

R88M-K@
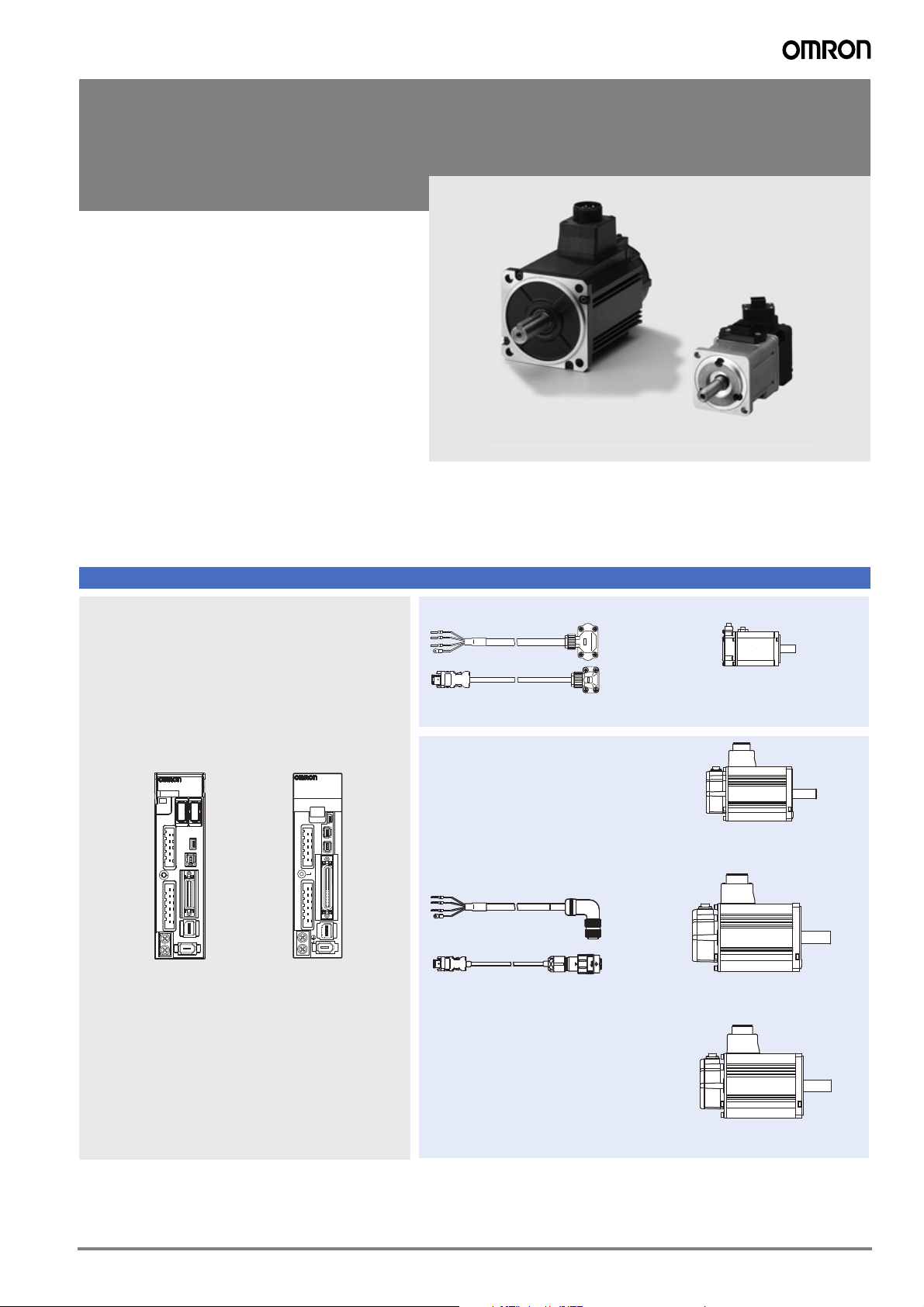
Configuración del sistema
Modelos
analógico/pulsos
Modelos
MECHATROLINK-II
Opciones de drive
(Consulte el capítulo de servodrives)
Cable de encoder
Cable de potencia
Servomotor
3.000 rpm (1 kW-5 kW)
Servomotor
2.000 rpm (400 W-5 kW)
Servomotor
1.000 rpm (900 W-3 kW)
Cable de encoder
Cable de potencia
Servomotor
3.000 rpm (50 W-750 W)
Servomotores rotativos Accurax G5
Familia de Servos para un control preciso del
movimiento. Rápida respuesta, alta
velocidad y alto par.
