auswahl, ob eine
Bremseinheit ein „Master“ oder ein „Slave“ sein soll. Setzen sie den Jumper bei der ersten Bremseinheit
immer auf „Master“ und bei allen weiteren Bremseinheiten auf „Slave“ (d. h. ab der zweiten Bremseinheit).
Frequenzumrichter
Bremseinheit 1
Kontakt des thermischen
Kontakt des thermischen
Überlastrelais
Pegel-
detektor
Bremswiderstandeinheit
(LKEB)
Kontakt des thermischen
Überlastrelais
Bremseinheit 2
Kontakt des thermischen
Überlastrelais
Überlastrelais
Abb. 2.9 Parallelschaltung von Bremseinheiten
Bremswiderstandeinheit
(LKEB)
Bremseinheit 3
Kontakt des thermischen
Überlastrelais
Kontakt des thermischen
Überlastrelais
Bremswiderstandeinheit
(LKEB)
2
2-19
Page 55

2
Verdrahtung der Steuerklemmen
Leiterquerschnitte
Für eine Fernbedienung mittels analoger Signale darf die Länge des Kabels zwischen analoger Bedienkonsole
bzw. einer anderen Quelle von analogen Steuersignalen und dem Frequenzumrichter nicht mehr als 50 m
betragen. Darüber hinaus müssen die Kabel von Netzspannungsleitungen oder anderen Steuerleitungen
getrennt verlegt werden, um induktive Störungen zu vermeiden.
Bei Einstellung von Frequenzen durch eine externe Sollwertquelle (statt über eine digitale Bedienkonsole)
müssen abgeschirmte, paarweise verdrillte Kabel verwendet werden und die Abschirmung mit der
größtmöglichen Kontaktfläche geerdet werden.
In Tabelle 2.7 sind die Klemmennummern und entsprechend geeignete Leiterquerschnitte aufgeführt.
Tabelle 2.7 Klemmennummern und Leiterquerschnitte (für alle Modelle identisch)
Klemmen
FM, AC, AM, SC, SP,
SN, A1, A2, +V, –V, S1,
S2, S3, S4, S5, S6, S7
MA, MB, MC, M1, M2,
M3, M4, M5, M6
MP, RP, R+, R-, S+, S-,
IG
E (G) M3,5 0,8 bis 1,0
* 1. Verwenden Sie zum Anschluss eines externen Frequenzsollwertgebers abgeschirmte Kabel mit paarweise verdrillte Adern.
* 2. Wir empfehlen an Signalleitungen die Verwendung von geraden, lötfreien Aderendhülsen, um die Verdrahtung zu vereinfachen und die Zuverlässigkeit
zu verbessern.
Klemmen-
schrauben
Typ
Phoenix
Anzugs-
drehmoment
(Nm)
0,5 bis 0,6
Mögliche
Leiter-
querschnitte
2
mm
(AWG)
Volldraht
0,5 bis 2,5
Litze:
0,5 bis 1,5
(26 bis 14)
0,5 bis 2,5
(20 bis 14)
Empfohlene
querschnitte
mm
*2
:
Leiter-
2
(AWG)
0,75
(18)
1
(12)
Kabeltyp
• Abgeschirmtes, paarweise
verdrilltes Kabel
• Abgeschirmtes, Polyethylenisoliertes Vinylschlauchkabel
*1
Gerade, lötfreie Aderendhülsen für Signalleitungen
Modelle und Größen von geraden, lötfreien Aderendhülsen sind in der folgenden Tabelle aufgeführt.
Tabelle 2.8 Größen von geraden, lötfreien Aderendhülsen
Leiterquerschnitt
2
(AWG)
in mm
0,25 (24) AI 0.25 - 8YE 0,8 2 12,5
0,5 (20) AI 0.5 - 8WH 1,1 2,5 14
0,75 (18) AI 0.75 - 8GY 1,3 2,8 14
1,25 (16) AI 1.5 - 8BK 1,8 3,4 14
2 (14) AI 2.5 - 8BU 2,3 4,2 14
Produktbezeichnung d1 d2 L Hersteller
Phoenix Contact
2-20
L
Abb. 2.10 Größen von geraden, lötfreien Aderendhülsen
Page 56

Verdrahtungsmethode
Verwenden Sie folgendes Verfahren zum Anschluss von Drähten an den Klemmenblock.
1. Lösen Sie die Klemmenschrauben mit einem passenden Schlitzschraubendreher.
2. Führen Sie die Drähte von unten in den Klemmenblock ein.
3. Ziehen Sie die Klemmenschrauben fest an.
Isolieren Sie das
Drahtende auf
7 mm Länge ab,
wenn keine
lötfreie
Aderendhülse
verwendet wird.
Schraubendreher
SteuerstromkreisKlemmenblock
Lötfreie Aderendhülse oder
nicht verlöteter Draht
Draht
Abb. 2.11 Anschluss von Drähten an den Klemmenblock
Schraubendreherklinge
2
max. 3,5 mm
Klingenstärke: max. 0,6 mm
2-21
Page 57

2
Funktionen der Steuerklemmen
Die Funktionen der Steuerklemmen sind in Ta bel le 2 .9 aufgeführt. Verwenden Sie alle Klemmen bestimmungsgemäß.
Tabelle 2.9 Steuerklemmen mit Standardeinstellungen
Be-
Typ
Digitale
Eingangs-
signale
Analoge
Eingangs-
signale
zeich-
nung
S1 Vorwärts-Start/Stopp-Befehl Vorwärts-Start bei EIN, Stopp bei AUS.
S2 Rückwärts-Start/Stopp-Befehl Rückwärts-Start bei EIN, Stopp bei AUS.
S3
S4
S5
S6
S7 Jog-Frequenzsollwert*1 Jog-Frequenz bei EIN.
SC
SN Digitaleingang Neutral – –
SP
+V 15-V-Ausgang
-V -15-V-Ausgang
A1 Frequenzsollwert -10 bis +10 V/100 % -10 bis +10 V (20 kΩ)
A2
AC
E (G)
Signalbezeichnung Funktion Signalspezifikation
Externer Fehlereingang
Fehler-Rücksetzung
*1
*1
Festdrehzahlsollwert Bit 0
(Haupt-/Hilfsschalter)
Festdrehzahlsollwert Bit 1
DigitaleingangsBezugspotenzial
DigitaleingangsSpannungsversorgung
MultifunktionsAnalogeingang
Bezugspotenzial für analogen
Sollwert
Fehler bei EIN.
Rücksetzung bei EIN.
*1
Hilfsfrequenzsollwert
bei EIN.
Einstellung von Festreh-
*1
zahlsollwert 2 bei EIN.
–
+24 V DC Spannungsversorgung für
Digitaleingänge
15-V-Versorgungsspannung für analoge
Sollwerte
-15-V-Versorgungsspannung für analoge
Sollwerte
4 bis 20 mA/100 %
-10 bis +10 V/100 %
––
Funktionen
werden durch die
Einstellungen
H1-01 bis H1-05
ausgewählt.
Funktionsauswahl mittels Einstellung H3-09.
24 V DC, 8 mA
Optokoppler
24 V DC, max. 250 mA
15 V
(Strom max. 20 mA)
-15 V
(Strom max. 20 mA)
4 bis 20 mA (250 Ω)
-10 bis +10 V (20 kΩ)
Abschirmung,
Anschlusspunkt für optionale
––
Erdungsleiter
–
*2
2-22
Sequenz-
ausgangs-
signale
M1
START aktiv
(1 Schließerkontakt)
M2
M3
Nulldrehzahl
M4
M5
Frequenzübereinstimmung
M6
MA
MB
Ausgangsfehlersignal
MC
Betrieb bei EIN.
EIN, wenn Ausgangsfrequenz bei oder unter
Nulldrehzahlpegel
Multifunktions-
Kontaktausgänge
(b2-01).
EIN, wenn innerhalb
±2 Hz der eingestellten
Frequenz.
Fehler bei MA und MC geschlossen.
Fehler bei MB und MC geöffnet.
Relaiskontakte
Kontaktbelastbarkeit:
max. 1 A bei 250 V AC
max. 1 A bei 30 V DC
Relaiskontakte
Kontaktbelastbarkeit:
max. 1 A bei 250 V AC
max. 1 A bei 30 V DC
*3
*3
Page 58

Tabelle 2.9 Steuerklemmen mit Standardeinstellungen
Be-
Typ
zeich-
Signalbezeichnung Funktion Signalspezifikation
nung
0 bis 10 V, 10 V
entspricht 100 % der
Ausgangsfrequenz
0 bis 10 V, 10 V
entspricht 200 % des
Frequenzumrichter-
MultifunktionsAnalogausgang 1
–
MultifunktionsAnalogausgang 2
max. -10 bis +10 V, ±5 %
max. 2 mA
4 bis 20 mA
Stromausgang
Analoge
Ausgangs-
signale
Multifunktions-Analog-
FM
ausgang (Ausgangsfrequenz)
Analogausgangs-
AC
Bezugspotential
Multifunktions-Analog-
AM
ausgang (Motorstrom)
Nennstroms
0 bis 32 kHz (3 kΩ)
*4
H6-01 (Frequenzsollwerteingang)
H-Pegel-Spannung:
3,5 bis 13,2 V
0 bis 32 kHz
+15-V-Ausgang V
Impuls-
E/A
RP
Impulseingang
MP Impulsfolgeausgang H6-06 (Ausgangsfrequenz)
(2,2 kΩ)
R+
RS-485/
422
MEMOBUSKommunikationseingang
R-
S+
MEMOBUSKommunikationsausgang
S-
Für Zweidraht-RS-485:
R+ und S+ sowie R- und S- kurzschließen.
Differenzialeingang,
Optokopplerisolierung
Differenzialeingang,
Optokopplerisolierung
IG Signal-Bezugspotential – –
* 1. In der Tabelle sind die Standardeinstellungen für die Klemmen S3 bis S7 angegeben. Bei einer Dreidraht-Ansteuerung sind die Standardeinstellungen:
Dreidraht-Ansteuerung für S5, Festdrehzahlsollwert Bit 1 für S6 und Festdrehzahlsollwert Bit 2 für S7.
* 2. Verwenden Sie diese Versorgungsspannung nicht zur Versorgung von externen Geräten.
* 3. Bei Ansteuerung einer Blindlast, wie z. B. einer Relaisspule mit DC-Spannungsversorgung, muss stets eine Freilaufdiode geschaltet werden
(siehe Abb. 2.12).
* 4. Die Impulseingangsspezifikationen sind in der folgenden Tabelle angegeben.
L-Pegel-Spannung 0,0 bis 0,8 V
H-Pegel-Spannung 3,5 bis 13,2 V
Tastverhältnis 30 % bis 70 %
Impulsfrequenz 0 bis 32 kHz
2
Externe Spannungsversorgung:
max. 30 V DC
Freilaufdiode
Spule
max. 1 A
Abb. 2.12 Zwischenschaltung der Freilaufdiode
Die Nennspannung der Freilaufdiode muss mindestens so hoch
wie die Spannung im Steuerstromkreis sein.
2-23
Page 59

2
Jumperblock CN15 und DIP-Schalterblock S1
In diesem Abschnitt werden die Funktion des Jumperblocks CN15 und des DIP-Schalterblocks S1 beschrieben.
CN15
Ch1
Ch2
Off On
V I
Abb. 2.13 Jumperblock CN15 und DIP-Schalterblock S1
Die folgende Tabelle enthält Angaben zur Funktion des Jumperblocks CN15 und des DIP-Schalterblocks S1.
Tabelle 2.10 Einstellungen des Jumperblocks CN15 und des DIP-Schalterblocks S1
Schalter/
Jumper
S1-1 RS-485/422-Abschlusswiderstand
S1-2 Eingangsart für Analogeingang A2
CN15-
CH1
CN15-
CH2
Schalter für Strom/Spannung über
Multifunktions-Analogausgang FM
Schalter für Strom/Spannung über
Multifunktions-Analogausgang AM
Auswahl Strom-/Spannungsausgang für Analogausgang FM
Auswahl Strom-/Spannungsausgang für Analogausgang AM
VI
S1
Abschlusswiderstand RS422/485-Schnittstelle
Auswahl Strom-/Spannungseingang für Analogeingang A2
Funktion Einstellung
AUS: Kein Abschlusswiderstand
EIN: Abschlusswiderstand von 110 kΩ
V: 0 bis 10 V (Eingangswiderstand: 20 kΩ)
I: 4 bis 20 mA (Eingangswiderstand: 250 Ω)
I: Stromausgang
V: Spannungsausgang
I: Stromausgang
V: Spannungsausgang
2-24
Page 60

NPN/PNP-Eingangsbetriebsart
Die Eingangsklemmenlogik kann zwischen NPN-Betriebsart (0 V Bezugspunkt) und PNP-Betriebsart
(+24 V Bezugspunkt) durch Verwenden der Klemmen SN, SC und SP gewählt werden. Eine externe
Spannungsversorgung wird ebenfalls unterstützt, wodurch mehr Auswahl bei den Signaleingangsmethoden
geboten wird.
Tabelle 2.11 NPN/PNP-Betriebsart und Eingangssignale
Interne Spannungsversorgung – NPN-Betriebsart
Interne Spannungsversorgung – PNP-Betriebsart
Externe Spannungsversorgung – NPN-Betriebsart
2
Externe Spannungsversorgung 24 V DC
Externe Spannungsversorgung – PNP-Betriebsart
Externe
Spannungsversorgung
24 V DC
2-25
Page 61

