

Page 1

Digital Controller
CompoBus/D
(DeviceNet) Type
User's Manual
Cat. No. H099-E1-02
Page 2
Preface
This high-function digital controller uses CompoBus/D (DeviceNet) as the communications function on a regular E5EK controller. From here on, the E5EKjjj-DRT controller that supports the CompoBus/D (DeviceNet) communications
function is abbreviated to E5EK-DRT.
• Use the CompoBus/D (DeviceNet) for communications.
• Select from many types of temperature and analog input (multiple input)
• Select output functions such as control output or alarm (output assignment)
• Use the HBA (heater burnout alarm) function.
• UseremoteSPinput.
• Monitor the control loop by LBA (Loop Break Alarm)
• Calibrate input
• It also features a watertight construction (NEMA4: equivalent to IP66)
This User’s Manual describes how to use the E5EK-DRT digital controller.
Before using your E5EK-DRT, thoroughly read and understand this manual in
order to ensure correct use.
PRECAUTIONS IN USING THE PRODUCT
When the product is used under the circumstances or environment below, ensure
adherence to limitations of the ratings and functions. Also, take countermeasures
for safety precautions such as fail-safe installations.
(1) Use under circumstances or environments which are not described in this user’s manual.
(2) Use for nuclear power control, railway, air craft, vehicle, incinerator, medical equipment, enter-
tainment equipment, safety device, etc.
(3) Use for applications where death or serious property damage is possible and extensive safety
precautions are required.
This product has been tested by ODVA’s authorized Independent T est Lab and found to comply with
ODVA Conformance Test Software Version 2.0-1.00.
About this manual
E OMRON, 1997
(1) All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or trans-
mitted, in any form, or by any means, mechanical, electronic, photocopying, recording, recording, or other-
wise, without the prior written permission of OMRON.
(2) No patent liability is assumed with respect to the use of the information contained herein.
(3) Moreover, because OMRON is constantly striving to improve its high-quality products, the information in
this manual is subject to change without notice. Every precaution has been taken in the preparation of this
manual. Nevertheless, OMRON assumes no responsibility for errors or omissions. Neither is any liability
assumed for damages resulting from the use of the information contained in this publication.
I
Page 3
Conventions Used in This Manual
JMeanings of Abbreviations
Sometimes the following abbreviations are used in parameter names, figures and in text
explanations. These abbreviations mean the following.
Abbreviation Term
PV Process value
SP Set point
RSP Remote set point
LSP Local set point
LBA Loop break alarm
HB Heater b ur nout
AT Auto -tuning
EU Engineering unit *1
*1 _C, m, g and other units are indicated for scaled data. However, “EU” is used as the mini-
mum unit for the data. For example, for “50.02 (m)”, 1EU is taken as the minimum unit
0.01 (m).
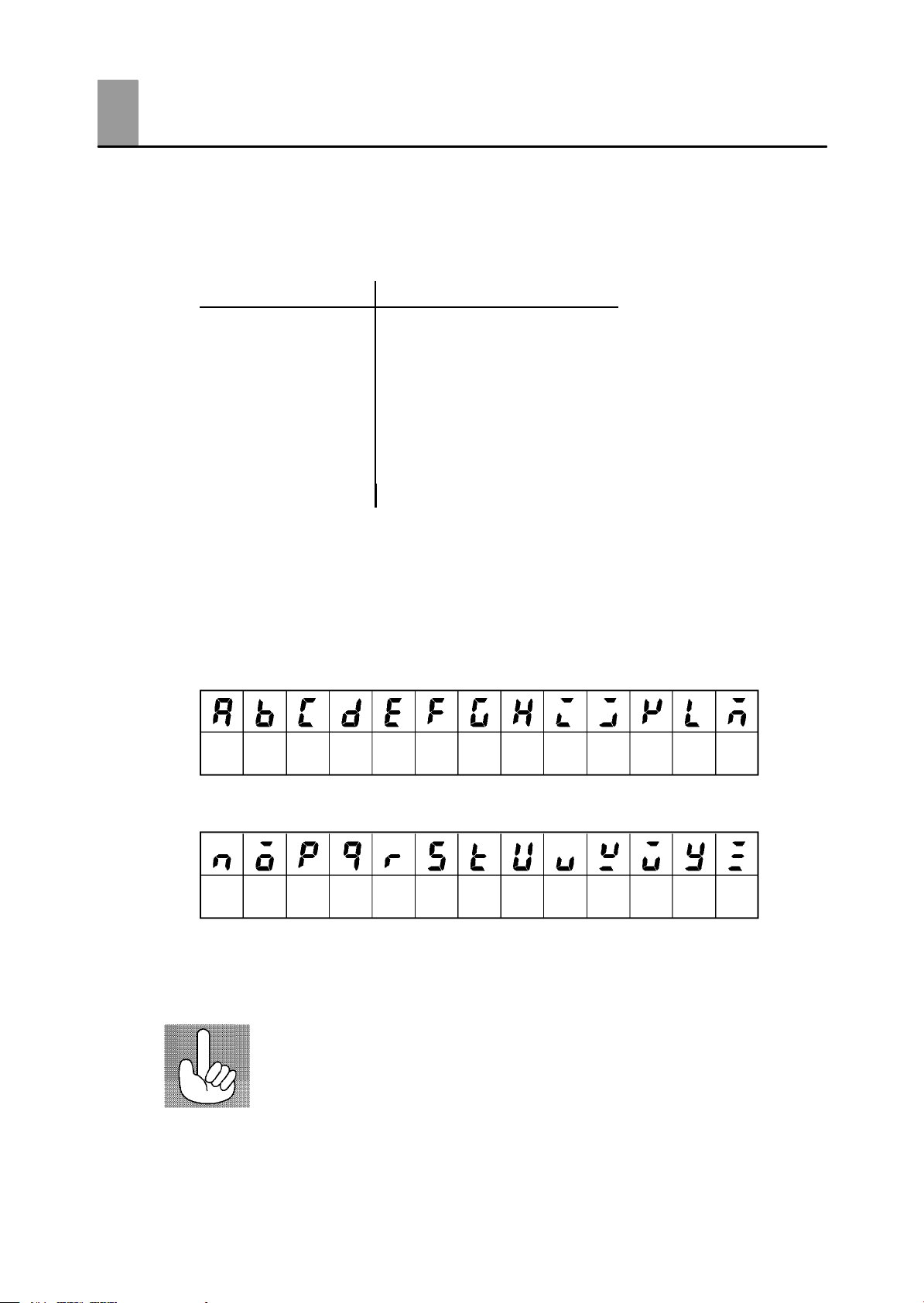
JHow to Read Display Symbols
The following tables show the correspondence between the symbols displayed on the displays
and alphabet characters.
ABCDEFGH I JKLM
NOPQRS TUVWXY Z
J“Reference” mark
This mark indicates that extra, useful information follows, such as supplementary explanations and how to apply functions.
II
Page 4
JHow this Manual is Organized
Purpose Title Description
D Learning about the
general features of the
E5EK-DRT
Chapter 1 Introduction This chapter describes the fea-
tures of the E5EK-DRT, names
of parts, and typical functions.
D Setting up
D Basic E5EK-DRT
operations
D Applied E5EK-DRT
operations
D CompoBus/D (DeviceNet)
communication
D Calibration
Chapter 2 Preparations This chapter describes the
operations that you must carry
out (e.g. installation, wiring and
switch settings) before you can
use the E5EK-DRT.
Chapter 3 Basic Operation
Chapter 5 Parameters
Chapter 4 Applied Operation
Chapter 5 Parameters
Chapter 6 Using the CompoBus/D (DeviceNet)
Chapter 7 Calibration This chapter describes how the
These chapters describe how to
use the front panel keys and
how to view the display when
setting the parameters of the
major functions for the E5EKDRT.
These chapters describe the
important functions of the
E5EK-DRT and how to use the
parameters for making full use
of the E5EK-DRT.
This chapter mainly describes
using for the E5EK-DRT on the
CompoBus/D (DeviceNet).
user should calibrate the E5EKDRT.
D Troubleshooting
Chapter 8 Troubleshooting This chapter describes what to
do if any problems occur.
III
Page 5
PRECAUTIONS ON SAFETY
F Marks For Ensuring Safe Use and Their Meanings
This manual uses the following marks to indicate precautions for ensuring that the
E5EK-DRT is used safely.
The precautions indicated below describe important information regarding safety.
Be sure to follow the instructions described in these precautions.
WARNING
Indicates information that, if not heeded, could
possibly result in loss of life or serious injury.
CAUTION
Indicates information that, if not heeded, could
result in relatively serious or minor injury, damage to the product, or faulty operation.
F Warning Symbols
WARNING
Do not touch the terminals while the power is ON.
This may cause an electric shock.
CAUTION
D The life expectancy of the output relay varies considerably according to its the output relay
within its rated load and electrical life expectancy, if the output relay is used beyond its life
expectancy, its contacts may become fused or burned.
D Do not allow metal fragments or lead wire scraps to fall inside this product.
This may cause electric shock, fire or malfunction.
D Never disassemble, repair or modify the product.
This may cause electric shock, fire or malfunction.
D Use the product within the rated load.
This may cause damage or burning.
D Use this product within the rated supply voltage.
This may cause damage or burning.
D Tighten the terminal screws properly. Tightening torque:0.78NSm
Loose screws might cause malfunction.
Correctly set the settings on this product matched to the control target.
If the settings are not compatible with the control target, the product might operate in an unex-
pected manner, resulting in damage to the product or an accident.
D To maintain safety in the event of a product malfunction, we recommend taking safety mea-
sures, for example, installing an excessive temperature rise prevention alarm on a separate
line.
If malfunction prevents control, this may result in a major accident.
D Use a screwdriver or similar tool to remove the output unit if it is hard to remove.
If you attempt to remove it by applying excessive force, you may be injured by pointed pins.
IV
Page 6
NOTICE
Be sure to observe these precautions to ensure safe use.
(1) Do not wire the terminals which are not used.
(2) Be sure to wire properly with correct polarity of terminals.
(3) To reduce induction noise, separate the high-voltage or large-current power lines from other
lines, and avoid parallel or common wiring with the power lines when you are wiring to the
terminals. We recommend to use separating pipes, ducts, or shielded lines.
(4) Do not use this product in the following places:
• P laces subject to dust or corrosive gases (in particular, sulfide gas and ammonia gas)
• Places subject to high humidity, condensation or freezing.
• Places subject to direct sunlight.
• P laces subject vibration and large shocks.
• Places subject to splashing liquid or oil atmosphere.
• Places directly subject to heat radiated from heating equipment.
• Places subject to intense temperature changes.
• Places subject to flammable or explosive gas.
(5) To allow heat to escape, do not block the area around the product. (Ensure enough space for
heat to escape.)
(6) If you remove the controller from its case, never touch nor apply shock to the electronic parts
inside.
(7) Cleaning: Do not use paint thinner or the equivalent. Use standard grade alcohol to clean the prod-
uct.
(8) Use specified size (M3.5, width 7.2mm or less) crimped terminals for wiring.
(9) Allow as much space as possible between the controller and devices that generate a powerful
high-frequency (e.g. high-frequency welders, high-frequency sewing machines) or surge.
PRECAUTIONS FOR ENSURING CORRECT USE
F Use a 100 to 240 V AC (50/60 Hz), 24 VAC (50/60 Hz) or 24 VDC power supply matched to the
power specifications of the E5EK-DRT. Also, make sure that rated voltage is attained within two
seconds of turning the power ON.
F Attach a surge suppress or or noise filter to periphe ra l devices that generate noise (in particular,
motors, transformers, solenoids, magnetic coils or other equipment that have an inductance component).
F When mounting a noise filter on the power supply, be sure to first check the filter’s voltage and
current capacity, and then mount the filter as close as possible to the controller.
F Insert a noise filter (TDK ZCB2206-11 or equivalent) on the AC power l ine to satisfy conducted
emission rating (FCC Regulation Class A EN50081-2-compliant).
F Use within the following temperature and humidity ranges:
• Temperature: -10 to 55°C, Humidity: 35 to 85% (with no icing or condensation)
If the E5EK-DRT is installed inside a control board, the ambient temperature must be kept to
under 55°C, including the temperature around the controller.
If the controller is subjecte d to heat radiation, use a fan to cool the surface of the controller to under
55°C.
F Store within the following temperature and humidity ranges:
• Temperature: -25 to 65°C, Humidity: 35 to 85% (with no icing or condensation)
F Never place heavy objects on, or apply pressure to the controller that may cause it to deform and
deteriorate during use or storage.
F Avoid using the controller in places near a radio, television set, or wireless installation. These
devices can cause radio disturbances which adversely affect the performance of the controller.
V
Page 7
Table of Contents
Preface I......................................
Conventions Used in This Manual II...............
Precautions on Safety IV.........................
CHAPTER 1 INTRODUCTION 1-1...........................
This chapter introduces the E5EK-DRT. First-time users should read this chapter
without fail.
For details on how to use the controller and parameter settings, see Chapters 2
onwards.
1.1 Names of parts 1-2..........................................
1.2 Input and Output 1-4.........................................
1.3 Parameters and Menus 1-6...................................
1.4 About the Communications Function for
the CompoBus/D (DeviceNet) Network 1-9.....................
1.5 About Calibration 1-10........................................
CHAPTER 2 PREPARATIONS 2-1...........................
This chapter describes the operations you should carry out before turning the
E5EK-DRT ON.
2.1 Setting up 2-2...............................................
2.2 Installation 2-4..............................................
2.3 Wiring Terminals 2-7.........................................
CHAPTER 3 BASIC OPERATION 3-1........................
This chapter describes an actual example for understanding the basic operation
of the E5EK-DRT.
3.1 Convention Used in this Chapter 3-2...........................
3.2 Setting Input Specifications 3-4...............................
3.3 Setting Output Specifications 3-7..............................
3.4 Setting Alarm Type 3-10.......................................
3.5 Protect Mode 3-13............................................
3.6 Starting and Stopping Operation 3-14...........................
3.7 Adjusting Control Operation 3-15...............................
CHAPTER 4 APPLIED OPERATION 4-1......................
This chapter describes each of the parameters required for making full use of the
features of the E5EK-DRT. Read this chapter while referring to the parameter
descriptions in chapter 5.
4.1 Selecting the Control Method 4-2..............................
4.2 Operating Condition Restrictions 4-4...........................
4.3 How to Use the Remote SP 4-7...............................
4.4 How to Use the Heater Burnout Alarm 4-9......................
4.5 LBA 4-11....................................................
Page 8

