

Page 1

Cat. No.
I50E-DE-03
Trajexia Bewegungssteuerungssystem
TJ1-MC04
TJ1-M C16
KURZANLEITUNG
Page 2
Inhalt
1 Einführung.....................................................................................................................................................................................................4
1.1 Zu diesem Handbuch........................................................................................................................................................................................................................4
1.2 Übersicht über dieses Handbuch......................................................................................................................................................................................................5
1.3 Was Sie benötigen............................................................................................................................................................................................................................6
2 Aus der Verpackung an die Hutschiene ..................................................................................................................................................... 7
2.1 Installationsregeln für das Trajexia-Systems ....................................................................................................................................................................................7
2.2 Lieferumfang.....................................................................................................................................................................................................................................8
2.3 Installieren des Trajexia-Systems...................................................................................................................................................................................................10
3 Anschlüsse..................................................................................................................................................................................................13
3.1 Bevor Sie mit den Arbeiten beginnen .............................................................................................................................................................................................13
3.2 Spannungsversorgungs-Baugruppen .............................................................................................................................................................................................13
3.2.1 Empfohlene Netzteile .......................................................................................................................................................................................................14
3.2.2 Optionale Netzteile ...........................................................................................................................................................................................................15
3.3 TJ1-MC__ .......................................................................................................................................................................................................................................16
3.4 TJ1-ML__........................................................................................................................................................................................................................................17
3.4.1 Anbringen der MECHATROLINK-II-Schnittstellenbaugruppe an den Servotreiber..........................................................................................................18
3.4.2 Anschließen des einphasigen 200-V-Servotreibers .........................................................................................................................................................19
3.4.3 Anschließen des dreiphasigen 400-V-Servotreibers ........................................................................................................................................................20
3.4.4 Anschließen der NS115-Baugruppe.................................................................................................................................................................................21
3.4.5 Einstellen der DIP-Schalter und der Adressen der NS115-Baugruppe ............................................................................................................................22
3.5 Abschließen der Installation............................................................................................................................................................................................................23
4 Trajexia-Tools.............................................................................................................................................................................................. 24
4.1 PC-Mindestkonfiguration ................................................................................................................................................................................................................24
4.2 Installieren der Trajexia-Tool-Software...........................................................................................................................................................................................24
4.3 Anschließen an den TJ1-MC__ ......................................................................................................................................................................................................29
4.4 Erstmaliges Erstellen eines Projekts ..............................................................................................................................................................................................34
4.5 Abschließen der Installation............................................................................................................................................................................................................42
5 Weitere Informationen................................................................................................................................................................................43
5.1 Das Trajexia-System ......................................................................................................................................................................................................................43
5.2 Vorteile von Trajexia .......................................................................................................................................................................................................................44
5.2.1 Direkte Verbindung über Ethernet ....................................................................................................................................................................................44
5.2.2 Schutz Ihres Know-hows ..................................................................................................................................................................................................44
5.2.3 Serielle Schnittstelle und lokale E/A’s ..............................................................................................................................................................................44
Revision 3.0
KURZANLEITUNG 2
5.2.4 MECHATROLINK-II..........................................................................................................................................................................................................44
5.2.5 TJ1-FL02 ..........................................................................................................................................................................................................................44
5.2.6 Antriebe und Frequenzumrichter ......................................................................................................................................................................................45
5.2.7 Dezentrale E/A’s...............................................................................................................................................................................................................45
Page 3

