

Page 1

Machine Automation Controller
NJ-series
CPU Unit
Hardware
User’s Manual
NJ501-
NJ301-1
NJ101-
NJ-P3001
CJ1W-ID/IA
CJ1W-INT01
CJ1W-IDP01
CJ1W-OC/OD/OA
CJ1W-MD
CJ1W-B7A
CPU Unit
Power Supply Unit
Basic I/O Units
W500-E1-27
Page 2

NOTE
• All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in
any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior
written permission of OMRON.
• No patent liability is assumed with respect to the use of the information contained herein.
Moreover, because OMRON is constantly striving to improve its high-quality products, the information contained
in this manual is subject to change without notice.
• Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility for errors or omissions.
Neither is any liability assumed for damages resulting from the use of the information contained in this publication.
Trademarks
• Sysmac and SYSMAC are trademarks or registered trademarks of OMRON Corporation in Japan and other
countries for OMRON factory automation products.
• Microsoft, Windows, Excel, and Visual Basic are either registered trademarks or trademarks of Microsoft Corporation in the United States and other countries.
• EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany.
• ODVA, CIP, CompoNet, DeviceNet, and EtherNet/IP are trademarks of ODVA.
• The SD and SDHC logos are trademarks of SD-3C, LLC.
Other company names and product names in this document are the trademarks or registered trademarks of their
respective companies.
Copyrights
• Microsoft product screen shots reprinted with permission from Microsoft Corporation.
• This product incorporates certain third party software. The license and copyright information associated with this
software is available at http://www.fa.omron.co.jp/nj_info_e/.
Page 3

Introduction
Thank you for purchasing an NJ-series CPU Unit.
This manual contains information that is necessary to use the NJ-series CPU Unit. Please read this
manual and make sure you understand the functionality and performance of the NJ-series CPU Unit
before you attempt to use it in a control system.
Keep this manual in a safe place where it will be available for reference during operation.
Intended Audience
This manual is intended for the following personnel, who must also have knowledge of electrical systems (an electrical engineer or the equivalent).
• Personnel in charge of introducing FA systems.
• Personnel in charge of designing FA systems.
• Personnel in charge of installing and maintaining FA systems.
• Personnel in charge of managing FA systems and facilities.
For programming, this manual is intended for personnel who understand the programming language
specifications in international standard IEC 61131-3 or Japanese standard JIS B 3503.
Introduction
Applicable Products
This manual covers the following products.
• NJ-series CPU Units
• NJ501-5
• NJ501-4
• NJ501-3
• NJ301-12
• NJ301-11
• NJ101-10
• NJ101-90
Part of the specifications and restrictions for the CPU Units are given in other manuals. Refer to Relevant Manuals on page 2 and Related Manuals on page 39.
NJ-series CPU Unit Hardware User’s Manual (W500)
1
Page 4

Relevant Manuals
Relevant Manuals
The following table provides the relevant manuals for the NJ-series CPU Units.
Read all of the manuals that are relevant to your system configuration and application before you use
the NJ-series CPU Unit.
Most operations are performed from the Sysmac Studio Automation Software. Refer to the Sysmac Stu-
dio Version 1 Operation Manual (Cat. No. W504) for information on the Sysmac Studio.
Basic informa-
tion
NJ-series CPU Unit Hardware
User’s Manual
User’s Manual
Purpose of use
Manual
NJ/NX-series CPU Unit Software
NJ/NX-series Instructions Refer-
ence Manual
NJ/NX-series CPU Unit Motion
Control User’s Manual
NJ/NX-series Motion Control
Instructions Reference Manual
erCAT Port User’s Manual
NJ/NX-series CPU Unit Built-in Eth-
erNet/IP Port User’s Manual
NJ/NX-series CPU Unit Built-in Eth-
NJ/NX-series CPU Unit OPC UA
User’s Manual
tion CPU Units User’s Manual
NJ/NX-series Database Connec-
NJ-series SECS/GEM CPU Units
User’s Manual
NJ-series Robot Integrated CPU
Unit User’s Manual
NJ-series NJ Robotics CPU Unit
User’s Manual
NJ/NY-series NC Integrated Con-
troller User’s Manual
NJ/NX-series Troubleshooting
Manual
Introduction to NJ-series Controllers
Setting devices and hardware
Using motion control
Using EtherCAT
Using EtherNet/IP
Using robot control for OMRON robots
Software settings
Using motion control
Using EtherCAT
Using EtherNet/IP
Using OPC UA
Using the database connection service
Using the GEM Services
Using robot control for OMRON robots
Using robot control by NJ Robotics
function
Using numerical control
Writing the user program
Using motion control
Using EtherCAT
Using EtherNet/IP
Using OPC UA
Using the database connection service
Using the GEM Services
Using robot control for OMRON robots
Using robot control by NJ Robotics
function
Using numerical control
Programming error processing
2
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 5

Relevant Manuals
Manual
Basic informa-
tion
NJ-series CPU Unit Hardware
User’s Manual
Purpose of use
Testing operation and debugging
Using motion control
Using EtherCAT
Using EtherNet/IP
Using OPC UA
Using the database connection service
Using the GEM Services
Using robot control for OMRON robots
Using robot control by NJ Robotics
function
Using numerical control
Learning about error management and
corrections
Maintenance
*1
Using motion control
Using EtherCAT
Using EtherNet/IP
*1 Refer to the NJ/NX-series Troubleshooting Manual (Cat. No. W503) for the error management concepts and the error
items. However, refer to the manuals that are indicated with triangles for details on errors corresponding to the products
with the manuals that are indicated with triangles.
NJ/NX-series CPU Unit Software
User’s Manual
NJ/NX-series Instructions Refer-
ence Manual
NJ/NX-series CPU Unit Motion
Control User’s Manual
NJ/NX-series Motion Control
Instructions Reference Manual
NJ/NX-series CPU Unit Built-in Eth-
erCAT Port User’s Manual
NJ/NX-series CPU Unit Built-in Eth-
erNet/IP Port User’s Manual
NJ/NX-series CPU Unit OPC UA
User’s Manual
NJ/NX-series Database Connec-
tion CPU Units User’s Manual
User’s Manual
NJ-series SECS/GEM CPU Units
Unit User’s Manual
NJ-series Robot Integrated CPU
NJ-series NJ Robotics CPU Unit
User’s Manual
NJ/NY-series NC Integrated Con-
troller User’s Manual
Manual
NJ/NX-series Troubleshooting
NJ-series CPU Unit Hardware User’s Manual (W500)
3
Page 6

Manual Structure
4-9
4 Installation and Wiring
NJ-series CPU Unit Hardware User’s Manual (W500)
stinU gnitnuoM 3-4
4
stnenopmoC rellortnoC gnitcennoC 1-3-4
4-3 Mounting Units
The Units that make up an NJ-series Controller can be connected simply by pressing the Units together
and locking the sliders by moving them toward the back of the Units. The End Cover is connected in the
same way to the Unit on the far right side of the Controller.
1 Join the Units so that the connectors fit exactly.
2 The yellow sliders at the top and bottom of each Unit lock the Units together. Move the sliders
toward the back of the Units as shown below until they click into place.
Precautions for Correct UsePrecautions for Correct Use
4-3-1 Connecting Controller Components
Connector
Hook
Hook holes
Slider
Lock
Release
Move the sliders toward the back
until they lock into place.
Level 1 heading
Level 2 heading
Level 3 heading
Level 2 heading
A step in a procedure
Manual name
Special information
Level 3 heading
Page tab
Gives the current
headings.
Indicates a procedure.
Icons indicate
precautions, additional
information, or reference
information.
Gives the number
of the main section.
This illustration is provided only as a sample. It may not literally appear in this manual.
The sliders on the tops and bottoms of the Power Supply Unit, CPU Unit, I/O Units, Special I/O
Units, and CPU Bus Units must be completely locked (until they click into place) after connecting
the adjacent Unit connectors.
Manual Structure
Page Structure
The following page structure is used in this manual.
4
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 7

Special Information
Special information in this manual is classified as follows:
Precautions for Safe Use
Precautions on what to do and what not to do to ensure safe usage of the product.
Precautions for Correct Use
Precautions on what to do and what not to do to ensure proper operation and performance.
Additional Information
Additional information to read as required.
This information is provided to increase understanding or make operation easier.
Version Information
Information on differences in specifications and functionality for CPU Units with different unit versions
and for different versions of the Sysmac Studio is given.
Manual Structure
Note References are provided to more detailed or related information.
Precaution on Terminology
In this manual, “download” refers to transferring data from the Sysmac Studio to the physical Controller
and “upload” refers to transferring data from the physical Controller to the Sysmac Studio.
For the Sysmac Studio, synchronization is used to both upload and download data. Here, “synchronize”
means to automatically compare the data for the Sysmac Studio on the computer with the data in the
physical Controller and transfer the data in the direction that is specified by the user.
NJ-series CPU Unit Hardware User’s Manual (W500)
5
Page 8

Manual Structure
6
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 9

Sections in this Manual
1
2
3
4
5
1
2
3
4
5
I
Introduction to NJ-series Controllers
System Configuration
Configuration Units
Installation and Wiring
Troubleshooting
I
6
A
Index
6
A
Inspection and Maintenance
Appendices
Sections in this Manual
NJ-series CPU Unit Hardware User’s Manual (W500)
7
Page 10

CONTENTS
CONTENTS
Introduction ...............................................................................................................1
Relevant Manuals......................................................................................................2
Manual Structure.......................................................................................................4
Sections in this Manual ............................................................................................7
Terms and Conditions Agreement .........................................................................12
Safety Precautions..................................................................................................14
Precautions for Safe Use........................................................................................20
Precautions for Correct Use...................................................................................30
Regulations and Standards....................................................................................34
Versions ...................................................................................................................36
Related Manuals......................................................................................................39
Terminology.............................................................................................................41
Revision History......................................................................................................46
Section 1 Introduction to NJ-series Controllers
1-1 The NJ-series Controllers ....................................................................................................... 1-2
1-1-1 Features...................................................................................................................................... 1-2
1-1-2 Introduction to the System Configurations ..................................................................................1-4
1-2 Specifications .......................................................................................................................... 1-7
1-3 Overall Operating Procedure for the NJ-series Controller ................................................ 1-12
1-3-1 Overall Procedure .....................................................................................................................1-12
1-3-2 Procedure Details......................................................................................................................1-13
Section 2 System Configuration
2-1 Basic System Configuration...................................................................................................2-2
2-1-1 EtherCAT Network Configuration ................................................................................................ 2-4
2-1-2 CJ-series Unit Configuration .......................................................................................................2-5
2-2 Connecting to the Sysmac Studio ....................................................................................... 2-19
2-3 Network Configuration .......................................................................................................... 2-20
Section 3 Configuration Units
3-1 CPU Units ................................................................................................................................. 3-2
3-1-1 Models and Specifications ..........................................................................................................3-2
3-1-2 Components and Functions ........................................................................................................3-3
3-2 SD Memory Cards.................................................................................................................. 3-10
8
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 11

CONTENTS
3-2-1 Models and Specifications........................................................................................................ 3-10
3-2-2 Purpose .....................................................................................................................................3-11
3-2-3 Installing and Removing ........................................................................................................... 3-12
3-3 Power Supply Units ............................................................................................................... 3-14
3-3-1 Models and Specifications........................................................................................................ 3-14
3-3-2 Components and Functions...................................................................................................... 3-16
3-3-3 Selecting a Power Supply Unit ................................................................................................. 3-17
3-4 CJ-series Basic I/O Units ...................................................................................................... 3-22
3-4-1 Models and Specifications........................................................................................................ 3-22
3-4-2 Part Names and Functions ....................................................................................................... 3-23
3-5 B7A Interface Ports ............................................................................................................... 3-26
3-5-1 Overview................................................................................................................................... 3-26
3-5-2 System Configuration ............................................................................................................... 3-26
3-5-3 Models ...................................................................................................................................... 3-26
3-5-4 B7A Communications Specifications ........................................................................................ 3-27
3-5-5 Common Specifications............................................................................................................ 3-28
3-5-6 B7A Interface Port I/O Types .................................................................................................... 3-28
3-5-7 Parts and Names...................................................................................................................... 3-29
3-5-8 Transmission Error Processing................................................................................................. 3-31
3-6 CJ-series I/O Control Units and I/O Interface Units............................................................ 3-32
3-6-1 Models and Specifications........................................................................................................ 3-32
3-6-2 Component and Functions........................................................................................................ 3-32
3-7 Sysmac Studio....................................................................................................................... 3-33
3-7-1 Model Numbers ........................................................................................................................ 3-33
3-7-2 Connection................................................................................................................................ 3-34
Section 4 Installation and Wiring
4-1 Processing at Power ON and Power OFF ............................................................................. 4-2
4-1-1 Power ON Operation .................................................................................................................. 4-2
4-1-2 Power OFF Operation................................................................................................................. 4-4
4-1-3 Resetting the Controller from the Sysmac Studio....................................................................... 4-6
4-2 Fail-safe Circuits...................................................................................................................... 4-7
4-2-1 Order of Powering Up the Controller and Controlled System ..................................................... 4-8
4-3 Mounting Units ...................................................................................................................... 4-10
4-3-1 Installation in a Control Panel ................................................................................................... 4-10
4-3-2 Connecting Controller Components.......................................................................................... 4-15
4-3-3 DIN Track Installation................................................................................................................ 4-17
4-3-4 Connecting CJ-series Expansion Racks................................................................................... 4-20
4-3-5 Assembled Appearance and Dimensions ................................................................................. 4-22
4-4 Wiring ..................................................................................................................................... 4-27
4-4-1 Power Supply Wiring ................................................................................................................ 4-27
4-4-2 Wiring the Built-in EtherCAT Port ............................................................................................. 4-32
4-4-3 Wiring CJ-series Basic I/O Units with Terminal Blocks ............................................................. 4-33
4-4-4 Wiring CJ-series Basic I/O Units with Connectors.................................................................... 4-34
4-4-5 Connecting to Connector-Terminal Block Conversion Units or I/O Relay Terminals ................ 4-39
4-4-6 Connecting I/O Devices............................................................................................................ 4-40
4-4-7 Wiring the Built-in EtherCAT Port ............................................................................................. 4-43
4-4-8 Wiring B7A Interface Units........................................................................................................ 4-44
4-5 Control Panel Installation ..................................................................................................... 4-50
4-5-1 Temperature.............................................................................................................................. 4-50
4-5-2 Humidity.................................................................................................................................... 4-52
4-5-3 Vibration and Shock.................................................................................................................. 4-52
4-5-4 Atmosphere .............................................................................................................................. 4-52
4-5-5 Electrical Environment.............................................................................................................. 4-53
4-5-6 Grounding................................................................................................................................. 4-57
NJ-series CPU Unit Hardware User’s Manual (W500)
9
Page 12

CONTENTS
Section 5 Troubleshooting
5-1 Overview of Troubleshooting ................................................................................................. 5-2
Section 6 Inspection and Maintenance
6-1 Periodic Maintenance and Inspection ................................................................................... 6-2
6-1-1 Periodic Inspection...................................................................................................................... 6-2
6-1-2 Unit Replacement Precautions.................................................................................................... 6-3
6-2 Replacing the Battery.............................................................................................................. 6-4
6-2-1 Battery Replacement...................................................................................................................6-4
6-2-2 Operation without a Battery.........................................................................................................6-7
Appendices
A-1 Specifications ..........................................................................................................................A-2
A-2 Specifications of Basic I/O Units ...........................................................................................A-3
A-2-1 Overview of Units........................................................................................................................A-3
A-2-2 Basic I/O Units ............................................................................................................................A-5
A-2-3 Precautions on Contact Output Units........................................................................................A-52
A-2-4 Connecting Connector-Terminal Block Conversion Units and I/O Relay Terminals ..................A-54
A-3 Dimensions ............................................................................................................................A-89
A-3-1 NJ-series CPU Units .................................................................................................................A-89
A-3-2 NJ-series Power Supply Units...................................................................................................A-90
A-3-3 CJ-series Basic I/O Units ..........................................................................................................A-91
A-3-4 B7A Interface Unit .....................................................................................................................A-94
A-3-5 CJ-series I/O Control Unit and I/O Interface Unit ......................................................................A-94
A-3-6 SD Memory Card ......................................................................................................................A-94
A-4 Load Short-circuit Protection and Line Disconnection Detection for CJ-series Basic I/O
Units......................................................................................................................................A-95
A-4-1 Load Short-circuit Protection and Line Disconnection Detection for CJ1W-OD202..................A-95
A-4-2 Load Short-circuit Protection for CJ1W-OD204/OD212/OD232/MD232...................................A-98
A-5 EMC Directive Measures for Relay Outputs......................................................................A-100
A-6 System-defined Variables Related to Hardware ...............................................................A-102
Index
10
A-7 Version Information.............................................................................................................A-103
A-7-1 Relationship between Unit Versions of CPU Units and Sysmac Studio Versions...................A-103
A-7-2 Relationship between Hardware Revisions of CPU Units and Sysmac Studio Versions........A-105
A-7-3 Functions That Were Added or Changed for Each Unit Version .............................................A-106
A-7-4 Performance Improvements for Unit Version Upgrades..........................................................A-109
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 13

NJ-series CPU Unit Hardware User’s Manual (W500)
CONTENTS
11
Page 14

Terms and Conditions Agreement
Terms and Conditions Agreement
Warranty, Limitations of Liability
Warranties
Exclusive Warranty
Omron’s exclusive warranty is that the Products will be free from defects in materials and workmanship for a period of twelve months from the date of sale by Omron (or such other period expressed in
writing by Omron). Omron disclaims all other warranties, express or implied.
Limitations
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, ABOUT
NON-INFRINGEMENT, MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OF
THE PRODUCTS. BUYER ACKNOWLEDGES THAT IT ALONE HAS DETERMINED THAT THE
PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR INTENDED USE.
Omron further disclaims all warranties and responsibility of any type for claims or expenses based
on infringement by the Products or otherwise of any intellectual property right.
Buyer Remedy
Omron’s sole obligation hereunder shall be, at Omron’s election, to (i) replace (in the form originally
shipped with Buyer responsible for labor charges for removal or replacement thereof) the non-complying Product, (ii) repair the non-complying Product, or (iii) repay or credit Buyer an amount equal
to the purchase price of the non-complying Product; provided that in no event shall Omron be
responsible for warranty, repair, indemnity or any other claims or expenses regarding the Products
unless Omron’s analysis confirms that the Products were properly handled, stored, installed and
maintained and not subject to contamination, abuse, misuse or inappropriate modification. Return of
any Products by Buyer must be approved in writing by Omron before shipment. Omron Companies
shall not be liable for the suitability or unsuitability or the results from the use of Products in combination with any electrical or electronic components, circuits, system assemblies or any other materials or substances or environments. Any advice, recommendations or information given orally or in
writing, are not to be construed as an amendment or addition to the above warranty.
See http://www.omron.com/global/ or contact your Omron representative for published information.
Limitation on Liability; Etc
OMRON COMPANIES SHALL NOT BE LIABLE FOR SPECIAL, INDIRECT, INCIDENTAL, OR CONSEQUENTIAL DAMAGES, LOSS OF PROFITS OR PRODUCTION OR COMMERCIAL LOSS IN ANY
WAY CONNECTED WITH THE PRODUCTS, WHETHER SUCH CLAIM IS BASED IN CONTRACT,
WARRANTY, NEGLIGENCE OR STRICT LIABILITY.
Further, in no event shall liability of Omron Companies exceed the individual price of the Product on
which liability is asserted.
12
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 15

Application Considerations
Suitability of Use
Omron Companies shall not be responsible for conformity with any standards, codes or regulations
which apply to the combination of the Product in the Buyer’s application or use of the Product. At
Buyer’s request, Omron will provide applicable third party certification documents identifying ratings
and limitations of use which apply to the Product. This information by itself is not sufficient for a complete determination of the suitability of the Product in combination with the end product, machine, system, or other application or use. Buyer shall be solely responsible for determining appropriateness of
the particular Product with respect to Buyer’s application, product or system. Buyer shall take application responsibility in all cases.
NEVER USE THE PRODUCT FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY OR IN LARGE QUANTITIES WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE
HAS BEEN DESIGNED TO ADDRESS THE RISKS, AND THAT THE OMRON PRODUCT(S) IS
PROPERLY RATED AND INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
Terms and Conditions Agreement
Programmable Products
Omron Companies shall not be responsible for the user’s programming of a programmable Product, or
any consequence thereof.
Disclaimers
Performance Data
Data presented in Omron Company websites, catalogs and other materials is provided as a guide for
the user in determining suitability and does not constitute a warranty. It may represent the result of
Omron’s test conditions, and the user must correlate it to actual application requirements. Actual performance is subject to the Omron’s Warranty and Limitations of Liability.
Change in Specifications
Product specifications and accessories may be changed at any time based on improvements and other
reasons. It is our practice to change part numbers when published ratings or features are changed, or
when significant construction changes are made. However, some specifications of the Product may be
changed without any notice. When in doubt, special part numbers may be assigned to fix or establish
key specifications for your application. Please consult with your Omron’s representative at any time to
confirm actual specifications of purchased Product.
Errors and Omissions
Information presented by Omron Companies has been checked and is believed to be accurate; however, no responsibility is assumed for clerical, typographical or proofreading errors or omissions.
NJ-series CPU Unit Hardware User’s Manual (W500)
13
Page 16