CHAPTER 5 PARAMETERS 5-1.............................
This chapter describes the parameters of the E5EK-DRT. Use this chapter as a
reference guide.
Conventions Used in this Chapter 5-2..............................
Protect Mode 5-3................................................
Manual Mode 5-5................................................
Level 0 Mode 5-6................................................
Level 1 Mode 5-10................................................
Level 2 Mode 5-17................................................
Setup Mode 5-24.................................................
Expansion M ode 5-31.............................................
Option Mode 5-36.................................................
Calibration Mode 5-42.............................................
CHAPTER 6 USING CompoBus/D (DEVICENET) 6-1..........
This chapter mainly describes communications with the CompoBus/D (DeviceNet).
6.1 Outline of CompoBus/D (DeviceNet) 6-2.......................
6.2 Data Refreshing by Communications 6-4.......................
6.3 Setting the Communications Conditions 6-6....................
6.4 Data Assignments 6-8.......................................
6.5 Data Structure 6-10...........................................
6.6 Data Timing 6-13.............................................
6.7 Sample Ladder 6-14..........................................
CHAPTER 7 CALIBRATION 7-1.............................
This chapter describes procedures for each calibration operation.
Read this chapter only when the controller must be calibrated.
7.1 Structure of Parameters 7-2..................................
7.2 Calibrating Thermocouple 7-4.................................
7.3 Calibrating Platinum Resistance Thermometers 7-7.............
7.4 Calibrating Current Input 7-9..................................
7.5 Calibrating Voltage Input 7-10..................................
7.6 Checking Indication Accuracy 7-12.............................
CHAPTER 8 TROUBLESHOOTING 8-1......................
This chapter describes how to find out and remedy the cause if the E5EK-DRT
does not function properly.
8.1 Initial Checks 8-2............................................
8.2 How to Use the Error Display 8-3..............................
8.3 How to Use Error Output 8-5..................................
8.4 Checking Operation Restrictions 8-6...........................
APPENDIX
SPECIFICATIONS A-2........................
ABOUT CURRENT TRANSFORMER (CT) A-5...
CONTROL BLOCK DIAGRAM A-6..............
SETTING AND MONITORING
PARAMETER LIST A-7........................
PARAMETER OPERATIONS LIST A-10..........
USING THE E5EK-DRT IN MULTI-VENDOR
APPLICATIONS A-12..........................
INDEX
REVISION HISTORY
Page 9
CHAPTER1
CHAPTER 1
INTRODUCTION
This chapter introduces the E5EK-DRT. First-time users should read
this chapter without fail.
For details on how to use the controller and parameter settings, see
Chapters 2 onwards.
CHAPTER 1 INTRODUCTION
1.1 Names of parts 1-2........................
Main parts 1-2............................
Front panel 1-2...........................
About the displays 1-3.....................
How to use keys 1-3.......................
1.2 Input and Output 1-4......................
Input 1-4.................................
Output 1-5................................
1.3 Parameters and Menus 1-6.................
Parameter types 1-6.......................
Selecting modes 1-7........................
Selecting parameters 1-8...................
Fixing settings 1-8.........................
1.4 About the Communications Function for
the CompoBus/D (DeviceNet) Network 1-9...
1.5 About Calibration 1-10......................
1--1
Page 10
CHAPTER 1 INTRODUCTION
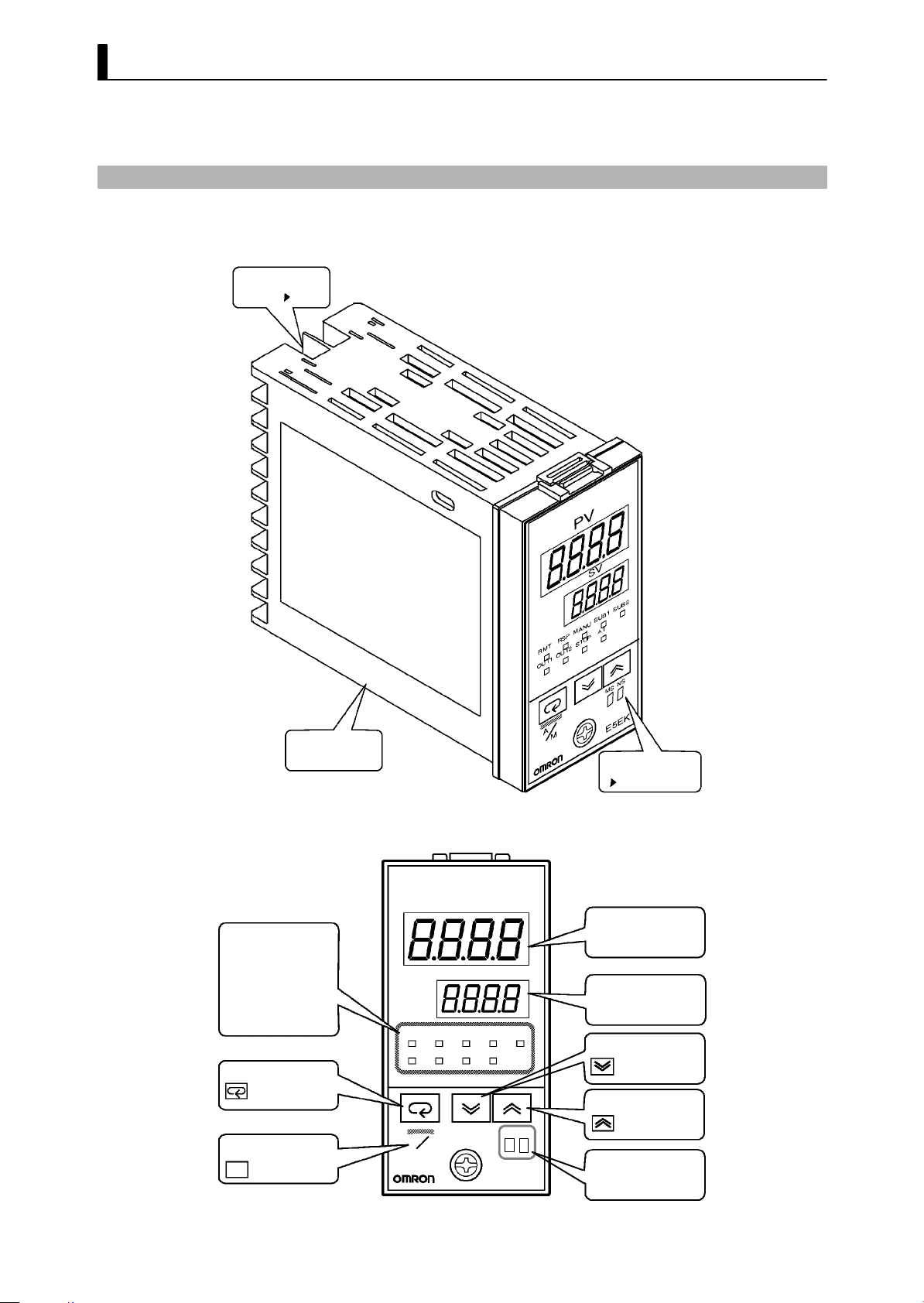
1.1 Names of parts
JMain parts
Terminals
P2-7
JFront panel
Operation indicators
OUT1
SUB1
MANU
STOP
RMT
RST
AT
Mode key
A/M key
A/M
Rear case
OUT2
SUB2
RMT
OUT1 OUT2
A
M
PV
SV
MANU
RSP SUB1
STOP
AT
SUB2
MS NS
E5EK
Front panel
This page
No.1 display
No.2 display
Down ke y
Up ke y
MS/NS indicators
1--2
Page 11
JAbout the displays
1.1 Names of parts
F No.1 display
F No.2 display
F Operation
indicators
F MS/NS indicators
Displays the p rocess value or parameter symbols.
Displays the set point, manipulated variable or parameter settings.
• OUT1 : Lit when the pulse output function assigned to “control
output 1” is ON.
• OUT2 : Lit when the pulse output function assigned to “control
out- put 2” is ON.
• SUB1 : Lit when the output function assigned to “auxiliary output
1” is ON.
• SUB2 : Lit when the output function assigned to “auxiliary
output 2” is ON.
• MANU : Lit in the manual operation mode.
• STOP : Lit when operation has stopped.
• RMT : Lit during remote operation.
• RSP : Lit during remote SP operation.
• AT : Flashes during auto-tuning.
Indicates the CompoBus/D (DeviceNet) status.
For details on indicated statuses, see “Chapter 8, 8.1 Initial Checks.”
(page 8-2).
JHow to use keys
A/M
F key
F key
F key
The following describes basic key operations.
Each press of this key switches between the auto and manual operations.
The functions of this key change according to how long it is pressed. If
the key is pressed for less than one second, the parameters are switched.
If the key is pressed for one second or more, the menu display appears.
In key operations from here on, “press the key” refers to pressing the
key for less than one second.
For details on parameter switching and menu display items, see pages
1-7 and 1-8.
Each press of the
on the No.2 display, while each press of the
returns the values or settings on the No.2 display.
Functions vary, for example, when the
neously with
see page 1-8. Also, chapters 3 and 4 describe examples using vari ous key
combinations.
key increments or advances the values or settings
key decrements or
A/M
key is held down simulta-
key, or a key is held down continuously. For details,
1--3
Page 12
CHAPTER 1 INTRODUCTION
1.2 Input and Output
JInput
Temperature input
Voltage input
Current input
CT input
Remote SP input
Controller
Control output
(heat)
Control output
(cool)
Alarm 1
Alarm 2
Alarm 3
HBA
LBA
Error 1
Error 2
Error 3
Control output 1
Control output 2
Auxiliary output 1
Auxiliary output 2
The E5EK-DRT supports following inputs: temperature input, current
input, voltage input, CT input and remote SP input.
F Temperature input/Voltage input/Current input
• Only one of temperature input, voltage input and current input can
be selected and connected to the controller. The above figure shows
temperature input connected to the controller.
• The following input sensors can be connected for temperature input:
Thermocouple:K,J,T,E,L,U,N,R,S,B,W,PLII
Platinum resistance thermometer: JPt100, Pt100
• The following currents can be connected for current input:
4to20mA,0to20mA
• The following voltages can be connected for voltage input:
1to5VDC,0to5VDC,0to10VDC
F CT input
F Remote SP input
• Connect CT input when using the HBA (heater burnout alarm) func-
tion. Note that the HBA function cannot be used simultaneously with
the linear output unit.
• When the remote SP function is enabled, inputs within the range 4 to
20 mA are used as the remote SP.
1--4
Page 13
JOutput
1.2 Input and Output
The E5EK-DRT supports the following four outputs.
Control output 1
Control output 2
Auxiliary output 1
Auxiliary output 2
When using control outputs 1 and 2, set the output unit (sold separately). Nine output units are available to suit the output circuit configuration.
Note: The output functions of the E5EK-DRT do not operate for five
secondsaftertheE5EK-DRTisturnedON.
F Output
assignments
The E5EK-DRT supports the following ten output functions.
Control output (heat)
Control output (cool)
Alarms 1 to 3
HBA
LBA
Error 1 (input error)
Error 2 (A/D converter error)
Error 3 (RSP input error)
Assign these output functions to control output 1, control output 2,
auxiliary output 1, and auxiliary output 2.
There are restrictions on how assignment destinations (control output
1, control output 2, auxiliary output 1, and auxiliary output 2) can be
used. For details, see 3.3 Setting Output Specifications.
In the example on the previous page, “control output (heat)” is assigned
to “control output 1”, “alarm 1” is assigned to “control output 2”,
“alarm 2” is assigned to “auxiliary output 1”, and “alarm 3” is assigned
to “auxiliary output 2”. Accordingly, the configuration is such that heating control output is connected to control output 1, and alarm output is
connected to control output 2 and auxiliary outputs 1 and 2.
Control outputs 1 and 2 are used depending on the differences in control method as follows.
Control Method
Standard control Control output (heat)/Alarm, etc.,.
Heating and cooling
control
Control output (heat) /
Control output (cool)
Control Output 1/
Control Output 2
1--5
Page 14
CHAPTER 1 INTRODUCTION
1.3 Parameters and Menus
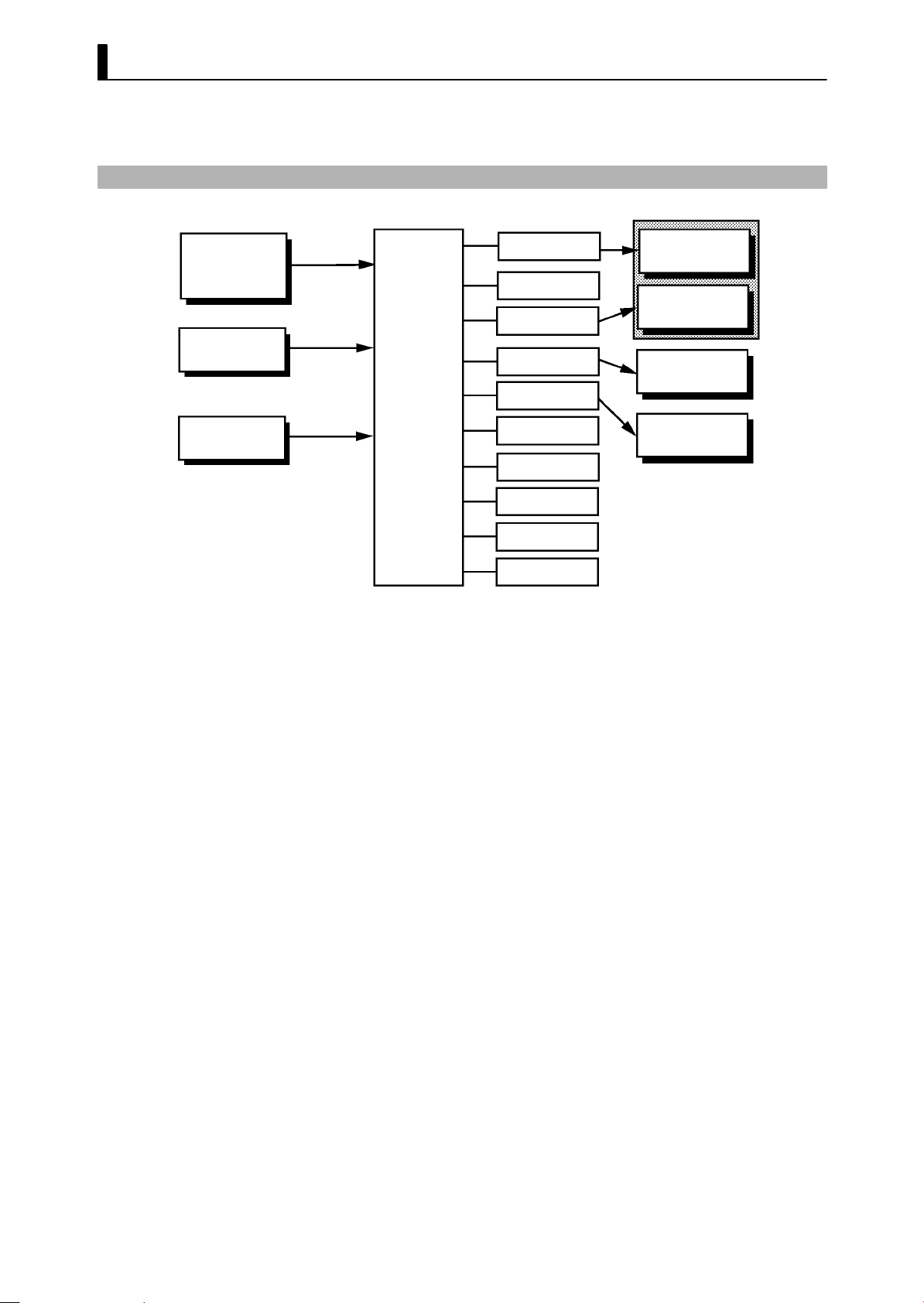
JParameter types
F Protect mode
F Manual mode
F L evel 0 mode
F L evel 1 mode
F L evel 2 mode
F Setup mode
F Expansion mode
E5EK-DRT parameters are distributed between the following nine
modes.
Protect mode
Manual mode
Level 0 mode
Level 1 mode
Level 2 mode
Setup mode
Expansion mode
Option mode
Calibration mode
The settings of parameters in each of seven modes (excluding the protect mode and manual mode) can be checked and modified by selection
on the menu display.
This mode is used to limit use of the keys. The protect function is for
preventing unwanted modification of parameters and switching
between the auto and manual operation.
In this mode, the controller can be switched manual operation. The
manipulated variable can be manipulated manually only in this mode.
Set the controller to this mode during normal operation. In this mode,
you may change the set point during operation, and stop and start operation. You can also monitor (not change) the process value, ramp SP
and manipulated variable.
This is the main mode for adjusting control. In this mode, you can
execute AT (auto-tuning), and set alarm values, the control period, PID
parameters and heater burnout al arm (HBA) conditions.
This is the auxiliary mode for adjusting control. In this mode, you can
set the parameters for limiting the manipulated variable, switch
between the remote and local modes, switch between the SP modes, and
set the loop break alarm (LBA), alarm hysteresis and the digital filter
value of inputs.
This is the mode for setting the basic specifications. In this mode, you
can set parameters that must be checked or set before operation such as
the input type, scaling, output assignments and direct/reverse operation.
This is the mode for setting expanded functions. In this mode, you can
set, SP setting limiter, selection of 2 -PID control or ON/OFF control,
specification of the standby sequence resetting method, time for automatic return to the monitoring display.
1--6
Differences from
General-purpose
Models
New function
CompoBus/D
(DeviceNet)
Functions not supported
Serial communications
Position-proportional control
Event input
Multi-SP
Transfer output
Self-tuning (ST)
Page 15
1.3 Parameters and Menus
F Option mode
F Calibration mode
JSelecting modes
This is the mode for setting option functions. CompoBus/D (DeviceNet)
communications conditions, heater burnout alarm function, and remote
SP scaling parameters are also located in this mode.
This mode is provided so that the user can calibrate inputs.
When calibrating input, the selected input type is calibrated.
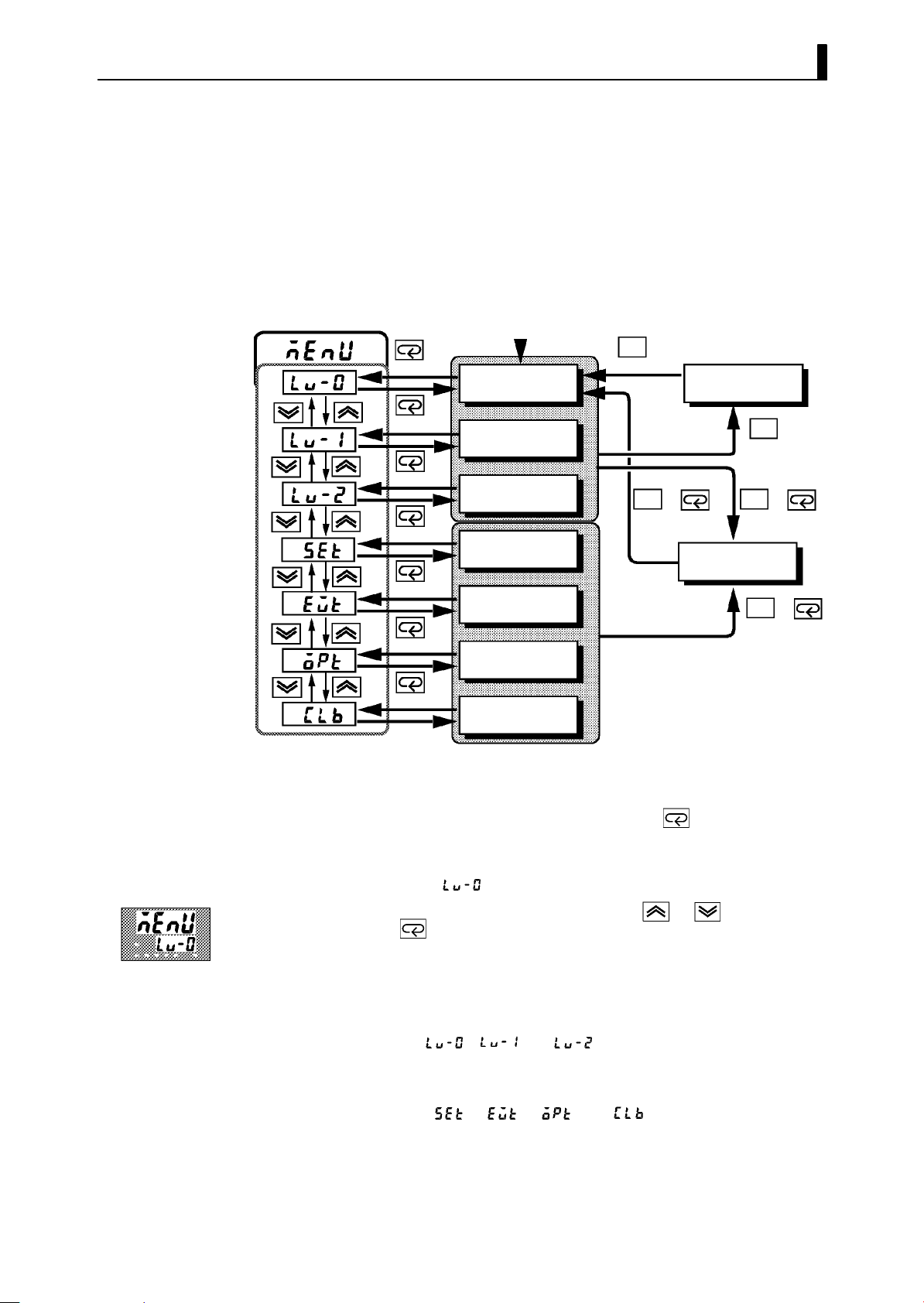
The following diagram shows the order in which modes are selected.
Power ON
1 second min.
Level 0 mode
1 second min.
Level 1 mode
1 second min.
Level 2 mode
1 second min.
Setup mode
1 second min.
Expansion mode
1 second min.
Option mode
A/M
1secondmin.
Manual mode
A/M
++
1 second min. 1 second min.
Protect mode
A/M
1secondmin.
A/M
A/M
+
1secondmin.
F Menu display
F L evel 0 to 2
modes
F Setup mode
F Expansion mode
F Option mode
F Calibration mode
1 second min.
Calibration mode
• To select the menu display in any of the above modes (excluding the
protect mode and the manual mode), press the
key for 1 second
minimum. The previously specified mode is selected. For example, if
you selected the menu display while in the level 0 mode, the No.2 display change to [
• If you select the destination mode using the
press the
key for 1 second minimum when you have selected the
] as shown on the left.
or keys and
menu display, the top parameter in the specified mode is selected.
• Protected modes cannot be selected. Also, the menu display does not
appear when modes are protected up to the level 1 mode.
• If you select [
][ ]or[ ] in the menu display, the level
0, level 1 and level 2 modes, respectively, are selected.
• These modes are selected with control still continuing.
• If you select [
][ ][ ]or[ ]inthemenudisplay,the
setup, expansion, option and calibration modes, respectively, are
selected. When these modes are selected, the control is reset. So, control outputs and auxiliary output are turned OFF. When another
mode is selected while in these modes, reset is canceled.
1--7
Page 16
CHAPTER 1 INTRODUCTION
F Protect mode
F Manual mode
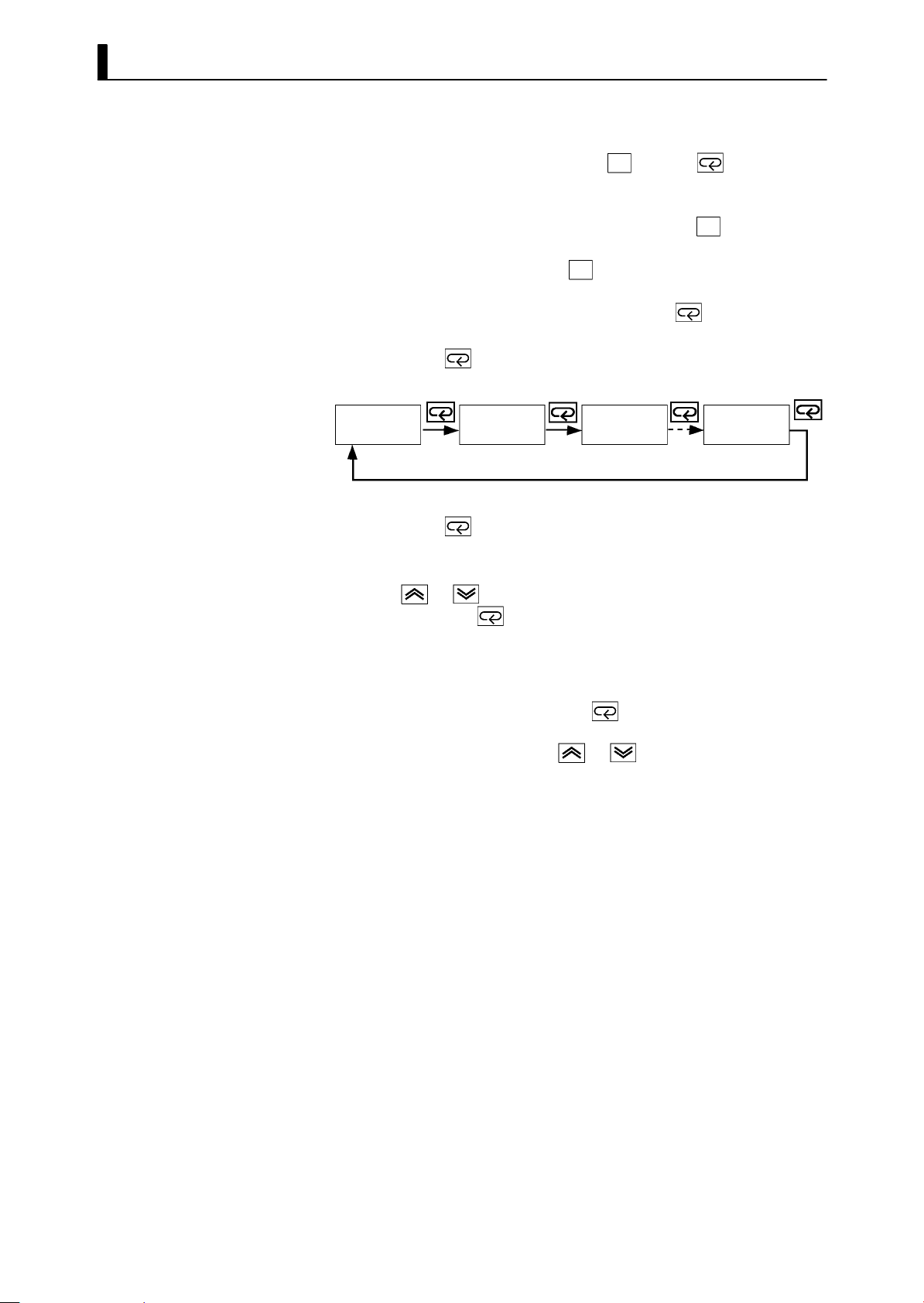
JSelecting
parameters
JFixing settings
• To set the controller to the protect mode or to return to the level 0
A/M
mode from the protect mode, press the
cond minimum simultaneously.
• To set the controller to the manual mode, press the
cond minimum in the level 0 to 2 mode. To return to the level 0 mode
from the manual mode, press the
• When not in the manual mode, each press of the
parameter.
• If you press the
turns to the first parameter.
Parameter
1
• If you press the key when at the final parameter, the display
returns to the first parameter.
• When you have changed a parameter setting, specify the parameter
using the
seconds or press the
• When another mode is selected, the content of the parameters before
the mode was selected is fixed.
• When turning the power OFF, you must first fix the settings and
parameter contents (by pressing the
mode). The settings and parameter contents are sometimes not
changed by merely pressing the
key when at the final parameter, the display re-
Parameter
2
or keys, and either leave the setting for at least two
key. This fixes the setting.
A/M key for 1 second minimum.
Parameter
or keys.
key and key for 1 se-
A/M key for 1 se-
key switches the
Parameter
3
key or selecting another
n
1--8
Page 17
1.4 About the Communications Function for the CompoBus/D (DeviceNet) Network
1.4 About the Communications Function for
the CompoBus/D (DeviceNet) Network
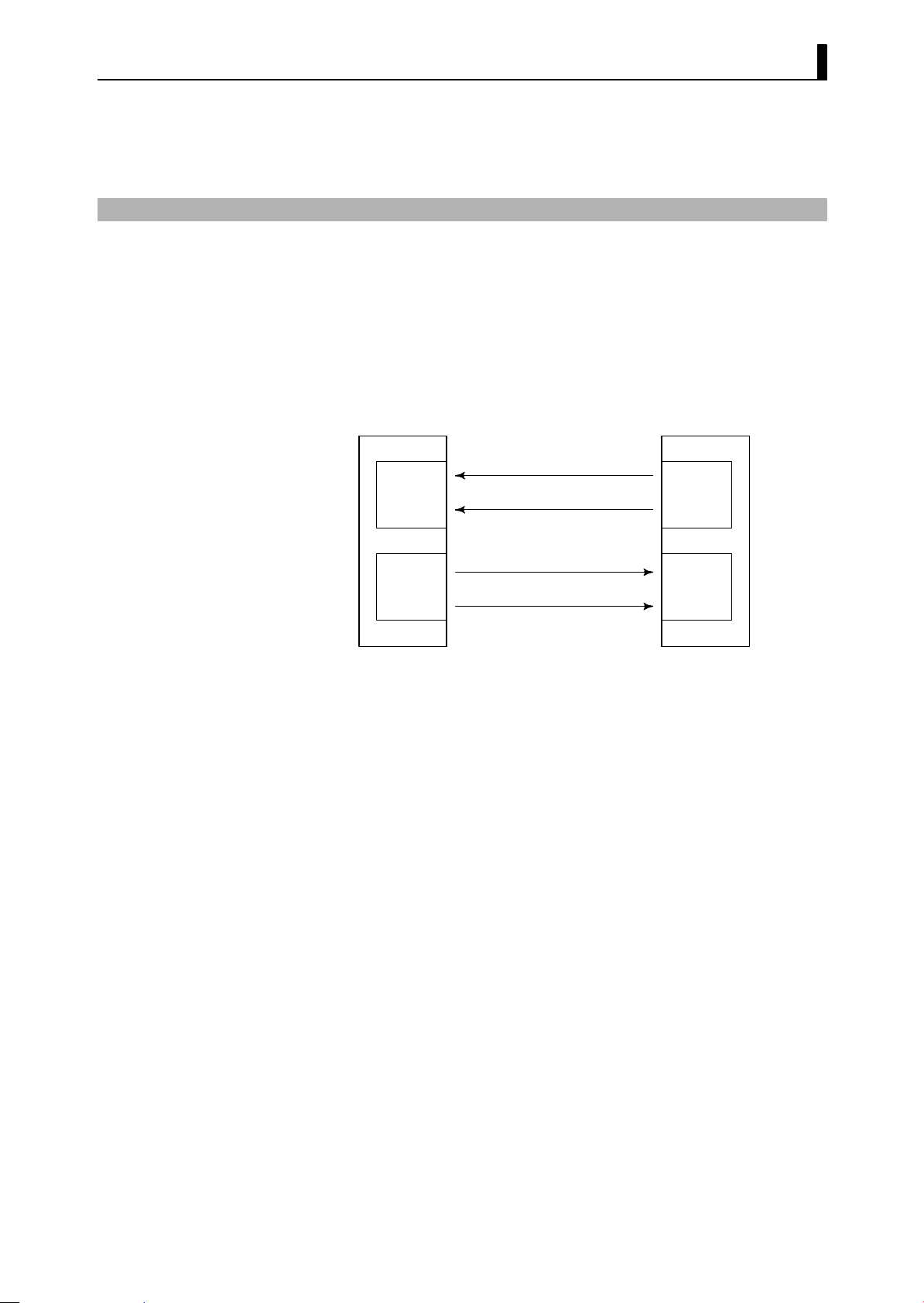
The E5EK-DRT operates as a slave on the CompoBus/D (DeviceNet)
network. Items (parameters, operation instructions and statuses) that
have been assigned as communication data on the E5EK-DRT can be
uploaded and downloaded between masters and slaves.
16 read and write operations can be assigned as communication data,
and can be assigned.
Master E5EK-DRT
Input area
16
channels
max.
Parameter (read)
Status
Communications read
data assignment
Output area
16
channels
max.
Parameter (write)
Operation instruction
Communications write
data assignment
As the data structure is flexible like this, communications is possible
using numerous parameter configurations, and the number of parameters can be limited to increase processing speed.
For details on the type of communication data and how to assign data,
see Chapter 6 Using CompoBus/D (DeviceNet).
For details on cable connections on the CompoBus/D (DeviceNet) net-
work, see Chapter 2 Preparations, 2.3 Wiring Terminals (page 2-7).
For details on CompoBus/D (DeviceNet) such as the network configuration and related system devices, see the CompoBus/D (DeviceNet)
Operation Manual (catalog No.: W267).
1--9
Page 18