Inhalt
5.2.8 PROFIBUS .......................................................................................................................................................................................................................45
5.2.9 DeviceNet .........................................................................................................................................................................................................................45
5.3 Trajexia-Handbücher ......................................................................................................................................................................................................................45
Revision 3.0
KURZANLEITUNG 3
Page 4
Einführung
1 Einführung
Diese Kurzanleitung dient dazu, Benutzer schnell mit dem
Trajexia-System vertraut zu machen. In dieser Kurzanleitung
wird erläutert, wie eine einzelne Achse mit einem Trajexia-System
und einem Sigma II-Servotreiber über MECHATROLINK-II
inbetrieb genommen wird.
Diese Kurzanleitung ist an Personen gerichtet, die Kenntnisse
von elektrischen Systemen (z.B. Elektrotechniker o.ä.) haben.
Der Techniker muss für einen sicheren Betrieb im Hinblick
auf die Spannungsversorgung (Stromversorgung für Trajexia
und Spannungsversorgung für den Servotreiber) und die
beweglichen Teile des Motor sorgen.
Wenn das Trajexia-System in reellen Anwendungen verwendet
wird, müssen die im Hardware-Referenzhandbuch aufgelisteten
Warnungen und Vorsichtsmaßnahmen befolgt werden.
Weitere Informationen zum Trajexia-System finden
Sie in den Handbüchern, die im Abschnitt 5.3 aufgeführt sind.
1.1 Zu diesem Handbuch
In dieser Kurzanleitung wird beschrieben, wie ein Trajexia-System
per MECHATROLINK-II-Kommunikation an einen Sigma
II-Servotreiber angeschlossen wird. Darüber hinaus wird
die Installation der Programmiersoftware (Trajexia-Tools) erläutert
und ein Beispielprogramm zur Steuerung eines Servomotors
angeführt.
Diese Kurzanleitung umfasst das schrittweise Vorgehen
mit entsprechenden Beschreibungen. Die vom Leser
durchzuführenden Schritte sind nummeriert. Alle sonstigen
Informationen sind als Text bzw. Aufzählung dargelegt.
Revision 3.0
Kurzanleitung 4
Page 5
Einführung
1.2 Übersicht über dieses Handbuch
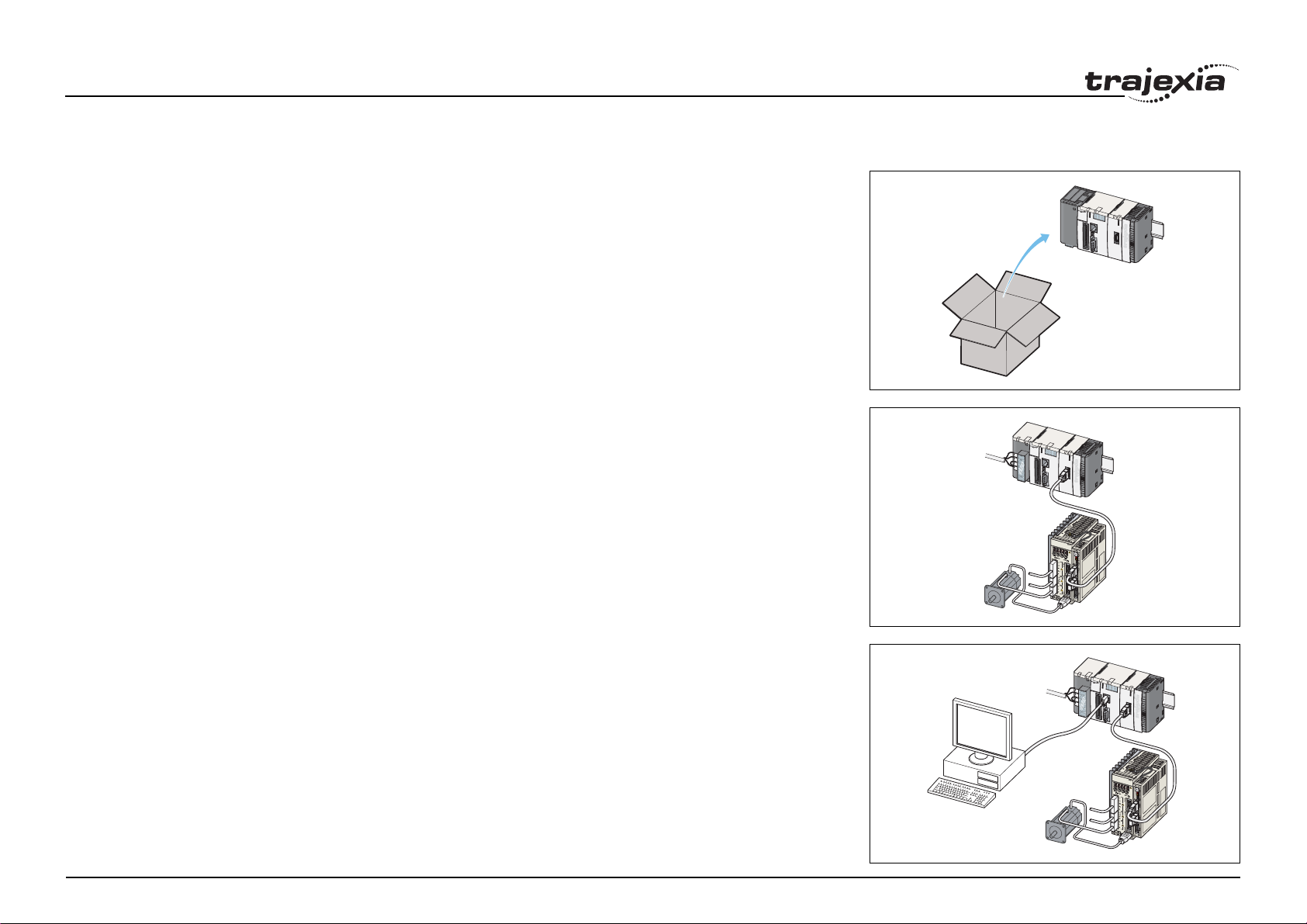
In Kapitel 2 wird beschrieben, wie die Verpackung entfernt
und die Trajexia-Module auf einer Hutschiene montiert werden.
In Kapitel 3 wird beschrieben, wie ein Servomotor
an das Trajexia-System angeschlossen wird.
Abb. 1
Abb. 2
MC16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
M
C
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N
O
1
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
In Kapitel 4 wird beschrieben, wie das Trajexia-System an einen
Abb. 3
PC angeschlossen und ein Beispielprogramm für den Betrieb
MC
des Servomotors erstellt wird.
Revision 3.0
Kurzanleitung 5
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
Page 6
Einführung
1.3 Was Sie benötigen
Sie benötigen folgende Elemente, um die in dieser Kurzanleitung
beschriebene Installation durchführen zu können.
1.3.1 Trajexia-Module
• Eine Netzgerät. Dabei kann es sich um eines der folgenden
Modelle handeln:
- CJ1W-PA202.
- CJ1W-PA205R.
- CJ1W-PD025.
• Ein TJ1-MC__ (Motion Controller-Baugruppe). Dabei kann
es sich um eines der folgenden Modelle handeln:
-TJ1-MC04.
-TJ1-MC16.
• Ein TJ1-ML__ (MECHATROLINK-II-Master-Baugruppe).
Dabei kann es sich um eines der folgenden Modelle handeln:
- TJ1-ML04.
- TJ1-ML16.
• Ein TJ1-TER (Abschlusswiderstand). Das Gerät wird
über die TJ1-MC__-Baugruppe mit Spannung versorgt.
1.3.2 Weitere Module
• Eine MECHATROLINK-II-Schnittstellenbaugruppe (NS115).
• Ein MECHATROLINK-II-Kabel.
• Ein MECHATROLINK-II-Abschlusswiderstand.
• Ein einphasiger 200-V-Servoantrieb oder ein dreiphasiger
400-V-Servotreiber.
• Ein Servomotor.
•Ein PC.
• Die Trajexia-Tools-Software-CD-ROM.
• Motor- und Geberkabel vom Servotreiber zum -Motor.
Revision 3.0
Kurzanleitung 6
Page 7
Aus der Verpackung an die Hutschiene
2 Aus der Verpackung an die Hutschiene
In diesem Kapitel werden die erforderlichen Schritte bei
der Montage der Baugruppen auf einer DIN-Schiene erläutert.
2.1 Installationsregeln für das Trajexia-Systems
Bevor Sie die Baugruppen montieren, muss sichergestellt werden,
dass folgende Regeln befolgt werden:
• Die erste Baugruppe links ist das Netzteil.
• Ein TJ1-MC__ muss an das Netzteil angebracht werden.
• Es können maximal sieben Baugruppen plus ein TJ1-TER
an den TJ1-MC__ montiert werden.
• Die letzte Baugruppe muss ein TJ1-TER sein.
• Sie können bis zu vier TJ1-ML__-Baugruppen im System
installieren.
• Sie können bis zu sieben TJ1-FL02-Baugruppen (flexible
Achsenbaugruppen) im System mit dem TJ1-MC16 installieren.
Sie können bis zu drei TJ1-FL02-Baugruppen im System
mit dem TJ1-MC04 installieren.
• Sie können entweder einen TJ1-PRT (PROFIBUS-DP
Slave-Baugruppe) oder einen TJ1-DRT
(DeviceNet-Slave-Baugruppe) im System installieren.
• Die Baugruppen können zwischen dem TJ1-MC__ und
dem TJ1-TER in beliebiger Reihenfolge angebracht werden.
Ändern Sie nicht die Positionen der Baugruppen, nachdem
die Programme erstellt wurden. Die Programme können
ungültig werden.
Revision 3.0
KURZANLEITUNG 7
Page 8
Aus der Verpackung an die Hutschiene
2.2 Lieferumfang
In diesem Abschnitt werden die Trajexia-Baugruppen aufgelistet,
die für die Installation benötigt werden.
2.2.1 Netzteil
Lieferumfang des Netzteils:
• Sicherheitshinweise.
• Netzteil.
• Schutzfolie an der Oberseite der Baugruppe.
2.2.2 TJ1-MC__
Lieferumfang des TJ1-MC__:
• Sicherheitshinweise.
•TJ1-MC__.
• Schutzfolie an der Oberseite des TJ1-MC__.
• Am TJ1-MC__ angebrachter TJ1-TER.
• Komponenten für einen seriellen Anschluss.
• Komponenten für eine E/A-Steckverbindung.
• Zwei Metallclips für DIN-Schienen, damit das Trajexia-System
nicht aus der Schiene geschoben werden kann.
• Weißer Clip als Ersatz für den gelben Clip der
Stromversorgungsbaugruppe.
2.2.3 TJ1-ML__
Lieferumfang TJ1-ML__:
• Sicherheitshinweise.
• TJ1-ML__.
• Schutzfolie an der Oberseite der Baugruppe.
2.2.4 Software
Revision 3.0
Lieferumfang der Software:
• OneTrajexia-Tools-CD-ROM.
• Etikett mit der Softwarelizenznummer auf der CD-Hülle.
KURZANLEITUNG 8
Page 9
Aus der Verpackung an die Hutschiene
• Garantieregistrierungskarte.
• Adressenaufkleber.
• Lizenzumschlag.
Revision 3.0
KURZANLEITUNG 9
Page 10
Aus der Verpackung an die Hutschiene
2.3 Installieren des Trajexia-Systems
1. Nehmen Sie alle Baugruppen aus der Verpackung.
Überprüfen Sie, ob alle Baugruppen vollständig sind.
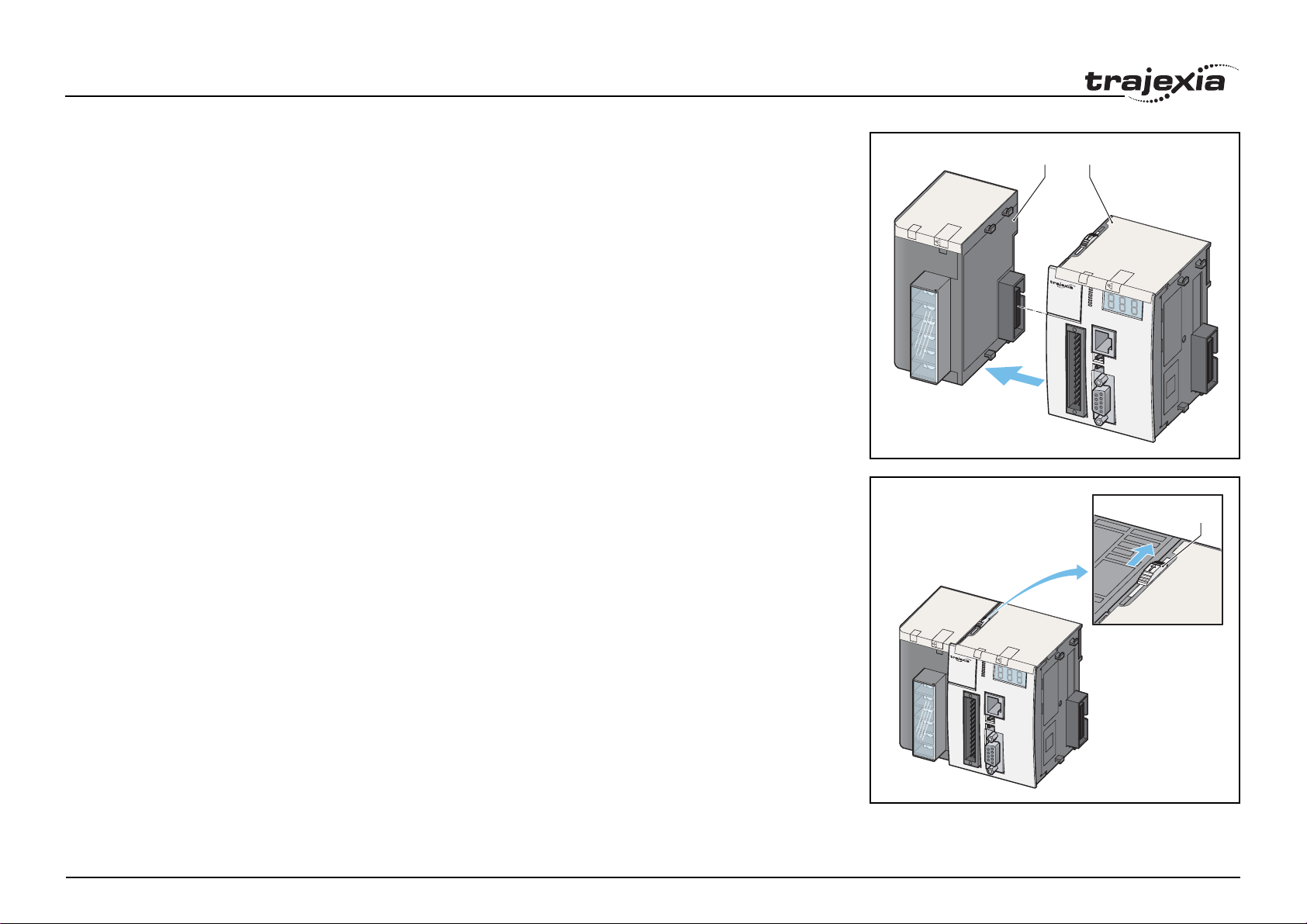
2. Die Schutzfolien der Baugruppen dürfen nicht entfernt werden.
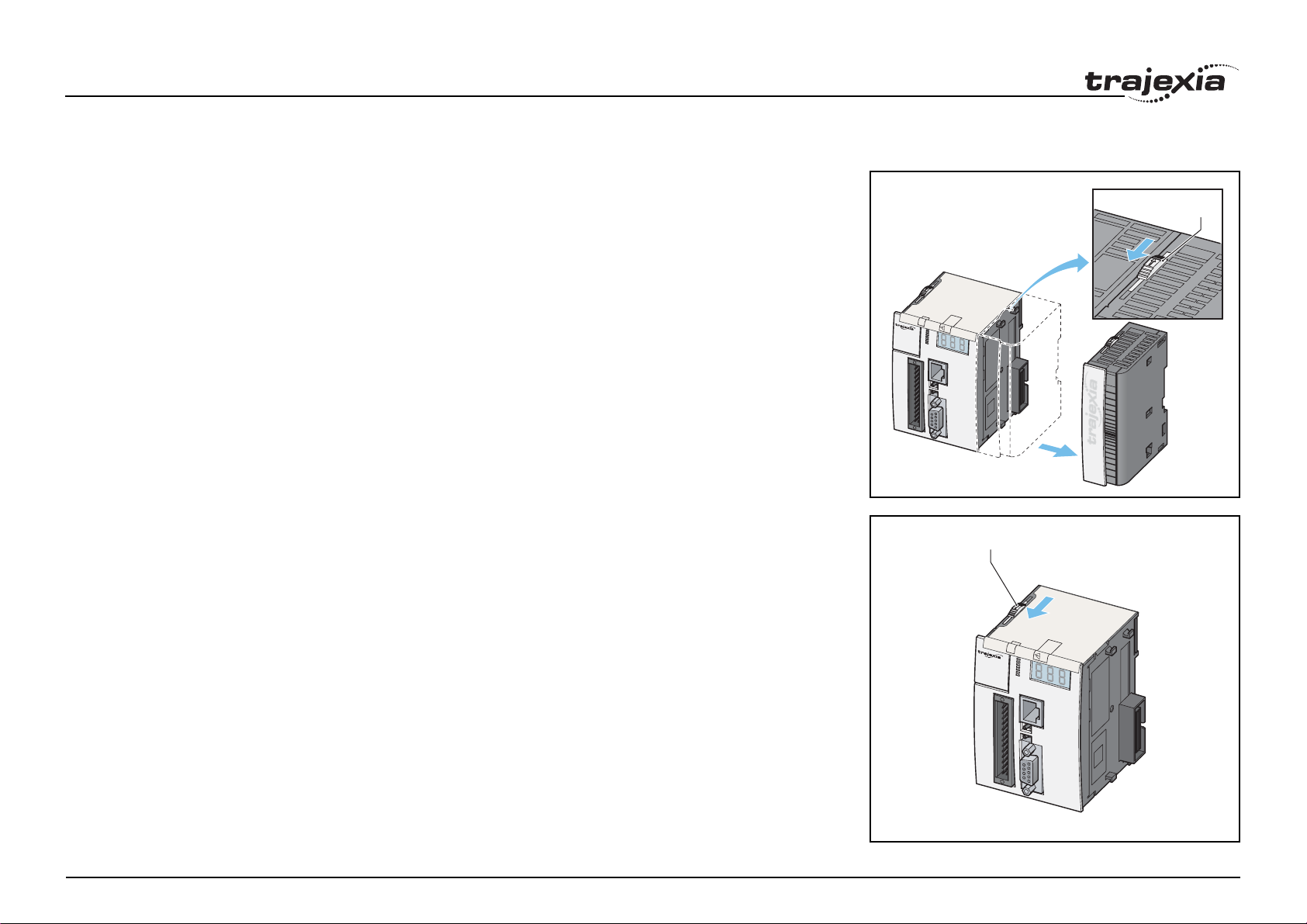
3. Um den TJ1-MC__ vom TJ1-TER zu trennen, schieben Sie die
Clips (A) an der Ober- und Unterseite des TJ1-TER nach vorn.
4. Trennen Sie den TJ1-TER vom TJ1-MC__.
5. Schieben Sie die Clips (A) an der Ober- und Unterseite
sämtlicher Baugruppen nach vorn.
Abb. 1
MC16
O
M
M
O
Abb. 2
A
0
1
R
O
N
2
TIO
N
3
C
O
N
T
R
O
4
L
L
E
R
5
6
7
C
N
3
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OMRON
1
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Revision 3.0
KURZANLEITUNG 10
Page 11
Aus der Verpackung an die Hutschiene
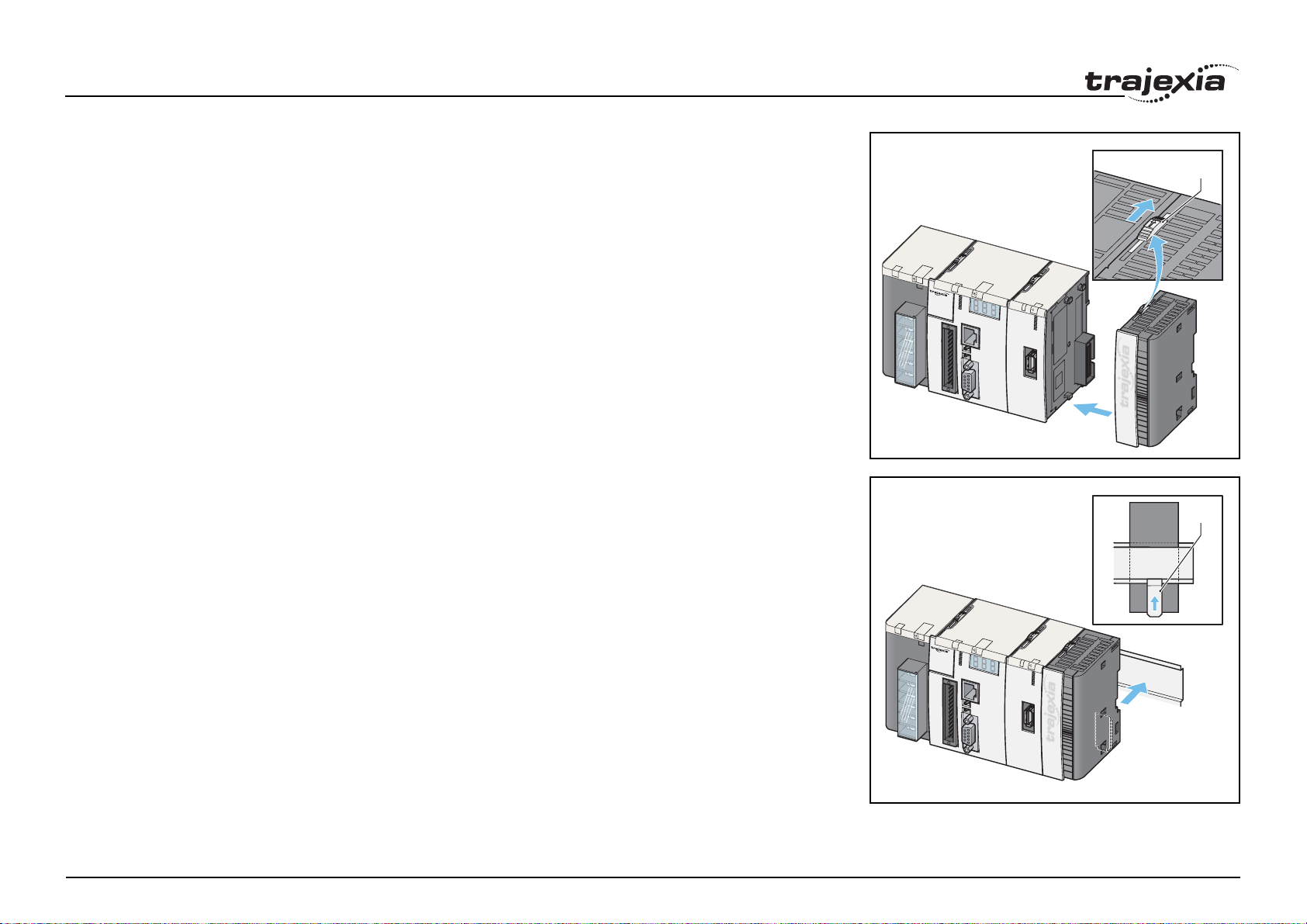
6. Bringen Sie den TJ1-MC__ (C) am Netzteil (B) an.
7. Schieben Sie die Clips (A) an der Ober- und Unterseite
sämtlicher Baugruppen nach hinten.
Abb. 3
Abb. 4
MC16
OMRON
MOTION CONTROLL
CB
0
1
2
3
4
ER
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
MOTION CON
3
TROLLER
4
5
6
7
C
N3
CN
1
TER
M
O
N
/OFF
W
IRE
2/4
CN2
Revision 3.0
KURZANLEITUNG 11
Page 12
Aus der Verpackung an die Hutschiene
8. Wiederholen Sie die beiden letzten Schritte für alle anderen
Baugruppen.
9. Stellen Sie sicher, dass der TJ1-TER die letzte Baugruppe ist.
10. Schieben Sie die Clips (D) aller Baugruppen nach unten.
11. Befestigen Sie das Trajexia-System an der DIN-Schiene.
12. Schieben Sie die Clips (D) aller Baugruppen nach oben.
Abb. 5
Abb. 6
MC16
O
M
R
O
MOTION CONTROLLER
A
0
1
N
2
3
4
M
L
5
6
7
CN3
1
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
RO
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Revision 3.0
KURZANLEITUNG 12
Page 13
Anschlüsse
3 Anschlüsse
In diesem Kapitel werden die Anschlüsse der Trajexia-Baugruppen
aufgeführt.
3.1 Bevor Sie mit den Arbeiten beginnen
In dieser Desktop-Umgebung sind keine Notschalter,
Verriegelungsschaltungen und Grenzschalter installiert.
Achtung
Der Elektrotechniker muss für einen sicheren Betrieb im
Hinblick auf die Spannungsversorgung (Stromversorgung
für Trajexia und Spannungsversorgung für den Servotreiber, die 380 V AC) und die beweglichen Teile des Motor
sorgen.
3.2 Spannungsversorgungs-Baugruppen
Es können drei verschiedene Arten von
Stromversorgungsbaugruppen verwendet werden:
/i
Stromversorgungsbaugruppe
CJ1W-PA202 AC 110 – 240 V 85 – 264 V 47 – 63 Hz 14 W
CJ1W-PA205R AC 110 – 240 V 85 – 264 V 47 – 63 Hz 25 W
CJ1W-PD025 DC 24 V 21,6 – 26,4 V – 25 W
Revision 3.0
KURZANLEITUNG 13
Strom Eingangs-
spannung
Betriebsspannungsgrenzwerte
Betriebsfrequenzgrenzwerte
Ausgangsspannung
Page 14

