

Page 1

Advanced Industrial Automation
Serie Smartstep A
R7M-A_ (Servomotors)
R7D-AP_ (Servo Drivers)
Servomotors/Servodrivers
MANUALE PER L’UTENTE
Breve introduzione
2 Modelli e specifiche standard
3 Installazione e progettazione del sistema
4 Funzionamento
5 Soluzione dei problemi
Cat. No. I533-IT1-01
Page 2
Grazie per aver scelto questo prodotto della serie SMARTSTEP A. Un uso
esatto ed adeguato del prodotto garantirà il funzionamento corretto del prodotto, ne allungherà la durata e preverrà allo stesso tempo eventuali incidenti.
Leggere attentamente e per intero il presente manuale, utilizzare e trattare il
prodotto con la massima cura. Tenere sempre a portata di mano il presente
manuale per poterlo consultare anche dopo averlo letto attentamente.
AVVISO
1.Questo manuale fornisce informazioni circa l’installazione, il cablaggio, l’impostazione dei
selettori e la risoluzione dei problemi dei Servomotori e dei Servoazionamenti della serie
SMARTSTEP A. Per informazioni sulle procedure operative attuali usando la Console di
Programmazione vedere il Manuale per l’Operatore per la serie SMARTSTEP A (I534).
2.Assicurarsi che il presente manuale venga consegnato all’utente finale insieme al prodotto.
3.Questo manuale è stato redatto con la massima cura; vi preghiamo tuttavia di rivolgervi
all’ufficio di rappresentanza OMRON più vicino per segnalarne eventuali miglioramenti.
4.Partire dal presupposto che tutto quanto non è stato descritto in dettaglio nel presente
manuale non è ottenibile.
5.Non fare allacciare, regolare o comandare il servomotore o il servoazionam. (dalla console di programmazione) da elettricisti non specializzati o altre persone non competenti.
6.Si raccomanda di inserire le seguenti avvertenze cautelative in tutti i manuali d’istruzione
redatti per il sistema in cui verrà installato il prodotto.
• Norme cautelative relative ai pericoli causati da attrezzature ad alto voltaggio
• Norme cautelative riguardo i collegamenti del prodotto che non dovranno essere toccati anche dopo aver disinserito l’alimentazione di corrente (Questi collegamenti sono
attivi anche quando la corrente è disinserita.)
7.Al fine di poter apportare costantemente migliorie al prodotto, le specifiche e le informazioni contenute nel presente documento sono soggette a modifiche senza preavviso.
8.La rotazione in positivo e in negativo dei servomotori c.a. descritta in questo manuale viene definita, prendendo come punto di riferimento l’estremità dell’albero motore, come segue: la rotazione in senso antiorario è positiva e quella in senso orario è negativa.
9.Non eseguire test per verificare la tensione di resistenza o altri test megametrici sul prodotto. In caso contrario si potrebbero danneggiare i componenti interni.
10.IServomotori ed i servoazionamenti hanno un periodo di utilizzo definito. Fare in modo di
avere sempre a portata di mano un prodotto di ricambio, verificare sempre l’idoneità
dell’ambiente in cui viene utilizzato il prodotto ed evitare eventuali condizioni che potrebbero pregiudicarne il periodo d’utilizzo.
11.Non impostare valori per parametri non descritti in questo manuale. In caso contrario potrebbero verificarsi degli errori di funzionamento. Per eventuali domande rivolgersi al rappresentante della OMRON.
12.Prima di utilizzare il prodotto in condizioni non descritte nel manuale o di applicarlo a sistemi di controllo nucleare, sistemi ferroviari, sistemi per l’aviazione, veicoli, sistemi di
combustione, apparecchiature medicali, macchine da luna park, apparecchiature di sicurezza e qualunque altro sistema, macchina o apparecchiatura, il cui utilizzo errato potrebbe avere un serio impatto sull'incolumità di persone o protezione di cose, rivolgersi al
proprio rappresentante OMRON.
Page 3

Da verificare prima di togliere l’imballaggio
1.Verificare i seguenti punti prima di liberare il prodotto dall’imballaggio:
• il prodotto consegnato corrisponde a quanto ordinato (p.e. numero di modello e
specifiche esatti)?
• il prodotto è stato danneggiato durante la spedizione?
2.Verificare che siano stati consegnati i seguenti accessori.
• Precauzioni per la sicurezza
Non vengono forniti connettori e viti per il montaggio. Procurarseli separatamente.
Page 4

Avvertenza:
a
a
I prodotti OMRON sono destinati all'uso da parte di un operatore qualificato e solo per gli scopi descritti in
questo manuale.
In questo manuale vengono utilizzate le seguenti convenzioni per indicare e classificare le norme cautelative. Attenersi sempre alle informazioni in esse contenute. La mancata osservanza di tali norme
potrebbe causare danni a persone o proprietà.
!PERICOLO Indica una situazione di pericolo immediato che, se non evitata, può essere
causa di lesioni gravi o mortali.
!AVVERTENZA Indica una situazione di potenziale pericolo che, se non evitata, può essere
causa di lesioni gravi o mortali.
!Attenzione Indica una situazione di potenziale pericolo che, se non evitata, può essere
causa di lesioni non gravi a persone o danni a cose.
Riferimenti ai prodotti OMRON
Tutti i nomi di prodotti OMRON sono scritti in maiuscolo nel presente manuale. Anche la parola
"Modulo" viene utilizzata con l'iniziale maiuscola quando si riferisce a un prodotto OMRON, indipendentemente dal fatto che faccia o meno parte del nome proprio del prodotto.
L'abbreviazione "Ch", che compare su alcuni display e prodotti OMRON, spesso corrisponde a
"parola", termine che viene abbreviato come "Par" nella documentazione.
L'abbreviazione ”PC” significa Programmable Controller (Controllore programmabile) ed è utilizzata
esclusivamente con questo significato.
Supporti visivi
Nella colonna sinistra del manuale vengono riportate le seguenti intestazioni per facilitare l'individuazione dei diversi tipi di informazioni.
Nota Indica informazioni di particolare rilevanza per un efficiente e vantaggioso utilizzo del prodotto.
OMRON, 2001
Tutti i diritti riservati. Nessuna parte di questa pubblicazione può essere riprodotta, memorizzata in un sistema, trasmessa in qualsivoglia formato o supporto, meccanico, elettronico, fotocopia, registrazione od altro senza il consenso scritto preventivo dell
OMRON.
Non viene assunta alcuna responsabilità derivante dall'uso delle informazioni contenute nel presente manuale. La OMRON cerc
costantemente di migliorare la qualità dei propri prodotti, pertanto le informazioni contenute nel presente manuale possono
essere soggette a modifica senza preavviso. Il presente manuale è stato redatto con la massima attenzione. Tuttavia la OMRON
non assume alcuna responsabilità per eventuali errori od omissioni o qualsivoglia danno derivante dalle informazioni in esso
contenute.
Page 5

Note cautelative
Rispettare le seguenti avvertenze quando si usa il Servomotore e il Servoazionamento SMARTSTEP
e tutti i dispositivi collegati o periferici.
In questo manuale, è possibile trovare delle illustrazioni del prodotto senza le coperture protettive per
poter descrivere nel dettaglio i componenti del prodotto. Prima di utilizzare il prodotto accertarsi che
tali coperture protettive non siano rimosse.
Quando si utilizza il prodotto dopo un lungo periodo di immagazzinaggio, contattare il proprio rappresentante OMRON.
!AVVERTENZA Allacciare sempre i connettori di massa a terra del Servoazionamento e del Ser-
vomotore a un punto di massa della categoria 3 (100 Ω o minore). Il collegamento
ad una massa diversa dalla categoria 3 potrebbe provocare scosse elettriche.
!AVVERTENZA Non toccare le parti all'interno del Servoazionamento In caso contrario si è sotto-
posti al rischio di scosse elettriche.
!AVVERTENZA Non rimuovere la copertura frontale, le coperture dei morsetti, cavi o altri elementi
opzionali quando l'alimentazione di corrente è attivata, In caso contrario si è sottoposti al rischio di scosse elettriche.
!AVVERTENZA L’installazione, il funzionamento, la manutenzione o l’ispezione devono essere
eseguiti solo da personale autorizzato. In caso contrario si è sottoposti al rischio di
scosse elettriche o lesioni.
!AVVERTENZA Attendere almeno cinque minuti, dopo aver disattivato l’alimentazione di corrente,
prima di procedere al cablaggio o ad un’ispezione. In caso contrario si è sottoposti
al rischio di scosse elettriche.
!AVVERTENZA Non danneggiare, schiacciare, tendere o appoggiare oggetti pesanti sui cavi. In
caso contrario si è sottoposti al rischio di scosse elettriche.
!AVVERTENZA Non toccare le parti rotanti del Servomotore durante il funzionamento. Eventuali
disattenzioni potrebbero essere causa di incidenti.
!AVVERTENZA Non modificare il prodotto, altrimenti potrebbero verificarsi incidenti o danni al pro-
dotto stesso.
!AVVERTENZA Installare un dispositivo d’arresto sulla macchina per garantirne la sicurezza. Il
freno di stazionamento non può essere considerato un dispositivo d’arresto a
scopo di sicurezza.
!AVVERTENZA Installare un dispositivo esterno per l'arresto di emergenza che consenta di arre-
stare il funzionamento e interrompere l'alimentazione di corrente immediatamente. In caso contrario potrebbero verificarsi degli incidenti.
Page 6

!AVVERTENZA Non avvicinarsi subito alla macchina dopo avere resettato un’interruzione
momentanea di corrente, onde evitare un riavvio inatteso (prendere le misure
necessarie atte a prevenire un riavvio inatteso). Eventuali disattenzioni potrebbero essere causa di incidenti.
!Attenzione Usare i Servomotori ed i Servoazionamenti in una combinazione specifica. In
caso contrario si potrebbe provocare un incendio o danneggiare il prodotto.
!Attenzione Non immagazzinare o installare il prodotto nei seguenti luoghi. In caso contrario si
potrebbe provocare un incendio o danneggiare il prodotto.
• Luoghi esposti alla luce diretta del sole.
• Luoghi soggetti a temperature o livelli di umidità al di fuori della gamma di
valori riportata nelle specifiche.
• Luoghi in cui può formarsi della condensa a causa di escursioni termiche
eccessive.
• Luoghi soggetti a gas corrosivi o infiammabili.
• Luoghi soggetti a polvere (in particolare polvere di ferro) o agenti salini.
• Luoghi soggetti a scosse o vibrazioni.
• Luoghi esposti ad acqua, olio o agenti chimici.
!Attenzione Non toccare il radiatore del Servoazionamento, la resistenza di rigenerazione del
Servoazionamento o il Servomotore durante l’alimentazione di corrente o subito
dopo averla sospesa. In caso contrario ci si potrebbe scottare venendo a contatto
con la superficie surriscaldata.
Precauzioni per l’immagazzinaggio ed il trasporto
!Attenzione Non trasportare il prodotto tenendolo per il cavo o l’albero motore per evitare
lesioni o malfunzionamenti.
!Attenzione Non applicare un carico superiore a quello indicato sul prodotto per evitare
lesioni o malfunzionamenti.
Precauzioni per l'installazione e il cablaggio
!Attenzione Non calpestare o appoggiare oggetti pesanti sul prodotto. Eventuali disattenzioni
potrebbero essere causa di incidenti.
!Attenzione Non coprire le porte di entrata ed uscita ed evitare che corpi estranei entrino nel
prodotto per evitare lo scoppio di un incendio.
!Attenzione Accertarsi di aver collegato il prodotto in senso corretto per evitare eventuali mal-
funzionamenti.
Page 7

!Attenzione Mantenere le distanze specificate tra il Servoazionamento ed il pannello di co-
mando o da altri dispositivi per evitare lo scoppio di un incendio o malfunzionamenti.
!Attenzione Evitare urti violenti. In caso contrario potrebbero verificarsi dei malfunzionamenti.
!Attenzione Assicurarsi di aver effettuato un cablaggio sicuro e corretto per evitare lo scoppio
di un incendio o malfunzionamenti.
!Attenzione Accertarsi che tutte le viti di montaggio, le viti dei morsetti e le viti dei connettori
dei cavi siano strette alla coppia specificata nei relativi manuali. Se la coppia non
è quella corretta, si potrebbero verificare errori di funzionamento.
!Attenzione Per il cablaggio utilizzare dei collegamenti crimp. Non collegare direttamente ai
connettori fili scoperti intrecciati. Il collegamento di fili scoperti intrecciati potrebbe
essere causa di bruciature.
!Attenzione Applicare sempre le tensioni di alimentazione specificate nei manuali per l’utente.
Una tensione errata potrebbe provocare malfunzionamenti o bruciature.
!Attenzione Prevedere misure adeguate per essere certi che l'alimentazione sia sempre della
tensione e frequenza nominali corrette. In particolare, fare molta attenzione in luoghi dove l'alimentazione è instabile. Un'alimentazione di corrente errata può provocare malfunzionamenti.
!Attenzione Installare degli interruttori esterni od altri dispositivi di sicurezza per evitare corto-
circuiti nel cablaggio esterno. Misure di sicurezza contro i cortocircuiti insufficienti
potrebbero essere causa di bruciature.
!Attenzione Prendere misure adeguate e sufficienti quando si installano sistemi nei luoghi di
seguito riportati. In caso contrario potrebbero verificarsi danni al prodotto.
• Luoghi in cui è presente elettricità statica o altre forme di disturbo.
• Luoghi soggetti a forti campi magnetici o elettromagnetici.
• Luoghi potenzialmente esposti a radioattività.
• Luoghi prossimi a linee elettriche.
Precauzioni per il funzionamento e le regolazioni
!Attenzione Prima di eseguire le operazioni di collaudo accertarsi che non possano causare
problemi al sistema. In caso contrario potrebbero verificarsi danni all’apparecchio.
!Attenzione Verificare gli ultimi parametri impostati ed il funzionamento degli interruttori prima
di utilizzarli. In caso contrario potrebbero verificarsi danni all’apparecchio.
Page 8

!Attenzione Non effettuare regolazioni estreme o cambi d’impostazione per evitare di pren-
dere scosse elettriche.
!Attenzione Separare il Servomotore dalla macchina, verificarne il funzionamento corretto e
poi collegarlo alla macchina. In caso contrario si potrebbero verificare incidenti.
!Attenzione Quando scatta un allarme, rimuoverne la causa, resettare l’allarme dopo aver
confermato la sicurezza e quindi riprendere il funzionamento. In caso contrario
potrebbero verificarsi degli incidenti.
!Attenzione Non usare il freno incorporato del Servomotore per operazioni di frenata normali.
In caso contrario potrebbero verificarsi dei malfunzionamenti.
Precauzioni per la manutenzione e l'ispezione
!AVVERTENZA Non tentare di smontare, riparare o modificare alcun Modulo, in quanto si potreb-
bero verificare malfunzionamenti, incendi o scosse elettriche.
!Attenzione Rimettere in funzione solo dopo aver trasferito nel nuovo Modulo il contenuto dei
dati necessari al funzionamento. Disattendere questa precauzione potrebbe provocare risultati imprevisti.
Page 9
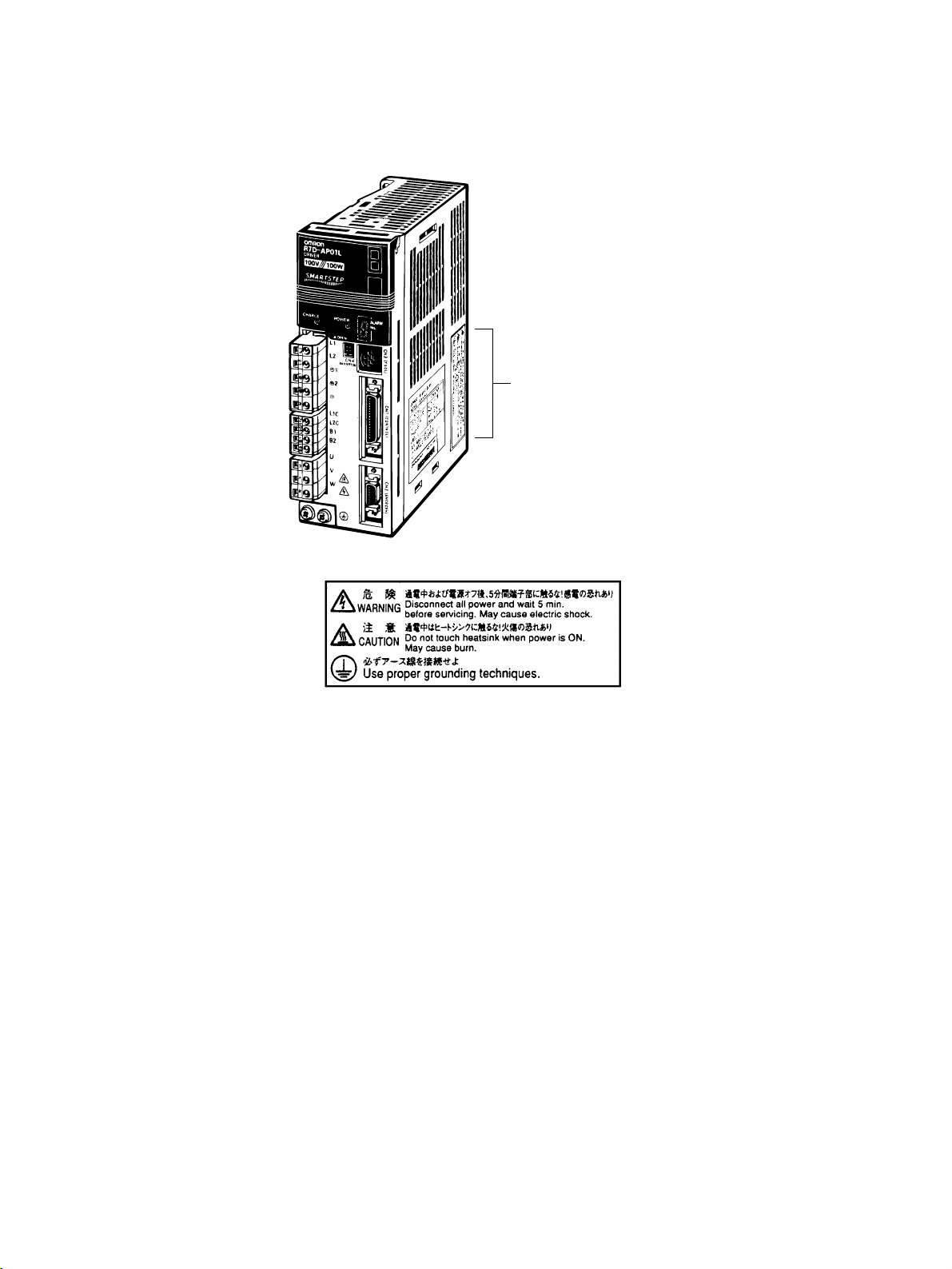
Etichette d’avviso
Sul prodotto si trovano delle etichette d’avviso così come illustrato in figura. Seguire le istruzioni indicate.
Esempio da R7D-AP01L
Etichetta di avvertenza
Esempio da R7D-AP01L
Page 10
Sommario
Capitolo 1. Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-1
1-1 Caratteristiche. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-2 Configurazione del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-4
1-3 Descrizione Servoazionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5
1-4 Standard applicabili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-6
1-5 Diagrammi di sistema a blocchi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
Capitolo 2. Modelli e specifiche standard . . . . . . . . . . . . . . . . . . . . . 2-1
2-1 Modelli standard. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-2 Dimensioni esterne per montaggio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2-3 Specifiche Servoazionamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-16
2-4 Specifiche Servomotore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-30
2-5 Specifiche rapporto di riduzione. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-38
2-6 Specifiche dei cavi e dei connettori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-42
2-7 Specifiche delle morsettiere per il Servoazionamento e dei cavi . . . . . . . . . . . . . . . . . . . . . . 2-52
2-8 Specifiche della Console di Programmazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-83
2-9 Specifiche resistenza di rigenerazione esterna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-85
2-10 Reattanze c.c. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-86
Capitolo 3. Installazione e progettazione del sistema . . . . . . . . . . . . 3-1
3-1 Condizioni di installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2 Cablaggio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-8
3-3 Assorbimento dell'energia di rigenerazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-36
Capitolo 4. Funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1
4-1 Procedura di funzionamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-3
4-2 Regolazione degli interruttori. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-4
4-3 Preparativi per il funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-7
4-4 Test di funzionamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-9
4-5 Regolazione del guadagno . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4-6 Parametri utente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4-7 Funzioni operative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-26
Capitolo 5. Soluzione dei problemi. . . . . . . . . . . . . . . . . . . . . . . . . . . 5-1
5-1 Contromisure appropriate. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-2
5-2 Allarmi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-5
5-3 Soluzione dei problemi. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5-4 Caratteristiche di sovraccarico (caratteristiche termiche elettroniche). . . . . . . . . . . . . . . . . . 5-15
5-5 Manutenzione periodica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-16
Capitolo 6. Appendice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6-1 Esempi di collegamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-2
Storico delle revisioni. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . R-1
Page 11

Page 12

Capitolo 1
Introduzione
1-1 Caratteristiche
1-2 Configurazione del sistema
1-3 Descrizione Servoazionamento
1-4 Standard applicabili
1-5 Diagrammi di sistema a blocchi
Page 13

Introduzione
Capitolo 1
1-1 Caratteristiche
I Servomotori ed i Servoazionamenti della serie SMARTSTEP A sono stati concepiti come Controllori
di Posizione del tipo a treno di impulsi per sostituire i motori passo a passo in sistemi di posizionamento semplice. I Servomotori ed i Servoazionamenti della serie SMARTSTEP A uniscono la facilità
d’uso dei motori passo a passo ad un posizionamento più performante, dovuto ad una velocità ed a un
momento di coppia elevati, ad una maggiore affidabilità, senza che questo vada a scapito dell’accuratezza di posizionamento anche durante cambiamenti di carico improvvisi e ad altre caratteristiche
avanzate.
■ Maggiore velocità di risposta e di rotazione
I Servomotori ed i Servoazionamenti della serie SMARTSTEP A hanno le stesse caratteristiche di velocità e di momento di coppia elevati della serie Omnuc W, caratteristiche che non possono essere raggiunte con i motori passo a passo. I Servomotori della serie SMARTSTEP A offrono velocità di
rotazione fino a 4.500 giri/min con possibilità di funzionamento costante a questa velocità. Una coppia
in uscita per 1 s fino a circa il 300% della coppia nominale consente un posizionamento medio e lungo
ancora più veloce.
■ Accuratezza costante
La risoluzione di 2.000 impulsi/rotazione degli encoder consente di controllare il feedback ottenendo
così un funzionamento in continuo senza perdere l’accuratezza del posizionamento anche in caso di
cambiamenti improvvisi di carico, accelerazioni o decelerazioni improvvise.
■ Impostazione con i selettori sul pannello frontale del Servoazionamento
Le serie SMARTSTEP A possono essere fatte funzionare immediatamente senza lunghe impostazioni di parametri. Gli interruttori rotativi sul pannello frontale dei Servoazionamenti della serie A consentono una più facile modifica delle funzioni e delle impostazioni di risoluzione.
● Impostazioni della risoluzione
È possibile selezionare la risoluzione dei Servomotori della serie SMARTSTEP A tra i quattro livelli
di seguito riportati:
500 impulsi/rotazione (0.72° /passo); 1,000 impulsi/rotazione (0.36° /passo) (default setting);
5,000 impulsi/rotazione (0.072° /passo); oppure 10,000 impulsi/rotazione (0.036° /passo)
● Regolazione inserimento impulsi di comando
La regolazione di inserimento degli impulsi di comando della serie SMARTSTEP A può essere
commutata tra il metodo CW/CCW e il metodo SIGN/PULS per adattarla facilmente alle specifiche
d’uscita del Modulo di Controllo della Posizione.
● Regolazione freno dinamico
I Servomotori della serie SMARTSTEP A possono decelerare forzatamente sino all’arresto in
caso di RUN OFF o quando scatta un allarme
1-2
Page 14

