

Page 1
Cat. No. I570-E1-02
USER’S MANUAL
SYSDRIVE MX2
SERIES
Multi-function Compact Inverter
Page 2

Page 3
1
Introduction
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Introduction
Thank you for choosing the multi-function Inverter 3G3MX2. This User's Manual (hereinafter
called "this manual") describes the parameter setting methods required for installation/wiring
and operation of the 3G3MX2 model, as well as troubleshooting and inspection methods.
z This manual should be delivered to the actual end user of the product.
z After reading this manual, keep it handy for future reference.
z This manual describes the specifications and functions of the product as well as the relations
between them. You should assume that anything not described in this manual is not possible
with the product.
z Intended readers
This manual is intended for those with knowledge of the workings of electricity (qualified
electric engineers or the equivalent), and also in charge of:
Introducing the control equipment
Designing the control system
Installing and/or connecting the control equipment
Field management
Page 4
2
Read and Understand this Manual
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Read and Understand this Manual
Please read and understand this manual before using the product. Please consult your
OMRON representative if you have any questions or comments.
Warranty and Limitations of Liability
WARRANTY
OMRON's exclusive warranty is that the products are free from defects in materials and workmanship
for a period of one year (or other period if specified) from date of sale by OMRON.
OMRON MAKES NO WARRANTY OR REPRESENTATION, EXPRESS OR IMPLIED, REGARDING
NON-INFRINGEMENT, MERCHANTABILITY, OR FITNESS FOR PARTICULAR PURPOSE OF THE
PRODUCTS. ANY BUYER OR USER ACKNOWLEDGES THAT THE BUYER OR USER ALONE HAS
DETERMINED THAT THE PRODUCTS WILL SUITABLY MEET THE REQUIREMENTS OF THEIR
INTENDED USE. OMRON DISCLAIMS ALL OTHER WARRANTIES, EXPRESS OR IMPLIED.
LIMITATIONS OF LIABILITY
OMRON SHALL NOT BE RESPONSIBLE FOR SPECIAL, INDIRECT, OR CONSEQUENTIAL
DAMAGES, LOSS OF PROFITS OR COMMERCIAL LOSS IN ANY WAY CONNECTED WITH THE
PRODUCTS, WHETHER SUCH CLAIM IS BASED ON CONTRACT, WARRANTY, NEGLIGENCE, OR
STRICT LIABILITY.
In no event shall the responsibility of OMRON for any act exceed the individual price of the product on
which liability is asserted.
IN NO EVENT SHALL OMRON BE RESPONSIBLE FOR WARRANTY, REPAIR, OR OTHER CLAIMS
REGARDING THE PRODUCTS UNLESS OMRON'S ANALYSIS CONFIRMS THAT THE PRODUCTS
WERE PROPERLY HANDLED, STORED, INSTALLED, AND MAINTAINED AND NOT SUBJECT TO
CONTAMINATION, ABUSE, MISUSE, OR INAPPROPRIATE MODIFICATION OR REPAIR.
Page 5
3
Read and Understand this Manual
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Application Considerations
SUITABILITY FOR USE
OMRON shall not be responsible for conformity with any standards, codes, or regulations that apply to
the combination of products in the customer's application or use of the products.
At the customer's request, OMRON will provide applicable third party certification documents identifying
ratings and limitations of use that apply to the products. This information by itself is not sufficient for a
complete determination of the suitability of the products in combination with the end product, machine,
system, or other application or use.
The following are some examples of applications for which particular attention must be given. This is not
intended to be an exhaustive list of all possible uses of the products, nor is it intended to imply that the
uses listed may be suitable for the products:
• Outdoor use, uses involving potential chemical contamination or electrical interference, or conditions
or uses not described in this manual.
• Nuclear energy control systems, combustion systems, railroad systems, aviation systems, medical
equipment, amusement machines, vehicles, safety equipment, and installations subject to separate
industry or government regulations.
• Systems, machines, and equipment that could present a risk to life or property.
Please know and observe all prohibitions of use applicable to the products.
NEVER USE THE PRODUCTS FOR AN APPLICATION INVOLVING SERIOUS RISK TO LIFE OR
PROPERTY WITHOUT ENSURING THAT THE SYSTEM AS A WHOLE HAS BEEN DESIGNED TO
ADDRESS THE RISKS, AND THAT THE OMRON PRODUCTS ARE PROPERLY RATED AND
INSTALLED FOR THE INTENDED USE WITHIN THE OVERALL EQUIPMENT OR SYSTEM.
PROGRAMMABLE PRODUCTS
OMRON shall not be responsible for the user's programming of a programmable product, or any
consequence thereof.
Page 6
4
Read and Understand this Manual
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Disclaimers
CHANGE IN SPECIFICATIONS
Product specifications and accessories may be changed at any time based on improvements and other
reasons.
It is our practice to change model numbers when published ratings or features are changed, or when
significant construction changes are made. However, some specifications of the products may be
changed without any notice. When in doubt, special model numbers may be assigned to fix or establish
key specifications for your application on your request. Please consult with your OMRON representative
at any time to confirm actual specifications of purchased products.
DIMENSIONS AND WEIGHTS
Dimensions and weights are nominal and are not to be used for manufacturing purposes, even when
tolerances are shown.
PERFORMANCE DATA
Performance data given in this manual is provided as a guide for the user in determining suitability and
does not constitute a warranty. It may represent the result of OMRON's test conditions, and the users
must correlate it to actual application requirements. Actual performance is subject to the OMRON
Warranty and Limitations of Liability.
ERRORS AND OMISSIONS
The information in this manual has been carefully checked and is believed to be accurate; however, no
responsibility is assumed for clerical, typographical, or proofreading errors, or omissions.
Page 7
5
Safety Precautions
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Safety Precautions
Indications and Meanings of Safety Information
In this user's manual, the following precautions and signal words are used to provide
information to ensure the safe use of the 3G3MX2 Inverter.
The information provided here is vital to safety. Strictly observe the precautions provided.
Meanings of Signal Words
Alert Symbols in this Document
Indicates a potentially hazardous situation which, if not avoided, will
result in minor or moderate injury, or may result in serious injury or
death. Additionally there may be significant property damage.
Indicates a potentially hazardous situation which, if not avoided, may
result in minor or moderate injury or in property damage.
WARNING
CAUTION
Turn off the power supply and implement wiring correctly. Not doing so may result in a serious injury
due to an electric shock.
Wiring work must be carried out only by qualified personnel. Not doing so may result in a serious
injury due to an electric shock.
Be sure to ground the unit. Not doing so may result in a serious injury due to an electric shock or fire.
(200 V class: type-D grounding, 400 V class: type-C grounding)
Do not remove the terminal block cover during the power supply and 10 minutes after the power
shutoff.
Doing so may result in a serious injury due to an electric shock.
Do not operate the Digital Operator or switches with wet hands. Doing so may result in a serious
injury due to an electric shock.
Inspection of the Inverter must be conducted after the power supply has been turned off. Not doing
so may result in a serious injury due to an electric shock. The main power supply is not necessarily
shut off even if the emergency shutoff function is activated.
Do not change wiring, slide switches, or optional devices while power is being supplied.
Always turn off the power supply to the Inverter before changing wiring, changing the slide switches,
or attaching/removing options.
Do not touch the Inverter fins, braking resistors and the motor, which become too hot during the
power supply and for some time after the power shutoff. Doing so may result in a burn.
WARNING
Page 8

6
Safety Precautions
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Do not connect resistors to the terminals (+1, P/+2, N/−) directly.
Doing so might result in a small-scale fire, heat generation or damage to the unit.
Install a stop motion device to ensure safety. Not doing so might result in a minor injury. (A holding
brake is not a stop motion device designed to ensure safety.)
Be sure to use a specified type of braking resistor/regenerative braking unit. In case of a braking
resistor, install a thermal relay that monitors the temperature of the resistor. Not doing so might result
in a moderate burn due to the heat generated in the braking resistor/regenerative braking unit.
Configure a sequence that enables the Inverter power to turn off when unusual overheating is
detected in the braking resistor/regenerative braking unit.
The Inverter has high voltage parts inside which, if short-circuited, might cause damage to itself or
other property. Place covers on the openings or take other precautions to make sure that no metal
objects such as cutting bits or lead wire scraps go inside when installing and wiring.
Take safety precautions such as setting up a molded-case circuit breaker (MCCB) that matches the
Inverter capacity on the power supply side. Not doing so might result in damage to property due to
the short circuit of the load.
Do not dismantle, repair or modify this product.
Doing so may result in an injury.
CAUTION
Page 9
7
Precautions for Safe Use
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Precautions for Safe Use
Installation and Storage
Do not store or use the product in the following places.
Locations subject to direct sunlight.
Locations subject to ambient temperature exceeding the specifications.
Locations subject to relative humidity exceeding the specifications.
Locations subject to condensation due to severe temperature fluctuations.
Locations subject to corrosive or flammable gases.
Locations subject to exposure to combustibles.
Locations subject to dust (especially iron dust) or salts.
Locations subject to exposure to water, oil, or chemicals.
Locations subject to shock or vibration.
Transporting, Installation, and Wiring
Do not drop or apply strong impact on the product. Doing so may result in damaged parts or
malfunction.
Do not hold by the terminal block cover, but hold by the fins during transportation.
Do not connect an AC power supply voltage to the control input/output terminals. Doing so may
result in damage to the product.
Be sure to tighten the screws on the terminal block securely.
Wiring work must be done after installing the unit body.
Do not connect any load other than a three-phase inductive motor to the U, V, and W output
terminals.
Take sufficient shielding measures when using the product in the following locations. Not doing
so may result in damage to the product.
Locations subject to static electricity or other forms of noise.
Locations subject to strong magnetic fields.
Locations close to power lines.
Main Circuit Power Supply
Confirm that the rated input voltage of the Inverter is the same as AC power supply voltage.
Operation and Adjustment
Be sure to confirm the permissible range of motors and machines before operation because the
Inverter speed can be changed easily from low to high.
Provide a separate holding brake if necessary.
Maintenance and Inspection
Be sure to confirm safety before conducting maintenance, inspection or parts replacement.
The life of the capacitor depends on ambient temperatures. Refer to the diagram of product life
specified in the manual. When the capacitor stops operating at the end of the product's life, the
Inverter must be replaced.
Page 10
8
Precautions for Correct Use
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Precautions for Correct Use
Installation
Mount the product vertically on a wall with the product's longer sides upright.
The material of the wall has to be nonflammable such as a metal plate.
Restart after Trip
Do not come close to the machine when using the Restart During Momentary Power Interruption
function because the machine may abruptly start when stopped by an alarm.
Be sure to confirm the RUN signal is turned off before resetting the alarm because the machine
may abruptly start.
Operation Stop Command
Provide a separate emergency stop switch because the STOP key on the Digital Operator is valid
only when function settings are performed.
When checking a signal during the power supply and the voltage is erroneously applied to the
control input terminals, the motor may start abruptly. Be sure to confirm safety before checking a
signal.
Maintenance and Parts Replacement
The Inverter consists of many parts, and these parts must operate properly in order to make full
use of the designed functions of the Inverter. Among the electronic components, there are some
that require maintenance depending on their usage conditions. In order to keep the Inverter
operating normally over a long period of time, it is necessary to perform periodic inspections and
replace parts according to their service life.
Product Disposal
Comply with the local ordinance and regulations when disposing of the product.
Page 11
9
Precautions for Correct Use
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
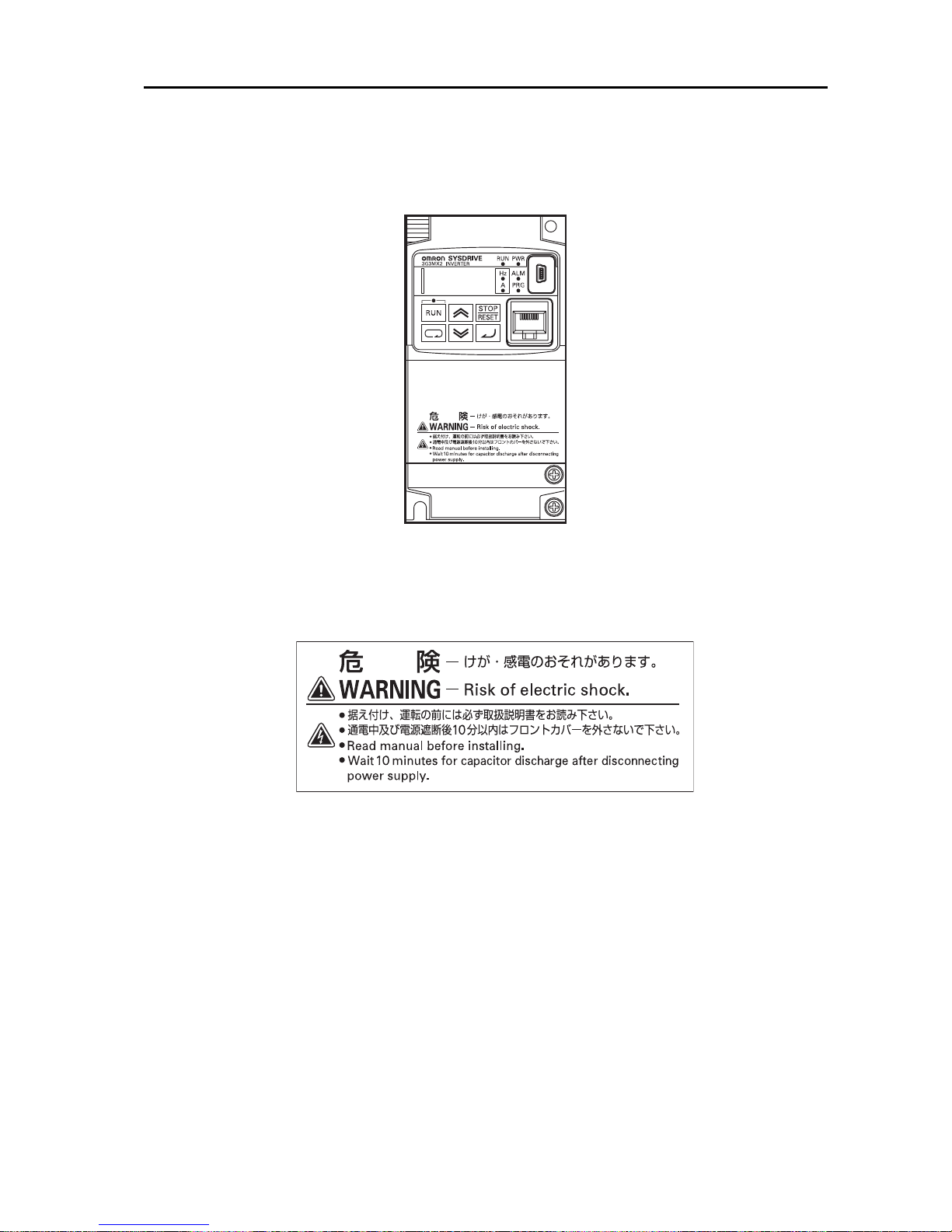
Warning Labels
Warning labels are located on the Inverter as shown in the following illustration.
Be sure to follow the instructions.
Warning Description
Page 12

10
Checking Before Unpacking
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Checking Before Unpacking
Checking the Product
On delivery, be sure to check that the delivered product is the Inverter 3G3MX2 model that you
ordered.
Should you find any problems with the product, immediately contact your nearest local sales
representative or OMRON sales office.
Checking the Nameplate
Checking the Model
Checking the Accessories
Note that Instruction manual is the only accessory included with the 3G3MX2 model.
Mounting screws and other necessary parts must be provided by the user.
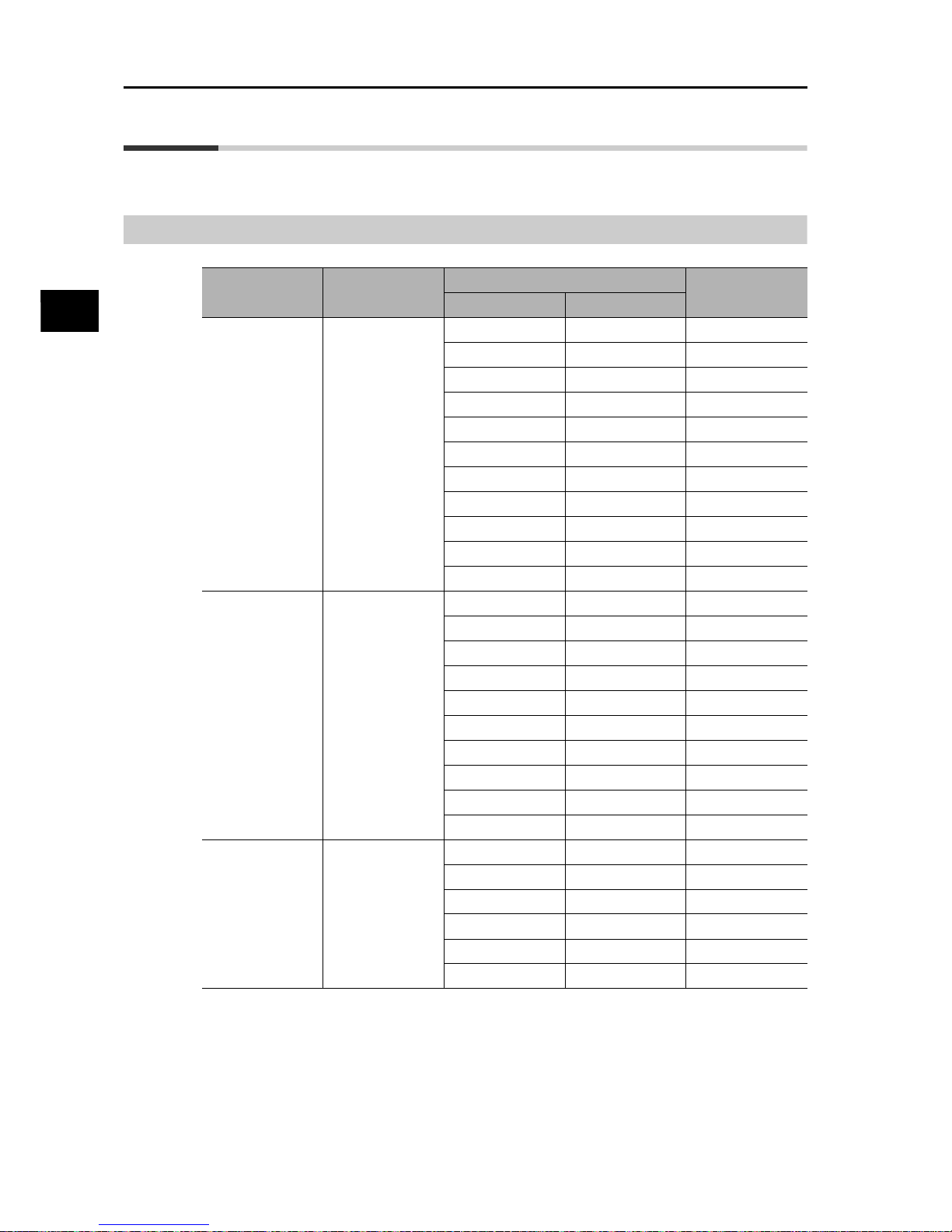
Inverter model
Input specifications
Output specifications
3G3MX2-A2055
Maximum applicable motor capacity (CT rating)
004
007
015
022
0.4 kW
0.75 kW
1.5 kW
2.2 kW
5.5 kW
7.5 kW
11 kW
15 kW
Voltage class
B
2
4
1-phase 200 V AC (200 V class)
3-phase 200 V AC (200 V class)
3-phase 400 V AC (400 V class)
Enclosure rating
A
Panel-mounting (IP10 min.) or closed
wall-mounting models
0.1 kW
0.2 kW
001
3.0 kW
3.7 kW
4.0 kW
030
037
040
002
055
075
110
150
Page 13
11
Revision History
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Revision History
A manual revision code appears as a suffix to the catalog number located at the lower left of
the front and back covers.
Cat.No. I570-E1-02
Revision code
Revision
code
Revision
date
Changes and revision pages
01 September 2009 First printing
02 March 2010
Revised information on the simple position control function and
revised/corrected manual contents.
Page 14
12
About This Manual
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
About This Manual
This User's Manual is compiled chapter by chapter for user's convenience as follows.
Understanding the following configuration ensures more effective use of the product.
Overview
Chapter 1 Overview Describes features and names of parts.
Chapter 2 Design
Provides external dimensions, installation dimensions, peripheral
device design/selection instructions, and other information necessary
for design.
Chapter 3 Operation
Describes names of parts, the Inverter's operations, including how to
use the keys on the Digital Operator, and the monitor function.
Chapter 4 Parameter List List of parameters set via Digital Operator.
Chapter 5 Functions Describes the functions of the Inverter.
Chapter 6
Communication
Function
Describes the Modbus-RTU communication.
Chapter 7
Maintenance
Operations
Describes the causes and their countermeasures if the Inverter fails,
including the solutions to possible troubles (troubleshooting).
Chapter 8
Inspection and
Maintenance
Describes items for periodical inspection and/or maintenance for the
Inverter.
Chapter 9 Specifications
Provides Inverter specifications, as well as the specifications and
dimensions of peripheral devices.
Appendix
Describes the derating chart, capacitor life curve, compliance with
international standards and index.
Page 15