Safety Precautions
Safety Precautions
Definition of Precautionary Information
The following notation is used in this manual to provide precautions required to ensure safe usage of an
NJ-series Controller. The safety precautions that are provided are extremely important to safety. Always
read and heed the information provided in all safety precautions.
The following notation is used.
Indicates a potentially hazardous situation which, if not avoided,
WARNING
could result in death or serious injury. Additionally, there may be
severe property damage.
Caution
Precautions for Safe Use
Indicates precautions on what to do and what not to do to ensure safe usage of the product.
Precautions for Correct Use
Indicates precautions on what to do and what not to do to ensure proper operation and performance.
Indicates a potentially hazardous situation which, if not avoided,
may result in minor or moderate injury, or property damage.
14
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 17

Symbols
Safety Precautions
The circle and slash symbol indicates operations that you must not do.
The specific operation is shown in the circle and explained in text.
This example indicates prohibiting disassembly.
The triangle symbol indicates precautions (including warnings).
The specific operation is shown in the triangle and explained in text.
This example indicates a precaution for electric shock.
The triangle symbol indicates precautions (including warnings).
The specific operation is shown in the triangle and explained in text.
This example indicates a general precaution.
The filled circle symbol indicates operations that you must do.
The specific operation is shown in the circle and explained in text.
This example shows a general precaution for something that you must do.
The triangle symbol indicates precautions (including warnings).
The specific operation is shown in the triangle and explained in text.
This example indicates a precaution for high temperatures.
NJ-series CPU Unit Hardware User’s Manual (W500)
15
Page 18

Safety Precautions
Warnings
During Power Supply
Do not touch any of the terminals or terminal blocks while the power is being
supplied. Doing so may result in electric shock.
Do not attempt to take any Unit apart. In particular, high-voltage parts are
present in the Power Supply Unit while power is supplied or immediately
after power is turned OFF. Touching any of these parts may result in electric
shock. There are sharp parts inside the Unit that may cause injury.
WARNING
Fail-safe Measures
Provide safety measures in external circuits to ensure safety in the system if
an abnormality occurs due to malfunction of the CPU Unit, slaves, or Units or
due to other external factors affecting operation. Not doing so may result in
serious accidents due to incorrect operation.
Emergency stop circuits, interlock circuits, limit circuits, and similar safety
measures must be provided in external control circuits.
The Controller outputs may remain ON or OFF due to deposition or burning
of the output relays or destruction of the output transistors. As a countermeasure for such problems, external safety measures must be provided to
ensure safe operation of the system.
The CPU Unit will turn OFF all outputs from Basic Output Units in the following cases. The slaves will operate according to the settings in the slaves.
• If an error occurs in the power supply
• If the power supply connection becomes faulty
• If a CPU watchdog timer error or CPU reset occurs
• If a major fault level Controller error occurs
• While the CPU Unit is on standby until RUN mode is entered after the
power is turned ON
External safety measures must be provided to ensure safe operation of the
system in such cases.
16
If external power supplies for slaves or other devices are overloaded or
short-circuited, the voltage will drop, outputs will turn OFF, and the system
may be unable to read inputs. Provide external safety measures in controls
with monitoring of external power supply voltage as required so that the system operates safely in such a case.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 19

Unintended outputs may occur when an error occurs in variable memory or
in memory used for CJ-series Units. As a countermeasure for such problems, external safety measures must be provided to ensure safe operation of
the system.
Provide measures in the communications system and user program to
ensure safety in the overall system even if errors or malfunctions occur in
data link communications or remote I/O communications.
If there is interference in remote I/O communications or if a major fault level
error occurs, output status will depend on the products that are used.
Confirm the operation that will occur when there is interference in communications or a major fault level error, and implement safety measures.
Correctly set all of the settings in the slaves and Units.
The NJ-series Controller continues normal operation for a certain period of
time when a momentary power interruption occurs. This means that the NJseries Controller may receive incorrect signals from external devices that are
also affected by the power interruption. Accordingly, take suitable actions,
such as external fail-safe measures and interlock conditions, to monitor the
power supply voltage of the external device as required.
Safety Precautions
You must take fail-safe measures to ensure safety in the event of incorrect,
missing, or abnormal signals caused by broken signal lines, momentary
power interruptions, or other causes. Not doing so may result in serious accidents due to incorrect operation.
Voltage and Current Inputs
Make sure that the voltages and currents that are input to the slaves and
Units are within the specified ranges.
Inputting voltages or currents that are outside of the specified ranges may
cause accidents or fire.
Downloading
Always confirm safety at the destination before you transfer a user program,
configuration data, setup data, device variables, or values in memory used
for CJ-series Units from the Sysmac Studio. The devices or machines may
perform unexpected operation regardless of the operating mode of the CPU
Unit.
Actual Operation
Check the user program, data, and parameter settings for proper execution
before you use them for actual operation.
NJ-series CPU Unit Hardware User’s Manual (W500)
17
Page 20
Safety Precautions
Version Information
Cautions
Application
Do not touch any Unit when power is being supplied or immediately after the
power supply is turned OFF. Doing so may result in burn injury.
Wiring
Caution
Be sure that all terminal screws and cable connector screws are tightened to
the torque specified in the relevant manuals. The loose screws may result in
fire or malfunction.
Online Editing
Execute online editing only after confirming that no adverse effects will be
caused by deviations in the timing of I/O. If you perform online editing, the
task execution time may exceed the task period, I/O may not be refreshed
with external devices, input signals may not be read, and output timing may
change.
EtherCAT Communications
If the cable redundancy function is enabled, always write a program to confirm that the network is in the cable redundancy status. If the program is not
written, you cannot check that the network is not in the cable redundancy
status due to a disconnection on the ring topology.
Use the _EC_RingBreaking system-defined variable to confirm that the network is in the cable redundancy status.
18
The cable redundancy function can be used with project unit version 1.40 or later.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 21

Safety Precautions
Version Information
Precaution on Error Message That Says an Instruction May Cause
Unintended Operation
Instructions may results in unexpected operation and affect the system if you
clear the selection of the Detect an error when an in-out variable is passed to
specific instruction argument Check Box in the Program Check Area. Always
confirm that the conditions for use that are given in the NJ/NX-series Instruc-
tions Reference Manual (Cat. No. W502) are met before you clear the selection of this check box.
This error message is displayed by and the above option setting is available on Sysmac Studio
version 1.02.
NJ-series CPU Unit Hardware User’s Manual (W500)
19
Page 22

Precautions for Safe Use
Precautions for Safe Use
Disassembly and Dropping
• Do not attempt to disassemble, repair, or modify any Units. Doing so may result in malfunction or fire.
• Do not drop any Unit or subject it to abnormal vibration or shock. Doing so may result in Unit malfunction or burning.
Mounting
• The sliders on the tops and bottoms of the Power Supply Unit, CPU Unit, I/O Units, and other Units
must be completely locked (until they click into place) after connecting the adjacent Unit connectors.
Installation
• Always connect to a ground of 100 Ω or less when installing the Units.
• If the LG and GR terminals are connected, make sure to connect them firmly. The LG terminal that is
a noise-filtered neutral terminal, has a half electrical potential of the input voltage. Therefore, if you
touch the metallic part of the LG terminal, GR terminal, or Controller, while the GR terminal is not
grounded, it may result in electrical shock.
Wiring
• Follow the instructions in this manual to correctly perform wiring.
Double-check all wiring and switch settings before turning ON the power supply.
• Use crimp terminals for wiring.
Do not connect bare stranded wires directly to terminals.
• Do not pull on the cables or bend the cables beyond their natural limit.
Do not place heavy objects on top of the cables or other wiring lines. Doing so may break the cables.
• Mount terminal blocks and connectors only after checking the mounting location carefully.
Be sure that the terminal blocks, expansion cables, and other items with locking devices are properly
locked into place.
• Always remove any dustproof labels that are on the top of the Units when they are shipped before
you turn ON the power supply. If the labels are not removed, heat will accumulate and malfunctions
may occur.
• Before you connect a computer to the CPU Unit, disconnect the power supply plug of the computer
from the AC outlet. Also, if the computer has an FG terminal, make the connections so that the FG
terminal has the same electrical potential as the GR terminal on the Power Supply Unit. A difference
in electrical potential between the computer and Controller may cause failure or malfunction.
• If the external power supply to an Output Unit or slave has polarity, connect it with the correct polarity.
If the polarity is reversed, current may flow in the reverse direction and damage the connected
devices regardless of the operation of the Controller.
20
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 23

Precautions for Safe Use
Task Design
• If the following variables are specified for a condition expression when the execution condition is a
condition expression for a variable, event tasks may not be executed when conditions are met or
event tasks may be executed when conditions are not met.
• Structure members whose data size is 16 bits or more, except for system-defined variables for
motion control
• Array elements whose data size is 16 bits or more
For information on event task execution conditions, refer to the NJ/NX-series CPU Unit Software
User's Manual (Cat. No. W501).
Power Supply Design
• Do not exceed the rated supply capacity of the Power Supply Units in the NJ-series Controller. The
rated supply capacities are given in the NJ-series CPU Unit Hardware User’s Manual (Cat. No.
W500).
If the capacity is exceeded, operation may stop, malfunctions may occur, or data may not be backed
up normally for power interruptions.
Use NJ-series Power Supply Units for both the NJ-series CPU Rack and Expansion Racks.
Operation is not possible if a CJ-series Power Supply Unit is used with an NJ-series CPU Unit or an
NJ-series Power Supply Unit is used with a CJ-series CPU Unit.
• Do not apply voltages or connect loads to the Output Units or slaves in excess of the maximum ratings.
• Surge current occurs when the power supply is turned ON. When selecting fuses or breakers for
external circuits, consider the above precaution and allow sufficient margin in shut-off performance.
Refer to the relevant manuals for surge current specifications. Refer to the NJ-series CPU Unit Hard-
ware User’s Manual (Cat. No. W500) for surge current specifications.
• If the full dielectric strength voltage is applied or turned OFF using the switch on the tester, the generated impulse voltage may damage the Power Supply Unit. Use the adjustment on the tester to gradually increase and decrease the voltage.
• Apply the voltage between the Power Supply Unit's L1 or L2 terminal and the GR terminal when testing insulation and dielectric strength.
• Do not supply AC power from an inverter or other device with a square-wave output. Internal temperature rise may result in smoking or burning. Always input a sinusoidal wave with the frequency
that is given in the NJ-series CPU Unit Hardware User’s Manual (Cat. No. W500).
• Install external breakers and take other safety measures against short-circuiting in external wiring.
NJ-series CPU Unit Hardware User’s Manual (W500)
21
Page 24

Precautions for Safe Use
Turning ON the Power Supply
• It takes up to approximately 10 to 20 s to enter RUN mode after the power is turned ON. The outputs
during this time behave according to the slave or Unit specifications. Use the RUN output on the
Power Supply Unit, for example, to implement fail-safe circuits so that external devices do not operate incorrectly.
• Configure the external circuits so that the power supply to the control system turns ON only after the
power supply to the Controller has turned ON. If the power supply to the Controller is turned ON after
the control power supply, temporary errors may result in incorrect control system signals because the
output terminals on Output Units may momentarily turn ON when power supply is turned ON to the
Controller.
• If you transfer data from a backup file on an SD Memory Card to the Controller when the power supply is turned ON, properly select the data groups to transfer. If the data for an unintended data group
is transferred to the Controller, it may cause the equipment to operate unpredictably.
• In the CPU Unit with unit version 1.05 or earlier, never turn OFF the power supply to the Controller
until RUN mode is entered after the power is turned ON. If the power supply is turned OFF, a Batterybackup Memory Check Error may occur at next time you start operation. If a Battery-backup Memory
Check Error occurs, the variables retained are set to their initial values and the Holding, DM and EM
Areas in memory used for CJ-series Units are cleared to all zeros. If you want to resume the operation, reload the correct data for the variables retained and CJ-series Unit memory, as required.
Turning OFF the Power Supply
• Never turn OFF the power supply to the Controller when the BUSY indicator is flashing. While the
BUSY indicator is lit, the user program and settings in the CPU Unit are being backed up in the builtin non-volatile memory. This data will not be backed up correctly if the power supply is turned OFF.
Also, a major fault level Controller error will occur the next time you start operation, and operation will
stop.
• Do not turn OFF the power supply or remove the SD Memory Card while SD Memory Card access is
in progress (i.e., while the SD BUSY indicator flashes). Data may become corrupted, and the Controller will not operate correctly if it uses corrupted data. To remove the SD Memory Card from the CPU
Unit while the power supply is ON, press the SD Memory Card power supply switch and wait for the
SD BUSY indicator to turn OFF before you remove the SD Memory Card.
• Do not disconnect the cable or turn OFF the power supply to the Controller when downloading data
or the user program from Support Software.
• Always turn OFF the power supply to the Controller before you attempt any of the following.
• Mounting or removing I/O Units or the CPU Unit
• Assembling the Units
• Setting DIP switches or rotary switches
• Connecting cables or wiring the system
• Connecting or disconnecting the connectors
The Power Supply Unit may continue to supply power to the rest of the Controller for a few seconds
after the power supply turns OFF. The PWR indicator is lit during this time. Confirm that the PWR
indicator is not lit before you perform any of the above.
22
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 25

Precautions for Safe Use
Operation
• Confirm that no adverse effect will occur in the system before you attempt any of the following.
• Changing the operating mode of the CPU Unit (including changing the setting of the Startup
Mode)
• Changing the user program or settings
• Changing set values or present values
• Forced refreshing
• After you change any slave or Unit settings, carefully check the safety of the controlled system before
you restart the Unit.
• If two different function modules are used together, such as when you use CJ-series Basic Units and
EtherCAT slaves, take suitable measures in the user program and external controls to ensure that
safety is maintained in the controlled system if one of the function modules stops. The relevant outputs will behave according to the slave or Unit specifications if a partial fault level error occurs in one
of the function modules.
• Always confirm safety at the connected equipment before you reset Controller errors with an event
level of partial fault or higher for the EtherCAT Master Function Module.
When the error is reset, all slaves that were in any state other than Operational state due to a Controller error with an event level of partial fault or higher (in which outputs are disabled) will go to Operational state and the outputs will be enabled.
Before you reset all errors or restart a slave, confirm that no Controller errors with an event level of
partial fault have occurred for the EtherCAT Master Function Module.
• Always confirm safety at the connected equipment before you reset Controller errors for a CJ-series
Special Unit. When a Controller error is reset, the Unit where the Controller error with an event level
of observation or higher will be restarted.
Before you reset all errors, confirm that no Controller errors with an event level of observation or
higher have occurred for the CJ-series Special Unit. Observation level events do not appear on the
Controller Error Tab Page, so it is possible that you may restart the CJ-series Special Unit without
intending to do so.
You can check the status of the _CJB_UnitErrSta[0,0] to _CJB_UnitErrSta[3,9] error status variables
on a Watch Tab Page to see if an observation level Controller error has occurred.
• Always confirm safety at the connected equipment before you perform the following operations when
the device output hold configuration is set to enable. The equipment may operate unexpectedly
because the last status for outputs is retained.
• Changing the operating mode of the CPU Unit
• When downloaded
NJ-series CPU Unit Hardware User’s Manual (W500)
23
Page 26

Precautions for Safe Use
Battery Backup
• The user program and initial values for the variables are stored in non-volatile memory in the CPU
Unit. The present values of variables with the Retain attribute and the values of the Holding, DM, and
EM Areas in the memory used for CJ-series Units are backed up by a Battery. If the Battery is not
connected or the Battery is exhausted, the CPU Unit detects a Battery-backup Memory Check Error.
If that error is detected, variables with a Retain attribute are set to their initial values and the Holding,
DM, and EM Areas in memory used for CJ-series Units are cleared to all zeros. Perform thorough
verifications and provide sufficient measures to ensure that the devices perform safe operation for
the initial values of the variables with Retain attributes and the resulting operation.
• The absolute encoder home offsets are backed up by a Battery. If the CPU Unit detects a low battery
voltage or the absence of a mounted battery when the power supply to the Controller is turned ON,
the absolute encoder home offsets are cleared to zeros and an Encoder Home Offset Read Error
occurs. Reset the error and perform homing to define home. If you do not define home, unintended
operation of the controlled system may occur.
Debugging
• Forced refreshing ignores the results of user program execution and refreshes I/O with the specified
values. If forced refreshing is used for inputs for which I/O refreshing is not supported, the inputs will
first take the specified values, but they will then be overwritten by the user program. This operation
differs from the force-set/reset functionality of the CJ-series PLCs.
• You cannot upload or download information for forced refreshing with the Sysmac Studio.
After downloading data that contains forced refreshing, change to RUN mode and then use the Sysmac Studio to perform the operation for forced refreshing.
Depending on the difference in the forced status, the control system may operate unexpectedly.
• Do not specify the same address for the AT specification for more than one variable.
Doing so would allow the same entity to be accessed with different variable names, which would
make the user program more difficult to understand and possibly cause programming mistakes.
General Communications
• When you use data link communications, check the error information that is given in _ErrSta (Control-
ler Error Status) to make sure that no error has occurred in the source device. Create a user program
that uses reception data only when there is no error in the source device. If there is an error in the
source device, the data for the data link may contain incorrect values.
• Unexpected operation may result if inappropriate data link tables are set. Even if appropriate data link
tables have been set, confirm that the controlled system will not be adversely affected before you
transfer the data link tables. The data links start automatically after the data link tables are transferred.
• All CPU Bus Units are restarted when routing tables are transferred from Support Software to the
CPU Unit. Confirm that the system will not be adversely affected by restarting before you transfer the
routing tables.
• Tag data links will stop between related nodes while tag data link parameters are transferred during
Controller operation. Confirm that the system will not be adversely affected before you transfer the
tag data link parameters.
24
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 27

Precautions for Safe Use
EtherNet/IP Communications
• Make sure that the communications distance, number of nodes connected, and method of connection for EtherNet/IP are within specifications.
Do not connect EtherNet/IP communications to EtherCAT or other networks. An overload may cause
the network to fail or malfunction.
• All related EtherNet/IP nodes are reset when you transfer settings for the built-in EtherNet/IP port
(including IP addresses and tag data links settings). The settings can only be enabled after the reset.
Confirm that the system will not be adversely affected by resetting nodes before you transfer the settings.
• If EtherNet/IP tag data links (cyclic communications) are used with a repeating hub, the communications load on the network will increase. This will increase collisions and may prevent stable communications. Do not use repeating hubs on networks where tag data links are used. Use an Ethernet
switch instead.
EtherCAT Communications
• Make sure that the communications distance, number of nodes connected, and method of connection for EtherCAT are within specifications.
Do not connect EtherCAT communications to EtherNet/IP, a standard in-house LAN, or other networks. An overload may cause the network to fail or malfunction.
• Malfunctions or unexpected operation may occur for some combinations of EtherCAT revisions of the
master and slaves. If you disable the revision check in the network settings, use the Sysmac Studio
to check the slave revision settings in the master and the actual slave revisions, and then make sure
that functionality is compatible in the slave manuals or other references. You can check the actual
slave revisions from the Sysmac Studio or on slave nameplates.
• After you transfer the user program, the CPU Unit is restarted and communications with the EtherCAT slaves are cut off. During that period, the slave outputs behave according to the slave specifications. The time that communications are cut off depends on the EtherCAT network configuration.
Before you transfer the user program, confirm that the system will not be adversely affected.
• If the Fail-soft Operation parameter is set to stop operation, process data communications will stop
for all slaves when an EtherCAT communications error is detected in a slave. At that time, the Servo
Drive will operate according to the Servo Drive specifications. Make sure that the Fail-soft Operation
parameter setting results in safe operation when a device error occurs.
• EtherCAT communications are not always established immediately after the power supply is turned
ON. Use the system-defined variables in the user program to confirm that communications are established before attempting control operations.
• If noise occurs or an EtherCAT slave is disconnected from the network, any current communications
frames may be lost. If frames are lost, slave I/O data is not communicated, and unintended operation
may occur. The slave outputs will behave according to the slave specifications. Refer to the manual
for the slave. If a noise countermeasure or slave replacement is required, perform the following processing.
• Program the Input Data Invalid system-defined variable as an interlock condition in the user program.
• Set the PDO communications timeout detection count setting in the EtherCAT master to at least 2.
Refer to the NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (Cat. No. W505) for
details.
• When an EtherCAT slave is disconnected, communications will stop and control of the outputs will be
lost not only for the disconnected slave, but for all slaves connected after it through to the physical
end node. Confirm that the system will not be adversely affected before you disconnect a slave.
• I/O data communications of NX bus are not always established immediately after the power supply is
turned ON. Use the system-defined variables and the EtherCAT Coupler Unit device variables in the
user program to confirm that I/O data communications are established before attempting control
operations.
NJ-series CPU Unit Hardware User’s Manual (W500)
25
Page 28