Beschaltung der Steuerklemmen
In Abb. 2.14 ist die Beschaltung der Steuerklemmen des Frequenzumrichters dargestellt.
Varispeed F7
CIMR-F7Z47P5
2
MultifunktionsKontakteingänge
(Werkseinstellung)
Vorwärts Start/Stopp
Rückwärts Start/Stopp
Externer Fehler
Fehler-Rücksetzung
Festdrehzahl Bit 0
Festdrehzahl Bit 1
Jog-Frequenz-Auswahl
AnalogeingangEinstellung
3
2 k
Ω
2
1
4 bis 20 mA
MEMOBUSKommunikation
RS-485/422
0 bis 10 V
S1
S2
S3
S4
S5
S6
S7
SN
SC
SP
24 V
Abschirmungsklemme
Impulseingang
RP
[Werkseinstellung:
Frequenzsollwerteingang]
0 bis 32kHz
+V
Analogeingangs-Spannungs-
2 k
Ω
PP
A1
A2
AC
-V
R+
P
R-
S+
P
S-
IG
versorgung, +15 V, 20 mA
Analogeingang 1:
Master-Frequenzsollwert
-10 bis +10 V (20 kΩ)
Multifunktions-Analogeingang 2:
[Werkseinstellung: FrequenzOffset] 4 bis 20mA (250
0 V
Analogeingang-Spannungsversorgung -15 V, 20 mA
Abschlusswiderstand
Abschirmungsklemme
Ω
)]
MA
Fehler-Kontaktausgang
MB
max. 250 V AC, 1 A
max. 30 V DC, 1 A
MC
M1
Kontaktausgang 1
(Werkseinstellung:
M2
In Betrieb)
M3
Kontaktausgang 2
(Werkseinstellung:
M4
Nulldrehzahl)
Kontaktausgang 3
M5
(Werkseinstellung:
M6
Frequenzübereinstimmung)
E(G)
MP
AC
FM
AM
AC
MultifunktionsKontakt-Ausgang
max. 250 V AC, 1 A
max. 30 V DC, 1 A
Impulsausgang
0 bis 32 kHz (2,2 k
(Werkseinstellung: Ausgangsstrom)
Einstellung, 20 k
+
Einstellung, 20 k
+
Ω
)
Ω
Multifunktions-Analogausgang 1
-
FM
(-10 bis +10 V, 2 mA / 4 bis 20 mA)
[Werkseinstellung: Ausgangsfrequenz,
0 bis +10 V]
Ω
Multifunktions-Analogausgang 2
-
AM
(-10 bis +10 V, 2 mA / 4 bis 20 mA)
[Werkseinstellung: Ausgangsstrom,
0 bis +10 V]
2-26
Abgeschirmte
Kabel
Abgeschirmte, paarweise
P
verdrillte Drähte
Abb. 2.14 Beschaltung der Steuerklemmen
Sicherheitshinweise für die Verdrahtung der Steuerklemmen
Beachten Sie bei der Verdrahtung der Steuerklemmen die folgenden Sicherheitshinweise.
• Verlegen Sie die Leitungen für die Steuerklemmen getrennt von den Leitungen des Leistungskreises
(Klemmen R/L1, S/L2, T/L3, B1, B2, U/T1, V/T2, W/T3, , 1, 2 und 3) und anderen Hochspannungs- und Starkstromleitungen.
• Verlegen Sie die Leitungen der Steuerklemmen MA, MB, MC, M1, M2, M3, M4, M5 und M6
(Kontaktausgänge) getrennt von den Leitungen anderer Steuerklemmen.
• Wenn eine optionale externe Spannungsversorgung verwendet wird, muss es sich um eine UL-gelistete
Spannungsversorgungsquelle der Klasse 2 handeln.
• Verwenden Sie für die Verdrahtung der Steuerklemmen paarweise verdrillte oder abgeschirmte Kabel, um
Betriebsfehler zu vermeiden.
•
Erden Sie die Kabelabschirmung mit der größtmöglichen Kontaktfläche zwischen Abschirmung und Erdung.
• Kabelabschirmungen müssen an beiden Kabelenden geerdet sein.
Page 62

Prüfung der Verdrahtung
Prüfen Sie nach Abschluss der Verdrahtung alle Verdrahtungen. Führen Sie an den Steuerklemmen keine
Durchgangsprüfung durch. Führen Sie folgende Prüfungen an der Verdrahtung durch.
• Ist die gesamte Verdrahtung korrekt?
• Wurden keine Kabelreste, Schrauben oder andere Fremdmaterialien hinterlassen?
• Sind alle Schrauben festgezogen?
• Kommen Drahtenden mit anderen Klemmen in Berührung?
2
2-27
Page 63

2
Installation und Verdrahtung von Optionskarten
Optionskarten-Modelle und Spezifikationen
Im Frequenzumrichter können bis zu drei Optionskarten installiert werden. Sie können jeweils eine Karte an
jedem der drei Steckplätze auf der Controllerkarte installieren, wie in Abb. 2.15 gezeigt.
In Tabelle 2.12 sind die Arten von Optionskarten und ihre Spezifikationen aufgelistet.
Tabelle 2.12 Optionskarten
Produkt-
Karte
Impulsgeberkarten
DeviceNetKommunikationskarte
Profibus-DPKommunikationskarte
InterBus-SKommunikationskarte
CANOpenKommunikationskarte
Analogeingangskarten
Digitaleingangskarten
bezeich-
nung
PG-B2
PG-X2
SI-N1/
PDRT2
SI-P1 Optionskarte für Profibus-DP-Feldbus C
SI-R1 Optionskarte für InterBus-S-Feldbus C
SI-S1 Optionskarte für CANOpen-Feldbus C
AI-14U
AI-14B
DI-08 8-Bit-Drehzahlsollwert-Digitaleingangskarte C
DI-16H2 16-Bit-Drehzahlsollwert-Digitaleingangskarte C
Zwei Phasen (Phasen A und B), +12 V-Eingänge,
max. Eingangsfrequenz: 50 kHz
Drei Phasen (Phasen A, B, Z), Line-Driver-Eingänge
(RS422), max. Eingangsfrequenz: 300 kHz
Optionskarte für DeviceNet-Feldbus C
2-Kanal-Analogeingangskarte mit hoher Auflösung
Kanal 1: 0 bis 10 V (20 kΩ)
Kanal 2: 4 bis 20 mA (250 Ω)
Auflösung: 14 Bit
3-Kanal-Analogeingangskarte mit hoher Auflösung
Signalspezifikation: -10 bis +10 V (20 kΩ)
Auflösung: 13 Bit + Vorzeichen
Spezifikationen Steckplatz
4 bis 20 mA (250 Ω)
A
A
C
C
2-28
Installation
Nehmen Sie vor der Installation einer Optionskarte die Klemmenabdeckung ab, und stellen Sie sicher, dass die
Ladeanzeige unter der Abdeckung nicht mehr leuchtet. Nehmen Sie anschließend die digitale Bedienkonsole
sowie die Frontabdeckung ab, und installieren Sie die Optionskarte.
Installationsanleitungen für die Optionssteckplätze finden Sie in der der Optionskarte beiliegenden
Dokumentation.
Page 64

Sicherung der Optionskartensteckverbindung C gegen Lösen
Nach Installation einer Optionskarte in Steckplatz C muss ein Optionsclip eingesetzt werden, um die
Steckverbindung zu sichern. Der Optionsclip kann durch Greifen des hervorstehenden Teils des Clips und
durch anschließendes Herausziehen einfach entfernt werden.
Bohrung für Abstandshalter von Optionskarte A
CN4
Steckverbindung für Optionskarte A
CN2
Steckverbindung für Optionskarte C
Abstandshalter für Optionskarte A
(liegt der Optionskarte A bei)
Optionskartenclip
(Zur Befestigung der
Optionskarte C)
Optionskarte A
Abb. 2.15 Installation von Optionskarten
2
Abstandshalter für Optionskarte
Optionskarte C
Abstandshalter für Optionskarte A
2-29
Page 65

2
Impulsgeberkarten – Klemmen und Spezifikationen
PG-B2
Die Klemmenspezifikationen der Impulsgeberkarte PG-B2 sind in der folgenden Tabelle aufgeführt.
Tabelle 2.13 Klemmenspezifikationen der Impulsgeberkarte PG-B2
Anschluss Nr. Belegung Spezifikationen
1
Spannungsversorgung für
Impulsgeber
2 0 V DC (Masse der Spannungsversorgung)
3
TA1
TA2
TA3 (E) Abschirmungs-Anschlussklemme -
Impulseingangsklemmen, Phase A
4 Impulseingangsmasse, Phase A
5
Impulseingangsklemmen, Phase B
6 Impulseingangsmasse, Phase B
1
Impulsausgangsklemmen
Phase A
2
3
Impulsausgangsklemmen
Phase B
4
12 V DC (±5 %), max. 200 mA
H: +8 bis +12 V (max. Eingangsfrequenz: 50 kHz)
L: max. +1 V
(Maximale Ansprechfrequenz: 30 kHz)
H: +8 bis +12 V (max. Eingangsfrequenz: 50 kHz)
Transistorausgang, offener Kollektor, 24 V DC,
max. 30 mA
Transistorausgang, offener Kollektor, 24 V DC,
max. 30 mA
PG-X2
Die Klemmenspezifikationen der Impulsgeberkarte PG-X2 sind in der folgenden Tabelle aufgeführt.
Tabelle 2.14 Klemmenspezifikationen der Impulsgeberkarte PG-X2
Anschluss Nr. Belegung Spezifikationen
1
Spannungsversorgung für Impulsgeber
2 0 V DC (Masse der Spannungsversorgung)
3 5 V DC (±5 %), max. 200 mA*
4 Impulseingangsklemme, Phase A (+)
TA1
TA2
TA3 (E) Abschirmungs-Anschlussklemme –
* Es kann immer nur eine der beiden Versorgungsspannungen (5 V DC oder 12 V DC) genutzt werden.
5 Impulseingangsklemme, Phase A (–)
6 Impulseingangsklemme, Phase B (+)
7 Impulseingangsklemme, Phase B (–)
8 Impulseingangsklemme, Phase Z (+)
9 Impulseingangsklemme, Phase Z (–)
10 Eingangsklemmen-Bezugspunkt –
1 Impulsausgangsklemme, Phase A (+)
2 Impulsausgangsklemme, Phase A (–)
Impulsüberwachungs-Ausgangsklemme,
3
4 Impulsausgangsklemme, Phase B (–)
5 Impulsausgangsklemme, Phase Z (+)
6 Impulsausgangsklemme, Phase Z (–)
7 Impulsausgangsklemmen, Bezugspunkt –
12 V DC (±5 %), max. 200 mA*
Line-Driver-Eingang (RS422-Pegel)
(Maximale Eingangsfrequenz: 300 kHz)
Line-Driver-Ausgang (RS422-Pegel)
2-30
Page 66

Verdrahtung
Verdrahtung der PG-B2
Die folgenden Abbildungen zeigen Beispiele für die Verdrahtung des PG-B2 bei Verwendung der Optionskarten-Spannungsversorgung bzw. einer externen Spannungsquelle für die Versorgung des Impulsgebers.
3 Phasen, 200 V
AC (400 V AC)
R/L1
S/L2
T/L3
Frequenzumrichter
CN4CN4
Spannungsversorgung +12 V
Spannungsversorgung 0 V
Impulseingang, Phase A
Impulseingangsmasse, Phase A
Impulseingang, Phase B
Impulseingangsmasse, Phase B
Impulsausgang, Phase A
Impulsausgang, Phase B
2
Abb. 2.16 Verdrahtung der PG-B2 bei Verwendung der Optionskarten-Spannungsversorgung
Abb. 2.17 Verdrahtung der PG-B2 bei Verwendung einer externen 12-V-Spannungsversorgung
• Als Signalleitungen müssen abgeschirmte, paarweise verdrillte Kabel verwendet werden.
• Verwenden Sie die Spannungsversorgung für den Impulsgeber ausschließlich für den Impulsgeber
(Encoder). Bei Verwendung für einen anderen Zweck kann es aufgrund von Störungen zu Fehlfunktionen
kommen.
• Die Länge der Verdrahtung des Impulsgebers darf 100 m nicht überschreiten.
• Die Drehrichtung des Impulsgebers kann in Anwenderparameter F1-05 eingestellt werden. Die
werksseitige Voreinstellung ist Vorwärtsdrehung, Phase A vorwärts.
Phase-A-Impulse
Phase-B-Impulse
2-31
Page 67

2
• Beim Anschluss an einen Impulsgeber (Encoder) mit Spannungsausgang wählen Sie einen Impulsgeber,
der eine Ausgangsimpedanz mit einem Strom von mindestens 12 mA am Optokoppler (Diode) des
Eingangs aufweist.
• Das Impulsüberwachungs-Teilungsverhältnis kann mittels Parameter F1-06 geändert werden.
ImpulsgeberSpannungsversorgung
+12 V
Impulseingang,
Phase A
Impulseingang,
Phase B
Phase-AImpulse
Phase-BImpulse
Schaltung
Teilungsraten-
Impulsausgang,
Phase A
Impulsausgang,
Phase B
Abb. 2.18 E/A-Schaltkreiskonfiguration des PG-B2
Verdrahtung der PG-X2
Die folgenden Abbildungen zeigen Beispiele für die Verdrahtung der PG-X2 bei Verwendung der
Optionskarten-Spannungsversorgung bzw. einer externen Spannungsquelle für die Versorgung des
Impulsgebers.
3 Phasen, 200/400 V AC
R/L1
S/L2
T/L3
Abb. 2.19 Verdrahtung der PG-X2 bei Verwendung der Optionskarten-Spannungsversorgung
Frequenzumrichter
R/L1
U/T1
S/L2
V/T2
T/L3
W/T3
CN4
E
4CN
E
PG-X2
PG-D2
TA 1
TA 2
+12 V
0 V
+5 V
Impulseingang Phase A (+)
Impulseingang Phase A (–)
Impulseingang Phase B (+)
Impulseingang Phase B (–)
Impulseingang Phase Z (+)
Impulseingang Phase Z (–)
Impulsausgang, Phase A
Impulsausgang, Phase B
Impulsausgang, Phase Z
Impulsgeber
2-32
Page 68