• Par máximo de 300% del par nominal durante
3 segundos o más, dependiendo del modelo
• Encoder serie de alta resolución de 20 bits
• Protección IP67 en todos los modelos
• Motor muy ligero y compacto
• Escasa fluctuación de velocidad y de par gracias a
la práctica ausencia de pares no uniformes
(cogging)
• Distintas opciones de eje, freno y junta
Valores nominales
• De 230 V CA, de 50 W a 1,5 kW (par nominal de
0,16 a 8,59 Nm)
• 400 V CA de 400 W a 5 kW (par nominal de 1,91 Nm
a 28,7 Nm)
1Servomotores rotativos Accurax G5

Combinación de servomotor / servodriver
Tensión Velocidad Par nominal Capacidad Modelo Modelo MECHATROLINK-II Modelo analógico/pulsos
230 V 3.000 min
400 V 2,39 Nm 750 W R88M-K75030(F/C)-@ - R88D-KN10F-ML2 - R88D-KT10F
230 V 2.000 min
400 V 1,91 Nm 400 W R88M-K40020(F/C)-@ - R88D-KN06F-ML2 - R88D-KT06F
230 V 1.000 min
400 V 8,59 Nm 900 W R88M-K90010(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
Nota: 1. Consulte los números de referencia de los servomotores y cables en la tabla de selección al final de este capítulo.
2. Consulte información detallada acerca de especificaciones y selección en el capítulo de Unidades de servodrive.
Servomotor rotativo Accurax G5 Servodrive Accurax G5
-1
0,16 Nm 50 W R88M-K05030(H/T)-@ R88D-KN01H-ML2 - R88D-KT01H 0,32 Nm 100 W R88M-K10030(H/T)-@ R88D-KN01H-ML2 - R88D-KT01H -
0,64 Nm 200 W R88M-K20030(H/T)-@ R88D-KN02H-ML2 - R88D-KT02H -
1,3 Nm 400 W R88M-K40030(H/T)-@ R88D-KN04H-ML2 - R88D-KT04H -
2,4 Nm 750 W R88M-K75030(H/T)-@ R88D-KN08H-ML2 - R88D-KT08H -
3,18 Nm 1.000 W R88M-K1K030(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H 4,77 Nm 1.500 W R88M-K1K530(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
3,18 Nm 1.000 W R88M-K1K030(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
4,77 Nm 1.500 W R88M-K1K530(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
