

Page 1
Positionierbaugruppe
C200HW−
NC113/NC213/NC413
Kurzübersicht
Spezifikationen und
Verdrahtung 17. . . . . . . . . . . . . .
Datenbereiche 51. . . . . . . . . . . .
Übertragung und Speicherung
von Daten 91. . . . . . . . . . . . . . . .
Bestimmung des Nullpunktes 1 13
Direktbetrieb 131. . . . . . . . . . . . . .
Speicherbetrieb 143. . . . . . . . . . .
Andere Betriebsfunktionen 163. .
Technisches Handbuch
W334–D1–2, Technisches Handbuch: Positionierbaugruppe C200HW–NC113/NC213/NC413, 03.99
Page 2
Positionierbaugruppe
C200HW–NC113/NC213/NC413
Technisches Handbuch
März 1999
I
Page 3

Copyright by OMRON, Langenfeld, März 1999
E
Alle Rechte vorbehalten. Kein Teil dieser Veröffentlichung darf in irgendeiner
Form, wie z. B. Druck, Fotokopie oder einem anderen Verfahren, ohne schriftliche
Genehmigung der Firma OMRON, Langenfeld, reproduziert, vervielfältigt oder
veröffentlicht werden.
Änderungen vorbehalten.
II
Page 4
Vorwort
Die englischsprachige Version dieses Handbuches kann unter der Kat–Nr.
W334–E1–2 bestellt werden.
Um die Arbeit mit diesem Handbuch für Sie besonders effizient zu gestalten,
beachten Sie bitte folgendes:
– Das Gesamt–Inhaltsverzeichnis finden Sie im direkten Anschluß an das
Vorwort.
– Die eingesetzten Symbole und deren Bedeutungen sind nachfolgend dar-
gestellt.
Gefahr Ein Nichtbeachten hat mit hoher Wahrscheinlichkeit den Tod oder schwere
!
Personenschäden zur Folge.
Achtung Ein Nichtbeachten hat möglicherweise den Tod oder schwere
!
Personenschäden zur Folge.
Vorsicht Ein Nichtbeachten kann zu leichten bis mittelschweren Personenschäden,
Sachschäden oder Betriebsstörungen führen.
Hinweis Gibt besondere Hinweise für den effizienten und sachgerechten Umgang mit
dem Produkt.
1, 2, 3...
1. Unterteilt Handlungsabläufe in einzelne Schritte, beinhaltet Checklisten
usw.
III
Page 5

Inhaltsverzeichnis
KAPITEL 1 – Einführung 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-1 Merkmale 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Systemkonfiguration 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Grundlegender Betrieb 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Positionierung 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Geschwindigkeitssteuerung 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Andere Operationen 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Steuerungssystem–Prinzipien 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-1 Datenfluss 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-2 Steuerungssystem–Prinzipien 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-3 Grundlegender Aufbau eines Positioniersystems 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Datenaustausch 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-1 Beschreibung 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Vor dem Betrieb 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
KAPITEL 2 – Spezifikationen und Verdrahtung 17. . . . . . . . . . . . . . . . . . . . . .
2-1 Spezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Allgemeine Spezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Operationen und Leistungsspezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-3 Elektrische Spezifikationen der E/A 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-4 Abmessungen (in mm) 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Komponenten 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3 Externe E/A–Schaltungen 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-1 Anschlußstift–Anordnung 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-2 Stiftanordnung der externen E/A–Steckverbinder 24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-3 E/A–Schaltungen 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Anschluß externer E/A 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-1 Beispiele für Ausgangsbeschaltungen 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-2 Beispiele für Eingangsbeschaltungen 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-3 Anschluß der Nullpunkt– und Positionierung beendet–Signale 34. . . . . . . . . . . . . . . . .
2-4-4 Sicherheitsmaßnahmen bei der Verdrahtung 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Anschlüsse für jede Betriebsart 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
KAPITEL 3 – Einführung 45. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1 Grundlegende Beschreibung 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Systemkonfiguration und Verdrahtung 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Einstellung der Daten und das Starten 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
V
Page 6

Inhaltsverzeichnis
KAPITEL 4 – Datenbereiche 51. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1 Allgemeine Struktur 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Allgemeine Parameter 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Achsenparameter 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4 Betriebsspeicherbereich 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-5 Betriebsdatenbereich 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-6 Einzelheiten zu Positioniersequenzen 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7 Einstellung von Daten über die Programmiersoftware SYSMAC–NCT 90. . . . . . . . . . . . . . . . .
KAPITEL 5 – Übertragung und Speicherung von Daten 91. . . . . . . . . . . . . .
5-1 Übertragung und Speicherung von Daten 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2 Schreiben von Daten mit dem DATEN SCHREIBEN–Bit 95. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Lesen von Daten mit dem DATEN LESEN–Bit 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4 Schreiben von Daten mit IOWR 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Lesen von Daten mit IORD 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Erstellung und Übertragung von Daten mittels der Programmiersoftware 109. . . . . . . . . . . . . . . .
5-7 Sicherung von Daten 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-1 Flash–Speicher 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-2 Warten auf den Start der Positionierbaugruppe 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-3 Bereichszuweisung 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-4 Datenbereiche 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Einstellung der Achsenparameter 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Die einzelnen Achsenparameter 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Betriebsarten 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-1 Beschreibung 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-2 Zeitdiagramm zum Schreiben von Daten 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-3 Beispiel eines Programms zum Schreiben von Daten 97. . . . . . . . . . . . . . . . . . . . . . . . .
5-3-1 Beschreibung 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3-2 Zeitdiagramm zum Lesen von Daten 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3-3 Beispiel eines Programms zum Lesen von Daten 101. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-1 Beschreibung 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-2 Befehlsspezifikationen 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-3 Verwendete Merker 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-4 Sicherheitsmaßnahmen für den Einsatz von IOWR 105. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-5 IOWR–Programmbeispiel 105. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-1 Beschreibung 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-2 DATEN LESE–Verfahren 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-3 Befehlsspezifikationen 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-4 Verwendete Merker 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-5 Sicherheitsmaßnahmen, wenn man IORD verwendet 108. . . . . . . . . . . . . . . . . . . . . . . . .
5-5-6 IORD–Programmbeispiel 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-1 Flash–Speicher 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-2 Datensicherungs–Vorgang 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-3 Zeitdiagramm zum Sichern von Daten 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VI
Page 7
Inhaltsverzeichnis
KAPITEL 6 – Bestimmung des Nullpunkts 113. . . . . . . . . . . . . . . . . . . . . . . . . .
6-1 Einstellung der Daten für eine Nullpunktsuche 114. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2 Ausführung der Nullpunktsuche 115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3 Nullpunktsuche–Zeitdiagramme 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4 Nullpunkt–Rückkehr 129. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
KAPITEL 7 – Direktbetrieb 131. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-1 Beschreibung 132. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-2 Einstellung der Daten für den Direktbetrieb 134. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3 Direktbetriebs–Funktionen 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-4 Einstellung der Daten für den Direktbetrieb 137. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-5 Direktbetrieb–Zeitdiagramme 138. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-6 Programmbeispiel 140. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2-1 Nullpunktsuche 115. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-2-2 Den Nullpunkterkennungen entsprechende Funktionsabläufe 116. . . . . . . . . . . . . . . . . . .
6-2-3 Den Betriebbetriebsarten entsprechende Funktionsabläufe 119. . . . . . . . . . . . . . . . . . . . .
6-2-4 Funktionsabläufe mit Nullpunktkompensation 124. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3-1 Ohne Nullpunktkompensation 125. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3-2 Mit Nullpunktkompensation 126. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3-3 NULLPUNKTSUCHE mit Abbremshalt 127. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-3-4 NULLPUNKTSUCHE mit Notaus 128. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6-4-1 Zuweisung des Betriebsspeicherbereichs und Einstellung des Betriebsdatenbereich 129.
6-4-2 Zeitdiagramm 130. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-1 Start des Direktbetriebes 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-2 Direktbetrieb und Betriebsdatenbereich 135. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-3 Mehrfachstarts im Direktbetrieb 136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-4 Mehrfachstart–Funktionsabläufe 136. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-3-5 Aufruf des Direktbetriebes während des Speicherbetriebes 137. . . . . . . . . . . . . . . . . . . .
7-6-1 Funktionsbeschreibung 140. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-6-2 Vorgabedaten–Einstellungen 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7-6-3 Programmbeispiel 141. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
KAPITEL 8 – Speicherbetrieb 143. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-1 Beschreibung 144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-1-1 Achsenzuweisung 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-1-2 Achsenzuweisung und Merker 145. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-2 Einstellung der Daten für die Anwendung im Speicherbetrieb 148. . . . . . . . . . . . . . . . . . . . . . . . .
8-3 Speicherbetriebs–Funktionen 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-3-1 Start des Speicherbetriebes 149. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-3-2 Speicherbetrieb gemäß Positionierungssequenzen 150. . . . . . . . . . . . . . . . . . . . . . . . . . .
8-3-3 Lineare Interpolation 153. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-3-4 Einsatz der fortlaufenden Beendigung mit linearer Interpolation 154. . . . . . . . . . . . . . . .
8-4 Einstellung der Daten für den Speicherbetrieb 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-5 Zeitdiagramm für den Speicherbetrieb 157. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6 Programmbeispiel 160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6-1 Funktionsbeschreibung 160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6-2 Bedingungen und Details von Einstellungen 160. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6-3 Einstellung der Daten 161. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8-6-4 Programmbeispiel 162. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VII
Page 8

Inhaltsverzeichnis
KAPITEL 9 – Andere Betriebsfunktionen 163. . . . . . . . . . . . . . . . . . . . . . . . . . .
9-1 Tipp–Betrieb 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-2 Teach–Betrieb 165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-3 Interrupt–Abarbeitung 167. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-4 Zwangsweiser Interrupt 169. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-5 Abbremshalt 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-6 Änderung der Istposition 175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-7 Übersteuerung 176. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-8 Freigabe der Impulsausgabe–Sperre 177. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-9 Fehlerzähler–Rücksetzausgabe und Nullpunktjustierungs–Befehlsausgabe 179. . . . . . . . . . . . . . .
9-10 Spielkompensation 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-1-1 Beschreibung 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-1-2 Ausführung 164. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-1-3 Betriebsspeicherbereichs–Zuweisung und Betriebdatenbereichs–Einstellungen 164. . . .
9-1-4 Zeitdiagramm 165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-2-1 Beschreibung 165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-2-2 Verfahren 165. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-2-3 Betriebsspeicherbereichs–Zuweisung und Betriebsdatenbereichs–Einstellungen 166. . . .
9-2-4 Zeitdiagramm 166. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-3-1 Beschreibung 167. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-3-2 Start des Speicherbetriebs 167. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-3-3 Start des Direktbetriebs 167. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-3-4 Betriebsspeicherbereichs–Zuweisung und Betriebdatenbereichs–Einstellungen 168. . . .
9-3-5 Zeitdiagramm 169. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-4-1 Zeitdiagramm 170. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-5-1 Beschreibung 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-5-2 Betriebsspeicherbereichs–Zuweisung 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-5-3 Abbremshalt während der Positionierung 171. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-5-4 Zeitdiagramm 174. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-6-1 Beschreibung 175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-6-2 Betriebsspeicherbereichs–Zuweisung und Betriebdatenbereichs–Einstellungen 175. . . .
9-6-3 Zeitdiagramm 175. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-7-1 Beschreibung 176. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-7-2 Betriebsspeicherbereichs–Zuweisung und Betriebdatenbereichs–Einstellungen 176. . . .
9-7-3 Zeitdiagramm 177. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-9-1 Beschreibung des Betriebes 179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-9-2 Betriebsspeicherbereichs–Zuweisung und externe
E/A–Steckverbinder–Stiftanordnung 179. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-9-3 Zeitdiagramm 180. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-10-1 Beschreibung 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-10-2 Einstellung der Achsenparametern 182. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-10-3 Spielkompensation 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9-10-4 Spielkompensation mit linearer Interpolation 183. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
VIII
Page 9

Inhaltsverzeichnis
KAPITEL 10 – Programmbeispiele 185. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-1 Anwendungshinweise für die Programmbeispiele 186. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-2 Speicherbetrieb 188. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-3 Direktbetrieb 202. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-4 Lineare Interpolation 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-5 Nullpunktsuche 214. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-6 Übersteuerung 217. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-7 Übertragung und Sicherung von Daten 220. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
KAPITEL 11 – Fehlersuche 227. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-1 Einführung 228. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-2 Leuchtdioden–Fehleranzeigen 230. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-3 Lesen der Fehlercodes 231. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-4 Fehlercode–Listen 232. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-5 CPU–Fehleranzeigen 242. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-2-1 Überprüfung der Positionierungsfunktionen 188. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-2-2 Wiederholungsbetrieb 193. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-2-3 Abbrechen der Positionierung 197. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-3-1 Positionierung mit im Datenwortbereich gespeicherten Positionen 202. . . . . . . . . . . . . .
10-3-2 Relative Positionierung 206. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-4-1 Lineare Interpolation mit zwei Achsen 208. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-5-1 Nullpunktsuche mittels eines Endschaltersignals 214. . . . . . . . . . . . . . . . . . . . . . . . . . . .
10-6-1 Änderung der Geschwindigkeit während der fortlaufenden Ausgabe 217. . . . . . . . . . . . .
10-7-1 Kopieren von Daten 220. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-4-1 Datenprüfung bei dem Einschalten 232. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-4-2 Befehlsausführungs–Prüfung 234. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-5-1 Spezial–E/A–Baugruppen–Fehlerliste 242. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11-5-2 Hilfreiche Merker und Steuerbits 243. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Anhang A 245. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Berechnung diverser Zeiten 245. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–1 Geschwindigkeiten 245. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–2 Einschaltzeit 246. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–3 START–Ausführungszeit 246. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–4 Datenübertragung und Datenspeicherzeit 247. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–4–1 Datenlesezeit 247. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–4–2 Datenschreibzeit 247. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–5 Auswirkung auf den Zyklus der SPS 248. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–6 Mindestansprechzeit 248. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–7 Externe Interrupt–Verarbeitungszeit 249. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–8 Verzögerungszeit des zwangsweisen Interrupts 249. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A–9 Geschwindigkeitsänderungs–Ansprechzeit im Direktbetrieb 249. . . . . . . . . . . . . . . . . . .
A–10 Zielpositions–Änderungsverarbeitungszeit im Direktbetrieb 250. . . . . . . . . . . . . . . . . . .
IX
Page 10

Inhaltsverzeichnis
Anhang B 251. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Schätzung von Zeiten und Impulse für die Beschleunigung/Abbremsung 251. . . . . . . . . . . . . . . . . . . . . .
Anhang C 253. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fehlercode–Tabellen 253. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Anhang D 255. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Auswirkungen der Kabellänge auf die Impulsausgabe 255. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Anhang E 257. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter–Kodiertabellen 257. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Index 261. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–10–1 Allgemeine Parameter 257. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1–10–2 Achsenparameter 258. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
X
Page 11

KAPITEL 1
Einführung
Dieses Kapitel beschreibt die Merkmale der Positionierbaugruppe und der verwendeten Systemkonfiguration.
1-1 Merkmale 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-2 Systemkonfiguration 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3 Grundlegender Betrieb 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-1 Positionierung 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-2 Geschwindigkeitssteuerung 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-3-3 Andere Operationen 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4 Steuerungssystem–Prinzipien 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-1 Datenfluss 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-2 Steuerungssystem–Prinzipien 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-4-3 Grundlegender Aufbau eines Positioniersystems 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5 Datenaustausch 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-5-1 Beschreibung 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1-6 Vor dem Betrieb 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Page 12
m
1-1 Merkmale
Positionierbaugruppe
KapitelVor dem Betrieb 1-6 Vor de
Funktionen
Nach Achseneinheit
wählbarer Motortreiber
C200HW–NC413
(Vierachsen–
Steuerung)
C200HW–NC213
(Zweiachsen–
Steuerung)
C200HW–NC113
(Einachsen–
Steuerung)
Diese Positionierbaugruppen sind Spezial–E/A–Baugruppen der C200HX/
HG/HE– und C200H/HS–Serien. Die Baugruppen werden durch Befehle
über den Spezial–Merkerbereich der SPS gesteuert und geben Impulszüge
an die verschiedenen Motortreiber zur Positionierung aus.
Die Betriebsart kann für jede Achse separat eingestellt werden, daher kann
für jede Achse ein eigner Motortreiber gewählt werden. Die Positionierbaugruppe gibt Impulszüge für die folgenden Motortreiber aus.
• Schrittmotor–Treiber
• Servomotor–Treiber mit Impulseingang.
Anzahl der Steuerachsen
und Steuerkapazität
Speicherbetrieb und
Direktbetrieb
Interrupt–Abarbeitung
Schnelle Antwort
Kompakte Größe
Programmiersoftware
(SYSMAC–NCT)
Die Positionierbaugruppe ist mit einer, zwei oder vier Steuerachsen lieferbar.
Bei dem Modell mit zwei Achsen können beide Achsen entweder zusammen
linear interpoliert oder unabhängig betrieben werden. Bei dem Modell mit vier
Achsen können bis zu vier Achsen linear interpoliert oder alle Achsen unabhängig voneinander betrieben werden.
Zwei verschiedene Betriebsarten stehen zur Verfügung. Die erste ist der
Speicherbetrieb, bei der die für die Positionierung erforderlichen Daten an
die Positionierbaugruppe übertragen und dann für die Positionierung bereitgestellt werden. Die zweite ist der Direktbetrieb, bei der Zielposition und Zielgeschwindigkeit jeweils von der SPS vorgegeben werden.
Tritt ein Interrupt während einer Impulsausgabe auf, wird die Positionierung
nur für die angegebene Anzahl von Impulsen fortgesetzt und dann angehalten.
Die Positionierbaugruppe reagiert auf Befehle von der speicherprogrammierbaren Steuerung innerhalb von 10 ms. (Dies gilt für die C200HW–NC113.)
Die Ein–, Zwei– oder Vierachsen–Modelle besitzten alle die gleiche Größe.
Daher kann der Montageplatz bei Mehrachsen–Anwendung effizient durch
den Einsatz der Zwei– und Vierachsen–Modelle genutzt werden.
Für die SPS der Serien C200 HX/HG/HE kann eine unter Windows 95 laufende Programmiersoftware, SYSMAC–NCT verwendet werden. Diese Software wird für das Senden von Daten, die auf einem PC erstellt oder editiert
2
Page 13
Vor dem Betrieb
m
Kapitel
wurden, an die Positionierbaugruppe verwendet. Sie wird ebenfalls eingesetzt, um Daten von der Posionierbaugruppe zu lesen und diese zu speichern oder auszudrucken oder um den Status von z. B. E/A–Punkten und
Sequenznummern während der Ausführung zu überwachen. Sehen Sie das
SYSMAC–NCT
der Anwendung dieser Programmiersoftware
Die Programmiersoftware SYSMAC–NCT kann nur für den Zugriff auf Posi-
tionierbaugruppen verwendet werden, die auf einem CPU– oder einem Erweiterungs–E/A–Baugruppenträger installiert sind. Sie kann nicht auf Positionierbaugruppen zugreifen, die auf Slave–Baugruppenträgern installiert sind.
Die Programmiersoftware SYSMAC–NCT kann nicht zusammen mit den
C200H/C200HS–Systemen verwendet werden.
Programmiersoftware–Handbuch für Einzelheiten bezüglich
.
1-6 Vor de
Datenkapazität und
Datensicherung
Schnelle
Datenübertragung
Die Anzahl der bei dem Speicherbetrieb einzustellenden Datenfelder sind in
der folgenden Tabelle aufgeführt:
Datenart Anzahl der Datenfeldern pro Achse
Positionierfolgen, Geschwindigkeiten, Positionen 100
Beschleunigungszeiten, Bremszeiten 9
Verweilzeiten 19
Zonen 3
Zur Anwendung werden diese Datenfelder an die Positionierbaugruppe übertragen, wo sie im Flash–Speicher gespeichert werden. Eine Batteriewartung
entfällt somit.
Hinweis Die Beschreibbarkeit des Flash–Speichers ist nicht unbegrenzt. Bis zu
100.000 Daten–Speicheroperationen können durchgeführt werden.
Bei den C200HX/HG/HE können Daten nicht nur über die Datenübertra-
gungs–Bits und die SYSMAC–NCT Programmiersoftware übertragen werden. Schnelle Datenübertragungen sind auch mittels der intelligenten E/A–
Schreib(IOWR)– und E/A–Lese(IORD)–Befehle möglich.
3
Page 14
m
1-2 Systemkonfiguration
a e se ba e
Die Positionierbaugruppe empfängt Steuersignale (Endschalter rechts, Endschalter lnks, Nullpunkt, Nullpunktnähe, Nothalt und externer Interrupt) von
Schaltern/Befehlsgeräten und einer Bedienkonsole und gibt Impulszüge an
Schrittmotor– und Servomotor–Treiber aus.
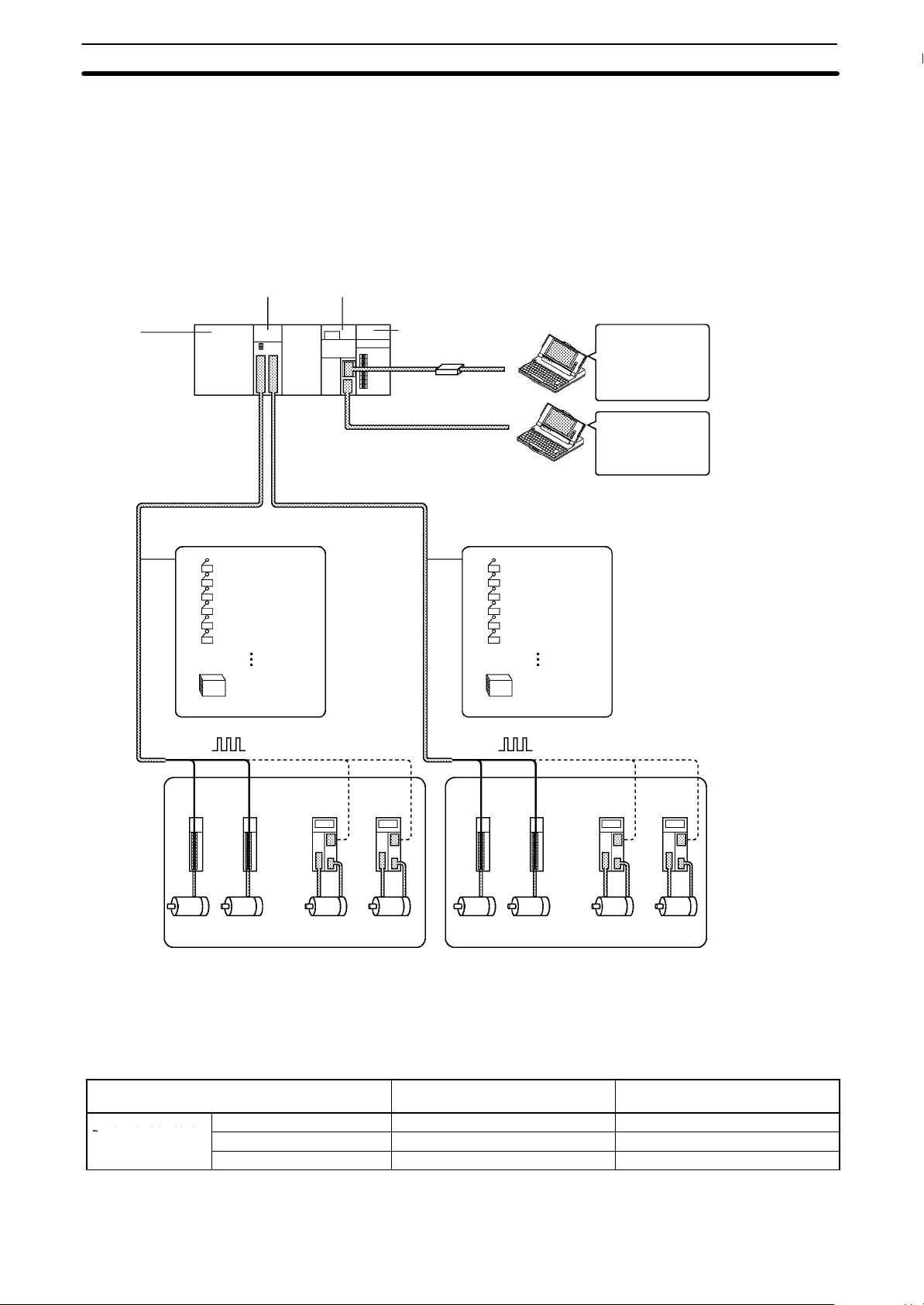
C200HW–NC413 Systemkonfigurations–Beispiel
KapitelVor dem Betrieb 1-6 Vor de
C200HW–
BC Jj
Baugruppen–
träger
C200HW–NC413
Positionierbaugruppe
Externe Eingangssignale
Endschalter rechts (CW)
Endschalter links (CCW)
Nullpunkt
Nullpunkt–Nähe
Notaus
Externe Unterbrechung
24 VDC Spannungs–
versorgungsanschluß
C200HX/HG/HE
CPU–Baugruppe
Spannungsversorgungs–
Baugruppe
Peripherieschnittstelle
Host–Schnittstelle
Externe Eingangssignale
Endschalter rechts (CW)
Endschalter links (CCW)
Nullpunkt
Nullpunkt–Nähe
Notaus
Externe Unterbrechung
24 VDC Spannungs–
versorgungsanschluß
Programmiersoftware
(SYSWIN):
Kontaktplan–Erstellung
und –Übertragung,
Überwachung,
Dateiverwaltung, usw.
SYSMAC–NCT:
Programmerstellung und
–Überwachung,
Positionierbaugruppen–
Überwachung,
Dateiverwaltung, usw.
Impuls–
ausgang
Schritt–
motor–
Treiber
Anzahl einsetzbarer
Baugruppen
Angabe C200H, C200HS, C200HE,
Anzahl einsetzbarer
Baugruppen
Impuls–
ausgang
Servomotor–
Treiber
Oder
Schritt–
motor–
Treiber
ServomotorenSchrittmotoren
Schrittmotoren
Servomotor–
Treiber
Oder
Servomotoren
Die Positionierbaugruppe gehört zu den SYSMAC C200H, C200HS und
C200HX/HG/ HE Spezial–E/A–Baugruppen. Die Anzahl der Spezial–E/A–
Baugruppen (einschließlich SPS–Link–Baugruppen), die zusammen mit einer einzelne CPU–Baugruppe installiert werden können, ist in der folgenden
Tabelle aufgeführt.
C200HX/HG–CPU3j/4j(Z) –E
C200HW–NC113 10 max. 16 max.
C200HW–NC213 10 max. 16 max.
C200HW–NC413 5 max. 8 max.
C200HX/HG–CPU5j/6j(Z)–E
4
Page 15
Vor dem Betrieb
m
Kapitel
1-6 Vor de
• Sehen Sie das entsprechende Bedienhandbuch der speicherprogrammierbaren Steuerung für Einzelheiten bezüglich der besonderen Einheiten, die
zu jeder Spezial–E/A–Baugruppegruppen gehören.
• Der jedem Baugruppenträger zugeführte Maximalstrom und die maximale
Stromaufnahme jeder Baugruppe sind beschränkt. Das entsprechende Bedienhandbuch der speicherprogrammierbaren Steuerung enthält weitere
Einzelheiten hierzu.
• Die Verwendung von dezentralen E/A–Slave–Baugruppenträger ist eingeschränkt. Diese Einschränkungen sind in dem nachfolgenden Absatz
be-
schrieben.
Einschränkungen des
Einsatzes dezentraler
E/A–Slave–
Baugruppenträger
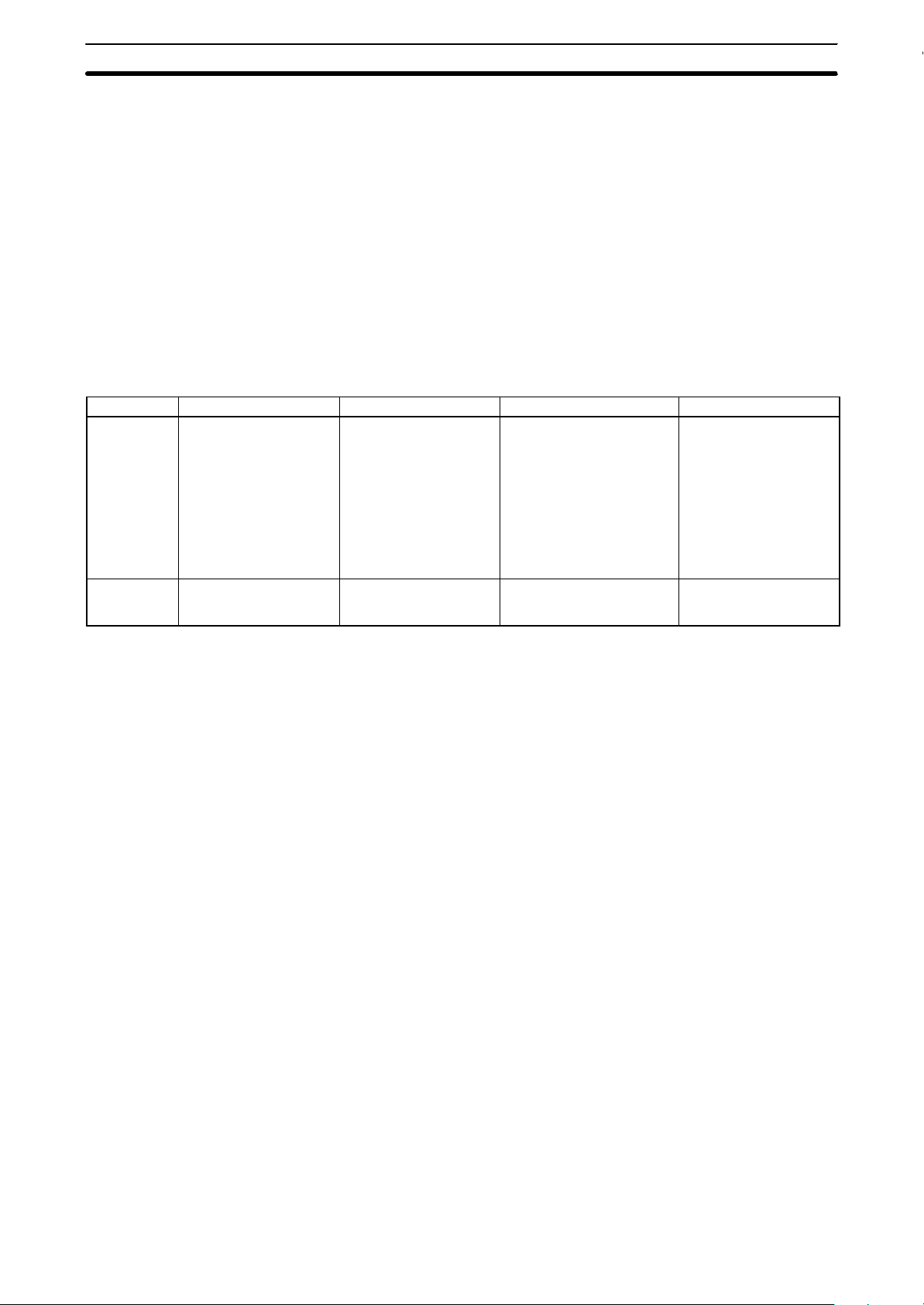
Gruppe A Gruppe B Gruppe C Gruppe D
Baugruppen in
der Gruppe
Anzahl der
verwendbaren
Baugruppen
Schnelle
Zähler–Baugruppen
Positionierbaugruppen
(NC111/112)
(NC113/213)
ASCII–Baugruppen
Analog E/A–Baugruppen
ID–Sensorbaugruppen
Fuzzy Logik–Baugruppen
4 Baugruppen 8 Baugruppen 6 Baugruppen 2 Baugruppen
Wie in der folgenden Tabelle gezeigt, wird die Anzahl der Spezial–E/A–Baugruppen, die auf einem einzelnen dezentralen E/A–Baugruppenträger verwendet werden können, durch die entsprechende Gruppe bestimmt (A, B, C
oder D).
Multipoint–
E/A–Baugruppen
Temperaturregelungs–
Baugruppen
PID–Baugruppe
Nockenschaltwerk–
Baugruppe
Temperatursensor–
Baugruppen
Sprachausgabe–Baugruppe
Positionierbaugruppen
(NC211)
(NC413)
• Werden Spezial–E/A–Einheiten der verschiedenen Gruppen miteinander
verwendet, dann muß die Kombination dieser Baugruppen den folgenden
beiden Formeln entsprechenden:
3A + B + 2C + 6D x 12
A + B + C + D x 8
• Für die Anzahl der Baugruppen, die mit speziellen CPU–Baugruppen verwendet werden können, bestehen Einschränkungen. Sehen Sie hierzu den
zuvor beschriebenen Absatz
Anzahl einsetzbarer Baugruppen
.
Systemkonfigurations–Hinweise
• Die einer bestimmten Spezial–E/A–Baugruppe zugeteilten E/A–Bits werden
• Installieren Sie bei einer C200H keine Positionierbaugruppe auf den beiden
• Spezial–E/A–Baugruppen können nicht mit dem dezentralen E/A–Slave–
durch die Baugruppennummer, die mit dem Schalter auf der Frontplatte der
Baugruppe eingestellt wird, bestimmt und nicht vom Steckplatz, auf dem
die Baugruppe installiert wird.
Steckplätzen neben der CPU–Baugruppe. Bei einer Installation auf einem
dieser Steckplätzen ist es nicht möglich, eine Programmierkonsole oder
ähnliches zu installieren.
Baugruppenträger der C200H verwendet werden, die mit dezentralen E/A–
Master–Baugruppenträgern anderer SPS der SYSMAC–Familie (wie C120,
C500, C1000H und C2000H) verbunden sind.
5
Page 16
KapitelVor dem Betrieb 1-6 Vor de
m
Installation der
Baugruppe
1, 2, 3...
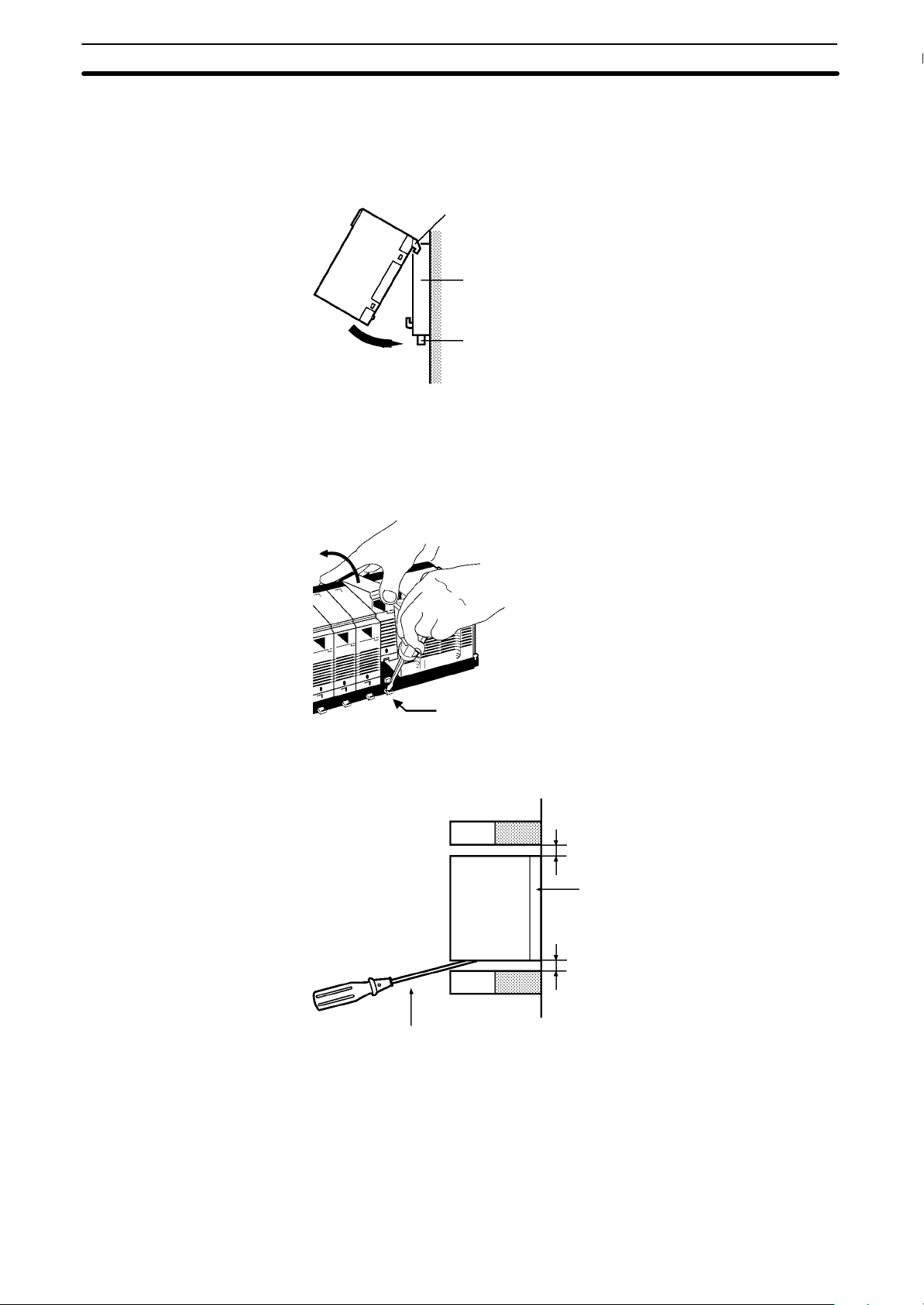
Installieren Sie die Positionierbaugruppe in dem Baugruppenträger entsprechend dem nachfolgend beschriebenen Verfahren.
1. Klinken Sie den Haken im oberen Teil der Rückwand der Baugruppe in
dem Schlitz des Baugruppenträgers ein.
Haken
Baugruppenträger
Sperrhebel
2. Stecken Sie die Baugruppe sorgfältig auf den Busverbinder des Baugrup-
penträgers.
3. Verwenden Sie zum Ausbau der Baugruppe ein Werkzeug, wie z. B. einen
Schraubenzieher, um den Sperrhebel niederzudrücken. Heben Sie dann
die Baugruppe vorsichtig an.
Sperrhebel
Hinweis Lassen Sie für die Installation/Deinstallation von Baugruppen auf einem Bau-
gruppenträger einen ausreichenden Platz in der Umgebung.
Klingen–Schraubenzieher
Vosichtsmaßnahmen bei der Handhabung der Baugruppe
• Schalten Sie die speicherprogrammierbare Steuerung und die Spannungsversorgung vor der Installation der Baugruppe oder dem Unterbrechung der
Anschlüsse des Anschlußkabels ab.
• Verlegen Sie die E/A–Verdrahtung, Hochspannungs– und Netzleitungen in
separaten Panzerrohren, um den Einfluß von Störsignalen zu reduzieren.
20 mm Min.
Baugruppen–
träger
20 mm Min.
6
Page 17
Vor dem Betrieb
m
Kapitel
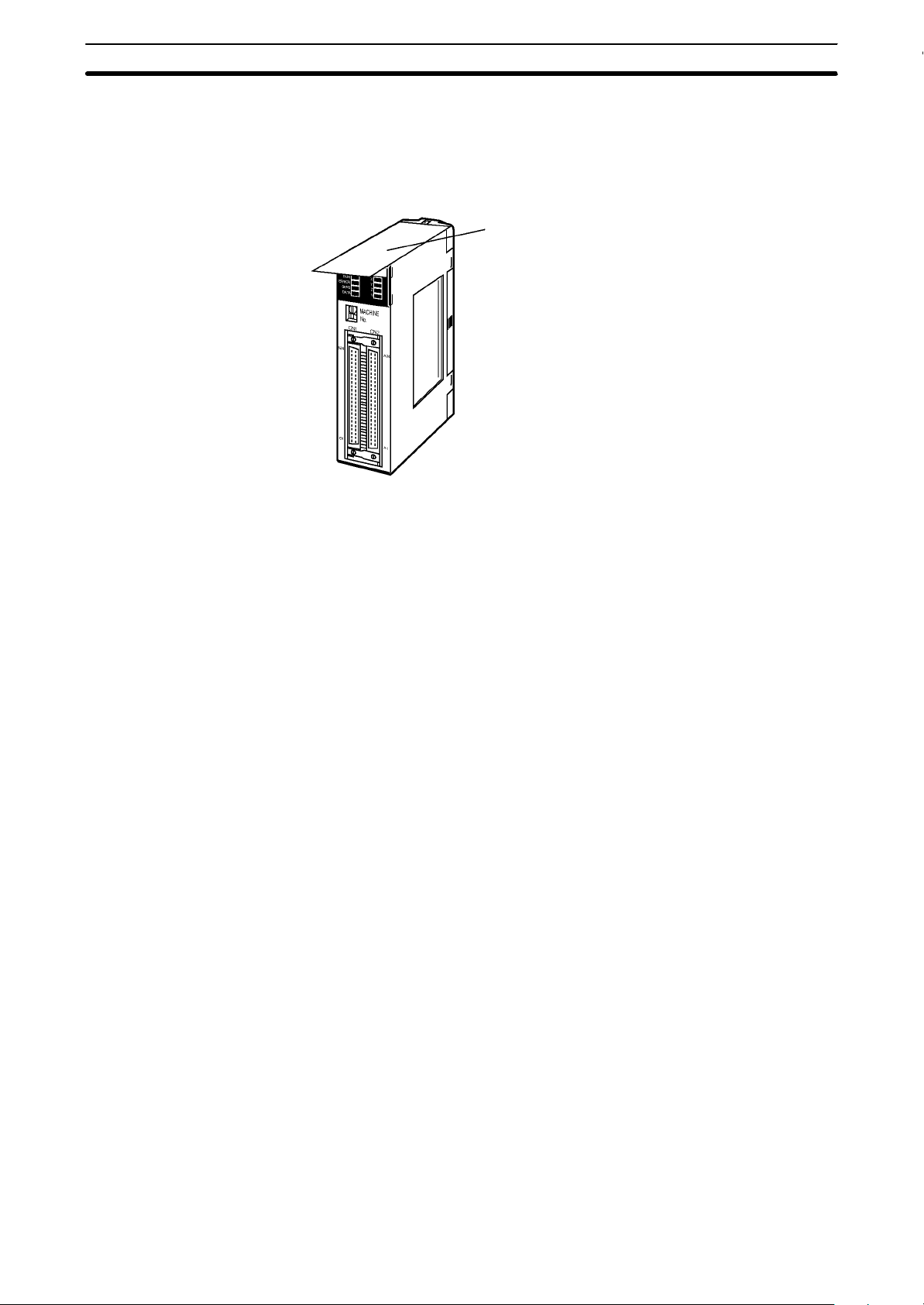
• Während der Verdrahtung können abgeschnittene Drahtenden in Baugruppen hineinfallen. Belassen Sie deshalb den Aufkleber auf der Oberseite der
Baugruppe, um das Hereinfallen von Kabelresten zu verhindern. Entfernen
Sie nach Abschluß der Verdrahtungsarbeiten diese Aufkleber, um eine einwandfreie Ventilation sdicherzustellen.
Entfernen Sie den Aufkleber
nach dem Abschluß der
Verdrahtungsarbeiten.
1-6 Vor de
1-3 Grundlegender Betrieb
Die Positionierbaugruppen C200HW–NC113 (eine Achse), C200HW–NC213
(zwei Achsen) und C200HW–NC413 (vier Achsen) wurden für den Einsatz
mit den Systemen der Serien C200HX/HG/HE und C200H/C200HS entwikkelt.
1-3-1 Positionierung
Positionierungen können entweder basierend auf einem Absolutwert (d.h.
bezogen auf eine absolute Position zum Nullpunkt) oder einem Inkrementalwert (d.h. relative Position zu der Istposition) durchgeführt werden.
Zur Positionierung stehen zwei Betriebsarten zur Verfügung: Speicherbetrieb
und Direktbetrieb. Ein Interrupt–Betrieb, bei der der Betrieb für eine spezifizierte Anzahl von Impulsen fortgesetzt wird, ist ebenfalls möglich.
Speicherbetrieb
Bei dem Speicherbetrieb werden Positionierfolgen (d.h. individuelle Positionieroperationen, die Daten wie Positionen und Geschwindigkeiten enthalten)
zuvor an die Positionierbaugruppe übertragen. Die Positionierung wird dann
7
Page 18
KapitelVor dem Betrieb 1-6 Vor de
m
von der SPS ausgeführt, indem die Nummer der Positionierfolge spezifiziert
wird.
Ausführung in der Reihenfolge
Positionierfolge–Nr. 0
Beschleunigungszeit–Nummer
Anfangs–
geschwindig–
keits–
nummer
Start Zielposition
Positionierfolge–Nr. 99
Zielgeschwindigkeits–Nummer
Abbremszeit–
Nummer
Position
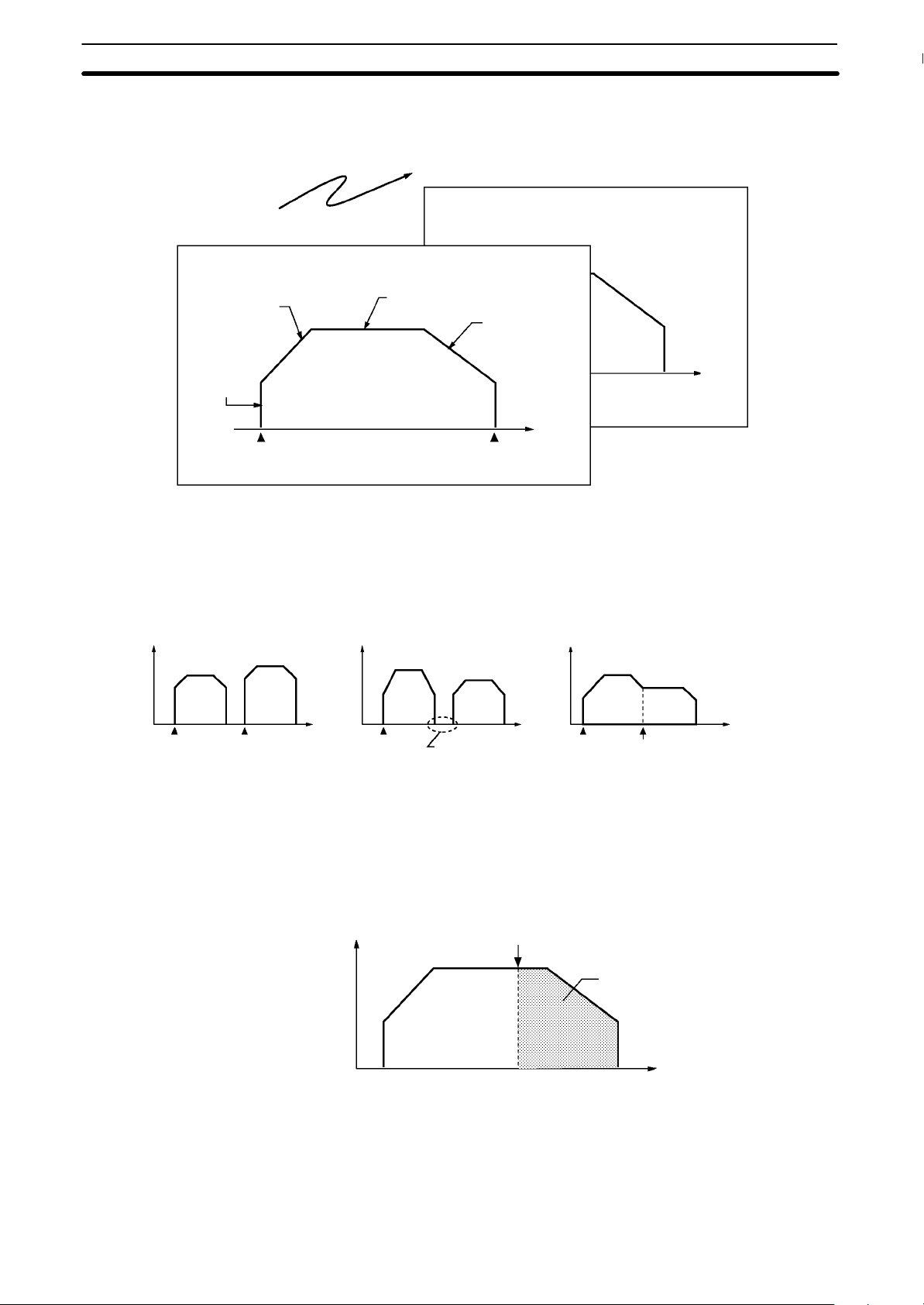
Je nach eingestelltem Endcode können die Positionierfolgen mittels der Einzelpositionierung, der Pausenpositionierung oder der fortlaufenden Positionierung ausgeführt werden. In den folgenden Abbildungen stellen “Nr. 0” und
“Nr.1” die Positionierfolgenummern dar.
Einzelpositionierung Pausenpositionierung Fortlaufende
Impulsausgabe Impulsausgabe Impulsausgabe
Positionierung
Position
Nr. 0
Start
Direktbetrieb
Nr. 0 Nr. 1
Zeit
Start Start
Bei dem Direktbetrieb werden Positionen und Geschwindigkeiten in reservierten DM– und EM–Bereichen der speicherprogrammierbaren Steuerung
spezifiziert. Die Positionierung erfolgt dann an Hand dieser Daten.
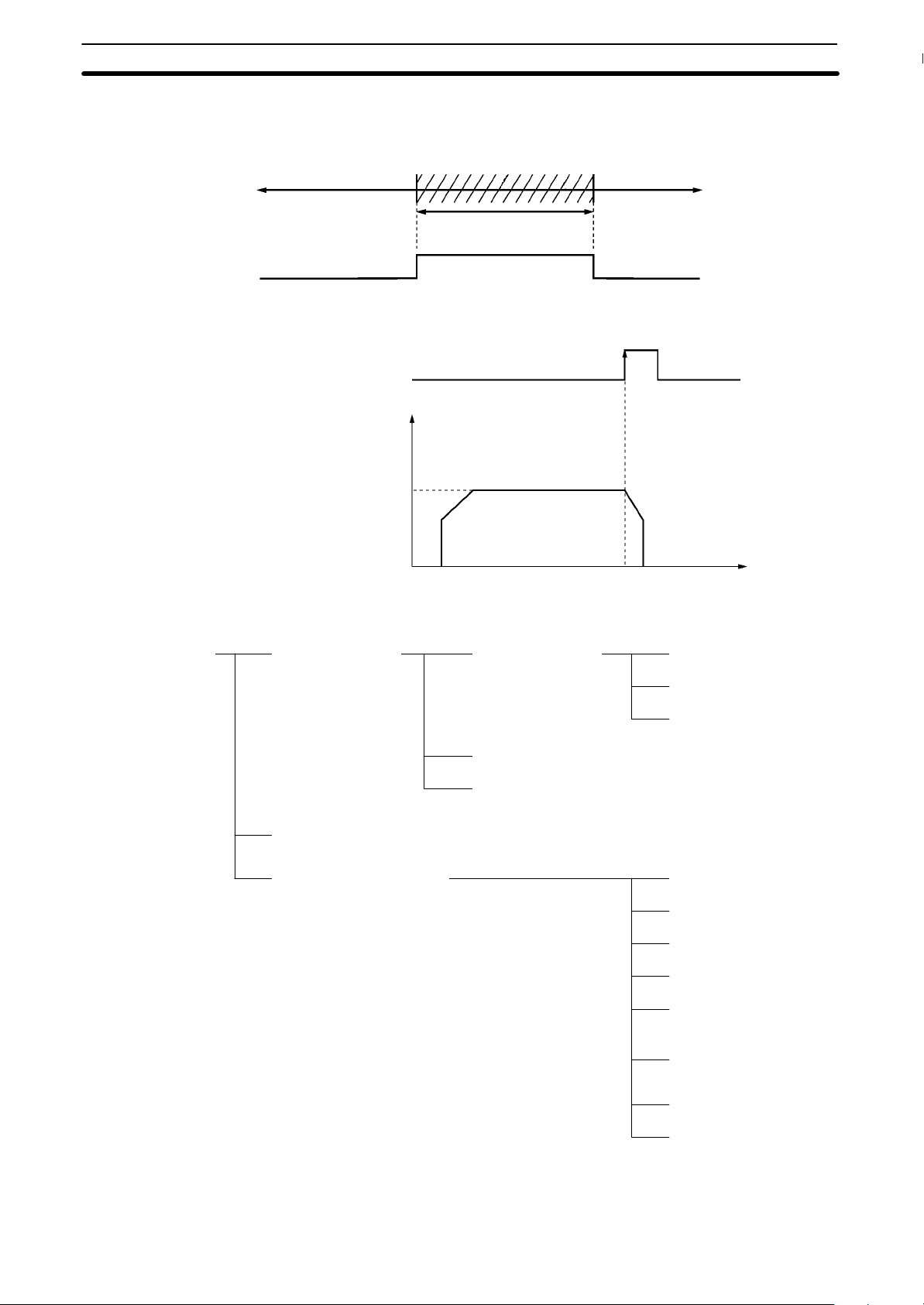
Interrupt–Betrieb
Nach Empfang eines Interrupt–Signals wird die Positionierung für die spezifizierte Anzahl von Impulsen fortgesetzt und dann angehalten.
Geschwindigkeit
1-3-2 Geschwindigkeitssteuerung
Nach der Ausführung eines Starts werden Impulse fortlaufend mit einer konstanten Geschwindigkeit ausgegeben. Das Muster hängt vom Endcode ab,
Nr. 1
Zeit
Pausen in der Länge
der eingestellten
Verweilzeit.
Interrupt–Signal
Nr. 0
Start Stoppt nicht.
Nr. 1
Spezifizierte
Anzahl von
Impulsen
Zeit
Zeit
8
Page 19

