

Page 1
MX2 Applikationsguide v1.0
MX2
Applikationsguide
Page 2
Application guide
Indholdsfortegnelse
1. PID REGULERING PÅ VENTILATION OG REN VANDSPUMPE.............................................. 4
1.1. VALG AF REGULERINGSMETODE (PARAMETERA044)......................................................................4
1.2. AKTIVERING AF PID REGULERING (PARAMETER A071)...................................................................5
1.3. VALG AF REFERENCE SETPUNKT FOR PID (PARAMETER A001).......................................................5
1.4. VALG AF START / STOP (PARAMETER A002) ..................................................................................5
1.5. VALG AF FEEDBACK FRA TRYK / FLOW TRANSMITTER (PARAMETER A076)........................................6
1.6. MONITOR.....................................................................................................................................6
1.7. 123… OPSÆTNING ......................................................................................................................6
1.8. RELATERET PARAMETER...............................................................................................................7
2. PID REGULERING PÅ SKRUE KOMPRESSOR........................................................................ 8
2.1. VALG AF REGULERINGS METODE (PARAMETERA044) .....................................................................8
2.2. AKTIVERING AF PID REGULERING (PARAMETER A071)...................................................................9
2.3. VALG AF REFERENCE SETPUNKT FOR PID (PARAMETER A001).......................................................9
2.4. VALG AF START / STOP (PARAMETER A002) ..................................................................................9
2.5. VALG AF FEEDBACK FRA TRYK / FLOW TRANSMITTER (PARAMETER A076)........................................9
2.6. MONITOR.................................................................................................................................. 10
2.7. 123… OPSÆTNING ................................................................................................................... 10
2.8. RELATERET PARAMETER............................................................................................................ 11
MX2
3. ENERGISPARE FUNKTION...................................................................................................... 12
3.1. 123… OPSÆTNING ................................................................................................................... 12
4. SIMPEL POSITIONERING MED MX2....................................................................................... 13
4.1. VALG AF REGULERINGSMETODE (PARAMETERA044):.................................................................. 14
4.2. AKTIVERING AF SIMPEL POSITIONERING (PARAMETER P012)........................................................ 14
4.3. AKTIVERING AF ENCODER INDGANG (PARAMETER P003)............................................................. 15
4.4. VALG AF ENCODER SIGNAL (PAMAMETER P004).......................................................................... 15
4.5. OPSÆTNING AF ENCODER OPLØSNING (PARAMETER P011)......................................................... 15
4.6. OPSÆTNING AF KRYBE HASTIGHED (PARAMETER P015).............................................................. 15
4.7. OPSÆTNING AF MAKSIMAL HASTIGHED (PARAMETER P055)......................................................... 15
4.8. VALG AF AKTIVERING AF POSITIONER (PARAMETER A002)........................................................... 15
4.9. OPSÆTNING AF DIGITALE INDGANGE (PARAMETER C003 ~ C007) ............................................... 16
4.10. NULPUNKTSKØRSEL (PARAMETER P068 ~ 071)........................................................................ 16
4.11. 123… OPSÆTNING ................................................................................................................... 17
4.12. MONITOR .................................................................................................................................. 17
4.13. RELATERET PARAMETER............................................................................................................ 17
4.14. FEJLKODER............................................................................................................................... 18
5. KONTROL AF KØRSEL MED MEKANISK BREMSE.............................................................. 19
5.1. BESKRIVELSE............................................................................................................................ 20
5.2. VALG AF HASTIGHEDSREFERENCE (PARAMETER A001)............................................................... 20
5.3. VALG AF START / STOP (PARAMETER A002) ............................................................................... 21
5.4. OPSÆTNING AF DIGITAL INDGANG FOR REGISTRERING OM BREMSEN ER ÅBEN (PARAMETER C001–
C007) ................................................................................................................................................ 21
5.5. OPSÆTNING AF DIGITAL UDGANG FOR BREMSE FEJL .................................................................... 21
5.6. OPSÆTNING AF DIGITAL UDGANG FOR AKTIVERING AF BREMSE..................................................... 21
5.7. AKTIVERING AF BREMSE KONTROL (PARAMETER B120) ............................................................... 21
5.8. BREMSE VENTETID FØR BREMSEN ÅBNES (PARAMETER B121) ..................................................... 21
5.9. BREMSE VENTETID FØR BREMSEN ÅBNES, FØR ACCELERATION (PARAMETER B122)...................... 22
5.10. BREMSE VENTETID FØR BREMSEN LUKKES, FØR STOP (PARAMETER B123)................................... 22
5.11. BREMSE VENTETID FØR BREMSEN LUKKES, NÅR BREMSE GODKENDELSE REGISTRERES (PARAMETER
124) ................................................................................................................................................ 22
B
HASTIGHED FØR BREMSEN ÅBNES (PARAMETER B125)................................................................ 22
5.12.
5.13. UDGANGSSTRØM FØR BREMSEN ÅBNES (PARAMETER B126)........................................................ 22
5.14. 123… OPSÆTNING ................................................................................................................... 23
KJ/OEE-DK
2
Page 3

