

Page 1
R88D-KN@@@-ML2, R88D-KT@
Accurax G5 servo drive
Accurate motion control in a compact size
servo drive family. MECHATROLINK-II
motion bus and safety built-in.
• MECHATROLINK-II and Analog/ Pulse servo drive
models
• Safety conforming ISO13849-1 Performance Level
D
• High-response frequency of 2 kHz
• High resolution serial encoder for greater accuracy
provided by 20 bits encoder
• External encoder input for full close loop
• Real time auto-tuning
• Advanced tuning algorithms (Anti-vibration function,
torque feedforward, disturbance observer)
Ratings
• 230 VAC Single-phase 100 W to 1.5 kW (8.59 Nm)
• 400 VAC three-phase 600 W to 5 kW (28.7 Nm)
AC Servo systems
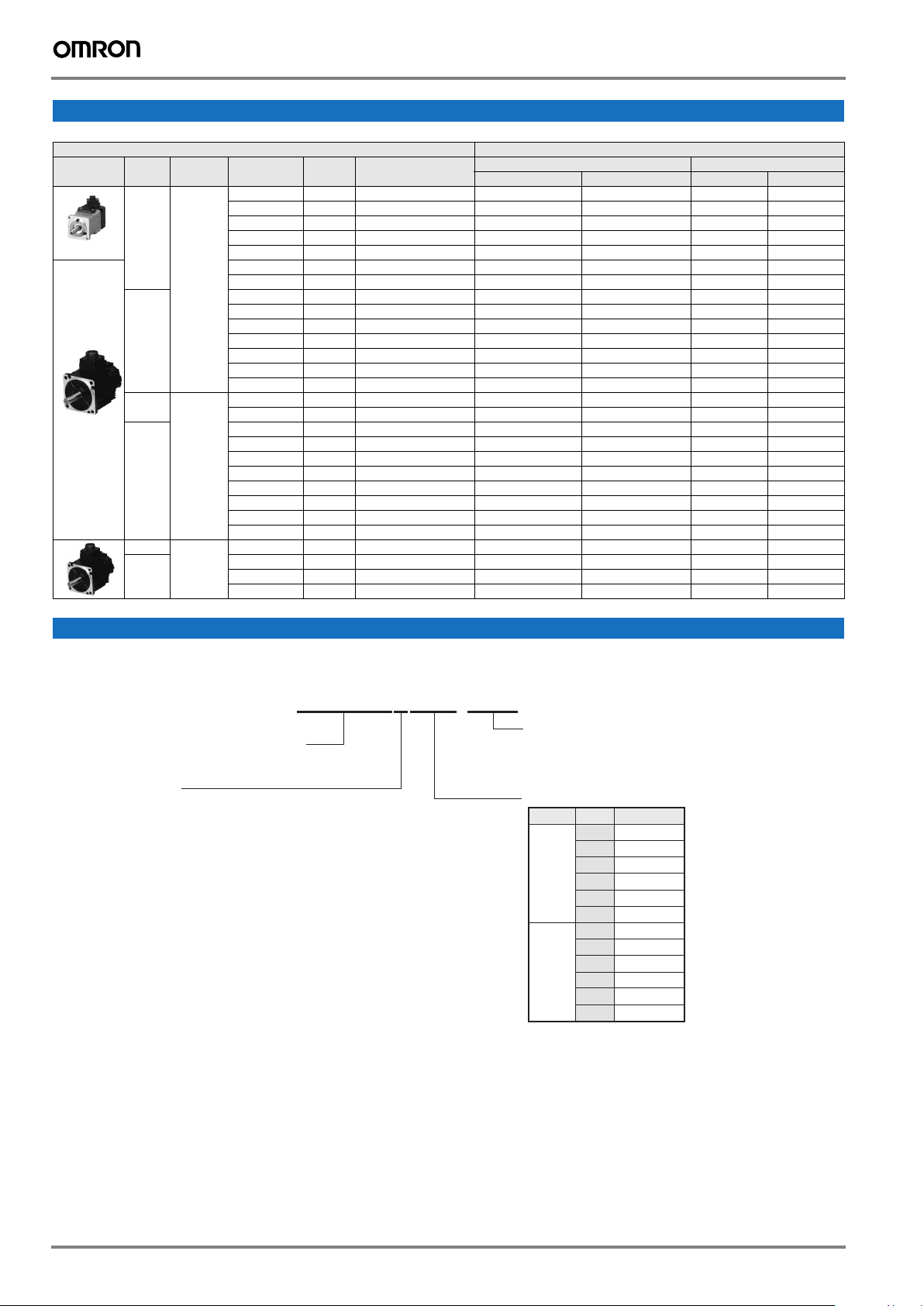
System configuration
MECHATROLINK-II control
TJ1-MC04/16
R88D-KN -ML2
Power cable
Encoder cable
CJ1W-MCH72
CJ1W-NCF71
MECHATROLINK-II
Open Analog/pulse control
Accurax G5 Analog/pulse
Servo Drive
Personal computer
software: CX-One
Accurax G5 ML-II Servo Drives
Terminator
R88D-KN -ML2
Servo Motor
3000 rpm (50 W-5 kW)
Servo Motor
2000 rpm (400 W-5 kW)
Servo Motor
1000 rpm (900 W-3 kW)
Power cable
Encoder cable
R88D-KT
Motion control unit
General purpose cable
Te rm i n al block
for Ser vo drive I/O
general purpose
signals
Unit
Personal computer :
Software CX-One
Position control unit
61Accurax G5 servo drive
Page 2
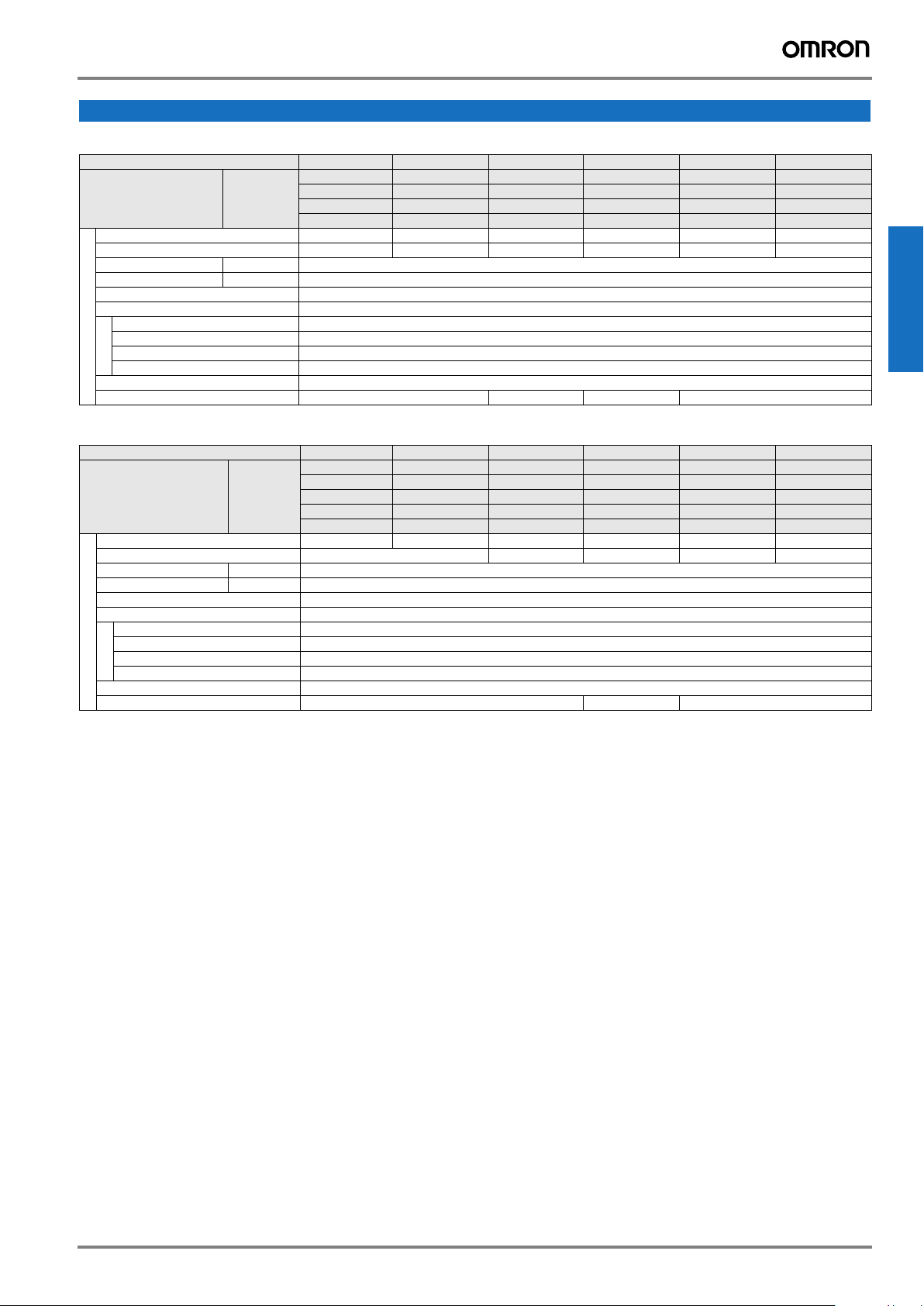
Servo motor supported
Voltage Speed Rated torque Capacity Model MECHATROLINK-II model Analog/Pulse model
230 V 3000 min
400 V 2.39 Nm 750 W R88M-K75030(F/C)-@ - R88D-KN10F-ML2 - R88D-KT10F
230 V 2000 min
400 V 1.91 Nm 400 W R88M-K40020(F/C)-@ - R88D-KN06F-ML2 - R88D-KT06F
230 V 1000 min
400 V 8.59 Nm 900 W R88M-K90010(F/C)-@ R88D-KN15F-ML2 - R88D-KT15F
Accurax G5 rotary servo motor Accurax G5 servodrive
-1
0.16 Nm 50 W R88M-K05030(H/T)-@ R88D-KN01H-ML2 - R88D-KT01H -
0.32 Nm 100 W R88M-K10030(H/T)-@ R88D-KN01H-ML2 - R88D-KT01H -
0.64 Nm 200 W R88M-K20030(H/T)-@ R88D-KN02H-ML2 - R88D-KT02H -
1.3 Nm 400 W R88M-K40030(H/T)-@ R88D-KN04H-ML2 - R88D-KT04H -
2.4 Nm 750 W R88M-K75030(H/T)-@ R88D-KN08H-ML2 - R88D-KT08H -
3.18 Nm 1000 W R88M-K1K030(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
4.77 Nm 1500 W R88M-K1K530(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
3.18 Nm 1000 W R88M-K1K030(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
4.77 Nm 1500 W R88M-K1K530(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
6.37 Nm 2000 W R88M-K2K030(F/C)-@ - R88D-KN20F-ML2 - R88D-KT20F
9.55 Nm 3000 W R88M-K3K030(F/C)-@ - R88D-KN30F-ML2 - R88D-KT30F
12.7 Nm 4000 W R88M-K4K030(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
15.9 Nm 5000 W R88M-K5K030(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
-1
4.77 Nm 1000 W R88M-K1K020(H/T)-@ R88D-KN10H-ML2 - R88D-KT10H -
7.16 Nm 1500 W R88M-K1K520(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
2.86 Nm 600 W R88M-K60020(F/C)-@ - R88D-KN06F-ML2 - R88D-KT06F
4.77 Nm 1000 W R88M-K1K020(F/C)-@ - R88D-KN10F-ML2 - R88D-KT10F
7.16 Nm 1500 W R88M-K1K520(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
9.55 Nm 2000 W R88M-K2K020(F/C)-@ - R88D-KN20F-ML2 - R88D-KT20F
14.3 Nm 3000 W R88M-K3K020(F/C)-@ - R88D-KN30F-ML2 - R88D-KT30F
19.1 Nm 4000 W R88M-K4K020(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
23.9 Nm 5000 W R88M-K5K020(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
-1
8.59 Nm 900 W R88M-K90010(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
19.1 Nm 2000 W R88M-K2K010(F/C)-@ R88D-KN30F-ML2 - R88D-KT30F
28.7 Nm 3000 W R88M-K3K010(F/C)-@ R88D-KN50F-ML2 - R88D-KT50F
230V 400V 230V 400V
Type designation
Servo drive
Accurax G5 Series servo drive
Drive Type
