


Cat. No.
I50E-ES-03
Sistema Motion Control Trajexia
TJ1-MC04
TJ1-MC 1 6
GUÍA RÁPIDA DE REFERENCIA
Contenido
1 Introducción ..................................................................................................................................................................................................4
1.1 Acerca de esta guía..........................................................................................................................................................................................................................4
1.2 Resumen de esta guía......................................................................................................................................................................................................................5
1.3 Elementos necesarios ......................................................................................................................................................................................................................6
2 De la caja al carril.......................................................................................................................................................................................... 7
2.1 Reglas del sistema Trajexia..............................................................................................................................................................................................................7
2.2 Contenido de las cajas .....................................................................................................................................................................................................................8
2.3 Instalación del sistema Trajexia......................................................................................................................................................................................................10
3 Conexiones..................................................................................................................................................................................................13
3.1 Antes de comenzar el trabajo .........................................................................................................................................................................................................13
3.2 Fuentes de alimentación.................................................................................................................................................................................................................13
3.2.1 Fuente de alimentación recomendada .............................................................................................................................................................................14
3.2.2 Fuentes de alimentación opcionales ................................................................................................................................................................................15
3.3 TJ1-MC__ .......................................................................................................................................................................................................................................16
3.4 TJ1-ML__........................................................................................................................................................................................................................................17
3.4.1 Conexión de la unidad de interfaz MECHATROLINK-II al servodriver.............................................................................................................................18
3.4.2 Conexión del servodriver monofásico de 200 V ...............................................................................................................................................................19
3.4.3 Conexión del servodriver trifásico de 400 V .....................................................................................................................................................................20
3.4.4 Conexión de la unidad NS115..........................................................................................................................................................................................21
3.4.5 Configuración de los interruptores DIP y la dirección de la unidad NS115 ......................................................................................................................22
3.5 Instalación completa .......................................................................................................................................................................................................................23