Application guide
6. MOMENT KONTROL................................................................................................................. 24
6.1. VALG AF REGULERINGSMETODE (PARAMETERA044):.................................................................. 24
6.2. VALG AF MOMENT REFERENCE (PARAMETER P033) .................................................................... 24
6.3. VALG AF START / STOP (PARAMETER A002) ............................................................................... 25
6.4. AKTIVERING AF MOMENT KONTROL (PARAMETER C001 – C007).................................................. 25
6.5. HASTIGHEDSGRÆNSE VED MOMENT KONTROL VED KØRSEL FREM (PARAMETER P039)................. 25
6.6. HASTIGHEDSGRÆNSE VED MOMENT KONTROL VED KØRSEL BAK (PARAMETER P040).................... 25
6.7. 123… OPSÆTNING ................................................................................................................... 25
BETINGELSER:.................................................................................................................................... 26
MX2
KJ/OEE-DK
3
Page 4
Application guide
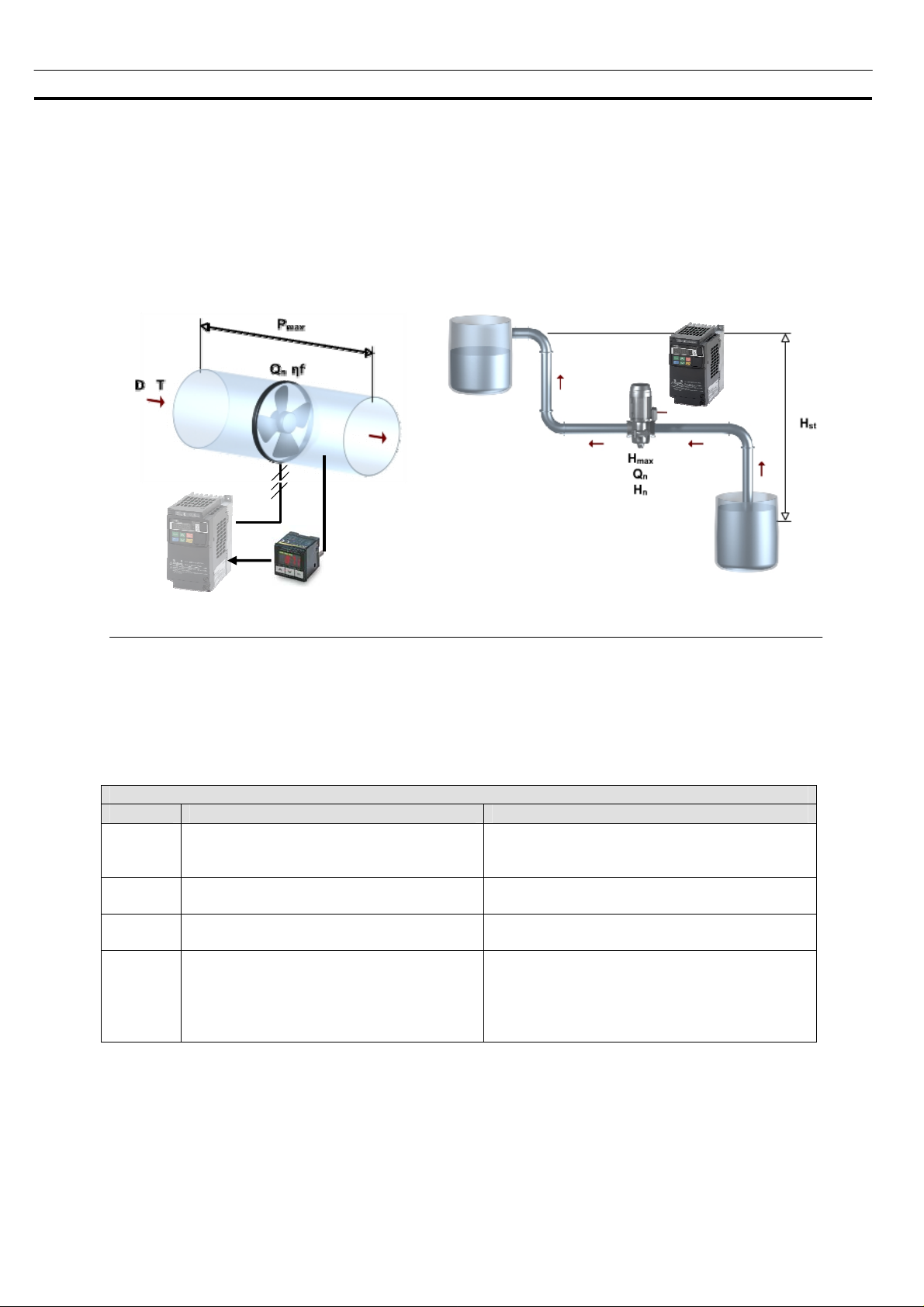
1. PID regulering på ventilation og rentvandspumpe
System:
MX2
P
1.1. Valg af reguleringsmetode (ParameterA044)
For PID regulering på en ventilator og rentvandspumpe, skal en passende V/f karakteristik vælges.
Med frekvensomformeren har vi mulighed for, at vælge 4 forskellige karakteristikker.
Karakteristikken indstilles i parameter A044: Vælg indstilling 1 eller 3 for regulering med PID
Parameter A044
Værdi Indstilling Beskrivelse
Pumpe og ventilator applikationer hvor
0 Konstant moment
1 Variabelt moment
2 Valgfri karakteristik
3 Sensorless Vector kontrol
hastigheden er konstant og automatisk
energisparefunktion benyttes.
Pumpe og ventilator applikationer med
PID regulering
Benyttes ikke for pumpe og ventilator
applikationer
Kan benyttes for applikationer hvor der
kræves meget kraftige accelerationer og
decelerationer og PID regulering. Ved valg
af Sensorless Vector kontrol, skal der
foretages en Auto-tuning. Se Quick Guide
KJ/OEE-DK
4
Page 5
Application guide
1.2. Aktivering af PID regulering (Parameter A071)
Værdi Indstilling
0
1
2
1.3. Valg af reference setpunkt for PID (Parameter A001)
Værdi Indstilling Beskrivelse
1
2 Betjeningspanel Setpunkt indstilles i parameter F001
3
6 Puls indgang [Terminal EA] 24 Vdc niveau
MX2
Parameter A071
Ikke aktiveret
Aktiveret (Normal regulering)
Aktiveret (Proportional regulering)
Parameter A001
0 – 10 Vdc svare til 0 – 100%
Analog indgang [Terminal O]
Analog indgang [Terminal OI]
Faste referencer [Terminal 3 – 7]
Modbus kommunikation
[Terminal SP og SN]
Skalering foretages i parameter A011 til A015
(Fabriksindstilling)
4 – 20 mA. svare til 0 – 100%
Skalering foretages i parameter A101 til A105
Styres via digitale indgange.
Digitale indgange opsættes i parameter C003
til C007
Faste referencer indtastes i parameter A019
til A035
1.4. Valg af start/ stop (Parameter A002)
Parameter A002
Værdi Indstilling Beskrivelse
1 Digitale indgange [Terminal 1 og 2]
2 Betjeningspanel [RUN knap]
Modbus kommunikation
3
KJ/OEE-DK
[Terminal SP og SN]
(Fabriksindstilling)
5
Page 6
Application guide
1.5. Valg af feedback fra tryk/ flow transmitter (Parameter A076)
Værdi Indstilling Beskrivelse
0 Analog indgang [Terminal OI]
1 Analog indgang [Terminal O] 0 – 10 Vdc
3
4 Puls indgang ([Terminal EA] 24 Vdc niveau
1.6. Monitor
Parameter Beskrivelse Enhed
d001 Udgangsfrekvens [ Hz ]
d002 Udgangsstrøm [ Amp. ]
d004 Feedback fra tryk/ flow transmitter: 0 – 100 [ % ]
d014 Monitorering af optaget effekt [ kW]
MX2
Parameter A076
4 – 20 mA.
(Fabriksindstilling)
Modbus kommunikation
[Terminal SP og SN]
1.7. 123… Opsætning
Step Indstilling Parameter
1.. Aktivering af PID regulering Parameter A071 = 1 ( PID aktiveret)
2.. Opsætning af reguleringsmetode Parameter A044 = 1 (Variabelt moment)
3.. Indstilling af maksimal hastighed Parameter A004 = xx Hz
4.. Indstilling af motorbeskyttelse Parameter B012 = xx Amp.
5.. Valg af reference setpunkt for PID Parameter A001= 2 (Betjeningspanel)
6.. Valg af start/ stop Parameter A002 = 1 (Digitale indgange)
7.. Opsætning af rampe tider
8.. Indstilling af setpunkt Parameter F001 = xx.xx (Setpunkt 0 – 100%)
NOTE: Hvis reguleringen er urolig justeres P forstærkningen ned og/eller I tiden op.
Parameter F002 = 20-60 sek. (Acceleration)
Parameter F003 = 20-60 sek. (Deceleration)
KJ/OEE-DK
6
Page 7
Application guide
1.8. Relateret parameter
motorbeskyttelse
Stop metode b091
Hastighedssøgning
Skalering ad display A075 100% x Faktor (A075)
Indstilling af maksimal hastighed A004 0 – 400 Hz
Indstilling af motorbeskyttelse b012
Hastighedsgrænser
Justering af PID parameter
Begrænsning af PID udgang A078 Hysterese af setpunkt
PID feed forward A079 Aktiv
PID sleep funktion
Digitale udgange for max./min.
grænser af PID udgang.
MX2
Funktion Parameter Beskrivelse
C005 Indgang 5 sættes op til funktion 19 [PTC] Brug af PTC modstand
C085 Skaleringsfaktor for PTC indgang
00: Deceleration til stop
01: Friløb til stop
(Husk at opsætte hastighedssøgning)
b091 01: Friløb til stop
b088 Aktivering af hastighedssøgning
b029 Deceleration rate for søgning af hastighed
b030
A061 Max. hastighedsgrænse
A062 Min. hastighedsgrænse
A072 Proportional bånd
A073 Integrale tid
A074 Differential tid
A156 Frekvensgrænse
A157 Tidsforsinkelse
C021
C022
C026
C052 Max. grænse 0 – 100 %
C053 Min. grænse. 0 – 100%
01: Start fra Max. hastighed
(Andre kan vælges)
Amp.
Udg. [11] sættes op til funktion 31 [FBV]
Eller
Udg. [12] sættes op til funktion 31 [FBV]
Eller
Udg. [AL1, AL2] sættes op til funktion 31
[FBV]
KJ/OEE-DK
7
Page 8
Application guide
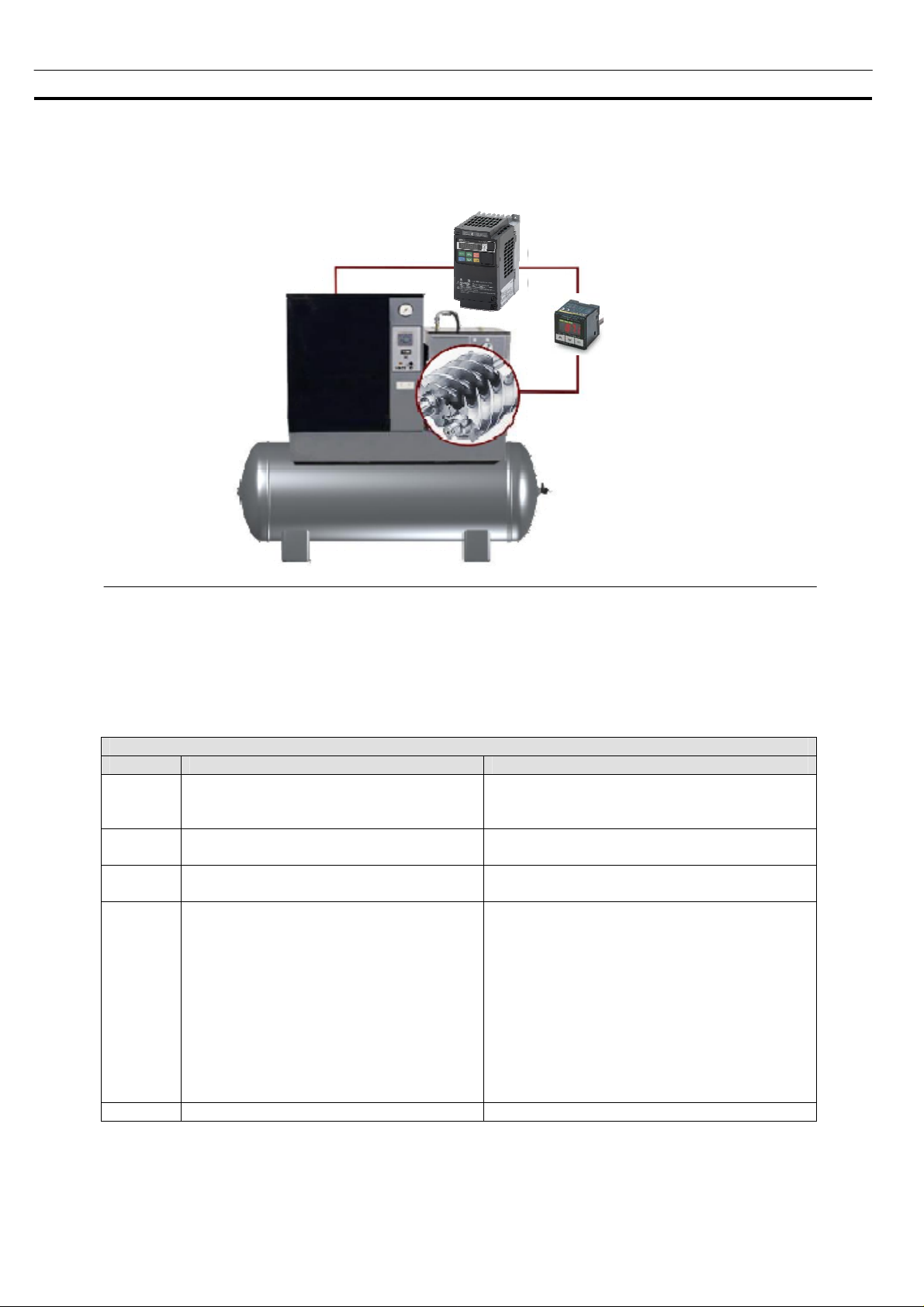
2. PID regulering på skrue kompressor
MX2
2.1. Valg af reguleringsmetode (ParameterA044):
For PID regulering på en skrue kompressor skal en passende V/f karakteristik vælges.
Med frekvensomformeren har vi mulighed for, at vælge 4 forskellige karakteristikker.
Karakteristikken indstilles i parameter A044: Vælg indstilling 3 for regulering med PID
Parameter A044
Værdi Indstilling Beskrivelse
Pumpe og ventilator applikationer hvor
0 Konstant moment
1 Variabelt moment
2 Valgfri karakteristik
3 Sensorless Vector kontrol
hastigheden er konstant og automatisk
energisparefunktion benyttes.
Pumpe og ventilator applikationer med PID
regulering
Benyttes ikke for pumpe og ventilator
applikationer
Benyttes for denne applikation, da
kompressoren som ofte kræver:
Lidt moment ved opstart, uden tryk i
kamret
Højt moment ved opstart, med tryk i
kamret
Ved valg af Sensorless Vector kontrol,
skal der foretages en Auto-tuning. Se
Quick Guide
KJ/OEE-DK
8
Page 9

