

Omron JUNMA User Manual

SERVOSYSTEME JUNMA
G a i n d e p l ac e , d e c â b l a ge e t d e te m p s
» Compact
»
MECHATROLINK-II
»
Conception sans réglage
Advanced Industrial Automation

Une nouvelle conception pour
simplifier au maximum les servomoteurs
La série de servomoteurs ultra compacts Junma repose
sur notre technologie novatrice de servomoteurs
et ouvre de nouvelles dimensions en matière de
simplicité de contrôle. Junma est probablement le
premier servomoteur entièrement sans réglage et sans
programmation. Il est équipé d’un bus numérique
MECHATROLINK-II intégré, lui permettant d’être
aisément connecté et contrôlé par un câble unique.
Junma permet d’économiser jusqu’à 30 % d’espace
dans l’armoire et de réduire considérablement les
temps de câblage et d’installation.
La série Junma ML-II présente également d’autres
caractéristiques de performance qui font des
servomoteurs Omron-Yaskawa des produits leaders dans
le monde entier. Citons notamment un temps de réponse
rapide, une grande vitesse, un couple élevé, une haute
précision et une fiabilité éprouvée.
Aperçu des caractéristiques principales :
• Servomoteur en format de poche très
peu encombrant (15x4,5 cm)
• Technologie sans réglage intégrée
pour un démarrage immédiat
• Le bus MECHATROLINK-II intégré réduit
le câblage et permet de réaliser la configuration
et les diagnostics du servo à distance.
• Couple élevé au démarrage :
300 % pendant 3 secondes.
Gain de place, de câblage et de temps
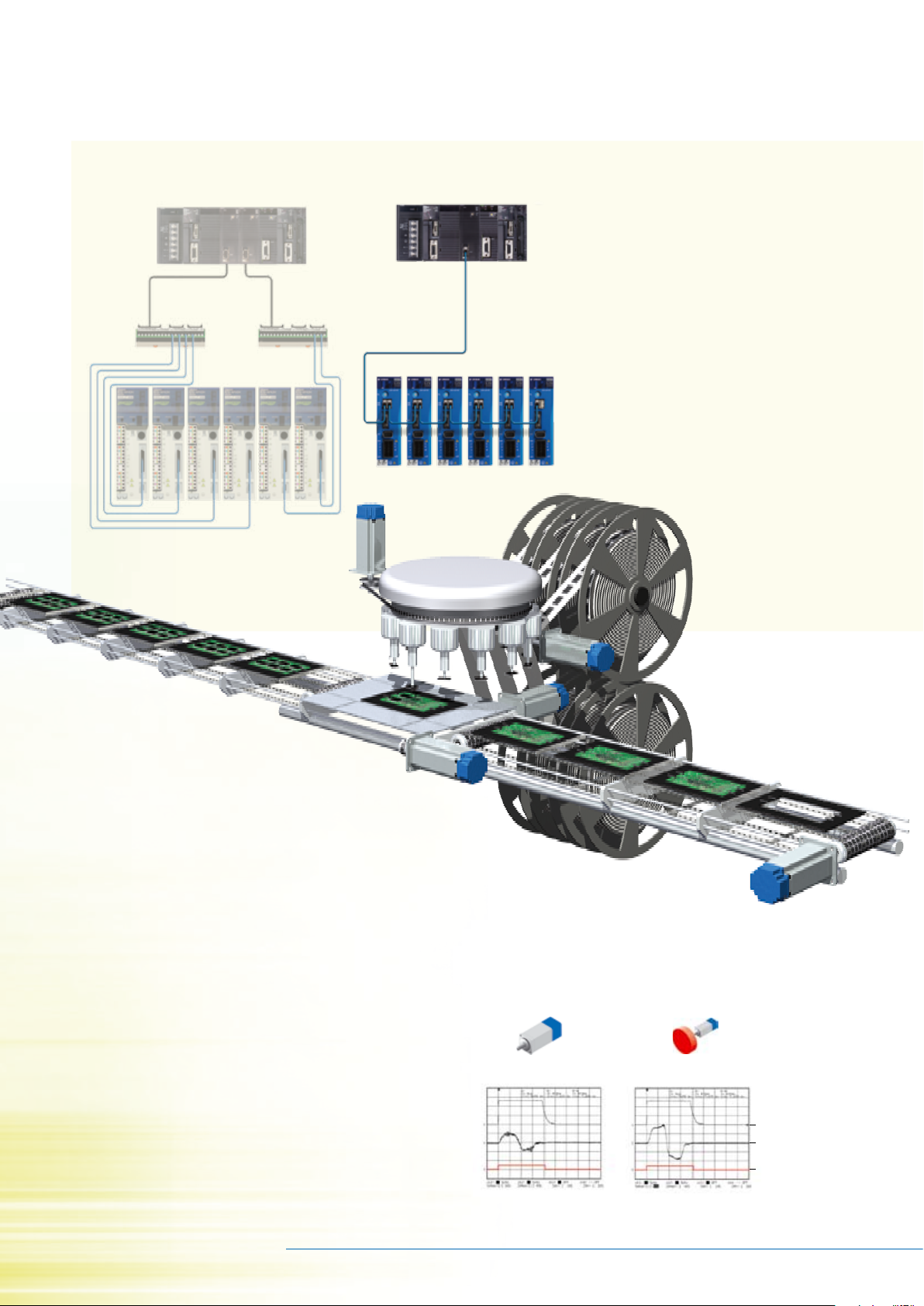
Des câbles multiples… reliés à un câble unique
30 % de gain de place
dans l’armoire électrique
Des connexions plus simples :
avec un câble unique !
Grâce au bus MECHATROLINK-II intégré, il suffit
MECHATROLINK-II
d’un seul câble pour relier les servomoteurs entre
eux. Vous économisez non seulement du câblage
et du temps lors de l’installation, mais vous
réduisez en plus considérablement les risques
d’erreur de connexion. La fiabilité est renforcée
car la connexion par câble unique est beaucoup
plus robuste qu’une solution à câblage multiple.
Conception sans réglage :
il suffit de le brancher et c’est tout !
Grâce à la technologie avancée mise en œuvre dans la série
Junma-ML-II, la solution rêvée d’un servomoteur ne requérant
aucun réglage devient réalité. Aucun paramètre de gain ne doit
être défini. Connectez-vous simplement au moteur et c’est prêt.
L’algorithme « sans réglage » se compose de deux éléments
majeurs.
• un ajustage du calcul de boucle de vitesse interne
pour obtenir les mêmes caractéristiques de réponse.
• un “cochage automatique” qui modifie les paramètres dans
le filtre d’encoches pour supprimer la résonance mécanique.
Exemple de l’effet dans réglage
Le test est réalisé avec un rapport d’inertie du rotor
de 0 % (sans charge) et 1000 % (charge 10 fois supérieure
à l’inertie du rotor).
Les graphiques montrent les résultats du test de couple
de sortie et de déviation de position, où la même réponse
dynamique est atteinte.
Inertie de charge rigide de 0 % Inertie de charge rigide de 1000 %
Temps de positionnement : 410 ms Temps de positionnement : 410 ms
Déviation de position
Couple de rotation
Cycle de positionnement
Advanced Industrial Automation