6,37 Nm 2.000 W R88M-K2K030(F/C)-@ - R88D-KN20F-ML2 - R88D-KT20F
9,55 Nm 3.000 W R88M-K3K030(F/C)-@ - R88D-KN30F-ML2 - R88D-KT30F
12,7 Nm 4.000 W R88M-K4K030(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
15,9 Nm 5.000 W R88M-K5K030(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
-1
4,77 Nm 1.000 W R88M-K1K020(H/T)-@ R88D-KN10H-ML2 - R88D-KT10H 7,16 Nm 1.500 W R88M-K1K520(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
2,86 Nm 600 W R88M-K60020(F/C)-@ - R88D-KN06F-ML2 - R88D-KT06F
4,77 Nm 1.000 W R88M-K1K020(F/C)-@ - R88D-KN10F-ML2 - R88D-KT10F
7,16 Nm 1.500 W R88M-K1K520(F/C)-@ - R88D-KN15F-ML2 - R88D-KT15F
9,55 Nm 2.000 W R88M-K2K020(F/C)-@ - R88D-KN20F-ML2 - R88D-KT20F
14,3 Nm 3.000 W R88M-K3K020(F/C)-@ - R88D-KN30F-ML2 - R88D-KT30F
19,1 Nm 4.000 W R88M-K4K020(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
23,9 Nm 5.000 W R88M-K5K020(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
-1
8,59 Nm 900 W R88M-K90010(H/T)-@ R88D-KN15H-ML2 - R88D-KT15H -
19,1 Nm 2.000 W R88M-K2K010(F/C)-@ - R88D-KN30F-ML2 - R88D-KT30F
28,7 Nm 3.000 W R88M-K3K010(F/C)-@ - R88D-KN50F-ML2 - R88D-KT50F
230 V 400 V 230 V 400 V
Modelo de servomotor
Servomotor
R88M-K05030H-BOS2
Servomotor serie Accurax G5
Capacidad
050
50 W
100 W
100
200
200 W
400 W
400
600 W
600
750 W
750
900
900W
1K0
1kW
1,5kW
1K5
2 kW
2K0
3 kW
3K0
4 kW
4K0
5 kW
5K0
Velocidad nominal (rpm)
10
1.000
20
2.000
30
3.000
Especificaciones del eje
En blanco
Eje recto, sin chaveta
Recto, chaveta, roscado (estándar)
S2
Especificaciones de junta de aceite
En blanco
Sin junta de aceite
Junta de aceite
O
Especificaciones del freno
En blanco
Sin freno
Freno
B
Especificaciones de tensión y encoder
H: 230 V y encoder incremental de 20 bits
T: 230 V y encoder absoluto de 17 bits
F: 400 V y encoder incremental de 20 bits