PG-X2
TA1
IP12
IG
IP5
A (+)
A (-)
B (+)
B (-)
Z (+)
Z (-)
IG
TA3
1
2
3
4
5
6
7
8
9
10
ImpulsgeberSpannungsversorgung
AC
0 V +12 V
SpannungsausfallÜberbrückungskondensator
0 V
+12 V
+
+
PG
-
+
+
-
Abb. 2.20 Verdrahtung der PG-X2 bei Verwendung einer externen 5-V-Spannungsversorgung
•
Als Signalleitungen müssen abgeschirmte, paarweise verdrillte Kabel verwendet werden.
• Verwenden Sie die Spannungsversorgung für den Impulsgeber ausschließlich für den Impulsgeber
(Encoder). Bei Verwendung für einen anderen Zweck kann es aufgrund von Störungen zu Fehlfunktionen
kommen.
• Die Länge der Verdrahtung des Impulsgebers darf 100 m nicht überschreiten.
• Die Drehrichtung des Impulsgebers kann im Anwenderparameter F1-05 eingestellt werden (Impulsgeber-
Drehrichtung). Die werksseitige Voreinstellung ist Vorwärtsdrehung, Phase A vorwärts.
2
Verdrahtung der Klemmenblöcke
Die Signalleitungen für den Impulsgeber (Drehgeber) dürfen nicht länger als 100 m sein und müssen getrennt
von der Leistungsverdrahtung verlegt werden.
Verwenden Sie als Kabel für die Impulsein- und -ausgänge paarweise verdrillte Kabel und schließen Sie die
Abschirmung an die entsprechende Klemme an.
Leiterquerschnitte (für alle Modelle identisch)
In Tabelle 2.15 sind die erforderlichen Leiterquerschnitte für die Klemmenverdrahtung angegeben.
Tabelle 2.15 Leiterquerschnitte
Klemmen-
Klemme
schrau-
ben
Impulsgeber-Spannungsversorgung
Impulseingangsklemme
-
Impulsausgangsklemme
Abschirmungs-Anschlussklemme M3,5 0,5 bis 2
Gerade, lötfreie Aderendhülsen
Wir empfehlen an Signalleitungen die Verwendung von geraden, lötfreien Aderendhülsen, um die
Verdrahtung zu vereinfachen und die Zuverlässigkeit zu verbessern.
Leiterquerschnitt
2
)
(mm
Litze: 0,5 bis 1,25
Volldraht: 0,5 bis 1,25
Kabeltyp
• Abgeschirmtes, paarweise verdrilltes Kabel
• Abgeschirmtes, Polyethylen-isoliertes
Vinylschlauchkabel (KPEV-S von Hitachi
Electric Wire oder gleichwertig)
Spezifikationen für Aderendhülsen finden Sie in Tabelle 2.8.
2-33
Page 69

2
Kabelschuhgrößen und Anzugsdrehmoment
Die Kabelschuhgrößen und Anzugsdrehmomente für verschiedene Leiterquerschnitte sind in Tabelle 2.16
angegeben.
Tabelle 2.16 Kabelschuhe und Anzugsdrehmoment
Leiterquerschnitt (mm2)
0,5
0,75 1,25 bis 3,5
1,25 1,25 bis 3,5
2 2 bis 3,5
Klemmen-
schrauben
M3,5
Größe der Crimp-Kabelschuhe Anzugsdrehmoment (Nm)
1,25 bis 3,5
0,8
Sicherheitshinweise
Die Verdrahtung erfolgt auf die gleiche Weise wie mit geraden, lötfreien Aderendhülsen. Siehe Seite 2-33.
Beachten Sie bei der Verdrahtung die folgenden Sicherheitshinweise.
• Verlegen Sie die Steuersignalleitungen für die Impulsgeberkarte getrennt von den Leitungen des
Leistungskreises und sonstigen Steuerstromkreisen.
• Die Abschirmung muss angeschlossen werden, um durch Störungen verursachte Fehlfunktionen zu
vermeiden. Die Kabellänge darf maximal 100 m betragen.
• Schließen Sie die Abschirmung (grüne Erdungsleitung der Optionskarte) an die Abschirmungsklemme (E)
an.
• Verlöten Sie die Drahtenden nicht. Andernfalls kann es zu Kontaktfehlern kommen.
• Wenn Sie keine geraden, lötfreien Aderendhülsen verwenden, isolieren Sie die Drähte auf ca. 5,5 mm
Länge ab.
• Wenn der Stromaufnahme des Impulsgebers höher als 200 mA ist, ist eine separate Spannungsversorgung
erforderlich. (Wenn es erforderlich ist, kurzzeitige Spannungsausfälle zu überbrücken, verwenden Sie
hierfür einen Sicherungskondensator oder eine andere geeignete Methode.)
• Stellen Sie sicher, dass die maximale Eingangsfrequenz der Impulsgeber-Optionskarten nicht überschritten
wird. Die Ausgangsfrequenz des Impulsgebers (PG) kann mit Hilfe der folgenden Formel errechnet
werden.
f
PG
Motordrehzahl bei maximaler Ausgangsfrequenz (min
(Hz) =
60
-1
)
x Impulsgeber-Impulsrate
2-34
Page 70

3
Digitale Bedienkonsole
und Betriebsarten
In diesem Kapitel werden die Anzeigen und Funktionen der digitalen Bedienkonsole erläutert.
Außerdem finden Sie hier eine Übersicht über die Betriebsarten und den Betriebsartenwechsel.
Digitale Bedienkonsole............................................................3-1
Betriebsarten...........................................................................3-4
Page 71

3
Digitale Bedienkonsole
In diesem Abschnitt werden die Anzeigen und Funktionen der digitalen Bedienkonsole erläutert.
Anzeige der digitalen Bedienkonsole
Die Bezeichnungen der Tasten und die Funktionen der digitalen Bedienkonsole werden unten beschrieben.
Antriebs-Statusanzeigen
FWD: Leuchtet bei Eingang eines „Vorwärts“-
REV: Leuchtet bei Eingang eines „Rückwärts“-
SEQ: Leuchtet, wenn ein andere Quelle als die
REF: Leuchtet, wenn ein andere Quelle für den
ALARM: Leuchtet beim Auftreten einer Fehlfunktion
Datendisplay
Startbefehls.
Startbefehls.
digitale Bedienkonsole für den Startbefehl
gewählt ist.
Frequenzsollwert als die digitale Bedienkonsole
gewählt ist.
oder eines Alarms.
Zeigt Überwachungsdaten, Parameternummern und Einstellungen an.
Betriebsartanzeige (wird in der oberen linken Ecke des
Datendisplays angezeigt)
DRIVE: Leuchtet in der Betriebsart „Betrieb“.
QUICK: Leuchtet in der Betriebsart „Schnellstart“.
ADV: Leuchtet in der Betriebsart „Programmierung“.
VERIFY: Leuchtet in der Betriebsart
A. TUNE: Leuchtet in der Betriebsart „Autotuning“.
Tasten
Abb. 3.1 Bezeichnungen und Funktionen der Komponenten der digitalen Bedienkonsole
„geänderte Parameter“.
Zur Ausführung von Funktionen wie dem
Einstellen von Parametern, Überwachung, Jog-Betrieb und Autotuning.
Tasten der digitalen Bedienkonsole
Die Bezeichnungen und Funktionen der Tasten auf der digitalen Bedienkonsole sind in
Tabelle 3.1 Tastenfunktionen
Taste Bezeichnung Funktion
Schaltet zwischen der Bedienung über die digitale Bedienkonsole
(LOCAL) und der Steuerung über die Steuerklemmen (REMOTE)
Taste LOCAL/REMOTE
um.
Diese Taste kann durch Einstellung des Parameters o2-01 aktiviert
oder deaktiviert werden.
Tabelle 3.1
beschrieben.
3-2
Taste MENU Auswahl der Betriebsarten.
Tas t e ESC
Rückkehr zu dem Status, der vor dem Drücken der Taste DATA/
ENTER aktiv war.
Page 72

Tabelle 3.1 Tastenfunktionen (Fortsetzung)
Taste Bezeichnung Funktion
Taste JOG
Tas t e FWD/RE V
Taste SHIFT/RESET
Aufwärts-Taste
Abwärts-Taste
Taste DATA/ENTER
Tas t e RUN
Tas t e STOP
* Außer in Schaltplänen werden die Tastenbezeichnungen in der obigen Tabelle verwendet.
Erlaubt Jog-Betrieb, wenn der Frequenzumrichter über die digitale
Bedienkonsole gesteuert wird.
Wählt die Drehrichtung des Motors, wenn der Frequenzumrichter
über die digitale Bedienkonsole gesteuert wird.
Dient zur Auswahl der aktiven Stelle beim Programmieren von
Parametern.
Funktioniert außerdem bei Auftreten eines Fehlers als Rücksetztaste.
Wählt Menüpunkte aus, legt Parameternummern fest und erhöht
Einstellwerte.
Wird zum Wechsel zu der nächsten Funktion oder den nächsten
Daten verwendet.
Wählt Menüpunkte aus, legt Parameternummern fest und verringert
Einstellwerte.
Wird zum Wechsel zu der vorigen Funktion oder den vorigen Daten
verwendet.
Zur Eingabe von Menüeinträgen, Parametern und Einstellwerten.
Dient auch zum Umschalten von Anzeigeseiten.
Startet den Betrieb des Frequenzumrichters, wenn der
Frequenzumrichter über die digitale Bedienkonsole gesteuert wird.
Stoppt den Betrieb des Frequenzumrichters.
Diese Taste kann durch Einstellung des Parameters o2-02 aktiviert
oder deaktiviert werden, wenn die Steuerung über die
Steuerklemmen erfolgt.
3
In der linken oberen Ecke der Tasten RUN und STOP auf der digitalen Bedienkonsole befinden sich
Kontrollleuchten. Diese Kontrollleuchten leuchten und blinken zur Anzeige des Betriebsstatus.
Die Kontrollleuchte der Taste RUN blinkt und die Kontrollleuchte der Taste STOP leuchtet bei Vorerregung
oder DC-Bremsung. Die Beziehung zwischen den Kontrollleuchten auf den Tasten RUN und STOP und dem
Status des Frequenzumrichters ist in Abb. 3.2 dargestellt.
Frequenzumrichter-Ausgangsfrequenz
Frequenzeinstellung
: Leuchtet
: Blinkt
Abb. 3.2 Kontrollleuchten der Tasten RUN und STOP
: Leuchtet nicht
3-3
Page 73

3
Betriebsarten
In diesem Abschnitt finden Sie Informationen zu den Betriebsarten des Frequenzumrichters und zum
Betriebsartenwechsel.
Frequenzumrichter-Betriebsarten
Die Parameter und Anzeigefunktionen des Frequenzumrichters sind in fünf Gruppen (als Betriebsarten
bezeichnet) organisiert, um das Ablesen und Einstellen von Parametern zu vereinfachen. Der Frequenzumrichter besitzt 5 Betriebsarten.
Die 5 Betriebsarten und ihre primären Funktionen sind in Tabelle 3.2 aufgeführt.
Tabelle 3.2 Betriebsarten
Betriebsart Primäre Funktion(en)
Verwenden Sie diese Betriebsart zum Starten und Stoppen des Frequenzumrichters,
Betriebsart „Betrieb“
Betriebsart „Schnellstart“ Verwenden Sie diese Betriebsart zum Lesen und Einstellen von Grundparametern.
Betriebsart „Programmierung“ Verwenden Sie diese Betriebsart zur Kontrolle und Einstellung aller Parameter.
Betriebsart „geänderte Parameter“
Betriebsart „Autotuning“*
zum Überwachen von Werten wie Frequenzsollwerte oder Ausgangsstrom sowie zur
Anzeige von Fehlerinformationen oder der Fehlerhistorie.
Verwenden Sie diese Betriebsart zum Lesen und Einstellen von Parametern, deren
werksseitige Einstellung geändert wurde.
Verwenden Sie diese Betriebsart, wenn ein Motor mit unbekannten Motordaten mit
Vektorregelung betrieben wird. Die Motordaten werden gemessen/berechnet und
automatisch eingestellt.
Diese Betriebsart kann auch zur reinen Messung des Motorwicklungs-Widerstands
verwendet werden.
* Vor dem Betreiben des Motors mit Vektorregelung muss stets ein Autotuning durchgeführt werden.
3-4
Page 74

Wechsel der Betriebsart
Wenn die Taste MENU gedrückt wird, erscheint der Anzeige zur Auswahl der Betriebsart. Drücken Sie in der
Anzeige zur Betriebsartauswahl die Taste MENU, um die Betriebsarten nacheinander anzuzeigen.
Drücken Sie die Taste DATA/ENTER, um eine Betriebsart zu wählen und von einer Überwachungsanzeige
zur Einstellungsanzeige umzuschalten.
Anzeige beim Einschalten
-DRIVE-
Frequency Ref
U1 - 01
U1-02=50.00Hz
U1-03=10.05A
Rdy
=50.00Hz
BetriebsartenAuswahlanzeige
-DRIVE-
** Main Menu **
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
Auto-Tuning
Operation
MENU
MENU
MENU
MENU
MENU
Überwachungsanzeige Einstellungsanzeige
Monitor
"0"
Rdy
*2*
*0*
RESET
RESET
-DRIVE-
Frequency Ref
U1- 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-ADV-
Select Language
A1- 00 = 0
-DRIVE-
U1 - 01=50.00Hz
U1-02=50.00Hz
ESC ESC ESC
ESC ESC
U1-03=10.05A
-QUICK-
Control Method
A1-02=2
Open Loop Vector
-ADV-
Initialization
A1 -00 = 1
ESC ESC ESC
ESC
ESC ESC
Select Language
-VERIFY-
None Modified
-A.TUNE-
Tuning Mode Sel
T1- 01= 01
Standard Tuning
Rdy
*1*
English
Bei Änderung einer Konstanten wird
die Nummer der Konstante angezeigt.
Drücken Sie die Taste DATA/ENTER,
um die Änderung zu übernehmen.
-DRIVE-
Frequency Ref
U1 - 01 =050.00Hz
(0.00 ~ 50.00)
" 00.00Hz "
-QUICK-
Control Method
A1 - 02= 2
Open Loop Vector
-ADV-
Select Language
A1 - 00 = 0
-A.TUNE-
Tuning Mode Sel
T1- 01= 0
Standard Tuning
Rdy
English
"0"
3
*2*
*1*
*0*
WICHTIG
Abb. 3.3 Umschalten zwischen den Betriebsarten
Wenn Sie den Frequenzumrichter nach dem Anzeigen/Ändern von Parametern in Betrieb
nehmen möchten, drücken Sie nacheinander die Taste MENU und die Taste DATA/ENTER,
um in die Betriebsart „Betrieb“ zu wechseln. Ein Startbefehl wird nicht akzeptiert, solange sich der
Frequenzumrichter in einer anderen Betriebsart befindet.
3-5
Page 75