Introduzione
● Impostazione guadagno
Un interruttore rotante speciale sui Servoazionamenti della serie SMARTSTEP consente di impostare facilmente il guadagno. L’autotuning online può essere attivato anche con un dip-switch e la
velocità di risposta può essere adattata facilmente all’apparecchiatura da usare.
Nota L’uso di una Console di Programmazione o di un personal computer consente di attivare il
funzionamento con le impostazioni dei parametri.
■ Servomotori di tipo cilindrico o piatto
La serie SMARTSTEP A offre oltre ai Servomotori di tipo cilindrico flangiati dei Servomotori di tipo
cubico con una lunghezza complessiva inferiore. Le misure di profondità dei Servomotori di tipo
cubico si avvicinano approssimativamente a quelle dei motori passo a passo con la stessa capacità
d’uscita. Il Servomotori possono essere scelti in base alle dimensioni rendendo così le apparecchiature più compatte.
■ Un’ampia scelta di Strumenti di programmazione
Sono disponibili Console di Programmazione speciali della serie SMARTSTEP A e software di monitoraggio su personal computer. Il software di monitoraggio speciale consente di eseguire l’impostazione dei parametri, di visualizzare a monitor velocità e corrente, di visualizzare la forma d’onda di
velocità e corrente, di visualizzare a monitor I/O, di effettuare l’autotuning, di operare ad intermittenza ed altre operazioni a computer. È anche possibile eseguire comunicazioni ad asse multipla
che impostano i parametri e le operazioni a monitor per Servoazionamenti multipli. Per ulteriori dettagli vedere Software di Monitoraggio su Personal Computer di Servoazionamenti (CD-ROM) per
Windows 95/98, Versione 2.0 (WMON Win Ver.2.0)
Capitolo 1
1-3
Page 15
Introduzione
DRIVER PR
PR DRIVER
WRITE
B.B
INP
VCMP
TGON
REF
POWER
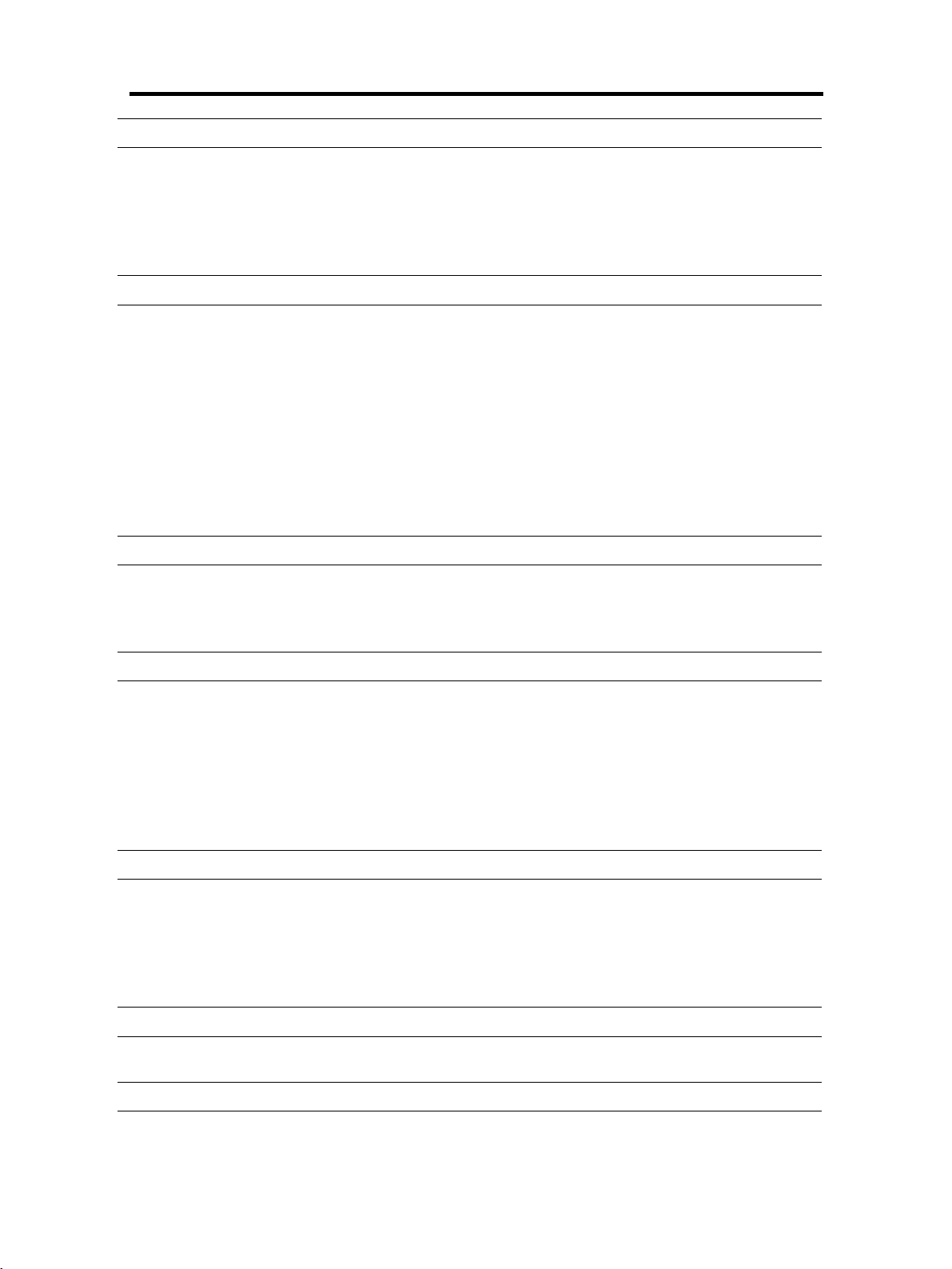
1-2 Configurazione del sistema
SYSMAC + Posizione unità di contatto con uscita a treno d’impulsi
NC
413
RUN
X
ERROR
Y
SENS
Z
DATA
U
MACHINE
No.
CN1 CN2
B
2
4
A24
B
1
A
1
SYSMAC CJ/CS/C/CV
Controllore programmabile
Posizione Unità di controllo
CJ1W-NC113/213/413
CJ1W-NC133/233/433
CS1W-NC113/213/413
CS1W-NC133/233/433
C200HW-NC113/213/413
C500-NC113/211
Treno di
impulsi
B.B
INP
TGON
VCMP
R7A–PR02A PARAMETER UNIT
SCROLL MODE/SET
RESET
JOG
RUN
READ
DRIVER PR
PR DRIVER
Console di programmazione R7A-PR02A
(può essere tenuta in mano)
Capitolo 1
REF
POWER
DATA
WRITE
SYSMAC Controllori programmabili con uscite ad impulsi
SYSMAC CPM2A
PA
203
POWER
SYSMAC CPM2C
/
SYSMAC CQM1H
Posizionatore ad un solo albero con uscita a treno d'impulsi
MS
NS
M0
M1
M2
3
2
4
1
5
0
6
9
7
8
3
2
4
1
5
0
6
9
7
8
123
ON↓
3F88M
1 AXIS POSITIONER
NA
×10
×
1
DR0
DR1
L/R
OPEN
No.
OPEN
LINE
-
DRT141
LINE
CCW CW
ALARM
LS
M2
M1
SOFT LIMIT
M0
ORG SRH NG
ENCODER ALM
STOP
LM
A
ER
IV
R
D
OTHER
: )
ED
(R
COMMUNICATION
SPEED
H
C
IT
125kbps
W
1
S
R
IP
D
250kbps
F
F
0D
O
R
D
500kbps
FF
E
−
O
T
FF
O
O
M
E
N
O
/R
L
ON
A
C
O
L
ON
OFF
ITCH
ON
REMOTE MODE
DIP SW
LOCAL MODE
L/R
OFF
ON
I/O
Posizionatore ad un solo albero 3F88M-DRT141
per DeviceNet
collegate
Serie SMARTSTEP A R7D-AP@
Servoazionamento
Serie SMARTSTEP A R7D-AP@
Servomotore
1-4
Page 16
,QWURGX]LRQH
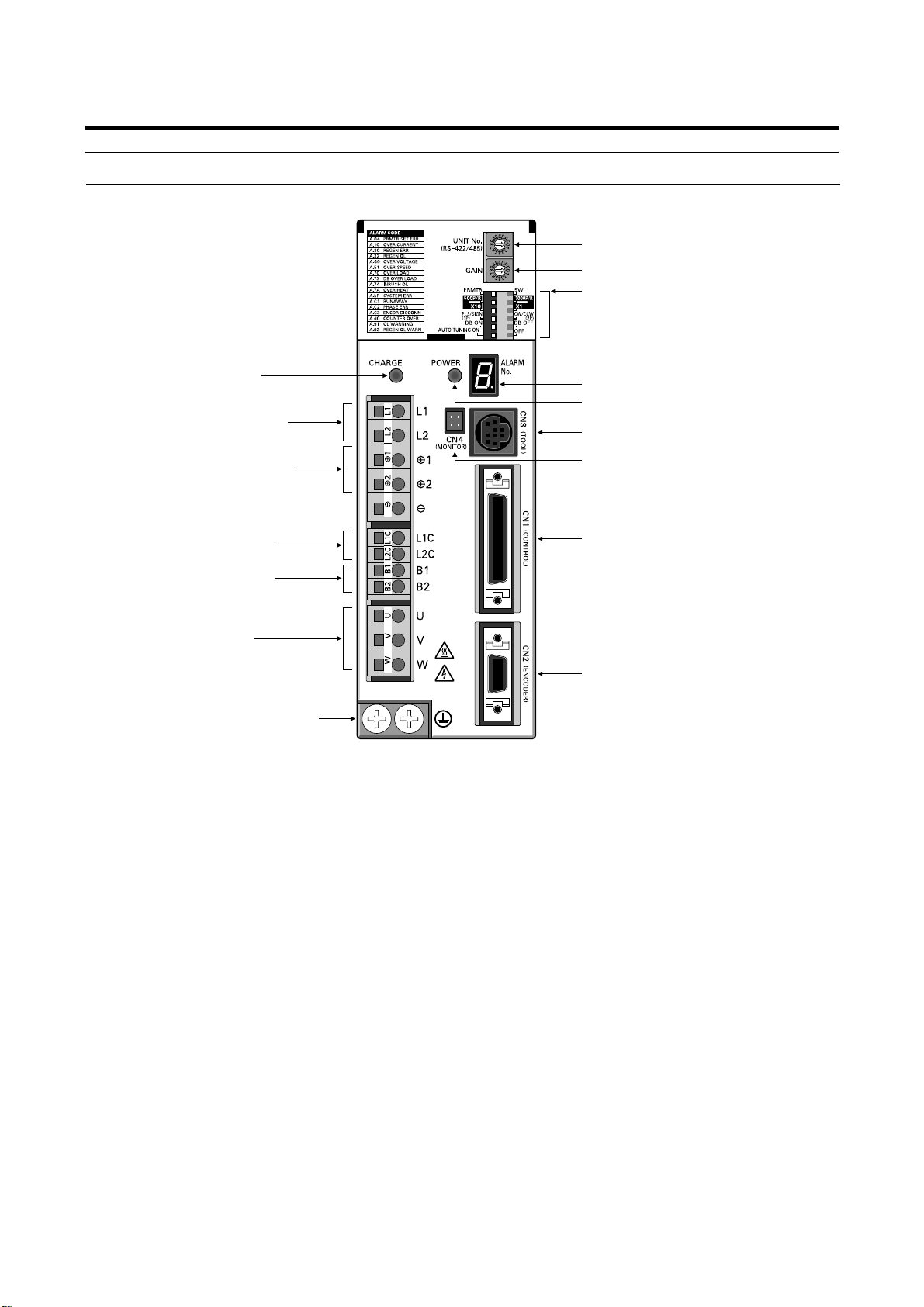
'HVFUL]LRQH6HUYRD]LRQDPHQWR
6SLDLQJUHVVRDOLPHQWD]LRQH
FLUFXLWRSULQFLSDOH
0RUVHWWLGLHQWUDWDDOLPHQWD]LRQH
GLFRUUHQWHFLUFXLWRSULQFLSDOH
7HUPLQDOLGLFROOHJDPHQWR
UHDWWDQ]DFF
&DSLWROR
,QWHUUXWWRUHURWDQWHSHUVHOH]LRQHQXPHURXQLWj
,QWHUUXWWRUHURWDQWHSHUUHJROD]LRQHJXDGDJQR
,QWHUUXWWRULGLVHOH]LRQHIXQ]LRQH
&RPPXWD$WWLYDLPSRVWD]LRQHSDUDPHWUL
,PSRVWD]LRQHGLULVROX]LRQH
5HJROD]LRQHLQVHULPHQWRLPSXOVLGLFRPDQGR
5HJROD]LRQHIUHQRGLQDPLFR
$XWRWXQLQJRQOLQH
9LVXDOL]]D]LRQHDOODUPL
6SLDDOLPHQWD]GLFRUUHQWHFLUFXLWRGLFRPDQGR
&RQQHWWRUHGLFRPXQLFD]LRQH&13&
&RQVROHGLSURJUDPPD]LRQH
&RQQHWWRUHG¶XVFLWDPRQLWRU&1
0RUVHWWLGLHQWUDWDDOLPHQWD]LRQH
GLFRUUHQWHFLUFXLWRGLFRPDQGR
&ROOHJDPHQWLHVWHUQLGLUHVLVWHQ]D
DOODULJHQHUD]LRQH
0RUVHWWLDOLPHQWD]LRQH
6HUYRPRWRUH
&ROOHJDPHQWL)*SHUDOLPHQWD]LRQH
FRUUHQWHHSRWHQ]DVHUYRPRWRUH
&RQQHWWRUHGLFRPDQGR,2&1
&RQQHWWRUHG¶LQJUHVVRHQFRGHU&1
Page 17
Introduzione
Capitolo 1
1-4 Standard applicabili
■ Direttive CE
Direttive CE Prodotto Standard applicabili Commenti
Direttive sulle
apparecchiature a bassa
tensione
Direttive EMC Servoazionamenti c.a.
Nota Le installazioni devono essere effettuate alle condizioni stabilite in 3-2-5 Cablaggi EMC per
essere conformi alle direttive EMC.
Servoazionamenti c.a. EN50178 Requisiti di sicurezza per apparec-
chiature elettriche di misurazione,
controllo e ricerca.
Servomotori c.a. IEC60034-1, -5, -8, -9
EN60034-1, -9
EN 55011 classe A gruppo 1 Interferenza wireless e metodi di
e servomotori c.a.
EN61000-6-2 Compatibilità elettromagnetica e
Apparecchiature elettriche rotanti
misurazione per dispositivi di radiofrequenza per l’industria e applicazioni medico-scientifiche.
standard di immunità per ambienti
industriali
■ Standard UL e cUL
Standard Prodotto Standard applicabili N. file Commenti
UL Servoazionamenti c.a. UL508C E179149 Apparecchi di conversione
potenza
Servomotori c.a. UL1004 E179189 Motori elettrici
cUL Servoazionamenti c.a. cUL C22.2 Nr. 14 E179149 Dispositivi di controllo
industriale
Servomotori c.a. cUL C22.2 Nr. 100 E179189 Motori e generatori
1-6
Page 18
Introduzione
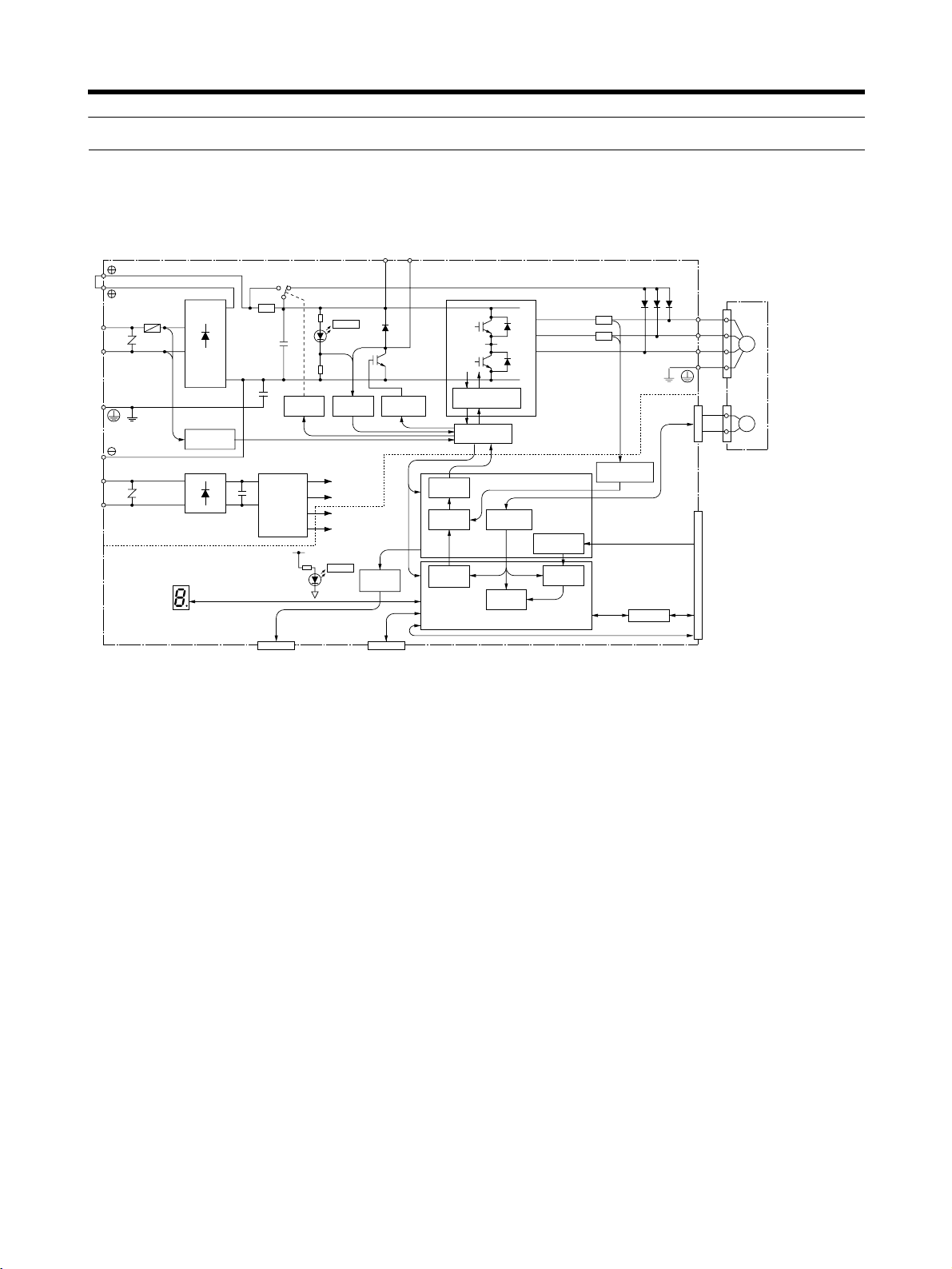
1-5 Diagrammi di sistema a blocchi
■ 200 V C.A. R7D-APA3H/-APA5H/-AP01H/-AP02H/-AP04H
100 V AC: R7D-APA3L/-APA5L/-AP01L/-AP02L/-AP04L
Servoazionamento c.a.
B1
1
2
Fusibile
L1
L2
L1C
L2C
Aree visualizzazione/impostazioni
P1
R
T
N1
Rilevamento
tensione
∼
∼
+
−
+
−
Guida
relè
+
Conversione
−
CC/CC
CN4
Uscita monitoraggio
analogico
+5 V
0 V
CHARGE
Rilevamento
tensione
±5 V
+16,5 V
+5 V
±15 V
POWER
Conversione
B2
P2
(vedere nota).
N2
Protezione da sovra-
Guida
gate
tensione
analogica
CN3
Console di programmazione/
computer
corrente guida gate
Generazione
PWM
Amp corrente
digitale
Elaborazione
comando
corrente
Porta seriale
Interfaccia
Elaborazione
segnale
encoder
Controllo
velocità
U
V
W
W
CN2
Rilevamento
corrente
ASIC
CN1
Elaborazione
impulso di
comando
Controllo
posizione
CPU
I/O
Nota Solo su R7D-AP04H/AP04L.
Servomotore c.a.
U
V
Ingresso impulsi
di comando
Controllo I/O
RS422
Capitolo 1
M
A
1-7
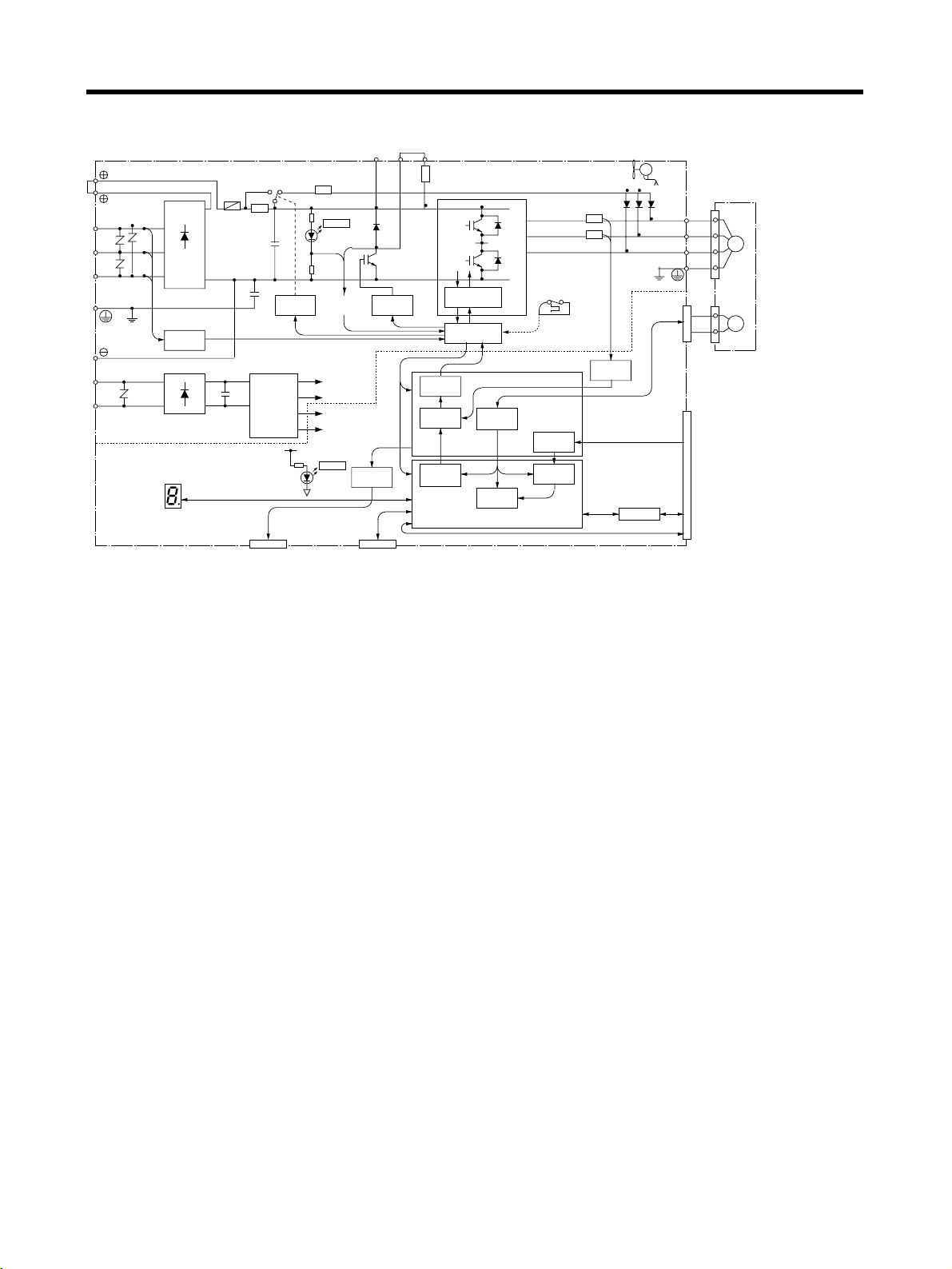
Page 19
Introduzione
■ 200 V C.A. R7D-AP08H
Capitolo 1
Servoazionamento c.a.
1
2
L1
L2
L3
L1C
L2C
Aree visualizzazione/impostazioni
P
R
S
T
N
Rilevamento
tensione
+~
-
~
Fusibile
+
-
versione
CC/CC
CN4
Uscita monitoraggio
analogico
Con-
B3
B2
B1
CHARGE
+
-
P
U
V
W
Ventilatore
±12 V
W
Servomotore c.a.
U
V
M
N
Guida
relè
+5 V
Rilevamento
tensione
±5 V
+16,5 V
+5 V
±15 V
POWER
0 V
Guida
gate
Conversione
tensione
analogica
CN3
Console di programmazione/
computer
Protezione da sovra-
corrente guida gate
Generazione
PWM
Amp corrente
digitale
Elaborazione
comando
corrente
Porta seriale
Interfaccia
Elaborazione
segnale
encoder
Controllo
velocità
ASIC
Elaborazione
impulso
di comando
Controllo
posizione
CPU
Termistore
Rilevamento
corrente
CN2
A
CN1
Ingresso
impulsi di comando
I/O
Controllo I/O
RS422
1-8
Page 20
2
Capitolo 2
Modelli e specifiche
standard
2-1 Modelli standard
2-2 Dimensioni esterne per montaggio
2-3 Specifiche Servoazionamento
2-4 Specifiche Servomotore
2-5 Specifiche rapporto di riduzione
2-6 Specifiche dei cavi e dei connettori
2-7 Specifiche delle morsettiere per il Servoaziona-
mento e dei cavi
2-8 Specifiche della Console di Programmazione
2-9 Specifiche resistenza di rigenerazione esterna
2-10 Reattanze c.c.
Page 21
Modelli e specifiche standard
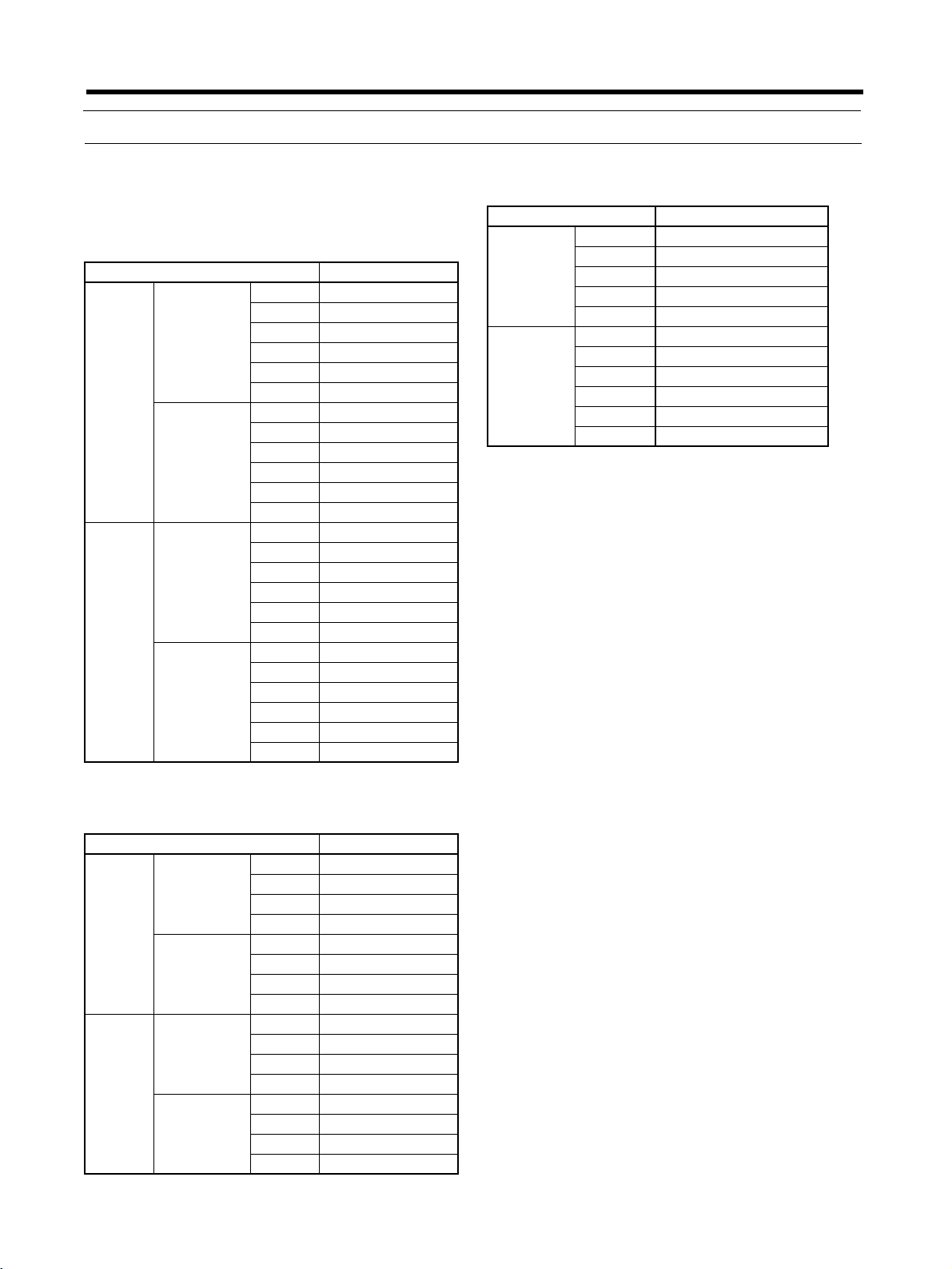
2-1 Modelli standard
Capitolo 2
Servomotori
■
Servomotori di tipo cilindrico da
●
3.000 giri/min
Specifiche Modello
Senza
freno
Con freno Albero in linea
Albero in linea
senza chiavetta
Albero in linea
con chiavetta
senza chiavetta
Albero in linea
con chiavetta
30 W R7M-A03030
50 W R7M-A05030
100 W R7M-A10030
200 W R7M-A20030
400 W R7M-A40030
750 W R7M-A75030
30 W R7M-A03030-S1
50 W R7M-A05030-S1
100 W R7M-A10030-S1
200 W R7M-A20030-S1
400 W R7M-A40030-S1
750 W R7M-A75030-S1
30 W R7M-A03030-B
50 W R7M-A05030-B
100 W R7M-A10030-B
200 W R7M-A20030-B
400 W R7M-A40030-B
750 W R7M-A75030-B
30 W R7M-A03030-BS1
50 W R7M-A05030-BS1
100 W R7M-A10030-BS1
200 W R7M-A20030-BS1
400 W R7M-A40030-BS1
750 W R7M-A75030-BS1
Servoazionamenti
■
Specifiche Modello
Monofase
100 V c.a.
Monofase
200 V c.a.
30 W R7D-APA3L
50 W R7D-APA5L
100 W R7D-AP01L
200 W R7D-AP02L
400 W R7D-AP04L
30 W R7D-APA3H
50 W R7D-APA5H
100 W R7D-AP01H
200 W R7D-AP02H
400 W R7D-AP04H
750 W R7D-AP08H
Servomotori di tipo cubico da
●
3.000 giri/min
Specifiche Modello
Senza
freno
Con freno Albero in linea
Albero in linea
senza chiavetta
Albero in linea
con chiavetta
senza chiavetta
Albero in linea
con chiavetta
100 W R7M-AP10030
200 W R7M-AP20030
400 W R7M-AP40030
750 W R7M-AP75030
100 W R7M-AP10030-S1
200 W R7M-AP10030-S1
400 W R7M-AP40030-S1
750 W R7M-AP75030-S1
100 W R7M-AP10030-B
200 W R7M-AP20030-B
400 W R7M-AP40030-B
750 W R7M-AP75030-B
100 W R7M-AP10030-BS1
200 W R7M-AP20030-BS1
400 W R7M-AP40030-BS1
750 W R7M-AP75030-BS1
2-2
Page 22
Modelli e specifiche standard
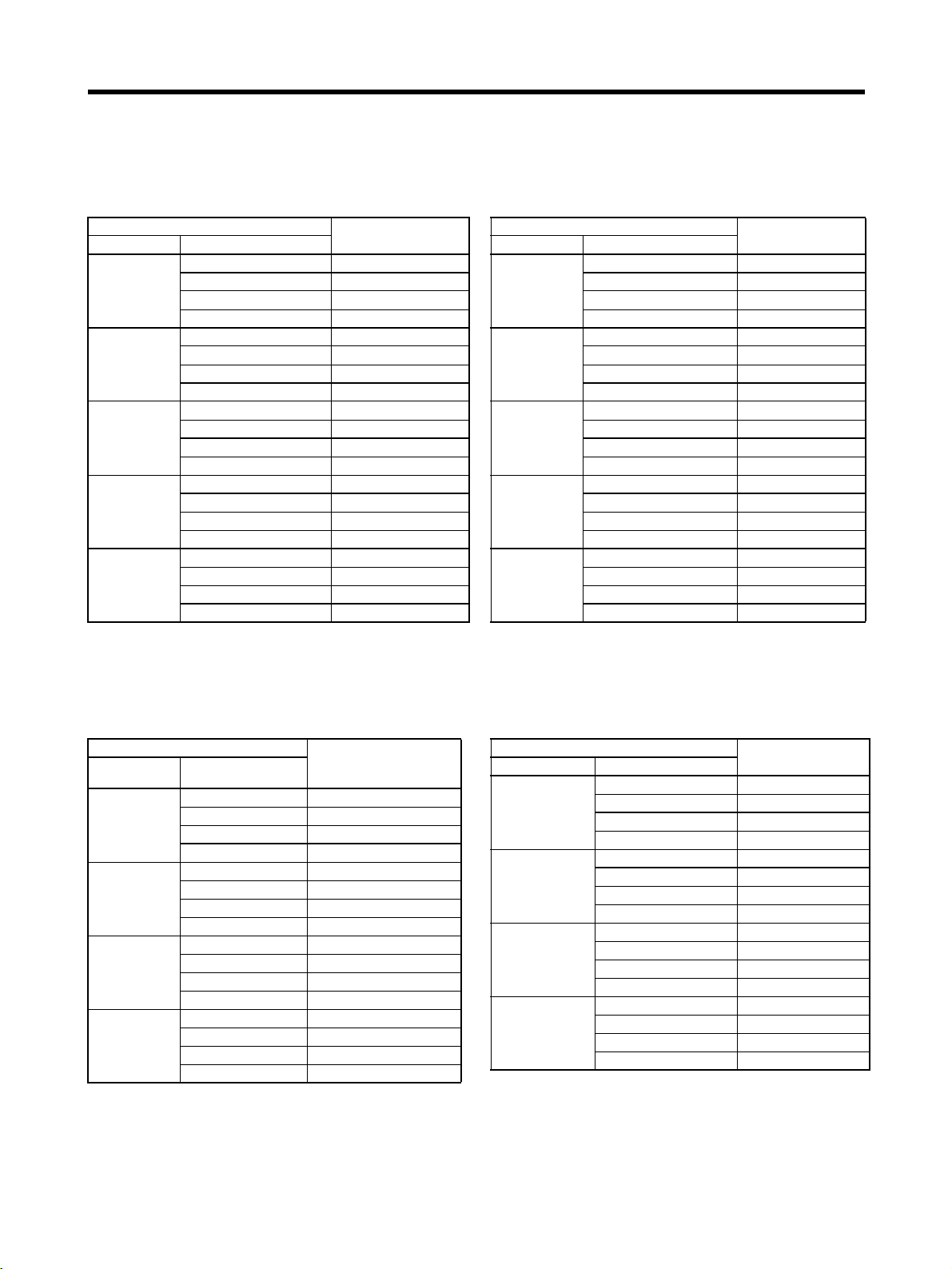
Servomotore con riduttore (albero con chiavetta)
■
Capitolo 2
Per Servomotori di tipo cilindrico
●
(gioco meccanico = 3′ max.)
Specifiche Modello
Servomotore Rapporto di riduzione
50 W 1/5 R7G-VRSFPB05B50
1/9 R7G-VRSFPB09B50
1/15 R7G-VRSFPB15B50
1/25 R7G-VRSFPB25B50
100 W 1/5 R7G-VRSFPB05B100
1/9 R7G-VRSFPB09B100
1/15 R7G-VRSFPB15B100
1/25 R7G-VRSFPB25B100
200 W 1/5 R7G-VRSFPB05B200
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB09B100
1/25 R7G-VRSFPB25C200
400 W 1/5 R7G-VRSFPB05C400
1/9 R7G-VRSFPB09C400
1/15 R7G-VRSFPB09B100
1/25 R7G-VRSFPB25D400
750 W 1/5 R7G-VRSFPB05C750
1/9 R7G-VRSFPB09D750
1/15 R7G-VRSFPB15D750
1/25 R7G-VRSFPB25E750
Per Servomotori di tipo cilindrico
●
(gioco meccanico = 45′ max.)
Specifiche Modello
Servomotore Rapporto di riduzione
50 W 1/5 R7G-RGSF05B50
1/9 R7G-RGSF09B50
1/15 R7G-RGSF15B50
1/25 R7G-RGSF25B50
100 W 1/5 R7G-RGSF05B100
1/9 R7G-RGSF09B100
1/15 R7G-RGSF15B100
1/25 R7G-RGSF25B100
200 W 1/5 R7G-RGSF05B200
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
400 W 1/5 R7G-RGSF05C400
1/9 R7G-RGSF09C400
1/15 R7G-RGSF15C400
1/25 R7G-RGSF25C400
750 W 1/5 R7G-RGSF05C750
1/9 R7G-RGSF09C750
1/15 R7G-RGSF15C750
1/25 R7G-RGSF25C750
Note
Non vi sono riduttori per i servomotori 30-W.
Per Servomotori di tipo cubico
●
(gioco meccanico = 3′ max.)
Specifiche Modello
Servomotore Rapporto di
100 W 1/5 R7G-VRSFPB05B100P
200 W 1/5 R7G-VRSFPB05B200P
400 W 1/5 R7G-VRSFPB05C400P
750 W 1/5 R7G-VRSFPB05C750P
riduzione
1/9 R7G-VRSFPB09B100P
1/15 R7G-VRSFPB15B100P
1/25 R7G-VRSFPB25C100P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25C200P
1/9 R7G-VRSFPB09C400P
1/15 R7G-VRSFPB15C400P
1/25 R7G-VRSFPB25D400P
1/9 R7G-VRSFPB09D750P
1/15 R7G-VRSFPB15D750P
1/25 R7G-VRSFPB25E750P
Note
Non vi sono riduttori per i servo-motori 30-W.
Per Servomotori di tipo cubico
●
(gioco meccanico = 45′ max.)
Specifiche Modello
Servomotore Rapporto di riduzione
100 W 1/5 R7G-RGSF05B100P
1/9 R7G-RGSF09B100P
1/15 R7G-RGSF15B100P
1/25 R7G-RGSF25B100P
200 W 1/5 R7G-RGSF05B200P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
400 W 1/5 R7G-RGSF05C400P
1/9 R7G-RGSF09C400P
1/15 R7G-RGSF15C400P
1/25 R7G-RGSF25C400P
750 W 1/5 R7G-RGSF05C750P
1/9 R7G-RGSF09C750P
1/15 R7G-RGSF15C750P
1/25 R7G-RGSF25C750P
2-3
Page 23
Modelli e specifiche standard
Capitolo 2
Unità morsettiere per CN1
■
Specifiche Modello
Morsettiera
Cavo Servoazionamento
Cavo Posizione
Unità di
controllo
Per CS1W-NC113/133
CJ1W-NC113/133
C200HW-NC113
C200H-NC112
3F88M-DRT141
(Nessuna comunicazione
supportata)
Per CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
C200HW-NC213/413
C500-NC113/211
C200H-NC211
(Nessuna comunicazione
supportata)
Per CS1W-HCP22
CQM1H-PLB21
CQM1-CPU43-V1
(Nessuna comunicazione
supportata)
Per CS1W-NC213/233/413/433
CJ1W-NC213/233/413/433
(Comunicazioni supportate)
Nessuna comunica-
zione supportata
Comunicazioni
supportate.
Per CQM1H-PLB21,
CQM1-CPU43-V1
Per C200H-NC112 0,5 m XW2Z-050J-A4
Per C200H-NC211,
C500-NC113/211
Per CS1W-NC113,
C200HW-NC113
Per CS1W-NC213/413,
C200HW-NC213/413
Per CS1W-NC133 0,5 m XW2Z-050J-A12
Per CS1W-NC233/433 0,5 m XW2Z-050J-A13
Per CJ1W-NC113 0,5 m XW2Z-050J-A16
Per CJ1W-NC213/413 0,5 m XW2Z-050J-A17
Per CJ1W-NC133 0,5 m XW2Z-050J-A20
Per CJ1W-NC233/433 0,5 m XW2Z-050J-A21
Per CS1W-HCP22
(1 asse)
Per CS1W-HCP22
(2 assi)
Per 3F88M-DRT141 0,5 m XW2Z-050J-A25
1 m XW2Z-100J-B5
2 m XW2Z-200J-B5
1 m XW2Z-100J-B7
2 m XW2Z-200J-B7
0,5 m XW2Z-050J-A3
1 m XW2Z-100J-A3
1 m XW2Z-100J-A4
0,5 m XW2Z-050J-A5
1 m XW2Z-100J-A5
0,5 m XW2Z-050J-A8
1 m XW2Z-100J-A8
0,5 m XW2Z-050J-A9
1 m XW2Z-100J-A9
1 m XW2Z-100J-A12
1 m XW2Z-100J-A13
1 m XW2Z-100J-A16
1 m XW2Z-100J-A17
1 m XW2Z-100J-A20
1 m XW2Z-100J-A21
0,5 m XW2Z-050J-A22
1 m XW2Z-100J-A22
0,5 m XW2Z-050J-A23
1 m XW2Z-100J-A23
1 m XW2Z-100J-A25
XW2B-20J6-1B
XW2B-40J6-2B
XW2B-20J6-3B
XW2B-40J6-4A
Cavo di comando per CN1
■
Specifiche Modello
Cavo di comando multiuso
(con connettore ad una estremità)
Cavo blocco connettori 1 m R88A-CTU001N
Blocchi connettori XW2B-40F5-P
Cavo Servomotore
■
Specifiche Modello
Per Servomotori senza
freno (tutti i tipi)
Per Servomotori con
freno (tutti i tipi)
Connettori cavi periferici
■
Specifiche Modello
Cavo monitor analogico (CN4) 1 m R88A-CMW001S
Cavo monitor computer (CN3) DOS 2 m R7A-CCA002P2
Connettore di comando I/O (CN1) R88A-CNU01C
Connettore encoder (CN2) R7A-CNA01R
Connettore encoder (estremità Servomotore) R7A-CNA02R
Console di programmazione
■
Specifiche Modello
Da tenere in mano (con cavo da 1 m) R7A-PR02A
Resistenze di rigenerazione
■
1 m R88A-CPU001S
2 m R88A-CPU002S
2 m R88A-CTU002N
3 m R7A-CEA003S
5 m R7A-CEA005S
10 m R7A-CEA010S
15 m R7A-CEA015S
20 m R7A-CEA020S
3 m R7A-CEA003B
5 m R7A-CEA005S
10 m R7A-CEA010B
15 m R7A-CEA015B
20 m R7A-CEA020B
PC98 2 m R7A-CCA002P3
esterne
Specifiche Modello
Resistenza 220 W 47
Reattori c.c.
■
Specifiche Modello
Per R7D-APA3L/APA5L/APA01L R88A-PX5063
Per R7D-AP02L R88A-PX5062
Per R7D-AP04L R88A-PX5061
Per R7D-APA3H/APA5H/AP01H R88A-PX5071
Per R7D-AP02H R88A-PX5070
Per R7D-AP04H R88A-PX5069
Per R7D-AP08H R88A-PX5061
Ω
R88A-RR22047S
2-4
Staffe pannello frontale
■
Specifiche Modello
Per le serie SMARTSTEP A R88A-TK01W
Page 24

