

Page 1

Advanced Industrial Automation
SmartStep A Serie
R7M-A_ (Servomotors)
R7D-AP_ (Servo Drivers)
Servomotors/Servodrivers
BEDIENERHANDBUCH
Kurzübersicht
2 Standardmodelle und technische Daten
3 Systemaufbau und Installation
4 Bedienung
5 Fehlersuche
Cat. No. I533-DE1-01
Page 2
Vielen Dank, dass Sie sich für ein Produkt der SMARTSTEP A-Serie entschieden
haben. Eine richtige Anwendung und Handhabung des Produkts gewährleisten
eine den Spezifikationen entsprechende Produktleistung, verlängern die Produktlebensdauer und können vor möglichen Unfällen schützen.
Bitte lesen Sie dieses Handbuch gründlich, und gehen Sie bei der Handhabung
und dem Betrieb des Produkts mit Sorgfalt vor. Bitte halten Sie das Handbuch nach
dem Lesen stets für Referenzzwecke griffbereit.
HINWEIS
1.Das vorliegende Handbuch enthält Informationen zu Installation, Verkabelung, Schaltereinstellungen und Fehlerbehebung für SMARTSTEP Servomotoren und -treiber
der Baureihe A. Informationen zur eigentlichen Bedienung über eine Bedienkonsole
finden Sie im Handbuch Bedienungsanleitung für SMARTSTEP Baureihe A (I534).
2.Stellen Sie sicher, dass dieses Handbuch dem Endbenutzer des Produkts vorliegt.
3.Die Dokumentation zu diesem Produkt wurde mit größter Sorgfalt erstellt. Wenn Sie
dennoch Vorschläge zur Verbesserung dieses Handbuchs haben, setzen Sie sich bitte mit unserem OMRON Vertriebsbüro in Verbindung.
4.Gehen Sie davon aus, dass nur die in diesem Handbuch beschriebenen Funktionen
möglich sind.
5.Servomotor und Servotreiber dürfen ausschließlich von ausgebildeten Elektrotechnikern oder entsprechend qualifiziertem Personal verkabelt, eingestellt oder (über eine
Bedienkonsole) bedient werden.
6.Wir empfehlen, die folgenden Sicherheitshinweise in alle technischen Handbücher
aufzunehmen, die Sie für das System erstellen, in dem das Produkt installiert wird.
• Sicherheitshinweise zu den Gefahren durch Hochspannungsgeräte.
• Sicherheitshinweise zum Berühren der Klemmen des Produkts nach Ausschalten
der Spannungsversorgung. (Auch nach dem Ausschalten der Versorgungsspannung können diese Spannung führen.)
7.Die technischen Daten und Funktionen können zur Verbesserung der Produktleistung
ohne vorherige Ankündigung geändert werden.
8.Die in diesem Handbuch beschriebene Vorwärts- und Rückwärtsdrehung von Wechselstrom-Servomotoren ist wie folgt mit Blickrichtung auf das Ende der Motorabtriebswelle definiert: Vorwärtsdrehung ist die Drehung gegen den Uhrzeigersinn,
Rückwärtsdrehung ist die Drehung im Uhrzeigersinn.
9.Führen Sie an diesem Produkt keine Durchschlagspannungstests oder sonstigen
Megametertests durch. Andernfalls können interne Bauteile beschädigt werden.
10.Die Lebensdauer von Servomotoren und Servotreibern ist begrenzt. Sorgen Sie dafür, dass Austauschprodukte vorhanden sind, und berücksichtigen Sie dabei die Betriebsumgebung sowie sonstige Faktoren, die Einfluss auf die Produktlebensdauer
haben.
11.Für nicht in diesem Handbuch beschriebene Parameter dürfen keine Einstellungen
vorgenommen werden. Andernfalls können Funktionsfehler auftreten. Bei Fragen
wenden Sie sich bitte an Ihren OMRON-Vertreter.
12.Wenden Sie sich vor der Verwendung dieses Produktes an Ihren OMRON-Vertreter,
falls Sie das Produkt unter Bedingungen verwenden, die nicht im Bedienerhandbuch
aufgeführt sind bzw. wenn Sie das Produkt im Bereich der Nukleartechnik, im Eisenbahnverkehr, in der Luftfahrt, in Fahrzeugen, in Verbrennungssystemen, in medizinischen Geräten, in Spielautomaten, in Sicherheitsausrüstungen oder anderen
Systemen, Geräten oder Ausrüstungen verwenden möchten, bei denen fehlerhafte
Verwendung zu schwerwiegenden Gefahren für Leben und Sachgut führen kann.
Page 3

Vor dem Auspacken zu überprüfende Punkte
1.Überprüfen Sie Folgendes, bevor Sie das Produkt auspacken:
• Wurde das richtige Produkt geliefert (d. h. stimmen Modellnummer und Spezifikationen)?
• Wurde das Produkt beim Versand beschädigt?
2.Kontrollieren Sie, ob die folgenden Zubehörteile mitgeliefert wurden.
• Sicherheitshinweise
Steckverbinder und Befestigungsschrauben sind nicht im Lieferumfang enthalten. Diese sind
gesondert erhältlich.
Page 4

Hinweis:
r
r
OMRON-Produkte sind zum Gebrauch durch einen qualifizierten Bediener gemäß angemessenen
Verfahren und nur zu den in diesem Handbuch beschriebenen Zwecken gefertigt.
In diesem Bedienerhandbuch werden Sicherheitshinweise nach folgenden Konventionen gekennzeichnet und eingeteilt. Beachten Sie stets die Informationen in diesen Hinweisen. Eine Nichtbeachtung der Sicherheitshinweise kann zu Verletzungen oder Sachschäden führen.
! GEFAHR Kennzeichnet eine drohende Gefahrensituation, die zum Tod oder zu schwe-
ren Verletzungen führen kann, wenn sie nicht vermieden wird.
! VORSICHT Kennzeichnet eine potenziell gefährliche Situation, die zum Tod oder zu
schweren Verletzungen führen kann, wenn sie nicht vermieden wird.
! Achtung Kennzeichnet eine potenziell gefährliche Situation, die zu leichteren oder mit-
telschweren Verletzungen oder Sachschäden führen kann, wenn sie nicht vermieden wird.
OMRON-Produktreferenzen
Alle OMRON-Produkte werden in diesem Handbuch groß geschrieben. Das Wort "Baugruppe" wird
ebenfalls großgeschrieben, wenn es sich auf ein OMRON-Produkt bezieht, unabhängig davon, ob es
im Eigennamen des Produkts auftritt oder nicht.
Die Abkürzung "Ch", die in manchen Anzeigen und manchen OMRON-Produkten auftaucht, bedeutet
häufig "Wort" und wird in dieser Dokumentation in diesem Sinn "Wd" abgekürzt.
Die Abkürzung "PC" bedeutet programmierbarer Controller und wird für nichts anderes als Abkürzung
gebraucht.
Visuelle Hilfen
Die folgenden Überschriften tauchen in der linken Spalte des Handbuchs auf und sollen Ihnen dabei
helfen, verschiedene Arten von Informationen zu finden.
Hinweis Kennzeichnet Informationen von besonderem Interesse für effizienten und zweckmäßigen
Betrieb des Produkts.
OMRON, 2001
Alle Rechte vorbehalten. Diese Publikation darf ohne vorherige schriftliche Genehmigung von OMRON weder als Ganzes
noch in Auszügen in irgendeiner Form oder auf irgendeine Weise, sei es auf mechanischem oder elektronischem Wege ode
durch Fotokopieren oder Aufzeichnen, reproduziert, auf einem Datensystem gespeichert oder übertragen werden.
In Bezug auf die hierin enthaltenen Informationen wird keine Patenthaftung übernommen. Da OMRON weiterhin an eine
ständigen Verbesserung seiner Qualitätsprodukte arbeitet, sind Änderungen an den in diesem Handbuch enthaltenen Informationen ohne Ankündigung vorbehalten. Bei der Herstellung dieses Handbuchs wurden alle Vorsorgemaßnahmen ergriffen.
Dennoch übernimmt OMRON keine Verantwortung für etwaige Fehler und Auslassungen. Es wird keine Haftung für Schäden übernommen, die auf die Nutzung von in diesem Dokument enthaltenen Informationen zurückzuführen sind.
Page 5

Allgemeine Sicherheitshinweise
Beachten Sie bei der Verwendung des SMARTSTEP Servomotors und Servotreibers sowie der angeschlossenen Geräte und Peripheriegeräte die folgenden Sicherheitshinweise.
Dieses Handbuch kann Abbildungen des Produkts mit Schutzabdeckungen enthalten, die abgenommen wurden, um die Komponenten des Produkts im Detail zu beschreiben. Stellen Sie sicher, dass
diese Schutzabdeckungen angebracht sind, bevor das Produkt verwendet wird.
Wenden Sie sich an ihre OMRON-Vertretung, wenn Sie das Produkt nach einem langen Lagerzeitraum verwenden.
! VORSICHT Verbinden Sie die Gehäuseerdung von Servotreiber und Servomotor stets mit
einer Erdung der Klasse 3 (max. 100 Ω). Wenn Sie keine Erdung der Klasse 3
anschließen, besteht die Gefahr eines elektrischen Schlags.
! VORSICHT Berühren Sie keine Komponenten im Inneren des Servotreibers. Andernfalls
besteht die Gefahr eines elektrischen Schlags.
! VORSICHT Nehmen Sie die vordere Abdeckung, Klemmenabdeckungen, Kabel oder optio-
nale Teile nicht ab, während das Gerät mit Spannung versorgt wird. Andernfalls
besteht die Gefahr eines elektrischen Schlags.
! VORSICHT Installation, Bedienung, Wartung oder Inspektion dürfen nur von befugtem Perso-
nal durchgeführt werden. Andernfalls besteht die Gefahr eines elektrischen
Schlags oder Verletzungsgefahr.
! VORSICHT Die Verdrahtung oder Inspektion darf frühestens fünf Minuten nach dem Aus-
schalten der Spannungsversorgung vorgenommen werden. Andernfalls besteht
die Gefahr eines elektrischen Schlags.
! VORSICHT Folgende Belastungssituationen für das Kabel sind zu vermeiden: Beschädigung,
Zug, schwere Belastung sowie Druck auf das Kabel durch schwere Gegenstände.
Andernfalls besteht die Gefahr eines elektrischen Schlags.
! VORSICHT Berühren Sie die drehenden Teile des Servomotors nicht während des Betriebs.
Andernfalls besteht Verletzungsgefahr.
! VORSICHT Nehmen Sie keine Änderungen an dem Produkt vor. Andernfalls besteht die
Gefahr von Verletzungen oder Schäden am Produkt.
! VORSICHT Richten Sie als Sicherheitsmaßnahme eine Stoppvorrichtung an der Maschine ein.
Die Haltebremse ist keine Stoppvorrichtung im Sinne der Maschinensicherheit.
! VORSICHT Richten Sie eine externe Not-Aus-Vorrichtung ein, um den Betrieb des Geräts
sofort stoppen und die Versorgungsspannung unterbrechen zu können. Andernfalls besteht Verletzungsgefahr.
! VORSICHT Kommen Sie der Maschine unmittelbar nach dem Wiederherstellen der Span-
nungsversorgung im Anschluss an eine kurze Versorgungsspannungsunterbrechung nicht zu nahe, da ein unerwarteter Wiederanlauf erfolgen könnte.
(Ergreifen Sie geeignete Maßnahmen zur Absicherung gegen ein unerwartetes
Wiederanlaufen.) Andernfalls besteht Verletzungsgefahr.
Page 6
! Achtung Verwenden Sie Servomotoren und Servotreiber nur in den angegebenen Kombi-
nationen. Bei unsachgemäßer Verwendung besteht Brandgefahr oder die Gefahr
einer Beschädigung der Produkte.
! Achtung Lagern oder installieren Sie das Produkt nicht an den folgenden Orten. Andern-
falls besteht die Gefahr eines Brandes, eines elektrischen Schlags oder einer
Beschädigung des Produkts.
• Orte, die direkter Sonneneinstrahlung ausgesetzt sind.
• Orte, an denen Temperaturen oder Luftfeuchtigkeit außerhalb der in den technischen Daten angegebenen Bereiche herrschen.
• Orte, die starken Temperaturschwankungen und damit Kondensatbildung ausgesetzt sind.
• Orte, die korrosiven oder entzündlichen Gasen ausgesetzt sind.
• Orte, die dem Einfluss von Stäuben (besonders Eisenstaub) oder Salzen ausgesetzt sind.
• Orte, die Stößen oder Schwingungen ausgesetzt sind.
• Orte, die dem Einfluss von Feuchtigkeit, Öl oder Chemikalien ausgesetzt sind.
! Achtung Fassen Sie den Kühlkörper des Servomotors, den Bremswiderstand des Servot-
reibers und den Servomotor bei angelegter Versorgungsspannung oder unmittelbar nach dem Ausschalten der Spannung nicht an. Die heißen Oberflächen
könnten Brandwunden verursachen.
Sicherheitshinweise für Lagerung und Transport
! Achtung Halten Sie das Produkt beim Transport nicht an den Kabeln oder an der Motor-
welle. Andernfalls besteht die Gefahr von Verletzungen oder Fehlfunktionen.
! Achtung Legen Sie keine höhere als die auf dem Produkt angegebene Last an. Andernfalls
besteht die Gefahr von Verletzungen oder Fehlfunktionen.
Sicherheitshinweise für Installation und Verkabelung
! Achtung Steigen Sie nicht auf das Produkt, und stellen Sie keine schweren Gegenstände
darauf. Andernfalls besteht Verletzungsgefahr.
! Achtung Decken Sie Ein- oder Auslassöffnungen nicht ab, und stellen Sie sicher, dass
keine Fremdkörper in das Gerät gelangen. Andernfalls besteht Brandgefahr.
! Achtung Stellen Sie sicher, dass das Produkt in der richtigen Einbaulage installiert wird.
Andernfalls kann es zu Fehlfunktionen kommen.
! Achtung Stellen Sie sicher, dass die angegebenen Abstände zwischen Servotreiber und
Bedienkonsole oder anderen Geräten eingehalten werden. Andernfalls besteht
die Gefahr von Bränden oder Fehlfunktionen.
Page 7

! Achtung Setzen Sie das Gerät keinen starken Stößen aus. Andernfalls besteht die Gefahr
einer Fehlfunktion.
! Achtung Achten Sie auf eine ordnungsgemäße und sichere Verkabelung. Andernfalls kann
der Motor durchgehen, und es besteht die Gefahr von Verletzungen oder Fehlfunktionen.
! Achtung Stellen Sie sicher, dass alle Befestigungsschrauben, Klemmenschrauben und
Schrauben von Steckverbindern mit dem in den entsprechenden Anleitungen
angegebenen Drehmoment festgezogen sind. Ein falsches Anzugsdrehmoment
kann zu Fehlfunktionen führen.
! Achtung Verwenden Sie für die Verkabelung Crimp-Kabelschuhe. Schließen Sie keine frei
liegenden Litzen direkt an Klemmen an. Beim Anschließen frei liegender Litzen
besteht Brandgefahr.
! Achtung Verwenden Sie stets die im Bedienerhandbuch angegebene Versorgungsspan-
nung. Eine falsche Spannung kann zu Fehlfunktionen oder Brandgefahr führen.
! Achtung Ergreifen Sie geeignete Maßnahmen, um sicherzustellen, dass das Gerät mit der
angegebenen Nennspannung und -frequenz versorgt wird. Lassen Sie an Installationsorten, an denen die Spannungsversorgung nicht stabil ist, besondere Vorsicht walten. Eine falsche Spannungsversorgung kann zu Fehlfunktionen führen.
! Achtung Installieren Sie externe Trennschalter, und ergreifen Sie weitere Sicherheitsmaß-
nahmen gegen Kurzschlüsse in externer Verdrahtung. Bei unzureichenden
Sicherheitsmaßnahmen gegen Kurzschlüsse besteht Brandgefahr.
! Achtung Ergreifen Sie beim Installieren von Systemen an folgenden Orten angemessene
und geeignete Gegenmaßnahmen. Andernfalls kann es zu einer Beschädigung
des Produkts kommen.
• Orte, die statischen Entladungen oder anderen Formen von Störeinflüssen ausgesetzt sind.
• Orte mit starken elektromagnetischen Feldern und Magnetfeldern.
• Orte, die dem Einfluss von Radioaktivität ausgesetzt sein könnten.
• Orte in der Nähe von Stromversorgungen.
Sicherheitshinweise für Bedienung und Einstellung
! Achtung Vergewissern Sie sich, dass keine negativen Auswirkungen im System auftreten
können, bevor Sie den Testbetrieb durchführen. Andernfalls besteht die Gefahr
von Geräteschäden.
! Achtung Prüfen Sie neu eingestellte Parameter und Schalter vor der Inbetriebnahme auf
korrekte Einstellung. Andernfalls besteht die Gefahr von Geräteschäden.
! Achtung Nehmen Sie keine extremen Einstellungen oder Einstellungsänderungen vor.
Andernfalls ist eine stabile Funktion nicht gewährleistet, und es besteht Verletzungsgefahr.
Page 8

! Achtung Trennen Sie den Servomotor von der Maschine, kontrollieren Sie ihn auf ord-
nungsgemäßen Betrieb, und schließen Sie ihn anschließend wieder an. Andernfalls besteht Verletzungsgefahr.
! Achtung Beheben Sie beim Auftreten eines Alarms die Alarmursache, setzen Sie den
Alarm nach Überprüfung der Sicherheit zurück, und nehmen Sie den Betrieb
anschließend wieder auf. Andernfalls besteht Verletzungsgefahr.
! Achtung Verwenden Sie die integrierte Bremse des Servomotors nicht zum normalen
Bremsen. Andernfalls besteht die Gefahr einer Fehlfunktion.
Sicherheitshinweise für Wartung und Inspektion
! VORSICHT Versuchen Sie nicht, Baugruppen zu zerlegen, zu reparieren oder zu modifizieren.
Bei jedem Versuch besteht das Risiko von Fehlfunktionen sowie die Gefahr eines
elektrischen Schlags bzw. Brandgefahr.
! Achtung Nehmen Sie den Betrieb erst dann wieder auf, wenn die benötigten Betriebsdaten
auf die neue Baugruppe übertragen wurden. Andernfalls besteht die Gefahr von
unerwartetem Verhalten.
Page 9
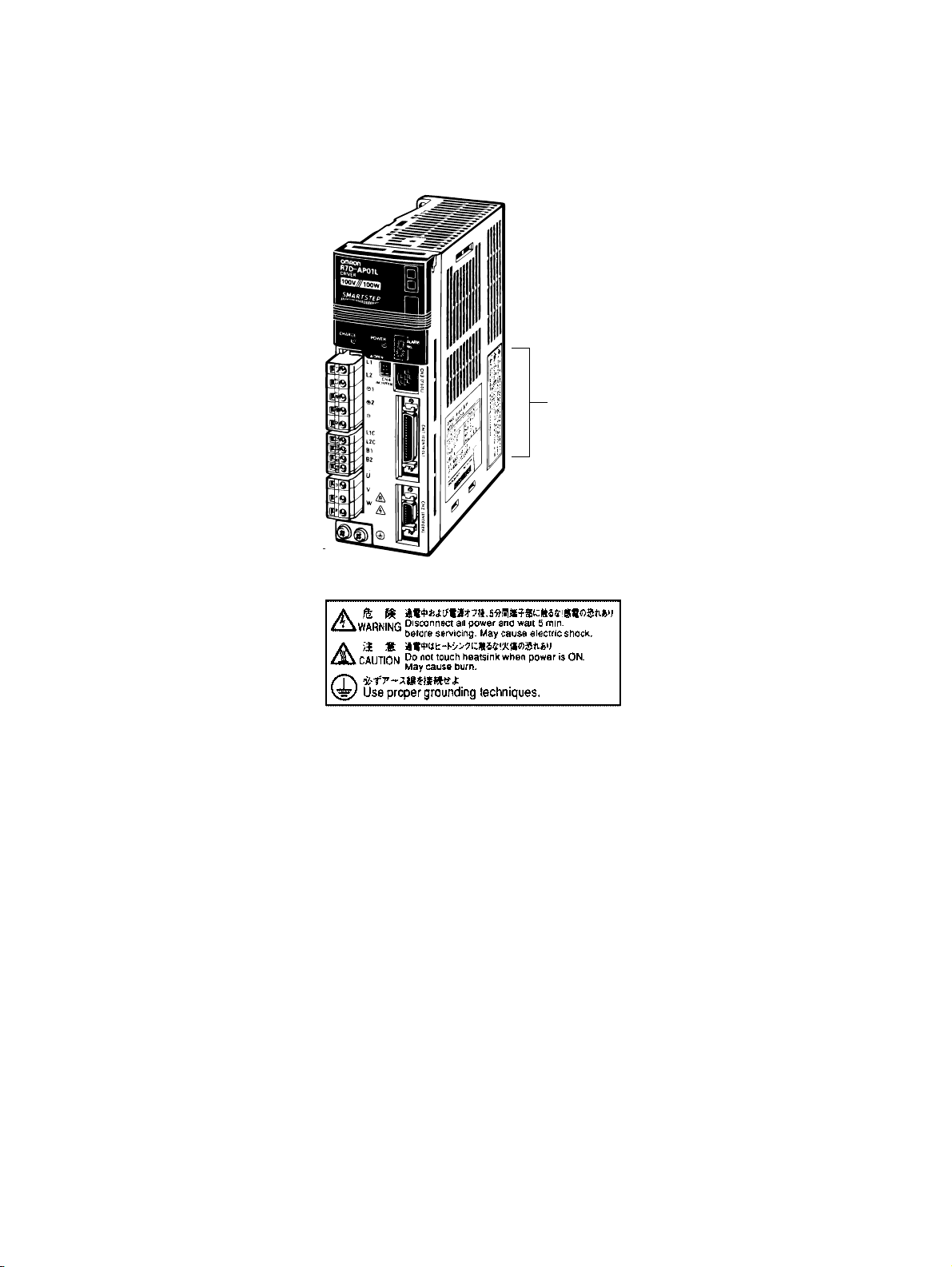
Warnetiketten
Warnetiketten sind wie nachstehend abgebildet auf dem Produkt angebracht. Beachten Sie die aufgeführten Anweisungen.
Warnetikett
H
Beispiel: R7D-AP01L
H
Beispiel: R7D-AP01L
Page 10
Inhaltsverzeichnis
Kapitel 1. Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1-1 Merkmale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-2 Systemkonfiguration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1-3 Servotreiber – Bezeichnungen der Anzeigen, Schalter und Anschlüsse . . . . . . . . . . . . . . . . 1-5
1-4 Anwendbare Normen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-5 Blockschaltbilder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Kapitel 2. Standardmodelle und technische Daten. . . . . . . . . . . . . . 2-1
2-1 Standardmodelle. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-2 Außen- und Einbaumaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2-3 Servotreiber – technische Daten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
2-4 Servomotor-Spezifikationen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-30
2-5 Spezifikationen Untersetzungsgetriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-38
2-6 Kabel- und Steckerspezifikationen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42
2-7 Spezifikationen der Servoklemmenblöcke und -kabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-52
2-8 Bedienkonsolen-Spezifikationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-83
2-9 Bremswiderstand-Spezifikationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-85
2-10 DC-Drosseln. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-86
Kapitel 3. Systemaufbau und Installation . . . . . . . . . . . . . . . . . . . . . 3-1
3-1 Installationsbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2 Verdrahtung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3-3 Ableitung generatorischer Energie. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-36
Kapitel 4. Bedienung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4-1 Vorgehensweise bei der Bedienung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3
4-2 Schaltereinstellungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-3 Vorbereitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4-4 Testbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4-5 Verstärkungseinstellungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-11
4-6 Benutzerparameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4-7 Betriebsfunktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-26
Kapitel 5. Fehlersuche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5-1 Maßnahmen beim Auftreten von Fehlern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5-2 Alarme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-3 Fehlersuche. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5-4 Überlastungseigenschaften (Elektrothermische Eigenschaften) . . . . . . . . . . . . . . . . . . . . . . 5-15
5-5 Wartungsintervalle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
Kapitel 6. Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6-1 Anschlussbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Revisionshistorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . R-1
Page 11

Page 12
Kapitel 1
Einführung
1-1 Merkmale
1-2 Systemkonfiguration
1-3 Servotreiber – Bezeichnungen der Anzeigen,
Schalter und Anschlüsse
1-4 Anwendbare Normen
1-5 Blockschaltbilder
Page 13

Einführung
Kapitel 1
1-1 Merkmale
Die SMARTSTEP Servomotoren und –treiber der Baureihe A wurden als impulsgesteuerte Positionsregler konzipiert und sollen Schrittmotoren in einfachen Positionierungssystemen ersetzen. Die
SMARTSTEP Servomotoren und –treiber der Baureihe A vereinen die mühelose Anwendbarkeit von
Schrittmotoren mit schnellerer Positionierung aufgrund hoher Geschwindigkeit und hohem Drehmoment, größerer Zuverlässigkeit ohne Verluste bei der Positionierungsgenauigkeit (selbst bei plötzlichen Lastwechseln) sowie weiteren überlegenen Merkmalen.
■ Schnelleres Ansprechen und höhere Drehzahlen
SMARTSTEP Servomotoren und –treiber der Baureihe A verfügen über dieselben, mit Schrittmotoren unerreichbaren Drehzahl- und Drehmomentspezifikationen wie die OMNUC Baureihe W. Die
SMARTSTEP Servomotoren der Baureihe A bieten höhere Drehzahlen von bis zu 4.500 U/min,
wobei der Dauerbetrieb bei dieser Drehzahl möglich ist. Ein höheres Ausgangsdrehmoment von 300
% des nominalen Drehmoments kann bis zu 1 s abgeben werden, sodass noch schnellere Positionierungen bei mittlerem und langem Hub möglich sind.
■ Anhaltende Präzision
Die höhere Encoder-Auflösung der Baureihe A von 2.000 Impulsen/Drehung bietet selbst bei plötzlichen Lastwechseln oder plötzlicher Beschleunigung oder Verzögerung eine für den Dauerbetrieb
geeignete Rückführungskontrolle ohne Verlust der Positionierungsgenauigkeit.
■ Minimaler Einstellaufwand über Schalter auf der Vorderseite des
Servotreibers
Die SMARTSTEP Baureihe A kann ohne zeitaufwändige Parametereinstellungen umgehend in Betrieb
genommen werden. Die Schalter auf der Vorderseite des Servotreibers der Baureihe A gestatten die
mühelose Veränderung von Funktions- oder Auflösungswerten für die Positionierung.
● Auflösungseinstellungen
Für die Auflösung des SMARTSTEP Servomotors der Baureihe A stehen die vier folgenden Einstellbereiche zur Verfügung:
500 Impulse/Drehung (0,72° /Schritt); 1.000 Impulse/Drehung (0,36° /Schritt) (Standardeinstellung); 5.000 Impulse/Drehung (0,072° /Schritt) oder 10.000 Impulse/Drehung (0,036° /Schritt)
● Befehlseingabeimpuls-Einstellung
Die Befehlseingabeimpuls-Einstellung kann bei der SMARTSTEP Baureihe A zwischen mit/gegen
Uhrzeigersinn (Doppelimpuls) und SIGN/PULS (Einfachimpuls) ausgewählt werden, um den Ausgangsspezifikationen des Positionsreglers zu entsprechen.
● Dynamische Bremseinstellung
SMARTSTEP Servomotoren der Baureihe A können bei RUN OFF oder im Notfall unverzögert
abgebremst werden.
1-2
Page 14

