

Page 1

Cat. No.
I62E-EN-01
English
Made to drive Lifts
Model: CIMR-L7Z
200V Class 3-phase 3.7 to 55 kW
400V Class 3-phase 4.0 to 55 kW
Deutsch
Español
FrançaisItaliano
Português
Pyccкий
Page 2

L7Z Quick Start Guide
Table of Contents
Warnings........................................................................EN-1
Safety Precautions and Instructions ............................................................. EN-2
EMC Compatibility ........................................................................................EN-3
Installation .....................................................................EN-5
Mechanical Installation ................................................................................. EN-5
Electrical Connection ....................................................................................EN-6
Keypad Operation .......................................................EN-11
Digital Operator Display (optional) ............................................................. EN-11
Power Up and Basic Parameter Setup......................EN-12
Start Up Procedure ..................................................................................... EN-12
Before Power Up ........................................................................................EN-13
Display after Power Up ...............................................................................EN-13
Control Mode Selection .............................................................................. EN-13
Autotuning...................................................................EN-14
Autotuning Mode Selection ........................................................................ EN-14
Autotuning Alarms and Faults ....................................................................EN-15
Autotuning Procedure with Induction Motors ............................................. EN-16
Autotuning Procedure for PM Motors ......................................................... EN-17
PM Motor Encoder Offset Tuning ............................................................... EN-18
Ride Profile and Sequence Setup..............................EN-19
Up and Down Commands and Speed Reference Selection .......................EN-19
Speed Selection Sequence Using Digital Inputs ........................................EN-19
Acceleration/Deceleration/Jerk Settings .....................................................EN-22
Brake Sequence .........................................................................................EN-22
Inertia Compensation (Feed Forward) .......................................................EN-22
Troubleshooting..........................................................EN-24
Fault and Alarm Detection .......................................................................... EN-24
Operator Programming Errors (OPE) .........................................................EN-26
Auto-tuning Faults .....................................................................................EN-27
Parameter Table ..........................................................EN-28
Page 3
Warnings
Cables must not be connected or disconnected, nor signal tests carried out, while the power is
switched on.
The Varispeed L7 DC bus capacitor remains charged even after the power has been switched off. To
avoid an electric shock hazard, disconnect the frequency inverter from the mains before carrying out
maintenance. Then wait for at least 5 minutes after all LEDs have gone out.
Do not perform a withstand voltage test on any part of the inverter. It contains semiconductors,
which are not designed for such high voltages.
Do not remove the digital operator while the mains supply is switched on. The printed circuit board
must also not be touched while the inverter is connected to the power.
Never connect general LC/RC interference suppression filters, capacitors or overvoltage protection devices to
the inverter input or output.
CAUTION
To avoid unnecessary over current faults, etc., being displayed, the signaling contacts of any contactor or switch fitted between inverter and motor must be integrated into the inverter control logic
(e.g. baseblock).
This is absolutely imperative!
This manual must be read thoroughly before connecting and operating the inverter. All safety precautions and instructions for use must be followed.
The inverter must be operated with the appropriate line filters, following the installation instructions
in this manual and with all covers closed and terminals covered.
Only then will adequate protection be provided. Please do not connect or operate any equipment
with visible damage or missing parts. The operating company is responsible for any injuries or
equipment damage resulting from failure to heed the warnings in this manual.
EN-1
Page 4