Modelli e specifiche standard
Capitolo 2
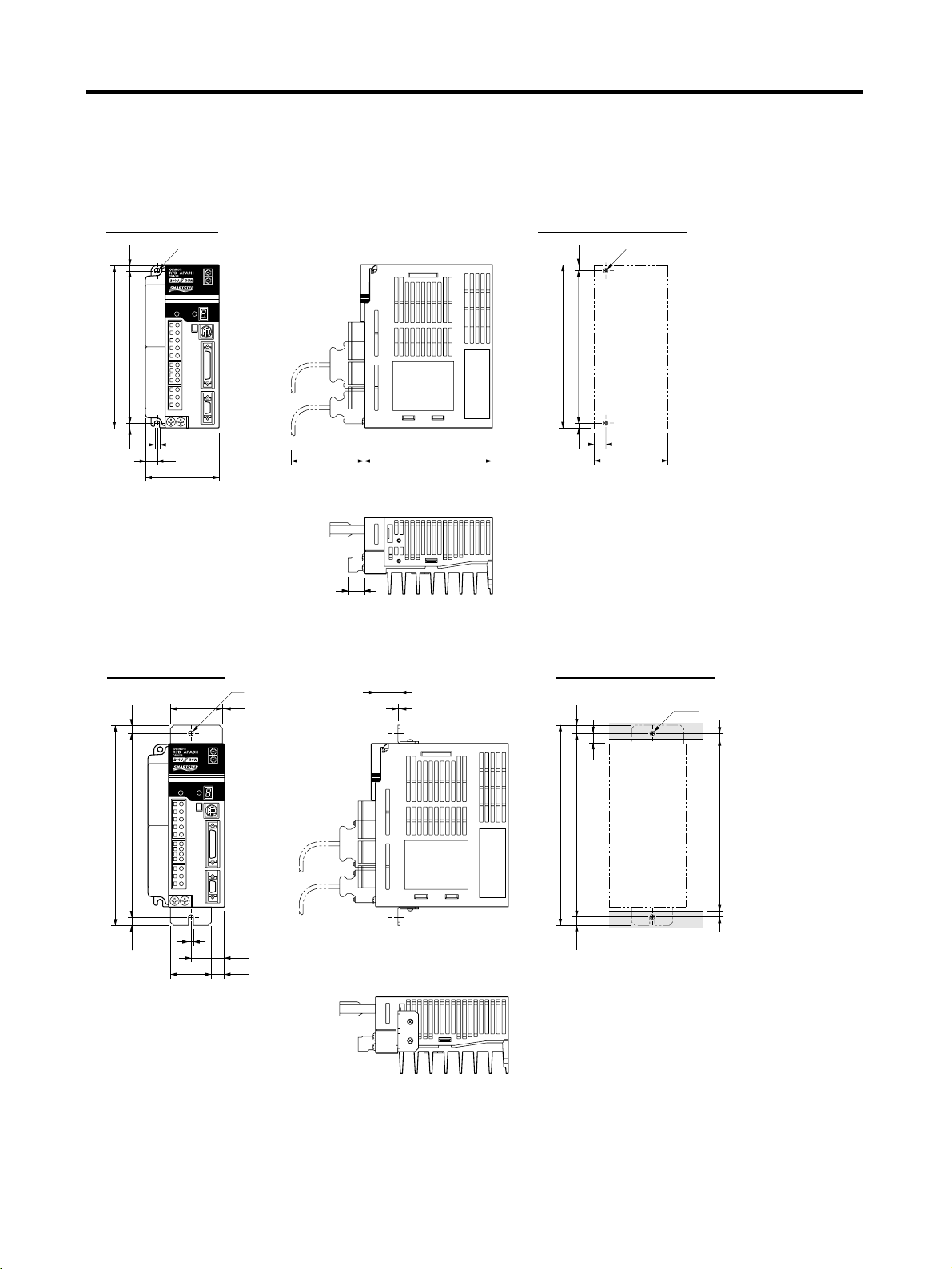
2-2 Dimensioni esterne per montaggio
2-2-1 Servoazionamenti
Monofase 100 V c.a. R7D-APA3L/-APA5L/-AP01L/-AP02L (da 30 W a 200 W)
■
monofase 200 V c.a. R7D-APA3H/-APA5H/-AP01H/-AP02H (da 30 W a 200 W)
Montaggio a parete
●
Dimensioni esterne
Dimensioni di installazione
Due, M4
5,5
160
55
(75) 130
17
Montaggio pannello frontale (con staffe di montaggio)
●
Dimensioni esterne
diametro 5
1,5
52
7,5
24,5
2
160
Dimensioni di installazione
149,5±0,5
(5)
7,5
10
5
55
Due, M4
6
195
180
(7,5)
195
180±0,5
5
32,5
11,542
(7,5)
(168)
6
2-5
Page 25
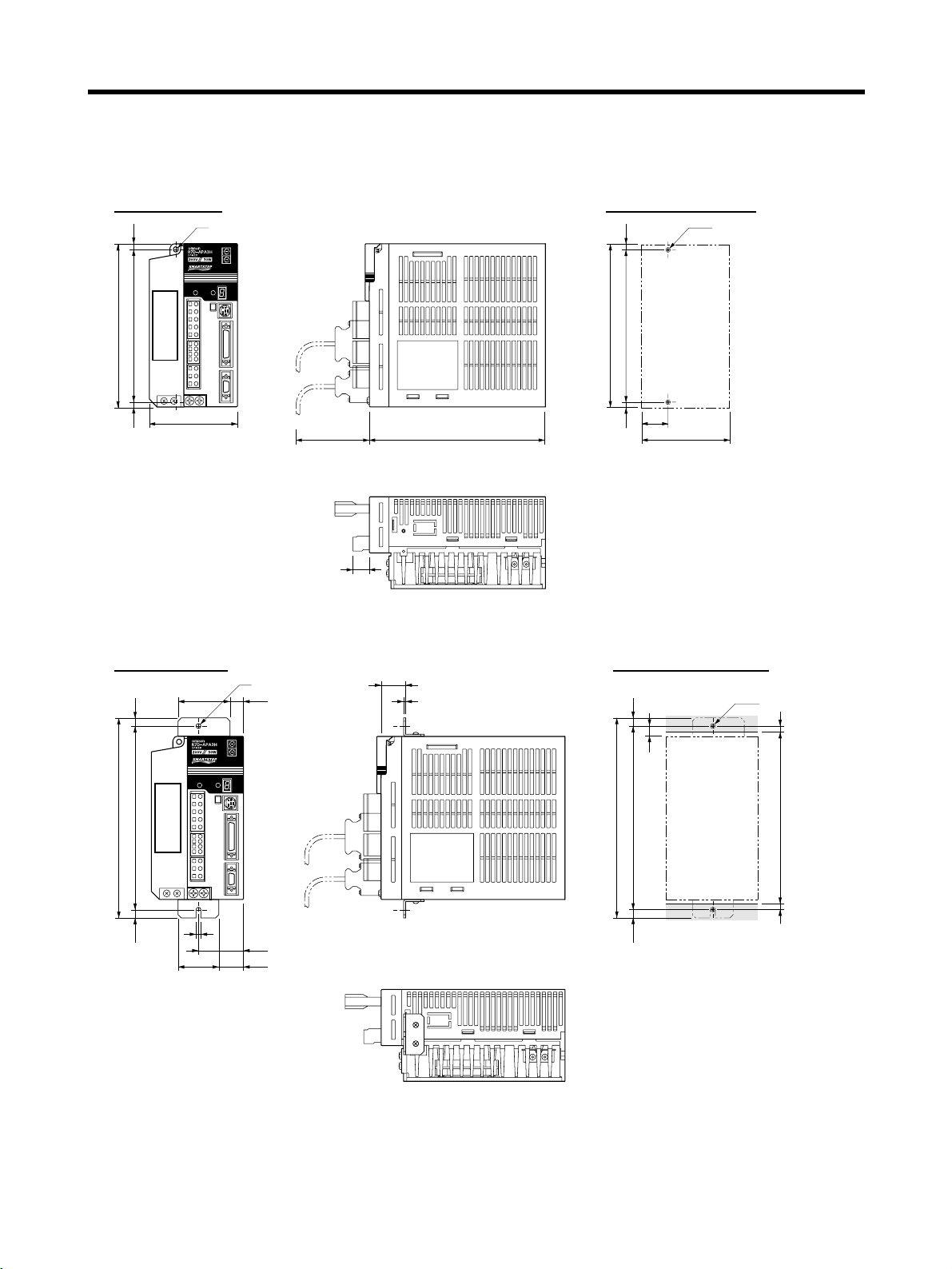
Modelli e specifiche standard
Monofase 100 V c.a. R7D-AP04L (400 W)
■
monofase 200 V c.a. R7D-AP04H (400 W)
Montaggio a parete
●
Dimensioni esterne
diametro 5
Dimensioni di installazione
5,5
Due, M4
Capitolo 2
160
149,5 5,5
5
(5)
12
75
Montaggio pannello frontale (con staffe di montaggio)
●
(75) 130
17
Dimensioni esterne
diametro 5
7,5
52 1,5
24,5
2
160
149,5±0,5
12
(5)
75
Dimensioni di installazione
7,5(7,5)
10
Due, M4
2-6
195
180
(7,5)
195
180±0,5
5
32,5
11,542
(168) 66
Page 26
Modelli e specifiche standard
Monofase/trifase 200 V c.a. R7D-AP08H (750 W)
■
Montaggio a parete
●
Dimensioni esterne
diametro 5
Capitolo 2
Dimensioni di installazione
5,5
Due, M4
160
149,5 5,5
(5)
Montaggio pannello frontale (con staffe di montaggio)
●
90
(75) 180
17
160
149,5±0,5
(5)
27
90
Dimensioni esterne Dimensioni di installazione
7,5(7,5)
diametro 5
52 12,5
24,5
2
7,5(7,5)
10
Due, M4
195
180
195
180±0,5
5
43,5
42
22,5
(168) 66
2-7
Page 27
Modelli e specifiche standard
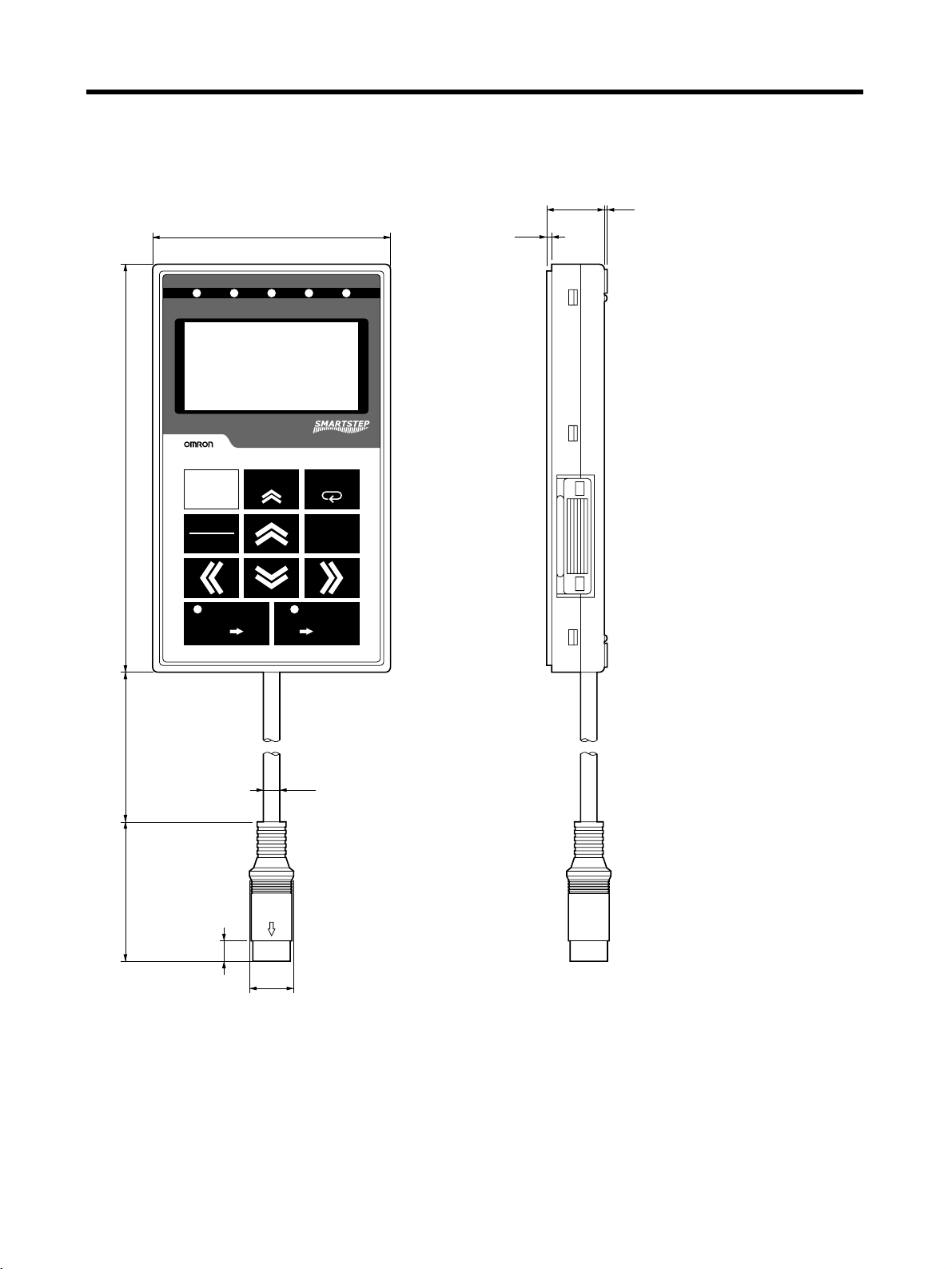
2-2-2 Console di Programmazione
Console di programmazione R7A-PR02A da tenere in mano
■
70
17
1,5
0,8
Capitolo 2
1201000
B.B INP
R7A–PR02A
RESET
JOG
RUN
READ
DRIVER PR PR DRIVER
TGON REF POWER
VCMP
CONSOLE DI PROGRAMMAZIONE
SCROLL MODE/SET
WRITE
DATA
2-8
diametro 4,8
42
6
diametro 13,2
Page 28
Modelli e specifiche standard
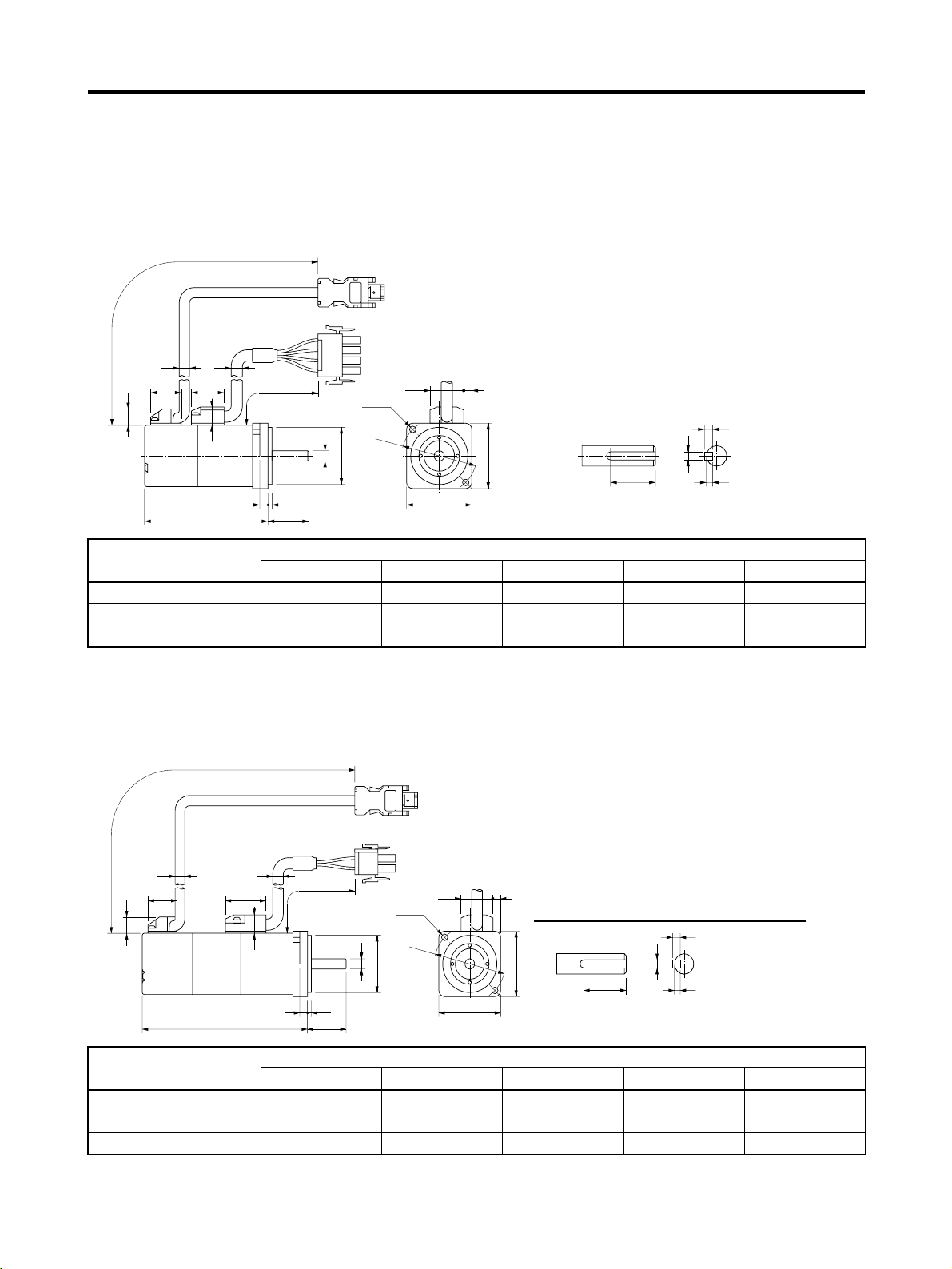
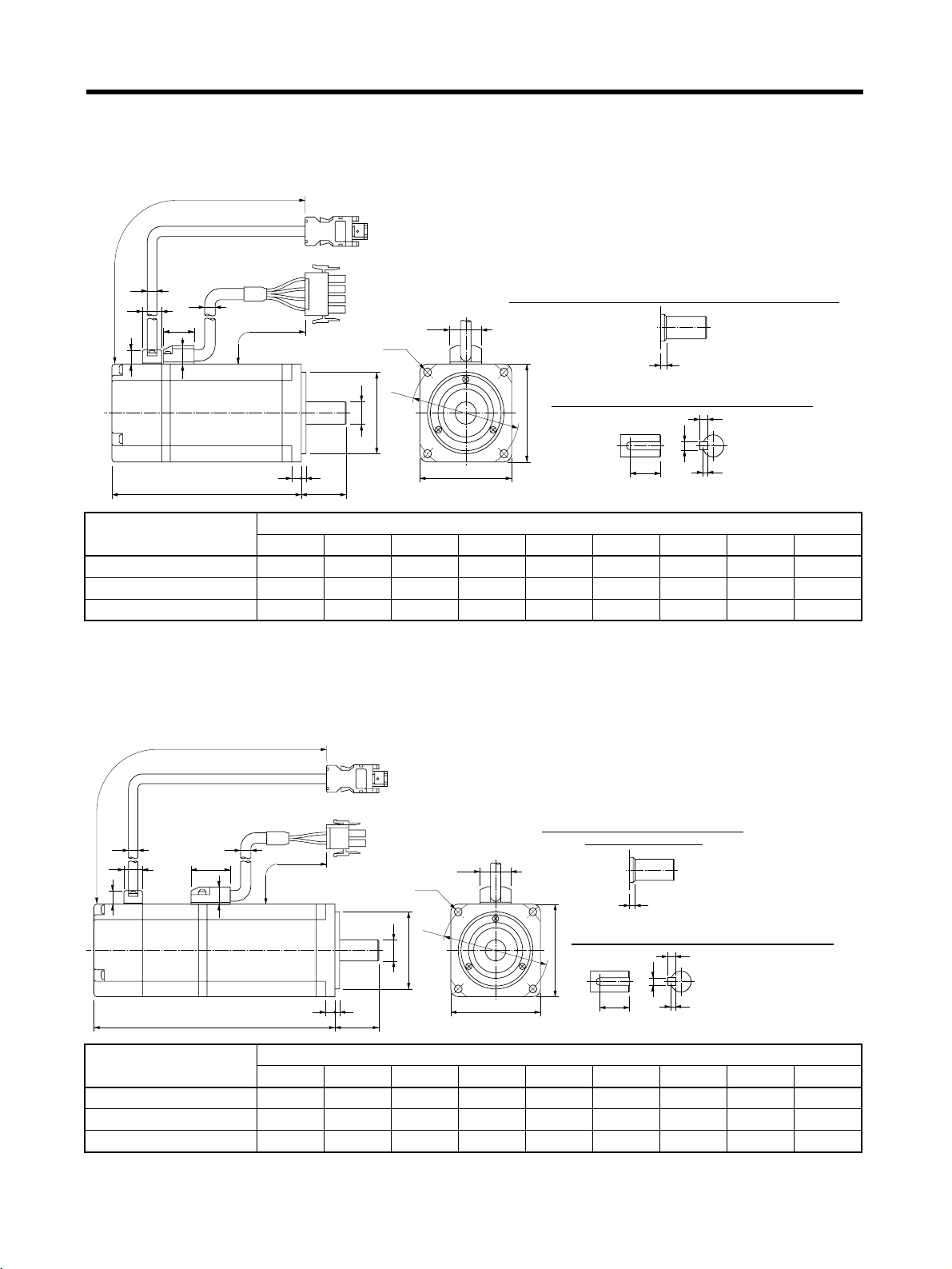
2-2-3 Servomotori
Servomotori di tipo cilindrico senza freno
■
30 W/50 W/100 W R7M-A03030(-S1)/-A05030(-S1)/-A10030(-S1)
●
300±30
Capitolo 2
diametro 6
9,5
diametro 7
19,5 20
300±30
11
LL 25
diametro S
diametro 30h7
21,5 5
Due, diametro 4,3
diametro 46
Dimensioni estremità albero con chiavetta (-S1)
h
b
40
14
405 2,5
t1
Modello Dimensioni (mm)
LL S b h t1
R7M-A03030-@ 69,5 6h6 2 2 1.2
R7M-A05030-@ 77 6h6 2 2 1,2
R7M-A10030-@ 94.5 8h6 3 3 1,8
Servomotori di tipo cilindrico con freno
■
30 W/50 W/100 W R7M-A03030-B(S1)/-A05030-B(S1)/-A10030-B(S1)
●
300±30
diametro 6 diametro 7
19,5
9,5
27
LL 25
11
300±30
dia-
S
metro
Due, diametro 4,3
diametro 46
diametro 30h7
21,5
5
Dimensioni estremità albero con chiavetta (-BS1)
h
b
40
14
405 2,5
t1
Modello Dimensioni (mm)
LL S b h t1
R7M-A03030-B@ 101 6h6 2 2 1,2
R7M-A05030-B@ 108,5 6h6 2 2 1,2
R7M-A10030-B@ 135 8h6 3 3 1,8
2-9
Page 29
Modelli e specifiche standard
Servomotori di tipo cilindrico senza freno
■
200 W/400 W/750 W R7M-A20030(-S1)/-A40030(-S1)/-A75030(-S1)
●
300±30
diametro 6
13
9
diametro 7
20
11
300±30
21,5
Quattro, diametro Z
diametro D1
diametro S
diametro D2
Dimensioni della sezione di uscita dei servomotori da 750 W
Dimensioni estremità albero con chiavetta (-S1)
C
Capitolo 2
2
5
5
G3
LL LR
C
QK
3
Modello Dimensioni (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-@ 96,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-@ 124,5 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-@ 145 40 80 90 70h7 8 7 16h6 30
Servomotori di tipo cilindrico con freno
■
200 W/400 W/750 W R7M-A20030-B(S1)/-A40030-B(S1)/-A75030-B(S1)
●
300±30
diametro 6
13
9
diametro 7
27
11
300±30
21,5
Quattro, diametro Z
diametro D1
diametro S
diametro D2
Dimensioni della sezione di uscita dei
servomotori da 750 W
2
Dimensioni estremità albero con chiavetta (-BS1)
C
5
5
LL LR
G3
C
QK
3
Modello Dimensioni (mm)
LL LR C D1 D2 G Z S QK
R7M-A20030-B@ 136 30 60 70 50h7 6 5,5 14h6 20
R7M-A40030-B@ 164 30 60 70 50h7 6 5,5 14h6 20
R7M-A75030-B@ 189,5 40 80 90 70h7 8 7 16h6 30
2-10
Page 30
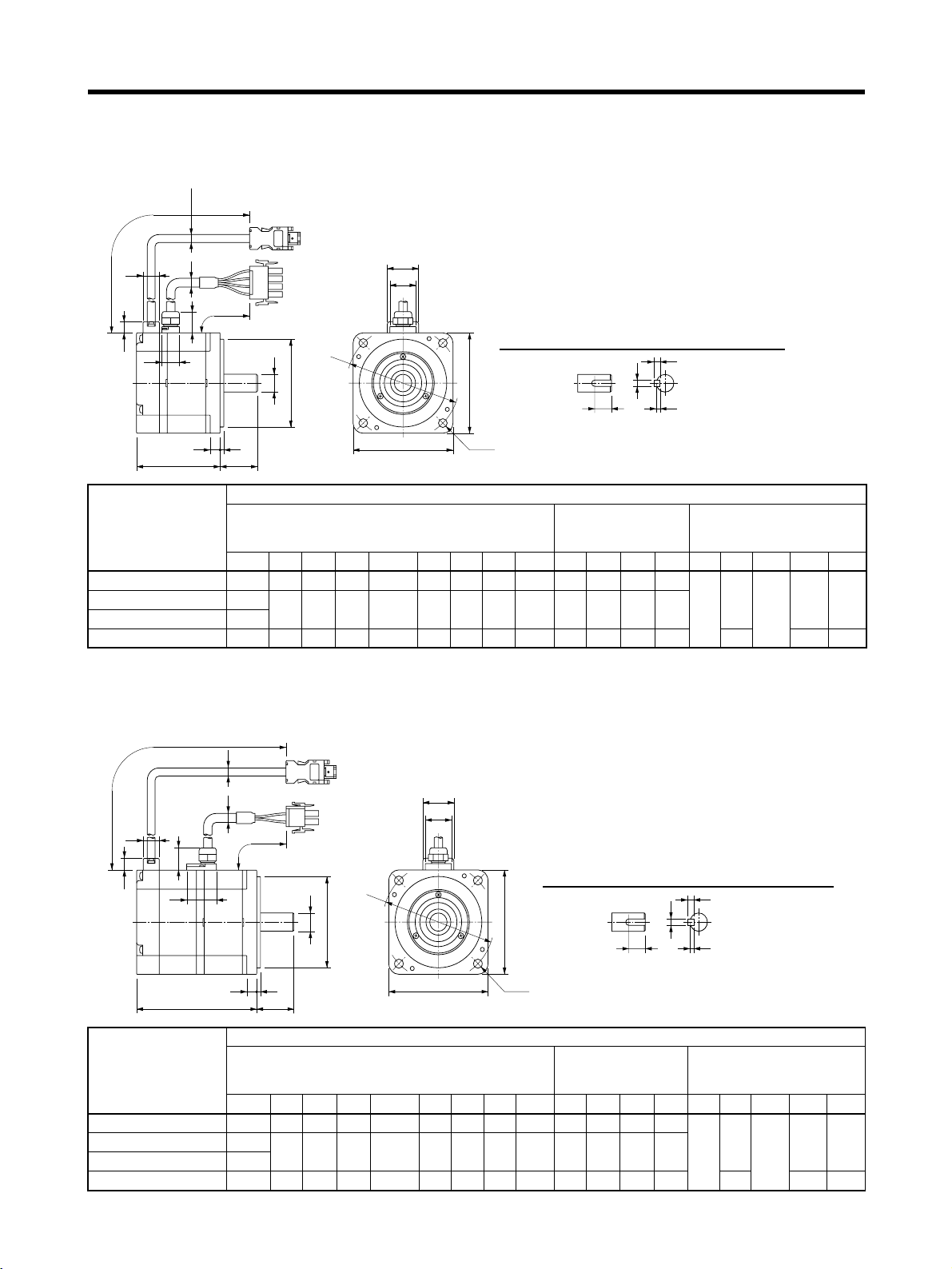
Modelli e specifiche standard
Servomotori di tipo cubico senza freno
■
100 W/200 W/400 W/750 W R7M-AP10030(-S1)/-AP20030(-S1)/-AP40030(-S1)/AP75030(-S1)
●
diametro 6
300±30
Capitolo 2
13
A1
diametro 7
300±30
A2
A5
F
G
LL
LR
diametro D1
diametro S
diametro D2
A3
A4
Dimensioni estremità albero con chiavetta (-S1)
h
b
C
QK
C
Quattro, diametro Z
t1
Modello Dimensioni (mm)
Dimensioni Servomotore base Con chiave
Dimensioni uscita cavo
(dimensioni
estremità albero)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-@ 62 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1,8 9 18 25 21 14
R7M-AP20030-@ 67 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-@ 87
R7M-AP75030-@ 86,5 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 19
Servomotori di tipo cubico con freno
■
100 W/200 W/400 W/750 W R7M-AP10030-B(S1)/-AP20030-B(S1)/-AP40030-B(S1)/AP75030-B(S1)
●
300±30
diametro 6
A3
diametro 7
13
A2
A1
A5
LL
300±30
diametro D1
diametro S
diametro D2
GF
LR
A4
Dimensioni estremità albero con chiavetta (-BS1)
h
b
C
QK
C
Quattro, diametro Z
t1
Modello Dimensioni (mm)
Dimensioni Servomotore base Con chiave
Dimensioni uscita cavo
(dimensioni
estremità albero)
LL LR C D1 D2 F G Z S QK b h t1 A1 A2 A3 A4 A5
R7M-AP10030-B@ 91 25 60 70 50h7 3 6 5,5 8h6 14 3 3 1,8 9 18 25 21 23
R7M-AP20030-B@ 98,5 30 80 90 70h7 3 8 7 14h6 16 5 5 3
R7M-AP40030-B@ 118,5
R7M-AP75030-B@ 120 40 120 145 110h7 3,5 10 10 16h6 22 5 5 3 28 38 26
2-11
Page 31