4 Trajexia Tools..............................................................................................................................................................................................24
4.1 Configuración mínima del PC .........................................................................................................................................................................................................24
4.2 Instalación del software Trajexia Tools...........................................................................................................................................................................................24
4.3 Conexión a la unidad TJ1-MC__ ....................................................................................................................................................................................................29
4.4 Creación de un proyecto por primera vez.......................................................................................................................................................................................34
4.5 Instalación completa .......................................................................................................................................................................................................................42
5 Más información ......................................................................................................................................................................................... 43
5.1 Sistema Trajexia .............................................................................................................................................................................................................................43
5.2 Aspectos destacados de Trajexia...................................................................................................................................................................................................44
5.2.1 Conexión directa mediante Ethernet ................................................................................................................................................................................44
5.2.2 Protección de los programas............................................................................................................................................................................................44
5.2.3 Puerto serie y E/S locales ................................................................................................................................................................................................44
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 2
5.2.4 MECHATROLINK-II..........................................................................................................................................................................................................44
5.2.5 TJ1-FL02 ..........................................................................................................................................................................................................................44
5.2.6 Drivers y variadores..........................................................................................................................................................................................................45
5.2.7 E/S remotas......................................................................................................................................................................................................................45
Contenido
5.2.8 PROFIBUS .......................................................................................................................................................................................................................45
5.2.9 DeviceNet .........................................................................................................................................................................................................................45
5.3 Manuales de Trajexia .....................................................................................................................................................................................................................45
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 3
Introducción
1 Introducción
Esta guía rápida de referencia pretende familiarizar rápidamente
al usuario con el sistema Trajexia. En esta guía rápida de referencia
se explica cómo realizar un movimiento simple de un eje mediante