C: 400 V y encoder absoluto de 17 bits
2 Servosistemas de CA
Especificaciones del servomotor
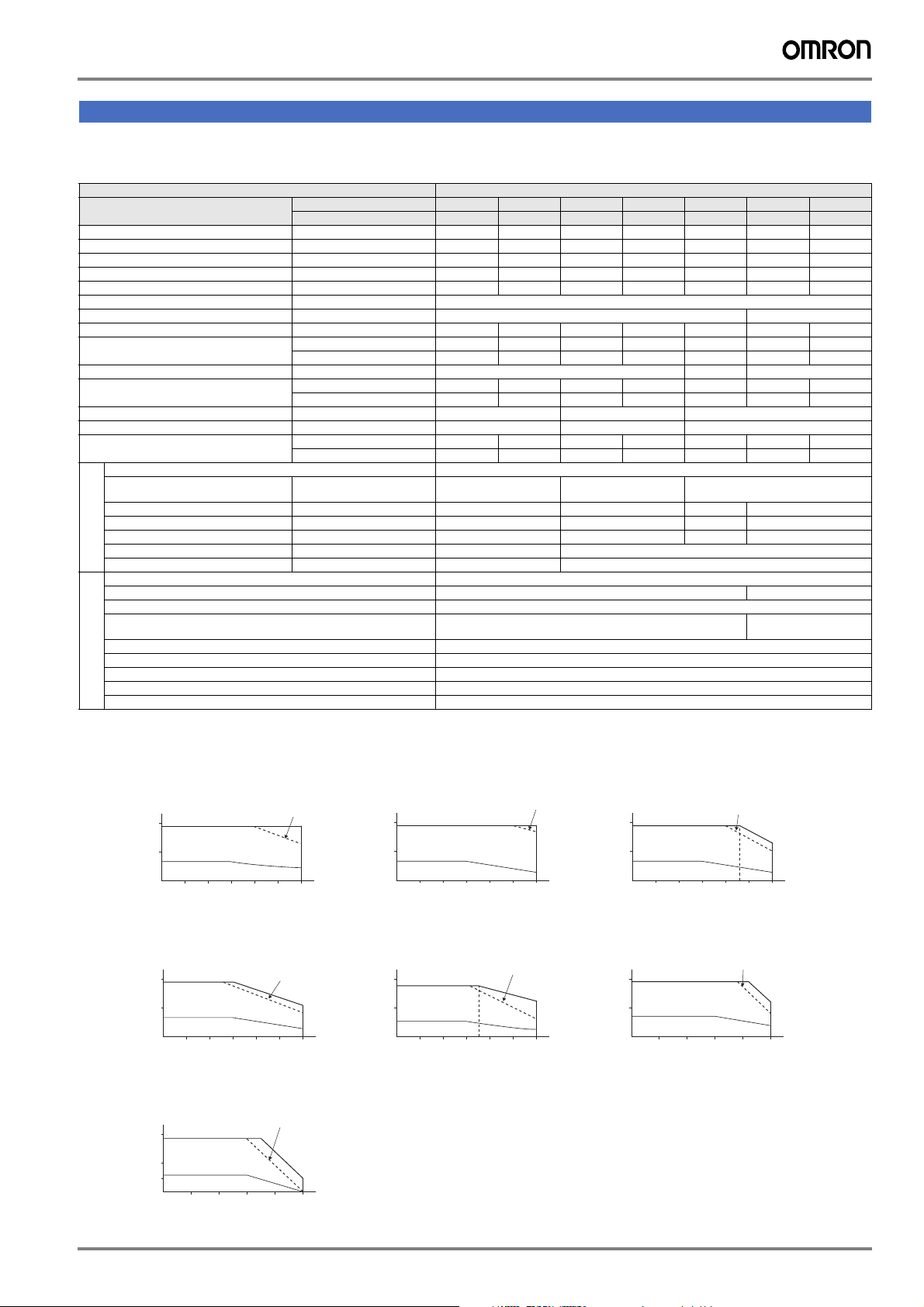
R88M-K05030H/T (50 W) R88M-K10030H/T (100 W) R88M-K20030H/T (200 W)
R88M-K40030H/T (400 W)
4,0
0 1.000 2.000 3.000
3600
4.000
6.000
(rpm)
5.000
8,0
7,1
4,9
3,0
7,1(3.200)
2,4 2,4
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
R88M-K75030H/T (750 W)
R88M-K1K030H/T (1 kW)
7,5
4,0
0 1.000 2.000 3.000 4.000
5.000
(rpm)
15
14,3 14,3
4,77 4,77
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
R88M-K1K530H/T (1,5 kW)
0,25
0 1.000 2.000 3.000 4.000
6.000
(rpm)
5.000
0.5
0,48
0,16 0,16
0,48 (4.000)
0,3
(N-M) (N-M)
(N-M)(N-M)(N-M)
(N-M)
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
0,08
0.5
0 1.000 2.000 3.000 4.000
6.000
(rpm)
5.000
1,0
0,95
0,32 0,32
0,95(5.000)
0,9
0,16
Tensión de alimentación
disminuida un 10%
Rango de operación
momentánea
Rango de operación continua
1,0
0 1.000 2.000 3.000 4.000
6.000
(rpm)
5.000
2,0
1,91
0,64 0,64
1,91
1,3
1,0
0,32
(4.000)
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
4600
2,0
0 1.000 2.000 3.000 4.000
6.000
(rpm)
5.000
4,0
3,8
1,3 1,3
1,8
2,3
3,8(2.600)
0,64
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
0,6
5
0 1.000 2.000 3.000 4.000
5.000
(rpm)
10
9,55 9,55(4.200)
3,18 3,18
6,0
4,0
1,9
(3.800)
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
(3.200)
(3.600)
Servomotores 3.000 rpm, 230 V
Valores nominales y especificaciones
Tensión 230 V
Modelo de servomotor R88M-K@ Encoder incremental de 20 bits 05030H-@ 10030H-@ 20030H-@ 40030H-@ 75030H-@ 1K030H-@ 1K530H-@
Salida nominal W 50 100 200 400 750 1.000 1.500
Par nominal N·m 0,16 0,32 0,64 1,3 2,4 3,18 4,77
Par máximo instantáneo N·m 0,48 0,95 1,91 3,8 7,1 9,55 14,3
Corriente nominal A (rms) 1,2 1,1 1,5 2,4 4,1 6,6 8,2
Corriente máx. instantánea A (rms) 5,1 4,7 6,5 10,2 17,4 28 35