Einführung
● Verstärkungseinstellung
Über einen speziellen Drehschalter an den Servotreibern der SMARTSTEP Baureihe A können
mühelos Verstärkungseinstellungen vorgenommen werden. Außerdem kann auf Knopfdruck die
Funktion Autotuning aktiviert werden, und die Ansprechempfindlichkeit lässt sich mühelos auf die
jeweils eingesetzten Maschinen abstimmen.
Hinweis Die Verwendung einer Bedienkonsole oder eines Personal Computers ermöglicht den
Betrieb über Parametereinstellungen.
■ Servomotoren in Zylinder- oder Würfelbauweise
Die SMARTSTEP Baureihe A bietet geflanschte Servomotoren in Zylinderbauweise mit geringerem
Platzbedarf sowie Servomotoren in Würfelbauweise mit einer geringeren Gesamtlänge. Die Tiefe der
Servomotoren in Würfelbauweise entspricht in etwa der von Schrittmotoren mit derselben Ausgangsleistung. Die Servomotoren können nach Größe ausgewählt werden und führen somit zu kompakteren Geräten.
■ Größere Auswahl von Programmiergeräten
Es sind spezielle SMARTSTEP-A-Bedienkonsolen sowie Personal-Computer-Parametriersoftware
verfügbar. Die spezielle Parametriersoftware gestattet das Einstellen von Parametern, Geschwindigkeits- und Stromüberwachung, Oszilloskopfunktion, E/A-Überwachung, Autotuning, Schrittbetrieb
und weitere Funktionen über einen Computer. Außerdem können über RS422 Parametrierung und
Überwachungsfunktionen für mehrere Servotreiber ausgeführt werden. Einzelheiten hierzu finden
Sie in der Personal-Computer-Parametriersoftware für Servotreiber (CD-ROM) für Windows 95/98,
Version 2.0 (WMON Win Ver.2.0) (Katalog-Nr.: SBCE-011).
Kapitel 1
1-3
Page 15
Einführung
DRIVER PR
PR DRIVER
B.B
INP
VCMP
TGON
REF
POWER
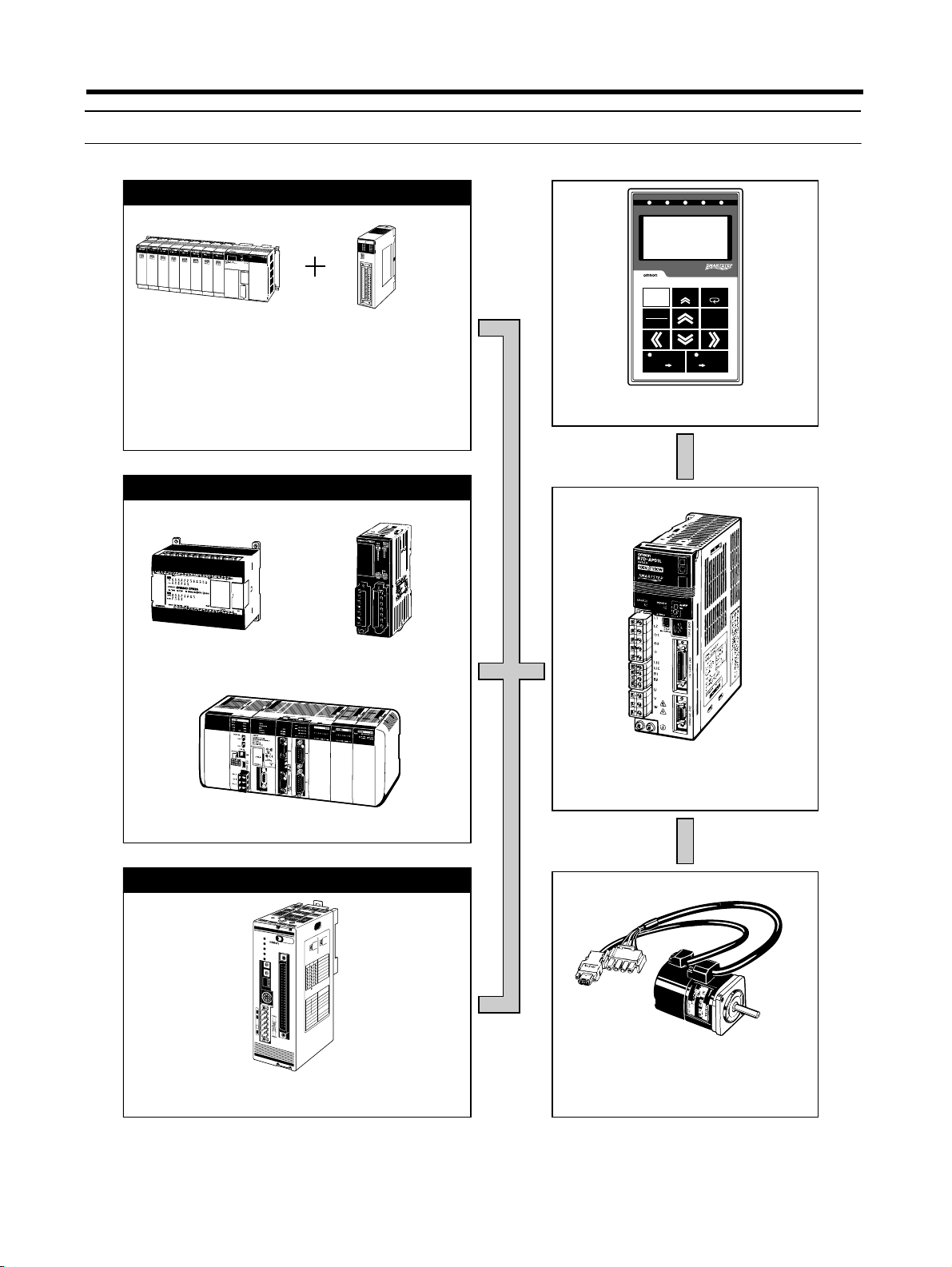
1-2 Systemkonfiguration
SYSMAC + Positionier-Baugruppe mit Impulskettenausgang
NC413
RUN
X
ERROR
Y
SENS
Z
DATA
U
MACHINE
No.
CN1 CN2
B2
4
A
24
B
1
A
1
SYSMAC CJ/CS/C/CV
Speicherprogrammierbare
Steuerung
SYSMAC Speicherprogrammierbare Steuerungen mit Impulsausgängen)
Positionier-Baugruppen
CJ1W-NC113/213/413
CJ1W-NC133/233/433
CS1W-NC113/213/413
CS1W-NC133/233/433
C200HW-NC113/213/413
C500-NC113/211
Impulskette
Kapitel 1
B.B
INP
TGON
REF
SCROLL MODE/SET
DATA
WRITE
PR DRIVER
POWER
VCMP
R7A–PR02A PARAMETER UNIT
RESET
JOG
RUN
READ
DRIVER PR
R7A-PR02A Bedienkonsole
(Handgerät)
SYSMAC CPM2A
P
A
203
POWER
SYSMAC CPM2C
SYSMAC CQM1H
Einachs-Positionierer mit Impulskettenausgang
MS
NS
3F88M
M0
1 AXIS POSITIONER
M1
M2
3
2
4
1
5
0
NA
6
9
7
8
×10
3
2
4
1
5
0
6
9
7
8
×
1
123
ON↓
DR0
DR1
L/R
3F88M-DRT141 EinachsPositionierer für DeviceNet
OPEN
No.
OPEN
LINE
-
DRT141
LINE
CCW CW
ALARM
LS
M2
M1
SOFT LIMIT
M0
ORG SRH NG
ENCODER ALM
STOP
LM
A
ER
IV
R
D
OTHER
: )
ED
(R
COMMUNICATION
SPEED
H
C
IT
125kbps
W
1
S
R
IP
D
250kbps
FF
0D
O
R
D
500kbps
F
F
E
−
F
O
T
F
O
O
M
E
N
O
/R
L
ON
A
C
O
L
ON
OFF
ITCH
ON
REMOTE MODE
DIP SW
LOCAL MODE
L/R
OFF
ON
I/O
/
SMARTSTEP Servotreiber
R7D-AP Baureihe A@
SMARTSTEP
Servomotor R7M-A
Baureihe A@
1-4
Page 16
Einführung
Kapitel 1
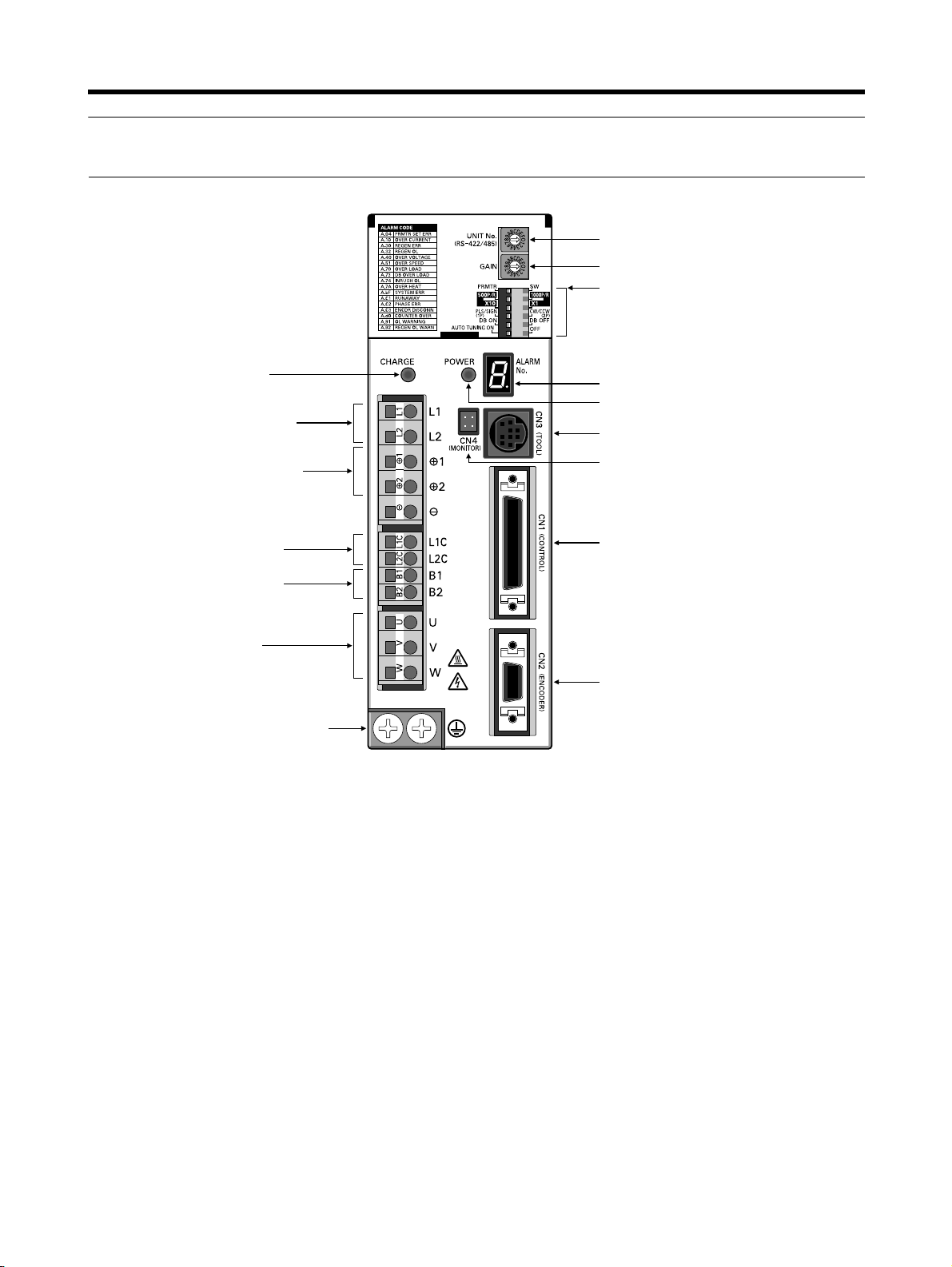
1-3 Servotreiber – Bezeichnungen der Anzeigen, Schalter und
Anschlüsse
Drehschalter für Auswahl der
Baugruppennummer
Drehschalter für Einstellung der Verstärkung
Funktionsschalter:
• Schalter Umschalten/Parametereinstellung
• Auflösungseinstellung
• Befehlseingabeimpuls-Einstellung
• Dynamische Bremseinstellung
• Schalter Online-Autotuning
Anzeige
Hauptstromversorgung
Eingangsklemmen
Hauptstromversorgung
Alarmanzeige
Anzeige Steuerstromversorgung
Datenaustauschstecker (CN3)
Anschlussklemmen
DC-Drossel
Eingangsklemmen
Steuerstromversorgung
Anschlussklemmen für
externen Bremswiderstand
Anschlussklemmen
Servomotor
FG-Klemmen für Stromversorgung
und Servomotorstrom
Monitorausgang (CN4)
E/A-Steueranschluss (CN1)
Encoder-Eingang (CN2)
1-5
Page 17
Einführung
Kapitel 1
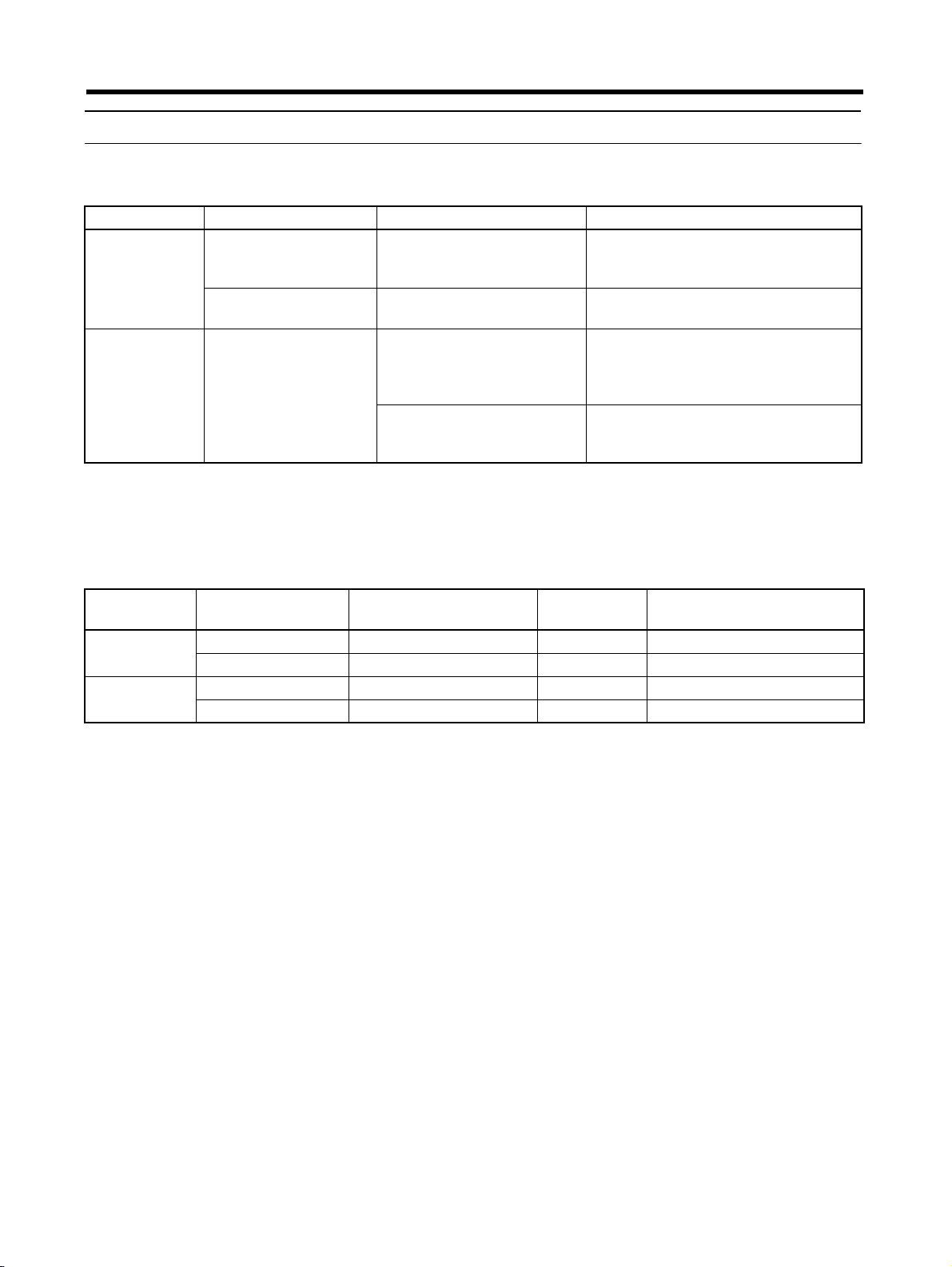
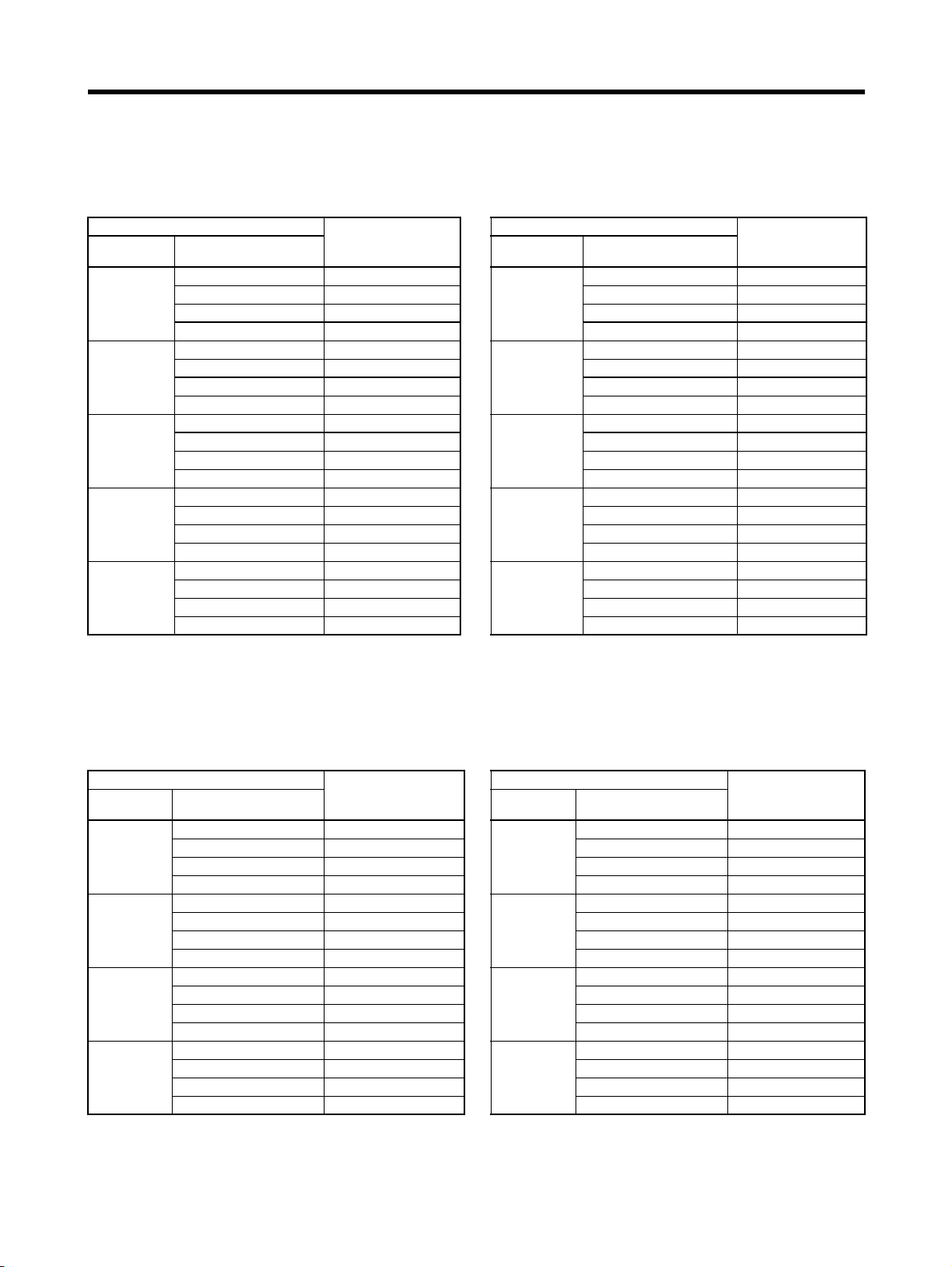
1-4 Anwendbare Normen
■ EU-Richtlinien
EU-Richtlinien Produkt Zulassungsnormen Anmerkungen
Niederspannungsrichtlinie
EMV-Richtlinien
Hinweis Die Installation muss unter den in 3-2-5 Verkabelung nach EMV aufgeführten Bedingungen
erfolgen, um die Einhaltung der EMV-Richtlinien zu gewährleisten.
AC-Servotreiber EN50178 Sicherheitsanforderungen für elektri-
sche Geräte für Mess-, Steuerungsund Forschungseinrichtungen
AC-Servomotoren IEC60034-1, -5, -8, -9
EN60034-1, -9
AC-Servotreiber und
AC-Servomotoren
EN55011 Klasse A Guppe 1 Kabellose Interferenz- und Messme-
EN61000-6-2 Normen zur elektromagnetischen
Rotierende elektrische Geräte
thoden für Funkfrequenzgeräte in
industriellen, wissenschaftlichen und
medizinischen Anwendungsbereichen
Verträglichkeit und Unempfindlichkeit
in industriellen Umgebungen
■ UL- und cUL-Normen
Normen Produkt Zulassungsnormen Zulassungs-
nummer
UL AC-Servotreiber UL508C E179149 Leistungswandler
AC-Servomotoren UL1004 E179189 Elektromotoren
cUL AC-Servotreiber cUL C22.2 No. 14 E179149 Industrielle Steuergeräte
AC-Servomotoren cUL C22.2 No. 100 E179189 Motoren und Generatoren
Anmerkungen
1-6
Page 18
Einführung
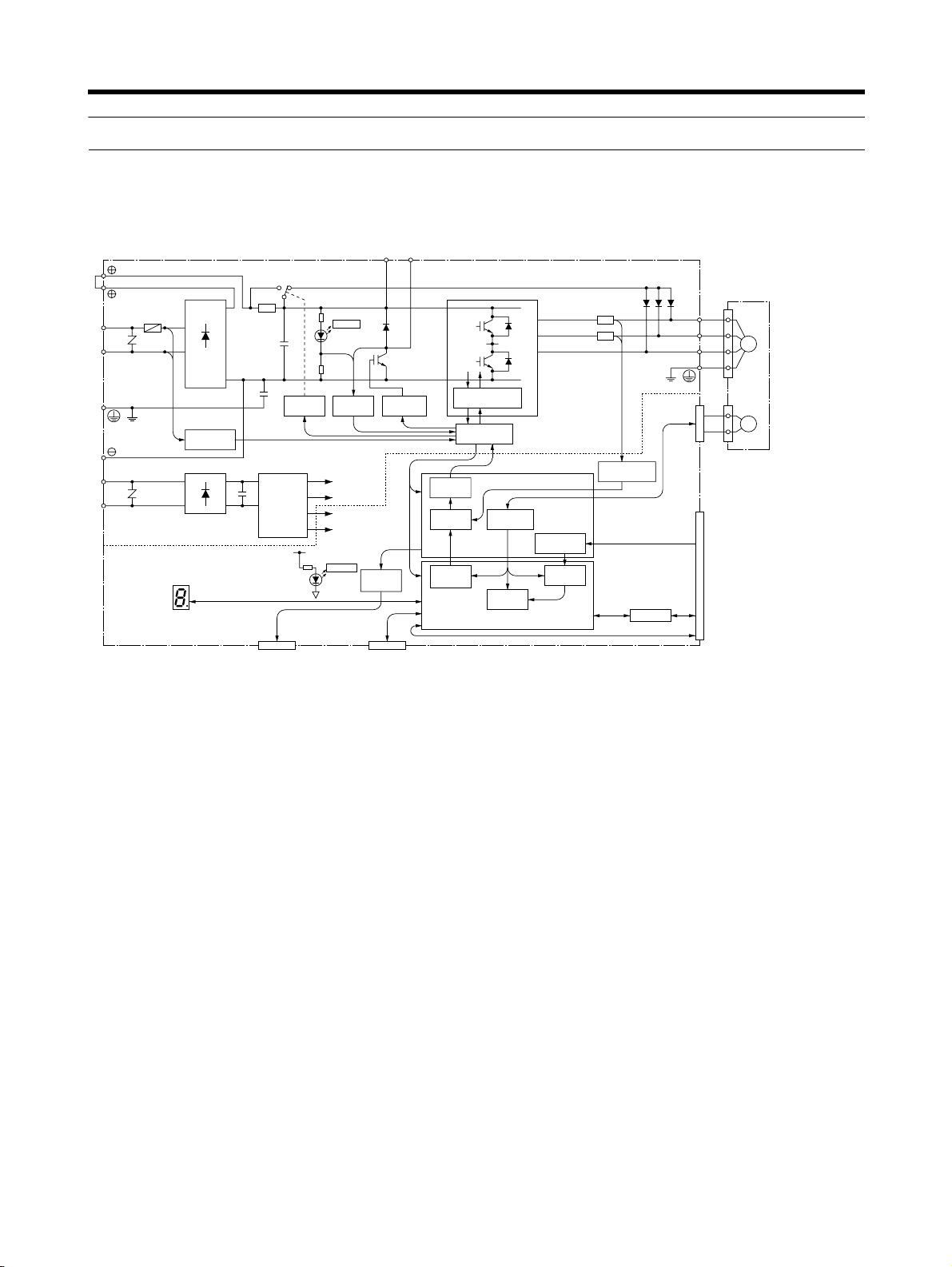
1-5 Blockschaltbilder
■ 200 VAC: R7D-APA3H/-APA5H/-AP01H/-AP02H/-AP04H
100 VAC: R7D-APA3L/-APA5L/-AP01L/-AP02L/-AP04L
AC-Servotreiber
1
2
Sicherung
L1
L2
S1
E
T
LADUNG
+
−
N1
Spannungs-
Relais-
ermittlung
± 5 V
+16,5 V
+5 V
L1C
L2C
Spannungs-
ermittlung
+
∼
−
∼
+
DC/DC-
−
Umwandlung
ansteuerung
± 15 V
+5 V
LEISTUNG
0 V
Anzeige-/Einstellbereiche
CN4
Analoger
Überwachungsausgang
B1 B2
(Siehe
Hinweis.)
Gate-
Ansteuerung
PWM-
Erzeugung
Digitaler
Stromverstärker
Analog-
spannungs-
umwandlung
CN3
Bedienkonsole/Computer
Strom-
befehls-
verarbeitung
Serieller Port
S2
N2
Überstromschutz
Gate-Ansteuerung
Schnittstellen
Encodersignal-
verarbeitung
Drehzahlsteuerung
U
V
W
CN2
Strom-
rückführung
ASIC
CN1
Sollimpuls-
verarbeitung
Positionssteuerung
CPU
E/A
HinweisNur bei R7D-AP04H/AP04L.
U
V
W
AC-Servomotor
M
E
Sollimpulseingang
Steuer-E/A
RS422
Kapitel 1
1-7
Page 19
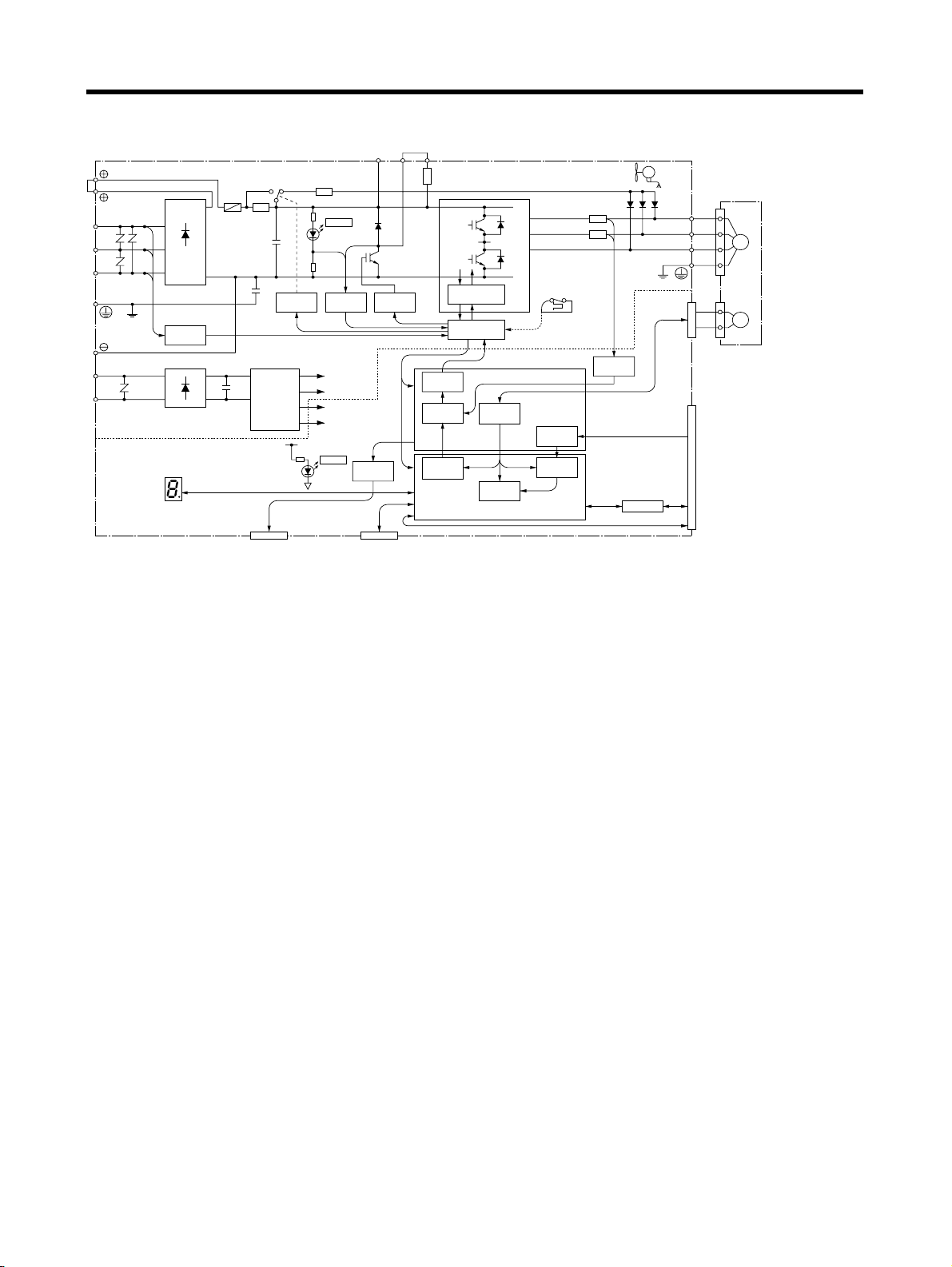
Einführung
■ 200 VAC: R7D-AP08H
AC-Servotreiber
1
2
L1
L2
L3
L1C
L2C
Anzeige-/Einstellbereiche
R
S
T
Spannungs-
ermittlung
∼
P
Sicherung
+
−
N
Relais-
ansteuerung
+∼
+
DC/DC-
−
−
Umwandlung
+5 V
LEISTUNG
0 V
CN4
Analoger
Überwachungsausgang
LADUNG
Spannungs-
ermittlung
± 5 V
+16,5 V
+5 V
± 15 V
Analogspannungsumwandlung
CN3
Bedienkonsole/Computer
B1 B2 B3
Gate-
Ansteuerung
Serieller Port
P
N
PWM-
Erzeugung
Digitaler
Strom-
verstärker
Strom-
befehls-
verarbeitung
Gate-Überstrom-
schutz
Schnittstelle
verarbeitung
Drehzahlsteuerung
Encoder-
signal-
Kapitel 1
LÜFTER
± 12 V
AC-Servomotor
E/A
CN2
CN1
U
V
W
Sollimpulseingang
Steuer-E/A
RS422
M
E
U
V
W
Thermistor
Strom-
rückführung
ASIC
Soll-
impuls-
verarbeitung
Positionssteuerung
CPU
1-8
Page 20
Kapitel 2
Standardmodelle und technische Daten
2-1 Standardmodelle
2-2 Außen- und Einbaumaße
2-3 Servotreiber – Spezifikationen
2-4 Servomotor-Spezifikationen
2-5 Spezifikationen Untersetzungsgetriebe
2-6 Kabel- und Steckerspezifikationen
2-7 Spezifikationen der Servoklemmenblöcke und -
kabel
2-8 Bedienkonsolen-Spezifikationen
2-9 Bremswiderstand-Spezifikationen
2-10 DC-Drosseln
Page 21
Standardmodelle und technische Daten
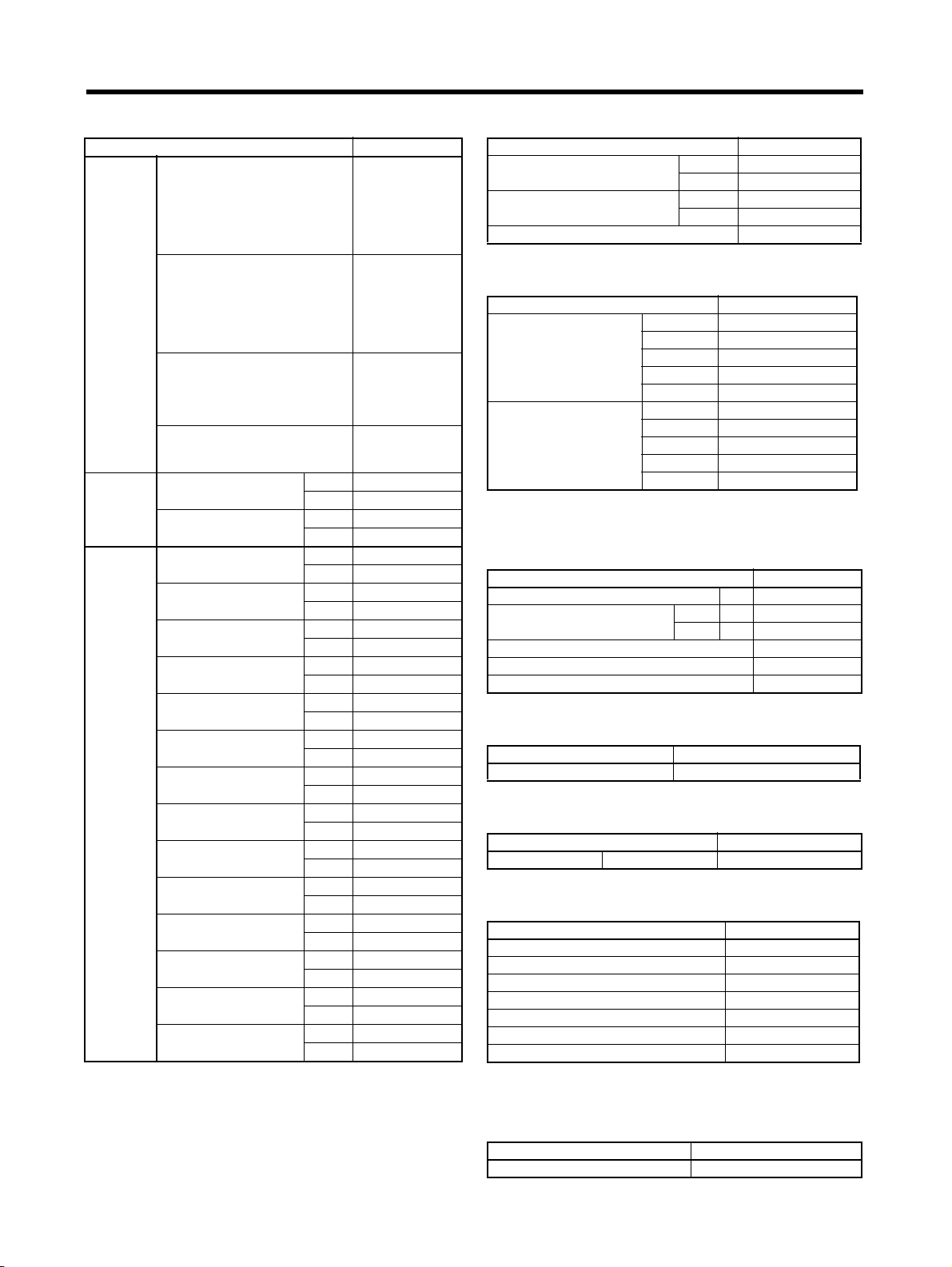
2-1 Standardmodelle
Kapitel 2
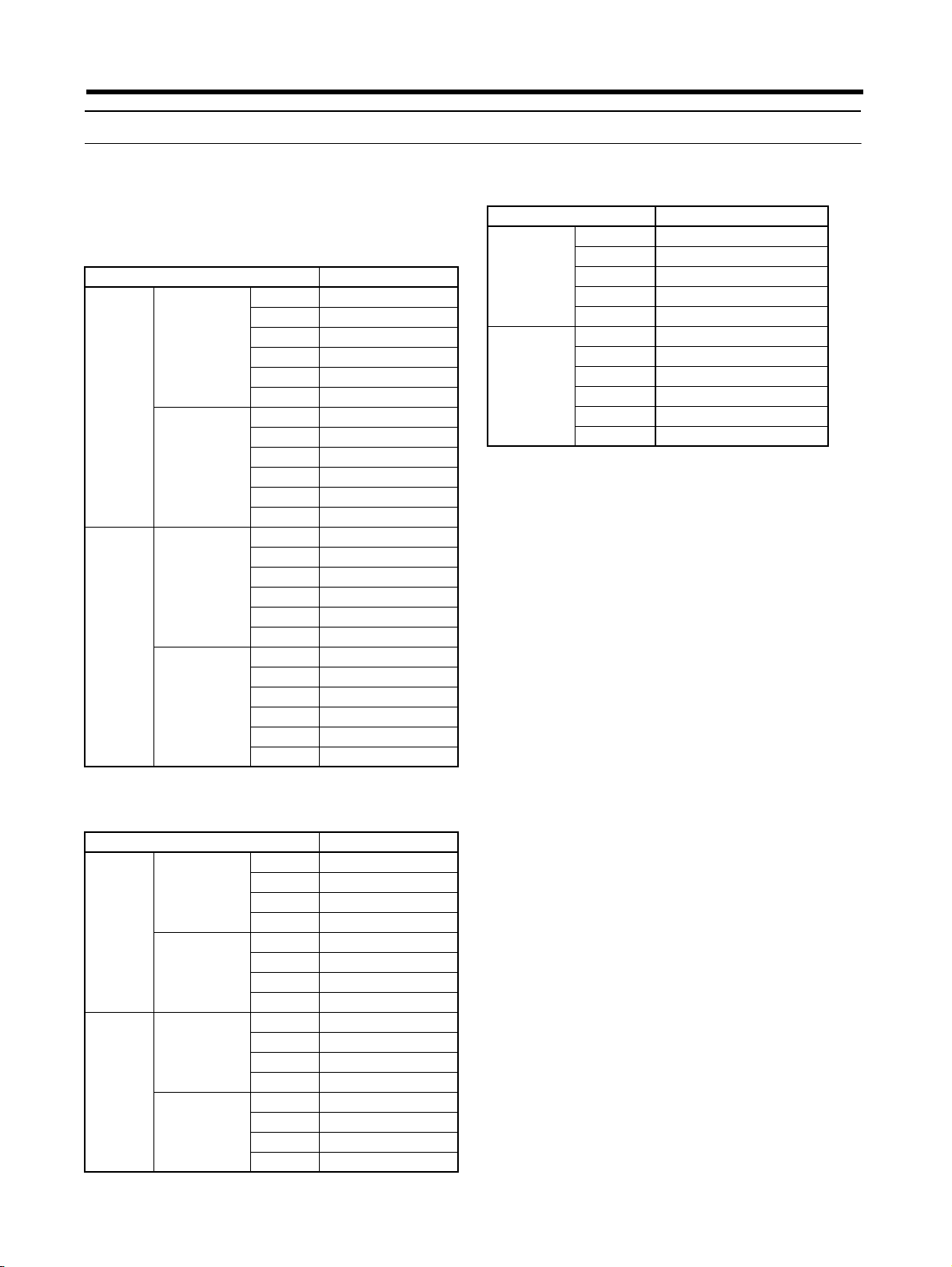
■ Servomotoren
● 3.000-U/min-Servomotoren in
Zylinderbauweise
Technische Daten Modell
Ohne
Bremse
Mit
Bremse
Gerade Welle
ohne Keil
Gerade Welle
mit Keil
Gerade Welle
ohne Keil
Gerade Welle
mit Keil
30 W R7M-A03030
50 W R7M-A05030
100 W R7M-A10030
200 W R7M-A20030
400 W R7M-A40030
750 W R7M-A75030
30 W R7M-A03030-S1
50 W R7M-A05030-S1
100 W R7M-A10030-S1
200 W R7M-A20030-S1
400 W R7M-A40030-S1
750 W R7M-A75030-S1
30 W R7M-A03030-B
50 W R7M-A05030-B
100 W R7M-A10030-B
200 W R7M-A20030-B
400 W R7M-A40030-B
750 W R7M-A75030-B
30 W R7M-A03030-BS1
50 W R7M-A05030-BS1
100 W R7M-A10030-BS1
200 W R7M-A20030-BS1
400 W R7M-A40030-BS1
750 W R7M-A75030-BS1
■ Servotreiber
Technische Daten Modell
Einphasig
100 VAC
Einphasig
200 VAC
30 W R7D-APA3L
50 W R7D-APA5L
100 W R7D-AP01L
200 W R7D-AP02L
400 W R7D-AP04L
30 W R7D-APA3H
50 W R7D-APA5H
100 W R7D-AP01H
200 W R7D-AP02H
400 W R7D-AP04H
750 W R7D-AP08H
● 3.000-U/min-Servomotoren in
Würfelbauweise
Technische Daten Modell
Ohne
Bremse
Mit
Bremse
Gerade Welle
ohne Keil
Gerade Welle
mit Keil
Gerade Welle
ohne Keil
Gerade Welle
mit Keil
100 W R7M-AP10030
200 W R7M-AP20030
400 W R7M-AP40030
750 W R7M-AP75030
100 W R7M-AP10030-S1
200 W R7M-AP20030-S1
400 W R7M-AP40030-S1
750 W R7M-AP75030-S1
100 W R7M-AP10030-B
200 W R7M-AP20030-B
400 W R7M-AP40030-B
750 W R7M-AP75030-B
100 W R7M-AP10030-BS1
200 W R7M-AP20030-BS1
400 W R7M-AP40030-BS1
750 W R7M-AP75030-BS1
2-2
Page 22
Standardmodelle und technische Daten
■ Untersetzungsgetriebe (gerade Welle mit Keil)
Kapitel 2
● Für Servomotoren in Zylinderbauweise
(Spiel = max. 3′ )
Technische Daten Modell
Servomotor-
leistung
50 W 1/5 R7G-VRSFPB05B50
100 W 1/5 R7G-VRSFPB05B100
200 W 1/5 R7G-VRSFPB05B200
400 W 1/5 R7G-VRSFPB05C400
750 W 1/5 R7G-VRSFPB05C750
Untersetzungsgetriebe
(Verzögerungsquotient)
1/9 R7G-VRSFPB09B50
1/15 R7G-VRSFPB15B50
1/25 R7G-VRSFPB25B50
1/9 R7G-VRSFPB09B100
1/15 R7G-VRSFPB15B100
1/25 R7G-VRSFPB25B100
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25C200
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB15C400
1/25 R7G-VRSFPB25D400
1/9 R7G-VRSFPB09D750
1/15 R7G-VRSFPB15D750
1/25 R7G-VRSFPB25E750
● Für Servomotoren in Zylinderbauweise
(Spiel = max. 45′ )
Technische Daten Modell
Servomotor-
leistung
50 W 1/5 R7G-RGSF05B50
100 W 1/5 R7G-RGSF05B100
200 W 1/5 R7G-RGSF05B200
400 W 1/5 R7G-RGSF05C400
750 W 1/5 R7G-RGSF05C750
Untersetzungsgetriebe
(Verzögerungsquotient)
1/9 R7G-RGSF09B50
1/15 R7G-RGSF15B50
1/25 R7G-RGSF25B50
1/9 R7G-RGSF09B100
1/15 R7G-RGSF15B100
1/25 R7G-RGSF25B100
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
1/9 R7G-RGSF09C750
1/15 R7G-RGSF15C750
1/25 R7G-RGSF25C750
Hinweis Für 30-W-Servomotoren existieren keine
Untersetzungsgetriebe.
● Für Servomotoren in Würfelbauweise
(Spiel = max. 3′ )
Technische Daten Modell
Servomotor-
leistung
100 W 1/5 R7G-VRSFPB05B100P
200 W 1/5 R7G-VRSFPB05B200P
400 W 1/5 R7G-VRSFPB05C400P
750 W 1/5 R7G-VRSFPB05C750P
Untersetzungsgetriebe
(Verzögerungsquotient)
1/9 R7G-VRSFPB09B100P
1/15 R7G-VRSFPB15B100P
1/25 R7G-VRSFPB25C100P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25C200P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25D400P
1/9 R7G-VRSFPB09D750P
1/15 R7G-VRSFPB15D750P
1/25 R7G-VRSFPB25E750P
Hinweis Für 30-W-Servomotoren existieren keine
Untersetzungsgetriebe.
● Für Servomotoren in Würfelbauweise
(Spiel = max. 45′ )
Technische Daten Modell
Servomotor-
leistung
100 W 1/5 R7G-RGSF05B100P
200 W 1/5 R7G-RGSF05B200P
400 W 1/5 R7G-RGSF05C400P
750 W 1/5 R7G-RGSF05C750P
Untersetzungsgetriebe
(Verzögerungsquotient)
1/9 R7G-RGSF09B100P
1/15 R7G-RGSF15B100P
1/25 R7G-RGSF25B100P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
1/9 R7G-RGSF09C750P
1/15 R7G-RGSF15C750P
1/25 R7G-RGSF25C750P
2-3
Page 23
Standardmodelle und technische Daten
■ Servoklemmenblöcke für CN1 ■ Steuerkabel für CN1
Technische Daten Modell
1 m R88A-CPU001S
2 m R88A-CPU002S
2 m R88A-CTU002N
Technische Daten Modell
3 m R7A-CEA003S
5 m R7A-CEA005S
10 m R7A-CEA010S
15 m R7A-CEA015S
20 m R7A-CEA020S
3 m R7A-CEA003B
5 m R7A-CEA005B
10 m R7A-CEA010B
15 m R7A-CEA015B
20 m R7A-CEA020B
Technische Daten Modell
PC98 2 m R7A-CCA002P3
Technische Daten Modell
Technische Daten Modell
Technische Daten Modell
Servoklemmenblock
Servotreiberkabel
Kabel
Positionier-Baugruppe
Technische Daten Modell
Für CS1W-NC113/133
CJ1W-NC113/133
C200HW-NC113
C200H-NC112
3F88M-DRT141
(Der Datenaustausch wird nicht
unterstützt.)
Für CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
C200HW-NC213/413
C500-NC113/211
C200H-NC211
(Der Datenaustausch wird nicht
unterstützt.)
Für CS1W-HCP22
CQM1H-PLB21
CQM1-CPU43-V1
(Der Datenaustausch wird nicht
unterstützt.)
Für CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
(Datenaustausch unterstützt.)
Der Datenaustausch
wird nicht unterstützt.
Datenaustausch
unterstützt.
Für CQM1H-PLB21,
CQM1-CPU43-V1
Für C200H-NC112 0,5 m XW2Z-050J-A4
Für C200H-NC211,
C500-NC113/211
Für CS1W-NC113,
C200HW-NC113
Für CS1W-NC213/413,
C200HW-NC213/413
Für CS1W-NC133 0,5 m XW2Z-050J-A12
Für CS1W-NC233/433 0,5 m XW2Z-050J-A13
Für CJ1W-NC113 0,5 m XW2Z-050J-A16
Für CJ1W-NC213/413 0,5 m XW2Z-050J-A17
Für CJ1W-NC133 0,5 m XW2Z-050J-A20
Für CJ1W-NC233/433 0,5 m XW2Z-050J-A21
Für CS1W-HCP22
(1-Achs)
Für CS1W-HCP22
(2-Achs)
Für 3F88M-DRT141 0,5 m XW2Z-050J-A25
1 m XW2Z-100J-B5
2 m XW2Z-200J-B5
1 m XW2Z-100J-B7
2 m XW2Z-200J-B7
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
1 m XW2Z-100J-A4
0,5 m XW2Z-050J-A5
1 m XW2Z-100J-A5
0,5 m XW2Z-050J-A8
1 m XW2Z-100J-A8
0,5 m XW2Z-050J-A9
1 m XW2Z-100J-A9
1 m XW2Z-100J-A12
1 m XW2Z-100J-A13
1 m XW2Z-100J-A16
1 m XW2Z-100J-A17
1 m XW2Z-100J-A20
1 m XW2Z-100J-A21
0,5 m XW2Z-050J-A22
1 m XW2Z-100J-A22
0,5 m XW2Z-050J-A23
1 m XW2Z-100J-A23
1 m XW2Z-100J-A25
XW2B-20J6-1B
XW2B-40J6-2B
XW2B-20J6-3B
XW2B-40J6-4A
Normales Steuerkabel
(mit Stecker an einem Ende)
Steckerklemmenblock-Kabel 1 m R88A-CTU001N
Steckerklemmenblöcke XW2B-40F5-P
■ Servomotorkabel
Für ungebremste Servomotoren (sowohl Zylinder- als auch
Würfelbauweise)
Für gebremste Servomotoren (sowohl Zylinderals auch Würfelbauweise)
■ Kabelverbindungen für
Peripheriegeräte
Analog-Monitorkabel (CN4) 1 m R88A-CMW001S
Computermonitorkabel (CN3) DOS 2 m R7A-CCA002P2
Stecker für E/A-Signale (CN1) R88A-CNU01C
Geberstecker (Treiberseitig) (CN2) R7A-CNA01R
Geberstecker (Servomotor-seitig) R7A-CNA02R
■ Bedienkonsolen
Handgerät (mit 1-m-Kabel) R7A-PR02A
■ Externe Bremswiderstände
Widerstand 220 W 47 Ω R88A-RR22047S
■ DC-Drosseln
Für R7D-APA3L/APA5L/APA01L R88A-PX5063
Für R7D-AP02L R88A-PX5062
Für R7D-AP04L R88A-PX5061
Für R7D-APA3H/APA5H/AP01H R88A-PX5071
Für R7D-AP02H R88A-PX5070
For R7D-AP04H R88A-PX5069
Für R7D-AP08H R88A-PX5061
Kapitel 2
2-4
■ Halterungen für Schaltschrank-
Frontplatte
Technische Daten Modell
Für SMARTSTEP Baureihe A R88A-TK01W
Page 24
Standardmodelle und technische Daten
Kapitel 2
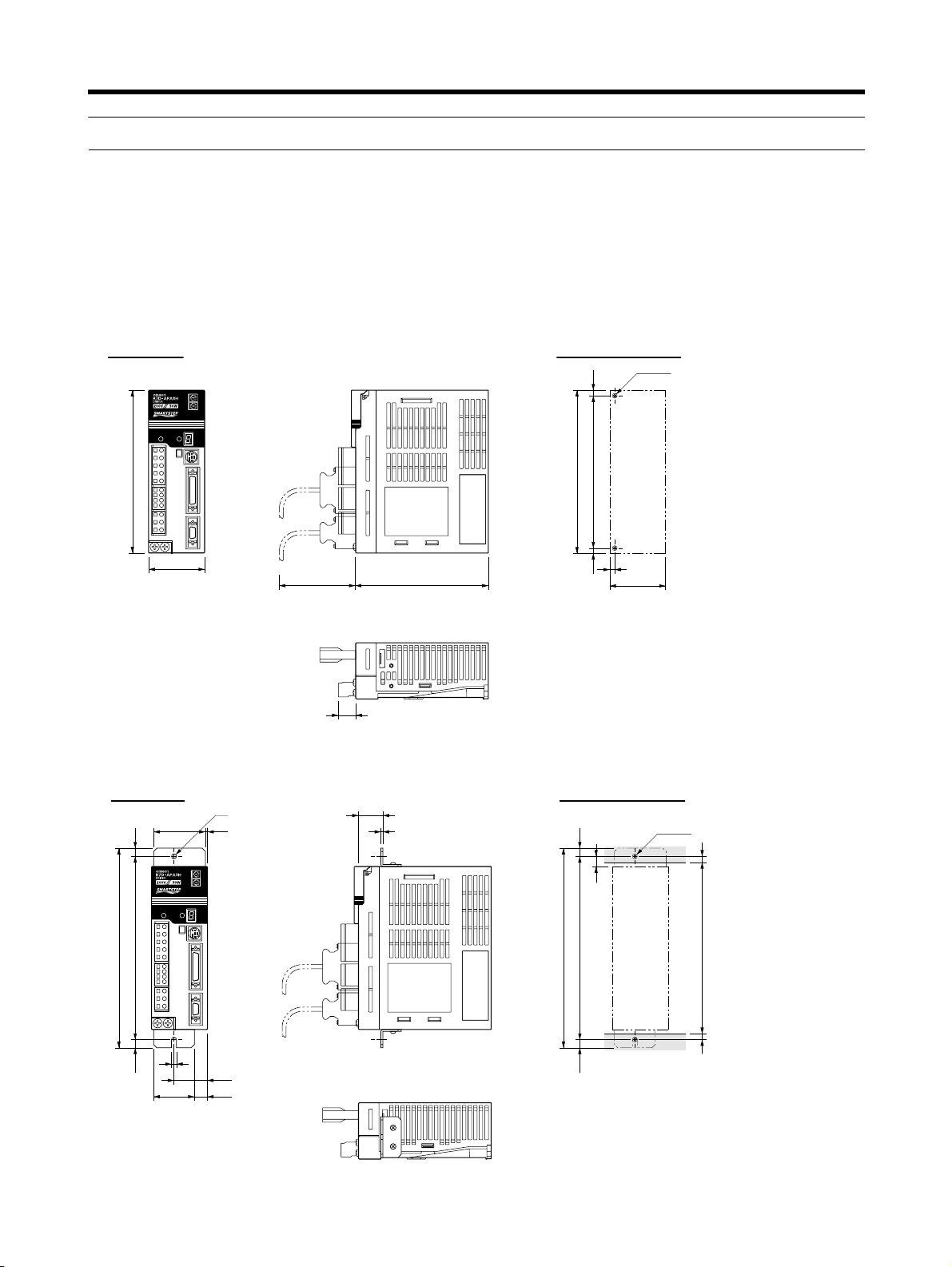
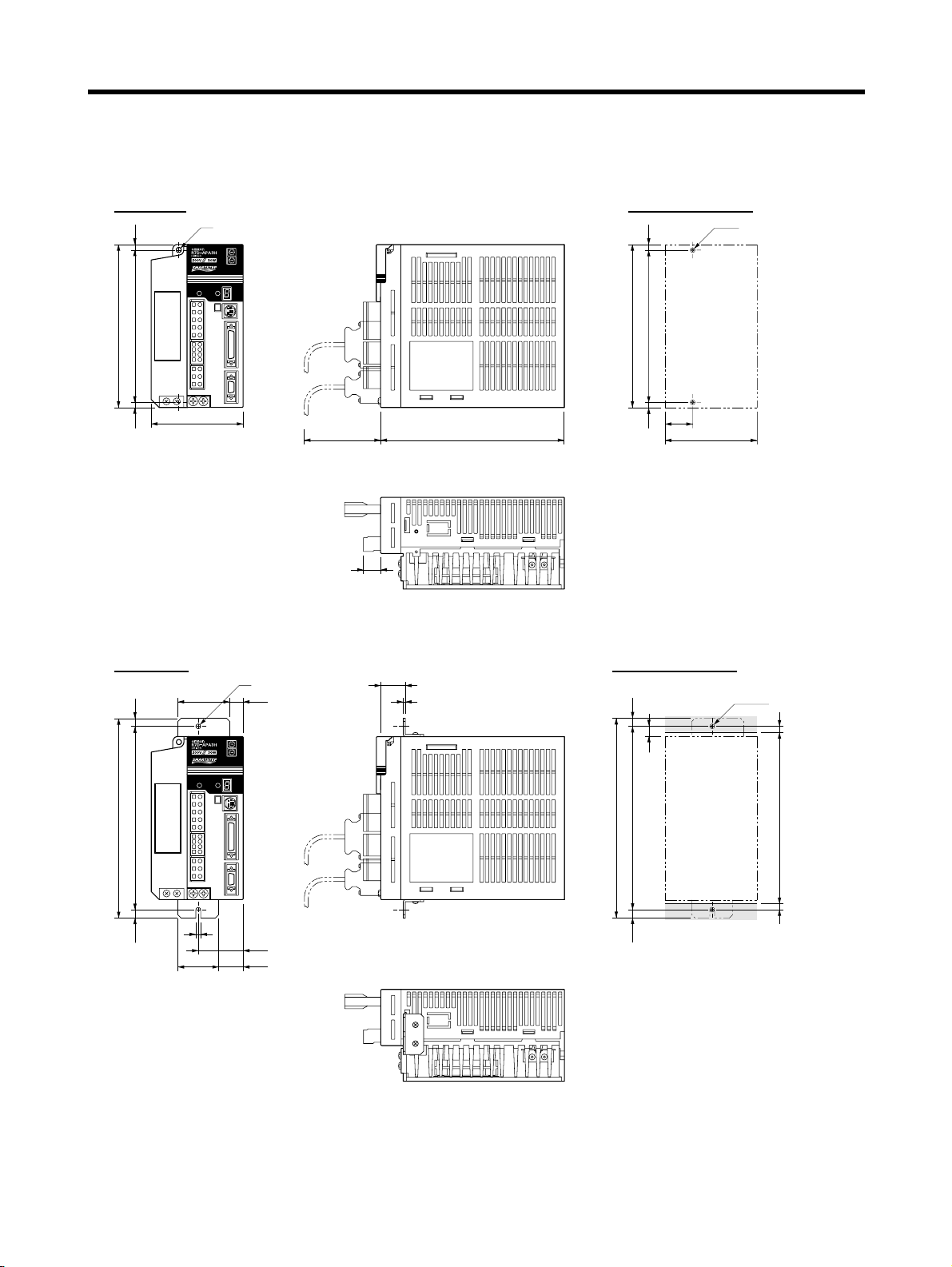
2-2 Außen- und Einbaumaße
2-2-1 Servotreiber
■ Einphasig 100 V AC: R7D-APA3L/-APA5L/-AP01L/-AP02L (30 bis 200 W)
Einphasig 200 V AC: R7D-APA3H/-APA5H/-AP01H/-AP02H (30 bis 200 W)
● Wandmontage
Außenmaße
Einbauabmessungen
Zwei, M4
5,5
160
55
(75) 130
17
160
149,5±0,5
(5)
5
55
● Montage in der Schaltschrank-Frontplatte (mit Halterungen)
Außenmaße
7,5(7,5)
Ø 5 24,5
52661,5
2
Einbauabmessungen
7,5(7,5)
10
Zwei, M4
195
180
195
180±0,5
5
32,5
11,542
(168)
2-5
Page 25
Standardmodelle und technische Daten
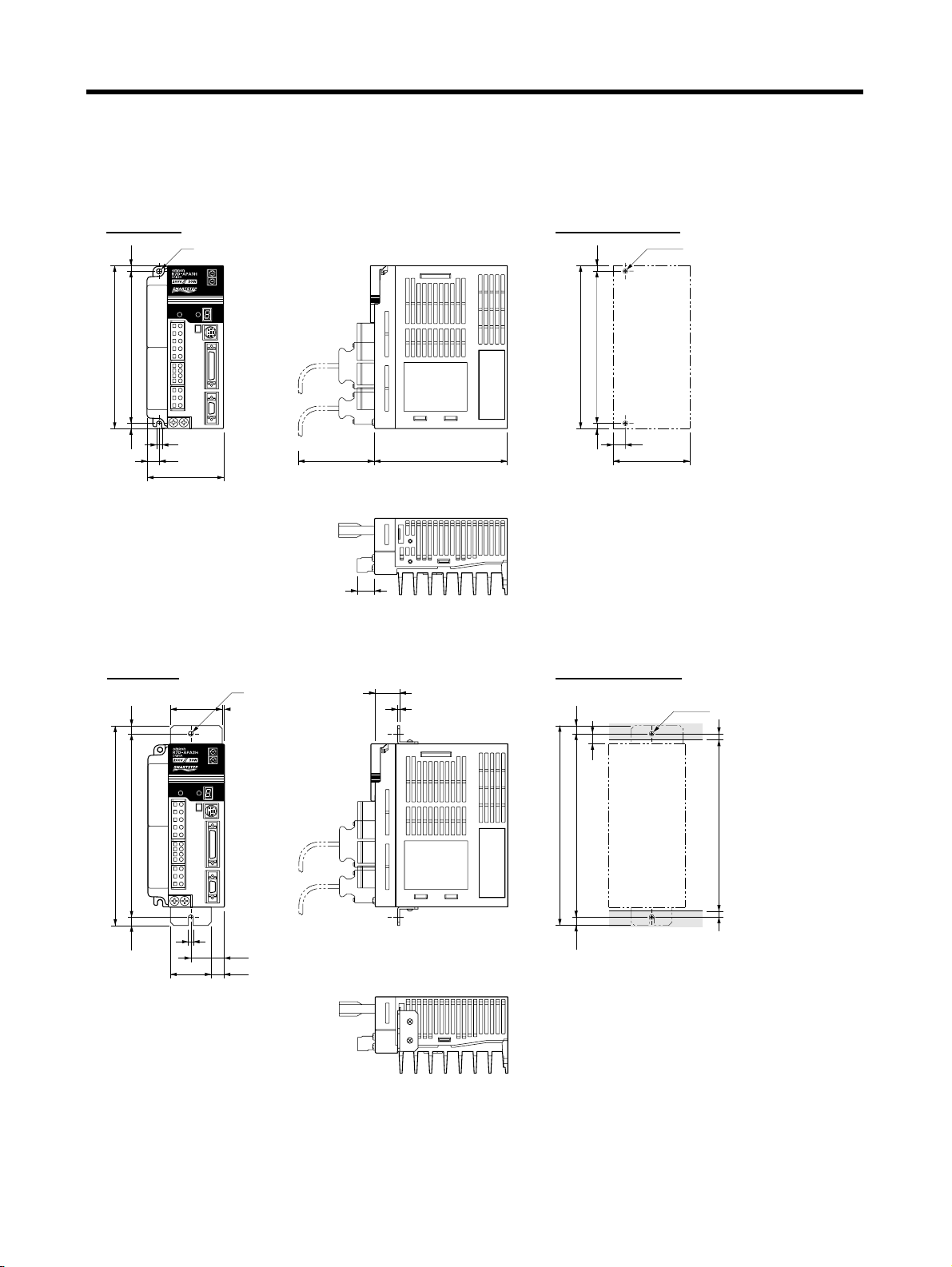
■ Einphasig 100 V AC: R7D-AP04L (400 W)
Einphasig 200 V AC: R7D-AP04H (400 W)
● Wandmontage
Außenmaße
Ø 5
Einbauabmessungen
5,5
Zwei, M4
Kapitel 2
160
149,5 5,5(5)
5
12
75
(75) 130
17
160
149,5±0,5
(5)
12
● Montage in der Schaltschrank-Frontplatte (mit Halterungen)
Außenmaße
7,5
Ø 5
52 1,5
24,5
2
Einbauabmessungen
7,5(7,5)
10
75
Zwei, M4
2-6
195
180
(7,5)
195
180±0,5
5
32,5
11,542
(168) 66
Page 26
Standardmodelle und technische Daten
■ Ein-/Dreiphasig 200 V AC: R7D-AP08H (750 W)
● Wandmontage
Außenmaße
Ø 5
Einbauabmessungen
5,5
Zwei, M4
Kapitel 2
160
149,5 5,5(5)
90
(75) 180
17
160
149,5±0,5
(5)
● Montage in der Schaltschrank-Frontplatte (mit Halterungen)
Außenmaße Einbauabmessungen
7,5(7,5)
Ø 5
52 12,5
24,5
2
7,5(7,5)
10
27
90
Zwei, M4
195
180
195
180±0,5
5
43,5
42
22,5
(168) 66
2-7
Page 27
Standardmodelle und technische Daten
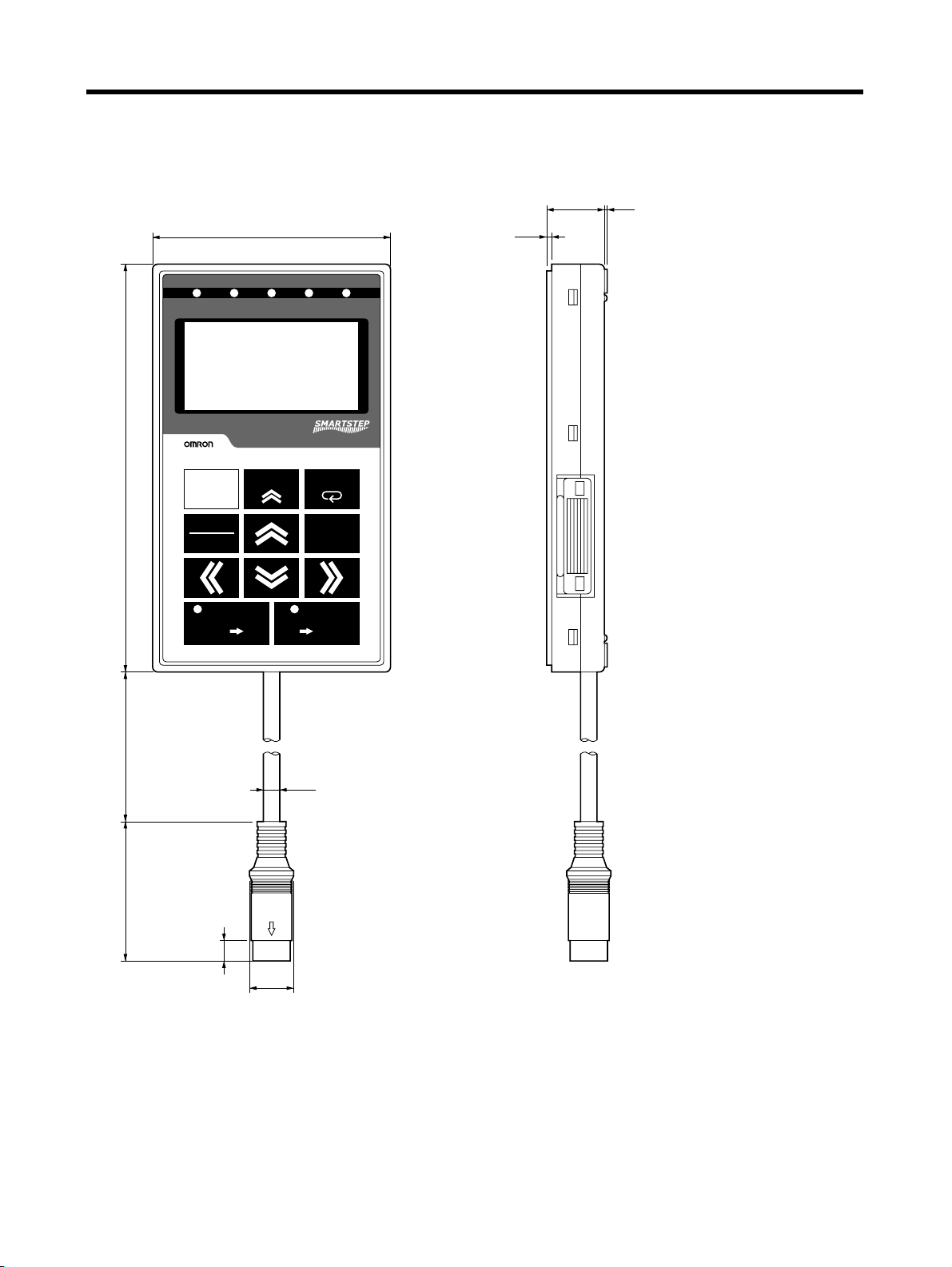
2-2-2 Bedienkonsole
■ R7A-PR02A Bedienkonsole (Handgerät)
70
1,5
17
Kapitel 2
0,8
1201000
B.B INP
R7A–PR02A
RESET
JOG
RUN
READ
DRIVER PR PR DRIVER
TGON REF POWER
VCMP
PARAMETER UNIT
SCROLL MODE/SET
WRITE
DATA
2-8
Ø 4,8
42
6
Ø 13,2
Page 28
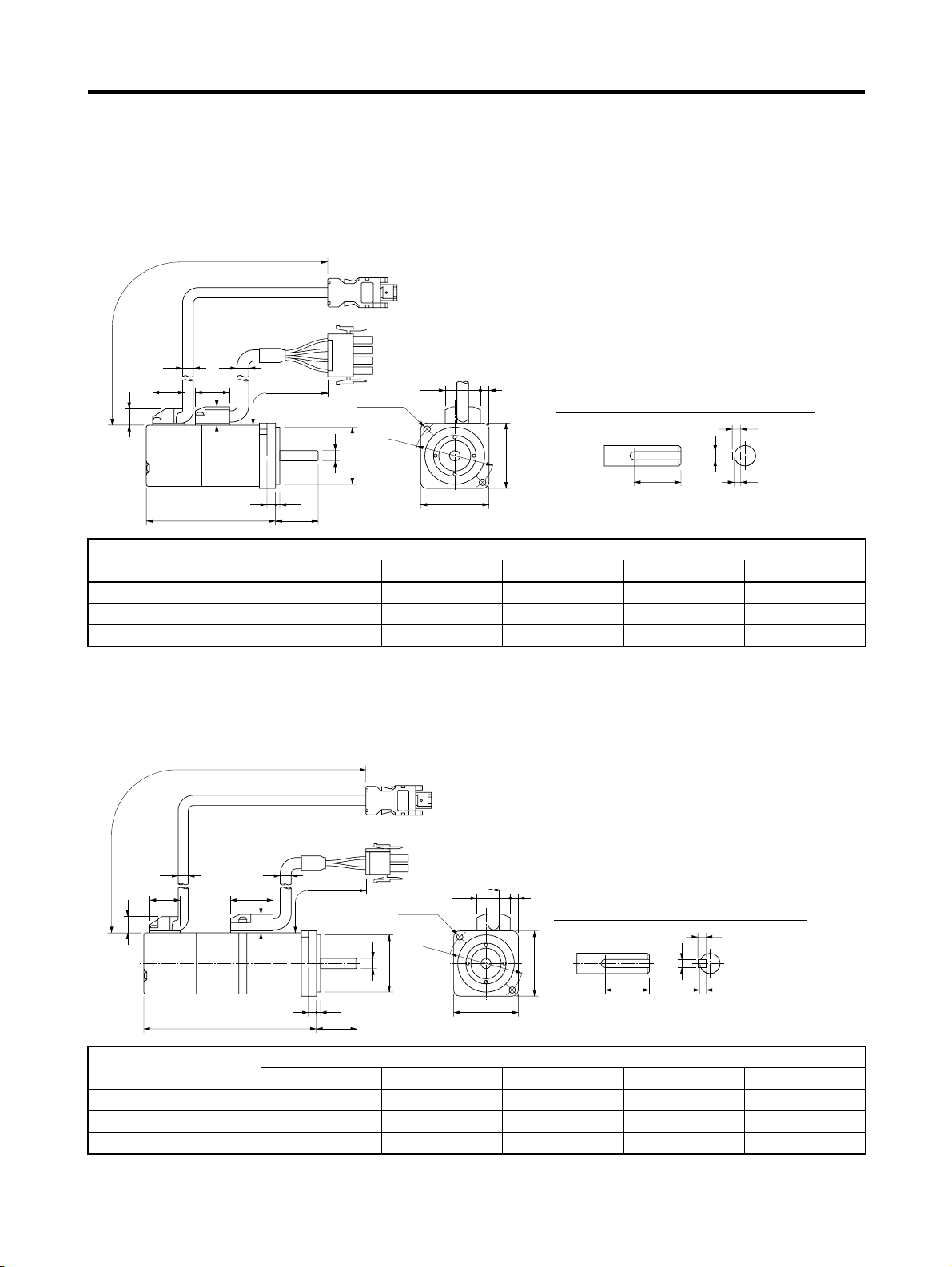
Standardmodelle und technische Daten
2-2-3 Servomotoren
■ Servomotoren in Zylinderbauweise ohne Bremse
● 30 W/50 W/100 W R7M-A03030(-S1)/-A05030(-S1)/-A10030(-S1)
300±30
Kapitel 2
Ø 6
19,5 20
9,5
Ø 7
300±30
11
LL 25
2 Bohrungen Ø 4,3
Ø S
Ø 30h7
21,5 5
Ø 46
Abmessungen Wellenstumpf mit Keil (-S1)
b
40
14
405 2,5
Modell Abmessungen (mm)
LL S b h t1
R7M-A03030-@ 69,5 6h6 2 2 1,2
R7M-A05030-@ 77 6h6 2 2 1,2
R7M-A10030-@ 94,5 8h6 3 3 1,8
■ Servomotoren in Zylinderbauweise ohne Bremse
● 30 W/50 W/100 W R7M-A03030-B(S1)/-A05030-B(S1)/-A10030-B(S1)
300±30
h
t1
Ø 6 Ø 7
19,5 27
9,5
11
LL 25
300±30
2 Bohrungen Ø 4,3
Ø S
Ø 30h7
21,5 5
Ø 46
Abmessungen Wellenstumpf mit Keil (-BS1)
h
b
40
14
405 2,5
t1
Modell Abmessungen (mm)
LL S b h t1
R7M-A03030-B@ 101 6h6 2 2 1,2
R7M-A05030-B@ 108,5 6h6 2 2 1,2
R7M-A10030-B@ 135 8h6 3 3 1,8
2-9
Page 29
Standardmodelle und technische Daten
■ Servomotoren in Zylinderbauweise ohne Bremse
● 200 W/400 W/750 W R7M-A20030(-S1)/-A40030(-S1)/-A75030(-S1)
300±30
Kapitel 2
Ø 6
13
9
Ø 7
20
11
LL LR
300±30
G3
Ø S
21,5
Vier, Ø Z
Ø D1
Ø D2
Abmessungen des Wellenstumpf bei 750-W-Servomotoren
2
Abmessungen Wellenstumpf mit Keil (-S1)
C
C
QK
5
5
3
Modell Abmessungen (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-@ 96,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-@ 124,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-@ 145 40 80 90 70h7 8 7 16h6 30
■ Servomotoren in Zylinderbauweise mit Bremse
● 200 W/400 W/750 W R7M-A20030-B(S1)/-A40030-B(S1)/-A75030-B(S1)
300±30
Abmessungen des Wellenstumpf bei
Ø 6 Ø 7
13 27
9
11
LL LR
300±30
G3
Ø S
21,5
Vier, Ø Z
Ø D1
Ø D2
C
750-W-Servomotoren
2
Abmessungen Wellenstumpf mit Keil (-BS1)
C
QK
5
5
3
Modell Abmessungen (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-B@ 136 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-B@ 164 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-B@ 189,5 40 80 90 70h7 8 7 16h6 30
2-10
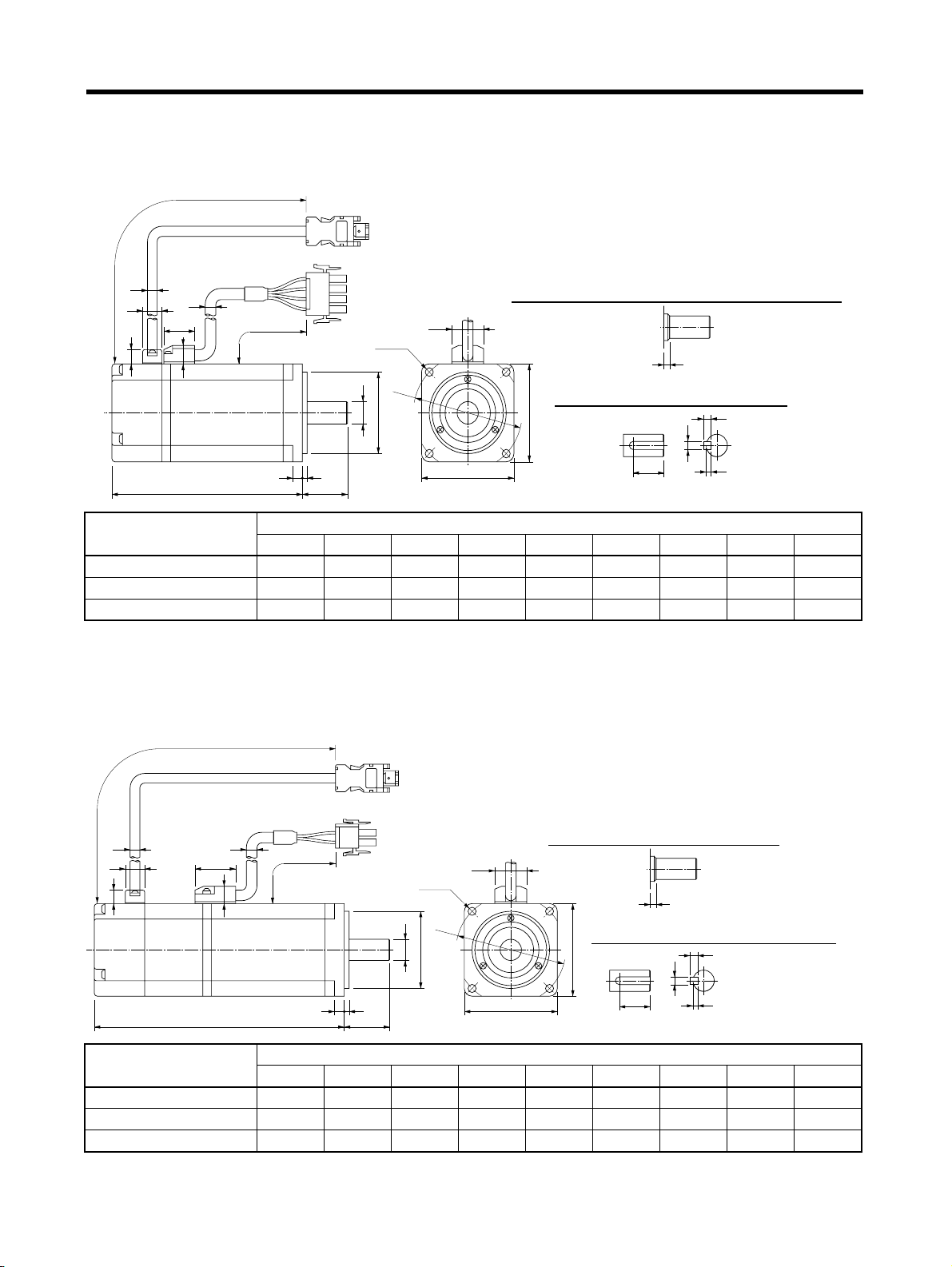
Page 30
Standardmodelle und technische Daten
Kapitel 2
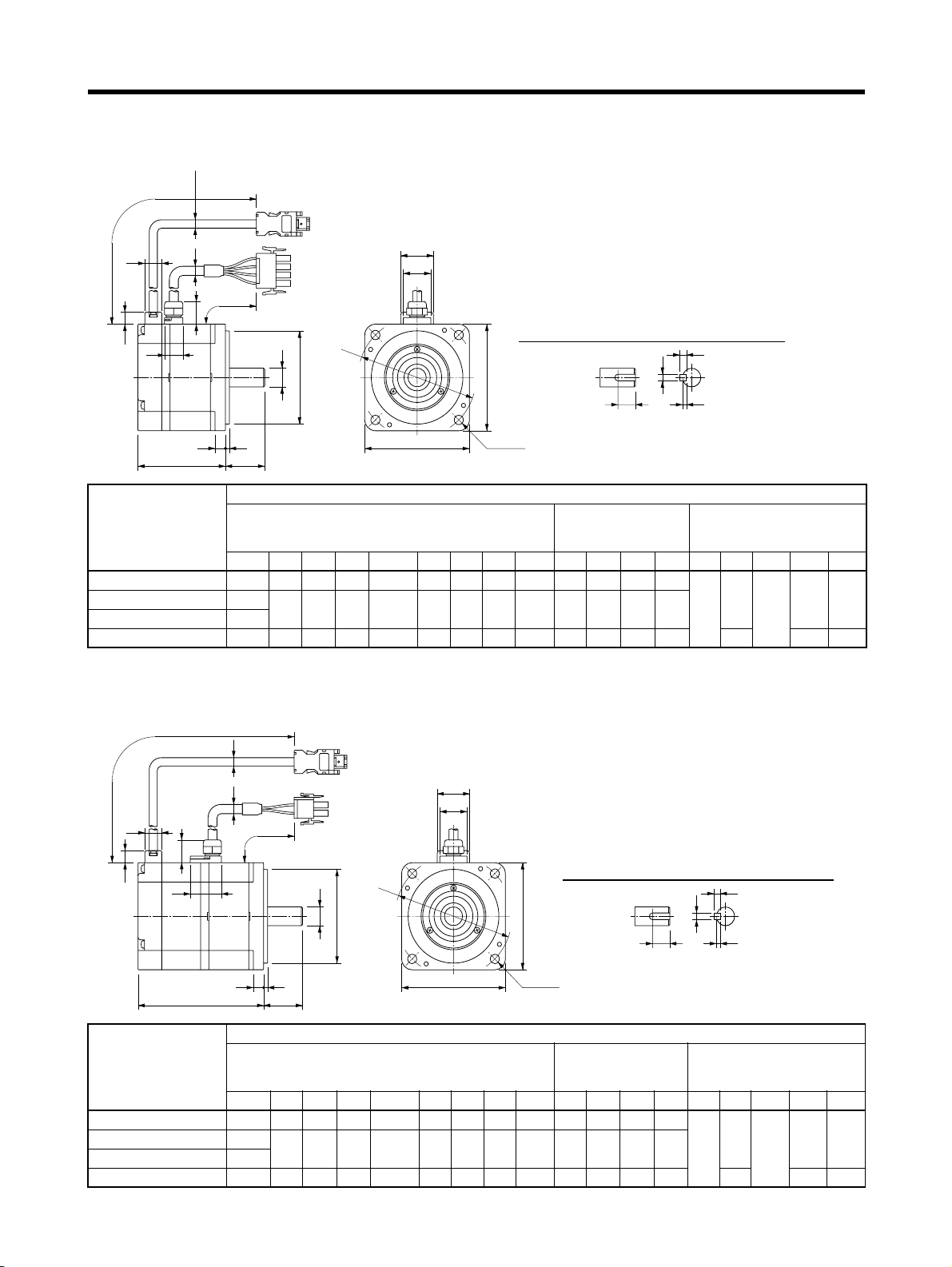
■ Servomotoren in Würfelbauweise ohne Bremse
● 100 W/200 W/400 W/750 W R7M-AP10030(-S1)/-AP20030(-S1)/-AP40030(-S1)/AP75030(-S1)
Ø 6Ø 7
300±30
13
300±30
A2
A1
A5
G
LL LR
Ø S
F
Ø D1
Ø D2
A3
A4
Abmessungen Wellenstumpf mit Keil (-S1)
h
b
C
QK
C
Vier, Ø Z
t1
Modell Abmessungen (mm)
Servomotor-Grundmaße Mit Keil
(Abmessungen
Abmessungen
Kabeldurchführung
über Wellenende)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-@ 62 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1,8 9 18 25 21 14
R7M-AP20030-@ 67 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-@ 87
R7M-AP75030-@ 86,5 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 19
■
Servomotoren in Würfelbauweise mit Bremse
● 100 W/200 W/400 W/750 W R7M-AP10030-B(S1)/-AP20030-B(S1)/-AP40030-B(S1)/AP75030-B(S1)
300±30
Ø 6
Ø 7
13
A2
A1
A5
LL LR
300±30
Ø D1
Ø S
Ø D2
GF
A3
A4
Abmessungen Wellenstumpf mit Keil (-BS1)
h
b
C
QK
C
Vier, Ø Z
t1
Modell Abmessungen (mm)
Servomotor-Grundmaße Mit Keil
(Abmessungen
Abmessungen
Kabeldurchführung
über Wellenende)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-B@ 91 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1,8 9 18 25 21 23
R7M-AP20030-B@ 98,5 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-B@ 118,5
R7M-AP75030-B@ 120 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 26
2-11
Page 31