T: Analog/pulse type
N: Network type
R88D-KN01H-ML2
Model
Blank: Analog/pulse type
ML2: MECHATROLINK-II comms
Capacity and Voltage
Vol tage Code
01H
02H
04H
230 V
08H
10H
15H
06F
10F
15F
400 V
20F
30F
50F
Output
100 W
200 W
400 W
750 W
1 kW
1.5 kW
600 W
1.0 kW
1.5 kW
2.0 kW
3.0 kW
5.0 kW
62 AC servo systems
Page 3
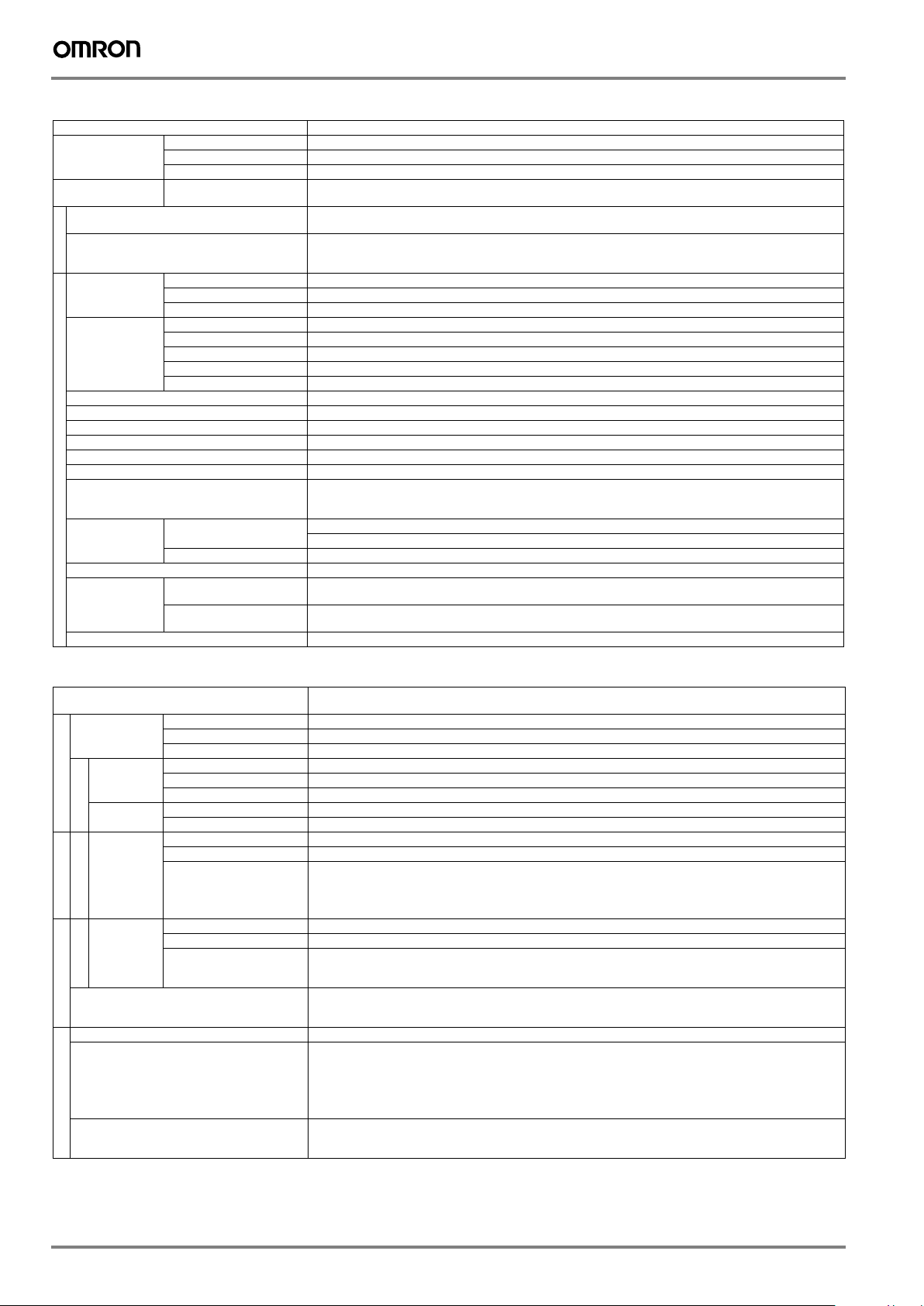
Servo drive specifications
Single-phase, 230 V
Servo drive type R88D-K@ 01H@ 02H@ 04H@ 08H@ 10H@ 15H@
Applicable
servo motor
Max. applicable motor capacity W 100 200 400 750 1000 1500
Continuous output current Arms 1.2 1.6 2.6 4.1 5.9 9.4
Input power Main circuit Single-phase/3-phase, 200 to 240 VAC + 10 to -15% (50/60 Hz)
Supply Control circuit Single-phase, 200 to 240 VAC + 10 to -15% (50/60 Hz)
Control method IGBT-driven PWM method, sinusoidal drive
Feedback Serial encoder (incremental/absolute value)
Usage/storage temperature 0 to +55°C / -20 to 65°C
Usage/storage humidity 90% RH or less (non-condensing)
Altitude 1000m or less above sea level
Basic specifications
Vibration /shock re sista nce (max. ) 5.88 m /s
Conditions
Configuration Base mounted
Appr ox. weight Kg 0.8 1.1 1.6 1.8
R88M-K@ 05030(H/T)@ 20030(H/T)@ 40030(H/T)@ 75030(H/T)@ 1K020(H/T)@ 1K030(H/T)@
10030(H/T)@ - - - - 1K530(H/T)@
- - - - - 1K520(H/T)@
- - - - - 90010(H/T)@
2
10-60 Hz (Continuous operation at resonance point is not allowed) / 19.6 m/s
2
AC Servo systems
Three-phase, 400 V
Servo drive type R88D-K@ 06F-@ 10F-@ 15F-@ 20F-@ 30F-@ 50F-@
Applicable
servo motor
Max. applicable motor capacity kW 0.6 1.0 1.5 2.0 3.0 5.0
Continuous output current Arms 2.9 4.7 6.7 9.4 16.5
Input power Main circuit 3-phase, 380 to 480 VAC + 10 to -15% (50/60Hz)
Supply Control circuit 24 VDC ±15%
Control method IGBT-driven PWM method, sinusoidal drive
Feedback Serial encoder (incremental/absolute value)
Usage/storage temperature 0 to +55°C / -20 to +65°C
Usage/storage humidity 90% RH or less (non-condensing)
Altitude 1000 m or less above sea level
Basic specifications
Vibration/shock resistance 5.88 m/s
Conditions
Configuration Base mounted
Ap prox. wei ght Kg 1. 9 2. 7 4. 7
R88M-K@ 40020(F/C)-@ 75030(F/C)-@ 1K030(F/C)-@ 2K030(F/C)-@ 3K030(F/C)-@ 4K030(F/C)-@
60020(F/C)-@ 1K020(F/C)-@ 1K530(F/C)-@ 2K020(F/C)-@ 3K020(F/C)-@ 5K030(F/C)-@
- - 1K520(F/C)-@ - 2K010(F/C)-@ 4K020(F/C)-@
- - 90010(F/C)-@ - - 5K020(F/C)-@
- - - - - 3K010(F/C)-@
2
10-60 Hz (Continuous operation at resonance point is not allowed) / 19.6 m/s
2
Accurax G5 servo drive 63
Page 4
General specifications (for MECHATROLINK-II servo drives)
Control mode Position control, velocity control, torque control, full-closed control.
Performance Frequency characteristics 2 kHz
Command input MECHATROLINK-II
Sequence input signal - Multi-function input x 8 by parameter setting (forward/reverse drive prohibition, emergency stop, external latch,
Sequence output signal It is possible to output three types of signal form incl.: brake release, servo ready, servo alarm, positioning com-
I/O signal
USB
communications
MECHATROLINKII communications
Automatic load inertia detection Automatic motor parameter setting. One parameter rigidity setting.
Dynamic brake (DB) Built-in. Operates during main power OFF, servo alarm, servo OFF or overtravel.
Regenerative processing Internal resistor included in models from 600 W to 5 kW. Regenerative resistor externally mounted (option).
Overtravel (OT) prevention function DB stop, deceleration stop or coast to stop during P-OT, N-OT operation
Encoder divider function Optional division possible
Protective functions Overcurrent, overvoltage, undervoltage, overspeed, overload, encoder error, overheat...
