

Omron JUNMA ML-II DATASHEET [es]
SJDE-@ANA-OY
Servodrive Junma ML-II
Un nuevo concepto de sencillez
Ahorre espacio, ahorre cableado, ahorre tiempo
• Tamaño ultracompacto para reducir el espacio necesario en el panel
• Tecnología tuning-less: no es necesario configurar
parámetros de ganancia
• Par máximo 300% del nominal durante 3 segundos
• Respuesta rápida, alta velocidad y elevada precisión
• Versión con puerto MECHATROLINK-II incorporado
• MECHATROLINK-II simplifica el cableado y reduce el
tiempo de instalación
• MECHATROLINK-II proporciona acceso al sistema
desde un solo punto
Valores nominales
• 230 Vc.a. monofásica 100 W a 750 W (2,39 Nm)
Servosistemas de c.a.
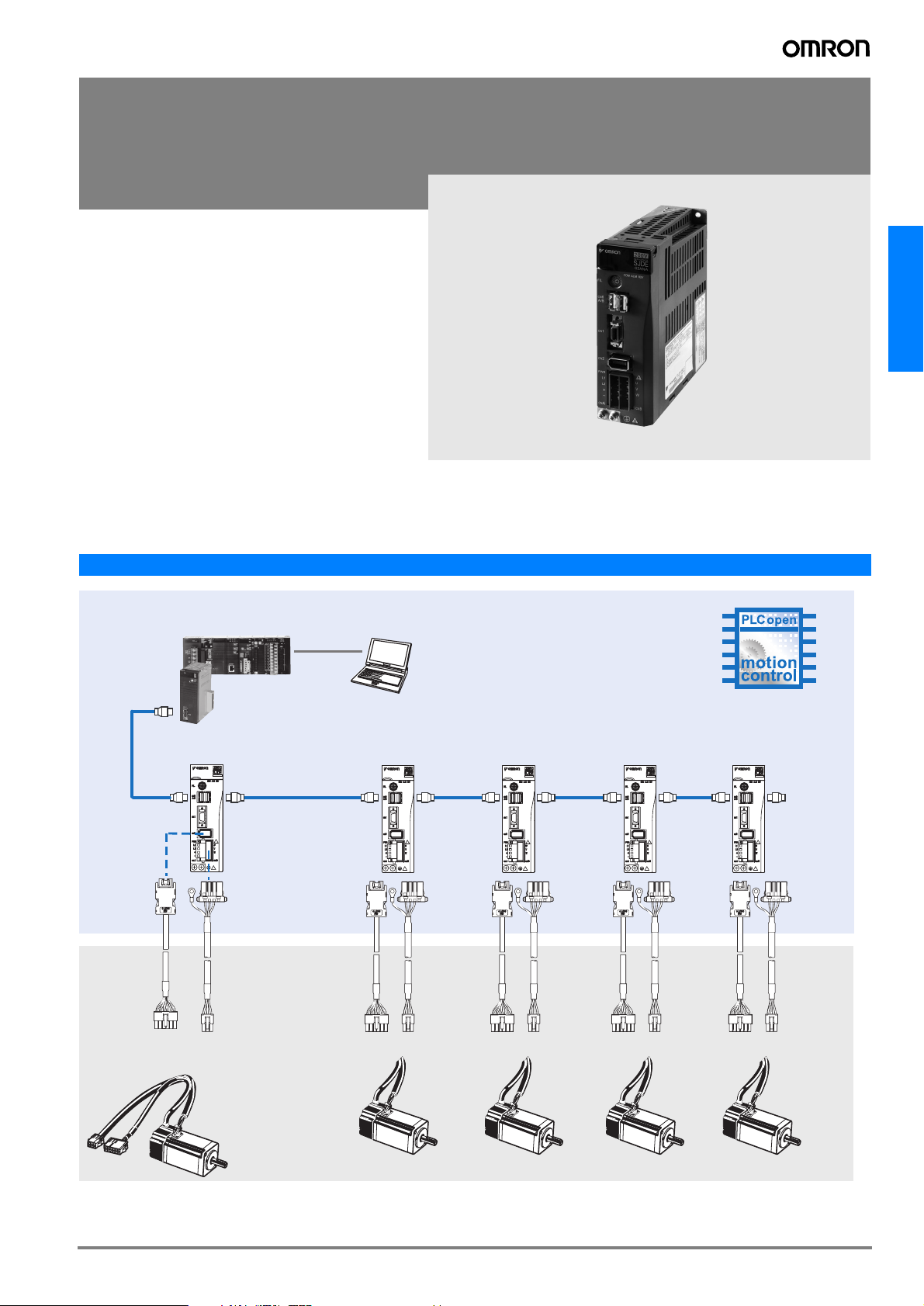
Configuración del sistema
Configuración de Servodrive Junma de MECHATROLINK-II
PLC de la serie CJ
Software
de PC: CX-One
Serie CJ1
Unidad de control de posición
CJ1W-NCF71
Cable de