el sistema Trajexia y un servodriver Sigma-II en MECHATROLINK-II.
Esta guía rápida de referencia está dirigida a personal con conocimientos
de sistemas eléctricos (ingenieros eléctricos o equivalentes).
El ingeniero debe de asegurarse de tomar las precauciones
necesarias para operar de forma segura con la alimentación
eléctrica (alimentación de Trajexia y del servodriver,
que puede ser a 380 Vc.a.) y las piezas móviles del motor.
Cuando el sistema Trajexia se utilice en una aplicación real,
se deben seguir las advertencias y precauciones de seguridad
enumeradas en el manual de referencia de hardware.
Para obtener información detallada del sistema Trajexia,
consulte los manuales enumerados en la sección 5.3.
1.1 Acerca de esta guía
En esta guía rápida de referencia se describe cómo conectar
un sistema Trajexia a un servodriver Sigma-II mediante
comunicación MECHATROLINK-II. Además, se describe
la instalación del software Trajexia Tools y se realiza
un programa de ejemplo para controlar un servomotor.
Esta guía rápida de referencia contiene ambos procedimientos
e información descriptiva. Los pasos que el lector debe realizar
están numerados. El resto de la información se presenta
en texto normal o viñetas.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 4
Introducción
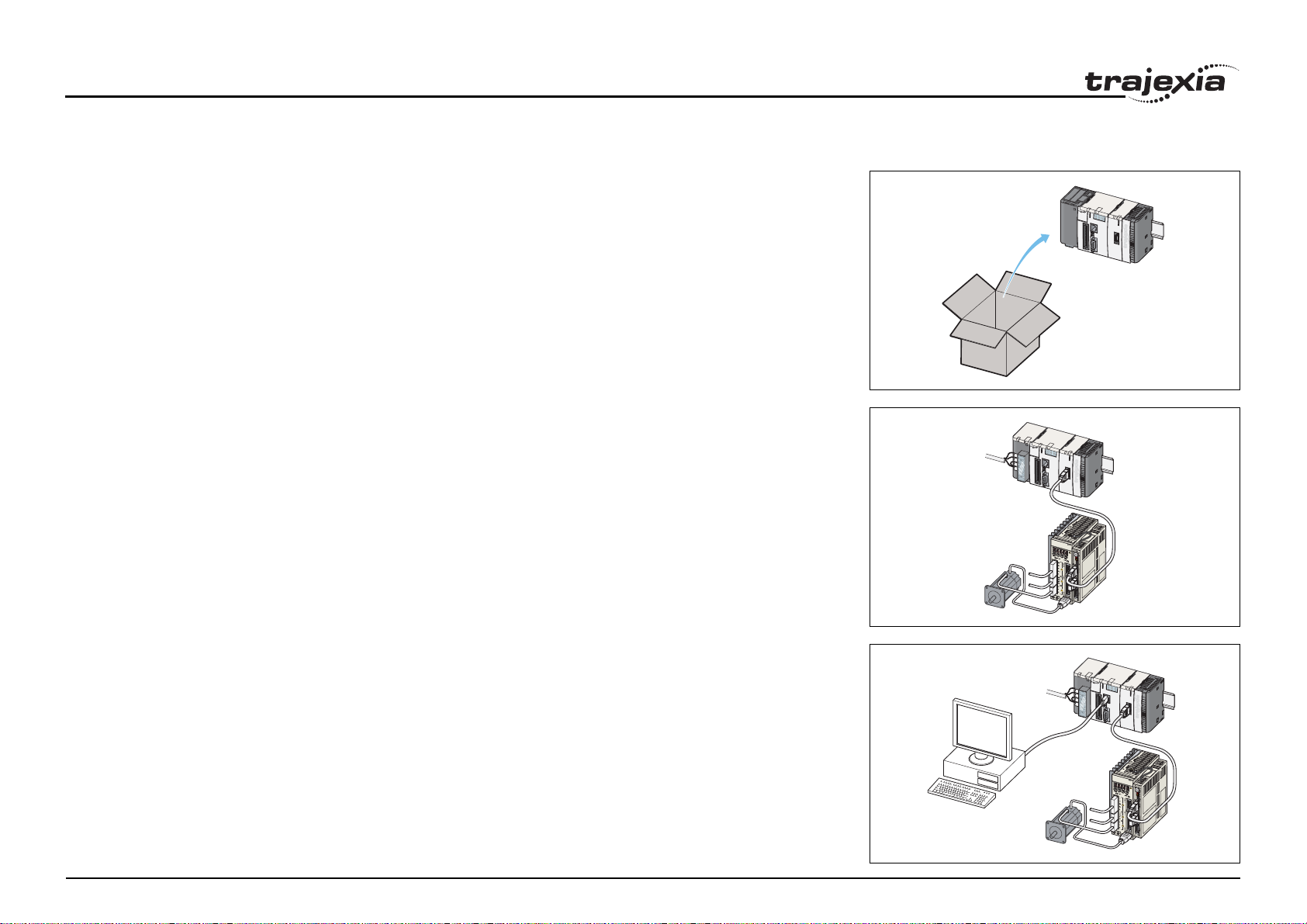
1.2 Resumen de esta guía
En el capítulo 2 se describe cómo desembalar las cajas e instalar
las unidades Trajexia en un carril DIN.
En el capítulo 3 se describe cómo conectar un servomotor
al sistema Trajexia.
fig. 1
fig. 2
MC16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
M
C
1
6
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
C
N
O
1
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
En el capítulo 4 se describe cómo conectar el sistema Trajexia a un
fig. 3
PC y escribir un programa de ejemplo para accionar el servomotor.
MC
16
0
O
1
M
R
O
N
2
M
O
T
I
O
N
3
C
O
N
T
R
O
4
L
L
M
E
R
L
1
5
6
6
7
R
U
N
C
N
8
F
3
C
N
1
T
E
R
M
CN1
O
N
/
O
F
F
W
I
R
E
2
/
4
C
N
2
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 5
Introducción
1.3 Elementos necesarios
Necesita los siguientes elementos para la instalación descrita
en esta guía rápida de referencia.
1.3.1 Unidades Trajexia
• Fuente de alimentación. Puede ser una de las siguientes:
- CJ1W-PA202.
- CJ1W-PA205R.
- CJ1W-PD025.
• TJ1-MC__ (unidad de Motion Control). Puede ser una
de las siguientes:
-TJ1-MC04.
-TJ1-MC16.
• TJ1-ML__ (unidad maestra MECHATROLINK-II).
Puede ser una de las siguientes:
- TJ1-ML04.
- TJ1-ML16.
• TJ1-TER (unidad de terminación). Se suministra junto con
la unidad TJ1-MC__.
1.3.2 Otras unidades
• Unidad de interfaz MECHATROLINK-II (NS115).
• Cable MECHATROLINK-II.
• Terminación de MECHATROLINK-II.
• Servodriver monofásico de 200 V o servodriver trifásico de 400 V.
•Servomotor.
• Ordenador.
• CD de software Trajexia Tools.
• Cables de alimentación y de encoder del servodriver al motor.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 6
De la caja al carril
2 De la caja al carril
En este capítulo se describen las acciones necesarias para
conectar las unidades a un carril DIN.
2.1 Reglas del sistema Trajexia
Antes de conectar las unidades entre sí, asegúrese de que
se cumplen estas reglas de conexión:
• La primera unidad de la izquierda es una fuente
de alimentación.
• Debe conectar una TJ1-MC__ a la fuente de alimentación.
• No puede conectar más de siete unidades además de una
TJ1-TER a la TJ1-MC__.
• La última unidad debe ser una TJ1-TER.
• Puede instalar hasta cuatro unidades TJ1-ML__ en el sistema.
• Puede instalar hasta siete unidades TJ1-FL02 (unidad de
Flexible Axis) en el sistema con la TJ1-MC16. Puede instalar
hasta tres unidades TJ1-FL02 en el sistema con la TJ1-MC04.
• Puede instalar una TJ1-PRT (unidad esclava PROFIBUS-DP)
o una TJ1-DRT (unidad esclava DeviceNet) en el sistema.
• Puede incluir las unidades entre la TJ1-MC__ y la TJ1-TER
en cualquier orden.
No cambie las posiciones de las unidades después de haber
escrito los programas, ya que pueden dejar de ser válidos.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 7
De la caja al carril
2.2 Contenido de las cajas
En esta sección se enumeran las unidades Trajexia que necesita
para la instalación.
2.2.1 Fuente de alimentación
La caja de la fuente de alimentación contiene:
• Hoja de precauciones.
• Fuente de alimentación.
• Etiqueta de protección colocada en la superficie superior
de la unidad.
2.2.2 TJ1-MC__
La caja de la TJ1-MC__ contiene:
• Hoja de precauciones.
•TJ1-MC__.
• Etiqueta de protección colocada en la superficie superior
de la TJ1-MC__.
• TJ1-TER, conectada a la TJ1-MC__.
• Piezas para un conector serie.
• Piezas para un conector de E/S.
• Dos presillas metálicas para carril DIN para prevenir que
el sistema Trajexia se caiga del carril.