CHAPTER 1 INTRODUCTION
1.5 About Calibration
The E5EK-DRT controller is calibrated before shipment from the factory. So, the user need not calibrate the E5EK-DRT controller during
regular use.
However, if the E5EK-DRT controller must be calibrated by the user,
use the parameters provided for user to calibrate temperature input,
analog input (voltage, current). In this case, note that the results of
calibration will not be assured.
Also, note that calibration data is updated to the latest value each time
the E5EK-DRT controller is calibrated. Calibration data set before shipment from the factory cannot be returned to after calibration by the
user.
F Calibrating
inputs
F Registering
calibration data
The input type selected in the parameter is the item to be calibrated.
The E5EK-DRT is provided with the following four calibration parame-
ters.
• Thermocouple
• Platinum resistance thermometer
• Current input
• Voltage input
Two parameters are provided for thermocouple, platinum resistance
thermometer and voltage input.
When calibrating each item, the calibration data is temporarily registered. This data can be registered as final calibration data only when all
items have been newly calibrated. So, all items must be temporarily
registered when calibrating the E5EK-DRT controller.
When registering data, information regarding whether or not calibration has been carried out is also registered.
To calibrate these items, the user must prepare separate measuring
devices and equipment. For details on handling these measuring devices
and equipment, refer to the respective manuals.
1--10
For details, see chapter 7 Calibration.
Page 19
CHAPTER2
CHAPTER 2
PREPARATIONS
This chapter describes theoperations you should carry out before turning the E5EK-DRT ON.
CHAPTER 2 PREPARATIONS
2.1 Setting up 2-2.............................
Draw-out 2-2..............................
Setting up the output unit 2-3..............
2.2 Installation 2-4............................
Dimensions 2-4............................
Panel cutout 2-4...........................
Mounting 2-5.............................
2.3 Wiring Terminals 2-7......................
Terminal arrangement 2-7.................
Precautions when wiring 2-7...............
Wiring 2-7................................
2--1
Page 20

CHAPTER 2 PREPARATIONS
2.1 Setting up
• Set up the output units for control outputs 1 and 2 before mounting
the controller.
• When setting up the output units, draw out the internal mechanism
from the housing and insert the output units into the sockets for control outputs 1 and 2.
JDraw-out
When drawing out the internal mechanism from the housing, p repare a
phillips screwdriver matched to the size of the screw on the lower part
of the front panel.
(1) Press down strongly on the hook on the top of the front panel, and
turn the Phillips screws to the left to loosen the screw on the lower
part of the front panel.
Press down here strongly
2--2
Fixing Screw for
Front Panel
(2) Draw out the internal mechanism towards you holding both sides
of the front panel.
Tighten this screw by a torque of 0.3 to 0.5 N⋅m.
Page 21