Standardmodelle und technische Daten
Kapitel 2
2-2-4 Untersetzungsgetriebe
■ Für Servomotoren in Zylinderbauweise (Spiel = max. 3′ )
Modell Abmessungen (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Keilmaße
QK b h t1
50 W 1/5 R7G-VRSFPB05B50 67,5 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,55
1/9 R7G-VRSFPB09B50 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/15R7G-VRSFPB15B50 78 3252 404660 50 45103 6 1220M4M5 12164 4 2,50,7
1/25R7G-VRSFPB25B50 78 3252 404660 50 45103 6 1220M4M5 12164 4 2,50,7
100 W 1/5 R7G-VRSFPB05B100 67,5 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,55
1/9 R7G-VRSFPB09B100 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/15 R7G-VRSFPB15B100 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/25 R7G-VRSFPB25C100 92 50 78 40 46 90 70 62 17 3 6 19 30 M4 M6 20 22 6 6 3,5 1,7
200 W 1/5 R7G-VRSFPB05B200 72,5 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,72
1/9 R7G-VRSFPB09C400 100 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-VRSFPB15C4001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
1/25R7G-VRSFPB25C4001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
400 W 1/5 R7G-VRSFPB05C400 89,5 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 1,7
1/9 R7G-VRSFPB09C400 100 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-VRSFPB15C4001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
1/25R7G-VRSFPB25D40010461986070115907518582440M5M820308743,2
750 W 1/5 R7G-VRSFPB05C750 93,5 50 78 80 90 90 70 62 17 3 10 19 30 M6 M6 20 22 6 6 3,5 2,1
1/9R7G-VRSFPB09D750110619880901159075185102440M6M820308743,8
1/15R7G-VRSFPB15D750110619880901159075185102440M6M820308743,8
1/25 R7G-VRSFPB25E750 135 75 125 80 90 135 110 98 17 5 10 32 55 M6 M10 20 45 10 8 5 7,2
Gewicht
(kg)
Aufrissdiagramme
Vier, Ø Z1
Ø D1
@C2
Keilmaße
QK
E3
F
Ø D4
Ø Sh6
G
LM
b
t1
T
LR
Ø D3h7
Vier Stück Ø Z2
(Effektive Tiefe: l)
Ø D2
@C1
2-12
h
Page 32