Safety Precautions and Instructions
1. General
Please read these safety precautions and instructions for use thoroughly before installing and operating this
inverter. Also read all of the warning signs on the inverter and ensure they are never damaged or removed.
Live and hot inverter components may be accessible during operation. Removal of housing components, the
digital operator or terminal covers runs the risk of serious injuries or damage in the event of incorrect installation or operation. The fact that frequency inverters control rotating mechanical machine components can give
rise to other dangers.
The instructions in this manual must be followed. Installation, operation and maintenance may only be carried
out by qualified personnel. For the purposes of the safety precautions, qualified personnel are defined as individuals who are familiar with the installation, starting, operation and maintenance of frequency inverters and
have the proper qualifications for this work. Safe operation of these units is only possible if they are used
properly for their intended purpose.
The DC bus capacitors can remain live for about 5 minutes after the inverter is disconnected from the power. It
is therefore necessary to wait for this time before opening its covers. All of the main circuit terminals may still
carry dangerous voltages.
Children and other unauthorized persons must not be allowed access to these inverters.
Keep these Safety Precautions and Instructions for Use readily accessible and supply them to all persons with
any form of access to the inverters.
2. Intended Use
Frequency inverters are intended for installation in electrical systems or machinery.
Their installation in machinery and systems must conform to the following product standards of the Low Voltage Directive:
EN 50178, 1997-10, Equipping of Power Systems with Electronic Devices
EN 60204-1, 1997-12 Machine Safety and Equipping with Electrical Devices
Part 1: General Requirements (IEC 60204-1:1997)/
Please note: Includes Corrigendum of September 1998
EN 61010-1, A2, 1995 Safety Requirements for Information Technology Equipment
(IEC 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modified)
CE marking is carried out to EN 50178, using the line filters specified in this manual and following the appropriate installation instructions.
3. Transportation and storage
The instructions for transportation, storage and proper handling must be followed in accordance with the technical data.
4. Installation
Install and cool the inverters as specified in the documentation. The cooling air must flow in the specified
direction. The inverter may therefore only be operated in the specified position (e.g. upright). Maintain the
specified clearances. Protect the inverters against impermissible loads. Components must not be bent nor insulation clearances changed. To avoid damage being caused by static electricity, do not touch any electronic
components or contacts.
EN-2
Page 5
5. Electrical Connection
Carry out any work on live equipment in compliance with the national safety and accident prevention regulations. Carry out electrical installation in compliance with the relevant regulations. In particular, follow the
installation instructions ensuring electromagnetic compatibility (EMC), e.g. shielding, grounding, filter
arrangement and laying of cables. This also applies to equipment with the CE mark. It is the responsibility of
the manufacturer of the system or machine to ensure conformity with EMC limits.
Contact your supplier or Omron-Yaskawa Motion Control representative when using leakage current circuit
breaker in conjunction with frequency inverters.
In certain systems it may be necessary to use additional monitoring and safety devices in compliance with the
relevant safety and accident prevention regulations. The frequency inverter hardware must not be modified.
If Permanent Magnet Motors are used:
If a PM motor is turned by any external force, high voltage is generated in the windings.
• During wiring, maintenance or inspection make sure, that the motor is stopped and can not turn.
• If the inverter is turned off and the motor must be turned, make sure that motor and inverter output are
electrically disconnected.
6. Inverter Setup
This L7 inverter can drive induction motors as well as permanent magnet motors.
Always select the appropriate control mode:
• For induction motors use V/f, Open Loop Vector or Closed Loop Vector control (A1-01 = 0, 2 or 3).
• For permanent magnet motors use no other control mode than Closed Loop Vector for PM (A1-01 = 6).
A wrong control mode selection can damage the inverter and motor.
If a motor is exchanged or operated the first time, always set up the motor control relevant parameters using
the nameplate data or perform autotuning. Do not change the parameters recklessly. To ensure a safe operation
with PM motors always set the:
• correct motor data
• the PG open detection parameters
• the speed deviation detection parameters
• the over acceleration detection parameters
Wrong parameter settings can cause dangerous behavior or motor and inverter damage.
Refer to page 12, Start Up Procedure for details about the correct start up procedure.
7. Notes
The Varispeed L7 frequency inverters are certified to CE, UL, and c-UL.
EMC Compatibility
1. Introduction
This manual was compiled to help system manufacturers using Omron-Yaskawa Motion Control frequency
inverters to design and install electrical switch gear. It also describes the measures necessary to comply with
the EMC Directive. The manual's installation and wiring instructions must therefore be followed.
EN-3
Our products are tested by authorized bodies using the standards listed below.
Product standard: EN 61800-3:1996
EN 61800-3; A11:2000
Page 6
2. Measures to Ensure Conformity of Omron-Yaskawa Motion Control Frequency
Inverters to the EMC Directive
Omron-Yaskawa Motion Control frequency inverters do not necessarily have to be installed in a switch cabinet.
It is not possible to give detailed instructions for all of the possible types of installation. This manual therefore
has to be limited to general guidelines.
All electrical equipment produces radio and line-borne interference at various frequencies. The cables pass
this on to the environment like an aerial.
Connecting an item of electrical equipment (e.g. drive) to a supply without a line filter can therefore allow HF
or LF interference to get into the mains.
The basic countermeasures are isolation of the wiring of control and power components, proper grounding and
shielding of cables.
A large contact area is necessary for low-impedance grounding of HF interference. The use of grounding
straps instead of cables is therefore definitely advisable.
Moreover, cable shields must be connected with purpose-made ground clips.
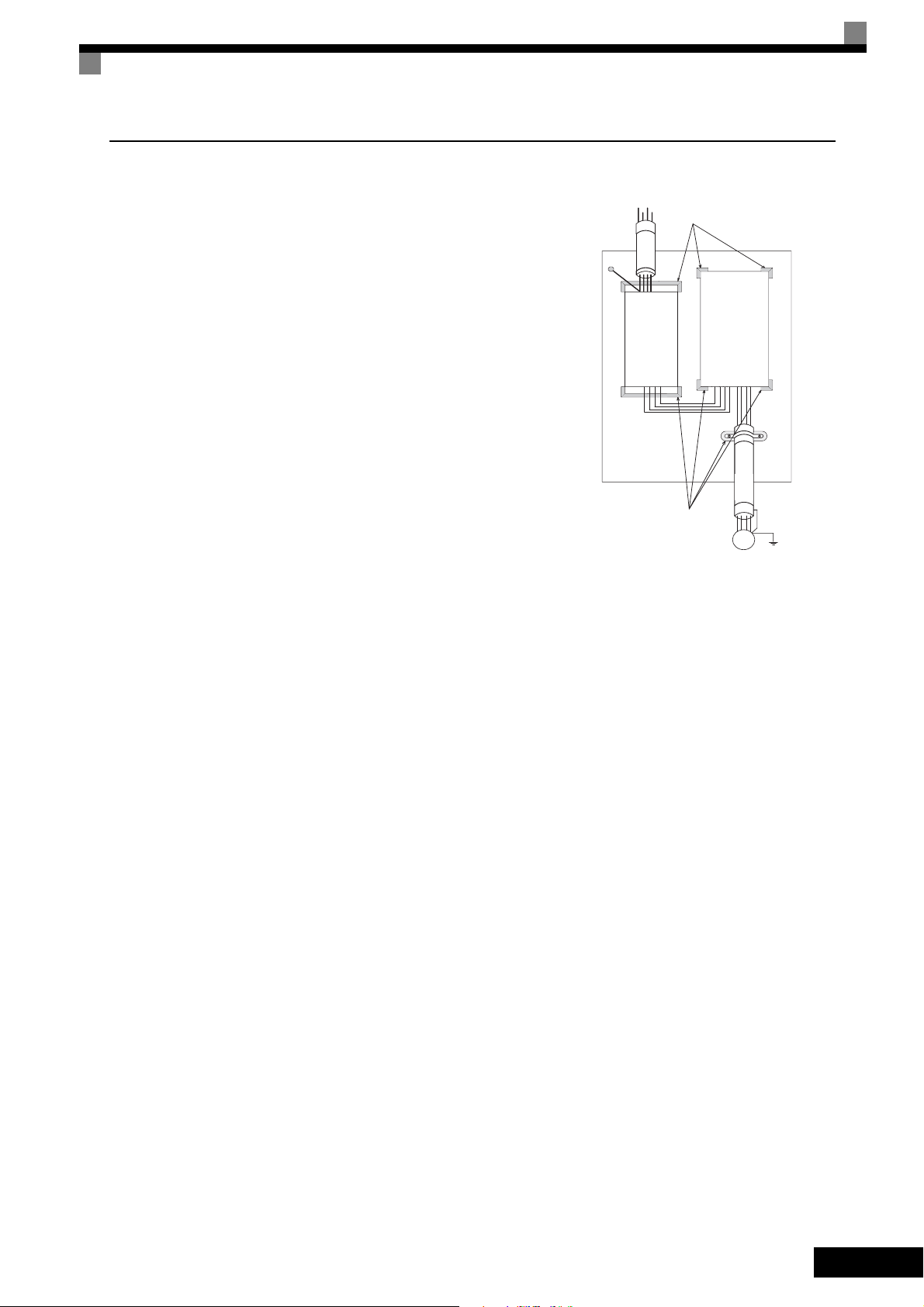
3. Laying Cables
Measures Against Line-Borne Interference:
Line filter and frequency inverter must be mounted on the same metal plate. Mount the two components as
close to each other as possible, with cables kept as short as possible.
Use a power cable with well-grounded shield. Use a shielded motor cable not exceeding 20 meters in length.
Arrange all grounds so as to maximize the area of the end of the lead in contact with the ground terminal (e.g.
metal plate).
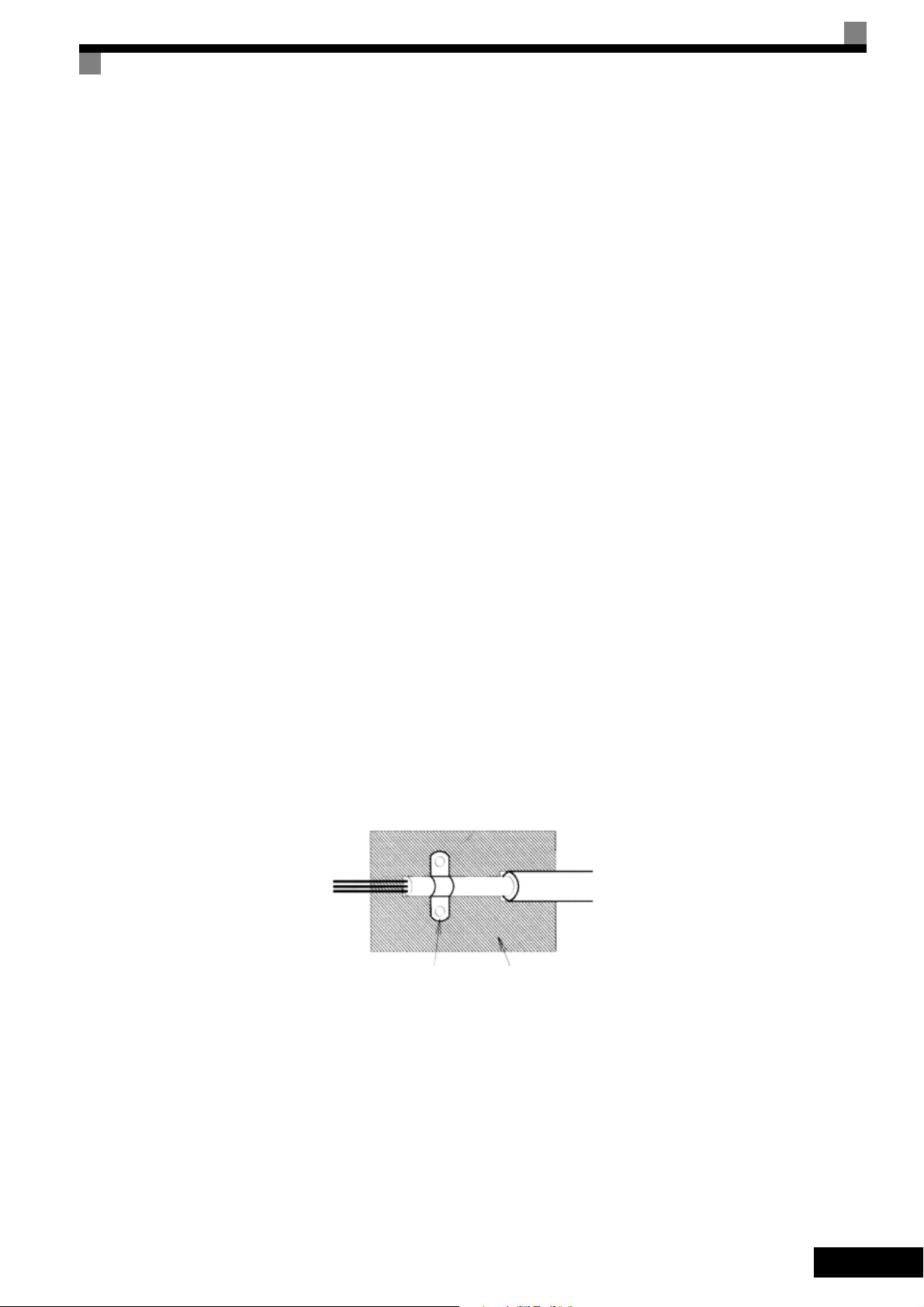
Shielded Cable:
• Use a cable with braided shield.
• Ground the maximum possible area of the shield. It is advisable to ground the shield by connecting the
cable to the ground plate with metal clips (see following figure).
Ground clip
The grounding surfaces must be highly conductive bare metal. Remove any coats of varnish and paint.
– Ground the cable shields at both ends.
– Ground the motor of the machine.
Ground plate
EN-4
Page 7
Installation
Mechanical Installation
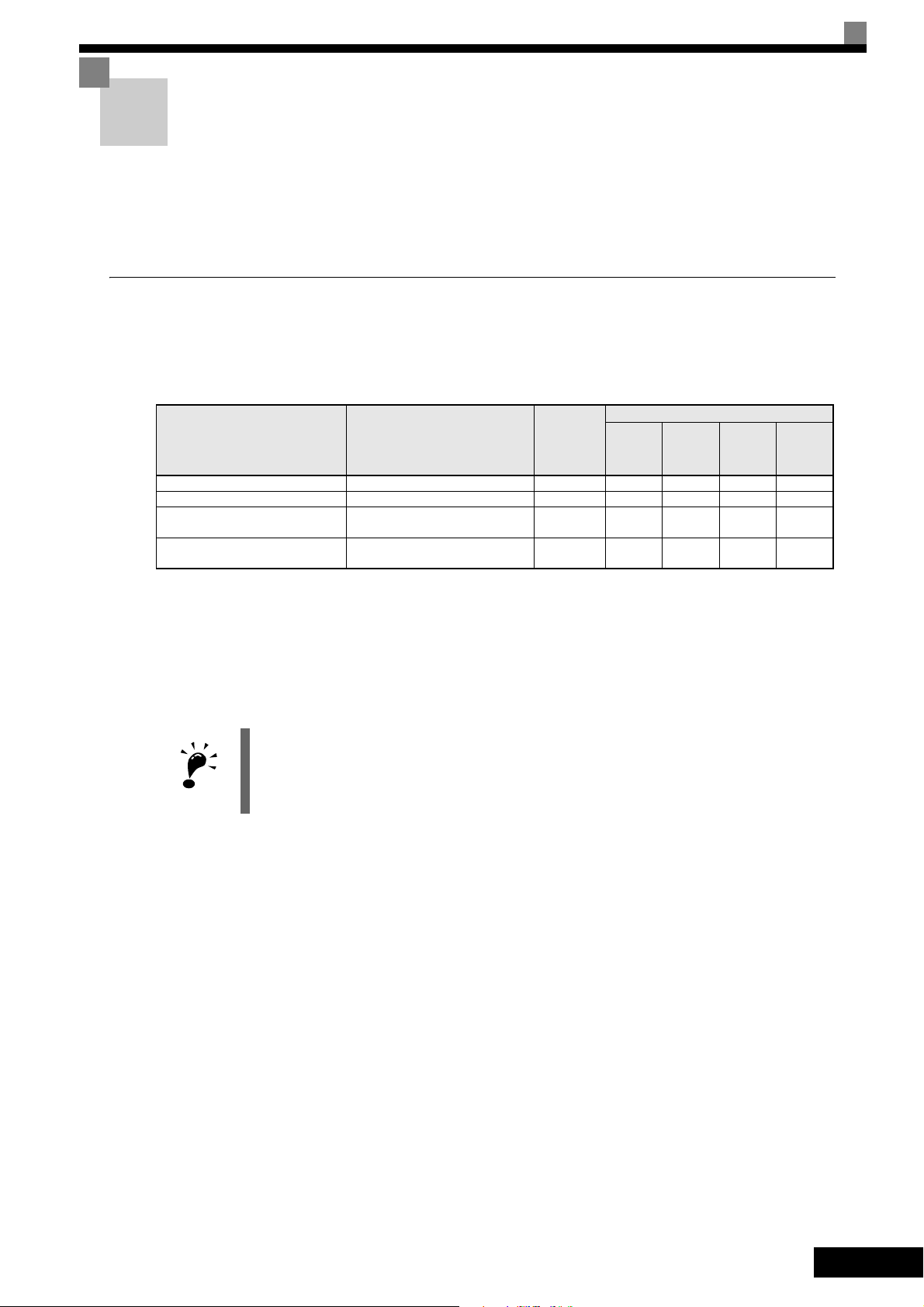
Unpacking the Inverter
Check the following items after unpacking the inverter.
Item Method
Has the correct model of Inverter been delivered? Check the model number on the nameplate on the side of the Inverter.
Is the Inverter damaged in any way?
Are any screws or other components loose? Use a screwdriver or other tools to check for tightness.
If you find any irregularities in the above items, contact the agency from which you purchased the Inverter or
your Omron-Yaskawa Motion Control representative immediately.
Checking the Installation Site
Before installing the inverter check the following:
• Make sure that the ambient temperature is not exceeded
• Install the Inverter in a clean location which is free from oil mist and dust. It can be installed in a totally
enclosed panel that is completely shielded from floating dust.
• When installing or operating the Inverter, always take special care so that metal powder, oil, water, or other
foreign matter does not get into the Inverter.
• Do not install the Inverter on combustible material, such as wood.
• Install the Inverter in a location free from radioactive materials and combustible materials.
• Install the Inverter in a location free from harmful gasses and liquids.
• Install the Inverter in a location without excessive oscillation.
• Install the Inverter in a location free from chlorides.
• Install the Inverter in a location free from direct sunlight.
Inspect the entire exterior of the Inverter to see if there are any scratches or other
damage resulting from shipping.
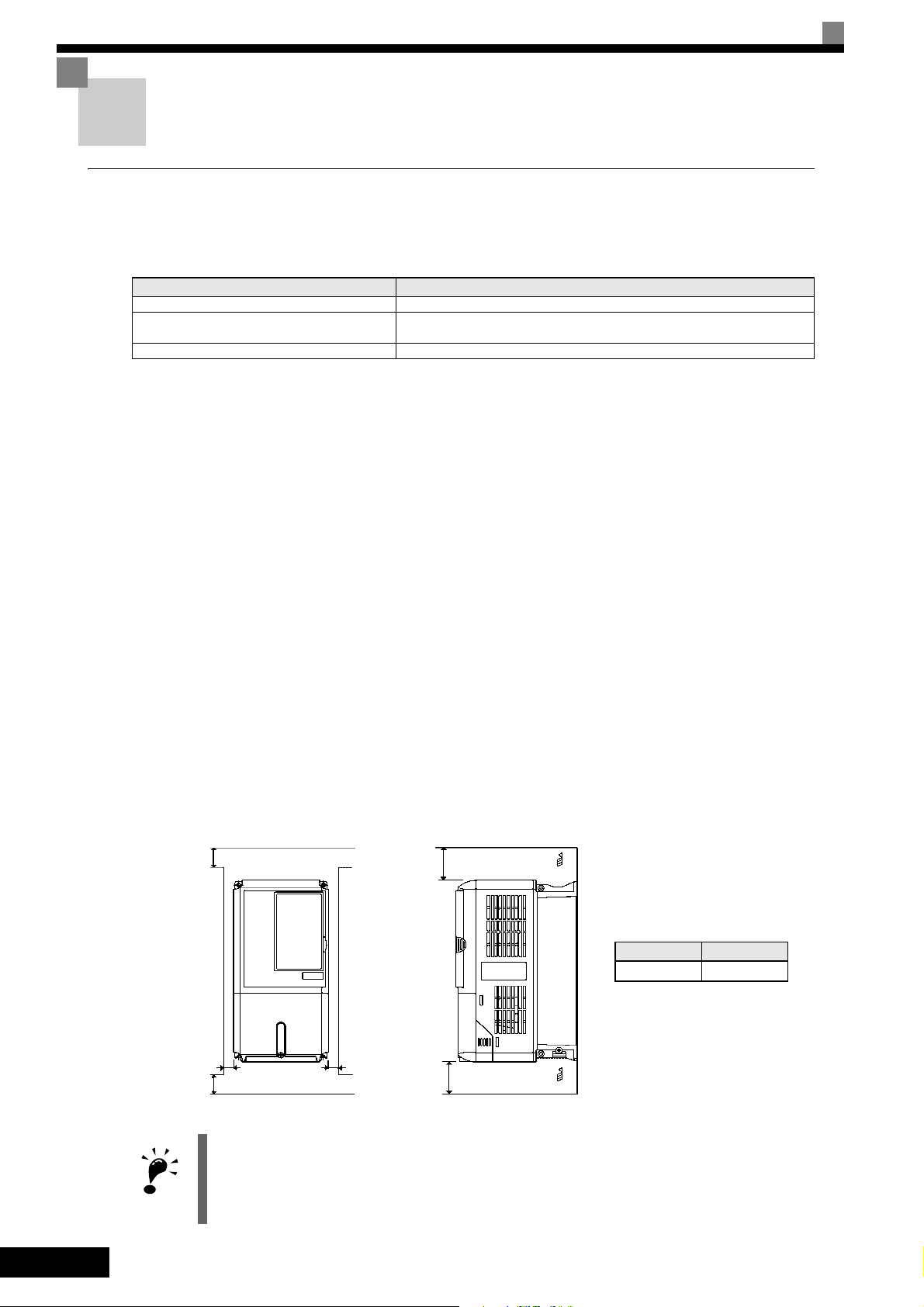
Installation Orientation
Install the Inverter vertically so as not to reduce the cooling effect. When installing the Inverter, always provide the following installation space to allow normal heat dissipation.
Air
A B
50 mm 120 mm
Air
50 mm min.
IMPORTANT
A
30 mm min.
30 mm min.
Horizontal Space
1. The same space is required horizontally and vertically for IP00, IP20 and NEMA 1 Inverters.
2. Always remove the top protection cover after installing an Inverter with an output of 18.5 kW or less in a
panel.
Always provide enough space for suspension eye bolts and the main circuit lines when installing an
Inverter with an output of 22 kW or more in a panel.
B
120 mm min.
Vertical Space
EN-5
Page 8
Electrical Connection
Installation of Inverters and EMC filters
PEL1L2
L3
Ground Bonds
Remove any paint!
For an EMC rules compliant installation consider the following
points:
• Use a line filter.
• Use shielded motor cables.
• Mount the inverter and filter on a grounded conductive plate.
• Remove any paint or dirt before mounting the parts in order to
reach the lowest possible grounding impedance.
Wiring Main Circuit Inputs
PE
Line
Filter
Load
Cable Length
as short as possible
Grounded
Metal Plate
GND
Ground Bonds
Remove any paint!
Inverter
L2
U
L1
L3
V
M
~3
W
GND
Screened
Motor cable
Consider the following precautions for the main circuit power supply input.
• If a moulded case circuit breaker is used for the power supply connection (R/L1, S/L2, and T/L3), ensure
that the circuit breaker is suitable for the Inverter.
• If an earth leakage breaker is used, it should be able to detect all kinds of current should be used in order to
ensure a safe earth leakage current detection
• A magnetic contactor or other switching device can be used at the inverter input. The inverter should not
be powered up more than once per hour.
• The input phases (R/S/T) can be connected in any sequence.
• If the Inverter is connected to a large-capacity power transformer (600 kW or more) or a phase advancing
capacitor is switched nearby, an excessive peak current could flow through the input power circuit, causing
an inverter damage. As a countermeasure install an optional AC Reactor at the inverter input or a DC reactor at the DC reactor connection terminals.
• Use a surge absorber or diode for inductive loads near the Inverter. Inductive loads include magnetic con-
tactors, electromagnetic relays, solenoid valves, solenoids, and magnetic brakes.
Wiring the Output Side of the Main Circuit
The following precautions should be considered for the output circuit wiring.
• Never connect any power source to the inverter output terminals. Otherwise the inverter can be damaged.
• Never short or ground the output terminals. Otherwise the inverter can be damaged.
• Do not use phase correction capacitors. Otherwise the inverter and capacitors can be damaged.
• Check the control sequence to make sure, that the magnetic contactor (MC) between the Inverter and
motor is not turned ON or OFF during inverter operation. If the MC is turned ON during the Inverter is
operation, a large inrush current will be created and the inverter’s over current protection may operate.
Ground Connection
The following precautions should be considered for the ground connection.
• Do not share the ground wire with other devices, such as welding machines or power tools.
• Always use a ground wire, that complies with technical standards on electrical equipment and minimize
the length of the ground wire.
EN-6
Page 9
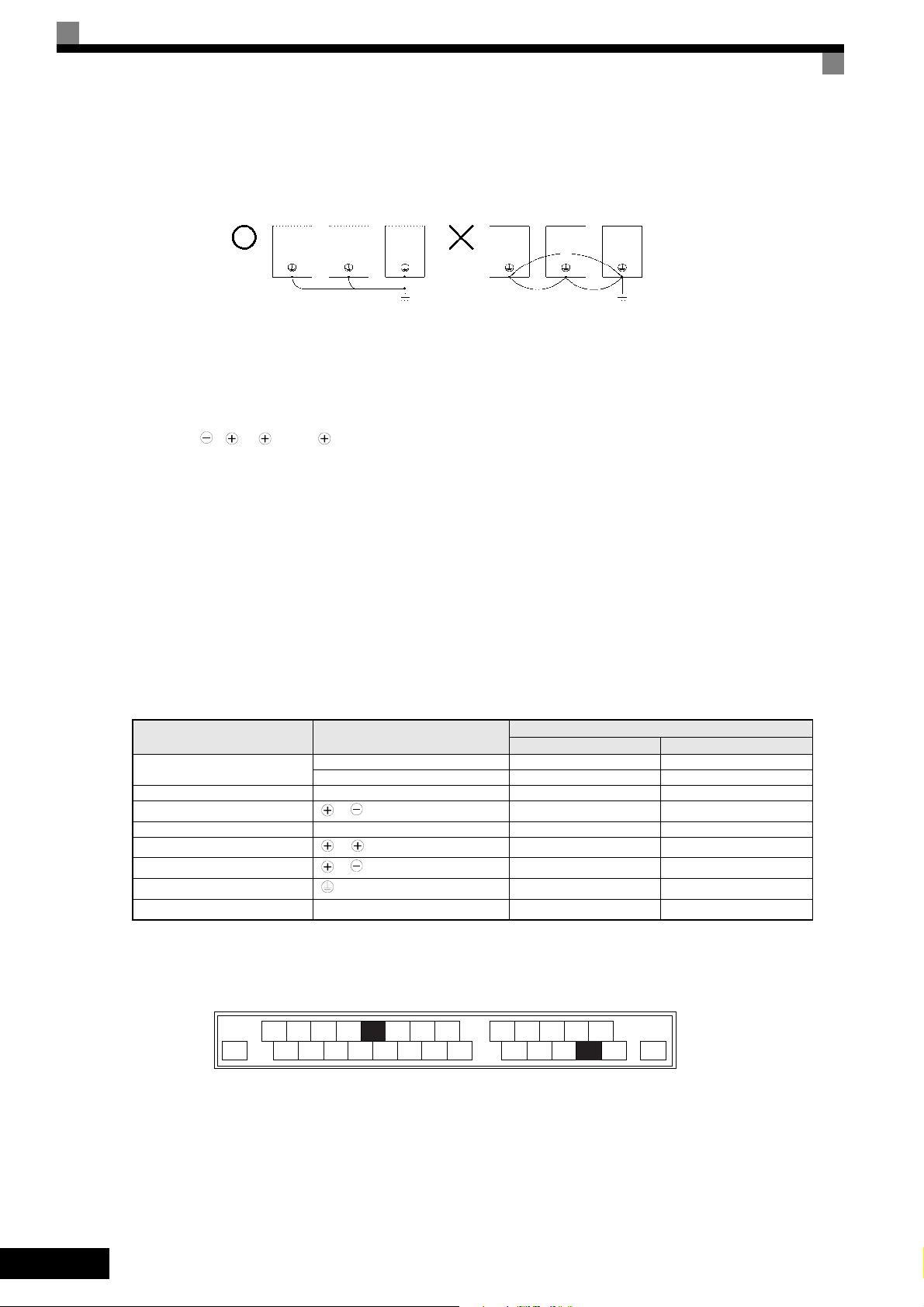
Leakage current is caused by the Inverter. Therefore, if the distance between the ground electrode and the
ground terminal is too long, potential on the ground terminal of the Inverter will become unstable.
• When more than one Inverter is used, do not to loop the ground wire.
OK
NO
Fig 1 Ground Wiring
Control Circuit Wiring Precautions
Consider the following precautions for wiring the control circuits.
• Separate control circuit wiring from main circuit wiring (terminals R/L1, S/L2, T/L3, B1, B2, U/T1, V/T2,
W/T3, , 1, 2, and 3, PO, NO) and other high-power lines.
• Separate wiring for control circuit terminals MA, MB, MC, M1, M2, M3, M4, M5, and M6 (contact out-
puts) from wiring to other control circuit terminals.
• If an optional external power supply is used, it should be a UL Listed Class 2 power supply.
• Use twisted-pair or shielded twisted-pair cables for control circuits to prevent operating faults.
• Ground the cable shields with the maximum contact area of the shield and ground.
• Cable shields have to be grounded on both cable ends.
Main Circuit Terminals
Main circuit terminal functions are summarized according to terminal symbols in Table 1. Wire the terminals
correctly for the desired purposes.
Table 1 Main Circuit Terminal Functions (200 V Class and 400 V Class)
Purpose Terminal Symbol
Main circuit power input
Inverter outputs U/T1, V/T2, W/T3 23P7 to 2055 43P7 to 4055
DC bus terminals
Braking Resistor Unit connection B1, B2 23P7 to 2018 43P7 to 4018
DC reactor connection
Braking Unit connection
Ground 23P7 to 2055 43P7 to 4055
Control Power Supply PO, NO 23P7 to 2055 43P7 to 4055
R/L1, S/L2, T/L3 23P7 to 2055 43P7 to 4055
R1/L11, S1/L21, T1/L31 2022 to 2055 4022 to 4055
1,
1, 2
3,
Model: CIMR-L7Z
200 V Class 400 V Class
23P7 to 2055 43P7 to 4055
23P7 to 2018 43P7 to 4018
2022 to 2055 4022 to 4055
EN-7
Control Circuit Terminals
Fig 2 shows the control terminal arrangement. The functions of the control circuit terminals are shown in
Table 2. Use the appropriate terminals for the correct purposes.
E(G)
SC SC SC
S1
S2
BB
S3 S4
Fig 2 Control terminal arrangement
+V
A1 AC
S5 S6 S7 BB1
M5
M6
M3
MA MB MC
M4
M1
M2
E(G)
Page 10
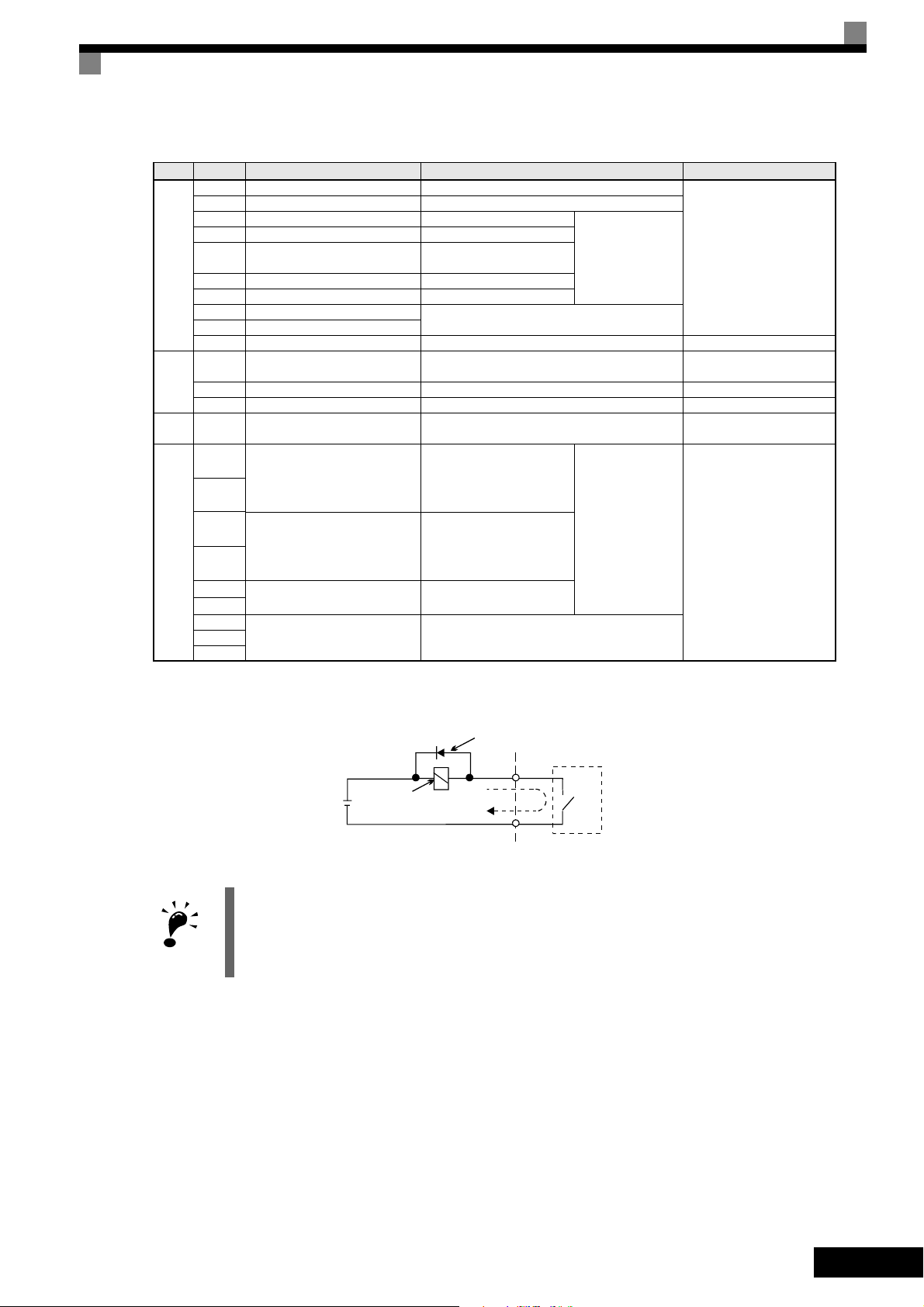
Table 2 Control Circuit Terminals with default settings
Type No. Signal Name Function Signal Level
S1 Forward run/stop command Forward run when ON; stopped when OFF.
S2 Reverse run/stop command Reverse run when ON; stopped when OFF.
S3 Nominal speed Nominal speed when ON.
Dig-
input
signals
S4 Inspection Run Inspection RUN when ON.
S5 Intermediate speed
ital
Intermediate speed when
ON.
S6 Leveling speed Leveling speed when ON.
S7 Not used –
BB Hardware baseblock Both inputs must be enabled to enable the inverter
outputBB1 Hardware baseblock 1
SC Digital input common – –
Ana-
input
signals
Dig-
output
signals
+V
log
15 V power supply
A1 Frequency reference 0 to +10 V/100% 0 to +10 V(20 kΩ)
AC Analog reference neutral – –
Shield wire, optional ground line
E(G)
connection point
M1
Brake command
(1NO contact)
M2
M3
ital
*1. Do not use this power supply for supplying any external equipment.
*2. When driving a reactive load, such as a relay coil with DC power supply, always insert a flywheel diode as shown in Fig 3.
Contactor Control
(1NO contact)
M4
M5
Inverter Ready
(1NO contact)
M6
MA
Fault output signal (SPDT)
MB
(1 Change over contact)
MC
*1
15 V power supply for analog references
––
Brake command when ON.
Contactor Control when ON
Inverter Ready when ON.
Fault when CLOSED across MA and MC
Fault when OPEN across MB and MC
Functions are
selected by setting
H1-01 to H1-05.
Multi-function contact outputs
24 VDC, 8 mA
Photo-coupler
15 V
(Max. current: 20 mA)
Relay contacts
Contact capacity:
1 A max. at 250 VAC
1 A max. at 30 VDC
*2
Flywheel diode
The rating of the flywheel diode must
External power: 30
VDC max.
Coil
1 A max.
be at least as high as the circuit voltage.
Fig 3 Flywheel Diode Connection
1. In Fig 4 the wiring of the digital inputs S1 to S7 and BB, BB1 is shown for the connection of contacts or NPN
transistors (0V common and sinking mode). This is the default setting.
For the connection of PNP transistors or for using a 24V external power supply, refer to Ta ble 3.
IMPORTANT
2. A DC reactor is an option only for Inverters of 18.5 kW or less. Remove the short circuit bar when connecting a
DC reactor.
Sinking/Sourcing Mode (NPN/PNP Selection)
The input terminal logic can be switched over between sinking mode (0-V common, NPN) and sourcing mode
(+24V common, PNP) by using the jumper CN5. An external power supply is also supported, providing more
freedom in signal input methods.
EN-8
Page 11
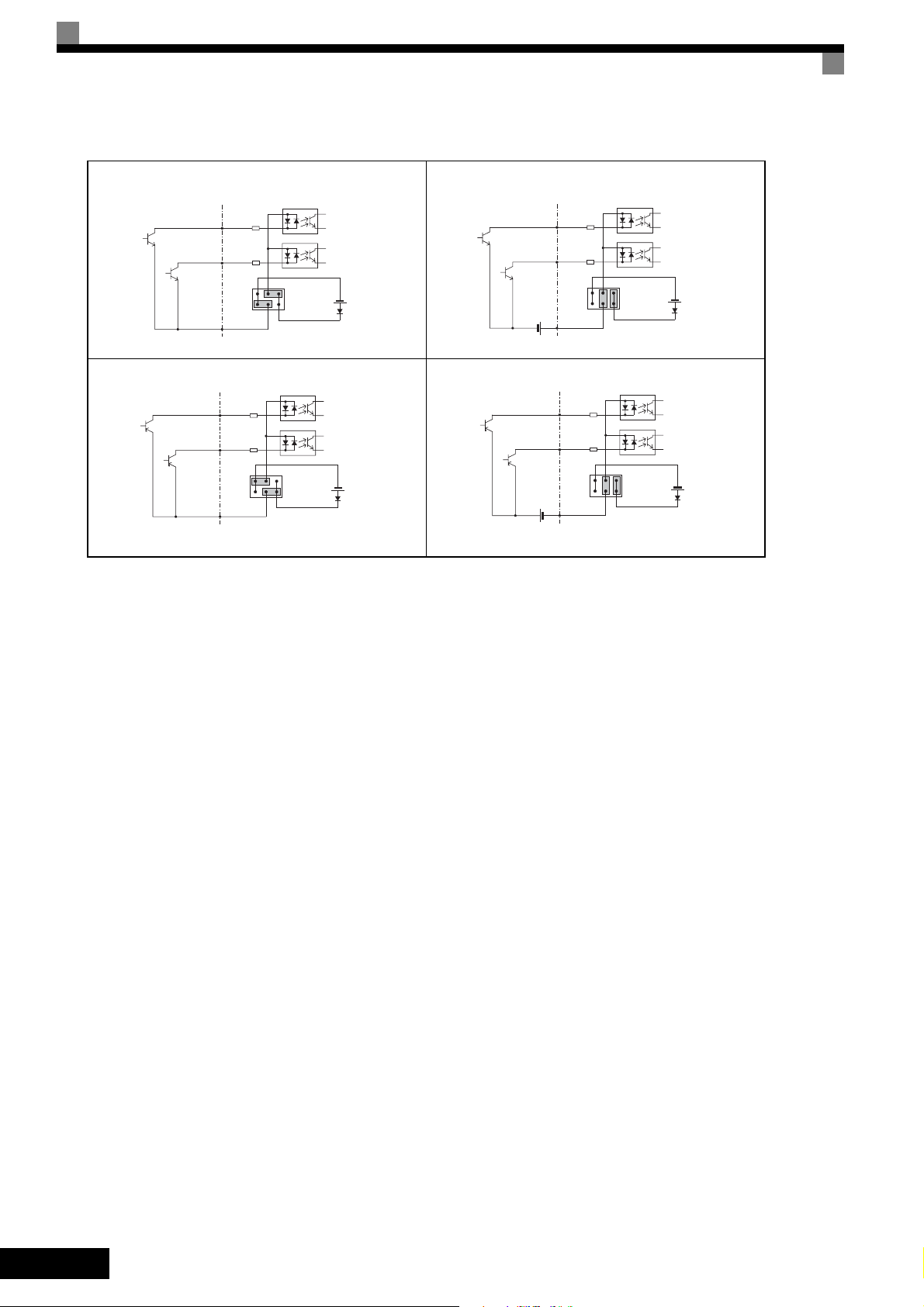
Table 3 Sinking/Sourcing Mode and Input Signals
S1
S2
SC
IP24V
(+24V)
CN5
A1 A3
B1
B3B2
A2
S1
S2
SC
IP24V
(+24V)
CN5
A1 A3
B1
B3B2
A2
24 VDC
+
S1
S2
SC
IP24V
(+24V)
CN5
A1 A3
B1
B3B2
A2
24 VDC
-
Internal Power Supply – Sinking Mode (NPN)
Internal Power Supply – Sourcing Mode (PNP)
S1
S2
B1
SC
A1 A3
A2
B3B2
CN5
IP24V
(+24V)
External Power Supply – Sinking Mode (NPN)
External Power Supply – Sourcing Mode (PNP)
EN-9
Page 12
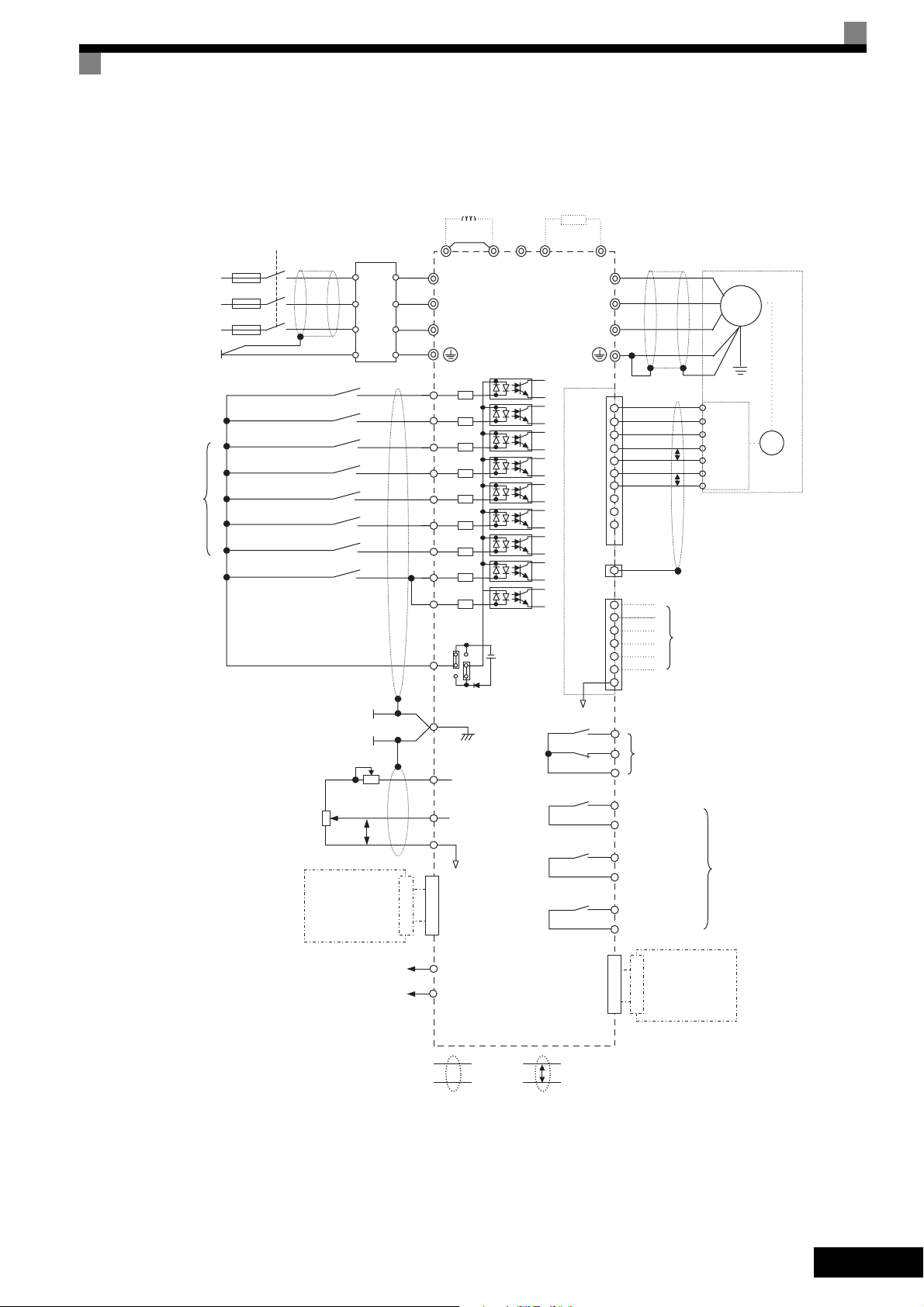
Wiring the Inverter
3-phase power
380 to 480V
50/60Hz
Multi function
Inputs
(Factory setting)
Magnetic
Contactor
L1
L2
L3
PE
Forward run/stop
Reverse run/stop
Nominal Speed
Inspection Run
Intermediate Speed
Leveling Speed
Not used
Hardware Baseblock (note 3)
Line
Filter
DC reactor to improve input
power factor (optional)
Link
(+1) (+2)
L1(R)
L2(S)
L3(T)
S1
S2
S3
S4
S5
S6
S7
BB
BB1
SC
(-)
+24V, 8mA
IP24V (24V)
Braking Resistor
unit (optional)
B1
U/T1
V/T2
W/T3
TA 1
PG-X2
(Optional)
TA 3
TA 2
B2
A Pulse
B Pulse
Z Pulse
Pulse Monitor Output
RS-422
(100m or less)
Motor
IM/PM
P
P
PG
Voltage adjustment
Analog input
(Speed reference)
2kOhm
Optional control power
supply input for Rescue
Operation
Note:
1
. Main circuit terminals are indicatied with double circles and
control circuit terminals are indicatied with a single circles
2. The CN5 factory setting is NPN
3. To enable the inverter both inputs, BB and BB1 must be closed. If
only one of the inputs is closed, “BB” will be displayed in the
operator panel and the inverter will not start.
2kOhm
0 to 10 V
P
Input option cards
to terminal B1
to terminal -
CN5(NPN setting)
E(G)
+V
Analog input power
supply +15V, 20mA
A1
Master speed
reference 0 to 10V
AC
0 V
2CN
P0
Control Power
Supply Input
N0
Shielded
wires
Fig 4 Wiring Diagram
MA
MB
MC
M1
M2
M3
M4
M5
M6
3CN
Twisted-pair
wires
Fault contact output
250VAC, max. 1A
30VDC, max. 1A
Brake Command
(Factory setting)
Contactor Control
(Factory setting)
Inverter Ready
(Factory setting)
Output option
cards
Multi-function
contact output
250VAC, max. 1A
30VDC, max. 1A
EN-10
Page 13
Keypad Operation
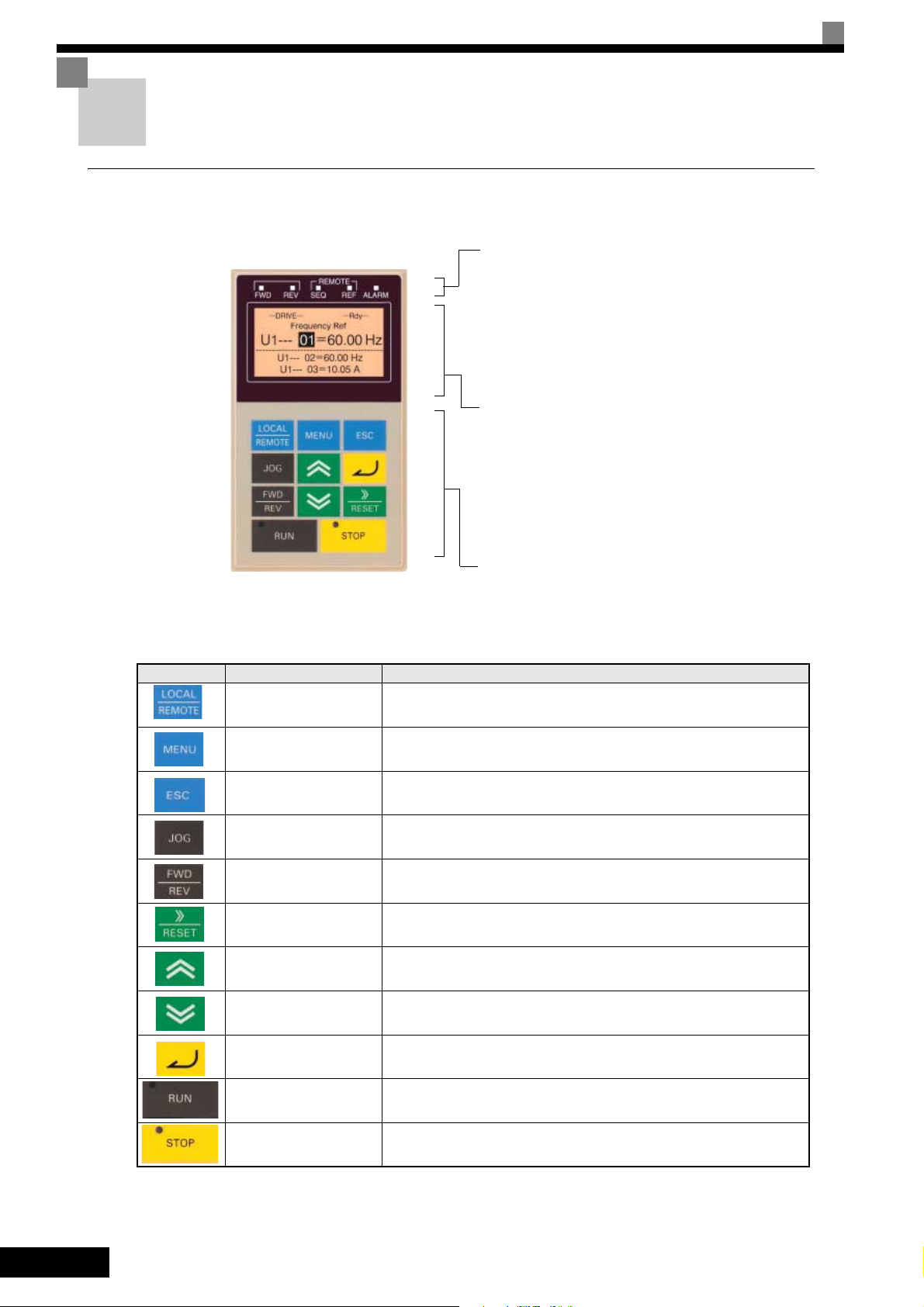
Digital Operator Display (optional)
The key names and functions of the Digital Operator are described below
Drive Status Indicators
FWD: Lights up when a forward run command is input.
REV: Lights up when a reverse run command is input.
SEQ: Lights up when any other run command source
REF: Lights up when any other frequency reference
ALARM:Lights up when an error or alarm has
Data Display
Displays monitor data, parameter numbers and parameter settings.
Mode Display (displayed at the upper left of data display)
DRIVE: Lights up in Drive Mode.
QUICK: Lights up in Quick Programming Mode.
ADV: Lights up in Advanced Programming Mode.
VERIFY: Lights up in Verify Mode.
A. TUNE: Lights up in Autotuning Mode.
Keys
Execute operations such as setting parameters, monitoring, jogging, and autotuning.
than the digital operator is selected
source than the digital operator is selected
occurred.
Digital Operator Keys
Key Name Function
LOCAL/REMOTE Key
MENU Key Selects menu items (modes).
ESC Key Returns to the status before the DATA/ENTER key was pressed.
JOG Key
FWD/REV Key
Shift/RESET Key
Increment Key
Decrement Key
DATA/ENTER Key Enters menus and parameters, and set validates parameter changes.
Switches between operation via the Digital Operator (LOCAL) and the settings in
b1-01 and b1-02 (REMOTE).
This key can be enabled or disabled by setting parameter o2-01.
Starts jog operation when the inverter is operated by the Digital Operator and d1-18
is set to 0.
Selects the rotation direction of the motor when the Inverter is operated by the Digital Operator.
Sets the active digit when programming parameters.
Also acts as the Reset key when a fault has occurred.
Selects menu items, sets parameter numbers, and increments set values.
Used to move to the next item or data.
Selects menu items, sets parameter numbers, and decrements set values.
Used to move to the previous item or data.
EN-11
RUN Key Starts the Inverter operation when the Inverter is controlled by the Digital Operator.
STOP Key
Note: Except in diagrams, Keys are referred to the key names listed in the above table.
Stops Inverter operation.
This key can be enabled or disabled using parameter o2-02 when operating from a
source different than the operator.
Page 14
Power Up and Basic Parameter Setup
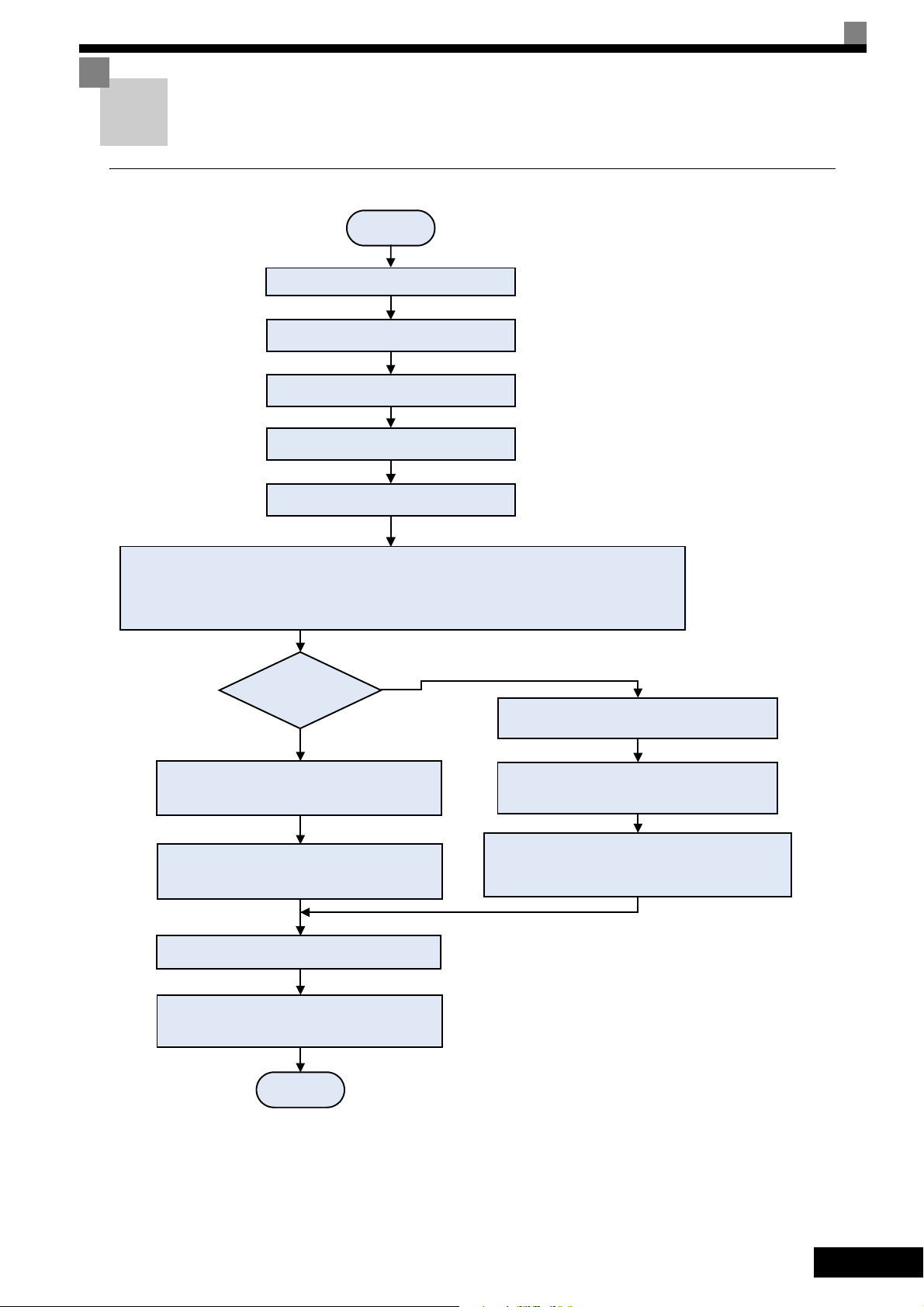
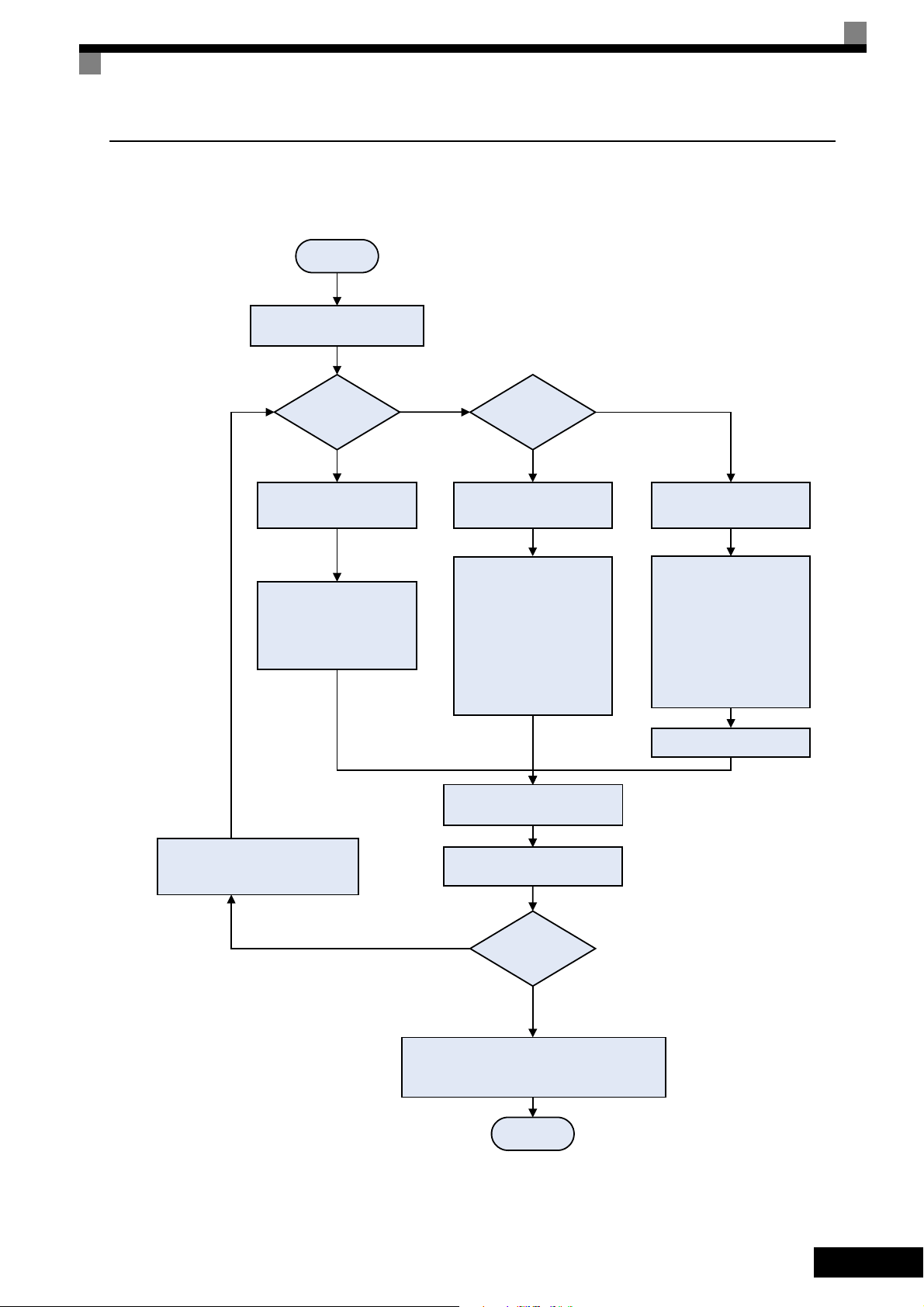
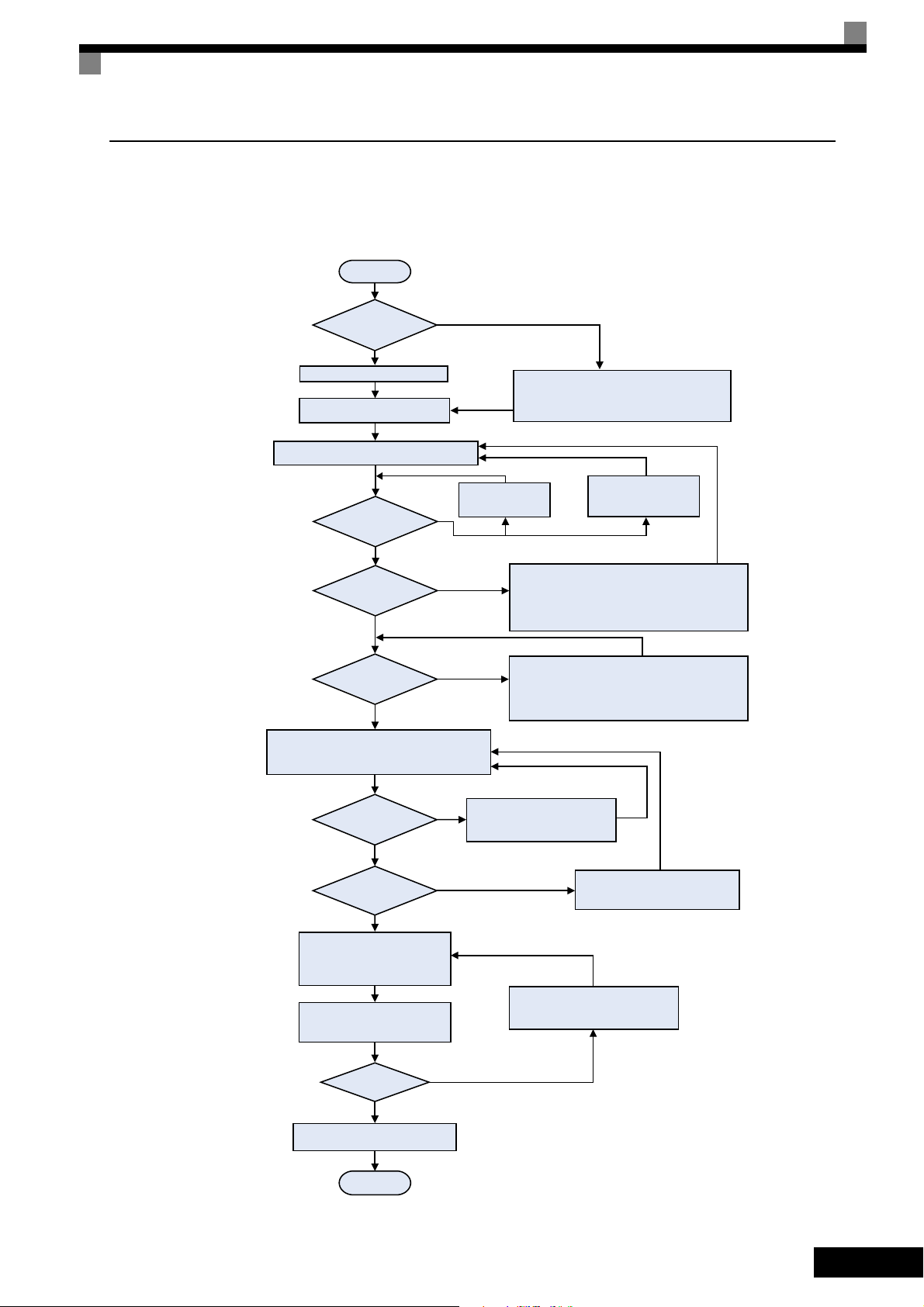
Start Up Procedure
START
Mechanical installation
Main and control circuit wiring
Check the encoder power supply selection
Select the control mode in parameter A1-02
Perform motor data / encoder offset auto tuning
* V/f control
* Open Loop Vector Control
* Closed Loop Vector Control
* Closed Loop Vector Control for PM
Speed reference
source
Set up the analog/digital I/O’s in the H1-xx,
H2-xx and H3-xx parameters
* (Closed Loop only)
Switch on the power supply
page 16, Autotuning Procedure with Induction Motors
page 17, Autotuning Procedure for PM Motors
Digital operator (b1-02 = 0)
Analog Input
Select the control sequence in
paramerter d1-18
Set up the digital I/O’s in the H1-xx
and H2-xx parameters
* Acceleration / Deceleration times (C1-xx)
Set up the
* S-Curves (Jerk) (C2-x)
Make test runs
Fine Tuning
* Brake sequence tuning
* Special functions setup
FINISH
Fig 5 Basic Start Up Sequence
* Preset speed values (d1-xx)
Set up the
* Acceleration / Deceleration times (C1-xx)
* S-Curves (Jerk) (C2-xx)
EN-12
Page 15
Before Power Up
The following points should be checked carefully before the power is switched on.
• Check if the power supply meets the inverter specification.
• Check if the power supply cables are tightly connected to the right terminals (L1, L2, L3).
• Check if the motor cables are tightly connected to the right terminals on the inverter side (U, V, W) as well
as on the motor side.
• Check if the braking unit/braking resistor is connected correctly.
• Check if the Inverter control circuit terminal and the control device are wired correctly.
• Set all Inverter control circuit terminals to OFF.
• When a PG card is used, check if it is wired correctly.
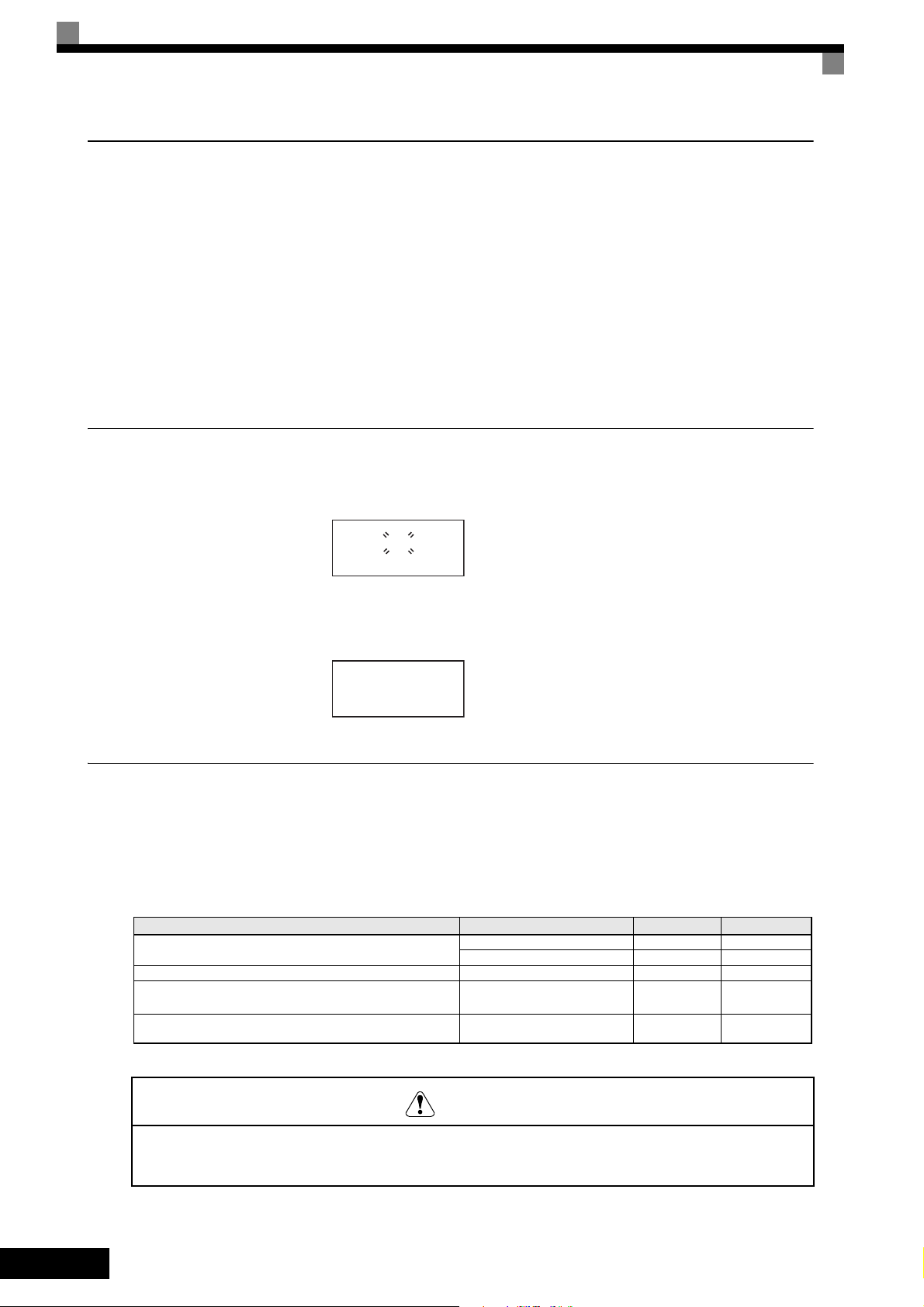
Display after Power Up
After normal power up without any problems the operator display shows the following messages
-DRIVE-
Display for normal operation The Baseblock message blinks.
Base Block
Rdy
BB
When a fault occurs or an alarm is active, a fault or alarm message will appear. In this case, refer to page 28,
Factory settings are in bold..
Display for fault operation
-DRIVE-
UV
Main Power Loss
A fault or alarm message is shown on the
display.
The example shows a low voltage alarm.
Control Mode Selection
As the first thing after power up one of the four control modes must be selected depending on the machine
type. The Closed Loop Vector modes require PG feedback cards. Table 4 shows the required/possible PG
cards for each mode.
Table 4 Control Mode Selection
Machine Type Control Mode
Induction motor without encoder
Induction motor with incremental encoder Closed Loop Vector Control 3 PG-B2/PG-X2
Permanent magnet motor with Hiperface
encoder
Yaskawa IPM motor with incremental encoder
y
or EnDat 2.1
Closed Loop Vector Control for
Closed Loop Vector Control for
V/f control 0 -
Open Loop Vector Control 2 -
PM motors
PM motors
A1-02 setting PG Card
6PG-F2
6 PG-X2
EN-13
CAUTION
• For Permanent Magnet motors do not use any other control mode than Closed Loop Vector for PM
(A1-02 = 6). Using any other control mode can cause damage to the equipment or can cause dangerous
behavior.
Page 16
Autotuning
The motor data autotuning function sets the V/f pattern parameters (E1-), motor data parameters
(E2-, E5-) and the encoder data (F1-01) automatically. The steps which have to be performed during
the autotuning depend on the tuning mode selection.
Autotuning Mode Selection
The autotuning mode has to be selected according to selected control mode and the mechanical system (motor
no load rotation possible or not). Tab l e 5 shows the selectable tuning mode for each control mode.
Table 5 Motor Data Autotuning Modes
Tuning
Autotuning Mode Function
Standard tuning with rotating motor Tunes all motor parameters. 0 No Yes Yes Yes
IM tuning with not rotating motor Tunes the basic motor parameters. 1 No Yes Yes No
IM Line-to-line resistance tuning
Encoder offset tuning
Tunes the line-to-line resistance
only
Tunes the offset between the
encoder and magnetic zero position.
Mode
Selection
(T1-01)
2YesYesYesNo
4NoNoNoYes
V/f
Control Mode
Open
Loop
Vector
Closed
Vector
Loop
Closed
Loop
Vector
(PM)
Autotuning Modes
Autotuning with Rotating Motor (T1-01 = 0)
This autotuning mode can be used in any Vector control mode. After the motor nameplate data have been
input, the inverter will operate the motor for approximately 1~2 minutes and set the required motor parameters
automatically.
Use this tuning mode only, if the motor can rotate freely which means that the ropes must be removed
and the brake must be open. The gearbox can remain connected to the motor.
IMPORTANT
Autotuning with Not Rotating Motor (T1-01 = 1)
This autotuning mode can be used for Open Loop and Closed Loop Vector control for IM only. The inverter
supplies power to the motor for approximately 1 minute and some of the motor parameters are set automatically while the motor does not turn. The motor no-load current and the rated slip value will automatically be
fine tuned during the first time operation.
Verify the rated slip value (E2-02) and the no-load current (E2-03) after the first run with nominal speed.
Autotuning for Line-to-Line Resistance (T1-01 = 2)
Non-rotating autotuning for line-to-line resistance can be used in V/f control, Open Loop Vector control and
Closed loop Vector control. The Inverter supplies power to the motor for approximately 20 seconds to measure
the motor line-to-line resistance and cable resistance. The motor does not turn during this tuning procedure.
Encoder Offset Tuning (T1-01=4)
This tuning mode is available in Closed Loop Vector control for PM motors only. It automatically sets the offset between the magnetic pole and the encoder zero position. It can be used to retune the offset after an
encoder change without changing the motor data settings.
EN-14
Page 17
General Precautions:
1. Use rotating autotuning whenever high precision is required or for a motor that is not connected to a load.
2. Use not rotating autotuning whenever the load cannot be disconnected from the motor (e.g. the ropes can’t be
IMPORTANT
removed).
3. Make sure, that the mechanical brake is not open for not rotating autotuning.
4. During autotuning the motor contactors have to be closed.
5. For autotuning the BB and BB1 signals must be ON (Inverter must not be in base block condition).
6. Confirm, that the motor is mechanically fixed and can not move.
7. Power is supplied during auto tuning, even though the motor does not turn. Do not touch the motor until autotuning has been completed.
8. Remove the feather key from the motor shaft before performing a tuning with rotating motor with a stand alone
motor (no traction sheave or gear mounted).
9. To cancel autotuning, press the STOP key on the Digital Operator.
Precautions for rotating and encoder offset autotuning:
1. The load should be disconnected which means, that the ropes have to be removed and the brake must be open.
2. If the load can’t be removed, the tuning can be done with a balanced car. The tuning result accuracy will be
lower which can result in a performance loss.
3. Make sure that the brake is open during autotuning.
4. During autotuning the motor can be started and stopped repeatedly. When the tuning is finished, “END” will be
displayed in the operator panel. Do not touch the motor until this display is shown and the motor has completely
stopped.
Autotuning Alarms and Faults
Data Input Errors
The inverter will show a “Data Invalid” message and will not perform autotuning if:
• the motor speed, rated frequency and pole pair number do not correspond.
Base Frequency · 60
Motor Speed
------------------
2 · Motor pole
• the rated current does not correspond to the rated power value
The inverter calculates the motor power using the input current value and data from the internal motor data
table. The calculated value must be between 50% and 150% of the input value for the rated power.
Other Alarms and Faults During Autotuning
For an overview of possible autotuning alarms or faults and corrective actions refer to page 27, Auto-tuning
Faults.
EN-15
Page 18
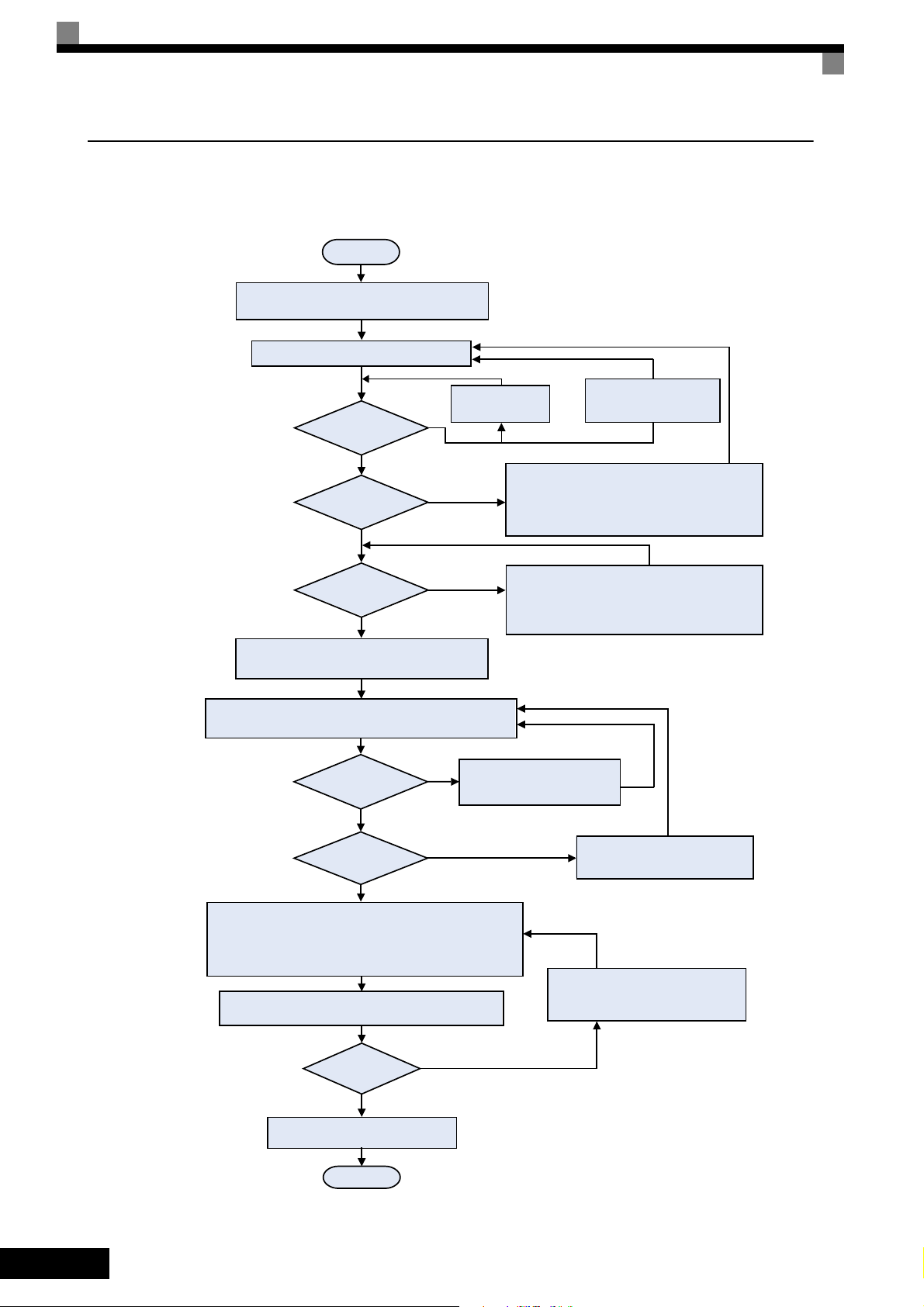
Autotuning Procedure with Induction Motors
Fig 6 shows the autotuning procedure for an induction motor with or without encoder in V/f-, Open loop vec-
tor and Closed loop vector control.
START
Set the Base Block Inputs BB and
BB1
No
V/f Control ?
(A1-02 = 0)
(A1-02 = 2/3)
Yes
Enter auto tuning mode and
set parameter T1-01 = 2
Set:
T1-02 - Motor rated power
T1-04 - Motor rated current
Press the UP button until
“Tuning Ready” display appears
Can the motor
rotate freely ?
No
Enter auto tuning mode and
set parameter T1-01 = 1
T1-02 - Motor rated power
T1-03 - Motor rated voltage
T1-04 - Motor rated current
T1-05 - Rated motor frequency
T1-06 - Motor pole number
T1-07 - Motor rated speed
T1-08 - PG pulse number*
“Tuning Ready” display appears
Set:
(*CLV only)
Press the UP button until
Yes
(ropes removed?)
“Tuning Ready” display appears
Enter auto tuning mode and
set parameter T1-01 = 0
T1-02 - Motor rated power
T1-03 - Motor rated voltage
T1-04 - Motor rated current
T1-05 - Rated motor frequency
T1-06 - Motor pole number
T1-07 - Motor rated speed
T1-08 - PG pulse number*
Set:
(*CLV only)
Press the UP button until
Open the brake
Refer to
page 27, Auto-tuning Faults
and eliminate the fault source
Close the motor contactor(s)
Press the RUN button
Tuning
No
(Fault code is
displayed)
Open the contactors, open the base
block inputs and close the brake if auto
tuning with rotating motor was performed
successful ?
(” Tuning successful”
is displayed)
FINISH
Fig 6 Autotuning for Induction Motors
Yes
EN-16
Page 19
Autotuning Procedure for PM Motors
Fig 7 shows the autotuning procedure for permanent magnet motors. Before tuning make sure that the control
mode is set to PM Closed Loop Vector (A1-02 = 6).
START
* Remove the ropes so that the motor can rotate freely
* Set the Base Block inputs BB and BB1
Switch ON the power supply if it is OFF
Does a OPE06 fault
occur?
No
Does a CPF24 fault
occur?
No
Does a OPE02 fault
occur?
No
S3-13 - Tracti on sheave diam eter
S3-14 - Roping
turn the motor slowly in Forward direction*
Set mechanical constants:
Open the brake, close the motor contactor,
Does PGO (no
encoder feedback)
occur?
No
Yes
Yes
Yes
S3-15 - Gear r atio
1
and check monitor U1-05.
Yes
Check parameter
* F1-01
* n8-35
* Check parameter n8-35
* If EnDat / Hiperface is used
- check the encoder power supply
- check the CLOCK and DATA signal wiring
* Switch off the power supply.
* Check if the correct PG constant (F1-01) and
absolute encoder resolution (F1-21) has been set.
* Refer to:
page 26, Operator Programming Errors (OPE)
Switch off the power supply
and check if the right PG card
is correctley installed
and eliminate the fault source
* Check the wi ring
* Check/r eadjust the encoder
power supply
EN-17
U1-05 value positive
T1- 01 = 0 - R otational Tuning
T2-01 - Motor rated power
T2- 02 - Mot or base fr equency
T2-03 - Motor rated voltage
Pres s the UP button until the “ Tuning R eady” di splay appear s
Cl ose the motor c ontactor( s) and pr ess the R UN butt on
(”Tuning successful” is displayed)
Set the autotuning par ameter s:
Wai t until tuning is fi nsihed
Tuning successful?
Yes
Open the cont actors , open the basebloc k
inputs and close t he brake
Fig 7 Autotuning for Permanent Magnet Motors
Is the sign of the
(not -)?
Yes
FINISH
No
T2-04 - Motor rated current
T2- 05 - Mot or pole num ber
T2-09 - Encoder resolution
T2- 10 - Mot or vol tage constant
No
(Fault code is displayed)
* 1. Forward direction means:
* Check the enc oder wi ring
* Change param eter F 1-05
Refer to
page 27, Auto-tuning Faults
and eli minate the faul t sourc e
The direction the motor turns with an UP command at terminal S1 (i.e.
with a clockwise rotating 3 phase supply and U-U, V-V, W-W wiring
between inverter and motor). Usually the direction is clockwise seen
from the motor shaft (traction sheave) side.
Refer to the motor instruction manual or consult the manufacturer for
details about the rotation direction.
Page 20
PM Motor Encoder Offset Tuning
Fig 8 shows the autotuning procedure for an encoder offset tuning. The procedure should be performed if the
encoder has been changed or has not been aligned correctly. Before tuning make sure that PM losed loop vector control is selected (A1-02 = 6) and that the E1- and E5- parameters are set up correctly.
START
Is it possible to remove
the ropes ?
Yes
Remove the ropes.
Set the Base Block inputs BB and BB1
Switch ON the power supply if it is OFF
Does a OPE06 fault
occur?
No
Does a CPF24 fault
occur?
No
Does a OPE02 fault
occur?
No
Open the brake, close the motor contactor,
turn the motor slowly in Forward direction*
monitor U1-05.
No
Yes
Yes
Yes
1
and check
Balance the car so that it does not move
Check parameter
* F1-01
* n8-35
* Check parameter n8-35
* If EnDat / Hiperface is used
- check the encoder power supply
- check the CLOCK and DATA signal wiring
* Switch off the power supply.
* Check if the correct PG constant (F1-01) and
absolute encoder resolution (F1-21) has been set.
* Refer to:
page 26, Operator Programming Errors (OPE)
and eliminate the fault source
with open brakes.
Note: The tuning accuracy will be lower
in this tuning mode
Switch off the power supply
and check if PG card is
correctly installed
Press the UP button until the “Tuning
(”Tuning successful”
display is shown)
Yes
Does PGO (no
encoder feedback)
occur?
No
Is the sign of the
U1-05 value positive
(not -)?
Yes
T1-01 = 4 - Encoder Offset Tuning
Close the motor contactor(s) and
Wait until the tuning is finished.
Open the contactors, open the base
block inputs and close the brake
Set:
Ready” display appears.
press the RUN key.
Tuning successful?
FINISH
Fig 8 Encoder Offset Autotuning
Yes
No
No
(Fault code is
displayed)
* C heck the wi ri ng
* Chec k/readj ust the encoder
power supply
* Chec k the encoder wir ing
* C hange parameter F1- 05
Refer to
page 27, Auto-tuning Faults
and eliminate the fault source.
* 1. Forward direction means:
The direction the motor turns with an UP command at terminal S1 (i.e.
with a clockwise rotating 3 phase supply and U-U, V-V, W-W wiring
between inverter and motor). Usually the direction is clockwise seen
from the motor shaft (traction sheave) side.
Refer to the motor instruction manual or consult the manufacturer for
details about the rotation direction.
EN-18
Page 21
Ride Profile and Sequence Setup
Up and Down Commands and Speed Reference Selection
Up/Down Command Source Selection
The input source for the Up and Down signal can be selected in parameter b1-02. The factory setting is Up/
Down command by the terminals S1/S2 (b1-02 = 1).
Travel start in Up or Down direction
To start in the elevator in Up or Down direction the following conditions have to be fulfilled:
• At least one speed reference must be selected if digital inputs are used for speed reference selection.
• The hardware base block signal (Terminal BB and BB1) must be set (not base block condition).
• The Up/Down signal must be set to start in the corresponding direction.
Travel stop
The inverter can be stopped as follows:
• The direction command (UP or Down) signal is removed.
• The speed reference selection signal is removed if digital inputs are used for speed reference selection.
• If d1-18 is set to 3 and all speed inputs are removed
Speed Reference Source Selection
The speed reference source can be selected using parameter b1-01. The factory setting is the digital operator
(b1-01 = 0), i.e. the speeds can be selected using digital inputs.
Speed Selection Sequence Using Digital Inputs
If the digital inputs are used for speed selection, the speed selection method and the speed priority depends on
the setting of parameter d1-18 (Speed priority selection).
Multi-Step Speed Operation 1/2 (Binary Input) (d1-18=0/3)
If d1-18 = 0
8 preset speed steps (defined in the parameters d1-01 to d1-08) can be selected using 3 binary coded digital
inputs. The Up/Down command starts the inverter. It stops when the Up/Down command is removed.
If d1-18 = 3
7 preset speed steps (defined in the parameters d1-02 to d1-08) can be selected using 3 binary coded digital
inputs. The Up/Down command starts the inverter. It is stopped when the Up/Down command is removed or
when no speed is selected (all D/Is off).
Multi-function Digital Input Settings (H1-01 to H1-05) (Example)
EN-19
Terminal
S4 H1-02 3 Multi-step speed command 1
S5 H1-03 4 Multi-step speed command 2
S6 H1-04 5 Multi-step speed command 3
Parameter
Number
Set Value Details
Page 22
Speed Selection Table
The following table shows the combinations of the digital input and the according speed.
If b1-02 is set to “1”, frequency reference 1 is input as analog reference at terminal A1.
Multi-step
Speed
Speed Com-
mand 1
1 OFF OFF OFF Frequency reference 1 d1-01 Stop
2 ON OFF OFF Frequency reference 2 d1-02 Frequency reference 2 d1-02
3 OFF ON OFF Frequency reference 3 d1-03 Frequency reference 3 d1-03
4 ON ON OFF Frequency reference 4 d1-04 Frequency reference 4 d1-04
5 OFF OFF ON Frequency reference 5 d1-05 Frequency reference 5 d1-05
6 ON OFF ON Frequency reference 6 d1-06 Frequency reference 6 d1-06
7 OFF ON ON Frequency reference 7 d1-07 Frequency reference 7 d1-07
8 ON ON ON Frequency reference 8 d1-08 Frequency reference 8 d1-08
Multi-step
Speed Com-
mand 2
Multi-step
Speed Com-
mand 3
Selected Frequency
d1-18 = 0 d1-18 = 3
Separate Speed Selection Inputs, High Speed Has Priority (d1-18=1)
With this setting 6 different speeds (defined in the parameters d1-09 to d1-17) can be set and selected using
four digital inputs.
Digital Input Factory Settings
Terminal
S3 H1-01 80 Nominal speed selection (d1-09)
S4 H1-02 84 Inspection speed selection (d1-14)
S5 H1-03 81 Intermediate speed selection (d1-10)
S6 H1-04 83 Leveling speed selection (d1-17)
Parameter
Number
Set Value Details
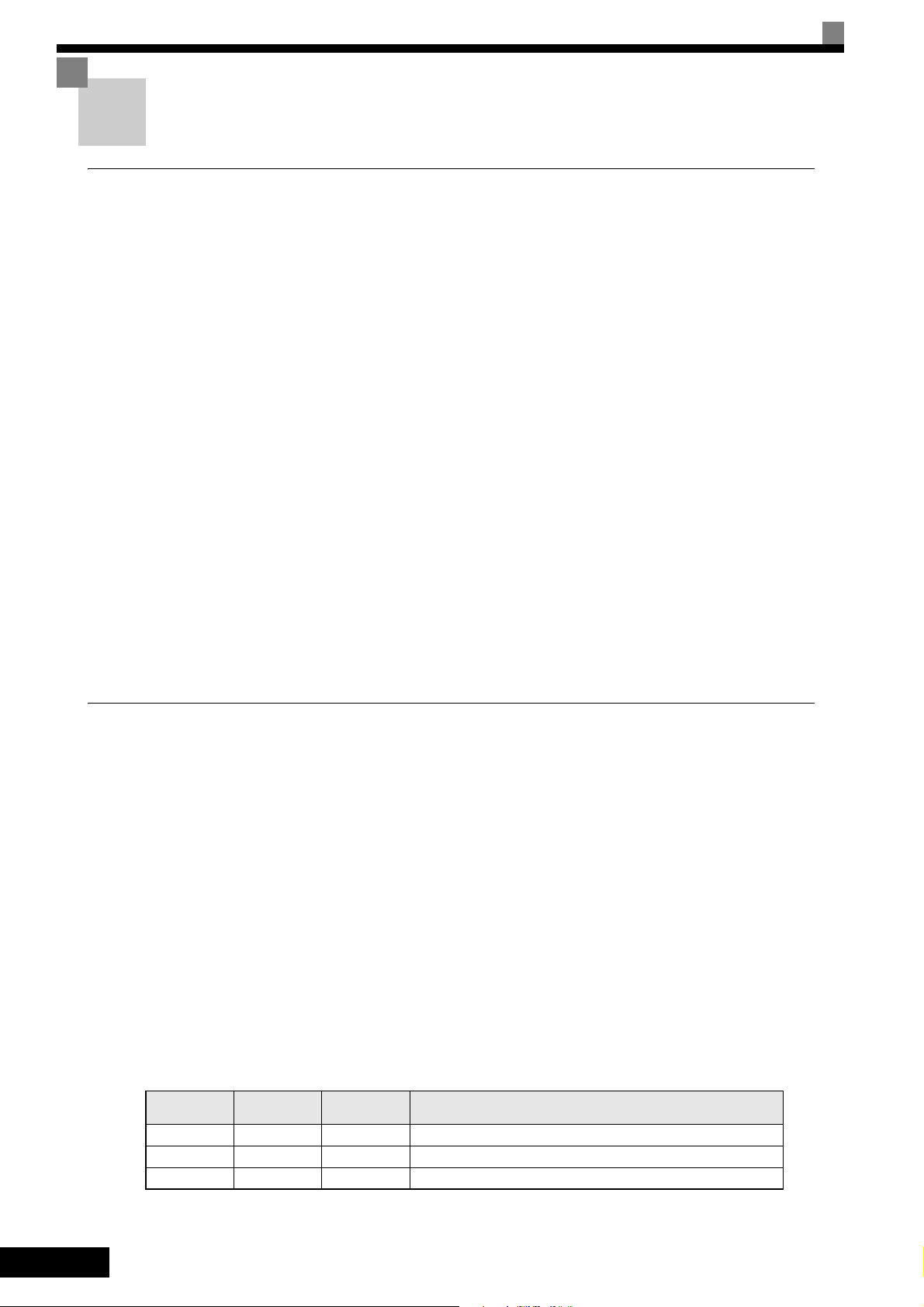
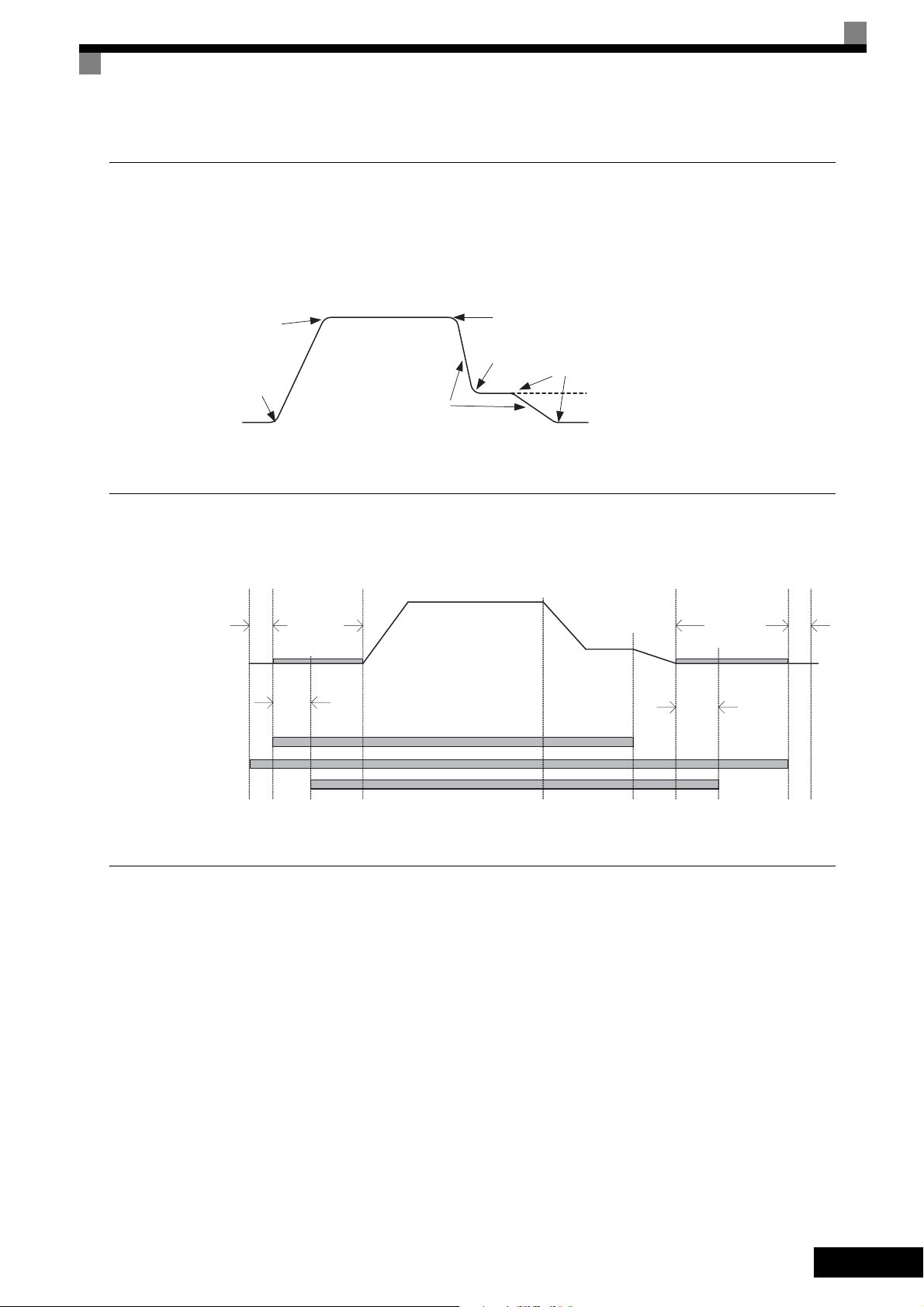
Higher Speed has Priority and a Leveling Speed Input is Selected (H1-=83)
If d1-18 is set to 1 and one multi-function digital input is set to leveling speed selection (H1-=83), the
inverter decelerates to the leveling speed (d1-17) when the selected speed signal is removed. Inspection Speed
can not be selected as travel speed. The higher speed has priority over the leveling speed, i.e. as long as a
higher speed is selected, the leveling signal is disregarded (see the fig. below)
The inverter stops when the leveling signal or the Up/Down signal is removed.
DC Injection/
zero servo
No effect
Input is set
Speed
Hardware BB
Up/Donw
Leveling speed
Selected speed
DC Injection/
zero servo
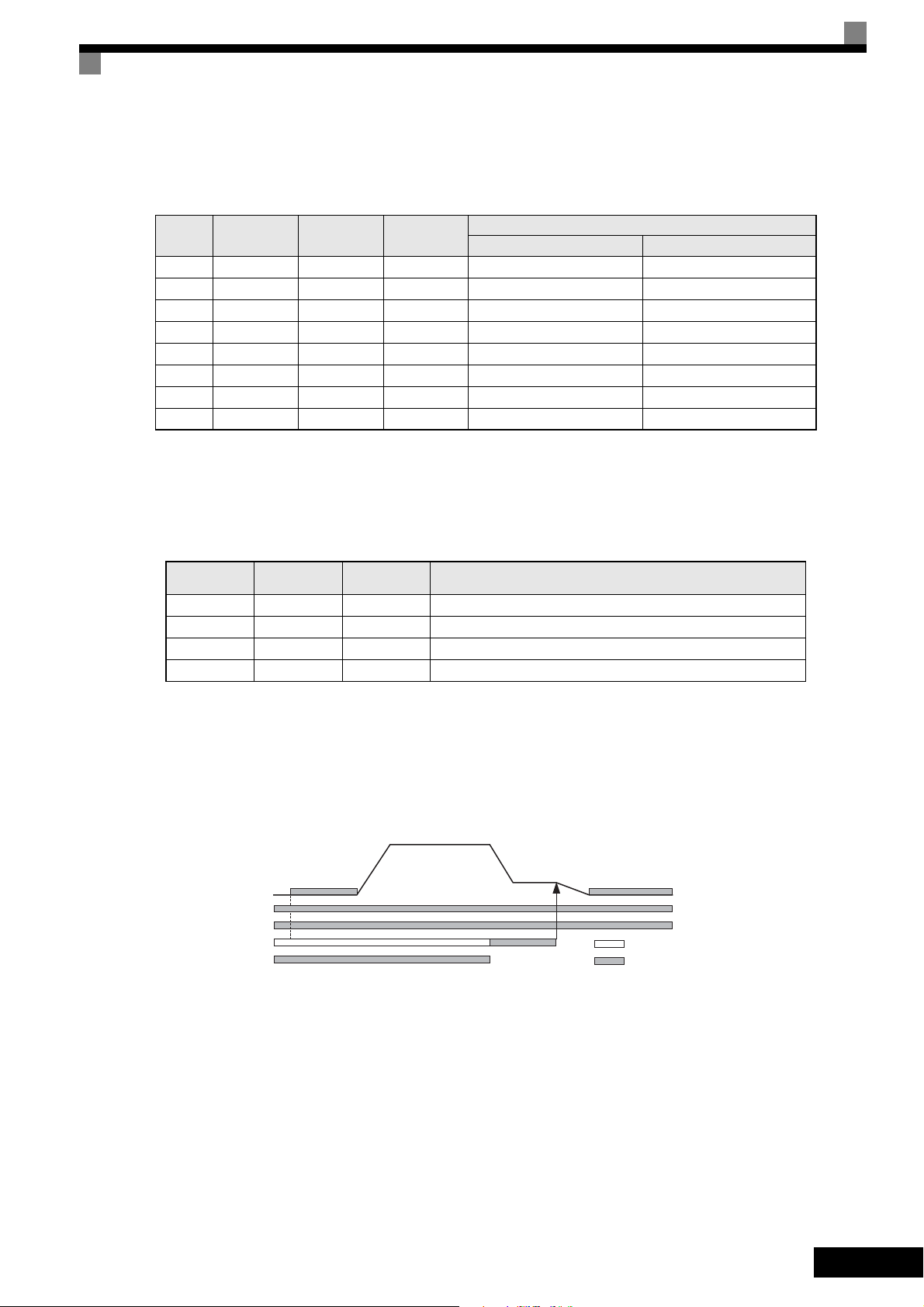
Higher Speed Priority is Selected and a Leveling Speed Input is Not Selected (H1-K83)
When the leveling speed command is not selected for any digital input, the inverter decelerates to the leveling
speed (d1-17) when the selected speed signal is removed. Inspection Speed can not be selected as travel speed
To select the leveling speed as travel speed the frequency reference loss detection must be disabled (S3-09=0).
The inverter stops when the direction signal Up/Down is removed.
EN-20
Page 23
When no speed selection input is set the leveling speed is taken as the speed reference.
Speed
Hardware BB
Up/Down
Selected speed
DC Injection/
zero servo
DC Injection/
zero servo
The inverter stops when the direction signal (UP or DOWN signal) is removed.
With this configuration the drive stops with a “FRL” (frequency reference loss fault) when no speed
reference input is selected during the start.
IMPORTANT
To disable the FRL detection, set parameter S3-09 to “0”.
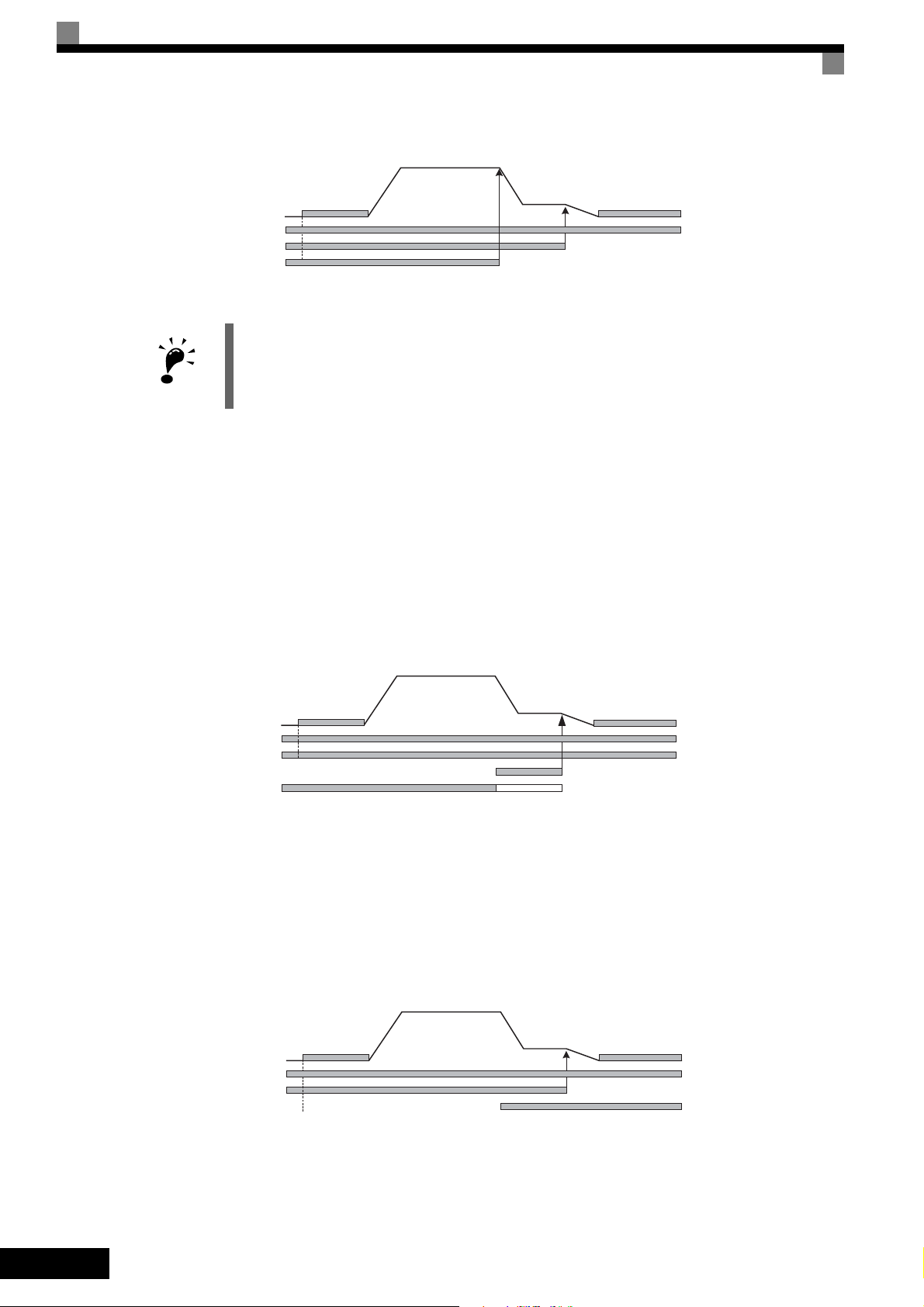
Separate Speed Selection Inputs, Leveling Speed Has Priority (d1-18=2)
The related parameters and the digital input pre-settings are the same as for the High Speed Priority setting
(d1-18=1).
Leveling Speed has Priority and a Leveling Speed Input is Selected (H1-=83)
If d1-18 is set to “2” and one multi-function digital input is set to leveling speed (H1-=83) the inverter
decelerates to the leveling speed (d1-17) when the leveling speed selection input is activated. The leveling signal has priority over the selected speed, i.e. the selected speed is disregarded. The selected travel speed must
be different from inspection speed.
The inverter stops when the leveling speed command is removed.
Speed
Hardware BB
Up/Down
Leveling speed
Selected speed
DC Injection/
zero servo
DC Injection/
zero servo
Leveling speed has priority
Leveling Speed Priority is Selected and a Nominal Speed Input is Not Selected (H1-K80))
If d1-18 is set to “2” and no digital input is set to nominal speed selection, the speed reference with speed
selection input set is nominal speed (d1-09). When the leveling speed signal is set, the inverter starts to decelerate to the leveling speed. The leveling speed signal has priority over all other speed signals, i.e. the intermediate speed 1 and 2 and the revelling signals are disregarded when leveling speed is selected.
The inverter can be stopped by removing the leveling speed signal or the Up/Down command.
CAUTION: This sequence can be risky if e.g. the speed selection doesn’t work for any reason (broken wire
etc.).
Speed
Hardware BB
Up/Down
Leveling speed
DC Injection/
zero servo
DC Injection/
zero servo
EN-21
Page 24
Acceleration/Deceleration/Jerk Settings
The acceleration time indicates the time to increase the speed from 0% to 100% of the maximum speed set in
E1-04. The deceleration time indicates the time to decrease the speed from 100% to 0% of E1-04.
The standard acceleration/deceleration times are set in the parameters C1-01/02, the jerk settings (S-curve) are
set in the C2- parameters as shown in Fig 9.
C2-02
Accel Time
C2-01
C1-01
Fig 9 Acceleration/Deceleration and Jerk (S-curve) settings
Brake Sequence
The figure below shows the standard brake sequence.
S1-04
Zero servo/
S1-16
DC Injection
at start
RUN delay time
Speed
S1-06
Delay time
Brake open
RUN
Inverter Hardware BB D/I
Brake Open Command
Decel Time
C1-02
C2-04
Selected Speed
C2-03
C2-05
Leveling Speed
Leveling Speed
S1-07
Brake close
delay time
S1-05
Zero servo/
DC inhection
at stop
S1-19
Contactor open delay
Fig 10 Timing chart of Brake sequence without torque compensation at start
Inertia Compensation (Feed Forward)
Feed Forward Control is used to eliminate the speed overshoot or undershoot by compensating inertia effects.
It can be enabled by setting parameter n5-01 to 1. After that the motor acceleration time n5-05 must be tuned.
Motor Acceleration Time Auto Tuning (n5-05)
Before the n5-02 auto tuning is performed, the motor data autotuning and the general setup should have been
finished. Do the tuning with the factory settings for the n5- parameters.
Use the following procedure:
1. Set n5-05 to “1” to enable the auto tuning and go back to the speed reference display.
2. Set the base block input.
3. Enable the inspection speed input. “FFCAL” will blink in the display to signalize that the calculation is
active.
4. Set an UP command. The inverter will accelerate the motor up to the nominal speed. Release the UP command a few seconds after the top speed has been reached.
EN-22
Page 25
5. When the motor has stopped, apply a DOWN command. The inverter will accelerate the motor in the
opposite direction to the nominal speed. Release the DOWN command a few seconds after the nominal
speed has been reached.
To abort the tuning set parameter n5-05 to “0”.
1. The order of giving the UP or DOWN command has no influence.
2. n5-01 should not be changed from the factory value for the tuning.
3. After the run in both directions is finished, parameter n5-05 is automatically set back to “0”.
IMPORTANT
4. The autotuning will be performed only if the inspection speed input is set.
5. Do not change the mechanical constants (load, inertia) between the runs.
Feed Forward Compensation P-Gain Setup
• Increase the gain to improve the responsiveness to the speed reference.
• Decrease the gain if vibrations or oscillations occur.
EN-23
Page 26
Troubleshooting
Fault and Alarm Detection
Faults and Alarms are functions that indicate unusual inverter/application conditions.
An alarm does not necessarily switch of the inverter but a message is displayed on the keypad and an alarm
output is generated at the multi-function outputs (H2-01 to H2-03) if programmed. An alarm automatically
disappears if the alarm condition is not present anymore.
A fault switches the inverter off immediately, a message is displayed on the keypad and the fault output is
switched. The fault must be reset manually after the cause has been removed.
The following tables shows a list of faults and alarms with their corrective actions.
Display
BUS
Option Com Err
(flashing)
CF
Out of Control
CPF00
CPF01
COM-
ERR(OP&INV)
CPF02 - CPF 04
CPF24
Option Comm Err
DEV
Speed Deviation
DV3
DV4
DV6
Over Accelera-
tion
EF0
Opt External Flt
EF
Ext Fault S
EF
External Fault
(flashing)
Ext Run Active
Cannot Reset
Displayed as
Alarm Fault
Meaning Corrective Actions
Option Communications Alarm
After initial communication was established, the connection was lost.
A torque limit was reached continuously for 3 seconds or longer during a deceleration stop in Open
Loop Vector control.
• Digital Operator/LED Monitor Communication
Fault 1/2
• Communication fault between Operator and
inverter
• CPU External RAM Fault
• Baseblock circuit error
•EEPROM error
• CPU Internal A/D Converter Fault
Hiperface serial communication error
Detected when no data were received from the
encoder for 200 msec
F1-04 = 0, 1 or 2 and A1-02 = 3 or 6
The speed deviation is higher than the F1-10 value
for the time F1-11 or longer.
F1-04 = 3 and A1-02 = 3 or 6
The speed deviation is higher than the F1-10 value
for the time F1-11 or longer.
Wrong rotation direction
Detected when the speed deviation is higher than
30% and the torque reference and acceleration have
opposite signs.
Wrong rotation direction
Detected when F1-19 is not 0, the speed reference
and motor speed have opposite signs and the detection threshold set in F1-19 is exceeded.
An over acceleration of the car was detected
(A1-02 = 6 only)
External fault input from Communications Option
Card
External fault at terminal S ( stands for terminals
S3 to S7)
Forward/Reverse Run Commands Input Together
Both the forward and the reverse run commands are
input simultaneously for 500ms or more. This alarm
stops the motor.
Fault reset was tried during run.
Check the connections and all user-side software configurations.
Check the motor parameters.
• Disconnect the Digital Operator/LED Monitor and
then connect it again.
• Replace the Inverter.
• Cycle the Inverter power supply.
• Replace the Inverter.
• Perform an initialization to factory defaults.
• Cycle the Inverter power supply.
• Replace the Inverter.
Check the encoder connection or replace the encoder
if necessary
• Reduce the load.
• Lengthen the acceleration time and deceleration
time.
• Check the mechanical system.
• Check the settings of F1-10 and F1-11.
• Check the sequence and if the brake is opened when
the inverter starts to increase the speed.
•Check the PG wiring
• Correct the wiring
• Verify the PG direction and execute an encoder offset auto tuning
• Reduce the load and check the brake
• Verify the PG direction and execute an encoder offset auto tuning
• Reduce the load and check the brake
• Reduce the load
• Check the PG direction, check F1-22 and perform
an encoder offset tuning.
• Verify the settings of S3-13, S3-14 and S3-15.
• Adjust the acceleration and deceleration times.
• Check for an external fault condition.
• Verify the parameters.
• Verify communication signals
Eliminate the cause of the external fault condition.
Check external sequence logic, so that only one input
is received at a time.
• Remove the direction signal and retry a fault reset.
• If a PLC handles the fault reset, check the sequence.
EN-24
Page 27
Display
FF_CAL
FRL
Ref Missing
GF
Ground Fault
LF
Output Phase
Loss
OC
Over Current
OH
Heatsink Over-
temp
OH1
Heatsink Max
Tem p
OL1
Motor Overload
OL2
Inv Overload
OS
Motor Over speed
Det
OV
DC Bus Overvolt
PF
Input Phase Loss
PGO
PG Open
(PG Disconnec-
tion)
Displayed as
Alarm Fault
(only in
stop
condi-
tion)
Meaning Corrective Actions
Feed forward motor acceleration time active
No speed was selected before the inverter start. Check the speed selection/start sequence.
The ground current at the Inverter output exceeded
50% of the Inverter rated output current and L8-09=1
(Enabled).
An open-phase occurred at the Inverter output.
The fault is detected when the output current falls
below 5% of the inverter rated current and L8-07=1
The Inverter’s output current exceeded the over cur-
rent detection level.
L8-03 = 0,1 or 2 and the temperature of the Inverter's
cooling fin exceeded the L8-02 value.
Inverter's Cooling Fan Stopped
L8-03 = 3 and the temperature of the Inverter's cool-
ing fin exceeded the L8-02 value.
The temperature of the Inverter’s heatsink exceeded
105 °C.
Inverter’s Cooling Fan Stopped
Detected when L1-01 is set to 1,2 or 3 and the
Inverter’s output current exceeded the motor overload curve.
The overload curve is adjustable using parameter E2-
01 (Motor Rated Current), L1-01 (Motor Protection
Selection) and L2-02 (Motor Protection Time Constant)
The Inverter output current exceeded the Inverter’s
overload capability.
F1-03 = 0, 1 or 2 and A1-02 is set to 3 or 6.
The motor speed feedback (U1-05) exceeded the F1-
08 value for the time F1-09.or longer.
F1-03 = 3 and A1-02 is set to 3 or 6.
The motor speed feedback (U1-05) exceeded the F108 value for the time F1-09.or longer.
The DC bus voltage has exceeded the overvoltage
detection level.
Default detection levels are:
200 V class: 410 VDC
400 V class: 820 VDC
Too big DC bus voltage ripple.
Only detected when L8-05=1 (enabled)
F1-02 = 0, 1 or 2 and A1-02 = 3 or 6
No PG (encoder) pulses are received for the time F1-
14 or longer.
F1-02 = 3 and A1-02 = 3 or 6.
No PG (encoder) pulses are received for the time F114 or longer.
• Perform the complete tuning procedure
• Abort the tuning by setting
n5-05 = 0.
• Remove the motor and run the Inverter without the
motor.
• Check the motor for a phase to ground short.
• Check the output current with a clampmeter to verify the DCCT reading.
• Check the control sequence for wrong motor contactor signals.
• Reset the fault after correcting its cause.
• Check the motor and Inverter capacity.
• Remove the motor and run the Inverter without the
motor.
• Check the motor for a phase-to-phase short.
• Verify the accel/decel times
•(C1-).
• Check the Inverter for a phase-to-phase short at the
output.
• Check for dirt build-up on the fans or heatsink.
• Reduce the ambient temperature around the drive.
• Replace the cooling fan(s).
• Check for dirt build-up on the fans or heatsink.
• Reduce the ambient temperature around the drive.
• Replace the cooling fan(s).
• Recheck the cycle time and the size of the load as
well as the accel/decel times
•(C1-).
• Check the V/f characteristics (E1-).
• Check the setting of Motor Rated Current Setting
(E2-01).
• Recheck the cycle time and the size of the load as
well as the accel/decel times
•(C1-).
• Check the V/f characteristics (E1-).
• Check the setting of Motor Rated Current Setting
(E2-01).
• Adjust the ASR settings in the C5 parameter group.
• Check the reference circuit and reference gain.
• Check the settings in F1-08 and F1-09.
• Increase the deceleration time (C1-02/04/06/08) or
connect a braking option.
• Check the power supply and decrease the voltage to
meet the inverter’s specifications.
• Check the braking chopper/resistor.
• Tighten the input terminal screws
• Check the power supply voltage
• Fix the broken/disconnected wiring.
• Fix the wiring.
• Supply power to the PG
•properly.
• Check the sequence and if the brake is opened when
the inverter starts to increase the speed.
EN-25
Page 28
Display
PUF
DC Bus Fuse
Open
RR
DynBrk Transistr
SE1
Sequence Error 1
SE2
Sequence Error 2
SE3
Sequence Error 3
SVE
Zero Servo Fault
UV1
DC Bus Under-
volt
UV2
CTL PS Under-
volt
Displayed as
Alarm Fault
(only in
condi-
tion)
stop
Meaning Corrective Actions
The fuse in the main circuit is blown.
War ni ng:
Never run the Inverter after replacing the DC bus
fuse without checking for shorted components.
The built-in dynamic braking transistor failed.
No output contactor response S1-16 or longer. Check the output contactor.
The output current at start was below 25% of no-load
current.
The output current during run was below 25% of noload current.
The motor position moved during Zero Servo Operation.
The DC bus voltage is below the under voltage
Detection Level
(L2-05). The default settings are:
200V class: 190 VDC
400 V class: 380 VDC
Main Circuit MC Operation Failure
No MC response during Inverter operation.
Control Power Supply Undervoltage
Undervoltage of the control circuit while the Inverter
was running.
• Check the motor and the motor cables for short circuits or insulation failures (phase-to-phase).
• Replace the inverter after correcting the fault.
• Cycle power to the Inverter.
• Replace the Inverter.
Check the output contactor.
Check the output contactor.
• Increase the torque limit.
• Decrease the load torque.
• Check for signal noise.
• Check the input voltage.
• Check the wiring of the input terminals.
• Check the input voltage and the wiring of the input
terminals.
• Extend the settings in
• C1-01/03/05/07
Replace the Inverter.
• Remove all connection to the control terminals and
cycle the power to the Inverter.
• Replace the Inverter.
Operator Programming Errors (OPE)
An Operator Programming Error (OPE) occurs when two or more parameter related to each other are set inappropriate or an individual parameter setting is incorrect. The Inverter does not operate until the parameter setting is set correctly; however, no other alarm or fault outputs will occur. If an OPE occurs, change the related
parameter by checking the cause shown in the table below. When an OPE error is displayed, press the ENTER
key to see U1-34 (OPE Detected). This monitor displays the parameter that is causing the OPE error.
Display Meaning Corrective Actions
OPE01
kVA Selection
OPE02 Limit
OPE03
Ter mi nal
OPE05
Sequence Select
OPE06
PG Opt Missing
OPE08
Constant Selection
OPE10
V/f Ptrn Setting
Inverter kVA Setting Error Enter the correct kVA setting in o2-04.
Parameter Setting out of Range
Hiperface selected (n8-35=4) and:
• F1-01 is different from 512 or 1024
• F1-21 is set to 2
EnDat selected (n8-35=5) and:
• F1-01 is different from 512 or 2048
• F1-21 is set to 0 or 1
Multi-function Input Selection Error (H1-01 to H1-05):
• Functions were selected duplicative.
• External Baseblock NO (8) and External Baseblock NC
(9) were selected at the same time.
The Emergency Stop Command NO (15) and NC(17) are
set simultaneously.
RUN/Reference Command Selection Error
The Reference Source Selection b1-01 and/or the RUN
Source Selection parameter b1-02 are set to 3 (option
board) but no option board is installed.
Control method selection error/
PG-card missing
Function Selection Error Verify the control method and the function.
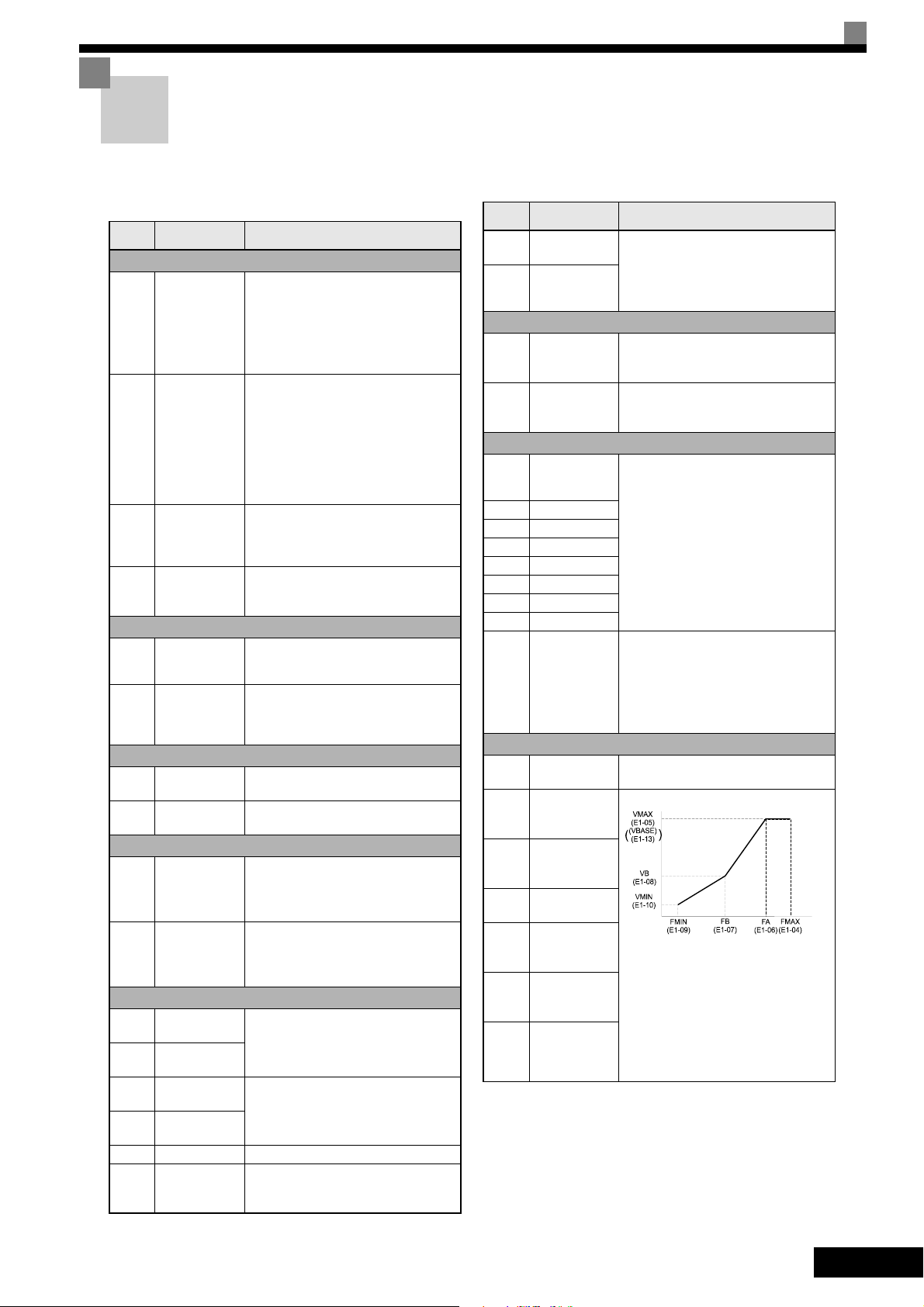
V/f Parameter Setting Error
Verify the parameter settings.
Verify the parameter settings in H1-
• Verify that the board is installed. Remove the power supply
and re-install the option board again
• Recheck the setting of b1-01 and b1-02.
Verify the control method selection in parameter A1-02 and/or
the installation of the PG option board.
Check parameters (E1-). A frequency/voltage value may
be set higher than the maximum frequency/voltage.
EN-26
Page 29
Auto-tuning Faults
Auto-tuning faults are shown below. When the following faults are detected, the fault is displayed on the digital operator and the motor coasts to stop. No fault or alarm outputs will be operated.
Display Meaning Corrective Actions
Acceleration error (detected during rotating autotuning
Accelerate
End - 1
V/f Over Setting
End - 2
Saturation
End - 3
Rated FLA Alm
Fault Motor data fault
I-det. Circuit
KE_ERR
(PM motor only)
LD_ERR
(PM motor only)
Leakage Induc-
tance Fault
Minor Fault
Motor Speed
No-Load Current No-Load Current Fault • Check the input data.
Resistance Line-to-Line Resistance Fault
Rated slip Rated Slip Fault
RS_ERR
(PM motor only)
STOP key STOP key input -
Z_SRCH_ERR
(PM motor only)
only)
The motor did not accelerate in the specified time.
V/f Settings Alarm
Displayed after auto-tuning is complete
The torque reference exceeded 100% and the no-load current exceeded 70% during auto-tuning.
Motor Core Saturation Fault
Displayed after auto-tuning is complete.
Detected only for rotating autotuning
Rated Current Setting Alarm
Displayed after auto-tuning is complete
During auto-tuning, the measured value of motor rated
current (E2-01) was higher than the set value.
Current detection error
The current exceeded the motor rated current or any output phase is open
Voltage constant error Check the motor wiring
Inductance error Check the motor wiring
The leakage inductance measurement caused an error.
The leakage inductance tuning current was too high or too
low (Closed Loop Vector for PM only)
Any of the above listed alarms occured during autotuning
or the inverter was in Base Block condition when the tuning was started.
Motor Speed Fault
Detected only for rotating autotuning
The torque reference exceeded 100% during acceleration.
Detected only when A1-02 is set to 2 (Open Loop Vector
control).
Line-to-line resistance error
All encoders:
The motor speed exceeded 20 rpm at the auto tuning start.
The magnetic pole position tuning could not be performed
in the specified time.
Encoder with Z-pulse:
The difference between two measurements of the magnet
pole position was higher than 3°.
Serial encoders:
The difference between two measurements of the magnet
pole position was higher than 5° or an encoder serial communication error has occurred during the tuning.
• Increase C1-01 (Acceleration Time 1).
• Increase L7-01 and L7-02 (Torque Limits) if they are low.
• Remove the ropes and repeat the tuning.
• Check and correct the motor settings
• If the motor and the machine are connected, disconnect the
motor from the machine.
• Check the input data.
• Check the motor wiring.
• If the motor and the machine are connected, disconnect the
motor from the machine.
Check the motor rated current value.
• Check the input data.
• The motor and inverter capacity do not fit. Check the Inverter
and motor capacity.
• Check the motor rated current and no-load current.
Check wiring of the Inverter and the mounting.
• Check the motor wiring.
• Check the motor rated current input value
• Reduce or increase the current level for leakage inductance
tuning by changing parameter n8-46.
• Leave the tuning menu, check the alarm content and remove
the cause as described in the alarm list above.
• Check the input data.
• Make sure that the inverter is not in Base Block condition
during the tuning.
• If the motor is connected to the machine, disconnect it.
• Increase C1-01 (Acceleration Time 1).
• Check the input data (particularly the number of PG pulses
and the number of motor poles).
• Perform not rotating auto tuning
• Check the motor wiring.
• If the motor is connected to the machine, disconnect it.
• If the setting of T1-03 is higher than the Inverter input power
supply voltage (E1-01), change the input data.
• Check the motor wiring
• Check the motor input data
• Remove the ropes and repeat the tuning
• Check the encoder rotation direction and if necessary change
F1-05.
• Check the encoder wiring (order, shield etc.)
• Check the encoder power supply.
Replace the encoder.
EN-27
Page 30
Parameter Table
Note: Factory settings are in bold.
Param.
Num.
Name Description
Initialize Data
Language
selection for
Digital Opera-
A1-00
tor display
(JVOP-160-OY
only)
Parameter
A1-01
access level
Control method
A1-02
selection
A1-03 Initialize
0:English
1:Japanese
2:German
3:French
4:Italian
5:Spanish
6:Portuguese
0:Monitoring only (Monitoring drive
mode and setting A1-01 and A1-04.)
1:Used to select user parameters (Only
parameters set in A2-01 to A2-32 can
be read and set.)
2:Advanced
(Parameters can be read and set in both,
quick programming mode (Q) and
advanced programming mode (A).)
0:V/f control
2: Open loop vector
3:Closed Loop Vector
6:Closed Loop Vector for PM motors
0: No initializing
1110:Initializes to user parameters
2220:.Initializes to the factory setting
Sequence/Reference Source
b1-01
b1-02
Reference
source selection
RUN command source
selection
0:Digital Operator
1:Control circuit terminal (analog input)
3:Option Card
0:Digital Operator
1:Control circuit terminal (digital
multi function inputs)
3:Option Card
Acceleration/Deceleration Settings
Accel./Decel.
C1-
C2-
time 1
S-curve charac-
teristic
Refer to page 1-22
Set the S-curve times at speed changes to
reduce the jerk. Refer to page 1-22
Slip Compensation
• Increase the value if slip compensation
C3-01
C3-02
Slip compensation gain
Slip compensation delay time
value is too low
• Decrease the value if slip is overcompensated
• Reduce the value if the slip compensation responsiveness is low.
• When speed is not stable, increase the
setting.
Automatic Speed Regulator (ASR)
ASR propor-
C5-01
tional (P) gain 1
ASR integral (I)
C5-02
time 1
ASR propor-
C5-03
tional (P) gain 2
ASR integral (I)
C5-04
time 2
C5-06 ASR delay time Sets the ASR output delay time.
ASR switching
C5-07
frequency
Set the proportional gain 1 and the integral time 1 of the speed control loop
(ASR) for the frequency C5-07.
Set the proportional gain 2 and the integral time 2 of the speed control loop
(ASR) for the minimum frequency.
The setting is active only for acceleration.
Sets the frequency for switching between
Proportion Gain 1, 2,3 and Integral Time
1, 2, 3.
Param.
Num.
C5-09
C5-10
Name Description
ASR proportional (P) gain 3
ASR integral (I)
time 3
Set the proportional gain 3 and the integral time 3 of the speed control loop
(ASR) for the minimum frequency.
The settings is active for deceleration
only.
Carrier Frequency Setup
C6-02
C6-11
Carrier frequency selection 1
Carrier frequency selection 2
Selects the carrier frequency for Induction motor control modes.
Selects the carrier frequency for PM
motor control modes
Speed Settings
d1-01
Multi speed ref.
to
1 to 8
d1-08
d1-09 Nominal speed
d1-10 Interm. speed 1
d1-11 Interm. speed 2
d1-12 Interm. speed 3
d1-13 Relevel. speed
d1-14 Inspect. speed
d1-17 Leveling Speed
Speed priority
d1-18
selection
Refer to page 19, Speed Selection
Sequence Using Digital Inputs
0:Use Multi-Speed ref. (d1-01 to d1-08)
1:High Speed reference has priority.
2:Leveling speed reference has priority.
3:Use multi-speed reference
With no speed selected, the up/ down
signal is switched off
Refer to page 1-19
V/f Pattern Settings
E1-01
E1-04
E1-05
E1-06
E1-08
E1-10
E1-13
Input voltage
setting
Max. output
frequency
(FMAX)
Max. output
voltage
(VMAX)
Base frequency
(FA)
Mid. output frequency voltage
(VB)
Min. output frequency voltage
(VMIN)
Base voltage
(VBASE)
This setting is used as a reference value
for protection functions.
Output Voltage (V)
To set V/f characteristics in a straight
line, set the same values for E1-07 and
E1-09. In this case, the setting for E1-08
will be disregarded.
Always ensure that the four frequencies
are set in the following manner:
E1-04 (FMAX) ≥ E1-06 (FA) > E1-07
(FB) ≥ E1-09 (FMIN)
Frequency (Hz)
EN-28
Page 31