Vor dem Betrieb
m
Kapitel
1-6 Vor de
der auf “Speicherbetrieb”–Positionierung eingestellt wird. Verwenden Sie den
HALT–Befehl, um die Ausgabe abzubrechen.
Geschwindigkeit
1-3-3 Andere Operationen
Nullpunktsuche
Tippbetrieb
Teach–Betrieb
Links–
lauf
Die Nullpunktsuche findet den Nullpunkt der spezifizierten Achse.
Bei dem Tippbetrieb wird die spezifizierte Achse mit einer spezifizierten Ge-
schwindigkeit bewegt und dann angehalten.
Der Teach–Betrieb übernimmt die gegenwärtige Position für die angegebene
Positionierfolge.
HALT
Zeit
Start
Gegenwärtige Position
Nullpunkt
Rechts–
lauf
Übersteuerung
Änderung der Istposition
Spielkompensation
Spezifizierte Positionierfolgenummer
Wird die Übersteuerung während des Positionierens aktiviert, wird die Zielgeschwindigkeit auf die Übersteuerungsgeschwindigkeit geändert.
Geschwindigkeit
X 1,5
Übersteuerung
aktiviert
A
1
0
Übersteuerungs–Einstellung: 150%
Zeit
Dieser Befehl ändert die Istposition auf eine spezifizierte Position.
Dieser Vorgang kompensiert das mechanische Spiel in Getrieben.
9
Page 20
KapitelVor dem Betrieb 1-6 Vor de
m
Zonen
Zonenmerker
Abbremshalt
Eine Zone ist ein Bereich von zu bestimmenden Positionen. bei dem Merker
gesetzt werden, wenn sich die Istposition innerhalb des Bereichs befindet.
Linkslauf Rechtslauf
Zoneneinstellung
EIN
AUS
Der HALT–Befehl bremst die Positionierung bis zu einem Halt ab.
HALT
Geschwindigkeit
1
0
Positionier–
baugruppen–
Funktionen
Zeit
Die Positionierbaugruppen C200HW–NC113/NC213/NC413 besitzen folgende Betriebsfunktionen:
Positions–
Speicherbetrieb einzeln
steuerung
mit Pausen
fortlaufend
Direktbetrieb
Interrupt–Betrieb
Geschwindigkeitssteuerung
Andere Operationen Nullpunktsuche
Tippbetrieb
Teach–Betrieb
Überstuerung
Ändere Istposition
10
Spielkompensation
Zoneneinstellung
Abbremshalt
Page 21
Vor dem Betrieb
m
1-4 Steuerungssystem–Prinzipien
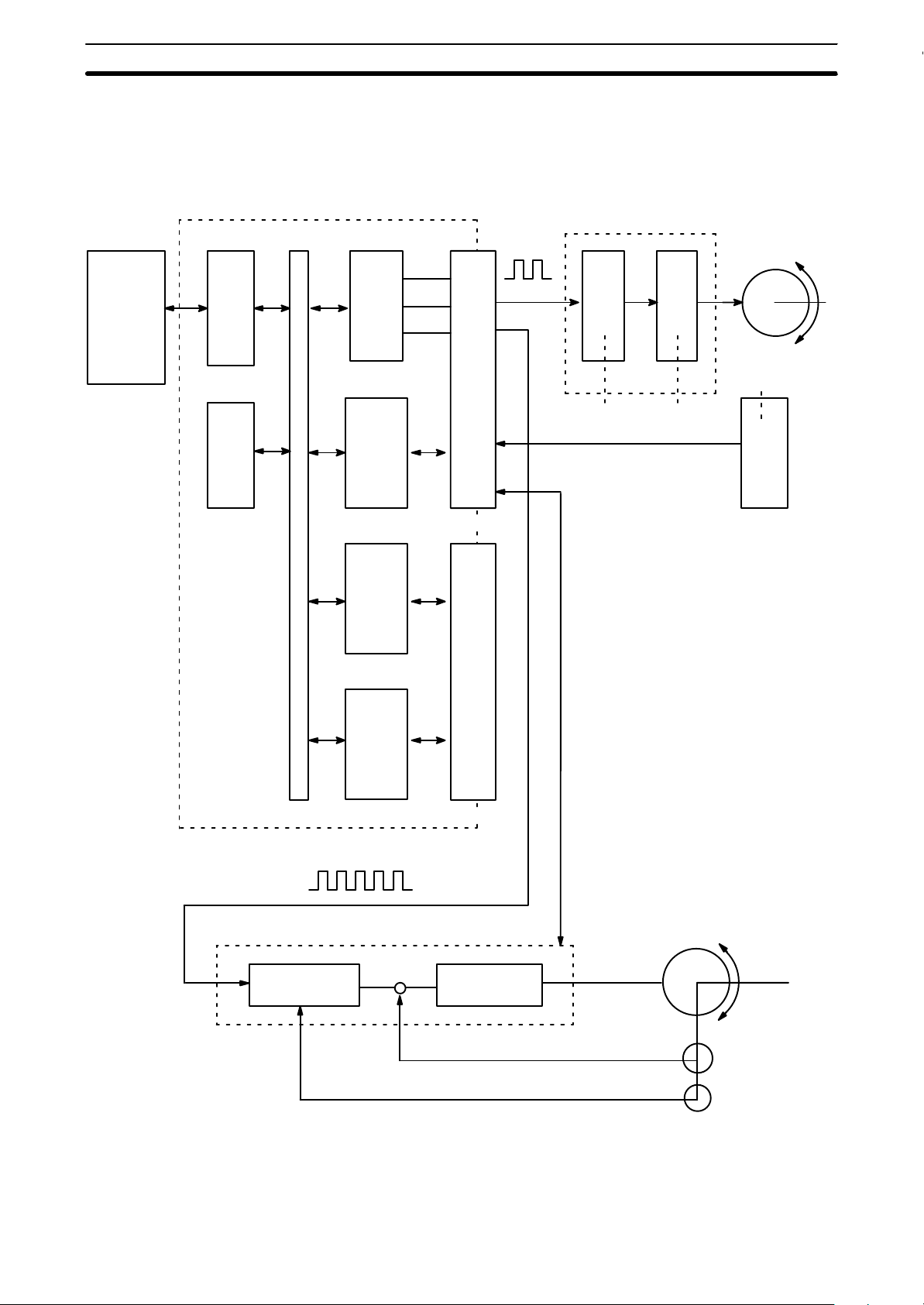
1-4-1 Datenfluss
C200HW–NC113/NC213/NC413–Positionierbaugruppe
Impulszug
Schrittmotor–Treiber
Kapitel
Schrittmotor
1-6 Vor de
SYSMAC
C200HX/–
HG/
HE/
HS/
H
SPS
BUS
MPU
I/F
Speicher
Impulsgenerator
E/A–
Schnitt–
stelle
Impulsgenerator
E/A–Anschluß
Wicklungs–
ansteuerung
Externer
Eingang
Leistungsverstärker
E/A–
Schnitt–
stelle
E/A–Anschluss
Hinweis Die NC113 verfügt nur über eine solche Schaltung.
Impulszug
Servomotor–Treiber
Fehlerzähler Leistungs-
verstärker
Servomotor
(Positionier–
ausgangs)
Tachogenerator
Inkremental–
Drehgeber
11
Page 22
m
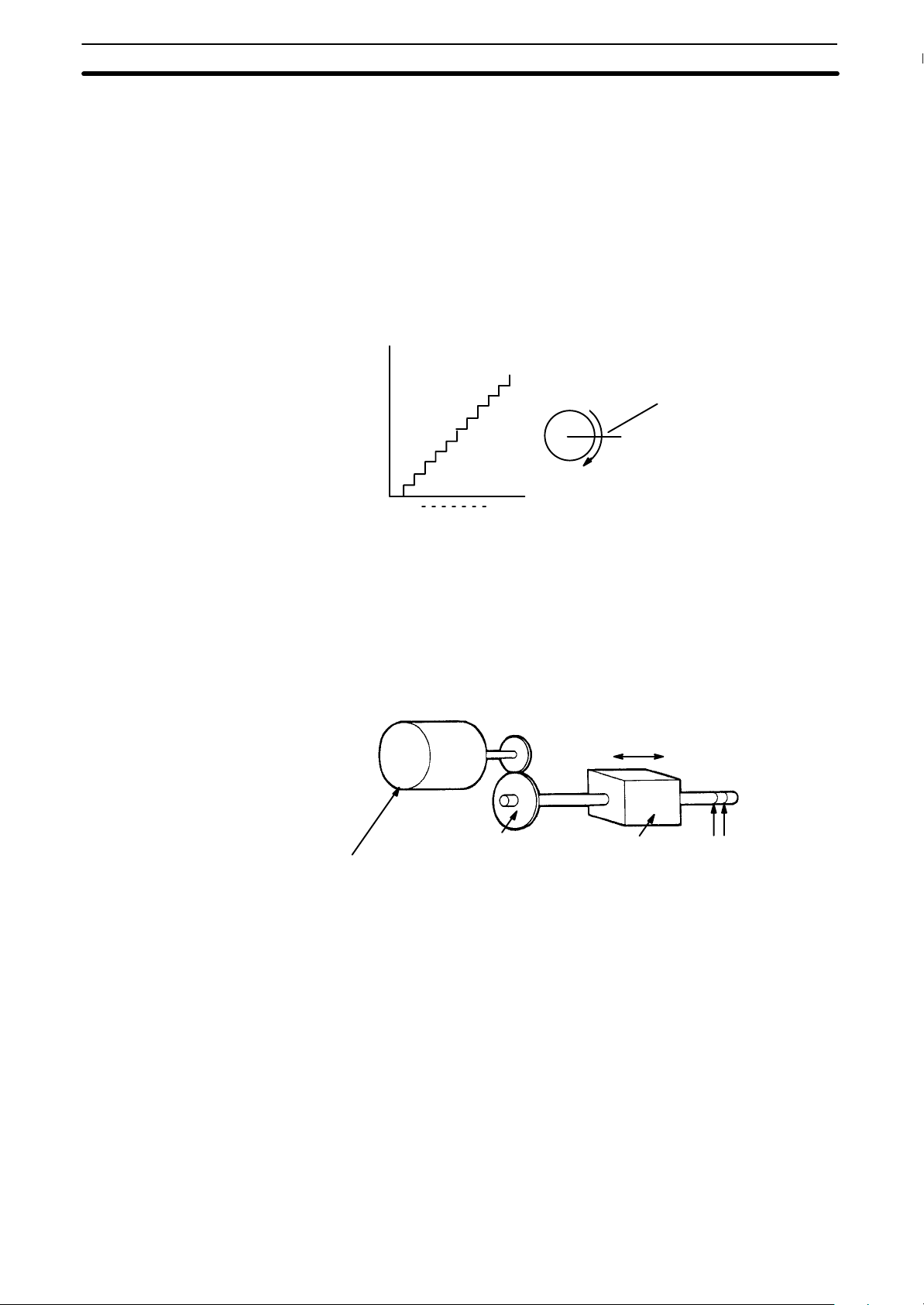
1-4-2 Steuerungssystem–Prinzipien
KapitelVor dem Betrieb 1-6 Vor de
System mit offener
Regelschleife
In einem System mit offener Regelschleife wird die Positionierung durch die
Anzahl der Eingangsimpulse, die der Motor empfängt, gesteuert. Es erfolgt
keine Positionsrückmeldung. Die C200HW–NC113/NC213/NC413 Positionierbaugruppen sind alle Systeme mit offener Regelschleife und Impulsausgabe. Der am häufigsten für diesen Steuerungssystem–Typ verwendete Motor ist ein Schrittmotor. Der Drehwinkel eines Schrittmotors wird durch die
Anzahl der an den Treiber angelegten Impulse gesteuert. Die Anzahl der
Drehungen des Schrittmotors ist proportional zur Anzahl der von der Positionierbaugruppe angelegten Impulse. Die Drehgeschwindigkeit des Schrittmotors verhält sich proportional zur Frequenz des Impulszuges.
Drehwinkel
Drehwinkel
Positionierausgabe
1 2 n
Positionierimpulse
1-4-3 Grundlegender Aufbau eines Positioniersystems
Das folgende Diagramm und die Parameter veranschaulichen ein vereinfachtes Positioniersystem.
M: Reduzierverhältnis
P: Vorschub–Spindelsteigung (mm/Umdrehung)
V: Zustellgeschwindigkeit des zu positionierenden Objektes (mm /s)
: Schrittwinkel pro Impuls (Grad/Impuls)
θ
s
N
Schrittmotor
Reduzier–
getriebe
M
zu positionieren–
des Objekt
V
Vorschubspindel–
Steigung
P
Die Positioniergenauigkeit in mm/Impuls wird wie folgt berechnet:
Positioniergenauigkeit = P/ (Impulse pro Umdrehung x M)
= P/ ((360/ θ
s) x M))
= (P x θs)/ (360 x M)
Die von der Positionierbaugruppe ausgegebene erforderliche Impulsfrequenz
(Hz) wird wie folgt berechnet:
Impulsfrequenz = V/Positioniergenauigkeit
= (360 x M x V)/ (P x θ
)
s
Und die Anzahl der Impulse, die benötigt werden, um ein Objekt um eine Distanz L (in mm) zuzustellen, wird wie folgt berechnet:
Anzahl der Impulsen = L/Positioniergenauigkeit
= (360 x M x L)/ (P x θ
)
s
12
Page 23
Vor dem Betrieb
m
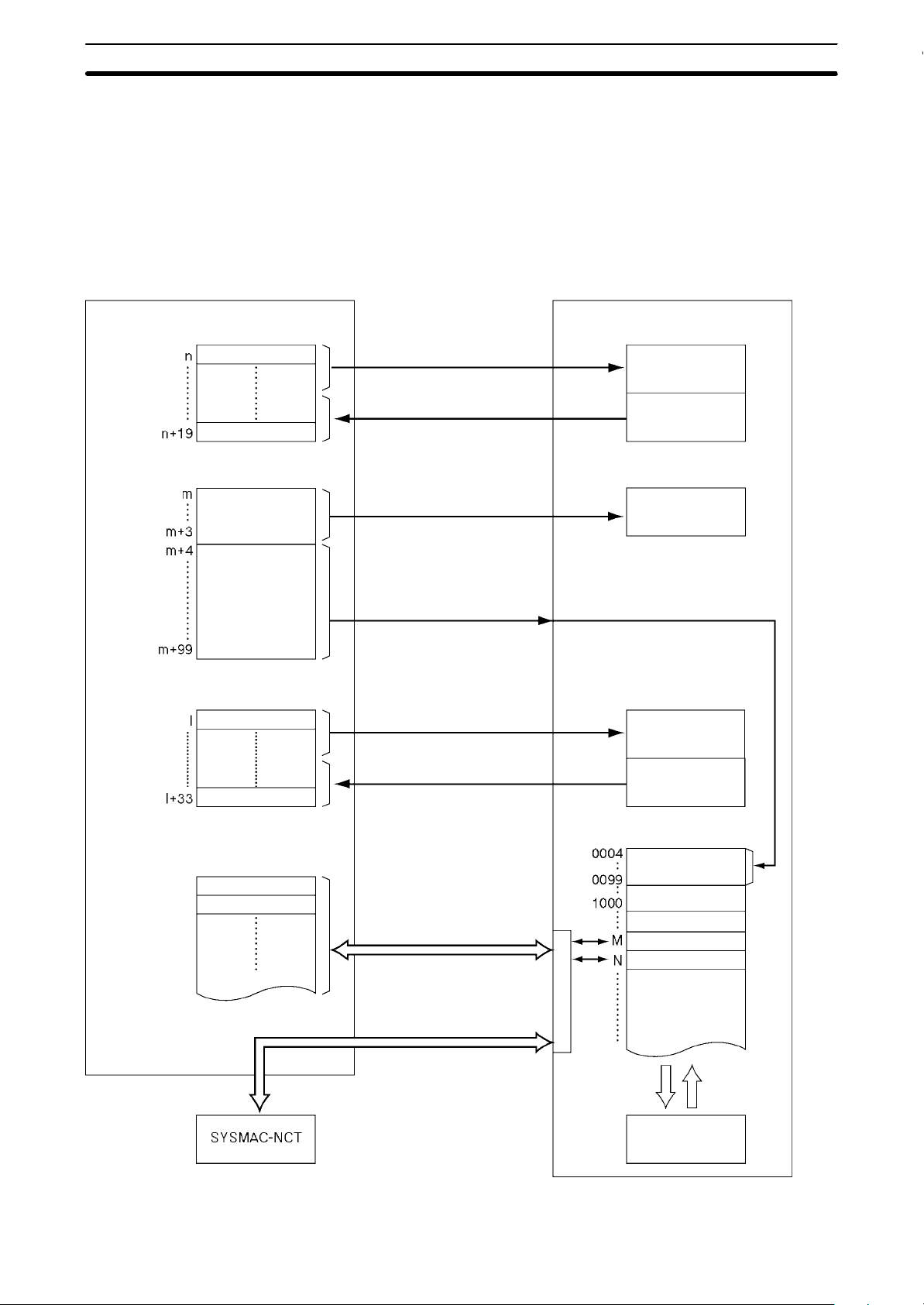
1-5 Datenaustausch
Wie im folgenden Diagramm gezeigt, tauscht die Positionierbaugruppe Daten
mit der speicherprogrammierbaren Steuerung aus. Diese Beschreibung erfolgt an Hand der C200HW–NC413. Die Größe der zugewiesenen Bereiche
unterscheiden sich für die NC113 und NC213. Sehen Sie für Einzelheiten
bezüglich der Datenbereiche der diversen Positionierbaugruppen das
4 Datenbereiche.
Kapitel
Kapitel
1-6 Vor de
IR–Bereich
DM–Bereich
DM– oder EM–
Bereich
SPS
Betriebsspeicherbereich
Parameterbereich
Allgemeine
Parameter
Achsenparameter
Betriebsdatenbereich
E/A–Auffrischung
(Betriebsbefehle,
Datenübertragungs–Befehle,
usw.)
E/A–Auffrischung
(Positionierbaugruppen–Status)
Beim Einschalten oder
Wiederanlauf
(Allgemeinese Parameter)
Beim Einschalten oder
Wiederanlauf
(Achsenparameter)
E/A–Auffrischung
(Datenübertragung und
Betriebsbefehls–
Informationen)
E/A–Auffrischung
(Positionierbaugruppen–Status)
Adresse
Positionierbaugruppe
Befehls–
interpretation
Status
Allgemeine
Parameter
Datenübertragung
und Betriebs–
befehlsinformation.
Status
Interner Speicher
DM– oder EM–
Bereich
Datenübertragungs–Bereich
Adresse M–Daten
Adresse N–Daten
Wenn Datenübertragungs–
Befehle ausgeführt werden.
Wenn IOWR oder IORD
ausgeführt wird.
(Positionierdaten)
Wenn Daten übertragen werden
Speichern
von Daten
Achsenparameter
Einschalten
oder
Wiederanlauf
Flash–Speicher
13
Page 24

