

Page 1
Cat. No. Z-DA024E-01
F7 Vector control
VARISPEED CIMR-F7Z
Quick guide
Page 2

Quick guide
1. Indholdsfortegnelse
2. FORTRÅDNING ............................................................................................................................3
3. PARAMETER STRUKTUR...........................................................................................................5
4. HURTIG OPSTART.......................................................................................................................7
5. BRUG AF BETJENINGS PANEL.................................................................................................8
6. OPEN LOOP KONTROL ..............................................................................................................9
7. FLUX VECTOR (LUKKET LOOP)............................................................................................. 10
8. PID KONTROL........................................................................................................................... 11
9. V/F KARAKTERISTIKKER ........................................................................................................ 12
CIMR-F7
2.1. FORTRÅDNING..............................................................................................................................4
3.1. PARAMETER STRUKTUR ................................................................................................................6
9.1. TABEL OVER V/F KARAKTERISTIKKER .......................................................................................... 13
10. BRUG AF THERMISTOR .......................................................................................................... 14
11. IND- OG UDGANGE .................................................................................................................. 15
11.1. FUNKTIONER TIL DIGITALE INDGANGE ...................................................................................... 15
11.2. DIGITAL UDGANGS FUNKTION .................................................................................................. 17
11.3. ANALOG INPUT FUNKTION ...................................................................................................... 18
11.4. FASTE HASTIGHEDER ............................................................................................................. 19
11.5. RAMPE SÆT SKIFT ................................................................................................................. 19
12. PARAMETER LISTE.................................................................................................................. 20
13. FEJL BESKRIVELSER.............................................................................................................. 32
14. BETINGELSER .......................................................................................................................... 34
CL/OEE-DK
2
Page 3
A
A
AM A
Quick guide
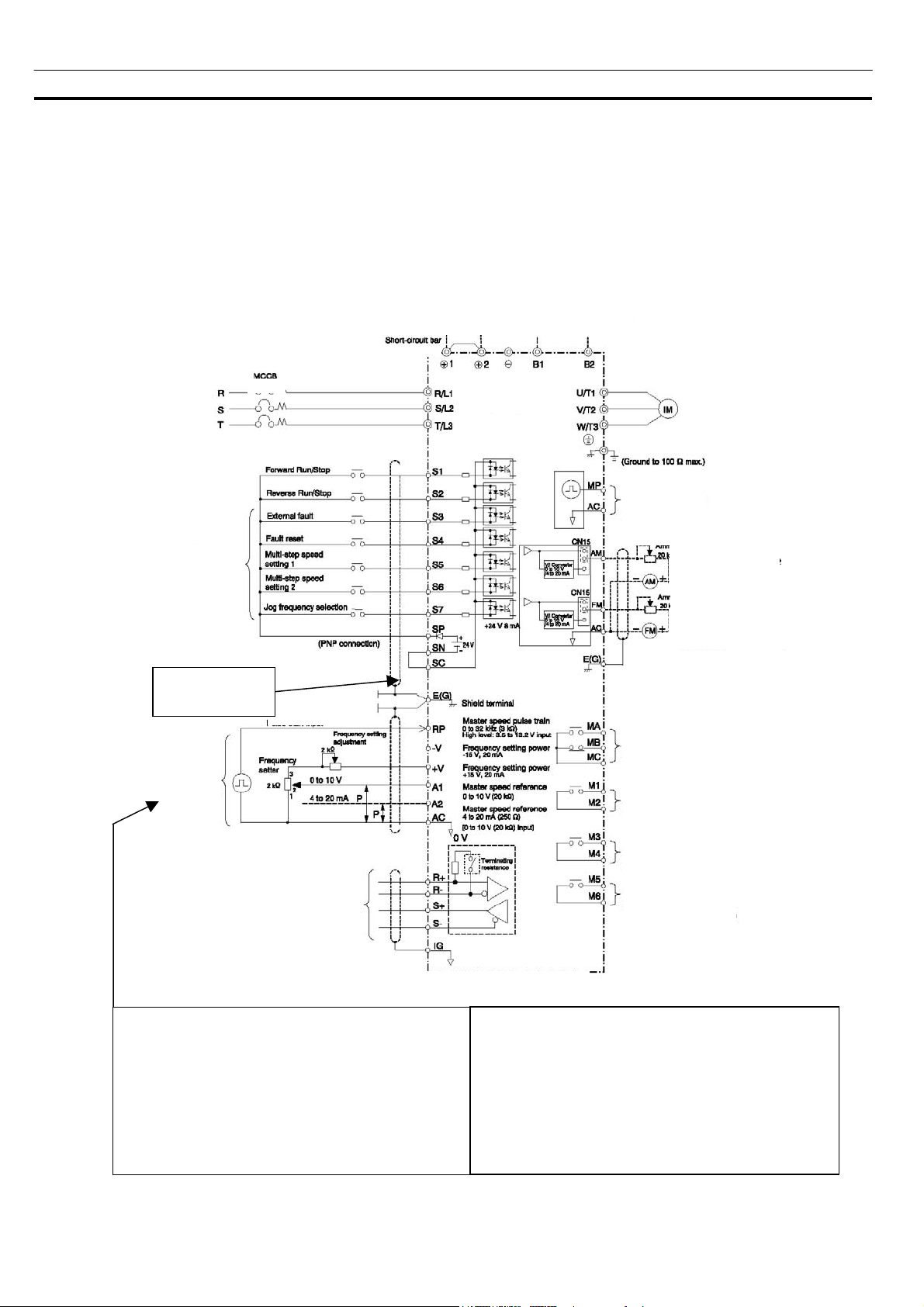
2. Fortrådning
CIMR-F7
Bemærk at på tegningen er indgange vist som PNP.
Fabriks opsætning er NPN.
Se næste side for hvordan man opsætter omformeren til enten NPN eller PNP.
Forsyning
Tilslutning af bremse
modstand
CIMR-F7Z
Motor
udgang
2.1.
Digitale
indgange
SP : +24V
SN : -24V
SC : fælles klemme
nalog
indgang
Puls indgang
RS 422A/485
kommunikatio
Puls udgang
nalog udgang 1
nalog udgang 2
FM
Fejl udgang
Programmerbar
relæ
udgang 1(M1/M2)
Programmerbar
relæ
udgang 2(M3/M4)
Programmerbar relæ
udgang 3(M5/M6)
RP : puls indgang
-V : 15 V. –
+V : 15 V. +
A1 : analog indgang 1 ( frekvens reference )
A2 : analog indgang 2 ( programmerbar )
AC : kommen for analoge indgange
Bemærk : potentiometer skal være min. 2 kohm.
CL/OEE-DK
Ekstra information på hastigheds indgange :
-V : - 15 V, 20 mA
+V : +15 V, 20 mA
RP : 0 – 32 kHz. , 3kohm
Højt niveau : 3,5 til 13,2 V.
Spændings indgang : 0 – 10 V. , 20 kohm
Strøm indgang : 4 – 20 mA. , 250 ohm
3
Page 4
Quick guide
CIMR-F7
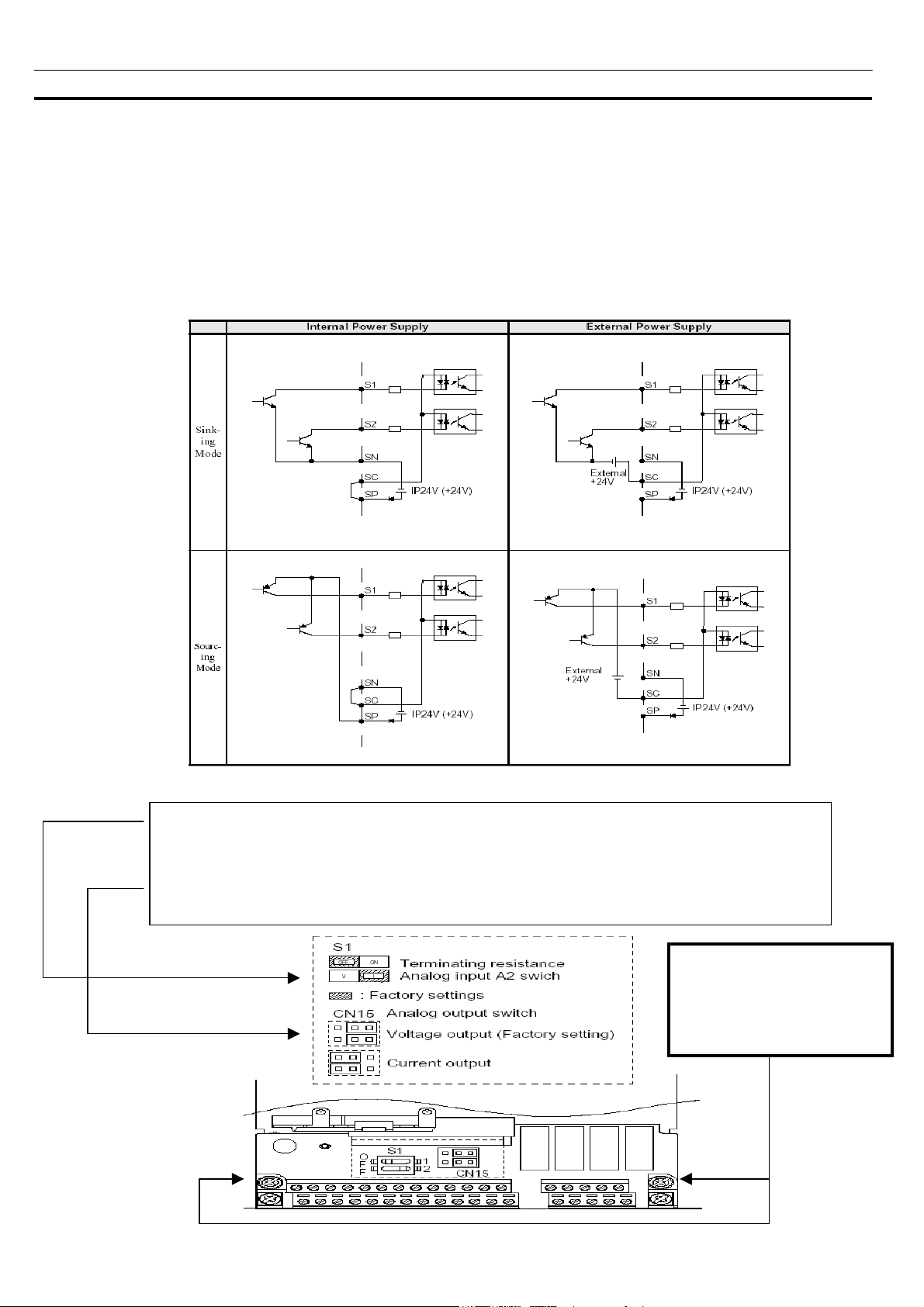
Fortrådning
Her er vist hvordan man opsætter omformeren til enten PNP eller NPN
Tegningen er opdelt i 4 rubrikker
Øverst til venstre : NPN med brug af den interne strømforsyning i
omformeren
Øverst til højre : NPN med ekstern forsyning
Nederst til venstre : PNP med brug af den interne strømforsyning i
omformeren
Nederst til højre : PNP med ekstern forsyning
Analog indgang 2 kan enten bruges som strøm eller spændings indgang.
Dette opsættes med skyde switch S1 : ( on = strøm ) dette er default.
CL/OEE-DK
De 2 analog udgange kan bruges enten til strøm eller spænding :
Dette opsættes med dip switch. CN-15
SE TEGNING NEDENFOR
BEMÆRK :
Kontrol terminal blokken kan
tages ud af omformeren.
Løsen de 2 skruer og træk i
siden på kortet
4
Page 5
A
Quick guide
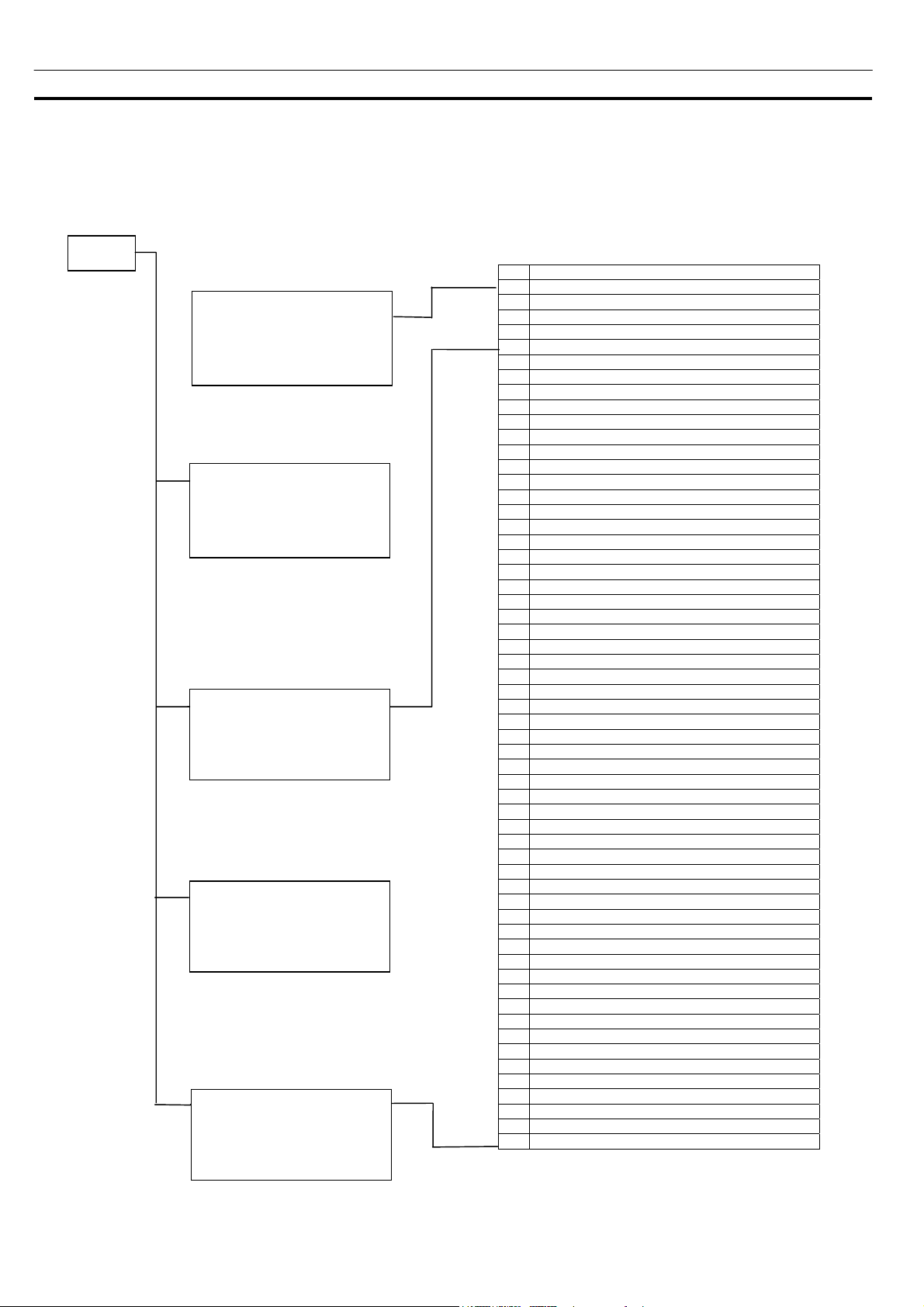
3. Parameter struktur
Menu
CIMR-F7
Her under er vist parameter strukturen i oversigts form :
Nr. Funktion
U1 Monitor status
U2 Registrering af data ved sidste fejl
U3 Fejl detektering
A1 Adgangs niveau og kontrol mode
A2 Bruger konstanter
B1 Valg af kørsels mode
B2 DC bremsning
B3 Hastighedssøgning
B4 Timer funktion
B5 PID kontrol
B6 Reference forsinkelse
B7 Droop kontrol
B8 Energispare funktion
B9 Servo lock
C1 Accel./decel. Tid
C2 S-kurve karakteristik
C3 Slip kompensering
C4 Moment kompensering
C5 ASR (Automatisk hastighedsregulering)
C6 Switchfrekvens
D1 Faste hastigheder
D2 Frekvensbegrænsning
D3 Frekvensspring
D4 Frekvens hold
D5 Moment kontrol
D6 Sænkning af motor spænding
E1 Spænding-/frekvensvalg
E2 Motor setup
E3 Spænding-/frekvensvalg 2
E4 Motor setup 2
F1 Pulsgiver (encoder)
F2 Analog kort
F3 Digital kort
F4 Analog monitor kort
F5 Digital udgangs kort
F6 Kom. Kort
H1 Digitale indgange
H2 Digitale udgange
H3 Analoge indgange
H4 Analoge udgange
H5 Seriel kommunikation
H6 Puls ind og udgangs terminaler
L1 Motor overbelastning
L2 Netudfald
L3 Udfaldsbeskyttelse
L4 Detektering af reference
L5 Fejl/Genstart
L6 Moment detektering
L7 Moment begrænsning
L8 Hardware beskyttelse
N1 Forhindring af motor svingninger
N2 Kontrol af hastigheds loop (open loop)
N3 Motor bremse (kun V/f mode)
O1 Visning på display
O2 Valg af nøglefunktioner
O3 Kopi funktion
T Automatisk indstilling af motor data
3.1.
Driver mode.
Om formeren kan
startes/stoppes og kan
moniteres i displayet.
Hurtig programmering.
Kun de mest brugte parameter
kan ænders/moniteres.
Avanceret
programmering.
lle parameter kan
ænders/moniteres.
Verify Mode.
Ændrede parameter kan
moniteres.
CL/OEE-DK
5
Page 6

