


Cat. No.
I51E-DE-03
Trajexia Bewegungssteuerungssystem
TJ1-MC04, TJ1-MC16, TJ1-ML04, TJ1-ML16, TJ1-PRT, TJ1-DRT, TJ1-FL02
HARDWARE-REFERENZHANDBUCH
Hinweis
OMRON-Produkte sind zum Gebrauch durch einen qualifizierten Bediener
gemäß angemessenen Verfahren und nur zu den in diesem Handbuch
beschriebenen Zwecken gefertigt.
In diesem Handbuch werden Sicherheitshinweise nach folgenden
Konventionen gekennzeichnet und eingeteilt. Beachten Sie stets die
in diesen Hinweisen enthaltenen Informationen. Ein Nichtbeachten der
Sicherheitshinweise kann zu Verletzungen oder zu Sachschäden führen.
Definition von Sicherheitsinformationen
GEFAHR
Kennzeichnet eine unmittelbar drohende gefährliche Situation,
die zum Tod oder zu ernsthaften Verletzungen führt, wenn sie
nicht vermieden wird.
VORSICHT
Kennzeichnet eine potenziell gefährliche Situation, die zum
Tod oder zu schweren Verletzungen führen kann, wenn sie
nicht vermieden wird.
Achtung
Kennzeichnet eine potenziell gefährliche Situation, die
zu kleineren oder mittelschweren Verletzungen oder
Sachschäden führen kann, wenn sie nicht vermieden wird.
/i
© OMRON, 2007
Warenzeichen und Urheberrechte
PROFIBUS ist ein eingetragenes Warenzeichen von PROFIBUS International.
MECHATROLINK ist ein eingetragenes Warenzeichen der Yaskawa Corporation.
DeviceNet ist ein eingetragenes Warenzeichen der Open DeviceNet Vendor
Assoc INC.
CIP ist ein eingetragenes Warenzeichen der Open DeviceNet Vendor Assoc INC.
Revision 3.0
Trajexia ist ein eingetragenes Warenzeichen von OMRON.
Motion Perfect ist ein eingetragenes Warenzeichen von Trio Motion
Technology Ltd.
HARDWARE-REFERENZHANDBUCH 2
Alle Rechte vorbehalten. Diese Publikation darf ohne vorherige schriftliche Genehmigung
von OMRON weder als Ganzes noch in Auszügen in irgendeiner Form oder auf irgendeine
Weise, sei es auf mechanischem oder elektronischem Wege oder durch Fotokopieren oder
Aufzeichnen, reproduziert, auf einem Datensystem gespeichert oder übertragen werden.
In Bezug auf die hierin enthaltenen Informationen wird keine Patenthaftung übernommen.
Da OMRON weiterhin an einer ständigen Verbesserung seiner Qualitätsprodukte arbeitet,
sind Änderungen an den in diesem Handbuch enthaltenen Informationen ohne Ankündigung
vorbehalten. Bei der Herstellung dieses Handbuchs wurden alle Vorsorgemaßnahmen
ergriffen. Dennoch übernimmt OMRON keine Verantwortung für etwaige Fehler und
Auslassungen. Ferner wird keine Haftung für Schäden übernommen, die durch die in
diesem Handbuch enthaltenen Informationen entstehen.
Zu diesem Handbuch
Bezeichnung Kat.- Nr. Inhalt
Dieses Handbuch beschreibt die Installation und den Betrieb
des Trajexia Motion-Controllers
Lesen Sie dieses Handbuch und die anderen in der folgenden Liste
aufgeführten Handbücher sorgfältig durch, und stellen Sie sicher, dass
Sie die Informationen verstanden haben, bevor Sie versuchen, Baugruppen
des Trajexia Motion-Controllers zu installieren oder zu betreiben. Beachten
Sie die Sicherheitshinweise im folgenden Abschnitt.
/i
Bezeichnung Kat.- Nr. Inhalt
Trajexia MotionController
KURZANLEITUNG
HARDWAREREFERENZHAND-
BUCH für Trajexia
Motion-Controller
Trajexia MotionController
PROGRAMMIERHANDBUCH
Handbuch für SigmaII-Servoantrieb
Handbuch für
Servoantriebe
der JUNMA -Serie
Handbuch
JUSP-NS115
Revision 3.0
I50 Beschreibt, wie Sie sich schnell mit
Trajexia vertraut machen und eine
Servoachse über MECHATROLINK-II
in Betrieb nehmen.
I51 Beschreibt die Installation und
Hardware-Spezifikationen der
Trajexia-Baugruppen und erläutert
die Trajexia Systemphilosophie.
I52 Beschreibt die für die Programmierung
von Trajexia verwendeten BASICBefehle, erklärt die Kommunikationsprotokolle und die Trajexia Tools-Software, gibt praktische Beispiele und
Informationen zur Fehlersuche.
SIEP S800000 15 Beschreibt die Installation und den
Betrieb von Sigma-II-Servoantrieben.
TOEP-C71080603 01-OY Beschreibt die Installation und den
Betrieb von JUNMA-Servoantrieben.
SIEP C71080001 Beschreibt die Installation und den
Betrieb der MECHATROLINK-IIOptionskarte.
Handbuch für Sigma-III
mit MECHATROLINKSchnittstelle
V7-Frequenzumrichter
F7Z-Frequenzumrichter
G7-Frequenzumrichter
SI-T MECHATROLINKSchnittstelle
für G7 & F7
ST-T/V7
MECHATROLINKSchnittstelle für V7
MECHATROLINK-E/
A-Module
SYSMAC CS/CJSerie Kommunikationsbefehle
VORSICHT
Fehler die dadurch verursacht werden, weil Sie die in diesem
Handbuch enthaltenen Informationen nicht lesen oder nicht
verstehen, können zur Verletzung oder zum Tod von Personen, zur
Beschädigung des Produkts bzw. zu Fehlfunktionen führen. Lesen
Sie jedes Kapitel vollständig durch, und führen Sie die vorgestellten
Maßnahmen und Bedienverfahren erst durch, wenn Sie sicher sind,
dass Sie die im jeweiligen Kapitel und den zugehörigen Abschnitten
bereitgestellten Informationen verstanden haben.
SIEP S800000 11 Beschreibt die Installation und den
Betrieb von Sigma-II-Servoantrieben
mit MECHATROLINK-Schnittstelle.
TOEP C71060605 02-OY Beschreibt die Installation und den
Betrieb von V7-Frequenzumrichtern.
TOE S616-55 1-OY Beschreibt die Installation und den
Betrieb von F7Z-Frequenzumrichtern.
TOE S616-60 Beschreibt die Installation und den
Betrieb von G7-Frequenzumrichtern.
SIBP-C730600-08 Beschreibt die Installation und
den Betrieb von MECHATROLINKSchnittstellen für G7 und F7Frequenzumrichter.
SIBP-C730600-03
SIE-C887-5
W342 Beschreibt das FINS-
Beschreibt die Installation und
den Betrieb von MECHATROLINKSchnittstellen für V7-Frequenzumrichter.
Beschreibt die Installation und
den Betrieb von MECHATROLINKEingangs- und Ausgangs-Baugruppen
und dem MECHATROLINK-II-Repeater.
Kommunikationsprotokoll
und die FINS-Befehle
HARDWARE-REFERENZHANDBUCH 3
Unterstützung von Funktionalität nach
Baugruppenversion
Nach der Markteinführung von Trajexia wurden weiterentwickelte
Funktionen in die Controller-Baugruppe übernommen.
Diese Funktionalität ist in die Firmware und/ oder FPGA der ControllerBaugruppe implementiert.
In der unten stehenden Tabelle ist die entsprechende Funktionalität
für die jeweilige Firmware- und FPGA-Version des TJ1-MC__ gezeigt.
/i
Funktionalität TJ1-MC__ Firmware-
Version
Volle Unterstützung TJ1-FL02 V1.6509 21 und höher.
Unterstützung für BASICBefehle FINS_COMMS
Unterstützung für TJ1-DRT V1.6509 Alle Ausführungen
Unterstützung für TJ1-MC04
und TJ1-ML04
V1.6509 Alle Ausführungen
V1.6607 21 und höher
TJ1-MC__ FPGA-Version
Überprüfen Sie die Firmware- und FPGA-Versionen des TJ1-MC__.
Verbinden Sie den TJ1-MC__ mit der Trajexia Tools-Software.
Weitere Informationen finden Sie im Programmierhandbuch.
Öffnen Sie das Terminalfenster, und geben Sie die folgenden Befehle ein:
Geben Sie
PRINT VERSION
in das Terminalfenster ein. Der Versionsparameter
zeigt die aktuelle Firmware-Versionsnummer des Motion-Controllers an.
Geben Sie PRINT FPGA_VERSION SLOT(-1) in das Terminalfenster ein. Der
Parameter zeigt die aktuelle FPGA-Versionsnummer des TJ1-MC__ an.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 4
Inhalt
1 Sicherheitswarnungen und -hinweise ........................................................................................................................................................8
1.1 Zielgruppe.........................................................................................................................................................................................................................................8
1.2 Allgemeine Sicherheitshinweise .......................................................................................................................................................................................................8
1.3 Sicherheits- hinweise........................................................................................................................................................................................................................8
1.4 Sicherheitshinweise für die Betriebsumgebung................................................................................................................................................................................9
1.5 Sicherheitshinweise zu Anwendungen ...........................................................................................................................................................................................10
1.6 Vorsichtsmaßnahmen bei der Montage von Baugruppen ..............................................................................................................................................................13
1.7 Entspricht den EU-Richtlinien .........................................................................................................................................................................................................13
1.7.1 Konzepte ..........................................................................................................................................................................................................................13
1.7.2 Konformität mit EU-Richtlinien..........................................................................................................................................................................................13
2 Systemphilosophie.....................................................................................................................................................................................14
2.1 Einführung ......................................................................................................................................................................................................................................14
2.2 Motion Control Konzepte ................................................................................................................................................................................................................16
2.2.1 PTP-Steuerung.................................................................................................................................................................................................................17
2.2.2 Positionssynchronisierung................................................................................................................................................................................................20
2.2.3 Elektronisches Getriebe ...................................................................................................................................................................................................22
2.2.4 Andere Vorgänge .............................................................................................................................................................................................................25
2.3 Funktionsweise des Servosystems.................................................................................................................................................................................................27
2.4 Architektur des Trajexia-Systems ..................................................................................................................................................................................................30
2.5 Zykluszeit .......................................................................................................................................................................................................................................31
2.6 Programmsteuerung und Multitasking ............................................................................................................................................................................................37
2.7 Bewegungsablauf und Achsen .......................................................................................................................................................................................................40
2.7.1 Profilgenerator ..................................................................................................................................................................................................................41
2.7.2 Positionsregelkreis ...........................................................................................................................................................................................................41
2.7.3 Achsenfolge......................................................................................................................................................................................................................41
2.7.4 Achsentyp.........................................................................................................................................................................................................................41
2.8 Bewegungs-Befehlsspeicher .........................................................................................................................................................................................................48
2.9 Mechanisches System....................................................................................................................................................................................................................50
3 Hardware-Referenz .....................................................................................................................................................................................51
3.1 Einführung ......................................................................................................................................................................................................................................51
3.1.1 Vorteile des Trajexia-Systems..........................................................................................................................................................................................52
3.1.2 Trajexia-Tools...................................................................................................................................................................................................................53
3.1.3 Dieses Handbuch .............................................................................................................................................................................................................53
3.2 Alle Baugruppen ............................................................................................................................................................................................................................54
Revision 3.0
HARDWARE-REFERENZHANDBUCH 5
3.2.1 Systeminstallation ............................................................................................................................................................................................................54
3.2.2 Umgebungsbedingungen und Lagerung für alle Baugruppen ........................................................................................................................................61
3.2.3 Abmessungen der Baugruppen .......................................................................................................................................................................................62
3.2.4 Verdrahten der Weidmüller Steckverbinder......................................................................................................................................................................64
Revision 3.0
Inhalt
3.3 Spannungsversorgungs-Baugruppe (PSU) ....................................................................................................................................................................................66
3.3.1 Einführung ........................................................................................................................................................................................................................66
3.3.2 PSU-Anschlüsse...............................................................................................................................................................................................................66
3.3.3 PSU-Spezifikationen.........................................................................................................................................................................................................67
3.3.4 PSU-Verpackungsinhalt ...................................................................................................................................................................................................67
3.4 TJ1-MC__ .....................................................................................................................................................................................................................................68
3.4.1 Einführung ........................................................................................................................................................................................................................68
3.4.2 LED-Anzeige ....................................................................................................................................................................................................................69
3.4.3 TJ1-MC__ Anschlüsse .....................................................................................................................................................................................................70
3.4.4 Batterie .............................................................................................................................................................................................................................76
3.4.5 TJ1-MC__ Spezifikation ..................................................................................................................................................................................................77
3.4.6 TJ1-TER ...........................................................................................................................................................................................................................78
3.4.7 TJ1-MC__-Verpackungsinhalt ..........................................................................................................................................................................................78
3.5 TJ1-ML__........................................................................................................................................................................................................................................79
3.5.1 Einführung ........................................................................................................................................................................................................................79
3.5.2 LED-Beschreibung ...........................................................................................................................................................................................................80
3.5.3 TJ1-ML__ Anschluss ........................................................................................................................................................................................................80
3.5.4 TJ1-ML__ Spezifikationen ...............................................................................................................................................................................................84
3.5.5 TJ1-ML__-Verpackungsinhalt...........................................................................................................................................................................................85
3.5.6 MECHATROLINK-II-Servotreiber Sigma-II-Serie .............................................................................................................................................................85
3.5.7 MECHATROLINK-II-Servotreiber der Junma-Serie .........................................................................................................................................................92
3.5.8 MECHATROLINK-II-Frequenzumrichter V7 .....................................................................................................................................................................98
3.5.9 MECHATROLINK-II-Frequenzumrichter F7 und G7 ......................................................................................................................................................102
3.5.10 MECHATROLINK-II digitale E/A-Slaves ........................................................................................................................................................................107
3.5.11 Analoges MECHATROLINK-II 4-Kanal-Eingangsmodul ...............................................................................................................................................117
3.5.12 Analoges MECHATROLINK-II 2-Kanal-Ausgangsmodul ..............................................................................................................................................123
3.5.13 MECHATROLINK-II-Repeater .......................................................................................................................................................................................128
3.6 TJ1-PRT .......................................................................................................................................................................................................................................131
3.6.1 Einführung ......................................................................................................................................................................................................................131
3.6.2 LEDs-Beschreibung........................................................................................................................................................................................................131
3.6.3 Teilnehmernummer-Wählschalter ..................................................................................................................................................................................132
3.6.4 TJ1-PRT-Anschlüsse .....................................................................................................................................................................................................132
3.6.5 TJ1-PRT-Spezifikationen ...............................................................................................................................................................................................133
3.6.6 TJ1-PRT-Verpackungsinhalt ..........................................................................................................................................................................................133
3.7 TJ1-DRT .......................................................................................................................................................................................................................................134
3.7.1 Einführung ......................................................................................................................................................................................................................134
3.7.2 LEDs-Beschreibung .......................................................................................................................................................................................................134
3.7.3 Teilnehmernummer-Wählschalter ..................................................................................................................................................................................135
3.7.4 TJ1-DRT-Anschlüsse ....................................................................................................................................................................................................136
3.7.5 TJ1-DRT-Spezifikationen ..............................................................................................................................................................................................137
3.7.6 TJ1-DRT-Baugruppengehäuse-Inhalt ............................................................................................................................................................................137
HARDWARE-REFERENZHANDBUCH 6
Inhalt
3.8 TJ1-FL02 ......................................................................................................................................................................................................................................138
3.8.1 Einführung ......................................................................................................................................................................................................................138
3.8.2 LED-Beschreibung ........................................................................................................................................................................................................139
3.8.3 TJ1-FL02-Anschlüsse ....................................................................................................................................................................................................140
3.8.4 TJ1-FL02-Spezifikationen ..............................................................................................................................................................................................146
3.8.5 Inkrementalwertgeber.....................................................................................................................................................................................................147
3.8.6 Absolutwertgeber............................................................................................................................................................................................................149
3.8.7 Schrittmotor ....................................................................................................................................................................................................................153
3.8.8 Registrierung ..................................................................................................................................................................................................................153
3.8.9 Hardware-PSWITCH ......................................................................................................................................................................................................154
3.8.10 TJ1-FL02-Verpackungsinhalt .........................................................................................................................................................................................154
A Unterschiede zwischen Sigma-II und Junma .........................................................................................................................................162
Revision 3.0
HARDWARE-REFERENZHANDBUCH 7
Sicherheitswarnungen und -hinweise
1 Sicherheitswarnungen und -hinweise
1.1 Zielgruppe
Dieses Handbuch ist an Personen gerichtet, die die Kenntnisse von
elektrischen Systemen (z.B. Elektrotechniker o.ä.) haben und die für die
Entwicklung, Installation und Verwaltung von Fabrikautomationssystemen
und -einrichtungen verantwortlich sind.
