

Omron Sysmac NY-, Sysmac NY512-1400, Sysmac NY512-1300, Sysmac NY532-1500, Sysmac NY532-1400 Installation Manual
...
Industrial PC Platform
-series
NY
Motion Control Instructions Reference Manual
NY532-1500
NY532-1400
NY532-1300
NY512-1500
NY512-1400
NY512-1300
W561-E1-05

NOTE
1. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or
transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or
otherwise, without the prior written permission of OMRON.
2. No patent liability is assumed with respect to the use of the information contained herein.
Moreover
mation contained in this manual is subject to change without notice.
3. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON as-
sumes no responsibility for errors or omissions.
Neither is any liability assumed for damages resulting from the use of the information contained in
this publication.
, because OMRON is constantly striving to improve its high-quality products, the infor-
Trademarks
• Sysmac and SYSMAC are trademarks or registered trademarks of OMRON Corporation in Japan
and other countries for OMRON factory automation products.
• Microsoft, Windows, Excel, and V
crosoft Corporation in the United States and other countries.
• EtherCAT
GmbH, Germany.
®
is registered trademark and patented technology, licensed by Beckhoff Automation
isual Basic are either registered trademarks or trademarks of Mi-
• ODVA, CIP, CompoNet, DeviceNet, and EtherNet/IP are trademarks of ODVA.
• The SD and SDHC logos are trademarks of SD-3C, LLC.
• Intel and Intel Core are trademarks of Intel Corporation in the U.S. and / or other countries.
Other company names and product names in this document are the trademarks or registered trade-
marks of their respective companies.
Copyrights
• Microsoft product screen shots reprinted with permission from Microsoft Corporation.
• This product incorporates certain third party software. The license and copyright information associ-
ated with this software is available at
http://www.fa.omron.co.jp/nj_info_e/.