• Presilla blanca, para sustituir la amarilla de la fuente de alimentación.
2.2.3 TJ1-ML__
La caja de la TJ1-ML__ contiene:
• Hoja de precauciones.
• TJ1-ML__.
• Etiqueta de protección colocada en la superficie superior
de la unidad.
2.2.4 Software
Revisión 3.0
La caja de software contiene:
• CD-ROM de Trajexia Tools.
GUÍA RÁPIDA DE REFERENCIA 8
De la caja al carril
• Etiqueta con el número de licencia de software,
pegada en la caja del CD.
• Tarjeta de formulario de registro de garantía.
• Etiquetas de direcciones.
• Sobre de licencia.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 9
De la caja al carril
2.3 Instalación del sistema Trajexia
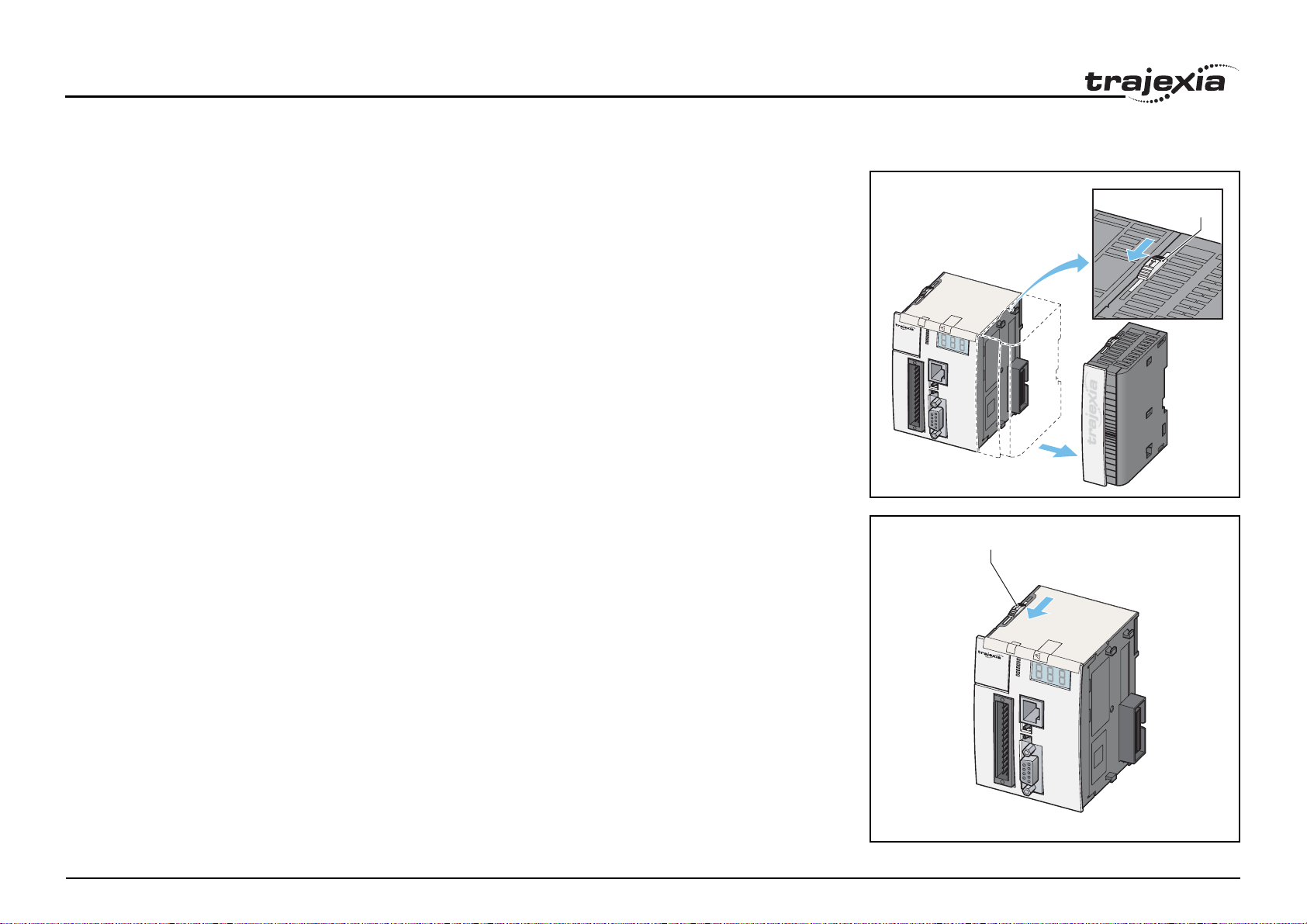
1. Extraiga todas las unidades del embalaje. Asegúrese
de que todas las unidades están completas.
2. No quite las etiquetas de protección de las unidades.
3. Para desconectar la TJ1-MC__ y la TJ1-TER, empuje
las presillas (A) de la parte superior e inferior de la TJ1-TER
hacia la parte frontal.
4. Desconecte la TJ1-TER de la TJ1-MC__.
5. Empuje las presillas (A) de la parte superior e inferior de todas
las unidades hacia la parte frontal.
fig. 1
fig. 2
A
MC16
0
O
1
M
R
O
N
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
5
6
7
C
N
3
C
N
1
T
E
R
M
O
N
/O
F
F
W
IR
E
2
/4
C
N
2
A
MC16
0
OMRON
1
2
MOTION CONTROLLER
3
4
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 10
De la caja al carril
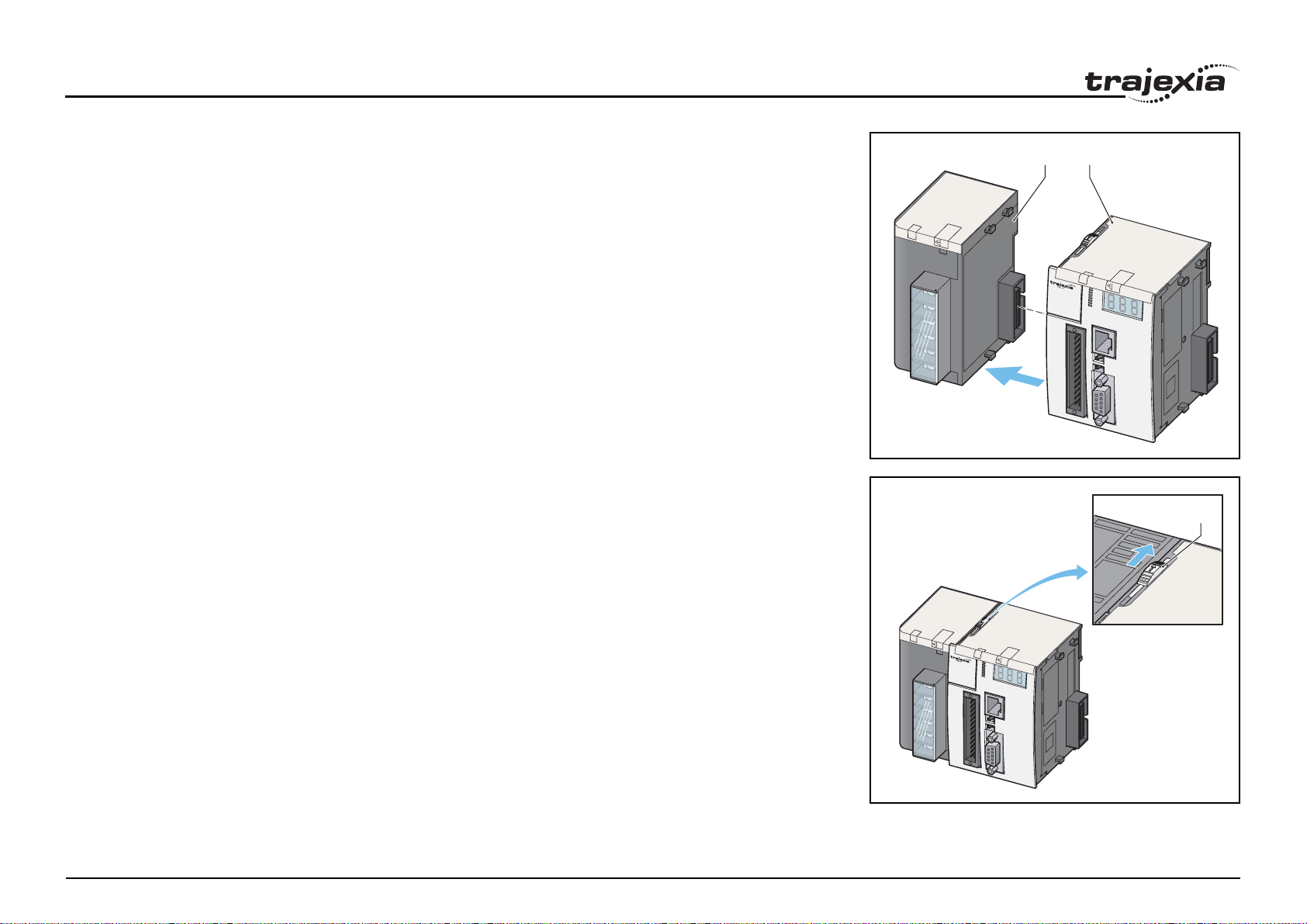
6. Conecte la TJ1-MC__ (C) a la fuente de alimentación (B).
7. Empuje las presillas (A) de la parte superior e inferior hacia
la parte trasera.
fig. 3
fig. 4
MC16
OMRON
MOTION CONTROLL
CB
0
1
2
3
4
ER
5
6
7
CN3
CN1
TERM
ON/OFF
WIRE
2/4
CN2
A
MC16
0
OMRON
1
2
M
OTION CON
3
TROLLER
4
5
6
7
C
N3
C
N1
TERM
ON
/O
FF
W
IRE
2/4
CN
2
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 11
De la caja al carril
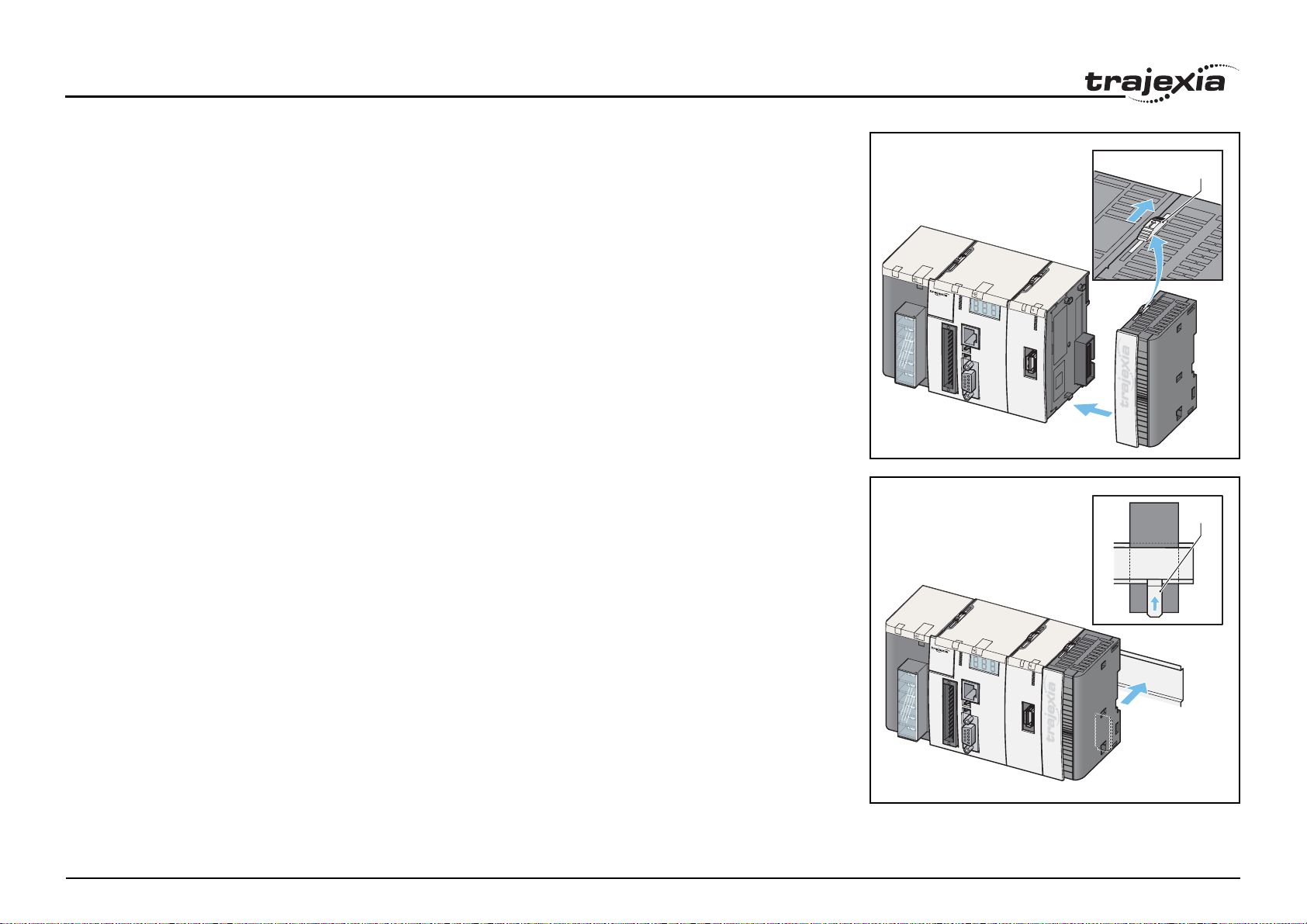
8. Repita los dos pasos anteriores para todas las demás unidades.
9. Asegúrese de que la última unidad sea la TJ1-TER.
10. Baje todas las presillas (D) de todas las unidades.
11. Conecte el sistema Trajexia al carril DIN.
12. Suba todas las presillas (D) de todas las unidades.
fig. 5
fig. 6
MC16
O
M
R
O
MOTION CONTROLLER
A
0
1
N
2
3
4
M
L
5
6
7
CN3
1
6
R
U
N
8
CN1
TERM
ON/OFF
W
IRE
2/4
CN2
F
C
N
1
D
MC16
0
O
1
M
R
ON
2
M
O
T
IO
N
3
C
O
N
T
R
O
4
L
L
E
R
C
N
3
ML16
5
6
7
C
N
1
T
E
R
M
O
N
/
O
F
F
W
IR
E
2
/
4
C
N
2
R
U
N
8
F
C
N
1
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 12
Conexiones
3 Conexiones
En este capítulo se describen las conexiones de las unidades
Trajexia.
3.1 Antes de comenzar el trabajo
En este ejemplo, no están instaladas las paradas de emergencia,
los circuitos de bloqueo ni los finales de carrera.
Precaución
El ingeniero debe de asegurarse de tomar las
precauciones necesarias para operar de forma segura
con la alimentación eléctrica (alimentación de Trajexia
y del servodriver, que puede ser a 380 Vc.a.) y las
piezas móviles del motor.
3.2 Fuentes de alimentación
Puede utilizar tres tipos distintos de fuentes de alimentación:
/i
Fuente de
alimentación
CJ1W-PA202 c.a. 110 – 240 V 85 – 264 V 47 – 63 Hz 14 W
CJ1W-PA205R c.a. 110 – 240 V 85 – 264 V 47 – 63 Hz 25 W
CJ1W-PD025 c.c. 24 V 21,6 – 26,4 V N/D 25 W
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 13
Corriente Entrada
tensión
Tensión de
alimentación
de servicio
Límites de
frecuencia
de servicio
Potencia
de salida
Conexiones
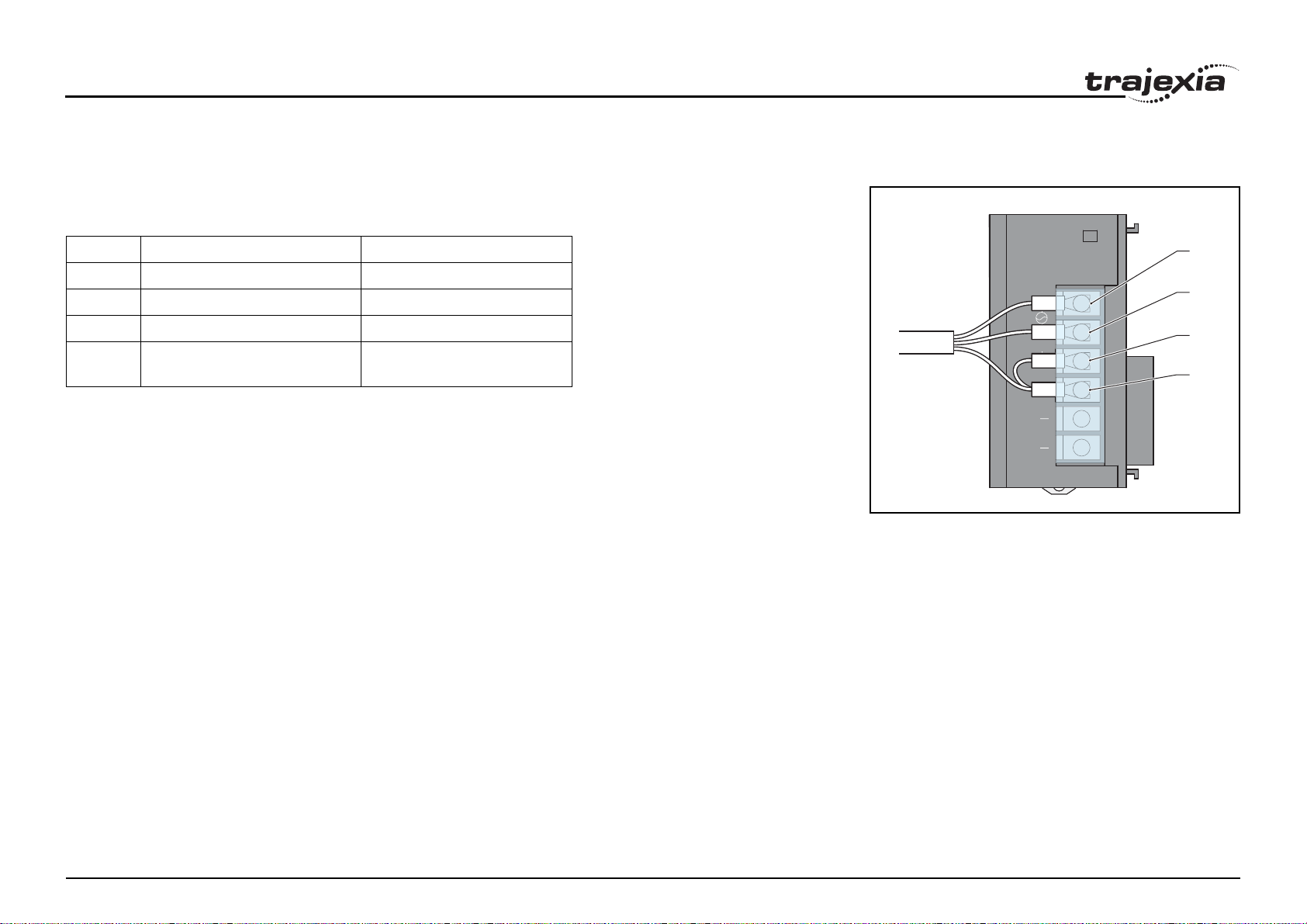
3.2.1 Fuente de alimentación recomendada
La fuente de alimentación recomendada es la CJ1W-PA202.
1. Conecte la fuente de alimentación CJ1W-PA202 del siguiente
modo:
/i
Terminal Descripción Conexión
A Alimentación de 110 – 240 V Vc.a. directa
B Alimentación de 110 – 240 V Vc.a. directa
C Linea de tierra Cortocircuito a terminal D
D Tierra • Cortocircuito a terminal C
• Tierra
fig. 1
PA2 02
AC100
-240V
INPUT
L2/N
POWER
A
L1
B
C
D
NC
NC
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 14
Conexiones
A
V
O
T
RUN
INPUT
V
L2/N
UT
C
C
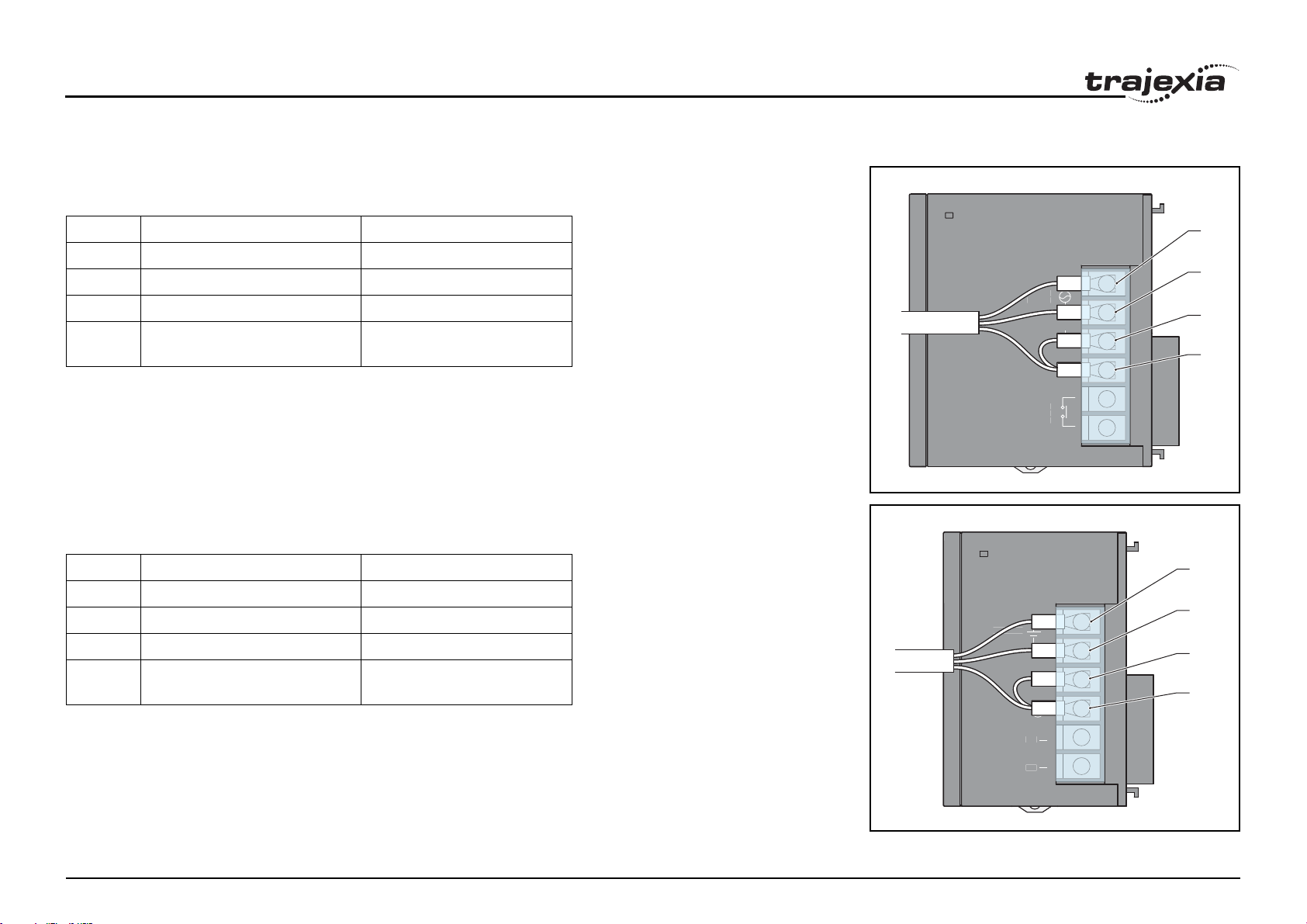
3.2.2 Fuentes de alimentación opcionales
1. Conecte la fuente de alimentación CJ1W-PA205R del siguiente
modo:
/i
Terminal Descripción Conexión
A Alimentación de 110 – 240 V Vc.a. directa
B Alimentación de 110 – 240 V Vc.a. directa
C Linea de tierra. Cortocircuito a terminal D
D Tierra • Cortocircuito a terminal C
• Tierra
1. Conecte la fuente de alimentación CJ1W-PD025 del siguiente
modo:
/i
Terminal Descripción Conexión
A Alimentación de 24 V 24 Vc.c.
B Alimentación de 0 V 0 V
C Linea de tierra Cortocircuito a terminal D
D Tierra • Cortocircuito a terminal C
• Tierra
fig. 2
fig. 3
PA2 05 R
POWER
PD025
PD025
POWER
POWER
INP
AC100-240
UTPU
C240
DC24V
A
B
C
D
A
B
C
D
N
N
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 15