Page 16

14
Contents
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Introduction ...................................................................................... 1
Read and Understand this Manual .................................................. 2
Safety Precautions........................................................................... 5
Precautions for Safe Use................................................................. 7
Precautions for Correct Use ............................................................ 8
Checking Before Unpacking ............................................................ 10
Revision History............................................................................... 11
About This Manual........................................................................... 12
Chapter1 Overview
1-1 Functions......................................................................................................1-1
1-2 Appearance and Names of Parts ................................................................. 1-4
Chapter2 Design
2-1 Installation ....................................................................................................2-1
2-2 Wiring ...........................................................................................................2-6
Chapter3 Operation
3-1 Name of Parts of the Digital Operator .......................................................... 3-1
3-2 Operation Method......................................................................................... 3-7
3-3 Test Run.....................................................................................................3-10
3-4 Tripping ......................................................................................................3-12
Chapter4 Parameter List
4-1 Monitor Mode ...............................................................................................4-1
4-2 Function Mode..............................................................................................4-4
Chapter5 Functions
5-1 Monitor Mode ...............................................................................................5-1
5-2 Basic Functions ..........................................................................................5-13
5-3 Input/Output Terminals............................................................................... 5-29
5-4 Analog Signal ............................................................................................. 5-37
5-5 Settings Relating to Control Method........................................................... 5-46
5-6 Operation Functions ................................................................................... 5-56
5-7 Digital Operator/Operation Functions.........................................................5-84
5-8 Restart Functions .......................................................................................5-94
5-9 Functions Relating to Protections, Warnings
and Various Output Signals...................................................................... 5-110
5-10 Brake Settings .......................................................................................... 5-135
5-11 Sensorless Vector Control........................................................................ 5-144
5-12 Simple Position Control Function ............................................................. 5-158
5-13 Safety Function ........................................................................................5-170
5-14 Other Functions........................................................................................ 5-174
Page 17

15
Contents
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Chapter6 Communication Function
6-1 Communication Specifications..................................................................... 6-1
6-2 RS-485 Port Specifications and Connection................................................ 6-2
6-3 List of Modbus Communication (Modbus-RTU) Parameters ....................... 6-3
6-4 Modbus Communication (Modbus-RTU) Protocol ....................................... 6-4
6-5 Explanation of Each Parameter No.............................................................. 6-8
6-6 To Save the Change to the Holding Register (Enter Command)............... 6-19
6-7 Co-Inverter Communication ....................................................................... 6-22
6-8 List of Modbus Communication (Modbus-RTU) Data ................................ 6-27
Chapter7 Maintenance Operations
7-1 Error Display and Remedial Actions ............................................................ 7-1
7-2 Troubleshooting ..............................
........................................................... 7-10
Chapter8 Inspection and Maintenance
8-1 Inspection and Maintenance ........................................................................ 8-1
Chapter9 Specifications
9-1 Standard Specification List .......................................................................... 9-1
9-2 External Dimensions .................................................................................... 9-6
Appendices
Appendix-1 Derating Table ................................................................................. App-1
Appendix-2 Smoothing Capacitor Life Curve ......................................................App-7
Appendix-3 Life Alarm Output .............................................................................App-8
Appendix-4 Notes on Compliance with EC Directives and UL/cUL Standards ...App-9
INDEX
Page 18

Page 19
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
1
Overview
Describes the features, operating procedures, performance specifications and
other aspects of this Unit.
1-1 Functions............................................................................... 1-1
3G3MX2 Inverter Models ................................................................ 1-1
International Standards (EC Directives and UL/cUL Standards) .... 1-2
High-performance, Multi-function Compact Inverter Supporting
Wide-ranging Applications .............................................................. 1-2
1-2 Appearance and Names of Parts......................................... 1-4
Page 20
1-1
1-1 Functions
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
1-1 Functions
3G3MX2 Inverter Models
Rated voltage
Enclosure
ratings
Max. applicable motor capacity
Model
CT: Heavy load VT: Light load
3-phase 200 VAC IP20 0.1kW 0.2 kW 3G3MX2-A2001
0.2 kW 0.4 kW 3G3MX2-A2002
0.4 kW 0.75 kW 3G3MX2-A2004
0.75 kW 1.1 kW 3G3MX2-A2007
1.5 kW 2.2 kW 3G3MX2-A2015
2.2 kW 3.0 kW 3G3MX2-A2022
3.7 kW 5.5 kW 3G3MX2-A2037
5.5 kW 7.5 kW 3G3MX2-A2055
7.5 kW 11 kW 3G3MX2-A2075
11 kW 15 kW 3G3MX2-A2110
15 kW 18.5 kW 3G3MX2-A2150
3-phase 400 VAC IP20 0.4 kW 0.75 kW 3G3MX2-A4004
0.75 kW 1.5 kW 3G3MX2-A4007
1.5 kW 2.2 kW 3G3MX2-A4015
2.2 kW 3.0 kW 3G3MX2-A4022
3.0 kW 4.0 kW 3G3MX2-A4030
4.0 kW 5.5 kW 3G3MX2-A4040
5.5 kW 7.5 kW 3G3MX2-A4055
7.5 kW 11 kW 3G3MX2-A4075
11 kW 15 kW 3G3MX2-A4110
15 kW 18.5 kW 3G3MX2-A4150
1-phase 200 V AC IP20 0.1 kW 0.2 kW 3G3MX2-AB001
0.2 kW 0.4 kW 3G3MX2-AB002
0.4 kW 0.55 kW 3G3MX2-AB004
0.75 kW 1.1 kW 3G3MX2-AB007
1.5 kW 2.2 kW 3G3MX2-AB015
2.2 kW 3.0 kW 3G3MX2-AB022
Page 21
1-2
1-1 Functions
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
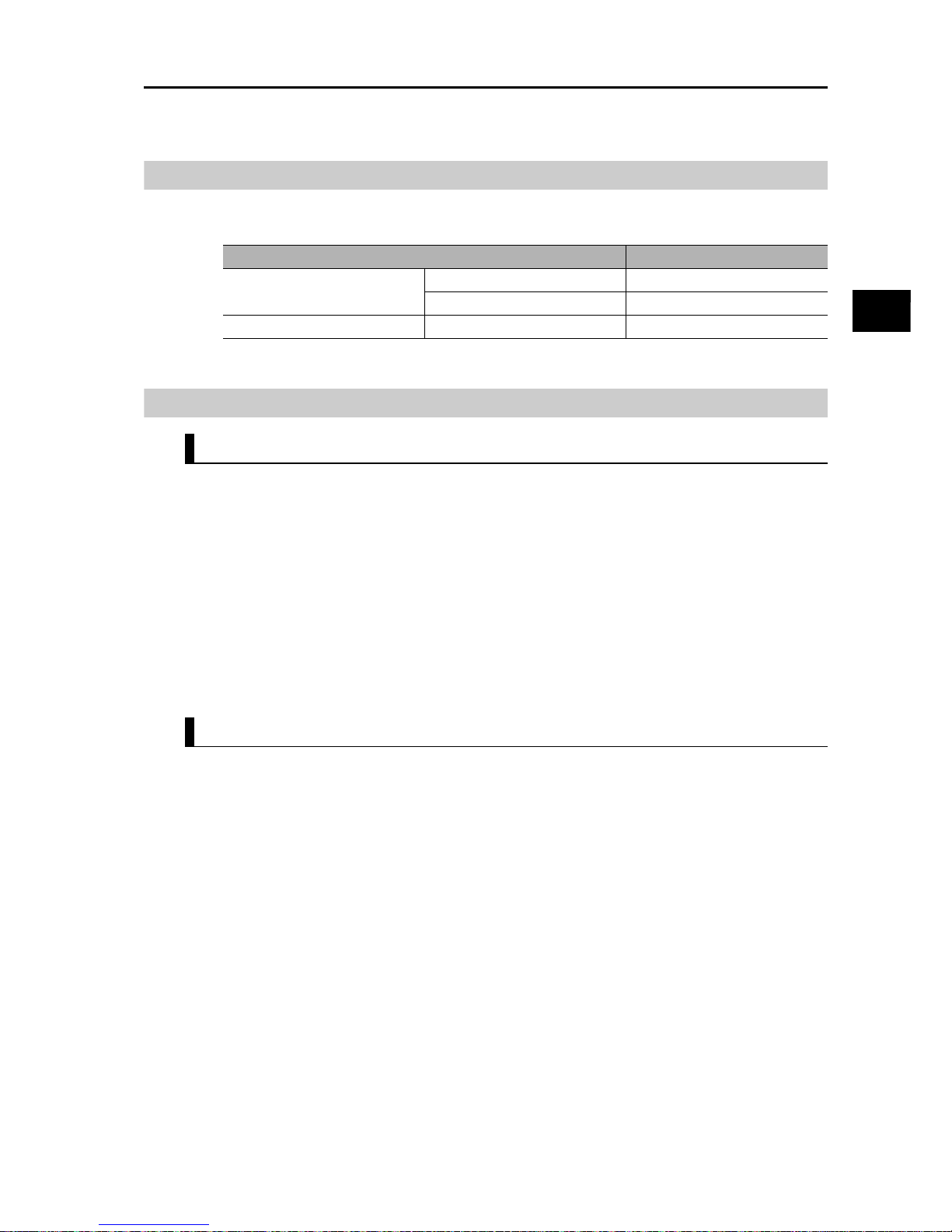
International Standards (EC Directives and UL/cUL Standards)
The 3G3MX2 Inverter meets the EC Directives and UL/cUL standard requirements for
worldwide use.
High-performance, Multi-function Compact Inverter Supporting Wide-ranging Applications
Powerful Torque Ideal for a Variety of Applications
High starting torque
With the sensorless vector control and auto-tuning functions, this Unit ensures high starting
torque of 200% at 0.5 Hz.
Note. The frame may have to be raised depending on the condition.
Overload limit/Overcurrent Suppression function
(1) The Inverter monitors the motor current during acceleration or constant speed operation in
order to lower output frequency automatically.
(2) This function suppresses significant change in current caused by rapid acceleration, etc.
Acceleration will be suppressed temporarily if the output current reaches approx. 180% of
the rated current during acceleration.
Various Applications
Safety Function
Conforming to stop category 0 under IEC60204-1 and the ISO13849-1: 2006 (PLd) standard
(certification pending)
Simple Position Control Function
(1) Comes standard with the pulse input functions.
(2) Supporting simple positioning to a maximum of 8 points by setting the position command,
speed reference and acceleration/deceleration time to parameters.
Comes Standard with RS-485 (Modbus-RTU)
(1) Comes standard with the Modbus-RTU communication function to communicate with, and
also read/write various parameters from/to, the host equipment.
Broadcasting from the host equipment is also supported.
(2) Transfer Speed: Supporting speeds up to 115.2 kbps
(3) Co-inverter communication is also supported.
Side-by-Side (Zero Clearance) Installation
Since the Inverter can be installed with its right or left face contacting a wall or other structure,
the installation space can be reduced.
Classification Applicable standard
EC Directives EMC directive EN61800-3: 2004
Low-voltage directive EN61800-5-1: 2003
UL/cUL Standards UL508C
Page 22
1-3
1-1 Functions
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
Note. The carrier frequency, etc. must be derated depending on the model.
Password Function
Comes with the password function to prevent reading or changing of parameters without
proper access privileges.
Page 23
1-4
1-2 Appearance and Names of Parts
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
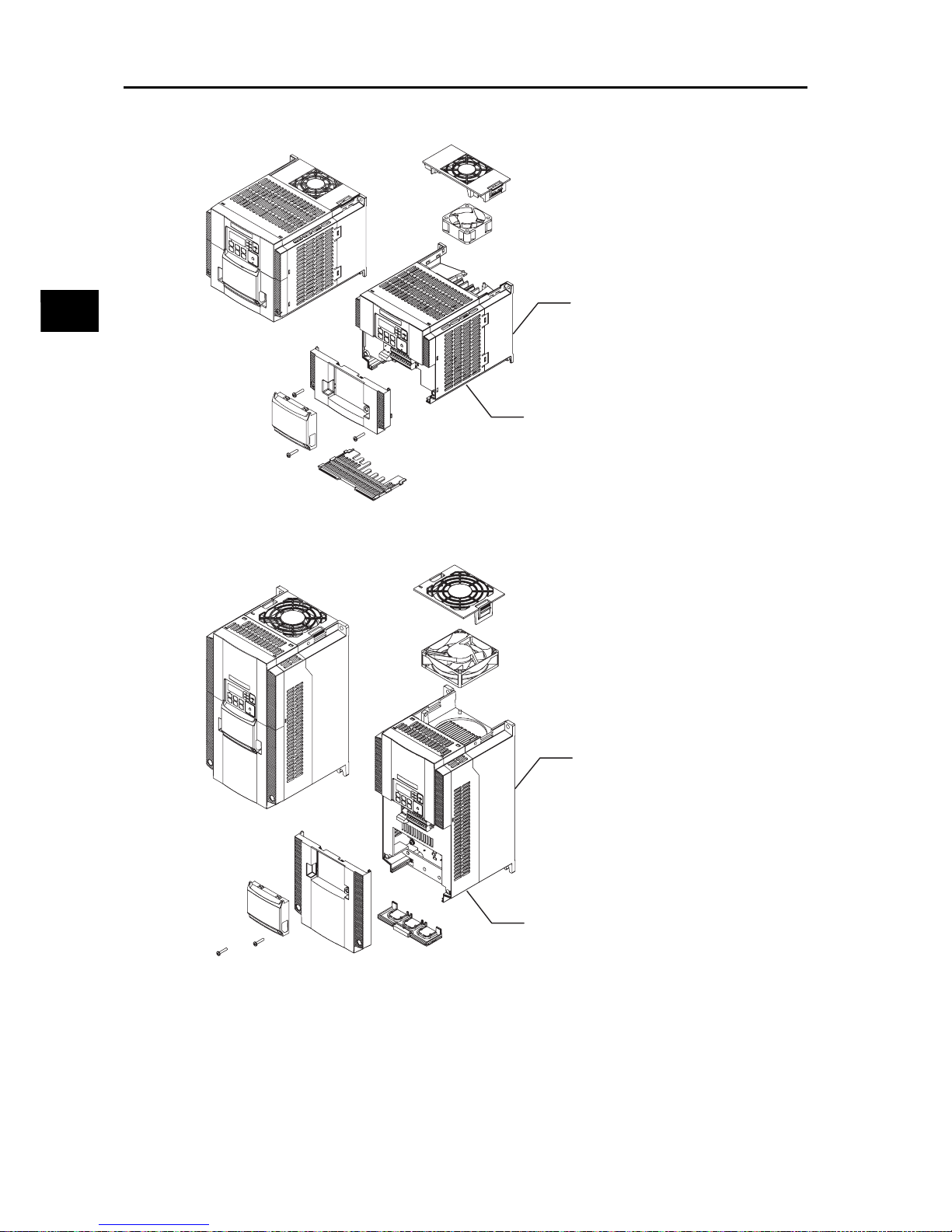
1-2 Appearance and Names of Parts
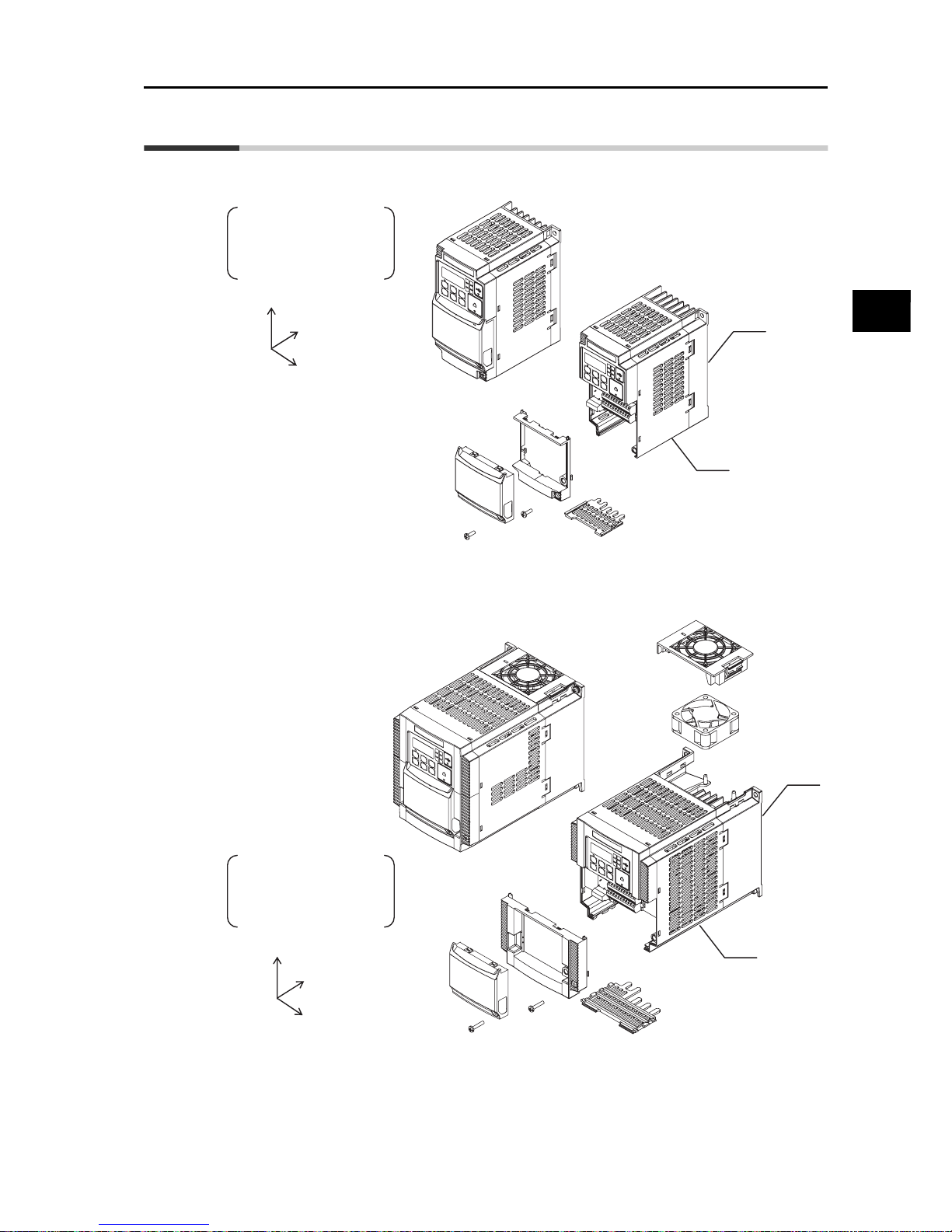
1-phase 200 V 0.1, 0.2, 0.4 kW
3-phase 200 V 0.1, 0.2, 0.4, 0.75 kW
1-phase 200 V 0.75, 1.5, 2.2 kW
3-phase 200 V 1.5, 2.2 kW
3-phase 400 V 0.4, 0.75, 1.5, 2.2, 3.0 kW
(1) Cooling fan cover (5) Terminal block cover
(2) Cooling fan (6) Optional board cover
(3) Cooling fin (7) Backing plate
(4) Main housing
Note: • 3-phase 200 V/0.75 kW models come with a cooling fan.
•
1-phase 200 V/0.75 kW models and 3-phase 400 V/0.4 kW/0.75 kW models do not come with a cooling fan.
Even if the W × H
dimension is the same, the
D dimension for the
cooling fin varies
depending on the capacity.
H
D
W
(5)
(6)
(7)
(4)
(3)
H
D
W
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Even if the W × H
dimension is the same, the
D dimension for the
cooling fin varies
depending on the capacity.
Page 24
1-5
1-2 Appearance and Names of Parts
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
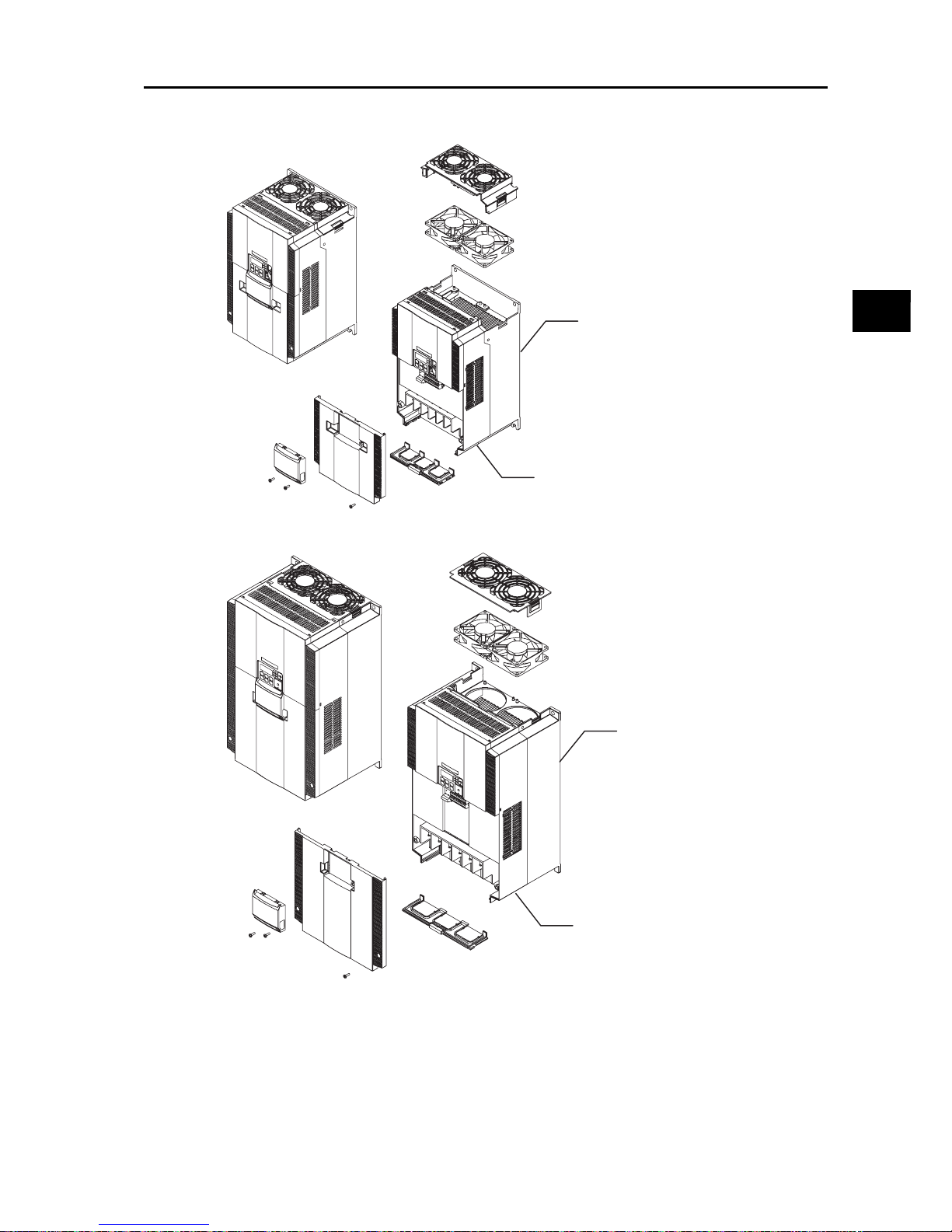
3-phase 200 V 3.7 kW
3-phase 400V 4.0 kW
3-phase 200 V 5.5, 7.5 kW
3-phase 400 V 5.5, 7.5 kW
(1) Cooling fan cover (5) Terminal block cover
(2) Cooling fan (6) Optional board cover
(3) Cooling fin (7) Backing plate
(4) Main housing
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Page 25
1-6
1-2 Appearance and Names of Parts
1
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
Overview
3-phase 200 V 11 kW
3-phase 400 V 11, 15 kW
3-phase 200 V 15 kW
(1) Cooling fan cover (5) Terminal block cover
(2) Cooling fan (6) Optional board cover
(3) Cooling fin (7) Backing plate
(4) Main housing
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Page 26

