

Page 1
Snelle start instructie
Positioneren Met CP1L
PNSPO
Page 2

Page 3
PNSPO Positioneren Met CP1-L
Mededeling
PNSPO apparatuur wordt gefabriceerd voor gebruik volgens de juiste procedures door een gekwalificeerde
gebruiker en alleen voor de doeleinden die in deze handleiding worden beschreven.
De volgende conventies worden gebruikt om voorzorgsmaatregelen te tonen en te classificeren. Schenk altijd
aandacht aan de informatie die getoond wordt. Het geen aandacht schenken aan of negeren van deze
waarschuwingen kan leiden tot het gewond raken van mensen of schade aan het product.
Gevaar
Waarschuwing
Geeft informatie aan die, wanneer er geen acht op wordt geslagen, zeer waarschijnlijk
zal leiden tot ernstige verwonding of verlies van leven.
Geeft informatie aan die, wanneer er geen acht op wordt geslagen, mogelijk kan leiden
tot ernstige verwonding of verlies van leven en zeker schade aan het product zal
toebrengen.
Voorzichtig Geeft informatie aan die, wanneer er geen acht op wordt geslagen, mogelijk kan leiden
tot relatief ernstige verwonding of letsel, schade aan het product of verkeerde werking
van het product.
PNSPO product verwijzingen
Namen van OMRON producten beginnen met een hoofdletter in deze handleiding.
Het woord unit wordt gebruikt om een OMRON product aan te duiden, onafhankelijk van het feit of het woord
unit in de naam van het product voorkomt.
Gebruikte afkortingen en termen zijn verklaard in de appendix.
Visuele hulpmiddelen
De volgende koppen verschijnen in de linkerkolom van de handleiding om u verschillende soorten informatie
snel te laten vinden.
Opmerking Geeft informatie weer die in het bijzonder praktisch is voor efficiënt en handig gebruik
van het product.
1, 2, 3... 1. Geeft diverse soorten lijsten weer zoals procedures, controlelijsten etc.
Noot Geeft een noot weer. Wordt vaak gebruikt in combinatie met tabellen.
Kantlijn In de kantlijn van de tekst is vaak weergegeven waar een alinea over gaat. U kan deze
teksten in de kantlijn gebruiken om snel binnen een hoofdstuk te zoeken naar een
onderwerp.
Vet gedrukte woorden refereren naar commando’s in menu’s van programma’s. Het
gedeelte voor de verticale streep refereert naar het menu, het gedeelte erachter naar
de naam van de optie uit het menu (bijvoorbeeld File|Open).
Cursief afgebeelde woorden worden gebruikt voor de namen van optieszoals check
boxes en knoppen in dialogen (bijvoorbeeld Save Program).
Toetsenbord combinaties worden vetgedrukt aangegeven met de toetsen die
tegelijkertijd ingedrukt moeten worden (bijvoorbeeld Shift+F6).
Pagina 1 Positioneren Met CP1L
Page 4

© PNSPO 2008,
OMRON Positioneren met CP1L snelle start instructie Publicatie april 2008
Document Positioneren met CP1L snelle start instructie Revisie. 1
De informatie in dit document is uitvoerig gecontroleerd. OMRON kan echter geen enkele aansprakelijkheid
aanvaarden voor enige incorrectheid of onvolledigheid van deze handleiding. Verder heeft OMRON het recht
onaangekondigd veranderingen aan het product en de handleiding aan te brengen ter verbetering van de
betrouwbaarheid, de functionaliteit en het ontwerp van de handleiding en/of het product. OMRON is niet
aansprakelijk voor enige schade die kan voortvloeien uit het gebruik van deze handleiding, noch kan het enig
onder patent rustende licentie of rechten van anderen, overdragen.
OMRON is een geregistreerd handelsmerk van OMRON Corporation.
OMRON ELECTRONICS B.V. Alle rechten voorbehouden.
pagina 2 Positioneren Met CP1L
Page 5

PNSPO Inhoudsopgave
Inhoudsopgave
1 Introductie 5
1.1
Wat is positioneren ........................................................................................................ 5
1.2
Het regelprincipe bij de CP1L ........................................................................................6
1.3
Functioneel overzicht.....................................................................................................7
2 Bedraden 8
2.1
De Encoder....................................................................................................................8
2.2
CP1L – Regelaar verbinding.......................................................................................... 8
3 Instellingen en programma 9
3.1
PLC Settings voor Built-in input .....................................................................................9
3.2
PLC Settings voor Inverter Positioning 0. ....................................................................10
3.3
PLC Settings voor Modbus Communicatie ..................................................................11
3.4
PLC settings Voor Origin Search.................................................................................12
3.5
PLC Settings wegschrijven en activeren .....................................................................12
4 Modbus Communicatie 13
4.1
Modbus en de CP1L PLC ............................................................................................13
4.2
De Modbus Registers ..................................................................................................13
4.3
Het Modbus bericht...................................................................................................... 14
4.4
Modbus voorbeeldprogramma.....................................................................................16
5 Positioneren 18
5.1
Positioneerinstructies................................................................................................... 18
5.2
De PLS2 instructie .......................................................................................................18
5.3
PLS2 Instructie in detail ...............................................................................................19
5.4
Belangrijke registers ....................................................................................................20
5.5
Origin Search...............................................................................................................21
5.6 Het positioneerprogramma ...............................................................................................22
6 Vraag en Antwoord 29
Pagina 3 Positioneren Met CP1L
Page 6
Introductie PNSPO
Voor wat betreft deze handleiding
De CP1L serie PLC’s van Omron heeft unieke functionaliteit aan boord die het gemakkelijk maakt om met
een Omron frequentieregelaar te kunnen positioneren.
Deze handleiding is een simpele beschrijving van deze positioneer functionaliteit.
Voorzichtig Lees deze handleiding nauwkeurig en wees er zeker van dat u de hierin weergegeven
informatie goed begrijpt voor u begint met het installeren en gebruik van deze regeling.
Uitgebreide informatie over deze CPU’s en het programmeren daarvan kunt
staat beschreven in de volgende manuals:
W471 CP1L “ Programming manual”
Deze handleiding bevat informatie over configuratie, installatie, bedraden, I/O
localisering, pulse/counter functie’s en uitbreidingen in detail.
Ook word behandeld errors , probleemoplossing en onderhoud.
W451 CP1H CP1L “ Programming_manual”
Deze manual omvat een complete omschrijving van alle in de CP1L beschikbare
instructies.
W07E CP1L “Getting started manual”
Deze manual introduceert de CP1L en bevat informatie over aansluiten,
bedraden, programmeren met CX-Programmer.
Aan deze handleiding en dit produkt is de grootst mogelijke zorg besteed. Mochten er ondanks deze zorg nog
onjuistheden of onduidelijkheden vermeld zijn of fouten in het produkt zitten, dan stellen wij ons uitdrukkelijk niet
aansprakelijk voor eventuele gevolgen hiervan. Voor suggesties ter verbetering houden wij ons aanbevolen.
pagina 4 Positioneren Met CP1L
Page 7
PNSPO
1 Introductie
In dit hoofdstuk zal worden uitgelegd wat positioneren precies is en hoe de combinatie
van de Omron CP1L en de frequentieregelaar hiermee omgaat.
1.1 Wat is positioneren
Van positioneren wordt gesproken als een besturing een aandrijving zo bestuurd dat er
altijd een vaste afstand wordt afgelegd. Deze vaste afstand is opgedeeld in pulsen die
in de besturing vaak weer worden omgerekend naar bijvoorbeeld millimeters. Om te
controleren of de aandrijving ook exact de gewenste afstand heeft afgelegd is er
terugkoppeling nodig van de aandrijving. Deze terugkoppeling wordt vaak verzorgd
door een encoder. Een encoder heeft een vast aantal pulsen per omwenteling, deze
pulsen worden door de besturing ingelezen en vergeleken met de gewenste afstand of
het gewenste aantal pulsen. Als er nu een verschil wordt geconstateerd tussen het
gewenst aantal pulsen en het aantal afgelegde pulsen dan zal de besturing de
aandrijving zo aansturen dat het verschil nul wordt. Tijdens het uitsturen wordt ook het
verschil gemeten tussen uitgestuurde pulsen en teruggemeten pulsen zodat een
afwijking in snelheid gemeten kan worden. Dit verschil tussen pulsen wordt
bijgehouden in de errorcounter. Loopt het aantal pulsen in de errorcounter op dan zal
de snelheid van de aandijving worden aangepast om dit verschil weg te regelen.
Pagina 5 Positioneren Met CP1L
Page 8