3
Betriebsart „Betrieb“
Dies ist die Betriebsart, in der der Frequenzumrichter normalerweise betrieben wird. In dieser Betriebsart
können alle Anzeigeparameter (U1-) sowie Informationen zu aktuellen Fehlern und die Fehlerhistorie
angezeigt werden.
Wenn b1-01 (Sollwertauswahl) auf 0 gesetzt ist, kann die Frequenz in der Frequenzeinstellungsanzeige mit
den Tasten Aufwärts, Abwärts und SHIFT/RESET geändert werden. Der Parameter wird geschrieben und das
Display kehrt zur Überwachungsanzeige zurück.
Bedienungsbeispiele
In der folgenden Abbildung sind Beispiele für Tastenbedienungen in der Betriebsart „Betrieb“ gezeigt.
Anzeige beim Einschalten
-DRIVE-
Frequency Ref
U1- 01 =50.00Hz
U1-02=50.00Hz
U1-03=10.05A
Rdy
Auswahlanzeige
-DRIVE-
** Main Menu **
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
-VERIFY-
** Main Menu **
Modified Consts
-A.TUNE-
** Main Menu **
Auto-Tuning
Operation
MENU
MENU
MENU
MENU
MENU
ESC
Überwachungsanzeige FrequenzeinstellungsanzeigeBetriebsarten-
A B
Monitor
Monitor
Monitor
Rdy
Rdy
Rdy
Rdy
Rdy
-DRIVE-
U1 -01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
U1 - 02=50.00Hz
U1-03=10.05A
U1-04 = 2
-DRIVE-
U1 - 40 = 10H
U1-01=50.00Hz
U1-02=50.00Hz
-DRIVE-
Fault Trace
U2 -01= OC
U2-02= OV
U2-03=50.00Hz
-DRIVE-
Fault Trace
U2 -02 = OV
U3-03=50.00Hz
U3-04=50.00Hz
1 2
RESET
ESC
RESET
ESC
RESET
ESC
-DRIVE-
Frequency Ref
U1- 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DRIVE-
Output Freq
U1- 02=50.00Hz
U1-03=10.05A
U1-04 = 2
-DRIVE-
FAN Elapsed Time
U1- 40 = 10H
U1-01=50.00Hz
U1-02=50.00Hz
Rdy Rdy
Rdy
Rdy
1 2
3 4
RESET
RESET
-DRIVE-
Current Fault
U2 - 01 = OC
U2-02=OV
ESC ESC
ESC ESC
U2-03=50.00Hz
-DRIVE-
Last Fault
U2 - 02 = OV
U3-03=50.00Hz
U3-04=50.00Hz
Rdy
Rdy
3 4
-DRIVE-
Frequency Ref
U1 - 01= 050.00Hz
(0.00 ~ 50.00)
ESC
" 00.00Hz "
Bei Einstellung des Frequenzsollwerts
über die Analogeingänge wird die
Frequenzeinstellungsanzeige nicht
angezeigt.
Wird während der Anzeige einer
Konstanten, für die ein Fehlercode
angezeigt wird, die Taste
DATA/ENTER gedrückt, so wird
der Fehlername angezeigt.
U2 - 01 = OC
Over Current
U2 - 02 = OV
Rdy
DC Bus Overvolt
3-6
5 5
-DRIVE-
Fault History
U3 -01= OC
U3-02= OV
U3-03= OH
-DRIVE-
Fault Message 2
U3 -02= OV
U3-03= OH
U3-04= UV
Rdy
Rdy
-DRIVE-
RESET
ESC ESC
RESET
ESC ESC
Last Fault
U3 - 01 = OC
U3-02=OV
U3-03=OH
-DRIVE-
Fault Message 2
U3 - 02 = OV
U3-03= OH
U3-04= UV
Rdy
Rdy
5 5
A B
Abb. 3.4 Bedienung in der Betriebsart „Betrieb“
U3 - 01 = OC
Over Current
U3 - 02 = OV
DC Bus Overvolt
Rdy
Rdy
Page 76

Hinweis: 1. Beim Ändern der Anzeige mit den Aufwärts-/Abwärts-Tasten folgt auf die Anzeige für die letzte Parameternummer diejenige für die erste
Parameternummer und umgekehrt. Z. B. ist die nächste Anzeige nach der für U1-01 die für U1-40. Diese Übergänge sind in den Abbildungen
durch die Buchstaben A und B und die Ziffern 1 bis 6 gekennzeichnet.
2. Die Anzeige des ersten Anzeigeparameters (Frequenzsollwert) erfolgt bei Einschalten der Spannungsversorgung. Der beim Start angezeigte
Wert kann in o1-02 eingestellt werden (Auswahl der Anzeige nach dem Einschalten). Der Betrieb kann aus der Betriebsart-Auswahlanzeige
nicht gestartet werden.
Betriebsart „Schnellstart“
In dieser Betriebsart können die für den Frequenzumrichter-Betrieb zwingend erforderlichen Parameter
angezeigt und eingestellt werden.
Die Parameter können in den Einstellungsanzeigen geändert werden. Verwenden Sie zum Ändern der
Frequenz die Aufwärts-Taste, die Abwärts-Taste und die SHIFT/RESET-Taste. Der Parameter wird
geschrieben und das Display kehrt zur Überwachungsanzeige zurück, wenn nach dem Ändern der Einstellung
die Taste DATA/ENTER gedrückt wird.
Weitere Einzelheiten über Parameter in der Betriebsart „Schnellstart“ finden Sie in Kapitel 5,
Anwenderparameter.
Bedienungsbeispiele
In der folgenden Abbildung sind Beispiele für Tastenbedienungen in der Betriebsart „Schnellstart“ gezeigt.
Betriebsarten-Auswahlanzeige Überwachungsanzeige Einstellungsanzeige
MENU
-DR IVE -
** Main Menu **
Operation
MENU
-QU ICK -
** Main Menu **
Quic k S etting
ESC
MENU
-AD V-
** Main Menu **
Programming
MENU
-VE RIFY -
** Main Menu **
Modified Consts
MENU
-A.T UN E-
** Main Menu **
Auto-Tuning
Monitor Display Setting DisplayMode S election Display
A B
-QU ICK -
Control Method
A1-02=2
Open Loop V ector
-QU ICK -
Reference Source
b1-01=1
Terminals
-QU ICK -
Run Source
b1-02=1
Terminals
-QU ICK -
Terminal AM Gain
H4-05 = 50%
(0.0 ~ 1000.0)
50.0%
-QU ICK -
MOL Fault Select
L1-01=1
Std Fan Cooled
*2 *
*1 *
*1 *
*1 *
ESC
ESC
ESC
ESC
ESC
-QU ICK -
Control Method
A1-02= 2
Open Loop V ector
-QU ICK -
Reference Source
b1-01= 1
Terminals
-QU ICK -
Run Source
b1-02= 1
Terminals
-QU ICK -
Terminal AM Gain
H4-05 =
(0.0 ~ 1000.0)
-QU ICK -
MOL Fault Select
L1-01= 1
Std Fan Cooled
*2 *
*1 *
*1 *
0050.0%
50.0%
*1 *
3
-QU ICK -
StallP Decel Sel
L3-04=1
Enabled
*1 *
ESC
A B
Abb. 3.5 Bedienung in der Betriebsart „Schnellstart“
-QU ICK -
StallP Decel S el
L3-04= 1
Enabled
*1 *
3-7
Page 77

3
Betriebsart „Programmierung“
In dieser Betriebsart können alle Frequenzumrichter-Parameter angezeigt und eingestellt werden.
Bei Anzeige der Einstellungsanzeigen kann ein Parameter mit Hilfe der Aufwärts-Taste, Abwärts-Taste und
der SHIFT/RESET-Taste geändert werden. Der Parameter wird geschrieben und das Display kehrt zur Überwachungsanzeige zurück, wenn nach dem Ändern der Einstellung die Taste DATA/ENTER gedrückt wird.
Detaillierte Informationen über die einzelnen Parameter finden Sie in Kapitel 5, Anwenderparameter.
Bedienungsbeispiele
In der folgenden Abbildung sind Beispiele für Tastenbedienungen in der Betriebsart „Programmierung“
gezeigt.
Betriebsarten-Auswahlanzeige Überwachungsanzeige Einstellungsanzeige
A B
Mon itor D is pla y S e tti ng D i s p layMode S election Display
1 2
-AD V-
** Main Menu **
Programming
-VE RIFY -
** Main Menu **
Modified Consts
-A.T UN E-
** Main Menu **
Auto-Tuning
-DR IVE -
** M ai n M e nu **
Operation
-QU ICK -
** M ai n M e nu **
Quick S etting
MENU
MENU
MENU
MENU
MENU
ESC
-AD V-
Initialization
A1-00=1
Selec t Language
-AD V-
Initialization
A1-02=2
Control Method
-AD V-
PID Control
b5-01=0
PID Mode
-AD V-
PID Control
b5 -14=1.0Sec
Fb los Det Time
-AD V-
Torque Limit
L7-01=200%
Fwd Torque Limit
RESET
ESC
RESET
ESC
-AD V-
Selec t Language
A1- 00 =0
English
-AD V-
Control Method
A1- 02 =2
Open Loop Vec tor
*1 *
*2 *
1 2
3 4
RESET
RESET
ESC
-AD V-
PID Mode
b5- 01 =0
Disabled
-AD V-
Fb los Det Time
b5- 14=1.0Sec
(0.0 ~ 25.5)
1.0 sec
*0 * *0 *
3 4
5 6
RESET
ESC ESC
-AD V-
Fwd Torque Limit
L7- 01=200%
(0 ~ 300)
200%
ESC
ESC
ESCESC
ESC
-AD V-
S elec t Language
A1-00= 0
English
-AD V-
Control Method
A1-02= 2
Open Loop Vector
-AD V-
PID Mode
b5-01= 0
Disabled
-AD V-
Fb los Det Time
b5-14=01.0Sec
(0.0 ~ 1000.0)
50.0%
-AD V-
Fwd Torque Limit
L7-01= 2
(0 ~ 300)
200%
00%
*1 *
*2 *
3-8
-AD V-
Torque Limit
L7- 04= 200%
Fwd Torque Limit
A B
RESET
ESC
-AD V-
Fwd Torque Limit
L7- 04=200%
(0 ~ 300)
200%
5 6
ESC
Abb. 3.6 Bedienung in der Betriebsart „Programmierung“
-AD V-
Torq Lmt Rev Rgn
L7-04= 2
(0 ~ 300)
200%
00%
Page 78

Einstellung von Parametern
Hier wird der Vorgang gezeigt, wie Parameter C1-01 (Beschleunigungszeit 1) von 10 s auf 20 s geändert wird.
Tabelle 3.3 Einstellung von Parametern in der Betriebsart „Programmierung“
Schritt
Nr.
1 Spannungsversorgung eingeschaltet.
2
3
4
5
6
Anzeige der digitalen
Bedienkonsole
-DRIVE-
Frequency Ref
Rdy
U1 - 01=50.00Hz
U1-02=50.00Hz
U1-03=10.05A
-DR IVE -
** Main Menu **
Operation
-QU ICK-
** Main Menu **
Q ui ck S etting
-AD V -
** Main Menu **
Programming
-AD V -
Initialization
A1-00=1
S elec t Language
-AD V -
Accel / Decel
C1-00 = 10.0sec
Accel Time 1
Beschreibung
Drücken Sie die Taste MENU drei Mal, um in die Betriebsart
„Programmierung“ zu wechseln.
Drücken Sie die Taste DATA/ENTER, um die Überwachungsanzeige aufzurufen.
Drücken Sie die Aufwärts- oder Abwärts-Taste, um den Parameter
C1-01 (Beschleunigungszeit 1) anzuzeigen.
3
-AD V -
7
8
9
10
11
12 Das Display kehrt zur Überwachungsanzeige für C1-01 zurück.
Accel Time 1
C1-01 =
0 010.0sec
(0.0 ~ 6000.0)
"10.0 sec"
-AD V -
Accel Time 1
C1-01 =
00 10.0sec
0
(0.0 ~ 6000.0)
"10.0 sec"
-AD V -
Accel Time 1
C1-01 =
001 0.0sec
(0.0 ~ 6000.0)
-AD V -
C1-01 =
(0.0 ~ 6000.0)
-AD V -
1
"10.0 sec"
Accel Time 1
001 0.0sec
2
"10.0 sec"
Entry Accepted
-AD V -
Accel Time 1
C1-01 =
(0.0 ~ 6000.0)
20.0sec
01
"10.0 sec"
Drücken Sie die Taste DATA/ENTER, um die Einstellungsanzeige
aufzurufen. Der aktuelle Einstellwert für C1-01 wird angezeigt.
Drücken Sie die Taste SHIFT/RESET, um die blinkende Stelle
nach rechts zu verschieben.
Drücken Sie Aufwärts-Taste, um den Einstellwert auf 20,00 s zu
ändern.
Drücken Sie die Taste DATA/ENTER, um die eingestellten Daten
zu speichern.
Nach dem Drücken der Taste DATA/ENTER wird 1 Sekunde lang
„Entry Accepted“ angezeigt.
3-9
Page 79

3
Betriebsart „geänderte Parameter“
Diese Betriebsart wird zur Anzeige von Parametern verwendet, deren werksseitige Einstellung in einer
Programmierbetriebs oder durch Autotuning geändert wurde. „None“ (keine) wird angezeigt, wenn keine der
Einstellungen verändert wurde.
Der Parameter A1-02 ist der einzige Parameter aus der Gruppe A1-, der in der Liste der veränderten
Konstanten angezeigt wird, wenn er zuvor geändert wurde. Die anderen Parameter dieser Gruppe werden
nicht angezeigt, auch wenn sich ihre Werte von der Standardeinstellung unterscheiden.
In der Betriebsart „geänderte Parameter“ können die gleichen Verfahren zum Ändern von Einstellungen wie in
der Betriebsart „Programmierung“ verwendet werden. Verwenden Sie zum Ändern der Einstellung die
Aufwärts-Taste, die Abwärts-Taste und die SHIFT/RESET-Taste. Wenn die Taste DATA/ENTER gedrückt
wird, werden die Parametereinstellungen geschrieben und das Display kehrt zur Überwachungsanzeige
zurück.
Bedienungsbeispiele
Im nachstehenden Beispiel wurden folgende Standardeinstellungen geändert:
• b1-01 (Sollwertauswahl)
• C1-01 (Beschleunigungszeit 1)
• E1-01 (Eingangsspannungs-Einstellung)
• E2-01 (Motornennstrom)
Betriebsarten-Auswahlanzeige Überwachungsanzeige Einstellungsanzeige
Monitor Display Setting DisplayMode Selection Display
MENU
-AD V-
** Main Menu **
Programming
MENU
-VE RIFY -
** Main Menu **
Modified Consts
MENU
-A.T UNE -
** M ai n M e n u **
Auto-Tuning
MENU
-DR IVE -
** Main Menu **
Operation
MENU
-QU IC K-
** M ai n M e n u **
Quick S etting
MENU
ESC
A B
-VE RIFY -
Reference Source
b1-01=0 *0*
Terminals
"1"
-VE RIFY -
Accel Time 1
C1-01=200.0sec
(0.0 ~ 6000.0)
"10.0sec"
-VE RIFY -
Inp u t V ol ta ge
E1-01=190V AC
(155~255)
"200VAC "
-VE RIFY -
Motor Rated FLA
E2-01= 2.00A
(0.32~6.40)
"1.90A"
A B
ESC
ESC
ESC
ESC
-VE RIFY -
Reference Source
b1-01= 0 *0 *
Terminals
"1"
-VE RIFY -
Accel Time 1
C1-01=0
200.0sec
(0.0 ~ 6000.0)
"10.0sec"
-VE RIFY -
Inp u t V ol ta ge
E1-01= 190VA C
(155~255)
"200VAC "
-VE RIFY -
Motor Rated FLA
E2-01= 2.00A
(0.32~6.40)
"1.90A"
3-10
Abb. 3.7 Bedienung in der Betriebsart „geänderte Parameter“
Page 80