Application guide
2.2. Aktivering af PID regulering (Parameter A071)
Værdi Indstilling
0
1
2
2.3. Valg af reference setpunkt for PID (Parameter A001)
Værdi Indstilling Beskrivelse
1
2 Betjeningspanel Setpunkt indstilles i parameter F001
3
6 Puls indgang [Terminal EA] 24 Vdc niveau
MX2
Parameter A071
Ikke aktiveret
Aktiveret (Normal regulering)
Aktiveret (Proportional regulering)
Parameter A001
0 – 10 Vdc svare til 0 – 100%
Analog indgang [Terminal O]
Analog indgang [Terminal OI]
Faste referencer [Terminal 3 – 7]
Modbus kommunikation
[Terminal SP og SN]
Skalering foretages i parameter A011 til A015
(Fabriksindstilling)
4 – 20 mA. svare til 0 – 100%
Skalering foretages i parameter A101 til A105
Styres via digitale indgange.
Digitale indgange sættes op i parameter
C003 til C007
Faste referencer indtastes i parameter A019
til A035
2.4. Valg af start/ stop (Parameter A002)
Parameter A002
Værdi Indstilling Beskrivelse
1 Digitale indgange [Terminal 1 og 2]
2 Betjeningspanel [RUN knap]
Modbus kommunikation
3
[Terminal SP og SN]
(Fabriksindstilling)
2.5. Valg af feedback fra tryk/ flow transmitter (Parameter A076)
Parameter A076
Værdi Indstilling Beskrivelse
0 Analog indgang [Terminal OI]
1 Analog indgang [Terminal O] 0 – 10 Vdc
3
4 Puls indgang ([Terminal EA] 24 Vdc niveau
Modbus kommunikation
[Terminal SP og SN]
4 – 20 mA.
(Fabriksindstilling)
KJ/OEE-DK
9
Page 10