Analog monitor functions for supervision Analog monitor of motor speed, speed reference, torque reference, command following error, analog input...
Integrated functions
Panel operator Display functions 2-digit 7-segment LED display shows the drive status, alarm codes, parameters...
CHARGE lamp Lits when the main circuit power supply is turned ON.
Safety terminal Functions Safety Torque OFF function to cut off the motor current and stop the motor. Output signal for failure monitoring
External encoder feedback Serial signal and line-driver A-B-Z encoder for full-close control
Speed zero clamp Preset velocity command can be clamped to zero by the speed zero clamp input.
soft start time setting 0 to 10 s (acceleration, deceleration can be set separately).
communication
Interface Personal computer/ Connector mini-USB
Communications standard Compliant with USB 2.0 standard
Function Parameter setting and status monitoring
Communications protocol MECHATROLINK-II
Station address 41H to 51 FH (max. number of slaves: 30)
Tranmission speed 10 Mbps
Transmission cycle 1, 2 & 4 ms
Data length 32 bytes
Switches 2 x rotary switches for setting the MECHATROLINK-II node address
Conformed standards EN ISO13849-1:2008 (PL- d, Performance Level d), IEC61800-5 -2:2007 (function STO, Safe Torque OFF),
MECHATROLINK-II commands (for sequence, motion, data setting/reference, monitor, adjustment and other
commands)
origin proximity, forward/reverse torque limit, general purpose monitor input).
plete, motor rotation speed detection, torque limit detection, zero speed detection, speed coincidence detection,
warning, position command status, speed limit detection, alarm ouput, speed command status.
The monitoring signals to output and their scaling can be specified with parameters.
Number of channels: 2 (Output voltage: ±10V DC)
MECHATROLINK-II communications status LED indicator (COM)
function.
EN61508:2001 (Safety Integrity Level 2, SIL2), EN954-1:1996 (CAT3).
General specifications (for analog/pulse servo drives)
Control mode 7 modes selectables by parameter: (1) position control, (2) velocity control, (3) torque control, (4) position/velocity
Performance Frequency characteristics 2 kHz
Speed control Speed reference voltage 6 VDC at rated speed: set at delivery (the scale and polarity can be set by parameters)
Torque control Torque reference voltage 3 VDC at rated torque: set at delivery (the scale and polarity can be set by parameters).
Input signal
Speed/torque control
Command
pulse
Input signal
Position control
Command
pulse
Input signal
External encoder scaling Applicable scaling ratio: 1/20 - 160
Full-closed control
Position signal output A-phase, B.phase, Z-phase line driver output and Z-phase open-collector output.
Sequence input signal - Multi-function input x 10 by parameter setting (servo ON, control mode switching, forward/reverse drive prohi-
I/O signal
Sequence output signal It is possible to output four types of signal form incl.: brake release, servo ready, servo alarm, positioning com-
Speed zero clamp Preset velocity command can be clamped to zero by the speed zero clamp input.
Soft start time setting 0 to 10 s (acceleration, deceleration can be set separately). S-curve acceleration/deceleration is also available.
Torque limit 3 VDC at rated torque (torque can be limited separately in positive/negative direction).
Preset speed control Preset speed is selectable from 8 internal settings by digital inputs.
Speed limit Speed limit can be set by parameter.
Input pulse type Sign + pulse train, 90° phase displacement 2-phase pulse (A-phase+ B-phase) or CCW/CW pulse train
Input pulse frequency 4 Mpps max. (200 Kpps max. at open collector).
Command pulse scaling
(Electronic Gear)
Input pulse type Sign + pulse train, 90° phase displacement 2-phase pulse (A-phase+ B-phase) or CCW/CW pulse train
Input pulse frequency 4 Mpps max. (200 Kpps max. at open collector).
Command pulse scaling
(Electronic Gear)
control, (5) position/torque control, (6) velocity/torque control and (7) full-closed control.
Applicable scaling ratio: 1/1000 - 1000
Any value of 1-2
per motor revolution). The combination has to be within the range shown above.
Applicable scaling ratio: 1/1000 - 1000
Any value of 1-2
The combination has to be within the range shown above.
Any value of 1-2
per motor revolution). The combination has to be within the range shown above.
bition, vibration filter switching, gain switching, electronic gear switching, error counter reset, pulse prohibition,
alarm reset, internal speed selection, torque limit switching, zero speed, emergency stop, inertia ratio switching,
velocity/torque command sign).
- Dedicated input x 1 (SEN: sensor ON, ABS data request).
plete, motor rotation speed detection, torque limit detection, zero speed detection, speed coincidence detection,
warning, position command status, speed limit detection, speed command status.
30
can be set for numerator (encoder resolution) and denominator (command pulse resolution
30
can be set for numerator (encoder resolution) and denominator (command pulse resolution).
30
can be set for numerator (encoder resolution) and denominator (external encoder resolution
64 AC servo systems
Page 5
USB
Communications
Interface Personal computer/ Connector mini-USB
Communications standard Compliant with USB 2.0 standard
Function Parameter setting and status monitoring
Automatic load inertia detection Automatic motor parameter setting. One parameter rigidity setting.
Dynamic brake (DB) Built-in. Operates during main power OFF, servo alarm, servo OFF or overtravel.
Regenerative processing Internal resistor included in models from 600 W to 5 kW. Regenerative resistor externally mounted (option).
Overtravel (OT) prevention function DB stop, deceleration stop or coast to stop during P-OT, N-OT operation
Encoder divider function Optional division possible
Electronic gearing (Numerator/Denominator) Up to 4 electronic gear numerators by combining with inputs.
Internal speed setting function 8 speeds may be set internally
Protective functions Overcurrent, overvoltage, undervoltage, overspeed, overload, encoder error, overheat...
Analog monitor functions for supervision Analog monitor of motor speed, speed reference, torque reference, command following error, analog input...
The monitoring signals to output and their scaling can be specified by parameters.
Number of channels: 2 (Output voltage: ±10V DC)
Panel operator Display functions 6-digit 7-segment LED display shows the drive status, alarm codes, parameters...
Integrated functions
Panel operator keys Used to set/monitor parameters and drive condition (5 key switches).
CHARGE lamp Lits when the main circuit power supply is turned ON.
Safety terminal Functions Safety torque OFF function to cut off the motor current and stop the motor. Output signal for failure monitoring
Conformed standards EN ISO13849-1:2008 (PL- d, Performance Level d), IEC61800-5 -2:2007 (function STO, Safe Torque OFF),
function.
EN61508:2001 (Safety Integrity Level 2, SIL2), EN954-1:1996 (CAT3).
External encoder feedback Serial signal and line-driver A-B-Z encoder for full-close control
Expansion connector Serial bus for option board
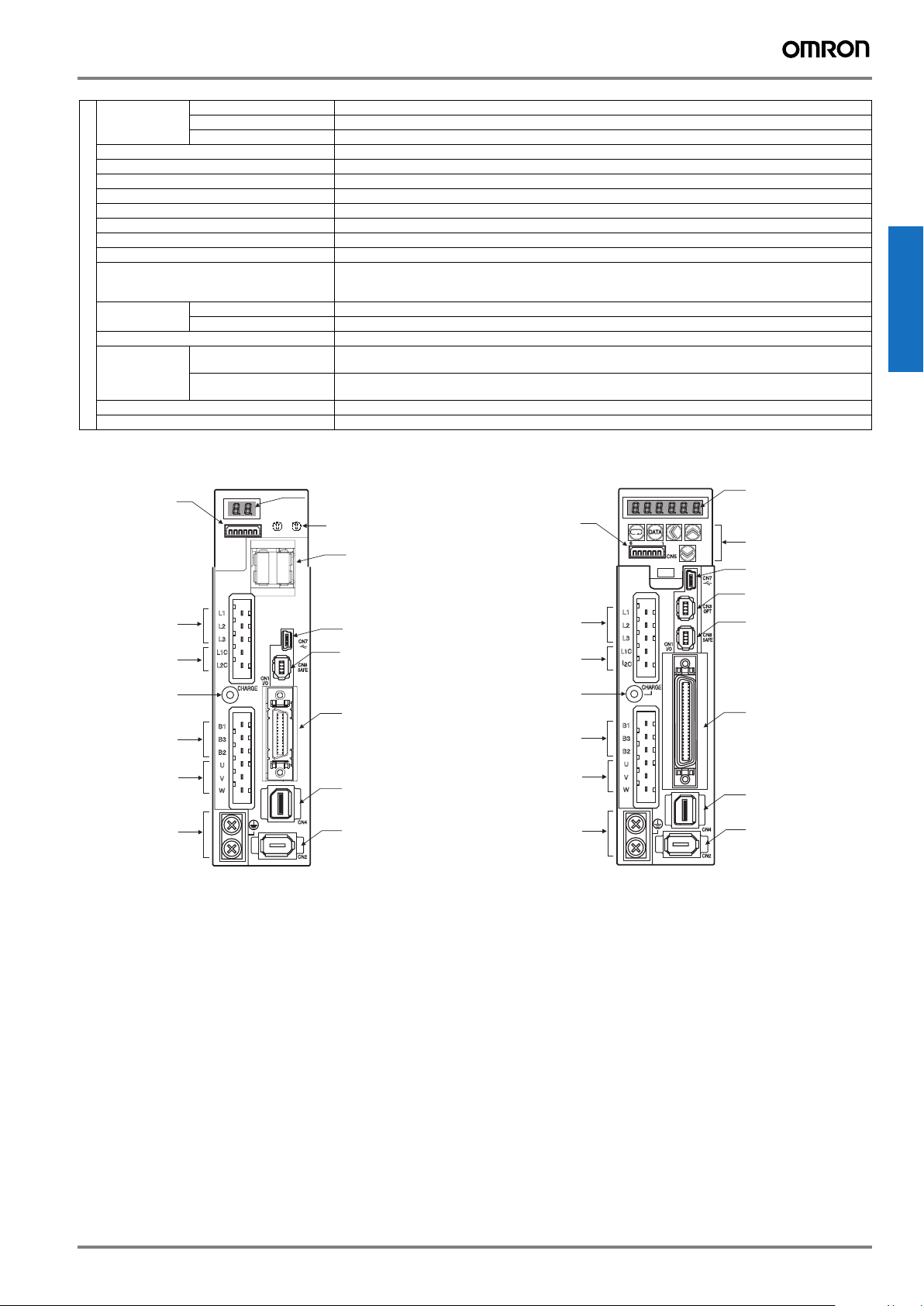
Servo drive part names
AC Servo systems
Monitor connector (CN5)
Main circuit
power supply terminals
(L1, L2, and L3)
Control circuit
power supply terminals
(L1C and L2C)
Charge lamp
External Regeneration
Resistor connection
terminals (B1, B2 and B3)
Motor connection
terminals (U, V and W)
Protective ground terminals
Display area
Address number switches
MECHATROLINK-II connector (CN6)
USB connector (CN7)
Safety connector (CN8)
Control I/O connector (CN1)
- 26 pins-
External encoder connector (CN4)
Encoder connector (CN2)
Monitor connector (CN5)
Main circuit
power supply terminals
(L1, L2, and L3)
Control circuit
power supply terminals
(L1C and L2C)
Charge lamp
External Regeneration
Resistor connection
terminals (B1, B2 and B3)
Motor connection
terminals (U, V and W)
Protective ground terminals
MECHATROLINK-II servo drives Analog/pulse servo drives
Display area
Operation area
USB connector (CN7)
Expansion connector (CN3)
Safety connector (CN8)
Control I/O connector (CN1)
- 50 pins -
External encoder connector (CN4)
Encoder connector (CN2)
Note: the above pictures show 230 V servo drives models only. The 400 V servo drives have 24 VDC power input terminals for control circuit
instead of L1C and L2C terminals.
