

Omron JUNMA ML-II User Manual
SJDE-@ANA-OY
Servodriver Junma ML-II
Une nouvelle conception de drivers
Gain de place, de câblage et de temps
• Driver ultra compact pour occuper moins d'espace
sur le panneau
• Technologie sans réglage, aucun paramètre de gain
ne doit être défini
• Couple maximal : 300 % du couple nominal pendant
3 secondes
• Réponse rapide, grande vitesse, couple élevé et
haute précision
• Version de driver avec port MECHATROLINK-II
intégré
• MECHATROLINK-II simplifie le câblage et réduit le
temps d'installation
• MECHATROLINK-II donne accès au système à partir
d'un point unique
Puissances
• 230 Vc.a. monophasé 100 W à 750 W (2,39 Nm)
Servomoteurs c.a.
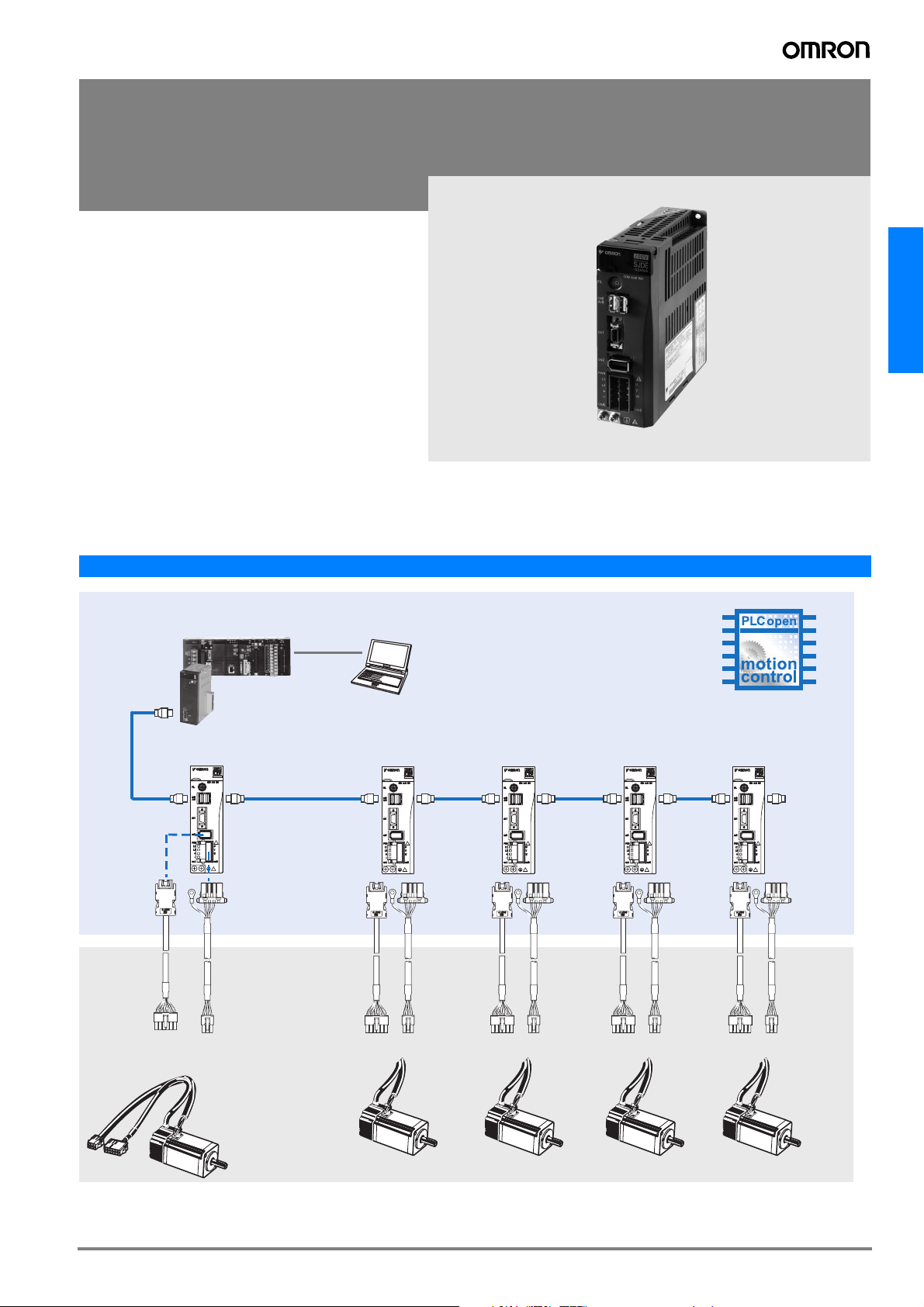
Configuration système
Configuration du servodriver Junma MECHATROLINK-II
API Série CJ
Série CJ1
Carte de contrôle de position
CJ1W-NCF71
Câble
codeur
Servodriver
Junma ML-II