Anschlüsse
3.2.1 Empfohlene Netzteile
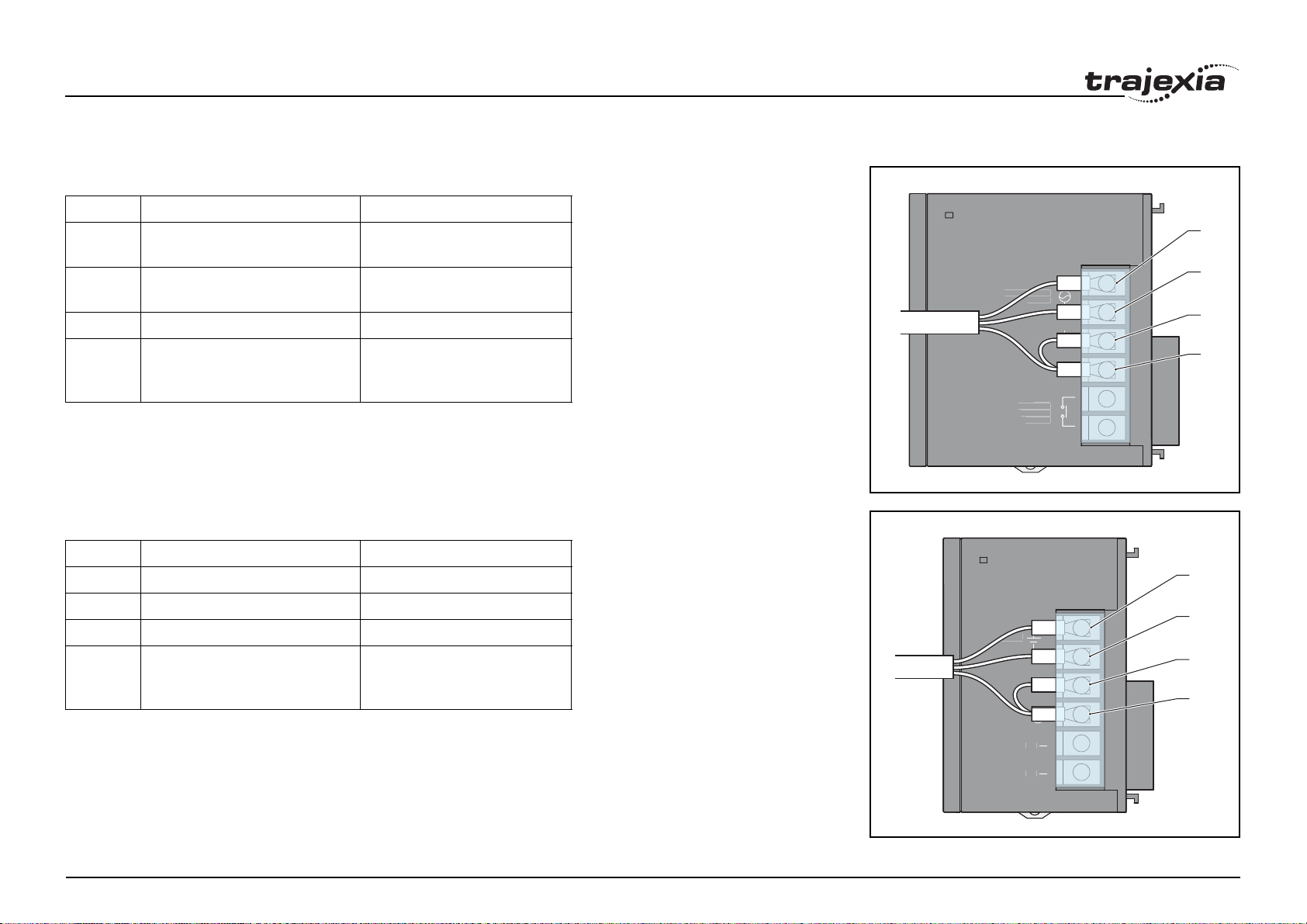
Es wird das Netzteil CJ1W-PA202 empfohlen.
1. Schließen Sie das Netzteil CJ1W-PA202 wie folgt an:
/i
Klemmen Beschreibung Anschluss
A 110 – 240 V
Versorgungsspannung
B 110 – 240 V
Versorgungsspannung
C Leitungserdung Kurzschlussbrücke zu Klemme D
Permanent mit Wechselstrom
versorgt
Permanent mit Wechselstrom
versorgt
Abb. 1
PA2 02
AC100
-240V
INPUT
L2/N
POWER
A
L1
B
C
D Erdung • Kurzschlussbrücke
zu Klemme C
•Erdung
Revision 3.0
D
NC
NC
KURZANLEITUNG 14
Page 15
Anschlüsse
A
V
O
T
RUN
INPUT
V
L2/N
UT
C
C
3.2.2 Optionale Netzteile
1. Schließen Sie das Netzteil CJ1W-PA205R wie folgt an:
/i
Klemme Beschreibung Anschluss
A 110 – 240 V
Versorgungsspannung
B 110 – 240 V
Versorgungsspannung
Permanent mit Wechselstrom
versorgt
Permanent mit Wechselstrom
versorgt
C Leitungserdung Kurzschlussbrücke zu Klemme D
D Erdung • Kurzschlussbrücke
zu Klemme C
•Erdung
1. Schließen Sie das Netzteil CJ1W-PD025 wie folgt an:
/i
Klemme Beschreibung Anschluss
A 24-V-Spannungsversorgung 24 V DC
B 0-V-Spannungsversorgung 0 V
C Leitungserdung Kurzschlussbrücke zu Klemme D
D Erdung • Kurzschlussbrücke
zu Klemme C
•Erdung
Abb. 2
Abb. 3
PA2 05 R
POWER
PD025
PD025
POWER
POWER
INP
AC100-240
UTPU
C240
DC24V
A
B
C
D
A
B
C
D
N
N
Revision 3.0
KURZANLEITUNG 15
Page 16