Accurax G5 servo drive 65
Page 6
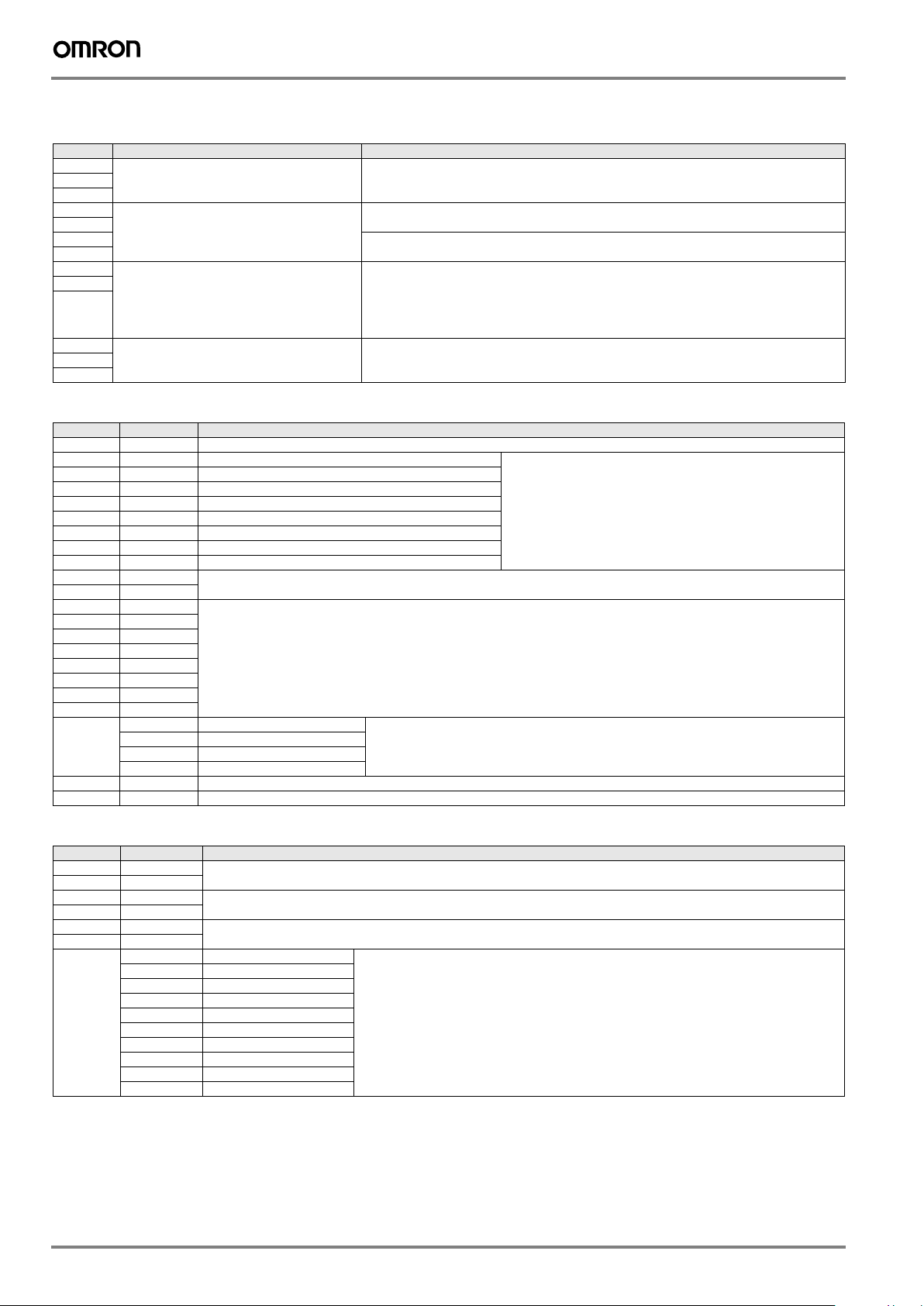
I/O specifications
Terminals specifications (for all drives)
Symbol Name Function
L1 Main power supply input terminal AC power input terminals for the main circuit
L2
L3
L1C Control power supply input terminal AC power input terminals for the control circuit
L2C
24 V DC power input terminals for the control circuit
0 V
B1 External regeneration resistor connection terminals Servo drives below 750W: no internal resistor is connected. Leave B2 and B3 open.
B2
B3
U Servo motor connection terminals Terminals for outputs to the servomotor.
V
W
Note: for single-phase servo drives connect the power supply input to L1 and L3.
(for 200V single/three-phase servo drives only).
(for 400V three-phase servo drives only).
Connect an external regenerative resistor between B1 and B2.
Servo drives from 750W to 5 kW: short-circuit in B2 and B3 for internal regenerative resistor. If the
internal regenerative resistor is insufficient, connect an external regenerative resistor between B1 and
B2 and remove the wire between B2 and B3.
I/O signals (CN1) - Input signals (for MECHATROLINK-II servo drives)
Pin No. Signal name Function
6 I-COM ± pole of external DC power. The power must use 12V-24V (±5%)
5 E-STOP Emergency stop The signal name shows the factory setting. The function can be
7 P-OT Forward run prohibited
8 N-OT Reverse run prohibited
9 DEC Origin proximity
10 EXT3 External latch input 3
11 EXT2 External latch input 2
12 EXT1 External latch input 1
13 SI-MON0 General purpose monitor input 0
14
15
17 - Terminals not used. Do not connect.
18 19 20 21 22 23 24 -
- PCL Forward torque limit The function of input signals allocated to pins 5 and 7 to 13 can be changed with these options by
Shell FG Shield ground. Connected to frame ground if the shield wire of the I/O signal cable is connected to the connector shell.
16 GND Signal ground. It is insulated with power supply (I-COM) for the control signal in the servo drive.
BTP-I
BTN-I
NCL Reverse torque limit
SI-MON1 General-purpose monitor input 1
SI-MON2 General-purpose monitor input 2
Connecting pin for the absolute encoder backup battery. Do not connect when a battery is connected to the encoder cable (CN2
connector).
parameters settings.
changed by parameter setting.
I/O signals (CN1) - output signals (for MECHATROLINK-II servo drives)
Pin No. Signal name Function
1 BRK-OFF+ External brake release signal
2BRK-OFF
25 S-RDY+ Servo ready: ON when there is no servo alarm and control/main circuit power supply is ON
26 S-RDY3 ALM+ Servo alarm: Turns OFF when an error is detected
4ALM-
- INP1 Position complete output 1 The function of output signals allocated to pins 1,2, 25 and 26 can be changed with these options by
AT-SPEED Speed complete
T_LIM Torque limit
ZSP Zero speed
V-COIN Speed coincidence
INP2 Position complete output 2
WARN1 Warning 1
WARN2 Warning 2
DEN Origin proximity
V_LIM Speed limit
parameters settings
66 AC servo systems
Page 7

I/O signals (CN1) - Input signals (for analog/pulse servo drives)
Pin No. Control mode Signal name Function
1 Position/
3+CW
4-CW
2 +24 VCW
5+CCW
6 -CCW
44 +CWLD Reference pulse input for line driver only.
45 -CWLD
46 +CCWLD
47 -CCWLD
14 Speed REF Speed reference input: ±10 V/rated motor speed (input gain can be modified using a parameter).
15 - AGND1 Analog signal ground
16 Torque TREF2 Torque reference input: ±10 V/rated motor torque (input gain can be modified using a parameter).
18 NCL Reverse torque limit input: ±10 V/rated motor torque (input gain can be modified using a parameter).
17 - AGND1 Analog signal ground
7 Common +24 VIN Control power supply input for sequence signals: users must provide the +24 V power supply (12 to 24 V).
29 RUN Servo ON: this turn ON the servo.
26 Position/Full
27 Common GSEL Gain switching Enables gain value according parameter setting.
28 Position/Full
30 Position/Full
31 Common RESET Alarm reset input. Release the alarm status. The error counter is reset when the alarm is reset.
32 Position/
33 Position IPG Pulse prohibition input. Digital input to inhibit the position reference pulse.
8 Coomon NOT Reverse run prohibited
9 POT Forward run prohibited
20 Position/
13 SENGND Sensor ON signal ground.
42 Common BAT (+) Backup battery connection terminals when the absolute encoder power is interrupted. Do not connect when a absolute
43 BATGND (-)
50 FG Frame ground
- - TLSEL Torque limit switch The function of input signals allocated to pins 8,9 and 26 to 33 can be changed with
12 - Terminals not used. Do not connect.
40 41 -
Full close loop
Torque TREF1 Torque reference input: ±10 V/rated motor torque (input gain can be modified using a parameter).
Position/Speed
Full close loop
close loop
close loop
Speed VSEL3 Internal speed selection 3 Input to select the desired speed setting during internally speed operation.
close loop
Speed VSEL2 Internal speed selection 2 Input to select the desired speed setting during internally speed operation.
Speed/Torque
Speed VSEL1 Internal speed selection 1 Input to select the desired speed setting during internally speed operation.
Speed/Torque
+24 VCW Reference pulse input for line driver and open collector according to parameter setting.