Param.
Num.
Name Description
Motor Data Settings
E2-01 Rated current
E2-02 Rated slip
E2-03 No-load current
E2-04 Pole number
Line-to-line
E2-05
resistance
Leak induct-
E2-06
ance
E5-02 Rated power
E5-03 Rated current
E5-04 Pole number
Line-to-line
E5-05
resistance
E5-06 d-Inductance
E5-07 q- Inductance
Motor voltage
E5-09
constant
Motor Data for induction motors
Motor Data for PM motors
Encoder Feedback Settings
F1-01 PG constant
PG rotation
F1-05
direction
Absolute
encoder resoluF1-21
tion (Hiperface
or EnDat)
Magnet posiF1-22
tion offset
Sets the number of PG pulses per revolution
0:Phase A leads with forward run com-
mand. (Phase B leads with reverse
run command; Counter Clockwise
rotation)
1:Phase B leads with forward run com-
mand. (Phase A leads with reverse run
command; Clockwise rotation)
0:16384
1:32768
2:8192
(if EnDat is selected (n8-35=5), F1-21 is
fixed to 2)
Sets the Offset between the rotor magnet
and encoder zero position.
Digital I/O Settings
Terminal S3 to
H1-01
to
H1-05
H2-01
to
H2-03
S7 function
selection
Terminal M1-
M2/M3-M4/
M5-M6 func-
tion selection
Refer to the end of this list for a list of
selections
Refer to the end of this list for a list of
selections
Motor Protection
0:Disabled
1:General-purpose motor protection
(fan cooled motor)
2:Inverter motor protection (externally
cooled motor)
3:Vector motor protection
When the Inverter power supply is
turned off, the thermal value is reset, so
even if this parameter is set to 1, protection may not be effective.
5:Permanent magnet constant torque
motor protection
L1-01
Motor protec-
tion selection
Feed Forward Compensation
n5-01
n5-02
Feed forward
control sel.
Motor accelera-
tion time
0:Disabled
1:Enabled
Param.
Num.
n5-03
n5-05
Name Description
Feed forward
proportional
gain
Motor acceleration time tuning
Speed reference response will increase as
the setting of n5-03 is increased.
0:Disabled
1:Enabled
Brake Sequence
Zero Speed
S1-01
level at stop
DC injection
S1-02
braking current
at start
DC injection
S1-03
braking current
at stop
DC inj. braking/
S1-04
Zero speed time
at start
DC inj. braking/
S1-05
Zero speed time
at stop
Brake release
S1-06
delay time
Brake close
S1-07
delay time
S1-20 Zero-servo gain
Sets the brake close command speed level
at stop.
Sets as a percentage of the Inverter rated
current.
Refer to page 22, Brake Sequence.
Zero servo position loop gain for closed
loop vector control.
Speed Reference Slip Compensation
S2-01
S2-02
S2-03
Motor rated
speed
Slip compensation gain in
motoring mode
Slip compensation gain in
regenerative
mode
Sets the motor rated speed.
Sets the slip compensation gain in motoring mode. Can be set for leveling accuracy improvement.
Sets the slip compensation gain in regenerative mode.
It can be used to improve the
leveling accuracy.
Special Functions Setup
Short-floor
S3-01
function selection
Nominal/Lev-
S3-04
eling speed
detection level
Output phase
S3-08
order
Traction sheave
S3-13
diameter
S3-14 Roping Ratio
S3-15 Gear Ratio Sets the mechanical gear ratio.
Enables or disables the short floor operation function
0:disabled
1:enabled (Standard)
2:enabled (Advanced)
Nominal/Leveling speed detection level
when multispeed inputs are used. (d118=0/3)
0:Output phase order is U-V-W
1:Output phase order is U-W-V
Sets the diameter of the traction sheave
for m/s display units.
1:1:1
2:1:2
Monitor Data
U1-01 Frequency reference in Hz/rpm
U1-02 Output frequency in Hz/rpm
U1-03 Output current in A
U1-05 Motor speed in Hz/rpm
U1-06 Output voltage in VAC
U1-07 DC bus voltage in VDC
EN-29
Page 32