Anschlüsse
3.3 TJ1-MC__
3.3.1 Ethernet-Schnittstelle
Wenn Sie die Stromversorgung des Trajexia-Systems einschalten,
zeigt die dreistellige LED-Anzeige (A) die IP-Adresse und die
Subnetzmaske des TJ1-MC__ an.
Verwenden Sie die Ethernet-Schnittstelle (B), um den TJ1-MC__
an einen PC anzuschließen. Sie können sowohl ein Crossoverals auch ein Patch-Ethernet-Kabel verwenden.
Wenn Sie den PC direkt an den TJ1-MC__ anschließen, anstatt
über einen Hub oder ein anderes Netzwerkgerät, muss der PC
über eine feste IP-Adresse verfügen.
Der TJ1-MC__ erkennt automatisch, wenn ein Ethernet-Kabel
an die Ethernet-Schnittstelle angeschlossen wird. Wenn Sie
ein Ethernet-Kabel an die Ethernet-Schnittstelle anschließen,
zeigt die LED-Anzeige (A) die IP-Adresse des TJ1-MC__ an.
3.3.2 Serielle Schnittstelle
Der serielle Anschluss (D) wird verwendet, um den TJ1-MC__
an ein Gerät anzuschließen, das einen seriellen Anschluss
benötigt. Dies wird im Hardware-Referenzhandbuch näher
erläutert. Dieser Anschluss wird bei der Beispielinstallation
nicht benötigt.
Abb. 4
A
B
C
D
3.3.3 28-polige E/A-Schnittstelle
Die 28-polige E/A-Schnittstelle (C) umfasst 16 Digitaleingänge
und 8 Digitalausgänge. Dies wird im Hardware-Referenzhandbuch
näher erläutert. Dieser Anschluss wird bei der Beispielinstallation
nicht benötigt.
Revision 3.0
KURZANLEITUNG 16
Page 17