Introductie PNSPO
1.2 Het regelprincipe bij de CP1L
De CP1L PLC heeft twee ingebouwde positioneer regelingen aan boord. De positie
wordt opgegeven middels instructies in de PLC. De positioneer instructie geeft zijn
pulsen aan de errorcounter. Vervolgens wordt de snelheid naar de regelaar
uitgestuurd middels modbus communicatie of via analoge signalen. Voor het uitsturen
van analoge signalen dient er een analoge utibreidingskaart geplaatst te worden. Voor
het besturen van de regelaar via modbus is er een seriele optiekaart nodig. De pulsen
worden teruggekoppeld door een encoder die is aangesloten op de puls ingangen van
de PLC. Afhankelijk van de gebruikte signaaltechniek (NPN of PNP) dient er een
overeenkomstige encoder geselecteerd te worden. Line driver- of vijf volt encoders
worden niet ondersteund. Maximaal kunnen er twee regelaars en twee encoders
aangesloten worden op de CP1L PLC.
Opmerkingen Omron beveelt aan om gebruik te maken van modbus communicatie als
aanstuurmethode. Aansturing via modbus verloopt sneller dan analoog en kost verder
geen uitgangen. Verder houdt u extra ruimte voor uitbreidingsunits door geen gebruik
te maken van de Analoge uitbreidingsunit. De voorbeelden in deze handleiding gaan
dan ook uit van modbuscommunicatie.
Verder dient opgemerkt te worden dat er geen gebruik gemaakt kan worden van puls
outputs op de PLC die behoren bij inverter positioning. Maakt u gebruik van inverter
positioning 0, dan kunt u geen gebruik maken van puls output 0. Gebruikt u inverter
positioning 1, dan is gebruik van puls output 1 niet mogelijk.
pagina 6 Positioneren Met CP1L
Page 9
PNSPO
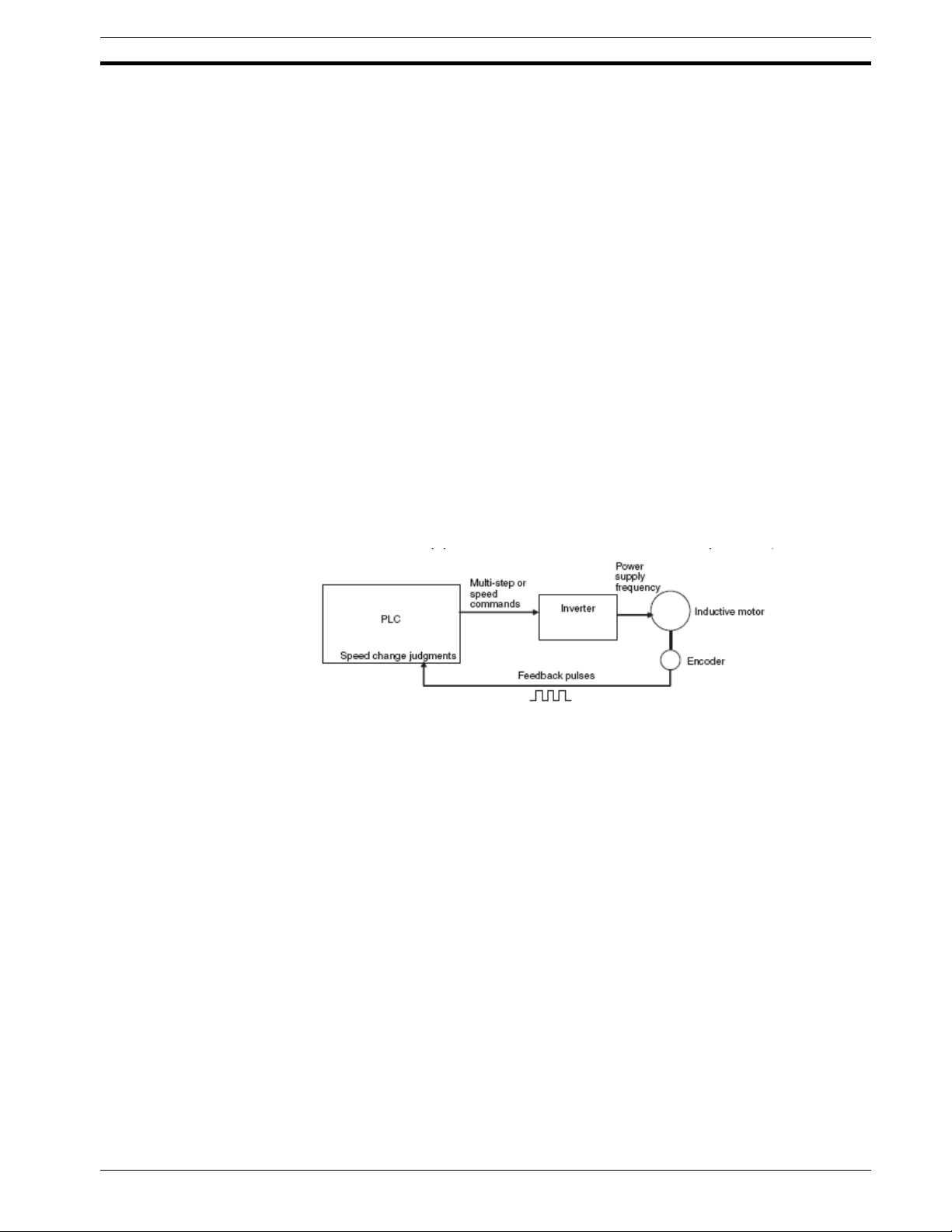
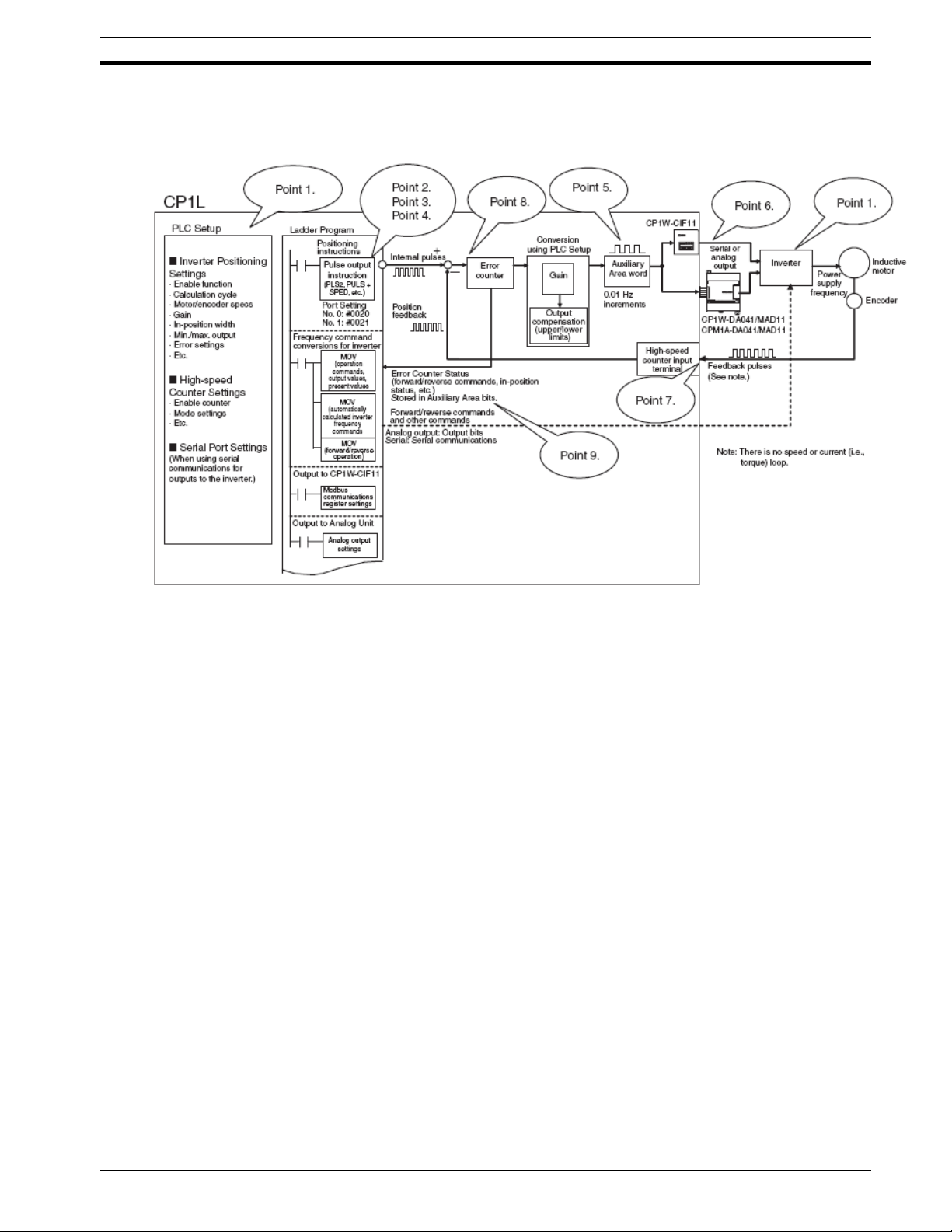
1.3 Functioneel overzicht
Hieronder het blokschema van een positioneerregeling.
1. PLC Setup - Om te kunnen positioneren moet de PLC setup worden ingesteld dat
het juiste aantal pulsen kan worden ingelezen en dat de uitsturing op de juiste
wijze kan plaatsvinden. De highspeed counter in de PLC en de frequentieregelaar
moeten ook worden ingesteld.
2. Ladder Progamma – Met puls instructies zoals PLS2 en PULS in combinatie met
SPED kan worden gepositioneerd.
3. Het aantal pulsen ofwel de bewegingsafstand die dient opgegeven te worden,
wordt afgeleid van het aantal pulsen per omwenteling van de encoder.
4. Specificeer de juiste inverter positioning poort op de PLC in de pulsinstructies
(port 0: 0020 hex, port 1: 0021 hex).
5. Referentie - Het aantal pulsen in de errorcounter wordt omgezet naar een
frequentiereferentie voor de frequentieregelaar. De resolutie van aansturing is 0,01
Hz.
6. Aansturing - De frequentiereferentie die op Auxilary Data gebied wordt geplaatst
dient via het ladderdiagram programma naar Modbus communicatie of Analoog te
worden overgezet.