Quick guide
CIMR-F7
Parameter struktur
Her er beskrevet i hvilke områder man kan finde de mest brugte parametre for at få
omformeren til at virke som ønsket.
A område.:
( A1-03 ) Her kan man sætte omformeren tilbage til fabriks indstilling
( A1-02 ) Her bestemmer man hvilken mode man ønsker at bruge (V/f eller open loop)
B område.:
( B1-01 ) Her bestemmer man hvor hastigheds referencen skal komme fra.
Betjeningspanel, klemmer, eller options kort
( B1-02 ) Her bestemmer man hvor start / stop skal komme fra
Betjeningspanel, klemmer eller options kort
C område.:
( C1-01 ) Her sættes accelerations tiden ( fra 0 – max frekvens )
( C1-02 ) Her sættes decelerations tiden ( fra max frekvens – 0 )
D område.:
( D1-01 til 17 ) Her indtastes alle de faste hastigheder man ønsker
Aktiveres med digitale indgange
E område.:
( E1-03 ) Her kan vælges en af de 15 faste moment karakteristikker eller vælge valgfri.
( E1 – 04 til 10 ) Hvis valgfri moment karakteristik er valgt skal karakteristikken sættes i
disse parametre ( se parameter tabel )
( E2 –01 ) Her sættes motorens fuldlast strøm
H område.:
( H1 ) Her opsættes hvilken funktion indgang S3 – S7 skal have
( H2 ) Her opsættes funktionen af de digitale output M1 – M6
( H3 ) Her sættes hvordan de 2 analoge indgange A1 og A2 skal virke
( H4 ) Her sættes funktionen af de analoge udgange Am og FM
L område.:
( L2 – 01 ) Her bestemmer man hvordan omformeren skal reagere på et kort
strømsvigt.
( L3 - 04 ) Hvis man bruger bremse modstand skal dette parameter sættes til 0
T område.:
( T ) Auto tuning ( for detaljer se under Open loop kontrol
U område.:
( U1 ) monitor parametre ( se under U1 i tabel
( U2 ) Fejl log. ( se under U2 i tabel )
( U3 ) Sidste 10 fejl ( se under U3 i tabel )
CL/OEE-DK
6
Page 7
Quick guide
4. Hurtig opstart
---------------------------------------------------------------------------------------------------------------------------
-------
CL/OEE-DK
CIMR-F7
Herunder er vist et opstart eksempel med henvisning til hvilke parametre man skal
indstille.
For at indstille parametre se under ”Brug af betjenings panel”
Applikation.:
1. Run signal fra betjenings panel
2. Reference fra klemmer
3. Fast hastighed sat fra klemme S3
Denne hastighed skal være 15 Hz
4. Motoren bruger 10 A
5. Start tid på 2 sek.
6. Stop tid på 11 sek.
7. Moment karakteristik med lavt start moment ( nr. 5 ) se under V/f karakteristik s. 8-12
Opsætning.:
Gå til B1-02 og sæt værdien til 0
Default ( men stilles i B1-01 )
Funktion af klemme S3 sættes i H1-01 ( sættes til multi step speed reference 1 = 3 )
Hastigheden sættes i D1-02 ( sæt værdien til 15 )
Bemærk : 2 indgange må ikke stå på det samme ( H1-03 står default til 3 )
Find derfor en anden værdi til denne indgang
Motor strømmen indtastes i E2-01 ( sæt værdien til 10 )
Accelerations tid sættes i C1-01 ( sæt værdien til 2 )
Decelerations tiden sættes i C1-02 ( sæt værdien til 11 )
Moment karakteristik sættes i E1-03 ( sæt værdien til 5 )
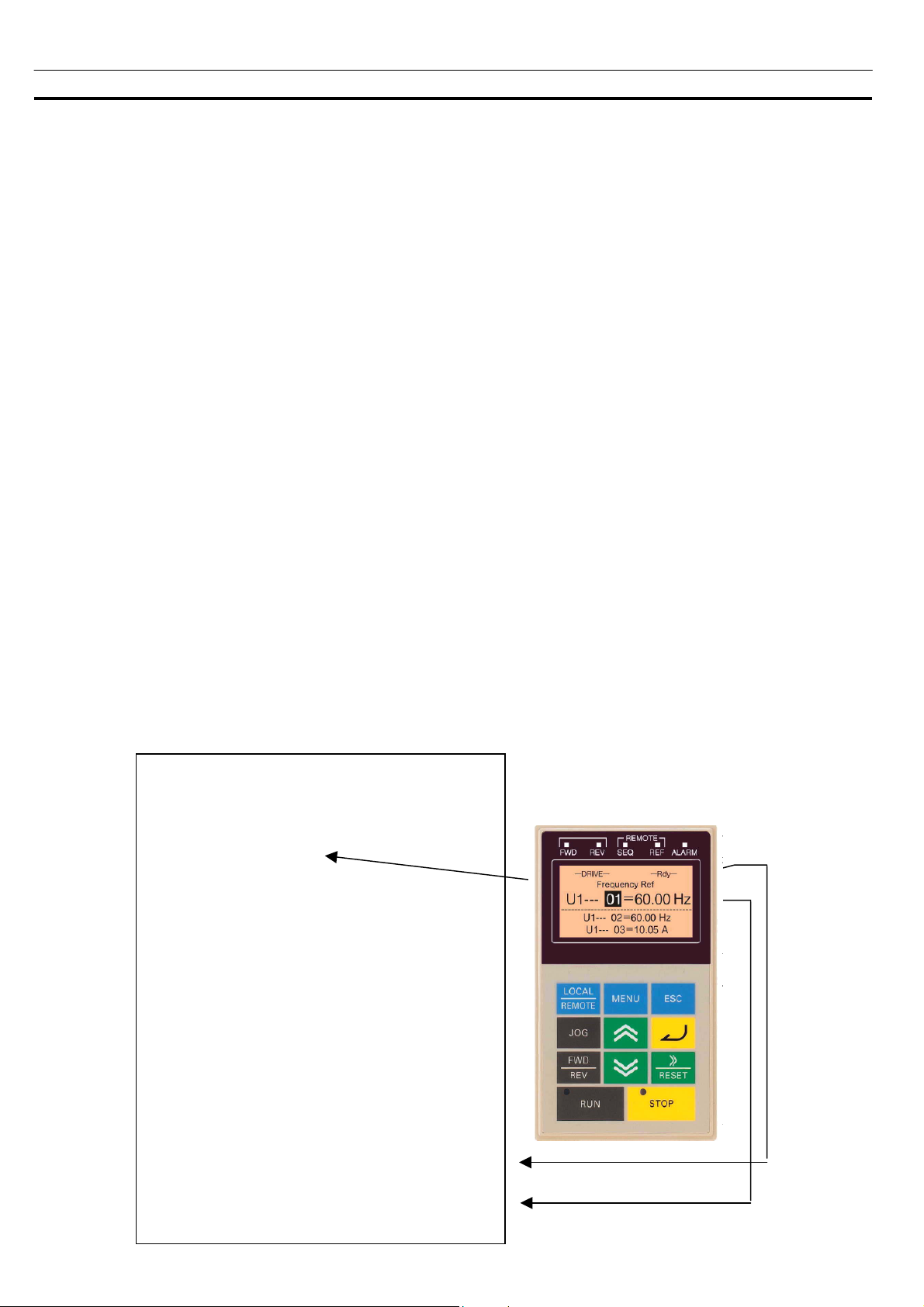
På næste side er beskrevet brugen af
betjeningspanelet.
Panelet som er LCD display
Dette panel har alle parametre beskrevet i kort
tekst
Panelet hedder ”3G3IV-PJVOP160” og er
standart på CIMR-F7Z
Sidst har man 3 data oplyst når man står inde i et
parameter.
1) Valgt værdi ( i tal og tekst ) men ikke lagt ned i
omformer
2) Aktuel værdi i omformer
-ADV-
B1-01 = 1
7
Page 8