Precautions for Safe Use
Version Information
• You cannot use standard Ethernet hubs or repeater hubs with EtherCAT communications. If you use
one of these, a major fault level error or other error may occur.
• Confirm that all of the slaves are connected before you set the transmission delay time by the actual
measurement. If the transmission delay time is exceeded from the set values due to the changes of
the unit configuration, such as when the disabled salve is connected to the actual configuration after
the setting, it may cause illegal communications with slaves.
• When the communications cable that is connected to the slave from other manufacturers on the ring
topology is broken or the power supply to the slave from other manufacturers is interrupted, any current communications frames may be lost.
If frames are lost, slave I/O data is not communicated, and unintended operation may occur.
When slaves from other manufacturers are connected on the ring topology, check the followings in
advance.
• Disconnect and connect communications cables that are connected to the output ports of slaves
from other manufacturers several times, and there is no error except for a Ring Disconnection
Detected.
• Disconnect and connect communications cables that are connected to the input ports of slaves
from other manufacturers several times, and there is no error except for a Ring Disconnection
Detected.
• Turn OFF and ON the power supply to the slaves from other manufacturers, and there is no error
except for a Illegal Slave Disconnection Detected.
• If you use the cable redundancy function, confirm that the task execution time is within the task
period while the cable for the end port of the ring is disconnected. When a disconnection occurred on
the ring topology, the transmission delay time is increased and the task execution time may be longer.
The cable redundancy function can be used with project unit version 1.40 or later.
26
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 29

Precautions for Safe Use
FirstOnPosition LastOnPosition
OffCompensation
LastOnPosition after compensation
Motion Control
• Confirm the axis number carefully before you perform an MC Test Run.
• The motor is stopped if communications are interrupted between the Sysmac Studio and the CPU
Unit during an MC Test Run. Connect the communications cable between the computer and CPU
Unit securely and confirm that the system will not be adversely affected before you perform an MC
Tes t R u n .
• Always execute the Save Cam Table instruction if you change any of the cam data from the user program in the CPU Unit or from the Sysmac Studio. If the cam data is not saved, the previous condition
will be restored when the power is turned ON again, possibly causing unexpected machine operation.
• The positive drive prohibit input (POT), negative drive prohibit input (NOT), and home proximity input
(DEC) of the Servo Drive are used by the MC Function Module as the positive limit input, negative
limit input, and home proximity input. Make sure that the signal widths for all of these input signals
are longer than the control period of the MC Function Module. If the input signal widths are shorter
than the control period, the MC Function Module may not be able to detect the input signals, resulting
in incorrect operation.
• If you make any changes in the Detailed Settings Area of the Axis Basic Settings Display of the Sysmac Studio, make sure that the devices or machines perform the expected operation before you start
actual operation.
If the relationship between the functions of the Motion Control Function Module and the EtherCAT
slave process data that is assigned to the axes is not correct, the devices or machines may perform
unexpected operation.
• Always use the axis at a constant velocity for the MC_DigitalCamSwitch (Enable Digital Cam Switch)
instruction.
If you set the Count Mode to Rotary Mode, the following operation will occur if you use OnCompensa-
tion or OffCompensation and the axis velocity changes abruptly.
• If the value of OnCompensation or OffCompensation is equivalent to the time for half a rotation or
more, InOperation will be FALSE.
• If the value of OnCompensation results in exceeding LastOnPosition, the output timing will be
unstable.
FirstOnPosition LastOnPosition
• If the value of OffCompensation results in exceeding FirstOnPosition, the output timing will be
• Use the NX_AryDOutTimeStamp (Write Digital Output Array with Specified Time Stamp) instruction
only after you confirm that InOperation from the MC_DigitalCamSwitch (Enable Digital Cam Switch)
instruction is TRUE.
• If you change the unit conversion settings, perform homing again. If you do not perform homing, unintended operation of the controlled system may occur.
NJ-series CPU Unit Hardware User’s Manual (W500)
OnCompensation
FirstOnPosition after compensation
unstable.
27
Page 30

Precautions for Safe Use
Restoring Data
• You cannot back up, restore, or compare some or all of the settings for certain slaves and Units. Also,
you cannot back up, restore, or compare data for disabled slaves or Units. After you restore data, sufficiently confirm that operation is correct before you start actual operation.
• The absolute encoder home offsets are backed up with a Battery in the CPU Unit as absolute
encoder information. If any of the following conditions is met, clear the absolute encoder home offsets from the list of data items to restore, and then restore the data. Then, define the absolute
encoder home again. If you do not define home, unintended operation of the controlled system may
occur.
• The Servomotor or Servo Drive was changed since the data was backed up.
• The absolute encoder was set up after the data was backed up.
• The absolute data for the absolute encoder was lost.
Transferring Programs
• When you use the program transfer from SD Memory Card whose Startup Mode setting is set to
RUN mode, the operating mode changes to RUN after the transfer is completed regardless of the
status and setting before the transfer. Use this function after you confirm that system startup does
not cause any problem.
Battery Replacement
• The Battery may leak, rupture, heat, or ignite. Never short-circuit, charge, disassemble, heat, or
incinerate the Battery or subject it to strong shock.
• Dispose of any Battery that has been dropped on the floor or otherwise subjected to excessive
shock. Batteries that have been subjected to shock may leak if they are used.
• UL standards require that only an experienced engineer replace the Battery. Make sure that an experienced engineer is in charge of Battery replacement.
• Apply power for at least five minutes before changing the Battery. Install a new Battery within five
minutes (at 25°C) of turning OFF the power supply. If power is not supplied for at least 5 minutes, the
saved data may be lost.
• We recommend replacing the Battery with the power turned OFF to prevent the CPU Unit’s sensitive
internal components from being damaged by static electricity and to prevent malfunctions. The Battery can be replaced without turning OFF the power supply. To do so, always touch a grounded piece
of metal to discharge static electricity from your body before you start the procedure.
After you replace the Battery, connect the Sysmac Studio and clear the Low Battery Voltage error.
Unit Replacement
• Make sure that the required data, including the user program, configurations, settings, variables, and
memory used for CJ-series Units, is transferred to a CPU Unit that was replaced and to externally
connected devices before restarting operation.
Be sure to include the tag data link settings, routing tables, and other CPU Bus Unit data, which are
stored in the CPU Unit.
• The absolute encoder home offsets are backed up with a Battery in the CPU Unit as absolute
encoder information. When you change the combination of the CPU Unit and Servomotor, e.g., when
you add or replace a Servomotor, define the absolute encoder home again.
• The performance may be different if the hardware revisions are different. Before you transfer the user
program, data, and parameter settings to the CPU Units with the different hardware revisions, check
them for proper execution and then use them for actual operation.
28
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 31

Precautions for Safe Use
Disposal
• Dispose of the product and Batteries according to local ordinances as they apply.
• The following information must be displayed for all products that contain primary lithium batteries with a
perchlorate content of 6 ppb or higher when shipped to or transported through the State of California, USA.
Perchlorate Material - special handling may apply.
See www.dtsc.ca.gov/hazardouswaste/perchlorate.
• The CPU Unit contains a primary lithium battery with a perchlorate content of 6 ppb or higher. Place
the above information on the individual boxes and shipping boxes when shipping finished products
that contain a CPU Unit to the State of California, USA.
NJ-series CPU Unit Hardware User’s Manual (W500)
29
Page 32

Precautions for Correct Use
Precautions for Correct Use
Storage and Installation
• Follow the instructions in this manual to correctly perform installation.
• Do not operate or store the Controller in the following locations. Operation may stop or malfunctions
may occur.
• Locations subject to direct sunlight
• Locations subject to temperatures or humidity outside the range specified in the specifications
• Locations subject to condensation as the result of severe changes in temperature
• Locations subject to corrosive or flammable gases
• Locations subject to dust (especially iron dust) or salts
• Locations subject to exposure to water, oil, or chemicals
• Locations subject to shock or vibration
• Take appropriate and sufficient countermeasures when installing the Controller in the following locations.
• Locations subject to strong, high-frequency noise
• Locations subject to static electricity or other forms of noise
• Locations subject to strong electromagnetic fields
• Locations subject to possible exposure to radioactivity
• Locations close to power lines
• Before touching a Unit, be sure to first touch a grounded metallic object in order to discharge any
static build-up.
• Install the Controller away from sources of heat and ensure proper ventilation. Not doing so may
result in malfunction, in operation stopping, or in burning.
Mounting
• An I/O bus check error will occur and the Controller will stop if an I/O Connecting Cable’s connector is
disconnected from the Rack. Be sure that the connectors are secure.
30
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 33

Precautions for Correct Use
Wiring
• Do not allow foreign matter to enter the openings in the Unit. Doing so may result in Unit burning,
electric shock, or failure.
• Do not allow wire clippings, shavings, or other foreign material to enter any Unit. Otherwise, Unit
burning, failure, or malfunction may occur. Cover the Units or take other suitable countermeasures,
especially during wiring work.
• For EtherCAT and EtherNet/IP, use the connection methods and cables that are specified in the
NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (Cat. No. W505) and the NJ/NX-series
CPU Unit Built-in EtherNet/IP Port User’s Manual (Cat. No. W506). Otherwise, communications may
be faulty.
• Use the rated power supply voltage for the Power Supply Units. Take appropriate measures to
ensure that the specified power with the rated voltage and frequency is supplied in places where the
power supply is unstable.
• Make sure that the current capacity of the wire is sufficient. Otherwise, excessive heat may be generated. When cross-wiring terminals, the total current for all the terminals will flow in the wire. When
wiring cross-overs, make sure that the current capacity of each of the wires is not exceeded.
• Do not touch the terminals on the Power Supply Unit immediately after turning OFF the power supply.
Residual voltage may cause electrical shock.
• If you use reed switches for the input contacts for AC Input Units, use switches with a current capacity of 1 A or greater.
If the capacity of the reed switches is too low, surge current may fuse the contacts.
Operation
• Confirm the device output hold configuration before you change the operating mode of the CPU Unit
or execute the download.
Error Processing
• In applications that use the results of instructions that read the error status, consider the affect on the
system when errors are detected and program error processing accordingly. For example, even the
detection of a minor error, such as Battery replacement during operation, can affect the system
depending on how the user program is written.
• If you change the event level of a Controller error, the output status when the error occurs may also
change. Confirm safety before you change an event level.
Restoring and Automatically Transferring Data
• When you edit the restore command file or the automatic transfer command file, do not change anything in the file except for the “yes” and “no” specifications for the selectable data groups. If you
change anything else in the file, the Controller may perform unexpected operation when you restore
or automatically transfer the data.
• To prevent an unexpected restoration, set to enter the password for each execution before the
restore operation.
Transferring Programs
• If you use the program transfer from SD Memory Card, set to enter the password for each execution
to prevent an unexpected program transfer.
NJ-series CPU Unit Hardware User’s Manual (W500)
31
Page 34

Precautions for Correct Use
Replacing Slaves and Units
• If you replace a slave or Unit, refer to the operation manual for the slave or Unit for information on the
data required for individual slaves or Units and redo the necessary settings.
Task Settings
• If a Task Period Exceeded error occurs, shorten the programs to fit in the task period or increase the
setting of the task period.
Motion Control
• Use the system-defined variable in the user program to confirm that EtherCAT communications are
established before you attempt to execute motion control instructions. Motion control instructions are
not executed normally if EtherCAT communications are not established.
• Use the system-defined variables to monitor for errors in communications with the slaves that are
controlled by the motion control function module. Motion control instructions are not executed normally if an error occur in slave communications.
• Before you start an MC Test Run, make sure that the operation parameters are set correctly.
• Do not download motion control settings during an MC Test Run.
EtherCAT Communications
• If you need to disconnect the cable from an EtherCAT slave during operation, first disconnect the
software connection to the EtherCAT slave or disable the EtherCAT slave and all of the EtherCAT
slaves that are connected after it.
• Set the Servo Drives to stop operation if an error occurs in EtherCAT communications between the
Controller and a Servo Drive.
• Make sure that all of the slaves to be restored are participating in the network before you reset a Network Configuration Verification Error, Network Configuration Verification Error (Mismatched Slave),
Network Configuration Verification Error (Slave Unconnected), Network Configuration Verification
Error (Unnecessary Slave Connected), Network Configuration Verification Error (Incorrect Ring Wiring), Process Data Communications Error, Illegal Slave Disconnection Detected or Link OFF Error in
the EtherCAT Master Function Module. If any slave is not participating when any of these errors is
reset, the EtherCAT Master Function Module may access salve with a different node address than
the specified node address or the error may not be reset correctly.
• Always use the specified EtherCAT slave cables. If you use any other cable, the EtherCAT master or
the EtherCAT slaves may detect an error and one of the following may occur.
• Continuous refreshing of process data communications will not be possible.
• Continuous refreshing of process data communications will not end during the set cycle.
Battery Replacement
• Be sure to install a replacement Battery within two years of the production date shown on the Battery
label.
• Turn ON the power after replacing the Battery for a CPU Unit that has been unused for a long time.
Leaving the CPU Unit unused again without turning ON the power even once after the Battery is
replaced may result in a shorter Battery life.
• When you replace the Battery, use the CJ1W-BAT01 Battery Set.
32
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 35

Precautions for Correct Use
SD Memory Cards
• Insert the SD Memory Card all the way.
• Do not turn OFF the power supply to the Controller during SD Memory Card access. The files may be
corrupted.
If there is a corrupted file in the SD Memory Card, the file is automatically deleted by the restoration
function when the power supply is turned ON.
• If you use an OMRON SD Memory Card, the end of the life of the SD Memory Card can be detected
in the following ways.
• _Card1Deteriorated (SD Memory Card Life Warning Flag) system-defined variable
• SD Memory Card Life Exceeded event in the event log
When the end of the life is detected in any of the above ways, replace the SD Memory Card.
Online Editing
When performing online editing in combination of a CPU Unit with a unit version of 1.04 or later and
Sysmac Studio version 1.05 or higher, the CPU Unit saves a program updated by the online editing to
built-in non-volatile memory. Sysmac Studio shows a message that it is in a backup operation. Do not
turn OFF the power supply to the Controller while this message is displayed. If the power supply to the
Controller is turned OFF, a Controller error will occur when the power supply is turned ON next time.
Debugging
• If you use data tracing to sample following variables, correct data may not be sampled.
• Structure members whose data size is 16 bits or more, except for system-defined variables for
motion control
• Array elements whose data size is 16 bits or more
For information on data tracing, refer to the NJ/NX-series CPU Unit Software User's Manual (Cat. No.
W501).
NJ-series CPU Unit Hardware User’s Manual (W500)
33
Page 36

Regulations and Standards
Regulations and Standards
Conformance to EU Directives
Applicable Directives
• EMC Directives
• Low Voltage Directive
Concepts
EMC Directive
OMRON devices that comply with EU Directives also conform to the related EMC standards so that
they can be more easily built into other devices or the overall machine. The actual products have
been checked for conformity to EMC standards.*
Whether the products conform to the standards in the system used by the customer, however, must
be checked by the customer. EMC-related performance of the OMRON devices that comply with EU
Directives will vary depending on the configuration, wiring, and other conditions of the equipment or
control panel on which the OMRON devices are installed. The customer must, therefore, perform
the final check to confirm that devices and the overall machine conform to EMC standards.
* Applicable EMC (Electromagnetic Compatibility) standards are as follows:
EMS (Electromagnetic Susceptibility): EN 61131-2
EMI (Electromagnetic Interference): EN 61131-2(Radiated emission: 10-m regulations)
Low Voltage Directive
Always ensure that devices operating at voltages of 50 to 1,000 VAC and 75 to 1,500 VDC meet the
required safety standards. The applicable directive is EN 61010-2-201.
Conformance to EU Directives
The NJ-series Controllers comply with EU Directives. To ensure that the machine or device in which
the NJ-series Controller is used complies with EU Directives, the Controller must be installed as follows:
• The NJ-series Controller must be installed within a control panel.
• You must use the power supply in SELV specifications for the DC power supplies connected to
DC Power Supply Units and I/O Units.
• NJ-series Controllers that comply with EU Directives also conform to the Common Emission Standard (EN 61000-6-4). Radiated emission characteristics (10-m regulations) may vary depending
on the configuration of the control panel used, other devices connected to the control panel, wiring, and other conditions.
You must therefore confirm that the overall machine or equipment complies with EU Directives.
34
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 37

Conformance to KC Certification
Observe the following precaution if you use NX-series Units in Korea.
Class A Device (Broadcasting Communications Device for Office Use)
This device obtained EMC registration for office use (Class A), and it is intended to be used in places
other than homes.
Sellers and/or users need to take note of this.
Conformance to Shipbuilding Standards
Regulations and Standards
The NJ-series Controllers comply with the following shipbuilding standards. Applicability to the shipbuilding standards is based on certain usage conditions. It may not be possible to use the product in
some locations. Contact your OMRON representative before attempting to use a Controller on a
ship.
Usage Conditions for NK and LR Shipbuilding Standards
• The NJ-series Controller must be installed within a control panel.
• Gaps in the door to the control panel must be completely filled or covered with gaskets or other
material.
• The following noise filter must be connected to the power supply line.
Noise Filter
Manufacturer Model
Cosel Co., Ltd. TAH-06-683
Software Licenses and Copyrights
This product incorporates certain third party software. The license and copyright information associated with this software is available at http://www.fa.omron.co.jp/nj_info_e/.
NJ-series CPU Unit Hardware User’s Manual (W500)
35
Page 38

Versions
ID information indication
Unit model
Lot number Serial number MAC address
Unit version Hardware revision
NJ501
-
Ver.1.
PORT1 MAC ADDRESS:
PORT2 MAC ADDRESS:
Lot No. DDMYY
xxxx
HW Rev.
Versions
Hardware revisions and unit versions are used to manage the hardware and software in NJ-series Units
and EtherCAT slaves. The hardware revision or unit version is updated each time there is a change in
hardware or software specifications. Even when two Units or EtherCAT slaves have the same model
number, they will have functional or performance differences if they have different hardware revisions or
unit versions.
Checking Versions
You can check versions on the ID information indications or with the Sysmac Studio.
Checking Unit Versions on ID Information Indications
The unit version is given on the ID information indication on the side of the product.
The ID information on an NJ-series NJ501-100 CPU Unit is shown below.
36
Note The hardware revision is not displayed for the Unit that the hardware revision is in blank.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 39

Versions
Checking Unit Versions with the Sysmac Studio
You can use the Sysmac Studio to check unit versions. The procedure is different for Units and for EtherCAT slaves.
Checking the Unit Version of a Unit
You can use the Production Information while the Sysmac Studio is online to check the unit version
of a Unit. You can do this for the CPU Unit, CJ-series Special I/O Units, and CJ-series CPU Bus
Units. You cannot check the unit versions of CJ-series Basic I/O Units with the Sysmac Studio.
Use the following procedure to check the unit version.
1 Double-click CPU/Expansion Racks under Configurations and Setup in the Multiview
Explorer. Or, right-click CPU/Expansion Racks under Configurations and Setup and select
Edit from the menu.
The Unit Editor is displayed.
2 Right-click any open space in the Unit Editor and select Production Information.
The Production Information Dialog Box is displayed.
Changing Information Displayed in Production Information Dialog Box
1 Click the Show Detail or Show Outline Button at the lower right of the Production Information
Dialog Box.
The view will change between the production information details and outline.
Outline View Detail View
The information that is displayed is different for the Outline View and Detail View. The Detail
View displays the unit version, hardware version, and software versions. The Outline View displays only the unit version.
Note The hardware revision is separated "/" and displayed on the right of the hardware version. The hardware
revision is not displayed for the Unit that the hardware revision is in blank.
NJ-series CPU Unit Hardware User’s Manual (W500)
37
Page 40

Versions
Checking the Unit Version of an EtherCAT Slave
You can use the Production Information while the Sysmac Studio is online to check the unit version
of an EtherCAT slave. Use the following procedure to check the unit version.
1 Double-click EtherCAT under Configurations and Setup in the Multiview Explorer. Or, right-
click EtherCAT under Configurations and Setup and select Edit from the menu.
The EtherCAT Tab Page is displayed.
2 Right-click the master on the EtherCAT Tab Page and select Display Production Information.
The Production Information Dialog Box is displayed.
The unit version is displayed after “Rev.”
Changing Information Displayed in Production Information Dialog Box
1 Click the Show Detail or Show Outline Button at the lower right of the Production Information
Dialog Box.
The view will change between the production information details and outline.
Outline View Detail View
Unit Versions of CPU Units and Sysmac Studio Versions
The functions that are supported depend on the unit version of the NJ-series CPU Unit. The version of
Sysmac Studio that supports the functions that were added for an upgrade is also required to use those
functions.
Refer to A-7 Version Information for the relationship between the unit versions of the CPU Units and the
Sysmac Studio versions, and for the functions that are supported by each unit version.
38
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 41