MECHATROLINK-II
Câble
d'alimentation
Servodriver
Junma ML-II
Logiciel
PC : CX-One
Servodriver
Junma ML-II
Servodriver
Junma ML-II
Servodriver
Junma ML-II
Terminaison
Servomoteur Junma
3000 tr/mn
(100 à 750 W)
165Servodriver Junma ML-II
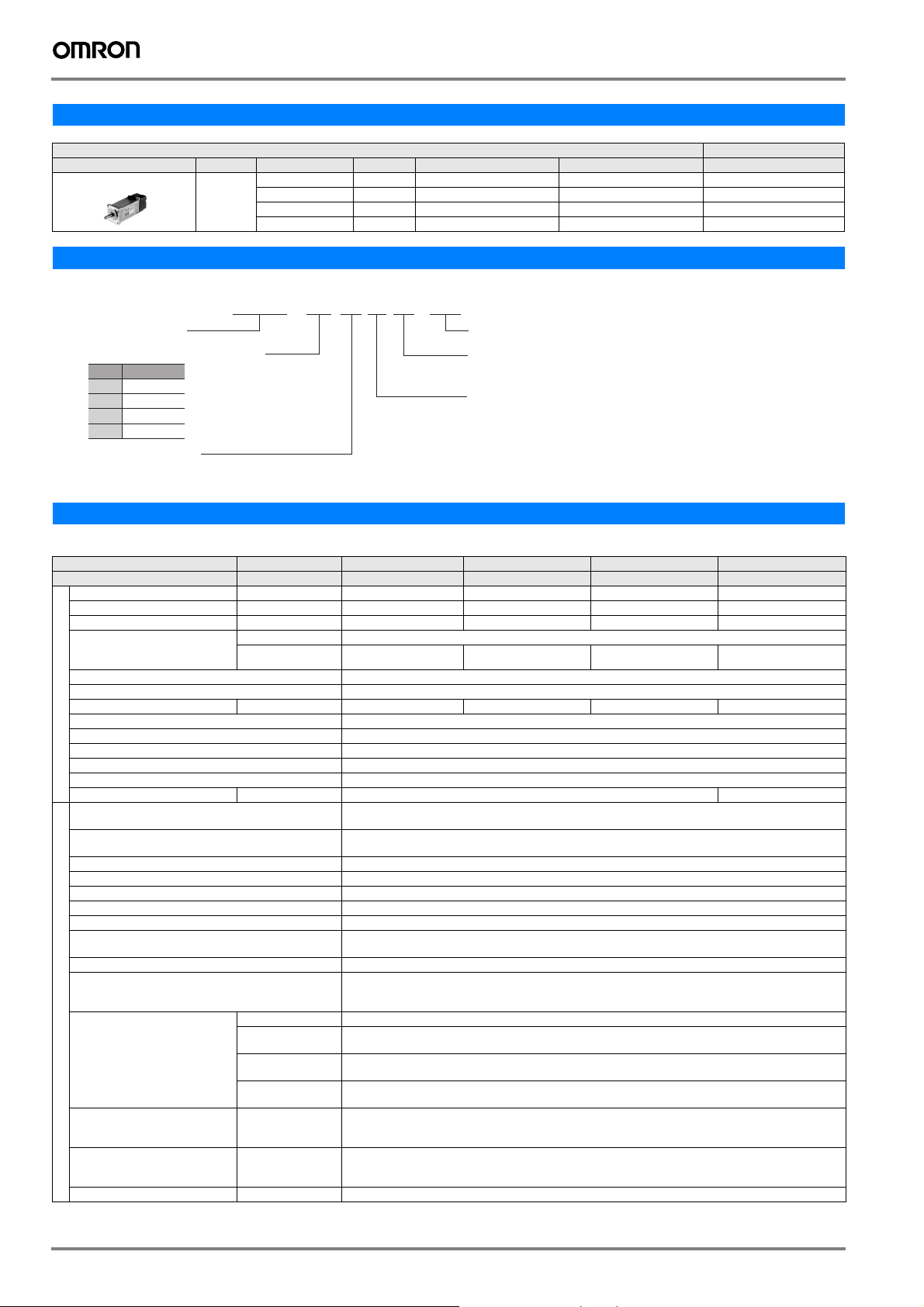
Combinaison servomoteur / servodriver
A
Servomoteur Junma Servodriver Junma
SJME- (3000 tr/min) 200 V 0,318 Nm 100 W SJME-01AMB41-OY SJME-01AMB4C-OY SJDE-01ANA-OY
Tension Couple nominal Capacité Modèle sans frein Modèle avec frein MECHATROLINK-II
0,637 Nm 200 W SJME-02AMB41-OY SJME-02AMB4C-OY SJDE-02ANA-OY
1,27 Nm 400 W SJME-04AMB41-OY SJME-04AMB4C-OY SJDE-04ANA-OY
2,39 Nm 750 W SJME-08AMB41-OY SJME-08AMB4C-OY SJDE-08ANA-OY
Désignation du type de servodriver
SJDE - 02 A N A -
Servodriver JUNMA
Capacité du servomoteur applicable
Code
Sortie (W)
100
01
200
02
400
04
750
08
Tension d'alimentation
: 200 Vc.a.