Quick guide
5. Brug af betjenings panel
CIMR-F7
CL/OEE-DK
8
Page 9

Quick guide
6. Open loop kontrol
CIMR-F7
Her er vist hvordan man opsætter omformeren til open loop kontrol.:
Med CIMR-F7Z omformeren et det faktisk meget få ting man skal sætte op.
Først sætter man omformeren til open loop.
Open loop on / off
Dette gøres i parameter A1-02 = 2
Herefter lader man omformeren auto tune.
Dette gøres for at omformeren ved hvordan motoren ser ud dynamisk ( for bedre
kontrol over motoren )
Auto tuning foretages i parameter T.
Auto tuning
Først skal man bestemme om der skal foretages en auto tuning med roterende motor
eller med stillestående motor.
Auto tuning med stille stående motor giver ikke et helt så godt resultat som med
roterende auto tuning men dog så præcist at det er godt nok.
T1-01 = 0 ( roterende auto tuning )
= 1 ( stille stående auto tuning )
T1-02 : motorens nominelle kW
T1-03 : motorens nominelle spænding
T1-04 : Motorens nominelle strøm
T1-05 : Motorens nominelle frekvens
T1-06 : Antal poler i motoren
T1-07 : Motorens nominelle omdrejnings tal
Når alle data er indtastet trykkes på RUN og omformeren auto tuner.
Motoren hyler højt under auto tuning ( dette er ikke en fejl )
Når auto tuning er færdig står der succesfull i displayet ( tryk på MENU -> ENTER )
Hvis der er indtastet nogle parametre der ikke stemmer overens kommer der en
datafejl.
Check de indtastede parametre for korrekte data.
Relaterede parametre :
Hvis omformeren kører ustabilt kan justere på hastigheds looped.
Det er dog normalt ikke nødvendigt.
Hvis svingninger forekommer sæt værdien lavere ( i step a 0,05 ) i parameter N2-01
Hvis responset er for langsomt sæt da værdien op ( også i step a 0,05 )
CL/OEE-DK
9
Page 10

Quick guide
7. Flux vector (lukket loop)
CIMR-F7
Her er vist hvordan man opsætter omformeren til at køre flux vector kontrol:
Når omformeren indstilles til at køre flux vector for man mulighed for at styre motoren
bedre (mere dynamisk), samt at have fuldt moment ved 0Hz.
At køre flux vector kræver at man på motoren har encoder monteret og i omformeren
har et puls feedback kort (option kort).
Typer på encoder kort.
PGX2 er typen for line driver encoder
PGB2 er typen for open collector encoder
Flux vector on / off
Dette gøres i parameter A1-02 = 3
Her efter er det vigtigt at køre en autotune, for at omformeren for de rigtige motordata.
Når der køres en roterende autotune skal motoren være ubelastet, dog kan roterende
autotune gennemføres med optil 20% belastning.
Hvis det ikke er muligt at køre med motoren uden belastning, skal der køres en stille
stående autotune.
OBS. Hvor det er muligt, kør ALTID en roterende autotune.
Autotune
Disse parameter skal indstille før autotune.
T1-01 = 0 ( roterende auto tuning )
= 1 ( stille stående auto tuning )
T1-02 : motorens nominelle kW
T1-03 : motorens nominelle spænding
T1-04 : Motorens nominelle strøm
T1-05 : Motorens nominelle frekvens
T1-06 : Antal poler i motoren
T1-07 : Motorens nominelle omdrejnings tal
T1-08 : Antal pulser på encoderen
Når alle data er indtastet trykkes på RUN og omformeren auto tuner.
Motoren hyler højt under auto tuning ( dette er ikke en fejl )
Når auto tuning er færdig står der succesfull i displayet ( tryk på MENU -> ENTER )
Hvis der er indtastet nogle parametre der ikke stemmer overens kommer der en
datafejl.
Check de indtastede parametre for korrekte data.
Relaterede parametre
Hvis motoren køre ustabilt kan der indstilles på hastigheds loop’et, det gøres ved at
ændre på parameter C5-01 og C5-02.
C5-01 hastigheds kontrol forstærkning
C5-02 hastigheds kontrol integral
CL/OEE-DK
10
Page 11

Quick guide
8. PID kontrol
CIMR-F7
Her er vist hvordan man sætter omformeren op til PID kontrol.:
For at omformeren skal kunne bruges til PID kontrol skal denne funktion selvfølgelig
aktiveres.
Men herudover er der nogle relaterede funktioner der skal sættes op.
Hvor skal set punkt komme fra ( B1-01 )
Hvor skal feed-back komme fra ( H3-09 )
Hvilken PID kontrol metode ønsker man ( B5-01 )
Skal det være varme eller køle regulering ( B5-09 )
Skal displayet skaleres i en ingeniør enhed ( O1-03 )
Læsning af feed-back på omformeren ( U1-24 )
Set-punkt
Hvor man sætter sit set-punkt bestemmes i B1-01 ( frekvens reference )
Standart er fra klemmerne A1 / AC
Med PID funktionen er det frekvens referencen der er set-punkt
Feed-back
Hvor man ønsker at få sit set-punkt fra sættes i H3-09
Man kan kun bruge analog indgang A2 / AC til dette formål.
Denne klemme er standart opsat til mA.( den kan dog godt sættes til spænding - se
under fortrådning )
Sæt derfor H3-09 til B
PID kontrol metode
Hvilken kontrol metode man ønsker at bruge sættes i B5-01
Sæt normalt til 2
Invers – direkte regulering ( køle / varme )
Om omformeren skal arbejde efter køle eller varme regulering sættes i B5-09
Standart er køle regulering ( B5-09 = 0 ) dvs. faldende feed-back medfører stigende
udgang
Skalering af display
Normalt vises set-punkt i Hz.
Hvis man ønsker at skalere visningen kan dette gøres i O1-03
Der er 5 digit
Det første til venstre er komma placering
De 4 næste er værdien ( svarende til maksimum )
For at få værdien 200,0 som maksimum skal man skrive 12000 i O1-03
Visning af feed-back
Man kan se den aktuelle værdi for anlægget ( feed-back ) i parameter U1-24
Vær opmærksom på at værdien er i %
CL/OEE-DK
11
Page 12