Input mode:
Sign + pulse string
Reverse/forward pulse (CCW/CW pulse)
Two-phase pulse (90° phase differential)
Input mode:
Reverse/forward pulse (CCW/CW pulse)
VLIM Speed limit input: ±10 V/rated motor speed (input gain can be modified using a parameter).
PCL Forward torque limit input: ±10 V/rated motor torque (input gain can be modified using a parameter).
DFSEL1 Vibration filter switching 1 Enables vibration filter according parameter setting.
GESEL1 Electronic gear switching 1 Switches the numerator fro electronic gear ratio.
ECRST Error counter reset input. Resets the position error counter.
TVSEL Control mode switching
SEN Sensor ON input. Initial data request signal when using an absolute encoder.
encoder battery cable for backup is used.
DFSEL2 Vibration filter switching 2
GESEL2 Electronic gear switching 2
VZERO Zero speed
VSIGN Speed command signal
TSIGN Torque command signal
E-STOP Emergency stop
JSEL Inertia ratio switching
The speed selecton is combining this input with VSEL1 and VSEL2 inputs.
The speed selecton is combining this input with VSEL1 and VSEL3 inputs.
Position ↔ speed
↔
↔
torque
speed
Position
To rque
The speed selecton is combining this input with VSEL2 and VSEL3 inputs.
Overtravel prohibited: stops servomotor when movable part travels beyond the
allowable range of motion.
these options by parameters settings
Enables control mode switching
AC Servo systems
Accurax G5 servo drive 67
Page 8

I/O signals (CN1) - output signals (for analog/pulse servo drives)
Pin No. Control mode Signal name Function
21 Position/
Full close loop
22 -A Encoder phase A48 +B Encoder phase B+
49 -B Encoder phase B23 +Z Encoder phase Z+
24 -Z Encoder phase Z19 Z Encoder phase-Z output Phase Z is output for encoder signals (or external scale signals during full closing control).
25 ZCOM Encoder phase-Z common
11 Common BKIR Brake release signal output Timing signal for operating the electromagnetic brake on a motor.
10 BKIRCOM
35 READY Servo ready: ON if there is not servo alarm when the control/main circuit power supply is turned ON.
34 READYCOM
37 /ALM Servo alarm: turns OFF when an error is detected.
36 ALMCOM
39 Speed/torque TGON Motor rotation speed detection. This output turns ON when the motor rotation speed reaches the speed set in a parameter.
39 Position/
Full close loop
38 INP1COM
- - INP2 Position complete output 2 The function of output signals allocated to pins 11,10, 34 to 39 can be changed with these op-
+A Encoder phase A+ Encoder signals (or external scale signals during full closing control) are output according En-
INP1 Positioning complete output 1: turns ON when position error is equal to setting parameter.
P-CMD Position command status
ZSP Zero speed
WARN1 Warning 1
WARN2 Warning 2
ALM-ATB Alarm output
VCMP Speed conformity output
V-CMD Speed command status
V-LIMIT Speed limit detection
T-LIMIT Torque limit detection
coder Dividing Numerator parameter.
This is the line-driver output (equivalent to R422). The maximum output frequency is 4 Mbps.
Phase Z is output for encoder signals (or external scale signals during full closing control). This
is the line-driver output (equivalent to R422).
Open-collector output.
tions by parameters settings.
Encoder connector (CN2) - (for all servo drives)
Pin No. Signal name Function
1 E5V Encoder power supply + 5 V
2 E0V Encoder power supply ground
3 BAT+ Battery + (used only with absolute encoder)
4 BAT– Battery – (used only with absolute encoder)
5 PS+ Encoder serial signal input (+phase)
6 PS– Encoder serial signal input (-phase)
Shell FG Shield ground
External encoder connector (CN4) - (for all servo drives)
Pin No. Signal name Function
1 E5V External scale power supply output. Use at 5.2V +/-5% and at or below 250 mA.
2 E0V This is connected to the control circuit ground connected to connector CN1.
3 PS External scale signal I/O (serial signal).
4/PS
5 EXA External scale signal input (Phase A, B, and Z signals). Perfoms the input and output of phase A, B and Z signals.
6 /EXA
7EXB
8 /EXB
9EXZ
10 /EXZ
Shell FG Shield ground
Monitor connector (CN5) - (for all servo drives)
Pin No. Signal name Function
1 AM1 Analog monitor output 1. Outputs the analog signal for the monitor. Use the parameters setting to select the output
2 AM2 Analog monitor output 2. Outputs the analog signal for the monitor. Use the parameters setting to select the output
3 GND Ground for analog monitors 1,2.
4 - Terminals not used. Do not connect.
56-
to monitor.
Default setting: Motor rotation speed 1 V/(1000 r/min).
to monitor.
Default setting: Motor rotation speed 1 V/(1000 r/min).
USB connector (CN7) - (all servo drives)
Pin No. Signal name Function
1 VBUS USB signal terminal for computer comunication.
2D3 D+ Ground for analog monitors 1,2.
4 - Not used. Do not connect.
5 GND Signal ground.
68 AC servo systems
Page 9

Safety connector (CN8) - (all servo drives)
Pin No. Signal name Function
1 - Not used. Do not connect.
23 SF1- Safety input 1 & 2. This input turns OFF the power trransistor drive signals in the servo drive to cut off the current
4SF1+
output to the motor.
5SF26SF2+
7 EDM- A monitor signal is output to detect a safety function failure.
8EDM+
Shell FG Frame ground.
Dimensions
Servo drives
R88D-KT01/02H, R88D-KN01/02H-ML2 (230 V, 100 - 200 W)
40
70
130 (for Analog/pulse model)
132 (for ML2 model)
φ5.2
AC Servo systems
150
R88D-KT04H, R88D-KN04H-ML2 (230 V, 400 W)
55
150
70
R88D-KT08H, R88D-KN08H-ML2 (230 V, 750 W)
65
70
130 (for Analog/pulse model)
132 (for ML2 model)
170 (for Analog/pulse model)
172 (for ML2 model)
±0.5
±0.5
±0.5
140
φ5.2
±0.5
140
φ5.2
(150)
6
28
(40)
(150)
6
43
(55)
4
±0.5
±0.5
140
150
(150)
7.5
50
(65)
Accurax G5 servo drive 69
Page 10

R88D-KT10/15H, R88D-KN10/15H-ML2 (230 V, 1 - 1.5 kW)
85 (for Analog/pulse model)
86 (for ML2 model)
70
170 (for Analog/pulse model)
172 (for ML2 model)
150
R88D-KT06/10/15F, R88D-KN06/10/15F-ML2 (400 V, 600 W - 1.5 kW)
170 (for Analog/pulse model)
172 (for ML2 model)
91 (for Analog/pulse model)
92 (for ML2 model)
70
150
4
(150)
8.5
(85)
±0.5
70
4
(150)
φ5.2
±0.5
140
φ5.2
±0.5
140
R88D-KT20F, R88D-KN20F-ML2 (400 V, 2 kW)
94
85
17.5
42.5
5.2
R2.6
5.2 5.2
17.5
50
φ5.2
5.2
168
188
198
R2.6
50
φ5.2
±0.5
(168)
70
±0.5
25
φ5.2
±0.5
188
±0.5
50
(94)
14.5
70
193.5 (for Analog/pulse model)
195 (for ML2 model)
1.5
70 AC servo systems
Page 11

R88D-KT30/50F, R88D-KN30/50F-ML2 (400 V, 3 - 5 kW)
R2.6
15
15
130
100
φ5.2
65
5.2 5.2
5.2
65
100
5.2
φ5.2
R2.6
220
240
70
250
212 (for Analog/pulse model)
213 (for ML2 model)
Filters
Filter model External dimensions Mount dimensions
R88A-FIK102-RE 190 42 44 180 20
R88A-FIK104-RE 190 57 30 180 30
R88A-FIK107-RE 190 64 35 180 40
R88A-FIK114-RE 190 86 35 180 60
R88A-FIK304-RE 190 86 40 180 60
R88A-FIK306-RE 245 94 40 235 60
R88A-FIK312-RE 290 130 45 280 100
H W D M1 M2
3
M1
(220)
15
H
±0.5
50
W
M2
drive
mounts
100
φ5.2
±0.5
240
AC Servo systems
±0.5
(130)
D
output
flexes
Accurax G5 servo drive 71
Page 12

Installation
Single-phase, 230 VAC (for MECHATROLINK-II servo drives)
L1
L2
L3
N
Thermal switch
Contactor
12 to 24 VDC
Noise filter
Single-Phase
200 to 230 VAC
Emergency stop
Forward run
prohibited
Reverse run
prohibited
Origin
proximity
External
latch 3
External
latch 2
External
latch 1
General-purpose
monitor input 0
I-COM
E-STOP
POT
NOT
DEC
EXT3
EXT2
EXT1
SI-MON0
L1
L3
CNA
L1C
L2C
4.7kΩ
6
1kΩ
5
4.7kΩ
1kΩ
7
4.7kΩ
1kΩ
8
4.7kΩ
1kΩ
9
4.7kΩ
1kΩ
10
4.7kΩ
1kΩ
11
4.7kΩ
1kΩ
12
4.7kΩ
1kΩ
13
*1
B1
B3
B2
CNB
Accurax G5
MECHATROLINK-II
Servo drive
CN1
CN2
U
V
W
1
2
25
26
3
4
BRK-OFF+
BRK-OFF-
S-RDY+
S-RDY-
ALM+
ALM-
Servo motor
Optical encoder
Brake release
signal output
Servo ready
completed output
Servo alarm output
External power supply 12 to 24 VDC
Maximum
service voltage: 30 VDC
Maximum
output current: 50 mADC
14
Backup battery
+24 V
+24 V
S1
+24 V +24 V
T11A1 T12 T21 T22 T31 T32 T33 Y1 T41 T42
+24 V
*1 For servo drives from 750 W, B2 and B3 are short-circuited. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an
external regenerative resistor between B1 and B2.
*2 For use only with an absolute encoder. If a backup battery is connected to CN1 I/O connector, an encoder cable with a battery is not required.
*3 Wiring diagram example using the G9SX safety unit. If a safety unit is not used, keep the factory safety bypass connector installed in the CN8.