Related Manuals
The followings are the manuals related to this manual. Use these manuals for reference.
Manual name Cat. No. Model numbers Application Description
NJ-series CPU Unit
Hardware User’s Manual
NJ/NX-series CPU Unit
Software User’s Manual
NJ/NX-series Instructions Reference Manual
NJ/NX-series CPU Unit
Motion Control User’s
Manual
NJ/NX-series Motion
Control Instructions Reference Manual
NJ/NX-ser
Built-in EtherCAT® Port
User’s Manual
NJ/NX-series CPU Unit
Built-in EtherNet/IP
User’s Manual
NJ/NX-series
CPU Unit OPC UA
User’s Manual
NJ/NX-series Database
Connection CPU Units
User’s Manual
NJ-series SECS/GEM
CPU Units User’s Manual
ies CPU U
W500 NJ501-
NJ301-
NJ101-
W501 NX701-
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
W502 NX701-
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
W507 NX701-
W508 NX701-
nit
W505 NX701-
W506 NX701-
Port
W588 NX701-
W527 NX701-20
W528 NJ501-1340 Using the GEM Services
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
NX102-
NJ501-100
NX102-
NJ501-20
NJ101-20
Learning the basic specifications of the NJ-series
CPU Units, including introductory information, designing, installation, and
maintenance. Mainly hardware information is provided.
Learning how to program
and set up an NJ/NX-series
CPU Unit. Mainly software
information is provided.
Learning detailed specifications on the basic instructions of an NJ/NX-series
CPU Unit.
Learning about motion control settings and programming concepts.
Learning about the specifications of the motion control
instructions.
Using the built-in EtherCAT
port on an NJ/NX-series
CPU Unit.
Using the built-in EtherNet/IP port on an NJ/NXseries CPU Unit.
Using the OPC UA. Describes the OPC UA.
Using the database connection service with NJ/NXseries Controllers
with NJ-series Controllers.
An introduction to the entire NJ-series system is
provided along with the following information on
the CPU Unit.
• Features and system configuration
• Introduction
• Part names and functions
• General specifications
• Installation and wiring
• Maintenance and inspection
The following information is provided on a Controller built with an NJ/NX-series CPU Unit.
• CPU Unit operation
• CPU Unit features
• Initial settings
• Programming based on IEC 61131-3 language
specifications
The instructions in the instruction set (IEC 61131-3
specifications) are described.
The settings and operation of the CPU Unit and
programming concepts for motion control are
described.
The motion control instructions are described.
Information on the built-in EtherCAT port is provided. This manual provides an introduction and
provides information on the configuration, features, and setup.
Information on the built-in EtherNet/IP port is provided. Information is provided on the basic setup,
tag data links, and other features.
Describes the database connection service.
Provides information on the GEM Services.
Related Manuals
NJ-series CPU Unit Hardware User’s Manual (W500)
39
Page 42

Related Manuals
Manual name Cat. No. Model numbers Application Description
NJ-series Robot
Integrated CPU Unit
User’s Manual
Sysmac Studio
Robot Integrated
System Building Function
with Robot Integrated
CPU Unit Operation
Manual
Sysmac Studio Robot
Integrated System
Building Function with
IPC Application
Controller Operation
Manual
Symac Studio
3D Simulation Function
Operation Manual
NJ-series NJ Robotics
CPU Unit User’s Manual
NJ/NY-series NC Integrated Controller User’s
Manual
NJ/NY-series
G code Instructions Reference Manual
NJ/NX-series Troubleshooting Manual
Sysmac Studio Version 1
Operation Manual
CNC Operator
Operation Manual
NX-series EtherCAT®
Coupler Unit User’s Manual
NA-series Programmable
Terminal Software User’s
Manual
NS-series Programmable Terminals Programming Manual
O037 NJ501-R Using the NJ-series Robot
Integrated CPU Unit.
W595 SYSMAC-
W621 SYSMAC-
W618 SYSMAC-
W539 NJ501-4
O030 NJ501-5300
O031 NJ501-5300
W503 NX701-
W504
O032 SYSMAC
W519 NX-ECC Learning how to use an NX-
V118 NA5-
V073 NS15-
SE2
SYSMACSE200D-64
SE2
SYSMACSE200D-64
SE2
SYSMACSA4-64
NJ501-R
NY532-5400
NY532-5400
NX102-
NX1P2-
NJ501-
NJ301-
NJ101-
SYSMACSE2
-RTNC0D
W
NS12-
NS10-
NS8-
NS5-
Learning about the
operating procedures and
functions of the Sysmac
Studio to configure Robot
Integrated System using
Robot Integrated CPU Unit.
Learning about the
operating procedures and
functions of the Sysmac
Studio to configure Robot
Integrated System using
IPC Application Controller.
Learning about an outline of
the 3D simulation function
of the Sysmac Studio and
how to use the function.
Controlling robots with NJseries CPU Units.
Performing numerical control with NJ/NY-series Controllers.
Learning about the specifications of the G code/M
code instructions.
Learning about the errors
that may be detected in an
NJ/NX-series Controller.
arning about the operat-
Le
ing procedures and functions of the Sysmac Studio.
Learning an introduction of
the CNC Operator and how
to use it.
series EtherCAT Coupler
Unit and EtherCAT Slave
Terminals.
Learning about NA-series
PT pages and object functions.
Learning how to use the
NS-series Programmable
Terminals.
Describes the settings and operation of the CPU
Unit and programming concepts for OMRON robot
control.
Describes the operating procedures of the
Sysmac Studio for Robot Integrated CPU Unit.
Describes the operating procedures of the
Sysmac Studio for IPC Application Controller.
Describes an outline, execution procedures, and
operating procedures for the 3D simulation function of the Sysmac Studio.
Describes the functionality to control robots.
Describes the functionality to perform the numerical control.
The G code/M code instructions are described.
Concepts on managing errors that may be
detected in an NJ/NX-series Controller and information on individual errors are described.
Describes the operating procedures of the Sysmac Studio.
An introduction of the CNC Operator, installation
procedures, basic operations, connection operations, and operating procedures for main functions
are described.
The following items are described: the overall system and configuration methods of an EtherCAT
Slave Terminal (which consists of an NX-series
EtherCAT Coupler Unit and NX Units), and information on hardware, setup, and functions to set
up, control, and monitor NX Units through EtherCAT.
Describes the pages and object functions of the
NA-series Programmable Terminals.
Describes the setup methods, functions, etc. of
the NS-series Programmable Terminals.
40
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 43

Terminology
Terminology
Term Description
absolute encoder home offset This data is used to restore in the CPU Unit the actual position of a Servo Drive with
an absolute encoder. The offset is the difference between the command position
after homing and the absolute data that is read from the absolute encoder.
array specification One of the variable specifications. An array variable contains multiple elements of
the same data type. The elements in the array are specified by serial numbers
called subscripts that start from the beginning of the array.
AT One of the attributes of a variable.
This attribute allows the user to specify what is assigned to a variable. An I/O port
or an address in memory used for CJ-series Units can be specified.
axes group A functional unit that groups together axes within the Motion Control Function Mod-
ule.
Axes Group Variable A system-defined variable that is defined as a structure and provides status infor-
mation and some of the axes parameters for an individual axes group.
An Axes Group Variable is used to specify an axes group for motion control instructions and to monitor the command interpolation velocity, error information, and
other information for the axes group.
axis A functional unit within the Motion Control Function Module. An axis is assigned to
the drive mechanism in an external Servo Drive or the sensing mechanism in an
external Encoder Input Slave Unit.
Axis Variable A system-defined variable that is defined as a structure and provides status infor-
mation and some of the axis parameters for an individual axis.
An Axis Variable is used to specify an axis for motion control instructions and to
monitor the command position, error information, and other information for the axis.
basic data type Any of the data types that are defined by IEC 61131-3.
They include Boolean, bit string, integer, real, duration, date, time of day, date and
time, and text string data types.
"Basic data type" is used as opposed to derivative data types, which are defined by
the user.
cam data variable A variable that represents the cam data as a structure array.
A cam data variable is an array structure that consists of phases and displace-
ments.
CJ-series Unit Any of the CJ-series Units that can be used with an NJ-series Controller.
Communications Coupler Unit The generic name of an interface unit for remote I/O communications on a network
between NX Units and a host network master. For example, an EtherCAT Coupler
Unit is a Communications Coupler Unit for an EtherCAT network.
Constant One of the attributes of a variable.
If you specify the Constant attribute for a variable, the value of the variable cannot
be written by any instructions, ST operators, or CIP message communications.
Controller The range of devices that are directly controlled by the CPU Unit.
In the NJ-series System, the Controller includes the CPU Rack, Expansion Racks,
and EtherCAT slaves (including general-purpose slaves and Servo Drives).
Controller error Errors that are defined by the NJ-series System.
“Controller error” is a collective term for major fault level, partial fault level, minor
fault level, and observation Controller events.
Controller event One of the events in the NJ-series System. Controller events are errors and infor-
mation that are defined by the system for user notification. A Controller event
occurs when the system detects a factor that is defined as a Controller event.
Controller information Information that is defined by the NJ-series System that is not an error. It rep-
resents an information Controller event.
CPU Unit The Unit that serves as the center of control for a Machine Automation Controller.
The CPU Unit executes tasks, refreshes I/O for other Units and slaves, etc. The
NJ/NX-series CPU Units include the NX701-, NX1P2- and NJ501-
.
derivative data type A data type that is defined by the user. Structures, unions, and enumerations are
derivative data types.
NJ-series CPU Unit Hardware User’s Manual (W500)
41
Page 44

Terminology
Term Description
device A general term for any Unit or slave that is refreshed by the I/O refreshing that is
performed by the CPU Unit. Specifically, it refers to EtherCAT slaves, NX Units on
the CPU Unit, built-in I/O, Option Boards, and CJ-series Units.
device output An output for any Unit or slave that is refreshed by the I/O refreshing that is per-
formed by the CPU Unit.
device variable A variable that is used to access a specific device through an I/O port.
download To transfer data from the Sysmac Studio to the Controller with the synchronization
operation of the Sysmac Studio.
edge One of the attributes of a variable.
This attribute makes a BOOL variable pass TRUE to a function block when the vari-
able changes from FALSE to TRUE or when it changes from TRUE to FALSE.
enumeration One of the derivative data types. This data type takes one item from a prepared
name list of enumerators as its value.
enumerator One of the values that an enumeration can take expressed as a character string.
The value of an enumeration is one of the enumerators.
EtherCAT Master Function Module One of the function modules. This function module controls the EtherCAT slaves as
the EtherCAT master.
EtherNet/IP Function Module One of the function modules. This function module controls the built-in EtherNet/IP
port.
event log A function that recognizes and records errors and other events.
Event Setup Settings that define user-defined errors and user-defined information.
event task A task that executes a user program only once when the task execution conditions
are met.
FB An acronym for "function block."
forced refreshing Forcing the refreshing of an input from an external device or an output to an exter-
nal device, e.g., when the user debugs a program.
Addresses that are subject to forced refreshing can still be overwritten from the
user program.
FUN An abbreviation for "function."
function A POU that is used to create an object that determines a unique output for the
same input, such as for data processing.
function block A POU that is used to create an object that can have a different output for the same
input, such as for a timer or counter.
function module One of the functional units of the software configuration of the CPU Unit.
general-purpose slave Any of the EtherCAT slaves that cannot be assigned to an axis.
global variable A variable that can be read or written from all POUs (programs, functions, and func-
tion blocks).
I/O map settings Settings that assign variables to I/O ports. Assignment information between I/O
ports and variables.
I/O port A logical interface that is used by the CPU Unit to exchange data with an external
device (slave or Unit).
I/O refreshing Cyclic data exchange with external devices that is performed with predetermined
memory addresses.
information One of the event levels for Controller events or user-defined events. These are not
errors, but appear in the event log to notify the user of specific information.
Initial Value One of the attributes of a variable. The variable is set to the initial value in the fol-
lowing situations.
• When power is turned ON
• When the CPU Unit changes to RUN mode
• When you specify to initialize the values when the user program is transferred
• When a major fault level Controller error occurs
inline ST ST programming that is included within a ladder diagram program.
instruction The smallest unit of the processing elements that are provided by OMRON for use
in POU algorithms. There are ladder diagram instructions (program inputs and outputs), function instructions, function block instructions, and ST statements.
literal A constant expression that is used in a user program.
42
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 45

Terminology
Term Description
local variable A variable that can be accessed only from inside the POU in which it is defined.
“Local variable” is used as opposed to “global variable.”
Local variables include internal variables, input variables, output variables, in-out
variables, and external variables.
main memory The memory inside the CPU Unit that is used by the CPU Unit to execute the OS
and user program.
major fault level Controller error An error for which all NJ-series Controller control operations stop. The CPU Unit
immediately stops user program execution and turns OFF the loads for all slaves
and Units (including remote I/O).
MC Test Run A function to check motor operation and wiring from the Sysmac Studio.
memory used for CJ-series units A type of I/O memory specified as the assignment destination of variables when
accessing a CJ-series Unit and CJ-series network.
It can be accessed only with variables with an AT attribute.
minor fault level Controller error An error for which part of the control operations for one of the function modules in
the NJ-series Controller stop.
An NJ-series CPU Unit continues operation even after a minor fault level Controller
error occurs.
Motion Control Function Module One of the function modules. The MC Function Module performs motion control
based on commands from the motion control instructions that are executed in the
user program.
motion control instruction A function block instruction that executes motion control.
The Motion Control Function Module supports instructions that are based on func-
tion blocks for PLCopen
cally for the Motion Control Function Module.
namespace A system that is used to group and nest the names of functions, function block defi-
nitions, and data types.
Network Publish One of the attributes of a variable.
This attribute allows you to use CIP message communications or tag data links to
read/write variables from another Controller or from a host computer.
NX bus The NX-series internal bus. An NX1P2 CPU Unit has the NX bus.
NX Units Any of the NX-series Units that perform I/O processing with connected external
devices. The Communications Coupler Units are not included with the NX Units.
®
motion control as well as instructions developed specifi-
observation One of the event levels for Controller events or user-defined events.
These are minor errors that do not affect control operations, but appear in the event
log to notify the user of specific information.
partial fault level Controller error An error for which all of the control operations for one of the function modules in the
NJ-series Controller stop.
An NJ-series CPU Unit continues operation even after a partial fault level Controller
error.
PDO communications An abbreviation for process data communications. Data is exchanged between the
master and slaves on a process data communications cycle. (The process data
communications cycle is the same as the task period of the primary periodic task.)
periodic task A tasks for which user program execution and I/O refreshing are performed each
period.
PLC Function Module One of the function modules. This function module executes the user program,
sends commands to the Motion Control Function Module, and provides an interface
to the USB and SD Memory Card.
POU An acronym for "program organization unit." A POU is a unit in a program execution
model that is defined in IEC 61131-3.
A POU contains an algorithm and a local variable table and forms the basic unit
used to build a user program.
There are three types of POUs: programs, functions, and function blocks.
primary periodic task The task with the highest priority.
process data communications One type of EtherCAT communications in which process data objects (PDOs) are
used to exchange information cyclically and in realtime. Process data communica-
tions are also called PDO communications.
program Along with functions and function blocks, one of the three types of POUs.
Programs are assigned to tasks to execute them.
NJ-series CPU Unit Hardware User’s Manual (W500)
43
Page 46

Terminology
Term Description
project unit version A unit version to be set for the project. It is set for the project in the Select Device
Area of the Project Properties Dialog Box on the Sysmac Studio.
Range Specification One of the variable specifications. You can specify a range for a variable in
advance. The variable can take only values that are in the specified range.
Retain One of the attributes of a variable. The values of variables with a Retain attribute
are held at the following times. (Variables without a Retain attribute are set to their
initial values.)
• When power is turned ON after a power interruption
• When the CPU Unit changes to RUN mode
• When you specify to not initialize the values when the user program is transferred
SDO communications One type of EtherCAT communications in which service data objects (SDOs) are
used to transmit information whenever required.
Servo Drive/encoder input slave Any of the EtherCAT slaves that is assigned to an axis. In the NJ-series System, it
would be a Servo Drive or Encoder Input Slave Unit.
slave A device that performs remote I/O for a master.
slave and Unit configurations A generic term for the EtherCAT configuration and Unit configuration.
Slave Terminal A building-block remote I/O terminal to which a Communications Coupler Unit and
NX Units are mounted. A Slave Terminal is one type of slave.
Special Unit Setup A generic term for the settings for a Special Unit, including the settings in allocated
DM Area words.
structure One of the derivative data types. It consists of multiple data types placed together
into a layered structure.
synchronization A function that automatically compares the information in the NJ-series Controller
with the information in the Sysmac Studio, displays any differences and locations in
a hierarchical form, and can be used to synchronize the information.
Sysmac Studio A computer software application for setting, programming, debugging, and trouble-
shooting NJ-series Controllers. It also provides operations for motion control and a
Simulator.
system common processing System processing that is performed by the CPU Unit to perform I/O refreshing and
the user program execution within a task. Exclusive control of variables between
tasks, data trace processing, and other processing is performed.
system service Processing that is performed by the CPU Unit in unused time between task pro-
cessing. The system service includes communications processing, SD Memory
Card access processing, self-diagnosis processing, and other processing.
system-defined variable A variable for which all attributes are defined by the system and cannot be changed
by the user.
task An attribute that defines when a program is executed.
task period The interval at which the primary periodic task or a periodic task is executed.
union One of the derivative data types. It allows you to handle the same data as different
data types.
Unit A device that mounts to the CPU Rack or an Expansion Rack. In NJ-series manu-
als, it refers to CJ-series Units.
Unit configuration The configuration information for the Units that are set on the Sysmac Studio. This
information tells what Unit models are connected to the CPU Unit and where they
are connected.
upload To transfer data from the Controller to the Sysmac Studio with the synchronization
operation of the Sysmac Studio.
user program All of the programs in one project.
user-defined event One of the events in the NJ-series System. These events are defined by the user.
“User-defined events” is a generic term for user-defined errors and user-defined
information.
user-defined variable A variable for which all of the attributes are defined by the user and can be changed
by the user.
variable A representation of data, such as a numeric value or character string, that is used in
a user program.
You can change the value of a variable by assigned the required value. “Variable” is
used as opposed to “constant,” for which the value does not change.
44
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 47

Terminology
Term Description
variable memory A memory area that contains the present values of variables that do not have AT
specifications. It can be accessed only with variables without an AT attribute.
NJ-series CPU Unit Hardware User’s Manual (W500)
45
Page 48

Revision History
W500-E1-27
Revision code
Cat. No.
Revision History
A manual revision code appears as a suffix to the catalog number on the front and back covers of the
manual.
Revision code Date Revised content
01 July 2011 Original production
02 March 2012 • Added information on the NJ301-.
03 May 2012 • Made changes accompanying release of unit version 1.02 of
04 August 2012 • Made changes accompanying release of unit version 1.03 of
05 February 2013 • Made changes accompanying release of unit version 1.04 of
06 April 2013 • Added information on the NJ501-120.
07 June 2013 • Made changes accompanying release of unit version 1.06 of
08 September 2013 • Made changes accompanying release of unit version 1.07 of
09 December 2013 • Made changes accompanying release of unit version 1.08 of
10 July 2014 • Corrected mistakes.
11 January 2015 • Made changes accompanying release of unit version 1.10 of
12 April 2015 • Added information on the NJ101-.
13 October 2015 • Added information on the hardware revision.
14 April 2016 • Made changes accompanying release of unit version 1.11 of
15 October 2016 • Made changes accompanying release of unit version 1.13 of
16 April 2017 • Made changes accompanying release of unit version 1.14 of
17 June 2017 • Made changes accompanying release of unit version 1.15 of
18 October 2017 • Made changes accompanying release of unit version 1.16 of
19 January 2018 • Made changes accompanying release of unit version 1.17 of
20 April 2018 • Corrected mistakes.
• Added information on the functions supported by unit version 1.01 of the CPU Units.
• Corrected mistakes.
the CPU Unit.
the CPU Unit.
the CPU Unit.
• Made changes accompanying release of unit version 1.05 of
the CPU Unit.
the CPU Unit.
the CPU Unit.
the CPU Unit.
the CPU Unit.
• Corrected mistakes.
• Corrected mistakes.
• Corrected mistakes.
the CPU Unit.
the CPU Unit.
the CPU Unit.
the CPU Unit.
the CPU Unit.
the CPU Unit.
46
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 49

Revision code Date Revised content
21 July 2018 • Added information on the hardware revision.
• Made changes accompanying release of unit version 1.19 of
the CPU Unit.
• Made changes accompanying the transfer of explanation for
event codes and errors to the NJ/NX-series Troubleshooting
Manual.
22 January 2019 • Made changes accompanying release of unit version 1.20 of
the CPU Unit.
• Corrected mistakes.
23 April 2019 • Made changes accompanying release of unit version 1.21 of
the NJ501-100, NJ301-, and NJ101-00.
24 July 2019 • Made changes accompanying release of unit version 1.40 of
the NJ501-100, NJ301-, and NJ101-00.
• Made changes accompanying release of unit version 1.21 of
the NJ501-400, NJ501-410, NJ501-1340, and NJ501-
5300.
25 August 2020 • Added information on the NJ501-R.
26 October 2020 • Corrected mistakes.
27 January 2021 • Made changes accompanying release of unit version 1.43 of
the NJ501-100.
Revision History
NJ-series CPU Unit Hardware User’s Manual (W500)
47
Page 50

Revision History
48
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 51

Introduction to NJ-series
Controllers
This section describes the features, basic system configuration, specifications, and
overall operating procedure of an NJ-series Controller.
1-1 The NJ-series Controllers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-1-1 Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2
1-1-2 Introduction to the System Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4
1-2 Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-7
1-3 Overall Operating Procedure for the NJ-series Controller . . . . . . . . . . . . 1-12
1-3-1 Overall Procedure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-12
1-3-2 Procedure Details . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-13
1
NJ-series CPU Unit Hardware User’s Manual (W500)
1-1
Page 52