m
Hinweis Die auf den Adressen 0004 bis 0099 gespeicherten Achsenparameter–Daten
1-5-1 Beschreibung
KapitelVor dem Betrieb 1-6 Vor de
können von den Worten (m+4) bis (m+99) des Datenwortbereichs übertragen
werden. Daten können ebenfalls an den Datenübertragungs–Bereich der
speicherprogrammierbaren Steuerung gesendet werden. Zusätzlich können
Daten im Flash–Speicher abgelegt werden.
In der folgenden Beschreibung wird die Positionierbaugruppe C200HW–
NC413 als Beispiel verwendet. NC213 und NC113 unterscheiden sich in Bezug auf die Größen der verschiedenen Bereiche durch die Anzahl der Achsen. Weitere Einzelheiten werden in
Kapitel 4 Datenbereiche beschrieben.
Betriebsspeicherbereich
(IR–Bereich)
Parameterbereich
(DM–Bereich)
Hinweis Die allgemeinen Parameterbereichs–Einstellungen sind bei Einsatz der Posi-
Die Positionierbaugruppe belegt 20 Worte des Spezial–E/A–Bereichs innerhalb des IR–Bereichs der speicherprogrammierbaren Steuerung. Von diesen
werden acht Worte während der E/A–Erfrischung für die Ausgabe von Informationen verwendet, die sich auf Befehle für Operationen beziehen wie
z. B. die Übertragung von Daten von der speicherprogrammierbaren Steuerung zur Positionierbaugruppe. Die verbleibenden 12 Worte werden für das
Einlesen des Status der Positionierbaugruppe während der E/A–Erfrischung
verwendet.
Der Positionierbaugruppe belegt 100 Worte des Spezial–E/A–Baugruppen–
Datenbereichs innerhalb des Datenwortbereichs der speicherprogrammierbaren Steuerung. Wird die Positionierbaugruppe eingeschaltet oder neugestartet, werden allgemeine Parameter und Achsenparameter, die sich auf die
Steuerung beziehen, zur Positionierbaugruppe übertragen. Die Achsenparameter werden im internen RAM der Positionierbaugruppe gespeichert.
Wird die Positionierbaugruppe eingeschaltet oder neugestartet, so ist es
ebenfalls möglich, Achsenparameter zu verwenden, die im internen Flash–
Speicher der Positionierbaugruppe gespeichert sind, ohne diese zuvor von
der speicherprogrammierbaren Steuerung zu laden. Die Auswahl zwischen
diesen beiden Betriebsarten erfolgt durch eine allgemeine Parametereinstellung. Weitere Einzelheiten werden im Abschnitt
bereich
tionierbaugruppe erforderlich. Ein allgemeiner Parameterfehler ( Fehlercodes
0010 bis 0013) wird generiert, wenn diese Einstellungen nicht vorgenommen
werden.
beschrieben.
4-2 Allgemeiner Parameter-
Betriebsdatenbereich
Datenübertragungs–
Bereich
Interner Speicher und
Flash–Speicher
14
Je nach einer allgemeinen Parametereinstellung werden 34 Worte in den
Datenbereichen der speicherprogrammierbaren Steuerung reserviert. Von
diesen werden 26 Worte während der E/A–Erfrischung für die Ausgabe von
Informationen, die sich auf Datenübertragungen von der speicherprogrammierbaren Steuerung zur Positionierbaugruppe beziehen und zur Ausgabe
von Informationen für Operationen benutzt. Die verbleibenden acht Worte
werden für das Einlesen des Status der Positionierbaugruppe während der
E/A–Erfrischung verwendet.
Nur die übertragenen Daten werden verwendet, wenn Daten entsprechend
den in den Betriebsdatenbereich eingestellten Datenübertragungs–Informationen übertragen werden. Die Positionierdaten werden zur Positionierbaugruppe übertragen, wenn die Datenübertragungs–Befehle Intelligentes E/A–
Schreiben (IOWR) und Intelligentes E/A–Lesen (IORD) ausgeführt werden .
Daten im internen Speicher können im Flash–Speicher gesichert werden,
indem ein Daten sichern–Befehl auf der speicherprogrammierbaren Steuerung ausgeführt wird. Die gesicherten Daten werden automatisch in den internen Speicher geladen, wenn die Positionierbaugruppe eingeschaltet oder
neugestartet wird. Eine eine allgemeine Parametereinstellung legt fest, ob
Page 25
Vor dem Betrieb
m
Achsenparameter vom Parameterbereich (DM) oder von Flash–Speicher gelesen werden.
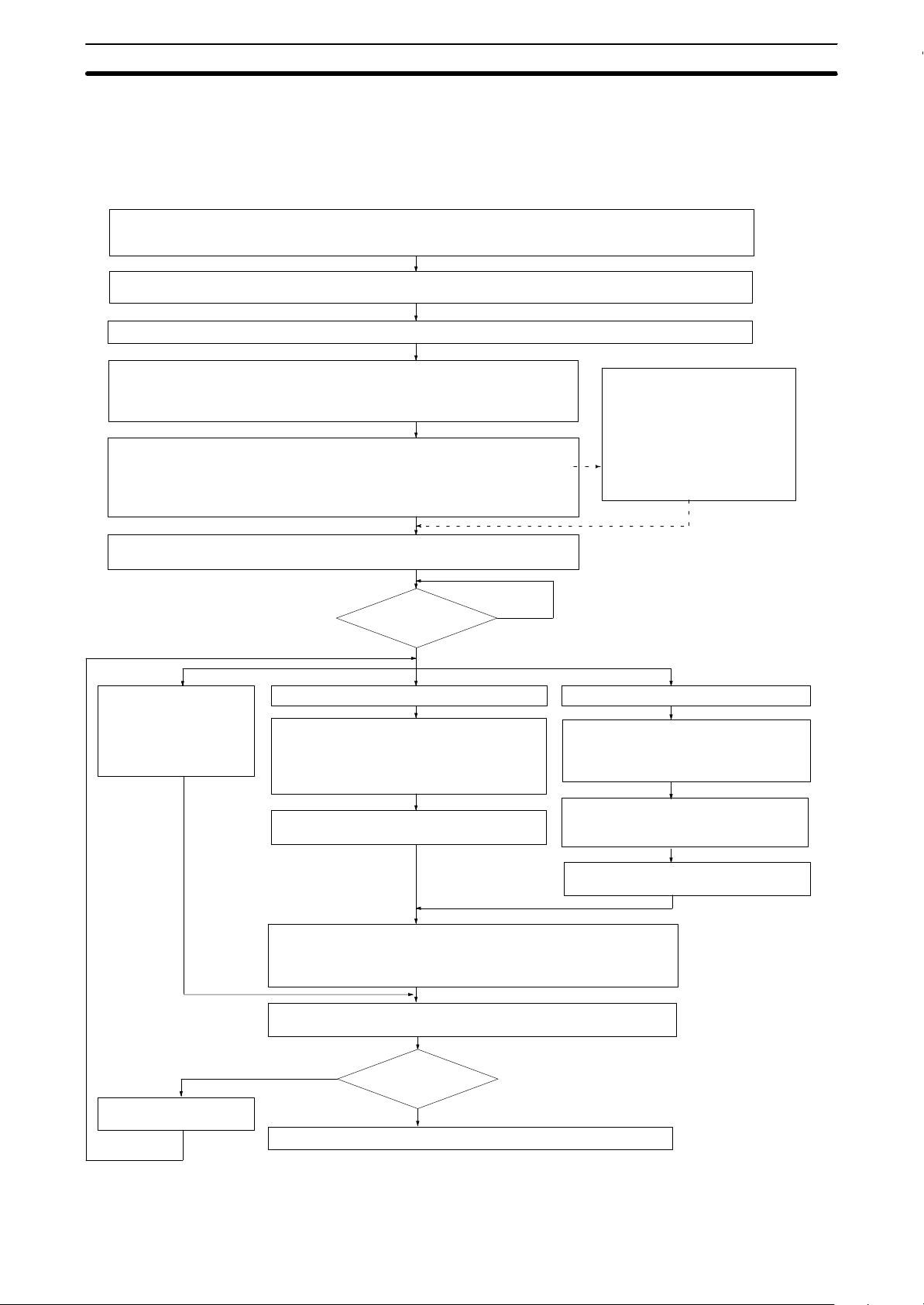
1-6 Vor dem Betrieb
Kapitel
1-6 Vor de
Verdrahtung der externen Eingänge. (Sehen Sie das
Verdrahten Sie das Nullpunkt–, Nullpunktnähe–, Rechts–/Linkslauf–Endschalter–, Notaus– und Interrupt–Signal.
Motor und Motor–Treiber verdrahten.
Verdrahten Sie den Motor und den Motor–Treiber wie im Installationshandbuch beschrieben.
Verdrahtung von Motor–Treiber und Positionierbaugruppe. (Siehe Kapitel
Einstellung der allgemeinen Parameter. (Sehen Sie den Abschnitt
Parameterbereich.
Stellen Sie den Betriebsdatenbereich, die Installationsposition
und die Parameter ein.
Einstellung der Achsenparameter. (Sehen Sie den Abschnitt
) (Siehe Hinweis 2.)
eich.
Einstellung der zur Steuerung der Positionierbaugruppe erforderlichen Daten, der
E/A, die Betriebbetriebsart, Nullpunkt–Suchmethode, Nullpunkt–Suchgeschwindigkeit, Beschleunigungs–/Abbremskurve, Endschalter–Signale, usw.
Wiedereinschalten oder Neustarten der Positionierbaugruppe. (Siehe Hinweis 5)
Die allgemeinen und Achsenparametereinstellungen werden übernommen.
) (Siehe Hinweis 1.)
Kapitel Spezifikationen und Verdrahtung.
Spezifikationen und Verdrahtung.
Allgemeiner
Achsenparameterber-
Aktiv–Merker
(Siehe Hinweis 6.)
AUS
EIN
)
)
Speichern der Achsenparameter. (Siehe Abschnitt
cherdaten.
Speichern Sie die Einstellungen im Flash–Speicher, falls
Sie die Achsenparameter mittels einer Datenübertragung
einstellen.
)
5-7 Spei-
Interrrupt–Abarbeitung
und andere Operationen.
(Sehen Sie
Andere Operationen.
Korrektur der Daten und
des Kontaktplanes.
Kapitel 9
)
(Direktbetrieb)
Einstellung des Betriebsdatenbereichs.
(Sehen Sie die
triebdatenbereich
Stellen Sie die Position, Geschwindigkeiten
und Beschleunigungs–/Abbremszeiten ein
Erstellung eines Kontaktplan–Programmes.
(Sehen Sie das
Nullpunktsuche. (Sehen Sie das
)(Siehe Hinweis 4.)
punkts
Ausführung des Direktbetriebs, des Speicherbetriebs (sehen Sie
Kapitel 7 Direktbetrieb, Kapitel 8 Speicherbetrieb.
Prozessbetrieb, Austesten. (Siehe
(Siehe Hinweis 5.)
Nicht O.K.
Betrieb. (Sehen SIe
allgemeine Struktur, 4-5 Be-
)
Kapitel 7 Direktbetrieb.
Prozessbetrieb
(Siehe Hinweis )
IN ORDNUNG
Kapitel 11 Fehlersuche.
)
Kapitel Bestimmung des Null-
Kapitel entstören.
)
Datenübertragung (siehe
gung und Speicherung von Daten.
Übertragung der im Speicherbetrieb verwendeten Daten zur Positionierbaugruppe.
Datensicherung (siehe
und Speicherung von Daten
ung von Daten.
Erstellung des Kontaktplan–Programms.
Kapitel Speicherbetrieb.
(Siehe
)
)
(Speicherbetrieb)
5-1 Übertragung
) (Siehe Hinweis 3.)
Kapitel Übertra-
)
,
5-7 Speicher-
)
15
Page 26

KapitelVor dem Betrieb 1-6 Vor de
m
Hinweis 1. Diese Einstellungen sind für den ersten Einsatz der Positionierbaugruppe
erforderlich oder bei der Änderung des Betriebsdatenbereichs, der Installationsposition oder der Parametereinstellungen.
2. Der Anwender kann wählen, ob er die im Datenspeicher oder die auf der
Positionierbaugruppe gespeicherten Achsenparameter verwenden
möchte.
3. Alle gespeicherten Daten werden nach dem Einschalten der Positionierbaugruppe automatisch in deren internen Speicher eingelesen. Sind die
allgemeinen Parameter so eingestellt, daß die auf der Positionierbaugruppe gesicherten Daten verwendet werden, dann werden die Achsenparameter automatisch nach dem Einschalten der Spannung eingelesen.
4. Für Operationen, die nicht durchgeführt werden können, wenn der Nullpunkt nicht festgelegt ist, ist es erforderlich, zuerst eine Nullpunktsuche
oder eine Änderung der Istposition durchzuführen, um den Nullpunkt
festzulegen.
5. Sehen Sie das
Fehler oder ein Alarm generiert wird
6. Warten Sie nach dem Einschalten der Positionierbaugruppe oder dem
Neustart, bis der X–Achse aktiv–Merker ausgeschaltet ist, bevor Sie einen Befehl ausführen.
Kapitel 11 Fehlersuche
für Gegenmaßnahmen, falls ein
.
16
Page 27

KAPITEL 2
Spezifikationen und Verdrahtung
Dieses Kapitel enthält die Spezifikationen der Positionierbaugruppe und beschreibt die Verdrahtung.
2-1 Spezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-1 Allgemeine Spezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-2 Operationen und Leistungsspezifikationen 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-3 Elektrische Spezifikationen der E/A 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-1-4 Abmessungen (in mm) 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2 Komponenten 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3 Externe E/A–Schaltungen 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-1 Anschlußstift–Anordnung 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-2 Stiftanordnung der externen E/A–Steckverbinder 24. . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-3-3 E/A–Schaltungen 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4 Anschluß externer E/A 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-1 Beispiele für Ausgangsbeschaltungen 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-2 Beispiele für Eingangsbeschaltungen 32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-4-3 Anschluß der Nullpunkt– und Positionierung beendet–Signale 34. . . . . . . . . . . . . . . . .
2-4-4 Sicherheitsmaßnahmen bei der Verdrahtung 35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-5 Anschlüsse für jede Betriebsart 36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
17
Page 28
Anschlüsse für jede Betriebsart
ü
gabe
/ o de u ge
S eue u g
os o e
Gesc dg e e
esc eu gu gs u d
2-1 Spezifikationen
2-1-1 Allgemeine Spezifikationen
Die allgemeinen Spezifikationen richten sich nach den Spezifikationen für die
SYSMAC C200H, C200HS und C200HX/HG/HE.
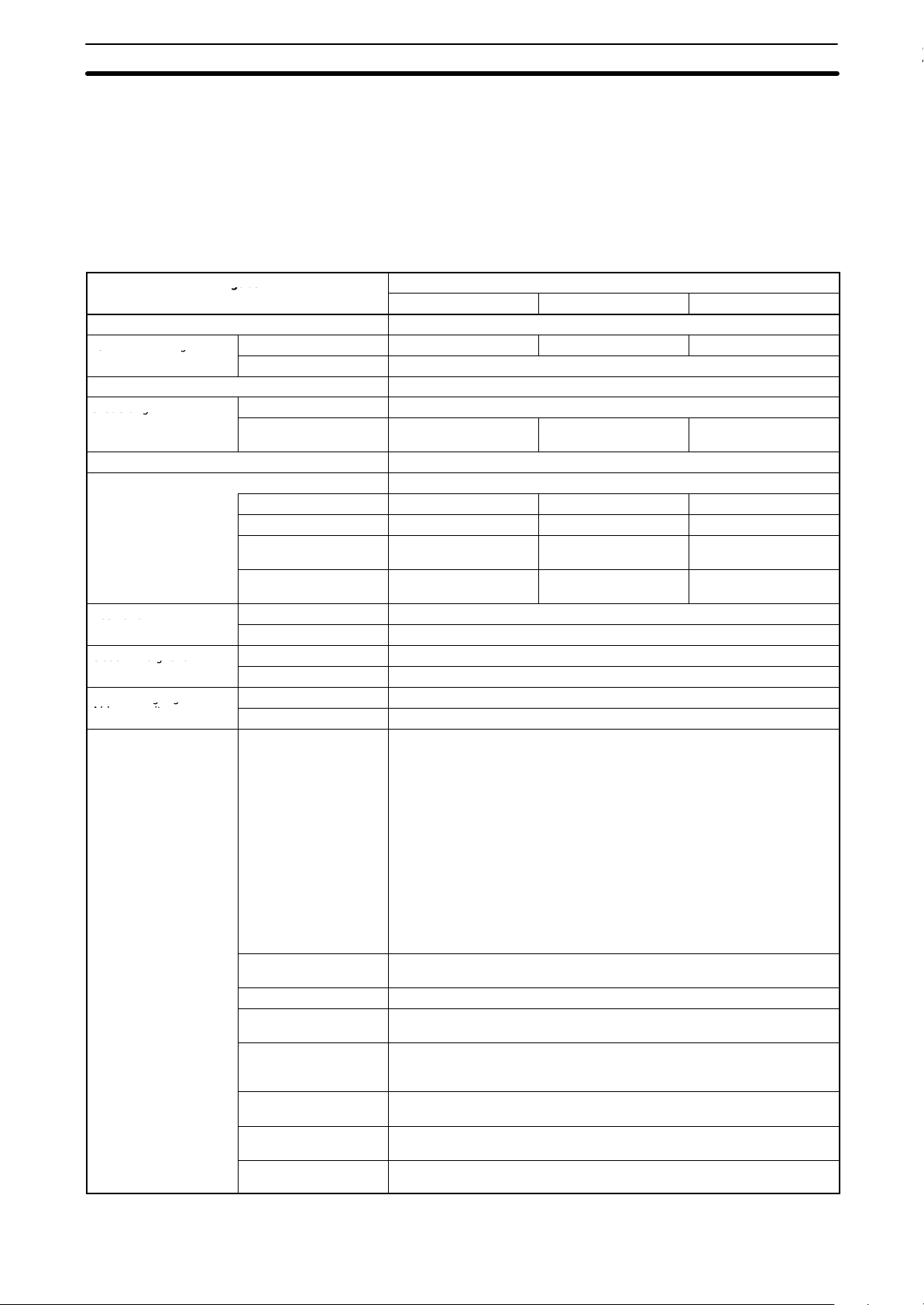
2-1-2 Operationen und Leistungsspezifikationen
Kapitel
2-5 Anschl
Angabe
C200HW–NC113 C200HW–NC213 C200HW–NC413
Einsetzbare SPS–Modelle C200HX/HG/HE und C200HS/H
E/A–Anforderungen Worte 5 Worte 10 Worte 20 Worte
Steckplätze 1 Steckplatz
Angesteuerter Treiber Impulszug–gesteuerter Servomotor– oder Schrittmotor–Treiber
Steuerung Steuersystem Offener Regelkreis, gesteuert durch Impulszug–Ausgabe
Anzahl der gesteuerten
Achsen
Steuereinheit Impuls
Positioniervorgänge Zwei Arten: Speicher– und Direktbetrieb
Unabhängig 1 Achse 2 unabhängige Achsen 4 unabhängige Achsen
Lineare Interpolation Keine 2 Achsen max. 4 Achsen max.
Geschwindigkeits–
steuerung
Unterbrechungs–
zustellung
Positionen Bereich –9.999.999 bis 9.999.999 Impulse
Datenfelder 100/Achse
Geschwindigkeiten Bereich 1 Hz zu 500 kHz
Datenfelder 100/Achse
Beschleunigungs– und
Abbremszeiten
Funktionen und
Einstellungen
Bereich 0 bis 250 s, bis Maximalgeschwindigkeit erreicht wird.
Datenfelder jeweils 9/Achse zum Beschleunigen und Abbremsen
Nullpunktsuche Nullpunktnähe–Signal: wählbar (ohne, Schließer– oder Öffner–Kontakt).
Tippbetrieb Der Tippbetrieb kann bei einer spezifizierten Geschwindigkeit ausgeführt
Verweilzeiten 19/Achse können von 0 bis 9,99 s eingestellt werden (Einheit: 0.01 s).
Beschleunigungs–/
Abbremskurven
Zonen Zonen–Merker wird aktiviert, wenn sich die Istposition innerhalb einer
Softwaregrenze Kann innerhalb eines Bereichs von –9.999.999 bis 9.999.999 Impulsen
Spielkompensation 0 bis 9.999 Impulse. Die Kompensationsgeschwindigkeit kann ebenfalls
Teach–Betrieb Mit einem Befehl von der SPS können die Daten der Istposition übernommen
1 Achse 2 Achsen 4 Achsen
1 Achse 2 unabhängige Achsen 4 unabhängige Achsen
1 Achse 2 unabhängige Achsen 4 unabhängige Achsen
Nullpunktsignal: wählbar (Schließer– oder Öffner–Kontakt)
Nullpunktkompensation: –9.999.999 bis 9.999.999 Impulse
Nullpunkt–Suchgeschwindigkeit: langsam oder Näherungsgeschwindigkeit kann
eingestellt werden.
Nullpunktsuche: kann eingestellt werden,
um bei einem Nullpunktsignal zu stoppen, nachdem das Näherungssignal sich
eingeschaltet hat,
um bei einem Nullpunktsignal zu stoppen, nachdem das Näherungssignal sich
ausgeschaltet hat,
um bei einem Nullpunktsignal zu stoppen, ohne das Näherungssignal
auszuwerten oder
um bei dem Nullpunktsignal zu stoppen, nachdem Grenzsignal deaktiviert
wurde.
werden.
Trapezförmige oder S–Kurve (kann getrennt für jede Achse eingestellt werden.)
spezifizierten Zone befindet. Drei Zonen können für jede Achse spezifiziert
werden.
spezifiziert werden.
spezifiziert werden.
werden.
Modell
18
Page 29
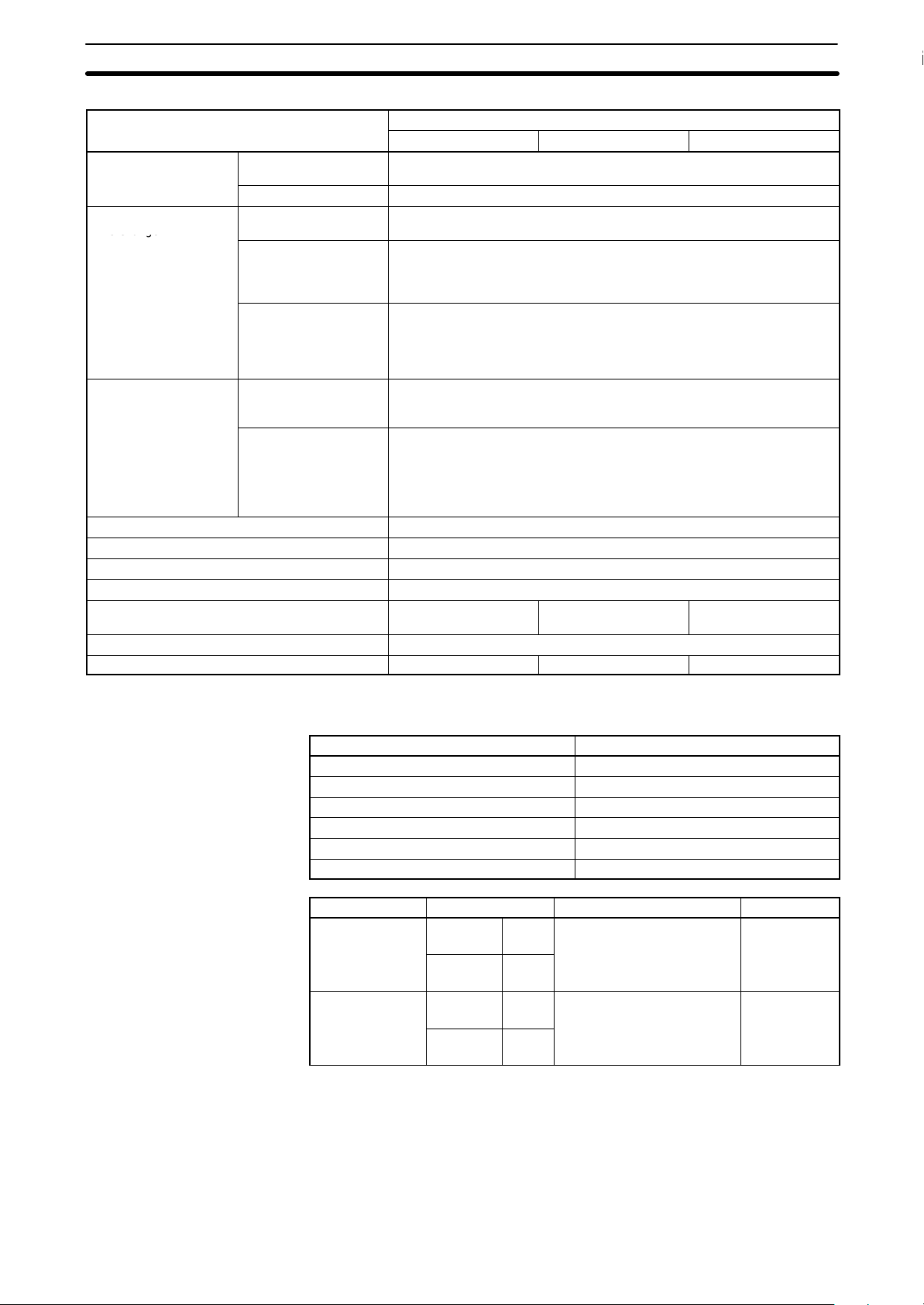
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
Einstellungen
Angabe ModellAngabe
C200HW–NC413C200HW–NC213C200HW–NC113
Abbremshalt Der HALT–Befehl verursacht eine Abbremsung der Positionierung bis zu einem
Notaus Die Impulsausgaben werden über einen externen Notaus–Befehl gestoppt.
Funktionen und
Einstellungen
Externe E/A–Punkte Eingänge Bereiten Sie die folgende Eingänge für jede Achse vor:
Impulsausgang–Verteilungszeitraum 4 ms
Ansprechzeit Siehe
Selbstdiagnose–Funktion Flash–Speicher–Prüfung, Speicherverlust–Prüfung, E/A–Busprüfung
Fehlererfassungs–Funktion Überfahren, CPU–Fehler, Software–Grenzüberschreitung, Notaus
Interne Stromaufnahme (Aufnahme vom
Baugruppenträger)
Abmessungen (eine Größe für alle Buagruppen) 130 (H) x 34,5 (B) x 100,5 (T)
Gewicht (ohne Steckverbinder) 250 g max. 300 g max. 350 g max.
Ändere Istposition Der ÄNDERE ISTPOSITION–Befehl wird dazu verwendet, die Istposition auf
Überseteuerung Wird der Übersteuerungs–Freigabebefehl während des Positionierens
Datenspeicherung 1) Speicherung im Flash–Speicher (kann 100.000mal beschrieben werden).
Ausgänge Bereiten Sie die folgenden Ausgänge für jede Achse vor:
Halt innerhalb der spezifizierten Bremszeit.
eine spezifizierte Position zu ändern.
ausgeführt, wird die Zielgeschwindigkeit durch Anlegen des
Übersetuerungskoeffizienten geändert. Mögliche Werte befinden sich in einem
Bereich von 1 bis 999% (mit einer Schrittweite von 1%).
2) Lesen des SPS–Bereiches durch einen Datenlesebefehl.
3) Lesen durch die SYSMAC–NCT Programmiersoftware und Speicherung
auf der Festplatte oder Floppy eines PCs.
Grenzsignale rechts/links, Nullpunktnähe–Signal, Nullpunktsignal,
Notaus–Signal, Positionierung beendet–Signal, Interrupt–Signal
Impulsausgänge (offene Kollektorausgänge)
Rechts– und Linkslaufimpulse, Impulsausgänge und Richtungsausgänge
können umgeschaltet werden.
Je nach Betriebsart kann zwischen Fehlerzähler–Rücksetzungs– oder
Nullpunktjustierungs–Befehlsausgängen gewählt werden.
Anhang A Daten–Berechnungsstandards.
5 VDC an 300 mA max. 5 VDC an 300 mA max. 5 VDC an 500 mA max.
2-1-3 Elektrische Spezifikationen der E/A
Eingangspezifikationen
Nullpunkt–Signal
Eingangsspezifikation
Spannung 24 VDC ±10%
Strom 4,3 mA (an 24 V) typ.
Einschaltspannung 17,4 VDC min.
Ausschaltspannung 5,0 VDC max.
EIN–Ansprechzeit 1 ms max. (0,1 ms max.: Interrupt–Eingang)
AUS–Ansprechzeit 1 ms max.
Angabe Anschlussklemme Spezifikation Ansprechzeit
Externes Signal ist
ein Offener
Kollector–Signal
Externes Signal ist
ein Linientreiber–
Signal
Angabe Spezifikation
X/Z–Achse A15
Y/U–Achse B15
X/Z–Achse A16
Y/U–Achse B16
A14
B14
A14
B14
Entspricht den vorstehenden
Eingangspezifikationen
Signal ist ein Treiber–
Ausgangssignal, das
Am26LS31 entspricht 0,1 ms–max.
p
Schließer–
Kontakt:
0,1 ms–max.
Öffner–Kontakt:
1 ms–max.
Schließer–
Kontakt:
Öffner–Kontakt:
1 ms–max.
19
Page 30
Anschlüsse für jede Betriebsart
ü
pu s
Kapitel
2-5 Anschl
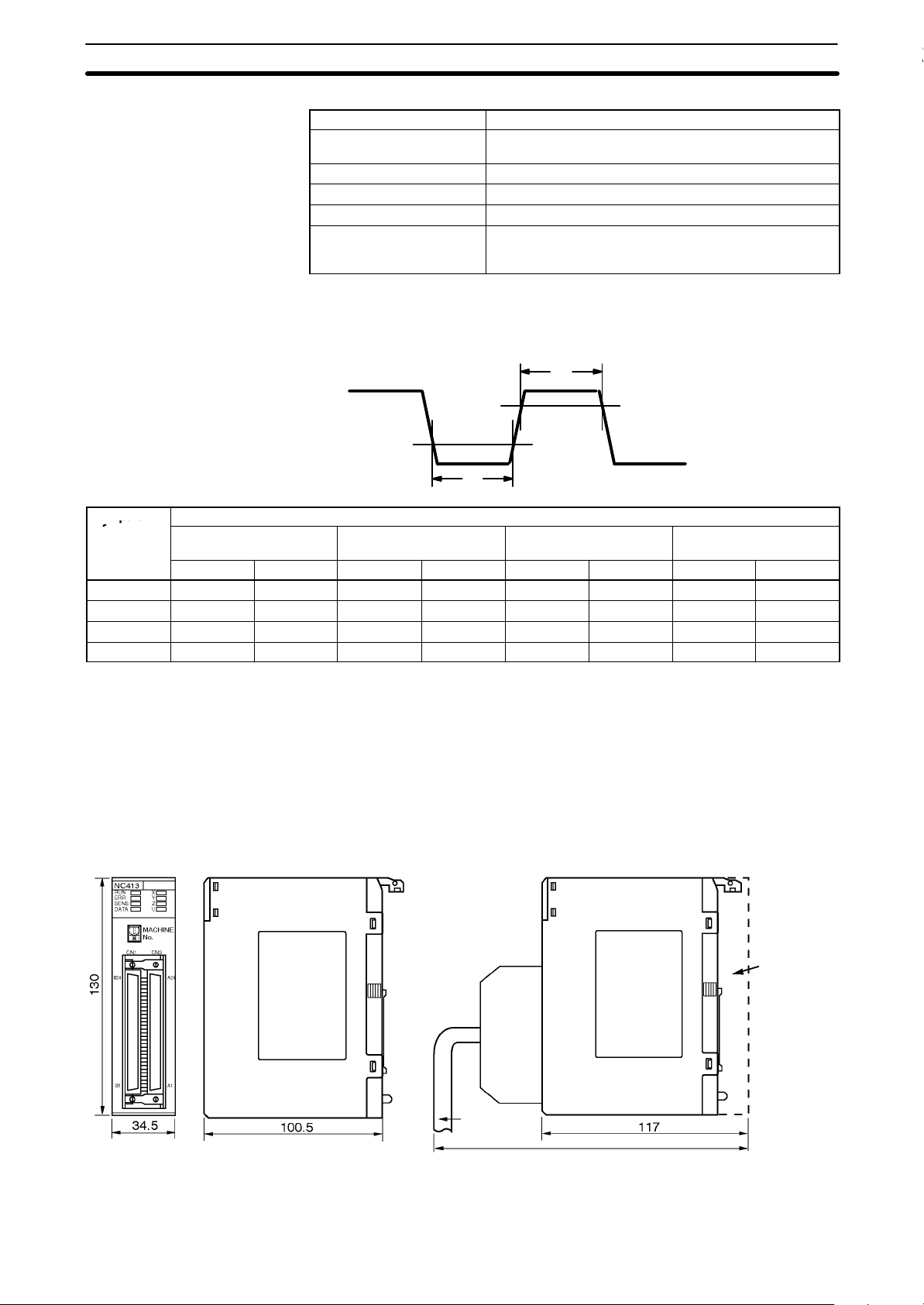
Ausgangs–
Spezifikationen
Rechtslauf–/Linkslauf–
Impuls–
Ausgangsspezifikationen
Maximale Schaltkapazität 30 mA bei 4,75 bis 26,4 VDC (NPN, offener Kollektor)
Minimale Schaltkapazität 7 mA bei 4,75 bis 26,4 VDC (NPN, offener Kollektor)
Leckstrom 0,1 mA max.
Restspannung 0,6 V max.
Externe
Spannungsversorgung
Die min. Rechtslauf/Linkslauf–Impulsbreiten sind nachfolgend dargestellt.
AUS und EIN beziehen Sie sich auf den den Ausgangstransistor.
Der Ausgangstransistor ist bei “L”–Pegel aktiv.
Angabe Spezifikation
(16 mA: Klemmen mit 1,6 k Ω Begrenzungswiderstand)
24 VDC ±10% NC413: 90 mA max.
NC213: 50 mA max.
NC113: 30 mA max.
B
AUS
90%
10%
EIN
A
Impuls–
frequenz
50 kHz 9,7 µs min. 9,7 µs min. 9,8 µs min. 9,8 µs min. 9,7 µs min. 9,7 µs min. 9,7 µs min. 9,7 µs min.
100 kHz 4,7 µs min. 4,7 µs min. 4,8 µs min. 4,8 µs min. 4,7 µs min. 4,7 µs min. 4,8 µs min. 4,8 µs min.
200 kHz 2,3 µs min. 2,3 µs min. 2,3 µs min. 2,3 µs min. 2,2 µs min. 2,2 µs min. 2,3 µs min. 2,3 µs min.
500 kHz 0,76µs min. 0,82 µs min. 0,77µs min. 0,88 µs min. 0,74 µs min. 0,72 µs min. 0,76 µs min. 0,85 µs min.
7 mA/5 VDC ±5% 30 mA/5 VDC ±5% 7 mA/24 VDC ±10%
A B A B A B A B
Strom bei offen oder geschlossen/ Spannung bei belasteter Spannungsquelle
(1,6 k Ω Widerstand)
16 mA/24 VDC ±10%
(1,6 k Ω Widerstand)
Hinweis 1. Die Last in der obenstehenden Tabelle entspricht dem Netto–Lastwider-
stand; die Impedanz des Last–Anschlußkabels wurde nicht berücksichtigt.
2. Bedingt durch die Verzerrungen der Impulsformen infolge der Anschlußkabel–Impedanz sind die Impulsbreiten bei der eigentlichen Anwendung
evtl. kleiner als die, die in der obenstehenden Tabelle gezeigt werden.
2-1-4 Abmessungen (in mm)
Abmessungen nach der Installation
Baugruppen–
träger
Kabel
ca. 230
20
Page 31