Quick guide
9. V/f karakteristikker
CIMR-F7
Denne omformer har 15 faste V/f karakteristikker og en fri.
Hvad er en V/f –karakteristik.
Denne karakteristik bestemmer momentet på motoren ved en given frekvens (
hastighed )
Den består af 4 punkter .
Hvert punkt er angivet ved en frekvens og en spænding.
Hvis man skal give et udtryk for momentet kan man opsætte følgende formel.
V
M =
f
M= udtryk for moment
V = spænding
F = frekvens
Bemærk : momentet er ikke i Nm. men et udtryk herfor.
Det skal betragtes som en hjælp til at opsætte karakteristikken.
En 400 V motor ved nominel frekvens 50 Hz har følgende standart moment
V
M
Eksempel :
Hvis man ved 25 Hz ønsker halvdelen af motorens nominelle moment. ( halv hastighed
på motor )
Det halve moment er = 4
Hvad skal spændingen så være ved 25 Hz.
400
===
8
f
50
VfMV 10025*4* ===
På denne måde kan man opsætte hele karakteristikken efter den moment kurve man
ønsker.
Ovenstående kan man gøre ved den valgfrie karakteristik
Valgfri karakteristik vælges ved at indtaste F i E1-03
Man kan også vælge at bruge en af de 15 faste karakteristikker.
De er opdelt efter 3 følgende karakteristikker.
Lavt startmoment : til ventilatorer ( kurve 0-3 )
Højt startmoment : til f.eks. omrøre ( kurve 8-B )
Konstant moment : til f.eks. transport bånd ( kurve 4-7 )
Se næste side for de 15 karakteristikker.
Vælg den du ønsker og indtast nummeret i E1-03
Den valg frie karakteristik er
opbygget
efter nedenstående. ( E1-03 = F )
Her kan man se de forskellige
punkter
med tilhørende parametre.
Med en for valgt karakteristik er
CL/OEE-DK
12
Page 13

Quick guide
CIMR-F7
9.1. Tabel over V/f karakteristikker
CL/OEE-DK
13
Page 14

Quick guide
10. Brug af thermistor
CIMR-F7
Denne omformer har indbygget thermistor input.
Inputtet kan bruges samtidig med den indbyggede overstrøms beskyttelse
Hvis man ønsker at bruge denne skal man bruge analog input 2 ( A2 )
Nedenstående viser hvordan man opstrikker thermistoren
Dip switch S1-1 skal sættes på V (Off) for valg af spænding på den analog indgang.
Parametrene relaterede denne funktion er L1-01 og L1-03 -> L1-05 samt H3-09
L1-01 : Dette parameter bestemmer om den indbyggede overstrøms beskyttelse er
aktiv
Denne funktion beregner udfra frekvens og belastnings grad om motoren er
overbelastet
Den kan virke sideløbende med thermistoren
L1-01 = 0 ( funktion frakoblet )
L1-01 = 1 ( beskyttelse med beregning udfra alm. Motor )
H3-08 : Sæt til 0, for 0-10V
H3-09 : Sæt den analoge ingang til thermistor input
Sæt dette parameter til E
L1-03 : sæt funktion for omformer drift når motor når en kritisk temperatur
0 = rampe til stop
1 = friløb til stop
2 = Hurtig stop
3 = fortsætter med advarsel
L1-04 : sæt funktion for omformer drift når motor er for varm
0 = rampe til stop
1 = friløb til stop
2 = Hurtig stop
3 = fortsætter med advarsel
L1-05 : Sæt en filter tid for thermistor input ( tid fra omformer når et kritisk niveau til den
reagerer )
CL/OEE-DK
14
Page 15

Quick guide
11. Ind- og udgange
CIMR-F7
11.1.
Funktioner til digitale indgange
0. 3- tråds sekvens
1. Lokal / remote ( on : operator / off : ifølge parameter )
2. options kort ( on : options kort / off : ifølge parameter )
3. Multi speed 1 ( bruges ved valg af faste hastigheder ) ( hvis H3-09 =0 er dette
analog 2 )
4. Multi speed 2 ( bruges ved valg af faste hastigheder ) ( se bilag 4 )
5. Multi speed 3 ( bruges ved valg af faste hastigheder ) ( se bilag 4 )
6. Jog frekvens ( højere priotet end faste hastigheder )
7. Acc / decc skift 1( skifter imellem acc sæt med binær funktion )
8. Base block NO ( åbner udgangs trin )
9. Base block NC ( åbner udgangs trin )
A. Frekvens hold ( fast fryser frekvens sålænge denne indgang er høj )
B. OH 2 alarm
C. Multi function analog input A2 ON/OFF
D. V/f kontrol med encoder ( frakobler encoder kontrol -> alm V/F kontrol )
E. Hastigheds kontrol integral del reset
F. Terminal ikke i brug ( brug denne hvis en terminal ikke skal bruges )
10. Up kommando ( bruges sammen med funktion 11 )
11. Ned kommando
12. Jog frem ( med hastighed sat i d1-17 )
13. Jog tilbage ( med hastighed sat i d1-17 )
14. Fejl reset
15. Hurtig stop NO ( nødstop ) ( stopper med tiden sat i C1-09 )
16. Motor skift ( skift imellem motor 1 og 2 )
17. Hurtig stop NC ( nødstop ) ( stopper med tiden sat i C1-09 )
18. Timer funktion ( se b4-01 og b4-02 )
19. PID kontrol frakobling
1A. Acc / decc skift 2( skifter imellem acc sæt med binær funktion ) se også 7 ( se
bilag 5 )
1B. Parameter lås ( alle parametre er skrive beskyttet )
1C. Tillæg af frekvens til analog frekvens ref. ( tillæg af værdi skrevet i d4-02 )
1D. Fratrækning af frekvens til analog frekvens ref. ( fratrækker værdi skrevet i
d4-02 )
1E. Analog frekvens ref. Hold ( ref. Modtages kun når dette input er højt )
20-2F. Ekstern fejl
30. PID kontrol integral reset
31. PID integral hold
32. Multi speed 4 ( bruges ved valg af faste hastigheder )
34. PID soft start ( langsom indkobling af set punkt )
35. PID kontrol metode skift ( invers / direkte )
60. DC bremse on ( kun når RUN ikke er aktiv )
61. Hastigheds søgning ( fra max output frekvens )
62. Hastigheds søgning ( fra valgt frekvens )
63. Sænkning af motor felt ( sættes i d6-01 og d6-02 )
64. Hastigheds søgning 3
65. KEB NC ( ramper motor til stop ved net svigt )
66. KEB NO ( ramper motor til stop ved net svigt )
67. Kommunikations test mode
CL/OEE-DK
15
Page 16

Quick guide
CIMR-F7
68. HSB ( bruger motor som bremse modstand ) ( kun i V/f mode )
69. Jog 2
6A. System klar ( run ikke tilladt før denne indgang er høj )
71. Hastigheds/moment skift on/off
72. Zero-servo
77. ASR forstærkning skift (ON C5-03)
78. Ændring af polaritet for analog indgang under moment kontrol
CL/OEE-DK
16
Page 17

Quick guide
CIMR-F7
11.2. Digital udgangs funktion
0. Under RUN
1. Hastighed = 0
2. opnået frekvens ( set frekvens )( med død bånd sat i L4-02 )
3. frekvens = L4-01 med død bånd sat i L4-02
4. Frekvens detektering ( L4-01>udgangs frekvens )
5. Frekvens detektering ( L4-01<udgangs frekvens )
6. Omformer klar ( ingen fejl )
7. Under spænding detektering
8. Base block aktiveret NO
9. Frekvens reference fra operator
A. Run kommando fra operator
B. Over / under moment detektering 1 NO
C. Tab af frekvens reference
D. Bremse modstands fejl
E. Fejl på omformer
F. Terminal ikke i brug ( sæt til denne værdi hvis en terminal ikke skal bruges )
10. Alarm
11. Fejl reset
12. Timer funktion ( aktiveres med digital indgang )
13. opnået frekvens ( med død bånd sat i L4-04 )
14. frekvens = L4-03 med død bånd sat i L4-04
15. Frekvens detektering ( L4-03>udgangs frekvens )
16. Frekvens detektering ( L4-03<udgangs frekvens )
17. Over / under moment detektering 1 NC
18. Over / under moment detektering 2 NO
19. Over / under moment detektering 2 NC
1A. Kørsel baglæns
1B. Base block aktiveret NC
1C. Motor 2 valgt
1D. Ikke brugt
1E. Restart valgt
1F. Motor overbelastet ( OL1, OH3 )
20. Omformer for varm ( OH )
30. Moment begrænsning aktiv
31. Hastigheds begrænsning aktiv
32. Udgangs frekvensen er nået speed grænsen
33. Zero-servo slut
37. Under RUN ( base block, DC injection off )
38. Omformer klar
CL/OEE-DK
17
Page 18

Quick guide
CIMR-F7
11.3. Analog input funktion ( for A2 terminal )
0. Læg værdi til terminal A1 ( samlet værdi af A1 og A2 )
1. Frekvens forstærkning
2. 2. analoge hastighed ( når multi speed 1 er aktiveret )
4. Spændings bias
5. Rampe tid justering ( C1-01 * A2 input )
6. DC bremse strøm
7. Under / over moment detekterings niveau
8. Udfalds beskyttelses niveau under RUN
9. Nedre frekvens grænse
A. Hop frekvens
B. PID feed back
C. PID reference
D. Frekvens bias 2
E. Thermister input
10. Positiv moment grænse
11. Negativ moment grænse
12. Moment grænse når der regeneres energi
13. Moment ref. / moment grænse for hastigheds kontrol
14. Moment kompensering
15. Både positiv og negativ moment grænse
1F. Analog indgang ikke brugt
CL/OEE-DK
18
Page 19

Quick guide
CIMR-F7
11.4. Faste hastigheder
11.5. Rampe sæt skift
CL/OEE-DK
19
Page 20

Quick guide
12. Parameter liste.
CIMR-F7
Funktion
mode
U
U1 Monitor status
U1-01 Frekvens reference Kan være analog udgang
U1-02 Udgangs frekvens Kan være analog udgang
U1-03 Udgangs strøm Kan være analog udgang
U1-04 Kontrol metode
U1-05 Motor hastighed Kan være analog udgang
U1-06 Udgangs spænding Kan være analog udgang
U1-07 DC mellemkreds spænding Kan være analog udgang
U1-08 Udgangseffekt Kan være analog udgang
U1-09 Moment reference Kan være analog udgang
U1-10 Indgangsterminal status
U1-11 Udgangsterminal status
U1-12 Funktions status
U1-13 Forløbet tid
U1-14 Fabriks ID nummer
U1-15 Terminal A1 niveau Kan være analog udgang
U1-16 Terminal A2 niveau Kan være analog udgang
U1-18 Motor strøm reference Isq beregnet Kan være analog udgang
U1-19 Motor strøm reference Isd beregnet Kan være analog udgang
U1-20 Udgangsfrekvens Kan være analog udgang
U1-21 Indgangssignal til hastighedsregulator Kan være analog udgang
U1-22 Udgangssignal til hastighedsregulator Kan være analog udgang
U1-24 PID feedback Kan være analog udgang
U1-25 Signal fra digital kort
U1-26 Intern spændingsreference Vsq Kan være analog udgang
U1-27 Intern spændingsreference Vsd Kan være analog udgang
U1-28 CPU software ID nummer
U1-29 kWH de mindste 4 digit
U1-30 kWH det 5. digit
U1-32 Motor strøm reference q Kan være analog udgang
U1-33 Motor strøm reference d Kan være analog udgang
U1-34 Viser første parameter hvor OPE fejl er
U1-35 Zero servo pulser
U1-36 PID input signal Kan være analog udgang
U1-37 PID output Kan være analog udgang
U1-38 PID setpunkt
U1-39 Kommunikations fejl
U1-40 Samlet drift tid for køle ventilator
CL/OEE-DK
20
Page 21