Introduction
Thank you for purchasing an NY-series IPC Machine Controller Industrial Panel PC / Industrial Box
PC.
In this manual, the Industrial Panel PCs and Industrial Box PCs may be collectively referred to as “NY-
series Industrial PCs”. In this manual, the range of devices that are directly controlled by the Controller
functions embedded in the Real-Time OS in the NY-series Industrial PC may be expressed as the
Controller.
This manual describes the motion control instructions. Please be sure that you sufficiently understand
the operations and handling procedures, and use the Motion Control Function Module (abbreviated as
“MC Function Module”) correctly.
Use this manual together with user's manuals for the NY-series Controller.
When you have finished reading this manual, keep it in a safe location where it will be readily available
for future use.
Introduction
Intended Audience
This manual is intended for the following personnel, who must also have knowledge of electrical sys-
tems (an electrical engineer or the equivalent).
• Personnel in charge of introducing FA systems.
• Personnel in charge of designing FA systems.
• Personnel in charge of installing and maintaining FA systems.
• Personnel in charge of managing FA systems and facilities.
For programming, this manual is intended for personnel who understand the programming language
specifications in international standard IEC 61131-3 or Japanese standard JIS B 3503.
Applicable Products
This manual covers the following products.
• NY-series IPC Machine Controller Industrial Panel PC
• NY532-15££
• NY532-14££
• NY532-13££
• NY532-5400
• NY-series IPC Machine Controller Industrial Box PC
• NY512-15££
• NY512-14££
• NY512-13££
Part of the specifications and restrictions for the products may be given in other manuals.
Refer to Relevant Manuals on page 2 and Related Manuals on page 22.
NY-series Motion Control Instructions Reference Manual (W561)
1
Relevant Manuals
Relevant Manuals
The following table provides the relevant manuals for the NY-series Controller. Read all of the manuals
that are relevant to your system configuration and application before you use the NY-series Controller.
Most operations are performed from the Sysmac Studio Automation Software. Refer to the Sysmac
Studio Version 1 Operation Manual (Cat. No. W504) for information on the Sysmac Studio.
NY-series IPC Machine Controller
Industrial Panel PC
Hardware User's Manual
Basic information
NY-series IPC Machine Controller
Industrial Box PC
Hardware User's Manual
Manual
NY-series
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Setup User's Manual
Industrial Panel PC / Industrial Box PC
Software User
Instructions Reference Manual
NY-series IPC Machine Controller
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Motion Control User's Manual
NY-series
Motion Control Instructions Reference Manual
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Built-in EtherCA
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Built-in EtherNet/IP Port User's Manual
NJ/NY-series NC Integrated Controller
User's Manual
NY-series
T
roubleshooting Manual
Purpose of use
Introduction to NY-series Panel PCs
Introduction to NY-series Box
PCs
Setting devices and hardware
Using motion control
Using EtherCAT
Using EtherNet/IP
Making setup
Software settings
Writing the user program
*1
Making the initial settings
Preparing to use Controllers
Using motion control
Using EtherCAT
Using EtherNet/IP
Using numerical control
Using motion control
Using EtherCAT
Using EtherNet/IP
Using numerical control
Programming error
processing
¡
¡ ¡
’s Manual
¡
¡
¡
¡
¡
¡ ¡
¡ ¡
T Port User’s Manual
¡
¡
¡
¡
¡
¡
¡
¡
¡
2
NY-series Motion Control Instructions Reference Manual (W561)
NY-series IPC Machine Controller
Industrial Panel PC
Hardware User's Manual
Basic information
NY-series IPC Machine Controller
Industrial Box PC
Hardware User's Manual
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Setup User's Manual
Manual
NY-series
Instructions Reference Manual
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Software User
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Motion Control User's Manual
NY-series
Motion Control Instructions Reference Manual
Relevant Manuals
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Built-in EtherCA
NY-series IPC Machine Controller
Industrial Panel PC / Industrial Box PC
Built-in EtherNet/IP Port User's Manual
NJ/NY-series NC Integrated Controller
User's Manual
NY-series
T
roubleshooting Manual
’s Manual
Purpose of use
Testing operation and debugging
Using motion control
Using EtherCAT
Using EtherNet/IP
Using numerical control
Learning about error manage-
ment and corrections
Maintenance
Using motion control
Using EtherCAT
Using EtherNet/IP
*1. Refer to the NY
the utilities on Windows.
*2. Refer to the NY-series Troubleshooting Manual (Cat. No. W564) for the error management concepts and an overview of the error
items.
*2
¡ ¡
-series Industrial Panel PC / Industrial Box PC Setup User’s Manual (Cat. No. W568) for how to set up and how to use
¡
¡
¡
T Port User’s Manual
¡
¡
¡
¡
¡
¡
NY-series Motion Control Instructions Reference Manual (W561)
3
Manual name
Le
vel-1 section heading
3 Axis Command Instructions
3-2
NJ-series Motion Control Instructions Reference Manual (W508)
MC_Power
The MC_Power instruction makes a Servo Drive ready to operate.
* Refer to A-1 Error Codes.
Output Variable Update Timing
Instruction Name FB/FUN Graphic expression ST expression
MC_Power Power Servo FB MC_Power_instance (
Axis :=parameter,
Enable :=parameter,
Status =>parameter,
Busy =>parameter,
Error =>parameter,
ErrorID =>parameter
);
Variables
Input Variables
Name Meaning Data type Valid range Default Description
Enable Enable BOOL TRUE or FALSE FALSE The device is ready for operation when
Enable is TRUE, and not ready when it is
FALSE.
Output Variables
Name Meaning Data type Valid range Description
Status Servo ON BOOL TRUE or FALSE TRUE when the device is ready for operation.
Busy Executing BOOL TRUE or FALSE TRUE when the instruction is acknowledged.
Error Error BOOL TRUE or FALSE TRUE while there is an error.
ErrorID Error Code WORD
*
Contains the error code when an error occurs.
A value of 16#0000 indicates normal execution.
Name Timing for changing to TRUE Timing for changing to FALSE
Status When the specified axis becomes
ready for operation.
• When operation ready status for the
specified axis is cleared.
• When Error changes to TRUE.
Bu
sy When Enable changes to TRUE. • W
hen Enable changes to FALSE.
• When Error changes to TRUE.
E
rror When there is an error in the execution
conditions or input parameters for the
instruction.
When the error is cleared.
MC_Power_instance
Error
Axis Axis
Enable Status
Busy
MC_Power
ErrorID
Level-2 section heading
Level-3 section heading
Manual Structure
Manual Structure
Some of the instructions described in this manual are common to the NJ/NX-series.
Therefore, note the following conditions.
• You cannot connect a CJ-series Unit with NY-series Controllers. In explanation of the instructions,
skip items and samples related to CJ-series Units.
• In explanation of the instructions, replace the term “CPU Unit” with “NY-series Controller.”
• NY-series Controllers have no SD Memory Card slots. Instead, they provide the Virtual SD Memory
Card function that uses the Windows shared folder. Therefore, replace the term “SD Memory Card”
with “Virtual SD Memory Card.”
Refer to the NY-series Industrial Panel PC / Industrial Box PC Software User’s Manual (Cat. No.
W558) and NY-series Industrial Panel PC / Industrial Box PC Setup User’s Manual (Cat. No. W568)
for details on the Virtual SD Memory Card function.
Page Structure
The following page structure is used in this manual.
4
NY-series Motion Control Instructions Reference Manual (W561)
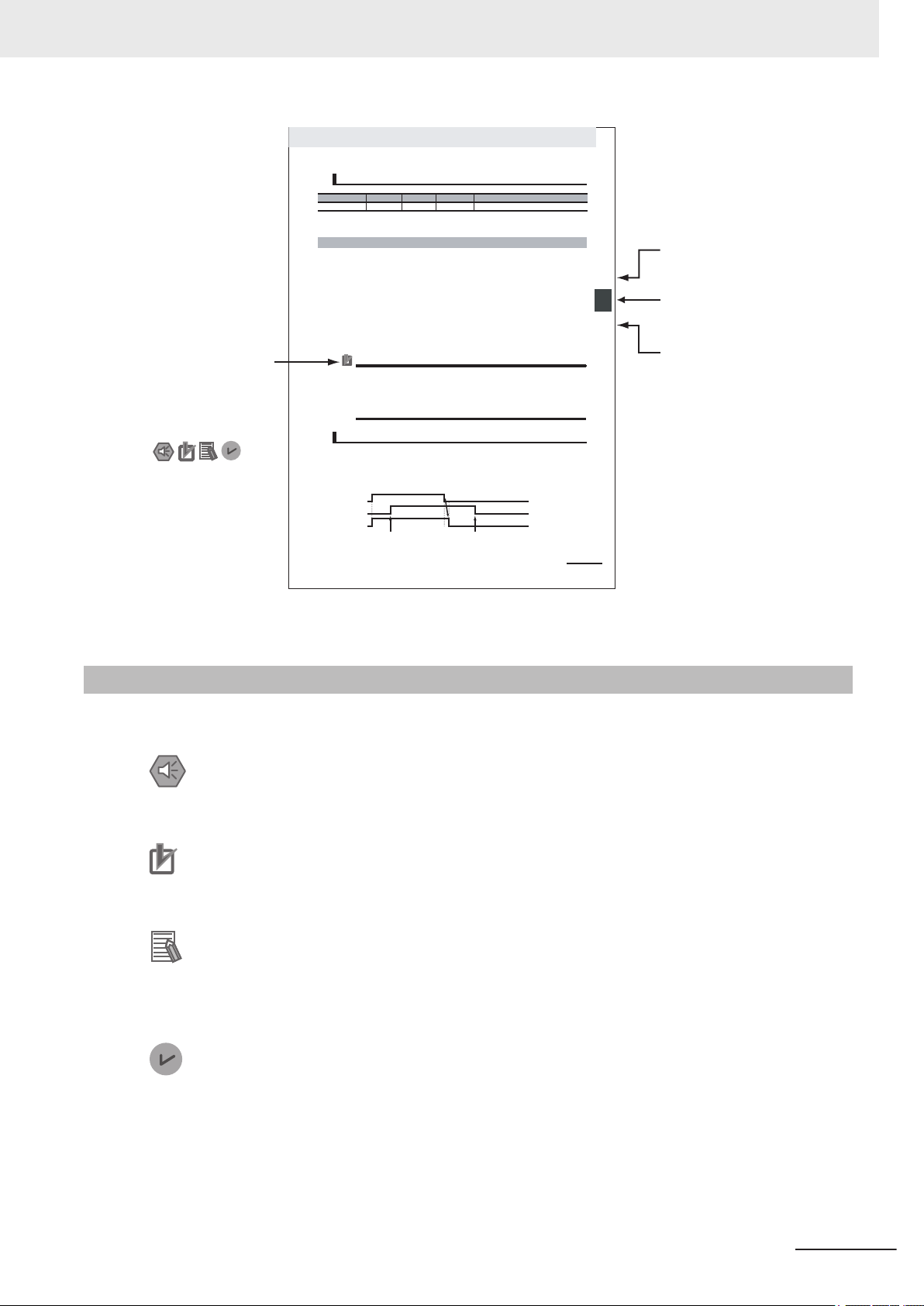
Special information
Icons indicate
precautions, additional
information, or reference
information.
Level-2 section heading
Level-1 section number
Level-3 section heading
The level-1 section number
is given.
The level-2 section heading
is given.
The level-3 section heading
is given.
3-3
3
Axis Command Instructions
NJ-series Motion Control Instructions Reference Manual (W508)
r
ew
oP
_
C
M
3
noitcnuF
* Specify an Axis Variable that was created in the Axis Basic Settings of the Sysmac Studio. (The default axis variable names
are MC_Axis***.)
• When
Enable changes to TRUE, the axis specified by Axis is made ready to operate.
You can control the axis when it is ready to operate.
• When Enable changes to FALSE, the ready status is cleared for the axis specified by Axis.
You cannot control the axis after the ready status is cl eared because it will not acknowledge operation commands. Also, an error occurs if a motion command is executed for an axis for which the
ready status is cleared. You can execute the MC_Power (Power Servo) and MC_Reset (Reset Axis
Error) instructions even for axes that are not ready.
• You can use this instruction to disable the operation of axes while they are in motion. In this case,
CommandAborted will change to TRUE. Output of the operation comman
d will stop and the axis will
not longer be ready for operation.
• If home is not defined for a Servomotor with an absolute encoder, compensation is performed using
the absolute encoder home offset to define home when the axis is ready to operate.
For details on the absolute encoder home offset, refer to the
NJ-series CPU Unit Motion Control
U
ser’s Manual (Cat. No. W507).
Precautions for Correct UsePrecautions for Correct Use
• You can use this instruction for servo axes and virtual servo axes. If the instruction is used for
encoder axes or virtual encoder axes, an error will occur.
• Executing this Instruction for the Master Axis of Synchronized Control
When master axis operation is disabled for a vertical axis, the position of the master axis may
change rapidly. This may cause the motion of th e slave axis to change rapidly. Take suitable
measures to prevent the slave axis from moving rapidly, such as applying a brake to the master axis or leaving master axis operation enabled until after synchronized control is completed.
• W
hen Enable changes to TRUE, Busy (Executing) changes to TRUE to indicate that the instruction
was acknowledged.
• After the axis becomes ready for operation, Status (Ser vo ON) changes to TRUE.
• W
hen Enable changes to FALSE, Busy (Executing) changes to FALSE. Status (Servo ON) changes
t
o FALSE when ready status is cleared. Status (Servo ON) outputs the axis ready status regardless
o
f whether Enable is TRUE or FALSE.
In-Out
Variables
Name Meaning Data type Valid range Description
Axis Axis _sAXIS_REF ---
Specify the axis.
*
Function
Timing Charts
Enable
Status
Busy
The specified axis becomes
ready for operation.
Rea
dy status is cleared for the
specified axis.
Manual Structure
Special Information
NY-series Motion Control Instructions Reference Manual (W561)
Note These pages are for illustrative purposes only. They may not literally appear in this manual.
Special information in this manual is classified as follows:
Precautions for Safe Use
Precautions on what to do and what not to do to ensure safe usage of the product.
Precautions for Correct Use
Precautions on what to do and what not to do to ensure proper operation and performance.
Additional Information
Additional information to read as required.
This information is provided to increase understanding or make operation easier
Information on dif
and for different versions of the Sysmac Studio is given.
Version Information
ferences in specifications and functionality for Controller with different unit versions
.
5