ü
2-2 Komponenten
s
U
Gü
Oa ge
Oa ge
Nomenklatur
C200HW–NC413 C200HW–NC213 C200HW–NC113
Leuchtdioden–Anzeigen
Anzeige des
Betriebszustandes der
Positionierbaugruppe.
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
X/Y–Achsen–
anschluss
Anschluss des
Schrittmotor– oder
Servomotor–
Treibers. (Steuerung
mit 2 Achsen)
Baugruppennummern–
Einstellschalter
Einstellung der
Baugruppennummer der
Positionierbaugruppe.
Z/U–Achsenanschluss
Anschluss des
Schrittmotor– oder
Servomotor–Treibers.
(Steuerung mit 2 Achsen)
X, Y–
Achsen–
anschluss
X–
Achsen–
anschlus
Leuchtdioden–Anzeigen
Name Farbe Status Erklärung
RUN Grün leuchtend Leuchtet während des normalen Betriebs.
nicht leuchtend Hardwarefehler oder SPS wurde über Positionierbaugruppen–Fehler informiert.
ERR Rot leuchtend/
blinkend
nicht leuchtend Kein Fehler ist aufgetreten.
SENS Rot leuchtend Entweder wurde ein Rechtslauf/Endschalter links oder ein Notaus–Signal angelegt. Jetzt
blinkend Entweder ist ein Parameterverlust, ein Datenverlust oder ein
nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
DATA Rot blinkend Die Prüfung aller Daten (Parameter, Position, usw.) nach dem Einschalten zeigte, daß
leuchtend Daten sind falsch (z.B. übertragene Parameter oder Positionen sind außerhalb des
DATA Rot nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
X Orange leuchtend Impulse werden an die X–Achse ausgegeben (vorwärts oder rückwärts).
blinkend Ein Fehler ist aufgetreten, wie falscher Kabeltyp für die X–Achse oder fehlerhafte Daten.
nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
Y Orange leuchtend Impulse werden an die Y–Achse ausgegeben (vorwärts oder rückwärts).
blinkend Ein Fehler ist aufgetreten, wie z. B. ein falscher Kabeltyp für die Y–Achse oder fehlerhafte
nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
Ein Fehler ist aufgetreten.
blinkt die Leuchtdioden–Anzeige für die relevante Achse (X bis U).
Betriebsdatenbereichs–Zuweisungsfehler aufgetreten.
Daten verloren wurden oder korrumpiert sind.
zulässigen Bereiches). Jetzt blinkt die Leuchtdioden–Anzeige für die relevante Achse (X
bis U).
Daten.
21
Page 32

Anschlüsse für jede Betriebsart
ü
Oa ge
U
Oa ge
C00 /GCU3j/ j
C00 /GCU5j/6 j
Name ErklärungStatusFarbe
Z Orange leuchtend Impulse werden an die Z–Achse ausgegeben (vorwärts oder rückwärts).
blinkend Ein Fehler ist aufgetreten, wie z. B. ein falscher Kabeltyp für die Z–Achse oder fehlerhafte
Daten.
nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
U Orange leuchtend Impulse werden an die U–Achse ausgegeben (vorwärts oder rückwärts).
blinkend Ein Fehler ist aufgetreten, wie z. B. ein falscher Kabeltyp für die U–Achse oder fehlerhafte
Daten.
nicht leuchtend Keiner der zuvor aufgeführten Fehler ist aufgetreten.
Kapitel
2-5 Anschl
Hinweis Sehen Sie das
Baugruppennummern–
Einstellschalter
Kapitel 11 Fehlersuche
für eine genaue Fehlerbeschreibung
.
• Für die C200HW–NC213 gilt dies nur für die X–Achse; für die C200HW–
NC213 gilt dies nur für die X– und Y–Achsen.
• Werden nicht alle Achsen der C200HW–NC213 oder C200–NC413 verwendet, so verbinden Sie entweder die Rechtslauf–/Linkslauf–Grenzeingänge
der unbenutzten Achsen mit der Eingabespannungsversorgung und schalten Sie diese ein oder stellen Sie die Kontaktlogik auf SCHLIEßER ein. Verbinden Sie Notaus mit der Eingangsmasse und aktivieren Sie ihn. Die
ERR–Anzeige leuchtet, falls der Eingang offen bleibt. Alle verwendeten
Achsen verhalten sich jedoch normal.
Mit diesem Schalter wird die Baugruppennummer (d.h. die Maschinennummer) der Positionierbaugruppe eingestellt.
Maschinen
Nr.
Der zulässige Bereich der Baugruppennummern–Einstellungen hängt vom
Typ der speicherprogrammierbaren Steuerung und dem Modell der Positionierbaugruppe ab. Dies ist in der folgenden Tabelle dargestellt.
SPS–Typ Positionier–
C200HX/HG–CPU3j/4 j
und/alle C200HE/HS/H–Modelle
C200HX/HG–CPU5j/6 j
baugruppen–
Modell
NC113/NC213 0 bis 9
NC413 0 bis 8
NC113/NC213 0 bis 9, A bis F
NC413 0 bis 8, A bis E
Einstellbereich
22
Jede Baugruppennummer innerhalb des zulässigen Bereichs kann eingestellt werden, solange sich diese nicht mit den eingestellten Baugruppennummern anderer installierter Spezial–E/A–Baugruppen in der gleichen SPS
überschneidet.
Vorsicht Schalten Sie die V ersorgungsspannung aus, bevor Sie diese Einstellungen vor-
nehmen.
Der IR– und Datenwortbereiche werden entsprechend den eingestellten Bau-
gruppennummern zugewiesen. Sehen Sie die Speicherbereichs–Zuweisungstabellen in
Kapitel 4 Datenbereichen
für Einzelheiten bezüglich der zu-
gewiesenen Wortadressen.
Page 33

ü
2-3 Externe E/A–Schaltungen
2-3-1 Anschlußstift–Anordnung
X/Y–Achse X/Y–Achse X–AchseZ/U–Achse
C20HW–NC413 C20HW–NC213 C20HW–NC113
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
Anschlußstift–Anordnung für X– und Z–Achsen
Stift–
A1 EIN Versorgungsspannung für Ausgänge, 24 VDC B1 EIN Versorgungsspannung für Ausgänge, 24 VDC
A2 EIN Masse für Ausgänge, 24 VDC B2 EIN Masse für Ausgänge, 24 VDC
A3 ––– Nicht verwendet B3 ––– Nicht verwendet.
A4 ––– Nicht verwendet B4 ––– Nicht verwendet.
A5 AUS Rechtslauf–Impulsausgang B5 AUS Rechtslauf–Impulsausgang
A6 AUS Rechtslauf–Impuls/Impulsausgang mit 1,6 kΩ
A7 AUS Linkslauf–Impuls/Richtungsausgang B7 AUS Linkslauf–Impuls/Richtungsausgang
A8 AUS Linkslauf–Impuls/Richtungsausgang mit 1,6 kΩ
A9 ––– Nicht verwendet B9 ––– Nicht verwendet.
A10 AUS Fehlerzähler–Rücksetzausgang,
A11 AUS Fehlerzähler–Rücksetzausgang mit 1,6 kΩ
A12 EIN Positionierung beendet–Signal B12 EIN Positionierung beendet–Signal
A13 ––– Nicht verwendet B13 ––– Nicht verwendet.
A14 EIN Nullpunktmasse B14 EIN Nullpunktmasse
A15 EIN Nullpunktsignal (24 V) B15 EIN Nullpunktsignal (24 V)
A16 EIN Nullpunktsignal (5 V) B16 EIN Nullpunktsignal (5 V)
A17 ––– Nicht verwendet B17 ––– Nicht verwendet.
A18 ––– Nicht verwendet B18 ––– Nicht verwendet.
A19 EIN Interrupt–Signal B19 EIN Interrupt–Signal
A20 EIN Notaus–Signal B20 EIN Notaus–Signal
A21 EIN Nullpunktnähe–Signal B21 EIN Nullpunktnähe–Signal
A22 EIN Granzsignal rechts B22 EIN Grenzsignal rechts
A23 EIN Grenzsignal links B23 EIN Grenzsignal links
A24 EIN Masse der Eingänge B24 EIN Masse der Eingänge
E/A Bezeichnung Stift–
Nr.
Widerstand
Widerstand
Nullpunktjustierungs–Befehlsausgang
Widerstand
Nullpunktjustierungs–Befehlsausgang mit 1,6 kΩ
Widerstand
Anschlußstift–Anordnung für Y– und U–Achsen
E/A Bezeichnung
Nr.
B6 AUS Rechtslauf–Impuls/Impulsausgang mit 1,6 kΩ
Widerstand
B8 AUS Linkslauf–Impuls/Richtungsausgang mit 1,6 kΩ
Widerstand
B10 AUS Fehlerzähler–Rücksetzausgang,
Nullpunktjustierungs–Befehlsausgang
B11 AUS Fehlerzähler–Rücksetzausgang mit 1,6 kΩ
Widerstand
Nullpunktjustierungs–Befehlsausgang mit 1,6 kΩ
Widerstand
Hinweis 1. Verwenden Sie entweder das 24 V oder das 5 V Nullpunktsignal, aber
nicht beide gleichzeitig.
23
Page 34

Anschlüsse für jede Betriebsart
ü
• Die Masse aller Ausgänge wird mit der 24 V–Masse verbunden.
• Die Masse aller Eingänge, bis auf die 24 V– und 5 V–Nullpunktsignale und
• Das Positionierung beendet–Massesignal wird mit der 24 V–Versorgungs-
• Die Nullpunktmasse wird mit dem 24 V– oder 5 V–Nullpunktsignal verwen-
Kapitel
2. Verwenden Sie 24 10% VDC für die Impulsausgangs–Spannungsversorgung.
3. Der Leckstrom muß weniger als 1,0 mA betragen, wenn Zweidraht–Sensoren verwendet werden.
4. Stellen Sie sicher, daß eine Last mit den Ausgangsklemmen verbunden
ist. Die internen Komponenten der Positionierbaugruppe können bei einem Kurzsachluß der Last beschädigt werden.
5. Die an die Positionierbaugruppe angeschlossene 24 V(A1/B1)–Ausgangs–Versorgungsspannung und die 24 V(A2, B2)–Masse wird an alle
Achsen angelegt.
6. Ziehen Sie bei der Installation der Steckverbinder der Positionierbaugruppe die Anschlußschrauben mit einem Drehmoment von 0,34 N D m
an.
die Positionierung beendet–Signale, werden mit ”Masse der Eingänge” verbunden.
spannung für die Ausgänge über eine Diode verbunden.
det.
2-5 Anschl
2-3-2 Stiftanordnung der externen E/A–Steckverbinder
• Die mit dieser Baugruppe gelieferten Steckverbinder besitzen Lötanschlüsse.
• Verwenden Sie Drähte mit einem Querschnitt von 0,2 mm
• Stellen Sie sicher, daß bei dem Löten keine angrenzendenden Klemmen
kurzgeschlossen werden.
• Isolieren Sie die Lötstelle mit Isolierschlauch.
Verdrahtung der Versorgungsleitungen
Isolierschlauch
Lötzinn
Steckverbinder
2
oder weniger.
24
Page 35

ü
Stiftnummern des Steckverbinders
(Ansicht von der Lötseite)
Zusammenbau des Steckverbinders
Steck–
verbinder
Umriß des Steckverbinders (von der
Rückseite)
Stiftnummern–
Markierungen
M2x8 Linsenkopf–Schrauben (vier)
M2 Mutter (vier)
Kabel–
Zugentlastungen
(zwei)
Gehäuse
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
1, 2, 3...
Abdeckungsabmessungen
Schraube (zwei)
Die folgenden Steckverbinder (Fujitsu 360–Stecker) können verwendet werden:
1. FCN–361J048 AU (Löt–Typ)
FCN–360C048 D (Steckverbinderabdeckung)
2. FCN–363J048 (Crimp–Typ)
FCN–363J AU/S (Kontakt)
FCN–360C048 D (Steckverbinderabdeckung)
Kabel–
Zugentlastung
25
Page 36

Anschlüsse für jede Betriebsart
ü
2-3-3 E/A–Schaltungen
Ausgänge
Konstantspannungs–
Schaltung
1,6 kΩ (1/2W)
24 VDC–Versorgungsspannung für
Ausgänge
24 VDC–Masse
Rechtslauf–Impuls/
Impulsausgang
(mit 1,6 kΩ Widerstand)
Rechtslauf–Impulsausgang
Kapitel
Siehe
Hinweis.
2-5 Anschl
Ausgangschaltungen
1,6 kΩ (1/2W)
Hinweis Die Ausgangsumschaltung hängt
1,6 kΩ (1/2W)
Linkslauf–Impuls/
Richtungsausgang
(mit 1,6 kΩ Widerstand)
Linkslauf–Impuls/
Richtungsausgang
von den Achsenparameter–Einstellungen ab. (Sehen Sie Abschnitt
Achsenparameter.
Fehlerzähler–Rücksetzausgang
(mit 1,6 kΩ Widerstand)
Nullpunktjustierungs–Befehlsausgang
(mit 1,6 kΩ Widerstand)
Fehlerzähler–Rücksetzausgang
Nullpunktjustierungs–Befehlsausgang
)
4-3
Für den Impulsausgang und die Fehlerzähler–Rücksetz–Schaltung der Positionierbaugruppe stehen zwei verschiedenen Anschlußarten zur Verfügung:
Klemmen mit einem Längswiderstand von 1,6 kΩ (1/2 W) und Klemmen
ohne Längswiderstand. Wählen Sie die Klemmen entsprechend den Leistungsnforderungen und den Spezifikationen des zu verwendenden Motortreibers.
26
Page 37

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
Vorsicht Schließen Sie eine Last mit einer Stromaufnahme von 7 bis 30 mA (oder 7 bis 16
mA für Klemmen mit 1,6 kΩ Längswiderstand) an die Ausgangsschaltung an.
Bei höheren Stromaufnahmen können Schäden an den internen Komponenten
der Positionierbaugruppe entstehen. Stellen Sie sicher, daß Sie die Rechtslauf–/Linkslauf–Ausgabe verwenden, wenn Sie die Impulsausgangs–Klemmen
mit Längswiderstand verwenden.
Offener Kollektorausgang
7 bis 30 mA
Ausgangstransistor
(Schaltungsbeispiel)
Positionierbaugruppe
Ausgang
7 mA
Kollektorausgang mit 1,6
7 bis 13 mA
kΩ Längswiderstand
Ausgang
Fügen Sie einen Parallelwiderstand für Lasten mit weniger als 7 mA Aufnahme hinzu.
24 VDC
Spannungsversorgung
Treiber
1 mA
6 mA
Parallelwiderstand
27
Page 38

Anschlüsse für jede Betriebsart
ü
Eingänge
24 VDC–Versorgungsspannung
Kapitel
2-5 Anschl
680 Ω
680 Ω 4,7 kΩ (1/2W)
680 Ω 4,7 kΩ (1/2W)
680 Ω 4,7 kΩ (1/2W)
680 Ω 4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
Positionierung beendet–Signal
Masse der Eingänge
Externer Interrupt–Eingang
(Schließer–Kontakt)
Notaus (Öffner–Kontakt)
(siehe Hinweis)
Nullpunktnähe–Signal
(Schließer/Öffner–Kontakt)
(siehe Hinweis)
Grenzsignal rechts
(Schließer/Öffner–Kontakt)
(siehe Hinweis)
680 Ω
680 Ω
4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
150 Ω
Grenzsignal links
(Schließer/Öffner–Kontakt)
(siehe Hinweis)
Nullpunktsignal (24 V)
(Schließer/Öffner–Kontakt)
(siehe Hinweis)
Nullpunktsignal
(Schließer/Öffner–Kontakt)
(siehe Hinweis)
Nullpunktmasse
5 V(RS–422)–
Signalausgang
Hinweis Öffner oder Schließer kann über die Achsenparameter eingestellt werden.
(Sehen Sie Abschnitt
4-3 Achsenparameter.
)
Schließen Sie einen Schalter mit einer Schaltkapazität von mindestens 5 mA
an die 24 V–Nullpunkt–Signalklemme an.
Folgende Nullpunktsignal–Betriebsarten sind möglich:
Betriebsart 0: Ansprechzeit: 0,1 ms (Schließer–Kontakteinstellung)
Anschluß eines Sensor wie einen Photoschalter ohne Kontaktklappern.
Betriebsart 1/2:Ansprechzeit: 0,1 ms (Schließer–Kontakteinstellung)
Anschluß des Z–Phasenausgangs eines Encoders (5
V(RS–422)–Signalausgang).
28
Vorsicht Verwenden Sie das 24 VDC– oder 5 VDC–Nullpunktsignal, aber nicht beide
gleichzeitig. Die interne Schaltung wird beschädigt, wenn beide angeschlossen
werden.
Verbinden Sie den 5 VDC–Nullpunkt–Signaleingang nur mit der 5
V(RS–422)–Ausgangsschaltung.
Page 39

ü
2-4 Anschluß externer E/A
Dieser Abschnitt enthält Beispiele für den Anschluß von Motortreibern. Überprüfen Sie vor dem eigentlichen Anschluß derTreiberschaltung die Spezifikationen des Treibers.
2-4-1 Beispiele für Ausgangsbeschaltungen
Impulse werden nicht ausgegeben, wenn der Ausgangstransistor in der Impulsausgangsschaltung deaktiviert ist. (Bei der Richtungsausgabe zeigt AUS
den Linkslauf an.)
Verwenden Sie keine 24 VDC–Spannungsversorgung für den Impulsausgang, die auch für andere E/A verwendet wird.
EIN
Ausgangtransistor
AUS
Rechtslauf/Linkslauf–Impulsausgänge
Rechtslauf Linkslauf
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
Während der Impulsausgabe
Rechtslauf
Linkslauf
Impuls– und Richtungsausgänge
Rechtslauf Linkslauf
Impulse
Richtung
Ausgangtransistor EIN
Ausgangtransistor AUS
29
Page 40

Anschlüsse für jede Betriebsart
ü
Kapitel
2-5 Anschl
Ausgabe von Rechts–
und Linkslaufimpulsen
Positionierbaugruppe
24 VDC–
Eingang
Rechtslauf
Impulsausgang
Linkslauf
Impulsausgang
1,6 kΩ
1,6 kΩ
In diesem Beispiel wird ein Motorantrieb mit einem 5 VDC Eingang mit Optokoppler für das Anlegen der Rechts– und Linkslaufimpulsen verwendet.
24 VDC–
Spannungsversorgung
+–
A1/B1
A6/B6
ca. 12 mA
A8/B8
ca. 12 mA
A2/B2
Treiber
(für 5 VDC–Eingangsspannung)
(Z. B. R=220 Ω)
+
–
+
–
Hinweis In diesem Beispiel werden die 1,6 kΩ Widerstände der Positionierbaugruppe
verwendet, um eine 24 VDC–Spannungsversorgung mit einem Motortreiber
mit einer Eingangsspezifikation von 5 VDC zu verwenden.
Bitte beachten Sie bei der Verdrahtung Ihres Systems den von dem Motortreiber benötigten Strom, um die Eingangsschaltung des Treibers nicht zu
beschädigen.
30
Page 41

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
Ausgabe von Rechts–
und Linkslaufimpulsen
Positionierbaugruppe
24 VDC–
Eingang
Rechtslauf
Impulsausgang
Linkslauf
Impulsausgang
1,6 kΩ
1,6 kΩ
In diesem Beispiel wird ein Motortreiber mit einem 5 VDC–Eingang mit Optokoppler für das Anlegen der Rechts– und Linkslaufimpulsen verwendet.
24 VDC–
Spannungsversorgung
+–
A1/B1
A5/B5
A7/B7
A2/B2
5 VDC–
Spannungsversorgung
+–
Treiber (für 5 VDC Eingangs–
spannung)
+
–
+
–
Ausgabe von
Impuls– und Richtungs–
signalen
Positionierbaugruppe
24 VDC–
Eingang
Impuls
(Rechtslauf+Linkslauf)–
Augabe
Richtungsausgang
1,6 kΩ
1,6 kΩ
In diesem Beispiel wird ein Motortreiber mit einem 5 VDC–Eingang zur Ausgabe der Impuls– und Richtungssignale verwendet.
24 VDC–
Spannungsver-
A1/B1
A5/B5
A7/B7
A2/B2
sorgung
+
7 bis 30 mA
7 bis 30 mA
–
Treiber (für 5 VDC Eingangs–
spannung)
Richtungseingang
Impulseingang
Wird der Spannungsausgang verwendet, entspricht der L–Pegel Ausgang
EIN und der H–Pegel Ausgang AUS.
31
Page 42

Anschlüsse für jede Betriebsart
ü
Kapitel
2-5 Anschl
Fehlerzähler–Rückset–
Ausgang
Positionierbaugruppe
24 VDC–
Spannungs–
versorgung
des Ausgangs
Positionierbaugruppe
24 VDC–
Spannungsversorgung
für Ausgang
1,6 kΩ
A1/B1
A10/B10
A2/B2
A1/B1
A10/B10
A2/B2
Für ca. 20 ms liegt ein Ausgangssignal an, wenn die Nullpunktsuche in Betriebsart 1 oder 2 beendet ist.
24 VDC–
+
Spannungsversorgung
–
5 VDC–
Spannungsversorgung
+–
24 VDC–
Spannungsversorgung
+–
+ECRST
– ECRST
+ECRST
– ECRST
OMRON R88D–UP
Servomotortreiber
5
6
OMRON R88D–UP
Servomotortreiber
5
6
2-4-2 Beispiele für Eingangsbeschaltungen
Vorsicht Ist die Schaltkapazität des Schalters zu gering, so kann der Schalter beschädigt
werden. Schließen Sie deshalb einen Schalter mit einer Schaltkapazität von
mindestens 5 mA an jeden Eingang an.
Schließen Sie bei Öffner–Eingängen eine Spannungsversorgung an unbenutzte Klemmen an und schalten sie diese ein.
Dieser Abschnitt enthält Beschaltungsbeispiele für Interrupt–, Notaus–, und
rechts/links Grenzsignale.
32
Page 43

ü
Die Eingangsschaltung verfügt sowohl über Schließer als auch über Öffner–
Eingänge. Jeweils einer von beiden kann je nach den Achsenparameter–Einstellungen verwendet werden. Sehen Sie den Abschnitt
für Einzelheiten bezüglich der Achsenparameter
ter
Externes Interrupt–Signal Schließer
Notaus–Signal Öffner
Nullpunktnähe–Signal Öffner oder Schließer
Grenzsignal rechts Öffner oder Schließer
Grenzsignal links Öffner oder Schließer
C200HW–NC113/213/413 Positionierbaugruppe
4-3 Achsenparame-
.
Name Anschlußart
24 VDC–
Spannungsversorgung
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
Externes
Interrupt–
signal
Notaus–
Signal
Nullpunkt–
nähe–
Signal
Grenz–
signal
rechts
Grenz–
signal
links
680 Ω
680 Ω
680 Ω
680 Ω
680 Ω
4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
4,7 kΩ (1/2W)
Schalter
(Schließer–Kontakt)
Schalter
(Öffner–Kontakt)
Schalter
(Schließer/
Öffner–Kontakt)
Schalter
(Schließer/
Öffner–Kontakt)
Schalter
(Schließer/
Öffner–Kontakt)
33
Page 44

Anschlüsse für jede Betriebsart
ü
Kapitel
2-4-3 Anschluß der Nullpunkt– und Positionierung beendet–Signale
Die nachfolgenden Beispiele zeigen Eingangsbeschaltungen mit einem offenen Kollektorausgang und den Anschluß der Z–Phase des Encoders an den
Linientreiber–Ausgang.
Nullpunktsignal (24 V)
2-5 Anschl
Positionierbaugruppe
150 Ω
4.7 kΩ
680 Ω
A15/B15
A14/B14
Nullpunktsignal (5 V) (Linientreiber–Eingang)
Positionierbaugruppe
4.7 kΩ
150 Ω
680 Ω
A16/B16
A14/B14
24 VDC–
Spannungsversorgung
+ –
Signal
Beispiel:
OMRON –Näherungsschalter
(NPN–Ausgangstyp)
+V
0 V
OMRON R88D–UP
Servomotortreiber
24
+Z
25
– z
Schalter–
schaltkreise
Positionierung
beendet–Signal
34
In den Betriebsarten 2 und 3 wird das Positionierung beendet–Signal auch
als Nullpunktsuche beendet–Signal verwendet. Stellen Sie den ServomotorTreiber so ein, daß dieses Signal immer ausgeschaltet ist, während der Servomotor aktiv ist und eingeschaltet, wenn der Motor deaktiviert ist.
Page 45

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
Eine Nullpunktsuche kann nicht beendet werden, wenn das Positionierung
beendet–Signal nicht einschaltet ist, nachdem die Positionierung beendet
wurde.
Positionierbaugruppe
680 Ω
4.7 kΩ
(1/2 W)
A1/B1
A12/B12
24 VDC–
Spannungsversorgung
+ –
OGND
2-4-4 Sicherheitsmaßnahmen bei der Verdrahtung
Funktionsfehler wie z. B. Fehlpositionierungen können in elektronischen
Steuergeräten auftreten, wenn diese Geräte elektronischen Störungen ausgesetzt sind, die durch in der Nähe verlegte Netzleitungen oder Lasten generiert werden. Das Beheben solcher Fehler ist meist schwerig und zeitraubend. Beachten Sie immer die folgenden Sicherheitsmaßnahmen bei der
Verlegung von elektrischen Leitungen, um die durch Störungen erzeugten
Fehler zu vermeiden und die Systemzuverlässigkeit zu erhöhen.
Stellen Sie sicher, daß Sie die Größen und Materialien verwenden, die in den
Spezifikationen für den Anschluß von Netzleitungen und Kabeln angegeben
sind.
Netzleitungen (z.B. AC–Spannungsversorgung, Motor–Versorgungsleitung)
und Steuerleitungen (z.B. Impulsausgangsleitungen, externe E/A–Signalleitungen) müssen getrennt verlegt werden. Verlegen Sie niemals diese Arten
von Leitungen zusammen im gleichen Rohr oder bündeln Sie diese.
• Verdrahten Sie einen Multischicht–Keramikkondensator mit einer Kapazität
von weniger als 1 nF am Ausgang der Impuls–Spannungsversorgung, um
die Störableitung zu verbessern.
• Verwenden Sie abgeschirmte Kabel für Steuerleitungen.
• Verbinden Sie das abgeschirmte Kabel mit der Schutzerde an der Positio-
nierbaugruppe und an dem Treiber.
INP
10
OMRON R88D–UP
Servomotortreiber
8
35
Page 46

Anschlüsse für jede Betriebsart
ü
• Befestigen Sie Störunterdrückungsglieder an allen induktiven Lasten wie
Relais, Magnetspulen und Magnetventilespulen.
Kapitel
2-5 Anschl
DC
DC–Relais
+
–
Magnetspulen, usw.
Magnetspule
Diode zur
Störableitung
Über–
spannungs–
ableiter
AC
Schütze
RYRY
Über–
spannungs–
ableiter
Hinweis Schließen Sie die Diode und den Überspannungsableiter im geringstmögli-
chen Abstand zum Relais an. Verwenden Sie eine Diode mit der fünffachen
Spannungsspezifikation der Schaltspannung.
• Setzen Sie ein Störfilter in der Eingangsschaltung des Netzteils ein, wenn
die Störungen über die Netzleitungen kommen (z.B. wenn eine elektrische
Schweißanlage oder Funkenmaschine mit der gleichen Spannungsversorgung verbunden ist oder wenn eine Spannungsversorgung hochfrequente
Störungen erzeugt).
• Verwenden Sie Erdkontakte Nr. 3 oder größer und einen Draht mit einem
Querschnitt von mehr als 1,25 mm
• Paarweise verdrillte Kabel werden für Netzleitungen empfohlen.
2-5 Anschlüsse für jede Betriebsart
Dieses Kapitel enthält Beispiele für das Verlegen der elektrischen Leitungen
der X– und Y–Achsen. Werden die Y– und U–Achsen ebenfalls verwendet,
so sehen Sie den Abschnitt
stift–Nummern und fertigen Sie die entsprechenden Leitungen in der gleichen Art an.
Hinweis 1. Stellen Sie sicher, daß eine Spannungsversorgung an unbenutzte
Öffner–Eingangsklemmen angeschlossen ist und diese eingeschaltet
wird.
2. Verwenden Sie abgeschirmte Kabel für den Anschluß der Schritt– und
Servomotortreiber. Verbinden Sie das abgeschirmte Kabel sowohl mit
der FG–Klemme der Positionierbaugruppe und als auch mit der des Treibers.
2-3 Externe E/A–Schaltungen
2
.
für die Anschluß-
36
Page 47

ü
Beispiel 1: Anschlüsse für Betriebsart 0
5
Dieses Beispiel zeigt die Verwendung eines Schrittmotors, bei dem ein
externes Sensorsignal an den Nullpunkt–Signaleingang angeschlossen ist.
Positionierbaugruppe
Abschirmung
KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
Beispiel:
DFU1507 Schrittmotortreiber, hergestellt von der Oriental Motor Co.
Rechtslauf–Ausgang
(mit 1,6 k
Ω
Widerstand)
Linkslauf–Ausgang
Ω
(mit 1,6 k
Widerstand)
24 V–Spannungs–
versorgung
für Ausgänge
24 V–Masse
für Ausgänge
Nullpunktnähe–
Signal
Nullpunkt–
signal
Masse der
Eingänge
Grenzsignal
links
Grenzsignal
rechts
A6
A8
A1
A2
A21
A15
A14
A24
A23
A22
+
24 VDC
24 VDC
+
FG
Schließer–Kontakt
24 V/0 V–
Signal
Öffner–
Kontakt
+ Rechtslauf
– Rechtslauf
+ Linkslauf
– Linkslauf
FG
Öffner–
Kontakt
PK543–NAC Schrittmotor
OMRON E2R–A01
Fotoschalter
(NPN–Ausgang Modell).
Öffner–
Kontakt
Notaus–Signal
A20
Beispiel für die Parametereinstellung
15 0
0 0 6 0
m+4
0 1 0 0
m+5
Wort
m+4
m+5
Bits Einstellung Inhalt
00 0 Rechtslauf–/Linkslauf–Ausgang
01 bis 03 0 –––
04 0 Endschalter–Eingang:
05 1 Nullpunktnähe–Signal:
06 1 Nullpunktsignal:
07 0 Impulsausgabe bei Notaus–Signal
08 bis 15 0 –––
00 bis 03 0 Betriebsart 0
04 bis 07 0 Umkehr–Betriebsart 1
08 bis 11 1 Übernimmt Nullpunktsignal, nach dem
12 bis 15 0 Suchrichtung: Rechtslauf
Öffner–Kontakt
Schließer–Kontakt
Schließer–Kontakt
stoppen.
das Nullpunktnähe–Signal anliegt.
Hinweis “m ”ist das erste DM–Wort, das der Baugruppennummer zugewiesen wird.
37
Page 48

Anschlüsse für jede Betriebsart
ü
Nullpunkt–Suchfunktion
Die Nullpunktsuche wird mit der steigenden Flanke des Nullpunktsignals beendet, nach dem die steigende Flanke des Nullpunktnähe–Signal anlag.
Nullpunktsuche
Nullpunktnähe–
Signal
Nullpunkt–
signal
Kapitel
2-5 Anschl
Impulsausgabe
Aktiv–Merker
Beispiel 2: Anschlüsse für Betriebsart 1
In diesem Beispiel wird ein Servomotortreiber verwendet. Die Z–Phase des
Encoders wird mit der Nullpunkt–Linientreiber–Eingangsklemme verbunden
und als Nullpunktsignal eingesetzt. Ein Servomotortreiber der OMRON U–
Serie wird verwendet.
Positionierbaugruppe
Rechtslauf–Ausgang
Ω
(mit 1,6 k
Widerstand)
Linkslauf–Ausgang
(mit 1,6 kΩ
Widerstand)
24 V–Spannungs–
versorgung
für Ausgänge
24 V–Masse
für Ausgänge
Fehlerzähler–
Rücksetz–Ausgang
A6
A8
A1
A2
A11
+
Abschirmung
24 VDC
Öffner–
Kontakt
Zeit
OMRON R88D–UPJjjj
Servomotortreiber
+ Rechtsl.
1
2
– Rechtsl.
+ Linksl.
3
– Linksl.
4
13
+24V EIN
14
RUN
+ECRST
5
– ECRST
6
R88M–U
Servomotor
38
Nullpunkt–
signal
Masse der
Eingänge
Nullpunktnähe–
Signal
Grenzsignal
links
Grenzsignal
rechts
Notaus–Signal
A16
A14
A24
A21
A23
A22
A20
FG
24 VDC
+
Schließer–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
24
+Z
25
– z
36
FG
Page 49