Quick guide
CIMR-F7
Funktion
mode
U
U2 Registrering af data
ved sidste fejl ( log )
U2-01 Strøm fejl
U2-02 Sidste fejl
U2-03 Frekvens reference ved sidste fejl
U2-04 Udgangsfrekvens ved sidste fejl
U2-05 Udgangsstrøm ved sidste fejl
U2-06 Motorhastighed ved sidste fejl
U2-07 Udgangsspænding ved sidste fejl
U2-08 DC-spænding ved sidste fejl
U2-09 Udgangseffekt ved sidste fejl
U2-10 Moment reference ved sidste fejl
U2-11 Indgangsterminal status ved sidste fejl
U2-12 Udgangsterminal status ved sidste fejl
U2-13 Omformer status ved sidste fejl
U2-14 Funktionstid ved sidste fejl
Initialisering
A
U3 Fejl detektering
A1 Adgangs niveau og
Kontrol mode
U3-01 Information om sidste fejl
U3-02 Fejl melding 2
U3-03 Fejl melding 3
U3-04 Fejl melding 4
U3-05 Forløbet tid ved fejl meddelelse U3-01
U3-06 Forløbet tid ved fejl meddelelse U3-02
U3-07 Forløbet tid ved fejl meddelelse U3-03
U3-08 Forløbet tid ved fejl meddelelse U3-04
U3-09 Fejl melding 5
U3-10 Fejl melding 6
U3-11 Fejl melding 7
U3-12 Fejl melding 8
U3-13 Fejl melding 9
U3-14 Fejl melding 10
U3-15 Forløbet tid ved fejl meddelelse U3-09
U3-16 Forløbet tid ved fejl meddelelse U3-10
U3-17 Forløbet tid ved fejl meddelelse U3-11
U3-18 Forløbet tid ved fejl meddelelse U3-12
U3-19 Forløbet tid ved fejl meddelelse U3-13
U3-20 Forløbet tid ved fejl meddelelse U3-14
A1-00 Valg af sprog 0: Engelsk
A1-01 Adgangs niveau 0: kun visning, 1: Bruger konstanter,
2: ADVANCED
CL/OEE-DK
A2 Bruger konstanter
A1-02 Valg af kontrol mode 0: V/f styrink, 1: V/f styring med feedback
A1-03 Initialisering
A1-04 Password
A1-05 Valg af password
A2-01
til
A2-32
Anvendes til at sætte bruger
parametre
2: Open loop flux vektor styring
3: Flux vektor (Lukket loop)
0: ingen initialisering, 1110: bruger
konstanter, 2220: 2-wire sekvens
3330: 3-wire sekvens
0 til 9999 0
0 til 9999 0
Funktionsparametre (B1-01) til (O2-08)
21
Page 22

Quick guide
CIMR-F7
Applikation
B
B1 Valg af kørsels mode
B2 DC bremsning
B3 Hastighedssøgning
B4 Timer funktion
B1-01 Referencevalg
B1-02 Styring af start/stop
B1-03 Valg af standsemetode
B1-04 Retningsspærrer 0=Ikke aktiv 1=Aktiv
B1-05 Valg af kørsel under min. frekvens E1-09
B1-06 Læsning af indgangsterminaler 2 gange 0=2 mSek - 2gange
B1-07 Status af RUN signal ved lokal / remote
omskiftning
B1-08 RUN gyldighed i programmerings mode
( altid frakoblet hvis b1-02 = 0 )
B2-01 Start af DC bremsning
B2-02 DC bremsestrøm 0 - 100% 50%
B2-03 DC bremsetid ved start
B2-04 DC bremsetid ved stop
B3-01 Valg af hastighedssøgning ved start
B3-02 Hastighedssøgningsstrøm
B3-03 Hastighedssøgning decel. tid
B3-05 Tid for aktivering af funktion efter strøm
svigt
B3-10 Hastighedssøgning forstærkning
B3-14 Hastighedssøgnings funktion 0: Starter udfra FREF.
B4-01 Forsinket tiltræk
B4-02 Forsinket frafald
0=Betjeningspanel 1=Terminaler
2=Seriel kommuni. 3=Option kort
4=puls indgang
0=Betjeningspanel 1=Terminaler
2=Seriel kommuni. 3=Option kort
0=Rampe til stop 1=Friløb til stop
2=DC bremsn. til stop 3=Friløb m.
indbygget timer
2=skift fase følge
0=Kørsel v. frekvensreference 1=Stop
2=Kørsel under min. frekvens 3=Kørsel
v. 0 Hz
1=5 mSek - 2gange
0=Run skal aktiveres efter omskiftning
1=Run status gældende straks
0=Run kan ikke aktiveres
1=Run kan aktiveres
0.0 - 10.0 Hz 0,5Hz
0.00 - 10.00 Sek 0sek
0.00 - 10.00 Sek 0sek
0,2=Ikke aktiv 1=Aktiv( hastigheds søg )
3=Aktiv ( strøm søgning )
0 - 200% 100%
0.0 - 10.0 Sek. 2,0sek
0,0 – 20,0 sek. 0,2sek
1,00-1,20 1,10
1: Starter udfra omformerens
beregning
0.0 - 300.0 Sek. 0,0sek
0.0 - 300.0 Sek. 0,0sek
CL/OEE-DK
22
Page 23

Quick guide
CIMR-F7
Applikation
B
B5 PID kontrol
B6 Reference forsinkelse
(OPHOLD)
B7 Droop kontrol
B8 Energispare funktion
B9 Zero Servo
B5-01 Valg af PID regulering
B5-02 Propotional forstærkning (P) 0.00 - 10.00
B5-03 Integral tid (I) 0.0 - 360.0 Sek
B5-04 Integral begrænsning 0.0 - 100.0%
B5-05 Differential tid (D) 0.00 - 10.00 Sek
B5-06 PID begrænsning 0.0 - 100.0%
B5-07 Justering af offset - 100.0 - 100.0%
B5-08 PID tidsforsinkelse 0.00 - 10.00 Sek
B5-09 Invers eller direkte regulering 0=direkte 1=invers
B5-10 PID udgangs forstærkning 0,0 – 25,0
B5-11 PID reverse funktion ( f.eks ved valse
B5-12 Funktion efter tab af PID feedback 0=ingen detektering 1=fejl relæ
B5-13 Niveau for tab af PID feedback 0 – 100 %
B5-14 Tid før tab af PID feedback 0,0 – 25,5 sek.
B5-15 Vælg frekvens for sleep funktion 0,0 – 400,0 Hz.
B5-16 Tid før aktivering af sleep funktion 0,0 – 25,5 sek.
B5-17 Acc / decc for PID reference 0,0 – 25,5 sek.
B5-18 Brug af internt PID setpunkt ( b5-19 ) 0=bruges ikke 1=bruges
B5-19 Internt PID setpunkt 0,0 – 100,0 %
B5-20 PI set-punkt skallering
B5-21 PI pause/sleep funktion
B5-22 Dvæle niveau
B5-23 Dvæle tidsforsinkelse
B5-24 Vågn op niveau
B5-25 Set-punkt forstærkning
B5-26 Max. forstærknings tid
B5-27 Dvæle feedback
B5-28 PI-feedback kvadratrod funktion
B5-29 PI-feedback kvadratrods forstærkning
B5-31 PID feedback monitor valg
B5-32 PID feedback monitor forstærkning 0-1000% 100%
B5-33 PID feedback monitor bias -100 – 100% 0%
B6-01 Dwell- frekvens ved start
B6-02 Dwell tid ved start (ophold)
B6-03 Dwell-frekvens ved stop
B6-04 Dwell-tid ved stop
B7-01 Droop kontrol forstærkning
B7-02
B8-01 Energi spare mode
B8-02 Energi spare forstærkning
B8-03 Energi spare filter tid
B8-04 Energi spare koefficient
B8-05 Reg. Tid for output power
B8-06 Spændings begrænsning for søgning
B9-01 Zero servo forskærkning
B9-02 Zero servo pulser
Normalt anbefales indstilling 2
For køle / varme valg se B5-09
Droop kontrol tidsforsinkelse
0=Ikke aktiv 1=Aktiv (afvigelse med D
virkning
2=Aktiv( feed back med D virkning )
3= aktiv( tillæg af fref + afvigelse med D )
4=aktiv( tillæg af fref + feedback med D )
0: kun forlæns 1: begge veje ( +/- 10 V )
2=stopper + fejl relæ
0= 0,01Hz
40-39999 bruger defineret
0=Frekves output før softstart
1=Fref. /set-punkt 2=Dvæle funktion
0-100% 0%
0-3600sek. 0sek.
0-100% 0%
0-100% 0%
0-3600sek. 0sek.
0-100% 60%
0=Ikke aktiv 1=Aktiv
0-2,0 1,00
U1-xx (0-18) 0
0.0 - 400.0 Hz 0,0Hz
0.0 - 10.0 Sek 0,0sek
0.0 - 400.0 Hz 0,0Hz
0.0 - 10.0 Sek 0,0sek
0-100% 0%
0,03-2,0sek 0,05sek
0=ikke aktiv 1=aktiv
0,0 – 10,0 0,7sek
0,00 – 10,0 sek. 0,50sek
0,0 – 655,0 Afh. af omf. størrelse
0 – 2000 ms. 20ms.
0 – 100 % ( af motor spænding ) 0%
0-100 5
0-16383 10
CL/OEE-DK
23
Page 24