JSetting up the output unit
2.1 Setting up
F Before setup
F Procedure
• Check the type of the output unit you are about to set up.
• For details on types of output unit and main specifications, see page
2-8.
(1) Check the positions of the sockets you are about to insert the out-
put units into as shown in the following diagram.
OUT1
OUT2
Bracket
(2) Remove the power board in the direction of the arrow shown in the
figure. The power board is connected to the control board by a cen-
ter connector. Remove this connector taking care not to bend the
connector pins.
Control board
Power board
(3) Insert the output unit for control output 1 into the socket “OUT1”
and the output unit for control output 2 into the socket “OUT2”.
(4) Fasten the output units with the bracket (accessory).
(5) Return the power board to its original position.
2--3
Page 22
CHAPTER 2 PREPARATIONS
2.2 Installation
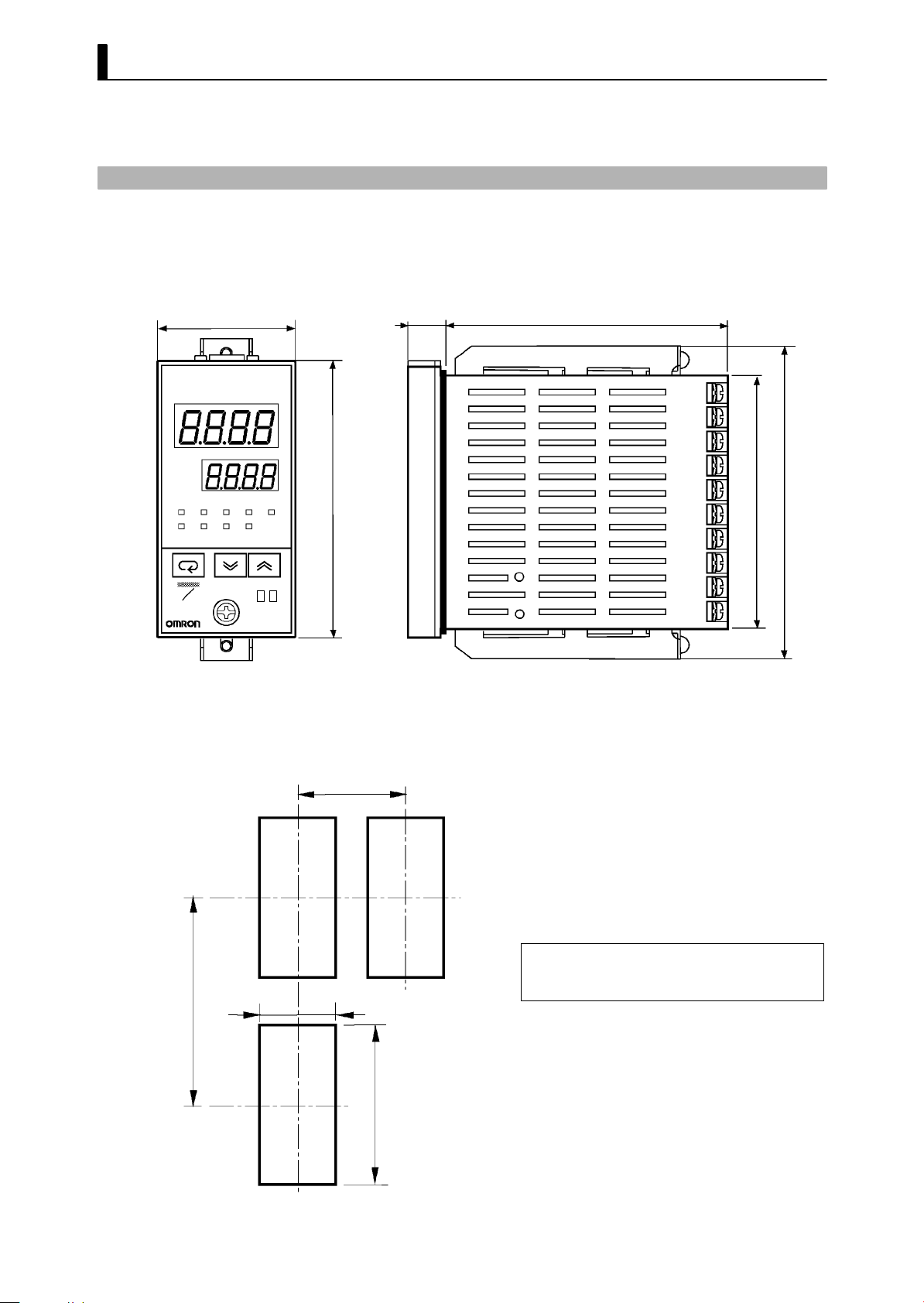
JDimensions
48
PV
SV
MANU
RMT
OUT1 OUT2
STOP
SUB2RSP SUB1
AT
96
13.5 100
Unit (mm)
91
112
A
M
JPanel cutout
Unit (mm)
120 min
MS NS
E5EK
45
+0.6
0
• Thewidthoftherearcaseis44mm.
60 min
• Recommended panel thickness is 1 to 8
mm.
• Maintain the specified vertical and horizontal mounting space between each
controller.
Controllers must not be closely mounted
vertically or horizontally.
2--4
92
+0.8
0
Page 23
2.2 Installation
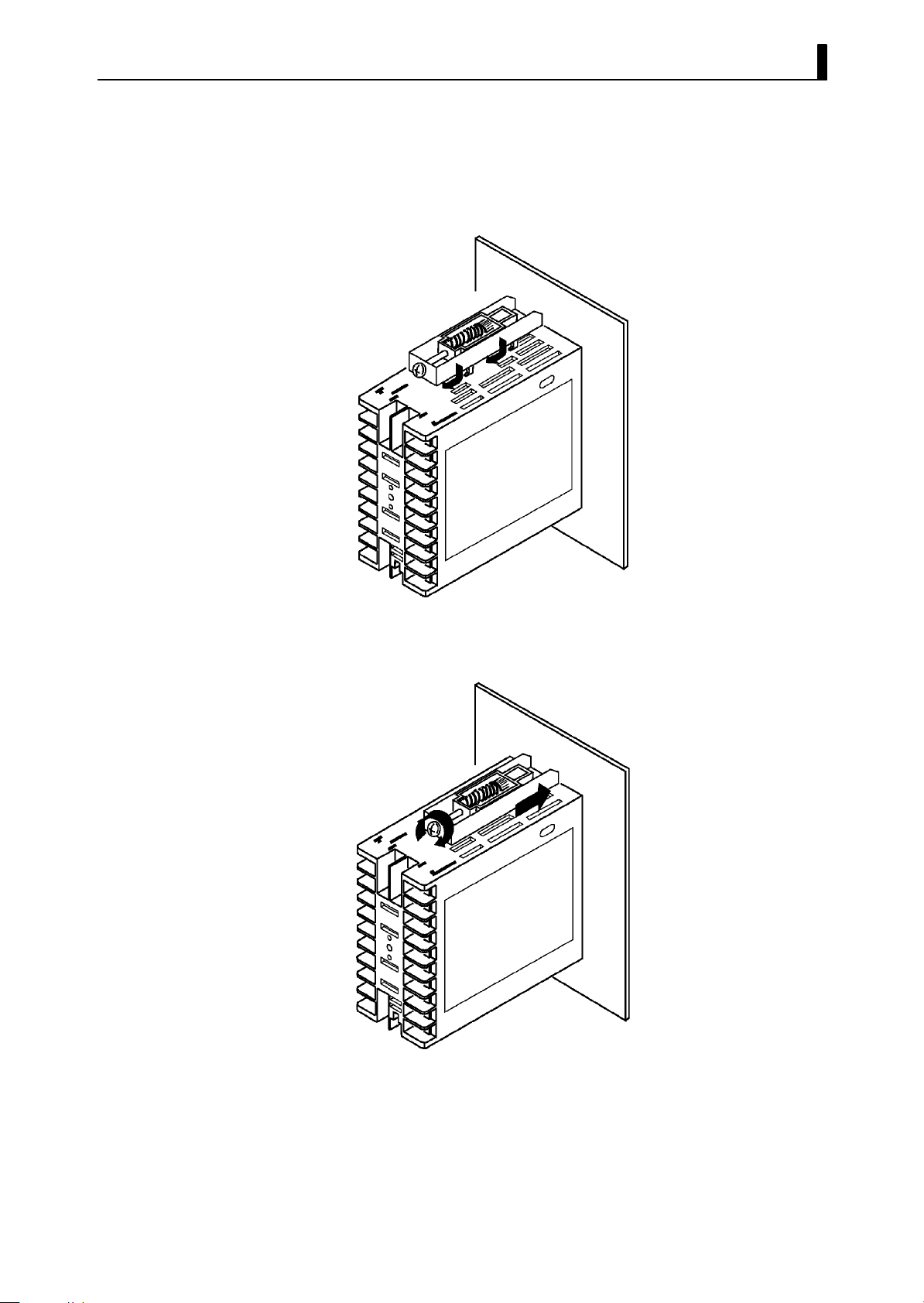
JMounting
(1) Insert the E5EK-DRT controller into the mounting hole in the
panel.
(2) Fit the mounting bracket (accessory) into the fixing slots on the top
and bottom of the rear case.
(3) Tighten the mounting bracket screws alternately a little at a time
until the ratchet start to slide.
2--5
Page 24
CHAPTER 2 PREPARATIONS
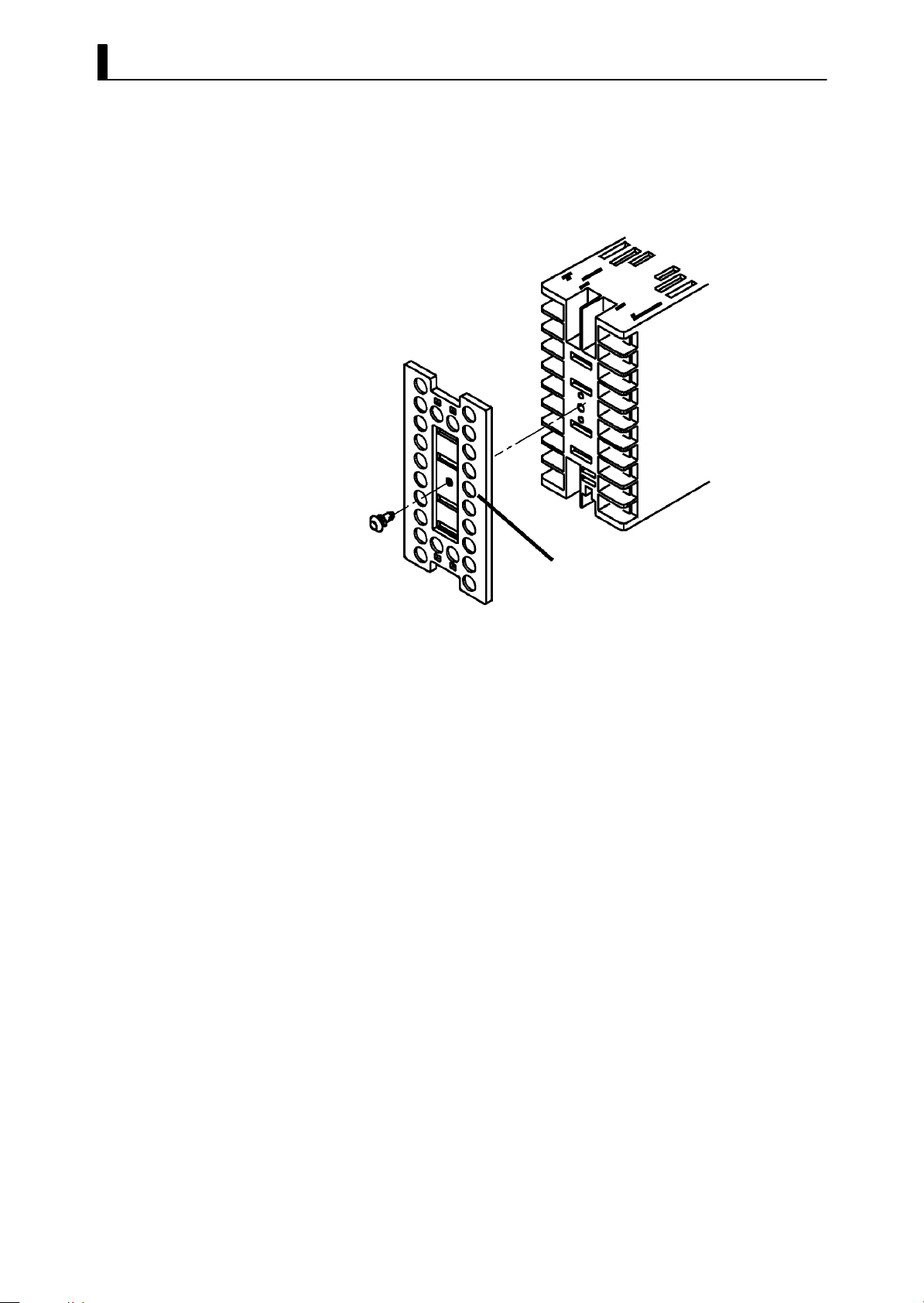
F Setting up the terminal covers
• Fasten the terminal cover (E53-COV08) to protect terminals.
• E5EK-AA2-DRT-500 controller is provided with terminal covers.
• Fasten the terminal cover as follows by using the snap pins.
E5EK
-AA2
-DRT
E53-COV08
• To remove the terminal cover, pull the edges of the snap pins.
2--6
Page 25
2.3 Wiring Terminals
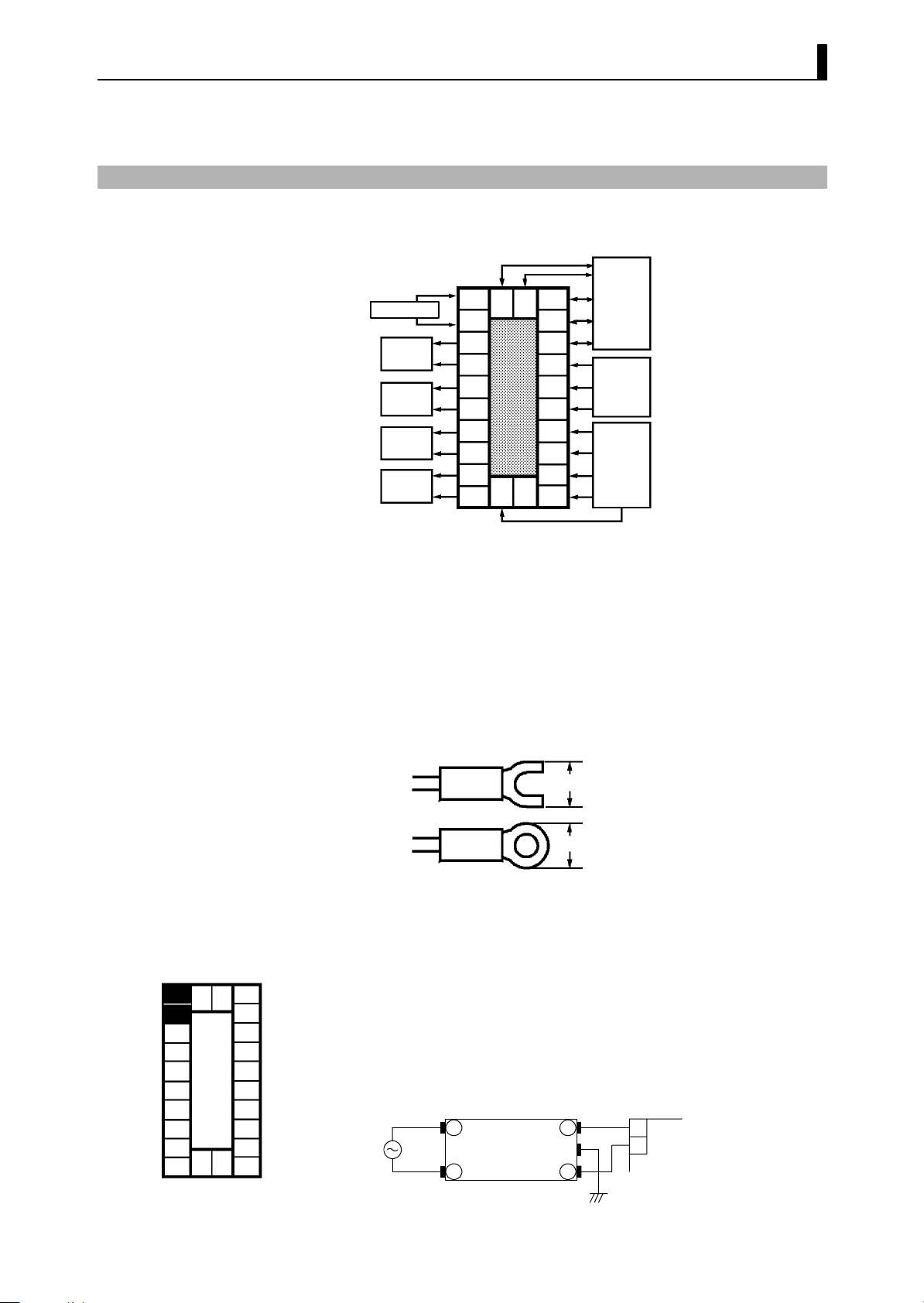
JTerminal arrangement
2.3 Wiring Terminals
JPrecautions
when wiring
10
SOURCE
OUT1
OUT2
SUB1
SUB2
SOURCE : 100 to 240VAC, 50/60Hz 15VA
21 22
9
8
7
6
5
4
3
2
23
1
or
24VAC, 50/60Hz 12VA
24VDC, 8W
20
19
18
17
16
15
14
13
12
11
CompoBus/D
RSP
CT
TC
Pt
I
V
(DeviceNet)
• Use ducts to separate input leads and power lines in order to protect
the controller and its lines from external noise.
• We recommend using solderless terminals when wiring the controller.
• Tighten the terminal screws using a torque no greater than 0.78 N·m.
Take care not to tighten the terminal screws too tightly.
• Do not connect anything to unused terminals.
• Use the following type of solderless terminals for M3.5 screws.
JWiring
F Power supply
10
21 22
9
8
7
6
5
4
3
2
23
1
20
19
18
17
16
15
14
13
12
11
7.2mm max.
7.2mm max.
In the following wiring diagrams, the left side of the terminal Nos. indicates the inside of the controller
• Input power to terminal Nos. 9 and 10. Power specifications are as follows:
100 to 240VAC, 50/60Hz, 15VA
or
24VAC, 50/60Hz, 12VA
24VDC, 8W (Terminals 9 and 10 have no polarities.)
• When using an AC power supply, connect the noise filter (TDK
ZCB2206-11 or equivalent) as shown in the figure below.
1
2
4
3
10
9
E5EK-DRT
2--7
Page 26
CHAPTER 2 PREPARATIONS
F Sensor input
10
9
8
7
6
5
4
3
2
1
21 22
23
20
19
18
17
16
15
14
13
12
11
F Control output
10
9
8
7
6
5
4
3
2
1
21 22
23
20
19
18
17
16
15
14
13
12
11
• Connect the sensor input to terminal Nos. 11 to 14 and 23 as follows
according to the input type.
14
13
12
11
23
Thermocouple Platinum
--
+
resistance
thermometer
14
13
12
11
23
Voltage input Current input
14
13
12
11
23
+
V
--
14
13
12
11
23
--
mA
+
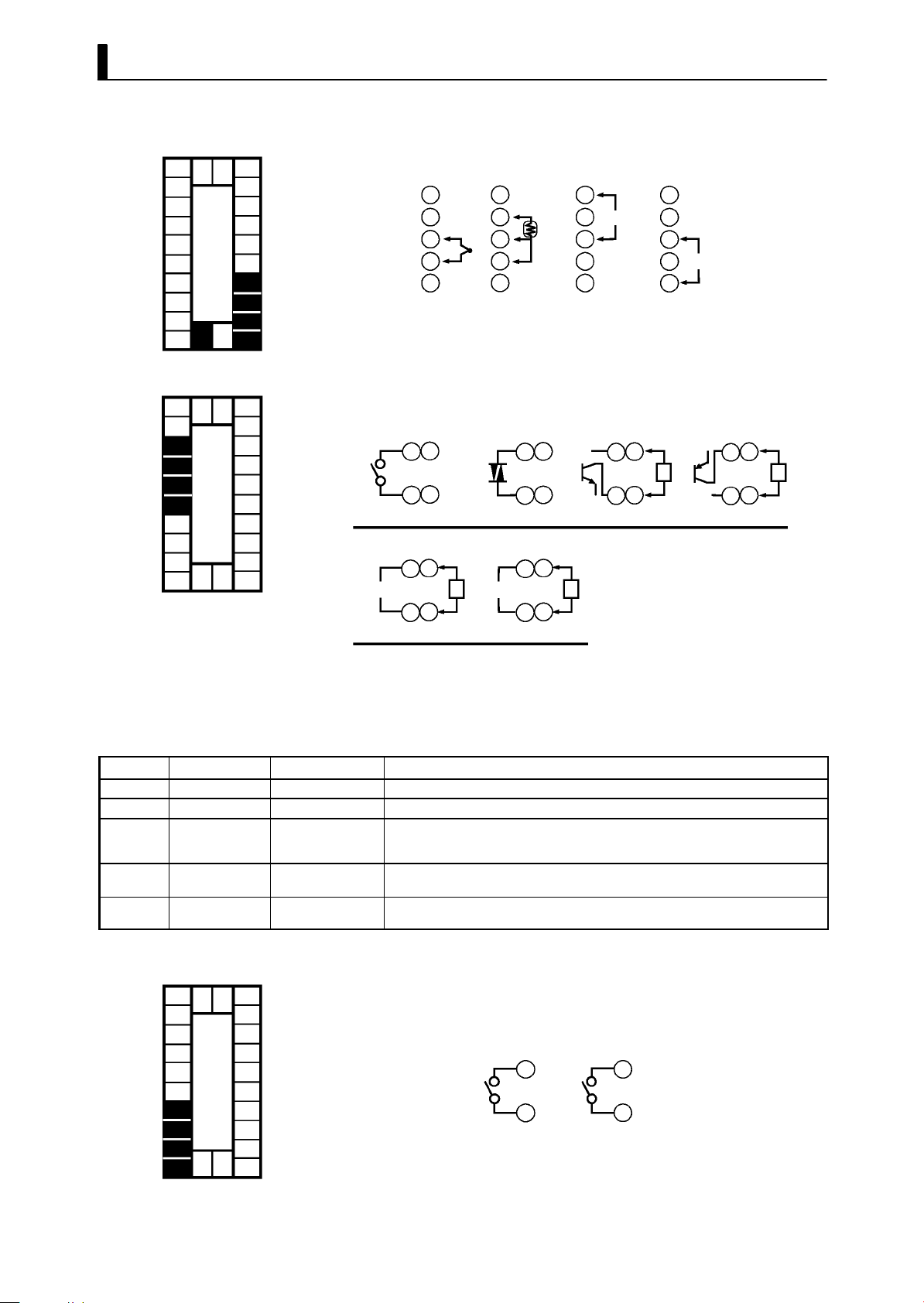
• Terminal Nos. 7 and 8 are for control output 1 (OUT1), and terminal
Nos. 5 and 6 are for control output 2 (OUT2). The following diagrams
show the available output units and their internal equalizing circuits.
86
75
NPN
E53-Q
E53-Q3
+
L
GND
--
86
75
Relay
E53-R E53-S E53-Q4
+
86
mA V
4to20mA/0to20mA
E53-C3
E53-C3D
LL
75
--
86
75
SSR PNP
86
75
0to10VDC/0to5VDC
E53-V34
E53-V35
+v
GND
+
--
+v
86
75
+
L
--
• With E53-VVV output units, about 2VDC is output for one second
afterthepowerisinterrupted.
• The following table shows the specifications for each output unit.
Model Output Type Output Method Specifications
E53-R Relay Pulse 250 VAC, 5 A
E53-S SSR Pulse 75 to 250 VAC, 1 A
E53-Q
E53-Q3
E53-Q4
E53-C3
E53-C3D
E53-V34
E53-V35
F Auxiliary output
Voltage (NPN)
Voltage (NPN)
Voltage (PNP)
4to20mA
0to20mA
0to10VDC
0to5VDC
10
21 22
9
8
7
6
5
4
3
2
23
1
20
19
18
17
16
15
14
13
12
11
Pulse
Pulse
Pulse
Linear
Linear
Linear
Linear
NPN : 12 VDC, 40 mA (with short-circuit protection)
NPN : 24 VDC, 20 mA (with short-circuit protection)
PNP : 24 VDC, 20 mA (with short-circuit protection)
4 to 20 mA, Permissible load impedance: 600 Ω max., Resolution: Approx. 2600
0 to 20 mA, Permissible load impedance: 600 Ω max., Resolution: Approx. 2600
0 to 10 VDC, Permissible load impedance: 1 kΩ min., Resolution: Approx. 2600
0 to 5 VDC, Permissible load impedance: 1 kΩ min., Resolution: Approx. 2600
• Terminal Nos.3 and 4 are for auxiliary output 1 (SUB1) and terminal
Nos.1 and 2 are for auxiliary output 2 (SUB2).
• The internal equalizing circuits for the auxiliary outputs are as follows:
4
3
Auxiliary
output 1
2
1
Auxiliary
output 2
• Output specifications are as follows:
SPST-NO, 250VAC, 3A
2--8
Page 27
2.3 Wiring Terminals
F CT input
10
9
8
7
6
5
4
3
2
1
21 22
23
20
19
18
17
16
15
14
13
12
11
F Remote SP input
21 22
23
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
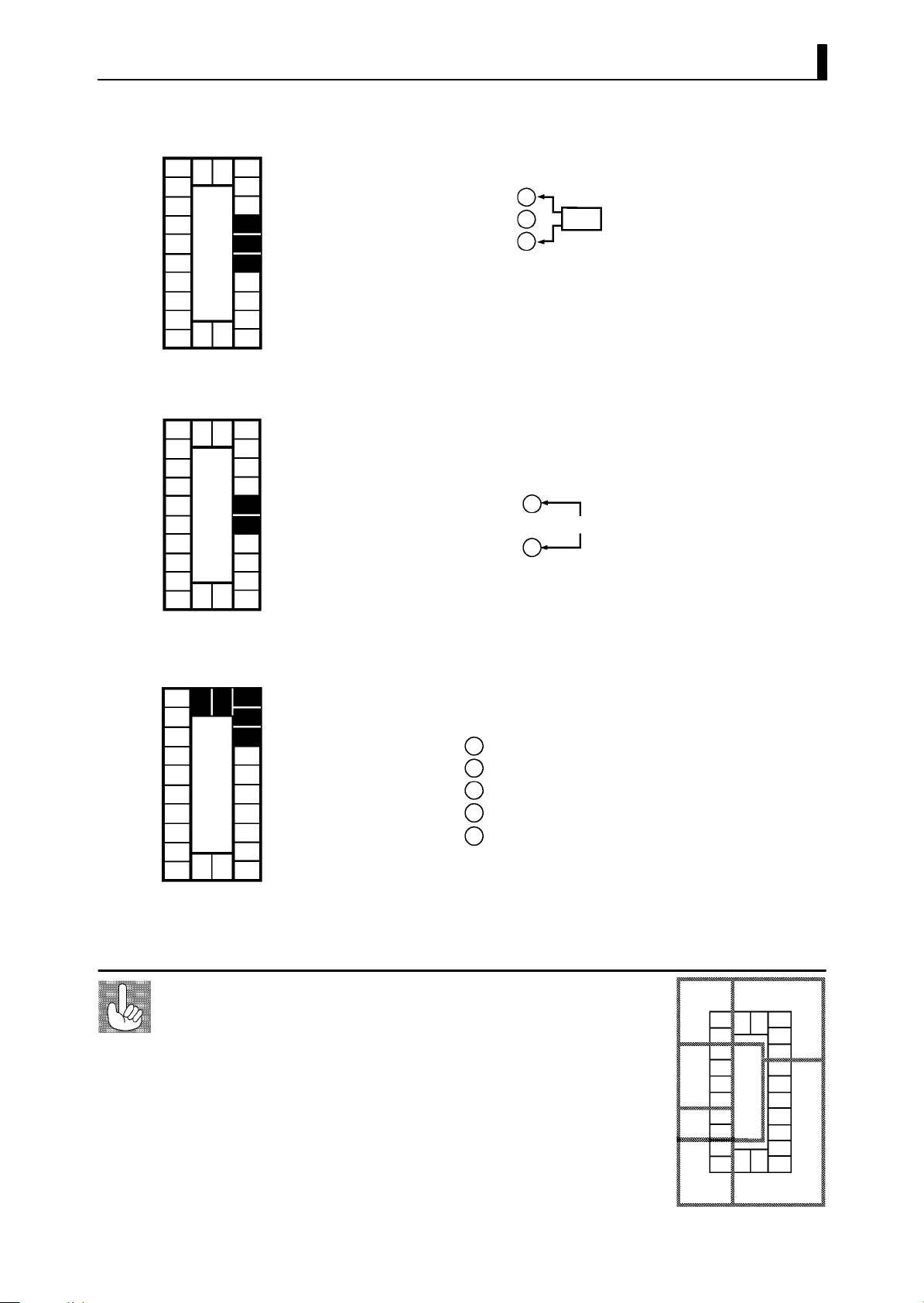
• When using the HBA function connect CT input (CT) to terminal
Nos.15 to 17.
17
16
15
CT input
CT
• For details on CT inputs, see Appendix, about current transformer.
• Connect an input (RSP) to be used as the remote SP to terminal
Nos.15 and 16.
• Only 4 to 20 mA inputs can be connected. Connect the input as follows:
+
16
4to20mA
15
--
F Communications
10
9
8
7
6
5
4
3
2
1
About the power
blocks
21 22
23
20
19
18
17
16
15
14
13
12
11
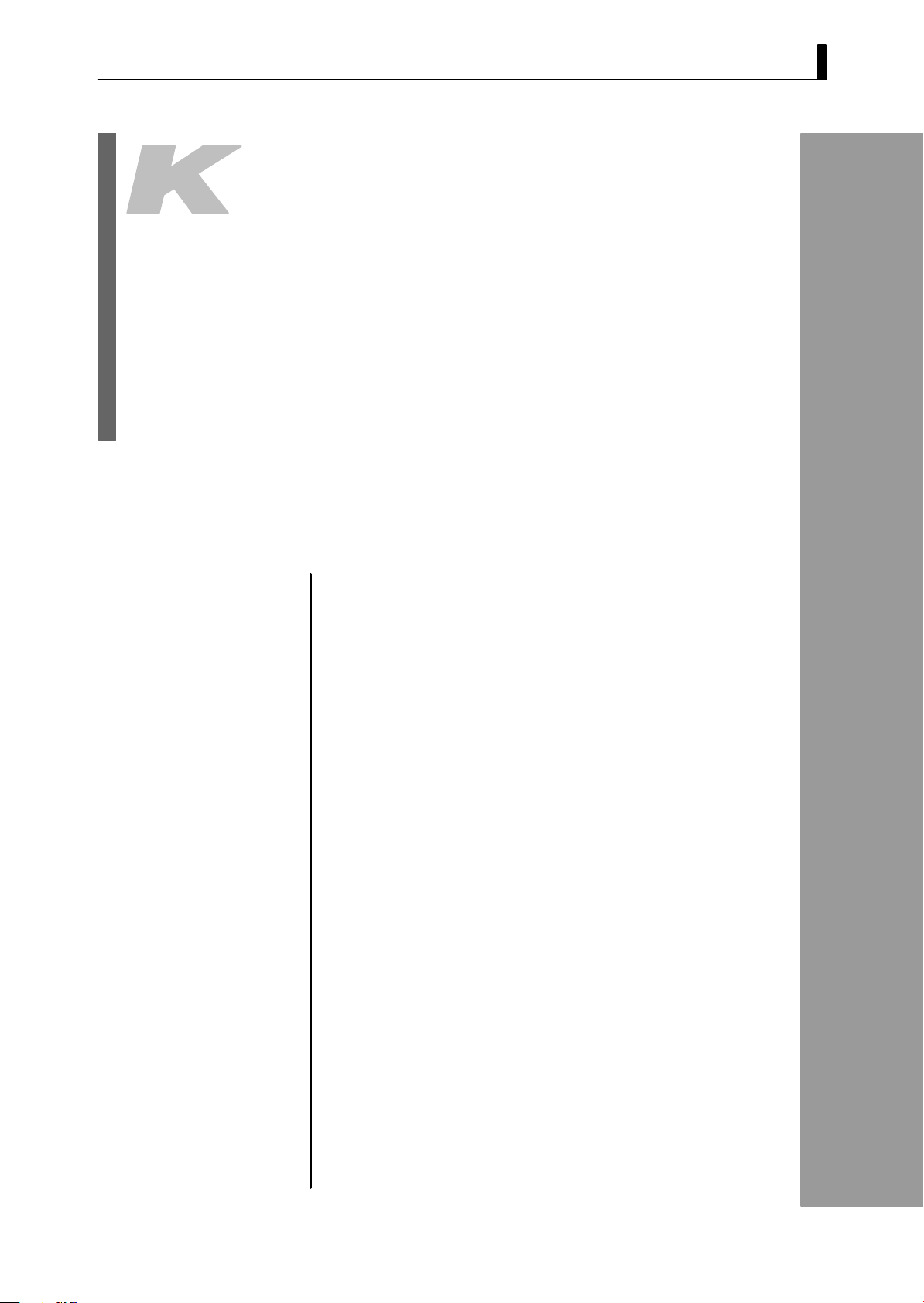
• Connect the solderless terminal of the CompoBus/D (DeviceNet)
5-core cabl e to terminal Nos. 18 to 22. Connect each of the inputs as
follows:
18
Red (V+)
19
White (CAN H)
20
22
21
(shield)
Blue (CAN L)
Black (V -- )
• For details on the meaning of signals and wiring precautions, see the
“CompoBus/D (DeviceNet) Operation Manual (W267).”
The E5EK-DRT has independent power supplies for
each of the terminal blocks shown on the right.
AC
21 22
23
20
19
18
17
16
15
14
13
12
11
10
9
8
7
B
6
5
4
E
3
2
1
FD
2--9
Page 28

CHAPTER 2 PREPARATIONS
2--10
Page 29
CHAPTER3
CHAPTER 3
BASIC OPERATION
This chapter describes an actual example for understanding the basic
operation of the E5EK-DRT.
CHAPTER 3 BASIC OPERATION
3.1 ConventionUsedinthisChapter 3-2........
3.2 Setting Input Specifications 3-4.............
Input type 3-4.............................
Temper ature input 3-5.....................
Analog input 3-5..........................
3.3 Setting Output Specifications 3-7...........
Output assignments 3-7....................
Direct/reverse operation 3-8................
Control period 3-8.........................
3.4 Setting Alarm Type 3-10....................
Alarm type 3-10............................
Alarm value 3-10...........................
Alarm hysteresis 3-11.......................
Closeinalarm/openinalarm 3-11............
3.5 Protect Mode 3-13..........................
Security 3-13...............................
A/M key protect 3-13........................
3.6 Starting and Stopping Operation 3-14........
3.7 Adjusting Control Operation 3-15............
Changing the set point 3-15.................
Manual operation 3-15......................
Auto-tuning (A.T.) 3-17.....................
3--1
Page 30

CHAPTER 3 BASIC OPERATION
3.1 Convention Used in this Chapter
This chapter describes basic E5EK-DRT operations such as how to set
up parameters, start and stop operation, and adjusting control opera-
tion.
For more complex control examples, refer to Chapter 4 Applied Operation and Chapter 5 Parameters.
F Basic Operation
Flow
The following diagram shows the basic operation flow.
Power ON
Setup
Setting input specifications
Setting output specifications
Setting alarm output
Protecting parameters
Operation
Start
Adjustment
Stop
3--2
Power OFF
This chapter describes basic operation according to this flow. Examples
of operation for each of these items are described at the end of the setting examples for the parameter in question. However, you must pro-
ceed to the first parameter of the subsequent item.
For example, to perform “setting output specifications” after complet-
ing “setting input specifications,” proceed to the first parameter of “setting output specifications” from the final parameter of “setting input
specifications.” For details on moving parameters between items, follow
the procedures in “Selecting modes” and “Selecting parameters”
described on pages 1-7 and 1-8.
Page 31

3.1 Convention Used in this Chapter
F Setup
The following are examples of how to set up each of the items. These
examples assume that the controller is operated at the factory defaults.
Themainspecificationsofthesetupexamplesinthischapterareasfol-
lows:
• A K thermocouple is connected to the controller.
• The control output (heat) function is assigned to control output 1,
and the alarm 2 function is assigned to auxiliary output 1. A relay
output unit is also attached to control output 1.
• The upper limit alarm is set. In this example, alarm 2 is set. An alarm
is output when the temperature exceeds 10_C of the set point.
The control example that is configured based upon the setup example is
as follows:
Temperature s ensor:
K thermocouple
Control target
Alarm 2 (upper limit)
(alarm value=10_C)
10
SOURCE
OUT1
SUB1
E5EK-AA2-DRT
(Control output 1: E53-R)
9
8
7
6
5
4
3
2
1
21 22
23
20
19
18
17
16
15
14
13
12
11
--
+
3--3
Page 32

CHAPTER 3 BASIC OPERATION
3.2 Setting Input Specifications
Setting input specifications
Input type
Temperature input?
Y
Temperature unit
Temperature input shift
End of setup
N
Scaling
Decimal point
Setup mode
Level 2 mode
• With temperature input, scaling and decimal point parameters need
not be set as this information is determined by the input (sensor)
type. (These parameters are not displayed.) Note that temperature
unit and temperature input shift parameters need to be set.
• With analog input, the “scaling upper limit”, “scaling lower limit”
and “decimal point” parameters need to be set.
JInput type
3--4
• Set the type No. (0 to 22) in the “input type” parameter (Set up
mode). The factory setting is “2: K (thermocouple).”
• For details on input types and setting ranges, see page 5-25.
Page 33