Manual Structure
6
NY-series Motion Control Instructions Reference Manual (W561)

Sections in this Manual
1
2
3
4
5
A
I
1
2
3
4
5
A
I
Introduction to Motion Control Instructions
V
ariables and Instructions
Axis Command Instructions
Axes Group Instructions
Common Command Instructions
Appendices
Index
Sections in this Manual
NY-series Motion Control Instructions Reference Manual (W561)
7
CONTENTS
CONTENTS
Introduction .............................................................................................................. 1
Intended Audience
Applicable Products ......................................................................................................................................... 1
Relevant Manuals..................................................................................................... 2
Manual Structure...................................................................................................... 4
Page Structure.................................................................................................................................................4
Special Information .......................................................................................................................................... 5
Sections in this Manual ........................................................................................... 7
Terms and Conditions Agreement........................................................................ 13
Warranty, Limitations of Liability ....................................................................................................................13
Application Considerations ............................................................................................................................14
Disclaimers ....................................................................................................................................................14
...........................................................................................................................................1
Safety Precautions................................................................................................. 16
Precautions for Safe Use ...................................................................................... 17
Precautions for Correct Use ................................................................................. 18
Regulations and Standards .................................................................................. 19
Versions.................................................................................................................. 20
Checking Versions.........................................................................................................................................20
Related Manuals..................................................................................................... 22
Revision History..................................................................................................... 25
Section 1 Introduction to Motion Control Instructions
1-1 Motion Control Instructions..................................................................................................1-2
1-1-1
1-1-2 Overview of Motion Control Instructions .....................................................................................1-2
1-1-3 Precautions for Master and Auxiliary Axes in Synchronized Control ..........................................1-6
1-2 Basic Information on Motion Control Instructions ............................................................. 1-8
1-2-1 Motion Control Instruction Names...............................................................................................1-8
1-2-2 Languages for Motion Control Instructions .................................................................................1-8
1-2-3 Motion Control Instruction Locations...........................................................................................1-9
1-2-4 Multi-execution of Motion Control Instructions ..........................................................................1-17
1-2-5 Online Editing of Motion Control Instructions ............................................................................1-18
1-2-6 Changes in the Operating Mode of the Controller.....................................................................1-18
Function Blocks for PLCopen® Motion Control ...........................................................................1-2
Section 2 Variables and Instructions
2-1 Variables ................................................................................................................................. 2-2
2-1-1
2-1-2 Axis Variables..............................................................................................................................2-4
8
MC Common Variables ...............................................................................................................2-3
NY-series Motion Control Instructions Reference Manual (W561)