Betriebsart „Autotuning“
Mit Autotuning werden alle erforderlichen Motordaten automatisch gemessen und eingestellt, um die
maximale Leistung zu erzielen. Vor der Aufnahme des Betriebs muss bei Verwendung der Vektorregelung
stets ein Autotuning durchgeführt werden.
Wenn U/f-Steuerung ausgewählt wurde, kann nur ein Autotuning im Stillstand für den MotorwicklungsWiderstand gewählt werden.
Wenn der Motor nicht von der Last getrennt werden kann und Vektorregelung mit oder ohne Rückführung
verwendet werden soll, muss ein Autotuning im Stillstand ausgeführt werden.
Bedienbeispiel
Geben Sie die folgenden, auf dem Typenschild des Motors angegebenen Motordaten ein:
Ausgangsnennleistung, Nennspannung, Nennstrom, Nennfrequenz, Nenndrehzahl und Polzahl. Drücken Sie
dann die Taste RUN. Der Motor wird nun automatisch angesteuert, und die gemessenen Motordaten werden in
den Parametern E2- eingestellt.
Stellen Sie immer die oben genannten Werte ein. Andernfalls kann das Autotuning nicht gestartet werden. So
kann das Autotuning beispielsweise nicht aus der Anzeige für die Motornennspannungs-Eingabe gestartet
werden.
Bei Anzeige der Einstellungsanzeigen kann ein Parameter mit Hilfe der Aufwärts-Taste, Abwärts-Taste und
der SHIFT/RESET-Taste geändert werden. Der Parameter wird gespeichert, wenn die Taste DATA/ENTER
gedrückt wird.
3
3-11
Page 81

Das folgende Beispiel zeigt die Eingabe der Motornennwerte für ein Autotuning mit Motordrehung bei
Vektorregelung ohne Rückführung.
Überwachungsanzeige EinstellungsanzeigeBetriebsarten-Auswahlanzeige
MENU
-VERIFY-
** Main Menu **
Modified Consts
MENU
3
-A.TUNE-
** Main Menu **
Auto-Tuning
-DRIVE-
** Main Menu **
Operation
-QUICK-
** Main Menu **
Quick Setting
-ADV-
** Main Menu **
Programming
MENU
MENU
MENU
MENU
ESC
-A.TUNE-
Tuning Mode Sel
T1 - 01 =0 *0*
Standard Tuning
"0"
-A.TUNE-
Mtr Rated Power
T1 - 02
= 0.40kW
(0.00~650.00)
"0.40kW"
-A.TUNE-
Rated Voltage
T1 - 03 = 200.0VAC
(0.0~255.0)
"200.0VAC"
-A.TUNE-
Rated Current
T1 - 04 = 1.90A
(0.32~6.40)
"1.90A"
-A.TUNE-
Rated Frequency
T1 - 05 = 50.0Hz
(0.0~400.0)
"50.0Hz"
-A.TUNE-
Number of Poles
T1 - 06
= 4
(2~48)
"4"
-A.TUNE-
Rated Speed
T1 - 07 = 1750RPM
(0~24000)
"1750"
ESC
ESC
ESC
ESC
ESC
ESC
-A.TUNE-
Tuning Mode Sel
T1 - 01 = 0 *0*
Standard Tuning
"0"
-A.TUNE-
Mtr Rated Power
0 00.40kW
T1 - 01 =
(0.00~650.00)
"0.40kW"
-A.TUNE-
Rated Voltage
T1 - 03 = 200.0VAC
(0.0~255.0)
"200.0VAC"
-A.TUNE-
Rated Current
T1 - 04 = 001.90A
(0.32~6.40)
"1.90A"
-A.TUNE-
Rated Frequency
T1 - 05=050.0Hz
(0.0~400.0)
"50.0Hz"
-A.TUNE-
Number of Poles
T1 - 06 = 4
(2~48)
"4"
-A.TUNE-
Rated Speed
T1 - 07
= 01750RPM
(0~24000)
"1750"
-A.TUNE-
Tune Proceeding
40.0Hz/10.5A
START GOAL
3-12
-A.TUNE-
Auto-Tuning
0.0Hz/0.0A
Tuning Ready?
Press RUN key
Rdy
RUN
Die Anzeige ändert
sich automatisch mit
dem jeweiligen Status
des Autotunings.
-A.TUNE-
Tune Proceeding
40.0Hz/10.5A
START GOAL
STOP
-A.TUNE-
Tune Aborted
STOP key
-A.TUNE-
Tune Proceeding
Tune Successful
-A.TUNE-
Tune Successful
Abb. 3.8 Bedienung in der Betriebsart „Autotuning“
Falls während des Autotunings ein Fehler auftritt, finden Sie weitere Informationen in Kapitel 7, Fehlersuche
und Fehlerbehebung.
Page 82

4
Testbetrieb
In diesem Kapitel wird der Ablauf des Testbetriebs des
Frequenzumrichters beschrieben und an einem Beispiel erläutert.
Ablauf Testbetrieb...................................................................4-2
Testbetrieb..............................................................................4-3
Empfohlene Einstellungen ....................................................4-15
Page 83

Ablauf Testbetrieb
Das folgende Flussdiagramm skizziert den Ablauf des Testbetriebs. Setzen Sie bei den Grundeinstellungen
den Parameter C6-01 (Auswahl normale/starke Beanspruchung) entsprechend der jeweiligen Anwendung.
START
Installation
Verdrahtung
4
Betriebsverfahren
wählen.
Einstellungen gemäß
Regelbetriebsart
Jumper für Versorgungsspannung einstellen.
Versorgungsspannung
einschalten.
Status überprüfen.
Grundeinstellungen
(Betriebsart „Schnellstart“)
U/f-Regelung?
Ja
Impulsgeber?
Nein
U/f-Regelung
E1-03 einstellen.
U/f-Standard: 200 V/50 Hz (400 V/50 Hz)
Autotuning im Stillstand
zur Bestimmung des
Wicklungswiderstandes
*1
Nein
Ja
Vektorregelung (A1-02 = 2 oder 3)*5
U/f-Regelung mit Impulsgeber (A1-02 = 1)
E1-03, E2-04 und F1-01 einstellen.
U/f-Standard: 200 V/50 Hz (400 V/50 Hz)
Motorbetrieb während
des Autotunings möglich?
*4
Autotuning mit
Motordrehung
*2
Nein
*3
Ja
Autotuning
*6
im Stillstand
*6
4-2
Anwendungseinstellungen
(Betriebsart „Programmierung“)
Lastfreier Betrieb
Lastbetrieb
Optimale Einstellungen
und Parameterwerte
Parameter überprüfen/
dokumentieren
ENDE
Abb. 4.1 Testbetrieb – Flussdiagramm
1. Nur bei Frequenzumrichtern der 400-V-Klasse ab 75 kW erforderlich.
2. Ist der Impulsgeber über ein Untersetzungsgetriebe mit dem
Motor verbunden, muss in den Parametern F1-12 und F1-13 das
Untersetzungsverhältnis eingestellt werden (erweiterter Programmiermodus).
3. Ist die Drehung des Motors unproblematisch/ungefährlich, so
verwenden Sie unbedingt rotatorisches Autotuning, um die
Genauigkeit des Autotunings zu verbessern.
4. Beträgt die Länge des Motorkabels in der konkreten Installation
mehr als 50 m, so führen Sie erst in der Installation das Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstands durch.
5. Die Standard-Regelbetriebsart ist die Vektorregelung ohne Rückführung (A1-02 = 2).
6. Wenn die maximale Ausgangsfrequenz von der Nennfrequenz
abweicht, stellen Sie die maximale Ausgangsfrequenz (E1-04)
erst nach dem Autotuning ein.
Page 84

Testbetrieb
Einstellung der Belastung entsprechend der Anwendung
Programmieren Sie bei Anwendungen mit quadratischer Drehmomentcharakteristik (z. B. Pumpen, Lüfter und
Gebläse) den Parameter C6-01 (Auswahl normale/starke Beanspruchung) auf 1 oder 2 (Normalbelastung 1
oder 2). Die Entscheidung zwischen den beiden Normalbelastungs-Betriebsarten 1 und 2 basiert auf der
geforderten Überlastungsfähigkeit.
Programmieren Sie bei Anwendungen mit konstanter Drehmomentcharakteristik (z. B. Förderbänder) den
Parameter C6-01 (Auswahl normale/starke Beanspruchung) auf 0 (starke Beanspruchung). Standardmäßig ist
der Parameter C6-01 auf 0 (starke Beanspruchung) programmiert.
Weitere Informationen zur Entscheidung zwischen normaler und starker Beanspruchung finden Sie unter
Kapitel 6, Anwendung und Überlasteinstellungen.
Setzen des Eingangsspannungs-Jumpers
(nur Frequenzumrichter der 400-V-Klasse ab 75 kW)
Bei Frequenzumrichtern der 400-V-Klasse ab 75 kW muss der Eingangsspannungs-Jumper gesetzt werden.
Setzen Sie den Jumper auf die Position, die der tatsächlichen Eingangsspannung am ehesten entspricht.
Der Jumper ist werksseitig auf 440 V gesetzt. Hat die Eingangsspannung einen anderen Wert als 440 V, so
gehen Sie wie folgt vor, um die Einstellung zu ändern:
1. Schalten Sie die Spannungsversorgung aus, und warten Sie mindestens fünf Minuten.
2. Kontrollieren Sie, dass die Ladungsanzeige (CHARGE) erloschen ist.
3. Nehmen Sie die Klemmenabdeckung ab.
4. Setzen Sie den Jumper auf die Position, die der tatsächlichen Eingangsspannung des Frequenzumrichters
entspricht (siehe Abb. 4.2).
5. Setzen Sie die Klemmenabdeckung wieder auf.
4
Jumper-Anschluss
Eingangsspannung 200 V AC
Eingangsspannung 400 V AC
SpannungsversorgungsEingangsklemmen
Abb. 4.2 Anschlüsse und Jumper bei Frequenzumrichtern hoher Leistung
Ladungsanzeige (CHARGE)
Jumper (werksseitige Position)
4-3
Page 85

Einschalten der Spannungsversorgung
Führen Sie die folgenden Kontrollen durch, und schalten Sie dann die Spannungsversorgung ein.
• Kontrollieren Sie die Versorgungsspannung:
200-V-Klasse: 3 Phasen, 200 bis 240 V AC, 50/60 Hz
400-V-Klasse: 3 Phasen, 380 bis 480 V AC, 50/60 Hz
• Kontrollieren Sie den korrekten Anschluss des Motors an die Motorausgangsklemmen (U, V, W).
• Kontrollieren Sie den korrekten Anschluss des Steuergeräte an die Steuerkreisklemmen.
• Setzen Sie alle Steuereingänge des Frequenzumrichters auf AUS.
• Kontrollieren Sie den korrekten Anschluss der Impulsgeber-Karte (sofern vorhanden).
Überprüfung des Anzeigestatus
Nach normalem, problemlosen Einschalten enthält die Anzeige der Bedienkonsole die folgenden
Informationen:
4
Rdy
=50.00Hz
Frequenzsollwertanzeige im
Datenanzeigebereich
Anzeige bei Normalbetrieb
-DRIVE-
Frequency Ref
U1- 01
U1-02=50.00Hz
U1-03=10.05A
Trat beim Einschalten der Versorgungsspannung ein Fehler auf, werden stattdessen die Details des Fehlers
angezeigt. Informationen zu Fehleranzeigen finden Sie in Kapitel 7, Fehlersuche und Fehlerbehebung.
Die angezeigte Meldung hängt vom
aufgetretenen Fehler ab.
Die hier abgebildete Anzeige meldet einen
Anzeige bei Betriebsstörung
-DR IVE -
UV
DC Bus Undervolt
Unterspannungsalarm.
4-4
Page 86