Param.
Num.
Name Description
U1-08 Output power in kW
U1-09 Torque reference in % of the motor rated torque
Shows input ON/OFF status.
1: FWD command
(S1) is ON
1: REV command
(S2) is ON
1: Multi input 1
(S3) is ON
1: Multi input 2
(S4) is ON
1: Multi input 3
(S5) is ON
1: Multi input 4
(S6) is ON
1: Multi input 5
(S7) is ON
U1-10
Input terminal
status
Shows output ON/OFF status.
1: Multi-function
contact output 1
(M1-M2) is ON
1: Multi-function
contact output 2
U1-11
Output terminal status
(M3-M4) is ON
1: Multi-function
contact output 3
(M5-M6) is ON
Not used
(Always 0).
1: Error output
(MA/MB-MC) is
ON
Inverter operating status.
Run
1: Zero speed
1: Reverse
U1-12
Operation status
1: Reset signal
input
1: Speed agree
1: Inverter ready
1: Minor fault
1: Major fault
U1-13 Cumulative operation time
U1-20 Frequency reference after soft-starter
U1-34 OPE fault parameter
U1-51 Max Current during acceleration
U1-52 Max Current during deceleration
U1-53 Max Current during Top speed
U1-54 Max Current during leveling speed
U1-55 Number of travels
Fault Trace Data
U2-01 Current fault
U2-02 Last fault
U2-03 Reference frequency at fault
U2-04 Output frequency at fault
U2-05 Output current at fault
U2-06 Motor speed at fault
U2-07 Output voltage reference at fault
U2-08 DC bus voltage at fault
U2-09 Output power at fault
U2-10 Torque reference at fault
U2-11 Input terminal status at fault
U2-12 Output terminal status at fault
Param.
Num.
Name Description
U2-13 Operation status at fault
U2-14 Cumulative operation time at fault
Fault History Data
U3-01
to
Last fault to Fourth last fault
U3-04
U3-05
to
Cumulative operation time at fault 1 to 4
U3-08
U3-09
to
Fifth last to tenth last fault
U3-14
U3-15
to
Accumulated time of fifth to tenth fault
U3-20
* The following errors are not recorded in the error log:
CPF00, 01, 02, 03, UV1, and UV2.
Digital Input Function Selections
3 Multi-step speed reference 1
4 Multi-step speed reference 2
Jog frequency command (higher priority than multi-step
6
speed reference)
F Not used (Set when a terminal is not used)
14 Fault reset (Reset when turned ON)
External fault; Input mode: NO contact/NC contact, Detec-
20 to
2F
tion mode: Normal/during operation
80 Nominal Speed Selection (d1-09)
81 Intermediate Speed Selection (d1-10)
82 Releveling Speed Selection (d1-13)
83 Leveling Speed Selection (d1-17)
84 Inspection Run Selection (d1-14)
Digital Output Function Selections
During run 1 (ON: run command is ON or voltage is being
0
output)
Inverter operation ready; READY: After initialization or no
6
faults
8 During baseblock (NO contact, ON: during baseblock)
Car stuck/undertorque detection 1 NO (NO contact, ON:
B
Overtorque/undertorque detection)
F Not used. (Set when the terminal is not used.)
10 Minor fault (ON: Alarm displayed)
Car stuck/undertorque detection 1 NC (NC Contact, OFF:
17
Torque detection)
1A During reverse run (ON: During reverse run)
40 Brake Release Command
41 Output Contactor Close Command
EN-30
Page 33

EN-31
Page 34

Kurzanleitung L7Z
Inhaltsverzeichnis
Warnhinweise................................................................DE-1
Sicherheitshinweise und -anleitungen .......................................................... DE-2
Elektromagnetische Verträglichkeit .............................................................. DE-3
Installation .....................................................................DE-5
Mechanische Installation ..............................................................................DE-5
Elektrischer Anschluss ................................................................................. DE-6
Tastaturbetrieb ............................................................DE-11
Digitale Bedienkonsole (optional) ............................................................... DE-11
Einschalten und Grundparameter-Einstellungen.....DE-12
Inbetriebnahme ..........................................................................................DE-12
Vor dem Einschalten ..................................................................................DE-13
Anzeige nach dem Einschalten .................................................................. DE-13
Auswahl der Regelbetriebsart .................................................................... DE-13
Autotuning...................................................................DE-14
Auswahl der Autotuning-Betriebsart ........................................................... DE-14
Autotuning-Alarme und -Fehler ..................................................................DE-15
Autotuning-Verfahren bei Induktionsmotoren ............................................DE-16
Autotuning-Verfahren bei Synchronmotoren .............................................. DE-17
Drehgeber-Offset-Einstellung bei Synchronmotoren .................................DE-18
Fahrprofil und Sequenzeinstellung...........................DE-19
Aufwärts-/Abwärtsbefehle und Drehzahlsollwert-Auswahl ......................... DE-19
Drehzahlauswahlsequenz bei Verwendung der Digitaleingänge ...............DE-19
Einstellungen für Beschleunigung/Verzögerung/Ruckkontrolle ..................DE-22
Bremssequenz ...........................................................................................DE-22
Trägheitskompensation (Vorsteuerung) ..................................................... DE-22
Fehlersuche und Fehlerbehebung ............................DE-24
Fehler- und Alarmerkennung ......................................................................DE-24
Fehler bei der Programmierung durch den Anwender (OPE) ....................DE-26
Autotuning-Fehler ....................................................................................... DE-27
Parametertabelle .........................................................DE-28
Page 35

Warnhinweise
Solange die Versorgungsspannung eingeschaltet ist, dürfen weder Kabel an- oder abgeklemmt
werden, noch dürfen Signalprüfungen durchgeführt werden.
Der Zwischenkreis des Varispeed L7 bleibt auch dann geladen, wenn die Spannungsversorgung
unterbrochen wurde. Trennen Sie den Frequenzumrichter vor Ausführung von Wartungsarbeiten
von der Spannungsversorgung, um einen elektrischen Schlag zu vermeiden. Warten Sie
anschließend mindestens 5 Minuten, bis alle LEDs erloschen sind.
Führen Sie an keinem Teil des Frequenzumrichters Spannungsfestigkeitstests durch. Er enthält
Halbleiter, die für derart hohe Spannungen nicht ausgelegt sind.
Die digitale Bedienkonsole darf nicht bei eingeschalteter Spannungsversorgung abgebaut werden.
Berühren Sie keine Platinen, wenn der Frequenzumrichter an die Spannungsversorgung
angeschlossen ist.
ACHTUNG
Schließen Sie niemals LC/RC-Entstörfilter, Kondensatoren oder Überspannungsschutzgeräte an den
Ein- oder Ausgang des Frequenzumrichters an, die nicht speziell für den Frequenzumrichter
vorgesehen sind.
Um unnötige Überstromfehler usw. zu vermeiden, müssen die Signalkontakte aller Schütze oder
Schalter, die zwischen Frequenzumrichter und Motor geschaltet sind, in die Steuerungslogik
(z. B. Endstufensperre) eingebunden sein.
Das ist zwingend erforderlich!
Dieses Handbuch muss vor Anschluss und Inbetriebnahme des Frequenzumrichters sorgfältig
durchgelesen werden. Alle Sicherheitshinweise und Anleitungen müssen beachtet werden.
Der Frequenzumrichter muss gemäß Installationsanleitungen in diesem Handbuch mit geeigneten
Netzfiltern betrieben werden. Zudem müssen alle Abdeckungen geschlossen und alle Klemmen
abgedeckt sein.
Nur dann ist ein angemessener Schutz gesichert. Geräte mit sichtbaren Beschädigungen oder
fehlenden Teilen dürfen nicht angeschlossen oder in Betrieb genommen werden. Der Betreiber der
Geräte ist für alle Verletzungen oder Geräteschäden, die aus Nichtbeachtung der Warnhinweise in
diesem Handbuch entstehen, verantwortlich.
DE-1
Page 36

Sicherheitshinweise und -anleitungen
1. Allgemein
Lesen Sie diese Sicherheitshinweise und -anleitungen vor Installation und Inbetriebnahme dieses
Frequenzumrichters. Lesen Sie auch alle Warnhinweise, die auf dem Frequenzumrichter angebracht sind, und
achten Sie darauf, dass diese nicht beschädigt oder entfernt werden.
Während des Betriebs können unter Spannung stehende oder heiße Bauteile zugänglich sein. Durch Entfernen
von Verkleidungsteilen, der digitalen Bedienkonsole oder Klemmenabdeckungen besteht im Falle einer
fehlerhaften Installation oder Bedienung das Risiko von ernsthaften Verletzungen. Durch die Tatsache, dass
Frequenzumrichter drehende mechanische Teile von Maschinen steuern, können weitere Gefahren entstehen.
Den Anleitungen in diesem Handbuch muss Folge geleistet werden. Installation, Bedienung oder Wartung
dürfen nur durch qualifiziertes Personal erfolgen. Aus Sicherheitsgründen sind als qualifizierte Mitarbeiter nur
solche anzusehen, die mit der Installation, dem Starten, der Bedienung und der Wartung von
Frequenzumrichtern vertraut sind und für diese Arbeiten entsprechende Qualifikationen besitzen. Ein sicherer
Betrieb dieser Geräte ist nur möglich, wenn diese auch für den vorgesehenen Zweck eingesetzt werden.
Der Zwischenkreis kann nach Abschalten der Versorgungsspannung des Frequenzumrichters noch ca.
5 Minuten lang unter Spannung stehen. Aus diesem Grund muss diese Zeitspanne vor dem Öffnen von
Geräteabdeckungen abgewartet werden. Alle Klemmen des Leistungskreises können noch gefährliche
Spannungen führen.
Kinder und andere nicht autorisierte Personen dürfen keinen Zugang zu Frequenzumrichtern haben.
Bewahren Sie diese Sicherheitshinweise und -anleitungen griffbereit auf, und lassen Sie sie allen Personen
zukommen, die Zugang zu den Frequenzumrichtern haben.
2. Vorgesehener Verwendungszweck
Frequenzumrichter sind für den Einbau in elektrische Systeme oder Maschinen gedacht.
Ihr Einbau in Maschinen oder Systeme muss folgenden Produktstandards der Niederspannungsrichtlinie
entsprechen:
EN 50178, 1997-10, Ausrüstung von Starkstromanlagen mit elektronischen Betriebsmitteln
EN 60204-1, 1997-12 Sicherheit von Maschinen - Elektrische Ausrüstung von Maschinen
Teil 1: Allgemeine Anforderungen (IEC 60204-1: 1997)/
Bitte beachten Sie: Enthält Ergänzungen von September 1998
EN 61010-1, A2, 1995 Sicherheitsbestimmungen für elektrische Mess-, Steuer-, Regel- und Laborgeräte
(IEC 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modifiziert)
Die CE-Kennzeichnung erfolgt gemäß EN 50178 bei Verwendung der in diesem Handbuch spezifizierten
Netzfilter und dem Befolgen der entsprechenden Installationsanleitungen.
3. Transport und Lagerung
Die Anleitungen für Transport, Lagerung und richtige Handhabung müssen unter Beachtung der technischen
Daten befolgt werden.
4. Installation
Installieren und kühlen Sie Frequenzumrichter wie in der Dokumentation spezifiziert. Die Kühlluft muss in
der angegebenen Richtung strömen. Der Frequenzumrichter darf dementsprechend nur in der spezifizierten
Position (z. B. aufrecht) betrieben werden. Halten Sie die angegebenen Freiräume ein. Schützen Sie die
Frequenzumrichter gegen unzulässige Lasten. Bauteile dürfen nicht verbogen werden. Isolationsabstände
dürfen nicht geändert werden. Berühren Sie keine elektronischen Bauteile oder Kontakte, um Beschädigungen
durch statische Elektrizität zu vermeiden.
DE-2
Page 37

5. Elektrischer Anschluss
Führen Sie jegliche Arbeiten an unter Spannung stehenden Geräten gemäß der gültigen Sicherheits- und
Unfallverhütungsvorschriften durch. Führen Sie die elektrische Installation in Übereinstimmung mit den
geltenden Vorschriften durch. Insbesondere müssen Sie die Anweisungen zur Sicherstellung der
elektromagnetischen Verträglichkeit (EMV), z. B. Abschirmung, Erdung, Filteranordnung und Verlegung von
Kabeln, beachten. Das gilt auch für Geräte, die das CE-Zeichen tragen. Es liegt in der Verantwortung des
Herstellers von System oder Maschine, die Konformität mit den EMV-Richtlinien zu gewährleisten.
Wenden Sie sich an Ihren Lieferanten oder die Omron-Yaskawa Motion Control-Vertretung, wenn
Fehlerstrom-Schutzschalter in Verbindung mit Frequenzumrichtern Verwendung finden.
Für bestimmte Systeme kann es erforderlich sein, gemäß der gültigen Sicherheits- und
Unfallverhütungsvorschriften zusätzliche Überwachungs- und Sicherheitseinrichtungen zu verwenden.
An der Hardware des Frequenzumrichters dürfen keine Änderungen vorgenommen werden.
Wenn Synchronmotore verwendet werden:
Wenn ein Synchronmotor durch eine externe Kraft gedreht wird, entsteht in den Spulenwindungen Hochspannung.
• Achten Sie bei der Verdrahtung, Wartung oder Inspektion darauf, dass der Motor gestoppt ist und sich
nicht drehen kann.
• Wenn der Frequenzumrichter ausgeschaltet ist und der Motor gedreht werden muss, vergewissern Sie sich,
dass die Ausgänge von Motor und Frequenzumrichter elektrisch abgetrennt sind.
6. Konfiguration des Frequenzumrichters
Dieser L7-Frequenzumrichter kann sowohl mit Asynchron- als mit Synchronmotoren betrieben werden.
Wählen Sie die immer die entsprechende Regelbetriebsart aus.
•
Stellen Sie bei Asynchronmotoren U/f, Vektorregelung mit oder ohne Rückführung ein (A1-01 = 0, 2 oder 3).
• Bei Synchronmotoren darf keine andere Regelbetriebsart als Vektorregelung mit Rückführung für PM
(Dauermagnet) verwendet werden (A1-01 = 6).
Bei falsch gewählter Regelbetriebsart können der Frequenzumrichter und der Motor beschädigt werden.
Wenn ein Motor ausgetauscht oder das erste Mal in Betrieb genommen wird, stellen Sie immer die
entsprechenden Motorsteuerungsparameter nach den Angaben auf dem Typenschild ein, oder benutzen Sie die
Autotuning-Funktion. Ändern Sie die Parametereinstellungen nicht unüberlegt. Um einen sicheren Betrieb bei
Synchronmotoren zu gewährleisten, stellen Sie immer Folgendes ein:
• die richtigen Motordaten
• die Parameter für die Erkennung einer Unterbrechung des Impulsgebersignals
• die Parameter für die Drehzahlabweichungserkennung
• die Parameter für die Erkennung einer Überbeschleunigung
Falsche Parametereinstellungen können ein gefährliches Verhalten oder Schäden am Motor und
Frequenzumrichter zur Folge haben.
DE-3
Weitere Informationen über das richtige Vorgehen bei der Inbetriebnahme finden Sie im Kapitel Seite 12,
Inbetriebnahme.
7. Hinweise
Die Frequenzumrichter Varispeed L7 sind gemäß CE, UL und c-UL zertifiziert.
Elektromagnetische Verträglichkeit
1. Einführung
Dieses Handbuch wurde erstellt, um Systemhersteller, die Omron-Yaskawa Motion ControlFrequenzumrichter verwenden, bei der Konstruktion und Installation von elektrischen Schaltgeräten zu
unterstützen. Zudem werden die zur Einhaltung der EMV-Richtlinie erforderlichen Maßnahmen beschrieben.
Die Anleitungen zur Installation und Verdrahtung in diesem Handbuch müssen deshalb befolgt werden.
Unsere Produkte sind durch autorisierte Stellen unter Anwendung der nachstehend aufgelisteten Normen getestet.
Produktnorm: EN 61800-3:1996
EN 61800-3; A11:2000
Page 38

2. Maßnahmen zur Sicherstellung der Konformität von Omron-Yaskawa Motion
Control-Frequenzumrichtern mit der EMV-Richtlinie
Omron-Yaskawa Motion Control-Frequenzumrichter müssen nicht unbedingt in einen Schaltschrank
eingebaut werden.
Detaillierte Anleitungen für alle möglichen Installationsarten können nicht gegeben werden. Dieses Handbuch
muss daher auf allgemeine Leitlinien begrenzt bleiben.
Alle elektrischen Geräte produzieren Funkstörungen und leitungsgeführte Störungen mit unterschiedlichen
Frequenzen. Die Kabel leiten diese Störungen wie eine Antenne an die Umgebung weiter.
Der Anschluss eines elektrischen Geräts (z. B. Frequenzumrichter) ohne Netzfilter an ein Stromnetz kann
deshalb bewirken, dass HF- oder NF-Störungen in das Stromnetz gelangen.
Die grundlegenden Gegenmaßnahmen sind die räumliche Trennung der Kabel von Steuer- und
Leistungskomponenten, ordnungsgemäße Erdung sowie die Abschirmung von Kabeln.
Für eine Niedrigimpedanz-Erdung von HF-Störungen ist eine große Kontaktfläche erforderlich.
Die Verwendung von Erdungsbändern anstelle von Kabeln wird ausdrücklich empfohlen.
Des Weiteren müssen Kabelabschirmungen mit entsprechenden Erdungsschellen verbunden werden.
3. Verlegen von Kabeln
Maßnahmen gegen leitungsgebundene Störungen:
Netzfilter und Frequenzumrichter müssen auf die selbe Metallplatte montiert werden. Montieren Sie die
beiden Bauteile so nah wie möglich nebeneinander, und halten Sie die Kabel so kurz wie möglich.
Verwenden Sie ein Netzkabel mit gut geerdeter Abschirmung. Verwenden Sie ein abgeschirmtes Motorkabel,
dass nicht länger als 20 m ist. Ordnen Sie alle Erdungen so an, dass die Fläche des Kabelendes, die mit der
Erdungsklemme in Kontakt ist (z. B. Metallplatte), möglichst groß ist.
Abgeschirmtes Kabel:
• Verwenden Sie ein Kabel mit geflochtener Abschirmung.
• Erden Sie die größtmögliche Fläche der Abschirmung. Es ist ratsam, die Abschirmung durch Verbinden
des Kabels mit der Erdungsplatte durch Metallschellen (siehe nachfolgende Abbildung) zu erden.
Erdungsschelle
Die Erdungsflächen müssen aus hoch leitfähigem, blankem Metall bestehen. Entfernen Sie Lack- und
Farbbeschichtungen.
– Erden Sie die Kabelabschirmungen an beiden Enden.
Erdungsplatte
– Erden Sie den Motor der Maschine.
DE-4
Page 39

Installation
Mechanische Installation
Auspacken des Frequenzumrichters
Überprüfen Sie nach dem Auspacken des Frequenzumrichters folgende Punkte.
Eigenschaft Vorgehensweise
Wurde das richtige Frequenzumrichtermodell
geliefert?
Ist der Frequenzumrichter irgendwie beschädigt?
Sind Schrauben oder andere Bauteile lose?
Wenn Sie bei den oben genannten Punkten Unregelmäßigkeiten finden, teilen Sie dies sofort Ihrem Händler
oder Ihrer Omron-Yaskawa Motion Control-Vertretung mit.
Überprüfen des Installationsortes
Überprüfen Sie vor dem Installieren des Frequenzumrichters folgende Punkte:
• Stellen Sie sicher, dass die Umgebungstemperatur nicht überschritten wird
• Installieren Sie den Frequenzumrichter an einem sauberen Ort, der frei von Ölnebeln und Staub ist.
Er kann in einem vollständig geschlossenen und staubdichten Schaltschrank installiert werden.
• Bei Installation oder Betrieb des Frequenzumrichters müssen Sie besonders darauf achten, dass kein
Metallpulver, Öl, Wasser oder sonstige Fremdstoffe in den Frequenzumrichter gelangen.
• Installieren Sie den Frequenzumrichter nicht auf brennbarem Material, wie z. B. Holz.
•
Installieren Sie den Frequenzumrichter an einem Ort, der frei von radioaktiven oder brennbaren Materialien ist.
•
Installieren Sie den Frequenzumrichter an einem Ort, der frei von schädlichen Gasen oder Flüssigkeiten ist.
• Installieren Sie den Frequenzumrichter an einem Ort ohne übermäßige Schwingungen.
• Installieren Sie den Frequenzumrichter an einem Ort, der frei von Chloriden ist.
• Installieren Sie den Frequenzumrichter an einem Ort ohne direkte Sonneneinstrahlung.
Prüfen Sie die Modellnummer auf dem Typenschild an der Seite des
Frequenzumrichters.
Überprüfen Sie das gesamte Gehäuse des Frequenzumrichters auf Kratzer oder
sonstige Transportschäden.
Verwenden Sie einen Schraubendreher oder andere Werkzeuge, um alle Schrauben
und Bauteile auf festen Sitz zu prüfen.
Ausrichtung bei der Installation
Installieren Sie den Frequenzumrichter stets aufrecht, damit die Kühlung nicht beeinträchtigt wird. Bei der
Installation des Frequenzumrichters müssen immer die nachfolgend angegebenen Einbauabstände vorhanden
sein, um eine Wärmeabgabe durch Konvektion zu ermöglichen.
Luft
A B
50 mm 120 mm
Luft
min. 50 mm
WICHTIG
A
min. 30 mm
min. 30 mm
Horizontaler Freiraum
1. Frequenzumrichter der Bauarten IP00, IP20 und NEMA 1 haben in horizontaler und vertikaler Richtung
den gleichen Platzbedarf.
2. Achten Sie unbedingt darauf, dass nach der Installation eines Frequenzumrichters mit einer Ausgangsleistung
bis zu 18,5 kW in einen Schaltschrank die obere Schutzabdeckung entfernt wird.
Lassen Sie beim Einbau eines Frequenzumrichters mit einer Ausgangsleistung von 22 kW und mehr in einen
Schaltschrank immer ausreichend Platz für die Ringschrauben zur Aufhängung und für die Leistungskabel.
B
min. 120 mm
Vertikaler Freiraum
DE-5
Page 40

Elektrischer Anschluss
Installation von Frequenzumrichtern und EMV-Filtern
Bei einer Installation, die der EMV-Richtlinie entspricht, sind
folgende Punkte zu beachten:
• Verwenden Sie einen Netzfilter.
• Verwenden Sie abgeschirmte Motorkabel.
•
Montieren Sie Frequenzumrichter und Filter auf einer geerdeten,
leitenden Platte.
•
Entfernen Sie vor dem Montieren der Teile Farbe oder Schmutz,
um die niedrigstmögliche Erdungsimpedanz zu erreichen.
Verdrahtung der Spannungsversorgung
Beachten Sie die folgenden Sicherheitshinweise für die Spannungsversorgungseingänge.
• Bei Anschluss der Netzeingangsklemmen (R/L1, S/L2 und T/L3) an die Spannungsversorgung unter
Verwendung eines Kompakt-Schutzschalters ist darauf zu achten, dass der Schutzschalter für den
Frequenzumrichter geeignet ist.
• Wenn ein Fehlerstrom-Schutzschalter verwendet wird, sollte er alle möglicherweise vorkommenden
Stromarten erkennen können, um eine sichere Fehlerstrom-Erkennung zu gewährleisten
•
Am Eingang des Frequenzumrichters kann ein Netzschütz oder ein anderes Schaltgerät verwendet werden.
Die Versorgungsspannung für den Frequenzumrichter sollte höchstens einmal pro Stunde geschalten werden.
• Die Eingangsphasen (R/S/T) können in jeder beliebigen Reihenfolge angeschlossen werden.
• Wenn der Frequenzumrichter an einen Transformator mit hoher Leistung (600 kW oder mehr)
angeschlossen wird oder ein Phasenschieber-Kondensator in der Nähe geschaltet wird, kann es zu einer
Spannungserhöhung im Eingangskreis kommen, wodurch der Frequenzumrichter beschädigt wird.
Als Gegenmaßnahme muss eine optionale AC-Drossel am Eingangs des Frequenzumrichters oder eine
DC-Drossel an die Anschlussklemmen für die DC-Drossel angeschlossen werden.
• Verwenden Sie einen Überspannungsableiter oder eine Diode, wenn induktive Lasten in der Nähe des
Frequenzumrichter geschaltet werden. Zu induktiven Lasten gehören Schütze, elektromagnetische Relais,
Magnetventile, Magnetspulen und Magnetbremsen.
Verdrahtung der Ausgangsseite des Leistungskreises
Beachten Sie die folgenden Sicherheitshinweise für die Verdrahtung des Ausgangsschaltkreises.
• Schließen Sie die Versorgungsspannung auf keinen Fall an die Ausgangsklemmen des Frequenzumrichters
an. Der Frequenzumrichter könnte dadurch beschädigt werden.
• Ausgangsklemmen dürfen niemals kurzgeschlossen oder geerdet werden. Der Frequenzumrichter könnte
dadurch beschädigt werden.
• Verwenden Sie keine Phasenschieber-Kondensatoren. Andernfalls können der Frequenzumrichter und die
Kondensatoren beschädigt werden.
• Prüfen Sie die Steuersequenz um sicherzustellen, dass das Schütz zwischen Frequenzumrichter und Motor
während des Betriebs des Frequenzumrichters nicht ein- oder ausgeschaltet wird. Beim Einschalten des
Schützes, während der Frequenzumrichter in Betrieb ist, wird ein hoher Einschaltstrom erzeugt, wodurch
der Überstromschutz des Frequenzumrichters auslösen kann.
PEL1L2
PE
Filter
Kabellänge
so kurz wie möglich
Geerdete
Metallplatte
L3
Netz-
Last
Erdungs-Kontaktflächen
Sämtliche Farbe entfernen!
Erdungs-Kontaktflächen
Sämtliche Farbe entfernen!
Frequenz-
umrichter
L2
V
GND
U
L1
L3
M
~3
GND
W
Abgeschirmtes
Motorkabel
Erdungsanschluss
Beachten Sie die folgenden Sicherheitshinweise für den Anschluss der Erdung.
•
Verwenden Sie den Erdungsleiter nicht noch für andere Geräte, wie z. B. Schweißgeräte oder Elektrowerkzeuge.
• Verwenden Sie stets einen Erdungsleiter, der den technischen Normen für Elektrogeräte entspricht, und
halten Sie die Länge des Erdungsleiters so kurz wie möglich.
DE-6
Page 41

Durch den Frequenzumrichter wird ein Leckstrom erzeugt. Wenn der Abstand zwischen der
Erdungselektrode und der Erdungsklemme zu groß ist, wird das Potenzial an der Erdungsklemme des
Frequenzumrichters instabil.
• Bei Einsatz von mehr als einem Frequenzumrichter darf der Erdungsleiter keine Schleife bilden.
richtig
falsch
Abb 1 Verdrahtung der Erdung
Sicherheitshinweise für die Verdrahtung der Steuerstromkreise
Beachten Sie bei der Verdrahtung der Steuerstromkreise die folgenden Sicherheitshinweise.
• Verlegen Sie die Leitungen der Steuerstromkreise getrennt von den Leitungen des Hauptstromkreises
(Klemmen R/L1, S/L2, T/L3, B1, B2, U/T1, V/T2, W/T3, , 1, 2 und 3, PO, NO) und anderen
Hochspannungskabeln.
• Verlegen Sie die Leitungen der Steuerklemmen MA, MB, MC, M1, M2, M3, M4, M5 und M6
(Kontaktausgänge) getrennt von den Leitungen anderer Steuerklemmen.
• Wenn eine optionale externe Spannungsversorgung verwendet wird, muss es sich um eine UL-gelistete
Spannungsversorgung der Klasse 2 handeln.
• Verwenden Sie für die Steuerstromkreise paarweise verdrillte oder abgeschirmte Kabel, um Betriebsfehler
zu vermeiden.
•
Erden Sie die Kabelabschirmung mit der größtmöglichen Kontaktfläche zwischen Abschirmung und Erdung.
• Kabelabschirmungen müssen an beiden Kabelenden geerdet sein.
Leistungsklemmen
Die Funktionen der Leistungsklemmen werden entsprechend der Klemmensymbole in Tabelle 1
zusammengefasst. Verdrahten Sie die Klemmen ordnungsgemäß für den gewünschten Zweck.
Tabelle 1 Funktionen der Leistungsklemmen (200- und 400-V-Klasse)
Zweck Klemmensymbol
Spannungsversorgung
Frequenzumrichterausgänge U/T1, V/T2, W/T3 23P7 bis 2055 43P7 bis 4055
Zwischenkreis-Klemmen
Bremswiderstand-Anschluss B1, B2 23P7 bis 2018 43P7 bis 4018
DC-Drossel-Anschluss
Anschluss für Bremseinheit
Masse 23P7 bis 2055 43P7 bis 4055
Steuerspannungsversorgung PO, NO 23P7 bis 2055 43P7 bis 4055
R/L1, S/L2, T/L3 23P7 bis 2055 43P7 bis 4055
R1/L11, S1/L21, T1/L31 2022 bis 2055 4022 bis 4055
1,
1, 2
3,
Modell: CIMR-L7Z
200-V-Klasse 400-V-Klasse
23P7 bis 2055 43P7 bis 4055
23P7 bis 2018 43P7 bis 4018
2022 bis 2055 4022 bis 4055
Steuerklemmen
Abb 2 zeigt die Anordnung der Steuerklemmen. Die Funktionen der Steuerklemmen sind in
Tabelle 2 aufgeführt. Verwenden Sie alle Klemmen bestimmungsgemäß.
E(G)
SC SC SC
S1
S2
BB
S3 S4
Abb 2 Anordnung der Steuerklemmen
+V
A1 AC
S5 S6 S7 BB1
M5
M6
M3
MA MB MC
M4
M1
M2
E(G)
DE-7
Page 42

Tabelle 2 Steuerklemmen mit Standardeinstellungen
Typ Nr. Signalbezeichnung Funktion Signalspezifikation
S1 Vorwärts-Start/Stopp-Befehl Vorwärts-Start bei EIN, Stopp bei AUS.
Digitale
Eingangs-
signale
Analoge
Eingangs-
signale
S2 Rückwärts-Start/Stopp-Befehl Rückwärts-Start bei EIN, Stopp bei AUS.
S3 Nenngeschwindigkeit
S4 Inspektionslauf Inspektionslauf bei EIN.
S5 Mittlere Geschwindigkeit
S6 Einfahrgeschwindigkeit
S7 Nicht verwendet –
BB Hardware-Endstufensperre Beide Eingänge müssen aktiviert sein, damit der
SC Bezugspotenzial Digitaleingänge – –
+V
15-V-Spannungsversorgung
A1 Frequenzsollwert 0 bis +10 V/100 % 0 bis +10 V (20 kΩ)
AC Neutralleiter f. analogen Sollwert – –
Abschirmung, Anschlusspunkt
Erde
für optionale Erdungsleiter
M1
Bremsbefehl
(1 Schließerkontakt)
M2
Nenngeschwindigkeit
bei EIN.
Mittlere Geschwindigkeit
bei EIN.
Einfahrgeschwindigkeit
bei EIN.
Funktionen werden
durch die
Einstellungen
H1-01 bis H1-05
ausgewählt.
24 V DC, 8 mA
Optokoppler
Ausgang des Frequenzumrichters aktiviert istBB1 Hardware-Endstufensperre 1
*1
15-V-Spannungsversorgung für analoge Sollwerte
15 V
(Max. Strom: 20 mA)
––
Bremsbefehl bei EIN.
Digitale
Aus-
gangs-
signale
*1. Verwenden Sie diese Spannungsversorgung nicht zur Versorgung von externen Geräten.
*2. Bei Ansteuerung einer Blindlast, wie z. B. einer Relaisspule mit DC-Spannungsversorgung, muss stets eine Freilaufdiode geschaltet werden
M3
Schützsteuerung
(1 Schließerkontakt)
M4
M5
Frequenzumrichter bereit
(1 Schließerkontakt)
M6
MA
Fehlersignalausgang
MB
(1 Wechslerkontakt)
MC
(siehe Abb 3).
Externe
Spannungsversorgung:
max. 30 V DC
Spule
Schützsteuerung bei EIN.
Frequenzumrichter bereit
bei EIN.
Fehler bei Durchgang zwischen MA und MC.
Fehler bei offen zwischen MB und MC.
Freilaufdiode
max. 1 A
MultifunktionsKontaktausgänge
Die Nennspannung der Freilaufdiode
muss mindestens so hoch wie die
Spannung im Steuerstromkreis sein.
Relaiskontakte
Kontaktbelastbarkeit:
max. 1 A bei 250 V AC
max. 1 A bei 30 V DC
Abb 3 Zwischenschaltung der Freilaufdiode
1. In Abb 4 ist die Verdrahtung der digitalen Eingänge S1 bis S7 und BB, BB1 für den Anschluss von Kontakten oder
Transistoren gezeigt (0 V Bezugspunkt und NPN-Modus). Dies ist die Standardeinstellung.
Für den Anschluss von PNP-Transistoren oder für die Verwendung einer externen 24-V-Spannungsversorgung
WICHTIG
siehe Tabelle 3.
2. Für Frequenzumrichter mit max. 18,5 kW sind DC-Drosseln optional erhältlich. Entfernen Sie beim Anschluss
einer DC-Drossel die Kurzschlussbrücke.
*2
NPN/PNP-Auswahl
Die Eingangsklemmenlogik kann zwischen NPN-Betriebsart (0 V Bezugspunkt) und PNP-Betriebsart
(+24 V Bezugspunkt) durch Setzen des Jumpers CN5 umgeschaltet werden. Eine externe Spannungsversorgung
wird ebenfalls unterstützt, wodurch mehr Auswahl bei den Signaleingangsmethoden geboten wird.
DE-8
Page 43

Tabelle 3 NPN/PNP-Betriebsart und Eingangssignale
S1
S2
SC
IP24 V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
S1
S2
SC
IP24 V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
24 V DC
+
S1
S2
SC
IP24 V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
24 V DC
-
Interne Spannungsversorgung – NPN-Modus
Externe Spannungsversorgung – NPN-Modus
Interne Spannungsversorgung – PNP-Modus
1
S
S2
B1
SC
A1 A3
A2
B3B2
CN
IP24 V
5
(+24 V)
Externe Spannungsversorgung – PNP-Modus
DE-9
Page 44

Verdrahten des Frequenzumrichters
AC-Drossel zur Optimierung
des Eingangsleistungsfaktors
(optional)
3-PhasenEingangsspannung
380 bis 480 V
50/60 Hz
PE
Netz-
schütz
L1
L2
L3
Netz-
filter
Link
(+1) (+2)
L1(R)
L2(S)
L3(T)
BremswiderstandsEinheit (optional)
(-)
B1
B2
U/T1
V/T2
W/T3
Motor
IM/PM
Multifunktionseingänge
(Werkseinstellung)
Vorwärts Start/Stopp
Rückwärts Start/Stopp
Nenngeschwindigkeit
Inspektionslauf
Mittlere Geschwindigkeit
Einfahrgeschwindigkeit
Nicht verwendet
Hardware-Endstufensperre
(Hinweis 3)
Spannungsanpas-
Analogeingang
(Drehzahlsollwert)
sung
2 kOhm
Eingangs-Options
0 bis 10 V
karten
2 kOhm
S1
S2
S3
S4
S5
S6
S7
BB
BB1
SC
P
+24 V, 8 mA
IP24V (24 V)
CN5 (NPN-Einstellung)
Erde
+V
Spannungsversorgung für
Analogeingang +15 V, 20 mA
A1
Master-DrehzahlSollwert 0 bis 10 V
AC
0 V
2 CN
PG-X2
(optional)
TA 1
TA 3
TA 2
MA
MB
MC
M1
M2
M3
M4
M5
M6
P
P
A-Impuls
B-Impuls
Z-Impuls
Bremsbefehl
(Werkseinstellung)
Schützsteuerung
(Werkseinstellung)
Frequenzumrichter
bereit
(Werkseinstellung)
Impulsüberwachungsausgang
RS-422
(Kabellänge max. 100 m)
Fehler-Relais
250 V AC, max. 1A
30 V DC, max. 1A
Drehgeber
MultifunktionsRelais
250 V AC, max. 1A
30 V DC, max. 1A
Optionaler Steuerspannungs-
versorgungseingang für
Rettungs- vorgang
Hinweis:
1. Die Leistungsklemmen werden durch doppelte Kreise und
die Steuerklemmen mit einzelnen Kreisen gekennzeichnet.
2. Werksseitig ist CN5 auf NPN eingestellt.
3. Um beide Eingänge des Frequenzumrichters zu aktivieren, müssen
BB und BB1 geschlossen sein. Wenn
nur einer der Eingänge geschlossen ist, wird „BB“ auf der
Bedienkonsole angezeigt, und der Frequenzumrichter läuft nicht an.
an Klemme B1
an Klemme -
P0
Eingang für
Steuerspannungs-
N0
versorgung
Abgeschirmte
Kabel
Abb 4 Schaltplan
3CN
Paarweise
verdrillte Drähte
Ausgangs-Options
karten
DE-10
Page 45

Tastaturbetrieb
Digitale Bedienkonsole (optional)
Die Bezeichnungen der Tasten und die Funktionen der digitalen Bedienkonsole sind unten beschrieben.
Antriebs-Statusanzeigen
FWD: Leuchtet bei Eingang eines „Vorwärts“-Startbefehls.
REV: Leuchtet bei Eingang eines „Rückwärts“-Startbefehls.
SEQ: Leuchtet, wenn ein andere Quelle als die digitale
REF: Leuchtet, wenn für den Frequenzsollwert eine andere
ALARM: Leuchtet beim Auftreten einer Fehlfunktion oder
Datendisplay
Zeigt Überwachungsdaten, Parameternummern und -einstellungen an.
Betriebsartanzeige (wird in der oberen linken Ecke des
Datendisplays angezeigt)
DRIVE: Leuchtet in der Steuerbetriebsart.
QUICK: Leuchtet in der Schnellprogrammierbetriebsart.
ADV: Leuchtet in der erweiterten Programmierbetriebsart.
VERIFY: Leuchtet in der Überprüfungsbetriebsart.
A. TUNE: Leuchtet in der Autotuning-Betriebsart.
Tas ten
Zur Ausführung von Funktionen wie dem Einstellen von
Parametern, Überwachung, Jog-Betrieb und Autotuning.
Bedienkonsole für den Startbefehl gewählt ist.
Quelle als die digitale Bedienkonsole gewählt ist.
eines Alarms.
Tasten der digitalen Bedienkonsole
Taste Bezeichnung Funktion
Schaltet zwischen der Bedienung über die digitale Bedienkonsole (LOCAL) und den
Taste LOCAL/REMOTE
Taste MENU Wählt den Menüeintrag (Modus) aus.
Taste ESC Rückkehr zu dem Status, der vor dem Drücken der Taste DATA/ENTER aktiv war.
Tas te J OG
Tas te F WD/ REV
Tas te S HIF T/R ESE T
Erhöhen-Taste
Verringern-Taste
Einstellungen in b1-01 und b1-02 (REMOTE) um.
Diese Taste kann durch Einstellung des Parameters o2-01 aktiviert oder deaktiviert werden.
Startet den Jog-Betrieb, wenn der Frequenzumrichter über die digitale Bedienkonsole
gesteuert wird und d1-18 auf 0 gesetzt ist.
Wählt die Drehrichtung des Motors, wenn der Frequenzumrichter über die digitale
Bedienkonsole gesteuert wird.
Dient zur Auswahl der aktiven Stelle beim Programmieren von Parametern.
Funktioniert außerdem bei Auftreten eines Fehlers als Rücksetztaste.
Wählt Menüpunkte aus, legt Parameternummern fest und erhöht Einstellwerte.
Wird zum Wechsel zu der nächsten Funktion oder den nächsten Daten verwendet.
Wählt Menüpunkte aus, legt Parameternummern fest und verringert Einstellwerte.
Wird zum Wechsel zu der vorigen Funktion oder den vorigen Daten verwendet.
DE-11
Taste DATA/ENTER Zur Eingabe von Menüeinträgen, Parametern und Änderungen von Parameter-Einstellwerten.
Tas te R UN
Tas te S TOP
Hinweis: Außer in Schaltplänen werden die Tastenbezeichnungen in der obigen Tabelle verwendet.
Startet den Betrieb des Frequenzumrichters, wenn der Frequenzumrichter über die digitale
Bedienkonsole gesteuert wird.
Stoppt den Betrieb des Frequenzumrichters.
Diese Taste kann durch Einstellung des Parameters o2-02 aktiviert oder deaktiviert werden,
wenn die Steuerung nicht über die Bedienkonsole erfolgt.
Page 46

Einschalten und Grundparameter-Einstellungen
Inbetriebnahme
START
Mechanische Installation
Verdrahtung der Haupt- und Steuerstromkreise
Überprüfen Sie die Auswahl der Spannungsversorgung
Schalten Sie die Spannungsversorgung ein
Wählen Sie die die Regelbetriebsart in
Führen Sie das Autotuning für die Motordaten/das Drehgeber-Offset durch
* U/f-Regelung
* Vektorregelung ohne Rückführung
* Vektorregelung mit Rückführungl
* Vektorregelung mit Rückführung für PM
Drehzahlsollwert-
quelle
Analogeingang
Stellen Sie die analogen/ digitalen E/A in den
Parametern H1-xx
, H2-xx und H3-xx ein
für den Drehgeber
* (nur bei geschlossenem Regelkreis)
Parameter A1-02 aus
Seite 16, Autotuning-Verfahren bei Induktionsmotoren
Seite 17, Autotuning-Verfahren bei Synchronmotoren
Digitale Bedienkonsole (b1-02 = 0)
Wählen Sie die Steuersequenz in
Stellen Sie die digitalen E/A in den Parametern
Parameter d1-18 aus
H1-xx und H2-xx ein
Einstellen der
* Beschleunigungs-/Verzögerungszeiten (C1-xx)
* S-Kurven (Ruck) (C2-x)
Probeläufe
Feineinstellung
*Einstellung der Bremssequenz
* Einstellen von Sonderfunktionen
FINISH
Abb 5 Grundlegende Startsequenz
Einstellen der
* voreingestellten Drehzahlwerte (d1-xx)
* Beschleunigungs-/Verzögerungszeiten (C1-xx)
* S-Kurven (Ruck) (C2-xx)
DE-12
Page 47

