

Page 1

MX2
Choke
LCD 5 lines remote
operator
Remote operator
extension cable
Output AC reactor
Communication option board
USB cable
Braking resistor
CX-Drive
CX-One
MCCB
MX2
Filter
Input AC reactor
Motor
Ground
Power
supply
DC reactor
Born to drive machines
• Current vector control
• High starting torque: 200% at 0.5 Hz
• Double rating VT 120%/1 min and CT 150%/1 min
• Speed range up to 1000 Hz
• IM & PM motor control
• Torque control in open loop vector
• Positioning functionality
• Built-in application functionality (i.e. Brake control)
• User programmable as standard
• Safety embedded compliant with ISO13849-1 (double input
circuit and external device monitor EDM)
• USB port for PC programming
• 24 VDC backup supply for control board
• Fieldbus communications: Modbus, DeviceNet, Profibus,
Componet, Ethercat, ML-II and CanOpen
• PC configuration tool: CX-Drive
• RoHS, CE, cULus
Ratings
• 200 V Class single-phase 0.1 to 2.2 kW
• 200 V Class three-phase 0.1 to 15.0 kW
• 400 V Class three-phase 0.4 to 15.0 kW
System configuration
1MX2
Page 2
Specifications
MX2 series
A: Standard specs
MX2AB002-E
Vol tage:
B: Single-phase 200 VAC
2: Three-phase 200 VAC
4: Three-phase 400 VAC
Max. applicable motor output
002: 0,2 kW
~
150: 15,0 kW
E: Europe standard
Type designation
200 V class
Single-phase: MX2@ AB001 AB002 AB004 AB007
Three-phase: MX2@ A2001 A2002 A2004 A2007 A2015 A2022 A2037 A2055 A2075 A2110 A2150
Motor
2
kW
Inverter capacity kVA
Rated output current (A) at VT 1.2 1.9 3.5 6.0 9.6 12.0 19.6 30.0 40.0 56.0 69.0
Output
Rated output current (A) at CT 1.0 1.6 3.0 5.0 8.0 11.0 17.5 25.0 33.0 47.0 60.0
characteristics
Max. output voltage Proportional to input voltage: 0..240 V
Max. output frequency 1000 Hz
Rated input voltage
and frequency
Allowable voltage fluctuation -15%..+10%
Power
supply
Allowable frequency fluctuation 5%
Braking torque
1. Three phase model use forced-air-cooling but single phase model is self cooling.
2. Based on a standard 3-Phase standard motor.
3. Above 400 Hz with some function limitation.
For VT setting 0.2 0.4 0.55 1.1 2.2 3.0 5.5 7.5 11 15 18.5
For CT setting 0.1 0.2 0.4 0.75 1.5 2.2 3.7 5.5 7.5 11 15
200 VT
200 CT
240 VT
240 CT
At short-time
deceleration
At capacitor
feedback
Cooling method
0.4 0.6 1.2 2.0 3.3 4.1 6.7 10.3 13.8 19.3 23.9
0.2 0.5 1.0 1.7 2.7 3.8 6.0 8.6 11.4 16.2 20.7
0.4 0.7 1.4 2.4 3.9 4.9 8.1 12.4 16.6 23.2 28.6
0.3 0.6 1.2 2.0 3.3 4.5 7.2 10.3 13.7 19.5 24.9
100%: <50Hz
50%: <60Hz
Self cooling
1
AB015 AB022 - - - - -
3
Single-phase 200..240 V 50/60 Hz
3-phase 200..240 V 50/60 Hz
70%:
<50Hz
50%:
Approx 20% -
<60Hz
Forced-air-cooling
400 V class
Three-phase: MX2@ A4004 A4007 A4015 A4022 A4030 A4040 A4055 A4075 A4110 A4150
Motor
1
kW
Inverter capacity kVA
Rated output current (A) at VT 2.1 4.1 5.4 6.9 8.8 11.1 17.5 23.0 31.0 38.0
Output
Rated output current (A) at CT 1.8 3.4 4.8 5.5 7.2 9.2 14.8 18.0 24.0 31.0
characteristics
Max. output voltage Proportional to input voltage: 0..480 V
Max. output frequency 1000 Hz
Rated input voltage
and frequency
Allowable voltage
fluctuation
Power
supply
Allowable frequency
fluctuation
Braking torque
1. Based on a standard 3-Phase standard motor.
2. Above 400 Hz with some function limitation.
2 Frequency inverters
For VT setting 0.75 1.5 2.2 3.0 4.0 5.5 7.5 11 15 18.5
For CT setting 0.4 0.75 1.5 2.2 3.0 4.0 5.5 7.5 11 15
Cooling method
At short-time
deceleration
At capacitor
feedback
380 VT
380 CT
480 VT
480 CT
*3
1.3 2.6 3.5 4.5 5.7 7.3 11.5 15.1 20.4 25.0
1.1 2.2 3.1 3.6 4.7 6.0 9.7 11.8 15.7 20.4
1.7 3.4 4.4 5.7 7.3 9.2 14.5 19.1 25.7 31.5
1.4 2.8 3.9 4.5 5.9 7.6 12.3 14.9 19.9 25.7
2
3-phase 380..480 V 50/60 Hz
-15%..+10%
5%
70%:
100%: <50Hz
50%: <60Hz
<50Hz
50%:
-
<60Hz
Self cooling Forced-air-cooling
Page 3
Specifications
Commom specifications
Model number
Control methods
Output frequency range
Frequency precision
Resolution of frequency set value
Resolution of output frequency
Starting torque
Control functions
Overload capability
Frequency set value
V/f Characteristics
Inputs signals
Output signals
Functionality
Standard functions
Analogue inputs
Pulse train input terminal
Accel/Decel times
Display
Motor overload protection
Instantaneous overcurrent
Overload
Overvoltage
Undervoltage
Momentary power loss
Cooling fin overheat
Protection functions
Stall prevention level
Ground fault
Power charge indication
Degree of protection
Ambient humidity
Storage temperature
Ambient temperature
Installation
Installation height
Ambient conditions
Vibration
MX2@
Specifications
Phase-to-phase sinusoidal pulse with modulation PWM (Sensorless vector control, V/F)
0.10..1000.00 Hz (with restrictions above 400Hz)
Digital set value: ±0.01% of the max. frequency
Analogue set value: ±0.2% of the max. frequency (25 ±10ºC)
Digital set value: 0.01 Hz
Analogue set value: 1/1000 of maximum frequency
0.01Hz
200% / 0.5 Hz
Dual rating:
Heavy duty (CT): 150% for 1 minute
Normal Duty (VT): 120% for 1 minute
0 to 10 VDC (10 KΩ), 4 to 20 mA (100 Ω), RS485 Modbus, Network options
Constant/ reduced torque, free V/f
FW (forward run command), RV (reverse run command), CF1~CF4 (multi-stage speed setting), JG (jog command), DB (external braking), SET (set second motor), 2CH (2-stage accel./decel. command), FRS (free run stop command), EXT (external
trip), USP (startup function), CS (commercial power switchover), SFT (soft lock), AT (analog input selection), RS (reset), PTC
(thermistor thermal protection), STA (start), STP (stop), F/R (forward/reverse), PID (PID disable), PIDC (PID reset), UP (remote control up function), DWN (remote control down function), UDC (remote control data clear), OPE (operator control),
SF1~SF7 (multi-stage speed setting; bit operation), OLR (overload restriction), TL (torque limit enable), TRQ1 (torque limit
changeover1), TRQ2 (torque limit changeover2), BOK (Braking confirmation), LAC (LAD cancellation), PCLR (position deviation clear), ADD (add frequency enable), F-TM (force terminal mode), ATR (permission of torque command input), KHC (Cumulative power clear), MI1~MI7 (general purpose inputs for EzSQ), AHD (analog command hold), CP1~CP3 (multistageposition switches), ORL (limit signal of zero-return), ORC (trigger signal of zero-return), SPD (speed/position changeover),
GS1~GS2 (STO inputs, safety related signals), 485 (Starting communication signal), PRG (executing EzSQ program), HLD
(retain output frequency), ROK (permission of run command), EB (rotation direction detection of B-phase), DISP (display limitation), OP (option control signal), NO (no function)
RUN (run signal), FA1~FA5 (frequency arrival signal), OL,OL2 (overload advance notice signal), OD (PID deviation error signal), AL (alarm signal), OTQ (over/under torque threshold), UV (under-voltage), TRQ (torque limit signal), RNT (run time expired), ONT (power ON time expired), THM (thermal warning), BRK (brake release), BER (brake error), ZS (0Hz detection),
DSE (speed deviation excessive), POK (positioning completion), ODc (analog voltage input disconnection), OIDc (analog
current input disconnection), FBV (PID second stage output), NDc (network disconnect detection), LOG1~LOG3 (Logic output signals), WAC (capacitor life warning), WAF (cooling fan warning), FR (starting contact), OHF (heat sink overheat warning), LOC (Low load), MO1~MO3 (general outputs for EzSQ), IRDY (inverter ready), FWR (forward operation), RVR (reverse
operation), MJA (major failure), WCO (window comparator O), WCOI (window comparator OI), FREF (frequency command
source), REF (run command source), SETM (second motor in operation), EDM (STO (safe torque off) performance monitor),
OP (option control signal), NO (no function)
Free-V/f, manual/automatic torque boost, output voltage gain adjustment, AVR function, reduced voltage start, motor data
selection, auto-tuning, motor stabilization control, reverse running protection, simple position control, simple torque control,
torque limiting, automatic carrier frequency reduction, energy saving operation, PID function, non-stop operation at
instantaneous power failure, brake control, DC injection braking, dynamic braking (BRD), frequency upper and lower
limiters, jump frequencies, curve accel and decel (S, U, inversed U,EL-S), 16-stage speed profile, fine adjustment of start
frequency, accel and decel stop, process jogging, frequency calculation, frequency addition, 2-stage accel/decel, stop mode
selection, start/end freq., analog input filter, window comparators, input terminal response time, output signal delay/hold
function, rotation direction restriction, stop key selection, software lock, safe stop function, scaling function, display
restriction, password function, user parameter, initialization, initial display selection, cooling fan control, warning, trip retry,
frequency pull-in restart, frequency matching, overload restriction, over current restriction, DC bus voltage AVR
2 analogue inputs 0 to 10 V (10 KΩ), 4 to 20 mA (100 Ω)
0 to 10 V (up to 24 V), up to 32 kHz
0.01 to 3600.0 s (line/curve selection), 2nd accel/decel setting available
Status indicator LED’s Run, Program, Alarm, Power, Hz, Amps
Digital operator: Available to monitor 32 items: frequency reference, output current, output frequency...
Electronic Thermal overload relay and PTC thermistor input
200% of rated current
Dual rating:
Heavy duty (CT): 150% for 1 minute
Normal Duty (VT): 120% for 1 minute
800 V for 400 V type and 400 V for 200 V type
345 V for 400 V type and 172.5 V for 200 V type
Following items are selectable: Alarm, decelerates to stop, decelerates to stop with DC bus controlled, restart
Temperature monitor and error detection
Stall prevention during acceleration/deceleration and constant speed
Detection at power-on
On when power is supplied to the control part
IP20, Varnish coating on PCB
90% RH or less (without condensation)
-20ºC..+65ºC (short-term temperature during transportation)
−10°C to 40°C
Indoor (no corrosive gas, dust, etc.)