2-1-3 Axes Group Variables................................................................................................................2-10
2-1-4
2-1-5 Output Variables for Motion Control Instructions.......................................................................2-27
2-1-6 In-Out Variables for Motion Control Instructions........................................................................2-30
Input Variables for Motion Control Instructions..........................................................................2-12
2-2 Instructions ..........................................................................................................................2-33
2-2-1 Common Commands ................................................................................................................2-33
2-2-2 Axis Commands ........................................................................................................................2-33
2-2-3 Axes Group Commands............................................................................................................2-35
2-3 PDO Mapping .......................................................................................................................2-37
2-3-1 Required Objects ......................................................................................................................2-37
2-3-2 Objects Required for Specific Instructions ................................................................................2-38
Section 3 Axis Command Instructions
MC_Power.........................................................................................................................................3-3
V
ariables .......................................................................................................................................................3-3
Function ........................................................................................................................................................3-4
MC_MoveJog .................................................................................................................................... 3-8
Variables.......................................................................................................................................................3-8
Function ........................................................................................................................................................3-9
MC_Home........................................................................................................................................3-18
Variables.....................................................................................................................................................3-18
Function ......................................................................................................................................................3-19
MC_HomeWithParameter ..............................................................................................................3-41
Variables.....................................................................................................................................................3-41
Function ......................................................................................................................................................3-45
MC_Move ........................................................................................................................................3-48
Variables.....................................................................................................................................................3-48
Function ......................................................................................................................................................3-50
MC_MoveAbsolute ......................................................................................................................... 3-53
Variables.....................................................................................................................................................3-53
Function ......................................................................................................................................................3-55
Sample Programming 1 ..............................................................................................................................3-61
Sample Programming 2 ..............................................................................................................................3-70
MC_MoveRelative...........................................................................................................................3-80
Variables.....................................................................................................................................................3-80
Function ......................................................................................................................................................3-82
MC_MoveVelocity...........................................................................................................................3-88
Variables.....................................................................................................................................................3-88
Function ......................................................................................................................................................3-90
Sample Programming .................................................................................................................................3-94
MC_MoveZeroPosition ................................................................................................................3-104
Variables...................................................................................................................................................3-104
Function ....................................................................................................................................................3-106
MC_MoveFeed .............................................................................................................................. 3-111
Variables................................................................................................................................................... 3-111
Function .................................................................................................................................................... 3-115
Sample Programming ...............................................................................................................................3-127
MC_Stop........................................................................................................................................3-140
Variables...................................................................................................................................................3-140
Function ....................................................................................................................................................3-141
MC_ImmediateStop......................................................................................................................3-149
Variables...................................................................................................................................................3-149
Function ....................................................................................................................................................3-150
MC_SetPosition............................................................................................................................3-154
CONTENTS
NY-series Motion Control Instructions Reference Manual (W561)
9

CONTENTS
MC_SetOverride ...........................................................................................................................3-161
MC_ResetFollowingError ............................................................................................................3-167
MC_CamIn.....................................................................................................................................3-174
MC_CamOut..................................................................................................................................3-232
MC_CamMonitor...........................................................................................................................3-237
MC_GearIn ....................................................................................................................................3-246
MC_GearInPos..............................................................................................................................3-267
MC_GearOut .................................................................................................................................3-289
MC_MoveLink ............................................................................................................................... 3-294
MC_CombineAxes........................................................................................................................3-317
MC_Phasing..................................................................................................................................3-328
MC_TorqueControl.......................................................................................................................3-335
MC_SetTorqueLimit .....................................................................................................................3-348
MC_ZoneSwitch ...........................................................................................................................3-355
MC_TouchProbe...........................................................................................................................3-361
MC_AbortTrigger..........................................................................................................................3-381
Variables ...................................................................................................................................................3-154
Function
Variables ...................................................................................................................................................3-161
Function ....................................................................................................................................................3-162
Variables ...................................................................................................................................................3-167
Function ....................................................................................................................................................3-168
Variables ...................................................................................................................................................3-174
Function ....................................................................................................................................................3-178
Sample Programming 1 ............................................................................................................................3-201
Sample Programming 2 ............................................................................................................................3-212
Variables ...................................................................................................................................................3-232
Function ....................................................................................................................................................3-233
Variables ...................................................................................................................................................3-237
Function ....................................................................................................................................................3-240
Precautions for Correct Use .....................................................................................................................3-245
Variables ...................................................................................................................................................3-246
Function ....................................................................................................................................................3-248
Sample Programming ...............................................................................................................................3-255
Variables ...................................................................................................................................................3-267
Function ....................................................................................................................................................3-270
Sample Programming ...............................................................................................................................3-277
Variables ...................................................................................................................................................3-289
Function ....................................................................................................................................................3-290
Variables ...................................................................................................................................................3-294
Function ....................................................................................................................................................3-297
Sample Programming ...............................................................................................................................3-306
Variables ...................................................................................................................................................3-317
Function ....................................................................................................................................................3-319
Variables ...................................................................................................................................................3-328
Function ....................................................................................................................................................3-330
Variables ...................................................................................................................................................3-335
Function ....................................................................................................................................................3-337
Variables ...................................................................................................................................................3-348
Function ....................................................................................................................................................3-350
Variables ...................................................................................................................................................3-355
Function ....................................................................................................................................................3-356
Variables ...................................................................................................................................................3-361
Function ....................................................................................................................................................3-364
Sample Programming ...............................................................................................................................3-374
Variables ...................................................................................................................................................3-381
....................................................................................................................................................3-155
10
NY-series Motion Control Instructions Reference Manual (W561)