1.2 Allgemeine Sicherheitshinweise
Der Anwender darf das Produkt nur entsprechend den in diesem
Handbuch niedergelegten Vorgaben einsetzen.
Wenden Sie sich vor der Verwendung dieses Produktes an Ihren OMRONVertreter, falls Sie das Produkt unter Bedingungen verwenden, die nicht im
Bedienerhandbuch aufgeführt sind bzw. wenn Sie das Produkt im Bereich
der Nukleartechnik, im Eisenbahnverkehr, in der Luftfahrt, in Fahrzeugen,
in Sicherheitseinrichtungen, petrochemischen Fabriken oder anderen Systemen,
Geräten oder Ausrüstungen verwenden möchten, bei denen fehlerhafte
Verwendung zu schwerwiegenden Gefahren für Leben und Sachgut führen kann.
1.3 Sicherheits- hinweise
VORSICHT
Zerlegen Sie das Gerät nicht und berühren Sie keine inneren
Teile, solange die Spannungsversorgung eingeschaltet ist.
Es besteht die Gefahr eines elektrischen Schlages.
VORSICHT
Die Anschlüsse der Plus- und Minuspole der Batterien dürfen
nicht kurzgeschlossen werden, und die Batterien dürfen nicht
aufgeladen, zerlegt, durch Druck deformiert oder verbrannt werden.
Die Batterien können explodieren, verbrennen, oder es kann
Flüssigkeit austreten.
VORSICHT
Der Kunde muss durch entsprechende Vorkehrungen
die Systemsicherheit für den Fall sicherstellen, dass bedingt
durch unterbrochene Signalleitungen, vorübergehende
Spannungsausfälle oder beliebige andere Ursachen falsche,
fehlende oder ungewöhnliche Signale auftreten.
Andernfalls besteht die Gefahr von schweren Unfällen.
VORSICHT
Der Anwender muss Not-Aus-Schaltungen, Verriegelungsund Begrenzungsschaltungen sowie ähnliche
Sicherheitsmaßnahmen in externen Schaltungen
(d. h. nicht im Trajexia Motion-Controller) vorsehen.
Andernfalls besteht die Gefahr von schweren Unfällen.
VORSICHT
Wenn der 24-V-DC-Ausgang (E/A-Spannungsversorgung
für den TJ1) überlastet oder kurzgeschlossen ist, kann die
Spannung abfallen, was eine Abschaltung der Ausgänge zur
Folge hat. Um solche Probleme zu vermeiden, müssen externe
Sicherheitsvorrichtungen installiert werden, um die Sicherheit
des Systems zu gewährleisten.
VORSICHT
Berühren Sie Klemmen oder Klemmenblöcke nicht bei
eingeschalteter Versorgungsspannung.
Es besteht die Gefahr eines elektrischen Schlags.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 8
VORSICHT
Die TJ1-Ausgänge werden abgeschaltet, wenn die
Ausgangstransistoren überlastet sind (Schutzvorrichtung).
Um solche Probleme zu vermeiden, müssen externe
Sicherheitsvorrichtungen installiert werden, um die
Sicherheit des Systems zu gewährleisten.
Sicherheitswarnungen und -hinweise
Revision 3.0
VORSICHT
Der TJ1 schaltet den WDOG ab, wenn seine
Selbstdiagnosefunktion einen Fehler erkennt. Um solche Fehler
zu vermeiden, müssen externe Sicherheitsvorrichtungen installiert
werden, um die Sicherheit des Systems zu gewährleisten.
VORSICHT
Statten Sie externe Schaltkreise (d. h. nicht die im Trajexia MotionController, hier als „TJ1“ bezeichnet) mit Sicherheitsvorrichtungen
aus, damit die Sicherheit im System gewährleistet bleibt, wenn
aufgrund einer Fehlfunktion des TJ1 oder eines anderen externen
Faktors mit Auswirkungen auf den TJ1-Betrieb eine Störung auftritt.
Andernfalls besteht die Gefahr von schweren Unfällen.
VORSICHT
Versuchen Sie nicht, Baugruppen zu zerlegen, instandzusetzen
oder zu modifizieren.
Bei jedem Versuch besteht das Risiko von Fehlfunktionen sowie
die Gefahr eines elektrischen Schlags bzw. Brandgefahr.
Achtung
Überprüfen Sie die Sicherheit in der Zielbaugruppe, bevor
Sie ein Programm in eine andere Baugruppe übertragen oder
den Speicher bearbeiten.
Wenn Sie eine dieser Aktionen durchführen, ohne die Sicherheit
zu überprüfen, kann dies zu Verletzungen führen.
Achtung
Anwenderprogramme, die in die Motion Controller-Baugruppe
geschrieben werden, werden nicht automatisch im Flash-Speicher
(Flash-Speicherfunktion) des TJ1 gesichert.
Achtung
Beachten Sie beim Verkabeln der DC-Spannungsversorgung
die Polarität (+/-). Eine falsche Polung kann Fehlfunktionen des
Systems verursachen.
Achtung
Ziehen Sie die Schrauben am Klemmenblock der
Spannungsversorgungsbaugruppe mit dem in diesem
Handbuch angegebenen Drehmoment fest.
Lose Schrauben können zu Schmorbränden oder
Fehlfunktionen führen.
1.4 Sicherheitshinweise für die Betriebsumgebung
Achtung
Betreiben Sie die Baugruppe nicht an den folgenden Orten:
Andernfalls besteht die Gefahr von Fehlfunktionen, elektrischen
Schlägen oder Brandgefahr.
- Orte, die direkter Sonneneinstrahlung ausgesetzt sind.
- Orte, an denen Temperaturen oder Luftfeuchtigkeit außerhalb der
in den technischen Daten angegebenen Bereiche herrschen.
- Orte, die starken Temperaturschwankungen und damit
Kondensatbildung ausgesetzt sind.
- Orte, an denen das Gerät korrosiven oder entzündlichen
Gasen ausgesetzt ist.
- Orte, die dem Einfluss von Stäuben (besonders Eisenstaub)
oder Salzen ausgesetzt sind.
- Orte, die dem Einfluss von Feuchtigkeit, Öl oder Chemikalien
ausgesetzt sind.
- Orte, die Stößen oder Schwingungen ausgesetzt sind.
Achtung
Ergreifen Sie beim Installieren von Systemen an folgenden
Orten angemessene und geeignete Gegenmaßnahmen.
Ungeeignete und unzureichende Maßnahmen können zu
Fehlfunktionen führen.
- Orte mit statischer Aufladung und anderen Störungen.
- Orte mit starken elektromagnetischen Feldern.
- Orte, die möglicherweise Radioaktivität ausgesetzt sind.
- Orte in der Nähe von Spannungsversorgungen.
HARDWARE-REFERENZHANDBUCH 9
Sicherheitswarnungen und -hinweise
Achtung
Die Betriebsumgebung des TJ1-Systems kann große Auswirkungen
auf die Lebensdauer und Zuverlässigkeit des Systems haben.
Ungeeignete Betriebsumgebungen können Fehlfunktionen,
Ausfälle und andere unvorhergesehene Probleme in Bezug
auf das TJ1-System zur Folge haben.
Achten Sie darauf, dass die Betriebsumgebung zum Zeitpunkt der
Installation die angegebenen Bedingungen erfüllt und dass diese
Bedingungen während der Lebensdauer des Systems erfüllt bleiben.
1.5 Sicherheitshinweise zu Anwendungen
VORSICHT
Prüfen Sie zuerst, ob alle Achsen vorhanden und vom richtigen
Typ sind, bevor Sie das System starten.
Die Anzahl der flexiblen Achsen ändert sich, wenn beim Start des
MECHATROLINK-II- Netzwerks Fehler auftreten oder wenn sich
die MECHATROLINK-II-Netzwerkkonfiguration ändert.
VORSICHT
Überprüfen Sie das Anwenderprogramm auf ordnungsgemäße
Ausführung, bevor Sie es tatsächlich für die Baugruppe einsetzen.
Wird das Programm nicht überprüft, besteht die Gefahr von
unerwartetem Verhalten.
Achtung
Ergreifen Sie geeignete Maßnahmen, um sicherzustellen, dass
das Gerät mit der angegebenen Nennspannung und -frequenz
versorgt wird. Lassen Sie an Installationsorten, an denen die
Spannungsversorgung nicht stabil ist, besondere Vorsicht walten.
Eine falsche Spannungsversorgung kann zu Fehlfunktionen führen.
Achtung
Installieren Sie externe Trennschalter, und ergreifen Sie weitere
Sicherheitsmaßnahmen gegen Kurzschlüsse in externer Verdrahtung.
Bei unzureichenden Sicherheitsmaßnahmen gegen Kurzschlüsse
besteht Brandgefahr.
Achtung
Legen Sie keine Spannung an die Eingangsbaugruppe an,
die die Nenneingangsspannung übersteigt.
Bei zu hoher Spannung besteht Brandgefahr.
Achtung
Legen Sie keine Spannung an die Ausgangsbaugruppen
an und schließen Sie keine Lasten an die Ausgangsbaugruppen
an, die die maximale Schaltleistung übersteigen.
Bei zu hohen Spannungen oder Lasten besteht Brandgefahr.
Achtung
Verwenden Sie stets die diesem Handbuch angegebene
Versorgungsspannung.
Eine falsche Spannung kann zu Fehlfunktionen oder
Achtung
Klemmen Sie die Erdung ab, wenn Sie Spannungsfestigkeitstests
durchführen.
Wird die Erdung nicht abgeklemmt, besteht Brandgefahr.
Brandgefahr führen.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 10
Sicherheitswarnungen und -hinweise
Achtung
Achten Sie bei der Installation der Baugruppen auf eine Erdung
der Klasse 3 (bis max. 100Ω).
Wenn Sie keine Erdung der Klasse 3 anschließen, besteht die
Gefahr eines elektrischen Schlags.
Achtung
Schalten Sie die Spannungsversorgung für das System immer
AUS, bevor Sie versuchen, eine der folgenden Arbeiten
durchzuführen.
Bei Nichtabschalten der Versorgungsspannung besteht das Risiko
von Fehlfunktionen und die Gefahr eines elektrischen Schlags.
- Anbringen oder Abbauen von Erweiterungsbaugruppen,
CPU-Baugruppen oder sonstigen Baugruppen.
- Montieren der Baugruppen.
- Einstellen der DIP-Schalter oder Drehschalter.
- Anschließen oder Verdrahten von Kabeln.
- Anschließen oder Lösen von Steckverbindungen.
Achtung
Stellen Sie sicher, dass alle Befestigungsschrauben,
Klemmenschrauben und Schrauben von Steckverbindern mit dem
in diesem Handbuch angegebenen Drehmoment festgezogen sind.
Ein falsches Anzugsdrehmoment kann zu Fehlfunktionen führen.
Achtung
Entfernen Sie die Schutzfolie nach Abschluss der
Verdrahtungsarbeiten, um eine ordnungsgemäße Wärmeableitung
zu gewährleisten.
Bei nicht entfernter Schutzfolie besteht die Gefahr von Fehlfunktionen.
Achtung
Verwenden Sie für die Verkabelung Crimp-Kabelschuhe. Schließen
Sie keine abisolierten Litzendrähte direkt an Klemmen an.
Beim Anschließen frei liegender Litzen besteht Brandgefahr.
Achtung
Überprüfen Sie alle Verdrahtungen sorgfältig, bevor Sie
die Spannungsversorgung einschalten.
Bei unsachgemäßer Verdrahtung besteht Brandgefahr.
Achtung
Achten Sie auf die richtige Verdrahtung.
Bei unsachgemäßer Verdrahtung besteht Brandgefahr.
Achtung
Installieren Sie die Baugruppe erst, nachdem Sie den
Klemmenblock eingehend überprüft haben.
Achtung
Lassen Sie beim Verdrahten die Schutzfolie an der Baugruppe.
Bei entfernter Schutzfolie besteht die Gefahr von Fehlfunktionen.
Achtung
Stellen Sie sicher, dass die Klemmenblöcke, Verlängerungskabel
und andere Teile mit Arretierungen ordnungsgemäß eingerastet sind.
Bei fehlender Arretierung besteht die Gefahr von Fehlfunktionen.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 11
Sicherheitswarnungen und -hinweise
Achtung
Vergewissern Sie sich, dass keine negativen Auswirkungen
im System auftreten können, bevor Sie die Betriebsart des
Systems ändern.
Andernfalls besteht die Gefahr von unerwartetem Verhalten.
Achtung
Nehmen Sie den Betrieb erst dann wieder auf, wenn der
für den Betrieb benötigte VR- und Table-Speicher auf die
neue CPU-Baugruppe übertragen wurde.