Anschlüsse
3.4 TJ1-ML__
Der TJ1-ML__ ist der Master einer Reihe von MECHATROLINK-IIGeräten. MECHATROLINK-II-Geräte sind Servotreiber,
E/A-Module oder Frequenzumrichter. E/A-Module
und Frequenzumrichter werden im Hardware-Referenzhandbuch
näher erläutert.
Der TJ1-ML__ verfügt über eine Schnittstelle (A) für den Anschluss
an das erste MECHATROLINK-II-Gerät.
Abb. 5
ML16
RUN
8F
CN1
A
Revision 3.0
KURZANLEITUNG 17
Page 18

Anschlüsse
3.4.1 Anbringen der MECHATROLINK-IISchnittstellenbaugruppe an den Servotreiber
Sie können einen einphasigen 200-V-Servotreiber (siehe Seite 19)
oder einen dreiphasigen 400-V-Servoantrieb (siehe Seite 20)
verwenden.
1. Fügen Sie die Clips (A) der MECHATROLINK-II-
Schnittstellenbaugruppe (NS115) in die Öffnungen (B)
des Servotreiber ein.
2. Vergewissern Sie sich, dass die Schnittstelle (C) des
Servoantriebs auf den Steckplatz der NS115-Baugruppe weist.
3. Fügen Sie den Clip (A) der MECHATROLINK-II-
Schnittstellenbaugruppe (NS115) in die Öffnung (E)
des Servotreibers ein.
4. Schließen Sie das Erdungskabel (F) der NS115-Baugruppe
an der Markierung G (G) des Servotreibers an.
Abb. 6
C
Abb. 7
G
B
E
D
A
F
Revision 3.0
KURZANLEITUNG 18
Page 19

Anschlüsse
3.4.2 Anschließen des einphasigen 200-V-Servotreibers
1. Die Klemmen in Gruppe A sind für den
Spannungsversorgungseingang vorgesehen, der zur
Erzeugung der Ausgangsleistung zum Motor (Gruppe C) dient.
Schließen Sie die Klemmen wie folgt an:
/i
Klemme Beschreibung Anschluss
D, E 200 – 230 V Versorgungsspannung Permanent mit
Wechselstrom versorgt
F +Zwischenkreis 1 Kurzschlussbrücke
zu Klemme G
G +Zwischenkreis 2 Kurzschlussbrücke
zu Klemme F
2. Die Klemmen in Gruppe B sind für die
Steuerspannungsversorgung des Servotreibers vorgesehen
(Anzeige, LEDs). Schließen Sie die Klemmen wie folgt an:
/i
Klemme Beschreibung Anschluss
H 200 – 230 V
Steuerspannungsversorgung
I 200 – 230 V
Steuerspannungsversorgung
Permanent mit
Wechselstrom versorgt
Permanent mit
Wechselstrom versorgt
3. Die Klemmen in Gruppe C sind Klemmen für die
Spannungsversorgung zum Motor. Schließen Sie die Klemmen
wie folgt an:
/i
Klemme Beschreibung Anschluss
U Motorphase U Die U-Klemme am Motor
V Motorphase V Die V-Klemme am Motor
Revision 3.0
W Motorphase W Die W-Klemme am Motor
Abb. 8
W
G
D
E
F
H
I
L1
L2
L1C
L2C
B1
B2
1
2
200V
MODE/SET
A
B
C
CHARGE
DATA/
POWER
C
L1
N
3
L2
1
2
C
N
1
L1C
L2C
B1
B2
U
v
C
N
w
2
J
U
V
U
V
W
4. Schließen Sie die Geberschnittstelle (J) an das Geberkabel
des Servomotors an.
KURZANLEITUNG 19
Page 20