Conexiones
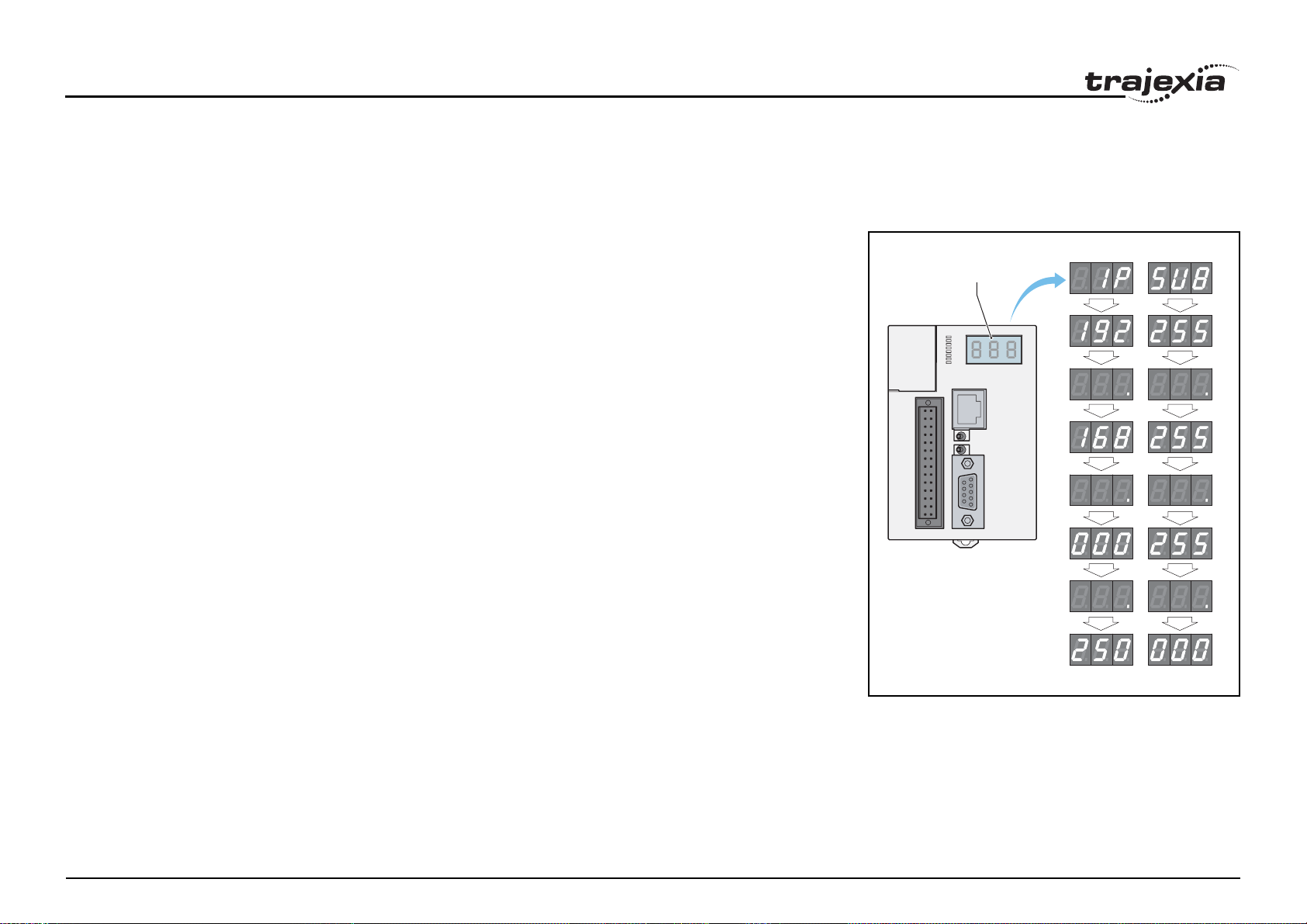
3.3 TJ1-MC__
3.3.1 Puerto Ethernet
Si conecta la alimentación del sistema Trajexia, el display de LED
de tres dígitos (A) muestra la dirección IP y la máscara de subred
de la TJ1-MC__.
Utilice el puerto Ethernet (B) para conectar la TJ1-MC__ a un PC.
Puede utilizar un cable cruzado ó plano de Ethernet para la
conexión. Si conecta el PC directamente al TJ1-MC__ y no
mediante un concentrador u otro dispositivo de red, el PC debe
contar con una dirección IP fija.
La TJ1-MC__ detecta automáticamente la inserción de un cable Ethernet
en el puerto Ethernet. Al insertar un cable Ethernet en el puerto Ethernet,
el display LED (A) muestra la dirección IP de la TJ1-MC__.
3.3.2 Puerto serie
El puerto serie (D) se utiliza para conectar el TJ1-MC__ a un
dispositivo que necesita conexión serie. Se describe en el manual
de referencia de hardware. En este ejemplo de instalación no
se necesita este puerto.
3.3.3 Puerto de E/S de 28 pines
El puerto de E/S de 28 pines (C) contiene 16 entradas digitales
y 8 salidas digitales. Se describe en el manual de referencia
de hardware. En este ejemplo de instalación no se necesita
este puerto.
fig. 4
A
B
C
D
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 16