Combinaison de
positionnement optimal :
Junma ML-II + NCF
Système complet de positionnement compact
Il est possible d’obtenir un système PTP (point à point) puissant
et complet dans un minimum d’espace en combinant une unité
CJ1W-NCF71 et le Junma servo. Cette configuration offre un
positionnement 16 axes avec interpolations circulaire et
linéaire, ainsi qu’une interruption de l’alimentation. Le NCF
et le Junma sont la solution idéale pour les applications à
espace réduit.
Transparence complète à partir d’un hôte distant
Lorsque le Junma est commandé par une unité de
positionnement NCF, le servomoteur est entièrement
transparent vers un PC distant. C’est possible avec le réseau
MECHATROLINK-II du Junma relié à un API et via une liaison
série ou Ethernet entre un API et un PC. D’où la compatibilité
complète avec la plate-forme Smart OMRON.
Mini-API CJ1
CJ1W-NCF71
Junma MECHATROLINK-II

Caractéristiques et avantages de l’unité NCF
• Contrôleur de position point à point 16 axes sur le bus
MECHATROLINK-II
• Simplicité, rapidité et fiabilité de connexion
• Optimisé pour les applications de positionnement
• Câblage simplifié vers les servomoteurs
• Intégration dans OMRON Smart Platform :
blocs fonctions, Smart Active Parts, CX-One
• Disponibles pour les séries CS1 et API CJ1
API ouvert
Norme mondiale pour la
programmation de contrôles
industriels, « PLCopen » offre
une interface de programmation
standardisée pour harmoniser le
mode de conception et d’utilisation
des contrôles industriels.
Version driver avec contrôle
de train d’impulsions
• Economise du temps et 44 % d’espace
• Pas de paramétrage nécessaire du servomoteur
• Ultra compact
• Economique
• Position et vitesse contrôlées par entrée d’impulsions
• Technologie sans réglage intégrée
• Plage de puissance de 100 à 750 W
• Résolution de position
de 10 000 pas / tour
Advanced Industrial Automation
JUSQU’A 16 AXES
 Loading...
Loading...