Page 27
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Describes the name and function of each part, installation method, wiring method,
etc.
2-1 Installation............................................................................. 2-1
Precautions for Safe Use ................................................................ 2-1
Precautions for Correct Use............................................................ 2-2
Installation Environment.................................................................. 2-2
Backing Plate .................................................................................. 2-3
Installation/Removal Method of the Terminal Block Cover ............. 2-4
Names of Parts Inside the Terminal Block Cover ........................... 2-5
2-2 Wiring..................................................................................... 2-6
Connection Diagram ....................................................................... 2-6
Wiring the Main Circuit Terminals ................................................. 2-10
Wiring Control Circuit Terminals ................................................... 2-18
Connection to Programmable Controller (PLC) ............................ 2-22
Page 28
2-1
2-1 Installation
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
2-1 Installation
Precautions for Safe Use
Installation and Storage
Do not store or use the product in the following places.
Locations subject to direct sunlight.
Locations subject to ambient temperature exceeding the specifications.
Locations subject to relative humidity exceeding the specifications.
Locations subject to condensation due to severe temperature fluctuations.
Locations subject to corrosive or flammable gases.
Locations subject to exposure to combustibles.
Locations subject to dust (especially iron dust) or salts.
Locations subject to exposure to water, oil, or chemicals.
Locations subject to shock or vibration.
Transportation, Installation, and Wiring
Do not drop or apply any strong impact to the Inverter to avoid damage to the parts and/or
the Inverter.
When transporting the Inverter, hold the fin, not the front cover or terminal block cover.
Do not connect an AC power supply to the control I/O terminals. Doing so may cause damage
to the Inverter.
Be sure to tighten the screws on the terminal block securely. Perform the wiring after
installing the Inverter.
Do not connect any load other than the 3-phase induction motor to the output terminals (U/
T1, V/T2, W/T3) of the Inverter.
Take appropriate and sufficient countermeasures when using the Inverter in the following
locations. Not doing so may result in damage to the Inverter.
Locations subject to static electricity or other forms of noise.
Locations subject to strong electromagnetic fields.
Locations close to power supplies.
Main Circuit Power Supply
Confirm that the rated input voltage of the Inverter matches the AC power supply voltage.
Page 29
2-2
2-1 Installation
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Precautions for Correct Use
Installation
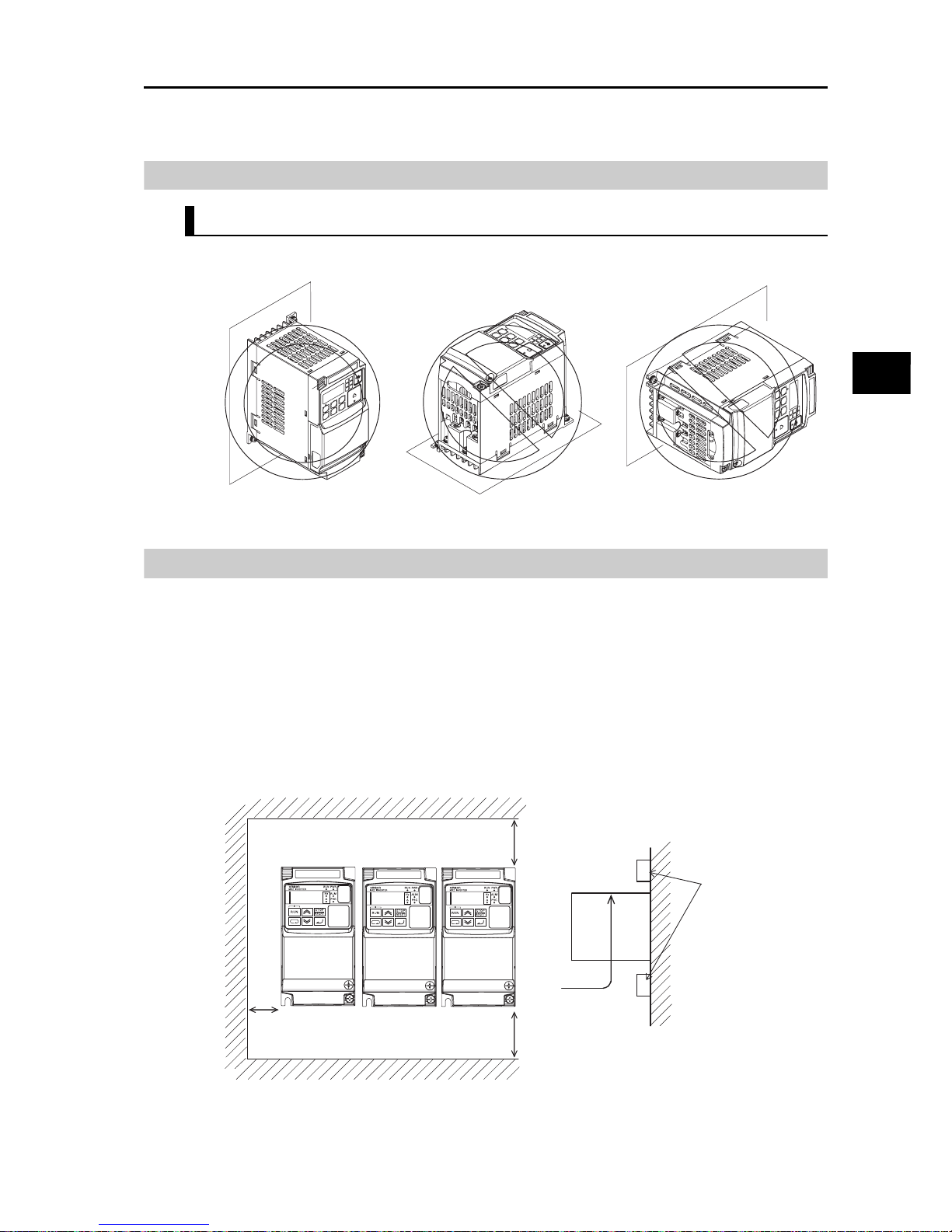
Install the Inverter vertically on a wall.
Install the Inverter on a nonflammable wall surface material, like metal.
Installation Environment
Make sure the ambient temperature remains within the rated range (−10 to 50°C). Take note that if
the ambient temperature reaches or exceeds 40
°
C, the carrier frequency and output current must
be derated. If the Inverter is used in an environment exceeding the allowable operating temperature
range, the product life of the Inverter (specifically, the capacitor) will be shortened.
Measure and check the temperature approx. 5 cm from the bottom center of the Inverter body.
Provide sufficient space around the Inverter because it can become very hot (up to 150°C or so).
Keep the Inverter away from heating elements (such as a Braking Resistor, reactor, etc.).
Although side-by-side installation is possible. The ambient temperature of the installation site
must not exceed 40°C and the carrier frequency and output current must be derated if side-byside installation is used.
Do not install the Inverter in hot, humid sites or other sites subject to frequent bedewing.
Make sure that the humidity in the installation site is within the allowable operating range (20%
to 90% RH), as defined in the standard specifications.
Air flow
100 mm or more
50 mm or more
Inverter
Wall
Provide sufficient
space so that the top
and bottom wiring
ducts, etc. will not
obstruct the flows of
cooling air.
100 mm or more
Page 30
2-3
2-1 Installation
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
In particular, make sure that the installation site is free from condensation. If condensed water
adheres to the Inverter's internal parts, the electronic components may short-circuit, causing
failure of the Inverter. In addition to avoiding condensation, avoid installing the Inverter under
direct sunlight.
Avoid an environment where the Inverter may be exposed to dust, gases (corrosive, explosive,
and/or flammable), grinding fluid mist, or salt. If a foreign object (e.g. dust) enters the Inverter,
it could result in failure of the Inverter. If using the Inverter in a dusty place, take appropriate
measures. (For example, place the Inverter in a closed panel.)
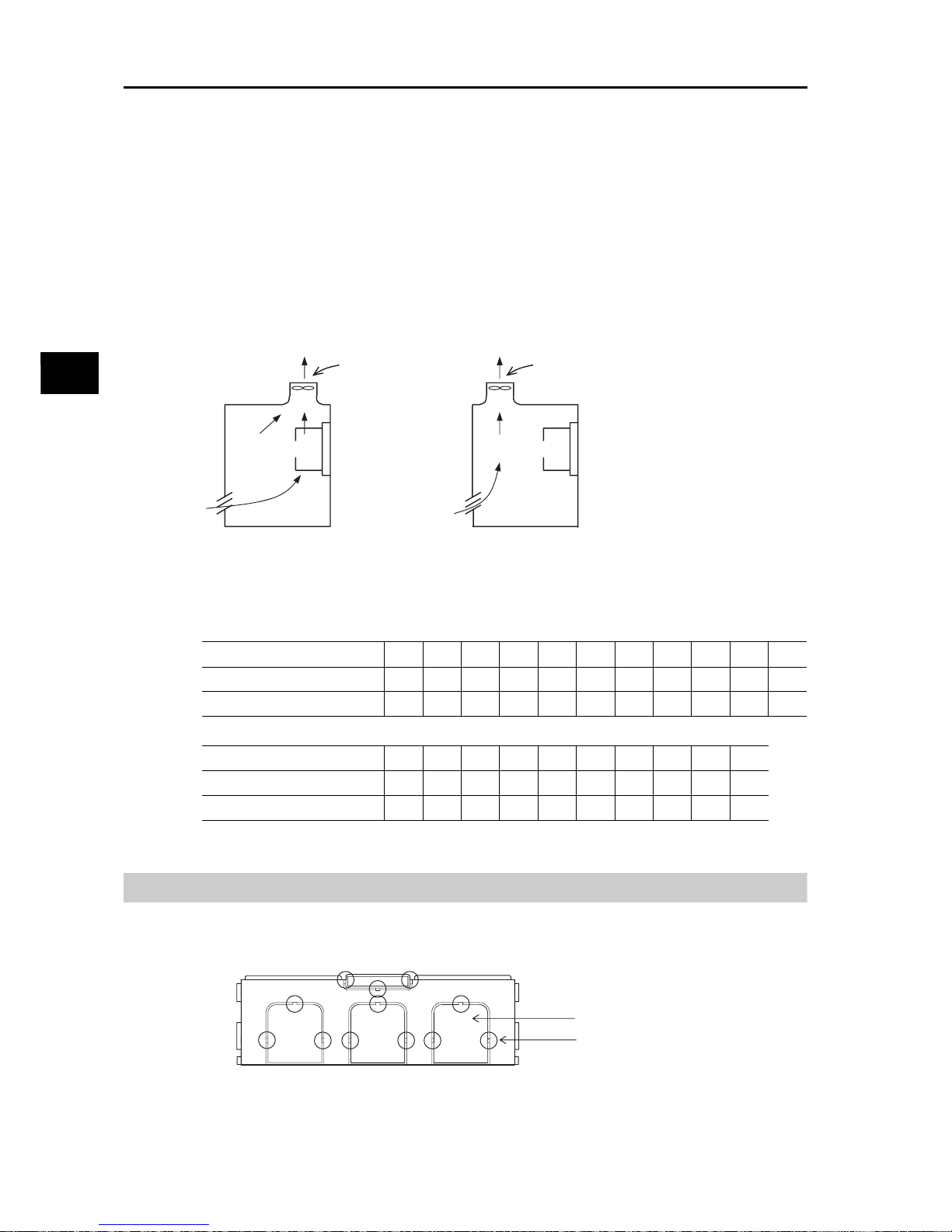
When several Inverters are installed in a panel and a ventilation fan is mounted in the panel,
be careful about the layout of the Inverters and the air intake apertures. Depending on the
layout, the Inverter's cooling effect may deteriorate, resulting in an increase in the ambient
temperature.
Heat Radiation from Inverter
1-phase/3-phase 200 V
3-phase 400 V
Backing Plate
With a model of 5.5 kW or higher capacity, cut off the connection points between the backing
plate and unnecessary portions with nippers or a wire cutter when running cables.
Inverter capacity (kW) 0.1 0.2 0.4 0.75 1.5 2.2 3.7 5.5 7.5 11 15
Load with 100% loss (W) 12 22 30 48 79 104 154 229 313 458 625
Efficiency at rated output (%) 89.5 90 93 94 95 95.5 96 96 96 96 96
Inverter capacity (kW) 0.4 0.75 1.5 2.2 3.0 4.0 5.5 7.5 11 15
Load with 100% loss (W) 35 56 96 116 125 167 229 296 411 528
Efficiency at rated output (%) 92 93 94 95 96 96 96 96.2 96.4 96.6
Ventilation fan
Ventilation fan
Inverter
Inverter
(Good example) (Bad example)
Unnecessary portions
Connection points
Page 31

2-4
2-1 Installation
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Installation/Removal Method of the Terminal Block Cover
1. Removal method
The terminal block cover is secured with one screw at the bottom right for 3.0 kW and smaller
models, or with two screws on both sides for 3.7 kW and larger models.
The optional board cover is affixed with screws onto the terminal block cover, but it is not
affixed onto the main unit. Accordingly, the terminal block cover can be removed without
removing the optional board cover.
2. Installation method
Follow the removal procedure in reverse. Set the top side of the terminal block cover onto the
main unit and push in the cover until you hear a "click" sound.
While pressing here in the direction
of the arrow, pull the terminal block
cover downward to remove.
Loosen the screw(s) (1 or 2
locations) securing the
terminal block cover.
While pressing the bottom of the
terminal block cover in the direction
of the arrow, pull the terminal block
cover downward to remove.
Optional board cover
Terminal block cover
Terminal block cover screw
(1 location for 3.0 kW and smaller models)
Terminal block cover screw
(2 locations for 3.7 kW and larger models)
8.8.8.8.
8.8.8.8.
Page 32

2-5
2-1 Installation
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Names of Parts Inside the Terminal Block Cover
Note. Refer to Chapter 3 "Operation" for the display and operating controls.
Name Description
Modbus-RTU
Termination resistor
selector switch
Use this Terminal Resistor selector switch for RS-485 terminals on the control circuit
terminal block. When this switch is turned ON, the internal 200
Ω
Resistor is connected.
Safety function
selector switch
Turn this switch ON when using the safety function. Turn OFF the power before
turning this switch ON/OFF.For details, refer to "Safety Function" on page 5-170.
EDM function
selector switch
Turn this switch ON when using the EDM output of the safety function. Turn OFF
the power before turning this switch ON/OFF. For details, refer to "Safety Function"
on page 5-170.
USB connector Use this mini-B USB connector to connect a PC.
Even when the Inverter is being operated by a PC, etc., via USB connection, it can
still be operated using the Digital Operator.
Connector for
Digital Operator
Use this connector to connect the Digital Operator.
Connector for
optional board
Use this connector to mount the optional board.
Communications Units and other options can be connected.
Control circuit
terminal blocks A
and B
These terminal blocks are used to connect various digital/analog input and output
signals for inverter control, etc.
Multi-function
contact terminal
block
Use this SPDT contact terminal block for relay outputs.
Main circuit
terminal block
Use this terminal block to connect an output to the motor and Braking Resistor, etc.
Also, use this terminal block to connect the inverter to the main power supply.
CHARGE
indicator (Charge
indicator LED)
This LED indicator is lit if the DC voltage of the main circuit (between terminals P/
+2 and N/−) remains approx. 45 V or above after the power has been cut off. Before
wiring, etc. confirm that the Charge LED indicator is turned OFF.
Modbus-RTU Termination resistor selector switch
Safety function selector switch
Connector for optional board
Multi-function contact terminal block
CHARGE indicator
Main circuit terminal block
OFF
(Factory default)
ON
USB connector (mini-B)
Connector for Digital Operator (RJ45)
EDM function selector switch
Control circuit terminal block A
Control circuit terminal block B
Disable
(Factory default)
Enable
P1 terminal
(Factory default)
EDM output
Page 33