Conexiones
3.4 TJ1-ML__
La TJ1-ML__ es el maestro de una serie de dispositivos
MECHATROLINK-II. Los dispositivos MECHATROLINK-II
son servodrivers, E/S o variadores. Las E/S y los variadores
se describen en el manual de referencia de hardware.
La TJ1-ML__ tiene un puerto (A) para conectar el primer
dispositivo MECHATROLINK-II.
fig. 5
ML16
RUN
8F
CN1
A
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 17

Conexiones
3.4.1 Conexión de la unidad de interfaz
MECHATROLINK-II al servodriver
Puede utilizar un servodriver monofásico de 200 V
(consulte la página 19) o un servodriver trifásico de 400 V
(consulte la página 20).
1. Inserte las presillas (A) de la unidad de interfaz
MECHATROLINK-II (NS115) en las aberturas (B)
del servodriver.
2. Asegúrese de que el puerto (C) del servodriver se encuentra
en el lado opuesto a la ranura del NS115.
3. Inserte la presilla (D) del NS115 en la abertura (E)
del servodriver.
4. Conecte el cable de tierra (F) del NS115 en el punto marcado
con G (G) en el servodriver.
fig. 6
fig. 7
C
G
B
E
D
A
F
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 18

Conexiones
3.4.2 Conexión del servodriver monofásico de 200 V
1. Los terminales del grupo A son para la entrada de alimentación que
se utiliza para generar la salida de potencia para el motor (grupo C).
(etapa de potencia) Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
D, E Alimentación de 200 – 230 V Vc.a. directa
F Bus de c.c. +1 Cortocircuito a terminal G
G Bus de c.c.+ 2 Cortocircuito a terminal F
2. Los terminales del grupo B son para la entrada de alimentación
para las necesidades de alimentación interna del servodriver,
electrónica de control, display, LEDs, (etapa de control)
Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
H Alimentación de 200 – 230 V Vc.a. directa
I Alimentación de 200 – 230 V Vc.a. directa
3. Los terminales del grupo C son terminales para la salida de
potencia al motor. Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
fig. 8
G
D
E
F
H
I
L1
L2
L1C
L2C
B1
B2
1
2
200V
MODE/SET
A
B
C
CHARGE
DATA/
POWER
C
L1
N
3
L2
1
2
C
N
1
L1C
L2C
B1
B2
U
v
C
N
w
2
J
U Fase de motor U Terminal U del motor
V Fase de motor V Terminal V del motor
W Fase de motor W Terminal W del motor
4. Conecte el cable de encoder del servomotor al puerto
de entrada de encoder (J).
Revisión 3.0
U
W
U
V
V
W
GUÍA RÁPIDA DE REFERENCIA 19

Conexiones
3.4.3 Conexión del servodriver trifásico de 400 V
1. Los terminales del grupo A son para la entrada de alimentación que
se utiliza para generar la salida de potencia para el motor (grupo C)
(etapa de potencia). Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
D, E, F Alimentación trifásica de 400 V Vc.a. directa
G Bus de c.c.+ 1 Cortocircuito a terminal H
H Bus de c.c.+ 2 Cortocircuito a terminal G
2. Los terminales del grupo B son para la entrada de alimentación
para las necesidades de alimentación interna del servodriver,
electronica de control, display, LEDs (etapa de control).
Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
I Alimentación de control 24 Vc.c.
J Alimentación de control 0 Vc.c.
K Común para resistencia regenerativa Cortocircuito a terminal L
L Resistencia regenerativa interna Cortocircuito a terminal K
1. Si se utiliza la resistencia interna.
3. Los terminales del grupo C son terminales para la salida de
potencia al motor. Conecte los terminales del modo siguiente:
/i
Terminal Descripción Conexión
U Fase de motor U Terminal U del motor
V Fase de motor V Terminal V del motor
W Fase de motor W Terminal W del motor
Revisión 3.0
4. Conecte el cable de encoder del servomotor al puerto
de entrada de encoder (M)
fig. 9
D
E
F
G
H
I
J
K
L
1
L1
L2
L3
L1C
L2C
B1
B2
B3
1
2
MODE/SET
CHARGE
A
B
C
400V
DATA/
POWER
C
L1
N
3
L2
L3
1
2
C
N
1
L1C
L2C
B1
B2
B3
U
v
C
N
w
2
M
U
V
W
U
V
W
GUÍA RÁPIDA DE REFERENCIA 20

Conexiones
3.4.4 Conexión de la unidad NS115
El NS115 tiene un interruptor DIP, un interruptor rotativo
de dirección o nodo y dos puertos de bus MECHATROLINK-II.
/i
Puerto
o interruptor
A Interruptor rotativo de dirección
B Interruptor DIP
C Puertos de bus MECHATROLINK-II
Descripción
1. Conecte un cable de MECHATROLINK-II (E) a la TJ1-ML__ (D)
y a uno de los puertos de bus del NS115.
2. Conecte una terminación de MECHATROLINK-II (F) al otro
puerto de bus del NS115.
fig. 10
A
B
C
C
fig. 11
D E
Revisión 3.0
F
GUÍA RÁPIDA DE REFERENCIA 21