1 Introduction to NJ-series Controllers
Sysmac Studio
Automation Software
IEC programming
NJ-series Controller
Multitasking, Synchronized Control
Sequence control
Motion control
Safety devices
Machine vision
I/O controls
Servo Drives and
Inverters
EtherCAT control network
1-1 The NJ-series Controllers
The SYSMAC NJ-series Controllers are next-generation machine automation controllers that provide
the functionality and high-speed performance that are required for machine control. They provide the
safety, reliability, and maintainability that are required of industrial controllers.
The NJ-series Controllers provide the functionality of previous OMRON PLCs, and they also provide
the functionality that is required for motion control. Synchronized control of I/O devices on high-speed
EtherCAT can be applied to safety devices, vision systems, motion equipment, discrete I/O, and more.
OMRON offers the new Sysmac Series of control devices designed with unified communications specifications and user interface specifications. The NJ-series Machine Automation Controllers are part of
the Sysmac Series. You can use them together with EtherCAT slaves, other Sysmac products, and the
Sysmac Studio Automation Software to achieve optimum functionality and ease of operation. With a
system that is created from Sysmac products, you can connect components and commission the system through unified concepts and usability.
1-1-1 Features
1-2
Hardware Features
Standard-feature EtherCAT Control Network Support
Support for EtherCAT Slave Terminals
All CPU Units provide an EtherCAT master port for EtherCAT communications. EtherCAT is an
advanced industrial network system that achieves faster, more-efficient communications. It is based
on Ethernet. Each node achieves a short fixed communications cycle time by transmitting Ethernet
frames at high speed. The standard-feature EtherCAT control network allows you to connect all of
the devices required for machine control (e.g., I/O systems, Servo Drives, Inverters, and machine
vision) to the same network.
You can use EtherCAT Slave Terminals to save space. You can also flexibly build systems with the
wide variety of NX Units.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 53

1 Introduction to NJ-series Controllers
Version Information
Achieving a Safety Subsystem on EtherCAT
You can use NX-series Safety Control Units to integrate safety controls in a sequence and motion
control system as a subsystem on EtherCAT.
A CPU Unit with unit version 1.06 or later and Sysmac Studio version 1.07 or higher are required
to use the NX-series Safety Control Units.
1-1 The NJ-series Controllers
1
CJ-series Units
In addition to EtherCAT network slaves, you can also mount CJ-series Basic I/O Units and Special
Units on the I/O bus.
Standard-feature EtherNet/IP Communications Port
All CPU Units provide an EtherNet/IP port for EtherNet/IP communications. EtherNet/IP is a multivendor industrial network that uses Ethernet. You can use it for networks between Controllers or as
a field network. The use of standard Ethernet technology allows you to connect to many different
types of general-purpose Ethernet devices.
Standard-feature USB Port
You can connect the computer that runs the Support Software directly to the CPU Unit.
Standard-feature SD Memory Card Slot
You can access an SD Memory Card that is mounted in the CPU Unit from the user program.
Highly Reliable Hardware
The NJ-series Controllers provide the hardware reliability and RAS functions that you expect of a
PLC.
1-1-1 Features
Software Features
Integrated Sequence Control and Motion Control
An NJ-series CPU Unit can perform both sequence control and motion control. You can simultaneously achieve both sequence control and multi-axes synchronized control. Sequence control,
motion control, and I/O refreshing are all executed in the same control period. The same control
period is also used for the process data communications cycle for EtherCAT. This enables precise
sequence and motion control in a fixed period with very little deviation.
Multitasking
You assign I/O refreshing and programs to tasks and then specify execution conditions and execution order for them to flexibly combine controls that suit the application.
Programming Languages Based on the IEC 61131-3 International Standard
The NJ-series Controllers support language specifications that are based on IEC 61131-3. To these,
OMRON has added our own improvements. Motion control instructions that are based on PLCo-
®
standards and an instruction set (POUs) that follows IEC rules are provided.
pen
Programming with Variables to Eliminate Worrying about the Memory Map
You access all data through variables in the same way as for the advanced programming languages
that are used on computers. Memory in the CPU Unit is automatically assigned to the variables that
you create so that you do not have to remember the physical addresses.
NJ-series CPU Unit Hardware User’s Manual (W500)
1-3
Page 54

1 Introduction to NJ-series Controllers
A Wealth of Security Features
The many security features of the NJ-series Controllers include operation authority settings and
restriction of program execution with IDs.
Complete Controller Monitoring
The CPU Unit monitors events in all parts of the Controller, including mounted Units and EtherCAT
slaves. Troubleshooting information for errors is displayed on the Sysmac Studio or on an NS-series
PT. Events are also recorded in logs.
Sysmac Studio Automation Software
The Sysmac Studio provides an integrated development environment that covers not only the Controller, but also covers peripheral devices and devices on EtherCAT. You can use consistent procedures for all devices regardless of the differences in the devices. The Sysmac Studio supports all
phases of Controller application, from designing through debugging, simulations, commissioning,
and changes during operation.
A Wealth of Simulation Features
The many simulation features include execution, debugging, and task execution time estimates on a
virtual controller.
1-1-2 Introduction to the System Configurations
The NJ Series supports the following system configurations.
Basic System Configurations
The NJ-series basic configurations include the EtherCAT network configuration, CJ-series Unit configuration, and the Support Software.
EtherCAT Network Configuration
You can use the built-in EtherCAT port to connect to EtherCAT Slave Terminals, to general-purpose
slaves for analog and digital I/O, and to Servo Drives and encoder input slaves. An EtherCAT network configuration enables precise sequence and motion control in a fixed cycle with very little deviation.
CJ-series Unit Configuration
In addition to the EtherCAT network, you can mount CJ-series Basic I/O Units and Special Units. CJseries Units can be mounted both to the CPU Rack where the CPU Unit is mounted and to Expansion Racks.
1-4
Support Software
The Support Software is connected to the peripheral USB port on the CPU Unit with a commercially
available USB cable. You can also connect it through an Ethernet cable that is connected to the
built-in EtherNet/IP port.
Refer to 3-7-2 Connection for details on the connection configuration of the Support Software.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 55

1 Introduction to NJ-series Controllers
Additional Information
Sysmac Studio
USB
EtherNet/IP
LAN
EtherCAT
Servo Drive/encoder
input slaves
Peripheral USB port
Built-in EtherNet/IP port
Built-in EtherCAT port
General-purpose slaves
Or
CPU
CJ-series Units
CJ-series Unit
Configuration
EtherCAT Network
Configuration
Power
Supply Unit
CPU Unit
NJ-series Controller
Support Software
Slave Terminal
CRT1
-
OD16
CRT1
-
OD16
1-1 The NJ-series Controllers
1
1-1-2 Introduction to the System Configurations
You can connect the Sysmac Studio directly to the Communications Coupler Unit to set up the
Slave Terminal. Refer to the NX-series EtherCAT Coupler Units User’s Manual (Cat. No. W519)
for details.
Network Configurations
• Host computers, HMIs, and other NJ-series Controllers are connected to the built-in EtherNet/IP
port on the CPU Unit or to a CJ1W-EIP21 EtherNet/IP Unit.
• A DeviceNet network is connected to a DeviceNet Unit. A serial communications network is connected to a Serial Communications Unit.
NJ-series Controller
BS+
BD H
DB L
BS
-
CompoNet
General-purpose device
with serial communications
Serial
CompoNet Master Unit
012345678 9 10 11 12 13 14 15
MS NS
WORD
NODE ADR
OUT
OD16
CRT1
REMOTE
TERMINAL
MS NS
CRT1
REMOTE
TERMINAL
WORD
NODE ADR
OD16
012345678 9 10 11 12 13 14 15
OUT
EtherNet/IP
Host computer
Built-in EtherNet/IP port
NJ-series Controller
Power Supply Unit
CPU Unit
Example: DeviceNet Unit
HMI
EtherNet/IP
Example: Serial Communications Unit
DeviceNet
NJ-series CPU Unit Hardware User’s Manual (W500)
1-5
Page 56

1 Introduction to NJ-series Controllers
Refer to the NJ/NX-series CPU Unit Software User’s Manual (Cat. No. W501) for details on the network configuration.
Support Software
You can use the following Support Software to set up, monitor, and debug an NJ-series Controller.
Sysmac Studio
The Sysmac Studio is the main Support Software that you use for an NJ-series Controller. On it, you
can set up the Controller configurations, parameters, and programs, and you can debug and simulate operation.
Other Support Software
The following Support Software is also included in the Sysmac Studio Software Package Standard
Edition.
Configuration software Application
Sysmac Studio
Network Configurator
CX-Integrator
CX-Protocol
CX-Designer The CX-Designer is used to create screens for NS-series PTs.
The Sysmac Studio is used for sequence control, motion control, and all other
operations except those described below.
The Network Configurator is used for tag data links on EtherNet/IP ports or
Units.
The CX-Integrator is used for remote I/O communications with a DeviceNet
Unit or CompoNet Master Unit.
The CX-Protocol is used for protocol macros with Serial Communications
Units.
*1
*1 If the NJ/NX-series Controller is a target device, you may also use Sysmac Studio version 1.10 or higher.
Use the Network Configurator if a CS/CJ-series PLC operates as the originator device.
1-6
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 57

1 Introduction to NJ-series Controllers
1-2 Specifications
This section gives the main specifications of the NJ-series Controllers.
Processing time
Programming
Motion
control
Item
Instruction
execution
times
Program
capacity
Memory
capacity for
variables
Data types Number of data types 2,000 1,000
Memory for
CJ-series
Units (Can
be specified with AT
specifications for
variables.)
Number of
controlled
*10
axes
Maximum number of axes groups 32 axes groups ---
Motion control period
Cams
Position units Pulse, mm, μm, nm, degree, and inch ---
Override factors 0.00% or 0.01% to 500.00% ---
LD instruction
Math instructions (for long
real data)
Size 20 MB 5 MB 3 MB
Number of POU
*7
Quantity
Retain
attri-
butes
No Retain
attri-
butes
CIO Area 6,144 words (CIO 0 to CIO 6143)
Work Area 512 words (W0 to W511)
Holding Area 1,536 words (H0 to H1535)
DM Area 32,768 words (D0 to D32767)
EM Area
Maximum number of controlled axes
Maximum number of used
real axes
Maximum number of axes for
linear interpolation axis control
Number of axes for circular
interpolation axis control
Number
of cam
data
points
Maximum number of cam
tables
definitions
Number of POU
instances
Size 2 MB 0.5 MB
Number of vari-
*8
ables
Size 4 MB 2 MB
Number of vari-
*9
ables
Motion control
axes
Single-axis position control axes
Used motion
control servo
axes
Used single-axis
position control
servo axes
Maximum points
per cam table
Maximum points
for all cam
tables
5 4 3 12 11 10 90
1.2 ns (1.9 ns or less)
26 ns or more
3,000 750 450
9,000 (*) 3,000 (*) 1,800
10,000 5,000 (*)
180,000 (*) 90,000 (*) 22,500
32,768 words × 25 banks (E0_00000
to E18_32767)
64 axes 32 axes 16 axes 15 axes (*) 6 axes ---
64 axes 32 axes 16 axes 15 axes (*) 6 axes ---
---
64 axes 32 axes 16 axes 8 axes 4 axes 2 axes ---
64 axes 32 axes 16 axes 8 axes 4 axes 2 axes ---
---
4 axes per axes group ---
2 axes per axes group ---
The same control period as that is used for the process data communications
cycle for EtherCAT.
65,535 points ---
1,048,560 points 262,140 points ---
640 tables 160 tables ---
NJ501- NJ301- NJ101-
*1
*4
2.0 ns (3.0 ns or less)*23.3 ns (5.0 ns or less)
42 ns or more
32,768 words × 4 banks (E0_00000 to E3_32767)
*5
70 ns or more
1-2 Specifications
*3
*6
---
1
NJ-series CPU Unit Hardware User’s Manual (W500)
1-7
Page 58

1 Introduction to NJ-series Controllers
Peripheral USB
port
Built-in
EtherNet/IP
port
Item
Supported services Sysmac Studio connection
Physical layer USB 2.0-compliant B-type connector
Transmission distance 5 m max.
Number of ports 1
Physical layer 10BASE-T/100BASE-TX
Frame length 1,514 bytes max.
Media access method CSMA/CD
Modulation Baseband
Topology Star
Baud rate 100 Mbps (100Base-TX)
Transmission media STP (shielded, twisted-pair) cable of Ethernet category 5, 5e or higher
Maximum transmission distance between
Ethernet switch and node
Maximum number of cascade connections There are no restrictions if an Ethernet switch is used.
Maximum number of connections
Packet interval
Permissible communications
band
Maximum number of tag sets 32
CIP service:
Tag dat a
links (cyclic
communications)
CIP message service:
Explicit
messages
Number of TCP sockets 30 (*)
Tag types Network variables, CIO, Work, Holding, DM, and EM Areas
Number of tags per connection (i.e., per tag set)
Maximum number of tags 256
Maximum link data size per
node (total size for all tags)
Maximum data size per connection
Maximum number of registrable tag sets
Maximum tag set size 600 bytes (Two bytes are used if Controller status is included in the tag set.)
Multi-cast packet filter
Class 3 (number of connections)
UCMM
(non-connection
type)
*11
*13
Maximum number of clients
that can communicate at one
time
Maximum number of servers
that can communicate at one
time
5 4 3 12 11 10 90
100 m
32
Can be set for each connection.
1 to 10,000 ms in 1-ms increments (*)
3,000 pps
8 (7 tags if Controller status is included in the tag set.)
19,200 bytes
600 bytes
32 (1 connection = 1 tag set)
Supported
32 (clients plus server)
32
32
NJ501- NJ301- NJ101-
*12
(including heartbeat) (*)
1-8
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 59

1 Introduction to NJ-series Controllers
Built-in
EtherNet/IP
port
OPC UA
Server
Item
Support profile/Model
Default Endpoint/Port opc.tcp://192.168.250.1:4840/ ---
Maximum number of sessions (Client)
Maximum number of Monitored Items per server
Sampling rate of Monitored
Items (ms)
Maximum number of Subscriptions per server
Maximum number of variables that can be published
Maximum number of value
attributes that can be pub-
*15
lished
Maximum number of structure definitions that can be
published
*14
Restrictions on variables
unable to be published
Security Policy/Mode
Application
Authentication
User
Authentication
Authentication X.509 ---
Maximum number of storable
certifications
Authentication
5 4 3 12 11 10 90
Micro Embedded Device Server Profile
PLCopen Information Model
5---
2,000 ---
0, 50, 100, 250, 500, 1,000, 2,000,
5,000, 10,000
if set to 0(zero), it is assumed that is
set to 50.
100 ---
10,000 ---
10,000 ---
100 ---
• Variables whose size is over 1,024
bytes
• Two-dimensional or higher structure
arrays
• Structures that include two-dimensional and higher arrays
• Structures with four or higher levels
of nesting
• Unions
• Arrays whose index number suffix
does not start from 0
• Arrays with 1,024 or more elements
• Structures with 100 or more mem-
bers
Select one of the following.
None
Sign - Basic128Rsa15
Sign - Basic256
Sign - Basic256Sha256
SignAndEncrypt - Basic128Rsa15
SignAndEncrypt - Basic256
SignAndEncrypt - Basic256Sha256
Trusted certification: 32
Issuer certification: 32
Rejected certification: 32
You can set the following items.
User name/Password
Anonymous
NJ501- NJ301- NJ101-
1-2 Specifications
---
1
---
---
---
---
---
NJ-series CPU Unit Hardware User’s Manual (W500)
1-9
Page 60

1 Introduction to NJ-series Controllers
Built-in
EtherCAT
port
Serial
communications
Unit configuration
Option
Board
Built-in
I/O
Internal
clock
Item
Communications standard IEC 61158 Type12
EtherCAT master specifications Class B (Feature Pack Motion Control compliant)
Physical layer 100BASE-TX
Modulation Baseband
Baud rate 100 Mbps (100Base-TX)
Duplex mode Auto
Topology
Transmission media
Maximum transmission distance between
nodes
Maximum number of slaves 192 64
Range of node addresses that can be set 1 to 192
Maximum process data size
Maximum process data size per slave
Communications cycle 500, 1,000, 2,000, or 4,000 μs (*)
Sync jitter 1 μs max.
Communications method ---
Synchronization method ---
Baud rate ---
Maximum number of CJ Units
per CPU Rack or Expansion
Rack
Maximum
number of
connectable Units
Maximum number of Expansion Racks 3
I/O capacity
Power Supply Unit for
CPU Rack
and Expansion Racks
Number of slots
Input Number of points ---
Output
Accuracy
Retention time of built-in capacitor ---
Maximum number of NX
Units per CPU Rack
Maximum number of CJ Units
for entire controller
Maximum number of NX
Units for entire controller
Maximum number of I/O
points on CJ-series Units
Model NJ-P3001
Power
OFF
detection
time
Number of points ---
Load short-circuit protection ---
AC power supply
DC power supply
5 4 3 12 11 10 90
Line, daisy chain, branching, and ring
Twisted-pair cable of category 5 or higher (double-shielded straight cable with aluminum tape
and braiding)
100 m
Inputs: 5,736 bytes
Outputs: 5,736 bytes
*17
Inputs: 1,434 bytes
Outputs: 1,434 bytes
10
---
40
4,096
(On EtherCAT Slave Terminals)
2,560
30 to 45 ms
22 to 25 ms
---
At ambient temperature of 55°C: −3.5 to +0.5 min error per month
At ambient temperature of 25°C: −1.5 to +1.5 min error per month
At ambient temperature of 0°C: −3 to +1 min error per month
NJ501- NJ301- NJ101-
*16
1,000, 2,000, or 4,000 μs
400
(On EtherCAT Slave Terminals)
*1 When the hardware revision for the Unit is A or B, the processing time is 1.1 ns (1.7 ns or less).
*2 When the hardware revision for the Unit is A, the processing time is 1.6 ns (2.5 ns or less).
*3 When the hardware revision for the Unit is A, the processing time is 3.0 ns (4.5 ns or less).
*4 When the hardware revision for the Unit is A or B, the value is 24 ns or more.
*5 When the hardware revision for the Unit is A, the value is 35 ns or more.
*6 When the hardware revision for the Unit is A, the value is 63 ns or more.
*7 Execution objects and variable tables (including variable names)
*8 Does not include Holding, DM, and EM Area memory for CJ-series Units.
*9 Does not include CIO and Work Area memory for CJ-series Units.
*10 Refer to the NJ/NX-series CPU Unit Motion Control User’s Manual (Cat. No. W507) for descriptions of axes.
1-10
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 61

1 Introduction to NJ-series Controllers
*11 Data will be refreshed at the set interval, regardless of the number of nodes.
*12 “pps” means packets per second, i.e., the number of communications packets that can be sent or received in one second.
*13 As the EtherNet/IP port implements the IGMP client, unnecessary multi-cast packets can be filtered by using an Ethernet switch that supports IGMP Snoop-
ing.
*14 The CPU Unit that supports OPC UA is an NJ501-100 CPU Unit with unit version 1.17 or later.
*15 The number of value attributes is defined by the following formula.
Number of value attributes = (Number of basic data type variables) + (Number of array-specified elements) + (Number of values in the structure)
*16 A ring topology can be used with project unit version 1.40 or later.
*17 However, for project unit version earlier than 1.40, the data must be within four frames.
Note Items that are marked with asterisks in the table are improvements that were made during version upgrades. Refer to A-
7 Version Information for information on version upgrades.
1-2 Specifications
1
NJ-series CPU Unit Hardware User’s Manual (W500)
1-11
Page 62

1 Introduction to NJ-series Controllers
1-3 Overall Operating Procedure for the
NJ-series Controller
This section gives the overall operating procedure of the NJ-series Controllers and then describes it in
more detail.
1-3-1 Overall Procedure
The overall procedure to use an NJ-series Controller is given below.
Step 1. Software Design
Design the overall system configuration, task configuration, programs, and variables.
Step 1-1 Designing I/O and Processing
Step 1-2 Designing Tasks
Step 1-3 Designing Programs
Step 2. Software Setups and Programming
Create the system configurations that you designed in step 1 on the Support Software and assign the variables. Create the tasks and programs, and debug them,
e.g., with simulations.
Step 2-1 Slave and Unit Configurations
Step 2-2 Controller Setup
Step 2-3 Programming
Step 2-4 Offline Debugging
Step 3. Mounting and Setting Hardware
Mount the Units and make the required hardware settings.
1-12
Step 4. Wiring
Connect the network cables and wire the I/O.
Step 5. Confirming Operation and Starting Actual System
Operation
Connect the Support Software to the physical system and download the project.
Check operation on the physical system and then start actual system operation.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 63