JTemperature input
3.2 Setting Input Specifications
F Temperature unit
F Temperature
input shift
• To switch the temperature unit from “_C” to“_F” when input is tem-
perature, switch the “_C/_F selection” parameter (setup mode) from
”to“ ”.
“
• When input is temperature input, the upper and lower limit values of
the sensor can be shifted linearly. For example, if both the upper and
lower limit values are shifted by 1.2_C,theprocessvalue(beforeshift)
is regarded as 201.2_C after shift when input is 200_Cbeforeshift.
• To set input shift, set shift values in the “input shift upper limit” and
“input shift lower limit” parameters (level 2 mode).
Temperature
Input shift upper limit value
Upper limit value
After shift
Before shift
Input shift lower
Lower limit value
0
limit value
Input (%FS)
100
JAnalog input
• When the analog input (the voltage input and current input) is selected, scaling matched to the control is available.
• The “scaling upper limit”, “scaling lower limit” and “decimal point”
parameters (setup mode) are used for scaling. These parameters cannot be used when the temperature input type is selected.
• The “scaling upper limit” parameter sets the physical quantity to be
expressed by the upper limit value of input, and the “scaling lower
limit” parameter sets the physical quantity to be expressed by the
lower limit value of input. The “decimal point” parameter sets the
number of digits past the decimal point.
• The following figure shows a scaling example of 4 to 20 mA input. After scaling, the humidity can be directly read. In this case, the “decimal point” parameter is set to “1”.
Readout (humidity)
Scaling upper limit
value (95.0%)
Scaling lower limit
value (10.0%)
0
100%FS
Input (4 to 20 mA)
3--5
Page 34

CHAPTER 3 BASIC OPERATION
Setting Example
1 second min.
1 second min.
1 second min.
In this example, let’s check the input type and temperature units, and
shift the lower limit by 1_C and the upper limit by 3_C.
“input type” = “2: K”
“temperature unit” = “_C”
“input shift upper limit”= “3.0”
“input shift lower limit” = “1.0”
(1) Select the menu display , and select “ :setupmode”usingthe
or keys. For details on selecting the menu display, see page
1-7.
(2) Press the
mode. The top parameter in the setup mode “
key for one second minimum to enter the setup
:inputtype”is
displayed. This parameter is factory-set to “2: K”.
(3) Press the
“
to “
: _C/_F selection” parameter. This parameter is factory-set
: _C”.
(4) Select the menu display , and select “
key to fix the set value. The display changes to
: level 2 mode” using the
or keys.
(5) Press the
key for one second minimum to enter the level 2
mode. The top parameter in the level 2 mode [ ] (“local/remote” parameter) is displayed.
(6) Press the
key until [ ] (“input shift upper limit” parame-
ter) is selected. This parameter is factory-set to “0.0”.
(7) Press the
(8) Press the
key until “3.0” is displayed.
key until [ ] (“input shift lower limit” parame-
ter) is selected. This parameter is factory-set to “0.0”.
(9) Press the
keyuntil“1.0”isdisplayed.Thissetsthe“inputshift
upper limit” and “input shift lower limit” values.
3--6
Page 35

3.3 Setting Output Specifications
Dest
inat
i
JOutput assignments
• Ten output are supported.
These functions are assigned to control outputs 1 and 2, and auxiliary
output 1 and 2.
• Restrictions on assignment destination are placed on some of the outputs. The following table shows where outputs may be assigned to.
3.3 Setting Output Specifications
Assignment
Control Output Auxiliary Output
on
Output Function
Control output (heat) F F
Control output (cool) F F
Alarm 1 F F F F
Alarm 2 F F F F
Alarm 3 F F F F
HBA F F F F
LBA F F F F
Error 1; Input error F F
Error 2; A/D converter error F F
Error 3; RSP input error F F
With control output (cool), the conditions for switching from standard control
to heating and cooling control are reached when the output function is assigned
at the cooling side during heating and cooling control.
1 2 1 2
In other words, heating and cooling control is carried out when control output (cool) is assigned, and standard control is carried out
when output is not assigned. For details on heating and cooling control, see 4.1 Selecting the Control Method (page 4-2).
• Factory settings are as follows:
control output 1 = Control output (heat)
control output 2 = Alarm 1
auxiliary output 1 = Alarm 2
auxiliary output 2 = Alarm 3.
• Output assignments are set in the “control output 1 assignment”,
“control output 2 assignment”, “aux output 1 assignment” and “aux
output 2 assignment” parameters (setup mode).
3--7
Page 36

CHAPTER 3 BASIC OPERATION
JDirect/reverse
operation
JControl period
• “Direct operation” (or normal operation) refers to control where the
manipulated variable is increased according to the increase in the
process value. Alternatively, “reverse operation” refers to control
where the manipulated variable is decreased according to the decrease
in the process value.
For example, when the process value (PV), is lower than the set point
(SP), in a heating control system, the manipulated variable increases
by the difference between the PV and SP values.
Accordingly, this becomes “revers e operation” in a heating control system. Alternatively, this becomes “direct operation” in a cooling control
system.
• Direct/reverse operation is set in the [
tion” parameter (setup mode).
• When the output unit is pulse output such as relay output, set the
pulse output cycle (control period). Though a shorter pulse period
provides better control performance, the control period should be set
taking the life expectancy of the output unit into consideration when
the output unit is relay. It is recommended that the control period be
set to longer than 20 seconds.
• The control period is set in the “control period (heat)” parameter
(level 1 mode). Factory setting is “20:20 seconds.”
• The “control period (cool)” output function is not allocated. So, the
“control period (cool)” parameter cannot be set.
]“direct/reverse opera-
3--8
Page 37

3.3 Setting Output Specifications
Setting Example
1 second min.
1 second min.
1 second min.
In this example, let’s set the parameters as follows:
“control output 1 assignment” = “control output (heat)”
“control output 2 assignment” = “alarm output 1”
“direct/reverse operation” = “reverse operation”
“control period” = “20 sec.”
All of the above settings in this example are factory settings. So, in this
example, we ar e only going to check the parameter settings.
(1) Select the menu display , and select [ ] (setup mode) using the
or keys. For details on selecting the menu display, see page
1-7.
(2) Press the
mode. The top parameter in the setup mode [
key for one second minimum to enter the setup
] “input type” is
displayed. In this example, the parameter setting is “17: 4 to 20
mA.”
(3) Press the
key until [ ] (“control output 1 assignment”
parameter) is displayed. The parameter default is [ ].
(4) Asthesettinginthisexampleistobeleftasitis,pressthe
The display changes to [
parameter). The parameter default is [
] (“control output 2 assignment”
].
(5) Asthesettinginthisexampleistobeleftasitis,pressthe
until [
The parameter default is [
] (“direct/reverse operation” parameter) is displayed.
].
(6) Asthesettinginthisexampleistobeleftasitis,pressthe
key.
key
or
keys to select [ ](level1mode).
(7) Press the
key for one second minimum to enter the level 1
mode. The top parameter in the level 1 mode [ ] “ AT execute/
cancel” is displayed.
(8) Press the
key until [ ] (“control period” parameter) is displayed. The parameter default is “20”. As the setting in this exam-
ple is to be left as it is, quit key operation.
3--9
Page 38

CHAPTER 3 BASIC OPERATION
A
l
3.4 Setting Alarm Type
• Three alarm outputs are supported: alarms 1 to 3. Of these, only the
alarm assigned as the output can be used.
• Alarm output conditions are determined according to the combination of the “alarm type”, “alarm value” and “alarm hysteresis”
parameter settings.
• The contact conditions when alarm output is ON can be set to “open”
or “closed” in the “close in alarm/open in alarm” p arameter.
JAlarm type
• The following table shows the alarm types supported by the E5EKDRT controller and their respective operations.
armType
Upper-and lower-limit alarm
1
(deviation)
Upper-limit alarm (deviation)
2
Lower-limit alarm (deviation)
3
Upper-and-lower-limit range
4
alarm (deviation)
Upper-and-lower-limit alarm
with standby sequence
5
(deviation)
Upper-limit alarm with
6
standby sequence (deviation)
Lower-limit alarm with
7
standby sequence (deviation)
Absolute-value upper-limit
8
alarm
Absolute-value lower-limit
9
alarm
Absolute-value upper-limit
10
alarm with standby sequence
Absolute-value lower-limit
11
alarm with standby sequence
When X is positive When X is negative
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Alarm Output Operation
XX
SP
X
SP
X
SP
XX
SP
XX
SP
X
SP
X
SP
X
0
X
0
X
0
X
0
Always ON
ON
OFF
ON
OFF
Always OFF
Always OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
X
SP
X
SP
X
SP
X
SP
X
0
X
0
X
0
X
0
• Alarm types are set independently for each alarm in the “alarm 1 to
3” parameters (setup mode). Factory setting is “2: Upper-limit alarm
(deviation)”.
JAlarm value
• Alarm values are indicated by “X” in the table above. Alarm output
operation differs according to whether the value of the alarm is positive or negative.
• Alarm values are set independently for each alarm in the “alarm
value 1 to 3” parameters (level 1 mode). Factory setting is “0”.
3--10
Page 39

3.4 Setting Alarm Type
C
l
O
JAlarm hysteresis
F Standby
sequence
• The hysteresis of alarm outputs when alarms are switched ON/OFF
can be set as follows.
Upper limit alarm Lower limit alarm
ON
OFF
Alarm hysteresis
Alarm value
ON
OFF
Alarm value
Alarm hysteresis
• Alarm hysteresis is set independently for each alarm in the “alarm 1
to 3 hysteresis” parameters (level 2 mode). Factory setting is “0.02:
0.02%FS”.
• “Standby sequence” is a function for unconditionally turning alarm
output O FF when the process value has left the alar m range once and
it next enters the alarm range.
• For example, when the alarm type is set to “deviation lower limit,”
generally the process value is within the alarm range, and al arm output become ON as it is as the process value when the power is turned
ON is smaller than the set point. However, if the alarm type is set to
“deviation lower limit with standby sequence”, alarm output first
becomes ON when the process value exceeds the alarm setting value
to leave the alarm range and on ce again falls below the alarm value.
• When an alarm is output, the standby sequence is canceled. For
details on the standby sequence reset conditions, see “Chapter 5,
Expansion Mode, Standby sequence reset method” on page 5-34.
JCloseinalarm/openinalarm
• When the controller is set to “close in alarm,” the status of the alarm
output function is output as it is. When set to “open in alarm,” the
status of the alarm output function is output inverted.
oseinalarm
peninalarm
• Alarm type and close in alarm (normally open)/open in alarm (normally close) can be set independently for each alarm.
• Close in alarm/open in alarm is set in the “alarm 1 to 3 open in
alarm” parameters (setup mode). Factory setting is [
alarm”.
F Summary of
alarm operations
The figure below visually summarizes the above description of alarm
operations (when alarm type is set to “lower limit alarm (deviation)
with standby sequence”):
Alarm value
Alarm
ON ON Lit
OFF OFF Not lit
ON OFF Lit
OFF ON Not lit
Alarm type: lower limit alarm (deviation) with standby sequence
PV
Output Output LED
Alarm hysteresis
] “close in
Time
Alarm output
(close in alarm)
Standby sequence
canceled
Close (ON)
Open (OFF)
3--11
Page 40

CHAPTER 3 BASIC OPERATION
Setting Example
1 second min.
1 second min.
1 second min.
When a set point for a temperature exceeds 10%, alarm1 will be output.
In this example, let’s set the parameters as follows:
“alarm type 1” = “1: (deviation upper-and lower-limit)”
“alarm value 1” = “10”
“alarm hysteresis” = “0.20”
“close in alarm/open in alarm”= “
: close in alarm”
Meanings of parameters, “alarm hysteresis” and “open in alarm/close
in alarm” are the same settings at the shipment, so settings for operations are omitted.
(1) Select the menu display , and select [
] (setup mode) using the
or keys. For details on selecting the menu display, see page
1-7.
(2) Press the
mode. The top parameter in the setup mode [
key for one second minimum to enter the setup
] “input type” is
displayed. In this example, the parameter setting is “17: 4 to 20
mA”.
(3) Press the
key until [ ] (“alarm type 1” parameter) is dis-
played. The parameter default is “2: deviation upper limit”.
(4) Press the
key to return to “1: deviation upper-and-lower lim-
it”.
(5) Select the menu key, and select [
](level1mode)usingthe
or keys.
(6) Press the
mode. The top parameter in the level 1 mode [
key for one second minimum to enter the level 1
] “AT execute/
cancel” is displayed.
(7) Press the
key until [ ] (“alarm value 1” parameter) is dis-
played.
(8) In this example, the parameter setting is “0.0” so press the
key
until “10.0” i s displayed.
3--12
About the Decimal
PointoftheAlarm
Val ue
The decimal point of the alarm value conforms to the setting of the “decimal
point” parameter (setup mode). (During temperature input, the decimal point of
the alarm value conforms to the set sensor.)
Page 41

3.5 Protect Mode
3.5 Protect Mode
JSecurity
• This parameter allows you to protect until start of operation parameters that do not change during operation to prevent unwanted modification.
• The range of usable parameters is specified by the set value of the
“security” (protect) parameter.
• The following table shows which modes are protected by this set
value:
Mode
Calibration F
Option F F
Expansion F F
Setup F F
Level 2 F F F
Level 1 F F F F
Level 0 F F F F F *2 *1
*1 The “PV/SP” parameter can only the displayed.
*2 Only the “PV/SP” parameter can be used.
0 1 2 3 4 5 6
Set Value
• Indicates operable
(unprotected) modes.
• When “0” is set, parameters are not protected.
• When “5” is set, only the “PV/SP” parameter can be used.
• When “6” is set, the “PV/SP” parameter can only be monitored.
• Default is “1”.
JA/M key protect
Setting Example
A/M
A/M
• This parameter disables use of the
example, if you protect use of the
A/M key during operation. For
A/M keybythe“A/M keyprotect”
parameter (protect mode) during auto operation, the controller can not be set to the manual mode, preventing manual operation of the
controller during operation.
• Let’s protect the setup, expansion, option and calibration modes. Set
the parameters as follows:
“security” = “2: Usable only in level 0 to 2 modes”
(1) Press for 1 second minimum the A/M and keys simultaneously,
the controller enters the protect mode.
(2) In the protect mode, the top parameter in the protect mode “secu-
rity” is displayed. The parameter default is “1”. Press the
key
to change the parameter setting to “2”.
(3) Press for 1 second minimum the
A/M and keys simultaneously,
the display changes to the “PV/SP monitor” parameter (level 0
mode).
3--13
Page 42

CHAPTER 3 BASIC OPERATION
3.6 Starting and Stopping Operation
• You can start and stop operation by changing the setting of the “run/
stop” parameter (level 0 mode).
• You can switch the RUN/STOP function up to 100,000 times.
• To stop operation, set the “run/stop” parameter to [
a stop state, the “STOP” LED lights.
• Operation cannot be stopped during auto-tuning.
](stop).In
F Man ip u lated vari-
able at stop
Setting Example
1 second min.
• Specify the manipulated variable (-5.0 to 105.0%) in the “MV at stop”
parameter (level 2 mode) to output the manipulated variable during
stop.
Factory-set to “0.0 : 0.0%”
The following example describes the procedure to follow to stop control
during operation of the controller.
(1) Select the menu display , and select [ ](level0mode)usingthe
or keys. For details on selecting the menu display, see page
1-7.
(2) Press the
mode. The PV and SP are displayed.
(3) Press the
played.
(4) Press the
lights, and operation stops.
key for one second minimum to enter the level 0
key until [ ] (“run/stop” parameter) is dis-
key to select [ ](stop).The“STOP”LED
3--14
To resume operation, follow the above procedure to select [
(“run”). The “STOP” LED goes out and operation starts.
]
Page 43

3.7 Adjusting Control Operation
3.7 Adjusting Control Operation
JChanging the set
point
Setting Example
JManual operation
Process value
Manipulated
variable
[MANU] LED
• You can change the set point in the “set point” parameter (level 0
mode).
• However, note that you cannot change the set point when the “security” parameter (protect mode) is set to “6”.
• To change the set p oint, p ress the
or keys to select the
desired value. If you leave the setting for two seconds, the set point is
updated to the new setting.
In the following example, let’s change the temperature set point from
“60_C” to “50_C”.
(1) Select the PV/SP monitor display.
(2) Press the
key to change the setting to “50.0: 50.0_C”.
• The manipulated variable is controlled.
• To set manual operation and manually set the manipulated variable
or the valve opening, press for 1 second minimum the
A/M key. The
controller enters the manual mode.
To end the manual mo de, press the
A/M key for 1 second minimum.
The mode returns to the level 0 mode.
• The process value is displayed on the No.1 display, and the manipulated variable is displayed on the No.2 display.
• To change the manipulated variable, press the
or keys. After
two seconds, the manipulated variable is updated to the new setting.
• Other modes cannot be selected while in the manual mode. To select
other modes, quit the manual mode.
• The automatic return of display function does not work while in the
manual mode.
• When switching between manual and auto operation, the manipulated variable is subject to balance-less, bump-less operation.
• If the power is interrupted during manual operation, manual operation is resumed at the manipulated variable at power interruption
when the power is reset.
• You can switch the AUTO/MANUAL function up to 100,000 times.
Balance-less,
Bump-less
Operation
To prevent sudden changes in the manipulated variable when switching between
manual and auto operation, operation is resumed using the value that was active
immediately before operation was switched, and the value is brought gradually
closer to the value immediately after operation was switched.
3--15
Page 44

CHAPTER 3 BASIC OPERATION
The following diagram summarizes manual operation.
Manipulated variable (%)
Balance-less, bump-less points
Manual
Auto
0
Manipulated variable
switched
OFF ON
Power interruption
Time
A/M A/M
3--16
Page 45

3.7 Adjusting Control Operation
JAuto-tuning
(A.T.)
F 40%AT
Deviation at start of AT
execution ≧ 10% full-scale
• AT (auto-tuning) cannot be executed while operation is canceled or
during ON/OFF control.
• W hen you execute auto-tuning, the optimum PID parameters for the
current set point at execution are automatically set b y forcibly changing the manipulated variable to calculate the characteristics (called
the “limit cycl e method”) of the control target. During auto -tuning,
the AT LED flashes.
• 40%AT or 100%AT can be selected by the limit cycle of MV change
width. Specify [
]or[ ], respectively, in the “AT execute/
cancel” parameter (level 1 mode).
• During heating and cooling control, only 100%AT can be executed.
(So, [
• To cancel AT execution, specify [
] (40%AT) will not be displayed.)
](“ATcancel”).
In order to set the limit cycle of MV change width to 40%, select 40%AT
to execute auto-tuning with fluctuations in the process value kept to a
minimum. However, note that auto-tuning takes longer time to execute
compared with 100%AT.
The timing by which limit cycles are generated varies according to
whether or not the deviation (DV) at the start of AT execution is 10%
full-scale or less.
Deviation at start of AT
execution < 10% full-scale
Limit cycle of MV change
width 40%
Limit cycle of MV change
width 40%
Set point Set point
Deviation 10%
full-scale
StartofAT
execution
F 100%AT
End of AT Start of AT
In order to set the limi t cycle of MV change width to 100%, select 100%
Time Time
AT to shorten the AT execution time without worrying about fluctuations in the process value.
Limit cycle of MV
change width 100%
Set point
Deviation 10%
full-scale
End of AT
execution
StartofAT
execution
Time
End of AT
3--17
Page 46

CHAPTER 3 BASIC OPERATION
Setting Example
1 second min.
AT execute
In this example, let’s execute 40%AT.
(1) Select [ ](level1mode)usingthe or keys. For details
on selecting the menu display, see page 1-7.
(2) Press the
key for one second minimum to enter the level 1
mode. The top parameter in the setup mode [ ] “AT execute/
cancel” is displayed. In this example, the parameter setting is
[
(3) Press the
]“ATcancel”
key to specify [ ].
(4) The AT LED flashes, and AT execution starts. When the AT LED
goes out (end of AT execution), the parameter automatically
returns to [
](“ATcancel”).
3--18
About PID Parameters
When control characteristics are already known, the PID parameters can be set
directly to adjust control.
PID parameters are set in the “proportional band” (P), “integrated time” (I) and
“derivative time” (D) parameters (level 1 mode).
For details on the setting ranges of these parameters, see chapter 5 Level 1 Mode
(page 5-12).
Page 47

CHAPTER4
CHAPTER 4
APPLIED OPERATION
This chapter describes each of the parameters required for making full
use of the features of the E5EK-DRT. Read this chapter while referring
to the parameter descriptions in chapter 5.
CHAPTER 4 APPLIED OPERATION
4.1 Selecting the Control Method 4-2............
Heating and cooling control 4-2.............
ON/OFF control 4-3.......................
4.2 Operating Condition Restrictions 4-4........
Manipulated variable restrictions 4-4........
Set point limiter 4-5.......................
SP ramp 4-5..............................
4.3 How to Use the Remote SP 4-7..............
Scaling 4-7................................
SP mode 4-7..............................
Remote SP monitor 4-8....................
SP tracking 4-8............................
Operating conditions 4-8...................
4.4 How to Use the Heater Burnout Alarm 4-9...
Heater burnout detection 4-9...............
Operating conditions 4-9...................
How to calculate
the heater burnout set value 4-10............
4.5 LBA 4-11..................................
4--1
Page 48

CHAPTER 4 APPLIED OPERATION
4.1 Selecting the Control Method
JHeating and
cooling control
When selecting the control method, set the parameters according to the
following table. (Parameters are factory-set to heating control.)
Parameter
Control
Method
Heating control
(Standard)
Cooling control
(Standard)
Heating and cooling
control
For details on how to assign outputs, see 3.3 Setting Output Specifications (page 3-7).
• When heating and cooling control is selected, the “deadband” and
“cooling coefficient” parameters can be used.
F Dead band
The dead band is set with the set point as its center. The dead band
width is the set value of the “dead band” parameter (level 1 mode). Setting a positive value produces a dead band, while setting a negative
value produces an overlap band. Default is set to “0.00: 0.00% FS.”
Output Output
Dead band: dead
band width = positive
Control output 1
assignment
Control output (heat)
Control output (heat)
Control output (heat) Control output (cool) Reverse operation
Control output 2
assignment
-
-
Overlap band: dead
band width = negative
Direct/Reverse
operations
Reverse operation
Direct operation
Heating
side
0
Set point Set point
F Cooling coeffi -
cient
F Man ip u lated vari-
able at stop
Cooling
side
PV
Heating
side
0
Cooling
side
PV
If the heating and cooling characteristics of the control target greatly
differ, preventing satisfactory control characteristics from being
obtained by the same PID parameters, adjust the proportional band (P
at cooling side) using the cooling coefficient to balance control b etween
the heating and cooling sides. In heating and cooling control, P at the
heating or cooling side is calculated by the following formula:
Heating side P = P; Cooling side P = cooling coefficient ¢ P
• In heating and cooling control, the manipulated variable output that
is output when controller operation is stopped is dependent on the set
value of the “MV at stop” parameter (level 2 mode) in the same way as
for standard control.
• However, note that in heating and cooling control, the manipulated
variable at the cooling side is treated as a negative value for the sake
of convenience. When the manipulated variable at STOP is a negative
value, the manipulated variable is output to only the cooling side, and
when a positive value, the manipulated variable is output to only the
heating side. The factory setting is “0”. If the controller is operated
using the factory setting, the manipulated variable is not output to
both the heating and cooling sides.
4--2
Switching with
Manual operation
When the overlap band is set, the bumpless function that operates when switching
between manual and automatic operation may not work.
Page 49