Application guide
2.6. Monitor
Parameter Beskrivelse Enhed
d001 Udgangsfrekvens [ Hz ]
d002 Udgangsstrøm [ Amp. ]
d004 Feedback fra tryk / flow transmitter: 0 – 100 [ % ]
d014 Monitorering af optaget effekt [ kW]
2.7. 123… Opsætning
Step Beskrivelse Parameter
1.. Aktivering af PID regulering Parameter A071 = 1 ( PID aktiveret)
2.. Opsætning af reguleringsmetode Parameter A044 = 3 (Sensorless Vector kontrol)
3.. Indstilling af maksimal hastighed Parameter A004 = 50 Hz
4.. Indstilling af motorbeskyttelse Parameter B012 = xx Amp.
5.. Valg af reference setpunkt for PID Parameter A001= 2 (Betjeningspanel)
6.. Valg af start/ stop Parameter A002 = 1 (Digitale indgange)
7.. Opsætning af rampe tider
8.. Indstilling af setpunkt Parameter F001 = xx.xx (Setpunklt 0 – 100%)
NOTE: Hvis reguleringen er urolig justeres P forstærkningen ned og/eller I tiden op.
MX2
Parameter F002 = 2 - 10 sek. (Acceleration)
Parameter F003 = 2 - 10 sek.
(Deceleration)
KJ/OEE-DK
10
Page 11