Andernfalls besteht die Gefahr von unerwartetem Verhalten.
Achtung
Achten Sie beim Austauschen von Komponenten darauf, dass
die neue Komponente die richtigen Nenndaten besitzt.
Andernfalls besteht die Gefahr von Fehlfunktionen oder Brandgefahr.
Achtung
Ziehen Sie nicht an den Kabeln, und biegen Sie die Kabel nicht
über das natürliche Maß hinaus. Die Kabel können dabei brechen.
Achtung
Achten Sie vor Berühren des Systems darauf, dass Sie
zunächst einen geerdeten Metallgegenstand berühren,
um statische Aufladung abzuleiten.
Andernfalls besteht die Gefahr von Fehlfunktionen oder Schäden.
Achtung
Die UTP-Kabel sind nicht abgeschirmt. Verwenden Sie
in Umgebungen, in denen elektrische Störungen auftreten,
ein System mit abgeschirmten, paarweise verdrillten Kabeln
(STP-Kabeln) und Hubs, die für eine FA-Umgebung geeignet sind.
Schließen Sie keine verdrillten Kabel an Hochspannungsleitungen an.
Schließen Sie keine verdrillten Kabel in der Nähe von Geräten an,
die elektrische Störungen erzeugen.
Schließen Sie keine verdrillten Kabel an Orten mit hoher
Luftfeuchtigkeit an.
Verwenden Sie keine verdrillten Kabel an Orten, an denen
übermäßig viel Schmutz oder Staub, Ölnebel oder andere
Schmutzstoffe auftreten.
Achtung
Verwenden Sie die in den Betriebshandbüchern angegebenen
Spezialkabel zum Anschluss der Baugruppen.
Bei Verwendung von handelsüblichen RS-232C Computerkabeln
können externe Geräte oder die Motion-Controller-Baugruppe
beschädigt werden.
Achtung
Bedingt durch Fehlfunktionen interner Transistorausgänge
oder anderer interner Schaltkreise besteht die Möglichkeit,
dass Ausgänge auf EIN gesetzt bleiben.
Zur Gewährleistung der Sicherheit im System müssen
als Gegenmaßnahme für solche Probleme externe
Sicherheitsmaßnahmen getroffen werden.
Achtung
Der TJ1 startet in der RUN-Betriebsart, wenn der Strom
eingeschaltet wird und wenn ein BASIC-Programm auf die
Betriebsart 'Auto Run' eingestellt ist.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 12
Sicherheitswarnungen und -hinweise
1.6 Vorsichtsmaßnahmen bei der Montage von Baugruppen
Achtung
Installieren Sie die Baugruppe ordnungsgemäß.
Bei unsachgemäßer Installation der Baugruppe besteht
die Gefahr von Fehlfunktionen.
Achtung
Montieren Sie die mit dem TJ1-MC__ gelieferte TJ1-TER
an der rechten äußeren Baugruppe.
Der TJ1 kann erst ordnungsgemäß funktionieren,
wenn die TJ1-TER Baugruppe richtig montiert ist.
1.7 Entspricht den EU-Richtlinien
1.7.1 Konzepte
Die Konzepte für die EMV- und Niederspannungsrichtlinien lauten wie folgt:
EMV-Richtlinien
OMRON-Automationsgeräte, die den EU-Richtlinien entsprechen, entsprechen
ebenfalls den damit zusammenhängenden EMV-Richtlinien, so dass sie
problemlos in andere Gerätekombinationen oder in andere Geräte oder
Anlagen integriert werden können. Die Produkte wurden auf Konformität
mit den EMV-Normen geprüft. Ob die Produkte jedoch in dem vom Kunden
verwendeten System den Normen entsprechen, muss der Kunde selbst prüfen.
Die Abstrahlungseigenschaften von OMRON-Produkten, die den EU-Richtlinien
entsprechen, variieren je nach Konfiguration, Verdrahtung und anderen
Bedingungen der Installation oder der Schaltschränke, in denen die
OMRON-Geräte installiert sind. Der Kunde muss daher eine abschließende
Prüfung durchführen, um die Bestätigung zu erhalten, dass die Geräte und
die Gesamtanlage den EMV-Normen entsprechen.
Revision 3.0
Niederspannungsrichtlinie
Stellen Sie immer sicher, dass Geräte, die mit Spannungen von
50 bis 1000 V AC oder 75 bis 1500 V DC arbeiten, die erforderlichen
Sicherheitsnormen erfüllen.
1.7.2 Konformität mit EU-Richtlinien
Die Trajexia Motion-Controller entsprechen den EU-Richtlinien.
Um zu gewährleisten, dass die Anlage oder das Gerät, in dem ein
System verwendet wird, den EU-Richtlinien entspricht, muss das
System wie folgt installiert sein:
1. Das System muss in einem Schaltschrank installiert sein.
2. Sie müssen eine Schutzisolierung oder eine doppelte Isolierung
für die DC-Spannungsversorgungen der Kommunikations- und
E/A-Baugruppen anbringen.
HARDWARE-REFERENZHANDBUCH 13
Systemphilosophie
2 Systemphilosophie
2.1 Einführung
Die Systemphilosophie orientiert sich an der Beziehung zwischen:
• Systemarchitektur
• Zykluszeit
• Programmsteuerung und Multitasking
• Bewegungsablauf und Achsen
• Befehlsspeicher
Ein vollständiges Verständnis der Beziehung zwischen diesen
Konzepten ist Voraussetzung, um die besten Ergebnisse für
das Trajexia-System zu erzielen.
2.1.1 Glossar
Bewegungsablauf
Der Bewegungsablauf ist verantwortlich für die Steuerung
der Achsposition.
Servo Zykluszeit
Legt die Frequenz fest, mit der der Bewegungsablauf
ausgeführt wird. Die Servo Zykluszeit muss der Konfiguration
der physikalischen Achsen entsprechend eingestellt sein.
Die verfügbaren Einstellungen sind 0,5 ms, 1 ms oder 2 ms.
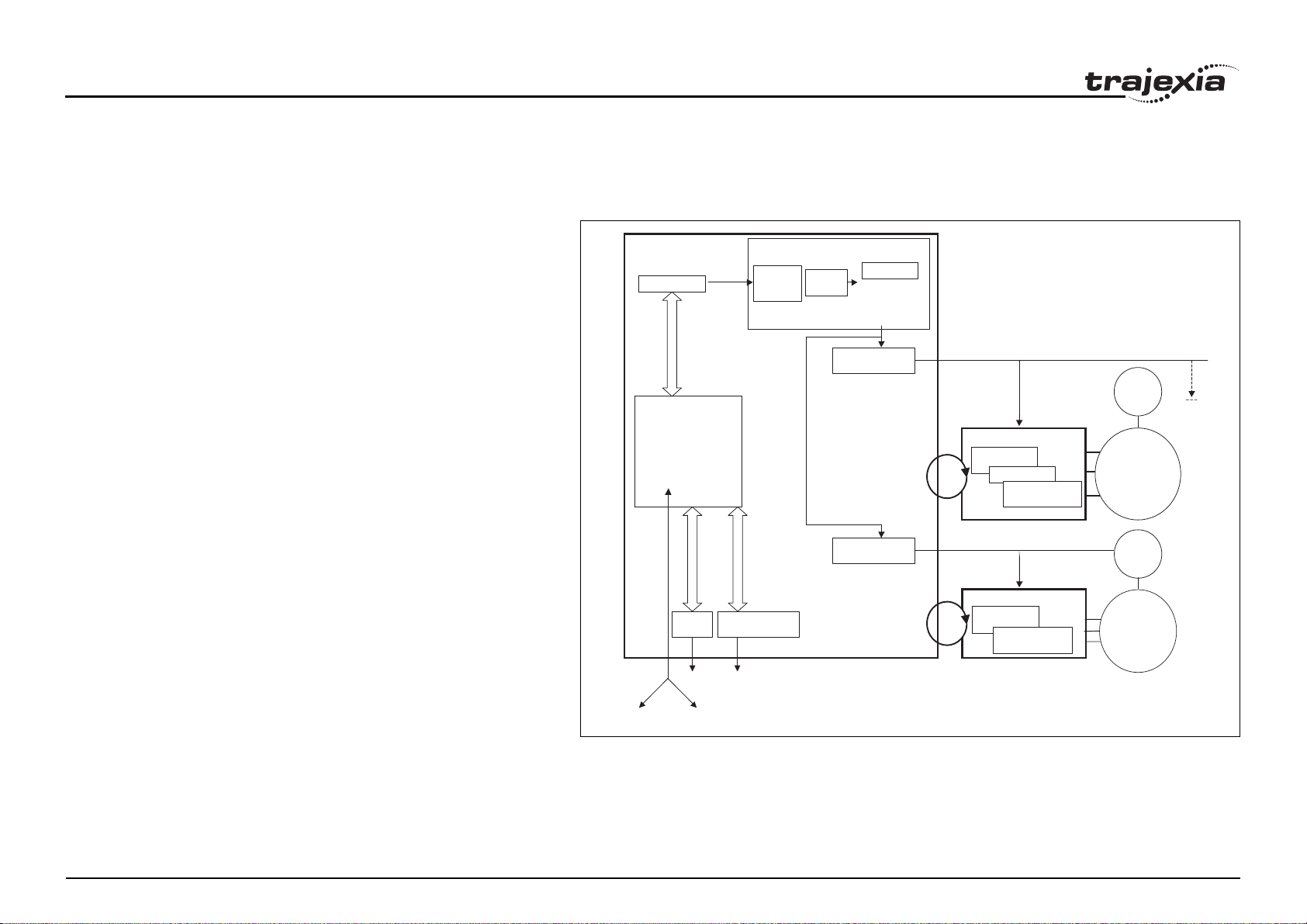
TJ1-MC16
Programmspeicher
BASIC PROGRAM
Prozess 1
Prozess 2
Prozess 3
…
Prozess 14
Comms
MC-E/A
Ethernet-
FINS
Speicher-
Speicher - und
und Profil-
Profil-
generator
generator
TJ1-PRT
ACHSEN-REGELKREIS
Positions-
Positions-
regelkreis
regelkreis
TJ1-ML16
-
TJ1 FL02
Abb.1
ACHSENTYP
ACHSENTYP
ACHSENTYP
Servoantrieb.
Positions-
Positionsregelkreis
regelkreis
Drehzahlregelkreis
Drehzahlregelkreis
Drehmomentregelkreis
Servoantrieb.
Drehzahlregelkreis
Drehmomentregelkreis
Drehmomentregelkreis
ENC
Alle anderen
Servo treiber
MOTOR
ENC
MOTOR
Ethernet
Zykluszeit
Ist die Zeit, die zur Ausführung eines vollständigen Betriebszyklus
des TJ1-MC__ erforderlich ist. Die Zykluszeit ist in vier
INTEGRIERT TJ1-ML16
PROFIBUS
Über
Zeitabschnitte gleicher Länge, sogenannte „CPU-Tasks“, unterteilt.
Die Zykluszeit ist 1 ms, wenn SERVO_PERIOD 0,5 ms oder 1 ms
beträgt, und 2 ms, wenn SERVO_PERIOD = 2 ms beträgt.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 14
Systemphilosophie
CPU-Tasks
Bei jeder CPU-Task werden folgende Vorgänge ausgeführt:
CPU-Task Betrieb
Erste CPU-Task Bewegungsablauf
Vorgang mit niedriger Priorität
Zweite CPU-Task Vorgang mit hoher Priorität
Dritte CPU-Task Bewegungsablauf (nur wenn SERVO_PERIOD = 0,5 ms)
LED-Aktualisierung
Vorgang mit hoher Priorität
Vierte CPU-Task Externe Kommunikation
Programm
Ein Programm besteht aus Programmzeilen in BASIC-Code.
Prozess
Ist ein Programm, das ausgeführt wird und dem eine bestimmte
Priorität zugewiesen ist. Die Prozesse 0 bis 12 sind Prozesse mit
niedriger Priorität und die Prozesse 13 und 14 sind Prozesse mit
hoher Priorität. Zuerst wird anhand der Prozesspriorität, hoch oder
niedrig, und dann anhand der Prozessnummer, von hoch bis niedrig,
festgelegt, welchem CPU-Task der Prozess zugewiesen wird.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 15
Systemphilosophie
2.2 Motion Control Konzepte
Der TJ1-MC__ bietet folgende Arten von Positionsregelungen:
1. Punkt-zu-Punkt-Positionierung
2. Positionssynchronisierung
3. Elektronisches Getriebe.
In diesem Abschnitt werden einige Befehle und Parameter vorgestellt,
die bei der BASIC-Programmierung der Motion-Controll Applikation
verwendet werden.
Koordinatensystem
Positionierungsvorgänge, die vom TJ1-MC__ durchgeführt werden,
basieren auf einem Achsenkoordinatensystem. Der TJ1-MC__
wandelt entweder die Positionsdaten eines angeschlossenen
Servotreibers oder die eines angeschlossenen Drehgebers
in ein internes absolutes Koordinatensystem um.
Die technische Maßeinheit für die Strecken kann für jede
Achse separat und frei bestimmt werden. Die Umwandlung
erfolgt anhand des Einheiten-Umwandlungsfaktors, der durch
den UNITS Achsenparameter bestimmt wird. Der Nullpunkt des
Koordinatensystem kann mithilfe des DEFPOS-Befehls festgelegt
werden. Mit diesem Befehl wird die aktuelle Position in Null oder
einen anderen Wert umdefiniert.