G9SX safety unit *3
S14A2S24 S34 S44 S54
(3.6 V)
L1 X1 X2
*2
BTP-I
BTN-I
Connect shield to
connector shell
SF1+
SF1-
SF2+
SF2-
15
16
FG
4kW
4
1kW
3
4kW
6
1kW
5
CN8
GND
Frame ground
10
EDM+
8
EDM output: Monitor signal to detect a safety function failure
(Maximum service voltage: 30 VDC or less
EDM-
7
Maximum output current: 50 mADC)
Note: The input function of pins 5 and 7 to 13, and output function of pins 1, 2, 25 and 26, can be changed via parameter settings.
72 AC servo systems
Page 13

Three-phase, 400 VAC (for MECHATROLINK-II servo drives)
Three-Phase
400 VAC
Thermal switch
Contactor
I-COM
E-STOP
POT
NOT
DEC
EXT3
EXT2
EXT1
SI-MON0
L1
L2
L3
24 V
0 V
6
5
7
8
9
10
11
12
13
CNA
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
4.7kΩ
1kΩ
Power supply
24 VDC +/-15%
12 to 24 VDC
Noise filter
Emergency stop
Forward run
prohibited
Reverse run
prohibited
Origin
proximity
External
latch 3
External
latch 2
External
latch 1
General-purpose
monitor input 0
*1
B1
B3
B2
CNB
Accurax G5
MECHATROLINK-II
Servo drive
CN1
CN2
U
V
W
1
2
25
26
3
4
BRK-OFF+
BRK-OFF-
S-RDY+
S-RDY-
ALM+
ALM-
Servo motor
Optical encoder
Brake release
signal output
Servo ready
completed output
Servo alarm output
External power supply 12 to 24 VDC
Maximum
service voltage: 30 VDC
Maximum
output current: 50 mADC
AC Servo systems
Backup battery
+24 V
+24 V
S1
+24 V +24 V
T11A1 T12 T21 T22 T31 T32 T33 Y1 T41 T42
+24 V
*1 Normally B2 and B3 are short-circuited. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an external regenerative
resistor between B1 and B2.
*2 For use only with an absolute encoder. If a backup battery is connected to CN1 I/O connector, an encoder cable with a battery is not required.
*3 Wiring diagram example using the G9SX safety unit. If a safety unit is not used, keep the factory safety bypass connector installed in the CN8.
G9SX safety unit *3
S14A2S24 S34 S44 S54
(3.6 V)
L1 X1 X2
*2
Connect shield to
connector shell
BTN-I
FG
SF1+
SF1-
SF2+
SF2-
15
16
GND
Frame ground
4kW
4
1kW
3
4kW
6
1kW
5
CN8
10
EDM+
8
EDM output: Monitor signal to detect a safety function failure
(Maximum service voltage: 30 VDC or less
EDM-
7
Maximum output current: 50 mADC)
14
BTP-I
Note: The input function of pins 5 and 7 to 13, and output function of pins 1, 2, 25 and 26, can be changed via parameter settings.
Accurax G5 servo drive 73
Page 14

Single-phase, 230 VAC(for analog/pulse servo drives)
L1
L2
L3
N
Thermal switch
Contactor
Noise filter
Single-Phase
200 to 230 VAC
+24 VCW
+CW
-CW
+24 VCCW
+CCW
-CCW
+CWLD
-CWLD
+CCWLD
-CCWLD
Position reference
Reverse pulse
500 kpps max.
Forward pulse
*3
Reverse pulse
2 Mpps max.
Forward pulse
12 to 24 VDC
L1
L3
L1C
L2C
1
3
4
2
5
6
44
45
46
47
7+24 VIN
2.2 kΩ
220 Ω
2.2 kΩ
220 Ω
3 kΩ
110 Ω
3k Ω
3k Ω
110 Ω
3 kΩ
4.7 k
CNA
43 kΩ
43 kΩ
43 kΩ
43 kΩ
Ω
*1
B1
B3
B2
Accurax G5
Analog/Pulse
Servo drive
CN1
CNB
CN2
U
V
W
11
BKIR
Brake release signal output
BKIRCOM
10
READY
35
Servo ready output
READYCOM
34
/ALM37
Alarm output
ALMCOM
36
INP39
Positioning completed output
INPCOM
38
19
Z
Phase-Z output
(open-collector output)
25
ZCOM
Servo motor
Optical encoder
External power supply 12 to 24 VDC
Maximum
service voltage: 30 VDC
Maximum
output current: 50 mADC
+24 V
+24 V
+24 V
S1
+24 V +24 V
T11A1 T12 T21 T22 T31 T32 T33 Y1 T41 T42
G9SX safety unit *5
S14A2S24 S34 S44 S54
L1 X1 X2
Servo ON
Vibration filter
switching
Gain switching
Electronic gear
switching
Deviation counter reset
Alarm reset
Control mode
switching
Pulse prohibition
Reverse run
prohibited
Forward run
prohibited
DFSEL1
GSEL
SF1+
SF1-
SF2+
SF2-
29RUN
Ω
4.7 k
26
Ω
4.7 k
27
Ω
4.7 k
28GESEL1
Ω
4.7 k
30ECRST
Ω
4.7 k
31RESET
Ω
4.7 k
32TVSEL
Ω
4.7 k
33IPG
Ω
4.7 k
8NOT
Ω
4.7 k
9POT
4kW
4
1kW
3
4kW
6
1kW
5
1 µF
3.83 kΩ
3.83 kΩ
3.83 kΩ
CN8
100Ω
4.7 kΩ
20 k
10 k
10 kΩ
10
Shell
+A
21
-A22
+B49
-B48
+Z23
-Z24
20
SEN
SENGND
13
42
BAT
43
BATGND
Ω
14
REF/TREF1/VLIM
15
AGND
Ω
16
PCL/TREF2
17
AGND1
18
NCL
50
FG
EDM+
8
EDM-
7
FG
Encoder phase-A output
Encoder phase-B output
Encoder phase-Z output
Reverse torque limit
Frame ground
Line-driver output corresponding
with the EIA RS-422A communications
method (load resistance 120 W min.)
Sensor ON
Backup battery
(3.6 V)
Speed/Torque command or Speed limit
(±10 V/rated speed or torque)
Forward torque limit/Torque command
(±12 V/rated speed or torque)
Reverse torque limit
(±12 V/rated speed or torque)
EDM output: monitor signal to detect a safety
function failure
(Maximum service voltage: 30 VDC or less
Maximum output current: 50 mADC)
*2
*4
*4
*4
*1 For servo drives from 750 W, B2 and B3 are short-circuited. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an
external regenerative resistor between B1 and B2.
*2 For use only with an absolute encoder. If a backup battery is connected to CN1 I/O connector, an encoder cable with a battery is not required.
*3 Only available in Position control mode.
*4 The input function depends on control mode used (Position, speed or torque control).
*5 Wiring diagram example using the G9SX safety unit. If a safety unit is not used, keep the factory safety bypass connector installed in the CN8.
Note: The input function of pins 8,9 and 26 to 33, and output function of pins 10, 11, 34, 35, 38 and 39, can be changed via parameter settings.
74 AC servo systems
Page 15

Three-phase, 400 VAC (for analog/pulse servo drives)
Three-Phase
400 VAC
Thermal switch
Contactor
Noise filter
Power supply
24 VDC +/-15%
+24 VCW
+CW
-CW
+24 VCCW
+CCW
-CCW
+CWLD
-CWLD
+CCWLD
-CCWLD
Position reference
Reverse pulse
500 kpps max.
Forward pulse
*3
Reverse pulse
2 Mpps max.
Forward pulse
12 to 24 VDC
L1
L2
L3
24 V
0 V
1
3
4
2
5
6
44
45
46
47
7+24 VIN
2.2 kΩ
220 Ω
2.2 kΩ
220 Ω
3 kΩ
110 Ω
3k Ω
3k Ω
110 Ω
3 kΩ
4.7 k
CNA
43 kΩ
43 kΩ
43 kΩ
43 kΩ
Ω
*1
B1
B3
B2
Accurax G5
Analog/Pulse
Servo drive
CN1
CNB
CN2
U
V
W
BKIR
11
Brake release signal output
BKIRCOM
10
READY
35
Servo ready output
READYCOM
34
/ALM37
Alarm output
ALMCOM
36
INP39
Positioning completed output
INPCOM
38
19
Z
Phase-Z output
(open-collector output)
25
ZCOM
Servo motor
Optical encoder
External power supply 12 to 24 VDC
Maximum
service voltage: 30 VDC
Maximum
output current: 50 mADC
AC Servo systems
+24 V
+24 V
+24 V
S1
+24 V +24 V
T11A1 T12 T21 T22 T31 T32 T33 Y1 T41 T42
G9SX safety unit *5
S14A2S24 S34 S44 S54
L1 X1 X2
Servo ON
Vibration filter
switching
Gain switching
Electronic gear
switching
Deviation counter reset
Alarm reset
Control mode
switching
Pulse prohibition
Reverse run
prohibited
Forward run
prohibited
DFSEL1
GSEL
SF1+
SF1-
SF2+
SF2-
29RUN
Ω
4.7 k
26
Ω
4.7 k
27
Ω
4.7 k
28GESEL1
Ω
4.7 k
30ECRST
Ω
4.7 k
31RESET
Ω
4.7 k
32TVSEL
Ω
4.7 k
33IPG
Ω
4.7 k
8NOT
Ω
4.7 k
9POT
4kW
4
1kW
3
4kW
6
1kW
5
1 µF
CN8
100Ω
3.83 kΩ
3.83 kΩ
3.83 kΩ
10
4.7 kΩ
20 k
10 k
10 kΩ
Shell
21
+A
-A22
+B49
-B48
+Z23
-Z24
20
SEN
SENGND
13
42
BAT
43
Ω
14
REF/TREF1/VLIM
15
AGND
Ω
16
PCL/TREF2
17
AGND1
18
NCL
50
FG
EDM+
8
EDM-
7
FG
Encoder phase-A output
Encoder phase-B output
Encoder phase-Z output
BATGND
Frame ground
Line-driver output corresponding
with the EIA RS-422A communications
method (load resistance 120 W min.)
Sensor ON
Backup battery
(3.6 V)
Speed/Torque command or Speed limit
(±10 V/rated speed or torque)
Forward torque limit/Torque command
(±12 V/rated speed or torque)
Reverse torque limit
(±12 V/rated speed or torque)
EDM output: monitor signal to detect a safety
function failure
(Maximum service voltage: 30 VDC or less
Maximum output current: 50 mADC)
*2
*4
*4
*4
*1 Normally B2 and B3 are short-circuited. If the internal regenerative resistor is insufficient, remove the wire between B2 and B3 and connect an external regenerative
resistor between B1 and B2.