Application guide
2.8. Relateret parameter
motorbeskyttelse
Skalering ad display A075 100% x Faktor (A075)
Indstilling af maksimal hastighed A004 0 – 400 Hz
Moment grænse (Frem (cw)/ power) b041 0 – 255 %
Moment grænse (Frem (cw)/
regenerering)
Moment grænse (Bak (ccw)/ power) b043 0 – 255 %
Moment grænse (Bak (ccw) /
regenerering)
Indstilling af motorbeskyttelse b012
Hastighedsgrænser
Justering af PID parameter
Begrænsning af PID udgang A078 Hysterese af setpunkt
PID feed forward A079 Aktiv
PID sleep funktion
Digitale udgange for max./min.
grænser af PID udgang.
MX2
Funktion Parameter Beskrivelse
C005 Indgang 5 sættes op til funktion 19 [PTC] Brug af PTC modstand
C085 Skalerings faktor for PTC indgang
b042 0 – 255 %
b044 0 – 255 %
Amp.
A061 Max. hastighedsgrænse
A062 Min. hastighedsgrænse
A072 Proportional bånd
A073 Integrale tid
A074 Differential tid
A156 Frekvensgrænse
A157 Tidsforsinkelse
C021
C022
C026
C052 Max. grænse 0 – 100 %
C053 Min. grænse. 0 – 100%
Udg. [11] sættes op til funktion 31 [FBV]
Eller
Udg. [12] sættes op til funktion 31 [FBV]
Eller
Udg. [AL1, AL2] sættes op til funktion 31
[FBV]
KJ/OEE-DK
11
Page 12

Application guide
3. Energisparefunktion
Denne funktion gør det muligt for frekvensomformeren, at levere mindst mulig effekt til motoren, for at
opretholde hastighed ved en given frekvens.
Funktionen virker bedst, når kørselshastigheden er konstant, og konstant moment karakteristikken
benyttes. Frekvensomformeren vil da justere ned for udgangsspændingen, som automatisk tilpasser
momentet.
Moment
MX2
Spjæld reguleret
ventilator
25Hz 50Hz
3.1.
Step Indstilling Beskrivelse
123… Opsætning
1..
2..
Aktivering af automatisk
energisparefunktion
Evt. justering af responstid for
regulering af spænding
A085 = 01 Aktivering
A086 = xx styrer grader af dens virkning.
(Fabriksindstilling = 50)
En indstilling på 0,0 giver langsom respons, med
høj nøjagtighed, mens en indstilling på 100 vil
give en hurtig respons med lav nøjagtighed.
Frek. regulering
med
energisparefunktion
Flow
KJ/OEE-DK
12
Page 13

Application guide
4. Simpel positionering med MX2
Med simpel positionering, er det muligt at benytte op til 8 indbyggede positioner i
frekvensomformeren. Alle positioner er som udgangspunkt, absolutte og vil kører efter nedenstående
skema. Nulstilling af aktuel position foretages med digital indgang eller via kommunikationen, hvis
dette benyttes.
Efter en nulpunktskørsel, nulstilles den aktuelle position.
Pos. 1 = -1500
MX2
Pos. 0 = 0 Pos. 3 = 3000
Pos. 2 = 1000
Eks. Produkt står som udgangspunkt ved pos. 0, herefter køres nedenstående kørsler:
Kald af pos. 3: Motoren kører automatisk i positiv retning indtil position 3000 er opnået
Kald af pos. 1: Motoren kører automatisk i negativ retning indtil position -1500 er opnået
Kald af pos. 2: Motoren kører automatisk i positiv retning indtil position 1000 er opnået
Kald af pos. 0: Motoren kører automatisk i negativ retning indtil position 0 er opnået
KJ/OEE-DK
13
Page 14

g
Application guide
En kørsel afvikles som nedenstående:
Run signal ON
MX2
Position start
Hastighed
Hvis positionen er så lille at den ønskede hastighed ikke
kan opnås, decelererer frekvens omformeren
Position færdi
ON
Krybe hastighed
(P015)
ON
Position
4.1. Valg af reguleringsmetode (ParameterA044):
For kørsel med positionering skal en passende V/f karakteristik vælges.
Med frekvensomformeren har vi mulighed for, at vælge 4 forskellige karakteristikker.
Karakteristikken indstilles i parameter A044: Vælg indstilling 3 for kørsel med positionering. Indstilling
2 (Konstant moment) kan vælges, dog vil frekvensomformeren ikke regulere så konstant.
Parameter A044
Værdi Indstilling Beskrivelse
Benyttes for denne applikation, da
frekvensomformeren skal have fuld kontrol
over motoren, samt skal kunne kører
kontrolleret ved meget lave hastigheder.
3 Sensorless Vector kontrol
Ved valg af Sensorless Vector kontrol,
skal der foretages en Auto-tuning. Se
Quick Guide
4.2. Aktivering af simpel positionering (Parameter P012)
Parameter P012
Værdi Beskrivelse
00 Simpel positionering ikke aktiv
01 Simpel positionering aktiv
KJ/OEE-DK
14
Page 15