Standardmodelle und technische Daten
Kapitel 2
■ Für Servomotoren in Zylinderbauweise (Spiel = max. 45′ )
Modell Abmessungen (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Keilmaße
QK b h t1
50 W 1/5 R7G-RGSF05B5078 3252 40 4660 50 4310 3 6 1220M4M5 12164 4 2,50,6
1/9 R7G-RGSF09B50 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/15R7G-RGSF15B5094 3252 40 46 60 50 4310 3 6 1220M4M5 12164 4 2,50,75
1/25R7G-RGSF25B5094 3252 40 46 60 50 4310 3 6 1220M4M5 12164 4 2,50,75
100 W 1/5 R7G-RGSF05B100 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/9 R7G-RGSF09B100 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/15 R7G-RGSF15B100 94 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,75
1/25 R7G-RGSF25B100 94 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,75
200 W 1/5 R7G-RGSF05B200 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,65
1/9 R7G-RGSF09C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15 R7G-RGSF15C400 114,5 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,5
1/25 R7G-RGSF25C400 114,5 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,5
400 W 1/5 R7G-RGSF05C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/9 R7G-RGSF09C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15 R7G-RGSF15C400 114,5 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,5
1/25 R7G-RGSF25C400 114,5 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,5
750 W 1/5 R7G-RGSF05C750 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,2
1/9 R7G-RGSF09C750 106,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,3
1/15 R7G-RGSF15C750 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,6
1/25 R7G-RGSF25C750 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,6
Gewicht
(kg)
Aufrissdiagramme
Vier, Ø Z1
Ø D1
@C2
Keilmaße
QK
E3
F
Ø D4
Ø Sh6
G
LM
b
t1
T
LR
Ø D3h7
Vier Stück Ø Z2
(Effektive Tiefe: l)
Ø D2
@C1
h
2-13
Page 33