Vor dem Einschalten
Die folgenden Punkte sollten vor dem Einschalten der Spannungsversorgung sorgfältig überprüft werden.
• Kontrollieren Sie, ob die Versorgungsspannung den Spezifikationen des Frequenzumrichters entspricht.
• Kontrollieren Sie, ob die Kabel der Spannungsversorgung fest an die richtigen Klemmen angeschlossen
sind (L1, L2, L3).
• Kontrollieren Sie, ob die Motorkabel fest an die richtigen Klemmen auf der Frequenzumrichterseite
(U, V, W) und auf der Motorseite angeschlossen sind.
• Kontrollieren Sie, ob die Bremseinheit/der Bremswiderstand richtig angeschlossen ist.
• Kontrollieren Sie, ob und die extern angeschlossenen Geräte die Steuerklemmen richtig verdrahtet sind.
• Setzen Sie alle Steuereingänge des Frequenzumrichters auf AUS.
• Kontrollieren Sie den korrekten Anschluss der Impulsgeber-Drehzahlregelungskarte (sofern vorhanden).
Anzeige nach dem Einschalten
Nach normalem, problemlosen Einschalten enthält die Anzeige der Bedienkonsole die folgenden Informationen:
-DRIVE-
Anzeige bei Normalbetrieb Die Anzeige für die Endstufensperre blinkt.
Endstufensperre
Rdy
BB
Wenn ein Fehler aufgetreten oder ein Alarm aktiviert ist, wird eine Fehler- oder Alarmmeldung angezeigt.
In diesem Fall siehe Seite 28, Werkseinstellungen sind in Fettdruck dargestellt.
Eine Fehler- oder Alarmmeldung wird
angezeigt.
Das Beispiel zeigt einen
Unterspannungsalarm.
Anzeige bei Betriebsstörung
-DRIVE-
UV
Ausfall der
Hauptspannungsversorgung
Auswahl der Regelbetriebsart
Als Erstes muss nach dem Einschalten je nach Maschinentyp eine der vier Betriebsarten ausgewählt werden.
Bei Vektorregelung mit Rückführung sind Impulsgeberkarten erforderlich. Tabelle 4 zeigt die benötigten/
möglichen Impulsgeberkarten für die einzelnen Betriebsarten.
Tabelle 4 Auswahl der Regelbetriebsart
Maschinentyp Regelbetriebsart
Induktionsmotor ohne Drehgeber
Induktionsmotor mit Inkremental-Drehgeber Vektorregelung mit Rückführung 3 PG-B2/PG-X2
Dauermagnet-Motor mit Hiperface-
Yaskawa IPM-Motor mit Inkremental-Drehgeber
y
oder EnDat 2.1-Drehgeber
Vektorregelung mit Rückführung
Vektorregelung mit Rückführung
U/f-Regelung 0 -
Vektorregelung ohne
Rückführung
für PM-Motoren
für PM-Motoren
A1-02
Einstellung
2-
6PG-F2
6PG-X2
Impulsgeberkarte
DE-13
ACHTUNG
• Bei PM-Motoren darf keine andere Regelbetriebsart als Vektorregelung mit Rückführung für PM
(Dauermagnet) verwendet werden (A1-02 = 6). Die Verwendung einer anderen Betriebsart kann
Schäden an der Ausrüstung oder gefährliches Verhalten zur Folge haben.
Page 48

Autotuning
Die Motordaten-Autotuning-Funktion stellt die Parameter für die U/f-Kennlinie (E1-), die MotordatenParameter (E2-, E5-) und die Drehgeberdaten (F1-01) automatisch ein. Die Schritte, die während des
Autotunings ausgeführt werden müssen, sind vom ausgewählten Autotuning-Modus abhängig.
Auswahl des Autotuning-Modus
Der Autotuning-Modus muss entsprechend der gewählten Regelbetriebsart und dem mechanischen System
ausgewählt werden (Motorleerlauf möglich/nicht möglich). Ta b e l le 5 zeigt die wählbaren Autotuning-Modi
für die einzelnen Regelbetriebsarten.
Tabelle 5 Motordaten-Autotuning-Modis
Regelbetriebsart
Vektor-
regelung
ohne
Rück-
führung
Vektor-
regelung
mit Rück-
führung
Autotuning-Modus Funktion
Autotuning bei sich drehendem
Motor
IM-Autotuning bei Motorstillstand
Bestimmung des IMWicklungswiderstands
Drehgeber-Offset-Einstellung
Einstellung aller Motorparameter. 0 No Ja Ja Ja
Einstellung der grundlegenden
Motorparameter.
Ausschließliche Abstimmung des
Wicklungswiderstands
Einstellung des Offsets zwischen
dem Drehgeber und der
magnetischen Nullstellung.
Auswahl
des
Autotuning-
Modus
(T1-01)
1 Nein Ja Ja Nein
2 JaJaJaNein
4 Nein Nein Nein Ja
U/f
Vektor-
regelung
mit Rück-
führung
(PM)
Autotuning-Modis
Autotuning bei sich drehendem Motor (T1-01 = 0)
Dieser Autotuning-Modus kann nur in Verbindung mit einer Vektorregelung eingesetzt werden. Wenn die
Daten vom Typenschild des Motors eingegeben sind, treibt der Frequenzumrichter den Motor für
ca. 1~2 Minuten an; die erforderlichen Motorparameter werden dabei automatisch eingestellt.
Verwenden Sie diesen Autotuning-Modus nur, wenn der Motor frei drehen kann, also alle Seile
entfernt sind und die Bremse gelöst ist. Das Getriebe kann an den Motor angeschlossen bleiben.
WICHTIG
Autotuning bei Motor im Stillstand (T1-01 = 1)
Dieser Autotuning-Modus kann nur bei Vektorregelung mit oder ohne Rückführung für IM verwendet werden.
Der Frequenzumrichter versorgt den Motor ca. eine Minute lang mit Spannung; einige der Motorparameter
werden automatisch eingestellt, während der Motor stillsteht. Der Motorleerlaufstrom und der Wert für den
Motornennschlupf werden automatisch bei der ersten Inbetriebnahme feinabgestimmt. Überprüfen Sie den Wert
für den Motornennschlupf (E2-02) und den Motorleerlaufstrom (E2-03) nach dem ersten Lauf mit Nenndrehzahl.
Bestimmung des Wicklungswiderstandes (T1-01 = 2)
Das Autotuning des Wicklungswiderstandes im Stillstand kann bei U/f-Regelung oder Vektorregelung mit und
ohne Rückführung eingesetzt werden. Der Frequenzumrichter speist den Motor etwa 20 Sekunden lang mit
Strom, um den Motor-Wicklungswiderstand sowie den Kabelwiderstand zu messen. Während dieses
Abstimmungsvorgangs steht der Motor still.
Drehgeber-Offset-Einstellung (T1-01 = 4)
Dieser Autotuning-Modus steht nur bei Vektorregelung mit Rückführung als Regelbetriebsart bei PMMotoren zur Verfügung. Er stellt automatisch den Offset zwischen dem Magnetpol und der Nullstellung des
Drehgebers ein. Er kann zur Neuabstimmung des Offsets nach einem Austausch des Drehgebers ohne
Änderung der Motordaten-Einstellungen verwendet werden.
DE-14
Page 49

Allgemeine Sicherheitshinweise
-
1. Verwenden Sie das rotatorische Autotuning, wenn ein besonders präzises Autotuning erforderlich ist oder der
Motor nicht mit einer Last verbunden ist.
WICHTIG
2. Verwenden Sie immer das Autotuning im Stillstand, wenn die Last nicht vom Motor getrennt werden kann
(z. B. wenn die Seile des Aufzugs nicht entfernt werden können).
3. Stellen Sie sicher, dass die mechanische Bremse beim Autotuning im Stillstand nicht gelöst wird.
4. Die Motorschütze müssen während des Autotunings geschlossen sein.
5. Beim Autotuning müssen die BB- und BB1-Signale AN sein (der Frequenzumrichter darf sich nicht im
Endstufensperr-Zustand befinden).
6. Vergewissern Sie sich, dass der Motor mechanisch gesichert ist und sich nicht bewegen kann.
7. Der Motor wird beim Autotuning mit Strom versorgt, auch wenn er nicht dreht. Berühren Sie den Motor erst
nach Abschluss des Autotunings.
8. Entfernen Sie die Feder aus der Motorwelle, bevor Sie ein Autotuning bei sich drehendem Motor vornehmen, wenn
es sich um einen Standalone-Motor handelt (d.h., wenn kein Antriebsrad oder Getriebe montiert ist).
9. Drücken Sie zum Abbrechen des Autotunings die STOP-Taste auf der digitalen Bedienkonsole.
Sicherheitshinweise für das Autotuning mit Motordrehung und Drehgeber-Offset:
1. Die Last muss vom Motor getrennt sein, d. h., die Seile müssen abgenommen und die Bremse gelöst sein.
2. Kann die Last nicht entfernt werden, kann das Autotuning bei austariertem Fahrkorb vorgenommen werden.
Die Genauigkeit des Autotunings ist in diesem Fall niedriger, was einen Leistungsverlust zur Folge haben kann.
3. Stellen Sie sicher, dass die Bremse beim Autotuning gelöst ist.
4. Während des Autotunings kann der Motor mehrmals gestartet und gestoppt werden. Wenn das Autotuning
beendet ist, wird auf der Bedienkonsole „END“ angezeigt.Berühren Sie den Motor erst, wenn diese Meldung
angezeigt wird und der Motor vollständig zum Stillstand gekommen ist.
Autotuning-Alarme und -Fehler
Dateneingabefehler
In den folgenden Fällen zeigt der Frequenzumrichter die Meldung „Data Invalid“ an und führt das Autotuning
nicht durch:
• Die Motordrehzahl, Nennfrequenz und Polpaarnummer stimmen nicht überein.
Nennfrequenz 60
Motordrehzahl
-----------------
2 · Motorpol
• Der Nennstrom stimmt nicht mit dem Wert der Nennspannung überein.
Der Frequenzumrichter berechnet die Motorleistung aus dem Wert des Eingangsstroms und den Daten aus
der internen Motordaten-Tabelle. Der berechnete Wert muss zwischen 50 % und 150 % des
Eingangswertes für die Nennleistung betragen.
Sonstige Fehler und Alarme während des Autotunings
Eine Übersicht über mögliche Alarme oder Fehler beim Autotuning und die entsprechenden
Gegenmaßnahmen finden Sie auf Seite 27, Autotuning-Fehler.
DE-15
Page 50

Autotuning-Verfahren bei Induktionsmotoren
Abb 6 zeigt das Autotuning-Verfahren bei einem Induktionsmotor mit oder ohne Drehgeber bei U/f- und
Vektorregelung mit und ohne Rückführung.
START
Stellen Sie die
Endstufensperreingänge BB und
BB1 ein
Nein
U/f-Regelung?
(A1-02 = 0)
(A1-02 = 2/3)
Ja
Geben Sie den Autotuning-Modus
ein, und setzen
Sie Parameter T1-01 = 2
Einstellen:
T1-02 - Motornennleistung
T1-04 - Motornennstrom
Drücken Sie die Taste UP, bis
„Tuning Ready“ angezeigt wird
Ja
Kann sich der Motor
frei drehen?
(Seile entfernt?)
Nein
Geben Sie den Autotuning-Modus
ein, und setzen
Sie Parameter T1-01 = 1
Einstellen:
T1-02 - Motornennleistung
T1-03 - Motornennspannung
T1-04 - Motornennstrom
T1-05 - Motornennfrequenz
T1-06 - Anzahl der Motorpole
T1-07 - Motornenndrehzahl
T1-08 - Anzahl der Geberimpulse
(*nur CLV)
Drücken Sie die Taste UP, bis
„Tuning Ready“ angezeigt wird
Schließen Sie das/ die Motorschütz(e)
Geben Sie den Autotuning-Modus
ein, und setzen
Sie Parameter T1-01 = 0
Einstellen:
T1-02 - Motornennleistung
T1-03 - Motornennspannung
T1-04 - Motornennstrom
T1-05 - Motornennfrequenz
T1-06 - Anzahl der Motorpole
T1-07 - Motornenndrehzahl
T1-08 - Anzahl der Geberimpulse
(*nur CLV)
Drücken Sie die Taste UP, bis
„Tuning Ready“ angezeigt wird
Lösen Sie die Bremse
Siehe
Seite 27, Autotuning-Fehler
und beseitigen Sie die Fehlerquelle
Drücken Sie die Taste RUN.
Tuning
Nein
(Fehlercode wird
angezeigt)
Öffnen Sie die Schütze, öffnen Sie die Endstufen-
sperreingänge, und betätigen Sie die Bremse, wenn das Auto-
tuning bei drehendem Motor durchgeführt wurde
erfolgreich ?
(„Tuning successful“
Ja
wird angezeigt)
ENDE
Abb 6 Autotuning bei Induktionsmotoren
DE-16
Page 51

Autotuning-Verfahren bei Synchronmotoren
Abb 7 zeigt das Autotuning-Verfahren bei Dauermagnet-Motoren. Vergewissern Sie sich vor der Abstimmung,
dass die Regelbetriebsart auf PM-Vektorregelung mit Rückführung eingestellt ist (A1-02 = 6).
START
* Seile abnehmen, damit der Motor frei drehen kann
* Endstufensperreingänge BB und BB1 einstellen
Spannungsversorgung einschalten, falls diese
ausgeschaltet ist
Liegt ein OPE06-Fehler
vor?
Ja
Parameter
* n8-35 überprüfen
Nein
Liegt ein CPF24-Fehler
vor?
Ja
Nein
Liegt ein OPE02-Fehler
vor?
Ja
Nein
S3-13 - Antri ebsraddur chmes ser
S3-14 - Seilführung
Lösen Sie die Bremse, schließen Sie das Motorschütz,
drehen Sie den Motor langsam in Vorwärtsrichtung*1, und überprüfen
Mec hanische Kons tanten einstell en:
Sie Anzeige U1-05.
Liegt PGO (keine
Rückmeldung vom
Drehgeber) vor?
S3-15 - Übersetzungsverhältnis
* Ver drahtung überprüfen
Ja
* Spannungsv ersor gung für den D rehgeber
prüfen/ neu absti mmen
Nein
Spannungsversorgung
* F1-01
* Parameter n8-35 überprüfen
* Wenn EnDat/Hiperface verwendet wird
- Spannungsversorgung des Drehgebers überprüfen
- Signalverkabelung von CLOCK und DATA überprüfen
* Spannungsversorgung ausschalten
* Prüfen, ob die richtige Impulsgeberauflösung (F1-01) und
die absolute Geberauflösung (F1-21) eingestellt sind.
* Siehe:
Seite 26, Fehler bei der Programmierung durch den
Anwender (OPE)
und Fehlerquelle beseitigen
ausschalten und prüfen, ob die
richtige Impulsgeberkarte korrekt
installiert ist
DE-17
Ist das Vorzeichen des
U1-05-Wertes positiv
T1- 01 = 0 - Autotuning mi t Motor drehung
T2- 01 - Mot ornennlei stung
T2- 02 - Mot ornennfrequenz
T2- 03 - Mot ornennspannung
(„Tuning successful“ wird angezeigt)
Autotuni ng-Param eter ei nstell en:
Taste UP dr ücken, bi s „T uning Ready“ angezeigt w ird
Motorschütz(e) schließen und Taste RUN drücken
War ten, bis Abstim mung abgesc hlossen i st
Tuni ng erfolgr eich?
Schütze öffnen, Endstufen-
sper reingänge öff nen und Brems e betätigen
Abb 7 Autotuning bei Synchronmotoren
Ja
Ja
(nicht -)?
T2- 04 - Mot ornennstr om
T2- 05 - Anzahl der Mot orpole
T2- 09 - Dr ehgeberaufl ösung
T2- 10 - Mot orspannungsk onstante
ENDE
Nein
Nein
(Fehlercode wird angezeigt)
* 1. Vorwärtsrichtung bedeutet:
Die Richtung, in die der Motor bei einem über Klemme S1 gegebenen
Aufwärts-Befehl dreht (d. h. mit einer im Uhrzeigersinn drehenden
dreiphasigen Spannungsversorgung und einer U-U, V-V, W-WVerdrahtung zwischen Frequenzumrichter und Motor). Normalerweise
erfolgt die Drehung im Uhrzeigersinn, aus Richtung der
Motorwellenseite (Antriebsrad) gesehen.
Nähere Angaben zur Drehrichtung erhalten Sie im Bedienerhandbuch
des Motors oder beim Hersteller.
* Ver drahtung des D rehgebers überprüfen
* Parameter F1-05 ändern
Siehe
Seite 27, Autotuning-Fehler
und besei tigen Sie di e Fehler quelle
Page 52

Drehgeber-Offset-Einstellung bei Synchronmotoren
Abb 8 zeigt das Autotuning-Verfahren bei einer Drehgeber-Offset-Einstellung. Das Verfahren sollte
durchgeführt werden, wenn der Drehgeber ausgetauscht wurde oder nicht korrekt ausgerichtet ist.
Vergewissern Sie sich vor der Abstimmung, dass die Regelbetriebsart PM-Vektorregelung mit Rückführung
ausgewählt ist (A1-02 = 6) und dass die Parameter E1- und E5- korrekt eingestellt sind.
START
Ist es möglich, die Seile
abzunehmen?
Ja
Seile abnehmen.
Endstufensperreingänge BB und BB1
Spannungsversorgung einschalten, falls diese
Lösen Sie die Bremse, schließen Sie das Motorschütz,
drehen Sie den Motor langsam in Vorwärtsrichtung*1, und
einstellen
ausgeschaltet ist.
Liegt ein OPE06-Fehler
vor?
Nein
Liegt ein CPF24-Fehler
vor?
Nein
Liegt ein OPE02-Fehler
vor?
Nein
überprüfen Sie Anzeige U1-05.
Nein
Ja
Ja
Ja
Fahrkorb austarieren, damit er sich nicht mit
gelösten Bremsen bewegen kann.
Hinweis: Die Genauigkeit des Autotuning ist
in diesem Autotuningmodus geringer
Parameter
* F1-01
* n8-35 überprüfen
* Parameter n8-35 überprüfen
* Wenn EnDat/Hiperface verwendet wird
- Spannungsversorgung des Drehgebers überprüfen
- Signalverkabelung von CLOCK und DATA überprüfen
* Spannungsversorgung ausschalten
* Prüfen, ob die richtige Impulsgeberauflösung (F1-01) und
die absolute Geberauflösung (F1-21) eingestellt sind.
* Siehe:
Seite 26, Fehler bei der Programmierung durch
den Anwender (OPE)
und Fehlerquelle beseitigen
Spannungsversorgung
ausschalten und prüfen, ob
die richtige Impulsgeberkarte
korrekt installiert ist
T1-01 = 4 - Drehgeber-Offset-Einstellung
Taste UP drücken, bis „Tuning Ready“
Motorschütz (e) schließen und RUN-Taste
Warten, bis Abstimmung abgeschlossen ist.
(„Tuning successful“
wird angezeigt)
sperreingänge öffnen und Bremse betätigen
Liegt PGO (keine
Rückmeldung vom Drehgeber)
vor?
Nein
Ist das Vorzeichen des
U1-05-Wertes positiv
(nicht -)?
Ja
Einstellen:
angezeigt wird.
drücken.
Tuning erfolgreich?
Ja
Schütze öffnen, Endstufen-
ENDE
Abb 8 Drehgeber-Offset-Autotuning
* Verdrahtung überprüfen
Ja
* Spannungsversorgung für den Drehgeber
prüfen/ neu abstimmen
Nein
Siehe
Seite 27, Autotuning-Fehler
und Fehlerquelle beseitigen.
Nein
(Fehlercode wird
angezeigt)
* 1. Vorwärtsrichtung bedeutet:
Die Richtung, in die der Motor bei einem über Klemme S1 gegebenen
Aufwärts-Befehl dreht (d. h. mit einer im Uhrzeigersinn drehenden
dreiphasigen Spannungsversorgung und einer U-U, V-V, W-WVerdrahtung zwischen Frequenzumrichter und Motor). Normalerweise
erfolgt die Drehung im Uhrzeigersinn, aus Richtung der
Motorwellenseite (Treibscheibe) gesehen.
Nähere Angaben zur Drehrichtung erhalten Sie im Bedienerhandbuch
des Motors oder beim Hersteller.
* Ver drahtung des D rehgebers überprüf en
* Par ameter F1-05 änder n
DE-18
Page 53

Fahrprofil und Sequenzeinstellung
Aufwärts-/Abwärtsbefehle und Drehzahlsollwert-Auswahl
Auswahl der Quelle für den Aufwärts-/Abwärtsbefehl
Die Eingangsquelle für das Aufwärts- und Abwärtssignal kann in Parameter b1-02 ausgewählt werden.
Werksseitig ist der Aufwärts- und Abwärtsbefehl über die Klemmen S1/S2 (b1-02 = 1) eingestellt.
Fahrbefehl in Aufwärts- oder Abwärtsrichtung
Zum Starten des Aufzugs in Aufwärts- oder Abwärtsrichtung müssen folgende Bedingungen erfüllt sein:
• Wenn zur Auswahl des Drehzahlsollwerts digitale Eingänge verwendet werden, muss mindestens ein
Drehzahlsollwert ausgewählt werden.
•
Das Hardwaresignal „Endstufe gesperrt“ (Klemme BB und BB1) muss gesetzt sein (keine Endstufensperrung).
• Zum Starten in die entsprechende Richtung muss das Aufwärts-/Abwärtssignal gesetzt sein.
Fahrtstopp
Der Frequenzumrichter kann wie folgt gestoppt werden:
• Das Signal für den Richtungsbefehl (Aufwärts oder Abwärts) wird aufgehoben.
• Die Auswahl des Drehzahlsollwerts wird aufgehoben, wenn digitale Eingänge zur Auswahl des
Drehzahlsollwerts verwendet werden.
• Wenn d1-18 auf 3 gesetzt sind, werden alle Drehzahleingänge aufgehoben
Auswahl der Quelle für den Drehzahlsollwert
Der Drehzahlsollwert kann über den Parameter b1-01 ausgewählt werden. Werksseitig ist die digitale
Bedienkonsole (b1-01 = 0) eingestellt, d. h., die Drehzahl kann über die digitalen Eingänge gewählt werden.
Drehzahlauswahlsequenz bei Verwendung der Digitaleingänge
Wenn die Digitaleingänge zur Drehzahlauswahl verwendet werden, ist das Drehzahlauswahlverfahren und die
Drehzahlpriorität von der Einstellung für Parameter d1-18 abhängig (Drehzahlprioritätsauswahl).
Multistep-Drehzahlbetrieb 1/2 (Binäreingang) (d1-18 = 0/3)
Wenn d1-18 = 0
Über 3 BCD-Eingänge können bis zu 8 voreingestellte Drehzahlstufen ausgewählt werden (definiert in den
Parametern d1-01 bis d1-08). Der Frequenzumrichter wird mit dem Aufwärts-/Abwärtsbefehl gestartet.
Durch Aufhebung des Aufwärts-/Abwärtsbefehls wird der Frequenzumrichter gestoppt.
Wenn d1-18 = 3
Über 3 BCD-Eingänge können bis zu 7 voreingestellte Drehzahlstufen ausgewählt werden (definiert in den
Parametern d1-02 bis d1-08). Der Frequenzumrichter wird mit dem Aufwärts-/Abwärtsbefehl gestartet.
Er wird gestoppt, wenn der Aufwärts-/Abwärtsbefehl aufgehoben wird oder wenn keine Drehzahl ausgewählt
ist (all D/E aus).
DE-19
Einstellungen für die Multifunktions-Digitalseingänge (H1-01 bis H1-05) (Beispiel)
Klemme Parameter-Nr. Einstellwert Details
S4 H1-02 3 Festfrequenzsollwert 1
S5 H1-03 4 Festfrequenzsollwert 2
S6 H1-04 5 Festfrequenzsollwert 3
Page 54

Drehzahl-Auswahltabelle
A
In der nachstehenden Tabelle sind die Kombinationen aus Digitaleingangssignalen und entsprechender
Drehzahl zusammengestellt.
Ist b1-02 auf 1 gesetzt, wird Frequenzensollwert 1 als analoger Sollwert über Klemme A1 eingegeben.
Geschwin-
digkeit
1 OFF OFF OFF Frequenzsollwert 1 (d1-01) Stopp
2 EIN OFF OFF Frequenzsollwert 2 (d1-02) Frequenzsollwert 2 (d1-02)
3 AUS EIN AUS Frequenzsollwert 3 (d1-03) Frequenzsollwert 3 (d1-03)
4 EIN EIN AUS Frequenzsollwert 4 (d1-04) Frequenzsollwert 4 (d1-04)
5 AUS AUS EIN Frequenzsollwert 5 (d1-05) Frequenzsollwert 5 (d1-05)
6 EIN AUS EIN Frequenzsollwert 6 (d1-06) Frequenzsollwert 6 (d1-06)
7 AUS EIN EIN Frequenzsollwert 7 (d1-07) Frequenzsollwert 7 (d1-07)
8 EIN EIN EIN Frequenzsollwert 8 (d1-08) Frequenzsollwert 8 (d1-08)
Festfrequenz-
sollwert-Befehl 1
Festfrequenz-
sollwert-Befehl 2
Festfrequenz-
sollwert-Befehl 2
d1-18 = 0 d1-18 = 3
Gewählte Frequenz
Separate Eingänge für die Geschwindigkeitsauswahl, hohe Geschwindigkeit hat
Priorität (d1-18 = 1)
Über 4 BCD-Eingänge können bei dieser Einstellung bis zu 6 verschiedene Drehzahlstufen eingestellt und
ausgewählt werden (definiert in den Parametern d1-09 bis d1-17).
Werkseinstellungen für die Digitaleingänge
Klemme Parameter-Nr. Einstellwert Details
S3 H1-01 80 Nenndgeschwindigkeit (d1-09)
S4 H1-02 84 Inspektionsgeschwindigkeit (d1-14)
S5 H1-03 81 Zwischengeschwindigkeit (d1-10)
S6 H1-04 83 Einfahrgeschwindigkeit (d1-17)
„Höhere Geschwindigkeit hat Priorität“ und ein „Einfahrgeschwindigkeit“ ist ausgewählt
(H1- = 83)
Wenn d1-18 auf 1 gesetzt wird und für die Einfahrgeschwindigkeit (H1- = 83) ein MultifunktionsDigitaleingang eingestellt ist, verzögert der Frequenzumrichter nach Aufhebung des gewählten Drehzahlsignals auf
Einfahrgeschwindigkeit (d1-17). Die Inspektionsgeschwindigkeit kann nicht als Fahrgeschwindigkeit ausgewählt
werden. Die höhere Geschwindigkeit hat Priorität gegenüber der Einfahrgeschwindigkeit, d. h., solange eine höhere
Geschwindigkeit ausgewählt ist, wird das Einfahrgeschwindigkeitssignal ignoriert (siehe Abb. unten).
Der Frequenzumrichter stoppt, wenn das Einfahrgeschwindigkeitssignal oder das Aufwärts-/Abwärtssignal
aufgehoben wird.
DC-Bremsung/
Nullservo
Keine Auswirkung
Eingang ist eingestellt
Geschwindigkeit
Hardware-Endstufensperre
Auf-/abwärts
Einfahrgeschwindigkeit
usgewählte Geschwindigkeit
DC-Bremsung/
Nullservo
Priorität höherer Drehzahl ist ausgewählt und ein Einfahrdrehzahleingang wird nicht
ausgewählt (H1-K83)
Wenn der Einfahrgeschwindigkeits-Befehl nicht für einen der digitalen Eingänge ausgewählt ist, verzögert der
Frequenzumrichter bei Aufhebung des ausgewählten Drehzahlsignals auf Einfahrgeschwindigkeit (d1-17).
Die Inspektionsgeschwindigkeit kann nicht als Fahrgeschwindigkeit ausgewählt werden. Um die
Einfahrgeschwindigkeit als Frequenzensollwert auszuwählen, muss die Spannungsausfallerkennung
deaktiviert sein (S3-09=0).
Der Frequenzumrichter stoppt bei Aufhebung des Aufwärts-/Abwärts-Richtungssignals.
DE-20
Page 55

Wenn kein Drehzahlauswahleingang aktiviert ist, wird die Einfahrgeschwindigkeit als Drehzahlsollwert genommen.
A
A
Geschwindigkeit
Hardware-Endstufensperre
Auf-/abwärts
usgewählte Geschwindigkeit
DC-Bremsung/
Nullservo>
DC-Bremsung/
Nullservo
Der Frequenzumrichter stoppt bei Aufhebung des Aufwärts-/Abwärts-Richtungssignals.
Bei dieser Konfiguration stoppt der Antrieb mit der Anzeige „FRL“ (FrequenzensollwertverlustFehler), wenn beim Start kein Drehzahlsollwerteingang ausgewählt ist.
WICHTIG
Um die FRL-Erkennung zu deaktivieren, setzen Sie Parameter S3-09 auf 0.
Separate Eingänge für die Drehzahlauswahl, Einfahrgeschwindigkeit hat Priorität
(d1-18 = 2)
Die Parameter und Voreinstellungen für die Digitaleingänge sind identisch mit der Einstellung "Höhere
Geschwindigkeit hat Priorität" (d1-18 = 1).
Die Einfahrgeschwindigkeit hat Priorität und eine Einfahrgeschwindigkeit ist ausgewählt
(H1- = 83)
Wenn d1-18 auf 2 gesetzt wird und für die Einfahrgeschwindigkeit (H1- = 83) ein MultifunktionsDigitaleingang eingestellt ist, verzögert der Frequenzumrichter auf Einfahrgeschwindigkeit (d1-17), wenn der
Eingang für die Auswahl der Einfahrgeschwindigkeit aktiviert wird. Das Einfahrgeschwindigkeitssignal hat
Priorität gegenüber der ausgewählten Drehzahl, d. h. die ausgewählte Drehzahl wird ignoriert. Die gewählte
Fahrgeschwindigkeit muss sich von der Inspektionsgeschwindigkeit unterscheiden.
Der Frequenzumrichter stoppt, wenn der Einfahrgeschwindigkeitsbefehl aufgehoben wird.
Geschwindigkeit
Hardware-Endstufensperre
Auf-/abwärts
Einfahrgeschwindigkeit
usgewählte Geschwindigkeit
DC-Bremsung/
Nullservo
DC-Bremsung/
Nullservo
Einfahrgeschwindigkeit hat Priorität
Einfahrgeschwindigkeits-Priorität ist ausgewählt und ein Nenngeschwindigkeits-Eingang ist
nicht ausgewählt (H1- K80)
Wenn d1-18 auf 2 gesetzt wird und für die Nenngeschwindigkeit kein Digitaleingang eingestellt ist, entspricht
der Drehzahlsollwert mit Drehzahlauswahleingang der Nenngeschwindigkeit (d1-09). Wenn das Signal für die
Einfahrgeschwindigkeit angelegt wird, beginnt der Frequenzumrichter, auf die Einfahrgeschwindigkeit zu
verzögern. Das Einfahrgeschwindigkeitssignal hat Priorität gegenüber allen anderen
Geschwindigkeitssignalen. Bei Auswahl der Einfahrgeschwindigkeit werden also die Signale für die
Zwischengeschwindigkeiten 1 und 2 sowie für die Nachnivellierung ignoriert.
Der Frequenzumrichter kann durch Aufhebung des Einfahrgeschwindigkeitssignals oder des Aufwärts-/
Abwärtsbefehls gestoppt werden.
ACHTUNG: Diese Sequenz kann gefährlich sein, z. B. wenn die Drehzahlauswahl aus irgendeinem Grund
nicht funktioniert (gerissenes Kabel usw.)..
Geschwindigkeit
Hardware-Endstufensperre
Auf-/abwärts
Einfahrgeschwindigkeit
DC-Bremsung/
Nullservo
DC-Bremsung/
Nullservo
DE-21
Page 56

Einstellungen für Beschleunigung/Verzögerung/Ruckkontrolle
Die Beschleunigungszeit entspricht der benötigten Zeit zur Erhöhung der Drehzahl von 0 % auf 100 % der in
E1-04 eingestellten Maximaldrehzahl. Die Verzögerungszeit entspricht der benötigten Zeit zur Verringerung
der Drehzahl von 100 % auf 0 % des in E1-04 definierten Wertes.
Die standardmäßigen Beschleunigung-/Verzögerungszeiten werden in den Parametern C1-01/02 eingestellt,
die Einstellungen für die Ruckkontrolle (S-Kurve) in den C2-Parametern, wie in Abb 9 gezeigt.
C2-02
C2-03
C2-04
C2-01
Beschl.-Zeit
C1-01
Verz.-Zeit
C1-02
Abb 9 Einstellungen für Beschleunigung/Verzögerung und Ruckkontrolle (S-Kurve)
Bremssequenz
In der nachstehenden Abbildung ist die standardmäßige Bremssequenz gezeigt.
Ausgewählte Drehzahl
S1-04
Nullservo/
S1-16
DC-Bremsung
beim Start
Zählfrequenz
RUN
Frequenzumrichter-Hardware-
Endstufensperre (Digitaleingang)
Bremslösebefehl
RUN-Verzögerungszeit
S1-06
Bremslöse-
Verzögerungszeit
C2-05
Einfahrdrehzahl
Einfahrdrehzahl
Nullservo/
DC-Bremsung
beim Stopp
S1-07
Bremslöse-
Verzögerungszeit
S1-05
S1-19
verzögerung
Schützöffnungs-
Abb 10 Zeitablaufdiagramm der Bremssequenz ohne Drehmomentkompensation beim Start
Trägheitskompensation (Vorsteuerung)
Die Vorsteuerung dient zur Beseitigung von Drehzahlüber- oder -untersteuerungen, indem
Trägheitsauswirkungen kompensiert werden. Sie kann durch die Einstellung von Parameter n5-01 auf
1 aktiviert werden. Anschließend muss die Motorverzögerungszeit n5-05 eingestellt werden.
Autotuning der Motorbeschleunigungszeit (n5-05)
Bevor das n5-02-Autotuning durchgeführt wird, muss das Autotuning der Motordaten und das allgemeine Setup
abgeschlossen sein. Führen Sie die Abstimmung mit den Werkseinstellungen für die n5-
Gehen Sie dazu folgendermaßen vor:
1. Setzen Sie n5-05 auf 1, um das Autotuning zu aktivieren, und gehen Sie zur Drehzahlsollwert-Anzeige zurück.
2. Stellen Sie den Endstufensperreingang ein.
3. Aktivieren Sie den Inspektionsdrehzahl-Eingang. „FFCAL“ blinkt auf der Anzeige als Meldung, dass die
Berechnung läuft.
4. Geben Sie einen Aufwärts-Befehl ein. Der Frequenzumrichter beschleunigt den Motor bis zur Nenndrehzahl.
Heben Sie den Aufwärts-Befehl ein paar Sekunden lang auf, wenn die Höchstdrehzahl erreicht ist.
Parameter durch.
DE-22
Page 57

5. Wenn der Motor gestoppt hat, geben Sie einen Abwärts-Befehl ein. Der Frequenzumrichter beschleunigt
den Motor in Gegenrichtung bis zur Nenndrehzahl. Heben Sie den Abwärts-Befehl ein paar Sekunden lang
auf, wenn die Nenndrehzahl erreicht ist.
Um das Autotuning abzubrechen, setzen Sie Parameter n5-05 auf 0.
1. Die Reihenfolge, in der der Aufwärts- oder Abwärts-Befehl gegeben wird, hat keine Bedeutung.
2. Der werksseitig für n5-01 eingestellte Wert sollte für die Abstimmung nicht geändert werden.
3. Nachdem die Fahrt in beide Richtungen beendet ist, wird Parameter n5-05 automatisch auf 0 zurückgesetzt.
WICHTIG
4. Das Autotuning wird nur dann durchgeführt, wenn der Inspektiongeschwindigkeits-Eingang eingestellt ist.
5. Ändern Sie zwischen den Läufen nicht die mechanischen Konstanten (Last, Trägheit).
Vorsteuerungskompensation/Einstellung der Proportionalverstärkung
• Erhöhen Sie die Verstärkung, um das Ansprechen auf den Drehzahlsollwert zu verbessern.
• Verringern Sie die Verstärkung, wenn Vibrationen oder Schwingungen auftreten.
DE-23
Page 58

Fehlersuche und Fehlerbehebung
Fehler- und Alarmerkennung
Fehler und Alarme sind Schutzfunktionen, die auf ungewöhnliche Bedingungen des Frequenzumrichters/
der Anwendung hinweisen.
Bei einem Alarm wird der Frequenzumrichter nicht unbedingt ausgeschaltet, sondern eine Meldung angezeigt
und eine Alarmausgabe an den Multifunktionsausgängen (H2-01 to H2-03) generiert, wenn dies programmiert
ist. Ein Alarm wird automatisch gelöscht, wenn der Alarmzustand nicht mehr gegeben ist.
Bei einem Fehler wird der Frequenzumrichter sofort ausgeschaltet, eine Meldung angezeigt und der
Fehlerausgang geschaltet. Der Fehler muss manuell zurückgesetzt werden, nachdem die Ursache beseitigt ist.
Die nachfolgenden Tabellen enthalten eine Liste von Fehlern und Alarme mit den entsprechenden
Abhilfemaßnahmen.
Anzeige
BUS
Option Com Err
(blinkt)
CF
Out of Control
CPF00
CPF01
COM-
ERR(OP&INV)
CPF02 - CPF 04
CPF24
Option Comm Err
DEV
Speed Deviation
DV3
DV4
DV6
Über-
beschleunigung
EF0
Opt External Flt
EF
Ext Fault S
EF
Externer Fehler
(blinkt)
Ext Run Active
Cannot Reset
Angezeigt als
Alarm Fehler
Bedeutung Abhilfemaßnahmen
Optionskarten-Kommunikationsalarm
Nachdem die Kommunikation erstmals zustande
gekommen ist, wurde die Verbindung unterbrochen.
Bei Vektorregelung ohne Rückführung wurde
kontinuierlich für die Dauer von mindestens drei
Sekunden ein Drehmomentgrenzwert während eines
Verzögerungsstopps erreicht.
• Kommunikationsfehler 1/2 der digitalen
Bedienkonsole/LED-Überwachungsanzeige
• Kommunikationsfehler zwischen Bedienkonsole
und Frequenzumrichter
• Externer RAM-Fehler der CPU
• Fehler bei der Endstufensperrschaltung
•EEPROM-Fehler
• Fehler am internen A/D-Wandler der CPU
Hiperface - serieller Kommunikationsfehler
Wird erkannt, wenn 200 mSek. lang keine Daten vom
Drehgeber empfangen wurden
F1-04 = 0, 1 oder 2 und A1-02 = 3 oder 6
Die Drehzahlabweichung ist für einen längeren als den in
F1-11 festgelegten Zeitraum höher als die Einstellung in
F1-10.
F1-04 = 3 und A1-02 = 3 oder 6
Die Drehzahlabweichung ist für einen längeren als den in
F1-11 festgelegten Zeitraum höher als die Einstellung in
F1-10.
Falsche Drehrichtung
Wird erkannt, wenn die Drehzahlabweichung über 30 %
beträgt und der Drehmomentsollwert und die
Beschleunigung unterschiedliche Vorzeichen haben.
Falsche Drehrichtung
Wird erkannt, wenn F1-19 ungleich 0 ist, der
Drehmomentsollwert und die Motordrehzahl
unterschiedliche Vorzeichen haben und der in F1-19
eingestellte Erkennungsgrenzwert überschritten wird.
Eine Überbeschleunigung des Fahrkorbs wurde erkannt
(nur wenn A1-02 = 6)
Externes Fehlersignal von der KommunikationsOptionskarte
Externer Fehler an Klemme S ( steht für
die Klemmen S3 bis S7)
Gleichzeitige Eingabe von Vorwärts-/Rückwärtsbefehl
Sowohl der Vorwärts- als auch der Rückwärtsbefehl
werden für 500 ms oder länger gleichzeitig eingegeben.
Der Motor wird durch diesen Alarm gestoppt.
Während des Betriebs wurde eine Fehlerrücksetzung
versucht.
Überprüfen Sie die Anschlüsse und alle durch den
Anwender vorgenommenen Software-Konfigurationen.
Überprüfen Sie die Motorparameter.
• Trennen Sie die digitale Bedienkonsole/LEDÜberwachungsanzeige, und schließen Sie sie erneut an.
• Tauschen Sie den Frequenzumrichter aus.
• Schalten Sie den Frequenzumrichter aus und anschließend
wieder ein.
• Tauschen Sie den Frequenzumrichter aus.
• Führen Sie eine Initialisierung auf die werksseitigen
Einstellungen durch.
• Schalten Sie den Frequenzumrichter aus und anschließend
wieder ein.
• Tauschen Sie den Frequenzumrichter aus.
Überprüfen Sie den Drehgeberanschluss, oder tauschen Sie
nötigenfalls den Drehgeber aus
• Vermindern Sie die Last.
• Verlängern Sie die Beschleunigungs- und
Verzögerungszeit.
• Überprüfen Sie das mechanische System.
• Überprüfen Sie die Einstellungen in F1-10 und F1-11.
• Überprüfen Sie die Sequenz und kontrollieren Sie, ob die
Bremse gelöst wird, wenn der Frequenzumrichter beginnt,
die Drehzahl zu erhöhen.
• Überprüfen Sie die Verdrahtung des Impulsgebers
• Korrigieren Sie die Verdrahtung
• Überprüfen Sie die Richtung des Impulsgebers, und
führen Sie ein Autotuning für das Drehgeber-Offset durch
• Reduzieren Sie die Last, und überprüfen Sie die Bremse
• Überprüfen Sie die Richtung des Impulsgebers, und
führen Sie ein Autotuning für das Drehgeber-Offset durch
• Reduzieren Sie die Last, und überprüfen Sie die Bremse
• Reduzieren Sie die Last
• Überprüfen Sie die Richtung des Impulsgebers,
kontrollieren Sie F1-22, und führen Sie eine Abstimmung
für das Drehgeber-Offset durch.
• Überprüfen Sie die Einstellungen in S3-13, S3-14 und S3-15.
• Passen Sie die Beschleunigungs- und Verzögerungszeit an.
• Überprüfen Sie, ob ein externer Fehlerzustand vorliegt.
• Überprüfen Sie die Parameter.
• Überprüfen Sie die Kommunikationssignale.
Beseitigen Sie die Ursache des extern bedingten Fehlers.
Überprüfen Sie die Logik der externen Sequenz, sodass
jeweils nur ein Eingangssignal empfangen wird.
• Heben Sie das Richtungssignal auf, und versuchen Sie die
Fehlerrücksetzung erneut.
• Wenn die Fehlerrücksetzung über eine SPS erfolgt,
überprüfen Sie die Sequenz.
DE-24
Page 59