4.1 Selecting the Control Method
JON/OFF control
F Hysteresis
• Switching between 2-PID control and ON/OFF control is carried out
by the “PID / ON/OFF” parameter (expansion mode). When this
parameter is set to [
[
], ON/OFF control is selected. Default is [ ].
], 2 -PID control is selected, and when set to
• In ON/OFF control, hysteresis is provided in the program when
switching between ON and OFF to stabilize operation. The hysteresis
width provided during ON/OFF control is simply referred to as “hysteresis.” Control output (heat) and control output (cool) functions are
set in the “hysteresis (heat)” and “hysteresis (cool)” parameters, respectively.
• In standard control (heating or cooling control), hysteresis can be set
only for the heating side.
Hysteresis (heat)
ON
OFF
Set point
PV
• In heating and cooling control, a dead band can be set. So, 3-position
control is made possible.
Dead band
Parameters
Hysteresis (heat)
OFF
Symbol
Control output 1
Control output 2
Direct/Reverse
Dead band : Level 1 Heating and cooling control
Cooling coefficient : Level 1 Heating and cooling control
MV at stop : Level 2 Manipulated variable when control
MV at PV error : Level 2 Manipulated variable when control
Hysteresis (heat) : Level 1 ON/OFF control
Hysteresis (cool) : Level 1 ON/OFF control
PID / ON/OFF : Expansion ON/OFF control
Hysteresis (cool)
ON
Heating
side
Set point
Parameter Name: Mode Description
assignment : Setup
assignment : Setup
operation : Setup
Cooling side
For specifying control method
For specifying control method
For specifying control method
operation is stopped
operation is PV error
PV
4--3
Page 50

CHAPTER 4 APPLIED OPERATION
4.2 Operating Condition Restrictions
JManipulated vari-
able restrictions
F MV limiter
The upper-and lower-limit values of the manipulated variable can be
restrictedbytheMVlimiter,andthechangerateofthe manipulated
variable can be restricted by the MV change rate limiter.
The upper-and lower-limit values of the manipulated variable are set in
the “MV upper limit” and “MV lower limit” parameters (level 2 mode).
When the mani pulated variab le calculated by the E5EK-DRT is outside
of the range of the MV limiter, actual outputs are dependent on the set
value of these parameters.
Output (%)
100
0
MV upper limit value
MV lower
limit value
PV
In heating and cooling control, the manipulated variable at the cooling
side is treated as a negative value for the sake of convenience. The
upper limit is set for the heating side (positive value), and the lower
limit is set for the cooling side (negative value) as shown in the following figure.
F MV change rate
limiter
Output (%)
100
MV lower limit value
MV upper limit value
Heating
side
0
Set point
Cooling
side
PV
The “MV change rate limit” parameter (level 2 mode) sets the maximum permissible change width per second of the manipulated variable.
If a change in the manipulated variable exceeds this parameter setting,
the value calculated by the E5EK-DRT is reached while changing the
value by the per -second value set in this parameter.
Output (%)
100
MV change rate
limit value
1 second
0
Switching point
Time
4--4
Page 51

4.2 Operating Condition Restrictions
F Limiter operation
conditions
JSet point limiter
The limiters are invalid or cannot be set when any of the following
conditions occurs:
• During ON/OFF control
• During AT execution (only by MV change rate limiter)
• During manual operation
• When operation is stopped
• When an error has occurred.
The setting range of the set point is limited by the set point limiter. The
upper-and lower-limit values of this set point limiter are set in the “Set
point upper limit” and “Set point lower limit” parameters (expansion
mode), respectively. However, note that when the set point limiter is
reset, the set point is forcibly changed to the upper-or lower-limit value
of the set point limiter if the set point is out of the limiter range. Also,
when the input type, temperature unit and scaling (sensor) ran ge are
changed, set point limiter is forcibly reset to the scaling (sensor) range.
Scaling (sensor) range
Set point limiter
Setting range
Changed to upper
limit value
Changed to
the new upper limit
value
A
*1
○B×
*1
SP
SP
JSP ramp
Input type changed
Set point Upper-and lower-limit values of the limiter
Scaling (sensor) upper-and lower-limit values
*1 : ○: Setting possible
×: Setting impossible
With the SP ramp function, the controller operates according to the value (set point during SP ramp) limited by a change rate, instead of the
changed set point when set point is changed. The interval in which the
set point during SP ramp is limited is referred to as the “SP ramp”.
SP
Set point after
change
Set point before
change
Switching point
SP ramp
SP ramp set value
SP ramp time unit
Time
CB
○
*1
4--5
Page 52

CHAPTER 4 APPLIED OPERATION
The change rate during the SP ramp is specified by the “SP ramp set
value” an d “SP ramp time unit” parameters. At the “SP ramp set value”
default “0”, the SP ramp function is disabled.
The set point changing in SP ramp can be monitored in the “Set point
during SP ramp” parameter (level 0 mode).
F Op eration at start
Set point
PV
The limiters are invalid or cannot be set when any of the following
conditions occurs:
If the SP ramp function is enabled when the power is turned ON, and
when “run” is switched to from “stop,” process value may reach the set
point after SP ramp in the same way as when the set point is changed.
In this case, operation is carried out with the process value regarded as
the set point before the change was made.
The direction of the SP ramp changes according to the relationship between the process value and the set point.
PV < SP PV > SP
SP
SP ramp
Set point
Time Time
Power ON
SP
SP ramp
PV
Same change
rate
Power ON
F Restrictions dur-
ing SP ramp
Parameters
• Execution of auto-tuning starts after the end of SP ramp.
• When the controller is switched to the manual mode, the set point
changes continuously until SP ramp ends.
• When the controller is in the stop state or an error occurs, the SP
ramp function becomes invalid.
Symbol Parameter Name: Mode Description
MV upper limit : Level 2 Manipulated variable restrictions
MV lower limit : Level 2 Manipulated variable restrictions
MV change rate limit : Level 2 Manipulated variable restrictions
SP setting upper limit: Expansion SP setting restrictions
SP setting lower limit : Expansion SP setting restrictions
SP ramp set value : Level 2 SP changing restrictions
SP ramp time unit : Level 2 SP changing restrictions
4--6
Page 53

4.3 How to Use the Remote SP
• Taking a remote SP input (4 to 20 mA) as the set point is referred to
as the “remote SP” function. The remote SP function is enabled only
when the “remote SP (RSP) enable” parameter (option mode) is set to
“ON”.
JScaling
• Remote SP upper-and lower-limit values can be set by scaling.
• Inp uts within the range 4 to 20 mA (-10 to 110%) are allowed as
remote SP inputs. Inputs not within this range are regarded as out-ofrange input values. In this case, input is clamped at the remote SP
lower or upper limit values, and the “RSP” LED blinks.
• If the output function “RSP input error” is assigned for when an outof-range remote SP is input, the “RSP input error” output is turned
ON. Control output also switches to the setting of the “MV at PV
error” parameter.
• Set the upper limit value in the “remote SP upper limit” parameter
and the lower limit value in the “remote SP lower limit” p arameter
(option mode).
RSP (%)
Upper limit value
4.3 How to Use the Remote SP
Out-of-range input
(blinks of upper-and lower-limit values)
F Relationship with
set point limiter
JSP mode
LSP
RSP
RSP enable
SP mode
Lower limit value
420
2.4 (-10%)
Input (mA)
21.6 (-110%)
• When the “SP setting upper limit” or “SP setting lower limit” parameters are changed, the remote SP upper-and lower-limit values are
forcibly changed to the set point upper-and lower-limit values. The
following example shows how the remote SP upper-and lower-limit
values are changed when the set point upper limit value is changed
from A to B.
Set point limiter
Before change
Changed to
upper limit value
RSP scaling range
Upper-and lower-limit values of the limiter
RSP scaling upper-and lower-limit values
A
B
Set point
Upper limit value
changed from A to B
Set point
• The set point held internally by the E5EK-DRT controller is referred
to as the “local SP (LSP).”
• Use the “SP mode” parameter to switch between the remote SP and
local SP. When the SP mode parameter is set to “
”(remoteSP),
the “RSP” LED lights. When the SP mode parameter is set to
“
”, the controller is in the local SP.
4--7
Page 54

CHAPTER 4 APPLIED OPERATION
JRemote SP
monitor
JSP tracking
• IntheremoteSP mode,theremoteSPcan be monitoredonthe
No.2 display for PV/SP.InthelocalSP mode,theremoteSPcanbe
monitored in the “remote SP monitor” parameter.
• When the local SP is switched to from the remote SP when the SP
tracking function is enabled, the local SP is changed so that the
remote SP value is held at the SP value used immediately before
switching.
To use the SP tracking function, set the “SP tracking” parameter to
“ON”.
• The following figure shows how SP tracking works when the SP mode
is switched.
RSP input
LSP1
LSP2
RSP2
SP mode LSP RSP LSP
JOperating
conditions
(1) When the remote SP is switched to when the set point is “LSP1”,
the SP is switched to “RSP2”.
(2) The SP shifts according to remote SP input.
(3) When the local SP is switched to, the set point becomes “LSP2” if
the SP tracking function is enabled. If this function is disabled, the
SP will be switched to “LSP1”.
• When the local SP is switched to the remote SP, the SP ramp will
operate if the SP ramp function is enabled.
• During auto-tuning, remote SP input is not accepted. Auto-tuning is
executed on the set point at the start of auto-tuning.
• Remote SP is not subject to the standby sequence reset conditions.
Parameters
4--8
Symbol
Parameter Name: Mode Application
Remote SP enable : Option Remote SP function
Remote SP upper limit : Option RSP scaling
Remote SP lower limit : Option RSP scaling
SP mode : Level 2 LSP/RSP switching
SP tracking : Option
SP tracking
Page 55

4.4 How to Use the Heater Burnout Alarm
4.4 How to Use the Heater Burnout Alarm
• On a standard type controller, the HBA (heater burnout alarm) function can be used only when the assignment destination of the output
function “control output (heat)” is set to pulsed output.
• When using the HBA function, assign output function “heater burnout (HB) alarm” to control output 1 or 2, auxiliary outputs 1 or 2.
JHeater burnout
detection
To E5EK-DRT
CT terminal
CT
Heater wire
F HBA
latch/release
JOperating
conditions
• Heater burnout detection works as follows.
(1) Connect the current transformer (CT) to terminal Nos.15 and 17,
and insert the heater lead through the CT hole.
(2) When current flows through this lead, the current transformer gen-
erates AC current proportional to the current value. The E5EKDRT measures this AC current to calculate the current flowing to
the heater.
(3) If heater is burned out, the current measured at the current trans-
former decreases. This value is compared with the value set as the
heater burnout set value and is output as the heater burnout
alarm.
• Set the heater burnout set value in the “heater burnout alarm”
parameter. To check the current value of the current transformer, use
the “heater current monitor” parameter.
• When you are not using the HBA function, set the “heater burnout
alarm” parameter to “0.0 (disabled)”.
• When the HBA latch function is set to “ON”, the heater burnout
alarm is held until either of the following measures is taken:
a Set the heater burnout set value to “0.0A” (default).
b Reset the controller.
(Turn the controller’s power OFF then back ON again.)
• To enable the HBA latch function, set the “HBA latch” parameter to
“ON”.
• Turn the heater power supply ON at the same time as or before turning the E5EK-DRT power supply ON. If the heater power supply is
turned ON after turning the E5EK-DRT power supply On, the heater
burnout alarm is output.
• Control is continued even when the heater burnout alarm is output.
(That is, the controller attempts to control the heater as if the heater
burnout alarm has not occurred.) So, remedy the condition such as
repairs which are caused by the heater burnout alarm.
• The heater burnout alarm is detected only if the control output is
continuously ON for 190 ms or more.
• The rated current value may sometimes differ slightly from the actual
current value flowing to the heater. Check the current value in an
actual operating status in the “heater current monitor” parameter.
• If there is little difference between the current in a normal status and
the current in a burnout status, detection may become unstable. On a
heater of current 10.0 A or less, maintain a difference of 1.0 A or
more. On a heater of current 10.0 A or more, maintain a difference of
2.5 A or more.
• Heater burnout alarm function cannot be used when controlling the
heater by a phase control method or by a cycle control method. Also,
3-phaseheaterscannotbeused.
When detecting heater burnout on a 3-phase heater, use the K2CU-FVVA-VGS
(with gate input terminal). (For details, see the respective data sheet.)
4--9
Page 56

CHAPTER 4 APPLIED OPERATION
JHow to calculate
the heater burnout set value
• Calculate the set value by the following formula:
Set value =
(current value at normal operation + current value at burnout)
2
• Setthecurrentvalueatburnoutwhentwoor moreheatersareconnected to the CT to the value at the time that the heater having the
smallest current value burns out (the value when one of the heaters
burns out with all heaters at the same current).
• Make sure that the following condition is satisfied:
Heater of current 10.0 A or less
Current value at normal operation --- current value at heater
burnout ≧ 1A
When resultant current is less than 1 A, detection is unstable.
Heater of current 10.0 A or more
Current value at normal operation --- current value at heater
burnout ≧ 2.5 A
When resultant current is less than 2.5 A, detection is unstable.
• The setting range is 0.1 to 49.9 A. Heater burnout is not detected
when the setting is “0.0” or “50.0”. When the setting is “0.0”, the
heater burnout alarm is set to “OFF”, and when the setting is “50.0”,
the heater burnout alarm is set to “ON”.
• Set the total current value at normal heater operation to 50 A or less.
When set to 55.0 A o r more, [
] is displayed in the “heater cur-
rent monitor” parameter.
F Examples of use
CT
17
1KWx3
CT
17
15
15
Control output
Control output
Heater
1KW
E5EK-DRT
Heater
E5EK-DRT
Example 1 : when using a 200 VAC, 1 kW heater
Current at normal operation =
1000
200
Current at heater burnout = 0A
200VAC
Set value =
5+0
2
=2.5A
(current at normal operation-current at heater burnout
= 5 --- 0 = 5A ( ≧ 1A)
Example 2 : when using three 200 VAC, 1 kW heaters
1000
200
1000
200
200VAC
Current at normal operation =
Current at burnout of one heater =
Set value =
15+10
2
= 12.5A
(current at normal operation-current at heater burnout
=15 --- 10=5A(≧ 2.5A)
= 5A (<10A)
×3 = 15A (≧ 10A)
×2 = 10A
Parameters
4--10
Symbol Parameter Name: Mode Application
Heater current monitor : Level 1 Heater current value monitor
Heater burnout : Level 1 Heater burnout detection
Heater burnout latch : Option Heater burnout detection alarm latch
Page 57

4.5 LBA
4.5 LBA
• The LBA function can be used only when assigned as an output. Also,
the LBA function does not work when a memory error or A/D converter error results.
• LBA (Loop Break Alarm) is a function for judging that an error has
occurred somewhere on the control loop and outputting an alarm
when the process value does not change with the manipulated variable at a maximum or minimum state. Accordingly, the LBA function
can be used as a means for detecting a malfunctioning control loop.
F L BA detection
time
F L BA detection
width
F L BA detection
example
• Normally, when output is set to maximum or minimum, the process
value rises or falls after the dead time has elapsed. LBA is output if
the process value does not change in the p redicted direction after a
fixed amount of time has elapsed. This fixed amount of time is the
“LBA detection time.”
• LBA operation sometimes becomes unstable when the process value
fluctuates considerably due to the control characteristics. The LBA
detection width is provided so that changes with respect to output can
be correctly detected. Changes smaller than the detection width due
to LBA detection timing are not regarded as changes.
• The following example describes what happens when a heater burnout at maximum output.
LBA detection time
PV
LBA detection time
LBA detection width
Output
Time
Heater burnout
• LBA judgment is carried out at each LBA detection time from the
point of maximum output. In above figure, the process value (PV) is
changing greatly at the 1st judgment timing, so LBA remains OFF.
• At the 2nd judgment timing, the process value increases as indicated
by the broken line of the process value is normal. This means that the
change width exceeds the LBA detection width, and LBA output
remains OFF.
• If the heater burns out at the point shown in the above figure, the
process value “decreases.” Accordingly, it is judged that “the process
value is not changing in the increasing direction” at the 2nd judgment timing and the LBA output b ecomes ON.
LBA=ON
4--11
Page 58

CHAPTER 4 APPLIED OPERATION
F Setting the LBA
detection time
F Determining the
LBA detection
time
• The LBA detection time is automatically set by auto-tuning (except in
heating and cooling control).
• If the optimum LBA detection time cannot be obtained by auto-tuning, set the time in the “LBA detection time” parameter (level 2
mode).
• Calculate the LBA detection time as follows:
(1) Set output to maximum.
(2) Measurethetimeittakesfortheinputchangewidthtoreachthe
LBA detection width (default: 0.2 % full-scale).
(3) Take a value twice that of the measurement time as the LBA detec-
tion time.
Measurement time Tm
PV
0.2%FS
Output
Time
LBA detection time = Tm x 2
(4) In the case of ON/OFF operation, set the LBA detection time to a
value longer than the control period.
Parameters
4--12
Symbol Parameter Name: Mode Application
AT Execute/Cancel : Level 1 Automatic setting of LBA detec-
tion time
LBA detection time : Level 2 Setting of LBA detection time
LBA detection width : Expansion Changing of LBA detection
width
Page 59

CHAPTER5
CHAPTER 5
PARAMETERS
This chapter describes the parameters of the E5EK-DRT. Use this chapter as a reference guide.
CHAPTER 5 PARAMETERS
ConventionsUsedinthisChapter 5-2............
Protect Mode 5-3...............................
Manual Mode 5-5..............................
Level 0 Mode 5-6...............................
Level 1 Mode 5-10...............................
Level 2 Mode 5-17...............................
Setup Mode 5-24................................
Expansion Mode 5-31............................
Option Mode 5-36...............................
Calibration Mode 5-42...........................
5--1
Page 60

CHAPTER 5 PARAMETERS
Conventions Used in this Chapter
JThe meaning of icons used in this chapter
Describesthefunctionsoftheparameter.
Function
Describes the range and defaults of the parameter setting.
Comment
Used for monitor-dedicated parameters.
Describes the range of the monitor values and monitor range.
Monitor
Describes a procedure using parameters in operating instructions.
Example
of use
Describes related parameters and items.
See
JAbout parameter display
Parameters are displayed on the E5EK-DRT indicator only when the “Conditions of Use” on
the right of the parameter heading are satisfied. However, note that the settings of protected
parameters are still valid, and are not displayed regardless of the conditions of use.
AT Execute/cancel
Conditions of Use
The controller must
be in operation.
JAbout the Order In Which Parameters Are Listed
Parameters are divided by mode.
The first page of each mode lists the contents of the paramete rs available in that mode. The
name of parameters in the contents follows the order in which parameters are displayed on the
controller.
5--2
Page 61

Mod
Protect Mode
• This mode restricts (protects) key operation to prevent unwanted key operation.
Before changing parameters in this mode, first make sure that protecting the
A/M
menu key or
key will not cause any problems in operation.
Function
Comment
• To select this mode, press the
minimum. To exit this mode, press the
A/M key and key simultaneously for 1 second
A/M
key and key down again simulta-
neously for 1 second minimum.
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
Symbol
Parameter Name Page
Security 5-3
[A/M] key protect 5-4
Security
• This parameter specifies which parameters are protected. However, note that the
protect mode and manual mode cannot be protected.
• When this parameter is set to “0” to “3”, only the modes indicated by the “f ”
mark in the table below can be selected on the menu display. For example, when
this parameter is set to “2”, only level 0 to 2 modes can be selected.
e
Calibration f
Option f f
Expansion f f
Setup f f
Level 2 f f f
Level 1 f f f f
Level 0 f f f f
Set value
0 1 2 3
• When this parameter is set to “4” to “6”, operations in only the level 0 mode can
be selected, and the mode is not displayed on the menu display.
• When this parameter is set to “5”, only the “PV/SP” parameter in the level 0 mode
can be used.
• When this parameter is set to “6”, only the “PV/SP” parameter in the level 0 mode
can be displayed. (The set point cannot change.)
• Default is “1”. (Only the calibration mode is protected.)
F Related article
3.5 Protect Mode (page 3-13)
See
5--3
Page 62

CHAPTER 5 PARAMETERS
Protect Mode
[A/M] key protect
Function
Comment
See
• Invalidate the function of the
A/M
key. In other words, you cannot switch between
the auto and manual operations by key operation.
• [
• [
• Default = [
]:
]:
A/M
key protect ON
A/M
key protect canceled
]
F Related article
3.5 Protect Mode (page 3-13)
5--4
Page 63

Function
Manual Mode
• In this mode, manual operations are possible, and the “MANU” LED lights.
• When this mode is selected, the manipulated variable that was active immediately
before the mode was switched to is output. When changing the manipulated variable, change it using the
If this mode is switched to during auto-tuning, auto-tuning is canceled.
• To select this mode when in the level 0 to 2 modes, press the
minimum. To exit this mode, press the
changes to the level 0 mode.
• “Manual MV” is the only parameter available in this mode.
Manual MV
• Sets the manipulated variable for manual operation. When you press the or
keys, the manipulate d variable is changed.
• The process value is displayed on the No.1 display and the manipulated variable is
displayed on the No.2 display.
or keys.
A/M
A/M
key for 1 second
key for 1 second minimum. The mode
Comment
See
Process value
Manipulated
variable
[MANU] LED
• The manual MV is held when the power is interrupted.
Control Method Setting Range
Standard -5.0 to 105.0 % 0.0
Heating and cooling -105.0 to 105.0 % 0.0
Unit Default
F Related article
3.7 Adjusting Control Operation (page 3-15)
5--5
Page 64