Quick guide
CIMR-F7
Tuning
C
C1 Accel./Decel.
C2 S-kurve karakteristik
C3 Slip kompensering
C4 Moment
kompensering
C5 ASR (Automatisk
hastighedsregulering)
Kun V/f med encoder
C6 Switchfrekvens
C1-01 Accelerationstid 1
C1-02 Decelerationstid 1
C1-03 Accelerationstid 2
C1-04 Decelerationstid 2
C1-05 Accelerationstid 3
C1-06 Decelerationstid 3
C1-07 Accelerationstid 4
C1-08 Decelerationstid 4
C1-09 Nødstop tid
C1-10 Accel./decel.tidsenhed 0=0.01 Sek. 1=0.1 Sek.
C1-11 Accel./decel tid skiftefrekvens 0.0 - 400.0 Hz 0,0Hz
C2-01 S-kurve tid ved accel. start
C2-02 S-kurve tid ved accel. slut
C2-03 S-kurve tid ved decel. start
C2-04 S-kurve tid ved decel. slut
C3-01 Slipkompensering forstærkning
C3-02 Slipkompensering tidsforsinkelse
C3-03 Slipkompensering begrænsning
C3-04 Valg af slipkompensering ved
C3-05 Udgangsspændings begrænsning
C4-01 Momentkompensering forstærkning 0.0 - 2.5 1,00
C4-02 Momentkompens. tidsforsinkelse
C4-03 Start moment forlæns kørsel
C4-04 Start moment baglæns kørsel
C4-05 Tid for opbygning af moment
C5-01 ASR proportionalforstærkning (P)
C5-02 ASR intergraltid (I)
C5-03 ASR proportionalforstærkning (P) 2
C5-04 ASR intergraltid (I) 2
C5-05 ASR begrænsning
C5-06 ASR forsinkelse
C5-07 ASR switch frekvens
C5-08 ASR intergraltid (I) begrænsning
C6-01 Konstant eller variabelt moment
C6-02 Switch frekvens
C6-03 Switch frekvens øvre grænse
C6-04 Switch frekvens nedre grænse
C6-05 Switch frekvens forstærkning
regenerering
0.0 - 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.0 – 6000.0 Sek. 10sek
0.00 - 2.50 Sek 0,20sek
0.00 - 2.50 Sek 0,20sek
0.00 - 2.50 Sek 0,20sek
0.00 - 2.50 Sek 0,20sek
0.0 - 2.5 1,00
0-10000ms 200ms
0-250% 200%
0=Ikke aktiv 1=Aktiv
0= ikke aktiv 1= aktiv
0 - 10000 ms. 20ms
0,0 – 200,0 % 0,0%
-200 – 0,0 % 0,0%
0 – 200 ms. 10ms
0.00 - 300.00 20,00
0.000 - 10.000 Sek. 0,500sek
0.00 - 300.00 20,00
0.000 - 10.000 Sek. 0,500sek
0.0 - 20.0% 5%
0,000-0,500ms 0,004ms
0,0-150,0Hz 0,0Hz
0-400% 400%
0: konstant 1: variabelt 1
2: variabelt 2
0 – F ( se manual ) 1 – 2kHz
2,0 – 15,0 kHz. 2,0kHz
0,4 – 15 kHz. 2,0kHz
00 – 99 00
CL/OEE-DK
24
Page 25

(
)
g
Quick guide
CIMR-F7
Frekvens
Reference
D
D1 Faste hastigheder
D2 Frekvensbegrænsning
D3 Frekvensspring
D4 Frekvens hold
D5 Moment kontrol
D6 Sænkning af motor
spænding
Aktiveres med digital
indgang ( funktion 63 )
D1-01 Fast hastighed 1 fref.
D1-02 Fast hastighed 2 multi. 1
D1-03 Fast hastighed 3 multi. 2
D1-04 Fast hastighed 4 multi. 1,2
D1-05 Fast hastighed 5 multi. 3
D1-06 Fast hastighed 6 multi. 1,3
D1-07 Fast hastighed 7 multi. 2,3
D1-08 Fast hastighed 8 multi. 1,2,3
D1-09 Fast hastighed 9 multi. 4
D1-10 Fast hastighed 10 multi. 1,4
D1-11 Fast hastighed 11 multi. 2,4
D1-12 Fast hastighed 12 multi. 1,2,4
D1-13 Fast hastighed 13 multi. 3,4
D1-14 Fast hastighed 14 multi. 1,3,4
D1-15 Fast hastighed 15 multi. 2,3,4
D1-16 Fast hastighed 16 multi. 1,2,3,4
D1-17 Jog hastighed fjog / rjog
D2-01 Frekvensref. øvre grænse
D2-02 Frekvensref. nedre grænse
D2-03 Master hastighed nedre grænse
D3-01 Frekvensspring 1
D3-02 Frekvensspring 2
D3-03 Frekvensspring 3
D3-04 Frekvensspring båndbredde
D4-01 Frekvensreference holdefunktion
D4-02 +/- hastigheds tillæg. ( 1C, 1D )
D5-01 Moment kontrol valg
D5-02 Moment ref. forsinkelse
D5-03 Hastigheds begrænsning valg
D5-04 Hastigheds grænse
D5-05 Hastigheds grænse bias
D5-06 Ref. hold time
D6-01 Motor spændings niveau (kun V7F)
D6-02 Nedre grænse for aktiv funktion (Kun
D6-03 Flux begrænsning
D6-06 Flux grænse niveau
Op / ned hukommelse
Bruges sammen med digital input.
V/F)
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 0,0Hz
0 – 400,00 Hz. 6,0Hz
0,0 – 110,0 % 100,0%
0,0 – 110,0 % 0,0%
0,0 – 110,0 % 0,0%
0,0 – 400,0 Hz. 0,0Hz
0,0 – 400,0 Hz. 0,0Hz
0,0 – 400,0 Hz. 0,0Hz
0,0 – 20,0 Hz. 1,0Hz
0=Ikke aktiv ( starter fra 0 )
1=Aktiv
starter fra sidste hastighed
Bruger denne procent til at trække eller
tillæge en hastighed til det analoge input
0: Hastigheds kontrol
1: Moment kontrol
0-100ms 0ms
1: Ref. fra analog indgang
2: Be
rænsning fra parameter D5-03
-120 – 120% 0,0%
0-120% 10%
0-1000 0ms
0 – 100 % ( af motor spænding ) 80%
0,0 – 400,0 Hz 0,0Hz
0=Ikke aktiv 1=Aktiv
100-400% 100%
CL/OEE-DK
25
Page 26

Quick guide
CIMR-F7
Motor
E
E1 Spænding/frekvens-
E2 Motor setup
E3 Spænding/frekvens-
E4 Motor 2 setup
valg
valg motor 2
E1-01 Forsyningsspænding
E1-03 Spænding/frekvens valg (faste)
E1-04 Max. udgangs frekvens
E1-05 Max. Udgangs spænding
E1-06 Knækfrekvens
E1-07 Middel moment frekvens
E1-08 Middel udgangsspænding
E1-09 Min. moment frekvens
E1-10 Min. udgangsspænding
E1-11 Middel moment frekvens 2
E1-12 Middel udgangsspænding 2
E1-13 Spænding for knæk frekvens
E2-01 Motorens mærkestrøm
E2-02 Motorens mærkeslip
E2-03 Motorens tomgangsstrøm
E2-04 Antal poler i motoren
E2-05 Viklingens ohmske modstand
E2-06 Motorens lækende induktans
E2-07 Motorens mætningskoificient 1 (jern) (50)
E2-08 Motorens mætningskoificient 2 (jern) (70)
E2-09 Motorens mekaniske tab
E2-10 Motorens jern tab i kW
E2-11 Nominel effekt ( kW )
E3-01 Kontrol metode for motor 2
E3-02 Max. udgangs frekvens
E3-03 Max. Udgangs spænding
E3-04 Knækfrekvens
E3-05 Middel moment frekvens
E3-06 Middel udgangsspænding
E3-07 Min. moment frekvens
E3-08 Min. udgangsspænding
E4-01 Nominel motor strøm
E4-02 Nominelt slip
E4-03 Tomgangs strøm
E4-04 Antal motor poler
E4-05 Fase til fase modstand
E4-06 Motorens lækende induktans
E4-07 Nominel effekt ( kW )
310 – 510 V 400V
00 til F faste indstillinger F = Valgfri
40,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,32 – 6,4 A Afh. Omf. størrelse
0,00 – 20,00 Hz Afh. Omf. størrelse
0,00 – 1,89 A Afh. Omf. størrelse
2 – 48 poler 4 poler
0,000 – 65000 ohm Afh. Omf. størrelse
0,0 – 40,0 % Afh. Omf. størrelse
0,00 – 0,50 0,50
0,50 – 0,75 0,70
0,0-10,0% 0,0%
0 – 65535 W Afh. Omf. størrelse
0,40 – 650,00 kW Afh. Omf. størrelse
0: V/f 1: V/f m. feedback 2: open loop
3: Flux vector (lukket loop)
40,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510 V Afh. Omf. størrelse
0,0 – 400,0 Hz Afh. Omf. størrelse
0,0 – 510,0 V Afh. Omf. størrelse
0,32 – 6,4 A Afh. Omf. størrelse
0,00 – 20,00 Hz Afh. Omf. størrelse
0,00 – 1,89 A Afh. Omf. størrelse
2 – 48 poler 4 poler
0,000 – 65000 ohm Afh. Omf. størrelse
0,0 – 40,0 % Afh. Omf. størrelse
0,40 – 650,00 kW Afh. Omf. størrelse
CL/OEE-DK
26
Page 27

g
Quick guide
CIMR-F7
Options
F
F1 Pulsgiver (encoder)
F2 Analog ref. kort
F3 Digital ref. kort
F4 Analog kort
F5 Reserveret
F6 Kom. kort
F1-01 Pulser pr. omdr.
F1-02 Valg af kørsel ved fejl på pulsgiver
F1-03 Valg af kørsel ved for høj hastighed Samme som F1-02
F1-04 Valg af kørsel ved pulsafvigelse Samme som F1-02
F1-05 Pulsgiver rotationsretning
F1-06 Puls skalering (til visning i display)
F1-07 Integral værdi ved accel./decel.
F1-08 Niveau detekt. for høj pulshastighed
F1-09 Tidsforsinkelse på Detekt. for høj
F1-10 Niveau for hastigheds afvigelse
F1-11 Tidsforsinkelse før reg. af hastigheds
F1-12 Antal pulser Gearing 1
F1-13 Antal pulser Gearing 2
F1-14 PG open detekterings tidsforsinkelse
F2-01 Valg af kort type
F3-01 Valg af kort type Se manual
F4-01 Kanal 1 visning i display
F4-02 Kanal 1 forstærkning
F4-03 Kanal 2 visning i display
F4-04 Kanal 2 forstærkning
F4-05 Kanal 1 bias -110,0 – 110,0 0,0%
F4-06 Kanal 2 bias -110,0 – 110,0 0,0%
F4-07 Signal valg for kanal 1
F4-08 Signal valg for kanal 2
F5-01 Udgang 1 valg
F5-02 Udgang 2 valg
F5-03 Udgang 3 valg
F5-04 Udgang 4 valg
F5-05 Udgang 5 valg
F5-06 Udgang 6 valg
F5-07 Udgang 7 valg
F5-08 Udgang 8 valg
F5-09 DO-08 udgangs mode
F6-01 Kom. fejl funktion
F6-02 Ekstern fejl detekterings metode
F6-03 Ekstern fejl indgang virkemåde samme som F6-01
F6-04 Bruges ikke
F6-05 Unit for strøm monitor
F6-06 Moment ref. / moment begrænsning
pulshastighed
afvi
else
0 – 60000 1024
0=Rampe til stop 1=Friløb til stop
2=Hurtig stop 3=Kun alarm
0=CCW 1=CW
1 – 132 1
0=Ikke aktiv 1=Aktiv
0 – 120 % 115%
0,0 – 2,0 sek. 0,0sek
0 – 50 % 10%
0,0 – 10,0 sek. 0,5sek
0 – 1000 0
0 – 1000 0
0,0 – 10,0 sek. 2,0sek
0: 2-kanals 1: 3-kanals
Sæt ifølge tabel U1 2
0,00 – 100% 100%
Sæt ifølge tabel U1 3
0,00 – 100% 50%
0=0 – 10 V 1=-10 – 10 V
0=0 – 10 V 1=-10 – 10 V
0-38 0
0-38 1
0-38 2
0-38 4
0-38 6
0-38 37
0-38 0F
0-38 0F
0: 8 kanals udgang
1: Binær udgangs kode
2: Udgang ifølge F5-01 – F5-08
0=ramper ned til stop med C1-02
1=friløb til stop
2=ramper ned til stop med C1-09
3=fortsat kørsel med alarm
0=fejl under power up 1=kun under
0= ampere 1=100%/8192
0: Ikke aktiv 1: Aktiv
CL/OEE-DK
27
Page 28