Anzeige
FF_CAL
FRL
Ref Missing
GF
Erdschlussfehler
LF
Output Phase
Loss
OC
Over Current
OH
Heatsink
Overtemp
OH1
Heatsink Max
Tem p
OL1
Motor Overload
OL2
Inv Overload
OS
Motor Over speed
Det
OV
DC Bus Overvolt
PF
Input Phase Loss
PGO
PG Open
(Ausfall des
Impulsgeber-
Signals)
Angezeigt als
Alarm Fehler
(nur
bei
Stopp-
bedin-
gung)
Bedeutung Abhilfemaßnahmen
Vorsteuerung Motorbeschleunigungszeit aktiv
Vor dem Start des Frequenzumrichters wurde keine
Drehzahl ausgewählt.
Der Erdschlussstrom am Frequenzumrichterausgang
überschreitet 50 % des FrequenzumrichterNennausgangsstroms und L8-09 = 1
(Erdschlussfehlerschutz aktiviert).
Am Ausgang des Frequenzumrichters ist ein
Phasenausfall aufgetreten.
Der Fehler wird erkannt, wenn der Ausgangsstrom auf
unter 5 % des Frequenzumrichter-Nennstroms fällt und
L8-07 = 1 (aktiviert) ist.
Der Ausgangsstrom des Frequenzumrichters hat den
Überstrom-Erkennungspegel überschritten.
L8-03 = 0,1 oder 2, und die Temperatur des
Frequenzumrichter-Kühlkörpers hat den Wert in L8-02
überschritten.
Der Kühllüfter des Frequenzumrichters funktioniert nicht
mehr.
L8-03 = 3, und die Temperatur des FrequenzumrichterKühlkörpers hat den Wert in L8-02 überschritten.
Die Temperatur des Frequenzumrichter-Kühlkörpers hat
105 C überschritten.
Der Kühllüfter des Frequenzumrichters funktioniert nicht
mehr
Wird erkannt, wenn L1-01 auf 1,2 oder 3 gesetzt ist und
der Ausgangsstrom des Frequenzumrichters die MotorÜberlastkurve überschritten hat.
Die Überlastkurve kann über die Parameter E2-01
(Motornennstrom), L1-01 (Auswahl der
Motorschutzfunktion) und L2-02 (MotorschutzZeitkonstante) eingestellt werden.
Der Ausgangsstrom des Frequenzumrichters hat die
Überstromgrenze überschritten.
F1-03 = 0, 1 oder 2, und A1-02 ist auf 3 oder 6 gesetzt.
Die Motordrehzahlrückführung (U1-05) hat den Wert in
F1-08 mindestens um die in F1-09 eingestellte Zeit
überschritten.
F1-03 = 3, und A1-02 ist auf 3 oder 6 gesetzt.
Die Motordrehzahlrückführung (U1-05) hat den Wert in
F1-08 mindestens um die in F1-09 eingestellte Zeit
überschritten.
Die Zwischenkreisspannung hat den ÜberspannungsErkennungspegel überschritten.
Standard-Erkennungsspannungen sind:
200-V-Klasse: 410 V DC
400-V-Klasse: 820 V DC
Zu hohe Welligkeit der Zwischenkreisspannung.
Wird nur erkannt, wenn L8-05 = 1 (aktiviert)
F1-02 = 0, 1 oder 2 und A1-02 = 3 oder 6
Für einen längeren als in der Einstellung F1-14
festgelegten Zeitraum werden keine Impulse vom
Impulsgeber (Drehgeber) empfangen.
F1-02 = 3 und A1-02 = 3 oder 6.
Für einen längeren als in der Einstellung F1-14
festgelegten Zeitraum werden keine Impulse vom
Impulsgeber (Drehgeber) empfangen.
• Führen Sie den gesamten Autotuningvorgang durch
• Um das Autotuning abzubrechen, setzen Sie Parameter
n5-05 = 0.
Überprüfen Sie die Drehzahlauswahl/Startsequenz.
• Klemmen Sie den Motor ab, und betreiben Sie den
Frequenzumrichter ohne Motor.
• Prüfen Sie den Motor auf eine Phase mit Erdschluss.
• Prüfen Sie den Ausgangsstrom mit einem Stromprüfer,
um die DCCT-Werte zu kontrollieren.
• Überprüfen Sie die Steuersequenz auf falsche
Motorschütz-Signale.
• Setzen Sie den Fehler zurück, nachdem Sie die Ursache
behoben haben.
• Überprüfen Sie die Leistung des Motors und die Leistung
des Frequenzumrichters.
• Klemmen Sie den Motor ab, und betreiben Sie den
Frequenzumrichter ohne Motor.
• Prüfen Sie den Motor auf einen Kurzschluss zwischen den
Phasen.
• Prüfen Sie die Beschleunigungs-/Verzögerungszeiten
•(C1-).
• Prüfen Sie den Ausgang des Frequenzumrichters auf einen
Kurzschluss zwischen den Phasen.
• Überprüfen Sie die Lüfter bzw. Kühlkörper auf
Schmutzansammlungen.
• Reduzieren Sie die Umgebungstemperatur für den
Frequenzumrichter.
• Tauschen Sie den/die Kühllüfter aus.
• Überprüfen Sie die Lüfter bzw. Kühlkörper auf
Schmutzansammlungen.
• Reduzieren Sie die Umgebungstemperatur für den
Frequenzumrichter.
• Tauschen Sie den/die Kühllüfter aus.
• Überprüfen Sie die Zykluszeit und die Größe der Last
ebenso wie die Beschleunigungs-/Verzögerungszeiten
erneut
•(C1-).
• Überprüfen Sie die U/f-Kennlinie (E1-).
• Überprüfen Sie die Einstellung des Motornennstroms (E2-
01).
• Überprüfen Sie die Zykluszeit und die Größe der Last
ebenso wie die Beschleunigungs-/Verzögerungszeiten
erneut
•(C1-).
• Überprüfen Sie die U/f-Kennlinie (E1-).
• Überprüfen Sie die Einstellung des Motornennstroms (E2-01).
• Passen Sie die ASR-Einstellungen in der Parametergruppe
C5 an.
• Überprüfen Sie die Sollwertschaltung und die
Sollwertverstärkung.
• Überprüfen Sie die Einstellungen in F1-08 und F1-09.
• Verlängern Sie die Verzögerungszeit (C1-02/04/06/08),
oder schließen Sie eine Bremsoption an.
• Prüfen Sie die Versorgungsspannung, und verringern Sie
die Spannung, damit sie den Spezifikationen des
Frequenzumrichters entspricht.
• Überprüfen Sie den Bremstransistor/-widerstand.
• Ziehen Sie die Schrauben der Eingangsklemmen fest.
• Überprüfen Sie die Versorgungsspannung.
• Reparieren Sie die defekte/unterbrochene Verdrahtung.
• Korrigieren Sie die Verdrahtung.
• Sorgen Sie für eine ordnungsgemäße
Spannungsversorgung des
• Impulsgebers.
• Überprüfen Sie die Sequenz und kontrollieren Sie, ob die
Bremse gelöst wird, wenn der Frequenzumrichter beginnt,
die Drehzahl zu erhöhen.
DE-25
Page 60

Anzeige
PUF
DC Bus Fuse
Open
RR
DynBrk Transistr
SE1
Sequence Error 1
SE2
Sequence Error 2
SE3
Sequence Error 3
SVE
Zero Servo Fault
UV1
DC Bus
Undervolt
UV2
CTL PS
Undervolt
Angezeigt als
Alarm Fehler
(nur
bei
Stoppb
edingu
ng)
Bedeutung Abhilfemaßnahmen
Die Sicherung im Zwischenkreis ist durchgebrannt.
Vorsicht:
Der Frequenzumrichter darf nach dem Ersatz der
Zwischenkreis-Sicherung nicht ohne Prüfung auf
kurzgeschlossene Komponenten in Betrieb
genommen werden.
Der interne Transistor für generatorisches Bremsen
ist ausgefallen.
Während der in S1-16 eingestellten Zeit konnte keine
Ausgangsschütz-Bestätigung erkannt werden.
Der Ausgangsstrom betrug beim Start unter 25 % des
Leerlaufstroms.
Der Ausgangsstrom betrug beim Betrieb unter 25 %
des Leerlaufstroms.
Die Position des Motors hat sich während des
Positionier-Betriebs geändert.
Die Zwischenkreisspannung liegt unterhalb des
Grenzwertes für Unterspannungserkennung
(L2-05). Die Standardeinstellungen sind:
200-V-Klasse: 190 V DC
400-V-Klasse: 380 V DC
Hauptstromkreisschütz-Betriebsfehler
Das Schütz reagiert nicht während des Betriebs des
Frequenzumrichters.
Steuerungs-Versorgungsspannung zu gering
Unterspannung der Steuerschaltung während des
Frequenzumrichterbetriebs.
• Prüfen Sie den Motor und die Motorkabel auf
Kurzschlüsse oder Beschädigungen der Isolierung
(zwischen den Phasen).
• Ersetzen Sie den Frequenzumrichter.
• Schalten Sie den Frequenzumrichter aus und
anschließend wieder ein.
• Tauschen Sie den Frequenzumrichter aus.
Überprüfen Sie das Ausgangsschütz.
Überprüfen Sie das Ausgangsschütz.
Überprüfen Sie das Ausgangsschütz.
• Erhöhen Sie den Drehmomentgrenzwert.
• Verringern Sie das Lastdrehmoment.
• Überprüfen Sie, ob Signalstörungen vorhanden sind.
• Prüfen Sie die Eingangsspannung.
• Überprüfen Sie die Verdrahtung der Eingangsklemmen.
• Überprüfen Sie die Eingangsspannung und die
Verdrahtung der Eingangsklemmen.
• Verlängern Sie die Einstellungen in den Parametern
• C1-01/03/05/07
Tauschen Sie den Frequenzumrichter aus.
• Klemmen Sie alle Anschlüsse an den Steuerklemmen
ab, und schalten Sie den Frequenzumrichter aus und
anschließend wieder ein.
• Tauschen Sie den Frequenzumrichter aus.
Fehler bei der Programmierung durch den Anwender (OPE)
Ein Fehler bei der Programmierung durch den Anwender (OPE) tritt auf, wenn zwei oder mehr miteinander
verknüpfte Parameter fehlerhaft eingestellt wurden oder eine einzelne Parametereinstellung falsch ist. Der
Frequenzumrichter kann erst dann in Betrieb genommen werden, wenn der Parameter richtig eingestellt wird.
Es werden jedoch keine anderen Alarme oder Fehler ausgegeben. Wenn ein OPE auftritt, ändern Sie den
entsprechenden Parameter, indem Sie überprüfen, ob eine der in der unten stehenden Tabelle beschriebenen
Ursachen vorliegt. Wenn ein OPE angezeigt wird, drücken Sie die ENTER-Taste, um U1-34 (OPE Detected)
anzuzeigen. Diese Überwachungsanzeige zeigt den Parameter an, der diesen OPE-Fehler verursacht.
Anzeige Bedeutung Abhilfemaßnahmen
OPE01
kVA Selection
OPE02-
Grenzwert
OPE03
Klemme
OPE05
Sequence
Select
OPE06
PG Opt
Missing
OPE08
Constant
Selection
OPE10
V/f Ptrn
Setting
Fehler bei der Leistungseinstellung (kVA) für den Frequenzumrichter
Parametereinstellung außerhalb des zulässigen Bereichs
Hiperface ausgewählt (n8-35=4) und:
• F1-01 ist anders als 512 oder 1024
• F1-21 ist auf 2 gesetzt
EnDat ausgewählt (n8-35=5) und:
• F1-01 ist anders als 512 oder 2048
• F1-21 ist auf 0 oder 1 gesetzt
Fehler bei der Auswahl des Multifunktionseingangs (H1-01 bis H1-05):
• Für zwei oder mehr Multifunktionseingänge wurde dieselbe
Einstellung gewählt.
• „Externe Endstufensperre Schließer“ (8) und „externe
Endstufensperre Öffner“ (9) wurden gleichzeitig ausgewählt.
Für den NOT-AUS-Befehl wurden „Schließer“ (15) und „Öffner“
(17) gleichzeitig eingestellt.
Fehler bei der Auswahl des RUN-/Sollwertbefehls
Der Parameter zur Auswahl der Sollwertquelle (b1-01) und/oder zur
Auswahl der RUN-Befehlsquelle (b1-02) wurde auf 3 (Optionskarte)
eingestellt, es wurde jedoch keine Optionskarte installiert.
Fehler bei der Auswahl der Regelungsart/Impulsgeberkarte fehlt
Funktionsauswahlfehler Überprüfen Sie die Regelbetriebsart und die Funktion.
U/f-Parametereinstellungsfehler
Geben Sie die korrekte kVA-Einstellung in o2-04 ein.
Überprüfen Sie die Parametereinstellungen.
Überprüfen Sie die Parametereinstellungen in H1-.
• Überprüfen Sie, ob die Karte installiert wurde. Schalten
Sie die Versorgungsspannung aus, und installieren Sie die
Optionskarte neu.
• Überprüfen Sie die Einstellung von b1-01 und b1-02.
Überprüfen Sie die in Parameter A1-02 ausgewählte
Regelbetriebsart und/oder die Installation der ImpulsgeberOptionskarte.
Überprüfen Sie die Parameter (E1-). Ein Frequenz-/
Spannungswert wurde möglicherweise höher eingestellt als
die maximal zulässige Frequenz/Spannung.
DE-26
Page 61

Autotuning-Fehler
In der nachfolgenden Tabelle sind Autotuning-Fehler aufgeführt. Wenn einer der folgenden Fehler erkannt
wird, wird der entsprechende Fehler auf der digitalen Bedienkonsole angezeigt, und der Motor läuft bis zum
Halt aus. Es wird kein Fehler- oder Alarmausgang geschaltet.
Anzeige Bedeutung Abhilfemaßnahmen
Accelerate
End - 1
V/f Over Setting
End - 2
Saturation
End - 3
Rated FLA Alm
Fehler Motordatenfehler
I-det. Circuit
KE_ERR
(nur PM-Motoren)
LD_ERR
(nur PM-Motoren)
Leakage Induc-
tance Fault
Minor Fault
Motordrehzahl
No-Load Current Leerlaufstrom-Fehler • Überprüfen Sie die Eingabedaten.
Resistance Fehler bei Bestimmung des Motor-Wicklungswiderstandes
Rated slip Nennschlupf-Fehler
RS_ERR
(nur PM-Motoren)
STOP key Drücken der STOP-Taste -
Z_SRCH_ERR
(nur PM-Motoren)
Beschleunigungsfehler (wird nur beim rotatorischen
Autotuning erkannt)
Der Motor hat nicht in der vorgegebenen Zeit beschleunigt.
U/f-Einstellungsalarm
Wird nach Abschluss des Autotunings angezeigt.
Der Drehmomentsollwert hat während des Autotunings 100 %
und der Leerlaufstrom 70 % überschritten.
Motorsättigungsfehler
Wird nach Abschluss des Autotunings angezeigt.
Wird nur beim rotatorischen Autotuning erkannt.
Nennstromeinstellungsalarm
Wird nach Abschluss des Autotunings angezeigt.
Der während des Autotunings gemessene Wert des
Motornennstroms (E2-01) war höher als der Einstellwert.
Stromerkennungsfehler
Der Strom lag über dem Motornennstrom, oder eine
Ausgangsphase ist offen.
Spannungskonstantenfehler Überprüfen Sie die Verdrahtung des Motors.
Induktivitätsfehler Überprüfen Sie die Verdrahtung des Motors.
Die Messung der Streuinduktivität hat einen Fehler verursacht.
Der Strom bei der Abstimmung der Streuinduktivität war zu
hoch oder zu niedrig (nur bei Vektorregelung mit Rückführung
für PM-Motoren)
Alle oben aufgelisteten Alarme treten beim Autotuning auf
oder wenn sich der Frequenzumrichter beim Start der
Abstimmung im Endstufensperr-Zustand befand.
Motordrehzahlfehler
Wird nur beim rotatorischen Autotuning erkannt.
Der Drehmomentsollwert hat bei der Beschleunigung 100 %
überschritten.
Wird nur erkannt, wenn A1-02 auf 2 gesetzt ist
(Vektorregelung ohne Rückführung).
Wicklungswiderstand-Fehler
Alle Drehgeber:
Die Motordrehzahl hat beim Start des Autotunings 20 U/min
überschritten.
Die Bestimmung der Magnetpolstellung konnte nicht in der
angegebenen Zeit durchgeführt werden.
Impulsgeber mit Z-Impuls
Der Unterschied zwischen zwei Messungen der
Magnetpolstellung betrug mehr als 3°.
Serielle Drehgeber:
Der Unterschied zwischen zwei Messungen der
Magnetpolstellung betrug mehr als 5°, oder es ist bei der
Abstimmung ein serieller Kommunikationsfehler des
Drehgebers aufgetreten.
• Erhöhen Sie C1-01 (Beschleunigungszeit 1).
• Erhöhen Sie L7-01 und L7-02 (Drehmomentbegrenzungen), fall
sie niedrig sind.
• Nehmen Sie die Seile ab, und wiederholen Sie die Abstimmung.
• Überprüfen Sie die Motoreinstellungen, und korrigieren Sie sie
entsprechend.
• Wenn der Motor und die Maschine angeschlossen sind, trennen Sie
den Motor von der Maschine.
• Überprüfen Sie die Eingabedaten.
• Überprüfen Sie die Verdrahtung des Motors.
• Wenn der Motor und die Maschine angeschlossen sind, trennen Sie
den Motor von der Maschine.
Überprüfen Sie den Wert des Motornennstroms.
• Überprüfen Sie die Eingabedaten.
• Die Leistung des Motors und des Frequenzumrichters passen nicht
zusammen. Überprüfen Sie die Leistung des Frequenzumrichters
und die Leistung des Motors.
• Überprüfen Sie den Motornennstrom und den Leerlaufstrom.
Überprüfen Sie die Verdrahtung des Frequenzumrichters sowie die
Befestigung.
• Überprüfen Sie die Verdrahtung des Motors.
• Überprüfen Sie den Nennstrom-Eingangswert des Motors
• Verringern oder erhöhen Sie den Stromwert für die Abstimmung
der Streuinduktivität, indem Sie Parameter n8-46 ändern.
• Verlassen Sie das Autotuning-Menü, überprüfen Sie den
Alarminhalt, und beseitigen Sie die Ursache, wie in der obigen
Alarmliste beschrieben.
• Überprüfen Sie die Eingabedaten.
• Achten Sie darauf, dass sich der Frequenzumrichter bei der
Abstimmung nicht im Endstufensperr-Zustand befindet.
• Wenn der Motor an die Maschine angeschlossen ist, trennen Sie
die Verbindung.
• Erhöhen Sie C1-01 (Beschleunigungszeit 1).
• Überprüfen Sie die Eingabedaten (besonders die Anzahl der
Geberimpulse/Umdrehung und die Anzahl der Motorpole).
• Führen Sie ein Autotuning im Stillstand durch
• Überprüfen Sie die Verdrahtung des Motors.
• Wenn der Motor an die Maschine angeschlossen ist, trennen
Sie die Verbindung.
• Wenn die Einstellung von T1-03 höher ist als die
Eingangsversorgungsspannung des Frequenzumrichters
(E1-01), ändern Sie die Eingabedaten.
• Überprüfen Sie die Verdrahtung des Motors.
• Überprüfen Sie die Motor-Eingabedaten
• Nehmen Sie die Seile ab, und wiederholen Sie das Autotuning
• Überprüfen Sie den die Drehrichtung des Drehgebers, und ändern
Sie nötigenfalls F1-05.
• Überprüfen Sie die Verdrahtung des Drehgebers
(Reihenfolge, Abschirmung usw.)
• Überprüfen Sie die Spannungsversorgung des Drehgebers.
Tauschen Sie den Drehgeber aus.
DE-27
Page 62

Parametertabelle
Hinweis:Werkseinstellungen sind in Fettdruck dargestellt.
Param.
Nr.
Bezeichnung Beschreibung
Daten initialisieren
Sprachauswahl für
die Anzeige der
A1-00
digitalen
Bedienkonsole (nur
JVOP-160-OY)
Parameter-
A1-01
zugriffsebene
Auswahl der
A1-02
Steuerungsart
A1-03 Initialisierung
0:Englisch
1:Japanisch
2:Deutsch
3:Französisch
4:Italienisch
5:Spanisch
6:Portugiesisch
0:Nur Anzeige (Anzeige der Betriebsart
und Einstellung von A1-01 und A1-04.)
1:Dient zur Auswahl von
Anwenderparametern (nur in A2-01 bis
A2-32 eingestellte Parameter können
gelesen und eingestellt werden).
2:Erweitert
(Parameter der
Schnellprogrammierbetriebsart (Q) und
der erweiterten Programmierbetriebsart
(A) können gelesen und eingestellt
werden).
0:U/f-Regelung
2:Vektorregelung ohne Rückführung
3:Vektorregelung mit Rückführung
6:Vektorregelung mit Rückführung für
Synchron-Motore
0: Keine Initialisierung
1110:Initialisierung auf Anwender- parameter
2220:.Initialisierung auf Werkseinstellungen
Sequenz/Sollwertquelle
Auswahl der
b1-01
Sollwertquelle
Auswahl der RUN-
b1-02
Befehlsquelle
0:Digitale Bedienkonsole
1:Steuerklemme (Analogeingang)
3:Optionskarte
0:Digitale Bedienkonsole
1:Steuerklemme (Multifunktions-
Digitaleingänge)
3:Optionskarte
Beschleunigungs-/Verzögerungseinstellungen
Beschl.-/Verzög.-
C1-
C2-
).
Zeit 1
S-KurvenCharakteristik
Siehe Seite 1-22
Einstellung der S-Kurven-Zeiten bei
Drehzahländerungen, um das Rucken zu
reduzieren. Siehe Seite 1-22
Schlupfkompensation
Schlupfkompensati
C3-01
onsverstärkung
Schlupfkompen-
C3-02
sationsVerzögerungszeit
• Erhöhen Sie den Einstellwert, wenn die
Schlupfkompensation zu niedrig ist.
• Verringern Sie den Einstellwert, wenn
die Schlupfkompensation zu hoch ist.
• Verringern Sie die Wert, wenn die
Schlupfkompensation schlecht anspricht.
• Erhöhen Sie die Einstellung, wenn die
Drehzahl nicht stabil ist.
Automatische Drehzahlregelung (ASR):
ASR-Proportional-
C5-01
verstärkung (P) 1
ASR-
C5-02
Integrationszeit (I) 1
ASR-Proportional-
C5-03
verstärkung (P) 2
ASR-
C5-04
Integrationszeit (I) 2
ASR-
C5-06
Verzögerungszeit
ASR-
C5-07
Schaltfrequenz
Einstellung der Proportionsverstärkung
1 und der Integralzeit 1 des
Drehzahlregelkreises (ASR) für die
Frequenz C5-07.
Einstellung der Proportionsverstärkung
2 und der Integralzeit 2 des
Drehzahlregelkreises (ASR) für die
Mindestfrequenz.
Die Einstellung ist nur bei Beschleunigung
aktiv.
Einstellung der ASR-Verzögerungszeit.
Einstellung der Frequenz für die
Umschaltung zwischen ASRProportionalverstärkung 1, 2,3 und ASRIntegralzeit 1, 2, 3.
Param.
C5-09
C5-10
Bezeichnung Beschreibung
Nr.
ASR-Proportionalverstärkung (P) 3
ASRIntegrationszeit (I) 3
Einstellung der Proportionsverstärkung
3 und der Integralzeit 3 des
Drehzahlregelkreises (ASR) für die
Mindestfrequenz.
Die Einstellung ist nur bei Verzögerung
aktiv.
Auswahl der Taktfrequenz
C6-02
C6-11
Auswahl der
Taktfrequenz 1
Auswahl der
Taktfrequenz 2
Auswahl der Taktfrequenz für die
Regelungsarten von Asynchronmotoren.
Auswahl der Taktfrequenz für die
Regelungsarten von Synchron-Motoren.
Drehzahleinstellungen
d1-01
Festdrehzahl-Sollw.
bis
1 bis 8
d1-08
Nenngesch-
d1-09
windigkeit
Mittl.
d1-10
Geschwindigkeit 1
Mittl.
d1-11
Geschwindigkeit 2
Mittl.
d1-12
Geschwindigkeit 3
Nachnivell.-
d1-13
Geschwindigkeit
Inspekt.-
d1-14
Geschwindigkeit
Einfahrgesch-
d1-17
windigkeit
Drehzahl-
d1-18
prioritätsauswahl
Siehe Seite 19, Drehzahlauswahlsequenz
bei Verwendung der Digitaleingänge
0:Festdrehzahl-Sollw. verwenden (d1-01
bis d1-08)
1:Hohe Geschwindigkeit hat Priorität.
2:Einfahrgeschwindigkeit hat Priorität.
3:Festdrehzahl-Sollwert verwenden
Wenn keine Drehzahl ausgewählt ist,
wird das Aufwärts-/Abwärtssignal
ausgeschaltet
Siehe Seite 1-19
Einstellungen für U/f-Kennlinie
Einstellung der
E1-01
Eingangsspannung
Maximale
E1-04
Ausgangsfrequenz
(FMAX)
Max.
E1-05
Ausgangsspannung
(VMAX)
Motornennfrequenz
E1-06
(FA)
Spannung bei
mittlerer
E1-08
Ausgangsfrequenz
(VB)
Spannung bei min.
E1-10
Ausgangsfrequenz
(VMIN)
Motornennspannung
E1-13
(VBASE)
Diese Einstellung dient als Referenzwert
für die Schutzfunktionen.
Ausgangsspannung (V)
Zur Einstellung der U/f-Charakteristik mit
linearer Kennlinie stellen Sie für E1-07
und E1-09 die selben Werte ein. In diesem
Fall wird die Einstellung für E1-08
übergangen.
Stellen Sie sicher, dass die vier Frequenzen
immer auf folgende Weise eingestellt
werden:
E1-04 (FMAX) ≥ E1-06 (FA) > E1-07
(FB) ≥ E1-09 (FMIN)
Frequenz (Hz)
DE-28
Page 63

Param.
Nr.
Bezeichnung Beschreibung
Einstellungen für Motordaten
E2-01 Nennstrom
E2-02 Nennschlupf
E2-03 Leerlaufstrom
E2-04 Anzahl der Pole
Wicklungs-
E2-05
widerstand
E2-06 Streuinduktivität
E5-02 Nennleistung
E5-03 Nennstrom
E5-04 Anzahl der Pole
WicklungsE5-05
widerstand
E5-06 d-Induktivität
E5-07 q-Induktivität
MotorspannungsE5-09
konstante
Motordaten für Asynchronmotore
Motordaten für Synchronmotore
Einstellungen für Rückmeldung vom Drehgeber
F1-01
F1-05
F1-21
F1-22
Impuls-
geberauflösung
Impulsgeber-
Drehrichtung
Absolute
Geberauflösung
(Hiperface oder
EnDat)
Magnetstellung-
Offset
Einstellung der Anzahl von
Geberimpulsen pro Umdrehung.
0:Phase A läuft bei Vorwärts-
Startbefehl voraus. (Phase B läuft bei
Rückwärts-Startbefehl voraus;
Drehung gegen den Uhrzeigersinn)
1:Phase B läuft bei Vorwärts-Startbefehl
voraus. (Phase A läuft bei RückwärtsStartbefehl voraus; Drehung im
Uhrzeigersinn)
0:16384
1:32768
2:8192
(wenn EnDat ausgewählt ist (n8-35=5),
wird F1-21 auf 2 festgelegt)
Einstellung des Offsets zwischen dem
Rotormagneten und der DrehgeberNullstellung.
Einstellungen für digitale E/A
H1-01
Funktionsauswahl
bis
für die Klemmen
H1-05
S3 bis S7
Funktionsauswahl
H2-01
für die Klemmen
bis
M1-M2/M3-M4/
H2-03
M5-M6
Eine Auswahlliste finden Sie am Ende
dieser Liste
Eine Auswahlliste finden Sie am Ende
dieser Liste
Motorschutz
0:Deaktiviert
1:Schutz für Universalmotor
(lüftergekühlt)
2:Schutz für Frequenzumrichermotor
(extern gekühlter Motor)
3:Schutz für Vektor-Spezialmotor
Beim Ausschalten der
Spannungsversorgung des
Frequenzumrichters wird der thermische
Wert zurückgesetzt. Auch wenn dieser
Parameter auf 1 gesetzt ist, kann der
Schutz evtl. nicht wirksam sein.
5:Motorschutz für Synchronmotor mit
konstantem Drehmoment
L1-01
Auswahl der
Motorschutz-
funktion
Vorsteuerungskompensation
Auswahl für
n5-01
Vorsteuerungs-
regelung
Motorbeschleunign5-02
ungszeit
Vorsteuerungsn5-03
Proportional-
verstärkung
Abstimmung der
n5-05
Motorbeschleunig-
ungszeit
0:Deaktiviert
1:Aktiviert
Das Ansprechverhalten des
Drehzahlsollwerts verbessert sich, wenn
die Einstellung von n5-03 erhöht wird.
0:Deaktiviert
1:Aktiviert
Param.
Nr.
Bezeichnung Beschreibung
Bremssequenz
Nulldrehzahl-
S1-01
grenzwert bei
Stopp
DC-Bremsstrom
S1-02
beim Start
DC-Bremsstrom
S1-03
beim Stopp
DC-Bremszeit/
S1-04
Nulldrehzahlzeit
beim Start
DC-Bremszeit/
S1-05
Nulldrehzahlzeit
beim Stopp
Bremslöse-
S1-06
Verzögerungszeit
Bremsbetätigungs-
S1-07
Verzögerungszeit
Positionier-
S1-20
Verstärkung
Einstellung des Drehzahlgrenzwerts für
den Bremsbetätigungsbefehl bei Stopp.
Einstellung als Prozentsatz des
Frequenzumrichter-Nennstroms.
Siehe Seite 22, Bremssequenz.
Nullservo-Lageregelkreisverstärkung für
Vektorregelung mit Rückführung.
Drehzahlsollwert-Schlupfkompensation
S2-01 Motornenndrehzahl Einstellung der Motornenndrehzahl
Schlupfkompen-
S2-02
sationsverstärkung
bei Motorbetrieb
Schlupfkompensationsverstärkung
S2-03
bei
generatorischem
Betrieb
Einstellung der
Schlupfkompensationsverstärkung bei
Motorbetrieb. Kann zur Erhöhung der
Genauigkeit der Niveausteuerung
eingestellt werden.
Einstellung der
Schlupfkompensationsverstärkung bei
generatorischem Betrieb.
Diese Funktion kann zur Verbesserung der
Niveausteuerungsgenauigkeit verwendet
werden.
Einstellung spezieller Funktionen
Aktiviert oder deaktiviert die
Kurzhaltestellen-
S3-01
Funktionsauswahl
Erkennungsgrenze
S3-04
für Nenn-/
Einfahrdrehzahl
Ausgangsphasen-
S3-08
Reihenfolge
Treibscheiben-
S3-13
durchmesser
Seil-Übersetzungs-
S3-14
verhältnis
Übersetzungs-
S3-15
verhältnis
Kurzhaltestellenbetriebs-Funktion.
0:disabled
1:aktiviert (Standard)
2:aktiviert (Erweitert)
Erkennungsgrenze für Nenn-/
Einfahrdrehzahl bei der Verwendung von
Multistep-Eingängen. (d1-18=0/3)
0:Ausgangsphasen-Reihenfolge ist U-V-W
1:Ausgangsphasen-Reihenfolge ist U-W-V
Einstellung des
Treibscheibendurchmessers für m/sAnzeigeeinheiten.
1:1:1
2:1:2
Einstellung des mechanischen
Übersetzungsverhältnisses.
Überwachungsdaten
U1-01 Frequenzsollwert in Hz/U/min
U1-02 Ausgangsfrequenz in Hz/U/min
U1-03 Ausgangsstrom in A
U1-05 Motordrehzahl in Hz/U/min
U1-06 Ausgangsspannung in V AC
U1-07 Zwischenkreisspannung in V DC
U1-08 Ausgangsleistung in kW
U1-09 Drehmomentsollwert des Motor-Nenndrehmoments in %
DE-29
Page 64

Param.
Nr.
Bezeichnung Beschreibung
Zeigt den EIN/AUS-Status der Eingänge an.
1: Vorwärts-Befehl
(S1) ist EIN
1: Rückwärts-Befehl
(S2) ist EIN
1: Multif.-Eingang 1
(S3) ist EIN
1: Multif.-Eingang 2
(S4) ist EIN
1: Multif.-Eingang 3
(S5) ist EIN
1: Multif.-Eingang 4
(S6) ist EIN
1: Multif.-Eingang 5
(S7) ist EIN
U1-10
Eingangsklemmenstatus
Zeigt den EIN/AUS-Status der Ausgänge an.
Ausgangs-
U1-11
klemmenstatus
Frequenzumrichter-Betriebszustand.
Betrieb
1: Nulldrehzahl
1: Rückwärts
1: Fehler-Rücksetzsignal
U1-12 Betriebsstatus
aktiv
1: Drehzahlüberein-
stimmung
1: Frequenzumrichter
bereit
1: Geringfügiger Fehler
1: Schwerwiegender
Fehler
U1-13 Kumulative Betriebszeit
U1-20 Frequenzsollwert nach Sanftanlauf
U1-34 OPE-Fehlerparameter
U1-51 Max. Strom während Beschleunigung
U1-52 Max. Strom während Verzögerung
U1-53 Max. Strom während Höchstgeschwindigkeit
U1-54 Max. Strom während Einfahrgeschwindigkeit
U1-55 Anzahl Fahrten
Fehlerverfolgungsdaten
U2-01 Aktueller Fehler
U2-02 Letzter Fehler
U2-03 Frequenzsollwert bei Fehler
U2-04 Ausgangsfrequenz bei Fehler
U2-05 Ausgangsstrom bei Fehler
U2-06 Motordrehzahl bei Fehler
U2-07 Ausgangsspannungs-Sollwert bei Fehler
U2-08 Zwischenkreisspannung bei Fehler
U2-09 Ausgangsleistung bei Fehler
U2-10 Drehmomentsollwert bei Fehler
U2-11 Eingangsklemmenstatus bei Fehler
U2-12 Ausgangsklemmenstatus bei Fehler
U2-13 Betriebsstatus bei Fehler
U2-14 Kumulative Betriebszeit bei Fehler
1: MultifunktionsKontaktausgang 1
(M1-M2) ist EIN
1: MultifunktionsKontaktausgang 2
(M3-M4) ist EIN
1: MultifunktionsKontaktausgang 3
(M5-M6) ist EIN
Nicht verwendet
(Immer 0).
1: Fehlerausgang
(MA/MB-MC) ist EIN
Param.
Bezeichnung Beschreibung
Nr.
Fehler-Speicherdaten
U3-01
bis
Letzter bis viertletzter Fehler
U3-04
U3-05
bis
Kumulative Betriebszeit bei Fehler 1 bis 4
U3-08
U3 09
bis
Fünftletzter bis zehntletzter Fehler
U3 14
U3 15
bis
Kumulative Betriebszeit beim fünft- bis zehntletzten Fehler
U3 20
* Folgende Fehler werden nicht im Fehlerprotokoll
aufgezeichnet: CPF00, 01, 02, 03, UV1 und UV2.
Funktionsauswahl der Digitaleingänge
3 Festfrequenzsollwert-Befehl 1
4 Festfrequenzsollwert-Befehl 2
Jog-Frequenzsollwert
6
(höhere Priorität als Festfrequenzsollwert)
F Nicht verwendet (Einstellung für nicht verwendete Klemmen)
14 Fehlerrücksetzung (Rücksetzung bei Wechsel auf EIN)
20 bis 2FExterner Fehler; Eingangsart: Schließer-Kontakt/Öffner-
Kontakt, Erkennungsbetriebsart: Normal/während des Betriebs
80 Nenngeschwindigkeitsauswahl (d1-09)
81 Zwischengeschwindigkeitsauswahl (d1-10)
82 Nachnivellier-Geschwindigkeitsauswahl (d1-13)
83 Einfahrgeschwindigkeitsauswahl (d1-17)
84 Inspektionsgeschwindigkeitsauswahl (d1-14)
Funktionsauswahl der Digitalausgänge
Während Betrieb 1
0
(EIN: RUN-Befehl auf EIN oder Spannung wird ausgegeben)
Frequenzumrichter betriebsbereit
6
(BEREIT: Initialisierung abgeschlossen oder keine Fehler
Während Endstufensperrung
8
(Schließerkontakt, EIN: während Endstufensperrung)
Erkennung von Drehmomentüberschreitung/
B
steckengebliebenem Fahrkorb 1, Schließer (Schließerkontakt,
EIN: Drehmoment-Über-/Unterschreitungserkennung)
F Nicht verwendet (Einstellung für nicht verwendete Klemmen)
10 Geringfügiger Fehler (EIN: Alarm wird angezeigt)
Erkennung von Drehmomentüberschreitung/
17
steckengebliebenem Fahrkorb 1, Öffner
(Öffnerkontakt, AUS: Drehmoment-Abweichungserkennung)
1A Rückwärtsbetrieb (EIN: Während Rückwärtsbetrieb)
40 Bremslösebefehl
41 Ausgangsschütz-Schließbefehl
DE-30
Page 65

DE-31
Page 66

Guía de referencia rápida de L7Z
Tabla de contenido
Advertencias..................................................................ES-1
Precauciones de seguridad e instrucciones ................................................. ES-2
Compatibilidad EMC ..................................................................................... ES-3
Instalación .....................................................................ES-5
Instalación mecánica .................................................................................... ES-5
Conexión eléctrica ........................................................................................ ES-6
Operación de teclado.................................................. ES-11
Display del operador digital (opcional) ....................................................... ES-11
Encendido y configuración
de parámetros básicos...............................................ES-12
Procedimiento de arranque ........................................................................ ES-12
Antes del encendido ................................................................................... ES-13
Display después del encendido .................................................................. ES-13
Selección de modo de control .................................................................... ES-13
Autotuning...................................................................ES-14
Selección de modo de autotuning .............................................................. ES-14
Alarmas y fallos de autotuning ................................................................... ES-15
Procedimiento de autotuning con motores de inducción ............................ ES-16
Procedimiento de autotuning para motores de imán permanente .............ES-17
Ajuste de desplazamiento de encoder de motor de imán permanente ........ ES-18
Perfil de operación y configuración de secuencia ......ES-19
Comandos UP y DOWN y selección de referencia de velocidad ............... ES-19
Secuencia de selección de velocidad utilizando entradas digitales ........... ES-19
Configuración de aceleración/deceleración/sacudidas .............................. ES-22
Secuencia de frenado ................................................................................ ES-22
Compensación de inercia (realimentación positiva) ................................... ES-22
Detección y corrección de errores............................ES-24
Detección de fallos y alarmas .................................................................... ES-24
Errores de programación del operador (OPE) ........................................... ES-26
Fallos de autotuning ................................................................................... ES-27
Tabla de parámetros ...................................................ES-28
Page 67

Advertencias
Mientras esté conectada la alimentación no deben ser conectados o desconectados cables ni se deben
llevar a cabo pruebas de señal.
El condensador de bus de c.c. del Varispeed L7 permanece cargado incluso una vez que
la alimentación se ha desconectado. Para evitar el riesgo de descarga eléctrica desconecte
el variador de frecuencia del circuito de alimentación antes de llevar a cabo trabajos
de mantenimiento. Posteriormente espere al menos durante 5 minutos hasta que todos los LEDs
se hayan apagado.
No realice pruebas de resistencia a la tensión en ninguna parte del variador. Contiene
semiconductores que no están diseñados para soportar tan altas tensiones.
No quite el operador digital mientras la alimentación principal de corriente esté conectada. La placa
de circuitos impresos tampoco se debe tocar mientras el variador esté conectado a la alimentación.
PRECAUCIÓN
Nunca conecte filtros de supresión de interferencias LC/RC, condensadores o dispositivos de protección contra
sobretensiones a la entrada o a la salida del variador.
Para evitar que se visualicen fallos innecesarios de sobrecorriente, etc., los contactos de señal
de cualquier contactor o conmutador instalado entre el variador y el motor deben estar integrados
en la lógica de control del variador (por ejemplo, baseblock).
Esto es absolutamente imprescindible
Este manual se debe leer detenidamente antes de conectar y operar el variador. Deben seguirse todas
las precauciones de seguridad e instrucciones.
El variador se debe operar con los filtros de línea apropiados siguiendo las instrucciones
de instalación de este manual y con todas las cubiertas cerradas y los terminales cubiertos.
Solamente entonces estará adecuadamente protegido. No conecte u opere cualquier equipamiento
que presente daños visibles o al que le falten componentes. La empresa operadora es responsable
de las lesiones a personas y de los daños al equipamiento derivados por no respetar las advertencias
que contiene este manual.
ES-1
Page 68

Precauciones de seguridad e instrucciones
1. General
Lea detenidamente estas precauciones de seguridad e instrucciones de funcionamiento antes de instalar
y operar este variador. Asimismo, lea todas las señales de advertencia que se encuentran en el variador
y asegúrese de que nunca estén dañadas o falten.
Es posible que se pueda acceder a componentes activos y calientes durante la operación. Retirar componentes de la
carcasa, el operador digital o las cubiertas de los terminales conlleva el riesgo de sufrir lesiones graves o de dañar
el equipo en el caso de una instalación u operación incorrecta. El hecho de que los variadores de frecuencia
se utilizan para controlar componentes mecánicos rotativos de máquinas puede ser la causa de otros peligros.
Deben seguirse las instrucciones contenidas en este manual. La instalación, la operación y el mantenimiento
solamente los deben llevar a cabo personal cualificado. En lo que se refiere a las precauciones de seguridad,
el personal cualificado se define como las personas que están familiarizadas con la instalación, el arranque,
la operación y el mantenimiento de variadores de frecuencia y que cuentan con la cualificación profesional
adecuada para llevar a cabo estos trabajos. La operación segura de estas unidades solamente es posible
si se utilizan de manera apropiada y para el fin para el que fueron diseñadas.
Los condensadores de bus de c.c. pueden mantenerse activos durante aproximadamente 5 minutos una vez que
el variador se desconecta de la alimentación. Por lo tanto es necesario esperar este tiempo antes de abrir sus
cubiertas. Todos los terminales del circuito principal pueden estar sometidos aún a tensiones peligrosas.
No debe permitirse el acceso a estos variadores a niños y personas no autorizadas.
Guarde estas Precauciones de seguridad e instrucciones en un lugar fácilmente accesible y haga que todas las
personas que tienen algún tipo de acceso a los variadores puedan disponer de ellas.
2. Uso previsto
Los variadores de frecuencia están previstos para su instalación en sistemas o maquinaria eléctricos.
Su instalación en la maquinaria y en los sistemas debe ser conforme a la siguiente normativa de producto
de la Directiva de baja tensión:
EN 50178, 1997-10, Equipo electrónico para uso en instalaciones de potencia
EN 60204-1, 1997-12 Seguridad de las máquinas, Equipo eléctrico de las máquinas
Parte 1: Requisitos generales (IEC 60204-1:1997)/
Tenga en cuenta: incluido Corrigendum de septiembre de 1998
EN 61010-1, A2, 1995 Requisitos de seguridad para equipos de procesamiento de información
(IEC 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modificada)
El marcado CE se lleva a cabo según EN 50178 utilizando los filtros de línea especificados en este manual
y siguiendo las instrucciones de instalación apropiadas.
3. Transporte y almacenamiento
Las instrucciones para el transporte, el almacenamiento y la manipulación adecuada se deben seguir según los
datos técnicos.
4. Instalación
Instale y refrigere los variadores como se especifica en la documentación. El aire de refrigeración debe circular
en la dirección especificada. El variador, por lo tanto, solamente debe ser operado en la posición especificada
(es decir, en posición vertical). Mantenga las distancias especificadas. Proteja los variadores contra cargas
no permitidas. Los componentes no deben estar doblados y las distancias de aislamiento no se deben modificar.
Para evitar daños causados por electricidad estática no toque ningún componente electrónico ni contacto.
ES-2
Page 69

5. Conexión eléctrica
Realice cualquier trabajo en el equipo activo según las regulaciones nacionales de seguridad y prevención
de accidentes correspondientes. Lleve a cabo la instalación eléctrica según las regulaciones correspondientes.
En concreto, siga las instrucciones de instalación asegurando la compatibilidad electromagnética (EMC),
por ejemplo el blindaje, la conexión a tierra, la distribución de filtros y el tendido de cables. Esto también
es de aplicación para el equipamiento con marcado CE. Es responsabilidad del fabricante del sistema
o máquina garantizar la conformidad con las limitaciones EMC.
Póngase en contacto con su distribuidor o representante Omron-Yaskawa Motion Control cuando utilice
interruptores automáticos diferenciales junto con variadores de frecuencia.
En ciertos sistemas puede ser necesario utilizar dispositivos adicionales de control y seguridad según las
regulaciones pertinentes sobre seguridad y prevención de accidentes. El hardware del variador de frecuencia
no se debe modificar.
Si se utilizan motores de imán permanente:
Si un motor de imán permanente se activa por una fuerza externa, en los bobinados se genera alta tensión.
• Durante el cableado, mantenimiento o inspección asegúrese de que el motor está parado y de que
no se puede activar.
• Si el variador está desactivado y se tiene que activar el motor, asegúrese de que las salidas del motor y del
variador están desconectadas eléctricamente.
6. Configuración del variador
Este variador L7 puede accionar motores de inducción así como motores de imán permanente.
Seleccione siempre el modo de control adecuado:
• Para los motores de inducción utilice V/f, control vectorial de lazo abierto o cerrado (A1-01 = 0, 2 ó 3).
• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial de lazo
cerrado para imán permanente (A1-01 = 6).
Una selección errónea del modo de control puede dañar al variador y al motor.
Si se cambia un motor o se utiliza por primera, configure siempre los parámetros relevantes de control
de motor según los datos de la placa o realice un autotuning. No cambie estos parámetros imprudentemente.
Para garantizar una operación segura con motores de imán permanente, configure siempre:
• los datos de motor correctos
• los parámetros de detección de apertura de PG
• los parámetros de detección de la desviación de velocidad
• los parámetros de detección de aceleración excesiva
Una configuración incorrecta de los parámetros puede provocar un comportamiento peligroso o daños
en el motor y el variador.
ES-3
Consulte en página 12, Procedimiento de arranque los detalles del procedimiento de arranque correcto.
7. Notas
Los variadores de frecuencia Varispeed L7 están certificados según CE, UL, y c-UL.
Compatibilidad EMC
1. Introducción
Este manual se ha compilado para ayudar a los fabricantes de sistemas que utilizan variadores de frecuencia
Omron-Yaskawa Motion Control a diseñar e instalar equipos eléctricos de conmutación. También describe las
medidas necesarias para adecuarse a la Directiva EMC. Por lo tanto, deben seguirse las instrucciones
de instalación y cableado de este manual.
Nuestros productos son probados por organizaciones autorizadas utilizando la normativa enumerada a continuación.
Normativa de producto: EN 61800-3:1996
EN 61800-3; A11:2000
Page 70