*2 For use only with an absolute encoder. If a backup battery is connected to CN1 I/O connector, an encoder cable with a battery is not required.
*3 Only available in Position control mode.
*4 The input function depends on control mode used (Position, speed or torque control).
*5 Wiring diagram example using the G9SX safety unit. If a safety unit is not used, keep the factory safety bypass connector installed in the CN8.
Note: The input function of pins 8,9 and 26 to 33, and output function of pins 10, 11, 34, 35, 38 and 39, can be changed via parameter settings.
Accurax G5 servo drive 75
Page 16

Ordering information
Accurax G5 series MECHATROLINK-II reference configuration
C
Accurax G5 series MECHATROLINK-II
Servo Drive
Servo M otor
A
300 0 rpm (50 W-5 k W)
Servo M otor
A
200 0 rpm (4 00 W- 5 kW)
Servo M otor
A
1000 rpm (900 W-3 kW)
Filter
CablesB
L
External
regenerative
resistor
K
R88D-KN@@@-ML2
CN5
CN6
CN7
CN8
CN1
CN4
CN2
G
H
I
USB mini connector cable
D
E
Analog monitor ca ble
MECHATROLINK-II cables
Personal computer:
Software CX-One
Servo d rive I/O signal s connector
F
Terminal block
for Servo drive I/ O
signals
Unit
Note: The symbols ABCDE... show the recommended sequence to select the components in Accurax G5 servo system
Servo motors, power & encoder cables
Note: AB Refer to the Accurax G5 servo motor chapter for servomotor, motor cables or connectors selection
J
MECHATROLINK-II
Motion controllers
TJ1-MC04/16
CJ1W-MCH72
CJ1W-NCF71
Servo drives
Symbol Specifications Servo drive model A Compatible G5 series rotary servo motors
C 1 phase 230 VAC 100 W R88D-KN01H-ML2 R88M-K05030(H/T)-@
R88M-K10030(H/T)-@
R88M-K1K530(H/T)-@
R88M-K1K520(H/T)-@
R88M-K90010(H/T)-@
R88M-K60020(F/C)-@
R88M-K1K020(F/C)-@
R88M-K1K530(F/C)-@
R88M-K1K520(F/C)-@
R88M-K90010(F/C)-@
R88M-K2K020(F/C)-@
R88M-K3K020(F/C)-@
R88M-K2K010(F/C)-@
R88M-K5K030(F/C)-@
R88M-K4K020(F/C)-@
R88M-K5K020(F/C)-@
R88M-K3K010(F/C)-@
3 phase 400 VAC
200 W R88D-KN02H-ML2 R88M-K20030(H/T)-@
400 W R88D-KN04H-ML2 R88M-K40030(H/T)-@
750 W R88D-KN08H-ML2 R88M-K75030(H/T)-@
1.0 kW R88D-KN10H-ML2 R88M-K1K020(H/T)-@
1.5 kW R88D-KN15H-ML2 R88M-K1K030(H/T)-@
600 W R88D-KN06F-ML2 R88M-K40020(F/C)-@
1.0 kW R88D-KN10F-ML2 R88M-K75030(F/C)-@
1.5 kW R88D-KN15F-ML2 R88M-K1K030(F/C)-@
2.0 kW R88D-KN20F-ML2 R88M-K2K030(F/C)-@
3.0 kW R88D-KN30F-ML2 R88M-K3K030(F/C)-@
5.0 kW R88D-KN50F-ML2 R88M-K4K030(F/C)-@
76 AC servo systems
Page 17

Control cables (for CN1)
Symbol Description Connect to Model
D I/O connector kit (26 pins) For I/O general purpose - R88A-CNW01C
E Terminal block cable For I/O general purpose 1 m XW2Z-100J-B34
General purpose cable 1 m R88A-CPKB001S-E
F Terminal block (M3 screw and for pin terminals) - XW2B-20G4
2 m XW2Z-200J-B34
Terminal block (M3.5 screw and for fork/round terminals) - XW2B-20G5
Terminal block (M3 screw and for fork/round terminals) - XW2D-20G6
Analog monitor (for CN5)
Symbol Name Model
G
Analog monitor cable 1m R88A-CMK001S
MECHATROLINK-II cables (for CN6)
Symbol Specifications Length Model
H
MECHATROLINK-II
Terminator resistor
MECHATROLINK-II cables 0.5 m JEPMC-W6003-A5-E
- JEPMC-W6022-E
1 m JEPMC-W6003-01-E
3 m JEPMC-W6003-03-E
5 m JEPMC-W6003-05-E
10 m JEPMC-W6003-10-E
20 m JEPMC-W6003-20-E
30 m JEPMC-W6003-30-E
USB personal computer cable (for CN7)
Symbol Name Model
I
USB mini-connector cable 2m AX-CUSBM002-E
MECHATROLINK-II Motion controllers
Symbol Name Model
J
Trajexia stand-alone motion controller TJ1-MC04 (4 axes)
TJ1-MC16 (16 axes)
Trajexia-PLC motion controller CJ1W-MCH72
Position Controller Unit for CJ1 PLC CJ1W-NCF71 (16 axes)
CJ1W-NC471 (4 axes)
CJ1W-NC271 (2 axes)
Position Controller Unit for CS1 PLC CS1W-NCF71 (16 axes)
CS1W-NC471 (4 axes)
CS1W-NC271 (2 axes)
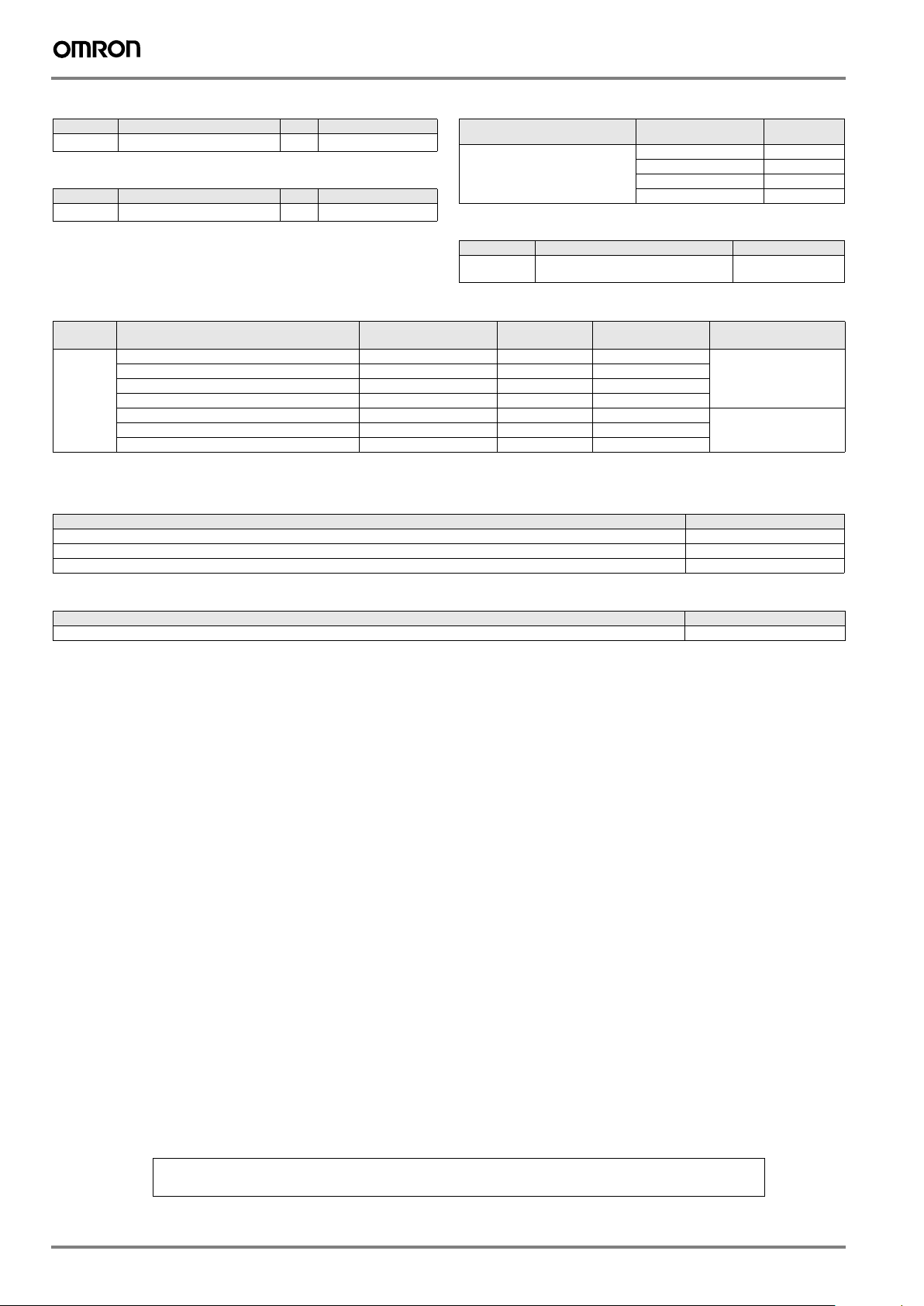
External regenerative resistor
Symbol Regenerative resistor unit model Specifications
K
R88A-RR08050S 50 Ω, 80 W
R88A-RR080100S 100 Ω, 80 W
R88A-RR22047S 47 Ω, 220 W
R88A-RR50020S 20 Ω, 500 W
Cable for Safety Functions (for CN8)
Symbol Description Model
- Safety connector with 3 m cable
(with loose wires at one end)
R88A-CSK003S-E
Filters
Symbol Applicable servodrive Filter model Rated current Leakage current Rated voltage
L R88D-KN01H-ML2, R88D-KN02H-ML2 R88A-FIK102-RE 2.4 A 3.5 mA 250 VAC single-phase