OY
OMRON YASKAWA Motion Control BV
Révision de conception
A : Standard
Caractéristique de l'interface de contrôle
N : MECHATROLINK-II
P : Entrée train d'impulsions
Caractéristiques techniques des servodrivers
Servodriver Junma MECHATROLINK-II
Type de servodriver SJDE- @ 01ANA-OY 02ANA-OY 04ANA-OY 08ANA-OY
Servomoteur applicable SJME-@ 01A@ 02A@ 04A@ 08A@
Puissance moteur max. applicable W 100 200 400 750
Courant de sortie continu Arms 0,84 1,1 2,0 3,7
Courant de sortie max Arms 2,5 3,3 6,0 11,1
Tension d’alimentation d’entrée
(Circuit principal et circuit de
contrôle)
Méthode de contrôle Contrôle MLI, système de driver à courant à onde sinusoïdale
Retour Code incrémental analogique (équivalent 13 bits incrémental)
Inertie de charge autorisée
Température de fonctionnement / stockage 0 à +55° C / -20 à 70° C
Humidité de fonctionnement / stockage 90 % ou moins (sans condensation)
Caractéristiques de base
Altitude 1 000 m ou moins au dessus du niveau de la mer
Résistance aux vibrations/chocs 4,9 m/s
Configuration Monté sur base
Poids approx. Kg 1,0 1,4
Frein dynamique (DB) Actionné lors de la coupure de l’alimentation principale, alarme servo, servo OFF
Traitement régénérateur En option (Si la quantité d’énergie régénérée est trop importante, installez une unité régénératrice
Fonction de prévention de dépassement (OT) P_OT, N_OT
Arrêt d'urgence Arrêt d’urgence (E-STP)
Affichage LED 4 LED (PWR, RDY, COM, ALM)
Surveillance MECHATROLINK-II MECHATROLINK-II en communication : LED COM (Allumée)
Surveillance Servo ON/OFF Quand Servo OFF : LED RDY (éteinte), quand Servo ON : LED RDY (clignote)
Surveillance de l'état de l'alimentation Etat OFF de l’alimentation du circuit principal/de contrôle : LED PWR (éteinte)
Réducteur électronique 0,01< A/B<100
Protection Surintensité, surtension, sous-tension, surcharge, erreur de capteur du circuit principal, erreur de
Communication
MECHATROLINK
Fonctions intégrées
Entrée commande Communication
Signal d'entrée de séquence Entrée fixée 5 points (agencement fixé : signal d’enclenchement externe, signal de vitesse réduite de retour
Signal de sortie de séquence Sortie fixée 2 points (agencement fixé : alarme servo, verrouillage du frein)
Tension Monophasé, 200 à 230 Vc.a., + 10 à-15 % (50/60 Hz)
Capacité KVA 0,40 0,75 1,2 2,2
*1
2
kg⋅m
(OFF après que le moteur se soit arrêté ; ON lorsque l’alimentation du moteur est désactivée).
JUSP-RG08D)
Etat ON de l’alimentation du circuit principal/de contrôle : LED PWR (allumée)
température de carte, dépassement excessif de l’erreur de position, surrégime, erreur du signal
Protocole commun MECHATROLINK-II
Vitesse de
transmission
Cycle de
transmission
Longueur des
données
MECHATROLINK
du codeur, protection overrun, erreur système, erreur de paramètre
10 Mbps
1 ms, 1,5 ms, 2 ms, 3 ms, 4 ms
17 octets et 32 octets
Commandes MECHATROLINK-II
(Pour séquence, mouvement, paramétrage/référence des données, surveillance,
réglage et autres commandes)
à zéro, signal d’inhibition de l’entraînement avant, signal d’inhibition de l’entraînement arrière,
signal d’arrêt d’urgence)
-4
0,6 × 10
2
(0,5 G) / 19,6 m/s2 (2 G)
3,0 × 10
-4
5,0 × 10
-4
10,0 × 10
-4
Remarque : *1. Valeur sans unité de régénération externe
166 Servomoteurs c.a.
 Loading...
Loading...