Application guide
4.3. Aktivering af encoder indgang (Parameter P003)
Værdi Beskrivelse
00 For kørsel med encoder feedback
4.4. Valg af encoder signal (Pamameter P004)
Værdi Beskrivelse
00 Enkel fase [A], Terminal [EA]
01 A/B fase (90° forskydning) 1 ([EA] og [EB]
02 A/B fase (90° forskydning) 2 ([EA] og [EB]
03 Enkel fase [A], Terminal [EA] og retningssignal [EB]
4.5. Opsætning af encoder opløsning (Parameter P011)
Værdi Beskrivelse
32 ~
1024
MX2
Parameter P003
Parameter P004
Parameter P011
Encoder opløsning pr. motor omdrejning.
4.6. Opsætning af krybe hastighed (Parameter P015)
Parameter P015
Værdi Beskrivelse
0,50 ~10.00 Krybe hastighed [Hz]
Note: Justeres op/ned, hvis positionen ikke er nøjagtig.
4.7. Opsætning af maksimal hastighed (Parameter P055)
Parameter P055
Værdi Beskrivelse
1.0~32.0 Maksimal pulshastighed fra encoder [Hz]
4.8. Valg af aktivering af positioner (Parameter A002)
Parameter P004
Værdi Beskrivelse
01 Digitale indgange [Terminal 3 til 7]
03 Modbus kommunikation [Terminal SP og SN]
KJ/OEE-DK
15
Page 16

Application guide
4.9. Opsætning af digitale indgange (Parameter C003 ~ C007)
Terminal Parameter Beskrivelse
3 C003 66…[CP1] multi positions switch (1)
4 C004 67…[CP1] multi positions switch (2)
5 C005 68…[CP1] multi positions switch (3)
6 C006 69…[ORL] Origin limit switch ved nulpunktskørsel
7 C007 70…[ORG] Start af nulpunkt kørsel
4.10. Nulpunktskørsel (Parameter P068 ~ 071)
Parameter Beskrivelse Værdi
P068 Nulpunkt kørselsmetode
P069 Nulpunkt kørselsretning
P070 Søgning ved lav hast 0 til 10 Hz.
P071 Søgning ved høj hast 0 til 400 Hz.
MX2
Parameter C001 ~ C007
Note: Ovenstående opsætning er et forslag.
Parameter P068 ~ P071
00…Lav hastighed
01…Høj hastighed
00…Frem (cw)
01…Bak (ccw)
Note: Nulpunktskørsel startes som eks. i 6.1.8 med digital indgang 7. Ved aktivering af
digital indgang 6 (Nulpunktsføler), er nulpunktskørselen færdig og aktuel position
nulstilles.
KJ/OEE-DK
16
Page 17

Application guide
4.11. 123… Opsætning
Step Beskrivelse
1.. Opsætning af reguleringsmetode A044 = 3 (Sensorless Vector kontrol)
2.. Aktivering af simpel positionering P012 = 00: Simpel positionering aktiv
3.. Aktivering af encoder indgang P003 = 00: For kørsel med encoder feedback
4.. Valg af encoder signal
5.. Opsætning af encoder opløsning P011 = Encoder opløsning pr. motor omdrejning.
6.. Opsætning af krybe hastighed P015 = Krybe hastighed [Hz]
7..
8.. Valg af aktivering af positioner P004 = Digitale indgange [Terminal 3 til 7]
9..
10.. Nulpunktskørsel
MX2
P004 = 01: A/B fase (90° forskydning) 1 ([EA] og
[EB]
Opsætning af maksimal hastighed
ved positionering
Opsætning af digitale indgange
P055 = Maksimal pulshastighed fra encoder [Hz]
Term. 3: C003 = 66…[CP1] multi positions switch (1)
Term. 4: C004 = 67…[CP1] multi positions switch (2)
Term. 5: 69…[ORL] Origin limit switch ved
nulpunktskørsel
Term. 6: 70…[ORG] Start af nulpunktskørsel
P068: 00…Lav hastighed
P069: 00…Frem (cw)
P070: 5 Hz lav hastighed
4.12. Monitor
Paramete
r
d001 Udgangsfrekvens [ Hz ]
d002 Udgangsstrøm [ Amp. ]
d003 Rotationsretning 0: Stop, 1: Frem, 2: Bak
d029 Ønsket position Pulser
d030 Aktuel position Pulser
Beskrivelse Enhed
4.13. Relateret parameter
Funktion Parameter Beskrivelse
Software limit
Indstilling af maksimal hastighed A004 0 – 400 Hz
Indstilling af motorbeskyttelse b012
Indstilling af motorbeskyttelse B012 Amp.
Hastighedsgrænser
Mekanisk bremse Se afsnit ” Kontrol af kørsel med mekanisk bremse”
P072 Limit frem (cw): 0 til 268435455
P073 Limit bak (ccw): -268435455 til 0
Amp.
A061 Max. hastighedsgrænse
A062 Min. hastighedsgrænse
KJ/OEE-DK
17
Page 18

Application guide
4.14. Fejlkoder
Fejlkode Beskrivelse Årsag / Afhjælpning
E80
E81
E83
Kode Beskrivelse
0
1
2
3
4
5
6
7
8
MX2
Fejlkode
Encoder ikke forbundet
For høj motor hastighed
Positioneringsvindue fejl
Omformer Status
Under opstart eller initialisering
Stop
Deceleration
Konstant hastighed
Acceleration
0Hz reference og start kommando
Start
DC bremsning
Overbelastning
Check om encoderen er forbundet på
EA / EB / L. Signaler skal være 24 Vdc
Hvis motor hastigheden >= maksimal
frekvens (A004) x fejldetektering niveau
(P026) ", vil frekvensomformeren stoppe og
fejlkoden vises.
Hvis position overstiger positioneringsvindue
(P072-P073), vil frekvensomformeren stoppe
og fejlkoden vises.
KJ/OEE-DK
18
Page 19