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
5
Beispiel für die Parametereinstellung
Diese Beispielsbeschreibung bezieht sich auf die X–Achse. Der Abschnitt
4-3 Achsenparameter
15 0
0 0 E 0
m+4
0 0 0 1
m+5
enthält weitere Einzelheiten
.
Wort
m+4
m+5
Bits Einstellung Inhalt
00 0 Rechtslauf–/Linkslauf–Ausgang
01 bis 03 0 –––
04 0 Endschalter–Eingang:
Öffner–Kontakt
05 1 Nullpunktnähe:
Schließer–Kontakt
06 1 Nullpunktsignal:
Schließer–Kontakt
07 1 Impulsausgabe wird durch
Notaus–Signal gestoppt;
Fehlerzähler–Rücksetzsignal–Ausgabe.
08 bis 15 0 –––
00 bis 03 1 Betriebsart 1
04 bis 07 0 Umkehr–Betriebsart 1
08 bis 11 0 Übernimmt Nullpunktsignal nach der
steigenden und fallenden Flanke des
Nullpunktnähe–Signals.
12 bis 15 0 Motorrichtung: Rechtslauf
Hinweis “m ”ist das erste DM–Wort, das der Baugruppennummer zugewiesen wird.
Nullpunkt–Suchfunktion
Die Nullpunktsuche stoppt mit der steigenden Flanke des ersten Z–Phasensignals, nach dem der EIN/AUS–Wechsel des Nullpunktnähe–Signals stattgefunden hat und die Abbremsung beendet wurde.
Nullpunktsuche
Nullpunktnähe–
Signal
Z–Phasensignal
Impulsausgang
Fehlerzähler–
Rücksetz–
Ausgang
(ECRST)
Aktiv–Merker
Zeit
ca. 20ms
39
Page 50

Anschlüsse für jede Betriebsart
ü
Beispiel 3: Anschlüsse für Betriebsart 2
In diesem Beispiel wird, wie in Beispiel 2, ein Servomotortreiber verwendet.
Die Z–Phase des Encoders wird mit der Nullpunkt–Linientreiber–Eingangsklemme verbunden und als Nullpunktsignal eingesetzt. Ein Servomotortreiber
der OMRON U–Serie wird verwendet.
Im Gegensatz zu Betriebsart 1 dient das Positionierung beendet–Signal
(INP) des Servomotortreibers als Nullpunktsuche beendet– und als Positionierung beendet–Signal.
Stellen Sie den Servomotortreiber so ein, daß das Positionierung beendet–
Signal während des Motorbetriebes deaktiviert und während des Motorstillstandes aktiviert ist.
Eine Nullpunktsuche kann nicht beendet werden, wenn das Positionierung
beendet–Signal vom Servomotortreiber nicht richtig angeschlossen wurde
oder nicht gesetzt wird.
Kapitel
2-5 Anschl
Positionierbaugruppe
Rechtslauf–Ausgang
Ω
(mit 1,6 k
Widerstand)
Linkslauf–Ausgang
(mit 1,6 kΩ
Widerstand)
24 V–Spannungs–
versorgung
für Ausgänge
24 V–Masse
für Ausgänge
Fehlerzähler–
Rücksetz–
Ausgang
Nullpunkt–
signal
Positionierung beendet–Signal
Masse der
Eingänge
Nullpunktnähe–
Signal
A6
A8
A1
A2
A11
A16
A14
A12
A24
A21
FG
24
VDC
+
24 VDC
Schließer–
Kontakt
Abschirmung
Öffner–
Kontakt
OMRON R88D–UPJjjj
Servomotortreiber
R88M–U
1
2
3
4
13
14
5
6
24
25
8
10
36
+ Rechtsl.
– Rechtsl.
+ Linksl.
– Linksl.
+24 V EIN
RUN
+ ECRST
– ECRST
+Z
– z
INP
OGND
FG
Servomotor
40
Grenzsignal
links
Grenzsignal
rechts
Notaus–Signal
A23
A22
A20
Öffner–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
Page 51

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
5
Beispiel für die Parametereinstellung
Diese Beispielsbeschreibung bezieht sich auf die X–Achse. Der Abschnitt
4-3 Achsenparameter
15 0
0 0 E 0
m+4
0 0 0 2
m+5
enthält weitere Einzelheiten
.
Wort
m+4
m+4
m+5
Bits Einstellung Inhalt
00 0 Rechtslauf–/Linkslauf–Ausgang
01 bis 03 0 –––
04 0 Endschalter–Eingang:
Öffner–Kontakt
05 1 Nullpunktnähe:
Schließer–Kontakt
06 1 Nullpunktsignal:
Schließer–Kontakt
07 1 Impulsausgabe wird durch
Notaus–Signal gestoppt;
Fehlerzähler–Rücksetzsignal–Ausgabe.
08 bis 15 0 –––
00 bis 03 2 Betriebsart 2
04 bis 07 0 Umkehr–Betriebsart 1
08 bis 11 0 Übernimmt Nullpunktsignal nach der
steigenden und fallenden Flanke des
Nullpunktnähe–Signals.
12 bis 15 0 Suchrichtung: Rechtslauf
Hinweis “m ”ist das erste DM–Wort, das der Baugruppennummer zugewiesen wird.
Nullpunkt–Suchfunktion
Die Nullpunktsuche stoppt mit der steigenden Flanke des ersten Z–Phasensignals, nach dem der EIN/AUS–Wechsel des Nullpunktnähe–Signals stattgefunden hat und die Abbremsung beendet wurde. Der Aktiv–Merker wird
mit dem Positionierung beendet Signal ausgeschaltet.
Nullpunktsuche
Nullpunktnähe–
Signal
Z–Phasensignal
Impulsausgabe
Fehlerzähler–
Rücksetz–
Ausgang
Aktiv–Merker
Positionierung
beendet–Signal
Zeit
ca. 20ms
41
Page 52

Anschlüsse für jede Betriebsart
ü
Beispiel 4: Anschlüsse für Betriebsart 3
In diesem Beispiel wird die Nullpunktjustierungs–Funktion des Servomotortreibers von OMRON verwendet. Das Positionierung beendet–Signal (INP)
wird als die Nullpunktsuche beendet– und als Positionierung beendet–Signal
verwendet.
Stellen Sie den Servomotortreiber so ein, daß das Positionierung beendet–
Signal während des Motorbetriebes deaktiviert und während des Motorstillstands aktiviert ist.
Kapitel
2-5 Anschl
Positionierbaugruppe
Rechtslauf–Ausgang
(mit 1,6 k
Ω
Widerstand)
Linkslauf–Ausgang
(mit 1,6 k
Widerstand)
24 V–Spannungs–
versorgung
für Ausgänge
24 V–Masse
für Ausgänge
Nullpunktjustierungs–Befehlsausgang
Positio–
nierung beendet–Signal
Masse der
Eingänge
Nullpunkt–
nähe–
Signal
Grenzsignal
links
Grenzsignal
rechts
Notaus–
Signal
A6
Ω
A8
A1
A2
A10
A12
A24
A21
A23
A22
A20
FG
24 VDC
+
Abschirmung
24 VDC
Schließer–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
Öffner–
Kontakt
OMRON R88D–UPJjjj
Servomotortreiber
R88M–U
15
34
14
33
19
18
36
13
6
11
28
37
26
+ Rechtsl.
– Rechtsl.
+ Linksl.
– Linksl.
+24 VIN
+5 VOUT
+5 VIN
RUN
EM
HRET
INP
24 VG
FG
Servomotor
42
Page 53

KapitelAnschlüsse für jede Betriebsart 2-5 Anschl
ü
5
Beispiel für die Parametereinstellung
Diese Beispielsbeschreibung bezieht sich auf die X–Achse. Der Abschnitt
4-3 Achsenparameter
15 0
0 0 6 0
m+4
0 0 0 3
m+5
enthält weitere Einzelheiten
.
Wort
m+4
m+5
Bits Einstellung Inhalt
00 0 Rechtslauf–/Linkslauf–Ausgang
01 bis 03 0 –––
04 0 Endschalter–Eingang:
Öffner–Kontakt
05 1 Nullpunktnähe:
Schließer–Kontakt
06 1 Nullpunktsignal: Schließer–Kontakt
07 0 Impulsausgabe wird durch
Notaus–Signal gestoppt.
08 bis 15 0 –––
00 bis 03 3 Betriebsart 3
04 bis 07 0 Umkehr–Betriebsart 1
08 bis 11 0 Übernimmt Nullpunktsignal nach der
steigenden und fallenden Flanke des
Nullpunktnähe–Signals.
12 bis 15 0 Suchrichtung: Rechtslauf
Hinweis “m ”ist das erste DM–Wort, das der Baugruppennummer zugewiesen wird.
Nullpunkt–Suchfunktion
Die Nullpunkt–Suchfunktion wird aktiviert, nach dem die Flanke des Nullpunktnähe–Signal einen Anstieg/Abstieg vollzogen hat. Der Nullpunktjustierungs–Befehl wird an den Servomotortreiber ausgegebt, nachdem die Abbremsung beendet ist. Das Positionierung beendet–Signal liegt dann vom
Servomotortreiber an und die Nullpunktsuche endet. Der Treiber führt anschließend intern die Fehlerzähler–Rücksetzung aus. Er stoppt automatisch
nach dem ersten Anliegen eines Signals am Z–Phaseeingang, nachdem er
den Nullpunktjustierungs–Befehl empfangen hat.
Nullpunktsuche
Nullpunktnähe–
Signal
Impulsausgabe
Nullpunkt–
justierungs–
Befehlsausgabe
Positionierung
beendet–Signal
Aktiv–Merker
Zeit
43
Page 54

KAPITEL 3
Einführung
Dieses Kapitel richtet sich an Erstanwender der Positionierbaugruppe. Es beschreibt die Anwendung des RELATIVE
BEWEGUNG–Befehls im Direktbetrieb. Es beinhaltet ebenfalls Beispiele für den Einsatz von Schrittmotoren. Um die
Erklärungen möglichst einfach zu halten, wird die für den Betrieb des Motors erforderliche minimale Systemkonfiguration verwendet und der Betrieb über die Programmierkonsole beschrieben.
Im Allgemeinen benötigt der Einsatz einer Positionierbaugruppe die Erstellung von Kontaktplan–Programmen, wobei
die diversen Arten von Daten, Statusinformationen, externe Eingangsinformationen und so weiter integriert werden. Die
Erklärungen dienen jedoch nur der Veranschaulichung des Betriebs des Motors. Sehen Sie den Abschnitt 4 Datenbereiche
für Einzelheiten bezüglich der Datenkonfiguration und –zuweisung .
3-1 Grundlegende Beschreibung 46. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-2 Systemkonfiguration und Verdrahtung 47. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-3 Einstellung der Daten und das Starten 49. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
Page 55

Grundlegende Beschreibung
e
3-1 Grundlegende Beschreibung
Kapitel
3-1 Grundl
Übersicht
Die in diesem Kapitel dargestellten Beispiele beschreiben den Einsatz eines
Schrittmotors im Direktbetrieb. Dabei wird vorausgesetzt, daß eine C200HX/
HG/HE CPU–Baugruppe, eine C200HW–NC113 Positionierbaugruppe und
die Parameter–Werkseinstellungen der Positionierbaugruppe verwendet werden.
Impulsausgabe
1.000 Hz
Zielposition: 5.000 Impulse
0,2 ms 0,2 ms
Zielgeschwindigkeit: 1.000 Hz
Zeit
Der Schrittmotor dreht sich für ungefähr fünf Sekunden im Uhrzeigersinn
(Rechtslauf, d.h. in der Richtung, in der die gegenwärtige Position heraufgezählt wird) und dann hält an.
Verwenden Sie die Programmierkonsole für die erforderlichen Einstellungen
und zur Ausgabe des START–Befehls. Stellen Sie zuerst die für den Direktbetrieb erforderlichen Daten ein. Aktivieren Sie dann den Motor, indem Sie
das RELATIVE BEWEGUNG–Befehlsbit von AUS auf EIN setzen.
Die Soll– und Istwerte für Beschleunigungs– und Abbremszeiten beziehen
sich auf die Maximalgeschwindigkeit und die Ist–Zielgeschwindigkeits–Werte
des Achsen–Parameterbereichs. Sehen Sie
Anhang B Schätzung von Zeiten
und Impulse für die Beschleunigung/Abbremsung.
Programmierkonsole
Dateneinstellungen
RELATIVE
BEWEGUNG–
Befehlsbit EIN
Die folgenden Daten müssen für dieses Beispiel eingestellt werden.
• Position: 5.000 Impulse
• Geschwindigkeit: 1.000 Hz
• Beschleunigungszeit: 100 ms (Werkseinstellung)
• Abbremszeit: 100 ms (Werkseinstellung)
Stellen Sie die Position und Geschwindigkeit im Betriebsdatenbereich ein,
der über den allgemeinen Parameterbereich spezifiziert wird. Für die Beschleunigungs– und Abbremszeiten verwenden Sie die auf der Positionierbaugruppe gespeicherten Werkseinstellungen.
Sehen Sie den
des allgemeinen Parameterbereichs und des Betriebsdatenbereichs
SPS Positionierbaugruppe
RELATIVE
BEWEGUNG–
Befehl
Impulsausgang
Abschnitt 4 Datenbereiche
Schrittmotortreiber
Schrittmotor–Drehung
für weitere Einzelheiten bezüglich
.
Betriebsverfahren
46
Verwenden Sie das folgende Verfahren, um den Motor zu betreiben.
Page 56

Kapitel Systemkonfiguration und Verdrahtung 3-2 Syste
m
1, 2, 3...
1. Installieren Sie alle Einheiten und schließen Sie die Programmierkonsole
an. (Sehen Sie
auch die
C200HX/HG/HE Installationsanleitung.
Abschnitt
3-2
Systemkonfiguration und Verdrahtung
2. Stellen Sie die Baugruppennummer für die Positionierbaugruppe ein. (Sehen Sie
Abschnitt 3-2 Systemkonfiguration und Verdrahtung.
3. Verdrahten Sie die externen Eingänge der Positionierbaugruppe und
schließen Sie den Schrittmotor an die Positionierbaugruppe an.(Sehen Sie
Abschnitt 3-2 Systemkonfiguration und Verdrahtung.
4. Schalten Sie die Spannungsversorgung ein und stellen Sie die Daten des
allgemeinen Parameterbereichs ein. (Sehen Sie
der Daten und das Starten.
)
5. Schalten Sie die Spannung wieder ein oder starten Sie die Steuerung neu.
(Sehen Sie
Abschnitt 3-3 Einstellung der Daten und das Starten.
6. Stellen Sie die Position, die Geschwindigkeit, die Beschleunigungszeit–
und Abbremszeit–Nummer ein. (Sehen Sie
Daten und das Starten.
7. Start. (Sehen Sie
)
Abschnitt 3-3 Einstellung der Daten und das Starten
3-2 Systemkonfiguration und Verdrahtung
(1) Systemkonfiguration
Verwenden Sie die im folgenden Diagramm gezeigte Konfiguration für den
Betrieb. In diesem Beispiel dreht sich nur der Motor, ohne Verbindung mit
einem mechanisches System.
In diesem Beispiel wird vorausgesetzt, daß die CPU auf dem CPU–Baugruppenträger installiert und Baugruppennummer 0 eingestellt ist.
und
)
)
)
Abschnitt 3-3 Einstellung
)
Abschnitt 3-3 Einstellung der
.)
Positionierbaugruppe CPU–Baugruppe
Stellen Sie Baugruppen–
Nr. 0 ein.
24 VDC–
Spannungs–
versorgung
Anschlußkabel
Spannungsversorgungs–
Baugruppe
CPU–
Baugruppenträger
Programmierkonsole
24 VDC–
Spannungsversorgung
Schrittmotortreiber
Schrittmotor
Die folgenden Einheiten und Geräte werden in diesem Beispiel verwendet.
47
Page 57

Systemkonfiguration und Verdrahtung
m
CPU–Baugruppe SYSMAC C200HX/HG/ER
Positionierbaugruppe C200HW–NC113
Spannungsversorgungs–Baugruppe C200HW–PA204
CPU–Baugruppenträger C200HW–BC101
Programmierkonsole C200H–PRO27 E
Anschlußkabel C200H–CN222
Schrittmotortreiber DFU1507 (Oriental Motor Co.)
Schrittmotor PK543–NAC (Oriental Motor Co.)
Kapitel
3-2 Syste
(2) Drehschalter–
Einstellung
(3) Verdrahtung
Verwenden Sie den Drehschalter auf der Frontplatte der Positionierbaugruppe, um die Baugruppennummer einzustellen (d.h. die Maschinennummer.).
Maschinennummer. 0
Sehen Sie
schalter–Einstellung
Abschnitt
2-2
Komponenten
.
für Einzelheiten bezüglich der Dreh-
Verdrahten Sie das System, wie im folgenden Diagramm gezeigt. Der Eingangs für die Endschalter rechts/links und der Notaus–Eingang sind werksseitig als Öffner eingestellt. Verbinden Sie diese deshalb mit Masse.
Positionierbaugruppe
Rechtslauf–
Ausgang
(mit
1,6 k
Ω
Wider–
stand)
Linkslauf–Ausgang
(mit
1,6 k
Ω
Wider–
stand)
24 V–Spannungs–
versor–
gung
für
Ausgänge
24 V–
Masse
für Ausgänge
Schrittmotor–Treiber
Schrittmotor
PK543–NAC
(Oriental Motor
Co.)
DFU1507
(Oriental Motor Co.)
24– VDC Spannungsversorgung
48
Masse
der
Eingänge
Grenz–
signal
links
Grenz–
signal
rechts
Notaus–
Signal
Sehen Sie die Motortreiber–Spezifikationen und
und Verdrahtung
baugruppe und des Schrittmotortreibers
für Einzelheiten bezüglich des Anschlusses der Positionier-
.
24– VDC Spannungsversorgung
Kapitel 2 Spezifikationen
Page 58

l
3-3 Einstellung der Daten und das Starten
Kapitel Einstellung der Daten und das Starten 3-3 Einstel
(4) Einstellung der
allgemeinen Parameter
(5) Wiedereinschalten
oder Neustarten
(6) Einstellung des
Betriebsdatenbereichs
Der verwendete Betriebsdatenbereich und die Installationsposition der Positionierbaugruppe werden in den allgemeinen Parametern spezifiziert. Verwenden Sie die Programmierkonsole, um die folgenden Daten in 1000 DM
bis 1002 DM einzutragen. Der allgemeine Parameterbereich wird automatisch spezifiziert, wenn die Positionierbaugruppe als Baugruppe Nr. 0 eingesetzt wird. Die folgenden Daten müssen eingestellt werden.
DM 1000
DM 1001
DM 1002
0 0 0 D
0 5 0 0
0 0 0 0
Der Datenspeicher(DM)–Bereich wird als Betriebs–
datenbereich verwendet. Spezifizieren Sie “D” für den
Datenwortbereich.
Spezifizieren Sie DM 0500 als das Anfangswort im
Betriebsdatenbereich.
Spezifizieren Sie die Installationposition der
Positionierbaugruppe auf dem CPU–Baugruppenträger
oder dem Erweiterungs–E/A–Baugruppenträger.
Verwenden Sie die auf der Positionierbaugruppe
gespeicherten Parameter.
Nach den Einstellungen können Sie entweder die Spannung wieder einschalten oder das System zurücksetzen (durch Umschalten von AR 0100 von
AUS auf EIN und wieder zurück auf AUS). Hierdurch werden die Daten, die
in den allgemeinen Parametern spezifiziert wurden, gültig.
Sehen Sie den Abschnitt 4-2 Allgemeine Parameter
für Einzelheiten bezüg-
lich der Einstellung des allgemeinen Parameterbereichs.
Durch eine Einstellung im allgemeinen Parameterbereich ist das Anfangs-
wort des Betriebsdatenbereichs auf 0500 DM eingestellt worden. Somit sind
die Worte für die diversen Datenfelder wie folgt definiert:
• Position: DM 0507 und DM 0506
• Geschwindigkeit: DM 0508
• Beschleunigungs–/Abbremszeit:DM 0510
Einstellung der Positionsdaten (DM 0507: am weitesten linksliegend;
DM 0506: am weitesten rechtsliegend)
Verwenden Sie die Programmierkonsole, um die folgenden Daten zu spezifizieren.
DM 0506
DM 0507
5 0 0 0
0 0 0 0
Tragen Sie 5000 (Impulse) als vierstelligen
BCD–Wert ein, der in zwei Worten gespeichert
wird.
Einstellung der Geschwindigkeitsdaten (DM 0508)
Verwenden Sie die Programmierkonsole, um die folgenden Daten zu spezifizieren.
DM 0508
1 0 0 0
Tragen Sie 1000 (Hz) als
vierstelligen BCD–Wert ein.
Einstellung der Beschleunigungs–/ Abbremszeit (DM 0510)
Verwenden Sie die Programmierkonsole, um die folgenden Daten zu spezifizieren.
Spezifizieren Sie die Beschleunigungszeit mit Nr. 0 und
die Abbremszeit mit Nr. 0. Wird “0” spezifiziert, so
DM 0519
0 0 0 0
werden die in der Positionierbaugruppe gespeicherten
Parameter für Beschleunigung/Abbremszeiten
verwendet.
Nicht in diesem Beispiel verwendet. Geben Sie “00” ein.
Beschleunigungszeit–Nr. 0
Abbremszeit–Nr. 0
49
Page 59

Einstellung der Daten und das Starten
l
Kapitel
3-3 Einstel
(7) Starten
• Sehen Sie den
lich des Betriebsdatenbereichs
• In diesem Beispiel wird der Direktbetrieb verwendet. Sehen Sie das
7 Direktbetrieb
Abschnitt 4-5 Betriebdaten–Bereich
.
für Einzelheiten
.
für Einzelheiten bezüg-
Kapitel
Der Start wird initiiert, indem das RELATIVE BEWEGUNG–Befehlsbit im Betriebsspeicherbereich (IR–Bereich) aktiviert wird.
Dem RELATIVE BEWEGUNG–Befehl wird Bit 10004 im IR–Bereich zugewiesen. Verwenden Sie die Programmierkonsole, um dieses Bit von AUS auf
EIN umzuschalten.
Der Betriebsspeicherbereich ist der Bereich, der automatisch verwendet
wird, wenn die Baugruppennummer des Positionierbaugruppe spezifiziert
wird (Baugruppen–Nr. 0).
04
Wd 100
RELATIVE BEWEGUNG
• Sehen Sie den
lich des Betriebsdatenbereichs
Abschnitt 4-5 Betriebdaten–Bereich
.
• In diesem Beispiel wird der Direktbetrieb verwendet. Sehen Sie das
7 Direktbetrieb
für Einzelheiten
.
Der Direktbetrieb wird durch den
RELATIVE BEWEGUNG–Befehl
ausgelöst ( d.h. durch Einschalten von
Bit 10004).
für Einzelheiten bezüg-
Kapitel
50
Page 60

KAPITEL 4
Datenbereiche
Dieses Kapitel enthält Informationen über die von der Positionierbaugruppe verwendeten Datenbereiche.
4-1 Allgemeine Struktur 52. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-1 Flash–Speicher 53. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-2 Warten auf den Start der Positionierbaugruppe 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-3 Bereichszuweisung 54. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-1-4 Datenbereiche 56. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-2 Allgemeine Parameter 73. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3 Achsenparameter 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-1 Einstellung der Achsenparameter 74. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-2 Die einzelnen Achsenparameter 75. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-3-3 Betriebsarten 80. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-4 Betriebsspeicherbereich 82. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-5 Betriebsdatenbereich 86. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-6 Einzelheiten zu Positioniersequenzen 87. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4-7 Einstellung von Daten über die Programmiersoftware SYSMAC–NCT 90. . . . . . . . . . . . . . . . .
51
Page 61

Allgemeine Struktur
4-1 Allgemeine Struktur
Die speicherprogrammierbare Steuerung steuert die Positionierbaugruppe
mittels der nachfolgend dargestellten Daten und Speicherbereiche sowie basierend auf Dateneinein– und ausgaben während der E/A–Erfrischung und
zu anderen Zeiten.
Dieses Beispiel beschreibt die Funktion an Hand einer C200HW–NC413 Positionierbaugruppe. Sehen Sie Abschnitt
heiten bezüglich der Bereichszuweisung der NC113 und NC213 Positionierbaugruppen
4-1Kapitel
4-1-3 Bereichszuweisung
.
für Einzel-
Zugewiesene
Bereiche
IR–Bereich
Betriebsspeicherbereich
Datenwort–
bereich
DM– oder
EM–
Bereich
SPS
Betriebs–
befehle
Status–
eingang
Parameterbereich
Allgemeine
Parameter
Achsen–
parameter
Betriebdatenbereich
Übertragungsdaten
und andere
Betriebsdaten
Statuseingang
E/A–Auffrischung
Einschalten oder
Neustart
Einschalten oder
Neustart
(Siehe Hinweis 1.)
E/A–Auffrischung
Positionierbaugruppe (NC413)
Befehls–
interpretation
Status wie Positio–
nierung beendet,
Istposition
Allgemeine
Parameter
Interpretation/ Aus–
führung spezifizier–
ter Daten
Status wie E/A–Signale jeder Achse,
Fehlercodes, usw.
Spezifizierte
Bereiche
Datenüber–
tragungsbereich
(siehe Hinweis 2.)
Speicher–
betriebs–
Daten
Datenübertragungs–
Befehlsausführung
IOWR– oder IORD–
Ausführung
Interner Speicher
DatenbereichAdresse
0004
Achsenparameter
0099
1000
Position.sequenzen
1300
Geschwindigkeiten
1400
Positionen
1600
Beschleunig.zeiten
1620
Abbremszeiten
1640
Verweilzeiten
1660
Daten für
die X–
Achse
Zonen
Daten für
Datenübertragungs–
Befehlsablauf
4670
Speichern
der Daten
Flash–
die Achsen
Y bis U
Einschalten
oder
Neustart
Speicher
Hinweis 1. Der Anwender kann mittels einer allgemeinen Parametereinstellung wäh-
len, ob die verwendenden Daten zur Positionierbaugruppe übertragen
oder ob die auf der Positionierbaugruppe gespeicherten Achsenparameter verwendet werden. (Sehen Sie Abschnitt
4-2 Allgemeine Parameter.
)
52
Page 62

Allgemeine Struktur
4-1Kapitel
2. Der Datenübertragungsbereich wird zum Übertragen von Daten zur Positionierbaugruppe verwendet (wird von der Programmiersoftware SYSMAC–NCT nicht verwendet).
Die Positionierbaugruppe verwendet die in der folgenden Tabelle aufgeführten Daten– und Speicherbereiche.
Name Inhalt Hinweis
Parameter–
bereiche
Betriebs–
speicher–
bereich
Betriebs–
daten
bereich
Daten–
übertragungs–
bereich
Wird dem Datenwortbereich der SPS zugewiesenen, wenn
die Baugruppennummer der Positionierbaugruppe
eingestellt wird. Die Parameter zur Steuerung der
Positionierbaugruppe werden im allgemeinen
Parameterbereich eingetragen und die Parameter zur
Steuerung der individuellen Achsen im
Achsenparameterbereich.
Hinweis Die Einstellungen im Achsenparameterbereich
Wird dem IR–Bereich der speicherprogrammierbaren
Steuerung zugewiesen, wenn die Baugruppennummer der
Positionierbaugruppe eingestellt wird. Dieser Bereich wird
für die Ausgabe von Daten, wie z. B. Betriebsbefehle an die
Positionierbaugruppe verwendet und zum Einlesen des
Positionierbaugruppen–Status.
Dieser Bereich wird durch den allgemeinen Parameter–
bereich festgelegt. Er wird für Informationen verwendet, die
sich auf die Übertragung von Speicherbetriebs–Daten
beziehen, auf Direktbetriebs–Einstellungen, wie z. B.
Positionen und Geschwindigkeiten und auf Statusdaten der
Positionierbaugruppe.
Dieser Bereich wird über den Betriebsdatenbereich
spezifiziert. Werden Daten zwischen der speicher–
programmierbaren Steuerung und der Positionierbaugruppe
übertragen, wird nur der Teil des Bereichs übertragen, der
für den Austausch dieser Daten spezifiziert wurde.
müssen bei Verwendung der Positionierbaugruppe
vorgenommen werden. Werden diese Einstellungen nicht durchgeführt, so wird ein allgemeiner Parameterfehler generiert (Fehlercodes 0010 bis
0013) und die Positionierbaugruppe arbeitet nicht
normal. Stellen Sie sicher, daß Sie Abschnitt
gemeine Parameter
gelesen haben.
4-2 All-
4-2
Allgemeine
Parameter
4-3
Achsen–
parameter
4-4
Betriebs–
speicher–
bereich
4-5
Betriebs–
datenbereich
–––
4-1-1 Flash–Speicher
Hinweis Die Daten aller verwendeten Achsen der entsprechenden Positionierbau-
m: 1000+100 x Baugruppennummer.
n: 100+10 x Baugruppen–Nr. [Baugruppen–Nr.
400+10 x (Baugruppen–Nr. – 10) [Baugruppen–Nr.
x9]
yA (10)]
l: Anfangs–Wortadresse im DM– oder EM–Bereich, der im Betriebsda-
tenbereich des allgemeinen Parameterbereichs spezifiziert wurde.
k: Anfangs–Wortadresse im DM– oder EM–Bereich, der über das
Übertragungsquellen– oder Übertragungsziel–Wort im Betriebdaten-
bereich spezifiziert wird.
Der Inhalt des internen Speichers der Positionierbaugruppe wird gelöscht,
wenn die Spannungsversorgung ausgeschaltet oder die Positionierbaugruppe neu gestartet wird. Durch das Speichern des Inhalts des internen
Speichers im Flash–Speicher bleiben Parameter und andere Daten nullspannungssicher erhalten.
• Achsenparameter
• Positioniersequenzen
• Geschwindigkeiten
• Beschleunigungs– und Abbremszeiten
• Verweilzeiten
• Zonen
gruppe werden auf einmal gespeichert.
53
Page 63

Allgemeine Struktur
4-1Kapitel
Sehen Sie Abschnitt
5-7 Speicherdaten
für Einzelheiten bezüglich der Spei-
cherung von Daten.
Parameter und andere, im Flash–Speicher gespeicherte Daten werden in
den internen Speicher der Positionierbaugruppe eingelesen, wenn die Positionierbaugruppe eingeschaltet oder neu gestartet wird. Werden die Parameter oder andere Daten zu dieser Zeit korrumpiert, so wird ein Parameter korrumpiert–Fehler (Fehlercode 0001) oder Daten korrumpiert–Fehler (Fehlercode 0002) generiert. Die Positionierbaugruppe wird anschließend mit Nullpunktdaten (d.h. mit den Werkseinstellungen) oder mit den zuletzt im Flash–
Speicher abgelegten Parametern und Daten neu gestartet.
Nach dem Verlust von Parametern oder Daten können keine anderen Funktion außer der Datenübertragung oder Datenspeicherung ausgeführt werden.
Speichern Sie nach der Datenübertragen die Daten ab und schalten Sie die
Versorgungsspannung aus und wieder ein oder starten Sie die Positionierbaugruppe neu.
4-1-2 Warten auf den Start der Positionierbaugruppe
Die Positionierbaugruppe führt eine Initialisierung durch, nach dem sie eingeschaltet oder neugestartet wurde. Während dieser Verarbeitung ignoriert die
Positionierbaugruppe Befehle von der speicherprogrammierbaren Steuerung.
Der X–Achsen aktiv–Merker der Positionierbaugruppe bleibt gesetzt, bis die
Initialisierung abgeschlossen ist. Überprüfen Sie deshalb nach dem Einschalten oder dem Neustart der Positionierbaugruppe, ob dieser Aktiv–Merker deaktiviert ist, bevor ein START initiiert wird.
Vorsicht Stellen Sie sicher, daß die Parameter und Daten für den Betrieb richtig einges-
tellt wurden.
Vorsicht Überprüfen Sie, bevor Sie die den Betriebsspeicherbereich ändernde Operatio-
nen ausführen, ob die Anlage ohne Gefahr betrieben werden kann.
4-1-3 Bereichszuweisung
Parameterbereiche
(Datenspeicher)
C200HW–NC113/NC213 C200HW–NC413
Baugruppe Nr. 0
Baugruppe Nr. 1
Baugruppe Nr. 2
Baugruppe Nr. 3
Baugruppe Nr. 4
Baugruppe Nr. 5
Baugruppe Nr. 6
Baugruppe Nr. 7
Baugruppe Nr. 8
Baugruppe Nr. 9
Baugruppe Nr. A
Baugruppe Nr. B
Baugruppe Nr. C
Baugruppe Nr. D
Baugruppe Nr. E
Baugruppe Nr. F
DM 1000 bis DM 1099
DM 1100 bis DM 1199
DM 1200 bis DM 1299
DM 1300 bis DM 1399
DM 1400 bis DM 1499
DM 1500 bis DM 1599
DM 1600 bis DM 1699
DM 1700 bis DM 1799
DM 1800 bis DM 1899
DM 1900 bis DM 1999
DM 2000 bis DM 2099
DM 2100 bis DM 2199
DM 2200 bis DM 2299
DM 2300 bis DM 2399
DM 2400 bis DM 2499
DM 2500 bis DM 2599
Jede Baugruppennummer belegt 100 Worte, die von DM 1000 bis DM 2599
zugewiesen werden (oder DM 2499 für die NC413 Positionierbaugruppe).
Baugruppe Nr. 0
Baugruppe Nr. 1
Baugruppe Nr. 2
Baugruppe Nr. 3
Baugruppe Nr. 4
Baugruppe Nr. 5
Baugruppe Nr. 6
Baugruppe Nr. 7
Baugruppe Nr. 8
Baugruppe Nr. A
Baugruppe Nr. B
Baugruppe Nr. C
Baugruppe Nr. D
Baugruppe Nr. E
DM 1000 bis DM 1099
DM 1100 bis DM 1199
DM 1200 bis DM 1299
DM 1300 bis DM 1399
DM 1400 bis DM 1499
DM 1500 bis DM 1599
DM 1600 bis DM 1699
DM 1700 bis DM 1799
DM 1800 bis DM 1899
DM 2000 bis DM 2099
DM 2100 bis DM 2199
DM 2200 bis DM 2299
DM 2300 bis DM 2399
DM 2400 bis DM 2499
Wortadresse Inhalt
m bis m+3 m+4
bis m+27 m+28
bis m+51 m+52
bis m+75 m+76
bis m+99
m: 1000+100 x Baugruppen–Nr.
Allgemeine Parameter
Achsenparameter
Für X–Achse
Für Y–Achse
Für Z–Achse
Für U–Achse
54
Page 64