Velocidad nominal min
Velocidad máx. min
Constante de par Nm/A (rms) 0,11±10% 0,21±10% 0,31±10% 0,39±10% 0,42±10% 0,37 0,45
Momento de inercia del rotor (JM) kg·m
Momento de inercia de la carga admisible (JL) Múltiplo de (JM) 30 20 15
Relación de potencia nominal kW/s (sin freno) 10,1 19,9 29,0 62,4 65,6 49,8 80,1
Carga radial admisible N 68 245 490
Carga axial admisible N 58 98 196
Peso aprox. Kg (sin freno) 0,32 0,47 0,82 1,2 2,3 3,5 4,4
Tensión nominal 24V CC ±10%
Momento de inercia del freno de
retención J
Consumo eléctrico (a 20 °C) W 7 9 17 19
Consumo de corriente (a 20 °C) A 0,3 0,36 0,70±10% 0,81±10%
del freno
Par de fricción estática Nm (mínimo) 0,29 1,27 2,5 7,8
Tiempo de subida para par de retención ms (máx.) 35 50
Especificaciones
Tiempo de apertura ms (máx.) 20 15
Tiempo de funcionamiento Continuo
Clase de aislamiento Tipo B Tipo F
Temperatura ambiente/temperatura de almacenamiento 0 a +40 °C/ -20 a 65 °C
Humedad ambiente de funcionamiento/humedad de almacenamiento 20 a 80% (sin condensación) 20 a 85% (sin
Categoría de vibración V-15
Resistencia de aislamiento 20 MΩ mín. a 500 V CC entre los terminales de alimentación y el terminal FG
Carcasa Totalmente cerrada, autoventilada, IP67 (excluida la sección del eje)
Resistencia a vibraciones Aceleración de vibración, 49 m/s²
Especificaciones básicas
Montaje Montaje mediante brida
Encoder absoluto de 17 bits 05030T-@ 10030T-@ 20030T-@ 40030T-@ 75030T-@ 1K030T-@ 1K530T-@
kg·m
-1
-1
2
-4
x10
(sin freno) 0,025 0,051 0,14 0,26 0,87 2,03 2,84
2
-4
x10
(con freno) 0,027 0,054 0,16 0,28 0,97 2,35 3,17
6.000 5.000
3.000
kW/s (con freno) 9,4 18,8 25,4 58 58,8 43 71,8
Kg (con freno) 0,53 0,68 1,3 1,7 3,1 4,5 5,4
2
-4
kg·m
x10
0,002 0,0018 0,33
condensación)
Características de par/velocidad
Servomotores rotativos Accurax G5 3
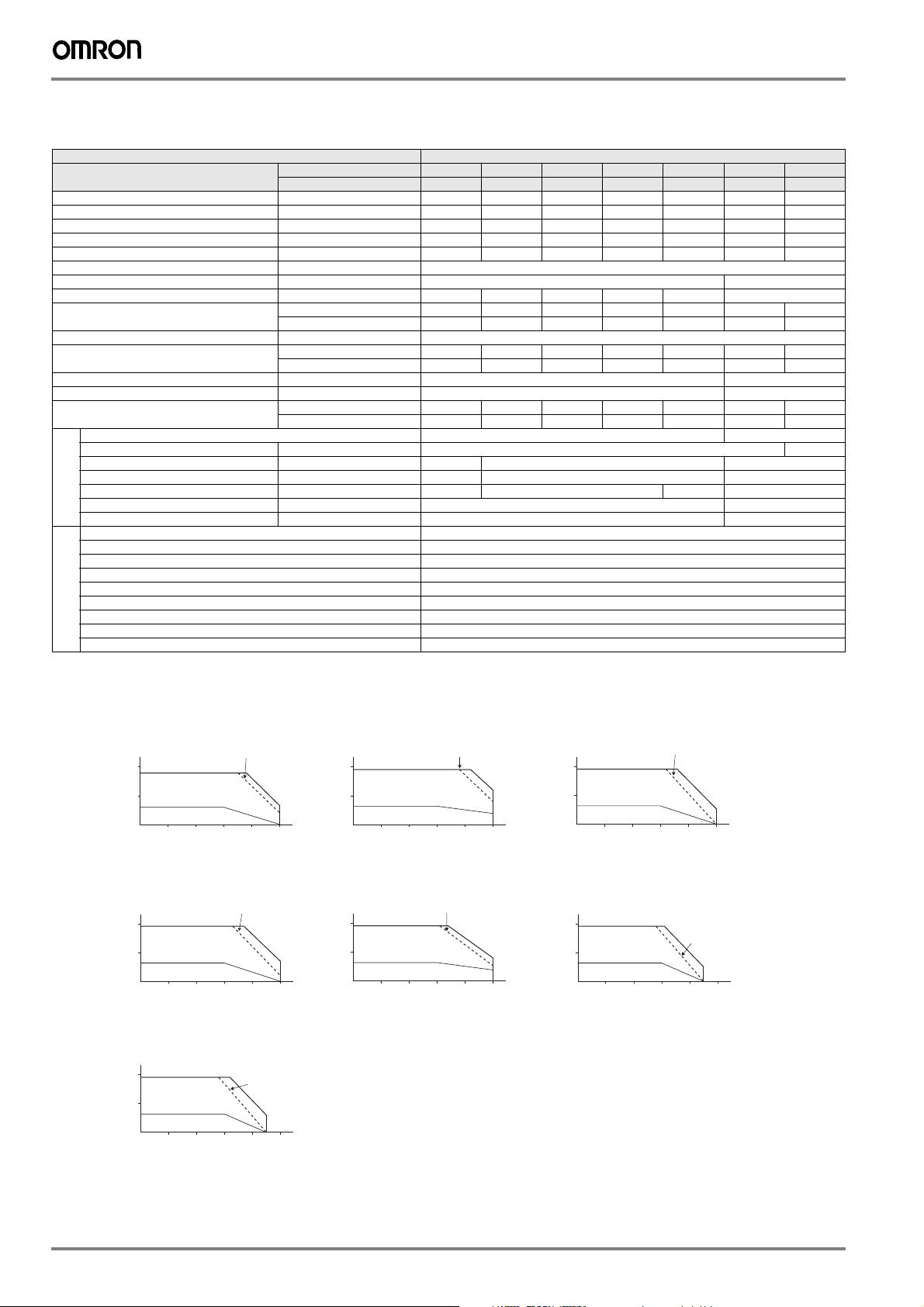