2-6
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
2-2 Wiring
Connection Diagram
Single-phase
3-phase
power
supply
Shorting
bar
Shorting bar
Motor
ELB
MC
ON
R/L1 (L1)
*1
S/L2
T/L3 (N)
*1
24 VDC
MC
S7/EB
S5/TH
S4/GS2
S3/GS1
S2
S1
FS
FV
FI
RP
AM
MP
RS−
RS+
PC
P1/EDM
P2
MB
MA
N/−
SC
S6
P24
DC reactor
PSC
SC
SC
If any source-logic external
output devices or external
power supply is used, refer to
"Connection to
Programmable Controller
(PLC)" on page 2-22.
Multi-function
outputs (2 outputs)
Multi-function
relay output
Braking Resistor
*2
*1 Connect to terminals L1 and N on a single-phase, 200-V Inverter (3G3MX2-AB@@@).
*2 Optional.
Power: 1/4 W min.
Resistance: 2 kΩ min.
10 VDC power supply
(7 mA Max.)
Analog voltage input
0 to 10 V (10 bits)
Analog voltage
output 0 to 10 V
(10 bits)
Ground to 100 Ω or less for 200-V class
Ground to 100 Ω or less for 400-V class
Analog current input
4 to 20 mA (10 bits)
Pulse input
5 to 24 VDC
(32 kHz Max.)
Pulse output
0 to 10 VDC
(32 kHz Max.)
Serial communication port
(RS-485/Modbus-RTU)
RB
P/+2
+1
W/T3
V/T2
U/T1
M
3~
Remove the short bar
when connecting a
DC reactor.
RB
N/
−
Regenerative
Braking Unit
*2
P
RB
Braking Resistor
*2
When using a Regenerative Braking Unit
P
N
10 VDC
SC
SC
SC
SC
SC
Approx.
100 Ω
Terminal
Resistor
Terminal Resistor
selector switch
Approx.
10 kΩ
Thermistor
Optional board connector
Communications Option Unit
*2
OFF
MC
AX
MC
AX
Multi-function
inputs
(7 contact
inputs)
Page 34

2-7
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Main Circuit Terminals
Control Circuit Terminals
Terminal
symbol
Terminal name Description
R/L1 L1 Main power supply
input terminal
Connect the input AC power supply. Connect to terminals L1 and N
on a single-phase, 200-V Inverter (3G3MX2-AB@@@).
S/L2
T/L3 N
U/T1 Inverter output
terminal
Connect a 3-phase motor.
V/T2
W/T3
+1 DC reactor
connection terminal
Remove the shorting bar between terminals +1 and P/+2, and
connect the optional DC reactor.
P/+2
P/+2 Braking Resistor
connection terminal
Connect optional braking resistors. (If a braking torque is required)
RB
P/+2 Regenerative
braking unit
connection terminal
Connect optional regenerative braking units. (When braking torque
is required or the built-in braking circuit is not sufficient)
N/−
G Ground terminal This is a ground terminal. Connect this terminal to the ground.
Provide Class D grounding for 200 V class models, and class C
grounding for 400 V class models.
On 200 V class models of 3.7 kW or below and 400 V class models
of 4.0 kW or below, the ground terminal is located on the cooling fin.
Terminal
symbol
Terminal name Description Specifications
Analog
Power
supply
SC Input signal
common
This is a common terminal
used by the internal power
supply, digital input and
analog input/output
terminals.
FS Frequency
reference
power supply
10 VDC power supply for
the FV terminal.
Allowable max. current:
7 mA
Frequency
setting
input
FV
Frequency
reference input
terminal (analog
voltage input)
Use this terminal if the
frequency reference is
provided by 0 to 10 VDC
voltage input.
Input impedance
Approx. 10 kΩ
Allowable input voltage
range
−0.3 to +12 VDC
FI
Frequency
reference
terminal (analog
current input)
Use this terminal if the
frequency reference is
provided by 4 to 20 mA
current input.
Input impedance
100 Ω
Allowable input range
0 to 24 mA
Page 35

2-8
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Analog
Sensor
input
S5/TH External
thermistor input
(also used as
multi-function
input terminal)
Connect an external
thermistor between the
SCs, to trip the Inverter
when a temperature error
occurs. (The inverter will trip
when the input from
thermistor is approx. 3 kΩ or
higher.) Since this input is
also used as the multifunction input terminal,
setting of C005 is required.
For details, refer to
"Thermistor Trip Function"
on page 5-120.
PTC type
Output AM Multi-function
analog output
(voltage)
Specified signals can be
output using voltage signals
of 0 to 10 VDC.
AM
Digital
Power
supply
SC
Input signal
common
This is a common terminal
used by the internal power
supply, digital input and
analog input/output
terminals.
P24
Power supply
terminal for
input signal
24 VDC power supply for
contact input signal. This is
used as a common terminal
if the source logic is input.
Allowable max. current:
100 mA
PSC
Power supply
terminal for
input terminal
Sink logic input: Shorted
with P24
Source logic input: Shorted
with SC
To drive the contact input
using an external power
supply, remove the shorting
bar. For details, refer to
"Connection to
Programmable Controller
(PLC)" on page 2-22.
Input
Contact
S7/EB
S6
S5/TH
S4/GS2
S3/GS1
S2
S1
Multi-function
input terminal
Select 7 functions from
among 59, and allocate
them to terminals S1
through S7/EB. Both sink
and source logics are
supported. For details, refer
to "Connection to
Programmable Controller
(PLC)" on page 2-22.
Voltage between each
input and PSC
ON voltage: 18 V min.
OFF voltage: 3 V max.
Allowable max. voltage: 27
VDC
Load current: 5 mA (at 24
V)
S4/GS2
S3/GS1
Safety input Enabled when the safety
function selector switch is
turned ON. For details, refer
to "Safety Function" on
page 5-170.
Terminal
symbol
Terminal name Description Specifications
Page 36

2-9
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Digital
Input
Pulse
RP
Pulse input-A A pulse input for frequency
setting. (Take note that the
internal circuit is different
from input terminals S7/
EB.)
Input pulse 32 kHz max.
Voltage between input and
SC
ON voltage: 4 V min.
OFF voltage: 1 V max.
Allowable max. voltage: 27
VDC
S7/EB
Pulse input-B A pulse input for frequency
setting. (Take note that the
internal circuit is different
from input terminal RP.)
Input pulse 1.8 kHz max.
ON voltage: 18 V min.
OFF voltage: 3 V max.
Allowable max. voltage: 27
VDC
Load current: 5 mA (at 24
V)
Output
Open collector
P1/EDM
P2
Multi-function
output terminal
Select 2 functions from
among 43, and allocate
them to terminals P1
through P2. Both sink and
source logics are
supported. For details, refer
to "Connection to
Programmable Controller
(PLC)" on page 2-22.
Open collector output
Between each terminal and
PC
Allowable max. voltage: 27
V
Allowable max. current: 50
mA
Voltage drop when ON: 4 V
max.
P1/EDM
Safety monitor Enabled when the EDM
function selector switch is
ON. For details, refer to
"Safety Function" on page
5-170.
Relay
MAMBRelay output
terminal
Select the desired functions
from among 43 functions,
and allocate them to these
terminals.
SPDT contact.
The factory default of Relay
Output (MA, MB) Contact
Selection (C036) is NC
contact between MA-MC,
and NO contact between
MB-MC.
Max. contact capacity
MA-MC:
250 VAC, 2 A (resistance)
0.2 A (induction)
MB-MC:
250 VAC, 1 A (resistance)
0.2 A (induction)
Contact min. capacity
100 VAC, 10mA
5 VDC, 100mA
MC
Relay output
common
Pulse
MP
Pulse output Pulses are output. Output pulse: 32 kHz max.
Output voltage: 10 VDC
Allowable max. current: 2
mA
Serial communication
RS+
RS−
Modbus port
(RS-485)
RS-485 port
RS+ RS-485 differential (+)
signal
RS- RS-485 differential (−)
signal
Max. speed: 115.2 kbps
Built-in Terminal Resistor:
200 Ω
Slide switch selection
Terminal
symbol
Terminal name Description Specifications
Page 37

2-10
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Wiring the Main Circuit Terminals
Before wiring, make sure that the CHARGE indicator is OFF.
Once the power supply is turned on, the capacitor in the Inverter is charged with high voltage for
a while even after the power supply is turned off and regardless of whether the Inverter is running
or not.
If you are going to change cable connections after the power supply is turned off, wait for at least
10 minutes. Before wiring, check for a residual voltage between terminals "P/+2" and "N/−" with
a circuit tester to ensure safety.
Main power supply input terminals (R/L1, S/L2, T/L3)
Use an earth leakage breaker for circuit (wiring) protection between the power supply and the
main power supply terminals (R/L1, S/L2, T/L3).
An earth leakage breaker may malfunction at high frequency. Use an earth leakage breaker
with a large high-frequency sensitive current rating.
As a guide for leakage current, if a CV wire is used and routed through a metal pipe, the
leakage current is 30 mA/km. Due to the higher specific inductive capacity of the H-IV wire, the
leakage current increases about eight times. Use a wire with a sensitivity current one-level
higher. The leakage current mentioned here is the effective value of the fundamental wave,
and high-frequency currents are excluded.
When the Inverter protective function is activated, your system may fail or an accident may
occur. Connect a magnetic contactor to turn off the Inverter power supply.
Do not start or stop the Inverter by switching ON/OFF the magnetic contactor provided in the
Inverter power supply input (primary) circuit and output (secondary) circuit. To start or stop the
Inverter via an external signal, use the operation command terminals (FW, RV) on the control
circuit terminal block.
Do not use this Inverter with an input phase loss connection. Doing so may damage the
Inverter.
The Inverter operates with 1-phase input during input phase loss, causing a trip (due to
undervoltage, overcurrent, etc.) or damage to the Inverter. Even if an input phase is open, the
internal capacitor is charged with voltage, and electric shock or injury may occur.
When changing the cable connections, refer to "Precautions for Use."
Inverter-motor distance Sensitivity current of earth leakage breaker
100 m max.
30 mA
300 m max.
100 mA
800 m max.
200 mA
Page 38

2-11
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
In the following cases, the internal converter module may be damaged:
Imbalance ratio of power supply voltage is 3% or more.
Power supply capacity is ten times or more than the Inverter capacity, and 500 kVA or more.
Rapid change in power supply voltage
Example) When several inverters are connected with a short bus.
When the phase advance capacitor is turned on/off.
Do not turn on the power and then turn it off again more than once every 3 minutes. Doing so
may damage the Inverter.
Inverter output terminal (U/T1, V/T2, W/T3)
For connection of the output terminal, use the compatible cable or a cable with a larger
diameter. Otherwise, the output voltage between the Inverter and the motor may drop.
Particularly during low-frequency output, a voltage drop occurs with the cable, resulting in
motor torque reduction.
Do not mount a phase advance capacitor or surge absorber, because these devices may
cause the Inverter to trip or cause damage to the capacitor or surge absorber.
If the cable length exceeds 20 m (particularly, with 400 V class), a surge voltage may be
generated at the motor terminal depending on stray capacitance or inductance of the cable,
causing the motor to burn out.
To suppress surge voltage, we offer a special filter (3G3AX-NFxxx). For details, contact our
authorized dealer.
To connect several motors, provide a thermal relay for each.
The RC value of each thermal relay should be 1.1 times larger than the motor rated current.
The relay may trip earlier depending on the cable length. In this case, connect an AC reactor
to the Inverter output.
DC Reactor Connection Terminal (+1, P/+2)
This terminal is used to connect the optional DC reactor.
By factory default, a shorting bar has been connected between terminals +1 and P/+2. Before
connecting the DC reactor, remove this shorting bar.
The length of the DC reactor connection cable should be 5 m or shorter.
If the DC reactor is not being used, do not remove the shorting bar.
If you remove the shorting bar without connecting the DC reactor, no power is supplied to the
Inverter main circuit, disabling operation.
Page 39

2-12
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
External Braking Resistor Connection Terminal (P/+2, RB)/Regenerative Braking Unit Connection Terminal (P/+2, N/−)
All models in the 3G3MX2 Series have a built-in regenerative braking circuit.
To improve braking capacity, mount the optional braking resistor to this terminal.
Do not mount a resistor whose resistance is lower than the specified value. Doing so may
damage the regenerative braking circuit.
The cable length should be 5 m or shorter. Twist the two wires.
Do not connect any device other than the optional Regenerative Braking Unit or Braking
Resistor to this terminal.
Ground Terminal
To prevent electric shock, be sure to ground the Inverter and the motor.
The 200 V class should be connected to the ground terminal under Class D grounding
conditions (conventional Class 3 grounding conditions: 100 Ω or less ground resistance), The
400 V class should be connected to the ground terminal under Class C grounding conditions
(conventional special Class 3 grounding conditions: 10 Ω or less ground resistance).
For the ground cable, use the compatible cable or a cable with a larger diameter. Make the
cable length as short as possible.
When several Inverters are connected, the ground cable must not be connected across several
Inverters, and must not be looped. Otherwise, the Inverter and surrounding control machines
may malfunction.
Inverter
Inverter
Inverter
Inverter
Inverter
Inverter
Your ground bolt
Page 40

2-13
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Arrangement of Main Circuit Terminal Block
Open the terminal block cover and wire the main circuit terminal blocks.
Applicable model Terminal arrangement
3G3MX2-A2001 to
A2007
3G3MX2-AB001 to
AB004
3G3MX2-A2015,
A2022
3G3MX2-A4004 to
A4030
3G3MX2-AB007,
AB015, AB022
Ground terminal
(M4) × 2
W/T3V/T2U/T1 T/L3S/L2R/L1
N/-
P/+2
+1
RB
From power supply
To motors
W/T3V/T2U/T1
NL1
N/-
P/+2
+1
RB
(Connect to L1 and N for 1-phase)
Ground terminal
(M4) × 2
From power supply
To motors
W/T3V/T2U/T1 T/L3S/L2R/L1
N/-
P/+2
+1
RB
Ground terminal (M4) × 2
From power supply
To motors
W/T3V/T2U/T1
NL1
N/-
P/+2
+1
RB
(Connect to L1 and N for 1-phase)
Ground terminal (M4) × 2
From power supply
To motors
Page 41

2-14
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
3G3MX2-A2037
3G3MX2-A4040
3G3MX2-A2055,
A2075
3G3MX2-A4055,
A4075
3G3MX2-A2110
3G3MX2- A4110 to
A4150
3G3MX2-A2150
Applicable model Terminal arrangement
P/+2
+1
Ground terminal (M4) × 2
W/T3V/T2U/T1 T/L3S/L2R/L1
N/−
RB
From power supply
To motors
GGRB
N/−
P/+2
+1
W/T3 V/T2U/T1T/L3S/L2R/L1
From power supply
To motors
GGRB
N/−
P/+2
+1
W/T3 V/T2U/T1T/L3S/L2R/L1
From power supply
To motors
GGRB
N/−
P/+2
+1
W/T3 V/T2U/T1T/L3S/L2R/L1
From power supply
To motors
Page 42

2-15
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Recommended Cable Size, Wiring Device and Crimp Terminal
Voltage
class
Motor
output
(CT)
kW
Inverter model
Wiring Applicable device
Power
cable
mm
Terminal-
block screw
size (terminal
block width)
mm
Tightening
torque
Earth
Leakage
Breaker
(ELB)
Magnetic
contactor
(MC)
Fuse size
(class J)
Rated
600 V AIC
200kA
3-phase
200 V
0.1 3G3MX2-A2001
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(5A)
H10C 10A
0.2 3G3MX2-A2002
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(5A)
H10C 10A
0.4 3G3MX2-A2004
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(10A)
H10C 10A
0.75 3G3MX2-A2007
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(10A)
H10C 15A
1.5 3G3MX2-A2015
AWG14
(2.0)
M4
(10)
1.4
EX30
(20A)
H20 15A
2.2 3G3MX2-A2022
AWG12
(3.5)
M4
(10)
1.4
EX30
(20A)
H20 20A
3.7 3G3MX2-A2037
AWG10
(5.5)
M4
(10)
1.4
EX50
(50A)
H25 30A
5.5 3G3MX2-A2055
AWG6
(14)
M5
(13)
3.0
EX60
(60A)
H35 30A
7.5 3G3MX2-A2075
AWG6
(14)
M5
(13)
3.0
EX100
(75A)
H50 40A
11 3G3MX2-A2110
AWG4
(22)
M6
(17.5)
3.9 to 5.1
EX100
(100A)
H65C 60A
15 3G3MX2-A2150
AWG2
(38)
M8
(23)
5.9 to 8.8
EX100
(100A)
H65C 80A
3-phase
400 V
0.4 3G3MX2-A4004
AWG16
(1.25)
M4
(10)
1.4
EX50
(5A)
H10C 10A
0.75 3G3MX2-A4007
AWG16
(1.25)
M4
(10)
1.4
EX50
(10A)
H10C 10A
1.5 3G3MX2-A4015
AWG16
(1.25)
M4
(10)
1.4
EX50
(10A)
H10C 10A
2.2 3G3MX2-A4022
AWG14
(2.0)
M4
(10)
1.4
EX50
(15A)
H20 10A
3.0 3G3MX2-A4030
AWG14
(2.0)
M4
(10)
1.4
EX50
(15A)
H20 15A
4.0 3G3MX2-A4040
AWG12
(3.5)
M4
(10)
1.4
EX50
(20A)
H20 15A
5.5 3G3MX2-A4055
AWG10
(5.5)
M5
(13)
3.0
EX50
(30A)
H25 15A
7.5 3G3MX2-A4075
AWG10
(5.5)
M5
(13)
3.0
EX50
(50A)
H35 20A
11 3G3MX2-A4110
AWG6
(14)
M6
(17.5)
3.9 to 5.1
EX60B
(60A)
H35 30A
15 3G3MX2-A4150
AWG6
(14)
M6
(17.5)
3.9 to 5.1
EX100B
(75A)
H65C 40A
Page 43

2-16
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Note 1: Applicable devices assume use of a standard 3-phase, 4-pole motor.
Note 2: Select an applicable circuit breaker by also considering the cutoff capacity. (Use an inverter type.)
Use one circuit breaker for one inverter according to the applications shown in the above table.
Note 3: If the wiring distance exceeds 20 m, the power cable size must be increased.
Note 4: A H-IV wire (75°C) is recommended.
Note 5: Use an earth leakage breaker (ELB) to ensure safety.
Note 6: To meet the UL standards, always insert a UL-standard fuse of class J type on the power supply
side.
Note 7: Use a ground wire with a larger diameter than that of the power cable shown above.
Note 8: Tighten the terminal-block screws with the specified torque. If the screws are not tightened
securely, short-circuiting or fire may occur. Excessive tightening may cause damage to the
terminal block or the Inverter.
Note 9: Choose the sensitivity current of the earth leakage breaker (ELB) depending on the total distance
between the Inverter and the power supply, and the Inverter and the motor. Also, use an earth
leakage breaker of time-delay type. Use of a high-speed type may result in malfunction.
Note 10: If a CV wire is used and routed through a metal pipe, the leakage current becomes 30 mA/km.
Note 11: Due to the higher specific inductive capacity of the IV wire, the leakage current increases about
eight times. Accordingly, use a wire with a sensitivity current of eight times the applicable level
shown in the table below. Also, use a CV wire if the total wiring length exceeds 100 m.
1-phase
200 V
0.1 3G3MX2-AB001
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(5A)
H10C 10A
0.2 3G3MX2-AB002
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(5A)
H10C 10A
0.4 3G3MX2-AB004
AWG16
(1.25)
M3.5
(7.6)
1.0
EX30
(10A)
H10C 10A
0.75 3G3MX2-AB007
AWG12
(3.5)
M4
(10)
1.4
EX30
(15A)
H10C 15A
1.5 3G3MX2-AB015
AWG10
(5.5)
M4
(10)
1.4
EX30
(20A)
H20 20A
2.2 3G3MX2-AB022
AWG10
(5.5)
M4
(10)
1.4
EX30
(20A)
H20 30A
Voltage
class
Motor
output
(CT)
kW
Inverter model
Wiring Applicable device
Power
cable
mm
Terminal-
block screw
size (terminal
block width)
mm
Tightening
torque
Earth
Leakage
Breaker
(ELB)
Magnetic
contactor
(MC)
Fuse size
(class J)
Rated
600 V AIC
200kA
Total wiring length Sensitivity current (mA)
100 m max. 50
300 m max. 100
Page 44