Modelli e specifiche standard
Capitolo 2
2-2-4 Riduttori
Per Servomotori di tipo cilindrico (gioco meccanico = 3′ max.)
■
Modello Dimensioni (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Dimensioni
50 W 1/5 R7G-VRSFPB05B50 67,5 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,55
1/9 R7G-VRSFPB09B50 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/15R7G-VRSFPB15B50 78 3252 404660 50 45103 6 1220M4M5 12164 4 2,50,7
1/25R7G-VRSFPB25B50 78 3252 404660 50 45103 6 1220M4M5 12164 4 2,50,7
100 W 1/5 R7G-VRSFPB05B100 67,5 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,55
1/9 R7G-VRSFPB09B100 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/15 R7G-VRSFPB15B100 78 32 52 40 46 60 50 45 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,7
1/25 R7G-VRSFPB25C100 92 50 78 40 46 90 70 62 17 3 6 19 30 M4 M6 20 22 6 6 3,5 1,7
200 W 1/5 R7G-VRSFPB05B200 72,5 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,72
1/9 R7G-VRSFPB09C400 100 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-VRSFPB09B1001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
1/25R7G-VRSFPB25C4001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
400 W 1/5 R7G-VRSFPB05C400 89,5 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 1,7
1/9 R7G-VRSFPB09C400 100 50 78 60 70 90 70 62 17 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-VRSFPB09B1001005078 607090 70 62173 8 1930M5M6 20226 6 3,52,1
1/25R7G-VRSFPB25D40010461986070115907518582440M5M820308743,2
750 W 1/5 R7G-VRSFPB05C750 93,5 50 78 80 90 90 70 62 17 3 10 19 30 M6 M6 20 22 6 6 3,5 2,1
1/9R7G-VRSFPB09D750110619880901159075185102440M6M820308743,8
1/15R7G-VRSFPB15D750110619880901159075185102440M6M820308743,8
1/25 R7G-VRSFPB25E750 135 75 125 80 90 135 110 98 17 5 10 32 55 M6 M10 20 45 10 8 5 7,2
chiave
QK b h t1
Peso
(kg)
Dimensioni
etro D1
@C2
Dimensioni chiave
Quattro, diametro Z1
QK
E3
F
diametro D4
diametro Sh6
G
LM
b
t1
T
LR
diametro D3h7
Quattro, dia. Z2
(profondità effettiva: l)
diametro D2
@C1
2-12
h
Page 32