g
j
Quick guide
CIMR-F7
Terminaler
H
H1 Digitale indgange
H2 Digitale udgange
H3 Analoge indgange
H4 Analoge udgange
H5 Seriel kommunikation
H6 Puls ind og udgangs
terminaler
H1-01 Mulitfunktions indgang (S-3) virkemåde
H1-02 Mulitfunktions indgang (S-4) virkemåde
H1-03 Mulitfunktions indgang (S-5) virkemåde
H1-04 Mulitfunktions indgang (S-6) virkemåde
H1-05 Mulitfunktions indgang (S-7) virkemåde
H2-01 Mulitfunktions udgang (M1-M2)
H2-02 Mulitfunktions udgang (M3-M4)
H2-03 Mulitfunktions udgang (M5-M6)
H3-01 Valg af styrespænding (terminal A1)
H3-02 Forstærkning (terminal A1)
H3-03 Offset (terminal A1) bias
H3-08 Valg af styrespænding (terminal A2)
H3-09 Mulltifunktions analog indgang
(terminal A2) virkemåde
H3-10 Forstærkning (terminal A2)
H3-11 Offset (terminal A2) bias
H3-12 Filter tid for analof indgange
H3-13 Skifte funktion for FREF
Indgang på A1 eller A2
H4-01 Valg af visning i display (terminal FM)
H4-02 Forstærkning (terminal FM)
H4-03 Offset (terminal FM) bias
H4-04 Valg af visning i display (terminal AM)
H4-05 Forstærkning (terminal AM)
H4-06 Offset (terminal AM) bias -110,0 til 110,0 0%
H4-07 Analog udgangsspænding terminal FM
Vær opmærksom på cn-15 switch
H4-08 Analog udgangsspænding terminal AM Samme som H4-07
H5-01 Stationær adresse
H5-02 Kommunikationshastighed 0=1200 baud 1=2400 baud
H5-03 Kommunikations paritet
H5-04 Standsemetode ved komm.fejl 0=Rampe til stop 1=Friløb til stop
H5-05 Kommunikations fejl detektering
H5-06 Tid imellem modtagelse af data til svar
H5-07 RTS funktion 0 : RTS altid høj
H6-01 Puls input funktion
H6-02 Puls input skalering Hz for max hastighed
H6-03 Puls input forstærkning
H6-04 Puls input bias ( når input er = 0 ) -100 til 100 0,0
H6-05 Puls input filter tid
H6-06 Puls udgangs valg
H6-07 Puls udgangs skalering
0 – 68 ( se bilag 1) 24
0 – 68 (se bilag 1 ) 14
0 – 68 (se bilag 1) 3
0 – 68 (se bilag 1 ) 4
0 – 68 (se bilag 1 ) 6
0 – 37 ( se bilag 2 ) 0
0 – 37 (se bilag 2 ) 1
0 – 37 (se bilag 2 ) 2
0=0 til 10 V 1=-10 til +10 V
0,0 – 1000,0 100%
-100,0 til +100,0 0%
0=0 til 10 V 1=-10 til +10 V 2=4-20 mA
0 – 1F ( se bilag 3 ) 0
0,0 – 1000,0 100%
-100,0 til 100,0 0%
0,00 – 2,00 sek. 0,03sek
0 = FREF på A1
1 = FREF på A2
( virker kun hvis H3-09 er sat til 2 )
Sæt ifølge U1 tabel ( 1 – 38 ) 2
0-1000% 100%
-110,0 til 110,0% 0%
Sæt ifølge U1 tabel ( 1 – 38 ) 3
0-1000% 50%
0=0 til 10 V 1=-10 til +10 V
2= 4 – 20 mA
0 – 20 1F
2=4800 baud 3=9600 baud
0=Ingen paritet 1=Even
2=Odd
2=Hurti
t stop 3=Kun alarm
0 : ingen detektering 1: detektering
5 – 65 ms. 5ms
1 : RTS hø
0:Frekvens ref. 1:PID feedback 2:PID
1000 – 32000 Hz 1440
0,0 – 1000,0 % 100%
0,00 – 2,00 sek. 0,1
1,2,5,20,24,36 2
0 – 32000 Hz 1440
under kommunikation
set
CL/OEE-DK
28
Page 29

p
)
Quick guide
CIMR-F7
Beskyttelse
L
L1 Motor overbelastning
L1-01 referer til den
interne motor
beskyttelse
Termistor kan bruges
uanset dette
L2 Netudfald
L3 Udfaldsbeskyttelse
L1-01 Valg af motorbeskyttelse
L1-02 Motorbeskyttelse tidsforsinkelse
L1-03 Funktion når motor stiger i temp.
L1-04 Funktion når motor er for varm
L1-05 Termistor input tids konstant
L2-01 Beskyttelse mod kortvarige
netudfald
L2-02 Netudfald varighed når L2-01 = 1
L2-03 Min. base block tid under genstart 0,1 – 5 sek. 0,2sek
L2-04 Tid for genskabelse af spænding
L2-05 Niveau for underspænding
L2-06 Stop tid for KEB funktion
L2-07 Acc. Tid efter spændings svigt
L2-08 Frekvens reducering under KEB
L3-01 Udfaldsbeskyttelse ved accel.
0: Ikke aktiv 1: Alm. Motor
0,1 – 5 min. 1,0min
0-3 se L8-03 3
0-2 se L8-03 1
0,00 – 10,00 sek. 0,20sek
0=Ikke aktiv 1=Kortvarig udfald
2=CPU s
0 – 2 sek. 0,1sek
0,0 – 5 sek. 0,3sek
300 – 410 V. 380V
0,0 – 200,0 sek 0,0sek
0,0 – 25,5 sek 0,0sek
0 – 300 % 100%
0=Ikke aktiv 1=Aktiv 2=Intellegent
ænding ( ingen detektering
L4 Detektering af
reference
L5 Fejl/genstart
L6 Moment detektering
L3-02 Niveau for udfaldsbeskyttelse accel.
L3-03 Begrænsning for udfaldsbeskyttelse ved
L3-04 Udfaldsbeskyttelse ved decel.
Brug 0, 3 sammen med bremsemodstand
L3-05 Udfaldsbeskyttelse ved kørsel
L3-06 Niveau for udfaldsbeskyttelse
L4-01 Detektering af opnået hastighed 1
L4-02 Båndbredde på opnået hastighed 1
L4-03 Detektering af opnået hastighed 2+/L4-04 Båndbredde på opnået hastighed 2
L4-05 Valg af kørsel ved mgl. reference
L4-06 Hastighed ved manglende reference
L5-01 Antal af automatiske genstarter
L5-02 Fejlrelæ ved automatisk genstart
L6-01 Detektering af opnået moment 1
0-200 % 150%
0 – 100 % 50%
0=Ikke aktiv 1=Aktiv 2=Intellegent
3=intellegent med bremse modstand
0:ikke aktiv 1:aktiv(C1-02) 2:aktiv(C1-
09)
30 – 200 % 150%
0,0-400 Hz 0,0Hz
0,0-20,0 2,0Hz
-400 til 400 Hz 0,0Hz
0,0 – 20,0 Hz 2,0Hz
0=Stop 1=Kørsel ved den % angivelse
der er i L4-06
0,0 – 100,0 % 80%
0-10 gg 0
0=Ikke aktiv 1=Aktiv
0=Ikke aktiv
1=Detektering overmoment ved opnået
hastighed og kørslen fortsætter efter
detektering
2=Detektering overmoment ved kørsel og
kørslen fortsætter efter detektering
3=Detektering overmoment ved opnået
hastighed og kørslen stopper efter
detektering
4=Detektering overmoment ved kørsel og
kørslen stopper ved detektering
5=Detektering undermoment ved opnået
hastighed og kørslen fortsætter efter
detektering
6=Detektering undermoment ved kørsel
og kørslen fortsætter efter detektering
7=Detektering undermoment ved opnået
hastighed og kørslen stopper efter
detektering
8=Detektering undermoment ved kørsel
og kørslen stopper ved detektering
CL/OEE-DK
29
Page 30