7. High Speed Counter - Wanneer er een frequentiereferentie wordt gestuurd naar
de frequentieregelaar komen er pulsen van de encoder terug op de high speed
counter ingang van de CP1L. De CP1L blijft een referentie uitsturen totdat de
waarde in de errorcounter nul wordt.
8. Error Counter - Als de errorcounter nul geworden is, dan zal de CP1L stoppen met
uitsturen. De errorcounter wordt wel in de gaten gehouden. Zodra de errorcounter
weer een waarde bevat, bijvoorbeeld door het verdraaien van de motoras, dan zal
de CP1L weer een referentie uitsturen om het veschil nul te maken.
9. De waarde van de errorcounter wordt ook opgeslagen in het Auxilary Data gebied,
zodat de status van errorcounter door het programma gevolgd kan worden.
Pagina 7 Positioneren Met CP1L
Page 10
Introductie PNSPO
2 Bedraden
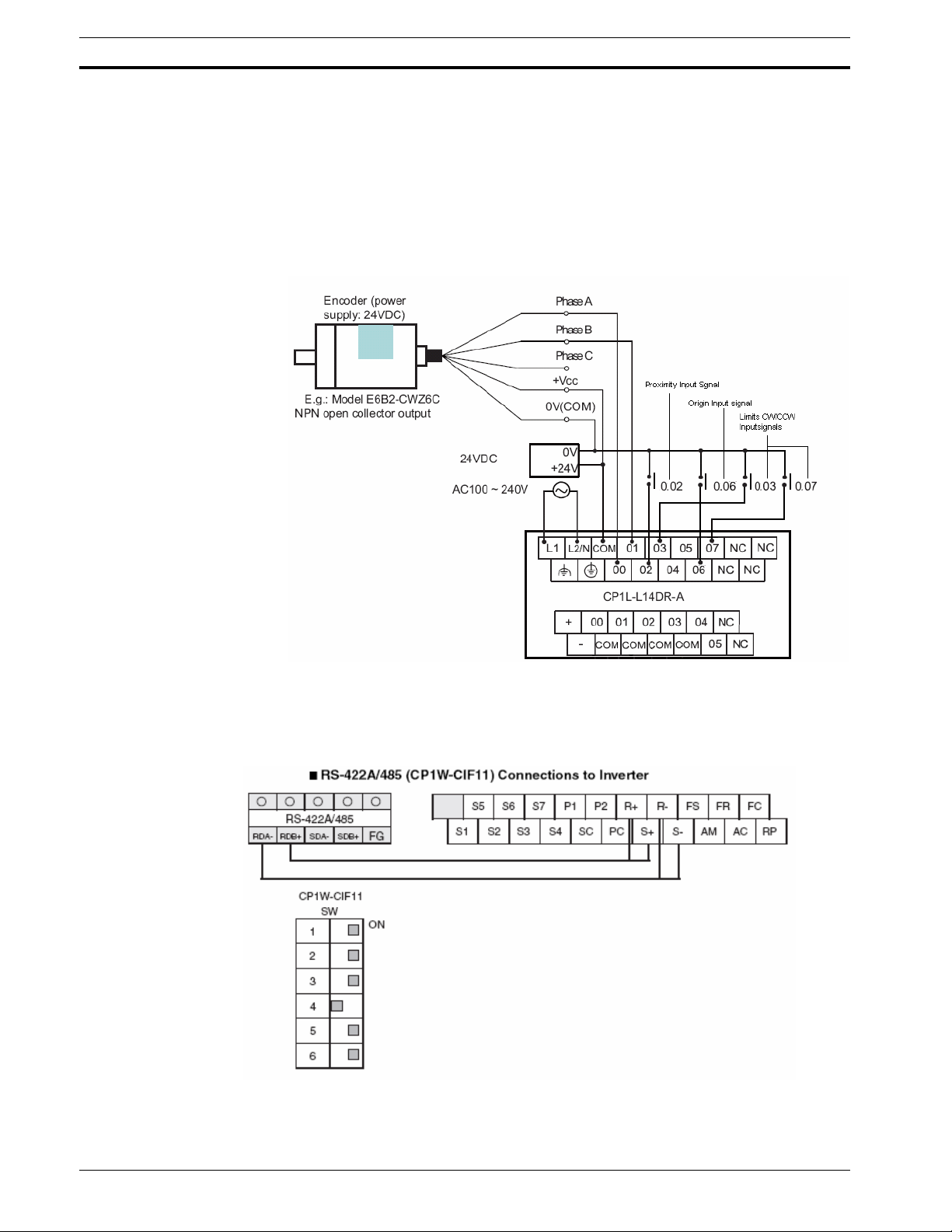
2.1 De Encoder
Hieronder een voorbeeld hoe een NPN encoder aan te sluiten op de high speed
counter ingangen van de CP1L. De verbinding tussen encoder en PLC is gemakkelijk
te testen. Ook al staat er niets ingesteld of geprogrammeerd, de leds van de
desbetreffende inputs zullen oplichten als er aan de encoder gedraaid
wordt.
2.2 CP1L – Regelaar verbinding
Hieronder een voorbeeld hoe de frequentieregelaar via modbus aangesloten kan
worden op de CP1W-CIF11 communicatieuitbreiding.
Opmerkingen De baudrate/dataformaat instellingen in de PLC Setup en frequentieregelaar dienen
gelijk aan elkaar te zijn.Raadpleeg voor het aansluiten van een tweede encoder
manual W462 CP1L Operation Manual.
pagina 8 Positioneren Met CP1L
Page 11
PNSPO
3 Instellingen en programma
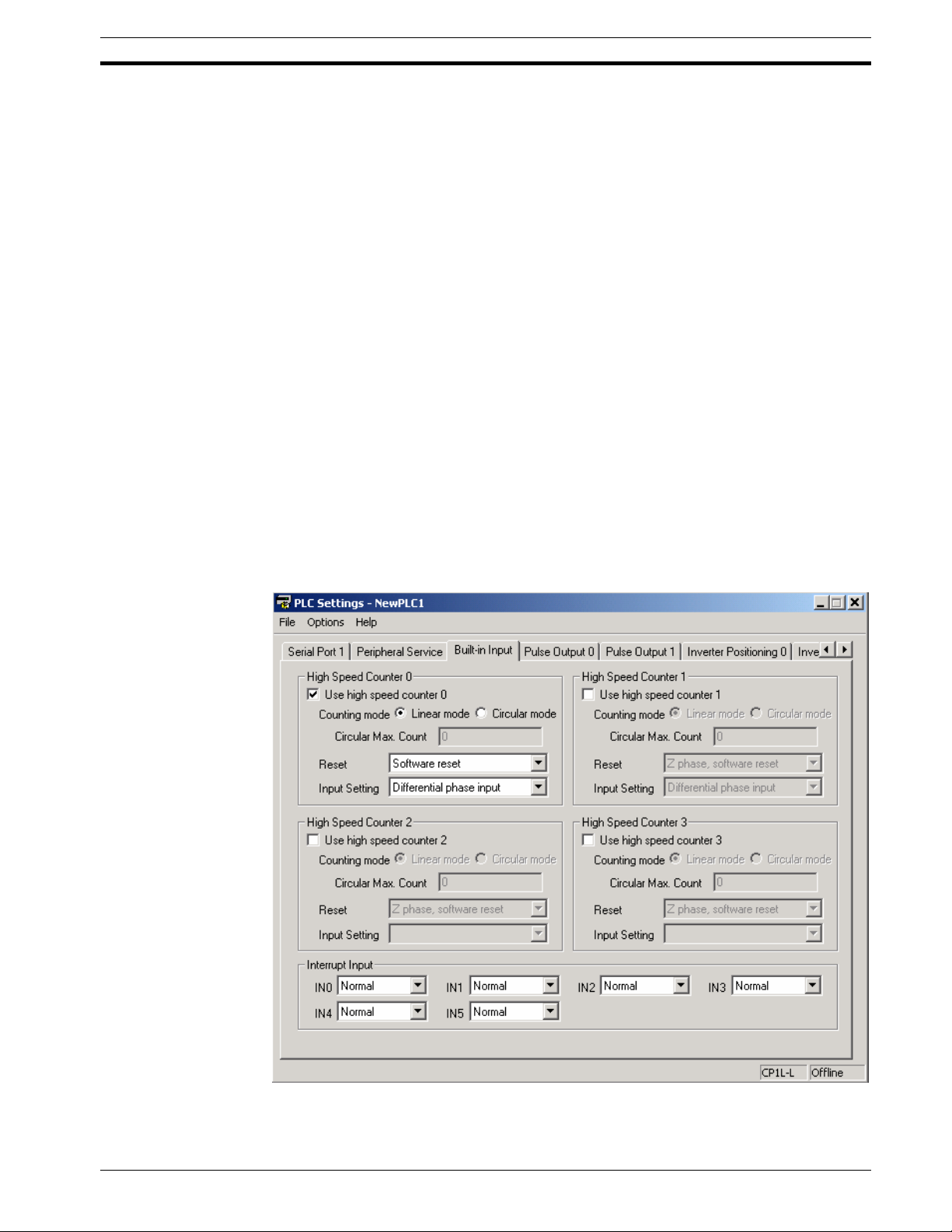
3.1 PLC Settings voor Built-in input
De PLC Setup van de CP1L PLC kent een aantal instellingen specifiek voor het
positioneren met frequentieregelaars. Er zijn drie tabs van groot belang als de
positioneer functionaliteit gebruikt gaat worden.
1. Built In Input – Hier worden de instellingen gemaakt voor het juiste encodertype.
Highspeed counter 0 hoort bij Inverter Positioning 0 en Highspeed counter 1 hoort
bij Inverter Positioning 1.
2. Inverter Positioning 0 is bedoelt voor de eerste regelaar.
3. Inverter Positioning 1 is bedoelt voor de tweede regelaar.
Als de encoder is aangesloten zoals beschreven onder punt 2.1 dan zal de CP1L zo
ingesteld moeten worden dat deze signalen als encodersignalen ingelezen worden.
Daartoe dient Use high speed counter 0 te worden aangevinkt. Reset en Input Setting
hebben te maken met het type encoder wat toegepast wordt. Indien u gebruik maakt
van een Omron incrementele encoder, dant kunnen onderstaande instellingen worden
overgenomen. Verder dient de Counting mode altijd op Linear mode te worden
ingesteld.
PLC Settings voor Built-in input.
Pagina 9 Positioneren Met CP1L
Page 12