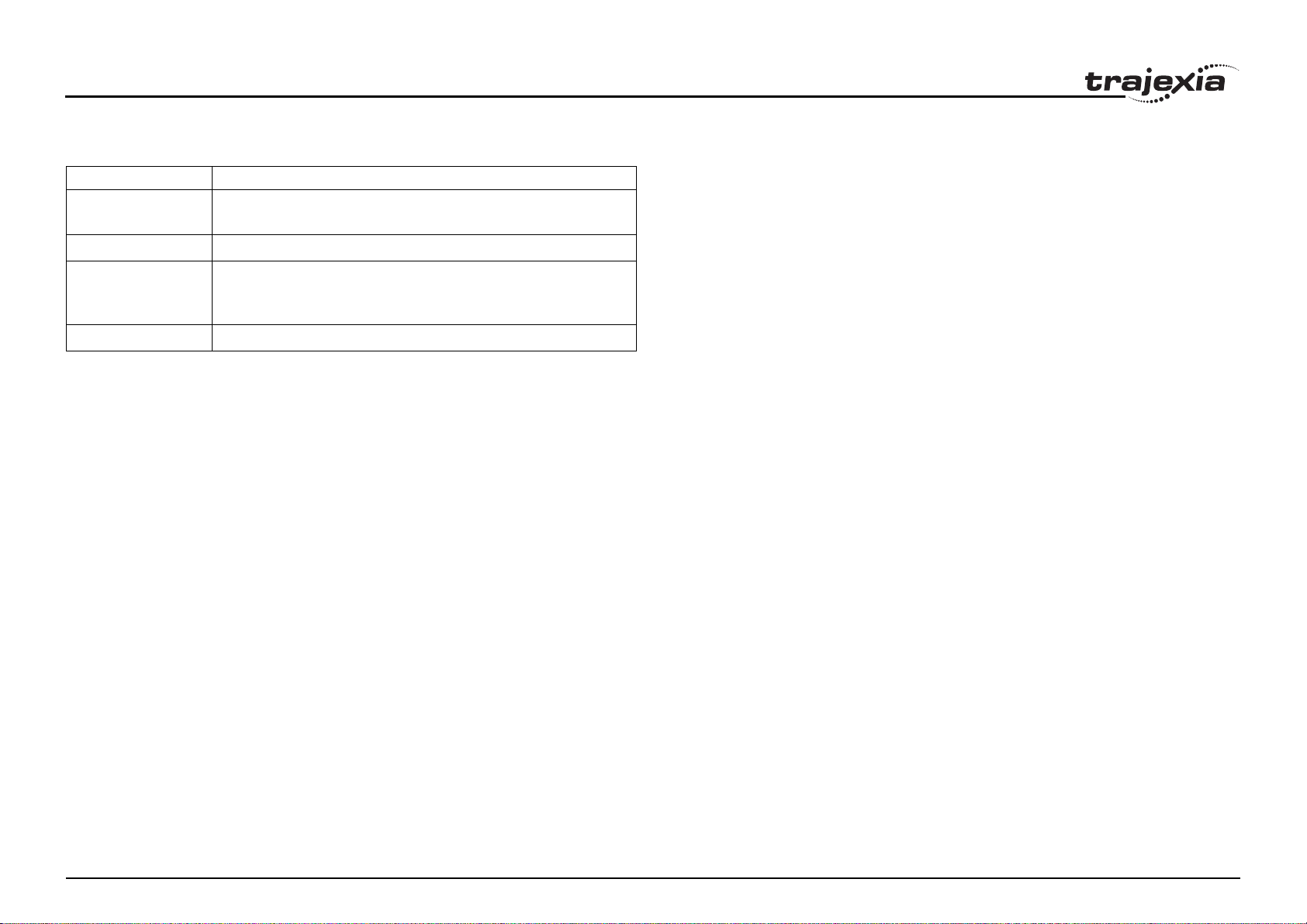
Eine Bewegung wird entweder absolut oder relativ definiert.
Abb.2
Eine absolute Bewegung führt die Achse (A) in eine bestimmte
vordefinierte Position in Beziehung zum Nullpunkt. Eine relative
Bewegung führt die Achse von der aktuellen Position in eine
Position, die als relativ zu dieser aktuellen Position definiert ist.
Die Abbildung zeigt ein Beispiel für relative (Befehl MOVE) und
absolute (Befehl MOVEABS) lineare Bewegungsabläufe.
MOVE(30)
Revision 3.0
0
HARDWARE-REFERENZHANDBUCH 16
MOVEABS(30)
MOVE(60)
MOVEABS(50)
MOVE(50)
50 100
A
Systemphilosophie
2.2.1 PTP-Steuerung
Bei der Punkt-zu-Punkt-Positionierung werden die einzelnen
Achsen unabhängig voneinander bewegt. Der TJ1-MC__
unterstützt die folgenden Vorgänge:
• Relative Bewegung
• Absolute Bewegung
• Kontinuierliche Vorwärtsbewegung
• Kontinuierliche Rückwärtsbewegung.
Absolute und relative Bewegungen
Zum Bewegen einer einzelnen Achse wird entweder der
Befehl MOVE für eine relative Bewegung oder der Befehl
MOVEABS für eine absolute Bewegung verwendet. Jede
Achse verfügt über individuelle Bewegungseigenschaften,
die durch die Achsenparameter definiert werden.
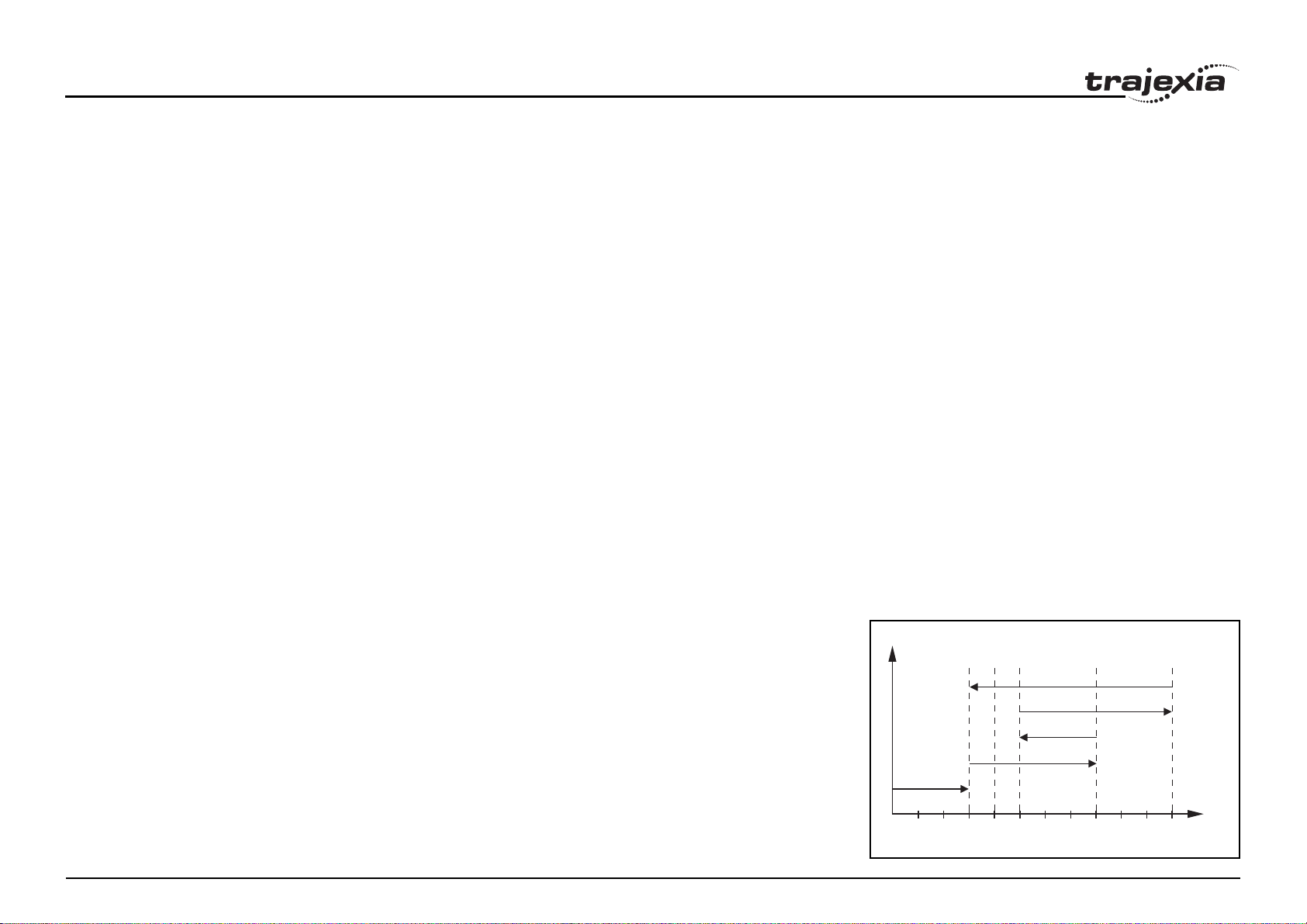
Angenommen, ein Steuerungsprogramm wird ausgeführt, um
eine Bewegung vom Nullpunkt zur Koordinate 100 von Achse
Nr. 0 (A) und zur Koordinate 50 von Achse Nr. 1 (B). Wenn für
beide Achsen derselbe Drehzahlparameter festgelegt wird und
die Beschleunigungs- und Verzögerungsrate hoch genug ist,
ergeben sich für die Achsen 0 und 1 die in der Abbildung gezeigten
Bewegungen.
Zu Beginn bewegen sich die Achsen 0 und 1 im selben Zeitraum
zur Koordinate 50. An diesem Punkt stoppt Achse 1 und Achse 0
bewegt sich weiter zur Koordinate 100.
Abb.3
B
50
0
50
MOVEABS(100) AXIS(0)
MOVEABS(50) AXIS(1)
100
A
Die Bewegung einer Achse wird mit den Achsenparametern
festgelegt. Einige relevante Parameter sind:
/i
Parameter Beschreibung
UNITS Einheiten-Umwandlungsfaktor
ACCEL Beschleunigungsrate einer Achse in Einheiten/s
Revision 3.0
DECEL Verzögerungsrate einer Achse in Einheiten/s
SPEED Solldrehzahl einer Achse in Einheiten/s
HARDWARE-REFERENZHANDBUCH 17
2
2
Systemphilosophie
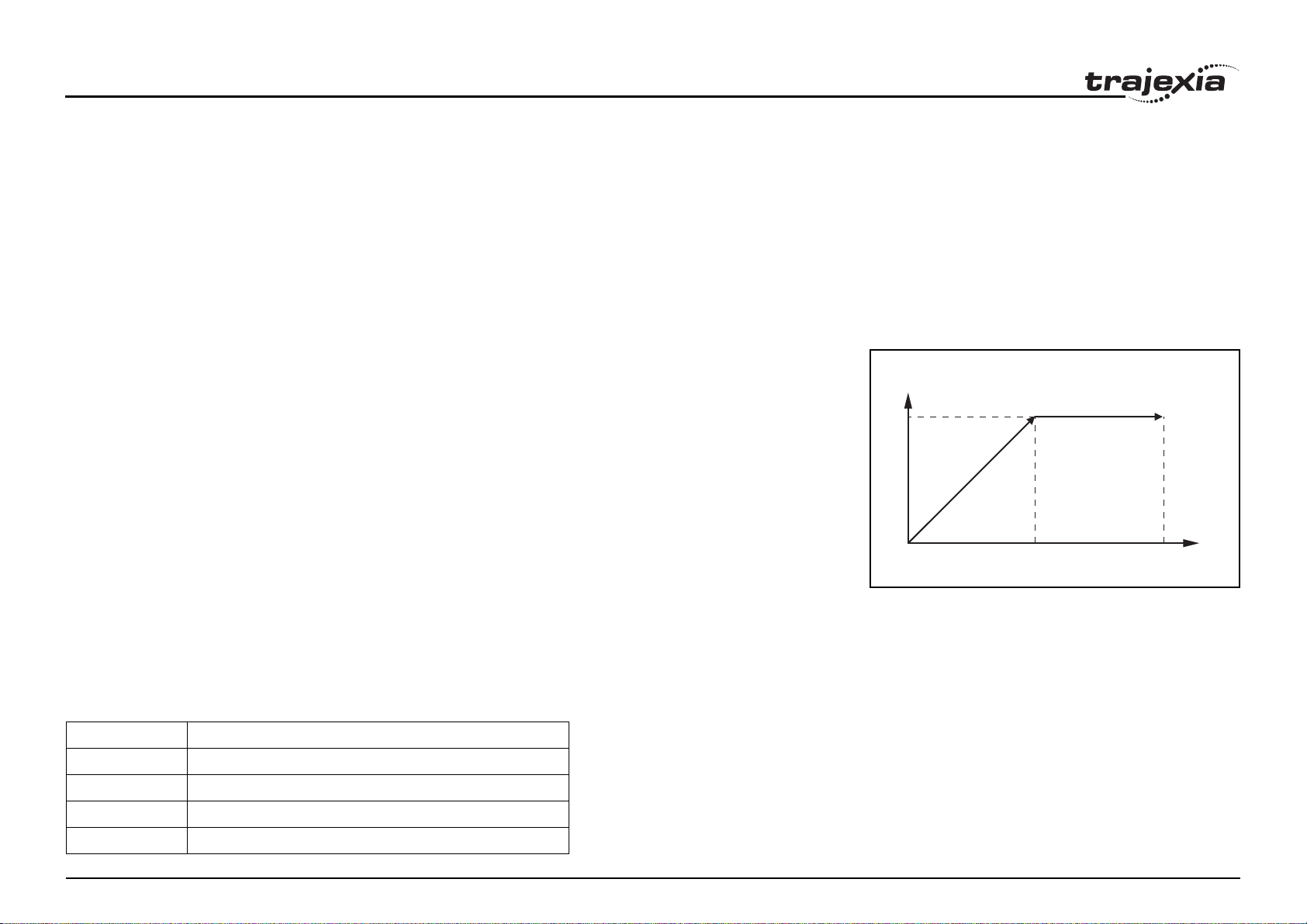
Definieren von Bewegungen
Das Drehzahlprofil in dieser Abbildung zeigt einen einfachen
MOVE
an. Der
-Vorgang. Achse A gibt die Zeit und Achse B die Drehzahl
UNITS
-Parameter für diese Achse wurde beispielsweise
als Meter definiert. Die erforderliche Maximaldrehzahl wurde auf
10 m/s eingestellt. Um diese Drehzahl in einer Sekunde zu erreichen
und in einer Sekunde auf Null zu verzögern, wurde sowohl die
2
Beschleunigungs- als auch die Verzögerungsrate auf 10 m/s
gesetzt. Die insgesamt zurückgelegte Strecke ist die Summe der
Strecken, die in den Segmenten Beschleunigung, Dauerbetrieb
und Verzögerung zurückgelegt wurden. Angenommen, die über
den
MOVE
-Befehl zurückgelegte Strecke beträgt 40 m, dann
ergibt sich das in der Abbildung angezeigte Drehzahlprofil.