Standardmodelle und technische Daten
Kapitel 2
■ Für Servomotoren in Würfelbauweise (Spiel = max. 3′ )
Modell Abmessungen (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Keilmaße
QK b h t1
100 W 1/5 R7G-VRSFPB05B100P 72,5 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,72
1/9 R7G-VRSFPB09B100P 83 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,77
1/15 R7G-VRSFPB15B100P 83 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,77
1/25 R7G-VRSFPB25C100P 92 50 78 60 70 90 70 62 17 3 10 19 30 M5 M6 20 22 6 6 3,5 1,8
200 W 1/5 R7G-VRSFPB05B200P 72,5 32 52 80 90 60 50 45 10 3 12 12 20 M6 M5 12 16 4 4 2,5 0,85
1/9 R7G-VRSFPB09C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/15 R7G-VRSFPB15C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/25 R7G-VRSFPB25C200P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
400 W 1/5 R7G-VRSFPB05C400P 93,5 50 78 80 90 90 70 62 17 3 10 19 30 M6 M6 20 22 6 6 3,5 1,8
1/9 R7G-VRSFPB09C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/15 R7G-VRSFPB15C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/25R7G-VRSFPB25D400P109619880901159075185122440M6M820308743,4
750 W 1/5 R7G-VRSFPB05C750P 98 50 78 120 145 90 70 62 17 3 15 19 30 M8 M6 20 22 6 6 3,5 2,6
1/9R7G-VRSFPB09D750P11061981201451159075185152440M8M820308744,2
1/15R7G-VRSFPB15D750P11061981201451159075185152440M8M820308744,2
1/25 R7G-VRSFPB25E750P 155 75 125 120 145 135 110 98 17 5 15 32 55 M8 M10 20 45 10 8 5 7,8
Gewicht
Aufrissdiagramme
E3
Vier, Ø Z1
F
Vier Stück Ø Z2
(Effektive Tiefe: l)
(kg)
Ø D1
Keilmaße
@C2
QK
Ø D2
Ø D4
Ø Sh6
T
G
LM
b
t1
h
LR
Ø D3h7
@C1
2-14
Page 34

Standardmodelle und technische Daten
Kapitel 2
■ Für Servomotoren in Würfelbauweise (Spiel = max. 45′ )
Modell Abmessungen (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Keilmaße
QK b h t1
100 W 1/5 R7G-RGSF05B100P 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,8
1/9 R7G-RGSF09B100P 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,8
1/15 R7G-RGSF15B100P 99 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,95
1/25 R7G-RGSF25B100P 99 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,95
200 W 1/5 R7G-RGSF05B200P 83 32 52 80 90 60 50 43 10 3 12 12 20 M6 M5 12 16 4 4 2,5 0,75
1/9 R7G-RGSF09C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/15 R7G-RGSF15C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
1/25 R7G-RGSF25C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
400 W 1/5 R7G-RGSF05C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/9 R7G-RGSF09C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/15 R7G-RGSF15C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
1/25 R7G-RGSF25C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
750 W 1/5 R7G-RGSF05C750P 106,5 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,5
1/9 R7G-RGSF09C750P 106,5 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,5
1/15 R7G-RGSF15C750P 123 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,9
1/25 R7G-RGSF25C750P 123 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,9
Gewicht
Aufrissdiagramme
E3
Vier, Ø Z1
F
Vier Stück Ø Z2
(Effektive Tiefe: l)
(kg)
Ø D1
Keilmaße
@C2
QK
Ø D2
Ø D4
Ø Sh6
G
LM
b
t1
h
T
LR
Ø D3h7
@C1
2-15
Page 35

Standardmodelle und technische Daten
Kapitel 2
2-3 Servotreiber – Spezifikationen
■ SMARTSTEP Servotreiber Baureihe A R7D-AP@
Wählen Sie einen Servotreiber aus, der zum jeweils verwendeten
Servomotor passt.
2-3-1 Allgemeine technische Daten
Beschreibung Technische Daten
Temperatur der Betriebsumgebung 0 bis 55° C
Luftfeuchtigkeit der Betriebsumgebung max. 90% (keine Kondensatbildung)
Temperatur (Lagerung) -20 bis 85° C
Luftfeuchtigkeit (Lagerung) max. 90% (keine Kondensatbildung)
Lager- und Betriebsatmosphäre Frei von korrosiven Gasen
Vibrationsfestigkeit 10 bis 55 Hz in X-, Y- und Z-Richtung bei 0,1-mm-Doppelamplitude;
Beschleunigung: max. 4,9 m/s
Stoßfestigkeit
Isolationswiderstand Zwischen Stromleitungsklemmen und Gehäuse: min. 0,5 MΩ
Durchschlagfestigkeit Zwischen Stromleitungsklemmen und Gehäuse: 1.500 V AC für 1 Min.
Schutzaufbau In Tafel integriert (IP10)
Beschleunigung max. 19,6 m/s
(bei 500 V DC)
bei 50/60 Hz
Zwischen Steuersignal und Gehäuse: 500 V AC für 1 Min.
2
2
, dreimal jeweils in X-, Y- und Z-Richtung
Hinweis 1. Die obigen Werte resultieren aus individuellen Prüftests. Bei abweichenden Bedingungen
können die Ergebnisse variieren.
Hinweis 2.
Führen Sie unter keinen Umständen eine Isolationsspannungsprüfung mit einem Widerstandsmesser am Servotreiber durch. Andernfalls können interne Bauteil beschädigt werden.
Hinweis 3. Je nach Betriebsbedingungen müssen einige Bauteile des Servotreibers gewartet werden.
Weitere Informationen finden Sie unter 5-5 Wartungsintervalle.
Hinweis 4. Die Lebensdauer des Servotreibers beträgt durchschnittlich 50.000 Stunden bei einer durch-
schnittlichen Umgebungstemperatur von 40°C und 80 % des nominalen Drehmoments.
2-16
Page 36

Standardmodelle und technische Daten
Kapitel 2
2-3-2 Leistungsspezifikationen
■ Steuerspezifikationen
● Ausführung mit 100-V AC-Eingang
Beschreibung R7D-APA3L R7D-APA5L R7D-AP01L R7D-AP02L R7D-AP04L
Ausgangs-Dauerstrom (rms) 0,42 A 0,6 A 0,89 A 2,0 A 2,6 A
Kurzzeit-Ausgangsstrom
maximal (rms)
Eingangsstrom-
versorgung
Verlustleistung Haupt-
Steuerungsmethode Servo, vollständig digital
Drehzahlistwert 2.000 Impulse/Drehung, Inkrementalgeber
Umrichtungsmethode PWM-Methode, basierend auf IGBT
PWM-Frequenz 11,7 kHz
Maximal anwendbare
Frequenz (Steuerimpulsanwendung)
Gewicht ca. 0,8 kg ca. 0,8 kg ca. 0,8 kg ca. 0,8 kg ca. 1,1 kg
Anwendbare Servomotor-
leistung
Anwendbarer
Servomotor
(R7M-)
Hauptschaltkreise
Steuerschaltkreise
schaltkreise
Steuerschaltkreise
Zylinderbauweise
Würfelbauweise
1,3 A 1,9 A 2,8 A 6,0 A 8,0 A
Einphasig 100/115 V AC (85 bis 127 V) 50/60 Hz (Doppelspannungsmethode)
Einphasig 100/115 V AC (85 bis 127 V) 50/60 Hz
3,1 W 4,6 W 6,7 W 13,3 W 20,0 W
13 W 13 W 13 W 13 W 13 W
250 kpps
30 W 50 W 100 W 200 W 400 W
A03030 A05030 A10030 A20030 A40030
– – AP10030 AP20030 AP40030
● Ausführung mit 200-V AC-Eingang (Einphasiger Eingang)
Beschreibung R7D-
Ausgangs-Dauerstrom
(rms)
Kurzzeit-Ausgangsstrom maximal (rms)
Eingangsstromversorgung
Verlu stleistung
Hauptschaltkreise
Steuerschaltkreise
Hauptschaltkreise
Steuerschaltkreise
APA3H
0,42 A 0,6 A 0,89 A 2,0 A 2,6 A 4,4 A
1,3 A 1,9 A 2,8 A 6,0 A 8,0 A 13,9 A
Einphasig 200/230 V AC (170 bis 253 V) 50/60 Hz (dreiphasiger Eingang nur für
R7D–AP08H möglich)
Einphasig 200/230 V AC (170 bis 253 V) 50/60 Hz
3,1 W 4,6 W 6,7 W 13,3 W 20 W 47 W
20 W 20 W 20 W 20 W 20 W 20 W
R7D-
APA5H
R7D-
AP01H
R7D-
AP02H
R7D-
AP04H
R7D-
AP08H
2-17
Page 37

Standardmodelle und technische Daten
Kapitel 2
Beschreibung R7D-
APA3H
Steuerungsmethode Servo, vollständig digital
Drehzahlistwert 2.000 Impulse/Drehung, Inkrementalgeber
Umrichtungsmethode PWM-Methode, basierend auf IGBT
PWM-Frequenz 11,7 kHz
Maximal anwendbare
Frequenz (Steuerimpulsanwendung)
Gewicht ca. 0,8 kg ca. 0,8 kg ca. 0,8 kg ca. 0,8 kg ca. 1,1 kg ca. 1,7 kg
Anwendbare Servomo-
torleistung
Anwendba-
rer Servomotor
(R7M-)
Zylinderbauweise
Würfelbauweise
250 kpps
30 W 50 W 100 W 200 W 400 W 750 W
A03030 A05030 A10030 A20030 A40030 A75030
– – AP10030 AP20030 AP40030 AP75030
R7D-
APA5H
R7D-
AP01H
R7D-
AP02H
R7D-
AP04H
R7D-
AP08H
2-3-3 Klemmenblockspezifikationen
Signal Funktion Beschreibung
L1 Eingang HauptL2
L3
+1 DC-Drosselklemme
+2
– DC-Ausgang
L1C Eingang SteuerL2C
B1 AnschlussklemB2
B3
UServomotorVweiß
Wblau
stromversorgung
für Oberwellenglättung des Versorgungsstroms
Hauptschaltkreis
(negativ)
stromversorgung
men für externen
Bremswiderstand
Anschlussklemmen
Gehäuseerdung Hierbei handelt es sich um die Erdungsklemme. Stellen Sie eine Erdung von
R7D–AP@H: Einphasig 200/230 V AC (170 bis 253 V AC) 50/60 Hz
R7D–AP@L: Einphasig 100/115 V AC (85 bis 127 V AC) 50/60 Hz
Hinweis: Nur das Modell R7D–AP08H (750 W) verfügt über eine L3 Klemme für
dreiphasigen Eingang: Dreiphasig 200/230 V AC (170 bis 253 V AC) 50/60 Hz
Normalerweise Kurzschluss zwischen +1 und +2.
Wenn Oberwellenmessungen erforderlich sind, schließen Sie eine DC-Drossel
zwischen +1 und +2 an.
Keine Anschlüsse vornehmen.
R7D-AP@H: Einphasig 200/230 V AC (170 bis 253 V AC) 50/60 Hz
R7D-AP@L: Einphasig 100/115 V AC (85 bis 127 V AC) 50/60 Hz
30 bis 200 W: Es kann kein externer Bremswiderstand angeschlossen werden.
400 W: Diese Klemme muss normalerweise nicht angeschlossen werden.
Klemmen Sie bei hoher generatorischer Energie einen externen Bremswiderstand zwischen B1 und B2 an.
750 W: Normalerweise zwischen B2 und B3 kurzgeschlossen. Entfernen Sie
bei hoher generatorischer Energie die Kabelbrücke zwischen B2 und B3, und
klemmen Sie einen externen Bremswiderstand zwischen B1 und B2 an.
rot Hierbei handelt es sich um die Klemmen für Ausgaben an den
Servomotor. Achten Sie auf ordnungsgemäße Verkabelung dieser
Klemmen.
grün/
gelb
maximal 100 Ω her (Klasse D, Klasse 3).
2-18
Page 38

Standardmodelle und technische Daten
2-3-4 E/A-Steuerungsspezifikationen (CN1)
■ Steuer-E/A und externe Signale zur Positionssteuerung
+im
-im
200 Ω
1
2
3
4
5
6
13
14RUN
200 Ω
200 Ω
3,3 k
(siehe
Hinweis 2)
(siehe
Hinweis 2)
(siehe
Hinweis 2)
(siehe
Hinweis 2)
INP8
PositionierungsendeAusgang
BKIR7
Bremssperre
10
OGND
Z32
Phase Z
ZCOM
33
ALM34
Alarmausgang
ALMCOM
35
22
TXD+
Übertragungsdaten
23 TXD-
Rückwärts-Impuls
Vorwärts-Impuls
FehlerzählerRücksetzung
RUN-Befehl
Uhrzeigersinn
Uhrzeigersinn
+gegen
Uhrzeigersinn
-gegen
Uhrzeigersinn
+ECRST
-ECRST
+24VIN24 V DC
Kapitel 2
Maximale
Betriebsspannung: 30 V DC
Maximaler
Ausgangsstrom:
Phase Z: 20 mA DC
Außer Phase Z:
50 mA DC
(siehe Hinweis 1)
AlarmRückstellung
3,3 k
18RESET
Hinweis 1. Schnittstelle für R-422:
• Anwendbarer Leitungstreiber: T.I. SN75174, MC3487 oder gleichwertig
• Anwendbarer Leitungsempfänger: T.I. SN75175, MC3486 oder gleichwertig
20 RXD+
21 RXD-
24 RT
Abschirmung
Empfangsdaten
Klemme
Abschlusswiderstand
FG
Gehäuseerdung
Hinweis 2. Für den Ausgangsschutz werden Sicherungen mit automatischer Rückstellung verwendet.
Wenn die Sicherung durch einen Überstrom ausgelöst wird, wird der Stromfluss zunächst
unterbrochen und dann nach einer bestimmten Dauer automatisch wiederhergestellt.
2-19
Page 39

Standardmodelle und technische Daten
■ E/A-Steuersignale
● CN1 Steuereingänge
Kapitel 2
Stift-
Nr.
1 +PULS/CW/A Vorwärtsimpulse,
2–PULS/CW/A
3 +SIGN/CCW/B Richtungssignal,
4 –SIGN/CCW/B
5 +ECRST Fehlerzähler-Rück6–ECRST
13 +24VIN +24-V-Spannungs-
14 RUN Eingang RUN-Befehl EIN: Servo EIN (Startet Stromversorgung für Servomotor.)
18 RESET Alarm-Rückstellein-
Signal-
bezeichnung
Funktion Beschreibung
Impulsketten-Eingangsklemmen für Positionierungsbefehle.
Rückwärtsimpulse,
oder 90° -Phasendifferenzimpulse
(Phase A)
Vorwärtsimpulse
oder 90° -Phasendif-
ferenzimpulse
(Phase B)
setzung
versorgungseingang für Steuer-DC
gang
Leitungstreiber-Eingang: 7 mA bei 3 V
Maximale Ansprechfrequenz: 250 kpps
Eingang mit offenem Kollektor: 7 bis 15 mA
Maximale Ansprechfrequenz: 250 kpps
Folgende Positionen können über eine Pn200.0-Einstellung
ausgewählt werden: Vorwärtsimpulse oder Richtungssignale
(PULS/SIGN); Vor- oder Rückwärtsimpulse (CW/CCW); 90° -
Phasendifferenzsignale (Phase A/B) (A/B).
Leitungstreiber-Eingang: 7 mA bei 3 V
Eingang mit offenem Kollektor: 7 bis 15 mA
EIN: Impulsbefehle unterbunden und Fehlerzähler gelöscht.
Hinweis Eingabe für mindestens 20 µs.
Eingangsklemme Stromversorgung (+24 V DC) für Sequenz-
eingaben (Stifte 14 und 18).
EIN: Servoalarm-Status wird zurückgestellt.
● CN1 Steuerausgänge
Stift-
Nr.
32 Z Phase Z Ausgang Ausgabe der Geberphase Z. (1 Impuls/Drehung)
33 ZCOM
34 ALM
35 ALMCOM
7 BKIR Bremssperrenausgang Ausgabe der Timing-Signale für die Haltebremse.
8 INP Positionierungsende-
10 OGND
Hinweis Für die Stift 7- und 8-Sequenzausgänge wird eine Ausgangsschnittstelle mit offenem Kollektor verwen-
Signal-
bezeich-
nung
Alarmausgang Wenn der Servotreiber einen Alarm erzeugt, wird der Ausgang
Ausgang
Ausgangs-Sammeler-
dung
det. (maximale Betriebsspannung: 30 V DC; maximale Ausgangsstromstärke: 50 mA)
Funktion Beschreibung
Ausgang mit offenem Kollektor (maximale Ausgangsspannung:
max. 30 V DC; maximale Ausgangsstromstärke: 20 mA)
abgeschaltet. Ausgang mit offenem Kollektor (maximale Betriebsspannung: 30 V DC; maximale Ausgangsstromstärke: 50 mA)
EIN, wenn der Positionsfehler innerhalb des Positionierungsendbereichs (Pn500) liegt.
Sammelerdung für Sequenzausgänge (Stifte 7 und 8).
2-20
Page 40

Standardmodelle und technische Daten
● Schnittstelle für R-422
Kapitel 2
Stift-
Nr.
20 RXD+
Signal-
bezeichnung
Empfangsdaten Schnittstelle für RS-422A-Übertragung und -Empfang.
21 RXD–
22 TXD+
Übertragungsdaten
23 TXD–
24 RT
19 GND
Klemme Abschlusswiderstand An Stift 21 (RXD–) des Abschlussgeräts anklemmen.
RS-422A Masse Masse für RS-422A.
■ CN1: Stiftbelegung
1
-PULS
2
/-CW/-A
-SIGN
4
/-CCW
/-B
6
-ECRST
8
INP
10 OGND
- Vorschubimpuls,
- Rückwärtsimpuls,
- Phase A
- Richtungssignal,
- Vorwärtsimpuls,
- Phase B
FehlerzählerRücksetzung
Positionierungs-
ende-
Ausgang
Ausgangs-
Sammelerdung
3
5
7
9
11
Funktion Beschreibung
+PULS
/+CW/+A
+SIGN
/+CCW/+B
+ECRST
BKIR
+ Vorschubimpuls,
+ Rückwärtsimpuls,
+ Phase A
+ Richtungs-
signal,
+ Vorwärtsimpuls,
+ Phase B
+ Fehlerzähler-
Rücksetzung
Bremssperren-
ausgang
19
RXD+
20
TXD+
22
24
RT
26
28
Empfangsdaten +
Übertragungs-
daten +
Klemme
Abschlusswiderstand
21
23
25
27
29
GND
RXD-
TXD-
Masse für
RS-422A
Empfangsdaten
Übertragungs-
daten -
12
13
+24VIN
RUN
14
16
18
RESET
RUN-
Befehlseingang
Alarm-
Rückstelleingang
15
17
Steuer-DC
+24-V-Eingang
30
Encoder
Z
32
34
ALM
36
Phase-ZAusgang
Alarmausgang
HinweisNicht belegte Stifte nicht verkabeln.
● CN1 Stecker (36P)
Servotreiber-Flachsteckhülse 10236-52A2JL (Sumitomo 3M)
Lötstecker 10136-3000VE (Sumitomo 3M)
Kabelgehäuse 10336-52A0-008 (Sumitomo 3M)
31
33
35
ZCOM
ALMCOM
Masse
Phase-Z-Ausgang
Masse für
Alarmausgang
2-21
Page 41