CHAPTER 5 PARAMETERS
Level 0 Mode
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” to “4”.
• The “PV/SP” parameter can be used when the “security” parameter is set to “5”
or “6”. However, note that the SP cannot be changed when it is set to “6”.
• This mode is used for changing the SP value and starting or stopping operation.
The mode can also be used for monitoring the PV value, set point during SP ramp,
or MV value, but cannot be used for changing them.
• To select this mode when in the levels 1 and 2, setup, expansion, option and calibration modes, press the
the menu display. If you select [
second minimum, the controller enters the level 0 mode.
• To select parameters in this mode, p ress the
tings, use the
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
key for 1 second minimum. The display changes to
]usingthe key then press key for 1
key. To change parameter set-
or keys.
Symbol
Parameter Name
PV/SP 5-7
Remote SP monitor 5-8
Set point during SP ramp 5-8
MV monitor (heat) 5-9
MV monitor (cool) 5-9
Run/Stop 5-9
Page
5--6
Page 65

Function
Level 0 Mode
PV/SP
• The process value is displayed on the No.1 display, and the set point is displayed
on the No.2 display. The set point can be set.
• Either of the local SP or remote SP is displayed as the set point depending on the
SP mode. In the remote SP mode, the set point is only monitored.
Local SP mode Remote SP mode
Process value
Comment
See
Set point
[RSP] LED not lit
[RSP] LED lit
Monitor only
• The decimal point position is dependent on the selected sensor during temperature input and on the results of scaling during analog input.
• Process value
Monitor Range
Scaling lower limit -10%FS to scaling upper limit +10%FS
Unit
EU
During temperature input, the range of the currently selected sensor is taken as
the monitor range.
• Set point
Setting Range/Monitor Range
Local SP : Local SP lower setting limit to local SP setting upper limit
Remote SP: Remote SP lower setting limit to remote SP upper limit
Unit Default
EU 0
EU -
F Related article
3.7 Adjusting Control Operation (page 3-15)
F Related parameters
“Input type” “Scaling upper limit” “Scaling lower limit” “Decimal point” (setup mode)
“SP setting upper limit” “SP setting lower limit” (expansion mode)
“SP mode” (level 2 mode)
“Remote SP enable” “Remote SP upper limit” “Remote SP lower limit” (option
mode)
5--7
Page 66

CHAPTER 5 PARAMETERS
Level 0 Mode
Function
Monitor
See
Remote SP monitor
Conditions of Use
The controller must be in the local SP
mode with the remote SP function
enabled.
• Monitors remote SP in the local SP mode.
Monitor Range
Remote SP lower limit to Remote SP upper limit
Unit
EU
F Related article
4.2 Operating Condition Restrictions/SP ramp (page 4-5)
F Related parameters
“SP mode” (level 2 mode)
“Remote SP enable” “Remote SP lower limit” “Remote SP upper limit” (option
mode)
Function
Monitor
See
Set point during SP
ramp
Conditions of Use
The remote SP function must be
enabled or the SP ramp function must
be enabled.
• Monitors the set point during SP ramp
• Matches the set point of the “PV/SP” parameter when the set point is not during
SP ramp.
Monitor Range
Local SP : Local SP setting lower limit to local SP setting upper limit EU
Remote SP : Remote SP lower limit to remote SP upper limit EU
Unit
F Related article
4.2 Operating Condition Restriction/SP ramp (page 4-5)
F Related parameters
“PV/SP” (level 0 mode)
“SP ramp time unit” “SP ramp set value” (level 2 mode)
“SP setting upper limit” “SP setting lower limit” (expansion mode)
“SP mode” (level 2 mode)
“Remote SP enable” “Remote SP upper limit” “Remote SP lower limit” (option
mode)
5--8
Page 67

Level 0 Mode
Function
Monitor
MV monitor (heat)
Conditions of Use
Control must be standard control or
heating and cooling control.
MV monitor (cool)
• This parameter cannot be set.
• Monitors the manipulated variable on the heating or cooling side.
• The manipulated variable in a standard control system is checked in the “MV
monitor (heat)” parameter.
• The “MV monitor (cool)” parameter can be used only during heating and cooling
control.
• MV monitor (heat)
Control
Standard -5.0 to 105.0 %
Heating and cooling 0.0 to 105.0 %
Monitor Range
• MV monitor (cool)
Control
Heating and cooling 0.0 to 105.0 %
Monitor Range
Unit
Unit
Function
Example
of use
See
Run/Stop
• This parameter is used for checking the operating status of the controller, and for
specifying start and stop of operation.
• To start operation, set this parameter to [
stop operation, set this parameter to [
“STOP” LED lights.
• Default is [
]
F Related article
3.6 Starting and Stopping Operation (page 3-14)
]pressthe or keys. To
]. When operation is stopped, the
5--9
Page 68

CHAPTER 5 PARAMETERS
Level 1 Mode
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” to “3”.
• This mode contains the main parameters for adjusting control. These parameters
include parameters for executing AT (auto-tuning), setting the alarm values, setting the control period, and setting PID parameters.
• To select this mode when in the levels 0 and 2, setup, expansion, option and calibration modes, press the
the menu display. If you select [
key for 1 second minimum, the controller enters the level 1 mode.
• To select parameters in this mode, p ress the
tings, use the
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
key for 1 second minimum. The display changes to
]usingthe key then press the
key. To change parameter set-
or keys.
Symbol Parameter Name Page
AT Execute/Cancel 5-11
Alarm value 1
Alarm value 2
Alarm value 3
Proportional band
Integral time
Derivative time
Cooling coefficient
Dead band
Manual reset value
Hysteresis (heat)
Hysteresis (cool)
Control period (heat)
Control period (cool)
Heater current monitor 5-15
Heater burnout 5-16
5-11
5-11
5-11
5-12
5-12
5-12
5-12
5-13
5-13
5-14
5-14
5-15
5-15
5--10
Page 69

Level 1 Mode
Function
Example
of use
See
AT Execute/Cancel
Conditions of Use
The controller must be in operation with
2-PID control.
• Selects the l imit cycle o f M V change width (40% or 100%) for execution. After AT
execution, the “PID” and the “LBA detection time” (LBA: Loop Break Alarm)
parameters are set automatically.
• During heating and cooling control, only 100%AT can be executed.
• When this parameter is selected, the setting becomes [
].
• To execute 40%AT, select [ ], and to execute 100%AT, select [ ]. During
execution of auto-tuning, the AT LED flashes. However, note that during heating
and cooling control, [
] is not displayed.
• When AT execution ends, the parameter setting automatically returns to [
F Related article
3.7 Adjusting Control Operation (page 3-15)
F Related parameters
“Run/Stop” (level 0 mode)
“Proportional band” “Integral time” “Derivative time” (level 1 mode)
“LBA detection time” (level 2 mode)
].
Function
Comment
See
Alarm value 1
Conditions of Use
Alarms must be assigned as outputs.
Alarm value 2
For example, if alarm outputs 1 and 2
only are assigned as outputs, the “alarm
Alarm value 3
value 3” parameter cannot be used.
• This parameter is used for monitoring or changing the alarm values of alarm outputs
1to3.
• During temperature input, the decimal point position is dependent on the currently selected sensor, and during analog input on the results of scaling.
Setting Range
-1999 to 9999 EU 0
Unit Default
F Related article
3.4 Setting Alarm Type (page 3-10)
F Related parameters
“Input type” “Scaling upper limit” “Scaling lower limit” “Decimal point” “Control
output 1 assignment” “Control output 2 assignment” “Auxiliary output 1 assignment” “Auxiliary output 2 assignment” “Alarm 1 type” “Alarm 2 type” “Alarm 3
type” “Alarm 1 open in alarm” “Alarm 2 open in alarm” “Alarm 3 open in alarm”
(setup mode)
“Alarm 1 hysteresis” “Alarm 2 hysteresis” “Alarm 3 hysteresis” (level 2 mode)
“Standby sequence reset method” (expansion mode)
5--11
Page 70

CHAPTER 5 PARAMETERS
Level 1 Mode
Function
Comment
See
Proportional band
Conditions of Use
Control must be 2-PID control.
Integral time
Derivative time
• Sets the PID parameters. However, note that the PID parameter settings are
changed to optimum values when auto-tuning is executed.
Parameter Setting Range
Proportional band 0.1 to 999.9 %F S 10.0
Integral time 0 to 3999 Second 233
Derivative time 0 to 3999 Second 40
F Related parameter
“AT Execute/Cancel” (level 1 mode)
Unit Default
Function
Comment
See
Cooling coefficient
Conditions of Use
The control must be either heating and
cooling control, or 2-PID control.
• In heating and cooling control, P at the cooling side is calculated by the following
formula:
Cooling side P = cooling coefficient ¢ P
Setting Range
0.01 to 99.99 None 1.00
Unit Default
F Related article
4.1 Selecting the Control Method (page 4-2)
F Related parameter
“Proportional band” (level 1 mode)
5--12
Page 71

Level 1 Mode
Function
Comment
See
Dead band
Conditions of Use
The control system must be heating and
cooling control.
• Sets the output dead band width in a heating and cooling control system. A negative setting sets an overlap band.
Setting Range
-19.99 to 99.99 %FS 0.00
Unit Default
F Related article
4.1 Selecting the Control Method (page 4-2)
Manual reset value
Conditions of Use
The control must be either standard control or 2-PID control, and the “integral
time” parameter must be set to “0”.
Function
Comment
• Sets the required manipulated variable to remove offset during stabilization of P
or PD control.
Setting Range
0.0 to 100.0 % 50.0
Unit Default
5--13
Page 72

CHAPTER 5 PARAMETERS
Level 1 Mode
Function
Comment
See
Hysteresis (h eat)
Hysteresis (co o l)
• Sets the hysteresis for ensuring stable operation at ON/OFF switching.
• In standard control, use the “hysteresis (heat)” parameter. The “hysteresis (cool)”
parameter cannot be used.
• In heating and cooling control, the hysteresis can be set independently for heating
and cooling. Use the “hysteresis (heat)” parameter to set the heating side hysteresis, and use the “hysteresis (cool)” parameter to set the cooling side hysteresis.
Parameter Setting Range
Hysteresis (heat) 0.01 to 99.99 %FS 0.10
Hysteresis (cool) 0.01 to 99.99 %FS 0.10
F Related article
4.1 Selecting the Control Method
F Related parameters
“Control output 1 assignment” “Control output 2 assignment” (setup mode)
“PID / ON/OFF” (expansion mode)
Conditions of Use
The control system must be ON/OFF
control.
Unit Default
@ ON/OFF control (page 4-3)
5--14
Page 73

Level 1 Mode
Function
Comment
See
Control period (heat)
Conditions of Use
Relay, SSR or voltage output must be
set as the outputs, and the control must
Control period (cool)
be set to 2-PID control, standard control
or heating and cooling control.
• Sets the pulse output period. Set the control period taking the control characteristics and life expectancy of the controller into consideration.
• In standard control, use the “control period (heat)” parameter. The “control
period (cool)” parameter cannot be used.
• In heating and cooling control, the control period can be set independently for
heating and cooling. Use the “control period (heat)” parameter to set the heating
side control period, and use the “control period (cool)” parameter to set the cool-
ing side control period.
Parameter Setting Range
Control period (heat) 1to99 Second 20
Control period (cool) 1to99 Second 20
Unit Default
F Related article
3.3 Setting Output Specifications (page 3-7)
F Related parameters
“Control output 1 assignment” “Control output 2 assignment” (setup mode)
Function
Monitor
See
Heater current monitor
Conditions of Use
The HBA output function must be
assigned.
• Measures the current value of the heater from CT input.
• This parameter is not displayed when the linear output unit (E53-Cj,E53-Vj)is
mounted.
Monitor Range Unit
0.0 to 55.0 A
• [ ] is displayed when 55.0 A is exceeded.
F Related article
4.4 How to Use the Heater Burnout Alarm (page 4-9)
F Related parameters
“Heater b urnout” (level 1 mode) “HBA latch” (option mode)
5--15
Page 74

CHAPTER 5 PARAMETERS
Level 1 Mode
Function
Comment
See
Heater burnout
• Outputs the heater burnout alarm when the heater current value falls below this
parameter setting.
• When the set value is “0.0”, the heater burnout alarm is “OFF”. When the set
value is “50.0”, the heater burnout alarm is “ON”.
Setting Range Unit Default
0.0 to 50.0 A 0.0
F Related article
4.4 How to Use the Heater Burnout Alarm (page 4-9)
F Related parameters
“Heater current monitor” (level 1 mode) “HBA latch” (option mode)
Conditions of Use
The HBA output function must be
assigned.
5--16
Page 75

Level 2 Mode
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” to “2”.
• This mode contains the auxiliary parameters for adjusting control. These parameters include parameters for limiting the manipulated variable and set point,
parameters for switching between remote and local operation, and parameters for
setting the LBA (Loop Break Alarm), alarm hysteresis, and input digital filter
values.
• To select this mode when in the levels 0 and 1, setup, expansion, option and calibration modes, press the
the menu display. If you select [ ]usingthe key then press the
key for 1 second minimum, the controller enters the level 2 mode.
• To select parameters in this mode, p ress the
tings, use the or keys.
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
Symbol Parameter Name Page
Remote/Local 5-18
key for 1 second minimum. The display changes to
key. To change parameter set-
SP mode
SP ramp time unit
SP ramp set value
LBA detection time
MV at stop
MV at PV error
MV upper limit
MV lower limit
MV change rate limit
Input digital filter
Alarm 1 hysteresis
Alarm 2 hysteresis
Alarm 3 hysteresis
Input shift upper limit (temperature)
Input shift lower limit (temperature)
5-18
5-19
5-19
5-20
5-20
5-20
5-21
5-21
5-21
5-22
5-22
5-22
5-22
5-23
5-23
5--17
Page 76

CHAPTER 5 PARAMETERS
Level 2 Mode
Remote/Local
• Switches between remote and local operation.
• To change the parameter setting during remote operation, use the communica-
Function
tions function. To change the parameter setting during local operation, change the
setting on the E5EK-DRT controller.
You can check the parameter setting by both communications and on the E5EKDRT controller regardless of whether the controller is switched to remote or local
operation.
Comment
See
Function
Comment
Setting Range
[ ]: remote / [ ]: local
Default
[]
F Related article
Chapter 6 Using the CompoBus/D (DeviceNet)
F Related parameters
“Communication speed” “Node address” (Option mode)
SP mode
Conditions of Use
The remote SP function must be
enabled.
• Switches between remote SP and local SP.
Setting Range Default
[ ]: Remote SP/[ ]: Local SP
5--18
See
F Related article
4.3 How to Use the Remote SP (page 4-7)
F Related parameters
“Remote SP enable”
Page 77

Function
Level 2 Mode
SP ramp time unit
SP ramp set value
• Specifies the change rate during SP ramp operation. Set the maximum permissi-
ble change width per unit of time (minute or hour) as the “SP ramp set value”.
However, note that when set to “0”, the SP ramp function is disabled.
• The time unit and SP ramp set value are independent of each other. For example,
when setting “30 per minute”, set the “SP ramp set value” parameter to “30” and
the “SP ramp time unit” parameter to [
thetimeunitonlyto[
] (“hour”), the set time becomes “30 per hour.”
• During temperature input, the decimal point position of the SP ramp set value is
dependent on the currently selected sensor, and during analog input on the results
of scaling.
] (“minute”). However, if you change
Comment
See
Parameter Setting Range
SP ramp time unit
SP ramp set value 0 to 9999 EU 0
[ ]: minute/ [ ]: hour
Unit Default
None
During temperature input, the range of the currently selected sensor it taken as
the setting range for the “SP ramp set value” parameter.
F Related article
4.2 Operating Condition Restrictions/SP ramp (page 4-5)
F Related parameters
“Input type” “Scaling upper limit” “Scaling lower limit” “Decimal point” (setup
mode)
5--19
Page 78

CHAPTER 5 PARAMETERS
Level 2 Mode
Function
Comment
See
LBA detection time
Conditions of Use
The LBA (Loop Break Alarm) function
must be assigned as an output.
• This parameter is automatically set by AT execution (excluding AT execution in a
ON/OFF control).
• The LBA is output if the change width of the process value falls below 0.2 %fullscale of the time preset to this parameter when the manipulated variable is set in
the “MV upper limit” or “MV lower limit” parameters.
• The LBA function is disabled when this parameter is set to “0”.
Setting Range
0 to 9999 Second 0
Unit Default
F Related article
4.5 LBA (page 4-11)
8.3 How to Use Error O utput (page 8-5)
F Related parameters
“AT Execute/Cancel” (level 1 mode)
“Control output 1 assignment” “Control output 2 assignment” “Auxiliary output
1 assignment” “Auxiliary output 2 assignment” (setup mode)
Function
Comment
See
MV at stop
Conditions of Use
2-PID control
MV at PV error
• The “MV at stop” sets the manipulated variable when operation stops. The “MV
at PV error” sets the manipulated variable when an input error occurs.
Control Method Setting Range
Standard -5.0 to 105.0 % 0.0
Heating and cooling -105.0 to 105.0 % 0.0
The manipulated variable at the cooling side during heating and cooling control is
expressed as a negative value.
F Related articles
MV at stop : 3.6 Starting and Stopping Operation (page 3-14)
MV at PV error : 8.2 How to Use the Error Display (page 8-3)
Unit Default
5--20
Page 79

Level 2 Mode
Function
Comment
MV upper limit
Conditions of Use
The control must be 2-PID control
MV lower limit
MV change rate limit
• The “MV upper limit” and “MV lower limit” parameters set the upper and lower
limits of the manipulated variable. When the manipulated variable calculated by
the E5EK-DRT controller is outside of the upper-and lower-limit range, the upper
limit or lower limit set to these parameters is output, respectively.
• The “MV change rate limit” par ameter sets the maximum permissible change
width per second of the manipulated variable. If a change in the manipulated variable causes this parameter setting to be exceeded, the calculated value is reached
while changing the value by the per-second value set in this parameter.
This function is disabled when the set value is “0.0”.
• MV upper limit
The setting ranges during standard control and heating and cooling control are
different. Also, the manipulated variable at the cooling side during heating and
cooling control is expressed as a negative value.
See
Control Method Setting Range
Standard MV lower limit +0.1 to 105.0 % 105.0
Heating and cooling 0.0 to 105.0 % 105.0
Unit Default
• MV lower limit
The setting ranges during standard control and heating and cooling control are
different. Also, the manipulated variable at the cooling side during heating and
cooling control is expressed as a negative value.
Control Method Setting Range
Standard -5.0 to MV upper limit -0.1 % -5.0
Heating and cooling -105.0 to 0.0 % -105.0
Unit Default
• MV change rate limit
Setting Range
0.0 to 100.0 %/S 0.0
Unit Default
F Related article
4.2 Operating Condition Restrictions/Manipulated variable restrictions (page 4-4)
5--21
Page 80

CHAPTER 5 PARAMETERS
Level 2 Mode
Input digital filter
• Sets the time constant of the input digital filter. The following figures shows the
effect on data after passing through the digital filter.
Function
Comment
PV before passing through filter
A
Tim e
constant
Input digital filter
Setting Range
0 to 9999 Second 0
Alarm 1 hysteresis
Alarm 2 hysteresis
Alarm 3 hysteresis
PV after passing through filter
0.63A
Time
Unit Default
Conditions of Use
Alarms must be assigned as outputs.
For example, if alarm outputs 1 and 2
only are assigned as outputs, the “alarm
3 hysteresis” parameter cannot be used.
5--22
Function
Comment
See
• This parameter is for setting the hysteresis of alarm outputs 1 to 3.
Setting Range
0.01 to 99.99 %FS 0.02
Unit Default
F Related article
3.4 Setting Alarm Type (page 3-10)
F Related parameters
“Alarm 1 type” “Alarm 2 type” “Alarm 3 type” “Alarm 1 open in alarm” “Alarm 2
open in alarm” “Alarm 3 open in alarm” (setup mode)
“Alarm value 1” “Alarm value 2” “Alarm value 3” (level 1 mode)
Page 81

Level 2 Mode
Function
Comment
See
Input shift upper limit
Input shift lower limit
• Sets each of the shift amounts for the input shift upper limit and lower limit values.
Setting Range
-199.9 to 999.9 _Cor_F 0.0
F Related article
3.2 Setting Input Specifications (page 3-4)
F Related parameter
“Input type” (setup mode)
Unit Default
Conditions of Use
The input type must be set to temperature input (thermocouple or platinum
resistance thermometer).
5--23
Page 82

CHAPTER 5 PARAMETERS
Setup Mode
t
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” and “1”.
• This mode contains the parameters for setting the basic specifications of the
E5EK-DRT controller. These parameters include parameters for specifying the
input type, scaling, output assignments, and direct/reverse operation.
• To select this mode when in the levels 0 to 2, expansion, option and calibration
modes, press the
display. If you select [
second minimum, the controller enters the setup mode.
• To select parameters in this mode, p ress the
tings, use the
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
key for 1 second minimum. The display changes to the menu
]usingthe key then press the key for 1
key. To change parameter set-
or keys.
Symbol Parameter Name Page
Input type 5-25
Scaling upper limit
Scaling lower limit
Decimal point
_C/_F selection
Parameter initialize
Control output 1 assignment
Control output 2 assignment
Auxiliary output 1 assignment
Auxiliary output 2 assignment
Alarm 1 type
Alarm 1 open in alarm
Alarm 2 type
Alarm 2 open in alarm
Alarm 3 type
Alarm 3 open in alarm
Direct/Reverse operation
5-26
5-26
5-26
5-27
5-26
5-27
5-27
5-28
5-28
5-29
5-30
5-29
5-30
5-29
5-30
5-30
5--24
Page 83