Abb.4
10
B
0
123 456
ACCEL = 10
DECEL = 10
SPEED = 10
MOVE(40)
A
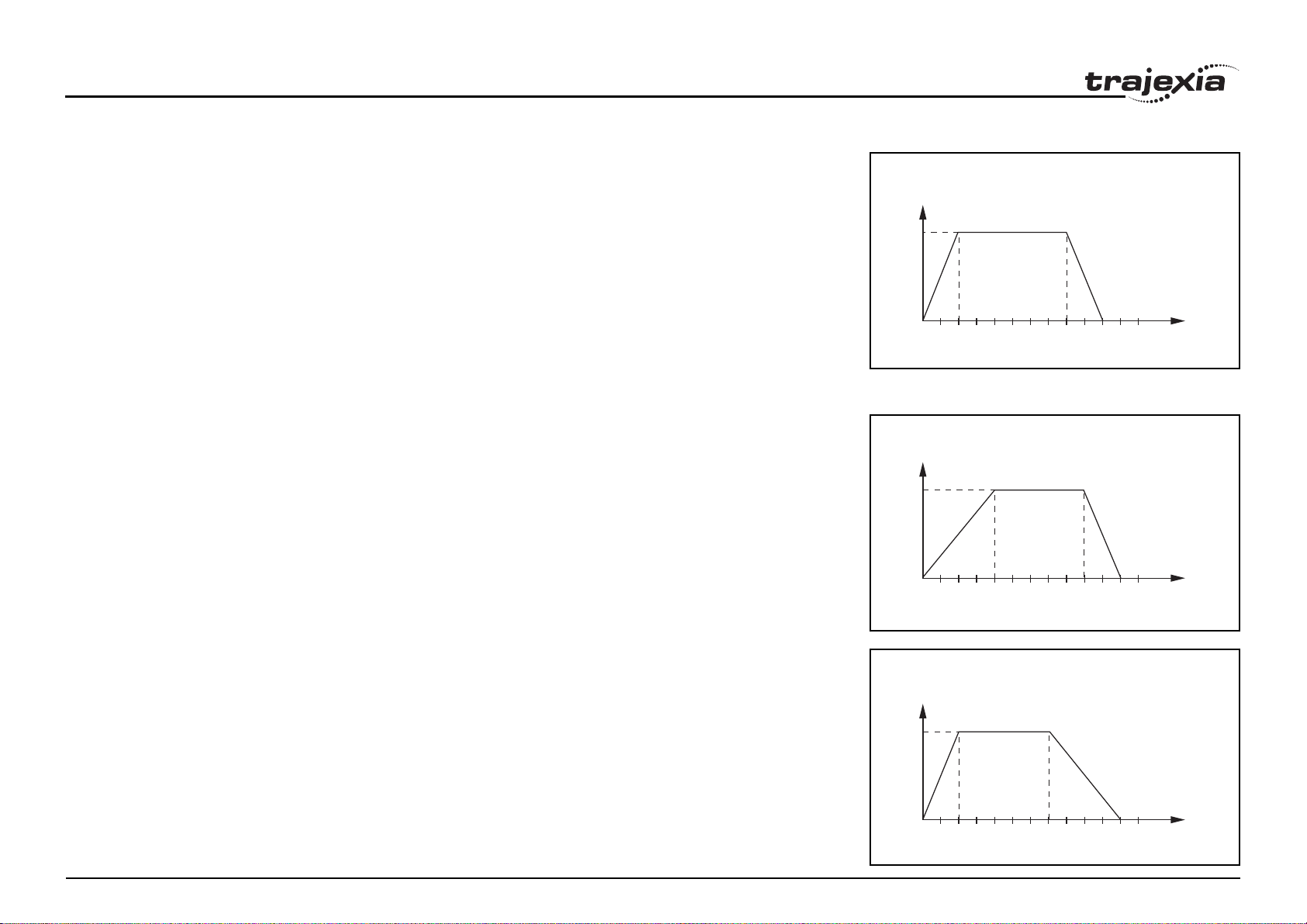
Die beiden Drehzahlprofile in diesen Abbildungen zeigen
dieselbe Bewegung mit einer Beschleunigungs- bzw.
Verzögerungszeit von zwei Sekunden. Auch hier gibt
Achse A die Zeit und Achse B die Drehzahl an.
Revision 3.0
Abb.5
10
Abb.6
10
B
0
123 456
B
0
123 456
ACCEL = 5
DECEL = 10
SPEED = 10
MOVE(40)
A
ACCEL = 10
DECEL = 5
SPEED = 10
MOVE(40)
A
HARDWARE-REFERENZHANDBUCH 18
Systemphilosophie
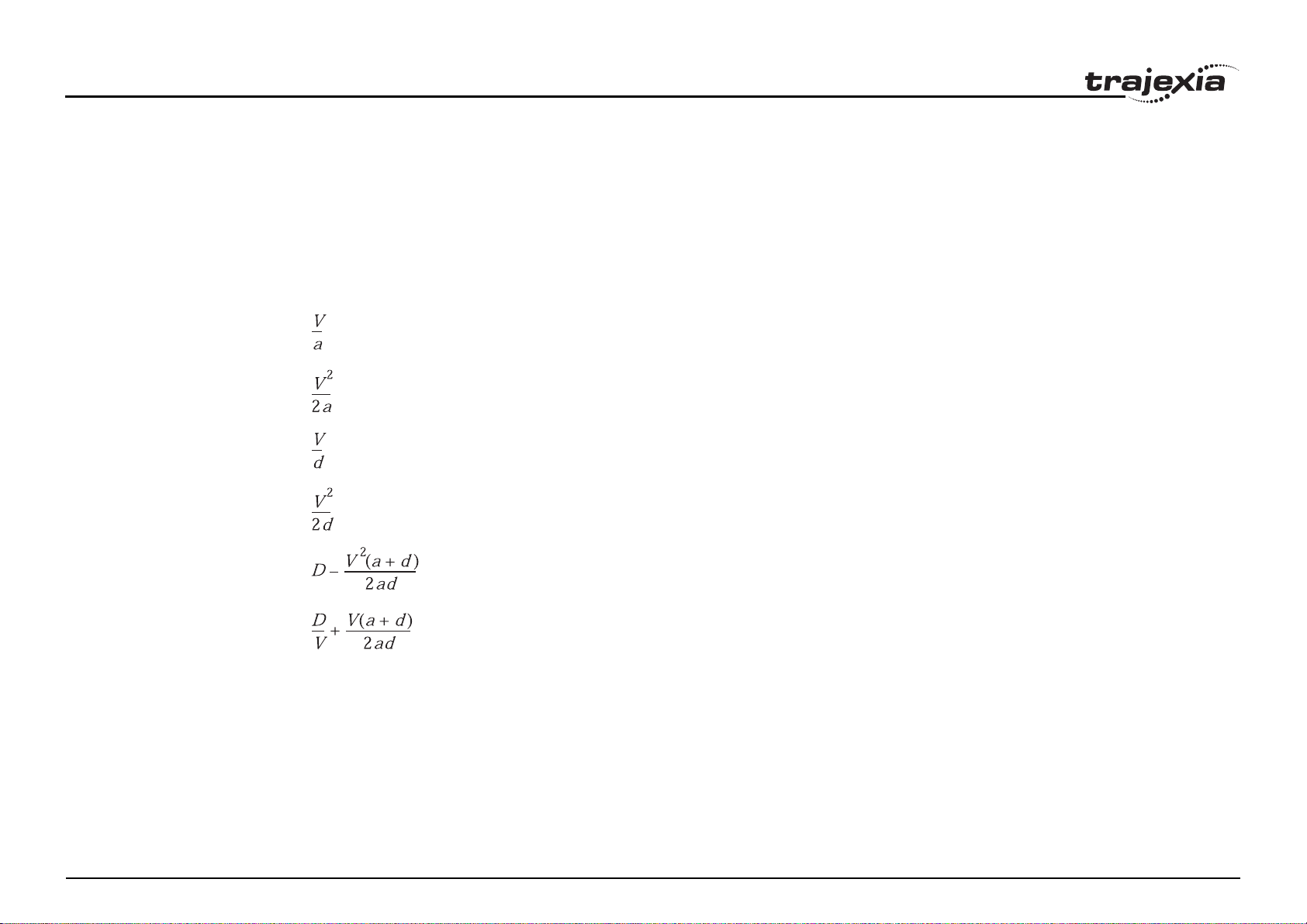
Bewegungsberechnungen
Die folgenden Gleichungen werden zur Berechnung der
Gesamtzeit für die Bewegung der Achsen verwendet.
• Die zurückgelegte Strecke für den MOVE-Befehl entspricht D.
• Die erforderliche Drehzahl entspricht V.
• Die Beschleunigungsrate entspricht a.
• Die Verzögerungsrate entspricht d.
/i
Beschleunigungszeit =
Beschleunigungsstrecke =
Verzögerungszeit =
Verzögerungsstrecke =
Strecke mit konstanter Drehzahl =
Gesamtzeit =
Fortlaufende Bewegungen
Die Befehle FORWARD und REVERSE können verwendet
werden, um auf einer Achse eine fortlaufende Bewegung mit
konstanter Drehzahl zu starten. Mit dem Befehl FORWARD
wird die Achse in positive Richtung und mit dem Befehl
REVERSE in negative Richtung bewegt. Für diese Befehle
Revision 3.0
gelten auch die Achsenparameter ACCEL und SPEED, um
die Beschleunigungsrate und die Solldrehzahl einzustellen.
HARDWARE-REFERENZHANDBUCH 19
Systemphilosophie
Beide Bewegungen können mithilfe des CANCEL- bzw.
RAPIDSTOP-Befehls abgebrochen werden. Mit dem Befehl
CANCEL wird die Bewegung für eine Achse abgebrochen und
mit RAPIDSTOP werden sämtliche Bewegungen auf allen Achsen
abgebrochen. Die Verzögerungsrate wird über DECEL eingestellt.
2.2.2 Positionssynchronisierung
Mit der Positionssynchronisierung kann eine synchronisierte
Bewegung zwischen der Start- und Endposition einer oder
mehrerer Achsen gesteuert werden. Der TJ1-MC__ unterstützt
die folgenden Vorgänge:
• Lineare Interpolation
• Kreisbogeninterpolation
• CAM-Steuerung.
Revision 3.0
HARDWARE-REFERENZHANDBUCH 20
Systemphilosophie
Lineare Interpolation
In einer Anwendung kann sie benutzt werden, um mit mehreren
Achsen eine Bewegung von einer Position zur anderen in einer
geraden Linie durchzuführen. Linear interpolierte Bewegungen
können zwischen mehreren Achsen stattfinden. Die Befehle
MOVEABS
und
werden auch für die lineare Interpolation verwendet.
In diesem Fall verfügen die Befehle über mehrere Argumente, um
die relative oder absolute Bewegung für jede Achse anzugeben.
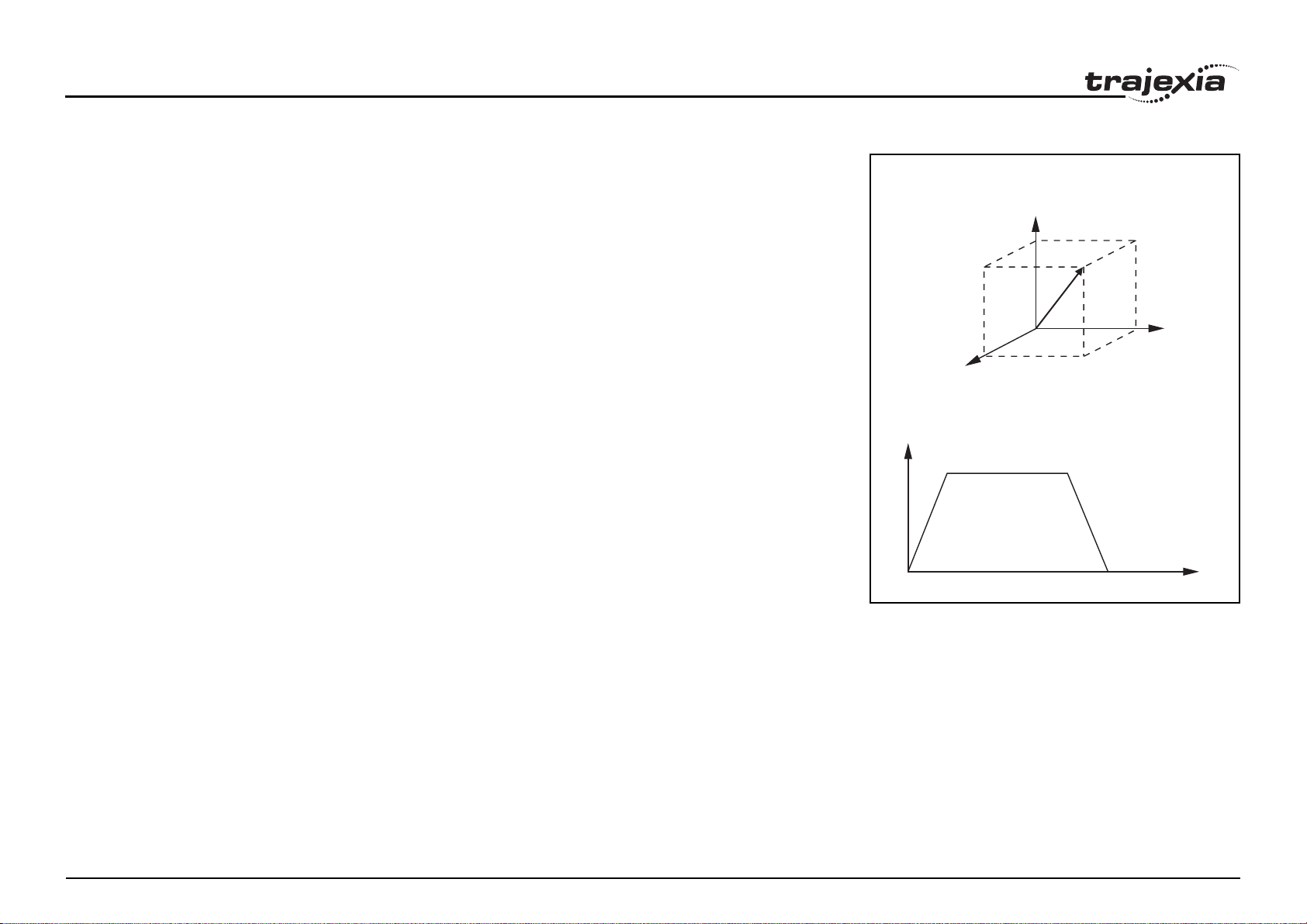
Beachten Sie in der Abbildung die Dreiachsenbewegung
in einer dreidimensionalen Ebene. Es entspricht dem Befehl
MOVE(50,50,50). Das Diagramm zeigt das Drehzahlprofil der
Bewegung entlang des Wegs. Die drei Parameter SPEED,
ACCEL und DECEL zur Bestimmung der Mehrachsbewegung
werden von den entprechenden Parametern der Basisachse
übernommen. Der MOVE-Befehl berechnet die verschiedenen
Komponenten der Solldrehzahl pro Achse.
A ist die Zeitachse, B ist die Drehzahlachse.