Max. 1000 m
5.9 m/s2 (0.6G), 10 to 55 Hz
MX2 3
Page 4
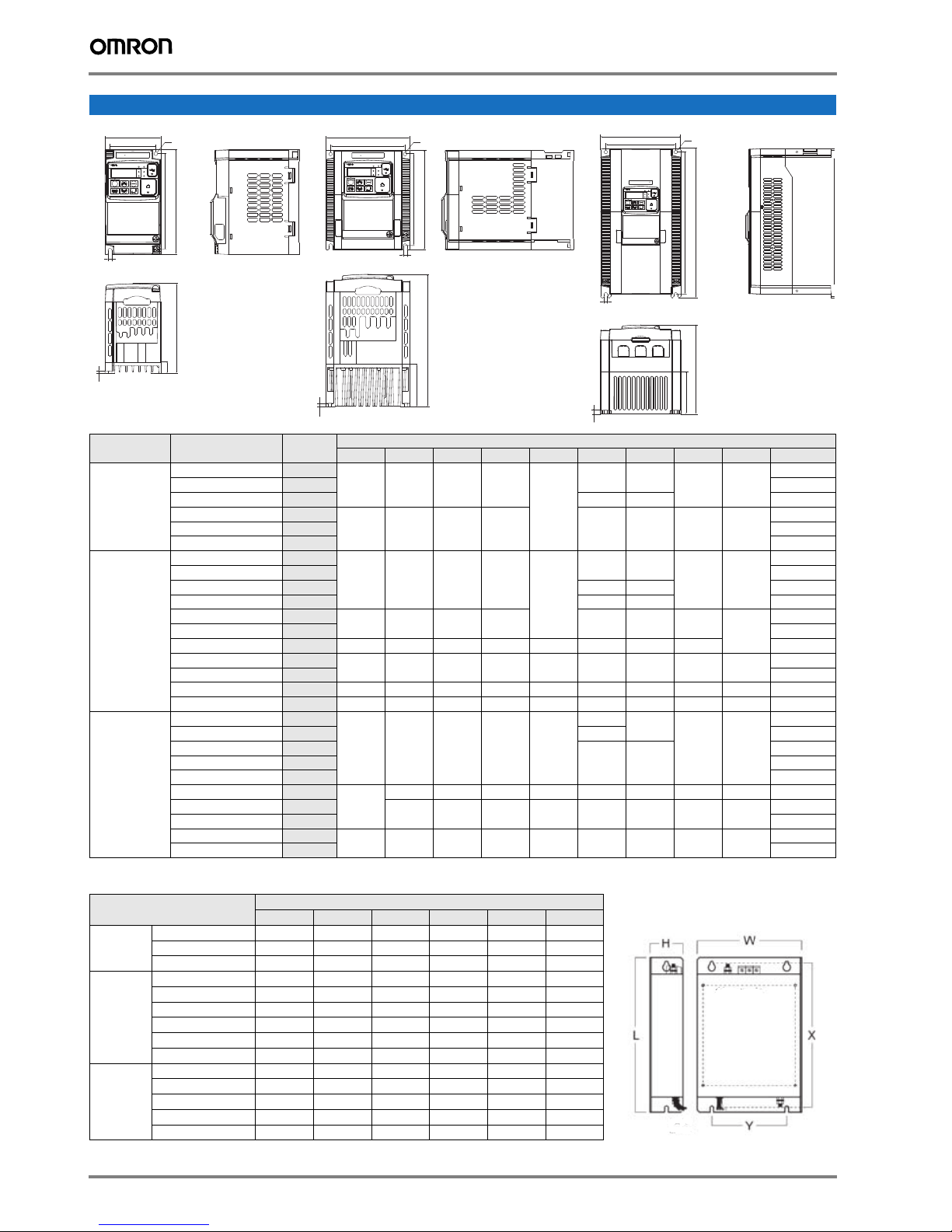
Dimensions
‚o‚v‚q
‚`‚k‚l
‚q‚t‚m
‚g‚š
‚o‚q‚f
‚q‚t‚m
‚r‚s‚n‚o
‚q‚d‚r‚d‚s
‚R‚f‚R‚l‚w‚Q?@?@
‚h‚m‚u‚d‚q‚s‚d‚q
‚o‚v‚q
‚`‚k‚l
‚q‚t‚m
‚g‚š
‚o‚q‚f
‚q‚t‚m
‚r‚s‚n‚o
‚q‚d‚r‚d‚s
‚R‚f‚R‚l‚w‚Q?@?@
‚h‚m‚u‚d‚q‚s‚d‚q
‚r‚x‚r‚c‚q‚h‚u‚d
‚o‚v‚q
‚`‚k‚l
‚q‚t‚m
‚g‚š
‚o‚q‚f
‚q‚t‚m
‚r‚s‚n‚o
‚q‚d‚r‚d‚s
‚R‚f‚R‚l‚w‚Q?@?@
‚h‚m‚u‚d‚q‚s‚d‚q
W
φ 4.5
W1
‚o‚v‚q
‚q‚t‚m
‚R‚f‚R‚l‚w‚Q
‚h‚m‚u‚d‚q‚s‚d‚q
‚`‚k‚l
‚g‚š
‚`‚`‚o‚q‚f
‚r‚s‚n‚o
‚q‚t‚m
‚q‚d‚r‚d‚s
W
W1
‚r‚x‚r‚c‚q‚h‚u‚d
‚R‚f‚R‚l‚w‚Q
‚h‚m‚u‚d‚q‚s‚d‚q
‚r‚s‚n‚o
‚q‚t‚m
‚q‚d‚r‚d‚s
HH1
φ 2-d
‚o‚v‚q
‚q‚t‚m
‚`‚k‚l
‚g‚š
‚`‚`‚o‚q‚f
H1
H
W
W1
‚R‚f‚R‚l‚w‚Q
‚h‚m‚u‚d‚q‚s‚d‚q
‚q‚t‚m
φ 2-d
‚o‚v‚q
‚q‚t‚m
‚`‚k‚l
‚g‚š
‚`‚`‚o‚q‚f
‚r‚s‚n‚o
‚q‚d‚r‚d‚s
H
H1
5
D
Figure 1
D1
2,6
Voltage class Inverter model MX2@ Figure
Single-phase
200 V
AB001
AB002
AB004
AB007
1
1 1.0
1
2
AB015 2 1.8
2 1.8
1
1 1.0
1 113 27 1.1
1 146 50 1.2
2
2 1.8
3 140 128 128 118 5 170.5 55 4.4 2.0
3
3 3.4
3 180 160 296 284 7 175 97 5 7 5.1
3 220 192 350 336 7 175 84 5 7 7.4
2
2 171 1.6
2
2 1.9
2 1.9
3
3
3 3.5
3
3 5.2
Three-phase
200 V
Three-phase
400 V
AB022
A2001
A2002
A2004
A2007
A2015
A2022
A2037
A2055
A2075
A2110
A2150
A4004
A4007
A4015
A4022
A4030
A4040
A4055
A4075
A4110
A4150
t
t
D
D1
D2
Figure 2
D
D1
D2
Dimensions in mm
W W1 H H1 t D D1 D2 d Weight (KG)
68 56 128 118
109 13.5
123 27 1.1
-
--
108 96 128 118 170.5 55 4.4 4.5
109 13.5
68 56 128 118
--
-
108 96 128 118 170.5 55 4.4
4.5
140 122 260 248 6 155 73.3 6 6
144
108 96 128 118 -
28
--
171 55
128 128 118 5 171 55 4.4 4.5 2.1
140
122 260 248 6 155 73.3 6 6
180 160 296 284 7 175 97 5 7
Figure 3
1.0
1.4
1.0
1.6
3.0
1.5
1.8
3.5
4.7
Rasmi footprint filters
Rasmi model
AX-FIM1010-RE 71 45 169 156 51 M4
1x200 V
3x200 V
AX-FIM1014-RE 111 50 169 156 91 M4
AX-FIM1024-RE 111 50 169 156 91 M4
AX-FIM2010-RE 82 50 194 181 62 M4
AX-FIM2020-RE 111 50 169 156 91 M4