Allgemeine Struktur
usga g
4-1Kapitel
Betriebsspeicherbereich
(IR–Bereich)
C200HW–NC113/NC213 C200HW–NC413
Baugruppe Nr. 0
Baugruppe Nr. 1
Baugruppe Nr. 2
Baugruppe Nr. 3
Baugruppe Nr. 4
Baugruppe Nr. 5
Baugruppe Nr. 6
Baugruppe Nr. 7
Baugruppe Nr. 8
Baugruppe Nr. 9
Baugruppe Nr. A
Baugruppe Nr. B
Baugruppe Nr. C
Baugruppe Nr. D
Baugruppe Nr. E
Baugruppe Nr. F
C200HW–NC413
Baugruppe Nr. 0
Baugruppe Nr. 1
Baugruppe Nr. 2
Baugruppe Nr. 3
Baugruppe Nr. 4
Baugruppe Nr. 5
Baugruppe Nr. 6
Baugruppe Nr. 7
Baugruppe Nr. 8
Baugruppe Nr. A
Baugruppe Nr. B
Baugruppe Nr. C
Baugruppe Nr. D
Baugruppe Nr. E
IR 100 bis IR 109
IR 110 bis IR 119
IR 120 bis IR 129
IR 130 bis IR 139
IR 140 bis IR 149
IR 150 bis IR 159
IR 160 bis IR 169
IR 170 bis IR 179
IR 180 bis IR 189
IR 190 bis IR 199
IR 400 bis IR 409
IR 410 bis IR 419
IR 420 bis IR 429
IR 430 bis IR 439
IR 440 bis IR 449
IR 450 bis IR 459
IR 100 bis IR 119
IR 110 bis IR 129
IR 120 bis IR 139
IR 130 bis IR 149
IR 140 bis IR 159
IR 150 bis IR 169
IR 160 bis IR 179
IR 170 bis IR 189
IR 180 bis IR 199
IR 400 bis IR 419
IR 410 bis IR 429
IR 420 bis IR 439
IR 430 bis IR 449
IR 440 bis IR 459
Die NC113/213 C200HW Positionierbaugruppes belegt 10 Worte im IR–Bereich für Spezial–E/A–Baugruppen. Die C200HW–NC413 Positionierbaugruppes belegt 20 Worte in diesem Bereich.
C200HW–NC213
E/A
Ausgang
Eingang
Wortadresse Achse
n bis n+1
n+2 bis n+4
C200HW–NC413
E/A
Aus–
gang
Ein–
gang
Wortadresse Achse
n bis n+1 n+
2 bis n+3 n+
4 bis n+5 n+
6 bis n+7
n+8 bis n+10
n+11 bis n+13
n+14 bis n+16
n+17 bis n+19
X–Achse
X–Achse
n: 100+10 x Baugruppen–Nr. (Baugruppen–Nr. x 9)
400+10 x (Baugruppen–Nr. – 10) (Baugruppen–Nr. y A (10))
X–Achse
Y–Achse
Z–Achse
U–Achse
X–Achse
Y–Achse
Z–Achse
U–Achse
E/A
Aus–
gang
Ein–
gang
Wortadresse Achse
n bis n+1 n+
2 bis n+3 n+
4 bis n+6 n+
7 bis n+9
X–Achse
Y–Achse
X–Achse
Y–Achse
Hinweis 1. Die C200HW–NC413 belegt den Bereich von zwei Baugruppennum-
Betriebsspeicherbereich
mern, d.h. die spezifizierte Baugruppennummer und die Sequenznummer.
2. Stellen Sie sicher, daß die spezifizierte Baugruppennummern sich nicht
mit den Baugruppennummern anderer Spezial–E/A–Baugruppen überschneiden.
3. Da die C200HW–NC413 den Bereich von zwei Baugruppennummern
belegt, kann die Baugruppennummer 9 oder F nicht spezifiziert werden.
Je nach dem Modell der verwendeten speicherprogrammierbaren Steuerung
ist es nicht möglich, die Baugruppennummern von A bis F (E) für die Positionierbaugruppen einzustellen. Bitte überprüfen Sie das Bedienhandbuch der
speicherprogrammierbaren Steuerung.
Sehen Sie die Abschnitte
Parameterbereiche
4-2 Allgemeine Parameter
für Einzelheiten bezüglich der Einstellungen des
unter
4-1-4 Datenbereiche
und
Betriebsspeicherbereichs.
Allgemeiner Parameterbereich
15 00
m
m+1
0
3
x10
x102x101x10
0 0 0
0
x: D (Datenwortbereich),
E (EM–Bereich)
Anfangs–Wortadresse
I
C200HW–NC113
E/A Wortadresse Achse
Ausgang I bis I+5 Allgemeines
I+6 bis I+10 X–Achse
Eingang I+11 bis I+12 X–Achse
55
Page 65

Allgemeine Struktur
usga g
ga g
usga g
ga g
4-1Kapitel
C200HW–NC213
E/A Wortadresse Achse
Ausgang I bis I+5 Allgemeines
I+6 bis I+10 X–Achse
I+11 bis I+15 Y–Achse
Eingang I+16 bis I+17 X–Achse
I+18 bis I+19 Y–Achse
C200HW–NC413
E/A Wortadresse Achse
Ausgang I bis I+5 Allgemeines
I+6 bis I+10 X–Achse
I+11 bis I+15 Y–Achse
I+16 bis I+20 Z–Achse
I+21 bis I+25 U–Achse
Eingang I+26 bis I+27 X–Achse
I+28 bis I+29 Y–Achse
I+30 bis I+31 Z–Achse
I+32 bis I+33 U–Achse
Hinweis “I” repräsentiert die Anfangs–Wortadresse des Bereichs, der über den allge-
meinen Parameterbereich spezifiziert wird.
Beispiel
Allgemeiner Parameterbereich
m
m+1
Werden die allgemeinen Parameterbereichs–Einstellungen, wie in diesem
Beispiel gezeigt, vorgenommen, wird der Betriebsdatenbereich von DM 0100
aufwärts zugewiesen.
Bei den C200H/HS/HE speicherprogrammierbaren Steuerungen steht kein
EM–Bereich zur Verfügung. Dieser Bereich kann somit nicht als Betriebsdatenbereich bestimmt werden.
Datenübertragungs–
Bereich
Sehen Sie die Abschnitte
für Einzelheiten bezüglich der Einstellungen des Übertragungsbereichs
4-1-4 Datenbereiche
Parameterbereich
Allgemeine Parameter (Datenspeicher)
15 00
0
0 0 D
0
1 0 0
Betriebsdatenbereiche
unter
4-1-4 Datenbereiche
.
56
Zuweisung des Betriebsdatenbereichs
Wort m
15 00
0
0 0 X
Spezifizieren Sie den Speicherbereich, auf den der Betriebsspeicher einzustellen ist.
X = D (Datenwortbereich)
E (EM Bereich)
Page 66

Allgemeine Struktur
Anfangswort des Betriebsdatenbereichs
Wort m+1
15 00
x10
3
x10
2
x10
1
x10
0
Spezifizieren Sie das Anfangswort des Betriebsdatenbereichs.
Baugruppen–Installationsposition und Parameterbezeichnung
Wort m+2
4-1Kapitel
15 00
Installationsposition
Parameterspezifikation
Reserviert
Wort m+3
Spezifizieren Sie 0000.
Achsenparameter (Datenspeicher)
E/A–Einstellungen
X–Achse m+4 (NC113), Y–Achse m+28 (NC213), Z–Achse m+52 und U–
Achse m+76 (NC413)
15 00
0000000 000E/A–Einstellungen
08 07
Installationsposition
Parameterspezifikation
00: auf einem CPU– oder Erweiterungs–E/A–Baugruppenträger
01: auf einem dezentralen Slave–Baugruppenträger
00: basierend auf den auf der Positionierbaugruppe gespeicherten Ach-
senparametern.
01: basierend auf den in den DM–Worten m+4 bis m+99 gespeicherten
Achsenparametern.
08 04
Bit
00 Impulsausgabe–Auswahl 0: Rechtslauf–/Linkslaufausgabe;
01 bis 03 Reserviert Spezifizieren Sie 0.
04 Endschaltersignal–Typ 0: Öffner–Eingang, 1: Schließer–Eingang
05 Nullpunktnähe–Signal 0: Öffner–Eingang, 1: Schließer–Eingang
06 Nullpunktsignal 0: Öffner–Eingang, 1: Schließer–Eingang
07 Notaus–Eingang 0: nur stoppen der Impulsausgabe
08 Kein Nullpunkt definiert 0: Beibehaltung des vorhergehenen Status (für
09 bis 15 Reserviert Spezifizieren Sie 0.
Angabe Einstellungen
1: Impuls–/Richtungsausgabe
1: stoppen der Impulsausgabe und Fehlerzähler–
Rücksetzausgabe (für Betriebsarten 1 und 2
aktiviert)
Notaus– oder Grenzeingänge)
1: Zwangsweiser Wechsel zum Nullpunkt
undefiniert–Status
57
Page 67

Allgemeine Struktur
4-1Kapitel
Betriebsarten–Auswahl
X–Achse m+5 (NC113), Y–Achse m+29 (NC213), Z–Achse m+53 und U–
Achse m+77 (NC413)
15 00
Nullpunkt–Suchrichtung
Bit Angabe Einstellungen
00 bis 03 Betriebsart 0 (Betriebsart 0): Einsatz eines Schrittmotors,
04 bis 07 Nullpunkt–Suchfunktion 0: Umkehr–Betriebsart 1 (Umkehr am
08 bis 11 Nullpunkt–Erkennung 0: Übernimmt Nullpunktsignal, nachdem
12 bis 15 Nullpunkt–Suchrichtung 0: Rechts
12 11 08 07 04 03
Nullpunkt–Erkennung
Nullpunkt–Suchfunktion
verwendet externes Sensorsignal als Nullpunkt–
Signal.
1 (Betriebsart 1): Einsatz eines
Servomotortreibers, verwendet das
Z–Phasensignal des Encoders für das
Nullpunktsignal. Verwendet kein Positionierung
beendet–Signal.
2 (Betriebsart 2): Entspricht Betriebsart 1, aber
verwendet das Positionierung beendet–Signal.
3 (Betriebsart 3): Verwendet die Servomotortreiber
der OMRON H– oder M–Serien. Die
Nullpunktsuche wird vom Nullpunktjustierungs–
Befehl des Servomotortreiber beendet. Verwendet
das Positionierung beendet–Signal.
Endschaltereingang)
Erkennt den Nullpunkt in spezifizierter
Nullpunkt–Suchrichtung.
1: Umkehr–Betriebsart 1 (Fehlerhalt bei Signal am
Endschaltereingang)
Erkennt den Nullpunkt in spezifizierter
Nullpunkt–Suchrichtung.
2: Einzelrichtungs–Betriebsart (keine Umkehr)
Nullpunktnähe–Signal aktiviert (↑) und deaktiviert
(↓) wurde.
1: Übernimmt Nullpunktsignal, nachdem
Nullpunktnähe–Signal aktiviert (↑) wurde.
2: Übernimmt Nullpunktsignal, ohne das
Nullpunktnähe–Signal zu verwenden.
3: Übernimmt das Nullpunktsignal, nachdem das
Grenzsignal aktiviert (↑) und deaktiviert (↓) oder
deaktiviert (↓) wurde, ohne das Nullpunktnähe–
Signal zu verwenden. (Nur bei Einzelrichtungs–
Betriebsart aktiviert.)
1: Links
Betriebsart
58
Maximalgeschwindigkeit
X–Achse m+6 (NC113), Y–Achse m+30 (NC213), Z–Achse m+54 und U–
Achse m+78 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Anfangsgeschwindigkeit
X–Achse m+7 (NC113), Y–Achse m+31 (NC213), Z–Achse m+55 und U–
Achse m+79 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Page 68

Allgemeine Struktur
4-1Kapitel
Schnelle Nullpunktsuche
X–Achse m+8 (NC113), Y–Achse m+32 (NC213), Z–Achse m+56 und U–
Achse m+80 (NC413)
15 00
14 13 12
Faktor x10
3
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Nullpunktsuche–Annäherungsgeschwindigkeit
X–Achse m+9 (NC113), Y–Achse m+33 (NC213), Z–Achse m+57 und U–
Achse m+81 (NC413)
15 00
14 13 12
Faktor x10
3
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Nullpunktkompensation (rechtes Wort)
X–Achse m+10 (NC113), Y–Achse m+34 (NC213), Z–Achse m+58 und
U–Achse m+82 (NC413)
Nullpunktkompensation (linkes Wort)
X–Achse m+11 (NC113), Y–Achse m+35 (NC213), Z–Achse m+59 und
U–Achse m+83 (NC413)
x10
x10
2
2
x10
x10
1
1
x10
x10
0
0
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
x10
0
Vorzeichen: 0: positiv (Rechtslauf), 1: negativ (Linkslauf), Einstellbereich:
–9,999,999 bis +9,999,999 (Impulse)
Spielkompensation
X–Achse m+12 (NC113), Y–Achse m+36 (NC213), Z–Achse m+60 und
U–Achse m+84 (NC413)
15 00
x10
3
x10
2
x10
1
x10
0
Einstellbereich: 0 bis 9.999 (Impulse)
Spielkompensations–Geschwindigkeit
X–Achse m+13 (NC113), Y–Achse m+37 (NC213), Z–Achse m+61 und
U–Achse m+85 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Beschleunigungs–/Abbremskurve
X–Achse m+14 (NC113), Y–Achse m+38 (NC213), Z–Achse m+62 und
U–Achse m+86 (NC413)
15 00
0 0 0 Bezeichnung
Bezeichnung: 0: Trapezförmige Kurve, 1: S–Kurve
59
Page 69

Allgemeine Struktur
4-1Kapitel
Beschleunigungszeit ( rechtes Wort)
X–Achse m+15 (NC113), Y–Achse m+39 (NC213), Z–Achse m+63 und
U–Achse m+87 (NC413)
Beschleunigungszeit (linkes Wort)
X–Achse m+16 (NC113), Y–Achse m+40 (NC213), Z–Achse m+64 und
U–Achse m+88 (NC413)
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
x10
0
Einstellbereich: 0 bis 250.000 (ms)
Abbremszeit (rechtes Wort)
X–Achse m+17 (NC113), Y–Achse m+41 (NC213), Z–Achse m+65 und
U–Achse m+89 (NC413)
Abbremszeit (linkes Wort)
X–Achse m+18 (NC113), Y–Achse m+42 (NC213), Z–Achse m+66 und
U–Achse m+90 (NC413)
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
x10
0
Einstellbereich: 0 bis 250.000 (ms)
Positionierungs–Überwachungszeit
X–Achse m+19 (NC113), Y–Achse m+43 (NC213), Z–Achse m+67 und
U–Achse m+91 (NC413)
15 00
x10
3
x10
2
x10
1
x10
0
Einstellbereich: 0 bis 9.999 (ms) (gültig, wenn die Betriebsart auf 2 oder 3
eingestellt wird.)
Software–Grenze links (rechtes Wort)
X–Achse m+20 (NC113), Y–Achse m+44 (NC213), Z–Achse m+68 und
U–Achse m+92 (NC413)
Software–Grenze links (linkes Wort)
X–Achse m+21 (NC113), Y–Achse m+45 (NC213), Z–Achse m+69 und
U–Achse m+93 (NC413)
Software–Grenze rechts (rechtes Wort)
X–Achse m+22 (NC113), Y–Achse m+46 (NC213), Z–Achse m+70 und
U–Achse m+94 (NC413)
Software–Grenze rechts (linkes Wort)
X–Achse m+23 (NC113), Y–Achse m+47 (NC213), Z–Achse m+71 und
U–Achse m+95 (NC413)
Rechts– und Linkslauf–Softwaregrenze
15 00
Vorzeichen x10
linkes Wort 00 15 rechtes Wort
6
x10
5
x10
4
x10
3
x10
2
x10
1
x10
0
Vorzeichen: 0: positiv (Rechtslauf), 1: negativ (Linkslauf), Einstellbereich:
–9,999,999 bis +9,999,999 (Impulse)
Reserviert
X–Achse m+24 bis m+27 (NC113), Y–Achse m+48 bis m+51 (NC213),
Z–Achse m+72 bis m+75 und U Achse m+96 bis m+99 (NC413)
Spezifizieren Sie 0000.
60
Page 70

Allgemeine Struktur
/
ode
s
uo
ebeeb
Hinweis E/A–Einstellungen werden nach dem nächsten Einschalten der Spannungs-
Betriebsspeicherbereich
E/A Modell
Aus–
gang
Ein–
gang
NC413
NC213nn
NC113 n
NC413
NC213
NC113 n+1
NC413
NC213
NC113 n+2
X–
AchseY–AchseZ–AchseU–Achse
n+1
n+1
n+8
n+4
Worte
n+2
n+2
n+3
n+3
n+11
n+7
versorgung oder einem Neustart gültig. Andere Achsenparameter werden
nach dem nächsten Befehl gültig, nach dem sie übertragen wurden.
Bits Funktion
n+4 n+6 00 Speicher–
n+5 n+7 00
n+14 n+17 00
betrieb
01 START (↑)
02 UNABHÄNGIGER START (↑)
03 Direktbetrieb ABSOLUTE BEWEGUNG (↑)
04
05 INTERRUPT–ABARBEITUNG (↑)
06 NULLPUNKTSUCHE (↑)
07 NULLPUNKT–RÜCKKEHR (↑)
08 ÄNDERE ISTPOSITION (↑)
09 TIPP–BETRIEB (1: aktiv; 0: Halt)
10 Richtungsspezifikation (Richtung bei Tipp–Betrieb und
Interrupt–Betrieb während des Direktbetriebs)
(1: Linkslauf; 0: Rechtslauf)
11 TEACH–Betrieb (↑)
12 FREIGABE DER IMPULSAUSGABE–SPERRUNG (↑)
13 Fehlerzähler–Rücksetzausgang und Nullpunktjustierungs–
Befehlsausgang (1:EIN; 0: AUS)
14 Übersteuerung aktiviert (1: aktiviert; 0: deaktiviert)
15 HALT (↑)
Sequenznummern: 00 bis 99 (BCD)
bis
07
08 ZWANGSWEISER INTERRUPT (↑)
09
Reserviert
bis 11
12 DATEN SCHREIBEN (↑) (nur für X–Achsen–Bit aktiviert)
13 DATEN LESEN (↑) (nur für X–Achsen–Bit aktiviert)
14 DATEN SICHERN (↑) (nur für X–Achsen–Bit aktiviert)
15 Reserviert
Ausgabecode: 0 bis F (hexadezimal)
bis
03
04 Warten auf Speicherbetrieb (1: warten; 0: nicht warten)
05 Positionierung beendet (↑ beendet; ↓starten)
06 Kein Nullpunktmerker (1: kein Nullpunkt; 0: festgelegter
07 Nullpunkthalt–Merker (1: an Nullpunkt gestoppt; 0: andere
08 Zone 0 (1: innerhalb d. Zone; 0: außerhalb d. Zone)
09 Zone 1 (1: innerhalb d. Zone; 0: außerhalb d. Zone)
10 Zone 2 (1: innerhalb d. Zone; 0: außerhalb d. Zone)
11 Teach–Vorgang beendet (↑ beendet; ↓ starten)
12 Fehlermerker (1: Fehler; 0: kein Fehler)
13 Aktiv–Merker (X–Achsen–Bit wird auch als Baugruppen–
Initialisierungs–Merker verwendet.)
14 Datenübertragung (nur für X–Achsen–Bit aktiviert)
(↑ übertragen oder speichern; ↓ beendet)
15 Abbremsungs–Ausführung (↑ beendet; ↓ beginnen
Sequenznummer aktiviert
1: aktiviert
0: deaktiviert
RELATIVE BEWEGUNG (↑)
Nullpunkt)
Position)
4-1Kapitel
61
Page 71

Allgemeine Struktur
10
3
10
2
10
1
10
0
g
S ezifizieren Sie bei dem Lesen von Daten die folgenden Angaben in
g
/
ode
ae
uo
4-1Kapitel
E/A FunktionBitsWorteModellE/A FunktionBits
Ein–
gang
Modell
NC413
NC213
NC113
X–
Achse
n+9
n+10
n+5
n+6
n+3
n+4
Y–
Achse
n+12
n+13
n+8
n+9
Z–
Achse
n+15
n+16
U–
Achse
n+18
n+19
00
bis
15
00
bis
15
Istposition (äußerst rechte Stellen)
Istposition (äußerst linke Stellen)
15
x10
3
x10
2
15
6
Vorzeichen
x10
Vorzeichen: 0: pos. (Rechtslauf); 1: neg. (Linkslauf)
Betriebsdatenbereich
Allgemeines
E/A Worte Bits Name Funktion
Ausgang I 00 bis 15 Anzahl der
Übertragungsworte
I+1 00 bis 15 Übertragungs–
Quellenwort
I+2 00 bis 15 Übertragungs–
Zieladresse
I+3 00 bis 15 Anzahl der
Übertragungsworte
I+4 00 bis 15 Übertragungs–
Quellenadresse
I+5 00 bis 15 Übertragungs–
Zielwort
Informationen zum Schreiben von Daten
15
3
x
2
x
x
Spezifizieren Sie bei dem Schreiben von Daten die folgenden
Angaben in den vier BCD–Stellen.
• Anzahl der zu übertragenden W orte.
• Übertragungs–Quellenwort (DM– oder EM–Wort der SPS)
• Übertragungs–Zieladresse (Positionierbaugruppen–Adresse)
Informationen zum Lesen von Daten
Spezifizieren Sie bei dem Lesen von Daten die folgenden Angaben in
den vier BCD–Stellen.
• Anzahl der zu übertragenden Worte.
• Übertragungs–Quellenadresse (Positionierbaugruppen–Adresse)
• Übertragungs–Zielwort (DM– oder EM–Wort der SPS)
00
x10
1
x10
0
00
x10
5
x10
4
00
1
0
x
Für individuelle Achsen
E/A Modell
X–
AchseY–AchseZ–AchseU–Achse
Aus–
gang
NC413
NC213
NC113
I+6
I+7
I+6
I+7
I+6
I+7
I+11
I+12
I+11
I+12
Worte
I+16
I+17
I+21
I+22
Bit Name Funktion
00
bis
15
Positions–
spezifikation
Positions–
spezifikation
Spezifizieren Sie die Position in diesem Feld, wenn
Sie eine ABSOLUTE BEWEGUNG, RELATIVE
BEWEGUNG, INTERRUPT–ABARBEITUNG oder
eine RÜCKSETZUNG DER ISTPOSITION
ausführen.
15
x10
3
x10
2
15
Vorzeichen x10
6
Vorzeichen: 0: positiv; 1: negativ
Bereich: –9,999,999 bis +9,999,999 (Impulse)
x10
x10
1
x10
0
00
00
5
x10
4
62
Page 72

Allgemeine Struktur
1: EIN
4-1Kapitel
E/A FunktionNameBitWorteModellE/A FunktionNameBit
Aus–
gang
Ein–
gang
Modell
X–
Achse
NC413
NC213
NC113
NC413
NC213
NC113
NC413
NC213
NC113 I+10
NC413
NC213
NC113 I+11
I+8
I+8
I+8
I+9
I+9
I+9
I+10
I+10
I+26
I+16
Y–
Achse
I+13
I+13
I+14
I+14
I+15
I+15
I+28
I+18
Z–
Achse
I+18 I+23 00
I+19 I+24 00
I+20 I+25 00
I+30 I+32 00
U–
Achse
Geschwin–
bis
digkeits–
15
spezifikation
Über–
bis
steuerung
15
Teach–
bis
Adresse
07
08
Beschleuni–
bis 11
gungszeit–Nr.
12
Abbremszeit–
bis
Nr.
15
Sequenz–
bis
nummer
07
08 Endschalter
rechts
09 Endschalter
links
10 Nullpunkt–
nähe
11 Nullpunkt–
signal
12 Interrupt–
Eingang
13 Notaus
14 Positionierung
beendet–
Eingabe
15 Fehlerzähler–
Rücksetz–
Ausgabe/
Nullpunkt–
Justierungs–
Befehls–
ausgabe
Spezifizieren Sie die Position in diesem Feld, wenn
Sie eine ABSOLUTE BEWEGUNG, RELATIVE
BEWEGUNG, INTERRUPT–ABARBEITUNG, eine
TIPP–BEWEGUNG oder eine
NULLPUNKT–RÜCKKEHR ausführen.
Wird die Geschwindigkeit in diesem Feld während
der Ausführung geändert, so wird sie auf die
folgende Geschwindigkeit geändert.
Zustellgeschwindigkeit = Geschwindigkeitsspez. x
Übersteuerung/100 (Übersteuerung wird nur bei
gesetztem Übersteuerung aktiviert–Bit verwendet.)
15
14 13 12
Faktor x10
Faktor: 00: x1; 01: x 10; 10: x100; 11: x1.000
(Einheit: Hz)
Spezifizieren Sie den Übersteuerungswert von 0001
bis 0999 (1% bis 999%) in vier BCD–Stellen. Dieser
Übersteuerungswert wird angesprochen, wenn das
Übersteuerung aktiviert–Bit auf EIN gesetzt ist.
Geben Sie die Positionsnummer von 00 bis 99
(BCD) für den Teach–Vorgang an.
Spezifizieren Sie die Beschleunigungszeit–Nummer
von 0 bis 9 (BCD) an, wenn Sie eine ABSOLUTE
BEWEGUNG, RELATIVE BEWEGUNG,
INTERRUPT–ABARBEITUNG oder eine
TIPP–BEWEGUNG ausführen.
Hinweis: Wird der Wert “0” spezifiziert, wird die
Beschleunigungszeit–Einstellung in den
Achsenparametern verwendet.
Spezifizieren Sie die Abbremszeit–Nummer von 0
bis 9 (BCD) an, wenn Sie eine ABSOLUTE
BEWEGUNG, RELATIVE BEWEGUNG,
INTERRUPT–ABARBEITUNG oder eine
TIPP–BEWEGUNG ausführen.
Hinweis: Wird der Wert “0” spezifiziert, wird die
Abbremszeit–Einstellung in den Achsenparametern
verwendet.
Gibt die Sequenznummer während des
Speicherbetriebs als zweistelligen BCD–Wert
zurück.
Gibt den E/A–Signalstatus für jede Achse zurück.
0: AUS
2
3
x10
x10
1
x10
00
0
63
Page 73

Allgemeine Struktur
4-1Kapitel
E/A FunktionNameBitWorteModellE/A FunktionNameBit
Ein–
gang
Modell
NC413
NC213
NC113
X–
Achse
I+27
I+17
I+12
Y–
Achse
I+29
I+19
Z–
Achse
I+31 I+33 00
U–
Achse
Datenübertragungsbereich
Die Speicherplätze der Positionierbaugruppe werden adressenweise angezeigt.
Sehen Sie das
bezüglich der Datenübertragung
für Einzelheiten bezüglich der Positionierungssequenz
quenz
E/A–Einstellungen
X–Achse 0004 (NC113), Y–Achse 0028 (NC213), Z–Achse 0052 und U–
Achse 0076 (NC413)
15 00
0000000 000E/A–Einstellungen
Bit
00 Ausgabeimpuls–Auswahl 0: Rechts–/Linkslauf–Ausgang
01 bis 03 Reserviert Spezifizieren Sie 0.
04 Endschaltersignal–Typ 0: Öffner–Eingang 1: Schließer–Eingang
05 Nullpunktnähesignal–Typ 0: Öffner–Eingang; 1: Schließer–Eingang
06 Nullpunktsignal–Typ 0: Öffner–Eingang; 1: Schließer–Eingang
07 Notaus–Signal 0: nur Haltimpuls–Ausgabe.
08 Nullpunkt undefiniert–
09 bis 15 Reserviert Spezifizieren Sie 0.
Fehlercode Gibt den Fehlercode als vierstelligen BCD–Wert
bis
15
zurück. Dieser Wert ist normalerweise 0000 (es liegt
kein Fehler an).
Kapitel 5 Übertragungs– und Speicherdaten
.
Sehen Sie den Abschnitt
08 04
Angabe Einstellungen
1: Impuls–/Richtungs–Ausgang
1: nur Haltimpuls–Ausgabe und
Fehlerzähler–Rücksetzsignal (aktiviert für
Betriebsarten 1 und 2).
Spezifikation
0: Beibehaltung des vorhergehenden Status
(für Notaus– oder Grenzsignale)
1: Zwangsweiser Wechsel zum Nullpunkt
undefiniert–Zustand
für Einzelheiten
4-6 Positionierse-
.
64
Grundeinstellung: 0060
Page 74

Allgemeine Struktur
4-1Kapitel
Betriebarten–Auswahl
X–Achse 0005 (NC113), Y–Achse 0029 (NC213), Z–Achse 0053 und U–
Achse 0077 (NC413)
15 00
Nullpunkt–Suchrichtung
Bit
00 bis 03 Betriebsart 0 (Betriebsart 0): Verwendet Schrittmotor und
04 bis 07 Nullpunkt–Suchfunktion 0: Umkehr–Betriebsart 1 (Umkehr bei Signal am
08 bis 11 Nullpunkt–Erkennung 0: Übernimmt Nullpunktsignal, nachdem
12 bis 15 Nullpunkt–Suchrichtung 0: Rechts
12 11 08 07 04 03
Nullpunkt–Erkennung
Angabe Einstellungen
Nullpunkt–Suchfunktion
externes Sensorsignal als Nullpunktsignal.
1 (Betriebsart 1): Verwendet Servomotortreiber
und das Z–Phasensignal des Encoders für das
Nullpunktsignal. Verwendet kein Positionierung
beendet–Signal.
2 (Betriebsart 2): Entspricht Betriebsart 1 aber
verwendet das Positionierung beendet–Signal.
3 (Betriebsart 3): Verwendet die Servomotortreiber
der OMRON H– oder M–Serien. Die
Nullpunktsuche wird vom Nullpunktjustierungs–
Befehl des Servomotortreiber beendet. Verwendet
das Positionierung beendet–Signal.
Endschaltereingang)
Erkennt den Nullpunkt in spezifizierter
Nullpunkt–Suchrichtung.
1: Umkehr–Betriebsart 2 (Fehlerhalt bei Signal am
Endschaltereingang)
Erkennt den Nullpunkt in spezifizierter
Nullpunkt–Suchrichtung.
2: Einzelrichtungs–Betriebsart (keine Umkehr)
Nullpunktnähe–Signal aktiviert (↑) und deaktiviert
(↓) wurde.
1: Übernimmt Nullpunktsignal, nachdem
Nullpunktnähe–Signal aktiviert (↑) wurde.
2: Übernimmt Nullpunktsignal, ohne das
Nullpunktnähe–Signal zu verwenden.
3: Übernimmt das Nullpunktsignal, nachdem das
Grenzsignal aktiviert (↑) und deaktiviert (↓) oder
deaktiviert (↓) wurde, ohne das
Nullpunktnähe–Signal zu verwenden. (Nur bei
Einzelrichtungs–Betriebsart aktiviert.)
1: Links
Betriebsart
Grundeinstellung: 0000
Hinweis Nach dem die E/A–Einstellungen vorgenommen wurden, werden diese akti-
viert, indem die Versorgungsspannung einschaltet oder die Baugruppe neu
gestartet wird. Speichern Sie die Daten, falls die Einstellung per Datenübertragung spezifiziert wurden. Schalten Sie dann die Versorgungsspannung ein
oder starten Sie die Baugruppe neu.
Die anderen Parameter für jede Achse werden zum Zeitpunkt der Übertragung und durch die folgenden Befehlsoperationen aktiviert.
Maximalgeschwindigkeit
X–Achse 0006 (NC113), Y–Achse 0030 (NC213), Z–Achse 0054 und U–
Achse 0078 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Grundeinstellung: C500
65
Page 75

Allgemeine Struktur
4-1Kapitel
Anfangsgeschwindigkeit
X–Achse 0007 (NC113), Y–Achse 0031 (NC213), Z–Achse 0055 und U–
Achse 0079 (NC413)
15 00
14 13 12
3
Faktor
x10
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Grundeinstellung: 0000
Schnelle Nullpunktsuche
X–Achse 0008 (NC113), Y–Achse 0032 (NC213), Z–Achse 0056 und U–
Achse 0080 (NC413)
15 00
14 13 12
3
Faktor
x10
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Grundeinstellung: 8250
Nullpunktsuche–Annäherungsgeschwindigkeit
X–Achse 0009 (NC113), Y–Achse 0033 (NC213), Z–Achse 0057 und U–
Achse 0081 (NC413)
x10
x10
2
2
x10
x10
1
1
x10
x10
0
0
15 00
14 13 12
Faktor
x10
3
x10
2
x10
1
x10
0
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Grundeinstellung: 4250
Nullpunktkompensations–Wert ( rechtes Wort)
X–Achse 0010 (NC113), Y–Achse 0034 (NC213), Z–Achse 0058 und U–
Achse 0082 (NC413)
Nullpunktkompensations–Wert (linkes Wort)
X–Achse 0011 (NC113), Y–Achse 0035 (NC213), Z–Achse 0059 und U–
Achse 0083 (NC413)
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
x10
0
Vorzeichen: 0: positiv (Rechtslauf); 1: negativ (Linkslauf)
Bereich: –9,999,999 bis +9,999,999 (Impulse)
Grundeinstellung: 0000, 0000
Spielkompensations–Wert
X–Achse 0012 (NC113), Y–Achse 0036 (NC213), Z–Achse 0060 und U–
Achse 0084 (NC413)
15 00
x10
3
x10
2
x10
1
x10
0
66
Bereich: 0 bis 9.999 (Impuls)
Grundeinstellung: 0000
Page 76

Allgemeine Struktur
4-1Kapitel
Spielkompensations–Geschwindigkeit
X–Achse 0013 (NC113), Y–Achse 0037 (NC213), Z–Achse 0061 und U–
Achse 0085 (NC413)
15 00
14 13 12
3
Faktor
x10
Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Grundeinstellung: 0000
Beschleunigungs–/Abbremskurve
X–Achse 0014 (NC113), Y–Achse 0038 (NC213), Z–Achse 0062 und U–
Achse 0086 (NC413)
15 00
00 0
Bezeichnung: 0: Trapezförmige Kurve; 1: S–Kurve
Grundeinstellung: 0000
Beschleunigungszeit ( rechtes Wort)
X–Achse 0015 (NC113), Y–Achse 0039 (NC213), Z–Achse 0063 und U–
Achse 0087 (NC413)
Beschleunigungszeit (linkes Wort)
X–Achse 0016 (NC113), Y–Achse 0040 (NC213), Z–Achse 0064 und U–
Achse 0088 (NC413)
x10
2
x10
1
0
x10
Bezeichnung
15 00
0 0 x10
5
x10
00 15linkes Wort
4
x10
3
rechtes Wort
2
x10
x10
1
x10
0
Bereich: 0 bis 250.000 (ms)
Grundeinstellung: 0100, 0000
Abbremszeit (rechtes Wort)
X–Achse 0017 (NC113), Y–Achse 0041 (NC213), Z–Achse 0065 und U–
Achse 0089
(NC413)
Abbremszeit (linkes Wort)
X–Achse 0018 (NC113), Y–Achse 0042 (NC213), Z–Achse 0066 und U–
Achse 0090 (NC413)
15 00
0 0 x10
linkes Wort rechtes Wort
5
x10
00 15
4
x10
3
x10
2
x10
1
x10
0
Bereich: 0 bis 250.000 (ms)
Grundeinstellung: 0100, 0000
Positionierungs–Überwachungszeit
X–Achse 0019 (NC113), Y–Achse 0043 (NC213), Z–Achse 0067 und U–
Achse 0091 (NC413)
15 00
x10
3
x10
2
x10
1
x10
0
Bereich: 0 bis 9.999 (ms)
Für Betriebsarten 2 und 3 aktiviert.
Grundeinstellung: 9999
67
Page 77