MOVE
Abb.7
2
1
3
B
Revision 3.0
HARDWARE-REFERENZHANDBUCH 21
A
Systemphilosophie
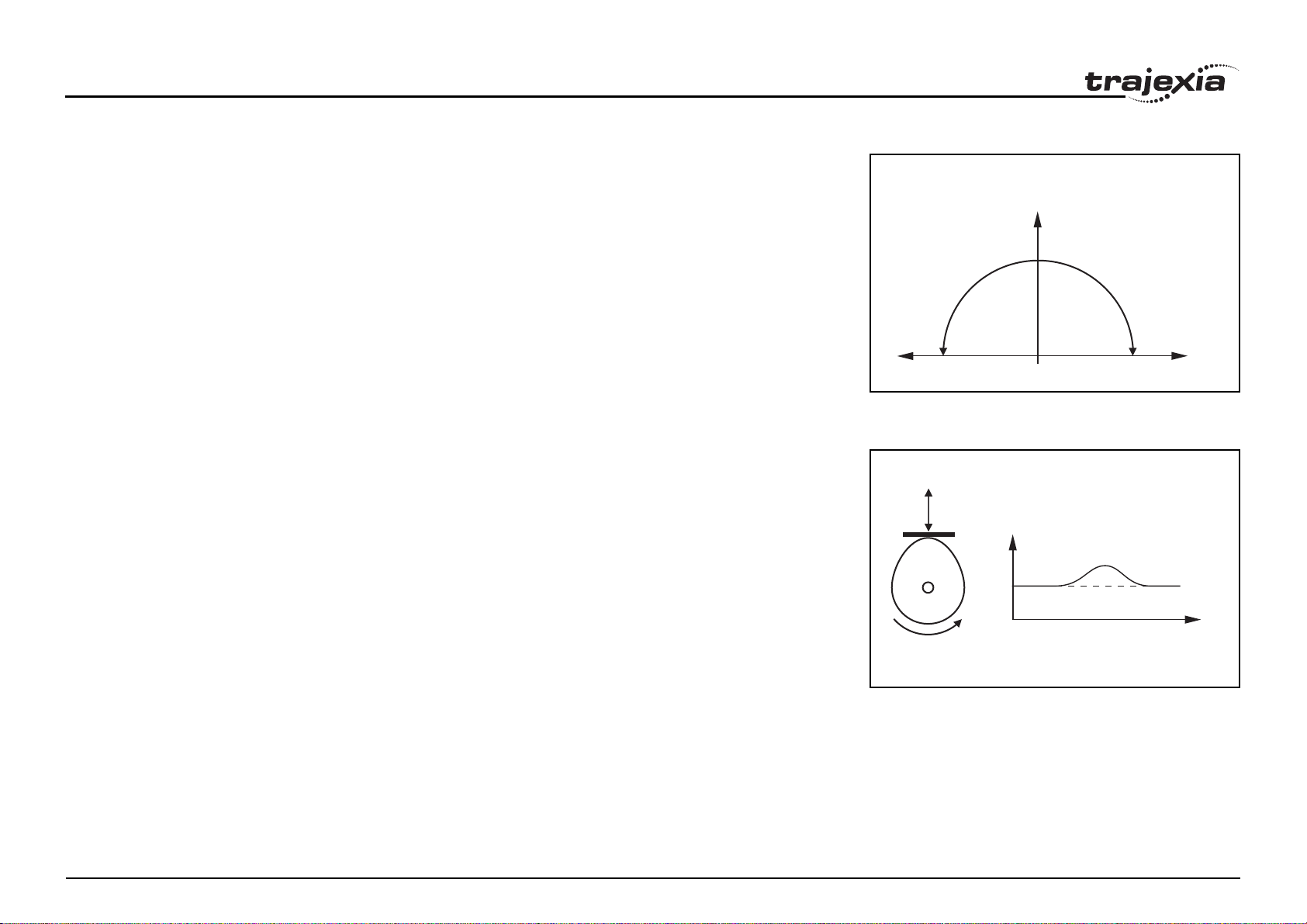
Kreisbogeninterpolation
Es kann erforderlich sein, dass ein Werkzeug vom Startpunkt zum
Endpunkt eines Kreisbogens bewegt werden muss. In diesem Fall
wird die Bewegung von zwei Achsen mit einer Kreisbogeninterpolation
durchgeführt. Dazu wird der Befehl
MOVECIRC
verwendet.
Beachten Sie das Diagramm in der Abbildung. Die Abbildung
entspricht dem Befehl MOVECIRC(–100,0,–50,0,1). Endpunkt und
Mittelpunkt der gewünschten Trajektorie werden relativ zum
Startpunkt der Bewegung angegeben. Der letzte Parameter
definiert die Richtung. Mit dem MOVECIRC-Befehl werden
Radius und Drehwinkel berechnet. Wie beim linear interpolierten
MOVE-Befehl wird anhand der Variablen ACCEL, DECEL und
SPEED, die der Basisachse zugeordnet sind, das Drehzahlprofil
entlang der kreisförmigen Bewegung bestimmt.
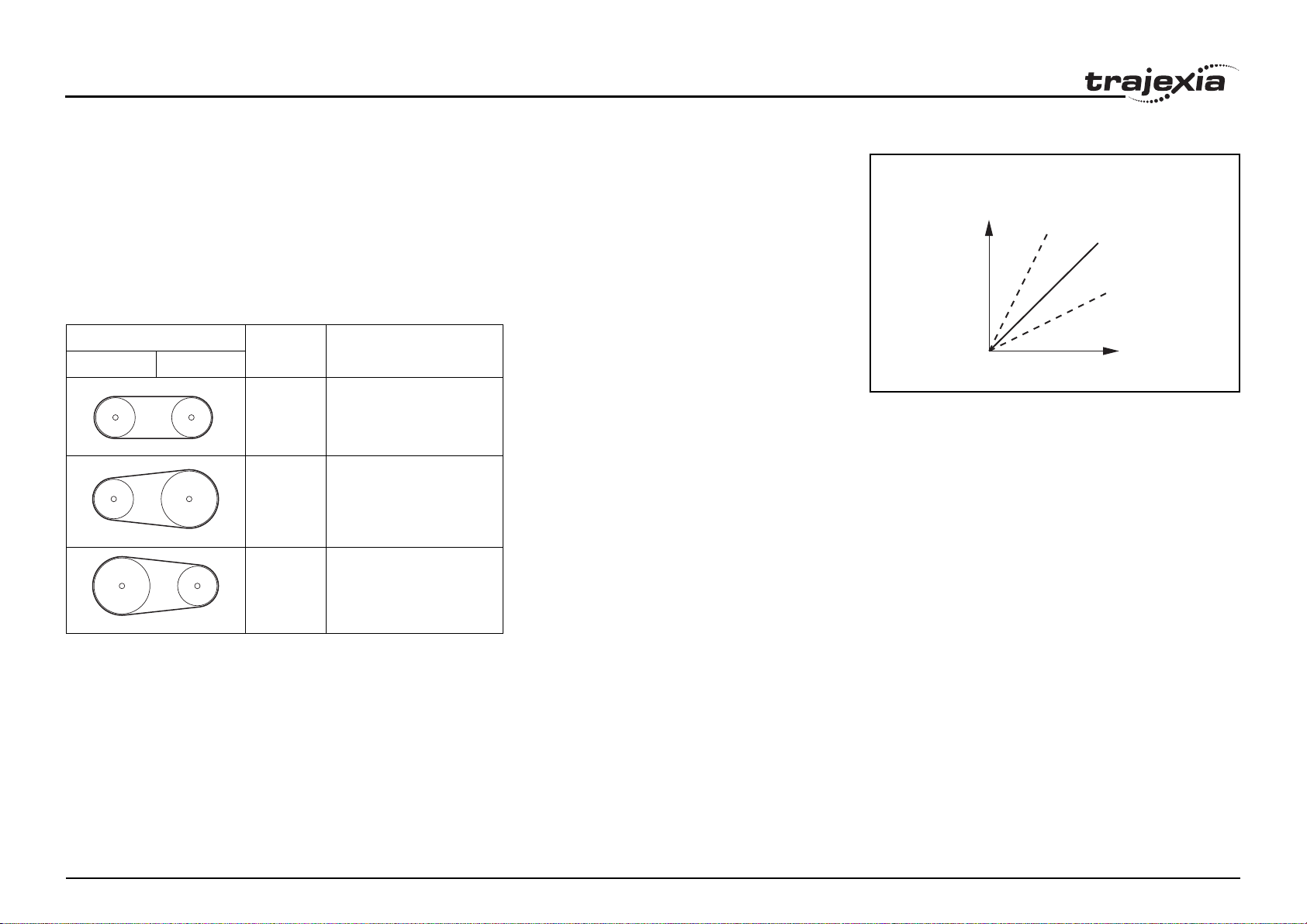
CAM-Steuerung
Zusätzlich zu den Standardbewegungsprofilen bietet der
TJ1-MC__ die Möglichkeit, ein Positionsprofil für die zu bewegende
Achse zu definieren. Mit dem CAM-Befehl wird eine Achse
entsprechend den im TJ1-MC__ Table-Array gespeicherten
Positionswerten bewegt. Die Drehzahl bei der Bewegung durch
das Profil wird durch die Achsenparameter der Achse bestimmt.
Die Abbildung entspricht dem Befehl CAM(0,99,100,20). A ist die
Zeitachse, B ist die Positionsachse.
Abb.8
Abb.9
–50
50
050
B
2.2.3 Elektronisches Getriebe
Mit einem elektronischen Getriebe kann eine direkte Koppelung
oder eine verknüpfte Bewegung zwischen zwei Achsen erstellt
werden. Die MC-Baugruppe unterstützt folgende Vorgänge.
• Elektronisches Getriebe
Revision 3.0
• Verknüpfte Kurvenscheiben
• Verknüpfte Bewegung
• Achsenüberlagerung
HARDWARE-REFERENZHANDBUCH 22
A
Systemphilosophie
Elektronisches Getriebe
Der TJ1-MC__ kann eine Koppelung zwischen zwei Achsen
in einem Übersetzungsverhältnis herstellen, die der Verbindung
durch ein physikalisches Getriebe entspricht. Dies erfolgt über
den CONNECT-Befehl im Programm. In dem Befehl werden
das Getriebeverhältnis und die zu koppelnde Achse angegeben.
In der Abbildung ist A die Master-Achse und B die CONNECT-
Achse. In der Tabelle ist Achse 0 die Masterachse und Achse 1
die CONNECT-Achse
/i
Achsen Verhältnis CONNECT-Befehl
01
1:1 CONNECT(1,0) AXIS(1)
2:1 CONNECT(2,0) AXIS(1)
Abb.10
B
2:1
1:1
1:2
A
1:2 CONNECT(0.5,0) AXIS(1)
Revision 3.0
HARDWARE-REFERENZHANDBUCH 23
Systemphilosophie
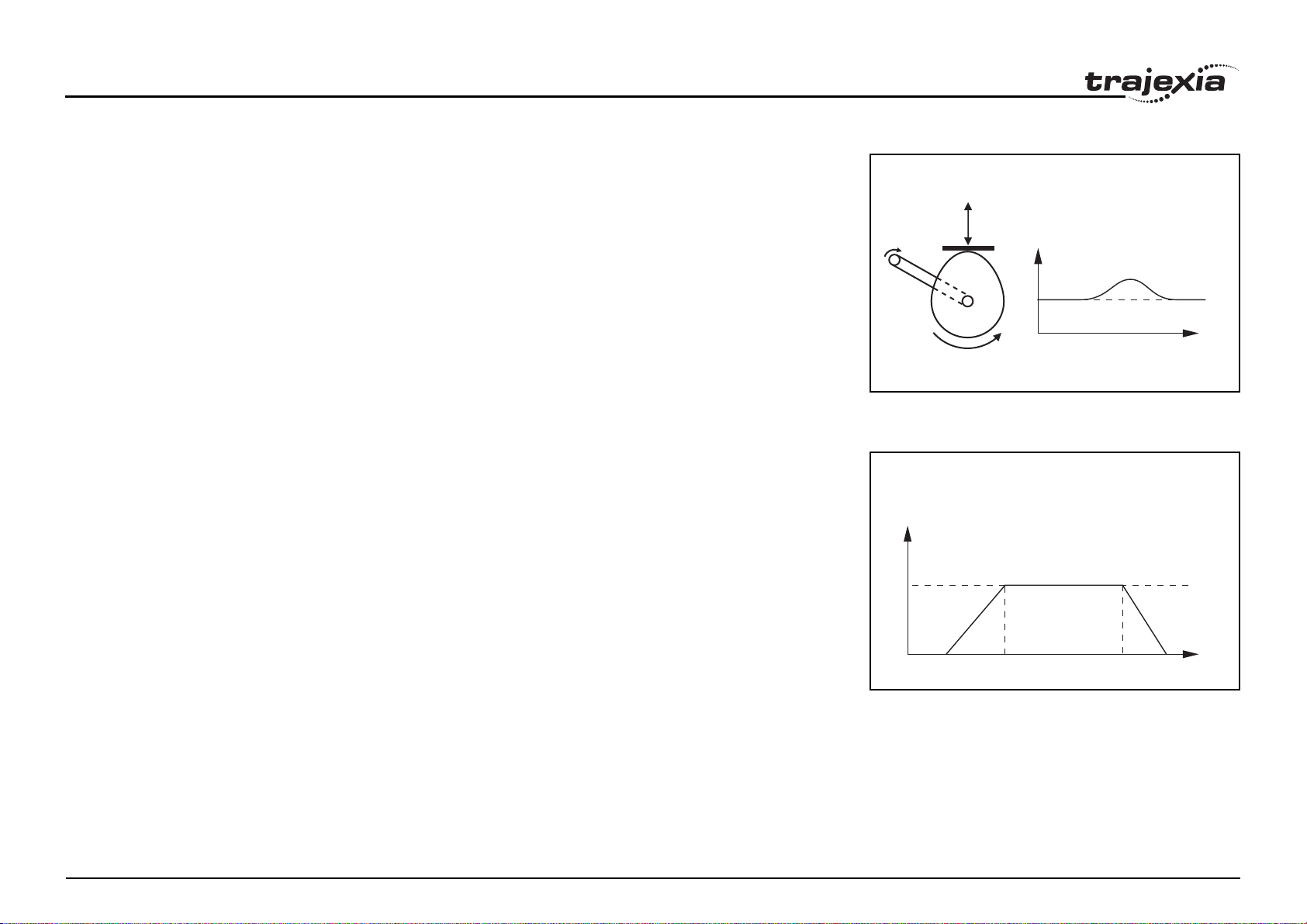
Verknüpfte CAM-Steuerung
Neben dem Standard-CAM-Profiltool stellt der TJ1-MC__ ein
Tool zur Kopplung eines CAM-Profils mit einer anderen Achse
zur Verfügung. Der Befehl zur Erstellung der Kopplung lautet
CAMBOX. Die Drehzahl bei der Bewegung durch das Profil wird
nicht durch die Achsenparameter der Achse bestimmt, sondern
durch die Position der gekoppelten Achse. Dies ist vergleichbar mit
zwei Achsen, die durch ein Nockenschaltwerk verbunden sind.
In der Abbildung ist A die Position von Master-Achse (0) und B
die Position der CONNECT-Achse.
gekoppelte Bewegung
Mit dem
Master-Achse gekoppelt werden Die Achsbewegung ist in einen
Beschleunigungs-, Verzögerungs- und Konstantdrehzahlteil unterteilt.