Conexiones
3.4.5 Configuración de los interruptores DIP
y la dirección de la unidad NS115
Los interruptores DIP del NS115 se usan para configurar
las opciones de comunicación.
1. Configure los interruptores DIP del siguiente modo:
/i
Interruptor
DIP
1 Velocidad
2 Longitud
3 Rango
4 Mantenimiento
Función Ajuste Descripción
ON 10 Mbps
de transmisión
ON Transmisión de datos de 32 bytes
de datos
OFF Direcciones 40-4F
de direcciones
OFF Siempre se debe configurar en OFF.
(reservado)
ON no se utiliza.
2. Configure el selector de dirección del NS115 en 1.
De este modo, se asigna la dirección lógica 41 al servodriver.
fig. 12
23 4
1
ON OFF
fig. 13
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 22

Conexiones
3.5 Instalación completa
La instalación completa de este ejemplo consta de fuente
de alimentación (A), TJ1-MC__ (B), TJ1-ML__ (C), servodriver (D),
NS115 (E), motor (F) y TJ1-TER (G).
Ahora puede quitar las etiquetas de protección de las unidades.
fig. 14
G
C
B
A
M
C
1
6
0
O
1
M
R
O
N
2
MOTION CON
3
TROLLER
4
M
L
1
5
6
7
CN3
6
R
U
N
8
CN1
TERM
ON/OFF
WIRE
2/4
CN2
F
C
N
1
F
D
E
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 23

Trajexia Tools
4 Trajexia Tools
4.1 Configuración mínima del PC
Necesita un PC con esta configuración mínima para instalar
Trajexia Tools:
• Windows 98 SE.
• CPU Pentium a 300 MHz.
•64 MB de RAM.
• 140 MB de espacio en disco duro.
• Puerto Ethernet.
• Si el sistema operativo es Windows 98 SE o Windows ME:
Internet Explorer 5.0.
• Si el sistema operativo es Windows 2000 o Windows XP:
Internet Explorer 6.0.
4.2 Instalación del software Trajexia Tools
1. Inserte el CD de Trajexia Tools en la unidad de CD-ROM del PC.
2. El programa de instalación de Trajexia Tools se inicia
automáticamente.
3. Si el programa de instalación de Trajexia Tools no se inicia
automáticamente, hágalo manualmente: ejecute setup.exe
en el directorio raíz del CD.
4. Seleccione el idioma que desee utilizar en la lista desplegable.
Haga clic en OK (Aceptar).
fig. 1
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 24

Trajexia Tools
5. Se muestra la ventana del programa de instalación de Trajexia
Tools. Haga clic en Next (Siguiente).
6. Haga clic en
Yes
(Sí) para aceptar el contrato de licencia y continuar.
fig. 2
fig. 3
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 25

Trajexia Tools
7. Escriba su nombre en el campo Name (Nombre).
8. Escriba el nombre de la empresa en el campo
Company
(Empresa).
9. Escriba el número de licencia en los campos Licence
(Licencia). El número de licencia de usuario está en la etiqueta
de la caja del CD de Trajexia Tools.
10. Haga clic en Next (Siguiente).
11. Haga clic en Yes (Sí).
fig. 4
fig. 5
12. Haga clic en Next (Siguiente).
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 26
fig. 6

Trajexia Tools
13. Haga clic en Next (Siguiente).
14. Haga clic en Next (Siguiente).
fig. 7
fig. 8
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 27

Trajexia Tools
15. Haga clic en Next (Siguiente).
16. El programa de instalación de Trajexia Tools copia los archivos
en el PC. Esto puede durar unos minutos.
17. Haga clic en Finish (Finalizar). Se muestra la ventana
del archivo léame de CX-Drive. Cierre esta ventana.
fig. 9
fig. 10
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 28
Trajexia Tools
4.3 Conexión a la unidad TJ1-MC__
Necesita un cable cruzado o plano de Ethernet para conectar
el PC a la TJ1-MC__.
1. Conecte el sistema Trajexia a la alimentación.
2. La dirección IP y la máscara de subred de la TJ1-MC__
se muestra 3 veces en el display LED (A). La dirección IP
de la TJ1-MC__ es 192.168.0.250. La máscara de subred
predeterminada es 255.255.255.0.
3. Si necesita volver a ver la dirección IP y la máscara de subred
de la TJ1-MC__, desconecte la alimentación del sistema
Trajexia y vuelva a conectarla.
4. Conecte el cable Ethernet al puerto Ethernet del PC.
5. Conecte el cable Ethernet al puerto Ethernet de la TJ1-MC__.
La dirección IP de la TJ1-MC__ se muestra 4 veces en el
display LED.
fig. 11
A
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 29

Trajexia Tools
6. Inicie el programa Trajexia Tools en el PC. Seleccione
en el menú Inicio de Windows:
- Programas
- OMRON
- Trajexia Tools
- Trajexia Tools
7. Aparece la pantalla de inicio de Motion Perfect 2.
Espere hasta que esté visible el botón Cancel (Cancelar).
A continuación, haga clic en Cancel (Cancelar).
8. Seleccione el menú:
- Options (Opciones)
- Communications (Comunicaciones)
fig. 12
fig. 13
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 30

Trajexia Tools
9. Asegúrese de que ENet0 en la lista está seleccionado.
10. Haga clic en Configure (Configurar).
11. Escriba 192.168.0.250 en el campo Server name/IP address
(Nombre de servidor/Dirección IP).
12. Haga clic en OK (Aceptar).
13. Haga clic en OK (Aceptar).
fig. 14
fig. 15
fig. 16
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 31

Trajexia Tools
14. Abra el Panel de control de Windows en el PC.
15. Haga doble clic en el icono Conexiones de red.
16. Haga clic con el botón derecho en el icono Conexión
de área local. Haga clic en el menú Propiedades.
17. Haga clic en la ficha General.
18. Seleccione Protocol Internet (TCP/IP) en la lista.
19. Haga clic en Propiedades.
fig. 17
fig. 18
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 32

Trajexia Tools
20. Haga clic en la ficha General.
21. Seleccione Usar la siguiente dirección IP.
22. Escriba la dirección 192.168.0.251 en el campo Dirección IP.
23. Escriba 255.255.255.0 en el campo Máscara de subred.
24. Haga clic en Aceptar.
25. Haga clic en Aceptar.
26. Cierre la pantalla Conexiones de red.
fig. 19
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 33

Trajexia Tools
4.4 Creación de un proyecto por primera vez
1. Desconecte la alimentación del sistema Trajexia,
del servodriver y del NS115.
2. Conecte la alimentación del servodriver y del NS115.
3. Conecte la alimentación del sistema Trajexia.
4. Vaya al programa Motion Perfect 2 en el PC.
5. Seleccione el menú:
- Controller (Controlador)
- Connect (Conectar)
fig. 20
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 34

Trajexia Tools
6. Espere hasta que esté visible el botón OK (Aceptar).
A continuación, haga clic en OK (Aceptar).
7. Haga clic en New (Nuevo).
fig. 21
fig. 22
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 35

Trajexia Tools
8. Haga clic en Yes (Sí).
9. Busque la ubicación en la que desea guardar el nuevo
proyecto en el árbol Disk directory (Directorio de disco).
10. Escriba el nombre del nuevo proyecto en el campo
Project name (Nombre de proyecto).
11. Haga clic en Create (Crear).
fig. 23
fig. 24
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 36

Trajexia Tools
12. Haga clic en Aceptar.
13. Haga clic en el botón Intelligent drives (Unidades inteligentes)
(A) de la barra de herramientas.
fig. 25
fig. 26
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 37

Trajexia Tools
14. Haga clic en el botón Config (Configurar).
15. Espere hasta que aparezca la ventana
MECHATROLINK Drive SGDH-01AE-OY
(Unidad MECHATROLINK SGDH-01AE-OY).
16. Haga clic en la ficha Configuration (Configuración).
fig. 27
fig. 28
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 38