Introductie PNSPO
3.2 PLC Settings voor Inverter Positioning 0.
Wanneer er gebruik gemaakt gaat worden van de eerste positioneerregeling dan dient
het vinkje bij Use inverter positioning aangevinkt zijn.
Gain – Versterking van de positie afwijking x 0,1. Een setting van 25 is dan een gain
van 2,5 x. Hoe hoger deze waarde, hoe agressiever er gecorrigeerd gaat worden.
Risico op oscillatie wanneer deze waarde te hoog wordt gekozen.
In-position range – Het aantal pulsen waarbinnen de beweging in positie is.
Min. Output value – De minimale frequentie waarmee uitgestuurd mag worden.
Max. Output value – De maximale frequentie waarmee uitgestuurd mag worden.
Error counter overflow detection value – Wanneer de errorcounter deze waarde
bereikt zal er een errorcounter overflow optreden. Het positioneren zal stoppen en in
het statusregister van deze regeling zal het overflow bit hoog worden gezet.
Error counter alarm detection value – Wanneer de errorcounter deze waarde
bereikt zal er een errorcounter alarm optreden. Het positioneren zal doorgaan maar in
het statusregister wordt wel het errorcounter alarm bit hoog worden gezet.
Error counter cycle – Setting per 4 ms, een instelling van 3 is 12 ms. De tijd waarmee
de waarde van de errorcounter gesampled wordt. De frequentiereferentie heeft
hiermee een minimale verversingstijd van wat hier staat ingesteld. Is de referentie
bijvoorbeeld 43,2 Hz, dan zal dit minimaal 12 ms worden gehandhaafd als de instelling
3 is.
Power Supply Freq. For One Motor Revolution per Sec. – Deze instelling moet
precies gemaakt worden. Er moet bepaald worden hoeveel hertz er door de
frequentieregelaar uitgestuurd moet worden om in 1 seconde precies 1 omwenteling te
maken. Dit kan ook berekend worden aan de hand van het motorplaatje. Staat hier
bijvoorbeeld 1440 rpm bij 50hz, dan kan dit als uitgangspunt gebruikt worden voor de
volgende formule: (rpm / 60 seconden) / 50hz geeft het aantal omwentelingen per
seconden bij 1Hz. 1 gedeeld door het antwoord geeft dan de juiste instelling.
Voorbeeld: 1440 / 60 = 24 daarna 24 / 50 = 0,48 daarna 1 / 0,48 = 2,08 = 2,1 afgerond.
pagina 10 Positioneren Met CP1L
Page 13