Diese werden als Master-Kopplungsstrecken angegeben. Dies kann
insbesondere bei der Synchronisierung von zwei Achsen für eine
festgelegte Strecke nützlich sein.
Die Bezeichnungen in der Abbildung lauten wie folgt:
A. Zeitachse.
B. Drehzahlachse.
C. Master-Achse (1).
D. Synchronisiert.
E. MOVELINK-Achse (0).
MOVELINK
-Befehl kann eine Achsbewegung mit einer
Abb.11
B
A
Abb.12
B
DC
E
A
Revision 3.0
HARDWARE-REFERENZHANDBUCH 24
Systemphilosophie
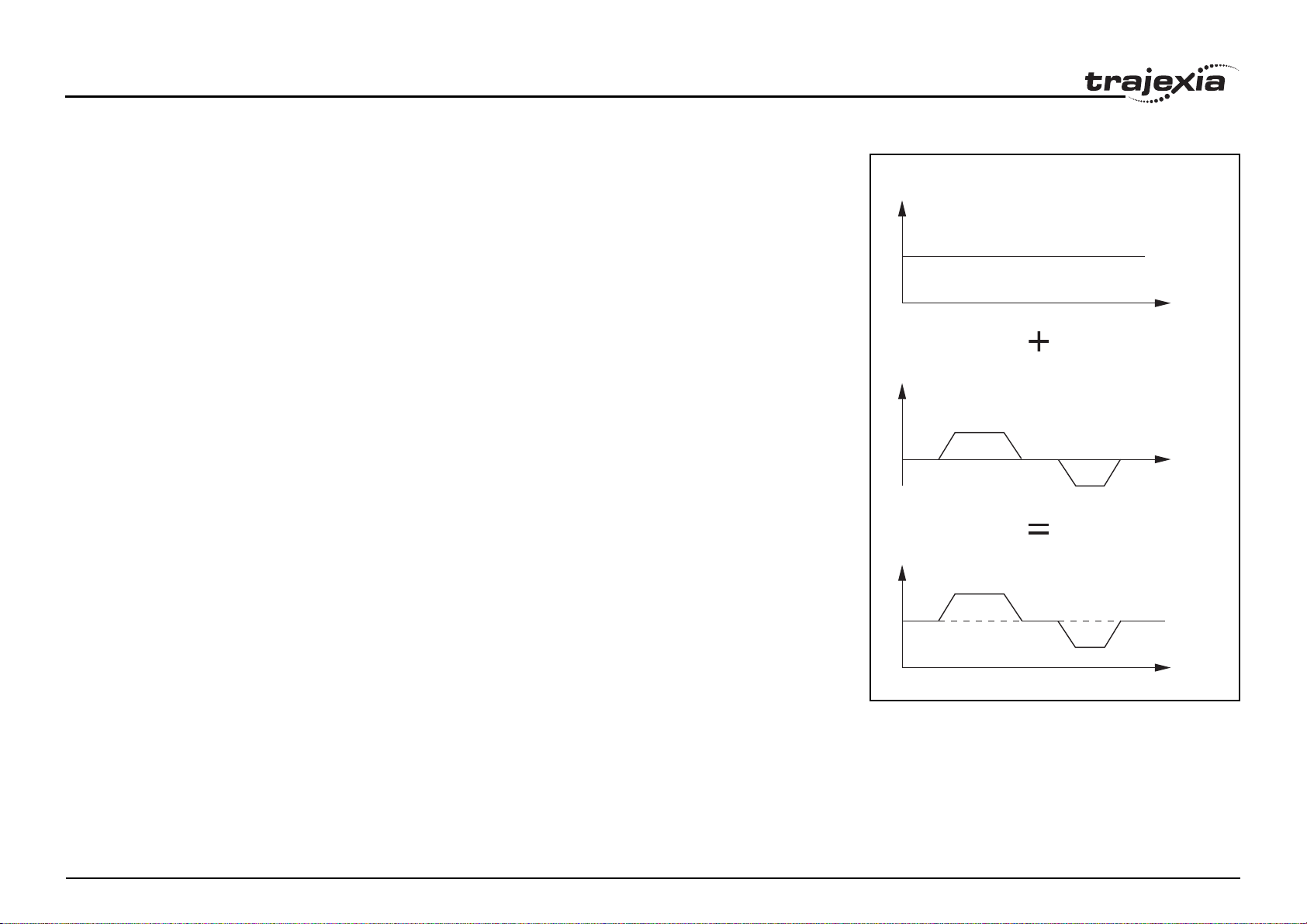
Achsenüberlagerung
Es kann sehr hilfreich sein, sämtliche Bewegungen einer
Achse auf eine andere zu übertragen. Eine mögliche Anwendung
ist beispielsweise die Änderung des Offsets zwischen zwei Achsen,
die durch ein elektronisches Getriebe gekoppelt sind. Der
TJ1-MC__ ermöglicht dies durch die Verwendung des Befehls
ADDAX. Die Bewegungen der gekoppelten Achse setzen sich
aus sämtlichen Bewegungen der tatsächlichen Achse plus den
zusätzlichen Bewegungen der Master-Achse zusammen.
In der Abbildung ist A die Zeitachse und B die Drehzahlachse.
Abb.13
B
B
BASE(0)
ADDAX(2)
FORWARD
MOVE(100) AXIS(2)
MOVE(-60) AXIS(2)
A
A
B
2.2.4 Andere Vorgänge
Bewegungen abbrechen
Im Normalbetrieb oder im Notfall kann ein Abbruch der aktuellen
Revision 3.0
Bewegung erforderlich sein. Bei Eingabe der Befehle CANCEL
oder RAPIDSTOP wird die aktuelle Bewegung der ausgewählten
Achse bzw. aller Achsen abgebrochen.
HARDWARE-REFERENZHANDBUCH 25
A
Systemphilosophie
Nullpunktsuche
Das Drehgebersignal zur Regelung der Motorposition ist ein
inkrementelles Signal. Dies bedeutet, dass alle Bewegungen
in Bezug zu einem Nullpunkt definiert werden müssen. Der
DATUM-Befehl wird für eine Prozedur verwendet, bei der der
TJ1-MC__ eine Nullpunktsequenz durchläuft. In dieser Sequenz
wird auf Basis digitaler Eingänge und/oder Z-Marker vom
Drehgebersignal nach dem Nullpunkt gesucht.
Druckmarkenerkennung
Der TJ1-MC__ kann die Position einer Achse in einem
Register erfassen, wenn ein Ereignis eintritt. Das Ereignis wird als
Druckmarkenerkennungseingang bezeichnet. An der steigenden oder
fallenden Flanke eines Eingangssignals, bei dem es sich entweder
um den Z-Marker oder einen Eingang handelt, erfasst der TJ1-MC__
die Position einer Achse in der Hardware. Diese Position kann
anschließend verwendet werden, um einen möglichen Fehler
zwischen der tatsächlichen und der Sollposition zu korrigieren. Die
Druckmarkenerkennung wird über den
REGIST
Die Position wird in der Hardware erfasst. Demzufolge sind
kein Software-Overhead und keine Interrupt-Routinen vorhanden.
Dadurch treten keine Zeitprobleme auf.
-Befehl eingerichtet.
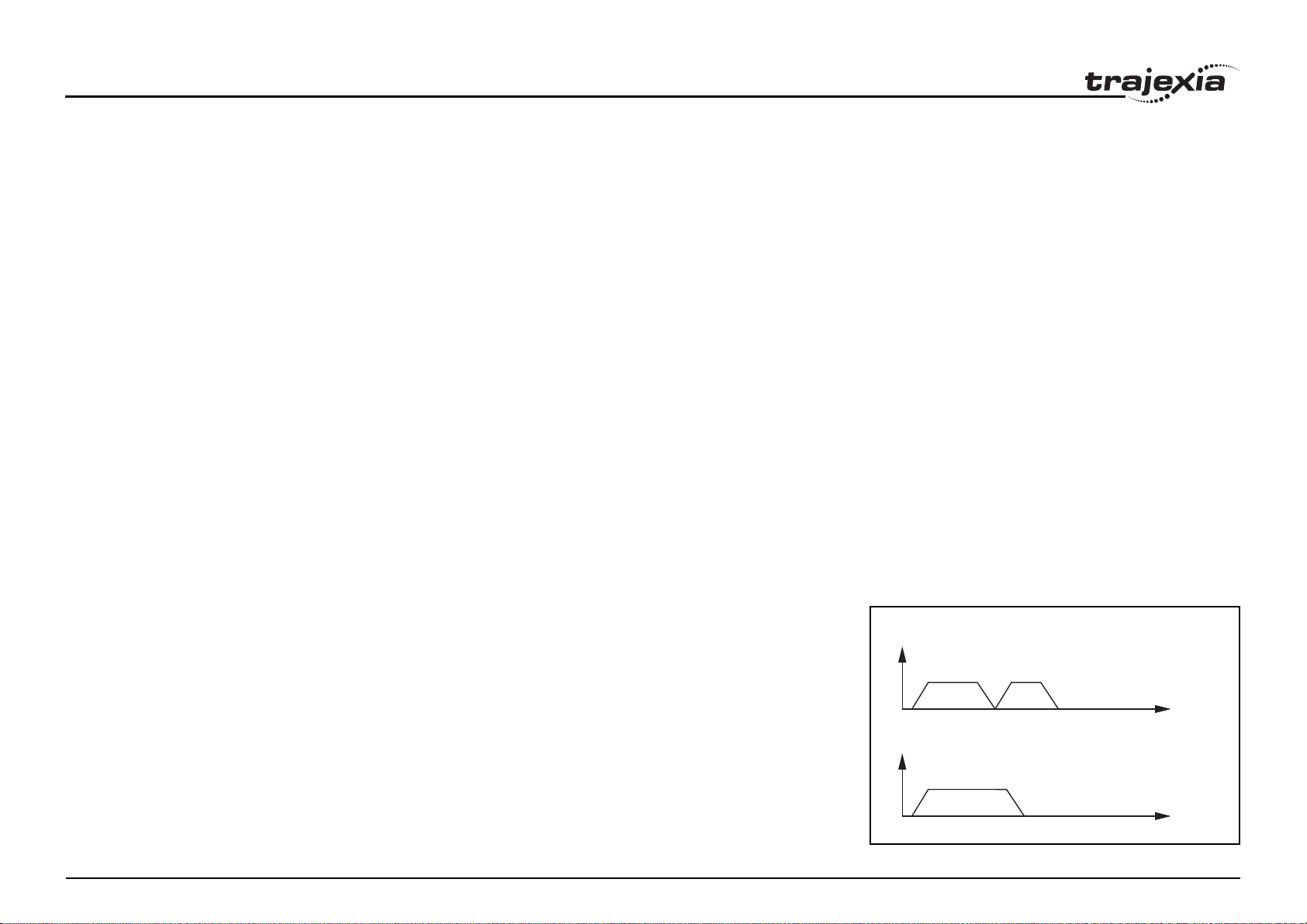
Verknüpfte Bewegungen
Wenn der Achsenparameter MERGE auf 1 gesetzt ist, folgt
auf eine Bewegung stets eine andere, ohne dass zwischen
den Bewegungen gestoppt wird. Die Abbildungen zeigen die
Übergänge zweier Bewegungen mit dem MERGE-Wert 0 und 1.
In der Abbildung ist A die Zeitachse und B die Drehzahlachse.
Abb.14
B
MERGE = 0
Tippbetrieb
Im Tippbetrieb werden die Achsen durch Betätigung der
Digitaleingänge mit konstanter Drehzahl vorwärts oder
rückwärts bewegt Unterschiedliche Drehzahlen können auch
Revision 3.0
durch Eingabe ausgewählt werden. Siehe die Achsenparameter
FWD_JOG, REV_JOG und FAST_JOG.
HARDWARE-REFERENZHANDBUCH 26
B
MERGE = 1
A
A
Systemphilosophie
2.3 Funktionsweise des Servosystems
In diesem Abschnitt wird das vom TJ1-MC__ verwendete Servosystem
und der interne Betrieb des TJ1-MC__ kurz beschrieben.
2.3.1 Halbgeschlossenes Regelkreissystem
Das Servosystem des TJ1-MC__ verwendet ein halbgeschlossenes
bzw. geschlossenes Regelkreissystem. Dieses System erkennt die
tatsächliche Maschinenbewegung indem es die Drehung des Motors
auf den gewünschten Zielwert bezieht. Es berechnet den Fehler
zwischen dem Zielwert und der tatsächlichen Bewegung und reduziert
den Fehler durch die entsprechende Rückkopplung.
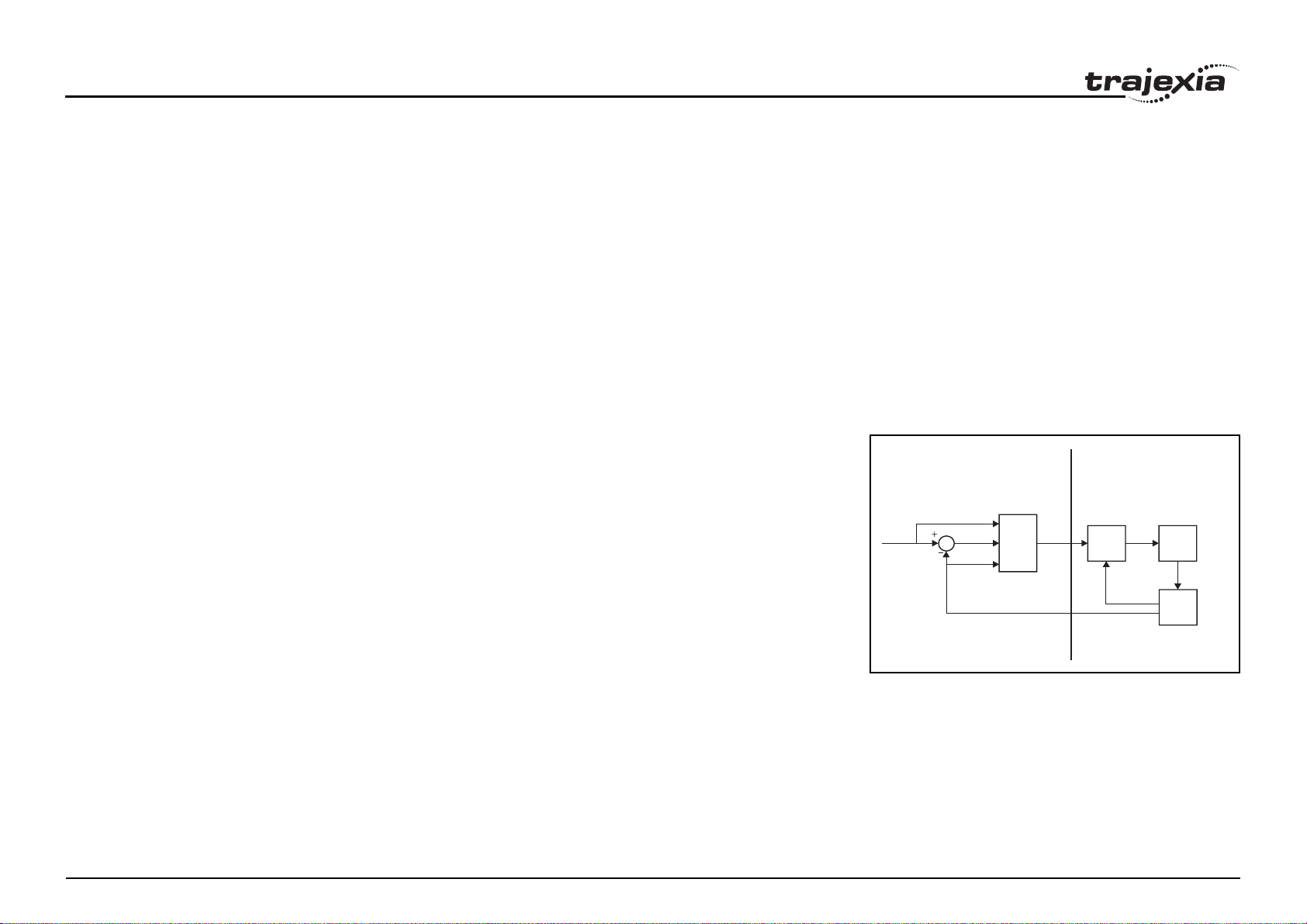
2.3.2 Interner Betrieb des TJ1-MC__
Geschlossene Regelkreissysteme bilden den Großteil moderner
Servosysteme, die zur Positionierung von Geräten für industrielle
Anwendungen eingesetzt werden. Die Abbildung zeigt das
Grundprinzip des Servosystems, das im TJ1-MC__ verwendet wird.