Application guide
5. Kontrol af kørsel med mekanisk bremse
Med bremse kontrol er det muligt at styrer en ekstern bremse for eks. lodrette bevægelser. Funktionen
kan kombineres med kørsel, hvor simpel positionering benyttes.
For aktivering af denne funktion, skal parameter B120 = 01
MX2
KJ/OEE-DK
19
Page 20

Application guide
5.1. Beskrivelse
1. Når frekvensomformeren får start signal, accelererer motoren i tiden (F002) op til Brake
Release Frequency Setting (B125).
2. Når motoren er accelereret op til hastigheden ”Release Frequency Setting”, venter
frekvensomformeren i tiden (b121), derefter åbnes bremsen med en digital udgang (19: BRK).
Hvis frekvensomformerens udgangsstrøm, der er indtastet i b126, ikke er opnået, vil bremsen
ikke blive åbnet og et fejlsignal (20: BER) vil blive aktiveret. Denne funktion sættes op via en
digital udgang C021 og C022.
3. Når bremsen er åbnet med den digitale udgang (19: BRK), forventer frekvensomformeren
signal om at bremsen er åben. Signalet fra bremsen indsættes på en digital indgang og
programmeres til funktion (44: BOK) signalet skal komme indenfor den indtastede tid (b124).
Hvis frekvensomformeren ikke modtager signalet fra bremsen inden tiden b124 er gået, vil
fejlsignalet (20: BER) blive aktiveret. Denne funktion sættes op via en digital udgang.
4. Når signalet fra bremsen er registreret inden for den angivne tid i b124, startes ventetiden
b122. Når tiden er gået, accelerere motoren op til den ønskede hastighed.
5. Når frekvensomformeren stoppes, decelerere motoren i tiden (F003) ned til hastigheden
indtastet i b127. Når motoren når hastigheden i b127, lukkes bremsen til motoren og bremse
ventetiden b124 startes.
6. Hvis frekvensomformeren ikke registrerer indgangssignalet (44:BOK) fra bremsen inden tiden
b124 er gået, vil fejlsignalet (20: BER) blive aktiveret. Denne funktion sættes op via en digital
udgang.
7. Når frekvensomformeren har registreret signalet (44: BOK), startes tiden b123. Når tiden er
gået, decelerere motoren til 0 Hz.
MX2
Note: Ovenstående kørsel forudsætter at en digital indgang benyttes for indikation af
om bremsen er åben (44: BOK).
Funktionen sættes op på en digital indgang terminal 1 til 7 (C001 ~ C007).
Hvis BOK signalet ikke er opsat til en digital indgang, vil:
Tiden i b122 startes når bremsen er åben under start
Tiden i b123 startes når bremsen er lukket ved stop
5.2. Valg af hastighedsreference (Parameter A001)
Parameter A001
Værdi Indstilling Beskrivelse
0 – 10 Vdc svare til 0 – 100%
Analog indgang [Terminal O]
Analog indgang [Terminal OI]
1
Faste referencer [Terminal 3 – 7]
2 Betjeningspanel Setpunkt indstilles i parameter F001
3
6 Puls indgang [Terminal EA]
KJ/OEE-DK
Modbus kommunikation
[Terminal SP og SN]
Skalering foretages i parameter A011 til A015
(Fabriksindstilling)
4 – 20 mA. svare til 0 – 100%
Skalering foretages i parameter A101 til A105
Styres via digitale indgange.
Digitale indgange sættes op i parameter
C003 til C007
Faste referencer indtastes i parameter A019
til A035
20
Page 21

Application guide
5.3. Valg af start/ stop (Parameter A002)
Værdi Indstilling Beskrivelse
1 Digitale indgange [Terminal 1 og 2]
2 Betjeningspanel [RUN knap]
3
5.4. Opsætning af digital indgang for registrering om bremsen er åben
Værdi Beskrivelse
44 BOK: Bremse godkendelse signal
MX2
Parameter A002
(Fabriksindstilling)
Modbus kommunikation
[Terminal SP og SN]
(Parameter C001 – C007)
Parameter C001 – C007
5.5. Opsætning af digital udgang for bremse fejl
(Parameter C001 – C007)
Parameter C021, C022 eller C026
Værdi Beskrivelse
20 BER: Bremse fejl
5.6. Opsætning af digital udgang for aktivering af bremse
(Parameter C021, C022 – C026)
Parameter C021, C022 eller C026
Værdi Beskrivelse
19 BRK: Bremse aktiveringssignal
5.7. Aktivering af bremse kontrol (Parameter b120)
Parameter b120
Værdi Beskrivelse
0 Bremse kontrol aktiveret
1 Bremse kontrol frakoblet
5.8. Bremse ventetid før bremsen åbnes (Parameter b121)
Parameter b121
Værdi Beskrivelse
0,00 ~ 5,00 Bremse ventetid før bremsen åbnes [Sek.]
KJ/OEE-DK
21
Page 22