AX-FIM2030-RE 144 50 174 161 120 M4
AX-FIM2060-RE 150 52 320 290 122 M5
AX-FIM2080-RE 188 62 362 330 160 M5
AX-FIM2100-RE 220 62 415 380 192 M6
AX-FIM3005-RE 111 45 169 156 91 M4
AX-FIM3010-RE 114 45 169 156 91 M4
3x400 V
AX-FIM3014-RE 144 50 174 161 120 M4
AX-FIM3030-RE 150 52 306 290 122 M5
AX-FIM3050-RE 182 62 357 330 160 M5
W H L X Y M
4 Frequency inverters
Dimensions
Page 5

Option board
31.3
Input AC reactor
Voltage Reference
AX-RAI02800080-DE 120 70 120 80 52 5.5 1.78
AX-RAI00880200-DE 120 80 120 80 62 5.5 2.35
200 V
AX-RAI00350335-DE 180 85 190 140 55 6 5.5
AX-RAI00180670-DE 180 85 190 140 55 6 5.5
AX-RAI07700050-DE 120 70 120 80 52 5.5 1.78
AX-RAI03500100-DE 120 80 120 80 62 5.5 2.35
400 V
AX-RAI01300170-DE 120 80 120 80 62 5.5 2.50
AX-RAI00740335-DE 180 85 190 140 55 6 5.5
Dimensions Weight
A
B2 C2 D E F
kg
DC Reactor
Voltage Reference
AX-RC21400016-DE
AX-RC10700032-DE
AX-RC06750061-DE
AX-RC03510093-DE
AX-RC02510138-DE
AX-RC01600223-DE
200 V
AX-RC01110309-DE
AX-RC00840437-DE
AX-RC00590614-DE
AX-RC00440859-DE
AX-RC43000020-DE
AX-RC27000030-DE
AX-RC14000047-DE
AX-RC10100069-DE
AX-RC06400116-DE
400 V
AX-RC04410167-DE
AX-RC03350219-DE
AX-RC02330307-DE
AX-RC01750430-DE
Output AC Reactor
Voltage Reference
AX-RAO11500026-DE 120 70 120 80 52 5.5 1.78
AX-RAO07600042-DE 120 70 120 80 52 5.5 1.78
AX-RAO04100075-DE 120 80 120 80 62 5.5 2.35
AX-RAO03000105-DE 120 80 120 80 62 5.5 2.35
200 V
AX-RAO01830180-DE 180 85 190 140 55 6 5.5
AX-RAO01150220-DE 180 85 190 140 55 6 5.5
AX-RAO00950320-DE 180 85 205 140 55 6 6.5
AX-RAO00630430-DE 180 95 205 140 65 6 9.1
AX-RAO00490640-DE 180 95 205 140 65 6 9.1
A
B C D E F G H
96
Dimensions Weight
84 113
101 66 5 7.5 2
105 1.60
116 1.95
108 135 124 120 82 6.5
120 152
136
135 94
146 6.00
160
150 177
160 115 2
182.
6
96
84 113
101 66 5 7.5 2
105 1.60
116 1.95
108 135 133 120 82 6.5
120 152
136
135 94 7
146 6.00
160
150 177
160 115 7 2
182.