2-17
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Main Circuit Connection Diagram
Name Function
(1) (2) (3) Refer to "Recommended Cable Size, Wiring
Device and Crimp Terminal" on page 2-15.
(4) AC reactor Apply this reactor as a harmonic suppression
measure, or when the imbalance ratio of
power supply voltage is 3% or more, power
supply capacity is 500 kVA or more, or power
supply voltage changes suddenly. It also
helps improve the power factor.
(5) Input noise filter This noise filter reduces the conducted noise
generated by the Inverter and traveling
through the wires. Connect it to the primary
(input) side of the Inverter.
(6) Radio noise filter When the Inverter is used, noise may
generate in a nearby radio, etc. through the
power wiring, etc. Use this noise filter to
reduce such noise (= reduce radiated noise).
(7) DC reactor This reactor suppresses the harmonics
generated by the Inverter.
(8) Braking Resistor
(9) Regenerative braking
unit
Use this Unit to increase the braking torque of
the Inverter to permit frequent ON/OFF
switchings, or decelerate a load whose
inertial moment is large.
(10) Output noise filter This noise filter is installed between the
Inverter and motor to reduce the radiated
noise emitted from the wires. Use it to reduce
radio interference in radios and TVs, or
prevent malfunctioning of measuring
equipment, sensors, etc.
(11) Radio noise filter Apply this noise filter to reduce the noise
generating on the output side of the Inverter
(both the input side and output side).
Power supply
(1)
(2)
ELB
(3)
Magnetic contactor
(4)
(5)
(6)
(7)
(8)
(9)
(8)
Inverter
RS
T
+1
P/+2
RB
N/
−
UVW
(10)
(11)
M
Page 45

2-18
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Wiring Control Circuit Terminals
Wiring and Arranging a Control Circuit Terminal Block
Terminals SC and PC are common terminals for input/output signals. They are isolated each
other. Do not short-circuit or ground these common terminals.
Do not ground these common terminals via external equipment and check the external
equipment ground conditions.
Connect diodes when wiring input/output signals for multiple inverters, because sneak circuit
paths are created.
For wiring of each control circuit terminal, use a twisted-pair shielded cable and connect the
shielded cable to each common terminal.
The control circuit terminal connection cable should be 20 m or shorter. Separate the control
circuit terminal connection cables from the main circuit cable (power cable) and the relay
control circuit cable. If the two cables must be crossed with each other, make sure they bisect
at right angles. Otherwise, the Inverters may malfunction.
For connection of the thermistor input terminal, connect the twisted wires to terminal SC
individually, and separate them from other SC common cables. Since a weak current flows
through the thermistor, the thermistor connection cable must be separated from the main
circuit cable (power cable).The thermistor connection cable should be 20 m or shorter.
When providing contacts for control circuit terminals (multi-function input terminals, etc.), use
a relay that will not cause contact failure even when the current or voltage is weak, such as a
relay with cross-bar twin contacts.
To use a relay for a multi-function output terminal, connect a surge-absorbing diode in parallel
with the coil.
Do not short-circuit the analog power supply terminals (FS-SC) and/or the interface power
supply terminals (P24 and SC). Doing so could result in failure of the Inverter.
The control circuit terminal block has two rows of terminals at top and bottom. Since wiring the
top terminals first makes it difficult to wire the bottom terminals, wire the bottom terminals first.
After the wiring, gently pull the wires to confirm that they are securely connected.
Page 46

2-19
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Wiring Example (Sink Logic)
When connecting a relay to the multi-function output terminal, install a surge-absorbing diode
in parallel with the relay. The output circuit can break down due to surge voltage when the relay
is switched on/off.
Switching Method for Input Control Logics
Multi-function input terminals are set to sink logic at the factory.
To switch the input control logic to source logic, remove the shorting bar between terminals
P24 and PSC on the control circuit terminal block, and connect it between terminals PSC and
SC.
RS+ MP RP FS FV FI SC AM PC P2
P1/EDM
RY
RS− S7/EB S6 S5/TH S4/GS2 S3/GS1 S2 S1 SC PSC P24
RY
Shorting bar
(sink logic)
Variable Resistor
Frequency reference
(1 to 2 kΩ)
Frequency reading
Signal during
RUN
Frequency arrival
signal
(27 VDC 50 mA max.)
PSC P24SCS1S2
Shorting bar
(1) Sink logic
PSC P24SCS1S2
Shorting bar
(2) Source logic
PSC P24S1 SC
S3
/GS1
S2
S5
/THS4/GS2
S6RS−
S7
/EB
P2
P1
/EDM
AM PCFI SCFS FVRPRS+ MP
MB MA MC
Relay output
Communication
RS-485
Logic input
Logic common and
power supply
Shorting
bar
Pulse
output
Pulse
input
Analog input and
power supply
Communication
RS-485
Analog
output
Logic output
Page 47

2-20
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Wire Sizes for Control Circuit Terminal Block and Relay Output Terminal Block
Recommended Terminal
To improve the ease of wiring and reliability of connection, use of ferrules of the following
specifications is recommended for signal wires:
* Manufacturer: Phoenix Contact
Crimp tool CRIPMFOX UD 6-4 or CRIMPFOX ZA 3
Relay output
terminal block
Control circuit terminal block
8 mm
Stripping length for
single/stranded wires:
Approx. 8 mm
Applicable wire
Single wire mm
2
(AWG)
Stranded wire mm
2
(AWG)
Ferrules mm2 (AWG)
Control Circuit Terminal
Block
0.2 to 1.5
(AWG 24 to 16)
0.2 to 1.0
(AWG 24 to 17)
0.25 to 0.75
(AWG 24 to 18)
Relay output terminal
block
0.2 to 1.5
(AWG 24 to 16)
0.2 to 1.0
(AWG 24 to 17)
0.25 to 0.75
(AWG 24 to 18)
Wire size
mm2 (AWG)
Ferrules
type*
L [mm] φd [mm] φD [mm]
0.25 (24) AI 0.25-8YE 12.5 0.8 2.0
0.34 (22) AI 0.34-8TQ 12.5 0.8 2.0
0.5 (20) AI 0.5-8WH 14 1.1 2.5
0.75 (18) AI 0.75-8GY 14 1.3 2.8
8
L
φ
d
φ
D
Page 48

2-21
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Wiring Method
1. Use a slotted screwdriver (width: 2.5 mm or less) to push in the orange part of the
control circuit terminal block. (The wire insertion part opens.)
2. With the slotted screwdriver pushed in, insert the wire or ferrule in the wire insertion
part (round hole).
3. Pull out the slotted screwdriver, and the wire will be fixed.
Note: When pulling out a wire, do so by also pushing in the part denoted by with a slotted screwdriver.
Use a slotted screwdriver
to push in the part.
Insert the wire. Pull out the slotted
screwdriver, and
the wire will be fixed.
2.5 mm
Page 49

2-22
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Connection to Programmable Controller (PLC)
Connection of Multi-function Input Terminal and Programmable Controller
When the Inverter's internal interface power
supply is used
When an external power supply is used
(Remove shorting bar on the control terminal block.)
Sink logicSource logicNo-voltage switch
P24
PSC
SC
S1
S7
24 VDC
Inverter
Shorting
bar
COM
S
Output module
P24
PSC
SC
S1
S7
24 VDC
Inverter
COM
S
Output module
24VDC
P24
PSC
SC
S1
S7
24 VDC
Inverter
Shorting
bar
COM
S
Output module
P24
PSC
SC
S1
S7
24 VDC
Inverter
COM
S
Output module
24 VDC
P24
PSC
SC
S1
S7
24 VDC
P24
PSC
SC
S1
S7
Shorting
bar
Shorting
bar
Inverter Inverter
24 VDC
P24
PSC
SC
S1
S7
24 VDC
P24
PSC
SC
S1
S7
24 VDC
24 VDC
Inverter
Inverter
Page 50

2-23
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Connection of Multi-function Output Terminal and Programmable Controller
Sink logic Source logic
P1/EDM
P2
PC
COM
24 VDC
Inverter
Input module
P1/EDM
P2
PC
COM
24 VDC
Inverter
Input module
Page 51

2-24
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
Note on Use of Multiple Inverters
If multiple Inverters are using a common input (switch, etc.) and the Inverters are turned on at
different timings, a sneak current path will be generated as shown below and the input may be
recognized as ON when it is actually OFF. In this case, be sure to insert a diode (rating: 50 V/
0.1 A) in the location shown below or use external power supply circuits to prevent the sneak
current path.
1. For Sink Logic
Add diodes.
P24
PSC
SC
S1
Shorting line
P24
PSC
SC
S1
Power ON
Power OFF
Shorting
line
Input ON
P24
PSC
SC
S1
P24
PSC
SC
S1
Switch OFF
Install a diode instead of the shorting
bar to prevent the sneak current path.
Power ON
Power OFF
Input OFF
P24
PSC
SC
S1
P24
PSC
SC
S1
Power ON
Power OFF
Input OFF
Change to an external
power supply.
24-VDC
power
supply
Switch OFF
A sneak current path will not occur
if the short bar is removed and an
external power supply is used.
Switch OFF
Without this diode, a sneak current path is
generated and the input turns ON when the
switch is OFF.
Page 52

2-25
2-2 Wiring
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
2
Design
2. For Source Logic
P24
PSC
SC
S1
Shorting line
P24
PSC
SC
S1
Switch OFF
Without this diode, a sneak current path is
generated and the input turns ON when
the switch is OFF.
Power ON
Power OFF
Shorting
line
Input ON
P24
PSC
SC
S1
P24
PSC
SC
S1
Switch OFF
Install a diode instead of the shorting
bar to prevent the sneak current path.
Power ON
Power OFF
Input OFF
P24
PSC
SC
S1
P24
PSC
SC
S1
Power ON
Power OFF
Input OFF
Add diodes.
Change to an external
power supply.
24-VDC
power
supply
Switch OFF
A sneak current path will not occur if
the short bar is removed and an
external power supply is used.
Page 53

SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Describes the operating procedures including procedures for trial operation.
3-1 Name of Parts of the Digital Operator................................. 3-1
Names of Parts and their Descriptions ........................................... 3-1
Key Operation System .................................................................... 3-3
3-2 Operation Method ................................................................. 3-7
RUN Command/Frequency Reference Input .................................. 3-7
3-3 Test Run............................................................................... 3-10
Procedure for Test Run................................................................. 3-10
3-4 Tripping................................................................................ 3-12
Overview of Operation upon Tripping ........................................... 3-12
Page 54

3-1
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
3-1 Name of Parts of the Digital Operator
Names of Parts and their Descriptions
8.8.8.8.
Data display
RUN Command enabled
LED indicator
Operation key
USB connector
RJ45 connector
Name Description
POWER LED Lit (green) while the Inverter is receiving power.
ALARM LED Lit (red) when the Inverter trips.
For information on how to reset the trip, refer to "Method for
Resetting Trip" on page 7-1.
PROGRAM LED
indicator
Lit (green) when the displayed data (set value) can be
changed.
Blinks if the set value is invalid. Refer to "Warning Display"
on page 7-7.
RUN (during
RUN) LED
indicator
Lit (green) when the Inverter is running. (Lit when there is
either a "valid RUN command" or "inverter output."
Accordingly, it is also lit when a RUN command is issued at
a set frequency of 0 Hz or while the motor is decelerating
after the RUN command is turned OFF.)
Monitor LED
indicator (Hz)
Lit (green) when the displayed data is frequency.
Monitor LED
indicator (A)
Lit (green) when the displayed data is current.
RUN Command
enabled LED
indicator
Lit (green) when the RUN command is set to the Digital
Operator.
(The RUN key on the Digital Operator is enabled.)
Display Various parameters, frequency/set value and other data are
displayed (red).
RUN key Runs the Inverter. Take note that this key is enabled only
when the RUN command destination is the Digital Operator.
STOP/RESET
key
This key decelerates the Inverter to a stop. (Although the
STOP/RESET key is enabled even when a RUN command is
issued to a destination other than the Digital Operator (factory
default), it can be disabled by a Setting (b087).)
If the Inverter is already tripped, the trip will be reset (return
from the tripping).
8.8.8.8.
Page 55

3-2
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Mode key
Parameter is displayed: Move to the beginning of the next
function group.
Data is displayed: Cancel the setting and return to the
parameter display.
Individual input mode: Move the blinking digit to the left.
Regardless of the displayed screen, pressing and holding
this key (for 1 second or more) displays the data for Output
Frequency Monitor (d001).
Increment key
Decrement key
These keys are used to increment/decrement a parameter
or set data. Pressing and holding each key increases the
incrementing/decrementing speed.
Pressing the Increment and Decrement keys together
activates the "Individual Input MODE" where each digit can
be edited independently.
Enter key Parameter is displayed: Move to the data display.
Data is displayed: Confirm/store the setting (in the
EEPROM) and return to the parameter
display.
Individual input mode: Move the blinking digit to the right.
USB connector
Use this connector (mini-B type) to connect a PC.
The Inverter can still be operated from the Digital Operator
even when it is being operated using a PC, etc., via USB
communication.
RJ45 connector Use this connector (RS-422) to connect the optional
Remote Operator. Once the Remote Operator is connected,
the keys on the main unit become disabled. In this case, use
b150 to set the item to be displayed.
Name Description
Page 56

3-3
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Key Operation System
The following describes the key operation system of the Digital Operator.
dk0k0k1
dk0k0k2
0.0k0
fk0k0k1
fk0k0k2
5k0.0k0
5k0.0k1
0k0
0k1
dk1k0k4
fk0k0k4
Function group "d"
Parameter display
When parameter is displayed
: Move to data display
Data display
*
Because the function group "d" is
a monitor mode, data cannot be changed.
d001: Output Frequency Monitor
When parameter is displayed
: Increases/decreases parameters by Increment/Decrement
keys. Pressing the Increment key at the end returns to the
beginning of the same function group.
When parameter is displayed
: Move to the next function group
Store
Data display
F001: Output Frequency Setting
When data is displayed (F001 to F*03)
Since changed are reflected the moment they are changed, the display
does not blink when any of these parameters is changed.
: Store the value in the EEPROM and return to the parameter display
: Return to the parameter display without storing the value in the EEPROM
Function group "F"
Parameter display
Function group "A"
Parameter display
Data display
A001: Frequency Reference Selection
ak0k0k1
ak0k0k2
ak1k6k5
When data is displayed
If data is changed, all digits will blink.
The new data is not yet reflected while its digits are still blinking.
: Confirm and store the changes and return to the parameter display
: Cancel the change and return to the parameter display
Pressing the Increment/Decrement keys
simultaneously in the parameter display
or data display can change the values
quickly and with ease.
For details, refer to the next page.
Function group "b"
Function group "C"
Function group "H"
Function group "P"
Function group "U"
Function group "d"
bk0k0k1
ck0k0k1
hk0k0k1
pk0k0k1
uk0k0k1
dk0k0k1
Return to d001
* Return to the function group "d" after the function group "U."
Page 57

3-4
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Example of Basic Operations
An example of basic parameter change operations is given below.
<Operation example of changing RUN Command Selection (A002) from Digital
Operator (02) to Terminal Block (01) when "0.00" is shown on the output frequency
monitor screen after the power has been turned ON>
Since F parameters other than F004 are reflected in real time the moment they are changed,
the display does not blink when any of these parameters is changed.
Reference
Regardless of the Digital Operator display, pressing and holding the Mode key (for 1 second or
more) displays the data for Output Frequency Monitor (d001) again. However, the selected mode
continues to cycle among the function groups while the Mode Key is held, according to the
designed operation of the key. (Example: A001→F001→b001→C001→...Elapse of 3 seconds,
followed by display of "50.00")
Output Frequency
Monitor
(2) Press the Mode Key to
display the parameters.
(1) The d001 (Output Frequency Monitor)
data is displayed during power ON time.
(Default setting)
dk0k0k1
(3) Press the Mode Key to move the function group.
0.0k0
fk0k0k1
(4) Press the Mode Key to move the function group.
ak0k0k1
(5) Press the Increment key to
increment the parameter by 1.
RUN Command Selection
ak0k0k2
(6) Press the Enter key to
move to the data display.
0k2
0k1
When the display first appears,
all data digits are lit.
(7) Press the Decrement key to
decrement the data by 1.
If data is changed, all digits will blink.
The new data is not yet reflected
while its digits are still blinking.
(8) Press the Enter key to
confirm and store the value.
(9) Pressing and holding the Enter key
(for 1 second or more) jumps to the
output frequency monitor display.
Key name Function code is displayed Data is displayed
Mode key Move to the next function group Value is cancelled and
return to the parameter display
Enter key Proceed to the data display Value is confirmed/stored and
return to the parameter display
Increment key Parameter is incremented by 1 Data is incremented by 1
Decrement key Parameter is decremented by 1 Data is decremented by 1
Increment/Decrement are
pressed simultaneously
Move to the individual input
mode
Move to the individual input
mode
Key arrangement
Page 58

3-5
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Operation Example in the Individual Input Mode
If the parameter or data to be changed is far away from the currently displayed value, use the
individual input mode to change the parameter efficiently.
The individual input mode is effective regardless of whether a parameter or data is currently displayed.
Note 1: Pressing the Mode Key while the cursor (blinking digit) is at the far left moves the cursor to the
far right.
Note 2: Pressing the Increment and Decrement keys together in the individual input mode restores the
normal input mode.
Note 3: While the displayed data is blinking, the change has not yet reflected even when the function
group is "F."
Step1: Increment/Decrement
keys are pressed
simultaneously.
dk0k0k1
bk0k8k1
The most significant
digit blinks.
Step2: Move the blinking digit to the
left/right using the Mode Key and
Enter key, and change the value
using the Increment/Decrement
keys.
Move to left Move to right
−
1
+1
Step3: Press the Enter key
while the least
significant bit is
blinking, to confirm the
setting.
bk0k8k3
3.0
fk0k0k1
fk0k0k1
fk1k0k1
fk0k0k1
fk0k1k1
fk0k0k1
fk0k0k2
fk0k0k1
ak0k0k1
Pressed simultaneously
(A)
(A)
Parameter display
Data display
(B)
5k0.0k0
5k0.0k0
6k0.0k0
5k0.0k0
5k1.0k0
5k0.0k0
5k0.1k0
5k0.0k0
5k0.0k1
If the specified parameter does not exist, the data display is
not shown and the blinking digit returns to the one at the far left.
(B)
Pressed simultaneously
The symbol digit blinks,
so increase/decrease the
parameter using the
Increment or Decrement
key.
The 100's digit blinks, so
increase/decrease the
parameter using the
Increment or Decrement
key.
The 10's digit blinks, so
increase/decrease the
parameter using the
Increment or Decrement
key.
The 10's digit blinks, so
increase/decrease the
parameter using the
Increment or Decrement
key.
The 10's digit blinks, so
increase/decrease the
parameter using the
Increment or Decrement key.
The 1's digit blinks, so
increase/decrease the
value using the Increment
or Decrement key.
The 0.1's digit blinks, so
increase/decrease the
value using the Increment
or Decrement key.
The 0.01's digit blinks, so
increase/decrease the
value using the Increment
or Decrement key.
Page 59