Modelli e specifiche standard
Per Servomotori di tipo cilindrico (gioco meccanico = 45′ max.)
■
Modello Dimensioni (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Dimensioni chiave
50 W 1/5 R7G-RGSF05B5078 3252 40 46 60 50 4310 3 6 1220M4M5 12164 4 2,50,6
1/9 R7G-RGSF09B50 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/15R7G-RGSF15B5094 3252 40 46 60 50 4310 3 6 1220M4M5 12164 4 2,50,75
1/25R7G-RGSF25B5094 3252 40 46 60 50 4310 3 6 1220M4M5 12164 4 2,50,75
100 W 1/5 R7G-RGSF05B100 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/9 R7G-RGSF09B100 78 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,6
1/15 R7G-RGSF15B100 94 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,75
1/25 R7G-RGSF25B100 94 32 52 40 46 60 50 43 10 3 6 12 20 M4 M5 12 16 4 4 2,5 0,75
200 W 1/5 R7G-RGSF05B200 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,65
1/9 R7G-RGSF09C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-RGSF15C400114,55078 60 70 90 70 6418,53 8 1930M5M6 20226 6 3,52,5
1/25R7G-RGSF25C400114,55078 60 70 90 70 6418,53 8 1930M5M6 20226 6 3,52,5
400 W 1/5 R7G-RGSF05C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/9 R7G-RGSF09C400 98 50 78 60 70 90 70 64 18,5 3 8 19 30 M5 M6 20 22 6 6 3,5 2,1
1/15R7G-RGSF15C400114,55078 60 70 90 70 6418,53 8 1930M5M6 20226 6 3,52,5
1/25R7G-RGSF25C400114,55078 60 70 90 70 6418,53 8 1930M5M6 20226 6 3,52,5
750 W 1/5 R7G-RGSF05C750 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,2
1/9 R7G-RGSF09C750 106,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,3
1/15 R7G-RGSF15C750 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,6
1/25 R7G-RGSF25C750 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,6
Capitolo 2
QK b h t1
Peso
(kg)
Dimensioni
diametro D1
Dimensioni chiave
@C2
QK
Quattro, diametro Z1
G
E3
F
diametro D4
diametro Sh6
T
LM
b
t1
LR
diametro D3h7
Quattro, dia. Z2
(profondità effettiva:l)
diametro D2
@C1
h
2-13
Page 33

Modelli e specifiche standard
Per Servomotori di tipo cubico (gioco meccanico = 3′ max.)
■
Modello Dimensioni (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Dimensioni
100 W 1/5 R7G-VRSFPB05B100P 72,5 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,72
1/9 R7G-VRSFPB09B100P 83 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,77
1/15 R7G-VRSFPB15B100P 83 32 52 60 70 60 50 45 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,77
1/25 R7G-VRSFPB25C100P 92 50 78 60 70 90 70 62 17 3 10 19 30 M5 M6 20 22 6 6 3,5 1,8
200 W 1/5 R7G-VRSFPB05B200P 72,5 32 52 80 90 60 50 45 10 3 12 12 20 M6 M5 12 16 4 4 2,5 0,85
1/9 R7G-VRSFPB09C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/15 R7G-VRSFPB15C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/25 R7G-VRSFPB25C200P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
400 W 1/5 R7G-VRSFPB05C400P 93,5 50 78 80 90 90 70 62 17 3 10 19 30 M6 M6 20 22 6 6 3,5 1,8
1/9 R7G-VRSFPB09C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/15 R7G-VRSFPB15C400P 100 50 78 80 90 90 70 62 17 3 12 19 30 M6 M6 20 22 6 6 3,5 2,2
1/25R7G-VRSFPB25D400P109619880901159075185122440M6M820308743,4
750 W 1/5 R7G-VRSFPB05C750P 98 50 78 120 145 90 70 62 17 3 15 19 30 M8 M6 20 22 6 6 3,5 2,6
1/9R7G-VRSFPB09D750P11061981201451159075185152440M8M820308744,2
1/15R7G-VRSFPB15D750P11061981201451159075185152440M8M820308744,2
1/25 R7G-VRSFPB25E750P 155 75 125 120 145 135 110 98 17 5 15 32 55 M8 M10 20 45 10 8 5 7,8
Capitolo 2
chiave
QK b h t1
Dimensioni
E3
Quattro, diametro Z1
F
Quattro, dia. Z2
(profondità effettiva:l)
Peso
(kg)
diametro D1
Dimensioni chiave
@C2
QK
diametro D2
diametro D4
diametro Sh6
T
G
LM
b
t1
h
LR
diametro D3h7
@C1
2-14
Page 34

Modelli e specifiche standard
Per Servomotori di tipo cubico (gioco meccanico = 45′ max.)
■
Modello Dimensioni (mm)
LM LR C1 C2 D1 D2 D3 D4 E3 F G S T Z1 Z2 l Dimensioni
100 W 1/5 R7G-RGSF05B100P 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,8
1/9 R7G-RGSF09B100P 83 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,8
1/15 R7G-RGSF15B100P 99 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,95
1/25 R7G-RGSF25B100P 99 32 52 60 70 60 50 43 10 3 10 12 20 M5 M5 12 16 4 4 2,5 0,95
200 W 1/5 R7G-RGSF05B200P 83 32 52 80 90 60 50 43 10 3 12 12 20 M6 M5 12 16 4 4 2,5 0,75
1/9 R7G-RGSF09C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/15 R7G-RGSF15C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
1/25 R7G-RGSF25C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
400 W 1/5 R7G-RGSF05C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/9 R7G-RGSF09C400P 102 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,4
1/15 R7G-RGSF15C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
1/25 R7G-RGSF25C400P 118,5 50 78 80 90 90 70 64 18,5 3 10 19 30 M6 M6 20 22 6 6 3,5 2,8
750 W 1/5 R7G-RGSF05C750P 106,5 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,5
1/9 R7G-RGSF09C750P 106,5 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,5
1/15 R7G-RGSF15C750P 123 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,9
1/25 R7G-RGSF25C750P 123 50 78 120 145 90 70 64 18,5 3 15 19 30 M8 M6 20 22 6 6 3,5 2,9
Capitolo 2
chiave
QK b h t1
Dimensioni
E3
Quattro, diametro Z1
F
Quattro, dia. Z2
(profondità effettiva: l)
Peso
(kg)
diametro D1
Dimensioni chiave
@C2
QK
diametro D2
diametro D4
diametro Sh6
G
LM
b
t1
h
T
LR
diametro D3h7
@C1
2-15
Page 35

Modelli e specifiche standard
Capitolo 2
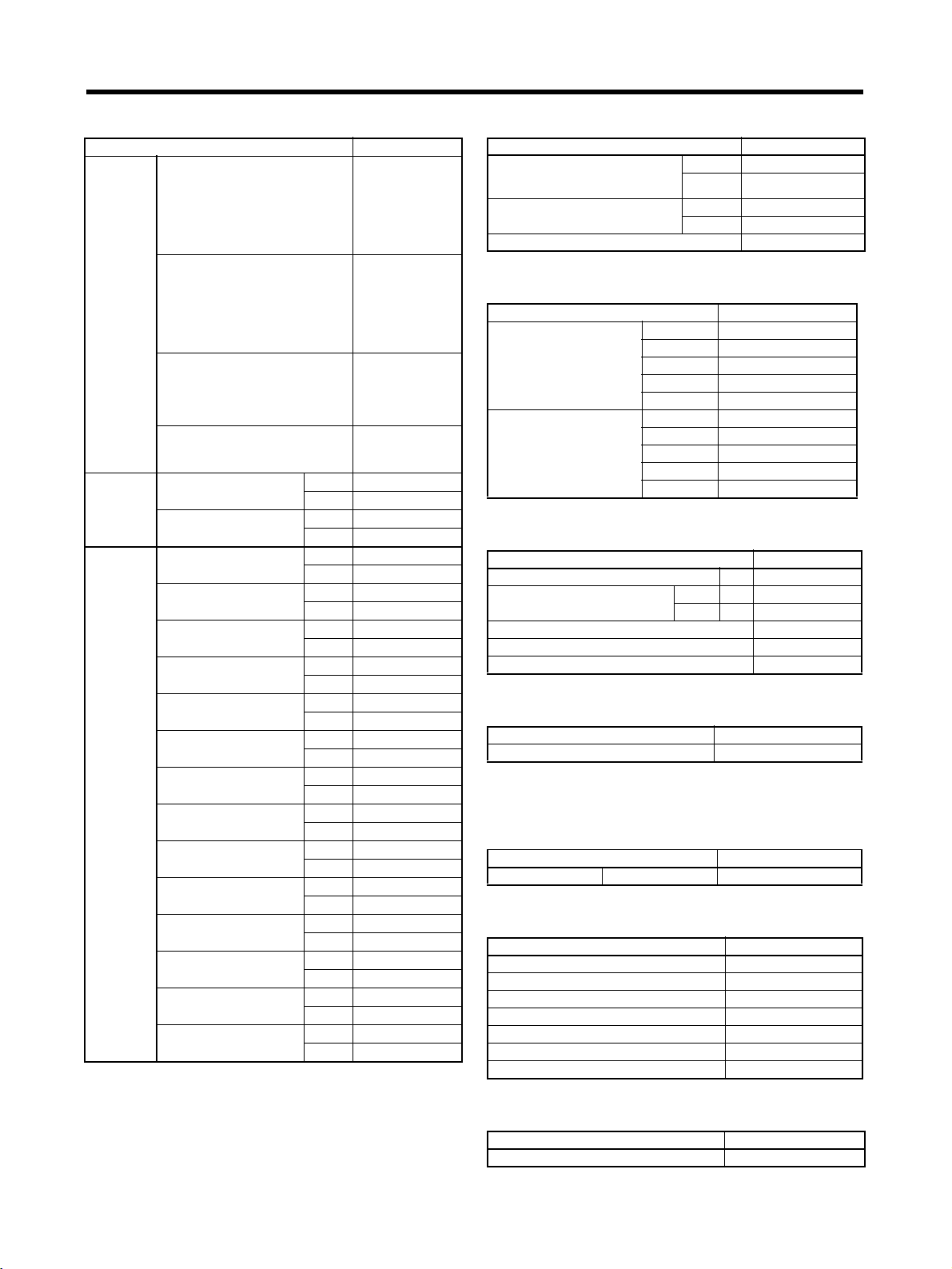
2-3 Specifiche Servoazionamento
Serie SMARTSTEP A R7D-AP@ Servoazionamenti
■
Selezionare un Servoazionamento adatto al Servomotore da impiegare.
2-3-1 Specifiche generali
Specifica Specifiche
Temperatura ambiente di
funzionamento
Umidità ambiente di funzionamento 90% max (senza condensa)
Temperatura ambiente di stoccaggio Da -20 a 85°C
Umidità ambiente di stoccaggio 90% max (senza condensa)
Atmosfera di stoccaggio ed opera-
tiva
Resistenza alle vibrazioni da 10 a 55 Hz, in direzione X, Y e Z con 0,1 mm in doppia ampiezza;
Resistenza di impatto
Resistenza di isolamento Tra morsetti di fissaggio e custodia: 0,5 MW min. (a 500 Vc.c.)
Rigidità dielettrica Tra morsetti di fissaggio e custodia: 1.500 V c.a. per 1 min. a 50/60 Hz
Struttura di protezione Incorporata nel pannello (IP10).
Da 0 a 55°C
Assenza di gas corrosivi.
2
accelerazione: 4,9 m/s
Accelerazione 19,6 m/s
Tra ogni segnale di comando e custodia: 500 V c.a. per 1 min
max.
2
max. in direzione X, Y e Z per 3 volte
Note 1.
Note 2.
Note 3.
Note 4.
2-16
I dati riportati qui sopra rispecchiano i risultati di test di valutazione individuali. I risultati possono differire in caso di valutazioni combinate.
Non effettuare in alcun caso un test della tensione di resistenza con un tester Megger sul
Servoazionamento. In caso contrario potrebbero essere danneggiati gli elementi interni.
A seconda delle condizioni operative alcuni componenti del Servoazionamento potrebbero
richiedere una manutenzione. Per ulteriori informazioni, fare riferimento alla sezione
5-5 Manutenzione periodica.
La durata di funzionamento prevista per il Servoazionamento è di 50,000 ore ad una temperatura ambiente media di 40
°
C e all‘80% della coppia nominale.
Page 36

Modelli e specifiche standard
Capitolo 2
2-3-2 Specifiche del prodotto
Specifiche di comando
■
Alimentazione 100 V c.a.
●
Specifica R7D-APA3L R7D-APA5L R7D-AP01L R7D-AP02L R7D-AP04L
Corrente d’uscita continua
(rms)
Corrente d’uscita massima
momentanea (rms)
Corrente di
ingresso
Dissipazione Circuiti
Metodo di controllo Servo completamente digitale
Feedback velocità 2.000 impulsi/giri, encoder incrementale
Metodo invertitore Metodo PM basato su IGBT
Frequenza PWM 11,7 kHz
Frequenza massima appli-
cabile (treno di impulsi)
Peso Circa 0,8 kg Circa 0,8 kg Circa 0,8 kg Circa 0,8 kg Circa 1,1 kg
Potenza applicabile al
Servomotore
Servomotore
applicabile
(R7M-)
Circuiti
principali
Circuiti di
controllo
principali
Circuiti di
controllo
Tipo a
cilindro
Tipo
cubico
0,42 A 0,6 A 0,89 A 2,0 A 2,6 A
1,3 A 1,9 A 2,8 A 6,0 A 8,0 A
Monofase 100/115 V c.a. (da 85 a 127 V) 50/60 Hz (metodo a doppio voltaggio)
Monofase 100/115 V c.a. (da 85 a 127 V) 50/60 Hz
3,1 W 4,6 W 6,7 W 13,3 W 20,0 W
13 W 13 W 13 W 13 W 13 W
250 kpps
30 W 50 W 100 W 200 W 400 W
A03030 A05030 A10030 A20030 A40030
– – AP10030 AP20030 AP40030
Alimentazione 200 V c.a. (ingresso monofase)
●
Specifica R7D-
APA3H
Corrente d’uscita
continua (rms)
Corrente d’uscita massima momentanea (rms)
Corrente di
ingresso
Dissipazione
Metodo di controllo Servo completamente digitale
Circuiti
principali
Circuiti di
controllo
Circuiti
principali
Circuiti di
controllo
0,42 A 0,6 A 0,89 A 2,0 A 2,6 A 4,4 A
1,3 A 1,9 A 2,8 A 6,0 A 8,0 A 13,9 A
Monofase 200/230 V c.a. (da 170 a 253 V) 50/60 Hz (solo per R7D-AP08H possibile
entrata trifase)
Monofase 200/230 V c.a. (da 170 a 253 V) 50/60 Hz
3,1 W 4,6 W 6,7 W 13,3 W 20 W 47 W
20 W 20 W 20 W 20 W 20 W 20 W
R7D-
APA5H
R7D-
AP01H
R7D-
AP02H
R7D-
AP04H
R7D-
AP08H
2-17
Page 37

Modelli e specifiche standard
Capitolo 2
Specifica R7D-
APA3H
Feedback velocità 2.000 impulsi/giri, encoder incrementale
Metodo invertitore Metodo PM basato su IGBT
Frequenza PWM 11,7 kHz
Frequenza massima
applicabile (treno di
impulsi)
Peso Circa
Potenza applicabile al
Servomotore
Servomotore applicabile
(R7M-)
Tipo a
cilindro
Tipo
cubico
250 kpps
0,8 kg
30 W 50 W 100 W 200 W 400 W 750 W
A03030 A05030 A10030 A20030 A40030 A75030
– – AP10030 AP20030 AP40030 AP75030
R7D-
APA5H
Circa
0,8 kg
R7D-
AP01H
Circa
0,8 kg
R7D-
AP02H
Circa
0,8 kg
2-3-3 Specifiche connettori
Segnale Funzione Condizione
L1 Ingresso alimentazioL2
L3
+1 Collegamento reat+2
– Uscita c.c. circuito
L1C Ingresso alimentaL2C
B1 Morsetti di collegaB2
B3
U Morsetti di collegaVBianco
WBlu
ne circuiti principali
tore c.c. per controllo
armoniche di alimentazione
principale (negativo)
zione circuiti di
comando
mento esterni per
resistenza alla rigenerazione
mento Servomotore
Massa a terra Si tratta dei connettori di massa a terra. Mettere a terra ad un minimo di 100 Ω
R7D–AP@H: Monofase 200/230 V c.a. (da 170 a 253 V c.a.) 50/60 Hz
R7D–AP@L: Monofase 100/115 V c.a. (da 85 a 127 V c.a.) 50/60 Hz
Nota: Solo il modello R7D-AP08H (750 W) ha un collegamento L3 che con-
sente un entrata trifase: Trifase 200/230 V c.a. (da 170 a 253 V c.a.) 50/60 Hz
generalmente in cortocircuito tra +1 e +2 )
Se viene richiesto un abbattimento delle armoniche collegare un reattore c.c.
tra +1 e +2.
Non collegare nulla
R7D-AP@H: Monofase 200/230 V c.a. (da 170 a 253 V c.a.) 50/60 Hz
R7D-AP@L: Monofase 100/115 V c.a. (da 85 a 127 V c.a.) 50/60 Hz
da 30 a 200 W: Non è possibile collegare nessuna resistenza di rigenerazione
esterna.
400 W: Questo contatto non deve essere generalmente collegato. Se l’energia
di rigenerazione è elevata, collegare una Resistenza di Rigenerazione Esterna
tra B1 e B2.
750 W: generalmente in cortocircuito tra B2 e B. Se l’energia di rigenerazione è
elevata, eliminare la barretta tra B2 e B3 e collegare una Resistenza di Rigenerazione Esterna tra B1 e B2.
Rosso Si tratta dei collegamenti per le uscite al Servomotore. Accertarsi che i
cablaggi di questi morsetti siano fatti correttamente.
Verde/
Giallo
(classe D, classe 3).
R7D-
AP04H
Circa
1,1 kg
R7D-
AP08H
Circa
1,7 kg
2-18
Page 38

Modelli e specifiche standard
2-3-4 Specifiche di comando I/O (CN1)
Comando I/O e Segnale Esterno per Controllo Posizione
■
Capitolo 2
Impulso rotazione indietro
Impulso rotazione in avanti
Reset
contatore scostamenti
24 Vc.c.
Comando RUN
Azzeramento dell'allarme
+CW
-CW
+CCW
-CCW
+ECRST
-ECRST
+24VIN
RUN
200 Ω
1
2
3
4
5
6
13
14
18RESET
200 Ω
200 Ω
3,3 K
3,3 K
(vedere
nota 2).
(vedere
nota 2).
(vedere
nota 2).
(vedere
nota 2).
INP8
Uscita
completamento
posizionamento
BKIR7
10
OGND
Z32
33
ZCOM
ALM34
35
ALMCOM
22
TXD+
Tr asmissione dati
23 TXD-
20 RXD+
21 RXD-
Blocco freno
Fase Z
Uscita allarme
Ricezione dati
Tensione massima di
funzionamento: 30 Vc.c.
Corrente massima
di uscita:
Fase Z: 20 mA c.c.
Altre fasi eccetto
fase Z: 50 mA c.c.
(vedere nota 1).
Note 1.
Note 2.
24 RT
Collegamento resistenza
di terminazione
Cavo schermato
FG
Messa a terra
Interfacce per RS-422:
• Line driver applicabile: T.I. SN75174, MC3487 o equivalente
• Ricettore linea applicabile: T.I. SN75175, MC3486 o equivalente
Per la protezione delle uscite vengono utilizzati dei fusibili di reset automatico. Se un ecces-
so di corrente fa scattare il fusibile la corrente non scorrerà più e dopo un periodo di tempo
prestabilito si ripristina automaticamente.
2-19
Page 39

Modelli e specifiche standard
Segnali di comando I/O
■
Ingressi di comando CN1
●
No.
Nome segnale Funzione Sommario
pin
1 +PULS/CW/A Impulsi di alimenta2–PULS/CW/A
3 +SIGN/CCW/B Segnale direzio4–SIGN/CCW/B
5 +ECRST Azzeramento conta6–ECRST
13 +24VIN Entrata alimenta-
14 RUN Entrata comando
18 RESET Entrata di reset
zione, impulsi di
marcia indietro o
impulsi con differenza di fase a 90°
(fase A)
nale, impulsi marcia
avanti o impulsi di
differenza di fase a
90° (fase B)
tore d'errore
zione da +24-V c.c.
per controllo
RUN
allarme
Capitolo 2
Treno di impulsi collegamenti d’entrata per comandi di posizione.
Entrata Azionamento Linea: 7 mA a 3 V
Frequenza massima di risposta: 250 kpps
Entrata a collettore aperto da 7 mA a 15 V
Frequenza massima di risposta: 250 kpps
Si può selezionare una tra le seguenti possibilità mediante
l’impostazione Pn200.0: impulsi di alimentazione o segnali di
direzione (PULS/SIGN), impulsi di marcia avanti o marcia indietro (CW/CCW); segnali di differenza fase a 90° (fase A/B).
Entrata Azionamento Linea: 7 mA a 3 V
Entrata a collettore aperto da 7 a 15 mA
ON: Comandi ad impulsi impediti e contatore d'errore azzerato.
Note
Entrata per almeno 20 ms.
Collegamento entrata alimentazione di corrente (+24 V c.c.) per
entrate sequenze (pin 14 e 18)
ON: Servo ON (avvia alimentazione corrente al Servomotore.)
ON: Lo stato di allarme del servo è resettato.
Ingressi di comando CN1
●
No.
pin
32 Z Uscita Fase Z Serve da uscita per la fase Z dell’encoder (1 impulso/giro)
33 ZCOM
34 ALM Uscita allarme Quando il Servoazionamento genera un allarme, l’uscita si disattiva.
35 ALMCOM
7 BKIR Uscita blocco freno Serve d’uscita per i segnali di temporizzazione freno di staziona-
8 INP Uscita posiziona-
10 OGND
Note
Nome
segnale
Interfaccia per uscita a collettore aperto usata per uscite di sequenza dei pin –7 e –8. (Tensione massima di esercizio: 30 V c.c. massima corrente di uscita: 50 mA)
Funzione Sommario
uscita a collettore aperto (voltaggio massimo d’uscita: 30 V c.c. max;
corrente di uscita massima: 20 mA
Uscita a collettore aperto (voltaggio massimo di funzionamento: 30 V
c.c. corrente di uscita massima: 50 mA)
mento.
ON quando l’errore di posizione è compreso nella finestra di comple-
mento completato
Uscita massa a terra Massa a terra per uscite sequenze (pin 7 e 8).
tamento (Pn500).
2-20
Page 40

Modelli e specifiche standard
Interfaccia per RS-422
●
Capitolo 2
No.
pin
20 RXD+
Nome
segnale
Funzione Sommario
Ricezione dati Interfaccia per RS-422A trasmissione e ricezione.
21 RXD–
22 TXD+
Trasmissione dati
23 TXD–
24 RT
Collegamento resistenza di
terminazione
19 GND
CN1: Disposizione dei pin
■
-PULS
2
/-CW/-A
-SIGN
4
/-CCW
/-B
6
-ECRST
8
INP
10 OGND
Impulso feed -,
impulso avanti -,
completamento
posizionamento
Massa RS-422A Massa per RS-422A.
+PULS
1
/+CW/+A
impulso
indietro -,
fase A -
Segnale di
direzione -,
fase B -
Reset
contatore
scostamenti
Uscita
Uscita massa
comune
+SIGN
3
/+CCW/+B
5
+ECRST
7
BKIR
9
Impulso feed +,
impulso
indietro +,
fase A +
Segnale di
direzione +, im-
pulso avanti +,
fase B +
Reset
contatore
scostamenti +
Uscita
interlock
freno
Collegare al pin 21 (RXD-) sull’Unità finale.
GND
19
20
22
24
26
28
RXD+
TXD+
RT
Dati di
ricezione +
Dati di
trasmissione +
Morsetto di
resistenza
di terminazione
21
23
25
27
RXD-
TXD-
Massa per
RS-422A
Dati di
ricezione -
Dati di
trasmissione -
11
12
RUN
14
16
18
RESET
Note
Non cablare i pin liberi.
Connettori CN1 (36P)
●
Ingresso
comando RUN
Ingresso reset
allarme
13
15
17
+24VIN
Ingresso
di controllo
+24 Vc.c.
30
32
34
36
Z
ALM
Presa azionamento 10236-52A2JL (Sumitomo 3M)
Spina saldata cavo 10136-3000VE (Sumitomo 3M)
Custodia cavo 10336-52A0-008 (Sumitomo 3M)
Uscita
encoder
fase Z
Uscita
di allarme
29
31
33
35
ZCOM
ALMCOM
Uscita
di massa
fase Z
Massa
uscita
allarme
2-21
Page 41

Modelli e specifiche standard
Circuiti d'ingresso di comando
■
Ingresso impulsi di comando posizione e ingresso di reset contatore d'errore
●
Capitolo 2
Ingresso di Line Driver
Controllore Servoazionamento
+
−
Line driver applicabile
AM26LS31A o equivalente
200 Ω
+
−
Corrente d'ingresso:
7 mA, 3 V
Entrata a collettore aperto
Uso alimentazione corrente esterna
Controllore
Vcc
R
Note
Selezionare un valore per la resistenza R tale da ottenere una corrente d'ingresso variabile tra 7 e
Servoazionamento
200 Ω
+
−
Corrente d'ingresso:
da 7 a 15 mA
15 mA.
Vc.c. R
24 V da 1,6 a 2,4 kΩ
12 V da 750 a 1,1 kΩ
5 V Nessuno
Ingressi sequenze
●
Servoazionamento
13+24VIN
Alimentazione esterna:
24 V + 1 V c.c.
Capacità di alimentazione:
50 mA min (pro unità)
Verso altri circuiti di ingresso GND
Tempo ON minimo: 2 ms
Verso altri circuiti di ingresso
14
3,3 k
Livelli di segnale livello ON: Minimo (+24VIN-11) V
livello OFF: Massimo (+24VIN-1) V
2-22
Ingresso fotoaccoppiatore:
24 V c.c., 7 mA
Page 42