CONTENTS
Function ....................................................................................................................................................3-382
MC_AxesObserve
Variables ...................................................................................................................................................3-385
Function ....................................................................................................................................................3-387
MC_SyncMoveVelocity ................................................................................................................ 3-391
Variables ...................................................................................................................................................3-391
Function ....................................................................................................................................................3-393
MC_SyncMoveAbsolute ..............................................................................................................3-401
Variables ...................................................................................................................................................3-401
Function ....................................................................................................................................................3-403
MC_Reset......................................................................................................................................3-408
Variables ...................................................................................................................................................3-408
Function ....................................................................................................................................................3-409
MC_ChangeAxisUse ....................................................................................................................3-412
Variables ...................................................................................................................................................3-412
Function ....................................................................................................................................................3-413
MC_DigitalCamSwitch .................................................................................................................3-416
Variables ...................................................................................................................................................3-416
Function ....................................................................................................................................................3-418
Sample Programming ...............................................................................................................................3-427
MC_TimeStampToPos .................................................................................................................3-436
Variables ...................................................................................................................................................3-436
Function ....................................................................................................................................................3-437
Sample Programming ...............................................................................................................................3-440
MC_SyncOffsetPosition ..............................................................................................................3-448
Variables ...................................................................................................................................................3-448
Function ....................................................................................................................................................3-450
MC_OffsetPosition ....................................................................................................................... 3-458
Variables ...................................................................................................................................................3-458
Function ....................................................................................................................................................3-460
.........................................................................................................................3-385
Section 4 Axes Group Instructions
MC_GroupEnable ............................................................................................................................. 4-2
V
ariables .......................................................................................................................................................4-2
Function ........................................................................................................................................................4-3
MC_GroupDisable ............................................................................................................................ 4-6
Variables.......................................................................................................................................................4-6
Function ........................................................................................................................................................4-7
MC_MoveLinear.............................................................................................................................. 4-11
Variables.....................................................................................................................................................4-11
Function ......................................................................................................................................................4-13
Sample Programming .................................................................................................................................4-24
MC_MoveLinearAbsolute ..............................................................................................................4-40
Variables.....................................................................................................................................................4-40
Function ......................................................................................................................................................4-42
MC_MoveLinearRelative................................................................................................................4-43
Variables.....................................................................................................................................................4-43
Function ......................................................................................................................................................4-45
MC_MoveCircular2D ......................................................................................................................4-46
Variables.....................................................................................................................................................4-46
Function ......................................................................................................................................................4-49
Sample Programming .................................................................................................................................4-61
MC_GroupStop...............................................................................................................................4-74
Variables.....................................................................................................................................................4-74
NY-series Motion Control Instructions Reference Manual (W561)
11
CONTENTS
MC_GroupImmediateStop
MC_GroupSetOverride ..................................................................................................................4-86
MC_GroupReadPosition................................................................................................................4-91
MC_ChangeAxesInGroup..............................................................................................................4-95
MC_GroupSyncMoveAbsolute......................................................................................................4-99
MC_GroupReset ........................................................................................................................... 4-106
Function ......................................................................................................................................................4-76
.............................................................................................................4-82
Variables .....................................................................................................................................................4-82
Function ......................................................................................................................................................4-83
Variables .....................................................................................................................................................4-86
Function ......................................................................................................................................................4-87
Variables .....................................................................................................................................................4-91
Function ......................................................................................................................................................4-92
Variables .....................................................................................................................................................4-95
Function ......................................................................................................................................................4-96
Variables .....................................................................................................................................................4-99
Function ....................................................................................................................................................4-101
Variables ...................................................................................................................................................4-106
Function ....................................................................................................................................................4-107
Section 5 Common Command Instructions
MC_SetCamTableProperty ..............................................................................................................5-2
V
ariables .......................................................................................................................................................5-2
Function ........................................................................................................................................................5-3
MC_SaveCamTable ..........................................................................................................................5-8
Variables.......................................................................................................................................................5-8
Function ........................................................................................................................................................5-9
MC_Write.........................................................................................................................................5-13
Variables.....................................................................................................................................................5-13
Function ......................................................................................................................................................5-16
MC_GenerateCamTable .................................................................................................................5-18
Variables.....................................................................................................................................................5-18
Function ......................................................................................................................................................5-20
Sample Programming .................................................................................................................................5-33
MC_WriteAxisParameter ...............................................................................................................5-47
Variables.....................................................................................................................................................5-47
Function ......................................................................................................................................................5-48
MC_ReadAxisParameter................................................................................................................5-61
Variables.....................................................................................................................................................5-61
Function ......................................................................................................................................................5-63
Appendices
A-1 Instructions for Which Multi-execution Is Supported ....................................................... A-2
A-1-1
A-1-2 State Transitions and Instructions for which Multi-execution Is Supported................................ A-4
A-2 Connecting to NX Units...................................................................................................... A-10
A-3 Version Information ............................................................................................................ A-11
Index
12
Axis and Axes Group Status ...................................................................................................... A-2
NY-series Motion Control Instructions Reference Manual (W561)
Terms and Conditions Agreement
Terms and Conditions Agreement
Warranty, Limitations of Liability
Warranties
Exclusive Warranty
Omron’s exclusive warranty is that the Products will be free from defects in materials and work-
manship for a period of twelve months from the date of sale by Omron (or such other period ex-
pressed in writing by Omron). Omron disclaims all other warranties, express or implied.
Limitations
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, ABOUT
NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF
THE PRODUCTS. BUYER ACKNOWLEDGES THAT IT ALONE HAS DETERMINED THAT THE
PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR INTENDED USE.
Omron further disclaims all warranties and responsibility of any type for claims or expenses based
on infringement by the Products or otherwise of any intellectual property right.
Buyer Remedy
Omron’s sole obligation hereunder shall be, at Omron’s election, to (i) replace (in the form originally
shipped with Buyer responsible for labor charges for removal or replacement thereof) the non-com-
plying Product, (ii) repair the non-complying Product, or (iii) repay or credit Buyer an amount equal
to the purchase price of the non-complying Product; provided that in no event shall Omron be re-
sponsible for warranty, repair, indemnity or any other claims or expenses regarding the Products
unless Omron’s analysis confirms that the Products were properly handled, stored, installed and
maintained and not subject to contamination, abuse, misuse or inappropriate modification. Return
of any Products by Buyer must be approved in writing by Omron before shipment. Omron Compa-
nies shall not be liable for the suitability or unsuitability or the results from the use of Products in
combination with any electrical or electronic components, circuits, system assemblies or any other
materials or substances or environments. Any advice, recommendations or information given orally
or in writing, are not to be construed as an amendment or addition to the above warranty.
See http://www.omron.com/global/ or contact your Omron representative for published information.
Limitation on Liability; Etc
OMRON COMPANIES SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT, INCIDENTAL, OR CON-
SEQUENTIAL DAMAGES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN ANY
NY-series Motion Control Instructions Reference Manual (W561)
13
Terms and Conditions Agreement
WAY CONNECTED WITH THE PRODUCTS, WHETHER SUCH CLAIM IS BASED IN CONTRACT,
W
ARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liability of Omron Companies exceed the individual price of the Product on
which liability is asserted.
Application Considerations
Suitability of Use
Omron Companies shall not be responsible for conformity with any standards, codes or regulations
which apply to the combination of the Product in the Buyer
er’s request, Omron will provide applicable third party certification documents identifying ratings and
limitations of use which apply to the Product. This information by itself is not sufficient for a complete
determination of the suitability of the Product in combination with the end product, machine, system, or
other application or use. Buyer shall be solely responsible for determining appropriateness of the par-
ticular Product with respect to Buyer’s application, product or system. Buyer shall take application re-
sponsibility in all cases.
’s application or use of the Product. At Buy-
NEVER USE THE PRODUCT FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY OR IN LARGE QUANTITIES WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE
HAS BEEN DESIGNED TO ADDRESS THE RISKS, AND THAT THE OMRON PRODUCT(S) IS
PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIP-
MENT OR SYSTEM.
Programmable Products
Omron Companies shall not be responsible for the user’s programming of a programmable Product, or
any consequence thereof.
Disclaimers
Performance Data
Data presented in Omron Company websites, catalogs and other materials is provided as a guide for
the user in determining suitability and does not constitute a warranty
Omron’s test conditions, and the user must correlate it to actual application requirements. Actual per-
formance is subject to the Omron’s Warranty and Limitations of Liability.
. It may represent the result of
14
Change in Specifications
Product specifications and accessories may be changed at any time based on improvements and oth-
er reasons. It is our practice to change part numbers when published ratings or features are changed,
or when significant construction changes are made. However
NY-series Motion Control Instructions Reference Manual (W561)
, some specifications of the Product may
Terms and Conditions Agreement
be changed without any notice. When in doubt, special part numbers may be assigned to fix or estab-
lish key specifications for your application. Please consult with your Omron’
time to confirm actual specifications of purchased Product.
s representative at any
Errors and Omissions
Information presented by Omron Companies has been checked and is believed to be accurate; how-
ever
, no responsibility is assumed for clerical, typographical or proofreading errors or omissions.
NY-series Motion Control Instructions Reference Manual (W561)
15