6
Dimensions Weight
A
B2 C2 D E F
kg
1.22
9.5 3.20
9.5
7-
5.20
11.4
14.3
1.22
9.5 3.70
9.5
5.20
-
11.4
14.3
kg
MX2 5
Page 6

Voltage Reference
X
H
YW
Ø
m
L
Ø
d
AX-REM00K1200
Fig 1
Fig 3
Fig 4
A
Dimensions Weight
B2 C2 D E F
kg
AX-RAO16300038-DE 120 70 120 80 52 5.5 1.78
AX-RAO11800053-DE 120 80 120 80 52 5.5 2.35
AX-RAO07300080-DE 120 80 120 80 62 5.5 2.35
400 V
AX-RAO04600110-DE 180 85 190 140 55 6 5.5
AX-RAO03600160-DE 180 85 205 140 55 6 6.5
AX-RAO02500220-DE 180 95 205 140 55 6 9.1
AX-RAO02000320-DE 180 105 205 140 85 6 11.7
Chokes
Reference D
diameter
AX-FER2102-RE 21 < 2.2 85 22 46 70 - 5 0.1
AX-FER2515-RE 25 < 15 105 25 62 90 - 5 0.2
AX-FER5045-RE 50 < 45 150 50 110 125 30 5 0.7
Motor
kW
Dimensions Weight
L W H X Y m
Resistor dimensions
kg
Fig 2
Type Fig.
AX-REM00K1400-IE
AX-REM00K2070-IE
AX-REM00K2120-IE
AX-REM00K2200-IE
AX-REM00K4075-IE
AX-REM00K4030-IE
AX-REM00K5120-IE 260 27 36 249 - 0.58
AX-REM00K6100-IE
AX-REM00K6035-IE
AX-REM00K9070-IE
AX-REM00K9017-IE
AX-REM01K9070-IE
AX-REM01K9017-IE
AX-REM02K1070-IE
AX-REM02K1017-IE
AX-REM03K5035-IE
AX-REM03K5010-IE
1
2 200 62 100 74 - 1.41AX-REM00K9020-IE
3 365 73 105 350 70 4
4
L H M I T kg
105 27 36 94 - 0.2
200 27 36 189 - 0.425AX-REM00K4035-IE
320 27 36 309 - 0.73
310 100 240 295 210 7
365 100 240 350 210 8
Dimensions
Weight
6 Frequency inverters
Page 7

Standard connections
Power source,
3-phase or
1-phase, per
inverter model
NOTE: For the wiring
of intelligent I/O and
analog inputs, be sure
to use twisted pair/
shielded cable. Attach
the shielded wire for
each signal to its
respective common
terminal at the inverter
end only.
Input impedance of
each intelligent input is
4.7kΩ
Thermistor
Breaker, MCCB
or GFI
Intelligent inputs,
7 terminals
Short bar
(Source type)
GND for logic inputs
Meter
Meter
Analog reference
Pulse train input
24Vdc 32kHz max.
GND for analog signals
Forward
0~10VDC
4~20mA
R
(L1)
S
(L2)
T
N(L3)
P24
MX2
24V
+ -
1
2
3/GS1
Input
circuits
4/GS2
6
[5] configurable as
discrete input or
thermistor input
Output circuit
5/PTC
7/EB
U
(T1)
V
(T2)
W
(T3)
PD/+1
P/+
RB
N/-
AL1
Relay contacts,
type 1 Form C
AL0
AL2
Open collector output
11/EDM
DC reactor
(optional)
Brake
resistor
(optional)
Freq. arrival signal
Load
(optional)
Motor
Braking
unit
PLC
L
L
12
Load
+
-
CM2
GND for logic outputs
EO
L
AM
L
H
O
OI
Apprx.10kΩ
Apprx.100Ω
L
EA
L
Termination resistor (200Ω)
(Change by slide switch)
10Vdc
+
-
L
L
RS485
transceiver
L
RS485
transceiver
USB
transceiver
Option port
controller
)
SP
Serial communication port
(RS485/ModBus)
SN
RJ45 port
L
L
L
(Optional operator port)
USB (mini-B) port
(PC communication port)
USB power: Self power
Option port connector
Terminal Block Specifications
Terminal Name Function (signal level)
R/L1, S/L2, T/L3
U/T1, V/T2, W/T3
PD/+1, P/+
P/+, N/-
P/+, RB
Main circuit power supply input Used to connect line power to the drive.
Inverter output Used to connect the motor
External DC reactor terminal Normally connected by the short-circuit bar. Remove the short-circuit bar between +1 and P/
Regenerative braking unit terminal
Braking resistor terminals
Grounding For grounding (grounding should conform to the local grounding code.)
MX2 7
Drives with single-phase 200 V input power use only terminals R/L1 and N (T/L3), terminal
S/L2 is not available for these units
+2 when a DC reactor is connected.
Connect optional regenerative braking units (If a braking torque is required)
Connect option braking resistor (if a braking torque is required)
Page 8

Control Circuit
Enclosure
Type No.