Allgemeine Struktur
4-1Kapitel
Software–Grenze links(rechtes Wort)
X–Achse 0020 (NC113), Y–Achse 0044 (NC213), Z–Achse 0068 und U–
Achse 0092 (NC413)
Software–Grenze links (linkes Wort)
X–Achse 0021 (NC113), Y–Achse 0045 (NC213), Z–Achse 0069 und U–
Achse 0093 (NC413)
Software–Grenze rechts (rechtes Wort)
X–Achse 0022 (NC113), Y–Achse 0046 (NC213), Z–Achse 0070 und U–
Achse 0094 (NC413)
Software–Grenze rechts (linkes Wort)
X–Achse 0023 (NC113), Y–Achse 0047 (NC213), Z–Achse 0071 und U–
Achse 0095 (NC413)
Links– und Rechtslauf–Softwaregrenze
15 00
Vorzeichen x10
linkes Wort 00 15 rechtes Wort
6
x10
5
x10
4
x10
3
x10
2
x10
1
Vorzeichen: 0: positiv (Rechtslauf); 1: negativ (Linkslauf)
Bereich: –9,999,999 bis +9,999,999 (Impulse)
Grundeinstellung: 1999, 9999; 0999, 9999
Reserviert
X–Achse 0024 bis 0027 (NC113), Y–Achse 0048 bis 0051 (NC213), Z–
Achse 0072 bis 0075 und U–Achse 0096 bis 0099 (NC413)
Spezifizieren Sie 0000.
Grundeinstellung: 0000
Positionier–Sequenznummer 0
X–Achse 1000, 1001, 1002 (NC113), Y–Achse 2000, 2001, 2002 (NC213),
Z–Achse 3000, 3001, 3002 und U–Achse 4000, 4001, 4002 (NC413)
Beispiel: X–Achse
15 00
Achsenspezifikation Ausgabecode 0 Endcode
1000
Verweilzeit–Nr. Beschleunig.zeit–Nr. Abbremszeit–Nr.
1001
Anfangsgeschwindigkeits–Nr. Zielgeschwindigkeits–Nr.
1002
12 11 08 07 04 03
Achsenspezifikation: Setzen Sie die Bits für aktive Achsen auf “1”.
Bit 15: U–Achse; 14: Z–Achse; 13: Y–Achse;
Bit 12: X–Achse
Ausgabecode: 0 bis F
Endcode: 0 bis 6 (BCD)
Verweilzeit–Nr. 00 bis 19 (BCD)
Beschleunigungszeit–Nr. 0 bis 9 (BCD)
Abbremszeit–Nr. 0 bis 9 (BCD)
Anfangs–/Zielgeschw.–Nr.: 0 bis 99 (BCD)
Grundeinstellung: 0000, 0000, 0000
x10
0
68
Positionier–Sequenznummer 1
X–Achse 1003 (NC113), Y–Achse 2003 (NC213), Z–Achse 3003 und U–
Achse 4003 (NC413)
Die Einstellungen entsprechen denen der Sequenz–Nr. 0.
Grundeinstellung: 0000, 0000, 0000
Hinweis Die Wortadressen setzen sich für alle vier Achsen von Sequenz–Nr. 2 bis
Sequenz–Nr. 98 fort. Diese sind hier nicht aufgelistet.
Page 78

Allgemeine Struktur
Hinweis Bei Einstellung der Sequenzdaten mit der Sysmac–NCT Programmiersoft-
4-1Kapitel
Sequenznummer 99
X–Achse 1297 (NC113), Y–Achse 2297 (NC213), Z–Achse 3297 und U–
Achse 4297 (NC413)
Die Einstellungen entsprechen denen der Sequenz–Nr. 0.
Grundeinstellung: 0000, 0000, 0000
ware kann jeweils nur eine Sequenznummerndefinition vorgenommen werden. Ein Achsenzuweisungsfehler tritt auf, falls mehr als eine Sequenznummer zugewiesen wird.
Ein Achsenzuweisungsfehler könnte auftreten bei:
Achsenzuweisung von ”XY” zu der X–Achse von Sequenz–Nr. 100
Achsenzuweisung von ”Y” zu der Y–Achse von Sequenz–Nr. 100
Geschwindigkeit–Nr. 0
X–Achse 1300 (NC113), Y–Achse 2300 (NC213), Z–Achse 3300 und U–
Achse 4300 (NC413)
15 00
14 13 12
Faktor x10
3
Diese Daten spezifizieren die Geschwindigkeit–Nr. 0. Der zulässige Bereich
beträgt 0 bis 1.000.000 (Hz) in der folgenden Kombination. Die beiden äußerst linken Bits werden für die Einstellung des Faktors verwendet.
Faktor: 00: x1; 01: x10; 10: x100; 11: x1.000
Geschwindigkeit: 0 bis 3.999
Grundeinstellung: 0000
x10
2
x10
1
x10
0
Geschwindigkeit–Nr. 1
X–Achse 1301 (NC113), Y–Achse 2301 (NC213), Z–Achse 3301 und U–
Achse 4301 (NC413)
Die Einstellungen entsprechen denen der Geschwindigkeit–Nr. 0.
Grundeinstellung: 0000
Hinweis Die Wortadressen setzen sich für alle vier Achsen von Geschwindigkeits–Nr.
2 bis Geschwindigkeits–Nr. 98 fort. Diese sind hier nicht aufgelistet.
Geschwindigkeit–Nr. 99
X–Achse 1399 (NC113), Y–Achse 2399 (NC213), Z–Achse 3399 und U–
Achse 4399 (NC413)
Die Einstellungen entsprechen denen der Geschwindigkeit–Nr. 0.
Grundeinstellung: 0000
Position–Nr. 0 (rechtes Wort)
X–Achse 1400 (NC113), Y–Achse 2400 (NC213), Z–Achse 3400 und U–
Achse 4400 (NC413)
Position–Nr. 0 (linkes Wort)
X–Achse 1401 (NC113), Y–Achse 2401 (NC213), Z–Achse 3401 und U–
Achse 4401 (NC413)
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
x10
0
69
Page 79

Allgemeine Struktur
Hinweis Die Wortadressen setzen sich für alle vier Achsen von Positions–Nr. 2 bis
4-1Kapitel
Dies spezifiziert die Daten für Position–Nr. 0. Die Position kann, entsprechend dem Vorzeichen, als Absolut– oder Inkrementalwert angegeben werden:
0: positiv (absolut)
1: negativ (absolut)
2: positiv (inkremental)
3: negativ (inkremental)
Spezifizieren Sie die Position innerhalb eines Bereichs von –9,999,999 bis
+9,999,999 (Impulse).
Grundeinstellung: 0000, 0000
Position–Nr. 1
X–Achse 1402 (NC113), Y–Achse 2402 (NC213), Z–Achse 3402 und U–
Achse 4402 (NC413)
Die Einstellungen sind die gleich, wie für Position–Nr. 0.
Grundeinstellung: 0000, 0000
Positions–Nr. 97 fort. Diese sind hier nicht aufgelistet.
Position–Nr. 98
X–Achse 1596 (NC113), Y–Achse 2596 (NC213), Z–Achse 3596 und U–
Achse 4596 (NC413)
Die Einstellungen entsprechen denen der Position–Nr. 0.
Grundeinstellung: 0000, 0000
Position–Nr. 99
X–Achse 1598 (NC113), Y–Achse 2598 (NC213), Z–Achse 3598 und U–
Achse 4598 (NC413)
Die Einstellungen entsprechen denen der Position–Nr. 0.
Grundeinstellung: 0000, 0000
Reserviert
X–Achse 1600, 1601 (NC113), Y–Achse 2600, 2601 (NC213), Z–Achse
3600, 3601 und U–Achse 4600, 4601 (NC413)
Spezifizieren Sie 0000.
Grundeinstellung: 0000
Beschleunigungszeit–Nr. 1 (rechtes Wort)
X–Achse 1602 (NC113), Y–Achse 2602 (NC213), Z–Achse 3602 und U–
Achse 4602 (NC413)
Beschleunigungszeit–Nr. 1 (linkes Wort)
X–Achse 1603 (NC113), Y–Achse 2603 (NC213), Z–Achse 3603 und U–
Achse 4603 (NC413)
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
x10
0
Dies spezifiziert die Daten für Beschleunigungszeit–Nr. 1.
Grundeinstellung: 0000, 0000
70
Hinweis Die Wortadressen setzen sich für alle vier Achsen der Beschleunigungszeit–
Nr. 2 bis Beschleunigungszeit–Nr. 8 fort. Diese sind hier nicht aufgelistet.
Page 80

Allgemeine Struktur
4-1Kapitel
Beschleunigungszeit–Nr. 9
X–Achse 1618 (NC113), Y–Achse 2618 (NC213), Z–Achse 3618 und U–
Achse 4618 (NC413)
Die Einstellungen entsprechen denen der Beschleunigungszeit–Nr. 1.
Grundeinstellung: 0000, 0000
Reserviert
X–Achse 1620, 1621 (NC113), Y–Achse 2620, 2621 (NC213), Z–Achse
3620, 3621 und U–Achse 4620, 4621 (NC413)
Spezifizieren Sie 0000.
Grundeinstellung: 0000
Abbremszeit–Nr. 1 (rechtes Wort)
X–Achse 1622 (NC113), Y–Achse 2622 (NC213), Z–Achse 3622 und U–
Achse 4622 (NC413)
Abbremszeit–Nr. 1 (rechtes Wort)
X–Achse 1623 (NC113), Y–Achse 2623 (NC213), Z–Achse 3623 und U–
Achse 4623 (NC413)
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
x10
0
Spezifiziert die Daten für Abbremszeit–Nr. 1.
Grundeinstellung: 0000, 0000
Hinweis Die Wortadressen setzen sich für alle vier Achsen der Abbremszeit–Nr. 2 bis
Abbremszeit–Nr. 8 fort. Diese sind hier nicht aufgelistet.
Abbremszeit–Nr. 9
X–Achse 1638 (NC113), Y–Achse 2638 (NC213), Z–Achse 3638 und U–
Achse 4638 (NC413)
Die Einstellungen entsprechen denen der Abbremszeit–Nr. 1.
Grundeinstellung: 0000, 0000
Reserviert
X–Achse 1640 (NC113), Y–Achse 2640 (NC213), Z–Achse 3640 und U–
Achse 4640 (NC413)
Spezifizieren Sie 0000.
Grundeinstellung: 0000
Verweilzeit–Nr. 1
X–Achse 1641 (NC113), Y–Achse 2641 (NC213), Z–Achse 3641 und U–
Achse 4641 (NC413)
15 00
0 x10
0
x10
–1
x10
–2
Dies spezifiziert die Daten für Verweilzeit–Nr. 1.
Einstell–Bereich: 0 bis 9,99 (Sekunden, Einstellung in Angaben von 0,01 s)
Grundeinstellung: 0000
Hinweis Die Wortadressen setzen sich für alle vier Achsen der Verweilzeit–Nr. 2 bis
Verweilzeit–Nr. 18 fort. Diese sind hier nicht aufgelistet.
Verweilzeit–Nr. 19
X–Achse 1659 (NC113), Y–Achse 2659 (NC213), Z–Achse 3659 und U–
Achse 4659 (NC413)
Diie Einstellungen entsprechen denen der Verweilzeit–Nr. 1.
Grundeinstellung: 0000
71
Page 81

Allgemeine Struktur
4-1Kapitel
Zonen–Nr. 0, Grenzwert links (rechtes Wort)
X–Achse 1660 (NC113), Y–Achse 2660 (NC213), Z–Achse 3660 und U–
Achse 4660 (NC413)
Zonen–Nr. 0, Grenzwert links (linkes Wort)
X–Achse 1661 (NC113), Y–Achse 2661 (NC213), Z–Achse 3661 und U–
Achse 4661 (NC413)
Zonen–Nr. 0, Grenzwert rechts (rechtes Wort)
X–Achse 1662 (NC113), Y–Achse 2662 (NC213), Z–Achse 3662 und U–
Achse 4662 (NC413)
Zonen–Nr. 0, Grenzwert rechts (linkes Wort)
X–Achse 1663 (NC113), Y–Achse 2663 (NC213), Z–Achse 3663 und U–
Achse 4663 (NC413)
Spezifikation der beiden Links– und Rechtslauf–Seiten
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
x10
0
Dies spezifiziert die Daten für Zonen–Nr. 0.
Vorzeichen: 0: positiv (Rechtslauf); 1: negativ (Linkslauf)
Bereich: –9,999,999 bis +9,999,999 (Impulse)
Nehmen Sie die Einstellungen so vor, daß der Grenzwert links kleiner ist als
der Grenzwert rechts.
Grundeinstellung: 0000, 0000
Zonen–Nr. 1, Grenzwert links
X–Achse 1664 (NC113), Y–Achse 2664 (NC213), Z–Achse 3664 und U–
Achse 4664 (NC413)
Zonen–Nr. 1, Grenzwert rechts
X–Achse 1666 (NC113), Y–Achse 2666 (NC213), Z–Achse 3666 und U–
Achse 4666 (NC413)
Die Einstellungen entsprechen denen der Zonen–Nr. 1.
Grundeinstellung: 0000, 0000
Zonen–Nr. 2, Grenzwert links
X–Achse 1668 (NC113), Y–Achse 2668 (NC213), Z–Achse 3668 und U–
Achse 4668 (NC413)
Zonen–Nr. 2, Grenzwert rechts
X–Achse 1670 (NC113), Y–Achse 2670 (NC213), Z–Achse 3670 und U–
Achse 4670 (NC413)
Die Einstellungen entsprechen denen der Zonen–Nr. 1.
Grundeinstellung: 0000, 0000
72
Page 82

Allgemeine Parameter
4-2 Allgemeine Parameter
Die allgemeinen Parameter werden dem Datenwortbereich der speicherprogrammierbaren Steuerung zugeordnet. Die Speicherplätze im Datenwortbereich werden durch die Einstellung der Baugruppennummer festgelegt.
Die Einstellungen der allgemeinen Parameter ist nachfolgend beschrieben.
Hinweis 1. Die Einstellungen der allgemeinen Parameter müssen bei Einsatz der
Positionierbaugruppe durchgeführt werden. Werden diese Einstellungen
nicht vorgenommen, so wird ein allgemeiner Parameterfehler generiert
(Fehlercodes 0010 bis 0013) und die Positionierbaugruppe arbeitet nicht
normal.
2. Nach den Einstellungen werden die allgemeinen Parametereinstellungen
nach dem Einschalten der Versorgungsspannung der Positionierbaugruppe oder nach derem Neustart wirksam.
4-2Kapitel
Spezifikation des
Betriebsdatenbereiches
Anfangswort des
Betriebsdatenbereichs
Wort: m
15 00
0
0 0 X
Diese Einstellung spezifiziert, ob der Betriebsdatenbereich dem DM– oder
dem EM–Bereich zugeordnet wird.
X = D (DM–Bereich)
E (EM–Bereich)
Liegt der spezifizierte Bereich außerhalb der oben aufgeführten Grenzen
oder befindet sich die Anfangswort–Spezifikation (in m+1) außerhalb des
zulässigen Bereiches, so wird ein Betriebsdatenbereichs–Wortfehler generiert. Wird ein solcher Fehler generiert, ergeben sich die folgenden Bedingungen. Korrigieren Sie in diesem Fall die Einstellung. Schalten Sie anschließend die Versogungsspannung aus und wieder ein oder starten Sie die Positionierbaugruppe erneut.
• Die RUN–Anzeige auf der Frontplatte der Positionierbaugruppe leuchtet
und die ERR–Anzeige blinkt.
• Der X–Achsen–Fehlermerker wird gesetzt.
Operationen (wie Überwachungen und Datenübertragungen) können über
die Programmiersoftware SYSMAC–NCT jedoch wie üblich ausgeführt werden.
Wort: m+1
15 00
x10
3
x10
2
x10
1
x10
0
Diese Einstellung spezifiziert das Anfangswort des Betriebsdatenbereichs.
Die zu spezifizierenden Worte sind die in der folgenden Tabelle für das Lesen/Schreiben freigegebenen DM– und EM (nur Bank 0)–Worte.
SPS–Modell Spezifizierbare Bereiche
C200H DM 0000 bis DM 0899
C200HS DM 0000 bis DM 0999
DM 2000 bis DM 5999
C200HX/HG/ER [für Baugruppen–Nr. 10]
DM 0000 bis DM 0999
DM 2000 bis DM 5999 (siehe Hinweis)
EM 0000 bis EM 6143 (nur Bank 0)
[für Baugruppen–Nr. 16]
DM 0000 bis DM 0999 (siehe Hinweis)
DM 2600 bis DM 5999
EM 0000 bis EM 6143 (nur Bank 0)
Hinweis Die obere Grenze variiert je nach Speicherkapazität.
73
Page 83

Achsenparameter
4-3Kapitel
Positionierbaugruppe –
Installationsposition und
Parameterbezeichnung
Hinweis Ein Spezial–E/ A–Baugruppefehler wird generiert, wenn diese Einstellung
Wort: m+2
15 00
Installationsposition
Die “Installationspositions” –Einstellung gibt an, ob die Positionierbaugruppe
auf dem CPU–Baugruppenträger, suf einem dezentralen E/A–Slave– oder
auf einem Erweiterungs–E/A–Baugruppenträger installiert wird.
00: Positionierbaugruppe ist auf dem CPU– oder Erweiterungs–E/ A–Bau-
gruppenträger installiert
01: Positionierbaugruppe ist auf dem dezentralen E/A–Slave–Baugruppenträ-
ger installiert
“00” ist, aber die Positionierbaugruppe in einem Slave–Baugruppenträger
installiert wird. Korrigieren Sie in diesem Fall die Einstellung auf “01”. Schalten Sie dann die Positionierbaugruppe wieder ein oder starten Sie diese neu.
Stellen Sie sicher, daß die “Installationspositions”–Einstellung auf “00” eingestellt ist, wenn die Positionierbaugruppe in dem CPU–Baugruppenträger oder
einem Erweiterungs–E/A–Baugruppenträger installiert. Wurde eine Einstellung auf “01” vorgenommen, erfolgen die Antworten auf Befehle von der
speicherprogrammierbaren Steuerung eine oder zwei Zyklen später, als bei
einer Einstellung auf “00”.
Die “Parameterbezeichnungs”–Einstellung spezifiziert, ob die in DM m+4 bis
DM m+99 gespeicherten oder die in dem Flash–Speicher der Positionierbaugruppe gespeicherten Achsenparameter für den Betrieb verwendet werden.
00: Verwendung der im Flash–Speicher der Positionierbaugruppe gespeicher-
ten Parameter.
01: Verwendung der in DM m+4 bis DM m+99 gespeicherten Parameter. (In
diesem Fall müssen diese Parameter vorher spezifiziert werden.)
08 07
Parameterbezeichnung
Reserviert
Wort: m+3
Spezifizieren Sie 0000.
4-3 Achsenparameter
Die Parameter für die X–, Y–, Z– und U–Achsen werden im Achsenparameter–Bereich spezifiziert.
4-3-1 Einstellung der Achsenparameter
Die für die Steuerung der Positionierbaugruppe erforderlichen Daten werden
im Achsenparameter–Bereich spezifiziert. Diese wesentlichen Daten werden
von den Einstellungen für die Betriebsart, Maximalgeschwindigkeit, Beschleunigungs–/Abbremsungs–Kurve, Nullpunkt–Suchgeschwindigkeiten,
Softwaregrenzen und so weiter gebildet.
Spezifiziert die “Parameterbezeichnung”–Einstellung die Verwendung der im
allgemeinen Parameterbereich gespeicherten Achsenparameter in DM m+4
bis DM m+99, dann werden diese Parameter auf die Positionierbaugruppe
übertragen. Spezifiziert die Parameterbezeichnung die Verwendung der im
Flash–Speicher der Positionierbaugruppe gespeicherten Achsenparameter,
so werden diese verwenden.
Werden die Achsenparameter in DM m+4 bis DM m+99 verwendet, werden
diese auf den Datenbereichs–Adressen 0004 bis 0099 der Positionierbaugruppe gespeichert. (Die Worte m+4 bis m+99 im Datenwortbereich der speicherprogrammierbaren Steuerung entsprechen den Adressen 0004 bis 0099
auf der Positionierbaugruppe). Bei der Speicherung dieser Daten werden die
Einstellungen im Flash–Speicher der Positionierbaugruppe abgelegt.
74
Page 84

Achsenparameter
4-3-2 Die einzelnen Achsenparameter
E/A–Einstellungen
X–Achse m+4 (NC113), Y–Achse m+28 (NC213), Z Achse m+52 und U–Achse m+76 (NC413)
4-3Kapitel
15 00
0000000 000E/A–Einstellungen
08 04
Diese Einstellungen spezifizieren die Impulsausgabe–Auswahl, die Grenzsignal–Kontakte usw.
Bits Einstellungen
00 Impulsausgabe–Auswahl:
01 bis 03 Reserviert
04 Grenzsignal:
05 Nullpunktnähe–Signal:
06 Nullpunktsignal:
07 Notaus–Eingang:
08 Nullpunkt undefiniert–Spezifikation:
09 bis 15 Reserviert
0: Rechtslauf–/Linkslaufausgabe; 1: Impuls–/Richtungsausgabe
Spezifiziert die Art des Endschalterkontakts.
0: Öffner–Eingang; 1: Schließer–Eingang
Spezifiziert die Art des Signalkontakts.
0: Öffner–Eingang; 1: Schließer–Eingang
Spezifiziert die Art des Signalkontakts.
0: Öffner–Eingang; 1: Schließer–Eingang
Spezifiziert die bei einem anliegenden Notaus–Signal ausgeführten Aktionen.
0: nur Impulsausgabe wird gestoppt.
1: Impulsausgabe wird gestoppt und das Fehlerzähler–Rücksetzsignal wird
ausgegeben (aktiviert für Betriebsarten 1 und 2).
Diese Einstellung spezifiziert, ob der Nullpunkt undefiniert ist oder nicht, wenn
ein Notaus–Signal, Links– oder Rechtslauf–Grenzsignal anliegt.
0: Stoppen der Impulsausgabe und beibehalten des vorhergehenden
Zustandes.
1: Stoppen der Impulsausgang und zwangsweiser Wechsel in den Nullpunkt
undefiniert–Zustand.
Betriebsarten–Auswahl
X–Achse m+5 (NC113), Y–Achse m+29 (NC213), Z Achse m+53 und U–Achse m+77 (NC413)
15 00
Nullpunkt–Suchrichtung
12 11 08 07 04 03
Nullpunkt–Erkennung
Nullpunkt–Suchfunktion
Betriebsart
Die in diesem Wort gespeicherten Daten spezifizieren die Betriebsart, die
Nullpunkt–Erkennung usw. (Sehen Sie Abschnitt
4-3-3 Betriebsarten
zelheiten der Betriebsart.)
für Ein-
75
Page 85

Achsenparameter
4-3Kapitel
Bit 00 bis 03: Betriebsarten–Auswahl
Spezifizieren Sie die Betriebsart entsprechend dem verwendeten Motortreiber und den Signalleitungen.
Einstellung Erklärung
0 (Betriebsart 0) Einsatz eines Schrittmotors. Verwendet ein externes Sensorsignal als
Nullpunktsignal. In dieser Betriebsart können der
Fehlerzähler–Rücksetzausgang und der Nullpunktjustierung–Ausgang
als Mehrzweck–Ausgänge verwendet werden.
1 (Betriebsart 1) Einsatz eines Servomotortreiber. Verwendet das Z–Phasensignal des
Encoders für das Nullpunktsignal. Verwendet kein Positionierung
beendet–Signal.
2 (Betriebsart 2) Entspricht Betriebsart 1 aber verwendet das Positionierung
beendet–Signal des Servomotortreibers.
3 (Betriebsart 3) Verwendet die Servomotortreiber der OMRON H– oder M–Serien. Die
Nullpunktsuche wird vom Nullpunktjustierungs–Befehl des
Servomotortreiber beendet. Verwendet das Positionierung
beendet–Signal.
Grundeinstellung: 0000
Bit 04 bis 07: Nullpunkt–Suchfunktion
Diese Einstellung spezifiziert die Nullpunkt–Suchfunktion.
Einstellung Erklärung
0 Umkehr–Betriebsart 1
Erkennt den Nullpunkt in spezifizierter Nullpunkt–Suchrichtung. Umkehr
bei Endschaltersignal.
1 Umkehr–Betriebsart 2
Erkennt den Nullpunkt in spezifizierter Nullpunkt–Suchrichtung.
Fehlerhalt am Endschalter.
2 Einzelrichtungs–Betriebsart
Erkennt den Nullpunkt in spezifizierter Nullpunkt–Suchrichtung. (Keine
Umkehr.) Fehlerhalt an Endschaltereingang für spezifizierte
Nullpunkt–Suchrichtung.
Bit 08 bis 11: Nullpunkterkennung
Diese Einstellung spezifiziert die Nullpunkterkennung.
Einstellung Erklärung
0 Übernimmt das Nullpunktsignal, nachdem das Nullpunktnähe–Signal
1 Übernimmt das Nullpunktsignal, nachdem das Nullpunktnähe–Signal
2 Übernimmt das Nullpunktsignal, ohne das Nullpunktnähe–Signal zu
3 Übernimmt das Nullpunktsignal, nachdem das Grenzsignal aktiviert (↑)
aktiviert (↑) und deaktiviert (↓) wurde.
aktiviert (↑) wurde.
verwenden.
und deaktiviert (↓) oder deaktiviert (↓) wurde, ohne das
Nullpunktnähe–Signal zu verwenden. (Nur bei Einzelrichtungs–
Betriebsart aktiviert.)
Bit 12 bis 15: Nullpunkt–Suchrichtung
Diese Einstellung spezifiziert die Erkennungsrichtung des Nullpunktsignals
während einer Nullpunktsuche.
Einstellung Erklärung
0 Rechts
1 Links
Maximalgeschwindigkeit
X–Achse m+6 (NC113), Y–Achse m+30 (NC213), Z Achse m+54 und U–Achse m+78 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
76
Diese Einstellung spezifiziert die von der Positionierbaugruppe ausgegebene Maximalgeschwindigkeit. Wird während des Speicherbetriebs oder
Page 86

Achsenparameter
Direktbetriebs eine Geschwindigkeit spezifiziert, die diese Einstellung überschreitet, so wird die Achse höchstens mit der hier angegebenen Geschwindigkeit betrieben.
Der zulässige Einstellbereich beträgt 0 bis 500.000 in der folgenden Kombination. Die zwei äußersten linken Bits werden für die Einstellung des Faktors verwendet.
• Faktor: 00: x1; 01: x10; 10: x100; 11: x1.000 (Hz)
• Geschwindigkeit: 1 bis 3.999
(Beispiel: C100) 1.000 x 100 = 100.000 (Hz)
Hinweis Ein Fehler wie ein BCD–Fehler der Geschwindigkeitsdaten (Fehlercodes
1500 bis 1599) wird generiert, wenn Anfangsgeschwindigkeit, schnelle Nullpunktsuche, Nullpunktsuche–Annäherungsgeschwindigkeit oder Spielkompensation auf höhere Werte eingestellt sind als die hier spezifizierte Maximalgeschwindigkeit.
Anfangsgeschwindigkeit
X–Achse m+7 (NC113), Y–Achse m+31 (NC213), Z Achse m+55 und U–Achse m+79 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
4-3Kapitel
0
Diese Einstellung spezifiziert die Anfangsgeschwindigkeit.
Der zulässige Einstellbereich beträgt 0 bis 500.000 in der folgenden Kombi-
nation. Die zwei äußersten linken Bits werden für die Einstellung des Faktors verwendet.
• Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
• Geschwindigkeit: 0 bis 3.999
(Beispiel: C100) 1.000 x 100 = 100.000 (Hz)
Schnelle Nullpunktsuche
X–Achse m+8 (NC113), Y–Achse m+32 (NC213), Z Achse m+56 und U–Achse m+80 (NC413)
15 00
14 13 12
Faktor
x10
3
x10
2
x10
1
Diese Einstellung spezifiziert die Nullpunkt–Suchgeschwindigkeit, bis das
Nullpunktnähe–Signal anliegt.
Der zulässige Einstellbeereich beträgt 1 bis 500.000 in der folgenden Kombination. Die zwei äußersten linken Bits werden für die Einstellung des Faktors verwendet.
• Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
• Geschwindigkeit: 1 bis 3.999
(Beispiel: C100) 1.000 x 100 = 100.000 (Hz)
x10
0
Nullpunktsuche–Annäherungsgeschwindigkeit
X–Achse m+9 (NC113), Y–Achse m+33 (NC213), Z Achse m+57 und U–Achse m+81 (NC413)
15 00
14 13 12
Faktor
x10
3
x10
2
x10
1
x10
0
77
Page 87

Achsenparameter
Diese Einstellung spezifiziert die Nullpunkt–Suchgeschwindigkeit, bis das
Nullpunktsignal anliegt.
Der zulässige Einstellbereich beträgt 1 bis 10.000 in der folgenden Kombination. Die zwei äußersten linken Bits werden für die Einstellung des Faktors verwendet.
• Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
• Geschwindigkeit: 1 bis 3.999
(Beispiel: C100) 1.000 x 100 = 100.000 (Hz)
Stellen Sie sicher, daß die Nullpunktsuche–Annäherungsgeschwindigkeit auf
einen geringeren Wert eingestellt wird als die schnelle Nullpunktsuche. Ein
Nullpunktsuche–Geschwindigkeitsfehler (Fehlercode 1603) wird generiert,
wenn die Nullpunktsuche–Annäherungsgeschwindigkeit gleich oder höher
als die schnelle Nullpunktsuche ist.
Nullpunktkompensations–Wert (rechtes Wort)
X–Achse m+10 (NC113), Y–Achse m+34 (NC213), Z Achse m+58 und U–Achse m+82 (NC413)
Nullpunktkompensations–Wert (linkes Wort )
X–Achse m+11 (NC113), Y–Achse m+35 (NC213), Z Achse m+59 und U–Achse m+83 (NC413)
4-3Kapitel
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
Diese Einstellung spezifiziert den Kompensationswert, nachdem das Nullpunktsignal von einer Nullpunkt–Suchfunktion erkannt wird. Wird die Kompensation auf einen Wert ungleich 0 eingestellt, wird die Achse bei der Nullpunktsuche–Annäherungsgeschwindigkeit für den spezifizierten Kompensationswert verfahren, nachdem das Nullpunktsignal erkannt wird.
• Vorzeichen: 0: positiv (Rechtslauf); 1: negativ (Linkslauf)
• Bereich: –9,999,999 bis 9.999.999 (Impulse)
Spielkompensation
X–Achse m+12 (NC113), Y–Achse m+36 (NC213), Z Achse m+60 und U–Achse m+84 (NC413)
15 00
x10
3
x10
2
x10
1
x10
Diese Einstellung spezifiziert die Spielkompensation.
• Bereich: 0 bis 9.999 (Impuls)
Spielkompensations–Geschwindigkeit
X–Achse m+13 (NC113), Y–Achse m+37 (NC213), Z Achse m+61 und U–Achse m+85 (NC413)
15 00
14 13 12
Faktor x10
3
x10
2
x10
1
x10
0
x10
0
0
78
Diese Einstellung spezifiziert die Ausgabegeschwindigkeit der Spielkompensation. Bei der Spezifikation von “0” wird die Spielkompensation mit 500 Hz
ausgegeben, wenn die Anfangsgeschwindigkeit geringer als 500 Hz ist oder
mit der Anfangsgeschwindigkeit, wenn die Anfangsgeschwindigkeit 500 Hz
oder mehr beträgt.
Diese Einstellung kann dazu verwendet werden, die Positionierzeit in Fällen
zu verkürzen, in denen sie, bedingt durch eine große Spielkompensation, bei
einer niedrigen Geschwindigkeit verlängert wurde.
Der zulässige Einstellbereich beträgt 0 bis 500.000 in der folgenden Kombination. Die zwei äußersten linken Bits werden für die Einstellung des Faktors verwendet.
• Faktor: 00: x1, 01: x10, 10: x100, 11: x1.000 (Hz)
Page 88

Achsenparameter
• Geschwindigkeit: 0 bis 3.999
(Beispiel: 0100) 1 x 100 = 100 (Hz)
Beschleunigungs–/Abbremskurve
X–Achse m+14 (NC113), Y–Achse m+38 (NC213), Z Achse m+62 und U–Achse m+86 (NC413)
15 00
0 0 0 Bezeichnung
Diese Einstellung spezifiziert die Kurve, die zur Beschleunigung und Abbremsung verwendet wird.
• Bezeichnung: 0: Trapezförmige Kurve; 1: S–Kurve
Beschleunigungszeit (rechtes Wort)
X–Achse m+15 (NC113), Y–Achse m+39 (NC213), Z Achse m+63 und U–Achse m+87 (NC413)
Beschleunigungszeit (linkes Wort)
X–Achse m+16 (NC113), Y–Achse m+40 (NC213), Z Achse m+64 und U–Achse m+88 (NC413)
4-3Kapitel
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
Diese Einstellung spezifiziert die Zeit, die benötigt wird, um beginnend mit 0
Hz oder der Anfangsgeschwindigkeit auf die Maximalgeschwindigkeit zu beschleunigen.
• Bereich: 0 bis 250.000 (ms)
Abbremszeit (rechtes Wort)
X–Achse m+17 (NC113), Y–Achse m+41 (NC213), Z Achse m+65 und U–Achse m+89 (NC413)
Abbremszeit (linkes Wort)
X–Achse m+18 (NC113), Y–Achse m+42 (NC213), Z Achse m+66 und U–Achse m+90 (NC413)
15 00
0 0 x10
linkes Wort 00 15 rechtes Wort
5
x10
4
x10
3
x10
2
x10
1
Diese Einstellung spezifiziert die Zeit, die benötigt wird, um von der Maximalgeschwindigkeit auf 0 Hz oder auf die Anfangsgeschwindigkeit abzubremsen.
• Bereich: 0 bis 250.000 (ms)
Positionierungs–Überwachungszeit
X–Achse m+19 (NC113), Y–Achse m+43 (NC213), Z Achse m+67 und U–Achse m+91 (NC413)
x10
x10
0
0
15 00
x10
3
x10
2
x10
1
x10
Nach dem Ende der Impulsausgabe wird ein
Positionierzeitgeber–Zeitsperre–Fehler (Fehlercode 8600) generiert, wenn
das Positionierung beendet–Signal nicht innerhalb der hier spezifizierten Zeit
anliegt. (Diese Funktion ist nur für die Betriebsarten 2 und 3 freigegeben.)
• Bereich: 0 bis 9.999 (ms)
Wird die Positionierungs–Überwachungszeit auf “0” eingestellt, wird das Positionierung beendet–Signal nur erwartet, wenn eine Nullpunkt–Suchfunktion
ausgeführt wird. Bei allen anderen Operationen (wie Tippbetrieb, Speicherbetrieb und so weiter) wird das Positionierung beendet–Signal ignoriert.
Softwaregrenze links (rechtes Wort)
X–Achse m+20 (NC113), Y–Achse m+44 (NC213), Z Achse m+68 und U–Achse m+92 (NC413)
Softwaregrenze links (linkes Wort)
X–Achse m+21 (NC113), Y–Achse m+45 (NC213), Z Achse m+69 und U–Achse m+93 (NC413)
0
79
Page 89