3-6
3-1 Name of Parts of the Digital Operator
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Operation Example When the Digital Operator is Connected to the Conventional Model
Although operations can be performed by connecting the conventional Digital Operator model
(3G3AX-OP01) to the 3G3MX2, the operations associated with the Mode key and Enter key
vary from that of the conventional key operation system. To switch to the parameter display to
data display, use the Enter key instead of the Mode key. Take note that pressing the FUNC
key while a parameter is displayed means moving the function group.
Key Operation System When the Conventional Digital Operator Model (3G3AX-OP01)
is Connected to the 3G3MX2
(Reference) Key Operation System of the 3G3MX2 Digital Operator
(Reference) Key Operation System When the Conventional Digital Operator Model (3G3AXOP01) is Connected to the Conventional Model
ak0k0k1
bk0k0k1
Move the function
group
Move to data display
Return without saving
the changes
Return after saving the changes
0k2
0k1
Conventional model 3G3AX-OP01
ak0k0k1
3G3MX2
ak0k0k1
bk0k0k1
Move the function
group
0k2
0k1
Move to data display
Return without saving the changes
Return after saving the changes
3G3MX2 Digital Operato
r
ak0k0k1
ak-k-k-
bk0k0k1
No applicable
function
ak0k0k1
0k2
0k1
Move to data display
Return without saving
the changes
Return after saving the changes
Conventional model 3G3AX-OP01
ak0k0k1
Conventional model
3G3MX, etc.
Page 60

3-7
3-2 Operation Method
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
3-2 Operation Method
To operate the Inverter, two commands are required including a RUN command and frequency
reference. Take note that the Inverter does not operate if only one of these commands is
issued, such as when a RUN command is issued but not a frequency reference (0 Hz setting),
or a frequency reference is issued but not a RUN command.
RUN Command/Frequency Reference Input
Command/Reference Input From the Digital Operator
Operates the Inverter via the key operation of the standard Digital Operator or optional Remote
Operator.
Setting
Change the following parameters, if necessary:
Operation
Refer to "Test Run" on page 3-10.
Parameter
No.
Function name Data
Default
value
Note
A001
Frequency
Reference
Selection 1
02 (Digital Operator)
02
A002
RUN Command
Selection 1
02 (Digital Operator)
02
The RUN command enabled LED
indicator is lit.
F001
Output
Frequency
Setting
0.0 to Max.
frequency 6.00
F004
RUN Direction
Selection
00 (Forward)
01 (Reverse)
00
Parameters cannot be changed
while the Inverter is operating.
Parameter
No.
Function name Data
Default
value
F002
Acceleration
Time Setting 1
0.01 to 99.99 s 100.0 to 999.9 s
1,000. to 3,600. s
10.00 s
(30.00 s)
F003
Deceleration
Time Setting 1
0.01 to 3,600 s 100.0 to 999.9
1,000. to 3,600. s
10.00 s
(30.00 s)
5k0.0k0
Lit when the RUN key is
pressed to start operation.
Lit when the frequency
data is displayed.
The RUN key is enabled
and the RUN command
enabled LED indicator is
lit when A002 is set to 02.
Page 61

3-8
3-2 Operation Method
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
Command/Reference Input From the Control Circuit Terminal Block
Operates the Inverter by connecting the external signals (frequency setting volume, switch,
etc.) to the control circuit terminal block.
<Setting the Forward/Reverse Direction Using the FW/RV Input Terminal and Setting
the Frequency Using the Frequency Volume>
Setting
Change the following parameters, if necessary:
Wiring the Control Circuit Terminal Block
*1 Allocate 16: FV/FI (Analog input switch) to a multi-function input to use as the voltage setting. If terminal
FV/FI is not allocated, the frequency reference becomes the sum of voltage input (FV) and current input
(FI). To use only one of voltage or current, therefore, short the other analog input to the SC terminal.
*2 This wiring diagram shows an example of using the built-in power supply of the Inverter. If an external
power supply is used, refer to "Connection to Programmable Controller (PLC)" on page 2-22.
Operation
Refer to "Test Run" on page 3-10.
Parameter
No.
Function name Data
Default
value
Note
A001
Frequency
Reference
Selection 1
01 (Control circuit
terminal block)
02
A002
RUN Command
Selection 1
01 (Control circuit
terminal block)
02
C001
Multi-function
Input 1 Selection
00 (FW: Forward)
00(FW)
If other input terminal is used, the
parameter number becomes different.
C002
Multi-function
Input 2 Selection
01 (RV: Reverse)
01(RV)
If other input terminal is used, the
parameter number becomes different.
Parameter
No.
Function name Data
Default
value
F002
Acceleration
Time Setting 1
0.01 to 99.99 s 100.0 to 999.9 s
1,000. to 3,600. s
10.00 s
(30.00 s)
F003
Deceleration
Time Setting 1
0.01 to 99.99 s 100.0 to 999.9 s
1,000. to 3,600. s
10.00 s
(30.00 s)
10 VDC
F/R
setting
STP
setting
STA
setting
Frequency setting
volume
*1
*2
FS
FV
FI SC S3/GS1 S2 S1 SC PSC P24
24 VDC
Reverse
input
Forward
input
Page 62

3-9
3-2 Operation Method
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
<Running/Stopping the Inverter via 3-wire Input and Setting the Frequency Using an
Analog Current Signal>
Setting
* For details on the 3-wire input method, refer to "3-wire Input Function (STA, STP, F/R)" on page 5-56.
Change the following parameters, if necessary:
Wiring the Control Circuit Terminal Block
*1 Allocate 16: FV/FI (Analog input switch) to a multi-function input to use as the current setting. If terminal
FV/FI is not allocated, the frequency reference becomes the sum of voltage input (FV) and current input
(FI). To use only one of voltage and current, therefore, short the other analog input to the SC terminal.
*2 This wiring diagram shows an example of using the built-in power supply of the Inverter. If an external
power supply is used, refer to "Connection to Programmable Controller (PLC)" on page 2-22.
Operation
Refer to "Test Run" on page 3-10.
Parameter
No.
Function name Data
Default
value
Note
A001
Frequency Reference
Selection 1
01 (Control circuit
terminal block)
02
A002
RUN Command
Selection 1
01 (Control circuit
terminal block)
02
C001
Multi-function
Input 1 Selection
20 (STA: 3-wire
start)*
00 (FW)
If other input terminal is used, the
parameter number becomes different.
C002
Multi-function
Input 2 Selection
21 (STP: 3-wire stop)
*
01 (RW)
If other input terminal is used, the
parameter number becomes different.
C003
Multi-function
Input 3 Selection
22 (F/R: 3-wire
forward/reverse)
*
18 (RS)
If other input terminal is used, the
parameter number becomes different.
Parameter
No.
Function name Data
Default
value
F002
Acceleration
Time Setting 1
0.01 to 99.99 s 100.0 to 999.9 s
1,000. to 3,600. s
10.00 s
(30.00 s)
F003
Deceleration
Time Setting 1
0.01 to 99.99 s 100.0 to 999.9 s
1,000. to 3,600. s
10.00 s
(30.00 s)
10 VDC
FS
FV
FI SC S2 S1 SC PSC P24
24 VDC
*1
Frequency setting
(4 to 20 mA)
*2
Forward/
reverse
Stop
(NC contact)
Operate
(NO contact)
S3/GS1
F/R
setting
STP
setting
STA
setting
Page 63

3-10
3-3 Test Run
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
3-3 Test Run
An example of basic connection is given below. Refer to "Operation Method" on page 3-7 when
issuing a RUN command/frequency reference from the control circuit terminal block.
Refer to "Name of Parts of the Digital Operator" on page 3-1 for the parameter setting method.
* Connect to terminals L1 and N on a single-phase, 200-V Inverter (3G3MX2-AB@@@).
Procedure for Test Run
Command/Reference Input From the Digital Operator
1. Check if the wires are connected correctly.
2. Turn on the power of the Inverter.
3. Set Frequency Reference Selection (A001) to "02" (Digital Operator).
4. Set RUN Command Selection (A002) to "02" (Digital Operator).
5. Set Output Frequency Setting (F001). It is recommended to set a low speed of approx.
10 Hz first to ensure safety.
6. Set RUN Direction Selection (F004).
7. Display Output Frequency Monitor (d001) and press the Enter key.
Confirm that
"
0.00" (Hz) is displayed.
8. Press the RUN key. The RUN (during RUN) LED indicator is lit and the motor starts
to turn.
9. Confirm the output frequency and motor rotation direction displayed on the Digital
Operator, and check if the Invertor is free from errors. For the motor rotation
direction, refer to Rotation Direction Monitor (d003).
10. If no problem is found, gradually increase the output frequency using Output
Frequency Setting (F001).
11. After checking the operation, press the STOP/RESET key. The motor starts to
decelerate and once it stops, the RUN (during RUN) LED indicator turns OFF.
Command/Reference Input From the Control Circuit Terminal Block
1. Check if the wires are connected correctly.
2. Turn on the power to the Inverter.
3. Set Frequency Reference Selection (A001) to "01" (Control circuit terminal block).
4. Set RUN Command Selection (A002) to "01" (Control circuit terminal block).
3-phase power
supply
ELB
R/L1(L1)*
S/L2
T/L3(N)*
U/T1
V/T2
W/T3
Inverter
Motor
M
G
Page 64

3-11
3-3 Test Run
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
5. Display Output Frequency Monitor (d001) and press the Enter key.
Confirm that "0.00" (Hz) is displayed.
6. After confirming that the analog voltage/current value for frequency reference is 0,
turn the RUN command ON. The RUN (during RUN) LED indicator is lit.
7. Gradually increase the analog voltage/current value for frequency reference.
* The frequency reference can be set first, before setting the RUN command in 6.
The motor accelerates/decelerates according to the acceleration/deceleration time
set in F002/F003.
8. The motor starts to turn. Confirm the output frequency and motor rotation direction
displayed on the Digital Operator, and check if the Inverter is free from errors.
9. After checking the operation, turn the RUN command OFF (turn the STP input ON
in the case of 3-wire input). The motor starts to decelerate and once it stops, the
RUN (during RUN) LED indicator turns OFF.
Check for tripping during acceleration/deceleration, and also check if the rotation speed and
frequency readings are correct.
If an overcurrent or overvoltage tripping occurs during trial operation, try to increase the
acceleration/deceleration time.
Confirm by Output Current Monitor (d002) and DC Voltage Monitor (d102) to confirm that the
current/voltage values are sufficiently away from the tripping values.
Page 65

3-12
3-4 Tripping
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
3-4 Tripping
Upon detecting an error (overcurrent, overload, etc.) during operation, the Inverter cuts off the
output to the motor to protect the motor and Inverter. At the same time, the ALARM LED
indicator is lit and an error code is displayed. "Tripping" refers to this series of operations.
When a tripping occurs, the motor goes into free-run status. Identify the cause of the error from
the displayed error code, and remove the cause.
A RUN command is not accepted during a tripping. To reset a tripping, press the STOP/RESET
key. If a Reset (18: RS) is allocated to the multi-function input terminal, switching the reset
input from ON to OFF resets a tripping.
Note, however, that a tripping may not be reset depending on the cause of the tripping. In such
case, reconnect the power.
Also, confirm the RUN command and various other input signals thoroughly before executing
a reset. If the RUN command signal remains ON, the Inverter will restart immediately after the
reset.
Overview of Operation upon Tripping
M
M
ALM
M
Normal operation → Error occurred
Error detection
Alarm
Display example
.
E05
4
For details on error codes,
refer to "Error Code List"
in page 7-2.
Output shut off
Free run
Reset
* Perform a reset after identifying and removing the cause of the error
and checking the various signals such as RUN Command.
or
RS terminal input
ON → OFF
Page 66

3-13
3-4 Tripping
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
3
Operation
RUN command FW, RV
Alarm occurred
Motor rotation speed
Free run
RS (reset) input
AL (alarm) output
(alarm signal)
Page 67

SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
3
Parameter List
Describes the parameters used by this Unit.
4-1 Monitor Mode ........................................................................ 4-1
4-2 Function Mode ...................................................................... 4-4
Page 68

4-1
4-1 Monitor Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
4-1 Monitor Mode
The description in "d001" is always displayed in the default setting at power-on. To fix the
optional display, change the setting in "b038".
The displayed parameters are limited in the default setting. To display all parameters, set Display
Selection (b037) to "00 (Complete display)".
Setting Soft Lock Selection (b031) to "10" permits data change during RUN.
Data ranges given in parentheses are for high-frequency mode. Refer to page 5-178 for details.
Parameter
No.
Function name Monitor or data range
Default
setting
Data can
be set
during
RUN
Data can
be
changed
during
RUN
Unit
Page
d001
Output
Frequency
Monitor
0.00 to 99.99
− yes yes Hz 5-1
100.0 to 1,000. (High-frequency
mode)
d002
Output Current
Monitor
0.0 to 655.3 −− −A5-1
d003
Rotation
Direction
Monitor
F: Forward
o: Stop
r: Reverse
−− −−5-2
d004
PID Feedback
Value Monitor
0.00 to 99.99
100.0 to 999.9
1000. to 9999.
1000 to 9999(10000 to 99990)
100 to 999(100000 to 999000)
−− −−5-2
d005
Multi-function
Input Monitor
−− −−5-3
d006
Multi-function
Output Monitor
−− −−5-3
d007
Output
Frequency
Monitor (after
conversion)
0.00 to 99.99
100.0 to 999.9
1000. to 4000 (9999)
1000 to 4000 (9999/100)
− yes yes − 5-4
d008
Real Frequency
Monitor
(−100/−999.) −400. to −100.
−99.9 to −10.0
−9.99 to −0.00
0.00 to 99.99
100.0 to 400.0 (400.1 to 999.9/1000.)
−− −Hz 5-5
d009
Torque
Reference
Monitor
−200. to +200. −− −%5-5
d010
Torque Bias
Monitor
−200. to +200. −− −%5-6
d012
Output Torque
Monitor
−200. to +200. −− −%5-6
d013
Output Voltage
Monitor
0.0 to 600.0 −− −V5-6
ON
OFF
S7 S6 S5 S4 S3 S2 S1
(Example)
Terminal S1, S2: ON
Terminal S3 to S7: OFF
ON
OFF
MA P2 P1
(Example)
Terminal P1, P2: ON
Terminal AL: OFF
Page 69

4-2
4-1 Monitor Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
d014
Input Power
Monitor
0.0 to 100.0 −− −kW 5-7
d015
Integrated
Power Monitor
0.0 to 999.9
1000. to 9999.
1000 to 9999 (10000 to 99990)
100 to 999 (100000 to 999000)
−− −−5-7
d016
Total RUN
Time
0.0 to 9999.
1000 to 9999 (10000 to 99990)
100 to 999 (100000 to 999000)
−− −h5-8
d017 Power ON Time
0.0 to 9999.
1000 to 9999 (10000 to 99990)
100 to 999 (100000 to 999000)
−− −h5-8
d018
Fin
Temperature
Monitor
−20.0 to 150.0 −− −°C5-8
d022
Life
Assessment
Monitor
−− −−5-9
d023
(Reserved) −−−−−−
d024
d025
d026
d027
d029
Position
Command
Monitor
−268435455 to 268435455
(Displays MSB 4 digits including "−")
−− −−5-9
d030
Current
Position
Monitor
−268435455 to 268435455
(Displays MSB 4 digits including "−")
−− −−5-9
d050
User Selection
Monitor (2
types)
Monitor data selected by b160/b161 is
displayed.
−− −−5-10
d060
Inverter Mode
Monitor
The currently set mode is displayed.
I-C (IM motor heavy load)
I-V (IM motor light load)
H-I (IM motor high frequency)
−− −−5-10
d080 Fault Counter
0. to 9999.
1000 to 6553 (10000 to 65530)
−− −Time 5-11
d081
Fault Monitor 1
(Latest)
Cause
→Frequency (Hz)
→Current (A)
→Voltage between PNs (V)
→RUN time (h)
→Power ON time (h)
−− −−5-11
d082 Fault Monitor 2
d083 Fault Monitor 3
d084 Fault Monitor 4
d085 Fault Monitor 5
d086 Fault Monitor 6
Parameter
No.
Function name Monitor or data range
Default
setting
Data can
be set
during
RUN
Data can
be
changed
during
RUN
Unit
Page
21
1: Capacitor on main
circuit board
2: Cooling fan
Page 70

4-3
4-1 Monitor Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
d090
Warning
Monitor
Warning code −− −−5-11
d102
DC Voltage
Monitor
0.0 to 999.9
1000.
−− −V5-12
d103
Regenerative
Braking Load
Rate Monitor
0.0 to 100.0 −− −%5-12
d104
Electronic
Thermal Load
Rate Monitor
0.0 to 100.0 −− −%5-12
Parameter
No.
Function name Monitor or data range
Default
setting
Data can
be set
during
RUN
Data can
be
changed
during
RUN
Unit
Page
Page 71

4-4
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
4-2 Function Mode
Parameter
No.
Function name Monitor or data range
Default
setting
Data can
be set
during
RUN
Data can
be
changed
during
RUN
Unit
Page
F001
Output
Frequency
Setting
0.0
Starting frequency to maximum
frequency 1/2
0.0 to 100.0 (PID function enabled)
6.00 yes yes
Hz
%
5-15
F002
Acceleration
Time Setting 1
0.01 to 99.99
100.0 to 999.9
1000. to 3600.
10.00
(30.00)
yes yes s
5-24
F202
Acceleration
Time Setting 2
0.01 to 99.99
100.0 to 999.9
1000. to 3600.
10.00
(30.00)
yes yes s
F003
Deceleration
Time Setting 1
0.01 to 99.99
100.0 to 999.9
1000. to 3600.
10.00
(30.00)
yes yes s
F203
Deceleration
Time Setting 2
0.01 to 99.99
100.0 to 999.9
1000. to 3600.
10.00
(30.00)
yes yes s
F004
RUN Direction
Selection
00: Forward
01: Reverse
00 no no − 5-23
Page 72

4-5
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Basic setting
A001
Frequency
Reference
Selection 1
00: Digital Operator (volume)
01: Control circuit terminal
block
02: Digital Operator (F001)
03: Modbus communication
(Modbus-RTU)
04: Optional board
06: Pulse train frequency
07: Do not set.
10: Operation function output
02 no no
− 5-15
A201
Frequency
Reference
Selection 2
02 no no
A002
RUN Command
Selection 1
01: Control circuit terminal
block
02: Digital Operator
03: Modbus communication
(Modbus-RTU)
04: Optional board
02 no no
− 5-22
A202
RUN Command
Selection 2
02 no no
A003
Base
Frequency 1
30.0. to Maximum Frequency
1 [A004]
60.0
(1000.0)
no no Hz
5-26
A203
Base
Frequency 2
30.0 to Maximum Frequency
2 [A204]
60.0
(1000.0)
no no Hz
A004
Maximum
Frequency 1
Base Frequency 1 [A003] to
400.0 (1000.)
60.0
(1000.0)
no no Hz
5-28
A204
Maximum
Frequency 2
Base Frequency 2 [A203] to
400.0 (1000.)
60.0
(1000.0)
no no Hz
Analog input, others
A005 FV/FI Selection
00: Switch between FV
(voltage)/FI (current)
02: Switch between FV
(voltage)/volume
*1
03: Switch between FI
(current)/volume
*1
00 no no − 5-38
A011
FV Start
Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-40
A012
FV End
Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
A013 FV Start Ratio 0. to FV end ratio 0. no yes %
A014 FV End Ratio FV start ratio to 100. 100. no yes %
A015
FV Start
Selection
00: Start Frequency A011
01: 0 Hz
01 no yes −
A016
Analog Input
Filter
(FV, FI
Sampling)
1. to 30.
31. (with 500 ms filter ±0.1 Hz
hysteresis)
8noyes− 5-38
A017 (Reserved) Do not change. 00 −−−−
*1. Enabled when the Digital Operator with Volume 3G3AX-OP01 is connected.
Page 73