PNSPO
Limit Output during acceleration and constant speed – Wordt gebruikt om de
uitgestuurde frequentie te limiteren tijdens accelereren en continue uitsturing.
Upper Limit = Interne puls uitgangswaarde + (Interne pulse uitgangswaarde x Output
coefficient).
Output
Limit Output during deceleration and when stopped – Wordt gebruikt om de
uitgestuurde frequentie te limiteren tijdens decelereren en wanneer de motor stilstaat.
De instellingen voor Inverter Positioning 1 zijn het zelfde als de settings hierboven uitgelegd
voor Inverter Positioning 0.
3.3 PLC Settings voor Modbus Communicatie
Hier worden de communicatieinstellingen gemaakt om te kunnen communiceren met
de frequentieregelaar(s). De Baudrate en Format dienen exact overeen te komen met
de instellingen in de frequentieregelaar. De Mode dient ingesteld te worden als Serial
Gateway.
In de V1000 frequentieregelaar dienen de volgende parameters te worden aangepast:
B1-01=2 B1-02 = 2 C1-01=0,0 C1-02=0,0 H5-01=1 H5-02=8 H5-03=1
In de V7/MV frequentieregelaar dienen de volgende parameters te worden aangepast:
n003=2 n004=6 n019=0,0 n020=0,0 n152=1 n153=1 n154=3 (115200bps)
Pagina 11 Positioneren Met CP1L
Page 14