PLC
P24
1
2
3/ST1
4/ST2
5/PTC
Digital input signals
train
Pulse
signal
Analog input
signals
Digital output
6
7/EB
L
EA
EO
H
O
OI
L
11/EDM
12
CMD
AL0
AL1
AL2
Signal name Function Signal level
Intelligent input common
Internal 24 VDC 24 VDC, 30mA 24 VDC, 30 mA
Multi-function Input selection 1 Factory setting: Forward/ Stop
Multi-function Input selection 2 Factory setting: Reverse/ Stop
Multi-function Input selection 3 / safe stop input 1 Factory setting: External trip
Multi-function Input selection 4 / safe stop input 2 Factory setting: Reset
Multi-function Input selection 5 / PTC thermistor input Factory setting: Multi-step speed reference 1
Multi-function input selection 6 Factory setting: Multi-step speed reference 2
Multi-function input selection 7 / Pulse train input B Factory setting: Jog
Multi-function Input selection common (in upper row) -- --
Pulse train input A Factory setting: Speed reference
Pulse train output LAD frequency
Frequency reference power supply 10 VDC 10 mA max
Voltage frequency reference signal 0 to 10 VDC (10 kΩ)
Current frequency reference signal 4 to 20 mA (250 Ω)
Frequency reference common (bottom row) --
Discrete logic output 1 / EDM output
Discrete logic output 2 Factory setting: Frequency arrival type 1
GND logic output --
Relay commom contact
Relay contact, normally open
Relay contact, normally closed
Source type: connecting [P24] to [1]-[7] turns inputs ON
Sink type: connecting [L] to [1]-[7] turns inputs ON
Factory setting: During Run
Factory setting: Alarm signal
Under normal operation
AL1 - AL0 Closed
AL2 - AL0 Open
-
27 VDC max
32 kHz max
5 to 24 VDC
10 VDC 2 mA
32 kHz max
27 VDC, 50 mA max
EDM based on
ISO13849-1
R load
250 VAC 2.5 A
30 VDC 3.0 A
I load
250 VAC 0.2 A
30 VDC 0.7 A
Signal
Monitor
Comms
AM
SP
SN
Analog voltage output Factory setting: LAD frequency 0 to 10 VDC 1 mA
Serial communication terminal RS485 Modbus communication
Side by side mounting
Inverter heat loss
Three-phase 200 V class
Model MX2 A2001 A2002 A2004 A2007 A2015 A2022 A2037 A2055 A2075 A2110 A2150
Inverter
capacity
kVA
Rated current (A) VT
Rated current (A) CT
Efficiency at rated load
Cooling Method Self cooling
200 VT
200 CT
240 VT
240 CT
Total heat loss
0.4 0.6 1.2 2.0 3.3 4.1 6.7 10.3 13.8 19.3 23.9
0.2 0.5 1.0 1.7 2.7 3.8 6.0 8.6 11.4 16.2 20.7
0.4 0.7 1.4 2.4 3.9 4.9 8.1 12.4 16.6 23.2 28.6
0.3 0.6 1.2 2.0 3.3 4.5 7.2 10.3 13.7 19.5 24.9
1.2 1.9 3.4 6.0 9.6 12.0 19.6 30.0 40.0 56.0 69.0
1.0 1.6 3.0 5.0 8.0 11.0 17.5 25.0 33.0 47.0 60.0
12 22 30 48 79 104 154 229 313 458 625
89.5 90 93 94 95 95.5 96 96 96 96 96
Forced-air-cooling
8 Frequency inverters
Page 9

Single-phase 200 V class
Model MX2 AB001 AB002 AB004 AB007 AB015 AB022
Inverter
capacity
kVA
Rated current (A) VT
Rated current (A) CT
Efficiency at rated load
200V VT
200V CT
240V VT
240V CT
Total heat loss
Cooling Method Self cooling Forced-air-cooling
Three-phase 400 V class
Model MX2 A4004 A4007 A4015 A4022 A4030 A4040 A4055 A4075 A4110 A4150
Inverter
capacity
kVA
Rated current (A) VT
Rated current (A) CT
Efficiency at rated load 92 93 94 95 96 96 96 96.2 96.4 96.6
380V VT
380V CT
480V VT
480V CT
Total heat loss 35 56 96 116 125 167 229 296 411 528
Cooling Method Self cooling Forced-air-cooling
Input AC Reactor
0.4 0.6 1.2 2.0 3.3 4.1
0.2 0.5 1.0 1.7 2.7 3.8
0.4 0.7 1.4 2.4 3.9 4.9
0.3 0.6 1.2 2.0 3.3 4.5
1.2 1.9 3.4 6.0 9.6 12.0
1.0 1.6 3.0 5.0 8.0 11.0
12 22 30 48 79 104
89.5 90 93 94 95 95.5
1.3 2.6 3.5 4.5 5.7 7.3 11.5 15.1 20.4 25.0
1.1 2.2 3.1 3.6 4.7 6.0 9.7 11.8 15.7 20.4
1.7 3.4 4.4 5.7 7.3 9.2 14.5 19.1 25.7 31.5
1.4 2.8 3.9 4.5 5.9 7.6 12.3 14.9 19.9 25.7
2.1 4.1 5.4 6.9 8.8 11.1 17.5 23.0 31.0 38.0
1.8 3.4 4.8 5.5 7.2 9.2 14.8 18.0 24.0 31.0
Power supply
MCCB
AC reactor
V
W
X
YZS/L2
MX2
R/L1U
T/L3
Max. applicable
motor output kW
1.5 AX-RAI02800080-DE 8.0 2.8 1.5 AX-RAI07700050-DE
3.7 AX-RAI00880200-DE 20.0 0.88 4.0 AX-RAI03500100-DE 10.0 3.5
7.5 AX-RAI00350335-DE 33.5 0.35 7.5 AX-RAI01300170-DE
15 AX-RAI00180670-DE 67.0 0.18 15 AX-RAI00740335-DE
3 phase 200 V class 400 V class
Reference
Current value AInductancemHMax. applicable
motor output kW
Reference
Current value AInductance
5.0 7.7
17.0 1.3
33.5 0.74
DC Reactor
Power
supply
Max. applicable
motor output kW
0.2 AX-RC21400016-DE 1.6 21.4 0.4 AX-RC43000020-DE
0.4 AX-RC10700032-DE 3.2 10.7 0.7 AX-RC27000030-DE 3.0 27.0
0.7 AX-RC06750061-DE 6.1 6.75 1.5 AX-RC14000047-DE
1.5 AX-RC03510093-DE 9.3 3.51 2.2 AX-RC10100069-DE 6.9 10.1
2.2 AX-RC02510138-DE 13.8 2.51 3.0 AX-RC08250093-DE 9.3 8.25
3.7 AX-RC01600223-DE 22.3 1.60 4.0 AX-RC06400116-DE 11.6 6.40
5.5 AX-RC01110309-DE 30.9 1.11 5.5 AX-RC04410167-DE 16.7 4.41