Grundeinstellungen
Wechseln Sie in die Betriebsart „Schnellstart“ (Anzeige „QUICK“), und stellen Sie die folgenden Parameter
ein.
Informationen zur Verwendung der digitalen Bedienkonsole finden Sie in Kapitel 3, Digitale Bedienkonsole
und Betriebsarten, Details zu den Parametern in Kapitel 5, Anwenderparameter und in Kapitel 6, Parametereinstellungen nach Funktion.
Tabelle 4.1 Grundparameter-Einstellungen
z: Muss eingestellt werden. : Einstellung je nach Bedarf.
Klasse
z
z
z
z
z
z
Para-
meter-Nr.
A1-02
b1-01 Sollwertquelle
b1-02
b1-03
C1-01
C1-02
C6-01
C6-02
Bezeichnung Beschreibung Einstellbereich
Auswahl der
Regelbetriebsart
Auswahl der
Quelle für den
START-Befehl
Auswahl der
Stoppmethode
Beschleunigungszeit 1
Verzögerungszeit 1
Auswahl
normale/starke
Beanspruchung
Taktfrequenzauswahl
Legt die Regelbetriebsart für den
Frequenzumrichter fest.
0: U/f-Regelung
1: U/f-Regelung mit Impulsgeber
2: Vektorregelung ohne Rückführung
3: Vektorregelung mit Rückführung
Legt die Quelle für den Frequenzsollwert
fest.
0: Digitale Bedienkonsole
1: Steuerklemme (Analogeingang)
2: MEMOBUS-Kommunikation
3: Optionskarte
4: Pulsfolgeeingang
Legt die Quelle für den START-Befehl
fest.
0: Digitale Bedienkonsole
1: Steuerklemme (Digitaleingang)
2: MEMOBUS-Kommunikation
3: Optionskarte
Legt die Stoppmethode bei Empfang
des Stoppbefehls fest.
0: Verzögerung bis zum Stillstand
1: Auslaufen bis zum Stillstand
2: DC-Bremsung bis zum Stillstand
3: Auslaufen bis zum Stillstand mit
Wiederanlaufverzögerung
Legt die Beschleunigungszeit für
den Anstieg der Ausgangsfrequenz
von 0 % auf 100 % fest.
Legt die Verzögerungszeit für
den Abfall der Ausgangsfrequenz
von 100 % auf 0 % fest.
Je nach den Anforderungen der
Anwendung „Starke Beanspruchung“
oder „Normale Beanspruchung“.
0: Starke Beanspruchung
1: Normale Beanspruchung 1
2: Normale Beanspruchung 2
Einstellung der Taktfrequenz.
Die Werkseinstellung und der Einstellbereich hängen von der Einstellung
des Parameters C6-01 ab.
0 bis 3 0 5-7
0 bis 4 1
0 bis 3 1
0 bis 3 0
0,0 bis 6000,0 10,0 s
0,0 bis 6000,0 10,0 s
0 bis 2 0
0 bis F
Werks-
einstellung
Abhängig
von der
Einstellung der
Parame-
ters C6-01.
Seite
5-9
6-7
6-64
6-82
5-9
6-12
6-64
6-82
5-9
6-14
5-19
6-19
5-19
6-19
5-24
6-2
5-24
4
4-5
Page 87

4
Tabelle 4.1 Grundparameter-Einstellungen (Fortsetzung)
z: Muss eingestellt werden. : Einstellung je nach Bedarf.
Klasse
* Der Einstellbereich gilt für den Standard-Beanspruchungsmodus „Starke Beanspruchung“ (C6-01 = 0). Bei Auswahl der Beanspruchungsmodi „Normale
Beanspruchung 1“ und „Normale Beanspruchung 2“ (C6-01 = 1 oder 2) geht der Einstellbereich von 0,0 bis 400,0 Hz.
Para-
meter-Nr.
d1-01 bis
d1-16 und
d1-17
E1-01
z
E2-01 Motornennstrom Einstellung des Motornennstroms.
z
H4-02
und
H4-05
L1-01
z
L3-04
Bezeichnung Beschreibung Einstellbereich
Frequenzsollwerte 1 bis 16 und
Jog-Frequenzsollwert
Eingangsspannungseinstellung
Verstärkung für
Ausgangsklemmen FM
und AM
Auswahl der
Motorschutzfunktion
Blockierschutzauswahl bei
Verzögerung
Legt die erforderlichen Frequenzsollwerte für die Festfrequenz- oder
Jog-Frequenz-Drehzahlregelung fest.
Einstellung der Nenneingangsspannung
des Frequenzumrichters in Volt.
Mithilfe dieser Einstellung können
die Analogausgänge FM und AM
an die Eingangsspezifikationen angeschlossener Geräte angepasst werden.
Aktivieren oder Deaktivieren der Motorüberlastschutzfunktion.
0: Deaktiviert
1: Schutz für Universalmotor
(lüftergekühlt)
2: Schutz für Frequenzumrichtermotor
(extern gekühlt)
3: Schutz für Spezialmotor für
Vektorregelung
Wird eine der generatorischen Bremsoptionen (Bremswiderstand, Bremswiderstandseinheit oder Bremseinheit)
verwendet, muss der Parameter L3-04
auf 0 (deaktiviert) oder auf 3 (aktiviert
mit Bremswiderstand) gesetzt werden.
0 bis
150,00 Hz
*
155 bis 255 V
(200-VKlasse)
310 bis 510 V
(400-VKlasse)
10 % bis
200 % des
Frequenz-
umrichter-
Nennstroms
0,0 bis
1.000,0 %
0 bis 3 1
0 bis 3 1
Werks-
einstellung
d1-01 bis
d1-16:
0,00 Hz
d1-17:
6,00 Hz
200 V
(200-V-
Klasse)
400 V
(400-V-
Klasse)
Einstellung
für
Universal-
motoren der
gleichen
Leistung
wie der
Frequen-
zumrichter
H4-02:
100 %
H4-05:
50 %
Seite
5-25
6-10
5-30
6-110
5-31
6-48
6-108
5-47
5-50
6-48
5-53
6-24
4-6
Page 88

Einstellungen für die Regelbetriebsarten
Die nutzbaren Autotuning-Methoden hängen von der für den Frequenzumrichter eingestellten Regelbetriebsart ab.
Einstellungen – Übersicht
Nehmen Sie die erforderlichen Einstellungen in den Betriebsarten „Schnellstart“ und „Autotuning“ vor.
Richten Sie sich dabei nach der in Abb. 4.1 skizzierten Vorgehensweise.
Einstellung der Regelbetriebsart
Wählen Sie die für die jeweilige Anwendung am besten geeignete Regelbetriebsart aus. Tabelle 4.2 zeigt die
Haupteigenschaften der einzelnen Regelbetriebsarten.
Tabelle 4.2 Eigenschaften der Regelbetriebsarten
Regelbetriebsart
U/f-Regelung A1-02 = 0
U/f-Regelung
mit Impulsgeber
Vektorregelung
ohne Rückführung
Vektorregelung
mit Rückführung
Parameter-
einstellung
Regelung mit festem Verhältnis
von Spannung und Frequenz
Regelung mit festem Verhältnis
A1-02 = 1
A1-02 = 2
(Werkseinstellung)
A1-02 = 3 Vektorregelung mit Rückführung
von Spannung und Frequenz
mit Drehzahlkompensation unter
Verwendung eines Impulsgebers
Stromvektorregelung ohne
Impulsgeber
Basisregelung Hauptanwendungsgebiete
Regelung mit variabler Drehzahl, insbesondere Ansteuerung mehrerer Motoren
mit einem Frequenzumrichter.
Anwendungen, die eine äußerst präzise
Drehzahlreglung durch Verwendung eines
Impulsgeber erfordern.
Variable Drehzahlregelung, Anwendungen
mit hohen Ansprüchen an die Drehzahlund Drehmomentgenauigkeit.
Hochleistungsregelung mit Impulsgeber
(einfache Servoantriebe, Drehzahl- und
Drehmomentregelung mit höchster
Präzision und Drehmomentbegrenzung).
4
Hinweis: Bei einer Vektorregelung mit oder ohne Rückführung müssen Motor und Frequenzumrichter direkt (ohne Drosseln und Filter in den
Motorleitungen) miteinander verbunden sein. Eine stabile Regelung ist möglich, wenn die Motornennleistung 50 % bis 100 % der
Frequenzumrichterleistung beträgt.
U/f-Regelung ohne Impulsgeber (A1-02 = 1)
• Stellen Sie in der Betriebsart „Programmierung“ eine den Eigenschaften des Motors und der Last
entsprechende feste U/f-Kennlinie (E1-03 = 0 bis E) ein, oder legen Sie mithilfe der Parameter E1-01 bis
E1-13 eine benutzerdefinierte U/f-Kennlinie fest (E1-03 = F).
E1-03 = 0 oder F (Standardeinstellung)
Einfacher Betrieb eines Universalmotors
bei 50 Hz:
Die Standardeinstellungen der benutzerdefinierten
Kennlinie (E1-03 = F) in E1-04 bis E1-13 eignen sich
für einen 50-Hz-Motor.
Einfacher Betrieb eines Universalmotors
bei 60 Hz:
• Beträgt die Länge des Motorkabels in der tatsächlichen Installation mehr als 50 m oder bewirkt eine große
E1-03 = 1
Last eine Motorblockade, so führen Sie ein Autotuning im Stillstand zur Bestimmung des MotorWicklungswiderstands durch. Details zum Autotuning im Stillstand finden Sie im nachfolgenden
Abschnitt Autotuning.
U/f-Regelung mit Impulsgeber (A1-02 = 1)
Zusätzlich zu den auch bei U/f-Regelung ohne Impulsgeber vorzunehmenden Einstellungen müssen bei dieser
Regelbetriebsart die folgenden Parameter gesetzt werden:
• Anzahl der Motorpole in E2-04.
4-7
Page 89

4
• Anzahl der Geberimpulse je Umdrehung in F1-01. Ist der Impulsgeber über ein Untersetzungsgetriebe mit
dem Motor verbunden, muss in den Parametern F1-12 und F1-13 das Untersetzungsverhältnis eingestellt
werden (erweiterter Programmiermodus).
Vektorregelung ohne Rückführung (A1-02 = 2)
Führen Sie grundsätzlich ein Autotuning durch. Ist eine Drehung des Motors unproblematisch/ungefährlich,
ist ein rotatorisches Autotuning durchzuführen, andernfalls ein Autotuning im Stillstand. Details zum
Autotuning finden Sie im nachfolgenden Abschnitt Autotuning.
Vektorregelung mit Rückführung (A1-02 = 3)
Führen Sie grundsätzlich ein Autotuning durch. Ist eine Drehung des Motors unproblematisch/ungefährlich,
ist ein rotatorisches Autotuning durchzuführen, andernfalls ein Autotuning im Stillstand. Details zum
Autotuning finden Sie im nachfolgenden Abschnitt Autotuning.
Autotuning
Autotuning dient zur automatischen Einstellung der Motorparameter bei Verwendung einer Vektorregelung
mit oder ohne Rückführung, bei langen Kabeln und bei Änderungen der Anlagenkonfiguration.
Einstellen des Autotuning-Modus
Es stehen drei Autotuning-Modi zu Wahl:
• Rotatorisches Autotuning
• Autotuning im Stillstand
• Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstandes
Rotatorisches Autotuning (T1-01 = 0)
Rotatorisches Autotuning wird nur bei Vektorregelung mit oder ohne Rückführung verwendet. Setzen Sie
T1-01 auf 0, geben Sie die auf dem Typenschild des Motors angegebenen Daten ein, und drücken Sie die
RUN-Taste auf der digitalen Bedienkonsole. Der Frequenzumrichter lässt den Motor ca. eine Minute lang
laufen und stellt die erforderlichen Motorparameter automatisch ein.
Autotuning im Stillstand (T1-01 = 1)
Autotuning im Stillstand wird nur bei Vektorregelung mit oder ohne Rückführung verwendet. Setzen Sie
T1-01 auf 1, geben Sie die auf dem Typenschild des Motors angegebenen Daten ein, und drücken Sie die
RUN-Taste auf der digitalen Bedienkonsole. Der Frequenzumrichter speist den sich nicht drehenden Motor
etwa eine Minute lang mit Strom, und bestimmte Motorparameter werden automatisch eingestellt. Die
restlichen Motorparameter werden während des ersten Motorlaufs automatisch eingestellt.
Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstands (T1-01 = 2)
Das Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstands kann in jeder Regelbetriebsart verwendet werden. Bei U/f-Regelung (mit oder ohne Impulsgeber) ist dies der einzige mögliche
Autotuning-Modus.
4-8
Autotuning kann zu einer Leistungsverbesserung führen, wenn das Motorkabel eine gewisse Länge überschreitet oder die Kabellänge geändert wurde oder wenn die Nennleistungen von Motor und Frequenzumrichter nicht übereinstimmen.
Stellen Sie zur Durchführung des Autotunings bei U/f-Regelung (mit oder ohne Impulsgeber) die Parameter
T1-02 (Motornennleistung) und T1-04 (Motornennstrom) ein, und drücken Sie die RUN-Taste auf der digitalen Bedienkonsole. Der Frequenzumrichter speist den sich nicht drehenden Motor etwa 20 Sekunden lang mit
Strom, und der Motor-Wicklungswiderstand sowie der Kabelwiderstand werden automatisch gemessen.
Page 90

Sicherheitshinweise für das Autotuning
Bitte lesen Sie die folgenden Sicherheitshinweise, bevor Sie ein Autotuning durchführen.
• Das Autotuning beim Frequenzumrichter unterscheidet sich grundsätzlich vom Autotuning bei einem
Servosystem. Beim Frequenzumrichter-Autotuning werden die Parameter an die ermittelten Motordaten
angepasst, beim Servosystem-Autotuning hingegen an die ermittelte Last.
• Ist bei hohen Drehzahlen (90 % der Nenndrehzahl oder darüber) eine genaue Drehzahl- oder Dreh-
momentregelung erforderlich, so verwenden Sie einen Motor mit einer Nennspannung, die ca. 20 V
(200-Volt-Klasse) bzw. ca. 40 V (400-Volt-Klasse) unter der Eingangsversorgungsspannung des Frequenzumrichters liegt. Entspricht die Nennspannung des Motors der Eingangsversorgungsspannung des
Frequenzumrichters, verliert der Spannungsausgang des Frequenzumrichters bei hohen Drehzahlen an
Stabilität, so dass die erforderliche Regelgenauigkeit nicht erzielt werden kann.
• Verwenden Sie Autotuning im Stillstand, wenn die Last nicht vom Motor getrennt werden kann.
• Verwenden Sie das rotatorische Autotuning, wenn ein besonders präzises Autotuning erforderlich ist oder
der Motor nicht mit einer Last verbunden ist.
• Ist der Motor bei der Durchführung eines Autotunings mit Motordrehung mit einer Last verbunden,
können die Motordaten nicht exakt bestimmt werden. Dies hat nachteilige Auswirkungen auf die
Regelungsleistung des Frequenzumrichters. Führen Sie niemals ein rotatorisches Autotuning durch, wenn
der Motor mit einer Last verbunden ist.
• Falls sich die Verkabelung zwischen Frequenzumrichter und Motor um 50 m oder mehr ändert, führen Sie
ein Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstands durch.
• Führen Sie bei langem Motorkabel (50 m oder mehr) ein Autotuning im Stillstand zur Bestimmung des
Motor-Wicklungswiderstands durch.
• Wenn eine mechanische Bremse verwendet wird, stellen Sie sicher, dass sie beim Autotuning im Stillstand
nicht gelöst wird. Beim rotatorischen Autotuning muss die Bremse gelöst werden.
• Der Motor wird beim Autotuning im Stillstand mit Strom versorgt, auch wenn der Motor nicht dreht.
Berühren Sie den Motor erst nach Abschluss des Autotunings
• In der nachstehenden Tabelle sind die Zustände der Multifunktionseingänge und -ausgänge während der
Durchführung des Autotunings aufgeführt.
Autotuning-Modus Multifunktionseingänge Multifunktionsausgänge
Rotatorisches Autotuning Außer Funktion Wie bei normalem Betrieb
Autotuning im Stillstand Außer Funktion
Autotuning im Stillstand
zur Bestimmung des
Wicklungswiderstandes
Außer Funktion
.
Beibehaltung des Zustands
zu Beginn des Autotunings
Beibehaltung des Zustands
zu Beginn des Autotunings
4
• Drücken Sie zum Abbrechen des Autotunings die STOP-Taste auf der digitalen Bedienkonsole.
4-9
Page 91