Safety Precautions
Safety Precautions
Refer to the following manuals for safety precautions.
• NY-series Industrial Box PC Hardware User’s Manual (Cat. No. W556)
• NY-series Industrial Panel PC Hardware User’s Manual (Cat. No. W557)
• NY-series Industrial Panel PC / Industrial Box PC Software User’s Manual (Cat. No. W558)
16
NY-series Motion Control Instructions Reference Manual (W561)

Precautions for Safe Use
Precautions for Safe Use
Refer to the following manuals for precautions for safe use.
• NY-series Industrial Box PC Hardware User’s Manual (Cat. No. W556)
• NY-series Industrial Panel PC Hardware User’s Manual (Cat. No. W557)
• NY-series Industrial Panel PC / Industrial Box PC Software User’s Manual (Cat. No. W558)
NY-series Motion Control Instructions Reference Manual (W561)
17

Precautions for Correct Use
Precautions for Correct Use
Refer to the following manuals for precautions for correct use.
• NY-series Industrial Box PC Hardware User’s Manual (Cat. No. W556)
• NY-series Industrial Panel PC Hardware User’s Manual (Cat. No. W557)
• NY-series Industrial Panel PC / Industrial Box PC Software User’s Manual (Cat. No. W558)
18
NY-series Motion Control Instructions Reference Manual (W561)

Regulations and Standards
Refer to the following manuals for Regulations and Standards.
• NY-series Industrial Box PC Hardware User’s Manual (Cat. No. W556)
• NY-series Industrial Panel PC Hardware User’s Manual (Cat. No. W557)
Regulations and Standards
NY-series Motion Control Instructions Reference Manual (W561)
19