Standardmodelle und technische Daten
Kapitel 2
■ Steuereingangsschaltkreise
● Positionierungsbefehl-Impulseingänge und Fehlerzähler-Rückstelleingänge
Line-Treiber-Eingang
Steuergerät
+
−
Anwendbarer Line-Treiber:
AM26LS31A oder gleichwertig
Servotreiber
200 Ω
+
−
Eingangsstrom: 7 mA, 3 V
Eingang mit offenem Kollektor
Mit externer Stromversorgung
Steuergerät
Vcc
E
Hinweis Wählen Sie den Widerstandswert R so, dass die Eingangsstromstärke 7 bis 15 mA beträgt.
Servotreiber
200 Ω
+
−
Eingangsstrom: 7 bis 15 mA
Vcc R
24 V 1,6 bis 2,4 kΩ
12 V 750 bis 1,1 kΩ
5 V Kein
● Sequenzeingänge
Servotreiber
Externe
Spannungsversorgung:
24 V + 1 VDC
Belastbarkeit:
min. 50 mA (
je Baugruppe)
An Massen anderer
Eingangsschaltkreise
Mindest-Einschaltzeit: 2 ms
13+24VIN
3,3 k
14
An andere
Eingangsschaltkreise
Signalspezifikationen EIN: Minimum (+24VIN-11) V
AUS: Maximum (+24VIN-1) V
Optokoppler-Eingang: 24 VDC, 7 mA
2-22
Page 42

Standardmodelle und technische Daten
■ Steuerausgangsschaltkreise
● Sequenz- und Alarmausgänge
Kapitel 2
Servotreiber
(Siehe Hinweis.)
An andere
Ausgangsschaltkreise
+
X
−
Di
Di: Diode für Überspannungsschutz (schnelle Dioden verwenden)
Externe
Spannungsversorgung
24 V DC ± 1 V
Maximale Betriebsspannung: 30 V DC
Maximaler Ausgangsstrom: 50 mA
Hinweis Für den Ausgangsschutz werden Sicherungen mit automatischer Rückstellung verwendet.
Wenn die Sicherung durch einen Überstrom ausgelöst wird, wird der Stromfluss zunächst
unterbrochen und dann nach einer bestimmten Dauer automatisch wiederhergestellt.
● Phase Z Ausgang
Servotreiber
33
(Siehe Hinweis.)
Z32
ZCOM
Steuergerät
Maximale Betriebsspannung: 30 V DC
Maximaler Ausgangsstrom: 20 mA
FG
Hinweis Für den Ausgangsschutz werden Sicherungen mit automatischer Rückstellung verwendet.
Wenn die Sicherung durch einen Überstrom ausgelöst wird, wird der Stromfluss zunächst
unterbrochen und dann nach einer bestimmten Dauer automatisch wiederhergestellt.
2-23
Page 43

Standardmodelle und technische Daten
■ Erläuterung der Steuereingänge
● Vorwärtsimpuls/Richtungssignal, Rückwärtsimpuls/Vorwärtsimpuls, +90°
Kapitel 2
Phasendifferenzsignale (Phase A/Phase B)
CN1 Stiftnummern
CN1 Stift 1:
+Vorwärtsimpuls (+PULS), +Rückwärtsimpuls (+CW), +90° -Phasendifferenzsignale (Phase A) (+A)
CN1 Stift 2:
-Vorwärtsimpuls (-PULS), -Rückwärtsimpuls (-CW), -90° -Phasendifferenzsignale (Phase A) (-A)
CN1 Stift 3:
+Richtungssignal (+SIGN), +Vorwärtsimpuls (+CCW), +90° Phasendifferenzsignale (Phase B) (+B)
CN1 Stift 4:
-Richtungssignal (-SIGN), -Vorwärtsimpuls (-CCW), -90° -Phasendifferenzsignale (Phase B) (-B)
Funktionen
Die Funktion dieser Signale hängt von den Einstellungen von Pn200.0 ab (Sollwertimpulsmodus:
Positionssteuerungseinstellung 1).
Logik Pn200.0
Einstellung
0 Vorwärtsimpuls
1 Rück- und
Positiv
290° -Phasendiffe-
390° -Phasendiffe-
490° -Phasendiffe-
Sollwertimpuls
modus
und Richtungssignal
Vorwärtsimpuls
renzsignale (x1)
renzsignale (x2)
renzsignale (x4)
Eingangs-
klemmen
1: +PULS
2: –PULS
3: +SIGN
4: –SIGN
1: +CW
2: –CW
3: +CCW
4: –CCW
1: +A
2: –A
3: +B
4: –B
Servomotor-
Vorwä rts be fe hl
H
L
Servomotor-
Rückwärtsbefehl
L
L
2-24
Page 44

Standardmodelle und technische Daten
Kapitel 2
Logik Pn200.0
Einstellung
5 Vorwärtsimpuls
6 Rück- und
Negativ
790° -Phasendiffe-
890° -Phasendiffe-
990° -Phasendiffe-
Sollwertimpuls
modus
und Richtungssignal
Vorwärtsimpuls
renzsignale (x1)
renzsignale (x2)
renzsignale (x4)
Eingangs-
klemmen
1: +PULS
2: –PULS
3: +SIGN
4: –SIGN
1: +CW
2: –CW
3: +CCW
4: –CCW
1: +A
2: –A
3: +B
4: –B
Servomotor-
Vorwärtsbefehl
L
H
Servomotor-
Rückwärtsbefehl
H
H
2-25
Page 45

Standardmodelle und technische Daten
Kapitel 2
Sollwertimpuls-Timing
Die folgenden Diagramme beziehen sich auf positive Logik. Bei negativer Logik gelten dieselben
Bedingungen.
Sollwertimpulsmodus Umschaltvorgang
Vorwärtsimpuls und
Richtungssignal
Maximale Eingangsfrequenz: 250 kpps
Richtungssignale
Vorwärtsdrehrichtungs-Befehl
t1 t1t2 t2 t2
Rückwärtsdrehrichtungs-Befehl
Rück- und Vorwärtsimpuls
Maximale Eingangsfrequenz: 250 kpps
90° Phasendifferenzsignale
Maximale Eingangsfrequenz:
x1:
Leitungstreiber:
250 kpps
x2:
Leitungstreiber:
250 kpps
x4:
Leitungstreiber:
187,5 kpps
Vorschubimpulse
Rückwärts-Impulse
Vorwärts-Impulse
Phase-A-Impulse
Phase-B-Impulse
t1 t1
Vorwärtsdrehrichtungs-Befehl Rückwärtsdrehrichtungs-Befehl
t1 t1
τ
T
Vorwärtsdrehrichtungs-Befehl
t1 t1
τ
T
τ
T
t1 ≤ 0,1 µs
t2 > 3,0 µs
τ ≥ 2,0 µs
T ≥ 4,0 µs
(τ/T) ´ 100 ≤ 50 (%)
t2
t1 ≤ 0,1 µs
t2 > 3,0 µs
τ ≥ 2,0 µs
T ≥ 4,0 µs
(τ/T) ´ 100 ≤ 50 (%)
RückwärtsdrehrichtungsBefehl
t1 ≤ 0,1 µs
τ ≥ 2,0 µs
T ≥ 4,0 µs
(τ/T) x 100 ≤ 50 (%)
2-26
Page 46

Standardmodelle und technische Daten
● + Fehlerzählerrückstellung (5: +ECRST)
Kapitel 2
- Fehlerzählerrückstellung (6: –ECRST)
Der Inhalt des Fehlerzählers wird zurückgestellt, wenn das Fehlerzähler-Rückstellsignal aktiviert
wird, und die Positionsschleife wird deaktiviert. Die Signaleingabe muss mindestens 20 µs dauern.
Der Zähler wird nicht zurückgesetzt, wenn das Signal zu kurz ist.
● RUN-Befehlseingabe (14: RUN)
Über diese Eingabe wird die Freigabe für den Hauptschaltkreis des Servotreibers aktiviert (EIN).
Wenn diese Signaleingabe nicht erfolgt (d. h. im Status Servo AUS), kann der Servomotor, abgesehen von JOG-Funktionen, nicht betrieben werden.
● Alarmrückstellung (18: RESET)
Dies ist der externe Rückstell-Signaleingang für den Alarm. Beseitigen Sie die Ursache für den
Alarm, und starten Sie die Funktion erneut. Schalten Sie den RUN-Befehl AUS, bevor Sie das Rückstellsignal eingeben. Es kann gefährlich sein, das Rückstellsignal bei aktiviertem RUN-Befehl einzugeben.
■ Erläuterung der Steuerausgänge
● Steuerausgangssequenz
Spannungsversorgungseingang
(L1C, LC2, L1, L2, (L3))
Alarmausgang
(ALM)
Positionierungsende-Ausgang
Bremssperrenausgang
(BKIR)
Eingang RUN-Befehl
(RUN)
Alarm-Rückstelleingang
(RESET)
(INP)
EIN
AUS
EIN
AUS
EIN
AUS
EIN
AUS
EIN
AUS
EIN
AUS
ca. 2 s
0 bis 35 ms
300 ms
2 ms
2 ms
● Alarmausgang (34: ALM)
Masse Alarmausgang (35: ALMCOM)
Wenn der Servotreiber einen Fehler ermittelt, werden die Ausgänge abgeschaltet (AUS). Beim Einschalten ist dieser Ausgang abgeschaltet (AUS). Er wird nach Abschluss der Initialisierungsphase
aktiviert (EIN).
2-27
Page 47

Standardmodelle und technische Daten
● Positionierungsende-Ausgang (8: INP)
Kapitel 2
Das Signal INP wird aktiviert (EIN), wenn die Anzahl der im Fehlerzähler registrierten Impulse weniger als Pn500 beträgt (Positionierungsende-Bereich).
● Bremsperrenausgang (7: BKIR)
Es werden externe Brems-Timing-Signale ausgegeben.
2-3-5 Spezifikationen Encoder-Eingangsstecker (CN2)
Stift-Nr. Symbol Signalbezeichnung Funktion/Schnittstelle
1, 2, 3 E0V Encoder-Stromversorgungs-
masse (GND)
4, 5, 6 E5V Encoder-Stromversorgung +5 V
8 S+ Encoder + Phase-S-Eingang Leitungstreibereingang (gemäß EIARS-422A)
9 S– Encoder - Phase-S-Eingang
10 A+ Encoder + Phase-A-Eingang Leitungstreibereingang (gemäß EIARS-422A)
11 A- Encoder - Phase-A-Eingang
12 B+ Encoder + Phase-B-Eingang Leitungstreibereingang (gemäß EIARS-422A)
13 B– Encoder - Phase-B-Eingang
Abschir-
mung
FG Masseabschirmung Kabelabschirmung (Masse)
Stromversorgung für Encoder: 5 V, 180 mA 5 V,
180 mA
(Eingangsimpedanz: 300 Ω±5%)
(Eingangsimpedanz: 300 Ω±5%)
(Eingangsimpedanz: 300 Ω±5%)
● Verwendete CN2 Stecker (14P)
Servotreiber-Flachsteckhülse: 10214-52A2JL (Sumitomo 3M)
Lötstecker: 10114-3000VE (Sumitomo 3M)
Kabelgehäuse: 10314-52A0-008 (Sumitomo 3M)
2-3-6 Spezifikationen Datenaustauschstecker (CN3)
Stift-Nr. Symbol Signalbezeichnung Funktion/Schnittstelle
1 /TXD Übertragungsdaten
2 /RXD Empfangsdaten
3 PRMU Umschaltung Bedienungsgerät Die Umschaltklemme für eine Bedienkonsole
7 +5V +5 V-Ausgang Der +5 V-Spannungsversorgungsausgang zur
8GNDErde
Abschir-
mung
● Verwendete CN3 Stecker (8P)
FG Masseabschirmung Kabelabschirmung (Masse)
Servotreiber-Flachsteckhülse: HR12-10R-8 SDL (Hirose Electric)
Kabelstecker: HR212-10P-8P (Hirose Electric)
Übertragungsdaten, RS-232C-Ausgang
Empfangsdaten, RS-232C-Eingang
oder einen Personal Computer
Bedienkonsole
2-28
Page 48

Standardmodelle und technische Daten
Kapitel 2
2-3-7 Steckerspezifikationen Überwachungsausgang (CN4)
Stift-Nr. Symbol Signalbezeichnung Funktion/Schnittstelle
1NM
2AM
3 GND Überwachungsmasse
4 GND Überwachungsmasse
● Verwendete CN4 Stecker (4P)
Servotreiber-Flachsteckhülse: DF11-4DP-2DSA (01) (Hirose Electric)
Kabelsteckerbuchse: DF11-4DS-2C (Hirose Electric)
Kabelsteckerkontakt: DF11-2428SCF (Hirose Electric)
Geschwindigkeitsüberwachung
Stromüberwachung Ausgabe Stromüberwachung: 1 V / Nenndrehmoment
Ausgabe Geschwindigkeitsüberwachung: 1 V je 1.000 U/min
Vorwärtsdrehung: – Spannung; Rückwärtsdrehung: + Spannung
Die Ausgabegenauigkeit beträgt ca. ±15%.
Vorwärtsdrehung: – Spannung; Rückwärtsdrehung: + Spannung
Die Ausgabegenauigkeit beträgt ca. ±15%.
Massen
2-29
Page 49

Standardmodelle und technische Daten
Kapitel 2
2-4 Servomotor-Spezifikationen
■ SMARTSTEP Servomotoren der Baureihe A (R7M-A@)
Es gibt zwei Arten von SMARTSTEP Servomotoren der Baureihe A:
•3.000-U/min-Servomotoren in Zylinderbauweise
•3.000-U/min-Servomotoren in Würfelbauweise
Diese Servomotoren haben außerdem unterschiedliche Spezi-
fikationen, wie Wellentyp, Bremse usw. Wählen Sie den für Ihr
System geeigneten Servomotor nach Lastbedingungen und
Installationsumgebung aus.
2-4-1 Allgemeine technische Daten
Beschreibung Angaben
Temperatur der Betriebsumgebung
Luftfeuchtigkeit der Betriebsumgebung
Lagertemperatur -20 bis 60° C
Temperatur (Lagerung) 20% – 80 % (ohne Kondensatbildung)
Lager- und Betriebsatmosphäre Frei von korrosiven Gasen
Vibrationsfestigkeit
(siehe Hinweis 1)
Stoßfestigkeit
Isolationswiderstand Zwischen Stromleitungsklemmen und FG: min. 10 MΩ (über 500 V DC
Durchschlagfestigkeit Zwischen Stromleitungsklemmen und FG: 1.500 V AC für 1 Min. bei 50/60 Hz
Laufposition Alle Richtungen
Isolationsklasse Typ B
Bauart Vollständig gekapselt, selbstkühlend
Schutzaufbau IP55 (außer Wellendurchgang)
Vibrationsklasse V-15
Montageart Flanschmontage
0 bis 40° C
20% – 80 % (ohne Kondensatbildung)
2
10 bis 2.500 Hz, 0,2-mm-Doppelamplitude oder 24,5 m/s
Beschleunigung, je nachdem, welches der kleinere Wert ist, in X-, Y- und ZRichtung
Beschleunigung max. 98 m/s
Widerstandsmesser)
2
, zweimal jeweils in X-, Y- und Z-Richtung
maximale
Hinweis 1. Die Vibrationen können durch Resonanzschwingungen der Anlage verstärkt werden. Ach-
ten Sie daher darauf, den Servomotortreiber unter Bedingungen einzusetzen, bei denen
80 % der spezifizierten Werte nicht über einen längeren Zeitraum überschritten werden.
Hinweis 2. Die obigen Werte resultieren aus individuellen Prüftests. Bei abweichenden Bedingun-
gen können die Ergebnisse variieren.
Hinweis 3. Die Servomotoren können nicht in Umgebungen mit sehr hoher Luftfeuchtigkeit einge-
setzt werden.
2-30
Page 50

Standardmodelle und technische Daten
2-4-2 Leistungsspezifikationen
■ 3.000-U/min-Servomotoren in Zylinderbauweise
Kapitel 2
Beschreibung Einheit R7M-
A03030
Nennausgabe* W 30 50 100 200 400 750
Nenndrehmoment* N⋅ m 0,095 0,159 0,318 0,637 1,27 2,39
Nenndrehzahl U/min 3.000
Kurzzeit-Höchst-
drehzahl
Kurzzeit-Maxi-
maldrehmoment*
Nennstrom* A (rms) 0,42 0,60 0,89 2,0 2,6 4,4
Kurzzeit-Maximal-
strom*
Trägheitsmoment
Drehmomentkonstante*
Induktionsspannungskonstante*
Leistung* kW/s 5,31 11,5 28,1 34,1 86,3 85,6
Mechanische
Zeitkonstante
Wicklungswider-
stand
Wicklungsinduktivität mH 23,1 16,9 13,2 7,2 7,9 5,7
Elektrische
Zeitkonstante
Zulässige
Radial-Last
Zulässige
Axial-Last
Ungebremst kg ca. 0,3 ca. 0,4 ca. 0,5 ca. 1,1 ca. 1,7 ca. 3,4
Gebremst kg ca. 0,6 ca. 0,7 ca. 0,8 ca. 1,6 ca. 2,2 ca. 4,3
Gewicht
Abschirmungsabmessungen
(Material)
Anwendbare Lastträgheit 100 × Masseträgheit des Motors (über regeneratorische Leistung begrenzt.)
Geeigneter Servo-
treiber (R7D-)
U/min 4.500
N⋅ m 0,29 0,48 0,96 1,91 3,82 7,1
A (rms) 1,3 1,9 2,8 6,0 8,0 13,9
2
1,7 × 10
kg⋅ m
2
/4)
(GD
N⋅ m/A 0,255 0,286 0,408 0,355 0,533 0,590
mV/ (U/
min)
ms 1,2 0,8 0,5 0,4 0,2 0,3
Ω 15,8 9,64 6,99 1,34 1,23 0,45
ms 1,5 1,8 1,9 5,4 6,4 13
N686878245245392
N5454547474147
100 V AC APA3L APA5L AP01L AP02L AP04L –
200 V AC APA3H APA5H AP01H AP02H AP04H AP08H
8,89 9,98 14,0 12,4 18,6 20,6
t6 × @250 mm (Al)
–6
R7M-
A05030
2,2 × 10–63,6 × 10
R7M-
A10030
R7M-
A20030
–6
1,19 × 10–51,87 × 10–56,67 × 10
R7M-
A40030
R7M-
A75030
5
–
2-31
Page 51

Standardmodelle und technische Daten
Kapitel 2
Beschreibung Einheit R7M-
A03030
Bremsträgheit
Erregerspannung
Leistungsaufnahme (bei
20° C)
Bremsspezifikationen
Stromaufnahme
(bei 20° C)
Statisches Reibungsdrehmoment
Anzugsdauer
(siehe Hinweis 3)
Abfallzeit (siehe
Hinweis 3)
Spiel 1° (Bezugswert)
Nenndaten – Fortlaufend
Isolationsklasse – Typ F
2
8,5 × 10
kg⋅ m
2
/4)
(GD
V24 V DC ±10%
W666777,7
A 0,25 0,25 0,25 0,29 0,29 0,32
N⋅ m min. 0,2 min. 0,2 min. 0,34 min. 1,47 min. 1,47 min. 2,45
ms max. 30 max. 30 max. 30 max. 60 max. 60 max. 60
ms max. 60 max. 60 max. 60 max. 20 max. 20 max. 20
–7
R7M-
A05030
8,5 × 10
–7
R7M-
A10030
8,5 × 10
–7
R7M-
A20030
6,4 × 10
–6
R7M-
A40030
6,4 × 10
–6
R7M-
A75030
1,71 × 10
5
Hinweis 1. *Die Werte für mit Sternchen markierte Positionen beziehen sich auf eine Ankerspulen-
temperatur von 100 °C, kombiniert mit dem Servotreiber. Die übrigen Werte beziehen
sich auf normale Bedingungen (20 ° C, 65%). Das oben angegebene Kurzzeit-Maximaldrehmoment gibt den Standardwert an.
Hinweis 2. Die Bremsen sind vom Typ „erregungsfreie Funktion“ (bei anliegender Erregungsspan-
nung gelöst).
Hinweis 3. Die Funktionsdauer entspricht dem Messwert (Bezugswert) mit Überstromableiter
(CR50500, von Okaya Electric Industries co. LTD).
Hinweis 4. Die zulässigen Radial- und Axial-Lasten entsprechen dem Wert bei einer Lebensdauer
von 20.000 Stunden bei normalen Betriebstemperaturen.
Hinweis 5. Der angegebene Wert für die zulässige Radial-Last bezieht sich auf die in den Abbildun-
gen nach der folgenden Tabelle gezeigten Positionen.
–
2-32
Radialkraft
Axialkraft
5 mm
Page 52

Standardmodelle und technische Daten
Kapitel 2
● 3.000-U/min-Servomotoren in Zylinderbauweise: Drehmoment- und
Drehzahleigenschaften
Die folgenden Diagramme zeigen die Eigenschaften bei einem 3-m-Standardkabel und einem 100VAC-Eingang für R7D-AP@L Servotreiber bzw. einem 200-VAC-Eingang für R7D-AP@H Servotreiber.
R7M-A03030 (30 W)
(Nm)
0,3
0,29 0,29
R7M-A05030 (50 W)
(Nm)
0,5
0,48 0,48
0,4
0,2
0,1
Aussetzbetrieb
Dauerbetrieb
0
1000
2000 3000
R7M-A10030 (100 W)
(Nm)
1,0
0,96
0,8
0,6
0,4
0,2
Aussetzbetrieb
Dauerbetrieb
0,0950,095
0,3180,318
4000 5000
0,96
(3600)
0,069
0,91
0,222
(U/min)
0,3
0,2
0,1
Dauerbetrieb
Aussetzbetrieb
0
1000
2000 3000
R7M-A20030 (200 W)
(Nm)
2,0
1,91
1,5
Aussetzbetrieb
1,0
0,5
Dauerbetrieb
0,1590,159
0,6370,637
1,91
(3650)
0,107
4000 5000
1,33
0,452
(U/min)
0
1000
2000 3000
R7M-A40030 (400 W)
(Nm)
4,0
3,0
3,82
(2000)
100-VACEingang
Aussetzbetrieb
2,0
1,0
Dauerbetrieb
0
1000
2000 3000
3,82
(2900)
1,271,27
4000 5000
1,45
1,24
0,89
4000 5000
(U/min)
(U/min)
0
1000
2000 3000
R7M-A75030 (750 W)
(Nm)
8,0
7,1
6,0
Aussetzbetrieb
4,0
2,0
7,1
(2225)
Dauerbetrieb
0
1000
2000 3000
2,392,39
4000 5000
1,24
4000 5000
(U/min)
(U/min)
2-33
Page 53

Standardmodelle und technische Daten
■ 3.000-U/min-Servomotoren in Würfelbauweise
Kapitel 2
Beschreibung Einheit R7M-
AP10030
Nennausgabe* W 100 200 400 750
Nenndrehmoment* N⋅ m 0,318 0,637 1,27 2,39
Nenndrehzahl U/min 3.000
Kurzzeit-Höchstdreh-
zahl
Kurzzeit-Maxi-
maldrehmoment*
Nennstrom* A (rms) 0,89 2,0 2,6 4,1
Kurzzeit-Maximal-
strom*
Läuferschwungmasse
Drehmomentkonstante*
Induktionsspannungskonstante*
Leistung* kW/s 15,7 19,4 46,8 26,9
Mechanische
Zeitkonstante
Wicklungswiderstand Ω 5,53 1,13 1,04 0,43
Wicklungsinduktivität mH 20,7 8,4 8,9 7,7
Elektrische
Zeitkonstante
Zulässige Radial-Last N 78 245 245 392
Zulässige Axial-Last N 49 68 68 147
ohne Bremse kg ca. 0,7 ca. 1,4 ca. 2,1 ca. 4,2
mit Bremse kg ca. 0,9 ca. 1,9 ca. 2,6 ca. 5,7
Gewicht
Abschirmungsabmessungen
(Material)
Anwendbare Lastträgheit 100 × Masseträgheit des Motors (über regeneratorische Leistung
Geeigneter Servotreiber (R7D-)
U/min 4.500
N⋅ m 0,96 1,91 3,82 7,1
A (rms) 2,8 6,0 8,0 13,9
2
kg⋅ m
N⋅ m/A 0,392 0,349 0,535 0,641
mV/ (U/min) 13,7 12,2 18,7 22,4
ms 0,7 0,6 0,4 0,7
ms 3,7 7,4 8,5 18
100 V AC AP01L AP02L AP04L –
200 V AC AP01H AP02H AP04H AP08H
(GD2/4) 6,5 × 10
t6 × @250 mm (Al) t12 × @300 mm
begrenzt.)
–6
R7M-
AP20030
2,09 × 10
–5
R7M-
AP40030
3,47 × 10
–5
R7M-
AP75030
2,11 × 10
(Al)
–4
2-34
Page 54

Standardmodelle und technische Daten
Kapitel 2
Beschreibung Einheit R7M-
AP10030
Bremsträgheit
Erregerspannung V 24 V DC ±10%
Leistungsaufnahme (bei 20° C)
Stromaufnahme
(bei 20° C)
Statisches Rei-
Bremsspezifikationen
bungsdrehmoment
Anzugsdauer
(siehe Hinweis 3)
Abfallzeit
(siehe Hinweis 3)
Spiel 1° (Bezugswert)
Nenndaten – Fortlaufend
Isolationsklasse – Typ F
2
kg⋅ m
W6 5 7,6 7,5
A 0,25 0,21 0,32 0,31
N⋅ m min. 0,4 min. 0,9 min. 1,9 min. 3,5
ms max. 40 max. 40 max. 40 max. 40
ms max. 20 max. 20 max. 20 max. 20
(GD2/4) 2,9 × 10
–6
R7M-
AP20030
1,09 × 10
–5
R7M-
AP40030
1,09 × 10
–5
R7M-
AP75030
8,75 × 10
–5
Hinweis 1.* Die Werte für mit Sternchen markierte Positionen beziehen sich auf eine Ankerspulen-
temperatur von 100 °C, kombiniert mit dem Servotreiber. Die übrigen Werte beziehen
sich auf normale Bedingungen (20 ° C, 65%). Das oben angegebene Kurzzeit-Maximaldrehmoment gibt den Standardwert an.
Hinweis 2. Die Bremsen sind vom Typ „erregungsfreie Funktion“ (bei anliegender Erregungsspan-
nung gelöst).
Hinweis 3. Die Funktionsdauer entspricht dem Messwert (Bezugswert) mit Überstromableiter
(CR50500, von Okaya Electric Industries Co. Ltd).
Hinweis 4. Die zulässigen Radial- und Axial-Lasten entsprechen dem Wert bei einer Lebensdauer
von 20.000 Stunden bei normalen Betriebstemperaturen.
Hinweis 5. Der angegebene Wert für die zulässige Radial-Last bezieht sich auf die in der folgenden
Abbildung gezeigte Position.
Radialkraft
Axialkraft
5 mm
2-35
Page 55