1 Introduction to NJ-series Controllers
1-3-2 Procedure Details
Step 1. Software Design
Step Description Reference
1-3 Overall Operating Procedure
for the NJ-series Controller
Step 1-1
Designing I/O and
Processing
Step 1-2
Designing Tasks
Step 1-3
Designing Programs
POU (Program
Organization Unit)
Design
Variable Design
• External I/O devices and unit configuration
• Refresh periods for external devices
• Program contents
• Task configuration
• Relationship between tasks and programs
• Task periods
• Slave and Unit refresh times
• Exclusive control methods for variables between tasks
• Programs
• Functions and function blocks
• Determining the algorithm languages
• Defining variables that you can use in more than one POU and
variables that you use in only specific POUs
• Defining the variables names for the device variables that you use
to access slaves and Units
• Defining the attributes of variables, such as the Name and Retain
attributes
• Designing the data types of variables
Section 3 Configuration
Units (page 3-1)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
1
1-3-2 Procedure Details
Step 2. Software Setups and Programming
Step Description Sysmac Studio Oper-
ations
Project Creation
NJ-series CPU Unit Hardware User’s Manual (W500)
1. Create a project in the Sysmac Studio.
2. Insert a Controller.
New Project Button
Insert − Controller
Reference
Sysmac Studio Version 1
Operation Manual (Cat. No.
W504)
1-13
Page 64
1 Introduction to NJ-series Controllers
The following Controller Configurations and Setup and the Programming and Task Settings can be performed in either
order.
Step 2-1
Slave and Unit
Configurations
1) Creating the Slave
and Unit Configurations
2) Assigning Device
Variables to I/O Ports
(The following step is for motion control.)
3) Creating the Axes
and Assigning Them
to the Servo
Drive/Encoder Input
Slaves
1. Creating the slave configuration and
Unit configuration either offline or
online. (For online configuration, make
the online connection that is described
in step 5.)
2. Setting up any Slave Terminals that are
used.
Registering device variables in variable
tables (Variable names are user defined or
automatically created.)
Creating the axes and setting them as real
axes or virtual axes. Creating axes groups
to perform interpolated axes control.
EtherCAT Slave Setting Editor
Unit Editor
I/O Map NJ/NX-series CPU Unit
Configurations and
Setup − Motion Control Setup
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
NX-series EtherCAT Coupler Unit User’s Manual
(Cat. No. W519)
Software User’s Manual
(Cat. No. W501)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
Step 2-2
Controller Setup
Setting the following parameters from the
Sysmac Studio
Setting the initial values for the PLC
Function Module
Initial settings for Special Units Configurations and
(To use motion control)
Setting the initial settings for the
Motion Control Function Module
Setting the initial values for the EtherCAT Function Module
Setting the initial values for the EtherNet/IP Function Module
Configurations and
Setup − Controller
Setup − Operation
Settings
Setup − CPU/Expansion Racks
Configurations and
Setup − Motion Control Setup
Configurations and
Setup − EtherCAT
Configurations and
Setup − Controller
Setup − Built-in EtherNet/IP Port Settings
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
1-14
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 65

Step 2-3
Programming
1 Introduction to NJ-series Controllers
1-3 Overall Operating Procedure
for the NJ-series Controller
1) Registering Variables
2) Writing Algorithms
for POUs
3) Setting the Tasks Making task settings Configurations and
Step 2-4
Offline Debugging
• Registering the variables used by more
than one POU in the global variable
table with Sysmac Studio
• Registering the local variable table for
each program
• Registering the local variable table for
each function block and function
Writing the algorithms for the POUs (programs, function blocks, and functions) in
the required languages
Checking the algorithms and task execution times on the Simulator (virtual controller)
Global Variable Table
Editor
Local Variable Table
Editor
Programming Editor NJ/NX-series CPU Unit
Setup − Task Settings
Sysmac Studio Version 1
Operation Manual (Cat. No.
W504)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
Software User’s Manual
(Cat. No. W501)
NJ/NX-series Instructions
Reference Manual (Cat. No.
W502) and NJ/NX-series
Motion Control Instructions
Reference Manual (Cat. No.
W508)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
1
1-3-2 Procedure Details
Step 3. Mounting and Setting Hardware
Step Description Reference
1. Mounting
2. Setting Hardware
• Connecting adjacent Units
• Mounting to DIN Track
• Setting the node addresses of the EtherCAT slaves
• Setting unit numbers on the rotary switches on the front of the Spe-
cial Units
4-3 Mounting Units
(page 4-10)
Operation manuals for the
EtherCAT slaves and Special Units
NJ-series CPU Unit Hardware User’s Manual (W500)
1-15
Page 66

1 Introduction to NJ-series Controllers
Step 4. Wiring
Step Description Reference
1. Connecting
Ethernet Cable
2. Wiring I/O
3. Connecting the
Computer That
Runs the Sysmac
• Connecting the built-in EtherCAT port
• Connecting the built-in EtherNet/IP port
• Wiring I/O to EtherCAT slaves
• Wiring Basic I/O Units and Special Units
• Checking wiring
• Connecting USB Cable
• Connecting the built-in EtherNet/IP port
4-4 Wiring (page 4-27)
Operation manuals for EtherCAT Slave Units and 4-4
Wiring (page 4-27)
Sysmac Studio Version 1
Operation Manual (Cat. No.
W504)
Sysmac Studio Version 1
Operation Manual (Cat. No.
W504)
Studio
Step 5. Checking Operation and Starting Operation on the Actual System
Step Description Sysmac Studio
Operations
1. Online Connection to Sysmac Studio and Project
Download
Turn ON the power supply to the Controller and place the Sysmac Studio online.
Then, download the project.*
(Perform this step before you create the
slave configuration or Unit configuration
from the mounted Units in step 2-1.)
Controller
nications Setup
Controller
nization
−
Commu-
−
Synchro-
Reference
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
2. Operation Check
on Controller
3. Actual Controller
1. Check the wiring by using forced
refreshing of real I/O from the I/O Map
or Watch Tab Page.
2. For motion control, use the MC Test
Run operations in PROGRAM mode to
check the wiring. Then check the motor
rotation directions for jogging, travel
distances for relative positioning (e.g.,
for electronic gear settings), and homing operation.
3. Change the Controller to RUN mode
and check the operation of the user
program.
Start actual operation.
Operation
* Use the Synchronize Menu of the Sysmac Studio to download the project.
NJ/NX-series CPU Unit
Software User’s Manual
(Cat. No. W501)
1-16
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 67
System Configuration
This section describes the basic system configuration and devices used for NJ-series
Controllers.
2-1 Basic System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2-1-1 EtherCAT Network Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-4
2-1-2 CJ-series Unit Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-5
2-2 Connecting to the Sysmac Studio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-19
2-3 Network Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-20
2
NJ-series CPU Unit Hardware User’s Manual (W500)
2-1
Page 68

2 System Configuration
2-1 Basic System Configuration
System Configuration
An NJ-series Controller supports the following two types of configurations.
(1) Basic Configurations
The basic configurations include the CPU Unit and the Configuration Units that are controlled
directly by the CPU Unit. There are two basic configurations.
• EtherCAT network configuration
• CJ-series Unit configuration
(2) Other Network Configurations
These are the configurations of the systems that are connected to the CPU Unit's built-in EtherNet/IP port and Communications Units.
EtherCAT Network Configuration
With an NJ-series CPU Unit, you can use an EtherCAT network as a basic system.
With the EtherCAT network system of the NJ-series CPU Unit, the period for sequence processing
and motion processing in the CPU Unit is the same as the EtherCAT communications period. This
enables high-precision sequence control and motion control with a constant period and little
fluctuation.
For information on EtherCAT, refer to the NJ/NX-series CPU Unit Built-in EtherCAT Port User's Man-
ual (Cat. No. W505).
CJ-series Unit Configuration
CPU Rack
The CPU Rack consists of the following items.
• NJ-series CPU Unit
• NJ-series Power Supply Unit
• CJ-series Configuration Units
CJ-series Basic I/O Units, Special I/O Units, and CPU Bus Units
• I/O Control Unit
An I/O Control Unit is required to connect an Expansion Rack.
• End Cover
* Some CJ-series Configuration Units cannot be used with an NJ-series CPU Unit.
Refer to CJ-series Configuration Units on page 2-11 for information on the models you can use with an NJseries CPU Unit.
Expansion Racks
You can connect an Expansion Rack to an NJ-series CPU Rack or to another Expansion Rack. A
CPU Unit cannot be mounted to an Expansion Rack. The rest of the configuration is the same as for
an NJ-series CPU Rack.
*
2-2
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 69

2 System Configuration
NJ-series Power Supply Unit
NJ-series CPU Unit
EtherCAT slaves
NJ-series Power Supply Unit
ADRADR
EtherCAT Slave Terminal
EtherCAT
CJ-series Unit Configuration
EtherCAT
Network Configuration
CPU Rack
(I/O Control Unit)
CJ-series Configuration Units
(Basic I/O Units, Special
I/O Units, and CPU Bus Units)
CJ-series Configuration Units
(Basic I/O Units, Special
I/O Units, and CPU Bus Units)
End Cover
End Cover
SD Memory Card
(I/O Interface Unit)
Expansion Rack
2-1 Basic System Configuration
2
NJ-series CPU Unit Hardware User’s Manual (W500)
2-3
Page 70
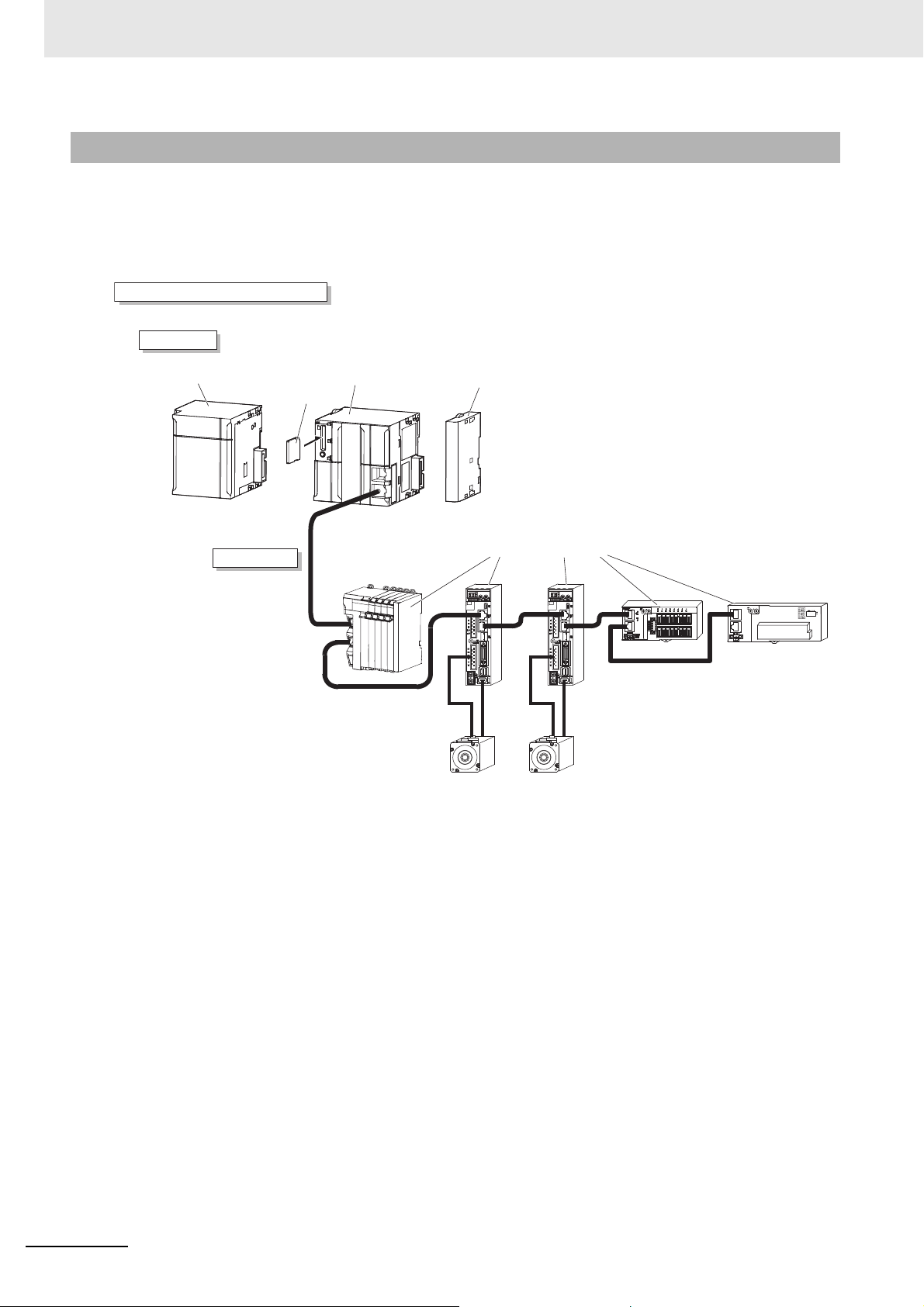
2 System Configuration
ADRADR
EtherCAT
NJ-series Power Supply Unit
NJ-series CPU Unit
EtherCAT slaves
SD Memory Card
CPU Rack
End Cover
EtherCAT Network Configuration
2-1-1 EtherCAT Network Configuration
The EtherCAT network configuration consists of an NJ-series CPU Unit, an NJ-series Power Supply
Unit, a CJ-series End Cover, and the EtherCAT slaves.
You use the built-in EtherCAT master port on the NJ-series CPU Unit to connect EtherCAT slaves.
For information on the system configuration of an EtherCAT network, refer to the NJ/NX-series CPU
Unit Built-in EtherCAT Port User's Manual (Cat. No. W505).
2-4
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 71

2-1-2 CJ-series Unit Configuration
NJ-series
CPU Unit
CJ-series Configuration Units
(10 Units max.)
NJ-series Power
Supply Unit
SD Memory Card
End Cover
I/O Control Unit
*
Configuration Units
The CJ-series Unit configuration consists of the CJ-series Units that are connected. It includes the CJseries Units on the CPU Rack and Expansion Racks.
CPU Rack
The CPU Rack consists of an NJ-series CPU Unit, an NJ-series Power Supply Unit, CJ-series
Configuration Units, and a CJ-series End Cover. Up to 10 CJ-series Configuration Units can be connected.
2 System Configuration
2-1 Basic System Configuration
2
2-1-2 CJ-series Unit Configuration
* The I/O Control Unit is required only to connect an Expansion Rack. It must be connected immediately to the
right of the CPU Unit.
Even though the NJ-series Controllers do not have Backplanes, the term “slot” is still used to refer to
the location of Units. Slot numbers are assigned in order to Units from left to right on the CPU Rack (slot
0, slot 1, slot 2, etc.).
Name Configuration Remarks
NJ-series Units NJ-series CPU Units (One End
Cover is provided with each
Unit.)
NJ-series Power Supply Unit
SD Memory Card Install as required.
CJ-series Units I/O Control Unit Required to connect an Expansion Rack. Must be con-
End Cover Must be connected to the right end of the CPU Rack.
CJ-series Basic I/O Units A total of up to 10 Units can be connected to the CPU
CJ-series Special I/O Units
CJ-series CPU Bus Units
One required for every CPU Rack.
nected immediately to the right of the CPU Unit.
One End Cover is provided with the CPU Unit.
(A Controller error in the major fault level will occur if the
End Cover is not connected to the right end.)
Rack and to each of the Expansion Racks. (A Controller
error in the major fault level will occur if 11 or more Units
are connected.)
NJ-series CPU Unit Hardware User’s Manual (W500)
2-5
Page 72

2 System Configuration
Units
NJ-series CPU Units
I/O capacity/Maxi-
mum number of
Model
NJ501-1500 2,560 points/40
NJ501-1400 32
NJ501-1300 16
NJ501R500
NJ501R400
NJ501R300
NJ501-4500 64
NJ501-4400 32
NJ501-4300 16
NJ501-4310
NJ501-1520 64
NJ501-1420 32
NJ501-1320 16
NJ501-4320
NJ501-1340
NJ501-5300
NJ301-1200 5 MB 0.5 MB:
NJ301-1100 4
NJ101-1000 3 MB 2
NJ101-9000 0
NJ101-1020 2
NJ101-9020 0
Configuration
Units (Maximum
number of Expan-
sion Racks)
Units (3 Expansion
Racks)
Program
capa
20 MB2 MB:
city
Memory
capacity
for vari-
ables
Retained
during
power
interruptions.
4 MB: Not
retained
during
power
interruptions.
Retained
during
power
interruptions.
2 MB: Not
retained
during
power
interruptions.
Number of
motio
n
axes
64
64
32
16
8
Data-
base
connec-
tion
service
Not supported.
Supported.
Not supported.
Supported.
GEM
Service
s
Not
supporte
d.
Supporte
d.
Not
supporte
d.
Rob
ot
con-
trol
for
OMR
ON
robo
ts
Not
supporte
d.
Supporte
d
Not
supporte
d.
Rob
ot
con-
trol
by
NJ
Rob
otics
func
tion
Not
supporte
d.
Supporte
d.
Not
supporte
d.
Supporte
d.
Not
supporte
d.
Num
erical
con-
trol
Not
supporte
d.
Supporte
d.
Not
supporte
d.
Current
consump-
tion
5
24
VD
VD
C
C
1.9
--- 55
0 A
We
igh
t
0 g
2-6
NJ-series Power Supply Units
Model
Power supply
voltage
NJ-PA3001 100 to 240 VAC 6.0 A 1.0 A 30 W Yes Yes Yes 470 g
NJ-PD3001 24 VDC 6.0 A 1.0 A 30 W Yes Yes Yes 490 g
Output current
5 VDC 24 VDC
Output
capacity
NJ-series CPU Unit Hardware User’s Manual (W500)
RUN
output
CPU
Rack
Expansion
Racks
Weight
max.
max.
Page 73

2 System Configuration
Precautions for Safe Use
Note A CJ-series Power Supply Unit cannot be used to supply power to an NJ-system CPU Rack or Expansion
Rack.
If you connect a CJ-series Power Supply Unit to a CPU Rack, an Incorrect Power Supply Unit Connected
error will occur, and the CPU Unit will not operate. The RUN indicator will flash at a 3-s interval and the
ERROR indicator will light.
If you connect the Power Supply Unit to an Expansion Rack, operation is performed without error detection.
Normal operation, however, may be unstable due to insufficient supplied power. Also, an Internal NJ-series
Bus Check Error (i.e., a Controller error in the major fault level) may occur when the power is interrupted.
Note The Power Supply Unit may continue to supply power to the rest of the Controller for a few seconds after the
power supply turns OFF and the PWR indicator is lit during this time. If the NJ-series NJ-PD3001 Power
Supply Unit is used, confirm that the PWR indicator is not lit when the power supply is tuned ON again after
the power supply turns OFF.
• Do not use the Power Supply Units in the system beyond the rated supply capacity ranges.
Doing so may result in operation stopping, incorrect operation, or failure to correctly back up
required data at power interruptions.
• Use only NJ-series Power Supply Units on NJ-series CPU Racks and Expansion Racks.
Operation is not possible if you use a CJ-series Power Supply Unit with an NJ-series CPU Unit
or an NJ-series Power Supply Unit with a CJ-series CPU Unit.
SD Memory Card
Model Card type Capacity Format
HMC-SD291 SD Card 2 GB FAT16 100,000
HMC-SD491 SDHC Card 4 GB FAT32 100,000
HMC-SD1A1
*1 This can be used for a CPU Unit with unit version 1.21 or later.
*1
16 GB
Number of over-
writes
2-1 Basic System Configuration
2
2-1-2 CJ-series Unit Configuration
Note Refer to 3-2-1 Models and Specifications for details on SD Memory Cards.
I/O Control Unit
Model Specifications
CJ1W-IC101 An I/O Control Unit is required to connect an NJ-series
Expansion Rack to an NJ-series CPU Rack. The I/O Control Unit must be connected immediately to the right of
the CPU Unit. Connect to the I/O Interface Unit (CJ1WII101) on the Expansion Rack with a CS/CJ-series I/O
Connecting Cable.
0.02 A --- 70 g max.
End Cover
Model Specifications
CJ1W-TER01 The End Cover must be connected to the right end of the
NJ-series CPU Rack. (A Controller error in the major fault
level will occur if the End Cover is not connected to the
right end of the Rack.) One End Cover is provided with
the CPU Unit and with an I/O Interface Unit.
Current consump-
tion
5 VDC 24 VDC
Current con-
sumption
Included with the CPU Unit or
Expansion Unit.
Weight
Weight
NJ-series CPU Unit Hardware User’s Manual (W500)
2-7
Page 74

2 System Configuration
Others
Name Model Specifications
DIN Track PFP-50N Track length: 50 cm, height: 7.3 mm
Connecting cable for peripheral USB
port (to connect the Sysmac Studio)
Battery Set CJ1W-BAT01 For CJ2 CPU Unit
Sysmac Studio
Standard Edition
PFP-100N Track length: 1 m, height: 7.3 mm
PFP-100N2 Track length: 1 m, height: 16 mm
PFP-M Stopper to prevent Units from moving on the track.
Two each are provided with the CPU Unit and with
an I/O Interface Unit.
Commercially available USB cable
SYSMAC-SE The Sysmac Studio is a Support Software pack-
USB 2.0 certified cable (A connector - B connector), 5.0 m max.
age that provides an integrated development
environment to design, program, debug, and
maintain SYSMAC NJ-series Controllers. The following Support Software is included.
• Sysmac Studio
• Network Configurator
• CX-Integrator
• CX-Protocol
• CX-Designer
Recommended Communications Cables for EtherCAT and EtherNet/IP
EtherCAT communications are performed in accordance with the 100BASE-TX standard. Refer to
the NJ/NX-series CPU Unit Built-in EtherCAT Port User’s Manual (Cat. No. W505) for recom-
mended cables.
EtherNet/IP communications are performed in accordance with the 100BASE-TX or 10BASE-T
standard. Refer to the NJ/NX-series CPU Unit Built-in EtherNet/IP Port User’s Manual (Cat. No.
W506) for recommended cables.
2-8
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 75