4-6
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Multi-step speed/jogging
A019
Multi-step
Speed
Selection
00: Binary (16-step selection
with 4 terminals)
01: Bit (8-step selection with 7
terminals)
00 no no −
5-63
A020
Multi-step
Speed 1
Reference 0
0.00
Starting frequency to
Maximum Frequency 1
6.00 yes yes Hz
A220
Multi-step
Speed 2
Reference 0
0.00
Starting frequency to
Maximum Frequency 2
6.00 yes yes Hz
A021
Multi-step
Speed
Reference 1
0.00
Starting frequency to
Maximum Frequency
0.00
yes yes Hz
A022
Multi-step
Speed
Reference 2
0.00
A023
Multi-step
Speed
Reference 3
0.00
A024
Multi-step
Speed
Reference 4
0.00
A025
Multi-step
Speed
Reference 5
0.00
A026
Multi-step
Speed
Reference 6
0.00
A027
Multi-step
Speed
Reference 7
0.00
A028
Multi-step
Speed
Reference 8
0.00
A029
Multi-step
Speed
Reference 9
0.00
A030
Multi-step
Speed
Reference 10
0.00
A031
Multi-step
Speed
Reference11
0.00
A032
Multi-step
Speed
Reference 12
0.00
A033
Multi-step
Speed
Reference 13
0.00
Page 74

4-7
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Multi-step speed/jogging
A034
Multi-step
Speed
Reference 14
0.00
Starting frequency to
Maximum Frequency
0.00
yes yes Hz 5-63
A035
Multi-step
Speed
Reference 15
0.00
A038
Jogging
Frequency
Starting frequency to 9.99 0.00 yes yes Hz
5-59
A039
Jogging Stop
Selection
00: Free run on jogging stop/
Disabled during operation
01: Deceleration stop on
jogging stop/Disabled
during operation
02: DC injection braking on
jogging stop/Disabled in
operation
03: Free run on jogging stop/
Enabled in operation
04: Deceleration stop on
jogging stop/Enabled in
operation
05: DC injection braking on
jogging stop/Enabled in
operation
04 no yes −
V/f characteristics
A041
Torque Boost
Selection 1
00: Manual torque boost
01: Automatic torque boost
00 no no −
5-49
A241
Torque Boost
Selection 2
00: Manual torque boost
01: Automatic torque boost
00 no no −
A042
Manual Torque
Boost Voltage 1
0.0 to 20.0 (Percentage of
motor voltage A082)
1.0 yes yes %
A242
Manual Torque
Boost Voltage 2
0.0 to 20.0 (Percentage of
motor voltage A282)
1.0 yes yes %
A043
Manual Torque
Boost
Frequency 1
0.0 to 50.0 (Ratio to base
frequency A003)
5.0 yes yes %
A243
Manual Torque
Boost
Frequency 2
0.0 to 50.0 (Ratio to base
frequency A203)
5.0 yes yes %
A044
Control Method
1
00: Constant torque
characteristics (VC)
01: Reduced torque
characteristics (VP 1.7th
power <VC, if low speed>)
02: Free V/f setting
03: Sensorless vector control
(heavy load only)
00 no no −
5-46
5-144
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 75

4-8
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
V/f characteristics
A244
Control Method
2
00: Constant torque
characteristics (VC)
01: Reduced torque
characteristics (VP 1.7th
power <VC, if low speed>)
02: Free V/f setting
03: Sensorless vector control
(heavy load only)
00 no no -
5-46
5-144
A045
Output Voltage
Gain 1
20. to 100. 100. yes yes %
5-72
A245
Output Voltage
Gain 2
20. to 100. 100. yes yes %
A046
Automatic
Torque Boost
Voltage
Compensation
Gain 1
0. to 255. 100. yes yes −
5-49
A246
Automatic
Torque Boost
Voltage
Compensation
Gain 2
0. to 255. 100. yes yes −
A047
Automatic
Torque Boost
Slip
Compensation
Gain 1
0. to 255. 100. yes yes −
A247
Automatic
Torque Boost
Slip
Compensation
Gain 2
0. to 255. 100. yes yes −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 76

4-9
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
External DC injection braking
A051
Internal DC
Injection
Braking
Selection
00: Disabled
01: Enabled
02: Enabled
(Operates only on set
frequencies.)
00 yes no −
5-135
A052
Internal DC
Injection
Braking
Frequency
0.00 to 60.00 0.50 no yes Hz
A053
DC Injection
Braking Delay
Time
0.0 to 5.0 0.0 no yes s
A054
DC Injection
Braking Power
0. to 100./70.
(heavy load/light load)
50 no yes %
A055
DC Injection
Braking Time
0.0 to 60.0 0.5 no yes s
A056
DC Injection
Braking Edge/
Level Selection
00: Edge operation
01: Level operation
01 no yes −
A057
Startup DC
Injection
Braking Power
0. to 100./70. (heavy load/light
load)
0. no yes %
External DC injection braking
A058
Startup Internal
DC Injection
Braking Time
0.0 to 60.0 0.0 no yes s
5-135
A059
DC Injection
Braking Carrier
Frequency
2.0 to 15.0/10.0
(heavy load/light load or high
frequency )
5.0/2.0 no yes
kHz
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 77

4-10
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Limit/jump
A061
Frequency
Upper Limit 1
0.00
Frequency Lower Limit 1 to
Maximum Frequency 1
0.00 no yes Hz
5-60
A261
Frequency
Upper Limit 2
0.00
Frequency Lower Limit 2 to
Maximum Frequency 2
0.00 no yes Hz
A062
Frequency
Lower Limit 1
0.00
Starting Frequency to
Frequency Upper Limit 1
0.00 no yes Hz
A262
Frequency
Lower Limit 2
0.00
Starting Frequency to
Frequency Upper Limit 2
0.00 no yes Hz
A063
Jump
Frequency 1
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-61
A064
Jump
Frequency
Width 1
0.00 to 10.00(100.0) 0.50 no yes Hz
A065
Jump
Frequency 2
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
A066
Jump
Frequency
Width 2
0.00 to 10.00 (100.0) 0.50 no yes Hz
A067
Jump
Frequency 3
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
A068
Jump
Frequency
Width 3
0.00 to 10.00 (100.0) 0.50 no yes Hz
Others
A069
Acceleration
Stop Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-62
A070
Acceleration
Stop Time
0.0 to 60.0 0.0 no yes s
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 78

4-11
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
PID control
A071 PID Selection
00: Disabled
01: Enabled
02: Reverse output enabled
00 no yes −
5-73
A072 PID P Gain 0.00 to 25.00 1.00 yes yes −
A073 PID I Gain
0.0 to 999.9
1000. to 3600.
1.0 yes yes s
A074 PID D Gain
0.00 to 99.99
100.0
0.00 yes yes s
A075 PID Scale 0.01 to 99.99 1.00 no yes
Time
A076
PID Feedback
Selection
00: FI (current)
01: FV (voltage)
02: Modbus communication
(Modbus-RTU)
03: Pulse train frequency
10: Operation function output
00 no yes −
A077
PID Deviation
Reverse Output
00: Disabled
01: Enabled
00 no yes −
A078
PID Variable
Range Limit
0.0 to 100.0 0.0 no yes %
A079
PID
Feedforward
Selection
00: Disabled
01: FV (voltage)
02: FI (current)
00 no yes −
AVR
A081
AVR Selection 1
00: Always ON
01: Always OFF
02: OFF during deceleration
02 no no
− 5-27
A281
AVR Selection 2
02 no no
A082
Motor Incoming
Voltage
Selection 1
200V class: 200/215/220/230/
240
400V class: 380/400/415/440/
460/480
200/
400
no no V
5-26
5-148
A282
Motor Incoming
Voltage
Selection 2
200/
400
no no V
A083
AVR Filter Time
Parameter
0.000 to 10.00 0.300 no yes s
5-27
A084
AVR
Deceleration
Voltage Gain
50. to 200. 100. no yes %
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 79

4-12
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Operation mode/acceleration/deceleration
A085
RUN Mode
Selection
00: Normal operation
01: Energy-saving operation
00 no no −
5-79
A086
Energy-saving
Response/
Accuracy
Adjustment
0.0 to 100.0 50.0 yes yes −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 80

4-13
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Operation mode/acceleration/deceleration function
A092
1st
Acceleration
Time 2
0.01 to 99.99
100.0 to 999.9
1000. to 3600.
10.00
(15.00)
yes yes
s
5-66
A292
2nd
Acceleration
Time 2
10.00
(15.00)
yes yes
A093
1st
Deceleration
Time 2
10.00
(15.00)
yes yes
A293
2nd
Deceleration
Time 2
10.00
(15.00)
yes yes
A094
2-step
Acceleration/
Deceleration
Selection 1
00: Switched via 2CH terminal
01: Switched by setting
02: Enabled only when
switching forward/reverse
00 no no
−
A294
2-step
Acceleration/
Deceleration
Selection 2
00 no no
A095
2-step
Acceleration
Frequency 1
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no no
Hz
A295
2-step
Acceleration
Frequency 2
0.00 no no
A096
2-step
Deceleration
Frequency 1
0.00 no no
A296
2-step
Deceleration
Frequency 2
0.00 no no
A097
Acceleration
Pattern
Selection
00: Linear
01: S shape
02: U shape
03: Reverse-U shape
04: EL-S shape
01 no no
− 5-68
A098
Deceleration
Pattern
Selection
01 no no
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 81

4-14
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Frequency adjustment
A101
FI Start
Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes
Hz
5-40
A102
FI End
Frequency
0.00 no yes
A103
FI Start Ratio
0. to FI end ratio 20. no yes %
A104 FI End Ratio FI start ratio to 100. 100. no yes %
A105
FI Start
Selection
00: Use Start Frequency
[A101]
01: 0 Hz
00 no yes −
Acceleration/Deceleration
A131
Acceleration
Curve
Parameter
01 (small curve) to 10 (large
curve)
02 no yes
− 5-68
A132
Deceleration
Curve
Parameter
02 no yes
Operation frequency
A141
Operation
Frequency
Selection 1
00: Digital Operator
01: Digital Operator (volume)
*1
02: FV (voltage) input
03: FI (current) input
04: Modbus communication
(Modbus-RTU)
05: Optional board
07: Pulse train frequency
02 yes no
− 5-70
A142
Operation
Frequency
Selection 2
03 yes no
*1. Enabled when the Digital Operator with Volume 3G3AX-OP01 is connected.
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 82

4-15
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Operation frequency
A143
Operation
Function
Operator
Selection
00: Addition (A141+A142)
01: Subtraction (A141−A142)
02: Multiplication (A141 ×
A142)
00 no yes − 5-70
A145
Frequency
Addition
Amount Setting
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-71
A146
Frequency
Addition Sign
Selection
00: Frequency reference +
A145
01: Frequency reference −
A145
00 no yes −
Acceleration/Deceleration
A150
EL-S Shape
Acceleration
Curve Ratio 1
0. to 50.
10. no no
%5-68
A151
EL-S Shape
Acceleration
Curve Ratio 2
10. no no
A152
EL-S Shape
Deceleration
Curve Ratio 1
10. no no
A153
EL-S Shape
Deceleration
Curve Ratio 2
10. no no
Others
A154
Deceleration
Stop Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-62
A155
Deceleration
Stop Time
0.0 to 60.0 0.0 no yes s
PID
A156
PID Sleep
Function
Operation Level
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-73
A157
PID Sleep
Operation
Delay Time
0.0 to 25.5 0.0 no yes s
Frequency adjustment
A161
VR Start
Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-40
A162
VR End
Frequency
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
A163 VR Start Ratio 0. to VR End Ratio 0. no yes %
A164 VR End Ratio VR Start Ratio to 100 100. no yes %
A165
VR Start
Selection
00: Use Start Frequency
[A161]
01: 0 Hz
01 no yes Hz
Page 83

4-16
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Momentary power interruption/Trip restart
b001 Retry Selection
00: Trip
01: 0 Hz restart
02: Frequency matching
restart
03: Trip after frequency
matching deceleration
stop
04: Frequency pull-in restart
00 no yes −
5-96
b002
Allowable
Momentary
Power
Interruption
Time
0.3 to 25.0 1.0 no yes s
b003
Restart
Standby Time
0.3 to 100.0 1.0 no yes s
5-96
5-100
5-103
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 84

4-17
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Momentary power interruption/Trip restart
b004
Momentary Power
Interruption/
Undervoltage Trip
During Stop
Selection
00: Disabled
01: Enabled
02: Disabled during stop and
deceleration stop
00 no yes −
5-96
b005
Restart During
Momentary
Power
Interruption
Count Selection
00: 16 times
01: Unlimited
00 no yes −
b007
Frequency
Matching Lower
Limit
Frequency
Setting
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-97
5-100
5-103
b008
Overvoltage/
Overcurrent
Restart
Selection
00: Trip
01: 0 Hz restart
02: Frequency matching
restart
03: Trip after frequency
matching deceleration
stop
04: Frequency pull-in restart
00 no yes −
5-97
b010
Overvoltage/
Overcurrent
Restart Count
Selection
1 to 3 3 no yes
Time
b011
Overvoltage/
Overcurrent
Restart
Standby Time
0.3 to 100.0 1.0 no yes s
Electronic Thermal
b012
Electronic
Thermal Level 1
0.20 × Rated current to 1.00 ×
Rated current
Inverter
rated
current
no yes
A
5-110
b212
Electronic
Thermal Level 2
Inverter
rated
current
no yes
b013
Electronic
Thermal
Characteristics
Selection 1
00: Reduced torque
characteristics
01: Constant torque
characteristics
02: Free setting
01 no yes
−
b213
Electronic
Thermal
Characteristics
Selection 2
01 no yes
Page 85

4-18
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Electronic Thermal
b015
Free-electronic
Thermal
Frequency 1
0. to Free-electronic Thermal
Frequency 2
0. no yes Hz
5-112
b016
Free-electronic
Thermal Current 1
0.00 to Rated current 0.00 no yes A
b017
Free-electronic
Thermal
Frequency 2
Free-electronic Thermal
Frequency 1 to Freeelectronic Thermal Current 3
0. no yes Hz
b018
Free-electronic
Thermal Current 2
0.00 to Rated current 0.00 no yes A
b019
Free-electronic
Thermal
Frequency 3
Free-electronic Thermal
Frequency 2 to 400. (1000.)
0. no yes Hz
5-112
b020
Free-electronic
Thermal
Current 3
0.00 to Rated current 0.00 no yes A
Overload limit, Overcurrent Protection
b021
Overload Limit 1
Selection
00: Disabled
01: Enabled in acceleration/
constant speed operation
02: Enabled in constant speed
operation
03: Enabled during
acceleration/constant
speed operation
(accelerated during
regeneration)
01 no yes
−
5-114
b221
Overload Limit 2
Selection
01 no yes
b022
Overload Limit 1
Level
0.20 × Rated current to 2.00 ×
rated current (heavy load
setting)
0.20 × Rated current to 1.50 ×
rated current (light load
setting)
Rated
current ×
1.50
(heavy)
or 1.20
(light)
no yes A
b222
Overload Limit 2
Level
no yes A
b023
Overload Limit 1
Parameter
0.1 to 999.9
1000. to 3000.
1.0 no yes
s
b223
Overload Limit 2
Parameter
1.0 no yes
b024
Overload Limit 1
Selection 2
00: Disabled
01: Enabled in acceleration/
constant speed operation
02: Enabled in constant speed
operation
03: Enabled during
acceleration/constant
speed operation
(accelerated during
regeneration)
01 no yes −
b025
Overload Limit 1
Level 2
0.20 × Rated current to 2.00 ×
rated current (heavy load
setting)
0.20 × Rated current to 1.50 ×
rated current (light load
setting)
Rated
current ×
1.50
(heavy)
or 1.20
(light)
no yes A
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 86

4-19
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Overload limit, Overcurrent Protection
b026
Overload Limit 1
Parameter 2
0.1 to 999.9
1000. to 3000.
1.0 no yes s 5-114
b027
Overcurrent
Suppression
Selection
00: Disabled
01: Enabled
00 no yes − 5-116
b028
Frequency Pullin Restart Level
0.20 × Rated current to 2.00 ×
rated current (heavy load
setting)
0.20 × Rated current to 1.50 ×
rated current (light load
setting)
Inverter
rated
current
no yes A
5-97
5-100
5-103
b029
Frequency Pullin Restart
Parameter
0.1 to 999.9
1000. to 3000.
0.50 no yes s
b030
Starting
Frequency at
Frequency Pullin Restart
Selection
00: Frequency at interruption
01: Maximum frequency
02: Set frequency
00 no yes −
Lock
b031
Soft Lock
Selection
00: Data other than b031
cannot be changed when
terminal SFT is ON.
01: Data other than b031 and
set frequency cannot be
changed when terminal
SFT is ON.
02: Data other than b031
cannot be changed.
03: Data other than b031 and
set frequency cannot be
changed.
10: Data can be changed
during RUN.
01 no yes − 5-84
Others
b033
Motor Cable
Length Code
Selection
5. to 20. 10. no yes − 5-145
b034
RUN Time/Power
ON Time Level
0. to 9999. (0 to 99990)
1000 to 6553 (100000 to
655350)
0. no yes h 5-124
b035
Rotation
Direction Limit
Selection
00: No direction limit
01: Only Forward is enabled
(Reverse is limited)
02: Only Reverse is enabled
(Forward is limited)
00 no no − 5-23
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 87

4-20
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
b036
Reduced
Voltage Startup
Selection
0 (Reduced voltage startup
time: short) to 255 (Reduced
voltage startup time: long)
2noyes− 5-58
b037
Display
Selection
00: Complete display
01: Individual display of
functions
02: User setting + b037
03: Data comparison display
04: Basic display
05: Monitor display only
04 no yes − 5-88
b038
Initial Screen
Selection
000: Screen on which the
Enter key was last
pressed
001 to 060: d001 to d060
201: F001
202: Do not use this setting.
001 no yes − 5-86
b039
User Parameter
Automatic
Setting
Function
00: Disabled
01: Enabled
00 no yes − 5-177
Torque limit
b040
Torque Limit
Selection
00: Four-quadrant separate
setting
01: Terminal switching
02: Analog voltage input
03: Optional board
00 no yes −
5-153
b041
Torque Limit 1
(Four-quadrant
Mode Forward
Power
Running)
0. to 200.
no (Torque limit disabled)
200. no yes
%
b042
Torque Limit 2
(Four-quadrant
Mode Reverse
Regeneration)
200. no yes
b043
Torque Limit 3
(Four-quadrant
Mode Reverse
Power
Running)
200. no yes
b044
Torque Limit 4
(Four-quadrant
Mode Forward
Regeneration)
200. no yes
b045
Torque
LADSTOP
Selection
00: Disabled
01: Enabled
00 no yes − 5-155
b046
Reverse
Rotation
Prevention
Selection
00: Disabled
01: Enabled
00 no yes − 5-157
Other
b049
Heavy Load/
Light Load
Selection
00: Heavy load mode
01: Light load mode
00 no no − 5-13
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 88

4-21
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Controlled deceleration on power loss
b050
Controlled
Deceleration on
Power Loss
00: Controlled deceleration on
power loss disabled.
01: Controlled deceleration on
power loss enabled
(deceleration stop)
02: Controlled deceleration on
power loss (constant
voltage, without recovery)
03: Controlled deceleration on
power loss (constant
voltage, with recovery)
00 no no −
5-106
b051
DC Bus Voltage
Trigger Level of
Ctrl. Decel.
0.0 to 999.9
1000.
220.0/
440.0
no no V
b052
Deceleration
Hold Level of
Ctrl. Decel
0.0 to 999.9
1000.
360.0/
720.0
no no V
b053
Deceleration
Time of Ctrl.
Decel
0.01 to 3600.00 1.0 no no s
b054
Freq. Drop to
Start Ctrl. Decel
0.00 to 10.00 (100.0) 0.00 no no Hz 5-106
Window comparator
b060
Window
Comparator FV
Upper Limit
Level
Set an upper limit level.
Setting range: 0. to 100.
Lower limit: Lower limit level +
Hysteresis width × 2
100. yes yes %
5-132
b061
Window
Comparator FV
Lower Limit
Level
Set a lower limit level. Setting
range: 0. to 100.
Upper limit: Upper limit level −
Hysteresis width × 2
0. yes yes %
b062
Window
Comparator FV
Hysteresis
Width
Set a hysteresis width for the
upper and lower limit levels.
Setting range: 0. to 10.
Upper limit: (Upper limit level −
Lower limit level)/2
0. yes yes %
b063
Window
Comparator FI
Upper Limit
Level
Set an upper limit level.Setting
range: 0. to 100.
Lower limit: Lower limit level +
Hysteresis width × 2
100. yes yes %
b064
Window
Comparator FI
Lower Limit
Level
Set a lower limit level.
Setting range: 0. to 100.
Upper limit: Upper limit level −
Hysteresis width × 2
0. yes yes %
Window comparator
b065
Window
Comparator FI
Hysteresis Width
Set a hysteresis width for the
upper and lower limit levels.
Setting range: 0. to 10.
Upper limit: (Upper limit level −
Lower limit level)/2
0. yes yes % 5-132
b070
Analog
Operation Level
at FV
Disconnection
0. to 100.
no (ignore)
no no yes −
5-132
b071
Analog
Operation Level
at FI
Disconnection
0. to 100.
no (ignore)
no no yes −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 89