2. Medidas para asegurar la conformidad de los variadores de frecuencia
Omron-Yaskawa Motion Control a la Directiva EMC
Los variadores de frecuencia Omron-Yaskawa Motion Control no se deben instalar necesariamente
en un armario de maniobra.
No es posible facilitar instrucciones detalladas para todos los tipos posibles de instalación. Por lo tanto,
este manual se ha tenido que limitar a directrices generales.
Todo equipo eléctrico produce interferencias de radio y de línea en varias frecuencias. Los cables las
transmiten a la atmósfera como si fueran una antena.
La conexión de equipamiento eléctrico (por ejemplo, un controlador) a una fuente de alimentación sin
un filtro de línea puede, por lo tanto, permitir que las interferencias de alta o baja frecuencia se introduzcan
en el circuito eléctrico.
Las contramedidas básicas son el aislamiento del cableado de los componentes de control y potencia,
una conexión a tierra adecuada y el blindaje de los cables.
Para la puesta a tierra de baja impedancia de interferencias de alta frecuencia es necesaria una amplia área
de contacto. Por lo tanto, se recomienda el uso de grapas de puesta a tierra en vez de cables.
Además, los cables blindados se deben conectar mediante clips específicos para la puesta a tierra.
3. Tendido de cables
Medidas contra la interferencia de línea:
El filtro de línea y el variador de frecuencia se deben montar sobre la misma placa metálica. Monte ambos
componentes tan cerca uno del otro como sea posible, manteniendo también el cableado lo más corto posible.
Utilice un cable de potencia con blindaje con una buena puesta a tierra. Utilice un cable blindado para el motor
cuya longitud no supere los 20 metros. Disponga todas las puestas a tierra de tal manera que se maximice
el área del extremo del conductor en contacto con el terminal de tierra (por ejemplo, una placa metálica).
Cable blindado:
• Utilice un cable con protección trenzada.
• Ponga a tierra la mayor superficie posible del blindaje. Es recomendable poner a tierra el blindaje
conectando el cable a la placa de tierra con clips metálicos (véase la siguiente figura).
Clip de tierra
Las superficies de puesta a tierra deben ser de metal desnudo altamente conductor. Elimine las capas de barniz
y pintura que pudiera tener.
Placa de tierra
– Conecte a tierra el apantallado en ambos extremos.
– Conecte a tierra el motor de la máquina.
ES-4
Page 71

Instalación
Instalación mecánica
Desembalaje del variador
Compruebe los siguientes elementos después de desembalar el variador.
Elemento Método
¿Le ha sido suministrado el modelo de variador
correcto?
¿Presenta el variador algún tipo de daño?
¿Hay tornillos o componentes flojos?
Si encuentra alguna irregularidad en los elementos anteriormente descritos, póngase en contacto con el distribuidor
en el que ha adquirido el variador o con su representante Omron-Yaskawa Motion Control inmediatamente.
Comprobación del lugar de instalación
Antes de instalar el variador, compruebe los siguientes elementos:
• Asegúrese de que no se excede la temperatura ambiente
• Instale el variador en una ubicación limpia libre de vapores de grasa y polvo. Puede ser montado
en un panel totalmente cerrado que esté completamente protegido contra el polvo en suspensión.
• Cuando instale u opere el variador tenga siempre especial cuidado de que no entre en el dispositivo polvo
metálico, grasa, agua o cualquier otro elemento extraño.
• No instale el variador sobre materiales combustibles, como por ejemplo madera.
• Instale el variador en una ubicación libre de materiales radiactivos y de materiales combustibles.
• Instale el variador en una ubicación libre de gases y fluidos dañinos.
• Instale el variador en una ubicación sin excesiva oscilación.
• Instale el variador en una ubicación libre de cloruros.
• Instale el variador en una ubicación protegida de la luz solar directa.
Compruebe el número de modelo en la placa del lateral del variador.
Inspeccione la totalidad del exterior del variador para comprobar la existencia
de arañazos u otro tipo de daños derivados del envío.
Compruebe la firmeza de las uniones mediante un destornillador u otras herramientas.
Orientación de instalación
Instale el variador verticalmente con el fin de no reducir el efecto refrigerante. Al instalar el variador tenga en
cuenta siempre las siguientes distancias de instalación para permitir una disipación normal del calor.
Aire
A B
50 mm 120 mm
Aire
50 mm mín.
IMPORTANTE
A
30 mm mín.
30 mm mín.
Distancia horizontal
1. Se requiere la misma distancia horizontal y vertical para los variadores IP00, IP20 y NEMA 1.
2. Extraiga siempre la cubierta de protección superior después de instalar un variador con una salida
de 18,5 kW o menos en un panel.
Deje siempre suficiente espacio para los pernos de anilla de suspensión y las líneas del circuito principal
al instalar un variador con una salida de 22 kW o más en un panel.
B
120 mm mín.
Distancia vertical
ES-5
Page 72

Conexión eléctrica
Instalación de variadores y filtros EMC
PEL1L2
L3
Conexiones a tierra
Quitar la pintura
Para una instalación compatible con las normas EMC, tenga
en cuenta los siguientes puntos:
• Utilice un filtro de línea.
• Utilice cables blindados para el motor.
• Monte el variador y el filtro en una placa conductora con
PE
Línea
Filtro
Variador
toma de tierra.
• Quite la pintura o la suciedad antes de montar las piezas con
el fin de lograr la mínima impedancia de tierra posible.
Cableado de las entradas del circuito principal
Carga
Longitud del cable
lo más corta posible
Placa de montaje
con toma de tierra
Conexiones a tierra
Quitar la pintura
L2
V
GND
GND
W
U
L1
L3
Cable de
motor
apantallado
M
~3
Tenga en cuenta las siguientes precauciones para la entrada de la fuente de alimentación del circuito principal.
•
Si se utiliza un interruptor automático de caja moldeada para la conexión de fuente de alimentación (R/L1, S/L2
y T/L3), asegúrese de que sea adecuado para el variador.
• Si se utiliza un interruptor automático diferencial, debe poder detectar todos los tipos de corriente para
garantizar una detección segura de corriente de fuga a tierra.
• Se puede utilizar un contactor magnético u otro dispositivo de conmutación en la entrada del variador.
El variador no se debe conectar a la red más de una vez por hora.
• Las fases de entrada (R/S/T) se pueden conectar en cualquier secuencia.
• Si el variador se conecta a un transformador de potencia de alta capacidad (600 kW o más) o se conmuta
un condensador de avance de fase en las proximidades, es posible que circule una corriente de pico
excesiva por el circuito de entrada de alimentación causando daños en el variador. Como medida, instale
una reactancia de c.a. opcionalmente en la entrada del variador o una reactancia de c.c a los terminales
de conexión de reactancia de c.c.
• Utilice un atenuador de sobretensiones o un diodo para cargas inductivas cerca del variador. Las cargas
inductivas incluyen contactores magnéticos, relés electromagnéticos, válvulas solenoides, solenoides
y frenos magnéticos.
Cableado del lado de salida del circuito principal
Las siguientes precauciones se deben tener en cuenta para el cableado del circuito de salida.
• Nunca conecte una fuente de alimentación a los terminales de salida del variador. De lo contrario, se puede
dañar el variador.
• Nunca cortocircuite o conecte a tierra los terminales de salida. De lo contrario, se puede dañar el variador.
• No utilice condensadores de corrección de fase. De lo contrario, el variador y los condensadores se pueden
dañar.
• Compruebe la secuencia de control para asegurarse de que el contactor magnético (MC) entre el variador
y el motor no esté en ON o en OFF durante la operación del variador. Si el contactor magnético está en ON
durante su operación, se creará una elevada corriente de irrupción y es posible que se active la protección
contra sobrecorriente del variador.
Conexión de tierra
Las siguientes precauciones se deben tener en cuenta para la conexión a tierra.
• No comparta el cable de tierra con otros dispositivos como equipos de soldadura o herramientas eléctricas.
ES-6
Page 73

• Utilice siempre un cable de tierra que cumpla las normativas técnicas sobre equipamiento eléctrico
y minimice su longitud.
El variador provoca corriente de fuga. Por lo tanto, si la distancia entre el electrodo de tierra y el terminal
de tierra es demasiado larga, el potencial en el terminal de tierra del variador se volverá inestable.
• Cuando utilice varios variadores, no forme lazos en el cable de tierra.
Sí
NO
Fig. 1 Cableado a tierra
Precauciones para el cableado del circuito de control
Tenga en cuenta las siguientes precauciones para el cableado de los circuitos de control.
• Separe el cableado del circuito de control del cableado del circuito principal (terminales R/L1, S/L2, T/L3,
B1, B2, U/T1, V/T2, W/T3, , 1, 2, y 3, PO, NO) y otras líneas de alta potencia.
• Separe el cableado para los terminales del circuito de control MA, MB, MC, M1, M2, M3, M4, M5 y M6
(salidas de contacto) del cableado a otros terminales del circuito de control.
• Si se utiliza una fuente de alimentación externa auxiliar, ésta deberá ser una fuente contenida en la lista UL
Clase 2.
• Utilice cable de par trenzado o cable de par trenzado apantallado para los circuitos de control para prevenir
fallos en el funcionamiento.
•
Conecte el blindaje de los cables a tierra con la mayor superficie de contacto posible entre el blindaje y tierra.
• El blindaje del cable se debe conectar a tierra en ambos extremos del cable.
Terminales del circuito principal
Las funciones de los terminales del circuito principal se resumen según los símbolos de terminal en la Tabla 1.
Cablee los terminales adecuadamente para los usos deseados.
Tabla 1 Funciones de los terminales del circuito principal (Clase 200 V y Clase 400 V)
Empleo Símbolo de terminal
Entrada de alimentación del
circuito principal
Salidas del variador U/T1, V/T2, W/T3 23P7 a 2.055 43P7 a 4.055
Terminales de bus de c.c.
Conexión de la unidad de
resistencia de freno
Conexión de la reactancia de c.c.
Conexión de la unidad de freno
Conexión a tierra 23P7 a 2.055 43P7 a 4.055
Fuente de alimentación de control PO, NA 23P7 a 2.055 43P7 a 4.055
R/L1, S/L2, T/L3 23P7 a 2.055 43P7 a 4.055
R1/L11, S1/L21, T1/L31 2.022 a 2.055 4.022 a 4.055
1,
B1, B2 23P7 a 2.018 43P7 a 4.018
1, 2
3,
Modelo: CIMR-L7Z
Clase 200 V Clase 400 V
23P7 a 2.055 43P7 a 4.055
23P7 a 2.018 43P7 a 4.018
2.022 a 2.055 4.022 a 4.055
Terminales del circuito de control
La Fig. 2 muestra la disposición de los terminales de control Las funciones de los terminales del circuito
de control se muestran en la Tabla 2. Utilice los terminales apropiados para los usos deseados.
E(G)
SC SC SC
S1
S2
BB
S3 S4
Fig. 2 Disposición de los terminales de control
+V
A1 AC
S5 S6 S7 BB1
M5
M6
M3
MA MB MC
M4
M1
M2
E(G)
ES-7
Page 74

Tabla 2 Terminales del circuito de control con configuraciones predeterminadas
Tipo Nº Nombre de la señal Función Nivel de señal
Señales de
entra-
da
digital
Señales de
entrada
analó-
gica
Comando de marcha directa/
S1
parada
Comando de marcha inversa/
S2
parada
S3 Velocidad nominal
S4 Marcha de inspección
S5 Velocidad intermedia Velocidad intermedia en ON.
S6 Velocidad de nivelación
S7 No se utiliza –
BB Baseblock de hardware Se deben activar ambas entradas para activar la
SC Entrada digital común – –
+V
Fuente de alimentación de 15 V
A1 Referencia de frecuencia 0 a +10 V/100% 0 a +10 V (20 kΩ)
AC Neutro de referencia analógica – –
Cable blindado, punto opcional
E(G)
de conexión de línea a tierra
M1
Comando de freno
(Contacto 1NA)
M2
Marcha directa cuando está en ON; parada cuando
está en OFF.
Marcha inversa cuando está en ON; parada cuando
está en OFF.
Velocidad nominal cuando
está en ON.
Marcha de inspección
cuando está en ON.
Las funciones se
seleccionan
24 Vc.c., 8 mA
Fotoacoplador
configurando
Velocidad de nivelación
H1-01 hasta H1-05.
cuando está en ON.
salida de variadorBB1 Baseblock de hardware 1
*1
Alimentación de 15 V para referencias analógicas
15 V
(Corriente máx.: 20 mA)
––
Comando de freno en ON.
Señales de
salida
digital
M3
Control de contactor
(Contacto 1NA)
M4
M5
Variador listo
(Contacto 1NA)
M6
MA
Señal de salida de fallo (SPDT)
MB
(1 contacto conmutado)
MC
*1. No utilice esta fuente de alimentación para dispositivos externos.
*2. Cuando controle una carga reactiva, como una bobina de relé con alimentación de c.c., inserte siempre un diodo como se muestra en la Fig. 3.
Fuente alimentación
externa: 30 Vc.c. máx.
Bobina
Control de contactor cuando
está en ON
Variador listo cuando está en
ON.
Fallo cuando CERRADO entre MA y MC
Fallo cuando ABIERTO entre MB y MC
Diodo volante
1 A máx.
Salidas de contacto
multifunción
La tensión del diodo debe ser al menos
tan alta como la tensión del circuito.
Contactos de relé
Capacidad de los contactos:
1 A máx. a 250 Vc.a.
1 A máx. a 30 Vc.c.
Fig. 3 Conexión del diodo volante
1. En Fig. 4 se muestra el cableado de las entradas digitales S1 a S7 y BB, BB1 para la conexión de contactos
o de transistores NPN (0 V modo común y NPN). Esta es la configuración predeterminada.
Para conectar transistores PNP o para utilizar una fuente de alimentación externa de 24 V consulte la Tabla 3.
IMPORTANTE
2. Una reactancia de c.c es una opción solamente para variadores de 18,5 kW o menos. Retire el puente al conectar
una reactancia de c.c.
*2
Modo NPN/PNP (selección NPN/PNP)
La lógica del terminal de entrada se puede conmutar entre el modo NPN (0 V común, NPN) y PNP (+24 V
común, PNP) mediante el puente CN5. También se admite una fuente de alimentación externa, lo que facilita
una mayor libertad de métodos de entrada de señal.
ES-8
Page 75

Tabla 3 Modo NPN/PNP y señales de entrada
S1
S2
SC
IP24V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
S1
S2
SC
IP24V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
24 Vc.c.
+
S1
S2
SC
IP24V
(+24 V)
CN5
A1 A3
B1
B3B2
A2
24 Vc.c.
-
Fuente de alimentación interna: modo NPN
Fuente de alimentación externa: modo NPN
Fuente de alimentación interna: modo PNP
1
S
S2
B1
SC
A1 A3
A2
B3B2
CN
IP24V
5
(+24 V)
Fuente de Alimentación externa: modo PNP
ES-9
Page 76

Cableado del variador
p
Fuente de
alimentación trifásica
380 a 480 V
50/60 Hz
Entradas
multifuncionales
(configuración de
fábrica)
Contactor
magnético
L1
L2
L3
PE
Marcha directa/parada
Marcha inversa/parada
Velocidad nominal
Marcha de inspección
Velocidad intermedia
Velocidad de nivelación
No se utiliza
Baseblock de hardware
(nota 3)
Filtro
de línea
Reactancia de c.c. para
mejorar factor de
potencia (opcional)
Enlace
(+1) (+2)
L1(R)
L2(S)
L3(T)
S1
S2
S3
S4
S5
S6
S7
BB
BB1
+24 V, 8 mA
SC
IP24V (24V)
Unidad de resistencia
de frenado (opcional)
(-)
B1
PG-X2
(opcional)
B2
U/T1
V/T2
W/T3
TA 1
TA 3
TA 2
Pulso A
Pulso B
Pulso Z
Motor
IM/PM
P
P
Salida de monitor de
pulsos RS-422
(100 m o menos)
PG
Ajuste
de tensión
Entrada analógica
(Referencia de velocidad)
2 kOhm
Entrada de fuente de alimentación
de control opcional para operación
Nota:
1. Los terminales del circuito principal están indicados con círculos
dobles y los terminales del circuito de control con círculos
sencillos.
2. La configuración de fábrica de CN5 es NPN
3. Para activar el variador, ambas entradas, BB y BB1, deben estar
cerradas. Si sólo está cerrada una de las entrada, se mostrará
“BB” en el
anel del operador y el variador no arrancará.
de rescate
2 kOhm
0 a 10 V
P
Tarjetas de
entrada
opcionales
a terminal B1
a terminal -
Fig. 4 Diagrama de cableado
CN5 (configuración NPN)
E(G)
Fuente de
alimentación
+V
de entrada analógica
+15 V, 20 mA
A1
Referencia de
velocidad
maestra 0 a 10 V
AC
0 V
2CN
P0
Entrada de fuente
de alimentación de
N0
control
Cables
blindados
MA
MB
MC
M1
M2
M3
M4
M5
M6
3CN
Cables de par
trenzado
Salida de contacto de fallo
250 Vc.a., máx. 1 A
30 Vc.c., máx. 1 A
Comando de freno
(configuración de
fábrica)
Control de
contactor
(configuración de
fábrica)
Variador preparado
(configuración de
fábrica)
Tarjetas de salida
opcionales
Salida de contacto
multifuncional
250 Vc.a., máx. 1A
30 Vc.c., máx. 1 A
ES-10
Page 77

Operación de teclado
Display del operador digital (opcional)
Los nombres y funciones de las teclas del operador digital se describen más adelante
Indicaciones del estado de controlador
FWD: Se ilumina cuando se introduce un comando de marcha directa.
REV: Se ilumina cuando se introduce un comando de marcha inversa.
SEQ: Se ilumina cuando se selecciona una fuente de comandos
REF: Se ilumina cuando se selecciona una fuente de referencia
ALARM: Se ilumina cuando ha tenido lugar un fallo o una alarma.
Display de datos
Muestra los datos de monitorización, números de parámetros
y configuración de parámetros.
Display de modo (se visualiza en la parte superior izquierda del
display de datos)
DRIVE: Se ilumina en el modo de controlador.
QUICK: Se ilumina en el modo de programación rápida.
ADV: Se ilumina en el modo de programación avanzada.
VERIFY: Se ilumina en el modo de verificación.
A. TUNE: Se ilumina en el modo de autotuning.
Tec la s
Ejecutan operaciones tales como la configuración de parámetros,
la monitorización, la operación jog y el autoajuste.
de marcha distinta del operador digital.
de frecuencia distinta del operador digital.
Teclas del operador digital
Te cl a Nombre Función
Tecla LOCAL/REMOTE
Tecla MENU Selecciona los elementos de menú (modos).
Tecla ESC Vuelve al estado que existía antes de pulsar la tecla DATA/ENTER.
Tecla JOG
Tecla FWD/REV
Tecla Desplazamiento/
RESET
Tecla Más
Tecla Menos
Tecla DATA/ENTER
Alterna entre la operación mediante el operador digital (LOCAL)
y las configuraciones en b1-01 y b1-02 (REMOTE).
Esta tecla se puede activar o desactivar configurando el parámetro o2-01.
Inicia la operación jog cuando el variador se utiliza mediante el Operador Digital
y d1-18 está configurado en 0.
Selecciona el sentido de rotación del motor cuando el variador se utiliza mediante
el operador digital.
Establece el dígito activo cuando se programan parámetros.
También funciona como tecla de reset cuando ha tenido lugar un fallo.
Selecciona elementos de menú, ajusta números de parámetro e incrementa los
valores seleccionados.
Se utiliza para desplazarse al siguiente elemento o dato.
Selecciona elementos del menú, ajusta números de parámetro y disminuye los
valores seleccionados.
Se utiliza para desplazarse al elemento o dato anterior.
Accede a los menús e introduce parámetros, además de establecer y validar los
cambios de parámetro.
ES-11
Tecla RUN Inicia la operación del variador cuando éste se controla mediante el operador digital.
Tecla STOP
Nota: Excepto en los diagramas, las teclas se refieren a los nombres de teclas de la lista anterior.
Detiene la operación del variador.
Esta tecla se puede activar o desactivar mediante el parámetro o2-02 cuando
se opera desde una fuente diferente al operador.
Page 78

Encendido y configuración de parámetros básicos
Procedimiento de arranque
INICIO
Instalación mecánica
Cableado del circuito principal y de control
Comprobar la selección de fuente
de alimentación del encoder
* (Sólo lazo cerrado)
Conectar la fuente de alimentación
Seleccionar el modo de control
en el parámetro A1-02
* Control V/f
* Control vectorial de lazo abierto
* Control vectorial de lazo cerrado
* Control vectorial de lazo cerrado
para imán permanente
Configurar las E/S analógicas/digitales en los
* Tiempos de aceleración/deceleración (C1-xx)
* Curvas S (sacudidas) (C2-x)
Realizar autotuning de datos de motor/desplazamiento de encoder
Fuente de referencia
de velocidad
parámetros H1-xx, H2-xx y H3-xx
Configurar
Realizar ejecuciones de prueba
Ajuste preciso
* Ajuste de secuencia de freno
* Configuración de funciones especiales
página 16, Procedimiento de autotuning con motores de inducción
página 17, Procedimiento de autotuning para motores de imán permanente
Operador digital (b1-02 = 0)
Entrada analógica
Seleccionar la secuencia de control en
* Valores de velocidad preconfigurados (d1-xx)
* Tiempos de aceleración/deceleración (C1-xx)
* Curvas S (sacudidas) (C2-xx)
el parámetro d1-18
Configurar las E/S digitales en los
parámetros H1-xx y H2-xx
Configurar
FIN
Fig. 5 Secuencia de arranque básico
ES-12
Page 79

Antes del encendido
Se deben comprobar atentamente los siguientes puntos antes de conectar la alimentación.
• Compruebe que la fuente de alimentación cumple la especificación del variador.
• Compruebe que los cables de la fuente de alimentación están conectados firmemente a los terminales
correctos (L1, L2, L3).
• Compruebe que los cables del motor están conectados firmemente a los terminales adecuados en el lado
del variador (U, V, W) así como en el lado del motor.
• Compruebe que la unidad/resistencia de freno está conectada correctamente.
• Compruebe que el terminal del circuito de control del variador y el dispositivo de control estén cableados
correctamente.
• Configure todos los terminales del circuito de control como OFF.
• Si se utiliza una tarjeta PG, compruebe que esté cableada correctamente.
Display después del encendido
Tras un encendido normal sin problemas el display del operador muestra los siguientes mensajes:
-DRIVE-
Display para operación normal El mensaje Baseblock parpadea.
Base Block
Rdy
BB
Cuando se produce un fallo o una alarma está activa, aparecerá el fallo o el mensaje de alarma. En tal caso,
consulte página 28, La configuración de fábrica está en negrita..
En el display se muestra un fallo
o un mensaje de alarma.
En el ejemplo se muestra una alarma
de tensión baja.
Display para operación de fallo
-DRIVE-
UV
Pérdida
de alimentación
Selección de modo de control
Lo primero después del encendido es seleccionar uno de los cuatro modos de control según el tipo de máquina.
Los modos vectoriales de lazo cerrado requieren tarjetas de realimentación de PG. En la Tabla 4 se muestran
las tarjetas de PG necesarias/posibles para cada modo.
Tabla 4 Selección de modo de control
Tipo de máquina Modo de control
Motor de inducción sin encoder
Motor de inducción con encoder incremental Control vectorial de lazo cerrado 3 PG-B2/PG-X2
Motor de imán permanente con encoder Hiperface
Motor de imán permanente interno de Yaskawa con encoder
incremental
y
o EnDat 2.1
Control vectorial de lazo abierto 2 -
Control vectorial de lazo cerrado
Control vectorial de lazo cerrado
Control V/f 0 -
para motores de imán
permanente
para motores de imán
permanente
Configuración
de A1-02
6PG-F2
6 PG-X2
Tarjeta de PG
ES-13
PRECAUCIÓN
• Para los motores de imán permanente no utilice otro modo de control que no sea el vectorial de lazo
cerrado para imán permanente (A1-02 = 6). El uso de otro modo de control puede provocar daños
en el equipo o un comportamiento peligroso.
Page 80

Autotuning
La función de autotuning de los datos de motor establece automáticamente los parámetros de la curva V/f
(E1-), los parámetros de los datos del motor (E2-, E5-) y los datos del encoder (F1-01).
Los pasos que se tengan que realizar durante el autotuning dependen de la selección de modo de ajuste.
Selección de modo de autotuning
El modo de autotuning se tiene que seleccionar según el modo de control y el sistema mecánico elegidos
(hay posibilidad o no de rotación del motor sin carga). La Tabla 5 muestra el modo de ajuste seleccionable
para cada modo de control.
Tabla 5 Modos de autotuning de datos del motor
Selección
de modo
Modo de autotuning Función
Ajuste estándar dinámico
(con rotación de motor)
Ajuste IM estático
(sin rotación del motor)
Ajuste de resistencia línea a línea IM Ajusta sólo la resistencia línea a línea 2 Sí Sí Sí No
Ajuste de desplazamiento de encoder
Ajusta todos los parámetros del motor. 0 No Sí Sí Sí
Ajusta los parámetros básicos del motor. 1 No Sí Sí No
Ajusta el desplazamiento entre el
encoder y la posición de cero magnético.
de
autotuning
(T1-01)
4 NoNoNo Sí
V/f
Modo de control
Vectorial
de lazo
abierto
Vectorial
de lazo
cerrado
Vectorial
de lazo
cerrado
(PM)
Modos de autotuning
Autotuning dinámico del motor (T1-01 = 0)
Este modo de autotuning se puede utilizar en cualquier modo de control vectorial. Después de haber
introducido los datos de la placa del motor, el variador accionará el motor durante 1 a 2 minutos
aproximadamente y establecerá los parámetros de motor necesarios automáticamente.
Utilice este modo de ajuste solamente si el motor puede girar libremente, lo que significa que los
cables deben estar retirados y el freno debe estar abierto. La caja de engranajes puede permanecer
IMPORTANTE
Autotuning estático de motor (T1-01 = 1)
Este modo de autotuning solamente se puede utilizar para el control vectorial de lazo abierto y lazo cerrado
para IM. El variador suministra alimentación al motor durante 1 minuto aproximadamente y parte de los
parámetros del motor se establecen automáticamente mientras el motor no gira. La corriente en vacío del
motor y el valor de deslizamiento nominal se ajustarán automáticamente durante la primera operación.
Verifique el valor de deslizamiento nominal (E2-02) y la corriente en vacío (E2-03) después de la primera
ejecución con velocidad nominal.
Autotuning para resistencia de línea a línea (T1-01 = 2)
El autotuning estático para la resistencia de línea a línea se puede usar en control V/f, control vectorial de lazo
abierto y control vectorial de lazo cerrado. El variador suministra alimentación al motor durante
aproximadamente 20 segundos para medir la resistencia de línea a línea del motor y la resistencia del cable.
El motor no gira durante este procedimiento de ajuste.
conectada al motor.
ES-14
Page 81

Ajuste de desplazamiento del encoder (T1-01 = 4)
Este modo de ajuste está disponible solamente en el modo de control vectorial de lazo cerrado para motores
de imán permanente. Establece automáticamente el desplazamiento entre el polo magnético y la posición
de cero magnético. Se puede utilizar para volver a ajustar el desplazamiento después de un cambio de encoder
sin cambiar la configuración de datos del motor.
Precauciones generales:
1. Utilice autotuning dinámico siempre que se requiera alta precisión o para un motor que no esté conectado a una
carga.
IMPORTANTE
2. Utilice autotuning estático siempre que la carga no se pueda desconectar del motor (por ejemplo, si no pueden
retirarse los cables).
3. Asegúrese de que el freno mecánico no esté abierto para el autotuning estático.
4. Durante el autotuning, los contactores del motor tienen que estar cerrados.
5. Para el autotuning, las señales BB y BB1 deben estar en ON (el variador no debe estar en condición de baseblock).
6. Confirme que el motor está mecánicamente fijo y que no se puede mover.
7. Durante el autotuning, se suministra alimentación aunque el motor no gire. No toque el motor hasta que
el autotuning haya finalizado.
8. Retire la chaveta paralela con tornillo del eje del motor antes de realizar un ajuste dinámico con un motor
autónomo (sin polea de tracción o montado en engranaje).
9. Para cancelar el autotuning pulse la tecla STOP del operador digital.
Precauciones para autotuning dinámico y desplazamiento de encoder:
1. La carga se debe desconectar, lo que significa que los cables se tienen que retirar y el freno debe estar abierto.
2. Si la carga no se puede retirar, el ajuste se puede realizar con una cabina equilibrada. La precisión del resultado
del ajuste puede ser menor, lo que puede provocar una pérdida de rendimiento.
3. Asegúrese de que el freno está abierto durante el autotuning.
4. Durante el autotuning, el motor se puede arrancar y parar varias veces. Cuando termine el ajuste, se mostrará
“END” en el panel del operador. No toque el motor hasta que se muestre este display y el motor se haya parado
por completo.
Alarmas y fallos de autotuning
Errores de entradas de datos
El variador mostrará un error de “datos no válidos” y no realizará el autotuning si:
• la velocidad del motor, la frecuencia nominal y el número de pares de polos no se corresponden.
Frecuencia base · 60
Velocidad de motor
• la corriente nominal no se corresponde con el valor de potencia nominal
El variador calcula la potencia del motor mediante el valor de corriente de entrada y los datos de la tabla
interna de datos del motor. El valor calculado debe estar entre el 50% y el 150% del valor de entrada para
la potencia nominal.
Otras alarmas y fallos durante autotuning
Para ver un resumen de las posibles alarmas o fallos de autotuning y las medidas correctivas,
consulte la página 27, Fallos de autotuning.
------------------
2 · Polo de motor
ES-15
Page 82

Procedimiento de autotuning con motores de inducción
En la Fig. 6 se muestra el procedimiento de autotuning para un motor de inducción con encoder, o sin él,
en control V/f, vectorial de lazo abierto y vectorial de lazo cerrado.
INICIO
Configurar las entradas de
baseblock, BB y BB1
No
¿Control V/f?
(A1-02 = 0)
(A1-02 = 2/3)
Sí
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 2
T1-02: potencia nominal del motor
T1-04: corriente nominal del motor
Configurar:
Pulsar el botón UP hasta
que aparezca “Tuning Ready”
(Ajuste listo)
¿El motor puede
girar libremente?
No
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 1
T1-02: potencia nominal del motor
T1-04: corriente nominal del motor
T1-05: frecuencia nominal del motor
T1-06: número de polos del motor
T1-07: velocidad nominal del motor
T1-08: número de pulsos del PG*
Configurar:
T1-03: tensión nominal del motor
(*Sólo CLV)
Pulsar el botón UP hasta que
aparezca “Tuning Ready”
(Ajuste listo)
Cerrar los contactores de motor
Sí
(¿cables retirados?)
Acceder al modo de autotuning y
configurar el parámetro T1-01 = 0
T1-02: potencia nominal del motor
T1-03: tensión nominal del motor
T1-04: corriente nominal del motor
T1-05: frecuencia nominal del motor
T1-06: número de polos del motor
T1-07: velocidad nominal del motor
T1-08: número de pulsos del PG*
que aparezca “Tuning Ready”
Configurar:
(*Sólo CLV)
Pulsar el botón UP hasta
(Ajuste listo)
Abrir el freno
Consulte
página 27, Fallos de autotuning
y elimine el origen del fallo
Pulsar el botón RUN
¿Ajuste
No
(Se muestra el
código de fallo)
Abrir los contactores, abrir las entradas
baseblock y cerrar el freno si se ha realizado
el autotuning dinámico (con rotación de motor)
correcto?
“Tuning successful”)
Sí
(Se muestra
FIN
Fig. 6 Autotuning para motores de inducción
ES-16
Page 83

Procedimiento de autotuning para motores de imán permanente
La
Fig. 7
muestra el procedimiento de autotuning para motores de imán permanente. Antes del ajuste, asegúrese
de que el modo de control está configurado en vectorial de lazo cerrado de imán permanente (A1-02 = 6).
INICIO
* Quitar los cables para que el motor pueda girar libremente
* Configurar las entradas de baseblock, BB y BB1
Conectar la fuente de alimentación si está
S3-13: diámetr o de polea de tr acción
S3-14: cables
Abrir el freno, cerrar el contactor del motor,
girar el motor lentamente en dirección directa*1 y comprobar la
desconectada
¿Se ha producido un
fallo OPE06?
No
¿Se ha producido un
fallo CPF24?
No
¿Se ha producido un
fallo OPE02?
No
Confi gurar las cons tantes mec ánicas:
monitorización de U1-05.
¿Se ha producido
PGO (sin realimentación de
No
encoder)?
S3-15: relac ión de
engranaj e
Comprobar el parámetro
Sí
Sí
Sí
* Compr obar el c ableado
Sí
* Compr obar/r eajustar la fuente de
ali mentaci ón del encoder
Desconectar la fuente de
* F1-01
* n8-35
* Comprobar el parámetro n8-35
* Si se utiliza EnDat/Hiperface
- comprobar la fuente de alimentación del encoder
- comprobar el cableado de la señal CLOCK y DATA
* Desconectar la fuente de alimentación.
* Comprobar si se ha configurado la constante PG correcta
(F1-01) y la resolución del encoder absoluto (F1-21).
* Consulte:
página 26, Errores de programación del operador
(OPE)
y elimine el origen del fallo
alimentación y comprobar si la
tarjeta PG está instalada
correctamente
ES-17
¿El signo del valor
U1-05 es positivo
(distinto de -)?
Sí
T1- 01 = 0: ajuste di námic o
T2- 01: potencia nom inal del motor
T2- 02: frec uencia base del motor
T2- 03: tensión nom inal de motor
Puls ar el botón U P hasta que apar ezca “T uning Ready ” (Aj uste list o)
(Se mue stra “Tu ning successful ”)
Confi gurar los par ámetros de autotuning:
Cer rar los contact ores del motor y puls ar el botón R UN
Esper ar a que acabe el ajuste
¿Ajuste correcto?
Sí
Abri r los contactor es, abri r las entradas de
basebl ock y cer rar el freno
T2- 04: corr iente nom inal del motor
T2- 05: númer o de polos del motor
T2- 09: resol ución del encoder
T2- 10: constante de t ensión del motor
FIN
Fig. 7 Autotuning para motores de imán permanente
No
No
(Se muestra el código de fallo)
* 1. Dirección directa significa:
La dirección en la que gira el motor con un comando UP en el terminal
S1 (es decir, con rotación en el sentido de las agujas del reloj
alimentación trifásica y cableado U-U, V-V, W-W entre el variador
y el motor). Normalmente, la dirección es en el sentido de las agujas
del reloj visto desde el lado del eje del motor (polea de tracción).
Consulte el manual de instrucciones del motor o consulte al fabricante
los detalles sobre la dirección de rotación.
* Compr obar el c ableado del enc oder.
* Cambi ar el par ámetr o F1-05
Consulte
página 27, Fallos de autotuning
y el imi ne el ori gen del fallo
Page 84

Ajuste de desplazamiento de encoder de motor de imán permanente
La Fig. 8 muestra el procedimiento de autotuning para un ajuste de desplazamiento de encoder.
El procedimiento se debe realizar si se ha cambiado el encoder o no se ha alineado correctamente.
Antes del ajuste, asegúrese de que el control vectorial de lazo cerrado de imán permanente está seleccionado
(A1-02 = 6) y de que los parámetros E1- y E5- están configurados correctamente..
INICIO
¿Se pueden quitar
los cables?
Sí
Quitar los cables.
Configurar las entradas de baseblock,
Conectar la fuente de alimentación si
Abrir el freno, cerrar el contactor del motor,
girar el motor lentamente en dirección directa*1 y
comprobar la monitorización de U1-05.
BB y BB1
está desconectada
¿Se ha producido un
fallo OPE06?
No
¿Se ha producido un
fallo CPF24?
No
¿Se ha producido un
fallo OPE02?
No
No
Sí
Sí
Sí
Equilibrar la cabina de modo que no se mueva
Comprobar el parámetro
* F1-01
* n8-35
* Comprobar el parámetro n8-35
* Si se utiliza EnDat / Hiperface
- comprobar la fuente de alimentación del encoder
- comprobar el cableado de la señal CLOCK y DATA
* Desconectar la fuente de alimentación.
* Comprobar si se ha configurado la constante PG correcta
(F1-01) y la resolución del encoder absoluto (F1-21).
* Consulte:
página 26, Errores de programación del operador
(OPE)
y elimine el origen del fallo
con los frenos abiertos.
Nota: la precisión será menor en este
modo de ajuste
Desconectar la fuente
de alimentación y comprobar
si la tarjeta PG está instalada
correctamente
T1-01 = 4: ajuste de desplazamiento de
Pulsar el botón UP hasta que aparezca
(Se muestra
“Tuning successful”)
Abrir los contactores, abrir las entradas
¿Se ha producido
PGO (sin realimentación de
encoder)?
No
¿El signo del valor
U1-05 es positivo
(distinto de -)?
Sí
Configurar:
encoder
“Tuning Ready” (Ajuste listo).
Cerrar los contactores del motor y
pulsar el botón RUN
Esperar a que acabe el ajuste.
¿Ajuste correcto?
Sí
* Com probar el cabl eado
Sí
* Com probar /reaj ustar l a fuente
de ali mentaci ón del encoder
No
No
(Se muestra el
código de fallo)
* 1. Dirección directa significa:
de baseblock y cerrar el freno
FIN
Fig. 8 Autotuning de offset del encoder
* Com probar el cabl eado del encoder .
* Cam biar el parám etro F 1-05
Consulte
página 27, Fallos de autotuning
y elimine el origen del fallo.
La dirección en la que gira el motor con un comando UP en el terminal
S1 (es decir, con una rotación en el sentido de las agujas del reloj
alimentación trifásica y cableado U-U, V-V, W-W entre el variador
y el motor). Normalmente, la dirección es el sentido de las agujas del
reloj visto desde el lado del eje del motor (polea de tracción).
Consulte el manual de instrucciones del motor o consulte al fabricante
los detalles sobre la dirección de rotación.
ES-18
Page 85

Perfil de operación y configuración de secuencia
Comandos UP y DOWN y selección de referencia de velocidad
Selección de fuente de comando UP/DOWN
La fuente de entrada para la señal UP o DOWN puede ser seleccionada en el parámetro b1-02.
La configuración de fábrica es el comando UP/DOWN mediante los terminales S1/S2 (b1-02 = 1).
Inicio de carrera en dirección ascendente o descendente
Para que el elevador inicie un desplazamiento en la dirección UP o DOWN deben cumplirse las siguientes
condiciones:
• Al menos una referencia de velocidad debe estar seleccionada si se utilizan entradas digitales para
la selección de referencia de velocidad.
•
La señal de baseblock de hardware (terminal BB y BB1) debe estar configurada (no condición de baseblock).
• La señal UP/DOWN debe estar configurada para arrancar en la dirección correspondiente.
Parada de viaje
El variador se puede parar del siguiente modo:
• Se retira la señal del comando de dirección (UP o DOWN).
• La señal de selección de referencia de velocidad se quita si se utilizan entradas digitales para la selección
de referencia de velocidad.
• Si d1-18 está configurado en 3 y todas las entradas de velocidad se han quitado
Selección de fuente de referencia de velocidad
La fuente de referencia de velocidad se puede seleccionar mediante el parámetro b1-01. La configuración de fábrica
es el operador digital (b1-01 = 0), es decir las velocidades se pueden seleccionar mediante entradas digitales.
Secuencia de selección de velocidad utilizando entradas digitales
Si se utilizan entradas digitales para la selección de velocidad, el método de selección de la velocidad y la prioridad
de la velocidad dependen de la configuración del parámetro d1-18 (selección de prioridad de velocidad).
Operación en multivelocidad 1/2 (introducción binaria) (d1-18 = 0/3)
Si d1-18 = 0
Puede seleccionarse un máximo de 8 pasos de velocidad preconfigurados (definidos en los parámetros d1-01
a d1-08) utilizando 3 entradas digitales codificadas en binario. El comando UP/DOWN arranca el variador.
Se detiene cuando se retira el comando UP/DOWN.
Si d1-18 = 3
Puede seleccionarse un máximo de 7 pasos de velocidad preconfigurados (definidos en los parámetros d1-02
a d1-08) utilizando 3 entradas digitales codificadas en binario. El comando UP/DOWN arranca el variador.
Se para cuando se retira el comando UP/DOWN o cuando no hay velocidad seleccionada (todas las entradas
digitales están desactivadas).
ES-19
Configuraciones de entrada digital multifuncional (H1-01 a H1-05) (Ejemplo)
Terminal Número de parámetro Valor seleccionado Detalles
S4 H1-02 3 Comando de multivelocidad 1
S5 H1-03 4 Comando de multivelocidad 2
S6 H1-04 5 Comando de multivelocidad 3
Page 86

Tabla de selección de velocidad
La siguiente tabla muestra las combinaciones de la entrada digital y la velocidad correspondiente.
Si b1-02 está configurado en “1”, la referencia de frecuencia 1 se introduce como referencia analógica
en el terminal A1.
Velocidad
Comando de
multivelocidad 1
1 OFF OFF OFF Referencia de frecuencia 1 d1-01 Parada
2 ON OFF OFF Referencia de frecuencia 2 d1-02 Referencia de frecuencia 2 d1-02
3 OFF ON OFF Referencia de frecuencia 3 d1-03 Referencia de frecuencia 3 d1-03
4 ON ON OFF Referencia de frecuencia 4 d1-04 Referencia de frecuencia 4 d1-04
5 OFF OFF ON Referencia de frecuencia 5 d1-05 Referencia de frecuencia 5 d1-05
6 ON OFF ON Referencia de frecuencia 6 d1-06 Referencia de frecuencia 6 d1-06
7 OFF ON ON Referencia de frecuencia 7 d1-07 Referencia de frecuencia 7 d1-07
8 ON ON ON Referencia de frecuencia 8 d1-08 Referencia de frecuencia 8 d1-08
Comando de
multivelocidad 2
Comando de
multivelocidad 3
Frecuencia seleccionada
d1-18 = 0 d1-18 = 3
Entradas de selección de velocidad separadas, alta velocidad tiene prioridad
(d1-18 = 1)
Con esta configuración se pueden seleccionar 6 velocidades distintas (definidas en los parámetros d1-09
a d1-17) mediante cuatro entradas digitales.
Configuración de fábrica de entrada digital
Terminal
S3 H1-01 80 Selección de velocidad nominal (d1-09)
S4 H1-02 84 Selección de velocidad de inspección (d1-14)
S5 H1-03 81 Selección de velocidad intermedia (d1-10)
S6 H1-04 83 Selección de velocidad de nivelación (d1-17)
Número de
parámetro
Val or
seleccionado
Detalles
La velocidad más alta tiene prioridad y una entrada de velocidad de nivelación está
seleccionada (H1- = 83)
Si d1-18 está configurado como 1 y una entrada digital multifunción está configurada para la selección
de velocidad de nivelación (H1- = 83), el variador decelera a la velocidad de nivelación (d1-17) una vez
retirada la señal de velocidad seleccionada. La velocidad de inspección no se puede seleccionar como
velocidad de carrera. La velocidad más alta tiene prioridad sobre la velocidad de nivelación, es decir, siempre
y cuando esté seleccionada una velocidad más alta, la velocidad de nivelación no se tendrá en cuenta
(véase la figura siguiente).
El variador se detiene cuando se retira la señal de nivelación o la señal UP/DOWN.
Inyección de c.c./
servo cero
Sin efecto
Entrada configurada
Velocidad
BB de hardware
UP/DOWN
Velocidad de nivelación
Velocidad seleccionada
Inyección de c.c./
servo cero
Está seleccionada la prioridad de velocidad más alta y no está seleccionada una entrada
de velocidad de nivelación (H1- K 83)
Cuando el comando de velocidad de nivelación no está seleccionado para ninguna entrada digital, el variador
decelera a la velocidad de nivelación (d1-17) cuando se retira la señal de velocidad seleccionada. La velocidad
de inspección no se puede seleccionar como velocidad de carrera. Para seleccionar la velocidad de nivelación
como la velocidad de carrera, se debe desactivar la detección de pérdida de referencia de frecuencia (S3-09 = 0).
El variador se detiene cuando se retira la señal de dirección UP/DOWN.
ES-20
Page 87

Cuando no está configurada ninguna entrada de selección de velocidad, la velocidad de nivelación se toma
como referencia de velocidad.
Velocidad
BB de hardware
UP/DOWN
Velocidad seleccionada
Inyección de c.c./
servo cero
Inyección de c.c./
servo cero
El variador se detiene cuando se retira la señal de dirección (señal UP/DOWN).
Con esta configuración, el controlador para con un “FRL” (fallo de pérdida de referencia
de frecuencia) cuando ninguna entrada de referencia de velocidad está seleccionada durante
el arranque.
IMPORTANTE
Para desactivar la detección de FRL, configure el parámetro S3-09 en “0”.
Entradas de selección de velocidad separadas, velocidad de nivelación tiene
prioridad (d1-18 = 2)
Los parámetros relacionados y las preconfiguraciones de entrada digital son las mismas que para
la configuración de prioridad de alta velocidad (d1-18 = 1).
La velocidad de nivelación tiene prioridad y la entrada de velocidad de nivelación está
seleccionada (H1- = 83)
Si d1-18 está configurado como “2” y una entrada digital multifunción está configurada para la velocidad
de nivelación (H1- = 83), el variador decelera a la velocidad de nivelación (d1-17) una vez que se
ha activado la entrada de selección de velocidad de nivelación. La señal de nivelación tiene prioridad sobre
la velocidad seleccionada, es decir, no se tiene en cuenta la velocidad seleccionada. La velocidad de carrera
seleccionada debe ser diferente de la velocidad de inspección.
El variador se detiene cuando el comando de velocidad de nivelación se retira.
Velocidad
BB de hardware
UP/DOWN
Velocidad de nivelación
Velocidad seleccionada
Inyección de c.c./
servo cero
Inyección de c.c./
servo cero
Velocidad de nivelación tiene prioridad
Está seleccionada la prioridad de velocidad de nivelación y no está seleccionada una entrada
de velocidad nominal (H1-K80)
Si d1-18 está configurado como “2” y no hay ninguna entrada digital configurada para la selección
de velocidad nominal, la referencia de velocidad con entrada de selección de velocidad es la velocidad
nominal (d1-09). Cuando la señal de velocidad de nivelación está configurada, el variador comienza
a decelerar hasta la velocidad de nivelación. La señal de velocidad de nivelación tiene prioridad sobre el resto
de las señales de velocidad, es decir, la velocidad intermedia 1 y 2 y las señales de renivelación no se tienen
en cuenta cuando está seleccionada la velocidad de nivelación.
El variador se puede detener retirando la señal de velocidad de nivelación o el comando UP/DOWN.
PRECAUCIÓN: esta secuencia puede ser arriesgada si, por ejemplo, la selección de velocidad no funciona
por algún motivo (un cable roto, etc.).
Velocidad
BB de hardware
UP/DOWN
Velocidad de nivelación
Inyección de c.c./
servo cero
Inyección de c.c./
servo cero
ES-21
Page 88