Introductie PNSPO
3.4 PLC settings Voor Origin Search
Hier worden de instellingen van de Origin Search functie gemaakt.
De aangegeven gebieden worden zijn belangrijk voor het functioneren van de Origin
search instructie.
3.5 PLC Settings wegschrijven en activeren
Na het maken van alle PLC instellingen dienen deze te worden weggeschreven naar
de PLC Setup in de CP1L PLC. Hiertoe dient er verbinding gemaakt te worden met de
PLC. Vervolgens dient de PLC in de programmeerstand gezet te worden. In het PLC
Settings scherm (zoals hierboven afgebeeld) dient de onder Options de selectie
Transfer To PLC te worden uitgevoerd. De instellingen staan vervolgens in de PLC,
maar worden pas geactiveerd als de PLC uit en weer ingeschakeld wordt.
pagina 12 Positioneren Met CP1L
Page 15

PNSPO
4 Modbus Communicatie
4.1 Modbus en de CP1L PLC
Het versturen van modbus berichten naar een frequentieregelaar is in de CP1L PLC
standaard geïmplementeerd. Dit betekend dat er niet zelf een modbus driver
geschreven hoeft te worden, maar dat deze reeds is ingebouwd in de CP1L PLC. Deze
ingebouwde Modbus driver wordt de Modbus-RTU Easy Master Function genoemd.
Wanneer de seriele poort als Serial Gateway staat ingesteld zoals vermeld onder
sectie 3.3 dan kan met het goedzetten van een aantal datamemories en het zetten van
een bit modbus communicatie worden bedreven. In dit hoofdstuk wordt nader
uitgelegd hoe modbus communicatie is op te zetten om daar met positioneren gebruik
van te maken.
Voor meer uitgebreide informatie over de modbus functionaliteit kan de CP1L
operation manual worden geraadpleegd onder sectie 6.3.3 Modbus-RTU Easy Master
Function.
4.2 De Modbus Registers
Welke datamemories er gebruikt moeten worden om het modbus bericht klaar te
zetten hangt af van de gebruikte seriele poort op de CP1L PLC en het type CP1L PLC
dat wordt toegepast, er zit verschil tussen de L-type en M-type CPU’s.
Het te versturen modbusbericht dient op de volgende datamemories klaar gezet te
worden:
• M-type CPU Units
Serial port 1: D32200 to D32249
Serial port 2: D32300 to D32349
• L-type CPU Units
Serial port 1: D32300 to D32349
Het antwoord dat volgt op het verzonden modbusbericht wordt geplaatst op de
volgende datamemories:
• M-type CPU Units
Serial port 1: D32250 to D32299
Serial port 2: D32350 to D32399
• L-type CPU Units
Serial port 1: D32350 to D32399
Commando bits:
• M-type CPU Units
A641 = Serial port1
A640 = Serial port2
• L-type CPU Units
A640 = Serial port1
A64x.00: Start versturen van bericht. 1 = verstuur bericht, wordt 0 geschreven door de
PLC na versturen van het bericht.
A64x.01: 1 = bericht succesvol verzonden, 0 = bzeig met versturen of er is een error.
A64x.02: 1 = Er is een error opgetreden, 0 = geen fout.
Pagina 13 Positioneren Met CP1L
Page 16

Introductie PNSPO
4.3 Het Modbus bericht
Nu de datamemories die gebruikt worden voor modbuscommunicatie bekend zijn
zullen deze gevuld moeten worden met waarden zodat er een compleet modbus
bericht met runvoorwaarden en frequentiereferentie naar de frequentieregelaar
gestuurd kan worden.
Hieronder is te zien hoe het modbusbericht wordt opgebouwd.
pagina 14 Positioneren Met CP1L
Page 17

PNSPO
Om te communiceren met een frequentieregelaar op nodenummer 1 dient het
volgende te worden ingevuld (voorbeel port2 op M-type of port1 op L-type):
D32300 = 0001 hex (nodenummer 1)
D32301 = 0010 hex (functiecode 10 hex)
D32302 = 0009 hex (9 bytes in bericht)
Om te communiceren met een frequentieregelaar op nodenummer 1 dient het
volgende te worden ingevuld (voorbeel port2 op M-type of port1 op L-type):
D32300 = 0001 hex (nodenummer 1)
D32301 = 0010 hex (functiecode 10 hex)
D32302 = 0009 hex (9 bytes in bericht)
D32303 = 0001 hex (modbus startregister)
D32304 = 0002 hex (modbus aantal register)
D32305 = 0400 hex (modbus data)
D32306 = Runcommando *
D32307 = Frequentiereferentie *
* Het Runcommando en de Frequentiereferentie dienen op een bepaalde manier in het
geheugen te worden geschreven. De digitvolgorde in de frequentieregelaar wijkt af van
wat de PLC aan data produceert.
In het voorbeeldprogramma staan een paar XFRB instructies om de data op de juiste
plaats neer te zetten.
Verder wordt de Frequentiereferentie naar de frequentieregelaar gestuurd in 0,01
Hertz stappen. In de V1000 en andere nieuwere frequentieregelaars is dit de
standaard, in oudere regelaars zoals MV en V7 dient er een parameter gezet te
worden van 0,1 Hertz naar 0,01 Hertz.
MV/V7: n152 0 = 0,1 Hz / 1 = 0,01 Hz.
Pagina 15 Positioneren Met CP1L
Page 18

Introductie PNSPO
4.4 Modbus voorbeeldprogramma
Op de volgende pagina’s staat het voorbeeldprogramma hoe er gecommuniceerd kan
worden via modbus naar de frequentieregelaar. Op D1 wordt het runcommando
gezet: 0001 hex is forward run, 0002 hex is reverse run. D2 is de frequentiereferentie,
opgegeven in 0,01Hz stappen in hex. D10 en D15 dienen vrij gehouden te worden
voor dit programma, deze worden gebruikt als hulpregister.
pagina 16 Positioneren Met CP1L
Page 19

PNSPO
…Vervolg van het modbusprogramma.
Het is nu een goed moment om te testen of de modbuscommunicatie goed werkt. Als
nu op D1 de waarde 0001 hex wordt geschreven en op D2 de waarde 0BB8 hex
(30,00Hz), dan zal de frequentieregelaar op 30Hz moeten gaan draaien. Indien er
niets gebeurd dan moeten de verbindingen naar de regelaar, de instellingen in de
regelaar en de instellingen in de PLC setup nagekeken worden. Het is van groot
belang dat bovenstaande stukje ladderdiagram goed werkt, het is namelijk de basis
voor de positioneersoftware. Denk erom dat de instellingen in de regelaar en PLC pas
actief worden bij inschakeling van de voedingsspanning.
Als er gecommuniceerd wordt met de frequentieregelaar kan het zijn dat er na korte
tijd CE verschijnt en de regelaar stopt met uitsturen. Dit is een normale
beschermingsfunctie van de regelaar. Er moet minstens eens in de seconde met de
regelaar worden gecommuniceerd, anders “denkt” de regelaar dat de verbinding is
weggevallen en zal dan uit veiligheid stoppen met uitsturen.
Pagina 17 Positioneren Met CP1L
Page 20