Servomotores 3.000 rpm, 400 V
Valores nominales y especificaciones
Tensión 400 V
Modelo de servomotor R88M-K@ Encoder incremental de 20 bits 75030F-@ 1K030F-@ 1K530F-@ 2K030F-@ 3K030F-@ 4K030F-@ 5K030F-@
Salida nominal W 750 1.000 1.500 2.000 3.000 4.000 5.000
Par nominal N·m 2,39 3,18 4,77 6,37 9,55 12,7 15,9
Par máximo instantáneo N·m 7,16 9,55 14,3 19,1 28,6 38,2 47,7
Corriente nominal A (rms) 2,4 3,3 4,2 5,7 9,2 9,9 12
Corriente máx. instantánea A (rms) 10 14 18 24 39 42 51
Velocidad nominal min
Velocidad máx. min
Constante de par Nm/A (rms) 0,78 0,75 0,89 0,87 0,81 0,98
Momento de inercia del rotor (JM) kg·m
Momento de inercia de la carga admisible (JL) Múltiplo de (JM) 30
Relación de potencia nominal kW/s (sin freno) 35,5 49,8 80,1 110 140 126 146
Carga radial admisible N 490 784
Carga axial admisible N 196 343
Peso aprox. Kg (sin freno) 3,1 3,5 4,4 5,3 8,3 11 14
Tensión nominal 24V CC±10%
Momento de inercia del freno de retención J kg·m
Consumo eléctrico (a 20 °C) W 17 19 22
Consumo de corriente (a 20 °C) A 0,70±10% 0,81±10% 0,90±10%
Par de fricción estática Nm (mínimo) 2,5 7,8 11,8 16,1
del freno
Tiempo de subida para par de retención ms (máx.) 50 110
Especificaciones
Tiempo de apertura ms (máx.) 15 50
Tiempo de funcionamiento Continuo
Clase de aislamiento Tipo F
Temperatura ambiente/temperatura de almacenamiento 0 a +40 °C/ -20 a 65 °C
Humedad ambiente de funcionamiento/humedad de almacenamiento 20 a 85% (sin condensación)
Categoría de vibración V-15
Resistencia de aislamiento 20 MΩ mín. a 500 V CC entre los terminales de alimentación y el terminal FG
Carcasa Totalmente cerrada, autoventilada, IP67 (excluida la sección del eje)
Resistencia a vibraciones Aceleración de vibración, 49 m/s²
Especificaciones básicas
Montaje Montaje mediante brida
Encoder absoluto de 17 bits 75030C-@ 1K030C-@ 1K530C-@ 2K030C-@ 3K030C-@ 4K030C-@ 5K030C-@