R88D-KN04H-ML2 R88A-FIK104-RE 4.1 A 3.5 mA
R88D-KN08H-ML2 R88A-FIK107-RE 6.6 A 3.5 mA
R88D-KN10H-ML2, R88D-KN15H-ML2 R88A-FIK114-RE 14.2 A 3.5 mA
R88D-KN06F-ML2, R88D-KN10F-ML2, R88D-KN15F-ML2 R88A-FIK304-RE 4 A 0.3 mA / 32 mA
R88D-KN20F-ML2 R88A-FIK306-RE 6 A 0.3 mA / 32 mA
R88D-KN30F-ML2, R88D-KN50F-ML2 R88A-FIK312-RE 12.1 A 0.3 mA / 32 mA
1. Momentary peak leakage current for the filter at switch-on/off.
1
400 VAC three-phase
1
1
AC Servo systems
Connectors
Specifications Model
External encoder connector (for CN4) R88A-CNK41L
Safety I/O signal connector (for CN8) R88A-CNK81S
Computer software
Specifications Model
Configuration and monitoring software tool for servo drives and inverters. (CX-drive version 1.91 or higher) CX-drive
Accurax G5 servo drive 77
Page 18

Ordering information
Accurax G5 series Analog/pulse Reference configuration
C
Accurax G5 series
Analog/Pulse servo drive
Servo Motor
A
3000 rpm (50 W-5 k W)
Servo Motor
A
2000 rpm (400 W-5 kW)
A
Servo Motor
1000 rpm (900 W-3 kW)
B
Cables
Filter
Q
External
regenerative
resistor
P
CN5
CN7
CN8
CN1
CN4
CN2
R88D-KT@
N
Analog monitor ca ble
O
USB mini c onnec tor cable
D
E
H
K
I
General purpose ca ble
L
Motion control unit
Position control unit
-High-speed type-
J
M
Terminal block for Ser vo drive
I/O general purpose signal s
Personal computer:
Software CX-One
Terminal block
for external signals
F
Position control unit
G
Note: The symbols ABCDE... show the recommended sequence to select the components in Accurax G5 servo system
Servo motors, power & encoder cables
Note: AB Refer to the Accurax G5 servo motor chapter for servomotor, motor cables or connectors selection
Servo drives
Symbol Specifications Servo drive model A Compatible Accurax G5 series rotary servo motors
C 1 phase 230 VAC 100 W R88D-KT01H R88M-K05030(H/T)-@
R88M-K10030(H/T)-@
R88M-K1K530(H/T)-@
R88M-K1K520(H/T)-@
R88M-K90010(H/T)-@
R88M-K60020(F/C)-@
R88M-K1K020(F/C)-@
R88M-K1K530(F/C)-@
R88M-K1K520(F/C)-@
R88M-K90010(F/C)-@
R88M-K2K020(F/C)-@
R88M-K3K020(F/C)-@
R88M-K2K010(F/C)-@
R88M-K5K030(F/C)-@
R88M-K4K020(F/C)-@
R88M-K5K020(F/C)-@
R88M-K3K010(F/C)-@
3 phase 400 VAC
200 W R88D-KT02H R88M-K20030(H/T)-@
400 W R88D-KT04H R88M-K40030(H/T)-@
750 W R88D-KT08H R88M-K75030(H/T)-@
1.0 kW R88D-KT10H R88M-K1K020(H/T)-@
1.5 kW R88D-KT15H R88M-K1K030(H/T)-@
600 W R88D-KT06F R88M-K40020(F/C)-@
1.0 kW R88D-KT10F R88M-K75030(F/C)-@
1.5 kW R88D-KT15F R88M-K1K030(F/C)-@
2.0 kW R88D-KT20F R88M-K2K030(F/C)-@
3.0 kW R88D-KT30F R88M-K3K030(F/C)-@
5.0 kW R88D-KT50F R88M-K4K030(F/C)-@
78 AC servo systems
Page 19

Control cables (for CN1)
Symbol Description Connect to Model
D
E Control cable
F Terminal block cable for external signals
Control cable
(1 axis)
Control cable
(2 axis)
(line-driver output for 1 axis)
Control cable
(open-collector output for 1 axis)
Control cable
(line-driver output for 2 axis)
Control cable
(open-collector output for 2 axis)
(for input common, forward/reverse run prohibited inputs,
emergency stop input, origin proximity input and interrupt input)
Motion control units
CS1W-MC221
CS1W-MC421
Motion control units
CS1W-MC221
CS1W-MC421
Position control units (high-speed type)
CJ1W-NC234
CJ1W-NC434
Position control units (high-speed type)
CJ1W-NC214
CJ1W-NC414
Position control units (high-speed type)
CJ1W-NC234
CJ1W-NC434
Position control units (high-speed type)
CJ1W-NC214
CJ1W-NC414
Position control units (high-speed type)
CJ1W-NC234
CJ1W-NC434
CJ1W-NC214
CJ1W-NC414
1 m R88A-CPG001M1
2 m R88A-CPG002M1
3 m R88A-CPG003M1
5 m R88A-CPG005M1
1 m R88A-CPG001M2
2 m R88A-CPG002M2
3 m R88A-CPG003M2
5 m R88A-CPG005M2
1 m XW2Z-100J-G9
5 m XW2Z-500J-G9
10 m XW2Z-10MJ-G9
1 m XW2Z-100J-G13
3 m XW2Z-300J-G13
1 m XW2Z-100J-G1
5 m XW2Z-500J-G1
10 m XW2Z-10MJ-G1
1 m XW2Z-100J-G5
3 m XW2Z-300J-G5
0.5 m XW2Z-C50X
1 m XW2Z-100X
2 m XW2Z-200X
3 m XW2Z-300X
5 m XW2Z-500X
10 m XW2Z-010X
G Terminal block for external signals (M3 screw, pin terminals) - XW2B-20G4
Terminal block for ext. signals
Terminal block for ext. signals
H Cable from servo relay unit to servo drive CS1W-NC1@3, CJ1W-NC1@3, C200HW-NC113,
I
J
K
L
Servo relay unit Position control units
Position control unit
connecting cable
General purpose cable For general purpose controllers 1 m R88A-CPG001S
Terminal block cable For general purpose controllers 1 m XW2Z-100J-B24
(M3.5 screw, fork/round terminals) - XW2B-20G5
(M3 screw, fork/round terminals) - XW2D-20G6
CS1W-NC2@3/4@3, CJ1W-NC2@3/4@3,
C200HW-NC213/413, CQM1H-PLB21 or CQM1-CPU43
CJ1M-CPU21/22/23 1 m XW2Z-100J-B31
CS1W-NC1@3, CJ1W-NC1@3 or C200HW-NC113
P o s i ti o n c o n t r o l un i t s
CS1W-NC2@3/4@3, CJ1W-NC2@3/4@3 or
C200HW-NC213/413
CQM1H-PLB21 or CQM1-CPU43 - XW2B-20J6-3B (1 axis)
CJ1M-CPU21/22/23 - XW2B-20J6-8A (1 axis)
CQM1H-PLB21 0.5 m XW2Z-050J-A3
CS1W-NC113 or C200HW-NC113 0.5 m XW2Z-050J-A6
CS1W-NC213/413 or C200HW-NC213/413 0.5 m XW2Z-050J-A7
CS1W-NC133 0.5 m XW2Z-050J-A10
CS1W-NC233/433 0.5 m XW2Z-050J-A11
CJ1W-NC113 0.5 m XW2Z-050J-A14
CJ1W-NC213/413 0.5 m XW2Z-050J-A15
CJ1W-NC133 0.5 m XW2Z-050J-A18
CJ1W-NC233/433 0.5 m XW2Z-050J-A19
CJ1M-CPU21/22/23 0.5 m XW2Z-050J-A33
1 m XW2Z-100J-B25
2 m XW2Z-200J-B25
2 m XW2Z-200J-B31
- XW2B-20J6-1B (1 axis)
- XW2B-40J6-2B (2 axes)
XW2B-40J6-9A (2 axes)
1 m XW2Z-100J-A3
1 m XW2Z-100J-A6
1 m XW2Z-100J-A7
1 m XW2Z-100J-A10
1 m XW2Z-100J-A11
1 m XW2Z-100J-A14
1 m XW2Z-100J-A15
1 m XW2Z-100J-A18
1 m XW2Z-100J-A19
1 m XW2Z-100J-A33
2 m R88A-CPG002S
2 m XW2Z-200J-B24
M Terminal block (M3 screw and for pin terminals) - XW2B-50G4
Terminal block (M3.5 screw and for fork/round terminals) - XW2B-50G5
Terminal block (M3 screw and for fork/round terminals) - XW2D-50G6
AC Servo systems
Accurax G5 servo drive 79
Page 20
Analog monitor (for CN5)
Symbol Name Model
N
Analog monitor cable 1m R88A-CMK001S
USB personal computer cable (for CN7)
Symbol Name Model
O
USB mini-connector cable 2m AX-CUSBM002-E
External regenerative resistor
Symbol Regenerative resistor
P
unit model
R88A-RR08050S 50 Ω, 80 W
R88A-RR080100S 100 Ω, 80 W
R88A-RR22047S 47 Ω, 220 W
R88A-RR50020S 20 Ω, 500 W
Specifications
Cable for Safety Functions (for CN8)
Symbol Description Model
- Safety connector with 3 m cable
(with loose wires at one end)
R88A-CSK003S-E
Filters
Symbol Applicable servodrive Filter model Rated current Leakage current Rated
voltage
Q R88D-KT01H, R88D-KT02H R88A-FIK102-RE 2.4 A 3.5 mA 250 VAC single-phase
R88D-KT04H R88A-FIK104-RE 4.1 A 3.5 mA
R88D-KT08H R88A-FIK107-RE 6.6 A 3.5 mA
R88D-KT10H, R88D-KT15H R88A-FIK114-RE 14.2 A 3.5 mA
R88D-KT06F, R88D-KT10F, R88D-KT15F R88A-FIK304-RE 4 A 0.3 mA / 32 mA
R88D-KT20F R88A-FIK306-RE 6 A 0.3 mA / 32 mA
R88D-KT30F, R88D-KT50F R88A-FIK312-RE 12.1 A 0.3 mA / 32 mA
1. Momentary peak leakage current for the filter at switch-on/off.
Connectors
Specifications Model
I/O connector kit -50 pins-(for CN1) R88A-CNU11C
External encoder connector (for CN4) R88A-CNK41L
Safety I/O signal connector (for CN8) R88A-CNK81S
1
400 VAC three-phase
1
1
Computer software
Specifications Model
Configuration and monitoring software tool for servo drives and inverters. (CX-drive version 1.90 or higher) CX-drive
ALL DIMENSIONS SHOWN ARE IN MILLIMETERS.
To convert millimeters into inches, multiply by 0.03937. To convert grams into ounces, multiply by 0.03527.
Cat. No. I101E-EN-01A
In the interest of product improvement, specifications are subject to change without notice.
80 AC servo systems
 Loading...
Loading...