Standardmodelle und technische Daten
Kapitel 2
3.000-U/min-Servomotoren in Würfelbauweise: Drehmoment- und Drehzahleigenschaften
Die folgenden Diagramme zeigen die Eigenschaften bei einem 3-m-Standardkabel und einem 100-VACEingang für R7D-AP@L Servotreiber bzw. einem 200-VAC Eingang für R7D-AP@H Servotreiber.
R7M-AP10030 (100 W)
(Nm)
1,0
0,96
0,8
0,6
0,4
0,2
Aussetzbetrieb
Dauerbetrieb
0
1000
2000 3000
R7M-AP40030 (400 W)
(Nm)
4,0
3,0
2,0
1,0
3,82
100-VACEingang
Aussetzbetrieb
(2350)
Dauerbetrieb
0,3180,318
1,271,27
0,96
(3725)
4000 5000
3,82
(3250)
0,800
0,222
1,77
1,22
0,87
(U/min)
R7M-AP20030 (200 W)
(Nm)
2,0
1,91
1,5
Aussetzbetrieb
1,0
0,5
Dauerbetrieb
0
1000
2000 3000
R7M-AP75030 (750 W)
(Nm)
8,0
7,1
(2500)
6,0
4,0
2,0
Einphasiger
200-VAC-
Aussetzbetrieb
Dauerbetrieb
0,6370,637
2,392,39
1,91
(3600)
7,1
(3200)
1,40
0,452
4000 5000
(U/min)
Dreiphasiger
200-VAC-Eingang
2,45
1,64
1,54
2-36
0
1000
2000 3000
4000 5000
(U/min)
0
1000
2000 3000
4000 5000
(U/min)
Page 56

Standardmodelle und technische Daten
● Temperatureigenschaften für Servomotoren und mechanische Systeme
Kapitel 2
• SMARTSTEP Servomotoren der Baureihe A verwenden Neodym-Eisenmagneten. Der Temperatur-
koeffizient für diese Magnete liegt bei etwa –0,13 %/°C. Bei sinkender Temperatur nimmt das Kurzzeit-Maximaldrehmoment des Servomotors zu, bei steigender Temperatur nimmt es ab. Ein Vergleich
der Temperaturen 20° C und –10° C ergibt eine Zunahme des Kurzzeit-Maximaldrehmoments um ca.
4 %. Wenn im Gegensatz dazu die Temperatur des Magneten gegenüber der Normaltemperatur von
20° C auf 80° C erhöht wird, nimmt das Kurzzeit-Maximaldrehmoment um ca. 8 % ab.
• Allgemein gilt für mechanische Systeme, dass bei abnehmender Temperatur das Reibungsdrehmo-
ment zunimmt und das Lastdrehmoment größer wird. Aus diesem Grund kann es bei niedrigen Temperaturen zu Überlastungen kommen. Insbesondere bei Systemen mit Untersetzungsgetrieben kann
das Lastdrehmoment bei niedrigen Temperaturen fast das doppelte des Werts bei normalen Temperaturen betragen. Prüfen Sie mit einem Strommesser, ob es bei niedrigen Temperaturen zu Überlastungen kommt und wie groß das Lastdrehmoment ist. Prüfen Sie ebenfalls, ob es bei hohen
Temperaturen zur Überhitzung des Servomotors kommt und ob Alarmzustände ausgelöst werden.
• Eine Zunahme des Lastreibungsdrehmoments führt zu einer erkennbaren Zunahme der Lastträgheit.
Daher ist die Funktion bei niedrigen Temperaturen möglicherweise selbst dann nicht optimal, wenn
die Parameter des Servotreibers bei normalen Temperaturen kalibriert wurden. Prüfen Sie auch bei
niedrigen Temperaturen auf optimale Funktion.
2-4-3 Geber-Spezifikationen
Beschreibung Spezifikation
Servomotoren in
Zylinderbauweise
Gebermethode Optischer Geber (inkremental) Magnetischer Geber
Anzahl der Ausgangsimpulse Phase A, B: 2.000 Impulse/Drehung
Phase Z: 1 Impuls/Drehung
Versorgungsspannung 5 V DC ±5%
Versorgungsstrom max. 150 mA
Maximaldrehzahl 4.500 U/min
Ausgangssignale +A, –A, +B, –B, +S, –S
Ausgabeschnittstelle Gemäß EIA RS-422A.
Ausgang nach AM26LS31CN oder entsprechend.
Serielle Daten Phase Z, Poll-Sensor, Phasen U, V, W
Serieller Datenaustausch Kombinierter Datenaustausch über Phasen A, B und S.
Servomotoren in Würfelbauweise
(inkremental)
2-37
Page 57

Standardmodelle und technische Daten
Kapitel 2
2-5 Spezifikationen Untersetzungsgetriebe
■ Untersetzungsgetriebe für SMARTSTEP Servomotoren der Baureihe A
(R7G-@)
Es gibt zwei Arten von Untersetzungsgetrieben für SMARTSTEP Servomotoren der Baureihe A:
• Untersetzungsgetriebe für 3.000-U/min-Servomotoren in Zylinderbauweise
(Spiel max. 3
• Untersetzungsgetriebe für 3.000-U/min-Servomotoren in Würfelbauweise
(Spiel max. 3
Es existieren vier Untersetzungsverhältnisse: 1/5, 1/9, 1/15 und 1/25. Wählen Sie ein für die Leistung des jeweiligen Servomotors geeignetes Untersetzungsverhältnis aus.
Hinweis Für die 30 W Servomotoren in Zylinderbauweise existieren keine Untersetzungsgetriebe
■ Untersetzungsgetriebe für Servomotoren in Zylinderbauweise.
● Spiel = max. 3′
Modell Nenn-
50 W 1/5 R7G-VRSFPB05B50 600 0,517 65 900 1,56
1/9 R7G-VRSFPB09B50 333 0,93 65 500 2,81
1/15 R7G-VRSFPB15B50 200 1,67 70 300 5,04
1/25 R7G-VRSFPB25B50 120 2,78 70 180 8,40
100 W 1/5 R7G-VRSFPB05B100 600 1,19 75 900 3,60
1/9 R7G-VRSFPB09B100 333 2,29 80 500 6,91
1/15 R7G-VRSFPB15B100 200 3,82 80 300 11,5
1/25 R7G-VRSFPB25C100 120 6,36 80 180 19,2
200 W 1/5 R7G-VRSFPB05B200 600 2,71 85 900 8,12
1/9 R7G-VRSFPB09C400 333 3,78 66 500 11,3
1/15 R7G-VRSFPB15C400 200 6,31 66 300 18,9
1/25 R7G-VRSFPB25C200 120 11,1 70 180 33,4
400 W 1/5 R7G-VRSFPB05C400 600 5,40 85 900 16,2
1/9 R7G-VRSFPB09C400 333 9,49 83 500 28,5
1/15 R7G-VRSFPB15C400 200 15,8 83 300 47,6
1/25 R7G-VRSFPB25D400 120 26,4 83 180 79,3
750 W 1/5 R7G-VRSFPB05C750 600 10,8 90 900 32,0
1/9 R7G-VRSFPB09D750 333 18,3 85 500 54,3
1/15 R7G-VRSFPB15D750 200 30,5 85 300 90,5
1/25 R7G-VRSFPB25E750 120 50,8 85 180 151
′ und Spiel max. 45′ )
′ und Spiel max. 45′ )
drehzahl
U/min N⋅ m% U/min N⋅ m
Nenn-
dreh-
ment
mo-
Ver-
hältnis
Kurzzeit-
Höchstdreh-
zahl
Kurzzeit-
Maximaldreh-
moment
Trägheit
Untersetzungsge-
triebe
kg⋅ m
4,13 × 10
5,01 × 10
3,67 × 10
3,59 × 10
4,08 × 10
4,96 × 10
3,62 × 10
3,92 × 10
1,53 × 10
3,66 × 10
2,71 × 10
2,67 × 10
3,22 × 10
3,66 × 10
2,71 × 10
2,79 × 10
7,17 × 10
9,54 × 10
7,09 × 10
7,05 × 10
Zulässiges
Radialdreh-
moment
2
–6
392 196
–6
441 220
–6
588 294
–6
686 343
–6
392 196
–6
441 220
–6
588 294
–6
1323 661
–5
392 196
–5
931 465
–5
1176 588
–5
1323 661
–5
784 392
–5
931 465
–5
1176 588
–5
1617 808
–5
784 392
–5
1176 588
–5
1372 686
–5
2058 1029
Zulässiges
Axialdreh-
moment
NN
Hinweis 1. Die Trägheit des Untersetzungsgetriebes bezeichnet den Umrechnungswert für die Welle
des Servomotors.
Hinweis 2. Die Gehäuseklasse für Servomotoren mit Untersetzungsgetriebe lautet IP44.
Hinweis 3. Das zulässige Radialdrehmoment bezieht sich auf die Mitte der Welle.
2-38
Page 58

Standardmodelle und technische Daten
● Spiel = max. 45′
Modell Nenn-
50 W 1/5 R7G-RGSF05B50 600 0,517 65 900 1,56
1/9 R7G-RGSF09B50 333 0,93 65 500 2,81
1/15 R7G-RGSF15B50 200 1,67 70 300 5,04
1/25 R7G-RGSF25B50 120 2,78 70 180 8,40
100 W 1/5 R7G-RGSF05B100 600 1,19 75 900 3,60
1/9 R7G-RGSF09B100 333 2,29 80 500 6,91
1/15 R7G-RGSF15B100 200 3,82 80 300 11,5
1/25 R7G-RGSF25B100 120 4,02
200 W 1/5 R7G-RGSF05B200 600 2,71 85 900 8,10
1/9 R7G-RGSF09C400 333 3,78 66 500 11,3
1/15 R7G-RGSF15C400 200 6,31 66 300 18,9
1/25 R7G-RGSF25C400 120 11,1 70 180 33,4
400 W 1/5 R7G-RGSF05C400 600 5,40 85 900 16,2
1/9 R7G-RGSF09C400 333 9,49 83 500 28,5
1/15 R7G-RGSF15C400 200 15,8 83 300 47,6
1/25 R7G-RGSF25C400 120 21,7
750 W 1/5 R7G-RGSF05C750 600 10,8 90 900 32,0
1/9 R7G-RGSF09C750 333 9,7
1/15 R7G-RGSF15C750 200 16,2
1/25 R7G-RGSF25C750 120 21,7
drehzahl
U/min N⋅ m%U/min N⋅ m
Nenndreh-
moment
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
Ver-
hältnis
50 180 12,0
68 180 65,1
45 500 29,1
45 300 48,6
36 180 65,1
Kurzzeit-
Höchstdrehzahl
Kurzzeit-Maxi-
maldrehmoment
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
Trä gh ei t
Untersetzungsge-
triebe
kg⋅ m
4,55 × 10
3,39 × 10
3,75 × 10
3,69 × 10
3,83 × 10
3,34 × 10
3,7 × 10
3,64 × 10
1,5 × 10
2,49 × 10
2,7 × 10
2,64 × 10
2,84 × 10
2,49 × 10
2,7 × 10
2,64 × 10
6,61 × 10
6,23 × 10
6,56 × 10
6,5 × 10
Kapitel 2
Zulässi-
ges
Radial-
dreh-
moment
2
–6
–6
–6
–6
–6
–6
–6
–6
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
NN
392 196
441 220
588 294
686 343
392 196
441 220
588 294
686 343
392 196
931 465
1176 588
1323 661
784 392
931 465
1176 588
1323 661
784 392
931 465
1176 588
1323 661
Zulässiges Axi-
aldreh-
moment
Hinweis 1. Die Trägheit des Untersetzungsgetriebes bezeichnet den Umrechnungswert für die
Welle des Servomotors.
Hinweis 2. Die Gehäuseklasse für Servomotoren mit Untersetzungsgetriebe lautet IP44.
Hinweis 3. Das zulässige Radialdrehmoment bezieht sich auf die Mitte der Welle.
Hinweis 4. Dabei handelt es sich um die zulässigen Drehmomentwerte für die Untersetzungsge-
triebe. Überschreiten Sie diese Werte nicht.
2-39
Page 59

Standardmodelle und technische Daten
■ Untersetzungsgetriebe für Servomotoren in Würfelbauweise.
● Spiel = max. 3′
Modell Nenn-
100 W 1/5 R7G-VRSFPB05B100P 600 1,19 75 900 3,60
1/9 R7G-VRSFPB09B100P 333 2,29 80 500 6,91
1/15 R7G-VRSFPB15B100P 200 3,82 80 300 11,5
1/25 R7G-VRSFPB25C100P 120 6,36 80 180 19,2
200 W 1/5 R7G-VRSFPB05B200P 600 2,71 85 900 8,12
1/9 R7G-VRSFPB09C400P 333 3,78 66 500 11,3
1/15 R7G-VRSFPB15C400P 200 6,31 66 300 18,9
1/25 R7G-VRSFPB25C200P 120 11,1 70 180 33,4
400 W 1/5 R7G-VRSFPB05C400P 600 5,40 85 900 16,2
1/9 R7G-VRSFPB09C400P 333 9,49 83 500 28,5
1/15 R7G-VRSFPB15C400P 200 15,8 83 300 47,6
1/25 R7G-VRSFPB25D400P 120 26,4 83 180 79,3
750 W 1/5 R7G-VRSFPB05C750P 600 10,8 90 900 32,0
1/9 R7G-VRSFPB09D750P 333 18,3 85 500 54,3
1/15 R7G-VRSFPB15D750P 200 30,5 85 300 90,5
1/25 R7G-VRSFPB25E750P 120 50,8 85 180 151
drehzahl
U/min N⋅ m% U/min N⋅ m
Nenn-
dreh-
mo-
ment
Ver-
hältnis
Kurzzeit-
Höchstdreh-
zahl
Kurzzeit-
Maxi-
maldreh-
moment
Trägheit
Untersetzungsge-
triebe
kg⋅ m
1,59 × 10
1,67 × 10
1,54 × 10
3,59 × 10
1,52 × 10
3,66 × 10
2,71 × 10
2,63 × 10
7,17 × 10
3,66 × 10
2,71 × 10
2,59 × 10
7,82 × 10
9,71 × 10
6,94 × 10
1,52 × 10
Zulässiges
Radialdreh-
moment
2
–5
392 196
–5
441 220
–5
588 294
–6
1323 661
–5
392 196
–5
931 465
–5
1176 588
–5
1323 661
–5
784 392
–5
931 465
–5
1176 588
–5
1617 808
–5
784 392
–5
1176 588
–5
1372 686
–4
2058 1029
NN
Kapitel 2
Zulässiges
Axialdreh-
moment
Hinweis 1. Die Trägheit des Untersetzungsgetriebes bezeichnet den Umrechnungswert für die Welle
des Servomotors.
Hinweis 2. Die Gehäuseklasse für Servomotoren mit Untersetzungsgetriebe lautet IP44.
Hinweis 3. Das zulässige Radialdrehmoment bezieht sich auf die Mitte der Welle.
2-40
Page 60

Standardmodelle und technische Daten
● Spiel = max. 45′
Modell Nenn-
100 W 1/5 R7G-RGSF05B100P 600 1,19 75 900 3,60
1/9 R7G-RGSF09B100P 333 2,29 80 500 6,91
1/15 R7G-RGSF15B100P 200 3,82 80 300 11,5
1/25 R7G-RGSF25B100P 120 4,02
200 W 1/5 R7G-RGSF05B200P 600 2,71 85 900 8,10
1/9 R7G-RGSF09C400P 333 3,78 66 500 11,3
1/15 R7G-RGSF15C400P 200 6,31 66 300 18,9
1/25 R7G-RGSF25C400P 120 11,1 70 180 33,4
400 W 1/5 R7G-RGSF05C400P 600 5,40 85 900 16,2
1/9 R7G-RGSF09C400P 333 9,49 83 500 28,5
1/15 R7G-RGSF15C400P 200 15,8 83 300 47,6
1/25 R7G-RGSF25C400P 120 21,7
750 W 1/5 R7G-RGSF05C750P 600 10,8 90 900 32,0
1/9 R7G-RGSF09C750P 333 9,7
1/15 R7G-RGSF15C750P 200 16,2
1/25 R7G-RGSF25C750P 120 21,7
dreh-
zahl
U/min N⋅ m%U/min N⋅ m
Nenndreh-
moment
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
(siehe Hinweis 4)
Ver-
hältnis
50 180 12,0 (siehe
68 180 65,1 (siehe
45 500 29,1 (siehe
45 300 48,6 (siehe
36 180 65,1 (siehe
Kurzzeit-
Höchstdrehzahl
Kurzzeit-Maxi-
maldreh-
moment
Hinweis 4.)
Hinweis 4)
Hinweis 4)
Hinweis 4)
Hinweis 4)
Trä gh ei t
Untersetzungsge-
triebe
kg⋅ m
1,56 × 10
1,52 × 10
1,55 × 10
1,54 × 10
1,49 × 10
2,49 × 10
2,7 × 10
2,64 × 10
6,70 × 10
6,30 × 10
6,50 × 10
6,43 × 10
7,33 × 10
6,93 × 10
7,12 × 10
7,05 × 10
Kapitel 2
Zulässi-
ges
Radi-
aldreh-
moment
2
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
–5
NN
392 196
441 220
588 294
686 343
392 196
931 465
1176 588
1323 661
784 392
931 465
1176 588
1323 661
784 392
931 465
1176 588
1323 661
Zulässi-
ges Axi-
aldreh-
moment
Hinweis 1. Die Trägheit des Untersetzungsgetriebes bezeichnet den Umrechnungswert für die Welle
des Servomotors.
Hinweis 2. Die Gehäuseklasse für Servomotoren mit Untersetzungsgetriebe lautet IP44.
Hinweis 3. Das zulässige Radialdrehmoment bezieht sich auf die Mitte der Welle.
Hinweis 4. Dabei handelt es sich um die zulässigen Drehmomentwerte für die Untersetzungsgetrie-
be. Überschreiten Sie diese Werte nicht.
2-41
Page 61

Standardmodelle und technische Daten
Kapitel 2
2-6 Kabel- und Steckerspezifikationen
2-6-1 Steuerkabel
■ Allgemeine Steuerkabel (R88A-CPU@@@S)
Ein allgemeines Steuerkabel ist an den E/A-Stecker der Servotreibersteuerung (CN1) angeschlossen. An der Controllerseite gibt es keinen Stecker. Bei Anschluss an eine Positionierbaugruppe ohne
Spezialkabel oder an Controller von Drittanbietern muss ein passender Stecker für den Controller
befestigt werden.
Hinweis Es existiert eine Anschlussmethode für Controller ohne Spezialkabel und eine weitere für die Ver-
wendung eines Klemmenblockkabels und eines Steckerklemmenblocks.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der Umhüllung Gewicht
R88A-CPU001S 1 m Ø 9,9 ca. 0,3 kg
R88A-CPU002S 2 m ca. 0,6 kg
● Anschlusskonfiguration und Außenmaße
Steuergerät
t=18
39L
Servotreiber
43,6
R7D-AP@
2-42
Page 62

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Kabel-/MarkierungsfarbeNr. Symbol
1 Orange/Schwarz (−) +im Uhrzeigersinn
2 Orange/Rot (−) -im Uhrzeigersinn
3 Grau/Schwarz (−) +gegen Uhrzeigersinn
4 Grau/Rot (−) -gegen Uhrzeigersinn
5 Weiß/Schwarz (−)
6 Weiß/Rot (−)
7 Gelb/Schwarz (−) BKIR
8 Gelb/Rot (−) INP
9 Rosa/Schwarz (−)
10 Rosa/Rot (−)
11 Grau/Schwarz (−−)
12 Grau/Rot (−−)
Orange/Schwarz (−−)
13
Orange/Rot (−−)
14 Weiß/Schwarz (−−)
15 Weiß/Rot (−−)
16 Gelb/Schwarz (−−)
17 Gelb/Rot (−−)
18 Rosa/Schwarz (−−) RESET
+ECRST
-ECRST
OGND
+24VIN
+24VIN
RUN
19 Rosa/Rot (−−)
20 Orange/Schwarz (−−−) RXD+
21 Orange/Rot (−−−) RXD22 Grau/Schwarz (−−−) TXD+
23 Grau/Rot (−−−)
24 Weiß/Schwarz (−−−)
25 Weiß/Rot (−−−)
26 Gelb/Schwarz (−−−)
27 Gelb/Rot (−−−)
28 Rosa/Schwarz (−−−)
29 Rosa/Rot (−−−)
30 Orange/Schwarz (−−−−)
31 Orange/Rot (−−−−)
32 Grau/Schwarz (−−−−)Z
33 Grau/Rot (−−−−) ZCOM
34 Weiß/Schwarz (−−−−)
35
36
Ab-
schirmung
Stecker: 10136-3000VE (Sumitomo 3M)
Gehäuse: 10336-52A0-008 (Sumitomo 3M)
Kabel: AWG24 × 18P UL20276
Kabel-/MarkierungsfarbeNr. Symbol
GND
TXD-
RT
ALM
Weiß/Rot (−−−−) ALMCOM
Schirmung FG
Steckerstiftbelegung
1
2
4
6
8
10
12
14
16
18
20
3
22
5
24
7
26
9
28
11
30
13
32
15
34
17
36
19
21
23
25
27
29
31
33
35
Hinweis Kabel derselben Farbe und mit derselben Anzahl Markierungen bilden Twisted Pairs. Zum Beispiel
wird ein orangefarbenes Kabel mit einer einzelnen roten Markierung (–) mit einem orangefarbenen
Kabel mit einer einzigen schwarzen Markierung (–) verdrillt.
Steckerklemmenblock-Kabel (R88A-CTU@@@N)
■
● Kabelmodelle
Modell Länge (L) Außendurchmesser der Ummantelung Gewicht
R88A-CTU001N 1 m Ø 9,9 ca. 0,3 kg
R88A-CTU002N 2 m ca. 0,6 kg
● Anschlusskonfiguration und Außenmaße
39L46
Steckerklemmenblock
Servotreiber
R7D-AP@
XW2B-40F5-P
72,72
43.6
t=18
t=10,3
2-43
Page 63

Standardmodelle und technische Daten
● Verdrahtung
Klemmenblock Steckverbinder
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
Nr.
1
A
1
B
2
A
2
B
3
A
3
B
4
A
4
B
5
A
5
B
6
A
6
B
7
A
7
B
8
A
8
B
9
A
9
B
10
A
10
B
11
A
11
B
12
A
12
B
13
A
13
B
14
A
14
B
15
A
15
B
16
A
16
B
17
A
17
B
18
A
18
B
19
A
19
B
20
A
20
B
Servotreiber
Nr.
Symbol
+im Uhrzeigersinn
1
−im Uhrzeigersinn
2
−gegen Uhrzeigersinn
3
−gegen Uhrzeigersinn
4
5
+ECRST
6
−ECRST
BKIR
7
8
9
10
11
12
13
14
15
16
17
18
19
20 RXD+
21 RXD22 TXD+
23
24
25
26
27
28
29
30
31
32 Z
33 ZCOM
34
35 ALMCOM
Ab-
schirmung
INP
OGND
+24VIN
RUN
RESET
GND
TXD-
RT
ALM
FG
Kapitel 2
Servotreiber-Stecker:
Stecker:
10136-3000VE (Sumitomo 3M)
Steckergehäuse:
10336-52A0-008 (Sumitomo 3M)
Klemmenblockstecker
Stecker:
FCN-361J040-AU (Fujitsu)
Steckergehäuse:
FCN-360C040-B (Fujitsu)
Kabel: AWG24 × 18P UL20276
2-44
Page 64

Standardmodelle und technische Daten
Kapitel 2
2-6-2 Servomotor-Kabel
Die Servomotor-Kabel verbinden den Servomotor mit dem Servotreiber. Es ist Versorgungsund Signalkabel zugleich und in zwei Ausführungen erhältlich: Servomotor-Kabel für ungebremste Servomotoren (R7A-CEA@@@S), und Servomotor-Kabel für gebremste Servomotoren (R7A-CEA@@@B). Wählen Sie ein für den jeweiligen Servomotor geeignetes Kabel
aus. Der maximale Abstand zwischen Servomotor und Servotreiber beträgt 20 Meter.
Hinweis: Verwenden Sie bei Anschluss an bewegliche Teile ein Roboterkabel (selbst anfertigen).
■ Servomotor-Kabel für Servomotoren (R7A-CEA@@@S) ohne Bremse
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Umhüllung
R7A-CEA003S 3 m Ø 12,4 ca. 0,8 kg
R7A-CEA005S 5 m ca. 1,2 kg
R7A-CEA010S 10 m ca. 2,1 kg
R7A-CEA015S 15 m ca. 3,1 kg
R7A-CEA020S 20 m ca. 4,0 kg
● Anschlusskonfiguration und Außenmaße
Servotreiber
R7D-AP@
29,5
t=12,7
5039 50L
80
43,7
27,4
t=15,7
Gewicht
Servomotor
R7M-A@
21,5
t=12
27,7
2-45
Page 65

Standardmodelle und technische Daten
● Verdrahtung
Servotreiber
Symbol Nr.
E0V 1
E0V 2
E0V 3
E5V 4
E5V 5
E5V 6
− 7
S+ 8
S- 9
A+ 10
A- 11
B+ 12
B- 13
− 14
FG
schirmung
Stecker:
10114-3000VE (Sumitomo 3M)
Steckergehäuse:
10314-52A0-008 (Sumitomo 3M)
M4 Crimp-Kabelschuh
Ab-
AWG22 Schwarz
AWG22 Rot
AWG24 Grün
AWG24 Grün/Weiß
AWG24 Blau
AWG24 Blau/Weiß
AWG24 Gelb
AWG24 Gelb/Weiß
AWG20 Rot
AWG20 Weiß
AWG20 Blau
AWG20 Grün/Gelb
Servomotor
SymbolNr.
7 E0V
8 E5V
5
6
1
2
3
4
Ab-
schirmung
SymbolNr.
1 U-Phase
2 V-Phase
34W-Phase
Kapitel 2
Steckersatz:
54280-0800 (Molex Japan)
S+
S-
A+
A-
B+
B-
FG
Anschlusskappe:
350780-1 (Tyco Electronics AMP)
Steckerbuchse:
350570-3 (Tyco Electronics AMP)
FG
■ Servomotor-Kabel für Servomotoren (R7A-CEA@@@B) mit Bremse
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Gewicht
Umhüllung
R7A-CEA003B 3 m Ø 12,4 ca. 0,8 kg
R7A-CEA005B 5 m ca. 1,2 kg
R7A-CEA010B 10 m ca. 2,1 kg
R7A-CEA015B 15 m ca. 3,1 kg
R7A-CEA020B 20 m ca. 4,0 kg
2-46
Page 66

Standardmodelle und technische Daten
● Anschlusskonfiguration und Außenmaße
Servotreiber
R7D-AP@
5039 50L
43,7
Kapitel 2
Servomotor
R7M-A@
29,5
● Verdrahtung
Servotreiber
Symbol Nr.
E0V 1
E0V 2
E0V 3
E5V 4
E5V 5
E5V 6
− 7
S+ 8
S- 9
A+ 10
A- 11
B+ 12
B- 13
− 14
FG
Stecker:
10114-3000VE (Sumitomo 3M)
Steckergehäuse:
10314-52A0-008 (Sumitomo 3M)
M4 Crimp-Kabelschuh
M4 Crimp-Kabelschuh
M4 Crimp-Kabelschuh
t=12,7
Ab-
schirmung
80
AWG22 Schwarz
AWG22 Rot
AWG24 Grün
AWG24 Grün/Weiß
AWG24 Blau
AWG24 Blau/Weiß
AWG24 Gelb
AWG24 Gelb/Weiß
AWG20 Rot
AWG20 Weiß
AWG20 Blau
AWG20 Grün/Gelb
AWG20 Schwarz
AWG20 Braun
Servomotor
SymbolNr.
7 E0V
8 E5V
5
6
1
2
3
4
Ab-
schirmung
SymbolNr.
1 U-Phase
2 V-Phase
34W-Phase
5 Bremse
6 Bremse
t=12
27,4
14
t=28,4
Steckersatz:
54280-0800 (Molex Japan)
S+
S-
A+
A-
B+
B-
FG
Anschlusskappe:
350781-1 (Tyco Electronics AMP)
Steckerbuchse
350570-3 (Tyco Electronics AMP)
FG
21,5
2-47
Page 67