(
Quick guide
CIMR-F7
Beskyttelse
Specielle
justeringer
Monitor /
Digital
operator
L
N
O
L6 Moment detektering
FORTSAT
L7 Moment begrænsning
L8 Hardware beskyttelse
N1 Forhindring af motor
svingninger
V/f mode)
N2 Kontrol af hastigheds
loop.
Open loop
N3 Motor bremse
Kun i V/f mode
O1 Visning på displayet
O2 Valg af
nøglefunktioner
O3 Kopi Funktion
Imellem operator og
omformer
L6-02 Momentdetektering niveau 1
L6-03 Momentdetekteringstid 1
L6-04 Detektering af opnået moment 2
L6-05 Moment detektering niveau 2
L6-06 Moment detekterings tid 2
L7-01 CW moment grænse
L7-02 CCW moment grænse
L7-03 CW moment grænse ved regenerering
L7-04 CCW moment grænse ved regenerering
L8-01 Beskyttelse af bremse modstand
L8-02 Niveau for advarsel af overophedning af
L8-03 Kørsel efter advarsel om overophedning 0: ramper ned efter C1-02
L8-05 Detektering fasebrud forsyning
L8-07 Detektering fasebrud motor afgang
L8-09 Jord fejls detektering
L8-10 Funktion af indbygget køle ventilator
L8-11 Tid før stop af indbygget køle ventilator
L8-12 Omgivelses temperatur for omformer
L8-15 OL2 detektering ved lav hastighed
L8-18 Soft CLA valg ( for beskyttelse mod OL )
N1-01 Undertrykkelse motor svingninger
N1-02 Forstærkning af funktion
N2-01 Forstærkning hastigheds loop
N2-02 Detekterings tid hastigheds loop
N2-03 Tid for tillæg af forstærkning
N3-01 Tilladt frekvens bredde under brems
N3-02 Strøm grænse ( i % a motor strøm )
N3-03 Holde tid ved lav frekvens
N3-04 Tid for OL fejl under nedbremsning
O1-01 Valg af visning i display ved kørsel
O1-02 Valg af visning i display ved tilslutning
O1-03 Skalering for visning af frekvensref.
O1-05 Lys styrke i display
O2-01 Lokalt/fjernbetjeningstaste aktiv
O2-02 Stoptaste aktiv
O2-03 Initialisere brugerparametre til fabrik
O2-04 Valg af kVA (type frekvensomf.) Stil ikke dette parameter
O2-05 Brug af enter knap ved af sætning af
O2-06 Valg af kørsel uden betjeningspanel
O2-07 Sætning af den sammenlagte kørselstid
O2-08 Valg af tidsudmåling 0=Ved forsyningsspænding
O2-09 Må ikke stilles
O2-10 Sæt køle ventilators drifttid
O2-12 Slet fejl hukommelse ( U2 og U3 )
02-14 kWh monitor
O3-01 Valg af kopierings funktion
O3-02 Kopierings lås
omformer
5 cifre ( yderste til venstre er komma )
eks. 12000 = 200,0
frekvensref. fra betjeningspanel
0-300 % 150%
0,0-10,0 sek. 0,1sek
Samme som L6-01 0
0-300 % 150%
0,0-10,0 sek. 0,1sek
0-300 % 200%
0-300 % 200%
0-300 % 200%
0-300 % 200%
0 : ingen beskyttelse 1 : aktiv
50 – 130 Grader 95
1: friløb til stop
2 : hurtig stop efter C1-09
3 : kun display visning
0:ikke aktiv 1:aktiv
0:ikke aktiv 1: 1 fase detektering
2: 2 og 3 fase detektering
0:ikke aktiv 1:aktiv
0 : kører når omformer er aktiv
1 : kører når der er spænding på
omformeren
0-300 sek. 60sek
45 – 60 grader 45
0: ingen detektering 1: detektering
0: ikke aktiv 1:aktiv
0:funktion fra 1:funktion til
0,00 – 2,50 1,00
0,00 – 10,00 1,00
0 – 2000 ms. 50ms
0 – 2000 ms. 750ms
1 – 20 % af E1-04 5
100 – 200 % 150
0,1 – 10,0 sek. 1,0sek
30 – 1200 sek. 40sek
4-40 6
1-4 1
0 : 0,01 Hz enheder
40-39999 : bruger defineret
0 – 5 3
0=Ikke aktiv 1=Aktiv
0=Ikke aktiv 1=Aktiv
0: gemt / ikke gemt 1: Set default
2=Reset alle
0=skal bruges 1=skal ikke bruges
0=Ikke aktiv 1=Aktiv
1=Ved kørselstid
0 – 65535 0
0: ingen funktion 1: slet hukommelse
0: Ingen reset 1: reset
0: ingen funktion
1: kopier fra omformer til operator
2: kopier fra operator til omformer
3: sammenlign omformer og operator
0:kopiering ikke mulig 1:kopiering
mulig
CL/OEE-DK
30
Page 31

Quick guide
CIMR-F7
Auto tuning
T
T1 Automatisk indstilling
af motor data
T1-00 Motor valg 1: motor 1 2: motor 2
T1-01 Autotunings metode 0: roterende autotuning ( open loop )
1: stille stående autotuning ( open loop )
2: stillestående autotuning ( V/f mode )
T1-02 Motor effekt Sæt motorens effekt i kW
T1-03 Motor spænding Sæt motorens nominelle spænding i V
T1-04 Motor strøm Sæt motorens nominelle strøm i A
T1-05 Motor frekvens Motorens nominelle frekvens ( 50 Hz )
T1-06 Motor poler Antal poler i motor
T1-07 Motor hastighed Sæt motorens nominelle hastighed
T1-08 Antal af encoder pulser Sæt antallet af encoder pulser pr. omdr.
CL/OEE-DK
31
Page 32

Quick guide
13. Fejl beskrivelser.
Display
Over
Current
Ground
Fault
DC Bus
Fuse open
DC Bus
Overvolt
Uu 1
DC Bus
Undervolt
CIMR-F7
Hvis omformeren detekterer en fejl, aktiveres en fejludgang og motoren decelerere til
stop, lader motoren løbe til stop, eller lader motoren forsætte kørslen i henhold til det
valg, der er foretaget med hensyn til fejldrift.
Ved fejl henvises til det følgende med hensyn til årsag og afhjælpning.
Beskrivelse Mulig årsag og handling
OC
GF
PUF
OU
Overstrøm (OC)
Omformerens udgangsstrøm har momentant
overskredet detekteringsniveauet for overstrøm.
(200% af mærkestrøm)
Jordfejl (GF)
En alvorlig jordfejlstrøm, der overskider 50% af
omformerens mærkeudgangsstrøm belaster
omformerens udgangsside.
DC sikring sprunget (PUF)
Sikring i DC hovedkredsen er sprunget
Overspænding i hovedkreds (OV)
DC spændingen i hovedkredsen overskrider
overspændings detekteringsniveauet.
410V for 200V type.
820V for 400V type.
Underspænding i hovedkredsen (UV1)
DC spændingen i hovedkredsen ligger under
detekteringsniveauet for underspænding.
190V for 200V type.
380V for 400V type.
Omformerens udgangsdel er kortsluttet eller
jordsluttet af isolationefejl enten i motoren eller i
motor kablet.
Motoren er overbelastet. Acceleration- eller
decelerationstider er for korte.
Der anvendes en specialmotor eller en motor, som
er for stor til omformeren.
Kontaktoren på omformerens afgangsside har været
faldet og er trukket igen.
→ Find årsagen til fejlen, ret den og reset systemet.
Omformerens udgangsdel er jordsluttet af
isolationsfejl ente i motoren eller i motor kablet.
→ Find årsagen til fejlen, ret den og reset systemet.
Udgangstransistoren er defekt.
Udgangstransistoren vil ødelægges, hvis B1 eller
den negative terminal kortsluttes med U, V,W
Omformerens udgangsdel er kortsluttet eller
jordsluttet.
→ Fjern årsagen til fejlen, og udskift omformeren.
Indstilling af decelerationstider er for kort, og
motorens bremseeffekt er for stor.
→ Gør decelerationstiden større eller tilslut en
bremseenhed
Spændingsniveauet på forsyningssiden er for stor.
→ Tilpas spændingen til omformerens
mærkespænding.
Omformerens forsyning har fasebrud..
Der har været en momentan afbrydelse.
Dårlig forbindelse på terminaler (løse skruer).
Forsyningens spændingsfluktationer er for store.
→ Find årsagen til fejlen, ret den og reset systemet.
PF
Input Pha
Loss
CL/OEE-DK
Fase udfald på indgangen (PF)
Hovedkredsens DC spænding har for store
fluktationer mens omformeren ikke er på virkes af
tilbage koblet energi.
Der mangler en fase i omformerens forsyning.
Der har være en momentan strømafbrydelse.
Spændingsfluktuationer i omformerens
strømforsyning er for store.
Ustabil motor hastighed.
→ Find årsagen til fejlen, ret den og reset systemet.
32
Page 33

Quick guide
Display
Headsnk
Overtmp
Headsnk
Motor
Overload
Overload
CIMR-F7
Beskrivelse Mulig årsag og handling
oH
(oH1)
MAX
temp
oL1
oL2
Inv
Overophedning af kølefinner (OH)
Temperaturen på omformerens kølefinner er større en
parameter L8-02 eller 105°
Motor overbelastet (OL1)
Det elektroniske termiske relæ har aktiveret motorens
overbelastningsbeskyttelse.
Omformer overbelastet (OL2)
Det elektroniske termiske relæ har aktiveret
omformerens overbelastningsbeskyttelse
.
Ekstern fejl (Terminal S2)
Omgivelsestemperaturen er for høj.
→ Installer en køleventilator eller air condition.
En genstand i nærheden af omformeren genererer
varme.
→ Fjern genstanden.
Omformerens køleventilator virker ikke.
→ Køleventilatoren skal udskiftes. Kontakt Omron.
Belastningen er for stor, accelerationstid,
decelerationstid og cyklustid er for korte
→ Vurder belastningens størrelse, accelerationstid,
decelerationstid og cyklustid igen.
V/f karakteristikkernes spænding er for stor.
→ Vurder V/f karakteristikkerne igen
Motorens mærkestrøm indstilling i parameter E2-01
er forkert.
→ Indstil E2-01 korrekt.
Belastningen er for stor, accelerationstid,
decelerationstid og cyklustid er for korte.
→ Vurder belastningens størrelse, accelerationstid,
decelerationstid og cyklustid igen.
V/f karakteristikkernes spænding er for stor.
→ Vurder V/f karakteristikkerne igen.
Omformerens kapacitet er for lille.
→ Erstat omformeren med en større model.
En ekstern fejl registreres.
→ Find årsagen til den eksterne fejl.
EF4 Ekstern fejl (Terminal S3)
EF5 Ekstern fejl (Terminal S4)
EF5 Ekstern fejl (Terminal S5)
EF6 Ekstern fejl (Terminal S6)
EF7 Ekstern fejl (Terminal S7)
oPE 2
Limit
oPE 3
Terminal
oPE 10
V/f Ptrn
Setting
Fejl i parameter indstilling
Multi-funktionsindgang indstillingsfejl
Indstillingerne for multi-funktion indgange er
ukorrekte.
V/f data indstillingsfejl
V/f karakteristikkernes indstilling er ukorrekt.
Parameter indstilling er udenfor det tilladte område.
→ Find årsagen til fejlen, ret den og reset systemet.
Sørg for at to eller flere indgange ikke har sammen
funktion.
→ Find årsagen til fejlen, ret den og reset systemet.
Reset V/f karakteristikkerne til følgende forhold.
→ E1-04(FMAX) ≥ E1-06(FA) ≥ E1-07(FB) ≥ E1-
09(FMIN)
→ E3-02(FMAX) ≥ E3-04(FA) ≥ E3-05(FB) ≥ E3-
07(FMIN)
Hvis omformerens fejl kode ikke findes på disse sider, henvises til manualen på CIMR-F7Z
Type på manual YEG-TOE-S616-55.1-OY
CL/OEE-DK
33
Page 34

Quick guide
14. Betingelser
CIMR-F7
Alle software eksempler, program forslag samt principdiagrammer kan og bør ikke
opfattes som direkte implementerbar i endelige applikationer.
Hvis der ændres i standard menuer samt prædefinerede opsætninger indestår OMRON
ikke for ansvar.
Der gøres opmærksom på at Omron Electronics A/S ikke kan holdes ansvarlig for
eventuelle trykfejl eller tab af data.
Visse programeksempler er udviklet til at bruge bestemte hukommelses område. Dette
medfører at der skal tages backup af de hukommelses områder som ikke må gå tabt.
Ved brug af Omron Electronics A/S programeksempler i egne sourcekoder indestår
OMRON ikke for deres rigtighed.
CL/OEE-DK
34
 Loading...
Loading...