Introductie PNSPO
5 Positioneren
5.1 Positioneerinstructies
In de CP1L PLC zijn er een aantal instructies die gebruikt kunnen worden bij het
positioneren. Deze instructies zijn: PRV, PULS, ACC, SPED, INI en PLS2. Aangezien
de PLS2 instructie de meest complete is en het gemakkelijkst kan worden toegepast
zal in deze handleiding alleen gebruik gemaakt worden van de PLS2 instructie. Voor
de werking van de overige instructies kan de CP1L operationmanual worden
geraadpleegd.
5.2 De PLS2 instructie
De PLS2 instructie zal als de wordt uitgevoerd pulsen genereren die de motor zullen
laten bewegen. Deze instructie is het hart van het positioneerprogramma. In deze
instructie dient het aantal af te leggen pulsen, de snelheid en acceleratie- en
deceleratietijd te worden opgegeven. De pulsen worden niet direct op de output van de
PLC gezet, maar ze worden aangeboden aan de positioneer regeling van de CP1L.
Deze zorgt er dan voor dat aan de hand van de errorcounter exact de positie wordt
afgelegd die is ingegeven.
pagina 18 Positioneren Met CP1L
Page 21

PNSPO
5.3 PLS2 Instructie in detail
P: Port specifier, hier wordt opgegeven welke positioneer regeling er gebruikt moet
worden, 0020 hex is Inverter Positioning 0, 0021 hex is inverter Positioning 1.
M: Output mode, De mode geeft aan hoe er gepositioneerd moet gaan worden.
0 hex is relative verplaatsing ofwel iedere keer dat de instructie wordt uitgevoerd wordt
opnieuw het opgegeven aantal pulsen uitgestuurd.
1 hex is absolute verplaatsing. Dit betekend dat elke positie uniek is. Stel er is een
machine waarin de maximale afstand die je kunt afleggen 1 meter is. Deze 1 meter
zou opgedeeld kunnen worden in 10.000 pulsen (afhankelijk van de encoder en
overbrenging) positie 1 is dan het begin, positie 10.000 het einde. Als er nu naar het
midden gegaan moet worden geeft je een positie op van 5000, een kwart van het
begin is dan 2500 etc.
Om een absolute verlaatsing te starten is het nodig om de actuele waarde van de puls
output te resetten. Dit kan met een INI instructie of een origin search beschreven in
hoofdstuk 5.5.
M: Direction, geeft aan bij een relatieve verplaatsing, welke richting er gedraaid moet
worden.
S: Geeft de locatie aan waar een tabel met data staat die meer informatie geeft over
hoe er verplaatst moet worden. Dit kan een willekeurige plek in de PLC zijn, mits dit
niet confilicteerd met al gebruikte datalocaties.
S1: Acceleratie ratio, Geeft aan hoeveel hertz er per 4 milliseconde geaccelereerd
moet worden. Invoeren in hex.
S1+1: Deceleratie ratio, Geeft aan hoeveel hertz er per 4 milliseconde gedecelereerd
moet worden. Invoeren in hex.
S1+2 onderste 4 digits plus S1+3 bovenste 4 digits: Maximale frequentie in Hertz
(20500 = 20,500 Hz) invoeren in hex: 20500 = 5014 hex.
S1+4 onderste 4 digits plus S1+5 bovenste 4 digits: Aantal af te leggen pulsen.
F en F+1 : De minimale frequentie waarmee uitgestuurd mag worden. Frequentie in
Hertz (0150 = 1,50 Hz) invoeren in hex: 0150 = 96 hex.
Pagina 19 Positioneren Met CP1L
Page 22

Introductie PNSPO
5.4 Belangrijke registers
pagina 20 Positioneren Met CP1L
Page 23

PNSPO
5.5 Origin Search
Wanneer er wordt gepositioneerd dan wordt er van een nul-positie uitgegaan. De nul
positie wordt de origin genoemd. Normaal gesproken zal er bij het opstarten van de
machine een origin search worden uitgevoerd om de nul-positie te bereiken. De nulpositie wordt vaak bepaald door een eindschakelaar of sensor aan het begin van de
aandrijving. In de CP1L kan de origin search gebruikt worden. Via de
modbuscommunicatie is de regelaar volledig te bedienen.
Een mogelijke origin search kan er als volgt uitzien:
1.Voer de ORG(889) instructie uit.
2.De regelaar gaat uitsturen tot proximity signal is gedetecteerd en decelereerd.
3.De regelaar zal wanneer de origin imput signal word gedetecteerd Flag A280.06 (at
origin) en Flag A26.03 (In-position) Flag hoog maken en Flag A280.05 (no origin) laag.
Met deze Flags kan een voorwaarde gecreeerd worden om de regelaar te stoppen.
4. Voer de INI instructie uit om de tellerstand/positie op nul te zetten.
P 0000 hex Inverter Puls output 0 / 0001 hex Inverter Puls output1
0010 hex High Speed Counter 0 / 011 hex High Speed Counter 1
0020 hex inverter Positioning 0 / 0021 hex Inverter Positioning 1
C: 0002 hex om de teller te resetten.
NP: 0000,0000hex Nieuwe teller waarde (let op bestaat uit een hoog- en laag woord).
Opmerking Als er Absoluut gepositioneerd gaat worden na een Org(889) instructie moet de
Errorcounter gereset worden anders word de PLS2(887) instructie niet uitgevoerd. De
A562.00 Flag reset de eventuele waarde die in de errorcounter is overgebleven.
Origin Search Aansluitingen
Als de CP1L gebruikt word voor een origin search, zijn er een aantal inputs
gereseveerd voor de origin proximity signal en de origin input signal.
Overige CP1L aansluitschema’s zijn beschikbaar in de operation manual.
Pagina 21 Positioneren Met CP1L
Page 24