2 System Configuration
CPU Rack
CS/CJ-series I/O Connecting Cables
Cable
CS1W-CN313
CS1W-CN713
CS1W-CN223
CS1W-CN323
CS1W-CN523
CS1W-CN133
CS1W-CN133B2
Length
0.3 m
0.7 m
2 m
3 m
5 m
10 m
12 m
CJ-series
Expansion Rack
CS/CJ-series I/O Connecting Cable
30 cm, 70 cm, 2 m, 3 m, 5 m, 10 m, 12 m
Expansion
Racks:
3 maximum
Total cable
length:
12 m
End Cover
I/O Control Unit
I/O Interface Unit
I/O Interface Unit
10 Units max.
CJ-series
Expansion Rack
CS/CJ-series I/O Connecting Cable
30 cm, 70 cm, 2 m, 3 m, 5 m, 10 m, 12 m
10 Units max.
NJ-series
Power
Supply
Unit
NJ-series
CPU
Unit
NJ-series
Power
Supply
Unit
NJ-series
Power
Supply
Unit
Expansion Racks
CJ-series Expansion Racks can be connected to the CPU Rack to expand the number of Units in the
System beyond the CPU Rack. Up to 10 I/O Units can be mounted to each Expansion Rack and a total
of 3 Expansion Racks can be connected.
Mount an I/O Control Unit immediately to the right of the CPU Unit, and mount the I/O Interface Unit
immediately to the right of the Power Supply Unit on the Expansion Rack. Mounting them in other locations may cause malfunctions.
2-1 Basic System Configuration
2
2-1-2 CJ-series Unit Configuration
Use an NJ-series Power Supply Unit as the power supply for an Expansion Rack in an NJ-series System.
A CJ-series Power Supply Unit cannot be used to supply power on an NJ-system Expansion Rack.
NJ-series CPU Unit Hardware User’s Manual (W500)
2-9
Page 76
2 System Configuration
Maximum Number of Expansion Racks
Expansion pattern Maximum number of Racks Remarks
NJ-series CPU Rack plus
CJ-series Expansion Racks
Units
Units for CJ-series Expansion Racks
Rack Configuration Remarks
NJ-series
Expansion
Racks
NJ-series Power Supply Unit One required for each Expansion Rack.*
I/O Interface Unit (one End Cover
included.)
CJ-series Basic I/O Units A total of up to 10 Units can be connected to the CPU
CJ-series Special I/O Units
CJ-series CPU Bus Units
End Cover Must be connected to the right end of the Expansion
CS/CJ-series I/O Connecting Cable Required to connect the I/O Interface Unit to the I/O
3 Racks The total length of I/O Connecting Cable
between the CPU Rack and an Expansion Rack,
and between all Expansion Racks, must be no
more than 12 m.
Rack and to each of the Expansion Racks. (A Controller
error in the major fault level will occur if 11 or more
Units are connected.)
Rack. (One End Cover is provided with the I/O Interface
Unit. A Controller error in the major fault level will occur
if the End Cover is not connected to the right end.)
Control Unit or previous I/O Interface Unit.
* A CJ-series I/O Control Unit is required on the NJ-series CPU Rack.
NJ-series Power Supply Units
Model
NJ-PA3001 100 to 240 VAC 6.0 A 1.0 A 30 W Yes Yes Yes 470 g
NJ-PD3001 24 VDC 6.0 A 1.0 A 30 W Yes Yes Yes 490 g
Note Use an NJ-series Power Supply Unit as the power supply for an NJ-series Expansion Rack.
A CJ-series Power Supply Unit cannot be used for an NJ-series Expansion Rack.
Power supply
voltage
Output current
5 VDC 24 VDC
Output
capacity
RUN
output
CPU
Rack
Expan-
sion
Racks
Weight
max.
max.
I/O Interface Unit
Current consump-
Model Specifications
CJ1W-II101 One Interface Unit is required for each CJ-series Expan-
sion Rack. One End Cover is provided with each Unit.
* Includes the weight of the End Cover.
0.13 A --- 130 g
tion
5 VDC 24 VDC
Weight
max.
*
2-10
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 77

2 System Configuration
End Cover
Current con-
Model Specifications
CJ1W-TER01 The End Cover must be connected to the right end of the
CJ-series Expansion Rack. An End Cover Missing error
(a Controller error in the major fault level) will occur if the
End Cover is not connected to the right end of the Rack.
One End Cover is provided with the CPU Unit and with an
I/O Interface Unit.
sumption
5 VDC 24 VDC
Included with the CPU Unit or
Expansion Unit.
CS/CJ-series I/O Connecting Cables
Model Specifications Cable length
CS1W-CN313 An I/O Connecting Cable connects an I/O Control Unit (CJ1W-IC101) to an
CS1W-CN713 0.7 m
CS1W-CN223 2 m
CS1W-CN323 3 m
CS1W-CN523 5 m
CS1W-CN133 10 m
CS1W-CN133B2 12 m
I/O Interface Unit (CJ1W-II101), or connects an I/O Interface Unit to
another I/O Interface Unit.
0.3 m
2-1 Basic System Configuration
Weight
2
2-1-2 CJ-series Unit Configuration
CJ-series Configuration Units
Maximum Number of Units
A maximum of 10 Units can be connected to the CPU Rack for an NJ-series CPU Unit or to an
Expansion Rack. There are no restrictions in the number of each model of Unit based on location.
Note If you connect more than the maximum number of Units to a CPU Rack or Expansion Rack, an Incorrect
Unit/Expansion Rack Connection error (a major fault level Controller error) will occur, and the CPU Unit will
not operate.
NJ-series CPU Unit Hardware User’s Manual (W500)
2-11
Page 78

2 System Configuration
Models of Configuration Units
The Configuration Units with which the NJ-series CPU Unit can exchange data are classified into
three groups. The number of Units that can be mounted depends on the type of Unit.
Units Description
Basic I/O Units Basic I/O Units are used for discrete inputs and
Special I/O Units Special I/O Units are more advanced than Basic
CPU Bus Units CPU Bus Units are advanced Units that
outputs.
I/O Units. They support functions other than discrete inputs and outputs.
Examples:
Analog I/O Units and High-speed Counter Units
Special I/O Units have a smaller area for
exchanging data with the CPU Unit than CPU
Bus Units (including Network Communications
Units).
exchange data with the CPU Unit via the CPU
bus.
Examples:
Network Communications Units and Serial Communications Units
CPU Bus Units have a larger area for exchanging data with the CPU Unit than Special I/O
Units.
Unit identifica-
tion method
Identified by the
CPU Unit according to mounting
position.
Identified by the
CPU Unit using
unit numbers 0 to
95 set with the
rotary switches on
the front panel of
the Unit.
Identified by the
CPU Unit using
unit number 0 to F
set with the rotary
switch on the front
panel of the Unit.
Number of
mountable Units
Up to 40 Basic I/O
Units can be
mounted.
Up to 40 Special
I/O Units can be
mounted.
(Depending on the
model, 1 to 4 unit
numbers are used
for one Unit.)
Up to 16 CPU Bus
Units can be
mounted.
2-12
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 79

2 System Configuration
CJ-series Configuration Units
CJ-series Basic I/O Units
Input Units
Name Specifications Model
DC Input
Units
AC Input
Units
Interrupt
Input Unit
Quickresponse
Input Unit
B7A Interface Units
Terminal block
12 to 24 VDC, 8
inputs
Terminal block
24 VDC, 16 inputs
Fujitsu connector
24 VDC, 32 inputs
MIL connector
24 VDC, 32 inputs
Fujitsu connector
24 VDC, 64 inputs
MIL connector
24 VDC, 64 inputs
Terminal block
200 to 240 VAC,
8 inputs
Terminal block
100 to 120 VAC,
16 inputs
Terminal block
24 VDC, 16 inputs
Terminal block
24 VDC, 16 inputs
64 inputs CJ1W-B7A14 64 --- --- 0.07 --- 80 g max.
CJ1W-ID201 16 20 μs
CJ1W-ID211 16 20 μs
CJ1W-ID212 16 15 μs
CJ1W-ID231
CJ1W-ID232
CJ1W-ID233
CJ1W-ID261
CJ1W-ID262
CJ1W-IA201 16 10 μs
CJ1W-IA111 16 10 μs
CJ1W-INT01
CJ1W-IDP01 16 0.05 ms
*2
*2
*2
*2
*2
*3, *4
Number
of bits
allocated
32 20 μs
32 20 μs
32 15 μs
64 120 μs
64 120 μs
16 0.05 ms
Response time
ON OFF 5 VDC 24 VDC
max.
max.
max.
max.
max.
max.
max.
max.
max.
max.
max.
max.
400 μs
max.
400 μs
max.
90 μs
max.
400 μs
max.
400 μs
max.
90 μs
max.
400 μs
max.
400 μs
max.
40 μs
max.
40 μs
max.
0.5 ms
max.
0.5 ms
max.
Current con-
*1
sumption (A)
0.08 --- 110 g max.
0.08 --- 110 g max.
0.13 --- 110 g max.
0.09 --- 70 g max.
0.09 --- 70 g max.
0.20 --- 70 g max.
0.09 --- 110 g max.
0.09 --- 110 g max.
0.08 --- 130 g max.
0.09 --- 130 g max.
0.08 --- 110 g max.
0.08 --- 110 g max.
2-1 Basic System Configuration
Weight
2
2-1-2 CJ-series Unit Configuration
*1 This is the input response time when no filter (i.e., 0 ms) is set. There is no filter setting for the CJ1W-
INT01/IDP01. (The time is always 0 ms.)
*2 The cable-side connector is not provided with Units equipped with cables. Purchase the connector separately
(Refer to 4-4-4 Wiring CJ-series Basic I/O Units with Connectors.), or use an OMRON Connector-Terminal
Block Conversion Unit or I/O Relay Terminal (Refer to 4-4-5 Connecting to Connector-Terminal Block Conver-
sion Units or I/O Relay Terminals.).
*3 An Interrupt Input Unit can be connected only in a CPU Rack. These Units must be mounted to slots 0 to 4 on
the CPU Rack. An Incorrect Unit/Expansion Rack Connection error (major fault level Controller error) will occur
if an Interrupt Input Unit is connected in other slots on the CPU Rack or to any slots on an Expansion Rack. Up
to two Interrupt Input Units can be connected.
*4 Interrupt Input Units can be used as normal Basic I/O Units. They cannot be used to start I/O interrupt tasks.
NJ-series CPU Unit Hardware User’s Manual (W500)
2-13
Page 80

2 System Configuration
Output Units
Name Specifications Model
Relay Output Units Terminal block, 250 VAC/24
VDC, 2 A; 8 points, independent
contacts
Terminal block, 250 VAC/24
VDC, 2 A; 16 points
Triac Output Unit Terminal block, 250 VAC, 0.6 A;
Transistor Output Units
B7A Interface Units 64 outputs CJ1W-B7A04 64 0.07 --- 80 g max.
Sinking
outputs
Sourcing outputs
8 points
Terminal block, 12 to 24 VDC,
2 A; 8 outputs
Terminal block, 12 to 24 VDC,
0.5 A; 8 outputs
Terminal block, 12 to 24 VDC,
0.5 A; 16 outputs
Terminal block, 24 VDC,
0.5 A; 16 outputs
Fujitsu connector, 12 to 24 VDC,
0.5 A; 32 outputs
MIL connector, 12 to 24 VDC,
0.5 A; 32 outputs
MIL connector, 24 VDC,
0.5 A; 32 outputs
Fujitsu connector, 12 to 24 VDC,
0.3 A; 64 outputs
MIL connector, 12 to 24 VDC,
0.3 A; 64 outputs
Terminal block, 24 VDC, 2 A;
8 outputs, load short-circuit protection and disconnected line
detection
Terminal block, 24 VDC, 0.5 A;
8 outputs, load short-circuit protection
Terminal block, 24 VDC, 0.5 A;
16 outputs, load short-circuit protection
MIL connector, 24 VDC, 0.5 A;
32 outputs, load short-circuit protection
MIL connector, 12 to 24 VDC,
0.3 A; 64 outputs
Number
of bits
allocated
CJ1W-OC201
CJ1W-OC211 16 0.11 0.096
CJ1W-OA201
CJ1W-OD201
CJ1W-OD203
CJ1W-OD211
CJ1W-OD213
CJ1W-OD231
CJ1W-
*1*2
OD233
CJ1W-
*1*2
OD234
CJ1W-OD261
CJ1W-OD263
CJ1W-OD202
CJ1W-OD204
CJ1W-OD212 16 0.10 --- 120 g max.
CJ1W-OD232
CJ1W-OD262
16
16
16
16
*1
16 0.10 --- 110 g max.
*1
16 0.15 --- 110 g max.
*2
32 0.14 --- 70 g max.
32 0.14 --- 70 g max.
32 0.22 --- 70 g max.
*2
64 0.17 --- 110 g max.
*2
64 0.17 --- 110 g max.
16
16
*2
32 0.15 --- 80 g max.
*2
64 0.17 --- 110 g max.
Current consumption
(A)
5 VDC 24 VDC
0.09 0.048
(0.006
×
Number of ON
outputs)
×
(0.006
Number of ON
outputs)
0.22 --- 150 g max.
0.09 --- 110 g max.
0.10 --- 110 g max.
0.11 --- 120 g max.
0.10 --- 120 g max.
Weight
140 g max.
170 g max.
2-14
*1 The ON/OFF response time for the CJ1W-OD213/CJ1W-OD234 is shorter than for the CJ1W-OD211/CJ1W-
OD233, as shown below.
• ON response time: 0.1 ms improved to 0.015 ms
• OFF response time: 0.8 ms improved to 0.08 ms
*2 The cable-side connector is not provided with Units equipped with cables. Purchase the connector separately
(Refer to 4-4-4 Wiring CJ-series Basic I/O Units with Connectors.), or use an OMRON Connector-Terminal
Block Conversion Unit or I/O Relay Terminal (Refer to 4-4-5 Connecting to Connector-Terminal Block Conver-
sion Units or I/O Relay Terminals.).
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 81

2 System Configuration
Mixed I/O Units
Number of
Name Specifications Model
24-VDC
Input/
Transistor Output Units
TTL I/O Units MIL connector
B7A Interface Units 32 inputs, 32 outputs CJ1W-B7A22 64 0.07 --- 80 g max.
Sinking Fujitsu connector
Inputs:
24 VDC, 16 inputs
Outputs: 12 to
24 VDC, 0.5 A;
16 outputs
Fujitsu connector
Inputs:
24 VDC, 32 inputs
Outputs: 12 to
24 VDC, 0.3 A;
32 outputs
MIL connector
Inputs: 24 VDC,
16 inputs
Outputs: 12 to
24 VDC, 0.5 A;
16 outputs
MIL connector
Inputs: 24 VDC,
32 inputs
Outputs: 12 to
24 VDC, 0.3 A;
32 outputs
Sourcing MIL connector
Inputs: 24 VDC,
16 inputs
Outputs: 24 VDC,
0.5 A; 16 outputs
Load-short circuit
protection
Inputs: TTL (5 VDC),
32 inputs
Outputs: TTL
(5 VDC, 35 mA),
32 outputs
CJ1W-MD231* 32 0.13 --- 90 g max.
CJ1W-MD261* 64 0.14 --- 110 g max.
CJ1W-MD233* 32 0.13 --- 90 g max.
CJ1W-MD263* 64 0.14 --- 110 g max.
CJ1W-MD232* 32 0.13 --- 80 g max.
CJ1W-MD563* 64 0.19 --- 110 g max.
bits allo-
cated
Current consump-
tion (A)
5 VDC 24 VDC
Weight
2-1 Basic System Configuration
2
2-1-2 CJ-series Unit Configuration
* The cable-side connector is not provided with Units equipped with cables. Purchase the connector separately
(Refer to 4-4-4 Wiring CJ-series Basic I/O Units with Connectors.), or use an OMRON Connector-Terminal Block
Conversion Unit or I/O Relay Terminal (Refer to 4-4-5 Connecting to Connector-Terminal Block Conversion Units
or I/O Relay Terminals.).
NJ-series CPU Unit Hardware User’s Manual (W500)
2-15
Page 82

2 System Configuration
CJ-series Special I/O Units
Typ e Name Specifications Model Unit No.
Special I/O
Units
Analog Input
Unit with Universal Inputs
Analog Input
Units
Analog Output Units
Analog I/O
Unit
Analog Input
Unit with Universal Inputs
Analog Current Input
Unit
Temperature
Control Units
ID Sensor
Units
High-speed
Counter Unit
4 inputs, fully universal
8 inputs (4 to 20 mA,
1 to 5 V, etc.)
4 inputs (4 to 20 mA,
1 to 5 V, etc.)
4 inputs (4 to 20 mA,
1 to 5 V, etc.)
4 outputs (1 to 5 V,
4 to 20 mA, etc.)
2 outputs (1 to 5 V,
4 to 20 mA, etc.)
8 outputs (1 to 5 V,
0 to 10 V, etc.)
8 outputs (4 to
20 mA)
4 outputs (1 to 5 V,
0 to 10 V, etc.)
4 inputs (1 to 5 V, 4 to
20 mA, etc.)
2 outputs (1 to 5 V,
4 to 20 mA, etc.)
4 inputs, fully universal Resolution:
1/256,000, 1/64,000,
1/16,000
DC voltage or DC current, 2 inputs
2 control loops, thermocouple inputs, NPN
outputs, heater burnout detection
2 control loops, thermocouple inputs, PNP
outputs, heater burnout detection
2 control loops, temperature-resistance
thermometer inputs,
NPN outputs, heater
burnout detection
2 control loops, tem-
re-resistance
peratu
thermometer inputs,
PNP outputs, heater
burnout detection
V680-series singlehead type
V680-series two-head
type
Number of counter
channels: 2, Maximum
input frequency:
500 kHz, line driver
compatible
CJ1W-AD04U 0 to 95 10 words 100 words 40
CJ1W-AD081-V1 0 to 95 10 words 100 words 40
CJ1W-AD041-V1 0 to 95 10 words 100 words 40
CJ1W-AD042 0 to 95 10 words 100 words 40
CJ1W-DA041 0 to 95 10 words 100 words 40
CJ1W-DA021 0 to 95 10 words 100 words 40
CJ1W-DA08V 0 to 95 10 words 100 words 40
CJ1W-DA08C 0 to 95 10 words 100 words 40
CJ1W-DA042V 0 to 95 10 words 100 words 40
CJ1W-MAD42 0 to 95 10 words 100 words 40
CJ1W-PH41U 0 to 95 10 words 100 words 40
CJ1W-PDC15 0 to 95 10 words 100 words 40
CJ1W-TC003 0 to 94
(uses
words for
2 unit
numbers)
CJ1W-TC004 0 to 94
(uses
words for
2 unit
numbers)
CJ1W-TC103 0 to 94
(uses
words for
2 unit
numbers)
CJ1W-TC104 0 to 94
(uses
words for
2 unit
numbers)
CJ1W-V680C11 0 to 95 10 words 100 words 40
CJ1W-V680C12 0 to 94
(uses
words for
2 unit
numbers)
CJ1W-CT021 0 to 92
(uses
words for
4 unit
numbers)
Num-
Number of
words
allocated
20 words 200 words 40
20 words 200 words 40
20 words 200 words 40
20 words 200 words 40
20 words 200 words 40
40 words 400 words 24
Words
allocated in
DM Area
moun
table
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Units
Current consumption (A)
ber
of
5
VDC
0.32 --- 150 g max.
0.42 --- 140 g max.
0.42 --- 140 g max.
0.52 --- 150 g max.
0.12 --- 150 g max.
0.12 --- 150 g max.
0.14 --- 150 g max.
0.14 --- 150 g max.
0.40 --- 150 g max.
0.58 --- 150 g max.
0.30 --- 150 g max.
0.18 --- 150 g max.
0.25 --- 150 g max.
0.25 --- 150 g max.
0.25 --- 150 g max.
0.25 --- 150 g max.
0.26 0.130 120 g max.
0.32 0.260 130 g max.
0.28 --- 100 g max.
24
VDC
Weight
2-16
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 83

2 System Configuration
Typ e Name Specifications Model Unit No.
Special I/O
Units
CompoNet
Master Units
CompoNet remote I/O
Communications
mode 0: 128
inputs and 128
outputs for Word
Slaves
Communications
mode 1: 256
inputs and 256
outputs for Word
Slaves
Communications
mode 2: 512
inputs and 512
outputs for Word
Slaves
Communications
mode 3: 256
inputs and 256
outputs for Word
Slaves, 128
inputs and 128
outputs for Bit
Slave Units
Communications
mode 8: 1,024
inputs and 1,024
outputs max. for
Word Slaves, 256
inputs and 256
outputs max. for
Bit Slave Units
CJ1W-CRM21
*1
0 to 94
(uses
words for
2 unit
numbers)
0 to 92
(uses
words for
4 unit
numbers)
0 to 88
(uses
words for
8 unit
numbers)
0 to 88
(uses
words for
8 unit
numbers)
0 to 95
(uses
words for
1 unit
number)
Num-
Number of
words
allocated
20 words None 40
40 words None 24
80 words None 12
80 words None 12
*2
10 words
Words
allocated in
DM Area
*2
None
moun
table
Units
Units
Units
Units
Units
40
Units
Current consumption (A)
ber
of
5
VDC
0.40 --- 130 g max.
0.40 ---
0.40 ---
0.40 ---
0.40 ---
24
VDC
2-1 Basic System Configuration
Weight
2
2-1-2 CJ-series Unit Configuration
*1 A CPU Unit with unit version 1.01 or later and Sysmac Studio version 1.02 or higher are required. Refer to A-7 Version
Information for information on versions.
*2 In addition, up to 208 other words are allocated depending on the number of Slave Units to which words are allocated and
their I/O capacity. Use the CX-Integrator to allocate words.
NJ-series CPU Unit Hardware User’s Manual (W500)
2-17
Page 84