Trajexia Tools
17. Desplácese a la fila de la lista donde el valor de la columna
Index (Índice) es Pn50A.3.
18. En esta fila, haga clic en el elemento de la columna
Value (Valor). Aparece una lista desplegable.
19. Seleccione el valor 8:Sets signal OFF (8:Desconecta la señal)
en la lista desplegable.
20. Pulse la tecla Intro. El icono de la primera columna
de la fila ahora está de color rojo, para indicar
que ha cambiado el ajuste de esta fila.
21. Desplácese a la fila de la lista donde el valor de la columna
Index (Índice) es Pn50B.0.
22. En esta fila, haga clic en el elemento de la columna Value
(Valor). Aparece una lista desplegable.
23. Seleccione el valor 8:Sets signal OFF (8:Desconecta la señal)
en la lista desplegable.
24. Pulse la tecla Intro. El icono de la primera columna de la
fila ahora está de color rojo, para indicar que ha cambiado
el ajuste de esta fila.
25. Haga clic en el botón Download to Drive
(Descargar en unidad) (A).
26. Haga clic en Close (Cerrar).
fig. 29
fig. 30
A
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 39

Trajexia Tools
27. Haga clic en Close (Cerrar).
28. Haga clic en Yes (Sí).
fig. 31
29. Desconecte la alimentación del sistema Trajexia y del
servodriver para que surtan efectos los ajustes del driver.
30. Conecte la alimentación del servodriver y del NS115.
31. Conecte la alimentación del sistema Trajexia.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 40

Trajexia Tools
32. Seleccione el menú:
- Program (Programa)
- New (Nuevo)
33. Escriba el nombre del nuevo programa en el campo Enter
new program name (Escriba el nombre del programa).
34. Haga clic en OK (Aceptar).
fig. 32
fig. 33
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 41

Trajexia Tools
35. Seleccione la ventana Edit (Editar).
36. Escriba este programa de ejemplo en la ventana de edición:
BASE(0)
SERVO=ON
WDOG=ON
loop:
MOVE(10000)
WAIT IDLE
WA(1000)
GOTO loop
37. Haga clic en el botón Run (Ejecutar) (A) de la barra
de herramientas.
Nota:
Los parámetros predeterminados son adecuados para
utilizarlos con encoders de 13 bits. Si el programa
de ejemplo no funciona, realice estos pasos:
38. Compruebe las especificaciones o el manual del motor para
obtener información sobre el tipo de encoder.
39. Si el motor tiene una resolución mayor, reduzca el valor del
parámetro P_GAIN y aumente los valores de los parámetros
SPEED, ACCEL y DECEL. Consulte el manual de
programación.
40. Vuelva a ejecutar el programa de ejemplo.
fig. 34
4.5 Instalación completa
Enhorabuena. Ha finalizado correctamente esta guía. Ahora tiene
una fuente de alimentación, una TJ1-MC__ y una TJ1-ML__
que está conectada a un servomotor y un programa de ejemplo
para controlarlo.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 42

Más información
5 Más información
5.1 Sistema Trajexia
Trajexia es una plataforma Motion Control de OMRON que ofrece
el rendimiento y la facilidad de uso de un sistema Motion Control
dedicado.
Trajexia es un sistema modular independiente que permite la
máxima flexibilidad y escalabilidad. En el corazón de Trajexia
se encuentra el coordinador de Motion Control multitarea TJ1.
Reforzado con un DSP de 32 bits, puede realizar tareas de Motion
Control como levas electrónicas, caja de cambios electrónica,
control de registro e interpolación, todo ello con simples comandos
motion.
Trajexia ofrece un control perfecto de hasta 16 ejes mediante
un bus de Motion Control MECHATROLINK-II, o control analógico
o de impulsos tradicional, con posicionamiento independiente,
control de par y velocidad para cada eje. Y además su potente
juego de instrucciones de Motion Control hace que la
programación se realice de forma intuitiva y sencilla.
Puede seleccionar de entre una amplia gama de los mejores
servosistemas rotativos, lineales y de accionamiento directo
y variadores. El sistema es escalable hasta 16 ejes y 8 variadores
y módulos de E/S.
HMI serie NS
E/S digital
HostLink
MECHATROLINK-II
fig. 1
PLC serie CJ CX-one
Trajexia Tools
Ethernet
Maestro de
PROFIBUS-DP
Maestro
DEVICENET
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 43

Más información
5.2 Aspectos destacados de Trajexia
5.2.1 Conexión directa mediante Ethernet
El puerto Ethernet integrado de Trajexia proporciona conectividad
directa y rápida a PCs, PLCs, HMIs y otros dispositivos,
a la vez que ofrece completo acceso a los drivers mediante
un bus de Motion Control MECHATROLINK-II. Permite mensajes
explícitos a través de Ethernet y mediante MECHATROLINK-II
con el fin de proporcionar una completa transparencia hasta
el nivel de actuador, lo que posibilita el acceso remoto.
5.2.2 Protección de los programas
El método de cifrado de Trajexia garantiza protección
y confidencialidad completas de sus programas.
5.2.3 Puerto serie y E/S locales
Un puerto serie proporciona conexión directa con cualquier PLC
de OMRON, HMI o cualquier otro dispositivo de campo. Con
16 entradas y 8 salidas completamente configurables integradas
en el controlador para adaptar Trajexia al diseño de su máquina.
5.2.4 MECHATROLINK-II
La TJ1-ML__ realiza el control de un máximo de 16 servodrivers,
variadores o E/S, de forma completamente transparente.
MECHATROLINK-II ofrece la velocidad de comunicación y la
precisión esenciales para garantizar un perfecto control de los
servodrivers. El tiempo del lazo de Motion se puede seleccionar
entre 0,5 ms, 1 ms ó 2 ms.
5.2.5 TJ1-FL02
Revisión 3.0
La TJ1-FL02 es una unidad de control analógica. Controla
un máximo de dos ejes en estos modos:
GUÍA RÁPIDA DE REFERENCIA 44

Más información
• Referencia de velocidad analógico más realimentación
de encoder.
• Entrada de encoder, incremental o absoluto.
• Salida de pulsos.
Puede conectar cualquier servodriver a la TJ1-FL02.
5.2.6 Drivers y variadores
Hay disponible una amplia variedad de servos rotativos, lineales
y direct-drives así como variadores que cubrirán sus necesidades
de tamaño compacto, rendimiento y fiabilidad. Los variadores
conectados a MECHATROLINK-II están controlados con el mismo
tiempo de ciclo de actualización que los servodrivers.
5.2.7 E/S remotas
Las E/S del bus Motion Control MECHATROLINK-II proporcionan
la expansión del sistema a la vez que mantienen los dispositivos
en un solo bus Motion Control.
5.2.8 PROFIBUS
La TJ1-PRT es una interfaz entre el sistema Trajexia y una red
PROFIBUS.
5.2.9 DeviceNet
La TJ1-DRT es una interfaz entre el sistema Trajexia y una red
DeviceNet.
5.3 Manuales de Trajexia
Toda la información sobre el sistema Trajexia se describe en estos
manuales:
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 45

Más información
/i
Nombre Cat. No. Contenido
Manual de referencia
de hardware del sistema
Motion Control Trajexia
Sistema Motion Control
Trajexia Manual
de programación
I51E Se describen la instalación,
las especificaciones
de hardware de las unidades
Trajexia y se explica la
filosofía del sistema Trajexia.
I52E Se describen los comandos
BASIC que se utilizan para
la programación de Trajexia,
se explican los protocolos de
comunicaciones y el software
Trajexia, se ofrecen ejemplos
prácticos e información para
la detección y corrección
de errores.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 46

Historial de revisiones
Historial de revisiones
El código de revisión del manual se muestra como sufijo del número de catálogo en la cubierta frontal del manual.
/i
Código de
revisión
01 Agosto de 2006 Original
02 Octubre de 2006 Actualización de DeviceNet
03 Mayo de 2007 Actualizado con TJ1-MC04 y TJ1-ML04.
Fecha Contenido revisado
Actualizado con información general del sistema Trajexia y los aspectos más
destacados de Trajexia.
Revisión 3.0
GUÍA RÁPIDA DE REFERENCIA 47
 Loading...
Loading...