4
Sicherheitshinweise für das Autotuning mit und ohne Motordrehung
• Wenn die Motornennspannung höher als die Versorgungsspannung ist, setzen Sie die Nennspannung wie
in Abb. 4.3 dargestellt herab, um eine Sättigung der Frequenzumrichter-Ausgangsspannung zu vermeiden.
Gehen Sie zur Durchführung des Autotunings wie folgt vor:
1. Stellen Sie die Eingangsspannung in T1-03 (Motornennspannung) ein.
2. Stellen Sie das Resultat der folgenden Formel in T1-05 (Motornennfrequenz) ein:
T1-03
T1-05 Nennfrequenz gemäß Motor-Typenschild
3. Führen Sie das Autotuning durch.
Stellen Sie nach Abschluss des Autotunings für E1-04 (Max. Ausgangsfrequenz) die Nennfrequenz gemäß
Motortypenschild ein.
Ausgangsspannung
Output voltage
Nenn-
Rated voltage
spannung
from motor
gemäß Motor-
name plate
Typenschild
T1-03
-----------------------------------------------------
×=
Motor-Nennspannung
Ausgangsfrequenz
0
Nennfrequenz gemäß
Base frequency from
Motor-Typenschild
motor name plate
Nennspannung gemäß
Rated voltage from motor
Motor-Typenschild
name plate
x T1-03
Base frequency
Nennfrequenz gemäß
from motor name
Motor-Typenschild
plate
Output frequency
Abb. 4.3 Einstellung der Motornennfrequenz und der Frequenzumrichter-Eingangsspannung
Wenn bei hohen Drehzahlen (90 % der Nenndrehzahl oder mehr) eine hohe Präzision der Drehzahlrege-
•
lung erforderlich ist, stellen Sie T1-03 (Motornennspannung) auf die Eingangsspannung × 0,9 ein. In diesem Fall erhöht sich der Motorstrom bei hohen Drehzahlen, während sich die Motorspannung verringert.
Achten Sie auf eine ausreichende Toleranzspanne beim Frequenzumrichterstrom.
Sicherheitshinweise nach Durchführung eines Autotunings mit und ohne
Motordrehung
Wenn die maximale Ausgangsfrequenz von der Nennfrequenz abweicht, stellen Sie nach dem Autotuning die
maximale Ausgangsfrequenz (E1-04) ein.
4-10
Page 92

Parametereinstellungen für das Autotuning
Vor dem Autotuning müssen die folgenden Parameter eingestellt werden.
Tabelle 4.3 Parametereinstellungen vor Durchführung des Autotunings
Bezeich-
Para-
meter-Nr.
T1-00
T1-01
T1-02
T1-03
T1-04
T1-05
T1-06
T1-07
Anzeige
Auswahl
Motor 1/2
*1
Select
Motor
Auswahl
des AutotuningModus
Tuning
Mode Sel
Motornennleistung
Mtr Rated
Power
Motornennspannung
Rated
Voltage
Motornennstrom
Rated
Current
Motornennfrequenz
Rated
Frequency
Anzahl der
Motorpole
Number of
Poles
Motornenndrehzahl
Rated
Speed
nung
Anzeige
Auswahl des Speicherorts für die
im Rahmen des Autotunings
ermittelten Daten.
1: E1 bis E2 (Motor 1)
2: E3 bis E4 (Motor 2)
Stellen Sie den AutotuningModus ein.
0: Rotatorisches Autotuning
1: Autotuning im Stillstand
2: Autotuning im Stillstand zur
Bestimmung des Wicklungswiderstandes
Stellen Sie die Ausgangsleistung
des Motors in Kilowatt ein.
Stellen Sie die Nennspannung
des Motors ein.
*4
Stellen Sie den Motornennstrom
in Ampère ein.
Stellen Sie die Nennfrequenz des
Motors ein.
*4
Stellen Sie die Anzahl der
Motorpole ein.
Stellen Sie die Nenndrehzahl des
Motors in U/min ein.
Einstell-
bereich
1 oder 2 1 Ja Ja Ja Ja
0 bis 2
10 % bis
200 % der
Frequenzumrichter-Nenn-
*3
leistung
0 bis 255,0 V
(200-V-
Klasse)
0 bis 510,0 V
(400-V-
Klasse)
10 % bis
200 % des
Frequenzumrichter-Nenn-
*3
stroms
0 bis
150,0 Hz
*5
2 bis 48 Pole 4 Pole – – Ja Ja
0 bis 24000
Werkseinstel-
lung
2 (U/f und
U/f mit
Impuls-
geber)
0 (Vektor-
regelung
ohne Rück-
führung)
Entspre-
chend der
Frequenzumrichter-
Nenn-
leistung
200,0 V
(200-V-
Klasse)
400,0 V
(400-V-
Klasse)
Entsprechend dem
Nennstrom
eines
Universal-
motors mit
der gleichen
Leistung
wie der
Frequenz-
umrichter
Datenanzeige während des Autotunings
Vektor-
regelung
U/f
U/f mit
Impuls-
geber
ohne
Rückf-
ührung
Ja
(nur 2)Ja(nur 2)
*2
Ja Ja Ja Ja
– – Ja Ja
Ja Ja Ja Ja
Ja Ja
50,0 Hz – – Ja Ja
1750
U/min
– – Ja Ja
Vek tor-
rege-
lung mit
Rück-
führung
4
4-11
Page 93

Tabelle 4.3 Parametereinstellungen vor Durchführung des Autotunings
4
Para-
meter-Nr.
Bezeich-
nung
Anzeige
Anzeige
Einstell-
bereich
Werkseinstel-
lung
Datenanzeige während des Autotunings
U/f mit
Impuls-
U/f
geber
Anzahl der
T1-08
Geberimpulse je
Umdrehung
PG Pulses/
Stellen Sie die Anzahl der
Geberimpulse (Impulsgeber oder
Encoder) je Motorumdrehung
ohne Multiplikationsfaktor ein.
0 bis 60.000 1024 - Ja - Ja
Rev
* 1. Wird nur angezeigt, wenn ein Motor-Umschaltbefehl für einen digitalen Multifunktions-Eingang eingestellt ist (einer der Parameter H1-01 bis H1-05
ist auf 16 gesetzt).
* 2. Bei U/f-Regelung mit oder ohne Impulsgeber ist nur Einstellung 2 (Autotuning im Stillstand zur Bestimmung des Motor-Wicklungswiderstands)
möglich.
* 3. Eine stabile Vektorregelung ist nur möglich, wenn diese Einstellung zwischen 50 % und 100 % liegt.
* 4. Bei Frequenzumrichter- und Vektorregelungsmotoren können Spannung und Frequenz niedriger sein als bei Universalmotoren. Überprüfen Sie die
Einstellung stets anhand des Typenschilds oder anhand von Prüfberichten. Falls Ihnen die Leerlaufwerte bekannt sind, stellen Sie die Leerlaufspannung
in T1-03 und die Leerlauffrequenz in T1-05 ein, um die Genauigkeit zu erhöhen.
* 5. Der Einstellbereich gilt für den Standard-Beanspruchungsmodus „Starke Beanspruchung“ (C6-01 = 0). Bei Auswahl der Beanspruchungsmodi
„Normale Beanspruchung 1“ und „Normale Beanspruchung 2“ (C6-01 = 1 oder 2) geht der Einstellbereich von 0,0 bis 400,0 Hz.
Anwendungseinstellungen
Die erforderlichen Parameter werden in der Betriebsart „Programmierung“ eingestellt (die LCD-Anzeige
zeigt „ADV“). In dieser Betriebsart werden zudem alle in der Betriebsart „Schnellstart“ einstellbaren Parameter angezeigt und können dort auch gesetzt werden.
Vektor-
regelung
ohne
Rückführung
Vektor-
rege-
lung mit
Rück-
führung
Einstellungsbeispiele
• Nachstehend einige Beispiele für anwendungsspezifische Einstellungen:
• Wird ein in den Frequenzumrichter eingebauter Bremswiderstand (ERF) verwendet, so setzen Sie L8-04
auf 1, um den Überhitzungsschutz für den ERF-Bremswiderstand zu aktivieren.
• Um einen Rückwärtslauf der Maschine zu verhindern, setzen Sie b1-04 auf 1.
• Zur Erhöhung der Drehzahl eines 50-Hz-Motors um 10 % setzen Sie E1-04 auf 55,0 Hz.
• Um die Drehzahl eines 50-Hz-Motors für den Betrieb mit variabler Drehzahl mittels eines Analogsignals
von 0 bis 10 V zwischen 0 und 45 Hz (0 bis 90 % der Nennfrequenz) einzustellen, setzen Sie H3-02 auf
90,0 %.
• Zur Einschränkung des Drehzahlbereichs auf 20 % bis 80 % der Nenndrehzahl setzen Sie d2-01 auf
80,0 % und d2-02 auf 20,0 %.
Lastfreier Betrieb
In diesem Abschnitt wird der Testbetrieb mit einem Motor ohne Last beschrieben, d. h., wenn die Maschine
nicht mit dem Motor verbunden ist. Um Ausfälle durch eine fehlerhafte Verdrahtung des Steuerkreises zu
vermeiden, wird empfohlen, den LOCAL-Modus zu verwenden. Drücken Sie die Taste LOCAL/REMOTE an
der digitalen Bedienkonsole, um in den LOCAL-Modus zu wechseln (die Anzeigeleuchten SEQ und REF an
der digitalen Bedienkonsole dürfen nicht leuchten).
Bevor der Frequenzumrichter über die digitale Bedienkonsole in Betrieb genommen wird, ist die Sicherheit im
Bereich des Motors und der Maschine zu überprüfen. Kontrollieren Sie, dass der Motor normal funktioniert
und dass am Frequenzumrichter keine Fehler angezeigt werden. Bei Anwendungen, bei denen die Maschine
nur in einer Richtung angetrieben werden kann, muss die Drehrichtung des Motors überprüft werden.
4-12
Page 94

Der Betrieb mit dem Jog-Frequenzsollwert (d1-17, Standardeinstellung: 6,00 Hz) kann durch Drücken und
Freigeben der Taste JOG an der digitalen Bedienkonsole gestartet und gestoppt werden. Wenn die externe
Steuerschaltung die Bedienung über die digitale Bedienkonsole verhindert, so kontrollieren Sie, dass die
NOT-AUS-Schaltkreise und die Sicherheitsmechanismen der Maschine funktionieren. Starten Sie dann den
Betrieb im REMOTE-Modus (d. h. durch ein Signal an den Steuersignalklemmen). Diese Sicherheitsmaßnahmen sind stets zu beachten, bevor der Frequenzumrichter mit angeschlossenem Motor in Betrieb
genommen wird.
Für die Inbetriebnahme des Frequenzumrichters muss ein Startbefehl (RUN) für Vorwärts- oder Rück-
HINWEIS
wärtslauf erteilt und ein Frequenzsollwert vorgegeben (bzw. ein Festfrequenz-Drehzahlbefehl gegeben)
werden.
Lastbetrieb
Verbinden mit der Last
• Kontrollieren Sie zunächst, dass der Motor zum vollständigen Stillstand gekommen ist. Verbinden Sie erst
dann die Last mit dem Motor.
• Achten Sie darauf, dass alle Schrauben festgezogen werden, wenn die Motorwelle mit der Last verbunden
wird.
4
Betrieb über die digitale Bedienkonsole
• Starten Sie über die digitale Bedienkonsole den Betrieb im LOCAL-Modus (in derselben Weise wie beim
lastfreien Betrieb).
• Achten Sie darauf, dass die Taste STOP an der digitalen Bedienkonsole frei zugänglich ist, um den Motor
im Falle einer Betriebsstörung sofort anhalten zu können.
• Stellen Sie den Frequenzsollwert zunächst auf eine niedrige Drehzahl, z. B. auf ein Zehntel der normalen
Betriebsdrehzahl.
Überprüfen des Betriebsstatus
• Überprüfen Sie die Drehrichtung und den reibungslosen Lauf der Maschine bei niedriger Drehzahl.
Erhöhen Sie dann den Frequenzsollwert.
• Wurde der Frequenzsollwert oder die Drehrichtung geändert, so prüfen Sie, ob der Motor vibriert oder
ungewöhnliche Geräusche abgibt. Kontrollieren Sie in der Überwachungsanzeige, ob der Ausgangsstrom
(U1-03) nicht zu hoch liegt.
• Informationen zu möglichen Parameteranpassungen bei Drehzahlschwankungen, Vibrationen oder
anderen regelungsbedingten Problemen finden Sie in Tabelle 4.4.
4-13
Page 95