ID information indication
Unit version
Ver.1.£
£
Versions
Versions
Hardware revisions and unit versions are used to manage the hardware and software in NY-series
Controllers and EtherCAT slaves. The hardware revision or unit version is updated each time there is
a change in hardware or software specifications. Even when two Units or EtherCAT slaves have the
same model number, they will have functional or performance differences if they have different hard-
ware revisions or unit versions.
Checking Versions
You can check versions on the ID information indications or with the Sysmac Studio.
Checking Unit Versions on ID Information Indications
The unit version is given on the ID information indication on the side of the product.
The ID information on an NY-series NY5£2-££££ Controller is shown below.
Checking Unit Versions with the Sysmac Studio
You can use the Sysmac Studio to check unit versions. The procedure is different for Units and for
EtherCA
T slaves.
Checking the Unit Version of an NY-series Controller
20
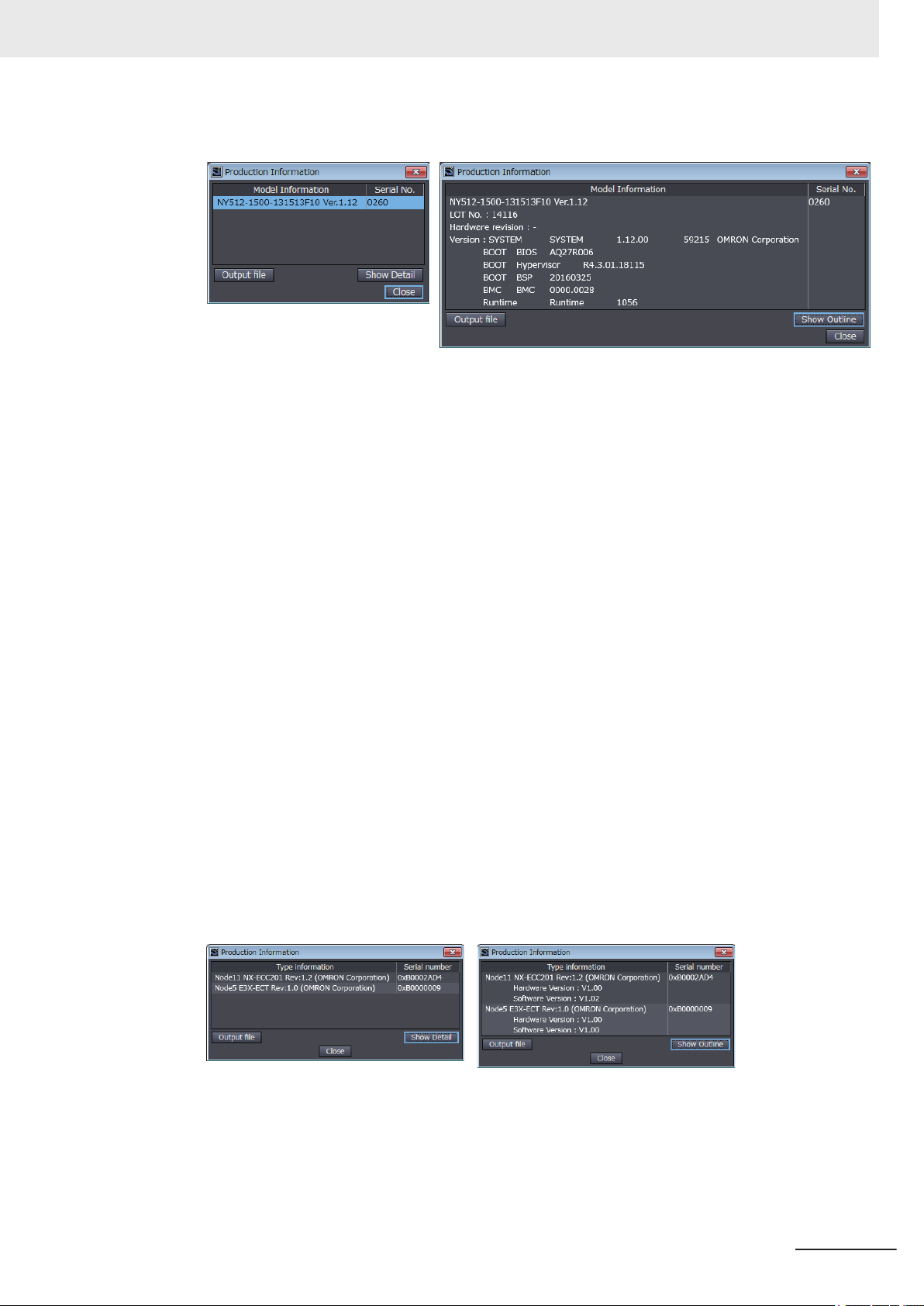
You can use the Production Information while the Sysmac Studio is online to check the unit version
of a Unit. You can do this only for the Controller.
1 Right-click CPU Rack under Configurations and Setup - CPU/Expansion Racks in the Multi-
view Explorer
The Production Information Dialog Box is displayed.
Changing Information Displayed in Production Information Dialog Box
, and select Production Information.
1 Click the Show Outline or Show Detail Button at the lower right of the Production Information
Dialog Box.
NY-series Motion Control Instructions Reference Manual (W561)
Versions
The view will change between the production information details and outline.
Outline View Detail View
The information that is displayed is different for the Outline View and Detail View. The Detail
iew displays the unit version, hardware revision, and other versions. The Outline View dis-
V
plays only the unit version.
Checking the Unit Version of an EtherCAT Slave
You can use the Production Information while the Sysmac Studio is online to check the unit version
of an EtherCAT slave.
Use the following procedure to check the unit version.
1 Double-click EtherCA
click EtherCAT under Configurations and Setup and select Edit from the menu.
The EtherCAT Tab Page is displayed.
T under Configurations and Setup in the Multiview Explorer. Or, right-
2 Right-click the master on the EtherCAT Tab Page and select Display Production Information.
The Production Information Dialog Box is displayed.
The unit version is displayed after “Rev
Changing Information Displayed in Production Information Dialog Box
.”
1 Click the Show Detail or Show Outline Button at the lower right of the Production Information
Dialog Box.
The view will change between the production information details and outline.
Outline View Detail View
NY-series Motion Control Instructions Reference Manual (W561)
21
Related Manuals
Related Manuals
The followings are the manuals related to this manual. Use these manuals for reference.
Manual name Cat. No. Model numbers Application Description
NY-series
IPC Machine Controller
Industrial Panel PC
Hardware User
NY-series
IPC Machine Controller
Industrial Box PC
Hardware User
NY-series
IPC Machine Controller
Industrial Panel PC / Industrial
Box PC
Setup User
NY-series
IPC Machine Controller
Industrial Panel PC / Industrial
Box PC
Software User
NY-series
Instructions Reference Manual
NY-series
IPC Machine Controller
Industrial Panel PC / Industrial
Box PC
Motion Control User
NY-series
Motion Control Instructions
Reference Manual
’s Manual
’s Manual
’s Manual
’s Manual
’s Manual
W557
W556
W568
W558
W560
W559
W561
NY532-££££
NY512-££££
NY532-££££
NY512-££££
NY532-££££
NY512-££££
NY532-££££
NY512-££££
NY532-££££
NY512-££££
NY532-££££
NY512-££££
Learning the basic
specifications of the
NY-series Industrial
Panel PCs, including
introductory information, designing, installation, and maintenance.
Mainly hardware information is provided.
Learning the basic
specifications of the
NY-series Industrial
Box PCs, including
introductory information, designing, installation, and maintenance.
Mainly hardware information is provided.
Learning about initial
setting of the NY-series Industrial PCs
and preparations to
use Controllers.
Learning how to program and set up the
Controller functions
of an NY-series Industrial PC.
Learning detailed
specifications on the
basic instructions of
an NY
-series Indus-
trial PC.
Learning about motion control settings
and programming
concepts of an NYseries Industrial PC.
Learning about the
specifications of the
motion control instructions of an NY
series Industrial PC.
-
An introduction to the entire NY-series system is provided along with the following information on the Industrial Panel PC.
• Features and system configuration
• Introduction
• Part names and functions
• General specifications
• Installation and wiring
• Maintenance and inspection
An introduction to the entire NY-series system is provided along with the following information on the Industrial Box PC.
• Features and system configuration
• Introduction
• Part names and functions
• General specifications
• Installation and wiring
• Maintenance and inspection
The following information is provided on an
introduction to the entire NY-series system.
• Two OS systems
• Initial settings
• Industrial PC Support Utility
• NYCompolet
• Industrial PC API
• Backup and recovery
The following information is provided on the
NY-series Controller functions.
• Controller operation
• Controller features
• Controller settings
• Programming based on IEC 61131-3 lan-
guage specifications
The instructions in the instruction set (IEC
61131-3 specifications) are described.
The settings and operation of the Controller
and programming concepts for motion control are described.
The motion control instructions are described.
22
NY-series Motion Control Instructions Reference Manual (W561)
Manual name Cat. No. Model numbers Application Description
NY-series
IPC Machine Controller
Industrial Panel PC
/ Industrial
Box PC
Built-in EtherCA
Manual
NY-series
IPC Machine Controller
Industrial Panel PC
/ Industrial
Box PC
Built-in EtherNet/IP™ Port Us-
’s Manual
er
NJ/NY-series
NC Integrated Controller
’s Manual
User
NJ/NY-series
G code
Instructions Reference Manual
NY-series
roubleshooting Manual
T
Sysmac Studio Version 1
Operation Manual
CNC Operator
Operation Manual
NX-series
EtherCA
User’s Manual
T® Port User’s
T® Coupler Unit
W562
W563
O030 NJ501-5300
O031 NJ501-5300
W564
W504 SYSMAC
O032
W519
NY532-££££
NY512-££££
NY532-££££
NY512-££££
NY532-5400
NY532-5400
NY532-££££
NY512-££££
-SE2£££
SYSMAC-RTNC0£
££D
NX-ECC£££
Using the built-in
EtherCAT port in an
NY-series Industrial
PC.
Using the built-in
EtherNet/IP port in
an NY-series Industrial PC.
Performing numerical
control with NJ/NYseries Controllers.
Learning about the
specifications of the
G code/M code instructions.
Learning about the
errors that may be
detected in an NYseries Industrial PC.
Learning about the
operating procedures
and functions of the
Sysmac Studio.
Learning an introduction of the CNC Operator and how to
use it.
Learning how to use
the NX-series EtherCAT Coupler Unit
and EtherCAT Slave
Terminals.
Information on the built-in EtherCAT port is
provided.
This manual provides an introduction and
provides information on the configuration,
features, and setup.
Information on the built-in EtherNet/IP port
is provided.
Information is provided on the basic setup,
tag data links, and other features.
Describes the functionality to perform the
numerical control.
The G code/M code instructions are described.
Concepts on managing errors that may be
detected in an NY-series Controller and information on individual errors are described.
Describes the operating procedures of the
Sysmac Studio.
An introduction of the CNC Operator, installation procedures, basic operations, connection operations, and operating procedures for main functions are described.
The following items are described: the overall system and configuration methods of an
EtherCAT Slave Terminal (which consists of
an NX-series EtherCAT Coupler Unit and
NX Units), and information on hardware,
setup, and functions to set up, control, and
monitor NX Units through EtherCAT.
Related Manuals
NY-series Motion Control Instructions Reference Manual (W561)
23
Related Manuals
Manual name Cat. No. Model numbers Application Description
NX-series
NX Units
’s Manual
User
NX-series
Data Reference Manual
GX-series EtherCAT Slave
Units
’s Manual
User
AC Servomotors/Servo Drives
1S-series with
Built-in EtherCA
cations User's Manual
AC Servomotors/Servo Drives
G5 Series with
Built-in EtherCA
cations User's Manual
T® Communi-
T® Communi-
W521
W522
W592
W566
W523
W524
W540
W565
W567
W525
W488
I586
I621
I576
I577
NX-ID££££
NX-IA££££
NX-OC££££
NX-OD££££
NX-MD££££
NX-AD££££
NX-DA££££
NX-HAD£££
NX-TS££££
NX-HB££££
NX-PD1£££
NX-PF0£££
NX-PC0£££
NX-TBX01
NX-EC0£££
NX-ECS£££
NX-PG0£££
NX-CIF£££
NX-RS££££
NX-ILM£££
NX-££££££
GX-ID££££
GX-OD££££
GX-OC££££
GX-MD££££
GX-AD££££
GX-DA££££
GX-EC££££
-ID££
XWT
XWT-OD££
R88M-1£
R88D-1SN£-ECT
R88M-1AL£/ -1AM
£
R88D-1SAN£-ECT
R88M-K£
R88D-KN£-ECT
R88L-EC-£
R88D-KN£-ECT
-L
Learning how to use
NX Units.
Referencing lists of
the data that is required to configure
systems with NX-series Units.
Learning how to use
the EtherCA
I/O terminals.
Learning how to use
the Servomotors/
Servo Drives with
built-in EtherCAT
Communications.
Learning how to use
the AC Servomotors/
Servo Drives with
built-in EtherCAT
Communications.
T remote
Describes the hardware, setup methods,
and functions of the NX Units.
Manuals are available for the following
Units.
Digital I/O Units, Analog I/O Units, System
Units, Position Interface Units, Communications Interface Units, Load Cell Input Unit,
and IO-Link Master Units.
Lists of the power consumptions, weights,
and other NX Unit data that is required to
configure systems with NX-series Units are
provided.
Describes the hardware, setup methods
and functions of the EtherCAT remote I/O
terminals.
Describes the hardware, setup methods
and functions of the Servomotors/Servo
Drives with built-in EtherCAT Communications.
Describes the hardware, setup methods
and functions of the AC Servomotors/Servo
Drives with built-in EtherCAT Communications.
The Linear Motor Type models and dedicated models for position control are available
in G5-series.
24
NY-series Motion Control Instructions Reference Manual (W561)
Revision History
W561-E1-05
R
evision code
Cat. No.
A manual revision code appears as a suffix to the catalog number on the front and back covers of the
manual.
Revision History
Revision
code
01 September 2016 Original production
02 April 2017 Corrected mistakes.
03 October 2017 Corrected mistakes.
04 January 2019 Corrected mistakes.
05 July 2019
Date Revised content
• Made changes accompanying the addition of 1S-series AC Servomotors/
Servo Drives.
• Made changes accompanying th addition of the MC_CamMonitor (Cam Mon-
itor) instruction and the MC_Of
instruction.
• Made changes accompanying the release of Sysmac Studio version 1.29.
fsetPosition (Position Offset Compensation)
NY-series Motion Control Instructions Reference Manual (W561)
25