Configuración de aceleración/deceleración/sacudidas
El tiempo de aceleración indica el tiempo para incrementar la velocidad desde el 0% al 100% de la velocidad
máxima configurada en E1-04. El tiempo de deceleración indica el tiempo para disminuir la velocidad desde
el 100% al 0% de E1-04.
Los tiempos de aceleración/deceleración estándar se configuran en los parámetros C1-01/02, la configuración
de sacudidas (curva S) se configura en los parámetros C2- tal como se muestra en la Fig. 9.
C2-02
C2-03
Tiempo de
C2-01
aceleración
C1-01
Tiempo de
deceleración
C1-02
Fig. 9 Configuración de aceleración/deceleración y sacudidas (curva S)
Secuencia de frenado
La siguiente figura muestra la secuencia de frenado estándar.
S1-04
Servo cero/
S1-16
inyección de c.c.
en arranque
Velocidad
Entrada digital de baseblock
de hardware de variador
Comando de apertura del freno
RUN
Tiempo de retardo de RUN
S1-06
Freno abierto
Tiempo de retardo
C2-04
Velocidad seleccionada
C2-05
Velocidad de nivelación
Velocidad de nivelación
S1-05
Servo cero/
inyección de c.c.
en parada
S1-07
Freno cerrado
Tiempo de retardo
S1-19
Retardo de contactor abierto
Fig. 10 Diagrama de tiempos sin compensación de par al arranque
Compensación de inercia (realimentación positiva)
El control de realimentación positiva se utiliza para eliminar la sobresaturación o la subsaturación
de velocidad mediante la compensación de los efectos de la inercia. Se puede activar configurando
el parámetro n5-01 en 1. Tras ello, el tiempo de aceleración del motor n5-05 se debe ajustar.
Autotuning del tiempo de aceleración del motor (n5-05)
Antes de que se realice el autotuning de n5-02, deben haber finalizado el autotuning de los datos de motor
y la configuración general. Realice el ajuste con la configuración de fábrica para los parámetros n5-.
Lleve a cabo el siguiente procedimiento:
1. Configure n5-05 en “1” para activar el autotuning y volver al display de referencia de velocidad.
2. Configure la entrada de baseblock.
3. Active la entrada de velocidad de inspección. “FFCAL” parpadeará en el display para señalar que
el cálculo está activo.
4. Aplique un comando UP. El variador acelerará el motor hasta la velocidad nominal. Cese de aplicar
el comando UP unos segundos después de que se haya alcanzado la velocidad máxima.
ES-22
Page 89

5. Cuando el motor se haya parado, aplique un comando DOWN. El variador acelerará el motor
E
en la dirección opuesta hasta la velocidad nominal. Cese el comando DOWN unos segundos después
de que se haya alcanzado la velocidad nominal.
Para anular el ajuste, configure el parámetro n5-05 a “0”.
1. El orden de envío del comando UP o DOWN no tiene influencia.
2. No se debe cambiar el valor de fábrica de n5-01 para el ajuste.
3. Una vez terminada la marcha en ambas direcciones, el parámetro n5-05 se configura automáticamente en “0”.
IMPORTANT
4. El autotuning sólo se realizará si está configurada la entrada de velocidad de inspección.
5. No cambie las constantes mecánicas (carga, inercia) entre las marchas.
Configuración de ganancia P de compensación de realimentación directa
• Incremente la ganancia para mejorar la capacidad de respuesta a la referencia de velocidad.
• Disminuya la ganancia si se producen vibraciones u oscilaciones.
ES-23
Page 90

Detección y corrección de errores
Detección de fallos y alarmas
Los fallos y las alarmas son funciones que indican un estado anómalo del variador/aplicación.
Una alarma no desconecta necesariamente el variador, sino que se muestra un mensaje en el teclado
y se genera una salida de alarma en las salidas multifunción (H2-01 a H2-03) si así se ha programado.
Una alarma desaparece automáticamente si ya no está presente la condición de alarma.
Un fallo desconecta el variador inmediatamente, se muestra un mensaje en el teclado y se conmuta la salida
de fallo. Se debe hacer un reset manual del fallo después de haber eliminado la causa.
En las siguientes tablas se muestra una lista de fallos y alarmas con sus acciones correctivas.
Se muestra
Display
BUS
Option Com Err
(parpadea)
CF
Out of Control
CPF00
CPF01
COM-
ERR(OP&INV)
CPF02 - CPF 04
CPF24
Option Comm Err
DEV
Speed Deviation
DV3
DV4
DV6
Aceleración
excesiva
EF0
Opt External Flt
EF
Ext Fault S
EF
External Fault
(parpadea)
Ext Run Active
Cannot Reset
como
Alarma Fallo
Significado Acciones correctivas
Alarma de tarjeta opcional de comunicaciones
Tras haber establecido la comunicación inicial
se ha perdido la comunicación.
Se ha alcanzado continuamente un límite de par
durante 3 segundos o más durante una deceleración
a la parada en control vectorial de lazo abierto.
• Fallo de comunicación del operador digital/monitor
de LEDs 1/2
• Fallo de comunicación entre el operador
yelvariador
• Fallo RAM externa de CPU
• Error del circuito de Baseblock
• Error de EEPROM
• Fallo convertidor A/D interno de CPU
Error de comunicaciones serie Hiperface
Se detecta cuando no se han recibido datos del
encoder durante 200 mseg.
F1-04 = 0, 1 ó 2 y A1-02 = 3 ó 6
La desviación de la velocidad es mayor que el valor
de F1-10 durante el tiempo de F1-11 o superior.
F1-04 = 3 y A1-02 = 3 ó 6
La desviación de la velocidad es mayor que el valor
de F1-10 durante el tiempo de F1-11 o superior.
Dirección de rotación errónea
Se detecta cuando la desviación de velocidad
es mayor que el 30% y la referencia de par
y la aceleración tienen signos opuestos.
Dirección de rotación errónea
Se detecta cuando F1-19 no es 0, la referencia
de velocidad y la velocidad del motor tienen signos
opuestos y se excede el umbral de detección
configurado en F1-19.
Se ha detectado una aceleración excesiva de la cabina
(Sólo A1-02 = 6)
Entrada de fallo externo desde tarjeta opcional
de comunicaciones
Fallo externo en el terminal S ( se refiere a los
terminales S3 a S7)
Comandos de marcha directa/inversa introducidos
ala vez
Los comandos de marcha directa y de marcha inversa
se han introducido simultáneamente durante 500 ms
o más. Esta alarma detiene el motor.
Se ha intentado un reset de fallo durante la marcha.
Compruebe las conexiones y todas las
configuraciones de usuario del software.
Compruebe los parámetros del motor.
• Desconecte el operador digital/monitor de LEDs
y vuelva a conectarlo.
• Sustituya el variador.
• Conecte/desconecte la fuente de alimentación del
variador.
• Sustituya el variador.
• Realice una inicialización a los valores
predeterminados de fábrica.
• Conecte/desconecte la fuente de alimentación del
variador.
• Sustituya el variador.
Compruebe la conexión del encoder o sustitúyalo
si es necesario
• Disminuya la carga.
• Amplíe los tiempos de aceleración y deceleración.
• Compruebe el sistema mecánico.
• Compruebe las configuraciones de F1-10 y F1-11.
• Compruebe la secuencia y si el freno se abre cuando
el variador empieza a aumentar la velocidad.
• Compruebe el cableado del PG
• Corrija el cableado
• Verifique la dirección de PG y ejecute un autotuning
de offset del encoder
• Reduzca la carga y compruebe el freno
• Verifique la dirección del PG y ejecute
un autotuning de offset de encoder
• Reduzca la carga y compruebe el freno
• Disminuya la carga
• Compruebe la dirección del PG, compruebe F1-22
y realice un ajuste de offset de encoder.
• Verifique la configuración de S3-13, S3-14 y S3-15.
• Ajuste los tiempos de aceleración y deceleración.
• Compruebe la existencia de condición de fallo
externo.
• Verifique los parámetros.
• Verifique las señales de comunicaciones.
Elimine la causa de la condición de fallo externo.
Compruebe la lógica de la secuencia externa, de tal
manera que solamente se reciba una entrada cada vez.
• Retire la señal de dirección y reintente un reset
de fallo.
• Si un PLC se ocupa del reset del fallo, compruebe
la secuencia.
ES-24
Page 91

Display
FF_CAL
FRL
Ref Missing
GF
Ground Fault
LF
Output Phase
Loss
OC
Over Current
OH
Heatsink
Overtemp
OH1
Heatsink Max
Tem p
OL1
Motor Overload
OL2
Inv Overload
OS
Motor Over speed
Det
OV
DC Bus Overvolt
PF
Input Phase Loss
PGO
PG Open
(PG
Disconnection)
Se muestra
como
Alarma Fallo
(sólo en
condición de
parada)
Significado Acciones correctivas
Tiempo de aceleración del motor de realimentación
directa activo
No se ha seleccionado velocidad antes de que
arrancara el variador.
La corriente de tierra en la salida del variador
ha excedido el 50% de la corriente nominal de salida
del variador y L8-09 = 1 (activado).
Ha tenido lugar un error de fase abierta en la salida
del variador.
El fallo se detecta cuando la corriente de salida cae
por debajo del 5% de la corriente nominal del
variador y L8-07 = 1
La corriente de salida del variador ha excedido
el nivel de detección de sobrecorriente.
L8-03 = 0,1 ó 2 y la temperatura del ventilador de
refrigeración del variador ha excedido el valor de L8-02.
Se ha detenido el ventilador de refrigeración del
variador
L8-03 = 3 y la temperatura del ventilador de refrigeración
del variador ha excedido el valor de L8-02.
La temperatura del disipador térmico del variador
ha excedido 105°C.
Se ha detenido el ventilador de refrigeración del
variador
Se detecta cuando L1-01 está configurado en 1, 2 ó 3
y la corriente de salida del variador ha excedido la
curva de sobrecarga.
La curva de sobrecarga es ajustable utilizando el
parámetro E2-01 (Corriente nominal del motor),
L1-01 (Selección de protección del motor) y L2-02
(Constante de tiempo de protección del motor)
La corriente de salida del variador ha excedido
la capacidad de sobrecarga del variador.
F1-03 = 0, 1 ó 2 y A1-02 está configurado en 3 ó 6.
La realimentación de velocidad del motor (U1-05)
ha excedido el valor de F1-08 durante el tiempo
de F1-09 o superior.
F1-03 = 3 y A1-02 está configurado en 3 ó 6.
La realimentación de velocidad del motor (U1-05)
ha excedido el valor de F1-08 durante el tiempo
de F1-09 o superior.
La tensión del bus de c.c. ha excedido el nivel
de detección de sobretensión.
Los niveles de detección predeterminados son:
Clase 200 V: 410 Vc.c.
Clase 400 V: 820 Vc.c.
Fluctuación de tensión de bus de c.c. demasiado
grande.
Sólo se detecta cuando L8-05 = 1 (activado)
F1-02 = 0, 1 ó 2 y A1-02 = 3 ó 6
No se reciben pulsos del PG (encoder) durante
el tiempo de F1-14 o superior.
F1-02 = 3 y A1-02 = 3 ó 6.
No se reciben pulsos del PG (encoder) durante
el tiempo de F1-14 o superior.
• Realice el procedimiento de ajuste completo
• Anule el ajuste mediante la configuración
de n5-05 = 0.
Compruebe la selección de velocidad/secuencia
de arranque.
• Retire el motor y haga funcionar el variador sin
el motor.
• Compruebe la existencia de alguna fase del motor
cortocircuitada a tierra.
• Compruebe la corriente de salida con un amperímetro
de pinza para verificar la lectura de DCCT.
• Compruebe la existencia de señales de contactor
de motor erróneas en la secuencia de control.
• Resetee el fallo tras corregir la causa.
• Compruebe la capacidad del motor y del variador.
• Retire el motor y haga funcionar el variador sin
el motor.
• Compruebe la existencia de cortocircuito fase a fase
en el motor.
• Verifique los tiempos de aceleración/deceleración
•(C1-).
• Compruebe la existencia de cortocircuito fase a fase
en la salida del variador.
• Compruebe la existencia de suciedad
en el ventilador o el dispositivo de disipación
térmica.
• Reduzca la temperatura ambiente alrededor del
variador.
• Sustituya el(los) ventiladores de refrigeración.
• Compruebe la existencia de suciedad en el
ventilador o el dispositivo de disipación térmica.
• Reduzca la temperatura ambiente alrededor del
variador.
• Sustituya el(los) ventiladores de refrigeración.
• Compruebe de nuevo el tiempo de conexión/
desconexión y el tamaño de la carga, así como los
tiempos de aceleración/deceleración.
•(C1-).
• Compruebe las características de V/f (E1-).
• Compruebe la configuración de la corriente nominal
del motor (E2-01).
• Compruebe de nuevo el tiempo de conexión/
desconexión y el tamaño de la carga, así como los
tiempos de aceleración/deceleración.
•(C1-).
• Compruebe las características de V/f (E1-).
• Compruebe la configuración de la corriente nominal
del motor (E2-01).
• Ajuste la configuración de ASR en el grupo
de parámetros C5.
• Compruebe el circuito de referencia y la ganancia
de referencia.
• Compruebe la configuración de F1-08 y F1-09.
• Incremente el tiempo de deceleración (C1-02/04/06/
08) o conecte una opción de freno.
• Compruebe la fuente de alimentación y disminuya
la tensión para adecuarla a las especificaciones del
variador.
• Compruebe la resistencia/chopper de freno.
• Apriete los tornillos de los terminales de entrada
• Compruebe la tensión de alimentación
• Repare el cableado roto/desconectado.
• Repare el cableado.
• Suministre alimentación al PG.
• Adecuadamente.
• Compruebe la secuencia y si el freno se activa
cuando el variador empieza a aumentar la velocidad.
ES-25
Page 92

Display
PUF
DC Bus Fuse
Open
RR
DynBrk Transistr
SE1
Sequence Error 1
SE2
Sequence Error 2
SE3
Sequence Error 3
SVE
Zero Servo Fault
UV1
DC Bus
Undervolt
UV2
CTL PS
Undervolt
Se muestra
como
Alarma Fallo
(sólo en
condición de
parada)
Significado Acciones correctivas
El fusible del circuito principal está fundido.
Advertencia:
Nunca haga funcionar el variador tras sustituir
el fusible del bus de c.c. sin comprobar la existencia
de cortocircuito en los componentes.
Ha fallado el transistor del freno dinámico
incorporado.
Sin respuesta del contactor de salida S1-16
osuperior.
La corriente de salida al arrancar estaba por debajo
del 25% de la corriente en vacío.
La corriente de salida durante la marcha estaba por
debajo del 25% de la corriente en vacío.
Se ha movido la posición del motor durante
la operación con servo cero.
La tensión del bus de c.c. está por debajo del nivel
de detección de subtensión
(L2-05). La configuración predeterminada es:
Clase 200 V: 190 V c.c.
Clase 400 V: 380 Vc.c.
Fallo de operación de circuito principal MC
Sin respuesta de MC durante la operación del
variador.
Subtensión de la fuente de alimentación de control
Subtensión del circuito de control mientras
el variador estaba en funcionamiento.
• Compruebe la existencia de cortocircuito o fallos
de aislamiento en el motor y en los cables del motor
(fase a fase).
• Sustituya el variador tras solucionar el fallo.
• Conecte/desconecte la alimentación del variador.
• Sustituya el variador.
Compruebe el contactor de salida.
Compruebe el contactor de salida.
Compruebe el contactor de salida.
• Incremente el límite de par.
• Disminuya el par de carga.
• Compruebe la existencia de ruido de señal.
• Compruebe la tensión de entrada.
• Compruebe el cableado de los terminales
de entrada.
• Compruebe la tensión de entrada y el cableado
de los terminales de entrada.
• Aumente la configuración de
• C1-01/03/05/07
Sustituya el variador.
• Retire todas las conexiones a los terminales
de control y conecte/desconecte la alimentación del
variador.
• Sustituya el variador.
Errores de programación del operador (OPE)
Un error de programación del operador (OPE) se produce cuando se configuran incorrectamente dos o más
parámetros relacionados entre sí o una configuración de parámetro individual es incorrecta. El variador no
opera hasta que el valor del parámetro se configure correctamente; a pesar de todo, no se producirán otras
salidas de alarma o fallo. Si ocurre un OPE, cambie el parámetro relacionado comprobando la causa mostrada
en la tabla siguiente. Cuando se visualice un error OPE, pulse la tecla ENTER para ver U1-34 (OPE
Detectado). Se visualiza el parámetro que está causando el error OPE.
Display Significado Acciones correctivas
OPE01
kVA Selection
OPE02 Limit
OPE03
Ter mi nal
OPE05
Sequence Select
OPE06
PG Opt Missing
OPE08
Constant Selection
OPE10
V/f Ptrn Setting
Error de configuración de kVA Introduzca la configuración de kVA correcta en o2-04.
Configuración de parámetro fuera del rango
Hiperface seleccionado (n8-35 = 4) y:
• F1-01 es distinto de 512 ó 1.024
• F1-21 está configurado como 2
EnDat seleccionado (n8-35 = 5) y:
• F1-01 es distinto de 512 ó 2.048
• F1-21 está configurado como 0 ó 1
Error de selección de entrada multifuncional
(H1-01 a H1-05):
• Se han seleccionado funciones duplicadas.
• Se han seleccionado simultáneamente los baseblocks
externos NA (8) y NC (9).
Se han configurado simultáneamente los comandos de
parada de emergencia NA (15) y NC (17).
Error de selección de comando RUN/referencia
La selección de fuente de referencia b1-01 y/o
el parámetro de selección de fuente RUN b1-02 están
configurados como 3 (tarjeta opcional), pero no hay
ninguna tarjeta opcional instalada.
Error de selección de método de control/
falta tarjeta de PG
Error de selección de función Verifique el método de control y la función.
Error de configuración del parámetro V/f
Verifique la configuración del parámetro.
Verifique la configuración del parámetro en H1-
• Verifique que la tarjeta está instalada. Desconecte
la alimentación y vuelva a instalar la tarjeta opcional
• Compruebe de nuevo la configuración de b1-01 y b1-02.
Verifique la selección del método de control en el parámetro
A1-02 y/o la instalación de la tarjeta opcional de PG.
Compruebe los parámetros (E1-). Un valor de frecuencia/
tensión puede estar configurado más alto que la frecuencia/
tensión máxima.
ES-26
Page 93

Fallos de autotuning
En este apartado se muestran los fallos de autotuning. Cuando se detectan los siguientes fallos, el fallo se
visualiza en el operador digital y el motor marcha libre hasta detenerse. No se operan salidas de fallo o alarma.
Display Significado Acciones correctivas
Accelerate
End - 1
V/f Over Setting
End - 2
Saturation
End - 3
Rated FLA Alm
Fault Fallo de datos del motor
I-det. Circuit
KE_ERR
(sólo motor PM)
LD_ERR
(sólo motor PM)
Leakage Induc-
tance Fault
Minor Fault
Motor Speed
No-Load Current Fallo de corriente en vacío • Compruebe los datos de entrada.
Resistance Fallo de resistencia de línea a línea
Rated slip Fallo de deslizamiento nominal
RS_ERR
(sólo motor PM)
STOP key Pulsación de la tecla STOP -
Z_SRCH_ERR
(sólo motor PM)
Error de aceleración (se detecta sólo durante el autotuning
dinámico)
El motor no ha acelerado en el tiempo especificado.
Alarma de configuración de V/f
Se visualiza después de completado el autotuning
La referencia de par ha excedido el 100% y la corriente
en vacío ha excedido el 70% durante el autotuning.
Fallo de saturación del núcleo del motor
Se visualiza después de completado el autotuning.
Se detecta solamente para autotuning en rotación
Alarma de configuración de corriente nominal
Se visualiza después de completado el autotuning
Durante el autotuning, el valor medido de la corriente
nominal del motor (E2-01) era mayor que el valor
seleccionado.
Error de detección de corriente
La corriente ha excedido la corriente nominal del motor o
alguna fase de salida está abierta
Error de constante de tensión Compruebe el cableado del motor
Error de inductancia Compruebe el cableado del motor
La medida de inductancia de fuga ha provocado un error.
La corriente de ajuste de inductancia de fuga era
demasiado alta o demasiado baja (vectorial de lazo
cerrado sólo para PM)
Cualquiera de las alarmas enumeradas anteriormente
se ha producido durante el autotuning o el variador estaba
en condición de baseblock cuando se inició el ajuste.
Fallo de velocidad del motor
Se detecta solamente para autotuning en rotación
La referencia de par ha excedido 100% durante
la aceleración.
Sólo se detecta cuando A1-02 está configurado en 2
(control vectorial de lazo abierto).
Error de resistencia de línea a línea
Todos los encoders:
La velocidad del motor ha superado 20 r.p.m. en el inicio
de autotuning.
El ajuste de posición de polo magnético no se ha podido
realizar en el tiempo especificado.
Encoder con pulso Z:
La diferencia entre dos mediciones de la posición del polo
magnético ha sido superior a 3°.
Encoders serie:
La diferencia entre dos mediciones de la posición del polo
magnético ha sido superior a 5° o se ha producido un error
de comunicaciones serie del encoder durante el ajuste.
• Incremente C1-01 (Tiempo de aceleración 1)
• Incremente L7-01 y L7-02 (límites de par) si son bajos.
• Quite los cables y repita el ajuste.
• Compruebe y corrija las configuraciones del motor
• Si el motor y la máquina están conectados, desconecte
el motor de la máquina.
• Compruebe los datos de entrada.
• Compruebe el cableado del motor.
• Si el motor y la máquina están conectados, desconecte
el motor de la máquina.
Compruebe el valor de la corriente nominal del motor.
• Compruebe los datos de entrada.
• La capacidad del motor y del variador no se corresponde.
Compruebe la capacidad del motor y del variador.
• Compruebe la corriente nominal y la corriente en vacío del
motor.
Compruebe el cableado del variador y el montaje.
• Compruebe el cableado del motor.
• Compruebe el valor de entrada de la corriente nominal del
motor
• Reduzca o aumente el nivel de corriente para el ajuste
de inductancia de fuga cambiando el parámetro n8-46.
• Salga del menú de ajuste, compruebe el contenido
de la alarma y elimine la causa tal como se ha descrito
en la lista de alarmas anterior.
• Compruebe los datos de entrada.
• Asegúrese de que el variador no está en condición de
baseblock durante el ajuste.
• Si el motor está conectado a la máquina, desconéctelo.
• Incremente C1-01 (Tiempo de aceleración 1)
• Compruebe los datos de entrada (especialmente el número
de pulsos del PG y el número de polos del motor).
• Realice un autotuning estático (sin rotación)
• Compruebe el cableado del motor.
• Si el motor está conectado a la máquina, desconéctelo.
• Si la configuración de T1-03 es mayor que la tensión
de alimentación de entrada del variador (E1-01), cambie los
datos de entrada.
• Compruebe el cableado del motor
• Compruebe la datos de entrada del motor
• Quite los cables y repita el ajuste
• Compruebe la dirección de rotación del encoder o cambie
F1-05 si es necesario.
• Compruebe el cableado del encoder (orden, blindaje, etc.)
• Compruebe la fuente de alimentación del encoder.
Sustituya el encoder.
ES-27
Page 94

Tabla de parámetros
Nota: La configuración de fábrica está en negrita.
Núme-
ro de
pará-
metro
Nombre Descripción
Inicialización de datos
Selección de
idioma para el
display del
A1-00
operador digital
(sólo JVOP160-OY)
Nivel de acceso
A1-01
a parámetros
Selección del
A1-02
método
de control
A1-03 Inicializar
0:Inglés
1:Japonés
2:Alemán
3:Francés
4:Italiano
5:Español
6:Portugués
0:Sólo monitorización (monitorización
del modo drive y configuración
de A1-01 y A1-04)
1:Se utiliza para seleccionar parámetros
de usuario (solamente pueden leerse
y configurarse parámetros
configurados de A2-01 a A2-32)
2:Ava nzad o
(pueden leerse y configurarse parámetros
tanto en el modo de programación rápida
(Q) como en el modo de programación
avanzada (A))
0:Control V/f
2:Vectorial de lazo abierto
3:Vectorial de lazo cerrado
6:Vectorial de lazo cerrado para motores
de imán permanente
0: Sin inicialización
1110: Inicializa a los parámetros de
usuario
2220: Inicializa según la configuración
de fábrica
Fuente de secuencia/referencia
0:Operador digital
1:Terminal de circuito de control
(entrada analógica)
3:Tarjeta opcional
0:Operador digital
1:Terminal de circuito de control
(entradas digitales multifuncionales)
3:Tarjeta opcional
b1-01
b1-02
Selección
de fuente
de referencia
Selección
de fuente del
comando RUN
Configuración de aceleración/deceleración
Tiempo de
C1-
aceleración/
deceleración 1
C2-Característica
de la curva S
Consulte página 1-22
Configura los tiempos de la curva S
en los cambios de velocidad para reducir
las sacudidas. Consulte página 1-22
Compensación de deslizamiento
• Aumente el valor si el valor
de compensación de deslizamiento
es demasiado bajo
• Reduzca el valor si el deslizamiento
está descompensado
• Reduzca el valor si la respuesta de
compensación de deslizamiento es baja.
• Cuando la velocidad no sea estable,
incremente el valor.
C3-01
C3-02
Ganancia de
compensación
de
deslizamiento
Tiempo de
retardo de la
compensación
de
deslizamiento
Regulación automática de la velocidad (ASR)
Ganancia
C5-01
C5-02
C5-03
C5-04
C5-06
proporcional 1
(P) de ASR
Tiempo de
integral 1 (I) de
ASR
Ganancia
proporcional 2
(P) de ASR
Tiempo de
integral 2 (I) de
ASR
Tiempo de
retardo de ASR
Configura la ganancia proporcional 1 y el
tiempo de integral 1 del lazo de control
de la velocidad (ASR) para la frecuencia
C5-07.
Configura la ganancia proporcional 2 y el
tiempo integral 2 del lazo de control de la
velocidad (ASR) para la frecuencia
mínima.
La configuración solamente está activa
para la aceleración.
Configure el tiempo de retardo de salida
ASR.
Núme-
ro de
pará-
metro
C5-07
C5-09
C5-10
Nombre Descripción
Frecuencia de
alternancia de
ASR
Ganancia
proporcional 3
(P) de ASR
Tiempo de
integral 3 (I) de
ASR
Configura la frecuencia para la
alternancia entre la ganancia proporcional
1, 2, 3 y el tiempo de integral 1, 2, 3.
Configura la ganancia proporcional 3
y el tiempo integral 3 del lazo de control
de velocidad (ASR) para la frecuencia
mínima.
La configuración solamente está activa
para la deceleración.
Configuración de frecuencia de portadora
C6-02
C6-11
Selección
de frecuencia
de portadora 1
Selección
de frecuencia
de portadora 2
Selecciona la frecuencia de portadora
para los modos de control de motor
de inducción.
Selecciona la frecuencia de portadora
para los modos de control de motor
de imán permanente.
Configuración de velocidad
d1-01
Referencia de
a
multivelocidad
d1-08
1 a 8
Ve l oc i d a d
d1-09
nominal
Ve l oc i d a d
d1-10
intermedia 1
d1-11
d1-12
d1-13
d1-14
d1-17
d1-18
Ve l oc i d a d
intermedia 2
Ve l oc i d a d
intermedia 3
Velocidad de
renivelación
Velocidad de
inspección
Velocidad de
nivelación
Selección
de prioridad
de velocidad
Consulte página 19, Secuencia de
selección de velocidad utilizando
entradas digitales
0:Usar referencia de multivelocidad
(d1-01 a d1-08)
1:La referencia de alta velocidad tiene
prioridad.
2:La referencia de velocidad
de nivelación tiene prioridad.
3:Usar referencia de multivelocidad
Sin ninguna velocidad seleccionada,
se desactiva la señal UP/DOWN
Consulte página 1-19
Configuración de la curva V/f
E1-01
E1-04
E1-05
E1-06
E1-08
E1-10
E1-13
Configuración
de la tensión
de entrada
Frecuencia
de salida máx.
(FMAX)
Tensión de
salida máx.
(VMAX)
Frecuencia base
(FA)
Tensión
de frecuencia
de salida media
(VB)
Tensión
de frecuencia
de salida mín.
(VMIN)
Tensión base
(VBASE)
Esta configuración se utiliza como valor
de referencia para funciones
de protección.
Tensión de salida (V)
Para configurar las características de V/f
en una línea recta, configure los mismos
valores para E1-07 y E1-09. En este caso
la configuración para E1-08 no será
tenida en cuenta.
Asegúrese siempre de que las cuatro
frecuencias están configuradas de la
siguiente manera:
E1-04 (FMAX) ≥ E1-06 (FA) > E1-07
(FB) ≥ E1-09 (FMIN)
Frecuencia
ES-28
Page 95

Núme-
ro de
pará-
metro
Nombre Descripción
Configuración de datos de motor
Corriente
E2-01
nominal
Deslizamiento
E2-02
nominal
Corriente
E2-03
en vacío
Número
E2-04
de polos
Resistencia
E2-05
de línea a línea
Inductancia
E2-06
de fuga
Potencia
E5-02
nominal
Corriente
E5-03
nominal
Número
E5-04
de polos
Resistencia
E5-05
de línea a línea
E5-06 Inductancia d
E5-07 Inductancia q
Constante
E5-09
de tensión
de motor
Datos de motor para motores de
inducción
Datos de motor para motores de imán
permanente
Configuración de realimentación de encoder
F1-01
F1-05
F1-21
F1-22
Constante
de PG
Dirección de
rotación del PG
Resolución
de encoder
absoluto
(Hiperface
oEnDat)
Desplazamiento
de posición
de imán
Configura el número de pulsos por
revolución del PG
0:Fase A para comando de marcha
directa. (Fase B para comando de
marcha inversa; rotación en sentido
contrario a las agujas del reloj)
1:Fase B para comando de marcha
directa. (Fase A para comando
de marcha inversa; rotación en sentido
contrario a las agujas del reloj)
0:16.384
1:32.768
2:8192
(si EnDat está seleccionado (n8-35 = 5),
F1-21 está fijo en 2)
Configura el desplazamiento entre
el imán del rotor y la posición de cero del
encoder.
Configuración de E/S digitales
Selección
H1-01
a
H1-05
H2-01
a
H2-03
de función
de terminal S3
aS7
Selección
de función
de terminal M1-
M2/M3-M4/
M5-M6
Al final de esta lista puede consultar una
lista de selecciones
Al final de esta lista puede consultar una
lista de selecciones
Protección del motor
0:Desactivado
1:Protección de motor de empleo
general (motor refrigerado por
ventilador)
2:Protección del motor de variador
(motor refrigerado externamente)
3: Protección de motor vectorial
Cuando la alimentación del variador
se desconecta, se resetea el valor
de temperatura, así que incluso si este
parámetro se configura como 1 es
posible que la protección no sea efectiva.
5:Protección de motor de par constante
de imán permanente
L1-01
Selección de
protección del
motor
Compensación de realimentación positiva
Selección
n5-01
n5-02
de control de
realimentación
positiva
Tiempo
de aceleración
del motor
0:Desactivado
1:Activado
Núme-
ro de
pará-
metro
n5-03
n5-05
Nombre Descripción
Ganancia
proporcional de
realimentación
positiva
Ajuste
de tiempo
de aceleración
del motor
La respuesta de referencia de velocidad
se incrementará al incrementar
la configuración de n5-03.
0:Desactivado
1:Activado
Secuencia de frenado
Nivel de
S1-01
velocidad cero
en parada
Corriente
de freno
S1-02
de inyección de
c.c. al arranque
Corriente
de freno
S1-03
de inyección de
c.c. a la parada
Tiempo
de freno
S1-04
de inyección de
c.c./velocidad
cero al arrancar
Tiempo
de freno
S1-05
de inyección de
c.c./velocidad
cero al parar
Tiempo
de retardo
S1-06
de liberación
de freno
Tiempo
S1-07
de retardo de
cierre de freno
Ganancia de
S1-20
servo cero
Compensación de deslizamiento de referencia
de velocidad
Ve l oc i d a d
S2-01
nominal del
motor
Ganancia de
compensación
de deslizamiento
S2-02
en modo de
operación
normal
Ganancia de
compensación
de
S2-03
deslizamiento
en modo de
regeneración
Configura el nivel de velocidad del
comando de cierre de freno en parada.
Configura como porcentaje
de la corriente nominal del variador.
Consulte página 22, Secuencia de
frenado.
Ganancia de lazo de posición de servo cero
para control vectorial de lazo cerrado.
Configura la velocidad nominal del
motor.
Configura la ganancia de compensación
de deslizamiento en modo de operación
normal. Se puede configurar para mejorar
la precisión de nivelación.
Configura la ganancia de compensación
de deslizamiento en modo de
regeneración.
Se puede utilizar para mejorar
la precisión de nivelación.
Configuración de funciones especiales
Activa o desactiva la función de “piso
corto”.
0:desactivado
1:activado (estándar)
2:activado (avanzado)
Nivel de detección de velocidad nominal/
nivelación cuando se utilizan entradas
multivelocidad (d1-18 = 0/3)
0:El orden de fase de salida es U-V-W
1:El orden de fase de salida es U-W-V
Configura el diámetro de la polea de
tracción para la visualización en unidades
m/s.
1:1:1
2:1:2
Configura la relación de engranaje
mecánico.
S3-01
S3-04
S3-08
S3-13
S3-14
S3-15
Selección
de función
“piso corto”
Nivel
de detección
de velocidad
nominal/
nivelación
Orden de fase
de salida
Diámetro
de polea
de tracción
Relación
de cables
Relación
de engranaje
ES-29
Page 96

Núme-
ro de
pará-
metro
Nombre Descripción
Datos monitorizados
U1-01 Referencia de frecuencia en Hz/r.p.m.
U1-02 Frecuencia de salida en Hz/r.p.m.
U1-03 Corriente de salida en A
Núme-
ro de
pará-
metro
Nombre Descripción
U2-10 Referencia de par en el fallo
U2-11 Estado de terminal de entrada en el fallo
U2-12 Estado de terminal de salida en el fallo
U2-13 Estado de operación en el fallo
U2-14 Tiempo de operación acumulativo en el fallo
U1-05 Velocidad del motor en Hz/r.p.m.
U1-06 Tensión de salida en Vc.a.
U1-07 Tensión de bus de c.c. en Vc.c.
U1-08 Potencia de salida en kW
U1-09 Referencia de par en % del par nominal del motor
Muestra el estado de entrada ON/OFF.
1: Comando de marcha directa
(S1) está ON
1: Comando de marcha inversa
(S2) está ON
1: Entrada múltiple 1
(S3) está ON
1: Entrada múltiple 2
(S4) está ON
1: Entrada múltiple 3
(S5) está ON
1: Entrada múltiple 4
(S6) está ON
1: Entrada múltiple 5
(S7) está ON
U1-10
Estado de
terminal de
entrada
Muestra el estado de salida ON/OFF.
1: Salida de contacto
multifuncional 1
(M1-M2) está ON
1: Salida de contacto
multifuncional 2
(M3-M4) está ON
1: Salida de contacto
multifuncional 3
(M5-M6) está ON
No se utiliza
(Siempre 0).
1: Salida de error
(MA/MB-MC) está ON
U1-11
Estado
de terminal
de salida
Estado de operación del variador.
RUN
1: Velocidad cero
1: REVERSE
U1-12
Estado de
operación
1: Entrada de
señal de reset
1: Velocidad alcanzada
1: Variador preparado
1: Fallo leve
1: Fallo grave
U1-13 Tiempo de operación acumulado
U1-20 Referencia de frecuencia tras arranque suave
U1-34 Parámetro de fallo OPE
U1-51 Corriente máx. durante la aceleración
U1-52 Corriente máx. durante la deceleración
U1-53 Corriente máx. durante velocidad máxima
U1-54 Corriente máx. durante velocidad de nivelación
U1-55 Número de carreras
Datos de seguimiento de fallos
U2-01 Fallo actual
U2-02 Último fallo
U2-03 Referencia de frecuencia en el fallo
U2-04 Frecuencia de salida en el fallo
U2-05 Corriente de salida en el fallo
U2-06 Velocidad del motor en el fallo
U2-07 Referencia de tensión de salida en el fallo
U2-08 Tensión del bus de c.c. en el fallo
U2-09 Potencia de salida en el fallo
Datos de histórico de fallos
U3-01
a
Del último al cuarto fallo
U3-04
U3-05
a
Tiempo de operación acumulativo en el fallo 1 a 4
U3-08
U3-09
a
Del quinto al décimo fallo
U3-14
U3-15
a
Tiempo acumulado del quinto al décimo fallo
U3-20
* Los siguientes errores no se guardan en el registro
de errores: CPF00, 01, 02, 03, UV1 y UV2.
Selecciones de función de entradas digitales
3 Referencia de multivelocidad 1
4 Referencia de multivelocidad 2
Comando de frecuencia de Jog (prioridad más alta que la
6
referencia de multivelocidad)
F No se utiliza (configurado cuando un terminal no se usa)
14 Reset de fallo (Reset si en ON)
Fallo externo, Modo de entrada: Contacto NA/
20 a
Contacto NC, Modo de detección: Normal/durante
2F:
operación
80 Selección de velocidad nominal (d1-09)
81 Selección de velocidad intermedia (d1-10)
82 Selección de velocidad de renivelación (d1-13)
83 Selección de velocidad de nivelación (d1-17)
84 Selección de inspección Run (d1-14)
Selecciones de función de salidas digitales
Durante Run 1 (ON: el comando Run está en ON o hay
0
salida de tensión)
Variador listo para operación; READY: Tras inicialización
6
o sin fallos
8 Durante baseblock (contacto NA, ON: durante baseblock)
Cabina atascada/detección de subpar 1 NA (contacto NA,
B
ON: detección de sobrepar/subpar)
No se utilizan. (Configurado cuando el terminal no se
F
utiliza).
10 Fallo leve (ON: alarma visualizada)
Cabina atascada/detección de subpar 1 NC (contacto NC,
17
OFF: detección de par)
1A Durante marcha inversa (ON: durante marcha inversa)
40 Comando de liberación del freno
41 Comando de cierre de contactor de salida
ES-30
Page 97

ES-31
Page 98

Guide de démarrage rapide L7Z
Sommaire
Avertissements..............................................................FR-1
Consignes de sécurité et instructions ........................................................... FR-2
Compatibilité CEM ........................................................................................ FR-3
Installation .....................................................................FR-5
Installation mécanique .................................................................................. FR-5
Connexions électriques ................................................................................ FR-6
Utilisation du pavé numérique................................... FR-11
Affichage de la console numérique (en option) .......................................... FR-11
Mise sous tension et configuration des principaux
paramètres...................................................................FR-12
Procédure de démarrage ........................................................................... FR-12
Avant la mise sous tension ......................................................................... FR-13
Affichage après la mise sous tension ......................................................... FR-13
Sélection du mode de contrôle ................................................................... FR-13
Autoréglage .................................................................FR-14
Sélection du mode d’autoréglage ............................................................... FR-14
Pannes et alarmes d’autoréglage ............................................................... FR-15
Procédure d’autoréglage des moteurs à induction ..................................... FR-16
Procédure d’autoréglage des moteurs PM ................................................. FR-17
Réglage du décalage du codeur des moteurs PM ..................................... FR-18
Configuration de la séquence et du profil de
déplacement ................................................................FR-19
Sélection des commandes Up et Down et de la référence de vitesse ....... FR-19
Séquence de sélection de vitesse en utilisant les entrées numériques ........ FR-19
Réglages d’accélération / de décélération / de poussée ............................ FR-22
Séquence de freinage ................................................................................ FR-22
Compensation d’inertie (marche avant) ..................................................... FR-22
Correction des erreurs ...............................................FR-24
Détection des pannes et des alarmes ........................................................ FR-24
Erreurs de programmation de l’opérateur (OPE, Operator Programming Error)
Pannes d’autoréglage ................................................................................ FR-27
.... FR-
26
Tableau des paramètres .............................................FR-28
Page 99

Avertissements
Il est strictement interdit de brancher ou de débrancher des câbles ou de procéder à des tests de
signalisation lorsque l’appareil est sous tension.
Le condensateur de bus continu Varispeed L7 DC reste chargé d’électricité même lorsque l’alimentation
est coupée. Pour éviter tout risque d’électrocution, débrancher le variateur de fréquence du secteur
avant de procéder à son entretien. Et patienter 5 minutes après extinction des LED.
Ne procéder à aucun test de rigidité sur aucun élément du variateur. Il comporte en effet des
éléments semi-conducteurs qui ne peuvent pas supporter des tensions aussi élevées.
Il est interdit de déposer l’opérateur numérique lorsque l’appareil encore sous tension. Il est
également interdit de toucher aux circuits imprimés lorsque le variateur est sous tension.
Ne jamais raccorder des filtres de suppression de bruit LC / LR, des condensateurs ou des appareils
de protection contre les surtensions à une entrée ou une sortie de variateur.
ATTENTION
Pour éviter l’affichage de pannes de surtension, etc. inutiles, les contacts de signalisation de tout
contact ou interrupteur placé entre le variateur et le moteur doivent être intégrés dans la logique
de contrôle du variateur (l’étage de sortie par exemple).
Ceci est d’une importance capitale :
Lire consciencieusement le présent manuel avant de raccorder ou utiliser le variateur. Il est impératif
de respecter toutes les précautions et instructions de sécurité.
Utiliser le variateur avec les filtres de câble appropriés et en respectant les instructions d’installation
du présent manuel, tout couvercle rabattu et toute borne protégée.
Ce n’est qu’après cela que toutes les mesures de sécurité seront effectivement respectées. Ne pas
raccorder ou utiliser un équipement apparemment endommagé ou sur lequel il manque des
éléments. La société utilisant l’appareil est responsable de toute blessure ou tout endommagement
de matériel causé par le non-respect des avertissements contenus dans le présent manuel.
FR-1
Page 100

Consignes de sécurité et instructions
1. Généralités
Lire attentivement les précautions de sécurité et les instructions d’utilisation avant d’installer et d’utiliser
le variateur. Contrôler également les dispositifs de sécurité du variateur et vérifier régulièrement leur état de
fonctionnement (dommage ou démontage).
Il est possible d’accéder aux éléments sous tension et aux éléments chauds pendant l’utilisation de l’appareil.
Vous courez de sérieux dangers de blessures et d’endommagement du matériel lors de la dépose des éléments
du carter, de l’opérateur numérique ou des couvercles de bornes lorsque ceux-ci ne sont pas correctement
installés ou utilisés. Le fait que les variateurs de fréquences contrôlent des appareils mécaniques en
mouvement peut générer d’autres risques.
Il est impératif de respecter les instructions du présent manuel. Toute installation, opération ou toute opération
d’entretien doit être effectuée par du personnel qualifié. Pour des raisons de sécurité, le personnel qualifié doit être
désigné comme personne habituée à installer, démarrer, utiliser et effectuer l’entretien des variateurs de fréquences
et il doit disposer des qualifications requises en la matière. Il n’est possible d’utiliser ces unités en toute sécurité
que lorsqu’elles sont utilisées correctement et pour l’utilisation pour laquelle elles ont été conçues.
Les condensateurs de bus continu DC restent actifs 5 minutes env. après coupure du courant. Il est donc
impératif de patienter 5 minutes avant d’ouvrir les couvercles. Toutes les bornes de raccordement électriques
peuvent se charger d’électricité.
L’accès des enfants et autres personnes non autorisées aux variateurs est strictement interdit.
Conserver les consignes de sécurité et les instructions d’utilisation à portée de main et les remettre à toute
personne ayant accès aux variateurs.
2. Limites d’utilisation des variateurs
Les variateurs de fréquences sont conçus pour être utilisés avec des systèmes ou des appareils électriques.
Ils doivent être installés sur ces appareils ou systèmes en respectant les normes et directives de basse tension
suivantes :
EN 50178, 1997-10, Systèmes d’alimentation électrique avec des appareils électriques
EN 60204-1, 1997-12 Sécurité des appareils et équipement avec des appareils électriques
1ère partie : Configuration préalable (CEI 60204-1:1997) /
Remarque importante : inclut le rectificatif de septembre 1998
EN 61010-1, A2, 1995 Conditions de sécurité pour les équipements de technologie de l’information
(CEI 950, 1991 + A1, 1992 + A2, 1993 + A3, 1995 + A4, 1996, modifiée)
La norme CE a été intégrée dans la norme EN 50178 avec les filtres spéciaux de câbles inclus dans le présent
manuel et tient compte des instructions d’installation concernées.
3. Transport et stockage
Les instructions de transport, de stockage et de manipulation de l’appareil doivent être respectées en accord
avec les caractéristiques techniques de l’appareil.
4. Installation
Installer et refroidir les variateurs comme indiqué dans la documentation technique. Insuffler l’air de
refroidissement dans la direction indiquée. Il n’est donc possible d’utiliser le variateur que dans la position
indiquée (debout par exemple). Respecter les distances indiquées. Protéger les variateurs contre les charges
non autorisées. Il est interdit de pencher les composants ou de modifier les distances d’isolement. Pour éviter
tout dommage causé par électricité statique, ne pas toucher les composants ou les contacts électroniques.
FR-2
 Loading...
Loading...