encoder
Servodrive
Junma ML-II
MECHATROLINK-II
Cable de
potencia
Servodrive
Junma ML-II
Servodrive
Junma ML-II
Servodrive
Junma ML-II
Servodrive
Junma ML-II
Resistencia
de terminación
Servomotor Junma
3.000 rpm
(100-750 W)
165Servodrive Junma ML-II
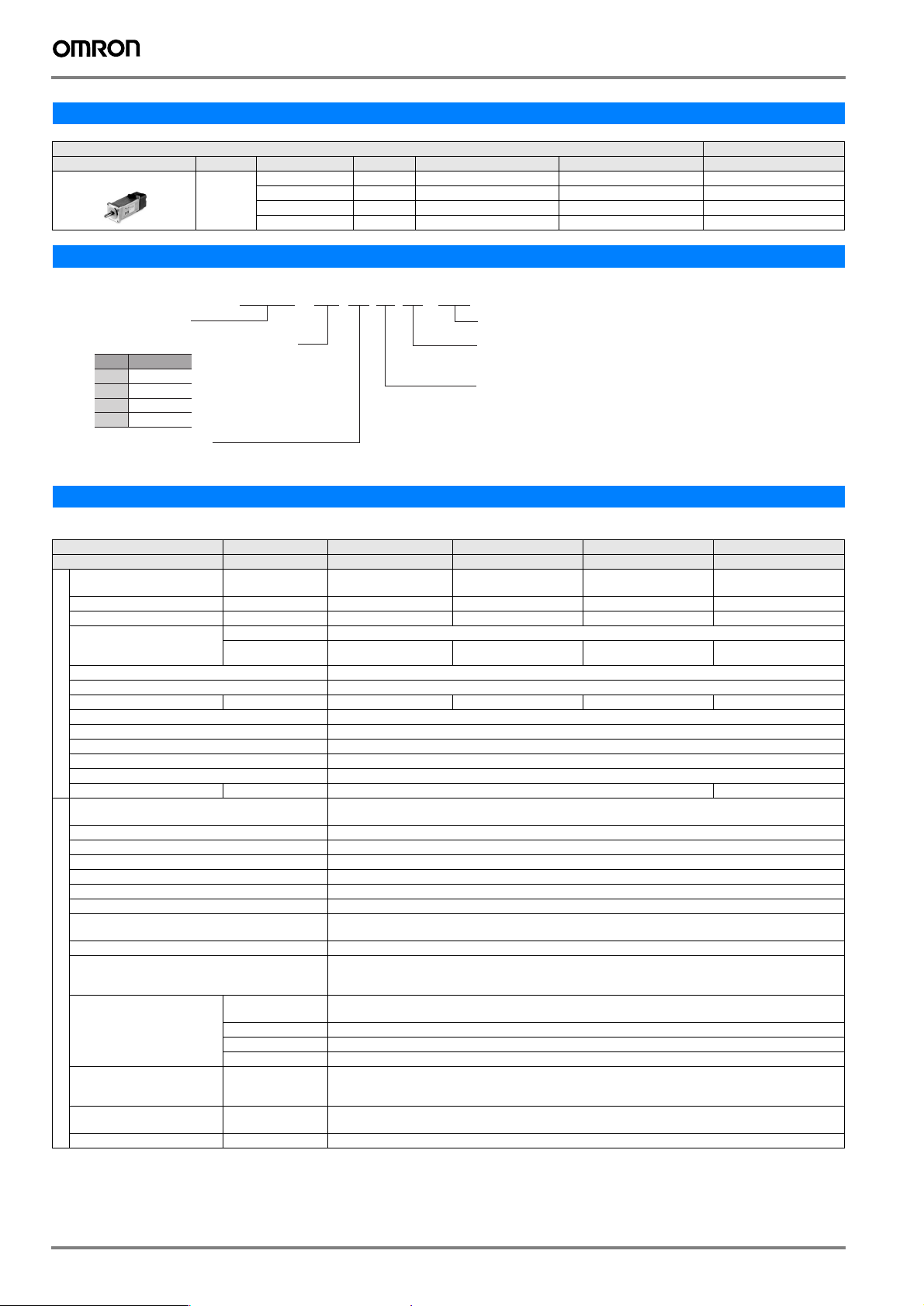
Combinación de servomotor/servodrive
A
Servomotor JUNMA Servodrive Junma
SJME- (3000 min
–1
) 200 V 0,318 Nm 100 W SJME-01AMB41-OY SJME-01AMB4C-OY SJDE-01ANA-OY
Tensión Par nominal Capacidad Modelo sin freno Modelo con freno MECHATROLINK-II
0,637 Nm 200 W SJME-02AMB41-OY SJME-02AMB4C-OY SJDE-02ANA-OY
1,27 Nm 400 W SJME-04AMB41-OY SJME-04AMB4C-OY SJDE-04ANA-OY
2,39 Nm 750 W SJME-08AMB41-OY SJME-08AMB4C-OY SJDE-08ANA-OY
Designación de tipo de servodrive
SJDE - 02 A N A - OY
Servodrive JUNMA
Capacidad máx. aplicable del servomotor
Código
Salida (W)
100
01
200
02
400
04
750
08
Tensión de alimentación
: 200 Vc.a.