Standardmodelle und technische Daten
Kapitel 2
2-6-3 Spezifikationen für Peripheriekabel und -stecker
■ Analog Überwachungskabel (R88A-CMW001S)
Dieses Kabel dient dem Anschluss des Überwachungsausgangs (CN4) des Servotreibers. Mit ihm werden Überwachungsausgänge an externe Geräte wie zum Beispiel Messinstrumente angeschlossen.
● Kabelmodell
Modell Länge (L) Gewicht
R88A-CMW001S 1 m ca. 0,1 kg
● Anschlusskonfiguration und Außenmaße
7,3 L
Servotreiber
Externes Gerät
1
2
3
4
5
Rot
Weiß
Schwarz
Schwarz
Kabel: AW24 x 4C UL1007
R7D-AP@
● Verdrahtung
Servotreiber
Symbol
NM
AM
GND
GND
Steckerbuchse:
DF11-4DS-2C (Hirose Electric)
Steckerkontakte:
DF11-2428SCF (Hirose Electric)
Nr.
t=6
Ø 1,7
2-48
Page 68

Standardmodelle und technische Daten
Kapitel 2
■ Computer-Überwachungskabel (R7A-CCA002P@)
Computer-Überwachungskabel und -software (unter Windows, Kat.-Nr. SBCE-011) für Servotreiber
werden für die Überwachung und Parametereinstellung von Servotreibern mittels Personal Computer benötigt. Es gibt zwei Kabelausführungen, eine für DOS-Rechner und eine für NEC PC98 Notebooks (jedoch keine für PC98 Desktop-Computer).
● Kabelmodelle
Für DOS-Rechner
Modell Länge (L) Außendurchmesser der
Umhüllung
R7A-CCA002P2 2 m Ø 4,2 ca. 0,1 kg
Für NEC PC98 Notebooks
Modell Länge (L) Außendurchmesser der
Umhüllung
R7A-CCA002P3 2 m Ø 4,2 ca. 0,1 kg
● Anschlusskonfiguration und Außenmaße
Für DOS-Rechner:
39 42L
6
Ø 13,2
Personal Computer
(DOS)
32,2
t=15
Für NEC PC98 Notebooks
Gewicht
Gewicht
Servotreiber
R7D-AP@
Notebook-Computer
(NEC PC98)
29,5
39
t=12,7
L
42
6
Ø 13,2
Servotreiber
R7D-AP@
2-49
Page 69

Standardmodelle und technische Daten
● Verdrahtung
Für DOS-Rechner:
Kapitel 2
Computer
Symbol
RXD
RTS
CTS
GND
FG
Stecker:
Nr. Nr.
Orange/Schwarz
21
Orange/Rot
3
7
8
Grau/Schwarz
5
Ab-
schirmung
Kabel: AWG28 x 3C UL2464
17JE-13090-02 (D8A) (DDK Ltd.)
Für NEC PC98 Notebooks
Computer
Symbol
RXD
RTS
CTS
GND
FG
FG
Stecker:
10114-3000VE (Sumitomo 3M)
Steckergehäuse:
10314-52F0-008 (Sumitomo 3M)
Nr. Nr.
Orange/Schwarz
11
Orange/Rot
9
10
4
Grau/Schwarz
14
12
Ab-
schirmung
Kabel: AWG28 x 3C UL2464
Servotreiber
Symbol
TXD
2
RXDTXD
8
GND
Gehäuse
FG
Servotreiber
Symbol
TXD
2
RXDTXD
8
GND
Gehäuse
FG
Stecker: HR212-10P-8P (Hirose Electric)
Stecker: HR212-10P-8P (Hirose Electric)
■ E/A-Steuerstecker (R88A-CNU01C)
Stecker für den Anschluss an den E/A-Stecker der Servotreibersteuerung (CN1). Dieser Stecker wird
für selbst gefertigte Kabel verwendet.
● Außenmaße
39
Stecker:
10136-3000VE (Sumitomo 3M)
43,6
Steckergehäuse:
10336-52A0-008 (Sumitomo 3M)
t=18
2-50
Page 70

Standardmodelle und technische Daten
■ Geberstecker (R7A-CNA0@R)
Kapitel 2
Dies ist der Stecker für das Geberkabel. Dieser Stecker wird für selbst gefertigte Kabel verwendet.
Es handelt sich um einen Lötstecker, und das entsprechende Kabel muss folgende Eigenschaften
haben.
• Geeignetes Kabel: max. AWG16
• Außendurchmesser der Beschichtung: max. Ø 2,1 mm
• Außendurchmesser der Umhüllung: 6,7 ± 0,5 mm Ø
● Außenmaße
R7A-CNA01R (Servotreiber CN2)
39
Stecker:
10114-3000VE (Sumitomo 3M)
29,5
t=12,7
Steckergehäuse:
10314-52A0-008 (Sumitomo 3M)
R7A-CNA02R (Servomotor)
t=12
43,7
Steckersatz:
54280-0800 (Molex Japan)
21,5
2-51
Page 71

Standardmodelle und technische Daten
Kapitel 2
2-7 Spezifikationen der Servoklemmenblöcke und -kabel
Dieser Abschnitt enthält die Spezifikationen der Servoklemmenblöcke und –kabel für
den Anschluss an OMRON Positionssteuergeräte. Wählen Sie die für das jeweilige
Positionsteuergerät geeigneten Modelle aus. Weitere Informationen dazu befinden
sich unter 3-2-1 Anschlusskabel.
Alle Abmessungen in Millimeter, soweit nicht anders angegeben.
2-7-1 Servoklemmenblöcke
■ XW2B-20J6-1B
Dieser Servoklemmenblock ist für den Anschluss der folgenden OMRON Positionssteuergeräte geeignet. Der Daten-
10
11
0
12
1
13
2
14
3
15
4
16
5
17
6
18
7
19
8
9
austausch wird nicht unterstützt.
•CS1W-NC113/-NC133
•CJ1W-NC113/-NC133
•C200HW-NC113
● Außenmaße
2 Bohrungen Ø 3,5
•C200H-NC112
•3F88M-DRT141
Stecker Positionssteuergerät
3,5
7
29,5
20,5
10
0
Servotreiberanschluss
3,5135
7
15,5
19
9
2
45
44,3
Hinweis
(46)
Klemmenblockabstand:
7,62 mm
2-52
Page 72

Standardmodelle und technische Daten
● Verdrahtung
+24 V
0
NOT-AUS
Sam-
0 V
mel
CWGrenzwert
Sammel
CCWGrenzwert
Nullpunktnäherung
RUN ALM BKIR10
Sammel
Sammel
Sammel
RESET
ALMCOM
FG
19
9
Kapitel 2
24 V DC
■ XW2B-40J6-2B
20
21
0
22
1
23
2
24
3
25
4
26
5
27
6
28
7
29
8
30
9
31
10
32
11
33
12
13
Hinweis 1. Der XB-Kontakt wird zum Ein- und Ausschalten
der elektromagnetischen Bremse verwendet.
2. Unbelegte Klemmen nicht anschließen.
X1
Externer
interrupt
X1 XB
(siehe Hinweis 1)
3. Die 0-V-Klemme ist intern an die
24 V DC
Sammelklemmen angeschlossen.
4. Folgende Kabelschuhe sind geeignet:
R1.25-3 (rund mit offenem Ende).
Dieser Servoklemmenblock ist für den Anschluss der folgenden OMRON Positionssteuergeräte geeignet. Der Datenaustausch wird nicht unterstützt.
•CS1W-NC213/-NC233/-NC413/-NC433
34
35
14
36
15
37
16
38
17
39
18
19
•CJ1W-NC213/-NC233/-NC413/-NC433
•C200HW-NC213/-NC413
•C500-NC113/-NC211
•C200H-NC211
● Außenmaße
Stecker Positionssteuergerät
2 Bohrungen Ø 3,5
Servotreiberstecker X-Achse
3,5 180 3,5
7
29,5
20
0
20,5
Hinweis Klemmenblockabstand: 7,62 mm
Servotreiberstecker Y-Achse
7
15,5
39
19
45
(46)
44,3
2
2-53
Page 73

Standardmodelle und technische Daten
● Verdrahtung
X/Y-Achse Nothalt
+24 V
0 V200
Sammel
X-Achse
CW
Grenzwert
Sammel
X-Achse
CCW
Grenzwert
Sammel
X-Achse Nullpunktnäherung
X-Achse
RUN
Sammel
X-Achse
ALMCOM
X1 Y1
X-Achse
externer
Interrupt
Sammel
X-Achse
ALM
X-Achse
RESET
X1 XB
24 V DC
X-Achse
BKIR
(siehe
Hinweis 1)
24 V DC
Hinweis 1. Der XB-Kontakt wird zum Ein- und Ausschalten der elektromagnetischen Bremse verwendet.
2. Unbelegte Klemmen nicht anschließen.
3. Die 0-V-Klemme ist intern an die Sammelklemmen angeschlossen.
4. Folgende Kabelschuhe sind geeignet: R1.25-3 (rund mit offenem Ende).
Y-Achse Nullpunktnäherung
Y-Achse
Y-Achse
CW
CCW
Grenzwert
Grenzwert
Sammel
Sammel
Y-Achse
RUN
Sammel
Sammel
Y-Achse
externer
Interrupt
Y-Achse
ALM
Y-Achse
RESET
Y1 YB
24 V DC
Y-Achse
BKIR
Y-Achse ALMCOM
(siehe Hinweis 1)
FG
Kapitel 2
39
19
■ XW2B-20J6-3B
10
11
0
12
1
13
2
14
3
15
4
16
5
17
6
7
8
● Außenmaße
CQM1-Anschluss
29,5
2 Bohrungen Ø 3,5
18
19
9
3,5
7
Dieser Servoklemmenblock ist für den Anschluss der folgenden speicherprogrammierbaren Steuerungen von OMRON
geeignet. Der Datenaustausch wird nicht unterstützt.
•CQM1-CPU43-V1
•CQM1H-PLB21 (Impuls-E/A-Platine für CQM1H-CPU51/CPU61)
•CS1W-HCP22
Servotreiberanschluss
3,5135
7
15,5
10
0
19
9
45
2-54
20,5
44,3
2
Klemmenblockabstand:
Hinweis
(46)
7,62 mm
Page 74

Standardmodelle und technische Daten
● Verdrahtung
gegen
im Uhr-
zeigersinn
0 V
zeigersinn
im Uhr-
zeigersinn
den Uhr-
gegen
den Uhr-
zeigersinn
RUN INP ALM BKIR10
Sam-
Sam-
ECRST
Z
mel
mel
RESET ALMCOM
FG
19
9
+24 V
0
Kapitel 2
Eingabebaugr
X1 XB
(siehe Hinweis 3)
24 V DC
24 V DC
(siehe
Hinweis 1)
(siehe
Hinweis 1)
X1
CQM1
(siehe
Hinweis 2)
Hinweis 1. Bei Eingabe dieser Signale kann der CQM1 Ausgabeimpuls in den
schnellen Zähler eingegeben werden.
Hinweis 2. Geben Sie dieses Ausgangssignal in die CQM1 Eingabebaugruppe ein.
Hinweis 3. Der XB-Kontakt wird zum Ein- und Ausschalten der elektromagnetischen
Bremse verwendet.
Hinweis 4. Phase Z ist ein Ausgang mit offenem Kollektor.
Hinweis 5. Schließen Sie unbelegte Klemmen nicht an.
Hinweis 6. Die 0-V-Klemme ist intern an die Sammelklemmen angeschlossen.
Hinweis 7. Folgende Kabelschuhe sind geeignet: R1.25-3 (rund mit offenem Ende).
2-55
Page 75

Standardmodelle und technische Daten
Kapitel 2
■ XW2B-40J6-4A
Dieser Servoklemmenblock ist für den Anschluss der folgenden OMRON Positionssteuergeräte
geeignet Der Datenaustausch wird unterstützt.
• CS1W-NC213/-NC233/-NC413/-NC433
• CJ1W-NC213/-NC233/-NC413/-NC433
● Außenmaße
Stecker Positionssteuergerät
3,5 3,5
7
29,5
20
0
2 Bohrungen Ø 3,5
20,5
Hinweis Klemmenblockabstand 7,62 mm.
● Verdrahtung
20
X/Y-Achse Nothalt
+24 V
0 V
0
Sammel
X-Achse
CW
Grenzwert
X-Achse Nullpunktnäherung
X-Achse
CCW
Grenzwert
Sam-
Sam-
mel
mel
X-Achse
RUN
X-Achse
Sam-
Sammel
X1 Y1
mel
X-Achse
ALMCOM
X-Achse
externer
Interrupt
RESET
Servotreiberstecker X-Achse
247,5
Y-Achse Nullpunktnäherung
Y-Achse
X-Achse
X-Achse
ALM
BKIR
X1 XB
(siehe
Hinweis 1)
24 V DC
CW
Grenzwert
Sammel
Y-Achse
CCW
Grenzwert
Sammel
Servotreiberstecker
Y-Achse
39
19
Y-Achse
RUN
Sammel
Sammel
Y-Achse
externer
Interrupt
Y-Achse
ALM
Y-Achse
RESET
Y1 YB
24 V DC
7
Y-Achse
BKIR
Y-Achse ALMCOM
(siehe Hinweis 1)
FG
15,5
2,8
39
19
45
2,8
44,3
(46)
24 V DC
Hinweis 1. Der XB-Kontakt wird zum Ein- und Ausschalten der elektromagnetischen Bremse verwendet.
2. Unbelegte Klemmen nicht anschließen.
3. Die 0-V-Klemme ist intern an die Sammelklemmen angeschlossen.
4. Folgende Kabelschuhe sind geeignet: R1.25-3 (rund mit offenem Ende).
2-56
Page 76

Standardmodelle und technische Daten
Kapitel 2
2-7-2 Kabel für Servoklemmenblöcke
■ Servotreiber-Kabel (XW2Z-@J-B5)
Diese Servotreiber-Kabel dienen zur Verbindung von Servotreiber und Servoklemmenblock. Diese Kabel werden bei Servoklemmenblöcken verwendet, die keinen Datenaustausch unterstützen.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-100J-B5 1 m Ø 8,0 ca. 0,1 kg
XW2Z-200J-B5 2 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
39L6
Servoklemmenblock
XW2B-20J6-1B
XW2B-40J6-2B
XW2B-20J6-3B
● Verdrahtung
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
30
Kabel: AWG28 x 4P + AWG28 x 9C
t=18
Servotreiber
Nr.
Symbol
13 +24VIN
OGND
10
+gegen Uhrzeigersinn3
−gegen Uhrzeigersinn4
1 +im Uhrzeigersinn
2 −im Uhrzeigersinn
5
+ECRST
−ECRST6
33 ZCOM
32 Z
8
14 RUN
15
18 RESET
7 BKIR
34 ALM
35 ALMCOM
Ab-
schirmung
INP
FG
Servotreiber
43,6
Stecker:
10136-3000VE (Sumitomo 3M)
Steckergehäuse:
10336-52A0-008 (Sumitomo 3M)
Gewicht
R7D-AP@
2-57
Page 77

Standardmodelle und technische Daten
Kapitel 2
■ Servotreiber-Kabel (XW2Z-@J-B7)
Diese Servotreiber-Kabel dienen zur Verbindung von Servotreiber und Servoklemmenblock. Diese Kabel werden bei Servoklemmenblöcken verwendet, die Datenaustausch (XW2B-40J6-4A)
unterstützen.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-100J-B7 1 m Ø 8,0 ca. 0,1 kg
XW2Z-200J-B7 2 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
39L6
Servoklemmenblock
XW2B-40J60-4A
● Verdrahtung
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
21
22
23
24
25
26
20
30
Kabel: AWG28x6P+AWG28x9C
t=18
Servotreiber
SymbolNr.
13 +24VIN
10
OGND
+gegen Uhrzeigersinn
3
−gegen Uhrzeigersinn
4
1
+im Uhrzeigersinn
2
−im Uhrzeigersinn
+ECRST
5
−ECRST6
33 ZCOM
32 Z
8
INP
14 RUN
15
18 RESET
7 BKIR
34 ALM
35 ALMCOM
20 RXD+
21 RXD22 TXD+
23 TXD-
Ab-
schirmung
FG
43,6
Stecker:
10136-3000VE (Sumitomo 3M)
Steckergehäuse:
10336-52A0-008 (Sumitomo 3M)
Gewicht
Servotreiber
R7D-AP@
2-58
Page 78

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A3)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von speicherprogrammierbaren Steuerungen der Typen CQM1-CPU43-V1 oder CQM1H-PLB21 mit Servoklemmenblöcken des Typs
XW2B-20J6-3B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A3 50 cm Ø 7,5 ca. 0,1 kg
XW2Z-100J-A3 1 m ca. 0,1 kg
● Anschlusskonfiguration und Außenmaße
CQM1-CPU43-V1
CQM1H-PLB21
● Verdrahtung
CQM1
Nr.
15
12
13
14
1
3
4
5
6
Gehäuse-Abdeckung
CQM1
32,2
Kabel: AWG28x4P+AWG28x4C
L
t=15
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
639
Servoklemmenblock
25
Gewicht
XW2B-20J6-3B
2-59
Page 79

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A4)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
C200H-NC112 mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A1 50 cm Ø 8,0 ca. 0,1 kg
XW2Z-100J-A1 1 m ca. 0,1 kg
● Anschlusskonfiguration und Außenmaße
8 L 6
Positionssteuergerät
C200H-NC112
● Verdrahtung
Positionssteuergerät
Nr.
A1
A5
A3
A4
A6
A7
A8
B8
A9
B9
A10
B10
A12
B12
A13
B13
A19
B19
A20
B20
A11
B11
69,5
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
Kabel: AWG28 x 4P + AWG28 x 15C
38
Gewicht
Servoklemmenblock
XW2B-20J6-1B
2-60
Page 80

Standardmodelle und technische Daten
■ Positionssteuergerät-Kabel (XW2Z-@J-A5)
Kapitel 2
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
C200H-NC211, C500-NC113 oder C500-NC211 mit Servoklemmenblöcken des Typs XW2B-40J6-2B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A5 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A5 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
40,5 L 6
Positionssteuergerät
C200H-NC211
C500-NC113
C500-NC211
52,3
t=18
Servoklemmenblock
38
Gewicht
XW2B-40J6-2B
2-61
Page 81

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
1
23
13
2
4
5
9
11
22
6
7
8
17
18
19
15
24
26
27
31
33
20
21
29
28
30
10
32
12
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
Kabel: AWG28 x 6P + AWG28 x 19C
2-62
Page 82

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A8)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
CS1W-NC113 oder C200HW-NC113 mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A8 50 cm Ø 8,0 ca. 0,1 kg
XW2Z-100J-A8 1 m ca. 0,1 kg
● Anschlusskonfiguration und Außenmaße
L 647
Positionssteuergerät
CS1W-NC113
C200HW-NC113
● Verdrahtung
Positionssteuergerät
Nr.
A1
A2
A8
A6
A10
A24
A12
A21
A23
A22
A19
A20
A15
A14
Crimp-Kabelschuh
83
t=11
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
Kabel: AWG28 x 4P + AWG28 x 9C
38
Gewicht
Servoklemmenblock
XW2B-20J6-1B
2-63
Page 83

Standardmodelle und technische Daten
■ Positionssteuergerät-Kabel (XW2Z-@J-A9)
Kapitel 2
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
CS1W-NC213, CS1W-NC413, C200HW-NC213 oder C200HW-NC413 mit Servoklemmenblöcken
des Typs XW2B-40J6-2B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A9 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A9 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
L 647
Positionssteuergerät
CS1W-NC213
CS1W-NC413
C200HW-NC213
C200HW-NC413
83
t=11
48
Gewicht
Servoklemmenblock
XW2B-40J6-2B
XW2B-40J6-4A
2-64
Page 84

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A1/B1
A2/B2
A8
A6
A10
A14
A24/B24
A19
A21
A12
A23
A22
A20/B20
B8
B6
B10
B14
B23
B22
B21
B19
B12
A15/B15
Crimp-Kabelschuh
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
Kabel: AWG28 x 6P + AWG28 x 17C
2-65
Page 85

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A12)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
CS1W-NC133 mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der Hülle Gewicht
XW2Z-050J-A12 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A12 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
L 647
Positionssteuergerät
CS1W-NC133
● Verdrahtung
Positionssteuergerät
Nr.
A3
A4
A1
A2
A7
A8
A5
A6
A10
A24
A12
A21
A23
A22
A19
A20
A15
A14
Crimp-Kabelschuh
83
t=11
AWG20 Schwarz
AWG20 Rot
Kabel: AWG28 x 4P + AWG28 x 9C
1000
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
48
Servoklemmenblock
XW2B-20J6-1B
2-66
Page 86

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A13)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
CS1W-NC233 oder CS1W-NC433 mit Servoklemmenblöcken der Typen XW2B-40J6-2B oder
XW2B-40J6-4A.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A13 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A13 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
L 647
Positionssteuergerät
CS1W-NC233
CS1W-NC433
83
t=11
1000
48
Gewicht
Servoklemmenblock
XW2B-40J6-2B
XW2B-40J6-4A
2-67
Page 87

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A3/B3
A4/B4
A1/B1
A2/B2
A7
A8
A5
A6
A10
A14
A24/B24
A19
A21
A12
A23
A22
A20/B20
B7
B8
B5
B6
B10
B14
B23
B22
B21
B19
B12
A15/B15
Crimp-Kabelschuh
AWG20 Schwarz
AWG20 Rot
Kabel: AWG28 x 6P + AWG28 x 17C
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
2-68
Page 88

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A16)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
CJ1W-NC113 mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A16 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A16 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
500
Positionsteuergerät
CJ1W-NC113
CJ1W-NC113
t=11
L 6
20J6-1B
38
Gewicht
Servoklemmenblock
XW2B-20J6-1B
2-69
Page 89

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A1
A2
A8
A6
A9
A20
A11
A17
A19
A18
A15
A16
A13
A12
Crimp-Kabelschuh
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
Kabel: AWG28 x 4P + AWG28 x 9C
2-70
Page 90

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A17)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
CJ1W-NC213 oder CJ1W-NC413 mit Servoklemmenblöcken der Typen XW2B-40J6-2B oder
XW2B-40J6-4A.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A17 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A17 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
500
Positionssteuergerät
CJ1W-NC213
CJ1W-NC413
CJ1W-NC213/NC413
t=11
L 6
40J6-2B
48
Gewicht
Servoklemmenblock
XW2B-40J6-2B
XW2B-40J6-4A
2-71
Page 91

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A1/B1
A2/B2
A8
A6
A9
A12
A20/B20
A15
A17
A11
A19
A18
A16/B16
B8
B6
B9
B12
B19
B18
B17
B15
B11
A13/B13
Crimp-Kabelschuh
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
27
28
29
30
31
32
34
33
Kabel: AWG28 x 6P + AWG28 x 17C
2-72
Page 92

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A20)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
CJ1W-NC133 mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A20 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A20 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
500
Positionssteuergerät
CJ1W-NC133
CJ1W-NC133
1000
t=11
L 6
20J6-1B
38
Gewicht
Servoklemmenblock
XW2B-20J6-1B
2-73
Page 93

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A3
A4
A1
A2
A7
A8
A5
A6
A9
A20
A11
A17
A19
A18
A15
A16
A13
A12
Crimp-Kabelschuh
AWG20 Schwarz
AWG20 Rot
Kabel: AWG28 x 4P + AWG28 x 9C
Servoklemmenblock
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
2-74
Page 94

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A21)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten der Typen
CJ1W-NC233 oder CJ1W-NC433 mit Servoklemmenblöcken der Typen XW2B-40J6-2B oder
XW2B-40J6-4A.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A21 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A21 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
500
Positionssteuergerät
CJ1W-NC233
CJ1W-NC433
CJ1W-NC233/NC433
1000
t=11
L 6
40J6-2B
48
Gewicht
Servoklemmenblock
XW2B-40J6-2B
XW2B-40J6-4A
2-75
Page 95

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A3/B3
A4/B4
A1/B1
A2/B2
A7
A8
A5
A6
A9
A12
A20/B20
A15
A17
A11
A19
A18
A16
B7
B8
B5
B6
B9
B12
B19
B18
B17
B15
B11
A13/B13
B16
Crimp-Kabelschuh
AWG20 Schwarz
AWG20 Rot
Kabel: AWG28 x 6P + AWG28 x 17C
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
27
28
29
30
31
32
34
33
2-76
Page 96

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A22)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
CS1W-HCP22 mit Servoklemmenblöcken des Typs XW2B-20J6-3B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A22 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A22 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
500
Positionssteuergerät
CS1W-HCP22
● Verdrahtung
Positionssteuergerät
Nr.
A19
A20
A18
A16
B2
A1
B4
A3
A17
A15
Crimp-Kabelschuh
CS1W-HCP22
t=11
L 6
Servoklemmenblock
Kabel: AWG28 x 4P + AWG28 x 4C
20J6-3B
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Servoklemmenblock
25
XW2B-20J6-3B
Gewicht
2-77
Page 97

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A23)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Positionssteuergeräten des Typs
CS1W-HCP22 mit Servoklemmenblöcken des Typs XW2B-20J6-3B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A23 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A23 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
Positionssteuergerät
CS1W-HCP22
500
20J6-3B
2525
CS1W-HCP22
20J6-3B
t=11
L 6
Gewicht
Servoklemmenblock
XW2B-20J6-3B
2-78
Page 98

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
Nr.
A19
A20
A18
A16
B2
A1
B4
A3
A17
A15
B19
B20
B18
B16
B8
A7
B10
A9
B17
B15
Crimp-Kabelschuh
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
Kabel: AWG28 x 4P + AWG28 x 4C
Servoklemmenblock
Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
Kabel: AWG28 x 4P + AWG28 x 4C
2-79
Page 99

Standardmodelle und technische Daten
Kapitel 2
■ Positionssteuergerät-Kabel (XW2Z-@J-A25)
Diese Positionssteuergerät-Kabel dienen zur Verbindung von Einachspositioniersteuerungen des
Typs 3F88M-DRT141 (für DeviceNet) mit Servoklemmenblöcken des Typs XW2B-20J6-1B.
● Kabelmodelle
Modell Länge (L) Außendurchmesser der
Hülle
XW2Z-050J-A25 50 cm Ø 10,0 ca. 0,1 kg
XW2Z-100J-A25 1 m ca. 0,2 kg
● Anschlusskonfiguration und Außenmaße
L 647
Positionssteuergerät
3F88M-DRT141
83
t=11
500
150
20J6-1B
38
Gewicht
Servoklemmenblock
XW2B-20J6-1B
2-80
Page 100

Standardmodelle und technische Daten
● Verdrahtung
Kapitel 2
Positionssteuergerät
A24
B24
B21
B22
A21
A22
A20
B20
A1
B10
A16/B16
A10
B9
A9
B8
B2
A11
B11
B19
Servoklemmenblock
Nr.Nr.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Crimp-Kabelschuh
(rund)
Kabel: AWG28 x 8P + AWG28 x 16C
Crimp-Kabelschuh
(Y-Ausführung)
2-81
 Loading...
Loading...