Modelli e specifiche standard
Circuiti uscita di comando
■
Uscite sequenze e allarmi
●
Capitolo 2
Servoazionamento
+
Verso altri circuiti
di uscita
X
Alimentazione esterna
−
(vedere nota).
Note
Per la protezione delle uscite vengono utilizzati dei fusibili automatici. Se un eccesso di corrente fa
Di
Di: Diodo per la prevenzione di sovratensione (utilizzare i diodi di velocità).
24 V c.c ± 1 V
scattare il fusibile la corrente non scorrerà più e dopo un periodo di tempo prestabilito si ripristina
33
.
Z32
ZCOM
Controllore
Tensione massima di funzionamento: 30 Vc.c.
Corrente massima di uscita: 20 mA
FG
automaticamente
Uscita Fase Z
●
Servoazionamento
(vedere nota).
Tensione massima di funzionamento: 30 Vc.c.
Corrente massima di uscita: 50 mA
Note
Per la protezione delle uscite vengono utilizzati dei fusibili di reset automatico. Se un eccesso di
corrente fa scattare il fusibile la corrente non scorrerà più e dopo un periodo di tempo prestabilito
si ripristina automaticamente
.
2-23
Page 43

Modelli e specifiche standard
Dettagli Ingresso di comando
■
Impulsi di alimentazione/segnale di direzione, impulsi di marcia avanti/indietro,
●
Capitolo 2
segnali con differenza di fase a +90° (fase A/fase B)
Numeri pin CN1
CN1 pin 1:
+Impulsi di alimentazione (+PULS), +Impulsi di marcia indietro (+CW), segnali di differenza di fase a
°
(fase A) (+A)
+90
CN1 pin 2:
-Impulsi di alimentazione (-PULS), -Impulsi di marcia indietro (-CW), segnali di differenza di fase a -90
(fase A) (-A)
CN1 pin 3:
+Segnale di direzione (+SIGN), +Impulsi di marcia avanti (+CW), segnali di differenza di fase a +90
(fase B) (+B)
CN1 pin 4:
-Segnale di direzione (-SIGN), -Impulsi di marcia avanti (-CCW), segnali di differenza di fase a -90
°
(fase B) (-B)
Funzioni
Il funzionamento di questi segnali dipende dalla regolazione del Pn200.0 (modalità comando impulsi:
regolazione comando posizione 1).
Logica Regolazione
Pn200.0
0 Impulso di alimenta-
Modalità impulsi di
comando
zione e segnale di
direzione
Pin di
ingresso
1: +PULS
2: –PULS
3: +SIGN
4: –SIGN
Comando marcia avanti
Servomotore
H
Comando marcia
indietro Servomotore
L
°
°
1 Impulso di marcia
indietro e impulso
di marcia avanti
Positivo
290° Segnali di diffe-
renza di fase (x1)
3
4
°
Segnali di diffe-
90
renza di fase (x2)
°
Segnali di diffe-
90
renza di fase (x4)
1: +CW
2: –CW
3: +CCW
4: –CCW
1: +A
2: –A
3: +B
4: –B
L
L
2-24
Page 44

Modelli e specifiche standard
Capitolo 2
Logica Regolazione
Pn200.0
5 Impulso di alimen-
6 Impulso di marcia
Negativo
7
8
9
Modalità impulsi di
comando
tazione e segnale di
direzione
indietro e impulso di
marcia avanti
°
90
Segnali di diffe-
renza di fase (x1)
°
90
Segnali di diffe-
renza di fase (x2)
°
Segnali di diffe-
90
renza di fase (x4)
Pin di
ingresso
1: +PULS
2: –PULS
3: +SIGN
4: –SIGN
1: +CW
2: –CW
3: +CCW
4: –CCW
1: +A
2: –A
3: +B
4: –B
Comando marcia avanti
Servomotore
L
H
Comando marcia
indietro Servomotore
H
H
2-25
Page 45

Modelli e specifiche standard
Capitolo 2
Temporizzazione impulsi di comando
Le seguenti forme d’onda sono per la logica positiva. Le condizione sono le stesse della logica negativa.
Modalità impulsi di
comando
Impulso di alimentazione e segnale di
direzione
Frequenza di risposta
massima: 250 kpps
Impulso di marcia
indietro e impulso di
marcia avanti
Frequenza di risposta
massima: 250 kpps
Segnali
di direzione
Impulsi di
alimentazione
Impulsi di
rotazione indietro
Impulsi di
rotazione in avanti
Temporizzazione
Comando di rotazione in avanti
t1 t1t2 t2 t2
t1 t1
Comando di rotazione in avanti Comando di rotazione indietro
t1 t1
τ
T
τ
T
t2
Comando di rotazione indietro
t1 ≤ 0,1 µs
t2 > 3,0 µs
τ ≥ 2,0 µs
T ≥ 4,0 µs
(τ/T) × 100 ≤ 50 (%)
t1 ≤ 0,1 µs
t2 > 3,0 µs
τ ≥ 2,0 µs
T ≥ 4,0 µs
(τ/T) × 100 ≤ 50 (%)
°
Segnali di diffe-
90
renza di fase
Frequenza di risposta
massima:
x1:
Line driver: 250 kpps
x2:
Line driver: 250 kpps
x4:
Line driver: 187,5 kpps
Impulsi fase A
Impulsi fase B
Comando di rotazione in avanti
t1
τ
t1
T
Comando di rotazione indietro
t1 ≤ 0,1 µs
τ ≥ 2,0 µs
T ³ 4,0 µs
(τ/T) × 100 ≤ 50 (%)
2-26
Page 46

Modelli e specifiche standard
+ Azzeramento contatore d'errore (5: +ECRST)
●
Capitolo 2
– Azzeramento contatore d'errore (6: –ECRST)
Il contenuto del contatore d'errore verrà azzerato quando il segnale di reset del contatore d'errore si
attiva e il loop di posizione viene disattivato. Inserisce il segnale di reset per minimo 20 ms. Il contatore
non potrà essere resettato se la durata del segnale è troppo breve.
Ingresso comando RUN (14: RUN)
●
Si tratta dell’input che attiva il circuito di azionamento della corrente per il circuito principale del Servoazionamento. Se questo segnale non viene inserito (p.e. stato di servo OFF) il Servomotore non può
funzionare salvo che per le operazioni di JOG.
Reset allarme (18: RESET)
●
Si tratta dell’inserimento del segnale di reset esterno per l’allarme. Rimuovere la causa dell'allarme e
avviare nuovamente l’operazione. Spegnere il comando di RUN prima di inserire il segnale di reset. Può
essere pericoloso inserire il segnale di reset mentre il comando RUN è attivato.
Dettagli Uscita di comando
■
Sequenza Uscita di controllo
●
Ingresso alimentazione
(L1C, LC2, L1, L2, (L3))
Uscita di allarme
(ALM)
Uscita completamento posizionamento
(INP)
Uscita interlock freno
(BKIR)
Ingresso comando RUN
(RUN)
Ingresso reset allarme
(RESET)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Circa 2 s
Da 0 a 35 ms
300 ms
2 ms
2 ms
Uscita allarme (34: ALM)
●
Terra Uscita Allarme (35: ALMCOM)
Quando il Servoazionamento individua un errore, le uscite vengono disattivate. Questa uscita è
disattivata al momento dell’accensione e si attiva quando viene completato il processo iniziale.
2-27
Page 47

Modelli e specifiche standard
Uscita posizionamento completato (8: INP)
●
Capitolo 2
Il segnale di INP si attiva se il numero di impulsi accumulati nel contatore d'errore è inferiore a quello
del parametro Pn500.
Uscita interblocco freno (7: BKIR)
●
Vengono emessi i segnali di temporizzazione per il freno esterno.
2-3-5 Specifiche Connettore d’Ingresso Encoder (CN2)
Numero
pin
1, 2, 3 E0V Alimentazione corrente
4, 5, 6 E5V Alimentazione encoder +5 V
8 S+ Ingresso +fase S encoder Ingresso line driver (conforme a EIARS-422A)
9 S– Ingresso -fase S encoder
10 A+ Ingresso encoder +fase A Ingresso line driver (conforme a EIARS-422A)
11 A– Ingresso encoder -fase A
12 B+ Ingresso encoder +fase B Ingresso line driver (conforme a EIARS-422A)
13 B– Ingresso encoder -fase B
Guscio FG Terra di schermatura Terra di schermatura cavo
Connettore CN2 (14P)
●
Simbolo Nome segnale Funzione/Interfaccia
Uscita alimentazione corrente per encoder: 5 V,
encoder GND
180 mA
(impendenza d’ingresso: 300 Ω±5%)
(impendenza d’ingresso: 300 Ω±5%)
(impendenza d’ingresso: 300 Ω±5%)
Presa Servoazionamento: 10214-52A2JL (Sumitomo 3M)
Spina saldata cavo: 10114-3000VE (Sumitomo 3M)
Custodia cavo: 10314-52A0-008 (Sumitomo 3M)
2-3-6 Specifiche connettore di comunicazione (CN3)
Numero
pin
1 /TXD Trasmissione dati
2 /RXD Ricezione dati
3 PRMU Commutazione Modulo Si tratta del contatto di commutazione per una
7 +5V Uscita +5 V Si tratta dell’uscita per l’alimentazione di cor8GNDTerra
Guscio FG Terra di schermatura Terra di schermatura cavo
Connettore CN3 (8P)
●
Simbolo Nome segnale Funzione/Interfaccia
Dati di trasmissione, uscita RS-232C
Dati di ricezione, entrata RS-232C
Console di Programmazione o un personal
computer.
rente a +5 V alla Console di Programmazione.
Presa Servoazionamento: HR12-10R-8 SDL (Hirose Electric)
Connettore cavo: HR212-10P-8P (Hirose Electric)
2-28
Page 48

Modelli e specifiche standard
2-3-7 Specifiche connettore d’uscita monitor (CN4)
No. pin Simbolo Nome segnale Funzione/Interfaccia
1NM
2AM
3 GND Terra del monitor
4 GND Terra del monitor
Connettori CN4 usati (4P)
●
Presa Servoazionamento: DF11-4DP-2DSA (01)(Hirose Electric)
Presa connettore cavo: DF11-4DS-2C (Hirose Electric)
Contatto connettore cavo: DF11-2428SCF (Hirose Electric)
Velocità monitor Velocità d’uscita del monitor: 1 V per 1,000 giri/min
Rotazione in avanti: – voltaggio; rotazione indietro: + voltaggio
L’accuratezza d’uscita è approssimativamente del ±15%.
Monitor corrente Uscita monitor corrente: 1 V / coppia nominale
Rotazione in avanti: – voltaggio; rotazione indietro: + voltaggio
L’accuratezza d’uscita è approssimativamente del ±15%.
Massa a terra per le uscite del monitor
Capitolo 2
2-29
Page 49

Modelli e specifiche standard
Capitolo 2
2-4 Specifiche Servomotore
Servomotori serie SMARTSTEP A (R7M-A@)
■
Sono disponibili due tipi di Servomotori della serie SMARTSTEP A:
•Servomotori di tipo cilindrico da 3.000 giri/min
•Servomotori di tipo cubico da 3.000 giri/min
Questi Servomotori hanno anche delle caratteristiche tecniche
opzionali, come, ad esempio, tipo d’albero, freno etc. Selezionare il Servomotore appropriato per il proprio sistema secondo
le condizioni di carico e l’ambiente d’installazione.
2-4-1 Specifiche generali
Dato Specifiche
Temperatura ambiente di
funzionamento
Umidità ambiente di funzionamento
Temperatura ambiente di
stoccaggio
Temperatura ambiente di
stoccaggio
Atmosfera di stoccaggio ed
operativa
Resistenza alle vibrazioni
(vedi nota 1)
Resistenza di impatto
Resistenza di isolamento Tra morsetti di fissaggio e FG: 10 MΩ min.
Rigidità dielettrica Tra morsetti di fissaggio e FG: 1.500 V c.a. per 1 min. a 50/60 Hz
Posizione di marcia Tutte le direzioni
Grado di isolamento Tipo B
Struttura Autoraffreddato interamente chiuso
Grado di protezione IP55 (ad esclusione della parte di albero passante)
Grado delle vibrazioni V-15
Metodo di installazione Flangia di montaggio
Da 0 a 40
Da 20% a 80% (senza formazione di condensa)
Da -20 a 60
Da 20% a 80% (senza formazione di condensa)
Assenza di gas corrosivi.
Da 10 a 2.500 Hz, 0,2 mm in doppia ampiezza o accelerazione max. 24,5 m/s
qualunque sia più piccola, nelle direzioni X, Y e Z
Accelerazione 98 m/s
(mediante Megger Tester da 500 Vc.c.)
°
C
°
C
2
max. in direzione X, Y e Z per 2 volte
2
Note 1.
Note 2.
Note 3.
2-30
Le vibrazioni possono essere amplificate dalla risonanza simpatetica dei macchinari; non
utilizzare pertanto il driver del Servomotore in condizioni che superino l’80% dei valori di
specifica per un lungo periodo di tempo.
I dati riportati qui sopra rispecchiano i risultati di test di valutazione individuali. I risultati possono differire in caso di valutazioni combinate.
I servomotori non possono essere usati in ambienti umidi.
Page 50

Modelli e specifiche standard
2-4-2 Dati tecnici sulle prestazioni
Servomotori di tipo cilindrico da 3.000 giri/min
■
Capitolo 2
Dato Unità di
misura
Uscita nominale* W 30 50 100 200 400 750
Coppia nominale* N⋅m 0,095 0,159 0,318 0,637 1,27 2,39
Velocità di rota-
zione nominale
Velocità massima di
rotazione momentanea
Coppia massima
momentanea*
Corrente nominale* A (rms) 0,42 0,60 0,89 2,0 2,6 4,4
Corrente massima
momentanea*
Inerzia del rotore kg⋅m2
Costante di coppia* N⋅m/A 0,255 0,286 0,408 0,355 0,533 0,590
Costante di voltag-
gio indotto*
Potenza* kW/s 5,31 11,5 28,1 34,1 86,3 85,6
Costante tempo
meccanico
Resistenza avvolgi-
mento
Induttanza avvolgi-
mento
Costante tempo
elettrico
Carico radiale con-
sentito
Carico di spinta
consentito
Senza freno kg Circa 0,3 Circa 0,4 Circa 0,5 Circa 1,1 Circa 1,7 Circa 3,4
Con freno kg Circa 0,6 Circa 0,7 Circa 0,8 Circa 1,6 Circa 2,2 Circa 4,3
Peso
Dimensioni radiatore (materiale)
Inerzia carico collegabile 100× (limitata in caso di capacità di processo rigenerativa)
Servoazionamento
applicabile (R7D-)
giri/min 3,000
giri/min 4,500
N⋅m 0,29 0,48 0,96 1,91 3,82 7,1
A (rms) 1,3 1,9 2,8 6,0 8,0 13,9
(GD2/4)
mV/
(giri/min)
ms 1,2 0,8 0,5 0,4 0,2 0,3
Ω 15,8 9,64 6,99 1,34 1,23 0,45
mH 23,1 16,9 13,2 7,2 7,9 5,7
ms 1,5 1,8 1,9 5,4 6,4 13
N686878245245392
N5454547474147
100 V
c.a.
200 V
c.a.
R7M-
A03030
1.7 × 10–6 2.2 × 10–6 3.6 × 10–6 1,19 × 10–5 1,87 × 10–5 6,67 × 10–5
8,89 9,98 14,0 12,4 18,6 20,6
t6 × @250 mm (Al)
APA3L APA5L AP01L AP02L AP04L –
APA3H APA5H AP01H AP02H AP04H AP08H
R7M-
A05030
R7M-
A10030
R7M-
A20030
R7M-
A40030
R7M-
A75030
2-31
Page 51

Modelli e specifiche standard
Capitolo 2
Dato Unità di
misura
Inerzia freno kg⋅m2
(GD2/4)
Tensione di
eccitazione
Potenza assor-
°
bita (a 20
Corrente assor-
Specifiche del freno
bita (a 20
Coppia attrito
statico
Tempo di
adesione
(vedi nota 3)
Tempo di
rilascio
(vedi nota 3)
Gioco meccanico
Classificazione/
valori nominali
Grado di
isolamento
C)
°
C)
V24 V c.c. ±10%
W666777,7
A 0,25 0,25 0,25 0,29 0,29 0,32
N⋅m 0,2 min. 0,2 min. 0,34 min. 1,47 min. 1,47 min. 2,45 min.
ms 30 max. 30 max. 30 max. 60 max. 60 max. 60 max.
ms 60 max. 60 max. 60 max. 20 max. 20 max. 20 max.
– Continuo
– Tipo F
R7M-
A03030
8.5 × 10–7 8.5 × 10–7 8.5 × 10–7 6.4 × 10–6 6.4 × 10–6 1.71 × 10–5
°
(valore di riferimento)
1
R7M-
A05030
R7M-
A10030
R7M-
A20030
R7M-
A40030
R7M-
A75030
Note 1.
Note 2.
Note 3.
Note 4.
Note 5.
*I valori dei dati contrassegnati con un asterisco sono i valori ad una temperatura di avvolgimento indotta di 100
zioni normali (20
°
C, combinata con il Servoazionamento. Gli altri valori sono a condi-
°
C, 65%). La coppia massima momentanea riportata qui sopra indica il
valore standard.
I freni sono del tipo a funzionamento a eccitazione zero (rilasciati quando viene applicato il
voltaggio di eccitazione).
Il tempo di funzionamento corrisponde al valore misurato (valore di riferimento) con un
soppressore di transienti (CR50500, by Okaya Electric Industries co. LTD) inserito.
I carichi radiali e di spinta consentiti corrispondono ai valori determinati per una durata
di funzionamento di 20,000 ore a temperature operative normali.
Il valore indicato per un carico radiale consentito è riferito ai punti indicati nei diagrammi
riportati dopo la prossima tabella.
Carico radiale
Carico di spinta
5 mm
2-32
Page 52

Modelli e specifiche standard
Servomotori di tipo cilindrico da 3.000 giri/min: Caratteristiche velocità di rotazione
●
Capitolo 2
e coppia
I seguenti grafici mostrano le caratteristiche con un cavo standard da 3 m e un'entrata di 100 V c.a. per
Servoazionamenti R7D-AP
R7M-A03030 (30 W)
(N•m)
0,3
0,29 0,29
@
L oppure un'entrata di 200 V c.a. per Servoazionamenti R7D-AP@H.
R7M-A05030 (50 W)
(N•m)
0,5
0,48 0,48
0,4
0,2
0,1
Uso ripetuto
Uso continuo
0
1000
2000 3000
R7M-A10030 (100 W)
(N•m)
1,0
0,96
0,8
0,6
0,4
0,2
Uso ripetuto
Uso continuo
0,0950,095
0,3180,318
4000 5000
0,96
(3600)
0,069
0,91
0,222
(g/min)
0,3
0,2
0,1
Uso continuo
Uso ripetuto
0
1000
2000 3000
R7M-A20030 (200 W)
(N•m)
2,0
1,91
1,5
Uso ripetuto
1,0
0,5
Uso continuo
0,1590,159
0,6370,637
1,91
(3650)
0,107
4000 5000
1,33
0,452
(g/min)
0
1000
2000 3000
R7M-A40030 (400 W)
(N•m)
4,0
3,0
3,82
(2000)
Uso ripetuto
2,0
1,0
Uso continuo
0
1000
2000 3000
3,82
(2900)
1,271,27
4000 5000
1,45
1,24
0,89
4000 5000
(g/min)
(g/min)
0
1000
2000 3000
R7M-A75030 (750 W)
(N•m)
8,0
7,1
(2225)
6,0
4,0
2,0
7,1
Uso ripetuto
Uso continuo
0
1000
2000 3000
2,392,39
4000 5000
1,24
4000 5000
(g/min)
(g/min)
2-33
Page 53

Modelli e specifiche standard
Servomotori di tipo cubico da 3.000 giri/min
■
Capitolo 2
Dato Unità di
misura
Potenza nominale* W 100 200 400 750
Coppia nominale* N⋅m 0,318 0,637 1,27 2,39
Velocità di rotazione
nominale
Velocità massima di
rotazione momentanea
Coppia massima
momentanea*
Corrente nominale* A (rms) 0,89 2,0 2,6 4,1
Corrente massima
momentanea*
Inerzia del rotore kg⋅m2 (GD2/4) 6,5 × 10–6 2,09 × 10–5 3,47 × 10–5 2,11 × 10–4
Costante di coppia* N⋅m/A 0,392 0,349 0,535 0,641
Costante di voltaggio
indotto*
Potenza* kW/s 15,7 19,4 46,8 26,9
Costante tempo
meccanico
Resistenza
avvolgimento
Induttanza
avvolgimento
Costante tempo
elettrico
Carico radiale
consentito
Carico di spinta
consentito
Senza freno kg Circa 0,7 Circa 1,4 Circa 2,1 Circa 4,2
Con freno kg Circa 0,9 Circa 1,9 Circa 2,6 Circa 5,7
Peso
Dimensioni radiatore (materiale) t6 × @250 mm (Al) t6 × @300 mm
Inerzia carico collegabile 100× (limitata in caso di capacità di processo rigenerativa)
Servoazionamento
applicabile (R7D-)
giri/min 3,000
giri/min 4,500
N⋅m 0,96 1,91 3,82 7,1
A (rms) 2,8 6,0 8,0 13,9
mV/ (giri/min) 13,7 12,2 18,7 22,4
ms 0,7 0,6 0,4 0,7
Ω 5,53 1,13 1,04 0,43
mH 20,7 8,4 8,9 7,7
ms 3,7 7,4 8,5 18
N 78 245 245 392
N496868147
100 V c.a. AP01L AP02L AP04L –
200 V c.a. AP01H AP02H AP04H AP08H
R7M-
AP10030
R7M-
AP20030
R7M-
AP40030
R7M-
AP75030
(Al)
2-34
Page 54

Modelli e specifiche standard
Capitolo 2
Dato Unità di
misura
Inerzia freno kg⋅m2 (GD2/4) 2,9 × 10–6 1,09 × 10–5 1,09 × 10–5 8,75 × 10–5
Tensione di
eccitazione
Potenza assorbita
°
C)
(a 20
Corrente assor-
°
bita (a 20
Specifiche del freno
Coppia attrito
statico
Tempo di adesione
(vedi nota 3)
Tempo di rilascio
(vedi nota 3)
Gioco meccanico
Classificazione/
valori nominali
Grado
di isolamento
Note 1.
C)
*I valori dei dati contrassegnati con un asterisco sono i valori ad una temperatura di avvolgimento indotta di 100
normali (20
V 24 V c.c. ±10%
W6 5 7,6 7,5
A 0,25 0,21 0,32 0,31
N⋅m 0,4 min. 0,9 min. 1,9 min. 3,5 min.
ms 40 max. 40 max. 40 max. 40 max.
ms 20 max. 20 max. 20 max. 20 max.
– Continuo
–Tipo F
°
C, combinata con il Servoazionamento. Gli altri valori sono a condizioni
°
C, 65%). La coppia massima momentanea riportata qui sopra indica il valore stan-
R7M-
AP10030
°
(valore di riferimento)
1
R7M-
AP20030
R7M-
AP40030
dard.
Note 2.
I freni sono del tipo a funzionamento a eccitazione zero (rilasciati quando viene applicato il voltaggio di eccitazione).
Note 3.
Il tempo di funzionamento corrisponde al valore misurato (valore di riferimento) con un soppressore di transienti (CR50500, by Okaya Electric Industries co. LTD) inserito.
Note 4.
I carichi radiali e di spinta consentiti corrispondono ai valori determinati per una durata di funzionamento di 20,000 ore a temperature operative normali.
Note 5.
Il valore indicato per un carico radiale consentito è riferito alla posizione indicata nei diagrammi
di seguito riportati.
R7M-
AP75030
Carico radiale
Carico di spinta
5 mm
2-35
Page 55

Modelli e specifiche standard
Capitolo 2
Servomotori di tipo cubico da 3.000 giri/min: Caratteristiche velocità di rotazione e
coppia
I seguenti grafici mostrano le caratteristiche con un cavo standard da 3 m e un'entrata di 100 V c.a. per Servoazionamenti R7D-AP@L oppure un'entrata di 200 V c.a. per Servoazionamenti R7D-AP@H.
R7M-AP10030 (100 W)
(N•m)
1,0
0,96
0,8
0,6
0,4
0,2
Uso ripetuto
Uso continuo
0,96
(3725)
0,800
0,3180,318
0,222
R7M-AP20030 (200 W)
(N•m)
2,0
1,91
1,5
Uso ripetuto
1,0
0,5
Uso continuo
1,91
(3600)
1,40
0,6370,637
0,452
0
1000
2000 3000
R7M-AP40030 (400 W)
(N•m)
4,0
3,82
(2350)
Entrata
3,0
2,0
1,0
100 V c.a
Uso ripetuto
Uso continuo
0
1000
2000 3000
1,271,27
4000 5000
3,82
(3250)
4000 5000
1,77
1,22
0,87
(g/min)
(g/min)
0
1000
2000 3000
R7M-AP75030 (750 W)
(N•m)
8,0
7,1
(2500)
6,0
Entrata monofase
200 V c.a.
4,0
2,0
Uso ripetuto
Uso continuo
0
1000
2000 3000
2,392,39
4000 5000
7,1
(3200)
Ingresso trifase da
200 Vc.a.
4000 5000
(g/min)
2,45
1,64
1,54
(g/min)
2-36
Page 56