2 System Configuration
CJ-series CPU Bus Units
Typ e Name Specifications Model Unit No.
CPU Bus
Units
Serial Communications Units
DeviceNet Unit DeviceNet remote I/O,
EtherNet/IP Unit Tag data links, CIP
EtherCAT Slave
Unit
Two RS-232C ports
High-speed models
Two RS-422A/485 ports
High-speed models
One RS-232C port and
one RS-422A/485 port
High-speed models
2,048 points; Userspecified allocations are
possible without the CXIntegrator.
message communications, FTP server, etc.
EtherCAT communications, Baud rate 100
Mbps
CJ1W-SCU22 0 to F 25 words 16 Units
CJ1W-SCU32 0.40 120 g max.
CJ1W-SCU42
CJ1W-DRM21 0 to F 25 words 16 Units 0.29 ---
*3
CJ1W-EIP21
CJ1W-ECT21 0 to F 25 words 16 Units 0.34 --- 97 g max.
0 to F 25 words 4 Units 0.41 --- 94 g max.
Number of
words allo-
cated
Maximum
number of
*1
Units
Current con-
sumption (A)
5 VDC 24 VDC
*1
0.28
0.36
--- 160 g max.
*1
Weight
140 g max.
118 g max .
*2
*1 Increases by 0.15 A/Unit when an NT-AL001 RS-232C/RS-422A Link Adapter is used. Increases by 0.04 A/Unit when a
CJ1W-CIF11 RS-422A Converter is used.
*2 Includes the weight of accessory connectors.
*3 Use an EtherNet/IP Unit with a unit version of 2.1 or later. Also use a CPU Unit with unit version 1.01 or later and Sysmac
Studio version 1.02 or higher. Refer to A-7 Version Information for information on version upgrades.
2-18
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 85

2 System Configuration
2-2 Connecting to the Sysmac Studio
Connect the NJ-series CPU Unit and the Sysmac Studio through USB or EtherNet/IP.
Refer to 3-7-2 Connection for information on how to make the connection between the NJ-series CPU
Unit and the Sysmac Studio.
2-2 Connecting to the Sysmac Studio
2
NJ-series CPU Unit Hardware User’s Manual (W500)
2-19
Page 86

2 System Configuration
EtherCAT
Slave Terminal
Programmable
Terminals
FA Communications
Software
Sysmac
Studio
EtherNet/IP
RS-232C,
RS-422A/485
DeviceNet
EtherCAT
Servo Drives
Vision
Systems
General-purpose components or OMRON components
DeviceNet slaves
Built-in EtherCAT port
Built-in EtherNet/IP port Built-in EtherNet/IP port
General-purpose
slaves
Serial-communications devices
RFID Systems
NJ-series
CPU Unit
Robot
Information
Level
Field Level
Serial
Communications
Units
DeviceNet Unit
CompoNet Master Unit
CompoNet
REMOTE
TERMINAL
012345678 9 10 11 12 13 14 15
OUT
CRT1CRT1
-
OD16OD16
MS NS
WORD
NODE ADR
CompoNet slaves
REMOTE
TERMINAL
012345678 9 10 11 12 13 14 15
OUT
CRT1CRT1
-
OD16OD16
MS NS
WORD
NODE ADR
REMOTE
TERMINAL
012345678 9 10 11 12 13 14 15
OUT
CRT1CRT1
-
OD16OD16
MS NS
WORD
NODE ADR
NJ/NX-series
CPU Unit
FA Wireless
LAN Unit
EtherNet/IP
Port on EtherNet/IP Unit
2-3 Network Configuration
You can make networks in the following layers with an NJ-series Controller.
For details on communications networks that you can connect to, refer to the NJ/NX-series CPU Unit
Software User’s Manual (Cat. No. W501).
2-20
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 87

2 System Configuration
Connection Connection method
Sysmac Studio Use USB or the built-in EtherNet/IP port.
Between Control-
lers
Devices Servo Drives, general-purpose
Programmable Terminals Use the built-in EtherNet/IP port or a port on an Eth-
Servers Connections to BOOTP server, DNS
*1 Use a CJ-series EtherNet/IP Unit with a unit version of 2.1 or later.
Also use CPU Units with unit version 1.01 or later and Sysmac Studio version 1.02 or higher.
Refer to A-7 Version Information for information on version upgrades.
NJ-series Controller or CJ-series
PLC
slaves and Vision Systems
Ethernet communications devices Use the built-in EtherNet/IP port or a port on an Eth-
Serial-communications devices Mount a Serial Communications Unit and use RS-
DeviceNet slaves Mount a DeviceNet Unit and use DeviceNet.
CompoNet slaves Mount a CompoNet Master Unit and use CompoNet.
server, or NTP server
Use the built-in EtherNet/IP port or a port on an EtherNet/IP Unit.
Use the built-in EtherCAT port.
erNet/IP Unit.
232C port or RS-422A/485 ports.
erNet/IP Unit.
Use the built-in EtherNet/IP port or a port on an EtherNet/IP Unit.
*1
*1
*1
*1
2-3 Network Configuration
2
NJ-series CPU Unit Hardware User’s Manual (W500)
2-21
Page 88

2 System Configuration
2-22
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 89

Configuration Units
This section describes the configuration devices in the CJ-series Unit configuration.
3-1 CPU Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-1-1 Models and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-2
3-1-2 Components and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-3
3-2 SD Memory Cards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
3-2-1 Models and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-10
3-2-2 Purpose . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-11
3-2-3 Installing and Removing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-12
3-3 Power Supply Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-14
3-3-1 Models and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-14
3-3-2 Components and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-16
3-3-3 Selecting a Power Supply Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-17
3-4 CJ-series Basic I/O Units . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-22
3-4-1 Models and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-22
3-4-2 Part Names and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-23
3-5 B7A Interface Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-26
3-5-1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-26
3-5-2 System Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-26
3-5-3 Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-26
3-5-4 B7A Communications Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-27
3-5-5 Common Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
3-5-6 B7A Interface Port I/O Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-28
3-5-7 Parts and Names . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-29
3-5-8 Transmission Error Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-31
3-6 CJ-series I/O Control Units and I/O Interface Units . . . . . . . . . . . . . . . . . 3-32
3-6-1 Models and Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-32
3-6-2 Component and Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-32
3-7 Sysmac Studio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33
3-7-1 Model Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-33
3-7-2 Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3-34
3
NJ-series CPU Unit Hardware User’s Manual (W500)
3-1
Page 90

3 Configuration Units
3-1 CPU Units
3-1-1 Models and Specifications
Typ e o f
Unit
NJ501
CPU
Units
NJ301
CPU
Units
NJ101
CPU
Units
N
Robot
con-
trol by
NJ
Robot-
ics
func-
tion
Not
supported.
Supported.
Not
supported.
ported.
Not
supported.
I/O capac-
ity/Maximum
number of Con-
Model
NJ501-1500 2,560 points/40
NJ501-1400 32
NJ501-1300 16
NJ501-R500 64 Sup-
NJ501-R400 32
NJ501-R300 16
NJ501-4500 64 Not
NJ501-4400 35
NJ501-4300 16
NJ501-4310
NJ501-1520 64 Sup-
NJ501-1420 32
NJ501-1320 16
NJ501-4320 Sup-
NJ501-1340 Not
NJ501-5300 Not
NJ301-1200 5 MB 0.5 MB:
NJ301-1100 4
NJ101-1000 3 MB 2
NJ101-9000 0
NJ101-1020 2 Sup-
NJ101-9020 0
figuration Units
(Maximum num-
ber of Expansion
Racks)
Units (3 Expansion Racks)
Program
capa
city
20
MB
Memory
capacity
for vari-
ables
2 MB:
Retained
during
power interruptions
4 MB: Not
retained
during
power interruptions
Retained
during
power interruptions.
2 MB: Not
retained
during
power interruptions.
Num-
ber of
motio
n axes
64 Not
8Not
Data-
base
connec-
tion
ser-
vice
supported.
ported.
supported.
ported.
GEM
Ser-
vices
Not
supported.
Supported.
supported.
Robot
control for
OMRO
robots
Not
supported
ported.
supported.
Nume
rical
con-
trol
Not
supported
.
Supported
.
supported
.
3-2
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 91

3-1-2 Components and Functions
(1)
(2)
(3)
(4)
(5)
(8)
(9)
(10)
(13)
(12)
(14)
(11)
(15)
(6)
(7)
3 Configuration Units
3-1 CPU Units
3
3-1-2 Components and Functions
NJ-series CPU Unit Hardware User’s Manual (W500)
3-3
Page 92

3 Configuration Units
ONON
1
2
3
4
Turn OFF.
Turn ON.
Number Name Function
1 Slider Holds the Units together.
2 SD Memory Card connector Connects the SD Memory Card to the CPU Unit.
3 CPU Unit operation indicators Shows the operation status of the CPU Unit.
Refer to CPU Unit Operation Status Indicators on page 3-5.
4 SD Memory Card power supply
switch
5 DIP switch
6 Battery connector Connector to mount the backup battery.
7 Battery Battery for backup.
8 Peripheral USB port Connects to the Sysmac Studio via a USB cable.
9 Built-in EtherNet/IP port (port 1) Connects the built-in EtherNet/IP with an Ethernet cable.
10 Built-in EtherNet/IP port operation
indicators
11 Unit connector Connects to another Unit.
12 ID information indication Shows the ID information of the CPU Unit.
13 Built-in EtherCAT port (port 2) Connects the built-in EtherCAT with an Ethernet cable.
14 Built-in EtherCAT port operation
indicators
15 DIN Track mounting pins Secures the Unit to a DIN Track.
Turns OFF the power supply so that you can remove the SD Memory
Card.
Refer to 3-2 SD Memory Cards.
*1
Used in Safe Mode
Normally, turn OFF all of the pins.
Shows the operation status of the built-in EtherNet/IP.
Refer to Built-in EtherNet/IP Port (Port 1) Indicators on page 3-7.
Shows the operation status of the built-in EtherCAT.
Refer to Built-in EtherCAT Port (Port 2) Indicators on page 3-8.
or when backing up data.
*2
*1 To use Safe Mode, set the DIP switch as shown below and then turn ON the power supply to the Controller.
If the power supply to the Controller is turned ON with the CPU Unit in Safe Mode, the CPU Unit will start in PROGRAM
mode. Use the Safe Mode if you do not want to execute the user program when the power supply is turned ON or if it is
difficult to connect the Sysmac Studio.
Use the Safe Mode when it is difficult to connect the Sysmac Studio. For information on Safe Mode, refer to the NJ/NX-
series Troubleshooting Manual (Cat. No. W503).
*2 Refer to the NJ/NX-series CPU Unit Software User’s Manual (Cat. No. W501) for details on backing up data.
3-4
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 93

CPU Unit Operation Status Indicators
3 Configuration Units
3-1 CPU Units
You can check the CPU Unit status with the indicators at the top of the front panel of the CPU Unit.
The following table describes these indicators.
Indicator Color Status Meaning
RUN Green Lit The CPU Unit is in normal operation in RUN mode. (The user
program is in execution.)
Flashing (3-s
intervals)
Flashing (1-s
intervals)
Not lit Operation is stopped in PROGRAM mode, when a CPU Unit
ERROR Red Lit Self-diagnosis found one of the following errors.
Flashing (1-s
intervals)
Not lit The CPU Unit is in normal operation, a CPU reset is in progress,
BUSY Yellow Flashing Built-in non-volatile memory access in progress.
Not lit Other than the above.
An Incorrect Power Supply Unit Connected error occurred. (A CJseries Power Supply Unit is connected in the CPU Rack.) The
CPU Unit will not operate and the ERROR indicator will light.
The CPU Unit is starting (entering RUN mode or PROGRAM
mode at startup).
reset is in progress, or when any of the following errors occurs.
• Controller error in the major fault level
• CPU error (WDT error)
• Controller error in the major fault level
• CPU error (WDT error)
The CPU Unit operation will stop, and all outputs will turn OFF.
Self-diagnosis found one of the following errors.
• Controller error in the partial fault level (an error in which all
control of a Function Module is disabled)
• Controller error in the minor fault level (an error in which partial
control of a Function Module is disabled)
CPU Unit operation will continue for either of these errors.
Operation will stop for the Function Module in which a Controller
error in the partial fault level occurred.
Operation will continue for the Function Module in which a Controller error in the minor fault level occurred.
or monitored information occurred. (CPU Unit operation will continue.)
3
3-1-2 Components and Functions
NJ-series CPU Unit Hardware User’s Manual (W500)
3-5
Page 94

3 Configuration Units
Precautions for Safe Use
Indicator Color Status Meaning
SD PWR Green Lit Power is being supplied to the SD Memory Card and the SD
SD BUSY Yellow Lit SD Memory Card access in progress.
• Do not turn OFF the power supply to the Controller while the BUSY indicator flashes. While
the BUSY indicator is lit, the user program and settings in the CPU Unit are being backed up in
the built-in non-volatile memory. The data will not be backed up if the power supply is turned
OFF. The next time that the Controller is started, a Controller error in the major fault level will
occur and operation will stop.
• Do not turn OFF the power supply or remove the SD Memory Card while SD Memory Card
access is in progress (i.e., while the SD BUSY indicator flashes). Data may become corrupted,
and the Controller will not operate correctly if it uses corrupted data. To remove an SD Memory
Card from the CPU Unit when power is supplied to the CPU Unit, press the SD Memory Card
power supply switch and wait for the SD PWR indicator to turn OFF before you remove the SC
Memory Card.
Memory Card can be used.
Flashing ---
Not lit The power supply for the SD Memory Card is stopped, an SD
Memory Card is not mounted, or the file format of the mounted
SD Memory Card is not supported.
Not lit SD Memory Card access not in progress
3-6
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 95

Built-in EtherNet/IP Port (Port 1) Indicators
3 Configuration Units
3-1 CPU Units
3
3-1-2 Components and Functions
Indicator Color Status Contents
NET RUN Green Lit Normal startup status.
Flashing Ethernet communications are in progress.
• Tag data link connection establishment in progress.
• IP address acquisition with BOOTP in progress.
Not lit You cannot perform Ethernet communications.
• The power supply is OFF or the CPU Unit was reset.
• A MAC address error or communications Controller error
occurred.
NET ERR Red Lit An error for which the user cannot recover operation occurred.
• A MAC address error or communications Controller error
occurred.
Flashing An error for which the user can recover operation occurred.
• An error occurred in TCP/IP communications or CIP communications.
• FTP server setting error, NTP server setting error, etc.
• Tag data link setting error, tag data link verification error, etc.
Not lit There are no Ethernet communications errors.
• The power supply is OFF or the CPU Unit was reset.
LINK/ACT Yellow Lit The link was established.
Flashing The link is established, and data communications are in progress.
Not lit A link was not established.
• The cable is not connected.
• The power supply is OFF or the CPU Unit was reset.
NJ-series CPU Unit Hardware User’s Manual (W500)
3-7
Page 96

3 Configuration Units
Additional Information
Built-in EtherCAT Port (Port 2) Indicators
Indicator Color Status Description
NET RUN Green Lit EtherCAT communications are in progress.
NET ERR Red Lit A hardware error or unrecoverable error occurred, such as for
LINK/ACT Yellow Lit A link was established.
• Inputs and outputs for I/O data are in operation.
Flashing EtherCAT communications are being established.
This indicator shows either of the following conditions.
• Only message communications are in operation.
• Only message communications and I/O data inputs are in operation.
Not lit EtherCAT communications are stopped.
• The power supply is OFF or the CPU Unit was reset.
• A MAC address error, communications Controller error, or other
error occurred.
exception processing.
Flashing A recoverable error occurred.
Not lit There are no errors.
Flashing Data communications are in progress after establishing link.
Flashes every time data is sent or received.
Not lit The link was not established.
DIP Switch
Use the CPU Unit with all the DIP switch pins turned OFF.
3-8
The DIP switch is not used to write-protect the user program of the NJ-series Controller. Set
write-protection in the Startup Write Protection Settings in the CPU Unit Protection Settings from
the Sysmac Studio.
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 97

Battery
NJ501 -1500 Ver.. HW Rev.
PORT1 MAC ADDRESS:
PORT2 MAC ADDRESS:
Lot No. DDMYY xxxx
(1) (2)
(4) (5)
(3)
The following Battery is built in as a standard feature.
Model Appearance Specifications
CJ1W-BAT01
3 Configuration Units
Effective life (i.e., maximum life expectancy): 5 years
The following values are retained during power interruptions.
• Values of variables with a Retain attribute
• Words for CJ-series Units in the Holding, DM, and EM
Areas
• Clock information
• Some system-defined variables
• Event logs
*1
3-1 CPU Units
*1 The Battery installed at the time of purchase is only for monitoring purpose to test the battery backup func-
tion.The Battery is exhausted depending on the period from factory checking to actual operation, thus it may
not satisfy specified battery lifetime.
ID Information Indication
You can check the followings in the ID information indications on the right side of the CPU Unit.
Number Name Function
1 Unit model Shows the model of the CPU Unit.
2 Unit version Shows the unit version of the CPU Unit.
3 Hardware revision
4 Lot number and
serial number
5 MAC addresses Shows the MAC addresses of the built-in ports on the CPU Unit.
Shows the hardware revision of the CPU Unit.
Shows the lot number and the serial number of the CPU Unit.
DDMYY: Lot number, : For use by OMRON, xxxx: Serial number
M is 1 to 9 for January to September, X for October, Y for November, and Z
for December.
*1
3
3-1-2 Components and Functions
*1 The hardware revision is not displayed for the Unit that the hardware revision is in blank.
NJ-series CPU Unit Hardware User’s Manual (W500)
3-9
Page 98

3 Configuration Units
Precautions for Correct UsePrecautions for Correct Use
Additional Information
3-2 SD Memory Cards
3-2-1 Models and Specifications
SD cards and SDHC cards are supported, but use one of the following OMRON Cards. OMRON is not
responsible for the operation, performance, or write life of any other SD or SDHC card.
Model Card type Capacity Format
*1
HMC-SD291
HMC-SD491 SDHC Card 4 GB FAT32
HMC-SD1A1
*1 You cannot use an HMC-SD291 for the NJ501-□□□□ CPU Unit with the hardware revision A and unit version
1.15 or later. You can use HMC-SD291 for any other CPU Units.
*2 This can be used for a CPU Unit with unit version 1.21 or later.
SD Card 2 GB FAT16 100,000 2 g max.
*2
16 GB
Number of
overwrites
Weight
When you use the SD Memory Card that "MR□" is displayed on the back side with an NJ501-
□□□□ CPU Unit, be sure to use the unit version 1.13 or later.
Write Protection Key
You will not be able to write to the SD Memory Card if the key is set to the LOCK position. (Use
this setting to prevent overwriting.)
3-10
NJ-series CPU Unit Hardware User’s Manual (W500)
Page 99

Version Information
3-2-2 Purpose
You can use the SD Memory Card for the following applications.
• Read and write files in the SD Memory Card with instructions.
• Read and write files in the SD Memory Card from an FTP client on EtherNet/IP.
• Back up, restore, and verify data in the Controller.
• Transfer data from the SD Memory Card to the Controller when the power is turned ON.
A CPU Unit with unit version 1.03 or later and Sysmac Studio version 1.04 or higher are required
to use the SD Memory Card backup functions and automatic transfer from SD Memory Cards.
3 Configuration Units
3-2 SD Memory Cards
3
3-2-2 Purpose
NJ-series CPU Unit Hardware User’s Manual (W500)
3-11
Page 100

3 Configuration Units
Model number label
3-2-3 Installing and Removing
Before Using an SD Memory Card
• Keep the following precautions because an SD Memory Card may become unusable.
• Do not turn OFF the power supply to the Controller while the SD BUSY indicator is lit (i.e., while
SD Memory Card access is in progress). The SD BUSY indicator is lit when the SD Memory Card
is accessed from user the programming or from a computer through FTP.
• Do not remove the SD Memory Card while the SD BUSY indicator is lit or the SD PWR indicator is
lit (i.e., while SD Memory Card power is supplied). Press the SD Memory Card power supply
switch and confirm that the SD BUSY indicator or SD PWR indicator is not lit before you remove
the SD Memory Card.
• Never insert the SD Memory Card facing the wrong way. If the SD Memory Card is inserted forcibly, it
may become unusable.
• To format the SD Memory Card (e.g., to delete all of the data), insert the SD Memory Card in the CPU
Unit and perform the operation from the Sysmac Studio.
• The SD Memory Card uses flash memory, and so its service life is limited. When the end of the SD
Memory Card's service life approaches, the ability to write data is lost, and data is sometimes not
retained after writing. The service life depends on the size of the data that is written and on the ambient temperature. For the unlikely event that data is lost, it is recommended to periodically back up
data.
• The service life may be extremely short if a non-OMRON SD Memory Card is used. Also, operation
may be affected due to deterioration in writing performance.
• If you use an OMRON SD Memory Card, the end of the life of the SD Memory Card can be detected
in the following ways.
• System-defined variable _Card1Deteriorated (SD Memory Card Life Warning Flag)
• SD Memory Card Life Exceeded (Observation) event in the event log
Installing the SD Memory Card
1 Pull the left side of the SD Memory Card cover forward and remove from the Unit.
2 Insert the SD Memory Card with the label facing to the left. (Insert the SD Memory Card with the
label facing the triangle on the CPU Unit.)
3-12
NJ-series CPU Unit Hardware User’s Manual (W500)
 Loading...
Loading...