4-22
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
b075
Ambient
Temperature
−10. to 50. 40. yes yes °C5-127
b078
Integrated
Power Clear
Cleared with the Enter key
after changing to 01
00 yes yes −
5-7
b079
Integrated
Power Display
Scale
1. to 1000. 1. yes yes −
b082
Starting
Frequency
0.10 to 9.99 (100.) 0.50 no yes Hz 5-57
b083
Carrier
Frequency
2.0 to 15.0/10.0
(heavy load/light load or high
frequency)
* With derating
10.0/
2.0
(5.0)
no yes
kHz
5-51
b084
Initialization
Selection
00: Initialization disabled
01: Fault monitor clear
02: Initializes data
03: Fault monitor clear + Data
initialization
04: Do not set.
00 no no −
5-174
b085
Initialization
Data Selection
00: Do not change. 00 no no −
b086
Frequency
Conversion
Coefficient
0.01 to 99.99 1.00 yes yes − 5-4
b087
STOP Key
Selection
00: Enabled
01: Disabled
02: Only reset is enabled
00 no yes − 5-84
b088
Free-run Stop
Selection
00: 0 Hz restart
01: Frequency matching
restart
02: Frequency pull-in restart
00 no yes − 5-103
b089
Automatic
Carrier
Reduction
00: Disabled
01: Enabled/depends on
current
02: Enabled/depends on fin
temperature
01 no no − 5-52
b090
Usage Rate of
Regenerative
Braking
0.0 to 100.0 0.0 no yes % 5-141
b091 Stop Selection
00: Deceleration stop
01: Free-run stop
00 no yes − 5-24
b092
Cooling Fan
Operation
00: Always
01: Only during operation
(including 5 minutes after
power on/stop)
02: Depends on the fin
temperature
01 no yes −
5-127
b093
Cooling Fan
Total Operation
Time Clear
00: Total operation time count
01: Clear total operation time
00 no no −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 90

4-23
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
b094
Initialization
Target
Selection
00: All data
01: All data other than
terminals/communication
02: U*** registration function
only
03: Other than U***
registration function and
Display Selection (b037)
00 no no − 5-174
b095
Regenerative
Braking
Selection
00: Disabled
01: Enabled (Disabled while
stopped)
02: Enabled (Enabled while
operating and stopped)
00 no yes −
5-141
b096
Regenerative
Braking ON
Level
330 to 380
660 to 760
360/
720
no yes V
V/f free setting
b100
Free V/f
Frequency 1
0. to Free V/f Frequency 2 0. no no Hz
5-47
b101
Free V/f
Voltage 1
0.0 to 800.0 0.0 no no V
b102
Free V/f
Frequency 2
Free V/f Frequency 1 to Free
V/f Frequency 3
0. no no Hz
b103
Free V/f
Voltage 2
0.0 to 800.0 0.0 no no V
b104
Free V/f
Frequency 3
Free V/f Frequency 2 to Free
V/f Frequency 4
0. no no Hz
b105
Free V/f
Voltage 3
0.0 to 800.0 0.0 no no V
b106
Free V/f
Frequency 4
Free V/f Frequency 3 to Free
V/f Frequency 5
0. no no Hz
b107
Free V/f
Voltage 4
0.0 to 800.0 0.0 no no V
b108
Free V/f
Frequency 5
Free V/f Frequency 4 to Free
V/f Frequency 6
0. no no Hz
5-47
b109
Free V/f
Voltage 5
0.0 to 800.0 0.0 no no V
b110
Free V/f
Frequency 6
Free V/f Frequency 5 to Free
V/f Frequency 7
0. no no Hz
b111
Free V/f
Voltage 6
0.0 to 800.0 0.0 no no V
b112
Free V/f
Frequency 7
Free V/f Frequency 6 to 400.
(1000.)
0. no no Hz
b113
Free V/f
Voltage 7
0.0 to 800.0 0.0 no no V
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 91

4-24
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
b120
Brake Control
Function
Selection
00: Disabled
01: Enabled
00 no yes −
5-143
b121
Brake Release
Wait Time
0.00 to 5.00 0.00 no yes s
b122
Acceleration
Wait Time
0.00 to 5.00 0.00 no yes s
b123 Stop Wait Time 0.00 to 5.00 0.00 no yes s
b124
Brake Wait
Time for
Confirmation
0.00 to 5.00 0.00 no yes s
b125
Brake Release
Frequency
0.00 to 99.99
100.0 to 400.0
0.00 no yes Hz
b126
Brake Release
Current
0.00 to 2.00 × Inverter rated
current
Inverter
rated
current
no yes A
b127
Break ON
Frequency
0.00 to 99.99
100.0 to 400.0
0.00 no yes Hz
b130
Overvoltage
Suppression
Function
Selection
During
Deceleration
00: Disabled
01: Enabled (DC voltage kept
constant)
02: Enabled (Acceleration
enabled)
00 no yes −
5-117
b131
Overvoltage
Suppression
Level During
Deceleration
200V class: 330. to 395.
400V class: 660. to 790.
380/
760
no yes V
b132
Overvoltage
Suppression
Parameter
0.10 to 30.00 1.00 no yes s
b133
Overvoltage
Suppression
Proportional
Gain Setting
0.00 to 5.00 0.20 yes yes −
b134
Overvoltage
Suppression
Integral Time
Setting
0.0 to 150.0 1.0 yes yes s
b145
GS Input
Operation
Selection
00: Not tripped (cut off by
hardware)
01: Tripped
00 no yes − 5-171
b150
Main Panel
Display
Selection
001 to 060 (corresponding to
d001 to d060)
001 yes yes − 5-87
b160
d050 Monitor
Target 1
001 to 030 (corresponding to
d001 to d030)
001 yes yes −
5-10
b161
d050 Monitor
Target 2
001 to 030 (corresponding to
d001 to d030)
002 yes yes −
b163
d001/d007
Frequency
Setting Mode
Selection
00: Disabled
01: Enabled
00 yes yes −
5-1
5-4
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 92

4-25
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
b164
Initial Screen
Automatic
Switching
Function
00: Disabled
01: Enabled
00 yes yes − 5-87
b165
Selection of
Operation on
Digital Operator
Disconnection
00: Trip
01: Trip after deceleration stop
02: Ignored
03: Free-run stop
04: Deceleration stop
02 yes yes − 5-86
b171
Inverter Mode
Selection
00: Selection disabled
01: Induction motor
02: High-frequency induction
motor
00 no no − 5-178
b180
Perform
Initialization/
Mode Selection
00: Initialization disabled
01: Perform initialization/
mode selection
00 no no − 5-174
Password
b190
Password A
Setting
0000: Password function
disabled
0001 to FFFF: Password
0000 no no −
5-91
b191
Password A
Authentication
0000 to FFFF 0000 no no −
b192
Password B
Setting
0000: Password function
disabled
0001 to FFFF: Password
0000 no no −
b193
Password B
Authentication
0000 to FFFF 0000 no no −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 93

4-26
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Multi-function input terminal
C001
Multi-function
Input 1
Selection
00: FW (Forward)
01: RV (Reverse)
02: CF1 (Multi-step speed 1)
03: CF2 (Multi-step speed 2)
04: CF3 (Multi-step speed 3)
05: CF4 (Multi-step speed 4)
06: JG (Jogging)
07: DB (External DC injection braking)
08: SET (Motor 2 control)
09: 2CH (2-step acceleration/deceleration)
11: FRS (Free-run stop)
12: EXT (External trip)
13: USP (USP function)
14: CS (Commercial switch)
15: SFT (Soft lock)
16: FV/FI (Analog input switch)
18: RS (Reset)
19: TH (PTC thermistor thermal protection)
20: STA (3-wire start)
21: STP (3-wire stop)
22: F/R (3-wire forward/reverse)
23: PID (PID disabled)
24: PIDC (PID integral reset)
27: UP (UP/DWN function accelerated)
28: DWN (UP/DWN function decelerated)
29: UDC (UP/DWN function data clear)
31: OPE (Forced operator)
32: SF1 (Multi-step speed bit 1)
33: SF2 (Multi-step speed bit 2)
34: SF3 (Multi-step speed bit 3)
35: SF4 (Multi-step speed bit 4)
36: SF5 (Multi-step speed bit 5)
37: SF6 (Multi-step speed bit 6)
38: SF7 (Multi-step speed bit 7)
39: OLR (Overload limit switching)
40: TL (Torque limit enabled/disabled)
41: TRQ1 (Torque limit switching 1)
42: TRQ2 (Torque limit switching 2)
44: BOK (Brake confirmation)
46: LAC (LAD cancel)
47: PCLR (Position deviation clear)
50: ADD (Frequency addition)
51: F-TM (Forced terminal block)
52: ATR (Torque reference input permission)
53: KHC (Integrated power clear)
56: Reserved.
57: Reserved.
58: Reserved.
59: Reserved.
60: Reserved.
61: Reserved.
62: Reserved.
65: AHD (Analog command held)
66: CP1 (Position command selection 1)
67: CP2 (Position command selection 2)
68: CP3 (Position command selection 3)
69: ORL (Zero return limit signal)
70: ORG (Zero return startup signal)
73: SPD (Speed/position switching)
77: GS1 (GS1 input (C003 only))
78: GS2 (GS2 input (C004 only))
81: 485 (Start co-inverter communication)
82: Reserved.
83: HLD (Retain output frequency)
84: ROK (Permission of RUN command)
85: EB (Rotation direction detection (C007 only))
86: DISP (Display fixed)
no: NO (Not assigned)
00
(FW)
no yes
− 5-29
C002
Multi-function
Input 2
Selection
01
(RV)
no yes
C003
Multi-function
Input 3
Selection
*1
18 (RS)
no yes
C004
Multi-function
Input 4
Selection
*1
12
(EXT)
no yes
C005
Multi-function
Input 5
Selection
02
(CF1)
no yes
C006
Multi-function
Input 6
Selection
03
(
CF2
)
no yes
C007
Multi-function
Input 7
Selection
06 (JG)
no yes
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 94

4-27
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Multi-function input terminal
C011
Multi-function
Input Terminal 1
Operation
Selection
00: NO (NO contact)
01: NC (NC contact)
00 no yes
− 5-31
C012
Multi-function
Input Terminal 2
Operation
Selection
00 no yes
C013
Multi-function
Input Terminal 3
Operation
Selection
00 no yes
C014
Multi-function
Input Terminal 4
Operation
Selection
00 no yes
C015
Multi-function
Input Terminal 5
Operation
Selection
00 no yes
C016
Multi-function
Input Terminal 6
Operation
Selection
00 no yes
C017
Multi-function
Input Terminal 7
Operation
Selection
00 no yes
Page 95

4-28
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Multi-function output terminal
C021
Multi-function
Output Terminal
P1/EDM
Selection
00: RUN (During RUN)
01: FA1 (Constant speed reached)
02: FA2 (Set frequency min. reached)
03: OL (Overload warning)
04: OD (PID excessive deviation)
05: AL (Alarm output)
06: FA3 (Set frequency only)
07: OTQ (Overtorque/Undertorque)
09: UV (Signal during undervoltage)
10: TRQ (During torque limit)
11: RNT (RUN time over)
12: ONT (Power on time over)
13: THM (Thermal warning)
19: BRK (Brake release)
20: BER (Brake error)
21: ZS (0Hz)
22: DSE (Excessive speed deviation)
23: POK (Position ready)
24: FA4 (Set frequency min. reached
2)
25: FA5 (Set frequency only 2)
26: OL2 (Overload warning 2)
27: FVdc (Analog FV disconnection
detection)
28: FIdc (Analog FI disconnection
detection)
31: FBV (PID FB status output)
32: NDc (Communication
disconnection detection)
33: LOG1 (Logic operation output 1)
34: LOG2 (Logic operation output 2)
35: LOG3 (Logic operation output 3)
39: WAC (Capacitor life warning)
40: WAF (Cooling fan life warning signal)
41: FR (Starting contact signal)
42: OHF (Fin overheat warning)
43: LOC (Low current signal)
44: Reserved.
45: Reserved.
46: Reserved.
50: IRDY (Operation ready)
51: FWR (During forward operation)
52: RVR (During reverse operation)
53: MJA (Fatal fault signal)
54: WCFV (Window comparator FV)
55: WCFI (Window comparator FI)
58: FREF (Frequency command source)
59: REF (RUN command source)
60: SETM (Motor 2 selection)
62: EDM (Safety device monitor)
63: OPO (Optional board)
no: NO (Not assigned)
00
(RUN)
no yes
− 5-32C022
Multi-function
Output Terminal
P2 Selection
01 (FA1)
no yes
C026
Multi-function
Relay Output
(MA, MB)
Function
Selection
05 (AL) no yes
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 96

4-29
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Analog monitor
C027 MP Selection
00: Output frequency
01: Output current
02: Output torque (heavy
load only)
03: Digital output frequency
04: Output voltage
05: Input power
06: Electronic thermal load
rate
07: LAD frequency
08: Digital current monitor
10: Cooling fin temperature
12: Do not set.
15: Pulse train input monitor
16: Optional board
07 no yes − 5-42
C028 AM Selection
00: Output frequency
01: Output current
02: Output torque (heavy
load only)
04: Output voltage
05: Input power
06: Electronic thermal load
rate
07: LAD frequency
10: Cooling fin temperature
11: Output torque (signed)
(heavy load only)
16: Optional board
07 no yes − 5-44
C030
Digital Current
Monitor
Reference Value
0.20 × rated current to 2.00 ×
rated current (current value
at digital current monitor
output 1,440 Hz)
Rated
current
yes yes A 5-43
Multi-function output terminal
C031
Multi-function
Output Terminal
P1/EDM Contact
Selection
00: NO contact at P1, P2,
MA, NC contact at MB
01: NC contact at P1, P2,
MA, NO contact at MB
00 no yes
− 5-34
C032
Multi-function
Output Terminal
P2 Contact
Selection
00 no yes
C036
Multi-function
Relay Output
(MA, MB)
Contact
Selection
01 no yes
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 97

4-30
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Level and output terminal status
C038
Low Current
Signal Output
Mode Selection
00: Enabled during
acceleration/deceleration
and constant speed
01: Enabled only during
constant speed
01 no yes −
5-129
C039
Low Current
Detection Level
0.0 to 2.00 × Rated current
Rated
current
yes yes A
C040
Overload
Warning Signal
Output Mode
Selection
00: Enabled during
acceleration/deceleration
and constant speed
01: Enabled only during
constant speed
01 no yes −
5-115
C041
Overload
Warning Level 1
0.0 to 2.00 × Rated current
Rated
current
×
1.15
yes yes
A
C241
Overload
Warning Level 2
Rated
current
×
1.15
yes yes
C042
Arrival
Frequency
During
Acceleration
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-122
C043
Arrival
Frequency
During
Deceleration
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
C044
PID Deviation
Excessive Level
0.0 to 100.0 3.0 no yes % 5-73
C045
Arrival
Frequency
During
Acceleration 2
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
5-122
C046
Arrival
Frequency
During
Deceleration 2
0.00 to 99.99
100.0 to 400.0 (1000.)
0.00 no yes Hz
C047
Pulse Train
Output
Coefficient
0.01 to 99.99 1.00 yes yes − 5-43
C052
Feedback
Comparison
Signal Off Level
0.0 to 100.0 100.0 no yes %
5-73
C053
Feedback
Comparison
Signal On Level
0.0 to 100.0 0.0 no yes %
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 98

4-31
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Level and output terminal status
C054
Overtorque/
Undertorque
Selection
00: Overtorque
01: Undertorque
00 no yes −
5-152
C055
Overtorque/
undertorque
level (Forward
Power Running)
0. to 200.
100. no yes
%
C056
Overtorque/
undertorque
level (Reverse
Regeneration)
100. no yes
C057
Overtorque/
undertorque
level (Reverse
Power Running)
100. no yes
C058
Overtorque/
undertorque
level (Forward
Regeneration)
100. no yes
C059
Overtorque/
Undertorque
Signal Output
Mode Selection
00: Enabled during
acceleration/deceleration
and constant speed
01: Enabled only during
constant speed
01 no yes −
C061
Electronic
Thermal
Warning Level
0. to 100. 90. no yes % 5-113
C063
0 Hz Detection
Level
0.00 to 99.99
100.0
0.00 no yes Hz 5-125
C064
Cooling Fin
Overheat
Warning Level
0. to 110. 100. no yes °C5-129
Communication function
C071
Communication
Speed Selection
03: 2,400 bps
04: 4,800 bps
05: 9,600 bps
06: 19.2 kbps
07: 38.4 kbps
08: 57.6 kbps
09: 76.8 kbps
10: 115.2 kbps
05 no yes −
6-3
C072
Communication
Station No.
Selection
1. to 247. 1. no yes −
C074
Communication
Parity Selection
00: No parity
01: Even
02: Odd
00 no yes −
C075
Communication
Stop Bit
Selection
1: 1 bit
2: 2 bits
1noyes−
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 99

4-32
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Communication function
C076
Operation
Selection on
Communication
Error
00: Trip
01: Trip after deceleration
stop
02: Ignored
03: Free-run stop
04: Deceleration stop
02 no yes −
6-3
C077
Communication
Error Timeout
Time
0.00: Timeout disabled
0.01 to 99.99
0.00 no yes s
C078
Communication
Wait Time
0. to 1000. 0. no yes ms
Adjustment
C081 FV Adjustment 0.0 to 200.0 100. yes yes %
5-40
C082 FI Adjustment 0.0 to 200.0 100. yes yes %
C085
Thermistor
Adjustment
0.0 to 200.0 100.0 yes yes % 5-120
C091
Debug Mode
Selection
Use "00". *Do not change. 00 yes yes −−
Communication function
C096
Communication
Selection
00: Modbus communication
(Modbus-RTU)
01: Co-inverter
communication
02: Co-inverter
communication
(management inverter)
00 no no −
6-22
C098
Co-inverter
Communication
Starting Station
Number
1. to 8. 1. no no −
C099
Co-inverter
Communication
Ending Station
Number
1. to 8. 1. no no −
C100
Co-inverter
Communication
Start Selection
00: 485 terminal
01: Always started
00 no no −
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
Page 100

4-33
4-2 Function Mode
SYSDRIVE MX2 Series USER'S MANUAL (3G3MX2-A@@@@)
4
Parameter List
Others
C101
UP/DWN
Storage
Selection
00: Do not store frequency
data
01: Store frequency data
00 no yes − 5-71
C102 Reset Selection
00: Trip reset at power-on
01: Trip reset at power-off
02: Enabled only during trip
(Reset when the power is
ON.)
03: Trip reset only
00 yes yes −
5-100
C103
Reset Restart
Selection
00: 0 Hz restart
01: Frequency matching
restart
02: Frequency pull-in restart
00 no yes −
C104
UP/DWN Clear
Terminal Mode
00: 0 Hz
01: EEPROM data at power-on00 no yes − 5-71
C105 MP Gain Setting 50. to 200. 100. yes yes % 5-43
C106
AM Gain
Adjustment
50. to 200. 100. yes yes % 5-45
C109 AM Bias Setting 0. to 100. 0. yes yes % 5-45
C111
Overload 1
Warning Level 2
0.00 to 2.00 × Rated current
Rated
current
×
1.15
yes yes A 5-115
Parameter
No.
Function name Monitor or data range
Default
setting
Set data
Data can
be set
during
RUN
Data can be
changed
during RUN
Unit
Page
 Loading...
Loading...