Modelli e specifiche standard
Caratteristiche temperatura sistema meccanico e Servomotore
●
• I Servomotori della serie SMARTSTEP A utilizzano dei magneti di terra speciali (magneti di ferro al
neodimio). Il coefficiente di temperatura per questi magneti è approssimativamente di –0,13%/
Come cala la temperatura la coppia massima momentanea del Servomotore aumenta e come sale
la temperatura diminuisce la coppia massima momentanea del Servomotore. Se si confrontano la
temperatura normale di 20
il 4%. Per contro se il magnete si surriscalda fino a 80
la coppia massima momentanea diminuisce di circa l’8%.
• Generalmente in un sistema meccanico, quando la temperatura cala aumenta la coppia d’attrito e
la coppia di carico diventa maggiore. Per questo motivo, potrebbe verificarsi un sovraccarico a temperature basse. In particolare, nei sistemi che utilizzano un rapporto di riduzione elettronico, la coppia di carico a basse temperature potrebbe essere due volte superiore a quella a temperature
normali. Effettuare un monitoraggio della corrente per vedere se si verifica un sovraccarico a basse
temperature e per verificare i valori della coppia di carico. In modo analogo, controllare se vengono
emessi allarmi o si verificano surriscaldamenti anomali del Servomotore a temperature elevate.
• Un aumento nella coppia di frizione del carico aumenta notevolmente l'inerzia del carico. Pertanto,
anche se i parametri del Servoazionamento sono regolati ad una temperatura normale, potrebbe
verificarsi un funzionamento non ottimale alle basse temperature. Verificare se il funzionamento è
ottimale anche alle basse temperature.
°
C e quella di –10°C la coppia massima momentanea diminuisce di circa
°
C rispetto alla temperatura normale di 20°C
Capitolo 2
°
C.
2-4-3 Specifiche dell'encoder
Specifica Caratteristica
Servomotori di tipo cilindrico Servomotori compatti
Metodo encoder Encoder ottico (incrementale) Encoder magnetico (incrementale)
Numero di impulsi in uscita Fase A, B: 2.000 impulsi/rotazione
Fase Z: 1 impulso/rotazione
Tensione di alimentazione 5 V DC±5%
Corrente di alimentazione 150 mA max.
Velocità massima di rotazione 4,500 giri/min.
Segnali in uscita +A, –A, +B, –B, +S, –S
Interfaccia d’uscita Conforme a EIA RS--422A.
Uscita basata su AM26LS31CN o equivalente.
Dati di comunicazione seriale Fase Z, sensore fasi U, V, W
Metodo di comunicazione seriale Metodo di comunicazioni combinate mediante le fasi A, B e S.
2-37
Page 57

Modelli e specifiche standard
Capitolo 2
2-5 Specifiche rapporto di riduzione
Riduttori per servomotori SMARTSTEP della serie A (R7G-@)
■
Esistono due tipi di riduttori per i servomotori SMARTSTEF della serie A:
• Riduttori da 3.000 g/min. Servomotori di tipo cilindrico
′
(gioco meccanico 3
• Riduttori da 3.000 g/min. Servomotori compatti
(gioco meccanico 3
Esistono quattro rapporti di riduzione: 1/5, 1/9, 1/15 e 1/25. Selezionare un rapporto di riduzione
adatto alle prestazioni del Servomotore.
max. e gioco meccanico 45′ max.)
′
max. e gioco meccanico 45′ max.)
Note
Riduttori per servomotori di tipo cilindrico
■
Gioco meccanico = 3′ max.
●
50 W 1/5 R7G-VRSFPB05B50 600 0,517 65 900 1,56 4,13 × 10–6 392 196
100 W 1/5 R7G-VRSFPB05B100 600 1,19 75 900 3,60 4,08 × 10–6 392 196
200 W 1/5 R7G-VRSFPB05B200 600 2,71 85 900 8,12 1,53 × 10–5 392 196
400 W 1/5 R7G-VRSFPB05C400 600 5,40 85 900 16,2 3,22 × 10–5 784 392
750 W 1/5 R7G-VRSFPB05C750 600 10,8 90 900 32,0 7,17 × 10–5 784 392
Non esistono riduttori per i servomotori di tipo da 30 W cilindrico.
Modello Velocità
1/9 R7G-VRSFPB09B50 333 0,93 65 500 2,81 5,01 × 10–6 441 220
1/15 R7G-VRSFPB15B50 200 1,67 70 300 5,04 3,67 × 10–6 588 294
1/25 R7G-VRSFPB25B50 120 2,78 70 180 8,40 3,59 × 10–6 686 343
1/9 R7G-VRSFPB09B100 333 2,29 80 500 6,91 4,96 × 10–6 441 220
1/15 R7G-VRSFPB15B100 200 3,82 80 300 11,5 3,62 × 10–6 588 294
1/25 R7G-VRSFPB25C100 120 6,36 80 180 19,2 3,92 × 10–6 1323 661
1/9 R7G-VRSFPB09C400 333 3,78 66 500 11,3 3,66 × 10–5 931 465
1/15 R7G-VRSFPB15C400 200 6,31 66 300 18,9 2,71 × 10–5 1176 588
1/25 R7G-VRSFPB25C200 120 11,1 70 180 33,4 2,67 × 10–5 1323 661
1/9 R7G-VRSFPB09C400 333 9,49 83 500 28,5 3,66 × 10–5 931 465
1/15 R7G-VRSFPB15C400 200 15,8 83 300 47,6 2,71 × 10–5 1176 588
1/25 R7G-VRSFPB25D400 120 26,4 83 180 79,3 2,79 × 10–5 1617 808
1/9 R7G-VRSFPB09D750 333 18,3 85 500 54,3 9,54 × 10–5 1176 588
1/15 R7G-VRSFPB15D750 200 30,5 85 300 90,5 7,09 × 10–5 1372 686
1/25 R7G-VRSFPB25E750 120 50,8 85 180 151 7,05 × 10–5 2058 1029
di rota-
zione
nominale
giri/min N⋅m % giri/min N⋅m
Cop-
pia
nomi-
nale
Rap-
porto
Velocità
massima di
rotazione
momentanea
Coppia
massima
momentanea
Inerzia ridut-
tore elettro-
nico
2
m
kg
⋅
Coppia radiale
consentita
NN
Coppia di
spinta
consentita
Note 1.
Note 2.
Note 3.
2-38
L’inerzia del riduttore indica il valore di conversione dell’albero del Servomotore.
Il livello di protezione per servomotori con riduttori è IP44.
La coppia radiale consentita è pari al valore per l’asse dell’albero.
Page 58

Modelli e specifiche standard
Gioco meccanico = 45′ max.
●
Modello Velocità
50 W 1/5 R7G-RGSF05B50 600 0,517 65 900 1,56 4,55 × 10–6 392 196
1/9 R7G-RGSF09B50 333 0,93 65 500 2,81 3,39 × 10–6 441 220
1/15 R7G-RGSF15B50 200 1,67 70 300 5,04 3,75 × 10–6 588 294
1/25 R7G-RGSF25B50 120 2,78 70 180 8,40 3,69 × 10–6 686 343
100 W 1/5 R7G-RGSF05B100 600 1,19 75 900 3,60 3,83 × 10–6 392 196
1/9 R7G-RGSF09B100 333 2,29 80 500 6,91 3,34 × 10–6 441 220
1/15 R7G-RGSF15B100 200 3,82 80 300 11,5 3,7 × 10–6 588 294
1/25 R7G-RGSF25B100 120 4,02 (vedi nota 4) 50 180 12,0 (vedi nota 4) 3,64 × 10–6 686 343
200 W 1/5 R7G-RGSF05B200 600 2,71 85 900 8,10 1,5 × 10–5 392 196
1/9 R7G-RGSF09C400 333 3,78 66 500 11,3 2,49 × 10–5 931 465
1/15 R7G-RGSF15C400 200 6,31 66 300 18,9 2,7 × 10–5 1176 588
1/25 R7G-RGSF25C400 120 11,1 70 180 33,4 2,64 × 10–5 1323 661
400 W 1/5 R7G-RGSF05C400 600 5,40 85 900 16,2 2,84 × 10–5 784 392
1/9 R7G-RGSF09C400 333 9,49 83 500 28,5 2,49 × 10–5 931 465
1/15 R7G-RGSF15C400 200 15,8 83 300 47,6 2,7 × 10–5 1176 588
1/25 R7G-RGSF25C400 120 21,7 (vedi nota 4) 68 180 65,1 (vedi nota 4) 2,64 × 10–5 1323 661
750 W 1/5 R7G-RGSF05C750 600 10,8 90 900 32,0 6,61 × 10–5 784 392
1/9 R7G-RGSF09C750 333 9,7 (vedi nota 4) 45 500 29,1 (vedi nota 4) 6,23 × 10–5 931 465
1/15 R7G-RGSF15C750 200 16,2 (vedi nota 4) 45 300 48,6 (vedi nota 4) 6,56 × 10–5 1176 588
1/25 R7G-RGSF25C750 120 21,7 (vedi nota 4) 36 180 65,1 (vedi nota 4) 6,5 × 10–5 1323 661
di rota-
zione
nominale
giri/min N⋅m % giri/min N⋅m
Coppia nominale Rap-
porto
Vel ocit à
massima di
rotazione
momentanea
Coppia massima
momentanea
Capitolo 2
Inerzia
riduttore
2
kg⋅m
Coppia
radiale
consen-
tita
NN
Coppia
di
spinta
consen-
tita
Note 1.
Note 2.
Note 3.
Note 4.
L’inerzia del riduttore indica il valore di conversione dell’albero del Servomotore.
Il livello di protezione per servomotori con riduttori è IP44.
La coppia radiale consentita è pari al valore per l’asse dell’albero.
Si tratta dei valori di coppia consentiti per i riduttori. Non superare questi valori.
2-39
Page 59

Modelli e specifiche standard
Riduttori per servomotori compatti
■
Gioco meccanico = 3′ max.
●
Modello Velocità
100 W 1/5 R7G-VRSFPB05B100P 600 1,19 75 900 3,60 1,59 × 10–5 392 196
1/9 R7G-VRSFPB09B100P 333 2,29 80 500 6,91 1,67 × 10–5 441 220
1/15 R7G-VRSFPB15B100P 200 3,82 80 300 11,5 1,54 × 10–5 588 294
1/25 R7G-VRSFPB25C100P 120 6,36 80 180 19,2 3,59 × 10–6 1323 661
200 W 1/5 R7G-VRSFPB05B200P 600 2,71 85 900 8,12 1,52 × 10–5 392 196
1/9 R7G-VRSFPB09C400P 333 3,78 66 500 11,3 3,66 × 10–5 931 465
1/15 R7G-VRSFPB15C400P 200 6,31 66 300 18,9 2,71 × 10–5 1176 588
1/25 R7G-VRSFPB25C200P 120 11,1 70 180 33,4 2,63 × 10–5 1323 661
400 W 1/5 R7G-VRSFPB05C400P 600 5,40 85 900 16,2 7,17 × 10–5 784 392
1/9 R7G-VRSFPB09C400P 333 9,49 83 500 28,5 3,66 × 10–5 931 465
1/15 R7G-VRSFPB15C400P 200 15,8 83 300 47,6 2,71 × 10–5 1176 588
1/25 R7G-VRSFPB25D400P 120 26,4 83 180 79,3 2,59 × 10–5 1617 808
750 W 1/5 R7G-VRSFPB05C750P 600 10,8 90 900 32,0 7,82 × 10–5 784 392
1/9 R7G-VRSFPB09D750P 333 18,3 85 500 54,3 9,71 × 10–5 1176 588
1/15 R7G-VRSFPB15D750P 200 30,5 85 300 90,5 6,94 × 10–5 1372 686
1/25 R7G-VRSFPB25E750P 120 50,8 85 180 151 1,52 × 10–4 2058 1029
di rota-
zione
nominale
giri/min N⋅m % giri/min N⋅m
Cop-
pia
nomi-
nale
Rap-
porto
Velocità
massima di
rotazione
momentanea
Coppia
massima
momenta-
nea
Inerzia
riduttore
kg⋅m
Coppia radiale
2
Capitolo 2
consentita
NN
Coppia di
spinta
consentita
Note 1.
Note 2.
Note 3.
L’inerzia del riduttore indica il valore di conversione dell’albero del Servomotore.
Il livello di protezione per servomotori con riduttori è IP44.
La coppia radiale consentita è pari al valore per l’asse dell’albero.
2-40
Page 60

Modelli e specifiche standard
Gioco meccanico = 45′ max.
●
Modello Velocità
100 W 1/5 R7G-RGSF05B100P 600 1,19 75 900 3,60 1,56 × 10–5 392 196
1/9 R7G-RGSF09B100P 333 2,29 80 500 6,91 1,52 × 10–5 441 220
1/15 R7G-RGSF15B100P 200 3,82 80 300 11,5 1,55 × 10–5 588 294
1/25 R7G-RGSF25B100P 120 4,02 (vedi nota 4) 50 180 12,0 (vedi nota 4). 1,54 × 10–5 686 343
200 W 1/5 R7G-RGSF05B200P 600 2,71 85 900 8,10 1,49 × 10–5 392 196
1/9 R7G-RGSF09C400P 333 3,78 66 500 11,3 2,49 × 10–5 931 465
1/15 R7G-RGSF15C400P 200 6,31 66 300 18,9 2,7 × 10–5 1176 588
1/25 R7G-RGSF25C400P 120 11,1 70 180 33,4 2,64 × 10–5 1323 661
400 W 1/5 R7G-RGSF05C400P 600 5,40 85 900 16,2 6,70 × 10–5 784 392
1/9 R7G-RGSF09C400P 333 9,49 83 500 28,5 6,30 × 10–5 931 465
1/15 R7G-RGSF15C400P 200 15,8 83 300 47,6 6,50 × 10–5 1176 588
1/25 R7G-RGSF25C400P 120 21,7 (vedi nota 4) 68 180 65,1 (vedi nota 4) 6,43 × 10–5 1323 661
750 W 1/5 R7G-RGSF05C750P 600 10,8 90 900 32,0 7,33 × 10–5 784 392
1/9 R7G-RGSF09C750P 333 9,7 (vedi nota 4) 45 500 29,1 (vedi nota 4) 6,93 × 10–5 931 465
1/15 R7G-RGSF15C750P 200 16,2 (vedi nota 4) 45 300 48,6 (vedi nota 4) 7,12 × 10–5 1176 588
1/25 R7G-RGSF25C750P 120 21,7 (vedi nota 4) 36 180 65,1 (vedi nota 4) 7,05 × 10–5 1323 661
di rota-
zione
nomi-
giri/min N⋅m % giri/min N⋅m
Coppia nominale Rap-
nale
porto
Velocità
massima di
rotazione
momentanea
Coppia
massima
momentanea
Capitolo 2
Inerzia
riduttore
2
kg⋅m
Coppia
radiale
consen-
tita
NN
Coppia
di
spinta
consen-
tita
Note 1.
Note 2.
Note 3.
Note 4.
L’inerzia del riduttore indica il valore di conversione dell’albero del Servomotore.
Il livello di protezione per servomotori con riduttori è IP44.
La coppia radiale consentita è pari al valore per l’asse dell’albero.
Si tratta dei valori di coppia consentiti per i riduttori. Non superare questi valori.
2-41
Page 61

Modelli e specifiche standard
2-6 Specifiche dei cavi e dei connettori
2-6-1 Cavi di controllo
Capitolo 2
Cavi di controllo generici (R88A-CPU
■
Un cavo di controllo generico viene collegato al connettore I/O di controllo del Servoazionamento
(CN1). Non vi sono connettori sull'estremità del controllore. Quando si collega questo cavo ad un
Modulo di Controllo della Posizione privo di speciali cavi o ad un controllore prodotto da un'altra
società, cablare un connettore adatto per il controllore.
Note
Esiste un metodo che consente di effettuare il collegamento ad un controllore privo di cavi speciali e un altro
che consente di utilizzare il cavo della morsettiera del connettore ed una morsettiera del connettore.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
R88A-CPU001S 1 m diametro di 9,9 Circa 0,3 kg
R88A-CPU002S 2 m Circa 0,6 kg
Configurazione del collegamento e dimensioni esterne
●
Controllore
@@@
39L
S)
Servoazionamento
43,6
R7D-AP@
t=18
2-42
Page 62

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Colore cavo/segnoNo. Simbolo
1 Arancione/Nero (−) +CW
2 Arancione/Rosso (−) -CW
3 Grigio/Nero (−) +CCW
4 Grigio/Rosso (−) -CCW
5 Bianco/Nero (−)
6 Bianco/Rosso (−)
7 Giallo/Nero (−) BKIR
8 Giallo/Rosso (−) INP
9 Rosa/Nero (−)
10 Rosa/Rosso (−)
11 Grigio/Nero (−−)
12 Grigio/Rosso (−−)
Arancione/Nero (−−)
13
Arancione/Rosso (−−)
14 Bianco/Nero (−−)
15 Bianco/Rosso (−−)
16 Giallo/Nero (−−)
17 Giallo/Rosso (−−)
18 Rosa/Nero (−−) RESET
+ECRST
-ECRST
OGND
+24VIN
+24VIN
RUN
Schermatura
Colore cavo/segnoNo. Simbolo
19 Rosa/Rosso (−−)
20 Arancione/Nero (−−−) RXD+
21 Arancione/Rosso (−−) RXD22 Grigio/Nero (−−−) TXD+
23 Grigio/Rosso (−−−)
24 Bianco/Nero (−−−)
25 Bianco/Rosso (−−−)
26 Giallo/Nero (−−−)
27 Giallo/Rosso (−−−)
28 Rosa/Nero (−−−)
29 Rosa/Rosso (−−−)
30 Arancione/Nero (−−−−)
31 Arancione/Rosso (−−−−)
32 Grigio/Nero (−−−−)Z
33 Grigio/Rosso (−−−−) ZCOM
34 Bianco/Nero (−−−−)
35
Bianco/Rosso (−−−−) ALMCOM
36
Schermo FG
Spina del connettore: 10136-3000VE (Sumitomo 3M)
Calotta connettore: 10336-52A0-008 (Sumitomo 3M)
Cavo: AWG24
×
18P UL20276
GND
TXD-
RT
ALM
Disposizione pin connettore
10
12
14
16
18
1
2
3
4
5
6
7
8
9
11
13
15
17
20
22
24
26
28
30
32
34
36
19
21
23
25
27
29
31
33
35
Note
I cavi con lo stesso colore e lo stesso numero di segni formano dei doppini intrecciati. Ad esempio, il cavo
arancione con un segno rosso (-) è accoppiato al cavo arancione con un segno nero (-).
Cavi blocco morsetti connettore (R88A-CPU
■
Modelli di cavi
●
@@@
N)
Modello Lunghezza (L) Diametro esterno della guaina Peso
R88A-CTU001N 1 m diametro di 9,9 Circa 0,3 kg
R88A-CTU002N 2 m Circa 0,6 kg
Configurazione del collegamento e dimensioni esterne
●
39L46
Morsettiera connettore
Servoazionamento
R7D-AP@
XW2B-40F5-P
72,72
43,6
t=18
t=10,3
2-43
Page 63

Modelli e specifiche standard
Cablaggio
●
Morsettiera Connettore
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
No.
1
A
1
B
2
A
2
B
3
A
3
B
4
A
4
B
5
A
5
B
6
A
6
B
7
A
7
B
8
A
8
B
9
A
9
B
10
A
10
B
11
A
11
B
12
A
12
B
13
A
13
B
14
A
14
B
15
A
15
B
16
A
16
B
17
A
17
B
18
A
18
B
19
A
19
B
20
A
20
B
Servoazionamento
No.
Simbolo
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20 RXD+
21 RXD22 TXD+
23
24
25
26
27
28
29
30
31
32 Z
33 ZCOM
34
35 ALMCOM
Schermatura
+CW
-CW
-CCW
-CCW
+ECRST
-ECRST
BKIR
INP
OGND
+24VIN
RUN
RESET
GND
TXD-
RT
ALM
FG
Capitolo 2
Connettore del Servoazionamento:
Spina del connettore:
10136-3000VE (Sumitomo 3M)
Calotta del connettore:
10336-52A0-008 (Sumitomo 3M)
Connettore blocco
Spina del connettore:
FCN-361J040-AU (Fujitsu)
Calotta del connettore:
FCN-360C040-B (Fujitsu)
Cavo: AWG24
18P UL20276
×
2-44
Page 64

Modelli e specifiche standard
Capitolo 2
2-6-2 Cavi Servomotore
I cavi del Servomotore collegano il Servomotore con il Servoazionamento. La corrente e l’encoder sono riuniti in un cavo che collega due tipi: Cavi Servomotore per servomotori senza freni
(R7A-CEA@@@S); e cavi Servomotore per servomotori con freni (R7A-CEA@@@B). Selezio-
nare un cavo adatto per il Servomotore utilizzato. La distanza massima tra il Servomotore e il
Servoazionamento è di 20 metri.
Nota: Utilizzare un cavo per robot quando si collegano parti mobili.
Cavi di alimentazione per servomotori senza freni (R7A-CEA
■
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
R7A-CEA003S 3 m diametro di 12,4 Circa 0,8 kg
R7A-CEA005S 5 m Circa 1,2 kg
R7A-CEA010S 10 m Circa 2,1 kg
R7A-CEA015S 15 m Circa 3,1 kg
R7A-CEA020S 20 m Circa 4,0 kg
Configurazione del collegamento e dimensioni esterne
●
Servoazionamento
R7D-AP@
29,5
t=12,7
5039
L
50
27,4
@@@
43,7
t=12
S)
Servomotore
R7M-A@
21,5
80
27,7
t=15,7
2-45
Page 65

Modelli e specifiche standard
Cablaggio
●
Servoazionamento
Simbolo No.
E0V 1
E0V 2
E0V 3
E5V 4
E5V 5
E5V 6
− 7
S+ 8
S- 9
A+ 10
A- 11
B+ 12
B- 13
− 14
Scher-
FG
Spina del connettore:
10114-3000VE (Sumitomo 3M)
Calotta del connettore:
10314-52A0-008 (Sumitomo 3M)
Terminale a
crimpare M4
matura
AWG22 Nero
AWG22 Rosso
AWG24 Verde
AWG24 Verde/Bianco
AWG24 Blu
AWG24 Blu/Bianco
AWG24 Giallo
AWG24 Giallo/Bianco
AWG20 Rosso
AWG20 Bianco
AWG20 Blu
AWG20 Verde/Giallo
Servomotore
SimboloNo.
7 E0V
8 E5V
5
S+
6
S-
1
A+
2
A-
3
B+
4
B-
Schermatura
FG
SimboloNo.
1 Fase U
2 Fase V
34Fase W
FG
Capitolo 2
Kit connettore:
54280-0800 (Molex Giappone)
Calotta del connettore:
350780-1 (Tyco Electronics AMP)
Zoccolo del connettore:
350570-3 (Tyco Electronics AMP)
Cavi di alimentazione per servomotori con freni (R7A-CEA
■
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
R7A-CEA003B 3 m diametro di 12,4 Circa 0,8 kg
R7A-CEA005B 5 m Circa 1,2 kg
R7A-CEA010B 10 m Circa 2,1 kg
R7A-CEA015B 15 m Circa 3,1 kg
R7A-CEA020B 20 m Circa 4,0 kg
@@@
B)
2-46
Page 66

Modelli e specifiche standard
Configurazione del collegamento e dimensioni esterne
●
Capitolo 2
Servoazionamento
R7D-AP@
Cablaggio
●
Servoazionamento
Simbolo No.
E0V 1
E0V 2
E0V 3
E5V 4
E5V 5
E5V 6
− 7
S+ 8
S- 9
A+ 10
A- 11
B+ 12
B- 13
− 14
FG
Spina del connettore:
10114-3000VE (Sumitomo 3M)
Calotta del connettore:
10314-52A0-008 (Sumitomo 3M)
Terminale a crimpare M4
Terminale a crimpare M4
Terminale a crimpare M4
29,5
Scher-
matura
t=12,7
80
Servomotore
5039
L
50
Servomotore
AWG22 Nero
AWG22 Rosso
AWG24 Verde
AWG24 Verde/Bianco
AWG24 Blu
AWG24 Blu/Bianco
AWG24 Giallo
AWG24 Giallo/Bianco
AWG20 Rosso
AWG20 Bianco
AWG20 Blu
AWG20 Verde/Giallo
AWG20 Nero
AWG20 Marrone
7
8
5
6
1
2
3
4
Schermatura
1
2
3
4
5
6
SimboloNo.
E0V
E5V
S+
S-
A+
A-
B+
B-
FG
SimboloNo.
Fase U
Fase V
Fase W
FG
Freno
Freno
43,7
R7M-A@
21,5
t=12
27,4
14
t=28,4
Kit connettore:
54280-0800 (Molex Giappone)
Calotta del connettore:
350781-1 (Tyco Electronics AMP)
Zoccolo del connettore
350570-3 (Tyco Electronics AMP)
2-47
Page 67

Modelli e specifiche standard
Capitolo 2
2-6-3 Specifiche dei connettori e dei cavi per i dispositivi
periferici
Cavo per il monitoraggio analogico (R88A-CMW001S)
■
Si tratta di un cavo per il collegamento al connettore d’uscita per il monitoraggio del Servoazionamento
(CN4). Serve per collegare le uscite di monitoraggio a dispositivi esterni come, ad esempio, gli strumenti
di misurazione.
Modello cavi
●
Modello Lunghezza (L) Peso
R88A-CMW001S 1 m Circa 0,1 kg
Configurazione del collegamento e dimensioni esterne
●
7,3 L
Servoazionamento
Dispositivo esterno
No.
1
2
3
4
5
Rosso
Bianco
Nero
Nero
Cavo: AW24 x 4C UL1007
R7D-AP@
Cablaggio
●
Servoazionamento
Simbolo
NM
AM
GND
GND
Zoccolo del connettore:
DF11-4DS-2C (Hirose Electric)
Contatti del connettore:
DF11-2428SCF (Hirose Electric)
t=6
dia. 1,7
2-48
Page 68