7.5 AX-RC00840437-DE 43.7 0.84 7.5 AX-RC03350219-DE 21.9 3.35
11.0 AX-RC00590614-DE 61.4 0.59 11.0 AX-RC02330307-DE 30.7 2.33
15.0 AX-RC00440859-DE 85.9 0.44 15.0 AX-RC01750430-DE 43.0 1.75
Output AC
Max. applicable
motor output kW
Reactor
0.4 AX-RAO11500026-DE 2.6 11.50
0.75 AX-RAO07600042-DE 4.2 7.60
1.5 AX-RAO04100075-DE 7.5 4.10
2.2 AX-RAO03000105-DE 10.5 3.00 2.2 AX-RAO11800053-DE 5.3 11.80
3.7 AX-RAO01830160-DE 16.0 1.83 4.0 AX-RAO07300080-DE
5.5 AX-RAO01150220-DE 22.0 1.15 5.5 AX-RAO04600110-DE 11.0 4.60
7.5 AX-RAO00950320-DE 32.0 0.95 7.5 AX-RAO03600160-DE 16.0 3.60
11 AX-RAO00630430-DE 43.0 0.63 11 AX-RAO02500220-DE 22.0 2.50
15 AX-RAO00490640-DE 64.0 0.49 15 AX-RAO02000320-DE 32.0 2.00
200 V class 400 V class
Reference
200 V class 400 V class
Reference
Current value AInductancemHMax. applicable
Current value AInductancemHMax. applicable
MCCB
motor output kW
motor output kW
MX2
R/L1
S/L2
T/L3
+1 P/+2
DC reactor
Reference
Reference
1.5 AX-RAO16300038-DE
Current value AInductance
2.0 43.0
4.7 14.0
Current value AInductance
3.8 16.30
8.0 7.30
mH
mH
mH
MX2 9
Page 10

Ordering information
Choke
A
B
B
LCD 5 lines remote
operator
Remote operator
extension cable
A
A
C
A
Output AC reactor
Communication option
USB cable
Braking resistor
D
B
E
A
CX-Drive
CX-One
MCCB
MX2
Filter
Input AC reactor
Motor
Ground
Power
supply
DC reactor
MX2
Voltage class
Single-phase 200 V
Three-phase 200 V
Three-phase
400 V
Specifications Model
Constant torque
Max motor kW
0.1 1.0 0.2 1.2 MX2-AB001-E
0.2 1.6 0.4 1.9 MX2-AB002-E
0.4 3.0 0.55 3.5 MX2-AB004-E
0.75 5.0 1.1 6.0 MX2-AB007-E
1.5 8.0 2.2 9.6 MX2-AB015-E
2.2 11.0 3.0 12.0 MX2-AB022-E
0.1 1.0 0.2 1.2 MX2-A2001-E
0.2 1.6 0.4 1.9 MX2-A2002-E
0.4 3.0 0.55 3.5 MX2-A2004-E
0.75 5.0 1.1 6.0 MX2-A2007-E
1.5 8.0 2.2 9.6 MX2-A2015-E
2.2 11.0 3.0 12.0 MX2-A2022-E
3.7 17.5 5.5 19.6 MX2-A2037-E
5.5 25.0 7.5 30.0 MX2-A2055-E
7.5 33.0 11 40.0 MX2-A2075-E
11 47.0 15 56.0 MX2-A2110-E
15 60.0 18.5 69.0 MX2-A2150-E
0.4 1.8 0.75 2.1 MX2-A4004-E
0.75 3.4 1.5 4.1 MX2-A4007-E
1.5 4.8 2.2 5.4 MX2-A4015-E
2.2 5.5 3.0 6.9 MX2-A4022-E
3.0 7.2 4.0 8.8 MX2-A4030-E
4.0 9.2 5.5 11.1 MX2-A4040-E
5.5 14.8 7.5 17.5 MX2-A4055-E
7.5 18.0 11 23.0 MX2-A4075-E
11 24.0 15 31.0 MX2-A4110-E
15 31.0 18.5 38.0 MX2-A4150-E
Rated current A Max motor kW Rated current A
Variable torque
Standard
10 Frequency inverters
Page 11

A Line filters A Input AC reactors
Inverter
Voltage Model MX2-@ Reference
1-Phase 200
VAC
3-Phase 200
VAC
3-Phase 400
VAC
AB001 / AB002 / AB004 AX-FIM1010-RE 10
AB007 AX-FIM1014-RE 14
AB015 / AB022 AX-FIM1024-RE 24
A2001 / A2002 /
A2004 / A2007
A2015 / A2022 AX-FIM2020-RE 20
A2037 AX-FIM2030-RE 30
A2055 / A2075 AX-FIM2060-RE 60
A2110 AX-FIM2080-RE 80
A2150 AX-FIM2100-RE 100
A4004 / A4007 AX-FIM3005-RE 5
A4015 / A4022 /
A4030
A4040 AX-FIM3014-RE 14
A4055 / A4075 AX-FIM3030-RE 23
A4110 / A4150 AX-FIM3050-RE 50
Line filter Rasmi
Rated current
(A)
AX-FIM2010-RE 10
AX-FIM3010-RE 10
Voltage Model MX2-@ Reference
Inverter
3-Phase 200 VAC
1-Phase 200 VAC
3-Phase 400 VAC
A DC reactors
200V single phase
Inverter
MX2-AB001
MX2-AB002 MX2-A2002 MX2-A4007 AX-RC27000030-DE
MX2-AB004 AX-RC06750061-DE MX2-A2004 AX-RC10700032-DE MX2-A4015 AX-RC14000047-DE
MX2-AB007 AX-RC03510093-DE MX2-A2007 AX-RC06750061-DE MX2-A4022 AX-RC10100069-DE
MX2-AB015 AX-RC02510138-DE MX2-A2015 AX-RC03510093-DE MX2-A4030 AX-RC08250093-DE
MX2-AB022 AX-RC01600223-DE MX2-A2022 AX-RC02510138-DE MX2-A4040 AX-RC06400116-DE
DC Reactor
AX-RC10700032-DE
-
200V 3-phase 400V 3-phase
Inverter
MX2-A2001
MX2-A2037 AX-RC01600223-DE MX2-A4055 AX-RC04410167-DE
MX2-A2055 AX-RC01110309-DE MX2-A4075 AX-RC03350219-DE
MX2-A2075 AX-RC00840437-DE MX2-A4011 AX-RC02330307-DE
MX2-A2011 AX-RC00590614-DE MX2-A4015 AX-RC01750430-DE
MX2-A2015 AX-RC00440859-DE -
DC Reactor
AX-RC21400016-DE
MX2-A4004 AX-RC43000020-DE
AC Reactor
A2002 / A2004 / A2007 AX-RAI02800080-DE
A2015 / A2022 / A2037 AX-RAI00880200-DE
A2055 / A2075 AX-RAI00350335-DE
A2110 / A2150 AX-RAI00180670-DE
AB002 / AB004
AB015 / AB022
A4004 / A4007 / A4015 AX-RAI07700050-DE
A4022 / A4030 / A4040 AX-RAI03500100-DE
A4055 / A4075 AX-RAI01300170-DE
A4110 / A4150 AX-RAI00740335-DE
Inverter
Under developmentAB007
DC Reactor
A Chokes A Output AC reactor
Model Diameter Description
AX-FER2102-RE 21 For 2.2 KW motors or below
AX-FER2515-RE 25 For 15 KW motors or below
AX-FER5045-RE 50 For 45 KW motors or below
Voltage Model MX2-@ Reference
200 VAC
400 VAC
B Accessories
Types Model Description Functions
Digital
operator
Accessories
AX-OP05-E LCD remote operator 5 Line LCD remote operator with copy function, cable length max. 3m.