Anschlüsse
3.4.3
Anschließen des dreiphasigen 400-V-Servotreibers
1. Die Klemmen in Gruppe A sind für die Hauptspannungsversorgung
vorgesehen. Schließen Sie die Klemmen wie folgt an:
/i
Klemme Beschreibung Anschluss
D, E, F Dreiphasige 400-V-
Spannungsversorgung
Permanent mit
Wechselstrom versorgt
G +Zwischenkreis 1 Kurzschlussbrücke
zu Klemme H
H +Zwischenkreis 2 Kurzschlussbrücke
zu Klemme G
2. Die Klemmen in Gruppe B sind für die
Steuerspannungsversorgung des Servotreibers vorgesehen
(Anzeige, LEDs). Schließen Sie die Klemmen wie folgt an:
/i
Klemme Beschreibung Anschluss
I Steuerspannungsversorgung 24 V DC
J Steuerspannungsversorgung 0 V DC
K Bezugspotenzial für Bremswiderstand Kurzschlussbrücke
zu Klemme L
1
L Interner Bremswiderstand Kurzschlussbrücke
zu Klemme K
1. Bei Verwendung des internen Widerstand.
3. Die Klemmen in Gruppe C sind Klemmen für die
Spannungsversorgung zum Motor. Schließen Sie die Klemmen
wie folgt an:
/i
Klemme Beschreibung Anschluss
U Motorphase U Die U-Klemme am Motor
V Motorphase V Die V-Klemme am Motor
Revision 3.0
W Motorphase W Die W-Klemme am Motor
4. Schließen Sie die Geberschnittstelle (M) an das Geberkabel
des Servomotors an.
Abb. 9
W
G
D
E
F
H
I
J
K
L
L1
L2
L3
L1C
L2C
B1
B2
B3
1
2
MODE/SET
CHARGE
A
B
C
400V
DATA/
POWER
C
L1
N
3
L2
L3
1
2
C
N
1
L1C
L2C
B1
B2
B3
U
v
C
N
w
2
M
U
V
U
V
W
KURZANLEITUNG 20
Page 21

Anschlüsse
3.4.4 Anschließen der NS115-Baugruppe
Die NS115-Baugruppe verfügt über einen DIP-Schalter, einen
Adressenauswahlschalter und zwei MECHATROLINK-IIBusschnittstellen.
/i
Schnittstelle
oder Schalter
A Adressenauswahlschalter
B DIP-Schalter
C MECHATROLINK-II-Busschnittstellen
Beschreibung
1. Schließen Sie ein MECHATROLINK-II-Kabel (E)
an den TJ1-ML__ (D) und eine der Busschnittstellen
der NS115-Baugruppe an.
2. Schließen Sie einen MECHATROLINK-II-Abschlußwiderstand
(F) an die anderen Busschnittstellen der NS115-Baugruppe an.
Abb. 10
A
B
C
C
Abb. 11
D E
Revision 3.0
F
KURZANLEITUNG 21
Page 22

Anschlüsse
3.4.5 Einstellen der DIP-Schalter und der Adressen
der NS115-Baugruppe
Die Kommunikationseinstellungen der NS115-Baugruppe
werden mittels der DIP-Schaltern vorgenommen.
1. Stellen Sie die DIP-Schalter wie folgt ein:
/i
DIPSchalter
1 Baudrate EIN 10 MBit/s
2 Länge der
3
4 Wartung
Funktion Einstellung Beschreibung
EIN 32-Byte-Datenübertragung
Datenpakete
Addressbereich
(reserviert)
OFF Adressen 40-4F
OFF Muss stets auf AUS gesetzt sein.
EIN wird nicht verwendet.
2. Setzen Sie den Adressenauswahlschalter der
NS115-Baugruppe auf 1. Dabei wird die logische Adresse 41
zum Servotreiber zugewiesen.
Abb. 12
23 4
1
EIN AUS
Abb. 13
Revision 3.0
KURZANLEITUNG 22
Page 23

Anschlüsse
3.5 Abschließen der Installation
Die vollständige Installation in diesem Beispiel besteht aus einem
Netzteil (A), einem TJ1-MC__ (B), einem TJ1-ML__ (C) und einem
Servotreiber (D), einer NS115-Baugruppe (E), einem Motor (F)
und einem TJ1-TER (G).
Jetzt können die Schutzfolien der Baugruppen entfernt werden.
Abb. 14
M
C
1
6
O
M
R
O
N
MOTION CONTROLLER
G
C
B
A
0
1
2
3
4
M
L
16
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
R
U
N
8
F
C
N
1
F
D
E
Revision 3.0
KURZANLEITUNG 23
Page 24

Trajexia-Tools
4 Trajexia-Tools
4.1 PC-Mindestkonfiguration
Sie benötigen einen PC mit folgender Mindestkonfiguration,
um Trajexia-Tools installieren zu können:
• Windows 98 SE.
• 300-MHz-Pentium-Prozessor.
• 64 MB RAM.
• 140 MB Festplattenspeicherplatz.
• Eine Ethernet-Schnittstelle.
• Wenn Sie Windows 98 SE oder Windows ME als
Betriebssystem verwenden: Internet Explorer 5.0.
• Wenn Sie Windows 2000 oder Windows XP als Betriebssystem
verwenden: Internet Explorer 6.0.
4.2 Installieren der Trajexia-Tool-Software
1. Legen Sie die Trajexia-Tools-CD in das CD-ROM-Laufwerk
des PCs ein.
2. Das Trajexia-Tools-Setup-Programm wird automatisch
gestartet.
3. Wenn das Trajexia-Tools-Setup-Programm nicht automatisch
gestartet wird, starten Sie es manuell: führen Sie im
Stammverzeichnis der CD die Datei setup.exe aus.
4. Wählen Sie die gewünschte Sprache aus der Dropdown-Liste.
Klicken Sie auf OK.
Abb. 1
Revision 3.0
KURZANLEITUNG 24
Page 25

Trajexia-Tools
5. Das Trajexia-Tools-Setup-Fenster wird angezeigt. Klicken
Sie auf Next (Weiter).
6. Klicken Sie auf Yes (Ja), um der Lizenzvereinbarung
zuzustimmen und setzen Sie den Vorgang fort.
Abb. 2
Abb. 3
Revision 3.0
KURZANLEITUNG 25
Page 26

Trajexia-Tools
7. Geben Sie Ihren Namen in das Feld Name ein.
8. Geben Sie den Namen Ihres Unternehmens in das Feld
Company (Unternehmen) ein.
9. Geben Sie die Nummer Ihrer Benutzerlizenz in die Felder
Licence (Lizenz) ein. Die Nummer Ihrer Benutzerlizenz
befindet sich auf dem Etikett, das an der Hülle
der Trajexia-Tools-CD angebracht ist.
10. Klicken Sie auf Next (Weiter).
11. Klicken Sie auf Yes (Ja).
Abb. 4
Abb. 5
12. Klicken Sie auf Next (Weiter).
Revision 3.0
KURZANLEITUNG 26
Abb. 6
Page 27

Trajexia-Tools
13. Klicken Sie auf Next (Weiter).
14. Klicken Sie auf Next (Weiter).
Abb. 7
Abb. 8
Revision 3.0
KURZANLEITUNG 27
Page 28

Trajexia-Tools
15. Klicken Sie auf Next (Weiter).
16. Das Trajexia-Tools-Setup-Programm kopiert die Dateien
auf Ihren PC. Dieser Vorgang kann einige Minuten dauern.
17. Klicken Sie auf Finish (Fertig stellen). Das Fenster für die CX-
Drive Readme-Datei wird geöffnet. Schließen Sie dieses
Fenster.
Abb. 9
Abb. 10
Revision 3.0
KURZANLEITUNG 28
Page 29