kg·m
-1
-1
2
-4
x10
(sin freno) 1,61 2,03 2,84 3,68 6,5 12,9 17,4
2
-4
x10
(con freno) 1,93 2,35 3,17 4,01 7,85 14,2 18,6
5.000 4.500
3.000
kW/s (con freno) 29,6 43 71,8 101 116 114 136
Kg (con freno) 4,1 4,5 5,4 6,3 9,4 12,6 16
2
-4
x10
0,33 1,35
Características de par/velocidad
R88M-K75030F/C (750 W) R88M-K1K030F/C (1 kW) R88M-K1K530F/C (1,5 kW)
(N-M)
7,16 7,16(3.800)
8
Rango de operación
momentánea
4
2,39 2,39
Rango de operación continua
0 1.000 2.000 3.000 4.000
R88M-K2K030F/C (2 kW) R88M-K3K030F/C (3 kW)
(N-M)
19,1
20
Rango de operación
momentánea
10
6,37 6,37
Rango de operación continua
0 1.000 2.000 3.000 4.000
Tensión de alimentación
disminuida un 10%
(3.500)
Tensión de alimentación
disminuida un 10%
(3.300)
19,1(3.700)
R88M-K5K030F/C (5 kW)
(N-M)
47,7 47,7(3.200)
50
25
15,9 15,9
0 1.000 2.000 3.000 4.000
(2.800)
Rango de operación
momentánea
Rango de operación continua
Tensión de alimentación
disminuida un 10%
15
5.000
(rpm)
5.000
(rpm)
5.000
(rpm)
momentánea
Tensión de alimentación
disminuida un 10%
(3.200)
5.000
(rpm)
4,0
(N-M)
9,55 9,55(4.200)
10
Rango de operación
momentánea
5
2,6
1,6
3,18 3,18
Rango de operación continua
0 1.000 2.000 3.000 4.000
Tensión de alimentación
disminuida un 10%
(3.800)
5.000
(rpm)
6,0
4,0
1,9
(N-M)
14,3 14,3(3.600)
15
Rango de operación
7,5
4,77 4,77
Rango de operación continua
0 1.000 2.000 3.000 4.000
R88M-K4K030F/C (4 kW)
(N-M)
28,6 28,7(3.400)
30
Rango de operación
momentánea
15
7,0
2,0
9,55 9,55
Rango de operación continua
0 1.000 2.000 3.000 4.000
Tensión de alimentación
disminuida un 10%
(3.100)
12,0
5.000
(rpm)
8,0
5,7
(N-M)
(2.800)
38,2
40
Rango de operación
momentánea
20
12,7
Rango de operación continua
0 1.000 2.000 3.000 4.000
38,2(3.100)
12,7
Tensión de alimentación
disminuida un 10%
10
5.000
(rpm)
4 Servosistemas de CA
 Loading...
Loading...