Revision History
26
NY-series Motion Control Instructions Reference Manual (W561)

1
Introduction to Motion Control Instructions
This section gives an introduction to motion control instructions supported by NY-series Controller
1-1 Motion Control Instructions .......................................................................... 1-2
1-1-1 Function Blocks for PLCopen® Motion Control............................................... 1-2
1-1-2 Overview of Motion Control Instructions ......................................................... 1-2
1-1-3 Precautions for Master and Auxiliary Axes in Synchronized Control.............. 1-6
1-2 Basic Information on Motion Control Instructions .....................................1-8
1-2-1 Motion Control Instruction Names .................................................................. 1-8
1-2-2 Languages for Motion Control Instructions ..................................................... 1-8
1-2-3 Motion Control Instruction Locations .............................................................. 1-9
1-2-4 Multi-execution of Motion Control Instructions.............................................. 1-17
1-2-5 Online Editing of Motion Control Instructions................................................ 1-18
1-2-6 Changes in the Operating Mode of the Controller ........................................ 1-18
s.
1
NY-series Motion Control Instructions Reference Manual (W561)
1-1
1 Introduction to Motion Control Instructions
1-1
1-1-1
Motion Control Instructions
Motion control instructions are used in the user program to execute motion controls for an NY-series
Controller. These instructions are defined as function blocks.
The motion control instructions of the MC Function Module are based on the technical specifications of
function blocks for PLCopen® motion control.
There are two types of motion control instructions: PLCopen®-defined instructions and instructions that
are unique to the MC Function Module.
This section provides an overview of the PLCopen® motion control function blocks and motion control
instructions.
For details on motion control instructions, refer to the NY-series Industrial Panel PC / Industrial Box PC
Motion Control User’s Manual (Cat. No. W559).
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information on us-
ing the NX-series Position Interface Units.
Function Blocks for PLCopen® Motion Control
1-1-2
PLCopen® standardizes motion control function blocks to define a program interface for the languages
specified in IEC 61
Single-axis positioning, electronic cams, and multi-axes coordinated control are defined along with ba-
sic procedures for executing instructions.
By using PLCopen® motion control function blocks, programming can be more easily reused without
hardware dependence.
Costs for training and support are also reduced.
Additional Information
PLCopen
PLCopen® is a promotion body for IEC 61
worldwide membership structure.
IEC 61131-3 is an international standard for PLC programming.
PLCopen® Japan is the promotion committee for the Japanese market and consists of members that have concerns related to the Japanese market.
• The website of PLCopen® Japan is http://www.plcopen-japan.jp/.
• The website of PLCopen® Europe (headquarters) is http://www.plcopen.org/.
131-3 (JIS B 3503).
®
131-3 that has its headquarters in Europe and a
Overview of Motion Control Instructions
1-2
This section describes items defined in the technical specifications of function blocks for PLCopen
motion control and provides an overview of their application in the MC Function Module.
Types of Motion Control Instructions
The following table list the different types of motion control instructions.
NY-series Motion Control Instructions Reference Manual (W561)
®
 Loading...
Loading...