Trajexia-Tools
4.3 Anschließen an den TJ1-MC__
Sie benötigen ein Patch- oder Crossover-Ethernet-Kabel,
um den PC an den TJ1-MC__ anzuschließen.
1. Verbinden Sie das Trajexia-System mit der Stromversorgung.
2. Die IP-Adresse und die Subnetzmaske des TJ1-MC__ werden
drei Mal in der LED-Anzeige (A) angezeigt.
Die Standard-IP-Adresse des TJ1-MC__ lautet 192.168.0.250.
Die Standard-Subnetzmaske ist 255.255.255.0.
3. Wenn die IP-Adresse und die Subnetzmaske des TJ1-MC__
erneut angezeigt werden soll, schalten Sie das Trajexia-System
aus und anschließend wieder ein.
4. Schließen Sie das Ethernet-Kabel an die Ethernet-Schnittstelle
des PCs an.
5. Schließen Sie das Ethernet-Kabel an die Ethernet-Schnittstelle
des TJ1-MC__ an. Die IP-Adresse des TJ1-MC__ wird vier
Mal in der LED-Anzeige (A) angezeigt.
Abb. 11
A
Revision 3.0
KURZANLEITUNG 29
Page 30

Trajexia-Tools
6. Starten Sie das Trajexia-Tools-Programm auf Ihrem PC.
Wählen Sie im Windows Start menü:
- Programme
- OMRON
- Trajexia-Tools
- Trajexia-Tools
7. Der Startbildschirm von Motion Perfect 2 wird angezeigt.
Warten Sie, bis die Schaltfläche Cancel angezeigt ist.
Klicken Sie anschließend auf Cancel (Abbrechen).
8. Wählen Sie das Menü:
- Options (Optionen)
- Communications (Kommunikation)
Abb. 12
Abb. 13
Revision 3.0
KURZANLEITUNG 30
Page 31

Trajexia-Tools
9. Stellen Sie sicher, dass ENet0 in der Liste ausgewählt ist.
10. Klicken Sie auf Configure (Konfigurieren)
11. Geben Sie im Feld Server name/IP address
(Servername/IP-Adresse) den Wert 192.168.0.250 ein.
12. Klicken Sie auf OK.
13. Klicken Sie auf OK.
Abb. 14
Abb. 15
Abb. 16
Revision 3.0
KURZANLEITUNG 31
Page 32

Trajexia-Tools
14. Öffnen Sie die Systemsteuerung von Windows auf Ihrem PC.
15. Doppelklicken Sie auf das Symbol Netzwerkverbindungen.
16. Doppelklicken Sie auf das Symbol LAN-Verbindung.
Klicken Sie auf das Menü Eigenschaften.
17. Klicken Sie auf die Registerkarte Allgemein.
18. Wählen Sie Internetprotokoll (TCP/IP) aus der Liste.
19. Klicken Sie auf Eigenschaften.
Abb. 17
Abb. 18
Revision 3.0
KURZANLEITUNG 32
Page 33

Trajexia-Tools
20. Klicken Sie auf die Registerkarte Allgemein.
21. Wählen Sie Folgende IP-Adresse verwenden.
22. Geben Sie im Feld IP-Adresse 192.168.0.251 ein.
23. Geben Sie im Feld Subnetzmaske 255.255.255.0 ein.
24. Klicken Sie auf OK.
25. Klicken Sie auf OK.
26. Schließen Sie den Bildschirm „Netzwerkverbindungen“.
Abb. 19
Revision 3.0
KURZANLEITUNG 33
Page 34

Trajexia-Tools
4.4 Erstmaliges Erstellen eines Projekts
1. Schalten Sie das Trajexia-System, den Servotreiber
und die NS115-Baugruppe aus.
2. Schalten Sie den Servotreiber und die NS115-Baugruppe ein.
3. Schalten Sie das Trajexia-System ein.
4. Wechseln Sie zum Programm „TrajeXia Tools“ auf Ihrem PC.
5. Wählen Sie das Menü:
- Controller
- Connect (Verbinden)
Abb. 20
Revision 3.0
KURZANLEITUNG 34
Page 35

Trajexia-Tools
6. Warten Sie, bis die Schaltfläche OK angezeigt wird. Klicken
Sie danach auf OK.
7. Klicken Sie auf New (Neu).
Abb. 21
Abb. 22
Revision 3.0
KURZANLEITUNG 35
Page 36

Trajexia-Tools
8. Klicken Sie auf Yes (Ja).
9. Navigieren Sie in der Struktur Disk directory
(Festplattenverzeichnis) zum gewünschten Speicherort
für das neue Projekt.
10. Geben Sie im Feld Project name (Projektname) einen
Namen für das neue Projekt ein.
11. Klicken Sie auf Create (Erstellen).
Abb. 23
Abb. 24
Revision 3.0
KURZANLEITUNG 36
Page 37

Trajexia-Tools
12. Klicken Sie auf OK.
13. Klicken Sie in der Symbolleiste auf die Schaltfläche
Intelligent drives (Intelligente Antriebe) (A).
Abb. 25
Abb. 26
Revision 3.0
KURZANLEITUNG 37
Page 38

Trajexia-Tools
14. Klicken Sie auf die Schaltfläche Config (Konfigurieren).
15. Warten Sie, bis das Fenster MECHATROLINK Drive
SGDH-01AE-OY angezeigt wird.
16. Klicken Sie auf die Registerkarte Configuration
(Konfiguration).
Abb. 27
Abb. 28
Revision 3.0
KURZANLEITUNG 38
Page 39

Trajexia-Tools
17. Navigieren Sie in der Liste zu der Zeile, in der der Wert
der Spalte Index Pn50A.3 lautet.
18. Klicken Sie in dieser Zeile auf den Eintrag in der Spalte
Value (Wert). Es wird eine Dropdown-Liste angezeigt.
19. Wählen Sie den Wert 8:Sets signal OFF. (8:Signal wird
auf AUS gesetzt) aus der Dropdown-Liste.
20. Drücken Sie die Eingabetaste. Das Symbol in der ersten
Spalte der Zeile wird jetzt rot dargestellt, um darauf
hinzuweisen, dass die Einstellung dieser Zeile geändert wurde.
21. Navigieren Sie in der Liste zu der Zeile, in der der Wert
der Spalte Index Pn50B.0 lautet.
22. Klicken Sie in dieser Zeile auf den Eintrag in der Spalte
Value (Wert). Es wird eine Dropdown-Liste angezeigt.
23. Wählen Sie den Wert 8:Sets signal OFF. (8:Signal wird
auf AUS gesetzt) aus der Dropdown-Liste.
24. Drücken Sie die Eingabetaste. Das Symbol in der ersten
Spalte der Zeile wird jetzt rot dargestellt, um darauf
hinzuweisen, dass die Einstellung dieser Zeile geändert wurde.
25. Klicken Sie auf die Schaltfläche Download to Drive
(Auf Antrieb herunterladen) (A).
26. Klicken Sie auf Close (Schließen).
Abb. 29
Abb. 30
A
Revision 3.0
KURZANLEITUNG 39
Page 40

Trajexia-Tools
27. Klicken Sie auf Close (Schließen).
28. Klicken Sie auf Yes (Ja).
Abb. 31
29. Schalten Sie das Trajexia-System und den Servotreiber aus,
damit die Einstellungen des Antriebs wirksam werden.
30. Schalten Sie den Servotreiber und die NS115-Baugruppe ein.
31. Schalten Sie das Trajexia-System ein.
Revision 3.0
KURZANLEITUNG 40
Page 41

Trajexia-Tools
32. Wählen Sie das Menü:
- Program (Programm)
- New (Neu)
33. Geben Sie im Feld Enter new program name
(Neuen Programmnamen eingeben) einen Namen
für das neue Programm ein.
34. Klicken Sie auf OK.
Abb. 32
Abb. 33
Revision 3.0
KURZANLEITUNG 41
Page 42