Achsenparameter
Softwaregrenze rechts (rechtes Wort)
X–Achse m+22 (NC113), Y–Achse m+46 (NC213), Z Achse m+70 und U–Achse m+94 (NC413)
Softwaregrenze rechts (linkes Wort)
X–Achse m+23 (NC113), Y–Achse m+47 (NC213), Z Achse m+71 und U–Achse m+95 (NC413)
4-3Kapitel
00
15
Vorzeichen
linkes Wort
6
x10
x10
5
x10
15
00
4
x10
3
rechtes Wort
2
x10
x10
1
x10
Diese Einstellungen spezifizieren die Links– und Rechtslauf–Softwaregrenzen.
• Vorzeichen: 0: positiv (Rechtslauf); 1: negativ (Linkslauf)
• Bereich: –9,999,999 bis 9.999.999 (ms)
Die Softwaregrenze funktioniert nicht, wenn die Softwaregrenze rechts auf
einen Wert kleiner/gleich der Softwaregrenze links eingestellt wird. Nach der
Spezifikation wird folgender Betrieb ausgeführt:
• Bei Beginn des Vorgangs ist die Istposition immer 0.
• Die gegenwärtige Stellung wird während des Achsenbetriebes immer auf-
gefrischt. Die Positionierung wird gestoppt, wenn die obere oder untere
Grenze erreicht wird.
Obere Grenze: +9,999,999 (Impulse)
Untere Grenze: –9,999,999 (Impulse)
Reserviert
X–Achse m+24, m+27 (NC113), Y–Achse m+48, m+51 (NC213), Z–Achse m+72, m+75 und U–Achse
m+96, m+99 (NC413)
Spezifizieren Sie 0000.
4-3-3 Betriebsarten
0
Betriebsart 0
Vier Betriebsarten werden nachfolgenden beschrieben. Die folgenden Abkürzungen werden in den Blockschaltbildern verwendet:
DCRI: Fehlerzähler–Rücksetzeingang
DCRO: Fehlerzähler–Rücksetzausgang
IC: Masse der Eingänge
OACI: Nullpunktjustierungs–Befehlseingang
OACO: Nullpunktjustierungs–Befehlsausgang
OPI: Nullpunktnähe–Eingang
OS: Nullpunktsignal
PCSI: Positionierung beendet–Eingang
PCSO: Positionierung beendet–Ausgang
PCU: Positionierbaugruppe
SMD: Schrittmotortreiber
Verwenden Sie Betriebsart 0 bei Einsatz eines Schrittmotortreibers. Ein Sensor wird mit dem Nullpunktsignal verbunden ( Anschlußnummer A14/A15,
B14, B15). Die Ansprechzeit für das Nullpunktsignal beträgt 0,1 ms. (Schließer–Kontakteinstellung)
Positionier–
baugruppe
X–Achse
IC
OS
Impulse
SMD
24 VDC
80
OPI
Page 90

Achsenparameter
4-3Kapitel
Betriebsart 1
Betriebsart 2
Verwenden Sie Betriebsart 1 bei Einsatz eines Servomotortreibers, Anschluß
eines Linientreibereingangs und eines Fehlerzähler–Rücksetzausgangs ohne
Auswertung eines Positionierung beendet–Signals. Die Ansprechzeit für den
Nullpunkt–Linientreibereingang beträgt 0,1 ms. (Schließer–Kontakteinstellung)
Positionier–
baugruppe
X–Achse
IC
OPI
OS
DCRO
Impulse
24 VDC
Servomotortreiber
Z–Phasen–
ausgang
DCRI
Verwenden Sie Betriebsart 2 bei Einsatz eines Servomotortreibers, Anschluß
eines Linientreibereingangs und eines Fehlerzähler–Rücksetzausgangs, wie
bei Betriebsart 1, aber zusätzlich mit der Auswertung des Positionierung beendet–Signals.
Positionier–
baugruppe
X–Achse
IC
Impulse
24 VDC
Servomotortreiber
Betriebsart 3
OPI
PCSI
OS
DCRO
PCSO
Z–Phasen–
ausgang
DCRI
Verwenden Sie Betriebsart 3 bei Einsatz eines Servomotortreibers und des
Nullpunktjustierungs–Befehls.
Positionier–
baugruppe
X–Achse
IC
OPI
PCSI
OACO
Impuls
24 VDC
Servomotortreiber
PCSO
OACI
Hinweis In den Verdrahtungsbeispielen für Betriebsarten 1 bis 3 wird der Servomotor-
treiber OMRON R88D verwendet. Stellen Sie den Servomotortreiber so ein,
daß das Positionierung beendet–Signal des Servomotortreibers während des
Motorbetriebs deaktiviert und bei stehenden Motor aktiviert ist. Fehlt diese
Einstellung, so ist evtl. keine Positionierung ohne das im Betriebsspeicherbereich gesetzte “Positionierung beendet”–Signal möglich.
81
Page 91

Betriebsspeicherbereich
/
ode
s
ae
eeb
4-4 Betriebsspeicherbereich
Der Betriebsspeicherbereich ist ein Teil des IR–Bereiches der SPS. Die IR–
Adressen werden durch die Baugruppennummern–Einstellung zugewiesen.
Der Betriebsspeicherbereich ist in Aus– und Eingänge unterteilt. Sich auf
Operationen beziehende Befehle werden dem Ausgangsspeicherbereich zugewiesen. Die Befehle werden an die Positionierbaugruppe gesendet, wenn
die jeweiligen Bits eingeschaltet sind oder bei der steigenden Flanke (↑),
wenn Bits aktiviert werden.
Status und Istposition der Positionierbaugruppe werden auf den Eingangsbereich übertragen. Der Betriebsdatenbereich tauscht bei jeder E/A–Auffrischung Daten mit der Positionierbaugruppe aus. Betriebsbefehle und so weiter können einfach ausgeführt werden, indem Daten an den IR–Bereich der
programmierbaren Steuerung geschrieben werden.
Hinweis Ist im Achsenparameter–Bereich die Grenzeinstellung links gleich/größer als
die Grenzeinstellung rechts und sind die Softwaregrenzen deaktiviert, ist die
Istposition “0”, wenn der Speicher– oder der Direktbetrieb ausgelöst werden.
Einzelheiten des Betriebsspeicherbereichs
4-4Kapitel
E/A Modell
Aus–
gang
NC413
NC213
NC113
Worte
X–
AchseY–AchseZ–AchseU–Achse
n
n
n
n+2
n+2
n+4 n+6 00 Speicher–
Bits Name Betrieb
betrieb
01 START Mit der steigenden Flanke (↑) dieses
02 UNABHÄN–
03 Direkt–
betrieb
Sequenz–
nummer–
Freigabe
GIGER START
ABSOLUTE
BEWEGUNG
Diese Einstellung spezifiziert die
Sequenznummer für den Start, wenn
ein START o. UNABHÄNGIGER
START ausgeführt wird. Wird ein
START oder UNABHÄNGIGER
START ausgeführt, während dieses Bit
gesetzt ist, beginnt der Betrieb mit der
Ausführung der zuwiesenen Folge, die
im Betriebs– speicherbereich
abgelegt ist.
Bits wertet START das Sequenz–
nummer–Freigabebit aus und beginnt
mit dem Speicherbetrieb.
Mit der steigenden Flanke (↑) dieses
Bits greift UNABHÄNGI– GER START
auf das Sequenznummer–
Freigabebit zu und beginnt mit dem
Speicherbetrieb.
Der Unterschied zwischen diesem
Befehl und START ist, daß der
”beendet”–Code als “Einzeln”
angesehen wird, bis auf den Fall wo
“Bankende” eingestellt ist.
Mit der steigenden Flanke (↑) dieses
Bits wird der Direktbetrieb ausgelöst,
wobei die zuwiesene Position als
Absolutposition angesehen wird.
• Ein ”Istposition unbekannt” Fehler
(Fehlercode 5040) wird generiert,
wenn ABSOLUTE BEWEGUNG verwendet wird, während der Nullpunkt
nicht definiert wurde.
• Wird erneut eine ABSOLUTE BEWEGUNG während der Achsenzustellung oder eine RELATIVE BEWEGUNG ausgeführt, wird die Zustellung in Richtung auf die spezifizierte
Position gestoppt und Zustellung in
Richtung der neu spezifizierten Position beginnt.
• Position, Geschwindigkeit und
Beschleunigungs–/Abbremszeit werden im Betriebsdatenbereich spezifiziert.
82
Page 92

Betriebsspeicherbereich
E/A BetriebNameBitsWorteModellE/A BetriebNameBits
Modell
U–
Achse
Aus–
gang
NC413
NC213
NC113
X–
Achse
n
n
n
Y–
Achse
n+2
n+2
Z–
Achse
n+4 n+6 04 Direkt–
betrieb
05 INTERRUPT–
06 NULLPUNKTSUCHE Mit der steigenden Flanke (↑) dieses
07 NULLPUNKTRÜCKKEHR Mit der steigenden Flanke (↑) dieses
08 ÄNDERE ISTPOSITION Mit der steigenden Flanke (↑) dieses
09 TIPP–Betrieb
(Geschwindigkeitzustellung)
10 Richtungsspezifikation Legt die Richtung für den TIPP–
RELATIVE
BEWEGUNG
ABARBEITUNG
Mit der steigenden Flanke (↑) dieses
Bits wird der Direktbetrieb ausgelöst,
wobei die zuwiesene Position als
relative Position angesehen wird.
• Wird erneut eine RELATIVE BEWEGUNG während der Achsenzustellung oder eine ABSOLUTE BEWEGUNG ausgeführt, wird die Zustellung in Richtung auf die spezifizierte
Position gestoppt und Zustellung in
Richtung der neuspezifizierten Position beginnt.
• Position, Geschwindigkeit und
Beschleunigungs–/Abbremszeit werden im Betriebsdatenbereich spezifiziert.
Mit der steigenden Flanke (↑) dieses
Bits beginnt die Interrupt–Abarbeitung
für den Direktbetrieb.
• Wird die INTERRUPT–ABARBEITUNG verwendet und ist der Nullpunkt nicht definiert, wird die Achsenzustellung begonnen, wobei die Istposition am Anfang der Funktion mit
“0” angenommen wird.
• Liegt die INTERRUPT–ABARBEITUNG an, wird die Istposition zur Referenzposition und die Achse wird um
den spezifizierten Betrag verfahren.
• Position, Geschwindigkeit und
Beschleunigungs–/Abbremszeit werden im Betriebsdatenbereich spezifiziert.
Bits wird eine Nullpunktsuche
ausgeführt. Die Nullpunkt–
Suchgeschwindigkeit hängt von der
Geschwindigkeitseinstellung der
Achsenparametern ab.
Bits erfolgt eine Positionierrückkehr
zum Nullpunkt. Die
Nullpunktrückkehr– Geschwindigkeit
wird im Betriebsdatenbereich
spezifiziert.
Bits wird die Istposition zwangsweise
geändert und diese neue Position als
Nullpunkt festgelegt. Die
Positionsänderung wird im
Betriebsdatenbereich spezifiziert.
Der Tipp–Betrieb wird durchgeführt,
wenn dieses Bit aktiviert wird. Die
Tipp–Geschwindigkeit wird im
Betriebsdatenbereich spezifiziert.
Betrieb oder die INTERRUPT–
ABARBEITUNG fest. (EIN:
Rechtslauf–Richtung; AUS:
Linkslauf–Richtung)
4-4Kapitel
83
Page 93

Betriebsspeicherbereich
E/A BetriebNameBitsWorteModellE/A BetriebNameBits
Modell
U–
Achse
Aus–
gang
Aus–
gang
NC413
NC213
NC113
NC413
NC213
NC113
X–
Achse
n
n
n
n+1
n+1
n+1
Y–
Achse
n+2
n+2
n+3
n+3
Z–
Achse
n+4 n+6 12 AUSGABE GESPERRT Mit der steigenden Flanke (↑) dieses
n+5 n+7 00
4-4Kapitel
11 TEACH–Betrieb Mit der steigenden Flanke (↑) dieses
13 Fehlerzähler–
Rücksetzausgang,
Nullpunktjustierungs–
Befehlsausgang
14 Übersteuerung aktiviert Dieses Bit aktiviert oder deaktiviert die
15 HALT Mit der steigenden Flanke (↑) dieses
Sequenznummer Diese Einstellung spezifiziert (in BCD)
bis
07
Bits wird der TEACH–Betrieb
ausgeführt. Wird der TEACH–Betrieb
ausgeführt, ohne das der Nullpunkt
festgelegt wurde, so wird ein
”Istposition unbekannt”– Fehler
(Fehlercode 5040) ausgelöst. Die
TEACH–Positionsnummer wird im
Betriebsdatenbereich spezifiziert.
Bits wird die Impulsausgabe–
Sperrung aufgehoben. (Siehe
Freigabe der Impulsausgabesperre.
Die Impulsausgabe wird gesperrt,
wenn die folgenden Eingangssignale
anliegen:
• Endschalter rechts oder links
• Softwaregrenze
• Notaus
In Betriebsart 0 kann dieser Ausgang
als Mehrzweckausgang verwendet
werden. (Siehe
9-9 Fehlerzähler–
9-8
)
Rücksetzausgang und Nullpunkt–
justierungs–Befehlsausgang).
1: Signal EIN; 0: Signal AUS
In den Betriebsarten 1 bis 3 werden
die Ausgänge automatisch als
Fehlerzähler–Rücksetz– und
Nullpunktjustierungs–Befehlsausgang
definiert. Sehen Sie
Kapitel 6
Spezifikation des Nullpunkts.
Übersteuerungsfunktion.
• Ist dieses Bit EIN (d.h. Übersteurung
aktiviert), wird der folgende Wert als
Geschwindigkeit verwendet:
Zustellgeschwindigkeit = (Geschwindigkeit) x Übersteuerung / 100
• Ist dieses Bit AUS (d.h. Übersteuerung deaktiviert), wird die Übersteuerung als 100% betrachtet.
Die Übersteuerung wird im
Betriebsdatenbereich spezifiziert.
Bits wird die Positionierung bis einem
Halt abgebremst. Die Ausführung von
HALT hat die folgenden Wirkungen im
Speicher– und Direktbetrieb:
• Während des Speicherbetriebs wird
das ”Warten auf Speicherbetriebs”–Bit nach Ausführung eines
HALT–Befehls aktiviert.
• Während des Direktbetriebs wird das
Abbrems–Ausführungshalt–Bit nach
Ausführung dieses Befehls aktiviert.
die erste Sequenznummer (00 bis 99),
die in einem Speicherbetrieb
auszuführen ist.
84
Page 94

Betriebsspeicherbereich
E/A BetriebNameBitsWorteModellE/A BetriebNameBits
Modell
U–
Achse
Aus–
gang
Ein–
gang
NC413
NC213
NC113
NC413
NC213
NC113
X–
Achse
n+1
n+1
n+1
n+8
n+4
n+2
Y–
Achse
n+3
n+3
n+11
n+7
Z–
Achse
n+5 n+7 13 DATEN LESEN Mit der steigenden Flanke (↑) dieses
n+14 n+17 00
4-4Kapitel
08 ERZWUNGENER
INTERRUPT
09
Reserviert –––
bis
11
12 DATEN SCHREIBEN Mit der steigenden Flanke (↑) dieses
14 DATEN SICHERN Mit der steigenden Flanke (↑) dieses
15 Reserviert –––
Ausgabecode Bei dem Speicherbetrieb wird der für
bis
03
04 Warten auf Speicherbetrieb Wird während des Speicherbetriebes
05 Positionierung beendet Wird AKTIVIERT, wenn die folgenden
06 Kein Nullpunktmerker DEAKTIVIERT, wenn der Nullpunkt
07 Nullpunkthalt–Merker AKTIVIERT, wenn am Nullpunkt
08 Zone 0 AKTIVIERT, wenn innerhalb des Zone
09 Zone 1 Entspricht in der Funktion der
Mit der steigenden Flanke (↑) dieses
Bits wird der Speicherbetrieb
zwangsweise beendet. Stattdessen
wird der Speicherbetrieb für eine
spezifizierte Sequenznummer
zwangsweise ausgeführt. (Sehen
Abschnitt
Dieser Befehl ist nur während des
Speicherbetriebes freigegeben.
Bits werden die Daten mittels einer
Datenübertragung geschrieben. Die
Y–, Z– und U–Bits werden nicht
verwendet.
Bits werden die Daten mittels einer
Datenübertragung gelesen. Die Y–, Z–
und U–Bits werden nicht verwendet.
Bits werden die Daten im Flash–
Speicher gesichert. Die Y–, Z– und
U–Bits werden nicht verwendet.
eine Positioniersequenz eingestellte
Ausgabencode ausgegeben, nachdem
die Positionierung beendet ist. (“0” am
Anfang des Speicherbetriebs.)
für einen unabhängigen Start, einen
Wartevorgang, Abbremsungs–Halt
oder Fehlerhalt AKTIVIERT.
DEAKTIVIERT bei einem
Speicherbetrieb–Start.
Operationen beendet werden.
Direkter oder Handbetrieb:
Nullpunktsuche, Nullpunktrückkehr,
absolute Bewegung, relative
Bewegung, Interrupt–Abarbeitung
Speicherbetrieb:
Speicherbetrieb beendet,
unabhängiges Ende
DEAKTIVIERT, wenn die Spannung
eingeschaltet oder der nächste
Achsenvorgang gestartet wird.
Bleibt DEAKTIVIERT, wenn ein
Notaus–Signal oder ein HALT–Befehl
während der Achsenfunktion erhalten
wird.
festgelegt wird und AKTIVIERT, wenn
der Nullpunkt noch nicht festgelegt
wurde.
angehalten wird, sonst DEAKTIVIERT.
0–Bereichs und DEAKTIVIERT, wenn
außerhalb des Bereichs, unabhängig
davon, ob der Nullpunkt definiert
wurde.
Beschreibung von Zone 0, hier jedoch
für Zone 1.
9-4 Zwangsweiser Interrupt.
)
85
Page 95

Betriebsdatenbereich
E/A BetriebNameBitsWorteModellE/A BetriebNameBits
Modell
U–
Achse
n+18
n+19
Ein–
gang
NC413
NC213
NC113
NC413
NC213
NC113
X–
Achse
n+8
n+4
n+2
n+9
n+10
n+5
n+6
n+3
n+4
Y–
Achse
n+11
n+7
n+12
n+13
n+8
n+9
Z–
Achse
n+14 n+17 13 Aktiv– Merker Wird bei Beginn eines beliebigen
n+15
n+16
4-5Kapitel
10 Zone 2 Entspricht in der Funktion der
11 TEACH–Vorgang beendet AKTIVIERT nach Ende des Teach–
12 Fehlermerker AKTIVIERT, wenn ein Fehler auftritt.
14 Datenübertragung AKTIVIERT, wenn eine Datenüber–
15 Abbremshalt–Ausführung AKTIVIERT, wenn der Achsenvorgang
00
Istposition (rechtes Wort)
bis
Istposition (linkes Wort)
15
00
bis
15
Beschreibung von Zone 0, hier jedoch
für Zone 2.
Vorgangs. DEAKTIVIERT, wenn
Spannung eingeschaltet wird oder der
Teach–Vorgang gestartet wird.
Wird DEAKTIVIERT, nach dem der
nächste Speicherbetrieb, Direktbetrieb
oder Datenschreib oder –lesevorgang
normal beendet wird.
Vorgangs AKTIVIERT und
DEAKTIVIERT, wenn der Vorgang
beendet wird. Für die Achsen stehen
die entsprechenden Aktiv–Merker zur
Verfügung.
Das X–Achsenbit wird während der
anfänglichen Verarbeitung, nach dem
Einschalten oder Neustarten der
Positionierbaugruppe AKTIVIERT und
DEAKTIVIERT, wenn die anfängliche
Verarbeiten beendet wird.
tragung oder Datenspeicherung erfolgt
und DEAKTIVIERT, wenn die Daten–
übertragung oder die Speicherung
beendet wird. DEAKTIVIERT, wenn
die Spannung wieder eingeschaltet
oder die Positionierbaugruppe
neugestartet wird. Nur das
X–Achsenbit wird freigegeben.
durch ein anliegendes Notaus–Signal
oder einen HALT–Befehl gestoppt
wird. DEAKTIVIERT, wenn der
Vorgang wieder fortgesetzt wird.
Gibt die Istposition als achtstelligen
BCD–Wert aus.
15
3
x10
15
Vorzeichen
x10
x10
2
6
1
x10
x105x10
x10
00
0
00
4
4-5 Betriebsdatenbereich
Der Betriebsdatenbereich wird über den allgemeinen Parameterbereich eingestellt. (Sehen Sie den Abschnitt
die Klassifizierung des Bereichs und des Anfangwortes definiert. Der DM–
oder EM–Bereich kann für den Betriebsdatenbereich verwendet werden.
Inhaltseinstellung
über den
Betriebsdatenbereich
86
Der Betriebsdatenbereich ist in Aus– und Eingänge unterteilt. Die Worte l bis
l+5 bilden den Ausgangs(allgemeinen)–Bereich zur Einstellung der sich auf
die Übertragungsdaten beziehenden Informationen. Die verbleibenden
Worte werden als Ausgangsbereichs–Einstellungen für Daten wie Positionen
und Geschwindigkeiten für den Direktbetrieb verwendet und als Einlesebereich für den E/A–Signalstatus von Achsen, von Sequenznummern während
des Speicherbetriebes und von Fehlercodes.
Vorzeichen: 0: pos. (Rechtslauf); 1:
neg. (Linkslauf)
4-2 Allgemeine Parameter).
Er wird durch
Page 96

Einzelheiten zu Positioniersequenzen
Der Betriebsdatenbereich tauscht Daten mit der Positionierbaugruppe während jeder E/ A–Auffrischung aus. Somit können Daten wie Positionen und
Geschwindigkeiten für den Direktbetrieb einfach an die Positionierbaugruppe
übertragen werden, indem Informationen in den DM– oder EM–Bereich der
SPS geschrieben wird.
4-6Kapitel
Inhalt des
Betriebsdatenbereich
Sehen Sie die
bezüglich des Inhalts der Betriebsdatenbereiche.
Betriebsdatenbereichs–Tabelle
4-6 Einzelheiten zu Positioniersequenzen
In diesem Abschnitt wird das Format und die Einstellungen von Positioniersequenzen beschrieben. Positioniersequenzen werden bei dem Start des
Speicherbetrieb von der SPS spezifiziert. Zusätzlich werden Daten definiert,
die für die Positionierung erforderlich sind, wie die Zielgeschwindigkeits–
Nummer, Beschleunigungs–/Abbrems–Nummer und so weiter.
Hinweis Bei vorhergehenden Positionierbaugruppen wurden Daten wie z. B. Zielge-
schwindigkeit, Beschleunigungs–/Abbremszeit und so weiter für “Positioniervorgänge”, die die Grundeinheit des Positionierens bildeten, spezifiziert. Bei
den Positionierbaugruppen C200HW–NC113/NC213/NC413 werden jedoch
die Positionsdaten unabhängig eingestellt. Diese Baugruppen wurden so
konzipiert, daß die verwendete Positionsnummer der Nummer der gestarteten Sequenz entspricht. Wird zum Beispiel START für die Sequenz–Nr. 50
ausgeführt, so wird die Positionierung unter Anwendung der Positionsdaten
für Positionsnummer 50 durchgeführt. Diese Positioniersequenz kann wieder verwendet werden, wobei nur die Position geändert wird und alle anderen Dateneinstellungen unverändert übernommen werden.
Sequenzformat
Jede Positioniersequenz wird über drei Worte konfiguriert, wie es nachfolgend dargestellt ist. Bis zu 100 dieser Sequenzen können für jede Achse definiert und an die Positionierbaugruppe übertragen und auf dieser gespeichert werden.
auf Seite 62 für Einzelheiten
Achsenbezeichnung
Hinweis Bei Einstellung der Sequenzdaten mit der Sysmac–NCT Programmiersoft-
Lineare Interpolation
15 00
Achsenbezeichnung Ausgabecode 0 Endcode
1000
Verweilzeit–Nr. Beschleunig.zeit–Nr. Abbremszeit–Nr.
1001
Anfangsgeschwindigkeits–Nr. Zielgeschwindigkeits–Nr.
1002
12 11 08 07 04 03
Um die zu startenden Achsen zu bestimmen, werden die entsprechenden
Bits auf “1” gesetzt. Folgende Konfiguration gilt:
Bit 14 13
15 12
U–Achse Z–Achse Y–Achse X–Achse
Stellen Sie zum Beispiel diese Bits auf “0001” ein, um nur die X–Achse zu
starten. Stellen Sie diese Bits auf “0101” ein, um die X– und Z–Achsen mit
linearer Interpolation zu starten.
ware kann jeweils nur eine Sequenznummerndefinition vorgenommen werden. Ein Achsenzuweisungsfehler tritt auf, falls mehr als eine Sequenznummer zugewiesen wird.
Ein Achsenzuweisungsfehler könnte auftreten bei:
Achsenzuweisung von ”XY” zu der X–Achse von Sequenz–Nr. 100
Achsenzuweisung von ”Y” zu der Y–Achse von Sequenz–Nr. 100
Werden zwei oder mehrere Achsen über die “Achsenbezeichnungs”–Einstellung ausgewählt, so werden die spezifizierten Achsen zusammen für eine
lineare Interpolation verwendet. Die Zielgeschwindigkeits–Einstellung für die
87
Page 97

Einzelheiten zu Positioniersequenzen
ae
ode
s
zu startende Positioniersequenz bestimmt die Interpolationsgeschwindigkeit.
Wird zum Beispiel eine lineare Interpolation mit den X– und Y–Achsen ausgeführt so ergeben sich die folgenden Geschwindigkeiten für jede Achse:
4-6Kapitel
Ausgabecode
Name Modell
Ausgabecode NC413
NC213
NC113
Y–Achse
Startpunkt
Interpolations–Endpunkt
v: Interpolationsgeschwindigkeit
vx: X–Achsengeschwindigkeit
vy: Y–Achsengeschwindigkeit
X–Achse
Die “Ausgabecode”–Einstellung spezifiziert, daß ein Ausgabecode von 0 bis
F (hexadezimal) beim Speicherbetrieb nach der beendeten Positionierung
ausgegeben wird.
Betriebsspeicherbereich
X–Achse Y–Achse Z–Achse U–Achse
n+8
n+4
n+2
n+11
n+7
n+14 n+17 00 bis 03
Bits
Wird Sequenznummer “1” aktiviert, so ist der Ausgabecode “0”, wenn der
Speicherbetrieb gestartet wird (durch START oder UNABHÄNGIGER
START).
Beispiel
Sequenz–Nr. 0: Fortlaufende Beendigung (Ausgabecode: 2)
Sequenz–Nr. 1: Einzelne Beendigung (Ausgabecode: 4)
Sequenz–Nr. 2: Pausen–Beendigung (Ausgabecode: 6)
Sequenz–Nr. 3: Bankende–Beendigung (Ausgabecode: 8)
Sequenznummer
Sequenz–Nr.
aktivieren
START
Geschwindigkeit
Impulsausgang
Sequenz–Nr. 0
Positionierung
beendet
Ausgabecode
Aktiv
Warten auf den
Speicherbetrieb
Endcode
Code Name Beschreibung Betrieb
Die sieben Endcodes werden nachfolgend beschrieben.
Sequenz–Nr. 1 Sequenz–Nr. 2
Verweilzeit
2
Se–
quenz–
Nr. 3
Zeit
88
Page 98

Einzelheiten zu Positioniersequenzen
Code BetriebBeschreibungName
0 Einzeln Die Sequenz wird ausgeführt. Die
Positionierung wird angehalten, bis
START für die nächste Sequenz
ausgeführt wird.
1 Pause Die Sequenz wird ausgeführt. Die
Positionierung wird für die Dauer der
Verweilzeit unterbrochen, bevor die
nächste Sequenz automatisch gestartet
wird.
Anfangs–
geschwin–
digkeit
Zielgeschwindigkeit
Abbremsung
Mit Anfangs–
Beschleu–
nigung
START Zielstellung
Zielgeschwindigkeit
geschwindigkeit
abgebremst
4-6Kapitel
Zeit
2 Fortlaufend Die Sequenz wird ausgeführt. Die
3 Bankende Die Positionierung wird nach der
4 Geschwindigkeits–
gesteuert
5 Interrupt–Abarbeitung
(Vorwärtsrichtung)
Positionierung wird dann mit der
nächsten Sequenz fortgesetzt, ohne an
der Zielposition anzuhalten. (Wird
jedoch eine Verweilzeit festgesetzt,
dann wird die Positionierung für die
Dauer der Verweilzeit unterbrochen.)
Beendigung angehalten. Wird START
als nächstes ausgeführt, beginnt die
Positionierung wieder mit der Sequenz,
die über “Sequenznummer” spezifiziert
und freigegeben ist.
Die “Geschwindigkeitssteuerung” ist der
“Fortlaufenden Ausgabe” früherer
Positionierbaugruppen ähnlich. Die
Impulsausgabe wird mit der für die
Sequenz eingestellten Geschwindigkeit
fortgesetzt. Die Istposition wird sogar
während der fortlaufenden Ausgabe
errechnet. Die Richtung der
Impulsausgabe wird bei der Einstellung
der Positionsdaten durch das
“Vorzeichen” bestimmt. Verwenden Sie
den HALT–Befehl, um die
Impulsausgabe zu stoppen.
Die Interrupt–Abarbeitung“ ist der
“Positionierung mit fortlaufender
Ausgabe” in vorhergehenden
Positionierbaugruppen ähnlich. Die
Impulsausgabe wird mit der für die
Sequenz eingestellten Geschwindigkeit
vorgenommen. Die Richtung der
Impulsausgabe wird bei der Einstellung
der Positionsdaten durch das
“Vorzeichen” bestimmt. Nach einer
Interrupt–Abarbeitung wird die Achse
von der Eingangsposition um einen
spezifizierten Betrag in der gleichen
Richtung wie die Impulsausgabe bewegt
und dann gestoppt.
START
Nächste Sequenz gestartet
Zielgeschwindigkeit
START
Hinweis Die Anfangsgeschwindigkeit wird am
Zielposition passiert ohne zu stoppen.
Zielgeschwindigkeit
START
Zielgeschwindigkeit
START
Ende verwendet.
Zielgeschwindigkeit
START
Interrupt–Eingang
Verweilzeit
Zielgeschwindigkeit für
nächste Sequenz
Positionierung
angehalten
HALT
Zeit
Zeit
Zeit
Zeit
Positionierung
angehalten
Spezifizier–
ter Wert der
Bewegung
Zeit
89
Page 99

Einstellung von Daten über die Programmiersoftware SYSMAC–NCT
Code BetriebBeschreibungName
6 Interrupt–Abarbeitung
(Rückwärtsrichtung)
Nach einer Interrupt–Abarbeitung wird
die Achse von der Eingangsposition um
einen spezifizierten Betrag in der
umgekehrten Richtung wie die
Impulsausgabe bewegt und dann
gestoppt.
Der Rest dieser Beschreibung
entspricht der der obenstehenden
Interrupt–Abarbeitung in
Vorwärtsrichtung.
Zielgeschwindigkeit
START
Spezifizierter Wert der Bewegung in umgekehrter
Richtung der Achsenzustellrichtung
4-7Kapitel
Interrupt–Eingang
Unmittelbare
Umkehrung
Zeit
Verweilzeitnummer
Beschleunigungs– und
Abbremszeit–Nummern
Anfangsgeschwin–
digkeits– und
Zielgeschwindigkeits–
Nummern
Diese Einstellung spezifiziert die Verweilzeitnummern von 00 bis 19 (BCD).
Die Einstellwerte haben folgende Bedeutung:
00: Verweilzeit wird nicht verwendet.
01 bis 19: Zuweisung der Verweilzeitnummern 1 bis 19.
Die Verweilzeit kann im Bereich von 0,01 s bis 9,99 s eingestellt werden (Einheit: 0.01 s). Das Zeitverhalten des nächsten Starts nach dem Ablauf der
Verweilzeit unterscheidet sich je nach der verwendeten Betriebsart.
Betriebsart 0 oder 1
Der nächste Vorgang wird nach Beendigung der Impulsausgabe und nach
Ablauf der spezifizierte Verweilzeit aktiviert.
Betriebsart 2 oder 3
Der nächste Vorgang beginnt nach Ablauf der spezifizierten Verweilzeit.
Diese Verweilzeit wird nach dem Anliegen des Positionierung beendet–Signals des Servomotortreibers und nach Abschluß der Impulsausgabe aktiviert.
Diese Einstellungen spezifizieren die Beschleunigungs– und Abbremszeiten
für die Impulsausgabe durch Angabe der Nummern von 1 bis 9 (BCD). Wird
eine der beiden auf “0” eingestellt, so wird die Beschleunigungs–/Abbremszeit–Einstellung im Achsenparameter–Bereich verwendet.
Diese Einstellungen spezifizieren die Anfangs– und Zielgeschwindigkeit für
die Impulsausgabe durch Eingabe eines Wertes zwischen 00 bis 99 (BCD).
4-7 Einstellung von Daten über die Programmiersoftware
SYSMAC–NCT
Wird die Positionierbaugruppe in einer C200HX/HG/HE installiert, können
Daten einfach mittels der Programmiersoftware SYSMAC–NCT eingestellt
werden. Die Programmiersoftware SYSMAC–NCT kann zur Einstellung,
Übertragung, Speicherung von Daten und zur Überwachung des Status der
Positionierbaugruppe verwendet werden.
90
Sehen Sie das
SYSMAC–NCT
Einzelheiten bezüglich der Anwendung der SYSMAC–NCT Programmiersoftware.
Hinweis Positionierbaugruppen, bei den die Programmiersoftware SYSMAC–NCT zur
Übertragung und Speicherung von Daten und zur Überwachung des Positionierbaugruppen–Status verwendet wird müssen in den CPU– oder Erweiterungs–E/A–Baugruppenträger installiert werden. Auf eine Positionierbaugruppe, die in einem dezentralen E/A–Slave–Baugruppenträger installiert ist,
kann nicht zugegriffen werden.
Programmiersoftware–Handbuch
(W324)
für
Page 100

KAPITEL 5
Übertragung und Speicherung von Daten
Dieses Kapitel enthält zum Betrieb des Motors erforderliche Informationen. Es beschreibt die Übertragung und Speicherung von Parametern und Daten.
5-1 Übertragung und Speicherung von Daten 92. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2 Schreiben von Daten mit dem DATEN SCHREIBEN–Bit 95. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-1 Beschreibung 96. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-2 Zeitdiagramm zum Schreiben von Daten 97. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-2-3 Beispiel eines Programms zum Schreiben von Daten 97. . . . . . . . . . . . . . . . . . . . . . . . .
5-3 Lesen von Daten mit dem DATEN LESEN–Bit 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3-1 Beschreibung 99. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3-2 Zeitdiagramm zum Lesen von Daten 100. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-3-3 Beispiel eines Programms zum Lesen von Daten 101. . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4 Schreiben von Daten mit IOWR 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-1 Beschreibung 103. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-2 Befehlsspezifikationen 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-3 Verwendete Merker 104. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-4 Sicherheitsmaßnahmen für den Einsatz von IOWR 105. . . . . . . . . . . . . . . . . . . . . . . . . . .
5-4-5 IOWR–Programmbeispiel 105. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5 Lesen von Daten mit IORD 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-1 Beschreibung 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-2 DATEN LESE–Verfahren 106. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-3 Befehlsspezifikationen 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-4 Verwendete Merker 107. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-5-5 Sicherheitsmaßnahmen, wenn man IORD verwendet 108. . . . . . . . . . . . . . . . . . . . . . . . .
5-5-6 IORD–Programmbeispiel 108. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-6 Erstellung und Übertragung von Daten mittels der Programmiersoftware 109. . . . . . . . . . . . . . . .
5-7 Sicherung von Daten 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-1 Flash–Speicher 110. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-2 Datensicherungs–Vorgang 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5-7-3 Zeitdiagramm zum Sichern von Daten 111. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
 Loading...
Loading...