Thermocoupl
e
Voltageinpu
t
Function
Setup Mode
Input type
• Sets the sensor type by the code.
• Set the code according to the following table. Default is “2: K thermocouple ( -200
to 1300_C)”.
Comment
Set value Input Type Input Type
0 JPt100 -199.9 to 650.0 (_C) /-199.9 to 999.9 (_F)
Pt100
1
22 -100.0 to 100.0 (_C) /-150.0 to 250.0 (_F)
K
2
3 0.0 to 500.0 (_C) /0.0 to 900.0 (_F)
J
4
5 0.0 to 400.0 (_C) /0.0 to 750.0 (_F)
6 T -199.9 to 400.0 (_C) /-199.9 to 700.0 (_F)
7 E 0to600(_C) /0 to 1100 (_F)
L
8
9 0.0 to 400.0 (_C) /0.0 to 750.0 (_F)
10 U -199.9 to 400.0 (_C) /-199.9 to 700.0 (_F)
11 N -200 to 1300 (_C) /-300 to 2300 (_F)
12 R 0 to 1700 (_C) /0 to 3000 (_F)
13 S 0 to 1700 (_C) /0 to 3000 (_F)
14 B 100 to 1800 (_C) /300 to 3200 (_F)
15 W (W5Re/W26Re) 0 to 2300 (_C) /0 to 4100 (_F)
16 PLII (PLATINEL) 0 to 1300 (_C) /0 to 2300 (_F)
17 4to20mA
18 0to20mA
19 1to5VDC
20 0to5VDC
21 0to10VDC
-199.9 to 650.0 (_C) /-199.9 to 999.9 (_F)
-200 to 1300 (_C) /-300 to 2300 (_F)
-100 to 850 (_C) /-100 to 1500 (_F)
-100 to 850 (_C) /-100 to 1500 (_F)
Platinum resistance ther-
mometer
Thermocouple
Current input
Voltage input
F Related article
3.2 Setting Input Specifications (page 3-4)
See
F Related parameters
When input type is set to temperature input:
“_C/_F selection” (setup mode)
When input type is set to voltage input or current input:
“Scaling upper limit” “Scaling lower limit” “Decimal point” (setup mode)
5--25
Page 84

CHAPTER 5 PARAMETERS
Setup Mode
Function
Comment
Scaling upper limit
Conditions of Use
The input type must be set to analog
Scaling lower limit
input (voltage or current input).
Decimal point
• This parameter can be used only when voltage input or current input is selected
as the input type.
• When voltage input or current input is selected as the input type, scaling is carried out. Set the scaling upper limit in the “scaling upper limit” parameter and
the scaling lower limit in the “scaling lower limit” parameter.
• The “decimal point” parameter specifies the decimal point position of parameters
(set point, etc.) whose unit is set to EU (Engineering Unit).
• Scaling upper limit, Scaling lower limit
Parameter Setting Range
Scaling upper limit Scaling lower limit +1 to 9999 EU 100
Scaling lower limit -1999 to scaling upper limit -1 EU 0
• Decimal point : default : 0 (0 digits past decimal point)
Unit Default
See
Function
Set Value
0
1
2
3
0 digits past decimal point
1 digit past decimal point
2 digits past decimal point
3 digits past decimal point
Setting Example
1234
123.4
12.34
1.234
F Related article
3.2 Setting Input Specifications (page 3-4)
F Related parameter
“Input type” (setup mode)
Parameter initialize
• Returns parameter settings to their defaults. However, note that the following
parameters are not affected by execution of this parameter:
“input type”, “scaling upper limit”, “scaling lower limit”, “decimal point”, “baud
rate”, “node address” and “_C/_F selection”.
• When this parameter is selected, [
eters, press the
key to specify [ ] (“yes”).
] (“no”) is first displayed. Toinitialize p aram-
5--26
Example
of use
Page 85

Setup Mode
Function
Comment
See
_C/_F selection
Conditions of Use
The input type must be set to temperature input (thermocouple or platinum
resistance thermometer).
• This parameter can be used when thermocouple or platinum resistance thermometer is selected as the input type.
• Set the temperature input unit to either of “_ C” or “_F”.
Setting Range
: _C/ :_F
Default
F Related article
3.2 Setting Input Specifications (page 3-4)
F Related parameter
“Input type” (setup mode)
Control output 1
assignment
Conditions of Use
The control must be standard control or
heating and cooling control.
Control output 2
assignment
Function
Comment
See
• Assigns the output functions to either of control output 1 or 2.
• The following seven output functions can be assigned as outputs:
Control output (heat), Control output (cool), Alarms 1 to 3, HBA, and LBA.
• Errors 1, 2 and 3 cannot be assigned as outputs.
• When the output function assigned to control output 1 or control output 2 is ON, the
“OUT1” or “OUT2” LED lights. However, note that the LED does not light when
control output (heat) or control output (cool) are assigned to linear outputs such as
current and voltage.
• When the output function assigned to control output 2 is ON, the “OUT2” LED
lights.
Symbol
Function
Control output
(heat)
Control output
(cool)
Alarm 1 Alarm 2 Alarm 3 HBA LBA
Defaults:
“Control output 1” = [
], “Control output 2” = [ ]
F Related article
3.3 Setting Output Specifications (page 3-7)
F Related parameters
• Alarm-related p arameters
• Heating and cooling related parameter
“LBA detection time” (level 2 mode)
5--27
Page 86

CHAPTER 5 PARAMETERS
Setup Mode
Auxiliary output 1 assignment
Auxiliary output 2 assignment
• Assigns output functions to either of auxiliary output 1 or 2.
• The following eight output functions can be assigned as outputs:
Function
Comment
Alarms 1 to 3, HBA, LBA, Error 1 (input error), Error 2 (A/D converter error),
and Error 3 (remote SP input error).
• Control output (heat) and control output (cool) cannot be assigned as outputs.
• Error 3 can b e assigned only when the remote SP function is enabled.
• When the output function assigned to auxiliary output 1 or auxiliary output 2 is
ON, the “SUB1” or “SUB2” LED lights.
Symbol
Function Alarm 1 Alarm 2 Alarm 3 HBA LBA Error 1 Error 2 Error 3
Defaults: “Auxiliary output 1”= [ ], “Auxiliary output 2”= [ ]
See
F Related article
3.3 Setting Output Specifications (page 3-7)
F Related parameter
• Alarm-related p arameter
“LBA detection time” (level 2 mode)
5--28
Page 87

Setup Mode
Function
Comment
Alarm 1 type
Conditions of Use
Alarms must be assigned as outputs.
Alarm 2 type
For example, if alarm outputs 1 and 2
only are assigned as outputs, the “alarm
Alarm 3 type
3 type” parameter cannot be used.
• “Alarm 1 to 3 type” parameters specify the operation of the alarm by the one of
the set values in the following table. For details of operation at an alarm, see page
3-10.
Set Value Settings Set Value Settings
1 Upper-and lower-limit alarm
(deviation)
2 Upper-limit alarm (deviation) 8 Absolute-value upper-limit alarm
3 Lower-limit alarm (deviation) 9 Absolute-value lower-limit alarm
4 Upper-and lower-limit range alarm
(deviation)
5 Upper-and lower-limit alarm with
standby sequence (deviation)
6 Upper-limit alarm with standby
sequence (deviation)
7 Lower-limit alarm with standby
sequence (deviation)
10 Absolute-value upper-limit alarm with
standby sequence
11 Absolute-value lower-limit alarm with
standby sequence
Defaults: 2 (Deviation upper limit)
See
F Related article
3.4 Setting Alarm Type (page 3-10)
F Related parameters
“Alarm value 1” “Alarm value 2” “Alarm value 3” (level 1 mode)
“Alarm 1 hysteresis” “Alarm 2 hysteresis” “Alarm 3 hysteresis” (level 2 mode)
“Alarm 1 open in alarm” “Alarm 2 open in alarm” “Alarm 3 open in alarm” “Control output 1 assignment” “Control output 2 assignment” “Auxiliary output 1 assignment” “Auxiliary output 2 assignment” (setup mode)
5--29
Page 88

CHAPTER 5 PARAMETERS
C
l
O
Setup Mode
Function
Comment
Alarm1openinalarm
Conditions of Use
Alarms must be assigned as outputs. For
Alarm2openinalarm
example, if alarm outputs 1 and 2 only are
assigned as outputs, the “alarm 3 open in
Alarm3openinalarm
alarm” parameter cannot be used.
• Selects the output states of alarms 1 to 3.
• When the controller is set to “close in alarm,” the status of the alarm output func-
tion is output as it is. When set to “open in alarm,” the status of the alarm output
function is output inverted. The following table shows the relationship between
alarm output functions, output and output LEDs.
Alarm
oseinalarm
peninalarm
Setting Range
[ ] : Close in alarm/ [ ]:Open in alarm
ON ON Lit
OFF OFF Not lit
ON OFF Lit
OFF ON Not lit
Output Output LED
Default
[]
See
Function
F Related article
3.4 Setting Alarm Type (page 3-10)
F Related parameters
“Alarm value 1” “Alarm value 2” “Alarm value 3” (level 1 mode)
“Alarm 1 hysteresis” “Alarm 2 hysteresis” “Alarm 3 hysteresis” (level 2 mode)
“Alarm 1 type in alarm” “Alarm 2 type in alarm” “Alarm 3 type in alarm”
“Control output 1 assignment” “Control output 2 assignment” “Auxiliary output
1 assignment” “Auxiliary output 2 assignment”(setup mode)
Direct/Reverse operation
• “Direct operation” (or normal operation) refers to control where the manipulated
variable is increased according to the increase in the process value. Alternatively,
“reverse operation” refers to control where the manipulated variable is increased
according to the decrease in the process value.
Setting Range
[ ] : Reverse operation/ [ ]:Direct operation []
Default
Comment
F Related article
3.3 Setting Output Specifications/Direct/reverse operation (page 3-8)
See
5--30
Page 89

Expansion Mode
t
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” and “1”.
• This mode contains the parameters for setting expanded functions. These parameters, for example, are for selecting the SP setting limiter, 2-PID and ON/OFF, specifying the standby sequence reset method, and setting the automatic return to the
monitoring display.
• To select this mode when in the levels 0 to 2, setup, option and calibration modes,
press the
play. If you select [
cond minimum, the controller enters the expansion mode.
• To select parameters in this mode, p ress the
tings, use the
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
key for 1 second minimum. The display changes to the menu dis-
]usingthe key then press the key for 1 se-
key. To change parameter set-
or keys.
Symbol Parameter Name Page
SP setting upper limit 5-32
SP setting lower limit 5-32
PID / ON/OFF 5-32
α 5-33
AT calculated gain 5-33
Standby sequence reset method 5-34
Automatic return of display mode 5-34
AT hysteresis 5-35
LBA detection width 5-35
5--31
Page 90

CHAPTER 5 PARAMETERS
Expansion Mode
SP setting upper limit
SP settin g lower limit
• Limits the upper and lower limits of the set point. When the set point exceeds the
settings of the “SP setting upper limit” and “SP setting lower limit” parameters,
Function
the E5EK-DRT controller regards the settings of the “Set point upper limit” and
“Set point lower limit” parameters as the set points.
• When the input type or temperature unit is changed, the values will be force-set to
the sensor’s upper and lower limits.
• During temperature input, the decimal point position is dependent on the currently selected sensor, and during analog input on the results of scaling.
Comment
See
Function
Parameter Setting Range
SP setting upper limit SP setting lower limit +1 to scaling upper limit EU 1300
SP setting lower limit Scaling lower limit to SP setting upper limit -1 EU -200
Unit Default
Duringtemperatureinput,therangebecomestherangeofuseoftheselectedsensor instead of the scaling upper and lower limit values.
F Related article
4.2 Operating Condition Restrictions (page 4-4)
F Related parameters
“Input type” “Scaling upper limit” “Scaling lower limit” “Decimal point” (setup
mode)
PID / ON/OFF
Condition of Use
Control must be standard control or
heating and cooling control.
• Selects 2 -PID control or ON/OFF control.
Setting Range
[ ]:2-PID/ [ ]:ON/OFF []
Default
5--32
Comment
See
F Related article
4.1 Selecting the Control Method/ON/OFF control (page 4-3)
F Related parameters
“Hysteresis (heat)” “Hysteresis (cool)” (level 1 mode)
Page 91

Expansion Mode
Function
Comment
See
α
• Usually use the default value.
• Sets 2-PID control parameter α.
Setting Range
0.00 to 1.00 None 0.65
F Related parameter
“PID / ON/OFF” (expansion mode)
Unit Default
Conditions of Use
The control must be 2-PID control.
Function
Comment
See
AT calcu lated gain
Conditions of Use
The control must be 2-PID control.
• Usually use the default value.
• Sets the gain when adjusting the PID parameters by auto-tuning.
• To give priority to response, decrease the set value of this parameter. To give
priority to stability, increase the set value of this parameter.
Setting Range
0.1 to 10.0 None 1.0
Unit Default
F Related parameters
“AT Execute/Cancel” (level 1 mode)
“PID / ON/OFF” (expansion mode)
5--33
Page 92

CHAPTER 5 PARAMETERS
Expansion Mode
Standby sequence reset method
• Selects the conditions for enabling reset after the standby sequence of the alarm
has been canceled.
Function
• Condition A:
Control started (including power ON), and, alarm value, input shift value or set
point (except for changing SP mode or during R emote SP) changed.
• Condition B:
Power ON
• The following illustration shows an operation example for the lower-limit alarm
with standby sequence.
Alarm point
(after change)
SP value change
Condition A only
Alarm hysteresis
Comment
See
Alarm point
Alarm Output: Condition A
Alarm Output: Condition B
Setting Range
0: Condition A / 1: Condition B 0
F Related parameters
“Alarm 1 type” “ Alarm 2 type” “Alarm 3 type” (setup mode)
Automatic return of display mode
Condition A only
Default
f : Standby sequence release point
F : Standby sequence restart point
5--34
Function
Comment
• If you do not operate any of the controller keys for the time set in this parameter
when in levels 0 to 2 modes, the display automatically returns to the PV/SP display.
• When this parameter is set to “0”, this function is disabled. (The screen will not
change automatically.)
• This parameter is invalid while the menu is displayed.
Setting Range
0to99 Second 0
Unit Default
Page 93

Expansion Mode
Function
Comment
AT h ysteresis
Conditions of Use
The control must be 2-PID control.
• Usually Use the default value.
• The levels of limit cycle operations during AT execution are given hysteresis at
event ON/OFF switching. This parameter sets this hysteresis width.
Setting Range
0.1to9.9 %FS 0.2
LBA detection width
Unit Default
Conditions of Use
The LBA (Loop Break Alarm) function
must be assigned as an output.
Function
Comment
• This p arameter can be used when LBA is assigned as an output.
• When the change width of the manipulated variable is below the width set in this
parameter, the controller regards this as detection of an LBA.
Setting Range
0.0 to 999.9 %FS 0.2
Unit Default
5--35
Page 94

CHAPTER 5 PARAMETERS
Option Mode
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0” and “1”.
• You can display this mode only on controller models that support the option functions. In this mode, you set communications conditions and communications data
assignment parameters to match the type of option function.
• To select this mode when in the levels 0 to 2, setup, expansion and calibration
modes, press the
display. If you select [
second minimum, the controller enters the option mode.
• To select parameters in this mode, p ress the
tings, use the
• The following table shows the parameters supported in this mode and the page
where the parameter is described.
key for 1 second minimum. The display changes to the menu
]usingthe key then press the key for 1
key. To change parameter set-
or keys.
Symbol Parameter Name Page
Baud rate 5-37
Node address 5-37
Communication data format 5-37
Operation at communication error 5-38
Read data assignment 1 to 16 5-38
Write data assignment 1 to 16 5-38
HBA latch 5-39
Remote SP enable 5-39
Remote SP upper limit 5-40
Remote SP lower limit 5-40
SP tracking enable 5-41
5--36
Page 95

[
]
]
[
Function
Comment
Option Mode
Baud rate
Node address
• These parameters area valid when the power is turned ON again.
• Set the same baud rate to the master and other slaves on the network.
• Set the node addresses so that the same values are not set to the master and
slaves.
• “Baud rate” parameter
Setting Range
125, 250, 500 kbps 125
• “Node address” parameter
Setting Range
0to63 None 0
Unit Default
Unit Default
See
Function
F Related article
6.3 Setting the Communications Conditions (page 6-6)
F Related parameter
“Remote/Local” (level 2 mode)
Communication data format
• This p a rameter is valid when the power is turned ON again.
• When the communication data is a numerical value, specify its format.
• When minus sign numerical values are being entered, the signed binary format is
expressed as a compl ement.
Numerical values are expressed as follows in the BCD format:
Numerical Value BCD Symbol
-0 F
-1 A
[Example]
-1500=“A500”, -15=“F015”
Unit Default
None
Comment
Setting Range
: Signed binaryformat/
:BCDformat
F Related article
6.3 Setting the Communications Conditions (page 6-6)
See
F Related parameter
“Remote/Local” (level 2 mode)
5--37
Page 96

CHAPTER 5 PARAMETERS
Option Mode
Operation at communication error
• Specifies operation when a communication error occurs.
• To continue operations other than communication functions, select “continue”.
Function
Comment
See
To stop operations, select “stop”.
[ ]:Stop] : Continue/[ None
F Related article
6.3 Setting the Communications Conditions (page 6-6)
F Related parameter
“Remote/Local” (level 2 mode)
Setting Range
Unit Default
Function
Comment
to
to
Read data assignment 1 to 16
Write data assignment 1 to 16
• The communication data types (16 types each for read and write) that have been
assigned to these parameters are sent and received from the CompoBus/D (DeviceNet) master.
• The assigned data type settings are successively sent and received via remote I/O
channels.
• Communication data type
For details on parameters, operation instructions and statuses that are assigned as
communication data, see Chapter 6 Using CompoBus/D (DeviceNet), 6.4 Data
Assignments/Data Type List (page 6-9).
Set [
] (“not assigned”) to parameters to which communication data is not
assigned.
• Default
Parameter Assignment Data
Read data assignment 1
Read data assignment 2
Read data assignment 3
Read data assignment 4
Read data assignment 16
Write data assignment 1
Write data assignment 2
Write data assignment 3
Write data assignment 4 Operation instruction
Write data assignment 5
Write data assignment 16
to
to
Process value
Manipulated variable (heat)
Status A
Not assigned
Set point
Alarm value 1
Alarm value 2
Not assigned
5--38
See
F Related article
6.4 Data Assignments (page 6-8)
F Related parameter
“Remote/Local” (level 2 mode)
Page 97

Option Mode
Function
Comment
See
HBA latch
Conditions of Use
The HBA output function must be
assigned.
• When this parameter is set to ON, the heater burnout alarm is held until either of
the following conditions is satisfied:
a The heater burnout set value is set to “0.0A”.
b The controller’s power OFF is turned OFF then back ON again.
Setting Range
[ ]: Enabled/[ ]: Disabled []
Default
F Related article
4.4 How to Use the Heater Burnout Alarm (page 4-9)
F Related parameters
“Control output assignment 1” “Control output assignment 2” “Auxiliary output
assignments 1” “Auxiliary output assignments 2” (setup mode)
Function
Comment
See
Remote SP enable
• When this parameter is set to “ON”, the remote SP and local SP can be switched
for use. (That is, to the SP mode can be specified.) Also, the “set point during SP
ramp” parameter is enabled at all times.
• When this parameter is set to “OFF”, only the local SP can be used. The set point
during SP ramp is enabled only when the SP ramp function is enabled.
Setting Range
[ ]: Enabled/[ ]: Disabled []
F Related article
4.3 How to Use the Remote SP (page 4-7)
F Relate parameters
“Set point during SP ramp” (level 0 mode)
“SP mode” (level 2 mode)
Default
5--39
Page 98

CHAPTER 5 PARAMETERS
Option Mode
Function
Remote SP upper limit
Conditions of Use
The remote SP function must be enabled.
Remote SP lower limit
• Sets the remote SP upper and lower limit values. The upper limit value is equivalent to 20 mA, and the lower limit value is equivalent to 4 mA. Set the upper limit
value in the “remote SP upper limit” parameter and the lower limit value in the
“remote SP lower limit” parameter.
RSP
Upper limit value
Lower limit value
420
• When the “SP setting upper limit” and “SP setting lower limit” parameters are
changed, the remote SP upper and lower limit values are forcibly changed to the
SP setting upper and lower limit values.
Input (mA)
Comment
See
Parameter Setting Range
Remote SP upper limit SP setting lower limit to SP setting upper limit EU 1300
Remote SP lower limit SP setting lower limit to SP setting upper limit EU -200
Unit Default
F Related article
4.3 How to Use the Remote SP (page 4-7)
F Related parameters
“Decimal point” (setup mode)
“SP setting upper limit” “SP setting lower limit” (expansion mode)
“Remote SP enable” (option mode)
5--40
Page 99

Option Mode
Function
Comment
See
SP tracking enable
Conditions of Use
The remote SP function must be enabled.
• Specifies the operation when the remote SP mode is switched to the local SP
mode.
• When this parameter is set to “ON”, the local SP is changed to the remote SP
value.
• When this parameter is set to “OFF”, the local SP is not influenced by the remote
SP.
Setting Range
[ ]: Enabled/[ ]: Disabled []
Default
F Related article
4.3 How to Use the Remote SP (page 4-7)
F Related parameters
“Set point during SP ramp” (level 0 mode)
“SP mode” (level 2 mode)
5--41
Page 100

CHAPTER 5 PARAMETERS
Calibration Mode
• The parameters in this mode can be used only when the “security” parameter
(protect mode) is set to “0”. When selecting this mode for the first time after the
E5EK-DRT has left the factory, return the “security” parameter to “0”.
• This mode contains the parameters for user calibration of inputs. Only parameters relating to input types specified in the “input type” parameter (setup mode)
can be used.
• To select this mode when in the levels 0 to 2, setup, expansion and option modes,
press the
play. If you select [
cond minimum, the controller enters the calibration mode.
• For details on parameters in the calibration mode, see Chapter 7 Calibration.
key for 1 second minimum. The display changes to the menu dis-
]usingthe key then press the key for 1 se-
5--42
 Loading...
Loading...