Application guide
5.9. Bremse ventetid før bremsen åbnes, før acceleration (Parameter b122)
Værdi Beskrivelse
0,00 ~ 5,00 Bremse ventetid før bremsen åbnes, før acceleration [Sek.]
5.10. Bremse ventetid før bremsen lukkes, før stop (Parameter b123)
Værdi Beskrivelse
0,00 ~ 5,00 Bremse ventetid før bremsen lukkes, før stop [Sek.]
5.11. Bremse ventetid før bremsen lukkes, når bremse godkendelse
Værdi Beskrivelse
0,00 ~ 5,00 Bremse ventetid før bremsen lukkes, når bremse godkendelse registreres [Sek.]
MX2
Parameter b122
Parameter b123
registreres (Parameter b124)
Parameter b124
5.12. Hastighed før bremsen åbnes (Parameter b125)
Parameter b125
Værdi Beskrivelse
0,00 ~ 400.00 Hastighed før bremsen åbnes [Hz]
5.13. Udgangsstrøm før bremsen åbnes (Parameter b126)
Parameter b126
Værdi Beskrivelse
0,00 ~ xx,xx Udgangsstrøm før bremsen åbnes [A]
KJ/OEE-DK
22
Page 23

Application guide
5.14. 123… Opsætning
Step Indstilling Beskrivelse
1.. Valg af hastighedsreference A001 = XX
2.. Valg af start/ stop A002 = XX
3..
4..
5..
6.. Aktivering af bremse kontrol b120: 00 Bremse kontrol aktiveret
7..
8..
9..
10..
11.. Hastighed før bremsen åbnes b125: 1 Hz
12 .. Udgangsstrøm før bremsen åbnes b126: xx A
MX2
Opsætning af digital indgang for
registrering af om bremsen er
åben
Opsætning af digital udgang for
aktivering af bremse
Opsætning af digital udgang for
bremse
Bremse ventetid før bremsen
åbnes [Sek.]
Bremse ventetid før bremsen
åbnes, før acceleration
Bremse ventetid før bremsen
lukkes, før stop
Bremse ventetid før bremsen
lukkes, når bremse godkendelse
registreres
Term. 3: C003 = 44 BOK: Bremse godkendelse
signal
Term. 11: C021 = 19 BRK: Bremse aktiveringssignal
Term. 12: C022 = 20 BER: Bremse fejl
b121: 0,5 sek.
b122: 0,5 sek.
b123: 0,5 sek.
b124: 0,5 sek.
KJ/OEE-DK
23
Page 24

Application guide
6. Moment kontrol
MX2
6.1. Valg af regulering metode (ParameterA044):
For kørsel med moment kontrol skal en passende v/f karakteristik vælges.
Med frekvensomformeren har vi mulighed for, at vælge 4 forskellige karakteristikker.
Karakteristikken indstilles i parameter A044: Vælg indstilling 3 for kørsel med moment kontrol, idet
frekvensomformeren skal have fuld kontrol over feltet i motoren for at tilpasse momentet.
Parameter A044
Værdi Indstilling Beskrivelse
Benyttes for denne applikation, da
frekvensomformeren skal have fuld kontrol
over motoren, samt skal kunne kører
kontrolleret ved meget lave hastigheder.
3 Sensorless Vector kontrol
Ved valg af Sensorless Vector kontrol,
skal der foretages en Auto-tuning. Se
Quick Guide
6.2. Valg af moment reference (Parameter P033)
Parameter P033
Værdi Indstilling Beskrivelse
0 – 10 Vdc svare til 0 – 100%
1 Analog indgang [Terminal O]
3 Analog indgang [Terminal OI]
2 Betjeningspanel Setpunkt indstilles i parameter P034
Skalering foretages i parameter A011 til A015
(Fabriksindstilling)
4 – 20 mA. svare til 0 – 100%
Skalering foretages i parameter A101 til A105
KJ/OEE-DK
24
Page 25

Application guide
6.3. Valg af start/ stop (Parameter A002)
Værdi Indstilling Beskrivelse
1 Digitale indgange [Terminal 1 og 2]
2 Betjeningspanel [RUN knap]
3
6.4. Aktivering af moment kontrol (Parameter C001 – C007)
Værdi Beskrivelse
52 ATR: Moment kontrol aktiv
MX2
Parameter A002
(Fabriksindstilling)
Modbus kommunikation
[Terminal SP og SN]
Parameter C001 – C007
Når digital indgang er høj, er moment kontrol
aktiv
6.5. Hastighedsgrænse ved moment kontrol ved kørsel frem (Parameter P039)
Parameter P039
Værdi Beskrivelse
0 ~ 120 Moment hastighedsgrænse frem [Hz]
6.6. Hastighedsgrænse ved moment kontrol ved kørsel bak (Parameter P040)
Parameter P040
Værdi Beskrivelse
0 ~ 120 Moment hastighedsgrænse bak (ccw) [Hz]
6.7. 123… Opsætning
Step Beskrivelse
1.. Opsætning af reguleringsmetode A044 = 3 (Sensorless Vector kontrol)
2.. Valg af moment reference P033 = 2: Betjeningspanel [P034]
3.. Valg af start/ stop A002 = 2: Betjeningspanel [RUN knap]
4.. Aktivering af moment kontrol Term. 3: C003 = 52 ATR: moment kontrol aktiv
5..
6..
Hastighedsgrænse ved moment
kontrol ved kørsel frem
Hastighedsgrænse ved moment
kontrol ved kørsel baglæns
P039 = 10 %
P040 = 10 %
KJ/OEE-DK
25
Page 26

Application guide
Betingelser:
MX2
Alle software eksempler, program forslag samt principdiagrammer kan og bør ikke
opfattes som direkte implementerbare i endelige applikationer.
Hvis der ændres i standard menuer samt prædefinerede opsætninger indestår OMRON
ikke for ansvar.
Der gøres opmærksom på at Omron Electronics A/S ikke kan holdes ansvarlig for
eventuelle trykfejl eller tab af data.
Visse programeksempler er udviklet til at bruge bestemte hukommelses områder. Dette
medfører at der skal tages backup af de hukommelses områder som ikke må gå tabt.
Ved brug af Omron Electronics A/S programeksempler i egne source koder indestår
OMRON ikke for deres rigtighed.
KJ/OEE-DK
26
 Loading...
Loading...