Especificaciones del servodrive
Servodrive Junma MECHATROLINK-II
Tipo de servodrive SJDE- @ 01ANA-OY 02ANA-OY 04ANA-OY 08ANA-OY
Servomotor aplicable SJME-@ 01A@ 02A@ 04A@ 08A@
Capacidad máx. aplicable del
motor
Corriente de salida permanente Arms 0,84 1,1 2,0 3,7
Corriente de salida máx. Arms 2,5 3,3 6,0 11,1
Alimentación de entrada
(Cableado del circuito principal
y de control)
Método de control Control PWM
Realimentación Encoder incremental analógico (equivalente a incremental de 13 bits)
Inercia de carga tolerable
Temperatura de uso/almacenamiento 0 a +55 °C / -20 a 70 °C
Humedad de uso/almacenamiento 90% de HR o inferior (sin condensación)
Especificaciones básicas
Altitud 1000 m como máximo por encima del nivel del mar
Resistencia a vibraciones/golpes 4.9m/s
Configuración Montado en base
Peso aprox. Kg 1,0 1,4
Freno dinámico (DB) Opera al caer la alimentación, alarma del servo, servo a OFF. (OFF después de parada del motor; ON cuan-
Proceso regenerativo Opcional (si la energía regenerada es demasiado alta instale una Unidad regenerativa JUSP-RG08D)
Función Over-travel P_OT, N_OT
Parada de emergencia Parada de emergencia (E-STP)
Display de LEDs 4 LEDs (PWR, RDY, COM, ALM)
Monitor de MECHATROLINK-II Bajo comunicaciones MECHATROLINK-II: LED COM (iluminado)
Monitor de servo ON/OFF Con servo OFF: LED RDY (apagado), con servo ON : LED RDY (intermitente)
Monitor de estado de alimentación Estado OFF de la alimentación del circuito de control/potencia: LED PWR (apagado)
Reductor electrónico 0,01< A/B<100
Protección Sobrecorriente, sobretensión, bajo voltaje, sobrecarga, error de sensor del circuito principal, error de tem-
Comunicaciones
MECHATROLINK
Funciones incorporadas
Entrada de comando MECHATROLINK
Señal de entrada de secuencia Entrada fija 5 puntos (diseño fijo: señal de registro, señal de búsqueda de origen, señal de inhibición de marcha directa,
Señal de salida de secuencia Salida fija 2 puntos (diseño fijo: alarma de servo, bloqueo de freno)
W 100 200 400 750
Tensión Monofásico, 200 a 230 Vc.a., + 10 a -15% (50/60 Hz)
Capacidad kVA 0,40 0,75 1,2 2,2
*1
2
kg⋅m
do la alimentación del motor está en OFF).
Estado ON de la alimentación del circuito de control/potencia: LED PWR (encendido)
peratura de la tarjeta, error de seguimiento, sobrevelocidad, error de señal de encoder, protección contra
Protocolo de comunicaciones
Tasa de transmisión 10 Mbps
Ciclo de transmisión 1ms, 1,5ms, 2ms, 3ms, 4ms
Longitud de datos 17 bytes y 32 bytes
comunicaciones
Over-travel, error del sistema, error de parámetro
MECHATROLINK-II
Comandos MECHATROLINK-II
(Para comandos de secuencia, movimiento, configuración/referencia de datos, monitorización, ajuste y
otros)
señal de inhibición de marcha inversa, señal de parada de emergencia)
-4
0,6 × 10
2
(0.5G) / 19.6m/s2 (2G)
OMRON YASKAWA Motion Control BV
Revisión de diseño
A: Estándar
Especificaciones de la interfaz de control
N: MECHATROLINK-II
P: Entrada de pulsos
3,0 × 10
-4
5,0 × 10
-4
10,0 × 10
-4
Nota: *1. Valor sin unidad de regeneración externa
166 Servosistemas de c.a.
 Loading...
Loading...