4
Überprüfen und Dokumentieren der Parameter
Überprüfen Sie in der Betriebsart „geänderte Parameter“ (in der LCD-Anzeige wird VERIFY angezeigt) die
für den Testbetrieb geänderten Parameter, und dokumentieren Sie diese in einer Parametertabelle.
Die durch das Autotuning geänderten Parameter werden in dieser Betriebsart ebenfalls angezeigt.
Bei Bedarf können die geänderten Einstellungen mittels der Kopierfunktion (Parameter o3-01 und o3-02 in
der Betriebsart „Programmierung“) aus dem Frequenzumrichter in den Speicher der digitalen Bedienkonsole
kopiert werden. Auf diese Weise können geänderte Einstellungen mühelos zurück in den Frequenzumrichter
kopiert werden, um eine Neu-Einstellung zu beschleunigen, wenn der Frequenzumrichter aus irgendeinem
Grund ausgetauscht werden muss.
Für die Verwaltung der Parameter können außerdem die folgenden Funktionen verwendet werden:
• Speicherung von kundenspezifischen Parametereinstellungen
• Einstellen von Zugriffsebenen für Anwenderparameter
• Einstellen eines Passworts
Speicherung von kundenspezifischen Parametereinstellungen (o2-03)
• Wenn o2-03 nach Abschluss des Testbetriebs auf 1 gesetzt wird, werden die Parametereinstellungen in
einem separaten Speicherbereich im Frequenzumrichter gespeichert. Wenn die Frequenzumrichtereinstellungen aus irgendeinem Grund geändert wurden, können die Anwenderparameter auf die im separaten Speicherbereich gespeicherten Einstellungen initialisiert werden, indem A1-03 (Initialisieren) auf 1110
gesetzt wird.
Parameterzugriffsebenen (A1-01)
• Zum Schutz der Parameter vor Änderungen kann A1-01 auf 0 (nur Anzeige) gesetzt werden. Um nur die
Parameter anzuzeigen, die von der Maschine oder Anwendung in einer Programmierbetriebsart benötigt
werden, kann A1-01 auf 1 (Benutzerdefinierte Parameter) gesetzt werden. Diese Parameter werden durch
Einstellen der Parameter A2-XX festgelegt.
Passwort (A1-04 und A1-05)
• Wird die Zugriffsebene auf „Nur Anzeige“ (A1-01 = 0) eingestellt, kann ein Passwort eingerichtet werden,
damit Anwenderparameter nur angezeigt werden, wenn das korrekte Passwort eingegeben wird.
4-14
Page 96

Empfohlene Einstellungen
Wenn während des Testbetriebs Drehzahlschwankungen, Vibrationen oder andere regelungsbedingte
Probleme auftreten, sollten die Parameter in der nachstehenden Tabelle entsprechend der jeweiligen
Regelbetriebsart eingestellt werden. Diese Tabelle enthält nur die gebräuchlichsten Parameter.
Tabelle 4.4 Parameteranpassungen
Regel-
betriebsart
U/fRegelung
(A1-02 = 0
oder 1)
Vektorregelung
ohne Rückführung
(A1-02 = 2)
Bezeichnung
(Parameter-Nr.)
Verstärkung für Übersteuerungsvermeidung
(N1-02)
Taktfrequenzauswahl
(C6-02)
Verzögerungszeitkonstante für die Drehmomentkompensation
(C4-02)
Drehmoment-Kompensationsverstärkung
(C4-01)
Spannung bei mittlerer
Ausgangsfrequenz
(E1-08)
Spannung bei minimaler
Ausgangsfrequenz
(E1-10)
Verstärkung der Drehzahlistwert-Erkennungsregelung (AFR)
(N2-01)
Verzögerungszeitkonstante für die Drehmomentkompensation
(C4-02)
Verzögerungszeitkonstante für die Schlupfkompensation (C3-02)
SchlupfkompensationsVerstärkung (C3-01)
Einfluss
Unterdrücken von Drehzahlschwankungen (Pendeln) und Vibrationen
im mittleren Drehzahlbereich (10 bis 40 Hz)
• Verringerung der
Magnetisierungsgeräusche des Motors
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
bei niedrigen Drehzahlen
• Verkürzen der
Ansprechzeit für
Drehmoment und
Drehzahl
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
• Verbesserung des
Drehmoments bei
niedrigen Drehzahlen
(10 Hz oder weniger)
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
• Verbesserung des
Drehmoments bei
niedrigen Drehzahlen
• Unterdrücken des
Anlaufrucks
• Verkürzen der Ansprechzeit für Drehmoment und Drehzahl
• Unterdrücken von
Drehzahlschwankungen (Pendeln) und
Vibrationen im mittleren Drehzahlbereich
(10 bis 40 Hz)
• Verkürzen der Ansprechzeit für Drehmoment und Drehzahl
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
• Verkürzen der Drehzahlansprechzeit
• Verbesserung der
Drehzahlstabilität
• Verbesserung der
Drehzahlgenauigkeit
Werksein-
stellung
1,00 0,50 bis 2,00
Leistungsabhängig
Leistungsabhängig
1,00 0,50 bis 1,50
Leistungsund Spannungsklassenabhängig
1,00 0,50 bis 2,00
20 ms
200 ms
1,0 0,5 bis 1,5
Empfohlene
Einstellung
0 bis Voreinstellung
200 bis
1000 ms
Vo r e i n s t e l lung bis Voreinstellung
*
+5 V
20 bis
100 ms
100 bis
500 ms
Einstellverfahren
• Verringern Sie die Einstellung,
wenn das Drehmoment für große
Lasten zu klein ist.
• Erhöhen Sie die Einstellung,
wenn bei kleinen Lasten Drehzahlschwankungen und Vibrationen auftreten.
• Erhöhen Sie die Einstellung,
wenn die Magnetisierungsgeräusche vom Motor sehr laut
sind.
• Verringern Sie die Einstellung,
wenn bei kleinen bis mittleren
Drehzahlen Drehzahlschwankungen oder Vibrationen auftreten.
• Verringern Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Erhöhen Sie die Einstellung,
wenn Drehzahlschwankungen
und Vibrationen auftreten.
• Erhöhen Sie die Einstellung,
wenn das Drehmoment bei niedrigen Drehzahlen zu gering ist.
• Verringern Sie die Einstellung,
wenn bei kleinen Lasten Drehzahlschwankungen und Vibrationen auftreten.
• Erhöhen Sie die Einstellung,
wenn das Drehmoment bei niedrigen Drehzahlen zu gering ist.
• Verringern Sie die Einstellung,
wenn der Ruck beim Anlaufen zu
groß ist.
• Verringern Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Erhöhen Sie die Einstellung,
wenn Drehzahlschwankungen
und Vibrationen auftreten.
• Verringern Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Erhöhen Sie die Einstellung,
wenn Drehzahlschwankungen
und Vibrationen auftreten.
• Verringern Sie die Einstellung,
wenn die Drehzahlansprechzeit
zu lang ist.
• Erhöhen Sie die Einstellung,
wenn die Drehzahl nicht stabil
ist.
• Erhöhen Sie die Einstellung,
wenn die Drehzahlansprechzeit
zu lang ist.
• Verringern Sie die Einstellung,
wenn die Drehzahl zu hoch ist.
4
4-15
Page 97

4
Tabelle 4.4 Parameteranpassungen (Fortsetzung)
Regel-
betriebsart
Vektorregelung
ohne Rückführung
(A1-02 = 2)
Vektorregelung
mit Rückführung
(A1-02 = 3)
* Die angegebenen Einstellungen gelten für Frequenzumrichter der 200-V-Klasse. Für Frequenzumrichter der 400-V-Klasse sind die Spannungswerte zu
verdoppeln.
Bezeichnung
(Parameter-Nr.)
Auswahl der
Taktfrequenz (C6-02)
Spannung bei mittlerer
Ausgangsfrequenz
(E1-08)
Spannung bei minimaler
Ausgangsfrequenz
(E1-10)
ASR-Proportionalverstärkung 1 (C5-01) und
ASR-Proportionalverstärkung 2 (C5-03)
ASR-Integrationszeit 1
(hohe Drehzahl, C5-02)
und
ASR-Integrationszeit 2
(niedrige Drehzahl,
C5-04)
ASR-Umschaltfrequenz
(C5-07)
ASR-Verzögerungszeit
(C5-06)
Auswahl der
Taktfrequenz (C6-02)
Einfluss
• Verringerung der
Magnetisierungsgeräusche des Motors
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
bei niedrigen Drehzahlen (10 Hz und
weniger)
• Verbesserung des
Drehmoments bei
niedrigen Drehzahlen
• Unterdrücken des
Anlaufrucks
• Ansprechen von Drehmoment und Drehzahl
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
• Ansprechen von Drehmoment und Drehzahl
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
Umschalten der ASRProportionalverstärkung
und -integralzeit in
Abhängigkeit von der
Ausgangsfrequenz
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
• Verringerung der
Magnetisierungsgeräusche des Motors
• Unterdrückung von
Drehzahlschwankungen und Vibrationen
bei niedrigen Drehzahlen (3 Hz und
weniger)
Werksein-
stellung
Leistungsabhängig
Leistungs- und
Spannungsklassenabhängig
20,00
0,500 s
0,0 Hz
0,004 s
Leistungsabhängig
Empfohlene
Einstellung
0 bis Voreinstellung
Vo r e i n s t e l lung bis Voreinstellung
*
+5 V
10,00 bis
50,00
0,300 bis
1,000 s
0,0 Hz bis
maximale
Ausgangsfrequenz
0,004 bis
0,020
2,0 kHz bis
Vo r e i n s t e l lung
Einstellverfahren
• Erhöhen Sie die Einstellung,
wenn die Magnetisierungsgeräusche vom Motor sehr laut sind.
• Verringern Sie die Einstellung,
wenn bei niedrigen Drehzahlen
Drehzahlschwankungen und
Vibrationen auftreten.
• Erhöhen Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Verringern Sie die Einstellung,
wenn der Ruck beim Anlaufen
zu groß ist.
• Erhöhen Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Verringern Sie die Einstellung,
wenn Drehzahlschwankungen
und Vibrationen auftreten.
• Verringern Sie die Einstellung,
wenn die Drehmoment- bzw.
Drehzahlansprechzeit zu lang ist.
• Erhöhen Sie die Einstellung,
wenn Drehzahlschwankungen
und Vibrationen auftreten.
Einstellung der Ausgangsfrequenz,
bei der ASR-Proportionalverstärkung und -integralzeit gewechselt
werden sollen, wenn bei hohen und
niedrigen Drehzahlen unterschiedliche Einstellungen erforderlich sind.
Erhöhen Sie die Einstellung, wenn
die Maschine nicht sonderlich steif
ist und leicht in Vibration gerät.
• Erhöhen Sie die Einstellung,
wenn die Magnetisierungsgeräusche vom Motor sehr laut sind.
• Verringern Sie die Einstellung,
wenn bei sehr kleinen bis mittleren Drehzahlen Drehzahlschwankungen oder Vibrationen
auftreten.
4-16
• Bei Verwendung der Vektorregelung ohne Rückführung darf die Werkseinstellung (1,00) der
Drehmoment-Kompensationsverstärkung (C4-01) nicht verändert werden.
• Aktivieren Sie die Schlupfkompensation während des generatorischen Betriebs (C3-04 = 1), wenn bei
Verwendung der Vektorregelung ohne Rückführung die Drehzahlen im generatorischem Betrieb ungenau
sind.
• Bei U/f-Regelung (A1-02 = 0) kann die Drehzahlregelung durch Verwendung der Schlupfkompensation
verbessert werden.
Stellen Sie Motornennstrom (E2-01), Motornennschlupf (E2-02) und Motorleerlaufstrom (E2-03) ein, und
setzen Sie dann die Schlupfkompensationsverstärkung (C3-01) auf einen Wert zwischen 0,5 und 1,5. Die
Standardeinstellung bei U/f-Regelung ist C3-01 = 0,0 (Schlupfkompensation deaktiviert).
• Zur Verbesserung des Ansprechverhaltens und der Stabilität der Drehzahl können Sie bei U/f-Regelung
mit Impulsgeber die ASR-Parameter (C5-01 bis C5-05) auf das 0,5- bis 1,5-fache der Standardwerte
einstellen. (In der Regel müssen diese Einstellungen nicht geändert werden.)
Page 98

Die folgenden Parameter haben indirekten Einfluss auf das Regelungssystem.
Tabelle 4.5 Parameter mit indirektem Einfluss auf das Regelungssystem
Bezeichnung (Parameter-Nr.) Anwendung
Auswahl normale/starke Beanspruchung
(C6-01)
Verweilzeitfunktion (b6-01 bis b6-04) Für schwere Lasten oder Mechanik mit großem Spiel.
Beschleunigungs- und Verzögerungszeiten
(C1-01 bis C1-11)
S-Kurven-Kennwerte (C2-01 bis C2-04)
Sprungfrequenzen (d3-01 bis d3-04)
Analogeingangs-Filterzeitkonstante (H3-12)
Blockierschutz (L3-01 bis L3-06)
Drehmomentbegrenzungen
(L7-01 bis L7-04)
Vorsteuerung (N5-01 bis N5-03)
Einstellung für maximales Drehmoment und die Überlastfähigkeit.
Das Drehmoments wird durch die Einstellung der Beschleunigungsund Verzögerungszeiten indirekt beeinflusst.
Zur Unterdrückung der Stoßbelastung zu Beginn und nach Abschluss
der Beschleunigung und Verzögerung.
Zur Vermeiden des Dauerbetriebs bei möglichen Resonanzfrequenzen
der Maschine.
Zum Unterdrücken von durch Störgrößen verursachten Schwankungen
der analogen Eingangssignale.
Zum Verhindern von Überspannungsfehlern (OV) und Stehenbleiben
des Motors bei großen Lasten oder starker Beschleunigung/Verzögerung.
Der Blockierschutz ist standardmäßig aktiviert; diese Einstellung braucht
in der Regel nicht geändert zu werden. Bei Verwendung eines Bremswiderstands muss ist der Blockierschutz während der Verzögerung
deaktiviert werden (L3-04 = 0 oder 3).
Einstellung des maximalen Drehmoments bei Vektorregelung mit oder
ohne Rückführung. Wird eine dieser Einstellungen zu stark verringert,
kann der Motor bei großen Lasten blockieren.
Verbesserung des Ansprechens bei Beschleunigung und Verzögerung,
Reduktion von Übersteuerungen, wenn bei mangelnder Steifheit der
Maschine die ASR-Verstärkung nicht erhöht werden kann. Stellen Sie
hier das Massenträgheitsverhältnis zwischen Last und Motor sowie die
Beschleunigungszeit des Motors im Leerlauf ein.
4
4-17
Page 99

4
4-18
Page 100

5
Anwenderparameter
In diesem Kapitel werden alle Anwenderparameter beschrieben,
die beim Frequenzumrichter eingestellt werden können.
Beschreibung der Anwenderparameter ..................................5-2
Funktionen und Ebenen der digitalen Bedienkonsole.............5-3
Anwenderparameter-Tabellen ................................................5-7
 Loading...
Loading...