1. Der TJ1-MC__ führt die Positionsregelung durch. Die
wichtigste Regelgröße des Controllers ist der Schleppfehler.
Der Schleppfehler ist die Differenz zwischen der Sollposition
und der tatsächlich gemessenen Position.
2. Der Ausgang des Positionsreglers ist ein Drehzahlsollwert,
der vom Schleppfehler und von der Abweichung zwischen
Sollposition und der gemessenen Position bestimmt wird.
Der Drehzahlsollwert wird zum Servotreiber übertragen.
3. Der Servotreiber regelt die Drehzahl des Servomotors
entsprechend dem Drehzahlsollwert. Die Drehzahl verhält
sich proportional zum Drehzahlsollwert.
4. Der Drehgeber erzeugt die Rückmeldungsimpulse für
die Drehzahlrückmeldung innerhalb des Drehzahlregelkreises
des Servotreibers und für die Positionsrückmeldung innerhalb
des Positionsregelkreises des TJ1-MC__.
Revision 3.0
Die Bezeichnungen in der Abbildung lauten wie folgt:
A. TJ1-MC__.
B. Servosystem.
Abb.15
C
AB
2
1
D
E
3
F
G
4
I
H
J
HARDWARE-REFERENZHANDBUCH 27
Systemphilosophie
C. Sollposition.
D. Positionierungsregelung.
E. Drehzahlsollwert.
F. Drehzahlregelung.
G. M oto r.
H. Drehgeber.
I. Gemessene Drehzahl.
J. Gemessene Position.
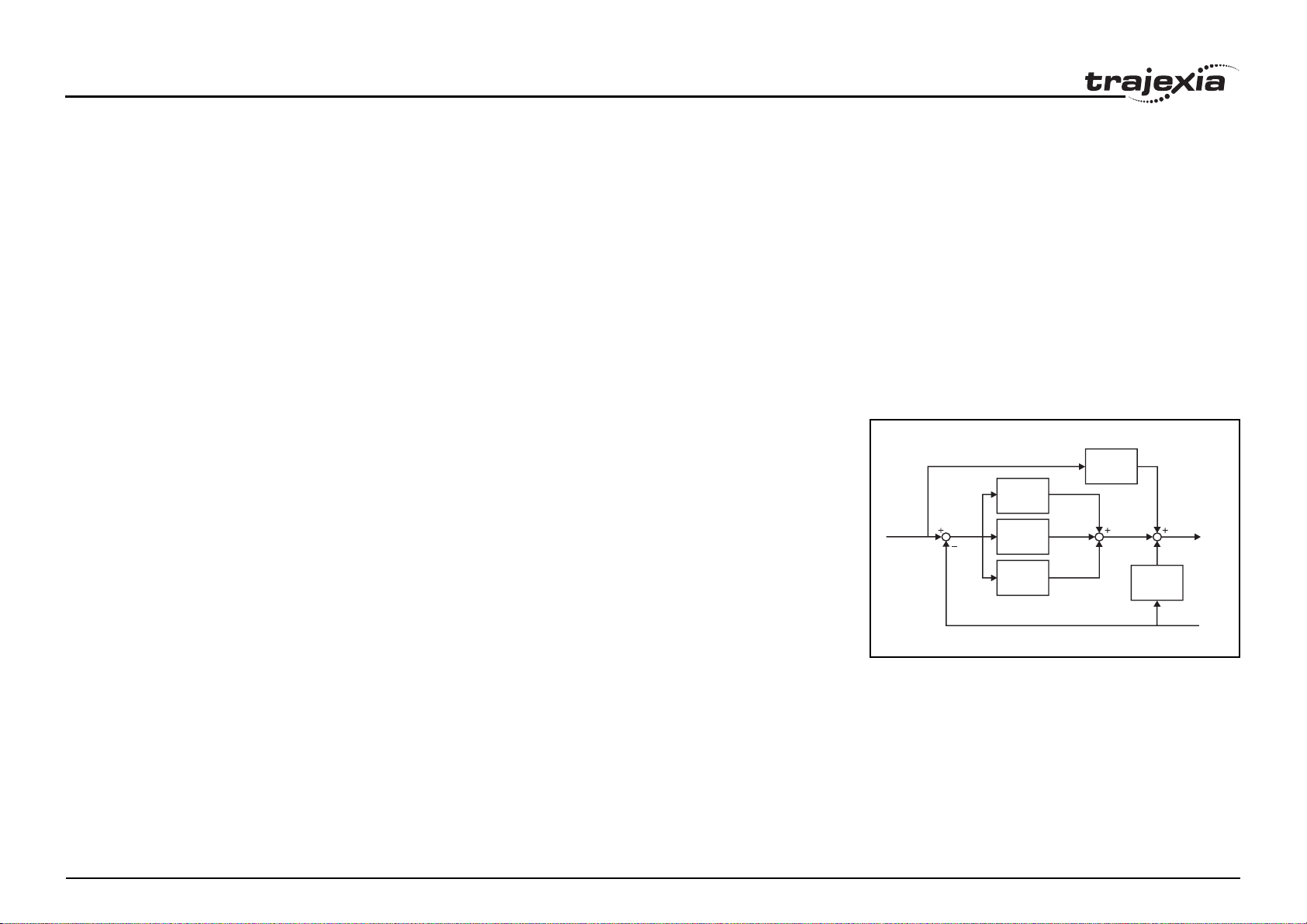
2.3.3 Motion-Controll -Algorithmus
Das Servosystem steuert den Motor durch die kontinuierliche
Anpassung des Drehzahlsollwerts für den Servotreiber. Der
Drehzahlsollwert wird anhand des Motion-Controll -Algorithmus des
TJ1-MC__ berechnet, der in diesem Abschnitt näher erläutert wird.
Der Motion-Controll -Algorithmus verwendet die Sollposition (A),
die gemessene Position (D) und den Schleppfehler (B) zur
Bestimmung des Drehzahlsollwerts. Der Schleppfehler ist die
Differenz zwischen der Soll- und der gemessenen Position.
Die gemessene Position, die Sollposition und der Schleppfehler
werden durch die Achsenparameter MPOS, DPOS und FE
dargestellt. Für den Anwender wurden fünf Verstärkungswerte
implementiert, mit denen die richtige Reglereinstellung für jede
Anwendung vorgenommen werden kann.
C ist das Ausgangssignal.
• Proportionalverstärkung
Die Proportionalverstärkung K
der proportional zum Schleppfehler E ist.
= Kp · E
O
p
Alle Systeme verwenden die Proportionalverstärkung. Für viele
Systeme ist die alleinige Verwendung der Proportionalverstärkung
bereits ausreichend. Der Achsenparameter für die
Proportionalverstärkung lautet
• Integralverstärkung
Die Integralverstärkung K
Revision 3.0
der proportional zur Summe der Schleppfehler E ist,
die während des Systembetriebs aufgetreten sind.
= Ki · ΣE
O
i
erzeugt einen Ausgang Op,
p
P_GAIN
erzeugt einen Ausgang Oi,
i
.
Abb.16
∑
K
vff
K
p
AB C
∑
K
i
∆
K
d
∆
K
ov
D
HARDWARE-REFERENZHANDBUCH 28
Systemphilosophie
Die Integralverstärkung kann Überschwingen verursachen
und wird demzufolge nur in Systemen verwendet, die mit
konstanter Drehzahl oder langsamer Beschleunigung arbeiten.
Der Achsenparameter für die Integralverstärkung lautet
I_GAIN
• Differenzverstärkung
Die Differenzverstärkung K
erzeugt einen Ausgang Od,
d
der proportional zur Änderung des Schleppfehlers E ist und
beschleunigt die Reaktion auf Fehleränderungen. Die Stabiltät
des Regelkreises bleibt erhalten.
= Kd · ∆E
O
d
Die Differenzverstärkung kann eine gleichmäßigere Reaktion
erzeugen. Hohe Werte können aber zu Schwingungen führen.
Der Achsenparameter für die Differenzverstärkung lautet
• Ausgangsdrehzahlverstärkung
Die Ausgangsdrehzahlverstärkung K
, der proportional zur Änderung der gemessenen Position Pm
O
ov
erzeugt einen Ausgang
ov
ist und die Systemdämpfung erhöht.
= Kov · ∆P
O
ov
m
Die Ausgangsdrehzahlverstärkung kann für gleichmäßigere
Bewegungsabläufe nützlich sein, erzeugt jedoch hohe
Schleppfehlerwerte. Der Achsenparameter für die
Ausgangsdrehzahlverstärkung lautet
OV_GAIN
.
• Verstärkung der Drehzahlvorsteuerung
Die Verstärkung der Drehzahlvorsteuerung K
Ausgang O
, der proportional zur Änderung der Sollposition Pd
vff
erzeugt einen
vff
ist und den Schleppfehlerwert bei hoher Drehzahl minimiert.
= K
O
vff
vff
· ∆P
d
Der Parameter kann so eingestellt werden, dass der Schleppfehler
bei konstanter Maschinendrehzahl nach Einstellung weiterer
Verstärkungen minimiert wird. Der Achsenparameter für die
Verstärkung der Drehzahlvorsteuerung lautet
VFF_GAIN
.
.
D_GAIN
.
Die Standardeinstellungen sind in der Tabelle aufgeführt.
Auch Werte nach dem Komma sind zulässig.
/i
Verstärkung Vorgabewert
Revision 3.0
Proportionalverstärkung 0,1
Integralverstärkung 0,0
HARDWARE-REFERENZHANDBUCH 29
Systemphilosophie
Verstärkung Vorgabewert
Differenzverstärkung 0,0
Ausgangsdrehzahlverstärkung 0,0
Verstärkung der Drehzahlvorsteuerung 0,0
2.4 Architektur des Trajexia-Systems
Die Architektur des Trajexia-Systems hängt von diesen
Konzepten ab:
• Programmsteuerung
• Bewegungsablauf
• Befehlsspeicher
• Kommunikation
• Peripherie
Diese Konzepte sind vom jeweils im Parameter
Wert abhängig. Die Beziehung zwischen dem Wert von
und den verschiedenen Konzepten der Systemarchitektur wird nachfolgend
beschrieben.
2.4.1 Programmsteuerung
Die Funktion des Systems wird anhand von Programmen festgelegt.
Die Programme werden in einer BASIC-ähnlichen Sprache geschrieben
und steuern die Achsen und Module. Es können 14 Programme parallel
ausgeführt werden. Die Programme können so eingestellt werden, dass
sie beim Einschalten des Systems ausgeführt, von anderen Programmen
gestartet und gestoppt oder von den Trajexia-Tools ausgeführt werden.
Programme führen Befehle aus, um die Achsen zu bewegen, Ein- und
Ausgänge zu steuern und die Kommunikation über BASIC-Befehle zu
ermöglichen.
2.4.2 Bewegungsablauf
Der Bewegungsablauf steuert die Position aller 16 Achsen mittels folgender
Revision 3.0
Aktionen:
• Lesen des Befehlsspeichers
• Lesen der aktuell gemessenen Position (MPOS)
SERVO_PERIOD
SERVO_PERIOD
eingestellten
• Berechnen der nächsten Sollposition (DPOS)
• Ausführen des Positionsregelkreises
• Senden des Achsensollwerts
• Fehlerbehandlung
2.4.3 Befehlsspeicher
Die Befehlsspeicher sind die Verbindung zwischen den BASIC-Befehlen und
Regelkreisen
den
für die Achsensteuerung. Wenn ein BASIC-Bewegungsbefehl
ausgeführt wird, wird der Befehl gespeichert. Während des nächsten
Bewegungsablaufs führt der Profilgenerator die Bewegung entsprechend
den Informationen im Speicher aus.
Wenn die Bewegung beendet ist, wird der Bewegungsbefehl aus dem
Befehlsspeicher entfernt.
2.4.4 Kommunikation
Die gesamte Kommunikation erfolgt in der vierten CPU-Task.
Zum Konfigurieren der Kommunikation wird eine Reihe von BASICKommunikationsbefehlen verwendet. Wenn es sich beim Trajexia-System
um einen Kommunikations-Slave (wie bei der PROFIBUS-Kommunikation)
handelt, muss die Kommunikation lediglich in einer Erstausführungs-Task
konfiguriert werden. Die Werte der konfigurierten globalen Variablen
werden vom Betriebssystem aktualisiert. Wenn es sich bei dem TrajexiaSystem um einen Kommunikations-Master handelt, werden die BASICKommunikationsbefehle zum Schreiben und Lesen verwendet.
2.4.5 Peripherie
Alle Eingänge und Ausgänge werden mit einer Reihe von Parametern
(IN, OP, AIN, AOUT) verwendet. Die Ein- und Ausgänge werden vom TrajexiaSystem automatisch erkannt und zugewiesen. Frequenzumrichter gelten
als Peripheriegeräte und verfügen über eine Reihe von BASIC-Befehlen zur
Steuerung. Verschiedene MECHATROLINK-II-Eingangs- und Ausgangsmodule
können an eine TJ1-ML__-Baugruppe angeschlossen werden.
HARDWARE-REFERENZHANDBUCH 30
 Loading...
Loading...