Introductie PNSPO
5.6 Het positioneerprogramma
Wanneer de modbuscommunicatie getest is en werkt dan kan er een programma gemaakt worden
die het positioneren mogelijk maakt. De bitjes die genoemd staan onder sectie 5.4 en worden
gebruikt om de regelaar aan te sturen. Het P_On wordt gebruikt om het modbus bericht uit te voeren.
De bits voor Run forward en Run reverse worden gebruikt om 0001 of 0002 hex te sturen naar het
run register van de regelaar. Het woord A23 bevat de frequentiereferentie die naar de regelaar wordt
gestuurd.
Het is aan te bevelen het modbusprogramma in een aparte sectie op te nemen om op deze manier
het overzicht te houden. Het modbus voorbeeldprogramma is vereist om te kunnen positioneren met
het positioneerprogramma.
Sectie:Origin search_instruction.
Als de machine wordt opgestart dan zal d.m.v hulpcontact W0.00 de org instructie gestart worden.
De regelaar zal gaan uitsturen op de highspeed search op zoek naar de proximity signal input.
Als deze is gevonden zal de regelaar gaan decelereren naar proximity search speed totdat het origin
signal binnenkomt,. In deze sectie zijn ook de eindschakelaars opgenomen als deze bedient worden
zal de installatie stilvallen.
Sectie:Resetwaarden voor absoluut.
Als de Origin Search is voltooid en dan zal de INI(880) instructie de waarde resetten van de Encoder
en de het bitje A562 reset de errorcouter waardoor het mogenlijk is geworden om absoluut te gaan
positioneren.
Sectie:Absoluut positioneren.
Tijdens de Eerste cyclus worden d.m.v. moves je juiste waardes naar de datamemory’s
geschreven.Werkbit W0.01 wordt gebruikt om de PLS2 instructie uit te voeren. In de PLS2 instructie
wordt verwezen naar D200 voor de tabel met waarden die de positie uitvoeren. D300 wordt gebruikt
voor de minimale snelheid. Voor meer info over deze waarden zie sectie 5.3.
De move van A23 naar D2 verplaatst de frequentiereferentie van het inverter positioning0 register
naar het modbus register voor de frequentiereferentie. De contacten A26.01 en A26.02 worden hoog
bij forward en reverse. Respectievelijk wordt er 0001 hex of 0002 hex geschreven naar D1 dit register
is het modbus register voor forward en reverse.
Als op W0.01 hoog wordt zal de regelaar gaan uitsturen naar de gewenste positie(bv &25000, Als
vervolgens de waarde op DM 204 veranderd word (bv &0) en de instructie nogmaals word uitgevoerd
zal de regelaar de draairichting gaan omkeren en teruggaan naar positie &0.
Sectie:Relatief positioneren.
Tijdens de Eerste cyclus worden d.m.v. moves instructie’s de juiste waardes naar de datamemory’s
geschreven.
Werkbit W0.02 wordt gebruikt om de PLS2 instructie uit te voeren. In de PLS2 instructie wordt
verwezen naar D500 voor de tabel met waarden die de positie uitvoeren. D600 wordt gebruikt voor de
minimale snelheid. Voor meer info over deze waarden zie sectie 5.3
De move van A23 naar D2 verplaatst de frequentiereferentie van het inverter positioning0 register
naar het modbus register voor de frequentiereferentie. De contacten A26.01 en A26.02 worden hoog
bij forward en reverse. Respectievelijk wordt er 0001 hex of 0002 hex geschreven naar D1 dit register
is het modbus register voor forward en reverse.
Het derde en laatste netwerk zorgt ervoor dat als de positie volledig bereikt is, de frequentiereferentie
weer nul geschreven wordt zodat de regelaar stopt met uitsturen. Dit wordt gedaan op de
voorwaarden “aansturen niet actief” (A26.00) en “in position” (A26.03).
Sectie:Joggen
Als er tijdens de originsearch of positioneneren een limitswitch signal binnenkomt dan zal de
regelaar direct stoppen maar er moet handmatig van de limit worden gecorrigeerd. Als de correctie is
gedaan word de INI(880) nogmaals uitgevoerd om de inverterpositioning te stoppen alle waarden te
nullen en het mogelijk maken om verder te positioneren.
pagina 22 Positioneren Met CP1L
Page 25

PNSPO
Sectie:Origin Search.
Pagina 23 Positioneren Met CP1L
Page 26

Introductie PNSPO
Sectie: Resetwaarden voor absoluut positioneren
pagina 24 Positioneren Met CP1L
Page 27

PNSPO
Sectie:Absoluut positioneren.
Pagina 25 Positioneren Met CP1L
Page 28

Introductie PNSPO
V ervolg: Absoluut positioneren.
Sectie:relatief positioneren.
pagina 26 Positioneren Met CP1L
Page 29

PNSPO
Pagina 27 Positioneren Met CP1L
Page 30

Introductie PNSPO
Sectie: Joggen
pagina 28 Positioneren Met CP1L
Page 31

PNSPO
6 Vraag en Antwoord
Vraag: Hoe kan ik controleren of de encoder werkt?
Antwoord: Kijk op de Input LEDs van de CP1L, als deze gaan branden wanneer er
aan de encoder wordt gedraaid, dan is de encoder correct aangesloten.
Vraag: De frequentieregelaar geeft CALL als errormelding, wat nu?
Antwoord: Er wordt niet gecommuniceerd met modbus, kijk de volgende zaken na:
- Is de regelaar correct aangesloten? (zie sectie 2.2)
- Zijn de baudrate/formaat instellingen in de regelaar en PLC correct?
- Zijn regelaar en PLC spanningsloos geweest na het wegschrijven van de
instellingen?
- Zijn het nodenummer in de regelaar en het PLC programma hetzelfde?
Vraag: De frequentieregelaar geeft CE als errormelding, wat nu?
Antwoord: Er is eenmalig communicatie geweest met de regelaar en daarna niet
meer. Het is van belang dat de regelaar minstens 1 x per seconde een modbusbericht
krijgt te verwerken, anders “denkt” de regelaar dat de communicatie is weggevallen.
Vraag: De motor begint te oscilleren, hoe kan ik dit voorkomen?
Antwoord: In de PLC settings met de gain worden verminderd.
Vraag: De motor “schiet” zijn positie voorbij of de motor reageert te traag.
Antwoord: Verhoog in de PLC settings de gain.
Pagina 29 Positioneren Met CP1L
Page 32

Introductie PNSPO
Notities:
pagina 30 Positioneren Met CP1L
Page 33

PNSPO
Pagina 31 Positioneren Met CP1L
Page 34

Introductie PNSPO
!
!
!
!
!
!
!
!
!
PNSPO
Omron Electronics B.V.
Wegalaan 61
2132 JD HOOFDDORP
Postbus 582
2130 AN HOOFDDORP
Tel.: (023) 568 11 00
Fax.: (023) 568 11 88
Uw leverancier;
pagina 32 Positioneren Met CP1L
Page 35

PNSPO
Pagina 33 Positioneren Met CP1L
 Loading...
Loading...