3G3AX-CAJOP300-EE Remote operator cable 3 meters cable for connecting remote operator
3G3AX-OP01 LED remote operator LED remote operator, cable length max. 3m
4X-KITMINI Mounting kit for LED operator Mounting kit for LED operator on panel
AX-CUSBM002-E PC configuration cable Mini USB to USB connector cable
Inverter
A2001 / A2002 / A2004
AB001 / AB002 / AB004
A2007/AB007 AX-RAO07600042-DE
A2015 / AB015 AX-RAO04100075-DE
A2022 / AB022 AX-RAO03000105-DE
A4004 / A4007 / A4015 AX-RAO16300038-DE
A4030 / A4040 AX-RAO07300080-DE
AC Reactor
AX-RAO11500026-DE
A2037 AX-RAO01830160-DE
A2055 AX-RAO01150220-DE
A2075 AX-RAO00950320-DE
A4022 AX-RAO11800053-DE
A4055 AX-RAO04600110-DE
A4075 AX-RAO03600160-DE
MX2 11
Page 12

C Communication option boards
In the interest of product improvement, specifications are subject to change without notice.
ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.
To convert millimeters into inches, multiply by 0.03937. To convert grams into ounces, multiply by 0.03527.
Cat. No. I113E-EN-02
Types Model Description Functions
3G3AX-MX2-PRT Profibus option card
3G3AX-MX2-DRT DeviceNet option card
3G3AX-MX2-ERT Ethercat option card Under development
3G3AX-MX2-CRT CompoNet option card
Communication options
3G3AX-MX2-ML2 Mechatrolink II option card Under development
3G3AX-MX2-CORT CanOpen option card Under development
Used for running or stopping the inverter, setting or referencing parameters, and monitoring
output frequency, output current, or similar items through Profibus communications with the
host controller.
Used for running or stopping the inverter, setting or referencing parameters, and monitoring
output frequency, output current, or similar items through DeviceNet communications with the
host controller.
Used for running or stopping the inverter, setting or referencing parameters, and monitoring
output frequency, output current, or similar items through CompoNet communications with the
host controller.
D Braking unit, braking resistor unit
Voltage
200 V
(single-/
three-
phase)
400 V
(three-
phase)
Inverter Braking resistor unit
Max.
motor
kW
0.12 2001 B001
0.25 2002 B002 180 180
0.55 2004 B004
1.1 2007 B007
1.5 2015 B015
2.2 2022 B022
4.0 2040 - REM00K4075-IE 75 50 REM00K6035-IE 35 100
5.5 2055 – 20
7.5 2075 –
11 2110 - REM00K6035-IE 35 40 REM02K1017-IE 17 75
15 2150 - 10 REM00K9017-IE 17 55 REM03K5010-IE 10 95
0.55 4004 –
1.1 4007 – 200 200
1.5 4015 – REM00K1200-IE 200 190 REM00K2200-IE 200 190
2.2 4022 –
3.0 4030 –
4.0 4040 – 120 REM00K6100-IE 100 140
5.5 4055 –
7.5 4075 – 100 REM01K9070-IE 70 110
11 4110 - REM00K6100-IE 100 50 REM02K1070-IE 70 75
15 4150 - 35 REM00K9070-IE 70 55 REM03K5035-IE 35 110
Inverter MX2@
3-phase 1-phase Type AX- Resist Ω Type AX- Resist Ω
Connectable
min.
resistance Ω
100
50
35
17
180
100
70
Inverter mounted type
(3 %ED, 10 sec max)
REM00K1400-IE 400
REM00K1200-IE 200
REM00K2070-IE 70
REM00K4035-IE 35
REM00K1400-IE 400
REM00K2200-IE 200 130
REM00K2120-IE 120
REM00K4075-IE 75
Braking
torque %
200
180 REM00K1200-IE 200 180
100 REM00K2070-IE 70 200
140 REM00K4075-IE 75 130
90 REM00K4035-IE 35 180
75 REM00K9020-IE 20 150
55 REM01K9017-IE 17 110
200
160 160
140 REM00K9070-IE 70 150
E Computer software
Types Model Description Installation
CX-drive Computer software Configuration and monitoring software tool
Inverter mounted type
(10%ED, 10 sec max)
REM00K1400-IE 400
REM00K1400-IE 400
REM00K5120-IE 120
Braking
torque %
200
200
200
Software
CX-One Computer software Configuration and monitoring software tool
12 Frequency inverters
 Loading...
Loading...