Modelli e specifiche standard
Cavi per il monitoraggio tramite computer (R7A-CCA002P@)
■
Capitolo 2
Per utilizzare un personal computer per il monitoraggio e l'impostazione dei parametri per un Servoazionamento, sono necessari il cavo per il monitor del computer e il software per il monitoraggio a computer
( che gira su Windows, N. cat. SBCE-011). Esistono due tipi di cavo, uno per personal computer in DOS
e l'altro per computer portatili NEC PC98 (ma non per i computer da tavolo PC98).
Modelli di cavi
●
Per computer DOS
Modello Lunghezza (L) Diametro esterno della guaina Peso
R7A-CCA002P2 2 m diametro di 4,2 Circa 0,1 kg
Per i computer portatili NEC PC98
Modello Lunghezza (L) Diametro esterno della guaina Peso
R7A-CCA002P3 2 m diametro di 4,2 Circa 0,1 kg
Configurazione del collegamento e dimensioni esterne
●
Per personal computer DOS:
39 42L
Personal computer
(DOS)
32,2
t=15
Per i computer portatili NEC PC98
39
Computer portatile
(NEC PC98)
29,5
t=12,7
6
L
42
6
Servoazionamento
dia 13,2
Servoazionamento
diametro 13,2
R7D-AP@
R7D-AP@
2-49
Page 69

Modelli e specifiche standard
Cablaggio
●
Per personal computer DOS:
Capitolo 2
Computer
Simbolo
RXD
RTS
CTS
GND
FG
Connettore:
No. No.
Arancione/Nero
21
Arancione/Rosso
3
7
8
Grigio/Nero
5
Scher-
matura
Cavo: AWG28 x 3C UL2464
17JE-13090-02 (D8A) (DDK Ltd.)
Per i computer portatili NEC PC98
Computer
Simbolo
RXD
RTS
CTS
GND
FG
FG
Spina del connettore:
10114-3000VE (Sumitomo 3M)
Calotta del connettore:
10314-52F0-008 (Sumitomo 3M)
No. No.
Arancione/Nero
11
Arancione/Rosso
9
10
4
Grigio/Nero
14
12
Schermatura
Cavo: AWG28 x 3C UL2464
Servoazionamento
Simbolo
TXD
2
RXDTXD
8
Superficie
esterna
GND
FG
Servoazionamento
Simbolo
TXD
2
RXDTXD
8
Superficie
esterna
GND
FG
Connettore: HR212-10P-8P (Hirose Electric)
Connettore: HR212-10P-8P (Hirose Electric)
Connettore di comando I/O (R88A-CNU01C)
■
Si tratta del connettore utilizzato per il collegamento al connettore I/O di controllo (CN1) del Servoazionamento. Questo connettore viene utilizzato quando il cavo viene predisposto dall'utente.
Dimensioni esterne
●
39
Spina del connettore:
10136-3000VE (Sumitomo 3M)
43,6
Calotta del connettore:
10336-52A0-008 (Sumitomo 3M)
t=18
2-50
Page 70

Modelli e specifiche standard
Connettore encoder (R7A-CNA0@R)
■
Capitolo 2
Questo è il connettore per il cavo dell’encoder. Questo connettore viene utilizzato quando il cavo
viene predisposto dall'utente. Si tratta di un connettore saldato ed il cavo utilizzabile deve avere le
seguenti caratteristiche.
• Cavo applicabile: AWG16 max.
• Diametro esterno del rivestimento: 2,1 mm dia. max.
• Diametro esterno della guaina: 6.7 ± 0,5 mm dia.
Dimensioni esterne
●
R7A-CNA01R (Servoazionamento CN2)
39
Spina del connettore:
10114-3000VE (Sumitomo 3M)
29,5
t=12,7
Calotta del connettore:
10314-52A0-008 (Sumitomo 3M)
R7A-CNA02R (Servomotore)
t=12
43,7
Kit connettore:
54280-0800 (Molex Giappone)
21,5
2-51
Page 71

Modelli e specifiche standard
Capitolo 2
2-7 Specifiche delle morsettiere per il Servoazionamento e dei
cavi
Questa sezione fornisce le specifiche delle morsettiere per il Servoazionamento e dei cavi
utilizzati per il collegamento al Modulo di Controllo della Posizione di OMRON.
Selezionare i modelli adatti per il Modulo di Controllo della Posizione utilizzato. Per
ulteriori dettagli vedere 3-2-1 Cavo di collegamento.
Tutte le dimensioni vengono espresse in millimetri, salvo dove diversamente specificato.
2-7-1 Morsettiere per il Servoazionamento
XW2B-20J6-1B
■
Questa morsettiera per il Servoazionamento viene collegata
ai seguenti Moduli di controllo della posizione OMRON. Le
10
11
0
12
1
13
2
14
3
15
4
16
5
17
6
18
7
19
8
9
comunicazioni non vengono supportate.
•CS1W-NC113/-NC133
•CJ1W-NC113/-NC133
•C200HW-NC113
•C200H-NC112
Dimensioni esterne
●
Connettore Modulo di controllo della posizione
3,5
7
29,5
Due, diametro 3,5
20,5
•3F88M-DRT141
Connettore del servoazionamento
3,5135
7
15,5
10
0
19
9
45
(46)
44,3
2
Nota Passo della morsettiera: 7,62 mm
2-52
Page 72

Modelli e specifiche standard
Cablaggio
●
Arresto di emergenza
0 V
Comune
Limite
CCW
+24 V
0
Comune
Limite
CCW
Prossimità origine
RUN ALM BKIR10
Comune
Comune
Comune
RESET ALMCOM
FG
Capitolo 2
19
9
24 Vc.c.
XW2B-40J6-2B
■
20
21
0
22
1
23
2
24
3
25
4
26
5
27
6
28
7
8
Nota 1. Il contatto XB viene utilizzato per attivare/
disattivare il freno elettromagnetico.
2. Non collegare morsetti inutilizzati.
3. Il morsetto 0 V è collegato internamente ai
morsetti comuni.
4. È possibile applicare il seguente terminale a crimpare:
X1
Interrupt
esterno
X1 XB
(vedere nota 1).
24 Vc.c.
R1,25-3 (rotondo con estremità aperta).
Questa morsettiera per il Servoazionamento viene collegata
ai seguenti Moduli di controllo della posizione OMRON. Le
comunicazioni non vengono supportate.
29
30
9
31
10
32
11
33
12
34
13
35
14
36
15
37
16
38
17
39
18
19
•CS1W-NC213/-NC233/-NC413/-NC433
•CJ1W-NC213/-NC233/-NC413/-NC433
•C200HW-NC213/-NC413
•C500-NC113/-NC211
•C200H-NC211
Dimensioni esterne
●
Connettore Modulo di
controllo della posizione
3,5 180 3,5
7
29,5
Due, dia. 3,5
20,5
Nota: Passo della morsettiera: 7,62 mm
Connettore servoazionamento
asse X
20
0
Connettore servoazionamento
asse Y
7
15,5
39
19
45
(46)
44,3
2
2-53
Page 73

Modelli e specifiche standard
Cablaggio
●
+24 V
20
0
24 Vc.c.
Arresto di emergenza
asse X/Y
Limite
CW
asse X
Co-
0 V
mune
Comune
Limite
CCW
asse X
Comune
Prossimità origine
asse X
RUN
Asse X
Co-
Co-
mune
mune
ALMCOM
asse X
X1 Y1
Interrupt
esterno
asse X
ALM
Asse X
RESET
asse X
X1 XB
24 Vc.c.
BKIR
Asse X
(vedere nota 1).
Limite
CW
asse Y
Comune
Nota 1. Il contatto XB viene utilizzato per attivare/disattivare il freno elettromagnetico.
2. Non collegare morsetti inutilizzati.
3. Il morsetto 0 V è collegato internamente ai morsetti comuni.
4. È possibile applicare il seguente terminale a crimpare: R1.25-3
(rotondo con estremità aperta).
Limite
CCW
asse Y
Prossimità origine
asse Y
Comune
RUN
Asse Y
Comune
Comune
Interrupt
esterno
asse Y
RESET
Asse Y
ALM
BKIR
Asse Y
Asse Y
Y1 YB
(vedere nota 1).
24 Vc.c.
Capitolo 2
39
FG
19
ALMCOM asse Y
XW2B-20J6-3B
■
10
11
0
12
1
13
2
14
3
15
4
5
Dimensioni esterne
●
Connettore CQM1
3,5
7
29,5
Due, dia. 3,5
Questa morsettiera per il Servoazionamento viene collegata ai
seguenti moduli di controllo programmabili. Le comunicazioni
non vengono supportate.
16
17
6
18
7
19
8
9
• CQM1-CPU43-V1
• CQM1H-PLB21 (Impulso I/O scheda per
CQM1H-CPU51/-CPU61)
• CS1W-HCP22
Connettore del Servoazionamento
3,5135
7
15,5
10
0
19
9
45
2-54
20,5
(46)
44,3
2
Nota Passo della morsettiera:
7,62 mm
Page 74

Modelli e specifiche standard
Cablaggio
●
+24 V
CW CCW RUN INP ALM BKIR10
Co-
0 V
0
CW CCW
mune
Co-
mune
ECRST
Z
RESET ALMCOM
FG
Capitolo 2
19
9
(vedere
nota 1).
24 Vc.c.
Note 1.
Note 2.
Note 3.
Note 4.
Note 5.
Note 6.
Note 7.
(vedere
nota 1).
X1
Unità d’input
(vedere
nota 2).
CQM1
X1 XB
(vedere nota 3).
24 Vc.c.
Se vengono inseriti questi segnali l’impulso d’uscita CQM1 può essere inserito
nel contatore ad alta velocità.
Inserire questo segnale d’uscita nell’Unità d’Ingresso CQM1.
Il contatto XB viene utilizzato per attivare/disattivare il freno elettromagnetico.
La fase Z è un uscita a collettore aperto.
Non collegare morsetti inutilizzati.
Il morsetto 0 V è collegato internamente ai morsetti comuni.
È possibile applicare il seguente terminale a crimpare: R1.25-3 (rotondo con
estremità aperta).
2-55
Page 75

Modelli e specifiche standard
XW2B-40J6-4A
■
Capitolo 2
Questa morsettiera per il Servoazionamento viene collegata ai seguenti Moduli di controllo della
posizione OMRON. Le comunicazioni sono supportate.
• CS1W-NC213/-NC233/-NC413/-NC433
• CJ1W-NC213/-NC233/-NC413/-NC433
Dimensioni esterne
●
Connettore Modulo di controllo
della posizione
3,5 3,5
7
Connettore servoazionamento
asse X
247,5
Connettore servoazionamento
asse Y
7
29,5
Due, dia. 3,5
20,5
Note
Passo della morsettiera: 7,62 mm.
Cablaggio
●
+24 V
0 V200
Arresto di emergenza
asse X/Y
Limite
CW
asse X
Co-
Co-
mune
mune
Limite
CCW
asse X
Comune
Prossimità origine
asse X
20
0
Prossimità origine
asse Y
Limite
RUN
Asse X
Co-
Comune
X1 Y1
mune
ALMCOM
asse X
Interrupt
esterno
asse X
RESET
asse X
BKIR
ALM
Asse X
Asse X
X1 XB
24 Vc.c.
(vedere nota 1).
Limite
CW
asse Y
Comune
CCW
asse Y
Comune
39
19
RUN
Asse Y
Comune
Comune
Interrupt
esterno
asse Y
ALM
Asse Y
RESET
Asse Y
Y1 YB
24 Vc.c.
BKIR
Asse Y
ALMCOM asse Y
(vedere nota 1).
FG
15,5
2,8
39
19
45
2,8
44,3
(46)
24 Vc.c.
Nota 1. Il contatto XB viene utilizzato per attivare/disattivare il freno elettromagnetico.
2. Non collegare morsetti inutilizzati.
3. Il morsetto 0 V è collegato internamente ai morsetti comuni.
4. È possibile applicare il seguente terminale a crimpare: R1.25-3
(rotondo con estremità aperta).
2-56
Page 76

Modelli e specifiche standard
Capitolo 2
2-7-2 Cavi delle morsettiere per il Servoazionamento
Cavi del Servoazionamento (XW2Z-@J-B5)
■
Questi cavi collegano un Servoazionamento e una morsettiera per il Servoazionamento. Questi
cavi vengono usati quando si collega una morsettiera per il Servoazionamento che non supporta
comunicazioni.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-100J-B5 1 m diametro di 8,0 Circa 0,1 kg
XW2Z-200J-B5 2 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
39L6
Relè per servoazionamento
XW2B-20J6-1B
XW2B-40J6-2B
XW2B-20J6-3B
Cablaggio
●
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Cavo: AWG28 x 4P + AWG28 x 9C
30
t=18
Servoazionamento
No.
Simbolo
13 +24VIN
10
OGND
3
+CCW
4
-CCW
1 +CW
2 -CW
5
+ECRST
6
-ECRST
33 ZCOM
32 Z
8
14 RUN
15
18 RESET
7 BKIR
34 ALM
35 ALMCOM
Schermatura
INP
FG
Servoazionamento
43,6
R7D-AP@
Spina del connettore:
10136-3000VE (Sumitomo 3M)
Calotta del connettore:
10336-52A0-008 (Sumitomo 3M)
2-57
Page 77

Modelli e specifiche standard
Cavi del Servoazionamento (XW2Z-@J-B7)
■
Capitolo 2
Questi cavi collegano un Servoazionamento e una morsettiera per il Servoazionamento. Questi cavi
vengono usati quando si collega una morsettiera per il Servoazionamento che non supporta comunicazioni (XW2B-40J6-4A).
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-100J-B7 1 m diametro di 8,0 Circa 0,1 kg
XW2Z-200J-B7 2 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
39L6
Relè per servoazionamento
XW2B-40J60-4A
Cablaggio
●
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
21
22
23
24
25
26
20
30
Cavo: AWG28 x 6P+AWG28 x 9C
t=18
Servoazionamento
SimboloNo.
13 +24VIN
OGND
10
3
+CCW
4
-CCW
1 +CW
2 -CW
+ECRST
5
6
-ECRST
33 ZCOM
32 Z
8
INP
14 RUN
15
18 RESET
7 BKIR
34 ALM
35 ALMCOM
20 RXD+
21 RXD22 TXD+
23 TXD-
Schermatura
FG
Servoazionamento
43.6
Spina del connettore:
10136-3000VE (Sumitomo 3M)
Calotta del connettore:
10336-52A0-008 (Sumitomo 3M)
R7D-AP@
2-58
Page 78

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A3)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo programmabile
CQM1-CPU43-V1 oppure CQM1H-PLB21 e una morsettiera per il Servoazionam. XW2B-20J6-3B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A3 50 cm diametro di 7,5 Circa 0,1 kg
XW2Z-100J-A3 1 m Circa 0,1 kg
Configurazione del collegamento e dimensioni esterne
●
L
639
CQM1-CPU43-V1
CQM1H-PLB21
Cablaggio
●
CQM1
No.
15
12
13
14
Rivestimento cappuccio
CQM1
32,2
t=15
Relè per servoazionamento
No.
1
2
3
4
5
6
1
3
4
5
6
Cavo: AWG28x4P+AWG28x4C
7
8
9
10
11
12
13
14
15
16
Relè per servoazionamento
25
XW2B-20J6-3B
2-59
Page 79

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A4)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo programmabile
C200H-NC112 e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A1 50 cm diametro di 8,0 Circa 0,1 kg
XW2Z-100J-A1 1 m Circa 0,1 kg
Configurazione del collegamento e dimensioni esterne
●
8 L 6
Modulo di con-
trollo posizione
C200H-NC112
Cablaggio
●
Modulo controllo posizione
No.
A1
A5
A3
A4
A6
A7
A8
B8
A9
B9
A10
B10
A12
B12
A13
B13
A19
B19
A20
B20
A11
B11
69,5
Cavo: AWG28 x 4P + AWG28 x 15C
38
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
Relè per il
servoazionamento
XW2B-20J6-1B
2-60
Page 80

Modelli e specifiche standard
Cavo per il Modulo di Controllo della Posizione (XW2Z-@J-A5)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
C200H-NC112, C500-NC113, oppure C500-NC211 e una morsettiera per il Servoazionamento
XW2B-40J6-2B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A5 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A5 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
40,5 L 6
Modulo controllo posizione
C200H-NC211
C500-NC113
C500-NC211
52,3
t=18
Relè per servoazionamento
38
XW2B-40J6-2B
2-61
Page 81

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
1
23
13
2
4
5
9
11
22
6
7
8
17
18
19
15
24
26
27
31
33
20
21
29
28
30
10
32
12
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
Cavo: AWG28 x 6P + AWG28 x 19C
2-62
Page 82

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A8)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-NC113 oppure C200HW-NC113 e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A8 50 cm diametro di 8,0 Circa 0,1 kg
XW2Z-100J-A8 1 m Circa 0,1 kg
Configurazione del collegamento e dimensioni esterne
●
L 647
Modulo di con-
trollo posizione
CS1W-NC113
C200HW-NC113
Cablaggio
●
Modulo controllo posizione
No.
A1
A2
A8
A6
A10
A24
A12
A21
A23
A22
A19
A20
A15
A14
Terminale a crimpare
83
t=11
Cavo: AWG28 x 4P + AWG28 x 9C
Relè per il
38
servoazionamento
XW2B-20J6-1B
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
2-63
Page 83

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A9)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-NC213, CS1W-NC413, C200HW-NC213 oppure C200HW-NC413 e una morsettiera per il
Servoazionamento XW2B-40J6-2B oppure XW2B-40J6-4A.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A9 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A9 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
L 647
Modulo controllo posizione
CS1W-NC213
CS1W-NC413
C200HW-NC213
C200HW-NC413
83
Relè per il
servoazionamento
48
XW2B-40J6-2B
XW2B-40J6-4A
t=11
2-64
Page 84

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A1/B1
A2/B2
A8
A6
A10
A14
A24/B24
A19
A21
A12
A23
A22
A20/B20
B8
B6
B10
B14
B23
B22
B21
B19
B12
A15/B15
Terminale a crimpare
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
Cavo: AWG28 x 6P + AWG28 x 17C
2-65
Page 85

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A12)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-NC133 e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A12 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A12 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
L 647
Modulo controllo posizione
CS1W-NC133
Cablaggio
●
Modulo controllo posizione
No.
A3
A4
A1
A2
A7
A8
A5
A6
A10
A24
A12
A21
A23
A22
A19
A20
A15
A14
Terminale a crimpare
83
t=11
AWG20 Nero
AWG20 Rosso
Cavo: AWG28 x 4P + AWG28 x 9C
1000
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
48
Relè per servoazionamento
XW2B-20J6-1B
2-66
Page 86

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A13)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-NC233 oppure CS1W-NC433 e una morsettiera per il Servoazionamento XW2B-40J6-2B
oppure XW2B-40J6-4A.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A13 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A13 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
L 647
Modulo controllo posizione
CS1W-NC233
CS1W-NC433
83
t=11
1000
48
Relè per
servoazionamento
XW2B-40J6-2B
XW2B-40J6-4A
2-67
Page 87

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A3/B3
A4/B4
A1/B1
A2/B2
A7
A8
A5
A6
A10
A14
A24/B24
A19
A21
A12
A23
A22
A20/B20
B7
B8
B5
B6
B10
B14
B23
B22
B21
B19
B12
A15/B15
Terminale a crimpare
AWG20 Nero
AWG20 Rosso
Cavo: AWG28 x 6P + AWG28 x 17C
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
34
33
2-68
Page 88

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A16)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CJ1W-NC133 e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A16 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A16 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
500
Modulo di controllo
della posizione
CJ1W-NC113
CJ1W-NC113
t=11
20J6-1B
L 6
Relè per il
servoazionamento
38
XW2B-20J6-1B
2-69
Page 89

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A1
A2
A8
A6
A9
A20
A11
A17
A19
A18
A15
A16
A13
A12
Terminale a crimpare
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
Cavo: AWG28 x 4P + AWG28 x 9C
2-70
Page 90

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A17)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CJ1W-NC213 oppure CJ1W-NC413 e una morsettiera per il Servoazionamento XW2B-40J6-2B
oppure XW2B-40J6-4A.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A17 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A17 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
500
Modulo controllo
posizione
CJ1W-NC213
CJ1W-NC413
40J6-2B
48
CJ1W-NC213/NC413
Relè per
servoazionamento
XW2B-40J6-2B
XW2B-40J6-4A
t=11
L 6
2-71
Page 91

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A1/B1
A2/B2
A8
A6
A9
A12
A20/B20
A15
A17
A11
A19
A18
A16/B16
B8
B6
B9
B12
B19
B18
B17
B15
B11
A13/B13
Terminale a crimpare
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
27
28
29
30
31
32
34
33
Cavo: AWG28 x 6P + AWG28 x 17C
2-72
Page 92

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A20)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CJ1W-NC133 e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A20 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A20 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
500
Modulo di controllo
della posizione
CJ1W-NC113
CJ1W-NC133
t=11
1000
20J6-1B
38
L
6
Relè per il
servoazionamento
XW2B-20J6-1B
2-73
Page 93

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A3
A4
A1
A2
A7
A8
A5
A6
A9
A20
A11
A17
A19
A18
A15
A16
A13
A12
Terminale a crimpare
AWG20 Nero
AWG20 Rosso
Cavo: AWG28 x 4P + AWG28 x 9C
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
25
26
24
2-74
Page 94

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A21)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CJ1W-NC233 oppure CJ1W-NC433 e una morsettiera per il Servoazionamento XW2B-40J6-2B
oppure XW2B-40J6-4A.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A21 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A21 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
Modulo controllo
posizione
CJ1W-NC233
CJ1W-NC433
500
CJ1W-NC233/NC433
t=11
1000
40J6-2B
L 6
48
Relè per
servoazionamento
XW2B-40J6-2B
XW2B-40J6-4A
2-75
Page 95

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A3/B3
A4/B4
A1/B1
A2/B2
A7
A8
A5
A6
A9
A12
A20/B20
A15
A17
A11
A19
A18
A16
B7
B8
B5
B6
B9
B12
B19
B18
B17
B15
B11
A13/B13
B16
Terminale a crimpare
AWG20 Nero
AWG20 Rosso
Cavo: AWG28 x 6P + AWG28 x 17C
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
27
28
29
30
31
32
34
33
2-76
Page 96

Modelli e specifiche standard
Cavo per il Modulo di Controllo della Posizione (XW2Z-@J-A22)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-HCP22 e una morsettiera per il Servoazionamento XW2B-20J6-3B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A22 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A22 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
500
Modulo di controllo
della posizione
CS1W-HCP22
Cablaggio
●
Modulo controllo posizione
Terminale a crimpare
No.
A19
A20
A18
A16
B2
A1
B4
A3
A17
A15
CS1W-HCP22
t=11
L
Cavo: AWG28 x 4P + AWG28 x 4C
20J6-3B
6
Relè per il
servoazionamento
25
XW2B-20J6-3B
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
2-77
Page 97

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A23)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un’unità di controllo della posizione
CS1W-HCP22 e una morsettiera per il Servoazionamento XW2B-20J6-3B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A23 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A23 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
Modulo di controllo
della posizione
CS1W-HCP22
CS1W-HCP22
500
t=11
Relè per il
servoazionamento
XW2B-20J6-3B
20J6-3B
25
20J6-3B
25
L
6
2-78
Page 98

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
No.
A19
A20
A18
A16
B2
A1
B4
A3
A17
A15
B19
B20
B18
B16
B8
A7
B10
A9
B17
B15
Terminale a crimpare
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
Cavo: AWG28 x 4P + AWG28 x 4C
Relè per servoazionamento
No.
1
2
3
4
5
6
7
8
9
10
11
12
13
Cavo: AWG28 x 4P + AWG28 x 4C
2-79
Page 99

Modelli e specifiche standard
Cavi per il Modulo di Controllo della Posizione (XW2Z-@J-A25)
■
Capitolo 2
Questi cavi per il Modulo di Controllo della Posizione collegano un posizionatore ad un solo albero
3F88M-DRT141 (per DeviceNet) e una morsettiera per il Servoazionamento XW2B-20J6-1B.
Modelli di cavi
●
Modello Lunghezza (L) Diametro esterno della guaina Peso
XW2Z-050J-A25 50 cm diametro di 10,0 Circa 0,1 kg
XW2Z-100J-A25 1 m Circa 0,2 kg
Configurazione del collegamento e dimensioni esterne
●
L 647
Posizione Console
di programmazione
3F88M-DRT141
83
t=11
500
150
20J6-1B
38
Relè per il
servoazionamento
XW2B-20J6-1B
2-80
Page 100

Modelli e specifiche standard
Cablaggio
●
Capitolo 2
Modulo controllo posizione
A24
B24
B21
B22
A21
A22
A20
B20
A1
B10
A16/B16
A10
B9
A9
B8
B2
A11
B11
B19
Relè per servoazionamento
No.No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
Terminale a crimpare
(rotondo)
Cavo: AWG28 x 8P + AWG28 x 16C
Terminale a crimpare
(tipo a Y)
2-81
 Loading...
Loading...