Trajexia-Tools
35. Wählen Sie das Fenster Edit (Bearbeiten).
36. Geben Sie dieses Beispielprogramm in dieses
Bearbeitungsfenster ein:
BASE(0)
SERVO=ON
WDOG=ON
loop:
MOVE(10000)
WAIT IDLE
WA(1000)
GOTO loop
37. Klicken Sie in der Symbolleiste auf die Schaltfläche
Run (Ausführen) (A).
Hinweis:
Die Standardparameter sind für die Verwendung mit
13-Bit-Drehgeber geeignet. Führen Sie folgende Schritte
durch, falls das Beispielprogramm nicht funktioniert:
38. Weitere Informationen zum Drehgebertyp finden
Sie in den Motorspezifikationen bzw. im Motorhandbuch.
39. Falls der Motor über eine höhere Auflösung verfügt,
verringern Sie den Wert des Parameters P_GAIN und erhöhen
Sie die Werte der Parameter SPEED, ACCEL und DECEL.
Weitere Informationen finden Sie im Programmierhandbuch.
40. Führen Sie das Beispielprogramm erneut aus.
Abb. 34
4.5 Abschließen der Installation
Konfiguration abgeschlossen. Sie haben die Anweisungen dieses
Handbuchs erfolgreich durchgeführt. Sie verfügen jetzt über
ein Netzteil, eine TJ1-MC__ und eine TJ1-ML__, die an einen
Servomotor angeschlossen ist, und ein Beispielprogramm
zur Steuerung des Servomotors.
Revision 3.0
KURZANLEITUNG 42
Page 43

Weitere Informationen
5 Weitere Informationen
5.1 Das Trajexia-System
Trajexia ist OMRON’s Plattform für eine Bahnsteuerung, die Ihnen
die Leistung und leichte Bedienbarkeit eines modernen Motion
Control-Systems bietet.
Trajexia ist ein modulares Standalone-System, das maximale
Flexibilität und Skalierbarkeit erlaubt. Herzstück des Trajexia
ist die TJ1-Multi-Tasking-Motion-CPU. Durch einen 32-Bit-DSP
ist sie speziell zur Bewältigung von Bewegungsaufgaben mit
einfachen Motion-Befehlen prädestiniert, z. B. E-Cam, E-Gearbox,
Druckmarkensteuerung und Interpolation.
Trajexia ermöglicht die Steuerung von bis zu 16 Achsen über
einen MECHATROLINK-II Motion-Bus oder über herkömmliche
Analog-oder Impulssteuerung mit unabhängiger Positionierung,
Drehzahl- oder Drehmomentregelung für jede Achse.
Der leistungsfähige Motion-Befehlssatz ermöglicht zudem
eine intuitive und einfache Programmierung.
Eine große Auswahl an erstklassigen Servo-, Linearund Torquemotoren sowie Servotreibern und Frequenzumrichtern
steht für die Lösung Ihrer Applikation zur Verfügung. Das System
kann bis auf sechzehn Achsen und acht Frequenzumrichter
und E/A-Module skaliert werden.
NS-Bedienterminal
Digitale E/A's
Hostlink
MECHATROLINK-II
Abb. 1
CJ-Serie SPS CX-one
Trajexia Tools
Ethernet
PROFIBUS-DP-
Master
DEVICENET
Master
Revision 3.0
KURZANLEITUNG 43
Page 44

Weitere Informationen
5.2 Vorteile von Trajexia
5.2.1 Direkte Verbindung über Ethernet
Die integrierte Ethernet-Schnittstelle des Trajexia ermöglicht die direkte
und schnelle Verbindung mit PCs, SPS, MMI’s und anderen Geräten.
Der direkte Zugriff auf die Antriebsparameter ist über den schnellen
Motion-Bus MECHATROLINK-II gewährleistet. Trajexia ermöglicht
„Explicit Messaging“ über Ethernet und den MECHATROLINK-II
Motion-Bus. Dies bietet eine vollständige Transparenz bis hinunter
zur Aktuatorenebene und ermöglicht einen dezentralen Zugriff.
5.2.2 Schutz Ihres Know-hows
Ein Passwortschutz nach einem Verschlüsselungsverfahren
garantiert den zuverlässigen Schutz Ihres wertvollen Know-hows.
5.2.3 Serielle Schnittstelle und lokale E/A’s
Eine serielle Schnittstelle ermöglicht den direkten Anschluss an
jede beliebige OMRON-SPS- und HMI-Systeme sowie an andere
Feldgeräte. Dank der frei konfigurierbaren integrierten 16 Eingänge
und 8 Ausgänge des Controllers können Sie den Trajexia perfekt
in Ihr Anlagenkonzept integrieren.
5.2.4 MECHATROLINK-II
Der TJ1-ML__ ermöglicht bei vollständiger Transparenz
im gesamten System eine perfekte Steuerung von bis
zu 16 Servotreiber, Frequenzumrichtern oder E/A-Modulen.
Der MECHATROLINK-II bietet die Kommunikationsgeschwindigkeit
und Präzision, die für die perfekte Bewegungssteuerung von
Servotreibern unverzichtbar ist. Die Bewegungszykluszeit
kann zwischen 0,5 ms, 1 ms oder 2 ms gewählt werden.
Revision 3.0
5.2.5 TJ1-FL02
Der TJ1-FL02 ist eine analoge Regelungs-Baugruppe.
Sie kann bis zu zwei Achsen in folgenden Modi steuern:
KURZANLEITUNG 44
Page 45

Weitere Informationen
• Analoger Drehzahlwert plus Rückmeldung vom Drehgeber.
• Drehgebereingang, Inkremental- oder Absolutwert.
• Impulsausgabe.
An den TJ1-FL02 kann jeder beliebige Servotreiber angeschlossen
werden.
5.2.6 Antriebe und Frequenzumrichter
Eine große Auswahl an Servo-, Linear- und Torquemotoren sowie
Servotreibern und Frequenzumrichtern, die Ihren Anforderungen
an Integrationsdichte, Leistung und Zuverlässigkeit entsprechen,
steht Ihnen für die Lösung Ihrer Applikation zur Verfügung.
Die an den MECHATROLINK-II Motion-Bus angeschlossenen
Frequenzumrichter werden mit derselben Systemtaktzeit
wie die Servotreiber betrieben.
5.2.7 Dezentrale E/A’s
Dezentrale E/A-Module am MECHATROLINK-II Motion-Bus
ermöglichen eine Erweiterung des Systems bei Beibehaltung
eines einzigen durchgängigen Motion-Bussystems.
5.2.8 PROFIBUS
Der TJ1-PRT ist eine Schnittstelle zwischen dem Trajexia-System
und einem PROFIBUS-Netzwerk.
5.2.9 DeviceNet
Der TJ1-DRT ist eine Schnittstelle zwischen dem Trajexia-System
und einem DeviceNet-Netzwerk.
5.3 Trajexia-Handbücher
Revision 3.0
Diese Handbücher enthalten alle Informationen zum Trajexia-System:
KURZANLEITUNG 45
Page 46

Weitere Informationen
/i
Bezeichnung Cat. No. Inhalt
Hardwarereferenzhandbuch
für das Trajexia Motion Control
System
Trajexia Motion Control System
Programmierhandbuch
I51E Beschreibt die Installation und
Hardware-Spezifikationen der
Trajexia-Module und erläutert
die Trajexia Systemphilosophie.
I52E Beschreibt die für die Program-
mierung von Trajexia verwendeten BASIC-Befehle, erklärt
die Kommunikationsprotokolle
und die Trajexia Tools-Software, gibt praktische Beispiele
und Informationen zur Fehlersuche.
Revision 3.0
KURZANLEITUNG 46
Page 47

Revisionshistorie
Revisionshistorie
Der Revisionsnummer des Handbuchs bildet das Ende der Katalognummer, die auf der vorderen Umschlagseite des Handbuchs angegeben ist.
/i
Überarbeitungsstand Datum Änderungen
01 August 2006 ORIGINAL
02 Oktober 2006 DeviceNet-Aktualisierung
03 Mai 2007 Aktualisiert durch TJ1-MC04 und TJ1-ML04.
Aktualisiert durch allgemeine Informationen zum Trajexia-System und den Vorteilen
von Trajexia.
Revision 3.0
KURZANLEITUNG 47
 Loading...
Loading...